C 4213:2014
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 用語及び定義 ··················································································································· 3
4 使用······························································································································· 4
4.1 使用 ···························································································································· 4
4.2 使用形式 ······················································································································ 5
5 定格······························································································································· 6
5.1 定格電圧 ······················································································································ 6
5.2 定格周波数 ··················································································································· 6
5.3 定格出力 ······················································································································ 6
6 設置場所の条件 ················································································································ 7
6.1 一般事項 ······················································································································ 7
6.2 標高 ···························································································································· 7
6.3 最高周囲温度 ················································································································ 7
6.4 最低周囲温度 ················································································································ 7
6.5 水冷媒温度 ··················································································································· 7
6.6 保管及び輸送 ················································································································ 7
7 性能······························································································································· 7
7.1 温度上昇 ······················································································································ 7
7.2 基準冷媒 ······················································································································ 9
7.3 効率 ···························································································································· 9
7.4 耐電圧 ························································································································ 12
7.5 運転中の電圧変動及び周波数変動 ····················································································· 12
8 構造······························································································································ 13
8.1 附属品 ························································································································ 13
8.2 ケーブル引込口 ············································································································ 13
8.3 接地端子 ····················································································································· 13
8.4 保護方式 ····················································································································· 13
9 寸法······························································································································ 14
10 試験方法 ······················································································································ 17
10.1 試験の種類 ················································································································· 17
10.2 構造試験 ···················································································································· 17
10.3 抵抗値 ······················································································································· 17
10.4 拘束試験 ···················································································································· 18
C 4213:2014 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
10.5 温度上昇 ···················································································································· 18
10.6 効率の算定 ················································································································· 20
10.7 始動特性の算定 ··········································································································· 20
10.8 過速度試験 ················································································································· 23
10.9 騒音試験 ···················································································································· 23
10.10 耐電圧試験 ··············································································································· 27
11 裕度 ···························································································································· 28
12 表示 ···························································································································· 29
13 安全 ···························································································································· 30
附属書JA(参考)標準的な枠番号と寸法及び出力との関係 ························································· 31
附属書JB(参考)JISと対応国際規格との対比表 ······································································ 40
C 4213:2014
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本電機工業会(JEMA)から,
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経
済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 4213:2014
低圧三相かご形誘導電動機−
低圧トップランナーモータ
Low-voltage three-phase squirrel-cage induction motors-
Low-voltage top runner motor
序文
この規格は,2010年に第12版として発行されたIEC 60034-1,2007年に第3版として発行されたIEC
60034-8,2007年に第4.1版として発行されたIEC 60034-9,2007年に第2.1版として発行されたIEC
60034-12及び1991年に第6版として発行されたIEC 60072-1を基とし,適用範囲以外の規定を削除するな
ど技術的内容を変更して作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JBに示す。また,附属書JAは対応国際規格にはない事項であ
る。
1
適用範囲
この規格は,次に示す周波数50 Hz及び/又は60 Hzの単一速度低圧三相かご形誘導電動機のうち,低
圧トップランナーモータ(以下,電動機という。)について規定する。この規格は,二つ以上の電圧及び/
又は周波数の定格をもつ電動機にも適用する。
− 定格電圧は,600 V以下
− 定格出力は,0.75 kW以上,375 kW以下
− 極数は,2極,4極又は6極
− 使用の形式は,S1(連続使用)又は80 %以上の負荷時間率をもつS3(反復使用)
− 駆動の種類は,商用電源駆動
− 箇条6の設置場所の条件に適した電動機
また,次の電動機にも適用する。
− 特殊なフランジ,脚及び軸の寸法をもつ電動機
− 軸及び/又はフランジの形状によらず,ギヤードモータ及びブレーキモータに組み込む電動機
ただし,次の電動機には適用しない。
− インバータ駆動専用に製作した電動機
− 機械(例えば,ポンプ,ファン及びコンプレッサ)に組み込んで,かつ,機械から分離して試験がで
きない電動機
2
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60034-1:2010,Rotating electrical machines−Part 1: Rating and performance
IEC 60034-8:2007,Rotating electrical machines−Part 8: Terminal markings and direction of rotation
IEC 60034-9:2007,Rotating electrical machines−Part 9: Noise limits
IEC 60034-12:2007,Rotating electrical machines−Part 12: Starting performance of single-speed
three-phase cage induction motors
IEC 60072-1:1991,Dimensions and output series for rotating electrical machines−Part 1: Frame
numbers 56 to 400 and flange numbers 55 to 1 080(全体評価:MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,記載の年の版を適用し,その後の改正版(追補を含む。)は適用しない。
JIS B 0401-1:1998 寸法公差及びはめあいの方式−第1部:公差,寸法差及びはめあいの基礎
注記 対応国際規格:ISO 286-1:1988,Geometrical product specifications (GPS)−ISO code system for
tolerances on linear sizes−Part 1: Basis of tolerances, deviations and fits(IDT)
JIS B 0401-2:1998 寸法公差及びはめあいの方式−第2部:穴及び軸の公差等級並びに寸法許容差の
表
注記 対応国際規格:ISO 286-2:1988,Geometrical product specifications (GPS)−ISO code system for
tolerances on linear sizes−Part 2: Tables of standard tolerance classes and limit deviations for holes
and shafts(IDT)
JIS B 0902:2001 駆動機及び被駆動機−軸高さ
注記 対応国際規格:ISO 496:1973,Driving and driven machines−Shaft heights(IDT)
JIS B 1001:1985 ボルト穴径及びざぐり径
注記 対応国際規格:ISO 273:1979,Fasteners−Clearance holes for bolts and screws(MOD)
JIS B 1301:1996 キー及びキー溝
注記 対応国際規格:ISO 3912:1977,Woodruff keys and keyways(MOD)
JIS B 9960-1:2008 機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:IEC 60204-1:2005,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements(MOD)
JIS C 1509-1:2005 電気音響−サウンドレベルメータ(騒音計)−第1部:仕様
注記 対応国際規格:IEC 61672-1:2002,Electroacoustics−Sound level meters−Part 1: Specifications
(IDT)
JIS C 1514:2002 オクターブ及び1/Nオクターブバンドフィルタ
JIS C 4034-2-1:2011 回転電気機械−第2-1部:単一速度三相かご形誘導電動機の損失及び効率の算定
方法
注記 対応国際規格:IEC 60034-2-1:2007,Rotating electrical machines−Part 2-1: Standard methods for
determining losses and efficiency from tests (excluding machines for traction vehicles)(MOD)
3
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 4034-5:1999 回転電気機械−第5部:外被構造による保護方式の分類
注記 対応国際規格:IEC 60034-5:1991,Rotating electrical machines−Part 5: Classification of degrees of
protection provided by enclosures of rotating electrical machines (IP code)(IDT)
JIS C 4034-30:2011 回転電気機械−第30部:単一速度三相かご形誘導電動機の効率クラス(IEコード)
注記 対応国際規格:IEC 60034-30:2008,Rotating electrical machines−Part 30: Efficiency classes of
single-speed, three-phase, cage-induction motors (IE-code)(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 4034-2-1:2011及びJIS C 4034-30:2011によるほか,次に
よる。
なお,記号及び略号は,JIS C 4034-2-1:2011の箇条4(記号及び略語)による。
3.1
低圧トップランナーモータ
“エネルギーの使用の合理化に関する法律(省エネ法)”で定めた特定機器のトップランナー基準の対象
のうち,低圧三相かご形誘導電動機。
3.2
使用(duty)
始動,電気制動,無負荷及び静止の状態で,かつ,電圧が印加していない期間を含んだ経時的な負荷の
状態(IEV 411-51-06)。
3.3
使用の形式(duty type)
連続使用,短時間使用,反復使用,又は不規則な負荷及び速度変化を伴う使用(IEV 411-51-13)。
3.4
負荷(load)
電気回路及び機械装置によって,電動機に要求する電気的又は機械的出力(IEV 411-51-01修正)。
3.5
負荷時間率(cyclic duration factor)
始動及び電気制動を含む負荷の期間。使用の1周期との比で,百分率で表す(IEV 411-51-09)。
3.6
熱的平衡状態(thermal equilibrium)
電動機の数箇所の温度上昇が1時間当たり2 Kを超えて変化をしなくなった状態(IEV 411-51-08修正)。
3.7
始動(starting)
静止状態にある電動機がまさに回転しようとする瞬間の状態(IEV 411-52-01)。
注記 電動機を静止状態から定常運転速度まで加速する過程をいうこともある。
3.8
定格値(rated value)
電動機の運転条件を規定する値(一般には,製造業者が指定する。)(IEV 411-51-23修正)。
3.9
定格(rating)
4
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電動機を保証する使用限度(IEV 411-51-24修正)。
3.10
定格出力(rated output)
定格に対応する出力値。
3.11
定格電圧(rated voltage)
定格出力における電動機の端子での線間電圧。
3.12
定格周波数(rated frequency)
定格出力における電動機へ供給される電源の周波数。
3.13
周囲温度(ambient temperature)
電動機を運転する場所における,機体に近接した周囲の空気の温度。
3.14
冷媒(coolant)
電動機に発生した熱を取り去るための液体又は気体の媒体(IEV 411-44-02修正)。
3.15
一次冷媒(primary coolant)
冷媒のうち,電動機の発熱部分に接触し,そこから熱を取り去るための液体又は気体の媒体(IEV
411-44-03修正)。
3.16
二次冷媒(secondary coolant)
熱交換器又は電動機の外表面において,一次冷媒から熱を取り去るための液体又は気体の媒体(IEV
411-44-03修正)。
3.17
直接冷却(内部冷却)巻線[direct cooled (inner cooled) winding]
中空導体,チューブ,ダクト又はチャンネルを用い,それに流れる冷媒によって主絶縁内部の導体を直
接冷却する導線(IEV 411-44-08)。
3.18
間接冷却巻線(indirect cooled winding)
直接冷却巻線以外の巻線(IEV 411-44-09)。
4
使用
4.1
使用
使用は,次のいずれかの事項を,購入者が指定する。
a) 負荷が変動しない場合,又は負荷が既知の方法で変動する場合,負荷の状況を数値で記述する。
b) 負荷,損失,温度など変数値の時間的変化を記述する。
c) 予想使用状態と同程度な使用形式S1又はS3のうちいずれかを選択する。
使用形式は,4.2に規定する適切な記号によって指定し,その後に負荷の値を付記する。
5
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
負荷時間率の算出式は,該当する使用形式の図に示す。
購入者が使用を指定できない場合は,製造業者は使用形式S1(連続使用)を適用するものとして扱う。
4.2
使用形式
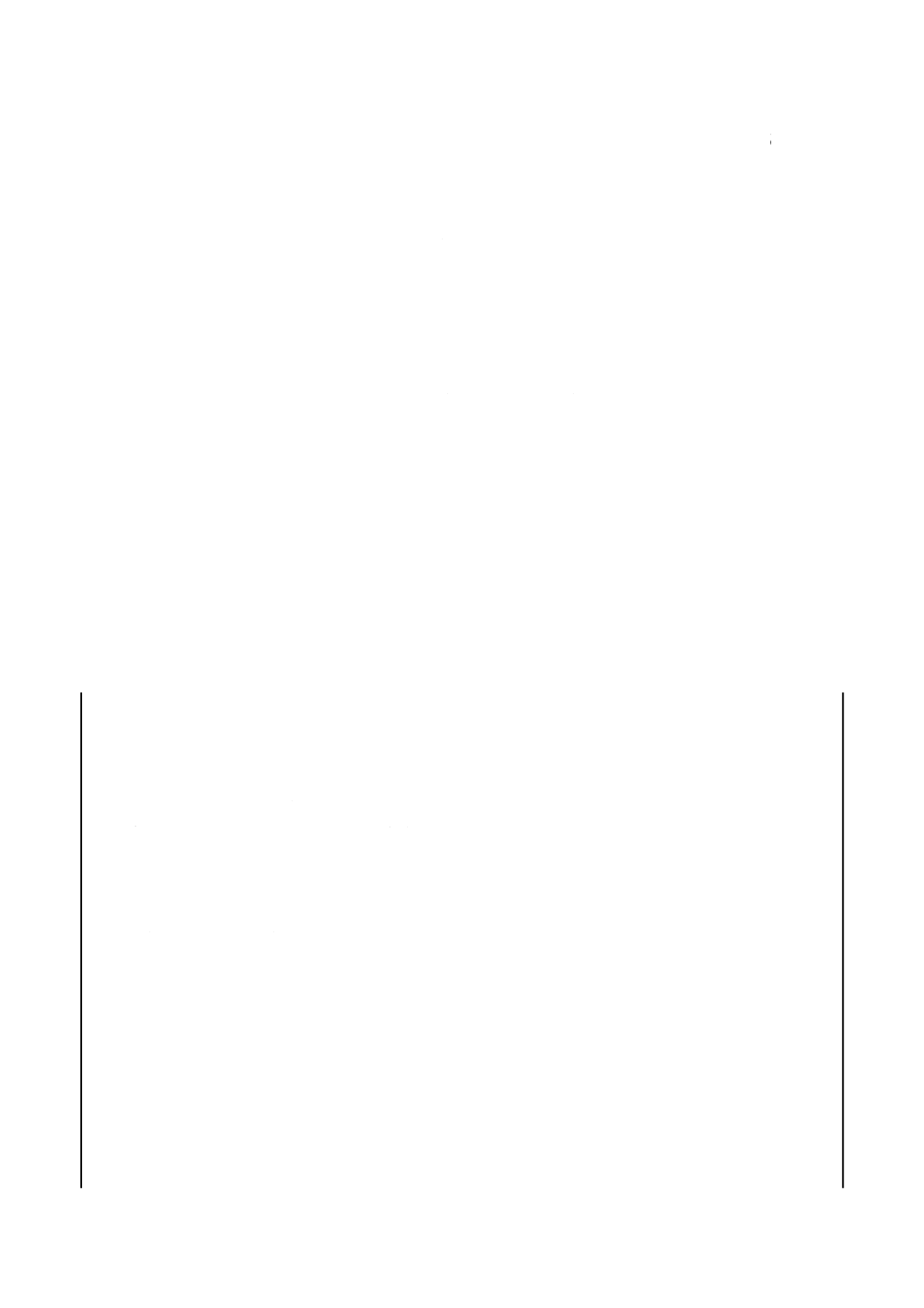
4.2.1
使用形式S1(連続使用)
連続使用とは,一定負荷で,電動機が熱的平衡状態に達する時間以上に継続運転する使用をいう(図1
参照)。
記号はS1とする。
t
t
t
θmax
PV
P
θ
P
負荷
PV 損失
θ
温度
θmax 到達最高温度
t
時間
図1−連続使用S1
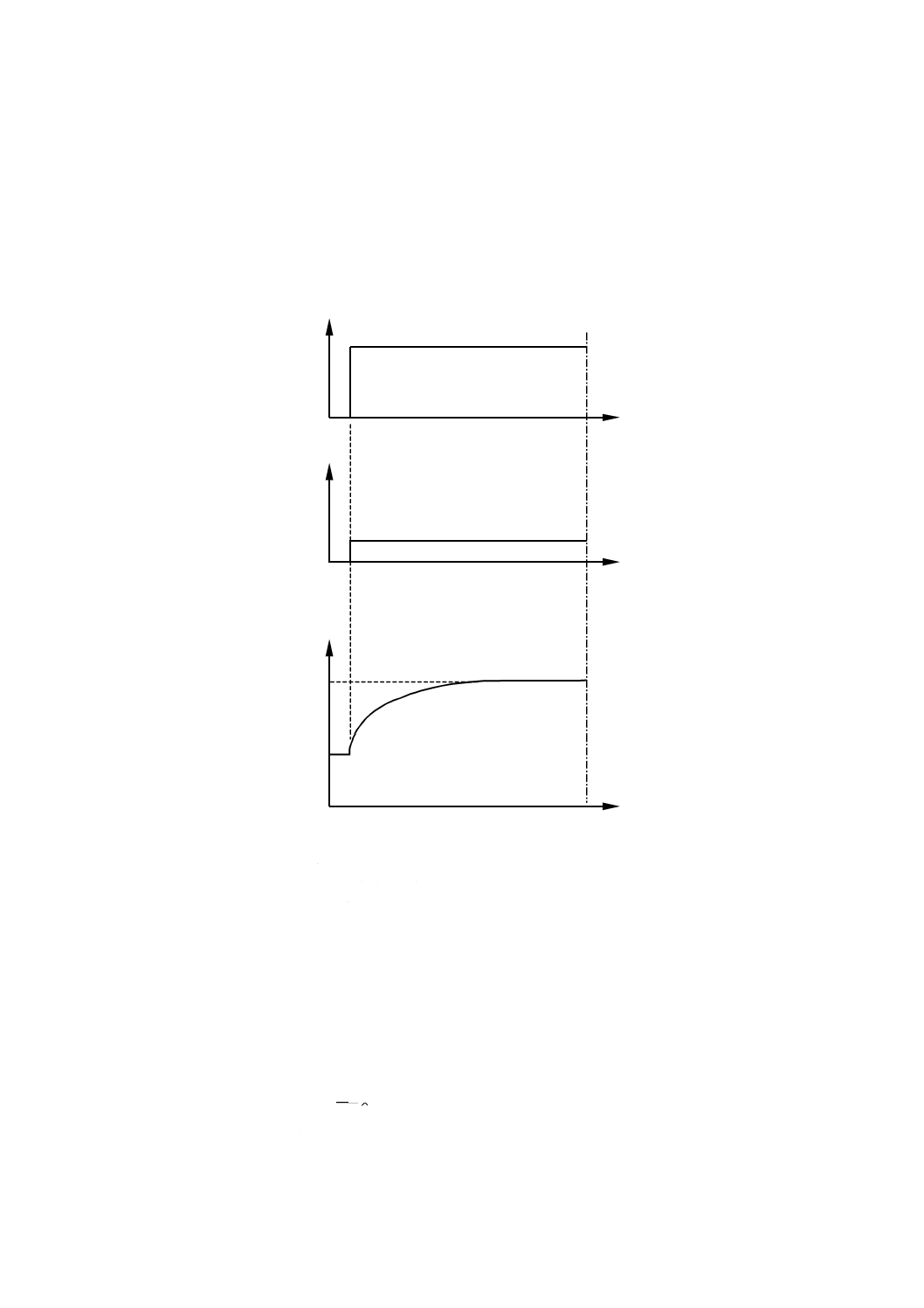
4.2.2
使用形式S3(反復使用)
反復使用とは,一定負荷の運転期間及び電圧を印加しない停止期間を一周期としてこれを反復する使用
をいう。この場合,電気制動を含まず,始動条件が温度上昇に与える影響は無視できる(図2参照)。記
号はS3とし,その後に負荷時間率を付記する。その負荷時間率%EDは,次の式で算出する。
%
100
Δ
=
%ED
C
P×
T
t
ここに,
ΔtP: 一定負荷での運転期間
TC: 一周期
6
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 S3 80 %
TC
∆tP
P
PV
θ
θmax
t
t
t
∆tR
P
負荷
PV 損失
θ
温度
θmax 到達最高温度
t
時間
TC 一周期
ΔtP 一定負荷での運転期間
ΔtR 停止及び電源切断期間
図2−反復使用S3
5
定格
5.1
定格電圧
定格電圧は,600 V以下とする。
5.2
定格周波数
定格周波数は,50 Hz及び/又は60 Hzとする。
5.3
定格出力
定格出力は,軸において使用可能な機械的出力であり,キロワット(kW)で表し,0.75 kW〜375 kWと
7
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する。表1は,推奨値とする。
表1−定格出力推奨値
単位 kW
定格出力
0.75,1.1,1.5,2.2,3,3.7,4,5.5,7.5,11,15,18.5,22,30,37,45,
55,75,90,110,132,150,160,185,200,220,250,280,300,315,355,
375
6
設置場所の条件
6.1
一般事項
特に指定がない場合,電動機の設置場所は,6.2〜6.6の全ての条件に適合しなければならない。設置場
所の条件がこれらの値から逸脱する場合の温度上昇限度の補正は,表3及び表5による。
6.2
標高
標高は,1 000 m以下とする。
6.3
最高周囲温度
周囲温度は,40 ℃以下とする。
6.4
最低周囲温度
周囲温度は,−20 ℃以上とする。ただし,すべり軸受を使用する電動機及び一次冷媒又は二次冷媒とし
て水を使用する電動機の場合には,周囲温度は0 ℃以上とする。
6.5
水冷媒温度
基準水冷媒の温度は,表6による。その他の水冷媒温度は,表3によって補正する。水冷媒の温度は,
+5 ℃以上とする。
6.6
保管及び輸送
輸送中,保管中又は設置後に,6.4の温度よりも低くなると予想できる場合には,購入者は,予想最低温
度を指定し,製造業者に伝える。
7
性能
7.1
温度上昇
空気冷媒による間接冷却巻線の温度上昇限度は,10.5によって試験したとき,表2の値以下とする。
6.2〜6.5の条件を満たさない場合の温度上昇限度は,表3に従って補正する(表3の項目3の標高で規
定する想定最高周囲温度は,表4による。)。
10.5.2.2 c)に従い温度計法を用いる場合,温度上昇限度は表2による。
空気によって巻線を間接冷却する場合で,かつ,試験場所の条件が設置場所の条件と異なっている場合
の試験場所の温度上昇限度は,表5によって補正する。表5に規定する補正の結果,製造業者が試験場所
での許容温度を過大と判断できる場合は,受渡当事者間の協定によって試験手順及び限度を定める。
8
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−空気冷媒による間接冷却巻線の温度上昇限度
単位 K
項目
電動機の部分
耐熱クラス
120(E)
130(B)
155(F)
温度
計法
抵抗
法
埋込温
度計法
温度
計法
抵抗
法
埋込温
度計法
温度
計法
抵抗
法
埋込温
度計法
1a
出力200 kWを超え,375 kW以下の
電動機の固定子巻線
−
75
80
−
80
90
−
105
115
1b
出力200 kW以下で,項目1c以外の
電動機の固定子巻線a)
−b)
75
−
−b)
80
−
−b)
105
−
1c
冷却扇なしの自冷形(IC40)・モール
ド絶縁巻線a)
−
75
−
−
85
−
−
110
−
2
かご形導体
この部分の温度上昇又は温度は,その部分の絶縁物及び近傍の材料の
機能に有害な影響を与えてはならない。
3
絶縁物との接触に関係なく,鉄心及
び全ての構造構成物(軸受を除く。)
これらの部分の温度上昇又は温度は,その部分の絶縁物及び近傍の材
料の機能に有害な影響を与えてはならない。
注a) 定格が200 kW以下である電動機の巻線に重ね合わせ等価負荷法を適用する場合は,抵抗法の温度上昇限度を
5 Kだけ超えてもよい。
b) 受渡当事者間の協定がある場合,温度計法によって決定してもよい。
表3−6.2〜6.5以外の運転条件を考慮した間接冷却巻線の設置場所における温度上昇限度の補正
項目
運転条件
表2における温度上昇限度の補正(Δθ)
1a
周囲温度の最高値
又は電動機入口部
の冷媒温度の最高
値(θC)
標高が1 000 m未
満
0 ℃≦θC≦40 ℃,かつ,
耐熱クラスθclsと(40 ℃+
Δθ)b)との差が5 K以下,
かつ,耐熱クラスが130(B)
又は155(F)
冷媒温度の最高値(θC)と40 ℃との差の分を加えるa)。
1b
0 ℃≦θC≦40 ℃,かつ,
耐熱クラスθclsと(40 ℃+
Δθ)b)との差が5 Kを超え,
かつ,耐熱クラスが130(B)
又は155(F)
冷媒温度の最高値(θC)と40 ℃との差に,係数
(
)
+
°
−
−
K
80
Δ
C
40
1
cls
θ
θ
を乗じて加えるa)。
θclsは耐熱クラスの許容最高温度,Δθは表2に規定する温度
上昇限度である。
1c
0 ℃<θC≦40 ℃,かつ,
耐熱クラスが120(E)
受渡当事者間の協定によって,最高を30 Kとして冷媒温度
の最高値(θC)と40 ℃との差の分を加えることができる。
1d
40 ℃<θC≦60 ℃
冷媒温度が40 ℃を超えた分だけ差し引く。
1e
θC<0 ℃又はθC>60 ℃
受渡当事者間の協定による。
2
水冷式熱交換器へ
の入口部の水の最
高温度(θw)
5 ℃≦θw≦25 ℃
15 Kを加え,更に25 ℃と最高水温θWとの差を加える。
θw>25 ℃
15 Kを加え,最高水温θWと25 ℃との差を差し引く。
3
標高(H)
1 000 m<H≦4 000 mで最
高周囲温度の指定のない
場合
補正しない。標高による冷却効果の減少は,最高周囲温度が
40 ℃よりも低くなることによって補償できると考慮し,合
計温度は40 ℃に表2の温度上昇を加えた値以下と想定す
る c)。
H>4 000 mの場合
受渡当事者間の協定による。
注a) 耐熱クラスの許容最高温度以下であるように,温度測定法の特性を考慮して最高冷媒温度と冷媒温度の基準値
40 ℃との差を補正した値である。
b) (40 ℃+Δθ)は,冷媒温度の基準値(40 ℃)と表2に規定する温度上昇限度Δθとの和であり,各耐熱クラス
の許容最高温度を,温度測定法の特性を考慮して補正した値である。
c) 周囲温度の減少を,1 000 mを超える標高100 mごとに表2に規定する項目1a及び1bの温度上昇限度の1 %と
し,1 000 m以下の最高周囲温度を40 ℃と仮定した場合,設置場所の想定最高周囲温度は表4のようになる。
9
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4−想定最高周囲温度
標高
m
耐熱クラス
120(E)
130(B)
155(F)
温度
℃
1 000
40
40
40
2 000
33
32
30
3 000
26
24
19
4 000
19
16
9
表5−空気間接冷却巻線に対する試験場所の条件を考慮した温度上昇限度の補正(ΔθT)
項目
試験条件
試験場所での補正された限度ΔθT
1
試験場所(θCT)と運転場所
(θC)との基準冷媒温度差
(θC−θCT)の絶対値≦30 K
ΔθT=Δθ
(θC−θCT)の絶対値>30 K
受渡当事者間の協定による。
2
試験場所(HT)と運転場所
(H)との標高差
1 000 m<H≦4 000 m
HT<1 000 m
−
−
=
m
000
10
m
000
1
1
Δ
ΔT
H
θ
θ
H<1 000 m
1 000 m<HT≦4 000 m
−
+
=
m
000
10
m
000
1
1
Δ
Δ
T
T
H
θ
θ
1 000 m<H≦4 000 m
1 000 m<HT≦4 000 m
−
+
=
m
000
10
1
Δ
Δ
T
T
H
H
θ
θ
H>4 000 m又はHT>4 000 m
受渡当事者間の協定による。
注記 補正前の温度上昇限度Δθは表2に規定してあり,必要がある場合は,表3によって補正する。
7.2
基準冷媒
機械の冷却方法による基準冷媒は,表6による。三次冷媒を使用する場合の温度上昇は,表6に規定す
る一次冷媒又は二次冷媒の温度を基準に測定する。
注記 機器は,表6の複数の項目があてはまる冷却構造の場合は,個々の巻線のそれぞれの基準冷媒
での値を適用してもよい。
表6−基準冷媒温度(表4参照)
項目
一次冷媒
冷却方式
二次冷媒
表番号
左欄記載の表が
規定する限度
基準冷媒及び基準冷媒温度
1
空気
間接
なし
表2
温度上昇
周囲空気
基準温度:40 ℃
2
空気
間接
空気
表2
3
空気
間接
水
表2
機器の入口冷媒又は周囲の水
機器入口の空気の冷媒基準温度:40 ℃
周囲の水の基準温度:25 ℃a)
注a) 間接冷却巻線及び水冷熱交換器が付く機械は,基準冷媒として一次冷媒又は二次冷媒のうちいずれかを用い
る(定格銘板に関する事項は,箇条12参照)。
機器表面の冷却を用いた水中で使用可能な機械又はウォータージャケット冷却による機械は,基準冷媒と
して二次冷媒を用いる。
7.3
効率
電動機の定格出力時の効率は,10.6の試験方法に従って算定し,JIS C 4034-30:2011のプレミアム効率
(IE3)とする。ただし,3定格又は6定格をもつ電動機では,200 V-60Hz又は400 V-60 Hzの効率は,表
10
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10による。
なお,3定格又は6定格における定格の組合せは次による。
− 3定格:200 V-50 Hz/200 V-60 Hz/220 V-60 Hz又は400 V-50 Hz/400 V-60 Hz/440 V-60 Hz
− 6定格:200 V-50 Hz/200 V-60 Hz/220 V-60 Hz/400 V-50 Hz/400 V-60 Hz/440 V-60 Hz
注記1 JIS C 4034-30:2011の表7[プレミアム効率(IE3)50 Hz の公称効率]及び表8[プレミアム
効率(IE3)60 Hz の公称効率]を,それぞれこの規格の表8及び表9に参考として示す。た
だし,表8では,JIS C 4034-30:2011の表7に記載されていない定格出力3.7 kWにおける公
称効率を補正係数に従って記載した。
この規格に規定する定格出力での効率は,公称値とする。
注記2 材料,製造工程及び試験でのばらつきのため,単一設計による電動機であっても効率にばら
つきが生じる。単一設計の複数の電動機の定格出力での効率は,ただ一つの数値ではなく,
幅をもった値となる。
製造業者が定格銘板に表示する効率は,定格効率とし,JIS C 4034-30:2011の表7(この規格の表8),JIS
C 4034-30:2011の表8(この規格の表9),及び表10が要求する公称効率以上とする。
定格電圧及び定格周波数で試験するとき,個々の電動機で測定した全負荷における効率には,箇条11
による定格効率の裕度を適用する。
注記3 定格効率には裕度があるが,公称効率には裕度はなく,ただ一つの数値となる。
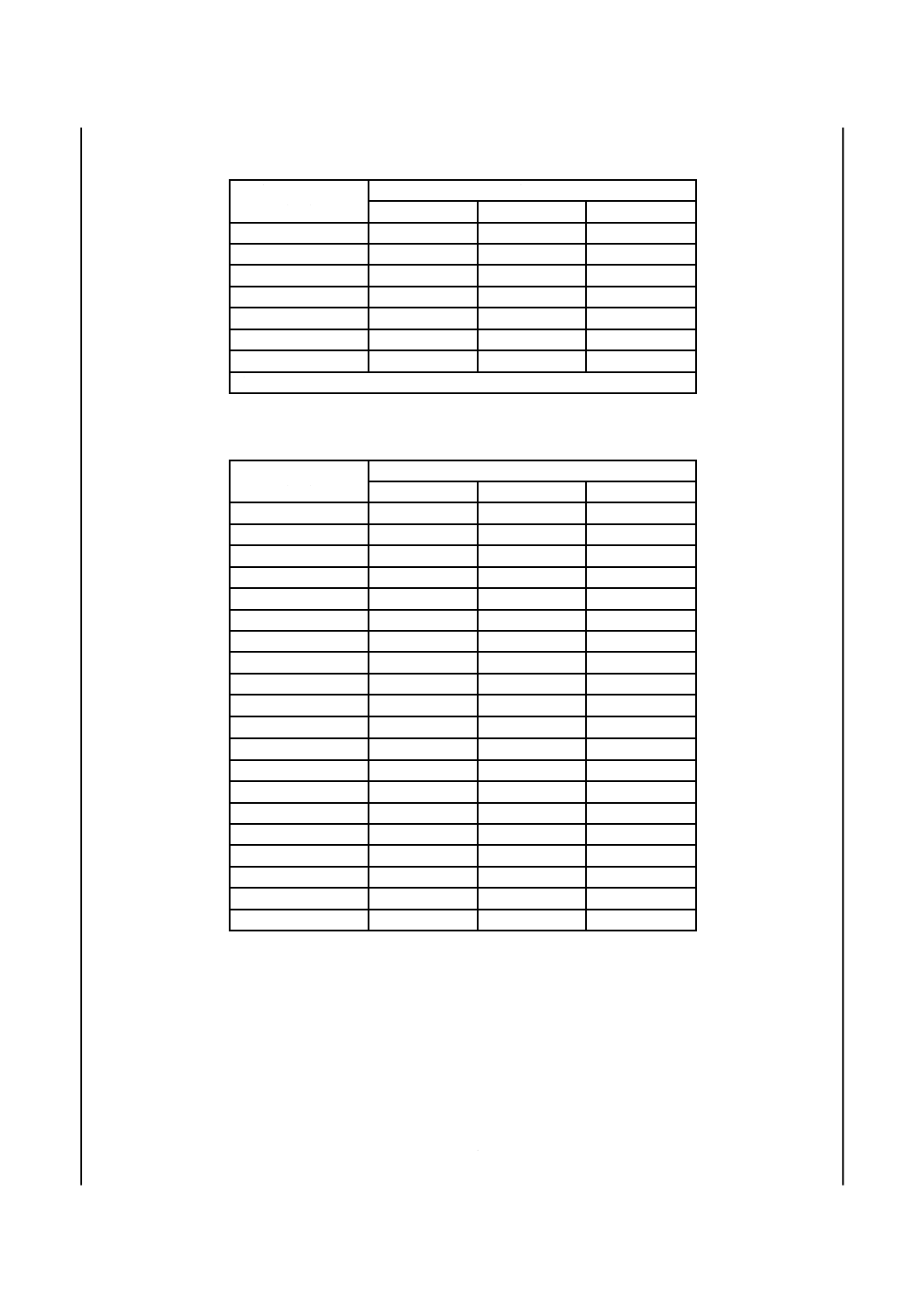
表8は,50 Hzの公称効率である。表8の0.75 kW〜200 kWの定格出力範囲では,表8の定格出力以外
の50 Hzの公称効率は,式(1)によって算出する。算定する公称効率ηn(%)は,小数点第2位を四捨五入
する。すなわち,xx.x %のように表示する。
D
P
P
C
P
P
B
P
P
A
η
+
+
+
×
×
×
=
c
N
10
2
c
N
10
3
c
N
10
n
log
log
log
················· (1)
ここに, A,B,C及びD: 補間係数(表7参照)
Pc: 1(kW)
注記4 式(1)及び補間係数は,表8の公称効率に対する最適近似曲線を得るために数学的に導いた。
注記5 PN(kW)を無次元化するため,1(kW)で除している。
注記6 200 kW〜375 kWの出力範囲では,公称効率は一定の値になるため,式(1)による補間の必要
はない。
表7−50 Hzの電動機に対する補間係数
効率クラス
(IEコード)
補間係数
50 Hz,0.75 kW〜200 kW
2極
4極
6極
IE3
A
0.356 9
0.077 3
0.125 2
B
−3.307 6
−1.895 1
−2.613 0
C
11.610 8
9.298 4
11.996 3
D
82.250 3
83.702 5
80.476 9
表9は60 Hzの公称効率,表10は3定格又は6定格をもつ電動機における200 V-60Hz又は400 V-60 Hz
の公称効率である。表9及び表10の定格出力以外の公称効率は,次による。
− 二つの連続した出力定格間において,中間点以上の定格出力の公称効率は,二つの公称効率の高い方
とする。
11
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 二つの連続した出力定格間において,中間点未満の定格出力の公称効率は,二つの公称効率の低い方
とする。
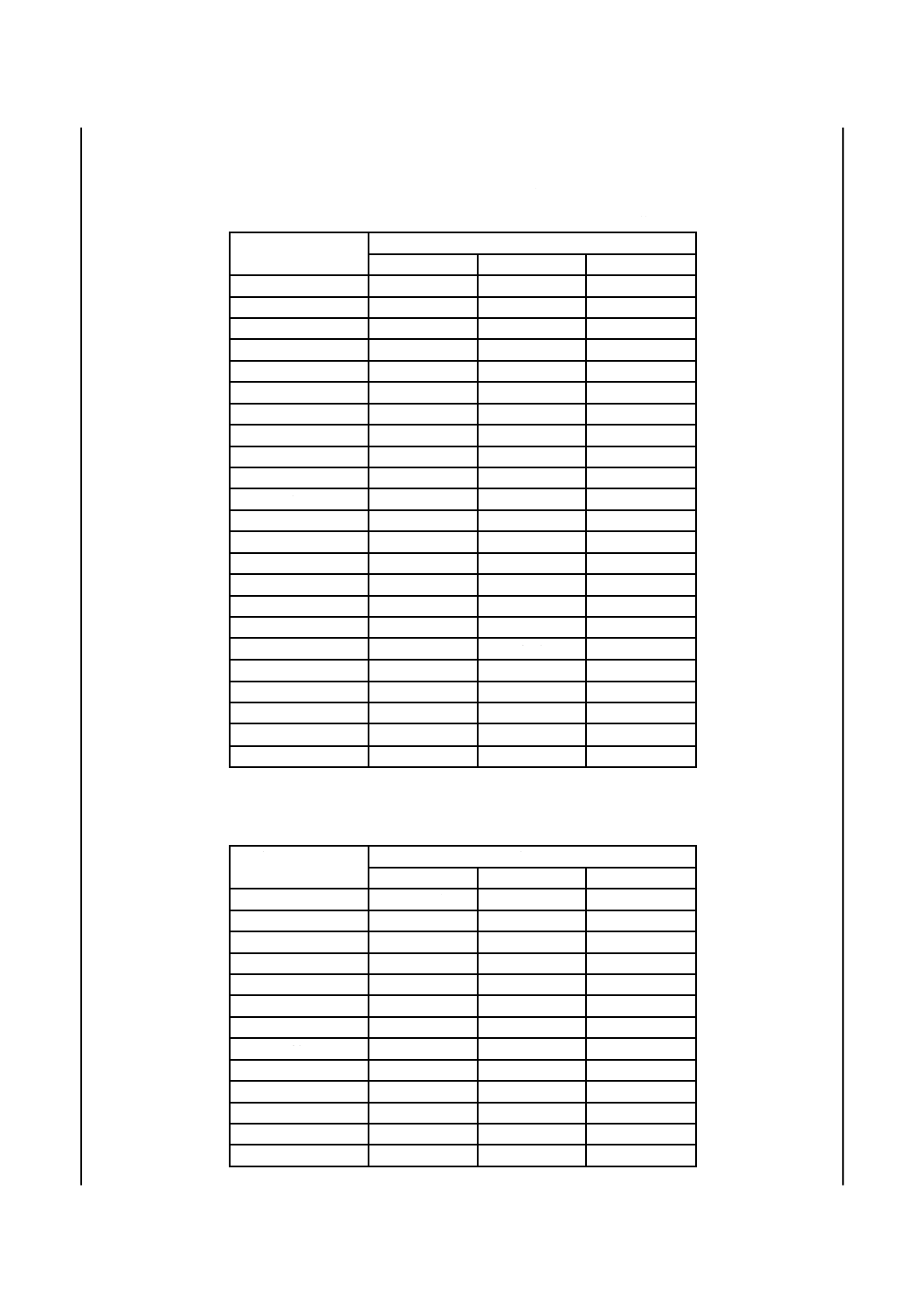
表8−(参考)プレミアム効率(IE3)50 Hzの公称効率(JIS C 4034-30,表7)
単位 %
定格出力 PN
(kW)
極数
2
4
6
0.75
80.7
82.5
78.9
1.1
82.7
84.1
81.0
1.5
84.2
85.3
82.5
2.2
85.9
86.7
84.3
3
87.1
87.7
85.6
3.7
87.8
88.4
86.5
4
88.1
88.6
86.8
5.5
89.2
89.6
88.0
7.5
90.1
90.4
89.1
11
91.2
91.4
90.3
15
91.9
92.1
91.2
18.5
92.4
92.6
91.7
22
92.7
93.0
92.2
30
93.3
93.6
92.9
37
93.7
93.9
93.3
45
94.0
94.2
93.7
55
94.3
94.6
94.1
75
94.7
95.0
94.6
90
95.0
95.2
94.9
110
95.2
95.4
95.1
132
95.4
95.6
95.4
160
95.6
95.8
95.6
200〜375
95.8
96.0
95.8
表9−(参考)プレミアム効率(IE3)60 Hzの公称効率(JIS C 4034-30,表8)
単位 %
定格出力 PN
(kW)
極数
2
4
6
0.75
77.0 a)
85.5
82.5
1.1
84.0
86.5
87.5
1.5
85.5
86.5
88.5
2.2
86.5
89.5
89.5
3.7
88.5
89.5
89.5
5.5
89.5
91.7
91.0
7.5
90.2
91.7
91.0
11
91.0
92.4
91.7
15
91.0
93.0
91.7
18.5
91.7
93.6
93.0
22
91.7
93.6
93.0
30
92.4
94.1
94.1
37
93.0
94.5
94.1
12
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表9−(参考)プレミアム効率(IE3)60 Hzの公称効率(JIS C 4034-30,表8)(続き)
単位 %
定格出力 PN
(kW)
極数
2
4
6
45
93.6
95.0
94.5
55
93.6
95.4
94.5
75
94.1
95.4
95.0
90
95.0
95.4
95.0
110
95.0
95.8
95.8
150
95.4
96.2
95.8
185〜375
95.8
96.2
95.8
注a) この値は,NEMA MG1の値を用いている。
表10−3定格又は6定格を含む電動機における200 V-60 Hz又は400 V-60 Hzの公称効率
単位 %
定格出力 PN
(kW)
極数
2
4
6
0.75
75.5
84.4
81.8
1.1
82.5
84.9
86.3
1.5
84.0
84.9
87.3
2.2
85.5
88.2
88.0
3.7
87.5
88.2
88.0
5.5
88.5
90.8
89.5
7.5
89.5
90.8
89.5
11
90.2
91.4
90.4
15
90.2
91.7
90.4
18.5
91.0
92.5
91.7
22
91.0
92.5
91.7
30
91.7
93.1
93.1
37
92.4
93.5
93.1
45
93.0
94.0
93.8
55
93.0
95.1
93.8
75
93.6
95.1
94.3
90
94.5
95.1
94.3
110
94.5
95.4
95.1
150
95.0
95.8
95.1
185〜375
95.4
95.8
95.1
7.4
耐電圧
耐電圧は,10.10の方法によって試験を行ったとき,これに耐えなければならない。
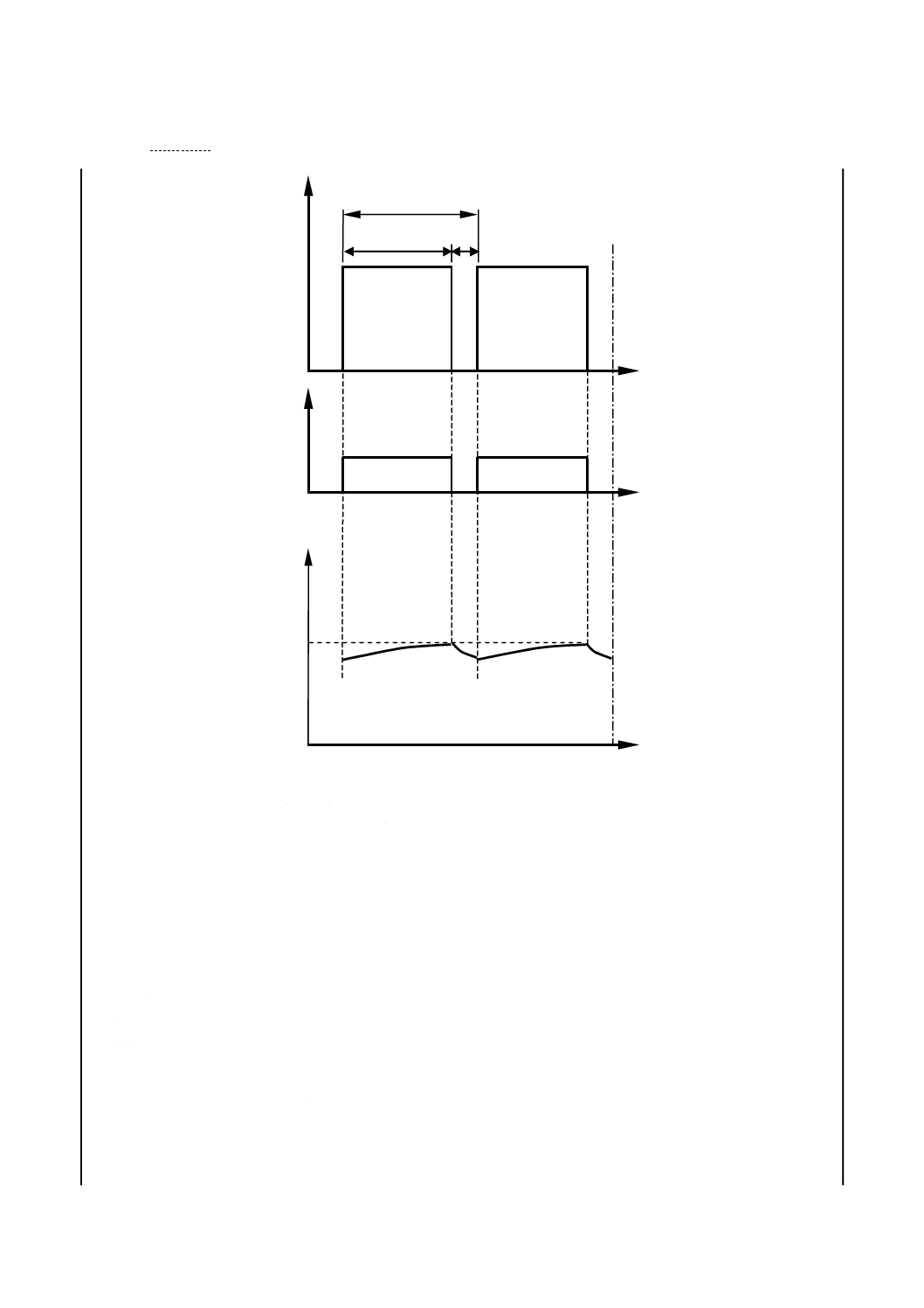
7.5
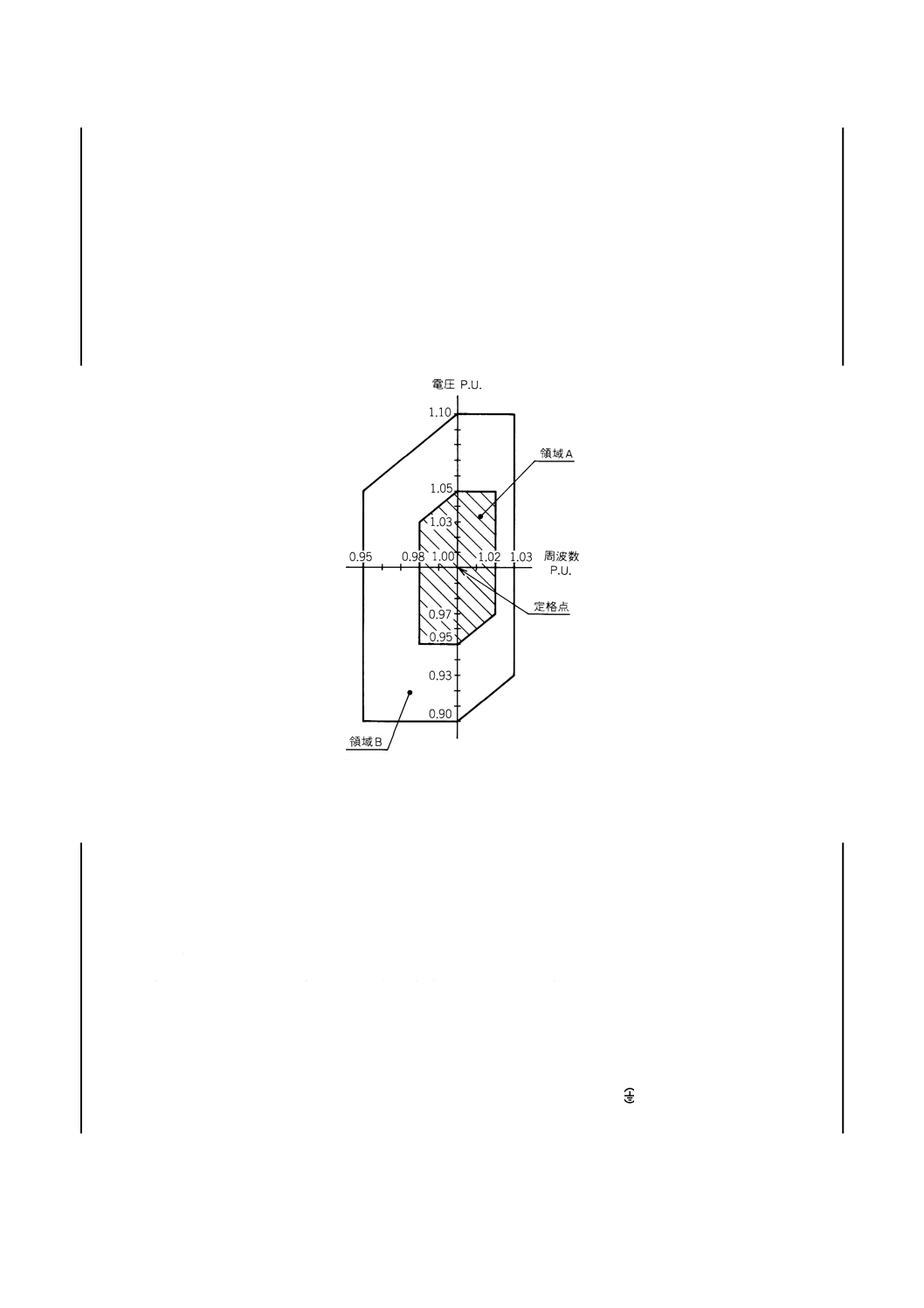
運転中の電圧変動及び周波数変動
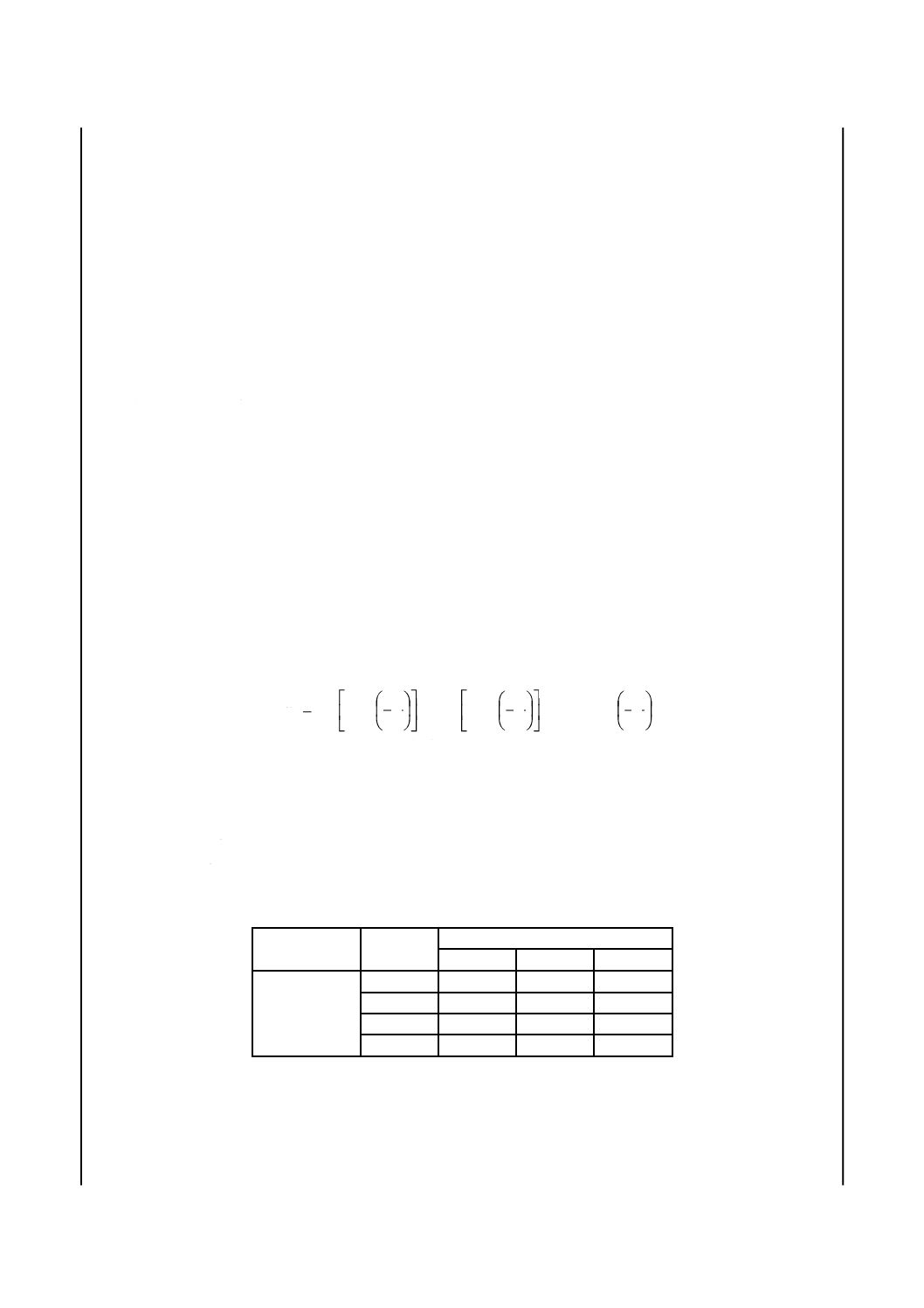
電源の電圧変動と周波数変動との組合せの適用は,図3の領域A又は領域Bとする。電動機は,領域A
内の電圧変動及び周波数変動に対しては,定格トルクで連続的に運転して,実用上支障があってはならず,
領域B内の電圧変動及び周波数変動に対しては,定格トルクで運転して実用上支障があってはならない。
“実用上支障がない”とは,安定な運転を持続し,電動機の寿命を著しく短縮する状態に至らないこと
を意味する。この場合,定格状態に規定した効率,温度上昇などの特性に従う必要はない。電動機は,そ
13
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の始動トルクが負荷に見合ったものである場合,電圧変動の下限においても始動可能だが,これはこの規
格の要求事項ではない。
なお,領域Bで長時間運転することは望ましくない。
注記1 電動機は,実際の運転条件下では,時々領域Aの範囲を超えて運転するが,この場合,持続
時間及び頻度を制限することが望ましく,温度による電動機の寿命低下に対する予防策とし
ては,出力を低減させることなどが考えられる。
注記2 温度上昇限度は,定格点で適用し,定格点から離れたところでは,この規格で規定する限度
を超える。この超過は,領域Aの境界部では,約10 K以上となり,領域Bでは,ほとんど
の場合領域Aよりも高くなる。
注記 P.U.:定格点に対する比率
図3−電動機の電圧変動及び周波数変動
8
構造
8.1
附属品
枠番号200以下の電動機には,必要に応じ,ベース,基礎ボルトなどを取り付ける。
枠番号200を超える電動機では,受渡当事者間の取り決めなどによる。
8.2
ケーブル引込口
ケーブル引込口は,特に規定がない場合,連結反対側から見て右側に設ける。
なお,端子箱を設ける場合,その取付中心は,特に規定がない場合,連結反対側から見て最上部から右
側110度の角度の範囲内に設ける。
8.3
接地端子
電動機には,接地導体を接続できるような端子を設ける。接地端子は,“
”の記号又は“PE”の文字
記号で識別できるようにする。
8.4
保護方式
電動機の保護方式は,JIS C 4034-5による。
14
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9
寸法
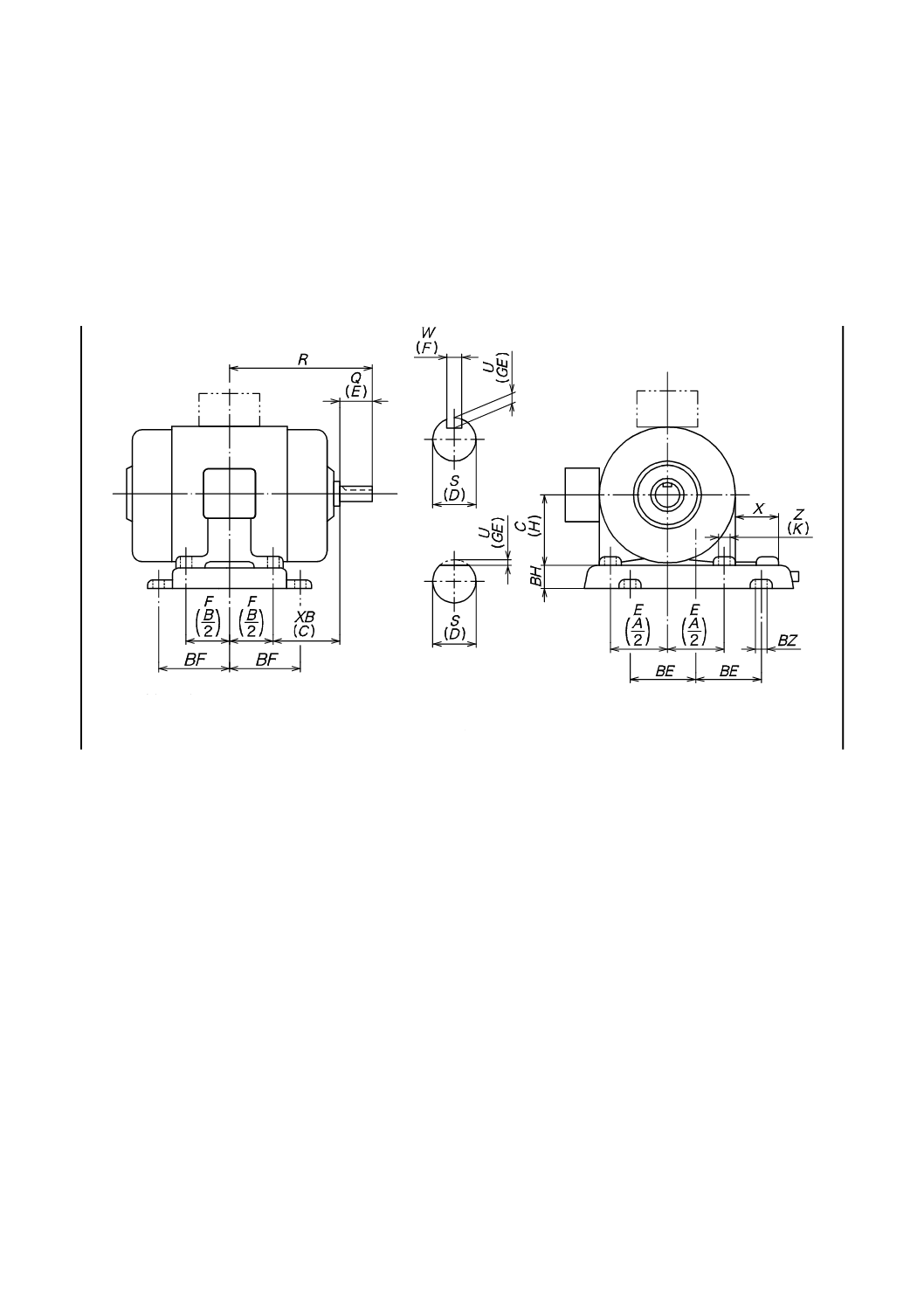
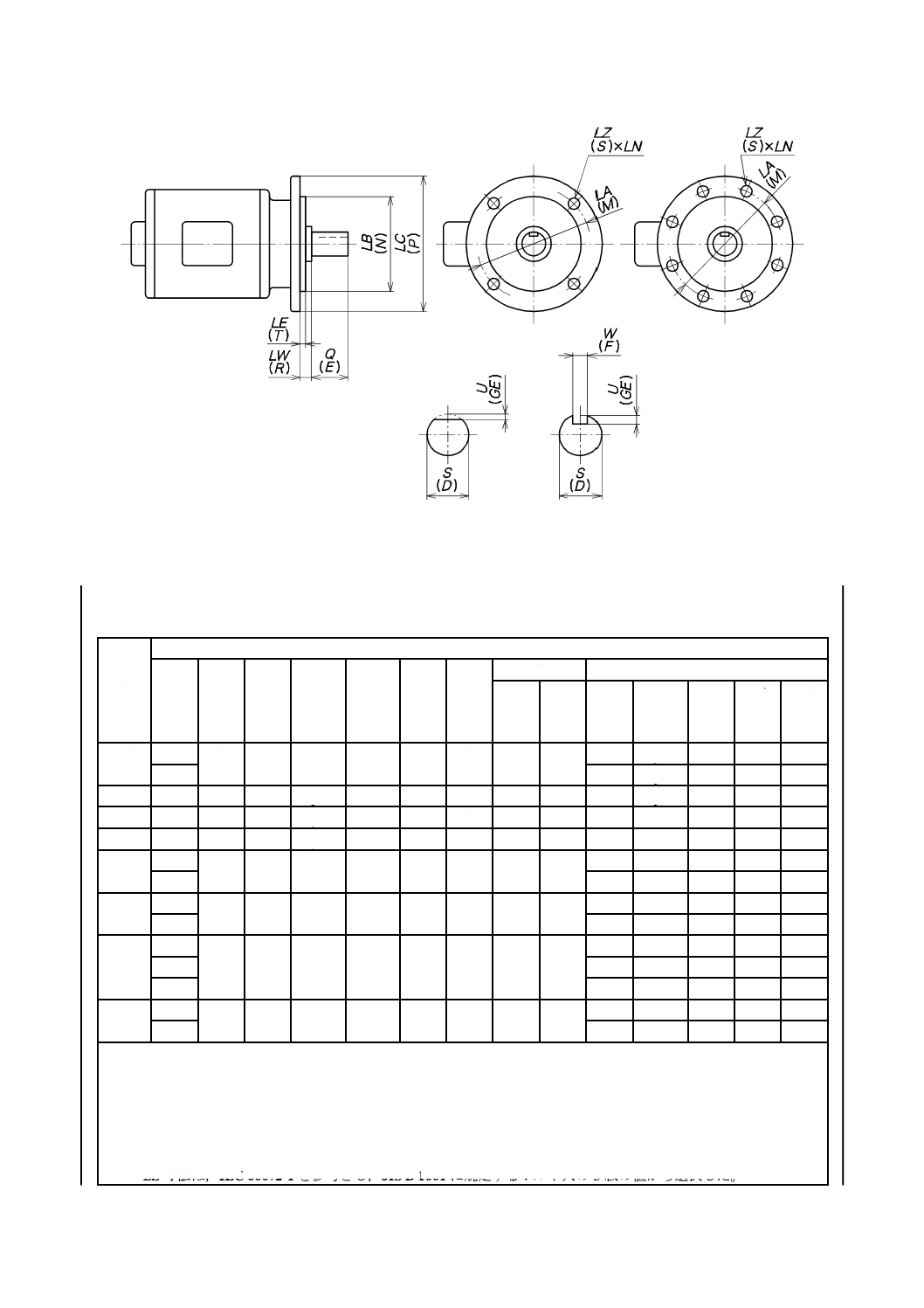
脚取付形IP4X及びIP5X電動機の各部寸法及びベース寸法,並びに枠番号及び寸法記号は,図4及び表
11による。また,フランジ形IP4X及びIP5X電動機各部寸法,並びにフランジ番号及び寸法記号は,図5
及び表12による。
なお,受渡当事者間の協定によって,表11及び表12に規定する以外の枠番号,フランジ番号,極数及
び寸法を用いることもできる。
IP4X及びIP5X以外の電動機の枠番号と寸法との組合せは,規定しない。
注記 括弧を付けた寸法記号は,IEC 60072-1に規定する寸法記号を示している。
図4−脚取付形IP4X及びIP5X電動機の寸法記号
15
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
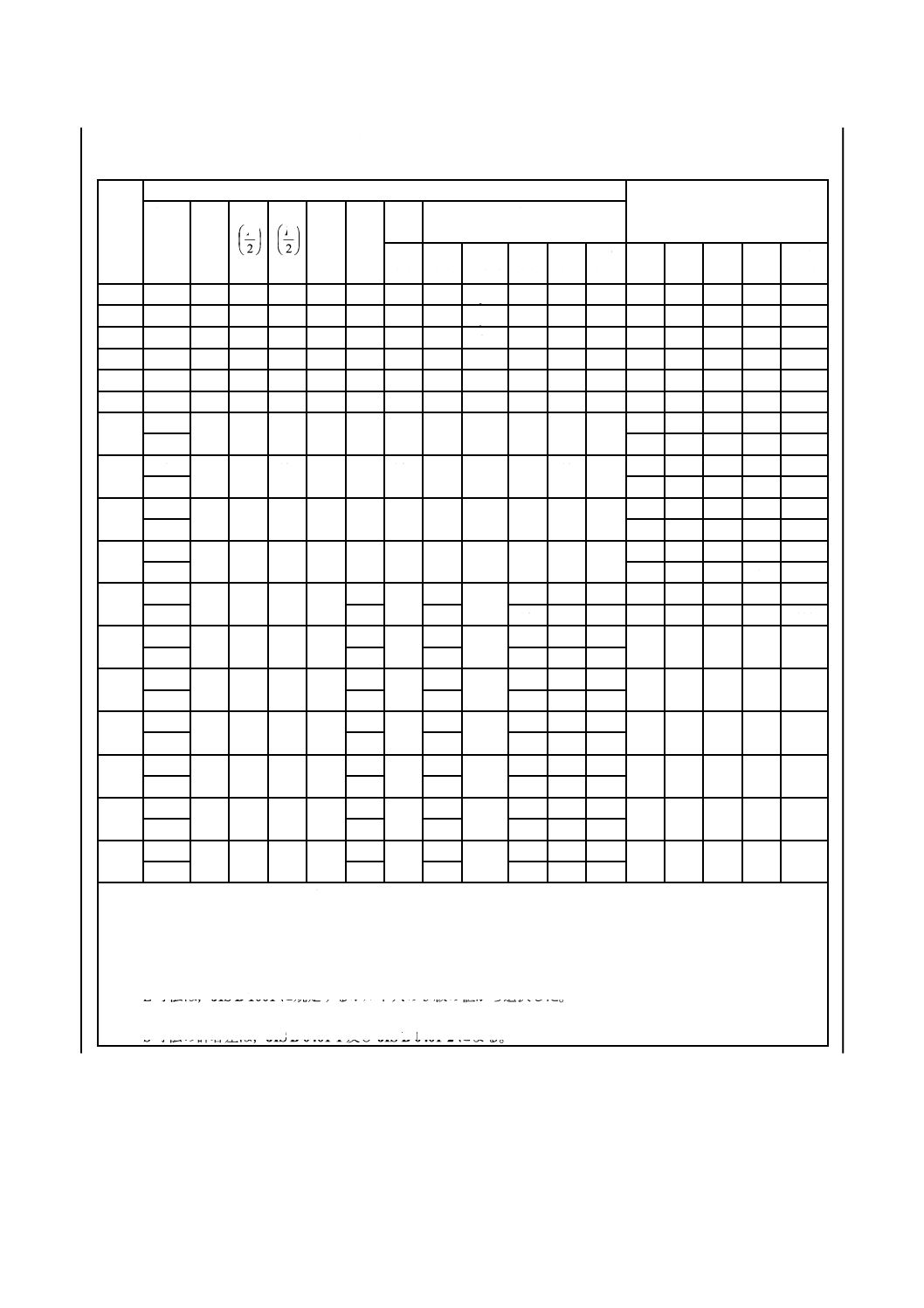
表11−脚取付形IP4X及びIP5X電動機の各部寸法及びベース寸法,並びに枠番号
単位 mm
枠
番
号
電動機の各部寸法
ベース
極数
C a)
(H)
E
2A
F
2B
XB
(C)
R
取付
穴径
軸
Z b)
(K)
S c)
(D)
S
許容差
Q
(E)
W
(F)
U
(GE)
BE
BF
BH
BZ
X
最小値
80M
2,4
80
62.5
50
50
140
10
19
j6
40
6
3.5
65
90
30
13
40
90L
2,4,6
90
70
62.5
56
168.5
10
24
j6
50
8
4
70
105
30
13
40
100L
4,6
100
80
70
63
193
12
28
j6
60
8
4
80
115
40
13
50
112M 2,4,6 112
95
70
70
200
12
28
j6
60
8
4
95
115
40
13
50
132S 2,4,6 132
108
70
89
239
12
38
k6
80
10
5
110
120
45
13
60
132M
4,6
132
108
89
89
258
12
38
k6
80
10
5
110
140
45
13
60
160M
2
160
127
105
108
323
14.5
42
k6
110
12
5
−
−
−
−
−
4,6
125
165
50
15
70
160L
2
160
127
127
108
345
14.5
42
k6
110
12
5
−
−
−
−
−
4,6
125
185
50
15
70
180M
2
180 139.5 120.5
121 351.5 14.5
48
k6
110
14
5.5
−
−
−
−
−
4,6
140
185
55
15
80
180L
2
180 139.5 139.5
121 370.5 14.5
55
m6
110
16
6
−
−
−
−
−
4,6
140
205
55
15
80
200L
2
200
159 152.5
133 395.5 18.5
55
m6
110
16
6
−
−
−
−
−
4,6
425.5
60
140
18
7
160
230
60
20
100
225S
2
225
178
143
149
402
18.5
55
m6
110
16
6
−
−
−
−
−
4,6
432
65
140
18
7
250S
2
250
203 155.5
168 433.5
24
55
m6
110
16
6
−
−
−
−
−
4,6
463.5
75
140
20
7.5
250M
2
250
203 174.5
168 452.5
24
55
m6
110
16
6
−
−
−
−
−
4,6
482.5
75
140
20
7.5
280S
2
280 228.5
184
190
484
24
55
m6
110
16
6
−
−
−
−
−
4,6
544
85
170
22
9
280M
2
280 228.5 209.5
190 509.5
24
55
m6
110
16
6
−
−
−
−
−
4,6
569.5
85
170
22
9
315S
2
315
254
203
216
529
28
55
m6
110
16
6
−
−
−
−
−
4,6
589
95
170
25
9
軸端キー及びキー溝は,JIS B 1301による。また,キー溝の寸法許容差は,普通形(N9)による。
注記1 括弧を付けた寸法記号は,IEC 60072-1に規定する寸法記号を示す。
注記2 参考となる定格出力と枠番号との関係は,表JA.1を参照。ただし,寸法によって,この規格の適用除外を
定めるものではない。
注a) C寸法の許容差は,JIS B 0902によって,250 mm以下は
0
0.5
−
mm,250 mmを超えるものは
0
1.0
−
mmとする。
b) Z寸法は,JIS B 1001に規定するボルト穴の3級の値から選択した。
なお,取付穴は,軸に直角方向に長い長穴としてもよい。
c) S寸法の許容差は,JIS B 0401-1及びJIS B 0401-2による。
16
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 括弧を付けた寸法記号は,IEC 60072-1に規定する寸法記号を示す。
図5−フランジ形IP4X及びIP5X電動機の寸法記号
表12−フランジ形IP4X及びIP5X電動機の各部寸法並びにフランジ番号
単位 mm
フラ
ンジ
番号
電動機の各部寸法
極数
LA
(M)
LB a)
(N)
LB
許容差
LC
(P)
最大値
LE
(T)
LW
(R)
取付穴
軸
LZ b)
(S)
径
LN
数
S a)
(D)
S
許容差
Q
(E)
W
(F)
U
(GE)
FF165
2,4
165
130
j6
200
3.5
0
12
4
19
j6
40
6
3.5
2,4,6
24
j6
50
8
4
FF215 2,4,6
215
180
j6
250
4
0
14.5
4
28
j6
60
8
4
FF265 2,4,6
265
230
j6
300
4
0
14.5
4
38
k6
80
10
5
FF300 2,4,6
300
250
j6
350
5
0
18.5
4
42
k6
110
12
5
FF350 2,4,6
350
300
j6
400
5
0
18.5
4
48
k6
110
14
5.5
2,4,6
55
m6
110
16
6
FF400
2
400
350
j6
450
5
0
18.5
8
55
m6
110
16
6
4,6
60
m6
140
18
7
FF500
2
500
450
j6
550
5
0
18.5
8
55
m6
110
16
6
4,6
65
m6
140
18
7
4,6
75
m6
140
20
7.5
FF600
2
600
550
js6
660
6
0
24
8
55
m6
110
16
6
4,6
85
m6
170
22
9
軸端キー及びキー溝は,JIS B 1301による。また,キー溝の寸法許容差は,普通形(N9)による。
注記1 括弧を付けた寸法記号は,IEC 60072-1に規定する寸法記号を示す。
注記2 電動機軸に対するフランジの偏心度及び直角度は,IEC 60072-1に規定してある。
注記3 参考となる定格出力とフランジ番号との関係は,表JA.2を参照。ただし,寸法によって,この規格の適用
除外を定めるものではない。
注a) LB及びS寸法の許容差は,JIS B 0401-1及びJIS B 0401-2による。
b) LZ寸法は,IEC 60072-1を参考とし,JIS B 1001に規定するボルト穴の3級の値から選択した。
17
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10 試験方法
10.1 試験の種類
a)〜c)及びf)は全数試験する。ただし,a)の保護方式試験は,同一構造で製作した電動機では,全数でな
く1機以上の試験とする。d)及びe) は同一設計で製作した電動機では,1機以上の試験とする。
a) 構造試験(10.2参照)
b) 抵抗値(10.3参照)
c) 拘束試験(10.4参照)
d) 温度上昇(10.5参照)
e) 効率の算定(10.6参照)
f)
耐電圧試験(10.10参照)
なお,次の試験は,購入者が指定する場合又は受渡当事者間の協定がある場合に行う。ただし,同一設
計で製作した電動機にあっては,1機以上の試験とする。
− 始動特性の算定(10.7参照)
− 過速度試験(10.8参照)
− 騒音試験(10.9参照)
10.2 構造試験
構造試験は,箇条8及び箇条12に規定する事項について調べる。
10.3 抵抗値
10.3.1 試験抵抗値
JIS C 4034-2-1:2011の5.7.1(試験抵抗値)を適用する。
10.3.2 巻線温度
JIS C 4034-2-1:2011の5.7.2(巻線温度)を適用する。
10.3.3 電源開路後,電動機の停止した後に行う抵抗法による測定の補正
10.3.3.1 一般事項
直接測定抵抗法による温度上昇試験後の温度測定には,速やかな電動機の停止が必要である。また,綿
密に計画した手順及び適切な人員が必要である。
10.3.3.2 短い停止時間の場合
最初の抵抗の測定値が,表13に規定する時間内で得られる場合は,その値を巻線温度の測定値とする。
表13−電源開路後の経過時間
定格出力 PN
kW
電源開路後の経過時間
s
PN≦ 50
30
50 <PN≦ 200
90
200 <PN≦ 375
120
10.3.3.3 長い停止時間の場合
最初の抵抗測定が表13に規定する時間内にできない場合は,できるだけ早く,表13に規定する経過時
間の2倍以内に最初の抵抗を測定し,抵抗値が最大の値から明確な下降を始めるまで約1分間の間隔で測
定する。これらの測定値を時間関数としてプロットし,表13に規定する電動機定格出力に対応する経過
時間まで外挿する。この場合,温度を対数目盛とした片対数表示がよい。
18
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
このようにして得た温度を電源開路時の巻線温度とみなす。
停止後の継続温度測定において温度が上昇し,その後,低下していくような場合は,測定した最も高い
温度を最高温度とする。
最初の測定までに,表13に規定する経過時間の2倍以上の時間を要する場合には,この補正方法は,受
渡当事者間の協定がある場合にだけ用いる。
10.3.4 基準冷媒温度の補正
JIS C 4034-2-1:2011の5.7.3(基準冷媒温度の補正)を適用する。
10.4 拘束試験
任意の周囲温度において,回転子を拘束し,一次巻線に定格周波数の電圧を加えて,印加電圧,一次電
流及び入力を次のように測定する。この試験では,測定値が試験中の巻線の温度上昇の影響を受けやすい
ため,できるだけ短時間に試験を終了する必要がある。
ただし,始動電流の制限又は始動トルクを大きくするためにかご形形状を特殊な構造にした電動機では,
定格周波数の1/2又は1/4の周波数で試験してもよい。
a) 回路定数算定のための拘束試験においては,定格電流又はそれに近い一次電流が流れるような低電圧
を加えて,一次電流,印加電圧及び入力を測定する。同一電流における印加電圧値が回転子位置によ
って異なる場合には,電圧がその最大値と最小値との平均値に等しくなるような回転子位置において
測定する。
b) 始動特性算定に10.7.1の対数比例法を用いない場合は,a) の試験は始動特性算定のための拘束試験を
兼ねる。ただし,同一電流における印加電圧値が回転子位置によって著しく異なる場合は,電圧が最
小となる回転子位置で一次電流及び印加電圧を測定するとともに,電圧が最大となる回転子位置で一
次電流,印加電圧及び入力を測定する。対数比例法(I)を用いる場合には,定格電流のほぼ100 %及
び200 %の電流を流す拘束試験,対数比例法(II)を用いる場合には,対数比例法(I)の拘束試験の
他に,更に定格電流のほぼ150 %の電流を流す拘束試験を行い,そのときの電流及び電圧を測定する。
印加電圧が回転子位置によって著しく異なる場合とは,平均値からの変動分が平均値の3.5 %を超え
る場合とする。
注記 この試験は周囲温度が10 ℃〜40 ℃において行うことが望ましい。
10.5 温度上昇
10.5.1 温度試験中の条件
10.5.1.1 温度上昇
使用中における電動機各部分の測定温度と冷媒温度との差を温度上昇とする。
10.5.1.2 負荷の方法
定格出力でその温度上昇が一定となったと認められるまで,電動機に連続負荷を掛ける。ただし,実負
荷法による温度試験を行うことが困難な場合には,等価負荷法によることができる。
注記 効率算定では,JIS C 4034-2-1:2011の6.4.4.1(定格負荷温度試験)によって,実負荷法を用い
る必要がある。
10.5.1.3 冷媒温度
電動機の温度上昇を定めるときの基準となる冷却媒体の温度を冷媒温度という。冷却方式によって冷媒
温度を次のように定め,測定を行う。
a) 開放形電動機又は熱交換器のない閉鎖形電動機(周囲空気又は気体によって冷却する) 電動機の周
囲で測定した空気又は気体の温度を冷媒温度として,測定する。
19
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 換気ダクトを通じて取り入れる遠方の空気又は気体によって冷却する電動機,及び別置きの熱交換器
をもつ電動機 電動機の入口で測定した一次冷媒の温度を冷媒温度として,測定する。
c) 取付け若しくは作り付け熱交換器又は内部熱交換器をもつ閉鎖形電動機 電動機の入口で測定した
一次冷媒の温度,又は熱交換器(水冷,空冷とも)の入口で測定した二次冷媒の温度を冷媒温度とし
て,測定する。電動機は,任意の適切な冷媒温度において試験をすることができる。温度試験の終わ
りの冷媒温度が指定された温度よりも30 K以上異なる場合は,7.1による補正を行う。
10.5.1.4 電動機周囲の空気又は気体温度の測定法
電動機からl m〜2 m隔たった箇所で,電動機の床上高さのほぼ中央の高さで,電動機若しくはその他か
らの熱放射,又は通風の影響を受けないように温度計数個を設置して温度を測定し,その平均値をとる。1
時間以下の等間隔で測定した記録から,全試験中最後の4分の1の期間における平均値を冷媒温度とする。
10.5.2 温度上昇の決定方法
10.5.2.1 電動機各部分の温度上昇
10.5.2.2によって選択した方法で電動機の運転中又は運転停止後の各部の最高温度と,10.5.1.2及び
10.5.1.3に従って測定した冷媒温度との差を電動機のその部分の温度上昇とする。
10.5.2.2 温度の測定方法
電動機各部分の温度の測定方法には,次の三つの方法がある。電動機の種類,出力(若しくは容量)又
は測定箇所に応じて適切な方法を選定する。
表2には,電動機の同一部分に対して複数の温度測定法を規定しているが,これは同一部分の温度を二
つ以上の方法で測定することを意味するものではない。仕様書などに温度上昇限度を示す場合は,該当す
る温度測定法を必ず記載する。
a) 抵抗法 巻線の抵抗の増加を測定して巻線の温度上昇を,次の式によって算出する方法で,巻線の平
均温度上昇を算出できる。巻線温度を抵抗から決定する場合は,冷温時の巻線温度は冷媒と2 K以上
の温度差があってはならない。
)
−
)+(
+
(
−
=
−
=
α
1
1
1
2
α
2
1
θ
θ
θ
θ
θ
θ
T
R
R
ここに,
θ: 巻線の温度上昇(K)
θ2: 試験直後における巻線温度(℃)
θα: 試験の最後における冷媒温度(℃)
R2: 熱状態(温度θ2)における巻線抵抗
R1: 冷状態(温度θ1)における巻線抵抗
T: 定数
銅の場合にはT=235とする。また,アルミニウムの場合で,
受渡当事者間の協定がない場合にはT=225を用いる。
その他の材料に対しては,その材料の0 ℃における抵抗の温
度係数の逆数とする。
θ1: 冷状態においてR1を測定したときの温度(℃)
b) 埋込温度計法 電動機の完成後には接近できない箇所に,抵抗温度計素子,熱電対素子,サーミスタ
素子などをあらかじめ埋め込んでおいて,電気的にその箇所の温度を測定する方法である。
固定子スロット内の巻線の温度を測定する場合で,かつ,2層巻線の場合には,上下層間に埋込温
度計素子を埋め込む。巻線の層数が2よりも多い場合には,層間で温度が最高と思われる箇所に埋め
込む。
この埋込温度計素子の数は6個以上とし,これを円周方向に適切に分布させる。
20
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単層巻線に対して,埋込温度計法は適用しない。
埋込温度計素子は最高温度となると思われる箇所に,一次冷媒に触れないよう,また,安全性を考
えて設置する。
注記1 埋込温度計素子の読みの最大値は,表2に規定する温度上昇又は温度限界値を満足してい
るかの判定に用いることができる。
注記2 単層巻線の使用時の温度を調べるために,スロットの底に入れた埋込温度計は,主として
鉄心の温度を示すため巻線の温度として正確とはいえない。また,巻線とくさび(楔)と
の間に入れた埋込温度計は,ギャップを通る冷却風の影響を受けるため巻線の温度として
正確とはいえない。ただし,これらの場所での温度測定値と抵抗法による温度測定値との
関係が温度上昇試験によって把握できている場合は,運転管理上の目安として利用するこ
とができる。
c) 温度計法 電動機の完成後に,外部から接近できる表面で,温度が最高と思われる箇所に適切な方法
で温度計を取り付けて温度を測定する。
温度計としては,棒状温度計,ダイヤル温度計,抵抗温度計,熱電対温度計などのいずれでもよい。
なお,棒状温度計を磁界の影響を受ける場所に用いる場合には,水銀温度計ではなくアルコール温
度計を用いる。
巻線の温度測定方法の選択は,次による。
− 通常は,電動機の巻線の温度測定には抵抗法を適用する。
− 定格出力が200 kW未満の電動機に対しては,受渡当事者間の協定がない場合には,抵抗法を適用す
る。
− 定格出力が200 kWを超え375 kW以下の電動機に対しては,受渡当事者間の協定がない場合には,製
造業者は,抵抗法又は埋込温度計法のいずれかを選択する。
− 単層巻の電動機の固定子巻線に対しては,抵抗法を適用する。
− 巻線の温度測定に対する温度計法は,埋込温度計法及び抵抗法が適用できない場合に適用する。
温度計法は,次のような場合にも適用できる。
− 抵抗法によって温度上昇を決定することが実際的でない場合,例えば低抵抗の巻線,特に全体の抵抗
に比べ,接合部の抵抗が無視できないような場合。
− 固定部の単層巻線
− 抵抗の適用は可能であるが,量産機の受渡試験のため,温度計法だけが用いられている場合。
注記 購入者が抵抗法又は埋込温度計法で規定する温度上昇のほかに,近接する可能性がある最高温
度部の温度計法による読みを要求する場合は,受渡当事者間で協議する。
10.6 効率の算定
JIS C 4034-30:2011の5.1(算定)に従って算定する。
注記 JIS C 4034-30:2011の5.1.1(一般)では,JIS C 4034-2-1:2011の不確かさ“低”の試験方法を
用いることを規定している。
10.7 始動特性の算定
10.7.1 電動機の最大始動電流
電動機の最大始動電流Istは,10.4の試験結果から,次のいずれかの方法によって算定する。ただし,一
21
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
定の拘束電流に対する拘束電圧が回転子位置によって著しく異なる場合には,拘束電圧の値は,回転子位
置に対する最小値をとる(10.4参照)。
a) 正比例法 拘束試験を定格電流のほぼ100 %の電流について行い,その結果から,次の式によって算
出する。
1
s
1
1
s
st
V
V
I
I=
(A)
ここに,
Is1: 拘束電流(A)(各線電流の平均値)
V1: 定格電圧(V)
Vs1: 拘束試験で加えた電圧(V)
b) 対数比例法(I) 拘束試験を定格電流のほぼ100 %及び200 %の電流について行い,そのときの拘束
電流Is1及びIs3(A)並びにそれぞれに対応するVs1及びVs3の拘束電圧を測定し,次の式によって最大
始動電流を算定する。この算定法は,全閉スロット機に適用する。
β
1s
1
1s
st
V
V
I
I=
(A)
β=0.7α+0.35
1s
3s
1s
3s
log
log
V
V
I
I
=
α
c) 対数比例法(II) 対数比例法(I)の拘束試験のほかに定格電流のほぼ150 %の電流について拘束試験
を行い,そのときの拘束電流Is2(A)及びそれに対応する拘束電圧Vs2(V)を測定し,次の式によっ
て最大始動電流を算定する。この算定法は,半閉スロット機及び開放スロット機に適用する。
γ
3s
1
3s
st
04
.1
V
V
I
I=
(A)
γ=1.05γ2−0.35(γ1−1) ·············································· (γ2>γ1のとき)
=0.7γ2+0.35 ························································ (γ2≦γ1のとき)
1s
2s
1s
2s
1
log
log
V
V
I
I
=
γ
2s
3s
2s
s3
2
log
log
V
V
I
I
=
γ
d) 対数比例法(III) 正比例法の拘束試験のほかに定格周波数の下で定格電圧に近い電圧を加えて始動
させ,そのときの電圧V1'(V)及び電流Ist'(A)を測定し,次の式によって最大始動電流を算定する。
α
'
'
1
1
st
st
V
V
I
I=
(A)
22
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
s1
1
s1
st
'
log
'
log
V
V
I
I
=
α
なお,始動試験時の電圧V1'は,定格電圧の60 %以上が望ましい。始動試験時の電流は,過渡現象
消滅後の値を測定する。
10.7.2 始動装置を用いる場合の電源側の最大始動電流
始動装置を用いる電動機の場合,その始動方式における電源側の最大始動電流Istは,10.4の試験結果か
ら次のようにして算定する。ただし,一定の拘束電流に対する拘束電圧が回転子位置によって著しく異な
る場合には,拘束電圧の値は,回転子位置に対する最小値をとる(10.4参照)。
a) スターデルタ始動の場合
1s
1
1s
st
3
1
V
V
I
I
×
×
=
ただし,拘束試験は三角結線で行う。
なお,星形結線で拘束試験を行い,10.7.1の対数比例法によって求めた定格電圧における始動電流
値をIstとしてもよい。
b) 補償器始動の場合
1s
1
1s
2
st
1
V
V
I
I
×
×
α
=
ここに,
α: 始動補償器の変圧比
ただし,10.7.1の対数比例法によって求めた始動時の電動機側電圧における始動電流値のα分の1
をIstとしてもよい。
c) リアクトル始動及び一次抵抗始動の場合 これらの場合には,始動時の電動機側電圧における始動電
流を,10.7.1の正比例法又は対数比例法によって算定する。
10.7.3 最小始動トルク
電動機の最小始動トルクτstは,次の式によって算定する(10.4参照)。
3
N
2
s
st
1
2
s
s
R
R
st
10
'
'
2
'
3
'
1
×
P
I
I
R
I
W
S
−
)
−
(
=
τ
τ
ここに,
τR: 全負荷トルク
PN: 定格出力(kW)
SR: 定格出力時の滑り(p.u.)
Ws': 拘束試験における入力(W)
Is': 定格電流にほぼ等しい拘束電流(A)
R1: 各端子間において測定した一次巻線抵抗の平均値(Ω)
一定の拘束電流Is'における拘束電圧の回転子位置による変化が著しくない場合は,Ws'は拘束電圧がその
最大値と最小値との平均値に等しくなるような回転子位置における入力を用い,Ist'は次の式によって算出
する。
Ist'=Ist(A)
ここに,
Ist: 最大始動電流(A)
一定の拘束電流Is'における拘束電圧の回転子位置による変化が著しい場合は,Ws'は拘束電流Is'及び拘束
23
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電圧(Vs')maxのときの入力を,また,Ist'は次によって算出する。
max
s
min
s
st
st
'
'
'
)
(
)
(
=
V
V
I
I
(A)
ここに,
(Vs')min: 拘束電流Is'に対する拘束電圧の最小値(V)
(Vs')max: 拘束電流Is'に対する拘束電圧の最大値(V)
始動装置を用いる電動機の場合,その始動方式における最小始動トルクは,電源側の最大始動電流が始
動装置に流れるときの電動機電流を上記の算定法におけるIstによって算出する。
10.8 過速度試験
電動機は最大定格回転速度の120 %に耐えられるよう,設計しなければならない。
過速度試験後,いかなる異常な永久変形もなく,通常の運転を妨げるいかなる不適合も検出されないも
のでなければならない。過速度試験を行う場合,試験時間は2分間とする。
なお,過速度試験後には,積層回転子のリム,くさび又はボルトで保持している積層磁極の径が,微小
に永久的に増加するが,これをもってその電動機の正常な運転ができない異常な変形とはみなさない。
規定の過速度で運転し,次に示すような運転中の異常を調べる。
− 異常振動
− 異常音響
− 停止後の軸受,固定子と回転子との接触,冷却ファン,バインド線,その他締付部分の異常の有無な
ど
試験方法としては,例えば,電源の周波数を上昇させる方法,高速電動機による方法,ベルト車の半径
の比率を変えて運転する方法などがある。
過速度試験は,温度上昇試験直後に行うことが望ましい。
10.9 騒音試験
電動機を,定格電圧及び定格周波数で無負荷運転した場合の騒音レベルを測定する。この場合,加速中
に異常騒音がないことを確認することが望ましい。
なお,A特性で補正した音響パワーレベルは,特殊な場合に用いる。
10.9.1 測定条件
10.9.1.1 据付け
測定は,暗騒音及び周囲からの反射音ができるだけ少なく,また,変化が少ない場所を選定し,かつ,
弾性体上で行うことが望ましい。
10.9.1.2 供給電源
供給電源は正弦波に近いもので,電圧が対称で急激な変動が少ないことが望ましい。
10.9.1.3 暗騒音の影響
合成騒音と暗騒音との差が10 dB以上の場合は,暗騒音の影響を無視してよい。その差が10 dB未満の
ときは,表14によって補正をして対象の音の騒音を推定できる。両者の差が少ないとき,特に3 dB未満
のときは測定値には信頼性がない。
表14−暗騒音の影響に対する補正
単位 dB
合成騒音と暗騒音との差
3
4
5
6
7
8
9
補正値
−3
−2
−1
24
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.9.1.4 反射音の影響
電動機の表面からマイクロホンまでの距離に対して,騒音レベルが一様に減少し,かつ,距離を2倍に
したとき,約4 dB以上減少するような場所を選定することが望ましい。
10.9.2 騒音の音圧レベルの測定方法
10.9.2.1 一般事項
測定には,JIS C 1509-1に規定するクラス2のサウンドレベルメータ(騒音計),又はこれと同等以上の
騒音計を用い,周波数補正は,A特性とする。オクターブ又は1/3オクターブバンドの測定を行うとき用
いるバンドパスフィルタは,JIS C 1514に適合するものとし,その中心周波数が表15のとおり,オクター
ブバンドのときは8個,1/3オクターブバンドの24個を原則とする。サウンドレベルメータの指示が変動
する場合は,数回の測定の平均値とする。
表15−バンドパスフィルタの中心周波数
単位 Hz
オクターブバンド
63
125
250
500
1000
2000
4000
8000
1/3オクターブバンド
50
63
80
100
125
160
200
250
315
400
500
630
800
1000
1250
1600
2000
2500
3150
4000
5000
6300
8000
10000
10.9.2.2 測定位置
10.9.2.2.1 横軸機の測定
測定位置は,軸中心線を含む水平面上の軸方向及び固定子枠のほぼ中心で軸と直角方向の左右2点を含
む4点で,表16に規定する距離で測定する。ただし,大形電動機の場合又は音源の指向性が顕著な場合
は,更に測定点を増やすことが望ましい。また,表16に規定する距離で測定するのが不適切な場合(例
えば,測定する騒音レベルと暗騒音とが著しく接近している場合),又は反射音の影響が顕著な場合には,
表16に規定する以外の距離を選定してもよいが,この場合にはマイクロホンの距離を明記する。
なお,マイクロホンは,電動機自体の冷却風の影響を受けないところに置く。距離のとり方は,軸を除
く各々の電動機表面から測定する。
表16−マイクロホンの距離
単位 m
電動機定格出力
距離
1 kW未満
0.5
1 kW以上
1.0
10.9.2.2.2 立軸機の測定
立形電動機の場合は,固定子枠のほぼ中心を通る水平面上で横軸機に準じて測定する。
10.9.2.3 騒音の音圧レベルの算出方法
測定値の算術平均をもって電動機の騒音の音圧レベルとする。
10.9.3 音響パワーレベルの測定方法
10.9.3.1 測定位置
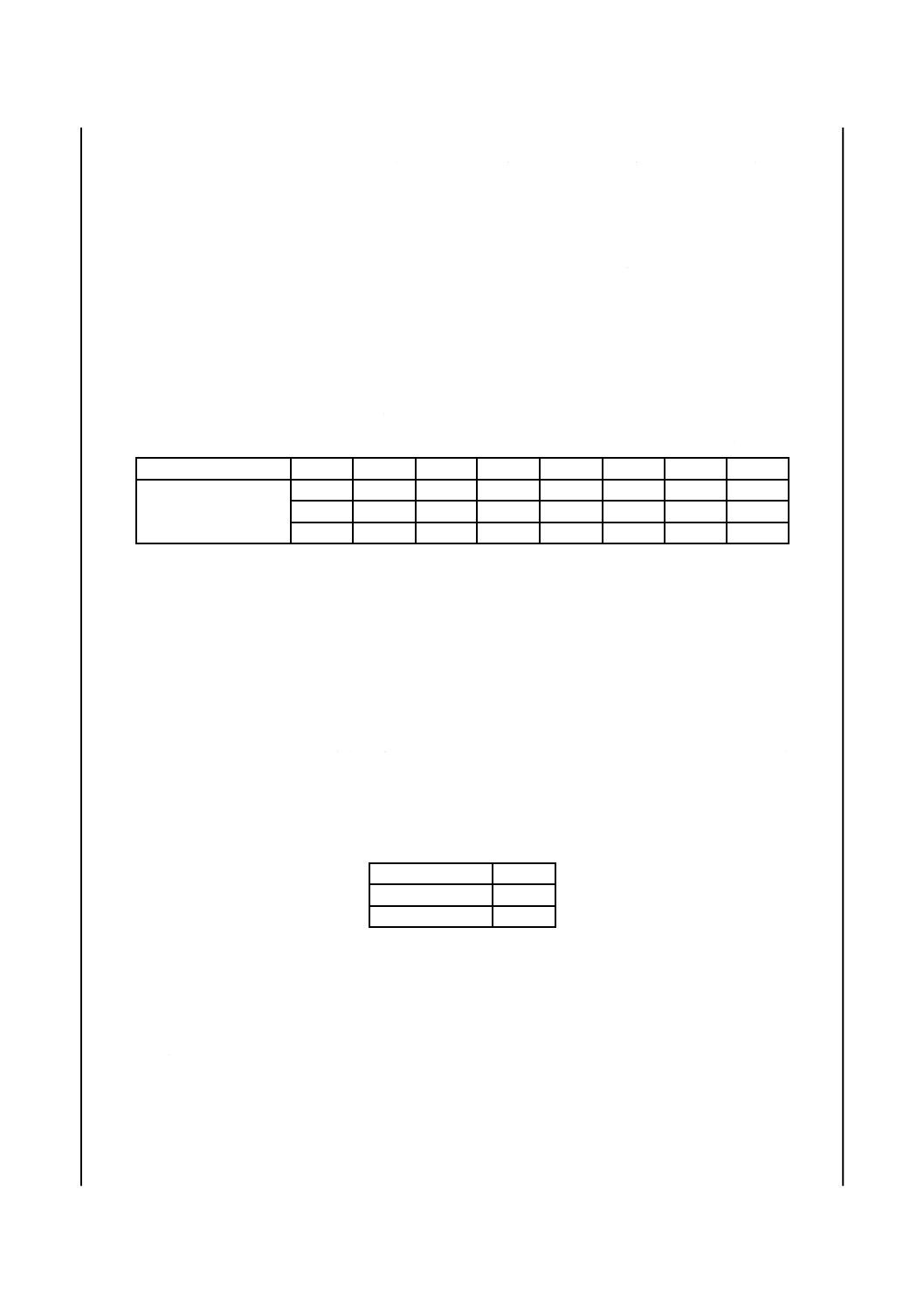
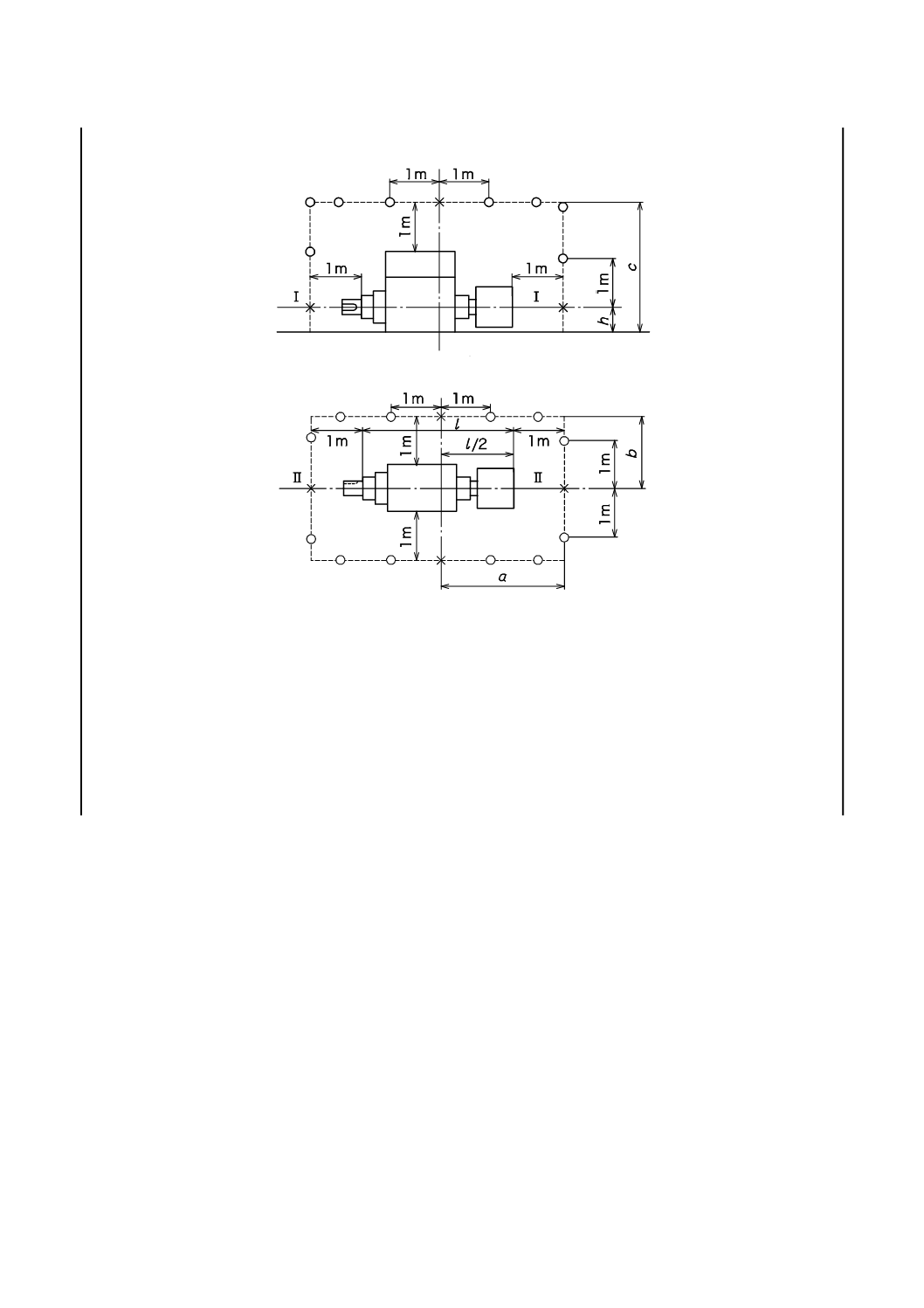
10.9.3.1.1 横軸機の測定
図6に示す基準測定点(×印)及び基準測定点から1 mピッチの各点(○印)で騒音レベル(dB)を測
定する。図6 a) に示す測定位置は,軸中心線を含む垂直面上の位置を示し,また,図6 b) に示す測定位
25
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
置は,軸中心線を含む水平面上の位置を示す。
a) b)のII−II線に沿う縦断面
b) a) のI−I線に沿う横断面
h: 軸心高さ(ただし,h<0.25 mのときは,h=0.25 mとする。)
l: 電動機全長(軸端を除く。)
図6−測定位置(横軸機)
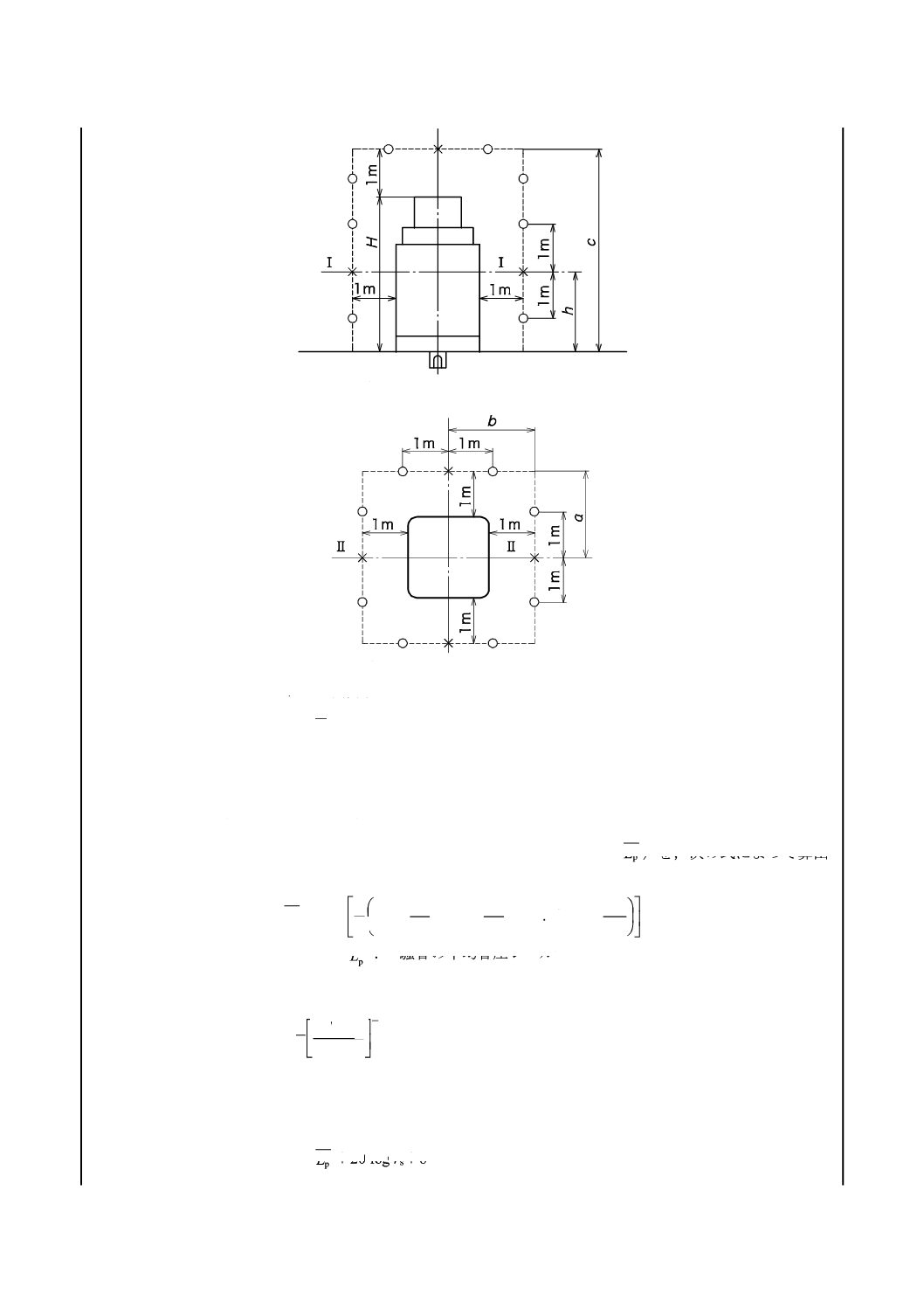
10.9.3.1.2 立軸機の測定
図7の基準測定点(×印)及び基準測定点から1 mピッチの各点(○印)で騒音レベル(dB)を測定す
る。図7 a) に示す測定位置は,軸中心線を含む垂直面上の位置を示し,また,図7 b) に示す測定位置は,
電動機高さの半分の位置における水平面上の位置を示す。
26
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) b)のII−II線に沿う縦断面
b) a) のI−I線に沿う横断面
H:電動機高さ
2
H
h=
(ただし,h<0.25 mのときは,h=0.25 mとする。)
a≧b
図7−測定位置(立軸機)
10.9.3.2 騒音の音響パワーレベルの算出方法
n個の騒音の音圧レベル測定値Lp1,Lp2,……,Lpnから平均音圧レベル(
pL)を,次の式によって算出
する。
…
…
10
log
10
log
10
log
1
log
10
pn
1
p2
1
1
p
1
p
L
L
L
n
L
−
−
−
+
+
+
=
ここに,
pL: 騒音の平均音圧レベル
次に,図6又は図7に示すa,b及びcの値からrsを,次の式によって算出する。
2
1
s
2
)
+
(
=
c
b
a
r
ここに,
rs: 等価半球の半径
電動機を反射性の床面,例えば,コンクリート床,地面上などに置いている場合は,Lwを,次の式によ
って算出する。
Lw=
pL+20 log rs+8
27
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
Lw: A特性で補正した音響パワーレベル(dB)
また,電動機を自由空間(音場が反射物などの影響を受けない場所のことであって,無響室がこれに相
当する。)で測定した場合は,Lwを,次の式によって算出する。
Lw=
p
L+20 log rs+11 (dB)
注記 騒音計及び測定上の精度のため,騒音レベル測定には,3 dB以下の誤差を生じることがある。
10.10
耐電圧試験
10.10.1
耐電圧試験
耐電圧試験は,供試巻線と電動機の外被又は固定子枠(大地)との間で行う。
巻線に対する規定試験電圧の高圧試験は,できるだけ繰り返さない。購入者の要求によって2度の試験
を行う場合は,必要に応じて乾燥を行い,2回目の試験電圧は,10.10.5による試験電圧の80 %の値で行う。
10.10.2
耐電圧試験を行う場合の電動機の状態
耐電圧試験は,新しい電動機で,正常運転状態と同等な全部品を組み立てたものに対して,製造工場で
行う。ただし,製造工場において組み立てできないものは,受渡当事者間の協定による。
温度試験を行う場合には,耐電圧試験は,温度試験後直ちに行う。試験を行う場合,鉄心及び試験しな
い巻線は,外被又は固定子枠に接続しておく。
10.10.3
試験電圧の周波数及び波形
試験電圧は,商用周波数(50 Hz又は60 Hz)のできるだけ正弦波に近いものを用いる。
10.10.4
試験時間
試験は,試験電圧の1/2以下の電圧から始め,連続的に規定電圧の5 %以下のステップ状に規定電圧ま
で昇圧する。1/2電圧からの昇圧時間は,10秒間以上とする。規定電圧に達してから,1分間その値を保
持する。
200 kW以下の多量生産機のルーチン試験においては,1分間の試験を表17の規定電圧の120 %の電圧
で1秒間の試験に代えてもよい。ただし,この場合,試験電圧を規定電圧に合わせた後,印加する。
10.10.5
試験電圧
定格電圧がE(V)である電動機の試験電圧は,表17による。
巻線を全部巻き替えた電動機は,新しい電動機に対する規定試験電圧で試験する。
表17−試験電圧
項
電動機又は部位
試験電圧(実効値)
V
1
1 kW未満で,定格電圧100 V未満の電動機の巻線。
ただし,3項に該当するものを除く。
500 V+2E
2
375 kW以下の電動機の巻線。
ただし,1項及び3項に該当するものを除くb)。
1 000 V+2E
ただし,1 500 V以上a)とする。
3
電動機・附属装置を組み合わせたもの。
1項及び2項の試験の繰返しは極力避ける。各単体ご
とに耐電圧試験を実施したものについて組合せ試験
を行う場合,単体試験における最低の試験電圧の80 %
を組み合わせた状態における試験電圧とするc)。
注a) 1端子を共用する二相巻線に対しては,運転中任意の2端子間に生じる最大実効電圧を基準とする。
b) 絶縁強度を段階的に変えた電動機(段絶縁の電動機)の耐電圧試験は,受渡当事者間の協定による。
c) 電気的に接続した1台又は複数台の電動機の巻線に対しては,試験電圧は,対地間に発生し得る最大電圧を
基準とする。
28
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.10.6
部分的な巻き替え又は修理を行った電動機の耐電圧試験
部分的な巻き替え又は修理を行った電動機に対して,耐電圧試験を行うことを受渡当事者間で合意した
場合は,次の基準で行うことが望ましい。
a) 部分的な巻き替えを行った電動機に対しては,新しい電動機に対する試験電圧(表17参照)の75 %
の電圧で試験する。ただし,巻線の巻き替えをしない部分については,十分な清掃及び乾燥を行う。
b) オーバーホールを行った電動機は,清掃・乾燥後,定格電圧の1.5倍の電圧で試験する。ただし,定
格電圧が100 V以上の場合の試験電圧は1 000 V以上,定格電圧が100 V未満の場合は500 V以上と
する。
10.10.7
耐電圧試験内容
電動機の耐電圧試験は,温度試験終了後できるだけ速やかに絶縁抵抗を測定し,適切な値であることを
確かめた後,引き続き行う。試験は,巻線と大地との間に表17に規定する試験電圧を加える。ただし,
温度試験を行わない電動機については,無負荷試験終了後に耐電圧試験を行う。
使用時に電気的に接続されない数個の巻線に耐電圧試験を行う場合には,次のものの間に規定電圧を加
える。
− 供試巻線
− その他の全巻線類と大地とを一括接続したもの
かご形巻線に対しては耐電圧試験を行わない。
絶縁抵抗の測定には,絶縁抵抗計を一般に用いる。巻線に印加する電圧は,機器の定格電圧及び絶縁状
態に適した値にする。
注記 一般には,600 V以下の巻線に対しては直流500 V絶縁抵抗計を使用する。
絶縁抵抗は,独立回路ごとに測定する。ただし,等しい電圧の回路を一括して行ってもよい。
吸収電流の影響が著しい場合には,試験時間は絶縁抵抗計の指示が十分安定した後に絶縁抵抗を測定す
る。1分値(1分間電圧印加後の値)をもって測定値とすることが望ましい。
11 裕度
裕度とは,電動機の特性の試験結果と保証値との差の許容する範囲をいう。裕度は,表18による。ただ
し,その他の規格又は仕様書で,最低値又は最高値を規定又は指定する場合には,裕度を適用しない。
29
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表18−裕度
No.
項目
裕度a)
1
定格効率
150 kW以下の電動機
150 kWを超える電動機
−0.15×(100-η) %
−0.10×(100-η) %
ここに,η:定格効率(%)
2
全損失(150 kWを超える電動機に適用する。) 保証値の10 %
3
定格力率
6
1
−×(1‒cosφ)
ここに,cosφ:定格力率
ただし,絶対値で0.02以上,0.07以下とする。
4
滑り(全負荷時)
− 出力1 kW未満
− 出力1 kW以上
保証値の±30 %
保証値の±20 %
5
最大始動電流
保証値の+20 %
6
最小始動トルク
保証値の−15 %
7
最小トルク(プルアップトルク)
保証値の−15 %
8
最大トルク(停動トルク)
保証値の−10 %
ただし,この裕度を適用した値が定格トルクの
1.6倍を下回らない。また,始動電流が4.5倍
以下の電動機の場合,1.5倍を下回らない。
9
慣性モーメント
保証値の±10 %
注a) 裕度を一方向だけ規定している場合,その他の方向については制限がない。
12 表示
電動機には,読みやすく,耐久性があり,次の事項を記載した定格銘板を取り付ける。次の事項は,必
ずしも同一銘板上になくてもよい。
表示事項は,便宜的に番号付けをしたもので,銘板上の順序を定めるものではない。表示事項は,適宜
に組み合わせて表示してもよい。
銘板は,できるだけ電動機の見やすい箇所に取り付ける。
a) 電動機の名称
b) 製造業者名,その略号又はそれに相当する標識
c) 製造番号又は機器番号
d) 製造年 この情報がc)によって得られる場合は省略してもよい。
e) 形式(製造業者が定めた形式名)
f)
保護方式の記号
g) 定格出力
h) 定格電圧
i)
定格電流 定格出力における電流の近似値を表示する。
j)
定格回転速度 定格出力における毎分回転数の近似値を表示する。
k) 相数,極数及び定格周波数
l)
定格効率及び効率クラス(IEコード) JIS C 4034-30:2011による。ただし,全ての定格電圧・定格周
波数・定格出力の組合せの中で,表9(IE3)を満たさない定格効率がある場合には,定格ごとの効率
クラスを定格銘板に表示する。
30
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 例えば,3定格又は6定格をもつ場合に,200V-60Hz又は400V-60Hzの定格において表10の
基準値は満たしているが,表9の基準値を満たしていない場合,IE3-IE2-IE3又は
IE3-IE2-IE3-IE3-IE2-IE3と定格ごとの効率クラスを記載する。
m) 使用の形式
注記 連続定格(S1)の場合は,連続又はCont.と表記してもよい。
n) 絶縁の耐熱クラス又は温度上昇限度
o) 最高冷媒温度 最高周囲温度が40 ℃の場合は,省略してもよい。
p) 最低冷媒温度 省略してもよい。ただし,6.4の規定を適用しない場合であっても使用者から指定され
た場合には表示する。
q) 標高 1 000 m以下の場合は,省略してもよい。1 000 mを超える場合は,その標高を表示する。
r) 回転方向 構造上回転方向が制約される場合には,回転方向を電動機の見やすい箇所に表示する。
s)
適用規格の番号
t)
概略質量 30 kgを超え,指定がある場合だけ表示する。30 kg以下の場合は,省略してもよい。
13 安全
この規格による電動機の安全性は,その他の指定がない場合,JIS B 9960-1による。
注記 設備全体が安全であることを確保するのは,設備の製造業者又は部品として電動機などの電気
機械を集めて設備を組み立てる者の責任であり,保護方式の種類(IPコード)によって,この
規格の適用除外を規定するものではない。
31
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
標準的な枠番号と寸法及び出力との関係
JA.1 一般
この附属書は,使用者の利便性のために,標準的な電動機の枠番号と寸法及び出力との関係について参
考として目安を記載する。
なお,この附属書の内容は,JIS C 4210:2010及びJIS C 4212:2010を基にしている。
JA.2 枠番号又はフランジ番号と出力との関係
枠番号又はフランジ番号と寸法及び出力との関係は,表JA.1〜表JA.4による。
32
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.1−脚取付形IP4X又はIP5X電動機の各部分及びベースの寸法並びに枠番号
単位 mm
定格出力
(kW)
枠
番号
電動機
ベース
C a)
(H)
E
2A
F
2B
XB
(C)
R
PB
取付
穴径
軸
2極 4極 6極
Z b)
(K)
S c)
(D)
S
許容差
Q
(E)
W
(F)
U
(GE)
BE BF BH BZ
X
最小値
0.2 0.2
−
63M
63
50
40
40
103
80
7
11
h6
23
−
1
50
80
30
13
40
0.4 0.4
−
71M
71
56
45
45
120
90
7
14
j6
30
5
3
55
85
30
13
40
0.75 0.75 0.4 80M
80
62.5
50
50
140
100
10
19
j6
40
6
3.5
65
90
30
13
40
1.5
2.2
1.5 0.75 90L
90
70
62.5
56 168.5 118.5
10
24
j6
50
8
4
70 105
30
13
40
−
2.2 1.5 100L
100
80
70
63
193
133
12
28
j6
60
8
4
80
115
40
13
50
3.7 3.7 2.2 112M 112
95
70
70
200
140
12
28
j6
60
8
4
95
115
40
13
50
5.5
7.5
5.5 3.7 132S
132
108
70
89
239
159
12
38
k6
80
10
5
110 120
45
13
60
−
7.5 5.5 132M 132
108
89
89
258
178
12
38
k6
80
10
5
110 140
45
13
60
11
15
−
− 160M 160
127
105
108
323
−
14.5
42
k6
110
12
5
−
−
−
−
−
−
11
7.5
213
125 165
50
15
70
18.5 −
−
160L
160
127
127
108
345
−
14.5
42
k6
110
12
5
−
−
−
−
−
−
15
11
235
125 185
50
15
70
22
180M 180 139.5 120.5 121 351.5
−
14.5
48
k6
110
14
5.5
−
−
−
−
−
− 18.5
22
15
241.5
140 185
55
15
80
30
−
−
180L
180 139.5 139.5 121 370.5
−
14.5
55
m6
110
16
6
−
−
−
−
−
−
30 18.5
22
260.5
140 205
55
15
80
37
45
−
−
200L
200
159
152.5 133 395.5
−
18.5
55
m6
110
16
6
−
−
−
−
−
−
37
45
30
37
425.5 285.5
60
140
18
7
160 230
60
20
100
55
−
−
225S
225
178
143
149
402
−
18.5
55
m6
110
16
6
−
−
−
−
−
−
55
45
432
292
65
140
18
7
75
−
−
250S
250
203
155.5 168 433.5
−
24
55
m6
110
16
6
−
−
−
−
−
−
75
55
463.5 323.5
75
140
20
7.5
90
−
− 250M 250
203
174.5 168 452.5
−
24
55
m6
110
16
6
−
−
−
−
−
−
90
75
482.5 342.5
75
140
20
7.5
110
−
−
280S
280 228.5
184
190
484
−
24
55
m6
110
16
6
−
−
−
−
−
−
110
90
544
374
85
170
22
9
132
−
− 280M 280 228.5 209.5 190 509.5
−
24
55
m6
110
16
6
−
−
−
−
−
− 132 110
569.5 399.5
85
170
22
9
160
−
−
315S
315
254
203
216
529
−
28
55
m6
110
16
6
−
−
−
−
−
− 160 132
589
419
95
170
25
9
注記 Z寸法は,JIS B 1001に規定のボルト穴の3級の値から選択した。
注a) C寸法の許容差は,JIS B 0902によって,250 mm以下は
0
0.5
−
mm,250 mmを超えるものは
0
1.0
−
mmとする。
b) 取付穴は,軸に直角方向に長い長穴としてもよい。
c) S寸法の許容差は,JIS B 0401-1及びJIS B 0401-2による。
33
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.2−フランジ形IP4X又はIP5X電動機の各部分の寸法並びにフランジ番号適用
単位 mm
定格出力
(kW)
フランジ
番号
電動機
LA
(M)
LB a)
(N)
LB
許容
差
LC
(P)
最大
値
LE
(T)
LW
(R)
取付穴
軸
2極 4極 6極
LZ b)
(S)
径
LN
数
S a)
(D)
S
許容
差
Q
(E)
W
(F)
U
(GE)
0.2
0.2
−
FF130
130
11
j6
160
3.5
0
10
4
11
h6
23
−
1
0.4
0.4
−
14
j6
30
5
3
0.75 0.75 0.4
FF165
165
130
j6
200
3.5
0
12
4
19
j6
40
6
3.5
1.5
2.2
1.5
0.75
24
j6
50
8
4
3.7
2.2
3.7
1.5
2.2
FF215
215
180
j6
250
4
0
14.5
4
28
j6
60
8
4
5.5
7.5
5.5
7.5
3.7
5.5
FF265
265
230
j6
300
4
0
14.5
4
38
k6
80
10
5
11
15
18.5
11
15
7.5
FF300
300
250
j6
350
5
0
18.5
4
42
k6
110
12
5
22
18.5
22
15
FF350
350
300
j6
400
5
0
18.5
4
48
k6
110
14
5.5
30
30
18.5
22
55
m6
110
16
6
37
45
−
−
FF400
400
350
j6
450
5
0
18.5
8
55
m6
110
16
6
−
37
45
30
37
60
m6
140
18
7
55
75
90
−
−
FF500
500
450
j6
550
5
0
18.5
8
55
m6
110
16
6
−
55
45
65
m6
140
18
7
−
75
90
55
75
75
m6
140
20
7.5
110
132
−
−
FF600
600
550
js6
660
6
0
24
8
55
m6
110
16
6
−
110
132
90
110
85
m6
170
22
9
注a) LB及びS寸法の許容差は,JIS B 0401-1及びJIS B 0401-2による。
b) LZ寸法は,IEC 60072-1を参考とし,JIS B 1001に規定のボルト穴の3級の値から選択した。
34
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.3−脚取付形IP2X電動機の各部分及びベースの寸法並びに枠番号適用
単位 mm
定格出力
(kW)
枠
番号
電動機
ベース
C a)
(H)
E
2A
F
2B
XB
(C)
R
PB
取付
穴径
軸
2極 4極 6極
Z b)
(K)
S c)
(D)
S
許容差
Q
(E)
W
(F)
U
(GE)
BE BF BH BZ
X
最小値
0.75 0.75 0.4 80M
80
62.5
50
50
140
100
10
19
j6
40
6
3.5
65
90
30
13
40
1.5
2.2
1.5 0.75 90L
90
70
62.5
56 168.5 118.5
10
24
j6
50
8
4
70 105
30
13
40
−
2.2
1.5 100L
100
80
70
63
193
133
12
28
j6
60
8
4
80
115
40
13
50
3.7 3.7
2.2 112M 112
95
70
70
200
140
12
28
j6
60
8
4
95
115
40
13
50
5.5
7.5
5.5
3.7 132S
132
108
70
89
239
159
12
38
k6
80
10
5
110 120
45
13
60
−
7.5
5.5 132M 132
108
89
89
258
178
12
38
k6
80
10
5
110 140
45
13
60
11
15
−
− 160M 160
127
105
108
323
−
14.5
42
k6
110
12
5
−
−
−
−
−
−
11
7.5
213
125 165
50
15
70
18.5 −
−
160L
160
127
127
108
345
−
14.5
42
k6
110
12
5
−
−
−
−
−
−
15
11
235
125 185
50
15
70
22
−
−
−
48
14
5.5
−
−
−
−
−
− 18.5 −
235
125 185
50
15
70
30
−
− 180M 180
139.5 120.5 121 351.5
−
14.5
55
m6
110
16
6
−
−
−
−
−
−
22
30
15
18.5
241.5
140 185
55
15
80
37
45
−
−
180L
180
139.5 139.5 121 370.5
−
14.5
55
m6
110
16
6
−
−
−
−
−
−
37
45
22
30
400.5 260.5
60
140 18
7
140 205
55
15
80
55
−
− 200M 200
159
133.5 133 376.5
−
18.5
55
m6
110
16
6
−
−
−
−
−
−
55
37
45
406.5 266.5
65
140 18
7
160 210
60
20
100
75
−
−
225S
225
178
143
149
402
−
18.5
55
m6
110
16
6
−
−
−
−
−
−
75
55
432
292
65
140 20
7.5
90
−
− 225M 225
178
155.5 149 414.5
−
18.5
55
m6
110
16
6
−
−
−
−
−
−
90
75
444.5 304.5
75
140 20
7.5
110
−
−
250S
250
203
155.5 168 433.5
−
24
55
m6
110
16
6
−
−
−
−
−
−
110
90
493.5 323.5
85
170 22
9
132
−
− 250M 250
203
174.5 168 452.5
−
24
55
m6
110
16
6
−
−
−
−
−
− 132 110
512.5 342.5
85
170 22
9
160
−
−
280S
280
228.5
184
190
484
−
24
55
m6
110
16
6
−
−
−
−
−
− 160 132
544
374
95
170 25
9
注記 Z寸法は,JIS B 1001に規定のボルト穴の3級の値から選択した。
注a) C寸法の許容差は,JIS B 0902によって,250 mm以下は
0
0.5
−
mm,250 mmを超えるものは
0
1.0
−
mmとする。
b) 取付穴は,軸に直角方向に長い長穴としてもよい。
c) S寸法の許容差は,JIS B 0401-1及びJIS B 0401-2による。
35
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.4−フランジ形IP2X電動機の各部分寸法並びにフランジ番号適用
単位 mm
定格出力
(kW)
フランジ
番号
電動機
LA
(M)
LB a)
(N)
LB
許容
差
LC
(P)
最大
値
LE
(T)
LW
(R)
取付穴
軸
2極 4極 6極
LZ b)
(S)
径
LN
数
S a)
(D)
S
許容
差
Q
(E)
W
(F)
U
(GE)
1.5
2.2
1.5
−
FF165
165
130
j6
200
3.5
0
12
4
24
j6
50
8
4
3.7
2.2
3.7
1.5
2.2
FF215
215
180
j6
250
4
0
14.5
4
28
j6
60
8
4
5.5
7.5
5.5
7.5
3.7
5.5
FF265
265
230
j6
300
4
0
14.5
4
38
k6
80
10
5
11
15
11
15
7.5
11
FF300
300
250
j6
350
5
0
18.5
4
42
k6
110
12
5
18.5
−
−
FF350
350
300
j6
400
5
0
18.5
4
42
k6
110
12
5
22
18.5
−
48
k6
110
14
5.5
30
22
30
15
18.5
55
m6
110
16
6
37
45
−
−
FF400
400
350
j6
450
5
0
18.5
8
55
m6
110
16
6
−
37
45
22
30
60
m6
140
18
7
55
75
90
−
−
FF500
500
450
j6
550
5
0
18.5
8
55
m6
110
16
6
−
55
37
45
65
m6
140
18
7
−
75
90
55
75
75
m6
140
20
7.5
110
132
−
−
FF600
600
550
js6
660
6
0
24
8
55
m6
110
16
6
−
110
132
90
110
85
m6
170
22
9
注a) LB及びS寸法の許容差は,JIS B 0401-1及びJIS B 0401-2による。
b) LZ寸法は,IEC 60072-1を参考とし,JIS B 1001に規定のボルト穴の3級の値から選択した。
36
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
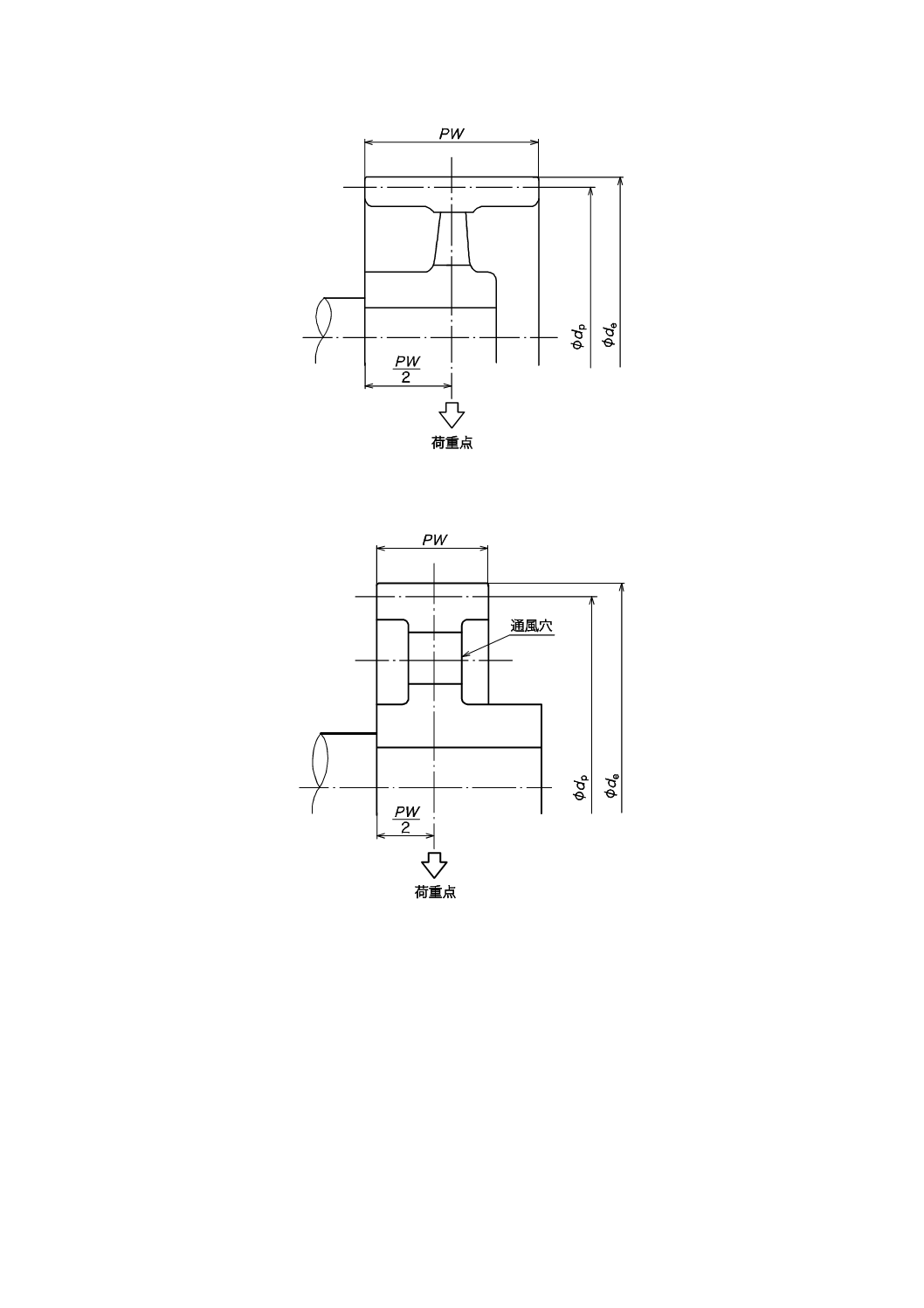
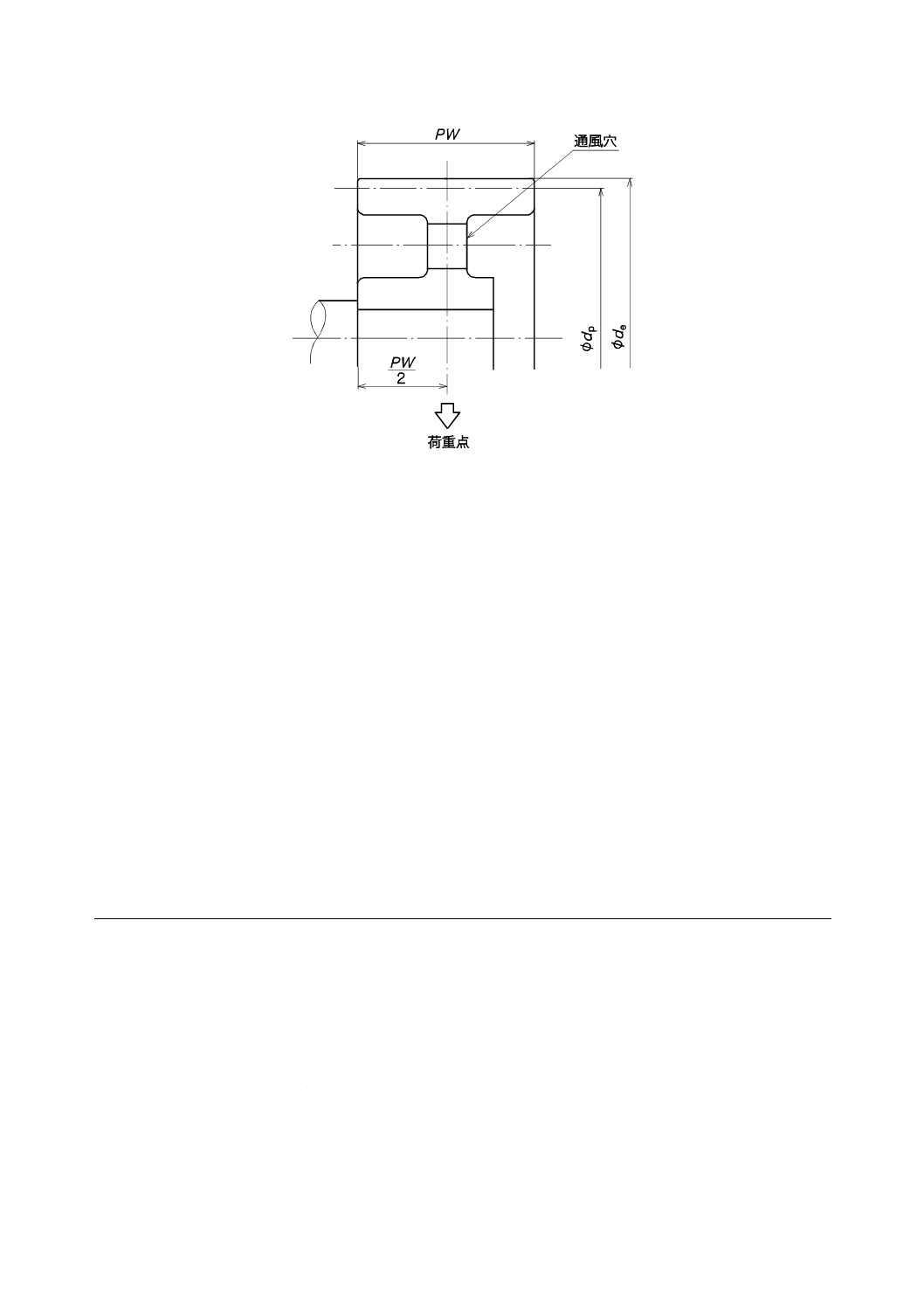
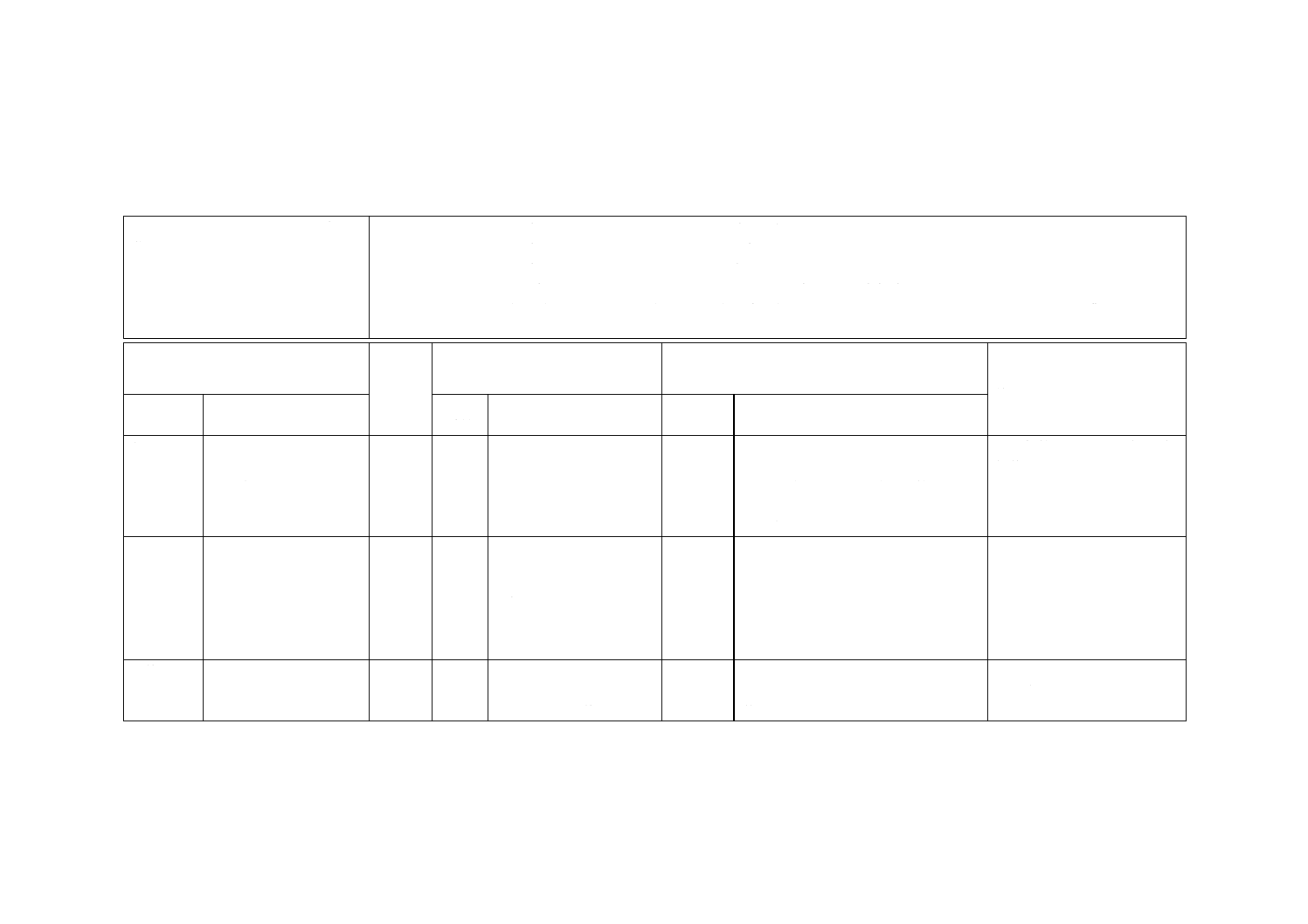
JA.3 Vプーリの寸法及び適用
Vプーリの寸法及び適用を,表JA.5〜表JA.7及び図JA.1〜図JA.4に示す。
表JA.5−2極の電動機におけるVベルト及びVプーリ適用
定格出力
kW
一般用Vベルト
細幅Vベルト
Vベルト
種類
Vベルト
本数
Vプーリ
呼び径
(dp)
mm
Vプーリ
リム幅
(PW)
mm
Vベルト
種類
Vベルト
本数
Vプーリ
呼び径
(de)
mm
Vプーリ
リム幅
(PW)
mm
0.2
A
1
75
20
3V
1
71
17.4
0.25
A
1
75
20
3V
1
71
17.4
0.37
A
1
75
20
3V
1
71
17.4
0.4
A
1
75
20
3V
1
71
17.4
0.55
A
1
80
20
3V
1
71
17.4
0.75
A
1
80
20
3V
1
71
17.4
1.1
A
2
80
35
3V
1
75
17.4
1.5
A
2
80
35
3V
1
75
17.4
2.2
A
2
90
35
3V
1
75
17.4
3.7
A
3
90
50
3V
2
75
27.7
5.5
A
3
112
50
3V
3
75
38.0
7.5
A
3
132
50
3V
4
80
48.3
表JA.6−4極の電動機におけるVベルト及びVプーリ適用
定格出力
kW
一般用Vベルト
細幅Vベルト
Vベルト
種類
Vベルト
本数
Vプーリ
呼び径
(dp)
mm
Vプーリ
リム幅
(PW)
mm
Vベルト
種類
Vベルト
本数
Vプーリ
呼び径
(de)
mm
Vプーリ
リム幅
(PW)
mm
0.2
A
1
75
20
3V
1
71
17.4
0.25
A
1
75
20
3V
1
71
17.4
0.37
A
1
75
20
3V
1
71
17.4
0.4
A
1
75
20
3V
1
71
17.4
0.55
A
1
80
20
3V
1
71
17.4
0.75
A
1
80
20
3V
1
71
17.4
1.1
A
2
90
35
3V
2
75
27.7
1.5
A
2
90
35
3V
2
75
27.7
2.2
A
2
100
35
3V
2
75
27.7
3.7
A
3
112
50
3V
2
100
27.7
5.5
B
3
125
63
3V
3
100
38.0
7.5
B
3
150
63
3V
3
125
38.0
11
B
4
160
82
3V
4
125
48.3
15
B
5
170
101
3V
6
125
68.9
18.5
B
5
200
101
3V
6
140
68.9
22
B
5
224
101
3V
6
160
68.9
30
C
5
224
136
3V
4
180
77.9
37
C
6
224
161.5
3V
4
200
77.9
37
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.7−6極の電動機におけるVベルト及びVプーリ適用
定格出力
kW
一般用Vベルト
細幅Vベルト
Vベルト
種類
Vベルト
本数
Vプーリ
呼び径
(dp)
mm
Vプーリ
リム幅
(PW)
mm
Vベルト
種類
Vベルト
本数
Vプーリ
呼び径
(de)
mm
Vプーリ
リム幅
(PW)
mm
0.4
A
1
80
20
3V
1
71
17.4
0.55
A
2
80
35
3V
1
75
17.4
0.75
A
2
80
35
3V
1
75
17.4
1.1
A
2
100
35
3V
2
75
27.7
1.5
A
2
100
35
3V
2
75
27.7
2.2
A
3
100
50
3V
2
90
27.7
3.7
B
3
125
63
3V
3
100
38.0
5.5
B
4
150
63
3V
3
140
38.0
7.5
B
4
150
82
3V
4
140
48.3
11
B
5
170
101
3V
5
140
58.6
15
B
5
224
101
3V
6
160
68.9
18.5
C
4
224
110.5
5V
3
180
60.4
22
C
5
224
136
5V
4
180
77.9
30
C
5
265
136
5V
4
224
77.9
37
C
6
265
161.5
5V
4
224
77.9
図JA.1−プーリの取付方法及び寸法記号 アーム形(その1)
38
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JA.2−プーリの取付方法及び寸法記号 アーム形(その2)
図JA.3−プーリの取付方法及び寸法記号 平板形(その1)
39
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JA.4−プーリの取付方法及び寸法記号 平板形(その2)
参考文献 JIS C 4003:2010 電気絶縁―熱的耐久性評価及び呼び方
JIS C 4034-1:1999 回転電気機械−第1部:定格及び特性
JIS C 4034-6:1999 回転電気機械−第6部:冷却方式による分類
JIS C 4210:2010 一般用低圧三相かご形誘導電動機
JIS C 4212:2010 高効率低圧三相かご形誘導電動機
日本電機工業会規格 JEM 1400:1991 一般用低圧三相かご形誘導電動機の寸法
日本電機工業会規格 JEM 1401:1991 一般用フランジ形低圧三相かご形誘導電動機の寸法
電気学会 電気規格調査会標準規格 JEC-2100:2008 回転電気機械一般
電気学会 電気規格調査会標準規格 JEC-2137-2000 誘導機
電気学会 電気規格調査会標準規格 JEC-2137-2000 追補1:2009-05 誘導機
40
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(参考)
JISと対応国際規格との対比表
JIS C 4213:2014 低圧三相かご形誘
導電動機−低圧トップランナーモー
タ
IEC 60034-1:2010 Rotating electrical machines−Part 1: Rating and performance
IEC 60034-8:2007 Rotating electrical machines−Part 8: Terminal markings and direction of rotation
IEC 60034-9:2007 Rotating electrical machines−Part 9: Noise limits
IEC 60034-12:2007 Rotating electrical machines−Part 12: Starting performance of single-speed three-phase cage induction motors
IEC 60072-1:1991 Dimensions and output series for rotating electrical machines−Part 1: Frame numbers 56 to 400 and flange numbers
55 to 1 080
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの
評価及びその内容
(V)JISと国際規格との技術
的差異の理由及び今後の対
策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範
囲
対象となる低圧三相か
ご形誘導電動機の範囲
を規定。
−
−
−
追加
製品規格として新たに適用範囲を作
成した。この適用範囲は,JIS C
4034-30(IEC 60034-30)と同等である。
ただし,定格電圧については,国内基
準に合わせて600 V以下とした。
IEC規格では,特性ごとの規
格体系としているが,JISで
は製品規格としているため,
IECへの提案は行わない。
3 用語及
び定義
3.4,3.6,3.8,3.9,3.14
〜3.18
IEC
60034-1
3.2,
3.3,
3.5,
3.19〜
3.23,
3.26
電動機だけでなく発電機
を含む回転機に対して規
定。
変更
製品規格を電動機に限定したため,
“回転機”を“電動機”に変更した。
適用範囲に合わせた変更で
IECへの提案は行わない。
4 使用
S1及びS3を規定
IEC
60034-1
4
S1〜S10を規定。
S3の図は負荷時間率
25 %の例を記載。
削除
S2,S4〜S10を削除。
S3の図は負荷時間率80 %の例を記
載。
JISは,適用範囲の使用だけ
を規定している。
3
C
4
2
1
3
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
41
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの
評価及びその内容
(V)JISと国際規格との技術
的差異の理由及び今後の対
策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
5 定格
定格出力
0.75 kW〜375 kWを規
定している。
IEC
60072-1
9
推奨する定格出力として
0.06 kW〜1 000 kWを規
定。
削除
0.06 kW〜0.55 kW及び400 kW〜1 000
kWを削除した。
JISは,適用範囲の定格出力
だけを規定している。JIS C
4210及びJIS C 4212に記載
の出力を網羅し,160 kW〜
375 kWの範囲は標準数を推
奨値とした。
6 設置場
所の条件
冷媒が空気又は水の場
合を規定。
IEC
60034-1
6
冷媒が空気,水又は水素
の場合を規定。
最低周囲温度0 ℃以上の
条件に,3 300 kWを超え
る,6 00 W未満,整流子
付が規定されている。
削除
水素冷媒の項目について削除した。
また,最低周囲温度0 ℃以上の条件
に,3 300 kWを超える,600 W未満,
整流子付を削除した。
JISは,この規格で適用する
冷媒及び機種に対してだけ
規定している。
7.1 温度
上昇
120(E),130(B),155
(F)の3種類の耐熱ク
ラスを規定した。
IEC
60034-1
8.10
130(B),155(F),180
(H)の3種類の耐熱ク
ラスを規定する。
追加
削除
120(E)を追加し,180(H)を削除
した。
また,水素冷媒による内容を削除し
た。
国内市場では120(E)の耐
熱クラスの電動機が流通し
ている。
180(H)はJISの適用範囲外
7.2 基準
冷媒
空気冷媒及び水冷媒だ
け記載。
IEC
60034-1
8.2
水素冷媒も記載。
削除
水素冷媒による内容を削除した。
JISは,この機種範囲に適用
する冷媒に対してだけ規定
している。
7.3 効率
効率基準値を規定した。 −
−
−
追加
IEC 60034-30に完全整合したJIS C
4034-30を引用した。
ただし,3定格又は6定格を含む電動
機における200V-60Hz又は400V-60Hz
の公称効率,及び50Hz 3.7kWの公称
効率を独自に追加した。
日本独自の電力事情による
追加規定であり,IEC規格へ
の提案は行わない。
7.5 運転
中の電圧
変動及び
周波数変
動
運転中の電圧及び周波
数変動範囲を規定した。
IEC
60034-1
7.3
運転中の電圧及び周波数
変動範囲を規定してい
る。
削除
電動機に関する記載以外は削除した。 JISは,適用範囲で発電機を
対象外としており,IEC規格
への提案は行わない。
3
C
4
2
1
3
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
42
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの
評価及びその内容
(V)JISと国際規格との技術
的差異の理由及び今後の対
策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
8.1 附属品 附属品としてベースに
ついて規定した。
−
−
IEC規格では特に規定し
ていない。
追加
−
ベース,基礎ボルトを取り付
けることについてユーザか
らの要求が多いため,記載し
た。
8.2 ケー
ブル引込
口
ケーブル引込口方向及
び端子箱を設ける場合
の位置について規定し
た。
IEC
60072-1
4
端子箱の取付位置を規定
している。
変更
ケーブル引込口方向及び端子箱位置
が異なる。
JISに長年にわたり規定され
ており,変更することはユー
ザに対し不利益となる。
8.3 接地
端子
接地端子について規定
した。
IEC
60034-1
11.1
接地端子について規定し
ている。
変更
IEC規格は接地導線の断面積を規定
しているが,JISでは削除した。
JISは国内の慣行に従った規
定としている。
9 寸法
枠番号及び極数に対す
る寸法,並びにフランジ
番号及び極数に対する
寸法について規定した。
IEC
60072-1
6.1,
6.2,10
枠番号に対する寸法及び
フランジ番号に対する寸
法について規定してい
る。
追加
極数の対応について規定した。
JISに長年にわたり規定され
ており,ユーザの要求によっ
て規定する必要がある。
10 試験
方法
10.3.3 電源開路後,電動
機の停止時間に関する
補正
IEC
60034-1
−
−
削除
10.3.3.2
短い停止時間の場合
表12の375 kWを超える定格出力の規
定は,適用範囲から外れるため,削除
した。
JISは,適用範囲による変更
であり,IEC規格への提案は
行わない。
10.4 拘束試験
−
−
−
追加
JIS C 4034-2-1:2011の試験方法では,
等価回路法で用いるための拘束試験
を規定しており,比例法で用いるため
の拘束試験を規定していないため,追
加した。
IEC 60034-12の改正時に提
案を検討する。
10.5 温度上昇
IEC
60034-1
8.5
−
変更
JIS C 4034-1の試験方法では,規定内
容が不十分であり,試験が実施できな
いため,詳細に規定した。
今後,より一層の標準化を図
る。
3
C
4
2
1
3
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
43
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの
評価及びその内容
(V)JISと国際規格との技術
的差異の理由及び今後の対
策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
10 試験
方法
(続き)
10.9 騒音試験
IEC
60034-9
回転電気機械の騒音試験
方法及び騒音値レベル
を,出力容量及び軸中心
高さによって規定。
変更
国際規格では騒音試験方法はISO
3741,ISO 3743-1,ISO 3743-2,ISO
3744,ISO 3745,ISO 3746及びISO
3747を引用して規定している。これ
らの騒音測定方法は被騒音試験体が
電動機だけを対象としているのでは
ないため,この規格では電動機の騒音
試験に適した方法を具体的に記述す
ることとし,JIS C 4210の内容を基に
一部追加,修正して記載した。
この規格では電動機の騒音値レベル
は規定していない。
IEC 60034-9の改正時に提案
を検討する。
10.10 耐電圧試験
IEC
60034-1
9.2
回転電気機械の試験電圧
を規定。
削除
三相かご形誘導電動機に関係しない
項目及び内容を削除した。
JISは,適用範囲による変更
であり,IEC規格への提案は
行わない。
11 裕度
電動機の特性の試験結
果と保証値との差の許
容される範囲を規定。
IEC
60034-1
12
回転電気機械の特性試験
の結果と保証値との差の
許容される範囲を規定。
削除
三相かご形誘導電動機に関係しない
項目を削除した。
また,IEC規格では,“効率”及び“力
率”と規定しているが,意味が曖昧で
あるため,それぞれ“定格効率”及び
“定格力率”であることを明確にし
た。
JISは,適用範囲による変更
であり,IEC規格への提案は
行わない。
3
C
4
2
1
3
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
44
C 4213:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの
評価及びその内容
(V)JISと国際規格との技術
的差異の理由及び今後の対
策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
12 表示
定格銘板及びその記載
事項を規定。
IEC
60034-1
10.2
定格銘板及びその記載事
項を規定。
変更
力率を削除した。
最低冷媒温度はIEC規格では“適用
しない場合は表示する”と規定してい
るが,JISでは“適用しない場合であ
っても,使用者から指定された場合に
は表示する”と規定した。
効率クラスの表記について,複数の定
格でIEコードが異なる場合に,IEC
60034-30及びJIS C 4034-30では,最
低の効率クラスか定格ごとの効率ク
ラスを記載することが規定されてい
るが,この規格では,定格ごとの効率
クラスを記載することを規定した。
JISは国内の慣行に従った規
定としている。
13 安全
低圧の電動機に関連す
る安全規格だけ記載。
IEC
60034-1
−
低圧及び高圧の電動機に
関連する安全規格を記
載。
削除
IEC 60204-11は高圧機器に適用する
規格であり,削除した。
JISは,適用範囲による変更
であり,IEC規格への提案は
行わない。
附属書JA
(参考)
標準的な電動機の枠番
号と寸法及び出力との
関係を記載。
−
−
追加
使用者の利便性のために,標準的な電
動機の枠番号と寸法及び出力との関
係について参考として目安を記載し
た。
参考情報であり,IEC規格へ
の提案は行わない。
JISと国際規格との対応の程度の全体評価:(IEC 60034-1:2010,IEC 60034-8:2007,IEC 60034-9:2007,IEC 60034-12:2007,IEC 60072-1:1991,MOD)
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
3
C
4
2
1
3
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。