C 4034-1 : 1999 (IEC 60034-1 : 1996)
(1)
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,通商産業大臣が制定した日
本工業規格である。
今回の制定は,回転電気機械の定格及び特性について,これまでJIS C 4004に含まれていた部分を分離
し,独立した規格として制定し,現時点での最新の国際規格との整合性を図った。
また,令和2年10月20日,産業標準化法第17条又は第18条の規定に基づく確認公示に際し,産業標
準化法の用語に合わせ,規格中“日本工業規格”を“日本産業規格”に改めた。
JIS C 4034-1には,次の附属書がある。
附属書A(参考) 使用形式S10の適用及び相対的熱寿命の期待値 (TL) の確定に関する指針
JIS C 4034は,主題を“回転電気機械”として,次の各部によって構成する。
JIS C 4034-1 第1部:定格及び特性
JIS C 4034-5 第5部:外被構造による保護方式の分類
JIS C 4034-6 第6部:冷却方式による分類
C 4034-1 : 1999 (IEC 60034-1 : 1996)
(1)
目次
ページ
序文 ··································································································································· 1
1. 一般事項 ························································································································ 1
2. 定義 ······························································································································ 2
3. 使用 ······························································································································ 5
4. 定格 ····························································································································· 16
5. 設置場所の条件 ·············································································································· 19
6. 電気的運転条件 ·············································································································· 20
7. 温度上昇及び試験 ··········································································································· 24
8. その他の特性及び試験 ····································································································· 36
9. 定格銘板 ······················································································································· 44
10. その他の要求事項 ········································································································· 46
11. 裕度 ··························································································································· 47
12. 電磁両立性 ·················································································································· 48
13. 安全 ··························································································································· 50
附属書A(参考) 使用形式S10の適用及び相対的熱寿命の 期待値 (TL) の確定に関する指針 ·········· 51
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本産業規格 JIS
C 4034-1 : 1999
(IEC 60034-1 : 1996)
回転電気機械−
第1部:定格及び特性
Rotating electrical machines
Part 1 : Rating and performance
序文 この規格は,1996年に第10版として発行されたIEC 60034-1, Rotating electrical machines−Part 1 :
Rating and performance及びAmendment 1 (1997) を元に,作成した日本産業規格であるが,公称電圧(付
表1)に従来の値を追加した。また,60Hz対応の電話調波重み係数[表16(A)]については,我が国の事
情に合わせてこれを追加した。ただし,追補 (Amendment) については,編集し,一体とした。
なお,この規格で点線の下線を施してある箇所は,現国際規格にはない事項である。
1. 一般事項
1.1
適用範囲
この規格は,車両用回転電気機械を除く各種の回転電気機械(以下,回転機という。)に共通な一般標準
事項について規定する。
備考1. この規格の特定の箇条が,特殊用途に合うように修正された場合であっても,矛盾しない限
り他の箇条は適用される。
2. この規格の対応国際規格を次に示す。
IEC 60034-1 : 1996, Rotating electrical machines−Part 1 : Rating and performance
1.2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,発行年を付記してあるものは,記載の年の版だけがこの規格の規定を構成するもので
あって,その後の改訂版・追補には適用しない。発行年を付記していない引用規格は,その最新版(追補
を含む。)を適用する。
JIS C 0364-4-41, 建築電気設備 第4部:安全保護 第41章:感電保護
備考 IEC 60364-4-41 : 1992/Amd. 1 : 1996, Electrical installations of buildings−Part 4:Protection for
safety−Chapter 41 : Protection against electric shockが,この規格と一致している。
JIS C 0366, 建築電気設備の電圧バンド
備考 IEC 60449 : 1973, Voltage bands for electrical installations of buildingsが,この規格と一致してい
る。
JIS C 4003, 電気絶縁の耐熱クラス及び耐熱性評価
備考 IEC 60085 : 1984, Thermal evaluation and classification of electrical insulationが,この規格と一致
している。
2
C 4034-1 : 1999 (IEC 60034-1 : 1996)
JIS C 4034-5, 回転電気機械−第5部:外被構造による保護方式の分類
備考 IEC 60034-5 : 1991, Rotating electrical machines−Part 5 : Classification of degrees of protection
provided by enclosures of rotating electrical machines (IP code) が,この規格と一致している。
JIS C 4034-6, 回転電気機械−第6部:冷却方式による分類
備考 IEC 60034-6 : 1991, Rotating electrical machines−Part 6 : Methods of cooling (IC code) が,この
規格と一致している。
ISO 497 : 1973, Guide to the choice of series of preferred numbers and series containing more rounded values
of preferred numbers
IEC 60445 : 1988, Identification of equipment terminals and of termination of certain designated conductors,
including general rules for an alphanumeric system
IEC 60027-1 : 1992, Letter symbols to be used in electric technology−Part 1 : General
IEC 60027-4 : 1985, Letter symbols to be used in electrical technology−Part 4 : Symbols for quantities to be
used for rotating electrical machines
IEC 60034-2 : 1972, Rotating electrical machines−Part 2 : Methods for determining losses and efficiency of
rotating electrical machinery from tests (excluding machines for traction vehicles)
IEC 60034-3 : 1988, Rotating electrical machines−Part 3 : Specific requirements for turbine-type synchronous
machines
IEC 60034-12 : 1980, Rotating electrical machines−Part 12 : Starting performance of single-speed three-phase
cage induction motors for voltages up to and including 660V
IEC 60034-15 : 1995, Rotating electrical machines−Part 15 : Impulse voltage withstand levels of rotating a.c.
machines with form-wound stator coils
IEC 60034-17 : 1992, Rotating electrical machines−Part17 : Guide for the application of cage induction
motors when fed from converters
IEC 60038 : 1983, IEC standard voltages
IEC 60050 : 1996, International Electrotechnical Vocabulary (IEV) −Chapter 411 : Rotating machines
IEC 60072, Dimensions and output series for rotating electrical machines
IEC 60204-1 : 1997, Safety of machinery−Electrical equipment of industrial machines−Part 1 : General
requirements
IEC 60279 : 1969, Measurement of the winding resistance of an a.c. machine during operation at alternating
voltage
IEC 60971 : 1989, Semiconductor converters. Identification code for converter connections
CISPR 11 : 1990, Limits and method of measurement of electromagnetic disturbance characteristics of
industrial, scientific and medical (ISM) radio-frequency equipment
CISPR 14 : 1993, Limits and method of measurement radio disturbance characteristics of electrical
motor-operated and thermal appliances for household and similar purposes, electric tools and electric
apparatus
CISPR 16 : Specification for radio disturbance and immunity measuring apparatus and methods
参考 上記IEC規格番号は,1997年1月1日から実施のIEC規格番号体系によるものである。これ
より前に発行された規格については,規格票に記載された規格番号に60000を加えた番号に切
り替える。これは番号だけの切替えであり,内容は同一である。
3
C 4034-1 : 1999 (IEC 60034-1 : 1996)
2. 定義 この規格で用いる主な用語の定義は,次による。
2.1
定格値 (rated value)
回転機の運転条件を規定する値(一般には,製造業者が決定する。) [IEV 411-51-23]。
2.2
定格 (rating)
回転機に保証された使用限度 [IEV 411-51-24]。
2.3
定格出力 (rated output)
定格に対応する出力値。
2.4
負荷 (load)
電気回路や機械装置によって,回転機に要求される電気的又は機械的出力 [IEV 411-51-01]。
2.5
無負荷(運転) [no-load (operation)]
零出力で回転している状態。ただし,出力が零である以外は正常な運転条件下である[IEV 411-51-02を
修正]。
2.6
全負荷(定格負荷) (full load)
定格出力に相当する負荷 [IEV 411-51-10]。
2.7
全負荷値 (ful load value)
全負荷運転をしている回転機の諸量 [IEV 411-51-11]。
備考 出力,トルク,電流,回転速度などに適用する。
2.8
静止及び無通電状態 (rest and de-energized)
すべての動作及び電気的供給又は機械的駆動がない状態 [IEV 411-51-03]。
2.9
使用 (duty)
始動,電気制動,無負荷,静止の状態で,かつ,電圧が印加されていない期間を含んだ経時的な負荷の
状態 [IEV 411-51-06]。
2.10 使用の形式 (duty type)
連続使用,短時間使用,反復使用,又は不規則な負荷及び速度変化を伴う使用 [IEV 411-51-13]。
2.11 負荷時間率 (cyclic duration factor)
始動及び電気制動を含む負荷の期間。使用の1周期との比で,百分率で表す [IEV 411-51-09]。
2.12 拘束トルク (locked-rotor torque)
定格電圧及び定格周波数のもとで,静止状態の電動機が軸端において発生するトルクの最小値。回転子
の拘束位置で変化する場合は,その最小値 [IEV 411-48-06]。
参考 最小始動トルクともいう。
2.13 拘束電流 (locked rotor current)
定格電圧及び定格周波数のもとで,静止状態の電動機に流れる線電流の定常状態における実効値の最大
値。回転子の拘束位置で変化する場合は,その最大値 [IEV 411-48-16]。
参考 最大始動電流ともいう。
2.14 最小トルク(交流電動機の) [pull-up torque (of an a.c. motor)]
定格電圧及び定格周波数のもとで,電動機が零速度から最大トルクに相当する回転速度の間で軸端にお
いて発生する定常トルクの最小値。プルアップトルクともいう。
この定義は,回転速度の増加とともにトルクが連続的に減少するような非同期電動機には適用しない。
備考 定常状態の非同期トルクに加えて,特定の回転速度で高調波同期トルクが発生する。このよう
な速度では,加速トルクが負となることがある。経験と計算によれば,これは非定常状態であ
4
C 4034-1 : 1999 (IEC 60034-1 : 1996)
るため,高調波同期トルクは電動機の加速を妨げるものではなく,この定義から除外する。
2.15 最大トルク(交流電動機の) [breakdown torque (of an a.c. motor)]
定格電圧及び定格周波数のもとで,運転中の電動機が軸端において発生し得る定常トルクの最大値。
この定義は,回転速度の増加とともにトルクが連続的に減少するような非同期電動機には適用しない。
2.16 脱出トルク(同期電動機の) [pull-out torque (of a synchronous motor)]
定格電圧,定格周波数及び定格負荷状態における界磁電流のもとで,運転中の同期電動機が同期速度に
おいて発生し得るトルクの最大値。
2.17 冷却 (cooling)
回転機の発生損失による熱を一次冷媒に伝える過程。一次冷媒は連続的に新たな冷媒を供給するか,又
は熱交換器の二次冷媒によって冷却する [IEV 411-44-01]。
2.18 冷媒 (coolant)
回転機に発生した熱を取り去る液体又は気体の媒体 [IEV 411-44-02]。
2.19 一次冷媒 (primary coolant)
冷媒のうち,回転機の発熱部分に接触し,そこから熱を取り去る液体又は気体の媒体 [IEV 411-44-03]。
2.20 二次冷媒 (secondary coolant)
熱交換器又は回転機の外表面によって一次冷媒から熱を取り去る液体若しくは気体の媒体 [IEV
411-44-03]。
2.21 直接冷却(内部冷却)巻線1) [direct cooled (inner cooled) winding)]
中空導体,チューブ,ダクト又はチャンネルを用い,それに流れる冷媒によって主絶縁内部の導体を直
接冷却する巻線 [IEV 411-44-08]。
2.22 間接冷却巻線1) (indirect cooled winding)
直接冷却巻線以外の巻線 [IEV 411-44-09]。
2.23 補助絶縁 (supplementary insulation)
主絶縁が破壊した場合,感電を確実に防止するため,主絶縁に加えて適用される独立した絶縁物。
2.24 慣性モーメント (moment of inertia)
質量要素と回転軸からの半径方向距離の二乗を乗じた値の総和。
2.25 熱的平衡状態 (thermal equilibrium)
回転機の数箇所の温度上昇が1時間当たり2Kを超える変化をしなくなった状態 [IEV 411-51-08]。
2.26 等価熱時定数 (thermal equivalent time constant)
電流がステップ状に変化した場合の巻線温度上昇の時定数。構成物個々の時定数とは異なる。
2.27 密封巻線 (encapsulated winding)
成形絶縁物によって,完全に密封又は密閉された巻線 [IEV 411-39-06]。
2.28 静止電力変換器から直流機電機子に供給される直流電流の定格波形率 (rated form factor of direct
current supplied to a d.c. motor armature from a static power converter)
定格状態における許容最大電流Irms, maxNと平均値IavN(1周期について積分した平均値)との比。
avN
maxN
rms,
fn
I
I
K =
2.29 電流脈動率 (current ripple factor)
注1) 直接冷却,間接冷却の記載がない場合は,間接冷却を指す。
5
C 4034-1 : 1999 (IEC 60034-1 : 1996)
脈動電流の最大値Imaxと最小値Iminの差と,平均値Iav(一周期について積分した平均値)の2倍との比。
av
min
max
i
2I
I
I
q
×
−
=
備考 電流脈動が小さい場合,脈動率は次の式によって近似値を求めることができる。
min
max
min
max
i
I
I
I
I
q
+
−
=
この式はqiの計算結果が0.4以下であれば,近似値として使用できる。
3. 使用
3.1
使用
使用は,購入者が指定する。購入者は,次のいずれかによって使用を記述する。
a) 負荷が変動しない場合,又は負荷が既知の方法で変動する場合,数値で記述する。
b) 変数値の時間的変化を記述する。
c) 予想使用状態と同程度な使用形式S1からS10のいずれかを選択する。
使用形式は,3.2に規定する適切な記号によって指定し,その後に負荷の値を付記する。
負荷時間率の式は,該当する使用形式図に示す。
通常,購入者は,電動機の慣性モーメント (JM) 又は相対的熱寿命の期待値 (TL) を設定することはで
きない。附属書A参照。これらの値は,製造業者が設定する。
購入者が使用を明示できない場合は,製造業者は使用形式S1(連続使用状態)が適用されるものと想定
する。
3.2
使用の形式
使用形式S1からS10は,主として電動機に適用するが,一部は,例えば,S1,S2及びS10は発電機に
も適用できる。
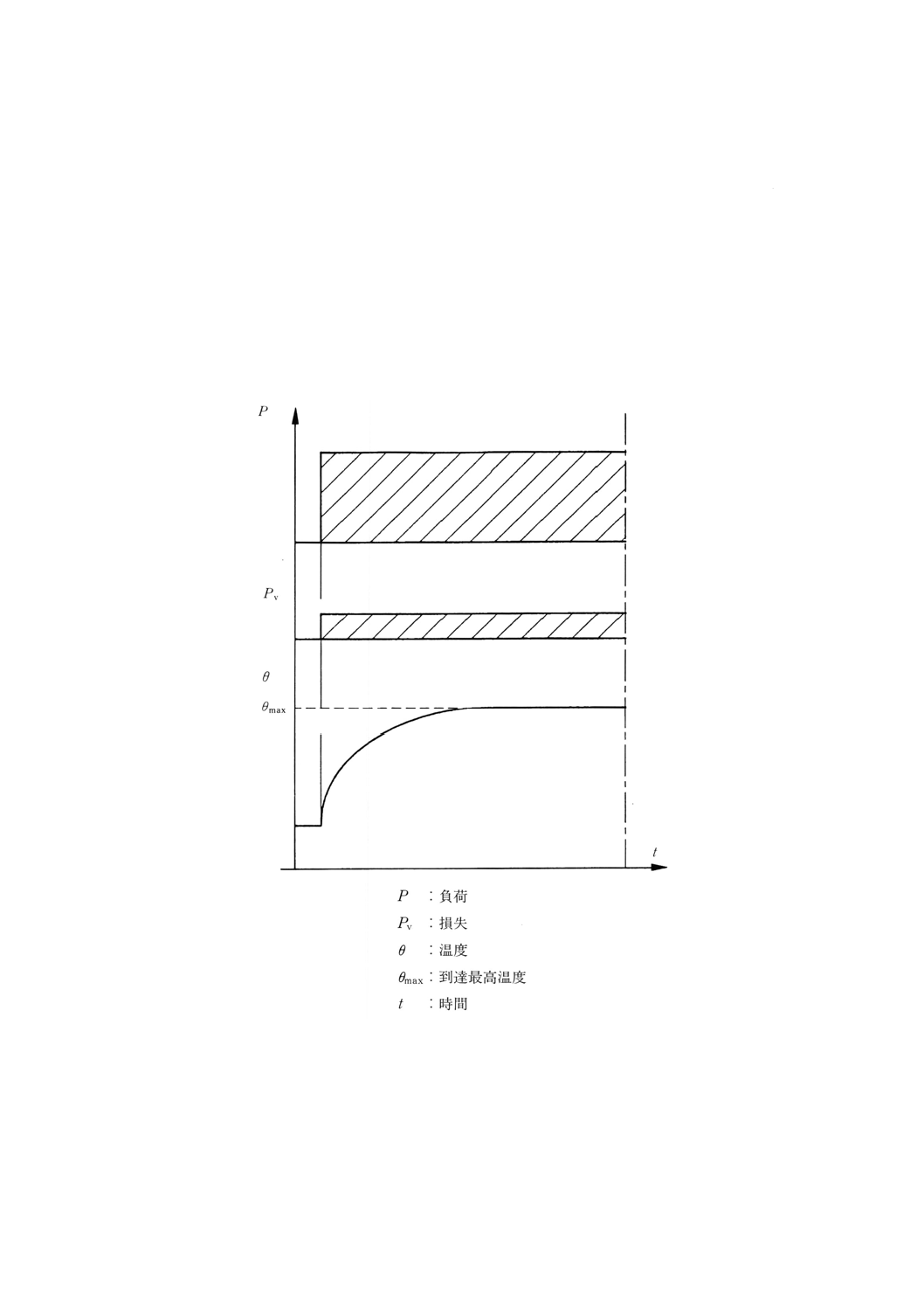
3.2.1
使用形式S1−連続使用
一定な負荷で,回転機が熱平衡に達する時間以上に継続運転する使用をいう。図1参照。記号はS1。
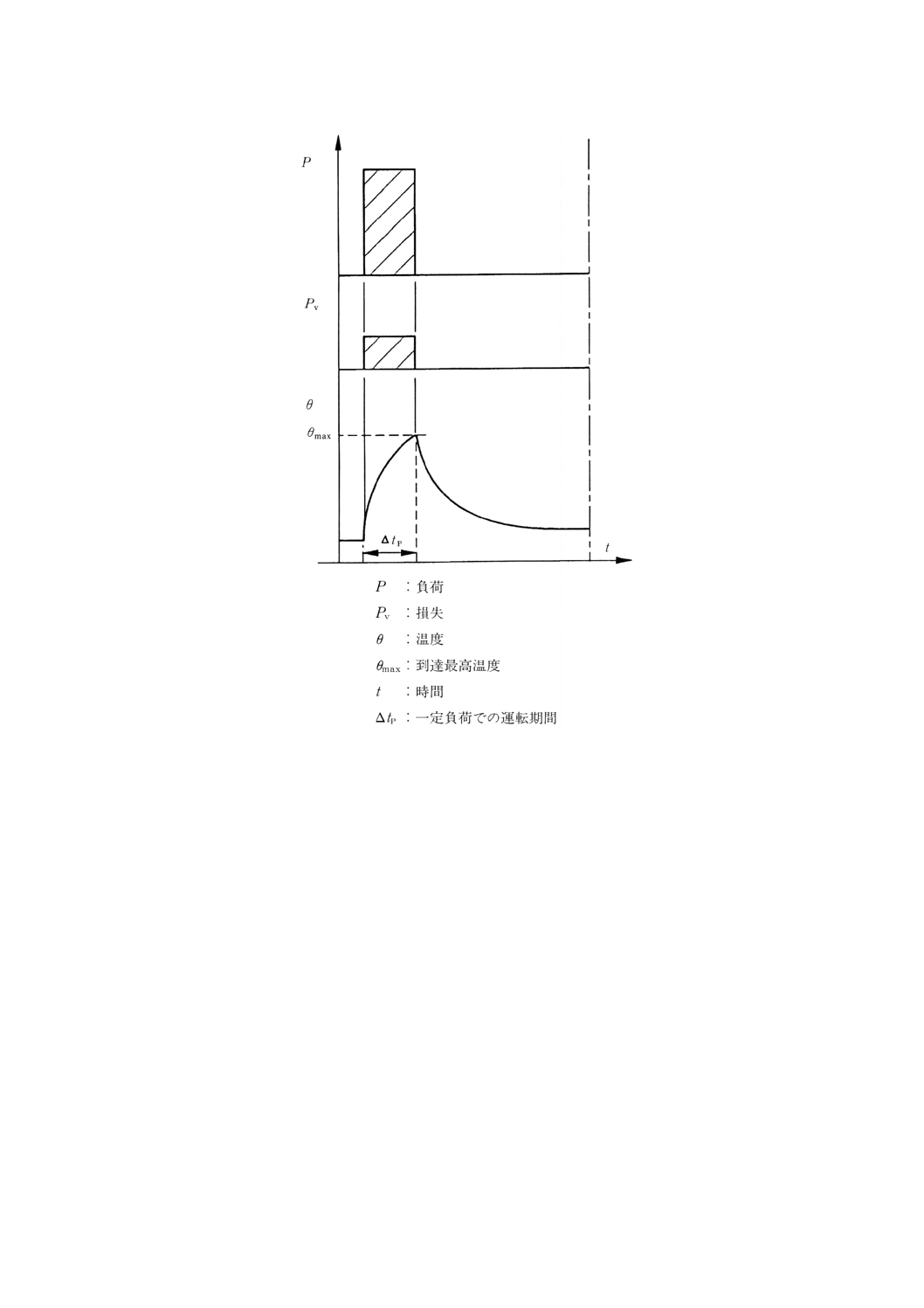
3.2.2
使用形式S2−短時間使用
一定な負荷で,回転機が熱平衡に達しない範囲の指定時間継続運転した後に,回転機を停止し,次の始
動時までに回転機の温度と冷媒温度との差が2K以内までに降下する使用をいう。図2参照。記号はS2で,
その後に負荷継続期間を付記する。
例 S2 60分
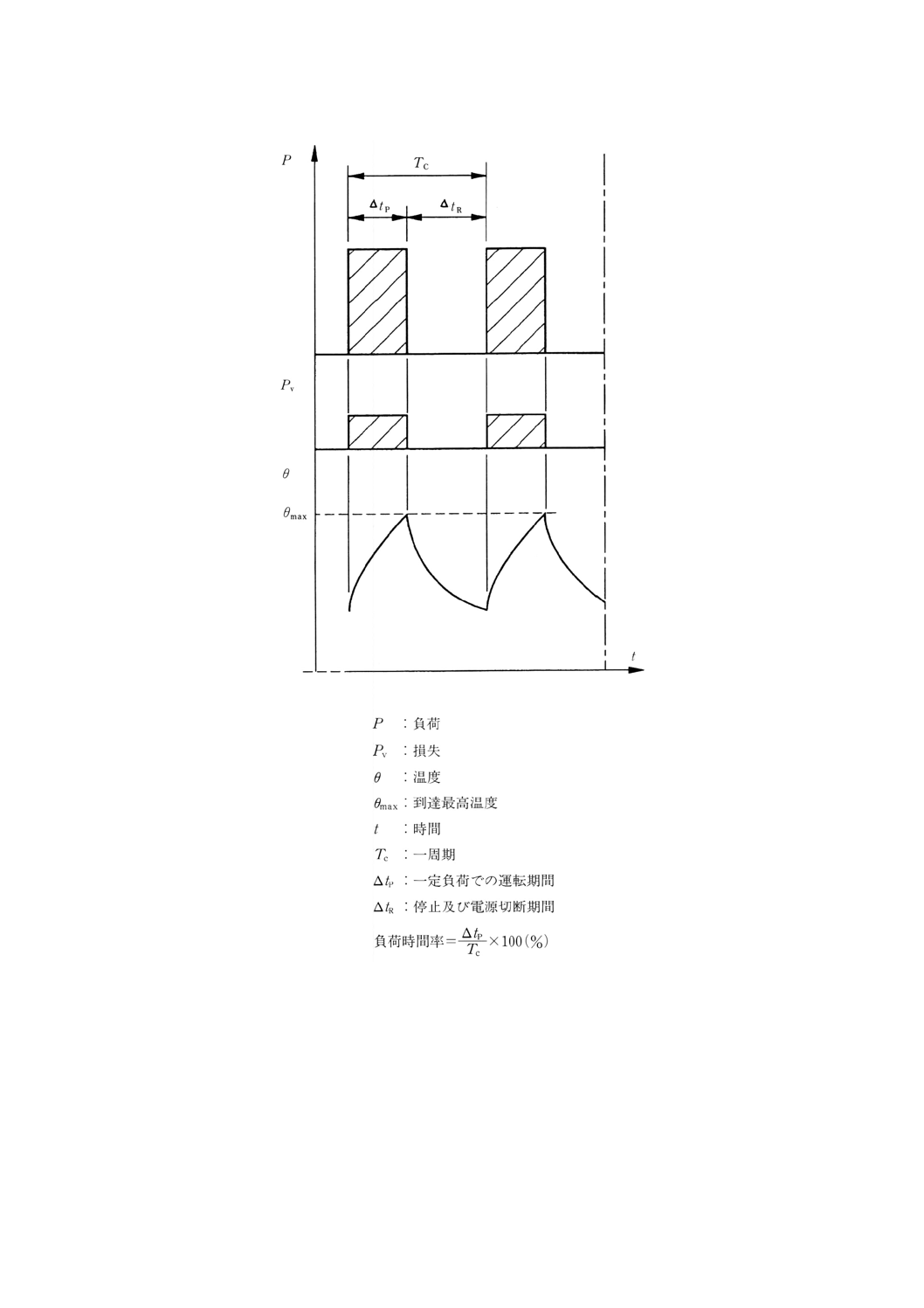
3.2.3
使用形式S3−反復使用2)
一定負荷の運転期間及び電圧を印加しない停止期間を一周期としてこれを反復する使用をいう。この場
合,電気制動を含まず,始動条件が温度上昇に与える影響を無視できるものとする。図3参照。記号はS3
で,その後に負荷時間率を付記する。
例 S3 25%
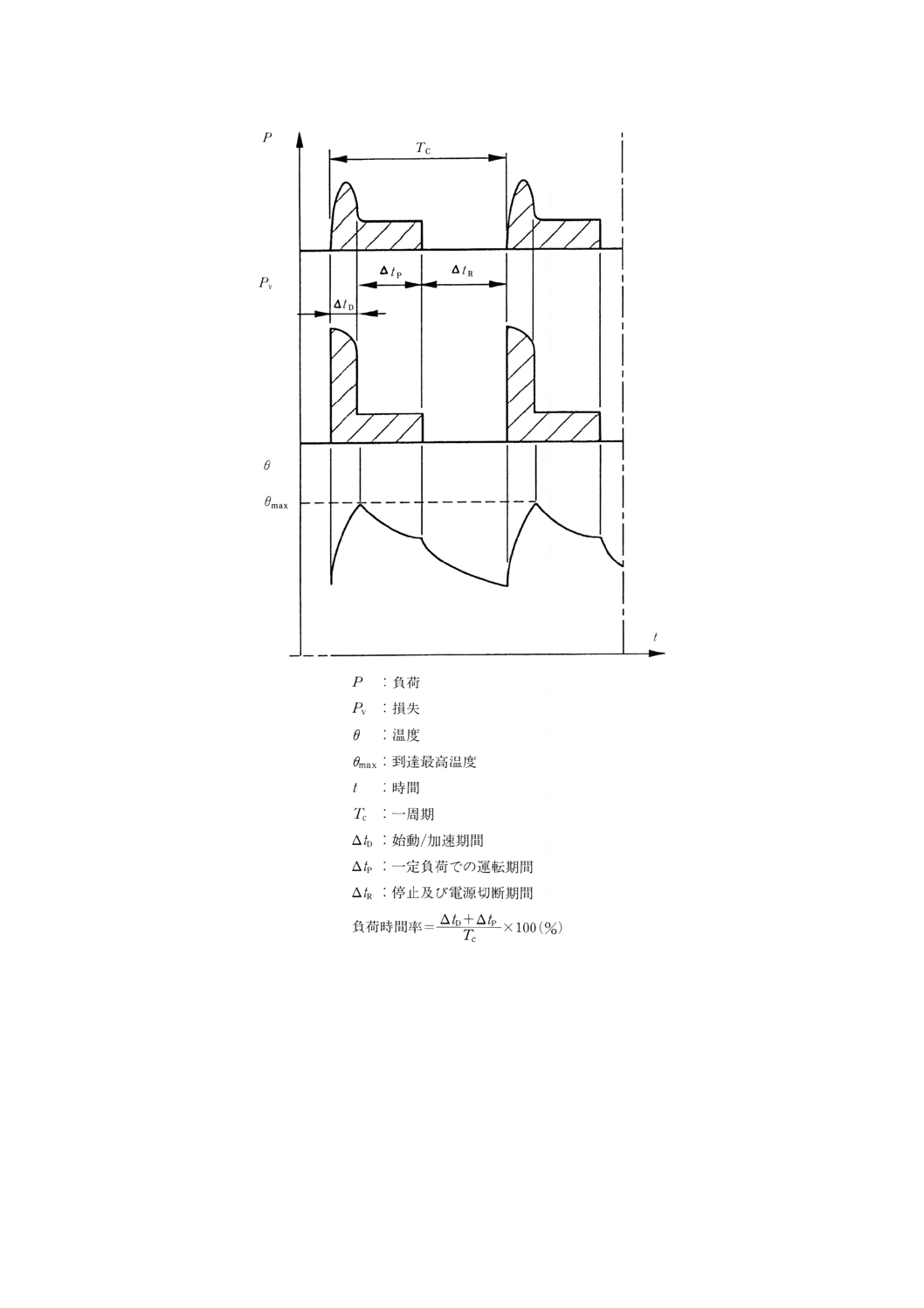
3.2.4
使用形式S4−始動の影響のある反復使用2)
温度上昇に与える影響が無視できない始動期間,実質的に一定な負荷の運転期間及び電圧を印加しない
停止期間とを一周期として,これを反復する使用をいう。この場合,制動条件が温度上昇に与える影響を
注2) 反復使用とは,負荷時に熱的平衡に到達しないことを指す。
6
C 4034-1 : 1999 (IEC 60034-1 : 1996)
無視できるものとする。図4参照。記号はS4で,その後に,負荷時間率と駆動軸に対する電動機の慣性
モーメント (JM) 及び負荷の慣性モーメント (Jext) を付記する。
例 S4 25% JM=0.15kg・m2 Jext=0.7kg・m2
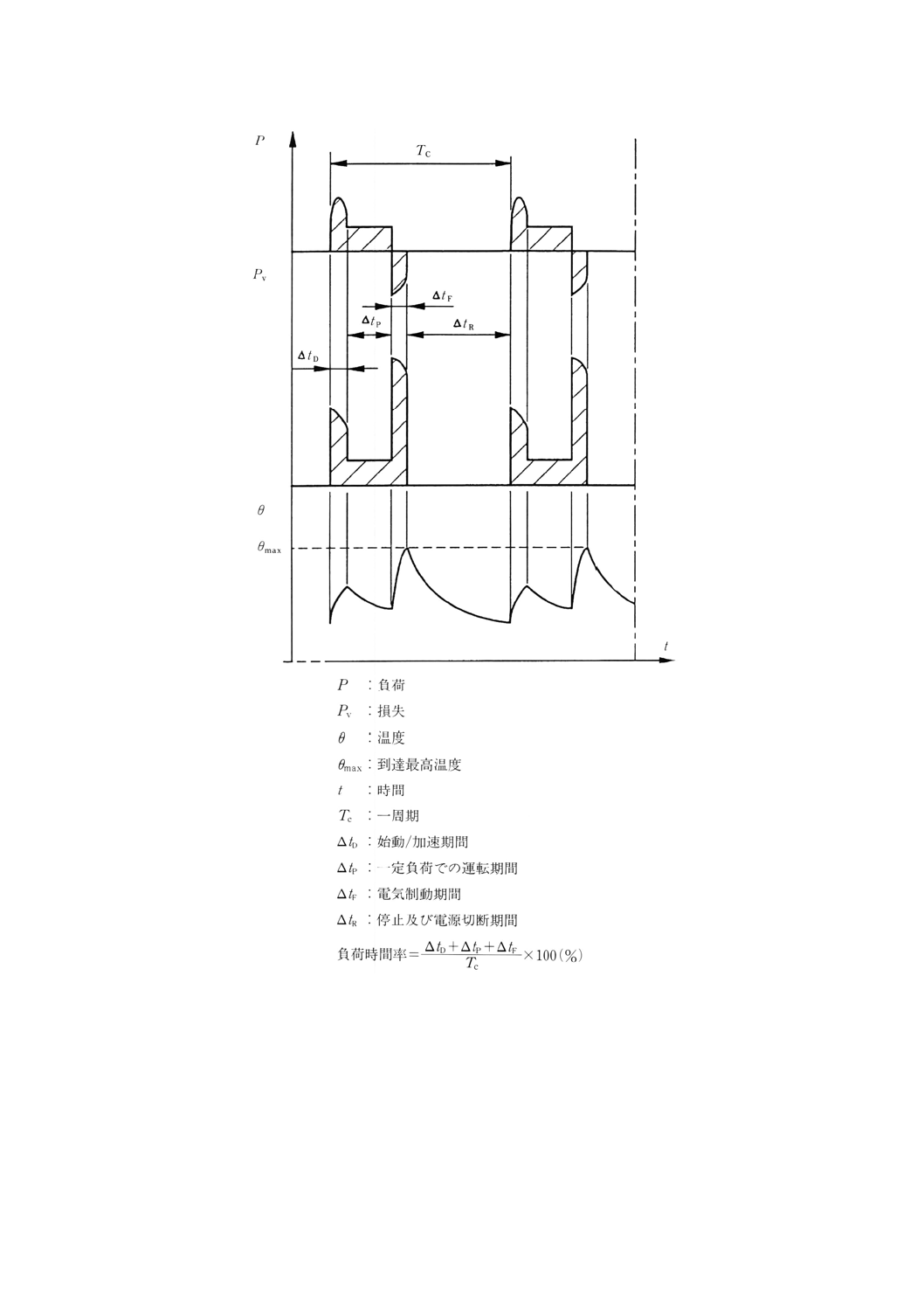
3.2.5
使用形式S5−電気制動を含む反復使用2)
温度上昇に与える影響が無視できない始動期間,実質的に一定な負荷の運転期間,温度上昇に与える影
響が無視できない電気制動期間及び電圧を印加しない停止期間とを一周期として,これを反復する使用を
いう。記号はS5で,その後に負荷時間率と駆動軸に対する電動機の慣性モーメント (JM) 及び負荷の慣性
モーメント (Jext) を付記する。
例 S5 25% JM=0.15kg・m2 Jext=0.7kg・m2
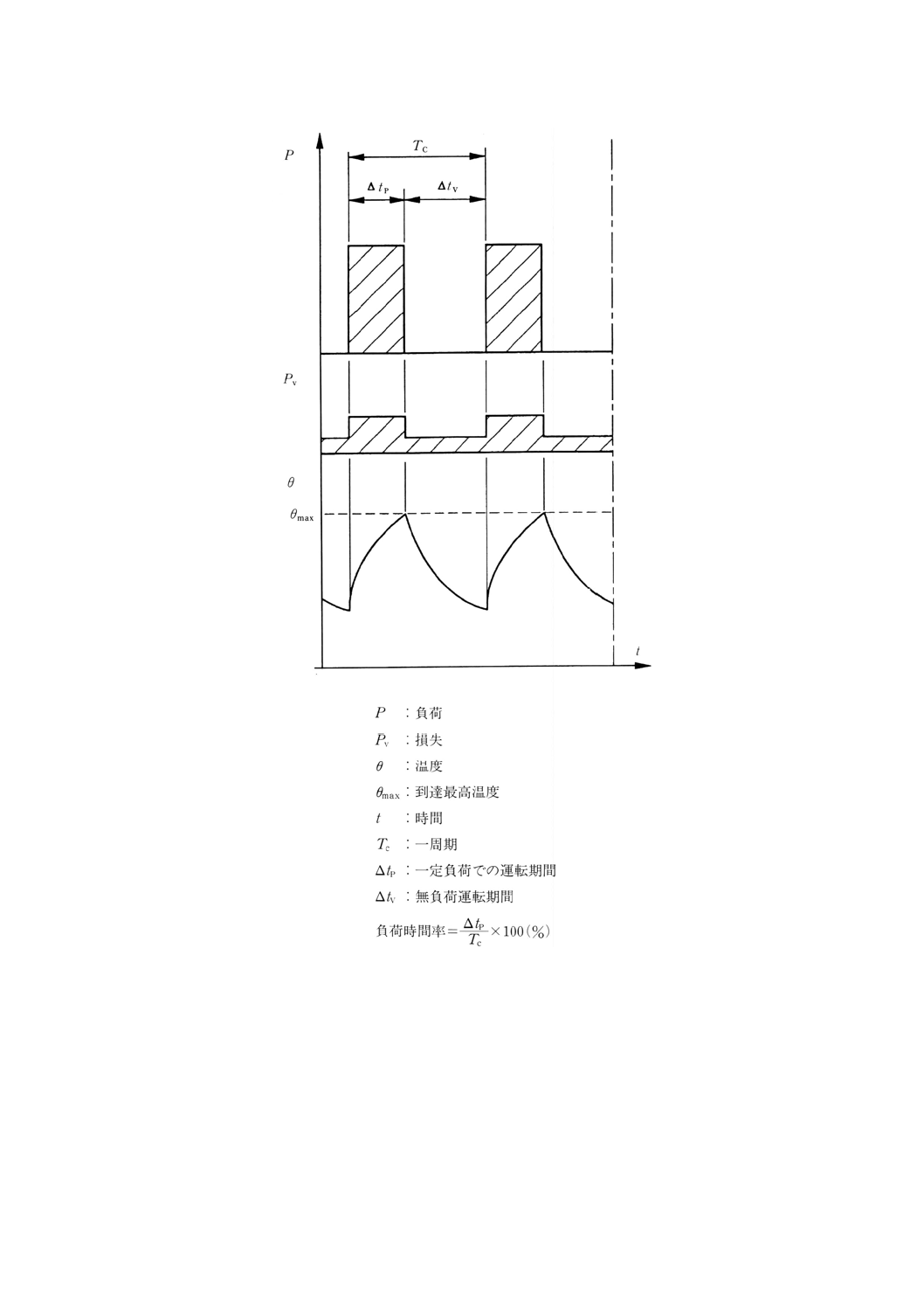
3.2.6
使用形式S6−反復負荷連続使用2)
一定な負荷の運転期間及び無負荷運転期間を一周期として,これを反復する使用をいう。停止及び電源
切断状態の期間はない。図6参照。この場合,始動及び制動条件が温度上昇に与える影響は無視できるも
のとする。
記号はS6で,その後に負荷時間率を付記する。
例 S6 40%
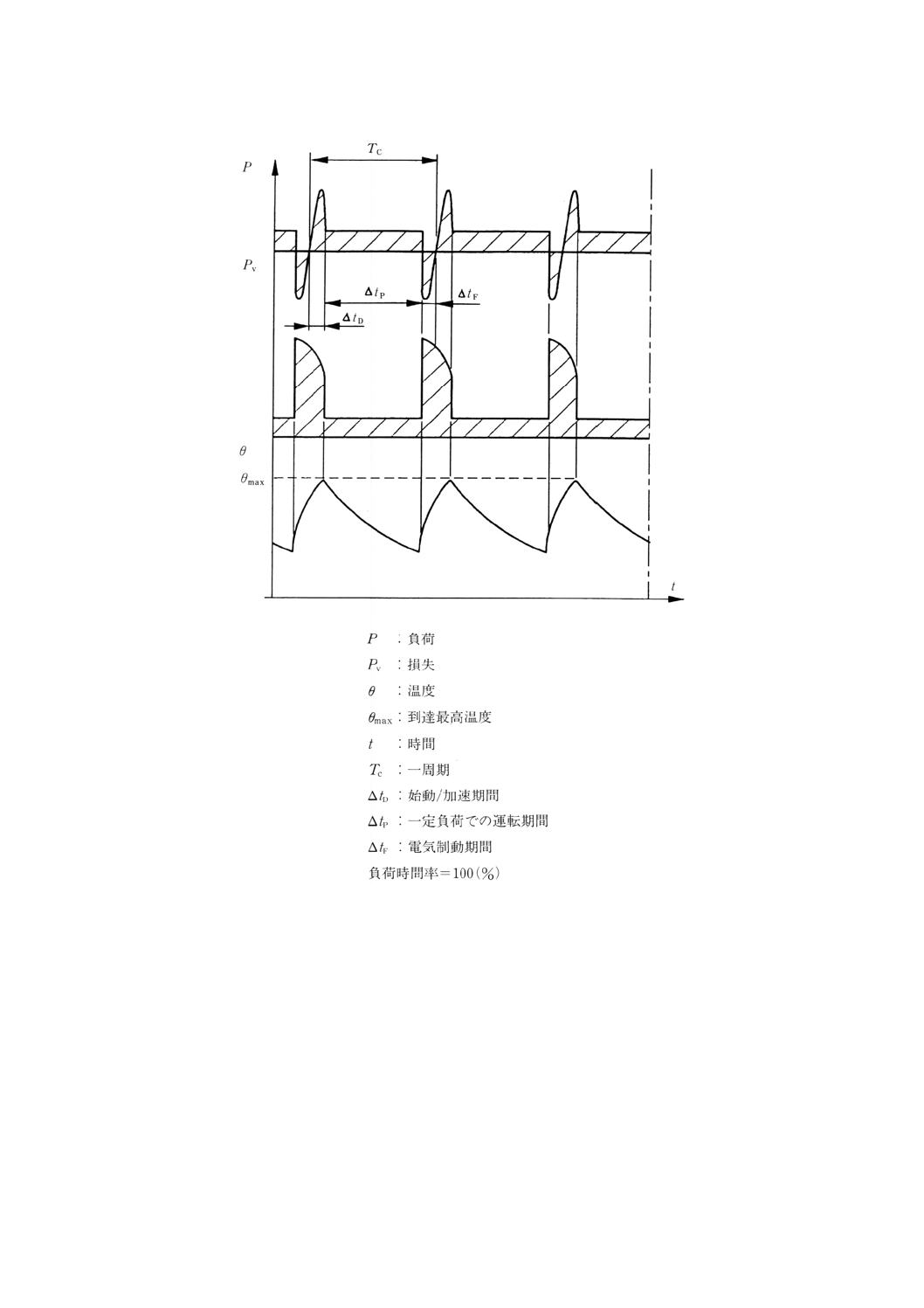
3.2.7
使用形式S7−電気制動を含む反復連続使用2)
温度上昇に与える影響が無視できない始動期間,一定な負荷の運転時間,温度上昇に与える影響が無視
できない電気制動期間を一周期として,これを反復する使用をいう。
この場合,電圧を印加しない期間及び停止期間がないものとする。図7参照。記号はS7で,その後に
負荷時間率と駆動軸に対する電動機の慣性モーメント (JM) 及び負荷の慣性モーメント (Jext) を付記する。
例 S7 JM=0.4kg・m2 Jext=7.5kg・m2
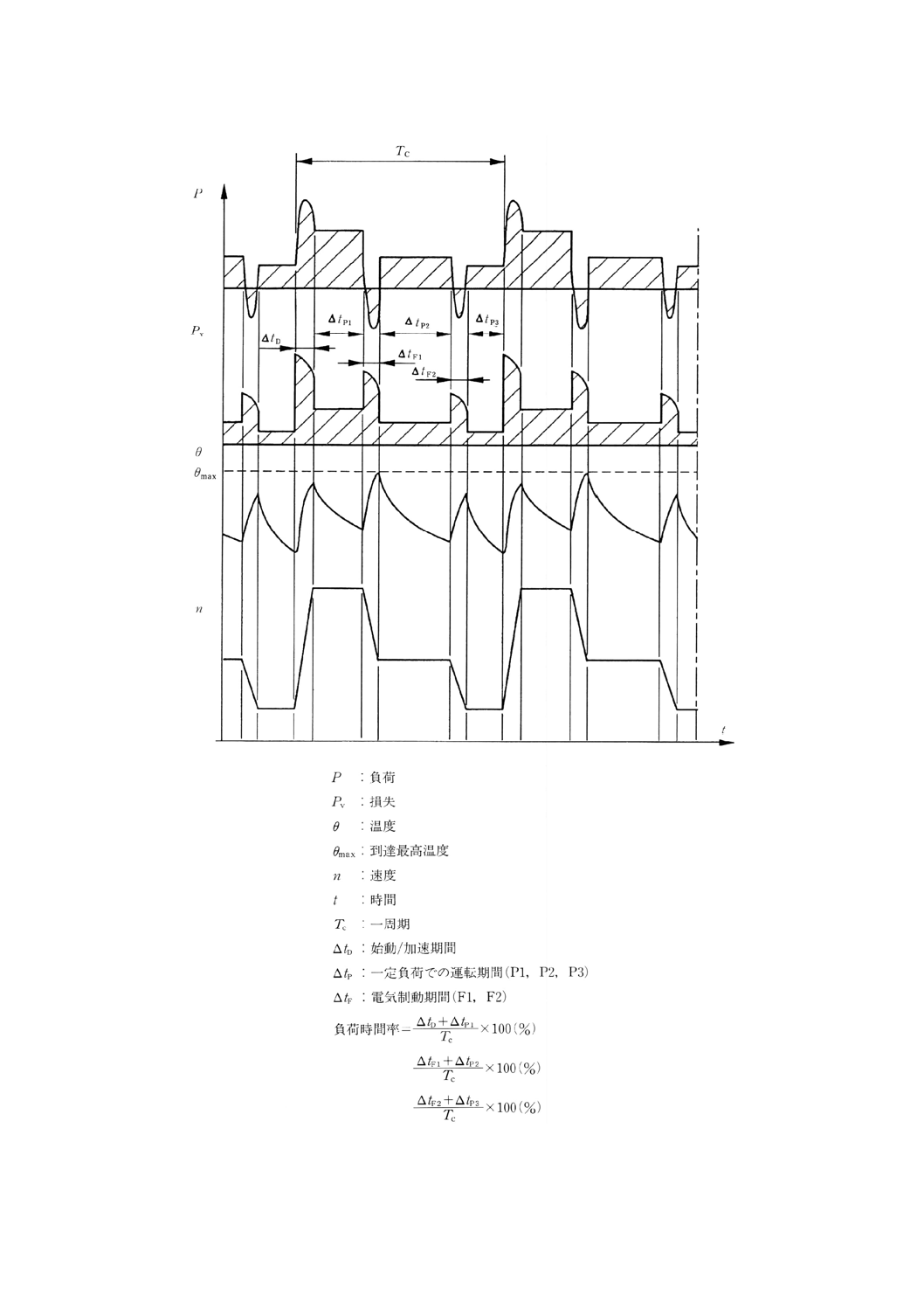
3.2.8
使用形式S8−変速度反復負荷連続使用2)
二つ以上の異なった回転速度に,それぞれ対応する一定な負荷(例えば,誘導電動機の場合には,極数
の切換えによって生じる。)の運転期間を一周期として,これを反復する使用をいう。
この場合,電圧を印加しない期間及び停止期間がないものとする。図8参照。記号はS8で,その後に
駆動軸に対する電動機の慣性モーメント (JM) 及び負荷の慣性モーメント (Jext) と負荷と速度と各速度に
おける負荷時間率を付記する。
例 S8 JM=0.5kg・m2 Jext=6kg・m2
16kW 740min−1
30%
40kW 1 460min−1 30%
25kW 980min−1
40%
3.2.9
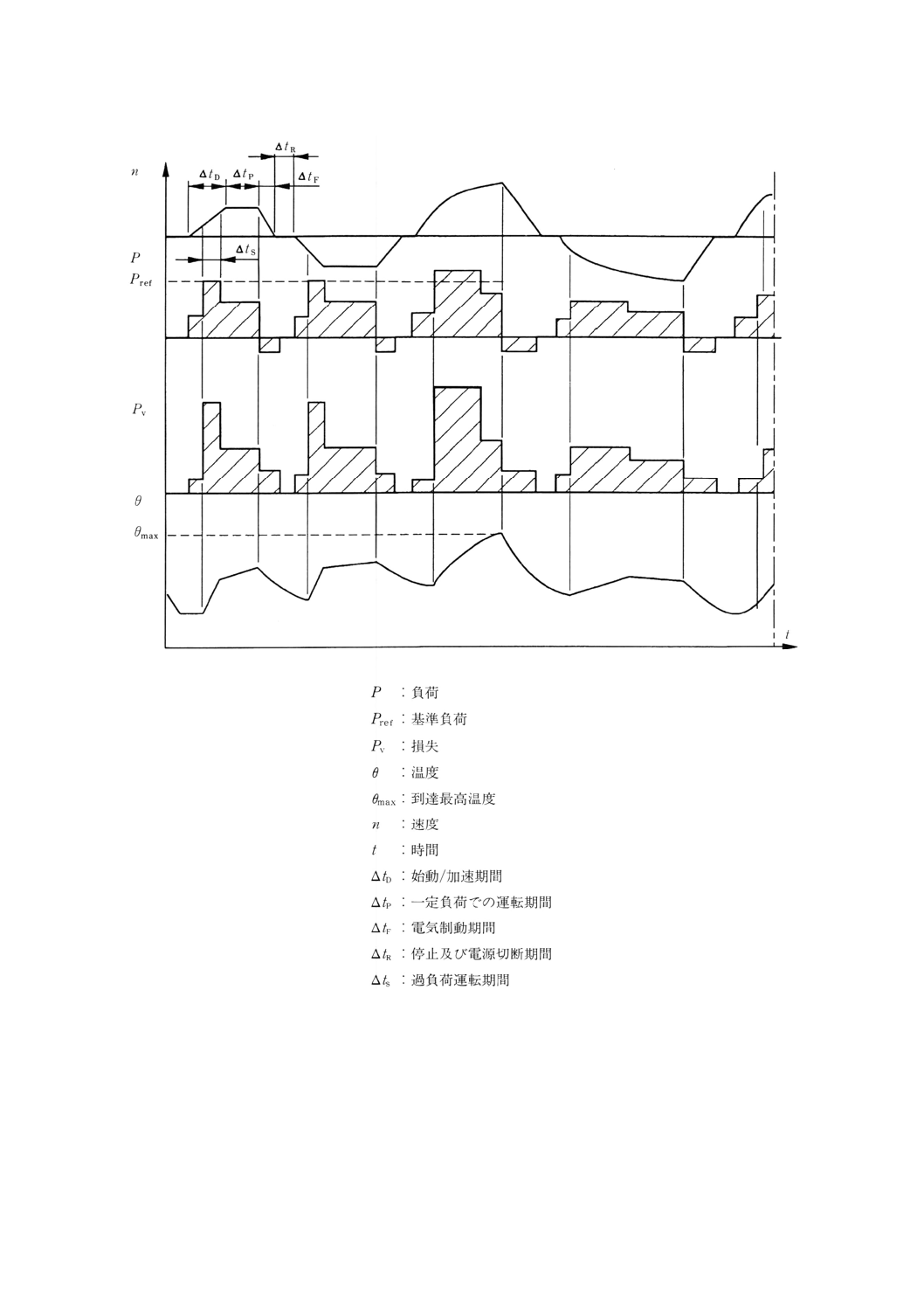
使用形式S9−不規則な負荷及び速度変化を伴う使用
通常,負荷及び速度が許容使用範囲内で不規則に変化する使用をいい,基準負荷をはるかに超える過負
荷がしばしば生じる場合を含む。図9参照。記号はS9である。
この場合,適切な基準負荷値(図9の“Pref”)は,使用形式S1に基づいた一定負荷で,過負荷を考慮し
て決める。
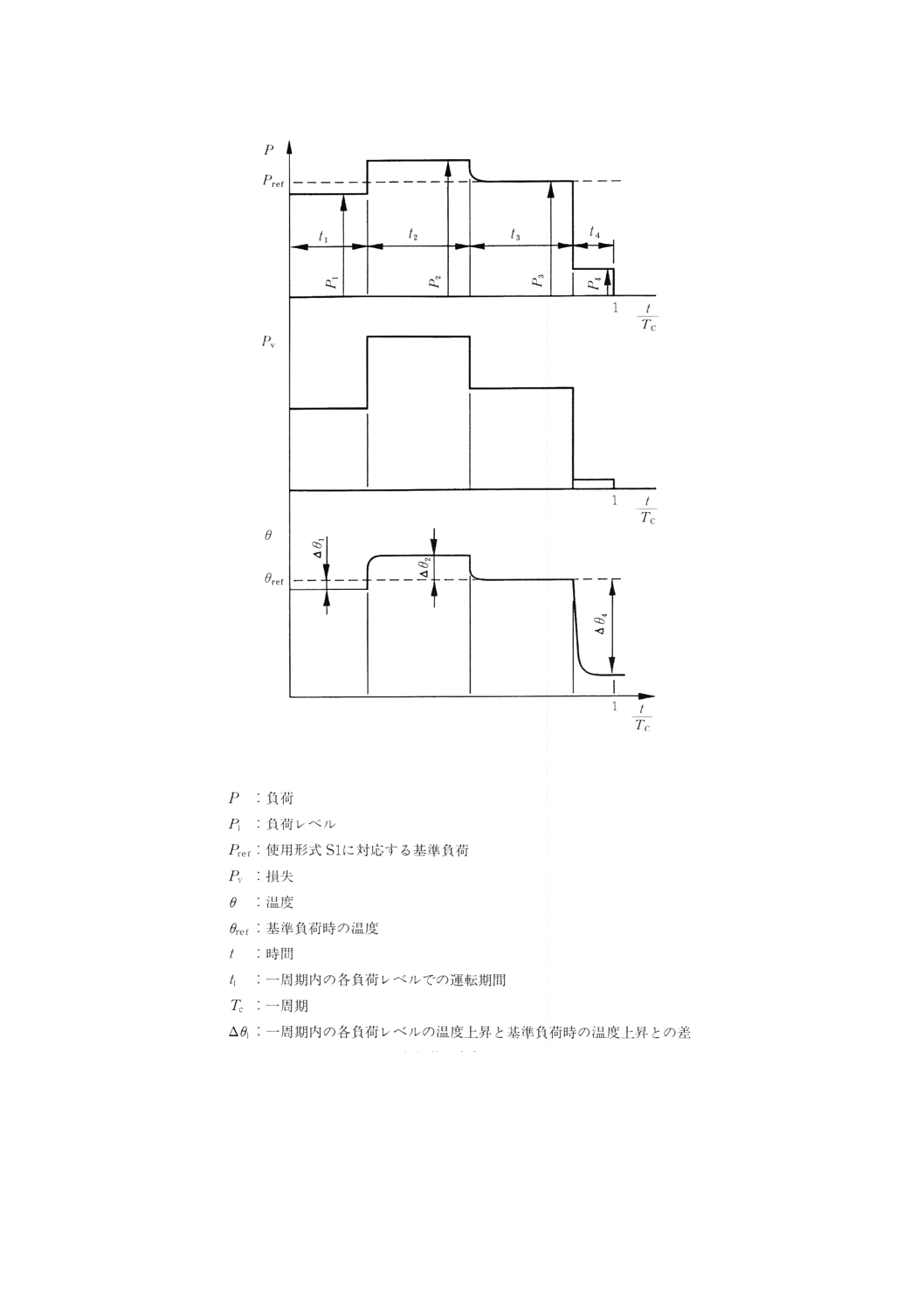
3.2.10 使用形式S10−多段階一定負荷使用
四つ以下の異なるレベルの負荷値(又は同等の負荷)からなる使用状態であり,各負荷は回転機が熱平
衡に到達できる十分な期間だけ維持される。図10参照。使用サイクル内の最小負荷は値がゼロ(無負荷又
は停止及び電源切断状態)でもよい。
記号はS10であり,その後にそれぞれの負荷の基準負荷に対する割合p (p.u.) と一周期に対するそれぞ
7
C 4034-1 : 1999 (IEC 60034-1 : 1996)
れの運転期間の割合△t (p.u.) をp/△tで順番に付記し,更に絶縁の相対熱寿命に関するTLのp.u.値を付記
する。熱寿命期待値の基準値は連続使用の定格における,すなわち,使用形式S1に基づく温度上昇の許
容限度における熱寿命期待値である。停止及び電源切断状態における期間に対しては,負荷の文字rで示
す。
例 S10 p/△t=1.1/0.4, 1/0.3, 0.9/0.2, r/0.1 TL=0.6
TLの値は0.05の整数倍まで丸める。このパラメータの意味については,附属書A参照。
この使用形式の場合,適切に選択した使用形式S1に基づく負荷を基準負荷(図10の“Pref”)とする。
備考 通常,負荷の離散値は,ある期間の積分に基づく等価負荷である。各負荷サイクルを全く同一
にする必要はなく,1サイクル内の各負荷を熱平衡に到達するのに十分な期間だけ維持するこ
と,及び同一の相対熱寿命を与えるため,各負荷サイクルを積分できることだけが必要となる。
図1 連続使用−S1
8
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図2 短時間使用−S2
9
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図3 反復使用−S3
10
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図4 始動の影響のある反復使用−S4
11
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図5 電気制動を含む反復使用−S5
12
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図6 反復負荷連続使用−S6
13
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図7 電気制動を含む反復連続使用−S7
14
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図8 変速度反復負荷連続使用−S8
15
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図9 不規則な負荷及び速度変化を伴う使用−S9
16
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図10 多段階一定負荷使用−S10
4. 定格
4.1
定格の指定
17
C 4034-1 : 1999 (IEC 60034-1 : 1996)
定義の2.2に規定した定格は,製造業者が指定する。定格を指定するとき,製造業者は4.2.1から4.2.6
に規定するいずれかの定格クラスを選択する。定格クラスの記号は定格出力の後に書く。記号が記述され
ていない場合,連続使用状態の定格が適用される。
リアクトルを回転機の端子と電源の間に接続し,回転機の不可欠な部分とみなす場合は,定格値はリア
クトルの電源側端子での値を指す。
備考 これは,回転機と電源の間に接続する電力変圧器には適用されない。
静止電力変換器から給電され,又は給電する回転機に定格を指定するときは,特別な配慮を要する。IEC
60034-17は,IEC 60034-12で取り扱われているかご形誘導電動機についての指針である。
4.2
定格のクラス
4.2.1
連続定格
この規格の要求事項に適合し,回転機を無期限に運転できる定格。
この定格のクラスは,使用形式S1に対応し,使用形式と同じように指定する。
4.2.2
短時間定格
この規格の要求事項に適合し,回転機を周囲温度で始動し,限定された期間だけ運転できる定格。
この定格のクラスは,使用形式S2に対応し,使用形式S2と同じように指定する。
4.2.3
反復定格
この規格の要求事項に適合し,回転機を使用の周期で運転できる定格。
この定格のクラスは,反復使用形式S3からS8のいずれかに対応し,対応する使用形式と同じように指
定する。
特に規定がない限り,一周期は10分であり,負荷時間率は,次のいずれかの値とする。
15%, 25%, 40%, 60%
4.2.4
非反復定格
この規格の要求事項に適合し,回転機を非反復的に運転できる定格。
この定格のクラスは,非反復使用形式S9に対応し,使用形式S9と同じように指定する。
4.2.5
多段階一定負荷使用に対する定格
この規格に適合し,回転機を使用形式S10の関連負荷で無期限に運転できる定格。一周期内における最
大許容負荷に関しては,回転機の全部品,例えば,相対熱寿命の指数法則の妥当性に関して絶縁方式,温
度に関して軸受,熱膨張に関してその他の部品などを考慮しなければならない。他の関連IEC規格に別に
規定していない限り,最大負荷は,使用形式S1に基づく負荷値の1.2倍を超えてはならない。最小負荷は,
値がゼロとなることはあるが,この場合,回転機は無負荷の状態で運転するか,停止及び電源切断状態で
ある。この定格クラス適用上の注意事項を附属書Aに示す。
この定格のクラスは,使用形式S10に対応し,使用形式S10と同じように指定する。
備考 他の関連IEC規格では,最大負荷を使用形式S1に基づく単位法による負荷の代わりに巻線温
度(又は温度上昇)を限定する面から規定している。
4.2.6
等価負荷定格
この規格の要求事項に適合し,熱平衡に到達するまで回転機を運転でき,使用形式S3からS10のいず
れかの形式に等価であるとみなすことができる試験を目的とする定格。
この定格のクラスは,適用される場合,“等価”と指定する。
4.3
定格のクラスの選択
はん(汎)用回転機は,連続定格をもち,使用形式S1の運転ができなければならない。購入者が使用
18
C 4034-1 : 1999 (IEC 60034-1 : 1996)
を指定していない場合,使用形式S1が適用され,指定される定格は連続定格とする。
回転機の定格を短時間定格にするときは,定格は使用形式S2に基づく(3.2.2参照)。
回転機が変動負荷又は無負荷期間や停止及び電源切断状態にある期間を含む負荷をかけるものであれば,
定格はS3〜S8から選択した使用形式に基づく反復定格とする。3.2.3から3.2.8を参照。
回転機が可変速で過負荷を含む可変負荷を非反復的にかけるものであれば,定格は,使用形式S9に基
づく非反復定格とする(3.2.9参照)。
回転機が過負荷期間又は無負荷(又は停止及び電源切断状態)期間を含む多段階の一定負荷をかけるも
のであれば,定格は使用形式S10に基づく多段階一定負荷使用とする(3.2.10参照)。
4.4
定格のクラスへの出力の割付け
定格を決定する場合,使用形式S1からS8の場合は,一定負荷の指定値を定格出力とする(3.2.1から
3.2.8を参照)。使用形式S9とS10の場合,使用形式S1に基づく負荷の基準値を定格出力とする(3.2.9及
び3.2.10を参照)。
4.5
定格出力
4.5.1
直流発電機
定格出力は,端子での出力であり,ワット (W) で表す。
4.5.2
交流発電機
定格出力は,端子での皮相電力であり,力率とともにボルトアンペア (VA) で表す。同期発電機の定格
力率は,別に指定がない限り,0.8遅れ(過励磁)である。
4.5.3
電動機
定格出力は,軸で使用できる機械動力であり,ワット (W) で表す。
参考 一部の国では,電動機の軸側で使用できる機械動力を馬力[1馬力は745.7Wに相当する。1ch
(仏馬力又はメートル馬力)は,736Wに相当する]で表現する慣例がある。
4.5.4
同期調相機
定格出力は,端子での無効電力であり,進み(不足励磁),又は遅れ(過励磁)状態におけるバール (Var)
で表す。
4.6
定格電圧
4.6.1
一般事項
定格電圧は,定格出力における回転機の端子での線間電圧である。
4.6.2
直流発電機
比較的小さな電圧範囲で運転する直流発電機の場合は,定格出力及び定格電流は,特に指定がない限り,
当該範囲の最高電圧における値とする(6.3参照)。
4.6.3
交流発電機
比較的小さな電圧範囲で運転する交流発電機の場合は,定格出力及び定格力率は,特に指定がない限り,
当該範囲の任意の電圧における値とする(6.3参照)。
4.7
電圧及び出力の関係
すべての定格電圧についてすべての定格の機械を作ることは実用的ではない。一般に交流機の場合,設
計及び製造上の理由によって,定格出力に関して1kVを超える望ましい電圧定格は,次のとおりである。
19
C 4034-1 : 1999 (IEC 60034-1 : 1996)
定格電圧 kV
最小定格出力 kW (kVA)
1.0 < UN ≦ 3.0
100
3.0 < UN≦ 6.0
150
6.0 < UN ≦ 11.0
800
11.0 < UN ≦ 15.0
2 500
4.8
定格が二つ以上ある回転機
定格が二つ以上ある回転機の場合,回転機は各定格においてこの規格に適合していなければならない。
多速度電動機の場合は,定格は各速度ごとに指定する。
定格値(出力,電圧,速度など)が数種の値を想定しているか,二つの限度値内において連続的に変動
するときは,定格をこれらの値又は限度値で示す。この規定は,6.3の運転時における電圧と周波数の変動,
又は始動目的のスターデルタ接続の場合は除く。
5. 設置場所の条件
5.1
一般事項
特に指定がない限り,回転機は,次の設置場所の条件に適したものとする。設置場所の条件がこれらの
値から逸脱する場合の補正を7.に示す。
5.2
標高
標高は,海抜1 000mを超えてはならない。
5.3
最高周囲温度
周囲温度は,40℃を超えてはならない。
5.4
最低周囲温度
周囲温度は,−15℃以上とする。ただし,回転機が次のいずれかの場合は,周囲温度は0℃以上とする。
a) 定格出力が1 000min−1当たり3 300kW(又はkVA)を超える回転機
b) 定格出力が600W(又はVA)未満の回転機
c) 整流子のある回転機
d) 滑り軸受を使用している回転機
e) 一次冷媒又は二次冷媒として水を使用する回転機
5.5
冷却水温度
回転機又は熱交換器への入口における冷却水温度は,+25℃を超えず,+5℃以上とする。
5.6
保管及び輸送
輸送中,保管中又は設置後に5.4の規定温度よりも低くなると予想できる場合は,購入者は,製造業者
にその旨を伝え,予想最低温度を指定する。
5.7
水素冷却の場合の水素の純度
水素冷却形回転機は,冷媒中の水素の容積含有率が95%以上の状態で,定格出力で運転できなければな
らない。
備考 安全上の理由から,水素含有率は,常に90%以上とし,混合物中の他の気体は空気であると想
定する。
IEC 60034-2に従って効率を算出する場合,混合気体の標準組成は,別に合意がない限り再冷却気体の
圧力と温度の指定値において,容積で水素が98%,空気が2%である。風損は対応する濃度で算出する。
20
C 4034-1 : 1999 (IEC 60034-1 : 1996)
6. 電気的運転条件
6.1
電源
50Hz又は60Hzの三相交流機の電圧は,付表1に示す公称電圧とする。
回転機の定格電圧を求める場合は,配電系統電圧と利用系統電圧の差を考慮する必要がある。
備考 大形高圧交流発電機の場合は,電圧は最適な特性が得られるように選択する。
交流電動機が静止電力変換器から給電される場合,電圧,周波数,波形に関する制限は適用されない。
この場合,定格電圧は合意によって選択する。
付表1 公称電圧
単位 V
1 0 0 , 1 2 0 , 1 0 0 / 2 0 0 , 1 2 0°/ 2 4 0 , 1 2 0 / 2 0 8 ,
2 0 0 , 2 2 0 , 2 2 0 / 3 8 0 , 2 4 0 , 2 4 0 / 4 1 5 ,
2 7 7 / 4 8 0 , 4 0 0 , 4 1 5 , 4 4 0 , 5 0 0 , 6 0 0 , 6 6 0 ,
2 4 0 0 , 3 0 0 0 , 3 3 0 0 , 2 4 0 0 / 4 1 6 0 , 4 8 0 0 ,
6 0 0 0 , 6 6 0 0 , 7 2 0 0 , 4 8 0 0 / 8 3 2 0 ,
1 0 0 0 0 , 1 1 0 0 0 , 1 2 0 0 0 , 7 2 0 0 / 1 2 5 0 0 ,
7 6 0 0 / 1 3 2 0 0 , 1 5 0 0 0 , 2 0 0 0 0 , 2 2 0 0 0 ,
2 3 0 0 0 , 2 7 6 0 0 , 3 0 0 0 0 , 3 3 0 0 0 , 3 4 5 0 0 ,
4 5 0 0 0 , 4 6 0 0 0 , 4 7 0 0 0 , 6 6 0 0 0 , 6 9 0 0 0 ,
7 7 0 0 0 , 1 1 0 0 0 0 , 1 5 4 0 0 0 , 1 6 1 0 0 0 ,
1 8 7 0 0 0 , 2 2 0 0 0 0 , 2 3 0 0 0 0 , 2 7 5 0 0 0 ,
2 8 7 0 0 0 , 3 3 0 0 0 0 , 3 4 5 0 0 0 , 3 8 0 0 0 0 ,
4 0 0 0 0 0 , 5 0 0 0 0 0 , 7 0 0 0 0 0 〜 7 5 0 0 0 0
備考 この付表は,IEC 60038 : 1983に規定されている公称電圧を元に作成したものであるが,従
来から我が国で使用が認められている電圧値を追加している。
なお,追加した電圧値には,点線の下線が施されている。
6.2
電圧と電流の形状及び対称性
6.2.1
交流電動機
6.2.1.1
固定周波数の電源で運転する定格をもち,交流発電機(ローカル又は供給網経由を問わず)から
給電される交流電動機は,高調波電圧係数 (HVF) が次を超えない供給電圧での運転に適したものでなけ
ればならない。
単相電動機及び同期電動機を含むデザインN(IEC 60034-12参照)以外の電動機については,製造業者
が別途明示していない限り,0.02。
デザインN電動機については,0.03。
HVFは,次の式から算出する。
n
U2
n
HVF
Σ
=
ここに, Unは,定格電圧Unに対する高調波電圧を単位法で表した値である。
nは,高調波の次数(三相交流電動機の場合は,3で割り切れない数。)
である。
通常,高調波次数n≦13を考慮すれば十分である。
三相交流電動機は,三相電圧系統の逆相分が長期間に正相分の1%を超えないか,又は数分を超えない
短期間に1.5%を超えておらず,零相分が正相分の1%を超えていない運転に適したものでなければならな
い。
21
C 4034-1 : 1999 (IEC 60034-1 : 1996)
HVF及び逆相分と零相分の限界値が定格負荷での使用中に同時に発生しても,電動機に有害な温度とな
ってはならない。ただし,その場合でも,この規格に規定されている温度上昇限度又は温度限度からの超
過は,約10K以下であることが望ましい。
備考 大きな単相負荷(誘導電気炉など)の周辺,及び地方の,特に産業系統と家庭系統が混在して
いる場合,電源が上記の範囲を超えて変形することがある。この場合は特別に協議することが
必要である。
6.2.1.2
静止電力変換器から給電される交流電動機は,供給電圧のより高い高調波成分の含有に耐えられ
なければならない。IEC 60034-12の適用範囲内のかご形電動機の事例については,IEC 60034-17を参照。
備考 静止電力変換器などからの供給電圧が正弦波とは著しく異なるとき,総波形と基本波形の実効
値は,両者とも交流機の特性決定に関係してくる。
6.2.2
交流発電機
交流発電機は,実際上ひずみのない対称な回路の給電に適したものでなければならない。実際上ひずみ
のない対称な回路とは,正弦波電圧を接続したとき,電流の瞬時値と基本波の対応する瞬時値との差が基
本波の振幅の5%以下であり,対称電圧システムを接続したとき,電流の逆相分も零相分も正相分の5%以
下の回路をいう。
定格負荷において使用中に変わい(歪)と対称の限度が同時に発生しても,これによって,発電機に有
害な温度となってはならない。この場合,この規格に規定されている温度上昇限度又は温度の超過は,約
10K以下とする。
6.2.3
同期機
別に指定がない限り,三相同期機は,次のような非対称系統,すなわち,相電流はいずれも定格電流以
下であり,定格電流 (IN) に対する逆相電流成分 (I2) の比が表1の値以下であるような系統で連続して運
転できなければならない。また,故障状態では, (I2/IN)2と時間 (t) の積が表1の値以下で運転できなけれ
ばならない。
22
C 4034-1 : 1999 (IEC 60034-1 : 1996)
表1 同期機の非対称運転条件
項目
回転機の種別
連続運転の
最大I2/IN値
故障状態下での運転
の
最大 (I2/IN)2×t(秒)
突極機
1
間接冷却巻線
電動機
0.1
20
発電機
0.08
20
同期調相機
0.1
20
2
直接冷却(内部冷却)固定
子及び/又は界磁巻線
電動機
0.08
15
発電機
0.05
15
同期調相機
0.08
15
非突極同期機
3
間接冷却回転子巻線
空冷
0.1
15
水素冷却
0.1
10
4
直接冷却(内部冷却)
回転子巻線
350 MVA
0.08
8
> 350 ≦ 900 MVA
備考1.参照
備考2.参照
> 900 ≦ 1 250 MVA
備考1.参照
5
> 1 250 ≦ 1 600 MVA
0.05
5
備考1. これらの回転機の場合は,I2/INの値は次のように算出される。
4
N
N
2
10
3
350
08
.0
×
−
−
=
S
I
I
2. これらの回転機の場合 (I2/IN)2×t(秒)の値は,次のように算出される。
(I2/IN)2×t=8−0.005 45 (SN−350)
ここにSNは,MVA単位の定格皮相電力である。
6.2.4
静止電力変換器から給電される直流電動機
静止電力変換器から給電される直流電動機の場合,脈動電圧及び電流は機械の性能に影響する。純直流
電源から給電される直流電動機と比べて,損失及び温度上昇が増大し整流が困難となる。したがって,静
止電力変換器から給電される直流電動機で,定格出力5kWを超えるものについては指定の電源のもとで動
作するよう設計する必要がある。また,電動機製造業者が必要と考える場合には,電流脈動低減用の外部
リアクトルの導入が必要となる。
直流電動機を駆動する静止電力変換器は,次の分類記号で標記する。
[CCC−UaN−f−L]
ここに,
CCC: IEC 60971による静止電力変換器分類記号
UaN: 変換器入力端子での交流定格電圧 [V] で3けた又は4け
たで表す。
f: 変換器入力の定格周波数 [Hz] で2けたで表す。
L: 電動機の電機子回路に直列に接続される外部リアクトル
のインダクタンス [mH] で1ないし3けたで表す。これ
がゼロであれば,外部リアクトルの省略を意味する。
5kW以下の直流電動機は,外部リアクトル付き,若しくは外部リアクトルなしの条件で特定タイプの静
止電力変換器を想定する代わりに,任意の静止電力変換器で運転可能なように設計することができる。た
23
C 4034-1 : 1999 (IEC 60034-1 : 1996)
だし,このとき,電動機が許容する定格波形率(2.28定義参照)を超えることなく,また変換器入力端子
での交流定格電圧に対して,電動機の電機子回路の絶縁レベルが適切であることが条件である。
備考 静止電力変換器の分類記号の標記,若しくは定格出力5kW以下の電動機における定格波形率の
標記と変換器の入力端子での交流定格電圧の標記によって,その静止電力変換器による脈動電
圧と脈動電流に対応する直流電動機であることが示される。
いずれの場合も,静止電力変換器による電流の脈動は定格負荷での脈動率で0.1を超えるものであって
はならない。
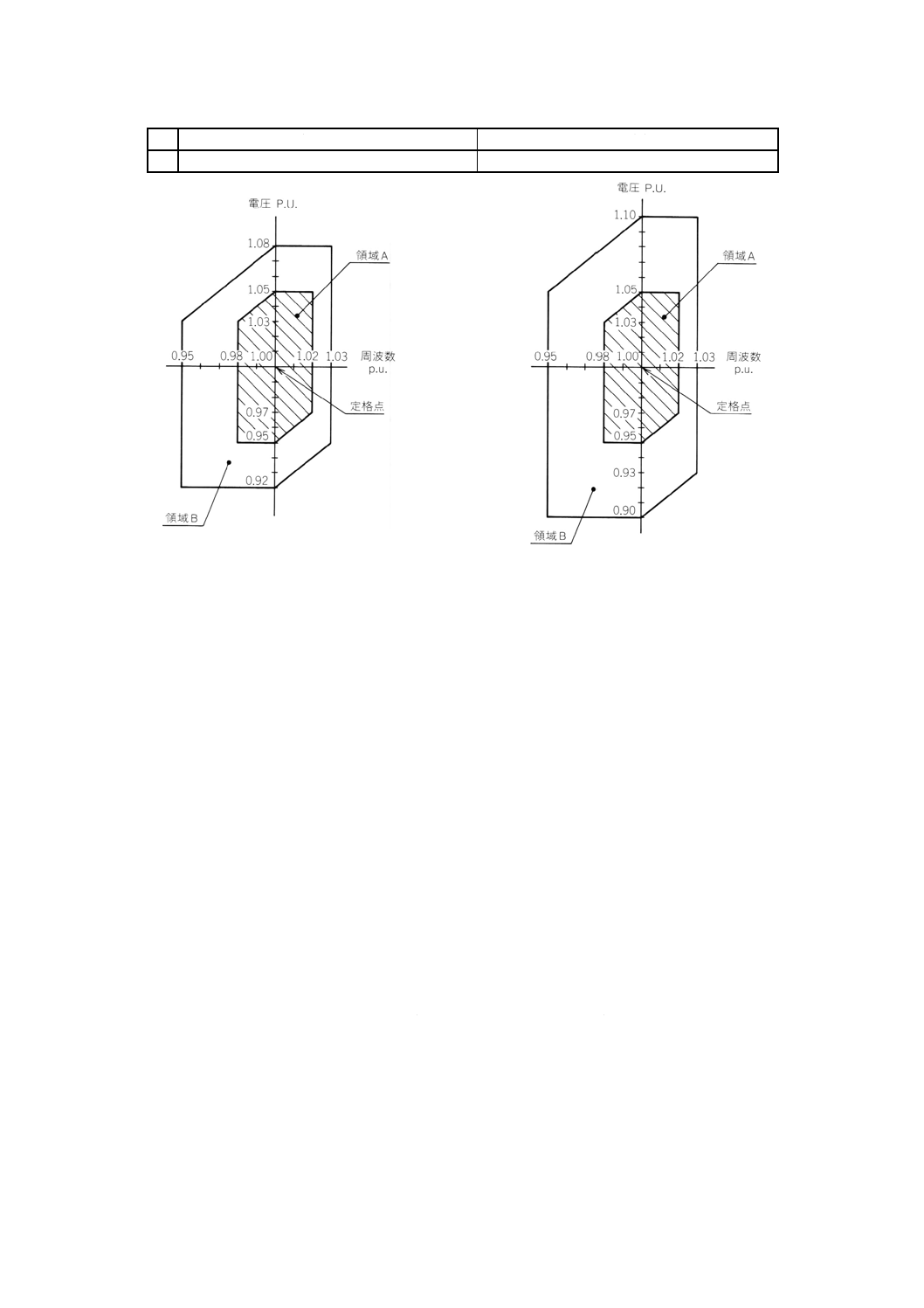
6.3
運転中の電圧及び周波数変動
回転機に対する電源の電圧変動と周波数変動の組合せは,次のとおりとする。
交流発電機及び同期調相機……図11の領域A又は領域B
交流電動機……図12の領域A又は領域B
直流機……直流母線に直接接続される場合,電圧変動に対してだけ領域Aと領域Bを適用
領域A内の電圧変動及び周波数変動に対し回転機は,表2に規定する主要な定格値で,連続的に運転で
きなければならない。このとき,効率,温度上昇など,定格点に対して定められた性能は十分に満足する
必要はなく,差異があってもよい。温度上昇は定格点における値より高くなってもよい。
領域B内の電圧変動及び周波数変動に対し回転機は,表2に規定する主要な定格値で,運転できなけれ
ばならない。このとき,定格点に対する性能の差異は,領城A内の場合よりも大きくなってもよい。温度
上昇は定格点における値より高くなってもよく,また,ほとんどの場合領域A内における温度上昇よりも
高くなる。
なお,領域Bの境界線上で長時間運転することは,勧められない。
備考1. 回転機は,実際の適用や運転条件下では,ときどき領域Aの範囲を超えて運転されるが,こ
の場合,持続時間や頻度が制限されるべきである。温度による回転機の寿命低下に対する予
防策としては,出力を低減させることが考えられる。
2. この規格で規定する温度上昇限度は,定格点において適用し,定格点から離れたところでは,
規格限度を超えてもよい。領域Aの境界部では,一般的に規格限度を約10K程度超える。
3. 交流電動機は,その始動トルクが負荷に見合ったものであれば,電圧変動の下限においても
始動可能だが,これはこの規格の要求事項ではない。
三相かご形誘導電動の始動特性については,IEC 60034-12を参照。
表2 回転機の主要な定格値
項
回転機の種別
主要な定格値
1.
交流発電機,ただし,5.に該当するものを除く。 定格力率における定格皮相電力 (kVA)
2.
交流電動機,ただし,3.,5.に該当するものを
除く。
定格トルク (Nm)
3.
同期電動機,ただし,5.に該当するものを除く。 定格トルク (Nm)
励磁は定格負荷状態における界磁電流又は定
格力率状態とする。
4.
同期調相機,ただし,5.に該当するものを除く。 当事者間の合意がない限り,図11の領域内で
定格皮相電力 (kVA)
5.
定格出力10MVA以上の円筒形同期機
IEC 60034-3による。
6.
直流発電機
定格出力 (kW)
7.
直流電動機
定格トルク (Nm)
分巻電動機では,界磁を他励とするとき,定
24
C 4034-1 : 1999 (IEC 60034-1 : 1996)
項
回転機の種別
主要な定格値
格速度を保つ界磁電流とする。
図11 発電機の電圧・周波数
図12 電動機の電圧・周波数
6.4
無接地システムで運転する三相交流機
三相交流機は中性点を大地電位又はそれに近い電圧で連続運転するのに適したものでなければならない。
それらはまた,まれに短時間ではあるが,例えば,一般の故障解消に必要なものとして一線が大地電位に
ある非接地運転にも適したものでなければならない。この状態で連続的又は長い期間運転する回転機は,
それに適する絶縁レベルをもつ必要があり,その条件は運転指針に定義されるべきである。
備考 回転機の中性点の接地又は相互接続は,製造業者と相談の上実施しなければならない。これは
ある運転条件では全周波数の零相電流成分の危険があり,また,各相と中性点間の故障では巻
線の機械的損傷があり得るためである。
6.5
耐電圧(ピーク及びこう配)レベル
交流電動機の場合,製造業者はピーク電圧及び連続運転における電圧こう配の制限値を明示しなければ
ならない。
IEC 60034-12の適用範囲内のかご形誘導電動機については,IEC 60034-17も参照。高圧交流電動機につ
いては,IEC 60034-15も参照。
7. 温度上昇及び試験
7.1
耐熱クラス
JIS C 4003に基づく耐熱クラスを回転機の絶縁システムに適用する。絶縁システムの耐熱クラスは,温
度値ではなく,文字によって表す。
製造業者は,耐熱試験によって得られた結果を自社の回転機種別と適用に合わせて説明する責任がある。
備考1. 新しい絶縁システムの耐熱クラスは,使用する個別材料の耐熱能力に直接関係すると想定す
べきではない。
2. 経験によって立証されている場合は,既存の耐熱クラスを継続して使用できる。
25
C 4034-1 : 1999 (IEC 60034-1 : 1996)
7.2
基準冷媒
回転機を冷却する各方式に対して使用する基準冷媒を表3に示す。
表3 冷却方式及び基準冷媒
項目
一次冷媒
冷却方式
二次冷媒
適用表番号 左欄記載の表が
規定する限度
基準冷媒
1
空気
間接
なし
表 6
温度上昇
周囲空気
2
空気
間接
空気
表 6
温度上昇
周囲空気
3
空気
間接
水
表 6
温度上昇
回転機への入口の空気1)
4
水素
間接
水
表 7
温度上昇
回転機への入口の水素1)
5
空気
直接
なし
表11
温度
周囲空気
6
空気
直接
空気
表11
温度
周囲空気
7
空気
直接
水
表11
温度
回転機への入口の空気
8
水素又は液体
直接
水
表11
温度
回転機への入口の水素
又は巻線の入口の液体
1)
巻線が間接冷却てあり,水冷熱交換器をもつ回転機は,基準冷媒として一次又は二次冷媒のどちらか
を使用することができる(定格銘板に関する情報として9.2を参照)。
三次冷媒が用いられる場合,温度上昇は表3に指定されるように一次又は二次冷媒の温度を基準として
測定される。
備考 回転機には,表3の項目を二つ以上適用し冷却することができる。この場合,異なる巻線に対
して異なる基準冷媒を適用できる。
7.3
温度上昇試験の条件
7.3.1
電源
電動機の温度上昇試験においては,電源の高調波電圧係数HVFは0.015を超えてはならない。また,零
相分の影響のない場合に,逆相電圧が正相電圧の0.5%未満でなければならない。
製造業者と購入者の合意によって,逆相電圧の代わりに逆相電流を測定する場合には,逆相電流は正相
電流の2.5%を超えてはならない。
7.3.2
温度上昇試験前の回転機の温度
巻線温度を抵抗の増加から決定する場合は,抵抗を温度上昇試験の前に測定するとき,温度計によって
測定した巻線温度が,実際上その時点の冷媒の温度と等しくなければならない。
短時間定格(使用形式S2)の回転機の場合,温度上昇試験開始前の回転機の温度と冷媒温度との差は,
5K以内でなければならない。
7.3.3
冷媒温度
回転機は,任意の都合のよい冷媒温度において試験することができる。表10(間接冷却巻線)又は表13
(直接冷却巻線)を参照。
7.3.4
試験中の冷媒温度の測定
回転機の温度上昇試験中に冷媒温度が変化する場合は,温度計で等間隔に測定した記録から試験時間の
最後の4分の1の期間における平均値を冷媒温度とする。
冷媒温度の変動に伴う大形回転機の温度変化の時間遅れによる誤差を少なくするため,あらゆる合理的
な予防措置を講じて変動を最小限に抑えねばならない。
7.3.4.1
開放形回転機又は熱交換器のない閉鎖形回転機(冷却は,周囲空気又は気体による。)
回転機から1〜2m隔たった箇所で,回転機の床上高さのほぼ中央の高さに設置した数個の温度計によっ
て測定する。各温度計は,回転機又は他からの熱放射若しくは通風の影響を受けないように保護する。
26
C 4034-1 : 1999 (IEC 60034-1 : 1996)
7.3.4.2
換気ダクトを通じて取り入れる遠方の空気又は気体によって冷却する回転機及び別置きの熱交
換器をもつ回転機
回転機への入口で一次冷媒温度を測定する。
7.3.4.3
取付け熱交換器又は内部熱交換器をもつ閉鎖形回転機
一次冷媒温度は回転機への入口で測定する。二次冷媒温度は熱交換器への入口で測定する。
7.4
回転機各部分の温度上昇
7.5による適切な方法で測定した回転機の各部分の温度と,7.3.4に従って測定した冷媒温度との差を回
転機のその部分の温度上昇 (△θ) とする。
表6,表7の温度上昇限度,表11の温度限度と比較する場合,温度は7.7に規定する温度上昇試験の終
了時に測定する。
連続定格(使用形式S1)の回転機に対しては,可能な場合は運転中及び停止後の両方について温度を測
定する。
反復定格(使用形式S3〜S8)の回転機に対しては,試験終了時の温度を試験の最終サイクルの最大の発
熱を生じる期間の中央における温度とする(7.7.3参照)。
7.5
温度測定方法
回転機の巻線及びその他の部分の温度の測定方法には,次の3方法がある。
− 抵抗法
− 埋込温度計 (ETD) 法
− 温度計法
相互の点検のために異なる方法を使用してはならない。
7.5.1
抵抗法
巻線抵抗の増加を測定して巻線の温度上昇を算出する方法である。
7.5.2
埋込温度計 (ETD) 法
回転機の完成後には,接近できない箇所に温度検出器(例えば,抵抗温度計素子,熱電対素子,サーミ
スタ素子など)をあらかじめ埋め込んでおいて,その箇所の温度を測定する方法である。
7.5.3
温度計法
回転機が完成した後,外部から接近できる表面に温度計を取り付けて温度を測定する方法である。温度
計としては,棒状温度計,抵抗温度計,熱電対温度計などのいずれでもよい。
なお,棒状温度計を磁界の影響を受ける場所に使用する場合には,水銀温度計ではなくアルコール温度
計を使用する。
7.6
巻線温度の決定
7.6.1
巻線の温度測定法の選択
通常は,回転機の巻線の温度測定には7.5.1の抵抗法を適用する(7.6.2.3.3も参照)。
定格出力5 000kW(又はkVA)以上の交流機の固定子(電機子)巻線にはETD法を適用する。
定格出力200kW(又はkVA)超過,5 000kW(又はkVA)未満の交流機に対しては,他に協定がない限
り,製造業者は,抵抗法又はETD法のどちらかを選択する。
定格出力200kW(又はkVA)以下の交流機に対しては,他に協定がない限り,製造業者は抵抗法の直接
測定法又は直流重畳法を適用する(7.6.2.1参照)。
定格出力600W(又はVA)以下の回転機に対しては,巻線が一様でない場合,又は必要な接続をするの
が困難な場合は,温度は,温度計法によって決定してもよい。この場合,表6の温度上昇限度を適用する。
27
C 4034-1 : 1999 (IEC 60034-1 : 1996)
温度計法は,次のような場合に適用できる。
a) 抵抗法によって温度上昇を決定することが実際的でない場合,例えば,低抵抗の補極巻線及び補償巻
線又は一般の低抵抗の巻線,特に全体の抵抗に比べ接合部の抵抗が無視できないような場合。
b) 固定部又は回転部の単層巻線。
c) 量産機の受渡試験の場合。
d) 購入者が抵抗法又はETD法で決定する温度上昇のほかに,温度計法による読みを要求する場合。
単層巻の交流機の固定子(電機子)巻線に対しては,本規格との適合性の検証には,ETD法は適用しな
い。抵抗法を適用する。
備考 単層巻線の使用時の温度を調べるために,スロットの底に入れた埋込温度計は,主として鉄心
の温度を示すのでほとんど役に立たない。巻線とくさび(楔)の間に入れた埋込温度計は低め
ではあるが,はるかに巻線温度に近い値を与えるので,参考値としては,より優れている。こ
の場所での温度測定値と抵抗法による温度測定値との関係は,温度上昇試験によって決定する
べきである。
単層巻のその他の巻線及びコイルエンドの場合,本規格との適合性の検証には,ETD法は使用しない。
直流機及び交流整流子機の電機子巻線の場合,及び円筒形回転子の同期機界磁巻線を除く界磁巻線の場
合,抵抗法と温度計法が使用できる。
固定子側に取り付けられる直流機多層界磁巻線の場合は,抵抗法が望ましいが,ETD法を用いてもよい。
7.6.2
抵抗法による温度上昇の決定
7.6.2.1
測定
次のいずれかの方法を使用する。
7.6.2.1.1
直接測定法
適切な計器を使用して,試験の開始前と試験終了時に直接抵抗値を測定する方法。
7.6.2.1.2
直流電流/電圧測定法
直流巻線の場合:適切な計器を使用して巻線に流れる電流と印加電圧を測定する。
交流巻線の場合:交流電圧が印加されていない状態のときに直流電圧を印加する。
7.6.2.1.3
直流重畳法
IEC 60279に基づき,交流負荷電流を遮断せずに,わずかな直流測定電流を交流負荷電流に重畳して流
す方法。
7.6.2.2
温度上昇の算出
温度上昇 (θ2−θa) は,次の式によって算出する。
1
2
1
2
R
R
k
k=
+
+
θ
θ
ここに,
θ1: 初期抵抗R1を測定したときの巻線(冷状態)温度 (℃)
θ2: 温度上昇試験終了時における巻線温度 (℃)
θa: 温度上昇試験終了時の冷媒温度 (℃)
R1: 温度θ1(冷状態)における巻線抵抗
R2: 温度上昇試験終了時の巻線抵抗
k: 導線材料の0℃における抵抗の温度係数の逆数。
銅に対しては,k=235
アルミニウムに対しては,特に取決めがない限りk=225を
用いる。
実用上は,次の式が便利である。
28
C 4034-1 : 1999 (IEC 60034-1 : 1996)
(
)
a
1
1
1
1
2
a
2
θ
θ
θ
θ
θ
−
+
+
−
=
−
k
R
R
R
7.6.2.3
電源開路後の回転機の停止時間に関する補正
直接測定抵抗法による温度上昇試験後の温度測定には,速やかな回転機の停止が心要である。
綿密に計画した手順と適切な人員が必要である。
7.6.2.3.1
短い停止時間の場合
最初の抵抗の読みが,表4に示した時間内で得られる場合は,その読みを巻線温度の測定値とする。
表4 電源開路後の経過時間
定格出力PN (kW又はkVA) 電源開路後の経過時間 (s)
PN≦50
30
50<PN≦200
90
200<PN≦5 000
120
5 000<PN
合意による
7.6.2.3.2
長い停止時間の場合
最初の抵抗測定が表4に示した時間内にできない場合は,できるだけ早く,表4に規定する経過時間の
2倍以内に最初の抵抗を測定し,抵抗値が最大の値から明確な下降を始めるまで約1分間の間隔で測定す
る。これらの測定値を時間関数としてプロットし,表4に示した回転機定格出力に対応する経過時間まで
外挿する。このとき,温度を対数目盛とした片対数表示がよい。
このようにして得た温度は,電源開路時の巻線温度とみなす。
停止後の継続温度測定において温度が上昇し,その後,低下していくような場合は,測定した最も高い
温度を最高温度とする。
最初の測定までに,表4に示した経過時間の少なくとも2倍の時間を要する場合は,この補正法は,製
造業者と購入者との合意がある場合だけ用いる。
7.6.2.3.3
スロット内巻線が単層の場合
単層巻き巻線の回転機の場合,回転機が表4に規定する経過時間内に停止すれば,直接測定法による抵
抗法を使用できる。電源遮断後,回転機が停止するのに要する時間が90秒を超える場合は,あらかじめ合
意していれば,直流重畳法を使用できる。
7.6.3
ETD法による温度上昇の決定
埋込温度計素子の数は6個以上とし,これを巻線全体に適切に分布させる。
埋込温度計素子は,最高温度となると思われる箇所に,一次冷媒に触れないよう,また,安全性を配慮
して設置する。
埋込温度計素子の読みの最大値を巻線の温度とする。
備考 埋込温度計素子やその接続部が故障したり,誤った読みを示すことがあるので,一つ又は二つ
以上の読みが異常であれば,調査後にその読みを除去する。
7.6.3.1
スロット内巻線が2層以上の場合
スロット内巻線の上下層間の温度が最高と思われる箇所に,温度計素子を埋め込む。
7.6.3.2
スロット内巻線が単層の場合
くさびと巻線の間の最高温度となりそうな位置に,温度計素子を埋め込む(7.6.1も参照)。
7.6.3.3
コイルエンドの場合
コイルエンド内の二つの隣接巻線の間の最高温度となりそうな位置に,温度計素子を埋め込む。温度計
29
C 4034-1 : 1999 (IEC 60034-1 : 1996)
素子の検出点は巻線表面と密着させ,かつ,冷媒の影響を受けないように保護する(7.6.1も参照)。
7.6.4
温度計法による測定
7.6.1の目的から,接近できる温度が最高と思われる箇所に,温度計を取り付ける。
7.7
温度上昇試験の試験時間
7.7.1
連続定格の回転機
熱的平衡状態に達するまで試験を継続する。
7.7.2
短時間定格の回転機
試験継続時間は,定格として定めた時間とする。
7.7.3
反復定格の回転機
通常,製造業者が選定した等価負荷定格(4.2.6を参照)にて熱的平衡状態に達するまで試験を実施する。
実際の使用に対する試験条件が合意されていれば指定の負荷サイクルを適用し,温度サイクルが同一と
みなされるまで,すなわち,隣り合ったサイクル間の対応する点を結んだ直線の傾きが1時間当たり2K
未満になるまで,定められた負荷サイクルを継続しなければならない。必要ならば,期間中,適切な間隔
で測定を行う。
7.7.4
非反復定格及び多段階一定負荷定格の回転機
製造業者が選定した等価負荷定格(4.2.6を参照)にて熱的平衡状態に達するまで試験を実施する。
7.8
使用形式S9の回転機の等価熱時定数の決定
温度変化過程をほぼ決定するのに用いる回転機の等価熱時定数は,運転中と同じ通風のもとで7.6.2.3と
同じ方法でプロットされる冷却曲線から決定できる。時定数の値は,電源開路後に回転機の温度が全負荷
温度の1/2まで低下するのに要する時間の1.44倍(すなわち,1/ln 2)である。
備考 時定数の異なる電機子巻線,界磁巻線,補極巻線をもつ直流機のように,時定数が二つ以上あ
る回転機の場合には,すべての時定数について検討し,温度上昇が最も大きいと思われる部位
の時定数を用いて,温度上昇を予測する。
7.9
軸受の温度測定方法
軸受の温度測定には,温度計法又はETD法を用いる。
温度測定点は,表5に規定する2か所のいずれかにできるだけ近い位置とする。
表5 軸受の温度測定点
軸受の種類
測定点
測定点の位置
転がり軸受
A
軸受ハウジング内で,軸受の外輪からの距離1)が10mm以下の位置2)
B
軸受ハウジング外表面で,軸受の外輪にできるだけ近い距離
滑り軸受
A
軸受台金内の荷重部位3)で油膜からの距離1)が10mm以下の位置2)
B
軸受台金内の他の位置
1): この距離は,ETD又は温度計の感温部の最も近い点から測る。
2): 内輪が固定されており,外輪が回転する形式の回転機の場合,測定点Aは,内輪からの距
離が10mm以下の固定部にあり,また,測定点Bは,内輪にできるだけ近い固定部の外表
面にある。
3): 軸受台金とは軸受を支える部分をいい,軸受ハウジングの中で固定されている。荷重部位
とは,回転子質量及び半径方向荷重の合成力を支える円周上の領域である。
温度計と温度測定対象物との間の熱抵抗は,極力少なくする。例えば,空げき(隙)などは熱伝導の良
いペーストでふさぐようにする。
備考 これらの測定点と軸受の最高温度との間に温度差があるように,測定点AとBの間にも軸受寸
法によって温度差が存在する。圧入ブッシュをもつ滑り軸受や内径150mmまでの転がり軸受
30
C 4034-1 : 1999 (IEC 60034-1 : 1996)
では,測定点AとBとの間の温度差は無視してもよい。さらに大きな軸受の場合には,測定点
Aの温度はBの温度よりおよそ15Kも高くなることがある。
7.10 温度及び温度上昇の限度
温度及び温度上昇限度は,5.に規定する設置場所の条件と連続定格(基準条件)における運転に対して
定められている。他の条件の現場や他の定格において運転するときの限度の補正法も決められている。試
験場所の条件が設置場所の条件と異なる場合は,別の規則によって温度上昇試験時の限度を補正する。
この限度は,表3に規定する基準冷媒との関係において規定されている。
水素冷媒の純度を考慮に入れた規則も定められている。
7.10.1 間接冷却巻線の温度上昇限度
基準条件の下での温度上昇は,該当する表6(空気冷媒)又は表7(水素冷媒)に示す限度を超えてはな
らない。
他の設置場所の条件,連続使用以外の定格,11 000Vを超える定格電圧の場合,限度は表8に従って補
正する。(表8に想定されている冷媒温度の限度については,表9を参照)
7.6.1d)に従い温度計の読みを確認する場合には,温度上昇限度は製造業者と購入者の合意によるが,次
の限度を超えてはならない。
耐熱クラスAの絶縁の巻線 65K
耐熱クラスEの絶縁の巻線 80K
耐熱クラスBの絶縁の巻線 90K
耐熱クラスFの絶縁の巻線 115K
耐熱クラスHの絶縁の巻線 140K
3
1
C
4
0
3
4
-1
:
1
9
9
9
(I
E
C
6
0
0
3
4
-1
:
1
9
9
6
)
表6 空冷間接冷却形回転機の温度上昇限度
単位 K
項目
回転機の部分
耐熱クラス
A
E
B
F
H
温度計
法
抵抗法 埋込温
度計法
温度計
法
抵抗法 埋込温
度計法
温度計
法
抵抗法 埋込温
度計法
温度計
法
抵抗法 埋込温
度計法
温度計
法
抵抗法 埋込温
度計法
1a) 出力5 000kW(又はkVA)以上の回転
機の交流巻線
−
60
651)
−
−
−
−
80
851)
−
100
1051)
−
125
1301)
1b) 出力200kW(又はkVA)超過,5 000kW
(又はkVA)未満の回転機の交流巻線
−
60
651)
−
75
−
−
80
901)
−
105
1101)
−
125
1301)
1c) 出力200kW(又はkVA)以下で,項目
1d)又は1e)以外の回転機の交流巻線2)
−
60
−
−
75
−
−
80
−
−
105
−
−
125
−
1d) 出力600W(又はVA)未満の回転機の
交流巻線2)
−
65
−
−
75
−
−
85
−
−
110
−
−
130
−
1e) 冷却扇なしの自冷形 (IC40) ・モールド
形回転機の交流巻線2)
−
65
−
−
75
−
−
85
−
−
110
−
−
130
−
2
整流子をもつ電機子巻線
50
60
−
65
75
−
70
80
−
85
105
−
105
125
−
3
項目4以外の交流機・直流機の界磁巻
線
50
60
−
65
75
−
70
80
−
85
105
−
105
125
−
4a) スロット内に埋め込んだ直流界磁巻線
をもつ円筒形回転子の同期機の界磁巻
線で,誘導同期電動機以外のもの
−
−
−
−
−
−
−
90
−
−
110
−
−
135
−
4b) 二層巻以上の直流機の静止界磁巻線
50
60
−
65
75
−
70
80
90
85
105
110
105
125
135
4c) 交流機・直流機の低抵抗界磁巻線及び
二層巻以上の直流機の補償巻線
60
60
−
75
75
−
80
80
−
100
100
−
125
125
−
4d) 交流機・直流機の露出した裸導体又は
ワニス処理した単層巻線,直流機の単
層補償巻線3)
65
65
−
80
80
−
90
90
−
110
110
−
135
135
−
1)
高圧交流巻線の場合に補正が適用される項目(表8の4を参照)。
2)
耐熱クラスがA,E,B,Fであり,定格が200kW(又はkVA)以下である回転機の巻線に重畳法を適用する場合は,抵抗法の温度上昇限度を5Kだけ超えてもよい。
3)
多層巻線であっても,下層巻線が,一次冷媒にそれぞれ接触している場合も含む。
3
2
C
4
0
3
4
-1
:
1
9
9
9
(I
E
C
6
0
0
3
4
-1
:
1
9
9
6
)
表7 水素間接冷却形回転機の温度上昇限度
単位 K
項
目
回転機の部分
耐熱クラス
A
E
B
F
抵抗法
埋込温
度計法
抵抗法
埋込温
度計法
抵抗法
埋込温
度計法
抵抗法
埋込温
度計法
1
出力5 000kW(又はkVA)以上,又は鉄心長1m以上の回転機の交流巻線
水素圧力2)≦150kPa (1.5bar)
−
−
−
−
−
851)
−
1051)
150kPa<水素圧力2)≦200kPa (2.0bar)
−
−
−
−
−
801)
−
1001)
200kPa<水素圧力2)≦300kPa (3.0bar)
−
−
−
−
−
781)
−
981)
300kPa<水素圧力2)≦400kPa (4.0bar)
−
−
−
−
−
731)
−
931)
400kPa<水素圧力2)
−
−
−
−
−
701)
−
901)
2a)
出力が5 000kW(又はkVA)未満,又は鉄心長1m未満の回転機の交流巻線
60
651)
75
801)
80
851)
100
1051)
2b)
項目3,4以外の交流機及び直流機の直流界磁巻線
60
−
75
−
80
−
105
−
3
直流励磁形の円筒形回転子機の界磁巻線
−
−
−
−
85
−
105
−
4a)
多層低抵抗界磁巻線及び補償巻線
60
−
75
−
80
−
100
−
4b)
露出した裸導体又はワニス処理した単層界磁巻線3)
65
−
80
−
90
−
110
−
1)
高圧交流巻線の場合に補正が適用される項目(表8の4を参照)。
2)
許容温度上昇が水素圧力に依存するのは,この項だけである。
3)
多層巻線であっても,下層巻線が,一次冷媒にそれぞれ接触している場合も含む。
33
C 4034-1 : 1999 (IEC 60034-1 : 1996)
表8 基準外運転条件及び定格を考慮した間接冷却巻線の設置場所における温度上昇限度の補正
項目
運転条件又は定格
表6及び表7における温度上昇 (△θ) 限度の補正
1
周囲空気の最高
温度又は回転機
への入口部の空
気の最高温度
(θc)
0℃≦θc<40℃
製造業者と購入者との合意によって,最高を30Kとして最高冷媒温度と
40℃との差の分を加えることができる。
40℃<θc≦60℃
冷媒温度が40℃を超えた分だけ差し引く。
θc<0℃又はθc>60℃
製造業者と購入者との合意による。
2
水冷式熱交換器
への入口部の水
の最高温度 (θw)
5℃≦θw≦25℃
10Kだけ加える。さらに,最高水温と25℃との差の分だけ加えることが
できる。3)
θw>25℃
10Kを加え,最高水温と25℃との差の分を差し引く。3)
3
標高 (H)
1 000m<H≦4 000mで
最高周囲空気温度の指
定のない場合
補正しない。標高による冷却効果の減少は,最高周囲温度が40℃より低
くなることによって補償されると考えられるため,合計温度は40℃に表
6,表7の温度上昇を加えた値を超えないと考えられる。1)
H>4 000m
製造業者と購入者との合意による。
4
固定子巻線の定
格電圧 (UN)
11kV<UN≦17kV
埋込温度計 (ETD) 法によって測定する場合は,11 000Vを超える1 000V
又はその端数ごとに1Kだけ差し引く。
UN>17kV
埋込温度計 (ETD) 法によって測定する場合は,6Kと更に17 000Vを超え
る1 000V又はその端数ごとに0.5Kだけ差し引く。
52)
定格出力が5 000kW(又はkVA)未満で
ある短時間使用 (S2) 定格
10Kだけ加える。
62)
非反復使用 (S9) 定格
回転機の運転中,短時間だけ温度上昇限度を超えてもよい。
72)
多段階一定負荷使用 (S10) 定格
回転機の運転中,過負荷期間だけ温度上昇限度を超えてもよい。
1)
必要な周囲温度の減少を,1 000mを越える100mごとに表6の1b)と1c)の温度上昇限度の1%とすると,1 000m以下
の最高周囲温度を40℃として,設置場所の想定最高周囲温度を求めると表9のようになる。
2)
空冷巻線だけに適用する。
3)
水温基準で表6,表7を適用する場合の補正。
表9 想定最高周囲温度
耐熱クラス
A
E
B
F
H
標高 (m)
温度 (℃)
1 000
40
40
40
40
40
2 000
34
33
32
30
28
3 000
28
26
24
19
15
4 000
22
19
16
9
3
巻線が空気によって間接的に冷却される場合試験場所の条件が設置場所の条件と異なっていれば,表10
で与えられる補正された限度を試験場所で適用する。
表10で与えられる補正された限度が,製造業者によって過剰と考えられる試験場所の許容温度になる場
合は,試験手順と限度は合意によって定めなければならない。
水素によって間接的に冷却する巻線に関しては,試験場所についての補正を行わない。その巻線を設置
場所以外の場所において定格負荷で試験することは極めてまれなためである。
7.10.2 直接冷却巻線
基準条件の下での温度は,表11に示す限度を超えてはならない。
他の設置場所の条件に関しては,限度は表12に従い補正する。
試験場所の条件が設置場所の条件と異なる場合は,表13で与えられる補正された限度を試験場所で適用
する。
表13で与えられる補正された限度が,製造業者によって過剰と考えられる試験場所の許容温度になる場
34
C 4034-1 : 1999 (IEC 60034-1 : 1996)
合は,試験手順と限度は合意によって定めなければならない。
7.10.3 試験時の水素純度を考慮する補正
巻線が水素によって直接又は間接に冷却される場合,水素の比率が95%から100%の間にあれば,温度
上昇限度若しくは温度限度に対して補正を行わない。
7.10.4 絶縁物との接触の有無にかかわらない永久短絡巻線,磁気鉄心及び全部の構成部品(軸受以外)
温度上昇又は温度は,当該部品若しくは隣接部品の絶縁に害になってはならない。
7.10.5 開放形又は閉鎖形の整流子及びスリップリング,並びにそのブラシ及びブラシホルダ
整流子,スリップリング,ブラシ又はブラシホルダの温度上昇若しくは温度は,当該部品又は隣接部品
の絶縁に害になってはならない。
整流子若しくはスリップリングの温度上昇又は温度は,ブラシ材質と整流子又はスリップリング材料を
組み合わせたものが全運転範囲における電流に対して耐えられる限度を超えてはならない。
表10 試験場所の条件を考慮した空気による間接冷却巻線に対する試験場所における温度上昇
の補正された限度 (△θT)
項目
試験条件
試験場所での補正された限度 △θT
1
試験現場 (θCT) と運
転場所 (θc) の基準
冷媒温度差
(θC−θCT) の絶対値≦
30K
△θT=△θ
(θC−θCT) の絶対値>
30K
製造業者と購入者との合意による
2
試験場所 (HT) と運
転場所 (H) の標高差
1 000m<H≦4 000m
HT<1 000m
△θT=△θ [1− (H−1 000)/10 000]
H<1 000m
1 000m<HT≦4 000m
△θT=△θ [1+ (HT−1 000)/10 000]
1 000m<H≦4 000m
1 000m<HT≦4 000m
△θT=△θ [1−(HT−H)/10 000]
H>4 000m又はHT>4
000m
製造業者と購入者との合意による。
備考1. 補正前の温度上昇限度△θは表6に示されており,必要があれば表8に従って補正する。
2. 水冷式熱交換器の入口部の水温を基準にして温度上昇を測定する場合は,標高が空気と
水の温度差に与える影響を厳密に考慮する。しかし,大部分の熱交換器の設計では,こ
の影響は小さく,標高が上がると増加する差はほぼ2K/1 000m程度である。補正の必要
があれば,製造者と購入者との合意による。
3
5
C
4
0
3
4
-1
:
1
9
9
9
(I
E
C
6
0
0
3
4
-1
:
1
9
9
6
)
表11 直接冷却形回転機及びその冷媒の温度限度
単位 ℃
項目
回転機の部分
耐熱クラス
B
F
温度計法
抵抗法
埋込温度計法
温度計法
抵抗法
埋込温度計法
1
直接冷却交流巻線の出口部冷媒。これらの冷媒温度は,項目2に
示す値に優先する(解説3参照)。
1a) ガス(空気,水素,ヘリウムなど)
110
−
−
130
−
−
1b) 水
90
−
−
90
−
−
2
交流巻線
2a) ガス冷却
−
−
1201)
−
−
1451)
2b) 液体冷却
−
−
1201)
−
−
1451)
3
円筒形 (turbine type) 回転子の界磁巻線
3a) 回転子冷却ガスの排気領域の数が次のガス冷却2)
−
1と2
−
100
−
−
115
−
3と4
−
105
−
−
120
−
6
−
110
−
−
125
−
8〜14
−
115
−
−
130
−
14超過
−
120
−
−
135
−
3b) 液体冷却
項目1b)で規定される最高冷媒温度が遵守されれば,巻線の局部温度は過大にはならない
4
項目3以外の交流機及び直流機の直流界磁巻線
4a) ガス冷却
−
130
−
−
150
−
4b) 液体冷却
項目1b)で規定される最高冷媒温度が遵守されれば,巻線の局部温度は過大にはならない
1)
高圧交流巻線の場合における補正は,これらの項目には適用できない。表12の項目2を参照。
2)
回転子の冷却は,回転子全長にわたる半径方向排気領域の数で分類される。巻線端部の冷媒の排気領域は,両端各1個と数える。
二つの軸方向の対向する冷媒の流れの共通排気領域は,2個と数える。
36
C 4034-1 : 1999 (IEC 60034-1 : 1996)
表12 基準外運転条件及び定格を考慮した空気又は水素による直接冷却巻線の設置場所における温度限
度の補正
項目
運転条件又は定格
表11における温度限度に対する補正
1
基準冷媒温度
(θC)
0℃≦θC<40℃
40℃と基準冷媒温度θCの差の値を差し引く。しかし,協議によって,
その差引量を少なくしてもよいが,θCが10℃未満の場合には,少なく
とも10℃とθCの差だけは差し引かねばならない。
40℃≦θC≦℃
補正なし。
θC<0℃又は
θC>60℃
製造業者と購入者との合意による。
2
固定子巻線の
定格電圧 (UN)
UN>11kV
補正なし。熱の流れは主として導体内部の冷媒の方向であり,巻線の
主絶縁を通らない。
表13 試験場所の条件を考慮した空気による直接冷却巻線に対する試験場所における温度の補正された
限度 (θT)
項目
試験条件
試験場所での補正された限度 θT
1
試験現場 (θCT) と設
置場所 (θC) の基準冷
媒温度差
(θC−θCT) の絶対値≦
30K
θT=θ
(θC−θCT) の絶対値>30K 製造業者と購入者との合意による。
2
試験場所 (HT) と設置
場所 (H) の標高差
1 000m<H≦4 000m
HT<1 000m
θT= (θ−θC) [1− (H−1 000) /10 000]
+θCT
H<1 000m
1 000m<HT≦4 000m
θT= (θ−θC) [1+ (HT− 1 000) /10 000]
+θCT
1 000m<H≦4 000m
1 000m<HT≦4 000m
θT= (θ−θc) [1− (HT−H) /10 000]
+θct
H>4 000m又は
HT>4 000m
製造業者と購入者との合意による。
備考 θは,表11に示されており,必要があれば表12に従って補正する。
8. その他の特性及び試験
8.1
耐電圧試験
耐電圧試験は,供試巻線と回転機の外被又は固定子枠との間で行う。
試験の際,鉄心と試験しない巻線は,外被又は固定子枠に接続しておく。
耐電圧試験は新たに製造した回転機で,正常運転状態と同等な全部品を組み立てたものに対して,製造
工場で行う。ただし,製造工場以外の場所で初めて正常運転状態と同等な全部品を組み立てた状態となる
回転機の耐電圧試験は,組み立てた場所で行ってもよいものとする。
温度上昇試験を行う場合には,耐電圧試験は温度上昇試験後直ちに行う。
定格電圧が1kVを超える多相機で,各相の両端が個々に得られる場合は,試験電圧は,各相と外被又は
固定子枠間に加える。この際,鉄心と他の相及び試験しない巻線は,外被又は固定子枠に接続しておく。
試験電圧は,商用周波数のできるだけ正弦波に近いものを用いる。
試験は,表14に規定する試験電圧の21以下の電圧から始め,連続的又は規定試験電圧の5%以下のステ
ップ状に規定試験電圧まで昇圧する。21電圧からの昇圧時間は10秒以上とする。規定試験電圧に達してか
ら,1分間その値を保持する。
5kW (kVA) 以下の量産機の受渡試験においては,1分間の試験を表14に規定する試験電圧で約5秒間の
試験に,又は規定試験電圧の120%の電圧で約1秒間の試験に変えてもよい。ただし,この場合,試験電
37
C 4034-1 : 1999 (IEC 60034-1 : 1996)
圧を規定試験電圧に合わせておいてから印加するものとする。
巻線に対する表14に規定する試験電圧の耐電圧試験は,できるだけ繰り返さないこととする。注文者の
要求によって二度の試験をしなければならない場合は,必要に応じて乾燥を行い,2回目の試験電圧は,
表14に規定する試験電圧の80%の値で行うものとする。
静止電力変換器によって運転される直流電動機の試験電圧は,電動機の定格電圧(直流電圧)又は静止
電力変換器の入力定格電圧(交流電圧)の相間実効値のいずれか高い方の値を定格電圧として,表14から
決定する。
備考 入力変圧器が静止電力変換器に内蔵されている場合は,上記の静止電力変換器の入力定格電圧
は,変圧器の出力端子側の電圧を指す。
巻線を全部巻き替えた回転機は,新しい回転機に対する規定電圧で試験する。
部分的な巻き替え又は修理を行った回転機に対して,耐電圧試験を実施することを当事者間で合意した
場合は,次の基準で実施することが望ましい。
a) 部分的な巻き替えを行った回転機に対しては,新たに製造した回転機に対する試験電圧(表14)の75%
の電圧で試験する。ただし,巻線の巻き替えをしない部分については,試験前に十分な清掃と乾燥を
行う。
b) 分解修理を行った回転機は,清掃・乾燥後,定格電圧の1.5倍の電圧で試験する。ただし,定格電圧
が100V以上のときの試験電圧は最低1 000V,定格電圧が100V未満のときは最低500Vとする。
表14 試験電圧
項
回転機又は部位
試験電圧(実効値)
1
定格出力が1kW (kVA) 未満及び定格電圧が100V未満の回転
機の巻線
ただし,4〜8項に該当するものを除く。
500V+定格電圧の2倍
2
定格出力が10 000kW (kVA) 未満の回転機の巻線
ただし,1項,4〜8項に該当するものを除く2)。
1 000V+定格電圧の2倍1)
(最低1 500V)
3
定格出力が10 000kW (kVA) 以上の回転機の巻線
ただし,4〜8項に該当するものを除く2)。
定格電圧1)
24 000V以下
1 000V+定格電圧の2倍
24 000V超
当事者間の合意による。
4
直流機の他励界磁巻線
1 000V+最高定格励磁回路電圧の2倍
(最低1 500V)
5
同期発電機,同期電動機,同期調相機の界磁巻線
5a) 定格界磁電圧
500V以下
定格界磁電圧の10倍(最低1 500V)
500V超
4 000V+定格界磁電圧の2倍
5b) 界磁巻線を短絡又は界磁巻線抵抗値の10倍未満の抵抗値を
接続して始動する場合
定格界磁電圧の10倍
(最低1 500V,最高3 500V)
5c) 界磁巻線を開路又は界磁巻線抵抗値の10倍以上の抵抗値を
接続して始動する場合
1 000V+磁巻線端子間に生じる最大電圧
(実効値)の2倍3)
6
巻線形誘導電動機又は誘導同期電動機の二次巻線
6a) 逆回転しないもの,又は静止状態からだけ逆回転するもの
1000V+集電装置又は二次端子における定
格電圧印加時の静止誘導電圧の2倍
6b) 運転状態から逆転又は逆相制動をするもの
1 000V+電装置又は二次端子における定格
電圧印加時の静止誘導電圧の4倍
7
励磁機(ただし,以下の例外は除く。)
励磁機が接続されている巻線による。
38
C 4034-1 : 1999 (IEC 60034-1 : 1996)
項
回転機又は部位
試験電圧(実効値)
例外1: 同期電動機(誘導同期電動機を含む。)の励磁機で,
始動中,界磁巻線から開路又は接地されているも
の
1 000V+定格励磁電圧の2倍
(最低1 500V)
例外2: 直流機他励巻線の励磁機
前記4項による。
8
回転機・附属装置を組み合わせたもの
前記1〜7項の繰り返しは極力避ける。各
単体ごとに耐電圧試験を実施したものにつ
いては組合せ試験を行う場合は,単体試験
における最低の試験電圧の80%を組み合わ
せた状態における試験電圧とする。4)
1)
一端子を共用する二相巻線に対しては,運転中任意の二端子間に生じる最大実効電圧を基準とする。
2)
絶縁強度を段階的に変えた回転機の耐電圧試験は,当事者間の合意による。
3)
規定始動条件の下で界磁巻線の端子相互間,又はその区間相互間で発生する電圧は,適切に低減した供給電
圧で測定してもよい。その場合,測定した電圧は,規定供給電圧と試験供給電圧の比率で増加させる。
4)
電気的に接続されている1台以上の回転機の巻線の場合,試験電圧は対地間に発生し得る最大電圧を基準と
する。
8.2
過電流
8.2.1
一般事項
回転機の過電流耐力は,機械の制御・保護装置との協調を目的として設定する。この耐力を実証する試
験については,この規格では定めない。
巻線に対する熱的影響は,時間と電流の二乗値の積によって異なる。定格電流を超える電流は温度上昇
の増加をもたらす。製造業者と注文者間で合意された場合を除いて,上記過電流を伴う運転は,機器の寿
命期間内で数回程度と想定している。
発電機及び電動機両用で使用される交流機では,その過電流耐力は当事者間の協定による。
備考 故障時における逆相電流成分を考慮した同期機の電流耐量については,6.2.3を参照。
8.2.2
交流発電機
定格出力1 200MVA以下の交流発電機は,定格電流の1.5倍に相当する電流に最低30秒間耐えなければ
ならない。
定格出力が1 200MVAを超える交流発電機は,定格電流の1.5倍に相当する電流に製造業者と注文者間
で合意された時間耐えなければならない。ただし,この時間は15秒間以上とする。
8.2.3
交流電動機(整流子電動機を除く。)
定格出力が315kW以下,定格電圧が1kV以下の三相交流電動機は,定格電流の1.5倍の電流に2分間耐
えなければならない。
備考 定格出力が315kWを超過する三相電動機及びすべての単相電動機については,過電流は規定し
ない。
8.2.4
直流機及び交流整流子機
直流機及び交流整流子機は,次の条件で定格電流の1.5倍を1分間加えても機械的に耐えられる構造で
なければならない。
a) 速度:
1) 直流電動機:最高全界磁速度
2) 直流発電機:定格速度
3) 交流整流子電動機:最高全磁界速度
b) 電機子電圧:上記で規定の速度に対応する電圧
39
C 4034-1 : 1999 (IEC 60034-1 : 1996)
8.3
電動機の瞬時超過トルク
8.3.1
多相誘導電動機(8.3.2の電動機を除く。)及び直流電動機
電動機は,その使用及び構造にかかわらず電圧・周波数(誘導電動機のとき)をその定格値に保った状
態において,その定格トルクの60%の超過トルクが15秒間加わっても(トルクは漸増させる。),停止又
は速度の急変を起こすことなく,これに耐えなければならない。
備考 IEC 60034-12の対象となる電動機には,より大きなトルクが要求される。
直流電動機の場合,上記の表現において,トルクを負荷電流に置きかえて解釈する。8.2.4参照。
使用の形式S9に対する電動機は,使用条件に応じて決定された瞬時超過トルクに耐えなければならな
い。
備考 このとき,電流に起因する損失がもたらす温度上昇の評価については,7.8に基づく等価熱時定
数を使用することができる。
直流機及び交流整流子電動機の場合,整流能力の限界に注意する必要がある。
8.3.2
特殊用途の誘導電動機
高いトルクを必要とする特殊用途(例えば,ホイスト用)の電動機は,当事者間の協定による。
始動電流が定格電流の4.5倍以下となるように特別に設計されたかご形誘導電動機においては,超過ト
ルクは8.3.1に規定した値の60%より小さくてもよいが,最低50%以上とする。
可変周波数で使用される電動機のように,特別な始動特性をもった誘導電動機の場合は,その超過トル
クの値は,当事者間の協定による。
8.3.3
多相同期電動機
特に協定がない場合は,多相同期電動機は使用のいかんにかかわらず,励磁を定格負荷に対応する値に
保った状態で,次に示す超過トルクが15秒間加わっても,同期を外れることなく,これに耐えなければな
らない。自動励磁装置を用いる場合も,励磁装置が正常な状態で動作している場合,超過トルクの限度は
同じ値とする。
− 誘導同期電動機(巻線形):35%超過トルク
− 同期電動機(円筒形) :35%超過トルク
− 同期電動機(突極形) :50%超過トルク
8.3.4
その他の電動機
単相、整流子、その他の電動機の瞬時超過トルクは,当事者間の協定による。
8.4
最小トルク(プルアップトルク)
特に規定していない限り,定格電圧におけるかご形誘導電動機の最小トルクは,次の値以上でなければ
ならない。
単一速度三相誘導電動機
− 定格出力100kW未満:定格トルクの0.5倍,かつ,拘束トルクの0.5倍
− 定格出力100kW以下:定格トルクの0.3倍,かつ,拘束トルクの0.5倍
− 定格電圧が690V以下のかご形誘導電動機に関しては,IEC 60034-12も参照する。
単相誘導電動機又は多段速度三相誘導電動機:定格トルクの0.3倍
8.5
過速度
回転機は,表15に規定した速度に耐えられるよう,設計しなければならない。
過速度試験は通常必要ないが,これが指定されている場合や,当事者間で協定された場合には実施する
(タービン発電機については,IEC 60034-3を参照する。)。過速度試験後,いかなる異常な永久変形もな
40
C 4034-1 : 1999 (IEC 60034-1 : 1996)
く,通常の運転を妨げるいかなる欠陥も検出されず,また,回転子巻線は規定された耐電圧試験に耐える
ものでなければならない。過速度試験を実施する場合,試験時間は2分間とする。
過速度試験後,積層回転子のリムや,くさび又はボルトで保持されている積層磁極の径が,微小に永久
的に増加することは当然であり,これをもってその回転機の正常な運転ができない異常な変形とはみなさ
ない。
水車発電機は,バランス確認のため,過速度保護装置が働く速度まで運転試験を行う。
表15 過速度
項目
機械の形式
過速度
1
交流機
下記以外のすべての回転機
最大定格回転速度の1.2倍
1a) 水車発電機及び主機に直接(電気的又は機械的)
接続された補機
他に規定がなければ,無拘束速度。ただし,最大定格回転速度
の1.2倍以上
1b) 特定条件のもとで,負荷によって駆動される回
転機
規定された無拘束速度。ただし,最大定格回転速度の1.2倍以
上
1c) 直巻電動機及びユニバーサルモータ
定格電圧における無負荷回転速度の1.1倍。負荷に完全に接続
され,負荷を取り外すことが困難な電動機については,無負荷
回転速度とは,負荷をできるだけ軽くした状態と解釈する。
2
直流機
2a) 分巻及び他励電動機
最大定格速度の1.2倍又は無負荷回転速度の1.15倍のいずれか
大きい方の速度。
2b) 速度変動率35%以下の複巻電動機
最大定格速度の21倍又は無負荷回転速度の1.15倍のいずれか大
きい方の速度。ただし,最高定格速度の1.5倍を超えない速度。
2c) 速度変動率が35%を超える複巻電動機及び直巻
電動機
製造業者は,最大安全運転速度を取り決めなければならない。
この電動機の過速度は最大安全速度の1.1倍とする。
なお,最大安全運転速度は,定格銘板に表示しなければなら
ない。ただし,定格電圧における無負荷回転速度の1.1倍が過
速度として許容できる電動機については,最大安全運転速度の
表示は必要ない。
2d) 永久磁石励磁電動機
2a)に同じ。ただし,直巻巻線をもつ電動機の場合,2b)又は2c)
による。
2e) 発電機
定格回転速度の1.2倍
8.6
同期機の短絡電流
特に規定していない限り,IEC 60034-3の対象外となるタービン発電機を含め,同期機の短絡電流の最
大値は,定格電圧での運転中において全相短絡時に,定格電流における瞬時値の15倍又は実効値の21倍
を超えてはならない。
この値は,計算又は定格電圧の0.5倍以上の電圧における試験によって確認することができる。
8.7
同期機の短絡試験
同期機の三相短絡試験は,注文者の要求によってだけ実施する。実施する場合,特に合意された場合を
除いて,無負荷定格電圧で行う。試験は無負荷状態であっても,定格電圧の1.05倍を超える電圧で試験を
行ってはならない。
製造業者と注文者の合意に基づき,同期機と系統間に設置される変圧器のインピーダンスを考慮して試
験電圧を減じることもできる。回路の短絡は3秒間維持する。
短絡試験後,有害な変形の発生がなく,かつ,この規格で規定する耐電圧試験(8.1の表14を参照)に
耐えれば合格とみなす。三相タービン発電機については,IEC 60034-3を参照する。
8.8
直流機及び交流整流子機の整流試験
41
C 4034-1 : 1999 (IEC 60034-1 : 1996)
直流又は交流整流子機は,無負荷から8.2と8.3に規定された過電流又は超過トルクの運転に対して,整
流子若しくはブラシの表面に永久的な損傷を与えることなく,かつ,有害な火花を発生することなく,運
転できなければならない。温度上昇試験を行う場合,整流試験は温度上昇試験の完了直後に行うものとす
る。
8.9
同期機の電話調波係数 (THF)
8.9.1
一般事項
8.9.2及び8.9.3の要求事項は,電力線路と隣接回路の間の干渉を最小限にする目的で,16.66Hz〜100Hz
の公称周波数で使用されている電力網に接続される300kW(又はkVA)以上の回転機にだけ適用される。
8.9.2
限度
開放開路で,定格電圧及び定格速度で試験を行う場合には,8.9.3に規定した方法によって測定された線
間端子電圧の電話調波係数 (THF) は,次の値を超えてはならない。
回転機の定格出力
THF
300 kW(又はkVA)<PN≦1 000kW(又はkVA)
5%
1 000 kW(又はkVA)<PN≦5 000kW(又はkVA)
3%
5 000 kW(又はkVA)<PN
1.5%
備考1. 上記要求事項に適合している回転機は,満足のいく運転が行われているものと考えられるた
め,個々の高調波の制限値については規定しない。
2. 回転機が通常とは異なる方法で系統に接続されている場合(例えば,中性点に接地された同
期機が,変圧器を介して系統に接続されていない場合),波形に関する要求事項は,製造業者
と注文者との協定による。
8.9.3
試験
8.9.2に適合していることを検証するために交流発電機について形式試験を実施しなければならない。
測定される周波数範囲は,定格周波数から5 000Hzまでの全高調波である。
THFは,この目的のために特別に設計された計測装置で測定するか,個々の高調波を測定し,その測定
値から次の式によって計算する。
()
2
2
23
23
22
22
21
21
100
%
THF
n
n
E
E
E
E
U
λ
λ
λ
λ
×
+
×
+
×
+
×
×
=
Λ
ここに,
En: 線間の端子電圧のn次高調波の実効値
U: 回転機の線間の端子電圧の実効値
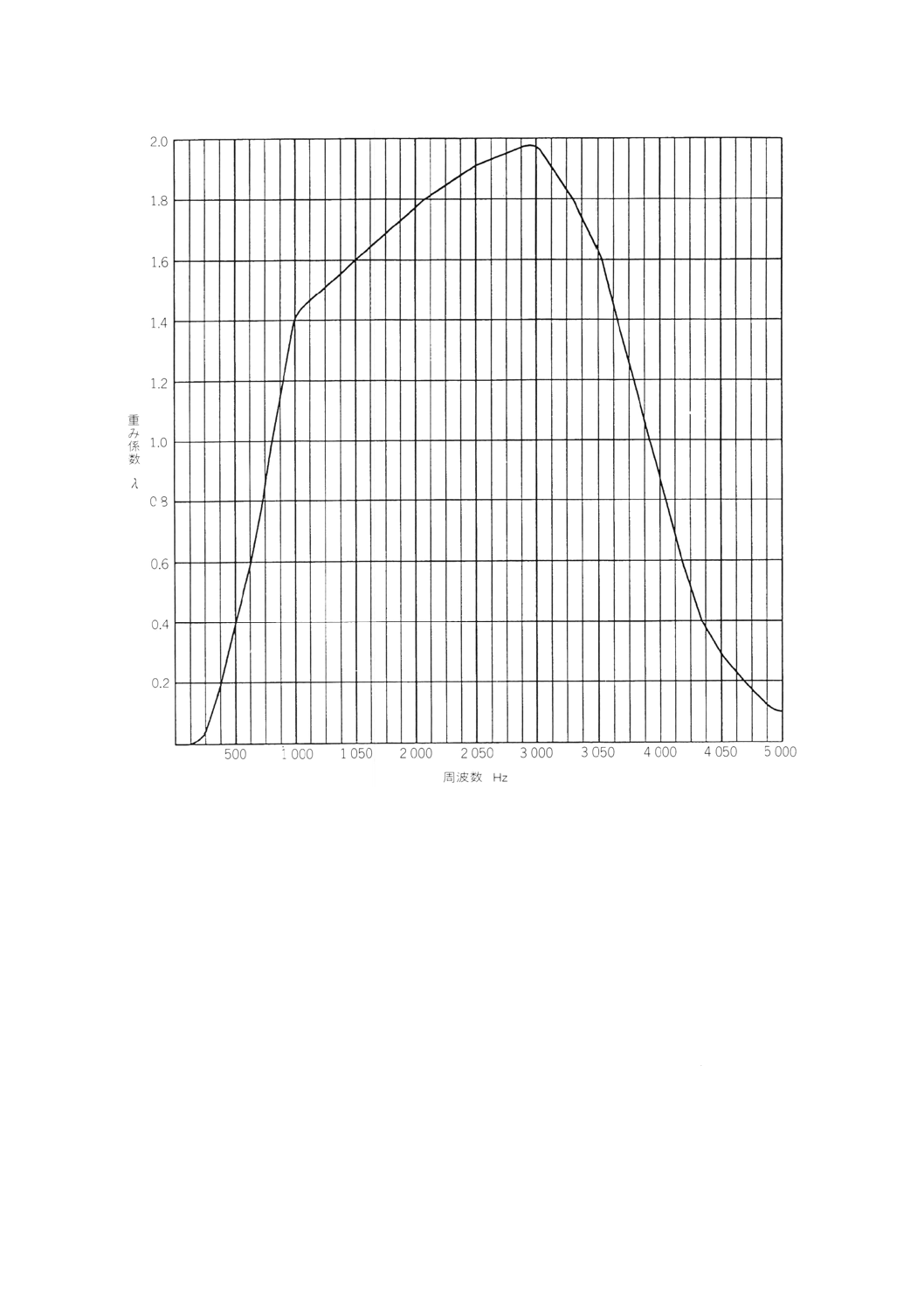
λn: n次高調波に関する重み係数
異なる周波数の重み係数の数値は,表16及び表16Aから求める。図13の曲線は補間の支援用に使用で
きる。
42
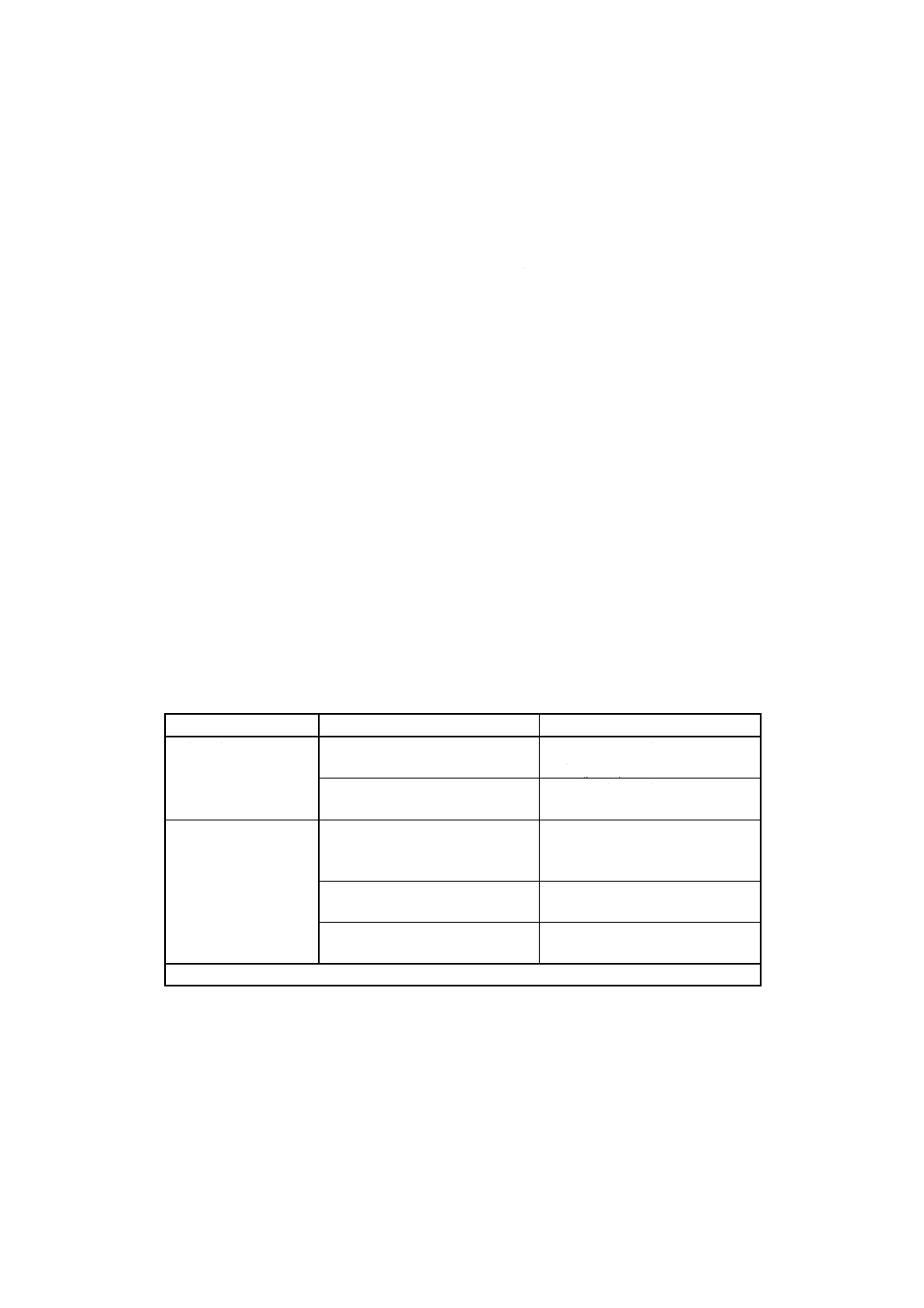
C 4034-1 : 1999 (IEC 60034-1 : 1996)
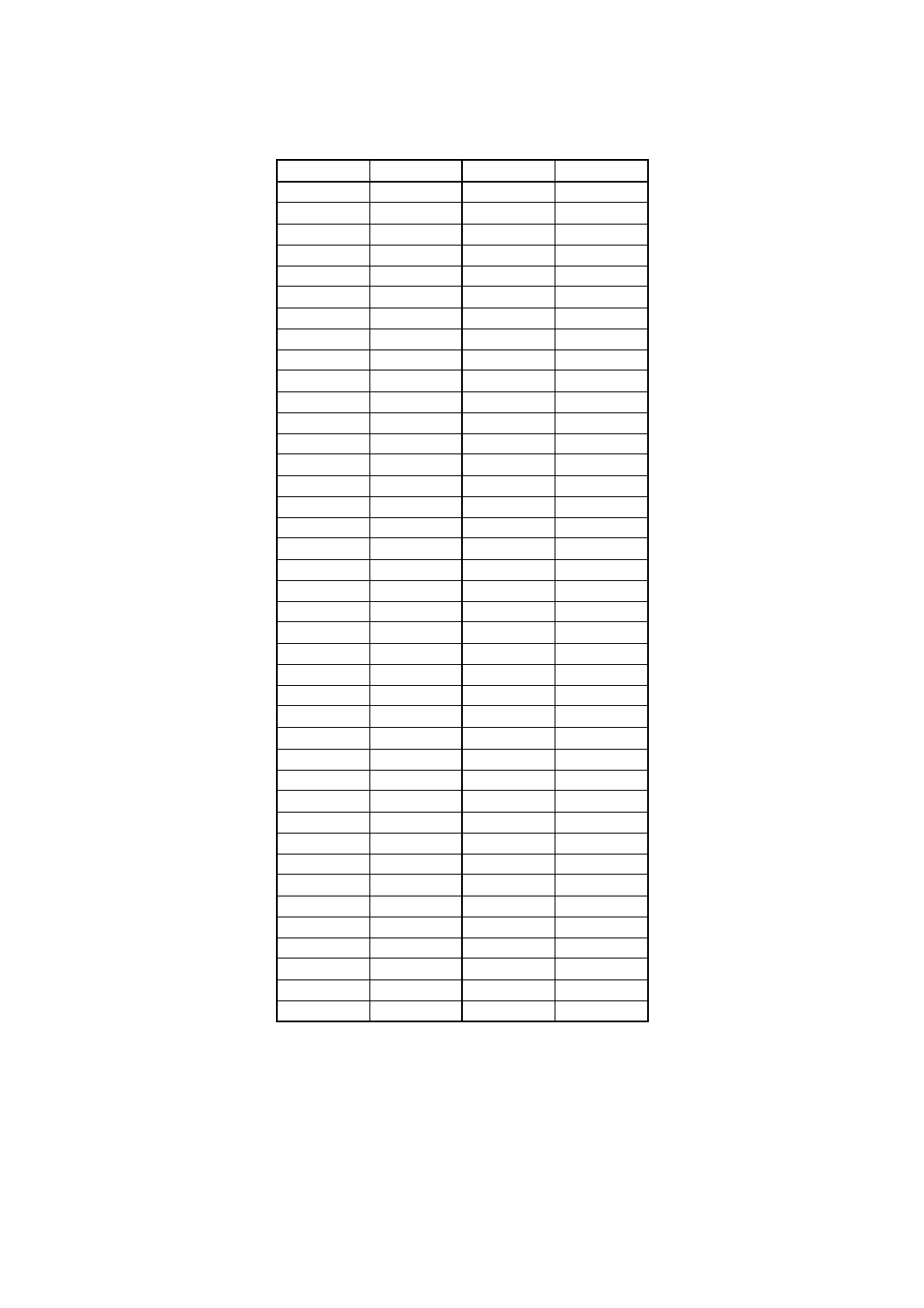
表16 重み係数
周波数 Hz
重み係数
周波数 Hz
重み係数
16.66
0.000 001 17
2 050
1.79
50
0.000 044
2 100
1.81
100
0.001 12
2 150
1.82
150
0.006 65
2 200
1.84
200
0.022 3
2 250
1.86
250
0.055 6
2 300
1.87
300
0.111
2 350
1.89
350
0.165
2 400
1.90
400
0.242
2 450
1.91
450
0.327
2 500
1.93
500
0.414
2 550
1.93
550
0.505
2 600
1.94
600
0.595
2 650
1.95
650
0.691
2 700
1.96
700
0.790
2 750
1.96
750
0.895
2 800
1.97
800
1.000
850
1.10
2 850
1.97
900
1.21
2 900
1.97
950
1.32
2 950
1.97
1 000
1.40
3 000
1.97
1 050
1.46
3 100
1.94
1 100
1.47
3 200
1.89
1 150
1.49
3 300
1.83
1 200
1.50
3 400
1.75
1 250
1.53
3 500
1.65
1 300
1.55
3 600
1.51
1 350
1.57
3 700
1.35
1 400
1.58
3 800
1.19
1 450
1.60
3 900
1.04
1 500
1.61
4 000
0.890
1 550
1.63
4 100
0.740
1 600
1.65
4 200
0.610
1 650
1.66
4 300
0.496
1 700
1.68
4 400
0.398
1 750
1.70
4 500
0.316
1 800
1.71
4 600
0.252
1 850
1.72
4 700
0.199
1 900
1.74
4 800
0.158
1 950
1.75
4 900
0.125
2 000
1.77
5 000
0.100
43
C 4034-1 : 1999 (IEC 60034-1 : 1996)
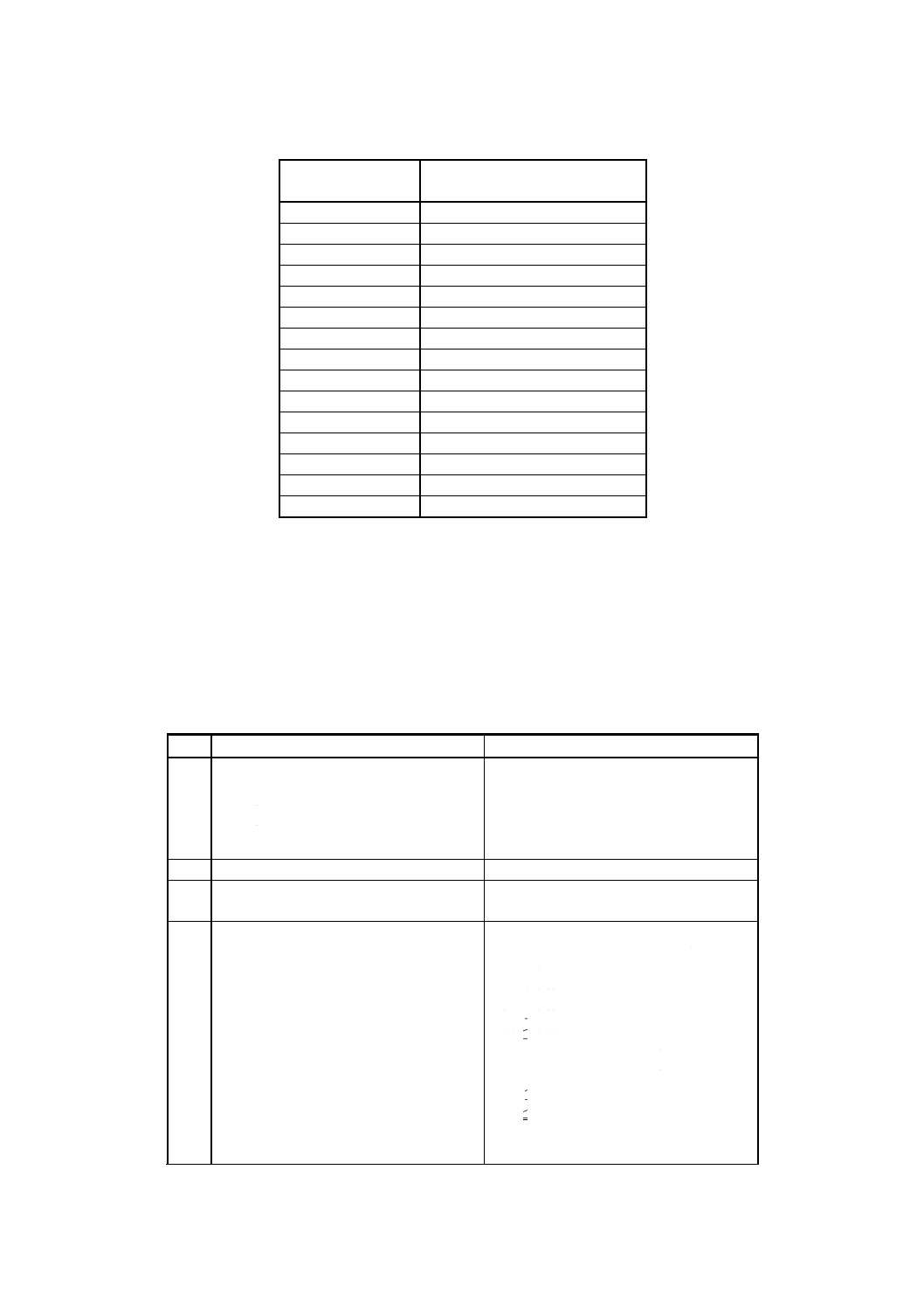
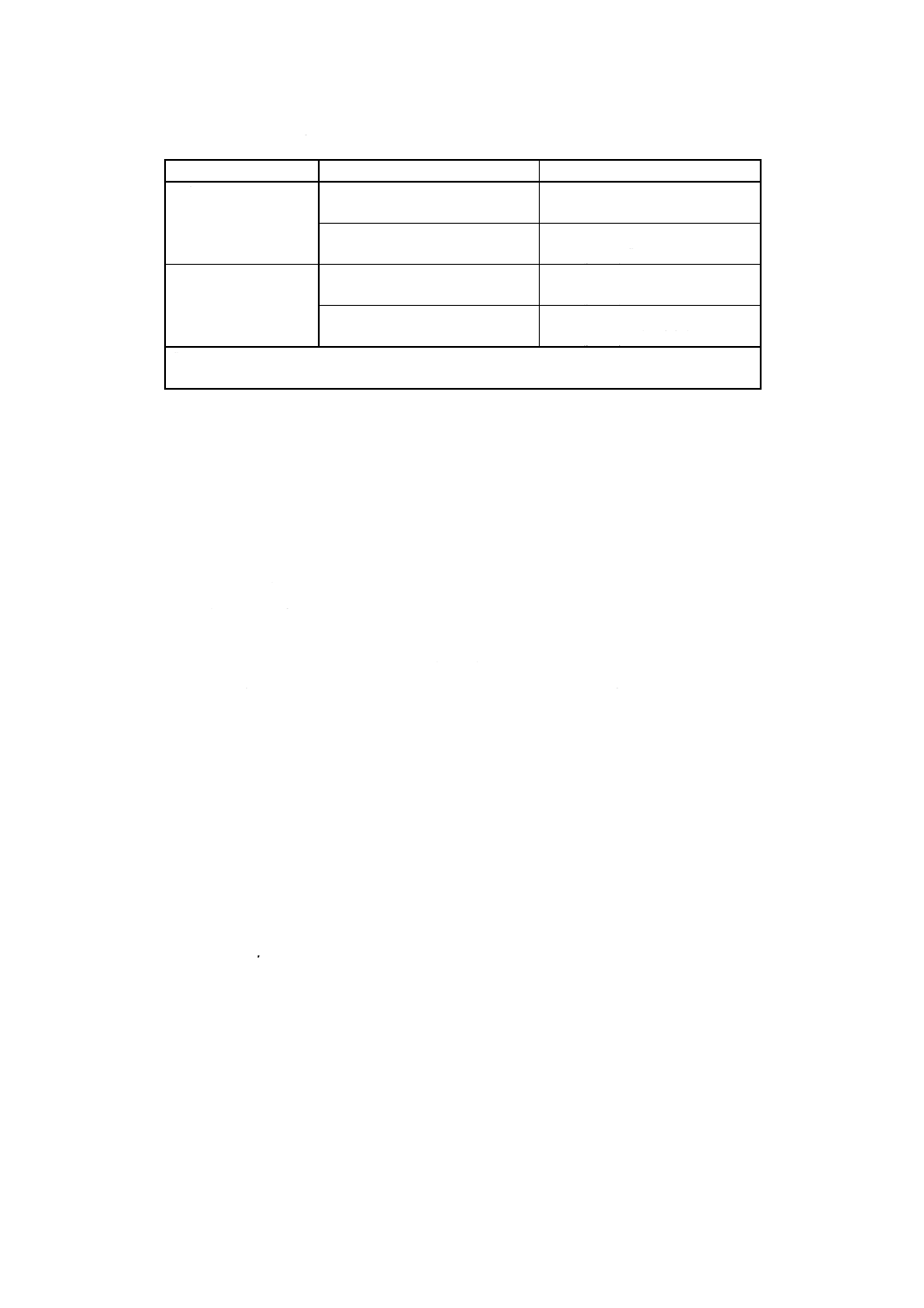
表16A 重み係数(60Hz対応)
周波数 Hz
重み係数
周波数 Hz
重み係数
60
0.000 1
2 460
1.92
120
0.002 9
2 520
1.93
180
0.016
2 580
1.94
240
0.047
2 640
1.95
300
0.111
2 700
1.96
360
0.177
2 760
1.96
420
0.275
2 820
1.97
480
0.380
2 880
1.97
540
0.489
2 940
1.97
600
0.595
3 000
1.97
660
0.714
3 060
1.96
720
0.830
3 120
1.93
780
0.956
3 180
1.90
840
1.08
3 240
1.87
900
1.21
3 300
1.83
960
1.34
3 360
1.79
1 020
1.43
3 420
1.74
1 080
1.47
3 480
1.67
1 140
1.49
3 540
1.60
1 200
1.50
3 600
1.51
1 260
1.53
3 660
1.42
1 320
1.56
3 720
1.32
1 380
1.58
3 780
1.22
1 440
1.59
3 840
1.13
1 500
1.61
3 900
1.04
1 560
1.64
3 960
0.95
1 620
1.65
4 020
0.86
1 680
1.67
4 080
0.77
1 740
1.69
4 140
0.69
1 800
1.71
4 200
0.61
1 860
1.73
4 260
0.54
1 920
1.74
4 320
0.476
1 980
1.76
4 380
0.416
2 040
1.79
4 440
0.364
2 100
1.81
4 500
0.316
2 160
1.82
4 560
0.275
2 220
1.85
4 620
0.241
2 280
1.87
4 680
0.208
2 340
1.89
4 740
0.183
2 400
1.90
4 800
0.158
備考:表16Aは,60Hz対応の値を図13のグラフから読
み取った。
44
C 4034-1 : 1999 (IEC 60034-1 : 1996)
図13 THF算出用重み曲線:8.9参照
9. 定格銘板
9.1
一般事項
すべての回転機には,耐久性のある定格銘板を取り付けなければならない。定格銘板は,回転機の見や
すい箇所に取り付け,読みやすいように配置する。
回転機が,装置の中に密閉又は取り付けられることによって,定格銘板が読み取りにくい場合には,注
文者の要求によって,第2の銘板を装置に取り付けなければならない。
9.2
表示事項
定格出力750W (VA) 以下でIEC 60072に準拠しない寸法の回転機及び定格出力3kW (kVA) 以下の特殊
な用途のビルトインの回転機は,少なくとも次の項目の1), 2), 11), 12)を表示しなければならない。
それ以外の回転機は,次の事項のうち適用できるだけの事項を定格銘板に確実に表示しなければならな
い。ただし,同一銘板上になくてもよい。単位及び数量に対する記号は,IEC 60027-1, IEC 60027-4による。
表示事項は,便宜的に番号付けをしたもので,銘板上の順序を定めるものでない。表示事項は,適宜に
45
C 4034-1 : 1999 (IEC 60034-1 : 1996)
組み合わせてもよい。
1) 製造業者名又は商標
2) 製造番号又は識別記号
備考 同一設計,同一技術によって生産された同一ロットの回転機に対しては,それらが同一グルー
プであることを示す一つの識別記号を使用してもよい。
3) 製造年を識別するための情報。これは,定格銘板又は回転機に附属する試験成績表で表示する。
備考 ただし,2)で定義された製造番号又は識別記号を製造業者に提示することで製造年が分かる場
合は,定格銘板への表示も試験成績表への記載も省略できる。
4) 製造業者の定めた形式
5) 相数(交流機の場合)
6) 適用規格の番号
7) 保護方式の記号
8) 絶縁の耐熱クラス又は温度上昇限度
もし,必要なら温度測定方法を表示する。また,水冷熱交換器をもつ回転機に対しては,温度上昇
に対する基準が,一次冷媒か二次冷媒であるかに従い,P又はSの記号を付ける。
Pは,一次 (primary) ,Sは,二次 (secondary) の略である。
9) 定格の種類(連続使用S1の場合は,省略してよい。)
10) 定格出力又は定格容量
11) 定格電圧又は定格電圧範囲
二つの異なる定格電圧XとYは,X/Yで表し,定格電圧範囲XからYは,X−Yで表示する。
12) 定格周波数又は定格周波数の範囲(交流機の場合)
交直両用電動機の場合は,定格周波数の後に適切な記号を付ける。例:〜50Hz/…又はa.c.50 Hz/d.c
13) 定格電流
14) 定格回転速度又は定格回転速度範囲
15) 接続図(三相交流機で接続箇所が3か所より多い場合)
これらの接続図は,端子箱の近くに取り付けた銘板に表示するか,端子箱内に明示する。
16) 許容過速度(この規格で定めた値と異なる場合)
17) 定格界磁電圧及び定格界磁電流(他励又は分巻の直流機及び同期機の場合)
18) 定格力率(交流機の場合)
19) 定格二次電圧及び定格二次電流(巻線形誘導電動機の場合)
20) IEC 60971による静止電力変換器種別の記号(電機子が静止電力変換器から給電される直流電動機の
場合)
ただし,5kW以下の電動機では,定格波形率と静止電力変換器の入力端子での定格交流電圧(この
電圧値が電機子回路の定格電圧値を超えるとき)を表示することで代えてもよい。
21) 最高周囲温度(40℃と異なる場合)
冷却水最高温度(25℃と異なる場合)
22) 最低周囲温度(この規格で定めた値と異なる場合)
23) 標高(1 000mを超える場合)
24) 定格出力時の水素の圧力(水素冷却の場合)
25) 概略質量(30kgを超え,指定された場合だけ)
46
C 4034-1 : 1999 (IEC 60034-1 : 1996)
26) 回転方向矢印(一方向回転の回転機の場合)
矢印は,定格銘板上に示す必要はなく,見やすい箇所に取り付ける。
回転機の巻線が製造業者以外によって一部又はすべてが更新された場合には,更新した業者名,更新年
及び更新内容を表す銘板を取り付ける。
10. その他の要求事項
10.1 回転機の接地
回転機には,保護導体又は接地導体を接続できるような端子を設けなければならない。また,それを記
号や説明書で明確にしなければならない。ただし,二重絶縁をもった回転機,定格電圧が交流50V以下,
又は直流120V以下の回転機(JIS C 0364-4-41の411.とJIS C 0366に記述がある。),又は二重絶縁された
装置に組み込む回転機の場合は,適用しない。
定格電圧が交流50V又は直流120Vを超え,交流1 000V以下又は直流1 500V以下の回転機の場合は,
接地導体用の端子は電源導体用端子の近傍に設けなければならない。端子箱が附属する場合は,端子箱内
に設けるものとする。定格出力が100kWを超える回転機は,上記に加えて外被又は固定子枠にも接地端子
を設けるものとする。定格電圧が交流1 000V又は直流1 500Vを超える回転機の場合は,外被若しくは固
定子枠に接地端子を設けなければならない。上記に加えて,電源ケーブルにシールドがある場合は,これ
を接続するために,端子箱の内部に接地端子を設けるものとする。
接地端子は,他の導体や端子に損傷を与えることなく,接地導体と良好に接続できるよう設計しなけれ
ばならない。回転機のすべての軸受及び回転子巻線が絶縁されているときは,製造業者と使用者の間で他
の保護手段について同意がない限りは,軸は接地端子に電気的に接続しなければならない。ここで,絶縁
されている軸受とは,絶縁処置を施した構造のものをいい,潤滑油などによる油膜は絶縁とはみなさない。
接地端子を端子箱内に設ける場合は,接地導体は通電導体と同じ金属を使用するものとする。
接地端子を外被又は固定子枠に設ける場合は,当事者間の協定によって,接地導体は他の金属(例えば,
鉄)を使用してもよい。この場合,端子の設計に当たっては,導体の導電性に十分な考慮が必要である。
接地端子は,表17に示す接地導体の断面積に適合するよう設計しなければならない。この表に示す寸法
よりも大きい接地導体を使用する場合は,極力この表の寸法に近い導線にすべきである。
接地導線又は保護導線は,接地端子以外の導線の断面積に関連して少なくとも次に示す面積と同等とす
る。
− 断面積が25mm2未満の場合,使用導線の断面積
− 断面積が25mm2から50mm2までの場合,25mm2
− 断面積が50mm2を超える場合,使用導線の断面積の50%
接地端子は,JIS C 0445によって識別する。
47
C 4034-1 : 1999 (IEC 60034-1 : 1996)
表17 接地導線の断面積
使用導線の断面積
mm2
接地導線又は保護導線の断面積
mm2
4
4
6
6
10
10
16
16
25
25
35
25
50
25
70
35
95
50
120
70
150
70
185
95
240
120
300
150
400
185
10.2 軸端キー
回転機の軸端にキー溝を設けてある場合は,キーを附属しなければならない。
11. 裕度
11.1 裕度
裕度とは,回転機の特性の試験結果と保証値の差の許し得る範囲をいう。回転機の保証値に関する裕度
は,表18による。
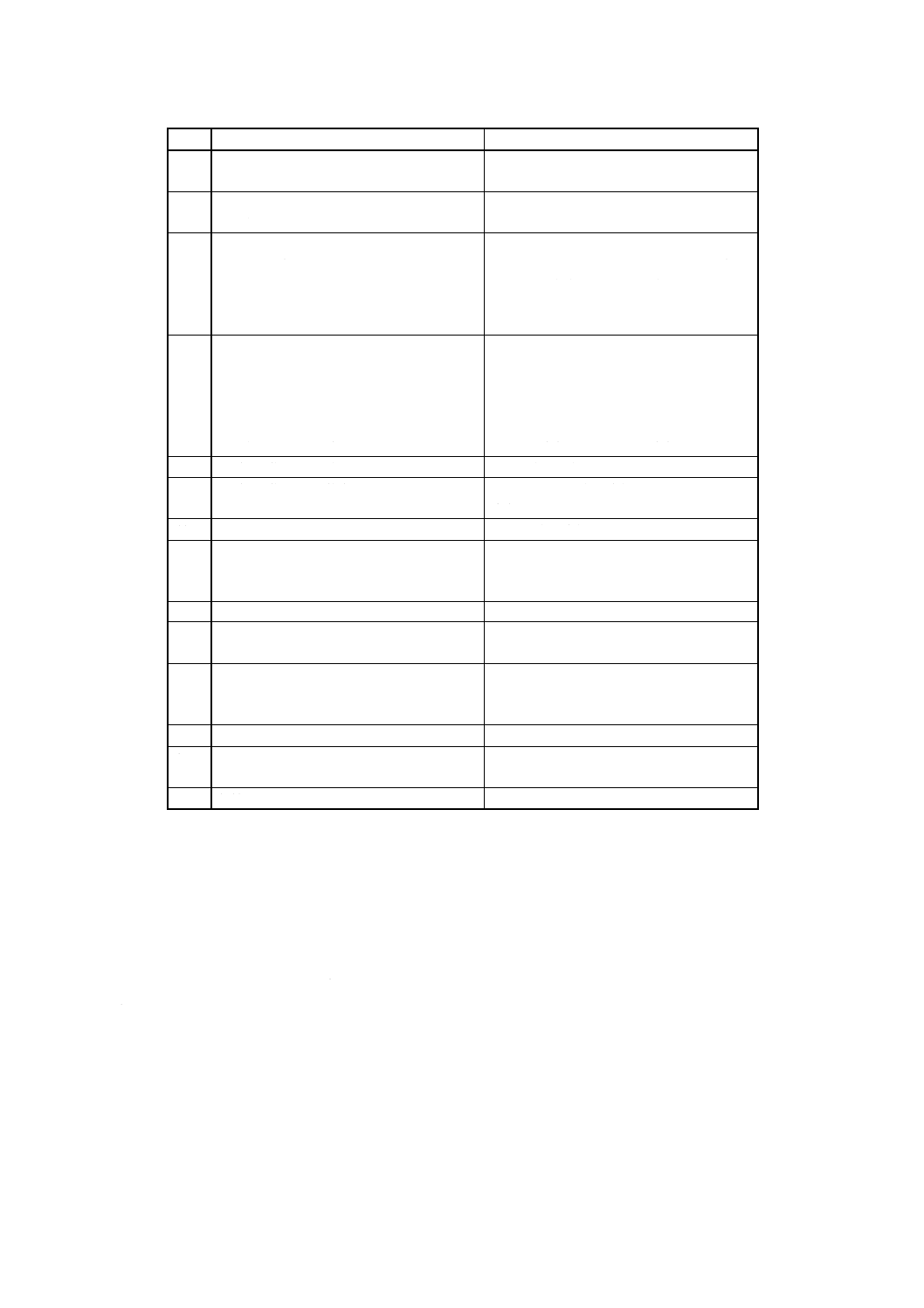
表18 裕度表
項
項目
裕度
1
効率η
1a)
規約効率
1b)
50kW (kVA) 以下の回転機
−0.15x (100−η) % η:保証効率
50kW (kVA) を超える回転機
−0.10x (100−η) %
実測効率
−0.15x (100−η) %
2
全損失[50kW (kVA) を超える回転機に適用]
+0.1x(保証値)
3
誘導機の力率,cosφ
−1/6x (1−cosφ)
ただし,最小0.02,最大0.07
4
直流電動機の回転速度(全負荷,運転温度時)
PN:定格出力 (W)
nN:定格回転速度 (min−1)
4a)
分巻及び他励の電動機
1 000 PN/nN<0.67
±15%
0.67≦ 1 000 PN/nN<2.5
±10%
2.5≦ 1 000 PN/nN<10
±7.5%
10≦ 1 000 PN/nN
±5%
4b)
直巻電動機
1 000 PN/nN<0.67
±20%
0.67≦ 1 000 PN/nN<2.5
±15%
2.5≦ 1 000 PN/nN<10
±10%
10≦ 1 000 PN/nN
±7.5%
4c)
複巻電動機
特に指定のない限り4b)を適用
48
C 4034-1 : 1999 (IEC 60034-1 : 1996)
項
項目
裕度
5
分巻又は複巻の直流電動機の速度変動率
(無負荷から全負荷まで)
±20%
ただし,最小は,定格回転速度の±2%
6
分巻又は他励発電機の固有電圧変動率
(各負荷において)
±20%
7
複巻発電機の固有電圧変動率
(交流の場合,定格力率時)
±20%
ただし,最小は,定格電圧の±3%(この裕度は,
保証された無負荷電圧及び全負荷状態における
電圧の両点を結ぶ直線と測定された各負荷にお
ける電圧との差電圧の最大値に対して適用)
8
8a)
誘導電動機の滑り(全負荷,実運転温度時)
出力1kW未満
±0.3x(保証値)
出力1kW以上
±0.2x(保証値)
8b)
分巻整流子電動機の回転速度
(全負荷,実運転温度時)
最高回転速度:−0.03x(同期速度)
最低回転速度:+0.03x(同期速度)
9
かご形誘導電動機の拘束電流
+0.2x(保証値)
10
かご形誘導電動機の拘束トルク
−0.15〜+0.25x(保証値)
合意のもとに+0.25を超えることができる。
11
かご形誘導電動機のプルアップトルク
−0.15x(保証値)
12
誘導電動機の最大トルク
−0.1x(保証値)
ただし,この裕度を適用した値が定格トルクの
1.6倍又は1.5倍を下回ってはならない。
13
同期電動機の拘束電流
+0.2x(保証値)
14
同期電動機の拘束トルク
−0.15〜+0.25x(保証値)
合意のもとに+0.25を超えることができる。
15
同期電動機の脱出トルク
−0.1x(保証値)
ただし,この裕度を適用した値が定格トルクの
1.35倍又は1.5倍を下回ってはならない。
16
規定条件下の交流発電機の短絡電流のピーク値
±0.3x(保証値)
17
規定励磁状態における交流発電機の定常短絡電
流
±0.15x(保証値)
18
慣性モーメント
±0.1x(保証値)
備考1. 裕度が一方向だけ規定されている場合,他の方向については制限されない。
2. 保証値は,表18に示した全項目又は幾つかの項目に対して,必ずしも与える必要はない。
注文又は照会の仕様に裕度付きの保証が含まれる場合には,その旨を明示しなければなら
ない。その裕度は,表18による。
12. 電磁両立性
12.1 電磁両立性 (EMC)
次の要求事項は,AC1 000V又はDC1 500Vを超えない定格電圧をもち,次の条件下で運転される回転機
に適用する。
回転機の中に取り付けられる電子部品で運転に必す(須)なもの(例えば,回転励磁装置)は,回転機
の一部である。
最終のドライブシステム及びその構成部品,例えば,電力及び電子制御装置,接続される機械及び監視
装置などに対し適用される要求事項は,その取付けが回転機の内部又は外部のいかんにかかわらず,この
規格の対象外である。
6.の限度は,定常運転時に対して定めたものである。始動時のような過渡時については,この規格によ
49
C 4034-1 : 1999 (IEC 60034-1 : 1996)
らない。
12.1.1 電磁イミュニティ限度値
電源電圧の変動及び高調波に対する直流機並びに交流機のイミュニティ限度値と接続される電源の非対
称に対する多相交流機のイミュニティ限度値は,6.による。
備考 イミュニティとは,電磁妨害が存在する環境で,機器,装置又はシステムが性能低下せずに動
作することができる能力をいい,イミュニティ限度値とは,規定された最小イミュニティレベ
ルをいう。
12.1.2 電磁エミッション限度値
備考 次の表の限度値は,CISPR11又はCISPR12による。
エミッションとは,ある発生源から電磁エネルギーが放出する現象をいい,エミッション限
度値とは,規定された最大エミッションレベルをいう。
12.1.2.1 誘導機
誘導機は,6.に従う電源に接続された場合,次の限度値より高い電磁放射妨害を発してはならない。
− かご形回転子又はブラシ引上げ装置と短絡装置をもつ巻線形は,表19による。
− 連続してスリップリング運転をする巻線形は,表20による。
伝導性エミッションは,本質的に表19による限度値より低い。
12.1.2.2 同期機
同期機は,6.に従う電源に接続された場合,ブラシレス同期機にあっては,表19,スリップリングをも
つ同期機にあっては,表20の限度値より高い電磁妨害を放射してはならない。
伝導性低周波のエミッションは,8.9による。高周波の伝導性放射のエミッションは,本質的に表19の
限度値より低い。
表19 ブラシなしで運転する回転機に対する電磁妨害の限度値
周波数範囲
限度値
放射妨害
30MHz〜230MHz
10mの距離で測定して
30dB (μV/m) 1)(準せん頭値)
230MHz〜1 000MHz
10mの距離で測定して
37dB (μV/m) 1)(準せん頭値)
交流電源供給端子で
の伝導妨害
0.15MHz〜0.5MHz
限度値は,周波数の対数に対し直
線的に減少する。
66〜56dB (μV/m) (準せん頭値)
56〜46dB (μV/m) (平均値)
0.5MHz〜5MHz
56dB (μV/m) (準せん頭値)
46dB (μV/m) (平均値)
5MHz〜30MHz
60dB (μV/m) (準せん頭値)
50dB (μV/m) (平均値)
1)
上表限度値に10dB加えることによって3mの距離で測定してもよい。
12.1.2.3 整流子回転機
平滑な電圧で運転する直流機及び6.に従う電源で運転する交流整流子機は,表20の限度値を超える妨害
を放射してはならない。
交流整流子機からの伝導性エミッションは,表20のレベル以下とする。
直流機からの伝導性エミッションは,直流機が,直接,交流電源に接続されていないので無関係である。
50
C 4034-1 : 1999 (IEC 60034-1 : 1996)
表20 ブラシ付きで運転する回転機に対する電磁妨害の限度値
周波数範囲
限度値
放射妨害
30MHz〜230MHz
30mの距離で測定して
30dB (μV/m) 1)(準せん頭値)
230MHz〜1 000MHz
30mの距離で測定して
37dB (μV/m) 1)(準せん頭値)
交流電源供給端子で
の伝導妨害
0.15MHz〜0.5MHz
79dB (μV/m) (準せん頭値)
66dB (μV/m) (平均値)
0.5MHz〜30MHz
73dB (μV/m) (準せん頭値)
60dB (μV/m) (平均値)
1)
上表限度値に10dB加えることによって10mの距離で測定してもよく,又は上表限度値に
20dB加えることによって3mの距離で測定してもよい。
12.1.3 試験
12.1.3.1 電磁イミュニティ試験
イミュニティ試験は,この項に従っていることを証明するために要求されるものではない。
12.1.3.2 電磁エミッション試験
300kW (kVA),又はそれ以上の出力をもつ同期機に対し伝導性低周波のエミッションに対する形式試験
は,8.9.2に従っていることを証明するために行われるべきである。
交流整流子機に対し,負荷時の伝導性及び放射性エミッションに対する形式試験は,12.1.2.3に従ってい
ることを証明するために行われるべきである。
直流機に対し負荷時の放射性エミッションに対する形式試験は,12.1.2.3に従っていることを証明するた
めに行われるべきである。
試験は,CISPR11, CISPR14及びCISPR16に従って行われるべきである。
このほかの機種の試験は,この項に従っていることを証明するために要求されるものではない。
13. 安全
13.1 安全
この規格による回転機は,この規格でほかに指定されない限り,IEC 60204-1の要求に従わなければな
らない。
備考 設備全体が安全であることを確保するのは,製造業者又は部品として電気機械を集めて設備を
組み立てる者の責任である。
このことは,次のような関連する製造規格が考慮されてもよい。
IEC 60079 : Electrical apparatus for explosive gas atomospheres
IEC 60335 : Safety of household and similar electrical appliances
かつ,IEC 60034の次の章も含まれる。
IEC 60034-5, IEC 60034-6, IEC 60034-7, IEC 60034-8, IEC 60034-9, IEC 60034-11, IEC
60034-12及びIEC 60034-14
さらに,表面温度の限界及び類似の特性についても考慮する必要がある。
例えば,IEC 60335 (1991) の11.熱を参照すべきである。
51
C 4034-1 : 1999 (IEC 60034-1 : 1996)
附属書A(参考) 使用形式S10の適用及び相対的熱寿命の
期待値 (TL) の確定に関する指針
A.1 回転機の負荷は,いかなる時点においても本体3.2.1に対応する使用形式S1に相当する。しかし,
負荷サイクルには,使用形式S1に基づく定格負荷以外の負荷が含まれることもある。一周期内には四つ
以下の多段階的な一定負荷が含まれてもよい(本体図10を参照)。
A.2 一周期内の異なる負荷の値と持続時間に基づき,絶縁の熱劣化による相対的寿命は,次の式から算
出できる。
k
i
t
θ
∆
=
×
∆
Σ
=
2
TL
1
1
n
1
i
ここに,
TL: 使用形式S1に基づく負荷が定格出力の場合の熱寿命に対
する相対値
△θi: 一周期内の各負荷レベルで運転されるときの巻線の温度上
昇と基準負荷で連続運転された場合における温度上昇の差
△ti: 一周期内の各負荷レベルで運転される期間のp.u.値
k: 絶縁の熱寿命を50%短縮することになる温度上昇の増加
n: 負荷レベルの数 (n≦4)
A.3 TLは,定格クラスの明確な識別に不可欠な部分である。
A.4 TLの値は,本体図10に基づく負荷サイクルに関する情報以外に,絶縁のk値が判明しているとき
に限り決定できる。このk値は,負荷サイクルが本体図10に基づき生じる温度範囲全体について,IEC
60034-18との適合性実験によって決定しなければならない。
A.5 TL値は相対値としてだけ明示できる。この値を近似法で使用すれば,定格出力の使用形式S1と比
較される回転機の熱寿命の実際の変化を査定することができる。これは,一周期内に存在する各負荷を考
慮すれば,回転機の寿命に与えるほかの影響(電圧によるストレス,環境影響など)は定格出力の使用形
式S1の場合とほぼ同じであると想定できるからである。
A.6 回転機の製造業者は,TL値を決定する各種パラメータを正確に取りまとめる責任がある。
52
C 4034-1 : 1999 (IEC 60034-1 : 1996)
JIS C 4004(回転電気機械通則)改訂本委員会 構成表
氏名
所属
(委員長)
山 村 昌
日本学士院
(幹事)
小 田 荘 一
小山職業能力開発短期大学校
(委員)
石 川 芳 博
株式会社東芝京浜事業所電動機部
大 西 忠 治
新日本製鐵株式会社技術開発本部システム制御技術部
桜 庭 雅 彦
株式会社明電舎産業技術部
篠 崎 信 行
富士電機株式会社鈴鹿工場回転機設計部
菅 原 良 二
電源開発株式会社工務部
鈴 木 孝 身
東京電力株式会社火力部火力エンジニアリングセンター
中 原 茂 樹
社団法人日本電機工業会技術部
浜 高 廣
株式会社日立製作所日立工場電機設計部
水 口 真 治
東洋電機製造株式会社横浜製作所産業工場設計部
村 里 茂
三菱電機株式会社電力・産業システム事業所
森 田 登
株式会社東芝京浜事業所電動機部
森 安 正 司
関東学院大学工学部
山 田 生 實
株式会社安川電機開発センターシステム事業部
山 本 潤
関西電力株式会社電力システム室
橋 本 繁 晴
財団法人日本規格協会
橋 爪 邦 隆
工業技術院標準部情報電気規格課