7
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 インタフェースの機能と構造
第2節 機能的仕様
4. 機能区分 デバイスは特定の用途向に設計された物理的なもので,それは各々,固有の役割をもつ次
の機能に区分される。
(1) デバイスファンクション(この定義は機器の用途に依存する。)
C 1901 : 1987
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目次
ページ
第1節 概説 ······················································································································· 1
1. 適用範囲と目的 ··············································································································· 1
1.1 適用範囲 ······················································································································ 1
1.2 目的 ···························································································································· 1
2. 定義 ······························································································································ 2
2.1 一般的なシステム用語····································································································· 2
2.2 信号とその経路 ············································································································· 3
3. インタフェースシステムの概要 ·························································································· 3
3.1 インタフェースの目的····································································································· 3
3.2 基本的な伝送能力 ·········································································································· 4
3.3 メッセージの経路とバス構造 ···························································································· 5
3.4 インタフェースシステム要素 ···························································································· 6
第2節 機能的仕様 ·············································································································· 7
4. 機能区分 ························································································································ 7
4.1 デバイスファンクション·································································································· 8
4.2 インタフェースファンクションの概念 ················································································ 8
4.3 メッセージの概念 ········································································································ 10
5. インタフェースファンクションの規定に使用される記号法 ···················································· 13
5.1 ステートダイヤグラムの表記記号 ···················································································· 13
5.2 メッセージの出力記号··································································································· 14
6. ソースハンドシェークインタフェース (SH) ファンクション ·················································· 15
6.1 概説 ·························································································································· 15
6.2 SHファンクションのステートダイヤグラム ······································································ 15
6.3 SHファンクションのステートの説明 ··············································································· 15
6.4 SHファンクションのサブセット ····················································································· 18
6.5 SHファンクションの補足説明及び指針 ············································································ 18
7. アクセプタハンドシェークインタフェース (AH) ファンクション ··········································· 18
7.1 概説 ·························································································································· 18
7.2 AHファンクションのステートダイヤグラム ······································································ 19
7.3 AHファンクションのステートの説明 ··············································································· 19
7.4 AHファンクションのサブセット····················································································· 21
7.5 AHファンクションの補足説明及び指針 ············································································ 21
8. トーカインタフェース (T) ファンクション(シリアルポール機能を含む。) ····························· 21
8.1 概要 ·························································································································· 21
8.2 Tファンクションのステートダイヤグラム ········································································ 22
C 1901 : 1987 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
8.3 Tファンクションの説明 ································································································ 25
8.4 TとTEファンクションのサブセット ··············································································· 27
8.5 T及びTEファンクションの補足説明及び指針 ··································································· 28
9. リスナインタフェース (L) ファンクション ········································································ 28
9.1 概説 ·························································································································· 28
9.2 Lファンクションのステートダイヤグラム ········································································ 29
9.3 Lファンクションの説明 ································································································ 30
9.4 LファンクションとLEファンクションのサブセット ·························································· 32
9.5 L及びLEファンクションの補足説明及び指針 ··································································· 32
10. サービスリクエストインタフェース (SR) ファンクション ··················································· 33
10.1 概説 ························································································································· 33
10.2 SRファンクションのステートダイヤグラム ····································································· 33
10.3 SRファンクションのステートの説明 ·············································································· 34
10.4 SRファンクションのサブセット ···················································································· 34
10.5 SRファンクションの補足説明と指針 ·············································································· 34
11. リモートローカルインタフェース (RL) ファンクション ······················································ 35
11.1 概説 ························································································································· 35
11.2 RLファンクションのステートダイヤグラム ····································································· 35
11.3 RLファンクションの説明 ····························································································· 35
11.4 RLファンクションのサブセット ···················································································· 36
11.5 RLファンクションの補足説明及び指針 ··········································································· 37
12. パラレルポールインタフェース (PP) ファンクション·························································· 37
12.1 概説 ························································································································· 37
12.2 PPファンクションのステートダイヤグラム ····································································· 38
12.3 PPファンクションの説明 ····························································································· 39
12.4 PPファンクションのサブセット ···················································································· 40
12.5 PPファンクションの補足説明及び指針 ··········································································· 40
13 デバイスクリアインタフェース (DC) ファンクション
13.1 概説 ························································································································· 41
13.2 DCファンクションのステートダイヤグラム ···································································· 41
13.3 DCファンクションの説明 ···························································································· 41
13.4 DCファンクションのサブセット ··················································································· 42
13.5 DCファンクションの補足説明及び指針 ·········································································· 42
14 デバイストリガインタフェース (DT) ファンクション ·························································· 42
14.1 概説 ························································································································· 42
14.2 DTファンクションのステートダイヤグラム····································································· 42
14.3 DTファンクションの説明 ···························································································· 42
14.4 DTファンクションのサブセット ··················································································· 43
14.5 DTファンクションの補足説明及び指針 ·········································································· 43
C 1901 : 1987 目次
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
15. コントローラインタフェース (C) ファンクション ······························································ 43
15.1 概説 ························································································································· 43
15.2 Cファンクションのステートダイヤグラム ······································································ 44
15.3 Cファンクションの説明 ······························································································ 44
15.4 Cファンクションのサブセット ····················································································· 51
15.5 Cファンクションの補足説明及び指針 ············································································ 51
16. リモートメッセージのコード化及び転送 ··········································································· 53
16.1 リモートメッセージのコード ························································································ 53
16.2 リモートメッセージのコード化の概念 ············································································ 53
16.3 リモートメッセージの転送 ··························································································· 53
16.4 リモートメッセージのコード表の構成及び取り決め ·························································· 54
16.5 リモートメッセージのコード表の全容 ············································································ 54
16.6 JISコード説明:メッセージコード化の概要 ····································································· 57
16.7 ステート移行時間の値 ································································································· 57
第3節 電気的仕様 ············································································································ 57
17. 適用範囲 ···················································································································· 57
18. 論理ステートと電気的ステートとの関係 ··········································································· 58
19 ドライバの必要条件 ······································································································ 58
19.1 ドライバのタイプ ······································································································· 58
19.2 ドライバの仕様 ·········································································································· 58
20. レシーバの必要条件 ····································································································· 58
20.1 レシーバの仕様(許容値) ··························································································· 58
20.2 レシーバの仕様(推奨) ······························································································ 59
21. 複合デバイスの負荷に対する必要条件 ·············································································· 59
21.1 終端抵抗 ··················································································································· 59
21.2 負電圧のクランプ ······································································································· 59
21.3 DC負荷条件 ·············································································································· 59
21.4 容量性負荷の制限 ······································································································· 60
21.5 代表的な回路構成 ······································································································· 60
22. 接地条件 ···················································································································· 61
23. ケーブル特性 ·············································································································· 61
23.1 導線の必要条件 ·········································································································· 61
23.2 ケーブル構造 ············································································································· 61
24 ステートの移行時間 ······································································································ 62
第4節 機械的仕様 ············································································································ 63
25. 適用範囲 ···················································································································· 63
26. コネクタタイプ ··········································································································· 63
26.1 電気的特性 ················································································································ 63
26.2 機械的特性 ················································································································ 63
C 1901 : 1987 目次
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
26.3 環境特性 ··················································································································· 63
27. コネクタピン割付け ····································································································· 63
28. 装置用コネクタの取付方法····························································································· 64
29. ケーブルアセンブリ ····································································································· 65
第5節 システムへの応用と設計者に対する指針 ····································································· 66
30. システムへの適合性 ····································································································· 66
30.1 一般的指針 ················································································································ 66
31. データ転送速度 ··········································································································· 66
32. デバイスの能力 ··········································································································· 67
32.1 ビジーファンクション ································································································· 67
32.2 リモートローカルの応用 ······························································································ 68
33. 論理AND及びORによる動作 ························································································ 69
33.1 RFD及びDACメッセージ ···························································································· 69
33.2 SRQメッセージ ········································································································· 69
33.3 回路構成 ··················································································································· 69
34. アドレスの割当て方法··································································································· 72
35. インタフェースファンクションの組合せ例 ········································································ 72
第6節 システムの必要条件とユーザに対する指針··································································· 72
36. システムへの適合性 ····································································································· 72
37. システムを構築する場合の必要条件 ················································································· 72
38. アドレスの割当て方法··································································································· 73
38.1 トーカアドレス ·········································································································· 73
38.2 リスナアドレス ·········································································································· 73
38.3 2次アドレス ·············································································································· 73
39. ケーブル接続制限 ········································································································ 74
39.1 最大ケーブル長 ·········································································································· 74
39.2 最大ケーブル長の分配 ································································································· 74
39.3 ケーブル構成 ············································································································· 74
39.4 グランドに対する注意 ································································································· 74
40. 操作シーケンス ··········································································································· 74
40.1 データ転送 ················································································································ 74
40.2 シリアルポー ············································································································· 75
40.3 コントロールの受渡し ································································································· 75
40.4 パラレルポール ·········································································································· 75
40.5 デバイスを強制的にリモート制御状態にする場合 ····························································· 76
40.6 インタフェースクリアを送る場合 ·················································································· 76
40.7 tca使用に対しての制限 ································································································ 76
附属書A 計測システムの例 ································································································ 77
附属書B ハンドシェークのタイミング ·················································································· 79
C 1901 : 1987 目次
(5)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C インタフェースファンクションに 許されるサブセットと能力識別コード ························ 82
附属書D インタフェースメッセージ参照リスト ······································································ 87
附属書E マルチラインインタフェースメッセー ······································································ 89
附属書F 論理回路の構成 ···································································································· 90
附属書G パラレルポールシーケンス ···················································································· 92
附属書H データシート上でのインタフェース パラメータの記述 ··············································· 93
附属書J この規格で規定するケーブルのシールド 効果を改善するために推奨される手法 ················ 98
参考 用語及び略号索引 ······································································································ 100
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 1901 : 1987
計測器用インタフェースシステム
An Interface System for Programmable Measuring Instruments
第1節 概説
1. 適用範囲と目的
1.1
適用範囲
1.1.1. この規格は,機器システムを組み立てるために,プログラマブル若しくはノンプログラマブルな電
子計測器とその他の機器又はアクセサリとの接続に使用されるインタフェース系に適用する。
1.1.2. この規格は,次のような機器システム用インタフェース,又はその一部に適用する。
(1) 接続されている装置間の転送データがデジタルの場合(アナログは除く。)。
(2) 接続しているケーブルの合計の長さが20mを超えない場合。
(3) いずれの1本の信号ラインに対してもそのデータ転送速度が1メガビット/秒を超えない場合。
この規格の基本的な機能に関する仕様は,次の条件を満足するデジタルインタフェースにも適用する。
(1) デバイス間の距離がより大きい。
(2) より多くのデバイスを必要とする。
(3) より大きい耐雑音性を必要とする環境。
(4) これらの組合せ。
このような拡張した応用に対しては,異なった電気的及び機械的仕様が必要とされる。
(例えば,対称性をもつ回路構成,高いスレショルドレベルをもつ論理回路構成,特殊なコネクタ及び
ケーブル構成)
1.1.3
この規格は,機器のシステムにおいて有用とみなされるプロセッサ,発振器,表示器,記憶装置,
ターミナルユニットのような他のシステム要素に応用できる。
1.1.4
この規格は,通常,電気的に条件の良い,かつ物理的寸法(システムコンポーネント間の距離)も
限定された実験室及び生産試験室の環境に対して適用する。
1.1.5
この規格の主要な目的は,単品で十分使用できる機器を外的手段を用いて他の機器と接続可能にす
るインタフェースシステムを示すことである。また,この規格は,その機器内の各部分間の接続にも適用
する。
1.2
目的 この規格は,次のことを目的とする。
(1) 限定された距離で使用するための多目的システムの定義。
(2) システムを通して相互に接続され,確実に情報が伝達されるために装置が満たすべき,デバイスに依
存しないインタフェースの機能的,電気的,機械的必要条件の決定。
(3) システムに関する用語,定義の決定。
(4) メーカ個々に製造された機器が一つの機能システムとして接続可能にすること。
(5) 同時にシステムに接続される機器に幅広い能力(簡単な能力から複雑な能力まで)を許容すること。
2
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(6) メッセージをコントローラや中間ユニットを経由しないで機器間で直接伝達することも可能にするこ
と。
(7) システムに接続される機器の機能に最小限の制限を与えるだけで構成できるようなシステムの定義。
(8) 幅広いデータ転送速度にわたって非同期転送可能にするシステムの定義。
(9) システム自身が比較的低価格で,かつ低価格のデバイスを相互接続することができるシステムの定義。
(10) 簡単に使用できるシステムの定義。
1.2.1
この規格は,機器システム用インタフェースの特性だけとし,装置の設計仕様,無線障害規制への
配慮,性能,安全性は,適用しない。
備考 性能及び安全性に関しては,IEC 359(電子測定装置の機能的性能の表し方),IEC 348(電子
測定器に対する安全規格)を参照のこと。
引用規格,対応国際規格及び関連規格:83ページに示す。
2. 定義 特に区別する必要のない限り,この規格では次のように定義する。
(1) “システム”とは,一般にデバイス間の確実なデータ転送を行うためのすべての回路,ケーブル,コ
ネクタ,メッセージ,制御方法などを含んでいるバイト直列ビット並列インタフェースシステムを示
す。
(2) “デバイス”又は“機器 (Apparatus) ”とは,この規格を満足するインタフェースと接続されるプロ
グラマブルな測定デバイス又は製品を示す。
2.1
一般的なシステム用語
2.1.1. システム 指定された機能を実行することによって,与えられた目的を達成するように構成した要
素の組合せ。
備考 システムとその周辺又は他のシステムとは,それらとこのシステム間の結合を切断する仮想界
面によって区分される。これらの界面を通じて,システムは周辺から影響を受けたり,外部シ
ステムからの作用を受けるとともに,それ自身が周辺や外部システムに作用を及ぼす。
2.1.2
インタフェース 考察するシステムとその他のシステム間,又はシステム構成部間で,これを通じ
て情報伝達が行われる境界面。
2.1.3
インタフェースシステム デバイス間の情報伝達に必要なインタフェースのデバイスに依存しな
い機械的,電気的,機能的要素の集まり。ケーブル,コネクタ,送受信回路,信号ライン仕様,タイミン
グ及び制御規定並びに機能的論理回路は,その典型的なシステム要素である。
2.1.4
プログラマブル 特定の仕事を行うために,デバイス内部の回路状態を変えるためのデータを受信
する能力をもたせるデバイスの特性。
2.1.5
リモート制御 異なる仕事をデバイスに行わせるために,その電気的インタフェース結合を介して
デバイスをプログラマブルにする方法。
2.1.6
ローカル制御 種々の仕事をデバイスに行わせるために,デバイス自身のもつローカル(前面又は
後面パネル)コントロールを行うことによってデバイスをプログラマブルにする方法(手動制御とも呼ば
れる。)。
2.1.7
適合性 デバイスがこの規格に基づいて設計されている場合,変更を必要としないで互いに接続で
きる度合い(機械的,電気的,機能的に)。
3
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.1.8
ハンドシェークサイクル ステータスとコントロール信号との“インタロックされたシーケンス
(かみ合わされた順序)”によって,インタフェースを介してデジタル信号が各データバイトを転送する過
程。“インタロックされたシーケンス”とは,そのシーケンスにおいて一つの現象 (event) が起きる前に必
ずその前の現象が起こっていなければならないような固定されたシーケンスをいう。
2.1.9
プログラマブルな測定機器 システムからの命令によって指定された動作を行う測定機器。必要な
場合には,その測定結果をシステムへ送る機能がある。
2.1.10 ターミナルユニット 考察しているインタフェースシステムを終端する機器であり,またこれによ
って,このインタフェースシステムと他のインタフェースシステム間の接続を行う(必要な場合には符号
変換も行う。)機器。
2.2
信号とその経路
2.2.1
信号 伝達情報の物理的表現。
備考 この規格に関しては,一般的にいう“信号”よりも限定された定義で,この規格ではデジタル
電気信号だけを示す。
2.2.2
信号パラメータ 電気量のパラメータ。その値又はその値のシーケンスは情報を伝達する。
2.2.3
信号レベル 任意の基準振幅と比較した信号の振幅(この規格においては電圧)。
2.2.3.1
高ステート 二つのバイナリロジックステートの一つで表されるメッセージ内容を示す相対的
に正の信号レベル。
2.2.3.2
低ステート 二つのバイナリロジックステートの一つで表されるメッセージ内容を示す相対的
に正でない信号レベル。
2.2.4
信号ライン 接続するデバイス間のメッセージの伝達に使用しているインタフェースシステム内
の信号線。
2.2.5
バイト 計算機の1ワードより一般的に短く,1単位として操作する隣接したバイナリビットのグ
ループ(通常,8ビットで示す。)。
2.2.6
バス 多数のデバイスが接続され,その間のメッセージを伝達するインタフェースシステムによっ
て使用する信号ラインの組合せ又は1本の信号ライン。
2.2.6.1
一方向性バス 個々のどのデバイスにも使用するメッセージの転送方向が,一方向だけ(入力だ
け,又は出力だけ)のバス。
2.2.6.2
双方向性バス 個々のどのデバイスにも使用するメッセージの転送方向が,双方向(入出力共用)
のバス。
2.2.7
バイト直列 共通のバスを用いて情報を伝達するために用いる一連のビット並列であるデータバ
イト。
2.2.8
ビット並列 同時に発生するデータビット (Concurrent data bits) の集まり。ビット並列データは,
グループ(バイト)として同時に取り扱うこともあり,個々のデータビットとして独立に取り扱うことも
ある。
3. インタフェースシステムの概要
3.1
インタフェースの目的
3.1.1
インタフェースシステムの全般的な目的は,接続したデバイスの間で誤りなく“メッセージ”の転
送を行うための能率よい伝送路を設ける。
4
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.2
インタフェースシステムによって転送するメッセージ(ある量の情報)には,大別して次の2種類
がある。
(1) インタフェースシステム自体を管理するために用いるメッセージで,この規格では“インタフェース
メッセージ”と呼ぶ。
(2) インタフェースシステムによって接続されたデバイス間で転送するメッセージで,このメッセージは,
直接インタフェースシステムによって使用するものではない。この規格では“デバイスディペンデン
トメッセージ”(デバイスに依存するメッセージ)と呼ぶ。
備考 デバイスディペンデントメッセージの詳細にわたる規定は,この規格の範囲外とする。
3.2
基本的な伝送能力
3.2.1
デバイス間で効率的に情報交換を行う場合,次の3種類の機能をもつデバイスが必要である。
(1) リスナとして動作するデバイス
(2) トーカとして動作するデバイス
(3) コントローラとして動作するデバイス
備考 この規格では,デバイスの役割をより良く記述するために“トーカ”及び“リスナ”という用
語は特別の意味をもつ。これらの用語は他のトランスミッタ(送信機),レシーバ(受信機)と
いった術語との混同を避けるために用いている。
3.2.2
この規格で定められるインタフェースシステムの記述において
(a) リスナとしての能力をもつデバイスは,インタフェースシステムに接続された他のデバイスからの
デバイスメッセージを受信できるように,あるインタフェースメッセージによってアドレスされる。
(b) トーカとしての能力をもつデバイスは,インタフェースシステムに接続された他のデバイスにデバ
イスディペンデントメッセージを送信できるように,あるインタフェースメッセージによってアドレ
スされる。
(c) コントローラとしての能力をもつデバイスは,他のデバイスをリスナ又はトーカにアドレス(指定)
することができる。また,他のデバイスに決められた動作をするように命令するためのインタフェー
スメッセージを送ることもできる。
しかし,コントローラだけの能力をもつデバイスはデバイスディペンデントメッセージを受信も送
信もすることはできない。
備考 この規格を通して用いられるコントローラという用語は,インタフェースシステムの管理を行
うものだけを意味するもので,データプロセッシング用のものとは異なる。
インタフェースシステムで用いられる種々のタイプのコントローラ機能の区分は,第2節に
おいて更に説明する。
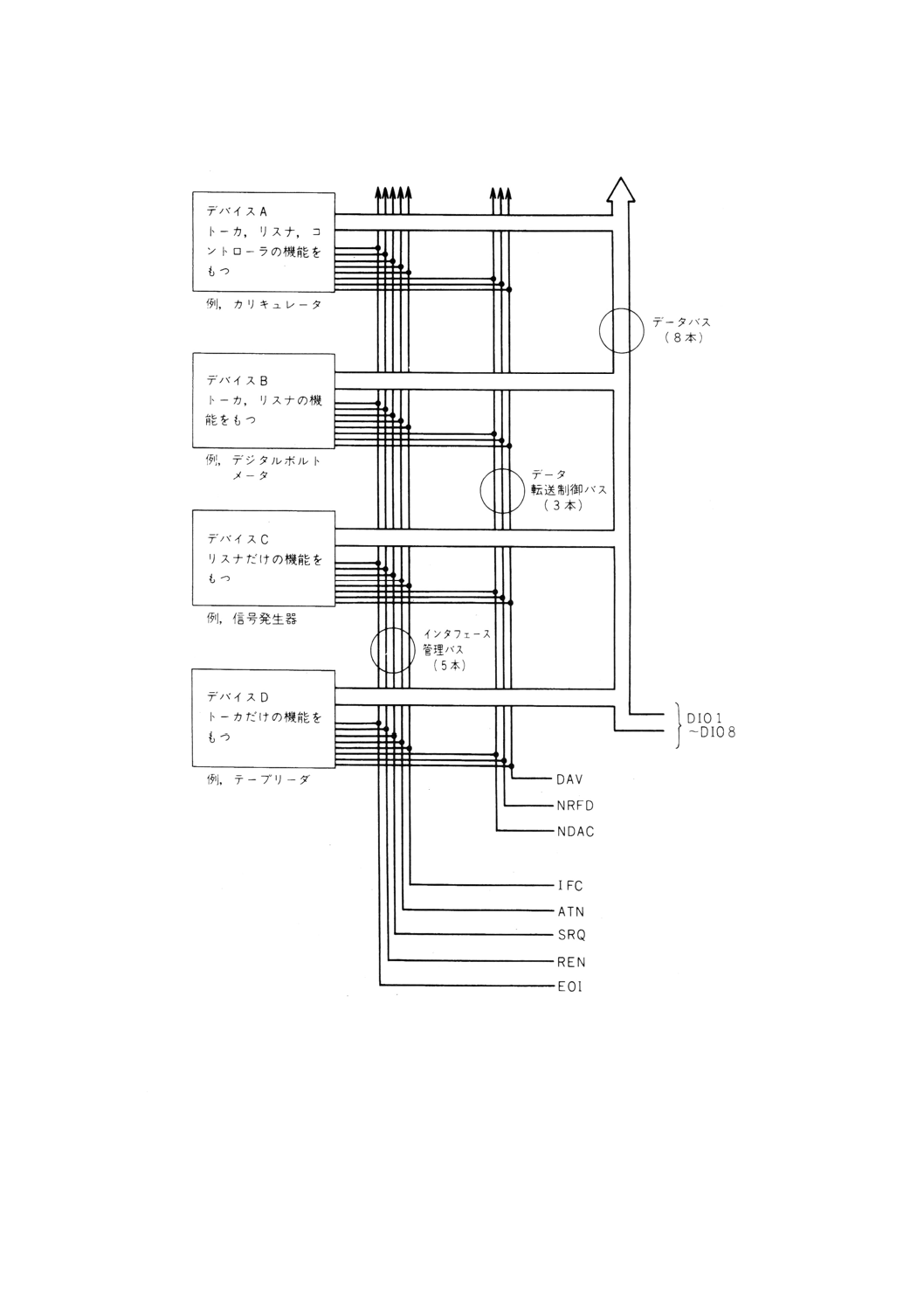
3.2.3
リスナ,トーカ,コントローラの機能は,インタフェースシステムに接続されたデバイスに別々に,
又は任意の組合せで一緒に存在する(図1参照)。
3.2.4
基本的なリスナ,トーカ及びコントローラ機能に加えて,本システムは次のような動作を行うイン
タフェースメッセージをもつ。
(a) シリアルポール手順は,(トーカ機能をもつ)デバイスがコントローラに何らかの動作を要求すると
き,サービスリクエストメッセージを送信することによって始められる。コントローラは,これに対
しどのデバイスがサービスを要求しているかを調べるために,順番に可能性をもつすべてのデバイス
のステータスバイトを読み込む。
(b) パラレルポール機能は,コントローラの要請に応じて,1ビットのステータス(状態)情報を他の
5
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
いくつかのデバイスと同時に送信する能力をデバイスに与える。
パラレルポール応答に使用するデータラインの各デバイスへの割り振りは,インタフェースメッセ
ージによって指定することもできる。
(c) デバイスクリア及びデバイストリガ機能は,コントローラからの指令に基づいて,自身を初期設定
又はトリガ入力ありの状態に設定する能力をデバイスに与える。
これは,システム内の指定された他のデバイス又はすべてのデバイスと同時に行うこともできる。
(d) リモート/ローカル機能は,自身をバスからのデータでプログラムされるようにするか,ローカル
データ(正面パネルのコントロール)でプログラムされるようにするかの選択を行う機能をデバイス
に与える。
3.3
メッセージの経路とバス構造
3.3.1
インタフェースシステムは,すべての情報,インタフェースメッセージとデバイスディペンデント
メッセージを相互接続されたデバイス間で伝達するために16本の信号ラインをもっている。
3.3.2
メッセージは,そのメッセージの内容とインタフェースシステムとの関係に従って,1本又は数本
の線でコード化される。
3.3.3
バスの構造は,機能的に次の3種類の信号線の組に分類し,その基本伝送路を図1に示す。
(1) データバス:8本の信号ライン
(2) データバイトを転送するための転送制御バス:3本の信号ライン
(3) インタフェース管理バス:5本の信号ライン
3.3.3.1
8本のインタフェース信号ラインは,すべての7ビットのインタフェースメッセージとデバイス
ディペンデントメッセージを転送する。
(a) データ入出力1 (DIO 1) ライン
…
(h) データ入出力8 (DIO 8) ライン
メッセージバイトは,DIOラインを用いて次の形で転送する。
(1) ビット並列バイト直列転送
(2) 非同期転送
(3) 双方向転送
備考 メッセージは,必要に応じて個々のDIOライン上を転送する。
3.3.3.2
3本の信号ラインの組は,一つのトーカ又は一つのコントローラから,一つ又は複数のリスナへ,
DIOライン上のデータバイトを効率的に転送するために使用する。
(a) Data Valid (DAV) は,DIOライン上の情報の有効性を示す。
(b) Not Ready For Data (NRFD) は,デバイス側が情報を受けとる準備ができたか否かを示す。
(c) Not Data Accepted (NDAC) は,デバイス側が情報を受け取り終わったか否かを示す。
DAV,NRFD,NDACの信号ラインは,インタフェースを通して各データバイトを転送するために,い
わゆる“3ワイヤハンドシェーク”※と呼ばれる動作を行う。
注※
3ワイヤハンドシェークの考え方は,6.及び7.で述べる。
参考 3ワイヤハンドシェークについては,工業所有権があるので,解説2.を参照のこと。
3.3.3.3
5本の信号ラインは,インタフェースを通じた情報の流れを管理するために使用する。
(a) ATN (Attention) は,DIOライン上の情報をどのように解釈すべきか,またいずれのデバイスがその情
報に対して応答しなければならないかを定義するために(コントローラによって)使用する。
6
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(b) IFC (Interface Clear) は,インタフェースシステム(すべてのデバイスはこの一部を内部に含んでいる。)
を初期状態にセットするために(コントローラによって)使用する。
(c) SRQ (Service Request) は,注意が必要なことを示すため,かつ現在行われているシーケンスに対して
割り込みを要求するために(デバイスによって)使用する。
(d) REN (Remote Enable) は,他のメッセージと合わせて用いられ,デバイスのリモート/ローカル制御
切換のために(コントローラによって)使用する。
(e) EOI (End or Identify) は,複数バイト転送のとき,その最後のバイトを示すために(トーカによって)
使用する。また,ATNと組み合わせて,パラレルポールを実行する場合に(コントローラによって)
使用する。
3.4
インタフェースシステム要素 インタフェースシステム要素は,次のものがある。
(1) 機能的要素
(2) 電気的要素
(3) 機械的要素
7
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 インタフェースの機能と構造
第2節 機能的仕様
4. 機能区分 デバイスは特定の用途向に設計された物理的なもので,それは各々,固有の役割をもつ次
の機能に区分される。
(1) デバイスファンクション(この定義は機器の用途に依存する。)
8
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(2) インタフェースファンクション(この定義は機器の用途に無関係である。)
(3) メッセージコーディングロジック
インタフェースファンクションが送信又は受信するすべての情報伝達は“メッセージ”と“ステートリ
ンケージ”によって定義する(4.3を参照)。
信号線を使用して送・受信されるすべてのメッセージは,16.で定義されるコーディングロジックに従っ
てコード化する。
4.1
デバイスファンクション デバイスファンクションの領域にある全体の概念とか目的,形,内容,
構成など(例えば,アナログ信号の測定機能,測定範囲,操作モードなど)は,この規格では規定しない。
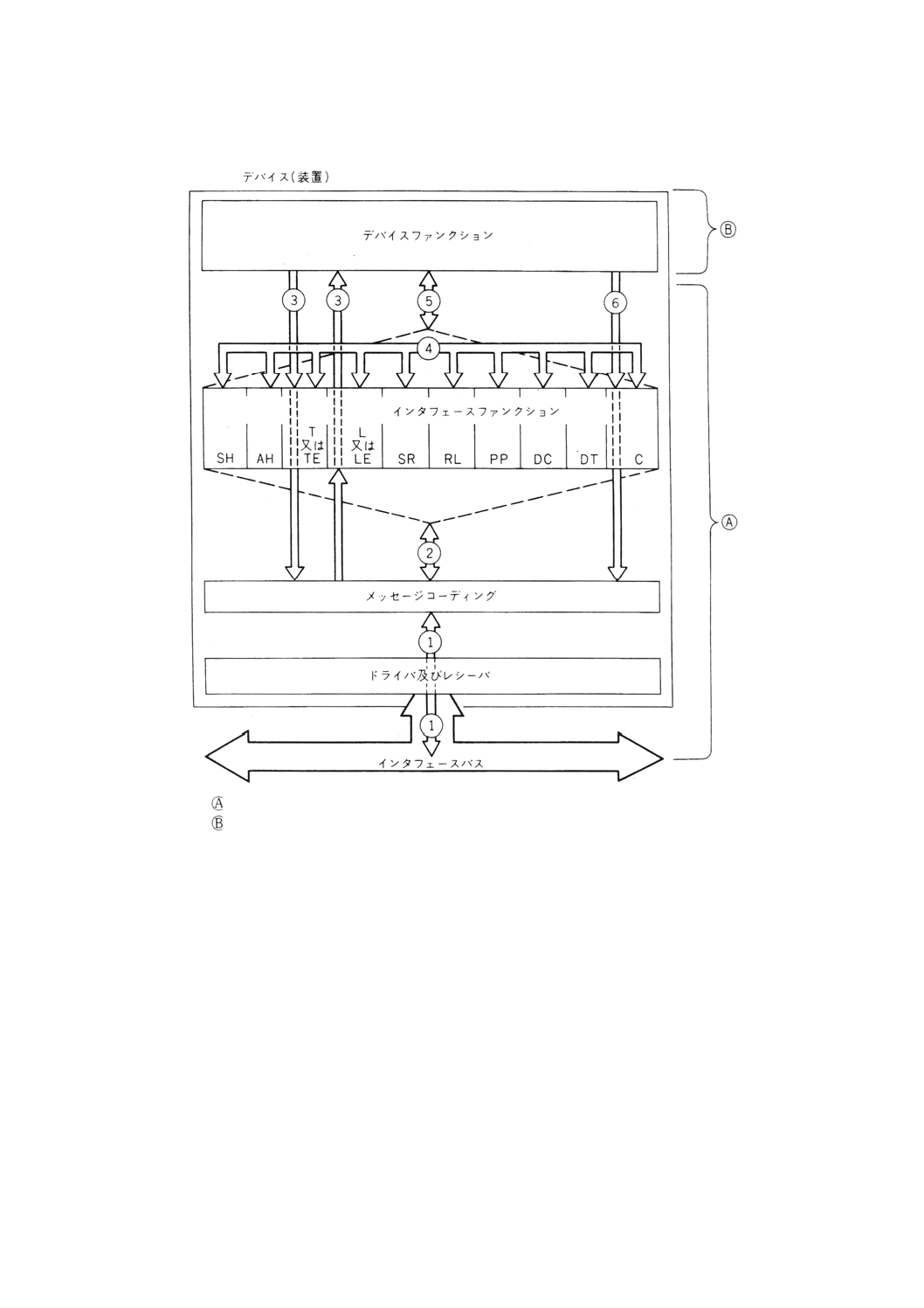
図2は設計者がデバイスの能力を自由に定義することができるデバイスファンクション領域 (B) と,こ
の規格によって規定するインタフェースファンクション領域 (A) を示している。
4.2
インタフェースファンクションの概念
4.2.1
インタフェースファンクション インタフェースファンクションとは,デバイスにメッセージを受
信,処理,送出するための基本的な動作能力を与えるものである。各々,特定のプロトコルに従って動作
する一群のインタフェースファンクションは,この節で定義される。各々のインタフェースファンクショ
ンは,決められたメッセージを送・受信するだけである。
4.2.2
インタフェースファンクションステート
4.2.2.1
各々のインタフェースファンクションは,相互に排他的な“ステート”を接続した一つ又はそれ
以上のグループによって定義する。
4.2.2.2
相互に排他的なステートを接続した一つのグループ内では,同一時点においてはただ一つのステ
ートだけアクティブである。
4.2.2.3
インタフェースファンクションの各々のステートは,そのステートがアクティブである間にイン
タフェースを経由して送・受信されるメッセージと,そのグループ内で,あるステートから他のステート
に移行する条件とで定義される。これらのメッセージや条件は,ステートの能力を定義している。
9
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2 デバイスの機能区分
ここに,
:この規格によって限定される能力
:設計者によって限定される能力
①:インタフェースバス信号線
②:インタフェースファンクションに送受されるリモートメッセージ
③:デバイスファンクションに送受されるデバイスディペンデントメッセージ
④:インタフェースファンクション間のステートリンケージ
⑤:デバイスファンクションとインタフェースファンクション間のローカルメッセージ
(インタフェースファンクションへのメッセージはこの規格で決められているが,インタ
フェースファンクションからのメッセージは設計者に任せられる。)
⑥:コントローラ内のデバイスファンクションによって送られるリモートインタフェースメッセ
ージ
4.2.3
インタフェースファンクションの分類
4.2.3.1
設計者は,個々のデバイスの応用範囲に適したインタフェースファンクションを任意に選択し,
組み合わせることができる。
図2及び表1は,有効なインタフェースファンクションの分類である。

10
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1
インタフェースファンクションの分類
インタフェースファンクション
記 号
関連メッセージ経路
ソースハンドシェーク
SH
1,2,4,5
アクセプタハンドシェーク
AH
1,2,4,5
トーカ又は拡張トーカ
T又はTE
1,2,3,4,5
リスナ又は拡張リスナ
L又はLE
1,2,3,4,5
サービスリクエスト
SR
1,2,4,5
リモートローカル
RL
1,2,4,5
パラレルポール
PP
1,2,4,5
デバイスクリア
DC
1,2,4,5
デバイストリガ
DT
1,2,4,5
コントローラ
C
1,2,4,5,6
4.2.3.2
どの瞬間でも,インタフェースファンクションの組合せ(特定のデバイス用に設計者が選択した
組合せ)による能力は,各インタフェースファンクション内でその瞬間にアクティブになっているすべて
のステートの論理的接続である。
4.2.4
インタフェースファンクションの論理設計
4.2.4.1
インタフェースファンクションの定義に用いられているステートダイヤグラムは,そのファンク
ションの論理的及び物理的動作を実現するための明確な回路構成を示してはいない。
例えば,すべてのステートがラッチのFF又は他の記憶素子をもつ必要があるわけではない。
4.2.4.2
インタフェースファンクションを定義しているステートダイヤグラムは,論理回路設計に広い自
由度を与えるべく考慮してある(例えば,ランダムロジック,シーケンシャルロジック等)。
4.2.4.3
本節で定義する各インタフェースファンクションの各ステートに関するすべての条件を満足す
る限り,設計者はある一つの論理設計に二つ又はそれ以上のインタフェースファンクションの組合せを行
うことは自由である。
4.2.4.4
この節では,ステートダイヤグラム,詳細説明,要求及び指針は,デバイス側に対して書かれ,
またデバイス側から見て理解されねばならない。第5節及び第6節は,システム側から見たデバイス間の
関係を示す。
4.2.4.5
インタフェースファンクションは,規格として定義されていないメッセージコーディングはどん
なものでも無視する(応答しない。)。
4.2.4.6
ファンクションは,定義された退出条件が得られた後,定められた条件に矛盾しない限り,いく
らでも(0秒を含む。)そのステートにとどまってよい。
4.3
メッセージの概念
4.3.1
メッセージ 各々のメッセージは一つの情報量を構成し,ある特定の時間にTrue又はFalseとして
受けとられる。
インタフェースファンクション及びその周りの物との間のすべての情報は,メッセージの送・受信によ
って伝達する。
4.3.2
ローカルメッセージの伝達経路と内容
4.3.2.1
インタフェースファンクションとデバイスファンクションとの間で送られるメッセージを,“ロ
ーカルメッセージ”と呼ぶ。
4.3.2.2
ローカルメッセージは,デバイスファンクションとインタフェースファンクションとの間で送ら
れる(図2のメッセージ経路⑤を参照)。
11
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 ある種のローカルメッセージはリモートメッセージを意味し,又は逆の場合もある。
4.3.2.3
設計者は,インタフェースファンクションに対して新しいローカルメッセージを使用することは
許されない。
4.3.2.4
インタフェースファンクションからデバイスファンクションに送られるローカルメッセージの
使用法は設計者に任せる。
4.3.2.5
デバイスファンクションによって送られるローカルメッセージは,ステート移行に必要な時間だ
け存在しなければならない。
4.3.3
リモートメッセージの伝達経路と内容
4.3.3.1
異なったデバイスのインタフェースファンクション間で,インタフェースを経て送られるメッセ
ージを,“リモートメッセージ”と呼ぶ。
4.3.3.2
リモートメッセージは,“インタフェースメッセージ”か“デバイスディペンデントメッセージ”
かのいずれかである。
4.3.3.3
各々のインタフェースメッセージは,他のデバイスのインタフェースファンクションのステート
移行を起こさせるために送られる。
インタフェースメッセージは,図2のメッセージ経路②に示すように,インタフェースファンクション
によって受けとられるが,デバイスには直接伝達されない。
4.3.3.4
デバイスディペンデントメッセージは,デバイスファンクションとメッセージコーディングロジ
ックとの間で規定されたインタフェースファンクションを経由して渡される。これらは,インタフェース
ファンクション内ではステート移行を生じさせない。
図2のメッセージ経路③に示すデバイスディペンデントメッセージの例は,デバイスのプログラムデー
タ,デバイスの測定データ,デバイスのステータスデータなどがある。
4.3.4
ステートリンケージの伝達経路と内容
4.3.4.1
ステートリンケージは,図2のメッセージ経路④に示すように,一つのインタフェースファンク
ションのアクティブステートへの移行が,他のインタフェースファンクションの規定されたアクティブス
テートの存在に依存するような二つのインタフェースファンクションの論理結合である。
4.3.5
メッセージコーディング
4.3.5.1
メッセージコーディングは,リモートメッセージのコード変換を行うところである。
4.3.5.2
1本の信号線によって送るメッセージを,“ユニラインメッセージ”と呼ぶ。これらのメッセージ
の二つ以上を同時に送ることができる。
4.3.5.3
いくつかの互いに排他的な組合せをもつ他のメッセージと信号線のグループを共有するメッセ
ージを,“マルチラインメッセージ”と呼ぶ。同時には,ただ一つのマルチラインメッセージ(メッセージ
バイト)しか送ることができない。
4.3.6
マルチラインメッセージの分類
4.3.6.1
マルチラインメッセージは,ATNメッセージがTrueの場合,インタフェースメッセージとして
判断される。
4.3.6.2
マルチラインメッセージは,ATNメッセージがFalseの場合,デバイスディペンデントメッセー
ジとして判断される。
12
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.3.6.3
ATNメッセージがTrueの場合は,各デバイスはこれらのマルチラインメッセージのいずれか又
はすべてを受信し,それに相応した動作を行ってよい。これらのメッセージは,デバイスのもつインタフ
ェースファンクションの範囲とインタフェースファンクション内のアクティブなステートの組合せによっ
て決定される。
インタフェースメッセージは,次のように分類される。
(1) ユニバーサルコマンド(インタフェースファンクションステートにかかわりなくすべてのテバイスに
よって受信される。)
(2) アドレスコマンド(受信すべくアドレスされたデバイスによって受信される。)
(3) アドレス(すべてのデバイスによって受信される。)
(4) 2次アドレス,2次コマンド(1次アドレス,又は1次コマンドで受信可能状態にされたすべてのデバ
イスによって受信される。)
特定のコマンドのリストは表36による。
4.3.6.4
ATNメッセージがFalseのときは,リスナに指定されていれば,自分へのデバイスディペンデン
トメッセージを受信し,それに相応した動作を行ってよい。
4.3.7
メッセージ伝達規定
4.3.7.1
リモートメッセージ規定
(a) デバイスが送信するすべてのリモートメッセージの値(True又はFalse)は,どんなときでもそのイン
タフェースファンクションのアクティブステートが指示する。
(b) メッセージの値を送るために用いるインタフェース信号線は,リモートメッセージコーディング(表
38参照)で規定するレベルに設定する。
(c) 通常のインタフェースの動作は,二つ以上のデバイスが同時にリモートメッセージの正反対の値を送
ることを許すから,これらの不一致を解決する方法が与えられる。
これは,インタフェースのメッセージ転送の二つの手段“Active転送”と“Passive転送”を行うこ
とによって達成される。インタフェースは二つのメッセージの値が不一致の場合,一つはActiveであ
り,その他はPassiveであるように構成される。メッセージは,不一致が発生した場合には常にActive
値がPassiveな値を無効にするように転送される。
(d) リモートメッセージは,次の四つの方法の一つで転送することができる。
(1) Active Trueで送信する値は,確実に受信される(デバイスはその値が無効にされることを許さない。)。
(2) Passive Trueで送信する値は,受信される値であるとは限らないし,デバイスはその値が無効にされ
ることを許容しなくてはならない。
(3) Active Falseで送信する値は,確実に受信される(デバイスはその値が無効にされることを許さな
い。)。
(4) Passive Falseで送信する値は,受信される値であるとは限らないし,デバイスはその値が無効にさ
れることを許容しなくてはならない。
(e) この規格では,インタフェースファンクションによって送られるリモートメッセージの値TrueとFalse
の語句は,規定しない限りActive TrueとActive Falseを意味する。
(f) 二つのリモートメッセージ,DACとRFDについては,False値だけがアクティブであることを定義す
る。
そのため論理AND動作がインタフェース信号線上でなされると考えられる(33.を参照のこと。)。
(g) 一つのリモートメッセージ,SRQについては,True値だけがアクティブであると定める。そのため論
13
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
理OR動作がインタフェース信号線上でなされると考えられる(33.を参照のこと。)。
(h) Trueで送るマルチラインメッセージだけは,(DIOラインを経て送る。)マルチラインメッセージが性
質上,互いに排他的であることから,インタフェースファンクションのステートによって規定する。
そのステートがアクティブである間は,他の規定がないマルチラインメッセージはすべてPassive False
で送られる。
4.3.7.2
ローカルメッセージの伝達規定
(a) ローカルメッセージのコーディングは,この規定の範囲外であり,デバイスの設計者に任せる。
(b) インタフェースファンクションの互いに排他的なステート群間の移行を制御するローカルメッセージ
は互いに排他的であることが望ましい。
5. インタフェースファンクションの規定に使用される記号法
5.1
ステートダイヤグラムの表記記号
5.1.1
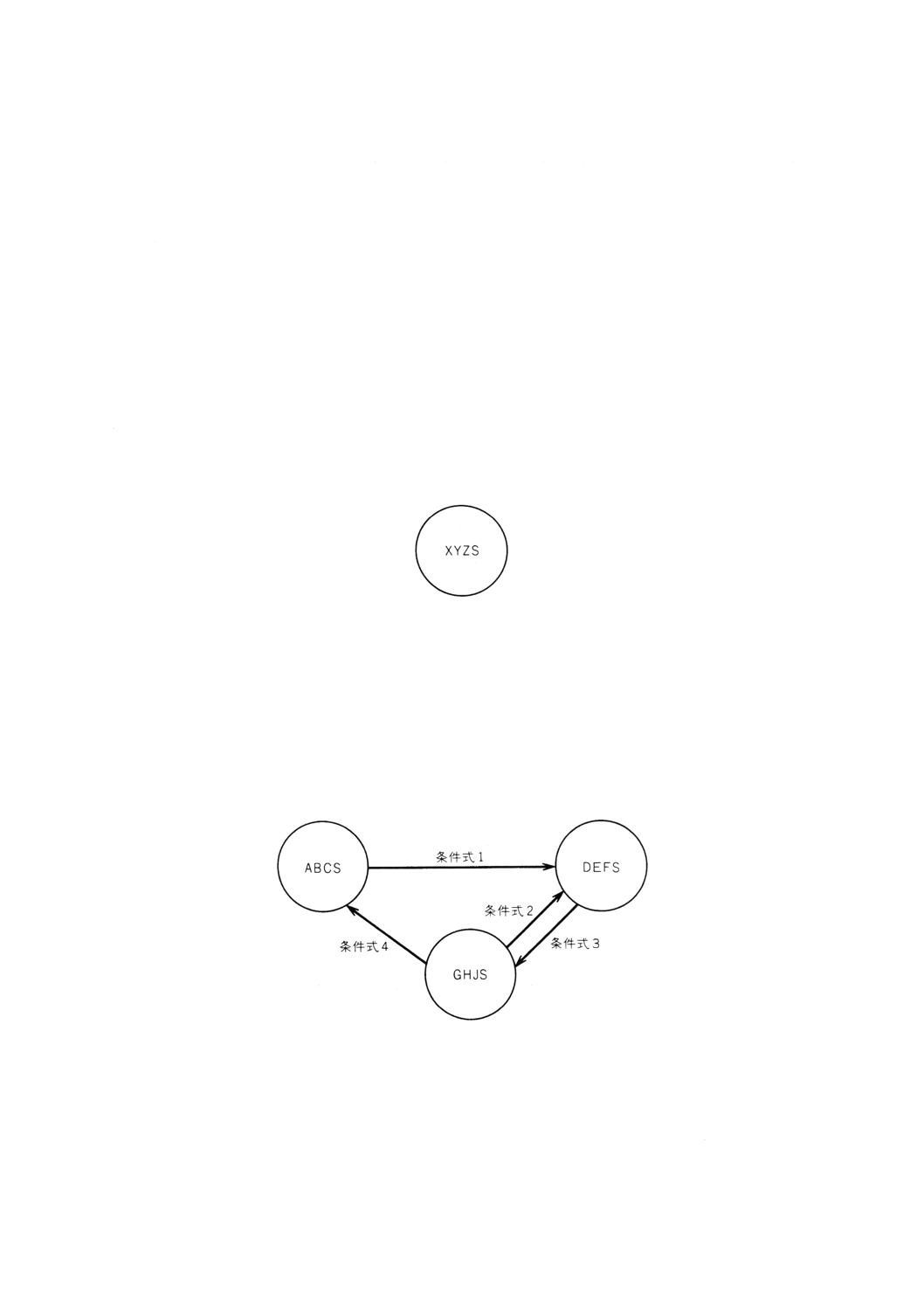
インタフェースファンクションの各ステートは,図で円として表し,そのステートは,常にSで終
わる四つの大文字を円内に表記する。
5.1.2
インタフェースファンクションのステートの間のすべての許される“移行”は,図でそれらを表し
ている円の間の矢印によって表す。
5.1.3
各移行は,その値がTrue又はFalseである条件式によって制限する。他のステートへの移行条件が
すべてFalseならば,インタフェースファンクションは現在のステートにとどまらなければならない。そ
れらの条件のうち一つがTrueになった場合だけインタフェースファンクションは指示されたステートに
移行する。
もしも,時間値が規定されていなければ,その条件がTrueになったら,いつでも新しいステートに移行
することができる。
5.1.3.1
条件式は,論理記号AND,OR,NOTと共に使用される一つ又はそれ以上のローカルメッセージ,
リモートメッセージ,ステートリンケージ及び時間制限から成り立っている。
5.1.3.2
インタフェースファンクションへのローカルメッセージは,例えばrdyのように,英小文字で書
かれた3文字の記号で表す。
5.1.3.3. リモートメッセージ(インタフェースを経由して受けとられる。)は,英大文字で書かれた3文
字の記号で表す(例:ATN)。
14
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.3.4
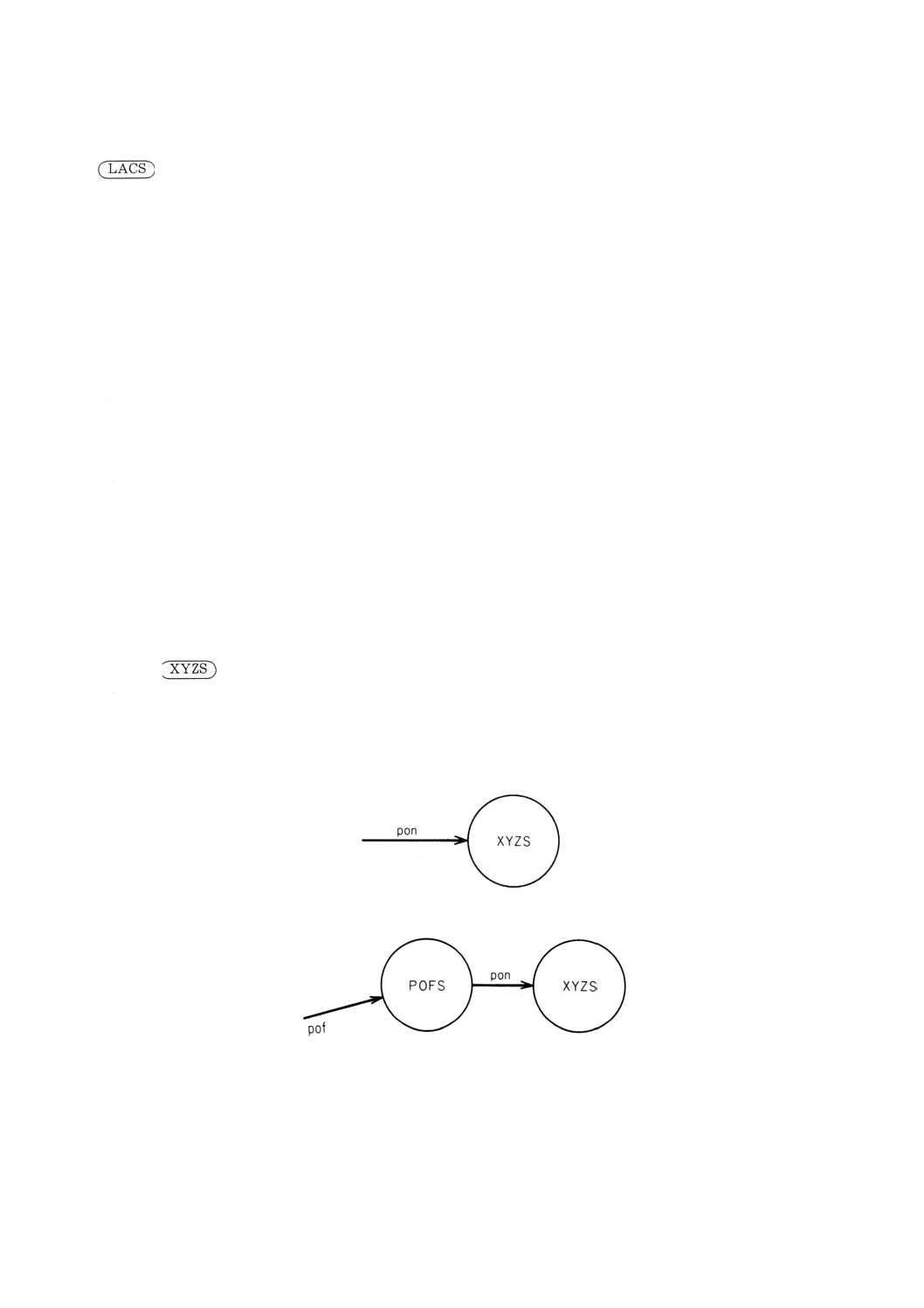
別のステートダイヤグラムとのリンケージは,だ円で囲まれた4文字記号によって表す(例:
)。
もし,囲まれたステートが現在アクティブならば,ステートリンケージはTrueであり,そうでないなら
ばFalseである。
5.1.3.5
最小時間制限は,記号“Tn”で表す。この記号は,少なくとも規定された時間,そのステートに
留まった後,次のステートに移行することを示す。これらの時間制限値を表39に記す。
5.1.3.6
論理ANDは,記号“∧”で表す。
5.1.3.7
論理ORは,記号“∨”で表す。
5.1.3.8
論理ANDは,括弧で制限されていないならば論理ORに優先する。
5.1.3.9
論理NOTは,否定されるべき条件の上の棒線によって表す。結果として,否定された条件は,
線の下の条件がFalseの場合だけTrueである。
5.1.4
もし,更に移行が最大時間制限“(tn以内)”,によって制限されるならば,そのステートは条件が
Trueになった後,その制限時間内にアクティブにならなければならない。
5.1.5
条件の一部がオプションで,設計者の選択によってはTrueである必要がない場合には,オプショ
ン部分を〔 〕で囲んで示す。
5.1.6
もし,特定の条件がダイヤグラムの他のすべてのステートから,一つのステートに移行を起こすな
らば,すべての個々の移行を書く代わりに省略した記号法を用いる。
起点となるステートをもたない矢印は,この状態を表すために用いられており,すべての他のステート
から起こり得るステートである。また,この条件は,ダイヤグラム中の他のすべての移行に関してFalse
であると見なせるので,これらはダイヤグラムから省略する(例:IFC又はREN)。
条件→
5.1.7
“Power off” (POFS) は,ほとんどのインタフェースファンクションで有効なステートであり,本
来はすべてのダイヤグラムでPower on時に達せられるステートに導く移行として表されるべきであるが,
ponを省略形として用いる。
(1) ステートダイヤグラムで使用される省略記号法
(2) 上記シンボルの意味する完全な表現
5.2
メッセージの出力記号
5.2.1
各インタフェースファンクションのステートダイヤグラムとともに記載したメッセージ出力表は,
そのファンクションの各ステートで送ることができるリモートメッセージだけを要約している。
5.2.2
メッセージ出力表の列は,インタフェースファンクションのステートを示すのに使用している。
15
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.2.3
メッセージ出力表の行は,インタフェースファンクションの少なくとも一つのステートの間に送る
ことができるリモートメッセージを示す。
5.2.4
それぞれのテーブルの記入事項は,特定のステートがアクティブの間送らなければならないメッセ
ージの値を示している。
(1) “T”はActive Trueを示す。
(2) “F”はActive Falseを示す。
(3) “(T)”はPassive Trueを示す。
(4) “(F)”はPassive Falseを示す。
5.2.5
必要な場合は,各テーブルの1行に送ることができるマルチラインリモートメッセージ群を示す。
マルチラインメッセージは,テーブルに記されたのと一致するステートが起こった場合にはTrueで出力さ
れる。マルチラインメッセージは本来排他的であるから,Falseでは表していない。マルチラインメッセー
ジの周りの括弧はActive TrueではなくPassive Trueで送らなければならないことを示している。
5.2.6
デバイスファンクションの動作の欄は,デバイスファンクションが送・受信を許されるメッセージ
を要約している。インタフェースファンクションからデバイスファンクションへのローカルメッセージは,
この規格の範囲外であり,設計者の選択で適当な動作をさせるために使用してよい。
6. ソースハンドシェークインタフェース (SH) ファンクション
6.1
概説 SHファンクションは,マルチラインメッセージを確実に送信する機能をデバイスにもたせる
ものである。接続された一つのSHファンクションと,一つ又はそれ以上のアクセプタハンドシェークイ
ンタフェースファンクション(それぞれ個別のデバイスに含まれる。)間のハンドシェークシーケンスによ
って各マルチラインメッセージの非同期転送が確実に行われる。SHファンクションは,マルチラインメ
ッセージバイト転送の開始,及び終了を制御する。このファンクションは,DAV,RFD,DACメッセージ
を用いてメッセージバイトの効率の良い転送を行う。
6.2
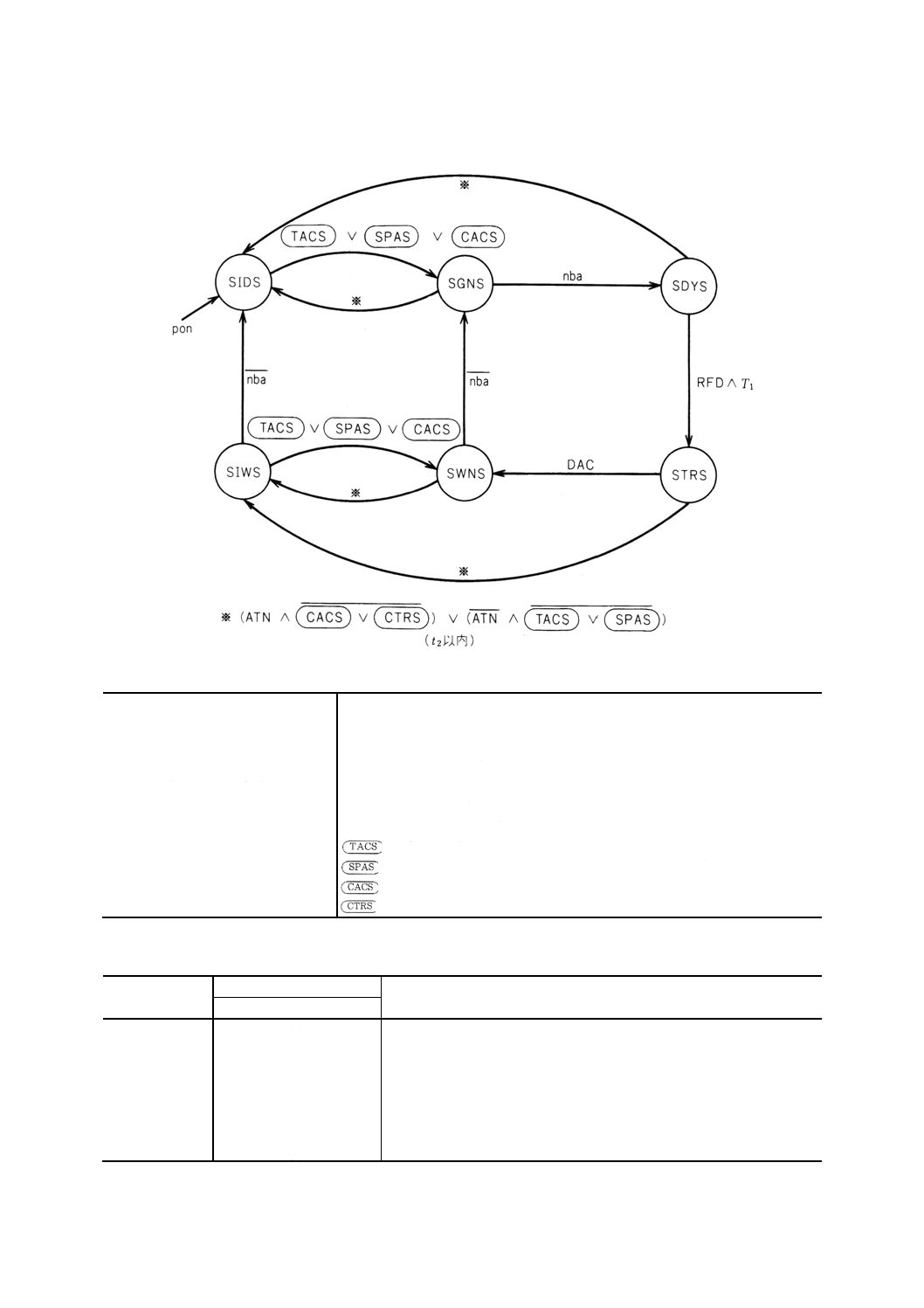
SHファンクションのステートダイヤグラム SHファンクションは,図3に示すステートダイヤグ
ラムと6.に記述されているステートに従って動作する。表2は,あるアクティブステートから次のステー
トに移行するためのメッセージやステートについて記述したものである。表3は,各ステートがアクティ
ブのときに送るメッセージ及びデバイスファンクションの動作を示す。
6.3
SHファンクションのステートの説明
6.3.1
SIDS (Source Idle State)
6.3.1.1
SIDSでは,SHファンクションはハンドシェークサイクルに関与しない。そして新しいメッセー
ジバイトを送信しない。
SHファンクションは,電源投入時にSIDSに入る。
6.3.1.2
SIDSでは,SHファンクションはDAVメッセージをPassive Falseで送信する。
6.3.1.3
SHファンクションは,次の条件でSIDSからSGNSへ移行する。
(1) TACSがアクティブの場合。
(2) 又は,SPASがアクティブな場合。
(3) 又は,CACSがアクティブな場合。
16
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 ソースハンドシェークのステートダイヤグラム
表2 SHメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon-power on
SIDS−SOURCE IDLE STATE
nba-new byte available
SGNS−SOURCE GENERATE STATE
ATN−ATTENTION
SDYS−SOURCE DELAY STATE
RFD−READY FOR DATA
STRS−SOURCE TRANSFER STATE
DAC−DATA ACCEPTED
SWNS−SOURCE WAIT FOR NEW CYCLE STATE
SIWS−SOURCE IDLE WAIT STATE
−TALKER ACTIVE STATE(Tファンクション)
−SERIAL POLL ACTIVE STATE(Tファンクション)
−CONTROLLER ACTIVE STATE(Cファンクション)
−CONTROLLER TRANSFER STATE(Cファンクション)
表3 SHメッセージ出力
SHステート
リモートメッセージ送信
デバイスファンクションの動作
DAV
SIDS
(F)
デバイスファンクションはマルチラインメッセージを変更できる。
SGNS
F
同上
SDYS
F
DAB,EOSマルチラインメッセージ及びENDメッセージを変更しない。
STRS
T
同上
SWNS
T or F
デバイスファンクションはマルチラインメッセージを変更することを要求さ
れている。
SIWS
(F)
同上
17
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.2
SGNS (Source Generate State)
6.3.2.1
SGNSでは,デバイスは新しいメッセージバイトを用意し,SHファンクションはそのメッセージ
バイトが有効となるのを待つ。
6.3.2.2
SGNSでは,SHファンクションはDAVメッセージをFalseで送信する。このステートでは,デ
バイスはTファンクションやCファンクションを経由して(TACS及びCACSの間に)送信するマルチラ
インメッセージを変えてもよい。
6.3.2.3
SHファンクションは,SGNSから次の条件で別のステートへ移行する。
(a) nbaメッセージがTrueになるとSDYSへ移行する。
(b) 次の条件でt2以内にSIDSへ移行する。
(1) ATNメッセージがTrueで,しかもCACS及びCTRSのいずれもアクティブでない場合。
(2) 又はATNメッセージがFalseで,しかもTACS及びSPASのいずれもアクティブでない場合。
6.3.3
SDYS (Source Delay State)
6.3.3.1
SDYSでは,SHファンクションはSGNSの間に変更したメッセージバイトがインタフェース信号
線上で落ちつくのを待つ。また,すべてのAHファンクションがメッセージを受け取る準備が完了するの
を待つステートでもある。
6.3.3.2
SDYSでは,SHファンクションはDAVメッセージをFalseで送信する。このステートではデバ
イスは,マルチラインメッセージを変更しない。
6.3.3.3
SHファンクションは,SDYSから次の条件で別のステートへ移行する。
(a) RFDメッセージがTrueになったら,T1時間後にSTRSへ移行する。
(b) 次の場合,t2時間以内にSIDSへ移行する。
(1) ATNメッセージがTrueで,しかもCACS及びCTRSのいずれもアクティブでない場合。
(2) ATNメッセージがFalseで,TACS及びSPASのいずれもアクティブでない場合。
6.3.4
STRS (Source Transfer State)
6.3.4.1
STRSでは,SHファンクションはAHファンクションに有効なメッセージバイトを転送している
状態であることを示している。
6.3.4.2
STRSでは,SHファンクションはDAVメッセージをTrueで送信する。このステートでデバイス
はマルチラインメッセージ及びENDメッセージ(もし使用しているならば)を変更しない。
6.3.4.3
SHファンクションは,STRSから次の条件で別のステートへ移行する。
(a) 次の場合は,t2時間以内にSIWS (Source Idle Wait State) へ移行する。
(1) ATNメッセージがTrueで,しかもCACS及びCTRSのいずれもアクティブでない場合。
(2) 又は,ATNメッセージがFalseで,しかもTACS及びSPASのいずれもアクティブでない場合。
備考 これは非同期の割り込みを意味する(15.5参照)。
(b) DACメッセージはTrueになったら,SWNSへ移行する。
6.3.5
SWNS (Source Wait For New Cycle State)
6.3.5.1
SWNSでは,SHファンクションはデバイスが新しいメッセージバイトを送出するのを待ってい
るステートである。
6.3.5.2
SWNSでは,SHファンクションはDAVメッセージをTrue,Falseのいずれにしてもよい。この
ステートのときデバイスは,マルチラインメッセージを変えてもよい。
6.3.5.3
SHファンクションは,SWNSから次の条件で別のステートへ移行する。
(a) nbaメッセージがFalseならば,SGNSへ移行する。
18
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(b) 次の場合には,t2時間以内にSIWSへ移行する。
(1) ATNメッセージがTrueで,しかもCACS及びCTRSのいずれもアクティブでない場合。
(2) 又は,ATNメッセージがFalseで,しかもTACS及びSPASのいずれもアクティブでない場合。
6.3.6
SIWS (Source Idle Wait State)
6.3.6.1 SIWSでは,SHファンクションは外部的なメッセージバイト転送に関してはアクティブではない。
しかし,自分自身が次の新しいメッセージバイトの送信サイクルが始まるのを待つ内部動作としてはア
クティブである。このステートを使用すると,インタフェース上のデータの損失なしにメッセージバイト
転送シーケンスに対する割り込みが可能であり,デバイスは割り込みが生じた時点で,次の新しいメッセ
ージバイトを送信する準備状態で待ち続ければよい。
6.3.6.2
SIWSでは,DAVメッセージをPassive Falseで送信する。
6.3.6.3
SHファンクションは,SIWSから次の条件で別のステートへ移行する。
(a) nbaメッセージがFalseならば,SIDSへ移行する。
(b) TACS又はSPASがアクティブである場合,又はCACSがアクティブの場合,SWNSへ移行する。
6.4
SHファンクションのサブセット SHファンクションに許されるサブセットを表4に示す。
表4
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
SH0
SH1
SHの機能なし
SHの全機能をもつ
すべて
なし
なし
なし
なし
T1〜T8,TE1〜TE8,C5〜C28の
いずれか
6.5
SHファンクションの補足説明及び指針
6.5.1
nbaメッセージについての説明
6.5.1.1
nbaメッセージがTrueであるということは,デバイスが新しいメッセージを発生したことを示し,
インタフェース信号線上のメッセージが有効となったことを示す。
6.5.1.2 nbaメッセージは,SIDS,SGNSのときだけ,Trueにできる。nbaメッセージは他のどのステート
でもFalseにしてよい。
6.5.2
アイドルステートへの移行条件の別の表現 図3における割り込みに関する表現 (ATN∧
は,各ステートへの移行がATNの変化後t2時間以
内に完了する場合には,
という表現に置き換えてもよい。
7. アクセプタハンドシェークインタフェース (AH) ファンクション
7.1
概説 SHファンクションは,リモートマルチラインメッセージを確実に受信する機能をデバイスに
もたせるものである。一つのSHファンクションと,一つ又はそれ以上のAHファンクション(それぞれ
別々のデバイスに含まれる。)間とのハンドシェークシーケンスによって各メッセージバイトを確実に転送
する。
AHファンクションは,バス上のメッセージバイト転送において,自分自身がメッセージ受信準備完了
又は受信完了するまでその転送の開始及び終了を遅らすことができる。AHファンクションは,DAV,RFD,
DACメッセージを用いてメッセージバイトの効率のよい転送を行う。
19
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2
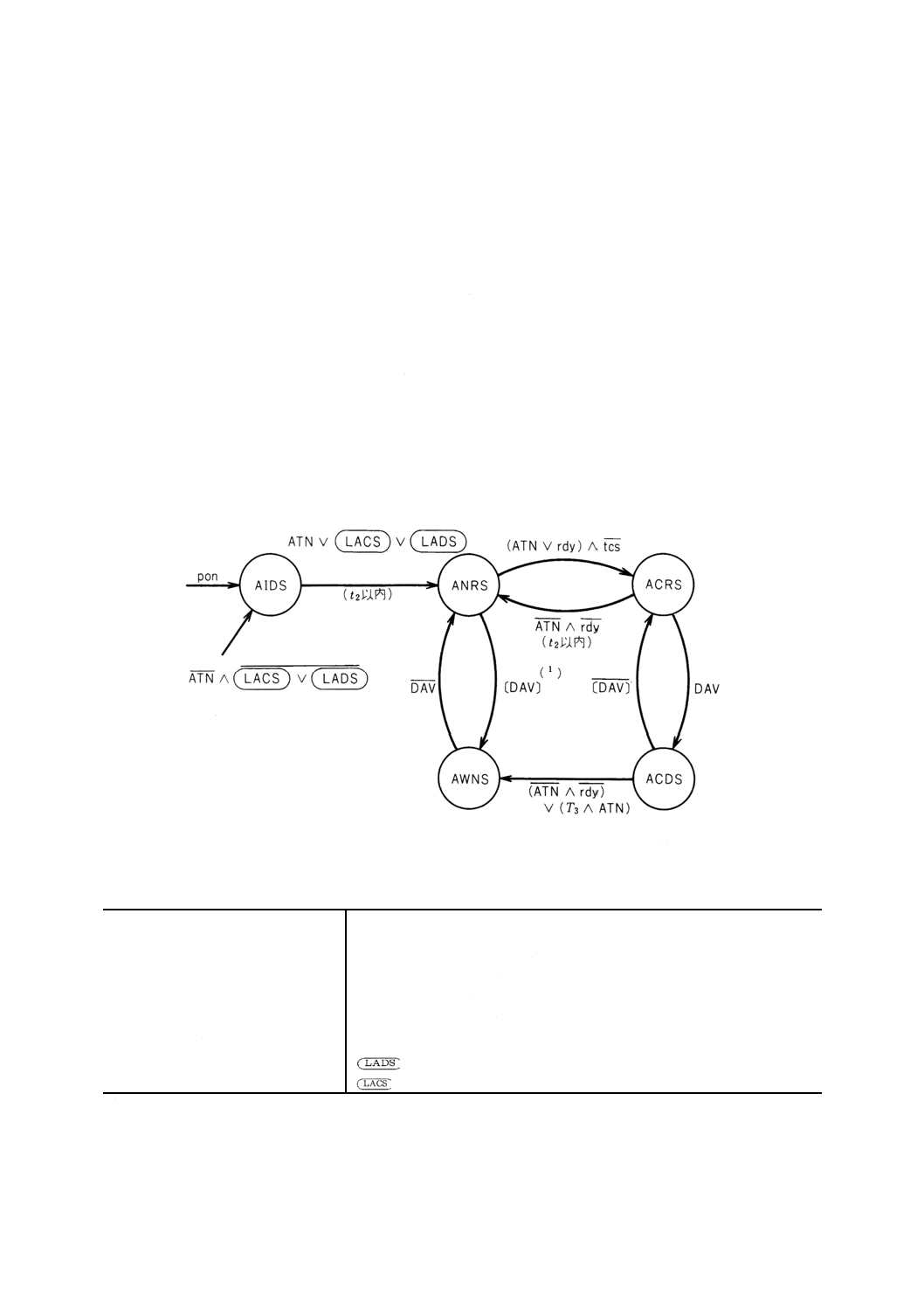
AHファンクションのステートダイヤグラム AHファンクションは,図4及び7.で説明するステー
トに従って動作する。表5は,あるアクティブステートから次のステートに移行するとき必要なメッセー
ジやステートを示す。表6は,各ステートがアクティブのとき送るメッセージ及びデバイスファンクショ
ンの動作を示す。
7.3
AHファンクションのステートの説明
7.3.1
AIDS (Accepter Idle State)
7.3.1.1
AIDSでは,AHファンクションはアクティブであってはならず,ハンドシェークサイクルに関与
しない。
AHファンクションは,電源投入時にこのステートに入る。
7.3.1.2
AIDSでは,RFD,DACメッセージをPassive Trueで送信する。
7.3.1.3
AHファンクションは,AIDSから次の条件でt2時間以内にANRSへ移行する。
(1) ATNメッセージがTrueの場合。
(2) 又は,LACSがアクティブの場合。
(3) 又は,LADSがアクティブの場合。
図4 アクセプタハンドシェークのステートダイヤグラム
注(1) このような転送は普通のインタフェース操作ではあり得ない。しかしながら,こ
の移行を設けることによってインタフェースファンクションの設計を簡単にする
ことができる。
表5 AHメッセージ及びステート一覧表
メッセージ:
インタフェースステート:
pon−power on
AIDS−ACCEPTOR IDLE STATE
rdy−ready for next message
ANRS−ACCEPTOR NOT READY STATE
tcs−take control synchronously(1)
ACRS−ACCEPTOR READY STATE
ACDS−ACCEPT DATA STATE
ATN−ATTENTION
AWNS−ACCEPTOR WAIT FOR NEW CYCLE STATE
DAV−DATA VALID
−LISTENER ADDRESSED STATE(Lファンクション)
−LISTENER ACTIVE STATE(Lファンクション)
注(1) 15.3.7.1を参照
20
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表6 AHのメッセージ出力
AHステート
リモートメッセージ出力
デバイスファンクションの動作
RFD
DAC
AIDS
(T)
(T)
デバイスはマルチラインメッセージもENDメッセージも受け取
らない。
ANRS
F
F
同上
ACRS
(T)
F
同上
AWNS
F
(T)
同上
ACDS
F
F
デバイスはもしLACSがアクティブならばマルチラインメッセ
ージを受けることができる。
7.3.2
ANRS (Acceptor Not Ready State)
7.3.2.1
ANRSでは,AHファンクションはデバイス内部がハンドシェークサイクルを続ける準備がまだ
できていないことを示す。
7.3.2.2
ANRSでは,RFD,DACメッセージをFalseで送信する。
7.3.2.3
AHファンクションは,ANRSから次の条件で別のステートへ移行する。
(a) tcsメッセージがFalseで,しかもATNメッセージがTrue,又はrdyメッセージがTrueの場合,ACRS
ステートへ移行する(15.3.7.1を参照)。
(b) ATNメッセージがFalseで,しかもLADSもLACSもいずれもアクティブでない場合,AIDSへ移行
する。
(c) もしDAVメッセージがTrueの場合,AWNSへ移行する(しかし,このようなことは通常のインタフ
ェース操作ではあり得ない。)。
7.3.3
ACRS (Acceptor Ready State)
7.3.3.1
ACRSでは,AHファンクションはマルチラインメッセージを受け取る準備ができたことを示す。
7.3.3.2
ACRSでは,DACメッセージをFalseにし,RFDメッセージをPassive Trueで送信する。
7.3.3.3
AHファンクションは,ACRSから次の条件で別のステートへ移行する。
(a) DAVメッセージがTrueになれば,ACDS (Accept Data State) へ移行する。
(b) ATNメッセージがFalseで,しかもLADS及びLACSのいずれもアクティブでない場合,AIDSへ移
行する。
(c) ATNメッセージも,rdyメッセージもFalseの場合には,t2時間以内にANRSへ移行する。
7.3.4
ACDS (Accept Date State)
7.3.4.1
ACDSでは,AHファンクションはSHファンクションに対してメッセージバイトを有効のままで
いるよう指示する。このステートの間だけDIOライン上のメッセージは有効である。
ATNメッセージがTrueの場合,ACDSはインタフェースファンクションに対して現在バスはインタフェ
ースメッセージを転送中であり,DIOラインにそのメッセージが確立していることを示す。
LACSがアクティブの場合,ACDSはデバイスファンクションに対して現在のデバイスディペンデント
メッセージが有効であることを示す。
7.3.4.2
ACDSでは,DAC,RFDメッセージをFalseで送信する。
7.3.4.3
AHファンクションは,ACDSから次の条件で別のステートへ移行する。
(a) ATNメッセージがTrueの場合はT3時間経過後,又はATNメッセージがFalseの場合はrdyメッセー
ジがFalseになったとき,AWNS (Acceptor Wait For New Cycle State) へ移行する。
(b) ATNメッセージがFalseで,LADS及びLACSのいずれもアクティブでない場合,AIDSへ移行する。
21
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(c) もしDAVメッセージがFalseの場合,ACRSへ移行する。
7.3.5
AWNS (Acceptor Wait For New Cycle State)
7.3.5.1
AWNSでは,AHファンクションはマルチラインメッセージを受け取り終わったことを示す。
7.3.5.2
AWNSでは,RFDメッセージをFalseで送信し,DACメッセージをPassive Trueで送信する。
7.3.5.3
AHファンクションは,AWNSから次の条件で別のステートへ移行する。
(a) DAVメッセージがFalseならばANRSへ移行する。
(b) ATNメッセージがFalseで,しかもLADS及びLACSのいずれもアクティブでない場合,AIDSへ移
行する。
7.4
AHファンクションのサブセット AHファンクションに許されるサブセットは,表7のとおりであ
る。
表7
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
AH0
AHの機能なし
すべて
なし
なし
AH1
AH全機能をもつ
なし
なし
なし
7.5
AHファンクションの補足説明及び指針
7.5.1
rdyメッセージはACRSの間にFalseになってはならない。ACRSからANRSへ移行できるのはATN
がFalseになったときだけである。
7.5.2
AHファンクションが受け取るRFDメッセージは,すべてのアクティブなAHファンクションから
転送されるRFDメッセージの論理ANDである。同様にSHファンクションによって受け取られるDAC
メッセージも,すべてAHファンクションから転送されるDACメッセージの論理ANDである。一つの
SHファンクションと多くのAHファンクションとの論理ANDのとりかたは,NRFD,NDAC信号ライン
の使用方法として33.に示す。
7.5.3
インタフェースファンクションは,規格化されたステートダイヤグラムに従って動作するよう設計
する必要がある。しかし,そのステートダイヤグラムを正確に記述する必要はない。
次に,その一例を示す。
インタフェースメッセージの受信によって生じる各インタフェースファンクションのステート移行は,
そのメッセージを受信後行ってもよい。ただし,この場合,移行が終了するまで,次のメッセージ受信の
ためRFDメッセージをFalseにしておく。
インタフェースメッセージ受信中にステート移行を行う(ステートダイヤグラムに忠実な移行)場合と,
現象的にとらえられただけでは区別できない。
このようなステート移行を行う場合は,AHファンクションの退出条件がTrueであってもRFDメッセー
ジをFalseにしておくため,ANRSに留まるべきである。
8. トーカインタフェース (T) ファンクション(シリアルポール機能を含む。)
8.1
概要
8.1.1
Tファンクションは,他のデバイスへデータ(シリアルポール中のステータスデータを含む。)を
インタフェースを通じて送る機能をデバイスに与える。
この機能は,Tファンクションがトーカとしてアドレスされたときだけ存在する。
22
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.1.2
Tファンクションには2種類あり,一つはアドレス拡張機能をもち,もう一つはもたない。通常の
Tファンクションは,1バイトアドレスを使用する。アドレス拡張機能をもつTファンクション(以下,
TEという。)は,2バイトアドレスを使用する。他のすべての点についてはTとTEファンクションの機
能は,全く同様である。
8.1.3
2種類のTファンクションのうちのどちらか一つが固有のデバイスに必要である。
備考 TファンクションとTEファンクションには広範囲にわたり類似性があるため,8.にまとめて述
べられている。
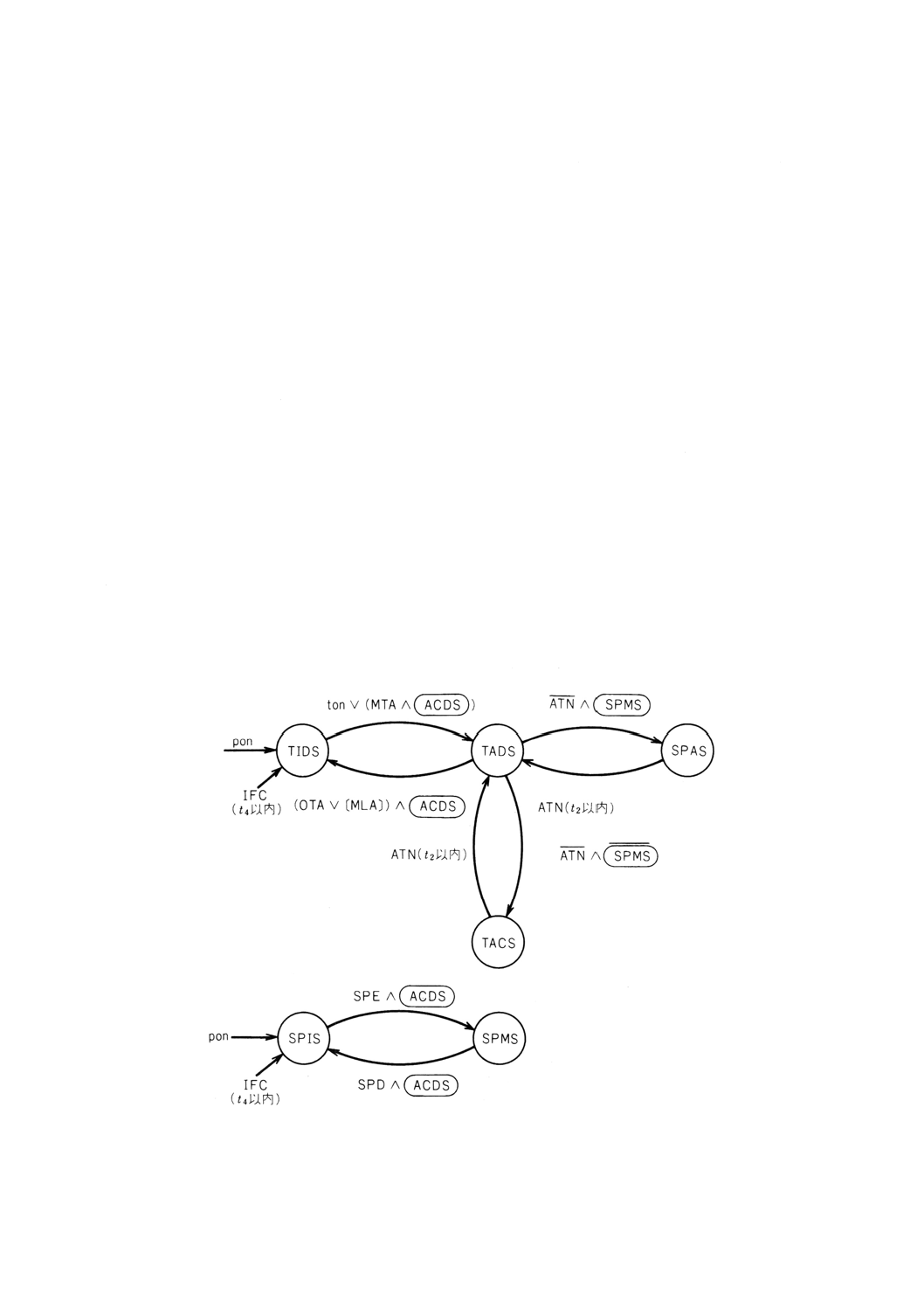
8.2
Tファンクションのステートダイヤグラム
8.2.1
Tファンクションは,図5のステートダイヤグラムと8.に記述されているステートに従って動作す
る。
表8は,あるアクティブステートから次のステートに移行するためのメッセージやステートについて記
述したものである。
表9は,各ステートがアクティブのときに送らなければならないメッセージ及びデバイスファンクショ
ンの動作を示す。
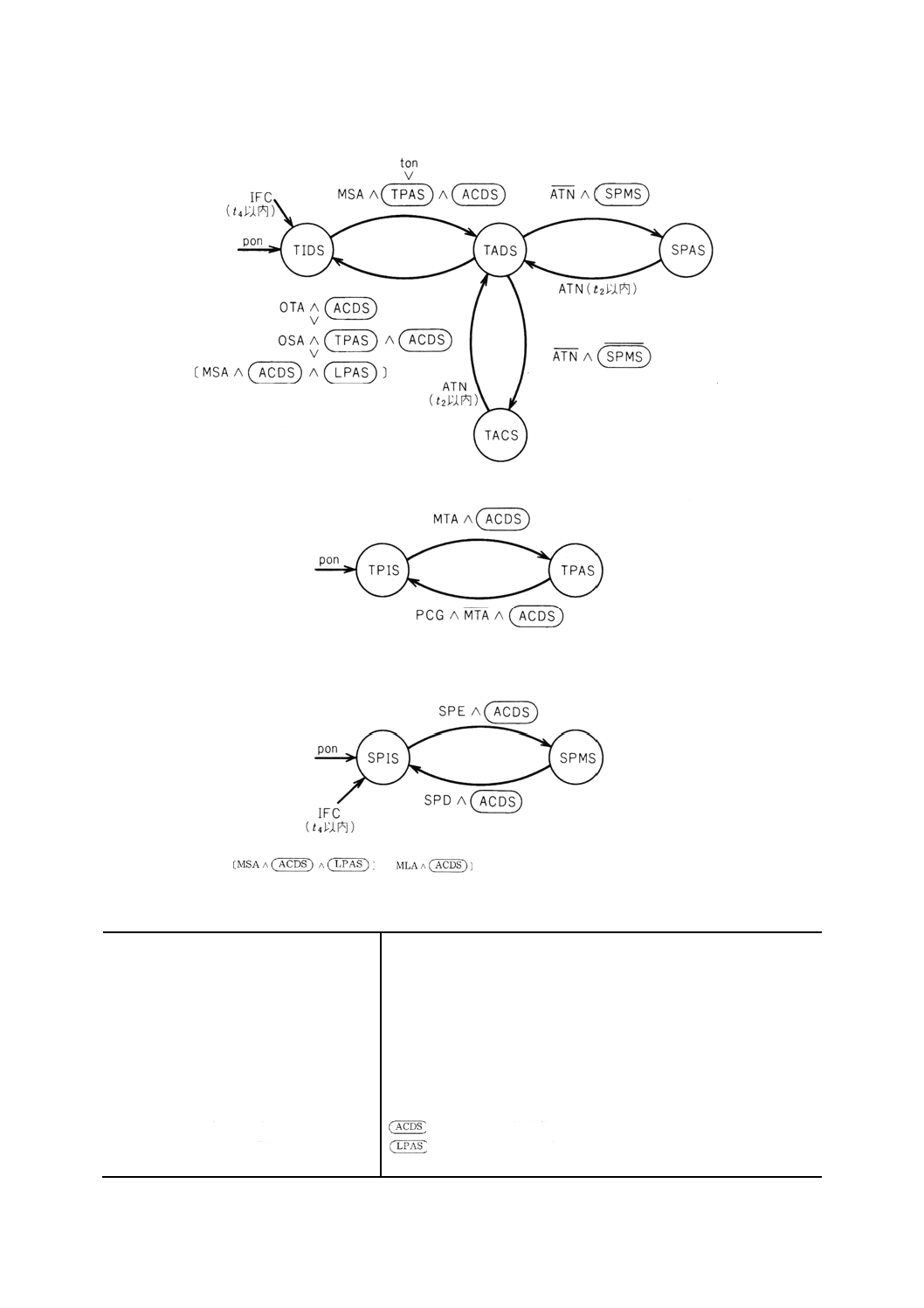
8.2.2
TEファンクションは,図6のステートダイヤグラムと8.に記述されているステートに従って動作
する。
表10は,あるアクティブステートから次のステートに移行するためのメッセージやステートについて記
述したものである。
表11は,各ステートがアクティブのときに送らなければならないメッセージ及びデバイスファンクショ
ンの動作を示す。
図5 トーカのステートダイヤグラム
23
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表8 Tメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
TIDS−TALKER IDLE STATE
ton−talk only
TADS−TALKER ADDRESSED STATE
IFC−INTERFACE CLEAR
TACS−TALKER ACTIVE STATE
ATN−ATTENTION
SPAS−SERIAL POLL ACTIVE STATE
MTA−MY TALK ADDRESS
SPIS−SERIAL POLL IDLE STATE
SPE−SERIAL POLL ENABLE
SPMS−SERIAL POLL MODE STATE
SPD−SERIAL POLL DISABLE
−ACCEPT DATA STATE(AHファンクション)
OTA−OTHER TALK ADDRESS
MLA−MY LISTEN ADDRESS
表9 T又はTEメッセージの出力表
Tステート
条 件
リモートメッセージの送信(2)
デバイスファンクションの動作
マルチライン
END
RQS(4)
TIDS
(NUL)
(F)
(F)
デバイスはメッセージを送信してはいけない。
TADS
(NUL)
(F)
(F)
デバイスはアドレスされるが,メッセージを送信して
はいけない。
TACS
DAB(1)
又はEOS(1)
T(1)
又はF(1)
(F)
デバイスはDAB,EOS又はDABと同時にENDメッ
セージを送信することができる。
SPAS
APRS(1)
でない場合
STB
又はT
F
デバイスはSTBメッセージを1バイト送信できる(3)。
SPAS
APRS
の場合
STB(1)
又はT
T
同上
注(1) メッセージの送信はデバイスファンクションのTファンクションにより可能となる。
(2) 16.表38を参照のこと。
(3) SHファンクションによって送信はコントロールする。
(4) 8.3.4.1を参照のこと。
(5) 10.3.3を参照、のこと。
24
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6 拡張トーカのステートダイヤグラム
備考 TEファンクションとLファンクションとを同時に使うときは
を
にする。
表10 TEメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
TIDS−TALKER IDLE STATE
ton−talk only
TADS−TALKER ADDRESSED STATE
IFC−INTERFACE CLEAR
TACS−TALKER ACTIVE STATE
ATN−ATTENTION
SPAS−SERIAL POLL ACTIVE STATE
MTA−MY TALK ADDRESS
TPIS−TALKER PRIMARY IDLE STATE
OTA−OTHER TALK ADDRESS
TPAS−TALKER PRIMARY ADDRESSED STATE
OSA−OTHER SECONDARY ADDRESS
SPIS−SERIAL POLL IDLE STATE
PCG−PRIMARY COMMAND GROUP
SPMS−SERIAL POLL MODE STATE
SPE−SERIAL POLL ENABLE
−ACCEPT DATA STATE(AHファンクション)
SPD−SERIAL POLL DISABLE
−LISTENER PRIMARY ADDRESSED STATE
MSA−MY SECONDARY ADDRESS
(Lファンクション)
25
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
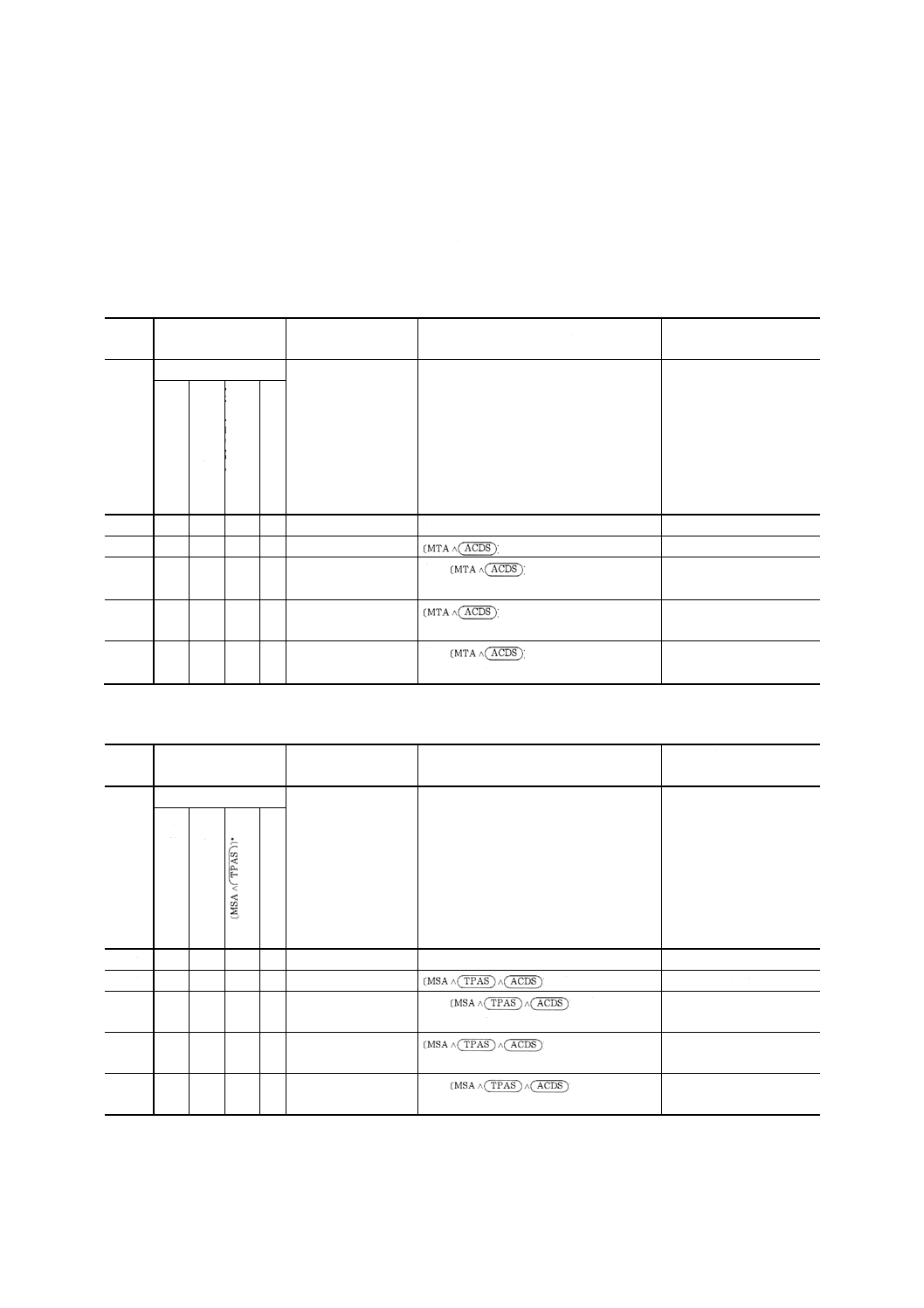
8.3
Tファンクションの説明
8.3.1. TIDS (Talker Idle State)
8.3.1.1
TIDSでは,Tファンクション又はTEファンクションは,デバイスメッセージの転送に関与して
はならない。
T,TEファンクションは,電源投入時にTIDSになる。
8.3.1.2
TIDSでは,END及びRQSメッセージはPassive Falseで送信する。また,NULメッセージはPassive
Falseで送信する。
8.3.1.3
Tファンクションは,次の条件の場合TIDSからTADSへ移行する。
(1) MTAメッセージがTrueで,しかもACDSがアクティブの場合。
(2) 又は,tonメッセージがTrueの場合(8.5.3を参照)。
8.3.1.4
TEファンクションは,次の条件の場合はTIDSからTADSへ移行する。
(1) MSAメッセージがTrueで,かつACDSがアクティブで,しかもTPASがアクティブの場合。
(2) 又は,tonメッセージがTrueの場合。
8.3.2
TADS (Talker Addressed State)
8.3.2.1
TADSでは,Tファンクションはそのトーカアドレスを受け取って,デバイスメッセージの送信
の準備状態にあるが,まだ送信はしない。TADSでは,TEファンクションのその1次及び2次トーカアド
レスを受け取って,デバイスメッセージの送信の準備状態にあるが,また送信はしない。
8.3.2.2
TADSでは,END,RQSメッセージはPassive Falseで送信する。また,NULメッセージはPassive
Trueで送信する。
8.3.2.3
Tファンクションは,次の条件で他のステートへ移行する。
(a) ATNメッセージがFalseで,かつSPMSがアクティブでない場合,TACSへ移行する。
(b) ATNメッセージがFalseで,しかもSPMSがアクティブの場合,SPASへ移行する。
(c) 次の場合,TIDSへ移行する。
(1) OTAメッセージがTrueで,かつACDSがアクティブの場合。
(2) 又は,MLAメッセージがTrueで,かつACDSがアクティブの場合。
(3) 又は,IFCメッセージがTrueならば,t4時間以内に移行する。
備考 MLAの使用はオプションである。
8.3.2.4
TEファンクションは,次の条件で他のステートへ移行する。
(a) ATNメッセージがFalseで,しかもSPMSがインアクティブの場合,TACSへ移行する。
(b) ATNメッセージがFalseで,しかもSPMSがアクティブの場合,SPASへ移行する。
(c) 次の場合,TIDSへ移行する。
(1) OTAメッセージがTrueで,しかもACDSがアクティブの場合。
(2) 又は,OSAメッセージがTrueで,かつTPASがアクティブで,しかもACDSがアクティブの場合。
(3) 又は,MSAメッセージがTrueで,かつLPASがアクティブで,しかもACDSがアクティブの場合。
(4) 又は,IFCメッセージがTrueならば,t4時間以内に移行する。
備考 MSAの使用はオプションである(図6の備考参照)。
8.3.3
TACS (Talker Active State)
26
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.3.3.1
TACSでは,Tファンクション,TEファンクションはデバイスファンクションからDIOライン上
にデバイスメッセージ(DAB,EOS,STB,ENDなど)を送信することを許可する。デバイスメッセージ
の内容はデバイスファンクションで決定される。デバイスファンクションがDABメッセージの内容(END
メッセージを使用している場合は,ENDのTrue,Falseの決定も含む。)を換えるタイミングは,SHファ
ンクションによって決定される。
8.3.3.2
TACSの間,DAB (Data Byte) やEOS (End of String),ENDメッセージがデバイスファンクション
によって送信される。
RQSメッセージはPassive Falseで送信する。
備考 データのコーディングとフォーマットは,一般的にデバイスに依存し,この規格の範囲外であ
る。
8.3.3.3
Tファンクション,TEファンクションは,次の条件で他のステートへ移行する。
(a) ATNメッセージがTrueならば,t2時間以内にTADSへ移行する。
(b) IFCメッセージがTrueならば,t4時間以内にTIDSへ移行する。
8.3.4
SPAS (Serial Poll Active State)
8.3.4.1
SPASでは,T又はTEファンクションは,ステータスバイト(RQSメッセージとSTBメッセー
ジによって構成される。)の転送をコントロールするためのSHファンクションを使用して,デバイスファ
ンクションからDIOラインへ一つのステータスバイトの送信を許可する。コントローラはデバイスからの
ステータスバイトを1バイトだけ受信すればよいのだが,コントローラがその最初の1バイトを受信後,
ATNラインをTrueにしない場合は,デバイスはさらにそのステータスバイトを送信し続けてよい。この
場合,最初の1バイト以外は転送中各ビットが変化してもよい。ただし,RQSメッセージはSRファンク
ションによって保持されている。
8.3.4.2
SPASでは,APRSがアクティブ又はアクティブでないいずれの場合でもENDメッセージはTrue
又はFalseのいずれかで送信する。APRSがアクティブの場合にはRQSメッセージをTrueで,APRSがア
クティブでない場合にはFalseで送信する。さらにSTBメッセージは,デバイスファンクションによって
送信する。
備考 APRSは,SRファンクションに含まれる。
8.3.4.3
Tファンクション,TEファンクションは,次の条件で他のステートへ移行する。
(a) ATNメッセージがTrueならば,t2時間以内にTADSへ移行する。
(b) IFCメッセージがTrueならば,t4時間以内にTIDSへ移行する。
8.3.5
SPIS (Serial Poll Idle State)
8.3.5.1
SPISでは,Tファンクション,TEファンクションはシリアポールに無関係である。
Tファンクション,TEファンクションは,電源投入時にSPISになる。
8.3.5.2
SPISは,リモートメッセージを送信する能力をもたない。
8.3.5.3
Tファンクション,TEファンクションは,SPEメッセージがTrueで,かつACDSがアクティブ
の場合SPMSへ移行する。
8.3.6
SPMS (Serial Poll Mode State)
8.3.6.1
SPMSでは,Tファンクション,TEファンクションはシリアルポールに関与できる。
8.3.6.2
SPMSは,リモートメッセージを送信する能力をもたない。
8.3.6.3
Tファンクション,TEファンクションは,次の条件でSPMSからSPISへ移行する。
(1) SPDメッセージがTrueで,かつACDSがアクティブの場合。
27
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(2) 又は,IFCメッセージがTrueならば,t4時間以内に移行する。
8.3.7
TPIS (Talker Primary Idle State)
8.3.7.1
TPISでは,TEファンクションはその1次アドレスを認識できるが,2次アドレスには応答でき
ない。TEファンクションは,電源投入時にTPISになる。
8.3.7.2
TPISは,リモートメッセージを送信する能力をもたない。
8.3.7.3
TEファンクションは,MTAメッセージがTrueで,かつAHファンクションがACDSの場合,
TPISからTPASへ移行する。
8.3.8
TPAS (Talker Primary Addressed State)
8.3.8.1
TPASでは,TEファンクションはその2次アドレスを認識し,応答することができる。
8.3.8.2
TPASは,リモートメッセージを送信する能力をもたない。
8.3.8.3
TEファンクション,PCGメッセージがTrueで,かつMTAメッセージがFalseで,かつACDS
がアクティブならば,TPASからTPISへ移行する。
8.4
TとTEファンクションのサブセット TとTEファンクションに許されるサブセットを表11及び表
12に示す。
表11
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
ト
ー
カ
シ
リ
ア
ル
ポ
ー
ル
ト
ー
ク
オ
ン
リ
ー
モ
ー
ド
ト
ー
カ
指
定
解
除
M
L
A
に
よ
り
T0
N N N
N
すべて
なし
なし
T1
Y Y Y
N
なし
を除く
SH1,AH1
T2
Y Y N
N
なし
1.
を除く
2.
tonは常にFalse
同上
T3
Y N Y
N
SPIS,SPMS,SPAS
を除く
同上
T4
Y N N
N
SPIS,SPMS,SPAS
1.
を除く
2.
tonは常にFalse
同上
T5
Y Y Y
Y
なし
を含む
SH1かつ(L1〜L4又はLE1
〜LE4)
T6
Y Y N
Y
なし
1.
を含む
2.
tonは常にFalse
同上
T7
Y N Y
Y
SPIS,SPMS,SPAS
を含む
同上
T8
Y N N
Y
SPIS,SPMS,SPAS
1.
を含む
2.
tonは常にFalse
同上
28
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表12
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
拡
張
ト
ー
カ
シ
リ
ア
ル
ポ
ー
ル
ト
ー
ク
オ
ン
リ
ー
モ
ー
ド
に
よ
り
ト
ー
カ
指
定
解
除
TE0
N N N
N
すべて
なし
なし
TE1
Y Y Y
N
なし
を除く
SH1,AH1
TE2
Y Y N
N
なし
1.
を除く
2.
tonは常にFalse
同上
TE3
Y N Y
N
SPIS,SPMS,SPAS
を除く
同上
TE4
Y N N
N
SPIS,SPMS,SPAS
1.
を除く
2.
tonは常にFalse
同上
TE5
Y Y Y
Y
なし
を含む
SH1かつ(L1〜L4又はLE1
〜LE4)
TE6
Y Y N
Y
なし
1.
を含む
2.
tonは常にFalse
同上
TE7
Y N Y
Y
SPIS,SPMS,SPAS
を含む
同上
TE8
Y N N
Y
SPIS,SPMS,SPAS
1.
を含む
2.
tonは常にFalse
同上
8.5
T及びTEファンクションの補足説明及び指針
8.5.1
Tファンクション,TEファンクションを含むデバイスは,MTA,MSAアドレスをユーザが変更で
きるような機能をもつ。
8.5.2
TACSでのデータ送信中の割り込みは,送信データフォーマットに影響を与えてはいけない。
デバイスのTACSへの復帰時のデータ送信は,中断の点の出力データ列のところから続行されることを
推奨する。
8.5.3
tonメッセージを含むデバイスは,トークオンリー状態をつくるマニュアルスイッチをもつ。
9. リスナインタフェース (L) ファンクション
9.1
概説
9.1.1
Lファンクションは,他のデバイスからのデバイスディペンデントデータ(ステータスデータを含
む。)を,インタフェースをとおして受けとる機能をデバイスに与える。この機能は,Lファンクションが
リスナとしてアドレス指定されたときだけ存在する。
9.1.2
Lファンクションには2種類あり,一つはアドレス拡張機能をもち,もう一つはもたない。通常の
Lファンクションは,1バイトアドレスを使用する。アドレス拡張機能をもつLファンクション(以下,
LEという。)は,2バイトアドレスを使用する。その他のすべての点では,LとLEファンクションの機能
は同じである。
9.1.3
2種類のLファンクションのうち,どちらか一つがデバイスに組み込まれる必要がある。
備考 LファンクションとLEファンクションには,広範囲にわたり類似性があるため,9.でまとめて
29
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
述べる。
9.2
Lファンクションのステートダイヤグラム
9.2.1
Lファンクションは,図7のステートダイヤグラムと9.に記述されているステートに従って動作し
なければならない。表13は,あるアクティブステートから別のステートに移行させるためのメッセージや
ステートについて記述したものである。表14は各ステートがアクティブのときに必要とするデバイスファ
ンクションの動作を示す。
9.2.2
LEファンクションは,図8のステートダイヤグラムと9.で記述されているステートに従って動作
しなければならない。表15は,あるアクティブステートから次のステートに移行させるためのメッセージ
やステートについて記述したものである。表14は各ステートがアクティブのときに必要とするデバイスフ
ァンクションの動作を示す。
図7 リスナステートダイヤグラム
表13 Lメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
LIDS−LISTENER IDLE STATE
ltn−listen
LADS−LISTENER ADDRESSED STATE
lun−local unlisten
LACS−LISTENER ACTIVE STATE
lon−listen only
IFC−INTERFACE CLEAR
−ACCEPT DATA STATE(AHファンクション)
ATE−ATTENTION
−CONTROLLER ACTIVE STATE(Cファンクション)
UNL−UNLISTEN
MLA−MY LISTEN ADDRESS
MTA−MY TALK ADDRESS
表14 L又はLEメッセージの出力表
L又はLEステート リモートメッセージ送信
デバイスファンクションの動作
LIDS
デバイスはメッセージを受信してはいけない。
LADS
なし
デバイスはメッセージを受信してはいけない。
LACS
デバイスはACDSがアクティブになるごとにデバイスディペン
デントメッセージバイトを受信することができる。
30
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図8 拡張リスナステートダイヤグラム
備考 LEファンクションとTファンクションとを同時に使うときは
を
にする。
9.3
Lファンクションの説明
9.3.1
LIDS (Listener Idle State)
9.3.1.1
LIDSでは,Lファンクション又はLEファンクションは,デバイスディペンデントメッセージの
転送に関与してはならない。L又はLEファンクションは,電源投入時にLIDSになる。
9.3.1.2
LIDSは,リモートメッセージを送信する能力をもたない。
表15 LEメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
LIDS−LISTENER IDLE STATE
ltn−listen
LACS−LISTENER ACTIVE STATE
lun−local unlisten
LADS−LISTENER ADDRESSED STATE
lon−listen only
LPIS−LISTENER PRIMARY IDLE STATE
IFC−INTERFACE CLEAR
LPAS−LISTENER PRIMARY ADDRESSED STATE
ATE−ATTENTION
UNL−UNLISTEN
−ACCEPT DATA STATE(AHファンクション)
MLA−MY LISTEN ADDRESS
−CONTROLLER ACTIVE STATE(Cファンクション)
PCG−PRIMARY COMMAND GROUP
−TALKER PRIMARY ADDRESSED STATE
MSA−MY SECONDARY ADDRESS
(Tファンクション)
9.3.1.3
Lファンクションは,次の条件の場合,LIDSからLADSへ移行する。
(1) MLAメッセージがTrueで,かつACDSがアクティブの場合。
(2) 又は,lonメッセージがTrueの場合(9.5.3を参照)。
(3) 又は,ltnメッセージがTrueで,かつCACSがアクティブの場合。
9.3.1.4
LEファンクションは,次の条件の場合LIDSからLADSへ移行する。
(1) MSAメッセージがTrueで,かつACDSがアクティブで,かつLPASがアクティブの場合。
(2) 又は,lonメッセージがTrueの場合。
(3) 又は,ltnメッセージがTrueで,かつCACSがアクティブの場合。
31
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3.2
LADS (Listener Addressed State)
9.3.2.1
LADSでは,Lファンクションはそのリスナアドレスを受け取ってデバイスディペンデントメッ
セージの受信の準備状態にあるが,まだ受信はしていない。LADSでは,LEファンクションは1次,2次
リスナアドレスを受け取ってデバイスディペンデントメッセージの受信の準備状態にあるが,まだ受信は
しない。
9.3.2.2
LADSは,リモートメッセージを送信する能力をもたない。
9.3.2.3
Lファンクションは,次の条件でLADSから別のステートへ移行する。
(a) ATNメッセージがFalseならば,t2の時間以内にLACSへ移行する。
(b) 次の場合,LIDSへ移行する。
(1) UNLメッセージがTrueで,かつACDSがアクティブの場合。
(2) 又は,lunメッセージがTrueで,かつCACSがアクティブの場合。
(3) 又は,MTAメッセージがTrueで,かつACDSがアクティブの場合。
(4) 又は,IFCメッセージがTrueならば,t4の時間以内に移行する。
備考 MTAメッセージの使用はオプションである。
9.3.2.4
LEファンクションは,次の条件でLADSから他のステートへ移行する。
(a) ATNメッセージがFalseならば,t2の時間以内にLACSへ移行する。
(b) 次の場合LIDSへ移行する。
(1) UNLメッセージがTrueで,かつACDSがアクティブの場合。
(2) 又は,lunメッセージがTrueで,かつCACSがアクティブの場合。
(3) 又は,MSAメッセージがTrueで,かつTPASとACDSがアクティブの場合。
(4) 又は,IFCメッセージがTrueならば,t4の時間以内に移行する。
備考 MSAメッセージを含む表現法の使用はオプションである(図8の備考参照)。
9.3.3
LACS (Listener Active State)
9.3.3.1
LACSでは,Lファンクション又はLEファンクションはデバイスファンクションに対してインタ
フェース信号ラインを経由してデバイスディペンデントメッセージ (DAB,EOS,STB,END,RQS) を受
信することを許可する。AHファンクションは,メッセージの転送を抑制するために,デバイスファンク
ションによって使用される。
備考 データのコーディングとフォーマットは,一般的に個々のデバイスで自由に定めるので,この
規格の範囲外である。
9.3.3.2
LACSは,リモートメッセージを送信する能力をもたない。
9.3.3.3
Lファンクション又はLEファンクションは,次の条件でLACSより別のステートへ移行する。
(a) ATNメッセージがTrueならば,t2時間以内にLADSへ移行する。
(b) IFCメッセージがTrueならば,t4時間以内にLIDSへ移行する。
9.3.4
LPIS (Listener Primany Idle State)
9.3.4.1
LPISでは,LEファンクションはその1次アドレスを認識できるが,2次アドレスには応答でき
ない。LEファンクションは,電源投入時にLPISになる。
9.3.4.2
LPISは,リモートメッセージを送信する能力をもたない。
9.3.4.3
LEファンクションは,MLAメッセージがTrueで,かつACDSがアクティブの場合,LPISから
LPASへ移行する。
9.3.5
LPAS (Listener Primany Addressed State)
32
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3.5.1
LPASでは,LEファンクションはその2次アドレスを認識し,応答することができる。
9.3.5.2
LPASでは,リモートメッセージを送信する能力をもたない。
9.3.5.3
LEファンクションは,PCGメッセージがTrueで,かつMLAメッセージがFalseで,かつACDS
がアクティブならば,LPASからLPISへ移行する。
9.4
LファンクションとLEファンクションのサブセット LとLEファンクションに許されるサブセッ
トを表16及び表17に示す。
表16
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
リ
ス
ナ
リ
ス
ン
オ
ン
リ
ー
モ
ー
ド
リ
ス
ナ
指
定
解
除
M
T
A
命
令
に
よ
り
L0
N
N
N
すべて
なし
なし
L1
Y
Y
N
なし
を除く
AH1
L2
Y
N
N
なし
1.
を除く
2.
lonは常にFalse
同上
L3
Y
Y
Y
なし
を含む
AH1かつ(T1〜T8又はTE1
〜TE8)
L4
Y
N
Y
なし
1.
を含む
2.
lonは常にFalse
同上
表17
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
拡
張
リ
ス
ナ
リ
ス
ン
オ
ン
リ
ー
モ
ー
ド
に
よ
り
リ
ス
ナ
解
除
LE0
N
N
N
すべて
なし
なし
LE1
Y
Y
N
なし
を除く
AH1
LE2
Y
N
N
なし
1.
を除く
2.
lonは常にFalse
同上
LE3
Y
Y
Y
なし
を含む
AH1かつ(T1〜T8又はTE1
〜TE8)
LE4
Y
N
Y
なし
1.
を含む
2.
lonは常にFalse
同上
*
Tファンクションとともに使用されるときは,MTAに置き換えられる。
33
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.5 L及びLEファンクションの補足説明及び指針
9.5.1
Lファンクション又はLEファンクションを含むデバイスは,MLA及びMSAとして認識されるリ
スンアドレス及びセカンダリアドレスをユーザがフィールドで変更できるような機能をもつ。
9.5.2
LACSでのデータ受信中の割り込みは,受信データに影響を与えてはいけない。
デバイスのLACSへの復帰時のデータ受信は,中断の点の入力データ列のところから続行されることを
推奨する。
9.5.3
lonメッセージを含む各々のデバイスは,リスンオンリー状態をつくるマニュアルスイッチをもつ。
10. サービスリクエストインタフェース (SR) ファンクション
10.1 概説 SRファンクションは,インタフェースを管理中のコントローラへの非同期のサービスを要求
する能力をデバイスにもたせる。また,それはシリアルポール中の複合ステータスバイトのRQSメッセー
ジの内容を同期させるので,一たん当番コントローラによりRQSメッセージをTrueで受信されるとイン
タフェースによって開放される。
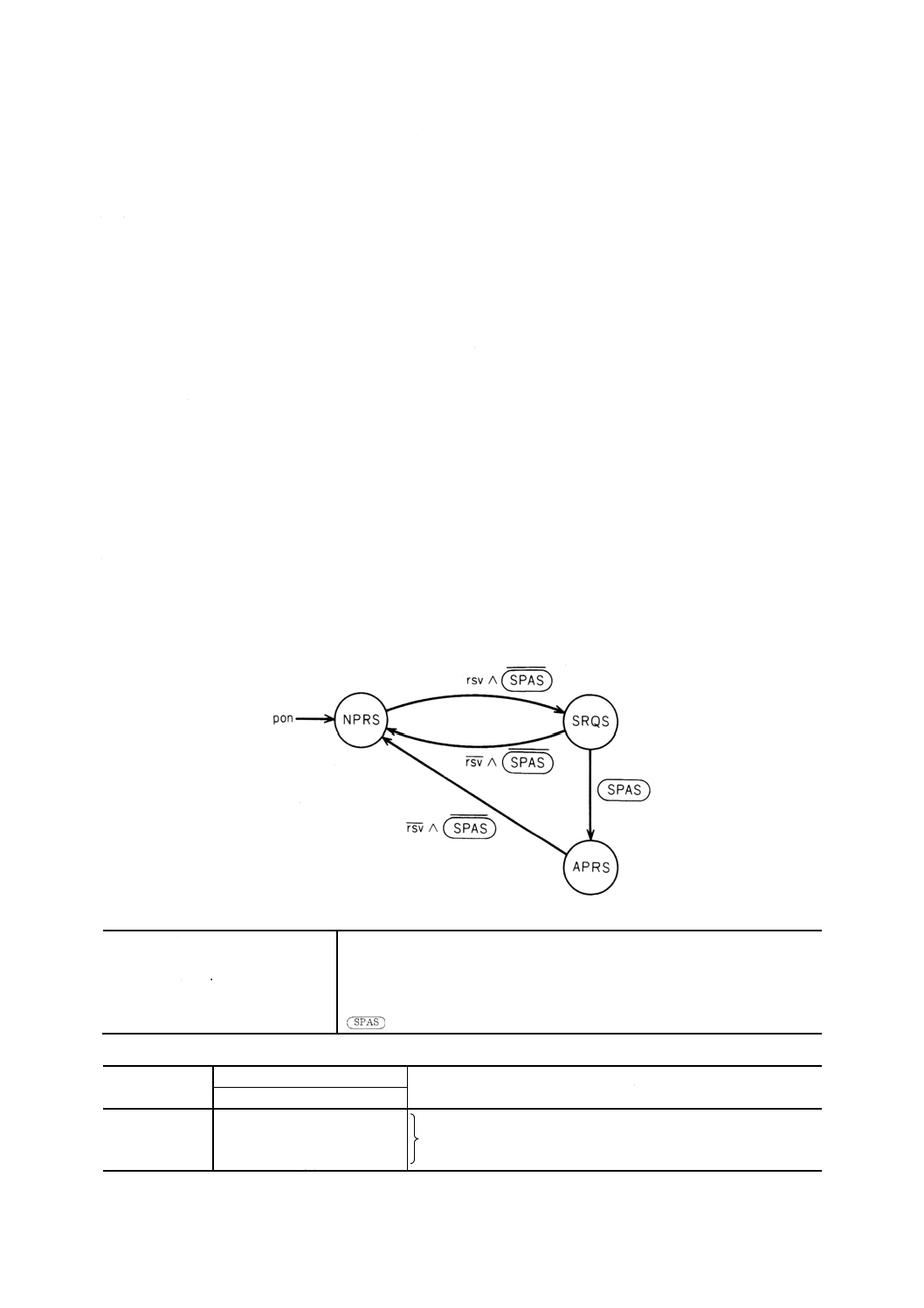
10.2 SRファンクションのステートダイヤグラム SRファンクションは,図9に示されたステートダイ
ヤグラムと10.に記述されている。ステートに従って動作しなければならない。表18は,あるアクティブ
ステートから別のアクティブステートに移行させるためのメッセージやステートについて記述したもので
ある。
表19は,各ステートがアクティブのときに送らなければならないメッセージ及びデバイスファンクショ
ン動作を示す。
図9 サービスリクエストのステートダイヤグラム
表18 SRメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
NPRS−NEGATIVE POLL RESPONSE STATE
rsv−request service
SRQS−SERVICE REQUEST STATE
APRS−AFFIRMATIVE POLL RESPONSE STATE
−SERIAL POLL ACTIVE STATE(Tファンクション)
表19 SRメッセージ出力表
SRステート
リモートメッセージの送信
デバイスファンクションの動作
SRQ
NPRS
(F)
なし
SRQS
T
APRS
(F)
34
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.3 SRファンクションのステートの説明
10.3.1 NPRS (Negative Poll Response State)
10.3.1.1 NPRSでは,SRファンクションはサービス要求をしていない。
SRファンクションは、電源投入時にNPRSになる。
10.3.1.2 NPRSでは,SRQメッセージはPassive Falseで送信する。
備考 SPASがアクティブのとき,RQSメッセージはFalseで送信される(8.3.4参照)。
10.3.1.3 SRファンクションは,rsvメッセージがTrueで,かつSPASがアクティブでない場合,NPRSか
らSRQSへ移行する。
10.3.2 SRQS (Service Request State)
10.3.2.1 SRQSでは,SRファンクションはインタフェース全体にサービス要求中であることを示す。
10.3.2.2 SRQSでは,SRQメッセージはTrueで送信する。
10.3.2.3 SRファンクションは,次の条件でSRQSから別のステートへ移行する。
(a) rsvメッセージがFalseで,かつSPASがアクティブでない場合,NPRSへ移行する。
(b) SPASがアクティブならば,APRS (Affirmative Poll Response State) へ移行する。
10.3.3 APRS (Affirmative Poll Response State)
10.3.3.1 APRSでは,SRファンクションはサービスを必要としているが,インタフェースにはサービス要
求を出していない。
10.3.3.2 APRSでは,SRQメッセージはPassive Falseで送信する。
備考 SPASがアクティブのとき,RQSメッセージはトーカによってTrueで送信される(8.3.4参
照)。
10.3.3.3 SRファンクションは,rsvメッセージがFalseで,かつSPASがアクティブでない場合,APRSか
らNPRSへ移行する。
10.4 SRファンクションのサブセット SRファンクションに許されるサブセットを表20に示す。
表20
分類
説明
省略されるステート
その他の条件
必要とされる他の
ファンクションのサブセット
SR0
SR機能なし
すべて
なし
なし
SR1
SRの全機能をもつ
なし
なし
T1,T2,T5,T6,TE1,TE2,TE5,TE6のいずれか
10.5 SRファンクションの補足説明と指針
10.5.1 SRファンクションは,単一理由のサービス要求に使用されることを目的としている。
もし一つのデバイス中に二つ以上のサービス要求理由がある場合は,それぞれの理由に対応したSRフ
ァンクション及びrsvメッセージを使用する。
10.5.1.1 SRQメッセージは,一つのデバイス内のいずれかのSRファンクションによって要求が発生する
ときにTrueで送信する。
10.5.1.2 TファンクションがSPASのとき,もしデバイス内のいずれかのSRファンクションがAPRSにあ
るならば,RQSメッセージはTrueで送信する。
10.5.2 Cファンクションを経由して受け取られたSRQメッセージは,すべてのSRファンクションによっ
て送られたSRQメッセージの論理ORである。
SRQ信号ラインの使用方法は,33.2に示す。
35
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11. リモートローカルインタフェース (RL) ファンクション
11.1 概説 RLファンクションは,インタフェースの情報で動作させる(リモート動作)か又は正面パネ
ルの情報で動作させる(ローカル動作)かを選択できる機能をデバイスに与える。
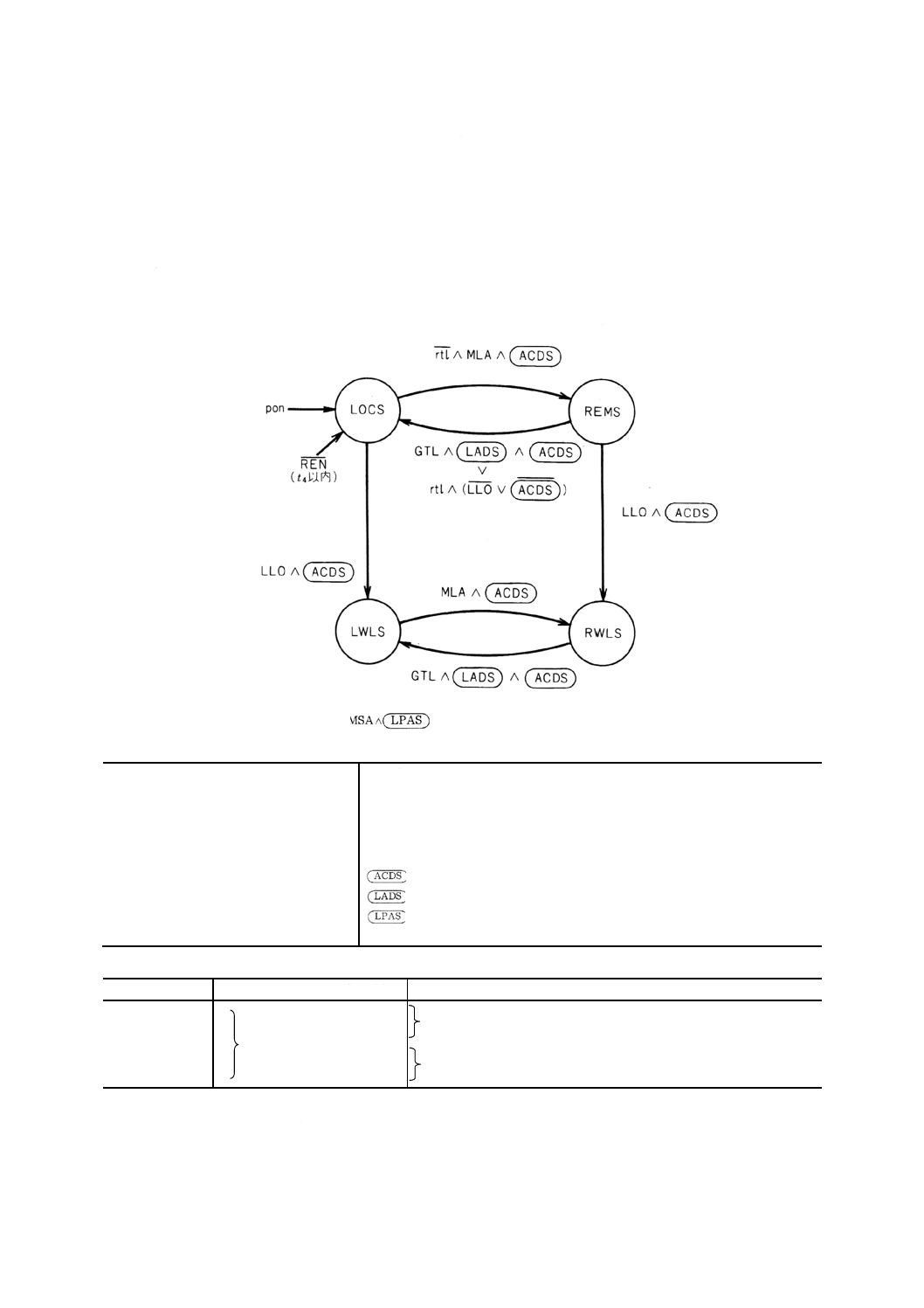
11.2 RLファンクションのステートダイヤグラム RLファンクションは,図10に示すステートダイヤグ
ラムと11.に記述されているステートに従って動作するように構成しなければならない。表21は,あるア
クティブステートから別のステートに移行させるためのメッセージやステートについて記述したものであ
る。表22は,各々のステートがアクティブのときに必要なデバイスファンクションの動作を規定する。
図10 リモートローカルのステートダイヤグラム
備考 RLファンクションがLEファンクションと共に使用されるときは,
MLAは
におきかえなくてはならない。
表21 RLメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
LOCS−LOCAL STATE
rtl−return to local
LWLS−LOCAL WITH LOCKOUT STATE
REN−REMOTE ENABLE
REMS−REMOTE STATE
LLO−LOCAL LOCKOUT
RWLS−REMOTE WITH LOCKOUT STATE
GTL−GO TO LOCAL
−ACCEPT DATA STATE(AHファンクション)
MLA−MY LISTEN ADDRESS
−LISTENER ADDRESSED STATE(Tファンクション)
MSA−MY SECONDARY ADDRESS
−LLISTNER PRIMARY ADDRESS STATE
(LEファンクション)
表22 RLメッセージ出力表
RLステート
リモートメッセージの送信
デバイスファンクションの動作
LOCS
LWLS
REMS
RWLS
なし
デバイスはローカル動作状態
デバイスはリモート動作状態
11.3 RLファンクションの説明
11.3.1 LOCS (Local State)
36
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11.3.1.1 LOCSステートでは,(正面又は背面パネルに)関連したデバイスファンクションのすべてのロー
カル制御が実施され,デバイスはインタフェースからデバイスディペンデントメッセージに応答はしない
が,これを保持してもよい。RLファンクションは電源投入時にLOCSに入る。
11.3.1.2 LOCSは,リモートメッセージを送信する能力をもたない。
11.3.1.3 RLファンクションは,次の条件でLOCSから別のステートへ移行する。
(a) rtlメッセージがFalseで,MLAメッセージがTrueで,しかもACDSがアクティブの場合,REMS (Remote
State) へ移行する。
(b) ユニバーサルコマンド (Local Lockout) メッセージがTrueであり,しかもACDSがアクティブの場合,
LWLS (Local With Lockout State) へ移行する。
11.3.2 LWLS (Local With Lockout State)
11.3.2.1 LWLSでは,関連したデバイスFalseのすべてのローカル制御が操作でき,デバイスではインタ
フェースからのデバイスディペンデントメッセージに応答はしないが,これを保持してもよい(rtlメッセ
ージは無視される)。
11.3.2.2 LWLSは,リモートメッセージを送信する能力をもたない。
11.3.2.3 RLファンクションは,次の条件でLWLSから別のステートへ移行する。
(a) MLAメッセージがTrueであり,しかもACDSがアクティブの場合,RWLS (Remote With Lockout State)
へ移行する。
(b) RENメッセージがFalseであるならば,t4の時間以内にLOCSへ移行する。
11.3.3 REMS (Remote State)
11.3.3.1 REMSでは,ローカルメッセージをインタフェースファンクションに送信する機能を除き,リモ
ートコントロールに対応したデバイスファンクションのローカル制御機能は動作しない。デバイスファン
クションは,リモートデバイスの制御下にある。
11.3.3.2 REMSは,リモートメッセージを送信する能力をもたない。
11.3.3.3 RLファンクションは,次の条件でREMSから他のステートへ移行する。
(a) LLOメッセージがTrueであり,しかもACDSがアクティブの場合,RWLSへ移行する。
(b) 次の場合に,LOCSへ移行する。
(1) RENメッセージがFalseである場合,t4の時間以内に移行する。
(2) 又は,GTLメッセージがTrueで,ACDS及びLADSがアクティブの場合。
(3) 又は,rtlメッセージがTrueであり,しかもLLOメッセージがFalseであるか,又はACDSがアク
ティブでない場合。
11.3.4 RWLS (Remote With Lockout State)
11.3.4.1 RWLSではローカルメッセージをインタフェースファンクションに送信する機能を除き,リモー
トコントロールに対応したデバイスファンクションのローカル制御機能は動作しない。デバイスファンク
ションは,リモート制御動作中である(rtlメッセージは無視される。)。
11.3.4.2 RWLSは,リモートメッセージを送信する機能をもたない。
11.3.4.3 RLファンクションは,次の条件でRWLSから別のステートへ移行する。
(a) RENメッセージがFalseならば,t4の時間以内にLOCSへ移行する。
(b) GTLメッセージがTrueであり,しかもLADS及びACDSがアクティブの場合,LWLSへ移行する。
11.4 RLファンクションのサブセット RLファンクションに許されるサブセットを表23に示す。
表23
37
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
RL0
RL機能なし
すべて
なし
なし
RL1
すべてのRL機能をもつ
なし
なし
L1〜L4又はLE1〜LE4
RL2
ローカルロックアウト動作なし
LWLS,RWLS
rtlは常にFalseである。
L1〜L4又はLE1〜LE4
11.5 RLファンクションの補足説明及び指針
11.5.1 デバイスがデバイスディペンデントメッセージを送信するか,ローカルで設定できるデータとかち
あうことのないようなデバイスディペンデントメッセージを受信するかのどちらかの能力は,RLファン
クションのアクティブなステートとは無関係である。
11.5.2 REMS又はRWLSのどちらかがアクティブであるときは,ローカル制御の使用は無視し,インタ
フェースからのすべてのデータに応答する。
しかし,特にプログラムを貯える能力をもっているデバイスは,次のように設計してもよい。
(1) インタフェースから新しいデータを受け終わるまで,今行っているローカル制御の状態を継続するこ
と。
(2) 又は,インタフェースから新しいデータを受け終わるまでは以前に受信してあるデータを使用するこ
と。
11.5.3 逆に,LOCS又はLWLSのどちらかがアクティブのときはローカル制御に復帰し,インタフェース
経由で受信するデータは無視する。しかし,次のように設計してもよい。
(1) ローカル制御でデータが設定されるまでは一番新しく受けた入力データを用いること。
(2) 又は,LOCS又はLWLSがアクティブになるときのローカル制御設定データを用いること。
11.5.4 rtlメッセージは,永続的に発生させてはいけない。
11.5.5 ローカルプログラミングソース(例えば,人間の操作)によるデバイスのローカル制御方法は,こ
の規格外である。
12. パラレルポールインタフェース (PP) ファンクション
12.1 概説
12.1.1 PPファンクションは,あらかじめトーカに指定されることなく,当番コントローラに対してPPR
メッセージを送る能力をデバイスに与える。
12.1.2 信号DIO1〜8は,パラレルポール時において,デバイスのステータスビットを転送するのに使用
されている。デバイスはパラレルポールに先だってコントローラ又はローカルメッセージによってPPRメ
ッセージを送信する1本のDIOラインを割り振られる。1ラインに1デバイスを割り振ることで8個のデ
バイスまで可能であるが,パラレルポールコマンドでDIOラインを割り振ることによって任意の数のデバ
イスも可能である。
12.1.3 システム内でパラレルポール機能を使用する場合,コントローラは必要に応じてパラレルポールを
行う必要がある。
12.1.4 パラレルポール機能はサービス要求を示すために使用することができる。この能力は次の点でSRQ
メッセージの使用の場合とは異なる。
(1) コントローラがパラレルポールシーケンスを開始するが,シリアルポールシーケンスの開始はどのデ
バイスからでも要求を出せる。
(2) パラレルポールでは同時に多数のデバイスからステータスデータの転送が可能であるが,シリアルポ
38
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ールでは各々のデバイスからステータス情報を順番に収集する。
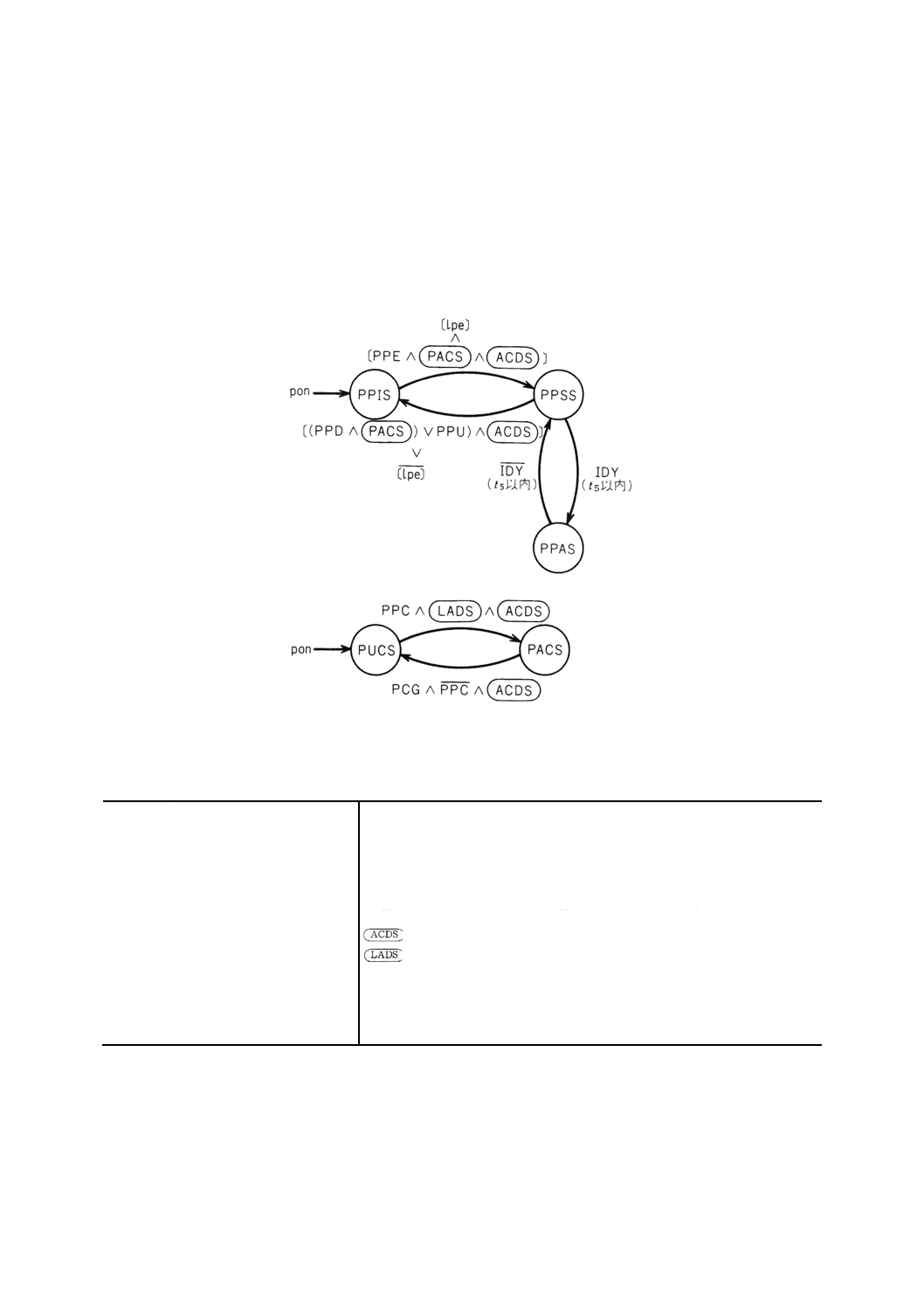
12.2 PPファンクションのステートダイヤグラム
12.2.1 PPファンクションは,図11に示すステートダイヤグラムと12.に記述されているステートに従っ
て動作する。表24は,あるアクティブステートから別のステートに移行させるためのメッセージやステー
トについて記述したものである。表25は,各ステートがアクティブのときに送られるメッセージ及びデバ
イスファンクションの動作を示す。
図11 パラレルポールのステートダイヤグラム
備考 PPファンクションのステート移行の使い方の制
御は,表27を参照のこと。
表24 PPメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
PPIS−PARALLEL POLL IDLE STATE
ist−individual status(表25)
PPSS−PARALLEL POLL STANDBY STATE
lpe−local poll enabled
PPAS−PARALLEL POLL ACTIVE STATE
PUCS−PARALELL POLL UNADDRESSED TO CONFIGURE STATE
PACS−PARALELL POLL ADDRESSED TO CONFIGURE STATE
IDY−IDENTIFY
−ACCEPT DATA STATE(AHファンクション)
PPE−PARALLEL POLL ENABLE
−LISTENER ADDRESSED STATE(Lファンクション)
PPD−PARALLEL POLL DISABLE
PPC−PARALLEL POLL CONFIGURE
PCG−PRIMARY COMMAND GROUP
PPU−PARALLEL POLL UNCONFIGURE
39
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表25 PPメッセージ出力
PPステート
制限
リモートメッセージ送信
デバイスファンクションの動作
PPRn(2)
PPIS
(F)
なし
PPSS
(F)
PPAS
ist≡Sʼ(1)
T
PPAS
istSʼ(1)
(F)
注(1) 12.3.3.2を参照のこと。
(2) この欄は,デバイスに割り当てられる特定のメッセージだけに適用する。
12.3 PPファンクションの説明
12.3.1 PPIS (Parallel Poll Idle State)
12.3.1.1 PPISでは,PPファンクションはコントローラによって発せられるパラレルポールに対して応答
できない。
PPファンクションは,電源投入時にPPISになる。
12.3.1.2 PPISでは,すべてのPPRメッセージはPassive Falseとして送られる。
12.3.1.3 PPファンクションは,次の条件でPPISからPPSSへ移行する。ただし,必ず次の一方を使用す
ること。
(1) PPEメッセージがTrueで,かつPACS及びACDSがアクティブの場合。
(2) 又は,lpeメッセージがTrueの場合。
12.3.2 PPSS (Parallel Poll Standby State)
12.3.2.1 PPSSでは,PPファンクションはコントローラによって発せられるパラレルポールに対していつ
でも応答できる状態である。
12.3.2.2 PPSSでは,すべてのPPRメッセージはPassive Falseとして送られる。
12.3.2.3 PPファンクションは,次の条件でPPSSから別のステートへ移行する。
(a) IDYメッセージがTrueである(パラレルポール実行中)場合には,t5時間以内にPPASへ移行する。
(b) 次の場合には,PPISへ移行する。ただし,必ず次の一方を使用すること。
(1) lpeメッセージがFalseの場合。
(2) 又は,PPDメッセージがTrueで,かつPACSとACDSがアクティブの場合。又は,PPUメッセー
ジがTrueで,かつACDSがアクティブの場合。
12.3.3 PPAS (Paralle Poll Active State)
12.3.3.1 PPASでは,PPファンクションはコントローラによって発せられているパラレルポールに応答し
ている状態である。
12.3.3.2 PPASでは,istメッセージの値と最後に受けたPPEコマンドの一部のS (Sense) ビットの値が等
しい場合だけ,PPRメッセージの一つがTrueで送られる。送信されるPRRメッセージは,最後に受信し
たPPEコマンドの一部のP1からP3の3ビットによって指定されたものである。表26は,P1からP3の
値の各々の組合せ(12.5を参照)によって割り振られるPPRメッセージを示している。他のすべてのPPR
メッセージはPassive Falseとして送られる。
12.3.3.3 もし,IDYメッセージがFalseになる(パラレルポールが終了する。)ならば,PPファンクショ
ンは,PPASからPPSSへ,t5の時間以内に移行する。
40
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表26
PPメッセージ
最後に受けたPPEコマンドによる各ビット
指定されたPPRメッセージ
P3
P2
P1
0
0
0
PPR1
0
0
1
PPR2
0
1
0
PPR3
0
1
1
PPR4
1
0
0
PPR5
1
0
1
PPR6
1
1
0
PPR7
1
1
1
PPR8
12.3.4 PUCS (Parallel Poll Unaddressed To Configure State)
12.3.4.1 PUCSでは,インタフェースを通して受けるどんなPPE又はPPDメッセージも,PPファンクシ
ョンは無視する。PPファンクションは,電源投入時にPUCSになる。
12.3.4.2 PUCSでは,リモートメッセージを送信する能力をもたない。
12.3.4.3 もし,PPCメッセージがTrueで,LADSとACDSがアクティブならば,PPファンクションは,
PUCSからPACSへ移行する。
12.3.5 PACS (Parallel Poll Addressed To Configure State)
12.3.5.1 PACSでは,PPファンクションはインタフェースを通して受けるPPE又はPPDメッセージに対
して動作することができる。もし,PPEメッセージを受けるなら,それに伴うビットS,P1,P2,P3をPP
ファンクションは記憶している。
12.3.5.2 PACSでは,リモートメッセージを送信する能力をもたない。
12.3.5.3 PCGメッセージがTrueで,PPCメッセージがFalseで,そしてACDSがアクティブならば,PP
ファンクションは,PACSからPUCSへ移行する。
12.4 PPファンクションのサブセット PPファンクションに許されるサブセットを表27に示す。
表 27
分類
説明
省略されるステート
その他の条件
要求される他のファン
クションのサブセット
PP0
PP機能なし
すべて
なし
なし
PP1
リモートコンフ
ィグレーション
なし
1.
を
含む。
2.
を含む。
3.
lpeを除く。
L1〜L4又はLE1〜LE4
PP2
ローカルコンフ
イグレーション
PUCS
PACS
1.
lpeを含む。
2.
を
除く。
3.
を除く。
4.
ローカルメッセージはS, P1, P2, P3に
置き換えられる。
なし
12.5 PPファンクションの補足説明及び指針 もし,PP2を使用するならば,パラレルポールのときに使
用されるPPRメッセージとメッセージ検出方法を指定するPPEコマンドを,フィールドでの設計が可能な
ローカルメッセージで置き換える。
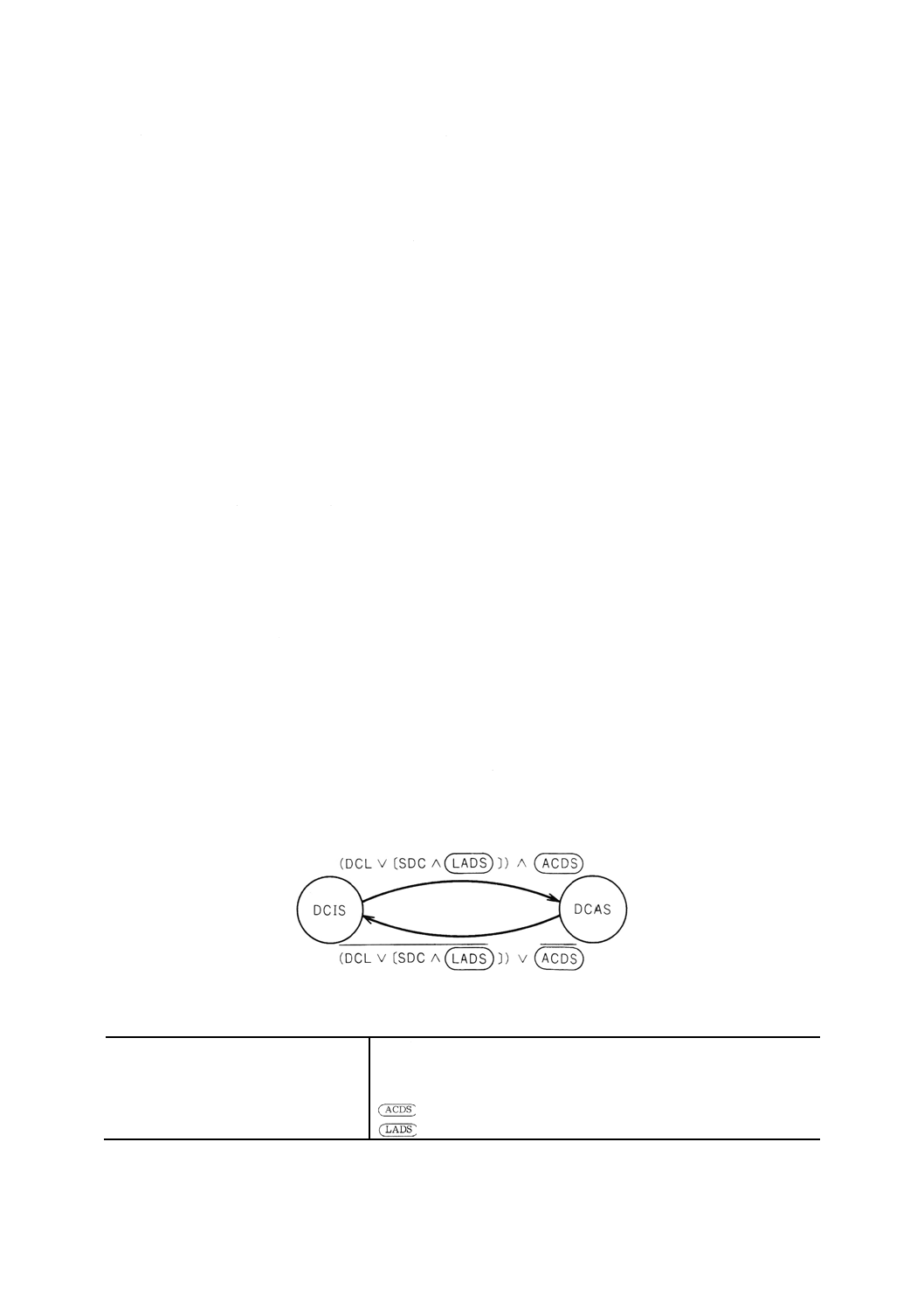
41
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13 デバイスクリアインタフェース (DC) ファンクション
13.1 概説 DCファンクションは,特定のデバイス又はデバイスのグループの一部のクリア(イニシャラ
イズ)を行う機能を与えるものである。グループとは,一つのシステムの中でのサブセット又は全部のア
ドレスに指定されたデバイスである。
13.2 DCファンクションのステートダイヤグラム DCファンクションは図12に示すステートダイヤグ
ラムと13.に記述されているステートに従って動作する。表28は,あるアクティブステートから次のステ
ートに移行するためのメッセージやステートについて記述したものである。表29は,各ステートがアクテ
ィブのときに要求されるデバイスファンクションの動作を示す。
13.3 DCファンクションの説明
13.3.1 DCIS (Device Clear Idle State)
13.3.1.1 DCISでは,DCファンクションは動作しない。
13.3.1.2 DCISでは,リモートメッセージを送信する能力をもたない。
13.3.1.3 DCファンクションはACDSがアクティブのとき,次のどちらかの条件でDCISからDCASへ移
行する。
(1) DCLメッセージがTrueの場合。
(2) LADSがアクティブで,SDCメッセージがTrueの場合。
備考 SDCメッセージはオプションである。
13.3.2 DCAS (Device Clear Active State)
13.3.2.1 DCASでは,DCファンクションはデバイスファンクションをクリアさせる内部メッセージをデ
バイスファンクションへ送る。
13.3.2.2 DCASではリモートメッセージを送信する能力をもたない。
13.3.2.3 DCファンクションは,ACDSがアクティブでない条件か,又は次の(1)と(2)が同時に起こる場合
の条件でDCASからDCISへ移行する。
(1) DCLメッセージがTrueでない。
(2) SDCメッセージがTrueで,かつLADSがアクティブであることが,Trueでない。
備考 SDCメッセージはオプションである。
図12 デバイスクリアステートダイヤグラム
表28 DCメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
DCL−DEVICE CLEAR
DCIS−DEVICE CLEAR IDLE STATE
SDC−SELECTED DEVICE CLEAR
DCAS−DEVICE CLEAR ACTIVE STATE
−ACCEPT DATA STATE(AHファンクション)
−LISTENER ADDRESSED STATE(Lファンクション)
42
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表29 DCメッセージ出力
DCステート
リモートメッセージ送信
デバイスファンクションの動作
DCIS
なし
通常の動作中
DCAS
既知の特定ステートへ戻る。
13.4 DCファンクションのサブセット DCファンクションに許されるサブセットを表30に示す。
表30
分類
説明
省略されるステー
ト
その他の条件
必要とされる他のファン
クションのサブセット
DC0
DC機能なし
すべて
なし
なし
DC1
DCの全機能をもつ
なし
なし
L1〜L4又はLE1〜LE4
DC2
SDC機能を省く
なし
を省略する。
AH1
13.5 DCファンクションの補足説明及び指針
13.5.1 DCASの説明
13.5.1.1 DCASは,デバイスファンクションだけに影響し,その他のインタフェースファンクション(IFC
によってクリアされるファンクション)には影響しない。
13.5.1.2 デバイスは,その動作に支障のない限り任意の目的にDCファンクションを使用してもよい。こ
のファンクションの通常の使い方は,デバイスファンクションを電源投入時の状態にすることである。し
かし,設計者が適当だと考えられる状態にデバイスファンクションを設定するために,このファンクショ
ンを使用してもよい。ただし,この状態については設計者が明記しなければならない。
14 デバイストリガインタフェース (DT) ファンクション
14.1 概説 DTファンクションは,個々のデバイス又はデバイスのグループの一部に基本動作を開始させ
る機能を与えるものである。グループとは,一つのシステムの中の一つのサブセット又は全部のアドレス
指定されたデバイスである。
14.2 DTファンクションのステートダイヤグラム DTファンクションは図13に示すステートダイヤグラ
ムと14に記述されているステートに従って動作する。表31は,あるアクティブステートから次のステー
トに移行するためのメッセージやステートについて記述したものである。表32は,各ステートがアクティ
ブのときに要求されるデバイスファンクションの動作を示す。
14.3 DTファンクションの説明
14.3.1 DTIS (Device Trigger Idle State)
14.3.1.1 DTISでは,DTファンクションは動作しない。
14.3.1.2 DTISでは,リモートメッセージを送信する能力をもたない。
14.3.1.3 DTファンクションは,LADS及びACDSがアクティブで,かつGETメッセージがTrueの場合,
DTISからDTASへ移行する。
14.3.2 DTAS (Device Trigger Active State)
14.3.2.1 DTASでは,DTファンクションはデバイスファンクションの基本動作を開始させる内部メッセー
ジをデバイスファンクションへ送る。
14.3.2.2 DTASは,リモートメッセージを送信する能力をもたない。
14.3.2.3 DTファンクションは,次の条件でDTASからDTISへ移行する。
(1) ACDSがアクティブでない場合。
(2) 又は,LADSがアクティブでない場合。
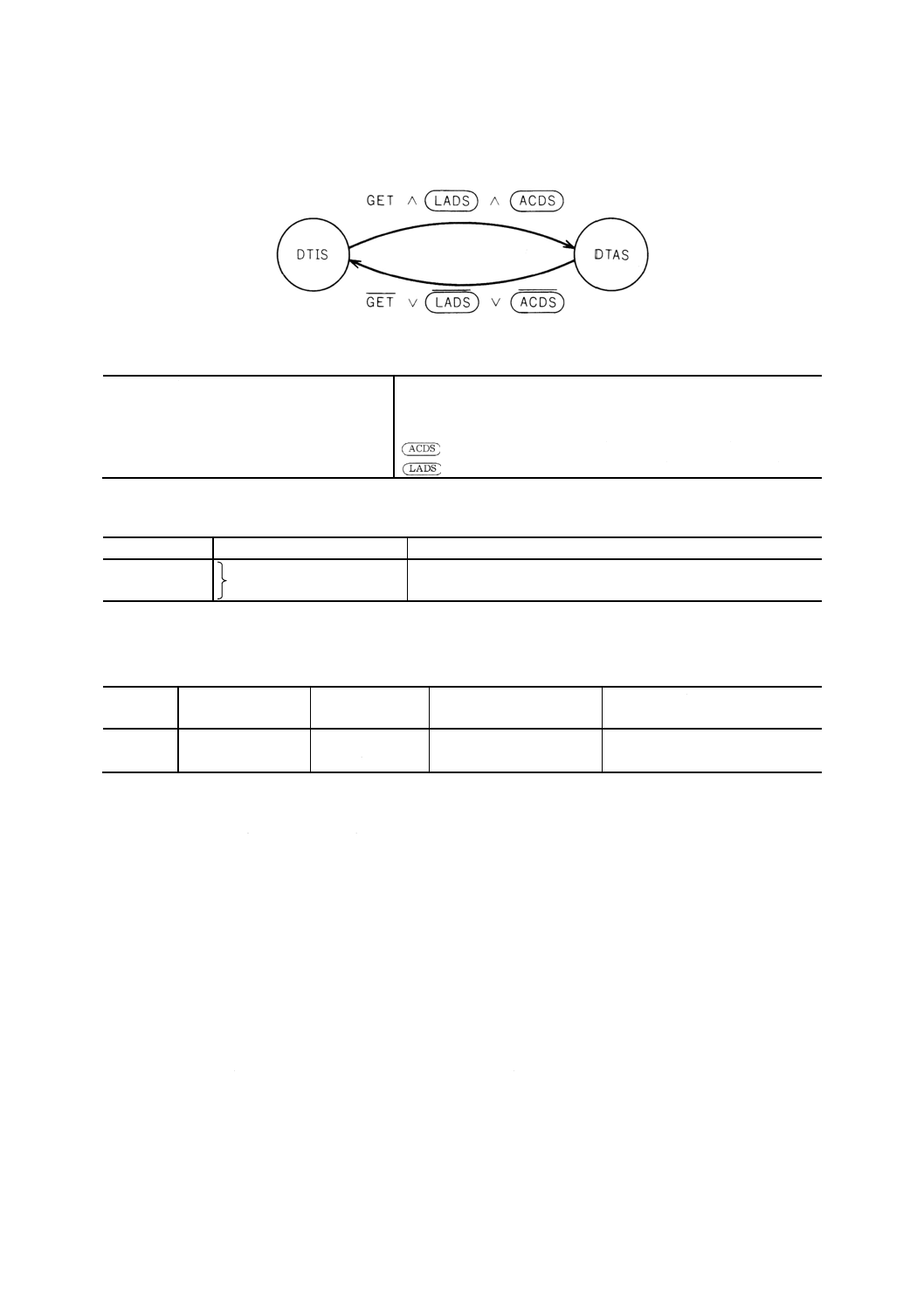
43
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(3) 又は,GETメッセージがFalseの場合。
図13 デバイストリガのステートダイヤグラム
表31 DTメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
GET−GROUP EXECUTE TRIGGER
DTIS−DEVICE TRIGGER IDLE STATE
DTAS−DEVICE TRIGGER ACTIVE STATE
−ACCEPT DATA STATE(AHファンクション)
−LISTENER ADDRESSED STATE(Lファンクション)
表32 DTメッセージ出力
DTステート
リモートメッセージ送信
デバイスファンクションの動作
DTIS
なし
通常の動作中
DTAS
トリガ動作を始める。
14.4 DTファンクションのサブセット DTファンクションに許されるサブセットを表33に示す。
表33
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
DT0
DT機能なし
すべて
なし
なし
DT1
DTの全機能をもつ
なし
なし
L1〜L4又はLE1〜LE4
14.5 DTファンクションの補足説明及び指針
14.5.1 DTASの説明
14.5.1.1 DTASは,デバイス(又はデバイスの一部分)が指定された動作を開始することを示す。
14.5.1.2 DTASがアクティブになった後,デバイスは直ちに動作を開始する方が望ましい。
14.5.1.3 一度デバイスが動作開始したら,その動作が終了するまでの次の動作開始を行ってはいけない。
最初の動作が終了した後でだけ,デバイスは次のDTASのアクティブの条件に応じて新しい次の動作を始
めることができる。
15. コントローラインタフェース (C) ファンクション
15.1 概説
15.1.1 Cファンクションはインタフェースを通じてデバイスのアドレス,ユニバーサルコマンド,アドレ
スコマンドを他のデバイスに送る機能をもつ。また,どのデバイスがサービスを要求しているかを決める
ためのパラレルポールを行う機能をもつ。
15.1.2 Cファンクションは,インタフェースを通じてATNメッセージを送っている間だけ動作可能であ
る。
44
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.1.3 もし,インタフェースシステム内にCファンクションをもつデバイスが二つ以上ある場合は,い
かなるときも動作中の一つを除いて他のものはすべてCIDS (Controller Idle State) になっていなければなら
ない。
CファンクションをもつデバイスがCIDSになっていないときは(インタフェースシステムの)“コント
ローラ・インチャージ(当番コントローラ)”と呼ばれる。
また,この規格ではCファンクションをもつデバイス間の“コントローラ・インチャージ”の交替を可
能とするプロトコルが示されている。
15.1.4 インタフェースに接続されているデバイスの中の一つ,デバイスのCファンクションだけSACS
(System Control Active State) となることができる。
インタフェースの操作を行っている間はSACSになっていなければならず,そしてコントローラ・イン
チャージ(当番コントローラ)であるか否かに関係なく,IFC,RENメッセージをインタフェースを通し
て送信する能力をもつ。このデバイスを(インタフェースシステムの)“システムコントローラ”と呼ぶ。
15.2 Cファンクションのステートダイヤグラム Cファンクションは図14で示すステートダイヤグラム
と15.を通じて記述されるステートに従って動作する。表34は,あるアクティブステートから別のステー
トに移行するためのメッセージやステートについて記述したものである。
表35は,各ステートがアクティブのときに送られるメッセージ及びデバイスファンクションの動作を示
す。
15.3 Cファンクションの説明
15.3.1 CIDS (Controller Idle State)
15.3.1.1 CIDSでは,Cファンクションはインタフェースをコントロールするすべての能力を失う。Cファ
ンクションは電源投入時にCIDSになる。
15.3.1.2 CIDSでは,ATN,IDYはPassive Falseで送信され,NULメッセージはPassive Trueで送信される。
備考 IDYメッセージはATNとEOI信号線によって符号化される。15.3を通して,ATNメッセージ
がTrueで送信され,IDYメッセージがアクティブすなわちPassive Falseで送信されるときは,
いつでもEOI信号線は,アクティブすなわちPassive Falseである。
15.3.1.3 Cファンクションは,次の条件でCIDSからCADS (Controller Addressed State) へ移行する。
(1) (コントローラ・インチャージのコントローラが送信する。)TCTメッセージがTrueであり,TADS
とACDSがアクティブの場合。
(2) 又は,SIAS (System Control Interface Clear Active State) がアクティブの場合。
備考 TCTメッセージはオプションである。
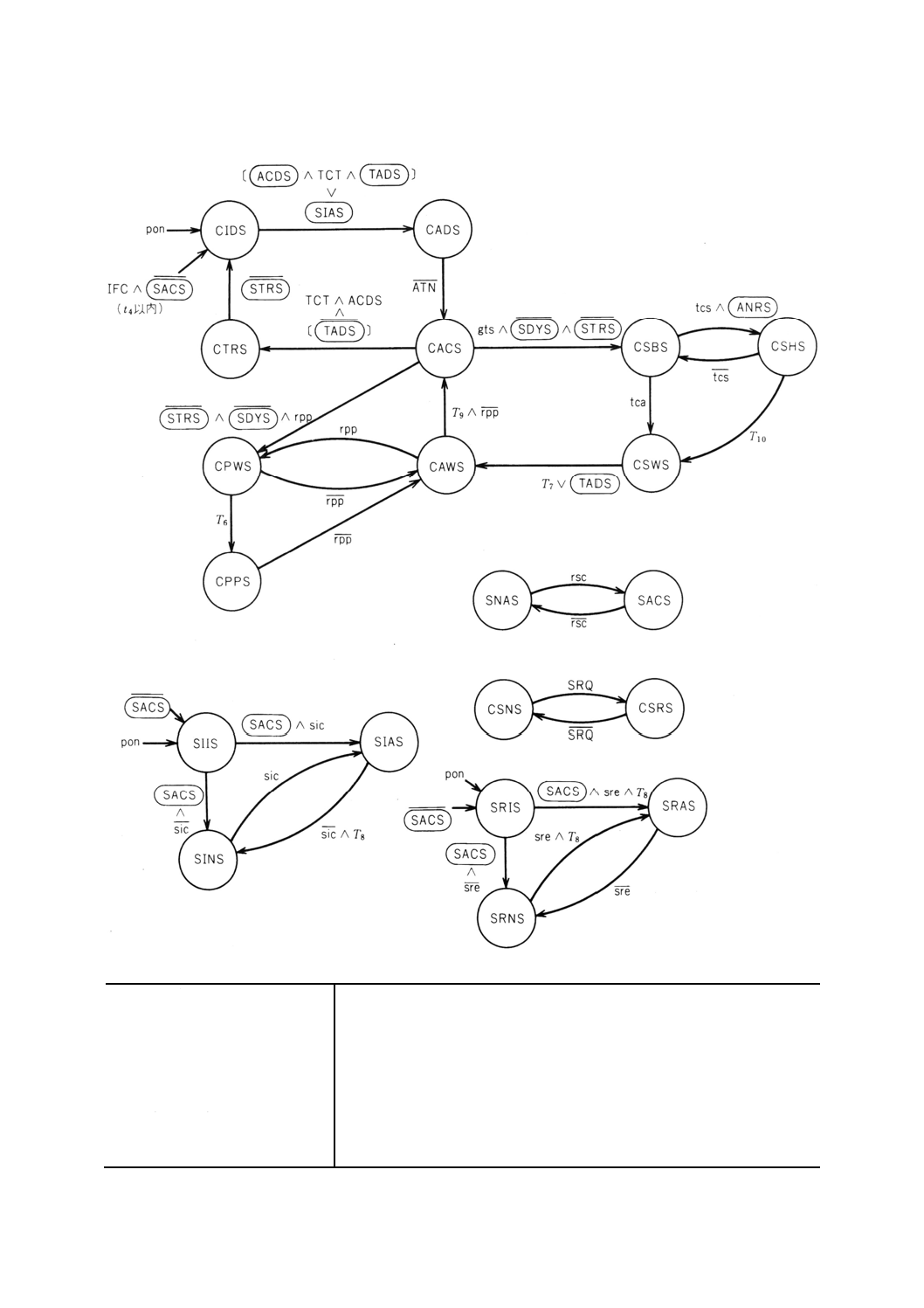
45
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図14 コントローラのステートダイヤグラム
表34 Cメッセージ及びステートの一覧表
メッセージ:
インタフェースステート:
pon−power on
CIDS−CONTROLLER IDLE STATE
rsc−request system control
CADS−CONTROLLER ADDRESSED STATE
rpp−request parallel poll
CTRS−CONTROLLER TRANSFER STATE
gts−go to standby
CACS−CONTROLLER ACTIVE STATE
tca−take control asynchronously
CPWS−CONTROLLER PARALLEL POLL WAIT STATE
tcs−take control synchronously
CPPS−CONTROLLER PARALLEL POLL STATE
sic−send interface clear
CSHS−CONTROLLER STANDBY HOLD STATE
sre−send remote enable
CSBS−CONTROLLER STANDBY STATE
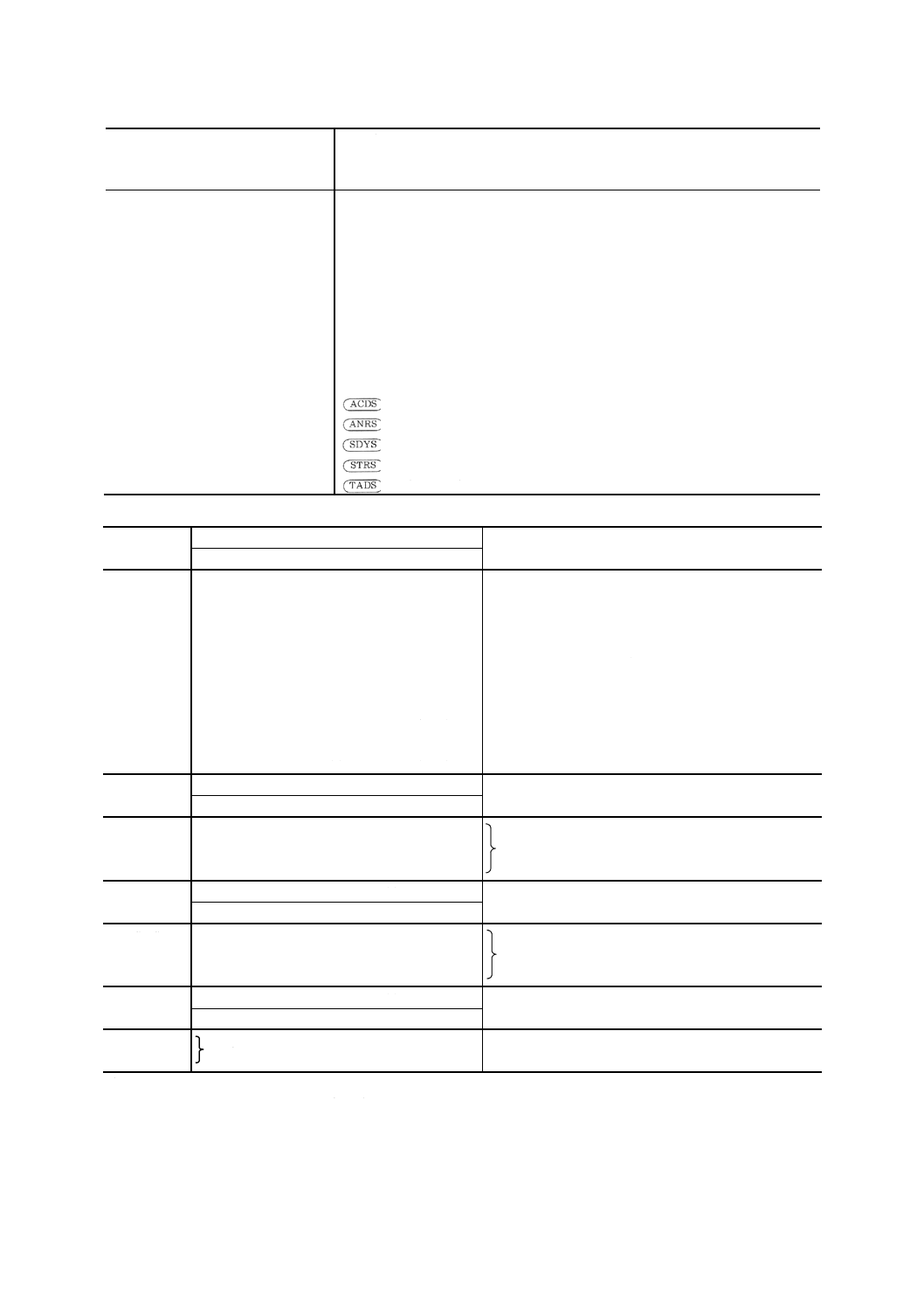
46
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
メッセージ:
インタフェースステート:
CAWS−CONTROLLER ACTIVE WAIT STATE
IFC−INTERFACE CLEAR
CSWS−CONTROLLER SYNCHRONOUS WAIT STATE
ATN−ATTENTION
CSRS−CONTROLLER SERVICE REQUESTED STATE
TCT−TAKE CONTROL
CSNS−CONTROLLER SERVICE NOT REQUESTED STATE
SNAS−SYSTEM CONTROL NOT ACTIVE STATE
SACS−SYSTEM CONTROL ACTIVE STATE
SRIS−SYSTEM CONTROL REMOTE ENABLE IDLE STATE
SRNS−SYSTEM CONTROL REMOTE ENABLE NOT ACTIVE STATE
SRAS−SYSTEM CONTROL REMOTE ENABLE ACTIVE STATE
SIIS−SYSTEM CONTROL INTERFACE CLEAR IDLE STATE
SINS−SYSTEM CONTROL INTERFACE CLEAR NOT ACTIVE STATE
SIAS−SYSTEM CONTROL INTERFACE CLEAR ACTIVE STATE
−ACCEPT DATA STATE(AHファンクション)
−ACCEPTOR NOT READY STATE(AHファンクション)
−SOURCE DELAY STATE(SHファンクション)
−SOURCE TRANSFER STATE(SHファンクション)
−TALKER ADDRESSED STATE(Tファンクション)
表35 Cメッセージの出力表(1)
Cステート
リモートメッセージ送信
デバイスファンクションの動作
ATN
IDY
マルチライン
CIDS
(F)
(F)
(NUL)
インタフェースメッセージを送ってはいけない。
CADS
(F)
(F)
(NUL)
同上
CACS
T
F
(2)
インタフェースメッセージを送ることが可能
CPWS
T
T
(NUL)
インタフェースメッセージを送ってはいけない。
CPPS
T
T
(NUL)
PPRメッセージを受信することが可能
CSBS
F
(F)
(NUL)
インタフェースメッセージを送ってはいけない。
CSWS
T
F又は(F)
(NUL)
同上
CAWS
T
F
(NUL)
同上
CTRS
T
F
TCT
TCTメッセージを送り続けなければならない。
CSHS
F
(F)
(NUL)
インタフェースメッセージを送ってはいけない。
Cステート
リモートメッセージ送信
デバイスファンクションの動作
IFC
SIIS
SINS
SIAS
(F)
F
T
なし
Cステート
リモートメッセージ送信
デバイスファンクションの動作
REN
SRIS
SRNS
SRAS
(F)
F
T
なし
Cステート
リモートメッセージ送信
デバイスファンクションの動作
CSNS
CSRS
なし
サービス要求なし
サービス要求を認識している。
注(1) 送信されるメッセージの値は,それらのステートに影響を及ぼすものだけを示した。表における各々のセク
ションは,Cファンクション内の違ったステートのグループである。
(2) 表38にCファンクションから送信されるマルチラインのインタフェースメッセージを示す。これらのメッ
セージは,Cファンクションによって働きが可能になるが,デバイスファンクションの中で発生される。
15.3.2 CADS (Controller Addressed State)
47
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.3.2.1 CADSでは、Cファンクションはインタフェースのコントローラ・インチャージになる過程にあ
る。しかし現在のコントローラがATNメッセージの送信を止めるまでこの状態にとどまっている。
15.3.2.2 CADSでは,ATN及びIDYメッセージはPassive Falseで,NULメッセージはPassive Trueで送信
される。
15.3.2.3 Cファンクションは,次の条件でCADSから別のステートへ移行する。
(a) ATNメッセージがFalseの場合は,CACS (Controller Active State) へ移行する。
(b) IFCメッセージがTrueであり,SACSがアクティブでない場合にはt4時間以内にCIDSへ移行する。
15.3.3 CACS (Controller Active State)
15.3.3.1 CACSでは,Cファンクションはデバイスファンクションからインタフェースの信号ラインへの
マルチラインインタフェースメッセージの送信を可能にする。これらのメッセージには,デバイスアドレ
ス,ユニバーサルコマンド,又はアドレスコマンドが含まれる。
SHファンクションは,デバイスファンクションが送るべきマルチラインメッセージの内容を変更して
もよいタイミングを決定する。しかし,メッセージ内容は,デバイスファンクションによって単独に決め
られるものである。
15.3.3.2 CACSがアクティブのとき,ATNメッセージはTrueで,IDYメッセージはFalseで連続して送信
される。このとき,表36の中のマルチラインメッセージは,デバイスファンクションによって送信される
かもしれない。
15.3.3.3 Cファンクションは,次の条件でCACSから別のステートへ移行する。
(a) TCTメッセージ(自身のデバイスファンクションにより送信されるが,リモートメッセージとして受
信される。)がTrueで,TADSがアクティブでない(オプション)場合で,かつACDSがアクティブ
の場合,CTRS (Controller Transfer State) へ移行する。
(b) rppメッセージがTrueで,STRSとSDYSの双方がアクティブでない場合に,CPWS (Controller Parallel
Poll Wait State) へ移行する。
(c) IFCメッセージがTrueであり,SACSがアクティブでない場合に,t4時間以内にCIDS (Controller Idle
State) へ移行する。
(d) gtsメッセージがTrueであり,STRS及びSDYSのいずれもアクティブでない場合に,CSBS (Controller
Standby State) へ移行する。
表36
ユニバーサルコマンド(マルチライン)
アドレス
−LLO
− (LAD)(1)
−DCL
− (TAD)(2)
−SPE
−UNL
−SPD
−PPU
アドレスコマンド
2次コマンド
−GET(リスナアドレスコマンド)
− (SAD)(3)
−GTL(リスナアドレスコマンド)
−PPD
−PPC(リスナアドレスコマンド)
−PPE
−SDC(リスナアドレスコマンド)
−TCT(トーカアドレスコマンド)
注(1) ある特定なデバイスのリスナアドレスを示している(MLAとして受信される)。
(2) ある特定なデバイスのトーカアドレスを示している(MTA又はOTAとして受信される)。
(3) ある特定なデバイスの2次アドレスを示している(MSA又はOSAとして受信される)。
48
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.3.4 CPWS (Controller Parallel Poll Wait State)
15.3.4.1 CPWSでは,Cファンクションはインタフェースを通じてパラレルポールを行おうとしているが,
DIOラインが安定するまでこのステートで待っている。
15.3.4.2 CPWSでは,CファンクションはIDYメッセージをTrueで,NULメッセージをPassive Trueで
送信する。
15.3.4.3 Cファンクションは,次の条件でCPWSから別のステートへ移行する。
(a) T6の時間が経過した後,CPPS (Controller Parallel Poll State) へ移行する。
(b) IFCメッセージがTrueで,しかもSACSがアクティブでない場合,t4時間以内にCIDSへ移行する。
(c) rppメッセージがFalseの場合,CAWSへ移行する。
15.3.5 CPPS (Controller Parallel Poll State)
15.3.5.1 CPPSでは,Cファンクションは,パラレルポールを実行し,インタフェースの信号ライン経由
で受信されるPPRメッセージの値をデバイスファンクションに伝える。
15.3.5.2 CPPSでは,IDYメッセージはTrueで,NULメッセージはPassive Trueで送信される。
15.3.5.3 Cファンクションは,次の条件でCPPSから別のステートへ移行する。
(a) rppメッセージがFalseの場合,CAWSへ移行する。
(b) IFCメッセージがTrueであり,SACSがアクティブでない場合,t4時間以内にCIDSへ移行する。
15.3.6 CSBS (Controller Standby State)
15.3.6.1 CSBSでは,Cファンクションはインタフェースを通じて複数のデバイスがデバイスディペンデ
ントメッセージを転送することを許可する。
15.3.6.2 CSBSでは,ATNメッセージはFalseで,IDYメッセージはPassive Falseで,NULメッセージは
Passive Trueで送信される。
15.3.6.3 Cファンクションは,次の条件でCSBSから別のステートへ移行する。
(a) tcsメッセージがTrueで,かつANRSがアクティブのとき,CSHSへ移行する。
(b) tcaメッセージがTrueのとき,CSWSへ移行する。
(c) IFCメッセージがTrueで,かつSACSがアクティブでないとき,t4時間以内にCIDSへ移行する。
15.3.7 CSWS (Controller Synchronous Wait State)
15.3.7.1 CSWSでは,CファンクションがCAWS (Controller Active Wait State) へ入るプロセス中にあるが,
現在アクティブのトーカがインタフェースを通じて送られたATNメッセージを確実に感知するために,C
ファンクションはT7の時間このステートで待っている。もし,tcsメッセージによってこのステートに入
った場合,デバイスファンクションはこのステートの間,tcsメッセージをTrueで送り続ける。このこと
によってこのデバイスのAHファンクションはインタフェースを通してRFDメッセージをFalseで送り続
けることになり,次のデータバイトの転送を止めてしまう。
15.3.7.2 CSWSでは,ATNメッセージはTrueで,IDYメッセージはアクティブすなわちPassive Falseで,
そしてNULメッセージはPassive Trueで送信される。
15.3.7.3 Cファンクションは,次の条件でCSWSから別のステートへ移行する。
(a) t7の時間が経過した後又はTADSがアクティブの場合,CSWSへ移行する。
(b) IFCメッセージがTrueで,しかもSACSがアクティブでない場合,t4時間以内にCIDSへ移行する。
15.3.8 CAWS (Controller Active Wait State)
49
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.3.8.1 CAWSでは,CファンクションはCACSに移行する前にT9の時間だけこのステートで待っている。
これは,EOIラインが十分安定し,その値を保証するために必要である。また,デバイスが誤って応答し
てパラレルポールを実行しないために必要である。
15.3.8.2 CAWSでは,ATNメッセージはTrueで,IDYメッセージはFalseで,NULメッセージはPassive True
で送信される。
15.3.8.3 Cファンクションは,次の条件でCAWSから別のステートへ移行する。
(a) rppメッセージがFalseで,更にT9の時間が経過した場合,CACSへ移行する。
(b) rppメッセージがTrueの場合,CPWSへ移行する。
(c) IFCメッセージがTrueで,SACSがアクティブでない場合,t4時間以内にCIDSへ移行する。
15.3.9 CTRS (Controller Transfer State)
15.3.9.1 CTRSでは,Cファンクションは,TCTアドレスコマンドを他のデバイスに送信し続ける。これ
は,Cファンクションがアイドル (CIDS) に移行する過程において行われる。
15.3.9.2 CTRSでは,ATNメッセージはTrueで,IDYメッセージはFalseで送信され,さらに,TCTメッ
セージは,連続してTrueで送信される。
15.3.9.3 Cファンクションは,次の条件で (CTRS) からCIDSへ移行する。
(1) STRSがアクティブでなくなる場合。
(2) 又は,IFCメッセージがTrueで,しかもSACSがアクティブでない場合に,t4時間以内に移行する。
15.3.10 CSRS (Controller Service Requested State)
15.3.10.1 CSRSでは,Cファンクションはインタフェースシステム内の少なくとも一つのデバイスがサー
ビスを要求していることをローカルメッセージによってデバイスファンクションに伝えている。
15.3.10.2 CSRSでは,リモートメッセージを送信する能力をもたない。
15.3.10.3 Cファンクションは,SRQメッセージがFalseの場合に,CSRSからCSNS (Controller Service Not
Requested State) へ移行する。
15.3.11 CSNS (Controller Service Not Requested State)
15.3.11.1 CSNSでは,Cファンクションは,インタフェース内の一つのデバイスもサービスを要求してい
ないことをローカルメッセージによってデバイスファンクションに伝えている。
15.3.11.2 CSNSでは,リモートメッセージを送信する能力をもたない。
15.3.11.3 Cファンクションは,SRQメッセージがTrueの場合に,CSNSからCSRSへ移行する。
15.3.12 SNAS (System Control Not Active State)
15.3.12.1 SNASでは,Cファンクションはすべてのシステムコントロールの能力を全くもたない。
15.3.12.2 SNASでは,リモートメッセージを送信する能力をもたない。
15.3.12.3 Cファンクションは,rscメッセージがTrueになる場合,SNASからSACSへ移行する。
15.3.13 SACS (System Control Active State)
15.3.13.1 SACSでは,Cファンクションはシステムコントロールの能力を実行することができる。
15.3.13.2 SACSでは,リモートメッセージを送信する能力をもたない。
15.3.13.3 Cファンクションは,rscメッセージがFalseになる場合,SACSからSNASへ移行する。
15.3.14 SIIS (System Control Interface Clear Idle State)
15.3.14.1 SIISでは,Cファンクションはインタフェースをクリアする能力をもたない。Cファンクション
は,電源投入時にSIISになる。
15.3.14.2 SIISでは,IFCメッセージはPassive Falseで送信される。
50
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.3.14.3 Cファンクションは,SACSがアクティブの場合,次の条件でSIISから別のステートへ移行する。
(a) sicメッセージがFalseの場合,SINS (System Control Interface Clear Not Active State) へ移行する。
(b) sicメッセージがTrueの場合,SIAS (System Control Interface Clear Active State) へ移行する。
15.3.15 SINS (System Control Interface Clear Not Active State)
15.3.15.1 SINSでは,Cファンクションはインタフェースをクリアすることはできない。
15.3.15.2 SINSでは,IFCメッセージはFalseで送信し続けられる。
15.3.15.3 Cファンクションは,次の条件でSINSから別のステートへ移行する。
(a) sicメッセージがTrueの場合,SIASへ移行する。
(b) SACSがアクティブでない場合に,SIISへ移行する。
15.3.16 SIAS (System Control Interface Clear Active State)
15.3.16.1 SIASでは,Cファンクションはインタフェースをクリアする。システムに接続されているすべて
のインタフェースファンクションはIFCメッセージのTrueに応答する。そして既知の初期の状態となるこ
とが必要である。
15.3.16.2 SIASでは,IFCメッセージはTrueで送信される。
15.3.16.3 Cファンクションは,次の条件でSIASから別のステートへ移行する。
(a) sicメッセージがFalseになってから少なくともT8の時間以上SIASにとどまった後,SINSへ移行する。
(b) SACSがアクティブでない場合に,SIISへ移行する。
15.3.17 SRIS (System Control Remote Enable Idle State)
15.3.17.1 SRISでは,Cファンクションはインタフェースシステムをリモート動作させる能力をもたない。
システムコントローラとして機能することを指定されたもの以外のすべてのCファンクションは,SRIS
の状態に止まる。Cファンクションは,電源投入時SRISになる。
15.3.17.2 SRISでは,RENメッセージはPassive Falseで送信される。
15.3.17.3 Cファンクションは,次の条件でSRISから別のステートへ移行する。
(a) sreメッセージがFalseで,かつSACSがアクティブの場合,SRNS (System Control Remote Enable Not
Active State) へ移行する。
(b) sreメッセージがTrueで,SACSがアクティブの場合,SRISに少なくともT8の時間とどまった後,SRAS
(System Control Remote Enable Active State) へ移行する。
15.3.18 SRNS (System Control Remote Enable Not Active State)
15.3.18.1 SRNSでは,Cファンクションはインタフェース上の他のデバイスをリモート動作にすることが
できない。
15.3.18.2 SRNSでは,RENメッセージはPassive Falseで送信される。
15.3.18.3 Cファンクションは,次の条件でSRNSから別のステートへ移行する
(a) sreメッセージが少なくともT8の時間以上続けてTrueである場合に,SRASへ移行する。
(b) SACSがアクティブでない場合に,SRISへ移行する。
15.3.19 SRAS (System Control Remote Enable Active State)
15.3.19.1 SRASでは,Cファンクションはインタフェース上の他のデバイスをリモート動作することがで
きる。
15.3.19.2 SRASでは,RENメッセージはTrueで送信し続けられる。
15.3.19.3 Cファンクションは,次の条件でSRASから別のステートへ移行する。
(a) sreメッセージがFalseの場合,SRNSへ移行する。
51
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(b) SACSがアクティブでない場合に,SRISへ移行する。
15.3.20 CSHS (Controller Standby Hold State)
15.3.20.1 CSHSでは,Cファンクションは,システムに接続されているDAVメッセージをFalseと見なす
まで,このステートで待っている。CSHSは,tcsシーケンス中にATNとDAVメッセージが同時に発生し
たとアイドルデバイスが誤って認識することを防止する。
15.3.20.2 CSHSでは,ATNメッセージはFalseで,IDYメッセージはPassive Falseで,NULメッセージは
Passive Trueで送信される。
15.3.20.3 Cファンクションは,次の条件でCSHSから別のステートへ移行する。
(a) T10の時間を経過した場合,CSWSへ移行する。
(b) tcsメッセージがFalseの場合,CSBSへ移行する。
(c) IFCメッセージがTrueで,しかもSACSがアクティブでない場合,t4時間以内にCIDSへ移行する。
15.4 Cファンクションのサブセット Cファンクションのサブセットを表37に示す。
15.5 Cファンクションの補足説明及び指針
15.5.1 警告:tcaメッセージは十分に注意して使用すること。
15.5.1.1 tcaメッセージの使用に対しての制限:デバイスディペンデントメッセージがTrueであり,tcaメ
ッセージがTrueになるような場合には,設計者は正しいデータがインタフェースを通じて転送されると思
ってはならない。
15.5.1.2 バックグラウンド:デバイスディペンデントメッセージがTrueのときは,いつでもコントローラ
はトーカに対してtcaメッセージを使って非同期の割り込みをかけてもよい。もしデバイスディペンデン
トメッセージがTrueでしかもATNがTrueになると,割り込みをかけられたバイトが紛失したり,他のデ
バイスによって間違ってインタフェースメッセージ(例:コマンド又はアドレス)として解釈されること
があり,予定されないステートの変化をさせてしまうことがある。
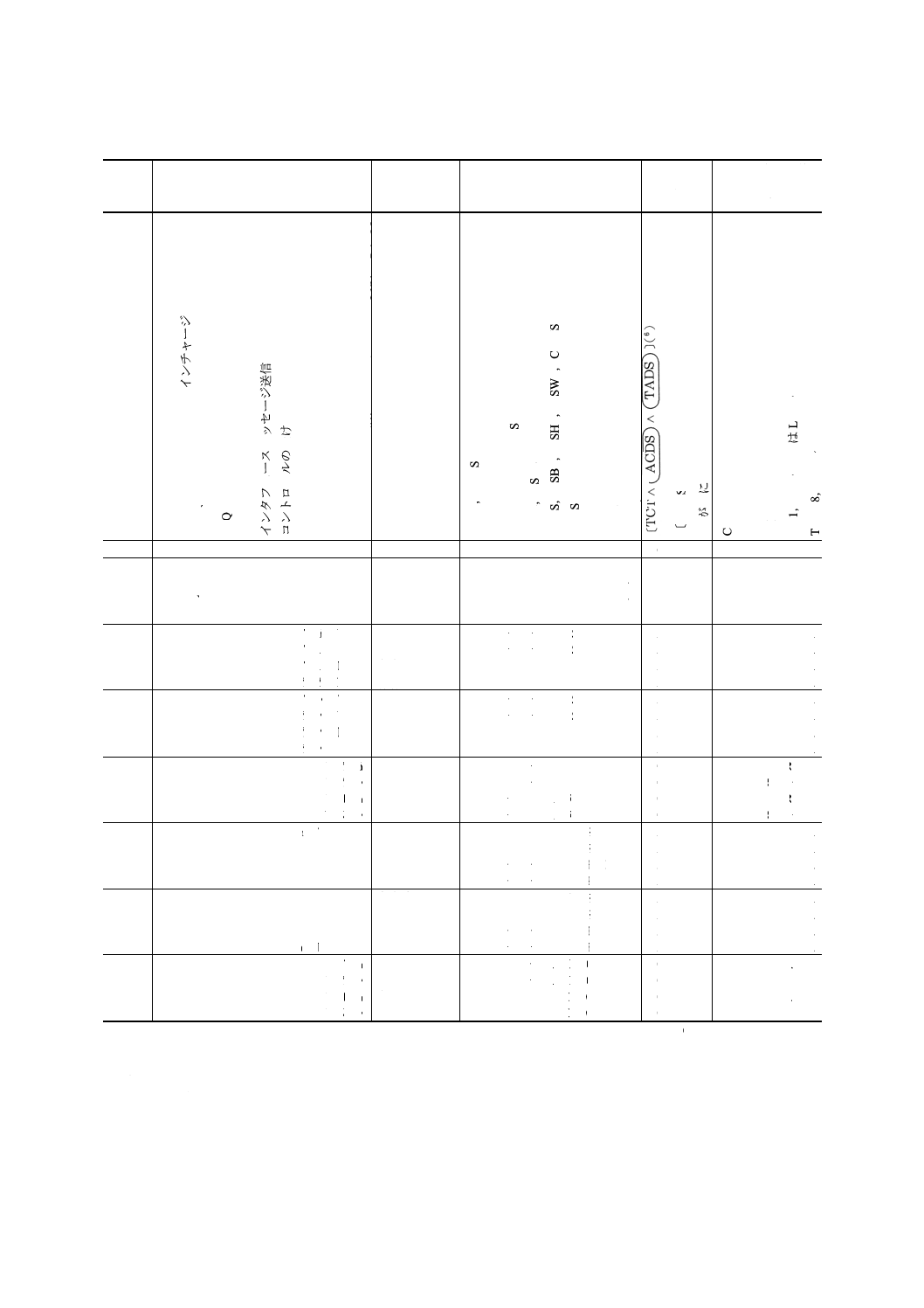
52
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表37 Cファンクションのサブセット
分類
能力
注
必要なステート
その他
の条件
必要とされる他
のファンクショ
ンのサブセット
シ
ス
テ
ム
コ
ン
ト
ロ
ー
ラ
IF
C
送
信
,
コ
ン
ト
ロ
ー
ラ
・
イ
ン
チ
ャ
ー
ジ
R
E
N
送
信
S
R
Q
に
対
す
る
応
答
イ
ン
タ
フ
ェ
ー
ス
メ
ッ
セ
ー
ジ
送
信
コ
ン
ト
ロ
ー
ル
の
受
け
コ
ン
ト
ロ
ー
ル
の
渡
し
自
分
自
身
へ
の
コ
ン
ト
ロ
ー
ル
の
渡
し
パ
ラ
レ
ル
ポ
ー
ル
ハ
ン
ド
シ
ェ
ー
ク
に
同
期
し
て
コ
ン
ト
ロ
ー
ル
の
受
渡
し
を
す
る
。
(5)
S
N
A
S
,
S
A
C
S
S
II
S
,
S
IA
S
,
S
IN
S
S
R
IS
,
S
R
A
S
,
S
R
N
S
C
S
N
S
,
C
S
R
S
C
A
C
S
,
C
S
B
S
,
C
S
H
S
,
C
S
W
S
,
C
A
W
S
C
A
D
S
C
ID
S
C
T
R
S
C
P
W
S
,
C
P
P
S
〔
(T
A
D
S
)〕
(
7
)
tc
s
が
常
に
F
al
se
と
は
限
ら
な
い
。
C
1
C
2
S
H
1
A
H
1
,
L
1
〜
L
4
又
は
L
E
1
〜
L
E
4
T
1
〜
T
8
,
T
E
1
〜
T
E
8
C0
N N N N
N N N N N N
O O O O O O O O O O O O O − − − −
C1
Y − − − − − − − − − (1)
R − − − − − − − − − − − − − − − −
C2
− Y − − − − − − − − (1)
− R − − − − − − − − − − R − − − −
C3
− − Y − − − − − − − (1)
− − R − − − − − − − − − R − − − −
C4
− − − Y
− − − − − − (1)
− − − R − − − − − − − − − − − − −
C5
− − − − Y Y Y Y Y Y (2)(3)
− − − − R R R R R R R R − − R R R
C6
− − − − Y Y Y Y Y N (2)(3)
− − − − R R R R R R R O − − R − R
C7
− − − − Y Y Y Y N Y (2)(3)
− − − − R R R R O R R R − − R R R
C8
− − − − Y Y Y Y N N (2)(3)
− − − − R R R R O R R O − − R − R
C9
− − − − Y Y Y N Y Y (2)(3)
− − − − R R R R R R O R − − R R R
C10
− − − − Y Y Y N Y N (2)(3)
− − − − R R R R R R O O − − R − R
C11
− − − − Y Y Y N N Y (2)(3)
− − − − R R R R O R O R − − R R R
C12
− − − − Y Y Y N N N (2)(3)
− − − − R R R R O R O O − − R − R
C13
− − − − Y Y N N Y Y (2)
− − − − R R R O R O O R − R R R −
C14
− − − − Y Y N N Y N (2)
− − − − R R R O R O O O − R R − −
C15
− − − − Y Y N N N Y (2)
− − − − R R R O O O O R − R R R −
C16
− − − − Y Y N N N N (2)
− − − − R R R O O O O O − R R − −
C17
− − − − Y N Y Y Y Y (2)(3)(4)
− − − − R O R R R R R R − − R R R
C18
− − − − Y N Y Y Y N (2)(3)(4)
− − − − R O R R R R R O − − R − R
C19
− − − − Y N Y Y N Y (2)(3)(4)
− − − − R O R R O R R R − − R R R
C20
− − − − Y N Y Y N N (2)(3)(4)
− − − − R O R R O R R O − − R − R
C21
− − − − Y N Y N Y Y (2)(3)(4)
− − − − R O R R R R O R − − R R R
C22
− − − − Y N Y N Y N (2)(3)(4)
− − − − R O R R R R O O − − R − R
C23
− − − − Y N Y N N Y (2)(3)(4)
− − − − R O R R O R O R − − R R R
C24
− − − − Y N Y N N N (2)(3)(4)
− − − − R O R R O R O O − − R − R
C25
− − − − Y N N N Y Y (2)
− − − − R O O O R O O R − − R R −
C26
− − − − Y N N N Y N (2)
− − − − R O O O R O O O − − R − −
C27
− − − − Y N N N N Y (2)
− − − − R O O O O O O R − − R R −
C28
− − − − Y N N N N N (2)
− − − − R O O O O O O O − − R − −
“O”:省略 “R”:必要 “−”:不必要 “Y”:YES “N”:NO
注(1) C5からC28までの中の一つのサブセットと,C1からC4までの一つ以上のサブセットの組合せが可能。
(2) C5からC28までの中の一つのサブセットだけ選択可能。
(3) マルチコントローラシステムの中で動作するデバイスは必ずCTRSを含まなければならない。
(4) C2を含まない場合には,このサブセットを選択できない。
(5) Cファンクションを示す“C”とそれに続く数字によって選択されたサブセットを示している。
(例:C1,2,3,4,8)
(6) CIDSからCADSに移行する場合の過渡的な部分。
(7) CACSからCTRSに移行する場合の過渡的な部分。
53
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.5.2 もし,tcsメッセージを使用する場合には,FalseからTrueにするのはCSBSのステートのときだけ
可能である。tcsメッセージはCAWSの間だけにTrueからFalseへ変えなければならない。これらの制限
によって,同期制御動作中一定時間にわたりRFDがFalseに保持されることを保証している。tcsとANRS
によるCSBSからCSWSへの移行は,コントローラ機能をもつデバイスがLACSステートにあるリスナと
して参加することを想定している。
16. リモートメッセージのコード化及び転送
16.1 リモートメッセージのコード 各リモートメッセージは,1本又は複数のインタフェースラインを経
由して送・受信する。
16. はリモートメッセージの分類及びコード化の方法,及び信号ライン上への転送方法を定義する。種々
のインタフェースファンクシヨンによって転送されるすべてのリモートメッセージのコード表を表38に
示す。
16.2 リモートメッセージのコード化の概念
16.2.1 メッセージは,1本又は複数の信号ラインの論理状態にコード化する。
16.2.2 ユニラインメッセージとは,1本の信号ラインの論理状態として送・受信するメッセージを示す
(例:ATNメッセージ)。
16.2.3 マルチラインメッセージとは,複数の信号ラインの論理状態の組合せによって送・受信するメッセ
ージを示す(例:DCLメッセージ)。
16.2.4 メッセージには他のメッセージの論理的組合せ (AND,OR,NOT) によって定義するメッセージ
もある(例:OTAメッセージ)。
16.2.5 送信するメッセージと受信するメッセージのコードは同一のものである。
16.3 リモートメッセージの転送
16.3.1 メッセージは,規定された1本又は複数のメッセージラインを論理的に1又は0にすることによっ
て送信する。
コードとして規定されていない信号ラインへの出力を行ってはならない。
16.3.2 メッセージは,規定された1本又は複数のメッセージラインの論理的な1又は0を感知することに
よって受信する。
コードとして規定されていない信号ラインは無視すること。
16.3.3 ユニラインメッセージの“値”は,それに相当する論理値になると同時に有効となる。
(表3,表6,表9,表19,表25及び表35のメッセージが送られる状態を参照のこと。)。
16.3.4 マルチラインメッセージは,SH又はAHファンクションによって規定する間だけ有効になる。送
信するマルチラインメッセージは,SHファンクションがソーストランスファステート (STRS) のとき有
効となる。
受信するマルチラインメッセージは,AHファンクションがアクセプトデータステート (ACDS) のとき
有効となる。
16.3.5 すべてのPassiveメッセージは,信号ラインを0として転送する。これをインタフェース上で実施
するためには,信号ラインの状態が論理ORになっていることだけ要求される。
16.4 リモートメッセージのコード表の構成及び取り決め
54
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
16.4.1 インタフェースファンクションが送受信可能なすべてのメッセージについて,名前と記号を記述し
ている。
16.4.2 表38において,メッセージの値のTrueがバス信号線の論理値1に,Falseの値が0に対応してい
る。
16.4.3 表中の各リモートメッセージは,メッセージの送信に必要なエンコード及び受信に必要なデコード
の両方を示している。
16.4.4 ユニラインメッセージのTrueの値は,一つの信号ラインに規定した論理値を割り当てることによ
って示す。
備考 ある種のユニラインメッセージ(例:SRQ)は随時変化するが,特定のタイミングでだけ変化
するもの(例:END)もある。
16.4.5 マルチラインメッセージのTrueの値は,それぞれのメッセージ用として規定した信号線に,論理
値(1又は0)の唯一の組合せを割り当てることによって示す。
16.4.6 メッセージのFalseの値は,Trueの値として示した唯一の論理値(1又は0)の組合せ以外のすべ
ての組合せである。
16.4.7 表38に登録されているメッセージは,ユニライン (U) 又はマルチライン (M) のどちらかの形式
に分類される。メッセージは,インタフェースファンクション又はデバイスファンクション内で果たす機
能に応じて,更に7種類の級に分類される。
16.4.8 信号線のもつ論理値を,表38では0,1,X,Yで示す。
これらの表す論理値を以下に示す。
0 = 論理0
1 = 論理1
X = (受信メッセージのコードとしては)無視する。
X = (送信メッセージのコードとしては)別のメッセージによる指定がない限り出力をしない。
Y = (送信メッセージのコードとしては)任意。
16.5 リモートメッセージのコード表の全容 表38は,それぞれのインタフェースファンクションが送信
(又は受信)するリモートメッセージを表している。実際には表中の2個以上のメッセージを異なったイ
ンタフェースファンクションが同時(例:DABメッセージがTrueで,かつATNメッセージがFalse)に
送ることもある。
〔表38の(9),及び(10)と附属書D参照〕。
55
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表38 リモートメッセージコード表
記号
メッセージ名
形
式
級
メッセージのTrueの値を決定するバス信号線
とコード
D
I
O
8 7 6 5 4 3 2
D
I
O
1
D
A
V
N
R
F
D
N
D
A
C
A
T
N
E
O
I
S
R
Q
I
F
C
R
E
N
ACG
ADDRESSED COMMAND GROUP
M
AC Y 0 0 0 X X X X X X X 1 X X X X
ATN
ATTENTION
U
UC X X X X X X X X X X X 1 X X X X
DAB
DATA BYTE(1)(9)
M
DD D D D D D D D D X X X 0 X X X X
8 7 6 5 4 3 2 1
DAC
DATA ACCEPTED
U
HS X X X X X X X X X X 0 X X X X X
DAV
DATA VALID
U
HS X X X X X X X X 1 X X X X X X X
DCL
DEVICE CLEAR
M
UC Y 0 0 1 0 1 0 0 X X X 1 X X X X
END
END(9)
U
ST
X X X X X X X X X X X 0 1 X X X
EOS
END OF STRING(2)(9)
M
DD E E E E E E E E X X X 0 X X X X
8 7 6 5 4 3 2 1
GET
GROUP EXECUTE TRIGGER
M
AC Y 0 0 0 1 0 0 0 X X X 1 X X X X
GTL
GO TO LOCAL
M
AC Y 0 0 0 0 0 0 1 X X X 1 X X X X
IDY
IDENTIFY
M
UC X X X X X X X X X X X 1 1 X X X
IFC
INTERFACE CLEAR
U
UC X X X X X X X X X X X X X X 1 X
LAG
LISTEN ADDRESS GROUP
M
AD Y 0 1 X X X X X X X X 1 X X X X
LLO
LOCAL LOCKOUT
M
UC Y 0 0 1 0 0 0 1 X X X 1 X X X X
MLA
MY LISTEN ADDRESS(3)
M
AD Y 0 1 L L L L L X X X 1 X X X X
5 4 3 2 1
MTA
MY TALK ADDRESS(4)
M
AD Y 1 0 T T T T T X X X 1 X X X X
5 4 3 2 1
MSA
MY SECONDARY ADDRESS(5)
M
SE
Y 1 1 S S S S S X X X 1 X X X X
5 4 3 2 1
NUL
NULLBYTE
M
DD 0 0 0 0 0 0 0 0 X X X X X X X X
OSA
OTHER SECONDARY ADDRESS
M
SE
(OSA=SCG∧MSA)
OTA
OTHER TALK ADDRESS
M
AD
(OTA=TAG∧MTA)
PCG
PRIMARY COMMAND GROUP
M
--
(PCG=ACG∨UCG∨LAG∨TAG)
PPC
PARALLEL POLL CONFIGURE
M
AC Y 0 0 0 0 1 0 1 X X X 1 X X X X
PPE
PARALLEL POLL ENABLE(6)
M
SE
Y 1 1 0 S P P P X X X 1 X X X X
3 2 1
PPD
PARALLEL POLL DISABLE(7)
M
SE
Y 1 1 1 D D D D X X X 1 X X X X
4 3 2 1
PPR1
PARALLEL POLL RESPONSE1(10)
U
ST
X X X X X X X 1 X X X 1 1 X X X
PPR2
PARALLEL POLL RESPONSE2(10)
U
ST
X X X X X X 1 X X X X 1 1 X X X
PPR3
PARALLEL POLL RESPONSE3(10)
U
ST
X X X X X 1 X X X X X 1 1 X X X
PPR4
PARALLEL POLL RESPONSE4(10)
U
ST
X X X X 1 X X X X X X 1 1 X X X
PPR5
PARALLEL POLL RESPONSE5(10)
U
ST
X X X 1 X X X X X X X 1 1 X X X
PPR6
PARALLEL POLL RESPONSE6(10)
U
ST
X X 1 X X X X X X X X 1 1 X X X
PPR7
PARALLEL POLL RESPONSE7(10)
U
ST
X 1 X X X X X X X X X 1 1 X X X
PPR8
PARALLEL POLL RESPONSE8(10)
U
ST
1 X X X X X X X X X X 1 1 X X X
PPU
PARALLEL POLL UNCONFIGURE
M
UC Y 0 0 1 0 1 0 1 X X X 1 X X X X
REN
REMOTE ENABLE
U
UC X X X X X X X X X X X X X X X 1
RFD
READY FOR DATA
U
HS X X X X X X X X X 0 X X X X X X
RQS
REQUEST SERVICE(9)
U
ST
X 1 X X X X X X X X X 0 X X X X
SCG
SECONDARY COMMAND GROUP
M
SE
Y 1 1 X X X X X X X X 1 X X X X
56
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号
メッセージ名
形
式
級
メッセージのTrueの値を決定するバス信号線
とコード
D
I
O
8 7 6 5 4 3 2
D
I
O
1
D
A
V
N
R
F
D
N
D
A
C
A
T
N
E
O
I
S
R
Q
I
F
C
R
E
N
SDC
SELECTED DEVICE CLEAR
M
AC Y 0 0 0 0 1 0 0 X X X 1 X X X X
SPD
SERIAL POLL DISABLE
M
UC Y 0 0 1 1 0 0 1 X X X 1 X X X X
SPE
SERIAL POLL ENABLE
M
UC Y 0 0 1 1 0 0 0 X X X 1 X X X X
SRQ
SERVICE REQUEST
U
ST
X X X X X X X X X X X X X 1 X X
STB
STATUS BYTE(8)(9)
M
ST
S X S S S S S S X X X 0 Y X X X
8 6 5 4 3 2 1
TCT
TAKE CONTROL
M
AC Y 0 0 0 1 0 0 1 X X X 1 X X X X
TAG
TALK ADDRESS GROUP
M
AD Y 1 0 X X X X X X X X 1 X X X X
UCG
UNIVERSAL COMMAND GROUP
M
UC Y 0 0 1 X X X X X X X 1 X X X X
UNL
UNLISTEN
M
AD Y 0 1 1 1 1 1 1 X X X 1 X X X X
注(1) D1〜D8は,デバイスディペンデントデータビットを示す。
(2) E1〜E8は,EOSメッセージに用いるためのデバイスによって自由に選べるコードを示す。このメッセージは,
連続したDABメッセージを終端するときなどに使用する。
(3) L1〜L5は,デバイスのリスナアドレスを示す(38.2.1参照)。
(4) T1〜T5は,デバイスのトーカアドレスを示す(38.1.1参照)。
(5) S1〜S5は,デバイスの2次アドレスを示す(38.3.1参照)。
(6) Sは,パラレルポールレスポンスの極性を規定する。
S
レスポンス
0
0
0
1
P1〜P3はパラレルポールを実行するときに送信するPPRメッセージを示す。
(7) D1〜D4は,無意味のビットである。送信側では,全部“0”として送信する。しかし,受信するデバイスは
デコードする必要はない。
(8) S1〜S6,S8は,デバイスによって自由に選択できるビットである。
(注:DIO7ラインはRQSメッセージに対して用いられる。)
(9) ATNメッセージの送信は,常にCファンクションが行う。しかし,DIOラインのメッセージ及びEOIライン
のメッセージは,Tファンクションが送信する。
(10) ATN及びEOIラインの送信は,常にCファンクションが行う。しかし,DIOラインのメッセージ送信は,常
にPPファンクションが行う。
備考 表38の説明
信号レベル:
記号:(形式)
0=信号のレベルが高ステート
1=信号のレベルが低ステート
表38のコードについては18.に示した電気的信号レベルと等価なものと解釈してよい。
U=ユニラインメッセージ
M=マルチラインメッセージ
57
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(級) AC=アドレスコマンド
AD=アドレス(トーカ又はリスナ)
DD=デバイスディペンデントデータ
HS=ハンドシェーク
UC=ユニバーサルコマンド
SE=2次メッセージ
ST=ステータス
16.6 JISコード説明:メッセージコード化の概要 多くのデバイスはJIS 7ビットコード[JIS X 0201(情
報交換用符号)]を使用している。このコードは,生成及び解釈のしやすいコードである。JISコードとこ
の規格で規定したメッセージ(バイナリビットパターン)との関係を次に示す。
16.6.1 インタフェースメッセージ インタフェースシステムは,ATNメッセージがTrueのときに,イン
タフェースメッセージをデバイスに対して出力するために,表38に示したメッセージコードを使用する。
このコードはDIO 1からDIO 7が,それぞれJISコードのビット1から7に対応する。JISコードには,
ATNメッセージ(ビット又は信号線)によって規定するコードは含んでいない。
この規格によるインタフェースシステムを端末機を通して他のシステムに接続する場合には,正しい情
報交換を可能にし,JISコードの示す別の意味との矛盾を避けるために,この規格の範囲を超えたプロト
コルが使用される。
16.6.2 デバイスディペンデントメッセージ デバイスディペンデントメッセージについては,この規格の
範囲外である。トーカとリスナがインタフェースメッセージによって指定され,ATNメッセージがFalse
になった後は,例えばBCDといったような8ビット以内の一般的なバイナリコードやアルファニューメ
リックコードを使用してよい。
備考1. 可能ならば,アルファニューメリックコード(JISコードの一部,カラム2から5)をデバイ
スメッセージの情報交換に使用するのが望ましい。JISコードのビット1から7をDIO 1から
DIO 7に対応させる。
2. (例えば,バイナリといった)他のコードを使用する場合には,MSB (Most significant bit) を,
大きい番号のDIO信号線に割り付けるべきである(例えば,ビット8をDIO 8にする。)。
16.6.3 JISコードについては,この規格のコードと対照させて,附属書Eに示す。
16.7 ステート移行時間の値 第2節のインタフェースファンクションとステートダイヤグラム全体に記
載されたTxとtyの値は,第3節の24.で定義する。
第3節 電気的仕様
17. 適用範囲 この節では,次の条件で使用するインタフェースシステムに関する電気的仕様を定義する。
(1) デバイスの間の物理的距離が短い
(2) 電気的ノイズが比較的少ない環境
レシーバ/ドライバ回路の電気的仕様はTTL技術に基づく。
備考1. ドライバやレシーバと接続するインタフェースファンクション回路に用いるデバイス技術は,
設計者に一任する。
2. ドライバやレシーバは,設計しようとするインタフェースファンクションに必要な信号ライ
ンだけに使用すればよい(終端については21.を参照。)。
3. ドライバにオープンコレクタドライバを使用するか,又はトライステートドライバを使用す
58
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
るかは19.及び31.に記述しているデータ転送速度を考慮して決定すること。
18. 論理ステートと電気的ステートとの関係
18.1 リモートメッセージのコード表38の論理ステートと各信号ラインの電気的ステートの電圧レベルと
の関係を次に示す。
コードの
論理ステート
電気的信号レベル
0
“高ステート”(+2.0V)
1
“低ステート”(+0.8V)
高ステート及び低ステートは,電源電圧が+5.25Vを超えない場合に,ロジックのグランドを基準にし
た標準のTTLレベルに基づく。
18.2 この節では,電流は正の符号のとき接続点に流入し,負の符号のとき接続点から流出することを示
す。
19 ドライバの必要条件 メッセージはインタフェース上において,Active又はPassiveという方法で送信
する(4.3参照)。
すべてのPassive Trueのメッセージ転送は“高ステート”で行われ,オープンコレクタドライバを使用
して信号線上を伝達する。
19.1 ドライバのタイプ
19.1.1 SRQ,NRFD,NDAC信号線にはオープンコレクタドライバを使用する。
19.1.2 DIO 1〜8,DAV,IFC,ATN,REN,EOI信号線にはオープンコレクタドライバ,又はトライステ
ートドライバのどちらを使用してもよい。ただし,パラレルポールを使用するシステムの場合には,DIO 1
〜8のドライバにはオープンコレクタドライバを用いる(12.3.3参照)。
参考 より速いデータ転送を必要とする場合は,トライステートドライバが効果的である。
19.1.3 システム内の各デバイスがDIO,DAV,EOIラインのドライバにトライステートドライバを使用し
ているならば,そのシステムのコントローラはATNラインのドライバにトライステートドライバを使用す
ることを推奨する。
19.2 ドライバの仕様
(1)
“低ステート”:出力電圧+0.5V
ただし,電流シンクが+48mAのとき
(トライステート,又はオープンコレクタドライバを使用する。)
ドライバは,連続して48mAの電流シンク能力をもつこと。
(2) “高ステート”:出力電圧(トライステートドライバの場合)+2.4V
(ただし,−5.2mAのとき)
出力電圧(オープンコレクタドライバの場合):21.5参照のこと。
上記の電圧値は,デバイスのコネクタにおけるグランドラインに対する信号ラインの電圧値である。ド
ライバに対する追加条件は21.を参照のこと。
20. レシーバの必要条件
20.1 レシーバの仕様(許容値) 通常のノイズ除去特性をもつレシーバの仕様は,次のとおりである。
59
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
入力電圧+0.8V(低ステートにおいて)
入力電圧+2.0V(高ステートにおいて)
レシーバに対する追加条件は21.3を参照のこと。
20.2 レシーバの仕様(推奨) より大きなノイズ除去特性を得るために全ての信号線のレシーバにシュ
ミット形のレシーバを使用することを推奨する。
(1) “低ステート”:低ステートへの反転スレショルド電圧+0.8V
(2) “高ステート”:高ステートへの反転スレショルド電圧+2.0V
(3) “ヒステリシス”:0.4V
21. 複合デバイスの負荷に対する必要条件
21.1 終端抵抗 各信号ラインは,抵抗性負荷によって終端する(ドライバ及びレシーバとの接続には無
関係に)。
この主な目的は,ラインに接続されているすべてのデバイスが,高インピーダンスになったとき,その
ラインの電圧(定常状態における)を安定にするためである。また,この負荷はライン上のインピーダン
スを一様にし,ノイズ除去特性の改善に役立つ。
仕様条件は21.3.3を,負荷の代表値は21.5を参照のこと。
21.2 負電圧のクランプ レシーバが接続されている各信号ラインは,負電圧入力に対する保護手段を備
えておく。一般的に,この回路要素はレシーバの素子に内蔵されているダイオードクランプである。
21.3 DC負荷条件
21.3.1 デバイスのDC負荷特性は,電圧クランプ回路,終端抵抗,レシーバ/ドライバ回路によって影響
を受ける。このため個々の素子ではなく,すべてのデバイスのインタフェース回路によってDC負荷特性
は決定される。
しかし,この項では,終端抵抗及び電圧クランプに回路に対する完全な仕様を規定する。
21.3.2 負荷測定条件は高インピーダンス状態のドライバをもつデバイス中に,レシーバ,ドライバ及び終
端抵抗回路が接続されていること。
21.3.3 デバイス中の各信号ラインは,次のDC負荷特性をもち,更に図15の網目外の範囲内に納める。
① :1 0mAのとき
U<3.7V
② :1 0mAのとき
U>2.5V
③ :1−12.0mAのとき
U>−1.5V
(レシーバがある場合だけ)
④ :U0.4V
I<−1.3mA
⑤ :U0.4V
I>−3.2mA
⑥ :U5.5V
I<2.5mA
⑦ :U5.0V
I>0.7mA又は小信号インピーダンス
Z2kΩ(1MHzのとき)
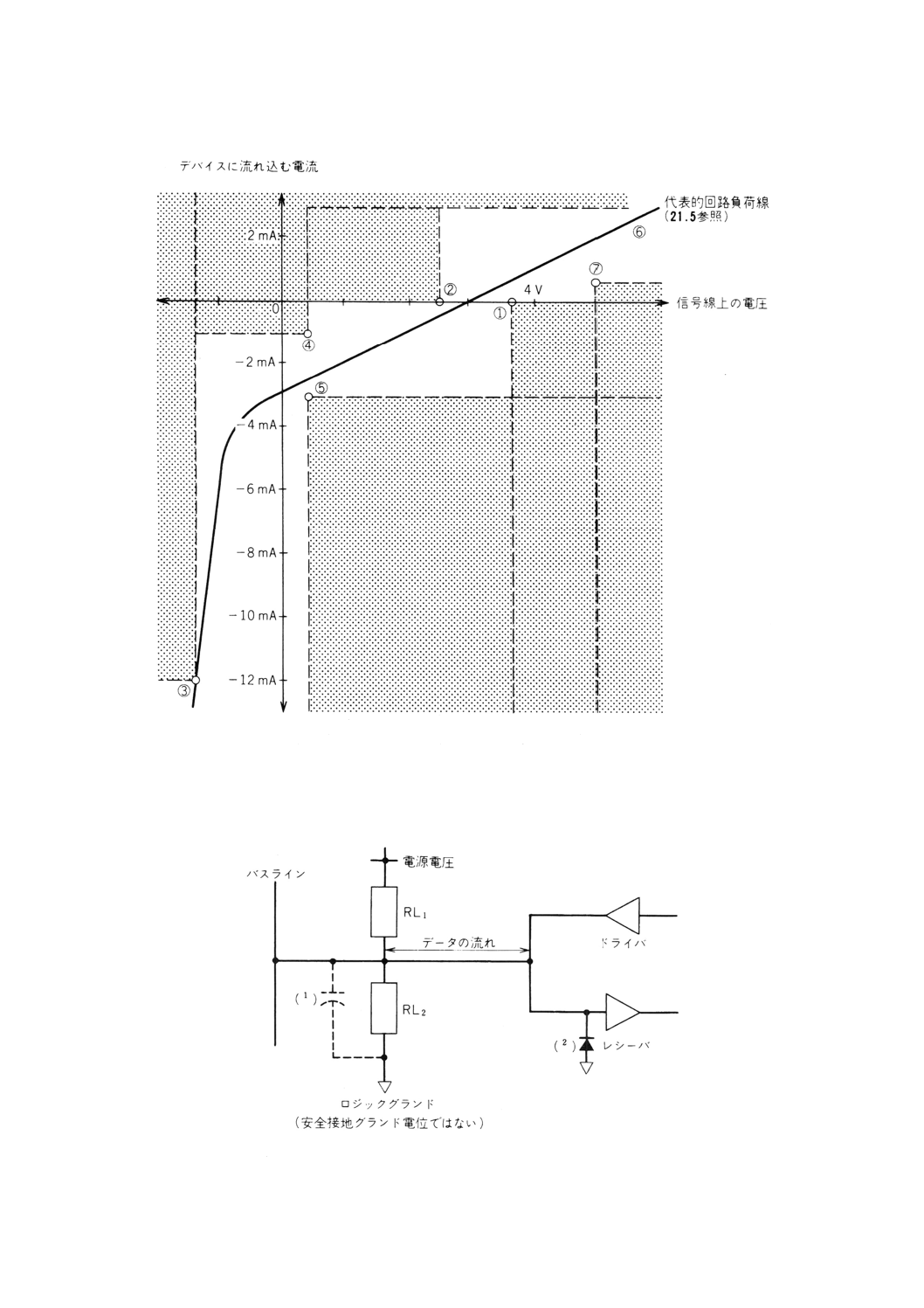
60
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図15 直流負荷境界条件
備考 DC負荷線の傾きは.一般的に3kΩ以下の抵抗値に相当する。
21.4 容量性負荷の制限 各信号ラインの容量性負荷は,1デバイス当たり100pF以下とし,実質上グラ
ンド間に存在させる。
21.5 代表的な回路構成 図16に代表的な入出力回路構成を示す。
図16 代表的な信号ラインの入出力回路
注(1) 浮遊容量の許容値は21.4を参照のこと。
(2) 通常はレシーバ素子に内蔵されている。
61
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この基本回路は,TTL回路及びディスクリートな素子回路と互換性がある。
代表的回路構成の各仕様値は,次のとおりである。
RL1:3kΩ±5%
RL2:6.2kΩ±5%
ドライバ:出力の漏れ電流=+0.25mAmax(Uz=+5.25Vのとき)
(ただし,オープンコレクタドライバ使用の場合)
出力の漏れ電流=±40μAmax(Uz=+2.4Vのとき)
(ただし,トライステートドライバ使用の場合)
レシーバ:入力電流=−1.6mAmax(Uz=+0.4Vのとき)
入力の漏れ電流=+40μAmax(Uz=+2.4Vのとき)
=+1.0mAmax(Uz=+5.25Vのとき)
電源電圧:+5V±5%
図16に示すように,1デバイス内の各信号ラインは1個のドライバと1個のレシーバだけを接続してよ
い。
また,21.3の複合デバイスの負荷に対する仕様を満足すれば,上記制限を受けない,他の回路構成であ
ってもよい。
22. 接地条件
22.1 接続ケーブルの外被シールドは,コネクタの1本のピンを通じて,フレーム(安全接地)に接続の
こと。これは,外部ノイズの影響及びその発生を最小にするためである。
備考 デバイス間の各フレーム電位が,システム動作に支障を生じるほど,相違があってはならない。
このインタフェースシステムの接続方法では過度なグランド電流を扱うことができるわけで
はない。
22.2 各コントロール及びステータスの信号ラインのリターン用グランドは,トランジェント時のクロス
トークによる干渉を最少にするために,ロジック回路のドライバ又はレシーバのところでロジックのグラ
ンドに接続することを推奨する。
22.3 フレームが金属板か,接地端子に接続されている場合,グランドループを防ぐために,ロジックグ
ランドとフレーム電位を簡単に切り離せるような構造にすることを推奨する。
23. ケーブル特性
23.1 導線の必要条件 導線1m当たりの最大抵抗値を次に示す。
(1) 各信号ライン(例:DIO 1,ATN)
0.14Ω
(2) 各信号ラインのリターン用グランドライン
0.14Ω
(3) 共通のグランドライン
0.085Ω
(4) シールド部
0.0085Ω
23.2 ケーブル構造
23.2.1 ケーブルは最小24本の導線をもち,そのうち16本は信号ラインに,残りはそのロジックグランド
リターンと外被シールドに使用すること。
23.2.2 最大線間容量は1m当たり150pFとする(ただし,1kHzで測定する。)。
備考 この場合,線間とは1本の信号ラインに対するすべてのライン間(他の信号ライン,グランド
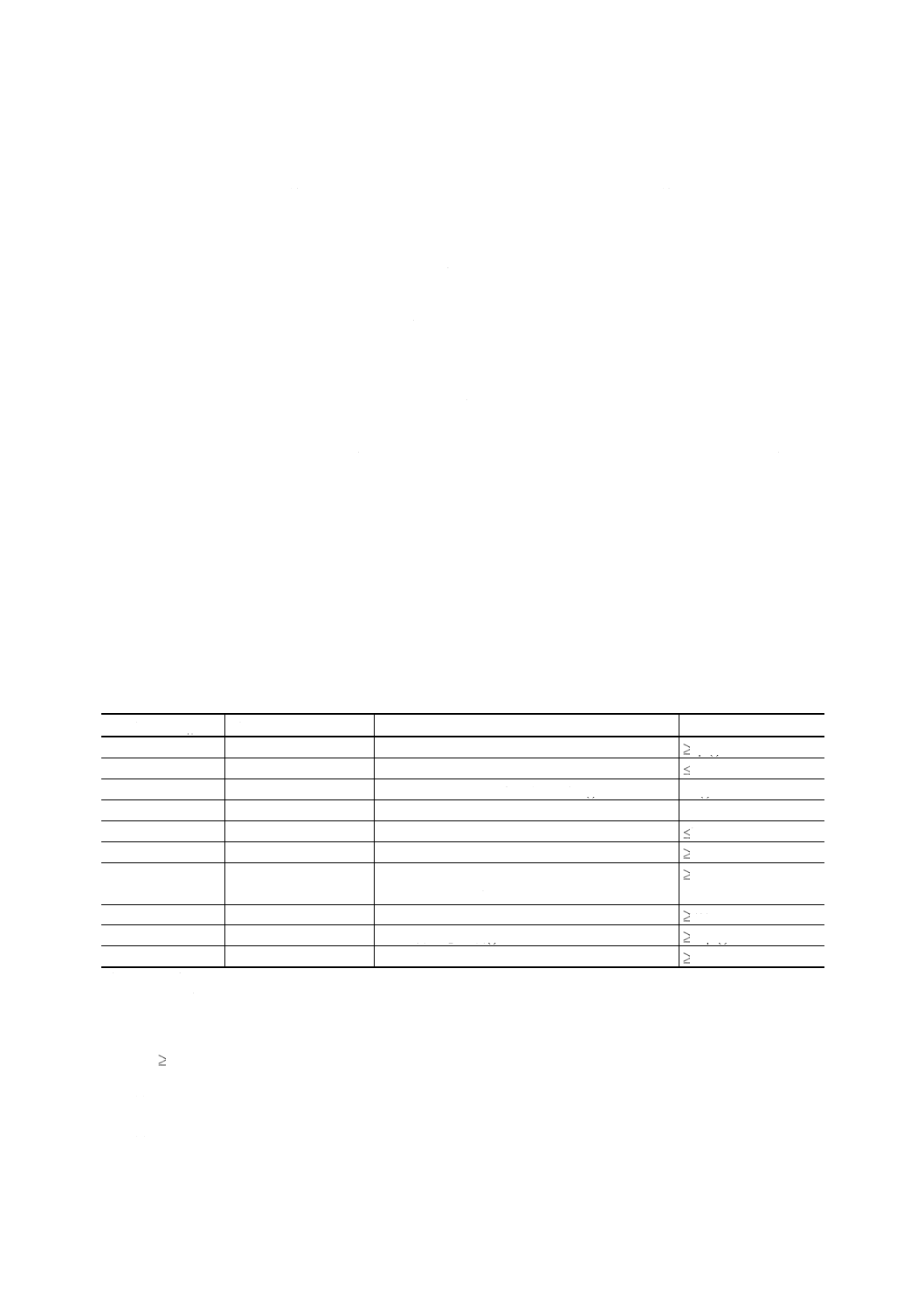
62
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ライン,シールド部)とする。
23.2.3 シールド部は,少なくとも85%の密度にする。
23.2.4 ケーブルには,信号線間のクロストークの影響,外部ノイズに対する信号線の感度,及び外部環境
へのインタフェース信号の漏れを最小にするような構造をもたせる。
(1) DAV,NRFD,NDAC,EOI,ATN,IFC,REN,SRQの各信号線は,ロジックグランド線とのツイス
トペアを用いるか,それと等価な方法により絶縁をする(クロストークを最小にするため)。
(2) 16本の信号線をすべてアース線とツイストペアにする構造をとらなくても,DIOライン以外の線だけ
ツイストペアにし,それらをしん(芯)線としてその周囲にDIOラインを配置する構造をとれば十分
満足できる。
(3) ケーブルには,それ自身と両端のコネクタまでの全体シールドをもたせる。
(4) 又は,同様の効果をもった別の内部構造のケーブルを使用してもよい。
24 ステートの移行時間 接続するデバイスの間で,最大限の適合性が得られるよう,表39は,デバイス
への信号入力と出力の間の時間関係についての規約を示す。時間値T1とT6〜T9は,伝送路の通常の伝播遅
れ時間と,他のデバイス内での代表的な回路の遅れ時間を許す。測定は,接続コネクタから見て,出力源
のドライバの遷移が見られた時間から行う。
時間値T1とT6〜T9が表39で規定した最小値に近いときには,注意が必要である。このときには電圧値,
容量,そしてクロストークが限界に近づく。このことは,次の条件が望まれることを示唆する。
(1) 高ステートのドライバ電圧は,その最大値が維持されていること。
(2) ケーブルの抵抗値と容量は,可能な限り低い値に保たれていること。
(3) クロストークは最小値に保たれていること。
表39
時間の分類(1)
適用されるファンクション
説明
その値
T1
SH
マルチラインメッセージのセットリング・タイム
2μs(2)
t2
SH,AH,T,TE,L,LE
ATNに対する応答時間
200ns
T3
AH
インタフェースメッセージを受信する時間(3)
>0(4)
t4
T,TE,L,LE,C,RL
IFCへの応答時間又はRENがFalseになったときの応答時間 <100μs
t5
PP
ATN∧EOIに対する応答時間
200ns
T6
C
パラレルポール実行時間
2μs
T7
C
現在のトーカがATNメッセージを感知するのをコントロー
ラが待つための遅れ時間
500ns
T8
C
IFCの維持時間又はRENがFalseのときの維持
100μs
T9
C
EOIに対する遅れ時間(5)
1.5μs(6)
T10
C
DAVに対する遅れ時間
1.5μs
注(1) 小文字tで表す時間は,あるステートへの移行時間の最大値を示す。
大文字Tで表す時間は,各ファンクションが次のステートへ移行するまでそのステートにとどまらなけれ
ばならない最小時間を示す。
(2) DIO,DAV,EOIラインにトライステートドライバを使用する場合,T1は次の値となる。
(a)
1100ns
(b) コントローラのATNラインにトライステートドライバを使用した場合は700ns。
(c) ATNがFalseになった後,最初に転送するバイトは上記の(a)又は(b)を満足しなければならないが,2番目
以後のバイトに対しては,500nsでよい。
(d) 31.3で規定した条件では,ATNがFalseになった後,最初のバイトに続くバイトでは,350nsでよい。
63
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(3) インタフェースメッセージを受信するために必要な時間(応答には必ずしも必要ではない。)。
(4) 実行状態により異なる。
(5) データ有効状態を示すためのEOI,NDAC,NRFDラインに必要な遅れ時間。
(6) トライステートドライバを使用する場合600ns。
第4節 機械的仕様
25. 適用範囲 この節では,次の条件で使用するインタフェースシステムに関する機械的仕様を定義する。
(1) 装置間の物理的距離が限られている。
(2) 星状,又は直線状のバス接続で使用されている。
(3) コネクタの取付場所が限られている。
26. コネクタタイプ ラックやパネルタイプのコネクタで,次に示す特性を最低限もった品質の良いコネ
クタを使用すること。
26.1 電気的特性
定格電圧:200V
定格電流:5A/ピン(25℃時)
接触抵抗:<20mΩ(10mA時)
絶縁抵抗:>1GΩ
試験電圧:500V(1分間,20℃)
容量 :<1.5pF(1kHzでのピン間)
耐 久 性:>1000h (1A,70℃)
26.2 機械的特性
ピ ン 数:24
ピン間隔:2.16mm(セルフワイピング)
極性(シェル形状):台形
シェル材質:耐腐食性,導電性材質
各ピンの保持力:>0.15N
挿抜力(F):8N<F<89N(代表値)
耐久性:500回以上の挿入でも接触抵抗の仕様を満足すること。
隣接ピン間のすきま:0.5mm
はんだ付け性(適用できる場合):235℃,2秒間
26.3 環境特性 温度,湿度,及び振動に関する基本的環境特性は,JIS C 0010[環境試験方法(電気・電
子)通則]に準じる。
27. コネクタピン割付け ケーブル用コネクタ及び装置用コネクタに対するピン割付けは,次表のとおり
とする。
ピン番号
信号線名
ピン番号
信号線名
1
DIO 1
13
DIO 5
2
DIO 2
14
DIO 6
3
DIO 3
15
DIO 7
4
DIO 4
16
DIO 8
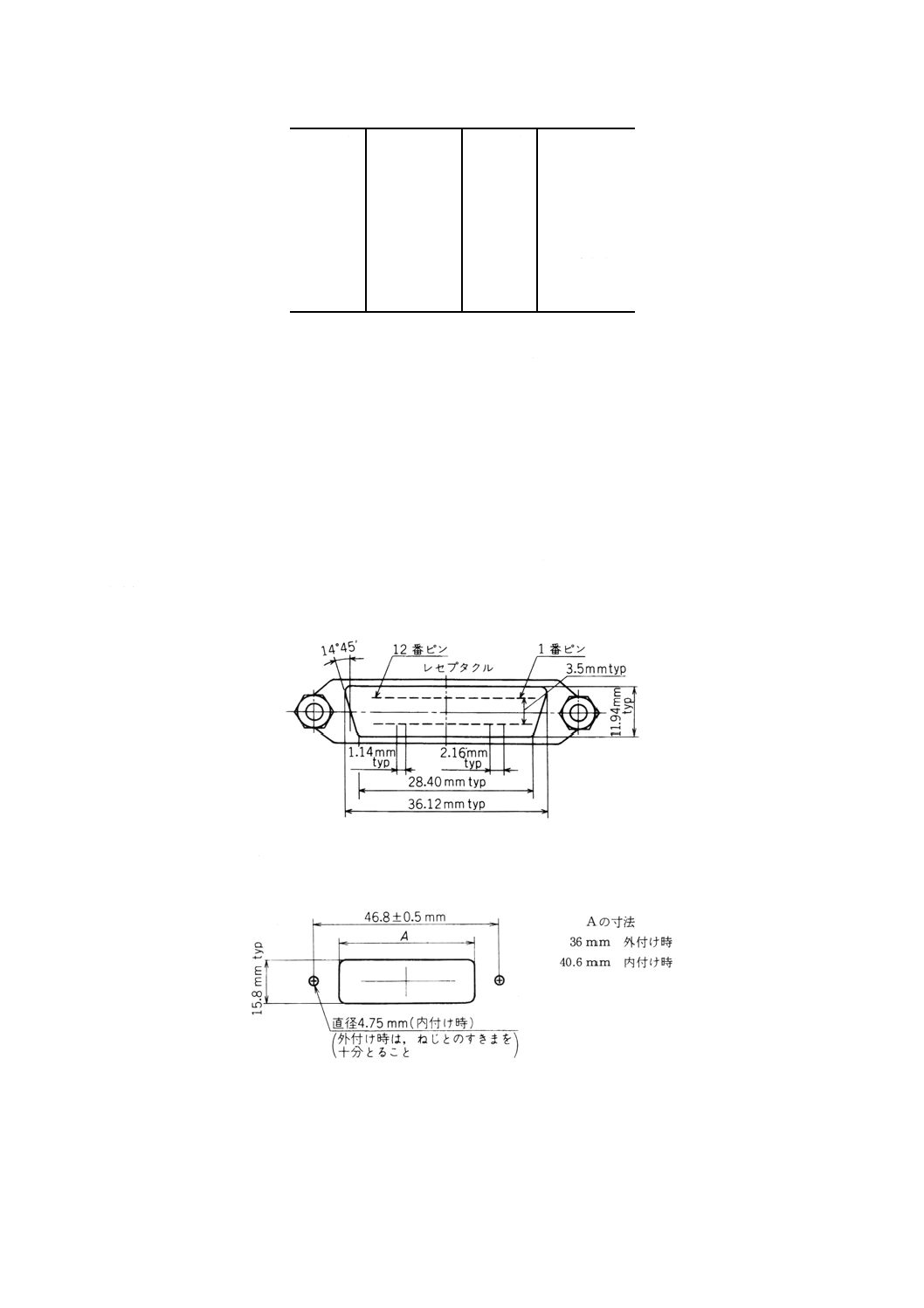
64
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ピン番号
信号線名
ピン番号
信号線名
5
EOI (24)
17
REN (24)
6
DAV
18
Gnd, (6)
7
NRFD
19
Gnd, (7)
8
NDAC
20
Gnd, (8)
9
IFC
21
Gnd, (9)
10
SRQ
22
Gnd, (10)
11
ATN
23
Gnd, (11)
12
SHIELD
24
Gnd, LOGIC
備考 Gnd, (n) は,括弧内の数字で示した信号線のリ
ターン用グランドであることを示している。ま
た,EOIとRENのリターン用グランドは24番
ピンである。
28. 装置用コネクタの取付方法
28.1 各装置には,レセプタクルタイプのコネクタを取り付ける。プラグタイプのコネクタが合うように,
以下に示す代表的寸法をもつこと。12本のピンを2列に,台形のシェルの中央に位置させる。コネクタ取
付部は,ケーブルアセンブリの固定用ねじを受けられるようになっていること。
コネクタの取付方向としては,装置の通常使用状態を背面から見たときに,1番ピンが右上の隅にくる
ような方向を推奨する。コネクタの取付位置は,ケーブルを曲げる余裕として,最低40mmは確保する必
要がある。
図17-1
28.2 コネクタの取付けは,パネルの外側からでも,内側からでもよい。
そのための代表的パネル取付穴寸法を図17-2に示す。
図17-2 コネクタ用パネル取付穴寸法
28.3 コネクタは,図18で示すように,パネルへの取付方法により決まるどちらか一方のスタッド付きス
タンドオフによって取り付けられる。
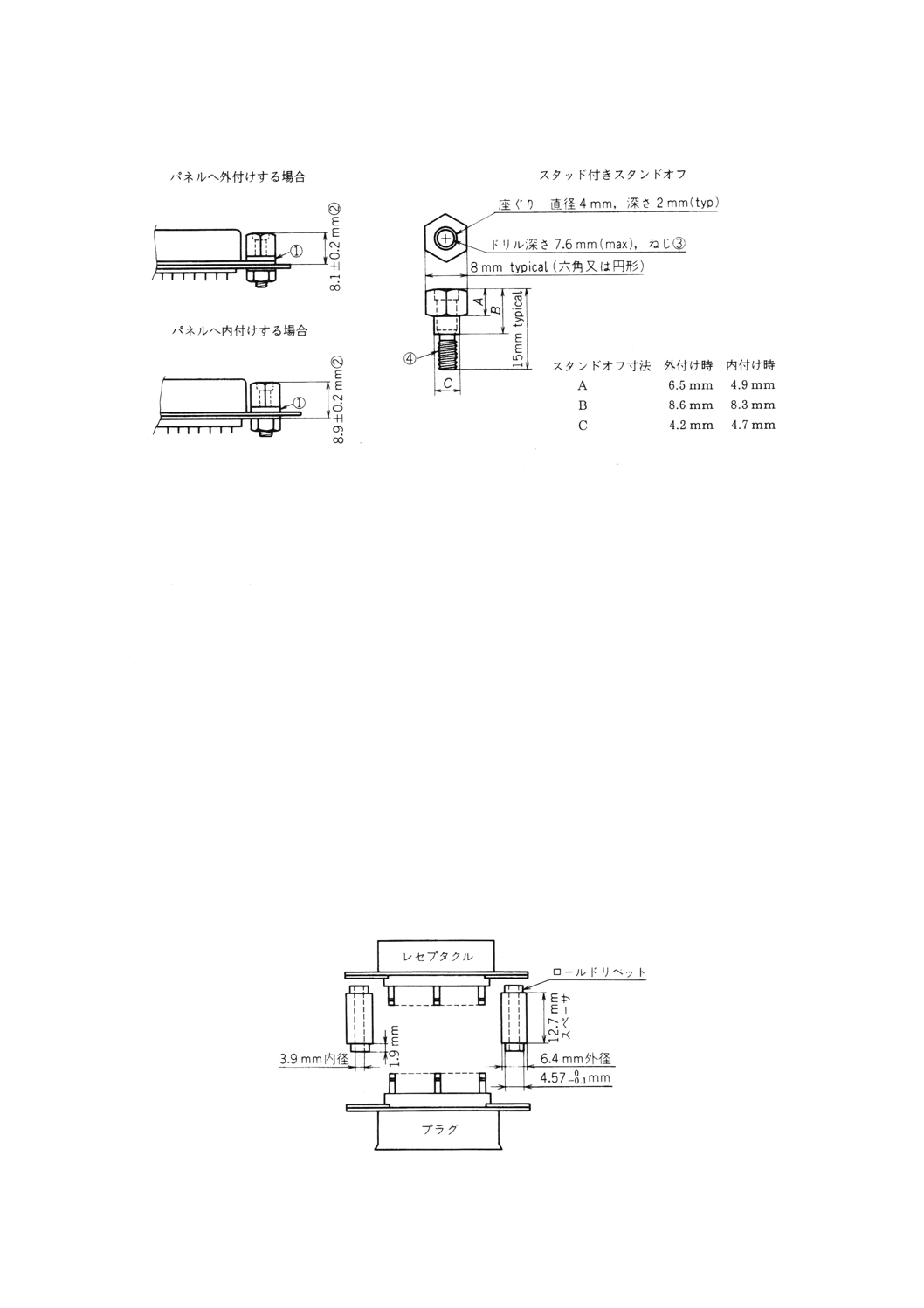
65
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図18 取付方法
ここに, ① :ばね座金 厚さ1.2mm (typ)
② :代表値(パネル厚,ばね座金厚,コネクタハウジング厚による。)
③ :JISメートルねじM3.5×0.6又は相当品
④ :ねじのサイズは設計者に任せる(適合性に影響しないため)。
29. ケーブルアセンブリ
29.1 ケーブルアセンブリは,プラグとレセプタクルの対でできたコネクタをケーブルの両端に備えてい
る。コネクタを積み重ねるアセンブリ方法としては,図19に示すようなしっかりした構造のものを推奨す
る(多数のケーブルアセンブリの接続時においても確実な接続をするため。)。
29.2 各コネクタアセンブリには,二つの抜け止めのある固定用ねじを付けること。
各固定用ねじの機械的寸法は,図20に従う。
また,固定用ねじの抜け止めのために止め輪又は相当品を使用すること。
29.3 29.1に従ってアセンブリされた一対のコネクタは,図21で示すように適切なハウジングで部分的に
覆われていることが望ましい。
個々のケーブルアセンブリは4m以下の任意の長さでよい。ハウジングの材質はプラスチックでも金属
でもよいが,後者の方がEMC(電磁環境整合性)特性が優れているので好ましい。ケーブルアセンブリ全
体を遮へいする適切な方法に関する追加情報は,附属書Jによる。
図19 積み重ね式コネクタアセンブリ
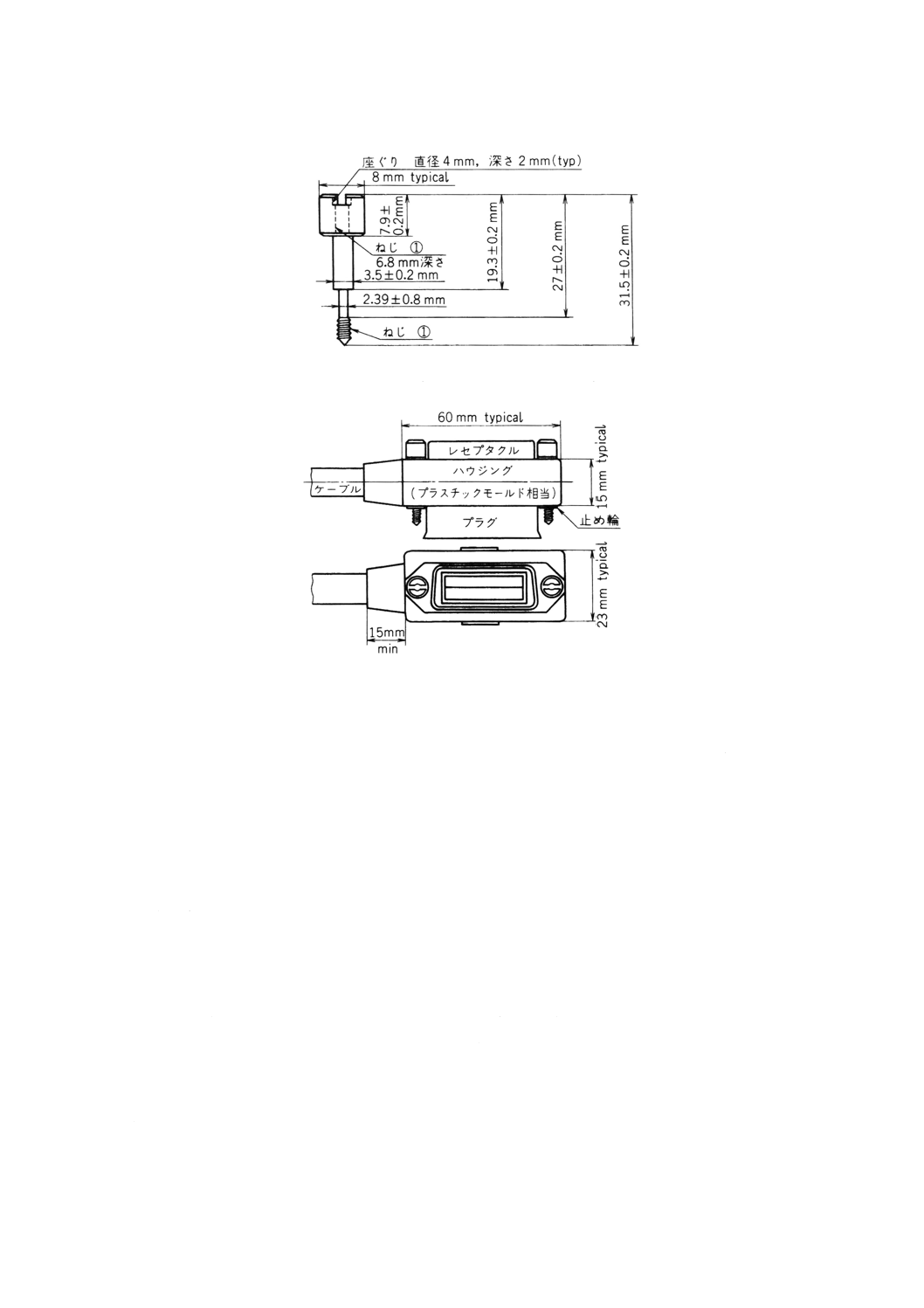
66
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図20 固定用ねじ
ここに,①JISメートルねじM3.5×0.6又は相当品
図21 ケーブル用コネクタハウジング
第5節 システムへの応用と設計者に対する指針
30. システムへの適合性
30.1 一般的指針 このインタフェースシステムは,インタフェースファンクションを任意に選ぶことが
可能なため,幅広い汎用性がある。また各インタフェースファンクション内にも多くのオプションがある。
さらに設計者は,デバイスファンクション内のあらゆるデバイス特有の能力を自由に選ぶことができる。
30.1.1 設計者には,デバイスのもっている能力(選択したインタフェースシステム,及びそれに関するデ
バイス特有の動作)を完全に定義する責任がある。その結果,デバイスのエンドユーザは効果的にデバイ
スをシステムに応用できる。
30.1.2 第2節で示したインタフェースファンクションの最小構成をとると,システムへ適合させるための
最小限の信号線は次のようになる。
(1) DIO1-7
(2) DAV,NRFD,NDAC
(3) IFC,ATN(コントローラを使用しないシステムの場合は不要)
30.1.3 システムへの適合性を保つため,設計者は第2節に定義されている範囲を超えたインタフェースフ
ァンクションを使用しないこと。
31. データ転送速度 インタフェースバスを用いてデバイスの情報伝達をさせようと考えている設計者は,
デバイスの性能レベルとシステムの性能レベルとの関係を十分考慮すること。
67
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次にその指針を示す。
31.1 48mAのオープンコレクタドライバを用いて,2mごとに標準負荷を付けた場合,20mまでの転送速
度は最大250キロバイト/秒である。
31.2 48mAのトライステートドライバを用いて,2mごとに標準負荷を付けた場合,20mまでの転送速度
は最大500キロバイト/秒である。
31.3 より高速での転送 システムとして最高のデータ転送速度(通常,1メガバイト/秒まで可能)を達
成するためには,設計者は次の項目を実施する必要がある。
(1) 48mAのトライステートドライバを使用する。
(2) ケーブル長をできるだけ短くし,最大でも15m以内とする。さらに,少なくとも1mごとに1台分と
等価な負荷を入れること。
(3) すべてのデバイスの電源を入れる。
(4) RENとIFCを除く各線でデバイスの容量を最小にし,デバイス当たり50pF以下の容量とする。
(5) T1として最小の350nsを用いる。
(6) 必要であれは,一つのデバイスの1信号線当たり一つ以上のプルアップ抵抗を付ける。ただし,一つ
のシステム当たり15負荷までとする。
備考1. T1として最小の350nsを用いて設計されたデバイスを上記以外の状態で使用した場合は,満足
いく転送(すなわち,エラーのない転送)を保証することはできない。
2. T1<700nsにすること,デバイス容量を50pF以下にすること,プルアップ抵抗を付けること
は,同一のことを意味する。
3. デバイス内にデータバイト用のバッファを用いると,転送速度に有利になる。
32. デバイスの能力
32.1 ビジーファンクション システムとして操作するうえで,あるデバイスをプログラムしたり,デバ
イス内でのある動作を開始させた後に他のデバイスと通信することは有用である(このとき,最初のデバ
イスは要求された仕事の実行中であってもよい。)。
ビジーファンクション(仕事が終了するまで動作中)は,デバイスのステートであり,インタフェース
のステートではない。
デバイスのビジー条件とは独立に,インタフェースバスに情報を伝達させるには,次の三つの方法が可
能である。
(1) NRFD保持
(2) SRQとシリアルポール
(3) パラレルポール
シリアルポール法,パラレルポール法については第2節で記述する。
32.1.1 NRFD保持 NRFD信号は,ビジーファンクションに合わせてゲートしてもよい。このような方法
を用いる場合には,NRFD信号(RFDメッセージ)の定義は“次のデータバイトを受信する用意ができた”
こと以上のことを含むようになる。また内部のビジー信号は,AHファンクションを通して,NRFD信号
にゲートされる。
この方法では,デバイスは“ビジーサイクル”中はリスナ解除されてもよい。またこの間インタフェー
スは別の目的に使用してもよい。リスナとして再びアドレスされたときに,デバイスはインタフェースに
対して内部のビジーステータスを示さなければならない。NRFDラインを1にセットすることにより“ビ
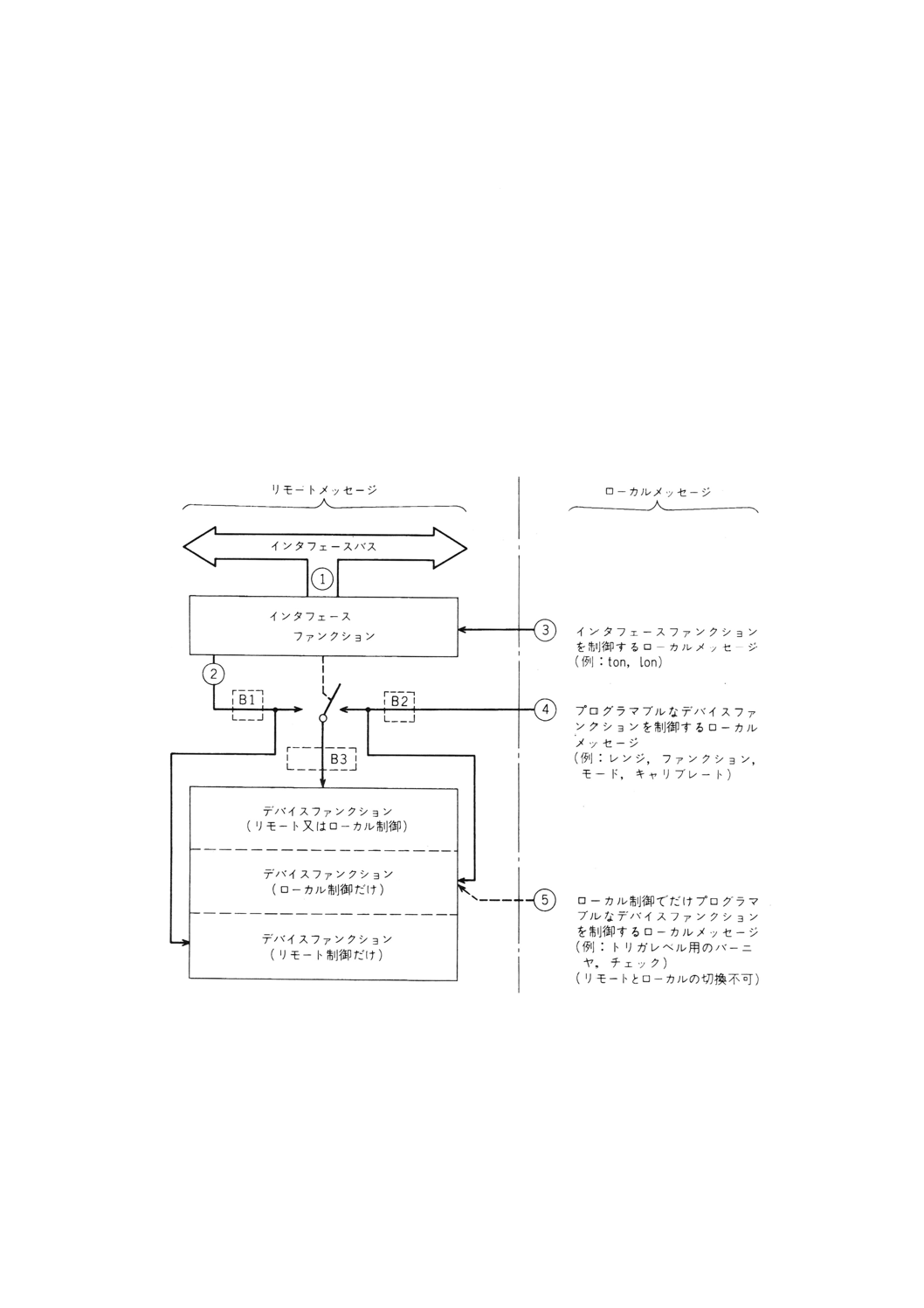
68
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ジー”を,NRFDラインを0にセットすることによって“動作終了”を,デバイスは示す。
備考 デバイスが自分自身で元に戻れない,又はビジーではない条件に到達しないようなビジーファ
ンクションにNRFD保持を使用する場合は,潜在するハングアップの状態をクリアするために,
もう一つのリスナアドレス(常にアクセス可能であること。)をもたなければならない。
32.2 リモートローカルの応用
32.2.1 デバイスをある特定なものに応用させるために,設計者は,そのデバイス内であれば,どのような
ファンクションであっても,リモートプログラムを可能にしてよいが,第2節で定義したインタフェース
ファンクションで直接作用するローカルコントロールファンクションはリモートプログラムを可能にして
はならない。
32.2.2 リモート及びローカル制御できるプログラマブルなデバイスには,図22に示されるような象徴的
制御の一部,又はすべてを実施するためのスイッチが必要である。ただし,この図では,スイッチする技
法,スイッチの位置,そしてスイッチされたメッセージの内容からなる集合を包括的に含んではいない。
図22 リモート/ローカル切換
ここに,
①: リモートメッセージ
(例:ATN,MLAインタフェースメッセージ,DABデバイスメッセージ)
②: プログラマブルなデバイスファンクションのリモート制御
(例:レンジ,ファンクション)
及びデバイスファンクションの実行
(例:トリガ,クリア)
B: バッファメモリを入れることのできる位置
通常,B1とB2は組で使用され,B3は単独で使用される。
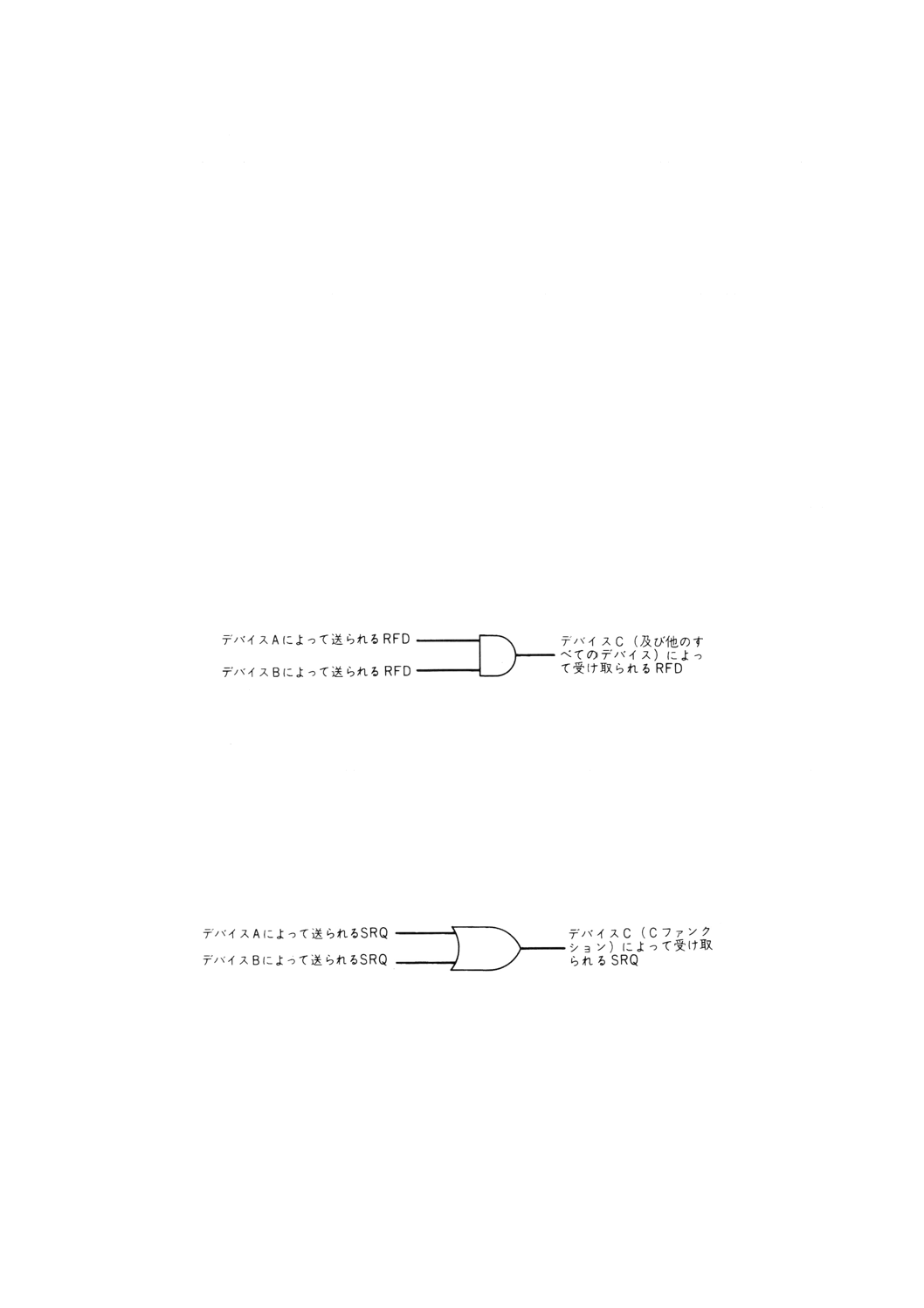
69
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
33. 論理AND及びORによる動作 SH,AH,及びSRのインタフェースファンクションに用いられる3
種のメッセージの場合においては,あるインタフェースファンクションによって送信されたメッセージは,
他のインタフェースファンクションによって受信されたメッセージと必ずしも同じである必要はない(信
号ラインの伝達特性による時間の相違に関係なく。)。
(1) SHによって受信されるRFD(又はDAC)メッセージは,(すべてのAHによって)送信されるRFD
(又はDAC)の論理AND機能でなければならない。
(2) Cファンクションによって受信されるSRQメッセージは,(すべてのSRによって)送信されるSRQ
の論理OR機能でなければならない。
備考 (すべてのAHによって)受信されるDAVメッセージは(唯一のSHによって)送信される
DAVメッセージでなければならない。
33.1 RFD及びDACメッセージ
33.1.1 AHファンクションによってTrue(又はFalse)で送信されるRFD(又はDAC)メッセージは,各々
NRFD(又はNDAC)信号ラインを0 (H) にセットするか又はNRFD(又はNDAC)信号ラインを1 (L) に
ドライブするかによってなされる。
33.1.2 SHファンクションによって受信されるRFD(又はDAC)メッセージは,信号ラインの状態が0 (H)
であるとき[すべてのRFD(又はDAC)がPassive Trueを送信しているとき]Trueで受信される。
33.1.3 SHファンクションによって受信されるRFD(又はDAC)メッセージは,信号ラインの状態が1 (L)
であるとき[一つ以上のRFD(又はDAC)がFalseを送信しているとき]Falseで受信される。
33.1.4 これらの状態の等価的論理回路は,次のように表される。
33.2 SRQメッセージ
33.2.1 SRファンクションによって各々True又はFalseで送信されるSRQメッセージは,SRQ信号ライン
を1 (L) にドライブするか,又は0 (H) にセットするかによってなされる。
33.2.2 Cファンクションによって送信されるSRQメッセージは,バス信号ラインが1 (L) であるとき(一
つ以上のSRファンクションがSRQメッセージをTrueで送信しているとき)Trueで受信される。
33.2.3 Cファンクションによって受信されるSRQメッセージは,バス信号ラインの状態が,0 (H) である
(すべてのSRファンクションがSRQメッセージをPassive Falseで送信しているとき)とき,Cファンク
ションによってFalseが受信される。
33.2.4 これらの状態の等価論理回路は,次のように表される。
33.3 回路構成
33.3.1 各々のバス信号ライン上のこれらのファンクションの基本的回路構成は,21.の図16に代表される。
ドライバ素子は,図23で代表されるようなバイステート(オープンコレクタ)ドライブでなければならな
い。
備考 送受信回路は,デバイスの内部の論理及びバスの論理と矛盾しなければ,インバータでもノン
インバータでもよい。
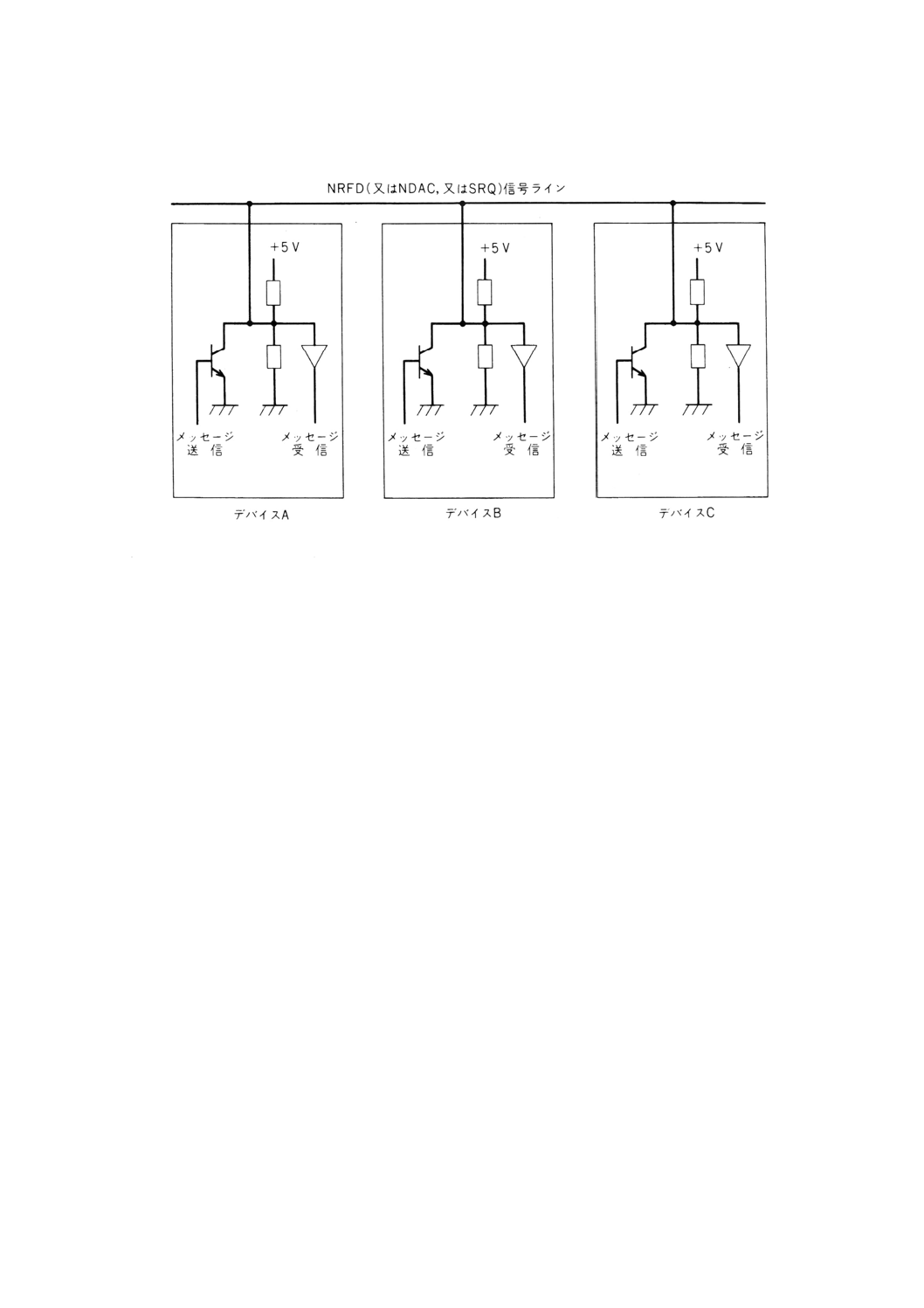
70
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図23 バイステート信号ライン論理
(オープンコレクタドライバ)
33.3.2 33.1及び33.2で述べられたように,デバイスAとBによるNRFD(又はSRQ)のインタフェース
バス信号ラインは,図24に示されるようになる。
デバイスCで受信される合成波形がバス上に存在することになる。
デバイスAとBに見られる信号レベルは,単にデバイス内部で存在し,バス信号ライン上にはない。
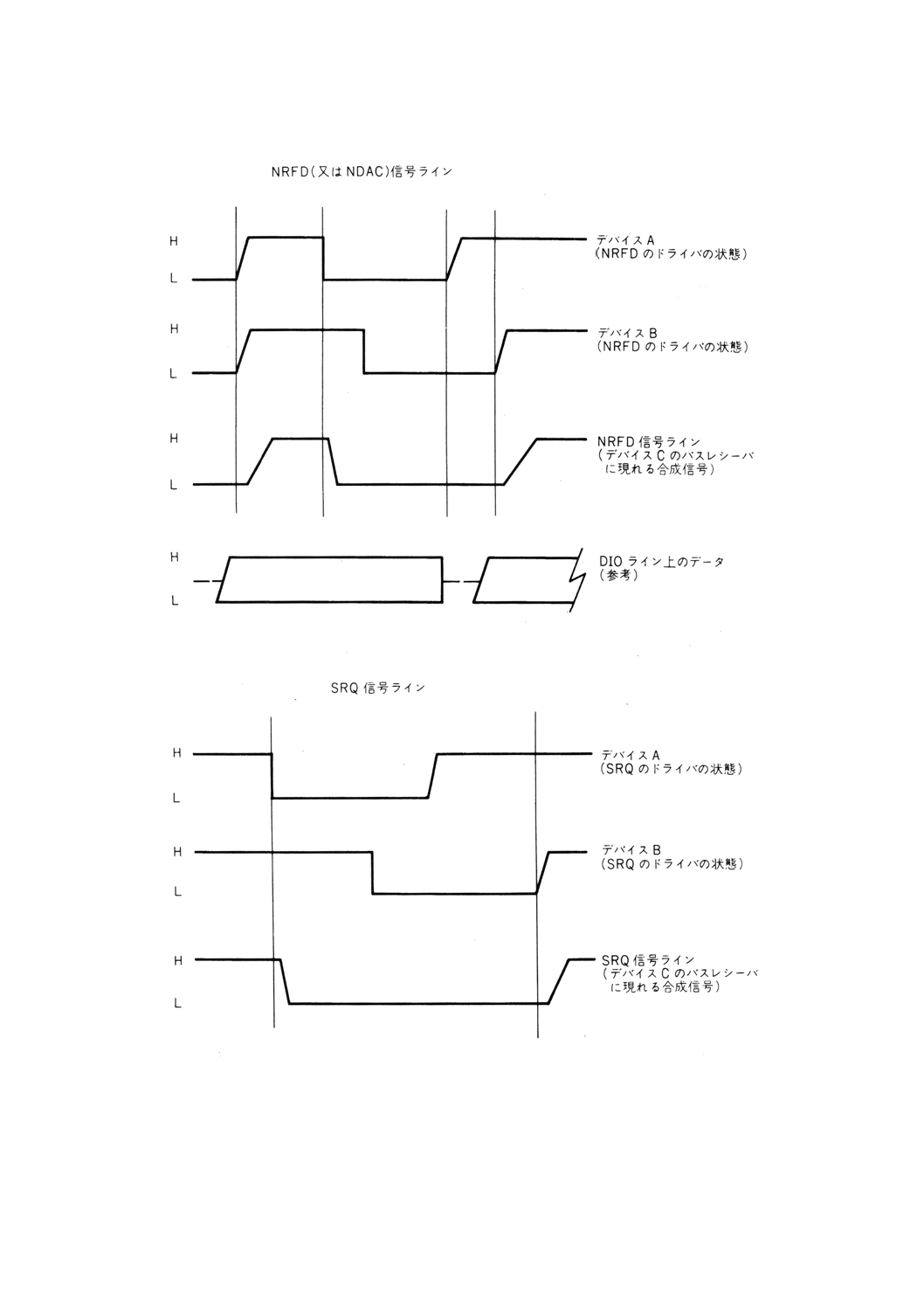
71
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図24 信号ラインの論理とタイミングの関係
34. アドレスの割当て方法
72
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
34.1 一般に,デバイスは基本的仕事を行う場合には1個のトーカと1個のリスナアドレスをもてばよい。
しかしシステムの必要上,一つのデバイスに複数のトーカ(又はリスナ)アドレスをもたせてもよい。例
えば,あるデバイスが2個のトーカアドレスをもっている場合,1個は生の測定データの送信に,もう1
個は処理したデータの送信に使用することもできる。ただし,1次アドレスを使い過ぎると,システムの
構成のときに制限を受けるので,複数のアドレスをもたせるのは,最小限にとどめるべきである。
35. インタフェースファンクションの組合せ例 設計者は,デバイスの応用に必要なインタフェースファ
ンクションを自由に選ぶことができる。インタフェースファンクションの選択に当たっては,第2節で定
義されている可能な組合せの項のように,他のファンクションが必然的に必要となる場合もある。
次にインタフェースの組合せ例を示す。しかし,ここで示すのはその代表的な組合せ例を示すのであって,
すべてを示しているわけではない。
デバイス
インタフェースファンクションの使用例
信号発生器
(リスナだけ)
AH,L,RL,DT
テープリーダ
(トーカだけ)
SH,AH,T
デジタル電圧計
(トーカ,リスナ)
SH,AH,T,L,SR,
RL,PP,DC,DT
カルキュレータ
(トーカ,リスナ,コントローラ)
SH,AH,T,L,C
第6節 システムの必要条件とユーザに対する指針
36. システムへの適合性
36.1 一般的指針 このインタフェースに適合するように設計されたデバイスは,インタフェースを介し
て情報交換する能力より更に幅広い能力を備えている場合がある。しかし,この規格は,デバイス特有の
操作方法を規定するものではなく,インタフェースシステムの機械的,電気的,機能的な能力を規定する
ものである。
36.1.1 操作方法に関する適合性についてはユーザに責務がある。ただし,ユーザはインタフェースシステ
ムと関係するすべてのデバイスの特性を十分理解しているものとする(例えば,プログラムデータのコー
ド,出力データのフォーマットなど)。
37. システムを構築する場合の必要条件
37.1 システムを構成するための制限
37.1.1 デバイスの最大数 一つのインタフェースに接続できるデバイスは,最大15個とする。
37.1.2 最小システム構成
37.1.2.1 インタフェースシステムは,少なくとも1個のTファンクション,1個のLファンクション,1
個のCファンクションをもつデバイスを1個以上もっているものとする。
37.1.2.2 tonメッセージをもつすべてのTファンクション(T1,T3,T5,T7,又はTE1,TE3,TE5,TE7)
とlonメッセージをもつLファンクション(L1,L3,又はLE1,LE3)で構成されているシステムは,ton
及びlonメッセージがTrueの場合,Cファンクションなしでも動作可能である。
73
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
一般に,tonとlonメッセージは,パネル面のスイッチによりTrue,Falseの切換えが可能である。
37.1.3 システムコントローラ 一つ以上のコントローラをもつすべてのシステムは,次の条件を満足して
いるものとする。
(1) SACS (System Control Active State) のステートにいるCファンクションは,システム中において必ず1
個であること。
(2) システムの中のすべてのコントローラは,コントロールの受渡しが可能とする。
37.1.4 デバイスの電源オン,オフ
37.1.4.1 少なくとも32以上のデバイスの電源がオンの状態にないとデータ伝送が正しく行われることは保
証できない。一方,電源オフ状態のデバイスが高ステートの仕様(すべての信号ラインのドライバがPassive
Falseの状態にあり,デバイスのロジックグランドに対して2.5V以上の電位が確保されている。)を満たす
場合には,システムは正常に動作する可能性がある。
37.1.4.2 特殊なドライバ(この規格の範囲外)を用いるなどして,その予防策を講じておかないと,シス
テム動作中にデバイスの電源を投入するとシステムは不完全な動作を行う可能性がある。
38. アドレスの割当て方法
38.1 トーカアドレス
38.1.1 T又はTEファンクションをもつデバイスは,T1〜T5の値によってそのマイトーカアドレス (MTA)
指定される。ただし,次に示すようなすべて“1”のパターンは除く。
1
1
1
2
1
3
1
4
1
5
T
T
T
T
T
備考 この制限は,以前のシステムに対する適合性のためだけに残されている(UNTと同じパターン)。
38.1.2 二つ以上のTファンクションがある場合(同じデバイス内にあるか,又は異なるデバイス内にあ
るかを問わず),MTAコードのT1〜T5を同じ値にしてはいけない。
38.1.3 TファンクションとLファンクションの両方をもつデバイスは,MTAコードのT1〜T5とMLAコ
ードのL1〜L5を同じ値にしてもよい。
38.1.4 TEファンクションの1次アドレスのMTAコードのT1〜T5と,TファンクションのMTAコード
のT1〜T5は同じ値にしてはいけない。
38.2 リスナアドレス
38.2.1 L又はLEファンクションをもつデバイスは,L1〜L5の値によって,そのマイリスナアドレス
(MLA) を指定される。ただし,次に示すようなすべて“1”のパターンは除く。
1
1
1
2
1
3
1
4
1
5
L
L
L
L
L
38.2.2 二つ以上のLファンクションがある場合(一般に,異なるデバイス内にある),MLAコードのL1
〜L5を同じ値にしてもよい。
38.2.3 LファンクションとTファンクションの両方をもつデバイスは,MLAコードのL1〜L5とMTAコ
ードのT1〜T5を同じ値にしてもよい。
38.3 2次アドレス
38.3.1 TEファンクション又はLEファンクションをもつデバイスは,S1〜S5の値によって,そのマイセ
カンダリアドレス (MSA) を指定される。ただし,次に示すようなすべて“1”のパターンは除く。
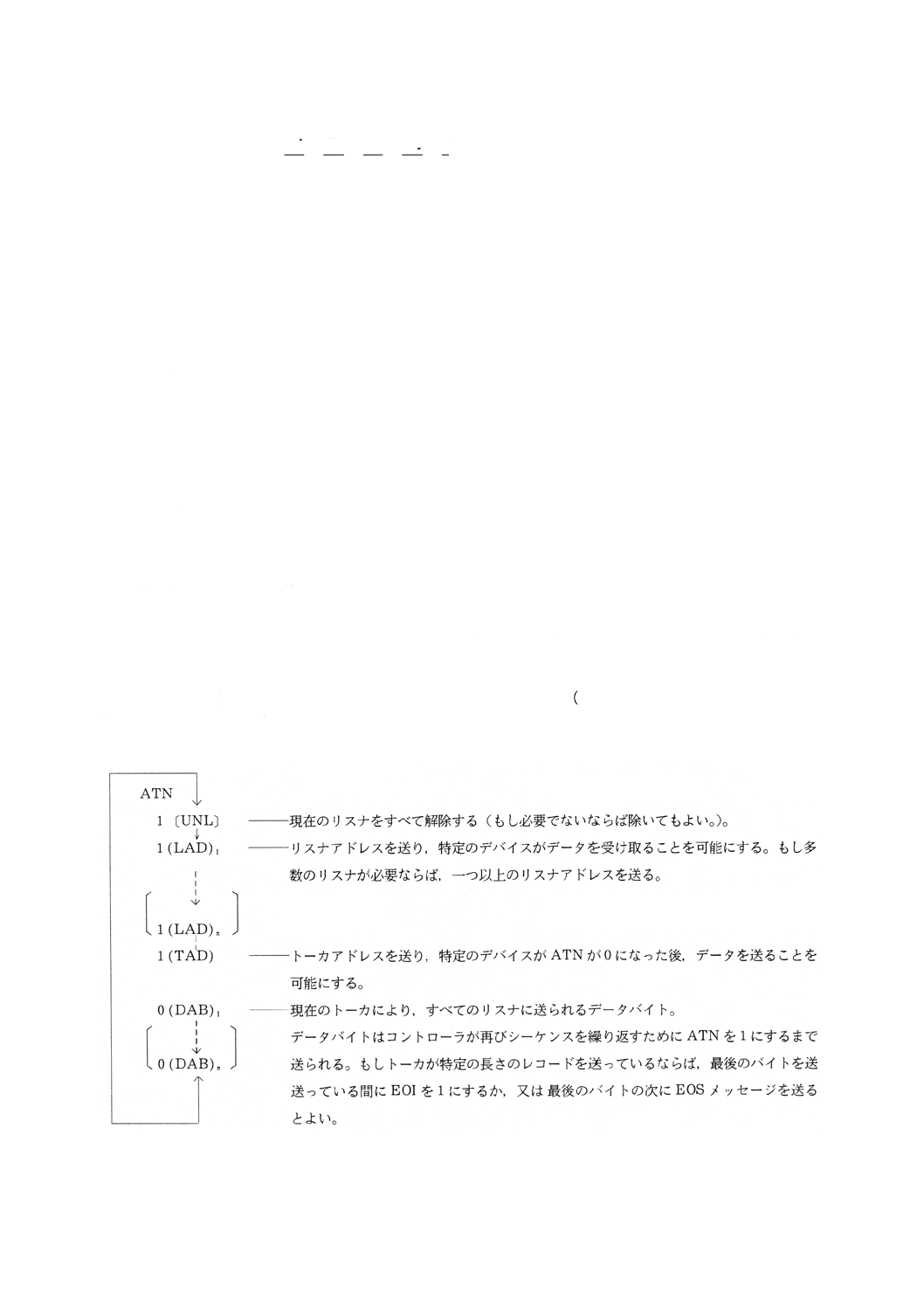
74
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
1
1
2
1
3
1
4
1
5
S
S
S
S
S
38.3.2 二つ以上のTEファンクションがある場合(同じデバイス内にあるか,又は異なるデバイス内にあ
るかを問わず),MTAコードのT1〜T5及びMSAコードのS1〜S5を同じ値にしてはいけない。
38.3.3 二つ以上のLEファンクションがある場合(一般的に,異なるデバイス内にある。),MLAコード
のL1〜L5及びMSAコードのS1〜S5を同じ値にしてもよい。
38.3.4 TEファンクションとLEファンクションの両方をもつデバイスは,MTAコードのT1〜T5とMLA
コードのL1〜L5を同じ値にしてもよい。また同じ2次アドレスを使用してもよい。
39. ケーブル接続制限
39.1 最大ケーブル長 一つのバスシステムの中の一群の装置を互いに接続するのに使用できる最大ケー
ブル長は,2m×(装置数)又は20mのどちらか短い方とする。
39.2 最大ケーブル長の分配 39.1で定められた最大ケーブル長は,使用者が適当にシステムの装置に分
配してよい。しかし,1本のケーブル長が4mを超える場合には,注意を要する。
39.3 ケーブル構成 使用者は,適当と思われる方法でケーブル接続してよい。(例えば,星形,直線状形
等)。
39.4 グランドに対する注意 システムは過大なグランド電流を扱える能力をもたないので,各デバイス
間に電位差を生じるような使用をしてはいけない。
40. 操作シーケンス 大部分のインタフェース間の通信には,一連のコード化されたメッセージを送る必
要がある。他にいろいろの方法もあるが,次のシーケンスは,指定された動作として推奨されているもの
である。ただし〔 〕印は,シーケンス上削除してもよい。また( )印は,この規格では特に規定
されていないメッセージを示す。
40.1 データ転送
ここに,
(LAD) :特定のメッセージのリスナアドレスを表す。
(TAD)
:特定のデバイスのトーカアドレスを表す。
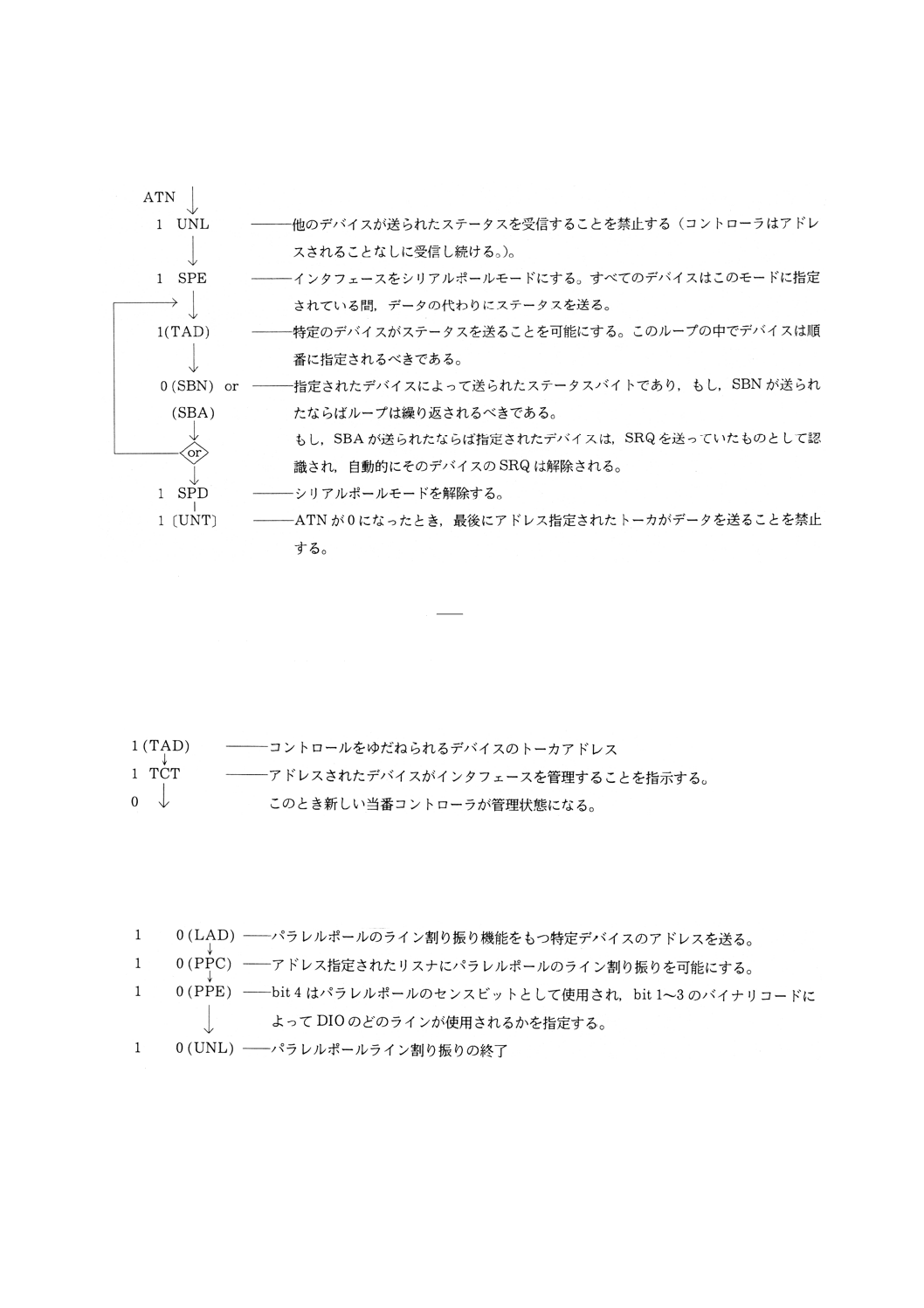
75
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(DAB) :任意のデータバイトを示す。
40.2 シリアルポール(通常SRQが1のときにコントローラによって発せられる。)
ここに, (TAD) :
特定のデバイスのトーカアドレスを表す。
(SBN) :
サービス要求していないデバイスのステータスバイトを表す。
(Bit7=0) (SBN=STB∧RQS)
(SBA) :
サービスを要求しているデバイスのステータスバイトを表す。
(Bit 7=1) (SBA=STB∧RQS)
40.3 コントロールの受渡し
ATN
ここに, (TAD) :特定のデバイスのトーカアドレスを表す。
40.4 パラレルポール
40.4.1 パラレルポールのライン割り振り
ATN IDY
ここに, (LAD) :特定のデバイスのリスナアドレスを表す。
PPEコマンド:PPDコマンドによりクリアされる。
パラレルポール:PPUコマンドによりクリアされる。
40.4.2 パラレルポールの応答
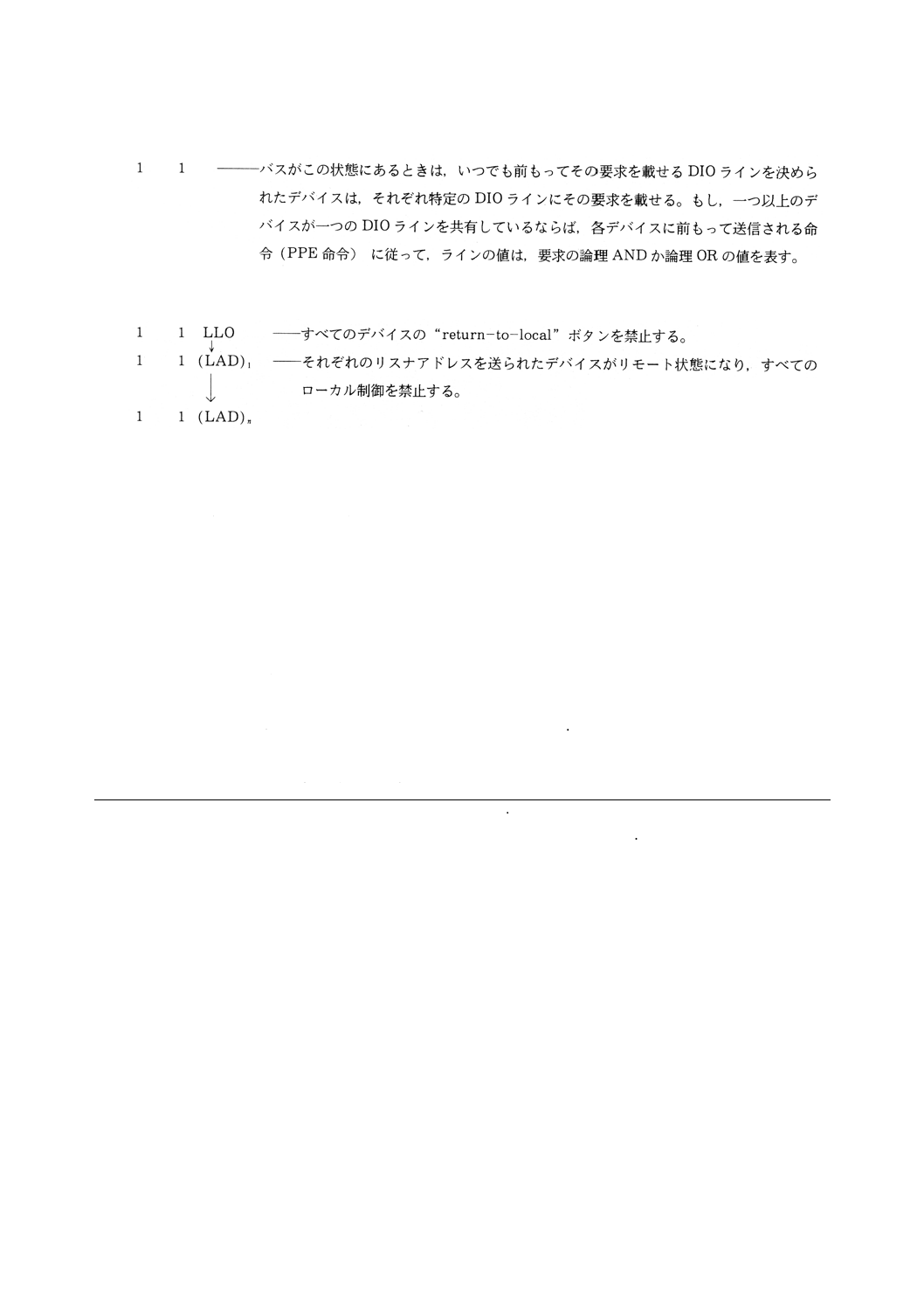
76
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ATN IDY
40.5 デバイスを強制的にリモート制御状態にする場合
ATN REN
ここに, (LAD) :特定のデバイスのリスナアドレスを表す(デバイスはインタフェース上でREN=0
になると,いつでもローカル状態に復帰する。)。
40.6 インタフェースクリアを送る場合 IFCが送られても,DCL,LLO,PPU,及びRENのユニバーサ
ルコマンドに対応するステートは影響されない。
40.7 tca使用に対しての制限 デバイスメッセージがTrueである間にtcaメッセージがTrueになる場合
があるならば,設計者は正しいデータがインタフェースを通して転送されていると考えてはいけない
(15.5.1.2参照)。
引用規格:
JIS C 0010 環境試験方法(電気・電子)通則
JIS X 0201 情報交換用符号
対応国際規格:
IEC 625-1 An interface system for programmable measuring instruments (byte serial bit parallel)
Part1 Functional specifications, electrical specifications, mechanical specifications, system
applications and requirements for the designer and user
関連規格:IEC 348 Safety requirements for electronic measuring apparatus
IEC 359 Expression of the functional performance of electronic measuring equipment
IEEE Std. 488-1978/488A-1980 Digital Interface for Programmable Instrumentation
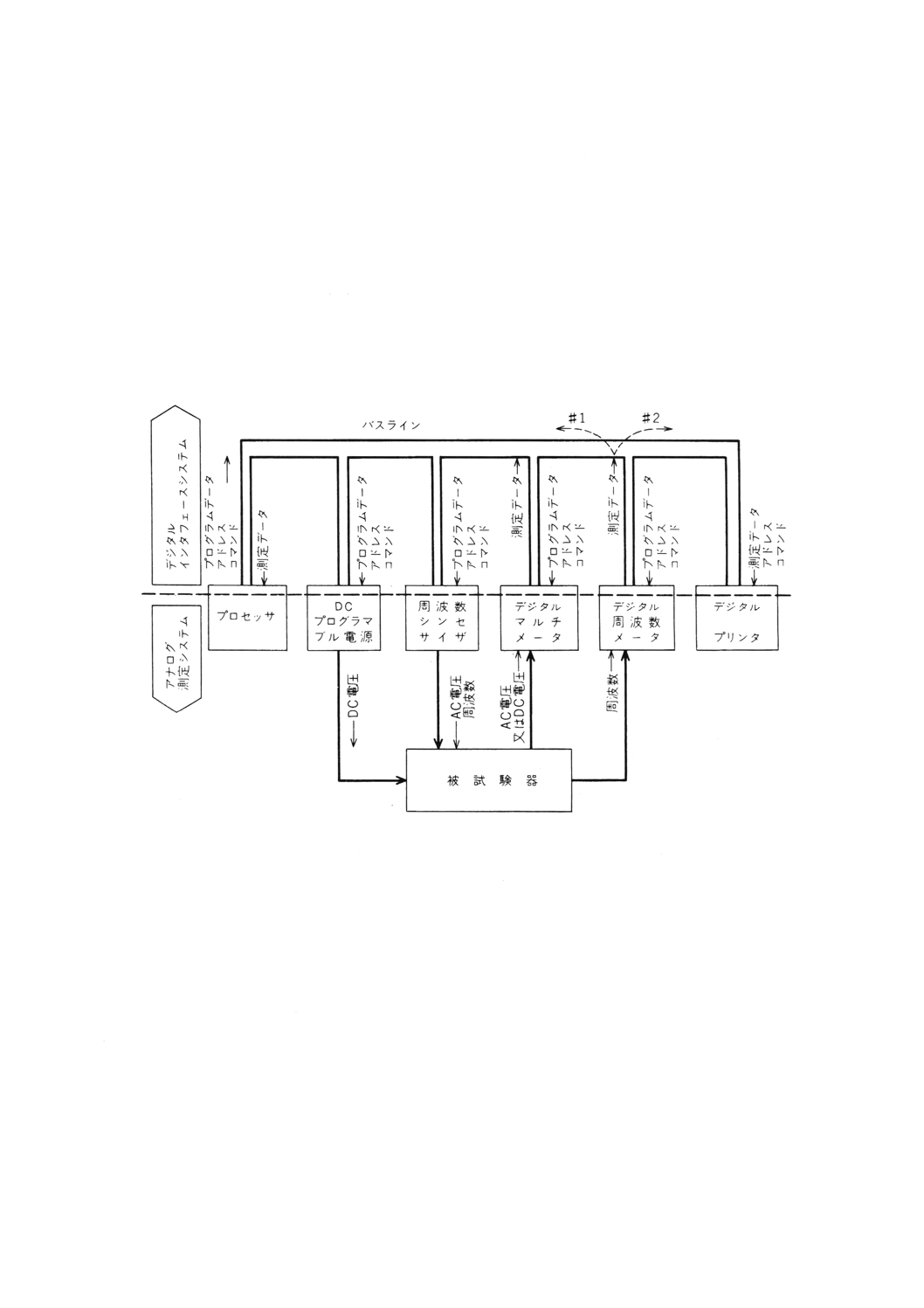
77
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A 計測システムの例
附属書A図Aに示されるシステムは,多くの計測システムの典型的な例を示す。このインタフェースシス
テムを用いて測定を実行させる場合,2種類のシーケンスが考えられる。
シーケンス#1
プロセッサが各装置をプログラマブルにし測定する。
そしてその測定結果をプロセッサに戻す。
シーケンス#2
プロセッサが各装置をプログラマブルにし測定する。
そしてその測定結果を他のデバイスに戻す。
附属書A図A 計測システムの一例
・シーケンス#1(測定結果をプロセッサに戻す。)
1. プロセッサはIFCメッセージを送信して,インタフェースシステムを初期状態にセットする。
2. プロセッサはDCLメッセージを送信して,すべてのデバイスを初期状態(又はプリセット状態)にセ
ットする。
3. プロセッサはD.C.プログラマブル電源のリスナアドレスを送信し,次にD.C.電源に対する設定値を送
る。
4. プロセッサはUNL命令を送信し,次に3.と同様にして別のデバイスをリスナに指定する。
5. 試験に必要なすべてのデバイスを設定するまで,4.を繰り返す。そしてUNL命令を送信する。
6. プロセッサは測定デバイス(例:デジタル周波数メータ)のリスナアドレスを送信する。そして測定
条件(例:レンジ等)をコード化したデータを送る。
7. プロセッサはUNL命令を送信し,次に自分をリスナに指定し,測定デバイスのトーカアドレスを送
信する。
8. 測定デバイスは一連の測定を終了すると,その結果をリスナ(プロセッサ)に送信する。
78
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・シーケンス#2(測定結果を直接デジタルプリンタに送る。)
1.〜6. はシーケンス#1と同じ。
7. プロセッサはUNL命令を送信する。次にデジタルプリンタをリスナに,測定デバイスをトーカに指
定する。
8. 測定デバイスは一連の測定を終了すると,その結果をリスナ(デジタルプリンタ)に送信する。
備考 プロセッサが自分自身とデジタルプリンタの両方をリスナに指定した場合,測定データは両方
のデバイスによって受信される(ただし,データ受信速度が異なる場合,その遅い方の速度で
データの転送速度が決定される。)。
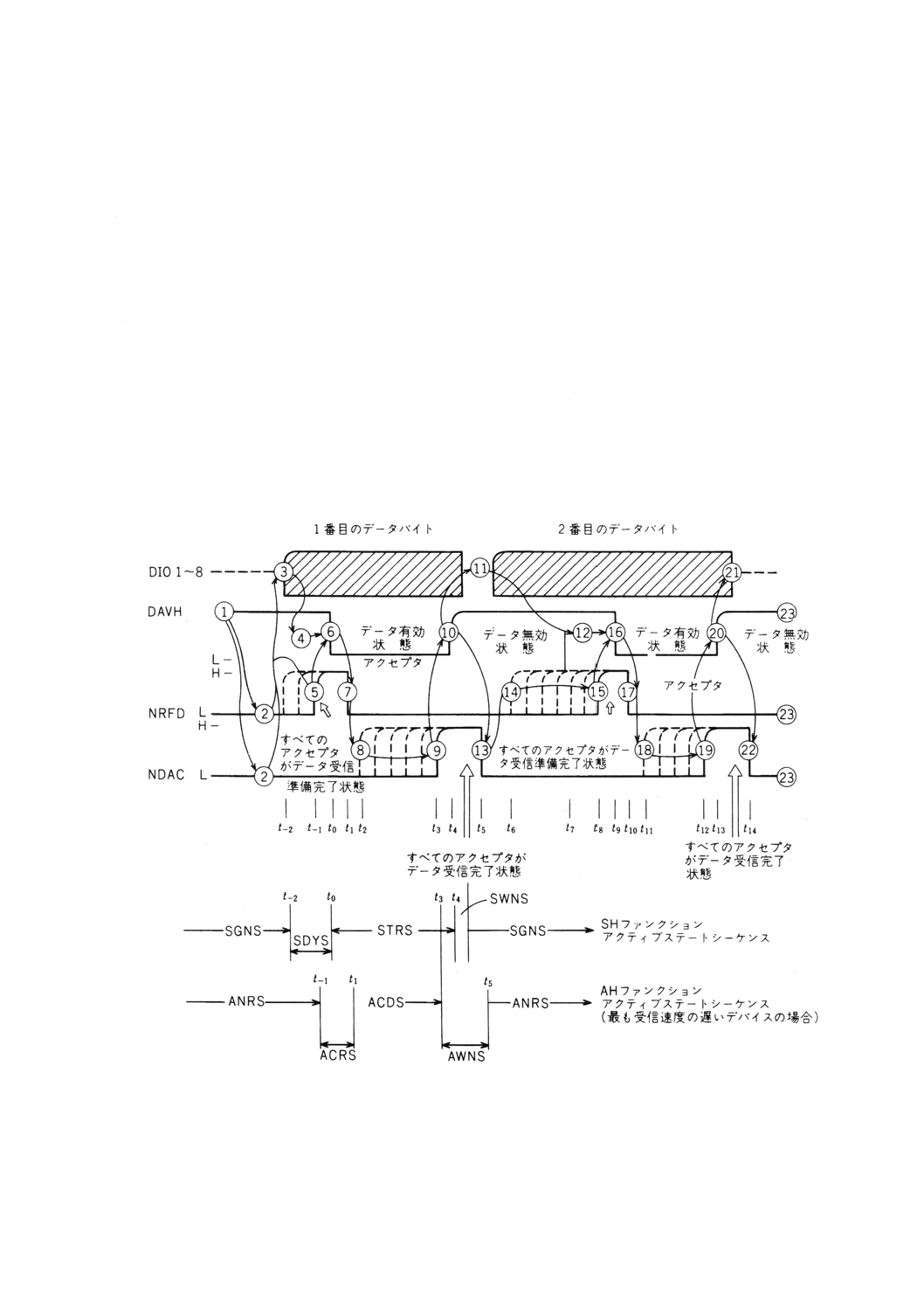
79
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B ハンドシェークのタイミング
B.1 一般的説明 インタフェースシステムによって転送される各データバイトは,ソースとアクセプタ間
のハンドシェーク過程を使用する。代表的な例としてはソースがトーカ,アクセプタがリスナである。
附属書B図B-1は,ハンドシェークシーケンスのタイミングチャートをDAV,NRFD,NDAC信号の波
形によって示している。データを受信するのに少し異なる応答時間をもつ2個以上のリスナによって,同
じデータを受信させる場合,NRFD,NDACラインは各リスナのドライブする波形の合成波形を示す。
附属書B図B-2は,ソースとアクセプタ間のデータバイトの転送シーケンスをフローチャートを用いて
示す。
フローチャート及びタイミングチャートに記述されている同じ数字は,同一時刻であることを示す。
B.2
ハンドシェークシーケンスのタイミングチャート
附属書B図B-1 1個のトーカと複数のリスナ間のハンドシェークのタイミングチャート
(附属書B図B-2のフローチャートを参照のこと。)
ここに,
H+2.0V
L+0.8V
B.3
ハンドシェークのフローチャート
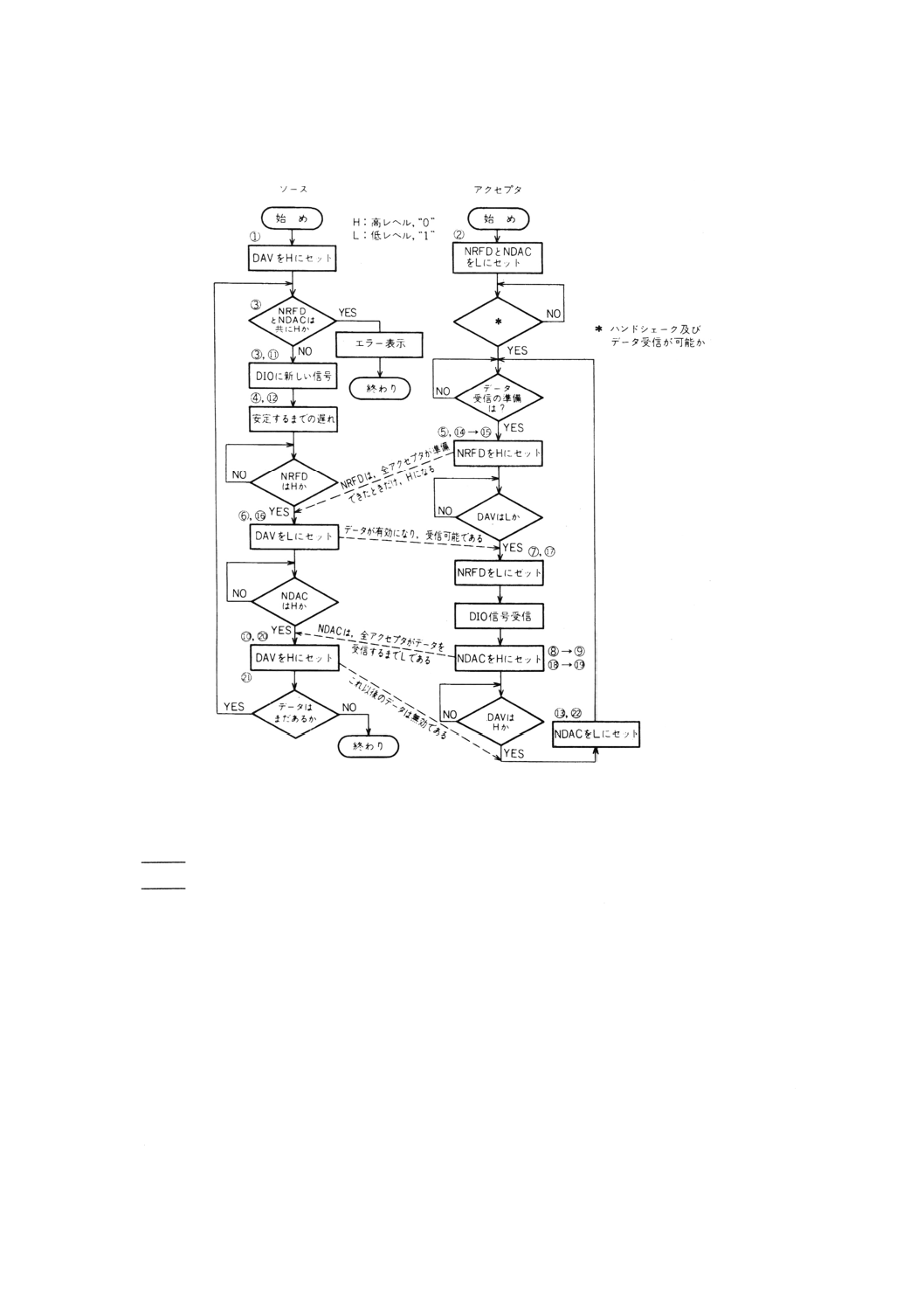
80
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B図B-2 ハンドシェークシーケンスを用いてデータを転送する場合の
ソースとアクセプタ間のフローチャート(B.4に注釈を記述する。)
備考 アクセプタハンドシェークの実現方法は,このフローチャートの例に限られるわけではない
(7.5.3を参照)。
B.4
ハンドシェーク過程の注釈
①
ソースは,DAVラインをHにする(データが有効になっていないことを示す。)。
②
アクセプタは,NRFDラインをLにする(データを受信する準備が完了していないことを
示す。)。またアクセプタは,NDACラインをLにする(データの受信が完了していないこ
とを示す。)。
③ t-2
ソースは,エラー条件をチェックする(NRFD,NDACラインが共にHであるかをチェッ
クする。)。そしてソースは,DIOライン上にデータをセットする。
④ t-2〜t0 ソースは,DIOラインにデータが完全にセットされるまで待つ。
⑤ t-1
すべてのアクセプタが最初のデータバイトを受信する準備が完了したことを示す(NRFD
ラインがHになる。)。
⑥ t0
ソースは,NRFDラインがHであることを確認した後,DAVラインをLにセットする(DIO
ライン上のデータが有効状態であることを示す。)。
⑦ t1
アクセプタは,DAVラインがLであることを確認した後,NRFDラインをLにセットする
81
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(アクセプタがもはやデータ受信準備完了状態ではなく,データ受信状態に移ったことを
示す。)。
⑧ t2
データ受信速度が最も速いアクセプタは,NDACラインをHにセットする(データを受信
完了したことを示す。)。ただし,他のアクセプタがまだNDACラインをLにセットしてい
ると,NDACラインはLを維持する。
⑨ t3
データ受信速度が最も遅いアクセプタがNDACラインをHにセットする(データを受信完
了したことを示す。)。
すべてのアクセプタがデータ受信完了したことを示す(NDACラインがHになる。)。
⑩ t4
ソースは,NDACラインがHであることを確認した後,DAVラインをHにセットする。
この状態でのDIOライン上のデータは有効ではないと考える。
⑪ t4〜t7
ソースは,DIOライン上のデータを変える。
⑫ t7〜t9
ソースは,DIOラインにデータが完全にセットされるまで待つ。
⑬ t5
アクセプタは,DAVラインがHであることを確認した後,NDACラインをLにセットする
(次のデータ転送サイクルに入る。)。
⑭ t6
データ受信速度が最も速いアクセプタは,NRFDラインをHにセットする(次のデータバ
イトを受信する準備が完了したことを示す。)。ただし,他のアクセプタがまだNRFDライ
ンをLにしていると,NRFDラインはLを維持する。
⑮ t8
データ受信速度が最も遅いアクセプタがNDACラインをHにセットする(次のデータバイ
トを受信する準備が完了したことを示す。)(NRFDラインがHになる。)。
⑯ t9
ソースは,NRFDラインがHであることを確認した後,DAVラインをLにセットする(DIO
ライン上のデータが有効状態であることを示す。)。
⑰ t10
アクセプタは,DAVラインがLであることを確認した後,NRFDラインをLにセットする
(アクセプタはもはやデータ受信準備完了状態ではなく,データ受信状態に移ったことを
示す。)。
⑱ t11
データ受信速度が最も速いアクセプタは,NDACラインをHにセットする(データを受信
完了したことを示す。)。⑧と同じ。
⑲ t12
データ受信速度が最も遅いアクセプタがNDACラインをHにセットする(データを受信完
了したことを示す。)。⑨と同じ。
⑳ t13
ソースは,NDACラインがHであることを確認した後,DAVラインをHにセットする。⑩
と同じ。
21
ソースは,DAVラインをHにセットした後,DIOライン上のデータを除去する。
22 t14
アクセプタは,DAVラインがHであることを確認した後,NDACラインLにセットする(次
のデータ転送サイクルに入る。)。
23
3本のハンドシェークライン(NRFD,NDAC,DAVライン)は①,②のような初期状態に
戻っている。
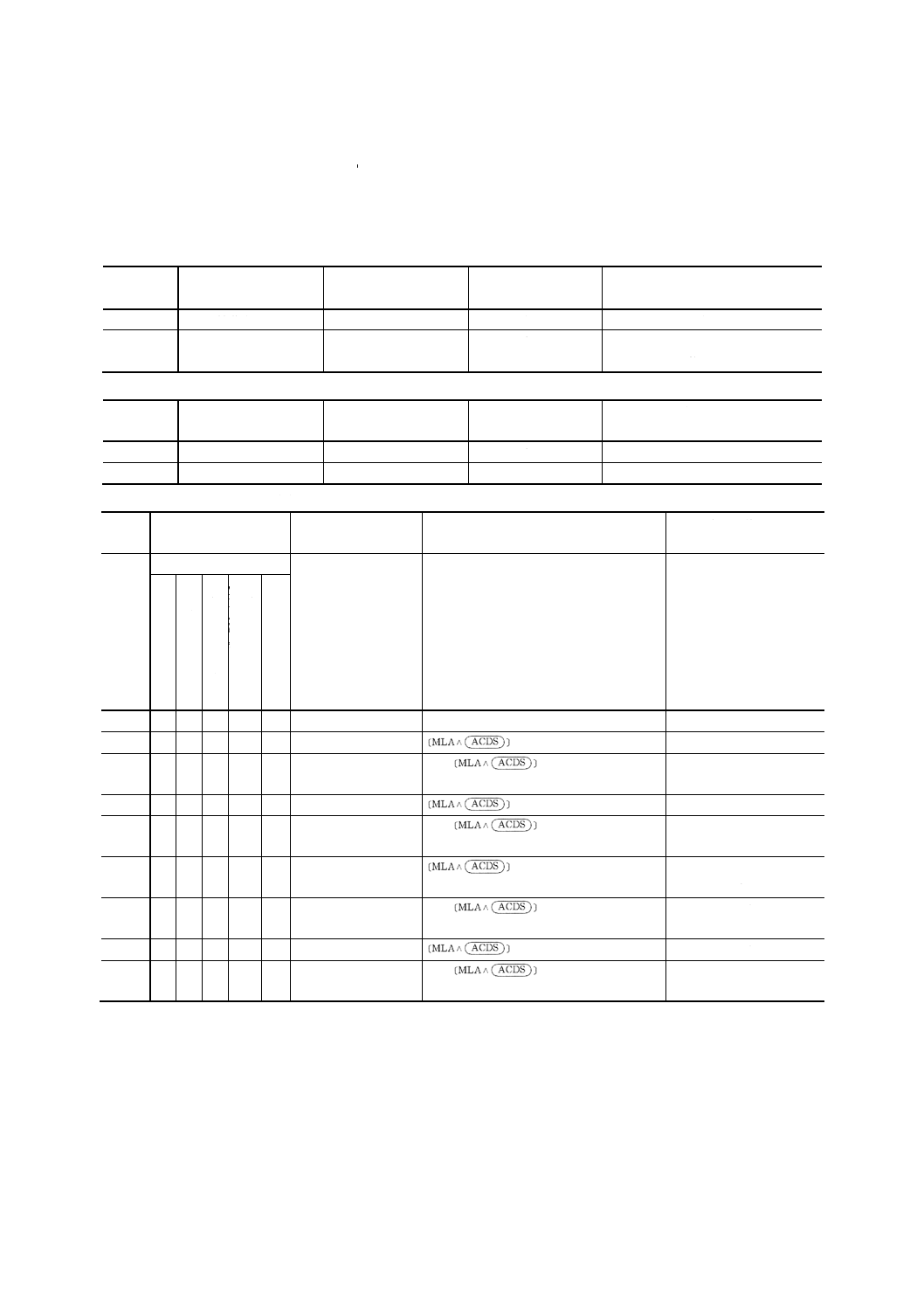
82
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C インタフェースファンクションに
許されるサブセットと能力識別コード
C.1 サブセットの一覧表 ソースハンドシェークインタフェース (SH) に許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
SH0
SHの機能なし
すべて
なし
なし
SH1
SHの全機能をもつ
なし
なし
T1〜T8,TE1〜TE8
C5〜C28のいずれか
アクセプタハンドシェークインタフェース (AH) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
AH0
AHの機能なし
すべて
なし
なし
AH1
AHの全機能をもつ
なし
なし
なし
トーカインタフェース (T) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
ト
ー
カ
シ
リ
ア
ル
ポ
ー
ル
ト
ー
ク
オ
ン
リ
ー
モ
ー
ド
ト
ー
カ
指
定
解
除
M
L
A
に
よ
り
T0
N
N
N
N
すべて
なし
なし
T1
Y
Y
Y
N
なし
を除く
SH1,AH1
T2
Y
Y
N
N
なし
1.
を除く
2.
tonは常にFalse
同上
T3
Y
N
Y
N
SPIS,SPMS,SPAS
を除く
同上
T4
Y
N
N
N
SPIS,SPMS,SPAS 1.
を除く
2.
tonは常にFalse
同上
T5
Y
Y
Y
Y
なし
を含む
SH1及びL1〜L4又はLE1
〜LE4のいずれか
T6
Y
Y
N
Y
なし
1.
を含む
2.
tonは常にFalse
同上
T7
Y
N
N
Y
SPIS,SPMS,SPAS
を含む
同上
T8
Y
N
N
Y
SPIS,SPMS,SPAS 1.
を含む
2.
tonは常にFalse
同上
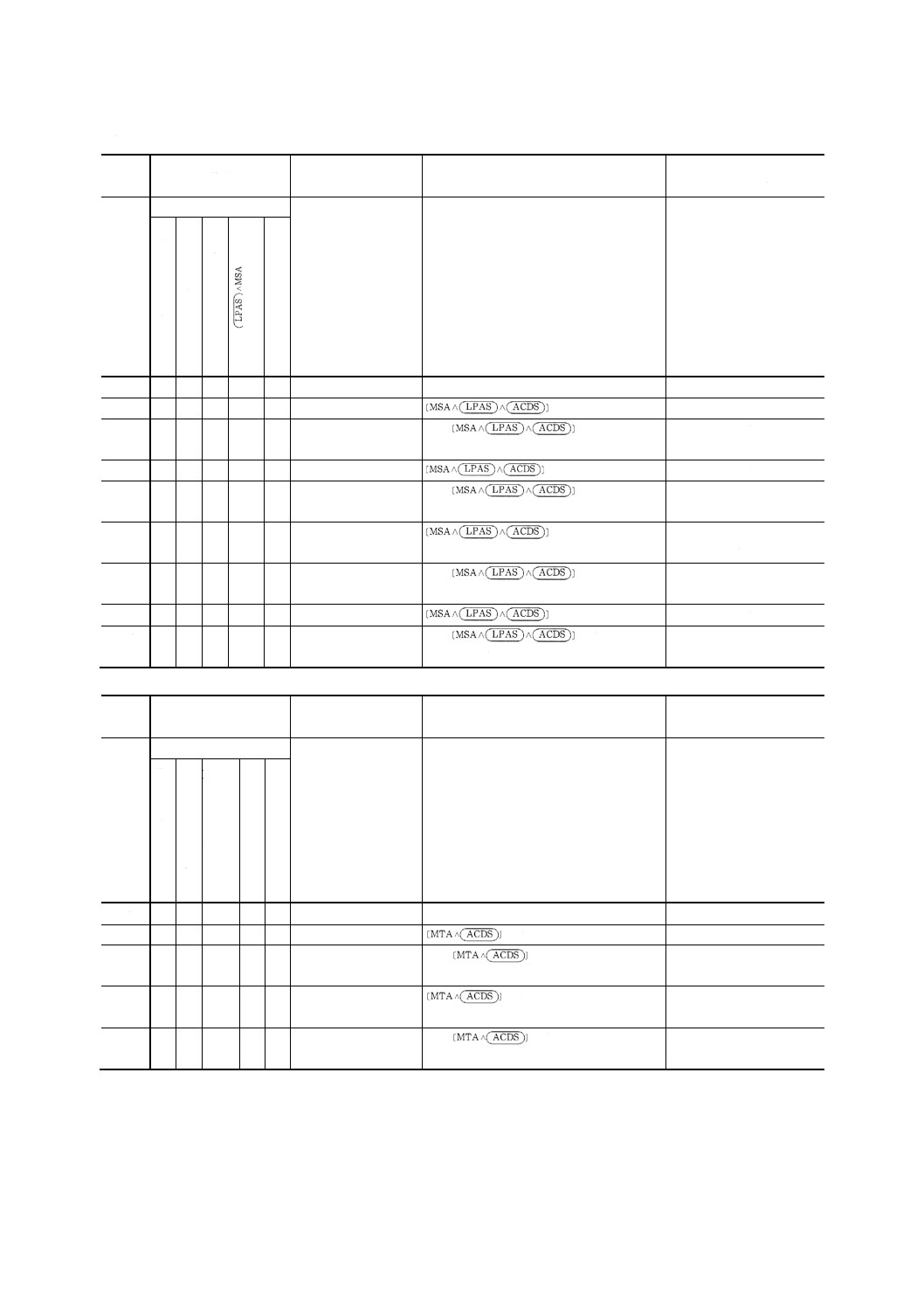
83
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
拡張トーカ (TE) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
拡
張
ト
ー
カ
シ
リ
ア
ル
ポ
ー
ル
ト
ー
ク
オ
ン
リ
ー
モ
ー
ド
に
よ
り
ト
ー
カ
指
定
解
除
TE0
N
N
N
N
すべて
なし
なし
TE1
Y
Y
Y
N
なし
を除く
SH1,AH1
TE2
Y
Y
N
N
なし
1.
を除く
2.
tonは常にFalse
同上
TE3
Y
N
Y
N
SPIS,SPMS,SPAS
を除く
同上
TE4
Y
N
N
N
SPIS,SPMS,SPAS 1.
を除く
2.
tonは常にFalse
同上
TE5
Y
Y
Y
Y
なし
を含む
SH1及びL1〜L4又はLE1
〜LE4のいずれか
TE6
Y
Y
N
Y
なし
1.
を含む
2.
tonは常にFalse
同上
TE7
Y
N
Y
Y
SPIS,SPMS,SPAS
を含む
同上
TE8
Y
N
N
Y
SPIS,SPMS,SPAS 1.
を含む
2.
tonは常にFalse
同上
リスナインタフェース (L) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
リ
ス
ナ
リ
ス
ン
オ
ン
リ
ー
モ
ー
ド
リ
ス
ナ
指
定
解
除
M
T
A
に
よ
っ
て
L0
N
N
N
すべて
なし
なし
L1
Y
Y
N
なし
を除く
AH1
L2
Y
N
N
なし
1.
を含む
2.
lonは常にFalse
AH1
L3
Y
Y
Y
なし
を含む
AH1及びT1〜T8又はTE1
〜TE8のいずれか
L4
Y
N
Y
なし
1.
を含む
2.
lonは常にFalse
同上
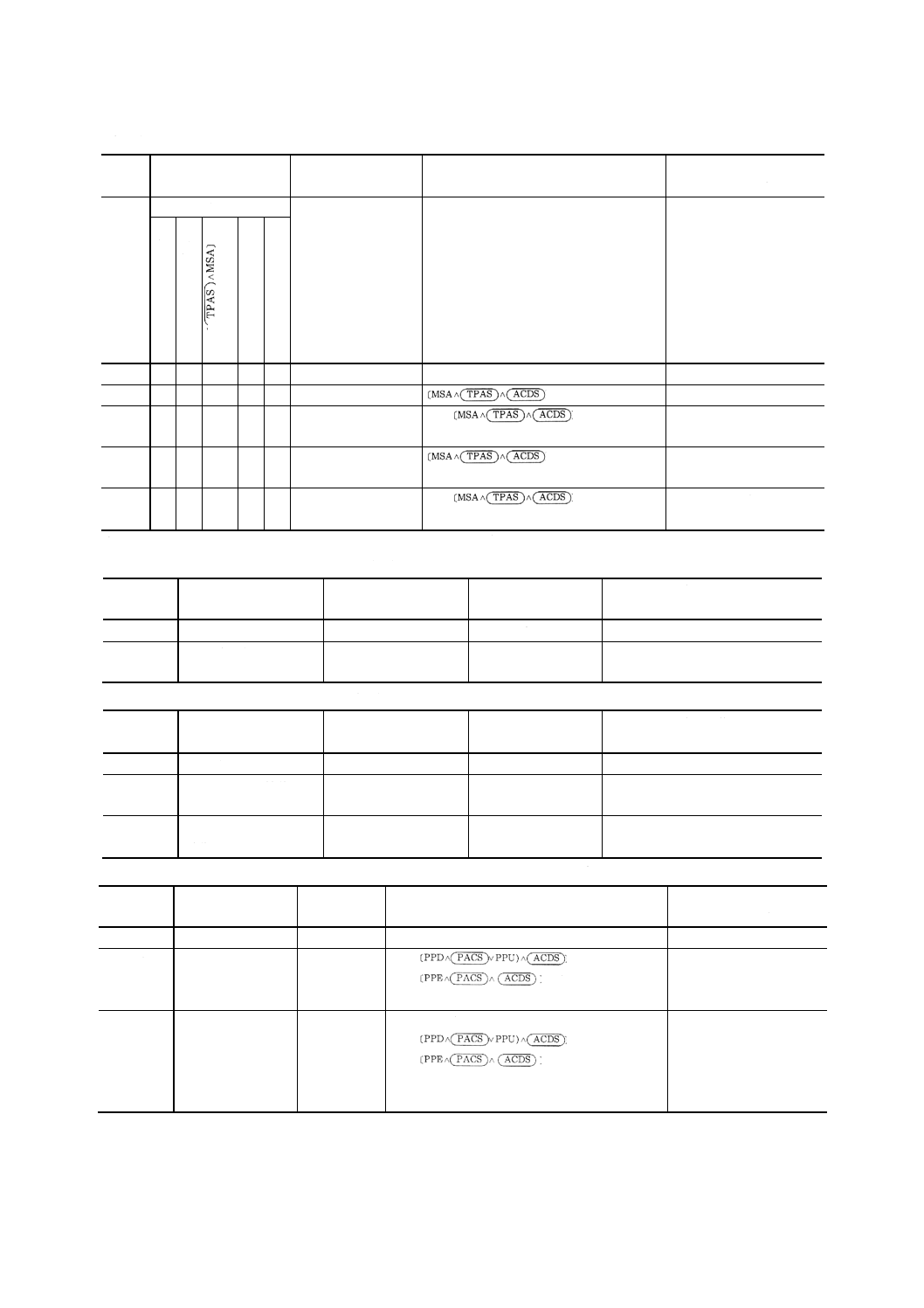
84
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
拡張リスナ (LE) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
能力
基
本
的
拡
張
リ
ス
ナ
リ
ス
ン
オ
ン
リ
ー
モ
ー
ド
*
に
よ
り
リ
ス
ナ
指
定
解
除
LE0
N
N
N
すべて
なし
なし
LE1
Y
Y
N
なし
を除く
AH1
LE2
Y
N
N
なし
1.
を除く
2.
lonは常にFalse
AH1
LE3
Y
Y
Y
なし
を含む
AH1及びT1〜T8又はTE1
〜TE8のいずれか
LE4
Y
N
Y
なし
1.
を含む
2.
lonは常にFalse
同上
*
Tファンクションと共に使用されるときは,MTAに置き換えられる。
サービスリクエストインタフェース (SR) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
SR0
SR機能なし
すべて
なし
なし
SR1
SRの全機能をもつ
なし
なし
T1,T2,T5,T6,TE1,
TE2,TE5,TE6のいずれか
リモートローカルインタフェース (RL) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
RL0
RL機能なし
すべて
なし
なし
RL1
すべてのRL機能をも
つ
なし
なし
L1〜L4又はLE1〜LE4
RL2
ローカルロックアウト
動作なし
LWLS,RWLS
rtlは常にFalseである L1〜L4又はLE1〜LE4
パラレルポールインタフェース (PP) ファンクションに許されるサブセット
分類
説明
省略される
ステート
その他の条件
必要とされる他のファン
クションのサブセット
PP0
PP機能なし
すべて
なし
なし
PP1
リモートコンフィ
ギュレーション
なし
1.
を含む
2.
を含む
3.
lpeを除く
L1〜L4又はLE1〜LE4
PP2
ローカルコンフィ
ギュレーション
PUCS,PACS 1.
lpeを含む
2.
を除く
3.
を除く
4.
ローカルメッセージはS,P1,P2,P3,に
置き換えられる。
なし
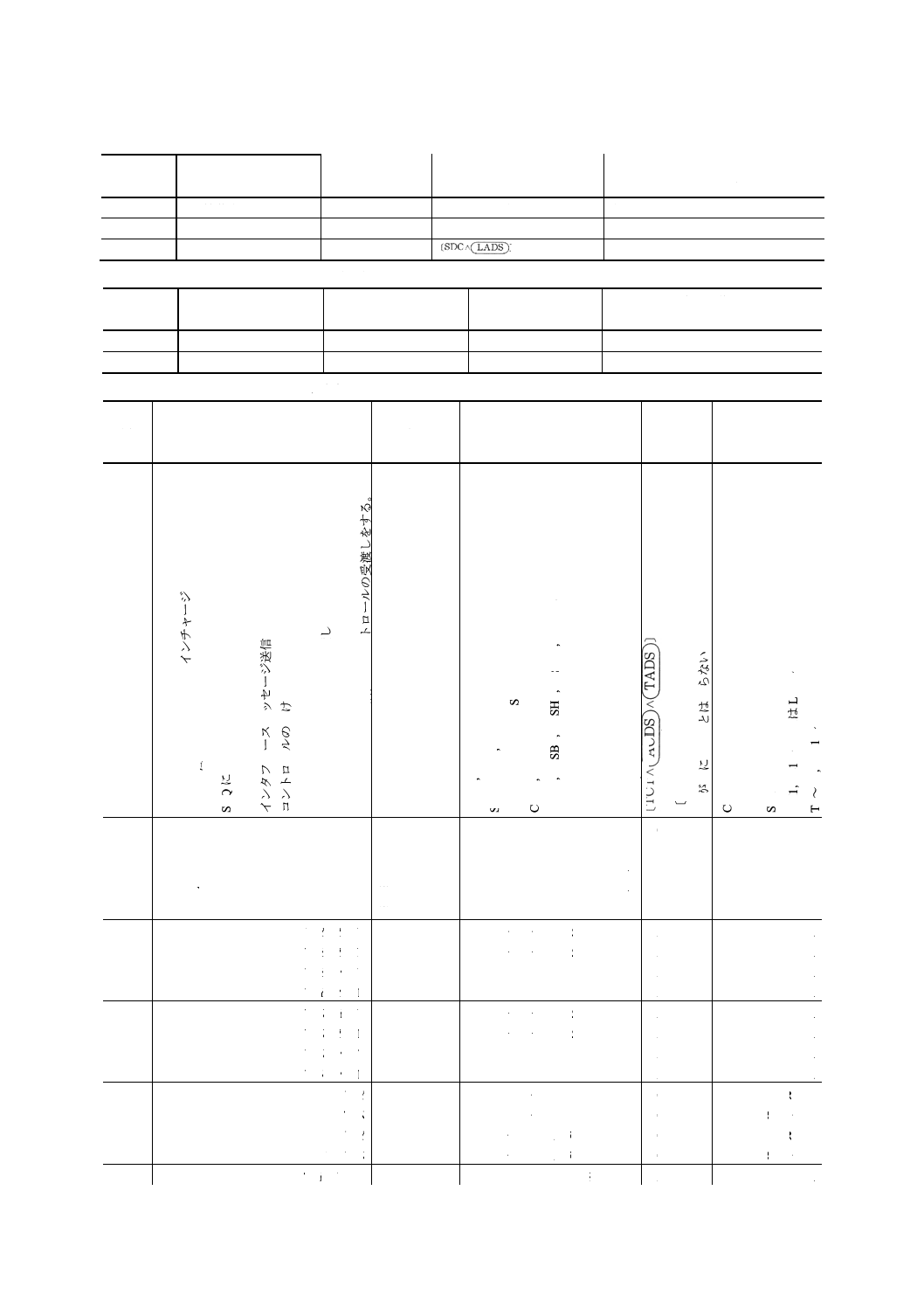
85
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
デバイスクリアインタフェース (DC) ファンクションに許されるサブセット
分類
説明
省略される
ステート
その他の条件
必要とされる他のファン
クションのサブセット
DC0
DC機能なし
すべて
なし
なし
DC1
DCの全機能をもつ
なし
なし
L1〜L4又はLE1〜LE4
DC2
SDC機能を除く
なし
を除く
AH1
デバイストリガインタフェース (DT) ファンクションに許されるサブセット
分類
説明
省略されるステート
その他の条件
必要とされる他のファン
クションのサブセット
DT0
DT機能なし
すべて
なし
なし
DT1
DTの全機能をもつ
なし
なし
L1〜L4又はLE1〜LE4
コントローラインタフェース (C) ファンクションに許されるサブセット
分類
能力
注記
必要なステート
その他
の条件
必要とされる他
のファンクショ
ンのサブセット
シ
ス
テ
ム
コ
ン
ト
ロ
ー
ラ
IF
C
送
信
,
コ
ン
ト
ロ
ー
ラ
・
イ
ン
チ
ャ
ー
ジ
R
E
N
送
信
S
R
Q
に
対
す
る
応
答
イ
ン
タ
フ
ェ
ー
ス
メ
ッ
セ
ー
ジ
送
信
コ
ン
ト
ロ
ー
ル
の
受
け
コ
ン
ト
ロ
ー
ル
の
渡
し
自
分
自
身
へ
の
コ
ン
ト
ロ
ー
ル
の
渡
し
パ
ラ
レ
ル
ポ
ー
ル
ハ
ン
ド
シ
ェ
ー
ク
に
同
期
し
て
コ
ン
ト
ロ
ー
ル
の
受
渡
し
を
す
る
。
(5)
S
N
A
S
,
S
A
C
S
S
II
S
,
S
IA
S
,
S
IN
S
S
R
IS
,
S
R
A
S
,
S
R
N
S
C
S
N
S
,
C
S
R
S
C
A
C
S
,
C
S
B
S
,
C
S
H
S
,
C
S
W
S
,
C
A
W
S
C
A
D
S
C
ID
S
C
T
R
S
C
P
W
S
,
C
P
P
S
(
6
)
〔
(T
A
D
S
)〕
(
7
)
tc
s
が
常
に
F
al
se
と
は
限
ら
な
い
C
1
C
2
S
H
1
A
H
1
,
L
1
〜
L
4
又
は
L
E
1
〜
L
E
4
T
1
〜
T
8
,
T
E
1
〜
T
E
8
C0
N N N N
N N N N N N
O O O O O O O O O O O O O − − − −
C1
Y − − − − − − − − − (1)
R − − − − − − − − − − − − − − − −
C2
− Y − − − − − − − − (1)
− R − − − − − − − − − − R − − − −
C3
− − Y − − − − − − − (1)
− − R − − − − − − − − − R − − − −
C4
− − − Y
− − − − − − (1)
− − − R − − − − − − − − − − − − −
C5
− − − − Y Y Y Y Y Y (2)(3)
− − − − R R R R R R R R − − R R R
C6
− − − − Y Y Y Y Y N (2)(3)
− − − − R R R R R R R O − − R − R
C7
− − − − Y Y Y Y N Y (2)(3)
− − − − R R R R O R R R − − R R R
C8
− − − − Y Y Y Y N N (2)(3)
− − − − R R R R O R R O − − R − R
C9
− − − − Y Y Y N Y Y (2)(3)
− − − − R R R R R R O R − − R R R
C10
− − − − Y Y Y N Y N (2)(3)
− − − − R R R R R R O O − − R − R
C11
− − − − Y Y Y N N Y (2)(3)
− − − − R R R R O R O R − − R R R
C12
− − − − Y Y Y N N N (2)(3)
− − − − R R R R O R O O − − R − R
C13
− − − − Y Y N N Y Y (2)
− − − − R R R O R O O R − R R R −
C14
− − − − Y Y N N Y N (2)
− − − − R R R O R O O O − R R − −
C15
− − − − Y Y N N N Y (2)
− − − − R R R O O O O R − R R R −
C16
− − − − Y Y N N N N (2)
− − − − R R R O O O O O − R R − −
C17
− − − − Y N Y Y Y Y (2)(3)(4)
− − − − R O R R R R R R − − R R R
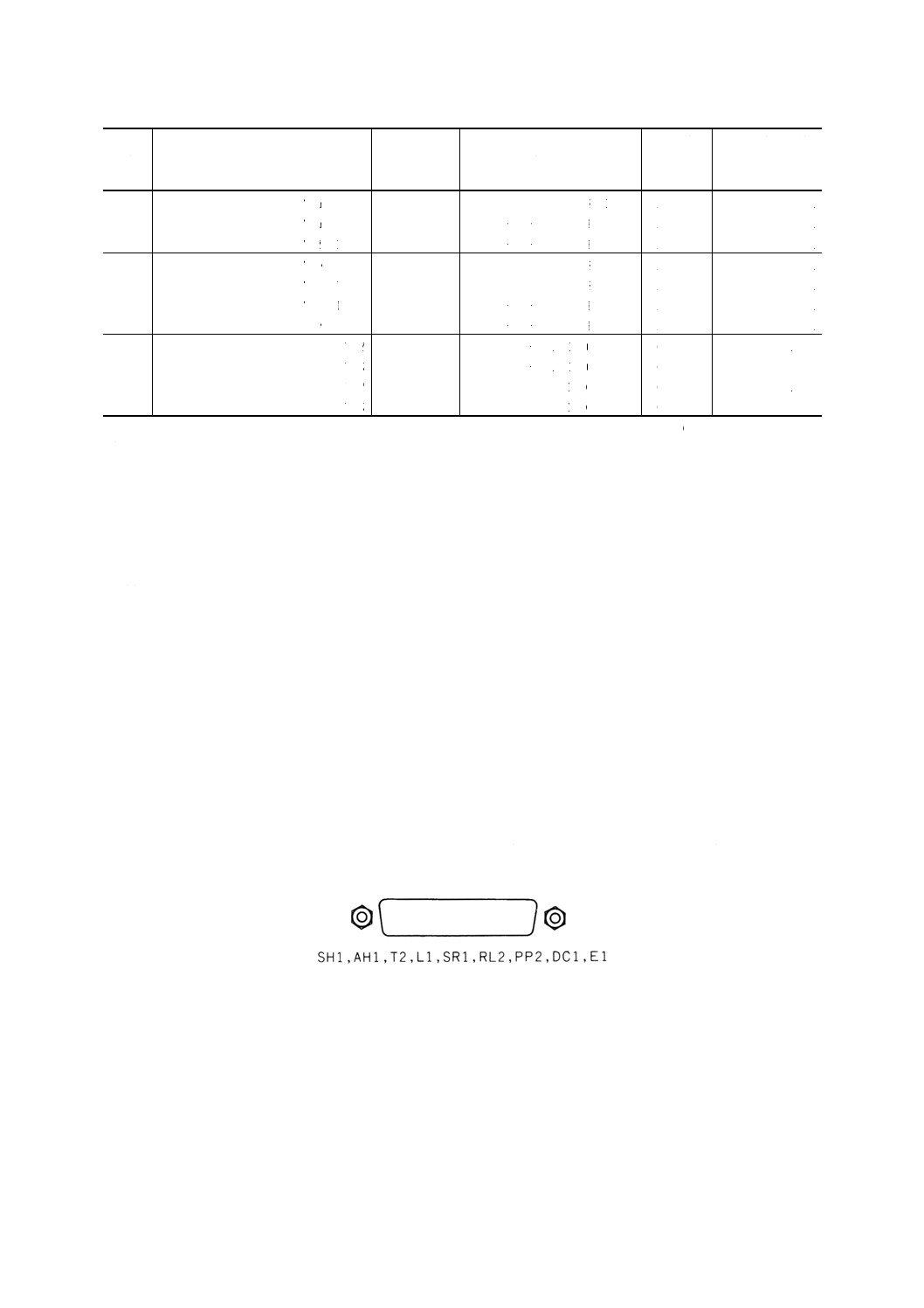
86
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
分類
能力
注記
必要なステート
その他
の条件
必要とされる他
のファンクショ
ンのサブセット
C18
− − − − Y N Y Y Y N (2)(3)(4)
− − − − R O R R R R R O − − R − R
C19
− − − − Y N Y Y N Y (2)(3)(4)
− − − − R O R R O R R R − − R R R
C20
− − − − Y N Y Y N N (2)(3)(4)
− − − − R O R R O R R O − − R − R
C21
− − − − Y N Y N Y Y (2)(3)(4)
− − − − R O R R R R O R − − R R R
C22
− − − − Y N Y N Y N (2)(3)(4)
− − − − R O R R R R O O − − R − R
C23
− − − − Y N Y N N Y (2)(3)(4)
− − − − R O R R O R O R − − R R R
C24
− − − − Y N Y N N N (2)(3)(4)
− − − − R O R R O R O O − − R − R
C25
− − − − Y N N N Y Y (2)
− − − − R O O O R O O R − − R R −
C26
− − − − Y N N N Y N (2)
− − − − R O O O R O O O − − R − −
C27
− − − − Y N N N N Y (2)
− − − − R O O O O O O R − − R R −
C28
− − − − Y N N N N N (2)
− − − − R O O O O O O O − − − − −
“O”:省略 “R”:必要 “−”:不必要 “Y”:YES “N”:NO
注(1) C5からC28までの中の一つのサブセットと,C1からC4までの一つ以上のサブセットの組合せが可能
(2) C5からC28までの中の一つのサブセットだけ選択可能。
(3) マルチコントローラシステムの中で動作するデバイスは必ずCTRSを含まなければならない。
(4) C2を含まない場合には,このサブセットを選択できない。
(5) Cファンクションを示す“C”とそれに続く数字によって選択されたサブセットを示している。
(例:C1,2,3,4,8)
(6) CIDSからCADSに移行する場合の過渡的な部分。
(7) CACSからCTRSに移行する場合の過渡的な部分。
C.2 能力識別コード そのデバイスに備えられているインタフェースファンクションの完全な組合せを
明らかにするために,各デバイスのインタフェースコネクタの下,又は周辺にこの規格の能力コードを表
示することが役立つかもしれない。この規格においては,各インタフェースファンクション及びそれにつ
いての許容されるサブセットはその能力を識別するための,アルファベットと数字による等価的なコード
をもっている。すべてのそうしたインタフェースファンクションの能力を示すコードは,アルファベット
と数字による簡潔な文字列で表現でき,ユーザがシステムを組み立てる場合の手助けとなるように,その
デバイスの外面に表示することができるであろう。
例えば,基本的トーカファンクション,ステータスバイト送信能力,基本的リスナファンクション,リ
スンオンリーモードのスイッチ,サービスリクエスト能力,ローカルロックアウトなしのリモートローカ
ル能力,手動割り付けによるパラレルポール能力,完全なデバイスクリア能力をもち,デバイストリガと
コントローラの能力をもたないデバイスは,次のコードによって識別できるであろう。
0の記号を使って,能力の欠如を示すことが許される(例:DT0はデバイストリガ能力がないことを示
す。)。上記の例では,8個のインタフェースファンクションが識別されている。これに加えて,このデバ
イスに含まれている電気的インタフェースのタイプも規定されている。E1の標記はオープンコレクタドラ
イバを示し,E2の標記は3ステートドライバを示すために使用される。
システム構築に役立つ,デバイスの付加的な能力については,物理的な装置上の適当な位置及びその装
置の関連説明書に加えられてもよい。
87
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D インタフェースメッセージ参照リスト
・ インタフェースファンクションによって受信されるローカルメッセージ
記号(ニモニック)
メッセージ
関連するインタフェース機能
gts
go to standby
C
ist
individual service request (qualifier)
PP
lon
listen only
L,LE
〔lpe〕
local poll enable
PP
ltn
listen
L,LE
lun
local unlisten
L,LE
nba
new byte available
SH
pon
power on
SH,AH,T,TE,L,LE,SR,RL,PP,C
rdy
ready for next message
AH
rpp
request parallel poll
C
rsc
request system control
C
rsv
request service
SR
rtl
return to local
RL
sic
send interface clear
C
sre
send remote enable
C
tca
take control asynchronously
C
tcs
take control synchronously
AH,C
ton
talk only
T,TE
インターフェースファンクションからデバイスファンクションへ
送信されるローカルメッセージ
規定されていない。
備考 第2節のデバイスファンクションの相互作用を記述した出力表を参照のこと。これがデバイスファン
クションへローカルメッセージが送信されるのに適合した各ステートに対するガイドラインを与え
る。
・ 受信されるリモートメッセージ
記号(ニモニック)
メッセージ
関連するインタフェース機能
ATN
ATTENTION
SH,AH,T,TE,L,LE,PP,C
DAB
DATE BYTE
(via L,LE)
DAC
DATA ACCEPTED
SH
DAV
DATA VALID
AH
DCL
DEVICE CLEAR
DC
END
END
(via L,LE)
GET
GROUP EXECUTE TRIGGER
DT
GTL
GO TO LOCAL
RL
IDY
IDENTIFY
L,LE,PP
IFC
INTERFACE CLEAR
T,TE,L,LE,C
LLO
LOCAL LOCKOUT
RL
MLA
MY LISTEN ADDRESS
L,LE,RL
〔MLA〕
MY LISTEN ADDRESS
T
MSA or〔MSA〕
MY SECONDARY ADDRESS
TE,LE
MTA
MY TALK ADDRESS
T,TE
〔MTA〕
MY TALK ADDRESS
L
OSA
OTHER SECONDARY ADDRESS
TE
OTA
OTHER TALK ADDRESS
T,TE
PCG
PRIMARY COMMAND GROUP
TE,LE,PP
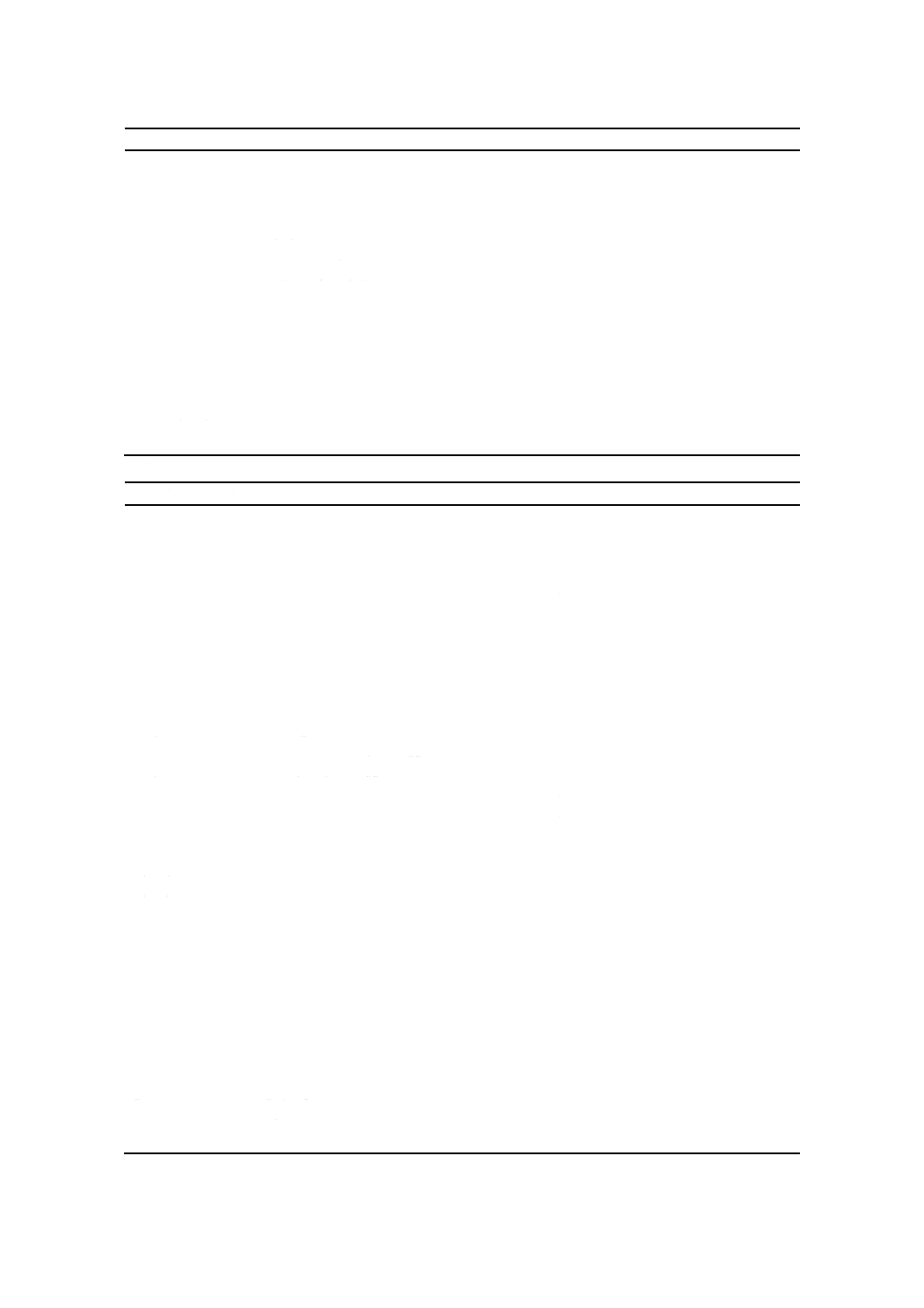
88
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号(ニモニック)
メッセージ
関連するインタフェース機能
PPC
PARALLEL POLL CONFIGURE
PP
〔PPD〕
PARALLEL POLL DISABLE
PP
〔PPE〕
PARALLEL POLL ENABLE
PP
PPRn
PARALLEL POLL RESPONSE n
(via C)
PPU
PARALLEL POLL UNCONFIGURE
PP
REN
REMOTE ENABLE
RL
RFD
READY FOR DATA
SH
RQS
REQUEST SERVICE
(via L,LE)
〔SDC〕
SELECTED DEVICE CLEAR
DC
SPD
SERIAL POLL DISABLE
T,TE
SPE
SERIAL POLL ENABLE
T,TE
SRQ
SERVICE REQUEST
(via C)
STB
STATUS BYTE
(via L,LE)
TCT or〔TCT〕
TAKE CONTROL
C
UNL
UNLISTEN
L,LE
・ 送信されるリモートメッセージ
記号(ニモニック)
メッセージ
関連するインタフェース機能
ATN
ATTENTION
C
DAB
DATA BYTE
(via T,TE)
DAC
DATA ACCEPTED
AH
DAV
DATA VALID
SH
DCL
DEVICE CLEAR
(via C)
END
END
(via T)
GET
GROUP EXECUTE TRIGGER
(via C)
GTL
GO TO LOCAL
(via C)
IDY
IDENTIFY
C
IFC
INTERFACE CLEAR
C
LLO
LOCAL LOCKOUT
(via C)
MLA or〔MLA〕
MY LISTEN ADDRESS
(via C)
MSA or〔MSA〕
MY SECONDARY ADDRESS
(via C)
MTA or〔MTA〕
MY TALK ADDRESS
(via C)
OSA
OTHER SECONDARY ADDRESS
(via C)
OTA
OTHER TALK ADDRESS
(via C)
PCG
PRIMARY COMMAND GROUP
(via C)
PPC
PARALLEL POLL CONFIGURE
(via C)
〔PPD〕
PARALLEL POLL DISABLE
(via C)
〔PPE〕
PARALLEL POLL ENABLE
(via C)
PPRn
PARALLEL POLL RESPONSE n
PP
PPU
PARALLEL POLL UNCOFIGURE
(via C)
REN
REMOTE ENABLE
C
RFD
READY FOR DATA
AH
RQS
REQUEST SERVICE
T,TE
〔SDC〕
SELECTED DEVICE CLEAR
(via C)
SPD
SERIAL POLL DISABLE
(via C)
SPE
SERIAL POLL ENABLE
(via C)
SRQ
SERVICE REQUEST
SR
STB
STATUS BYTE
(via T,TE)
TCT
TAKE CONTROL
(via C)
UNL
UNLISTEN
(via C)
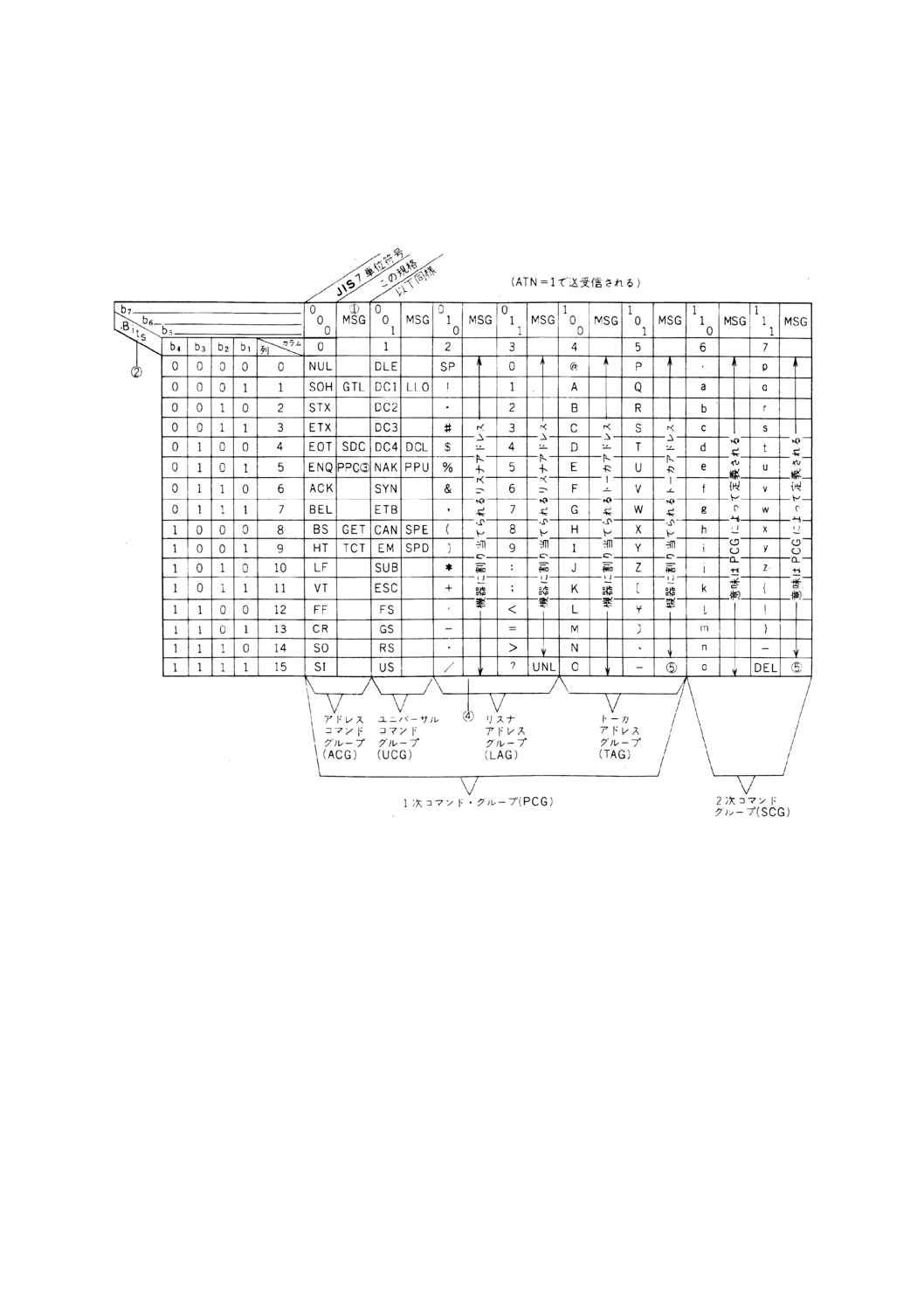
89
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E マルチラインインタフェースメッセージ
(ローマ文字用7単位符号JIS X 0201)
備考① MSG=インタフェースメッセージ
② b1=DIO I……b2=DIO 7
③ 2次コマンドが必要
④ 最もしばしば用いられるサブセット(コラム2から5)
⑤ 38.を参照
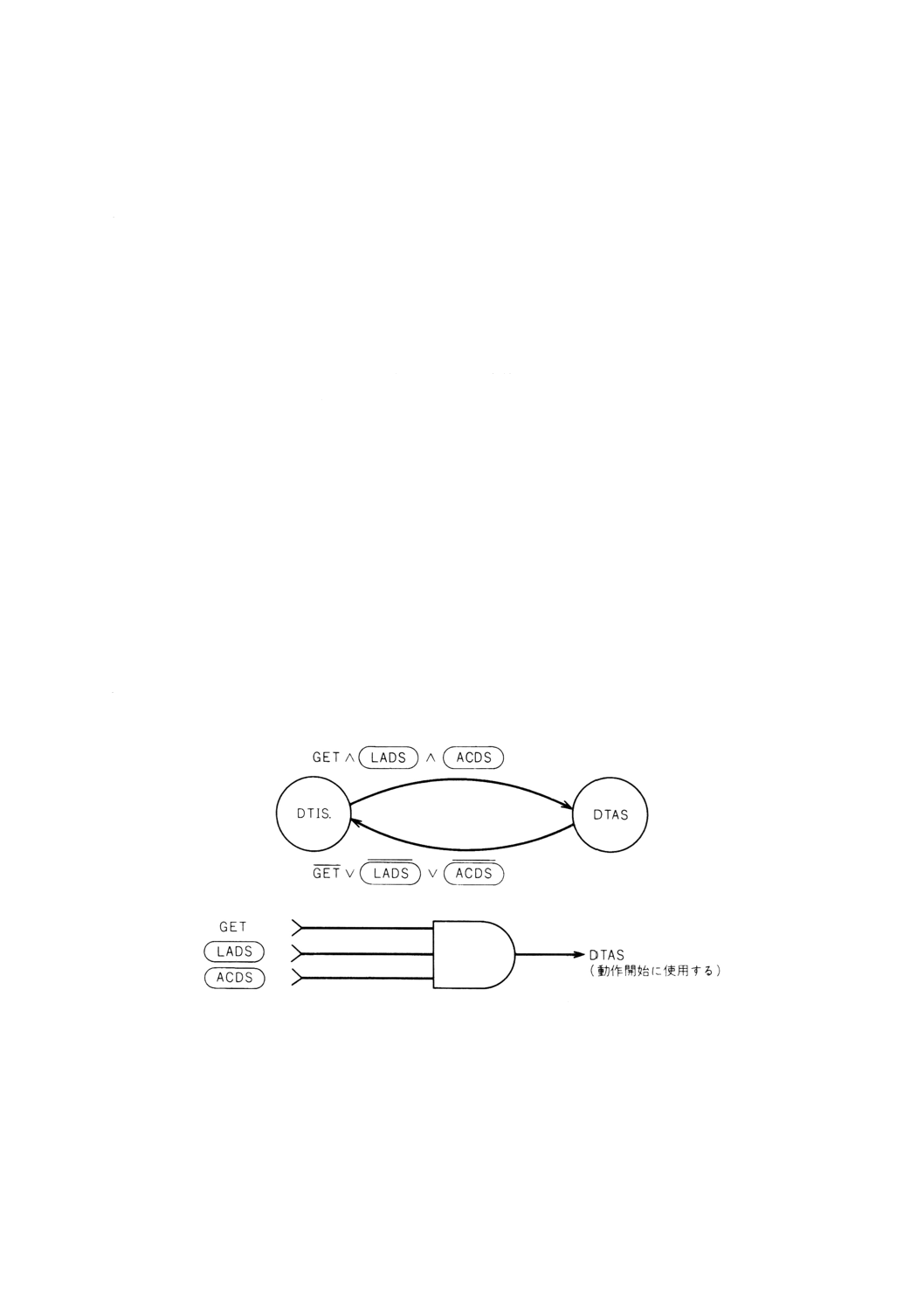
90
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F 論理回路の構成
F.1 設計者のステートダイヤグラムの解釈を手助けすることを目的として,インタフェースファンクショ
ンの内部に生じる種々の状態について可能な回路構成を示す。
この附属書Fの回路構成は唯一の可能な例ではなく,推奨される回路構成を表しているのでもない。こ
れらは教育的な目的のためだけのものである。
F.2
ステートダイヤグラムは,次の二つの概念を表現するのに用いられる。
(1) インタフェースファンクションの取り得る異なった応答を区別し,そのインタフェースファンクショ
ンの一つ又はそれ以上の特有な状態(ステート)を明確にする。
(2) インタフェースファンクションが正しい応答を発生させるために記憶しておかねばならない過去の事
象がどのようなものであったかを明確にする。
各々のステートダイヤグラムに示されたそれぞれのステートは,上に示す目的のいずれか一つ又は両方
を満足している。例えば,LファンクションのLADSは,これに伴うデバイスファンクションへの特別の
メッセージを送信しないためLIDSと区別することはできない。しかし,LADSのステートはデバイスが
バスからリスナアドレスを受け取ったことを保持している。したがって,ATNメッセージが,低レベルに
なったときにLACSに移行することができる(図7参照)。
逆にLACSは保持力をもたないが,LADSではできなかった能力を示すためのステートである。この二
つのステート間の相違は,単にATNメッセージの論理の相違だけである。そしてLACSが保持力を必要と
しないのは,このATNメッセージの論理値が,常に利用できるためである。
F.3 記憶能力を必要としないステート DTファンクションは,記憶能力を必要としないインタフェース
ファンクションの一例である。図13のステートダイヤグラムは次のようである。
保持能力を必要としないため、このインタフェースファンクションは,単なるANDゲートで構成できる。
F.4
記憶能力を必要とするステート SRファンクションは,記憶能力を必要とする一例である。図9の
ステートダイヤグラムは次のようである。
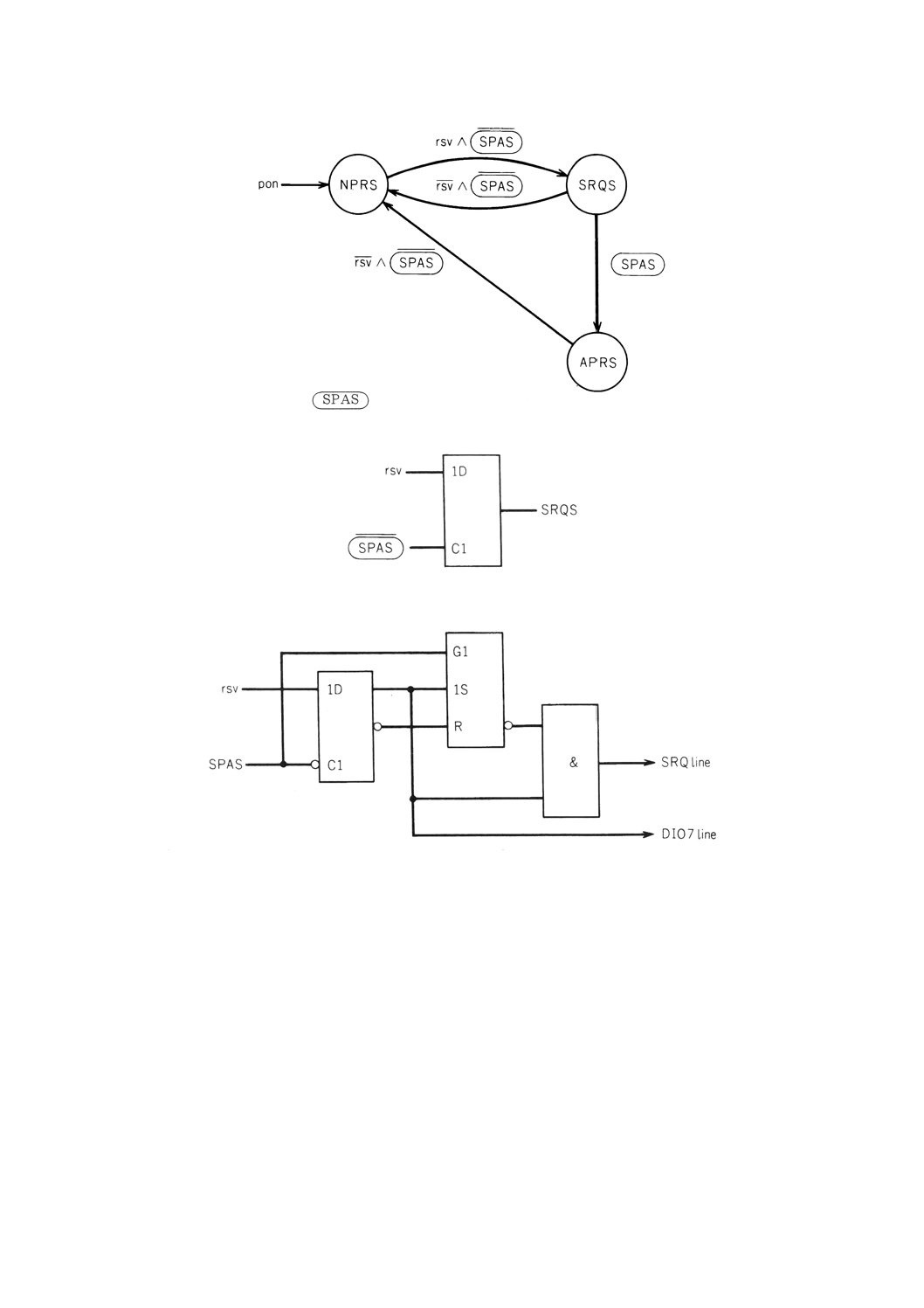
91
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
上図のNPRSとSRQS,もし
がFalseであるという条件さえあれば,ステートはrsvメッセージ
の値に従う回路で示される。これは一般的なDラッチで構成される。
完全な回路にするためには,ラッチの電源投入後にSPASが発生したことを記憶する部分だけ加える必
要がある。この回路は一般的なRSフリップフロップ等で作られ,先のラッチに加えると次のようになる。
この回路においてSRFFは,ラッチされたrsvメッセージがFalseになっているときはいつでもその出力
は,クリア状態になっていなければならない。ラッチされたrsvメッセージがTrueになっても,SPASが
初めてアクティブになり,セットされるまで,その出力はクリア状態を保つ。一たんセットされれば,RQS
メッセージは既に送信されており,SRQはもはやTrueに保たれる必要はないことを記憶している。
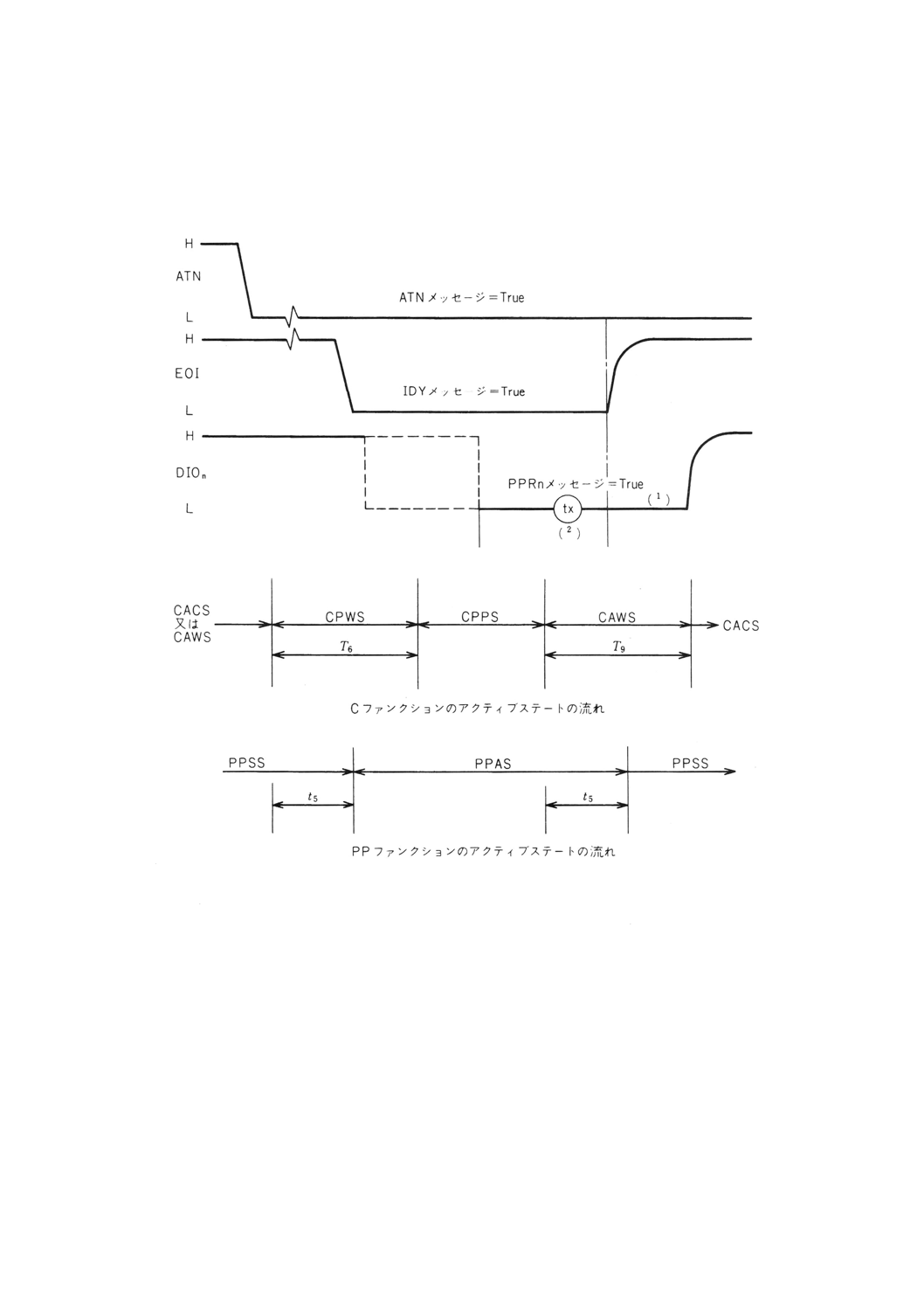
92
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G パラレルポールシーケンス
G.1
信号波形
G.2
インタフェースファンクションのアクティブステート
注(1) PPRnメッセージのTrueの状態は,PPEメッセージによって決定された二つの相反するステート
の内の一つで示される。
(2) データラインのストローブは,CPPSの間に設計者によって決められた任意の内部タイミングで
コントローラによって発生される(パラレルポールの間のステータスデータの伝達は,ハンドシ
ェーク課程を使用しない。)。
93
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H データシート上でのインタフェース
パラメータの記述
次のガイドラインは,この規格の規定を満足する製品のドキュメント,特にデータシートの作成準備を
容易にするためのものである。
この規格の規定を満足する製品は,デバイス機能にかかわる部分の能力をもっている。そのような能力
のうち,この規格のインタフェースポートを介してアクセス可能な部分について言及しておくことは,そ
の機器を使用したシステムのユーザにとって有用であろう。
本附属書Hは,重要なインタフェース関連のパラメータを記述するに当たっての,設計者とユーザ両者
を対象とした,基本的なチェックリストである。したがって,リストに記載されたパラメータのすべてが,
あらゆる製品で使用されるわけではない。
記載したパラメータは,おおまかなガイドラインとなることを意図したものであり,完全なものとみな
すべきではない。
データシートに載せることのできるデータ量は,記載スペースとそのデータシートの主要目的(例えば,
詳細な技術的データシート,概要を記述したパンフレット,操作説明書の簡易リスト)に依存する。
H.1 概要 この規格の規定を満足する機器のデータシートには,その機器の一般的な性能,プログラム
可能な範囲,(インタフェースにかかわる)システムパフォーマンスなどを,ユーザが検討するだけの情報
は載せておくように推奨する。同様に,機器の取扱説明書では,システム構築が容易になるようインタフ
ェースに関する性能について,より詳細に記述することを推奨する。
記述内容は,この規格を考慮すべきである。
この規格の第5節及び第6節は,インタフェースの能力について,機器設計者が定義すること,システ
ムユーザが熟知していることを要求している。
システムを完全に操作するには,システム内の各デバイスのもつ各機器固有な特性についての詳細な知
識が必要であり(そのような詳細な知識を得るためには,この規格に含まれる以上の情報が必要かもしれ
ない。),したがってこの規格の規定を満足しているというだけではトータルな意味での適合性は必ずしも
得られるとは限らないことに注意すべきである。
設計者は次の推奨案に加えて,その機器固有の機能の中でプログラマブルな部分についての詳細な情報
をユーザに示すべきである。
H.2 インタフェースファンクションの能力の記述 対象となるデバイスのもつインタフェース機能の種
類は,少なくともシンボリック表現によって,データシートに記載することを推奨する。
例示した簡単な説明文は,記載スペースがあるならば,有用であろう。
ある製品がインタフェース機能のすべてを必要とするわけではない。そのような場合は,機能を示す記
号と数字の0によって“機能をもたない”ことを表現することができる(例:C0)。
H.2.1 ソースハンドシェークインタフェース (SH) ファンクション
SH1
全機能をもつ。
H.2.2 アクセプタハンドシェークインタフェース (AH) ファンクション
AH1
全機能をもつ。
H.2.3 トーカインタフエース (T) ファンクション
94
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
T1
基本的トーカ,シリアルポール,トークオンリーモードの機能をもつ。
T2
基本的トーカ,シリアルポールの機能をもつ。
T3
基本的トーカ,トークオンリーモードの機能をもつ。
T4
基本的トーカの機能をもつ。
T5
基本的トーカ,シリアルポール,トークオンリーモード,MLAによってトーカ指定解
除の機能をもつ。
T6
基本的トーカ,シリアルポール,MLAによってトーカ指定解除の機能をもつ。
T7
基本的トーカ,トークオンリーモード,MLAによってトーカ指定解除の機能をもつ。
T8
基本的トーカ,MLAによってトーカ指定解除の機能をもつ。
H.2.4 拡張トーカ (TE) ファンクション
TE1
基本的拡張トーカ,シリアルポール,トークオンリーモードの機能をもつ。
TE2
基本的拡張トーカ,シリアルポールの機能をもつ。
TE3
基本的拡張トーカ,トークオンリーモードの機能をもつ。
TE4
基本的拡張トーカの機能をもつ。
TE5
基本的拡張トーカ,シリアルポール,トークオンリーモード,
によりト
ーカ指定解除の機能をもつ。
TE6
基本的拡張トーカ,シリアルポール,
によってトーカ指定解除の機能を
もつ。
TE7
基本的拡張トーカ,トークオンリーモード,
によってトーカ指定解除の
機能をもつ。
TE8
基本的拡張トーカ,
によってトーカ指定解除の機能をもつ。
H.2.5 リスナインタフェース (L) ファンクション
L1
基本的リスナ,リスンオンリーモードの機能をもつ。
L2
基本的リスナの機能をもつ。
L3
基本的リスナ,リスンオンリーモード,MTAによってリスナ指定解除の機能をもつ。
L4
基本的リスナ,MTAによってリスナ指定解除の機能をもつ。
H.2.6 拡張リスナ (LE) ファンクション
LE1
基本的拡張リスナ,リスンオンリーモードの機能をもつ。
LE2
基本的拡張リスナの機能をもつ。
LE3
基本的拡張リスナ,リスンオンリーモード,
によってリスナ指定解除の機
能をもつ。
LE4
基本的拡張リスナ,
によってリスナ指定解除の機能をもつ。
H.2.7 サービスリクエストインタフェース (SR) ファンクション
SR1
全機能をもつ。
H.2.8 リモートローカルインタフェース (RL) ファンクション
RL1
全機能をもつ。
RL2
ローカルロックアウトの機能を除く。
H.2.9 パラレルポールインタフェース (PP) ファンクション
PP1
リモートメッセージによってDIOラインの割り振りを行う。
PP2
ローカルメッセージによってだけDIOライン割り振りを行う。
95
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.2.10 デバイスクリアインタフェース (DC) ファンクション
DC1
全機能をもつ。
DC2
SDCの機能を除く。
H.2.11 デバイストリガインタフェース (DT) ファンクション
DT1
全機能をもつ。
H.2.12 コントローラインタフェース (C) ファンクション
C1
システムコントローラの機能をもつ。
C2
IFC送信,コントローラインチャージの機能をもつ。
C3
REN送信の機能をもつ。
C4
SRQに対する応答の機能をもつ。
C5
インタフェースメッセージの送信,コントロールの受け,コントロールの渡し,自分自
身へのコントロールの渡し,パラレルポール,ハンドシェークに同期してコントロール
する機能をもつ。
C6
インタフェースメッセージの送信,コントロールの受け,コントロールの渡し,自分自
身へのコントロールの渡し,パラレルポールの機能をもつ。
C7
インタフェースメッセージの送信,コントロールの受け,コントロールの渡し,自分自
身へのコントロールの渡し,ハンドシェークに同期してコントロールする機能をもつ。
C8
インタフェースメッセージの送信,コントロールの受け,コントロールの渡し,自分自
身へのコントロールの渡しの機能をもつ。
C9
インタフェースメッセージの送信,コントロールの受け,コントロールの渡し,パラレ
ルポール,ハンドシェークに同期してコントロールする機能をもつ。
C10
インタフェースメッセージの送信,コントロールの受け,コントロールの渡し,パラレ
ルポールの機能をもつ。
C11
インタフェースメッセージの送信,コントロールの受け,コントロールの渡し,ハンド
シェークに同期してコントロールする機能をもつ。
C12
インタフェースメッセージの送信,コントロールの受け,コントロールの渡しの機能を
もつ。
C13
インタフェースメッセージの送信,コントロールの受け,パラレルポールハンドシェー
クに同期してコントロールする機能をもつ。
C14
インタフェースメッセージの送信,コントロールの受け,パラレルポールの機能をもつ。
C15
インタフェースメッセージの送信,コントロールの受け,ハンドシェークに同期してコ
ントロールする機能をもつ。
C16
インタフェースメッセージの送信,コントロールの受けの機能をもつ。
C17
インタフェースメッセージの送信,コントロールの渡し,自分自身へのコントロールの
渡し,パラレルポール,ハンドシェークに同期してコントロールする機能をもつ。
C18
インタフェースメッセージの送信,コントロールの渡し,自分自身へのコントロールの
渡し,パラレルポールの機能をもつ。
C19
インタフェースメッセージの送信,コントロールの渡し,自分自身へのコントロールの
渡し,ハンドシェークに同期してコントロールする機能をもつ。
C20
インタフェースメッセージの送信,コントロールの渡し,自分自身へのコントロールの
96
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
渡しの機能をもつ。
C21
インタフェースメッセージの送信,コントロールの渡し,パラレルポール,ハンドシェ
ークに同期してコントロールする機能をもつ。
C22
インタフェースメッセージの送信,コントロールの渡し,パラレルポールの機能をもつ。
C23
インタフェースメッセージの送信,コントロールの渡し,ハンドシェークに同期してコ
ントロールする機能をもつ。
C24
インタフェースメッセージの送信,コントロールの渡しの機能をもつ。
C25
インタフェースメッセージの送信,パラレルポール,ハンドシェークに同期してコント
ロールする機能をもつ。
C26
インタフェースメッセージの送信,パラレルポールの機能をもつ。
C27
インタフェースメッセージの送信,ハンドシェークに同期してコントロールする機能を
もつ。
C28
インタフェースメッセージの送信の機能をもつ。
備考 C5〜C28の中から一つとC1〜C4までの一つ以上の組合せが可能。
H.3 代表的時間値の記述 この項で述べる時間値の記述は,システム全体の構成(トーカ,リスナ,コ
ントローラの特性)に大いに依存している。実際の時間値は,実際の測定条件,機器の特性,また計器又
はコントローラのどちらかに内蔵されているオペレーティングシステムソフトウェアにも大いに依存する
であろう。そのため,一義的に値をスペック化することは困難であり,適確ではない。
H.3.1 DABメッセージの転送速度
(a) データ入力レート(リスナにアドレスされたとき)
例:Nキロバイト/秒 関連条件(構成,データ型,機能操作)
(b) データ出力レート(トーカにアドレスされたとき)
例:Nキロバイト/秒 関連条件(構成,データ型,機能操作)
H.3.2 その他の時間値
例:(a) インタフェースハンドシェーク遅延時間(タイムアウト,ホールド)
(b) デバイスコマンドに対する応答時間
(c) インタフェースメッセージに対する応答時間
H.4 デバイスディペンデントメッセージの記述 最も記述しなければいけない情報は,実はデバイスに
依存している。それゆえ明確な例をあげられない。次にデータシートに記述されていると役立つ情報のリ
ストを示す。
H.4.1 アドレスの能力
(a) リスナアドレスとしての有効なコードセット
例:コード表2列0から3列14まで
(b) トーカアドレスとしての有効なコードセット
例:コード表4列0から4列15まで
(c) 工場出荷時のプリセット値
例:MLA=2列7,MTA=4列7
(d) 特殊アドレス機能
例: アドレス4列7=生データ
アドレス4列8=処理後データ
97
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.5 ドライバ/レシーバの電気的能力
H.5.1 オープンコレクタドライバの信号ライン=E1
(DIOラインに適用される。)
H.5.2 3ステートドライバの信号ライン=E2
(DIOラインに適用される。)
98
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書J この規格で規定するケーブルのシールド
効果を改善するために推奨される手法
この規格では,様々な環境のもとで,許容されるEMC特性を得たコネクタとケーブルのアセンブリを
規定している。しかしながら,アプリケーションの内容によっては,電磁ふく射の影響を更に減少させる
ことが望まれたり,必要であったりすることもある。この推奨方法は,計測システムでの電磁ふく射の影
響を減らすための一般的な手引となり,この規格の他の規定によって得られる特性を更に改善することが
できる。
ケーブルアセンブリ(接続ケーブルと結合されたコネクタ),及び機器のすぐ内側のコネクタとケーブル
のインタフェースは,多方面にわたり,全体の計測システムのEMC特性を決定付けるということが,一
般的に受け入れられている。
次に示す指針は,この規格においてEMC特性を改善するために,この規格に規定されたコネクタを,
どのようにして機器に接続するかを記述する。それらのシールドは,基本的な二つの形式の電波障害の影
響を減らしている。
(a) 他のRFシステムに影響を与えるケーブルとコネクタからのリーケージに対するシールド。
(b) ケーブルとコネクタへの外部からの電波障害に対するシールド。これは結果としてこの規格で記述す
るデータ転送に影響を与える。
これらの目的は,リーケージを最小化するケーブル配線のテクニックを使用することによって達成され
る。
次に詳細を記述する。
J.1
バスケーブルとコネクタ
J.1.1 十分にシールドされたケーブルを使用する 最小限85%の被覆率が必要であり,更に改良するには
90%の被覆率とする。編組とメタライズドマイラー又ははく(箔)の組合せは,ケーブルのシールドが一
層改良される。これを推奨する。
J.1.2
良好なRF接続テクニックを使用する 装置上で,ケーブルのシールドとコネクタの間を1本又は
数本のコネクタピンによるグランド接続だけをあてにするのでは,不十分である。例を示すと,その代わ
りに、金属製のコネクタハウジングを通してシャーシへの十分なRF接続を行うことが必要になる。既に
使用しているコネクタハウジングの形状に対する適合性(機械的にまた電気的に)が得られることに注意
する。
J.1.3
金属のコネクタハウジングを使用する コネクタハウジングは金属製にする。ハウジングはシャー
シへの接続に使用されるので,ハウジングの接触部分は電気的な接点として設計されて仕上げられる(例:
金属製で導体であるハウジング,金属でカバーしたコネクタ又はその同等品,ケーブルシールドと金属製
のハウジング間の良好なRF接続等)。
J.1.4
電磁ふく射のシールドは,ピギーバックコネクタの端を包む金属カバーを使うことによって,更に
改善される。しかしながら,この手段は例外的な場合にだけ使用する。コネクタのコンタクトによる,RF
リーケージの影響度は小さい。
J.2
この規格に適合したコネクタを装置に使用する。
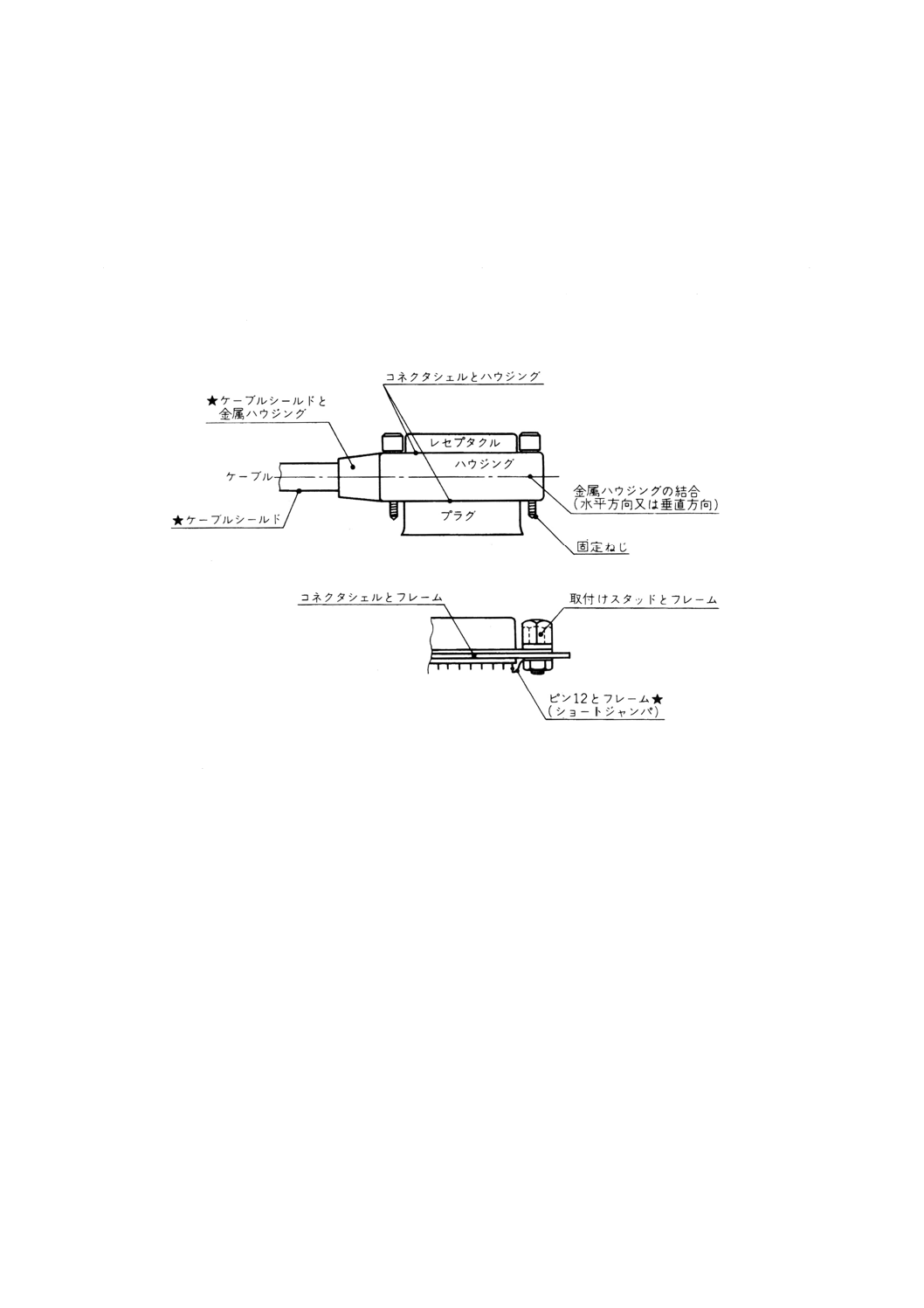
99
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
J.2.1
この規格によるコネクタのポートは,金属のシェルを使用し,ケーブルのコネクタハウジングに対
し,十分なRF接続を保障する(J.1.3の条件にかなっている。)。
J.2.2
コネクタのシールドピンの間の電気的接続は,金属のハウジングとシャーシに取り付けるコネクタ
のシェル,そしてシャーシフレームに対し,可能な限り短い経路でショートされるように作られている。
目立ったシールド効果の低下は50mmを超えるグランド長さのときに起こる。したがって,この規格のコ
ネクタのポートとの内部接続を行うのにフラットケーブルが使われたときには,シールドはこのケーブル
を通してシャーシに接続することができない。このことはロジック信号グランドには適用しない。これら
のグランドは,信号線と同じ経路をたどって接続する。
附属書J図J-1 RF接続(グランド)点
備考1. 指摘箇所は,すべて金属面とする。
2. それぞれの指摘箇所は高品質の電気的接合が推奨される。
3. ★印は最も重要な接続点であり,良好なRF処理が是非必要とされる。
100
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考 用語及び略号索引
この規格を利用する人たちへの手引書として,規格内で使用している用語及び略号の索引を記載する。
この索引は,この規格内で使用されている用語(略号)の定義箇所及び使用箇所を示すことによって利
用(使用)者の理解を助け,内容の確認を容易にすることを目的としている。
この索引は,用語(略号)が解説又は定義されている節,項番号を記述し,解説又は定義のない用語(略
号)については,主に使用されている節,項番号又は関連する節,項番号を記述している。
(1) この規格で定義されている用語及びこの規格固有の用語索引(五十音順)
−あ−
アクセプタハンドシェークインタフェースファンクション
(Acceptor Handshake Interface Function)
7.1
アクティブ (Active)
4.3.7.1
アクティブステート (Active State)
4.3.7.1
アテンション (Attention)
3.3.3.3
アドレス (Address)
34/38
アドレスコマンド (Address Command)
15.3.3.3
−い−
一方向性バス (Unidirectional Bus)
2.2.6.1
一次アドレス (Primary Address)
8.1.2/9.1.2
インタフェース (Interface)
2.1.2
インタフェースクリア (Interface Clear)
3.3.3.3
インタフェースシステム (Interface System)
2.1.3
インタフェースファンクション (Interface Function)
4.2.1
インタフェースメッセージ (Interface Message)
3.1.2
インターロック (Inter lock)
2.1.8
−か−
拡張トーカ (Extended Talker)
8.1.2
拡張リスナ (Extended Listener)
9.1.2
管理バス (Interface Management Bus)
3.3.3
−き−
機器 (Apparatus)
2.
−け−
ケーブルアセンブリ (Cable Assembly)
29.
−こ−
高ステート (High State)
2.2.3.1
コマンド (Command)
4.3.6.3
コントローラ (Controller)
3.2
コントローラインチャージ (Controller-in-charge)
15.1.3
コントローラインタフェースファンクション
(Controller Interface Function)
15.1
101
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
−さ−
サービスリクエスト (Service Request)
3.3.3.3
サービスリクエストインタフェースファンクション
(Service Request Interface Function)
10.1
−し−
システム (System)
2.1.1
システムコントローラ (System controller)
15.1.4/37.1.3
受信準備完了 (Ready for Data)
3.3.3.2/7.1
受信完了 (Date Accepted)
3.3.3.2/7.1
シリアルポール (Serial Poll)
8.3.5/8.3.6
信号パラメータ (Signal Parameter)
2.2.2
信号ライン (Signal Line)
2.2.4
信号レベル (Signal Level)
2.2.3
−す−
ステータスバイト (Status Byte)
8.3.4.1
ステート (State)
5.1.1
ステートリンケージ (State Linkage)
4.3.4
3ワイヤハンドシェーク (3 Wire Handshake)
3.3.3.2
−そ−
双方向性バス (Bidirectional Bus)
2.2.6.2/21.5
ソースハンドシェークインタフェースファンクション
(Source Handshake Interface Function)
6.1
−た−
ターミナルユニット (Terminal Unlt)
2.1.10
−て−
低ステート (Low State)
2.2.3.2
データバイト (Data Byte)
3.3.3
データバス (Data Bus)
3.3.3
データ有効 (Data Valid)
3.3.3.2
デバイス (Device)
2. /3.2.1
デバイスクリアインタフェースファンクション
(Device Clear Interface Function)
13.1
デバイストリガインタフェースファンクション
(Device Trigger Interface Function)
14.1
デバイスファンクション (Device Function)
4.1
デバイスメッセージ (Device Message)
3.1.2
適合性 (Compatibility)
2.1.7
転送制御バス (Data Byte Transfer Control Bus)
3.3.3
−と−
トーカ (Talker)
3.2
トーカインタフェースファンクション
(Talker Interface Function)
8.1
トーカアドレス (Talker Address)
38.1
トークオンリー (Talk Only)
8.3.1.3/8.5.3
当番コントローラ (Controller-incharge)
15.1.3
102
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
True
4.3.7.1
−に−
2次アドレス (Secondary Address)
8.3.2.1/9.3.2.1
2次コマンド (Secondary Command)
15.3.3.2
−は−
バイト (Byte)
2.2.5
バイト直列 (Byte Serial)
2.2.7
バス (Bus)
2.2.6
パッシブ (Passive)
4.3.7.1
パラレルポールインタフェースファンクション
(Parallel Poll Interface Function)
12.1
ハンドシェーク (Handshake)
3.3.3.2
ハンドシェークサイクル (Handshake Cycle)
2.1.8
ハンドシェークシーケンス (Handshake Sequence)
附属書B
−ひ−
ビジー (Busy)
32.1.1
ビジーサイクル (Busy Cycle)
32.1.1
ビジーファンクション (Busy Function)
32.1
ビット並列 (Bit Parallel)
2.2.8
非同期転送 (Asynchronous Communication)
1.2
−ふ−
プログラマブル (Programable)
2.1.4
False
4.3.7.1
−ま−
マルチライン (Multiline)
16.2.3
マルチラインメッセージ (Multiline Message)
4.3.6
−め−
メッセージ (Message)
4.3.1
メッセージコーディング (Message Coding)
4.3.5
メッセージバイト (Message Byte)
4.3.5.3
−り−
リスナ (Listener)
3.2
リスナインタフェースファンクション (Listener Interface Function)
9.1
リスナアドレス (Listener Address)
38.2
リスンオンリー (Listen Only)
9.3.1.3/9.5.3
リモートイネーブル (Remote Enable)
3.3.3.3
リモート制御 (Remote Control)
2.1.5
リモートメッセージ (Remote Message)
4.3.3/16.
リモートローカルインタフェースファンクション
(Remote Local Interface Function)
11.1
−ろ−
ローカル制御 (Local Control)
2.1.6
ローカルプログラミングソース (Local Programing Source)
11.5.5
103
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ローカルメッセージ (Local Message)
4.3.2
−ゆ−
ユニバーサルコマンド (Universal Command)
15.3.3.1
ユニラインメッセージ (Uniline Message)
16.2.2
(2) この規格固有の略号索引(アルファベット順)
−A−
ACDS (Accept Date State)
7.3.4
ACG (Addressed Command Group)
16.5
ACRS (Acceptor Ready State)
7.3.3
AH (Acceptor Handshake Interface Function)
7.1
AIDS (Acceptor Idle State)
7.3.1
ANRS (Acceptor Not Ready State)
7.3.2
APRS (Affirmative Poll Response State)
10.3.3
ATN (Attention)
3.3.3.3
AWNS (Acceptor Wait For New Cycle State)
7.3.5
−C−
C (Controller Interface Function)
15.1
CACS (Controller Active State)
15.3.3
CADS (Controller Addressed State)
15.3.2
CAWS (Controller Active Wait State)
15.3.8
CIDS (Controller Idle State)
15.3.1
CPWS (Controller Parallel Poll Wait State)
15.3.4
CSBS (Controller Standby State)
15.3.6
CSHS (Controller Standby Hold State)
15.3.20
CSNS (Controller Service Not Requested State)
15.3.11
CPPS (Controller Parallel Poll State)
15.3.5
CSRS (Controller Service Requested State)
15.3.10
CSWS (Controller Synchronous Wait State)
15.3.7
CTRS (Controller Transfer State)
15.3.9
−D−
DAB (Data Byte)
8.3.3/9.3.3
DAC (Data Accepted)
6.1/7.1
DAV (Data Valid)
3.3.3.2
DC (Device Clear Interface Function)
13.1
DCAS (Device Clear Active State)
13.3.2
DCIS (Device Clear Idle State)
13.3.1
DCL (Device Clear)
13.3.1
DIO (Data Input Output)
3.3.3.1
DT (Device Trigger Interface Function)
14.1
DTAS (Device Trigger Active State)
14.3.2
DTIS (Device Trigger Idle State)
14.3.1
−E−
END (End)
8.3.3/9.3.3.1/16.5
EOI (End or Identify)
3.3.3.3/16.5/40.1
EOS (End of String)
8.3.3/9.3.3.1/16.5/40.1
104
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
−G−
GET (Group Execute Trigger)
14.3.1.3/16.5
GTL (Go To Local)
11.3.3.3/11.3.4.3/16.5
gts (go to standby)
15.3.3.3
−I−
IDY (Identify)
12.3.2.3/12.3.3.3/15.3.5.2
IFC (Interface Clear)
3.3.3.3/16.5/40.6
ist (individual status)
12.3.3.2
−L−
L (Listener Interface Function)
9.1
LACS (Listner Active State)
9.3.3
LAD (Listener Address)
40.1
LADS (Listener Addressed State)
9.3.2
LAG (Listener Address Group)
16.5
LE (Extend Listener Function)
9.1.2
LIDS (Listener Idle State)
9.3.1
LLO (Local Lockout)
11.3.1.3
LOCS (Local State)
11.3.1
lon (listen only)
9.3.1.3
LPAS ( Listener Primary Addressed State)
9.3.5
lpe (local poll enable)
12.3.1.3
LPIS (Listener Primary Idle State)
9.3.4
ltn (listen)
9.3.1.3
LWLS (Local With Lockout State)
11.3.2
lun (local unlisten)
9.3.2.3
−M−
MLA (My Listener Address)
9.3.1.3
MSA (My Secondary Address)
8.3.1.4/9.3.1.4
MTA (My Talker Address)
8.3.1.3
−N−
nba (new byte available)
6.3.2.3
NDAC (Not Date Accepted)
3.3.3.2/6.7
NPRS (Negative Poll Responce State)
10.3.1
NRFD (Not Ready For Data)
3.3.3.2
NUL (Null Byte)
16.5
−O−
OSA (Other Secondary Address)
8.2.2/8.3.2.4
OTA (Other Talker Address)
8.2.1/8.3.2.4
−P−
PACS (Parallel Poll Addressed to Configure State)
12.3.5
PCG (Primary Command Group)
16.5
pon (power on)
5.1.7
PP (Parallel Poll Interface Function)
12.1
PPAS (Parallel Poll Active State)
12.3.3
PPC (Parallel Poll Configure)
12.3.4.3
105
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PPD (Parallel Poll Disable)
12.3.2.3
PPE (Parallel Poll Enable)
12.3.1.3
PPIS (Parallel Poll Idle State)
12.3.1
PPR (Parallel Poll Response)
12.3.3.2
PPSS (Parallel Poll Standby State)
12.3.2
PPU (Parallel Poll Unconfigure)
12.3.2.3
PUCS (Parallel Poll Unaddressed to Configure State)
12.3.4
−R−
rdy (ready for next message)
7.3.2.3
REMS (Remote State)
11.3.3
REN (Remote Enable)
3.3.3.3
RFD (Ready For Data)
7.3.3.2
RL (Remote Local Interface Function)
11.1
rpp (request parallel poll)
15.3.3.3
RQS (Request Service)
10.5.1.2
rsc (request system control)
15.3.12.3
rsc (request service)
10.3.1.3
rtl (return to local)
10.3.3.3
RWLS (Remote With Lockout State)
11.3.4
−S−
SACS (System Control Active State)
15.3.13
SCG (Secondary Command Group)
16.6.1
SDC (Selected Device Clear)
13.3.2.3
SDYS (Source Delay State)
6.3.3
SGNS (Source Generate State)
6.3.2
SH (Source Handshake Interface Function)
6.1
SIAS (System Control Interface Clear Active State)
15.3.16
sic (send interface clear)
15.3.1.3
SIDS (Source Idle State)
6.3.1
SIIS (System Control Interface Clear Idle State)
15.3.14
SINS (System Control Interface Clear Not Active State)
15.3.15
SIWS (Source Idle Wait State)
6.3.6
SNAS (System Control Not Active State)
15.3.12
SPAS (Serial Poll Active State)
8.3.4
SPD (Serial Poll Disable)
8.3.6.3
SPE (Serial Poll Enable)
8.3.5.3
SPIS (Serial Poll Idle State)
8.3.5
SPMS (Serial Poll Mode State)
8.3.6
SR (Service Request Interface Function)
10.1
SRAS (System Control Remote Enable Active State)
15.3.19
sre (send remote enable)
15.3.17.3
SRIS (System Control Remote Enable Idle State)
15.3.17
SRNS (System Control Remote Enable Not Active State)
15.3.18
SRQ (Service Request)
3.3.3.3
SRQS (Service Request State)
10.3.2
STB (Status Byte)
8.3.4.1/16.6.1
STRS (Source Transfer State)
6.3.4
SWNS (Source Wait For New Cycle State)
6.3.5
106
C 1901 : 1987
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
−T−
T (Talker Interface Function)
8.1
TACS (Talker Active State)
8.3.3
TAD (Talker Address)
40.1
TADS (Talker Addressed State)
8.3.2
TAG (Talker Address Group)
16.5
tca (take control asynchronously)
15.3.6.3
tcs (take control synchronously)
7.3.2.3/15.3.6.3
TCT (Take Control)
15.3.9.1
TE (Exteded Talker Function)
8.1.2
TIDS (Talker Idle State)
8.3.1
ton (talk only)
8.3.1.3
TPAS (Talker Primary Addressed State)
8.3.8
TPTS (Talker Primary Idle State)
8.3.7
−U−
UCG (Universal Command Group)
16.5
UNL (Unlisten)
9.3.2.3
UNT (Untalk)
38.1.1
計測器用インタフェースシステムJIS原案作成委員会 構成表
氏名
所属
(委員長)
大 森 俊 一
東京理科大学 工学部
兵 頭 洋
通商産業省機械情報産業局
太 田 健一郎
工業技術院標準部
横 島 一 郎
工業技術院電子技術総合研究所 電波電子部
山 崎 修 快
日本電気計器検定所 標準研究部
藤 沢 和 也
財団法人機械電子検査検定協会 計量・標準事業部
猪 野 欽 也
東京都立工業技術センター計測制御部
藤 本 正 弘
社団法人 日本電気計測器工業会
加 藤 治 朗
株式会社アドバンテストソフトウェア開発部
澤 谷 基
安藤電気株式会社 計測機器事業部第2技術部
戸 田 博 道
アンリツ株式会社 計測機器事業部第1技術部
酒 井 聡
岩崎通信機株式会社 産業計測事業部計測技術部
有 井 敏 彦
菊水電子工業株式会社 計測事業部
山 古 勇 玄
日本無線株式会社 技術第5部
百 瀬 英 穂
松下通信工業株式会社 電子計測事業部技術部
門 脇 淳
横河・ヒューレット・パッカード株式会社 開発生産本部技術1部
豊 則 有 擴
横河北辰電機株式会社 測定機器技術部
菅 原 淳 夫
財団法人日本規格協会
(事務局)
高 田 範 雄
社団法人日本電子機械工業会