C 1400-21:2005
(1)
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,経済産業大臣が制定した日
本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,IEC 61400-21:2001,Wind turbine
generator systems - Part 21 : Measurement and assessment of power quality characteristics of grid connected wind
turbinesを基礎として用いた。
また,令和2年10月20日,産業標準化法第17条又は第18条の規定に基づく確認公示に際し,産業標
準化法の用語に合わせ,規格中“日本工業規格”を“日本産業規格”に改めた。
JIS C 1400-21には,次に示す附属書がある。
附属書A(参考)報告書形式の例
附属書B(参考)電圧変動及びフリッカ
附属書C(参考)参考文献
附属書1(規定)高調波流出電流上限値
附属書2(参考)JISと対応する国際規格との対比表
JIS C 1400の規格群には,次に示す部編成がある。
JIS C 1400-0 風力発電システム−第0部:風力発電用語
JIS C 1400-1 風力発電システム−第1部:安全要件
JIS C 1400-2 風力発電システム−第2部:小形風力発電システムの安全基準
JIS C 1400-11 風力発電システム−第11部:騒音測定方法
JIS C 1400-12 風力発電システム−第12部:風車の性能計測方法
TS C 1400-13 風力発電システム−第13部:機械的荷重の計測方法(TS)
JIS C 1400-21 風力発電システム−第21部:系統連系風車の電力品質特性の測定及び評価
TS C 1400-23 風力発電システム−第23部:風車の実翼構造強度試験(TS)
TR C 1400-24 風力発電システム−第24部:風車の雷保護(TR)
C 1400-21:2005
(2)
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 2
3. 定義 ······························································································································ 3
4. 記号及び単位 ·················································································································· 4
5. 略語 ······························································································································ 6
6. 風車電力品質特性パラメータ ····························································································· 6
6.1 一般 ···························································································································· 6
6.2 定格値 ························································································································· 6
6.3 最大許容出力 ················································································································ 6
6.4 最大出力実測値 ············································································································· 6
6.5 無効電力 ······················································································································ 6
6.6 電圧変動 ······················································································································ 6
6.7 高調波 ························································································································· 7
7. 測定手順 ························································································································ 8
7.1 一般 ···························································································································· 8
7.2 定格値 ························································································································ 10
7.3 最大許容出力 ··············································································································· 10
7.4 最大出力実測値 ············································································································ 10
7.5 無効電力 ····················································································································· 11
7.6 電圧変動 ····················································································································· 11
7.7 高調波 ························································································································ 16
8. 電力品質の評価 ·············································································································· 16
8.1 一般 ··························································································································· 16
8.2 定常電圧 ····················································································································· 17
8.3 電圧変動 ····················································································································· 17
8.4 高調波 ························································································································ 19
附属書A(参考)報告書形式の例 ·····························································································
附属書B(参考)電圧変動及びフリッカ ·····················································································
附属書C(参考)参考文献 ······································································································
附属書1(規定)高調波流出電流上限値 ·····················································································
附属書2(参考)JISと対応する国際規格との対比表 ·····································································
C 1400-21:2005
日本産業規格
JIS
C 1400-21:2005
風力発電システム−
第21部 系統連系風車の
電力品質特性の測定及び評価
Wind turbine generator systems − Part 21 : Measurement and assessment
of power quality characteristics of grid connected wind turbines
序文 この規格は,2001年に第1版として発行されたIEC 61400-21:2001,Wind turbine generator systems -
Part 21 : Measurement and assessment of power quality characteristics of grid connected wind turbinesを翻訳し,
技術的内容を変更することなく作成した日本産業規格であるが,対応国際規格には規定されていない規定
項目を日本産業規格として追加している。
なお,この規格で点線の下線を施してある箇所は,原国際規格を変更している事項である。変更の一覧
表をその説明を付けて,附属書2(参考)に示す。
この規格の目的は,風車を連系した電力系統における電力品質特性の測定及び評価において,精度が高
い統一した方法を提供することである。この点に関して電力品質という用語には,風車が連系される電力
系統の電圧品質に影響を与える風車の電気的特性を含んでいる。この規格は,次のような関係者による適
用を期待して作成した。
− 明確に定義されたな電力品質特性を満たそうと努力する風車の製造業者。
− 明確に定義された電力品質特性を指定する風車の購入者。
− 記載された又は要求された電力品質特性が満たされていることを検証しなければならない風車の運用
者。
− 電圧品質の必要条件が尊重されるように,設備が設計されていることを確実にするために,新設又は
更新された設備の電圧品質への影響を正確,かつ,公平に決定すべき風車の計画者又は規制者。
− 風車の電力品質特性を評価する風車の認証者又は部品の試験機関。
− 風車の系統連系を決定しなければならない電力系統の計画者又は規制者。
この規格は,電力系統に連系されている風車の電力品質について,測定及び分析の準備に関する推奨を
提供する。この規格は,風車の製造,設置,計画,許可の取得,操作,利用及び規則に関係した機関に利
益をもたらす。この文書で推奨された測定及び分析の技術は,風車の継続的な開発及び運用が一定の正確
な連絡環境で実行されることを確実にするために,すべての団体によって適用されるべきである。
この規格は,その他の機関によって再現可能な,一定の結果を提供することが期待できる測定及び分析
の手順を提供する。
1. 適用範囲 この規格は,次の事項を規定する。
− 系統連系される風車の電力品質の特性を決定する量的な定義及び仕様。
2
C 1400-21:2005
− 特性を定量化する測定手順。
− 複数設置の場合を含め,特定サイトに設置されるとき,風車タイプに依存する電力品質の評価を含め
て,電力品質要件の遵守を評価するための手順。
この規格の計測方法は,三相電力系統連系で,風車が電力系統のどのような場所においても周波数又は
電圧を能動的に制御しない限りにおいて有効である。
この規格に規定する測定方法は,風車が中圧又は高圧での共通結合点で,この規格に従って測定及び特
長付けされることを要求するが,測定手順は,風車の大きさにかかわらず有効である。
測定される特性は,評価される風車の特定の構成だけに有効である。風車を,電力品質に関して,制御
パラメータの変更を含めて異なった構成で運転する場合,ほかの評価を必要とする。
この規格の測定手順は,ひとつのサイトで測定された電力品質特性が,ほかのサイトでも有効であるよ
う,可能な限り一定のサイトに依存しないよう考慮されている。
電力品質の必要条件への適合を評価する手順は,周波数±1 Hz以内の電力系統における中圧又は高圧で
の共通結合点において,十分な有効及び無効電力調整能力をもち,風力発電量を吸収する十分な負荷があ
る場合に有効である。その他の場合は,電力品質の必要条件への適合の評価基準として用いてもよい。
備考1. この規格は,電力系統電圧として,次の用語を用いる。
低圧(LV)は,Un≦1 kVとする。
中圧(MV)は,1 kV<Un≦35 kVとする。
高圧(HV)は,Un>35 kVとする。
2. 次数間高調波の問題は,この規格で扱わない。適切なIEC委員会によって適切な測定及び評
価手順の確立について検討中である。
3. この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
IEC 61400-21:2001,Wind turbine generator systems − Part 21 : Measurement and assessment of
power quality characteristics of grid connected wind turbines (MOD)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格のうちで,発行年を付記してあるものは,記載の年の版だけがこの規格の規定を構
成するものであって,その後の改正版・追補には適用しない。発効年又は発行年を付記していない引用規
格は,その最新版(追補を含む。)を適用する。
JIS C 1400-0 風力発電用語
JIS C 1400-1 安全要件
備考 IEC 61400-1 Wind turbine generator system − Part1 : Safety requirements (IDT) がこの規格
と一致している。
JIS C 0161 EMCに関するIEV用語
備考 IEC 60050(161) International Electrotechnical Vocabulary (IEV) − Chapter 161: Electromagnetic
compatibilityが,この規格と一致している。
JIS C 1000-4-7 電磁両立性 第4部:試験及び測定技術 第7節:電力供給システム及びこれに接続
する機器のための高調波及び次数間高調波測定方法及び計装に関する指針
備考 IEC 61000-4-7 Electromagnetic compatibility (EMC) − Part 4 : Testing and measurement
3
C 1400-21:2005
techniques − Section 7 : General guide on harmonics and interharmonics measurements and
instrumentation, for power supply systems and equipement connected theretoが,この規格と一致
している。
JIS C 1731-1 計器用変成器−(標準用及び一般計測用)第1部:変流器
備考 IEC 60044-1 Instrument transformers − Part 1 : Current transformersからの引用事項は,この
規格の該当事項と同等である。
IEC 60034-1 Rotating electrical machines − Part 1 : Rating and performance.
IEC 60050(393) International Electrotechnical Vocabulary (IEV) − Chapter 393 : Nuclear instrumentation:
Physical phenomena and basic concepts
IEC 60050(415) International Electrotechnical Vocabulary (IEV) − Chapter 415 : Wind turbine generator
systems
IEC 60186 Voltage transformers
Amendment 1:1988
Amendment 2:1995
IEC 60688 Electrical measuring transducers for converting a.c. electrical quantities to analog or digital
signals.
IEC 61000-4-15 Electromagnetic compatibility (EMC) − Part 4 : Testing and measurement techniques −
Section 15 : Flickermeter - Functional and design specifications
IEC 61800-3 Adjustable speed electrical power drive systems − Part 3 : EMC product standard including
specific test methods
3. 定義 この規格で用いる主な用語の定義は,次による。
3.1
(風車の)連続運転 カットイン及びカットアウトを除く,風車の標準運転状態。
3.2
(風車の)カットイン風速 風車が利用可能な動力を生むハブ高さにおける最小の風速(JIS C
1400-0)。
3.3
(風車の)連続運転フリッカ係数 風車の連続運転時における正規化されたフリッカ放射。
n
fic
k,
fic
st,
k
S
S
P
c
×
=
)
(Ψ
ここに,
Pst,fic: 仮想回路における風車からのフリッカ放射
Sn: 風車の定格皮相電力
Sk,fic: 仮想回路の短絡容量
備考 短時間(10分間)及び長時間(2時間)の連続運転フリッカ係数は,同一である。
3.4
(風車の)フリッカステップ係数 風車の1回の切換運転時における正規化されたフリッカ放射。
31
.0
130
1
)
(
p
fic
st,
n
fic
k,
k
f
T
P
S
S
k
×
×
×
=
Ψ
ここに,
Tp: 測定期間(切換運転による過渡現象が十分収束し,
かつ,風の乱れによる出力変動が除外できる時間)
Pst,fic: 仮想回路における風車からのフリッカ放射
Sn: 風車の定格皮相電力
Sk,fic: 仮想回路の短絡容量
4
C 1400-21:2005
3.5
(風車の)最大許容出力 気象及び電力系統の条件にかかわらず,超過してはならない10分間の平
均出力。
3.6
(風車の)最大出力実測値 風車の連続運転中に観測された最大出力(指定の時間で平均化)。
3.7
回路インピーダンス位相角 回路インピーダンスの位相角。
k
k
k
R
X
arctan
=
Ψ
ここに,
Xk: 回路のリアクタンス
Rk: 回路の抵抗
3.8
(風車の)通常運転 風車マニュアルの解説に合った故障がない状態の運転。
3.9
(風車の)出力 風車の接続点における有効電力。
3.10 共通結合点(PCC) ある特定の負荷に電気的に最も近い電力供給ネットワークの端点であり,ほかの
負荷が接続されているか,又はその可能性がある点(IEV161-07-15修正)。
備考1. 上記負荷は設備,装置,システム,需要家固有の施設などである。
2. “共通結合点”という語は,公共の電力系統の場合だけに限定されている場合がある。
3.11 (風車の)集電設備(JIS C 1400-1) 1台以上の風車から電力を集める集電システム。これには風
車接続点と電力系統の接続点との間を接続するすべての電気設備を含む。
3.12 (風車の)定格皮相電力 定格電圧,定格周波数及び定格出力で運転されている風車の皮相電力。
2
n
2
n
n
Q
P
S
+
=
ここに,
Pn: 定格出力
Qn: 定格出力時の無効電力
3.13 (風車の)定格電流 定格電圧,定格周波数及び定格出力で運転されている風車の電流。
3.14 (風車の)定格出力 一般には製造業者によって指定される,機器又は装置の規定の運転状態にお
ける出力値(JIS C 1400-0)。
3.15 (風車の)定格風速 風車の定格出力が発生するハブ高さにおける規定の風速(JIS C 1400-0)。
3.16 (風車の)定格無効電力 定格電圧,定格周波数及び定格出力で運転されている風車の無効電力。
3.17 (風車の)静止 風力発電機の停止した状態(JIS C 1400-0)。
3.18 (風車の)起動 風車の静止と出力発生との間の過渡的状態。
3.19 (風車の)切換運転 起動又は発電機の切換え。
備考 風車の切換運転(Switching operation)は,風車が起動して電力系統と並列する場合,又は複数
の発電機がある場合に,発電機切換操作のときの電気的過渡現象が生じる風車の運転をいう。
3.20 乱流強度 風速の標準偏差の平均風速に対する比。この比は,指定の時間内に採取した同一の風速
測定データセットから決定する(JIS C 1400-0)。
3.21 (風車の)電圧変化係数 風車の切換運転による電圧変化を正規化した値。
n
fic
k,
n
min
fic,
max
fic,
k
u
S
S
U
U
U
k
×
×
−
=3
)
(Ψ
ここに, Ufic,min: 切換運転時における仮想回路瞬時相電圧の一周期
実効値の最小値
Ufic,max: 切換運転時における仮想回路瞬時相電圧の一周期
実効値の最大値
Un: 公称線間電圧
5
C 1400-21:2005
Sn: 風車の定格皮相電力
Sk,fic: 仮想回路の短絡容量
備考 電圧変化係数kuは,回路インピーダンス位相角の関数であるが,最大突入電流及び定格電流の
比kiに近い値である。kuの最大値は,数値的にkiに近い。
3.22 風車 風がもつ運動エネルギーを,電気エネルギーに変換するシステム。
3.23 風車接続点 風車が集電設備に接続でき,風車供給者によって特定される接続点。これは電力移送
及び通信のための接続を含む(JIS C 1400-1)。
4. 記号及び単位
n
dyn
U
U
∆
最大許容電圧変化(%)
Ψk
回路インピーダンス位相角(°)
αm(t)
測定された電圧の基本電気角(°)
β
高調波の加算に関係する指数
c(Ψk)
連続運転フリッカ係数
d
相対電圧変化(%)
EPlti
長時間フリッカ放射限度
EPsti
短時間フリッカ放射限度
fg
系統基本波周波数(Hz)
fm,i
i番目の風速ビン内でのフリッカ係数発生頻度
fy, i
i番目の風速ビン内での風速発生頻度
h
高調波次数
Ih,i
i番目の風車のh次高調波電流ひずみ(A)
im(t)
測定された瞬時電流(A)
In
定格電流(A)
kf (Ψk)
フリッカステップ係数
ki
最大突入電流と定格電流の比
ku(Ψk)
電圧変化係数
Lfic
仮想回路のインダクタンス(H)
N10
10分間の単一種類の切換運転最大数
N120
120分間の単一種類の切換運転最大数
Nbin
vcut-inと15 m/s間の風速ビン総数
ni
i番目の風車の変圧器の変圧比
Nm
測定されたフリッカ係数の総数
Nm,i
i番目の風速ビン内での測定されたフリッカ係数の数
Nm,i,c<x
i番目の風速ビン内でのxより低いフリッカ係数の数
Nwt
風車の数
P0,2
最大出力実測値(0.2秒平均値)(W)
P60
最大出力実測値(60秒平均値)(W)
Plt
長時間フリッカ妨害係数
6
C 1400-21:2005
Pmc
最大許容出力(W)
Pn
風車の定格出力(W)
Pr (c<x)
cの累積分布
Pst
短時間フリッカ妨害係数
Pst,fic
仮想回路における短時間フリッカ妨害係数
Q0, 2
P0,2における無効電力(0.2秒平均値)(var)
Q60
P60における無効電力(60秒平均値)(var)
Qmc
Pmcにおける無効電力(var)
Qn
風車の定格無効電力 (var)
Rfic
仮想回路の抵抗(Ω)
S0,2
P0,2における皮相電力(0.2秒平均値)(VA)
S60
P60における皮相電力(60秒平均値)(VA)
Sk
系統の短絡容量 (VA)
Sk,fic
仮想回路の短絡容量(VA)
Smc
Pmcにおける皮相電力 (VA)
Sn
風車の定格皮相電力 (VA)
Tp
一つの切換運転における過渡現象継続時間 (s)
u0(t)
理想電圧源の瞬時相電圧 (V)
ufic (t)
仮想回路で模擬された瞬時相電圧 (V)
Ufic,max
仮想回路の最大相電圧 (V)
Ufic,min
仮想回路の最小相電圧 (V)
Un
公称線間電圧 (V)
va
年平均風速 (m/s)
vcut-in
カットイン風速 (m/s)
vi
i番目の風速ビンの中央値
wi
i番目の風速ビンの重み係数
Xfic
仮想回路のリアクタンス (Ω)
5. 略語
A/D変換器
アナログからデジタルへの変換器
HV
高圧
LV
低圧
MV
中圧
PCC
共通結合点
RMS
実効値
WT
風車
6. 風車電力品質特性パラメータ
6.1
一般 この項は,風車の電力品質特性を表す量について記述する。報告書形式の例を,附属書Aに
記載する。
7
C 1400-21:2005
電力流れの方向は,慣例に従い風車から電力系統へ流れる場合を正とする。
6.2
定格値 Pn,Qn,Sn,Un及びInを含む定格値を特定する。
備考 定格値は,この基準において正規化の目的だけに用いる。
6.3
最大許容出力 風車の最大許容出力(制御システムによって許容される。)Pmcを,特定する。
6.4
最大出力実測値 風車の最大出力実測値は,0.2秒平均値P0.2及び60秒平均値P60の両方について特
定する。
6.5
無効電力 風車の無効電力及び設定力率は,定格出力の0,10,...90,100 %の値として10分間平
均値として表で特定する。Pmc,P60及びP0.2における無効電力及び設定力率も,特定する。
6.6
電圧変動 風車によって引き起こされる電圧変動(フリッカ及び電圧変化)は,6.6.1及び6.6.2に記
述される内容で特性を表示することとする。
6.6.1
連続運転 風車の連続運転フリッカ係数c(Ψk,va)は,6,7.5,8.5及び10 m/sの4種類の年平均風
速(va)をもつ風速分布で,回路インピーダンス位相角Ψkが30,50,70及び85 °ごとに,99 %百分位数と
して表に特定する。風速の10分間平均値は,レイリー分布であると仮定する(備考参照)。年平均風速は,
風車のハブ高さを基準とする。
備考 レイリー分布は,年間の風速分布に一般的に合う確立分布関数のひとつである。レイリー分布
は次のように表す。
−
2
4
exp
1
)
(
a
v
v
v
F
π
−
=
ここに, F(v): 風速のレイリー累積確率分布関数
va: ハブ高さにおける年平均風速
v: 風速
6.6.2
切換運転 次に示すケースで,切換運転の特性を特定する。
a) カットイン風速における風車の起動。
b) 定格風速における風車の起動。
c) 発電機間切換で最悪のケース(風車が,複数の発電機又は発電機が複数の巻線をもつ場合にだけ適用
する。)。備考1.参照。
次のパラメータが,上記各切換運転ケースで特定する。
1) 10分間の切換運転の最大数N10 。
2) 2時間の切換運転の最大数N120 。
3) 回路インピーダンス位相角Ψkが30,50,70,85 °でのフリッカステップ係数kg(Ψk) 。
4) 回路インピーダンス位相角Ψkが30,50,70,85 °での電圧変化係数ku(Ψk) 。
備考1. 発電機間の切換で最悪のケースは,最大のフリッカステップ係数を与える切換運転として定
義されているフリッカステップ係数に関連し,最大の電圧変化係数を与える切換運転として
定義されている電圧変化係数に関連する。
2. パラメータN10及びN120は,製造業者からの情報に基づいて決定してもよいが,kf(Ψk)及び
ku(Ψk)は測定と計算から決定しなければならない。
3. 風車の制御システムによっては,2時間の切換運転の最大数は,10分間の切換運転の最大数
の12倍よりも少なくなることがある。
8
C 1400-21:2005
6.7
高調波 半導体電力変換装置をもつ風車(備考1.〜備考4.参照)は,風車の連続運転時の高調波流
出電流を記述しなければならない。
これらは,個々の高調波電流及び最大総合高調波電流ひずみとして系統基本波周波数の50倍までの周波
数を特定する。個々の高調波電流は,次数ごとに最大高調波電流を与えるような出力での10分間平均デー
タとして提供する。これらの値は,定格電流に対する比率(パーセント)で表に記載する。定格電流の0.1 %
未満の高調波電流は,いずれの次数の高調波電流であっても記載の必要はない。
備考1. 半導体電力変換装置をもたない誘導発電機の風車からの高調波流出が,これまでに報告され
ている。しかし,誘導機からの高調波の測定に関して,合意を得た手順はない。さらに,こ
れら誘導機を搭載した風車からの,高調波に起因する需要家の障害,被害などは知られてい
ない。したがって,この規格は,誘導機を搭載した風車からの高調波測定は要求しない。
2. 同期発電機は,エアギャップ及び固定子巻線の規則正しさによって決まる磁場の形に依存す
る波形の電圧を生成する。同期発電機をもつ風車が電力系統に直接連系されている場合,8.4
によればその波形は,IEC 60034-1の8.9必要条件に適合していなければならない。このよう
な風車は,非常に限られた高調波及び次数間高調波電流しか流出しないため,同期発電機を
直接系統へ連系する場合は,これらの特定を必要としない。
3. 高調波は,その発生が短時間に限られていれば,無害であると考えられる。過去の経験から,
ソフトスタート装置をもつ風車が,短時間の高調波流出による問題を引き起こすことはない
ということが,一般的に知られている。したがって,この規格は,風車の起動,その他の切
換運転によって発生する短時間の高調波の特定を必要としない。
4. 風車の起動時の高調波電流流出に起因すると考えられる,低圧回路の地絡保護装置の誤動作
がこれまでに報告されている。この問題は,この規格の将来版で検討する。
5. kHzレンジのスイッチング周波数で運転する半導体電力変換装置は,系統基本波周波数の50
倍を超える高調波を流出することがある。このような高調波問題は現在検討中であり,適切
な測定手順・評価手順の確立と経験の蓄積を行って,適切なIEC委員会で今後検討する。
7. 測定手順 7.1に,必要な試験条件及び装置に関する一般的事項を記述する。7.2から7.7に,評価対
象風車の電力品質特性パラメータの決定に必要な測定方法を記述する。
7.1
一般 測定手順は,1基の風車が三相の電力系統に連系され,連系された系統のどの場所においても,
風車が電圧及び周波数を能動的に制御しない場合に限り有効である。
測定は,風車のすべての運転風速範囲にわたって,電力品質特性パラメータを決定することを一般的な
目的とする。しかし,風速15 m/sを超える範囲の測定を要求しない(備考1.参照)。これは,より高い風
速域の測定には,風速出現頻度が低く一般的に相当の測定時間を要求されるためであり,その割にはその
測定時間に見合う電力品質特性パラメータの精度向上が期待できないためである(備考2.参照)。
測定された特性は,評価対象風車の一つの構成に対してだけ有効である。風車の挙動を変える制御パラ
メータの変更を含み,ほかの構成においては別途評価が必要である。
備考1. 風速15 m/sを超えて測定された場合には,その結果は省略してもよい。測定結果に風速15 m/s
を超える測定結果が含まれる場合には,測定風速範囲を報告書に明記しなければならない。
2. 風速15 m/sを超える測定データを含めることは,フリッカ係数の精度を向上する可能性があ
り,風車の設計によってはより大きい最大出力実測値(0.2秒平均値)になる場合がある。し
かし,費用及び精度のバランスを考慮する場合,風速15 m/sを超える範囲の測定は不要であ
9
C 1400-21:2005
る。風速15 m/sを超える範囲の測定結果が含まれる場合,高風速サイトの場合は8.3に示す
手順による結果の信用性が高くなる。
3. 変圧器備え付けで設計される風車があるが,電気的特性の測定は風車の接続点で行われるべ
きである。試験が行われるのが変圧器の低圧側又は高圧側接続点かを決定するのは,風車の
供給者である。変圧器の出力端電圧が変わっても,風車の電力品質には影響を及ぼさない。
したがって,変圧器の出力端電圧が変わっても,定格電圧及び定格電流の記述が変更される
場合,別の評価は不要である。
7.1.1
試験条件 必要な試験条件を,次に示す(備考1.参照)。
少なくとも評価対象風車のPmcにおける皮相電力と同一の定格容量の変圧器を通じて,中圧系統へ直接
風車を連系しなければならない。
中圧系統の風車連系点の短絡容量は,評価対象風車のPmcにおける皮相電力の少なくとも50倍でなけれ
ばならない。電力系統の短絡容量は,風車の試験に先立ち,計算又は電力系統運用者への問合せによって
求められる(備考2.参照)。
風車が発電しない状態での風車端末における,第50次までの高調波を含む電圧総合ひずみ率実測値の
10分間平均値は,5 %未満でなければならない。電圧総合ひずみ率は,風車試験前の測定によって決定し
てもよい。
0.2 秒平均として測定された系統の周波数は,公称周波数の±1 %以内でなければならない。また,0.2
秒平均として測定された系統周波数の変化率は,0.2秒当たりの変化率が,公称周波数の0.2 %未満でなけ
ればならない。系統周波数が非常に安定しており,十分上記範囲にあることが既知の場合(大規模な電力
系統については一般的なケース)は,この周波数条件は,これ以上の評価を必要としない。それ以外の場
合は,測定の期間中系統周波数を記録し,上記周波数条件を満たさない測定データは排除しなければなら
ない。
10分平均として測定された風車端末における電圧は,公称電圧の±5 %以内でなければならない。系統
電圧が非常に安定しており,十分上記範囲にあることが既知の場合(電気的に強い電力系統に風車が連系
された場合に一般的なケース)は,この電圧条件はこれ以上の評価を必要としない。それ以外の場合は,
測定の期間中電圧を記録し,上記電圧条件を満たさない測定データは排除しなければならない。
10分平均として測定された風車端末における電圧不平衡率は,2 %未満でなければならない。電圧不平
衡率は,IEC 61800-3 B3に従って決定できる。電圧不平衡率が十分上記範囲にあることが既知の場合は,
この条件は,これ以上の評価を必要としない。それ以外の場合は,測定の期間中電圧不平衡率を記録し,
上記条件を満たさない測定データは,排除しなければならない。
10分間の測定期間から得られる乱流強度は,8 %と16 %との間になければならない。乱流強度は,障
害物及び地形の変化の方位区分での特定,又は風速測定に基づき評価しなければならない。いずれの場合
も,上記乱流強度以外の条件で得られた測定データは,排除しなければならない(備考3.参照)。
測定環境条件は,風車の製造業者が指定する風車及び関係装置の動作環境に従わなければならない。測
定環境条件は,一般項目として測定結果報告書に記述することが必要であるが,通常の場合は,測定環境
条件のオンライン測定までは要求しない(備考4.参照)。
備考1. この節で記述する測定条件は,信頼できる試験結果を得るために必要なものであり,信頼性
がある電力系統連系及び風車の運転の条件と混同してはならない。
2. 風車自身の影響,ほかの発電設備,需要設備などの影響によって,風車接続点において大き
く電圧が変化することがある。風車に起因する電圧変化は,電気的に強い系統へ連系するこ
10
C 1400-21:2005
とによって制限可能である。前記対応によって,試験目的のための電圧変化の合理的な制限
が可能である。
3. 風車の設計によっては,最大出力実測値,電圧変動などの電力品質特性は,ある程度乱流強
度に依存する。基本的には,乱流強度が低いサイトにおいて,7.6.2及び7.6.3に記述する手
順によって測定・決定された特性値は,乱流強度がより高いサイトにおいて測定された特性
値よりも小さい。しかし,7.1.1で記述されたように,電力品質特性値は,乱流強度が8 %〜
16 %の間の条件で得られた測定だけから決定しなければならない。このことは,試験結果が
通常の乱流条件を代表するということを保障している。
4. 風車の設計によっては,最大出力実測値は空気密度に依存する。したがって,空気密度が低
いサイトで測定し,7.4に記述する手順によって決定される最大出力実測値は,空気密度がよ
り高いサイトで測定するものより低い。しかし,空気密度範囲に関する制限を設けないこと
による不確かさは,関連する追加的測定装置手順・測定手順のための費用を正当化しない。
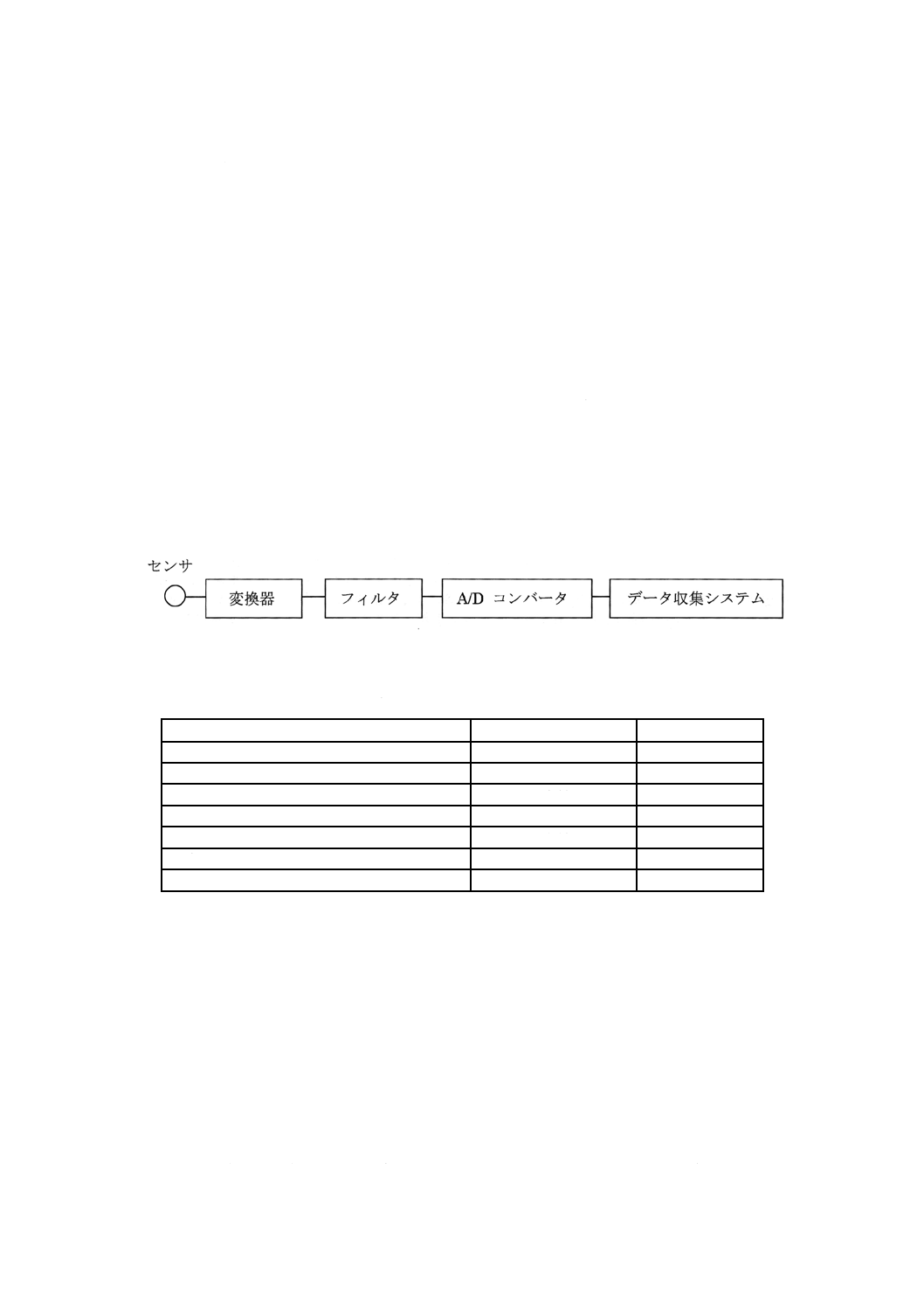
7.1.2
試験装置 測定手順の記述は,図1に示すような測定要素で構成されると仮定する。
備考 例えば,アナログ変換器及びフィルタの機能を,デジタルデータ収集システムの一部としてソ
フトウェアで置き換えることができる。さまざまな要素が,物理的に一つの要素に分離又は編
入され得る。
図 1 仮定した測定システムの構成
測定機器は,表1に示された仕様に適合しているものとする。
表 1 測定機器必要条件の仕様
機器
必要な確度
適合規格
計器用変圧器
1.0クラス
IEC 60186
変流器
1.0クラス
IEC 60044-1
皮相電力変換器
1.0クラス
IEC 60688
有効電力変換器
1.0クラス
IEC 60688
無効電力変換器
1.0クラス
IEC 60688
風速計
±0.5 m/s
−
フィルタ+A/D変換器+データ収集システム
フルスケールの1 %
−
測定機器レンジ及び応答は,関連する変動を測定するのに十分であるものとする。必要なレンジ応答は,
測定によって異なる。
一般に,測定レンジは,最高の全体精度を得るために可能な限り小さいものとする。適切なレンジを選
択するための指標(備考参照)を後節に記載する。
風速計を除き,センサ,変換器及びローパスフィルタの総合応答は,7.2から7.7に指定されているカッ
トオフ周波数よりも速いものとする。ローパスフィルタをかけた信号を収集するために,データ収集シス
テムのサンプル率は,常にカットオフ周波数の少なくとも2倍であるものとする。
理想的には,風車の後流及び風車自身が障害とならない位置に設置したハブ高さの風速計に基づき,風
速を測定すべきである。ロータ直径の2.5倍離れた風上位置に風速計を設置すれば,一般的にはよい。代
替として,ハブ高さの風速は,より低い位置での測定からの計算又は出力測定及び風車のパワーカーブに
関する知識から類推される修正ナセル風速とすることができる。いずれにしても,風速計の設置場所に起
11
C 1400-21:2005
因する不確かさは,±1 m/sを超えてはならない。
備考 風速計に関しては,10分間平均値を計算するだけなので,応答時間に対する必要条件は定めな
い。
7.2
定格値 製造業者からの情報に基づき,定格値を特定しなければならない。
7.3
最大許容出力 製造業者からの情報に基づき,最大許容出力Pmcを確認する。
7.4
最大出力実測値 最大出力実測値は,60秒平均値P60及び0.2秒平均値P0.2として,次の方法を用い
て測定する。
a) 測定は,連続運転時だけデータの収集を行う。
b) 出力は,風車接続点で測定する。
c) 測定は,カットイン風速から15 m/sまでの各風速ビンで,少なくとも5個の10分間時系列出力デー
タを収集する。ここで,風速は,測定データの10分間平均値とする。
d) 風速は,7.1.2に従って測定する。
e) 測定データは,点検し,疑わしいデータは排除する。
f)
測定された出力は,ブロック平均によって0.2秒平均データ及び60秒平均データに変換する。
g) P0.2は,測定期間記録された最も高い有効な0.2秒平均値として決定する。
h) P60は,測定期間記録された最も高い有効な60秒平均値として決定する。
測定は,図1に示すように構成した測定システムで,表1に示す仕様の計器用変圧器,変流器,電力変
換器及び風速計を適用して実施する。出力測定のカットオフ周波数は,少なくとも5 Hzとする。参考まで
に,出力測定のフルスケールレンジは,風車定格出力の2倍にしてもよい。
7.5
無効電力 有効電力及び無効電力の関係は,6.5に従い測定し,次の手順を適用する。
a) 測定は,連続運転時だけでデータの収集を行う。
b) 有効電力及び無効電力は,風車接続点で測定する。
c) 測定は,カットイン風速から15 m/sまでの各風速ビンで,少なくとも5個の10分間時系列の有効電
力及び無効電力データを収集する。ここで,風速は,測定データの10分間平均値とする。
d) 収集されたデータは,10分間ごとのブロック平均を適用することによって,10分間平均データへ変換
する。
e) 10分間平均データは,ビンの方法によって分類され,無効電力が定格出力の0,10,...90,100 %と
して表に記述する。ここで,0,10,...90,100 %は,出力ビンの中央点とする。
f) Pmc,P60及びP0.2における無効電力は,測定された有効電力と無効電力との関係の外挿法で決定する
か,又は必要に応じて上記測定を拡張して決定する。
測定は,図1に示すように構成した測定システムで,表1に示す仕様の計器用変圧器,変流器,有効電
力及び無効電力変換器を適用して実施する。この節に示す測定結果は,10分平均値を示すだけなので,有
効電力及び無効電力測定には,カットオフ周波数の必要条件を規定しない。
7.6
電圧変動 7.1.1に記述されているように,測定対象風車は,中圧系統へ連系されなければならない。
中圧系統は,測定が行われる風車接続点において,大きな電圧変動を引き起こす変動負荷を通常含んでい
る。さらに,風車によって引き起こされる電圧変動は,電力系統の特性に依存する。しかし,電力品質特
性評価の目的は,電力系統の状態に依存しない結果を提供することである。これを達成するため,この規
格は,測定対象風車以外に電圧変動源がない,風車接続点における電圧及び電流の時系列実測データによ
って,電圧変動を模擬する仮想回路を用いる手法を提供する。
仮想回路の適用については7.6.1に記述する。電圧変動の測定手順は,連続運転時における手順(7.6.2
12
C 1400-21:2005
参照)と切換運転時における手順(7.6.3参照)に分けられる。この分離は,連続運転時における風車から
のフリッカ放射は,統計的雑音の特性をもち,切換運転時におけるフリッカ放射及び電圧変化は,限られ
た時間,すなわち,非同時発生的特性をもつということを反映している。
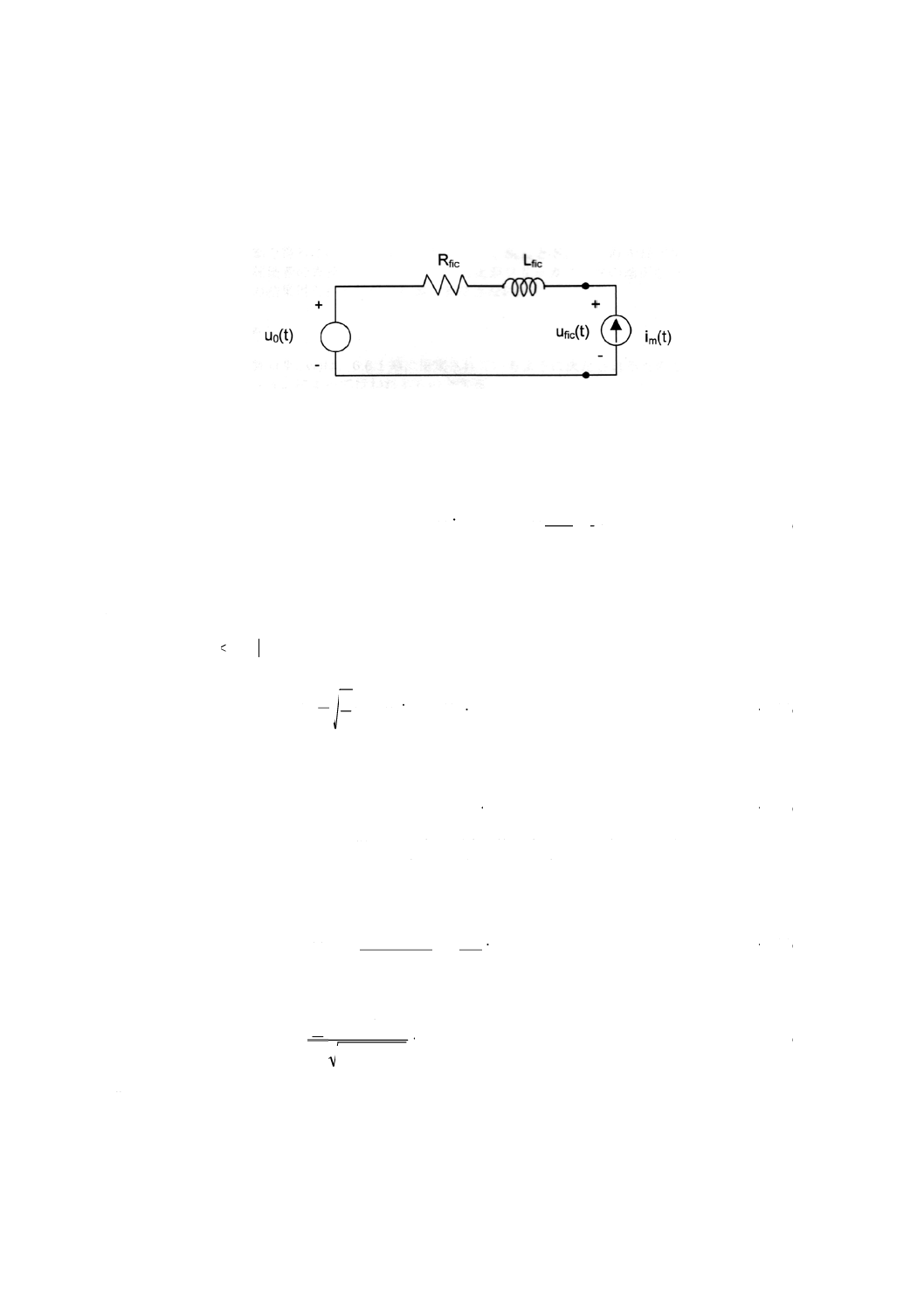
7.6.1
仮想回路 仮想回路の単相図を,図2に示す。
図 2 仮想電圧模擬のための仮想回路
仮想回路は,u0(t)の瞬時電圧をもつ理想相電圧源,抵抗Rfic及び直列接続されたインダクタンスLficをも
つ回路インピーダンスで表される。風車は,瞬時線電流の実測値である電流源im(t)で表される。この簡単
なモデルは,次に示す模擬の瞬時電圧ufic(t)を与える。
dt
)
t
(
di
L
)
t
(
i
R
)
t
(
u
)
t
(
u
m
fic
m
fic
0
fic
×
×
+
+
=
································· (1)
理想電圧源u0(t)は,様々な方法で発生可能であるが,次に示す二つの特性を満足しなければならない。
a) 理想電圧源は,変動がないものとする。すなわち,電圧フリッカは零でなければならない。
b) u0(t)は,測定された電圧の基本波と同じ電気角αm(t)をもたなければならない。このことは,
)(
)
(
)
(
0
0
fic
t
u
t
u
t
u
<<
−
である限り,ufic(t)とim(t)間の位相差が適切であることを保障する。
上記特性を満足するために,u0(t)は,(2)式によって定義される。
)]
(
[
sin
3
2
)
(
m
n
0
t
U
t
u
α
×
×
=
··························································· (2)
ここに,
Un: 系統公称電圧の実効値
測定された電圧の基本波電気角は,(3)式で記述できる。
∫
×
×
t
dt
f(t)
)
t
(
0
0
m
2
α
+
π
=
α
························································ (3)
ここに,
f(t): 周波数(時間的に変化する場合がある。)
t: 時系列の始めからの時間
α0: t = 0における電気角
Rfic及びLficは,(4)式を適用して計算される適切な回路インピーダンス位相角Ψkを得るために選択する。
fic
fic
fic
fic
g
k
2
R
X
R
L
f
)
tan(
=
π
=
Ψ
×
×
······················································· (4)
仮想回路の3相短絡容量は,次の(5)式で計算される。
2
fic
2
fic
2
n
fic
k,
X
R
U
S
+
=
····································································· (5)
Sk, fic及びSn間の適切な比が,適用されるフリッカメータアルゴリズム又は測定器が,IEC 61000-4-15
に規定される測定範囲にあるPstを与えることを確実にするために使用されなければならない。IEC
61000-4-15に規定されている手順の目的は,特定の電圧変動がフリッカを引き起こすかどうかを決定する
13
C 1400-21:2005
ことであり,小さい電圧変動を正確に評価するには適さない。フリッカメータのレンジ内で模擬された電
圧変動を得るには,この規格は,参考としてSk, ficとSnの比50を提示するが,その正しい比を選択する
のは,評価者の責務である。選択された比がフリッカメータの適正なレンジの外にない限り,実際の比は,
その結果得られる係数に影響を及ぼさない。
7.6.2
連続運転 フリッカ係数c(Ψk,va)は,6.6.1に指定されているように決定する。これは,測定及び
シミュレーションによって行われる。
この項は,測定手順について記述する。参考資料を,附属書B.1に示す。
次の測定を,実行する。
a) 3相の瞬時線電流及び3相の瞬時相電圧が,風車接続点で測定する(備考1.参照)。
b) 測定は,少なくとも15個の10分間時系列の瞬時電圧値及び瞬時電流値(5回の試験及び3相分)が,
カットイン風速と15 m/sの間のそれぞれの1 m/s風速ビンで収集されるものとする。ここで,風速は,
10分間の平均値として測定する。
c) 風速は,7.1.2に従って測定する。
d) 切換運転は,風車の連続運転中に発生する力率改善コンデンサの開閉のような場合を除き,排除され
る。
測定は,図1に示すように構成した測定システムで,表1による仕様をもつ計器用変圧器,変流器及び
風速計を適用することによって実行する。電圧及び電流測定のカットオフ周波数は,少なくとも400 Hz
であるものとする(備考2.参照)。
測定は,回路インピーダンス位相角及び風速分布の関数として,風車のフリッカ係数を決定するために
行わなければならない。これは,6.6.1で指定されているように各回路インピーダンス位相角及び風速分布
において,次の手順を繰り返し実行する。
はじめに,10分間で測定された時系列の電圧及び電流データセットのフリッカ係数を,決定する。この
手順は,次の1)〜3)のステップで行われる。
1) 測定された時系列データは,電圧の時系列データufic(t)を得るために(1)式と結合する。
2) 電圧の時系列データufic(t)は,各10分間の時系列データの仮想回路における一つのフリッカ放射値
Pst,ficを得るため,IEC 61000-4-15に従って,フリッカアルゴリズムに入力する。
3) フリッカ係数は,次の式を適用することによって,それぞれの計算されたフリッカ係数で決定する。
n
fic
k,
fic
st,
k
S
S
P
c
×
=
)
(Ψ
····································································· (6)
ここに,
Sn: 風車の定格皮相電力
Sk,fic: 仮想回路の短絡容量
備考3.参照
次に,仮定された風速分布に関連したフリッカ係数が発生する頻度をスケール化するために,重
み係数が各風速ビンで決定する。重み係数は,次の4)〜6)の手順によって求められる。
4) 6.6で記述されているように,i番目の風速ビン内での風速fy,iの仮定発生頻度は,レイリー分布に
一致する。すなわち,(7)式が使用される。
×
×
2
2
5.0
4
exp
5.0
4
exp
a
i
a
i
i
y,
v
v
v
v
f
+
−
−
−
−
=
π
π
··························· (7)
ここに,
vi: i番目の風速ビンの中央点
14
C 1400-21:2005
va: 仮定された年平均風速
5) i番目の風速ビン内の測定されたフリッカ係数の実際の発生頻度fm,iは,(8)式によって与えられる。
m
i
m,
i
m,
N
N
f=
··············································································· (8)
ここに,
Nm,i: i番目の風速ビン内で測定されたフリッカ係数値の数
Nm: フリッカ係数値の総数
6) 重み係数は,vcut-inと15 m/sの間のそれぞれの1 m/s風速ビンで,(9)式に計算されたfy,i及びfm,iを
代入することによって決定する。
i
m,
i
y,
i
f
f
w=
·················································································· (9)
最後に,測定されたフリッカ係数の重み付けした累積分布を決定し,フリッカ係数c(Ψk,va)を,
この分布の99 %百分位数として決定する(備考4.及び備考5.参照)。この手順を,次の7)及び8)
に示す。
7) 測定されたフリッカ係数の重み付けした累積分布は,(10)式によって与えられる。
∑
∑
=
=
<
×
×
=
<
bin
bin
1
i
m,
i
1
x
c i,
m,
i
r
N
i
N
i
N
w
N
w
)
x
c
(
P
··························································· (10)
ここに, Nm,i,c<x: i番目の風速ビン内でのx以下のフリッカ係数の数
Nbin: 風速ビンの総数
8) フリッカ係数は,フリッカ係数の重み付けした累積分布の99 %百分位数として決定する。これは,
Pr(c<x)を計算し,その99 %百分位数を読むことによって実行する。
上記手順4)〜8)は,附属書B.3で更に説明する。
IEC 61000-3-7によると,長時間フリッカ放射は,連続した短時間の12個の値の立方平均として計算で
きる。風車からのフリッカ放射が風速の関数であり,風の状態は,2時間持続すると考えると,12個の連
続した短時間の値は,同一であると思われる。つまり,長時間フリッカ係数は,短時間の値と同一になる。
備考1. 相電圧が利用できない場合は,線間電圧を測定し,測定した線間電圧から相電圧を計算しな
ければならない。相電圧は,測定した線間電圧を用いて,次の式によって計算してもよい。
3
31
12
1
u
u
u
−
=
3
12
23
2
u
u
u
−
=
3
23
31
3
u
u
u
−
=
ここに,
u1,u2,u3: 瞬時相電圧
u12,u31,u23: 瞬時線間電圧
2. IEC 61000-4-15に記述されているフリッカアルゴリズムは,ufic(t)の実効値を与え,35 Hzよ
り速い変化は除外される。それでも,連続運転でのフリッカ測定においては,400 Hzの最小
カットオフ周波数(サンプリング周波数800 Hzに相当)を,この規格は要求する。一貫した
結果を得るためには,このようなサンプリング周波数が必要であることを,これまでの試算
結果が示している。低いサンプリング周波数は,測定電圧の基本電気角αm(t)の精度を低下す
15
C 1400-21:2005
る。
3. フリッカ係数を定義する式は,附属書B4.1で更に説明する。
4. 99 %百分位数は,通常のフリッカ放射限界として適用されている。
5. 6.6.1に記述しているように,c(Ψk,va) は,va=6 m/s,7.5 m/s,8.5 m/s及び10 m/sでそれぞ
れ決定しなければならないが,この項で記述されているように,測定は,風速15 m/sまでで
よいとなっている。風速分布がレイリー分布に従うと仮定した場合,風速15 m/sは,va=6 m/s
の場合の99 %百分位数に一致し,更にva=7.5 m/s,8.5 m/s及び10 m/sの場合の96 %,91 %
及び83 %百分位数にそれぞれ一致する。したがって,c(Ψk,va) は,この節に示すようにデ
ータセットの99 %百分位数で決定するが,c(Ψk,va) は,va=7.5 m/s,8.5 m/s及び10 m/s
の場合にはより低い百分位数を表すことになる。これについては,附属書B.3に記述する。
実際の百分位数の不確かさは,必要な測定時間が大幅に増加することを考慮すれば,va=7.5
m/s,8.5 m/s及び10 m/sにおいて99 %百分位数を求めるときに要求される,より高い風速
まで測定を広げることを正当化しないと判断する。しかし,va>6 m/sの場合におけるc(Ψk,
va) の精度を向上するために,15 m/sを超える測定風速を含むことは,この規格の使用者の判
断による。
7.6.3
切換運転 風車製造業者の情報に基づき,切換運転の最大値N10及びN120が,それぞれの切換運転
の種類に応じ6.6.2 a),6.6.2 b)及び6.6.2 c)によって特定する。風車製造業者が上記情報を提示できない場
合,又は風車製造業者が,切換運転の最大値を決定し得る風車制御システムに関する十分な仕様を提示で
きない場合は,次による。
− N10=10,N120=120[6.6.2 a)及び6.6.2 c)の場合]
− N10=1,N120=12[6.6.2 b)の場合]
測定及びそれに続くシミュレーションと計算は,電圧変化係数ku(Ψk)及びフリッカステップ係数kf(Ψk)
を,6.6.2 a),6.6.2 b)及び6.6.2 c)で指定されている各切換運転において決定するために準備する。
この節は詳細な手順を記述し,参考となる概要を附属書B.2に記述する。
6.6.2 a)及び6.6.2 b)は,特定の風速における切換運転を規定するが,6.6.2 c)の条件を特定するのは評価者
の責務である。これは,風車の設計評価によって行う場合があり,これで十分な証拠が提供できない場合
は,6.6.2 c)の条件を特定する測定を行わなければならない(6.6.2の備考1.参照)。
電圧変化係数ku(Ψk)及びフリッカステップ係数kf(Ψk)を決定するには,次の測定を準備する。
a) 3相瞬時線電流及び3相瞬時相電圧が風車接続点で測定する(7.6.2の備考2.参照)。
b) 測定は,切換運転の過渡現象が収束していることを確実にするため十分長い時間で,かつ,風の乱れ
による出力変動を排除できるように制限された時間Tp実行する。
c) 測定結果が,標準的な条件の典型的なものであることを確実にするために,各ケースにつき測定は,5
回繰り返すべきである。
d) 風速は,7.1.2に従い測定する。切換運転中の10分間平均風速は,必要とされる風速の±2 m/sの範囲
内になければならない。
測定は,図1に示すように構成した測定システムで,表1による仕様をもつ計器用変圧器,変流器及び
風速計を適用することによって実行する。電圧及び電流測定のカットオフ周波数は,少なくとも1 500 Hz
とする(備考1.参照)。参考までに,ソフトスタータ,その他の突入電流を効果的に減少させる技術を適用
した風車では,変流器の定格は,風車定格電流の2倍に設定するのがよい。突入電流制限を行わない風車
では,変流器の定格は,風車定格電流の10倍から20倍に設定するのがよい。
16
C 1400-21:2005
測定は,電圧変化係数及びフリッカステップ係数を決定するために扱う。これは,次の手順を適用する
ことによって実行する。
1) 測定された時系列データは,電圧時系列データufic(t)を得るために結合する。
2) 模擬された電圧時系列データufic(t)は,それぞれの時系列データで仮想回路における一つの短時間フ
リッカ放射値Pst,ficを得るために,IEC 61000-4-15に従って,フリッカアルゴリズムに入力する。
これは,各ケースでPst,ficの15個の値(すなわち,5回の試験と3相)となる。
3) フリッカステップ係数kf(Ψk)は,次の定義によって計算する。
31
.0
130
1
)
(
p
fic
st,
n
fic
k,
k
f
T
P
S
S
k
×
×
×
=
Ψ
·················································(11)
ここに,
kf(Ψk): フリッカステップ係数
Pst,fic: 短時間フリッカ放射値
備考2.参照
4) 電圧変化係数ku(Ψk)は,次の定義によって計算する。
n
fic
k,
n
min
fic,
max
fic,
k
u
S
S
U
U
U
k
×
×
−
=3
)
(Ψ
············································ (12)
ここに, Ufic,min: 切換運転時における仮想回路瞬時相電圧の一周期
実効値の最小値
Ufic,max: 切換運転時における仮想回路瞬時相電圧の一周期
実効値の最大値
備考3.参照
5) フリッカステップ係数及び電圧変化係数は,15個の値の平均値として決定する。
備考1. カットオフ周波数は,ソフトスタートのための半導体電力変換装置が引き起こす,変動する
高調波が正しく電圧変化係数及びフリッカステップ係数に反映されるよう,最低でも
1 500 Hzでなければならない(7.6.2備考2.参照)。
2. フリッカステップ係数を定義する式は,附属書B.4.2に説明するように,IEC 61000-3-3によ
って導かれる。
3. 電圧変化係数を定義する式は,附属書B.4.3で更に説明する。
7.7
高調波 この項は,半導体電力変換装置をもつ風車だけに関連する。
半導体電力変換装置をもつ風車では,連続運転中の風車からの最大高調波電流が6.7に指定されている
ように決定する。
高調波電流は,IEC 61000-4-7に従って,風車接続点で測定する。IEC 61000-4-7で定義されている最高
精度を適用する。
測定結果は,10分間の観察時間による。
測定手順は,発生する高調波電流の大きさが数秒で変化することが考えられるような場合は,風車に合
ったものを採用する。
備考 測定が容易であること及び測定結果が短時間データの場合とほとんど変わらないことを考慮し,
短時間データに変わって10分平均データが適用する。
8. 電力品質の評価
8.1
一般 この項は,単独の風車又は複数の風車が特定のサイトに設置された場合の電力品質の評価方
法(7.1.1の備考3.参照)と,ほかのIEC出版物の要求事項と測定結果の対比について記述する。
17
C 1400-21:2005
電力系統運用者及び規制者が,独自の必要条件を適用する場合及びIECの規格に条件を追加する場合は,
この項の規則は,参考として用いてもよい。
電力品質の必要条件への適合を評価する方法は,風車が周波数変動±1 Hz以内である中圧又は高圧の電
力系統の共通結合点に連系され,電力系統が十分な有効電力及び無効電力調整能力並びに風車の出力を吸
収する十分な負荷をもつ場合に有効である。その他の場合は,電力品質の必要条件への適合評価の規則は,
参考として用いてもよい。
風車の位置が能動的な連続電圧調整装置に近い場合は,この後の項で要約されている方法では,悲観的
な結果をもたらす場合がある。
この手法は,この規格の測定方法による電力品質特性をもつ単独又は複数の風車で構成される設備を想
定している。しかし,設備の一部を構成する制御システム,ほかの装置の効果を評価に反映するのは,評
価者の責務である。
ここで記述する評価手法は,風車の系統連系の設計支援として使用する場合がある。しかし,この場合
は,電力系統計画からリップル制御信号までを含むほかの側面の適正な検討を要する(備考参照)。
備考 負荷,料金制御などのため,リップル制御信号を使用する国がある。一般的に,その地域によ
ってこれらのシステムは,110 Hz〜3 000 Hzの周波数帯で運用されている。同期発電機又は誘
導発電機の電力系統への接続は,風車近傍においてはリップル制御信号への過度なダンピング
を引き起こすことがある。これを避けるために,緩衝装置(能動又は受動フィルタ)が必要に
なる。そのシステムの特性が多様であるため,発電機のダンピング効果の評価についての一般
的指針を記述することはできないが,電力系統への風車の影響を評価するときには,この問題
に対する注意を払わなければならない。
8.2
定常電圧 風車設備の運転は,連系された電力系統の定常電圧へ影響を及ぼすことがある。この影
響を評価するには,潮流解析が行われることを推奨する。すなわち,風車の設置によって電圧規制値を超
えないことを確認する。
潮流解析の目的によって,風車がPmc及びQmc,P60及びQ60,P0.2及びQ0.2のいずれかを供給すると仮定
するのが適切である場合がある。
複数の風車を設置する場合,共通結合点における出力を仮定して評価する場合がある。10分間平均デー
タ(Pmc及びQmc)及び60秒平均データ(P60及びQ60)は,単純加算で計算する場合があり,0.2秒平均デ
ータ(P0.2及びQ0.2)は,(13)式及び(14)式によって計算する場合がある。
∑
∑
=
=
Σ
wt
1
wt
1
2
i
n,
,2.0
i
n,
2.0
)
(
N
i
N
i
iP
P
P
P
−
+
=
················································· (13)
∑
∑
=
=
Σ
wt
1
2
i
n,
,2.0
wt
1
i
n,
2.0
)
(
N
i
i
N
i
Q
Q
Q
Q
−
+
=
················································ (14)
ここに,
Nwt: グループ内での風車の数
備考 (13)式及び(14)式は,風車間の最大出力には相関がないと仮定している。電気的に弱い系統に誘
導発電機式風車を連系した場合,翼通過周期に同期して出力変動が大きくなる場合がある。こ
のような場合,(13)式及び(14)式による出力ピークの偏倚によって,実際の電力系統への影響を
過小評価することがある。
8.3
電圧変動 風車からのフリッカ放射は,次の(15)式及び(16)式に示すように,フリッカ放射制限内に
なければならない。
Pst≦EPsti ················································································· (15)
18
C 1400-21:2005
Plt≦EPlti ················································································· (16)
ここに,
Pst及びPlt: 風車からの短時間フリッカ放射
EPsti及びEPlti: 関連する共通結合点における短時間フリッカ
放射制限
さらに,風車の設置による相対電圧変化は,(17)式によって制限されなければならない。
n
dyn
U
U
d∆
≤
·············································································· (17)
ここに,
d: 風車の切換運転による相対電圧変化
ΔUdyn/Un: 最大許容電圧変化
中圧及び高圧系統における,フリッカ放射限度及び最大許容電圧変化を評価する手法は,IEC 61000-3-7
で推奨されている。
風車によるフリッカ放射及び相対電圧変化の評価では,この後の節に記述する手順を推奨する。
日本で,従来用いられてきたΔV10による評価方法と,IEC 61000-3-7で規定するPst,Pltによる評価法で
は,フリッカの許容値が異なっている。
IECの方法では,Pstの測定の単位時間は10分間であり,10分ごとに一つの測定値が得られる。Pstを2
時間にわたり測定した12個の値からPltが計算され,両立性レベルとして表2の値を示している。
一方,日本でのアーク炉によるフリッカの許容値は,“溶解期中の最も電圧変動の激しい連続1時間にお
いて,1分間単位∆V10測定値の平均値と最大値のいずれもが,表3の値を超えないこと”が推奨されてい
る。
なお,表3の最大値には,連続する60個のうち4番目最大値(95 %確率値)が用いられる。
表 2 IEC 61000-3-7による両立性レベル
Pst
1.0
Plt
0.8
表 3 日本で従来使用されてきたフリッカ許容値
∆V10(V)
最大値
0.45
平均値
0.32
フリッカ評価方法の適用に当たっては,通常IEC 61000-3-7に規定する評価法とするが,IEC 61000-3-7
で規定しているフリッカ評価の基準となる低圧100 V系の視感度曲線は,日本ではまだ確立されていない
ので,当面,現行のΔV10による評価方法を適用してもよい。
8.3.1
連続運転 単独の風車の連続運転時のフリッカ放射99 %百分位数は,次の(18)式を適用すること
によって,求める。
k
n
a
k
lt
st
)
(
S
S
v
c
P
P
×
,
=
=
Ψ
························································· (18)
ここに,
c(Ψk,va): 共通結合点における与えられた回路インピーダンス
位相角がΨkで,風車サイトにおけるハブ高さの年平
均風速がvaである場合の,風車のフリッカ係数
Sn: 風車の定格皮相電力
Sk: 共通結合点における短絡容量
サイトでの実際のΨk及びvaにおける風車のフリッカ係数は,線形内挿法を適用することによって,7.6.2
19
C 1400-21:2005
で説明する測定結果表から決定してもよい。
複数の風車が共通結合点で接続されている場合は,フリッカ放射を次の(19)式によって決定できる。
∑
×
×
wt
1
2
i
n
k
i
k
lt
st
)
)
(
1
N
i
a
S
v
c
S
P
P
=
,
,
=
=
Ψ
Σ
Σ
········································ (19)
ここに, ci(Ψk,va): 各風車のフリッカ係数
Sn,i: 各風車の定格皮相電力
Nwt: 共通結合点に接続されている風車の数
備考 (19)式は,風車間の最大出力レベルには相関がないと仮定している。電気的に弱い系統に誘導
発電機式風車を連系した場合,翼通過周期に同期して出力変動が大きくなる場合がある。この
ような場合,(19)式は,実際の電力系統への影響を過小評価することがある。
8.3.2
切換運転 単独の風車の切換運転によるフリッカ放射は,(20)式及び(21)式を適用することによっ
て,予測する。
k
n
K
f
31
.0
10
st
)
(
18
S
S
k
N
P
×
×
×
Ψ
=
························································ (20)
k
n
k
f
31
.0
120
lt
)
(
8
S
S
k
N
P
×
×
×
Ψ
=
························································ (21)
ここに,
kf(Ψk): 共通結合点における回路インピーダンス位相角が
Ψkである場合のフリッカステップ係数(備考1.参
照)
サイトでの実際のΨkにおける風車のフリッカステップ係数は,線形内挿法を適用することによって,
7.6.3で説明する測定結果表から決定してもよい。
複数の風車が共通結合点に接続されている場合は,フリッカ放射を次の(22)式及び(23)式によって決定で
きる。
[
]
0.31
wt
1
3.2
i
n
k
i
f
i
10
k
Σ
st
)
(
18
×
×
×∑
N
i
S
k
N
S
P
=
,
,
,
=
Ψ
·································· (22)
[
]
0.31
wt
1
3.2
i
n
k
i
f
i
120
k
lt
)
(
8
×
×
×∑
Σ
N
i
S
k
N
S
P
=
,
,
,
=
Ψ
···································· (23)
ここに, N10,i及びN120,
i:
10分間及び2時間の個々の風車における切
換運転の数
kf,i(Ψk): 個々の風車のフリッカステップ係数
Sn,i: 個々の風車の定格皮相電力(備考2.参照)
切換運転の数を制限するような風車総合制御システムがある場合は,この効果を反映するよう適切な方
法が取られるべきである。
単独の風車の1回の切換運転による相対電圧変化は,次の(24)式を適用することによって,求める。
k
n
k
u
)
(
100
S
S
k
d
×
×
Ψ
=
································································· (24)
ここに,
d: 相対電圧変化(%)
ku(Ψk): 回路インピーダンス位相角がΨkである場合の,共
通結合点における風車の電圧変化係数
サイトの実際のΨkでの風車の電圧変化係数は,線形内挿法を適用することによって,7.6.3で説明する
測定結果表から決定してもよい。
複数の風車が共通結合点で接続されている場合は,たとえ2台の風車であっても,同時に切換運転を実
行することはありえないと思われる。このため,複数の風車で構成する場合の相対電圧変化を評価するた
20
C 1400-21:2005
めに,加算の影響を考慮する必要はない。
備考1. (20)式及び(21)式は,観察時間をそれぞれ600秒及び7 200秒とした場合,B.4.2から導かれる。
2. (22)式及び(23)式は,総和記号に共通結合点に接続する風車の数が含まれるが,(20)式及び(21)
式から導かれる場合がある。総和は,切換運転の過渡時間,すなわち,フリッカ放射に大き
く寄与する部分の継続が,通常は短いことによって正当化される。
8.4
高調波 高調波電流は,共通結合点における高調波電圧が許容値を超えないように制限する。
誘導発電機をもつ風車を直接電力系統へ連系する場合(例えば,半導体電力変換装置がない風車)は,
顕著な高調波ひずみを発生するとは考えられない。このため,この規格は,これに関する評価を必要とし
ない(6.7備考1.参照)。
電力系統に直接同期発電機を接続する風車(例えば,半導体電力変換装置がない風車)は,IEC 60034-1
で要求する波形の不規則さを満足しなければならない。このため,その風車は,非常に制限された高調波
電流を流出するだけであり,この規格は,これ以上の評価を要求しない(6.7備考2.参照)。
半導体電力変換装置をもつ風車の適用可能な高調波放射限度は,IEC 61000-3-6に記述する指針によって
与えられる。しかし,高調波限度値に関する標準情報TR C 0015“電磁両立性 第3部:限度値 第6節:
中圧及び高圧系統におけるひずみ負荷に対するエミッション限度値の評価法”によれば,“高調波の両立性
レベル及び計画レベルは,欧州地域の配電事情を基礎として制定されたもので,日本ではまだ確立されて
おらず適用できない。”となっている。
日本では,1994年10月3日に制定された“高圧又は特別高圧で受電する需要家の高調波抑制対策ガイ
ドライン”によって,系統へ流出する高調波電流の上限値が推奨されている(附属書1)。
IEC 61000-3-6は,負荷からの高調波電流の総和について指針を提供している。これを適用すると,複数
の風車をもつ施設では,共通結合点における高調波電流を(25)式を適用して予測してもよい。
β
β
∑
wt
1
i
i
h
hΣ
N
i
n
I
I
=
,
=
····································································· (25)
ここに, Nwt: 共通結合点に接続されている風車の数
IhΣ: 共通結合点におけるh番目の高調波電流ひずみ
ni: i番目の風車の変圧器変圧比
Ih,i: i番目の風車のh次の高調波電流ひずみ
β: 高調波の加算に関係する指数(表4)
風車が同じで,それらの電力変換装置が他励式の場合は,高調波は同位相にある可能性が高く,すべて
の高調波次数にβ=1を用いる。
表 4 IEC 61000-3-6による指数
高調波次数
β
H<5
1.0
10
5
≤
≤h
1.4
h>10
2.0
(25)式は,特定の高調波を消去するような異なるベクトルグループをもつ変圧器を用いることを考慮し
ていない。このような場合は,この影響を反映するために,適切な方法が取られるべきである。
21
C 1400-21:2005
附属書A(参考)報告書形式の例
この附属書(参考)は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではな
い。
この報告書形式の例は,風車の電力品質特性パラメータを特定するための測定結果を報告する形式を推
奨するものである。
風車電力品質試験の結果報告書
報告された特性は,評価対象風車の特定の構成に対してだけ有効である。制御パラメータの変更を含み,
風車が電力品質に関して異なる動作をするように変更された構成の場合は,別途評価が必要となる。
試験機関の名前
報告書番号
風車型式名称
製造業者
試験対象風車のシリアル番号
上記記載の風車は,IEC 61400-21に従って試験された。
この試験報告書は,次の文書を含む。
情報の種類
文書の名前及び日付
制御パラメータの設定を含む試験対象風車の記述
試験サイト及び電力系統連系の記述
測定機器の記述
試験条件の記述
IEC 61400-21からの例外に関するメモ
作成者
確認者
承認者
発行日
IEC 61400-21に記述されていない特性パラメータは,マークされている。これには,測定の代わりに計
算されたパラメータを含む。IEC 61400-21以外の文書は,適用された異なる手順について記述しているも
のである。
特性パラメータの結果は,次に記載されている。
22
C 1400-21:2005
B.1 一般データ
風車型式(水平/垂直 軸)
翼枚数
ロータ直径 (m)
ハブ高さ (m)
翼制御(ピッチ/ストール)
回転数制御(固定/2段速度/可変速)
発電機型式及び定格 (kW)
周波数変換装置型式及び定格 (kW)
風車接続点の特定
電気定数
同期発電機の場合
過渡リアクタンス
( %(自己容量ベース)/ Ω)
初期過渡リアクタンス
( %(自己容量ベース)/ Ω)
同期リアクタンス
( %(自己容量ベース)/ Ω)
誘導発電機の場合
拘束リアクタンス
( %(自己容量ベース)/ Ω)
励磁リアクタンス
( %(自己容量ベース)/ Ω)
B.2 定格値
定格出力,Pn(kW)
定格風速,vn(m/s)
定格皮相電力,Sn(kVA)
定格無効電力,Qn(kVA)
定格電流,In(A)
定格電圧,Un (V)
B.3 最大許容出力
評価値,Pmc(kW)
正規化された値,pmc = Pmc/Pn
B.4 最大出力実測値
B.4.1 60秒平均値
測定値,P60 (kW)
正規化された値,p60=P60/Pn
B.4.2 0.2秒平均値
測定値,P0.2 (kW)
正規化された値,p0.2=P0.2/Pn
23
C 1400-21:2005
B.5 無効電力
出力
Pnの%
出力
kW
無効電力
kvar
設定力率
0
10
20
30
40
50
60
70
80
90
100
Pmcにおける評価無効電力(kvar)
P60における評価無効電力(kvar)
P0.2における評価無効電力(kvar)
Pmcにおける設定力率
P60における設定力率
P0.2における設定力率
B.6 電圧変動
B.6.1 連続運転
回路インピーダンス位相角,Ψk(度)
30
50
70
85
年平均風速,va(m/s)
フリッカ係数,c(Ψk,va)
6.0
7.5
8.5
10.0
B.6.2 切換運転
切換運転のケース
カットイン風速での起動
切換運転の最大数,N10
切換運転の最大数,N120
回路インピーダンス位相角,Ψk(°)
30
50
70
85
フリッカステップ係数,kf(Ψk)
電圧変化係数,ku(Ψk)
切換運転のケース
定格風速での起動
切換運転の最大数,N10
切換運転の最大数,N120
回路インピーダンス位相角,Ψk(°)
30
50
70
85
フリッカステップ係数,kf(Ψk)
電圧変化係数,ku(Ψk)
24
C 1400-21:2005
切換運転のケース
発電機切換最悪ケース
切換運転の最大数,N10
切換運転の最大数,N120
回路インピーダンス位相角,Ψk(°)
30
50
70
85
フリッカステップ係数,kf(Ψk)
電圧変化係数,ku(Ψk)
B.7 高調波 この項は,半導体電力変換装置をもつ風車だけに関連する。
次数
出力
kW
高調波電流
Inの%
次数
出力
kW
高調波電流
Inの%
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
最大総合高調波電流ひずみ(Inの%)
最大総合高調波電流ひずみにおける出力(kW)
25
C 1400-21:2005
附属書B(参考)電圧変動及びフリッカ
この附属書(参考)は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではな
い。
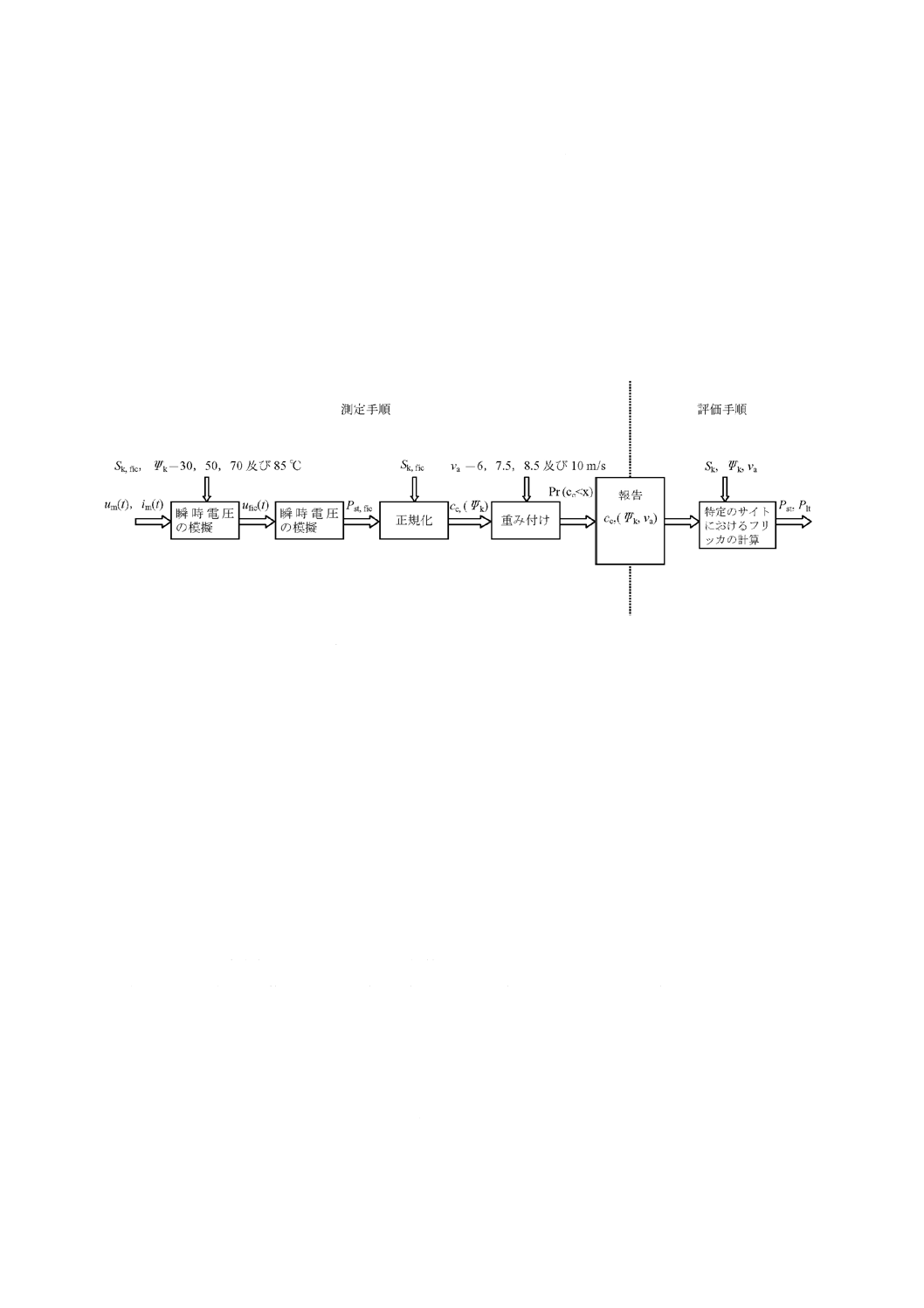
B.1 連続運転 連続運転におけるフリッカの測定及び評価手順を附属書B図1に示す。附属書B図1か
ら,測定手順は比較的広範囲で,評価手順はかなり単純であることがわかる。
附属書B図 1 連続運転におけるフリッカの測定及び評価手順
附属書B図1に示した測定手順を,次に記述する。
a) カットイン風速から15 m/sにわたる,多数の電圧um(t)及び電流im(t)の時系列データを測定する。
b) それぞれ測定された時系列データは,適切な短絡容量Sk,fic及び4種類の異なる回路インピーダンス
位相角Ψkをもつ仮想回路上の電圧変動を模擬するため,入力として用いる。
c) それぞれの模擬された瞬時電圧時系列データufic(t)は,フリッカ放射値Pst,ficを求めるため,IEC
61000-4-15に規定されているフリッカアルゴリズムの入力として用いる。
d) それぞれのPst,fic値は,原理的には選択された回路の短絡容量Sk,ficとは無関係なフリッカ係数c(Ψk)
へ正規化する。
e) 各回路インピーダンス位相角Ψkにおいて,4種の異なる風速分布を仮定し,フリッカ係数の重み付け
された累積分布関数Pr(c<x)を重み付け手順によって計算する。Pr(c<x)は,平均風速vaのレイリー分
布をもつサイトで測定した場合に得られるフリッカ係数を表す。
f)
それぞれの累積分布において,フリッカ係数の99 %百分位数c(Ψk,va)を報告書に記載する。
評価手順は,単独又は複数の風車が連続運転している場合におけるフリッカ放射について,報告された
フリッカ係数をどのように用いるかを記述する。
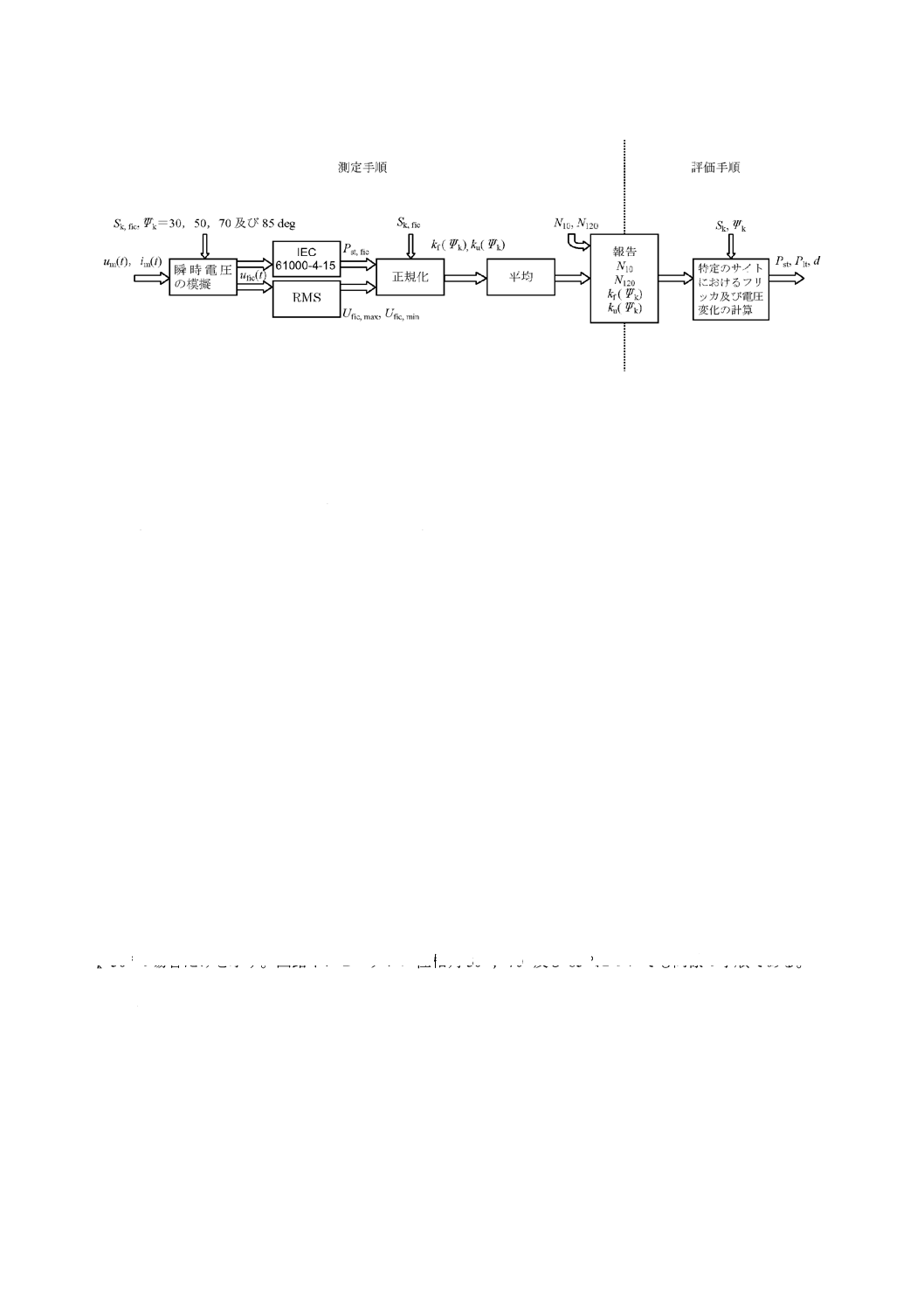
B.2 切換運転 切換運転におけるフリッカの測定及び評価手順を,附属書B図2に示す。これらの手順
は,フリッカ同様に電圧変化についてもどのように測定・評価するかを記述する。附属書B図2から,測
定手順は比較的広範囲で,評価手順はかなり単純であることがわかる。
26
C 1400-21:2005
附属書B図 2 風車の切換運転における電圧変化並びにフリッカの測定及び評価手順
切換運転の場合の測定手順を,次に記述する。
a) それぞれ指定された切換運転の種類において,多数の電圧um(t)及び電流im(t)の時系列データを測定す
る。
b) それぞれ測定された時系列データセットは,適切な短絡容量Sk,fic及び4種類の異なる回路インピー
ダンス位相角Ψkをもつ仮想回路上の電圧変動ufic(t)を模擬するため,入力として用いる。
c) それぞれの模擬された瞬時電圧時系列データufic(t)は,IEC 61000-4-15に記述されているフリッカアル
ゴリズムによってフリッカ放射値Pst,ficを求めるため,並びに1周期の最大電圧実効値Ufic,max及び最
小電圧実効値Ufic,minを求めるための実効値計算アルゴリズムの入力として用いる。
d) 各Pst,fic値は,フリッカステップ係数kf(Ψk)へ,各電圧変化Ufic,mac−Ufic,minは,電圧変化係数ku(Ψk)
へそれぞれ正規化される。
e) それぞれの回路インピーダンス位相角Ψkにおいて,測定されたフリッカステップ係数及び電圧変化係
数は平均する。
f)
平均フリッカステップ係数及び電圧変化係数は,各切換運転の種類に応じ,10分間の切換運転数の最
大値N10及び120分間の切換運転最大値N120とともに,報告書に記載する。
切換運転の評価手順は,報告されたフリッカステップ係数及び電圧変化係数を用い,特定のサイトにお
ける切換運転時のフリッカ放射及び電圧変化をどのように予測するかについて記述する。記述された手法
は,単独風車の場合及び複数風車の場合も同様である。
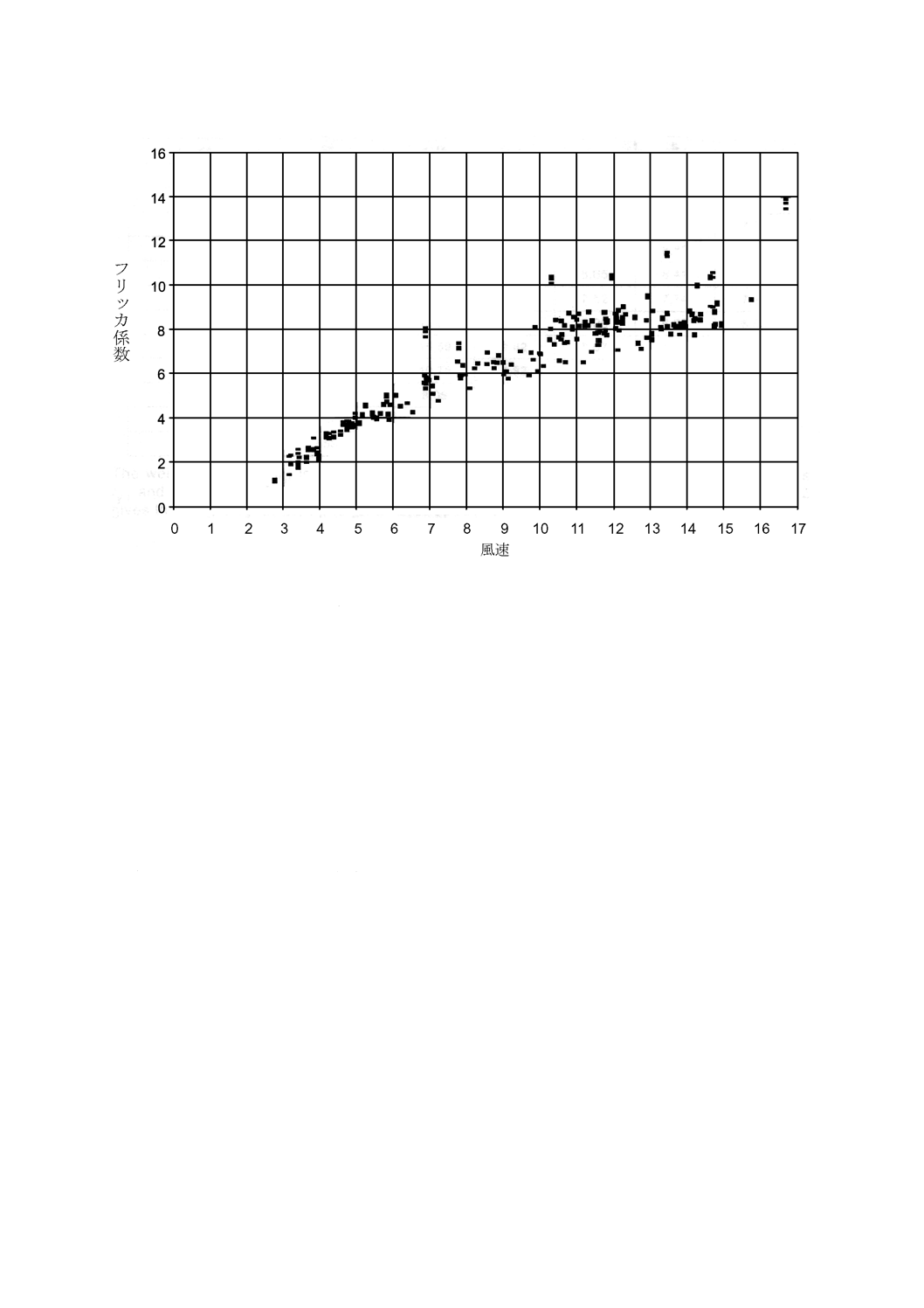
B.3 フリッカ係数の重み付け 次の例は,この規格で用いる4種類の異なる風速分布におけるフリッカ係
数c(Ψk,va)を求めるための重み付けの手順を示す。フリッカ係数の決定は,回路インピーダンス位相角Ψ
k=50 °の場合だけを示す。回路インピーダンス位相角30 °,70 °及び85 °についても同様の手順である。
附属書B図3は,回路インピーダンス位相角Ψk=50 °の場合の,一連の測定されたフリッカ係数c(Ψk)
を風速の関数として示したものである。
27
C 1400-21:2005
附属書B図 3 風速の関数としてのフリッカ係数
図のフリッカ係数を用い,各風速分布のフリッカ係数c(Ψk,va)を得るには,次のステップを実行する。
− フリッカ係数c(Ψk)を,1 m/s幅の風速ビンへ区分する。
− 各風速ビン内の測定数を決定する。
− 各風速ビンの重み付け係数wiを決定する。
− 重み付けされた累積分布Pr(c<x)を決定する。
− フリッカ係数c(Ψk,va)を与える99 %百分位数を決定する。
この例の場合の風車のカットイン風速vcut−inは,3 m/sである。カットイン風速未満及び15 m/sを超える
領域の測定データは,非常に少なく,これらの測定値は,考慮されていない。カットイン風速を超え,15 m/s
未満の風速時の測定結果だけ,フリッカ係数c(Ψk,va)の決定に用いる。
風速ビン,各風速ビンの測定数,各風速ビンにおける測定フリッカ係数の相対出現頻度fm.i並びに年平
均風速va=6 m/s,7.5 m/s,8.5 m/s及び10 m/sの場合のレイリー分布fy,iを,附属書B表1に示す。
28
C 1400-21:2005
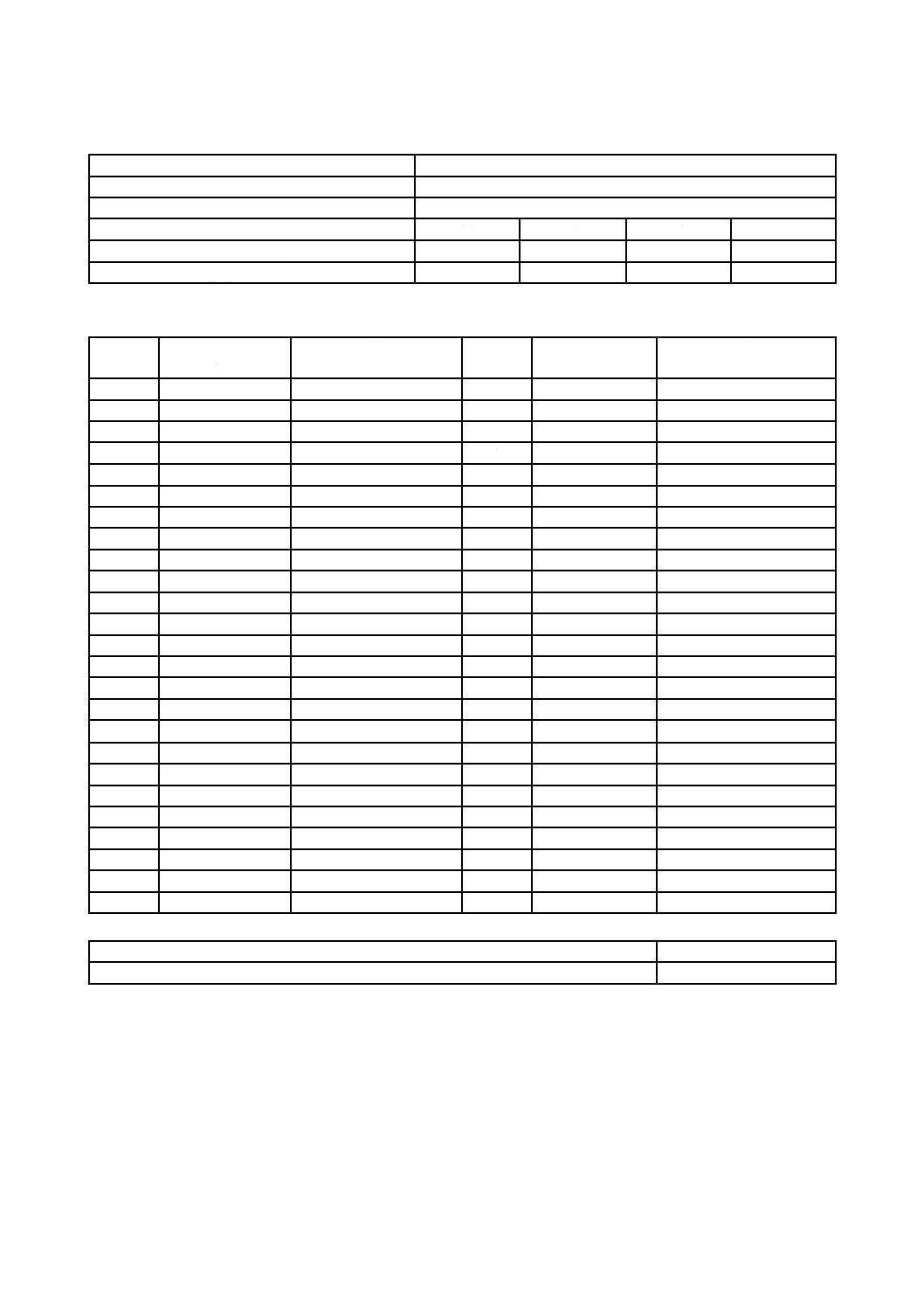
附属書B表 1 カットイン風速から15 m/sまでの各風速ビンの測定回数Nm,i,発生頻度fm,i及びfy,i
風速ビン範囲
m/s
測定数
Nm,i
fm,i
%
fy,i
%
6 m/s
fy,i
%
7.5 m/s
fy,i
%
8.5 m/s
fy,i
%
10 m/s
3−<4
30
5.38
11.64
8.21
6.64
4.98
4−<5
36
6.45
12.57
9.44
7.83
6.02
5−<6
45
8.06
12.37
10.04
8.59
6.80
6−<7
33
5.91
11.26
10.04
8.91
7.32
7−<8
42
7.53
9.58
9.53
8.83
7.56
8−<9
33
5.91
7.67
8.65
8.41
7.56
9−<10
33
5.91
5.80
7.52
7.74
7.34
10−<11
69
12.37
4.15
6.29
6.88
6.93
11−<12
87
15.59
2.82
5.07
5.94
6.39
12−<13
60
10.75
1.82
3.95
4.97
5.75
13−<14
45
8.06
1.11
2.97
4.05
5.07
14−<15
45
8.06
0.65
2.16
3.21
4.37
合計Nm
558
重み係数wiは,風速の出現頻度fy,iと測定されたフリッカ係数の相対出現頻度fm,iの比である。附属書
B表2に各風速ビンの重み付け係数wiを示す。
附属書B表 2 各風速ビンの重み係数wi
風速ビン範囲
m/s
wi
6 m/s
wi
7.5 m/s
wi
8.5 m/s
wi
10 m/s
3−<4
2.165
1.527
1.236
0.927
4−<5
1.949
1.464
1.214
0.933
5−<6
1.533
1.245
1.065
0.843
6−<7
1.904
1.698
1.507
1.237
7−<8
1.273
1.267
1.173
1.005
8−<9
1.297
1.462
1.423
1.278
9−<10
0.980
1.272
1.308
1.241
10−<11
0.335
0.509
0.557
0.561
11−<12
0.181
0.325
0.381
0.410
12−<13
0.169
0.367
0.463
0.535
13−<14
0.138
0.368
0.502
0.628
14−<15
0.081
0.267
0.398
0.542
各風速ビンにおいて,重み係数を測定回数倍したものの総和を附属書B表3に示す。
附属書B表 3 各風速ビンで重み係数を測定回数倍したものの総和
va(m/s)
6.0
7.5
8.5
10.0
∑
×
bin
1
i
m
i
N
i
N
w
=
,
454.40
467.99
457.64
424.60
次のステップで,フリッカ係数c(Ψk)に従い,測定結果をソートしたものを附属書B表4に示す。附属
書B表4で,最上行は,風速範囲3 m/s〜15 m/sのフリッカ係数c(Ψk)の最大値を表す。フリッカ係数c(Ψ
k)の最大値は,100 %百分位数で,重み付けされた累積分布係数Pr(c<11.495)=1.0を意味する。附属書B
表4の次の行は,前行値から関連する測定値の重み係数(附属書B表2)を重み係数の総和(附属書B表3)で
29
C 1400-21:2005
除した数字を引いた値である。
附属書B表 4 各風速分布におけるフリッカ係数の重み付けされた累積分布Pr(c<x)
ソートした
フリッカ係数
一致する風速
m/s
Pr(c<x)
6 m/s
Pr(c<x)
7.5 m/s
Pr(c<x)
8.5 m/s
Pr(c<x)
10 m/s
11.495
13.4
1.0000
1.0000
1.0000
1.0000
11.379
13.4
0.9997
0.9992
0.9989
0.9985
11.298
13.4
0.9994
0.9984
0.9978
0.9970
10.584
14.6
0.9991
0.9976
0.9967
0.9956
10.472
11.9
0.9989
0.9971
0.9958
0.9943
10.444
14.6
0.9985
0.9964
0.9950
0.9933
10.418
11.9
0.9983
0.9958
0.9941
0.9920
10.418
10.3
0.9979
0.9951
0.9933
0.9911
10.364
14.6
0.9972
0.9940
0.9921
0.9898
10.308
14.6
0.9970
0.9935
0.9912
0.9885
10.286
10.3
0.9968
0.9929
0.9903
0.9872
10.280
11.9
0.9961
0.9918
0.9891
0.9859
10.104
10.3
0.9957
0.9911
0.9883
0.9849
10.059
14.2
0.9950
0.9900
0.9871
0.9836
9.931
14.2
0.9948
0.9894
0.9862
0.9823
:
:
:
:
:
8.882
12.9
0.9906
0.9788
0.9713
0.9620
8.858
12.9
0.9902
0.9780
0.9703
0.9608
8.846
12.1
0.9898
0.9772
0.9693
0.9595
8.836
11.3
0.9895
0.9765
0.9683
0.9582
8.831
12.1
0.9891
0.9758
0.9674
0.9573
適正な99 %百分位数は,附属書B表4に太字で示す。これら99 %百分位数は,附属書B表5に示す
ように回路インピーダンス位相角50 °における測定結果としてのフリッカ係数c(Ψk,va)を与える。
附属書B表 5 連続運転時のフリッカ係数測定結果
Ψk
degrees
30
50
70
85
va
m/s
フリッカ係数
6.0
8.9
7.5
10.1
8.5
10.3
10.0
10.4
報告されたフリッカ係数は,0 m/sから無限大の完全な風速範囲の必要性を満たさない,カットイン風速
から15 m/sまでの風速範囲の99 %百分位数である。
限られた測定範囲に起因する不確かさを,附属書B表6に示す。累積分布関数には,レイリー分布を用
いているため,表の最初の3行は,指定された測定風速範囲が3 m/s以上で15 m/s以下の確率を示す。最
良のケースでは,測定風速範囲外のすべてのフリッカ係数は,測定風速範囲内の99 %百分位数より小さ
い。この場合,報告された百分位数は,附属書B表6の最良ケース百分位数に実際に一致する。最悪のケ
ースでは,15 m/sを超える範囲のすべてのフリッカ係数は,測定風速範囲内の99 %百分位数より大きい。
この場合,報告された百分位数は,附属書B表6の百分位数の最悪ケースと一致する。年平均風速が高い
風速分布の場合,報告された百分位数の実際の割合はかなり不確実なものとなる。測定風速範囲の上限を
30
C 1400-21:2005
15 m/sよりも上げることで,目的とするレベルまで不確かさを下げることは可能である。しかし,これは
しばしば測定に要する時間を大きく増大し,それに伴う測定費用も大きく増大する。
附属書B表 6 異なる風速分布における確率及び百分位数
va (m/s)
6.0
7.5
8.5
10.0
Pr(v<3 m/s) (%)
17.8
11.8
9.3
6.8
Pr(3 m/s<v<15 m/s) (%)
81.4
83.9
82.0
76.1
Pr(v>15 m/s) (%)
0.7
4.3
8.7
17.1
最良ケースの百分位数 (%)
99.2
99.2
99.2
99.2
最悪ケースの百分位数 (%)
98.4
94.8
90.5
82.2
備考 最初の3行は,指定された測定風速範囲が3 m/s未満,3 m/s以上15 m/s以下
又は15 m/s超過の確率を示す。これらの確率から、実際の百分位数の確率の範囲が
最後の2行によって与えられる。
B.4 定義の導き
B.4.1 フリッカ係数 仮想回路で模擬されたフリッカ値Pst,ficは,回路の短絡容量Sk,fic及び回路インピー
ダンス位相角Ψkに依存する。Pst,ficは,ほぼSk,ficに反比例するのに対し,Pst,ficとΨkの関係は風車タイプ
に依存する。したがって,フリッカ係数c(Ψk)の定義は,次の(B.1)式のようになる。
fic
k
n
k
fic
st
)
(
,
,=
S
S
c
P
×
Ψ
······························································· (B.1)
ここに,
Sn: 風車の定格皮相電力
ゆえに,フリッカ係数c(Ψk)は,次の(B.2)式のようになる。
n
fic
k
fic
st
k)
(
S
S
P
c
,
,
=
×
Ψ
······························································· (B.2)
B.4.2 フリッカステップ係数 IEC 61000-3-3は,電圧変化及び形状係数によってフリッカを評価するた
めの一つの解析的手法を定義している。形状係数F=1は,階段状電圧変化の場合である。現在の規格でこ
の手法は,フリッカステップ係数kf(Ψk)を定義するために用いられている。フリッカステップ係数は,切
換運転と同じフリッカ厳しさをもつ等価電圧ステップを計算するために用いるように定義されている。正
式な定義は,次の(B.3)式による。
100
)
(
fic
k
n
k
f
max
×
×
,
=
S
S
k
d
Ψ
························································· (B.3)
ここに,
dmax: 定格電圧の百分率で表した等価電圧ステップ
IEC 61000-3-3の解析的手法及び等価電圧ステップdmaxを適用すれば,フリッカ影響時間tfは次の(B.4)
式によって与えられる。
3.2
max
f
2.3d
t
×
=
······································································· (B.4)
そして,このフリッカ影響時間及び次の(B.5)式によって,観察時間Tpにおけるフリッカ厳しさPst,ficが
得られる。
2.3
1
p
f
fic
st
∑Tt
P
=
,
····································································· (B.5)
単独のフリッカ影響時間tfを用い,次の(B.6)式が得られる。
2.3
1
p
fic
k
n
k
f
fic
st
2.3
)
(
100
×
×
×
T
S
S
k
P
,
,=
Ψ
··········································· (B.6)
31
C 1400-21:2005
(B.6)式の結果を用い,フリッカステップ係数kf(Ψk)は,次の(B.7)式のように定義できる。
fic
st
3.2
1
p
n
fic
k
k
f
2.3
100
)
(
,
,
=
P
T
S
S
k
×
×
×
Ψ
·············································· (B.7)
(B.7)式の観察時間Tpは,模擬された電圧時系列データの長さ(秒)である。
B.4.3 電圧変化係数 切換運転における相対電圧変化Δuは,回路の短絡容量Sk,fic及び回路インピーダン
ス位相角Ψkに依存する。Δuは,ほぼSk,ficに反比例するが,一方,ΔuとΨkの関係は,風車の設計に依
存する。したがって,電圧変化係数ku(Ψk)は,次の(B.8)式によって定義できる。
fic
k
n
k
u
)
(
,
=
S
S
k
u
×
Ψ
∆
································································· (B.8)
短絡容量Sk,ficの回路における模擬された電圧変化を代入し,電圧変化係数は,次の(B.9)式によって決
定する。
n
fic
k
n
min
fic
max
fic
k
u
3
)
(
S
S
U
U
U
k
,
,
,
−
=
×
×
Ψ
········································ (B.9)
ここに, Ufic,max: 仮想回路における模擬相電圧ufic(t)の最大値
Ufic,min: 仮想回路における模擬相電圧ufic(t)の最小値
32
C 1400-21:2005
附属書C(参考)参考文献
この附属書(参考)は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではな
い。
IEC 60050(131):1978, International Electrotechnical Vocabulary (IEV)−Chapter 131: Electric and magnetic
circuits
IEC 60050(151):1978, International Electrotechnical Vocabulary (IEV)−Chapter 151: Electrical and magnetic
devices
IEC 60050(601):1985, International Electrotechnical Vocabulary (IEV)−Chapter 601: Generation, transmission
and distribution of electricity−General
IEC 61000-3-3:1994, Electromagnetic compatibility (EMC)−Part 3: Limits−Section 3: Limitation of voltage
fluctuation and flicker in low-voltage supply systems for equipment with rated current ≦16 A
IEC 61000-3-6:1996, Electromagnetic compatibility (EMC)−Part 3: Limits−Section 6: Assessment of emission
limits for distorting loads in MV and HV power systems−Basic EMC publication
IEC 61000-3-7:1996, Electromagnetic compatibility (EMC)−Part 3: Limits−Section 7: Assessment of emission
limits for fluctuating loads in MV and HV power systems−Basic EMC publication
IEC 61400-1:1999, Wind turbine generator systems−Part 1: Safety requirements
IEC 61400-12:1998, Wind turbine generator systems−Part 12: Wind turbine power performance testing
33
C 1400-21:2005
附属書1(規定)高調波流出電流上限値
電力利用基盤強化懇談会(1987年5月)において,系統の総合電圧ひずみ率及び高調波障害発生の関係
を考慮して提言された“高調波環境目標レベル”(6.6 kV配電系統で5 %,特別高圧系統で3 %)を維持
するよう,高調波の発生者である特定需要家が高調波電流の流出を抑制するための対策を行う場合の技術
要件として,1994年10月3日,資源エネルギー庁公益事業部長から“高圧又は特別高圧で受電する需要
家の高調波抑制対策ガイドライン”が発行された。
高調波を発生する特定需要家から系統に流出する高調波流出電流の許容される上限値は,高調波の次数
ごとに,附属書1表1に示す需要家の契約電力1 kW当たりの高調波流出電流の上限値に当該需要家の契
約電力(kWを単位とする。)を乗じた値となっている。
附属書1表1 契約電力1 kW当たりの高調波流出電流上限値
単位 mA/kW
受電電圧
5次
7次
11次
13次
17次
19次
23次
23次超過
6.6 kV
3.5
2.5
1.6
1.3
1.0
0.9
0.76
0.70
22 kV
1.8
1.3
0.82
0.69
0.53
0.47
0.39
0.36
33 kV
1.2
0.86
0.55
0.46
0.35
0.32
0.26
0.24
66 kV
0.59
0.42
0.27
0.23
0.17
0.16
0.13
0.12
77 kV
0.50
0.36
0.23
0.19
0.15
0.13
0.11
0.10
110 kV
0.35
0.25
0.16
0.13
0.10
0.09
0.07
0.07
154 kV
0.25
0.18
0.11
0.09
0.07
0.06
0.05
0.05
220 kV
0.17
0.12
0.08
0.06
0.05
0.04
0.03
0.03
275 kV
0.14
0.10
0.06
0.05
0.04
0.03
0.03
0.02
附属書1表1に示した“契約電力1 kW当たりの高調波流出電流の上限値”は,力率が1として計算し
た基本波入力電流に対する百分率で表現すると附属書1表2のとおりになる。
附属書1表2 高調波流出電流上限値の基本波入力電流に対する百分率
単位 %
受電電圧
5次
7次
11次
13次
17次
19次
23次
23次超過
6.6 kV
4.0
2.8
1.8
1.5
1.1
1.0
0.87
0.80
22 kV以上
6.7
4.8
3.1
2.6
1.9
1.8
1.5
1.4
34
C 1400-21:2005
附属書2(参考)JISと対応する国際規格との対比表
JIS C 1400-21 風力発電システム−第21部 系統連系風車の電力品質特性の測定
及び評価
IEC 61400-21:2001,Wind turbine generator systems - Part 21 : Measurement and assessment of power quality
characteristics of grid connected wind turbines
(Ⅰ) JISの規定
(Ⅱ)国際規
格番号
(Ⅲ) 国際規格の規定
(Ⅳ)JISと国際規格との技術的差異の項目ごとの
評価及びその内容
表示箇所:本体、表示方法:点線の下線又は実線
の側線
(Ⅴ)JISと国際規格との技術的差異の理由及び今後の対策
項目
内容
内容
項目ごとの
評価
JISと国際規格との相違点
1.適用範囲
61400-21
IDT
2.引用規格
IDT
3.定義
3.19(風車の)切換運転
3.19 switching
operation (for wind
turbines)
MOD/追加 “(風車の)切換運転”とし,追加
説明を加えた。
現在のところ,このような風車の運転形態を表す英文に対
応する電気技術用語がないため。
4.記号及び単位
IDT
5.略語
IDT
6.風車電力品質特性パ
ラメータ
IDT
6.1一般
IDT
6.2定格値
IDT
6.3最大許容出力
IDT
6.4最大出力実測値
IDT
6.5無効電力
無効電及び設定力率
無効電力
MOD/追加 設定力率を追加した。
風車の無効電力は,測定によって特定されるが,力率改善
コンデンサ,半導体電力変換装置などを用いて力率可変運
転が可能な風車では,無効電力測定における設定力率が必
要となるため。
6.6電圧変動
IDT
35
C 1400-21:2005
(Ⅰ) JISの規定
(Ⅱ)国際規
格番号
(Ⅲ) 国際規格の規定
(Ⅳ)JISと国際規格との技術的差異の項目ごとの
評価及びその内容
表示箇所:本体、表示方法:点線の下線又は実線
の側線
(Ⅴ)JISと国際規格との技術的差異の理由及び今後の対策
項目
内容
内容
項目ごとの
評価
JISと国際規格との相違点
6.7高調波
IDT
7.測定手順
IDT
7.1一般
IDT
7.2定格値
IDT
7.3最大許容出力
IDT
7.4最大出力実測値
IDT
7.5無効電力
IDT
7.6電圧変動
IDT
7.7高調波
IDT
8.電力品質の評価
IDT
8.1一般
IDT
8.2定常電圧
IDT
8.3電圧変動
従来の評価方法(ΔV10)を
併記。
MOD/追加 フリッカと呼ばれている照明設
備・照明器具の明るさのちらつき
感の許容値が異なっている。
日本の従来の評価方法(ΔV10)を
併記した。
フリッカメータについては,IEC 61000-4-15 :
Electromagnetic compatibility (EMC)−Part 4 : Testing
and measurement techniques−Section 15 :
Flickermeter−Functional and design specificationsに機
能及び設計の仕様が記載されている。IEC 61000-4-15に規
定するランプ特性(視感度特性)は,欧州の230 V系だけ
を扱っており,北米120 V系ランプ特性については,現在,
同国際規格の改定を審議中で,日本の100 V系のランプ特
性だけが取り残された状況になっている。100 V系のラン
プ特性を網羅したフリッカメータ国際規格改訂版の早期制
定が望まれる。
現在,フリッカ問題を含むIEC 61000-4-30(電力品質パラ
メータの測定法)が審議中であり,同国際規格の今後の方
36
C 1400-21:2005
(Ⅰ) JISの規定
(Ⅱ)国際規
格番号
(Ⅲ) 国際規格の規定
(Ⅳ)JISと国際規格との技術的差異の項目ごとの
評価及びその内容
表示箇所:本体、表示方法:点線の下線又は実線
の側線
(Ⅴ)JISと国際規格との技術的差異の理由及び今後の対策
項目
内容
内容
項目ごとの
評価
JISと国際規格との相違点
向性を見極めた上で,フリッカに関する国際規格との整合
性をはかるべきである。
8.4高調波
“高圧又は特別高圧で受電
する需要家の高調波抑制対
策ガイドライン”を併記。
MOD/追加 高調波限度値が異なる。
日本の現行の“高圧又は特別高圧
で受電する需要家の高調波抑制対
策ガイドライン”を併記した。
TR C 0015の解説には,“高調波電圧の両立性レベル及び
計画レベルは,欧州地域の配電事情を基礎として制定され
たもので,日本ではまだ確立されておらず適用できない。”
とあるため。
高調波を発生する半導体電力変換装置などの機器が,今後
ますます普及することが予想され,現在,高調波の測定方
法を含む高調波関連のIEC規格の見直し作業が行われてい
る状況にある。今後出版が予想される高調波に関するIEC
規格改訂版の内容を踏まえ,高調波に関するJISの早期制
定が望まれる。
附属書A(参考)報告書
形式の例
電気定数(附属書AのB.1)
無効電及び設定力率(附属書
AのB.1)
MOD/追加 電気定数を一般データへ追加し
た。
設定力率を無効電力へ追加した。
風車の系統連系を検討するときに,電気定数が必要となる
ため。
風車の無効電力は,測定によって特定されるが,力率改善
コンデンサ,半導体電力変換装置などを用いて力率可変運
転が可能な風車では,無効電力測定における設定力率が必
要となるため。
附属書B(参考)電圧変
動及びフリッカ
IDT
附属書C(参考)参考文
献
IDT
附属書1(規定)高調波
流出電流上限値
なし
MOD/追加 高調波限度値が異なる。
日本の現行の“高圧又は特別高圧
で受電する需要家の高調波抑制対
策ガイドライン”を併記した。
TR C 0015の解説には,“高調波電圧の両立性レベル及び
計画レベルは,欧州地域の配電事情を基礎として制定され
たもので,日本ではまだ確立されておらず適用できない。”
とあるため。
37
C 1400-21:2005
(Ⅰ) JISの規定
(Ⅱ)国際規
格番号
(Ⅲ) 国際規格の規定
(Ⅳ)JISと国際規格との技術的差異の項目ごとの
評価及びその内容
表示箇所:本体、表示方法:点線の下線又は実線
の側線
(Ⅴ)JISと国際規格との技術的差異の理由及び今後の対策
項目
内容
内容
項目ごとの
評価
JISと国際規格との相違点
附属書2(参考)JISと
対応する国際規格との
対比表
なし
MOD/追加 IEC規格には,この附属書は存在し
ない。
JISの国際規格の採用及び対応の程度の全体評価:MOD
備考1. 項目ごとの評価欄の記号の意味は,次のとおりである。
― IDT……………………技術的差異がない。
MOD/追加………………国際規格にない規定項目又は規定内容を追加している。
MOD/変更………………国際規格の規定内容を変更している。
2. JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
MOD………………………国際規格を修正している。