C 1400-2:2020 (IEC 61400-2:2013)
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 記号及び略語 ·················································································································· 11
4.1 一般 ··························································································································· 11
4.2 記号 ··························································································································· 11
4.3 座標系 ························································································································ 15
5 主要構成要素 ·················································································································· 18
5.1 一般事項 ····················································································································· 18
5.2 設計方法 ····················································································································· 18
5.3 品質保証 ····················································································································· 18
第1章 設計評価 ················································································································ 19
6 外部条件························································································································ 19
6.1 一般事項 ····················································································································· 19
6.2 SWTクラス ················································································································· 20
6.3 風条件 ························································································································ 21
6.4 その他の環境条件 ········································································································· 27
6.5 室内の試験条件 ············································································································ 28
6.6 電気負荷条件 ··············································································································· 28
7 構造設計························································································································ 29
7.1 一般事項 ····················································································································· 29
7.2 設計方法 ····················································································································· 29
7.3 荷重及び荷重ケース ······································································································ 29
7.4 簡易荷重計算法 ············································································································ 30
7.5 シミュレーションモデル ································································································ 37
7.6 荷重測定 ····················································································································· 39
7.7 応力計算 ····················································································································· 39
7.8 安全率 ························································································································ 40
7.9 限界状態解析 ··············································································································· 41
8 保護システム及び停止システム ·························································································· 42
8.1 一般事項 ····················································································································· 42
8.2 保護システムの機能的要求事項 ······················································································· 42
8.3 手動停止 ····················································································································· 43
8.4 保守のための停止 ········································································································· 43
C 1400-2:2020 (IEC 61400-2:2013) 目次
(2)
ページ
9 電気システム ·················································································································· 43
9.1 一般事項 ····················································································································· 43
9.2 保護システム ··············································································································· 44
9.3 断路器 ························································································································ 44
9.4 接地システム ··············································································································· 44
9.5 雷保護 ························································································································ 44
9.6 電気導体及びケーブル ··································································································· 44
9.7 電気負荷 ····················································································································· 44
9.8 地域の要求事項 ············································································································ 45
10 支持構造物 ··················································································································· 46
10.1 一般事項 ···················································································································· 46
10.2 動的要求事項 ·············································································································· 46
10.3 環境要因 ···················································································································· 46
10.4 接地 ·························································································································· 46
10.5 基礎 ·························································································································· 46
10.6 風車アクセス時の設計荷重 ···························································································· 46
11 文書に対する要求事項 ···································································································· 46
11.1 一般事項 ···················································································································· 46
11.2 製品マニュアル ··········································································································· 46
11.3 消費者ラベル ·············································································································· 49
12 風車の表示 ··················································································································· 50
第2章 型式試験 ················································································································ 50
13 試験方法 ······················································································································ 50
13.1 一般事項 ···················································································································· 50
13.2 設計データ検証試験 ····································································································· 50
13.3 機械的荷重試験 ··········································································································· 51
13.4 耐久性試験 ················································································································· 52
13.5 機械部品の試験 ··········································································································· 57
13.6 安全性及び機能試験 ····································································································· 58
13.7 環境試験 ···················································································································· 58
13.8 電気試験 ···················································································································· 58
附属書A(参考)小形風車の仕様変更 ····················································································· 59
附属書B(規定)SWTクラスSの場合に記載する設計パラメータ ················································ 61
附属書C(参考)乱流の統計的モデル ····················································································· 63
附属書D(参考)乱流の決定論的モデル ·················································································· 65
附属書E(参考)材料の部分安全率 ························································································ 67
附属書F(参考)簡易荷重計算法の開発 ··················································································· 77
附属書G(参考)試験報告書様式の例 ····················································································· 87
附属書H(参考)EMC試験 ·································································································· 92
C 1400-2:2020 (IEC 61400-2:2013)
(3)
ページ
附属書I(規定)固有振動数解析 ···························································································· 96
附属書J(参考)極値環境条件 ······························································································· 97
附属書K(参考)熱帯低気圧の極値風条件 ··············································································· 99
附属書L(参考)その他の風条件 ·························································································· 105
附属書M(参考)消費者ラベル ····························································································· 112
参考文献 ··························································································································· 117
C 1400-2:2020 (IEC 61400-2:2013) 目次
C 1400-2:2020 (IEC 61400-2:2013) 目次
(4)
まえがき
この規格は,産業標準化法に基づき,日本産業標準調査会の審議を経て,経済産業大臣が改正した日本
産業規格である。これによって,JIS C 1400-2:2010は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本産業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 1400の規格群には,次に示す部編成がある。
JIS C 1400-0 第0部:風力発電用語
JIS C 1400-1 第1部:設計要件
JIS C 1400-2 第2部:小形風車
JIS C 1400-3 第3部:洋上風車の設計要件
JIS C 1400-11 第11部:騒音測定方法
JIS C 1400-12-1 第12-1部:発電用風車の性能試験方法
JIS C 1400-21 第21部:系統連系風車の電力品質特性の測定及び評価
JIS C 1400-22 第22部:風車の適合性試験及び認証
JIS C 1400-24 第24部:雷保護
日本産業規格 JIS
C 1400-2:2020
(IEC 61400-2:2013)
風力発電システム−第2部:小形風車
Wind energy generation systems-Part 2: Small wind turbines
序文
この規格は,2013年に第3版として発行されたIEC 61400-2を基に,技術的内容及び構成を変更するこ
となく作成した日本産業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,安全原則,品質保証及び技術的な健全性に関して,特定の外部条件下での設計,据付け,
保守及び運転を含む小形風車の安全に関する設計要件について規定する。また,設計寿命を通じて生じる
システムの危険要因による損傷に対して,適切な保護レベルを提供する。
この規格は,保護機構,内部電気システム,機械システム,支持構造物,基礎,及び負荷との電気的接
続といった,小形風車の全てのサブシステムに関係している。小形風車には,支持構造物を含む風車本体,
風車コントローラ,(必要に応じて)充電コントローラ及びインバータ,配線及び断路器,マニュアル類(据
付け,運転及び保守),並びにその他の文書を含む。
この規格は,JIS C 1400-1に類似しているが,小形風車に適用するために,単純化し,重要な変更を加
えている。小形風車の安全性が損なわれないことを適切に実証できる場合は,この規格の要件を変更して
もよい。ただし,箇条6に規定するSWTクラス及び外部条件の関連定義には適用しない。
この規格に適合しても,いかなる個人,組織又は企業は,その他の関連する規制を順守する義務を軽減
するものではない。
この規格は,ロータの受風面積が200 m2以下で,発電電圧が交流1 000 V以下又は直流1 500 V以下の
系統連系用及び独立電源用の風車に適用する。
この規格は,適切なJIS,IEC規格及びISO規格と併せて用いることが望ましい(箇条2参照)。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61400-2:2013,Wind turbines−Part 2: Small wind turbines(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9960-1:2008 機械類の安全性−機械の電気装置−第1部:一般要求事項
2
C 1400-2:2020 (IEC 61400-2:2013)
注記 対応国際規格:IEC 60204-1:2005,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements
JIS C 1400-11 風力発電システム−第11部:騒音測定方法
注記 対応国際規格:IEC 61400-11,Wind turbines−Part 11: Acoustic noise measurement techniques
JIS C 1400-12-1:2010 風車−第12-1部:発電用風車の性能試験方法
注記 対応国際規格:IEC 61400-12-1:2005,Wind turbines−Part 12-1: Power performance measurements
of electricity producing wind turbines
JIS C 5381-11 低圧サージ防護デバイス−第11部:低圧配電システムに接続する低圧サージ防護デバ
イスの要求性能及び試験方法
注記 対応国際規格:IEC 61643-11:2011,Low-voltage surge protective devices−Part 11: Surge
protective devices connected to low-voltage power systems−Requirements and test methods
JIS C 60364-5-54 建築電気設備−第5-54部:電気機器の選定及び施工−接地設備,保護導体及び保
護ボンディング導体
注記 対応国際規格:IEC 60364-5-54,Low-voltage electrical installations−Part 5-54: Selection and
erection of electrical equipment−Earthing arrangements and protective conductors
JIS C 60721-2-1 環境条件の分類−第2-1部:自然環境の条件−温度及び湿度
注記 対応国際規格:IEC 60721-2-1,Classification of environmental conditions−Part 2-1: Environmental
conditions appearing in nature−Temperature and humidity
JIS Q 17025 試験所及び校正機関の能力に関する一般要求事項
注記 対応国際規格:ISO/IEC 17025,General requirements for the competence of testing and calibration
laboratories
ISO 2394:1998,General principles on reliability for structures
IEC 60038,IEC standard voltages
IEC/TS 61400-13,Wind turbine generator systems−Part 13: Measurement of mechanical loads
IEC/TS 61400-14:2005,Wind turbines−Part 14: Declaration of apparent sound power level and tonality
values
IEC/TS 61400-23:2001,Wind turbine generator systems−Part 23: Full-scale structural testing of rotor blades
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
注記 ここに規定しない用語は,JIS C 1400-0を参照する。
3.1
年平均(annual average)
十分な期間にわたって集めた十分な量の測定データセットを平均した値であって,測定対象の期待値を
推定できるもの。
注記 平均を計算する期間は,季節差などの非定常効果をならすため,年数は整数となる。
3.2
年平均風速(annual average wind speed),Vave
年平均の定義に従って平均した風速。
3
C 1400-2:2020 (IEC 61400-2:2013)
3.3
自動再閉路周期(auto-reclosing cycle)
電力系統不具合の後に開放された遮断器が自動的に再閉路し,電路が系統に再接続されるまでの約0.01
秒〜数秒間変化する期間。
3.4
ブレーキ装置(brake)
ロータの回転数を下げるか,又は回転を停止させることができる装置。
3.5
重大故障(catastrophic failure)
コンポーネント又は構造物が分解又は破壊して,基礎機能を失い安全性を損ねること。
3.6
(材料の)特性値[characteristic value (of a material property)]
限りなく試験されると仮定した場合に,所定の達成されない確率をもつ(材料特性の)値。
注記 JIS Z 8101-1に定義する“分位点”(fractile)と同等である。
3.7
消費者ラベル(consumer label)
次の二つから成る消費者向けのラベル。
− ラベル自体
− ウェブサイトで入手可能な試験要約報告書
3.8
制御システム(control system)
風車の状態及び/又は周囲の環境の情報を受けて,風車を動作限界内に保つように調整する補助システ
ム。
3.9
カットイン風速(cut-in wind speed),Vin
風車が正の正味出力を発生する,ハブ高さにおける最小のビン平均風速。
3.10
カットアウト風速(cut-out wind speed),Vout
風車が出力を発生するように設計された,ハブ高さにおける最大の平均風速。
3.11
表示音響パワーレベル(declared sound power level)
公表された見かけのA特性音響パワーレベル[dB(A)]。
注記 この値は,JIS C 1400-11に従って測定され,IEC 61400-14に従って計算される(M.3.4参照)。
3.12
設計限界(design limits)
設計に用いられる最大値又は最小値。
3.13
設計運転状態(design situation)
風車の運用において,考えられる状態。例えば,発電状態,待機状態など。
4
C 1400-2:2020 (IEC 61400-2:2013)
3.14
設計風速(design wind speed)
簡易設計計算式において,入力値として用いるハブ高さの風速(1.4×Vaveに等しい。)。
3.15
風下(downwind)
風の流れの主方向。
3.16
緊急停止(emergency shutdown)
保護システム又は手動操作によって風車を緊急に停止させること。
3.17
環境条件(environmental conditions)
風車の挙動に影響を与える可能性がある環境(高度,気温,湿度など)の特性。
3.18
外部条件(external conditions)
環境条件(気温,雪,氷など)及び風車に関連する部分以外の電力系統の条件を含めた,風車の運転に
影響を与える要素。
3.19
極値風速(extreme wind speed)
t秒間で平均した最大平均風速で,N年(再現期間)内に起こる可能性がある風速。
注記 多くの規格では,再現期間N=50年及びN=1年,並びに平均時間t=3秒及びt=10分を用い
ている。平易な言葉では,“耐風速”という,あまり正確ではない用語がしばしば用いられる。
しかし,実際的には風力発電システムは,設計荷重ケースとして極値風速を用いて設計される。
3.20
フェイルセーフ(fail-safe)
故障の発生が重大な障害につながることを防止する設計上の機能。
3.21
ファーリング(furling)
ロータの投影受風面積を減らすことによって,出力,回転数などを受動的に制御する機構。
3.22
ガスト(gust)
風速が平均値を超えて,突発的かつ短時間に増加すること。
注記 ガストは,立ち上がり時間,振幅及び継続時間で特徴付けることができる。
3.23
水平軸風車(horizontal axis wind turbine)
ロータの回転軸が風の流れに対しておおむね平行な風車。
3.24
ハブ(hub)
翼又は翼組立品を風車のロータ軸に固定する部品。
3.25
ハブ高さ(hub height)
5
C 1400-2:2020 (IEC 61400-2:2013)
風車ロータの受風面の幾何学的中心の地表面からの高さ。
3.26
アイドリング(idling)
低速回転しているが,電力を発生していない風車の状態。
3.27
限界状態(limit state)
構造物及びそれにかかる荷重の状態であって,それを超えると構造物が設計要件を満足しなくなる状態。
注記1 設計計算(すなわち,限界状態に対する設計要件)の目的は,限界状態になる確率を対象の
構造物の種類に対して規定されたある値以下に抑えることである。
注記2 風車に合わせてISO 2394の2.2.9の定義を修正した。
3.28
荷重ケース(load case)
構造物に加わる荷重を決定する設計運転状態と外部条件との組合せ。
3.29
ウィンドシアーの対数則(logarithmic wind shear law)
地上高さに対する水平方向の風速の変化を,対数関数で表現する数式。
3.30
最大電流(maximum output current)
風車から出力される最大の電流(交流又は直流)。最大電流は,風車の電気接続装置において測定する。
600秒平均のi600,60秒平均のi60,及び0.2秒平均のi0.2を指定する。
注記1 一般的に,最大電流は定格電流である。
注記2 最大電流は,基準出力時における電流と区別して用いられている。
3.31
最大出力(maximum output power)
風車の電気接続装置において測定される最大出力(交流又は直流)。600秒平均のP600,60秒平均のP60,
及び0.2秒平均のP0.2を指定する。
注記1 一般的に,最大出力は定格出力である。
注記2 最大出力は,基準出力と区別して用いられている。
3.32
最大電圧(maximum output voltage)
風車の電気接続装置において測定される最大電圧(交流又は直流)。600秒平均のU600,60秒平均のU60,
及び0.2秒平均のU0.2を指定する。
注記 風車内部の電圧は,この最大電圧を超える場合がある。
3.33
平均風速(mean wind speed)
風速の瞬間値を,数秒から数年といった所定期間で統計的に平均化した風速。
3.34
ナセル(nacelle)
水平軸風車において,タワーの頂部に配置され,動力伝達系,その他の構成要素を格納するもの。
6
C 1400-2:2020 (IEC 61400-2:2013)
3.35
騒音ラベル(noise label)
小形風車に関係した騒音のデータを,定義に基づいてグラフ及びテキストによって表したもの。
3.36
通常外部条件(normal external conditions)
再現期間1年以内に,風車がさら(曝)される外部条件。
3.37
通常運転(normal operation)
風車マニュアル類の記載に適合する,不具合を伴わない運転状態。
3.38
通常停止(normal shutdown)
停止の全段階が制御システムの制御下で行われる停止。
3.39
動作限界(operating limits)
小形風車の設計者によって定義された,制御システム及び保護システムを動作させる条件セット。
3.40
過回転制御(overspeed control)
過度なロータ回転数を抑制するための制御システムの動作,又はそのシステムの部分的な動作。
3.41
待機中の風車(parked wind turbine)
風車の設計に応じて,静止状態又はアイドリングのいずれかの状態の風車。
3.42
待機(parking)
通常停止後の風車の状態。
3.43
電力形式(power form)
風車が負荷に対して生み出す電力の形式を表現する物理特性(例:単相交流230 V/50 Hz又は直流48 V)
3.44
ウィンドシアーの指数則(power law for wind shear)
地上高さに対する風速の変化を,指数関数で表現する数式。
3.45
出力(power output)
特定の形態で,かつ,特定の目的のために,装置によって供給される動力。
注記 風車の場合,風車によって供給される電力をいう。
3.46
保護システム(protection system)
風力発電システムを設計限界内に保つように保護するシステム。
3.47
定格出力(rated power)
通常運転中の風車が連系設備において,達成するように設計した最大連続出力。
7
C 1400-2:2020 (IEC 61400-2:2013)
注記1 基準出力は風車を比較するために定義されており,より高い風速で発生する定格出力と区別
して用いられている。定格出力は,旧式の用語であり,前後関係により最大出力又は基準出
力によって置き換える方がよい。
注記2 風車に合わせてIEC 61400-21:2008の3.14を適切に修正した。
3.48
定格電流(rated current)
通常運転中の風車が連系設備において,達成するように設計した最大連続電流。
注記1 基準電流は風車を比較するために定義されており,より高い風速で発生する定格電流と区別
して用いられている。定格電流は,旧式の用語であり,最大電流によって置き換える方がよ
い。
注記2 風車に合わせてIEC 61400-21:2008の3.13の定義を修正した。
3.49
定格風速(rated wind speed)
風車が定格出力を発生させる風速。
注記1 定格風速は旧式の用語である。基準出力及び基準年間発電電力量は,風車を比較するために
定義されており(対応する定義を参照),より高い風速で発生する最大出力と区別して用いら
れている。
注記2 風車に合わせてIEC 61400-21:2008の3.15の定義を修正した。
3.50
レイリー分布(Rayleigh distribution)
風速に対して,しばしば用いられる確率分布関数。
注記1 レイリー分布は,平均風速を操作する調整可能なパラメータである尺度パラメータに依存す
る。
注記2 レイリー分布は,形状パラメータが2のときのワイブル分布(3.73参照)に等しい。
3.51
安全停止回転数(reduced speed)
人員にあらゆるリスクも及ぼさずに風車を手動で停止状態にすることができる回転数。
3.52
基準年間発電電力量(reference annual energy)
風速のレイリー分布,稼働率100 %,及びJIS C 1400-12-1によって定義される出力曲線を仮定して,ハ
ブ高さにおける年平均風速5.0 m/sでの年間発電電力量(AEP)。
注記1 AEPは,JIS C 1400-12-1において“計測AEP”又は“外挿AEP”であり,それぞれの“海抜
0 m”又は“サイト固有”のものと規定している。
注記2 この規格の範囲内で,基準年間発電電力量は海抜0 mの計測AEPである。
注記3 基準年間発電電力量は,風車を比較するために定義されている。
3.53
基準出力(reference power)
JIS C 1400-12-1に基づく出力曲線でのハブ高さにおける風速11.0 m/sの風車の出力,又は同出力曲線で
の11.0 m/sより低い風速における風車の最大出力のうち,いずれか高い方の出力。
注記 基準出力は,風車を比較するために定義されており,より高い風速で生じる最大出力と区別し
8
C 1400-2:2020 (IEC 61400-2:2013)
て用いられている。
3.54
基準風速(reference wind speed),Vref
SWTクラスを定義するために用いられる風速の基本パラメータ。
注記1 その他の設計に関係する気象パラメータは,基準風速,その他の基本SWTクラスのパラメ
ータから導かれる。
注記2 基準風速VrefのSWTクラスで設計された小形風車は,小形風車のハブ高さにおける再現期間
50年の10分平均極値風速がVref以下の気象に耐えるように設計されたものである(3.19参照)。
3.55
共振(resonance)
強制振動の周期が自由振動の周期に非常に近い振動系で現れる現象。
3.56
ロータ中心(rotor center)
風車ロータの幾何学的な中心。
3.57
ロータ回転数(rotor speed)
風車ロータの軸周りの回転数。
3.58
粗度長(roughness length)
鉛直方向の風速プロファイルが,高さに対して対数的に変化すると仮定した場合,平均風速が0となる
外挿高さ。
3.59
安全寿命(safe life)
重大故障の申告確率を含めて定めた耐用年数。
3.60
計画保守(scheduled maintenance)
規定の計画に従って実施する予防的保守。
3.61
停止(shutdown)
発電状態から,静止又はアイドリングに移行するまでの,風車の過渡的な状態。
3.62
静止(standstill)
風力発電システムが止まっている状態。
3.63
支持構造物(support structure)
タワー及び基礎からなる風車の一部。
3.64
耐風速(廃止予定)[survival wind speed (deprecated)]
構造物が耐えるよう設計されている最大風速に対する慣用名称。
注記 JIS C 1400規格群では,この用語は用いていない。設計運転状態では,その代わりに優先使用
9
C 1400-2:2020 (IEC 61400-2:2013)
語として“極値風速”を用いる(3.19参照)。
3.65
小形風車[small wind turbine (SWT)],SWT
ロータの受風面積が200 m2以下の,風の運動エネルギーを電気エネルギーに変換するシステム。
注記 小形風車には,支持構造物を含む風車本体,風車コントローラ,(必要に応じて)充電コントロ
ーラ及びインバータ,配線及び断路器,マニュアル類(据付け,運転及び保守)並びに他の文
書を含む。
3.66
受風面積(swept area)
風向に垂直な平面に投影したロータが1回転中に描く面積。
3.67
風車試験クラス(turbine test class)
耐久性試験(13.4)の要求事項を満たすことが確認されたSWTクラス。
3.68
乱流強度(turbulence intensity)
平均風速に対する風速の標準偏差の比。この比は,指定の時間内に取得した風速測定データサンプルと
同一のデータセットから決定する。
3.69
終極限界状態(ultimate limit state)
一般に最大耐荷重能力に相当する限界状態(ISO 2394参照)。
3.70
計画外保守(unscheduled maintenance)
規定の計画保守ではなく,ある項目の状態に関して指摘を受けて実施する保守。
3.71
風上(upwind)
風の流れの主たる風向と反対の方向。
3.72
垂直軸風車(vertical axis wind turbine)
ロータの回転軸が風の流れに対しておおむね垂直な風車。
3.73
ワイブル分布(Weibull distribution)
風速に対してしばしば用いられる確率分布関数。
注記 この分布関数は,分布の幅を調整する形状パラメータ及び平均風速を調整する尺度パラメータ
の二つのパラメータによって決まる(3.75の風速分布を参照)。
3.74
(ウィンドシアー則における)風速プロファイル(wind profile-wind shear law)
地上高さに対する風速の変化に対して仮定される数学表現。
注記 通常,風速プロファイルが対数則の場合は式(1),指数則の場合は式(2)を用いる。
10
C 1400-2:2020 (IEC 61400-2:2013)
()
()
×
=
0
r
0
r
ln
ln
z
z
z
z
z
V
z
V
·································································· (1)
()
()
α
×
=
r
r
z
z
z
V
z
V
···································································· (2)
ここに,
V(z): 高さzにおける風速
z: 地上高さ
zr: プロファイルを合わせるために用いられる基準地上高さ
z0: 粗度長
α: 指数則風速プロファイルにおける指数
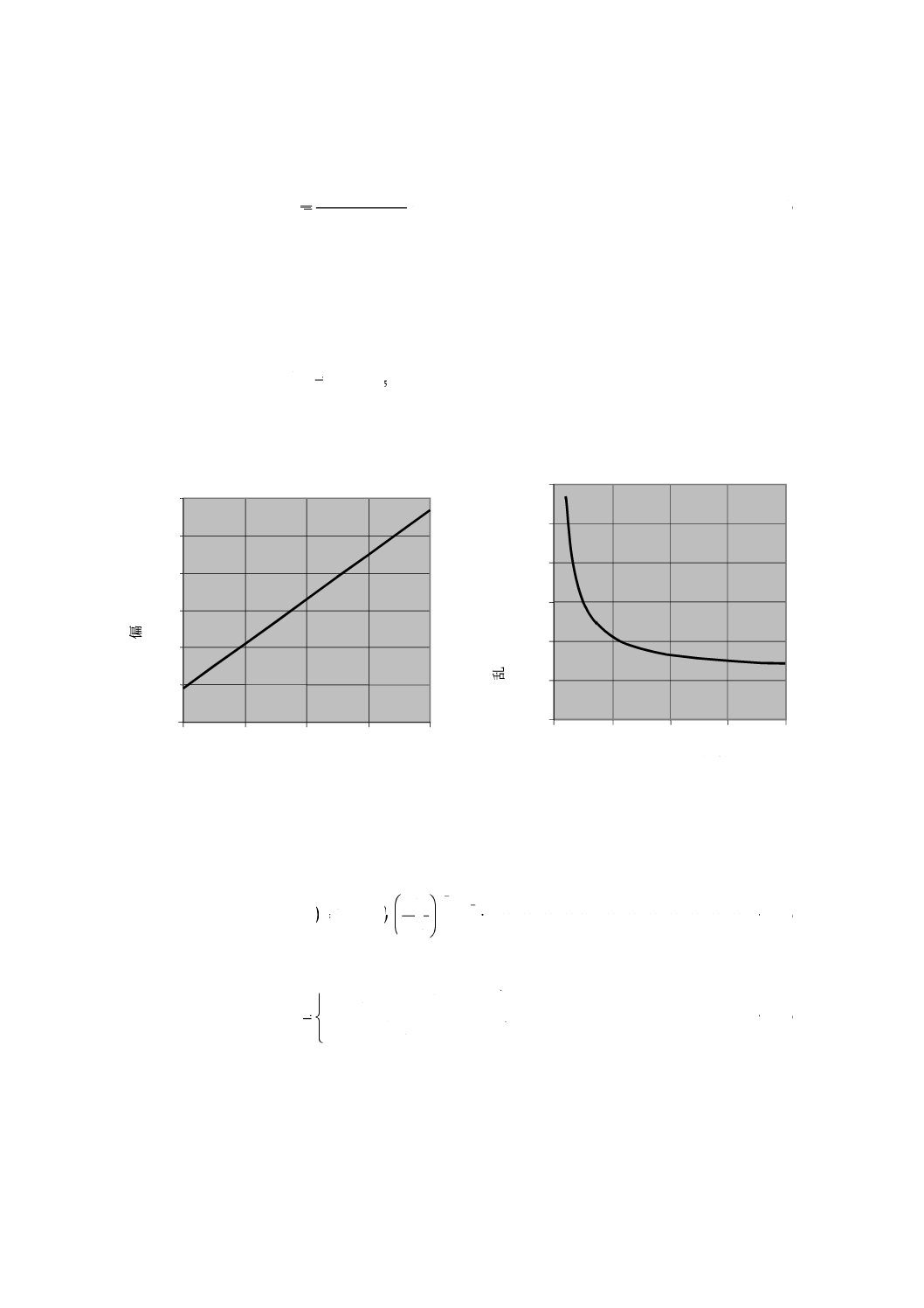
3.75
風速分布(wind speed distribution)
ある長時間内の風速の分布を記載するのに用いる確率分布関数。
注記 よく用いられる分布関数は,式(3)に示すレイリー分布関数PR(V0)及びワイブル分布関数PW(V0)
である。
{
}
−
−
=
2
ave
0
0
R
2
π
exp
1
V
V
V
V
P
<
{
}
−
−
=
k
C
V
V
V
P
0
0
W
exp
1
<
························································ (3)
ただし,
=
+
=
の場合)
(
π
2
2
π
1
1
ave
k
C
k
CΓ
V
··············································· (4)
ここに,
PR(V0): 累積確率関数,すなわち,V<V0の確率
V0: 限界風速
Vave: 風速Vの平均値
C: ワイブル分布関数の尺度パラメータ
k: ワイブル分布関数の形状パラメータ
Γ: ガンマ関数
C及びkは,実際のデータから求めることができる。レイリー関数は,k=2,かつ,C及び
Vaveがk=2の場合の式(4)で表す条件を満足する場合のワイブル分布関数に等しい。
分布関数は,風速がV0よりも小さい累積確率を表す。したがって,[P(V1)−P(V2)] は,指定
した範囲V1とV2との間で求めた場合,風速がこれらの範囲にあるのは時間にしてどのくらい
の割合かを示す。分布関数を微分することで,それに対応する確率密度関数が得られる。
3.76
ウィンドシアー(wind shear)
11
C 1400-2:2020 (IEC 61400-2:2013)
風向に対して垂直な面上の風速変化。
3.77
ウィンドシアーの指数(wind shear exponent)
ウィンドシアーの指数則の指数(α)(3.74参照)。
3.78
風速(wind speed)
空間中の指定の点において,その指定点周りの微小量の空気の運動の速さ。
注記 風速は局所の風速度(ベクトル)の大きさである(3.79参照)。
3.79
風速度(wind velocity)
対象点の微小量の空気の運動の方向を示すベクトル。その大きさは,この空気の“かたまり”の運動の
速さに等しい。
注記 したがって,任意点の速度は,その点を通って移動する空気のかたまりの位置ベクトルの時間
微分である。
3.80
ヨー運動(yawing)
鉛直軸周りのロータ軸の回転(水平軸風車だけに適用)。
3.81
ヨー角速度(yaw rate)
ヨー角の時間変化率,すなわち,ヨー運動の角速度。
3.82
ヨーミスアラインメント(yaw misalignment)
風車のロータ軸の風向に対する水平偏向量。
4
記号及び略語
4.1
一般
注記 記号・略語の意味が附属書と異なる場合は,該当する附属書内で定義される。
4.2
記号
この規格で用いる記号,添字,略号及びそれらの意味は,次による。
A
断面積
(m2)
Aproj
風向に直角又は平行な面へのコンポーネントの投影面積
(m2)
a
乱流標準偏差モデルの傾斜パラメータ
(−)
B
ブレードの枚数
(−)
C
ワイブル分布関数の尺度パラメータ
(m/s)
Cd
抗力係数
(−)
Cf
空力係数
(−)
Cl
揚力係数
(−)
CT
スラスト係数
(−)
Coh
コヒーレンス関数
(−)
D
ロータ直径
(m)
12
C 1400-2:2020 (IEC 61400-2:2013)
er
ロータ重心からロータ軸までの距離
(m)
F
力
(N)
FzB
翼根における翼幅方向の翼への力
(N)
Fx-shaft
軸方向の力
(N)
f
周波数
(Hz)
fk
材料強度の特性値
(−)
G
発電機の定格トルクと短絡トルクとの比
(−)
g
自由落下の加速度:9.81
(m/s2)
i
電流
(A)
IB
翼根のフラップ方向軸周りの慣性モーメント
(kg・m2)
I15
ハブ高さにおける10分平均風速15 m/sでの乱流強度の特性値
(−)
K
修正ベッセル関数
(−)
k
ワイブル分布関数の形状パラメータ
(−)
L
等方性乱流積分尺度パラメータ
(m)
Llt
つ(吊)り上げ点(支持点)とタワートップとの間の距離
(m)
Lrt
ロータ中心とヨー軸との間の距離
(m)
Lrb
ロータ中心と第1ベアリングとの間の距離
(m)
Lc
コヒーレンスの尺度パラメータ
(m)
Lk
速度成分の積分尺度パラメータ
(m)
MxB,MyB
翼根曲げモーメント
(Nm)
Mbrake
低速軸上のブレーキによるトルク
(Nm)
Mx-shaft
第1ベアリングにおけるロータ軸上のねじりモーメント
(Nm)
Mshaft
第1ベアリング(ロータに最も近い)における軸合成曲げモーメント
(Nm)
Mtower
つり上げ点の留め具におけるタワーの曲げモーメント
(Nm)
mB
翼質量
(kg)
moverhang
つり上げ点(支持点)からタワートップまでのタワーの質量
(kg)
mr
翼及びハブのロータ質量
(kg)
mtowertop
ナセル及びロータの合計質量
(kg)
N(.)
応力(又はひずみ)の関数として,根拠をもって示される破壊に至るまでのサ
イクル数(すなわち,特性S−N曲線)
(−)
N
極値状態の再現期間
(年)
n
ロータ回転数
(min−1)
ndesign
設計ロータ回転数
(min−1)
ni
荷重ビンiの疲労サイクルのカウント数
(−)
nmax
最大ロータ回転数
(min−1)
O
運転時間率
(%)
P
電力
(W)
PR(V0)
レイリー累積確率分布,すなわち,V<V0となる確率
(−)
PW(V0)
ワイブル累積確率分布
(−)
PH
ロータ回転数である基本励起振動数の高調波
(Hz)
13
C 1400-2:2020 (IEC 61400-2:2013)
p
生存確率
(−)
Q
ロータ軸トルク
(Nm)
Qdesign
設計ロータ軸トルク
(Nm)
R
ロータ半径
(m)
Rcog
翼重心とロータ中心との間の半径方向距離
(m)
r
投影されたベクトルの大きさ
(m)
S1(f)
主方向風速度成分のパワースペクトル密度関数
(m2/s)
Sk
片側速度成分スペクトル
(m2/s)
si
ビンiにおけるサイクル総数に関連する応力(又はひずみ)レベル
(−)
T
ガスト特性時間
(s)
t
時間
(s)
Td
設計寿命
(s)
TE
解析から除外される時間
(h)
TN
風車が運転していないと判明している時間
(h)
TT
評価期間(耐久性試験中の全考察期間)
(h)
TU
風車の状態が不明の期間
(h)
U
電位差(電圧)
(V)
V
風速
(m/s)
V(z)
高さzにおける風速
(m/s)
Vave
ハブ高さにおける年平均風速
(m/s)
Vcg
ロータ受風面全域の極値コヒーレントガストの大きさ
(m/s)
Vdesign
設計風速
(m/s)
VeN
再現期間N年の期待極値風速(3秒間平均)。Ve1及びVe50は,それぞれ1年及び
50年に対応する。
(m/s)
VgustN
期待再現期間N年におけるガストの大きさの最大値
(m/s)
Vhub
ハブ高さにおける10分間平均風速
(m/s)
Vin
カットイン風速
(m/s)
Vmaint
点検,サービス又は保守のために小形風車を停止することが可能な風速(10分
平均値)
(m/s)
Vmax,shutdown
製造業者が通常停止を許容する最大風速
(m/s)
V0
風速分布モデルにおける限界風速
(m/s)
Vout
カットアウト風速
(m/s)
Vref
10分平均基準風速
(m/s)
Vtip
翼端の周速
(m/s)
V(z,t)
極値ガスト及びシアの状態の瞬間変化を記述するための風速度の主方向成分
(m/s)
W
応力計算で用いられる断面係数
(m3)
x,y,z
風の流れ場の記述に使用する座標系。風の方向(主方向),風と直角方向(横方
向)及び高さ方向に対応する。
(m)
zhub
小形風車のハブ高さ
(m)
zr
基準地上高さ
(m)
14
C 1400-2:2020 (IEC 61400-2:2013)
z0
対数則風速プロファイルにおける粗度長
(m)
α
指数則風速プロファイルにおける指数
(−)
β
極値風向変化モデル及び極値運転ガストモデルのパラメータ
(−)
Γ
ガンマ関数
(−)
γf
荷重の部分安全率
(−)
γm
材料の部分安全率
(−)
Δ
範囲(幅)
(−)
θ(t)
風向の瞬時変化
(°)
θcg
ガスト下における平均風速方向からの最大角度偏差
(°)
θeN
再現期間N年の極値風向変化
(°)
η
出力電力とロータ出力との間のコンポーネント(代表的には発電機,ギアボッ
クス,変換システム)の効率
(−)
Λ1
主方向のパワースペクトル密度fS1(f)/σ12が0.05に等しくなる無次元の波長とし
て定義される乱流尺度パラメータ
(m)
λ
翼端の周速比
(−)
ρ
大気密度,ここでは1.225と仮定
(kg/m3)
σ1
ハブ高さにおける主方向風速度の標準偏差
(m/s)
σ2
ハブ高さにおける鉛直方向風速度の標準偏差
(m/s)
σ3
ハブ高さにおける横方向風速度の標準偏差
(m/s)
σd
設計応力
(MPa)
σk
ハブ高さにおけるk番目風速度成分の標準偏差(k=1,2又は3)
(m/s)
ωn
ロータの角速度
(rad/s)
ωyaw
ヨー角速度
(rad/s)
ωyaw,max
最大ヨー角速度
(rad/s)
添字:
ave
平均
B
翼
design
簡易化された設計式の入力パラメータ
e1
1年1回の極値(3秒間平均)
e50
50年1回の極値(3秒間平均)
hub
ハブ
max
最大
overhang
つり上げ点からタワートップまでのタワー部分の記述
r
ロータ
shaft
軸
x
x方向
y
y方向
z
z方向
15
C 1400-2:2020 (IEC 61400-2:2013)
略語:
asl
海抜(above sea level)
AEP
年間発電電力量(Annual Energy Production)
RAE
基準年間発電電力量(Reference Annual Energy)
AC
交流(Alternating current)
DC
直流(Direct current)
CFD
数値流体力学(Computational Fluid Dynamics)
DLC
設計荷重ケース(Design load case)
ECD
風向変化を伴う極値コヒーレントガスト(Extreme coherent gust with direction change)
ECG
極値コヒーレントガスト(Extreme coherent gust)
EDC
極値風向変化(Extreme wind direction change)
EMC
電磁両立性(Electromagnetic compatibility)
EOG
運転中の極値ガスト(Extreme operating gust)
EWC
極値風条件(Extreme wind conditions)
EWM
極値風速モデル(Extreme wind speed model)
F
疲労(Fatigue)
FMEA
故障モード及び影響解析(Failure Mode and Effects Analysis)
FMECA
故障モード影響及び致命度解析(Failure Mode Effects and Criticality Analysis)
GFCI
漏電遮断器(Ground fault circuit interrupter)
HAWT
水平軸風車(Horizontal axis wind turbine)
NTM
通常乱流モデル(Normal turbulence model)
NWC
通常風条件(Normal wind conditions)
NWP
通常風速プロファイルモデル(Normal wind profile model)
OWC
その他の風条件(Other wind conditions)
S
特別IEC風車クラス(Special IEC wind turbine class)
SWC
標準風条件(Standard wind conditions)
SWT
小形風車(Small wind turbine)
U
終極(Ultimate)
UV
紫外線(Ultra violet)
VAWT
垂直軸風車(Vertical axis wind turbine)
4.3
座標系
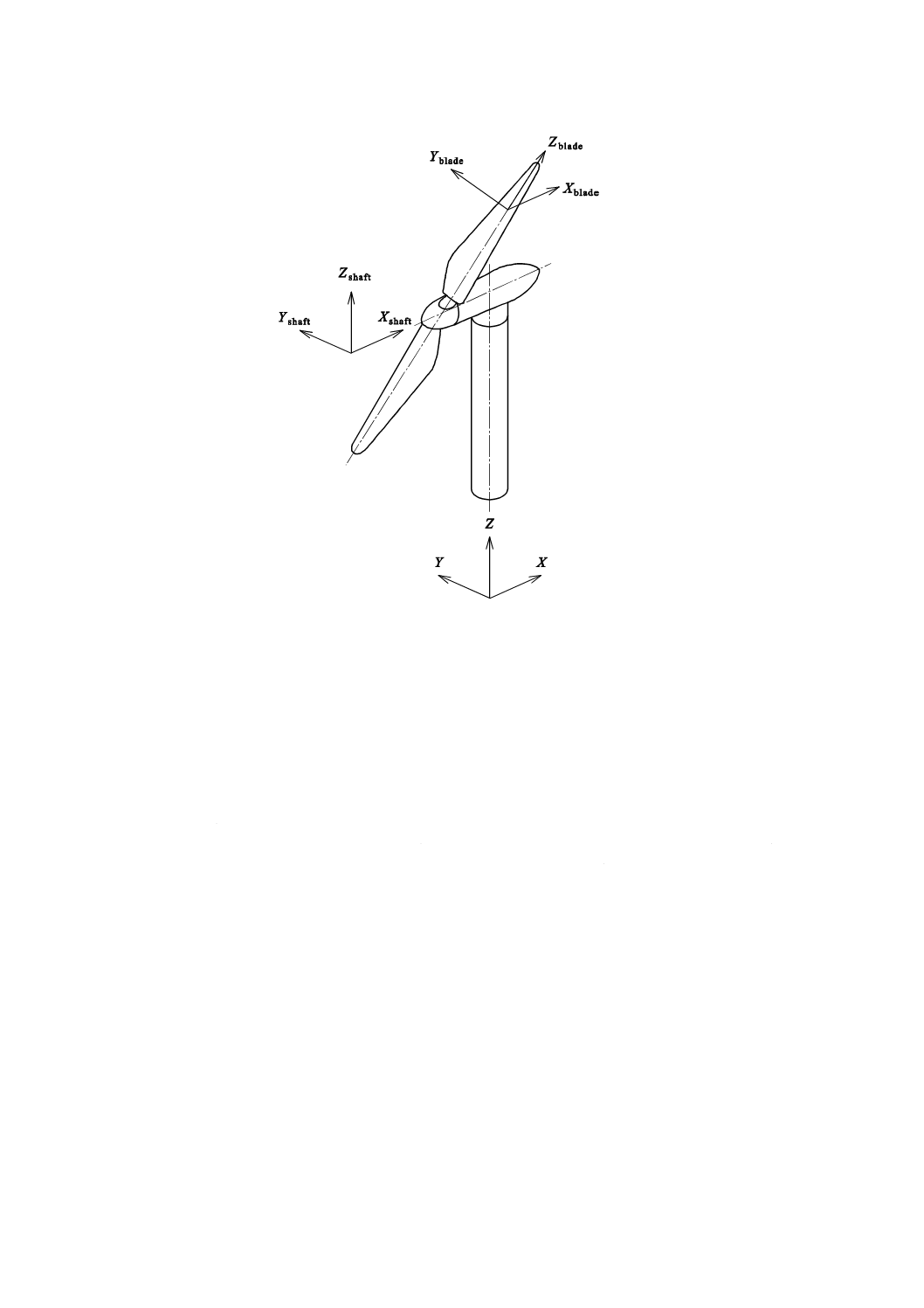
水平軸風車(HAWT)の荷重の方向を定義するために,図1に示す座標系を用いる。
16
C 1400-2:2020 (IEC 61400-2:2013)
タワー座標系
Xは風下の方向に正,Zは上方に正,及びYは右手系の方向に正となるように定める。
タワーの座標系は,固定座標系を用いる。
軸座標系
Xshaftは,X軸周りの正モーメントが回転方向に働く方向(Xshaft及び正モーメントが右ねじになる方向)とする。
Yshaft及びZshaftは用いず,合成モーメントを表現するときだけに用いる。
軸座標系は,ナセルとともに回転する座標系を用いる。
翼座標系
Xbladeは,X軸周りの正モーメントが回転方向に働く方向(Xblade及び正モーメントが右ねじになる方向)とする。
Ybladeは,正モーメントが翼先端を風下へ曲げるように働く方向とする。
Zbladeは,翼先端方向を正とする。
翼座標系は,風上から見たときに,時計方向に回転するロータに対しては右手系に従い,反時計回りに回転するロ
ータに対しては左手系に従うことに注意する。翼座標系は,ロータとともに回転する座標系を用いる。
図1−HAWTの座標系の定義
17
C 1400-2:2020 (IEC 61400-2:2013)
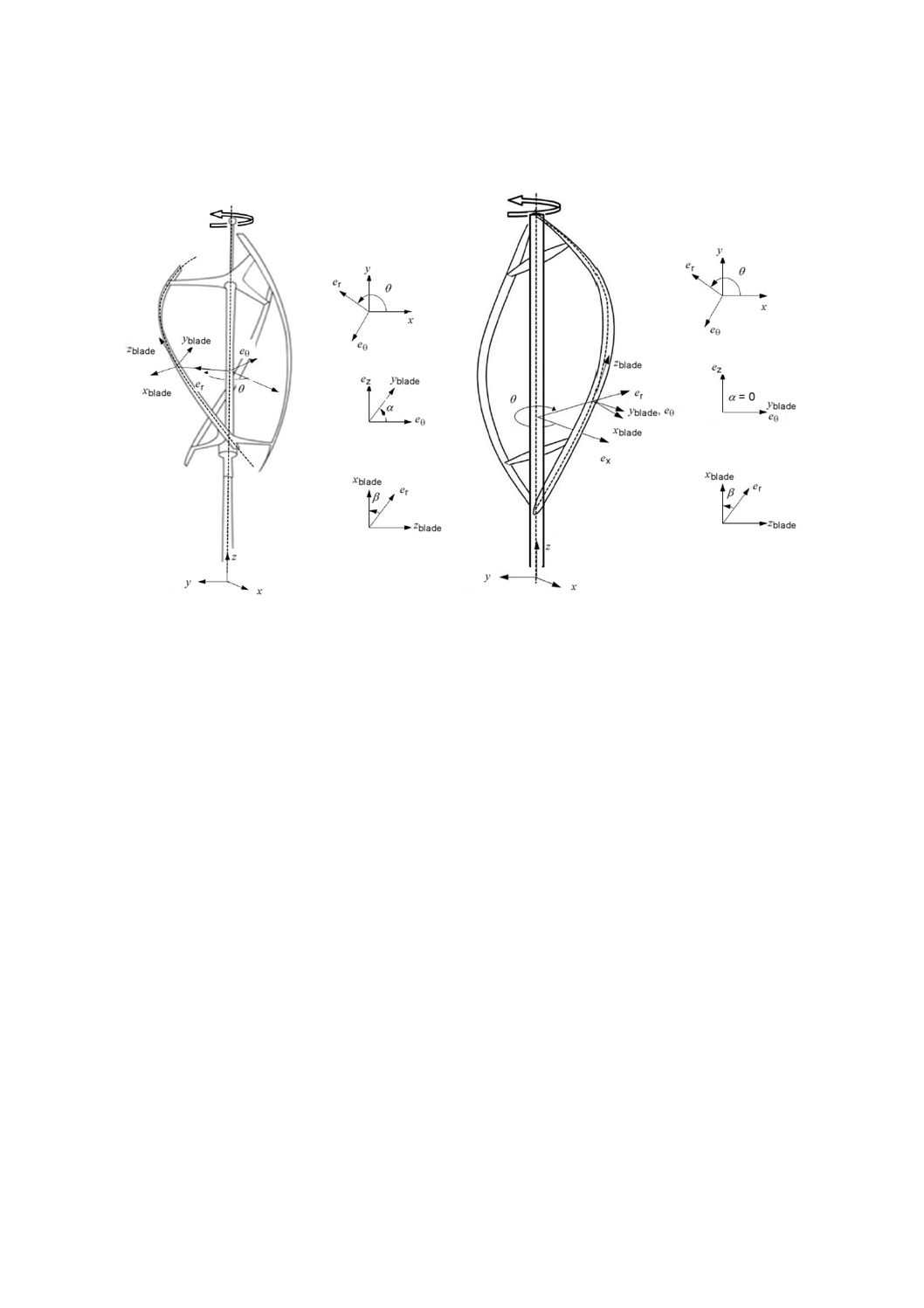
垂直軸風車(VAWT)の荷重の方向を定義するために,図2に示す座標系を用いる。
タワー座標系
xは風下の方向に正,zは上方に正,及びyは右手系の方向に正となるように定める。
ロータ座標系
ロータ座標系はz軸を回転軸とする円筒座標系とする。
角度θ=(ex,er)は風下方向xから定める。(er,eθ,ez)は右手系である。
翼座標系
zbladeは翼の基準線の接線方向にあり,上向きを正とする。
ybladeはzbladeとラジアル方向ベクトルerに直交し,回転方向を正とする。
xbladeをこれらに加えて右手系が完成する(xbladeは翼に垂直である。)。
注記 ロータがz軸の負の方向に対して平板直線翼の翼(傾斜角及びひねり角は,共にゼロ)の場合には,翼座標系は
ロータ座標系と一致する。
図2−VAWTの軸系の定義
ひねり角
傾斜角
ひねり角
傾斜角
18
C 1400-2:2020 (IEC 61400-2:2013)
5
主要構成要素
5.1
一般事項
風車の構造,機械,電気及び制御システムの安全性を確保するための工学的及び技術的要求事項を箇条
5〜箇条12に示す。要求事項の仕様は,適切かつ十分な文書によって,風車の設計,製造,据付け及び保
守,並びに関連する品質管理プロセスに適用する。
5.2
設計方法
この規格が対象とする小形風車の設計方法は,図3による。種々の風車形状に対して,簡易的なアプロ
ーチを認める。受風面積が2 m2以下の風車の場合,設計評価の一部として,主要な支持構造物だけを考慮
する(11.2.3.2参照)。
設計荷重は,次の三つの方法のいずれか又は組合せによって取得される。これらの設計荷重を,“設計デ
ータ検証試験”(13.2参照)の測定によって検証する。
なお,設計データ取得のための室内試験は,開発の初期に実施するのがよい。
1) 簡易荷重計算法
ある種の風車形状については,簡易荷重計算法を規定する。荷重ケースと風車仕様(構成)との限
定的な組合せは,簡易的な計算式及び外部条件とともに,7.4に規定する。この簡易計算式で仮定した
風車データは,“設計データ検証試験”(13.2参照)によって検証する。
2) シミュレーションモデル
シミュレーションモデルは,乱流条件及び6.3.3に定義するその他の極値風条件,並びに7.5に定義
する設計運転状態を用いて,所定の風速範囲における荷重を決定するために用いる。この手法は,風
車及び適用された適切な仮定を構造の動的シミュレーションモデルと結合するものである。この仮定
は,“設計データ検証試験”(13.2参照)によって検証する。
該当する全ての外部条件及び設計運転状態の組合せを解析する。この規格では,最小限の組合せを,
荷重ケースとして定義している。
3) 実スケール荷重計測
荷重の外挿を含む実スケール荷重を測定する(7.6参照)。
これらの方法は,それぞれ異なる不確かさをもつ。したがって,用いる荷重推定方法ごとに,異なる安
全率の組合せ(7.8参照)を適用する。
全ての風車に対して,静的翼試験(13.5.2参照)を要求する。その他の荷重を担うコンポーネントの適
合性を立証するために,計算,試験,又はこれらの両方を要求する。試験条件は,関連する安全率を含め
た設計荷重を反映させる。
最終的に,全ての風車に対して,“安全性及び機能試験”(13.6参照)及び“耐久性試験”(13.4参照)を
要求する。
5.3
品質保証
品質保証は,小形風車及びその全てのコンポーネントの設計,調達,製造,据付け,運転及び保守にお
いて要求する。
品質システムは,JIS Q 9000シリーズの要求事項に適合することが望ましい。
19
C 1400-2:2020 (IEC 61400-2:2013)
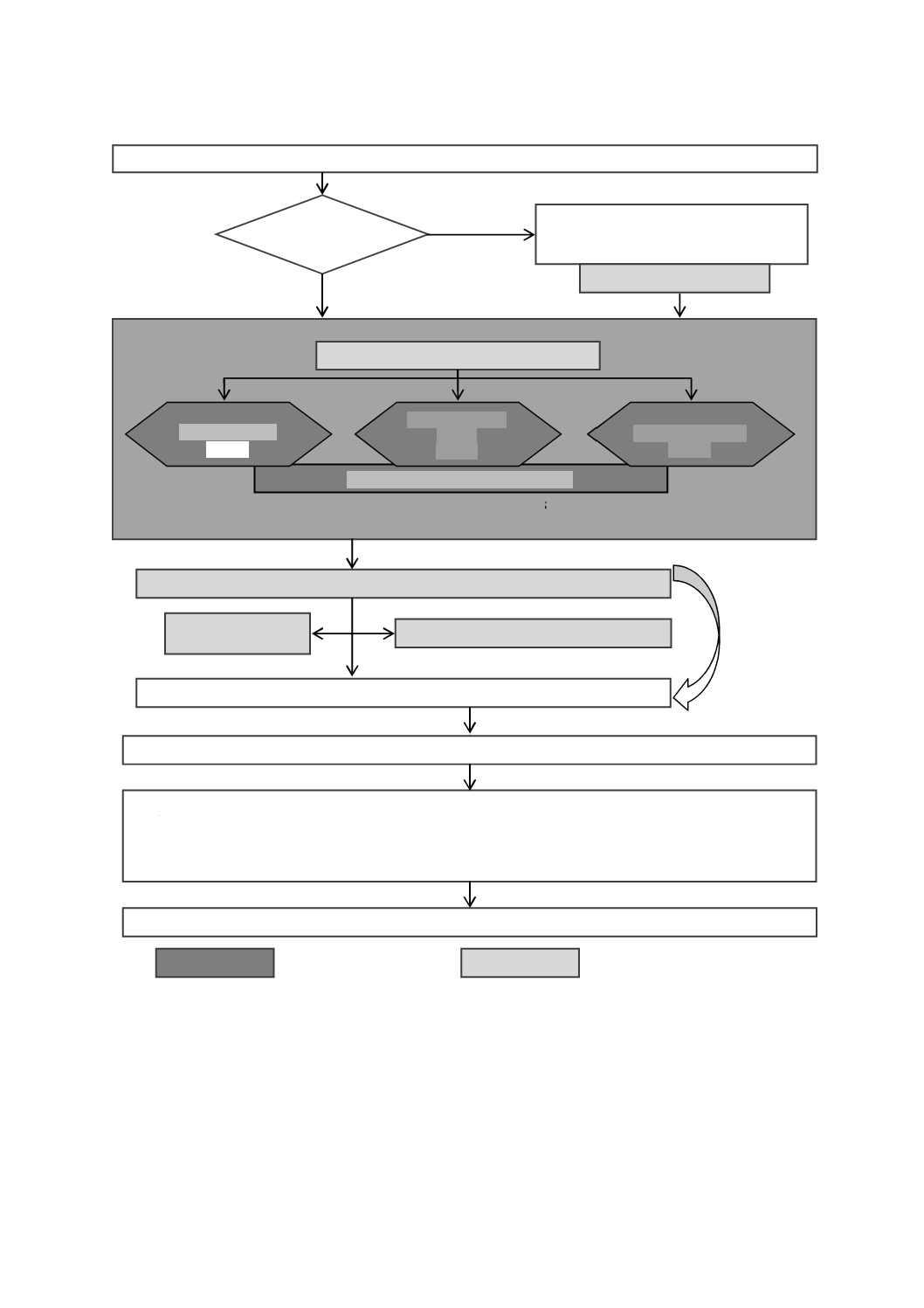
図3−この規格における判定ルート
第1章 設計評価
6
外部条件
6.1
一般事項
風車は,荷重,耐久性及び運転に影響を与える,環境条件及び電気的条件にさら(曝)される。適切な
荷重解析のための設計手法
SWTクラス(6.2),風条件(6.3),環境条件(6.4),電気負荷及び接続形式(6.6)を定義
風条件及び環境条件(附属書B),
利用モデル及び重要な設計パラメータ値
の定義
SWTクラスSで
あるか?
環境試験(13.7)
設計データ検証試験(13.2)
安全係数(7.8)及びその他荷重(7.3.5)
注a) 風車構成要求事項を満たさなければいけない。[ロータ受風面積が2 m2以下の風車で最大ヨー角周波数
は,3 s−1 とする。(7.4.3)]
簡易荷重計算法a)
(7.4)
シミュレーション
モデル
(7.5)
実スケール荷重計測
(7.6)
静的翼試験を含む機械部品試験(13.5)
安全性及び機能試験(13.6)
耐久試験
(13.4)
固有振動数解析(附属書I),限界状態解析及び臨界変形解析(7.9)
電気要件(9)−サージ保護装置,回路,適切なキャビネット,絶縁,接地,導体,などを含む
風車用支持構造物(10)
・2 m2超える:システムの一部を構成する支持構造物は10.1に,サンプル基礎システムは10.5による
・2 m2以下:基礎要件は10.5による
・風車の動的評価(試験又は計算)(10.2)
・タワーを登り,タワーを上下させる設計荷重を考慮する(10.6)
文書(11)及び風車の表示(12)
=試験
=解析/計算
Yes
No
全ての載荷部品は,
計算,試験又は両方
を実施する。
20
C 1400-2:2020 (IEC 61400-2:2013)
レベルの安全性及び信頼性を確保するため,環境,電気及び土壌のパラメータを考慮して設計し,これら
のパラメータを,設計文書に明確に記載する。
環境条件は,風条件,その他の環境条件に分けられる。電気的条件は,電力系統の条件,又はバッテリ,
ハイブリッドシステム,ローカルグリッドなどの局所の電気的条件のいずれかに関係する。土壌特性は,
風車の基礎の設計に関係する。
風条件は,構造の健全性に対する,主要な外部考慮事項である。また,その他の環境条件は,制御シス
テムの機能,耐久性,腐食などの設計特性に影響を与える。
それぞれの外部条件は,通常外部条件及び極値外部条件に分けられる。通常外部条件は,一般的に長期
間の構造への荷重条件及び運転条件に関係する。一方,極値外部条件は,頻度としてはまれではあるが,
潜在的に重大な外部設計条件を示す。設計荷重ケースは,風車の運転モードとこれらの外部条件との組合
せによって構成される。
6.2
SWTクラス
設計上考慮する外部条件は,計画サイト又は風車設置サイトの種別に依存する。SWTクラスは,風速及
び乱流パラメータによって定義する。風速及び乱流パラメータの値は,多くの異なるサイトの代表的な特
性値を表現することを意図しており,ある特定のサイトを正確に表すものではない。小形風車をクラス分
けする目的は,風によって影響される強じん(靱)性を明確に分類することである。表1は,SWTクラス
を定義する基本パラメータを示している。
SWTクラスの目的は,大部分の適用事例を網羅することである。また,経験する可能性があるその他の
風条件に関する参考文書を附属書Lとして示す。特殊な設計[例えば,特殊な風条件,その他の風条件(附
属書Lによる),その他の外部条件,又は特殊な安全クラス]が必要となる場合,追加のSWTクラスとし
て,クラスSを設定する。SWTクラスSに対する設計値は,設計者が定め,設計文書に記載する(附属書
B参照)。このような特殊な設計の場合,設計運転状態として選択する値は,風車の使用に対して想定され
る値よりも苛酷な環境条件を反映させる。
SWTクラスI,II,III及びIVに対して定義する特定の外部条件は,洋上条件,又はハリケーン,サイク
ロン及び台風のような熱帯低気圧で経験される風条件を網羅することを意図しない。このような条件は,
SWTクラスSの設計において要求される場合がある(附属書B,附属書K及び附属書L参照)。
なお,熱帯低気圧などで発生する風条件の評価方法には,JIS C 1400-1などがある。
表1−SWTクラスの基本パラメータ
SWTクラス
I
II
III
IV
S
Vref
(m/s)
50
42.5
37.5
30
設計者が指定する値
Vave
(m/s)
10
8.5
7.5
6
I15
(−)
0.18
0.18
0.18
0.18
a
(−)
2
2
2
2
この表の値は,ハブ高さにおいて適用する。
I15は,風速15 m/sでの乱流強度の無次元特性値であり,0.18を最小値として用いる。この値は,附属書Lに表示
する乱流強度に関する観測結果に一致する。
aは,式(7)で用いられる無次元傾斜パラメータである。
風車設計で用いる外部条件を完全に規定するには,これらの基本パラメータのほかに,幾つかの重要な
追加パラメータが必要である。
21
C 1400-2:2020 (IEC 61400-2:2013)
標準SWTクラスであるSWTクラスI〜IVに対する追加パラメータの値は,6.3,6.4及び6.6に規定す
る。
この箇条6の細分箇条の見出しに括弧書きで追加した略語は,シミュレーションモデル(7.5)中で定義
する設計荷重ケースの風条件を記載するときに用いる(単純な荷重計算の場合,風条件も同様に簡素化さ
れる。)。
SWTクラスSの場合,製造業者は設計文書に,用いたモデル及び重要な設計パラメータの値を記載する。
この6.2に規定するクラスを採用する場合には,パラメータの値を記載するだけでよい。SWTクラスSの
設計文書には,附属書Bに規定する情報を記載する。
設計寿命は,設計文書に明確に記載する。
6.3
風条件
6.3.1
一般事項
風車は,選択したSWTクラスによって定義する風条件に対して,安全に耐えるように設計する。風条
件の設計値は,設計文書に明確に記載する。荷重及び安全性を検討するための風条件は,風車の通常運転
中に頻繁に発生する通常風条件(NWC)と1年又は50年の再現期間に起こるものとして定義される極値
風条件(EWC)とに分類する。
この規格では,通常風条件と極値風条件との組合せ及び四つのSWTクラスI〜IVを併せて,標準風条件
(SWC)として定義する。また,附属書Lにおいてその他の風条件(OWC)を示す。
全ての風条件において,水平面に対して最大8°までの平均流の傾斜角による影響を考慮する。傾斜角
は,高さ方向には変化しないものと仮定してもよい。ロータ面の傾斜角に関してファーリングの方向の選
択を誤ると,傾いて流入する風がファーリングに影響を与える可能性があるので,注意する。
6.3.2
通常風条件
6.3.2.1
風速分布
サイトにおける風速分布は,それぞれの荷重条件の発生頻度を決定するため,風車設計において重要で
ある。標準SWTクラスの場合,設計荷重計算に対して,10分平均風速はレイリー分布に従うと仮定する。
この場合,ハブ高さにおける風速の累積確率分布は,式(5)による。
(
)
−
−
=
2
ave
hub
hub
R
2
π
exp
1
V
V
V
P
······················································· (5)
6.3.2.2
通常風速プロファイルモデル(NWP)
風速プロファイルV(z)は,平均風速を地上高さzの関数で表したものである。標準SWTクラスの場合,
通常風速プロファイルは,式(6)の指数則と仮定する。
()
α
=
hub
hubz
z
V
z
V
······································································ (6)
指数αは,0.2とする。
仮定した風プロファイルを用いて,ロータの受風面の平均鉛直ウィンドシアーを定義する。
6.3.2.3
通常乱流モデル(NTM)
通常の乱流モデルには,6.3.2.2のNWPに規定するウィンドシアーを含める。“乱流”とは,10分平均風
速に対する風速の確率的変動を表す。乱流モデルには,風速変化,風向変化及び回転ブレード系サンプリ
ングの影響を含む。標準SWTクラスの場合,不規則な風速度のベクトル場におけるパワースペクトル密
22
C 1400-2:2020 (IEC 61400-2:2013)
度は,モデルの中で明確に用いるか否かを問わず,次の要求事項を満足する。
a) 風速の主方向成分の標準偏差は,式(7)による1)。
(
)
1
15
hub
15
1
+
+
=
a
aV
I
σ
····································································· (7)
ここに,I15及びaの値は,表1による。また,標準偏差σ1及び乱流強度σ1/Vhubの特性値は,図4
に示す。
注1) 表4に規定する荷重ケースにその他の荷重ケースを加えて計算する場合,異なる分位値を用
いることが適切な場合もある。その分位値は,次の式で求めた値を式(7)の解へ追加すること
で決定される。
(
)15
1
1
2
I
x
Δ
−
=
σ
ここに,xは正規確率分布関数から求める。例えば,第95 %分位値に対するxは,1.64で
ある。
0
1.0
2.0
3.0
4.0
5.0
6.0
0
10
20
30
40
風速 Vhub (m/s)
標
準偏
差
σ1
(
m
/s
)
図4−乱流の特性
b) 慣性小領域の高周波数側では,乱流の主方向成分のパワースペクトル密度S1(f) は,式(8)に漸近する。
()
()
3
5
3
2
hub
1
2
1
1
05
.0
−
−
=
f
V
Λ
f
S
σ
························································ (8)
c) 乱流尺度パラメータΛ1は,式(9)による。
(
)
(
)
=
の場合
≧
の場合
<
m
30
m
21
m
30
7.0
hub
hub
hub
1
z
z
z
Λ
················································· (9)
これらの要求事項を満たす乱流の統計的モデルの仕様を,附属書Cに示す。また,乱流の統計的記
述に基づく簡易化された決定論的モデルを,附属書Dに示す。この決定論的モデルは,回転ブレード
系風速度に対して,風車翼の応答が十分に減衰することが実証できるときに用いることができる。こ
の検証に対する指針も,附属書Dに示す。
0
10
20
30
50
40
60
0
10
20
30
40
風速 Vhub (m/s)
乱
流
強
度
σ
1
/V
h
ub
(
%
)
IEC 2899/13
23
C 1400-2:2020 (IEC 61400-2:2013)
6.3.3
極値風条件
6.3.3.1
一般事項
極値風条件を用いて,風車に加わる極値風荷重を決定する。これらの条件は,暴風による極大風速,並
びに風速及び風向の急激な変化を含む。また,これらの極値条件は,乱流の潜在的な影響も含め,設計計
算においては決定論的な影響だけを考慮するようにする。
6.3.3.2
極値風速モデル(EWM)
再現期間50年の極値風速Ve50及び再現期間1年の極値風速Ve1は,基準風速Vrefに基づく。標準SWT
クラスにおける風車設計では,3秒ガストの極値風速Ve50及びVe1は,式(10)及び式(11)によって計算する。
()
11
.0
hub
ref
50
e
4.1
=
z
z
V
z
V
····························································· (10)
05
e
1e
75
.0 V
V=
···········································································(11)
ここに,
zhub: ハブ高さ。1.4は,ハブ高さのガスト係数である。
また,平均風向から±15°の短周期偏差を仮定する。
6.3.3.3
運転中の極値ガスト(EOG)
再現期間N年のハブ高さにおける極値ガストの大きさVgustNは,標準SWTクラスの場合,式(12)によっ
て計算する。
+
=
1
1
gustN
1.0
1
Λ
D
V
σ
β
······························································ (12)
ここに,
σ1: 式(7)で与えられる標準偏差
Λ1: 式(9)で与えられる乱流尺度パラメータ
D: ロータ直径
β=4.8(N=1の場合)又はβ=6.4(N=50の場合)
再現期間N年の風速は,式(13)によって定義する。
()
()
(
)
()
(
)
−
−
=
の場合
>
及び
<
の場合
≦
≦
T
t
t
z
V
T
t
T
t
T
t
V
z
V
t
V
0
0
π
2
cos
1
π
3
sin
37
.0
gustN
········ (13)
ここに,
V(z): 式(6)に定義する。
T=10.5(秒)(N=1の場合)又はT=14.0(秒)(N=50の場合)
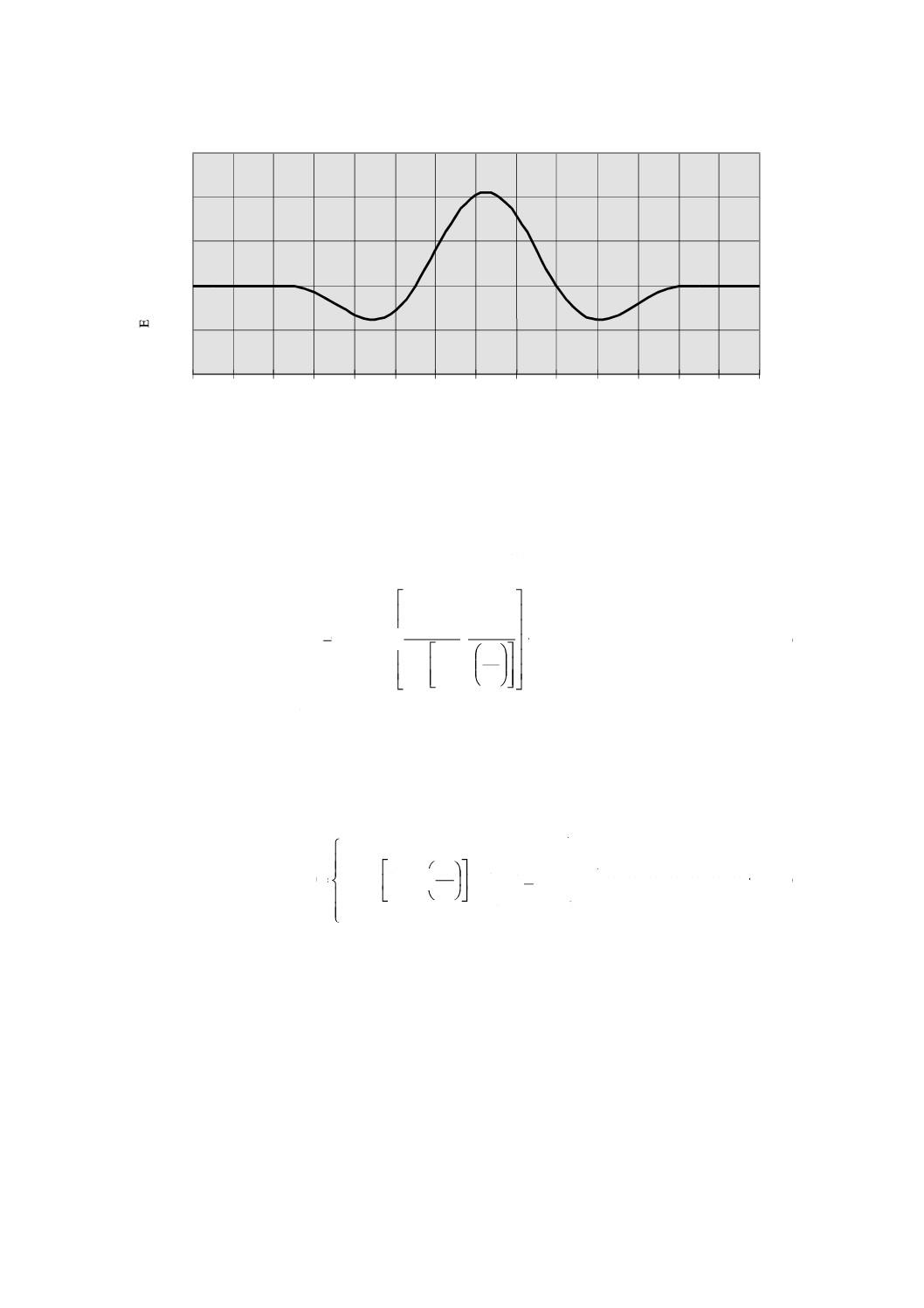
再現期間1年及びVhub=25(m/s)における運転中の極値ガストの例を,図5に示す。
24
C 1400-2:2020 (IEC 61400-2:2013)
図5−運転中の極値ガストの例[N=1及びVhub=25(m/s)]
二つの再現期間に対するパラメータ値は,同じ最大上昇率が得られるように選択する。
6.3.3.4
極値風向変化(EDC)
再現期間N年の極値風向変化量θeNは,式(14)によって計算する。
()
+
±
=
1
hub
1
eN
1.0
1
arctan
Λ
D
V
t
σ
β
θ
············································· (14)
ここに,
θeN: ±180°の間隔に制限される。
Λ1: 式(9)で与えられる乱流尺度パラメータ
D: ロータ直径
β=4.8(N=1の場合)及びβ=6.4(N=50の場合)
再現期間N年の過渡的な極値風向変化θN(t) は,式(15)による。
()
(
)
(
)
(
)
−
=
の場合
>
の場合
≦
≦
の場合
<
T
t
T
t
T
t
t
t
eN
eN
N
0
π
cos
1
5.0
0
0
θ
θ
θ
······························ (15)
ここに,T=6(秒)を極値風向変化の過渡状態継続時間とする。符号は,最悪の過渡状態が生じるよう
に選択する。風向変化の過渡的状態が終了した後,風向は変わらないものと仮定する。
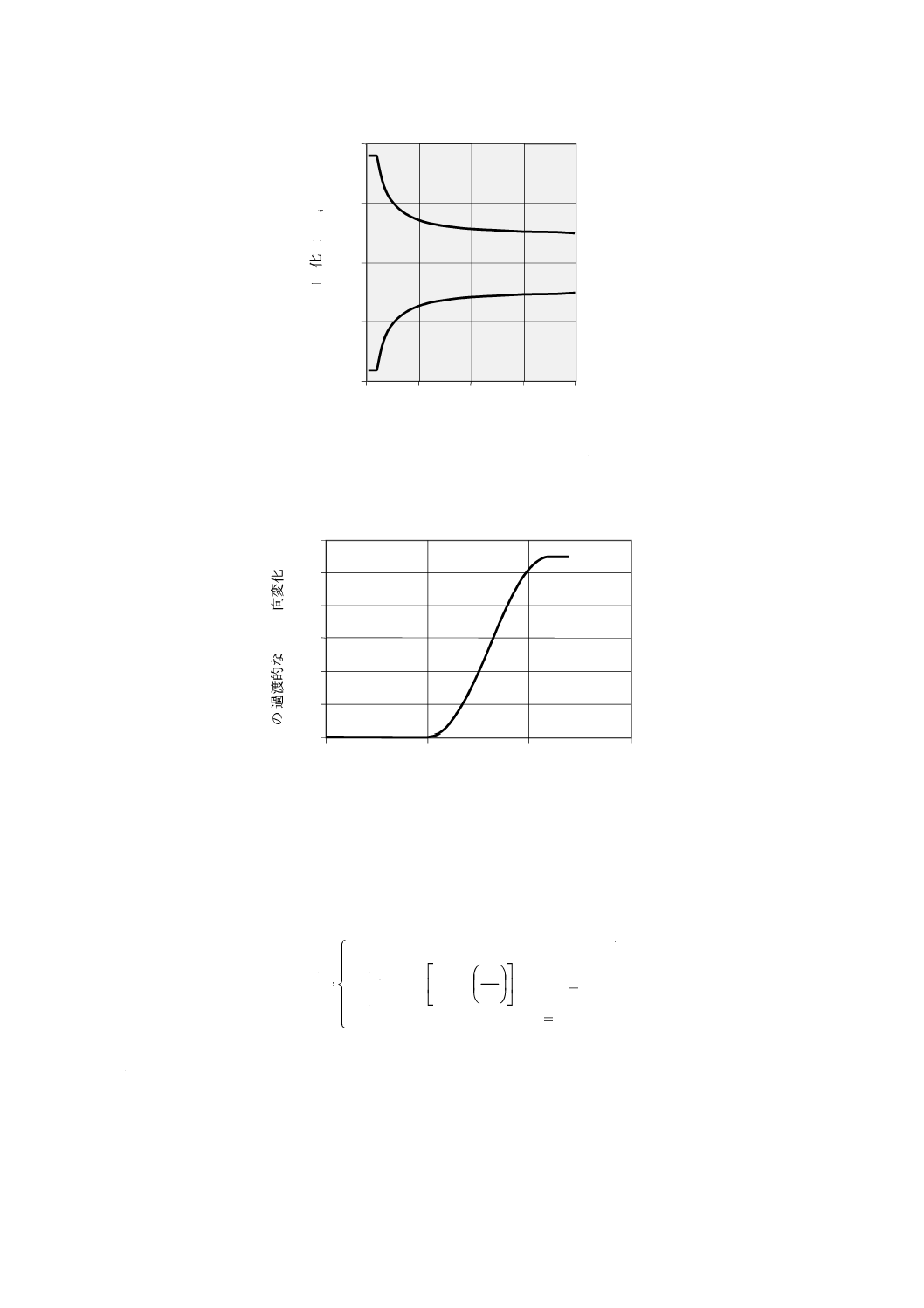
再現期間50年及びVhub=25(m/s)における極値風向変化の例を,図6及び図7に示す。
15
20
25
30
35
40
‒2
‒1
0
1
2
3
4
5
6
7
8
9
10
11
12
時間 t (s)
E
O
G
風
速
V
hu
b
(
m
/s
)
25
C 1400-2:2020 (IEC 61400-2:2013)
図6−極値風向変化量の例[N=50,D=5(m)及びzhub=20(m)]
図7−過渡的な極値風向変化の例[N=50及びVhub=25(m/s)]
6.3.3.5
極値コヒーレントガスト(ECG)
標準SWTクラスの風車設計の場合,Vcg=15(m/s)の大きさの極値コヒーレントガストを仮定する。風
速は,式(16)に定義する。
()
()
(
)
()
(
)
()
(
)
+
−
+
=
の場合
≧
の場合
≦
≦
の場合
≦
T
t
V
z
V
T
t
T
t
V
z
V
t
z
V
z
t
V
cg
cg
0
π
cos
1
5.0
0
,
····················· (16)
ここに,T=10(秒)を立ち上がり時間とする。また,風速は,式(6)に規定する通常風速プロファイル
モデルを用いる。Vhub=25(m/s)における極値コヒーレントガストを,図8に示す。
0
10
20
30
40
50
60
-5
0
5
10
時間 t (s)
E
D
C
の
過
渡
的
な
極
値
風
向
変
化
θ
N
(t
)
IEC 2901/13
‒200
0
200
0
10
20
30
40
風速 Vhub (m/s)
E
D
C
の
風向
変化
量
θe
N
(°
)
100
‒100
IEC 2900/13
26
C 1400-2:2020 (IEC 61400-2:2013)
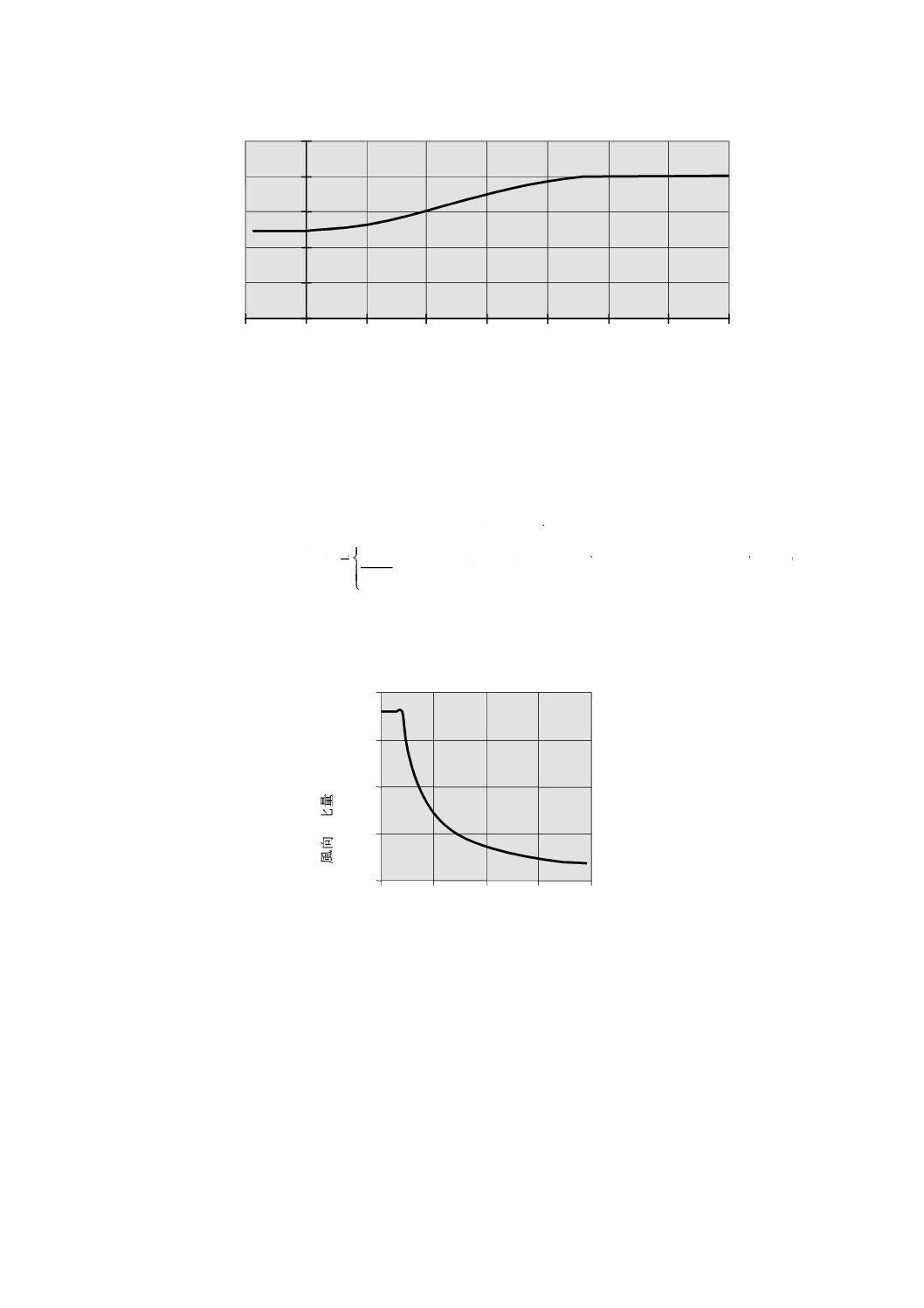
図8−極値コヒーレントガスト[Vhub=25(m/s)](ECG)
6.3.3.6
風向変化を伴う極値コヒーレントガスト(ECD)
ここでは,風速の立ち上がり(6.3.3.5及び図8参照)は,風向変化θcgと同時に発生すると仮定する。
ここに,θcgは,式(17)に定義する。
(
)
(
)
(
)
°
°
=
の場合
≦
≦
の場合
<
ref
hub
hub
hub
hub
cg
s
m
4
720
s
m
4
180
V
V
V
V
V
θ
······························· (17)
Vhubに対する風向変化量θcg及びVhub=25(m/s)における風向の時間変化θ(t) を,それぞれ図9及び図
10に示す。
図9−ECDの風向変化
0
50
100
150
200
0
10
20
30
40
風速 Vhub (m/s)
風
向
変
化
量
θ
c
g
(
°)
IEC 444/06
0
10
20
30
40
50
‒2
0
2
4
6
8
10
12
14
時間 t (s)
風
速
V
(
t)
(
m
/s
)
IEC 443/06
27
C 1400-2:2020 (IEC 61400-2:2013)
図10−Vhub=25(m/s)の場合の風向の時間変化
同時に発生する風向変化は,式(18)による。
()
(
)
(
)
(
)
±
−
±
°
=
の場合
>
の場合
≦
≦
の場合
<
T
t
T
t
T
t
t
t
cg
cg
0
π
cos
1
5.0
0
0
θ
θ
θ
······························· (18)
6.4
その他の環境条件
6.4.1
一般事項
風以外の種々の環境(気象)条件である,熱,光化学,腐食,機械的,電気的又はその他の物理的作用
は,風車の健全性及び安全性に影響することがある。さらに,気象パラメータの組合せによっては,これ
らの作用が増大することもある。少なくとも,次に示す環境条件を考慮し,対策を設計文書に記載する(追
加情報については,附属書J参照)。
1) 温度
2) 湿度
3) 大気密度
4) 日射
5) 雨,あられ,雪及び氷
6) 化学的活性物質
7) 機械的活性粒子[例として,砂,ほこり(埃)粒子]
8) 雷
9) 地震
10) 海洋環境−腐食
海洋環境では,更に追加検討する必要がある。設計のための気象条件は,代表値又は変化する条件の限
界値によって定義する。設計値を選ぶ場合,幾つかの気象条件が同時に起きる確率を考慮する。
再現期間1年に対応する通常限界内の気象条件の変化では,通常運転が妨げられない設計とする。相関
が存在しない場合には,6.4.3に規定するその他の極値環境条件は,6.3.2の通常風条件と組み合わせる。
0
5
10
15
20
25
30
35
0
2
4
6
8
10
12
14
時間 t (s)
E
C
D
風
向
θ
(t
)(
゜
)
IEC 445/06
28
C 1400-2:2020 (IEC 61400-2:2013)
6.4.2
その他の通常環境条件
その他の通常の環境条件値で考慮するものは,次のとおりである。
1) 通常のシステム運転周囲温度:−10 ℃〜+40 ℃
2) 相対湿度:95 %
3) 大気成分:内陸の非汚染大気と同等(JIS C 60721-2-1参照)
4) 日射強度:1 000 W/m2
5) 大気密度:1.225 kg/m3
設計者が追加の外部条件パラメータを指定する場合には,これらのパラメータ及び値を設計文書に記載
する。また,それらはJIS C 60721-2-1の要求事項に適合させる。
6.4.3
その他の極値環境条件
6.4.3.1
一般事項
風車設計で考慮するその他の極値環境条件は,温度,雷,着氷及び地震とする。
6.4.3.2
温度
標準SWTクラスの場合,極値温度範囲としての設計値は,少なくとも−20 ℃〜+50 ℃とする。
6.4.3.3
雷
標準SWTクラスの場合,9.5に規定する雷保護対策を適切とみなしてもよい。
6.4.3.4
着氷
標準SWTクラスの場合,着氷に対する要求事項は規定しない。
製造業者が設計荷重の見積りにおいて着氷荷重についても織り込みたい場合には,全ての露出面上に密
度900 kg/m3で30 mm厚以上の着氷を想定することが望ましい。この静的着氷荷重は,待機中の風車シス
テム上で3Vaveのときの抗力荷重と組み合わせる。支持ワイヤを含む支持構造物上の着氷荷重は,支持構造
物の設計荷重で考慮することが望ましい。
6.4.3.5
地震
標準SWTクラスの場合,地震に対する要求事項は規定しない。
6.5
室内の試験条件
室内温度は,+10 ℃〜+35 ℃とする。管理試験条件下での試験では,管理室内温度は,常に+18 ℃〜
+28 ℃(+23±5 ℃)とする。
6.6
電気負荷条件
6.6.1
一般事項
設計で考慮する必要がある電気条件は,風車の適用方法によって異なる。
6.6.2
電力系統に接続される風車の場合
6.6.2.1
通常の電力系統条件
設計で考慮する風車接続端における通常条件を,次に示す。次に示すパラメータが規定の範囲内にある
場合には,通常の電力系統条件であるとみなす。
− 電圧:公称値(IEC 60038に準拠)に対して,±10 %
− 周波数:公称値に対して,±2 %
− 電圧不平衡:逆相成分の正相成分に対する比が2 %以下
− 自動再閉路周期:初回の再閉路に対して0.2秒〜5.0秒,2回目に対しては10秒〜90秒
− 停電:電力系統の停電は,年間20回起きると仮定する。最長24時間の停電は,通常条件と考える。
6.6.2.2
極値電力系統条件
29
C 1400-2:2020 (IEC 61400-2:2013)
風車接続端における,最小限の極値電力系統条件を,次に示す。
− 電圧:公称値から±20 %までの逸脱
− 周波数:公称値に対して,±10 %
− 電圧不平衡:15 %以下
− 対称故障及び非対称故障
− 停電:最長1週間の停電は,極値条件として考える。
6.6.3
電力系統に接続されない風車の場合
6.6.3.1
バッテリ充電風車
風車は,次のバッテリ電圧の全範囲で運転する。
− 電圧範囲:公称電圧(例 12 V,24 V,36 Vなど)の−15 %から+30 %まで。
− 充電コントローラの最大設定値の+5 %及び最小設定値の−5 %
6.6.3.2
ローカルグリッド
ローカルグリッド,すなわち,大規模電力系統に接続されない風車は,大きな電圧及び周波数の変化に
遭遇することを想定する。風車は,次に示す制約内で運転可能とする。
− 電圧:公称値から±15 %までの逸脱
− 周波数:公称値に対して,±5 Hz
7
構造設計
7.1
一般事項
小形風車の構造設計は,翼から基礎までの重要な荷重伝達経路にあるコンポーネントが,構造的に健全
であることを検証することを基本とする。小形風車の構造健全性が適切な安全レベルにあることを確認す
るために,構造部品(例えば,ブレード,ハブ,ロータ軸,ナセル,ヨー軸,タワー,接合部)の終極強
度及び疲労強度を計算及び/又は試験によって検証する。この検証の目的は,選択した設計方法(7.2)に
かかわらず同じである。
構造解析は,ISO 2394又は該当する場合には同等の規格に基づいて行う。
7.2
設計方法
小形風車の設計に当たっては,限界状態を超えないことを検証する。
小形風車の設計荷重の決定には,5.2で規定した次の三つの方法がある。
− 簡易荷重計算法(7.4)
− シミュレーションモデル(7.5)
− 実スケール荷重計測(7.6)
7.3
荷重及び荷重ケース
7.3.1
一般
7.3.2〜7.3.6に規定する荷重を考慮する。
7.3.2
振動,慣性荷重及び重力荷重
慣性荷重及び重力荷重は,慣性力,ジャイロ力,振動,回転,重力及び地震活動,又は船のような支持
物の運動によって小形風車に作用する静的及び動的な荷重である。
風車の主要支持構造物に対して,キャンベル線図で与えられるような共振解析を実施する(附属書I参
照)。
7.3.3
空力荷重
30
C 1400-2:2020 (IEC 61400-2:2013)
空力荷重は,静的及び動的な荷重であって,大気流と小形風車の静止部及び可動部との相互作用によっ
て生じる。大気流は,ロータ回転数,ロータ回転面を通過する風の風速,乱流,大気密度,並びにコンポ
ーネントの空力的形状及び空力弾性効果を含む相互作用効果に依存することを考慮する。
7.3.4
運転荷重
運転荷重は,ヨー運動,制動,ファーリング,ピッチ動作,系統連系などの,風車の運転及び制御によ
って生じる。
7.3.5
その他
製造業者が設定する特別な運転環境によって生じることが想定される全ての荷重を考慮する(例えば,
波荷重,後流荷重,着氷荷重,輸送,組立て,保守,補修に係る荷重など)。
7.3.6
荷重ケース
小形風車の寿命は,設計において,小形風車が経験すると思われる最も重大な条件を含む,一連の設計
運転状態によって表すことができる。
荷重ケースは,特定の組立て,建設,保守,及び運転モード又は設計運転状態を外部条件と組み合わせ
て決定する。合理的な発生確率をもつ全ての荷重ケースは,制御システム及び保護システムの挙動と併せ
て考慮する。
一般的に,小形風車の構造的な健全性を決定するために用いる設計荷重ケースは,次の全ての組合せに
よって計算するのがよい。
− 不具合がなく,かつ,通常外部条件での運転
− 不具合がなく,かつ,極値外部条件での運転
− 不具合があり,かつ,適切な外部条件での運転
− 輸送,据付け及び保守の設計運転状態,及び適切な外部条件(10.6参照)
極値外部条件と故障状態との間に強い相関関係がある場合,両者の現実的な組合せを一つの設計荷重ケ
ースとして考慮する。
小形風車のコンポーネントの構造的な健全性を検証するために,各設計運転状態の中で複数の設計荷重
ケースを考慮する。少なくとも,表2又は表4の設計荷重ケースを考慮する。これらの表では,設計荷重
ケースは,風条件,電気的外部条件,その他の外部条件の記載によってそれぞれの設計運転状態に対して
規定する。
制御システム及び保護システムが監視も制限もしない風車パラメータがある場合は,荷重ケースの中で
考慮しなければならない。このようなパラメータの例を,次に示す。
− ケーブルのねじれ
− 振動
− ロータ回転数
− フラッタ
7.4
簡易荷重計算法
7.4.1
一般事項
特定の風車構成の場合,荷重は,限定した一連の荷重ケースに対する単純かつ安全側の計算式を用いて
求めることができる。これらの計算式の背景を,附属書Fに説明する。風車構成が要求事項を満足しない
場合,簡易荷重計算法を用いることはできない。その代わりに,シミュレーションモデル(7.5)又は荷重
測定(7.6)を用いる。
31
C 1400-2:2020 (IEC 61400-2:2013)
風車が次の全ての要求事項を満足する場合,簡易荷重計算法を用いることができる。
− 水平軸をもつ。
− 2枚以上のブレードのプロペラ形ロータをもつ。
− 片持ち翼をもつ。
− 協調的なブレードの運動である(ブレードのピッチ動作,コーニングなどが独立かつ非協調的ではな
い。)。
− リジッドハブである(ティータードハブ又はヒンジドハブではない。)。
風車は,アップウィンドロータでもダウンウィンドロータでもよく,可変速運転又は一定速度運転のい
ずれかでもよい。また,固定ピッチ機構に限らず,アクティブなピッチ機構又はパッシブなピッチ機構(た
だし,ピッチ機構が全ての翼を同時に調整する場合)のいずれでもよい。また,垂直軸周り,水平軸周り
又は傾斜した軸周りのファーリング機構をもっていてもよく,ファーリング機構をもたなくてもよい。
簡易荷重計算法は,13.2(特に,ヨー動作に関しては,13.2.3)に記載されたとおりに決定した入力パラ
メータを用いる。これらのパラメータは,次による。
− 設計ロータ回転数 ndesign
− 設計風速 Vdesign
− 設計ロータ軸トルク Qdesign
− 最大ヨー角速度 ωyaw,max
− 最大ロータ回転数 nmax
次に,翼端の設計上の周速比は,次のように定義する。
30
πdesign
design
design
hub
hub
tip
n
V
R
V
R
V
V
=
⇒
=
=
λ
ω
λ
········································· (19)
30
π
60
π
2
n
n
n=
=
ω
······································································· (20)
簡易荷重計算法における荷重ケースを,表2に要約する。簡易荷重計算法の荷重成分は,それぞれの荷
重ケースを規定する細分箇条に規定する。
各設計運転状態に対して,適切な解析タイプを表2において,“F”及び“U”で示す。“F”は,疲労強
度評価に用いる疲労荷重の解析を表す。“U”は,材料強度,翼端変位,安定性の解析などの終極荷重の解
析を表す。
32
C 1400-2:2020 (IEC 61400-2:2013)
表2−簡易荷重計算法における設計荷重ケース
設計条件
荷重ケース
風速
解析タイ
プ
注記
発電
A
通常運転
F
B
ヨーイング
Vhub=Vdesign
U
C
ヨーエラー
Vhub=Vdesign
U
D
最大スラスト
Vhub=2.5Vave
U
ロータ回転は,ファーリ
ングでもフラッタリング
でもよい。
発電中の故障発生
E
最大ロータ回転数
U
F
負荷接続時の短絡
Vhub=Vdesign
U
最大短絡発電機トルク
停止
G
停止
(ブレーキング)
Vhub=Vdesign
U
極値風荷重
H
極値風荷重
Vhub=Ve50
U
風車は待機中(アイドリ
ング又は静止)又は調速
状態でもよい。手動操作
は行わない。
待機中の故障
I
待機中の風荷重で
最悪の受風状態
Vhub=Ve1
U
風車は,最悪の受風状態
の荷重を受ける。
輸送,組立て,保守及び補修
J
製造業者による指定
U
記号
F:疲労荷重の解析
U:終極荷重の解析
特定の小形風車の設計に必要な場合は,安全に関するその他の設計荷重ケースを考慮する。
7.4.2
荷重ケースA:通常運転
通常運転における設計荷重は,疲労荷重である。荷重ケースは,次に規定する翼及び軸に対する一定範
囲の疲労荷重を仮定する。疲労評価におけるこれらの範囲はピーク間の幅として考え,荷重範囲の平均値
は,無視することができる。
注記 F.3を参照。
翼荷重
2
design
n,
cog
B
zB
2
ω
R
m
ΔF=
······························································· (21)
cog
B
design
xB
2
R
m
B
Q
ΔM
g
+
=
·························································· (22)
B
Q
ΔM
design
design
yB
λ
=
·································································· (23)
ブレードの疲労荷重は,翼と翼根との接続部又は翼根とハブとの接続部に生じると考えられ,これらの
接続部のいずれかが,最小の終極強度をもつと判断される。計算される応力は,遠心力(FzB)と曲げモー
メント(MxB及びMyB)との組合せである[式(21)〜式(23)参照]。
軸荷重
33
C 1400-2:2020 (IEC 61400-2:2013)
R
Q
ΔF
design
design
shaft
-
x
2
3λ
=
····························································· (24)
r
r
design
shaft
-x
2
e
m
Q
ΔM
g
+
=
·························································· (25)
shaft
-
x
rb
r
shaft
6
2
ΔF
R
L
m
ΔM
+
=
g
······················································ (26)
ここで,erは,設計文書において,より低い値の妥当性が証明されない限り,0.005Rとする。
ロータ軸の疲労荷重は,第1ベアリング(ロータに最も近い位置)でのロータ軸において考慮する。応
力の範囲は,スラスト荷重(Fx-shaft),ねじりモーメント(Mx-shaft)及び曲げモーメント(Mshaft)の組合せ
から計算する[式(24)〜式(26)参照]。
7.4.3
荷重ケースB:ヨー運動
この荷重ケースの場合,終極荷重(ジャイロ力及びモーメント)は,設計ロータ回転数ndesignで生じる
最大ヨー角速度ωyaw,maxを仮定して計算する。
パッシブヨーシステムの場合,最大ヨー角速度は,式(27)によって計算する。
(
)2
π
01
.0
3
2
max
,
yaw
−
×
−
=
R
ω
························································ (27)
受風面積が2 m2未満の風車の場合,最大ヨー角速度は,3 rad/sとする。
アクティブヨーシステムの場合,最大ヨー角速度は,穏やかな風の中での測定によって決定する。最大
ヨー角速度が,より高い角速度の緊急ヨー運動のような特別な条件下で起きると予想される場合,アクテ
ィブヨー角速度はこの条件で測定する。
翼根曲げモーメントMyB及び軸曲げモーメントMshaftは,式(28)〜式(30)によって計算する。
shaft
-
x
design
n,
B
max
,
yaw
cog
rt
2
max
,
yaw
B
yB
9
2
ΔF
R
I
R
L
m
M
+
+
=
ω
ω
ω
······················ (28)
ここで,∆Fx-shaftは,式(24)で与えられる。
軸に対する荷重は,翼数に依存する。
2枚翼のロータの場合:
shaft
-
x
rb
r
B
design
n,
max
,
yaw
shaft
6
4
ΔF
R
L
m
I
M
+
+
=
g
ω
ω
································· (29)
3枚以上の翼のロータの場合:
shaft
-
x
rb
r
B
design
n,
max
,
yaw
shaft
6ΔF
R
L
m
I
B
M
+
+
=
g
ω
ω
································ (30)
7.4.4
荷重ケースC:ヨーエラー
全ての風車は,その運転においてヨーエラーを伴う。この荷重ケースでは,30°のヨーエラーを仮定す
る。ヨーエラーによるフラップ方向の翼根曲げモーメントは,式(31)によって計算する。
+
+
=
2
design
design
2
design
n,
3
max
,l
B
proj,
yB
1
2
1
3
4
1
8
1
λ
λ
ω
ρ
R
C
A
M
······················· (31)
最大揚力係数Cl,maxのデータが手に入らない場合は,2.0を用いる。
7.4.5
荷重ケースD:最大スラスト
小形風車では,ロータに大きなスラスト荷重が加わる可能性がある。スラスト荷重は,ロータ軸に平行
34
C 1400-2:2020 (IEC 61400-2:2013)
に働き,最大値は式(32)によって計算する。
注記 F.3を参照。
(
)
2
2
ave
T
shaft
-x
π
5.2
5.0
R
V
C
F
×
=
ρ
····················································· (32)
ここで,CTはスラスト係数で,0.5である。ただし,2.5Vaveにおいて高い回転数で運転する風車には注
意することが望ましく,この場合,式(32)のCTを,8/9に置き換える方がより適切な場合がある。
7.4.6
荷重ケースE:最大ロータ回転数
翼根の遠心力荷重FzB,及び遠心力荷重及びロータのアンバランスによる軸曲げモーメントMshaftは,式
(33)及び式(33')によって計算する。ここで,起こる可能性がある最大ロータ回転数ωn,max=(π/30)nmaxは,
13.2.4に規定する測定によって求める。
cog
2
max
,n
B
zB
R
m
F
ω
=
···································································· (33)
rb
2
max
,n
r
r
rb
r
shaft
L
e
m
L
m
M
ω
+
=
g
······················································ (33')
7.4.7
荷重ケースF:負荷接続時の短絡
小形風車の出力端における短絡又は発電機の内部短絡の場合,交流発電機の短絡トルクによって大きな
モーメントがロータ軸周りに発生する。発電機軸に働く短絡トルクMx-shaftは,式(34)によって計算する。
より正確な証明された値がない場合には,2Qdesignとする。また,翼根曲げモーメントMxBは,式(35)によ
って計算する。
design
shaft
-x
GQ
M
=
······································································ (34)
ここで,Gは,より正確な証明された値がない場合には,2.0とする。
cog
B
shaft
-x
xB
R
m
B
M
M
g
+
=
···························································· (35)
7.4.8
荷重ケースG:停止(制動)
機械式又は電気式のブレーキ装置を動力伝達系に装備した小形風車の場合,制動モーメントが最大駆動
モーメントより大きくなる場合がある。この場合,試験又は計算で求めた制動モーメントMbrakeを小形風
車の設計計算に用いる。最大軸トルクは,式(36)に示すとおり,制動モーメントに設計ロータ軸トルクを
加えた値に等しいと仮定する(したがって,発電機が設計ロータ軸トルクを発生させた状態で,ブレーキ
がかけられると仮定している。)。
design
brake
shaft
-x
Q
M
M
+
=
······························································ (36)
ブレーキ装置が高速軸側にある場合,Mbrakeはブレーキトルクに増速比を乗じて計算する。
停止動作中の翼荷重は,軸トルク及び翼質量によると仮定し,式(37)を用いて計算する。
cog
B
shaft
-x
xB
R
m
B
M
M
g
+
=
···························································· (37)
ここに,
Mx-shaft: 式(36)で計算した軸トルク
小形風車がギアボックス及び高速軸ブレーキ装置を装備している場合,式(36)で計算した軸トルクは,
動力伝達系の動力学を考慮して割り増すことが望ましい。より正確な証明された値がない場合,軸トルク
は2倍とする。
7.4.9
荷重ケースH:極値風荷重
35
C 1400-2:2020 (IEC 61400-2:2013)
この荷重ケースでは,極値風速下において,小形風車は設計の意図どおりに機能しているとする。小形
風車の風にさらされた部分の荷重は,6.3.3.2に規定する風速Ve50を想定して計算する。
注記 F.3を参照。
ロータが非常に低速で回転するように制御される場合,式(41)によるスラスト荷重の代わりに,式(40)
による,より大きいスラスト荷重を用いる。
待機する風車の場合,フラップ方向の翼根曲げモーメントは,抗力によって支配され,式(38)によって
定義する。
R
A
V
C
M
B
proj,
2
50
e
d
yB
4
1ρ
=
····························································· (38)
ここに,
Cd: 抗力係数。1.5とする。
Aproj,B: ブレードの投影面積
Ve50でロータが回転する小形風車の場合,ロータの任意の位置で,風向の変化によってブレードの一つ
でCl,maxが生じる可能性がある。この翼根曲げモーメントは,式(39)によって計算する。
R
A
V
C
M
B
proj,
2
50
e
max
l,
yB
6
1ρ
=
·························································· (39)
ここで,Cl,maxのデータが手に入らない場合,2.0の値を用いる。
スラスト荷重は,次によって計算する。
− 待機中のロータの場合,軸スラスト荷重は,式(40)による。
B
proj,
2
50
e
d
shaft
-x
2
1
A
V
C
B
F
ρ
×
=
························································ (40)
− 回転するロータの場合,スラスト荷重は,式(41)による。
2
50
e
2
50
e
B
proj,
shaft
-x
17
.0
V
A
B
F
ρ
λ
=
···················································· (41)
ここで,λe50はVe50における周速比で,未知の場合,式(42)によって計算してもよい。
50
e
max
50
e
30
π
V
R
n
=
λ
········································································· (42)
タワーの最大曲げモーメントは,式(40)又は式(41)のいずれか(設計に依存する。)で計算したスラスト
荷重を用いて計算する。タワー及びナセルの抗力,揚力又はこれらの合成力も同様に考慮する必要がある。
これらの力は,式(43)によって計算する。自立タワーの場合,最大曲げモーメントは,タワー基部に生じ
る場合がある。支線付きのタワーの場合,最大曲げモーメントは,上部の支線留め具に生じる場合がある。
個々のコンポーネントの荷重は,式(43)によって計算する。
proj
2
50
e
f2
1
A
V
C
F
ρ
=
···································································· (43)
ここに,
Cf: 空力係数(表3参照)
Aproj: 風向に直角な面上に投影されたコンポーネントの面積
翼荷重,軸荷重及びタワー荷重は,個々のコンポーネントの荷重から計算する必要がある。
7.4.10
荷重ケースI:待機中の風荷重,最悪の受風状態
ヨー機構が故障した場合,小形風車は全方向から風を受ける可能性がある。したがって,設計に当たっ
て,小形風車のブレード,ナセル,タワー及び(当てはまる場合)テール(尾部)に作用する力は,ロー
36
C 1400-2:2020 (IEC 61400-2:2013)
タの前,横又は後ろからの風を含む,全方向からの風に対して計算する。
個々のコンポーネントの荷重は,式(44)によって計算する。
proj
2
1e
f2
1
A
V
C
F
ρ
=
····································································· (44)
ここに,
Cf: 空力係数。揚力,抗力又はこれらの合成力から生じる。
Aproj: 空力係数を適用するコンポーネントの(最も好ましくな
い場所における)面積。鈍い(又は角ばった)物体(ナ
セルカバー,タワー断面など)の場合,面積は風向に直
角な面への投影面積とする。翼型形状の場合,投影面積
とする。
表3−空力係数Cf
断面形状
風の向きは左から
右とする。
特性長さがa) 0.1 m
未満
1.3
1.3
1.5
1.5
1.5
2.0
特性長さがa) 0.1 m
超
0.7
1.2
1.5
1.5
1.5
2.0
注a) 特性長さは,図に示す(風向に直角な)頂部から底部までの寸法をいう。ただし,翼型が斜めの場合を除く。
この場合は,翼型データ資料を使用することが望ましい。
7.4.11
荷重ケースJ:輸送,組立て,保守及び補修
製造業者は,輸送,組立て,据付け,保守及び補修によって小形風車に作用する荷重を考慮する。この
場合の荷重の例を,次に示す。
− 直立以外の状態で輸送中の風車に加わる重力荷重
− 特別な据付工具によって生じる荷重
− 据付け又は保守中の風荷重
− 風車を基礎上につり上げるときに風車に加わる荷重
− 建設中,傾いたタワーに作用する荷重
− 昇降時に,支持構造物に作用する荷重
傾いたタワーに作用する荷重の計算式の例を,式(45)に示す。
lt
overhang
towertop
tower
2
2
L
m
m
M
g
+
=
················································· (45)
ここに,
Mtower: つり上げ点(支持点)におけるタワーの曲げモーメント
(Nm)
mtowertop: ナセル及びロータの合計質量(kg)
moverhang: つり上げ点(支持点)からタワートップの間の質量(kg)
Llt: つり上げ点(支持点)からタワートップの間の距離(m)
式(45)は,次に示す仮定に基づいている。
− 動的増幅率は,2である。
37
C 1400-2:2020 (IEC 61400-2:2013)
− 風車の重心は,ロータ軸上にある。
− ロータは,待機中である。
− タワーが水平のとき,最大曲げモーメントが生じる。
7.5
シミュレーションモデル
7.5.1
一般事項
設計荷重をシミュレーション(空力弾性)モデリングによって決定する場合,7.5の荷重ケースを考慮す
る。最小限の設計荷重ケース(DLC)を,表4に規定する。この表では,各設計運転状態に対して,風,
電気的,その他の外部条件を定義して設計荷重ケースを規定している。風速範囲が示されている荷重ケー
スでは,最も厳しい荷重とするために,風速の全範囲にわたって評価する。
特定の風車設計に必要な場合には,安全に関連するその他の設計荷重ケースを考慮する。
各設計荷重ケースに対する適切な解析のタイプは,表4において“F”又は“U”で示す。“F”は,疲労
強度の評価に用いる疲労荷重の解析を表す。“U”は,材料強度,翼端変位,安定性の解析などの終極荷重
の解析を表す。
表4−空力弾性モデルによるシミュレーションに対する最小限の設計荷重ケース(DLC)
設計条件
DLC
番号
風条件
その他の条件
解析のタイプ
1) 発電
1.1
NTM
Vin<Vhub<(Vout又は
3Vave)
F,U
1.2
ECD
Vhub<Vdesign
U
1.3
EOG50
Vin<Vhub<(Vout又は
3Vave)
U
1.4
EDC50
Vin<Vhub<(Vout又は
3Vave)
U
1.5
ECG
Vhub=Vdesign
U
2) 発電中の故障発生
2.1
NWP
Vhub=(Vdesign,Vout
又は2.5Vave)
制御システムの故障
U
2.2
NTM
Vin<Vhub<Vout
制御システム又は保護シ
ステムの故障
F,U
2.3
EOG1
Vin<Vout又は2.5Vave 電気接続の喪失
U
3) 通常停止
3.1
NTM
Vin<Vhub<Vout
F
3.2
EOG1
Vhub=Vout又は
Vmax,shutdown
U
4) 緊急又は手動停止
4.1
NTM
製造業者が指定
U
5) 極値風荷重
(静止,アイドリング又は回転
中)
5.1
EWM
Vhub=Ve50
電力系統の喪失の可能性
U
5.2
NTM
Vhub<0.7Vref
F
6) 待機中の故障
6.1
EWM
Vhub=Ve1
U
7) 輸送,組立て,保守及び補修
7.1
製造業者による指定
U
記号
F:疲労荷重の解析
U:終極荷重の解析
7.5.2
発電(DLC 1.1〜1.5)
これらの荷重ケースでは,風車は運転中であり,電気負荷に接続されている。想定する風車の状態には,
38
C 1400-2:2020 (IEC 61400-2:2013)
ロータの不平衡を考慮する。設計計算には,ロータ製造時に指定されている最大質量及び空力不平衡(例
えば,翼ピッチ及びねじれの偏差)を用いる。
さらに,運転荷重の解析には,ヨーミスアラインメント,制御システムの追従誤差などの,理論的な最
適運転状態からの偏差を考慮する。
計算には,各状態の最悪の組合せを仮定している。例えば,DLC 1.4では,特有のヨーミスアラインメ
ントにおける風向変化を仮定している。DLC 1.1では,大気乱流によって生じる荷重の要求事項を具体化
している。DLC 1.2〜1.5は,風車の耐用期間中に発生する可能性がある危機的事象として選択された過渡
的ケースを規定している。
7.5.3
発電中の故障発生(DLC 2.1〜2.3)
制御システム若しくは保護システムの故障,又は電気システムの内部故障(例えば,発電機の短絡)は,
風車にかかる荷重に大きく影響するので,発電中に起きるものと想定する。DLC 2.1では,制御システム
の故障の発生は,通常の事象として解析する。DLC 2.2では,即時停止にならないが重大な疲労損傷をも
たらす,保護システム又は内部電気システムの故障の発生について評価する。
DLC 2.3では,再現期間1年の運転中の極値ガストと電気接続の喪失とを組み合わせる必要がある。
パッシブ制御風車の制御システムの故障の例を,次に示す。
− ファーリングシステムの故障(例えば,テールの固着)(ファーリングシステムが安全な寿命をもつと
実証されない場合)。
− ブレードピッチシステムの故障(ブレードピッチシステムが安全な寿命をもつと実証されない場合)。
最短でも1年間当たり24時間,風車の単一故障に対する疲労ケースを評価する。
7.5.4
通常停止(DLC 3.1〜3.2)
この荷重ケースは,発電状態から静止又はアイドリング状態に至るまでの通常の過渡状態中において風
車に荷重をもたらす全ての事象を含んでいる。発生回数は,制御システムの動作に基づいて推定する。
パッシブ制御風車の場合,自動停止はないかもしれない。この場合,疲労荷重ケースを無視できる。DLC
3.2の場合,最大風速はVout又はVmax,shutdownとする。
7.5.5
緊急停止又は手動停止(DLC 4.1)
緊急停止又は手動停止によって生じる荷重を考慮する。製造業者は,この場合の限界風速を運転マニュ
アル中に記載する。風速は,Voutではなく,製造業者が指定する値を用いる。
7.5.6
極値風荷重(静止,アイドリング又は回転中)(DLC 5.1〜5.2)
静止又はアイドリング状態で待機中の風車のロータは,極値風速条件を考慮する。また,ほとんどのパ
ッシブ制御風車(例えば,ファーリング)のように,極値風速時にロータが回転する風車においても,極
値風速条件を受ける状態を考慮する。この状態は,乱流であるか,又はガスト及び動的応答に対して補正
を施した準定常であるかのいずれかとする。
いずれかのコンポーネントに重大な疲労損傷が生じる場合(例えば,アイドリング状態のブレードの質
量などによる),各適切な風速における発電していない状態の予想時間数も考慮する。
待機中の風車に対する電力系統の喪失又は他の電気負荷(例えば,バッテリ,又は抵抗加熱若しくは水
ポンプのようなダンプロード)の喪失の影響を考慮に入れる。
7.5.7
待機中の故障状態(DLC 6.1)
電力系統又は風車の故障によって,待機中の風車が通常動作から逸脱する場合について解析が必要であ
る。電力系統の喪失以外の何らかの故障によって,待機中の風車が通常動作から逸脱する場合,起こる可
能性がある事態を解析の対象とする。この荷重ケースでは,故障状態は,極値風速モデル(EWM)と再現
39
C 1400-2:2020 (IEC 61400-2:2013)
期間1年との組合せとする。この状態は,乱流であるか,又はガスト及び動的応答に対して補正を施した
準定常であるかのいずれかとする。
7.5.8
輸送,組立て,保守及び補修(DLC 7.1)
製造業者は,輸送,組立て,据付け,保守及び補修によって風車に作用する荷重を考慮する。この場合
の荷重の例を,次に示す。
− 直立以外の状態で輸送中の風車に加わる重力荷重
− 特別な据付工具によって生じる荷重
− 据付け中の風荷重
− 風車を基礎上につり上げるときに風車に加わる荷重
− 建設中,傾いたタワーに作用する荷重
− 昇降時に,支持構造物に作用する荷重
7.5.9
荷重計算
7.3に規定する荷重を,各設計荷重ケースにおいて考慮する。関連する場合には,次の事項を考慮する。
− 風車自体に起因する風の流れ場のじょう(擾)乱(風車後流による誘導速度,タワーシャドウなど)
− 三次元流れがブレードの空力特性に及ぼす影響(例えば,三次元失速,空力翼端損失など)
− 非定常空力効果
− 構造の動特性及び振動モードの連成
− 空力弾性効果
− 風車の制御システム及び保護システムの挙動
7.6
荷重測定
設計荷重を荷重測定から導く場合,荷重測定は7.5に規定する荷重ケースに可能な限り近い条件で行う
ことが望ましい。測定した荷重の外挿は,IEC/TS 61400-13による。荷重測定に関する追加の要求事項は,
13.3及びIEC/TS 61400-13による。
7.4又は7.5のいずれかの荷重ケースにおいても,荷重ケースの規定と同等の条件で測定した場合に限り,
計算の代わりに荷重測定を用いてもよい。
7.7
応力計算
重要な荷重を担う全てのコンポーネントに対して,応力を計算する。一つの荷重ケース内で,個別の力
及びモーメントから計算した応力を合成して,等価応力を決定する。この結果得られた等価応力を,材料
の設計応力値と比較する。
応力の計算に当たっては,次の事項を考慮する。
− 応力の変動
− 応力の集中
− 合成した荷重の大きさ及び方向
− コンポーネントの寸法及び材料厚さの変動
− コンポーネントの表面粗さ及び表面処理
− 荷重の種類(曲げ,引張り,ねじりなど)
− 溶接,鋳造,機械加工,最終の結晶構造など
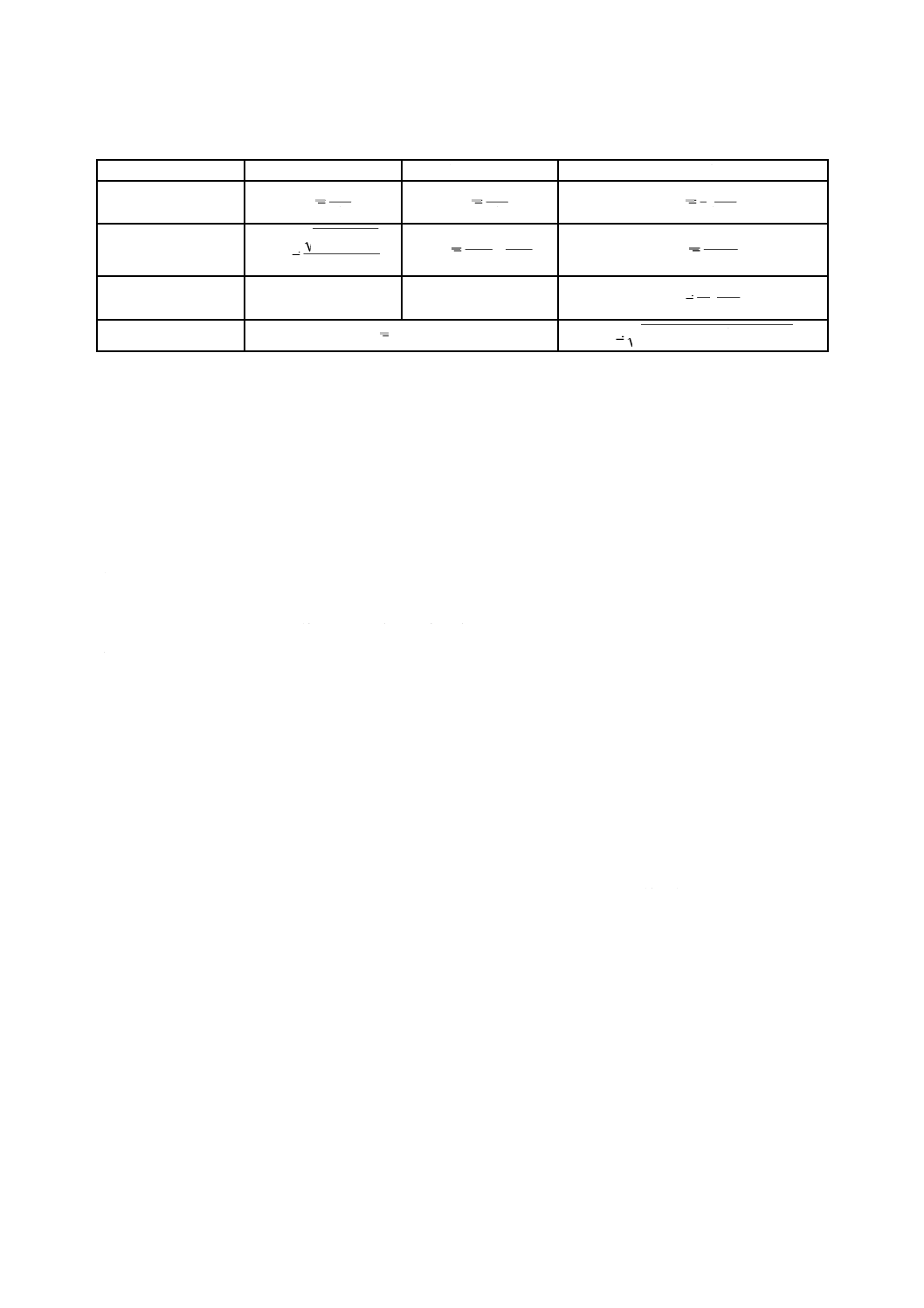
一方向の値から合成して等価応力を計算する指針を,表5に示す。
40
C 1400-2:2020 (IEC 61400-2:2013)
表5−等価応力
円形の翼根
角形の翼根
ロータ軸
軸力
B
zB
zB
A
F
=
σ
B
zB
zB
A
F
=
σ
shaft
shaft
-
x
shaft
-
x
A
F
=
σ
曲げ
B
2
yB
2
xB
MB
W
M
M+
=
σ
yB
yB
xB
xB
MB
W
M
W
M
+
=
σ
shaft
shaft
shaft
-
M
W
M
=
σ
せん断
無視する。
無視する。
shaft
shaft
-
x
shaft
-
M
2W
M
=
τ
合成値(軸力+曲げ)
MB
zB
eqB
σ
σ
σ
+
=
(
)
2
shaft
-
M
2
shaft
-
M
shaft
-
x
eq
3τ
σ
σ
σ
+
+
=
7.8
安全率
7.8.1
材料安全率及び要求事項
この細分箇条に示す材料安全率を,生存確率95 %,信頼限界95 %で推定する材料特性に適用する。材
料特性を他の生存確率で導き出した場合,材料の安全率を調整する(附属書E参照)。
強度は,応力又はひずみのいずれかに基づいて導き出してもよい。材料特性を決定する場合,次に示す
要因を考慮する。
a) 実スケール構造を代表する材料及び材料構成
b) 実スケール構造を代表する試験サンプルの製造方法
c) 静荷重試験,疲労荷重試験及びスペクトル荷重試験(速度効果を含む。)
d) 環境効果(例えば,紫外線劣化,湿度,温度,腐食など)
e) 材料特性に影響を及ぼす形状効果(例えば,射出成形翼の材料の配向,複合材及び木材の積層厚変化,
金属の鍛造による材料の配向など)
疲労強度及び終極強度の解析に用いる材料の部分安全率を,表6に規定する値とする。上記の五つの要
因を十分に考慮した場合,最小の材料の部分安全率を用いてもよい。こうした評価を“完全評価”と定義
し,これには公認の材料コード(ISOなど)が利用可能な場合も含めてもよい。材料特性が切り取った試
験片を用いた材料試験だけに基づいており,上記の要因を考慮しない場合,最大の材料安全率を用いる。
このような評価を“最小評価”と定義する。
上記のd) について,次の事項を考慮する。
− 荷重を担う構造部分の繊維強化プラスチック材料に対する環境効果[紫外線放射,湿気,ぜい(脆)
化などによる材料の劣化,経年劣化など]を,静的な強度解析の場合だけ,材料部分安全率に1.35を
乗じる。代表的な試験によって劣化効果が低いことが示された場合,この安全率を減少してもよい。
繊維強化プラスチック材料には,(例えば,ガラス,カーボンなどによって)繊維強化されたプラスチ
ック材料(例えば,エポキシ樹脂,ポリエステル,ビニルエステルなど)が全て含まれる。
− 管理下にある室温(6.5を参照)よりも高い材料温度に起因する繊維強化プラスチックの強度低下(終
極強度及び疲労強度の両方に対する。)を,材料安全率に1.1を乗じる。風車が対応可能な設計上の最
高(極値)温度,つまり50 ℃(これよりも高い温度にするには,設計運転状態に記載する必要がある。)
で,切り取った試験片を用いた材料試験を実施する場合,材料安全率に1.0を乗じてもよい。
− 風車の寿命期間にわたる適切な腐食に対する保護手段がある場合,腐食の環境効果を除外する。
41
C 1400-2:2020 (IEC 61400-2:2013)
実施した材料試験の種類及び数に応じて適切な安全率を決定するための指針を附属書Eに示す。
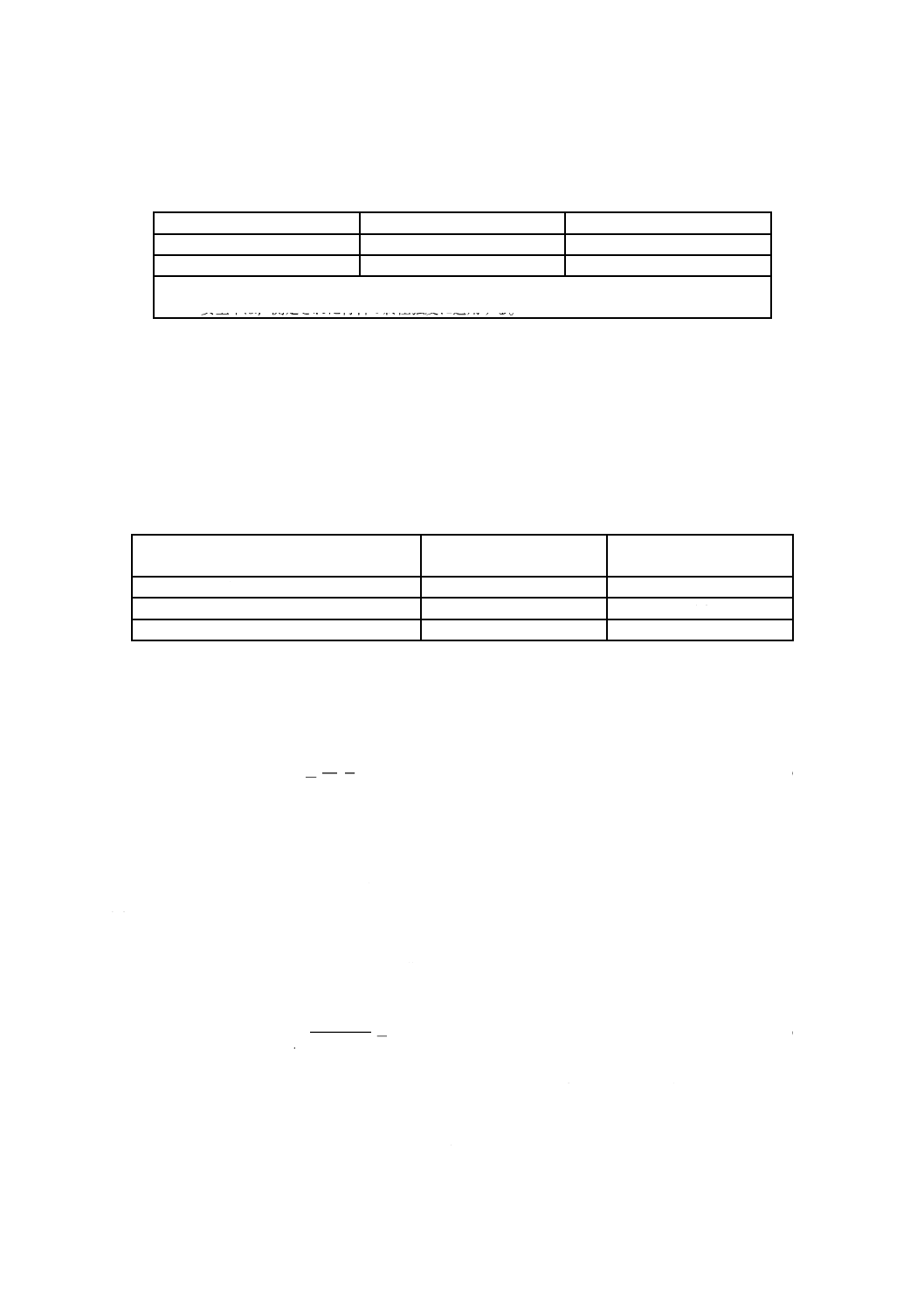
表6−材料の部分安全率γm
材料特性評価
疲労強度
終極強度
完全評価
1.25 a)
1.1
最小評価
10.0 b)
3.0
注a) 安全率は,測定された材料の疲労強度に適用する。
b) 安全率は,測定された材料の終極強度に適用する。
7.8.2
荷重の部分安全率
部分安全率は,荷重の推定プロセスの不確かさを表しているため,各荷重決定法によって異なる。表7
は,各決定法に対して用いる荷重の部分安全率を示す。シミュレーションモデルは,限定された実スケー
ル測定によって実証されているため,荷重の部分安全率は,この荷重決定法の中で,最も小さい。重力の
ように,よく知られた荷重に関しては,終極荷重に対して低い安全率を適用してもよい。
表7−荷重の部分安全率γf
荷重決定法
(5.2参照)
疲労荷重の安全率
終極荷重の安全率
1. 簡易荷重計算法
1.0
3.0
2. シミュレーションモデル
1.0
1.35
3. 実スケール荷重計測
1.0
3.0
7.9
限界状態解析
7.9.1
終極強度解析
終極強度に対する設計応力(σd)の要件を,式(46)に示す。
f
m
k
d
γ
γ
σ
f
≦
············································································· (46)
ここに,
fk: 材料強度の特性値
γm: 材料の部分安全率(7.8.1を参照)
γf: 荷重の部分安全率
一般に,材料強度の特性値として,降伏強度を用いることができる。
7.9.2
疲労破壊
疲労破壊を,全ての疲労荷重ケースによって組み合わせる。疲労破壊は,適切な疲労破壊計算を用いて
予測する。例えば,Miner則の場合,累積損傷が1を超えたとき限界状態に達したとする。そのため,風
車の設計寿命の範囲内での累積損傷は,式(47)に示すとおり,1以下とする。
(
)
∑
i
s
N
n
0.1
i
m
f
i
≦
γ
γ
·································································· (47)
ここに,
ni: 全ての関連する荷重ケースを含む,特性荷重スペクトル
のビンiにおける疲労サイクルの総数
si: 平均及び繰返し範囲の両方に対する効果を含む,ビンi
におけるサイクル総数に関連する応力(又はひずみ)レ
ベル
42
C 1400-2:2020 (IEC 61400-2:2013)
N(.): 応力(又はひずみ)の関数として,根拠をもって示され
る破壊に至るまでのサイクル数(すなわち,特性S−N
曲線)
γf: 適切な荷重の部分安全率
γm: 適切な材料の部分安全率
解析方法によって平均応力の影響が扱われていない場合,その影響を考慮する。
簡易荷重計算法(7.4)を用いる場合,荷重ケースA(通常運転,7.4.2)の範囲を,式(48)で与えられる
疲労サイクル数に対して適用する。
60
d
designT
Bn
n=
·········································································· (48)
ここに,
Td: 秒で表した風車の設計寿命
S−N曲線が利用可能でない場合,材料強度の特性値としての終極強度と設計応力を計算するための疲
労荷重とを用いて,式(46)を計算する。その場合,表6の疲労強度及び最小評価に対する材料の部分安全
率(γm=10.0)を用いる。
7.9.3
臨界変形解析
風車の安全性に影響を及ぼす変位が,設計荷重ケースにおいて発生しないことを検証する。
最も重要な検討事項は,翼とタワーとの間に機械的な干渉が発生しないことを検証することである。全
ての設計荷重ケースにおいて,ブレードのいずれの部分も,タワーに接触しないことを確認する。適切な
荷重の部分安全率を乗じた予測される最大の翼端変位は,無荷重時の翼とタワーとの間の間隔を超えない
ことを確認する。
翼端変位の解析は,全ての設計荷重ケースにおいて,仮定される最も厳しい曲げモーメント分布に基づ
いて行う。
簡易荷重計算法(7.4)によって決定した設計荷重の場合は,翼長方向の荷重分布は,附属書Fに示す式
を考慮することによって得られる。
荷重の部分安全率を,適用する。
注記 例えば,設計荷重が荷重ケースHであって,ロータが待機中である場合,式(F.34)は,面外の
抗力荷重が翼弦長に比例して変化することを示す。設計荷重が荷重ケースHであって,ロータ
が回転している場合,式(F.35)は,翼端で最大値であって翼根で0である線形の荷重分布を仮定
している。
8
保護システム及び停止システム
8.1
一般事項
小形風車は,全ての設計荷重ケース下で全てのパラメータを設計限界内に保つように設計する。これを,
能動的及び/又は受動的保護システムを設計に含めることによって達成する。特に,回転数の設計限界が
nmaxを超えないようにする手段が必要である。
設計SWTクラスに関する全ての通常外部条件[つまり,1年以内の再現期間でさら(曝)される外部条
件]において,風車を待機状態にすることができる,安全なシステム又は手順を示す。ただし,そのシス
テムが別の条件によってより安全であることを示す場合は除く。
8.2
保護システムの機能的要求事項
保護システムは,フェイルセーフに設計する。いかなる単一故障,電源故障,又は制御システム及び保
43
C 1400-2:2020 (IEC 61400-2:2013)
護システム内のいかなる交換部品の故障からも小形風車を保護する。試験及び/又は(FMEA,FMECAな
どの)解析によって,システムのフェイルセーフ動作を証明する。制御システム,電源システム又は保護
システムの故障によって,風車の回転数がnmaxを超えたり,不安定な運転状態になったりしないようにす
る。
風車が手動下又は自動制御下にあるかを問わず,常に保護システムは満足に動作させる。保護システム
が偶発的又は不正に改変されないように対策をとる。
保護システム内にある非交換部品は,風力発電システムの設計寿命を大きく上回った耐用年数とする。
保守可能な部品の場合の耐用年数は,その部品の指定の保守間隔以内とする。保護システム内の非交換部
品の重大故障の確率は,その安全寿命期間中極めて低いものとする。
8.3
手動停止
小形風車には,ボタン,スイッチ,レバーなどによる手動停止及びその停止手順を必要とする。ボタン,
スイッチ,レバーなどによる手動停止は,全ての通常外部条件によって,自動制御システムを無効にし,
かつ,小形風車を待機状態にする。停止後,風車は手動で運転を再開しない限り待機状態を維持させる。
注記 箇条1の“小形風車の安全性が損なわれないことを適切に実証できる場合は,この規格の要件
を変更してもよい。”が適用可能である。
ボタン,スイッチ,レバーなどは,権限を付与された要員が床面又は地表面において操作できるものと
する。この操作は,合理的な期間内に一般使用者が習得できるものとする。
8.4
保守のための停止
製造業者は,点検,サービス又は保守を行う前に小形風車を停止するための安全な方法を提供する。そ
の方法には,それに基づいて停止することが可能な最大の風条件(Vmaint)及びその他の条件に関する仕様
を含める。ここで,Vmaintは,10 m/s又は1.4Vaveのいずれか大きい方の値以上とする。
ロータ及びヨーの運動は,保守を行う前に停止させておく。他の機械的運動(テール,ピッチ機構など)
も,保守を行う前に停止するか,又は安全であることを確認する。さらに,運転状態に復帰するための安
全な方法を提供する。
40 m2未満の風車の場合,製造業者は,Vmaint未満で風車を停止させるための安全な手順を提供する。起
倒式タワー上にある40 m2未満の小形風車を倒すことは,風車を停止させるために許容される手順である。
40 m2以上の風車の場合,製造業者は,Vmaint未満で風車を停止させるための安全な手段,及びその手段
を用いるための手順(固定装置を安全に挿入するための手順など)を提供する。40 m2以上の風車を倒す
ことは,風車を停止させるために許容される手順の一部に含めない。
起倒式タワー上にある小形風車の保守は,地表面で行ってもよい。保守を直立したタワーの上で行う場
合,ロータ及びヨーの動き,並びに他の機械的運動(テール,ピッチ機構など)を防止するための手段を
保守前に講ずる。
9
電気システム
9.1
一般事項
小形風車の電気システム,その中で用いられる風車コントローラ及び発電機などの全ての電気系コンポ
ーネントは,JIS B 9960-1:2008の箇条4(一般要求事項)〜箇条15(附属品及び照明)の該当する部分,
及び関連する全ての製品規格に適合させる。小形風車が電力系統に接続される場合,9.7.3を適用する。全
ての電気系コンポーネントは,全ての設計環境条件(6.4参照),並びに運転中に受ける機械的,化学的及
び熱的な応力に耐えるものとする。
44
C 1400-2:2020 (IEC 61400-2:2013)
出力特性に基づいて選定した全ての電気系コンポーネントは,故障条件を含む設計荷重ケースを考慮し,
装置が果たす機能に対して適切なものとする。ただし,電気系コンポーネントが小形風車の電気システム
全体の一部として適切な追加保護を備える場合は,設計上,最終目的に対応する特性をもたなくてもよい。
9.2
保護システム
小形風車の電気システムは,安全ではない条件又は状態を引き起こす可能性がある風車及び外部電気シ
ステムの両方の故障に対して保護する適切な装置を含める。この保護は,JIS B 9960-1:2008の7.1(一般事
項)〜7.5(停電,電圧低下及びその復旧時の保護)及び7.8(相順の保護)に従って実施する(このよう
な装置の例としては,過電流保護ヒューズ,温度サーミスタなどがある。)。
小形風車は,一般的に,サージ防護デバイス(SPD)によって,(大気,スイッチングなどに起因する)
過電圧に対して保護する。風車内の空間が限られている場合,風車の外側の個別のキャビネットにサージ
保護デバイスを設置してもよい。キャビネットは,環境条件に適したものとする。
9.3
断路器
小形風車の電気システムは,保守又は試験中,全ての電源から切り離すことができるものとする。電源
からの切離しは,JIS B 9960-1:2008の5.3.2(種類)及び5.3.3(要求事項)に従って実施する。
照明,その他の電気システムが保守中の安全のために必要な場合,これらの回路は,その他の全ての回
路が通電していないときに通電できるように,独自の断路器をもつ補助回路を備える。
9.4
接地システム
小形風車の設計には,JIS C 60364-5-54の要求事項に適合する局所接地電極システムを含める。接地装
置(接地電極,導体,接地棒及び主端子)の据付け,配置及び選択は,避雷対策のための小形風車の適用
に合致したものとする。接地電極システムの設計に対する土壌条件の範囲は,据付マニュアルに記載する。
その他の土壌条件は,据付マニュアルにその管理方法に関する推奨事項を示す。
9.5
雷保護
小形風車の雷保護の指針として,JIS C 1400-24を参照してもよい。保護策を翼及びその他の空力装置ま
で拡大する必要はない。
雷などの一時的な過電圧状態によって影響を受ける可能性がある全ての風車の保護システム回路は,JIS
C 5381-11に従って保護する。小形風車に用いる全てのサージ防護デバイスは,JIS C 5381-11の規定に適
合させる。
9.6
電気導体及びケーブル
小形風車の導体は,JIS B 9960-1:2008の箇条13(配線)に従って,温度,電圧,電流,環境条件及び劣
化を促進するものへの暴露(例えば,油,紫外線暴露)に適した定格をもたせる。
導体が据付け及び運転中に受けると想定される,ねじれに起因する応力を含む機械的応力を考慮する。
導体は,JIS B 9960-1:2008の箇条14(電動機及び関連装置)に従って施設する。
げっ歯類などの動物がケーブルをきず付ける可能性がある場合,外被付きケーブル又は電線管を用いる。
地下ケーブルは,作業者又は農耕機によって損傷を受けないように,適切な深さに埋設する。
これらの保護は,電気的コンポーネントに加わる過電圧がコンポーネントの絶縁レベルによって設定さ
れる限界を超えないように設計する。
9.7
電気負荷
9.7.1
一般事項
9.7.2〜9.7.5に規定する電気負荷は,小形風車に適合する負荷とする。
9.7.2
バッテリ充電
45
C 1400-2:2020 (IEC 61400-2:2013)
バッテリ充電装置として用いる小形風車は,運転マニュアルに推奨するタイプに適した電流及び電圧に
よってバッテリを充電するように設計する。その他の考慮事項は,次による。
− バッテリの温度
− バッテリの膨張
− 導体サイズ及び絶縁定格
充電回路は,電気負荷の喪失中の最大電圧,又はバッテリが完全に充電され,その電圧が別の用途に用
いられているときの最大電圧に耐えることができるものとする。
9.7.3
電力系統(連系システム)
9.7.3.1
一般事項
電力系統に接続される小形風車は,9.7.3.2及び9.7.3.3の要求事項及び関連の系統連系に関する規格の要
求事項に適合させる。
9.7.3.2
自己励磁−電力系統の停電
小形風車を自己励磁することができる電気システムは,電力系統が停電した場合,自動的に電力系統か
ら遮断し,かつ,安全に切り離した状態に維持させる。
キャパシタバンクを系統連系用の小形風車と並列に接続する(すなわち,力率改善のため)場合,電力
系統が停電したときはいつでも風車の発電機の自己励磁を回避するため,キャパシタバンクを切り離す適
切な開閉器が必要である。ただし,キャパシタが自己励磁の原因とならないことを十分に示すことができ
る場合は,キャパシタを接続したままでもよい。キャパシタバンクを切り離せない場合,キャパシタを徐々
に分離するための対策をとる。
9.7.3.3
電力調整装置,EMC,高調波及び電気せん(閃)光,並びに無効電力
小形風車のシステムの電磁両立性(EMC)は,附属書Hを参照する。
インバータ,パワーエレクトロニクス制御装置,静止型無効電力補償装置(SVC)などの電力調整装置
は,高調波線電流及び電圧波形ひずみが電力系統の保護継電装置に影響を与えないように設計する。具体
的には,電力系統に接続される小形風車の場合,風車によって生成された電流高調波は,電力系統接続点
での電圧波形ひずみが電力系統に対する許容上限値を超えないようにする。同様に,無効電力調整が,い
かなる場合でも電力系統の保護継電装置の動作を妨げないものとする。
9.7.4
電動機(例えば,揚水)との直接接続
電動機に直接接続される小形風車は,電圧,電流及び周波数が変わる場合がある。運転範囲全体にわた
って安全に動作することを実証する。
9.7.5
直接抵抗負荷(例えば,暖房)
抵抗負荷に直接接続される小形風車は,電圧,電流及び周波数が変わる場合がある。運転範囲全体にわ
たって安全に動作することを実証する。ヒータなどの抵抗負荷に接続される小形風車の文書は,該当する
電流,電圧及び温度に適した導体を指定する。
9.8
地域の要求事項
地域の電気規則は,世界の地域ごとに異なる。これは,配電システム及び/又は送電システムの技術的
詳細が地域によって異なる場合が多いためである。特に,実施された接地システム及び雷保護システムが,
互換性がなかったり対立したりする場合がある。小形風車の文書が,このような状況で十分なガイダンス
となることが望ましい。
46
C 1400-2:2020 (IEC 61400-2:2013)
10
支持構造物
10.1
一般事項
支持構造物は,小形風車の重要コンポーネントである。支持構造物は,風車の荷重を受けている。ロー
タの受風面積が2 m2を超える場合,支持構造物は小形風車のシステムの一部に含め,箇条7に従って設計
する。
保守のために,地上に安全に降ろすことができない風車及び倒すことができないタワーは,タワーの昇
降及びタワー上での作業において,落下防止システムを備えることが望ましい。
10.2
動的要求事項
風車の動的評価を実施する。動的評価では,実験及び/又は解析によって,通常,構造に影響を及ぼす
及び/又は制御機能の損失を引き起こす動的状態又は共振状態で損傷を受けないことを証明する。詳細は,
附属書Iによる。
10.3
環境要因
小形風車の支持構造物は,箇条6に規定する全ての外部条件に耐えることが望ましい。極値環境条件下
での小形風車の据付け,運転及び保守に対しては,特に配慮することが望ましい。製造業者は,マニュア
ル類(据付け,運転など)及び設計図書に,小形風車の設計環境条件を記載する。
10.4
接地
小形風車の支持構造物(支線を含む。)は,落雷による損傷を減らすために適切に接地する(9.4及び9.5
参照)。
10.5
基礎
ロータの受風面積が2 m2を超える風車の場合,製造業者は,基礎のレイアウト,推奨する最小及び最大
の支線の位置,該当する場合の支線設置に対する要求事項などを含む基礎に対する要求事項を指定する。
ロータの受風面積が2 m2を超える風車の場合,製造業者は,通常の土壌条件及び設計荷重に対する基礎シ
ステムのサンプルを設計する。
ロータの受風面積が2 m2以下の風車に対しては,11.2.3.2による。
10.6
風車アクセス時の設計荷重
通常の風車保守で生じる設計荷重は,タワーの昇降及びタワーの起倒を含めて考慮する。これらの荷重
は,該当するマニュアルで指定する風車へのアクセス手順と一致させる(7.4.11及び/又は7.5.8参照)。
11
文書に対する要求事項
11.1
一般事項
この箇条では,小形風車の製品マニュアル及びその他の製品に関する文書に対する要求事項を規定する。
11.2
製品マニュアル
11.2.1
一般事項
製品マニュアルは,風車の技術仕様,並びに風車設備の組立て,据付け,運転及び建設に関する要求事
項の明確な説明を提供する。この文書には,小形風車の保守に関する要求事項に関する特定の情報も含め
る。これらの情報は,据付者,所有者及びサービス要員に対して,一つ以上のマニュアルで提供する。
全ての文書は,使用者に対して,内容が重要な安全指示書であること,及び文書は保存することが望ま
しいことを知らせる。文書には,型式名,製造番号及び改訂番号を記載する。文書は,使用者の役に立ち,
かつ,使用者が読んで理解できる言語で記載する。
11.2.2
仕様
47
C 1400-2:2020 (IEC 61400-2:2013)
製造業者は,次の情報を提供する。
a) 製造業者名
b) 型式名
c) 主要コンポーネントの概要
d) 基準出力(W又はkW)(試験の完了後だけに記載する。)
e) 基準年間発電電力量(kWh/年)
f)
ロータ直径(m)(該当する場合)
g) 受風面積(m2)
h) ブレードの枚数
i)
アップウィンドロータ又はダウンウィンドロータ(該当する場合)
j)
垂直軸風車(VAWT),水平軸風車(HAWT)又はその他
k) タワートップに搭載する質量(ロータナセルローターアセンブリ)(kg)
l)
保護システム及び停止システムの説明
m) ヨー機構の説明
n) 回転方向
o) ロータ回転数及び/又は翼端速度範囲(min−1及び/又はm/s)(試験の完了後だけに記載する。)
p) カットイン風速(m/s)(試験の完了後だけに記載する。)
q) カットアウト風速(m/s)
r) 極値風速(再現期間50年の3秒間ガスト)(m/s)
s)
SWTクラス(設計に基づくが,可能な場合は,試験結果による。)
(Sクラスの場合は,設計パラメータに関する正確な説明が必要である。)
t)
電力形式
u) 最大出力(定義に従って,最低でもP60を記載する。)
v) 最大電圧(定義に従って,最低でもU0.2を記載する。)
w) 最大電流(定義に従って,最低でもi60を記載する。)
x) 風速8 m/sにおける表示音響パワーレベル[dB(A)](試験の完了後だけに記載する。)
y) 動作温度範囲(℃)
z) 利用可能な支持構造物
aa) 設計寿命(年)
11.2.3
据付け
11.2.3.1
一般事項
小形風車の製造業者は,風車の組立て,据付け,運転及び建設のために,図面,手順,仕様書,指示書
及びこん(梱)包リストを提供する。これらの文書には,小形風車の安全な輸送及び据付けに必要な全て
の荷重,質量,揚重装置及び揚重手順の詳細を含める。
小形風車の据付訓練を受けた要員が行うことを製造業者が要求する場合,据付マニュアルの表紙に,据
付けは訓練を受けた要員が行わなければならない旨の宣言を表示する。
これらの文書には,安全なつり上げ作業に必要な全てのスリング,フック,その他の器具を含むクレー
ン,ホイスト及びつり上げ具に対する要求事項を含める。明確なつり上げ点を,マニュアル及び小形風車
のコンポーネント上に明確に表示する。また,安全な据付作業に必要な全ての特殊工具,治工具,固定具,
その他の機器について記載する。
48
C 1400-2:2020 (IEC 61400-2:2013)
コンポーネント全ての運転前の調整及び適切な潤滑を,文書に明確に記載する。
電線を小形風車の所有者又は据付者が用意する場合,電気機器の端子に対する国際標準記号で作成した
電気的相互接続配線図を,マニュアルの据付けの項目に記載し,かつ,適切な導体サイズを選定するため
の十分な情報を記載する。システム配線図は,マニュアルの据付けの項又はサービスの項のいずれかに記
載する。
11.2.3.2
支持構造物
ロータの受風面積が2 m2以下の小形風車の場合,製造業者は,使用者が風車の安全運転のための適切な
支持構造物を選択するために必要な全ての情報を提供する。これには次の事項を含めるが,これだけには
限定しない。
− 風車とタワーとの機械的接続の詳細
− 風車とタワーとの電気的接続の詳細
− 翼とタワーとの間の最小離隔距離
− タワートップの最大許容変位
− タワートップの最大荷重(安全率が含まれているかどうか,また,その大きさ)
− 支持構造設計例
ロータの受風面積が2 m2を超える小形風車の場合,上記の情報を提供することを推奨する。これらの風
車の場合,10.5に規定する情報には,地質条件を仮定した基礎構造サンプル,運転荷重及びアクセス時の
荷重を含める。
11.2.4
運転
運転マニュアルには,通常外部条件での小形風車の起動及び停止の具体的な手順を含める。マニュアル
には,緊急停止の制御設定点などの,適切な制御装置の設定の全てを含める。また,この運転マニュアル
には,通常運転及び意図される利用に対して,システム全体の説明も網羅する。
製造業者は,手順が安全に実行可能である限界風速及びその他の条件の仕様を含む手動停止手順をマニ
ュアルに記載し,提供する。また,計画外保守及び顧客支援のために,相談窓口を設ける。
11.2.5
保守及び定期点検
11.2.5.1
一般事項
製造業者は,小形風車の点検及び保守に関する文書を提供する。この文書には,小形風車に対する点検,
停止手順及び定期保守の要求事項を具体的に記載する。この文書には,8.4に規定するVmaintについて明確
に記載し,説明する。
小形風車の保守及びサービスを訓練を受けた要員が行うことを製造業者が要求する場合,保守及びサー
ビスのマニュアルの表紙に“保守及びサービスは訓練を受けた要員が行わなければならない”旨の宣言を
表示する。
11.2.5.2
安全手順
保守に関する文書には,具体的な停止手順を記載する。これには,次の指示を含めるが,これだけには
限定しない。
− 電気負荷及び/又は電源を切り離す方法(9.3参照)
− ロータを止め,かつ,固定する方法
− ヨー機構を止め,かつ,固定する方法
− 該当する場合,ファーリングシステムを止め,かつ,固定する方法
小形風車が系統連系用の場合,風車を系統から解列する手順を提供する。
49
C 1400-2:2020 (IEC 61400-2:2013)
該当する場合,製造業者は,適切な昇降装置及び手順を含む,タワーを昇降する場合の安全推奨事項を
提供する。
11.2.5.3
定期点検
製造業者は,タワー,動力伝達系,コントローラ及びロータを含む小形風車の定期点検の周期を指定す
る。製造業者は,次の点検対象のコンポーネントについて文書に記載するが,これだけには限定しない。
− ロータ翼
− 垂れ下がりケーブルの擦切れ又はねじれ
− 支線の張りの度合い
− 潤滑油の漏れ
− 締め具
製造業者は,適切な運転及びその検証を確実にするために必要な装置及び測定の一覧表を提供する。製
造業者は,小形風車の安全に致命的な影響を与える通常運転範囲の全ての値(バッテリ電圧,送水ポンプ
流量,インバータの電圧,電流,周波数などを含む。)を提供する。
製造業者は,それぞれの小形風車に対して,記録簿をとり続けることを推奨する。記録簿のデータには,
月日,時間,点検実施者,重要な事象及び是正処置又は追加情報を含めることが望ましい。
11.2.5.4
保守
製造業者は,小形風車の定期保守の周期を指定する。定期保守は,小形風車の安全な運転を維持するた
めに,製造業者が一定期間後に必要と考えるサービス又は補修と定義する。定期保守には,次の事項を含
めるが,これに限定しない。
− 潤滑
− 緊急停止及び/又は過回転防止システムの定期試験
− ブレーキ装置の調整及び/又は交換
− ベアリング,ブラッシ及び/又はスリップリングの交換
− 全ての安全寿命内の非交換部品が設計寿命を満たすために必要な保守
製造業者が,小形風車は定期保守の前に停止させることを要求する場合は,文書に“注意 定期保守を
実施する前に,適切な手順に従って,風車を停止させなければならない。”又は同等の趣旨の宣言文を記載
する。
製造業者は,全ての保守及び補修について,記録簿に記録することを推奨する。
11.2.5.5
トラブルシューティング
製造業者は,サービス要員を呼ぶ前に確認可能な項目についてトラブルシューティングリストを提供す
る。このリストの項目は,訓練を受けた運転員によって確認可能なものとするが,専門的な試験装置又は
訓練を受けたサービス要員を必要としないものとする。
11.2.5.6
要員の安全
製造業者は,マニュアル類(据付け,運転,保守など)に,全ての要員の安全に関する必要な情報を提
供する。この情報には,タワーの昇降手順,はしご,アンカー位置,要員の安全器具の使用などの情報を
含める。また,製造業者は,タワー昇降及び起倒時の限界風速を指定する。
11.3
消費者ラベル
消費者ラベルは,附属書Mに従って提供することが望ましい。このラベルを提供する場合は,消費者ラ
ベルの作成に当たって,JIS Q 17025及び試験要求事項を定義した関連規格(JIS C 1400-12-1など)の要
求事項を測定報告書に用いる。
50
C 1400-2:2020 (IEC 61400-2:2013)
12
風車の表示
風車の銘板には,少なくとも,次の事項を,人目につきやすく,判読可能で,かつ,消えないように表
示する。
− 風車の製造業者名及び製造国
− 型式名,製造番号及び改訂番号
− SWTクラス
− 発電出力形式
− 最大出力(定義に従って,最低でもP60を記載する。)
− 最大電圧(定義に従って,最低でもU0.2を記載する。)
必要に応じて,次の追加情報を含める。
− 製造日
− タワートップ搭載質量(ロータナセルアセンブリ)
− 設計極値(耐)風速(Ve50など)
− 最大電流(定義に従って,最低でもi60を記載する。)
− 受風面積
第2章 型式試験
13
試験方法
13.1
一般事項
この箇条では,小形風車に対する利用可能な試験について規定する。必須となる試験の概要は,5.2に規
定する。供試品は,設計上,風車の型式及び/又はコンポーネントの代表を示すものとする。適切に校正
された計器及び適切なサンプリング周波数を用いる。
風速の測定が必要な場合は,風速計の位置及び測定方位区分は性能試験方法規格である,JIS C 1400-12-1
に従う。
試験に当たって,用いる試験方法,試験条件,供試品の仕様及び試験結果を詳しく記載した報告書によ
って文書化する。試験方法の説明には,測定手順,計器類,データ収集及びデータ解析に関する詳細も含
める。この箇条に規定する方法から逸脱する場合は,その内容を文書化する。
測定報告書は,JIS Q 17025及び試験要求事項を定義した関連規格(JIS C 1400-12-1,IEC/TS 61400-13,
JIS C 1400-11など)の要求事項を満足させる。
13.2
設計データ検証試験
13.2.1
一般事項
簡易荷重計算法に必要なデータの決定,又はシミュレーションモデル(空力弾性モデル)の検証に当た
って,試験を実施し,次の設計データを検証又は決定する。
− 設計出力 Pdesign
− 設計ロータ回転数 ndesign
− 設計ロータ軸トルク Qdesign
− 最大ロータ回転数 nmax
13.2.2 Pdesign,ndesign,Vdesign及びQdesign
51
C 1400-2:2020 (IEC 61400-2:2013)
設計風速Vdesignは,1.4Vaveと定義する。そのとき,設計出力Pdesign及び設計ロータ回転数ndesignは,設計
風速における出力レベル及びロータ回転数である。これらのパラメータを決定するために,風速,出力及
び回転数を公称電気出力下において測定する。
測定データを0.5 m/s風速ビンに入れる。Vin以下である1 m/sから2Vaveまでの各風速区間は,10以上の
データ点を含める。一つのデータ点は,0.5 Hz以上のサンプリング周波数で記録したサンプルの1分間平
均に基づく。
設計ロータ軸トルクQdesignは,Pdesign及びndesignから式(50)によって導くか,又は直接測定による。動力
伝達系の効率ηは,より正確に証明された値がない場合は,式(49)によって算出する。
(
)
(
)
+
=
の場合
>
の場合
≦
kW
20
7.0
kW
20
005
.0
6.0
design
design
design
P
P
P
η
································· (49)
design
design
design
π
30
n
P
Q
η
=
····································································· (50)
13.2.3
最大ヨー角速度
最大ヨー角速度は,ヨー軸周りのロータのヨー運動の最大速度と定義する。詳細は,次による。
1) ヨー軸及び/又はファーリング軸周りのロータの自由運動を伴うパッシブヨー風車の場合,このヨー
角速度は,ナセルフレームヨー角速度の要素と,ヨー軸に平行な軸周りのファイリング速度の要素と
からなる。パッシブヨー風車の場合,測定値は簡略化した荷重計算には用いることができないため,
7.4.3の式(27)で得られる値を用いる。
2) 全ての条件においてヨー軸周りのロータの制御運動を伴うアクティブなヨー風車の場合,測定値を簡
易荷重計算法に用いることが望ましい。
3) ヨー軸周りのロータの運動を[例えば,回転速度又は加速を制限する装置(ダンパなど)を用いて]
部分的に制限したセミアクティブヨー風車又は減衰ヨー風車の場合,運転中の全ての風況において測
定値に上限があることを示すことができる場合は,測定値を用いてもよい。これが示すことができな
い場合は,7.4.3の式(27)で得られる値を用いる。
製造業者が上記の2) 及び3) のモデル検証のために,ヨー角速度を測定する場合は,次の事項を考慮す
ることが望ましい。
− ヨー角速度は,外部条件の影響を強く受けやすい。
− 最大ヨー角速度を導き出すために,内挿又は外挿が必要になる可能性がある。
− ヨー位置からヨー角速度を導き出した場合,その結果は不明確なものになりやすい。
13.2.4
最大ロータ回転数
10 m/s〜20 m/sの風速範囲で最大ロータ回転数を与える風車条件(例えば,負荷喪失又はガスト)下に
おいて,ロータ回転数を測定する。測定データは,2時間以上とし,そのうち15 m/s未満のデータを30
分間以上,15 m/sを超えたデータを30分間以上とする。これらのデータから,最大ロータ回転数は,傾き
の変化を考慮に入れて,Vrefへの内挿又は外挿によって決定する。
13.3
機械的荷重試験
荷重測定は,設計計算が正しいことを証明すること及び設計荷重を決定することの二つの目的のために
行う。
荷重測定プログラムは,7.5に定義する設計荷重ケースに実際上可能な限り近い測定による荷重ケースに
52
C 1400-2:2020 (IEC 61400-2:2013)
基づいて構成する。測定による荷重ケースには,通常運転状態,最大運転状態及び故障状態,ブレーキ性
能並びにヨー挙動を全て含める。試験は,設計風速の範囲全体で,典型的な運転挙動を特徴付けるのに十
分なものとする。該当する風速に対して,外挿を可能にするために,統計的に十分な量のデータを収集す
る。
測定データには,少なくとも荷重,気象パラメータ及び風車の運転データを含める。構造物において臨
界荷重が作用する位置で荷重を測定する。これらの荷重は,翼根曲げモーメント,軸荷重及び支持構造物
に働く荷重を含む場合がある。気象パラメータは,ハブ高さの風速及び風向を含める。該当する風車の運
転データは,ロータ回転数,電力,ヨー位置及び風車の状態を含めて測定する。
設計荷重が正しいことを証明するために荷重測定を実施する場合,データは,計算した荷重との有効な
比較が可能なように解析する。少なくとも,適正な荷重データの平均値,最小値及び最大値,並びに標準
偏差を,測定された風速,乱流強度の範囲及び試験報告書に含まれる関連データの全般にわたって評価し,
記録する。
試験手順及び試験評価の指針は,IEC/TS 61400-13を参照する。
13.4
耐久性試験
13.4.1
一般事項
耐久性試験は,次について調査するために行う。
− 構造的健全性,及び材料劣化(腐食,ひび及び変形)
− 風車の環境条件からの保護特性
− 風車の動的挙動
耐久性試験中は,試験手順を遂行し,試験用風車が確実に次の全ての試験基準を満たすかどうか,及び
いつ満たすかを確認する。風車がこれらの試験基準を満たした場合,耐久性試験に合格したことになる。
1) 試験期間中の確実な運転
2) 6か月間以上の運転
3) 全ての風速域で合計2 500時間以上の発電
4) 1.2Vave以上の風速において250時間以上の発電
5) 1.8Vave以上の風速において25時間以上の発電
6) 風車の通常運転期間において2.2Vave以上かつ15 m/s以上の風況下で10分以上の通常運転
上記の5) 及び6) に関しては,次による。
− 風車が1.8Vaveで停止するように設計されている場合,この条件における“発電”を“通常運転”に緩
和することができる。
− この風速において,風車が停止するように設計されている場合は停止しなければならず,発電するよ
うに設計されている場合は発電しなければならない。
風車がSクラスの場合,上記の全ての試験基準に加え,15 m/s以上の風速において250時間以上の発電
を要求事項として追加する。
15 m/sの平均乱流強度を,報告する。この乱流強度は,10分間の平均風速が14.5 m/s〜15.5 m/sの範囲
の全てのデータ点の乱流強度の平均値とする。
試験期間中の最大瞬間風速(3秒間のガスト)を,試験報告書に記載する。
53
C 1400-2:2020 (IEC 61400-2:2013)
耐久性試験期間中の風車挙動は,可能な限り風車の通常使用に類似させる。例えば,バッテリ電圧レベ
ルは,バッテリ充電システムとしてはバッテリバンクの通常な充放電を反映して変化させることが望まし
い。
小規模な補修は容認されるが,13.4.4に従って報告する。
風速は,0.5 Hz以上のサンプリング速度とし,ハブ高さで測定した風速サンプルの10分間(JIS C
1400-12-1に定義する連続した計測データから算出した10分間)の平均値と定義する。
注記 1分間データを10分間データに変換する場合は,次のように計算することができる。
1分間データを10分間データに変換する必要がある場合に限る。10分間平均値は,1分間平
均の平均値とする。10分間の最小値及び最大値は,それぞれ,1分間測定の最小値及び最大値
とする。
10分間の標準偏差は,1分間の標準偏差を次の式を用いて計算することによって得られる。
(
)
2
10
1
min
1
10
1
2
min
1
2
min
1
min
10
10
1
10
1
−
+
=
∑
∑
=
=
i
i
i
i
i
μ
μ
σ
σ
······························· (51)
簡易式は,次のとおりである。
(
)(
)2
min
10
10
1
2
min
1
2
min
1
min
10
10
1
μ
μ
σ
σ
−
+
=
∑
=i
i
i
········································ (52)
ここに,
σ: 標準偏差
μ: 指定された一連のデータの平均値
発電は,電気負荷との接続点で電力変換器によって測定した正の出力を風車が発生していることと定義
する。(出力信号に対するあらゆるオフセット値を考慮した後に)10分間の平均出力が正である場合,こ
れらの全ての10分間の合計が2 500時間を超えるまで加算する。
10分間の平均風速が1.2Vave以上又は1.8Vave以上のいずれかである場合,10分間の平均出力はそれぞれ
の発電時間の合計が250時間及び25時間を超えるまで加算する。
耐久性試験では,全風向からの風を発電時間に用いてもよい。
地形は,出力性能試験(附属書B又はJIS C 1400-12-1)に用いる要求事項を満たさなくてもよい。風速
計は,測定する風速が風車ハブ高さでの風速を示す代表的な位置に設置することが望ましい。風速計を風
車の受ける風速よりも大幅に大きい(5 %を超える)風速が測定されるような位置に設置しないように注
意することが望ましい。
13.4.2
確実な運転
13.4.2.1 一般事項
信頼性のある運転とは,次の条件をいう。
− 運転時間率が,90 %以上である。
− 風車システム中の風車又はコンポーネントに主要な故障がない。
− 風車のコンポーネントに重大な摩耗,腐食又は損傷がない。
− 同等な風速において発電電力量に大きな低下がない。
13.4.2.2 主要な故障
計画保守又は点検以外の目的で,試験期間中に風車に加えた全ての変更について,試験機関はこれらの
54
C 1400-2:2020 (IEC 61400-2:2013)
変更が主要な故障に起因するものかどうかを判定する。試験機関の判定事項は,試験報告書に記載する。
風車システムの主要な故障には,風車の安全性及び機能に影響を及ぼすシステムコンポーネント(翼,主
軸,交流発電機,ヨーベアリング,支持構造物,コントローラ,インバータなど)に関する全ての重大故
障を含める。
13.4.2.3 重大な摩耗
重大な摩耗とは,許容できない強度低下又は隙間の喪失をもたらし,風車の寿命に影響を及ぼす全ての
摩耗をいう。部品の摩耗,腐食及び損傷について,据付け及び試運転の直後に風車システムの詳細な検査
を実施し,試験の開始前に存在した摩耗,腐食及び損傷を文書に記録し,さらに,試験の終了時に2回目
の詳細な検査を実施することによって評価する。これらの詳細な検査では,風車の規模,故障の重大さ及
び部品保証の状況以外には立ち入らない。
13.4.2.4 運転時間率
耐久性試験では,運転時間率とは,評価期間中に風車が設計上の通常動作を示す時間の,試験時間に対
する比(パーセント表示)をいう。設計上の通常動作には,(該当する場合,)次の事項を含める。
− 風車が発電中
− 弱風カットインから強風カットアウトに遷移する風速による自動的な起動及び停止
− Vin未満又はVout超の風速におけるアイドリング又は待機状態
− 通常停止(故障停止ではない。)と風車の再スタートとの間の延長時間(例えば,ブレーキ冷却サイク
ル及び翼端ブレーキの格納)
運転時間率Oは,式(53)によって算出する。
%
100
E
U
T
E
U
N
T
×
−
−
−
−
−
=
T
T
T
T
T
T
T
O
······················································· (53)
ここに,
TT: 評価期間(耐久性試験中の全考察期間)
TN: 風車が運転していないと判明している期間
TU: 風車の状態が不明の期間
TE: 解析から除外される期間
評価期間において,風車の状態が不明の期間及び解析から除外される期間は,運転時間率を上げる又は
下げるにかかわらず,いずれも考慮されないことに注意する。
次に示す状態は,風車故障とみなし,TNの一部とする。
− 風車の運転が妨げられていることが風車コントローラによって表示された風車の故障状態
− 表示された故障が原因の風車コントローラによる風車の自動停止
− 定期点検又は明らかな故障状態のために,手動による通常運転状態から休止,停止又は試験モードへ
の選択
− 製造業者の推奨に従って実施される風車の点検
− 垂れ下がりケーブルを解くための運転中断時間
次に示す状態は,風車の状態が不明の時間とみなし,TUの一部とする。
− 試験所のデータ収集システムの故障又は保守
− 風車状態の記録の喪失又は未解明記録
55
C 1400-2:2020 (IEC 61400-2:2013)
次に示す状態は,試験期間から除外される期間とみなし,TEの一部とする。
− 試験の一部として行う風車の点検(例えば,データ収集システムの点検)の中で,製造業者が推奨し
ていないもの
− 風車又は製造業者以外の事由によって生じた運転停止状態
− 定期点検又は明らかな故障状態とは異なる目的による,手動による通常運転状態から休止,停止又は
試験モードへの選択
− 系統,バッテリシステム,インバータ又は供試風車システム外のコンポーネントの故障。これらのコ
ンポーネントが風車システムの一部とみなされる場合,この期間はTNとしてカウントする。
− 外部条件が設計上の外部条件から逸脱したことを風車の制御システムが検知したことによる発電の低
下又は停止
風車故障が通常外部条件下で,上記のいずれの状態中に発生した場合,その期間はTNの一部とみなす。
耐久性試験の報告書には,どのコンポーネントを小形風車システムの一部とみなし,どのコンポーネン
トを小形風車の外部とみなしたかを明確に記載する。この記載には,次の事項を考慮する。
− 風車と地面との間の機械的インタフェース
− 風車と負荷との間の電気的インタフェース
− 風車と現場及び/又は遠隔制御装置との間の制御的インタフェース
明確に風車故障及び外部条件のいずれにも起因しない条件がある場合,試験計画には,これらの条件を
どのカテゴリに起因するかを定義付ける。このような条件には,次の例がある。
− 翼端ブレーキ又はファーリングの不測の動作
− 過渡電圧によるコントローラの誤作動
試験報告書には,耐久性試験中の全時間における風車運転状態の確定及び記録に用いる計器の使用及び
データ記録整理方法を記載する。
13.4.2.5 発電出力の低下
耐久性試験の一部として,風車の出力性能の隠れた低下を確認するため,次の手順で試験する。
耐久性試験の月単位で,出力レベルを,風速によってビン処理する。各風速について,時間の関数とし
てビン処理した出力レベルをプロットする。傾向が検出された場合,その原因を決定するために,調査を
行う。バッテリ充電システムの場合,類似の充電状態をもつ点をプロットすることが望ましい。通常運転
とみなしたデータ点だけを解析に用いることが望ましい。風速の読みにおける,地形及び障害物が及ぼす
解析上の潜在的影響を除去するため,測定方位区分の範囲内で得られたデータだけを用いてもよい。
13.4.3
動的挙動
システムが過度に振動しないことを検証するため,風車の動的挙動を評価する。風車の動的挙動は,カ
ットイン風速から1.8Vaveまでの風速の風の中で,全体で1時間以上,全ての運転条件(例えば,負荷状態,
無負荷状態及びファーリング状態)下で観察する。タワーの振動及び共振,風車騒音,テールの運動並び
にヨー挙動に特に注意を払うことが望ましい。観察結果を,記録簿及び試験報告書に記載することが望ま
しい。この観察結果は測定器を用いて評価してもよい。
13.4.4
耐久性試験の報告
耐久性試験の報告書には,次の情報を含める。
56
C 1400-2:2020 (IEC 61400-2:2013)
a) 次の事項を含む,試験に用いた具体的な風車の設計形状に関する識別情報及び説明
− 風車の製造業者名,型式名,製造番号,製造年
− 製造業者が指定した設計用のSWTクラス
− 受風面積
− ロータ直径(該当する場合)
− ハブ高さ及びタワーの種類
− 電圧を含む負荷(系統連系方式,バッテリ充電方式など)に関する説明
− 制御システム用ソフトウェアのバージョン及び設定値
− 風車システムの境界部分(機械的部分,電気的部分及び制御部分)に関する明確な説明
b) 次の事項を含む,試験サイトに関する説明
− 風車ロータ直径の20倍の半径方向距離に至る周辺領域を示し,地形,風車の位置,気象観測マスト,
有意な障害物,及び他の風車を示した試験サイトの地図。地図には,縮尺目盛を含める。
− 四つの基本方位(東西南北)に向かって撮影した写真
− 主風向に向かって撮影した風車及び気象観測マストの写真
− サイト標高の説明及び典型的な空気密度の表示
− 試験期間における気温を示す図表
c) 試験装置の説明
− 全ての使用計器の製造業者名,型式名,製造番号
− 気象観測マストの計器設置場所
− 各計器の校正証明書の写し
− 風車運転状態を確定するために用いた方法についての説明
− サンプリング周波数の説明
d) データ取得方法の説明
e) 試験結果の説明
− 試験の開始日及び終了日の説明
− 各風速を超えた発電時間,及び月別に分類した運転時間率の時間成分を記載した表(附属書G参照)
− 15 m/sでの平均乱流強度
− 試験期間中の最大瞬間風速(3秒間ガストの最大値)
− 月別の運転時間率の計算に用いた時間区分ごとの時間,及びTT以外の時間に分類した理由を記載し
た表
− 出力低下解析の図表,及び低下が見つかった場合はその理由
− 動的挙動の観察結果の記録
− 耐久性試験に合格した小形風車に対するSWTクラス(風車試験クラス)
f)
保守,補修及び/又は変更
− 風車に実施したあらゆる保守の記録
− 風車に施したあらゆる補修及び/又は変更の記録
g) 試験後の検査
− 試験後の検査の結果(写真を含む。)
h) 規定からの逸脱
− この箇条の要求事項からのいかなる逸脱も,試験報告書中の別の箇条として明確に記録する。全て
57
C 1400-2:2020 (IEC 61400-2:2013)
の逸脱は,逸脱の技術的な根拠及び試験結果に対して推定される影響を用いて裏付ける。
13.5
機械部品の試験
13.5.1
一般事項
全ての小形風車に対して,ブレードの静的荷重試験を実施する。荷重を担うその他全てのコンポーネン
トは,7.9に従って荷重計算していない場合,試験を行う。一般的に,この試験は,安全率を含む設計荷重
の最悪な組合せで行う。風車の安全運転を妨げる可能性があるいかなる損傷(例えば,剛性の大きな喪失,
プラスチック材料の変形,座屈,亀裂など)も起きてはならない。
購入部品の場合,設計荷重が,部品仕様の範囲内であることを示す必要がある。
13.5.2
翼試験
ブレードの静的荷重試験で加える荷重は,フラップ方向の曲げモーメントと遠心力との最悪の組合せと
する。翼は,翼ハブ接続部を含めて試験する。簡易荷重計算法,シミュレーションモデル又は荷重測定に
よって予測される最大運転荷重まで,安全率を含めた試験荷重で損傷が起きてはならない。
簡易荷重計算法(7.4)によって決定した設計荷重の場合,ブレードスパンに沿った想定荷重分布は,附
属書Fに示す式を考慮することによって得ることができる。
試験中にブレードスパン方向に沿って荷重を分布させるには,適切な数の荷重点を選択することが望ま
しい。荷重点の場所及び荷重の大きさは,必要な翼根曲げモーメントが得られるように選択し,かつ,試
験によって表される設計荷重ケースの曲げモーメント分布に対して実現可能な限り近い(等しい又はより
大きい)翼長に沿った曲げモーメント分布が得られるように選択する。
翼端の変位量は,ブレードとタワー又は他の支持構造物との無負荷状態での離隔距離を超えてはならな
い。材料特性又は形状の変化に対応可能で十分な変位の許容値を提供するか,又は製造したブレードの品
質を確認するために十分な試験を実施するかの,いずれかを行う。
注記 複数の荷重ケースで,試験を行うことが適切な場合がある。例えば,待機中のロータの曲げモ
ーメントを示すための試験,及び最大ロータ回転数下の遠心荷重を示すための試験の両方が必
要になる場合がある。
設計荷重と実際の翼破壊荷重との間の強度余裕を決定するため,翼を破壊する試験を実施することが望
ましい。
翼疲労試験を実施する場合,試験は,IEC/TS 61400-23の要求事項を満たしていなければならない。
13.5.3
ハブ試験
ハブ試験を実施する場合,ハブが翼との全ての接続点で受ける遠心力及びフラップ方向の曲げを模擬す
ることによって静的に試験する。ハブは,ハブ軸接続部を含めて試験する。最大計算荷重に基づいた設計
試験荷重(安全率を含む。)によって,損傷が起きてはならない。
13.5.4
ナセルフレーム試験
ナセルフレーム試験を実施する場合,ナセルフレームは軸を傾けたときに生じる曲げモーメント,ロー
タの軸方向力及びロータ質量を加えて,静的に試験する。計算した最大荷重に基づいた設計試験荷重(安
全率を含む。)によって損傷が起きてはならない。
13.5.5
ヨー機構試験
ヨー機構試験を実施する場合,ヨー機構はナセルフレーム試験(13.5.4参照)に規定する荷重を加えて
試験する。ヨー機構は,適切に動作することを示す。
13.5.6
ギアボックス試験
ギアボックス試験は要求しないが,ギアボックスの試験及び設計は,IEC 61400-4に準拠することを推
58
C 1400-2:2020 (IEC 61400-2:2013)
奨する。
13.6
安全性及び機能試験
安全性及び機能試験の目的は,試験中の風車が設計で予測した挙動を示し,要員の安全に関する対策が
適切に実行されていることを検証することである。
安全性及び機能試験には,設計文書に記載される試験検証を必要とする制御システム及び保護システム
の重要な機能を含める。これらの重要な機能には,次を含める。
− 出力及び回転数制御
− ヨーシステム制御(風向追従)
− 負荷の喪失
− 設計風速以上における過回転防止
− 設計風速を上回る風速における起動及び停止
該当することが想定されるその他の項目は,次による。
− 過度の振動に対する保護
− 過大電圧及び過小電圧に対するバッテリの保護
− 通常運転中の緊急停止
− ケーブルのねじれ
− 単独運転防止(系統連系用に対して)
コンポーネントの故障,又はその他の重大事象若しくは運転状態によって作動する可能性がある追加の
保護システムの機能も試験する。この試験には,重大事象又は運転状態のシミュレーションを含めてもよ
い。例えば,ケーブルがひどくねじれたとき,自動的に遮断するように設計したケーブルを垂れ下げた小
形風車の場合,適切に機能することを実証する。
13.7
環境試験
小形風車を通常外部条件(箇条6参照)外の外部条件によって設計した場合,風車に対してこれらの条
件を模擬する試験を行う。これらの試験は,小形風車全体に対して実施することが望ましい。小形風車全
体で試験することが困難な場合は,この外部条件によって影響を受けるシステムのあらゆる部分に対して
試験する。
13.8
電気試験
小形風車の安全性に決定的な影響を及ぼす電気のサブシステム(例えば,発電機,制御盤,モータ,変
圧器,GFCI及びヒータ)は,該当するJIS又はIEC規格に基づいて評価し,試験する。例えば,発電機
については,試験はIEC 60034-1,IEC 60034-2規格群,IEC 60034-5及びIEC 60034-8に適合することが
望ましい。
59
C 1400-2:2020 (IEC 61400-2:2013)
附属書A
(参考)
小形風車の仕様変更
A.1 一般事項
小形風車の仕様変更は,元となる風車の派生型を製作する場合,又は元となる風車を改良する場合に行
われる。仕様変更には,原則として風車のあらゆる側面が含まれる。型式認証に影響を及ぼす可能性があ
る仕様変更は,JIS C 1400-22:2014[特に,6.5.2(型式認証書の維持)を参照するが,これに限定されない。]
に規定されている。
この附属書に示す概念は,設計評価及び型式試験のいずれにも関連する。
ある風車の派生型が複数ある場合,代表的な構成に対して,完全な設計評価を行う。その他の派生型に
対しては,代表的な構成との異なる点について,評価又は試験を行う必要がある。仕様変更の設計評価を
行うのか,型式試験を行うのか,限定的に試験を行うのか,全く試験を行わないか,又はこれらを組み合
わせて行うのかは,代表的な構成から逸脱した点の詳細に応じて決定する。この決定に当たっては,設計
を十分に理解し,設計の弱点を知ることが必須である。
A.2〜A.4に,説明用の事例を示す。
A.2 例1:発電出力形式
様々な発電出力形式(直流又は交流,異なる出力電圧,50 Hz又は60 Hzなど。ただし,出力値は全て
同じ。)で使用可能な風車は,ある構成の性能が代表的な構成の性能よりも大きな応力を生じる場合,又は
代表的な構成とは異なる形で風車に応力を生じる場合を除き,通常,個別の構造設計評価は不要である。
なお,様々な出力形式で使用可能な風車であっても,通常,個別の性能試験(出力及び音響)は必要と
なる。ただし,構成が代表的な構成と同様の性能特性をもつことを実証できるものは,限定的な性能試験
を行うことで十分な場合もある。
異なるインバータを用いる風車であって,構成が代表的な構成の荷重,性能及び機能に関する特性と同
様であることを実証できるものは,性能試験及び耐久性試験を限定的に適用する場合もある。
A.3 例2:翼
高風速及び低風速の条件に対して設計した翼(構造形状における派生型の例)が適用可能な小形風車は,
個別に設計評価,耐久性試験及び静的翼試験が必要となる。初期設計評価及び耐久性試験を,最も大きな
応力を受ける構成で行った場合は,追加の耐久性試験が不要な場合もある。ただし,性能試験(出力及び
音響)は,個別の構成ごとに実施する必要がある。
A.4 例3:支持構造物
様々なタワー又は支持構造物の構成が適用可能な小形風車は,代替のタワー又は支持構造物の動的及び
静的な挙動によって,風車の設計限界を超えないことが計算及び/又は限定的な試験で十分に実証できる
場合,タワー又は支持構造物ごとの耐久性試験は不要である。
小形風車の場合,見かけ上の小さな仕様変更であっても重大な影響を及ぼす場合があることに注意する。
例えば,電線径を太くする場合,風車に対して過負荷を引き起こす場合がある。同様に,ペンキの色を変
60
C 1400-2:2020 (IEC 61400-2:2013)
えると過熱を引き起こす場合がある。このため,再度強調するが,システム設計及び仕様変更の影響を十
分に理解することが必須である。
61
C 1400-2:2020 (IEC 61400-2:2013)
附属書B
(規定)
SWTクラスSの場合に記載する設計パラメータ
SWTクラスSの小形風車の場合,次の情報を設計文書に記載する。
機械パラメータ
− 設計出力
(W)
− ハブ高さにおける運転風速範囲 Vin〜Vout
(m/s)
− 設計寿命
(年)
風条件
− 平均風速の関数としての乱流強度特性
(−)
− 年平均風速
(m/s)
− 気流の平均傾斜角
(°)
− 風速分布(ワイブル,レイリー,実測などによる。)
(−)
− 乱流モデル及びパラメータ
(−)
− ハブ高さにおける極値風速Ve1及びVe50
(m/s)
− 1年及び50年の再現期間における極値ガストモデル及びパラメータ
(−)
− 1年及び50年の再現期間における極値風向変化モデル及びパラメータ
(−)
− 極値コヒーレントガストモデル及びパラメータ
(−)
− 風向変化を伴う極値コヒーレントガストモデル及びパラメータ
(−)
電力系統条件
− 通常の供給電圧及び範囲
(V)
− 通常の供給周波数及び範囲
(Hz)
− 電圧不平衡
(V)
− 電力系統の停電の最大継続期間
(日)
− 電力系統の停電の回数
(回/年)
− 自動再閉路周期(要説明)
(−)
− 対称及び非対称の外部故障中の挙動(要説明)
(−)
その他の環境条件(考慮が必要な場合)
− 洋上小形風車の場合の設計条件(水深,波の条件など)
(−)
− 通常及び極値の温度範囲
(℃)
− 大気中の相対湿度
(%)
− 大気密度
(kg/m3)
− 日射
(W/m2)
− 雨,あられ,雪及び氷
(−)
− 化学的活性物質
(−)
− 機械的活性粒子
(−)
− 雷保護システムの説明
(−)
− 地震モデル及びパラメータ
(−)
62
C 1400-2:2020 (IEC 61400-2:2013)
− 大気中塩分濃度
(g/m3)
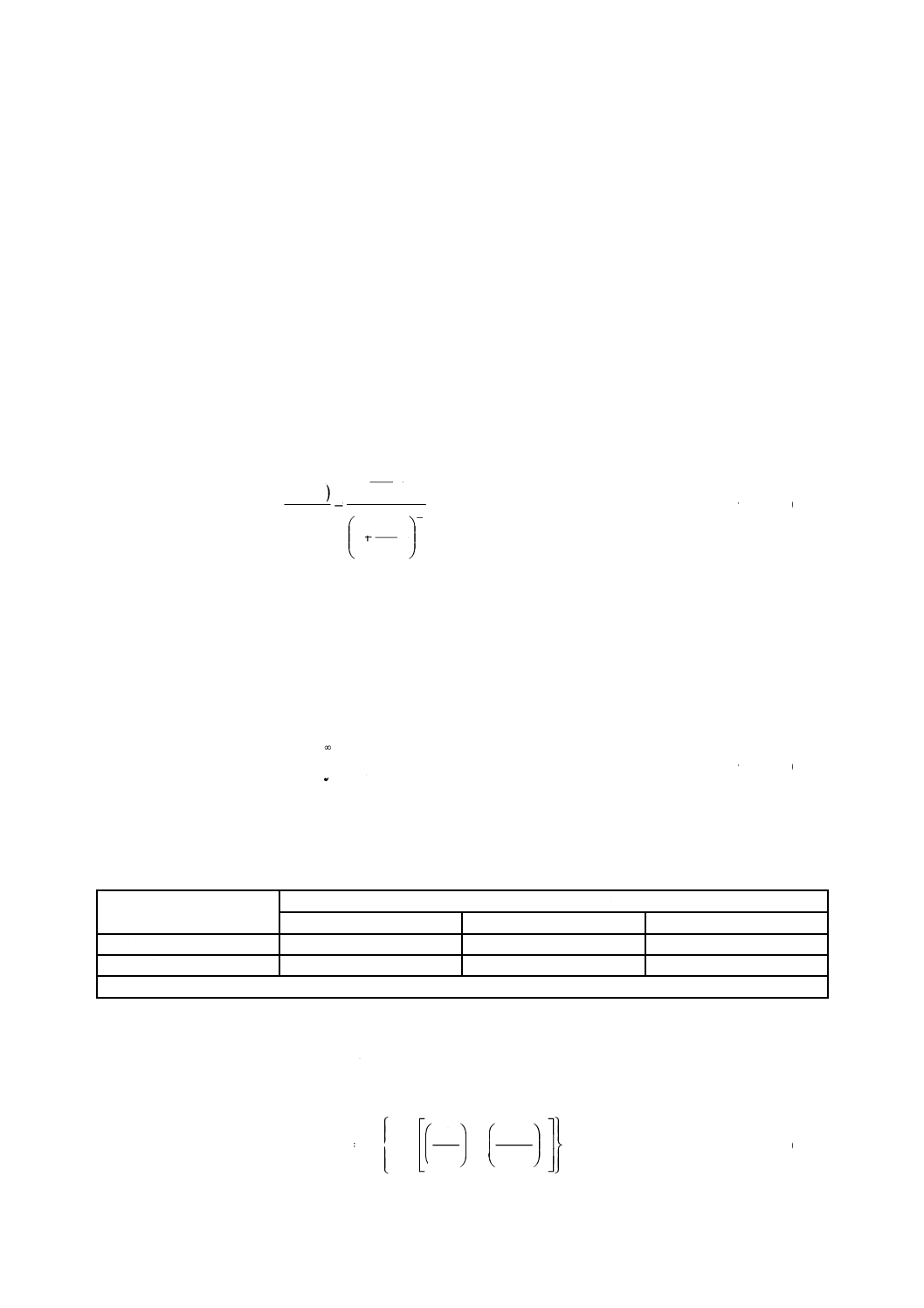
63
C 1400-2:2020 (IEC 61400-2:2013)
附属書C
(参考)
乱流の統計的モデル
C.1 一般事項
次に示す乱流の統計モデルを,設計荷重計算に用いてもよい。このモデルは,6.3.2の要求事項を満足し
ている。乱流速度の変動は,その成分がゼロ平均のガウス統計量をもつランダムのベクトル場であると仮
定する。成分を表すパワースペクトル密度は,カイマル(Kaimal)のスペクトルモデル,及び指数コヒー
レンスモデル又はフォン・カルマン(von Karman)の等方性乱流モデルによって与えられる。
カイマルのスペクトルモデル
成分ごとのパワースペクトル密度は,式(C.1)によって無次元の形で与えられる。
()
3
5
hub
hub
2
6
1
4
+
=
V
fL
V
fL
f
fS
k
k
k
k
σ
······························································ (C.1)
ここに,
f: 周波数(Hz)
k: 速度成分の方向を示す添字(すなわち,1=主方向,2=
横方向,3=垂直方向)
Sk: 片側速度成分スペクトル
σk: 速度成分の標準偏差[式(C.2)参照]
Lk: 速度成分の積分尺度パラメータ
さらに,
()
∫∞
=
0
2
df
f
Sk
k
σ
······································································ (C.2)
乱流のスペクトルパラメータは,表C.1で与えられる。
表C.1−カイマルモデルの乱流のスペクトルパラメータ
速度成分の添字 k
1
2
3
標準偏差
σk
σ1
0.8σ1
0.5σ1
積分尺度パラメータ Lk
8.1Λ1
2.7Λ1
0.66Λ1
注記 σ1及びΛ1は,それぞれこの規格に規定する乱流の標準偏差及び尺度パラメータである。
C.2 指数コヒーレンスモデル
式(C.3)に示す指数コヒーレンスモデルは,主方向速度成分の空間的相関構造を考慮するために,カイマ
ルの自己スペクトルモデルと併用してもよい。
(
)
5.0
2
c
2
hub
12
.0
8.8
exp
,
+
−
=
L
r
V
fr
f
r
Coh
·································· (C.3)
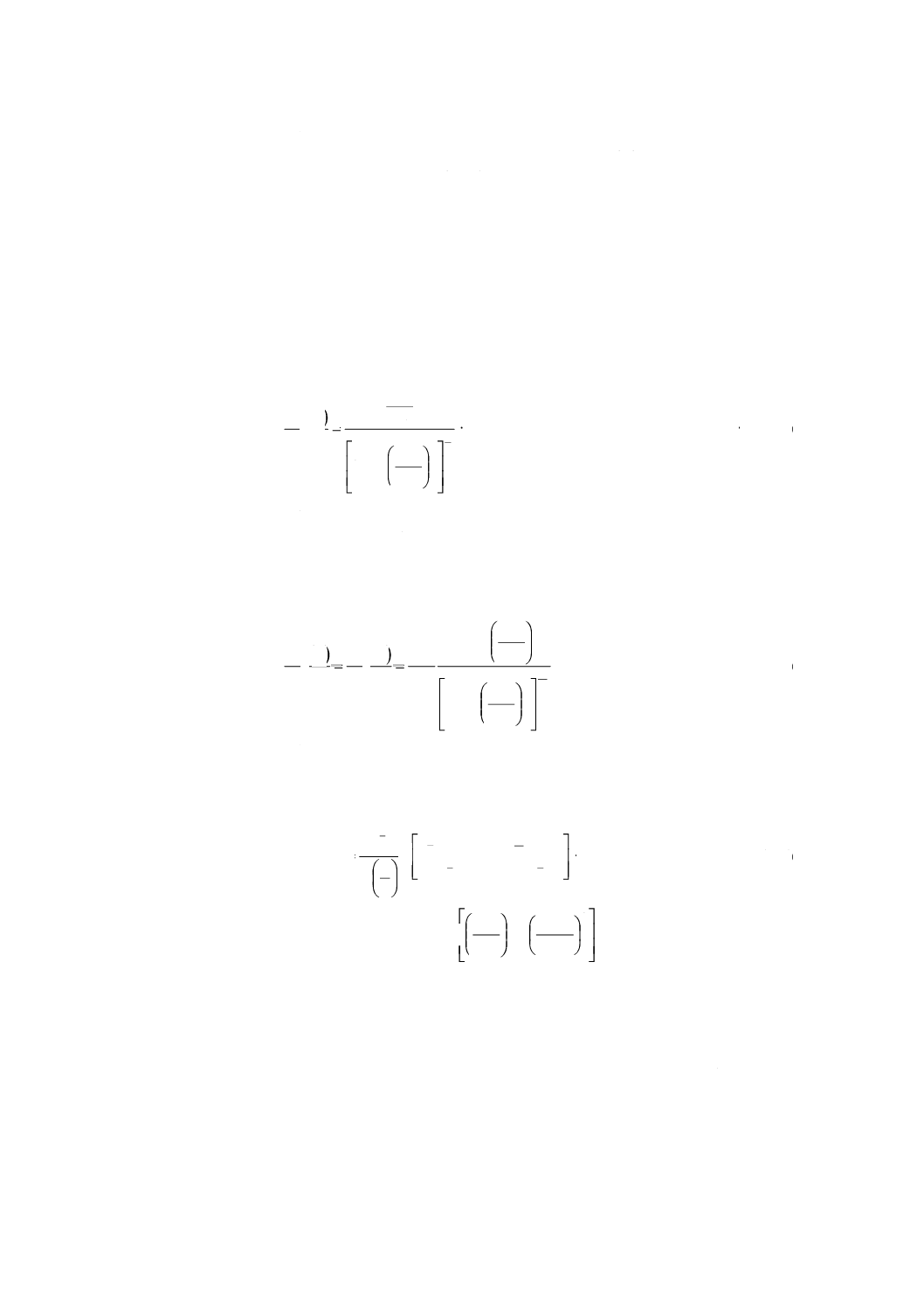
64
C 1400-2:2020 (IEC 61400-2:2013)
ここに,
Coh(r,f): 自己スペクトル関数によって正規化された,空間的に離
れた2点における主方向速度成分のクロススペクトル密
度の絶対値によって定義されるコヒーレンス関数
r: 平均風向に垂直な平面上へ投影された2点間のベクトル
の大きさ
f: 周波数(Hz)
Lc=3.5Λ1: コヒーレンスの尺度パラメータ
C.3 フォン・カルマンの等方性乱流モデル
フォン・カルマンの等方性乱流モデルでは,主方向速度成分のスペクトルは,式(C.4)に示す無次元の方
程式で与えられる。
()
6
5
2
hub
hub
2
1
1
71
1
4
+
=
V
fL
V
fL
f
fS
σ
························································· (C.4)
ここに,
f: 周波数(Hz)
L=3.5Λ1: 等方性乱流の積分尺度パラメータ
σ1: ハブ高さにおける主方向の標準偏差
横方向及び垂直方向のスペクトルは等しく,式(C.5)に示す無次元の方程式で与えられる。
()
()
6
11
2
hub
2
hub
hub
2
3
3
2
2
2
71
1
189
1
2
+
+
=
=
V
fL
V
fL
V
fL
f
fS
f
fS
σ
σ
······································ (C.5)
ここに,
L: 式(C.4)と同じ等方性乱流の積分尺度パラメータ
σ2=σ3=σ1: 速度成分の標準偏差
この場合,コヒーレンスは,式(C.6)で与えられる。
(
)
()
()
−
×
=
x
K
x
x
K
x
Γ
f
r
Coh
6
1
6
11
6
5
6
5
6
1
5.0
6
5
2
,
··································· (C.6)
ここに,
x:
5.0
2
2
hub
12
.0
π
2
+
L
r
V
fr
r: 2点間の距離
L: 等方性乱流の積分尺度パラメータ
Γ(.): ガンマ関数
K(.)(.): 分数次,修正ベッセル関数
式(C.6)は,Lcを等方性尺度パラメータLで置き換えることによって,式(C.3)の指数モデルと近似するこ
とができる。
65
C 1400-2:2020 (IEC 61400-2:2013)
附属書D
(参考)
乱流の決定論的モデル
小形風車,特にロータの振動モードが十分に減衰する場合,次に示す決定論的モデルを通常風条件下の
乱流に対して用いてもよい。十分に減衰するか否かの検証は,回転ブレード系風速度に対する簡易的な統
計モデルを用いてもよい。この簡易的な検証モデルでは,小形風車の動的シミュレーションモデルの時間
ステップごとに,独立し,時間的に相関がなく,かつ,標準偏差が平均値の5 %のランダムな増分を各ブ
レードに対して平均風速に加える。各翼は,十分にそれぞれの瞬時速度場に入っていると仮定する。この
条件下で,翼端の変形及び翼根部の曲げモーメント(フラップ方向及びエッジ方向)について,時刻歴応
答解析を実施する。この解析では,回転ブレード系周波数が基本振幅よりも高い調和振幅の比を決定する。
これらの比が全て1.5未満である場合,次の決定論的モデルを用いることができる。
主方向の速度成分:
(
)
()
(
)
(
)
(
)
+
+
+
+
+
=
t
f
t
f
z
A
t
f
t
f
y
A
t
f
A
z
V
t
z
y
v
3
2
2
3
2
2
1
1
1
π
2
cos
4
1
π
2
sin
π
2
sin
4
1
π
2
sin
π
2
sin
,
,
··········································· (D.1)
ここに,
(y, z): 小形風車の受風面における点の横軸(y軸)及び垂直軸
(z軸)の座標。原点は,ロータの中心とする。
横方向(y軸方向)の速度成分:
()
(
)
+
=
t
f
t
f
A
t
v
5
4
3
2
π
2
sin
4
1
π
2
sin
············································· (D.2)
横方向速度成分は,ロータの受風面積にわたって一様であると仮定する。
これらの風速モデルにおいて,振幅及び周波数のパラメータは,次の関係式で与えられる。
振幅パラメータ:
1
3
1
2
1
1
8.0
0.2
A
A
D
A
A
A
=
=
=
σ
周波数パラメータ:
0.
10
6.0
0.
10
0.4
4
019
.0
4
5
1
4
1
3
1
2
1
hub
1
f
f
f
f
f
f
f
f
Λ
V
f
=
=
=
=
=
ここに,
σ1: ハブ高さにおける風速の標準偏差
Λ1: 乱流の尺度パラメータ
Vhub: ハブ高さでの10分平均風速
D: 風車のロータ直径
66
C 1400-2:2020 (IEC 61400-2:2013)
横方向及び主方向の速度成分は,両方を併せて式(D.3)の関係式を用いて,ハブ高さにおける瞬間風速及
び風向を定義することに注意する。
()
(
)
[
]
()
[
]
{
}
()
()
(
)t
v
t
v
t
t
v
t
v
t
V
,0,0
arctan
,0,0
1
2
hub
5.0
2
2
2
1
hub
=
+
=
θ
···················································· (D.3)
67
C 1400-2:2020 (IEC 61400-2:2013)
附属書E
(参考)
材料の部分安全率
E.1
一般事項
この附属書は,包括的な材料試験結果を入手できない場合,疲労に対する材料の部分安全率の選定指針
を与える。
E.2
記号
F
複合材において形状効果を説明する材料安全率
(−)
N
所定の応力レベルにおいて疲労破壊に至るまでのサイクル数
(−)
P
生存確率
(−)
R
疲労サイクルにおける最小応力の最大応力に対する比
(−)
S
応力
(MPa)
Vf
繊維体積分率
(−)
γm
材料の部分安全率
(−)
δ
変動係数
(−)
E.3
特性値対設計値
特性値及び設計値の概念の定義を,次に示す。
− 特性値 統計的な確率及び信頼度が材料又は要素に関連する規定レベルを満足する,部品又は構造の
設計に用いる材料又は要素の機械的性質。この規格では,通常,材料が95 %信頼限界で特性値を超え
るという95 %確率に基づいて,材料の安全率を規定している。
− 設計値 所定の部品の設計及び解析において,設計基準,解析方法及び材料の特性値を説明する値。
材料の部分安全率を,式(E.1)に定義する。
k
m
d
1f
f
γ
=
············································································ (E.1)
ここに,
fd: 材料の設計値
γm: 材料の部分安全率
fk: 材料物性の特性値
特性値を決定するために,図E.1による適切な分布を用いることが望ましい。多くの設計者は,正規分
布又はベルカーブを利用している。ただし,経験的に,複合材料により適しているのは,ワイブル分布で
ある。
68
C 1400-2:2020 (IEC 61400-2:2013)
図E.1−正規分布及びワイブル分布
正規分布は対称形であり,平均よりも強度の小さい標本に対して,対応する強度が大きい標本があるこ
とを意味する。一方,ワイブル分布は,一方に片寄っている。図E.1の場合では,試験のいかなる組でも
強度の大きい標本数よりも強度の小さい標本数が多い。分布が右側に片寄っている場合は,母集団におい
て,強度の大きい標本数が強度の小さい標本数よりも多いことを意味する。
金属及びその他の均質材料の場合は,最も適しているのは典型的に正規分布又は対数正規分布である。
複合材料の場合,しばしばワイブル分布が適している。これは,分布曲線が右に片寄る繊維支配形の強
度特性では強度の小さい標本より大きい標本が多いため,特に当てはまる。
この規格での所定の材料安全率は,材料特性が95 %信頼限界での95 %確率に基づくという仮定に基づ
いている。
材料物性の特性値が,ほかの生存確率p(ただし,95 %信頼限界において)及び/又は10 %以上の変動
係数δから導かれている場合,関連する材料安全率に対して,表E.1に示す係数を乗じなければならない。
これらの係数は,正規分布に基づいている。
表E.1−異なる生存確率と変動係数との組合せによる係数
p
(%)
δ=10 %
δ=15 %
δ=20 %
δ=25 %
δ=30 %
99
0.93
0.95
0.97
1.02
1.06
98
0.96
0.99
1.03
1.09
1.15
95
1.00
1.05
1.11
1.2
1.3
90
1.04
1.11
1.20
1.32
1.45
80
1.08
1.18
1.31
1.47
1.65
E.4
材料安全率及び要求事項
E.4.1 一般事項
材料の疲労強度及び終極強度は,次の五つの主要な要因によって影響を受ける。材料試験は,これらの
影響を考慮することが望ましい。
a) 実スケール構造を代表する材料及び材料構成
b) 実スケール構造を代表する試験サンプルの製造方法
強度
供
試
品
の
パ
ー
セ
ン
ト
平均
正規分布
ワイブル分布
IEC 2902/13
69
C 1400-2:2020 (IEC 61400-2:2013)
c) 疲労荷重試験及びスペクトル荷重試験
d) 環境効果
e) 材料物性に影響を及ぼす形状効果(例えば,射出成形翼の材料配向,複合材及び木材の積層厚変化,
金属の鍛造による材料配向など)
最良の試験データは,a)〜e) の要因を含む実スケール試験から取得することができる。十分な試験サン
プル数を用いて,95 %確率及び95 %信頼限界の結果を得ることが望ましい。これらの影響には,標準的な
応力集中係数を含めないように注意する。これらの安全率は,応力解析中には考慮するが,材料特性評価
には考慮しない。
材料データベースがa)〜e) の全ての要因を含まない場合,部分安全率は,適切に補正する。個々の安全
率は,五つの影響のそれぞれについて推定する。これらの安全率は,適用する全ての条件に対して乗じる。
材料の特性値は,この補正した安全率で除する。
例えば,特性値が環境効果又は疲労効果を含まない場合,特性値に対して次の追加の補正安全率を適用
する。
補正安全率は,環境効果の安全率,疲労強度の安全率及び公称安全率を乗算する。材料データベースが
a)〜e) の基準を満足しない場合,小形風車の設計に対する材料安全率として,E.4.2〜E.4.4に示す指針を
適用する。
E.4.2 複合材
主な複合材の材料安全率を次に示す。
− ガラス繊維複合材の材料安全率
γm=7.4
− 炭素繊維複合材の材料安全率
γm=3.7
これらは,E.6の文献[E.1]2) から引用した材料安全率で,終極引張強度から疲労強度への変換を含む。
注2) この附属書では,角括弧内の番号は,E.6に挙げる文献を示す。
これらは,疲労,環境,信頼性,寸法などの効果を考慮して,材料の静的終極強度に適用する総合係数
である。形状効果に対する追加的な安全率は,それが局所的な材料物性に当てはまる場合,E.5に示すよ
うに必要な場合がある。形状効果は,実験又は解析によって決定される場合がある。応力解析の場合は,
応力集中を考慮に含めた方がよい。この場合,形状効果に対する追加的な安全率の係数は含めない。
上記は,極端に保守的ではないことに注目する。これらの係数は,文献[E.4]と一致する。代表的なデー
タを,図E.2〜図E.4に示す。特に,図E.4のS−N曲線の傾きは,図E.2のそれの約半分である。これは,
炭素繊維複合材の材料安全率が,ガラス繊維複合材のものに比べて小さいことの原因の一つである。
70
C 1400-2:2020 (IEC 61400-2:2013)
図E.2−ガラス繊維複合材の疲労に対する典型的なS−N曲線(文献[E.2]の図41を引用)
図E.3−ガラス繊維複合材への典型的な環境効果(文献[E.2]の図25を引用)
図E.4−炭素繊維とビニルエステルとの複合材に対する疲労ひずみ線図
(ラージトウ,0°一方向材,R=0.1及びR=10)(文献[E.2]の図107を引用)
最
大絶
対ひ
ず
み
(
%
)
破壊までのサイクル数
100
101
102
103
104
105
106
107
108
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0
R = 0.1
R = 10
b = 0.054
b = 0.038
IEC 452/06
700
600
500
400
300
200
100
0
100
101
102
103
104
105
106
107
20 ℃乾燥
20 ℃湿潤
50 ℃乾燥
50 ℃湿潤
絶
対最
大
圧
縮
応
力
(
M
P
a)
破壊までのサイクル数
20 ℃乾燥
20 ℃湿潤
50 ℃乾燥
50 ℃湿潤
IEC 451/06
1.1
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
100
正規
化
され
た
最大
応
力
S
/S
o
破壊までのサイクル数
101
102
103
104
105
106
107
R = 0.1
R = 0.5
R = 0.1
R = 0.5
IEC 450/06
71
C 1400-2:2020 (IEC 61400-2:2013)
E.4.3 金属主な金属の疲労強度の材料安全率を次に示す。
− 鋼の場合
1.9(文献[E.3]から引用)
− アルミニウムの場合
3.5(文献[E.3]から引用)
この場合も,これらの安全率には,終極引張強度から疲労強度への変換を含む。典型的な曲線を,図E.5
に示す。類似の曲線は,他の合金又はチタンのような金属に対しても,適用可能である。
104
105
106
107
108
109
10
20
30
40
50
60
70
80
500
400
200
100
5
5
5
5
5
サイクル数
応
力
k
si
σEA
σEB
σEC
σED
A‒T‒1 鋼
B‒1 020 鋼
C‒アルミニウム合金 2 024‒T4
D‒マグネシウム合金
すべて研磨試料の回転
ビーム試験データ
応
力
(M
N
/m
2
)
300
図E.5−典型的な金属の疲労に対するS−N曲線
環境効果の材料安全率は,応力腐食割れ試験が実施されていない場合,次の値を適用する(文献[E.4]か
ら引用)。
− 鋼の場合
1.3
− アルミニウムの場合
1.3
− チタンの場合
4.2
E.4.4 木材
木材の材料安全率を次に示す。
− 木材の疲労の材料安全率
3.4(文献[E.5]から引用)
− 木材の環境効果の材料安全率
1.6(文献[E.6]から引用)
設計において,ステップ形状,継ぎ手,形状変化などの詳細部位の解析又は試験を含まない場合,形状
効果を考慮し,追加的な安全率として,2.8を適用する(文献[E.7]から引用)。
上記を裏付ける追加のデータを,図E.6〜図E.10に示す。
72
C 1400-2:2020 (IEC 61400-2:2013)
接合した木材の疲労曲線
70
60
50
40
30
20
10
0
‒1
1
3
5
7
9
log (N)
回帰曲線
応力
振
幅
(M
P
a)
完全両振応力振幅(生存確率 95 %,信頼限界 95 %)
図E.6−接合した軟材の疲労寿命データ(文献[E.5]から引用)
60
50
40
30
20
10
0
‒1
0
1
2
3
4
5
6
7
8
R = 10
R = ‒10
R = ‒2
R = ‒1
log (N)
ピ
ー
ク圧
縮
応
力
(M
P
a)
図E.7−木材の典型的なS−N曲線(文献[E.5]から引用)
73
C 1400-2:2020 (IEC 61400-2:2013)
図E.8−繊維に平行方向の木材の圧縮強度への含有水分量の影響(文献[E.6]の図4-13から引用)
A:繊維に平行方向の引張り
B:曲げ
C:繊維に平行方向の圧縮
D:繊維に直角方向の圧縮
E:繊維に直角方向の引張り
図E.9−木材の強度特性への含有水分量の影響(文献[E.6]の図4-11から引用)
150
120
90
60
30
0 0
5
10
15
20
25
30
0
5.5
11.0
16.5
22.0
特
性
(M
P
a
)
特
性
(
×
1
0
3l
b
f/
in
2)
含有水分量 (%)
E
D
C
B
A
90
60
30
0 8
12
16
20
24
含有水分量 (%)
終
極
圧
縮
強
度
(M
P
a)
74
C 1400-2:2020 (IEC 61400-2:2013)
1.0
0.8
0.6
0.4
0.2
0
0
10
20
30
40
50
60
70
繊維方向に対する角度 (°)
繊維
方向
に平
行
な機
械特
性比
N
/P
Q/P =
0.20
0.10
0.05
n = 2.5
2.0
1.5
2.5
2.0
1.5
2.5
2.0
1.5
Q/P:繊維(P)を横切る機械的特性比
N/P:繊維方向に平行な機械的特性比
n:実験的に決められる定数
図E.10−Hankinson式に従った節のない木材の機械的特性における繊維角影響
(文献[E.6]の図4-4から引用)
E.5
形状効果
構造設計評価では,製造業者が破壊及び疲労による形状効果を適切に考慮しているものと想定する。均
一材料に対する典型的な応力集中の場合,機械設計に関する実用書,例えば,文献[E.7]を利用してもよい。
複合材の場合,複合材構造の耐久性について,形状効果を決定するのに表E.2(文献[E.2]から引用)を
用いてもよい。
表E.2において,Fは追加的な材料安全率である。E.4.1のa)〜e) において形状効果を扱わない場合は,
形状効果として,このFを適用する。
75
C 1400-2:2020 (IEC 61400-2:2013)
表E.2−形状の不連続性
項目
略図
F
切取りサンプル
(真っすぐな材料)
1.0
接着された補剛材
[はり(梁)がウェブのもの]
1.2
荷重に対して直交方向(90°)に
分割した継当て材
1.0
荷重方向(0°)の内層1層分の
積層厚変化
VF<0.4の場合
1.2
VF>0.4の場合
−
荷重方向(0°)の内層2層分の
積層厚変化
VF<0.4の場合
1.6
VF>0.4の場合
1.0
局所的な高繊維含有率
1.4
表面のへこ(凹)み
(厚さ25 %減によるVFが増加
した場合)
2.5
E.6
文献
[E.1] ECN-C-96-033,Verification of design loads for small wind turbines,F.J.L. Van Hulle et al. Table 2.6 Safety
Factors in IEC 1400-2 and Danish Code
[E.2] MANDELL, J.F., SAMBORSKY, D.D., and CAIRNS, D.S.,Fatigue of composite materials and substructures
for wind turbine blades,SAND REPORT, SAND2002-0771, Unlimited Release, Sandia National
Laboratories, March 2002.
[E.3] HIGDON, OHLSEN, STILES, WEESE, and RILEY,Mechanics of Materials,3rd Edition, John Wiley and
Sons, Inc., New York, New York, 1976, pp. 572, 674-675.
[E.4] HERTZBERG, R. W.,Deformation and Fracture Mechanics of Engineering Materials,Fourth Edition, John
Wiley and Sons, Inc, New York, New York, 1996, pp. 508-509.
[E.5] BOERSTRA, G.K., ZWART, G.G.M.,Proposal, Design Envelope Wood Epoxy Laminate as a Completion of
NEN 6096,Paragraph 4.3.5.4, WindMaster Nederland, 1992, p. 11.
[E.6] Forest Products Laboratory, 1999,Wood handbook−Wood as an engineering material,Gen. Tech. Rep.
FPL-GTR-113, Madison, WI: U.S. Department of Agriculture, Forest Service, Forest Products Laboratory,
“Chapter 4 Material properties of Wood”
76
C 1400-2:2020 (IEC 61400-2:2013)
[E.7] NORTON, R. L.,Machine Design ‒ An Integrated Approach,Prentice-Hall, Upper Saddle River, New Jersey,
1996, Appendix E ‒ Stress concentration factors, pp. 1005-1012.
77
C 1400-2:2020 (IEC 61400-2:2013)
附属書F
(参考)
簡易荷重計算法の開発
F.1
この附属書で用いる記号
A
受風面積
(m2)
Aproj
風向に直角な面に投影された成分の面積
(m2)
B
ブレードの枚数
(−)
c
翼弦長
(m)
Cd
抗力係数
(−)
Cf
空力係数
(−)
Cl
揚力係数
(−)
Cp
出力係数
(−)
CT
スラスト係数
(−)
D
ロータ直径
(m)
er
ロータ重心からロータ軸までの距離
(m)
F
力
(N)
FzB
翼根においてブレードz軸方向に(ブレードに)作用する力
(N)
Fx-shaft
軸方向の力
(N)
g
自由落下の加速度:9.81
(m/s2)
G
発電機短絡回路の乗数
(−)
IB
翼慣性モーメント
(kgm2)
Lrt
ロータ中心とヨー軸との間の距離
(m)
Lrb
ロータ中心と第1ベアリングとの間の距離
(m)
mB
翼質量
(kg)
mr
翼及びハブのロータ質量
(kg)
MxB,MyB
翼根曲げモーメント
(Nm)
Mbrake
ブレーキによる低速軸上のトルク
(Nm)
Mx-shaft
第1ベアリングにおけるロータ軸上のねじりモーメント
(Nm)
Mshaft
第1ベアリングにおける軸曲げモーメント
(Nm)
n
ロータ回転数
(min−1)
P
電力
(W)
Pr
ロータ出力
(W)
Q
ロータ軸トルク
(Nm)
r
半径座標
(m)
R
ロータ半径
(m)
Rcog
翼重心とロータ中心との間の距離
(m)
V
風速
(m/s)
78
C 1400-2:2020 (IEC 61400-2:2013)
Vave
ハブ高さにおける年平均風速
(m/s)
Vdesign
1.4Vaveと定義した設計風速
(m/s)
VeN
再現期間N年の期待極値風速(3秒間平均)
Ve1及びVe50の再現期間はそれぞれ1年及び50年に対応する。
(m/s)
Vhub
ハブ高さにおける10分平均風速
(m/s)
Vtip
翼端の周速
(m/s)
W
相対風速
(m/s)
Δ
範囲
(−)
γ
ヨー角
(−)
η
出力電力とロータとの間のコンポーネント(代表的な発電機,
ギアボックス及び変換システム)の効率
(−)
λ
周速比
(−)
λe50
Ve50における周速比
(−)
Ρ
大気密度。ここでは,1.225と仮定する。
(kg/m3)
ψ
ロータのアジマス角(0°は翼垂直上)
(°)
ωn
ロータの角速度
(rad/s)
ωyaw
ヨー角速度
(rad/s)
添字:
ave
平均
B
翼
design
簡易設計計算式の入力パラメータ
H
ヘリコプタ
hub
ハブ高さ
max
最大
proj
投影された
r
ロータ
shaft
軸
F.2
一般事項
この附属書は,この規格に用いる簡易設計計算式(以下,簡易式という。)の背景を与える。簡易式の背
景及び導出過程を示すことは,次の目的に役立つ。
− 簡易式のよりよい理解となる。
− 簡易式中にどのような種類の物理的特性が含まれ,何が含まれていないかを明らかにする(例えば,
フラッタ,シュラウド)。
− 簡易式の背景を示すことによって,特別な設計思想をもつ製造業者が,式の基礎に立ち戻って自身の
設計に適用可能な式を導き出すことが可能になる。
F.3
簡易式の使用に関する注意
簡易式はこの規格の旧版の段階で開発されたものであり,当時入手可能であった測定値に照らして有効
79
C 1400-2:2020 (IEC 61400-2:2013)
性が確認されたが,その後,幾つかの荷重ケースに関して,次の懸念が示された。
− F.4の荷重ケースAにおいて,疲労の処理は,十分に安全が確保されているとはいえない。通常,こ
のような安全確保意識の欠如は,特に十分な安全率で用いる場合,静的荷重ケースによってかき消さ
れてしまう。静的荷重ケースで安全率を下げる場合は,それによって疲労が問題になることがあるた
め,注意することが望ましい。詳細は,F.4の荷重ケースAに示す。
− F.4の荷重ケースDにおいて,最大スラストの処理は,2.5Vaveでの風車の回転数が高い場合には十分
に慎重であるとはいえない。この場合,F.4の荷重ケースDに示すように,増加したCTの値を用いる
ことが望ましい。
F.4
一般的な関係式
一般に,式(F.1)〜式(F.3)が成り立つ。
30
π
60
π
2
n
n
n=
=
ω
······································································· (F.1)
ここに,
n: ロータの回転数(min−1)
ωn: ロータの角速度(rad/s)
30
π
hub
hub
n
hub
tip
n
V
R
V
R
V
V
=
=
=
ω
λ
··························································· (F.2)
ここに,
λ: 周速比(−)
Vtip: 翼端の周速(m/s)
Vhub: ハブ高さにおける風速(m/s)
R: ロータ半径(m)
n
P
P
P
Q
π
30
n
n
r
η
ηω
ω
=
=
=
································································ (F.3)
ここに,
Q: ロータ軸トルク(Nm)
Pr: ロータ出力(W)
P: 電力(W)
さらに,次に示す幾つかの設計入力値が,この規格の中で定義されている。
− Vdesignは,1.4Vaveとして定義した設計風速である。Vaveは,風車のクラスに依存する。
− Pdesign及びndesignは,それぞれVdesignにおける出力及びロータ回転数である。
各荷重ケースについて,次に示す。
− 荷重ケースA:通常運転
この荷重ケースAは,一定範囲の疲労荷重ケースである。この範囲については,基本的な概念として,
風車は“定格”の0.5〜1.5の範囲で回ると考える。“定格”は,多くの異なる意味をもつ用語なので,代わ
りに“設計(design)”を導入する。この用語の定義は,F.1に定義している。
注意 簡易式における疲労計算では,通常非常に小さい疲労荷重を予測する。この簡易式に用いる疲
労サイクル数は,これらの低荷重を考慮した設計寿命においてブレードがタワーを通過する回
数(人為的に大きい数となる。)である。ただし,予測疲労荷重は極めて小さいため,設計者は,
全ての疲労サイクルは疲労限界を超えないと結論付け,そのため,疲労そのものを無視してし
80
C 1400-2:2020 (IEC 61400-2:2013)
まう可能性がある。これは,空力弾性モデルとの比較から明らかなように配慮に欠ける可能性
がある。サイクル数と荷重との相互作用は,風車の規模によって異なり,ある風車の例では,
簡易式による過小予測でタワートップのスラスト係数は2.4,及び軸曲げモーメント係数は7.7
である。軸曲げモーメントの過小予測の理由は,簡易式の疲労ケースからヨーイングによるジ
ャイロ荷重が除かれることが少なくとも一部は関係している可能性がある。これらの例の相違
点は重大であり,風車及びタワーが過小に設計される可能性が実際に起こる場合があることを
示している。そのため,静的荷重ケースでの安全率を下げる場合は,それによって疲労が問題
になることがあるため,注意することが望ましい。
nを0.5ndesignから1.5ndesignに変えることによって,回転数の範囲は,Fzの範囲を式(F.4)に示す(この場合,
ロータ回転数は可変であると仮定する。)。
2
design
n,
cog
B
2
design
cog
B
2
design
cog
B
2
design
cog
B
zB
2
30
π
2
30
5.0
π
30
5.1π
ω
R
m
n
R
m
n
R
m
n
R
m
ΔF
=
=
−
=
······· (F.4)
ここに,
mB: 翼質量
Rcog: 翼重心とロータ中心との間の距離
ndesign: Vdesignにおけるロータ回転数として定義される設計ロー
タ回転数
エッジ方向の曲げモーメントの場合,エッジ方向のモーメント範囲は,式(F.5)に示すとおり,トルク変
化(翼枚数Bで均等に分割された1.5Qdesign〜0.5Qdesign)の項及び翼質量のモーメントの項からなる。
cog
B
design
xB
2
R
m
B
Q
ΔM
g
+
=
·························································· (F.5)
フラップ方向の曲げモーメントの導出過程は,式(F.6)及び(F.7)に示すとおり,多少複雑である。
2
2
hub
T
2
hub
T
axial
π
2
1
2
1
R
V
C
A
V
C
F
ρ
ρ
×
=
×
=
·········································· (F.6)
2
3
hub
p
3
hub
p
r
π
2
1
2
1
R
V
C
A
V
C
P
ρ
ρ
×
=
×
=
·············································· (F.7)
ここに,
ρ: 大気密度。1.225(kg/m3)とする。
A: 受風面積(m2)
R: ロータ半径(m)
Pr: ロータ出力(W)
CTは,3/2Cpである(文献[F.1]の3章から引用)と仮定した場合,式(F.6)と式(F.7)とを組み合わせると,
式(F.8)となる。
hub
r
axial
2
3
V
P
F
=
·········································································· (F.8)
式(F.8)に,式(F.2)のVhub及び式(F.3)のPrを代入すると,式(F.9)となる。
R
Q
n
Q
n
R
P
n
R
F
λ
λ
λ
2
3
30
π
π
30
2
3
π
30
2
3
r
axial
=
=
=
············································ (F.9)
この荷重が2/3Rに加わると仮定し,かつ,翼数で除した場合,式(F.10)となる。
B
Q
M
λ
=
yB
··········································································· (F.10)
81
C 1400-2:2020 (IEC 61400-2:2013)
これらは,円すい(錐)角が十分小さく遠心力成分を無視できると仮定している。
フラップ方向の翼根曲げモーメントの範囲は,Qが0.5Qdesign〜1.5Qdesignに変わると仮定した場合,式(F.11)
となる。
B
Q
ΔM
design
design
yB
λ
=
································································ (F.11)
軸上の軸荷重は,式(F.12)に示すとおり,式(F.9)で与えられるロータ軸荷重に等しい。
R
Q
ΔF
design
design
shaft
-x
2
3λ
=
··························································· (F.12)
軸ねじりの範囲は,式(F.13)に示すとおり,トルクの項及び偏心の項からなる。偏心の項は,重力による
トルク範囲を引き起こし,ロータ質量中心が0.005Rだけ軸からずれてると仮定する(よりよいデータが手
に入らない場合に限る。)。
r
r
design
shaft
-x
2
e
m
Q
ΔM
g
+
=
························································ (F.13)
軸曲げモーメントは,第1ベアリングにおいて最大であると仮定する。軸曲げの場合,ロータ質量及び
軸荷重偏心(ウィンドシアーによって引き起こされる。)を考慮する。
この偏心をR/6と仮定すると,軸曲げモーメントは式(F.14)に示す範囲となる。R/6は,この規格の対応
国際規格であるIEC 61400-2の最初の作業グループによって決められた値である。
shaft
-x
rb
r
shaft
6
2
ΔF
R
L
m
ΔM
+
=
g
···················································· (F.14)
ここに,
Lrb: ロータ面と第1ベアリングとの間の距離
mr: ロータ(ブレード,ハブなど)の質量
− 荷重ケースB:ヨー運動
この荷重ケースの場合,風車はωyaw,maxでヨー運動し,ロータはωn,designで回転している。
フラップ方向の翼根曲げモーメントは,遠心力,ジャイロ効果力及び軸荷重の偏心の三つの項からなる
と仮定する。
遠心力の曲げモーメントは,式(F.15)に示すとおり,ヨー角速度による翼上の遠心力に,ロータ中心とブ
レードの重心との間の距離を乗じて算出する。
cog
rt
2
max
,
yaw
B
certifugal
yB,
R
L
m
M
ω
=
···················································· (F.15)
ここに,
Lrt: ロータ中心とヨー軸との間の距離(m)
ジャイロモーメント:
ヨー角速度及びロータ角速度による翼上のジャイロモーメントは,式(F.16)によって表される。この式は,
文献[F.1]3) の238ページに更に詳細な導出過程が示されている。
()
ψ
ω
ω
ψ
ω
ω
cos
2
cos
2
n
B
yaw
2
yaw
0
n
gyroscopic
yB,
I
dr
r
m
r
M
R
=
=∫
··················· (F.16)
ジャイロモーメントは,式(F.16)において,ψ=0のとき最大となる。
最後の項は,ウィンドシアー又は気流のゆがみによる軸力のずれによる。ロータがndesignで回転し,か
つ,ロータがタワーにおいてωyaw,maxで運動している場合,フラップ方向全体の曲げモーメントは,式(F.17)
によって表される。
82
C 1400-2:2020 (IEC 61400-2:2013)
shaft
-x
design
n,
B
max
,
yaw
cog
rt
2
max
,
yaw
B
yB
9
2
ΔF
R
I
R
L
m
M
+
+
=
ω
ω
ω
···················· (F.17)
注3) この附属書では,角括弧内の番号は,F.5の文献リストを示す。
軸の曲げモーメントは,次のように導かれる。
ジャイロ荷重:
2枚翼ロータの場合,ヨー軸回りのロータの慣性は,アジマス角に左右される。剛体動力学に関する応
用教本では,最大モーメントに対して式(F.18)が示されている。
B
design
n,
max
,
yaw
shaft
2
I
B
M
ω
ω
=
······················································· (F.18)
3枚翼以上のロータの場合,ロータの慣性はアジマス角によっては変化しない。したがって,式(F.19)が
適用できる。
B
design
n,
max
,
yaw
shaft
I
B
M
ω
ω
=
························································ (F.19)
これらの式に,質量荷重及び軸荷重の偏心を加えると,次のように表される。
− 2枚翼ロータの場合
shaft
-x
rb
r
B
design
n,
max
,
yaw
shaft
6
4
ΔF
R
L
m
I
M
+
+
=
g
ω
ω
······························· (F.20)
− 3枚翼以上のロータの場合
shaft
-x
rb
r
B
design
n,
max
,
yaw
shaft
6ΔF
R
L
m
I
B
M
+
+
=
g
ω
ω
······························ (F.21)
ここに,
Lrb: ロータ中心と第1ベアリングとの間の距離(m)
− 荷重ケースC:ヨーエラー
固定ヨー風車は,多くの時間,ヨーエラーで運転する。ロータがヨーエラーをもち,かつ,瞬間的な風
によって翼全体に最大揚力が加わる場合,極値荷重が生じる可能性がある。この状態を簡略化した解析を,
次に示す。
翼半径rにおける相対風速は,近似的に,式(F.22)となる。
ψ
γ
ω
cos
sin
hub
nV
r
W
+
=
·························································· (F.22)
この式では,相対風の接線成分に比べて一般的に小さい垂直成分を無視している。
翼根のフラップモーメントは,近似的に,式(F.23)となる。
(
)
∫
+
=
R
dr
Ψ
V
r
r
C
c
M
0
2
hub
n
max
,l
ave
yB
cos
sin
2
1
γ
ω
ρ
······························· (F.23)
これは,Ψ=0のとき最大となる。
この式を積分すると,式(F.24)となる。
+
+
=
γ
γ
ω
ω
ρ
2
2
hub
2
hub
n
3
2
n
4
max
,l
ave
yB
sin
2
1
sin
3
2
4
1
2
1
V
R
V
R
R
C
c
M
··········· (F.24)
30°のヨーエラーに対して,この式を再整理すると,式(F.25)となる。
+
+
=
2
design
design
2
design
n,
3
max
,l
B
proj,
yB
1
2
1
3
4
1
8
1
λ
λ
ω
ρ
R
C
A
M
··················· (F.25)
83
C 1400-2:2020 (IEC 61400-2:2013)
− 荷重ケースD:最大スラスト
この荷重ケースでは,多くの説明を要しない。この場合,動圧と組み合わされた単純な空力係数が関係
する。
(
)
2
2
ave
T
shaft
-x
π
5.2
2
1
R
V
C
F
ρ
=
······················································ (F.26)
ここに,
CT: スラスト係数。0.5とする。
式(F.26)は,空力弾性モデルによって予想されるスラスト荷重を用いて調整した。2.5VaveとCT=0.5とを
組み合わせることで,この空力弾性モデルと類似の結果を与えた。ただし,2.5Vaveで高速回転で運転する
風車では,CT=8/9の方がより適切であることに注意する。
− 荷重ケースE:最大角速度
この荷重ケースは,最大ロータ回転数によって支配されると仮定する。
翼荷重の場合,式(F.27)に示すとおり,遠心力だけを考慮する。
cog
2
max
,n
B
2
max
cog
B
zB
30
π
R
m
n
R
m
F
ω
=
=
··········································· (F.27)
軸に対しては,式(F.28)に示すとおり,軸曲げモーメントだけを考慮し,ロータの重心からロータ中心ま
での距離erの不均衡があると仮定し,ヨーイングはないものと仮定する。
rb
2
max
,n
r
r
rb
r
imbalance
-r
mass
-r
shaft
L
e
m
L
m
M
M
M
ω
+
=
+
=
g
·························· (F.28)
− 荷重ケースF:負荷接続時の短絡
この荷重ケースは,発電機の大きな短絡トルクを仮定する。定数は,発電機の専門家と議論を行い,デ
ンマーク設計評価(NEN 6096/2,1994),ドイツ船級協会の“Blue Book”などのほかの規格を参考にして
選ばれた。
発電機に対してより正確な数値が知られていない場合,設計ロータ軸トルクには次の表の値Gを乗じる。
発電機のタイプ
乗数G
同期機又は非同期機
2
永久磁石発電機
2
この場合,Mx-shaft及びMxBは,それぞれ,式(F.29)及び式(F.30)となる。
design
shaft
-x
Q
G
M
×
=
································································· (F.29)
cog
B
design
xB
R
m
B
Q
G
M
g
+
×
=
······················································· (F.30)
− 荷重ケースG:停止
最大軸トルクは,式(F.31)に示すとおり,ブレーキトルク(ブレーキがある場合)に定格発電機トルクを
加えた値に等しいと仮定する(したがって,発電機が定格トルクを供給している状態で,ブレーキがかけ
られると仮定する。)。
design
brake
shaft
-x
Q
M
M
×
=
···························································· (F.31)
ここに,
Mbrake: 低速軸上のブレーキトルク
84
C 1400-2:2020 (IEC 61400-2:2013)
停止中の翼荷重は,軸トルク及び翼質量によると仮定し,MxBは,式(F.32)とする。
cog
B
shaft
-x
xB
R
m
B
M
M
g
+
=
·························································· (F.32)
風車がギアボックス及び高速軸ブレーキをもつ場合,式(F.31)で計算した軸トルクは,動力伝達系の動力
学を考慮して割り増すことが望ましい。より正確な証明された値がない場合,軸トルクには,動的増幅係
数として2を乗じる。
− 荷重ケースH:極値風荷重
この荷重ケースは実際には二組の式があるが,そのうちの一つの組を風車の設計に応じて用いる。一つ
の組は強風で待機する風車に対するもので,大半のアクティブ制御風車に用いる。もう一つの組はロータ
を回転させる風車に対するもので,大半のパッシブ制御風車(ファーリングなど)に用いる。風速Ve50は,
一般的には“耐風速”といわれるが,3.19の定義にあるように,正確には,極値風速(再現期間50年の3
秒ガスト)のことである。二組の式を,次に示す。
注意 式(41)[又は式(F.42)]を用いる場合には,注意することが望ましい。Fx-shaftは
2
50
eλに比例する
ため,ロータの回転速度を低速に制御した場合,この式では0に接近できるスラスト力が予
測されるからである。これは,待機中のロータの荷重ケース[式(40)又は式(F.34)]でのスラ
ストが示唆する値よりもはるかに低くなる場合があり,これは明らかに誤りである。つまり,
回転ロータを非常に低速に制御する場合,式(41)[又は式(F.42)]から得られる低い方のスラ
ストではなく,式(40)[又は式(F.34)]から得られる高い方のスラストを用いる必要がある。
・ 待機中のロータ:
待機中の風車の場合,フラップ方向の翼根曲げモーメントは抗力によって支配されるため,式(F.33)
のように定義される。
R
A
V
C
M
2
1
2
1
B
proj,
2
50
e
d
yB
ρ
=
························································ (F.33)
ここに,
Cd: 抗力係数。1.5とする。
Aproj,B: ブレードの投影面積
式(F.33)は,ブレードに作用する抗力はブレードスパン中央の圧力中心にあると仮定している。大抵
のブレードの場合,この仮定は安全側である。ブレードの平面図形は,風に完全に直角であるとも仮
定している。
待機中のロータの場合,軸スラスト荷重は,式(F.34)によって計算する。
B
proj,
2
50
e
d
shaft
-x
2
1
A
V
BC
F
ρ
=
························································· (F.34)
これは,全てのブレードの合計の抗力である。
完全にフェザリングされたブレードは,主に,抗力よりむしろ揚力にさらされる場合がある。ブレ
ードは,風向の変化によって大きな迎角にさらされる。この場合,力は,最大抗力係数よりむしろ最
大揚力係数によって決定する。これらの二つの値は同程度の大きさなので,フェザリングされたロー
タに対しては,これらの単純な式を適用する。
・ 回転中のロータ:
85
C 1400-2:2020 (IEC 61400-2:2013)
ロータがVe50で回転している風車の場合,ロータ上のある位置で,風向の変化によってブレードの
一つでCl,maxが生じる可能性がある。この翼根の曲げモーメントは,式(F.35)によって計算する。
R
A
V
C
crdr
V
R
r
C
M
R
B
proj,
2
50
e
max
,l
2
50
e
0
max
,l
yB
6
1
2
1
ρ
ρ
≈
=∫
·························· (F.35)
この式は,翼端でCl,max及び翼根で0の三角形の揚力分布を仮定している。さらに,一定の翼弦長
を仮定している。Cl,maxの正確なデータが手に入らない場合は,2.0の値を用いる。
回転中のロータの場合,スラスト力の計算はヘリコプタ理論に基づく。ヘリコプタスラスト係数は,
風速ではなく翼端速度に基づき,式(F.36)によって計算する。
(
)2
n
2
H
T,
π
R
R
T
C
ω
ρ
=
································································ (F.36)
文献[F.2]の345ページによる場合,最大のヘリコプタスラスト係数は,近似的に,式(F.37)とする。
17
.0
Hmax
T,
=
σ
C
······································································· (F.37)
ここに,
σ: ロータのソリディティ。
R
Bc
π
ave
=
σ
であり,caveは平均翼
弦長をいう。
この値は,進行率(前進率)
R
V
n
ω
(周速比の逆数)が0となる場合に与えられる。進行率が0.5で
水平飛行の場合,スラスト係数は約0.06に減少する。ただし,過渡的な場合では約0.17となる。した
がって,進行率とは無関係に0.17の一定値を用いる。
ヘリコプタスラスト係数を風車のスラスト係数に変換すると,式(F.38)となる。
2
H
T,
T
2
λ
C
C=
········································································· (F.38)
式(F.37)と式(F.38)とを組み合わせると,式(F.39)となる。
2
T
34
.0
σλ
=
C
········································································· (F.39)
式(F.39)及び式(F.26)を用いて,
A
V
F
2
50
e
2
50
e
shaft
-x
2
1
34
.0
ρ
λ
σ
=
······················································· (F.40)
ここに,
σ: ロータのソリディティ(BAproj,B/A)
λe50: Ve50における周速比。未知の場合,次の式で推定しても
よい。
50
e
max
50
e
30
π
V
R
n
=
λ
······································································· (F.41)
式(F.40)にσ=BAproj,B/Aを入れると,式(F.42)が導かれる。
2
50
e
2
50
e
B
proj,
shaft
-x
17
.0
V
BA
F
ρ
λ
=
····················································· (F.42)
回転中のロータ及び待機中のロータの両ケースにおいて,タワー又は支持構造物の荷重計算の場合,
86
C 1400-2:2020 (IEC 61400-2:2013)
スラスト力はタワー又は支持構造物上の抗力とナセル上の抗力とを組み合わせる。この抗力は,式
(F.43)を用いてコンポーネントごとに評価することができる。
proj
2
50
e
f2
1
A
V
C
F
ρ
=
·································································· (F.43)
ここに,
Cf: 空力係数
Aproj: 風向に直角な面に投影された,対象となる要素の面積
− 荷重ケースI:全方向から風を受ける場合
この荷重ケースでは,風車は完全に停止していると仮定する。コンポーネントの形状寸法に基づいて,
揚力及び/又は抗力を考慮する。基本式を,式(F.44)に示す。
proj
2
1e
f2
1
A
V
C
F
ρ
=
··································································· (F.44)
ここに,
Ve1: 再現期間1年の極値風速(3秒間平均)
荷重は,風にさらされる全ての要素に対して計算する。風車全体に生じる応力を計算する。
F.5
参考文献
[F.1] BURTON, T., SHARPE, D, JENKINS, N, and BOSSANYI, E.,Wind Energy Handbook,John Wiley and
Sons, 2001.
[F.2] PROUTY, R.W.,Helicopter Performance, Stability and Control,PWS Publishers, 1986
[F.3] Dutch Design Assessment (NEN 6096/2, 1994)
[F.4] Germanischer Lloyd Industrial Services GmbH, Renewables Certification,Guideline for the Certification of
Wind Turbines, commonly known as the “GL Blue Book”
87
C 1400-2:2020 (IEC 61400-2:2013)
附属書G
(参考)
試験報告書様式の例
G.1
概要
この附属書では,試験報告書様式の例を示す。G.2は,この規格の中で定義されている(13.4参照)。G.3
及びG.4は,ほかの規格の規定事項を参照しており,純粋にこの規格の利用者の利便性,及び必要な場合,
附属書Mに示すラベルの作成上の利便性を目的としたものである。詳細な指針については,JIS C 1400-11
及びJIS C 1400-12-1を参照する。
G.2
耐久性試験
G.2.1 一般事項
ここでは,耐久性試験結果の報告書様式の二つの例を示す。
G.2.2 耐久性試験結果の要約表
表G.1に,SWTクラスIIIに関する耐久性試験結果の要約表の例を示す。
表G.1−耐久性試験結果の例
発電時間
Max
gust
(m/s)
I15
(%)
#Data
points
TT
(h)
TU
(h)
TE
(h)
TN
(h)
O
(%)
月
0 m/s
9 m/s
[1.2Vave]
13.5 m/s
[1.8Vave]
18.8 m/s
[2.5Vave]
全体
2 704.9
710.6
215.0
1.0
41.9
19.0
255
7 094
172.5
152.0
624.6
90.8
2008年
6月
238.2
36.2
3.8
−
28.6
18.5
5
518
11.3
7.8
3.3
99.3
7月
256.0
8.5
0.3
−
23.9
−
−
744
78.2
2.2
38.8
94.1
8月
115.8
4.5
0.0
−
19.2
−
−
744
6.3
20.0
323.0
55.0
9月
120.5
11.7
1.8
−
22.4
−
−
720
36.2
30.3
174.7
73.3
10月
236.0
45.0
12.2
−
32.8
17.3
10
744
0.7
1.3
0.0
100.0
11月
348.0
98.7
22.5
−
37.0
20.9
10
720
22.1
0.0
0.0
100.0
12月
339.7
160.5
54.8
0.5
41.4
17.4
68
744
7.9
27.2
32.8
95.4
2009年
1月
385.0
155.5
56.0
0.5
38.8
19.9
76
744
4.9
32.0
36.5
94.8
2月
333.2
10.3
36.8
−
41.9
20.0
23
672
3.2
27.0
0.0
100.0
3月
332.5
8.7
26.8
−
36.7
18.0
33
744
1.7
4.2
15.5
97.9
表G.1は,主要な全体的な結果だけでなく,月別の結果も示している。報告書には,TU,TE及びTNとし
て時間を分類した理由についても記載する。I15の列は10分間統計に基づく乱流強度である。最大ガスト
は,試験期間に測定した最大瞬間(3秒間)風速である。
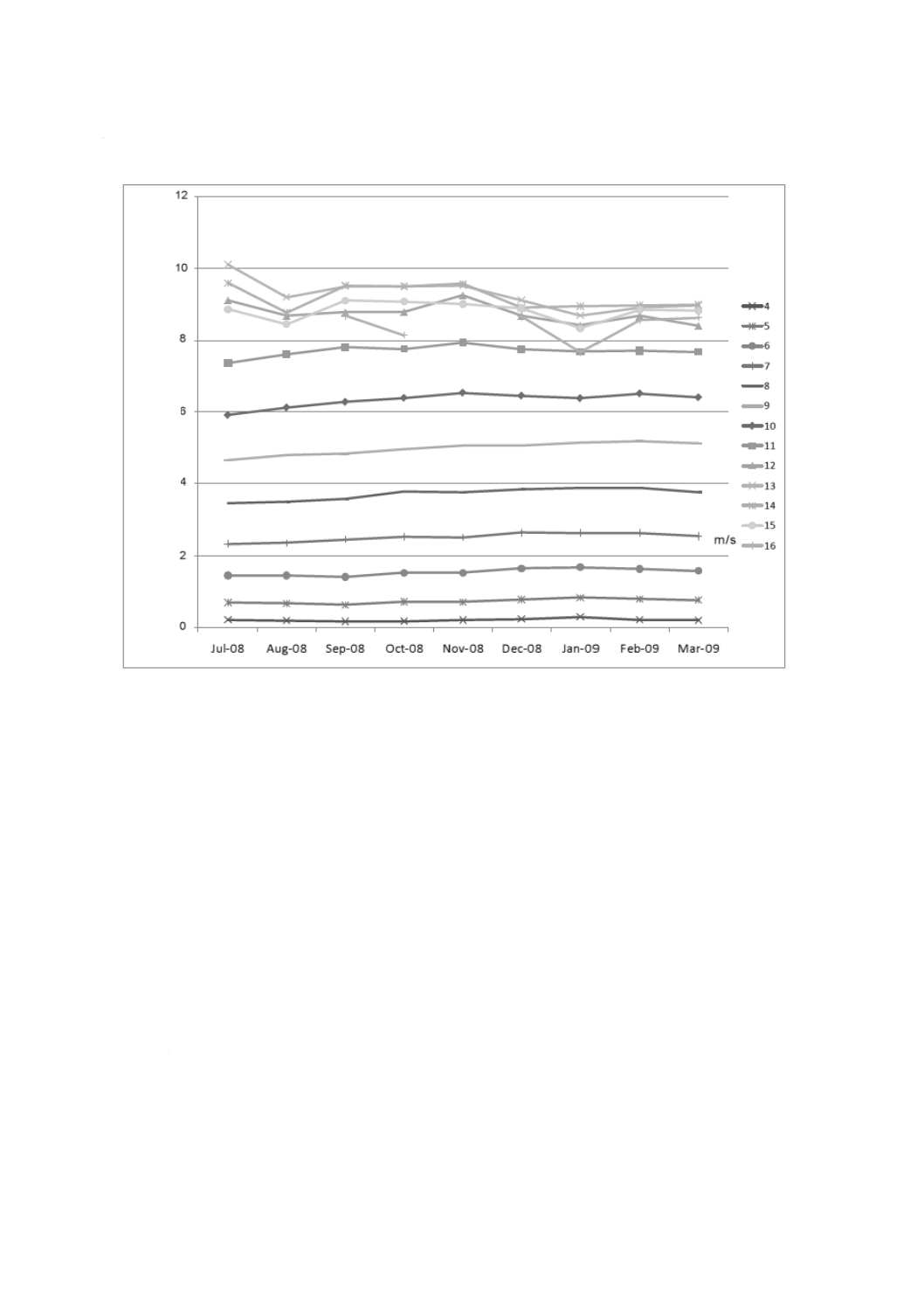
88
C 1400-2:2020 (IEC 61400-2:2013)
G.2.3 出力低下の可能性を示す図
図G.1−出力低下図の例
図G.1に示す出力低下図(13.4.2.5参照)は,毎月の複数の風速に関するビン平均した出力レベル(10
分間平均)における傾向を示したものである。良好な流入条件を確保するため,測定方位区分の範囲内か
らのデータだけを用いる。また,空気密度の影響を軽減するため,データは海抜0 mに正規化する必要が
ある。この図は,風車システムの目に見えない劣化を示す傾向を見いだすためのものである。温度,空気
密度などの季節的影響によって多少の変化が生じることは依然として予想される。
G.3
出力・発電性能
G.3.1 一般事項
出力・発電性能の情報の提示方法の例を,図G.2,図G.3及び表G.2に示す。出力・発電性能はこれらと
異なる様式でもよいが,この情報を含めることが望ましい。
G.3.2 ビン平均化した海抜0 m正規化出力曲線を示す図
出力曲線には,カットイン風速未満の電力消費量についても示すことが望ましい。図では,出力に対し
て標準不確かさを示す上下両方向の範囲を示すことが望ましい。
風車によっては,空気密度の影響に対応するために,設定(翼ピッチなど)の調整が行われる場合があ
る点に注意する。このような風車では,追加の空気密度の正規化は行わなくてもよい。
出
力
(
k
W
)
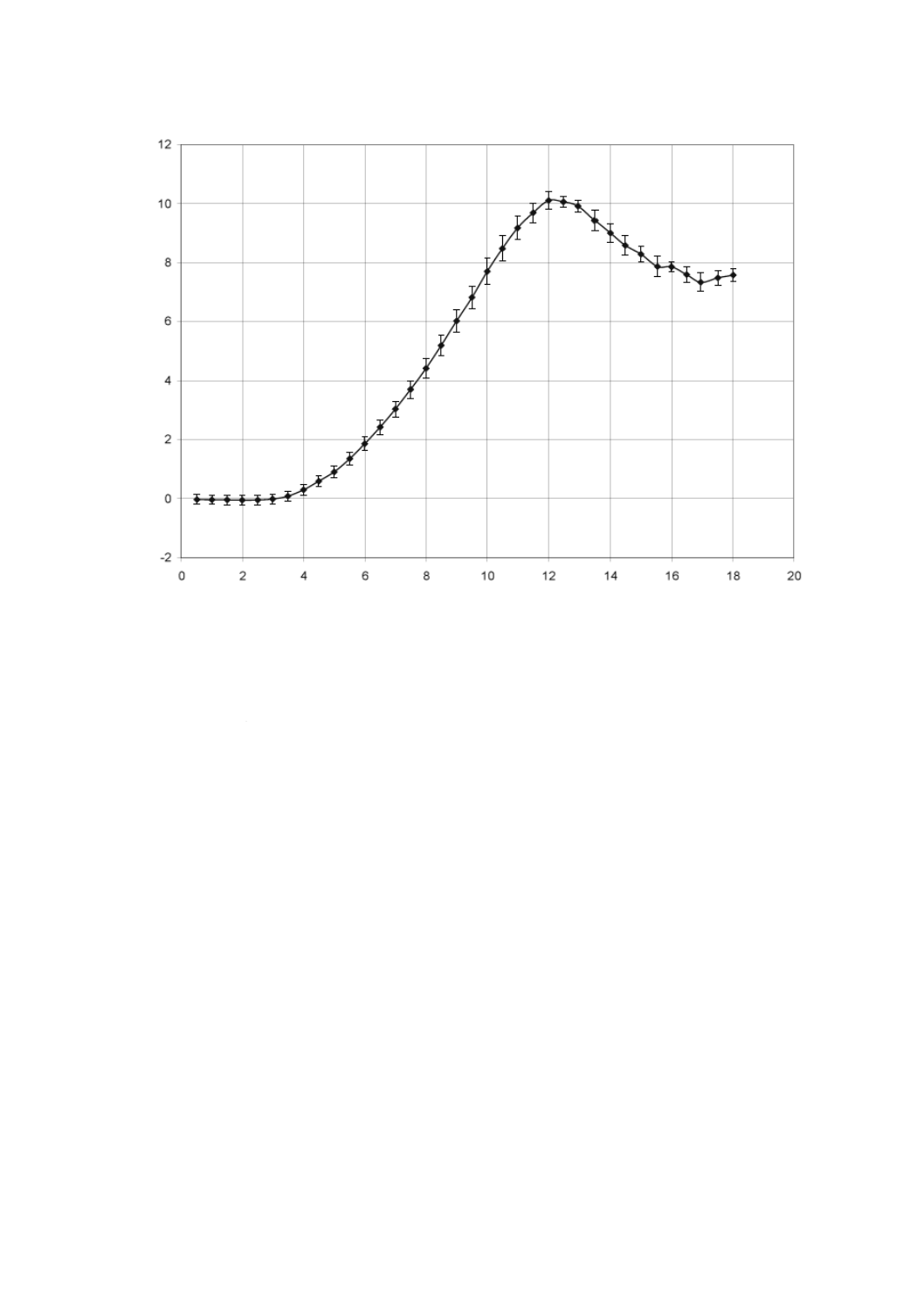
89
C 1400-2:2020 (IEC 61400-2:2013)
図G.2−ビン平均化した海抜0 m正規化出力曲線の例
G.3.3 ビン平均化出力曲線に用いた測定出力及び風速の散布図
ビン平均化出力曲線に用いた測定出力及び風速の散布図には,データ点ごとの平均値,最大値,最小値,
及び標準偏差値を示すことが望ましい(図G.3参照)。
出
力
(
k
W
)
正規化した風速(m/s)
90
C 1400-2:2020 (IEC 61400-2:2013)
図G.3−測定出力及び風速の散布図の例
G.3.4 海抜0 mの空気密度で補正した推定年間発電電力量を示す表
海抜0 mの空気密度で補正した推定年間発電電力量を示す表を,表G.2に示す。
表G.2−推定年間発電電力量(AEP)表の例
推定年間発電電力量,データベースA(全有効データ)
参照空気密度:1.225 kg/m3
参照カットアウト風速:25.00 m/s
ハブ高さでの
年間平均風速
(レイリー分布)
(m/s)
計測AEP
(kWh)
計測AEPの標準不確かさ
外挿AEP
(kWh)
計測AEPが外挿AEPの
95 %以上の場合は完全,
それ以外の場合は不完
全とする。
(kWh)
(%)
4
7 884
1 717
22
7 884
完全
5
15 327
1 948
13
15 329
完全
6
23 516
2 144
9
23 572
完全
7
30 967
2 271
7
31 330
完全
8
36 718
2 325
6
37 924
完全
9
40 459
2 314
6
43 158
不完全
10
42 350
2 254
6
47 049
不完全
11
42 770
2 160
5
49 696
不完全
計測AEPは最大ビン風速からカットアウト風速までの間の出力をゼロと仮定する。
外挿AEPは実測の最大ビン風速とカットアウト風速との間は,最大ビン風速での出力で一定として仮定する。
出
力
(
k
W
)
測定したハブ高さにおける風速(m/s)
標準偏差
最小
最大
平均
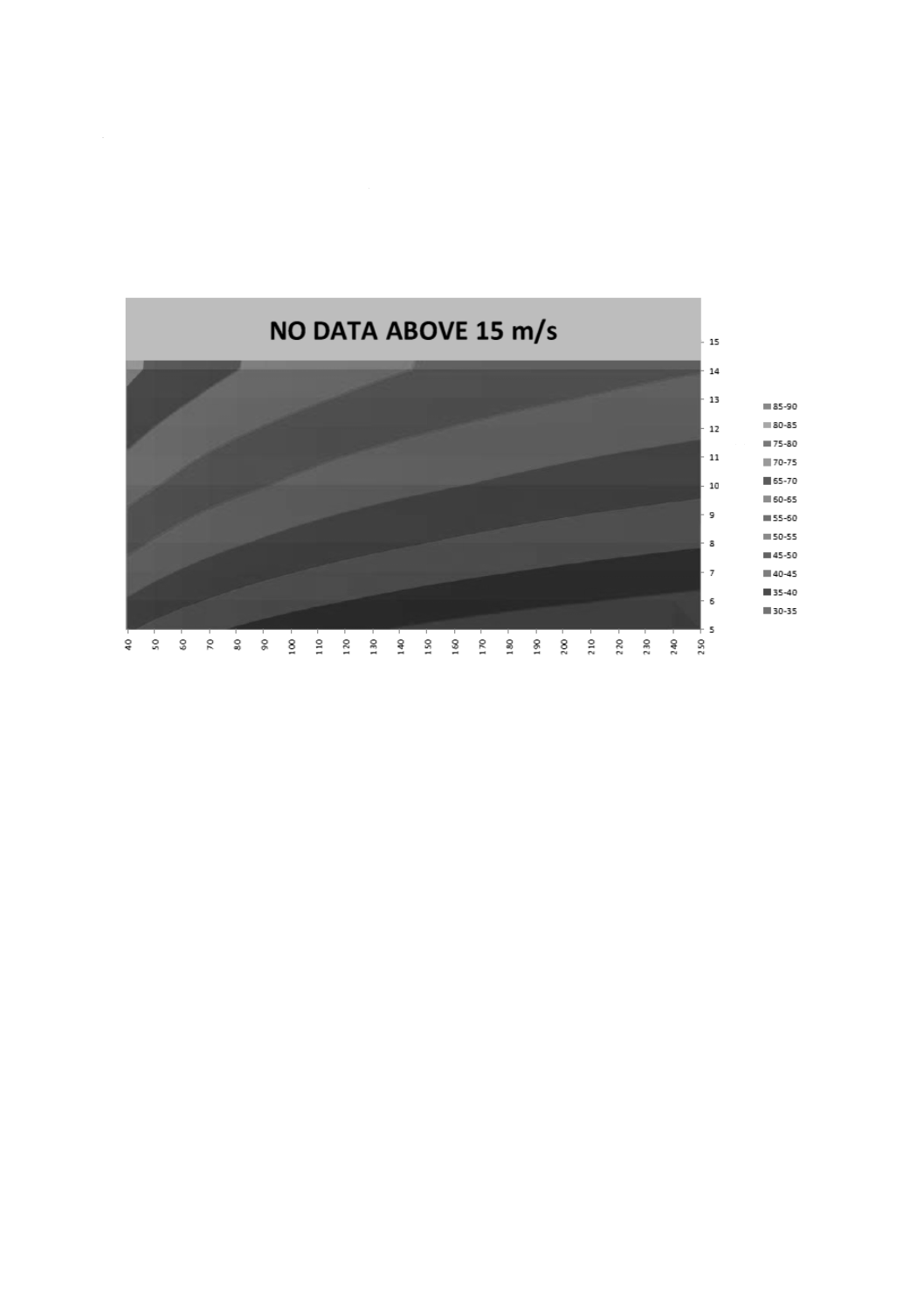
91
C 1400-2:2020 (IEC 61400-2:2013)
G.4
騒音試験
騒音試験については,騒音ばく(曝)露マップが必要である。この情報の提示方法の例を図G.4に示す。
様式は異なってもよいが,この情報を含めることが望ましい。
この図は,風速の範囲に対する見かけの音響パワーレベル及びロータの中心までの距離から計算した音
圧レベルを示す。
図G.4−騒音ばく(曝)露マップの例
風
速
(
m
/s
)
ロータ中心からの距離(m)
92
C 1400-2:2020 (IEC 61400-2:2013)
附属書H
(参考)
EMC試験
H.1 概要
EMC測定結果の再現及び比較が可能な手段として,EMC共通規格であるIEC 61000-6-3並びに測定方
法の基本規格であるCISPR 16-2-1及びCISPR 16-2-3は,小形風車の電気システムの電磁両立性を評価す
るためには十分ではない。
この附属書では,測定結果の変動を避けるため,小形風車の試験セットアップを示す。H.2及びH.3に
おいて,発電機,インバータ及び制御装置がナセル又は風車の基部に近接して設置される風車のEMCを
評価するための試験セットアップを提案する。
インバータ及び/又は制御装置がナセル又は風車の基部の中にある発電機と近接して設置されないシス
テムについて,これらの試験を考慮する場合には,所定の風車の据付けに対する結果の有効性を維持する
ために,追加の測定を実施することを推奨する。ケーブル,スリップリング及び発電機からのエミッショ
ンを制限する必要があるインバータ及び制御装置に対して,風車の入力部に適切に選定されたEMCフィ
ルタが必要になる場合がある。ケーブル自体からのエミッションを抑制するために,EMCシールドケーブ
ルを用いてもよい。
H.2 放射性エミッションの測定
CISPR 16-2-3に規定する要求事項に対して,図H.1又は図H.2に示す試験セットアップを追加すること
が望ましい。
電気負荷は,電波暗室の外に配置してもよい。この場合,ケーブルは電波暗室の中では高さ0.1 mの誘
導体スペーサの上に備え付け,電波暗室の外側からの電磁妨害を回避するために壁でフィルタをかける。
試験装置(例えば,モータ)及び測定機器は,追加のエミッションを発して結果に影響を及ぼさないこ
とを確実にする。
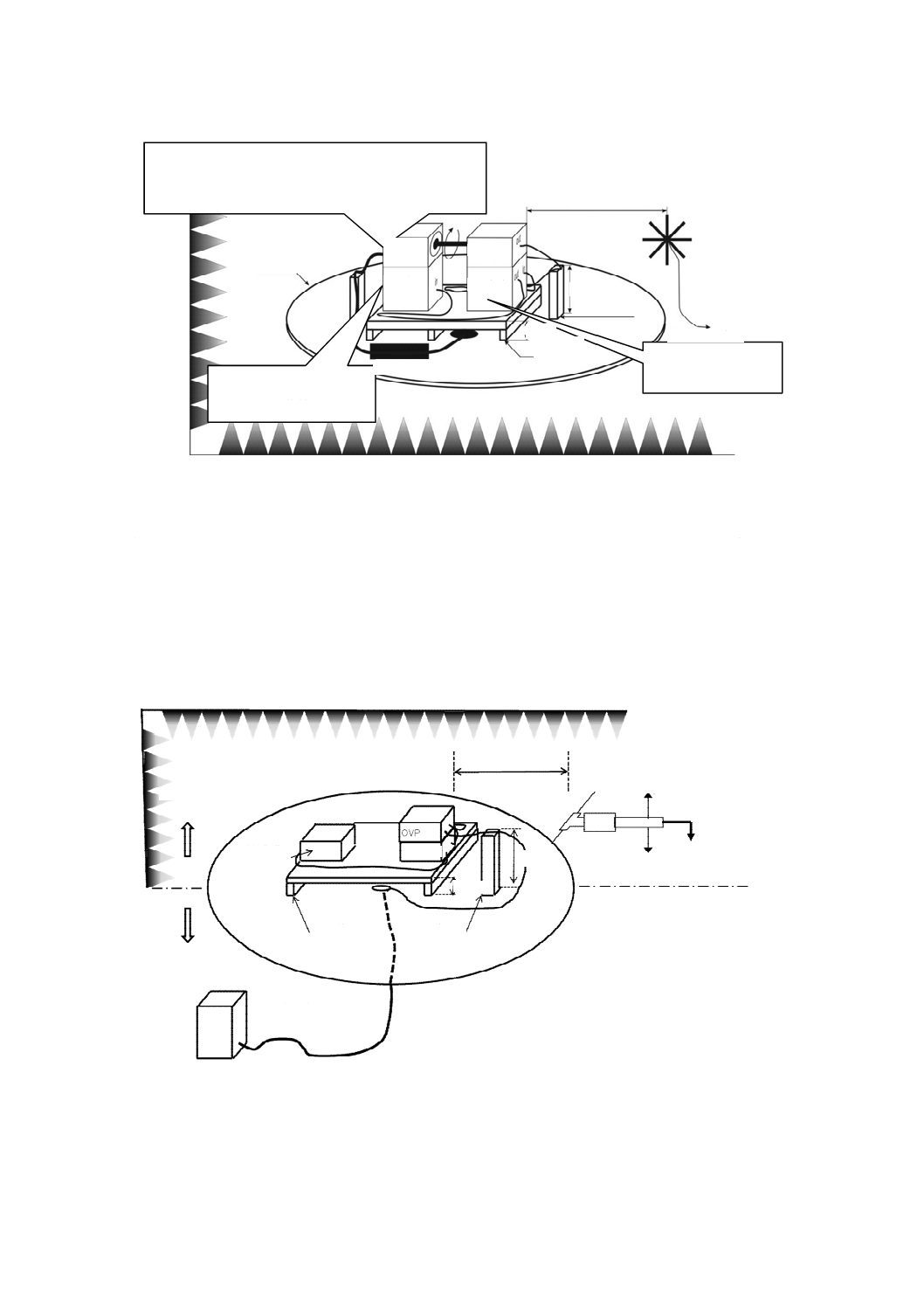
93
C 1400-2:2020 (IEC 61400-2:2013)
正確な測定のために,コンバータ及びコンバータとモータとの
間のケーブルを適切に遮蔽することを推奨する。
多くのDCモータはブラシノイズを発するため,DCモータは速
度制御モータとして適さない場合がある。
発電機の電気負荷として,
負荷装置又は電源回生装置を
用いることを推奨する。
コンバータは,風車の
制御装置を含んでいる
ことを推奨する。
回転台
アンテナ
10 m
速度制御
モータ
電気負荷
発電機
コンバータ
誘電体
スペーサ
EMIレシーバへ
フェライトクランプ
0.4 m
0.1 m
誘電体
スペーサ
半電波暗室
図H.1−放射性エミッションの試験セットアップ(セットアップタイプA)
固有のノイズを発する他の電気装置をもたない発電機であって,その発電機から発する放射ノイズが非
常に低いと推察できる場合は,図H.2に示す試験セットアップを適用してもよい。
風車の発電機とみなして用いる電源供給装置(CVCF)が発生させる出力は,交流,直流,整流後の波
形などの発電機出力波形を模擬できることが望ましい。
ケーブルは,代表的な使用長さ及び型式を選定することが必要な場合がある。
回転機
10 m
EMIレシーバへ
アンテナ
上
0.4 m
0.1 m
誘電体
スペーサ
誘電体
スペーサ
電気負荷
半電波暗室
グラウンド面下
電源(CVCF)
下
コンバータ
図H.2−放射性エミッションの試験セットアップ(セットアップタイプB)
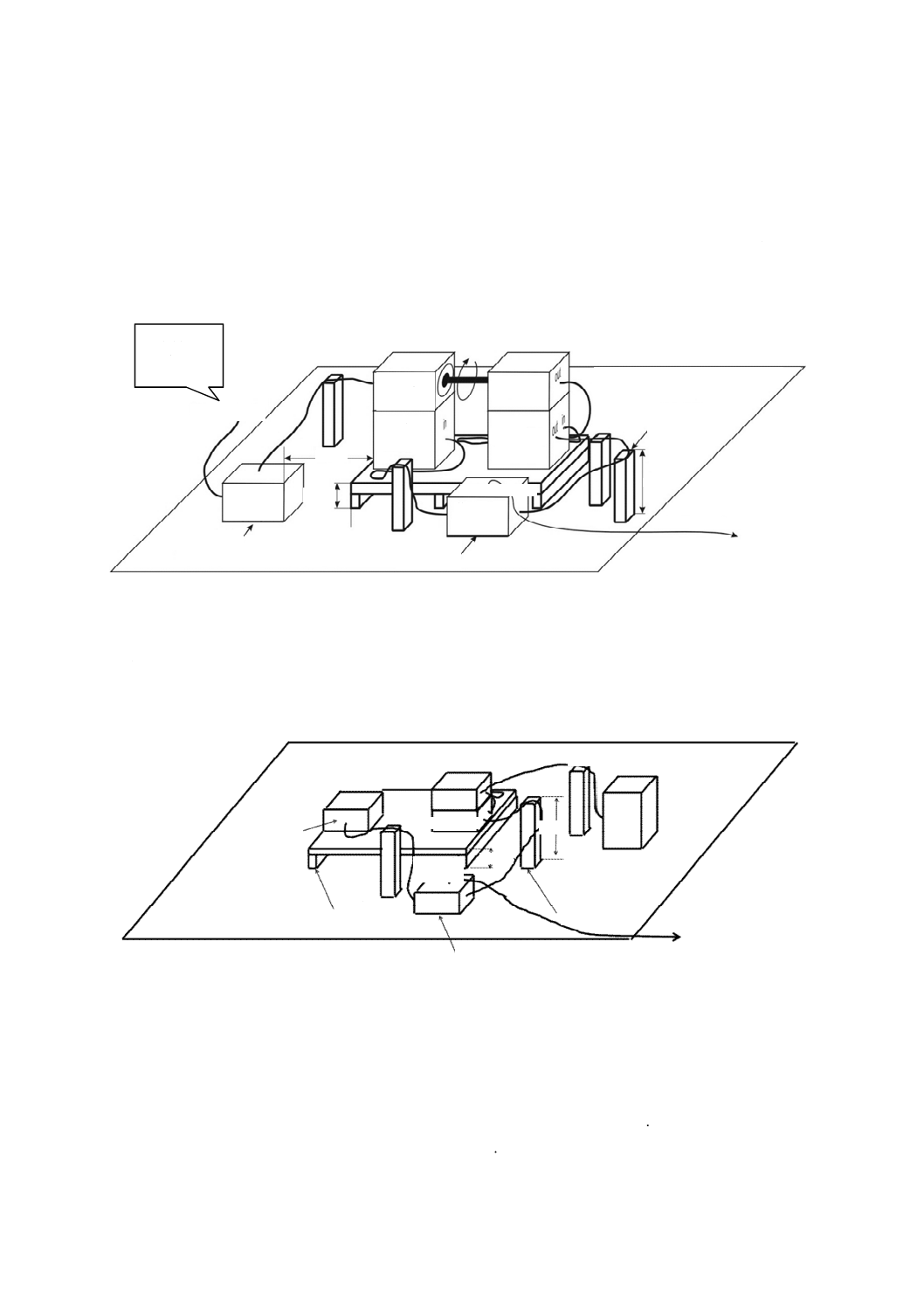
94
C 1400-2:2020 (IEC 61400-2:2013)
H.3 伝導性エミッション測定
CISPR 16-2-1に規定する要求事項に対して,図H.3又は図H.4に示す試験セットアップを追加すること
が望ましい。必要に応じて,電気負荷を金属グラウンド面の外に配置してもよい。この場合の計測装置の
仕様は,CISPR 16-1-2を参照する。
注記 金属グラウンド面の外縁と発電機及びコンバータとの間の距離は,CISPR 16-2-1に従って,0.5
m以上に設定することに注意する。
0.1 m
速度制御
モータ
電気負荷
発電機
コンバータ
誘電体
スペーサ
0.4 m
0.8 m
疑似電源
回路
結合回路網
グラウンドへ
接続
グラウンドへ
接続
模擬電源
EMIレシーバへ
RF(無線周波)出力
供給電力は,
発電電力から
分離すること
を推奨する。
金属グラウンド面(2 m×2 m以上)
図H.3−伝導性エミッションの試験セットアップ(セットアップタイプA)
放射エミッション測定にセットアップタイプBを選択した場合は,伝導性エミッション測定でもセット
アップタイプBを選択することが望ましい(図H.4参照)。
電気負荷
OVP
コンバータ
誘電体
スペーサ
0.4 m
RF(無線
周波)
0.1 m
誘電体
スペーサ
結合回路網
グラウンドへ接続
EMIレシーバへ
電源
(CVCF)
金属グラウンド面(2 m×2 m以上)
図H.4−伝導性エミッションの試験セットアップ(セットアップタイプB)
H.4 参考文献
[H.1] IEC 61000-6-3:2006,Electromagnetic compatibility (EMC)−Part 6-3: Generic standards−Emission
standard for residential, commercial and light-industrial environments,Amendment 1:2010
[H.2] CISPR 16-1-2:2003,Specification for radio disturbance and immunity measuring apparatus and methods−
Part 1-2: Radio disturbance and immunity measuring apparatus−Ancillary equipment−Conducted
95
C 1400-2:2020 (IEC 61400-2:2013)
disturbances,Amendment 1:2004 and Amendment 2:2006
[H.3] CISPR 16-2-1:2008,Specification for radio disturbance and immunity measuring apparatus and methods−
Part 2-1: Methods of measurement of disturbances and immunity−Conducted disturbance measurements,
Amendment 1:2010 and Amendment 2:2013
[H.4] CISPR 16-2-3:2006,Specification for radio disturbance and immunity measuring apparatus and methods−
Part 2-3: Methods of measurement of disturbances and immunity−Radiated disturbance measurements and
Amendment 1:2010
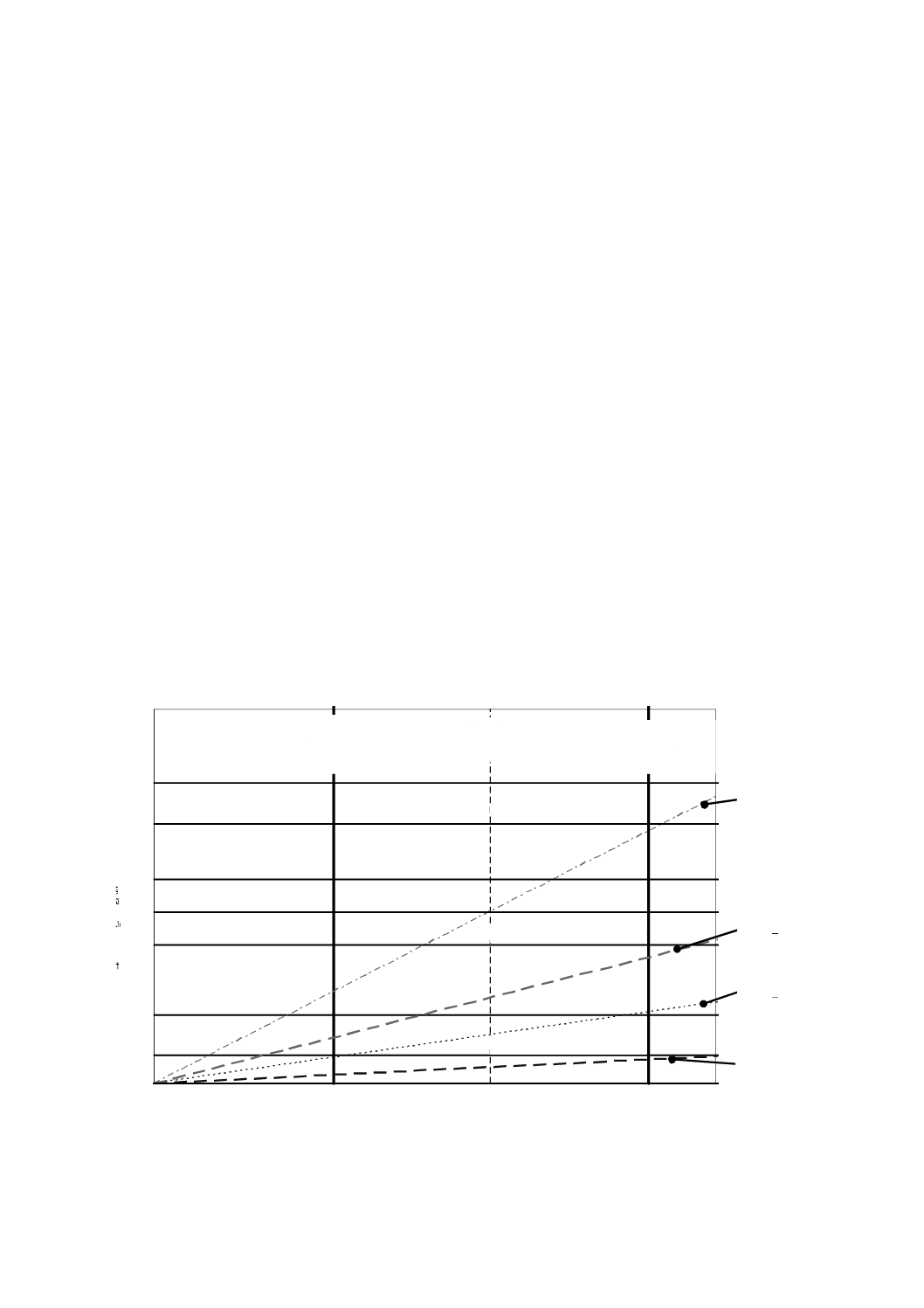
96
C 1400-2:2020 (IEC 61400-2:2013)
附属書I
(規定)
固有振動数解析
風車の主な固有振動数は,共振線図(キャンベル線図など)によって評価する。図には,風車の固有振
動数(f̲N)及び関連する励起振動数(f̲E)を含める。また,少なくとも,風車の主要構造部品の固有振
動数を考慮する。これらは,タワー又は支持構造物,ロータ翼,並びに設計によってはドライブトレイン,
ロータ翼とハブとの間の補強材(例えば,スティフナ),及びタワーの補強材(例えば,支線及び筋交い)
の固有振動数である。考慮の必要がある関連する励起振動数は,少なくともロータ回転数1PH及びその倍
数(2PH,3PH...),並びにロータ回転数に翼数を乗じた値及びその倍数(例えば3枚翼の場合,3PH,6PH,
9PH...)である。キャンベル線図の例を図I.1に示す。風速と毎分の回転数(rpm)との関係を示す曲線は
この評価の中で考慮する。
固有振動数は,シミュレーション又は実際の風車での測定によって得ることができる。解析を拡張し,
異なるロータ回転数での固有振動数の変化を考慮してもよい。
通常,風車の運転回転数範囲内での共振の発生は,回避する。共振の発生を回避できない場合,構造物
の設計の中で荷重の増幅を考慮する。必要な場合,適切な設計又は制御仕様の改変を行う。
可変速運転の風車では,通常,風の非定常性によって風車システムの固有振動数を通過する。一般的に
は,これが有害な共振状態を引き起こすとは仮定しない方がよい。ただし,風速とロータ回転数との関係
を切り離す制御機能(例えば,一定の回転数を維持するロータ過回転制御)は,有害な共振を引き起こす
場合がある。
Rotor speed, [rpm]
N
a
tu
ra
l
fr
e
q
u
e
n
c
ie
s
o
f
W
in
d
T
u
rb
in
e
f
̲
N
,
[H
z
],
E
x
c
it
a
ti
o
n
f
re
q
u
e
n
c
ie
s
o
f
W
in
d
T
u
rb
in
e
f
̲
E
,
[H
z
]
minimum
operating
speed n1
maximum
operating
speed n3
rated
speed nr
f̲E1P̲H rotor
speed 1PH
f̲E2P̲H
f̲E3P̲H
f̲E6P̲H
1st tower fore-aft / side-side
1st blades edgewise
1st blades flapwise
2nd tower fore-aft / side-side
1st drive train torsion
2nd blades flapwise
2nd blades edgewise
風車
の
固有
振動数
f
̲
N
(
H
z
)
風
車
の励起
振
動数
f
̲
E
(
H
z
)
最小運転
回転数 n1
定格回転数
nr
最大運転
回転数 n3
2次のブレードフラップ方向
2次のブレードエッジ方向
1次のブレードエッジ方向
1次のドライブトレイン
ねじり方向
2次のタワー前後方向又は左右方向
1次のブレードフラップ方向
1次のタワー前後方向又は左右方向
f̲E6P̲H
f̲E3P̲H
f̲E2P̲H
f̲E1P̲H ロータ
回転数1PH
ロータ回転数(min-1)
図I.1−キャンベル線図の例
97
C 1400-2:2020 (IEC 61400-2:2013)
附属書J
(参考)
極値環境条件
J.1
概要
設計文書において,風車の型式が6.4.1に規定する環境条件の範囲外(着氷,塩害,低温又は高温の条件
を含む場合がある。)での運転について設計する場合,これらについて明確に記載する。その設計がどのよ
うに行ったかについては,例えば,次のような条件がどのように考慮したかを記載する。
J.2
極値条件
極値条件に関しては,次による。
a) コンポーネント評価及び材料特性 低温で十分な衝撃強度もつ鋼,高温での電子部品評価など
b) 異種材料の使用 熱膨張に影響を及ぼす可能性があるため,例えばシステム剛性を変化させるかなど
を考慮するのがよい。
c) 潤滑 例えば,温度変化によって潤滑特性が変化する場合がある。
d) 湿気及び結露に対するコンポーネントの保護
e) 組立て,作動,運転及び保守での許容温度 これらを文書化し,特別な留意事項(例えば,コンクリ
ート又はエポキシの硬化条件)を記載するのがよい。
f)
ブレードの腐食 粒子状物質,例えば,砂,塩などが存在する場合,これに取り組む。
J.3
低温
低温に関しては,次による。
a) 始動手順 低温及び/又は着氷による系統故障後の始動について,例えば,スイッチオンの回数,遅
れ,装置加熱などを考慮する。
b) 低温及び/又は着氷に関する特別保守要件 文書化が望ましい。
c) 運転への影響 例えば,起動時の風速を考慮する。
J.4
着氷
着氷に関しては,次による。
a) 機構の凍結の可能性 3Vaveでの着氷静的荷重ケース(6.4.3.4)において,ファーリングヒンジ,ピッ
チ機構,外部のセンサなどの凍結の可能性を考慮するのが望ましい。
b) 着氷による空力及び質量の不釣り合い これらについて,設計荷重推定に考慮するのが望ましい。風
車保護のために,振動検出を用いるのがよい。
c) センサ,翼などへの着氷蓄積防止 これらについて,受動的手段又は能動的手段で考慮するのが望ま
しい。
d) 保護と密封,例えば,氷及び雪の発電機又はナセルへの侵入防止 ナセル内部及び周囲に蓄積する氷
及び雪は,電気及び機械コンポーネントの誤動作及び腐食を引き起こす場合がある。
e) 氷飛散時の推奨安全距離
f)
低乱流,高い空気密度及び/又は着氷蓄積による出力増加の可能性 着氷蓄積は,例えば,前縁半径
98
C 1400-2:2020 (IEC 61400-2:2013)
を大きくするなど,ロータの空力を変化させる。これらは,全ての失速制御機の過剰出力を引き起こ
す可能性があるが,失速制御機以外の風車にも影響を及ぼす場合がある。
J.5
高温
低温条件は高温条件よりも風車材料の強度及び特性に有害な影響を示すが,小形風車製造業者が風車の
設計及び設置に対応するために,考慮が必要な幾つかの高温気象条件がある。高温に関しては,次による。
a) 電子部品 適切な定格とする。
b) 砂及びほこり(埃) 風車全体を十分に密閉するのがよい。
c) 露出部,特に構造物のプラスチック 紫外線に対して,安定しているものを用いる。
d) 接地 風車はコンポーネントの帯電の蓄積を放散するため十分に接地するのがよい。
J.6
海洋環境
海洋環境に関しては,次による。
a) 防水及び防食 適切な防水及び防食を実施するのがよい。
b) 異種金属及び一般材料の組合せ 注意深く選択する。
99
C 1400-2:2020 (IEC 61400-2:2013)
附属書K
(参考)
熱帯低気圧の極値風条件
K.1 一般事項
SWTクラスI,II,III及びIVに対して定義する外部条件には,熱帯低気圧(ハリケーン,サイクロン及
び台風)における風条件は含まれない。熱帯低気圧における条件では,風車クラスS設計が必要になる場
合がある。ただし,熱帯低気圧地域に設置する全ての風車が必ずしも“クラスS”が必要になるとは限ら
ない。これは,熱帯低気圧の発生頻度及び規模は,気象条件だけでなく地理的条件にもよるからである。
この附属書では,熱帯低気圧の一般的な特色について説明し,図K.2に示すような熱帯低気圧地域に設
置する風車の設計を容易に行えるようにする。
K.2 熱帯低気圧地域でのSWTクラスの使用
最初の重要な作業は,熱帯低気圧気候地域の特定サイトに設置するSWTクラスを特定することである。
この作業は,観測された年最大風速(熱帯低気圧の極値)の解析作業,及びサイトの再現期間50年の極値
である基準風速Vrefの推定作業で構成する。
サイトのVrefの推定に,適切な統計的極値理論を適用してもよい。ただし,年最大風速といったまれな
事象を含む大量の親データは,通常,統計的極値理論を適用するのには不十分である。そのような場合,
推定の不確実性を減じるために,モンテカルロモデルによるシミュレーションなどの特定の補正方法を適
用してもよい。CFDモデルは,地形条件を考慮することによって推定精度を向上させる場合がある。極値
の推定方法の導入については,K.5に示す参考文献に記載する。
K.3 極値風条件
K.3.1 熱帯低気圧の定義
ハリケーン,サイクロン及び台風は,熱帯又は亜熱帯の海面で発生する強力な低気圧であり,熱帯低気
圧と呼ばれる。熱帯低気圧は,10分平均風速が32.7 m/s{64ノット}を超える熱帯暴風と定義されている。
10分平均風速が50 m/sを超える強力な熱帯低気圧は,基準風速Vrefの統計的予測に影響を及ぼす。
K.3.2 熱帯低気圧の一般的な特徴
熱帯低気圧は季節的及び地域的な海洋性気象現象である。熱帯低気圧地域ごとに熱帯低気圧の典型的な
パターン及び進路が存在する。上陸した熱帯低気圧は,地形条件の影響を受けて,風速を加速させる場合
がある。これらの理由から,熱帯低気圧に的を絞った年10分平均最大風速を慎重に解析することが望まし
い。
ある地域又はあるサイトに1年間に発生したり上陸したりする熱帯低気圧の数は,極値解析のときに重
要なパラメータとなる。例えば,過去60年間に日本周辺の海域で発生した台風の年間平均数は26である
が,日本の陸地に上陸した台風の年間平均数は僅か3である。このため,ほとんどの地域及びサイトでは,
観測された年10分平均最大風速のデータ点の数は限られている。従来の極値統計の使用によるVrefの推定
に必要な最低条件としては,対象となる地域又はサイトで,過去50年以内に二つ以上の独立した観測によ
って,熱帯低気圧による年10分平均最大風速データが得られていることが望ましい。
100
C 1400-2:2020 (IEC 61400-2:2013)
K.3.3 極値風条件
K.3.3.1 観測データ
表K.1に,典型的な熱帯低気圧地域の気象観測所で記録された世界上位5位までの10分平均最大極値
風速を示す。再現期間は,極値データごとに特定されていない点に注意する。
表K.1−気象観測所で記録された上位5位までの平均極値風速
順位
米国大西洋沿岸ハリケーンa)
フランス大西洋沿岸サイクロンc)
日本の台風b)
極値
(m/s)
発生年
名称
観測期間
高さ(m)d)
極値
(m/s)
発生年
観測地
観測期間
高さ(m)d)
極値
(m/s)
発生年
観測地
観測期間
高さ(m)d)
1
74.4
1992年
Andrew
1980年〜
10.0
40
1987年
Quimper
1981年〜
10.0
69.8
1965年
室戸岬
1961年〜
41.8
2
66.7
2004年
Charley
1980年〜
10.0
32
1999年
Orly
1981年〜
10.0
69.3
1951年
室戸岬
1961年〜
41.8
3
61.6
1989年
Hugo
1980年〜
10.0
31
1984年
Millau
1981年〜
10.0
60.8
1966年
宮古島
1961年〜
11.4
4
56.5
2005年
Katrina
1980年〜
10.0
30
1999年
La
Rochelle
1981年〜
10.0
60.0
1942年
雲仙岳
1961年〜
51.7(海抜)
5
53.9
2004年
Ivan
1980年〜
10.0
30
1982年
Millau
1981年〜
10.0
54.3
1968年
宮古島
1961年〜
11.4
注記 上記の値は瞬間の最大値ではなく,データセットごとに定義した持続平均最大値である。
注a) 1分平均最大風(参考文献[K.11]4) の附属書Aから引用)。
b) 測定装置はベーンタイプ(プロペラ形)であり,データは10分間の平均値である。
c) 10分間の平均最大風速。
d) 高さは別途記載がない限り,地表面からの測定高さである。
注4) この附属書では角括弧内の番号は,K.5の文献リストを示す。
表K.2に,気象観測所で記録された世界上位5位までの瞬間極値風速(ガスト)を示す。測定装置に限
界があるため,これらの瞬間的なガストは,標準的な3秒間のガストよりも持続時間が短い場合がある点
に注意する。
表K.2−気象観測所で記録された極値風速
順位
米国大西洋沿岸ハリケーンa)
フランス大西洋沿岸サイクロンd)
日本の台風b)
極値
(m/s)
概要
観測期間
高さ(m)e)
極値
(m/s)
発生年
観測地
観測期間
高さ(m)e)
極値
(m/s)c)
発生年
観測地
観測期間
高さ(m)e)
1
80 a)
100年周
期モデル
化a)
1900年
10.0
52
1987年
Quimper
1981年〜
10.0
85.3
1966年
宮古島
1961年
11.4
2
51
2009年
Perpignan
1981年〜
10.0
84.5
1961年
室戸岬
1961年
41.8
3
48
1999年
Brieuc
1981年〜
10.0
79.8
1968年
宮古島
1961年
11.4
4
48
1986年
Chambery
1981年〜
10.0
78.9
1970年
名瀬
1967年
20.7
5
45
1990年
Quimper
1981年〜
10.0
77.1
1965年
室戸岬
1961年
41.8
101
C 1400-2:2020 (IEC 61400-2:2013)
表K.2−気象観測所で記録された極値風速(続き)
注記 上記の値は瞬間の最大値ではなく,データセットごとに定義された持続平均最大値である。
注a) 再現期間100年の3秒間ガストに関するシミュレーションデータについては,参考文献[K.8]を参照する。
b) 測定装置はベーンタイプ(プロペラ形)風速計である。
c) 1秒間の平均相当値。
d) 測定0.5秒間の最大値。参考文献[K.10]参照。
e) 高さは別途に記載がない限り,地表面からの測定高さである。
K.3.3.2 乱流強度
10分平均風速15 m/sでのハブ高さにおける乱流強度の特性値(I15)も,SWTクラスを定義する重要な
パラメータである。他に根拠がない場合,標準SWTクラスI〜IVに対するI15は,熱帯低気圧に見舞われ
る場所にとって有効であると考える。
K.3.3.3 極値ウィンドシアー
極値ガスト条件の下では,ウィンドシアーはより傾きが大きくなる。つまり,熱帯低気圧によって高空
で生まれる強風は,低い位置に設置された風車にも強い影響を及ぼす。
K.3.3.4 風向反転
熱帯低気圧の通過中に,風向は早い時には30分ほどの間で180°変わる。これは,熱帯低気圧の通過中
に待機状態を更新し,風への露出を低減することによって風車を保護するあらゆる風車に関係する。こう
した暴風雨の条件下では停電が発生することは一般的であるため,フェイルセーフ設計に注意する。
K.4 確率論的シミュレーション(モンテカルロモデルによるシミュレーション)
強風が主に温帯低気圧に起因する地域において,JIS C 1400-1の附属書Eの説明にあるように,測定相
関予測(MCP)法を用いることによって近くの基準気象観測所のデータから極値風速を推定することがで
きる。一方,熱帯低気圧及び温帯低気圧のいずれも多い熱帯地域及び亜熱帯地域は,混合気候として知ら
れており,文献[K.2][Gomes and Vickery (1978)]が言及しているように,強風を生むそれぞれの気象現象
の検討が必要である。MCP法では,図K.1に示すように,混合気候地域での極値風速が過小に見積もられ
ることが指摘されている。これに代わる方法として,確率論的モデルを用いて測定データを拡張し,単純
な相関及び予測よりも優れた予測となる擬似データを作成する方法がある。これはモンテカルロモデルと
呼ばれることが多く,特に,利用可能なデータが限定されている場合に有用である。
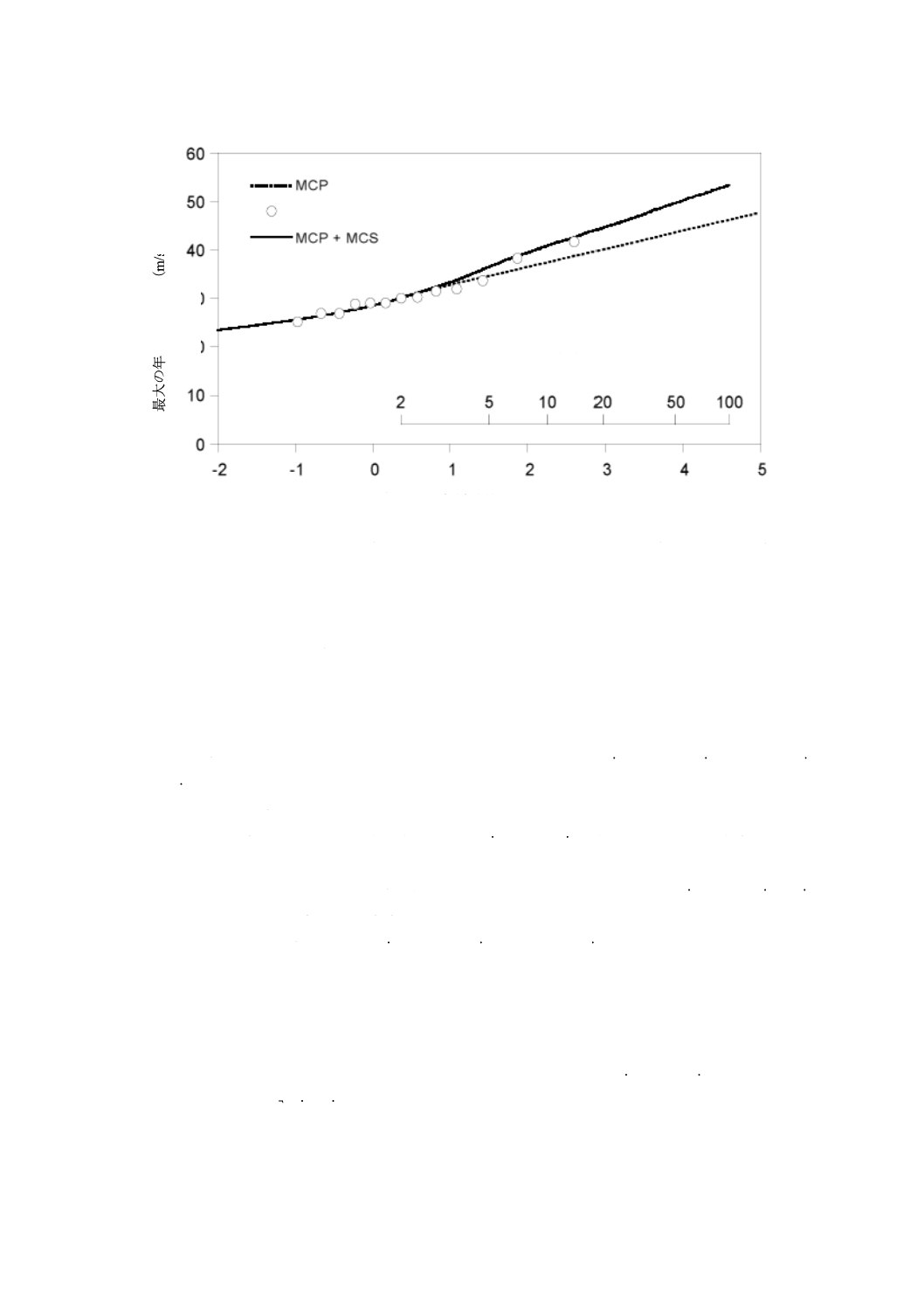
102
C 1400-2:2020 (IEC 61400-2:2013)
図K.1−混合気候地域で予測及び観測された極値風の比較(Isihara, T.及びYamaguchi, A.)
図K.1に,モンテカルロモデルによるシミュレーションで予測し,実際の測定値と比較した複合極値風
速分布(MCP+MCS)を示す。比較のため,Gumbel解析を用いたMCP法による推定確率分布(MCP)も,
プロットする。モンテカルロモデルが測定値と良好な一致を示す一方で,MCP法では主に再発生率の低い
熱帯低気圧による極値風速を過小に見積もられることが明らかである。
K.5 参考文献
[K.1] ISHIHARA, T. and YAMAGUCHI, A. (2010), Prediction of the extreme wind speed in mixed climate regions
by using Monte Carlo simulation and Measure-Correlate-Predict method, (Submitted to Journal of Wind
Engineering, JAWE)
[K.2] GOMES, L. and VICKERY, B. J (1978), Extreme wind speeds in mixed climates, J. Wind Eng. Indust.
Aerodyn., 2, 331-334.
[K.3] GEORGIOU, P. N., DAVENPORT, A. G. and VICKERY, B. J. (1983), Design wind speeds in regions
dominated by tropical cyclones, J. Wind Eng. Indust. Aerodyn., 13,139-152.
[K.4] SCHLOEMER, R. W. (1954), Analysis and synthesis of hurricane wind patterns over, Lake Okeechobee,
Florida. Hydrometeorogical Report, No.31.
[K.5] ISHIHARA, T., SIANG, K. K., LEONG, C. C. and FUJINO, Y. (2005), Wind field model and mixed
probability distribution function for typhoon simulation, The Sixth Asia- Pacific Conference on Wind
Engineering, 412-426.
[K.6] VICKERY, P. J. and TWISDALE, L. A. (1995), Prediction of hurricane wind speeds in the United States,
Journal of Structural Engineering, ASCE, 121(11), 1691-1699.
[K.7] ISHIHARA T. and HIBI K. (2002), Numerical study of turbulent wake flow behind a three-dimensional steep
hill, Wind and Structures, Vol.5, No.2-4, 317-328.
基準化変数 ‒ ln(-ln(F))
最
大
の
年
間
極
値
風
速
(
m
/s
)
再現期間(年)
観測値
103
C 1400-2:2020 (IEC 61400-2:2013)
[K.8] YASUI, H., OHKUMA, T., MARUKAWA, H. and KATAGIRI, J. (2002), Study on evaluation time in
typhoon simulation based on Monte Carlo method, J. Wind Eng. Indust. Aerodyn., 90, 1529-1540.
[K.9] VICKERY, P. J, WADHERA, D., W, TWISDALE, L. A.,.LAVELLE, F.M; U.S. Hurricane, Wind Speed Risk
and Uncertainty; Journal of Structural Engineering, Vol. 135, No. 3, March 2009
[K.10] SABRE, M. (2011); Analysis of the strongest cyclones on French Atlantic coast, CSTB, Report EN-CAPE
11.035-C V0.
[K.11] NOAA Technical Memorandum NWS TPC-5; “THE DEADLIEST, COSTLIEST, AND MOST INTENSE
UNITED STATES TROPICAL CYCLONES FROM 1851 TO 2006 (AND OTHER FREQUENTLY
REQUESTED HURRICANE FACTS); see http://www.nhc.noaa.gov/pdf/NWS-TPC-5.pdf
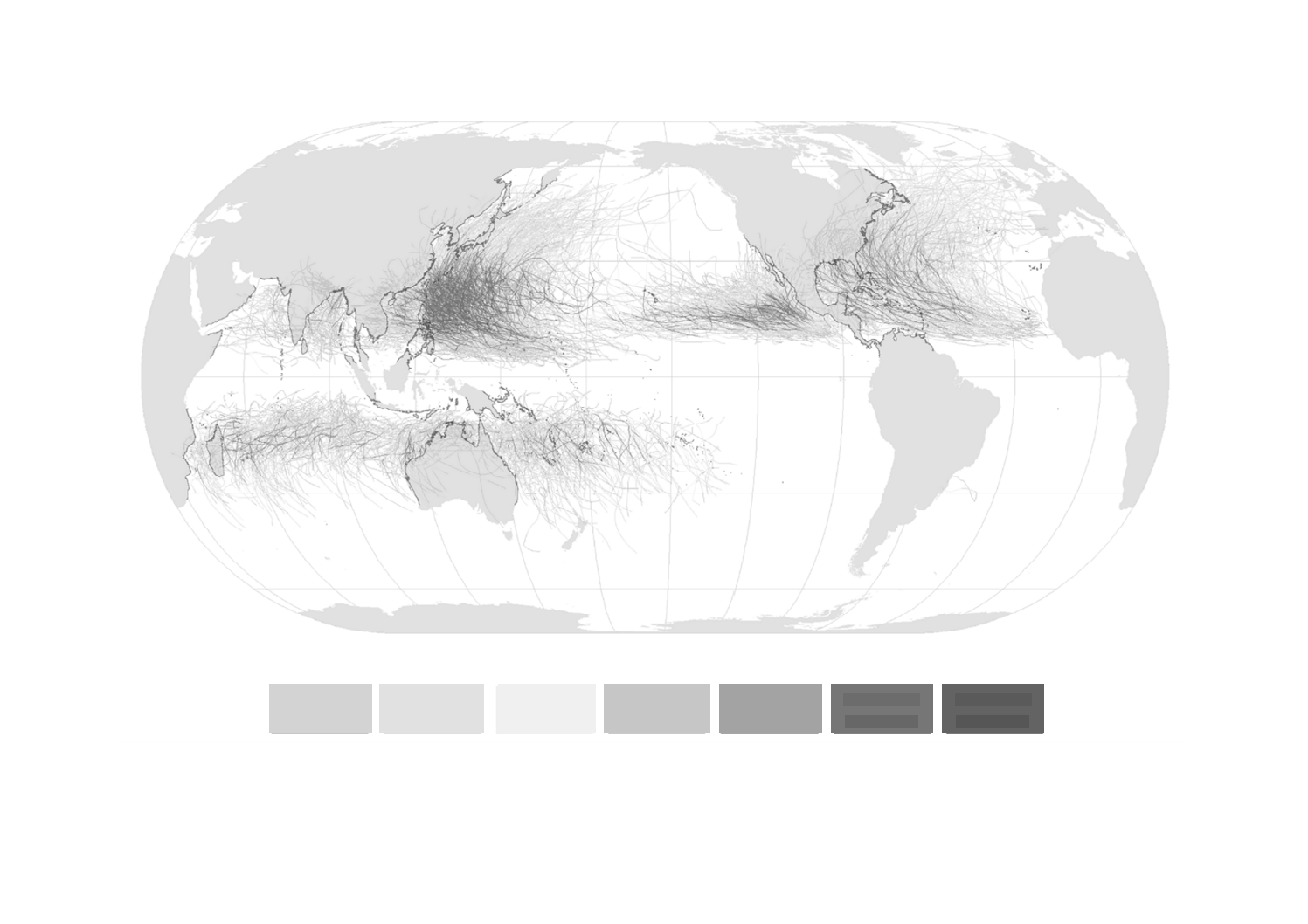
104
C 1400-2:2020 (IEC 61400-2:2013)
図K.2−1945年〜2006年における熱帯低気圧経路
(出典:米軍合同台風警報センター及びアメリカ海洋大気庁)
サファ・シンプソン・ハリケーン・スケール
熱帯低気圧
熱帯暴風
Hurricane
category 1
ハリケーン
カテゴリ2
ハリケーン
カテゴリ3
ハリケーン
カテゴリ4
ハリケーン
カテゴリ5
ハリケーン
カテゴリ1
IEC 2914/13
1
2
C
1
4
0
0
-2
:
2
0
2
0
(I
E
C
6
1
4
0
0
-2
:
2
0
1
3
)
105
C 1400-2:2020 (IEC 61400-2:2013)
附属書L
(参考)
その他の風条件
L.1
一般事項
この附属書では,この規格の他の部分に記載されていないが,小形風車の寿命,安全性,機能及び性能
に著しく悪影響を及ぼす可能性がある,その他の風の流入条件の存在を示す。
この規格に定義する四つの標準的SWTクラス,風条件及び荷重ケースは,大形風車を設置する場所と
同様に,空気の流れを妨げるものが比較的少ない典型的な風車環境を代表する場合を意図している。これ
らは,6.3において標準風条件(SWC)と定義している。
その一方で,小形風車はその他の風条件(OWC)が存在する環境に設置される場合もある。そのため,
標準風条件モデルを,設計者が変更なく用いることは妥当でない。“その他の風条件”は,実際には単純な
場合もあれば複雑な場合もある。この附属書では,それぞれの側面を切り分けて取り扱う構成となってい
る。
L.2
典型的な状況
その他の風条件が観測される環境の例としては,市街地,建物屋上,森林地,山地又は丘陵地がある。
それぞれの環境には風に影響を及ぼす独自の特性がある。例えば,建物屋上の風は,屋根勾配,建物の向
き,周辺構造物など様々なパラメータの影響を受ける。したがって,複雑な環境が類似しているタイプで
あっても,流入条件を一般化することは難しい。この附属書では,例えば,図L.3〜図L.9のように,実
際の測定値によって裏付けられた,その他の流入条件の幾つかの例を示す。これらの測定値は,全ての複
雑な状況を代表するものではなく,指標となる値として参照されることを意図したものである。
この附属書では,他の運転中の風車から受ける後流効果は対象外とする。
その他の流入条件には,極値乱流,異なるガスト係数,極値風向変化を含み,また,鉛直風成分をもっ
て傾斜する場合(瞬間的な鉛直風だけでなく,平均傾斜流も含む。),及び方向に依存する場合がある。
L.3
方向依存流
データ解析において,風がある特定の方向から来ているときに限って存在する設計に重要な極値が,平
均化によって不明確にならないように,注意する必要がある。例えば,小形風車を壁近くに設置した場合,
発生頻度は低いかもしれないが,一つ以上の方向の風で乱流が特に強くなる場合がある。同様に,障害物
によって,例えば,全ての風向を含む平均乱流条件を考察するときに想定よりも大きい極値風向変化が引
き起こされる場合がある。このことは,傾斜流で存在する場合もある。
L.4
傾斜流
6.3では,水平面に対する平均流の傾斜が8°以下の風条件を定義しているが,この値は更に大きくなる
場合がある。このような傾斜流は,定量的な実測データは少ないが,CFDによるシミュレーション及び経
験から,高層建築物の屋上及び崖の上で,特に問題となることが指摘されている(図L.1及び図L.2参照)。
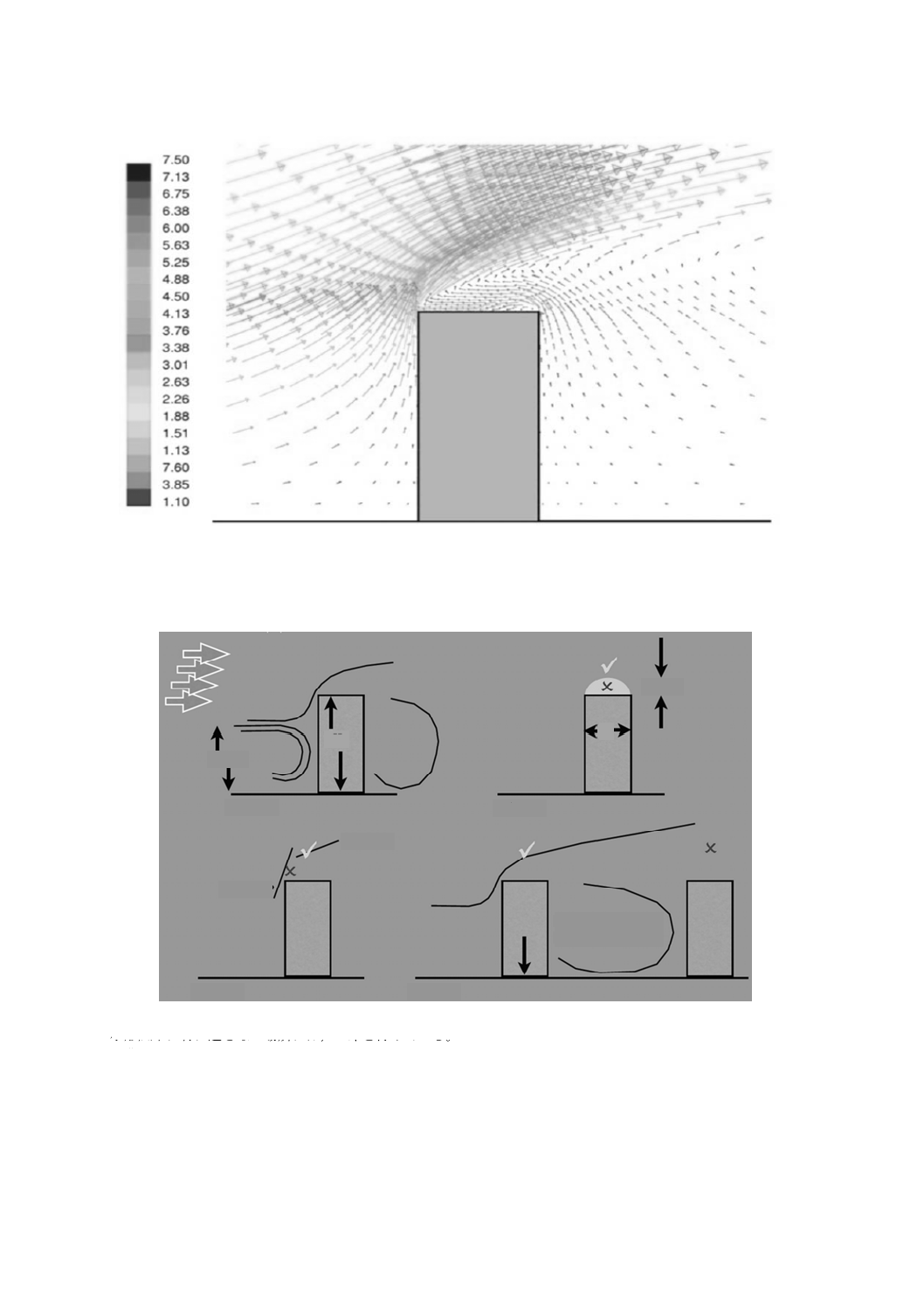
106
C 1400-2:2020 (IEC 61400-2:2013)
図L.1−建築物上での傾斜流を示したシミュレーション(Sander Mertens提供)
小形風車に特に適さない場所には,X印を付けている。
出典:Quiet Revolution Ltdの実地経験及びCFD研究による。L.8の参考文献[L.1]及び参考文献[L.2]も参照。
図L.2−建築物の周辺の風の流れの例
2/3 H
H
D
1/2 D
60°-70°
15°-20°
断面
断面
断面
断面
吸引された
低圧空気
風ベクトルを,風速値によって着色(m/s)
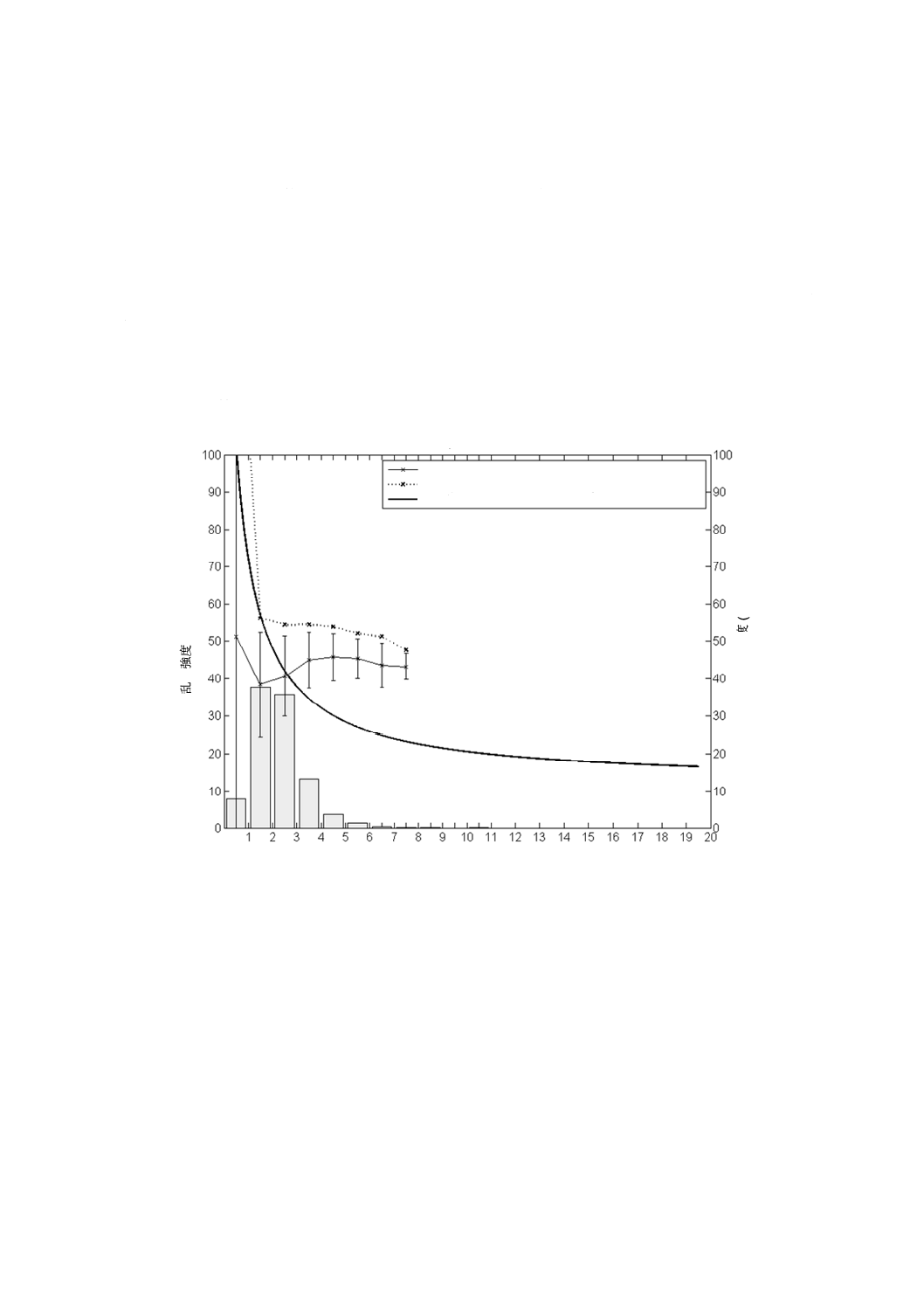
107
C 1400-2:2020 (IEC 61400-2:2013)
L.5
乱流
6.3.1に規定する通常風条件には,通常乱流モデル(NTM)が含まれる。このモデルは,空力弾性モデル
による疲労荷重ケースの計算などに用いる。NTMは,次に示す複雑な環境における現実世界の乱流の例と
比較することができる。
乱流測定結果を,図L.3〜図L.6に示す。ここで,細い実線は,10分間平均風速Vhub(ビン幅1 m/sによ
るビン平均化)の関数としてビン平均乱流強度σ1/Vhubを示す。σ1/Vhubの標準偏差は,σ1/Vhubの平均値の上
下のエラーバーで示す。×印の付いた点線は,乱流強度の推定90 %分位値を示す[JIS C 1400-1の11.9(風
のデータを参照した構造的な健全性の評価)参照]。
測定値と上記の基準との比較を単純化するため,これらの図には,表1で標準SWTクラスについて定
義した乱流パラメータI15及びaのNTMを示す太い実線を追加する。さらに,実測による10分平均風速
Vhubの確率分布を棒グラフで示す。
図L.3−スウェーデンのウプサラの北にある森林の樹木頂部から
5 m上空の乱流強度及び風の分布(2009年1月〜12月)
乱
流
強度
σ
1
/V
hu
b
(
%
)
V
h
ub
の
頻度
(
%
)
風速 Vhub (m/s)
乱流強度測定値の平均値(及び標準偏差の範囲)
乱流強度測定値の90 %分位値
NTM(90 %分位値)
IEC 2917/13
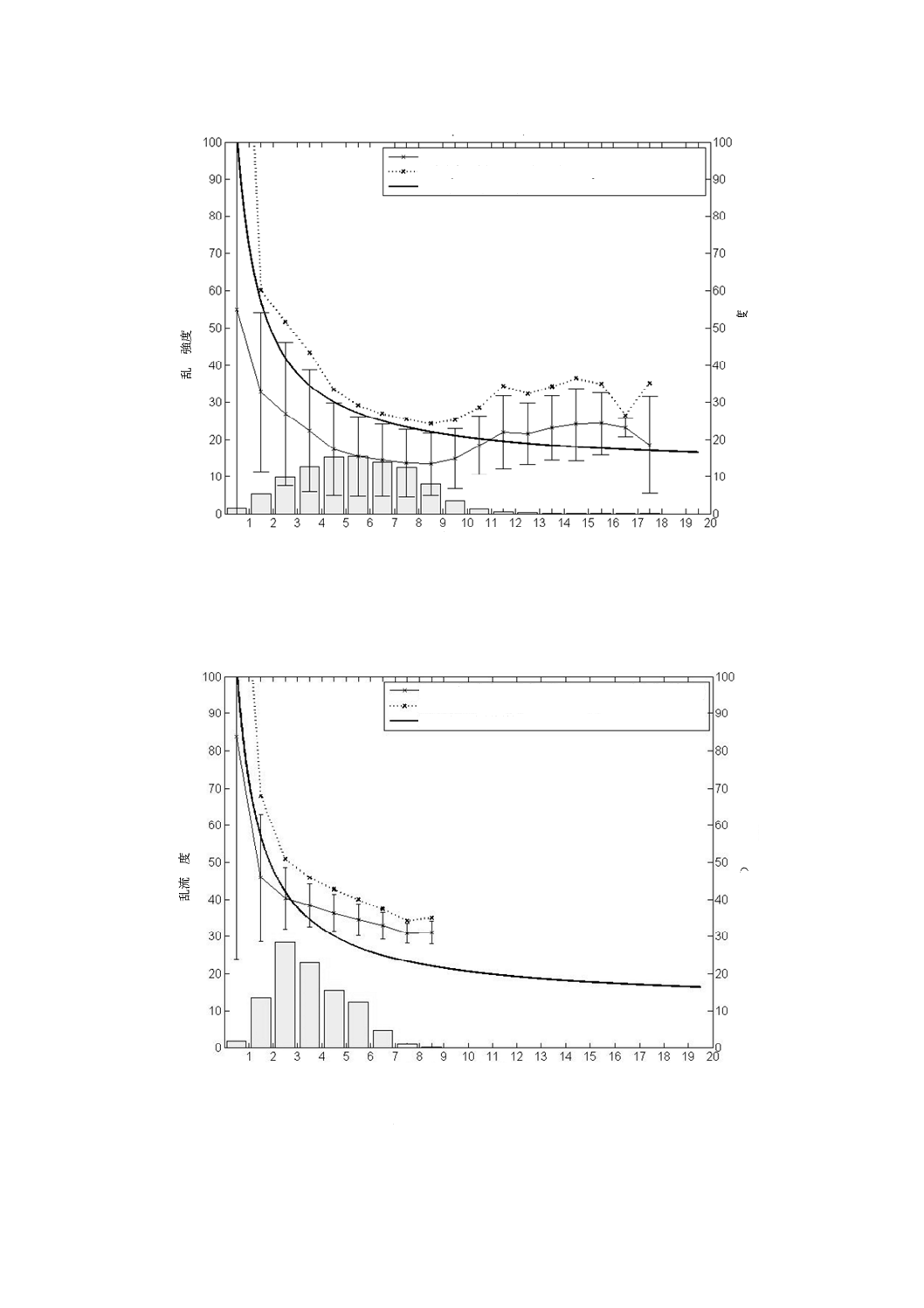
108
C 1400-2:2020 (IEC 61400-2:2013)
図L.4−スウェーデンのウプサラの北にある森林の樹木頂部から69 m上空の乱流強度及び風速の分布
(2009年1月〜12月)(高風速に関するデータ量は十分でない)
図L.5−西オーストラリア州メルビルの建物屋上から2 m上空の乱流強度及び風速の分布
(2009年1月〜2月,参考文献[L.4])
乱
流
強
度
σ
1/
V
hu
b
(
%
)
V
hu
b
の
頻
度
(
%
)
風速 Vhub (m/s)
乱流強度測定値の平均値(及び上下の標準偏差)
乱流強度測定値の90 %分位値
NTM (90 %分位値)
乱
流
強度
σ
1/
V
h
ub
(
%
)
V
h
ub
の
頻度
(
%
)
風速 Vhub (m/s)
乱流強度測定値の平均値(及び標準偏差の範囲)
乱流強度測定値の90 %分位値
NTM (90 %分位値)
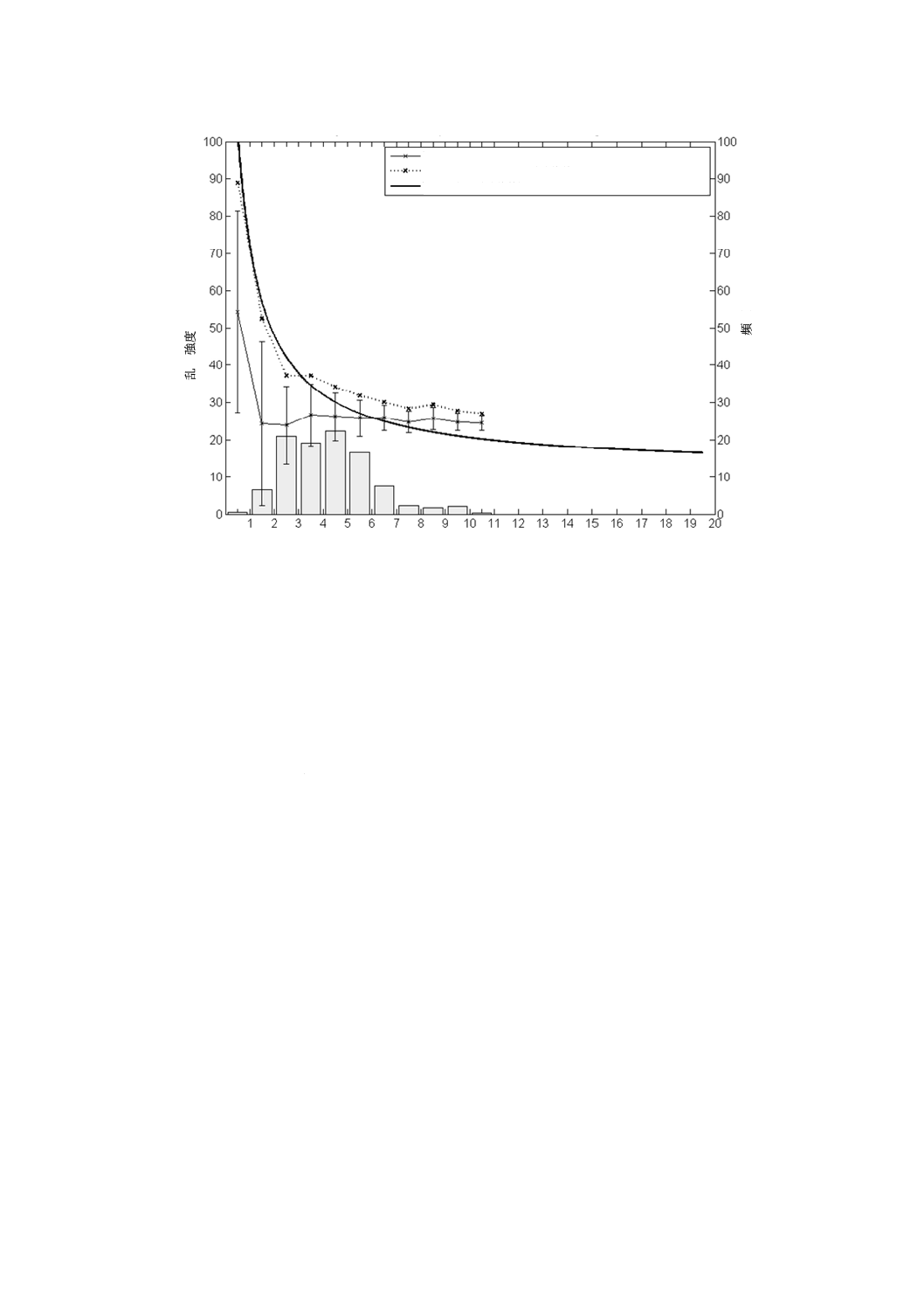
109
C 1400-2:2020 (IEC 61400-2:2013)
図L.6−西オーストラリア州ポートケネディの建物屋上から5.7 m上空の乱流強度及び風速の分布
(2010年2月〜3月,参考文献[L.4])
図L.3〜図L.9に示すとおり,標準SWTクラスに対して定義したパラメータのNTMでは,複雑な環境
をうまく代表することができない。これらの図に示した全てのサイトにおいて,乱流強度測定値の90 %分
位値が,風速が約3 m/sを超える場合,風車の典型的な運転範囲でNTMよりも高いことに注意する。0.2Vref
〜0.4Vrefの範囲(通常は6 m/s〜20 m/s)において,NTMよりも測定値が高いということは,JIS C 1400-1
の11.9によって,これらのモデル値に合わせて設計した風車は,そのサイトに適さないことを示している。
このような環境では,この規格の規定事項よりも大幅に厳しい乱流条件を伴うと結論付けられる。
L.6
極値風向変化
6.3.3.4では,風の極値風向変化(EDC)が定義され,また,別の箇条では,EDCに対応するSWTの荷
重ケースが定義されている。これらは,次に示す複雑な環境における現実世界の極値事象の例と比較する
ことができる。
日本において,極値風向変化は,異なるタイプの構造物に囲まれた2階建て建物の屋上で調べられ,EDC
モデルと比較された。図L.7〜図L.8に示すデータ点は,極値風向変化の測定値の例を示したものである。
比較のため,これらの図に,再現期間Nが1年及び50年のEDCモデルの線を追加する(ロータ直径5 m
のハブ高さ20 mのデータを使用)。
乱
流
強度
σ
1/
V
h
ub
(
%
)
V
hu
b
の頻
度
(
%
)
風速 Vhub (m/s)
乱流強度測定値の平均値(及び上下の標準偏差)
乱流強度測定値の90 %分位値
NTM (90 %分位値)
110
C 1400-2:2020 (IEC 61400-2:2013)
図L.7−東京における建物屋上から1.5 m上空の極値風向変化の例
(2007年2月〜5月)(0.5 Hzデータ,参考文献[L.5])
この数箇月間の測定期間中,再現期間50年のモデルよりもはるかに大きい極値風向変化が観測された。
この傾向は,2010年9月〜2011年2月の5か月間での測定値(1 Hzデータ)においても確認されている。
図L.8−東京における建物屋上から1.5 m上空の極値風向変化の例
(2010年9月〜2011年2月)(1.0 Hzデータ,参考文献[L.5])
L.7
ガスト係数
6.3.3.2の極値風速モデル(EWM)では,ガスト係数を1.4と想定している。ここで,ガスト係数は,10
分間平均風速に対する3秒平均最大風速の比率である。高さ10 mで測定した場合,ガスト係数は,通常,
狭い範囲で変化する。高緯度の強風では1.45が典型的である一方,ハリケーンでは1.55〜1.66の測定値と
なる場合がある(参考文献[L.6])。ただし,オーストラリアの都市の建物屋上環境で行われた測定では,1
回の暴風雨でのガスト係数の方がはるかに高く,通常は4,高いものでは5.5にもなることが示された(10
分間平均値を用いた場合)(参考文献[L.7])。
0
50
100
150
200
250
300
0
1
2
3
4
5
6
7
8
9
Wind speed Vhub (m/s)
E
D
C
m
ag
ni
tu
d
e
(d
eg
)
EDC-Median(bin)
EDC-90%(bin)
IEC-EDC N=1
IEC-EDC N=50
EDC中央値 (bin)
EDC-90 % (bin)
IEC-EDC N = 1
IEC-EDC N = 50
風速 Vhub (m/s)
E
D
C
値
(
°)
0
50
100
150
200
250
300
0
1
2
3
4
5
6
7
8
9
Wind speed Vhub (m/s)
E
D
C
m
a
gn
it
ud
e
(d
eg
)
EDC-Median(bin)
EDC-90%(bin)
IEC-EDC N=1
IEC-EDC N=50
EDC中央値 (bin)
EDC-90 % (bin)
IEC-EDC (N=1)
IEC-EDC (N= 50)
風速 Vhub (m/s)
E
D
C
値
(
°)
111
C 1400-2:2020 (IEC 61400-2:2013)
図L.9−西オーストラリア州ポートケネディで暴風雨中に建物屋上から5 m上空において測定したガスト
係数(2010年3月,10分間平均風速との比較)
運転中の極値ガストなど,その他の極値荷重ケースでも,更に強いものになる場合があるので,注意す
る。
L.8
参考文献
[L.1] Carbon Trust,Small Scale Wind Energy, Policy insights and practical guidance,2008
[L.2] Met Office,Small-scale wind energy, Technical report, to accompany the Carbon Trust report,2008 cited
above
[L.3] CARPMAN, N.,Turbulence Intensity in Complex Environments and its Influence on Small Wind Turbines,
Uppsala University 2011; thesis
[L.4] WHALE, J., RUIN, S. and TOKUYAMA, H.,Turbulence Intensity Values at Potential SWT Sites in
Non-open Terrain,Presented at the International Energy Agency Task 27 Meeting, Ithaca, New York, April
28-29, 2012.
[L.5] TOKUYAMA, H.,Analysis of field data regarding extreme wind direction changes on an urban rooftop site,
unpublished data supplied to IEC 61400 MT2 committee, courtesy Nasu Denki Tekko Corporation
[L.6] HOLMES, J.D.,Atmospheric boundary layers and turbulence,2001,
http://www.hurricaneengineering.lsu.edu
[L.7] DOWLEY, Mark.,A Successful Roof-top Wind Power Project?,Murdoch University, MSc thesis 2010
[L.8] IEC 61400-1:2005,Wind turbines−Part 1: Design requirements
暴風中の10分間平均風速(m/s)
ガ
ス
ト
係
数
G
112
C 1400-2:2020 (IEC 61400-2:2013)
附属書M
(参考)
消費者ラベル
M.1 一般事項
この附属書では,消費者ラベル(以下,ラベルという。)について説明する。この附属書に従ってラベル
を提示する場合,この附属書全体を順守する。
ラベルは,SWTモデルごとに提示することが望ましい。ラベルが一つ以上の個別の風車(同一モデルだ
が製造番号は異なるもの)に対して関連するJIS又はIEC規格に従って実施した試験に基づく場合,その
ラベルは,同一基本設計の複数の風車に用いてもよい。
ラベルは,出荷用コンテナ又はこん(梱)包材,風車本体,運転マニュアル,保守マニュアル,風車モ
デルに関連する販売用パンフレットなどに表示してもよい。ウェブサイトに詳細情報を示し,ラベルの正
当性の保証に用いてもよい。
M.2 管理機関
M.2.1 一般事項
ラベルを発行する機関を,ラベル発行機関という。これは,ラベルの発行元がどこであるかを問わず,
ラベルに表示される結果が他のラベルに表示される結果と比較できるようにすることを意図している。そ
のため,ラベル発行機関は,常に客観的に行動する必要がある。
M.2.2 試験要約報告書
ラベル発行機関は,試験要約報告書を発行する。試験要約報告書には,最低限,次の内容を盛り込む。
これは,完全な測定報告書を発行することによって実現できる。
1) ラベル発行機関名,試験要約報告書の発行日,及び現在の改訂番号を記載した固有の試験要約報告書
2) 試験を行った風車の写真
3) 製造業者が11.2.2に従って提出した仕様書
4) 製造業者の名称及び連絡先
5) 試験機関が確認した風車の構成。少なくとも,次の内容を含める。
a) 型式名及び製造番号
b) 支持構造物
c) ハブ高さ
d) 主要コンポーネントの概要
e) ロータ直径(m)(該当する場合)
f)
受風面積(m2)
g) ブレードの枚数
h) アップウィンドロータ又はダウンウィンドロータ(該当する場合)
i)
VAWT,HAWT又はその他
j)
回転方向
k) カットイン風速(m/s)
113
C 1400-2:2020 (IEC 61400-2:2013)
l)
カットアウト風速(m/s)(観測した場合)
m) 耐久性試験中に観測した3秒間ガストの最大値(m/s)
n) 電力形式
o) 耐久性試験中に観測した大気温度範囲(℃)
6) 出力曲線及び年間発電電力量(フォーマットの例は,附属書G参照)
7) 風速8 m/sでの音響パワーレベルの測定値及び表示音響パワーレベル,並びに騒音ばく(曝)露マッ
プ(JIS C 1400-11による。)
8) 13.4.4による耐久性試験結果及び風車試験クラス
9) 測定報告書の参照情報。少なくとも,作成機関,発行日及び固有の報告書番号を含める。
10) JIS Q 17025及び試験要件の定義に用いた関連規格(JIS C 1400-12-1など)の要求事項をどのように
満たしているかについての簡単な説明。少なくとも認定試験機関が関わっているかどうかを記載する。
M.2.3 ラベルの発行
ラベル発行機関がこの附属書に示すラベルに関する要求事項を満たしていると判断した場合,M.4に従
って,ウェブサイトのURL上に,試験要約報告書及びラベルのコピーを発行する場合がある。ただし,こ
れを行う場合,ラベル発行機関は製造業者から書面による同意を得る必要がある。
M.2.4 小形風車の仕様変更
附属書Aに記載したように,仕様変更した小形風車が登場する場合がある。この場合,ラベル及びそれ
に関連する全ての文書には,どの風車を仕様変更したものかを明確に示す必要がある。
M.3 ラベルに関する試験
M.3.1 一般事項
ラベルには,JIS Q 17025の要求事項を満たす測定報告書に記載する,次の3種類の試験の結果を要約す
る。
− 13.4に規定する耐久性試験
− JIS C 1400-12-1に規定する出力性能試験
− JIS C 1400-11に規定する騒音試験
箇条2に規定する規格を用いる。ラベルに関する全ての試験は,同一の試験機関が同じサイトで1基の
風車(すなわち,製造番号は一つ)を用いて実施することが望ましい。ただし,試験要約報告書に明確に
記載(異なる製造番号を用いるなど,状況を詳細に記載)する場合に限り,この原則から逸脱してもよい。
また,複数の風車を用いる場合は,これらの風車が本質的に同一であることを保証する必要がある。例え
ば,最大出力を発電するために構成した翼一式で出力性能を試験し,騒音を最小限に抑えるために設計し
た別の翼一式で騒音試験を行うことは認めない。
M.3.2 耐久性試験
ラベルには,“風車試験クラス”として,13.4の耐久性試験に合格したSWTクラスを表示する。
M.3.3 出力曲線及び基準年間発電電力量
出力曲線は,JIS C 1400-12-1の附属書Hに従って測定する。対応する基準年間発電電力量は,ラベルに
“基準年間発電電力量”として表示する。
M.3.4 騒音試験
騒音試験は,JIS C 1400-11に従って実施する。ラベルには,ハブ高さにおける風速8.0 m/sでの見かけ
114
C 1400-2:2020 (IEC 61400-2:2013)
の音響パワーレベルを用いる。1回以上の試験からハブ高さにおける風速8.0 m/sで測定した音響パワーレ
ベルを,IEC 61400-14に従って表示音響パワーレベル(ラベルには“表示音響パワーレベル”と表示する。)
に変換する。この値は,IEC 61400-14では,表示見かけ音響パワーレベルと呼び,風車の個体差による騒
音のばらつき及び測定における不確かさを説明するものである。ラベルは,騒音特性を考慮しない。
SWT型式の中には,試験を実施する上で暗騒音レベルが非常に低い試験サイトを必要とする場合がある。
M.4 ラベルのレイアウト
ラベルは,図M.1のサンプルに示すフォーマットの中に情報を表示する。
ラベルのグレー部分の情報は,該当する風車の測定による関連情報と差し替えるか,又はウェブサイト
のURLに差し替える。
千の位は,コンマなどで区切らない。ラベルの数値は,表示音響パワーレベルは四捨五入して小数点第
1位まで表し,他の値は小数点以下を四捨五入した値で表す[例えば,88.54 dB(A)は88.5 dB(A)と表
示し,8 567.53 kWh/yrは8 568 kWh/yrと表示する。]。
ラベルの発行日は,試験要約報告書の発行日とし,YYYY-MM-DD形式で表す。
このラベルは,ラベル上に記載したウェブサイトのURLから,消費者がラベルのコピーとそれに対応す
る試験要約報告書とを閲覧することができる場合に限り,有効であるとみなす。
なお,図M.1のサンプルのURL例(www.ieawind.org)を,特定のラベルに関連したURLと差し替える。
ラベルは,他の言語に翻訳してもよい。二か国語版の例を,図M.2に示す。
M.5 参考文献
[M.1] Consumer Label For Small Wind Turbines: Recommended Practices For Wind Turbine Testing And
Evaluation,IEA Wind (task 27); 2011-03-04 (edition1)
115
C 1400-2:2020 (IEC 61400-2:2013)
図M.1−英語版ラベルのサンプル
116
C 1400-2:2020 (IEC 61400-2:2013)
図M.2−二か国語(英語/フランス語)ラベルのサンプル
117
C 1400-2:2020 (IEC 61400-2:2013)
参考文献
IEC 60034 (all parts),Rotating electrical machines
IEC 60034-1,Rotating electrical machines−Part 1: Rating and performance
IEC 60034-2 (all parts),Rotating electrical machines−Part 2: Specific methods for determining separate losses
of large machines from tests
IEC 60034-5,Rotating electrical machines−Part 5: Degrees of protection provided by the integral design of
rotating electrical machines (IP code)−Classification
IEC 60034-8,Rotating electrical machines−Part 8: Terminal markings and direction of rotation
IEC 60364 (all parts),Low-voltage electrical installations
IEC 60529:1989,Degrees of protection provided by enclosures (IP Code)
JIS C 1400-0 風力発電システム−第0部:風力発電用語
JIS C 1400-1:2010 風車−第1部:設計要件
注記 対応国際規格:IEC 61400-1:2005,Wind turbines−Part 1: Design requirements
IEC 61400-4,Wind turbines−Part 4: Design requirements for wind turbine gearboxes
IEC 61400-21:2008,Wind turbines−Part 21: Measurement and assessment of power quality characteristics of
grid connected wind turbines
JIS C 1400-22:2014 風車−第22部:風車の適合性試験及び認証
注記 対応国際規格:IEC 61400-22:2010,Wind turbines−Part 22: Conformity testing and certification
JIS C 1400-24:2014 風車−第24部:雷保護
注記 対応国際規格:IEC 61400-24,Wind turbines−Part 24: Lightning protection
ISO/IEC 17020:2012,Conformity assessment−Requirements for the operation of various types of bodies
performing inspection
JIS Q 9000(シリーズ) 品質マネジメントシステム
注記 対応国際規格:ISO 9000 (all parts),Quality management and quality assurance standards
JIS Z 8101-1:2015 統計−用語及び記号−第1部:一般統計用語及び確率で用いられる用語
JIS Q 9001:2015 品質マネジメントシステム−要求事項
注記 対応国際規格:ISO 9001:2008,Quality management systems−Requirements
ECN-C-96-033,Verification of design loads for small wind turbines, F.J.L. Van Hulle et al.
AIAA 2003-1048,Investigation of the IEC safety standard for small wind turbine design through modelling and
testing,Jason Jonkman et al.
AGMA/AWEA 921-A97,Recommended practices for design and specification of gearboxes for wind turbine
generator systems
Expert group study on recommended practices for wind turbine testing,9. Lightning protection for wind turbine
installations,IEA, 1997
EN 1993, Eurocode 3,Design of steel structures
Hobbacher,Fatigue Design of Welded Joints and Components,International Institute of Welding (IIW),Doc.
IIW-1823-07 ex XIII-2151r4-07/XV-1254r4-07, 2008
Germanischer Lloyd Industrial Services GmbH,Renewables Certification, Guideline for the Certification of
118
C 1400-2:2020 (IEC 61400-2:2013)
Wind Turbines,Edition 2010
DIRECTIVE 2006/42/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 17,May 2006
on machinery, and amending Directive 95/16/EC (recast)
DIRECTIVE 2006/95/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 12,December
2006 on the harmonisation of the laws of Member States relating to electrical equipment designed for use
within certain voltage limits