B 9962:2019 (IEC 62745:2017)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語,定義及び略語 ·········································································································· 2
4 機能要求事項 ··················································································································· 6
4.1 一般 ···························································································································· 6
4.2 操作上の防止事項 ·········································································································· 7
4.3 シリアルデータ転送 ······································································································· 8
4.4 リモートステーション伝送の除去······················································································ 8
4.5 伝送及び通信の確立及び表示 ··························································································· 9
4.6 CCSの安全関連機能 ······································································································· 9
4.7 CCSの停止機能 ············································································································· 9
4.8 リセット ····················································································································· 12
4.9 リモートステーションからの伝送の停止············································································ 12
4.10 ラッチ制御機能 ··········································································································· 12
4.11 電源喪失時の挙動 ········································································································ 13
4.12 複数のリモートステーション ························································································· 13
4.13 複数のベースステーション ···························································································· 13
4.14 CCS制御の中断 ·········································································································· 13
4.15 設定環境の保護 ··········································································································· 14
5 検証······························································································································ 14
5.1 一般事項 ····················································································································· 14
5.2 ラベリング及びマーキング ····························································································· 14
5.3 文書 ··························································································································· 14
5.4 機能検証 ····················································································································· 14
6 使用上の情報 ·················································································································· 16
6.1 一般事項 ····················································································································· 16
6.2 提供する必要がある情報 ································································································ 16
7 ラベリング及びマーキング ································································································ 18
附属書A(参考)停止機能の論理 ··························································································· 19
参考文献 ···························································································································· 21
B 9962:2019 (IEC 62745:2017)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本機械工業連合会(JMF)か
ら,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,
厚生労働大臣及び経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9962:2019
(IEC 62745:2017)
機械類の安全性−機械類の
ケーブルレス制御システムに対する要求事項
Safety of machinery-Requirements for cableless control systems of
machinery
序文
この規格は,2017年に第1版として発行されたIEC 62745を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
幅広い機械類について,オペレータ向けのインタフェースとしてのケーブルレス制御システム(CCS)
の使用が増加の一途をたどっている。したがって,CCSの機能及びCCSが機械制御システム全体とのイ
ンタフェースで接続する方法は,機械類の安全性に影響をもたらす可能性がある。
この規格は,機械制御システムとのインタフェースで接続する,又は機械制御システムの一部である機
械のオペレータコントロールステーションとして使用されるCCSの機能に関する要求事項を定めるもの
である。
機械のリスクを最小限に抑えるためにCCSの機能がどの程度求められるのか,という点が重要な選択基
準である。したがって,機械のリスク評価に従い,適切な安全インテグリティで適切な制御機能を提供す
るCCSを選択することが重要である。
一部の特殊な機器のCCS要求事項は,この規格で定める内容の範囲を超える場合がある。
1
適用範囲
この規格は,オペレータコントロールステーションと機械制御システムとのケーブルレス(電波,赤外
線など)制御システムの機能及びインタフェース接続に関する要求事項について規定する。また,オペレ
ータが携帯できるタイプのオペレータコントロールステーションに関する要求事項も含む。
注記1 ケーブルレス制御システムのうち,オペレータコントロールステーションとして使用する部
分を“送信機(transmitter)”,また,機械制御システムインタフェースを“受信機(receiver)”
と呼ぶ場合がある。しかし,この規格では,双方向通信の可能性があることを考慮し,前者
を“リモートステーション”,後者を“ベースステーション”と呼ぶ。
この規格は,オペレータコントロールステーションではない機械部分間のケーブルレス通信は取り扱わ
ない。
この規格は,ケーブルレス制御システムの設計及び構築に必要な全ての要求事項について規定するもの
ではない。例えば,通信プロトコル,周波数又は帯域幅の面を扱わないし,耐衝撃性,異物の侵入保護,
電磁適合性などの構造的要求事項についても取り扱わない。
この規格の規定は,JIS B 9960-1の電気機器に対する要求事項に追加して適用することを意図している。
2
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この規格は,JIS B 9700で規定するタイプB2規格である。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62745:2017,Safety of machinery−Requirements for cableless control systems of machinery
(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9703 機械類の安全性−非常停止機能−設計原則
注記 対応国際規格:ISO 13850,Safety of machinery−Emergency stop function−Principles for design
(IDT)
JIS B 9705-1 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
注記 対応国際規格:ISO 13849-1,Safety of machinery−Safety-related parts of control systems−Part 1:
General principles for design(IDT)
JIS B 9960-1:2008 機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:IEC 60204-1:2005,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements(MOD)
JIS B 9961 機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能安全
注記 対応国際規格:IEC 62061,Safety of machinery−Functional safety of safety-related electrical,
electronic and programmable electronic control systems(IDT)
JIS C 8201-5-5 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第5節:機械的ラ
ッチング機能をもつ電気的非常停止機器
注記 対応国際規格:IEC 60947-5-5,Low-voltage switchgear and controlgear−Part 5-5: Control circuit
devices and switching elements−Electrical emergency stop device with mechanical latching function
(IDT)
JIS C 60068-2-31:2013 環境試験方法−電気・電子−第2-31部:落下試験及び転倒試験方法(試験記
号:Ec)
注記 対応国際規格:IEC 60068-2-31:2008,Environmental testing−Part 2-31: Tests−Test Ec: Rough
handling shocks, primarily for equipment-type specimens(IDT)
IEC 60947-5-1:2016,Low-voltage switchgear and controlgear−Part 5-1: Control circuit devices and switching
elements−Electromechanical control circuit devices
ISO 13849-2,Safety of machinery−Safety-related parts of control systems−Part 2: Validation
3
用語,定義及び略語
この規格で用いる主な用語,定義及び略語は,次による。
定義の一覧は,表1を参照。
略語の一覧は,表2を参照。
3
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
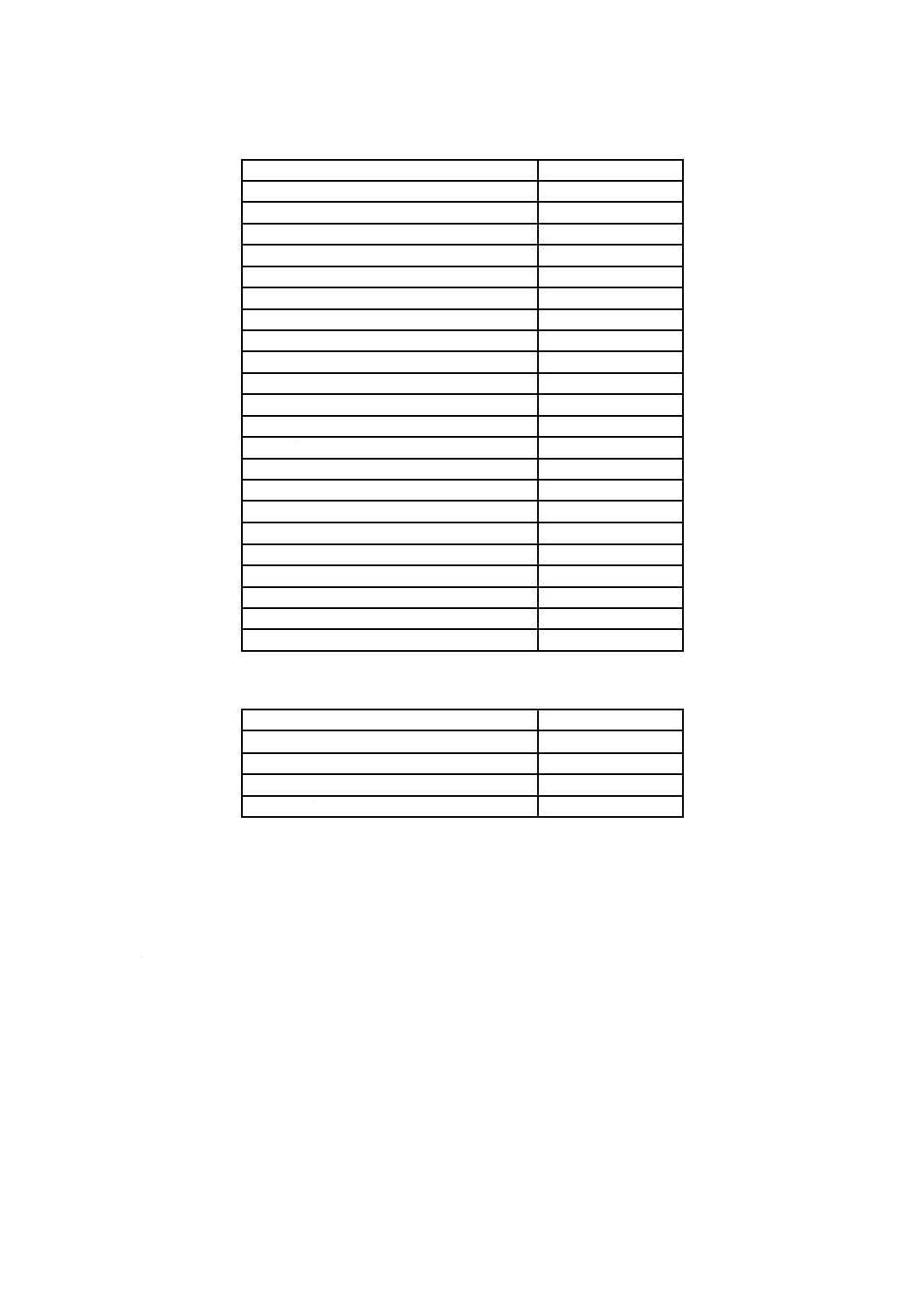
表1−定義の一覧
用語
定義の箇条番号
アクティブ停止
3.17
アドレス符号
3.7
自動停止(ATS)
3.19
ベースステーション
3.13
ケーブルレス制御
3.1
ケーブルレス制御システム(CCS)
3.2
リモートステーションの無効化
3.22
エラー検出符号
3.9
フレーム
3.6
ハミング距離
3.11
手動停止
3.20
ニュートラルフレーム
3.10
オフ状態
3.15
操作指令信号
3.8
オペレータコントロールステーション
3.5
パッシブ停止
3.18
受信機
3.3
リモートステーション
3.12
安全関連停止機能
3.16
停止出力
3.14
送信機
3.4
有効信号
3.21
表2−略語の一覧
用語
略語
自動停止(4.7.3.5)
ATS
ケーブルレス制御システム(3.2)
CCS
非常停止(4.7.3.4)
EMS
一般安全停止(4.7.3.3)
GSS
3.1
ケーブルレス制御(cableless control)
有線接続なしに機械オペレータの指令を伝送すること。
3.2
ケーブルレス制御システム(cableless control system)
CCS
一つ以上のリモートステーション及びベースステーションで構成され,両ステーション間の指令伝送を
ケーブルレス制御で行うシステム。
3.3
受信機(receiver)
ケーブルレス制御システムのうち,送信機からのフレームを受信する部分。
4
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.4
送信機(transmitter)
ケーブルレス制御システムのうち,受信機にフレームを伝送する部分。
3.5
オペレータコントロールステーション(operator control station)
同一パネル上又は同一のエンクロージャ内にある一つ以上の制御アクチュエータのユニット(外部から
の手動操作が行われるデバイス部分)。
注記 オペレータコントロールステーションには,関連機器(例えば,ポテンショメータ,信号ラン
プ,計器,ディスプレイデバイスなど)を含めることも可能である。
3.6
フレーム(frame)
リモートステーションとベースステーションとの間で交わされる情報の“パッケージ”。例えば,次の事
項を含む。
a) アドレス符号
b) 操作指令
c) エラー検出符号
d) その他の指令,信号又は情報
注記 “フレーム”は,“テレグラム”又は“メッセージ”と呼ぶ場合もある。
3.7
アドレス符号(address code)
ベースステーション又はリモートステーションが,フレームが指令を伝えることを目的としたものであ
ることを認識できるようにするフレームの一部。
注記 ベースステーション又はリモートステーションは,適切なアドレス符号があると認識された指
令に反応する。
3.8
操作指令信号(operating command signal)
機械の機能を開始,変更又は維持するための制御信号。
3.9
エラー検出符号(error detection code)
伝送エラーの検出を可能にする各フレームに追加された情報。
3.10
ニュートラルフレーム(neutral frame)
フレーム内の操作指令信号は全て,ベースステーションで受信されたときに,機械の危険な作動を引き
起こさない状態にあるフレーム。
注記1 ニュートラルフレームは,送信機と受信機との間の通信(すなわち,有効信号)を維持する
ために使用する場合もある(例えば,機械の停止機能の自動開始を防ぐなど)。
注記2 ニュートラルフレームの伝送は,通信の確立又は再確立時に機械の危険な作動を防ぐために
用いられる。
注記3 ニュートラルフレームには,情報(例えば,パラメータ化情報など),及び機械の危険な作動
を引き起こさない指令を含めることができる。
5
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.11
ハミング距離(hamming distance)
同一長の二つのフレームを比較した場合の異なるビット位置の数。
3.12
リモートステーション(remote station)
ケーブルレス制御システムの一部で,オペレータがケーブルレス制御システムを操作するインタフェー
ス。
注記1 ケーブルレス制御システムのリモートステーションを“送信機”と呼ぶ場合がある。しかし,
双方向ケーブルレス制御システムの一部であるリモートステーションには,送信機及び受信
機の両方が含まれる。
注記2 リモートステーションは,ケーブルレス制御システムのオペレータコントロールステーショ
ンを構成する。
注記3 リモートステーションは,(オペレータによる)携帯型,移動体型(例えば,機械とは分離し
て車両又は台車に設置),固定型(例えば,機械上又は機械付近に設置)などがある。
3.13
ベースステーション(base station)
ケーブルレス制御システムの一部で,機械制御システムのインタフェース。
注記1 ケーブルレス制御システムのベースステーションを“受信機”と呼ぶ場合がある。しかし,
双方向ケーブルレス制御システムの一部であるベースステーションには,送信機及び受信機
の両方が含まれる。
注記2 ベースステーションは,固定型又は可動型のいずれの機械にも設置できる。
注記3 ベースステーションは,必ずしも個別の物理的実体である必要はないが,ベースステーショ
ンに対してこの規格で定められた要求事項を満たすコンポーネントを全て備えている。
3.14
停止出力(stop output)
停止機能を開始する機械の制御システムに接続された,ベースステーションの出力回路。
注記1 停止出力は,安全関連の場合も,そうでない場合もある(表3参照)。
注記2 CCSベースステーションのフィールドバス部の接続も,出力回路とみなせる。
3.15
オフ状態(OFF-state)
ベースステーションの安全関連停止出力状態であり,機械の一つ以上の停止機能を開始するために使用
する。
3.16
安全関連停止機能(safety-related stop function)
CCSによって提供される停止機能であり,機械はオフ状態となる。この機能に障害が発生した場合は,
リスクが急激に高まる。
3.17
アクティブ停止(active stop)
リモートステーションからベースステーションに停止信号を伝送することによる停止。
6
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.18
パッシブ停止(passive stop)
ベースステーションに有効信号がないことによる安全関連停止。
注記 例えば,範囲外の状態,バッテリ故障,電磁妨害の場合にパッシブ停止は開始される。
3.19
自動停止(automatic stop)
オペレータによるデバイスの手動操作なしに作動する安全関連停止。
3.20
手動停止(manual stop)
オペレータによるデバイス操作によって作動する停止。
3.21
有効信号(valid signal)
受信機のエラーチェックルーチンによって受信したフレーム及び該当する受信機のアドレス符号を含む,
ニュートラルフレームを含む全てのフレーム。
3.22
リモートステーションの無効化(disabling of a remote station)
リモートステーションからベースステーションに信号を伝送できない状態にする意図的操作。
4
機能要求事項
4.1
一般
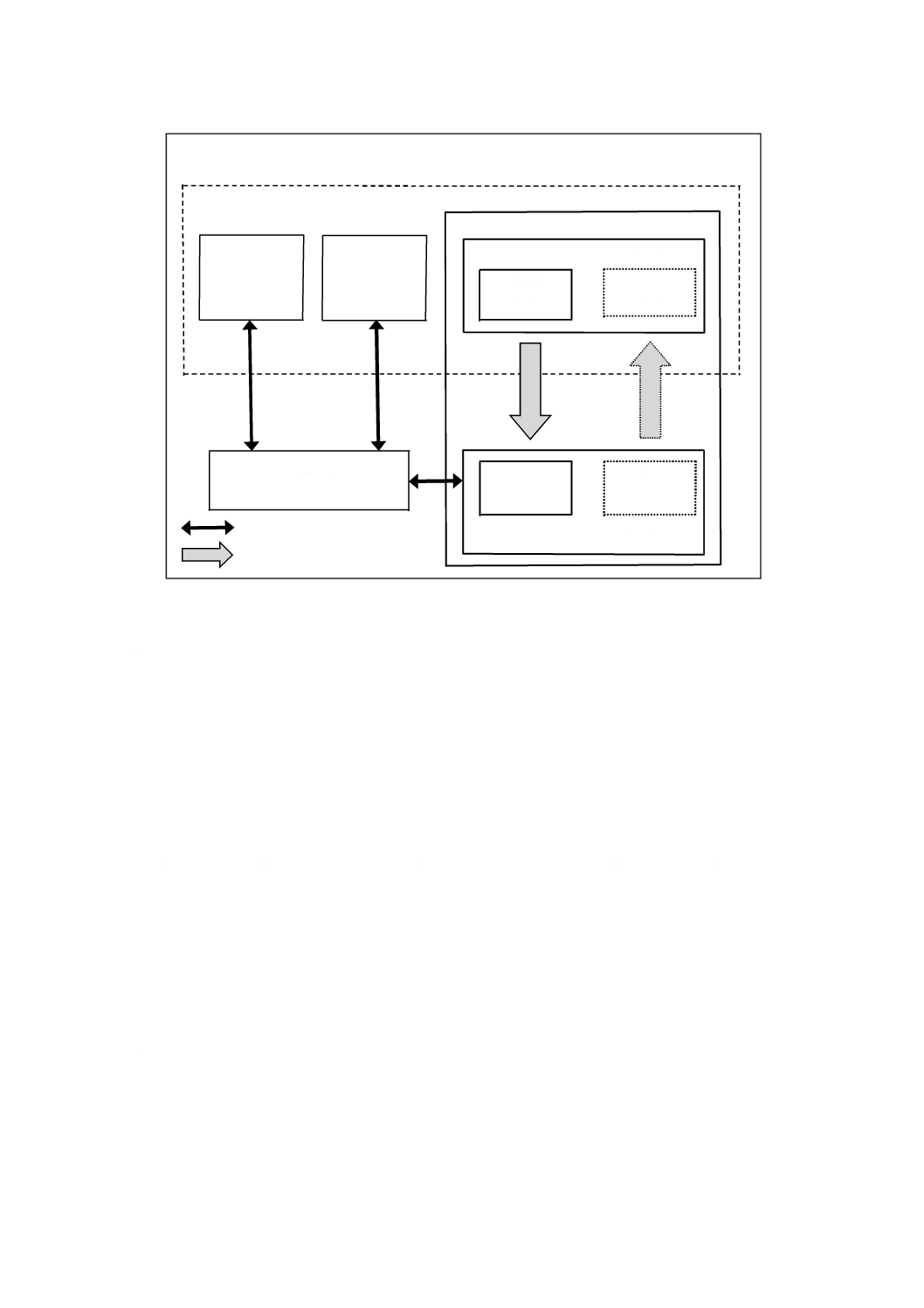
図1はCCSと機械制御システムとの相互作用の主な要素の例を示す。
7
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1−ケーブルレス制御システムと機械制御システムとの関係ブロック図例
注記 この規格でのJIS B 9960-1の引用において,IEC 60204シリーズのその他の関連部分における
対応要求事項が含まれる場合がある。
4.2
操作上の防止事項
4.2.1
不注意による作動の防止
リモートステーション及びその制御アクチュエータは,不注意による作動(例えば,床に落とす,物に
ぶつかる,電源喪失など)によって,意図しない危険な指令が引き起こされる可能性を最小限に抑えるよ
う設計し,配置しなければならない。
4.2.2
無許可操作の防止
CCSの無許可操作を防止する必要がある場合,リモートステーションに無許可操作を防止する手段(キ
ースイッチ,アクセス符号など)を設けなければならない。
4.2.3
意図しない指令の防止
操作指令信号を確実にする次の手段をとらなければならない。
・ 操作指令信号が,意図するベースステーション又はリモートステーションだけに作用するようにする
(例えば,アドレス符号を使用する。)。
・ 操作指令信号が,ベースステーション又はリモートステーションにおいて意図する機能だけ開始させ
る。
こうした手段は,偶発的又は意図せぬ変更の影響を受けないようにしなければならない。
誤作動又は故障の検出時に,関連する全ての安全関連出力は適切な安全インテグリティでオフ状態にな
るよう制御しなければならない。
装置アドレス指定にハードウェアスイッチ(例えば,DIPスイッチ)を用いるとき,故障時の要求事項
機械制御システム
オペレータコントロールステーション(3.5)
ケーブルレス制御システム(3.2)
リモートステーション(3.12)
送信機
(3.4)
受信機
(3.3)
送信機
ベースステーション(3.13)
(3.4)
(3.3)
受信機
有線制御
ステーション
有線
ペンダント
コントローラ
制御回路
有線信号
ケーブルレス信号
8
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を満たすためにパリティチェックのような追加手段が必要になる場合がある。
注記 よくある手法として工場出荷時の符号設定がある。この手法はユーザによって(意図的又は不
注意で)損なわれないため,ユーザが設定する手法よりも強固である。
4.3
シリアルデータ転送
シリアルデータ転送は,次の要求事項の一つを満たさなければならない。
・ 入力ビットエラー率Pe=10−3でそれ以上の入力ビットエラー率が認められない場合は,受信するエラ
ーフレームの未検出率R(Pe) を,1×10−8未満となるような手段を講じなければならない。
・ ハミング距離は,4又は1フレームの総ビット数を20で除した数の,いずれか大きい値でなければな
らない。
注記1 入力ビットエラー率Pe=10−3という値は,加法性白色ガウス雑音(AWGN)と電磁妨害(EMI)
とによって障害が発生した無線チャネルの基準予測値とみなすことができる。
注記2 IEC 60870-5-1では,一連の可能な伝送フレーム形式を定義している。
注記3 シリアルデータ伝送の信頼性向上を図ることによってだけ,伝送メディアで発生するエラー
の可能性を減らすことができる。
CCSの安全関連機能に加えて,1時間当たりの未検出エラー発生確率である見逃しエラー率Λは,CCS
各機能に対するPFHD値の1 %未満でなければならない。1時間当たりの未検出エラー見逃し確率Λは,
次の計算式による。
Λ(Pe)=R(Pe)×v×b [1/h]
ここに,
Λ(Pe): 入力ビットエラー率に対する1時間当たりの未検出エラ
ー見逃し確率
R(Pe): 入力ビットエラー率に対する1フレーム当たりの未検出
エラー見逃し確率
Pe: 入力エラー確率。同値に関してより高い数値が認められ
ない場合は,Pe=1×10−3として計算
v: 1時間当たりの安全関連の最大メッセージ数
b: 待受状態にあるベースステーション最大数
注記4 PFHDの定義については,JIS B 9961又はJIS B 9705-1を参照。
注記5 Λ(Pe) の計算は,IEC 61784-3に基づく。この手法は,安全関連メッセージのサイクリック伝
送に有効である。
注記6 CRCをハッシュ機能として用いる場合,IEC 61784-3:2016の式(B.3)又は式(B.4)を用いて,入
力ビットエラー率Pe=1×10−3でR(Pe) を適用して決定することができる。
CCSは,伝送の信頼性を示す表示器を設けることができる。
注記7 伝送の信頼性に影響を及ぼす可能性がある各条件に対して,個別の警告表示器を用意する必
要はない。
4.4
リモートステーション伝送の除去
リモートステーションからの伝送を容易に停止できる手段を用意する必要がある。これは,次の一つ以
上の方法によって達成しなければならない。
・ リモートステーションに対する伝送の電力供給を遮断する機器で,この機器は直接開路動作機能をも
つ(IEC 60947-5-1:2016のAnnex K参照)。
・ 工具を使わずにバッテリを取り外す。
9
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・ IEC 61508シリーズ,JIS B 9961又はJIS B 9705-1及びISO 13849-2に従い,かつ,4.7.2に規定する
インテグリティをもつ伝送除去機能。
注記 パッシブ停止は,伝送電力の除去による。
4.5
伝送及び通信の確立及び表示
リモートステーションの電源投入又は通信の再確立(例えば,電力供給中断後,リモートステーション
のバッテリ交換後,信号消失後)によって,機械の危険な運転の制御のためのいかなる出力も行ってはな
らない。そのような操作の始動又は再始動は,意図的動作(例えば,通電時の位置から制御アクチュエー
タを解放してから,制御アクチュエータを再び押す。)を要求しなければならない。
ベースステーションは,ニュートラルフレームを受信するまで(すなわち,通信が再確立するまで),機
械の危険な運転を引き起こす操作指令信号に応答してはならない。
リモートステーションから伝送が行われている場合は,リモートステーション上に表示しなければなら
ない(例えば,表示灯,ビジュアルディスプレイ表示など)。
注記 ベースステーションが関連するリモートステーションからの伝送を受信している場合,そのこ
とを示す手段を設けることも有用である。例えば,ベースステーションの出力は,この目的の
ために定められたものである。さらに,双方向通信が利用可能な場合には,ベースステーショ
ンから確認信号をリモートステーションに伝送することができる。ベースステーションに指定
の表示方法がない場合,CCSの使用に関する情報に,この機能の実行方法(例えば,ベースス
テーションの停止出力を使用する。)に関する指示が記載されていることが重要である。
4.6
CCSの安全関連機能
安全関連用途のCCSの機能は,適切な安全インテグリティをもっていなければならない。JIS B 9961及
び/又はJIS B 9705-1,ISO 13849-2の要求事項を適用しなければならない。
故障が検出された場合には,該当する全ての安全関連出力をオフ状態にしなければならない。さらに,
リモートステーション上で安全関連機能の喪失につながりかねない故障が検出された場合,伝送を中止し
なければならない。
注記 制御機能の安全関連設計に関する詳細情報は,JIS B 9700及びIEC 61508シリーズに記載され
ている。
4.7
CCSの停止機能
4.7.1
一般事項
CCSは,自動停止(ATS)機能,及び専用の制御機器で意図的に人間によって動作することができる安
全関連停止機能を一つ以上,備えていなければならない。
停止機能の考え方の情報は,附属書Aを参照。
注記 ほとんどの場合,この手動による停止機能は,GSS又はEMSのいずれかである(4.7.3参照)。
4.7.2
CCSの安全関連停止機能
CCSの各安全関連停止機能は,ベースステーションの関連停止出力をオフ状態にしなければならない。
CCSの各安全関連停止機能は,少なくともSIL1/PLcの安全インテグリティをもたなければならない。
さらに,CCS内のどのような部分の単一故障も安全関連停止機能の喪失を招いてはならない。合理的に
見て実行可能な場合には,安全関連停止機能の次回要求時又は要求前に単一故障を検出しなければならな
い。
4.7.3
停止機能の分類
4.7.3.1
一般事項
10
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
CCSの停止機能の分類は,次による。
・ 制御停止
・ 一般安全停止(GSS)
・ 非常停止(EMS)
・ 自動停止(ATS)
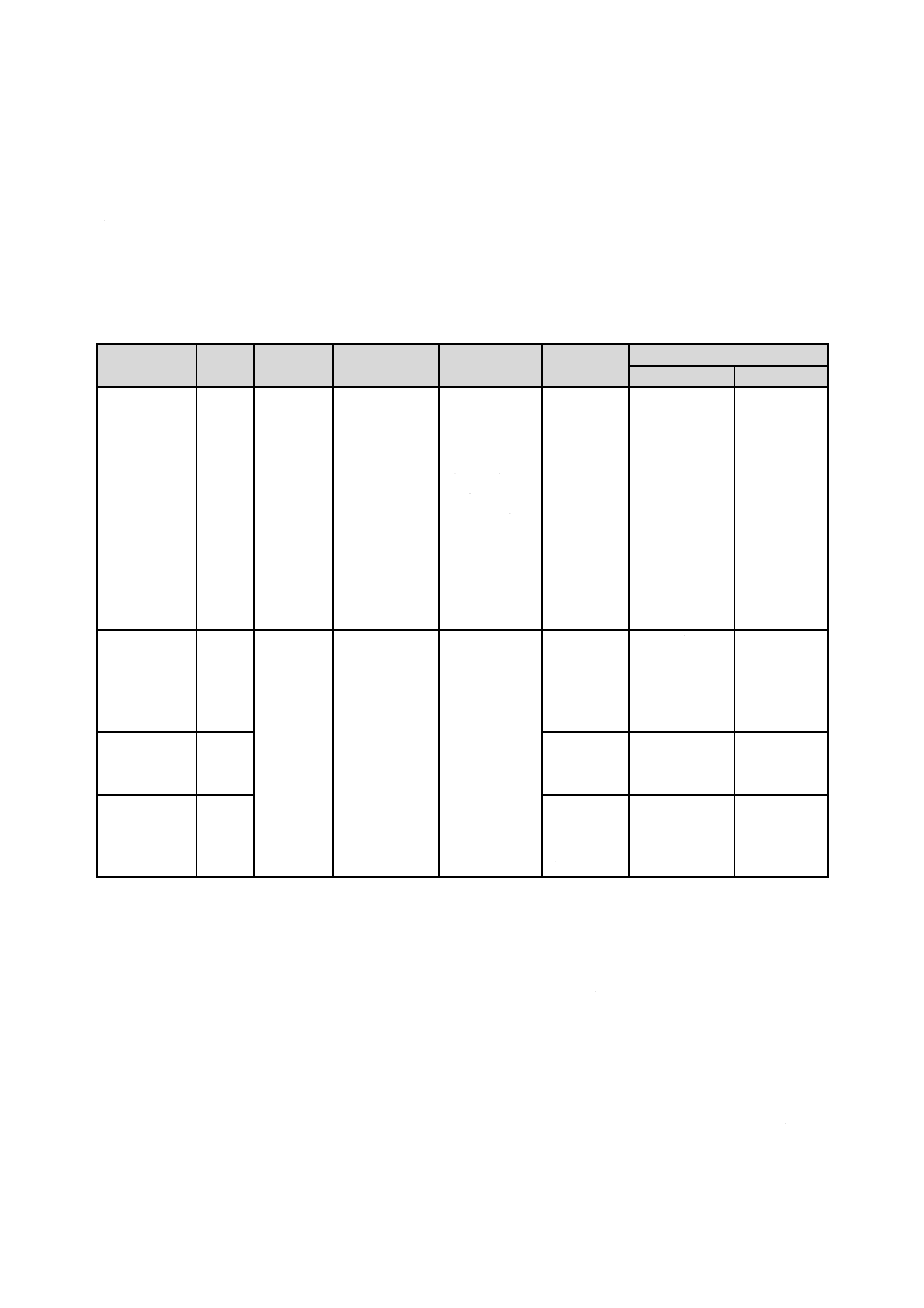
表3に,各停止機能の特性を示す。
表3−CCSの停止機能概要
機能
箇条
安全関連
機能
停止の種類
(図A.1参照)
CCSへの影響 可用性及び
操作性
制御アクチュエータ
種類
色
制御停止
4.7.3.2
安全及び
非安全
アクティブ,パ
ッシブ又はパ
ッシブに引き
継がれるアク
ティブ
停止出力の状
態,若しくは
ホールド・ト
ゥ・ラン制御
機器の作動に
関連した他の
出力の状態を
定義,又は安
全関連の場合
は全ての安全
関連停止出力
のオフ状態
CCSが機械
を制御して
いる場合に
有効
JIS B 9960-1
参照
黒,白又は灰
一般安全停止
(GSS)
4.7.3.3
安全
アクティブ,パ
ッシブ又はパ
ッシブに引き
継がれるアク
ティブ
全ての安全関
連停止出力が
オフ状態
CCSが機械
を制御して
いる場合に
有効
4.7.3.3参照
黒(推奨)又
は赤。赤は背
景に黄を用
いてはなら
ない。
非常停止
(EMS)
4.7.3.4
常に有効
JIS C 8201-5-5
に適合した機
器
赤で背景が
黄
自動停止
(ATS)
4.7.3.5
CCSが機械
を制御して
いる場合に
有効
−
−
4.7.3.2
制御停止機能
制御停止機能は,オペレータが常に手動で開始する機能であり,CCSが機械を制御している状態にある
場合にだけ可能とする。
制御停止機能は,JIS B 9960-1:2008の9.2.5.3によって設計しなければならない。
注記 制御停止機能は,ホールド・トゥ・ラン制御機器を操作した場合又はイネーブル機器が操作位
置にない場合に開始することができる。
4.7.3.3
一般安全停止(GSS)機能
CCSのGSS機能は,安全関連制御機能とする。
GSS機能はCCS上で利用可能であり,リモートステーションは,この機能を手動で作動させる,個別で
明確に識別可能な手段を含まなければならない。これによって,ベースステーションで全ての安全関連停
11
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
止出力をオフ状態にしなければならない(表3参照)。
GSS機能を作動させる機器は,直接開路動作機能をもたなければならない(IEC 60947-5-1:2016のAnnex
K参照)。
GSS機能の作動後に実際のアクチュエータが動作したとき,停止指令の効果はリモートステーションの
手動動作によって解除されるまで機器のかみ合わせによって維持しなければならない。停止指令はアクチ
ュエータのラッチがなければならない,及びアクチュエータのラッチが停止指令の発生を妨げてはならな
い。ラッチ機構に故障が発生した場合には,アクチュエータがラッチするかどうかにかかわらず,機器の
作動で停止指令を発生しなければならない。
GSS機能の作動後に実際の制御アクチュエータが動作したとき,停止指令の効果はリモートステーショ
ンの手動動作によって解除されるまで機器のかみ合わせによって維持しなければならない。
注記1 GSS機能で生成された信号は,リスクアセスメントで決定のとおり,JIS B 9960-1の停止カ
テゴリ0又は1のいずれかを作動させるために用いる。
注記2 一部のCCSは,伝送を止める前に停止指令を伝送することでGSS機能を実行する(アクテ
ィブ停止),また,単に伝送を止めるだけのCCSもある(パッシブ停止)。アクティブ停止の
場合,機械の制御システムによって迅速に停止指令を送ることができる。これは,自動停止
指令の開始前に有効信号の損失の認識に遅延が発生しないためである。
4.7.3.4
非常停止(EMS)機能
EMS機能を備えるCCSは,4.7.2及び4.7.3.3の要求事項に加えて,次の追加要求事項に適合しなければ
ならない(表3参照)。
a) アクチュエータに非常停止装置であることを示すマーキング及び/又はラベリングがされていること
(JIS B 9960-1:2008の10.7.3参照)に加えて,JIS C 8201-5-5に適合していなければならない。
b) この機能は,常時有効かつ操作可能でなければならない。
c) EMS機能の作動は,ベースステーションの全ての安全関連停止出力をオフ状態にしなければならな
い。
d) JIS B 9703の関連要求事項を満たしている。
e) 使用上の情報(箇条6参照)は,機械の制御システムにCCSを組み込むシステムインテグレータに対
して,この箇条の要求事項に適合するよう指示するものでなければならない。
f)
複数のリモートステーションがベースステーションと同時に通信している場合,一つのリモートステ
ーションの無効化(無効になったリモートステーションのEMS機能が利用不可能)で,自動停止(ATS)
機能が作動する。
注記 双方向通信が可能な場合,EMSが有効かつ操作可能な状態の表示が,リモートステーション
にあると有用である。
4.7.3.5
自動停止(ATS)機能
機械の危険な作動を防止するために,CCSのATS機能は,ベースステーションの全ての安全関連停止出
力をオフ状態にしなければならない(表3参照)。
注記1 ATS機能による停止出力は,GSS機能及び/又はEMS機能によるオフ状態への切替えと同
様である。
CCSのATS機能は,安全関連制御機能とする。ATS機能は,CCSのその他安全関連停止機能の最も高
い安全インテグリティと同等以上の安全インテグリティでなければならない。
CCSのATS機能は,次を含む状態で自動的に作動しなければならない。ただし,これに限定されるもの
12
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ではない。
・ CCSの安全関連部分に故障が検出された場合。
・ ベースステーションにおいて(また,リスクアセスメントによって必要な場合,双方向通信をもつCCS
のリモートステーションにおいても)CCS製造業者が公表した時間内に有効信号を検出できなかった
場合。この時間は,機械のリスクアセスメントによって決定しなければならないが,0.5秒を超えない
ことが望ましい。
・ 伝送が停止した場合(4.9参照)。
注記2 この時間中の機械制御機能の喪失及び全体的な機械停止時間がどのような影響をもたらすか
については,機械制御システムの設計者又は製造業者によって検討可能である。
4.8
リセット
リモートステーションで起動されたGSS又はEMSのリセットは,機械の危険な作動を制御するベース
ステーションの出力が開始される前に,そのリモートステーション上で(及び安全関連停止が作動した場
合には,その他全てのリモートステーションでも)意図的操作が必要となる。
ラッチされたGSS又はEMSデバイスによって通信が再確立された場合,リモートステーションにおい
て追加の手動リセットが必要になる場合がある。
注記 リスクアセスメントによっては,リモートステーションにおける追加リセットだけではなく,
危険区域の人をはっきりと見ることができる場所に一つ以上の追加的固定リセット装置(例え
ば,押しボタン)の設置を検討する必要がある。
リモートステーションが移動体型又は携帯型の場合,特に検討が必要になる。
(リモート又はベースステーションいずれかにおける)電源遮断及び再投入,又はCCSのどのような部
分の単一故障も,GSS,EMS機能など既に作動している安全関連停止機能をリセットしてはならない。
CCS内で検出された故障が存在する間は,リセットを可能にしてはならない。
製造業者によって提供される情報は,6.2 q) も参照。
4.9
リモートステーションからの伝送の停止
CCSが自動伝送停止機能を備えている場合,操作指令信号がなくなった後のある期間,ニュートラルフ
レームを送信しなければならない。CCS製造業者は,このニュートラルフレーム伝送期間を明示しなけれ
ばならない。CCSは,事前に定められたこのニュートラルフレーム伝送終了時にATS機能を作動しなけれ
ばならない。
自動伝送停止機能が備わっていない場合,次の操作指令信号までニュートラルフレームを伝送しなけれ
ばならない。
注記 ニュートラルフレーム伝送期間が不十分な自動伝送停止機能は,停止出力(例えば,機械のメ
インコンタクタ)でオフ状態になる頻度が高まり,停止出力及び停止出力が切り換えるコンポ
ーネントへの,切替え操作回数が増える。
4.10
ラッチ制御機能
人間工学及び機能上の理由で,リモートステーション又はベースステーションにラッチ機能(すなわち,
ホールド・トゥ・ランではない。)を実装することは,幾つかのCCS機能にとって有用である。
注記1 特定の制御機能のラッチは,リモートステーションの制御機器(例えば,双安定スイッチ又
はポテンショメータ)又はベースステーションの制御回路内の制御アクチュエータによって
達成することが可能である。
リモートステーションの制御回路でのラッチは,機械の危険ではない操作の制御出力だけに使用しなけ
13
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ればならない。
ベースステーションのラッチ制御機能は,機械の危険な操作を維持するために使用してはならない。リ
スクアセスメントによる裏付けがあり,安全関連機能として理解される場合は除く。この制限に関する情
報は,CCSの使用方法で提供しなければならない(箇条6参照)。
注記2 幾つかの例,例えば,CCSが磁気又は真空吸着式の昇降装置の制御に使われる場合,指令を
ベースステーションでラッチする能力は有用な機能である。
4.11
電源喪失時の挙動
CCSのバッテリ電圧変動又は電源変動によって,ベースステーションから意図しない指令が出てはなら
ない。
バッテリ電圧が規定の限度を超えて変動した場合,オペレータに視覚的警告をしなければならない。音
響及び/又は触覚的なものを追加してもよい。このような状況の下で,CCSは使用上の情報に記載された
一定時間その機能を維持しなければならない。
注記 機械を危険がない状態に戻すのに10分間あれば十分と考えられる。この時間は,バッテリ劣化
及び温度のような環境要因によって異なる。
バッテリ電圧が安定伝送を保証できないレベルにまで低下したとき,伝送電力を除去しなければならな
い。バッテリ電圧が許容可能なレベルに回復し,手動リセットされるまで,リモートステーションからフ
レームを伝送できる状態にしてはならない(4.5及び4.8参照)。
設定データ,アドレス符号などの情報がCCSに格納される場合は(4.15も参照),そうしたデータの保
持は供給電源に依存してはならない。
4.12
複数のリモートステーション
一つのCCSに複数のリモートステーションがある場合に,EMS機能の作動を除いて,CCSは同時に複
数のリモートステーションを使用できないように設計しなければならない。
注記 この要求事項は,稼働していないリモートステーションには適用しない。
ベースステーションが制御しているリモートステーションを示す手段があることが望ましい(4.5も参
照)。
あるリモートステーションから他のリモートステーションに制御を移行する場合は,危険な状況に陥る
可能性を最小限に抑えるために,特別に意図された操作を制御中のリモートステーションで行う必要があ
る。
4.13
複数のベースステーション
一つのリモートステーションが複数のベースステーションのうちの一つと通信するために使われる場合,
どのベースステーションと接続するかを選択する手段がリモートステーションに提供されていなければな
らない。単独で,特定のベースステーションへの接続を選択することは,ベースステーションでの制御指
令としてはならない。
一つのリモートステーションが複数のベースステーションを制御するのに用いられる場合は,どのベー
スステーションをリモートステーションが制御しているかを確認する表示をベースステーション及び/又
はリモートステーションに提供しなければならない。
4.14
CCS制御の中断
ベースステーションをオフ状態にすることなく,機械の制御をCCSから他のオペレータコントロールス
テーションに切り替えられるようにするために,中断モードを提供することができる(4.13も参照)。
注記 CCS制御の中断は,リモートステーションのスイッチが,例えば,バッテリ節約のために切ら
14
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
れているか,又は別のオペレータコントロールステーション若しくは機械制御システム(例え
ば,自動モード)によって制御されている場合に,よくあるモード又は機能である。
リモートステーションが機械の制御を引き渡し,再び取り戻すのを可能にするための手段をCCSに提供
しなければならない。これらの行為は,その目的のために特別に設計されたリモートステーションの,例
えば,特定のスイッチ又はキースイッチを使用する意図された操作によって,行わなければならない。
制御の引渡しが完了すると,そのリモートステーションからは対象の機械を制御できなくなる。制御の
取戻しが完了すると,再びそのリモートステーションで機械の制御が可能になる。
中断は,次の全てが必要になる。
・ リモートステーションに表示される。
・ 機械制御システムのためのベースステーションでの出力信号を作動させる。
このモードが利用可能な場合は,EMSはリモートステーションでは許可しない。
4.15
設定環境の保護
CCSのどのような設定可能な機能でも,不正な変更から保護されていることを確実にする手段をとらな
ければならない。設定可能な機能の例は,制御アクチュエータの出力への割当てを含むニュートラルフレ
ーム伝送期間(4.9参照),又はリモートステーションとベースステーションとの間の通信ペアリングであ
る(4.2.3参照)。
5
検証
5.1
一般事項
CCSと機械制御システムとのインタフェースへの具体的要求事項は,CCS製造業者及び/又は必要に応
じてシステムインテグレータ(例えば,CCS製造業者が提供する使用上の情報に明示されたような)によ
る目視,分析(例えば,計算)及び/又は試験(例えば,型式試験,受入れ及び/又は定期試験,機能試
験及び総合試験)によって検証しなければならない(CCS製造業者が提供する使用上の情報に記載された
規定に従う。)。
注記 検証活動の一部は,CCS自体の特性に関わる。それ以外は,CCSの正しい設定と機械制御シス
テムとのインタフェースの適合性に関係する。
機械制御システムのCCSの構成が変更又は修正された場合には,適切な検証を繰り返さなければならな
い。
5.2
ラベリング及びマーキング
CCSのリモートステーション及びベースステーションについて,明確な識別情報が存在すること及びそ
れぞれの銘板には少なくとも箇条7で規定した情報が記載されていることを検証しなければならない。
5.3
文書
CCSが使用上の情報に適合していることを検証する(箇条6参照)。
5.4
機能検証
箇条4で規定した機能要求事項への適合性について,適切な試験を実施して検証しなければならない。
分析によってCCSが試験に合格することが確実な場合,試験を省略してもよい。
検証が必要なCCSの機能要求事項の概要を表4に示す。表4は,使用上の情報で定めた機械制御システ
ムとCCSとのインタフェースについて,システムインテグレータに適用される検証手順を示す[6.2 x) 参
照]。
15
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
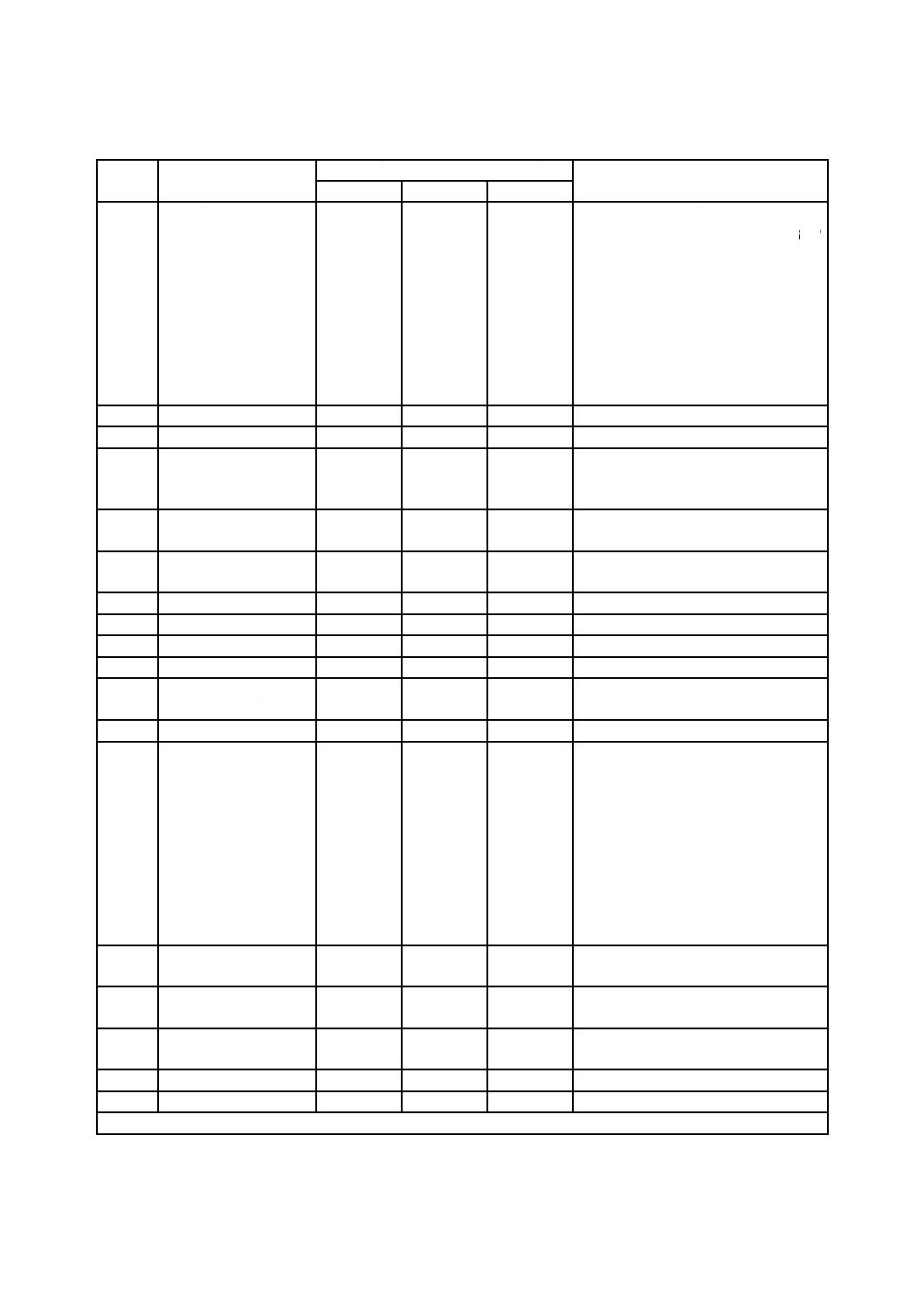
表4−機能要求事項の検証
参照
箇条
要求事項
手法(特定した一つ以上の手法を適用)
追加検証事項
分析
試験
目視検査
4.2.1
不注意による作動の防
止
○
○
CSSが動作可能状態にある間,携帯型
リモートステーションは,JIS C
60068-2-31:2013の5.1(落下及び転倒)
及び5.2(自然落下試験−方法1)によ
って試験しなければならない。JIS C
60068-2-31:2013の箇条6で規定した最
終検査及び確認に加え,これらの試験
中は対応するCCS,EMS又はATS機
能に対応した信号変化を除いて信号変
化が発生してはならない。
4.2.2
無許可操作の防止
○
○
4.2.3
意図しない指令の防止
○a)
○a)
4.3
シリアルデータ転送
○
○
例えば,障害を発生させて,不正なア
ドレス指定及びフレームの改変を試験
する。
4.4
リモートステーション
伝送の除去
○
○
4.5
伝送及び通信の確立及
び表示
○
○
4.6
CCSの安全関連機能
○
○
4.7
CCSの停止機能
○
○
○
4.7.3.4
非常停止(EMS)機能
○a)
○a)
○a)
4.8
リセット
○
○
4.9
リモートステーション
からの伝送の停止
○
4.10
ラッチ制御機能
○
○
4.11
電源喪失時の挙動
○
製造業者の推奨に従い,最初にバッテ
リをフル充電しておかなければならな
い。これらの試験中,電源はリモート
ステーションからは切り離さなければ
ならない,リモートステーションは最
大数のベースステーションと通信を行
わなければならない(例えば,シング
ルの1,タンデムの2),及びリモート
ステーションは試験中は伝送を続けな
ければならない。
4.11
バッテリ駆動型リモー
トステーション
○
○
4.12
複数のリモートステー
ション
○
○
4.13
複数のベースステーシ
ョン
○
○
4.14
CCS制御の中断
○
○
4.15
設定環境の保護
○
注a) この事項の検証には,マークされた全ての手法が適用される。
16
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
使用上の情報
6.1
一般事項
CCSの製品識別情報,輸送,設置,使用,保守,廃棄及び処分について必要な全ての情報を,適切な書
式,例えば,図面,図,図表,表,指示などで提供しなければならない。
注記1 CCSとともに提供された技術文書は,機械の文書全体の一部となる。
注記2 国によっては,特定の言語を使用するよう求める法的要件が存在する場合がある。
6.2
提供する必要がある情報
ユーザが参照可能な文書には,次の情報を含まなければならない。
a) 製造業者名(商号,原産地表示)及び完全な住所
b) CCSの概説
c) リモートステーション及びベースステーションの使用される前提となる,環境及び稼働条件(温度,
湿度など)
d) 伝送の出力又はエミッションのレベル
e) 定格動作電圧(直流,交流,周波数)及び消費電力,バッテリについては,次の詳細事項を含む。
− ユーザによる交換が可能な場合,リモートステーション向け推奨バッテリ仕様
− 1回の充電当たりの通常作動時間及び基準動作状態
− バッテリの交換及び充電手順
− バッテリ残量低下警告が出てからリモートステーションのシャットダウンまでの概算時間及びその
時間に影響をもたらす要素(例えば,バッテリの劣化又は温度)
f)
障害物がない場合の公称動作距離
g) 設置場所において,CCS及び使用中の他システムが互いに干渉しないようにするための方法の説明
h) 全ての制御アクチュエータの詳細及びそれに関連する制御機能。各々の制御機能の最大応答時間を含
む。
i)
該当する場合は,異なるリモートステーション間の制御移行の説明
j)
自動電源オフ(伝送力の除去)が提供されるか否かにかかわらず,ニュートラルフレーム伝送が提供
されている場合の最大継続時間
k) ベースステーションの任意の制御機能及び関連する出力機能は,ユーザが設定できる又は工場出荷時
にあらかじめ設定されたラッチ機能(4.10参照)をもっているか,また,ユーザ設定の場合には設定
方法の説明。電源投入時又は通信の再確立時のような移行状態における機能を含む,機械の危険な操
作に対するラッチ機能の使用に関する制限事項に関する説明の提供
l)
リモートステーションとベースステーションとの間の通信ペアリングは,工場出荷時にあらかじめ設
定するか,又はユーザが設定するかにかかわらず,適切な設定方法の提供
m) CCSがサポートする各安全関連制御機能(停止機能を含む。)の次を含む機能的な仕様
− 機能の説明
− エラー検出時の反応
− EMS,GSS及びATS機能に関して,安全関連出力インタフェース(例えば,接点)のあらゆる遅延
時間を含むタイミング情報
n) CCSのATS機能(4.7.3.5参照)については,次の事項を説明する。
− ATS機能が作動するあらゆる状況
− 有効な信号が途絶えてからATS機能が作動するまでの時間間隔
17
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− CCS内部の最大応答時間。異なる理由で時間が異なる場合には,それぞれの時間を明記する。
o) 各安全関連制御機能の安全インテグリティの仕様について,次の事項又はいずれかの事項
− IEC 61508シリーズ又はJIS B 9961に基づくSIL
− JIS B 9705-1に基づくPL
注記 関連するその他のデータ(例えば,PFHD,MTTFD及び/又はB10D,DC,SFF)も,CCSの
機械制御システムへの統合を容易にするのに用いることができる。
p) CCSの停止機能の,全ての作動の詳細。それぞれがアクティブ,パッシブ,又はパッシブに引き継が
れるアクティブ及びCCS内部の最大応答時間を含む。
q) 実行するための指示
− 安全関連停止機能作動後のリセット
− 通信の喪失,リモートステーション又はベースステーションの故障又は機能不全後の復帰
r) EMS機能を備えている場合,EMS機能の説明及び可用性に関する説明。これには,携帯型又は移動
体型リモートステーションの非常停止装置が,機械のEMS機能を作動させる唯一の手段であっては
ならないことの説明を含む。
s)
携帯型又は移動体型リモートステーションによるEMS機能作動後のリセットについて,原因が解消
されるまでリセットを行えないこと,及びこれには追加的な固定型リセット機器の使用が必要になる
ことの説明
t)
ニュートラルフレームだけ受信した場合(又は通信の再確立に続いてニュートラルフレームの受信な
しに),ベースステーションのどの出力が作動するかの具体的説明,及び機械の危険な操作の制御に使
用することの注意の提供
u) 不正な操作を防止する手段の説明
v) エラー符号の取扱い及びオペレータが行わなければならない対応の説明
w) EMS機能を備えている場合,機械の動作モード(例えば,自動又は手動,リモート又はローカル)に
関係なく,常に操作可能な状態にあることの説明
x) CCSが機械の電気機器に統合される場合に,システムインテグレータが実施しなければならない全て
の検証活動の詳細(表5及び5.4参照)
18
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5−システムインテグレータに必要な検証リストの例
機能要求事項
不注意による作動の防止
無許可操作の防止
意図しない指令の防止
リモートステーション伝送の除去
伝送及び通信の確立及び表示
CCSの安全関連機能
CCSの停止機能
リセット
ラッチ制御機能
電源喪失時の挙動
バッテリ駆動型リモートステーション
警告表示器
複数のリモートステーション
複数のベースステーション
応答時間
CCS制御の中断
7
ラベリング及びマーキング
CCSのベースステーション又はリモートステーションには,それぞれに読みやすく,耐久性に優れたマ
ーキングを施し,使用される状況(環境など)及び用途に適した銘板を設置しなければならない。ベース
ステーション及びリモートステーションの銘板には,少なくとも次の情報を含まなければならない。
・ 供給者の名称及び商標
・ 要求される場合は,認証マーク
・ シリアルナンバ及び形式
・ 使用周波数帯域
・ 定格電圧
また,関連する場合は,次の情報を含まなければならない。
・ バッテリのタイプ及び定格電圧
・ 必要に応じて,リモートステーション及びベースステーションのマッチングを識別する追加マーク
19
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
停止機能の論理
CCSの停止機能は手動又は自動で作動させることができ,アクティブ停止及び/又はパッシブ停止で実
行することができる。
注記 アクティブ停止は,自動的にパッシブ停止に引き継ぐことができる。
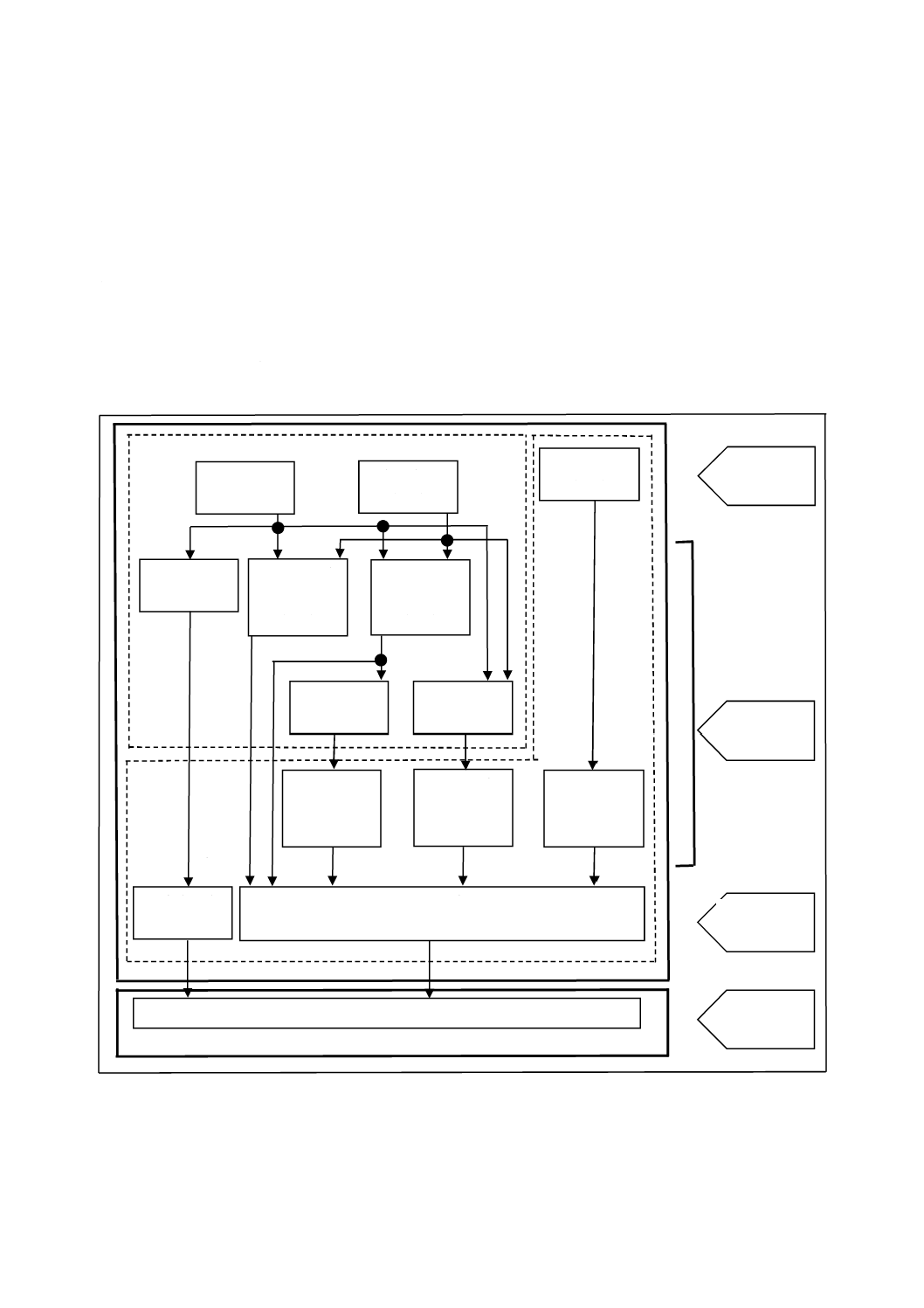
図A.1は,CCSの停止機能のための典型的な論理シーケンスを示している。矢印の横にある1〜5の番
号は,シーケンスに対応している。
図A.1−停止機能の論理
手動停止
(3.20)
信号変化
アクティブ
停止信号
(3.17)
アクティブ
停止信号
(3.17)
伝送電力の
除去
伝送電力の
除去
自動停止
(3.19)
パッシブ
停止
(3.18)
パッシブ
停止
(3.18)
パッシブ
停止
(3.18)
非安全関連
停止
リモートステーション
ベースステーション
JIS B 9962
JIS B 9960-1
機械停止機能
CCS停止出力
(3.14)
入力開始
ロジック
シーケンス
機械出力
自動停止
(3.19)
オフ状態
(3.15)
1
2
3
4
5
1
2
3a
3b
4
5
20
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シーケンス1は,手動で作動する停止を表すもので,最終的に,CCSの非安全関連停止出力の停止に至
る。例えば,ホールド・トゥ・ラン制御アクチュエータを始動させると,CCSが制御停止機能を実行し,
それに関連した機械の動作が発生し,停止に至る。ベースステーションにおいてオフ状態になることはな
い。
シーケンス2〜4は,手動停止(3.20)又は自動停止(3.19)の様々なタイプを表している。全てが,最
終的にベースステーションでオフ状態になる。
a) シーケンス2−アクティブ停止だけ
・ 手動停止(3.20)の例
STOPアクチュエータを作動させると,リモートステーションが停止信号を伝送し,ベースステ
ーションでオフ状態となる。リモートステーションの伝送電力は除去されない。
・ 自動停止(3.19)の例
リモートステーションは特定の状況に対応して停止信号を伝送し,ベースステーションにおいて
オフ状態となる。リモートステーションの伝送電力は除去されない。
b) シーケンス3−アクティブ停止後,自動的にリモートステーションの伝送電力が除去される。アクテ
ィブ停止(3a)及びパッシブ停止(3b)によって,ベースステーションにおいてオフ状態となる。し
たがって,たとえアクティブ停止(3a)が無効であっても,パッシブ停止(3b)によってオフ状態に
至る。
・ 手動停止(3.20)の例
STOPアクチュエータを作動させると,停止信号が伝送され,その後,リモートステーションの
伝送電力も除去される。ベースステーションにおいて停止信号を受信したとき,又は後に発生する
有効な信号の喪失を検出したとき,オフ状態に至る。
・ 自動停止(3.19)の例
リモートステーションは,特定の状況に対応して伝送電力が除去される前に停止信号を伝送する。
ベースステーションにおいて停止信号を受信したとき,又は後に発生する有効な信号の喪失を検出
したとき,オフ状態に至る。
c) シーケンス4−リモートステーションの伝送電力の除去によるパッシブ停止
・ 手動停止(3.20)の例
STOPアクチュエータを作動させると,リモートステーションの伝送電力が除去される。ベース
ステーションにおいて,結果的に発生する有効な信号の喪失を検出したとき,オフ状態に至る。
・ 自動停止(3.19)の例
特定の状況に対応して,リモートステーションにおいて伝送電力が除去される。ベースステーシ
ョンにおいて,結果的に発生する有効な信号の喪失を検出したとき,オフ状態に至る。
シーケンス5は,自動停止(3.19)のその他のタイプを表している。ここでは,パッシブ停止及びそれ
に起因するオフ状態が,ベースステーションにおいて自動的に開始する。例えば,リモートステーション
を動作範囲外,すなわち,ベースステーションから遠く離れた場所に移動した場合,有効信号が失われる
ことから,オフ状態はベースステーションで自動的に開始する。
21
B 9962:2019 (IEC 62745:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
注記 対応国際規格:ISO 12100,Safety of machinery−General principles for design−Risk assessment
and risk reduction
JIS B 9960規格群 機械類の安全性−機械の電気装置
注記 対応国際規格:IEC 60204 (all parts),Safety of machinery−Electrical equipment of machines
JIS C 8201-5-8 低圧開閉装置及び制御装置−第5-8部:制御回路機器及び開閉素子−3ポジションイ
ネーブルスイッチ
注記 対応国際規格:IEC 60947-5-8,Low-voltage switchgear and controlgear−Part 5-8: Control circuit
devices and switching elements−Three-position enabling switches
JIS C 60068-2-1 環境試験方法−電気・電子−第2-1部:低温(耐寒性)試験方法(試験記号:A)
注記 対応国際規格:IEC 60068-2-1,Environmental testing−Part 2-1: Tests−Test A: Cold
JIS C 60068-2-2 環境試験方法−電気・電子−第2-2部:高温(耐熱性)試験方法(試験記号:B)
注記 対応国際規格:IEC 60068-2-2,Environmental testing−Part 2-2: Tests−Test B: Dry heat
JIS C 60068-2-6 環境試験方法−電気・電子−第2-6部:正弦波振動試験方法(試験記号:Fc)
注記 対応国際規格:IEC 60068-2-6,Environmental testing−Part 2-6: Tests−Test Fc: Vibration
(sinusoidal)
JIS C 60068-2-27 環境試験方法−電気・電子−第2-27部:衝撃試験方法(試験記号:Ea)
注記 対応国際規格:IEC 60068-2-27,Environmental testing−Part 2-27: Tests−Test Ea and guidance:
Shock
JIS C 60068-2-30 環境試験方法−電気・電子−第2-30部:温湿度サイクル(12+12時間サイクル)
試験方法(試験記号:Db)
注記 対応国際規格:IEC 60068-2-30,Environmental testing−Part 2-30: Tests−Test Db: Damp heat,
cyclic (12 h + 12 h cycle)
JIS C 60068-2-64 環境試験方法−電気・電子−第2-64部:広帯域ランダム振動試験方法及び指針(試
験記号:Fh)
注記 対応国際規格:IEC 60068-2-64,Environmental testing−Part 2-64: Tests−Test Fh: Vibration,
broadband random and guidance
IEC 60050 (all parts),International Electrotechnical Vocabulary (available at http://www.electropedia.org)
IEC 60050-441:1984,International Electrotechnical Vocabulary. Switchgear, controlgear and fuses
IEC TR 60870-1-3,Telecontrol equipment and systems−Part 1: General considerations−Section 3: Glossary
IEC 60870-5-1,Telecontrol equipment and systems−Part 5: Transmission protocols. Section One−
Transmission frame formats
IEC 61508 (all parts),Functional safety of electrical/electronic/programmable electronic safety-related systems
IEC 61784-1,Industrial communication networks−Profiles−Part 1: Fieldbus profiles
IEC 61784-3:2016,Industrial communication networks−Profiles−Part 3: Functional safety fieldbuses−
General rules and profile definitions
EN 13557:2003,Cranes−Controls and control stations