B 9715:2013 (ISO 13855:2010)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語,定義,記号及び略号 ································································································· 2
3.1 用語及び定義 ················································································································ 2
3.2 記号及び略号 ················································································································ 4
4 方法論···························································································································· 4
5 総合システム停止性能及び最小距離計算のための一般式 ·························································· 7
5.1 総合システム停止性能 ···································································································· 7
5.2 最小距離 ······················································································································ 7
6 能動的光電保護装置に対する最小距離の計算 ········································································· 8
6.1 一般要求事項 ················································································································ 8
6.2 接近方向に対して垂直な検出区域(垂直検出区域) ······························································ 8
6.3 接近方向に対して平行な検出区域····················································································· 11
6.4 接近方向に対して角度をもった検出区域············································································ 13
6.5 検出区域の上方を越えてのう(迂)回の取扱い ··································································· 15
6.6 間接接近−障害物によって制限された検出区域から危険区域への経路 ····································· 18
7 圧力検知マット又はフロアの位置決めの計算方法 ·································································· 20
7.1 一般要求事項 ··············································································································· 20
7.2 ステップの設置 ············································································································ 21
8 両手操作制御装置 ············································································································ 21
9 施錠なしインターロックガード ·························································································· 21
附属書A(参考)使用事例 ···································································································· 22
附属書B(参考)危険な機械機能の終止··················································································· 28
附属書C(参考)間接接近の場合の使用事例 ············································································ 29
附属書D(参考)総合システム停止性能の測定及び算出 ····························································· 31
附属書E(参考)光軸数及び基準面からの高さ ·········································································· 33
参考文献 ···························································································································· 34
B 9715:2013 (ISO 13855:2010)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
機械工業連合会(JMF)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工
業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が改正した日本工業規格である。
これによって,JIS B 9715:2006は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9715:2013
(ISO 13855:2010)
機械類の安全性−
人体部位の接近速度に基づく安全防護物の位置決め
Safety of machinery-Positioning of safeguards with respect to
the approach speeds of parts of the human body
序文
この規格は,2010年に第2版として発行されたISO 13855を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格にはない事項である。
この規格は,JIS B 9700のまえがきで示されるタイプB規格である。
この規格で扱う特定の安全防護物のリスク低減効果は,危険区域に対して装置の関連部分が正しく位置
決めされることに依存する。これらの位置を決定する際,次のような多くの側面を考慮する必要がある。
− JIS B 9700に従ったリスクアセスメントの必要性
− 機械の使用に関する実際の経験
− 総合システム停止性能
− 安全防護物の作動に従って機械が安全条件を達成する(例えば,機械が停止する)までにかかる時間
− 生体力学的データ及び人体測定データ
− 保護装置が作動するまでに起こる人体部位の危険区域への侵入
− 検出区域から危険区域に向かう際の人体部位の動作経路
− 危険区域と安全防護物との間に人が存在する可能性
− 接近が検出されない可能性
1
適用範囲
この規格は,人体部位の接近速度に基づく安全防護物の位置決めについて規定する。
また,この規格は,人体部位の接近速度の値に基づいたパラメータを指定し,安全防護物の検出区域又
は作動装置から危険区域までの最小距離を決定するための方法論を示す。
この規格の接近速度(歩行速度及び上肢の動作速度)の値は,現実の経験及び時間計測から導き出され
たものである。この規格は,典型的な接近に対する指針を提供する。他の形態の接近,例えば,走る,跳
ねる又は落下するなどは,この規格では考慮しない。
注記1 他の形態の接近は,結果としてこの規格の規定よりも速く又は遅くなる可能性がある。
この規格で考慮される安全防護物は,次を含む。
a) 電気的検知保護装置(JIS B 9704シリーズ参照),すなわち,次による。
− ライトカーテン及びライトグリッド(AOPD)
− レーザスキャナ(AOPDDR)及び二次元映像利用保護装置
2
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 圧力検知保護装置(JIS B 9717-1,ISO 13856-2及びISO 13856-3参照),特に,圧力検知マット
c) 両手操作制御装置(JIS B 9712参照)
d) 施錠機能をもたないインターロック付きガード(JIS B 9710参照)
この規格は,検出区域(面,線,点),又はインターロック付きガードの開口箇所から機械の危険源(例
えば,押しつぶし,せん断,引き込み)による危険区域までの最小距離を指定する。
固体又は液体の飛来,(音,光,熱などの)放出,放射線,及び電気的な危険源に対する保護は,この規
格では扱わない。
注記2 14歳以上を対象にした人体測定データの5パーセンタイルから95パーセンタイルまでの値
が,後述する式における侵入距離Cの決定に使用された。
注記3 この規格のデータは,産業用途における経験に基づいている。設計者が,非産業用途の機械
にこの規格を使用する場合,それは設計者の責任となる。
注記4 子供を対象にした測定結果は,この規格では使用されていない。特定の接近速度に関するデ
ータが利用可能になるまで,子供が素早く動くこと,及び子供の検知が遅れるおそれがある
ことを考慮することは,設計者の責任となる。
この規格は,工具を使用することなく,この規格から導かれた最小距離よりも危険区域に近づけること
が可能な安全防護物(例えば,イネーブル機能付きペンダント,可動式両手操作制御装置)には適用でき
ない。
この規格に従って導かれる最小距離は,ガード又は電気的検知保護装置によって既に保護されている区
域内の人を検出するための安全防護物には適用できない。
注記5 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 13855:2010,Safety of machinery−Positioning of safeguards with respect to the approach speeds
of parts of the human body(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
注記 対応国際規格:ISO 12100,Safety of machinery−General principles for design−Risk assessment
and risk reduction(IDT)
JIS B 9718 機械類の安全性−危険区域に上肢及び下肢が到達することを防止するための安全距離
注記 対応国際規格:ISO 13857,Safety of machinery−Safety distances to prevent hazard zones being
reached by upper and lower limbs(IDT)
3
用語,定義,記号及び略号
3.1
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 9700によるほか,次による。
3.1.1
(安全防護物の)作動[(safeguard) actuation]
3
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
人体又は人体部位を検出した際の安全防護物の物理的な始動。
3.1.2
総合システム停止性能(overall system stopping performance),T
検知機能の作動と危険な機械機能の終止との間の時間間隔。
注記 JIS B 9704-1から採用。
3.1.3
検出能力(detection capability),d
保護装置を作動させる,供給者によって指定される検出機能パラメータの制限値。
[TS B 62046の3.1.4]
3.1.4
電気的検知保護装置(electro-sensitive protective equipment),ESPE
保護トリップ又は存在検知のために,協調して作動する機器・部品のアセンブリであって,少なくとも
次の構成品をもつもの。
− 検知器
− 制御・監視装置
− 出力信号開閉器(OSSD)
[JIS B 9704-1の3.5]
注記 略号“ESPE”は,非接触式検知装置に対してだけに用いる。
3.1.5
間接接近(indirect approach)
危険区域への最短距離が障害物で妨げられている状態での接近。
注記 障害物をう(迂)回することによって危険区域に接近できる。
3.1.6
検出区域のう(迂)回(circumventing the detection zone)
検出区域を越える,くぐる又は脇から通過したために保護装置が作動しない危険区域への到達。
3.1.7
危険な機械機能の終止(termination of the hazardous machine function)
傷害又は健康障害を生じないレベルにまで危険な要因が低減された状態。
注記 附属書Bの例参照。
3.1.8
検出区域(detection zone)
指定の試験片が保護装置によって検出される区域。
注記1 検地区域は,点,線又は面である場合がある。
注記2 JIS B 9704-1の3.4から採用。
3.1.9
最小距離(minimum distance),S
危険な機械機能が完全に終止する前に人又は人体部位が危険区域に到達することを防ぐのに必要な安全
防護物と危険区域との間の距離。
注記 様々な条件又は接近経路によって異なる最小距離が算出される場合があるが,安全防護物の位
置を決める際は最も大きな値を使用する。
4
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.10
侵入距離(intrusion distance),C
人体部位(通常は,手)が,安全防護物に検出される前に,先行して危険区域に接近できる距離。
3.2
記号及び略号
3.2.1
記号
記号
用語
単位
T
総合システム停止性能
s
S
最小距離
mm
C
侵入距離
mm
t1
保護装置の応答時間
s
t2
機械の停止時間
s
t3
ガードを開くのに要する時間
s
K
接近速度パラメータ
mm/s
d
センサ検出能力
mm
H
基準面より上の検出区域の高さ
mm
h
ステップの高さ
mm
X
検出区域の終端から危険区域までの距離
mm
SRO
保護装置を越えて危険区域に到達する場合の最小距離
mm
SRT
保護装置を通過して危険区域に到達する場合の最小距離
mm
CRO
保護装置を越える場合の危険区域側への侵入距離
mm
CRT
保護装置を通過する場合の危険区域側への侵入距離
mm
a
危険区域の高さ
mm
b
安全防護物(例えば,ESPE,保護構造物)の高さ
mm
S*
障害物のう(迂)回を考慮した実際の最小距離
mm
l1,l2,l3
障害物周辺を通る最短経路要素
mm
S1
S2
S3
水平面上にl1を投影した距離
水平面上にl2を投影した距離
水平面上にl3を投影した距離
mm
e
開口寸法
mm
v
動力式インターロックガードの開放動作速度
mm/s
3.2.2
略号
AOPD
能動的光電保護装置(Active opt-electronic protective device)
AOPDDR 拡散反射形能動的光電保護装置[Active opto-electronic protective device responsive to diffuse
reflection (e.g. laser scanners)]
VBPD
映像利用保護装置(Vision-based protective device)
ESPE
電気的検知保護装置(Electro-sensitive protective equipment)
4
方法論
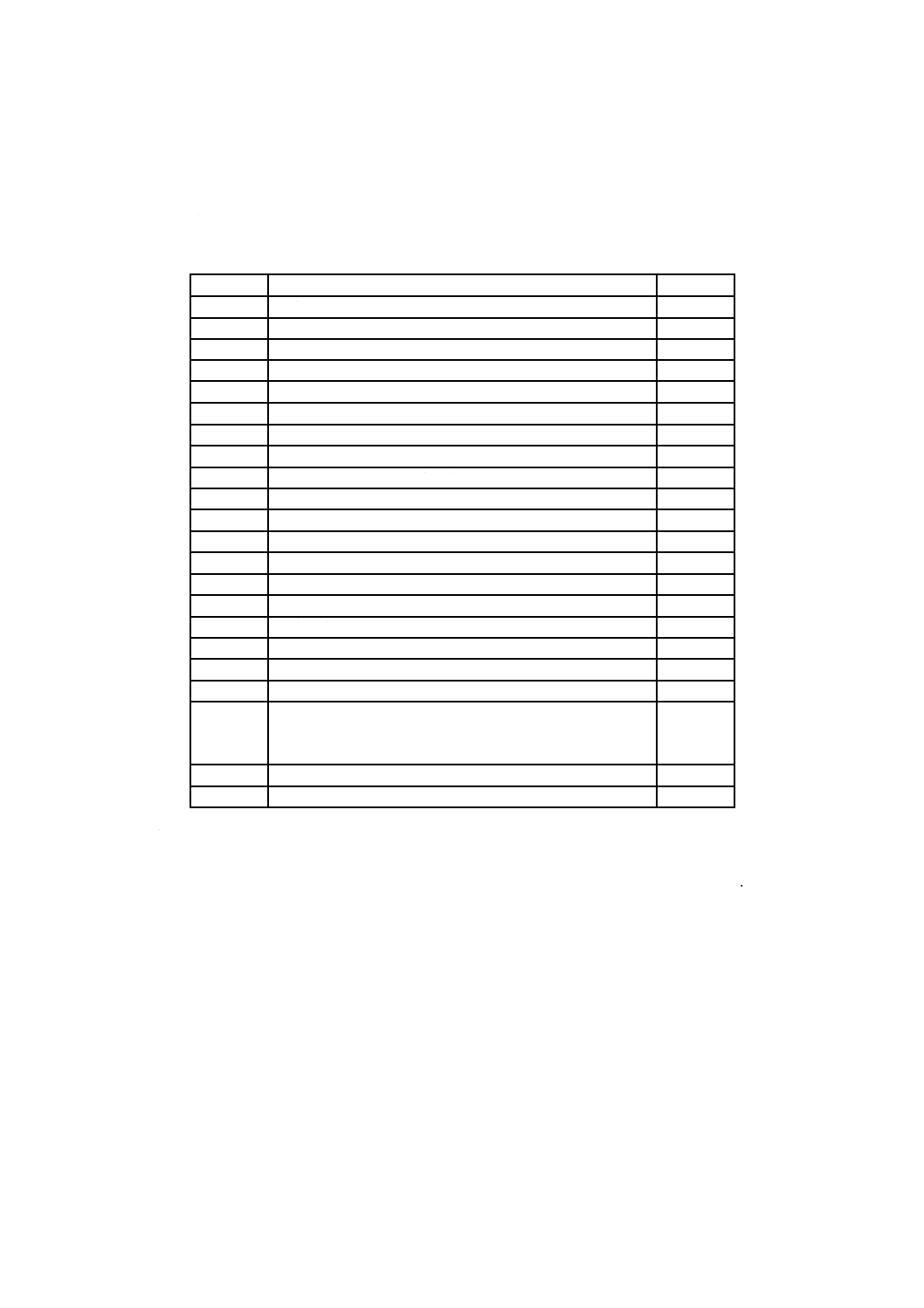
図1は,この規格に従い安全防護物の検知又は作動装置の正しい位置を決定するための次の方法論を示
す図である。
a) 危険源を同定し,リスクを見積もる(JIS B 9700で規定される。)。
b) 当該機械に対してタイプC規格が存在する場合,その規格に規定する安全防護物の一つを選択し,そ
の規格で指定する距離を採用する。
5
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 タイプC規格は,最小距離を直接的に,又はこの規格を参照することによって指定する。
c) タイプC規格がない場合,選択した安全防護物の最小距離を算出するためにこの規格の式を使用する。
注記2 適切な種類の安全防護物の選択に関して,JIS B 9700の6.3及びTS B 62046参照。
d) 検出区域をう(迂)回することが可能な場合,6.5の式を使用した追加の計算をしなければならない。
e) 安全防護物を組み合わせて使用する場合,最小距離の計算は,各安全防護物及び可能なう(迂)回を
考慮しなければならない。
f)
危険区域に到達するそれぞれの可能性に関して最小距離を計算し,大きな値を選択する。
g) 可能な場合,機械設計自体に距離を入れ込む。あるいはステップi)を参照する。
h) 安全防護物が検出できない接近を確認する。検出されない接近が可能な場合,再設計[ステップi)]
する。あるいはステップj)に進む。
i)
パラメータ,又は代替の安全防護物の使用が可能か。いずれも不可能なら,追加の安全防護物を使用
しなければならない。
j)
決定した位置で安全防護物と危険区域との間に人が存在できるかを確認する。存在できる場合,リス
クアセスメントに基づいて付加的な方策が要求される。
注記3 付加的な方策の一例として,危険区域,及び安全防護物と危険区域との間の空間の外側に
手動リセットスイッチを設置することがある。その位置は,危険区域内,又は安全防護物
と危険区域との間の空間に誰もいないことを操作する人が容易に確認できるところを選択
する。手動リセット機能に関しては,JIS B 9705-1の5.2.2参照。
6
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1−方法論
a) 危険源の同定及びリスクの査
定(JIS B 9700参照)
b) タイプC規格は
あるか?
c) 適切な安全防護物の選択
施錠なしインターロ
ックガード−箇条9
能動的光電保護装
置−箇条6
圧力検知マット/
フロア−箇条7
両手操作制御装置
−箇条8
タイプC規格で指定す
る適切な安全防護物を
選択する。
この規格の式を使用して最小
距離を計算する。
e) 安全防護物の組合せを使
用する場合,それら全て
の最小距離を計算する。
d) う(迂)回の可能性
を考慮
検出区域の方向及び接近
角度の考慮
設置高さ及び最小距離を
考慮
リスクアセスメントに基づいて追
加の方策と組み合わせて最小距離
を使用する。
この最小距離を使用する。
リスクアセスメントに基づいた安
全防護物の追加
f) 様々な可能性に対する最小
距離を比較し,最も保護効
果の高い(最も大きい)値
を選択する。
最小距離を達成する
ことができるか?
j) 人が安全防護物と
危険区域との間に検出さ
れずに存在することが可
能な最小距離か?
g) 最小距離を機械設
計に組み込むこと
ができるか?
i)
パラメータは変更
できるか,又は代
替の安全防護物を
使用できるか?
h) 検出されない
接近が可能か?
はい
いいえ
はい
いいえ
はい
いいえ
はい
いいえ
はい
いいえ
はい
いいえ
7
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
総合システム停止性能及び最小距離計算のための一般式
5.1
総合システム停止性能
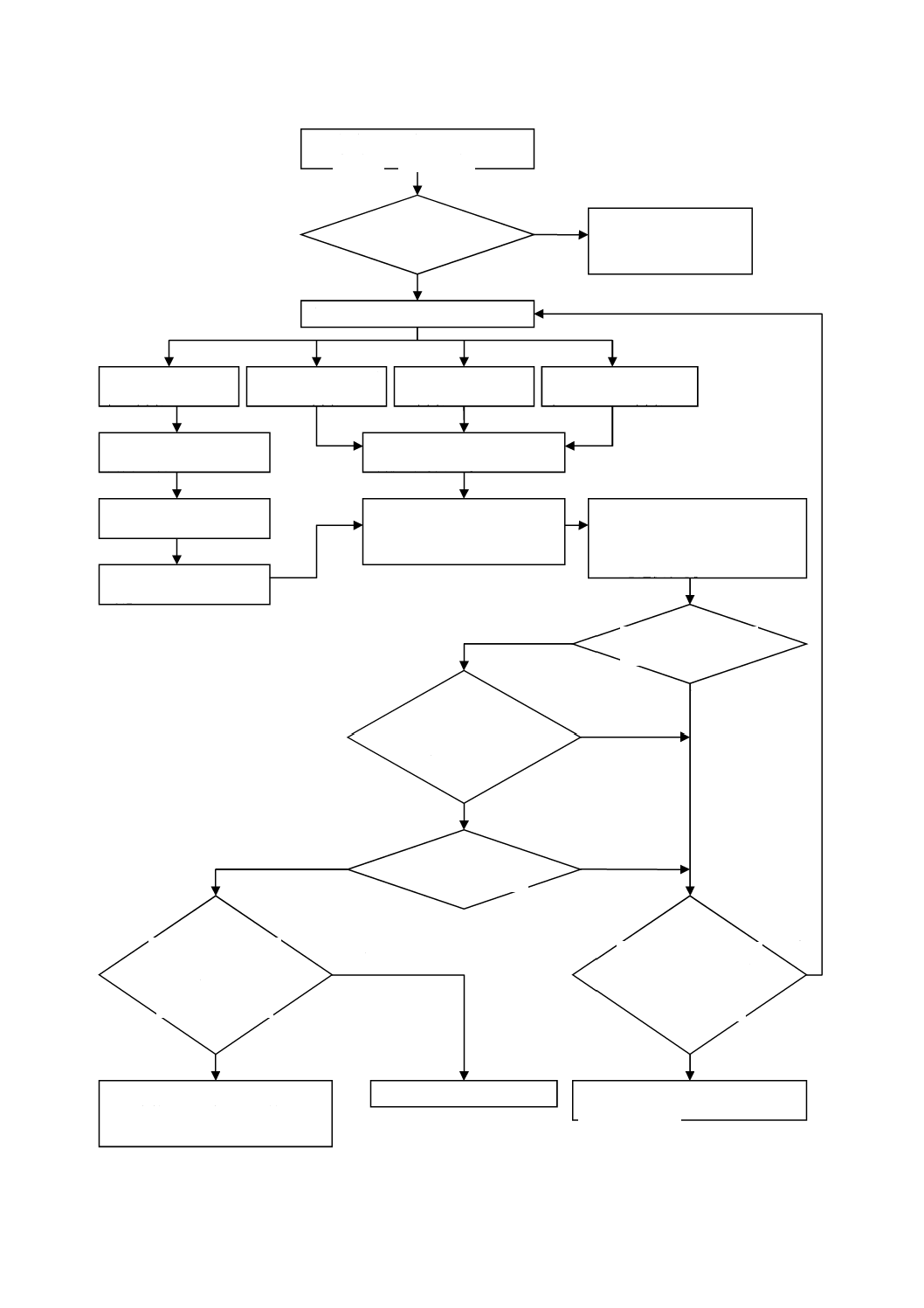
総合システム停止性能は,少なくとも二つの段階で構成される。二つの段階は式(1)によって関連付けら
れる。
T=t1+t2 ·················································································· (1)
ここに,
T: 総合システム停止性能
t1: 安全防護物が作動してから,出力信号開閉器がオフ状態にな
るまでの最大時間
t2: 安全防護物の出力信号がオフ状態になってから危険な機械機
能が終止するまでの最大時間。機械の制御システムの応答時
間tは,t2に含まなければならない。
t1及びt2は様々な要因,例えば温度バルブの開閉時間,コンポーネントの経年変化などに影響を受ける。
t1とt2との関係は図2で示される。t1及びt2は,それぞれ安全防護物及び機械の特性の関数であり,設計
及び測定によって決定される。この二つの値の評価には,測定,計算及び/又は製造の結果から生じる不
確かさを含まなければならない。
a
安全防護物の作動
b
安全防護物の出力信号のオフ
c
危険な機械機能の終止(安全条件)
図2−t1とt2との関係
総合システム停止性能Tは,保護装置の位置に対して本質的な特性である。Tの見積りにおいては,機
械の停止時間t2の変動を考慮しなければならない(附属書D参照)。機械の寿命の間,停止時間が悪化す
る可能性がある場合,正規の総合システム停止性能を確保するために,技術的又は組織的方策を講じるの
が望ましい。例えば,次がある。
− ブレーキ性能を制御する装置
− 点検(その性質及び頻度は,使用マニュアルで規定するのが望ましい。)
注記 さらに,考慮する事項として次を挙げることができる。
a) 保護機能の健全性(障害条件下での安全性)(JIS B 9705-1,ISO 13849-2及びJIS B 9961
参照)
b) 停止性能の監視(例えば,TS B 62046参照)
c) この規格を適用することが適切でない停止性能の場合,例えば,次がある。
1) 1サイクル中は機械を停止することができない。
2) 停止性能を予測できない。
システムの停止性能の測定は,正確かつ妥当な値が得られるよう慎重に検討する必要がある。附属書D
は,適切な結果を確実に得るために考慮する必要がある事項を示す。
5.2
最小距離
危険区域までの最小距離は,式(2)を使用して計算しなければならない。
8
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
S=(K×T)+C ··········································································· (2)
ここに,
S: 最小距離(mm)
K: 人体又は人体部位の接近速度に基づくデータから抽出された
パラメータ(mm/s)
T: 総合システム停止性能(s)(3.1.2及び5.1参照)
C: 侵入距離(mm)
箇条6〜箇条9は,特定の保護装置の種類及び組合せに対する式(2)の適用方法を示す。具体的な実施例
は,附属書A参照。
6
能動的光電保護装置に対する最小距離の計算
6.1
一般要求事項
6.1.1 この箇条は,人体又は人体部位が次の二つの方向から接近する状況に対する要求事項を規定する。
a) 検出区域に対して垂直(直交又は法線方向)(6.2参照)
b) 検出区域に対して平行(6.3参照)
さらに,次の場合に対する要求事項も規定する。
− 検出区域と接近方向との角度(垂直と平行との間)を考慮する必要がある場合(6.4参照)
− ESPEの検出区域がう(迂)回される可能性を扱う必要がある場合(6.5参照)
− 検出区域から危険区域への経路が障害物によって制限される場合(6.6参照)
注記1 これらの状況が組み合わされて現れる場合もある。
検出区域と危険区域との間に検出されないまま人が存在できるほど最小距離が長い場合,このことを防
止するために,更に存在検知装置を使用するなどの対策を講じるのが望ましい。
注記2 この規格は,よじ登りによる危険区域への到達に対する方策を示すことは意図していない。
6.1.2 安全防護物は,人が危険区域に検出されずに入ることがないように構成及び位置決めしなければな
らない。
6.1.3 必要な場合,検出区域のう(迂)回を防止するために安全防護物を追加しなければならない(図9
参照)。
6.1.4 拡散反射形能動的光電保護装置(AOPDDR)又は二次元の保護区域をもつ映像利用保護装置(VBPD)
の使用に対しては,最小距離の計算は,接近方向に基づいて6.2,6.3又は6.4に適合しなければならない。
6.2
接近方向に対して垂直な検出区域(垂直検出区域)
6.2.1
一般要求事項
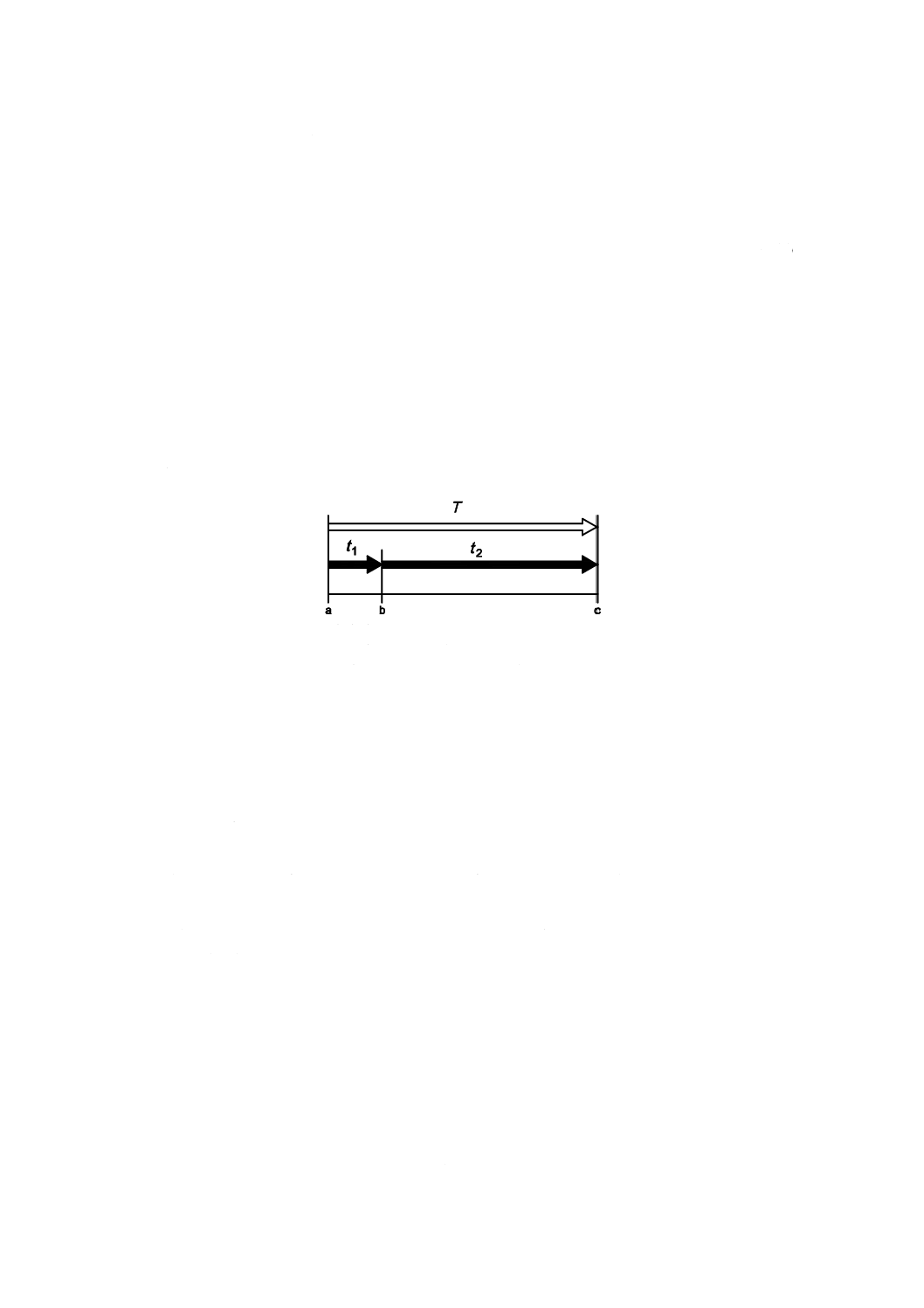
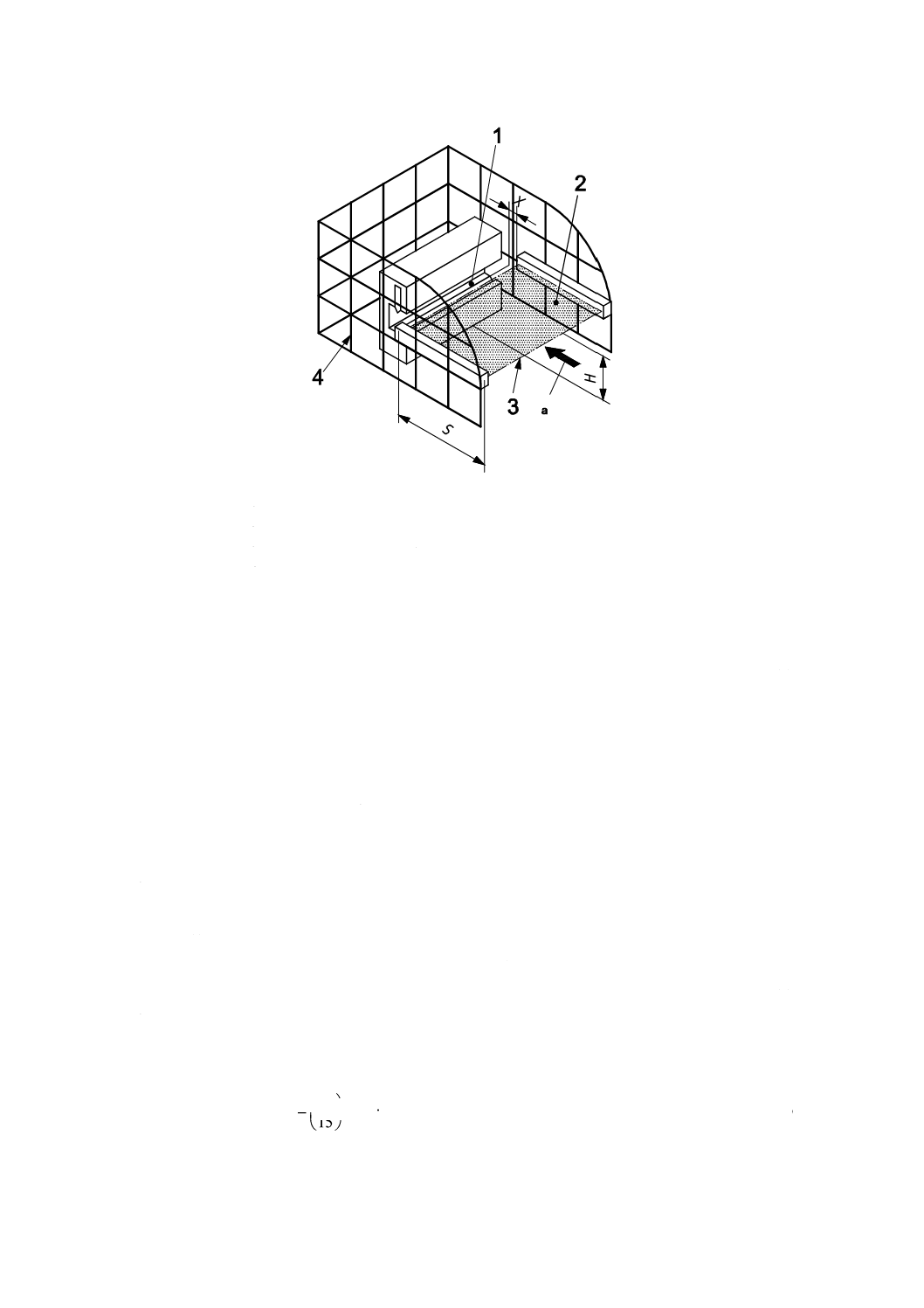
図3は,検出区域が接近方向に対して垂直な三つの例を示す。
9
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a)
b)
c)
記号の説明
1
危険区域
2
検出区域
3
固定式ガード
S
最小距離
a
接近方向
図3−検出区域が接近方向に対して垂直な三つの例
6.2.2
全身を検出する垂直な検出区域
安全防護物が全身の検出にだけ使用される場合
a) 最も下のビームの高さは,検出区域の下からの接近を防止するために300 mm以下でなければならな
い。ESPEを非産業用の用途(例えば,子供のいる場所)で使用することが予見可能な場合,最も下
のビームの高さは200 mm未満でなければならない。
b) 最も上のビームの高さは,検出区域の上方を越えて到達することを防止するために900 mm以上でな
ければならない。ただし,単光軸又は接近方向に平行な検出区域に対しては適用しない(6.3参照)。
6.2.3
検出能力が40 mm以下の能動的光電保護装置
6.2.3.1
計算
検出区域から危険区域までの最小距離S(mm)は,式(2)を使用して計算した値未満であってはならない。
10
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
S=(K×T)+C ··········································································· (2)
ここに,
K= 2 000 mm/s
C= 8(d−14) ただし,dが14 mm未満であっても,0 mm未満とし
てはならない。
d: 保護装置の検出能力(mm)
ゆえに,
S=2 000 T+8(d−14) ·································································· (3)
式(3)は,500 mm以下の全ての最小距離Sに適用される。Sの最小値は,100 mmでなければならない。
式(3)を使用して計算したSが500 mmを超える場合,式(4)を使用できる。この場合,Sの最小値は500 mm
でなければならない。
S=(K×T)+C ··········································································· (2)
ここに,
K= 1 600 mm/s
C= 8(d−14) ただし,dが14 mm未満であっても,0 mm未満とし
てはならない。
d: 保護装置の検出能力(mm)
ゆえに,
S=1 600 T+8(d−14) ·································································· (4)
ESPEを非産業用の用途(例えば,子供のいる場所)で使用することが予見可能な場合,Sは,式(3)で計
算した結果に少なくとも75 mmを加えた値でなければならない。この場合には式(4)は適用できない。
6.2.3.2
制御機能付き能動的光電保護装置を使用する機械のサイクル運転の再始動
能動的光電保護装置が機械のサイクル運転の再始動に使用される場合
− 検出能力は30 mm以下でなければならない。
− 式(3)(6.2.3.1参照)を適用しなければならない。かつ,
− 最小距離Sは150 mm超でなければならない。
ただし,検出能力が14 mm以下のときは,Sの最小値を100 mmとできる。
注記1 機械のサイクル運転の再始動でESPEを使用する条件は,JIS B 9700の6.3.2.5.3及びTS B
62046の5.6で示される。
注記2 ESPEの追加要求事項は,JIS B 9704-1で示される。
注記3 検出能力が30 mm超のESPEは,手のひらが検出された後に手首又は前腕を検出しないこと
がある。予期しないサイクル運転の再始動が起こる可能性がある。
6.2.4
40 mm超70 mm以下の検出能力をもつ電気的検知保護装置(ESPE)
40 mm超70 mm以下の検出能力をもつESPEは,手の侵入を検出する必要がないとリスクアセスメント
によって示された場合だけ使用してよい。
このような装置は,次のパラメータに従って設置しなければならない。
検出区域から危険区域までの最小距離は,式(5)を使用して計算しなければならない。
S=(K×T)+C ··········································································· (2)
ここに,
K= 1 600 mm/s
C= 850
ゆえに,
S=1 600 T+850········································································· (5)
注記 850 mmは,標準的な腕の長さとされる値である。
11
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.2.5
複数ビーム
2,3又は4本の分離したビームの組合せは,危険区域への全身の侵入を検出するために使用することは
できるが,人体部位(例えば,手又は指)を検出するためには適切ではない。
リスクアセスメントによって,その使用が適切なものであるということが示された場合,保護装置は,
式(5)に従った最小距離を確保して位置決めしなければならない(6.2.4参照)。
リスクアセスメントでは,ビームがう(迂)回される可能性を考慮しなければならない。例えば,次が
ある。
− 最も下のビームの下をは(這)う。
− 最も上のビームの上を越える。
− ビームの間から上肢又は下肢が届く。
− ビームの間を通り抜ける。
追加情報に関しては,附属書E参照。
6.2.6
単一ビーム
単一ビームは,地面に対して平行に使用され,かつ,直立した人体によって遮光される場合だけについ
て考慮されている。
全身の接近を防止する目的に対し,単一ビームだけを使用することは,適切でない。
注記 単一ビームは,通常,これに検出されずに通過できるような開口を制限する別の安全防護物又
は構造物と組み合わせて使用する。
最小距離Sは,式(6)に従って計算しなければならない。
S=1 600 T+1 200 ······································································ (6)
ビームをまたぐ又はかがんで通るといった問題に対する現実的な解決策として,産業用用途では,単一
ビームの高さを地面又は基準面(JIS B 9718参照)から750 mmにすることが知られている。
6.3
接近方向に対して平行な検出区域
図4参照。
12
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1
危険区域
2
検出区域
3
検出区域の先端
4
固定式ガード
H 基準面からの検出区域の高さ
S
最小距離
X
検出区域の終端から危険区域までの距離
a
接近方向
図4−接近方向に対して平行な検出区域
接近の方向が検出区域に対して平行の場合,最小距離Sは式(7)を使用して計算しなければならない。
S=(K×T)+C ··········································································· (2)
ここに,
K= 1 600 mm/s
C= 1 200−0.4 H ただし,Cは850 mm以上でなければならない。
また,Hは基準面(例えば,床)から検出区域までの高さ(mm)
である。
したがって,
S=1 600 T+(1 200−0.4H) ··························································· (7)
接近に対して平行な検出区域をもつ保護装置については,検出区域の高さHが1 000 mmを超えてはな
らない。
ただし,Hが300 mm(非産業用の用途,例えば子供のいる場所では200 mm)を超える場合には,検出
区域の下で検出されない不意の接近が行われ得ることをリスクアセスメントで考慮し,必要な場合には更
に別の保護方策を適用しなければならない。
検出区域の許容される最低の高さは,式(8)を使用して計算しなければならない。
H=15(d−50) ············································································ (8)
ただし,dが50 mm未満であっても,Hは0 mm以上でなければならない。
検出区域の高さが与えられる場合,対応するセンサの検出能力dは,式(9)を使用して計算しなければな
らない。
50
15+
=H
d
············································································ (9)
式(9)は,Hが1 000 mmまで使用できる。
13
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L字形のESPEの水平部分の高さについても,式(8)又は式(9)を使用できる。
トリップ及び存在検知の両方の機能に装置を使用する場合,検出区域の終端から危険区域までの距離X
(図4参照)は,検出能力d以下でなければならない。
保護装置が危険区域への接近を支援してしまう場合(例えば,保護装置に乗る又はよじ登る),これを防
ぐ方策を講じなければならない。
6.4
接近方向に対して角度をもった検出区域
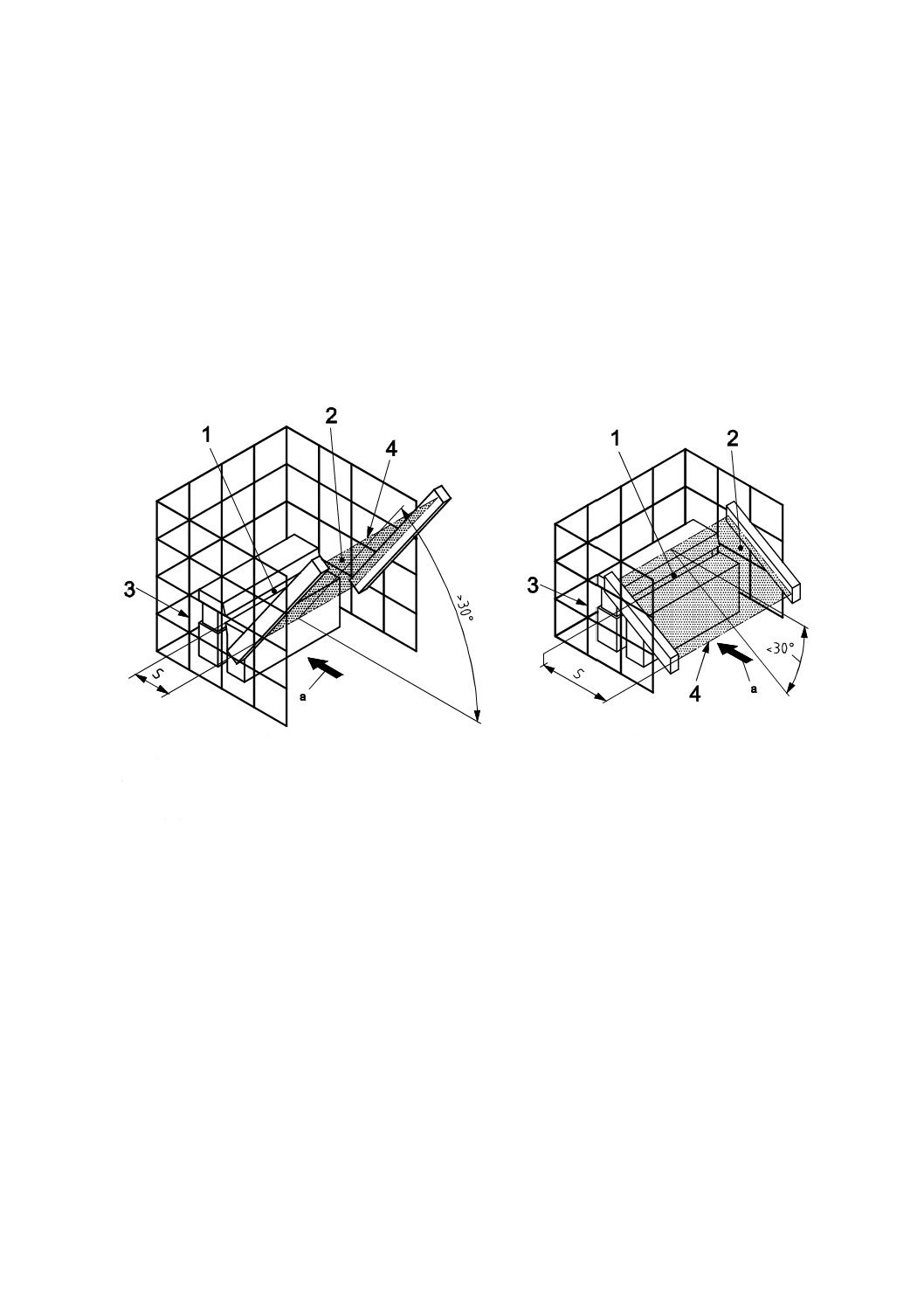
接近方向に対して±30°を超える角度をもって検出区域を設ける場合は,検出区域を接近に対して垂直
な検出区域として扱わなければならない[6.2並びに図5 a)及び図6参照]。角度が±30°未満の場合は,
平行な検出区域として扱わなければならない[6.3並びに図5 b)及び図6参照]。
角度の許容値は,±5°とする。
a) 垂直接近
b) 平行接近
記号の説明
1
危険区域
2
検出区域
3
固定式ガード
4
検出区域の先端
S
最小距離
a
接近方向
図5−接近方向に対して角度をもった検出区域
14
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
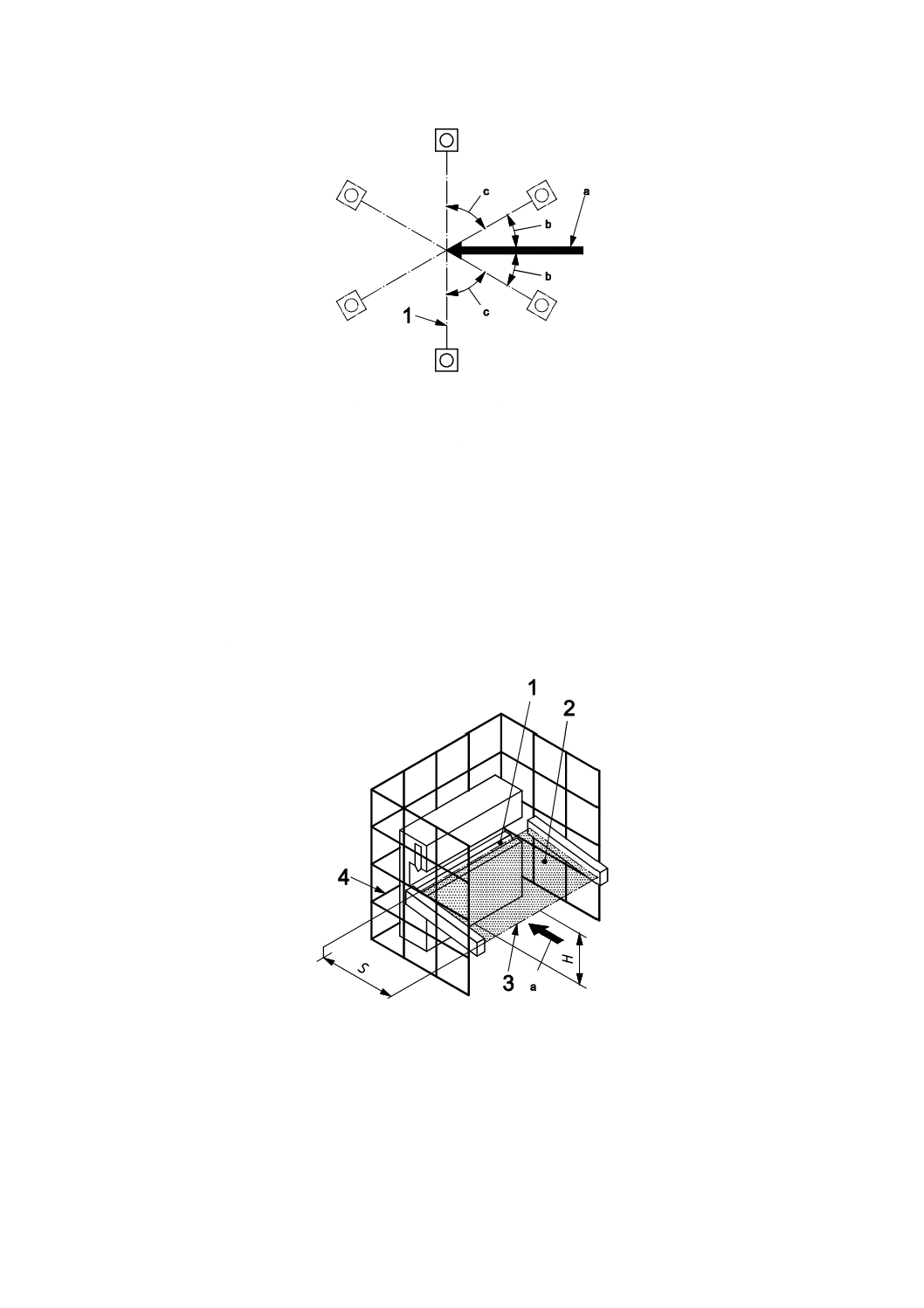
記号の説明
1
接近方向に対する様々な角度におけるESPEの位置
a
接近方向
b
平行接近とみなす角度範囲(±30°未満)
c
垂直接近とみなす角度範囲
図6−接近方向に対する様々な角度
接近が平行接近とみなせる場合(図6参照),H及びdに関係する式(8)(6.3参照)は,検出区域の危険
区域から最も離れた端の高さに適用しなければならない(図7参照)。
注記 ±30°未満の角度をもって検出区域を設けると,検出区域が基準面上方1 000 mmを超える場
合がある。この場合,式(7)を使用した計算において基準面上方1 000 mmを超える検出区域の
部分は含めない。
記号の説明
1
危険区域
2
検出区域
3
検出区域の端部
4
固定式ガード
H 検出区域の高さ(最下
部のビーム)
S
最小距離
a
接近方向
図7−検出区域の高さ(最下部のビーム)
15
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.5
検出区域の上方を越えてのう(迂)回の取扱い
6.5.1
一般要求事項
ESPEの検出区域の上方を越えてう(迂)回することによる危険区域への接近は,回避しなければなら
ない。
注記 これはガード又は他の保護方策を適用することで達成できる。
垂直に設置したESPEの検出区域の上方を越えて危険区域への接近を防ぐことができない場合,これを
考慮して安全防護物の高さ及び最小距離Sを決定しなければならない。すなわち,四肢又は人体部位の接
近速度に基づいて6.2及び6.3で計算された値と柵(保護構造物)越えに対して6.5.2,6.5.3及び6.5.4で
決定される値とを比較して,これらのうちより大きな値を最小距離Sとしなければならない。
6.5.2
追加保護構造物がない場合でのESPEの垂直検出区域を越えての到達の防止
ESPEの上方を越えてのう(迂)回を防止するための検出区域から危険区域までの最小距離S(mm)は,
式(10)を使用して計算した値以上でなければならない。
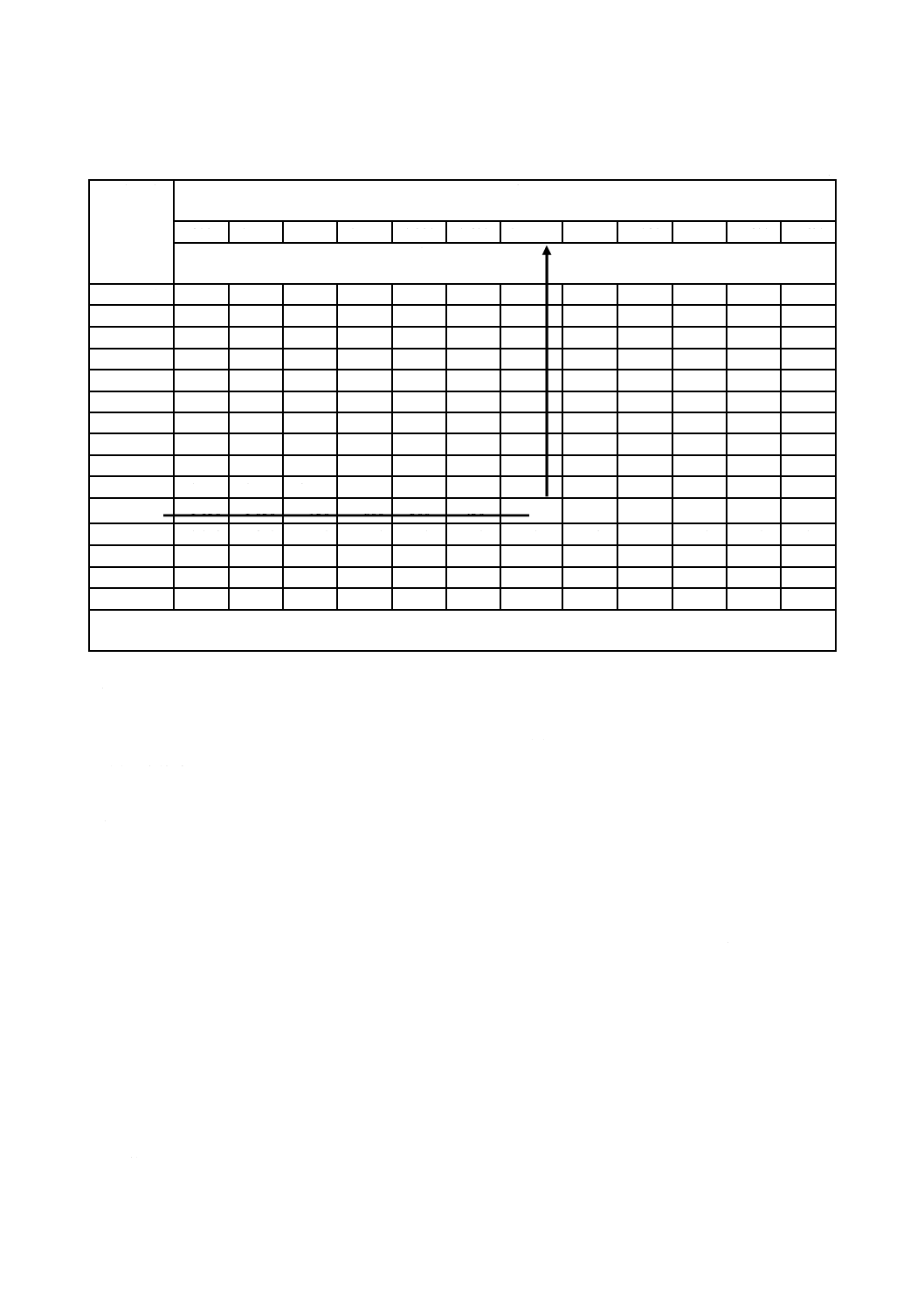
ここで,CROに対しては表1の値を適用しなければならない。CROは,表1で侵入距離として示されてお
り,人体部位(通常は手)がESPEの作動に先行して危険区域に向かって接近ができる距離に基づく。表
1はESPEの検出区域の上方を越えての到達だけを取り扱う。
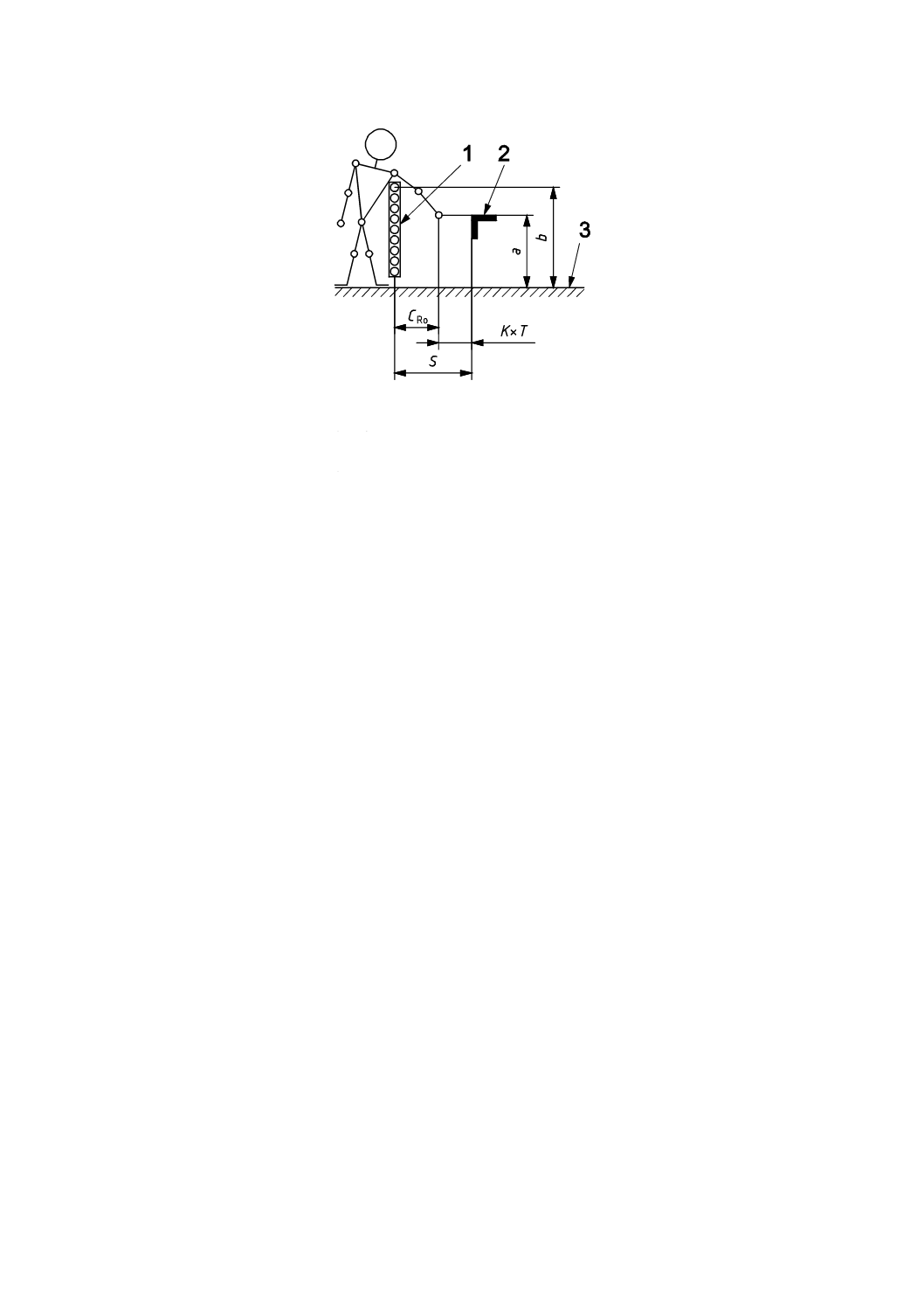
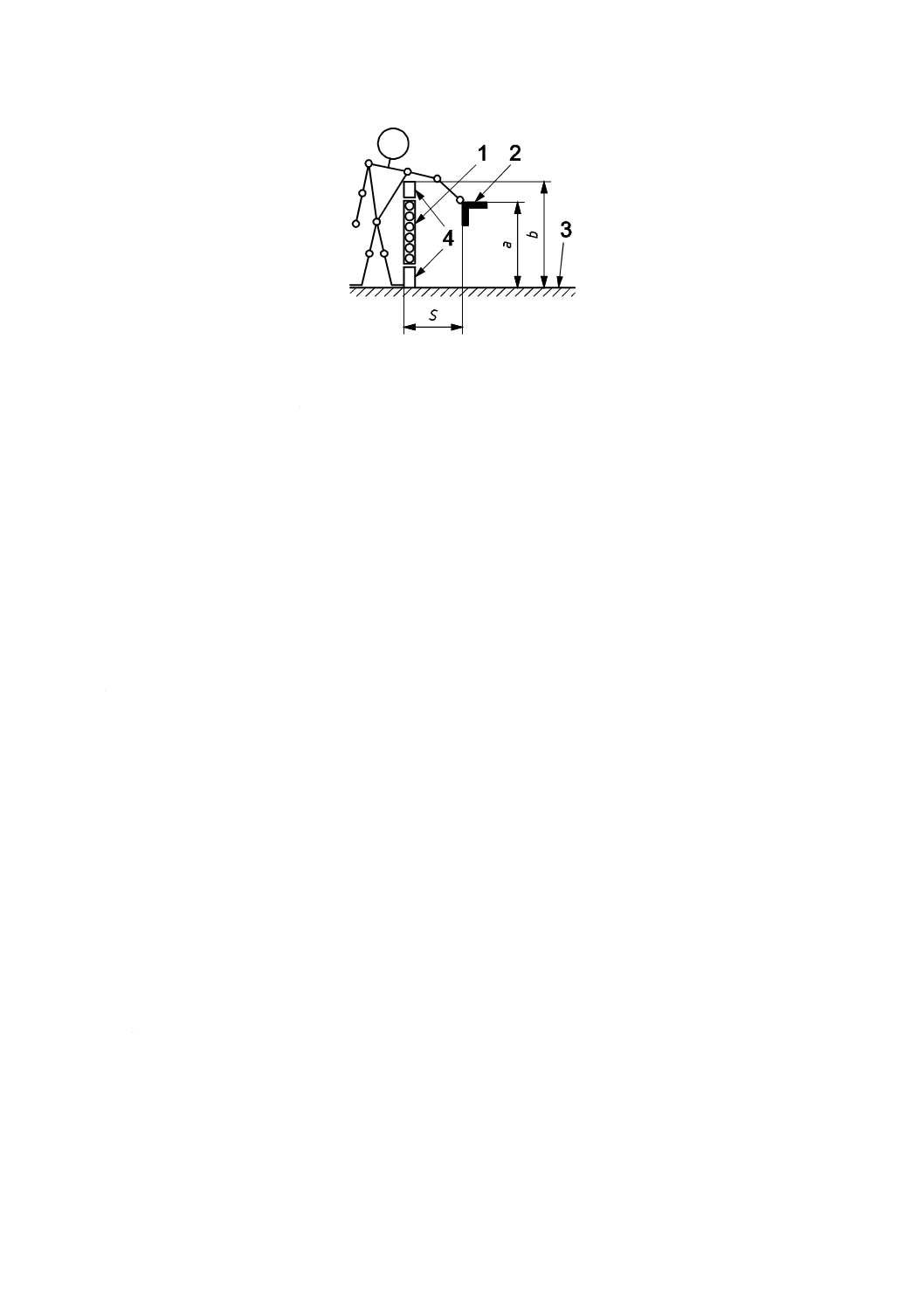
追加保護方策がない場合での垂直検出区域を越えての到達を,図8に示す。
ESPEの高さが既に決定されている場合,表1は最小距離Sを導くために使用できる。最小距離Sが既
に決定されている場合,表1はESPEの高さを導くために使用できる。
S=(K×T)+CRO ······································································· (10)
ここに,
K= 2 000 mm/s
とし,
S=2 000 T+CRO ·······································································(11)
式(11)は,500 mm以下の全ての最小距離Sに適用する。ただし,最小距離Sは,100 mm以上でなけれ
ばならない。はじめに式(11)を使用し,Sが500 mmを超える場合には,式(12)を適用できる。
S=(K×T)+CRO ······································································· (10)
ここに,
K= 1 600 mm/s
とし,
S=1 600 T+CRO ······································································ (12)
ただし,Sは500 mm以上でなければならない。
16
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1
ESPE
2
危険区域
3
基準面
a
危険区域の高さ
b
ESPEの検出区域上端の高さ
CRO 人体部位が保護装置の作動に先行して危険区域に接
近できる距離に基づいた侵入距離(表1の値参照)
S
検出区域の上方を越えての到達を考慮した最小距離
図8−ESPEの垂直検出区域を越えての到達
17
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
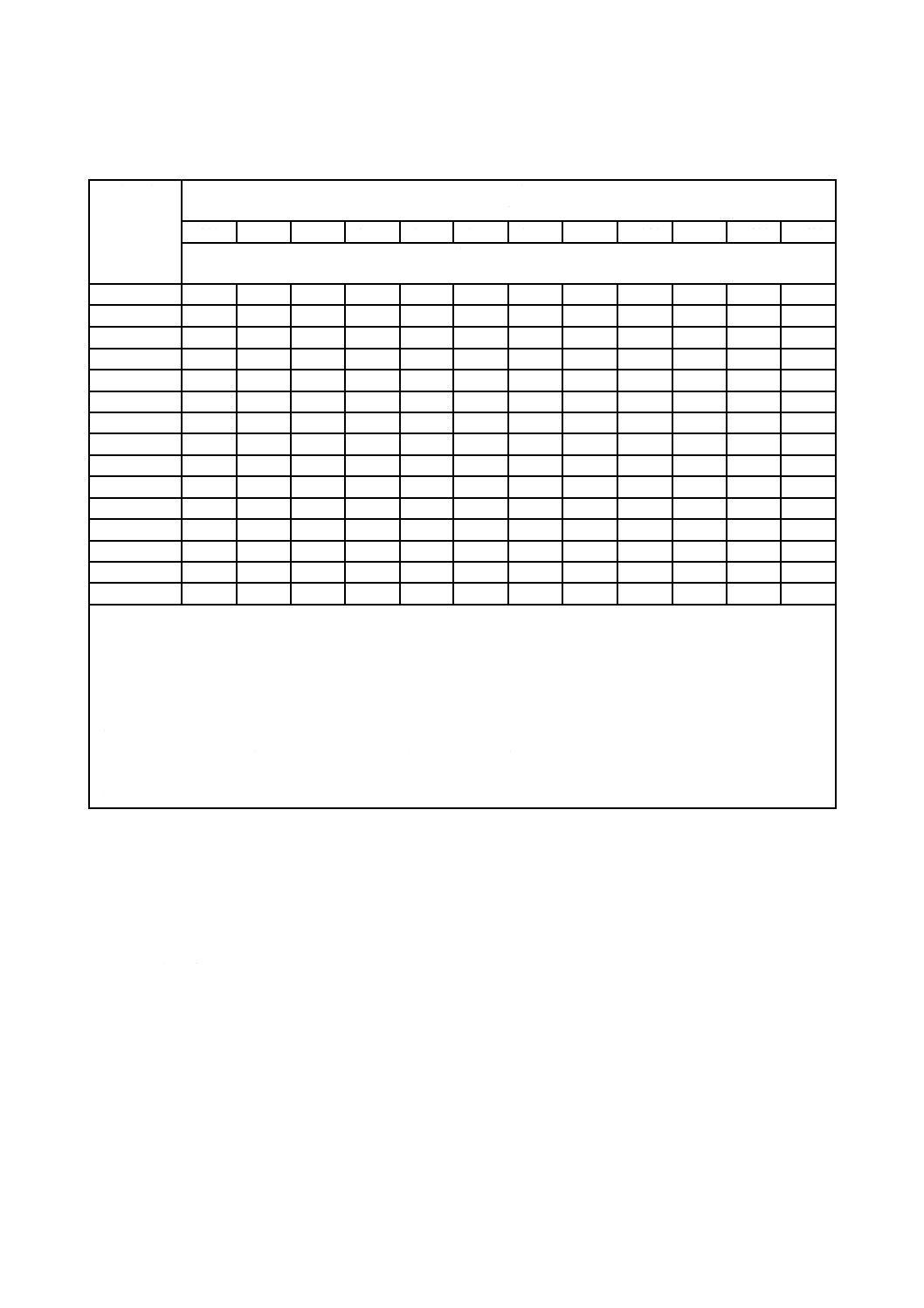
表1−ESPEの垂直検出区域を越えての到達
単位 mm
危険区域の
高さ
a
ESPEの検出区域上端の高さ
b
900
1 000
1 100
1 200
1 300
1 400
1 600
1 800
2 000
2 200
2 400
2 600
危険区域への侵入距離
CRO
2600 a)
0
0
0
0
0
0
0
0
0
0
0
0
2500
400
400
350
300
300
300
300
300
250
150
100
0
2400
550
550
550
500
450
450
400
400
300
250
100
0
2200
800
750
750
700
650
650
600
550
400
250
0
0
2000
950
950
850
850
800
750
700
550
400
0
0
0
1800
1100
1100
950
950
850
800
750
550
0
0
0
0
1600
1150
1150
1100
1000
900
850
750
450
0
0
0
0
1400
1200
1200
1100
1000
900
850
650
0
0
0
0
0
1200
1200
1200
1100
1000
850
800
0
0
0
0
0
0
1000
1200
1150
1050
950
750
700
0
0
0
0
0
0
800
1150
1050
950
800
500
450
0
0
0
0
0
0
600
1050
950
750
550
0
0
0
0
0
0
0
0
400
900
700
0
0
0
0
0
0
0
0
0
0
200
600
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
値が0の場合,最小距離Sの計算は6.2〜6.4に従って計算するのが望ましい。
注記1 う(迂)回又はまたぎに対して十分な保護を提供しないため,検出区域上端が900 mm未満の場合は含まれて
いない。
注記2 検出区域下端が基準面から300 mmを超える場合は,検出区域の下をくぐる接近に対して十分な保護を提供し
ない。
注記3 この表のデータは,Berufsgenossenschaft(BG)の研究に基づいている。[22]参照。
注記4 表1のほとんどの値はJIS B 9718の表1及び表2の値と比較すると小さくなっている。検知保護装置の検出
区域を越える場合では,保護構造物に人体部位を乗せて支えることができないために,侵入距離が短くなる
からである。
注a) 検出区域を越えての到達による危険区域への接近は,不可能である。
表1の値を決定する場合,補間してはならない。既知のa,b又はCROが表1の二つの値の間にある場合,
最小距離がより大きくなる値を使用しなければならない。
具体的な例については,附属書A参照。
6.5.3
保護構造物と組み合わせた場合でのESPEの垂直検出区域を越えての到達の防止
固定式ガードのような保護構造物を越えて危険区域に接近することが可能な場合(図9参照),最小距離
Sは,危険区域に対してJIS B 9718の4.2.2,表1(低リスク)又は表2(高リスク)で定められた水平安
全距離c(保護構造物越え到達距離)未満であってはならない。
18
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1
ESPE
2
危険区域
3
基準面
4
保護構造物(例えば,固定式ガード)
a
危険区域の高さ
b
保護構造物の上部の高さ
S
最小距離(Sは,JIS B 9718の4.2.2の表1(低リス
ク)又は表2(高リスク)の値cと同じである。)
図9−保護構造物を組み合わせたESPEの垂直検出区域を越えての到達の例
6.5.4
接近方向に対し角度をもった検出区域を越えての到達
検出区域が接近方向に対して垂直とみなされ[図5 a)及び図6参照],かつ,ESPEの検出区域を越えて
危険区域に接近することができる場合,最小距離Sは次のいずれかのうちより大きい値でなければならな
い。
a) 6.2.3.1又は6.2.4から適切な式を用いて計算した距離
b) 侵入距離Cを表1で示される検出区域を越えての到達の侵入距離CROに置き換えて,6.2.3.1又は6.2.4
から適切な式を用いて計算した距離
最小距離は,危険区域に最も近いビームを対象にして適用しなければならない。
6.6
間接接近−障害物によって制限された検出区域から危険区域への経路
6.6.1
一般要求事項
二つ以上の危険区域が存在する場所でESPEを使用する用途においては,各危険区域に対する最小距離
を計算しなければならない。
恒久的に設置された障害物が上肢による危険区域への接近を妨害する場合,最小距離は,その障害物の
周辺をう(迂)回する最短経路とすることができる(間接接近に関しては図10参照)。さらに,接近速度
は,直接接近の速度とは異なるとして,1 600 mm/sまで低減してもよい。
最小距離Sについては,全ての距離を比較して,最も大きな値を適用しなければならない。
障害物は,機械の機能設計の結果として設置されるものであって,上肢の接近速度を低減することだけ
を目的に設置してはならない。
注記 障害物は,危険源へ直接到達することを防止するハウジング,覆い,阻止装置,附属品のよう
なものであり,機械の一部である。
19
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
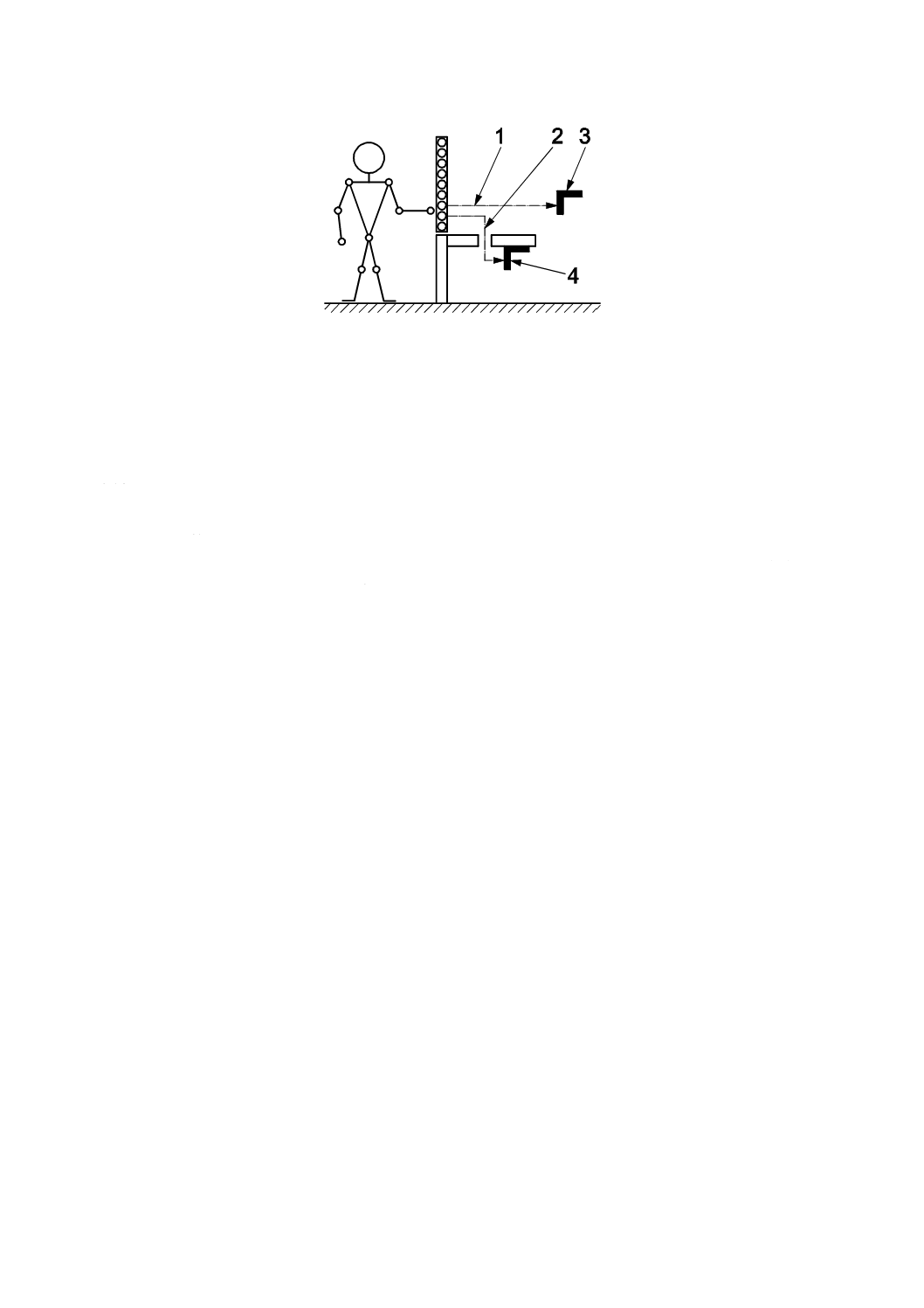
記号の説明
1
ESPE
2
障害物
3
危険区域2
4
危険区域1
図10−間接接近の例
6.6.2
間接接近における最小距離の計算
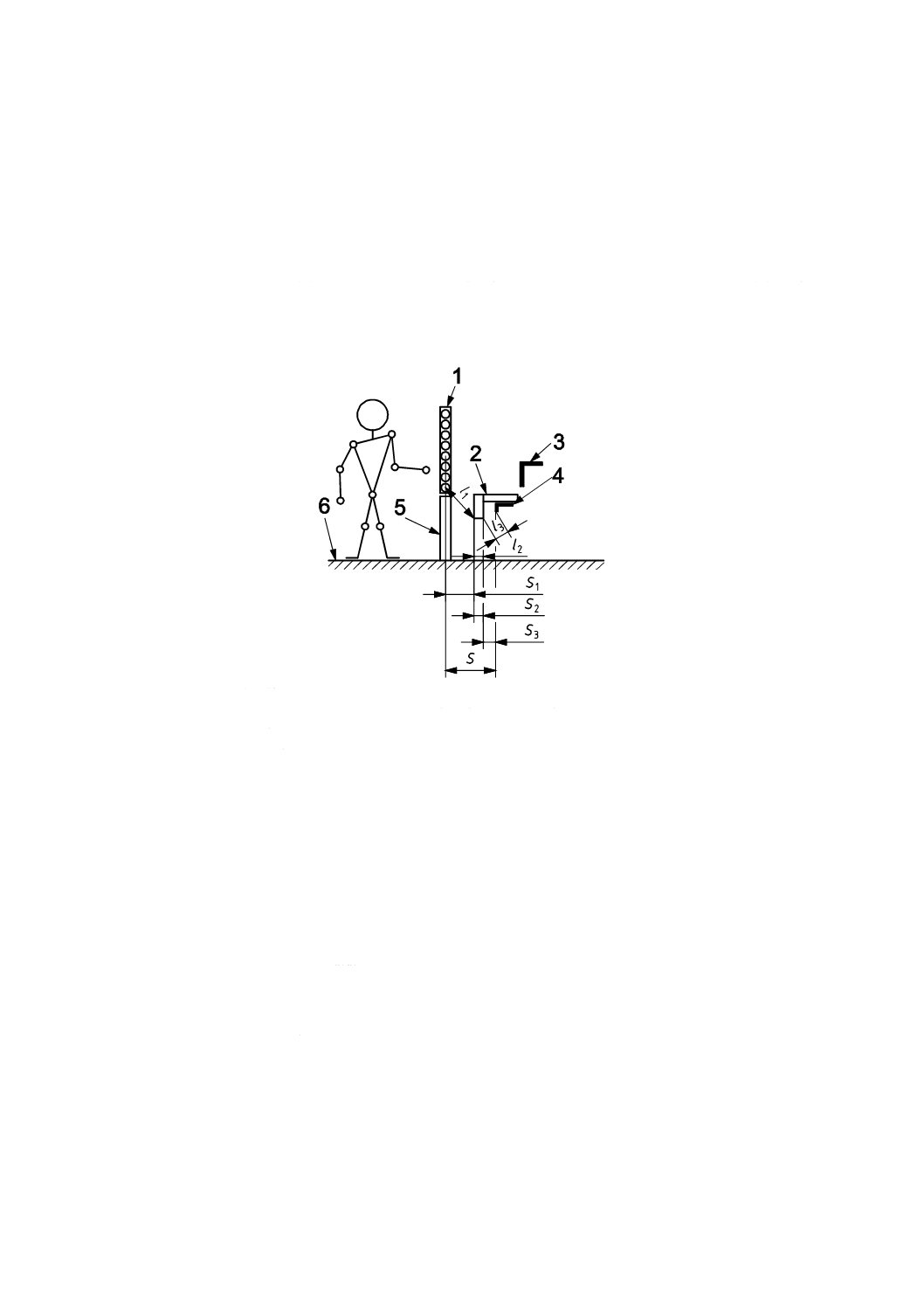
間接接近に対しては,ESPEから危険区域まで障害物のう(迂)回を考慮した実際の最小距離を式(13)
を使用して計算する。
S*=(K×T)+C=l1+l2+l3 ·························································· (13)
ここに,
S*: 障害物のう(迂)回を考慮した実際の最小距離
この式では,接近速度パラメータKには1 600 mm/sを適用しなければならない。l1,l2及びl3は検出区
域(6.2〜6.5参照)からの障害物の周囲,下方又は上方を通る最短の経路に沿って測定しなければならな
い。間接接近に対しては,最小距離S(図11参照)は,障害物のう(迂)回を考慮した実際の最小距離S*
を水平面上に投影した距離とみなされる。
最小距離Sの計算の例は,附属書Cで示される。
20
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
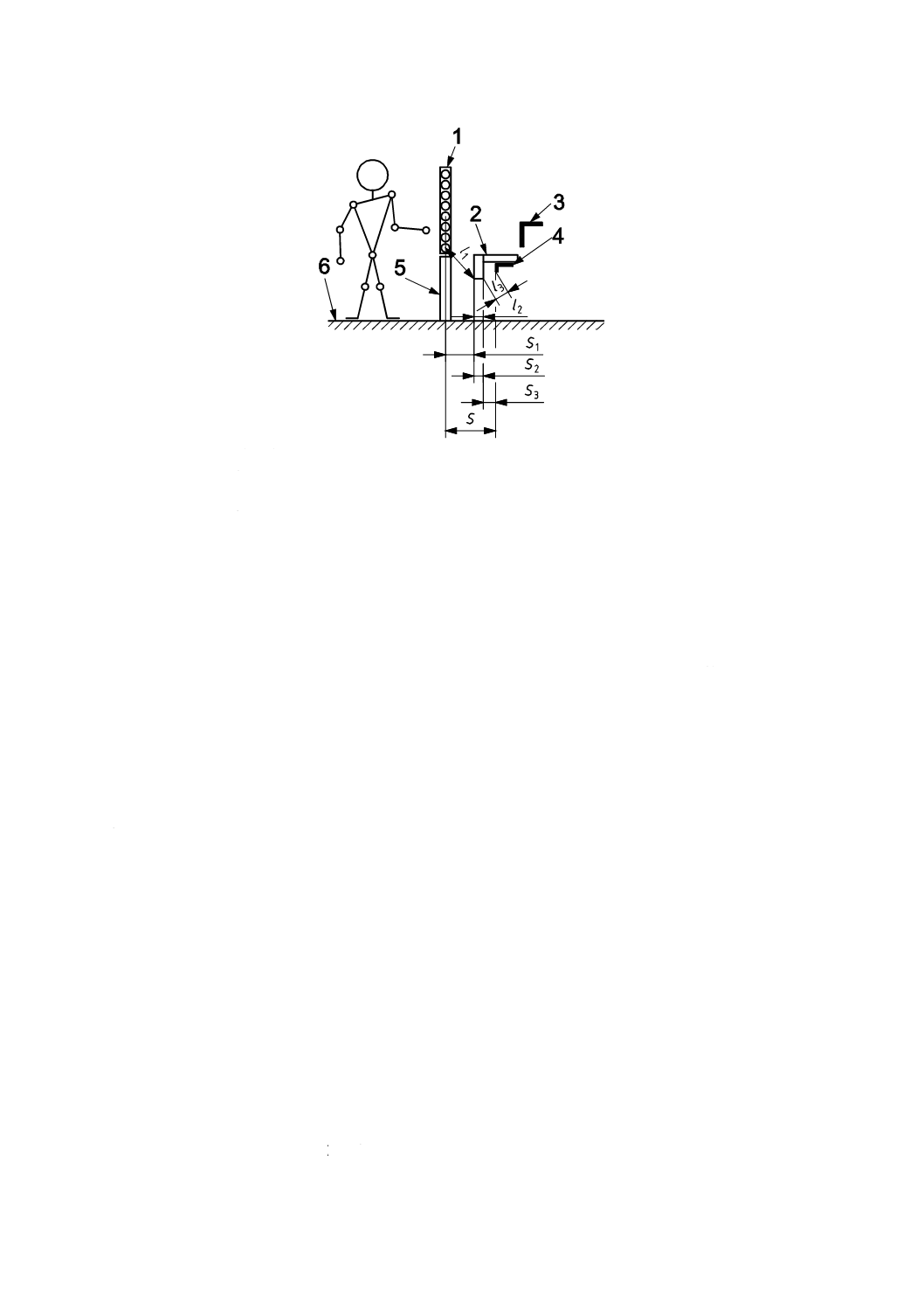
記号の説明
1
ESPE
2
障害物
3
危険区域2
4
危険区域1
5
保護構造物
6
基準面
S
危険区域から検出区域中心までの水平距離
S=S1+S2+S3
S1 水平面上にl1を投影した距離
S2 水平面上にl2を投影した距離
S3 水平面上にl3を投影した距離
S*=l1+l2+l3
l1,l2,l3 障害物をう(迂)回する危険区域への最短経路の要素
図11−障害物のう(迂)回を考慮した実際の最小距離の計算
間接接近が可能な場合,検出区域を設定するための最小距離は,上の方法によって計算できる。
注記 間接接近だけが可能で,かつ,運転頻度が頻繁でない場合,接近速度をより低くしてもよい。
例として,1 m以内に最小高さ500 mmの二つの障害物が置かれている場合に低減係数0.8が適
用可能なことが報告されている(参考文献[22]参照)。
7
圧力検知マット又はフロアの位置決めの計算方法
7.1
一般要求事項
圧力検知マット又はフロアの選択及び使用は,適切なタイプC規格,又はタイプC規格がない場合は
JIS B 9700に従う。
圧力検知マット又はフロアの幅は,少なくとも750 mmでなければならない。これは,簡単にまたいで
装置を作動させないことを防止するために必要な幅である。
注記 歩行速度において,接地するかかとから計測された2歩の95パーセンタイル値はおよそ1 900
mmである。この値を2で除し,靴の長さの5パーセンタイル値を引くと1歩の幅700 mmが
得られる。この歩幅との間に例えば50 mmの余裕を検出区域に設定しなければならないとする
と,最小幅は750 mmとなる。
圧力検知マット又はフロアに対するこの箇条で導き出される最小距離は,危険区域への接近速度が歩行
速度(1 600 mm/s)であると仮定している。
危険区域から保護装置の検出区域の端までの最小距離Sは,式(14)を使用して計算しなければならない。
S=1 600 T+1 200 ···································································· (14)
21
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2
ステップの設置
保護装置を階段又はプラットフォームなど基準面よりも高い位置に設置する場合,最小距離Sは,設置
高さhに0.4を乗じた分低減してもよい。すなわち,検出区域から危険区域までの最小距離Sは,式(15)
を使用して計算してよい。
S=1 600 T+(1 200−0.4h) ·························································· (15)
8
両手操作制御装置
最も近いアクチュエータから危険区域までの最小距離Sは,式(16)を使用して計算しなければならない。
S=(K×T)+C ··········································································· (2)
ここに,
K= 1 600 mm/s
C= 250 mm
したがって,
S=1 600 T+250······································································· (16)
例えば,適切な覆いによって,手又は手の一部が危険区域に到達する可能性がアクチュエータを操作し
ている間は十分低下する場合,Sが100 mm未満にならない範囲でCを0 mmまで短縮してもよい。
注記 JIS B 9712は,制御器で意図する操作の無効化を防止するための覆いに関して参考となる情報
を示している。ただし,JIS B 9712に示された方策が,危険区域に手又は手の一部が到達する
ことを防止するための全ての用途に対して適切とはいえない。
9
施錠なしインターロックガード
施錠なしインターロックガードを開けたとき,危険な機械の動きが停止する前に危険区域に到達しない
ことを確実にするために,最小距離Sを決定しなければならない。
危険区域から施錠なしインターロックガードの開口部の最も危険区域に近い端までの最小距離は,式(2)
を用いて計算しなければならない。
S=(K×T)+C ··········································································· (2)
ここに,
K= 1 600 mm/s
C: JIS B 9718の表4又は表5から決定される安全距離。これは,
停止信号が生成される前にカードの開口部から危険区域に指
又は手を通すことが可能である場合に考慮する。
場合によっては,対象としている人体部位が通過できる広さまでガードが開くのに要する時間t3だけT
を低減してもよい。ただし,JIS B 9718の表4及び表5で示される開口部寸法eを考慮しなければならな
い。計算は,危険区域に到達可能な最小の人体部位から始めなければならない。
ガードが開く時間t3がインターロックガードの特性に依存している場合,その値を計算又は試験から決
定し,使用しなければならない。
巻上式インターロックドアを含む動力式インターロックガードに対しては,t3は式(17)を用いて計算でき
る。
v
e
t=
3
··················································································· (17)
ここに,
e: 開口寸法(mm)
v: 動力式インターロックガードの開放動作速度(mm/s)
注記 最小距離が非常に大きくなる場合,施錠式インターロックガードの使用が推奨される(JIS B
9710参照)。
22
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
使用事例
A.1 一般
この附属書では,この規格の使用例を示す。
ここで示す例では,機械のタイプC規格又はリスクアセスメントによって,ここで選択する安全防護物
の使用が認められていると仮定する。
最小距離Sの算出は,次の3ステップで構成される。
a) 第1ステップ:検出区域を通過して到達する場合の最小距離SRT
b) 第2ステップ:検出区域を越えて到達する場合の最小距離SRO
c) 第3ステップ:Sを決定するためのSRTとSROとの比較
注記 幾つかの用途においては,安全防護物を越える場合以外の他のう(迂)回を考慮する必要があ
る。
A.2 例1
機械の停止時間は,60 ms(t2)とする。ESPEとして,検出能力14 mm(d),応答時間30 ms(t1)の検
出性能をもつ能動的光電保護装置(AOPD)を垂直に設置して使用する。この例では,ESPEの検出区域を
越えて到達することは可能ではないと仮定する。このため,第2ステップ及び第3ステップは不要である。
式(3)によって,
S=2 000 T+8(d−14)
ここに,
S: 危険区域から検出区域までの最小距離(mm)
T: 総合システム停止性能。60+30=90 ms=0.09 s
d= 14 mm
よって,
S=2 000×0.09+8(14−14)
S=180 mm
A.3 例2
例1と同じ機械を仮定するが,センサの検出能力は30 mmとする。
式(3)によって,
S=2 000 T+8(d−14)
ここに,
S: 危険区域から検出区域までの最小距離(mm)
T: 総合システム停止性能。60+30=90 ms=0.09 s
d= 30 mm
よって,
S=2 000×0.09+8(30−14)
S=180+128
S=308 mm
23
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4 例3
垂直に設置したESPEを仮定し,最小距離Sを算出した後,これに基づいて,検出区域を越える経路で
の到達に対してもリスク低減効果を確保できる検出区域上端の高さbを決定する。
機械の停止時間を制御システムの応答時間を含めて250 ms(t2)とする。ESPEとして,検出能力30 mm
(d),応答時間30 ms(t1)の検出性能をもつAOPDを垂直に設置して使用する。基準面からの危険区域の
高さは800 mm(a)とし,AOPDの検出区域の高さは,200 mmから有効になるとする。
a) 第1ステップ
ESPEの検出区域を通過する場合に対する最小距離SRTを算出する。
式(3)によって,
SRT=(K×T)+CRT=2 000 T+8(d−14)
ここに, SRT: 通過の場合に対する危険区域から検出区域までの最小距離
(mm)
T: 総合システム停止性能。250+30=280 ms=0.28 s
d= 30 mm
したがって,
SRT=2 000×0.28+8(30−14)
SRT=688 mm
SRT>500 mmなので,式(4)を適用する。
SRT=1 600 T+8(d−14)
したがって,
SRT=1 600×0.28+8(30−14)
SRT=448+128
SRT=576 mm
b) 第2ステップ
1) 次を決定する。
− 危険区域までの侵入距離CRO
− 検出区域を越える場合のESPEの最小高さb
式(2)によって,
S=(K×T)+C
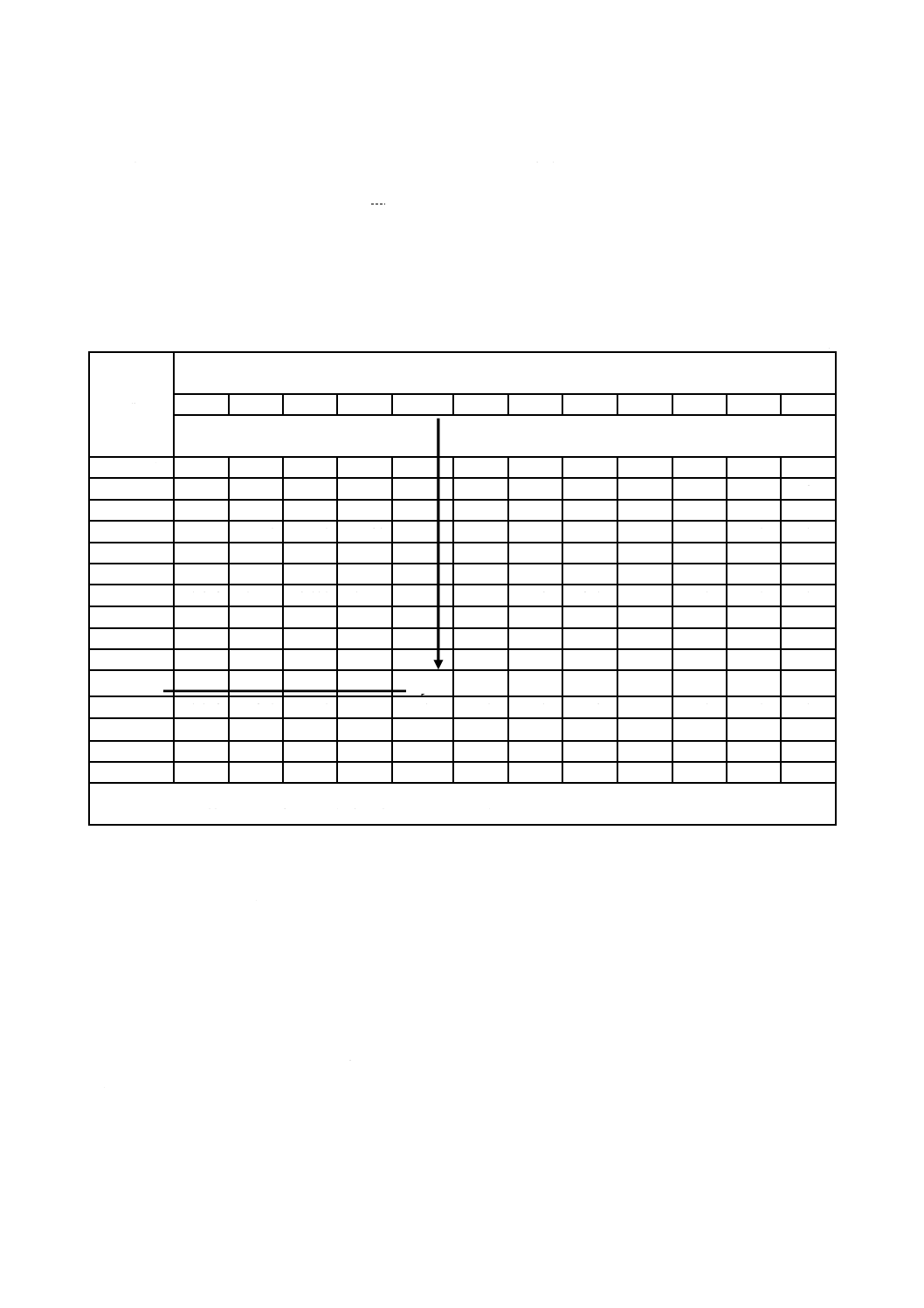
ここで,一旦SRO=SRTとおき,CRO=CRT=128 mmと仮定する。
表A.1で,a=800 mmの行(①参照)に記載の値の中で,128 mmに最も近い値は,CRO=0 mm
(②参照)である。
注記 中間値の取扱い方は,JIS B 9718の附属書A参照。
2) そこで改めてCRO=0 mmと設定し,表A.1からESPEに必要な検出区域上端の高さbを決定すると,
b=1 600 mmとなる(③参照)。
c) 第3ステップ
高さb=1 600 mmでのCROは0 mmであるから,SROはSRTより小さくなる。したがって,最小距離
SにはSRTを使用する。
S=SRT=576 mm
24
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−ESPEの垂直検出区域を越えての到達
単位 mm
危険区域
の高さ
a
ESPEの検出区域上端の高さ
b
900
1 000
1 100
1 200
1 300
1 400
1 600③
1 800
2 000
2 200
2 400
2 600
危険区域への侵入距離
CRO
2600 a)
0
0
0
0
0
0
0
0
0
0
0
0
2500
400
400
350
300
300
300
300
300
250
150
100
0
2400
550
550
550
500
450
450
400
400
300
250
100
0
2200
800
750
750
700
650
650
600
550
400
250
0
0
2000
950
950
850
850
800
750
700
550
400
0
0
0
1800
1 100
1 100
950
950
850
800
750
550
0
0
0
0
1600
1 150
1 150
1 100
1 000
900
850
750
450
0
0
0
0
1400
1 200
1 200
1 100
1 000
900
850
650
0
0
0
0
0
1200
1 200
1 200
1 100
1 000
850
800
0
0
0
0
0
0
1000
1 200
1 150
1 050
950
750
700
0
0
0
0
0
0
800①
1 150
1 050
950
800
500
450
0②
0
0
0
0
0
600
1 050
950
750
550
0
0
0
0
0
0
0
0
400
900
700
0
0
0
0
0
0
0
0
0
0
200
600
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
注記 追加情報として表1の注記を参照する。
注a) この高さの危険区域に検出区域を越える経路で到達することは不可能である。
A.5 例4
検出区域上端の高さbが1 340 mmの垂直に設置されたESPEの検出区域に対する最小距離Sを算出する。
機械の停止時間を制御システムの応答時間を含めて250 ms(t2)とする。ESPEとして,検出能力30 mm
(d),応答時間30 ms(t1)の検出性能をもつAOPDを垂直に設置して使用する。基準面からの危険区域の
高さaを650 mmとする。AOPDの検出区域の高さは,200 mm〜1 340 mm(b)とする。
a) 第1ステップ
ESPEの検出区域を通過する場合に対する最小距離SRTを算出する。
式(3)によって,
SRT=(K×T)+CRT=2 000 T+8(d−14)
ここに, SRT: 危険区域から検出区域までの最小距離(mm)
T: 総合システム停止性能。250+30=280 ms=0.28 s
d= 30 mm
したがって,
SRT=2 000×0.28+8(30−14)
SRT=688 mm
SRT>500 mmなので,式(4)を適用する。
SRT=1 600 T+8(d−14)
ここに, SRT= 1 600×0.28+8(30−14)
SRT= 576 mm
b) 第2ステップ
25
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.2の値を決める場合,補間することはできない。表A.2において,a=650 mmに対し,より安
全な値は,a=800 mmであり,b=1 340 mmに対し,より安全な値は,b=1 300 mmである。
注記 中間値の取扱い方は,JIS B 9718の附属書A参照。
ESPEの検出区域を越えての到達に対する最小距離SROを決定する。
1) 表A.2でa=800 mm(①参照)及びb=1 300 mm(②参照)のとき,検出区域を越えての到達に対
する侵入距離はCRO=500 mm(③参照)である。
表A.2−ESPEの垂直検出区域を越えての到達
単位 mm
危険区域
の高さ
a
ESPEの検出区域上端の高さ
b
900
1 000
1 100
1 200
1 300②
1 400
1 600
1 800
2 000
2 200
2 400
2 600
危険区域への侵入距離
CRO
2600 a)
0
0
0
0
0
0
0
0
0
0
0
0
2500
400
400
350
300
300
300
300
300
250
150
100
0
2400
550
550
550
500
450
450
400
400
300
250
100
0
2200
800
750
750
700
650
650
600
550
400
250
0
0
2000
950
950
850
850
800
750
700
550
400
0
0
0
1800
1 100
1 100
950
950
850
800
750
550
0
0
0
0
1600
1 150
1 150
1 100
1 000
900
850
750
450
0
0
0
0
1400
1 200
1 200
1 100
1 000
900
850
650
0
0
0
0
0
1200
1 200
1 200
1 100
1 000
850
800
0
0
0
0
0
0
1000
1 200
1 150
1 050
950
750
700
0
0
0
0
0
0
800①
1 150
1 050
950
800
500③
450
0
0
0
0
0
0
600
1 050
950
750
550
0
0
0
0
0
0
0
0
400
900
700
0
0
0
0
0
0
0
0
0
0
200
600
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
注記 追加情報は,表1の注記参照。
注a) 検知装置を越えての到達による危険区域への接近は不可能である。
2) 式(10)によって,
S=SRO=(K×T)+CRO
パラメータを代入すると,
SRO=2 000×0.28+500
SRO>500 mmであるので,式(12)を適用する。
S=1 600 T+CRO
よって,
SRO=1 600×0.28+500
SRO=448+500=948 mm
c) 第3ステップ
SRTとSROとを比較して最小距離Sを決定する。
SRT<SROであるので,危険区域までの最小距離は,S=SRO=948 mmとなる。
26
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.6 例5
固定式ガードを組み合わせた垂直設置のESPEの検出区域に対する最小距離Sを算出する(図9参照)。
機械の停止時間を制御システムの応答時間を含めて250 ms(t2)とする。ESPEとして,AOPDは検出能
力30 mm(d),応答時間30 ms(t1)の装置で,垂直に設置するとする。基準面からの危険区域の高さは
800 mm(a),AOPDの検出区域の下端は200 mm,ガードの高さは1 600 mm(b)とする。
a) 第1ステップ
ESPEの検出区域を通過する場合に対する最小距離SRTを算出する。
式(3)によって,
SRT=2 000 T+8(d−14)
ここに, SRT: 危険区域から検出区域までの最小距離(mm)
T: 総合システム停止性能。250+30=280 ms=0.28 s
d= 30 mm
したがって,
SRT=2 000×0.28+8(30−14)
SRT=688 mm
SRT>500 mmなので,式(4)を適用する。
SRT=1 600 T+8(d−14)
したがって,
SRT=1 600×0.28+8(30−14)
SRT=576 mm
b) 第2ステップ
固定式ガードを越えての到達に対する最小距離SROを決定する。
a=800 mm及びb=1 600 mmでJIS B 9718の表2を使用すると,
危険区域を越える最小距離として,SRO=c=600 mm
c) 第3ステップ
SRTとSROとを比較して最小距離Sを決定する。
SRO>SRTであるので,危険区域までの最小距離は,S=SRO=600 mmとなる。
A.7 異なる保護装置を比較した例
A.7.1 例6
機械の危険区域への不用意な接近を光電保護装置で検出することを考える。危険区域の高さは600 mm
を仮定する。
リスクアセスメントによって,多光軸の光電保護装置の使用が適切であるということが示されたとし,
附属書Eに従い3光軸の装置を選択するとする。
機械の停止時間は300 ms(t2),安全防護物の応答時間は35 ms(t1)であるとする。
表E.1から,光軸高さは床からそれぞれ300 mm,700 mm及び1 100 mmを選択した。
a) 第1ステップ
最小距離は式(5)によって,
SRT=1 600 T+850
ここに,
T= 335 ms=0.335 s
27
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
したがって,
SRT=1 600×0.335+850
SRT=536+850
SRT=1 386 mm
b) 第2ステップ
最上段の光軸高さが1 100 mmなので,これを越えての到達を考慮する。
表A.1から,CROの値は750 mmであるので,SROは次のようになる。
SRO=1 600×0.335+750
SRO=536+750
SRO=1 286 mm
c) 第3ステップ
SRO<SRTであるので,危険区域までの最小距離は,S=SRT=1 386 mmとなる。
A.7.2 例7
例6と同じ機械を仮定するが,3光軸の光電保護装置の代わりに圧力検知マット又はフロアに設置する
光電保護装置を使用する場合を考える。
a) 第1ステップ
最小距離は式(14)又は式(7)によって,
S=1 600 T+1 200
ここに,
S= 1 600×0.335+1 200
S= 536+1 200
S= 1 736 mm
b) 第2ステップ及び第3ステップ
例6と同様に,表A.1から導いた上方からの到達に対する値を比較すると,1 736 mmが最小距離S
として選択される。
A.7.3 例8
例6と同じ機械を仮定するが,両手操作制御装置を設置する場合を考える。
式(16)によって,
S=1 600 T+250
ここに,
S= 1 600×0.335+250
S= 536+250
S= 786 mm
両手操作制御装置に適切な覆いを具備した場合には,Sは536 mmまで低減可能である(箇条8参照)。
28
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
危険な機械機能の終止
この規格の規定に従って安全防護物の最小距離Sを算出する場合,システムの停止性能は決定的なパラ
メータとなる。この停止時間は,危険な機械機能(通常は動作)が人体に危害を及ぼさない状態になった
時点,すなわち,身体的傷害又は健康障害の可能性が排除された時点に大きく左右される。
仮に,機械が完全に停止する前にこの状態(すなわち,危険な機械機能の終止)が達成されるとしても,
それがいつの時点か決定することが不可能な場合,完全に動作が止まるまでの時間を考察する必要がある。
終止の時点を決定する上で考慮に入れる必要がある要因は多数あるが,参考となる情報は極めて限られ
ている。考えられる例を次に示すが,対象とする用途にここに掲げた規格が直接関連するとは限らない。
a) 人体に加わる力
b) 影響を受ける人体部位
c) 機械部分の形状[例えば,鋭利な角,せん(尖)部]
d) 材質(例えば,柔らかいゴム,変形する材料)
e) 動作速度
f)
押しつぶしの危険源によるリスク
人体に加わる力の影響を評価する目的に利用できるタイプB規格はない。
注記1 力及び運動エネルギに関する情報は,JIS B 9716の5.2.5.2参照。
注記2 人体部位の押しつぶしを回避するための最小隙間は,JIS B 9711で示される。
注記3 JIS B 9700の附属書Bの危険状態の例のリストも参照。
この規格の規定に従って最小距離Sを算出するとき,危険な機械機能が終止した時点と機械が完全に停
止した時点との関係は,例えば次の例のように,明確に定義するのが望ましい。
− 頭部を押しつぶすリスクがある場合を除いて,押しつぶしの危険源に対して,危険な機械機能の終止
は,機械が完全に停止する位置から2 mm手前の時点としてよい。すなわち,この2 mm手前の時点
をもって,総合システム停止性能を減らしてよい。
注記4 2 mmまでの圧縮は,頭部以外の人体部位に対して危害を及ぼさないとみなせる。
29
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
間接接近の場合の使用事例
この附属書は,障害物をう(迂)回して到達する場合の最小距離Sの算出例を示す。
機械の停止時間を250 ms(t2)とし,ESPEとして検出能力30 mm(d)及び応答時間30 ms(t1)の能動
的光電保護装置(AOPD)を垂直に設置して使用すると仮定する。
危険区域1へ到達するには障害物をう(迂)回する必要があるとする(図C.1参照)。
記号の説明
1
ESPE
2
障害物
3
危険区域2
4
危険区域1
5
保護構造物
6
基準面
S
危険区域から検出区域中心までの水平距離
S=S1+S2+S3
S1 水平面上にl1を投影した距離
S2 水平面上にl2を投影した距離
S3 水平面上にl3を投影した距離
S*=l1+l2+l3
l1,l2,l3 障害物をう(迂)回する危険区域への最短経路の要素
図C.1−間接接触による全危険区域到達の算出のための図
この例では,l1及びl3は設計段階で既に決定されていると仮定する。
l1=100 mm
l3=200 mm
式(4)及び6.2.3.1から,
S*=1 600 T+8(d−14)
ここに,
S*= (K×T)+C=l1+l2+l3[式(13)から]:危険区域1から検出区域
までのう(迂)回を考慮した上での実距離(mm)。
T: 総合システム停止性能。前記の仮定から,250+30=280 ms=
0.28 s
d= 30 mm
したがって,
S*=1 600×0.28+8(30−14)
30
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
S*=576 mm
S1はl1から,S3はl3から各々導かれる。ここでは次のようになったと仮定する。
S1=60 mm
S3=75 mm
これによって,
l2=S*−(l1+l3)=576 mm−300 mm=276 mm
S2は水平な経路要素l2と同じ値(S2=l2=276 mm)であるので,危険区域1までのESPEの水平距離は,
S=S1+S2+S3=60 mm+276 mm+75 mm
S=411 mm
となる。
31
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
総合システム停止性能の測定及び算出
D.1 停止信号を与えるときの条件
総合システム停止性能を実測する際,保護装置の作動を模擬した信号(例えば,停止信号の入力)は,
停止時間が最長となる動作の瞬間,位置,状況で機械に入力されるのが望ましく,機械の停止時間に対す
る(現実的な範囲での)ワーストケースを想定するのが望ましい。ワーストケースを決定する場合,工具
や金型の重量,使用環境温度,バルブの切替時間及びコンポーネントの経年劣化といった要因を考慮する
のが望ましい。多くの場合,ワーストケースでは,機械が最大速度で運転されていることを想定する。
この規格に従って最小距離を算出する際,危険区域にある可動部の速度を設定された(例えば,プログ
ラムされた)速度とすることができる。障害条件下での速度を考慮する必要はない。
注記1 危険状態に人が近づく場合に障害条件下での異常速度を考慮するとは,二つの独立した事象
(すなわち,人が危険点に腕を伸ばすことと,故障によって速度又は動作範囲に影響が出る
こと)が同時に起こることを想定していることを意味するが,これはほとんど起こり得ない。
注記2 例えば,機械の制限された移動範囲又は動きを設計する場合で,人が障害条件下で衝突する
可能性がある場合,及び人が接近はしないが存在し,かつ,単一障害によって危険な状況に
至るような場合,障害条件下においての速度での算出が必要である。ただし,このようなこ
とに対する考慮は,この規格では取り扱っておらず,タイプC規格で定められる事項である。
D.2 総合システム停止性能の決定方法
最小距離の算出のために総合システム停止性能を実測で求める場合,少なくとも10回は測定を実施する
必要がある。
正規分布を仮定すれば,出現可能な値の99.7 %を網羅する統計的手法は,平均値±3×標準偏差を算出
することである。
最長の測定結果又は平均値+3×標準偏差のいずれか長いほうを,最小距離の算出で用いるのが望ましい。
D.3 総合システム停止性能を得る際の注意事項
測定結果の平均値を最小距離の算出に用いないほうがよい。なぜならば,半分の停止はより長い総合シ
ステム停止性能をもつことになるからである。停止時間が監視される用途に限り,平均値を用いても差し
支えない。
明らかに測定上の誤りによると判断できる場合を除き,測定結果から外れ値を除外することは推奨され
ない。
D.4 試験報告書を作成する際の配慮事項
試験報告書には,測定した機械を同定すること及び算出した最小距離を記録することに加え,ワースト
ケース(とした状況)を決定した際の仮定及び機械の安全状態を定義した際の前提をまとめた一覧を含め
ることが望ましい。
適切な試験報告書には,次の情報を含めることが望ましい。
32
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 測定する機械
b) 対象とする安全防護物
c) 使用する測定装置
d) 測定装置の検査方法(校正を含む。)
e) 測定を実施する人又は法人
f)
測定日
g) 使用した測定方法
h) 測定及び算出のための仮定
i)
機械又は測定計画に関する追加情報
j)
算出した総合システム停止性能
k) 算出した最小距離(式に代入した値を含む。)
33
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
光軸数及び基準面からの高さ
多光軸の光電保護装置の使用において,表E.1に示す2,3及び4本の光軸高さは,適切なリスク低減と
実用上の制約との最良の妥協として認められている値である。全ての用途で多光軸の光電保護装置の使用
が許容されているわけではなく,危険区域への接近を防止するために更に保護方策が要求される場合もあ
る。リスクアセスメントで許容された場合に限り,最も低い光軸高さを400 mmにしてもよい[6.2.2 a)参
照]。
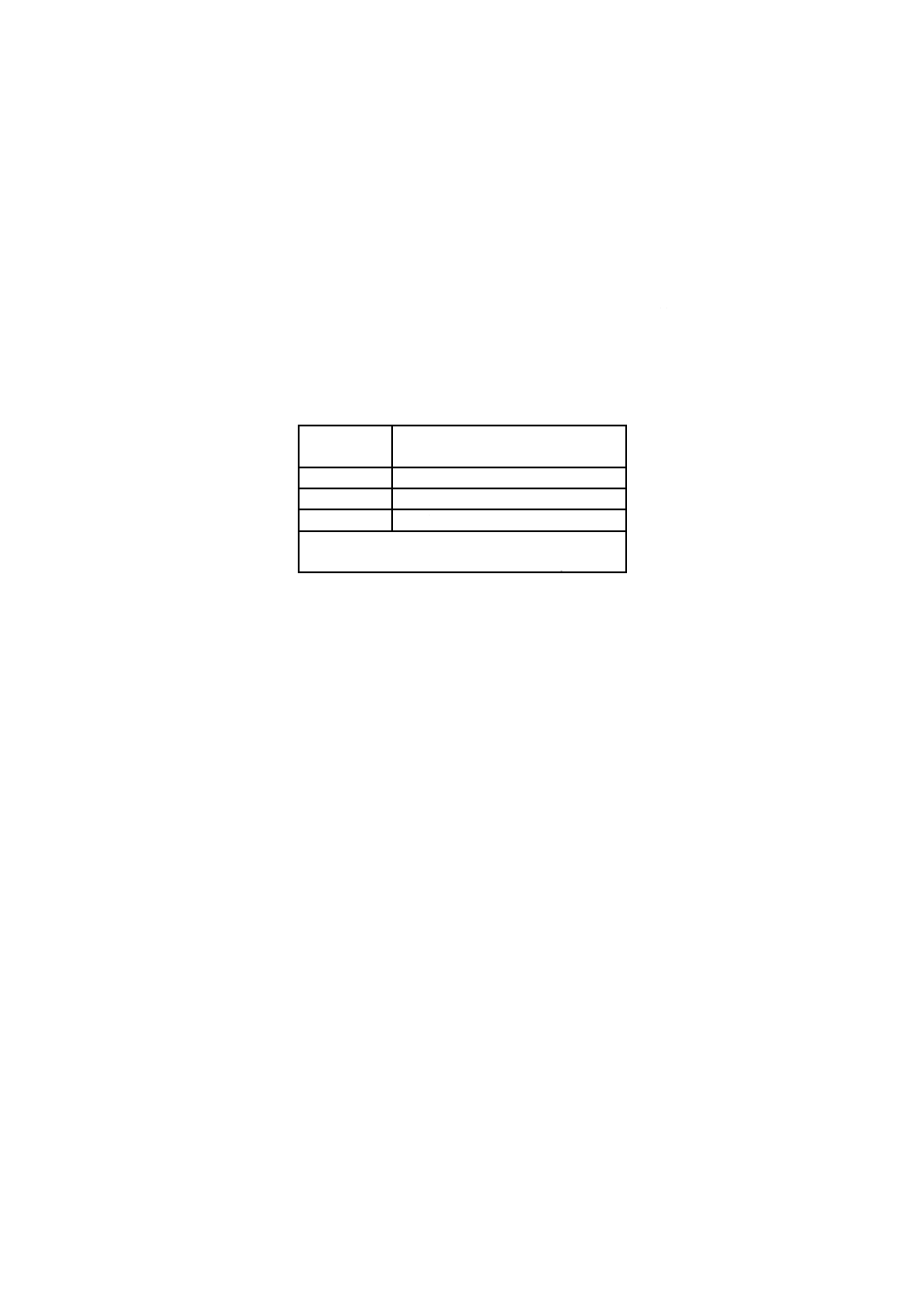
表E.1−光軸数及び基準面からの高さ
光軸数
基準面(例えば床)からの高さ
mm
4
300,600,900,1 200
3
300,700,1 100
2
400 a),900
注a) リスクアセスメントで許容された場合に限
り,400 mmを採用できる[6.2.2 a)参照]。
34
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1]
JIS B 9704-1 機械類の安全性−電気的検知保護設備−第1部:一般要求事項及び試験
注記 対応国際規格:IEC 61496-1,Safety of machinery−Electro-sensitive protective equipment−Part 1:
General requirements and tests(IDT)
[2]
JIS B 9704-2 機械類の安全性−電気的検知保護設備−第2部:能動的光電保護装置を使う設備に対
する要求事項
注記 対応国際規格:IEC 61496-2,Safety of machinery−Electro-sensitive protective equipment−Part 2:
Particular requirements for equipment using active opto-electronic protective devices (AOPDs)
(IDT)
[3]
JIS B 9704-3 機械類の安全性−電気的検知保護設備−第3部:拡散反射形能動的光電保護装置に対
する要求事項
注記 対応国際規格:IEC 61496-3,Safety of machinery−Electro-sensitive protective equipment−Part 3:
Particular requirements for Active Opto-electronic Protective Devices responsive to Diffuse
Reflection (AOPDDR)(IDT)
[4]
JIS B 9705-1 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
注記 対応国際規格:ISO 13849-1,Safety of machinery−Safety-related parts of control systems−Part 1:
General principles for design(IDT)
[5]
JIS B 9710 機械類の安全性−ガードと共同するインタロック装置−設計及び選択のための原則
注記 対応国際規格:ISO 14119,Safety of machinery−Interlocking devices associated with guards−
Principles for design and selection(IDT)
[6]
JIS B 9711 機械類の安全性−人体部位が押しつぶされることを回避するための最小すきま
注記 対応国際規格:ISO 13854,Safety of machinery−Minimum gaps to avoid crushing of parts of the
human body(IDT)
[7]
JIS B 9712 機械類の安全性−両手操作制御装置−機能的側面及び設計原則
注記 対応国際規格:ISO 13851,Safety of machinery−Two-hand control devices−Functional aspects
and design principles(IDT)
[8]
JIS B 9716 機械類の安全性−ガード−固定式及び可動式ガードの設計及び製作のための一般要求
事項
注記 対応国際規格:ISO 14120,Safety of machinery−Guards−General requirements for the design and
construction of fixed and movable guards(IDT)
[9]
JIS B 9717-1 機械類の安全性−圧力検知保護装置−第1部:圧力検知マット及び圧力検知フロアの
設計及び試験のための一般原則
注記 対応国際規格:ISO 13856-1,Safety of machinery−Pressure-sensitive protective devices−Part 1:
General principles for design and testing of pressure-sensitive mats and pressure-sensitive floors
(IDT)
[10] JIS B 9961 機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能安全
注記 対応国際規格:IEC 62061,Safety of machinery−Functional safety of safety-related electrical,
electronic and programmable electronic control systems(IDT)
35
B 9715:2013 (ISO 13855:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
[11] TR B 0025 機械類の安全性−電気的検知保護設備−第4部:映像利用保護装置(VBPD)を用いる
設備に対する要求事項
注記 対応国際規格:IEC/TR 61496-4,Safety of machinery−Electro-sensitive protective equipment−
Part 4: Particular requirements for equipment using vision based protective devices (VBPD)(IDT)
[12] TS B 62046 機械類の安全性−人を検出する保護設備の使用基準
注記 対応国際規格:IEC/TS 62046,Safety of machinery−Application of protective equipment to detect
the presence of persons(IDT)
[13] ISO 11161,Safety of machinery−Integrated manufacturing systems−Basic requirements
[14] ISO 13849-2,Safety of machinery−Safety-related parts of control systems−Part 2: Validation
[15] ISO 13856-2,Safety of machinery−Pressure-sensitive protective devices−Part 2: General principles for the
design and testing of pressure-sensitive edges and pressure-sensitive bars
[16] ISO 13856-3,Safety of machinery−Pressure-sensitive protective devices−Part 3: General principles for the
design and testing of pressure-sensitive bumpers, plates, wires and similar devices
[17] ISO 15534-1,Ergonomic design for the safety of machinery−Part 1: Principles for determining the
dimensions required for openings for whole-body access into machinery
[18] ISO 15534-2,Ergonomic design for the safety of machinery−Part 2: Principles for determining the
dimensions required for access openings
[19] ISO 15534-3,Ergonomic design for the safety of machinery−Part 3: Anthropometric data
[20] EN 12203,Footwear, leather and imitation leather goods manufacturing machines−Shoe and leather presses
−Safety requirements
[21] EN 12453,Industrial, commercial and garage doors and gates−Safety in use of power operated doors−
Requirements
[22] “Reaching over ESPE and indirect approach to hazardous zones”; research by German Berufsgenossenschaft
Metall Nord Süd, Fachausschuss Maschinenbau Fertigungssysteme und Stahlbau (FA MFS), W.Th.
Römheldstr.15; D-55130 Mainz; DOK 612.1:2008 http://www.bg-metall.de/