B 9710:2019 (ISO 14119:2013)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 ガードと共同するインターロック装置との作動原理及び代表的な形式 ········································ 7
4.1 一般 ···························································································································· 7
4.2 ガード施錠なしガードインターロックの原理 ······································································· 9
4.3 ガード施錠付きガードインターロックの原理 ······································································· 9
5 ガード施錠式又は施錠なしインターロック装置の設計及び設置のための要求事項 ························ 12
5.1 一般 ··························································································································· 12
5.2 位置スイッチの準備及び締結 ·························································································· 12
5.3 アクチュエータの準備及び締結 ······················································································· 13
5.4 インターロック装置の作動モード····················································································· 13
5.5 制御システムのインタフェース ······················································································· 14
5.6 機械的ストッパ ············································································································ 14
5.7 ガード施錠装置に対する追加要求事項··············································································· 14
6 インターロック装置の選定 ································································································ 19
6.1 一般要求事項 ··············································································································· 19
6.2 ガード施錠装置の選択 ··································································································· 19
6.3 環境条件の考慮事項 ······································································································ 21
7 インターロック装置の無効化の可能性を最小化する設計 ························································· 22
7.1 一般 ··························································································································· 22
7.2 インターロック装置の無効化の可能性を最小にする追加方策 ················································· 23
8 制御に関する要求事項 ······································································································ 27
8.1 一般要求事項 ··············································································································· 27
8.2 障害の査定 ·················································································································· 27
8.3 共通原因故障の防止 ······································································································ 28
8.4 ガード施錠装置の解錠機能 ····························································································· 30
8.5 障害の除外 ·················································································································· 30
8.6 インターロック装置の論理的接続····················································································· 31
8.7 電気的及び環境的条件 ··································································································· 31
9 使用上の情報 ·················································································································· 32
9.1 一般要求事項 ··············································································································· 32
9.2 インターロック装置の製造業者による使用上の情報 ····························································· 32
9.3 機械の製造業者によって示される使用上の情報 ··································································· 33
B 9710:2019 (ISO 14119:2013) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
附属書A(参考)タイプ1インターロック装置−例 ··································································· 34
附属書B(参考)タイプ2インターロック装置−例 ···································································· 39
附属書C(参考)タイプ3インターロック装置−例 ··································································· 44
附属書D(参考)タイプ4インターロック装置−例 ··································································· 45
附属書E(参考)その他のインターロック装置の例 ···································································· 47
附属書F(参考)ガード施錠装置の例 ······················································································ 48
附属書G(参考)安全機能として使用されるインターロック装置の適用例 ····································· 54
附属書H(参考)インターロック装置の無効化動機 ··································································· 61
附属書I(参考)最大静的動作力 ···························································································· 64
B 9710:2019 (ISO 14119:2013)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
機械工業連合会(JMF)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工
業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が改正した日本工業規格である。これによっ
て,JIS B 9710:2006は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9710:2019
(ISO 14119:2013)
機械類の安全性−ガードと共同するインターロック
装置−設計及び選択のための原則
Safety of machinery-Interlocking devices associated with guards-
Principles for design and selection
序文
この規格は,2013年に第2版として発行されたISO 14119を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
また,この規格はJIS B 9700のまえがきで記載されているタイプB規格である。
1
適用範囲
この規格は,使用するエネルギーは問わず,ガードと共同するインターロック装置の設計及び選択のた
めの原則について規定する。この規格は,インターロック装置を作動させるガードの一部もその範囲とす
る。
注記1 JIS B 9716は,第一に機械的危険源から人を保護するためのガードの設計及び選択のための
一般要求事項について規定している。機械を停止及び不作動にするためのインターロック装
置からの信号処理は,JIS B 9705-1又はJIS B 9961で規定されている。
この規格は,トラップド・キーシステムのための特定要求事項の全てを規定するものではない。
この規格は,インターロック装置の合理的に予見可能な方法による無効化を最小にする方策についても
規定する。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 14119:2013,Safety of machinery−Interlocking devices associated with guards−Principles for
design and selection(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
注記 対応国際規格:ISO 12100,Safety of machinery−General principles for design−Risk assessment
and risk reduction
JIS B 9705-1 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
2
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 対応国際規格:ISO 13849-1,Safety of machinery−Safety-related parts of control systems−Part 1:
General principles for design
JIS B 9705-2,機械類の安全性−制御システムの安全関連部−第2部:妥当性確認
注記 対応国際規格:ISO 13849-2,Safety of machinery−Safety-related parts of control systems−Part 2:
Validation
JIS B 9960-1,機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:IEC 60204-1,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements
JIS B 9961,機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能安全
注記 対応国際規格:IEC 62061,Safety of machinery−Functional safety of safety-related electrical,
electronic and programmable electronic control systems
IEC 60947-5-3,Low-voltage switchgear and controlgear−Part 5-3: Control circuit devices and switching
elements−Requirements for proximity devices with defined behaviour under fault conditions (PDDB)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 9700によるほか,次による。
3.1
インターロック装置,インターロック(interlocking device,interlock)
特定の条件(一般的にはガードが閉じていない場合)の下で危険な機械機能の運転を防ぐことを目的と
した機械装置,電気装置又はその他の装置。
(出典:JIS B 9700の3.28.1)。
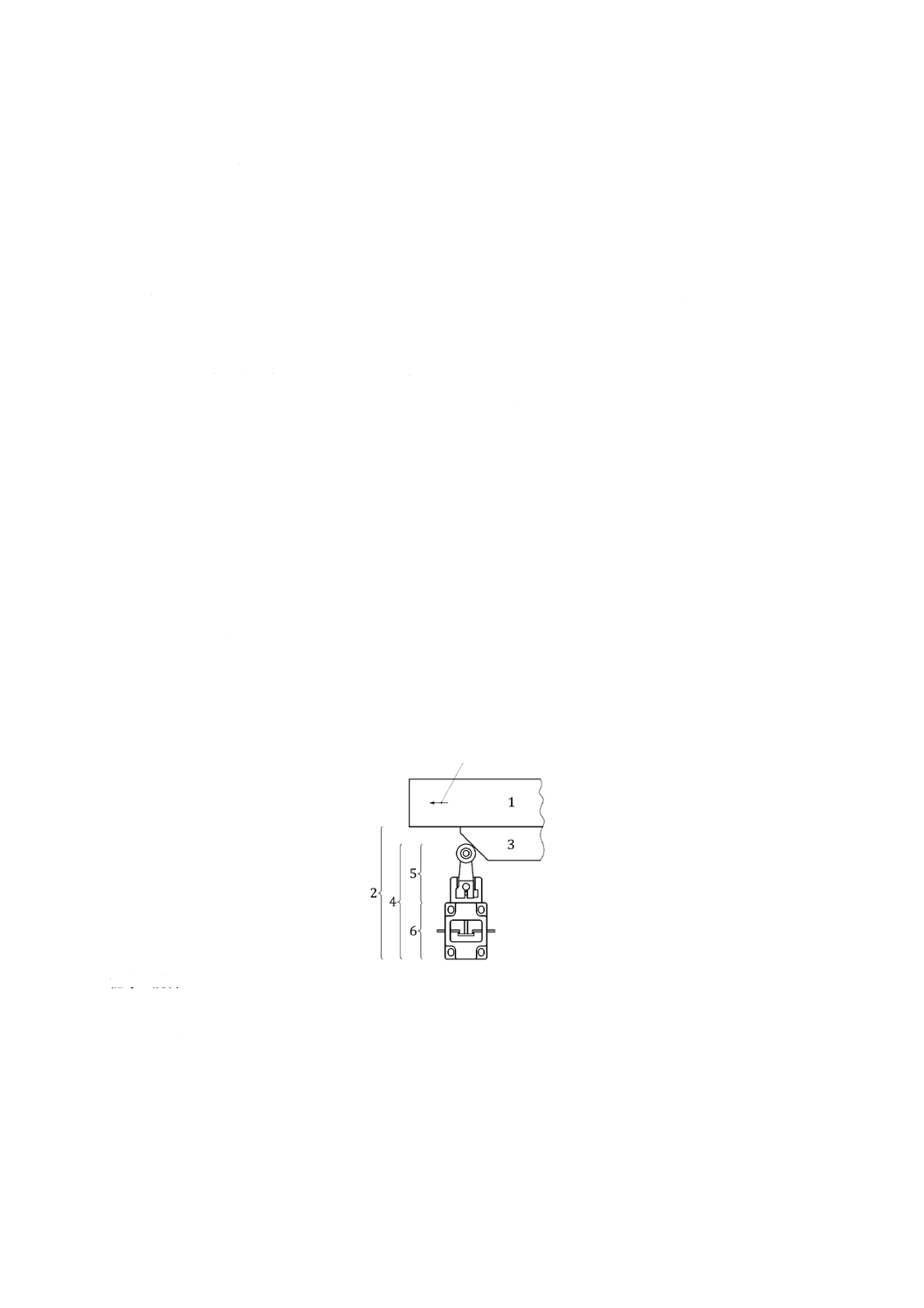
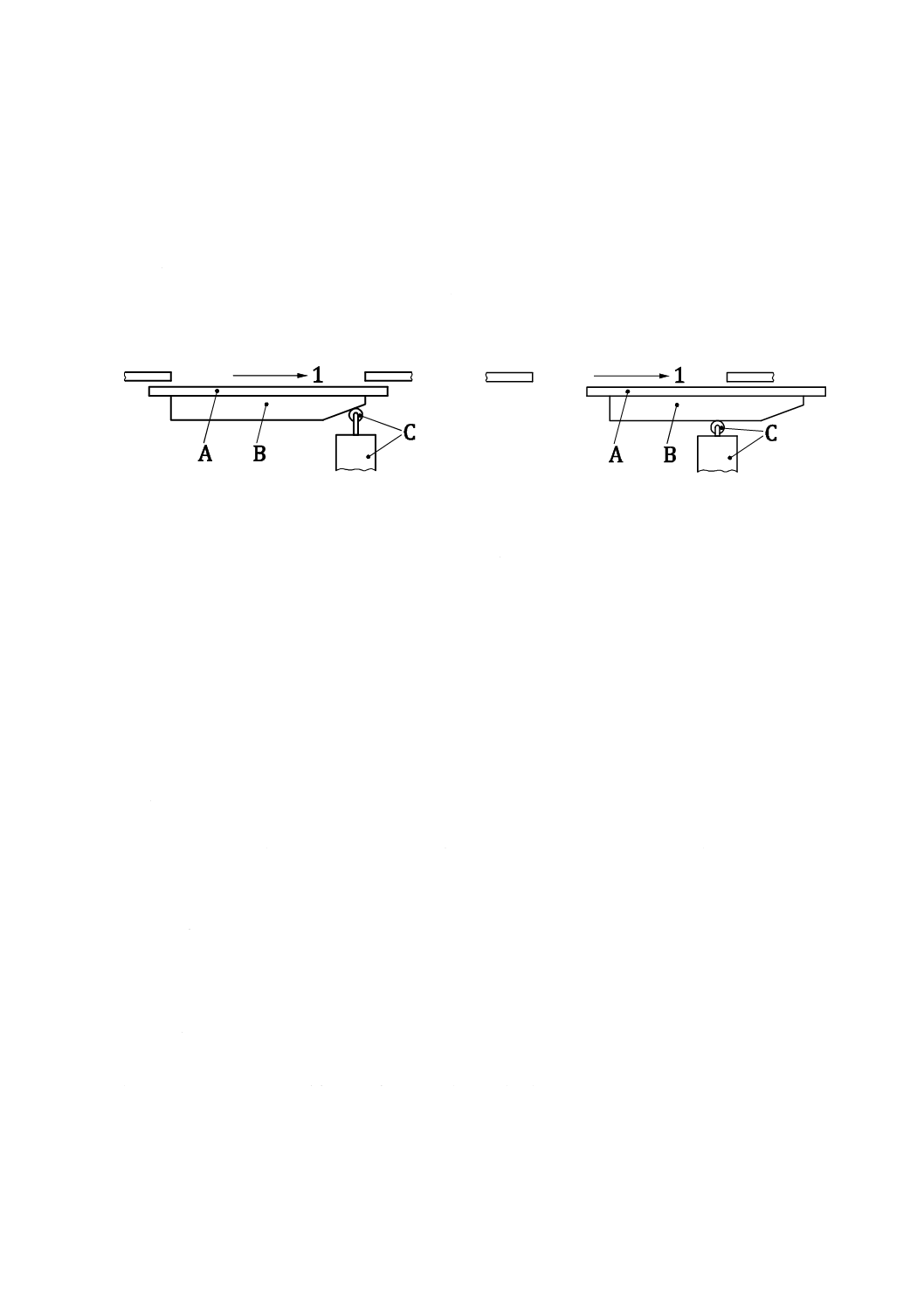
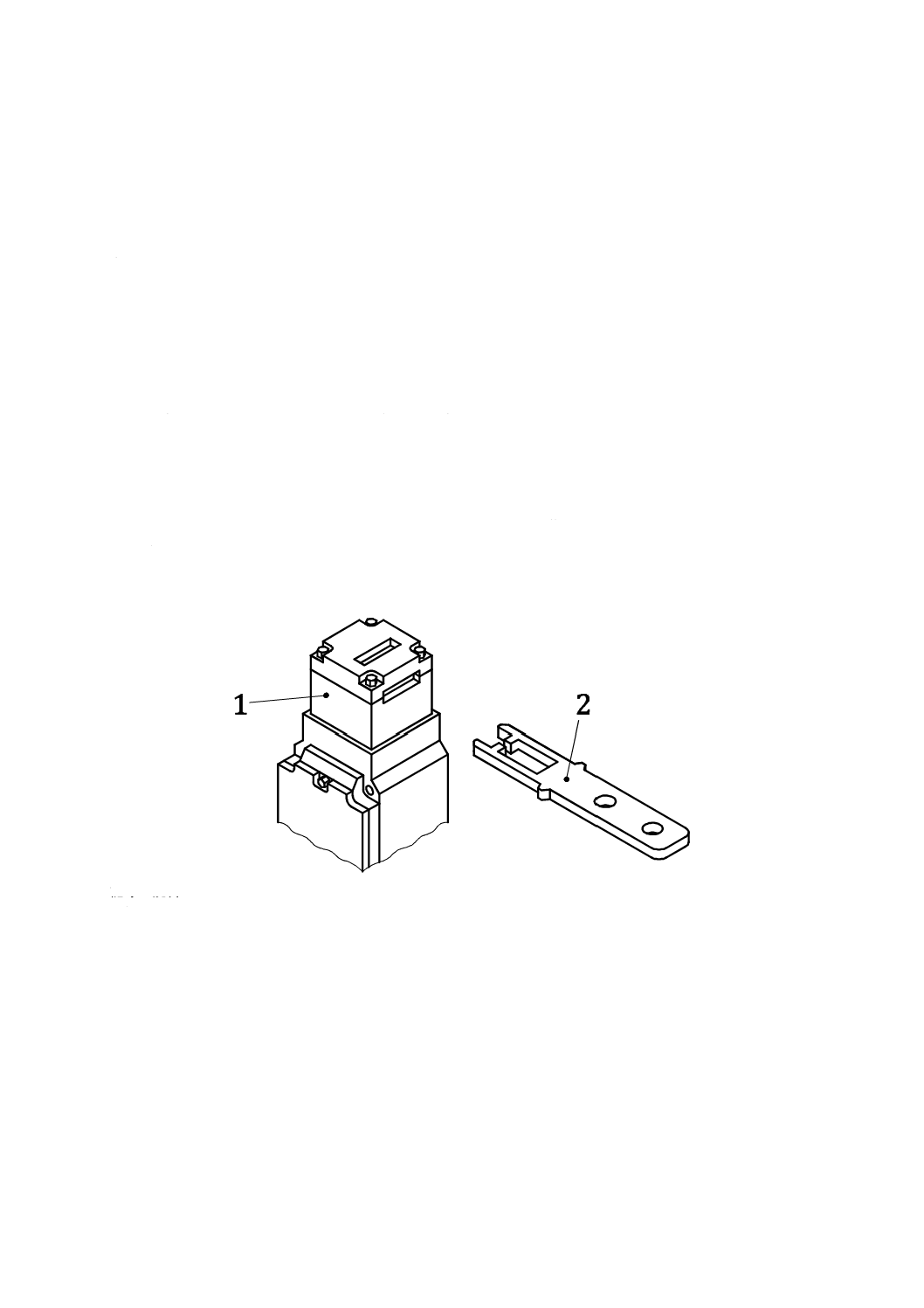
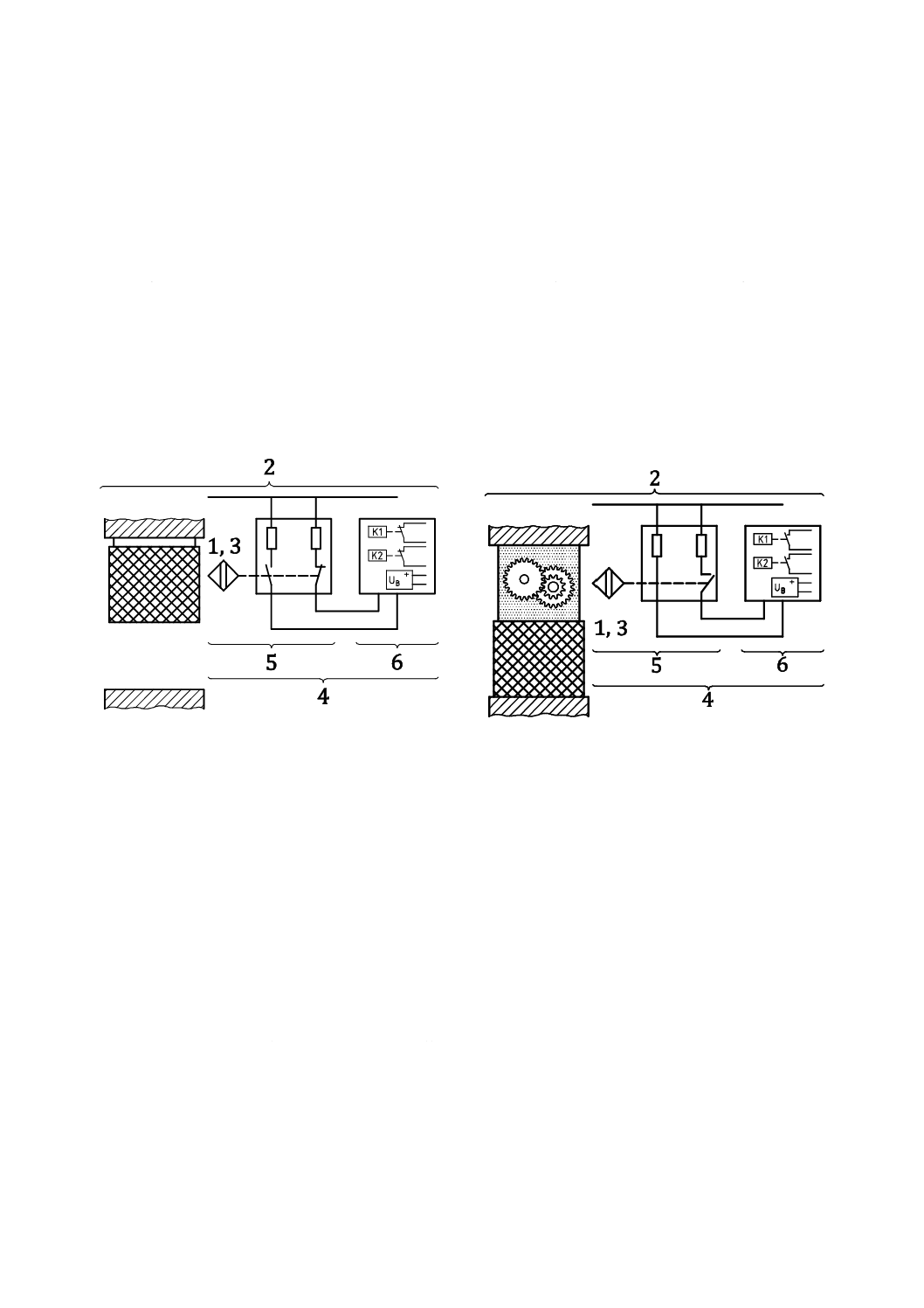
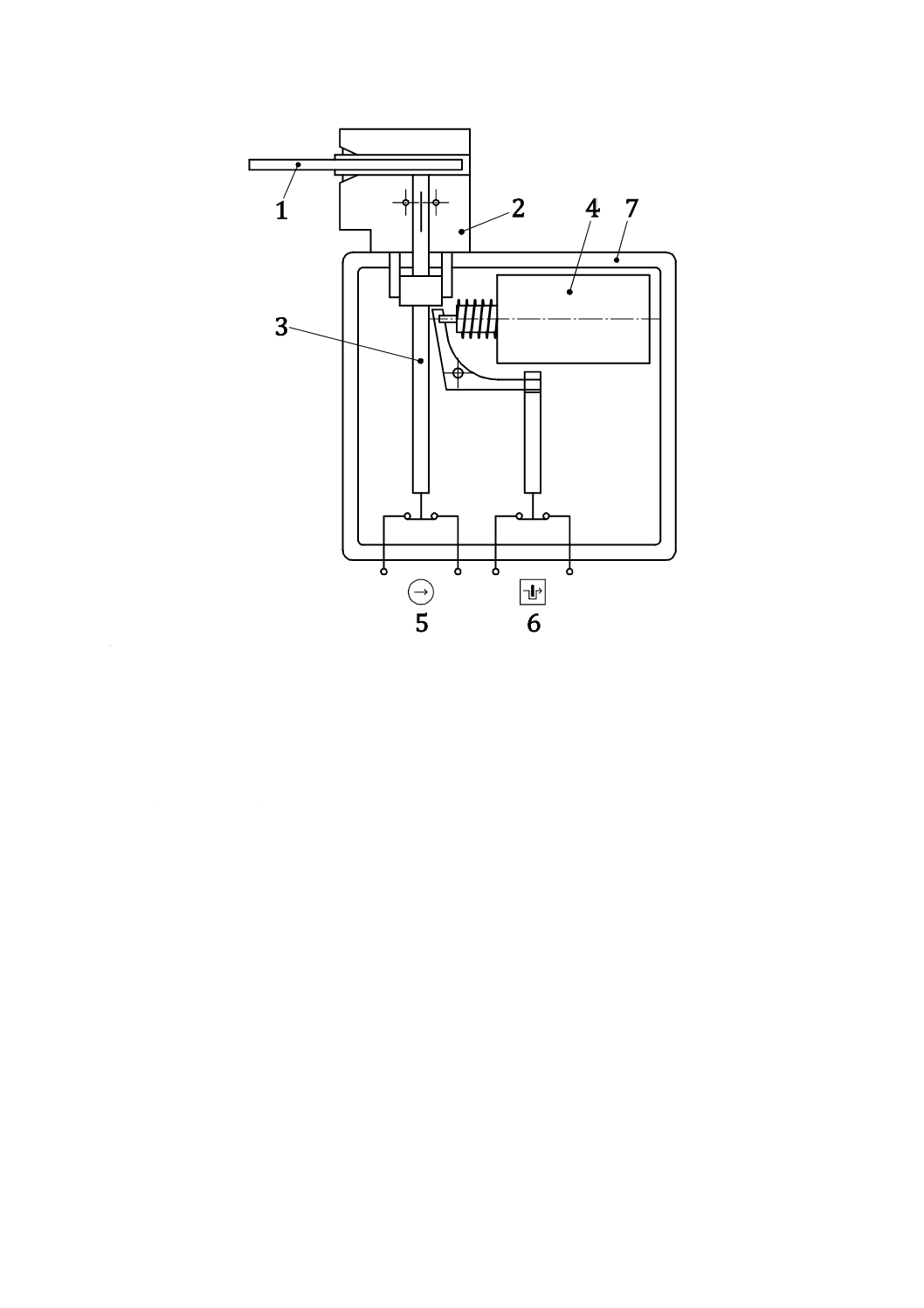
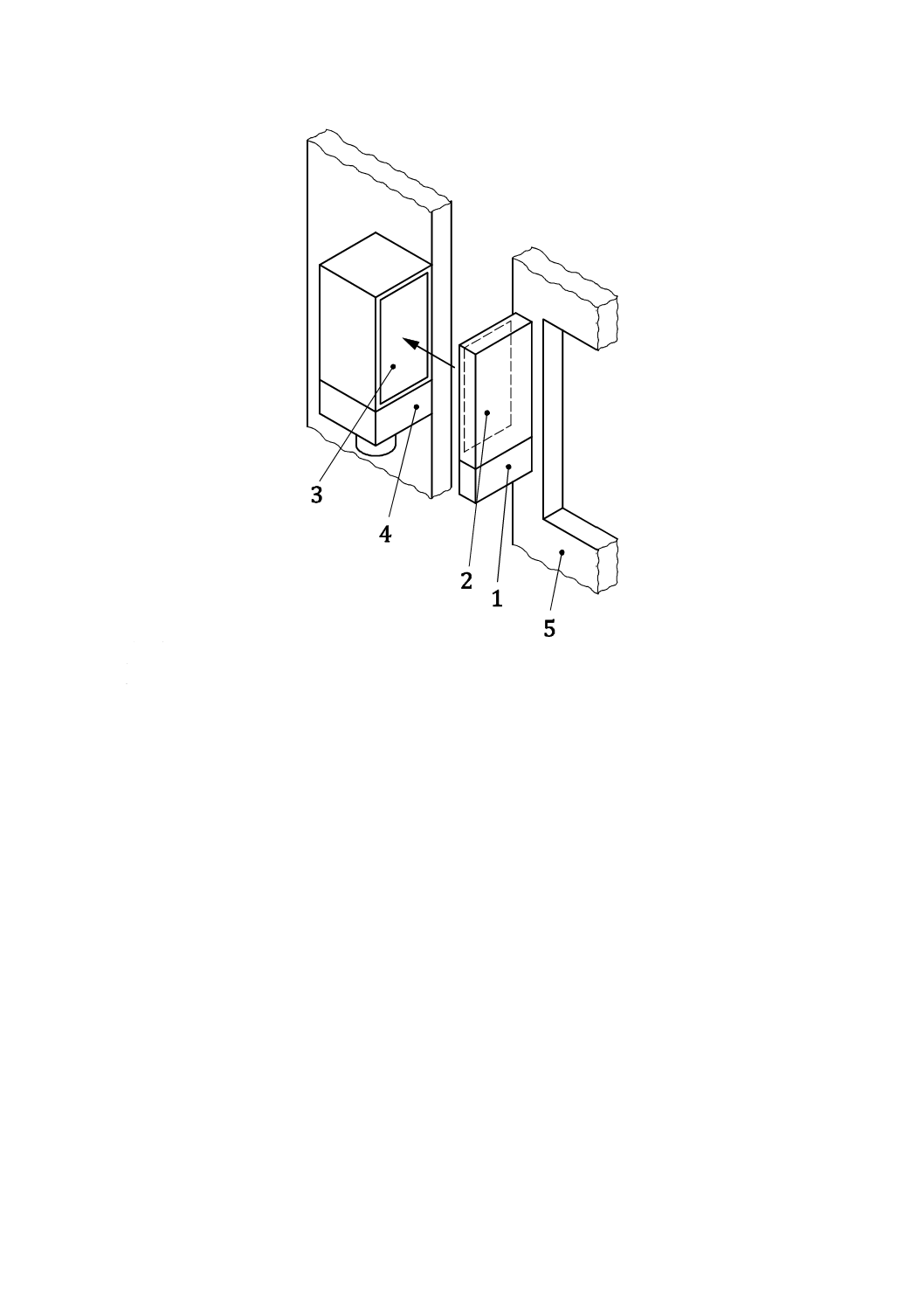
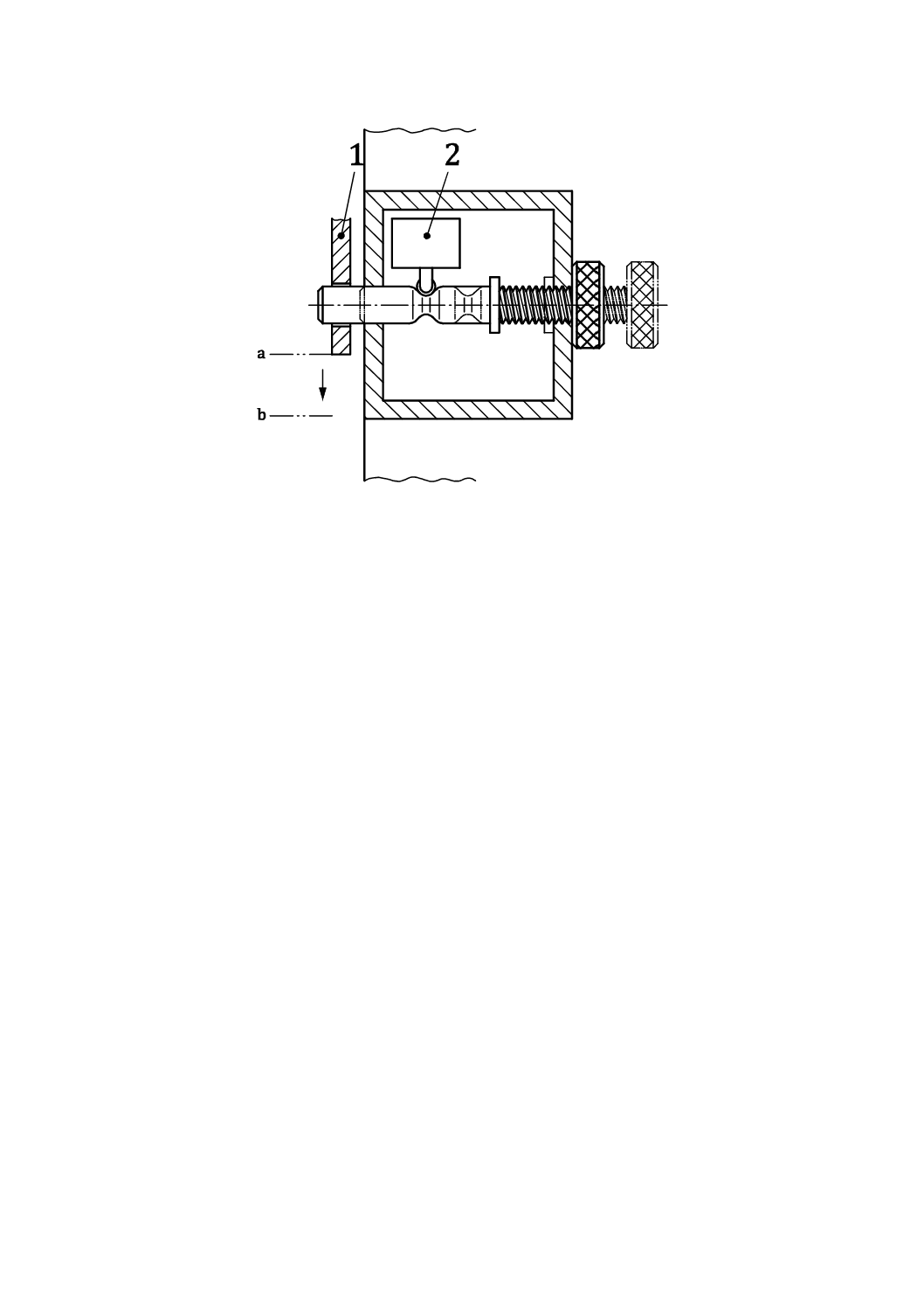
注記 図1及び表1参照。
記号の説明
1 ガード
4 位置スイッチ
2 インターロック装置
5 作動部
3 アクチュエータ
6 出力部
7 開方向
図1−インターロック装置の例
7
3
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2
インターロック付きガード(interlocking guard)
機械の制御システムと一緒に次のように機能するインターロック装置が付加されたガード。
− ガードによって“覆われた”危険な機械機能は,ガードが閉じるまで運転できない。
− 危険な機械機能の運転中にガードが開くと,停止指令が発生する。
− ガードが閉じると,ガードによって“覆われた”危険な機械機能は運転することができる。ガードが
閉じたこと自体によって危険な機械機能が起動しない。
(出典:JIS B 9700の3.27.4)
3.3
起動機能インターロック付きガード(interlocking guard with a start function)
制御式ガード(control guard)
ガードが閉じる位置に到達したら,他の起動制御器を使うことなく危険な機械機能の起動開始指令を出
すインターロック付きガードの特別な形式。
注記 使用条件についての詳細は,JIS B 9700の6.3.3.2.5参照。
(出典:JIS B 9700の3.27.6)
3.4
ガード施錠装置(guard locking device)
ガードを閉じた状態で施錠することを意図し,かつ,制御システムと連携した装置。
3.5
施錠式インターロック付きガード(interlocking guard with guard locking)
機械の制御システムと一緒に次のように機能するインターロック装置とガード施錠装置を備えたガード。
− ガードによって“覆われた”危険な機械機能はガードが閉じ,かつ,施錠されるまで運転できない。
− ガードによって“覆われた”危険な機械機能によるリスクが消失するまで,ガードは閉じ,かつ,施
錠されている。
− ガードが閉じ,かつ,施錠されていると,ガードによって“覆われた”危険な機械機能は運転するこ
とができる(ガードを閉じ,かつ,施錠したことによって危険な機械機能が起動しない。)。
(出典:JIS B 9700の3.27.5)
3.6
制御システムの安全関連部,SRP/CS(safety-related parts of a control system)
安全関連入力信号に応答し,安全関連出力信号を生成する制御システムの部分。
注記1 制御システムに組み合わされた安全関連部は,安全関連入力信号の発生するところ(例えば,
位置スイッチの作用カム及びローラを含む。)で始まって,動力制御要素(例えば,接触器の
主接点を含む。)の出力で終わる。
注記2 監視システムが診断に使用される場合,これはSRP/CSとみなされる。
(出典:JIS B 9705-1の3.1.1)
3.7
無効化(defeat)
インターロック装置を不作動にする又はバイパスする行為。結果として機械が設計者の意図しない方法
で,又は必要な安全方策がない状態で使用される。
4
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.8
合理的に予見可能な方法による無効化(defeat in a reasonably foreseeable manner)
手動又は容易に利用可能なものを使用することによるインターロック装置の無効化。
注記1 この定義は,機械の意図する使用のために必要とされる工具,又は容易に利用可能な工具(ド
ライバ,レンチ,六角レンチ及びペンチ)を使用してスイッチ又はアクチュエータを取り外
すことを含む。
注記2 代替の起動手段として容易に利用可能なものとは,次のようなものである。
− ねじ,針,金属片
− 鍵,コイン,粘着テープ,ひも及びワイヤのような日常で使用するもの
− トラップド・キーインターロック装置のスペアのキー
− スペアのアクチュエータ
3.9
自動監視(automatic monitoring)
コンポーネント又は要素の機能遂行能力が低下した場合,又は工程の状態が危険側に変化した場合に,
不具合(障害)に応答する機能を始動する診断機能。
3.10
直接機械作動(direct mechanical action)
ポジティブ機械作動(positive mechanical action)
一つの機械的コンポーネントが直接接触して,又は剛性要素を介して他の機械的コンポーネントに作用
するような作動。
3.11
直接開路動作(direct opening action)
ポジティブ開路動作(positive opening operation)
<接点要素>非弾性部材(例えば,ばねを用いない)によるスイッチアクチュエータの指定動作の直接
的な結果としての接点解放。
注記 この定義で規定する接点要素は,タイプ1及びタイプ2インターロック装置で使用される(5.4
も参照)。
3.12
アクチュエータ(actuator)
ガードの状態(閉又は開)を作動部に伝達するインターロック装置の分離部分。
例 ガードに取り付けられたカム,キー,トング,リフレクタ,マグネット,RFIDタグ。
注記1 附属書A〜附属書E参照。
注記2 アクチュエータの例は,図2参照。
3.13
コード化アクチュエータ(coded actuator)
ある特定の位置スイッチを作動するために特別に設計された(例えば,形状による)アクチュエータ。
3.13.1
低コード化アクチュエータ(low level coded actuator)
コード数が,1〜9のコード化アクチュエータ。
5
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.13.2
中コード化アクチュエータ(medium level coded actuator)
コード数が,10〜1 000のコード化アクチュエータ。
3.13.3
高コード化アクチュエータ(high level coded actuator)
コード数が,1 000超のコード化アクチュエータ。
3.14
作動部(actuating system)
アクチュエータの位置を伝達し,出力部の状態を変化させるインターロック装置の部分。
例 ローラプランジャ形,カム機構形,誘導形,又は静電容量形センサ。
注記 作動部の例は,図2参照。
3.15
出力部(output system)
ガードの状態を制御システムに伝達するインターロック装置の部分。
例 接点要素(電気機械式),半導体出力,バルブ
3.16
タイプ1インターロック装置(type 1 interlocking device)
コード化されていないアクチュエータによる機械的に作動する位置スイッチを備えたインターロック装
置。
例 ヒンジ作動式インターロック装置
注記 詳細な例は,附属書A参照。
3.17
タイプ2インターロック装置(type 2 interlocking device)
コード化されたアクチュエータによる機械的に作動する位置スイッチを備えたインターロック装置。
例 タン作動式位置スイッチ
注記 詳細な例は,附属書B参照。
3.18
タイプ3インターロック装置(type 3 interlocking device)
コード化されていないアクチュエータによる非接触式の位置スイッチを備えたインターロック装置。
例 近接スイッチ
注記 詳細な例は,附属書C参照。
3.19
タイプ4インターロック装置(type 4 interlocking device)
コード化されたアクチュエータによる非接触式の位置スイッチを備えたインターロック装置。
例 RFIDタグ作動式位置スイッチ
注記 詳細な例は,附属書D参照。
3.20
停止指令(stop command)
危険な機械機能を停止するためのインターロック装置によって生じる信号。
6
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.21
総合システム停止性能(overall system stopping performance)
ガードを開くことによる停止指令と危険な機械機能の終止との時間間隔。
(出典:JIS B 9715の3.1.2の定義を修正)
3.22
接近時間(access time)
人体又は人体部位の接近速度に基づいて計算される,インターロック装置によって生成される停止指令
の発令後に人が危険区域に到達するまでの時間。
注記 接近速度の選定及び計算は,JIS B 9715参照。
3.23
保持力(holding force)
ガード施錠装置が損傷することなく耐えられることができ,その力が加わった後も装置の機能は損なわ
れず使用され,かつ,ガードが閉位置を離れない力。
3.24
不適切な施錠位置の防止(prevention of inadvertent locking position)
ガードが閉じられていないとき,施錠手段(例えば,施錠ボルト)が施錠状態にならないことを確実に
するガード施錠装置の機能。
3.25
ガード施錠の非常解錠機能(emergency release of guard locking)
非常時に,支援手段なしに安全防護区域の外側からガード施錠を手動で解錠することができる機能。
注記 非常解錠機能付きのガード施錠は,例えば,捕捉された人の救助又は消火活動に対して必要と
なる場合がある。
3.26
ガード施錠の補助解錠機能(auxiliary release of guard locking)
故障時に,安全防護区域の外側から工具又はキーを使用してガード施錠を手動で解錠することができる
機能。
注記 補助解錠機能付きのガード施錠は,ガード施錠装置の非常時の解錠又は脱出時の解錠に対して
は適切ではない。
3.27
ガード施錠の脱出用解錠機能(escape release of guard locking)
支援手段なしに安全防護区域の内側からガード施錠を手動で解錠し,その区域を離れることを可能とす
る機能。
3.28
人保護のためのガード施錠(guard locking for protection of a person)
危険源に対する人の保護を目的としたガード施錠装置の適用。
3.29
プロセス保護のためのガード施錠(guard locking for protection of the process)
作業プロセスが中断することを防ぐことを目的としたガード施錠装置の適用。
7
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.30
工具(tool)
締結具を締めたり,緩めたりするように設計されたキー又はレンチのような道具。
注記 コイン又は爪やすりのような間に合わせの道具は,工具とはみなせない。
(出典:JIS B 9716の3.7を修正)
3.31
動力インターロック(power interlocking)
機械アクチュエータへの動力供給を直接中断する,又は可動部分を機械アクチュエータから分離するイ
ンターロック。
注記 動力供給の再開は,ガードが閉位置にあり,かつ,ロック位置にある場合だけ可能である。“直
接”の意味は,制御インターロックとは違って,制御システムがインターロック機能において
中間的な役割を果たさないということを意味する。
3.32
安全機能(safety function)
故障がリスクの増加に直ちにつながるような機械の機能。
(出典:JIS B 9700の3.30)
4
ガードと共同するインターロック装置との作動原理及び代表的な形式
4.1
一般
インターロック技術は,幅広い技術的側面を含む。インターロック装置は非常に多様な基準を使用して
分類することができる。この基準とは,例えば,ガードと出力部,又は出力部の技術的種類(電気機械式,
空圧式,電子式など)である。
インターロック装置は,ガードが閉じているか否かを検知し,ガードが閉位置にない場合停止指令を発
生するガードの位置監視機能をもつ。インターロック装置は,例えば,接近が可能になる前に危険な機械
機能を停止するようにブレーキをかけるなどの,他の機能の制御にも使用できる。
幾つかのインターロック装置は,危険な機械機能が存在する間,ガードをロック状態にするためのガー
ド施錠機能ももっている。ガード施錠装置の状態監視機能は,ガード施錠装置が施錠されているか,解錠
されているかを監視し,適切な出力信号[4.3.1のa)及びb)参照]を発生する。
注記1 ガード施錠装置(3.4参照)は,インターロック装置に統合する,又は独立ユニットとするこ
とができる。
注記2 ガードに関する追加情報は,JIS B 9700の6.3.3.1(一般要求事項)参照。
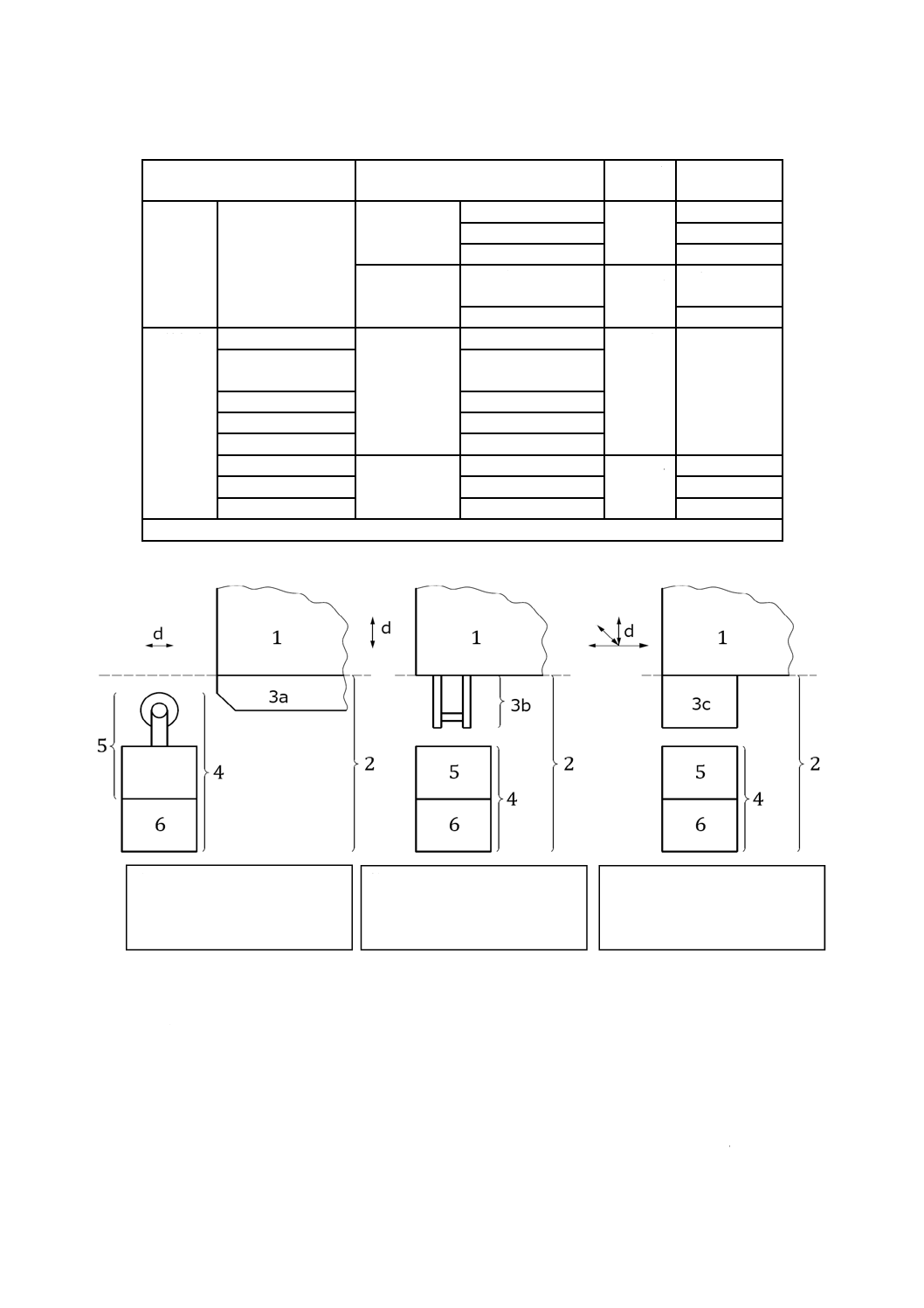
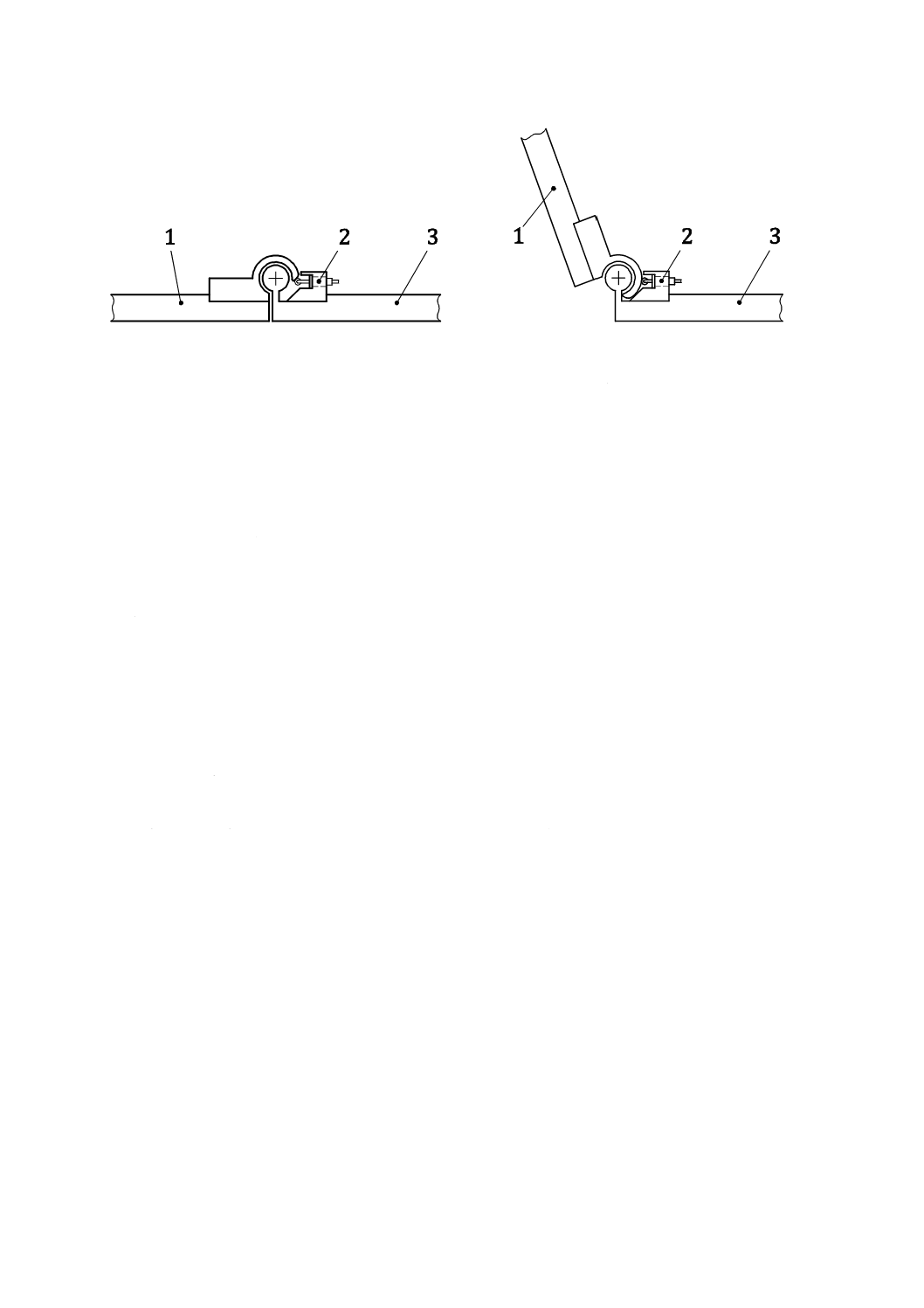
表1は,作動原理及び指定のインターロック装置のアクチュエータを示す。
注記3 インターロック装置の四つのタイプは,階層的な順序を意味していない。各インターロック
装置の正しい適用は,特定の機械に対するリスクアセスメントに基づく。
8
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−インターロック装置の概要
作動原理の例
アクチュエータの例
タイプ
例
附属書a)参照
機械式
物理的接触/力
コード化なし
回転カム
タイプ1
A.1
リニアカム
A.2,A.4
ヒンジ
A.3
コード化あり
タン形状のアクチュ
エータ
タイプ2
B.1
トラップド・キー
B.2
非接触式
誘導式
コード化なし
適切な磁性体
タイプ3
C
磁気式
マグネット,ソレノ
イド
容量式
適切なもの
超音波式
適切なもの
光学式
適切なもの
磁気式
コード化あり
コード化マグネット タイプ4
D.1
RFID
コード化RFIDタグ
D.2
光学式
光学式コード化タグ
−
注a) その他のインターロック装置の例は,附属書E参照。
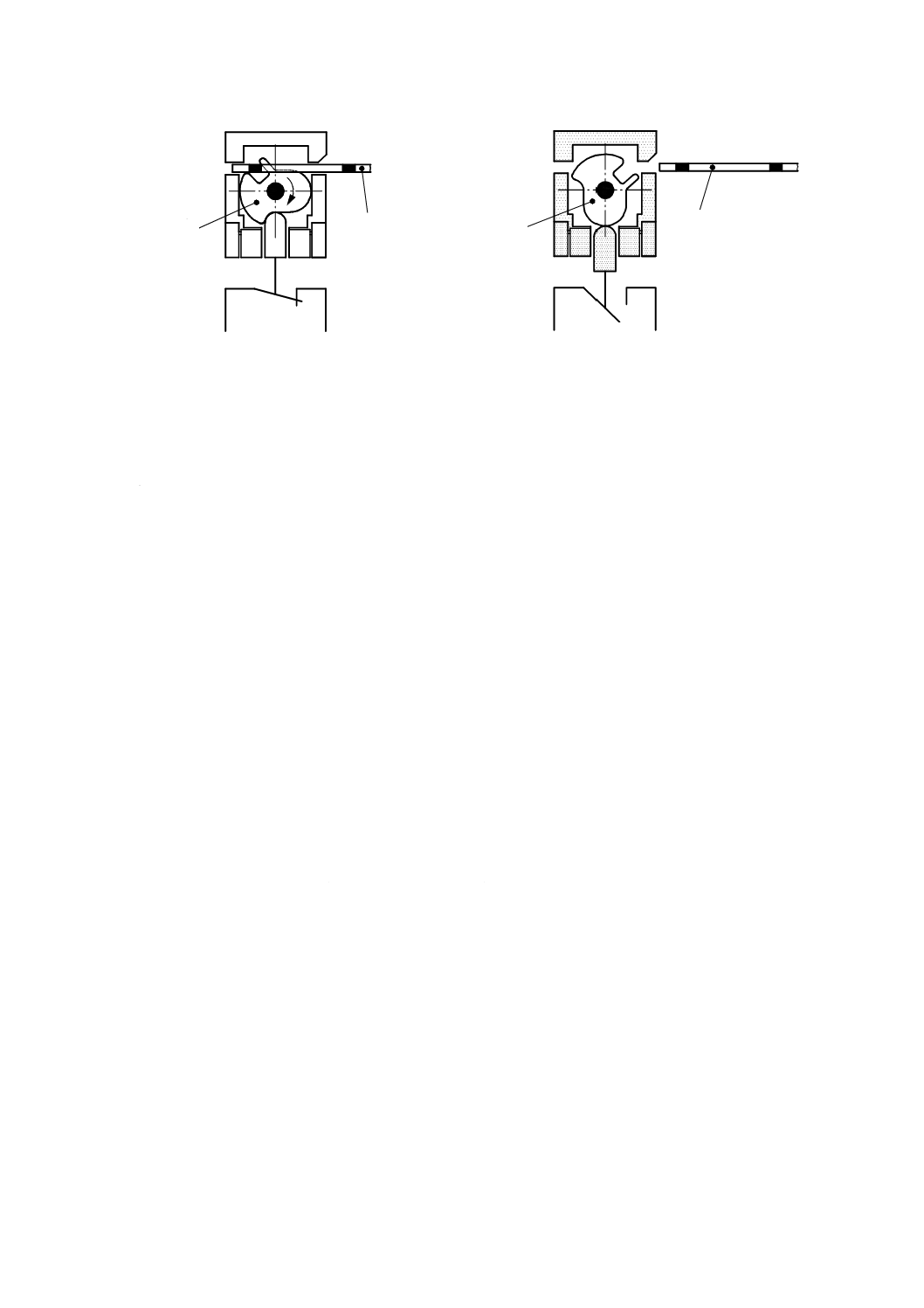
記号の説明
1 可動式ガード
4 位置スイッチ
2 インターロック装置
5 作動部
3 アクチュエータ
6 出力部
3a カム
3c 例えば,RFID,リフレクタ,適切な表面
3b タン
d 移動方向
注記 場合によって,位置スイッチが可動式ガードに取り付けられて,アクチュエータが機械の固定部分に取り付けら
れることもある。このような場合,図2の“1”が機械の固定部分となる。
図2−タイプ1,タイプ2,タイプ3及びタイプ4インターロック装置の原理
a) タイプ1インターロック装置
(非コード化カム作動式,ガード
の状態は閉)
b) タイプ2インターロック装置
(コード化タン作動式,ガードの
状態は開)
c) タイプ3又はタイプ4インタ
ーロック装置(非コード化又はコ
ード化非接触式,ガードの状態は
閉)
9
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2
ガード施錠なしガードインターロックの原理
ガード施錠なしのガードインターロック機能を使用する場合,ガードは機械の機能とは関係なく,いつ
でも開くことが可能である。
ガードが閉じていないとき,インターロック装置は,停止指令を発生しなければならない。
接近時間は,総合システム停止性能よりも長くなければならない。
注記1 機械制御システムに連携するインターロックについては,箇条8参照。
注記2 ガード施錠なしインターロック装置の例は,附属書A,附属書B,附属書C及び附属書D参
照。
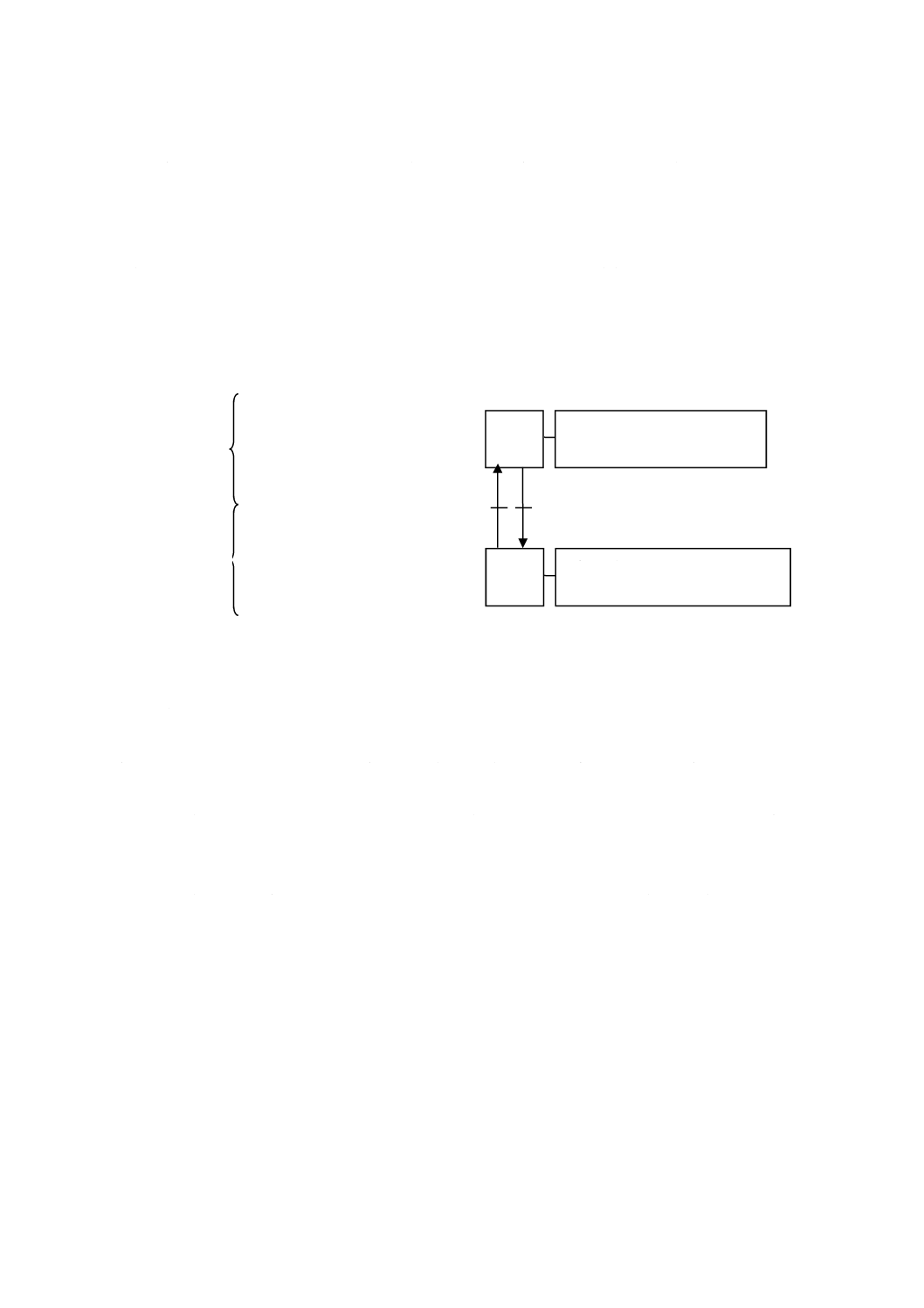
注記3 ガード施錠なしインターロック装置の機能ダイアグラムは,図3参照。
図3−ガード施錠なしインターロック装置の機能ダイアグラム
4.3
ガード施錠付きガードインターロックの原理
4.3.1
一般
ガード施錠付きインターロックを使用する場合,ガードの開放は,このガードによって覆われた全ての
危険な機械機能が消失するまでガード施錠装置(3.4参照)によって防止されなければならない。
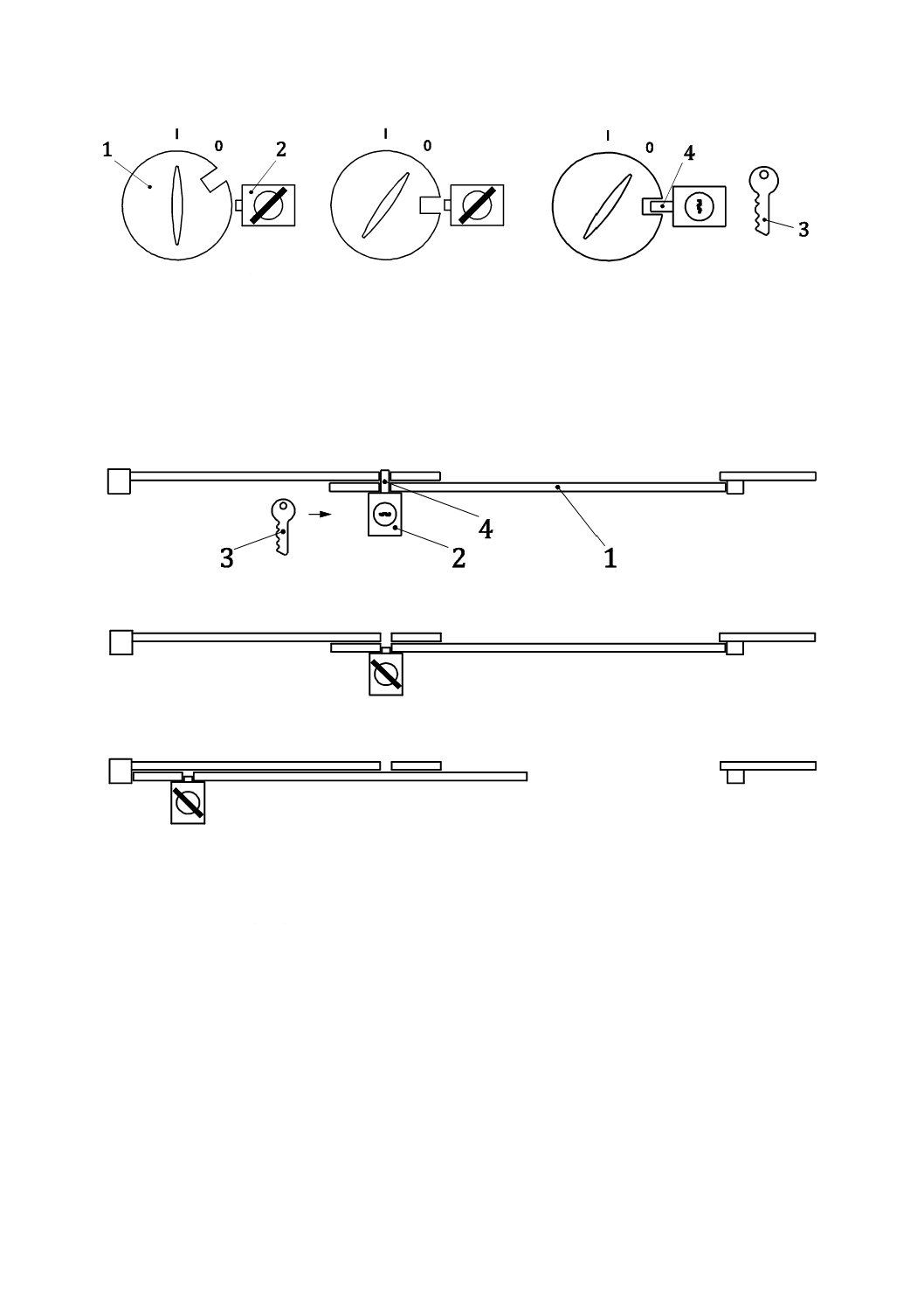
ガード施錠機能の設計には二つの選択肢がある(図4参照)。
a) ガードの解錠は,いつでもオペレータができる。解錠されたとき,ガード施錠装置は停止指令を発生
する。これは条件なし解錠と呼ばれる。ガードが解錠されるのに必要な時間は,危険な機械機能が消
失するのに要する時間より長くなければならない。
b) ガードの解錠は,危険な機械機能が消失したときだけ可能である。これは,条件付き解錠と呼ばれる。
危険な機械機
能は運転可能
危険な機械機能
は運転不可能
1
ガード閉
2
ガード開
ガード閉の終了
ガード開の開始
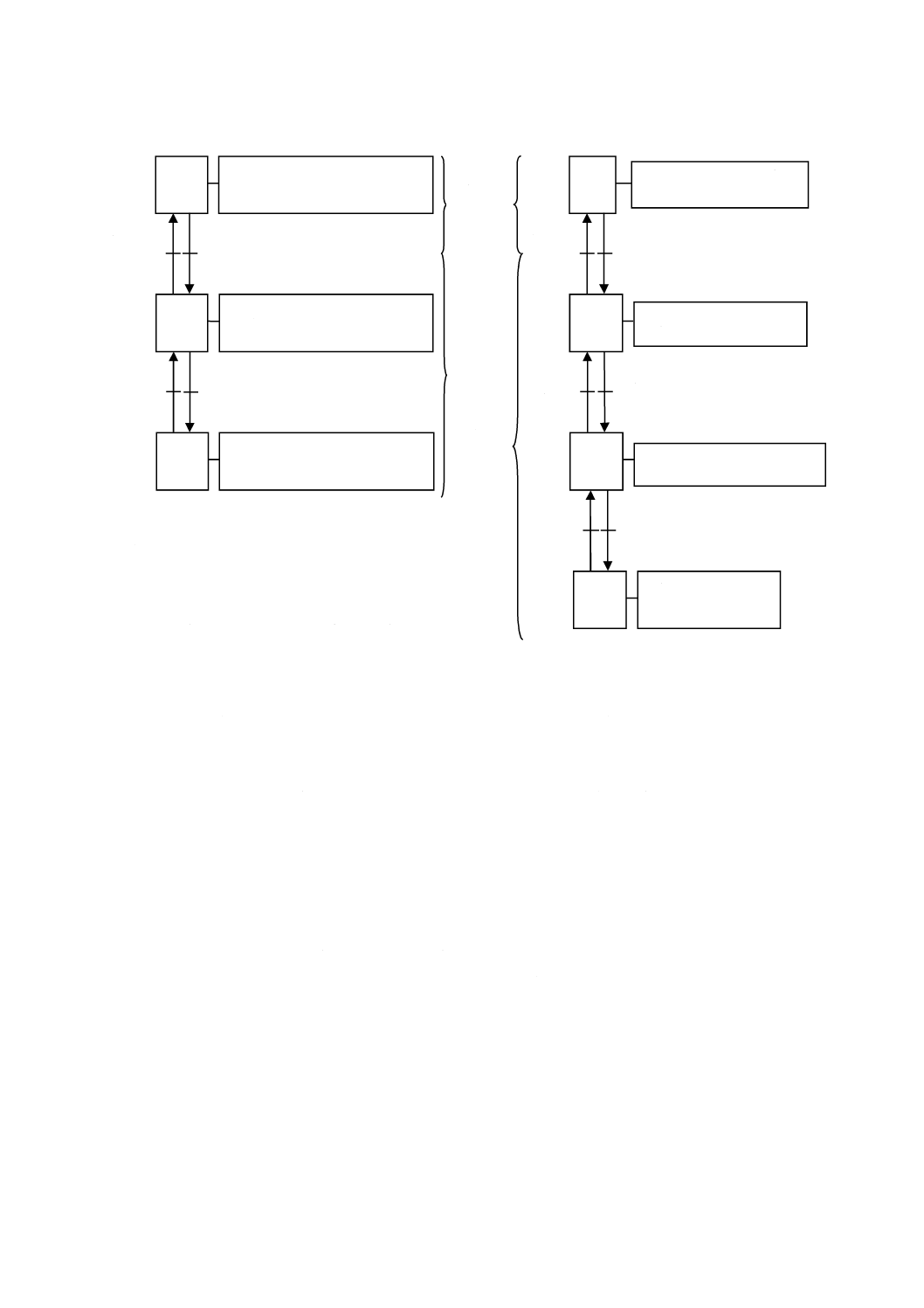
10
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 条件なし解錠
b) 条件付き解錠
注記 条件付き施錠において,状態2から状態3,又は状態3から状態2への遷移は,時間的な遅延なしで起こり
得る。
図4−ガード施錠付きインターロック装置の機能ダイアグラム
ガード施錠装置の例は,附属書F参照。
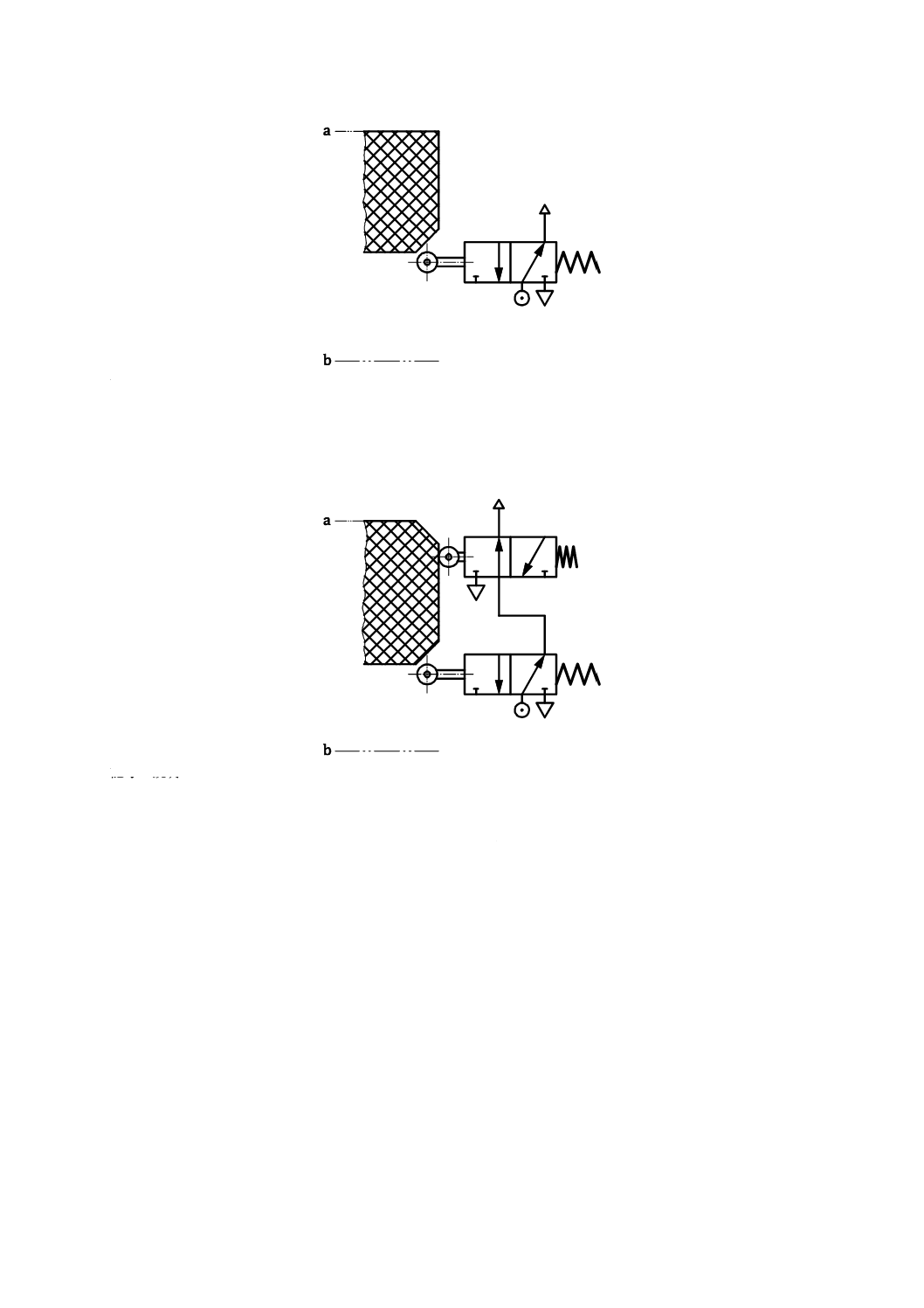
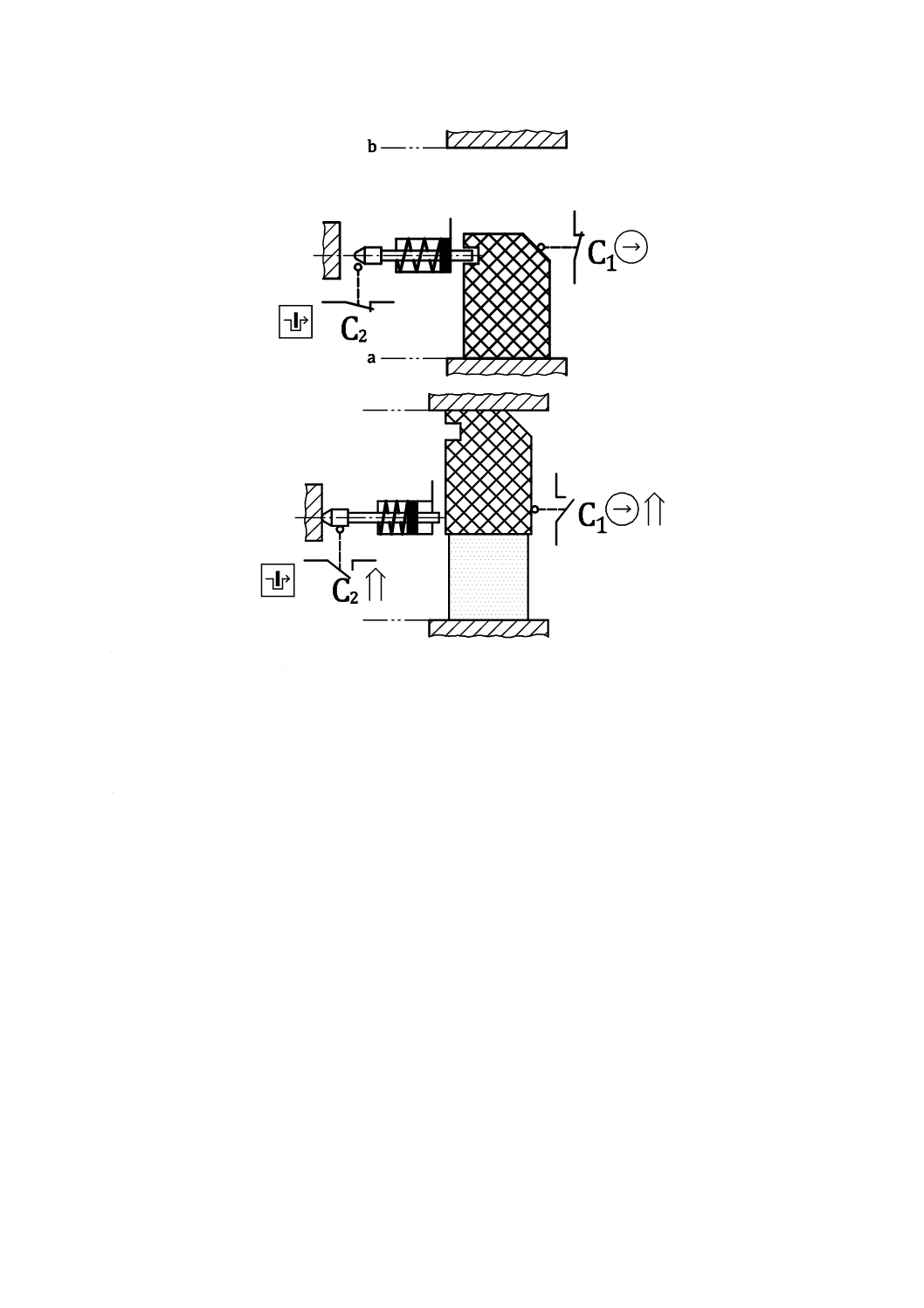
4.3.2
機械作動式ガード施錠付きインターロック装置
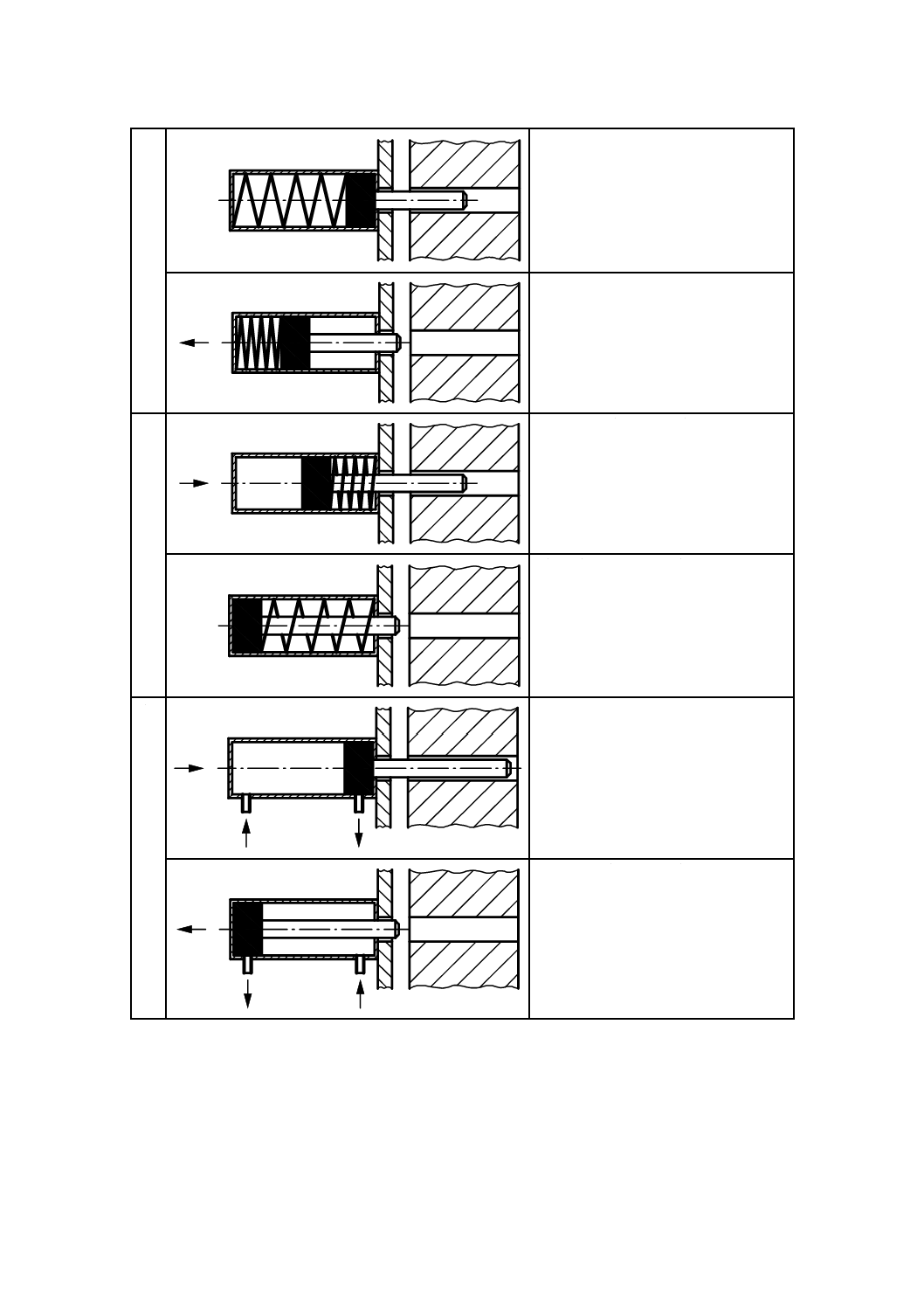
インターロックガードを施錠する機械的部分(例えば,施錠ボルト)は,次である。
− 手動で施錠,手動で解錠(図F.5参照)
− ばね(又は類似のもの)で施錠,動力オンで解錠[図5 a)参照]
− 動力オンで施錠,ばね(又は類似のもの)で解錠[図5 b)参照]
− 動力オンで施錠,動力オンで解錠[図5 c)参照]
機械作動式ガード施錠は,構造によって直接機械的に阻害する原理を使用しなければならない。摩擦又
は力だけによるものであってはならない。
4.3.3
電磁作動式ガード施錠付きインターロック装置
ガードは,機械的ロック手段なしで,電磁力によって閉じたままの状態(ロック状態)を維持する(F.4
参照)。電磁式ガード施錠は,動力オンで施錠,動力オフで解錠[図5 d)参照]の原理で構成する。
危険な機械
機能は運転
不可能
危険な機械
機能は
運転可能
施錠終了
1
・ガード閉で,かつ,施錠
・解錠することができる
2
・ガード閉で,かつ,解錠
・ガードを開くことができる
解錠終了*)
3
ガード開
ガード開の開始
解錠
不可能
1
・ガード閉で,かつ,施錠
・解錠することができない
2
危険源消失(例えば,機械休止)
の検出又は一定時間経過によって
確実にする
施錠
終了
3
・ガード閉で,かつ,解錠
・ガードを開くことができる
解錠終了
ガード閉
の終了
4
ガード開
ガード開の開始
・ガード閉で,かつ,施錠
・解錠することができる
*)”解錠終了”とは次の意味である。
− 停止の指令は解錠装置の作動開始と同時に,
かつ,その結果として,発生される。
− ガードを解錠するために必要な時間は危険源
が消失するのに要する時間より長い。
ガード閉
の終了
11
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a)
ばねで施錠
施錠
動力オンで解錠
解錠
b)
動力オンで施錠
施錠
ばねで解錠
解錠
c)
動力オンで施錠
施錠
動力オンで解錠
解錠
図5−動力作動式ガード施錠装置に使用される作動モード
12
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d)
動力オンで施錠
施錠
動力オフで解錠
解錠
図5−動力作動式ガード施錠装置に使用される作動モード(続き)
5
ガード施錠式又は施錠なしインターロック装置の設計及び設置のための要求事項
5.1
一般
インターロック装置は,適切に堅ろう(牢)な方法で,かつ,製造業者によって提供される指示書(箇
条9参照)に従い設置しなければならない。
5.2
位置スイッチの準備及び締結
位置スイッチは,位置の変化に対して十分に保護されるよう準備しなければならない。これを満足する
ために,次の要求事項に適合しなければならない。
a) インターロック装置の締結具は信頼でき,かつ,それを緩めるためには工具を必要としなければなら
ない。
b) タイプ1位置スイッチは,調整後,その位置を恒久的に固定する準備をしなければならない(例えば,
ピン又はだぼによって)。
c) 保全及び正しい動作確認のためにインターロック装置に接近するための必要な手段が準備されていな
ければならない。合理的に予見可能な方法による無効化の防止は,接近手段を設計するときに考慮し
なければならない。
d) 自然に緩むことは防止しなければならない。
e) 合理的に予見可能な方法によるインターロック装置の無効化を防止する(箇条7参照)。
f)
位置スイッチは,予見可能な外部原因による損傷を回避するように配置し,必要な場合には,保護し
13
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なければならない。
g) 機械的動作によって生じる動き又はシステムを作動する近接スイッチの隙間は,正しい動作を確実に
するために及び/又は行き過ぎを防止するために,スイッチの製造業者が指定する位置スイッチ又は
作動部の動作範囲内とする。
h) 位置スイッチの製造業者が機械的ストッパとしても使用できることを明言していない限り,機械的ス
トッパとして使用してはならない。
i)
位置スイッチがその状態を変える前に隙間を生じるようなガードのミスアライメントは,ガードによ
る保護効果を損なうほど大きなものであってはならない(危険区域への接近に関しては,JIS B 9715
及びJIS B 9718参照)。
j)
位置スイッチの支持及び締結は,装置の正しい動きを維持できるよう十分に堅固にしなければならな
い。
5.3
アクチュエータの準備及び締結
5.3.1
一般要求事項
アクチュエータ(図2参照)は,意図する寿命の間,緩んだり又は作動部に対して意図した相対的位置
を変化させたりする可能性を最小化するように締結しなければならない。
注記 定期検査が必要となる場合がある(9.3.2参照)。
a) アクチュエータの締結具は信頼できるものであり,緩める場合工具を使用しなければならない。
b) 自然に緩むことは防止しなければならない。
c) アクチュエータは,予見可能な外部原因による損傷を回避するように配置し,必要な場合には,保護
しなければならない。
d) 位置スイッチの製造業者が機械的ストッパとして使用できることを明言していない限り,機械的スト
ッパとして使用してはならない。
e) アクチュエータの支持及び締結は,装置の正しい動きを維持できるよう十分に堅固にしなければなら
ない。
5.3.2
カム
タイプ1インターロック装置の回転及びリニアカムは,次の要求事項に適合しなければならない。
a) 工具を使用しないと緩めることができない締結具によって固定する。
b) 最終的な固定は,形状(例えば,スプライン又はピン)による,又は他の同等な固定レベルの手段に
よる。
c) カムは,位置スイッチに損傷を与えたり,その耐久性を損ねたりしない。
5.4
インターロック装置の作動モード
停止指令を発令するのに,単一のタイプ1又はタイプ2インターロック装置を使用する場合,ガード,
アクチュエータ及び作動部との間は,直接機械作動で作動し,また,接点要素間は直接開路動作としなけ
ればならない(3.10,3.11及び表2参照)。
非直接機械作動式のタイプ1インターロック装置は,直接機械作動式のタイプ1又はタイプ2インター
ロック装置との組合せの場合だけ,ガード及びアクチュエータと出力システムとの間に使用しなければな
らない。
共通原因故障(8.3参照)を回避するため,直接機械作動式インターロック装置を非直接機械作動式イン
ターロック装置に組み合わせる。
14
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−タイプ1インターロック装置の直接機械作動及び非機械作動
機械的作動
ガード閉
ガード開
作動モード
故障の場合の挙動例
(8.3.2参照)
直接
プランジャは,ガードが開いてい
る限り,カムによって圧下状態に
保持される。
ガードが閉じているとき,ばねの
戻り動作の結果として出力の状態
が変わる。
ばねが壊れてもガー
ドが開いている場合,
出力は安全状態を維
持する。
非直接
プランジャは,ガードが閉じてい
る限り,カムによって圧下状態に
保持される。
ガードが開いているとき,ばねの
戻り動作の結果として出力の状態
が変わる。
ばねが壊れた場合,出
力は,ガードが開いて
いる場合は,非安全状
態に遷移する。
インターロック装置は,適用した位置スイッチの作動原理に応じて適切に作動しなければならない。
タイプ3又はタイプ4インターロック装置だけを使用する場合,インターロック装置はIEC 60947-5-3
の要求事項に適合したものでなければならない。
5.5
制御システムのインタフェース
インターロック装置の出力部は,JIS B 9705-1又はJIS B 9961に従って設計された制御システムに接続
するために適切なものでなければならない。
5.6
機械的ストッパ
製造業者は,インターロック装置を機械的ストッパとしても使用できると明言する場合,最大衝撃耐性
値を示さなければならない[9.2.2 r)参照]。
5.7
ガード施錠装置に対する追加要求事項
5.7.1
一般
ガード施錠機能の適用が危険源を生じる場合は,追加方策を考慮しなければならない[5.7.5及びJIS B
9700の6.3.5.3(捕捉された人の脱出及び救助のための方策)参照]。
ガードを施錠することを意図した施錠要素(例えば,施錠ボルト)は,リスクアセスメントの結果が適
切でないことを示さない限り,“ばねで施錠,動力オンで解錠(図5 a)参照)”,又は“動力オンで施錠,動
力オンで解錠[図5 c)参照]”でなければならない。
特殊な用途において,他のシステム[例えば,図5 b)参照]を使用する場合,同等の安全レベルを提供
しなければならない。
注記 動力が失われて施錠要素が解錠される場合,機械の停止時間は,通常,かなり長くなり,機械
の動きが停止する前(又は他の危険源が消失する前)に危険源への接近が可能となり得る。
ガード施錠機能を人の保護のために使用する場合は,5.7の要求事項を適用する。ガード施錠機能をプロ
セスの保護だけに使用する場合は,この要求事項は適用しない。しかし,ガード施錠機能及びガードイン
ターロック機能が,プロセスの保護だけのための機能を果たす装置の一部である場合,ガードインターロ
15
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ック機能は,非安全関連ガード施錠機能(例えば,プロセスの保護だけのために使用されるガード施錠機
能)によって負の影響を受けてはならない。
5.7の要求事項は,ガード施錠付きインターロック装置のガード施錠装置だけでなく,別のコンポーネン
トから構成されるガード施錠装置にも適用する。
ガード施錠装置は,施錠位置の監視をできるようにJIS B 9705-1又はJIS B 9961に従って設計された制
御システムに適合する出力部を備えなければならない。
ガード施錠装置は,ガードが閉じ,かつ,施錠されているときだけ危険な機械機能を許可しなければな
らない。
5.7.2
機械式ガード施錠装置
5.7.2.1
一般
機械的に作動するガード施錠装置は,二つの剛体[施錠−解錠の形態,図5のa)〜c)参照]の結合から
なるものでなければならない。
“ばねで施錠,動力オンで解錠”又は“動力オンで施錠,動力オンで解錠”システム[図5のa)及びc)
参照]の場合で,非常時に外側から接近する必要があると予想される場合,非常解錠機能付きガード施錠
装置(5.7.5.3参照)を備えなけなければならない。
図6は,この装置の機能を示す。
5.7.2.2
施錠監視
施錠要素の施錠位置は,5.5の要求事項に従い監視しなければならない。
危険な機械機能は,ガードの閉位置及び施錠要素の施錠位置(附属書F参照)を監視によって検出した
ときだけ可能としなければならない。
ガード施錠装置の効果的な監視に対しては,次のいずれかの方法を適用し,確実なものとしなければな
らない。
− 可動式ガードが閉位置(図6参照)にある場合だけ,施錠要素は,施錠位置に移行することができる。
この場合,ガードの閉位置及び施錠状態は,施錠要素の監視でチェックできる。
− 施錠要素の監視及びガード位置の監視もインターロックに対して使用しなければならない。
16
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
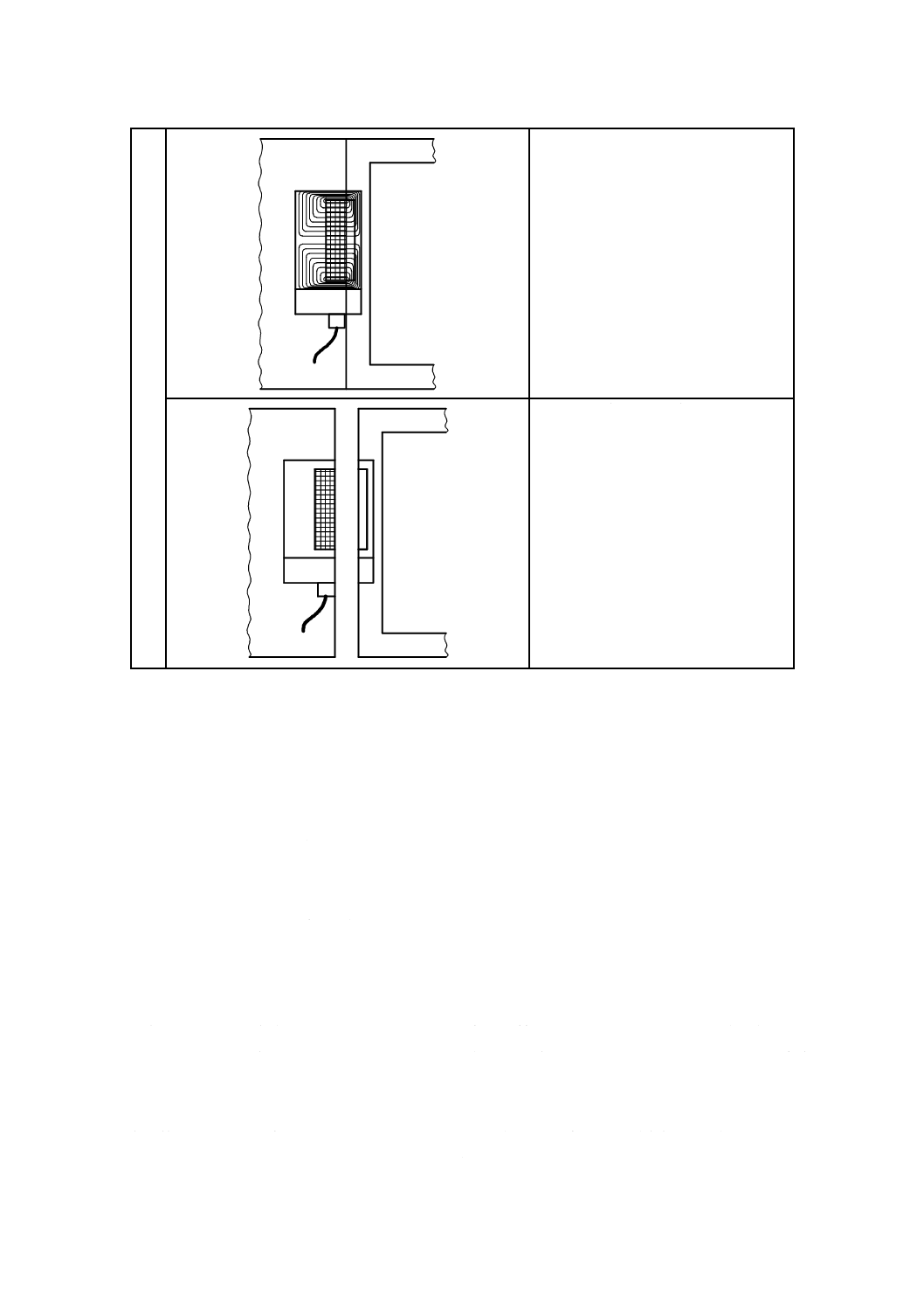
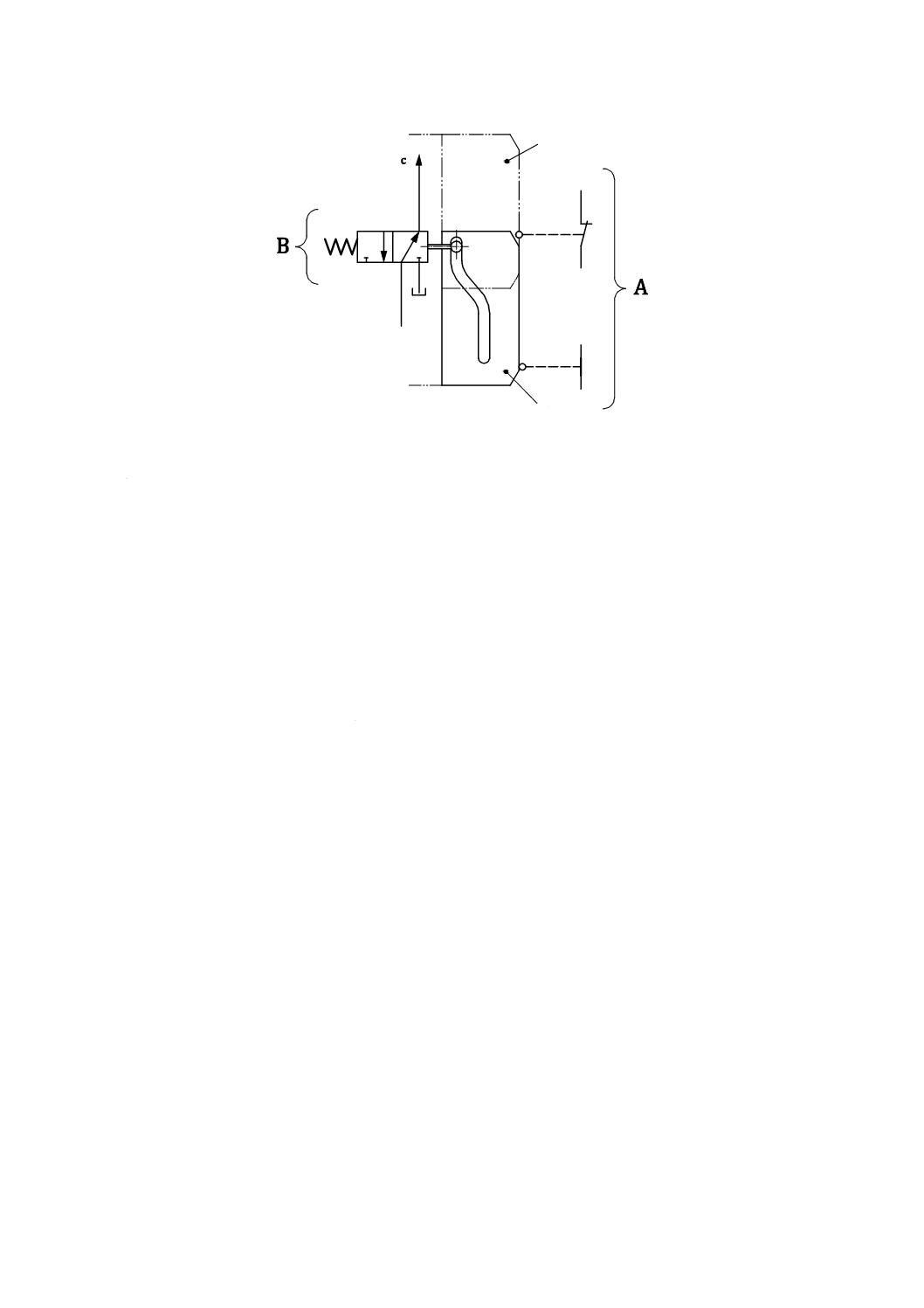
記号の説明
a) ガード閉で施錠
1 アクチュエータ(タン)
b) ガード閉で未施錠
2 施錠要素(施錠ボルト)
c) ガード開で未施錠
3 作動部(内部回転カム)
注記 この種の位置スイッチでは,アクチュエータは二つの機能をもつ。一つは内部回転カム及び施錠ボルトと
ともに接点を動作させるものであり,もう一つはガード施錠機能を提供するものである。施錠ボルトは外
部手段,例えば,ソレノイド又は空圧シリンダによって動作可能である。
図6−ガード施錠付きタイプ2インターロック装置の例
5.7.3
電磁施錠式インターロック装置(施錠装置)
5.7.3.1
一般要求事項
ガード施錠に必要とされる力は,電磁界の発生によって生じる[図5 d)参照]。
5.7.3.2
施錠監視
保持力は,指定の保持力が達成され,維持されたかどうかを決定するために監視しなければならない
(6.2.2及び附属書I参照)。
危険な機械機能は,ガードの閉位置及び指定保持力の達成を監視によって検出したときだけ可能としな
ければならない。
5.7.3.3
無効化の可能性を最小化する基本方策
電磁式ガード施錠装置が物理的な力によって開けられた場合,プロセス(機械の動き)は,その動きを
即座には継続することができないよう確実なものとしなければならない。
注記 機械式ガード施錠とは異なり,電磁式ガード施錠は力による解放の後,損傷を生じない。
この方策の目的は,力による開扉(無理やりこじ開ける)が結果として通常の修理作業(時間遅延)と
同様に時間がかかるものであり,また,電気機械式のガード施錠の損傷を修理するのと同程度の時間がか
17
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
かるということを示すことである。
無効化防止のための方策は,例えば,次のような方策を講じることができる。
a) ガード施錠装置自体での方策,例えば,
1) 危険な機械機能の中断後のリセットを最低10分後にだけ可能にする。
2) ガード施錠の交換又は修理を必要とする機能不良を発生させる。
b) 機械制御システムにおける同等の時間がかかる方策,例えば,次のようなシーケンスをとる。
1) 機械上の警告メッセージ
2) サイクル停止
3) 生産モードのオフ
4) ガード施錠機能のテスト
5) 生産モードのオン
6) 次の機械サイクルの再起動(最低10分の後)
5.7.4
保持力
ガード施錠装置の製造業者は,施錠位置においてガード施錠装置が少なくとも指定の保持力Fに耐える
ものであることを確実にしなければならない。製造業者は,次の試験によって決定される保持力FZh以下
の値を示さなければならない。
試験
ガード施錠装置は,製造業者が意図するベースの上に固定する。ガード施錠装置にガード施錠機能の故
障レベルにまで負荷をかけて,最大作動角で施錠手段をガード開方向に一定速度で動かす。負荷をかけて
いる間,最大力F1maxで変形の過程を測定する。試験はサンプルとして未使用のもので実施しなければなら
ない。
検証
安全係数Sを考慮して試験で測定された最大力F1maxに基づいて,保持力FZhを次の式から算出する。
S
F
F
max
1
Zh=
安全係数S=1.3
試験装置の要求事項
引張速度:10±0.25mm/min(一定)
力測定装置の要求事項
サンプリングレート:≧10 Hz
最大力の測定精度:±2.5 %
注記 試験の詳細に関しては,参考文献[17]参照。
5.7.5
ガード施錠の追加解錠機能
5.7.5.1
一般要求事項
適用によっては,ガード施錠機能の解錠に関して補助的手段が必要となる(JIS B 9700の6.3.5.3参照)。
選定に関しては,6.2.3参照。ガード施錠の脱出用解錠機能及び非常解錠機能は,少なくともJIS B 9705-1
に従い,カテゴリBの要求事項を満たさなければならない。
注記 記載されている解除方法の一つを使用する場合は,リスクアセスメントでは通常よりもかなり
長い停止時間を考慮したほうがよい結果となることがある。
18
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.7.5.2
ガード施錠の脱出用解錠機能
ガード施錠装置が脱出用の解錠機能を備えている場合,次の要求事項に適合しなければならない。
− 安全防護区域の内側からのガード施錠の意図的な解錠は,補助手段なしで,かつ,運転条件に関係な
く,容易に可能なものでなければならない。
− 解錠手段は,手動で操作でき,かつ,施錠機構の構造原理に直接的に作用するものでなければならな
い。
− 解錠は,停止指令を発生しなければならない。
− 脱出用の解錠手段は安全防護区域の内側からだけ容易に接近可能でなければならない。
5.7.5.3
ガード施錠の非常解錠機能
ガード施錠装置が,非常解錠機能を備えている場合,次の要求事項に適合しなければならない。
− 補助手段なしで,運転条件に関係なく,安全防護区域の外側からガード施錠を意図的に解錠すること
が可能であり,かつ,容易に作動できるものでなければならない。
− 解錠手段は,手動で操作でき,かつ,施錠機構の構造原理に直接的に作用するものでなければならな
い。
− 解錠は,停止指令を発生しなければならない。
− 非常解錠は,その解錠状態において施錠手段を使用できなくする。
− ガード施錠の非常解錠機能は,非常事態においてだけ使用可能であることを明瞭に示さなければなら
ない。また,施錠の偶発的な開放を防止するよう位置決め及び/又は保護しなければならない。
− 非常解錠のリセットは,工具によってだけ又は他の方法(例えば,コンポーネントの交換)によって
可能なものとしなければならない。この要求事項は,制御システムレベルで満足することができる。
要求事項が,安全制御システムレベル(ガード施錠装置においてではなく)で実行することを意図し
ている場合,明瞭な指示事項をガード施錠装置の使用のための指示書[9.2.2 m)]において提供しなけ
ればならない。
注記 非常解錠機能が脱出用解錠機能の要求事項に適合するという条件で,非常解錠機能は,安全防
護区域の内側に設置される場合,脱出用解錠機能となり得る。
5.7.5.4
ガード施錠の補助解錠機能
ガード施錠装置が補助解錠機能を備えている場合,次の要求事項に適合しなければならない。
− 安全防護区域の外側からのガード施錠の意図的な解錠は,運転条件に関係なく,工具又はキーによっ
てだけ可能としなければならない。補助解錠機能は,意図しない作動に対して保護されなければなら
ない(例えば,シール,保護コーティング)。それは,補助解錠機能は例外的な場合にだけ使用するも
のであるからである。例外的な場合とは,例えば,施錠が動力オンで解錠されて,動力が失われる場
合,ガード施錠が非常解錠機能をもたない場合などである。使用上の指示事項には,通常運転を回復
する前に,保護効果の回復が必要であるということを示さなければならない。
− 補助解錠機能による解錠は,停止指令を発生しなければならない。
− 補助解錠機能のリセットは,工具によってだけ又は他の方法(例えば,コンポーネントの交換)によ
って可能としなければならない。この要求事項は,制御システムレベルで満足することができる。要
求事項が,安全制御システムレベル(ガード施錠装置においてではなく)で実行することを意図して
いる場合,明瞭な指示事項をガード施錠装置の使用のための指示書[9.2.2 m)]において提供しなけれ
ばならない。
19
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.7.6
締結具の要求事項
ガード施錠装置の締結は,5.2の要求事項に適合しなければならない。また,保持力に耐えるように設計
しなければならない。
6
インターロック装置の選定
6.1
一般要求事項
機械のためのインターロック装置を選択する場合に,機械のライフサイクルの全ての局面を考慮するこ
とが必要である。
選択は,次の基準を考慮しなければならないが,これに限定しない。
− 機械の使用条件及び意図する使用[6.3,JIS B 9700の3.23及び5.3(機械類の制限の決定)参照]
− 機械に存在する危険源[JIS B 9700の5.4(危険源の同定)参照]
− 起こりえる傷害のひどさ[JIS B 9700の5.5(リスク見積り)参照]
− インターロック装置の故障の可能性(箇条8参照)
− 総合システム停止性能及び接近時間(6.2.1参照)
− 安全機能(8.1参照)に対する要求パフォーマンスレベルPLr(JIS B 9705-1参照)又は安全インテグ
リティレベルSIL(JIS B 9961参照)
− インターロック装置に関する,9.2.2に従った使用上の情報
− タイプ4インターロック装置については,オペレータが特別な知識及び特殊な工具を使用せずに単一
のアクチュエータを無制限にいじることができることを回避する手段
注記 ガードを機械から完全に取り除くことができる場合,及び/又は環境/プロセス条件がより高
い保護レベル(例えば,IP69K)を要求する場合,タイプ3又はタイプ4インターロック装置
は,タイプ1及びタイプ2インターロック装置の使用から生じる問題を克服するために使用す
ることができる。
6.2
ガード施錠装置の選択
6.2.1
総合システム停止性能及び接近時間
総合システム停止性能(3.21参照)が,人が危険区域に到達するのに要する接近時間(図7参照)以上
の場合にガード施錠付きインターロック装置を使用しなければならない。
接近時間は,接近速度とともに,危険区域とガードとの間の距離を使用し,計算しなければならない(代
表値については,JIS B 9715参照)。
20
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
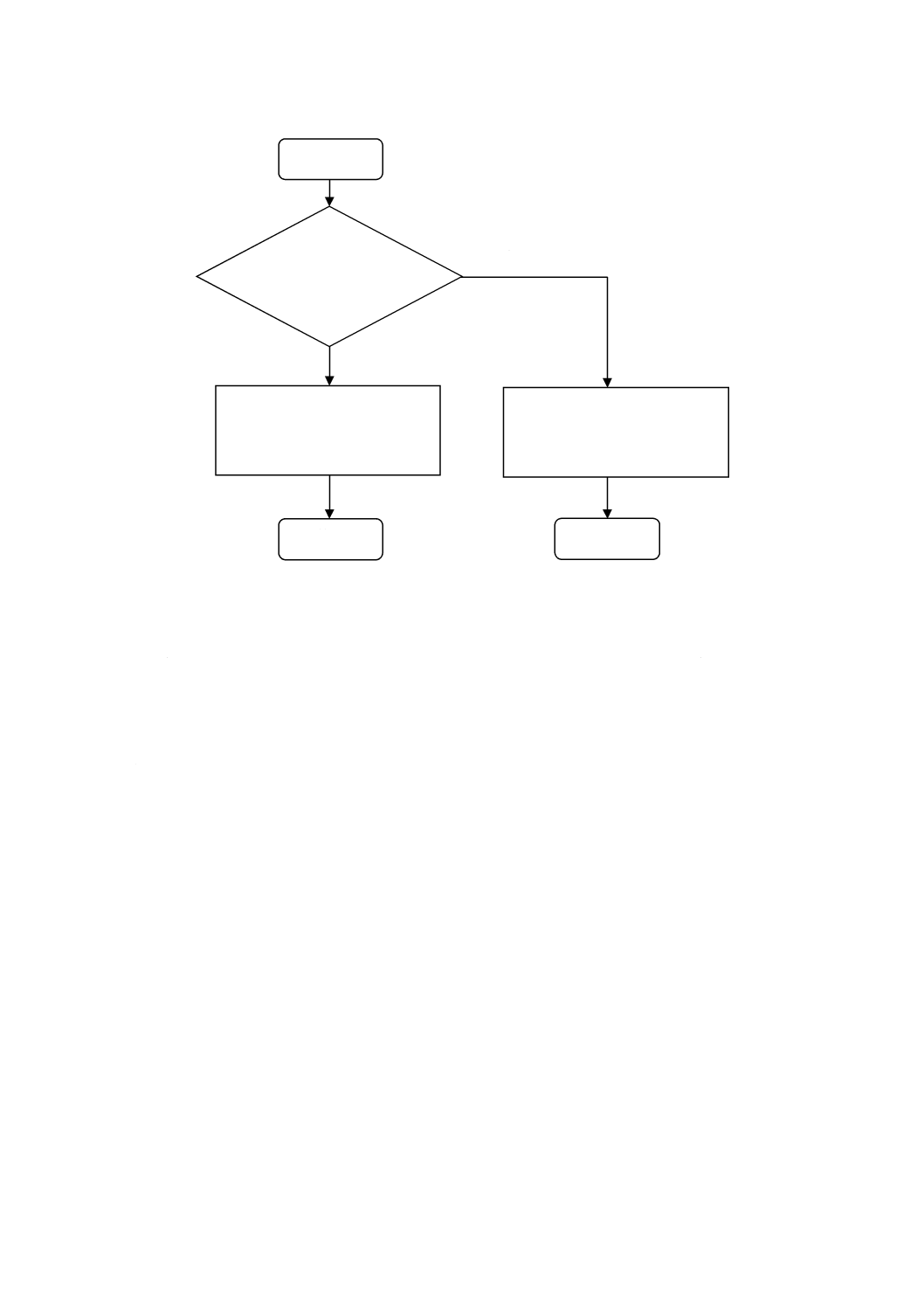
図7−ガード施錠装置の必要性の決定
6.2.2
ガード施錠装置選択のための特定要求事項
ガード施錠装置は,予想される力に耐えることができるようなものを選択しなければならない。跳ね又
はびびりのような動的な影響も考慮しなければならない。
予想される衝撃力が,選択した装置が耐えることができる力より大きい場合,力を低減する又は回避す
るような設計方策を講じなければならない。
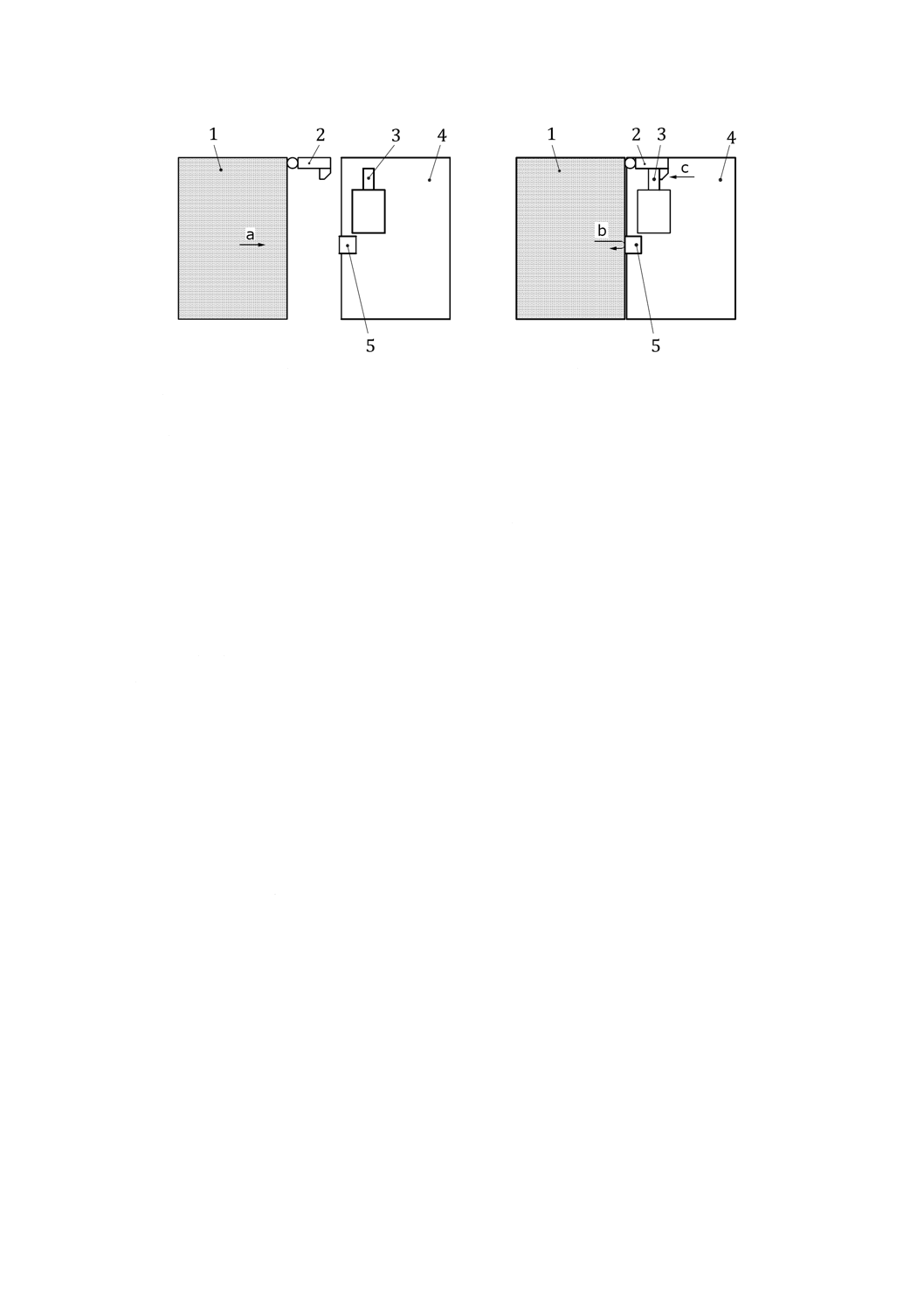
注記1 動的な力は,ドアが閉じられていて,かつ,施錠機構が既に作動しているときに生じること
が想定される。図8参照。
ガードが閉位置に達するとき,ガード施錠装置が自動的に作動することを意図したものである場合,選
択したガード施錠装置は結果として生じる機械的力に耐えるものでなければならない。
ガード施錠式インターロックガ
ード(箇条5参照)
ガード施錠なしインターロック
ガードで十分保護効果がある
(5.1〜5.6参照)
終了
終了
総合システム停止
性能≧接近時間
開始
はい
いいえ
21
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) ドア開
b) ドア閉で施錠
記号の説明
1 可動式ガード
4 ガードの固定部分
2 アクチュエータ
5 ガードストッパ
3 ガード施錠機構(施錠)
a 閉方向
c 施錠機構にかかる動的な力
b ガードストッパによる跳ね返り
図8−動的な力に影響を受けるガード施錠装置の例
機械的施錠要素の強度又は電磁施錠の保持力は,バール又は類似の工具を使用せずに閉位置からガード
が開くのを防止するのに十分なものでなければならない。
必要な保持力は,ガードの意図する用途及び構造に対して適切なものでなければならない(附属書I及
びJIS B 9716参照)。
注記2 適切な保持力の決定は,タイプC規格作成者又は機械設計者の役割である。
6.2.3
追加的なガード施錠の解錠機能の選定
用途によって,追加の解錠機能が必要となる場合がある。この方策は次を含むが,これに限定しない。
− 5.7.5.2に従ったガード施錠の脱出用解錠機能。
− 5.7.5.3に従ったガード施錠の非常解錠機能。
− 脱出することを織り込んだガードの特別な設計。
− ガード施錠の補助解錠機能は,特殊な状況で安全防護区域に侵入することが予見可能である場合に必
要となり得る。特殊な状況とは,例えば,非常解錠機能をもたない動力オンで解錠される装置で,動
力が失われている場合などである。
注記1 5.7.5,JIS B 9700の6.3.5.2(非常停止機能を達成するためのコンポーネント及び要素)及び
ISO 11161の8.9参照。
注記2 脱出用解錠機能は,非常解錠機能又は補助解錠機能と組み合わせて使用することができる。
6.3
環境条件の考慮事項
6.3.1
一般
インターロック装置の技術及び種類は,使用条件(例えば,環境,衛生)及び機械の意図する使用に適
していることを確実にするよう考慮しなければならない。
環境条件は,適切なインターロック装置の選定のために考慮しなければならない。基準は,例えば,次
である。
− 温度
22
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− ほこり
− 水分
− 振動及び衝撃
− 衛生
− 電磁影響
インターロック装置は,その予期される寿命の間,予見可能なあらゆる影響に耐えられるものでなけれ
ばならない。
注記1 故障は,塩分,酸又はアルカリ(例えば,海水)からの腐食によって誘引される可能性があ
る。また,そのような影響の可能性,特に長期間の暴露を考慮するのが望ましい。インター
ロックの特別な設計及び使用される技術の種類によっては,化学物質又は物質の進入に対し
て影響されやすい。重要な汚染が存在する区域においては,製造業者の説明を求めるのがよ
い。
注記2 リード接点を使用するタイプ3又はタイプ4インターロックを論理監視ユニットと組み合わ
せる場合,使用者は論理監視ユニットによって生じるスパイク電流がスイッチの許容限界を
超えないということを検証するのが望ましい。
6.3.2
タイプ2インターロック装置のほこりの影響
タイプ2インターロック装置を使用する場合,設置位置で起こり得る汚染を考慮しなければならない。
タイプ2インターロック装置は,適切な方策(例えば,防じんカバー)が適用されない限り,ちり,くず
又はほこりの侵入を回避できない用途においては不適切な場合がある。
注記 アクチュエータは,位置スイッチに挿入される。そのため,位置スイッチはほこりの侵入を可
能にする開口部をもっている。JIS C 0920による保護等級IPXXは,電気的なエンクロージャ
だけに関連する。機械部分の汚染は,機構の劣化につながり,また,インターロック装置の危
険側故障につながり得る。
7
インターロック装置の無効化の可能性を最小化する設計
7.1
一般
機械は,インターロック装置を無効化しようとする動機を最小化するような方法で設計しなければなら
ない{JIS B 9700の5.5.3.6[保護方策の無効化又はう(迂)回の可能性]参照}。
インターロック装置は,それを無効化しようとする動機を低減するために,運転中及び機械の他の寿命
の間に行われる作業に対して最小限の障害となるようなものでなければならない。例えば,
− 機械の容易な運転,特に保全及び修理
− 機械機能に関する故障フリー運転
インターロック装置の合理的に予見可能な方法による無効化を回避するために次の手順に従わなければ
ならない。
a) 5.2,5.3,5.4,5.7.3.3及び6.2.2に規定する基本方策の実施。
タイプ3インターロック装置は,その適用において,合理的に予見可能な方法による無効化がされない
ことがリスクアセスメントによって示されない限り使用してはならない。
b) 合理的に予見可能な方法によるインターロック装置の無効化の動機が存在するかどうかチェックす
る。
注記1 使用経験を考慮することは有益である。JIS B 9700の5.2 c)(使用経験に関する事項)参照。
23
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記2 表H.1は,インターロック装置の無効化の動機を評価及び/又は除去するためのガイダンス
として使用できる。
c) 次によって動機を除去又は最小化できるかどうかをチェックする。
− 設計方策 及び/又は
− 代替モード
可能な場合は,これらの方法を使用する。
注記3 代替の運転モードの実行は,無効化の動機を回避できる。代替の運転モード,例えば,設定,
工具交換,不具合(障害)の発見,保全又はプロセスの監視などである。これらは,機械の
種類及びその用途に大きく依存し,この規格では包括的に取り扱うことはできない。
d) 予見可能な無効化の動機が継続して存在する場合,追加方策を必要とする(7.2参照)。
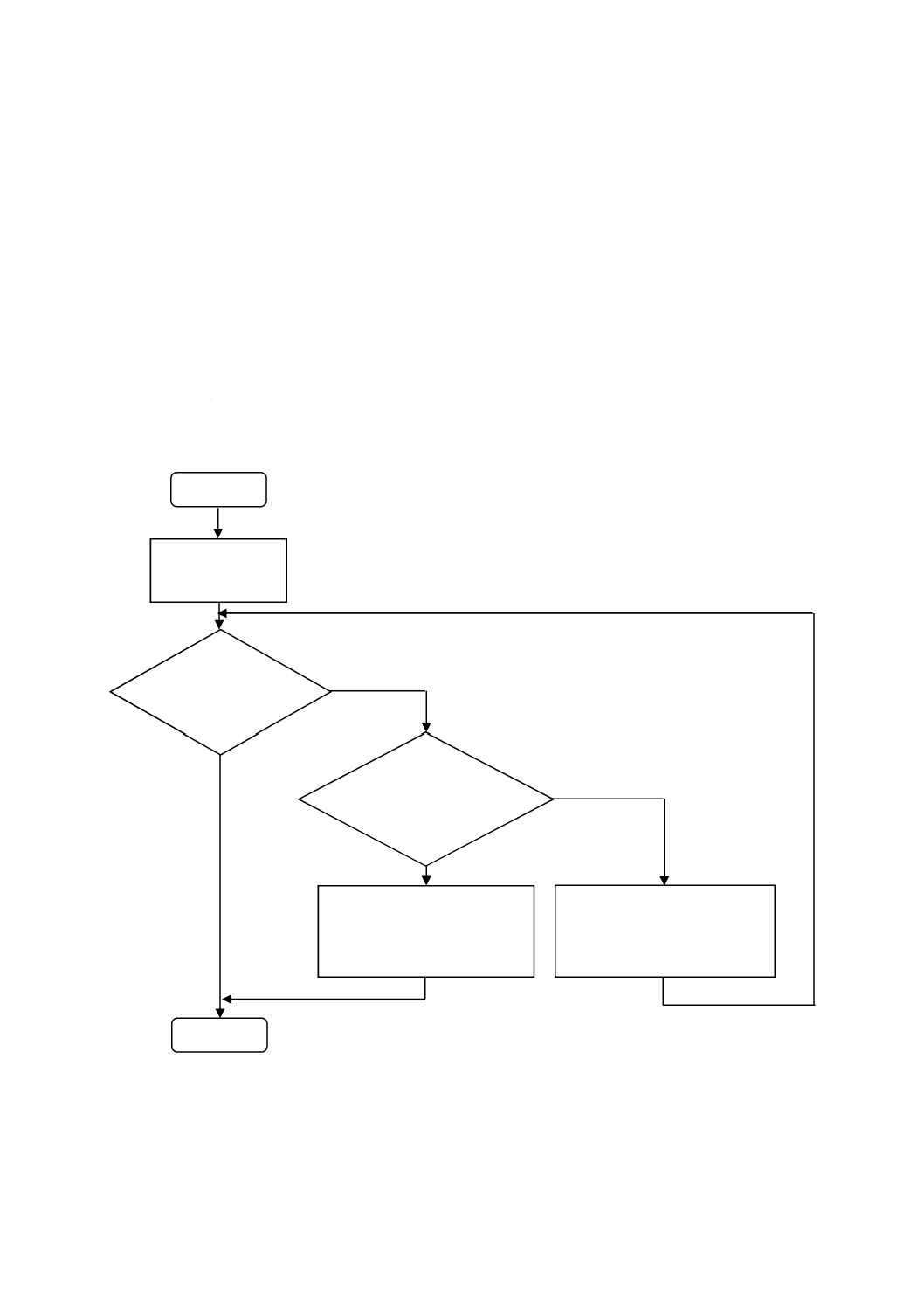
図9は,機械製造業者においてなされる,無効化を起こす誘因及び無効化防止の方策を決定するための
方法を示す概念図である。
図9−製造業者においてなされる,無効化を起こす誘因及び無効化防止の方策を決定するための方法論
7.2
インターロック装置の無効化の可能性を最小にする追加方策
インターロック装置は,合理的に予見可能な方法による無効化を防止するように選択及び/又は設置し
いいえ
はい
はい
いいえ
開始
基本方策の実施
[7.1 a)参照]
終了
表3に従って合理的に予見可能な方
法による無効化防止方策の実施
[7.1 d)参照]
インターロック装置
の無効化の動機を除
去又は最小化できる
か?[7.1 c)参照]
設計方策の実施による,又は代替モ
ードの実施による無効化の動機の除
去又は最小化[7.1 c)参照]
無効化の動機はあ
るか?[7.1 b)及び
附属書H参照]
24
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なければならない。
次に,合理的に予見可能な方法による無効化に対する可能な方策を示す。
要求事項及び適用可能性については,表3参照。
a) インターロック装置の要素への接近の防止
1) 届かないところに設置する(図11参照)
2) 物理的な妨害物又は遮蔽物(図10参照)
3) 隠れたところに設置
b) 代替手段による(容易に利用可能なものを使用することによる)インターロック装置の作動の防止
1) アクチュエータの低コード化
2) アクチュエータの中コード化
3) アクチュエータの高コード化
c) 取外し不可能な固定具(例えば,溶接,接着,一方向ねじ,リベット打ち)を使用することによるイ
ンターロック装置要素の解体又は取外しの防止
注記1 取外し不可能な固定具は,機械の寿命の間インターロック装置の故障が予想できる場合,ま
た,迅速な交換が必要な場合は,適切な解決策ではない。この場合,リスク低減の要求レベ
ルに対しては,他の方策,例えば,a),b)及びd)を使用するのが望ましい。
d) 無効化の防止
1) 次の手段による無効化監視を制御システムに搭載する。
i)
状態監視
ii) サイクルテスト
注記2 1.1)の状態監視において,プロウザビリティ(確かさ)テストは,機械のサイクル中,無効
化が招く通常でない状態が継続していることを検出する。制御システムは,例えば,規定さ
れた機械サイクル中にドアが開くことを予期し,制御信号がないことによって無効化を示す。
注記3 1.2)のサイクルテストにおいて,安全防護物を作動させることが制御システムによってオペ
レータに求められ,予期される制御信号がないことによって無効化を示す。
2) 追加の行為によってだけ無効化が可能な場合,追加のインターロック装置を使用することでプロウ
ザビリティ(確かさ)をチェックする(例えば,分離設置及び配線,又は異なる作動原理の使用に
よって,無効化のために更なる行為を必要とする。)。
注記4 この文脈において,プロウザビリティ(確かさ)のチェックは,両方のインターロック装置
があらかじめ定められた方法で反応することのチェックを意味する。
25
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
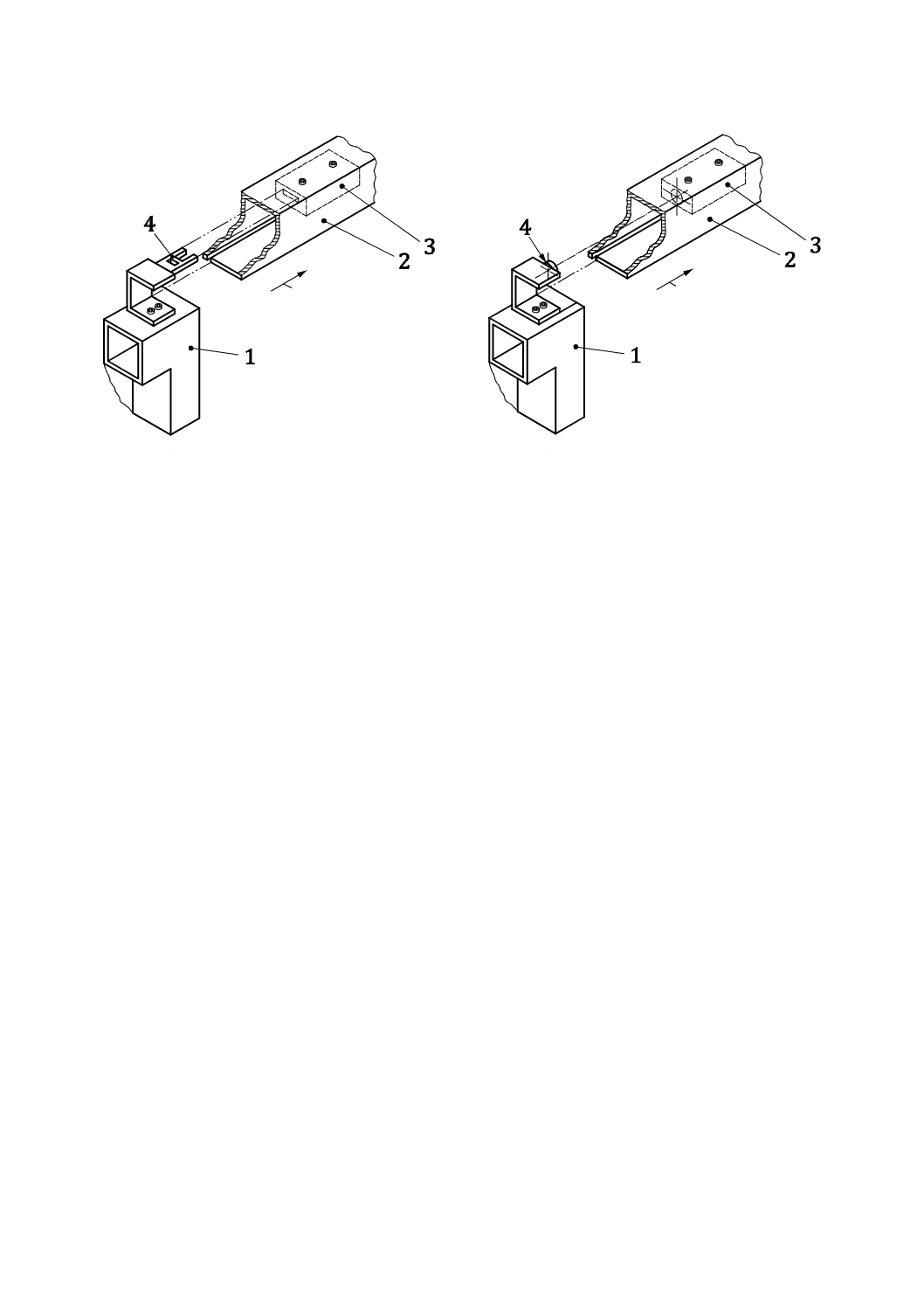
a) タイプ2インターロック装置
b) タイプ3又はタイプ4低コード化
インターロック装置
記号の説明
1 スライドガード(開)
3 位置スイッチ
2 カバー(固定部分)
4 アクチュエータ
a 閉方向
注記 インターロック装置の無効化は,カバー(2),又はその前にあるガードよって困難になる。
図10−物理的妨害物又は遮蔽物による無効化対策の例
a
a
26
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3−インターロック装置の種類ごとの追加無効化防止方策
原則及び方策
タイプ1インタ
ーロック装置
(ヒンジ形を除
く。)
及び
タイプ3インタ
ーロック装置
ヒンジ形タイプ
1インターロッ
ク装置だけ
タイプ2及びタ
イプ4インター
ロック装置
・電磁式ガード施
錠装置付き又
はなしの低コ
ード[7.2 b) 1)]
又は中コード
[7.2.b) 2)]
タイプ2及びタ
イプ4インター
ロック装置
・電磁式ガード施
錠装置付き又
はなしの高コ
ード[7.2 b) 3)]
トラップド・キ
ーシステム
・中コード又は
高コード
(注記2参照)
届かないところに設置
7.2 a) 1)参照
X
X
物理的妨害・遮蔽物
7.2 a) 2)参照
隠れたところに設置
7.2 a) 3)参照
状態監視又はサイクル
試験
7.2 d) 1) i)及びii)参照
位置スイッチ及びアク
チュエータの非着脱式
固定方法
7.2 c)参照
位置スイッチの非着脱
式固定方法
7.2 c)参照
M
M
アクチュエータの非着
脱式固定方法
7.2 c)参照
M
M
M
M
追加のインターロック
装置及びプロウザビリ
ティ(確かさ)のチェ
ック
7.2 d) 2)参照
R
R
X 必須(少なくともこれらの方策のうちの一つを適用する。) M 必須 R 推奨(追加)
注記1 この表はインターロック装置の無効化に対する適切な方策を選択するために使用することを意図している。
リスクアセスメントに基づき示された方策の二つ以上の適用が必要となることもある。
注記2 一つのサイト内で使用されるトラップド・キー装置の数が既知の場合,次の条件下においては合理的に予見
可能な無効化に対する十分な方策として,コード化アクチュエータを使用することができる。
− コード化が装置上に示される場合,各インターロック装置が異なるコードをもつ 及び
− アクチュエータは中又は高コード化されたものであることが望ましい。
注記3 トラップド・キーシステムにはアクチュエータキーのコード化レベルと“ボルトロック形又はキャッチ(保
持)形機構”との間に明確な違いがある。この表は,アクチュエータキーのコード化レベルについてだけ言
及するものである。
注記4 この表に従った方策は,最小限度の要求事項を示す。
27
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1 ヒンジ形位置スイッチ
5 ガードの移動方向
2 ロータ(危険な部位)
6 地面からの高さ
3 ガード
7 フレームに取り付けられたカバー
4 ガードの可動機構
8 作動カップリング(機構)
図11−道路建設機械においてインターロック装置に届かないようにすることによる無効化保護の例
8
制御に関する要求事項
8.1
一般要求事項
ガード施錠付き又はなしのインターロック装置は,危険状態を防止することを目的とした機械の制御シ
ステムの安全関連部(SRP/CS)であり(JIS B 9705-1参照),又は安全関連電気制御システム(SRECS)(JIS
B 9961)のサブシステム若しくはサブシステムの要素である。
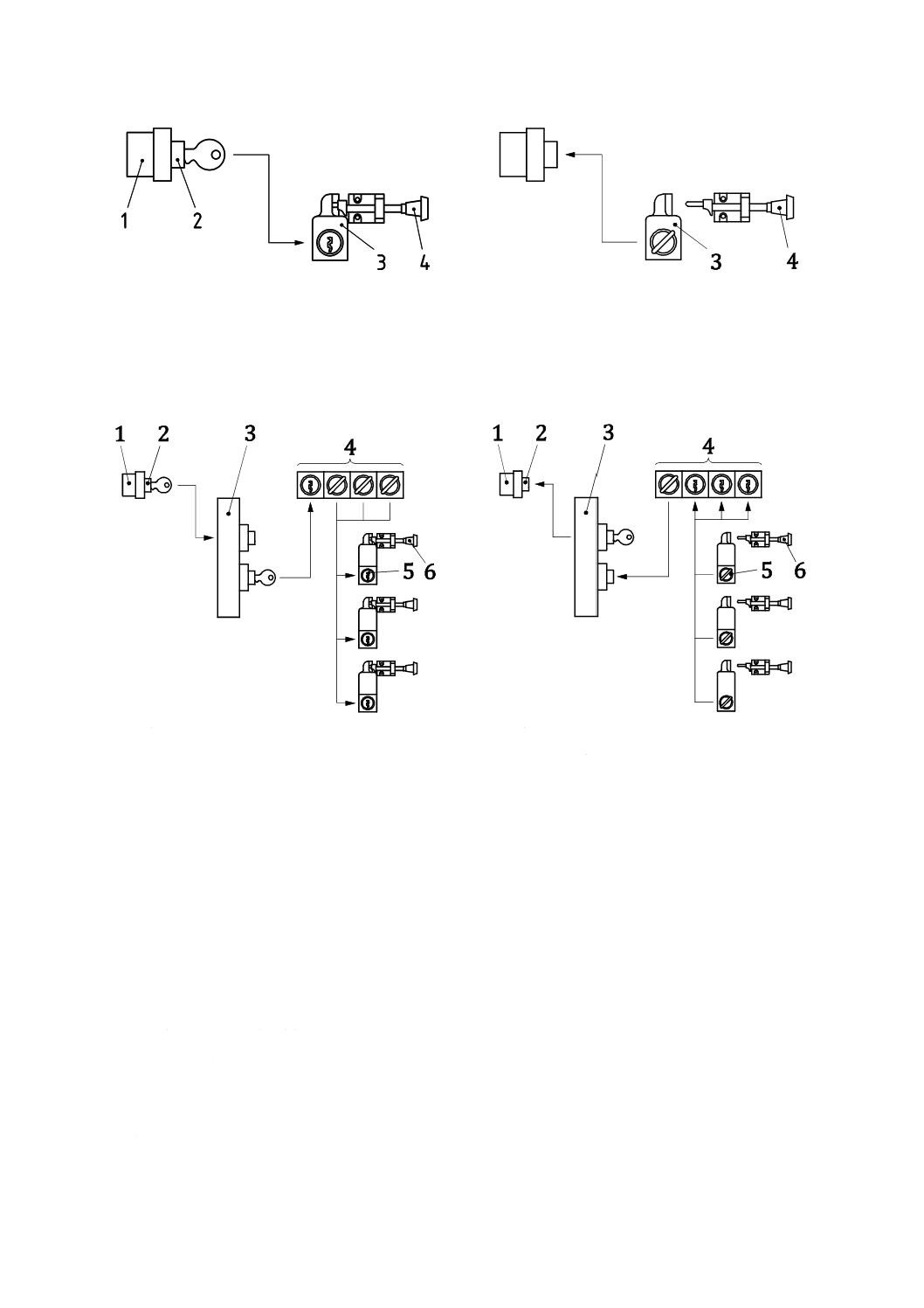
注記 幾つかのアーキテクチャにおいて実現されているインターロック装置の例は,附属書G参照。
8.2
障害の査定
例えば,JIS B 9705-1に従った要求PLr=e,又はJIS B 9961に従ったSIL3のインターロックシステムは,
最低フォールトトレランス1を必要とする(例えば,二つのタイプ1インターロック装置を使用すること
による。)。これを達成するために,アクチュエータが壊れるというような障害を除外するのは通常では正
当化できない。しかし,関連する規格に従って設計された制御パネル内の配線の短絡のような障害は除外
できる場合がある。
JIS B 9705-1又はJIS B 9961に従い,完全な正当化を示すことができない場合は,同様なことが,PLr =
28
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d及びSIL2にも当てはまる。
要求安全性能に対し必要な診断範囲を達成するために自動監視付きのインターロック装置を使用する用
途に対しては,装置が状態を変化させるごとに,例えば,接近の都度,機能試験[JIS B 9960-1の9.4.2.5
(機能試験の採用)参照]を実施することができる。低頻度の接近しかないような場合は,次の機能試験
までに生じる未検出障害の発生確率が増加するので,インターロック装置には,追加方策を備えなければ
ならない。
障害の蓄積を検出するために手動機能試験が必要とされる場合は,次の試験間隔内で実行しなければな
らない。
− PLe + カテゴリ3若しくはカテゴリ4(JIS B 9705-1に従って),又はHFT1(ハードウェアフォールト
トレランス)+SIL3(JIS B 9961に従って)に対しては,少なくとも毎月
− PLd + カテゴリ3(JIS B 9705-1に従って),又はHFT1(ハードウェアフォールトトレランス)+SIL2
(JIS B 9961に従って)に対しては,少なくとも12か月ごと
注記 機械の制御システムは,要求された間隔で,例えば,表示器又は表示灯によって,これらの試
験を要求することが推奨されている。機械の制御システムは,試験を監視し,試験を省略又は
失敗した場合,機械を停止させることが望ましい。
8.3
共通原因故障の防止
8.3.1
一般
冗長インターロック装置を備えている場合は,共通原因故障(CCF)を回避しなければならない。
注記 単純な冗長化に代えて多様性(ダイバーシティ)を使用する,例えば,8.3.2及び/又は8.3.3
で記載される方策を使用する。
8.3.2
タイプ1インターロック装置に使用される位置スイッチの直接及び非直接機械作動
直接及び非直接機械作動のタイプ1インターロック装置の位置スイッチの作動は,通常,共通原因故障
を防止するために使用する。
図12は,タイプ1インターロック装置の位置スイッチの直接及び非直接機械作動の組合せを示す。
29
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1a ガード閉
c 直接機械作動
1b ガード開
d 非直接機械作動
D1 位置スイッチ(NC)
D2 位置スイッチ(NO)
スイッチ作動
直接開路動作
図12−直接及び非直接機械作動を使用することによる二つの機械式作動位置スイッチの
共通原因故障の回避
機械的に作動する位置スイッチの故障の典型的な原因は,次のとおりである。
a) 作動部(例えば,プランジャ又はローラ),又はガードに取り付けられたアクチュエータの過度の摩耗
b) アクチュエータと位置スイッチとの間のミスアライメント
c) ばねによる作動を妨げる作動部(プランジャ)のジャミング
D1又はD2の故障の場合,回路の切離しは一方の位置スイッチによって確実なものとされる。D1(図12
参照)のように直接機械作動の位置スイッチは,ケースa)では,危険側故障に至るが,ケースc)ではそう
ならない。ミスアライメント次第では,ケースb)では危険側故障に至る場合がある。D2(図12参照)の
ように非直接機械作動の位置スイッチは,ケースc)では,危険側故障に至るが,ケースa)ではそうならな
い。ミスアライメントの場合には,ケースb)では危険側故障に至る。
注記 D2は,位置検出システムとなり得る。
直接及び非直接機械作動原理を使用した二つの機械作動位置スイッチ,又は一つは機械作動位置スイッ
チで,もう一つは非機械作動位置スイッチを使用する場合,このサブシステムにおいて,多様性(ダイバ
ーシティ)は,JIS B 9705-1に従い共通原因故障(CCF)の定量化を行うと,スコア20を主張することが
1b
1a
30
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
できる。
8.3.3
動力媒体の多様性(ダイバーシティ)
共通原因故障(CCF)の確率を最小化するために,異なるエネルギー源からの供給をそれぞれ遮断する
ような二つの独立したインターロック装置を,ガードと組み合わせる場合がある(図A.6参照)。この場合,
JIS B 9705-1に従いCCFの定量化を行うと,スコア20を主張することができる。
例 電気的/電子的に制御され,生産プロセスで必要な力を得るため液圧コンポーネントが使用され
ている機械において,インターロックが組まれた可動式ガードの開扉は,二つの独立した位置ス
イッチを動作させる。第1のスイッチは,液圧を遮断するバルブを直接的に制御し,第2のスイ
ッチは,別のバルブを制御する電圧を遮断する。いずれのバルブも危険な動きを消失させること
を前提としている。異なる技術を使用することによって,二つのスイッチが危険側故障となる共
通原因故障のおそれがなくなる。
8.4
ガード施錠装置の解錠機能
ガード施錠装置の解錠機能について,次のために使用する全ての装置はSRP/CSの部分であり,適切な
安全機能は,リスクアセスメントによって決定される要求パフォーマンスレベルPLr又はSILを満たさな
ければならない。
− 施錠位置を検出する。
− 解錠条件を検出する(例えば,速度又は位置監視,時間遅延)。
− 論理信号を処理する。
− ガードを解錠する。
注記1 意図しないガードの解錠の検出と機械が安全条件に達するまでの所要実時間との間に,危険
な状態が生じる可能性があり,そのためガード施錠に対して安全機能によるリスク低減が必
要であるということがリスクアセスメントによって示された場合,施錠/解錠信号を発生す
る全ての装置はSRP/CSに含まれる。
注記2 PLr又はSILは,個別用途ごとのリスクアセスメントに基づく。多くの場合,ガード施錠機能
のPLr又はSILは,インターロック機能のそれよりも低い。ガード施錠機能の機能不良が人
の接近と同時に起こる確率は,非常に低い。PLr=eの場合でもガード施錠機能については,
機械部品に対する障害の除外が可能である[JIS B 9705-2の附属書A(機械システムに対す
る妥当性確認ツール)参照]。JIS B 9705-2の表D.8[障害及び障害の除外−スイッチ−電気
機械式ポジションスイッチ,手動操作用スイッチ(例えば,押しボタン,リセットアクチュ
エータ,DIPスイッチ,磁気作動式接点,リードスイッチ,圧力スイッチ,温度スイッチな
ど)]は,インターロック装置だけに関連することから,ガード施錠装置に対しては適用しな
い。
8.5
障害の除外
障害の除外を適用する場合,JIS B 9705-1の7.3(障害の除外),JIS B 9705-2及びJIS B 9961に従わなけ
ればならない。
可能性のある障害の除外は,予想される環境条件及び外部影響を考慮して機械力学的側面及び電子工学
的側面に対して別々に実施しなければならない。
注記1 頻繁に使用される障害の除外は,電気機械式位置スイッチに関するものである。ノーマルク
ローズの接点が開かないことは,その接点がJIS C 8201-5-1の附属書K(直接開路動作機能
付制御スイッチに対する特別要求事項)に従っている場合,除外可能である。JIS B 9705-2
31
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の表D.8参照。
注記2 幾つかの場合,電気機械式位置スイッチを作動する機構の障害を除外することが可能である。
正当化に対しては,JIS B 9705-2の附属書A参照。予想される環境条件を考慮することは最
も重要である。
注記3 より詳細な情報は,6.3.2参照。
ガード施錠装置の保持力(FZh,5.7.4参照)は,施錠要素(施錠ボルト)に加わる静的な力に十分に耐
えるものであり,また,可動式ガードの跳ね返りによって施錠要素に加わるせん断力を防止する(注記4
参照)ことを確実にする装置を適切に選定するのが望ましい。この場合,施錠要素の破損に対する障害の
除外の使用は,ガード施錠機能に対してPL又はSILを制限するとは限らない。
注記4 例えば,制御システムの設計は,可動式ガードが閉じ,かつ,静止する前に,ばね施錠の施
錠要素が施錠位置に移動しないということを確実にすることができる。これは,例えば,ガ
ードを閉じるのとソレノイドへの電圧を遮断する間の時間遅延によって実現できる。
注記5 ガード施錠機能は,施錠監視機能とは別の安全機能である。
注記6 より詳細な情報は,6.2.2参照。
8.6
インターロック装置の論理的接続
インターロック装置の論理的接続とは,NC接点に対しては直列に接続されたことを意味し,NO接点に
対しては並列に接続されたことを意味する。
冗長接点をもつインターロック装置が直列に接続されている場合,安全関連制御システムに接続されて
いる欠陥をもったインターロック装置の単一障害の検出は,論理的に直列接続された他の正常なインター
ロック装置の動作によって隠されてしまう。
オペレータによる障害の発見(トラブルシューティング)において,欠陥をもつインターロック装置と
直列に接続されているインターロック装置が設置されたガードのうちの一つが作動することは予見可能で
ある。
この場合,障害は隠され,診断範囲値への影響を考慮しなければならない。
直列接続に対しては,最大DC(JIS B 9705-1又はJIS B 9961参照)を考慮するのが望ましい。
注記 装置の論理的直列接続に関する標準情報ISO/TR 24119も参照。
8.7
電気的及び環境的条件
8.7.1
一般要求事項
電気式インターロック装置は,JIS B 9960-1に適合しなければならない。
JIS B 9960-1で指定される環境制限外で装置が使用されることが予見可能な場合,インターロック装置
は,予見可能な環境条件に適合するように選択しなければならない。
8.7.2
性能の考慮
動力インターロックコンポーネントは,全ての予見可能な状況(例えば,過負荷)を考慮して,適切な
電流遮断容量を備えたものでなければならない。
8.7.3
イミュニティ耐性
インターロック用途に使用する近接スイッチ及び磁気スイッチは,予見可能な外部電気,磁気又は電磁
フィールドがその機能を損なわないように選択し,使用しなければならない。
8.7.4
電気的作動条件
電子コンポーネントがインターロック装置に使用される場合,電圧変動,一時的な過電圧などによって
生じる機能不良を防止するために,必要な予防措置をしなければならない。
32
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9
使用上の情報
9.1
一般要求事項
インターロック装置は,次の形をとることが考えられる。
a) 利用可能な個々のコンポーネントを使用して機械製造業者によって設計及び製造される。又は
b) すぐに使用できる完成品として製造され,市場に出荷される。
したがって,機械製造業者及びインターロック装置製造業者に適用される使用上の情報は,異なる要求
事項となる。
9.2
インターロック装置の製造業者による使用上の情報
9.2.1
マーキング
マーキングは,JIS B 9700の6.4(使用上の情報)に従ったものでなければならない。
さらに,爆発性雰囲気で使用するために設計及び製造されたインターロック装置は,それに応じたマー
キングをしなければならない。
印字箇所の制約などによってこのことが現実的でない場合,製造業者の住所及び装置の種類を示す表示
は,取扱説明書に記載しなければならない。装置は,製造業者の名前又はロゴで明瞭に識別できなければ
ならない。
マーキングは,適切な方法で9.2.2又は9.3に従った使用上の情報を含む文書を特定するために十分なも
のでなければならない。
注記 マーキングの目的は,製造業者を特定し,コンポーネントの意図する機能を示すことである(例
えば,直接開路動作に対するタイプ又はシンボル)。
5.7.1,5.7.2.2及び5.7.3.2に従った施錠監視のマーキングは,図13に従ったシンボルを使用しなければ
ならない。
図13−施錠要素の施錠監視シンボルマーク
9.2.2
説明書
インターロック装置の製造業者は,説明書に次を示さなければならない。
a) 製造業者の名前及び住所,適用可能な場合,代表者
b) インターロック装置の名称
c) シリーズ又はタイプの名称
d) インターロック装置の一般的な記載
e) インターロック装置の使用,保全並びに修理のために,及びその正確な機能を確認するために必要な
図,ダイアグラム,記載及び説明
f)
インターロック装置の意図する使用の記載
g) インターロック装置の図,ダイアグラム及び取付手段を含む組立,設置及び接続指示書
h) インターロック装置の使用開始前及び使用に関する説明書,必要な場合,オペレータの訓練に関する
説明書
33
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
i)
使用者によって実施されるべき調整及び保全,並びに順守されるべき予防保全の記載
j)
調整及び保全中に講じられるべき保護方策を含んだ,これらの作業を安全に実施することができるよ
うに作成された説明書
k) 意図する安全機能に対するPL又はSILを決定するために必要な使用者のためのデータ
追加して,関連する場合,次を指定しなければならない。
l)
合理的に予見可能な誤使用に関連する警告
m) 装置自体には,非常の場合のリセット手段及びガード施錠の補助解除機能をもたないという警告,ま
た,これを達成するためには追加の方策が必要とされる(5.7.5.3及び5.7.5.4参照)ということを示す
警告
n) 宣言書(要求される場合)
o) 5.7.4に従った保持力FZh
p) 作動範囲
q) 使用される交換部品の仕様。作業者の健康及び安全に影響する場合
r) 装置が機械的ストッパとして使用される場合,最大衝撃耐性値J
s)
位置スイッチ出力部の最大ピーク電流及び電圧
t)
安全防護区域の外側から脱出用解錠機能を実行する手動アクチュエータに届いてはならないという警
告,又は不適切な起動のリスクを低減するために追加方策を採用してもよいという警告
u) インターロックシステムが特別なアクチュエータ又はキー(コード化又は非コード化)に依存する場
合,指示書にスペアアクチュエータ,キー及びマスターキーの利用に関連するリスク,並びにスペア
アクチュエータ又はキーを確実に管理する必要があることを示す忠告を記載しなければならない。こ
れには,非常及び脱出用解錠機能のためのリセットキーも含む。
v) コード化インターロック装置(タイプ2又はタイプ4)のコード化レベル(低,中,高)
9.3
機械の製造業者によって示される使用上の情報
9.3.1
マーキング
特定のマーキングは要求しない。
9.3.2
説明書
機械製造業者は,機械の使用説明書にインターロック装置に関して,9.2.2に示す関連情報を含めなけれ
ばならない。
34
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
タイプ1インターロック装置−例
A.1 回転カム
A.1.1 説明
直接機械作動で作動する位置スイッチを備えた単一のタイプ1インターロック装置が可動式ガードの位
置を監視する(5.4及び図A.1参照)。
a) 可動式ガード閉
b) 可動式ガード開
記号の説明
A 可動式ガード
C 位置スイッチ
B アクチュエータ(カム)
1 開扉方向
図A.1−回転カム作動式位置スイッチを備えたタイプ1インターロック装置
A.1.2 典型的な特徴
− 位置スイッチ(C)の作動部とアクチュエータ(回転カム)(B)との直接機械作動
− 直接機械作動(3.11参照)による位置スイッチのNC接点の直接開路動作が可能
− 回転カム又は位置スイッチを取り外さない限り,作動部の手動操作による無効化は不可能
− 次の場合,危険側故障になる。
・ ガードと位置スイッチとの間の機械的リンクの故障(アクチュエータが摩耗又は壊れる)
・ 位置スイッチとカムとの間のミスアライメント
A.1.3 注釈
− 可動式ガードの不在が検出されないので,ガードは工具なしで取り外すことができないことを必須と
する。
− 次を参照。
35
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・ 5.2
・ 5.3
注記 障害の除外については,8.5参照。
A.2 リニアカム
A.2.1 説明
直接機械作動で作動する位置スイッチを備えた単一のタイプ1インターロック装置が可動式ガードの位
置を監視する(5.4及び図A.2参照)。
a) 可動式ガード閉
b) 可動式ガード開
記号の説明
A 可動式ガード
C 位置スイッチ
B アクチュエータ(カム)
1 開口方向
図A.2−リニアカム作動式位置スイッチを備えたタイプ1インターロック装置
A.2.2 典型的な特徴
− 位置スイッチ(C)の作動部とアクチュエータ(リニアカム)(B)との直接機械作動
− 直接機械作動(3.11参照)による位置スイッチのNC接点の直接開路動作
− リニアカム又は位置スイッチを取り外さない限り,作動部の手動操作による無効化は不可能
− 次の場合は,危険側故障になる。
・ ガードと位置スイッチとの間の機械的リンクの故障(アクチュエータが摩耗又は壊れる)
・ 位置スイッチとカムとの間のミスアライメント
A.2.3 注釈
− 可動式ガード及び/又はアクチュエータの不在が検出されないので,ガード及び/又はアクチュエー
タは工具なしで取り外すことができないことを必須とする。
− 次を参照。
・ 5.2
・ 5.3
注記 障害の除外については,8.5参照。
A.3 ヒンジ
A.3.1 説明
単一の位置スイッチがヒンジ内部に搭載される(図A.3参照)。
36
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 可動式ガード閉
b) 可動式ガード開
記号の説明
1 可動式ガード
3 ガードの固定部分
2 ヒンジ形インターロック装置
図A.3−ヒンジ形インターロック装置
A.3.2 特徴
− 組込み形位置スイッチの直接機械作動。
− 取り外さなければ無効化は不可能。
− ガードの可動部分に対してはヒンジとして機能。
− スイッチ点の調整は,正確でなければならない。したがって,大きな可動式ガードには適切でない場
合がある。
− ヒンジ形可動式ガードだけ使用可能である。
A.3.3 注釈
可動式ガードの不在が検出されないので,ガードは工具なしで取り外すことができないことを必須とす
る。
A.4 空圧式及び液圧式インターロック装置
A.4.1 例
空圧式及び液圧式インターロック装置の例は,図A.4〜図A.6参照。
37
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
a 閉
b 開
図A.4−可動式ガード及び直接機械作動の単一バルブ(出力部)
記号の説明
a 閉
b 開
図A.5−二つのバルブ(出力部)
38
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1a 可動式ガード閉
1b 可動式ガード開
c 機械アクチュエータへ
A 電気制御回路(自動監視付き)に接続される独立
したインターロック装置
B 液圧回路(動力式インターロック,8.7.2参照)に
接続される独立したインターロック装置(動力回
路の直接遮断が可能な場合)
図A.6−ハイブリッド(電気及び液圧)インターロック装置
A.4.2 注釈
ハイブリッドインターロック装置は,同一技術によるコンポーネントの“共通原因故障”(例えば,同一
原因による同時故障)を誘発するおそれのある非常に過酷な環境条件において特に重要である。共通原因
故障には,例えば,高温条件下で運転する機械の導体絶縁層の溶融,又は電気的若しくは電磁的妨害の影
響下での二つの近接検出器の同時故障がある。
1b
1a
39
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
タイプ2インターロック装置−例
B.1
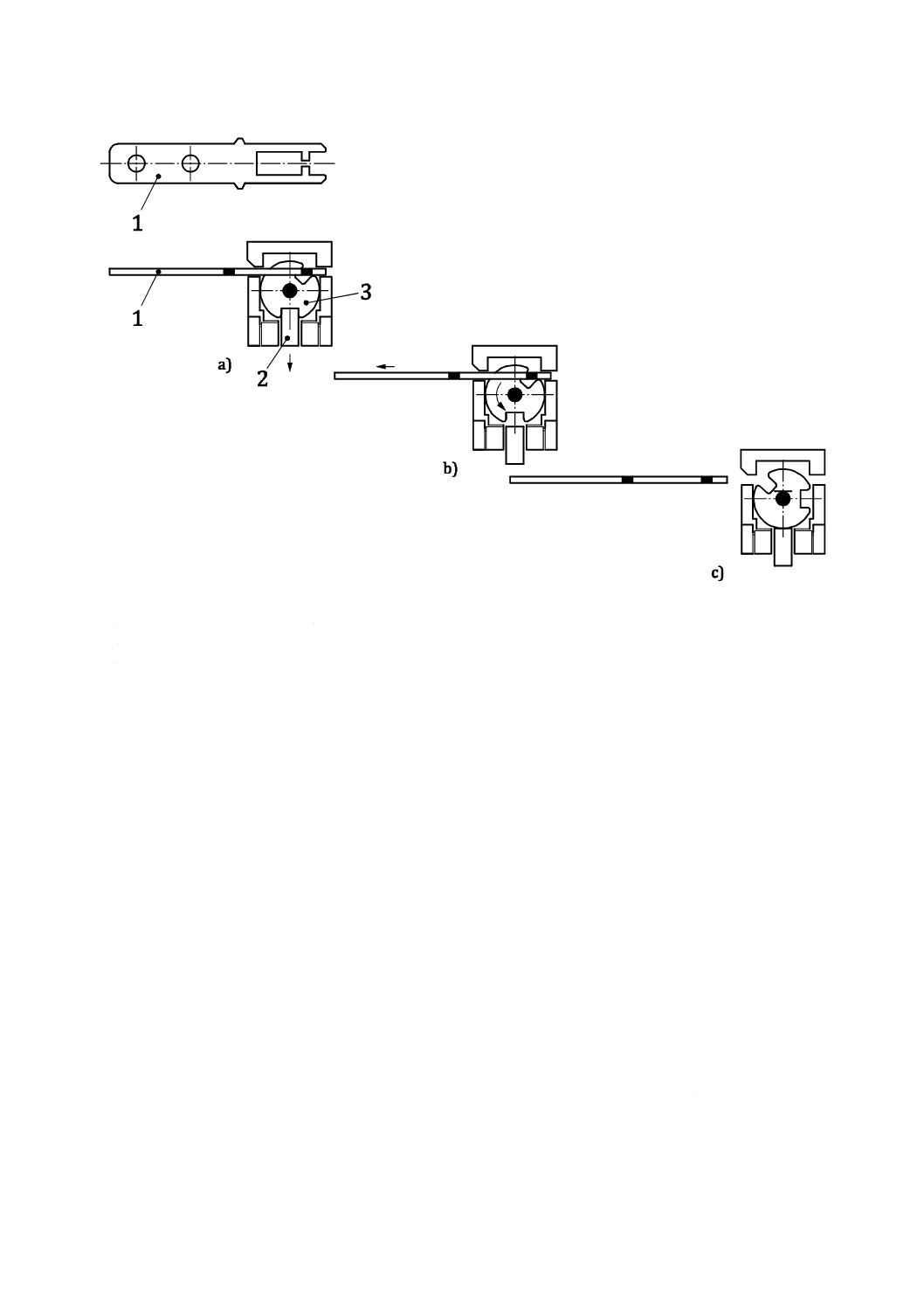
タン作動式位置スイッチ
B.1.1 説明
直接機械作動で作動する位置スイッチを備えた単一のタイプ2インターロック装置が,可動式ガードの
位置を監視する(図B.1及び図B.2参照)。
B.1.2 典型的な特徴
− ガード施錠装置を容易に統合できる仕組み。
− 可動式ガードの開口端に使用する場合,特に適している。
− 位置スイッチのアクチュエータへ直接機械作動。
− 直接機械作動(3.11参照)による位置スイッチのNC接点の直接開路動作が可能。
− 低コード化のため,無効化に対する追加方策が必要とされることがある。
− 機械のライフサイクルにおいてミスアライメントによって損傷を生じる。
− 汚染による機能低下。
− アクチュエータとの衝突によって人が危害を生じる。
記号の説明
1 位置スイッチ
2 アクチュエータ(特殊形状のタン)
図B.1−コード化されたタンアクチュエータをもつ位置スイッチ
40
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 可動式ガード閉
b) 可動式ガード開
記号の説明
1a 可動式ガード閉時の
1b 可動式ガード開時の
内部回転カムの位置
内部回転カムの位置
2a タンの挿入
2b タン未挿入
3a スイッチ要素閉
3b スイッチ要素開
図B.2−タン作動式位置スイッチの作動原理
B.1.3 注釈
無効化を最小にする方策は,箇条7参照。
B.2
トラップド・キー
B.2.1 説明
トラップド・キーインターロック装置は,制御要素とガードに取り付けられた錠(ガード錠)との間で
キーの移動を伴うインターロック装置である(図B.4参照)。
トラップド・キーインターロック装置では,ガード錠と錠を組み込むスイッチ要素とは,一体構造にな
っていない。
このシステムの基本的特徴は,抜き差し可能なキーが,ガード錠又はスイッチ錠のいずれかに保持(ト
ラップ)されることである。ガード錠では,ガードが閉じて,かつ,施錠されるときだけキーが抜ける。
これによって,ガードからスイッチ錠にキーを移動できる。キーはスイッチを閉じると(オン)保持され,
オン位置で抜くことができない(図B.3及び図B.5参照)。
動力源が複数あり出力部の複数の要素を作動させる必要がある場合,キー交換箱が必要である。キー交
換箱に全てのキーを差し込んで施錠させないと,異なるコードのアクセスキー(コードキー)をガード錠
へ移動するために抜くことができない。ガードが複数ある場合は,その数だけのアクセスキーがキー交換
箱に収容(図B.6参照)される。
生産又は安全目的で,幾つかの操作を規定の順序で実施しなければならない場合は,各段階で移動キー
が錠に施錠されて,別の移動キーと交換される。キー交換箱は,錠と一体化することもできる。
1b
2b
3b
1a
2a
3a
41
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 動力供給,キー保持
b) 動力遮断,キー取外し
c) ボルト施錠によって動力遮断,
キー施錠,キー取外し
記号の説明
1 スイッチ
2 ボルト施錠
3 アクチュエータ(キー)
4 ボルト
図B.3−トラップド・キーインターロックの原理−ステップ1
a) 可動式ガード閉及び施錠
b) 可動式ガード閉,未施錠,アクチュエータキーは挿入され,ひねり,保持される。
c) 可動式ガード開,ボルトを伸ばすことができず,アクチュエータ(キー)は保持される。
記号の説明
1 可動式ガード
2 ボルトロック
3 アクチュエータ(キー)
4 ボルト
図B.4−伸縮ボルトを使用したトラップド・キーインターロックの原理−ステップ2
42
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 動力供給中アクセス不可
b) 動力遮断中アクセス可
記号の説明
1 出力部
3 ガードの錠
2 出力部の錠
4 可動式ガードに取り付けられた施錠ボルト/キャッチ
図B.5−シンプルな基本システム
a) 時間遅延,交換箱及びマルチアクセス
b) 時間遅延,交換箱及びマルチアクセス
−動力供給中アクセス不可
−動力遮断中アクセス可
記号の説明
1 出力部
4 キー交換箱
2 出力部の錠
5 ガードの錠
3 時間遅延装置
6 可動式ガードに取り付けられた施錠ボルト/キャッチ
図B.6−複合システム
B.2.2 典型的な特徴
− 可動式ガードと制御システムとが離れていてもインテグリティが低下しない。
− 各々の可動式ガードに電気配線をしなくてよい。
− 可動式ガードが環境条件の悪い場所に置かれている場合に適している。
− 可動式ガードが完全に撤去されても使用できる。
− 特に機械に複数の異なる動力源がある場合,及び動力インターロックに適している。
− 接近を急ぐ必要がある場合には適していない。
− スペアキーによって無効化される(箇条7参照)。
− 施錠ボルトとキャッチとの衝突によって人が危害を生じる。
− 古いタイプのキーは無効化されやすい。
43
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.2.3 注釈
出力部の開とガードの解錠との間の遅延は,キーを差し替える時間分だけが確保される(必要な場合,
時間遅延装置で時間を長くする。)。
キーアクセスシステムの個別(インディヴィジュアル)コード化
個別(インディヴィジュアル)キーコード化は,二つ以上のインターロックを意図せずに同一のキーで
使用し,結果として危険源となることを防止する。例えば,工場では二つの機械A及びBが使用されてい
るとき,機械Aをシャットダウンし安全な立入接近を可能にするキーは,機械Bに立入接近,又は操作す
るためには使用できない。
個別(インディヴィジュアル)キーコード化は,個々のサイト管理,又は特有(ユニーク)キーコード
化を提供するインターロック機器の製造業者を使用することによって,いずれでも工場若しくはサイト又
は組織ごとに維持することができる。
キー及びアクチュエータは,混同を回避するために曖昧でなく,かつ,明瞭に識別できるのが望ましい。
注記 個別(インディヴィジュアル)コード化は,同一のコード化が全ての装置に共通のものではな
いコード化である。これは中コード化又は高コード化によって達成できる。表3参照。
44
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
タイプ3インターロック装置−例
C.1 説明
可動式ガードとリンクする非コード化アクチュエータによって作動する一つ以上の非機械式の位置スイ
ッチ(誘導式,磁気式,容量式,超音波式又は光学式近接スイッチ)で構成するタイプ3インターロック
装置(図C.1参照)。
ほとんどの場合,安全性のインテグリティの要求事項を満たすために,単一の位置スイッチがIEC
60947-5-3の要求事項(5.4も参照)に適合するように設計されていない限り,監視機能付きの二つの単一
の位置スイッチが必要になる。
a) 可動式ガード閉
b) 可動式ガード開
記号の説明
1 可動式ガード
4 近接スイッチ
2 インターロック装置
5 作動部
3 アクチュエータ
6 出力部
図C.1−非コード化アクチュエータによって作動する近接スイッチ形タイプ3インターロック装置
C.2 特徴
− 可動部分なし。
− じんあい(塵埃),液体への高い抵抗性。
− 清潔に保つことが容易。
− 非コード化のため,無効化に対する追加方策が必要。
− 用途が限定される。
C.3 注釈
無効化を最小にする方策については,箇条7参照。
45
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
タイプ4インターロック装置−例
D.1 コード化マグネット作動式インターロック装置
D.1.1 説明
可動式ガードに取り付けられたコード化マグネット(磁気式)アクチュエータによって作動する位置ス
イッチを備えたタイプ4インターロック装置は,ガードが開いているときその接点を開く(図D.1参照)。
a) 可動式ガード閉
b) 可動式ガード開
記号の説明
1 開方向
3 コード化マグネット(磁気式)アクチュエータ
2 タイプ4インターロック装置
4 可動式ガード
図D.1−コード化マグネット(磁気式)アクチュエータによって作動する位置スイッチを備えた
タイプ4インターロック装置の例
D.1.2 特徴
− コンパクトで,外部可動部分なし。
− じんあい(塵埃),液体への高い抵抗性。
− 清潔に保つことが容易。
− コード化されている。
− ガードのミスアライメントに対する許容度がある。
− 電磁妨害に対して影響を受けやすい。
− リード接点が使用される場合,振動及び衝撃,並びに過渡的な電気現象の影響を受けやすい。
− 中又は高コード化は,利用不可能。
46
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
D.1.3 注釈
無効化を最小にするための方策については,箇条7参照。
D.2 コード化RFID作動式インターロック装置
D.2.1 説明
可動式ガードに取り付けられたコード化RFIDタグアクチュエータによって作動する位置スイッチを備
えたタイプ4インターロック装置は,ガードが開いているときその接点を開く(図D.2参照)。
D.2.2 典型的な特徴
− コンパクトで,外部可動部分なし。
− じんあい(塵埃),液体への高い抵抗性。
− 清潔に保つことが容易。
− 中又は高コード化が利用可能。
− ガードのミスアライメントに対する許容度がある。
− 電磁妨害に対してある程度の耐性がある。
D.2.3 注釈
無効化を最小にする方策については,箇条7参照。
記号の説明
1 開方向
3 コード化RFIDタグアクチュエータ
2 タイプ4インターロック装置
4 可動式ガード
図D.2−コード化RFIDタグアクチュエータによって作動する位置スイッチを備えた
タイプ4インターロック装置の例
47
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
その他のインターロック装置の例
E.1
可動式ガードと可動要素との間の機械的インターロック
E.1.1 説明
可動式ガードと危険な可動要素との間の直接機械式インターロック(図E.1参照)。機能の確実性はガー
ド施錠式インターロック付きガードの機能に依存する。
記号の説明
記号の説明
1 可動式ガード
1 可動式ガード
2 可動要素−フリー状態
2 可動要素−拘束状態
可動要素が拘束状態でない
ガードが閉位置でなくなる
場合,ガードは閉位置にロッ
と,可動要素は拘束される。
クされる。
a) 可動式ガード閉
b) 可動式ガード開
図E.1−可動式ガードと可動要素との間の機械的インターロックの例
E.1.2 注釈
− 用途は非常に単純な機構に限定される。
− ガードを開くためには,手動による可動要素の位置変更が必要とされる場合がある。これは,危険区
域に接近せずに可能とするのが望ましい。
48
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(参考)
ガード施錠装置の例
F.1
ガード位置及び施錠手段(施錠の仕組み)の位置を個別に検出するインターロック装置の例
F.1.1
説明
図F.1は,ガード施錠とガード施錠監視とを組み合わせたタイプ2インターロック装置である。アクチ
ュエータは,アクチュエータにリンクする可動式ガードの閉位置で示されている。
ガード施錠のソレノイドは,ばねによって施錠位置にある。ソレノイドに電気が印加されるとソレノイ
ドのプランジャが右に動き,ばねを圧縮する。ドア監視接点はソレノイドのプランジャに結合したレバー
を経由して開く。インターロックのプランジャは,ガードとアクチュエータの開扉動作とによって下方へ
動く。ガードの開位置でインターロックのプランジャの太い部分によって施錠機構が施錠位置に設定され
るのを防ぐ(意図しない施錠を予防する機構)。インターロックのプランジャをインターロックの接点及び
ガード施錠位置の接点両方にリンクさせることによって一つの装置内で両方を監視することができる。
F.1.2
特徴
可動式ガードの状態表示を個別に備える。
49
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1 アクチュエータ
5 インターロック監視接点
2 アクチュエートヘッド
6 ガード施錠監視接点
3 インターロックのためのプランジャ
7 ハウジング
4 ソレノイド形ガード施錠
図F.1−ばね施錠及び動力解錠ガード施錠装置を備えたインターロック装置
F.2
ガードの位置とガード施錠装置の位置とを個別に検出することによるインターロック機能
F.2.1
説明
C1は,可動式ガードの位置を検出し,C2は,施錠装置の位置を検出する(図F.2参照)。
F.2.2
特徴
可動式ガードの状態表示を個別に備える。
50
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
C1 可動式ガードの位置検出
a 閉
C2 施錠装置の位置検出
b 開
注記 C1及びC2は,検出器としていろいろな技術形式が使用可能である(4.1参照)。
図F.2−可動式ガードの位置及びガード施錠装置の位置の個別検出
F.3
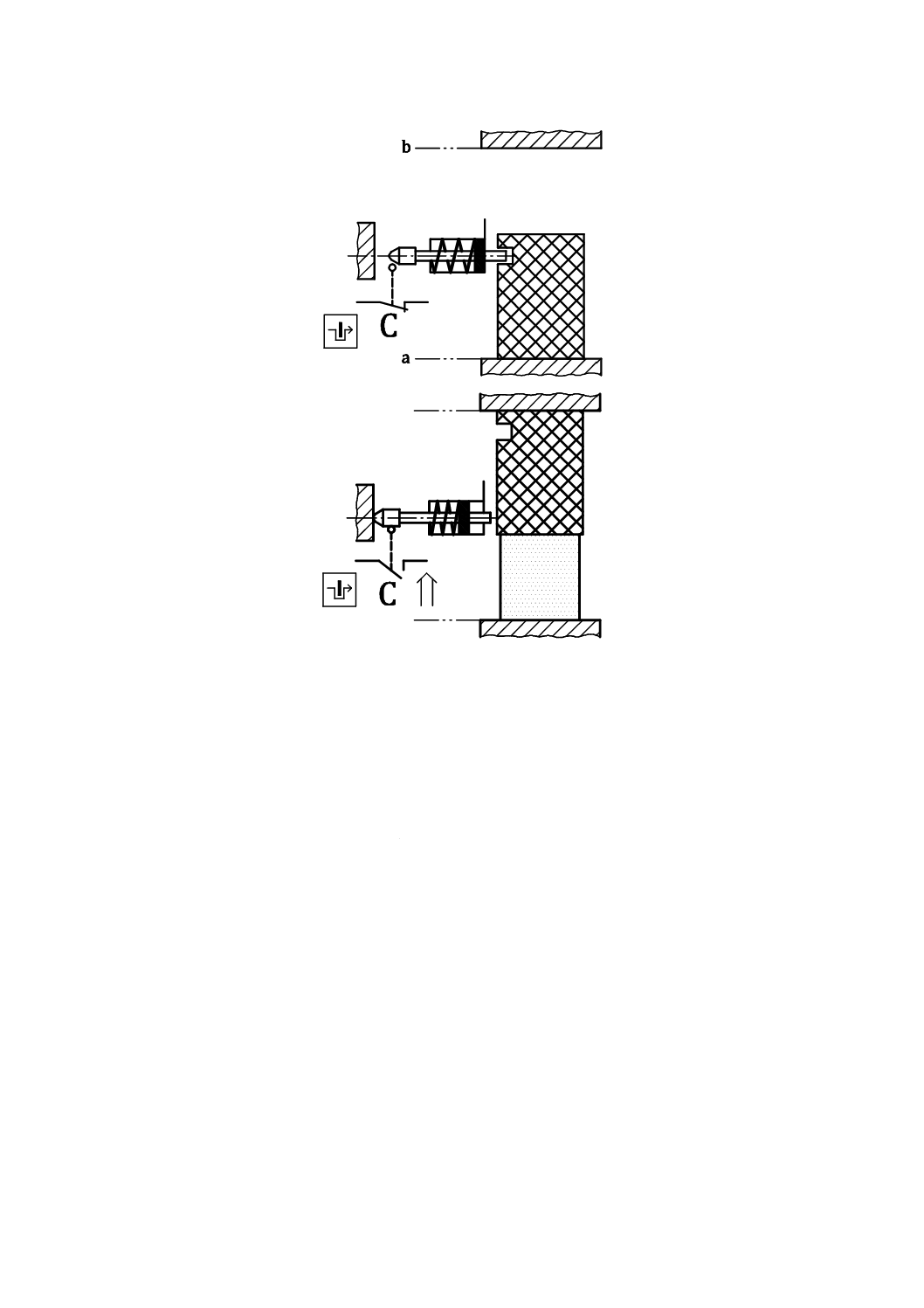
施錠装置の位置検出だけによってガードの閉位置及び施錠を確実にしたインターロック機能
F.3.1
説明
施錠装置の位置を検出することによって,単一の検出器(C)は可動式ガードの位置を監視するために
も使用することができる。これは,ガードの閉位置がガード施錠装置の接点及び可動式ガードの組込みに
対してよい設計・製作によって確実に,信頼性をもって検出されることが前提である(図F.3参照)。
F.3.2
特徴
可動式ガードの状態表示を個別に備えていない。
51
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
C 施錠装置の位置検出
a 閉
b 開
注記 Cは,検出器としていろいろな技術形式が使用可能である(4.1参照)。
図F.3−可動式ガードの位置検出及びガード施錠装置の位置検出を同時に行う検出
F.4
電磁式ガード施錠装置を備えたインターロック装置
F.4.1
説明
閉じた状態の可動式ガードは,電磁的に施錠される(電磁石の作動原理,図F.4参照)。インターロック
機能は,ガード位置の検出によってなされる。施錠機能は,電磁力の監視を含み,無理に開扉すると,例
えば,リセットを最低10分後に可能とするような応答機能が働く(5.7.3.3参照)。
52
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1 コード化アクチュエータ
4 非接触形作動の位置スイッチ
2 マグネットキーパープレート
5 可動式ガード
3 電磁式ガード施錠部
図F.4−電磁式ガード施錠装置を用いたインターロック装置
F.4.2
特徴
− 密閉構造によって清掃が容易。
− じんあい(塵埃)及び液体への高い抵抗性。
− コンパクトで,可動部分がない。
− 設計によっては,動力に故障が生じた場合,解錠されてしまう。
− 非常に高い保持力には,対応できない。
F.5
手動操作式遅延装置を備えたガード施錠式インターロック装置
F.5.1
説明
ねじ切りされたピンを手で回す(図4に示す“条件なし解錠”)(図F.5参照)。スイッチ開とガード解錠
との間の経過時間は,危険な機能が停止するための時間より長くなるように決定する。
ガードが開いているとき,ピンが再度回されてスイッチ接点が閉じるのを可動式ガードは防止する。
53
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1 可動式ガード
a 閉
2 位置スイッチ
b 開
図F.5−手動操作式遅延装置を備えたガード施錠式インターロック装置
F.5.2
特徴
− シンプルゆえの信頼性。
− 追加手段,例えば動力式ドライバによって素早く解錠できる。
F.5.3
注釈
低頻度の接近用途だけに適切。
54
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(参考)
安全機能として使用されるインターロック装置の適用例
G.1
一般
この附属書の説明は,ハードウェアフォールトトレランス(アーキテクチャ)に関してJIS B 9705-1に
基づく適切なカテゴリに限定されている。要求される安全関連性能を達成するために追加要求事項(例え
ば,診断範囲)を考慮する必要がある。
G.2
例1−カテゴリ1
記号の説明
1 開
2 閉
B1 ガード位置を監視する位置スイッチ
Q1 コンタクタ
図G.1−危険な動きを防止するための可動式ガードの位置監視
G.2.1 安全機能
− 保護装置によって始動する安全関連停止機能。可動式ガードの開は,安全機能[IEC 61800-5-2に従っ
たSTO(安全トルクオフ)又はJIS B 9960-1に従った停止カテゴリ0]を始動する。
G.2.2 機能の説明
− 可動式ガードの開は,直接開路動作の位置スイッチB1によって検出される。B1は,危険な動きを停
止するコンタクタQ1を無励磁にする(図G.1参照)。
− 単一故障(障害)が発生した場合,安全機能が失われる可能性がある。安全機能はコンポーネントの
信頼性に依存する。
− 不具合(障害)を検出する方策をもたない。
− 保護装置の取外しは検出されない。
直接開路動作
55
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.2.3 設計上の特徴
カテゴリ1を達成するため,次の要求事項に適合する。
− 基本安全原則及び十分吟味された安全原則に従い,及びカテゴリBの要求事項に適合する。保護回路
(例えば,接点保護)が実装されている。無励磁の原則が基本安全原則として採用されている。制御
回路のアースは十分吟味された安全原則としてみなされる。
− 位置スイッチB1は,JIS B 9705-2の表D.2(十分吟味された安全原則一覧)に従った直接開路動作の
位置スイッチである。したがって,十分吟味されたコンポーネントとしてみなされる。開離する接点
は,可動式ガードが開いている場合,直接機械作動で回路を遮断する。
− コンタクタQ1は,十分吟味されたコンポーネントであり,これはJIS B 9705-2の表D.3(十分吟味さ
れたコンポーネント一覧)に従った追加条件が求められる。
− 可動式ガードの堅固な配置が位置スイッチB1の作動を保証する。位置スイッチB1の作動要素は,ず
れないように保護されている。強固な機械的部分(ばね要素はない)だけが採用されている。
− 位置スイッチの作動ストローク量は,製造業者の仕様に適合する。
注記 単位時間当たりの危険側故障発生確率の見積りを含む詳細な説明は,参考文献[14]の8.2.5で利
用可能である。
G.3
例2−カテゴリ3
G.3.1 安全機能
− ドライブモータの速度がゼロでない限り,可動式ガードは解錠できない。
− 可動式ガードが施錠されていない又は閉じていない場合,予期しない起動を防止する。
G.3.2 機能の説明
− 危険な動作への接近は,モータが給電中又は静止するまでの惰性で動いている間,可動式ガードが閉
じ,かつ,施錠されていることによって防止される(図G.2参照)。可動式ガードが解錠されて,解錠
ソレノイドによって施錠要素(施錠ボルト)が引き抜かれたとき,開くことができる。モータが静止
状態にあるときだけ,解錠ソレノイドは励磁することができる。これは静止モニタK4で達成される。
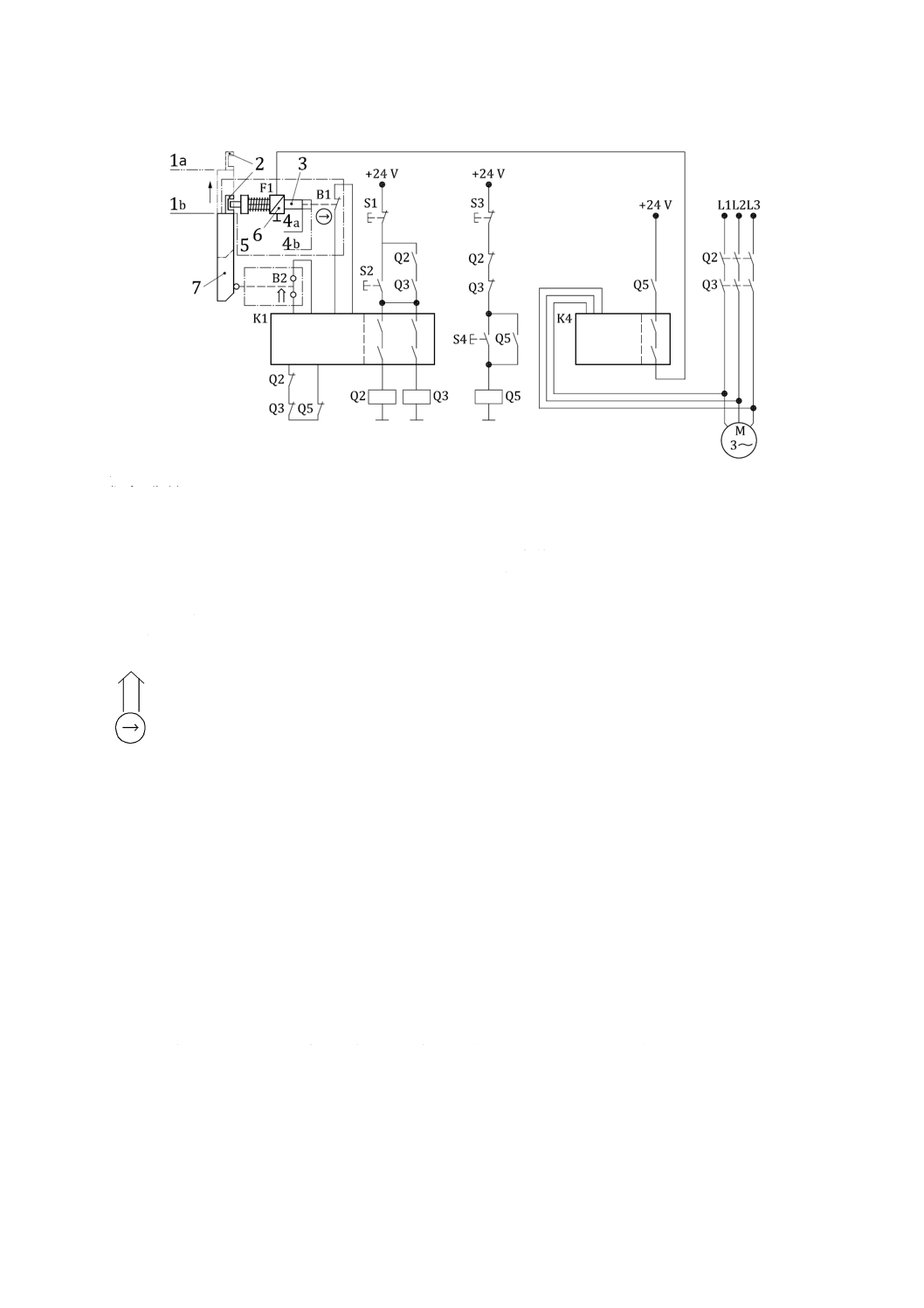
56
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1a 可動式ガード開
1b 可動式ガード閉
2 施錠ボルトを挿入するためのノッチ
3 施錠要素(施錠ボルト)
4a 施錠ボルトの施錠位置
4b 施錠ボルトの解錠位置
5 ガード施錠装置
6 解錠ソレノイド
7 可動式ガード
S1 停止スイッチ
S2 起動スイッチ
S3 施錠スイッチ
S4 解錠スイッチ
K1 監視論理ユニット
Q2 コンタクタ
Q3 コンタクタ
K4 安全静止モニタ
Q5 コンタクタ
F1 ばね
B1 施錠要素監視位置スイッチ
B2 ガード位置監視位置スイッチ
図G.2−安全リレー及び静止モニタを備えたガード施錠装置−カテゴリ3
− 起動スイッチS2を押してモータを起動させるには,可動式ガードが閉じ(B2が閉じている),かつ,
施錠されている(B1が閉じている)ときだけ可能である。Q2,Q3及びQ5は,無励磁状態であり,
K1のフィードバックループは閉じている。S2が閉じられると,Q2及びQ3が励磁され閉じた状態に
なり,モータへの動力供給がオンになる。
− 停止スイッチS1を押すことによって,Q2及びQ3は無励磁状態になり,モータは停止する。
− モータが動いている間,可動式ガードの開は施錠要素(施錠ボルト)で防止される。施錠ボルトが解
除されたときだけガードの開は,可能となる。施錠ボルトを解除するのに,次の手順が要求される。
− 停止スイッチS1を押すと,Q2及びQ3が無励磁状態になり,接点が切り替わる。
− 解錠スイッチS4を押し,解錠を要求する(Q5は励磁され,閉じる)。
− モータが停止したとき,静止モニタK4の出力が閉じる。
− 解錠ソレノイドが励磁され,施錠要素(施錠ボルト)が解錠位置に動く。
解錠要求が施錠スイッチS3を押すことによって取り消される。Q5が無励磁状態になる。
− 可動式ガードが閉じると,ばねによって施錠要素(施錠ボルト)が,意図するノッチとかみ合い,可
作動している状態を示している。ドア閉。
直接開路動作
57
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
動式ガードは施錠され,B1及びB2は閉じる。
− 入力回路の一つ,B1(施錠要素モニタ)又はB2(ガードモニタ)が開くと,K1の出力は開く。
G.3.3 設計上の特徴
カテゴリ3を達成するために次の要求事項を満足する。
− 基本安全原則及び十分吟味された安全原則に従い,及びカテゴリBの要求事項に適合する。保護回路
(例えば,接点保護)が実装されている。
− 配線の障害が考慮されている[JIS B 9705-2の表D.4(障害及び障害の除外−導体及びケーブル)]。短
絡が検出され,安全条件が始動するか,又は障害除外が可能となるようにケーブルが敷設されている。
− コンタクタQ2,Q3及びQ5は,JIS C 8201-5-1の附属書L[機械的に結合された接点素子(リンクド
コンタクト)に対する特別要求事項]に従い機械的リンクドコンタクトをもつ。
− カテゴリ3に必要な単一障害に対する安全性を達成するため,位置スイッチB2は,別の位置スイッ
チとする(B1の作動とは機械的に独立)。
− 位置スイッチB1は,JIS C 8201-5-1の附属書Kに従い直接開路動作である。ゆえに,接点溶着によ
る接点が開かないという障害については除外することが許される。
− ばねによる施錠要素(施錠ボルト)の施錠機能,ソレノイドによる解錠機能,施錠要素監視用の位置
スイッチB1を備えたガード施錠装置は,単一のエンクロージャの中に置かれる。ボルトを挿入する
ノッチは,可動式ガードの部分である。
− ガード施錠装置のばねは,JIS B 9705-2の表A.3(十分吟味されたコンポーネント一覧)による十分吟
味されたばねである。追加して,ばねはEN 13906-1に従い恒久的フェールセーフ(ばねの損傷の障害
除外)のものである。解錠用のソレノイドは,電気的な入力がなければオンしない。
− 次による施錠要素(施錠ボルト)の損傷に対する障害の除外
− ガード施錠装置の保持力(FZh)が施錠ボルトに加わる静的な力に十分耐える施錠装置を適切に
選択する。
− 可動式ガードの跳ね返りによって施錠ボルトに動的な力が加わることを防止する。制御システ
ムの設計は,可動式ガードが閉じ,かつ,静止する前に,ばねによる施錠要素(施錠ボルト)
が施錠位置に移動しないということを確実にする[例えば,ドアを閉じてソレノイドを無励磁
(図G.2にはない。)にするまでの遅延時間による。]。
施錠ボルトの損傷に対する障害の除外は,安全機能に対するPL又はSILを必ずしも制限するもの
ではない。
− 設計によって,施錠要素(施錠ボルト)は,可動式ガードが閉じていないとき(不適切な施錠位置の
防止),施錠位置(ガード施錠位置)に届かない配置にする。
− K1は,少なくともJIS B 9705-1のカテゴリ3の要求事項に適合した監視論理ユニットである。入力回
路は,地絡及び供給電圧への短絡を監視する。安全状態は障害の検出で始動する。安全関連出力は,
入力回路及びフィードバックループが閉じたときだけ始動することが可能である。Q2,Q3又はQ5
の接点溶着のようなエラーは,K1のフィードバック回路で検出する。
− 静止モニタK4は,少なくともJIS B 9705-1のカテゴリ3の要求事項に適合する。K4は,接点と接点
との間の短絡,モータへのインプット線の外れ,供給電圧への短絡を見るために入力回路を監視して
いる。安全状態は,障害の検出時に始動する。
− スイッチB1及びB2はプロセスで試験される。理由はK1の安全関連出力は,B1及びB2が作動した
ときだけ,再びスイッチオンとなる。これは,ガードの開閉によって達成される。
58
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.4
例3−カテゴリ4
G.4.1 安全機能
− 保護装置によって始動する安全関連停止機能。可動式ガードの開は,安全機能[JIS B 9960-1に従っ
た停止カテゴリ0又はIEC 61800-5-2に従ったSTO(安全トルクオフ)]を始動する。
G.4.2 機能説明
− 危険な動きは,可動式ガード(図G.3参照)によって安全防護されている。可動式ガードの開は二つ
の位置スイッチB1及びB2によって検出されており,このスイッチはNC接点とNO接点との組合せ
で構成され,監視論理ユニットK1で評価されている。K1は,二つのコンタクタQ1及びQ2を無励
磁状態とし,危険な動きを停止する。
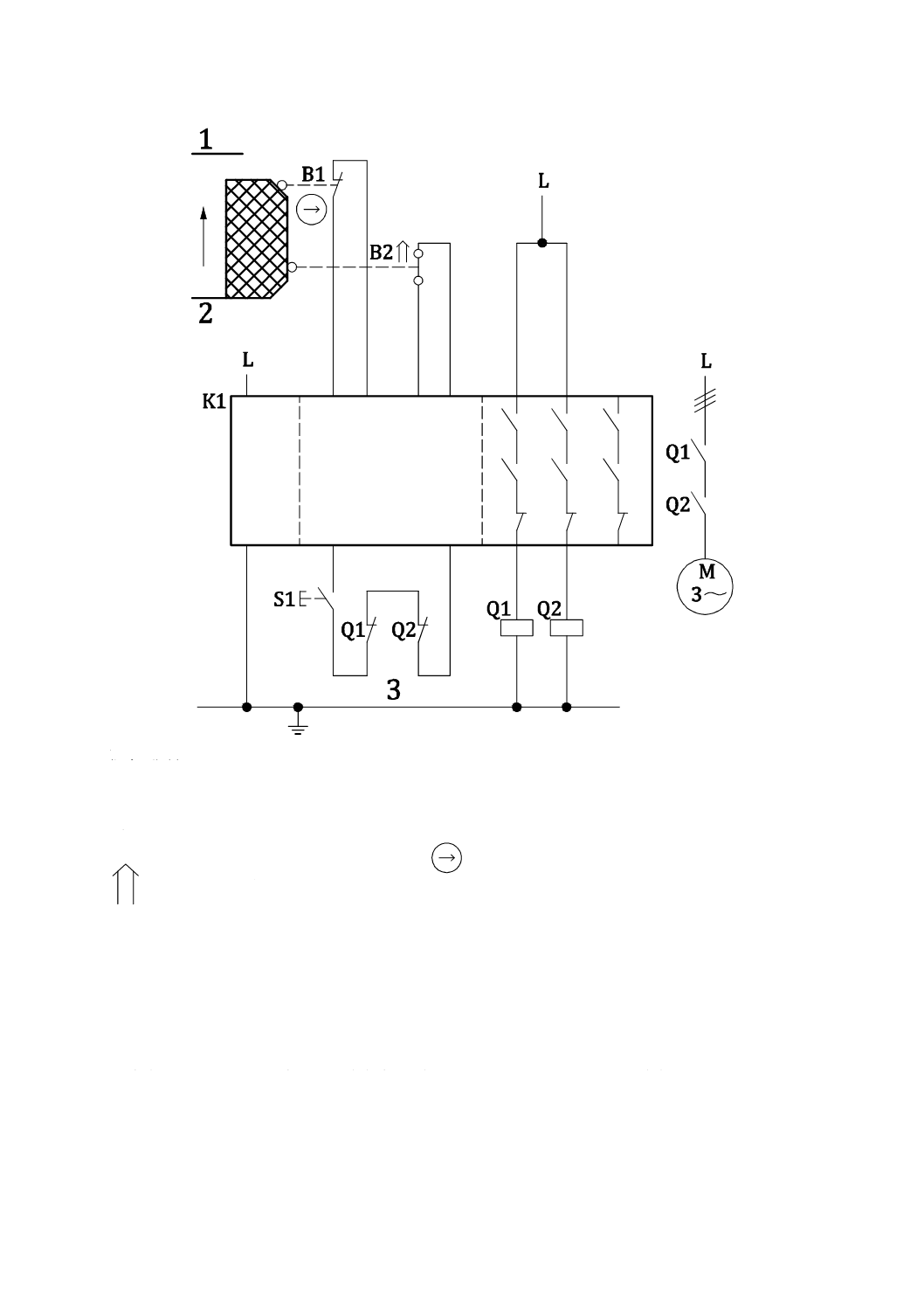
59
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号の説明
1 開
S1 起動(リセット)スイッチ
2 閉
Q1 コンタクタ
3 フィードバック回路
Q2 コンタクタ
B1 ガード位置監視の位置スイッチ
K1 監視論理ユニット
B2 ガード位置監視の位置スイッチ
図G.3−安全モジュール(K1監視論理ユニット)による可動式ガードの位置監視
− 位置スイッチは,障害検出のためにK1でプロウザビリティ(確かさ)が監視されている。Q1及び
Q2の障害は,K1で外部監視装置によって検出される。起動指令は,Q1及びQ2のメインコンタクタ
が前もって開になったときだけ継続する。
− 安全機能は,コンポーネントの障害時には損なわれていないままである。障害は,起動中に,又はQ1
及びQ2の電圧低下による可動式ガードの作動(開閉)時に検出される。Q1及びQ2の励磁は,障害
が修正されるまで防止される。
作動している状態を示している。
直接開路動作
60
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.4.3 設計上の特徴
カテゴリ4を達成するため,次の要求事項を満足する。
− 基本安全原則及び十分吟味された安全原則に従い,かつ,カテゴリBの要求事項に適合する。
− 保護装置の安定した設置は,位置スイッチの作動のために保証されている。
− スイッチB1は,JIS C 8201-5-1の附属書Kに従った直接開路動作の位置スイッチである。
− 位置スイッチB1及びB2に接続する電線は,分離して配線又は保護されて配線されている。
− 監視論理ユニットK1は,カテゴリ4の全ての要求事項を満足する。
− コンタクタQ1及びQ2は,JIS C 8201-5-1の附属書Lに従ったリンクドコンタクトをもつ。
注記1 様々な保護装置に対して幾つかの機械的位置スイッチが直列に接続(例えば,カスケードな
し)されていない場合だけ,カテゴリ4として認められる。それは,スイッチにおける障害
は検出することができないからである。
注記2 1時間当たりの危険側故障確率の見積りを含む詳細な説明は,参考文献[13]の8.2.34に記載さ
れている。
61
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(参考)
インターロック装置の無効化動機
インターロック装置の無効化は,重大な危害のリスクを増加させる可能性があり,予見可能な誤使用の
影響を最小化するためにできる限り実行可能な保護方策を採用しなければならない。
注記1 この附属書は,自動で運転する工作機械の例を示す。この附属書に記載されている原則及び
表を他の機械に使用する場合は,特定の機械及び生産の特徴に合うように表を修正すること
が望ましい。
ガードに取り付けられたインターロック装置を無効化する動機は,幾つかの側面がある。その一つは,
ある特定の機械加工を遂行しなければならない場合に安全防護物がどのように邪魔になるかであり,もう
一つの側面は,ワークピースがスクラップになるのを避けるためにオペレータが機械加工を近くで監視し,
かつ,微調整する必要があることである。
インターロック装置を無効化する動機を機械設計者が特定する場合に,次の方法を利用できる。この方
法を使用する場合は,全ての意図する運転モード及び保護装置を考慮する必要がある,
個々の保護装置は別々のものとしてみなし,関連する各タスクについては,機械の運転に精通している
人に次の質問をする必要がある。
“機械の作業に対して保護装置を無効化する利益は何であると想定されるか?”
表H.1は,この実施手順を支援するものである。オペレータの最も一般的なタスクは,インターロック
装置を無効化する場合の利益に対してリスト化してある。この表は,幾つかの基本的な入力としての入口
を示しているが,必要な場合,追加の入力も可能である。
この手順に従うために,次の4ステップを遂行する。
a) 機械に備えられている全ての運転モードを特定しなければならない。例えば,モード1=自動,モー
ド2=手動など
b) 機械に適用される個々の全てのタスクは,表の列に集めて,一致する運転モードの欄に“○”の印を
付ける。
c) 次の二つの欄は,“はい”又は“いいえ”を付ける。これは意図するタスクが選択されたモードで許容
可能かどうか,また,無効化せずにそのモードで可能かどうかを特定するためである。この二つの欄
に,一つ“いいえ”が入ると不安全な機械とみなされ,機械設計の改良が必須となる。
d) さらに,幾つかの欄があるが,“より高い正確性”のような保護装置なしでの作業特性上の利益を記入
する。これらの欄には,“0(なし)”,“+(微小)”,“++(大幅)”をチェックし,記入する。“+”,
“++”は,安全防護物が作業プロセスを妨げる運転条件を特定していることを意味する。設計者は,
実用に即した安全防護物の改善が可能かどうかをチェックするのが望ましい。
注記2 実用に即した運転モードは,無効化を不要にする,又は興味をひかなくするための重要な手
段である。制限された運転条件(例えば,低減速度,イネーブル装置と組み合わせたホール
ド・トゥ・ラン制御,機能の制限)は,低減された残留リスク,及び自動運転モードへある
種の“戻る動機”(最も低い残留リスク)の双方を提供する。
表H.2は,表H.1の適用例を示す。
無効化の動機が運転モードの変更又は追加によって完全に除去できない場合,設計者に残された選択は
62
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
一つである。これは,インターロック装置の無効化をより困難又は不可能にすることである。
表H.1−インターロック装置を無効化する動機の評価
タスク
運
転
モ
ー
ド
1
a
)
運
転
モ
ー
ド
2
a
)
運
転
モ
ー
ド
3
a
)
運
転
モ
ー
ド
4
a
)
運
転
モ
ー
ド
5
a
)
こ
れ
ら
の
運
転
モ
ー
ド
で
の
タ
ス
ク
は
許
容
可
能
か
無
効
化
せ
ず
タ
ス
ク
は
遂
行
可
能
か
よ
り
容
易
/
便
利
b
)
よ
り
迅
速
に
/
生
産
性
は
向
上
b
)
フ
レ
キ
シ
ビ
リ
テ
ィ
,
例
え
ば
,
よ
り
大
き
な
ワ
ー
ク
ピ
ー
ス
に
対
し
て
b
)
よ
り
高
い
正
確
性
b
)
よ
り
良
い
視
認
性
b
)
よ
り
良
い
聞
き
取
り
や
す
さ
b
)
よ
り
低
負
荷
の
身
体
的
努
力
b
)
低
減
さ
れ
た
行
程
(
ト
ラ
ベ
ル
)
b
)
よ
り
大
き
な
動
き
の
自
由
度
b
)
改
良
さ
れ
た
動
作
フ
ロ
ー
b
)
中
断
の
回
避
b
)
最初の運転
プログラム試験/テストラン
設定/調整のための変更/工具管理・交換など
機械加工
切りくず除去のための手動介入
ワークピースの手動交換
トラブルシューティングのための手動介入
チェック/ランダムサンプリング
測定/微調整のための手動介入
工具の手動交換
保全
障害のある機械の修正
清掃など,例えば,削りくず(屑)の除去
注a) 運転モード
・運転モード1:............................
・運転モード2:............................
・運転モード3:............................
・運転モード4:............................
・運転モード5:............................
運転モードには,表H.2で示すような自動モード及び手動モードを含む。
注b) 保護装置がない場合の利益。0=なし,+=微小,++=大幅
参考文献[15]参照。
63
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.2−インターロック装置を無効化する動機の評価例
タスク
運
転
モ
ー
ド
1a
)
=
自
動
運
転
モ
ー
ド
2a
)
=
手
動
運
転
モ
ー
ド
3a
)
運
転
モ
ー
ド
4a
)
運
転
モ
ー
ド
5a
)
こ
れ
ら
の
運
転
モ
ー
ド
で
の
タ
ス
ク
は
許
容
可
能
か
無
効
化
せ
ず
タ
ス
ク
は
遂
行
可
能
か
よ
り
容
易
/
便
利
b
)
よ
り
迅
速
に
/
生
産
性
は
向
上
b
)
フ
レ
キ
シ
ビ
リ
テ
ィ
,
例
え
ば
,
よ
り
大
き
な
ワ
ー
ク
ピ
ー
ス
に
対
し
て
b
)
よ
り
高
い
正
確
性
b
)
よ
り
良
い
視
認
性
b
)
よ
り
良
い
聞
き
取
り
や
す
さ
b
)
よ
り
低
負
荷
の
身
体
的
努
力
b
)
低
減
さ
れ
た
行
程
(
ト
ラ
ベ
ル
)
b
)
よ
り
大
き
な
動
き
の
自
由
度
b
)
改
良
さ
れ
た
動
作
フ
ロ
ー
b
)
中
断
の
回
避
b
)
最初の運転
○
はい
はい
0
0
0
0
0
0
0
0
0
0
0
プログラム試験/テストラン
○
はい
はい
0
0
0
0
0
0
0
0
0
0
0
設定/調整のための変更/工
具管理・交換など
○
いい
え
いい
え
++ 0
0
0 ++ ++ 0
0
0
0
0 適切
な運
転モ
ード
なし
機械加工
○
はい
はい
0
0
0
0
0
0
0
0
0
0
0
切りくず除去のための手動介
入
ワークピースの手動交換
トラブルシューティングのた
めの手動介入
○
はい
はい ++ 0
0
0
0
0
0
0
0
0
0 改良
が必
要
チェック/ランダムサンプリ
ング
測定/微調整のための手動介
入
工具の手動交換
○
はい
はい
0
0
0
0
0
0
0
0
0
0
0
保全
障害のある機械の修正
清掃,例えば,削りくず(屑)
の除去
.........
..........
注a) 運転モード
b) 保護装置がない場合の利益。0=なし,+=微小,++=大幅
64
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書I
(参考)
最大静的動作力
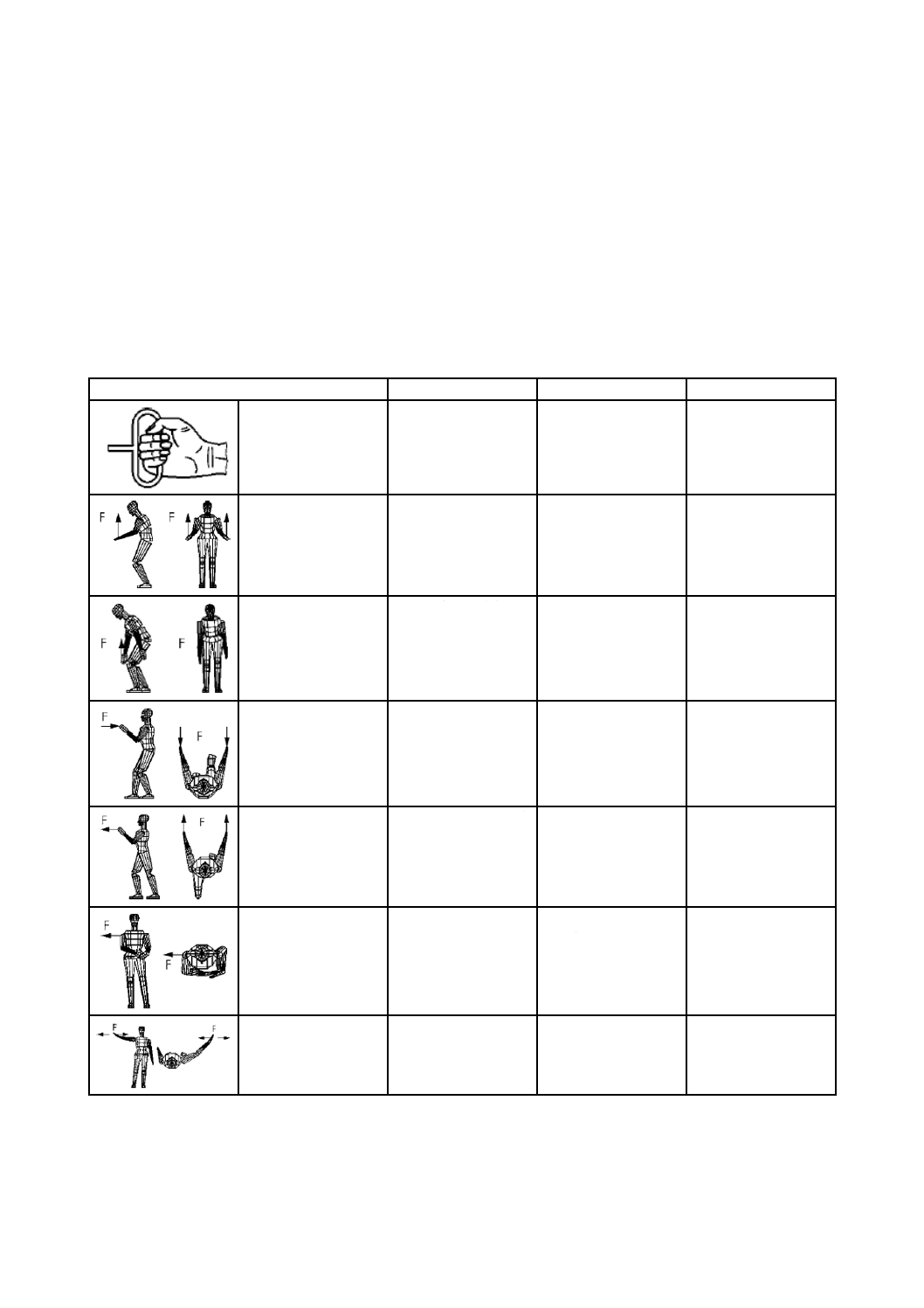
表I.1は,最大静的動作力の方向の例を示す(参考文献[16]参照)。
注記 表I.1は,静的な力を示す。幾つかの用途においては,動的な力も考慮しなければならなくな
る。
表I.1−最大静的動作力の例
力の方向
姿勢
力の作用
力の値(N)
水平に引く(引きず
る)
座位
片手
600
上方に垂直
立位,胴と脚は曲げ状
態で,足は平行
両手,水平なグリップ
1 400
上方に垂直
立位,自由な姿勢
片手,水平なグリップ
1 200
体の対称面に対して
平行で,後方に水平に
“引く”
立位,足は平行又は踏
み出した姿勢
両手,垂直なグリップ
1 100
体の対称面に対して
平行で,前方に水平に
“押す”
立位,足は平行又は踏
み出した姿勢
両手,垂直なグリップ
1 300
体の対称面に対して,
直角で,体の外に向か
って水平
立位,胴を側面に傾け
た姿勢
側面にある金属板を
肩で押す
1 300
体の対称面に対して,
直角
立位,足は平行
片手,垂直なグリップ
700
65
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS B 9714 機械類の安全性−予期しない起動の防止
注記 対応国際規格:ISO 14118,Safety of machinery−Prevention of unexpected start-up(IDT)
[2] JIS B 9715 機械類の安全性−人体部位の接近速度に基づく安全防護物の位置決め
注記 対応国際規格:ISO 13855,Safety of machinery−Positioning of safeguards with respect to the
approach speeds of parts of the human body(IDT)
66
B 9710:2019 (ISO 14119:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
[3] JIS B 9716 機械類の安全性−ガード−固定式及び可動式ガードの設計及び製作のための一般要求事
項
注記 対応国際規格:ISO 14120,Safety of machinery−Guards−General requirements for the design and
construction of fixed and movable guards(IDT)
[4] JIS B 9718 機械類の安全性−危険区域に上肢及び下肢が到達することを防止するための安全距離
注記 対応国際規格:ISO 13857,Safety of machinery−Safety distances to prevent hazard zones being
reached by upper and lower limbs(IDT)
[5] JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
注記 対応国際規格:IEC 60529,Degrees of protection provided by enclosures (IP code)(IDT)
[6] JIS C 8201-5-1 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第1節:電気機械
式制御回路機器
注記 対応国際規格:IEC 60947-5-1,Low-voltage switchgear and controlgear−Part 5-1: Control circuit
devices and switching elements−Electromechanical control circuit devices(IDT)
[7] JIS C 8201-5-2 低圧開閉装置及び制御装置−第5-2部:制御回路機器及び開閉素子−近接スイッチ
注記 対応国際規格:IEC 60947-5-2,Low-voltage switchgear and controlgear−Part 5-2: Control circuit
devices and switching elements−Proximity switches(IDT)
[8] ISO 11161,Safety of machinery−Integrated manufacturing systems−Basic requirements
[9] ISO/TR 23849,Guidance on the application of ISO 13849-1 and IEC 62061 in the design of safety-related
control systems for machinery
[10] ISO/TR 24119,Safety of machinery−Evaluation of fault masking serial connection of interlocking devices
associated with guards with potential free contacts
[11] IEC 60617-DB:2001,Graphical symbols for diagrams (online database)
[12] IEC 61800-5-2,Adjustable speed electrical power drive systems−Part 5-2: Safety requirements−Functional
[13] EN 953+A1,Safety of machinery−Guards−General requirements for the design and construction of fixed and
movable guards
[14] EN 13906-1,Cylindrical helical springs made from round wire and bar−Calculation and design−Part 1:
Compression springs
[15] Assessment matrix of the incentive to bypass a protective device, BGIA:
<www.dguv.de/ifa/en/pra/manipulation/index.jsp >1)
1) Free download of Table H.1.
[16] Report BGIA 2/2008e, Functional safety of machine controls and additional Software, BGIA:
<http://www.dguv.de/bgia/en/pra/en13849/index.jsp>
[17] Handbuch der Ergonomie. HdE: mit ergonomischen Konstruktionsrichtlinien und Methoden/hrsg. vom
Bundesamt für Wehrtechnik und Beschaffung. [Wiss. Berab. Heinz Schmidtke] Koblenz : Bundesamt für
Wehrtechnik und Beschaffung Losebl.-Ausg. 2., überarb. und erw. Aufl. 1989 ISBN3-927038-70-9
[18] DIN 33411-5,Körperkräfte des Menschen−Teil 5: Maximale statische Aktionskräfte, Werte
[19] GS-ET-19,Principles of testing and certification for interlocking devices with solenoid guard-locking, 2011-02,
Expert committee for electrical engineering, Testing and certification facility in DGUV Test
[20] GS-ET-31,Principles of testing and certification for interlocking devices with key transfer systems, 2010-02,
Expert committee for electrical engineering, Testing and certification facility in DGUV Test