B 9706-3:2009 (IEC 61310-3:2007)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 一般要求事項 ··················································································································· 2
5 操作及び操作の結果 ·········································································································· 4
5.1 基本原則 ······················································································································ 4
5.2 最終結果の分類 ············································································································· 4
5.3 操作の分類 ··················································································································· 4
5.4 操作及び最終結果の相関性 ······························································································ 5
5.5 停止 ···························································································································· 6
附属書A(参考)単機能アクチュエータの代表例 ······································································· 7
参考文献 ····························································································································· 9
B 9706-3:2009 (IEC 61310-3:2007)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本機械
工業連合会(JMF)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工業標準調
査会の審議を経て,厚生労働大臣及び経済産業大臣が改正した日本工業規格である。これによって,JIS B
9706-3:2001は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,
このような特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願にかかわる確
認について,責任はもたない。
JIS B 9706の規格群には,次に示す部編成がある。
JIS B 9706-1 第1部:視覚,聴覚及び触覚シグナルの要求事項
JIS B 9706-2 第2部:マーキングの要求事項
JIS B 9706-3 第3部:アクチュエータの配置及び操作に対する要求事項
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格
JIS
B 9706-3:2009
(IEC 61310-3:2007)
機械類の安全性−表示,マーキング及び操作−
第3部:アクチュエータの配置及び操作に対する
要求事項
Safety of machinery−Indication, marking and actuation−
Part 3: Requirements for the location and operation of actuators
序文
この規格は,2007年に第2版として発行されたIEC 61310-3を基に,技術的内容及び対応国際規格の構
成を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,ヒューマン マシン インタフェースにおいて,人が,手又は他の身体部分によって操作す
るアクチュエータに対する安全関連の要求事項について規定する。
この規格は,次の要求事項を規定する。
− アクチュエータの動きの標準的方向
− アクチュエータの相互配置
− 操作及び操作がもたらす最終結果の相関性
この規格は,JIS C 0447を基礎にしているが,電気以外の技術を用いるシステム,例えば,機械的シス
テム及び液圧システムにも適用できる。
この規格は,組立品の一部を構成する単一及び一群のアクチュエータについて適用する。
この規格は,タッチパネルに関する要求事項は規定しない(タッチパネルに関しては,JIS C 0447に規
定がある。)。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61310-3:2007,Safety of machinery−Indication, marking and actuation−Part 3: Requirements for
the location and operation of actuators (IDT)
なお,対応の程度を表す記号(IDT)は,ISO/IEC Guide 21に基づき,一致していることを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。
これらの引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追
補を含む。)には適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9706-1:2009 機械類の安全性−表示,マーキング及び操作−第1部:視覚,聴覚及び触覚シグ
2
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ナルの要求事項
注記 対応国際規格:IEC 61310-1:2007,Safety of machinery−Indication, marking and actuation−Part 1:
Requirements for visual, acoustic and tactile signals (IDT)
JIS B 9706-2:2009 機械類の安全性−表示,マーキング及び操作−第2部:マーキングの要求事項
注記 対応国際規格:IEC 61310-2:2007,Safety of machinery−Indication, marking and actuation−Part 2:
Requirements for marking (IDT)
JIS B 9712:2006 機械類の安全性−両手操作制御装置−機能的側面及び設計原則
注記 対応国際規格:ISO 13851:2002,Safety of machinery−Two-hand control devices−Functional
aspects and design principles (IDT)
JIS C 0447 マンマシンインタフェース(MMI)−操作の基準
注記
対応国際規格:IEC 60447,Basic and safety principles for man-machine interface, marking and
identification−Actuating principles (IDT)
JIS Z 8907:1987 方向性及び運動方向通則
注記 対応国際規格:ISO 1503:1977,Geometrical orientation and directions of movements (MOD)
ISO 9355-2:1999,Ergonomic requirements for the design of displays and control actuators−Part 2: Displays
IEC 60073:2002,Basic and safety principles for man-machine interface, marking and identification−Coding
principles for indicators and actuators
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 9706-1及びJIS B 9706-2によるほか,次による。
3.1
操作(action)
アクチュエータを操作する人の身体部分(例えば,指,手,足など)に要求される動き。
3.2
最終結果(final effect)
オペレータの操作に対応して現れる意図した結果。
4
一般要求事項
この規格は,機械の設計初期段階において,機械設備全体の中であいまいさがないように適用しなけれ
ばならない。機械の意図する用途,機械の形状,姿勢及び位置,並びにオペレータの技量,姿勢及び視野
(JIS B 9706-1の4.2.2参照)による制約条件を考慮しなければならない。さらに,JIS Z 8907も考慮する
ことが望ましい。
アクチュエータは,次の要求事項を満足しなければならない。
− 明確に識別できる(JIS B 9706-1及びIEC 60073による。)。
− 適切にマーキングされている(JIS B 9706-2による。)。
− 適時に安全に操作できる(JIS C 0447による。)。
− 関連する人間工学的原理に従っている(ISO 9355-2による。)。
− 想定する環境及び意図する使用条件に耐える。
− 予見可能な使用によって摩耗せず,破損しない。
3
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
アクチュエータは,次のように配置しなければならない。
− 非常停止機器,ティーチング用ペンダントなどのように,特に必要性があって危険区域内に置くもの
を除き,アクチュエータは,危険区域外に配置する。
− アクチュエータの操作によって別のリスクを招かない。
− アクチュエータ操作に対応して最終結果が実行されたことを(直接的に,又はフィードバックによっ
て)オペレータが確認できる。
− アクチュエータの動きと最終結果の現れ方との相関性が,箇条5の規定に適合する(追加的情報に関
しては,JIS C 0447参照)。
− 操作パネル上において線対称(上下対称,左右対称など)となるようなアクチュエータ配置にしない。
起動アクチュエータは,可能な限り,アクチュエータ操作中に制御される要素をオペレータが見ること
ができるように配置しなければならない[JIS B 9700-2の4.11.8 d) 参照]。
停止アクチュエータは,起動アクチュエータの近くに配置しなければならない。起動機能及び停止機能
をホールド・ツゥ・ラン制御装置1) によって実行する場合,ホールド・ツゥ・ラン制御装置のホールドを
解除したときに,停止指令が伝達されない故障によって危険を招く可能性があるならば,ホールド・ツゥ・
ランとは別の停止アクチュエータも備えなければならない。
注1) ホールド・ツゥ・ラン制御装置(hold-to-run control device)とは,アクチュエータを作動させて
いる間に限り,危険な機械機能の起動開始指令を出し,かつ,維持する制御装置をいう(JIS B
9700-1の3.26.3参照)。
アクチュエータは,プロセス,機械又は装置を制御するための各操作間又は各機能間の相互関係に従っ
て,論理的にグループ分けしなければならない(JIS C 0447を参照)。
アクチュエータの操作によって,装置又はプロセスに,想定しない状態又は危険状態を招いてはならな
い。
危険状態を招くような偶発的なアクチュエータ操作が起こることは,できる限り回避しなければならな
い。必要な場合,次に示す方策の幾つかを用いなければならない。
− アクチュエータを埋め込む又は覆う。
− アクチュエータを操作するために大きな力を必要とするようにする。
− ロックアウト(操作の無効化)を用いる。
− 偶発的な接触を受けない場所にアクチュエータを配置する。
− 順次操作を必要とするアクチュエータの組合せを用いる。
− 両手操作制御装置(JIS B 9712)を用いる。
− イネーブル装置2) を用いる。
− 遠隔制御による操作盤の無効化を用いる。
注2) イネーブル装置(enable device)とは,これを連続的に操作しているときだけ機械が機能するこ
とを許可するように,起動制御に連係して用いる補足的な手動操作装置をいう(JIS B 9700-1
の3.26.2参照)。
間接的な操作(例えば,キーボードの使用)を行う場合には,行う操作が明りょうに表示され,操作指
令が実行されたことの明確な確認(視覚又は聴覚によるフィードバック)が,オペレータに伝達されなけ
ればならない。
重要な安全機能に関連する操作において,オペレータの視野が完全にふさがれる可能性がある場合,又

4
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は視認条件が制限される場合には,接触(触覚)によってアクチュエータの位置を容易に識別できなけれ
ばならない(触覚シグナルについては,JIS B 9706-1に規定がある。)。
5
操作及び操作の結果
注記 この規格は,JIS C 0447を基礎にしている。表示器及びアクチュエータの人間工学設計に関す
る追加的情報については,ISO 9355-2に記述がある。
5.1
基本原則
機械において,アクチュエータの操作及び制御される要素の最終結果の相関性がオペレータに対して明
確でなければならない。この相関性は,操作及び最終結果を対照的な2グループに分ける分類法に基づく
ものである。
最終結果に至る途中の中間的な結果は,この規格では考慮しない。
注記 例えば,可変速駆動装置において,その最終結果は,操作によって指令した運転速度であって,
データ処理ユニットの出力指令でもなく,界磁調整器の変化でもない。
5.2
最終結果の分類
多くの場合,操作に対する最終結果の現れ方は,反対の結果をもたらす二つのグループに分類できる。
試験機器,支援機器,イネーブル装置のように,最終結果を増加・減少のような対照的な現れ方に分類で
きないアクチュエータであっても,これらの配置は箇条4に従わなければならない。
最終結果の現れ方の分類は,表1(JIS C 0447の表A.2から引用)による。
表1−最終結果の現れ方の分類
操作の目的
最終結果の現れ方
グループ1
グループ2
物理量の変更(例えば,電圧,電流,
電力,速度,周波数,温度,照度)
増加
減少
状態の変更
使用開始
起動
加速
スイッチ オンa)
点火
使用停止
停止
減速
スイッチ オフb)
消火
基準軸に関して物体又は車両の動き
を制御
上方へ
右方へ
前進
下方へ
左方へ
後退
オペレータを基準にした動きを制御
遠ざかる方向へ
近づく方向へ
注a) オフ状態で電力線が接地されている場合は,その接地回路はオフにする。
b) オフ状態で電力線を接地する場合は,その接地回路はオンにする。
5.3
操作の分類
操作についても,次に基づいて二つのグループに分類できる。
− アクチュエータに二つの操作方向がある場合は,アクチュエータの動く方向によって操作を分類する。
この場合,操作方向は,オペレータの身体部分が動く方向である。
− アクチュエータの操作方向が一つで,その最終結果も一つだけの場合は,対にして用いるアクチュエ
ータの相対位置によって分類する。この場合の操作は,アクチュエータのある方向に身体部分を動か
すことである。
5
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
グループ1及びグループ2(表2参照)への分類は,次に基づいて行う。
− 操作の方向,又は
− 操作の作用点
異種類及び異種配置のアクチュエータの操作の分類は,表2(JIS C 0447の表A.1と同じ)による。
附属書A(JIS C 0447の附属書Bと同じ)には,単機能アクチュエータの例を示す。
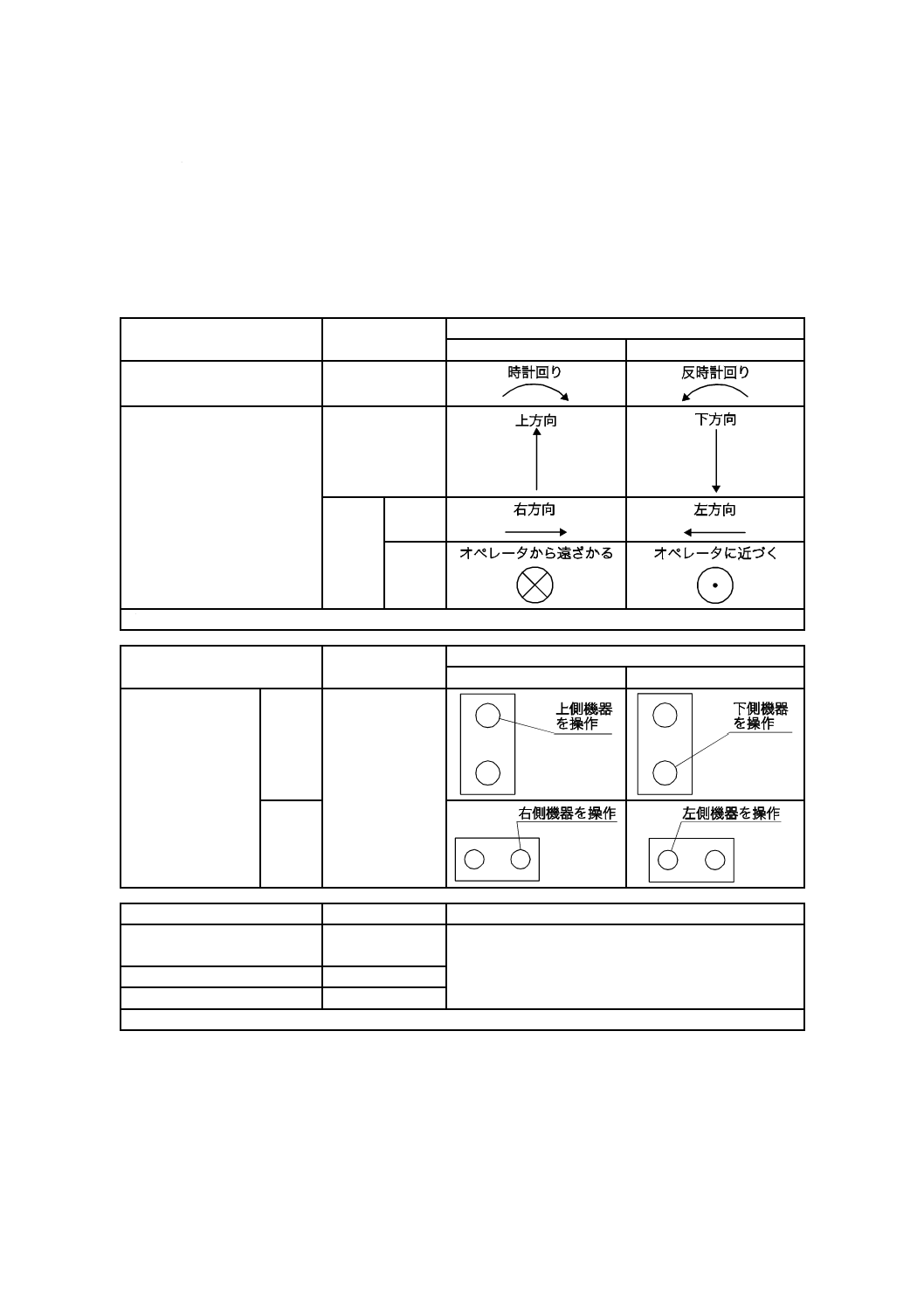
表2−操作の分類
アクチュエータの種類
操作の種類
操作方向による分類
グループ1
グループ2
ハンドホイール,ハンドル,
ノブなど
回転
グリップ,レバー,押引ボタ
ンなど実質的に直線運動をす
るものa)
上下運動
水平方
向運動
右−左
前進−
後退a)
注a) 更に詳しい情報が,JIS C 0447に記述されている。
アクチュエータの特徴
操作の特徴
操作箇所による分類
グループ1
グループ2
反対の最終結果を
もたらす,グリッ
プ,押ボタン,ロッ
ド,プルコードなど
の対
縦配置
押す,引くなど
横配置
アクチュエータの特徴
操作の特徴
操作の分類
VDT(ディスプレー端末装置)
のXYコントローラ
移動及び操作
(クリック)
操作の方向及び操作点の分類はしない。b)
キーボード
キー打ち
感応領域
接触
注b) 可能な限り,この表の上部二段を用いる。
5.4
操作及び最終結果の相関性
グループ1の操作は,グループ1の最終結果に帰結しなければならない。
グループ2の操作は,グループ2の最終結果に帰結しなければならない。
例 a) ハンドホイールを時計回りに回すと,速度が増す。
6
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) レバーを左へ動かすと,物体が左へ動く。
c) 操作する手の動きと同じ方向に制御対象物が動く。
オペレータと機械との相対位置が変化し得る場合(特に,移動機械及び/又は遠隔操作用の携行式アク
チュエータの場合)には,機械の運動方向を認識しにくいことがある。そのような場合は,目印として,
アクチュエータの上及び/又は近傍に付けた記号及び/又は色に対応する適切なマークを機械の可動部又
はその近傍に表示しなければならない。
特別な理由(注記1及び注記2参照)があって,採用した実施方法が操作及び最終結果の相関性の原則
に適合しない場合は,
− 操作(身体部分の動き)の方向及び操作による最終結果を,アクチュエータ又はその近傍に表示しな
ければならない。
− 操作と最終結果との相関性の原則に適合させるための変更は,用いるアクチュエータの種類を(例え
ば,レバーから押しボタンへ)変えることによって行うことが望ましい。アクチュエータの種類変更
を適切に実施できない場合には,オペレータに特別の指導を行わなければならない。
注記1 “特別な理由”には,特定のアクチュエータの操作による最終結果を,既にオペレータが熟
知している場合がある。また,操作及び結果のグループを一致させることが技術的に難しい
場合がある。例えば,流体制御弁は,一般に,時計回りに回すと流量が減るような仕組で用
いるが,このことは特別の理由によるものとみなされる。
注記2 例えば,次に示すような特別な種類及び特定用途のアクチュエータの要求事項に関しては,
JIS C 0447に規定がある。
− レバーの上げ下げ
− 押引ボタン
− 足踏みアクチュエータ
5.5
停止
位置選択式の各種のアクチュエータが,特定の位置を選択したとき“停止”を指令するように用いられ
る。この場合,アクチュエータの停止指令位置は,次の要求に従わなければならない。
a) “停止”の位置から1回の直線的操作又は回転操作を行うアクチュエータにおいては,“停止”の位置
は,左端,下端又は反時計回り端とする。
b) “停止”の位置から二つの反対方向に各1回の直線的操作又は回転操作を行うアクチュエータにおい
ては,“停止”の位置は,その運動範囲の中央とする。
アクチュエータの対において,二つのアクチュエータの操作方向が同じで,各操作が一つの最終結果を
もたらす場合には,“停止”用アクチュエータは,その対の左端又は下端に配置しなければならない。
反対の最終結果をもたらす二つのアクチュエータと組み合わせて用いる“停止”用アクチュエータは,
その組合せの中央に配置しなければならない。
注記 非常停止用アクチュエータの要求事項については,JIS B 9960-1,IEC 60947-5-5及びJIS B 9703
を参照。
7
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
単機能アクチュエータの代表例
序文
この附属書は,単機能アクチュエータの操作方向の例を示すものであって,規定の一部ではない。この
附属書は,JIS C 0447の附属書Bと実質的に同じものである。
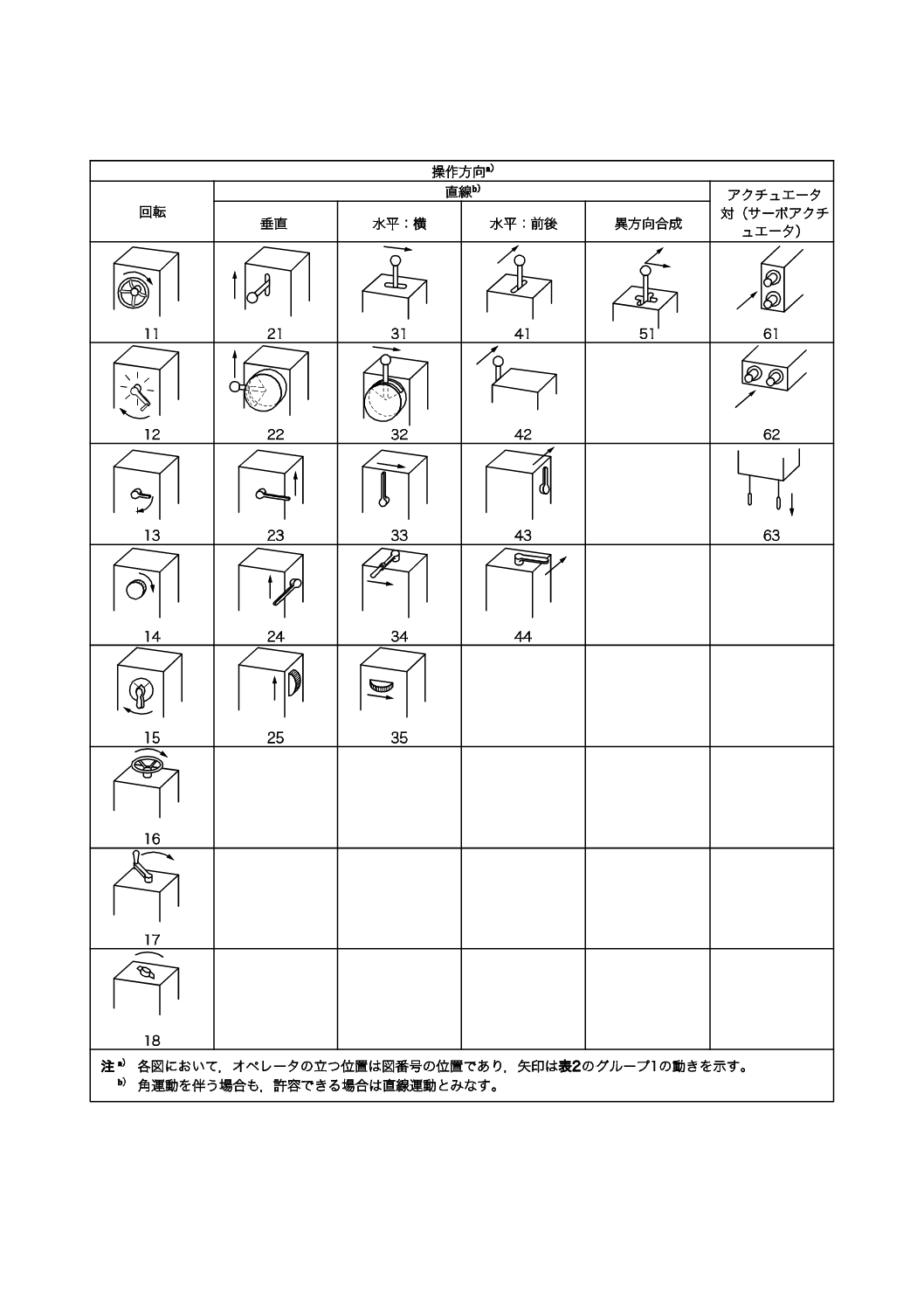
A.1 アクチュエータの種類
A.1.1 一般事項
表A.1は,アクチュエータの操作方向の代表例を示す。表内各図の矢印は,最終結果をもたらす操作方
向(表2による。)を示している。
操作方向は,操作位置に立ってアクチュエータに向かっている人から見る方向とする。オペレータの立
つ位置は,各図の番号がある位置とする。
A.1.2 回転
回転するハンドルに角度目盛が組み合わされているときは,そのハンドルは常に回転操作を行うものと
みなす(表A.1の例15参照)。
表A.1の例13が示すように,三つの基本軸の一つから他の軸への動きも回転とみなす。
A.1.3 直線運動
一つの基本軸に実質的に平行な動きは,直線運動とみなす。すなわち,双方向への可動範囲が等しい角
運動は,全運動範囲が120度を超えない場合には,直線運動とみなす(表A.1の例22,例23,例24,例
32,例33,例34,例42,例43及び例44を参照)。
角変位が小さい場合(表A.1の例21,例31,例41及び例51),又は回転するアクチュエータの端部の
小部分だけに触れることができる場合は,アクチュエータは直線運動するものとみなす。例25及び例35
のように部分的にエンクロージャに収めたハンドホイール又はスロットの背後に引っ込めたノブは,その
例である。
8
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−アクチュエータの操作方向の例
9
B 9706-3:2009 (IEC 61310-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
JIS B 9700-1:2004 機械類の安全性−設計のための基本概念,一般原則−第1部:基本用語,方法論
注記 対応国際規格:ISO 12100-1:2003,Safety of machinery−Basic concepts, general principles for design
−Part 1: Basic terminology, methodology (IDT)
JIS B 9700-2:2004 機械類の安全性−設計のための基本概念,一般原則−第2部:技術原則
注記 対応国際規格:ISO 12100-2:2003,Safety of machinery−Basic concepts, general principles for design
−Part 2: Technical principles (IDT)
JIS B 9703:2000 機械類の安全性−非常停止−設計原則
注記 対応国際規格:ISO 13850:1996,Safety of machinery−Emergency stop−Principles for design (IDT)
JIS B 9960-1:2008 機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:IEC 60204-1:2005,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements (MOD)
JIS C 8201-5-5:2008 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第5節:機械的
ラッチング機能をもつ電気的非常停止機器
注記 対応国際規格:IEC 60947-5-5:2005,Low-voltage switchgear and controlgear−Part 5-5: Control
circuit devices and switching elements−Electrical emergency stop device with mechanical latching
function (IDT)