B 9704-2:2017 (IEC 61496-2:2013)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
4 機能,設計及び環境に対する要求事項 ·················································································· 4
4.1 機能要求事項 ················································································································ 4
4.2 設計要求事項 ················································································································ 5
4.3 環境要求事項 ················································································································ 8
5 試験方法························································································································· 8
5.1 一般事項 ······················································································································ 8
5.2 機能試験 ····················································································································· 10
5.4 環境試験 ····················································································································· 26
6 識別及び安全使用のためのマーキング ················································································· 33
6.1 一般事項 ····················································································································· 33
7 附属文書························································································································ 34
附属書A(規定)ESPEのオプション機能 ················································································ 36
附属書B(規定)ESPE電気用品の単一障害一覧表(5.3の危険側故障として考慮するもの) ············· 40
附属書AA(参考)タイプ2 AOPDの周期試験構成 ···································································· 41
B 9704-2:2017 (IEC 61496-2:2013)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
機械工業連合会(JMF)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工
業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が改正した日本工業規格である。
これによって,JIS B 9704-2:2008は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
JIS B 9704の規格群には,次に示す部編成がある。
JIS B 9704-1 第1部:一般要求事項及び試験
JIS B 9704-2 第2部:能動的光電保護装置を使う設備に対する要求事項
JIS B 9704-3 第3部:拡散反射形能動的光電保護装置に対する要求事項
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9704-2:2017
(IEC 61496-2:2013)
機械類の安全性−電気的検知保護設備−第2部:
能動的光電保護装置を使う設備に対する要求事項
Safety of machinery-Electro-sensitive protective equipment-
Part 2: Particular requirements for equipment using active opto-electronic
protective devices (AOPDs)
序文
この規格は,2013年に第3版として発行されたIEC 61496-2を基に,技術的内容及び構成を変更するこ
となく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
電気的検知保護設備(以下,ESPEという。)は,人に傷害を及ぼすリスクをもつ機械類から人を保護す
るために,人が危険状態に至る前に機械を安全な状態に移行させる装置である。ESPEに対する一般要求
事項及び試験は,JIS B 9704-1(以下,第1部という。)に規定する。
ESPEには異なる検知原理を用いる幾つかの種類がある。この規格は,機械から人を保護するESPEのう
ち,能動的光電保護装置(以下,AOPDという。)によって人を検知するESPEの設計,構成及び試験に対
する要求事項を規定する。
この規格は,第1部と併読して用いる規格である。この規格は,AOPDを用いるESPEに対して,第1
部に関連する箇条の変更又は補足を指示する。この規格において特別の指示をしない第1部の箇条は,そ
のまま適用する。この規格において“追加”及び“置換え”と指示する箇所は,第1部の該当部分をその
ように改めて適用する。
この規格は,AOPDを用いるタイプ2及びタイプ4のESPEについて規定する。タイプ1及びタイプ3
のESPEは,この規格では扱わない。
機械にはその機械特有の危険源がある。この規格は,特定の機械に対しESPEをどのように使用するか
については規定しない。ESPEの使用法は,供給者,機械使用者及び監督機関が合意して決める事項であ
る。これに関連する指針としては,例えば,JIS B 9700がある。
1
適用範囲
第1部の箇条1を,次に置き換える。
この規格は,安全関連システムの一部として特に人を検知することを目的とし,検知機能としてAOPD
を用いるESPEの設計,製造及び試験に対する要求事項について規定する。適切な安全関連性能を確実に
達成するための機能及び設計に対する要求事項に特に配慮している。ESPEには,附属書Aに規定する追
加の安全関連機能を任意に付加するものがある。
この規格は,特定の施設について検知区域の寸法,形状及び危険源に対する配置について規定するもの
2
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ではなく,また,何が機械の危険源になるかについても規定しない。ESPEの機能に関する事項及びESPE
と機械とのインタフェースに関する事項に限定して規定する。
400〜1 500 nmの波長以外の放射光を用いるAOPDは,この規格の対象外とする。
この規格は,人を保護する用途以外にも,例えば,機械,製品の機械的損傷に対する保護などに関連し
て利用することもできる。そのような用途では,例えば,検知機能によって認識する対象物の特質が人の
特質と異なるので,この規格以外に追加の要求事項が必要となる可能性がある。
この規格は,電磁両立性(EMC)の放射に対する要求事項は扱わない。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61496-2:2013,Safety of machinery−Electro-sensitive protective equipment−Part 2: Particular
requirements for equipment using active opto-electronic protective devices (AOPDs)(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
第1部の箇条2に,次を追加する。
JIS B 9704-1:2015 機械類の安全性−電気的検知保護設備−第1部:一般要求事項及び試験
注記 対応国際規格:IEC 61496-1:2012,Safety of machinery−Electro-sensitive protective equipment
−Part 1: General requirements and tests(IDT)
JIS B 9715 機械類の安全性−人体部位の接近速度に基づく安全防護物の位置決め
注記 対応国際規格:ISO 13855,Safety of machinery−Positioning of safeguards with respect to the
approach speeds of parts of the human body
JIS C 6802:2011 レーザ製品の安全基準
注記 対応国際規格:IEC 60825-1:2007,Safety of laser products−Part 1: Equipment classification and
requirements(IDT)
JIS C 7550 ランプ及びランプシステムの光生物学的安全性
注記 対応国際規格:IEC 62471,Photobiological safety of lamps and lamp system
EN 471: 2003,High−visibility warning clothing for professional use−Test methods and requirements
3
用語及び定義
第1部の箇条3に,次を追加する。
3.201
能動的光電保護装置,AOPD(active opto-electronic protective device)
装置内で生成した光を光電式投光部から照射して,照射光が指定の検知区域内(光ビーム装置の場合は
光ビーム上)に存在する不透明物体によって遮光されたことを,受光部で検知する原理によって検知機能
を達成する装置。
注記 検知に用いるエネルギー(照射光)を,装置自体が発生するので“能動的”という。
3
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.202
ビーム中心線(beam centre-line)
AOPDにおいて,投光部の光学中心と,正常運転時には投光部からの光に反応するように投光部に対向
する受光部の光学中心とを結ぶ光路。
注記1 光ビームの光軸は,必ずしもビーム中心線上にあるとは限らない。
注記2 正常な運転の結果として,ビーム中心は物理的に移動することがある(例えば,電動ミラー
を使う場合)。
注記3 再帰反射技術を用いるAOPDにおいて,光路は投受光部及び再帰反射器の配置で決まる。
3.203
有効開口角,EAA(effective aperture angle)
その範囲内でAOPDが正常な運転を続けることができる,投光部及び受光部の光学的最良アライメント
からの最大偏位角。
3.204
光ビーム装置(light beam device)
一対又は複数対の投光部及び受光部から成り立ち,供給者が検知区域を指定しないAOPD。
3.205
ライトカーテン(light curtain)
一対又は複数対の投光部及び受光部の組合せから成り立ち,供給者が指定する検知能力及び検知区域を
もつAOPD。
注記 大きな検知能力をもつライトカーテンは,光グリッドと呼ばれることがある。
3.206
試験片(test piece)
AOPDの検知能力を検証するために用いる不透明な円柱状物体。
3.207
幾何学的に限定された光学設計,GROD(geometrically restricted optical design)
次の全ての光学設計を用いたAOPD。
− 個々の投光部及び受光部の有効開口角(EAA)は,図6に示す値以下
− 光ビームの光軸は,平行
− サイドローブは,最小化
− ビーム中心線の間隔は,均一
− 検知能力の値は,試験片が検知区域内のどの位置においても,少なくとも一つの光軸を完全に遮光す
ることに基づく(図7参照)。
3.3
検知能力(detection capability)
第1部の3.3を,次に置き換える。
試験片の直径を表す数値であって,次によって特徴付けられるもの。
− ライトカーテンにおいては,この直径の試験片を検知区域に置いたとき検知器が作動(検知)する。
− シングル光ビーム装置においては,この直径の試験片をビーム中心線上に置いたとき検知器が作動す
る。
− マルチ光ビーム装置においては,この直径の試験片をいずれのビーム中心線上に置いたときにも検知
4
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
器が作動する。
注記1 検知能力という用語は,規定された直径の試験片を検知できる能力という意味にも用いられ
る。
注記2 “検知能力が大きい”ということは,“検知可能な物体サイズが小さい”ことをいうのであっ
て,“検知能力が優れている”ことをいうのではない。
この規格では,検知確率は考慮していない。検知能力に相当する直径をもつ試験片は,指
定の条件下で100 %検知されるものとしている。
4
機能,設計及び環境に対する要求事項
次を除き,第1部の箇条4を適用する。
4.1
機能要求事項
4.1.2
検知機能
第1部の4.1.2を,次に置き換える。
4.1.2.1
一般要求事項
検知機能は,供給者が指定する検知区域内において有効に作動しなければならない。鍵,パスワード又
は工具を用いずに検知区域,検知能力又はブランキング機能を調整できるようにしてはならない。
ライトカーテンにおいては,4.2.13に規定する試験片が検知区域内のどこに置かれても,静止状態(ど
のような角度でも)であっても,又は0〜1.6 m/sの範囲内のいかなるスピードで(円柱軸が検知区域面に
直角に)動いていても,検知器が作動し,OSSDがオフ状態にならなければならない。
光ビーム装置においては,4.2.13に規定する試験片が作動距離範囲のどこにあってもビーム中心線上で
試験片円柱軸がビーム軸と直角をなすように存在するときには検知器が作動し,OSSDがオフ状態になら
なければならない。
注記1 作動距離とは,発光部と受光部との間隔のことをいう。AOPDが正常に作動できる最小(最
大)の間隔を最小(最大)作動距離という。作動距離の範囲とは,AOPDが正常に作動でき
る間隔の最小値(最小作動距離)から最大値(最大作動距離)までの範囲のことである。
OSSDが一度オフ状態になった場合は,試験片が検知区域内(又は光ビーム上)にとどまる時間又は80
msのいずれか長い方の時間,OSSDはオフ状態にとどまらなければならない。
注記2 4.1.2.1の要求事項の目的は,人又は人の一部が検知区域又は光ビームを通過するときに
OSSDが確実にオフになることを保証することである。80 msというオフ時間は,検知対象部
分の寸法を150 mm,人の接近速度(歩行速度)を1.6 m/sとしたとき適切であるとされる値
である。
供給者仕様が1.6 m/sよりも速い速度で動く対象も検知できるとするAOPDの場合には,4.1.2.1の要求
事項はその仕様の最大速度まで満たさなければならない。
注記3 この場合も,オフ時間は80 msである。
4.1.2.2
再帰反射(retro-reflective)技術を用いるAOPD及び同じアセンブリ内に投光部と受光部とをも
つAOPDに対する追加要求事項
4.1.2.2.1
一般事項
光ビームが検知区域を2回以上(同じ光路を)横切るような,再帰反射(retro-reflective)技術を用いる
AOPD及び同じアセンブリ内に投光部と受光部とをもつAOPDは,反射物体(例えば,反射性の衣服)が
検知区域のどこに置かれても危険側故障を起こしてはならない。
5
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 光ビームを戻すために鏡を使用するものは,再帰反射技術とはみなさない。
再帰反射とは,広い入射角にわたって,入射光の光路にほぼ沿う方向に,選択的に反射光が
戻るような反射をいう。再帰反射器とは,反射光の大部分が再帰反射によるような反射器をい
う(JIS Z 8113参照)。この規格では,AOPDの構成品としての再帰反射器をいう。
4.1.2.2.2
検知機能
試験片(4.2.13参照)の直径及び長さ以上の大きさをもつ反射物体を,検知区域内で5.2.1.4に基づいた
どの位置においたときでも,OSSDがオフ状態にならなければならない。
タイプ4のAOPDは,通常の運転条件下では,5.2.1.4で規定された反射物体が投受光部の検知面の前に
できるだけ近い位置に置かれたとき,OSSDはオフ状態にならなければならない。
4.1.3
ESPEのタイプ
第1部の4.1.3を,次に置き換える。
JIS B 9704のこの部においては,タイプ2及びタイプ4のESPEについてだけを考慮する。障害の存在,
環境条件などの影響によって,各タイプの性能は異なる。第1部では,電気的又は電気機械的障害の影響
が考慮される(そのような障害は第1部の附属書Bに記載されている)。特定のアプリケーションにおい
てどのタイプが必要とされるかを決定する責任は機械製造業者及び/又は使用者にある。
タイプ2のESPEは,4.2.2.3の障害検知要求事項を満たさなければならない。
タイプ2のESPEは,定常運転において検知機能が作動する又はESPEから電源が断たれたときには,
出力回路の少なくとも一つの出力信号開閉器がオフ状態に移行しなければならない。
タイプ2のESPEは,周期テスト手段をもたなければならない。
タイプ4のESPEは,第1部の4.2.2.5の障害検知要求事項を満たさなければならない。
タイプ4のESPEは,定常運転において,検知機能が作動する又はESPEから電源が断たれたときには,
出力回路の少なくとも2個の出力信号開閉器がオフ状態に移行しなければならない。
OSSDの機能を実行するために単一の安全関連通信インタフェースを使用する場合は,データインタフ
ェースと関連する安全関連通信インタフェースは,第1部の4.2.4.4の要求事項を満たさなければならない。
この場合,単一の安全関連通信インタフェースはタイプ4のESPEでの2個のOSSDと置き換えることが
できる。
4.2
設計要求事項
4.2.2
障害検出に関する要求事項
4.2.2.3
タイプ2のESPEへの要求事項
第1部の4.2.2.3に,次を追加する。
周期テストは,供給者によって規定された方法で各光ビームを検証しなければならない。
異なる構成は,安全関連性能のテストが実行される方法が異なることが考慮される。
図AA.1,図AA.2及び図AA.3は周期テストが外部から起動され,その結果の評価が外部で行われるタ
イプ2のAOPDの例を示す。図AA.4は,周期テストが自動で起動され内部で評価されるタイプ2のAOPD
の例を示す。
周期テストが自動で起動され内部で評価されるタイプ2のAOPDにおいては,その周期テストの喪失を
招く単一障害は検知されてロックアウト状態にならなければならない。
4.2.2.4
タイプ4のESPEへの要求事項
第1部の4.2.2.4は適用しない。
第1部の4.2に,4.2.12,4.2.13,4.2.14及び4.2.15を追加する。
6
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2.12 AOPD検知能力のインテグリティ
AOPDの設計は,AOPDが次の一つ,二つ又は全てを組み合わせた条件で作動するとき,AOPDの検知
能力が供給者の仕様を満足するようにしなければならない。
− 供給者仕様内の全ての条件
− 4.3に規定する環境条件
− アライメント及び/又は調整の限界点
− 検知区域全体
通常の運転条件(第1部の5.1.2.1参照)下では,単一障害(第1部の附属書Bに規定)によってはAOPD
検知能力の喪失は起こらないが,上の条件が重なるときに検知能力の喪失が起こる場合は,その条件の組
合せとその障害とを合わせて単一障害とみなし,AOPDは,4.2.2の要求を満足するように単一障害に反応
しなければならない。
AOPDは次のように設計し構成しなければならない。
a) AOPDの外部で光ビームが反射することによってAOPDが危険側故障を起こす可能性を制限する(3 m
までの作動範囲に対しては,図1参照)。
注記 制限エリア内には反射面をなくし,制限エリア外に存在する反射面によって危険側故障を起
こさないようにするという意味である。
b) ミスアライメント状態で正常運転できる可能性を制限する。
c) 波長400〜1 500 nmの外乱光にさらされたときの誤作動を制限する。
単位 mm
ESPEのタイプ
d
L
タイプ4
131
250〜3 000
タイプ2
262
500〜3 000
注記 図の斜線部外側にある表面からの外部反射は,危険側故障を生じさせない。
図1−反射バイパスビームのリスクから保護するための制限エリア
AOPDを反射面の近傍(例えば,図1の斜線部分)に設置して保護機能を発揮させようとする場合は,
その反射面からの反射光(バイパスビーム)を拾わないようにAOPDを設計しなければならない。このよ
うな装置では,EAAを2.5°より十分小さく(例えば,0.1°以下)することが必要となる。この場合には
図1は適用せず,反射光から保護するための制限は製造業者の仕様による。
図2に,垂直と水平との光軸ずれの制限値を示す。
7
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
ESPEのタイプ
2d
L
タイプ4
262
3 000
タイプ2
524
3 000
図2−垂直と水平との光軸ズレの制限
4.2.13 試験片
試験片は円柱状の不透明物体とし,最小有効長を150 mmとしなければならない。試験片の直径は供給
者が指定するAOPD検知能力より大きくしてはならない。
再帰反射式AOPD及び同一のアセンブリ内に投光/受光器をもったAOPD(4.1.2.2参照)では,不透明
な試験片の表面は次のものでなければならない。
− 再帰反射物体はEN 471のクラス2の再帰反射の要求に従ったもの又は同等のもの。
注記 EN 471:2003の表5では,クラス2物体の最小再帰反射率を,入光角5°及び参照角0.2°(12′)
で330 cd lx−1 m−2と定義している。
− ミラータイプの反射表面は,運用波長で90 %以上の反射率をもつもの,例えば,磨きクロムメッキ又
は磨きアルミニューム。
− 拡散反射表面は,投光波長で80〜90 %の範囲の拡散反射率をもつ白いもの,適している例としては白
紙である。
AOPD検知能力が40 mmを超えないライトカーテン用の試験片は供給者が用意し,試験片に次のマーキ
ングをしなければならない。
− mm表示の直径
− 試験片を用いるAOPDの名称及び形式
AOPDに二つ以上の検知能力が指定される場合,供給者は各検知能力を検証する試験片を用意しなけれ
ばならない。
8
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
検証は検査によって行う。
4.2.14 波長
AOPDは400〜1 500 nmの範囲の波長で作動しなければならない。
4.2.15 放射強度
投光器がLED技術を使用した場合,AOPDによって発生,投光される放射強度は,JIS C 7550に従った
免除グループの要求に合致しなければならない。
注記1 免除グループは,リスクグループゼロ(JIS C 7550参照)と同等である。
投光器がレーザ技術を使用した場合,AOPDによって発生,投光される放射強度は,JIS C 6802:2011の
8.2に従ったクラス1M装置の被ばく放出限界を超えてはならない。
注記2 クラス2装置は,光軸調整に使用されることもある。
4.3
環境要求事項
第1部の4.3に,次を追加する。
4.3.5
光干渉
ESPEは次の干渉光を受けたときに正常運転を続けなければならない。
− 白熱光
− フラッシングビーコン光
− 高周波電子式電源で作動する蛍光ランプ光
ESPEは次の干渉光を受けたときに危険側故障を起こしてはならない。
− 白熱光(ハロゲン電球を用いた模擬昼光)
− ストロボ光
− 高周波電子式電源で作動する蛍光ランプ光
− タイプ4のESPEに対しては,同一設計の他の投光アセンブリ(又はエレメント)からの投光
製造業者によって提供された情報に従った,技術的な対策と設置及び設定手順との組合せを,試験しな
ければならない。
注記 タイプ2のAOPDでは,同一設計の他の投光器からの投光の危険側故障のリスクは,製造業者
によって提供される設置対策で低減することができる。
4.3.5の要求事項は,ESPEを5.4.6によって試験したときに満足しなければならない。
異常作動又は危険側故障を招くかもしれない他の種類の外部光源に対するイミュニティについての要求
事項は規定しない。ESPEに潜在する問題について供給者が使用者に伝えるべき情報に関する要求事項は,
第1部の箇条7 ff)及びこの規格の箇条7 ff)に規定する。
5
試験方法
次を除き,第1部の箇条5を適用する。
5.1
一般事項
第1部の5.1に,次を追加する。
次の試験において,OSSDがオフに移行したとき,試験片が検知区域内(又は光ビーム上)にとどまる
時間又は80 msのいずれか長い方の時間,オフ状態を維持することを検証しなければならない。AOPDが
再起動インタロックを備えている場合は,箇条5の試験を実施中,再起動インタロックを無効にしなけれ
ばならない。
AOPDは異なった手法で設計してもよい。表1は,この規格において記載された異なった設計,それに
9
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
対応する要求及び試験を示す。
表1−要求事項及び/又は試験とAOPD設計との対比表
細分
箇条
要求事項及び試験
異なるAOPD設計
同一アセンブリ内
で投光器だけ又は
受光器だけを用い
るAOPD
再帰反射技術を用
いるAOPD
同一アセンブリ内
で投光器及び受光
器を用いるAOPD
GROD 制限のない
光学設計
GROD 制限のない
光学設計
GROD 制限のない
光学設計
4.1
機能要求事項
○
○
○
○
○
○
4.1.2
検知機能
○
○
○
○
○
○
4.1.2.2
再帰反射技術を用いるAOPD及び同
じアセンブリ内に投光部と受光部と
をもつAOPDに対する追加要求事項
○
○
○
○
4.2
設計要求事項
○
○
○
○
○
○
4.2.2
障害検出に関する要求事項
○
○
○
○
○
○
4.2.12
AOPD検知能力のインテグリティ
○
○
○
○
○
○
4.2.13
試験片
○
○
○
○
○
○
4.2.14
波長
○
○
○
○
○
○
4.2.15
放射強度
○
○
○
○
○
○
4.3
環境要求事項
○
○
○
○
○
○
4.3.5
光干渉
○
○
○
○
○
○
5
試験方法
○
○
○
○
○
○
5.1
一般事項
○
○
○
○
○
○
5.1.1
型式試験
○
○
○
○
○
○
5.1.1.2
運転条件
○
○
○
○
○
○
5.1.2
試験条件
○
○
○
○
○
○
5.1.2.2
測定精度
○
○
○
○
○
○
5.2
機能試験
○
○
○
○
○
○
5.2.1
検知機能
○
○
○
○
○
○
5.2.1.2.2
電気光学サブシステムの分析
○
○
○
○
○
○
5.2.1.2.3
GRODに対する電気光学サブシステ
ムの検証
○
○
○
○
○
○
5.2.1.2.4
GRODのEAA試験
○
○
○
5.2.1.2.5
GRODのプリズム試験
○
○
○
5.2.1.3
GROD以外の技術に対する電気光学
サブシステムの検証
○
○
○
5.2.1.3.2
光学サブシステムモデルのモデリン
グ及び検証
○
○
○
5.2.1.3.3
シミュレーションによる検知能力の
分析
○
○
○
5.2.1.3.4
検知能力の追加試験
○
○
○
5.2.1.3.5
外部反射光の分析
○
○
○
5.2.1.3.6
外部反射光試験
○
○
○
5.2.1.3.7
ミスアライメント試験
○
○
○
5.2.1.4
再帰反射技術を用いるAOPD及び同
じアセンブリ内に投光部及び受光部
をもつAOPDに対する追加試験
○
○
○
○
10
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−要求事項及び/又は試験とAOPD設計との対比表(続き)
細分
箇条
要求事項及び試験
異なるAOPD設計
同一アセンブリ内
で投光器だけ又は
受光器だけを用い
るAOPD
再帰反射技術を用
いるAOPD
同一アセンブリ内
で投光器及び受光
器を用いるAOPD
GROD 制限のない
光学設計
GROD 制限のない
光学設計
GROD 制限のない
光学設計
5.4
環境試験
○
○
○
○
○
○
5.4.6
光干渉
○
○
○
○
○
○
5.4.6.1
一般事項
○
○
○
○
○
○
5.4.6.2
光源
○
○
○
○
○
○
5.4.6.3
試験手順
○
○
○
○
○
○
5.4.6.4
定常運転試験(最良アライメントの
場合)
○
○
○
○
○
○
5.4.6.5
危険側故障試験−白熱光(3 000 lx
で最悪アライメントの場合)
○
○
○
○
○
○
5.4.6.6
危険側故障試験−ストロボ光(最悪
アライメントの場合)
○
○
○
○
○
○
5.4.6.7
危険側故障試験−蛍光灯光(3 000 lx
で最悪アライメントの場合)
○
○
○
○
○
○
5.4.6.8
危険側故障試験−同一設計の投光部
からの干渉光
○
○
○
○
○
○
5.1.1
型式試験
5.1.1.2
運転条件
第1部の5.1.1.2に,次を追加する。
これらの試験において,ライトカーテン検知区域の面は,垂直又は水平のいずれか都合のよい方でよい。
結果が同じになることを示せる場合は,長い作動距離に対する試験は,NDフィルタを用いて短い距離
で試験してもよい。
注記 NDフィルタ(neutral density filter)は,特定の波長領域内でほぼ一定の透過率を示す。これに
よって,分光分布を変えずに光の強度を減じることができる。
5.1.2
試験条件
5.1.2.2
測定精度
第1部の5.1.2.2に,次を追加する。
− 角度測定に対して:±0.1°
− 光強度測定に対して:±10 %
5.2
機能試験
5.2.1
検知機能
第1部の5.2.1を,次に置き換える。
5.2.1.1
検知機能
AOPDの作動原理,特に環境からの妨害に対する耐力を備えるために用いる技術を考慮して,検知器が
作動し続けること及び特にOSSDがオフ状態になることを検証しなければならない。
ライトカーテンでは,
11
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
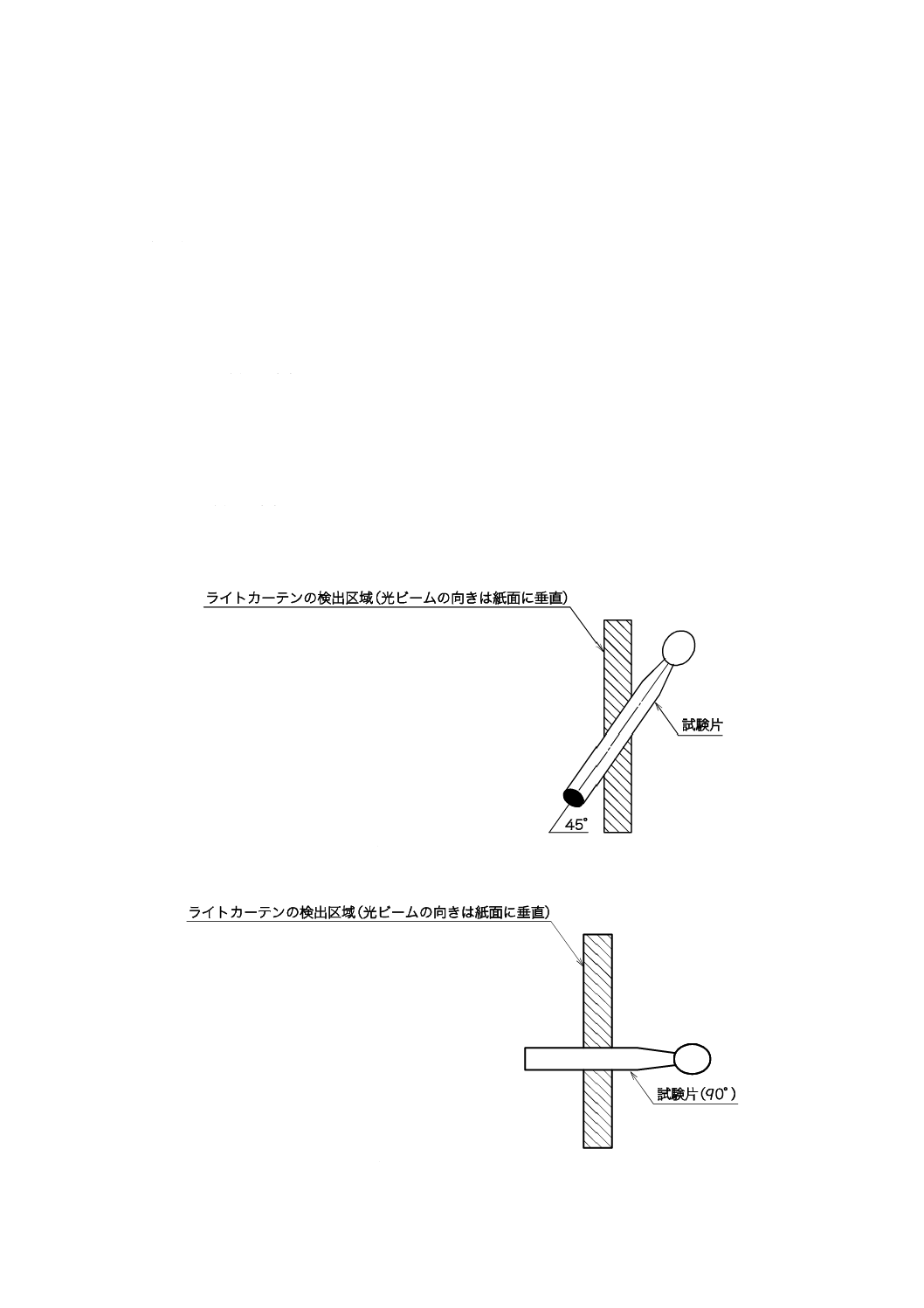
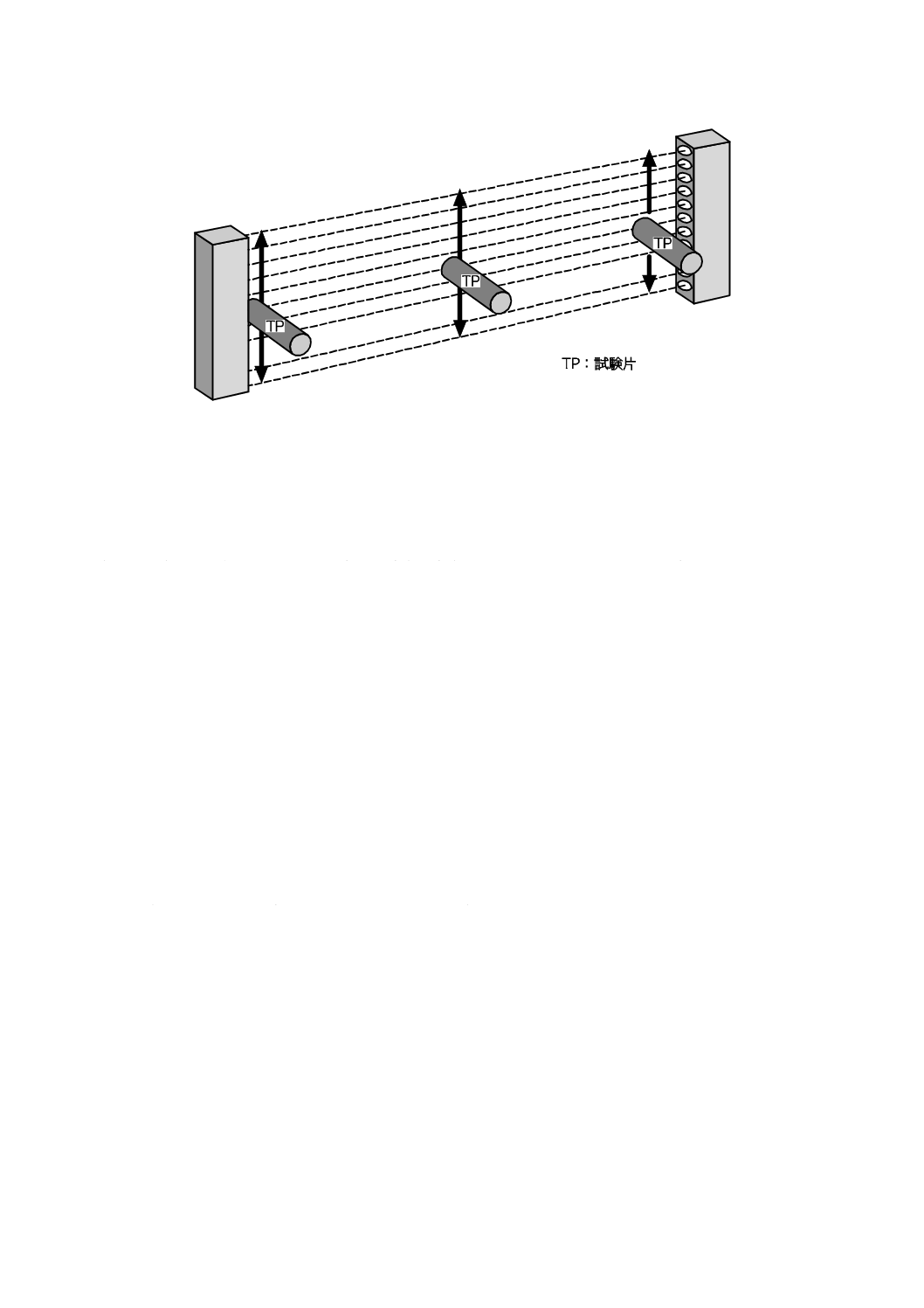
− 検知区域の両端(可能な限り投光器及び受光器並びに再帰反射器に近い位置)及び中間点(図5参照)
において,試験片の軸が角度45°及び90°(図3及び図4参照)でビームを横切るように,検知区域
内で試験片をゆっくり動かす。
− 5.2.1.2.2による分析の結果,検知区域内で最も不利であると考えられる角度及び/又は位置に試験片
を静止させる。
− 4.1.2.1で規定する範囲(0〜1.6 m/s)内の最大速度及びこの範囲において5.2.1.2.2による分析によって
最も不利と考えられる速度で,ビームを横切るように検知区域内で試験片を動かす。
− 150 mmの長さの試験片を,検知区域の極限位置(例えば,各コーナー)及び5.2.1.2.2による分析に
よって最も不利と考えられる位置で,試験片の運動方向及び試験片の軸方向が検知面に対して直角に
なるように,検知区域内を1.6 m/sの速度で動かす。
光ビーム装置では,
− ビームの両端及び中間点で,試験片の軸がビーム軸と直角になるようにビーム内に試験片を置く。
− 150 mmの長さの試験片を,ビームの両端及び中間点において及び5.2.1.2.2の分析によって最も不利
と考えられる作動距離で,試験片の運動方向及び試験片の軸がビーム内でビーム軸に対して直角にな
るように,検知区域内を1.6 m/sの速度で動かす。
上記の試験は,AOPDの最小の指定作動距離又は0.5 mの大きい方,及び最大の指定作動距離において
行わなければならない。
図3−ビームに45°をなす試験片の挿入
図4−ビームに直角をなす試験片の挿入
12
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5−試験片を投光器近傍,受光器(再帰反射器)近傍及び中間点において
検知区域内で動かすことによる検知機能の検証
5.2.1.2
検知能力のインテグリティの検証
5.2.1.2.1
一般事項
AOPDの設計を系統的に分析して,また,必要ならば試験を行って,4.1.2及び4.2.12に規定する条件の
全ての組合せ及び第1部の5.3で規定する障害を考慮に入れて,AOPDの検知能力が常に維持されること,
又はESPEが危険側故障を起こさないことを検証しなければならない。
5.2.1.2.2
電気光学サブシステムの分析
電気光学サブシステムの分析を実施し,次の各項を決定しなければならない。
a) 投光部及び受光部のビーム中心線及び光軸
b) ビーム中心線間の間隔
c) 光学アセンブリの特性(例えば,レンズ径,焦点距離,スポットの径及び位置,レンズホルダーの形
状など)
d) マルチビーム装置での,各ビームの相対的な強度及び感度
e) 同種の部品間のビーム方向及び定位(例えば,一つの投光アセンブリともう一つの投光アセンブリと
の間又は一つの受光アセンブリともう一つの受光アセンブリとの間)
f)
センシング機能の状態を決定する基準
この分析の結果は,電気光学サブシステムの検証及び検知能力のインテグリティの検証において,どの
手法が適切であるかを決定するために使用しなければならない。
この分析が5.2.1.2.3での全ての基準を満たす場合は,5.2.1.2.3,5.2.1.2.4及び5.2.1.2.5を使用しなければ
ならない。
その他の全てのケース又は分析によって,5.2.1.2.3での基準が一つ以上不適な場合は,5.2.1.3(5.2.1.3.1
〜5.2.1.3.7)を使用しなければならない。
5.2.1.2.3
GRODに対する電気光学サブシステムの検証
GRODは,次に示す事項を保証することによって,4.2.12に規定された要求事項を満たさなければなら
ない。
− 個々の投光部及び受光部の有効開口角(EAA)は,図6に示す値以下
− 光ビームの光軸は,平行
13
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− サイドローブは,最小化
− ビーム中心線の間隔は,均一
− 検知能力の値は試験片が検知区域内のどの位置においても,少なくとも一つの光軸を完全に遮光する
ことに基づく(図7参照)。
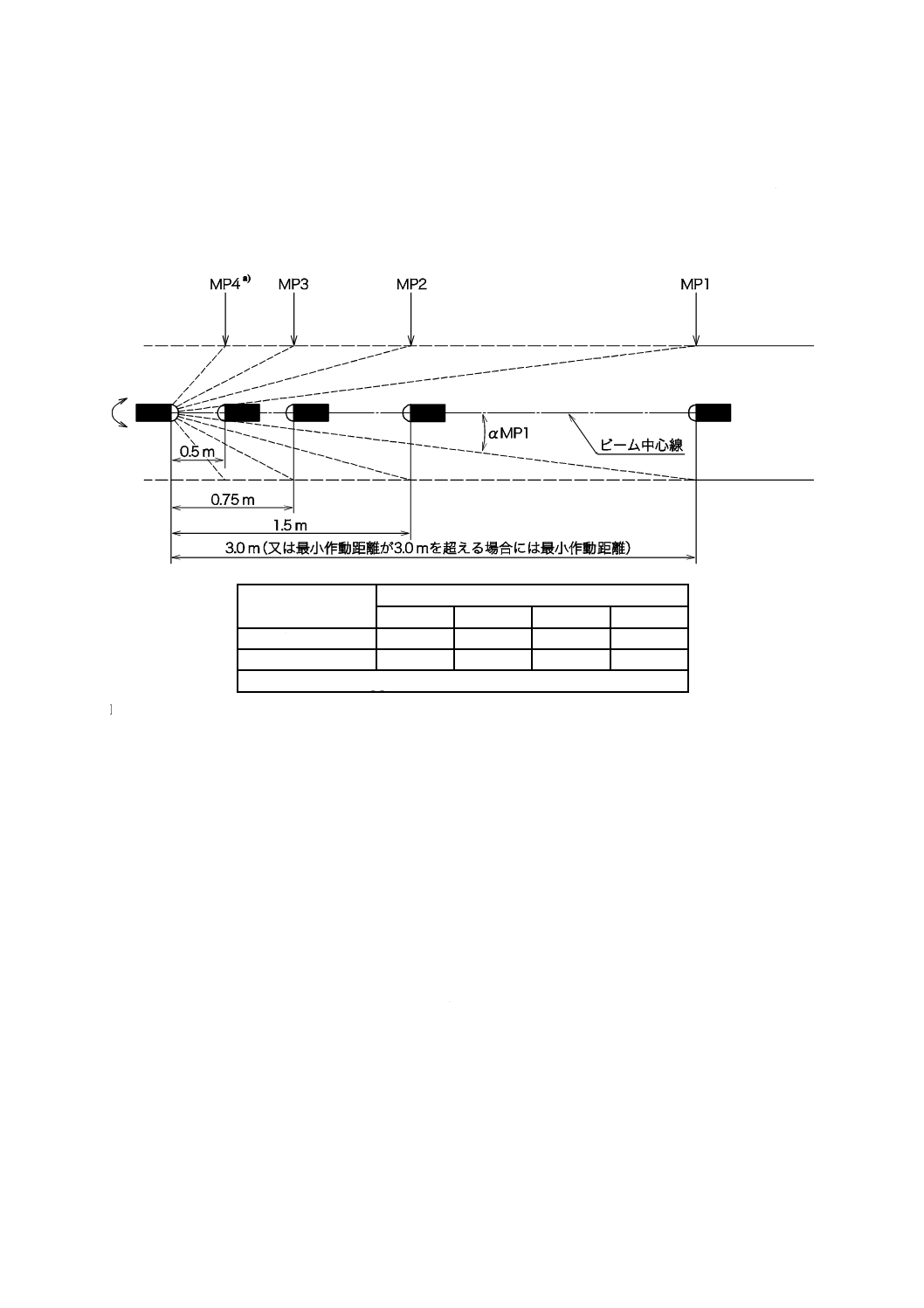
全てのビームが,次に示す制限に合致することを検証しなければならない。
α:EAAの限度値(°)
MP1
MP2
MP3
MP4
タイプ2のAOPD
5
10
19.3
27.7
タイプ4のAOPD
2.5
5
10
14.7
注a) MP(measuring point)は測定点を示す。
EAAは5.2.1.2.4の試験手順に従って決定する。
供給者が指定する作動距離の範囲内にあるMP1〜MP4の各測定点において測定する。指定する最小作動距離が3.0 m
より大きい場合は,その最小作動距離だけで測定する。
注記1 作動距離範囲が1〜3.5 mである場合は,MP4(0.5 m)及びMP3(0.75 m)の測定はしない。MP2(1.5 m)
及びMP1(3.0 m)で測定する。1.0 mでも測定することを推奨する。作動距離範囲が4〜10 mである場合
は,4 mだけで測定する。
注記2 MP1とMP4との間の距離に対するEAA限度値は,次の式で計算できる。
α=arctan (d/L)
ここに,
d=262 mm(タイプ2に対して)
d=131 mm(タイプ4に対して)
L=投光器と受光器間との距離(又は被試験装置と再帰反射器との距離)
作動距離が3.0 mより大きい場合は,MP1のα限度値を使用する。
注記3 再帰反射システムにあっては,αの値は図6の表の値の半分とする。
図6−有効開口角(EAA)の限度値
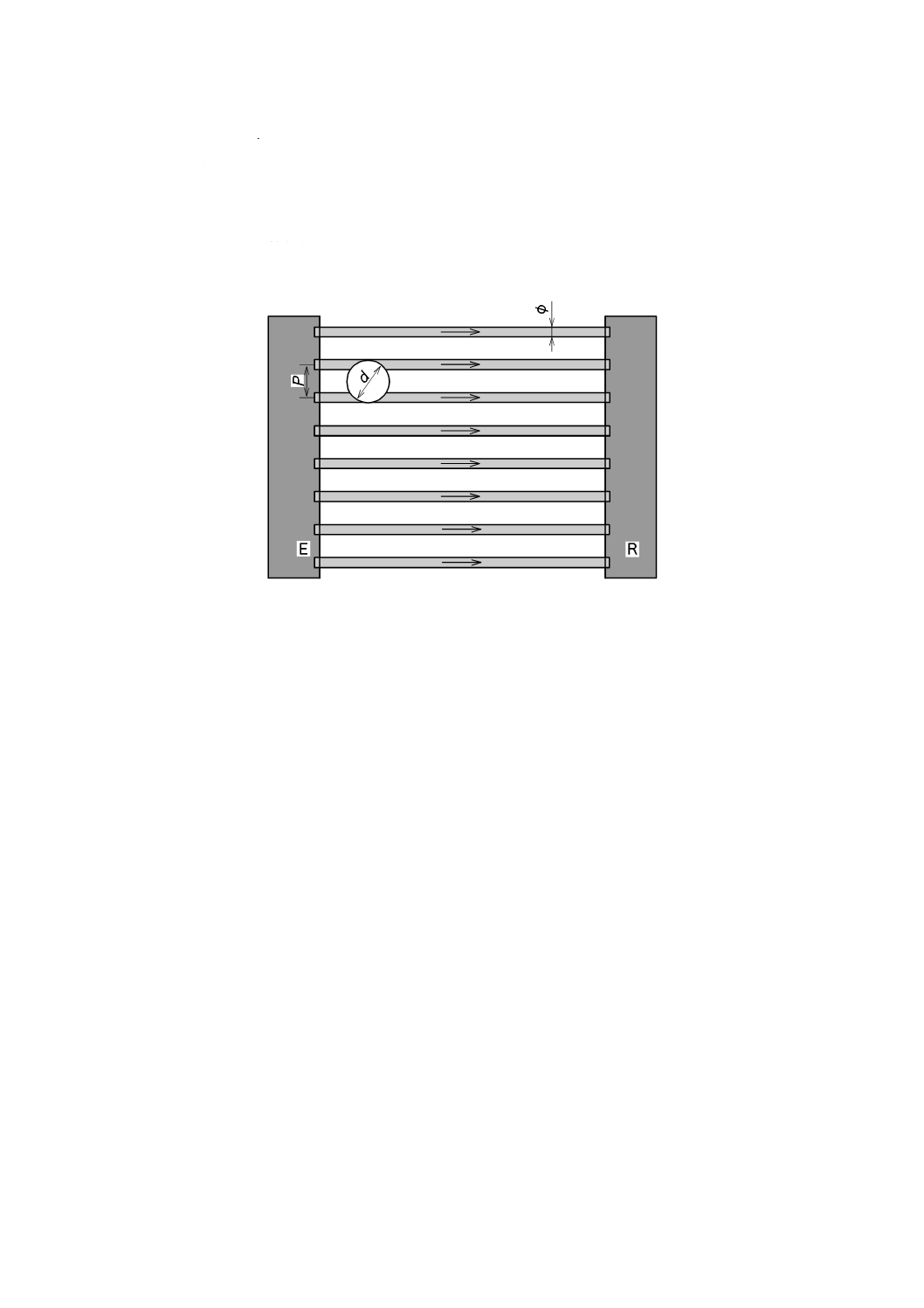
GRODが使用されるとき,検知能力(d)を決定する式は次のとおりである(図7参照)。
d=P+φ
ここに,
d: 検知能力
P: ビーム中心線間隔
φ: レンズ直径
例えば,
14
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
レンズ直径(φ)=6 mm
ビーム間隔(P)=8 mm
とすれば,
d=6+8=14 mm
したがって,この例では検知能力は14 mmになる。
レンズ直径が異なる場合は,計算では最大直径を使用しなければならない。
図7−最小検知能力の決定
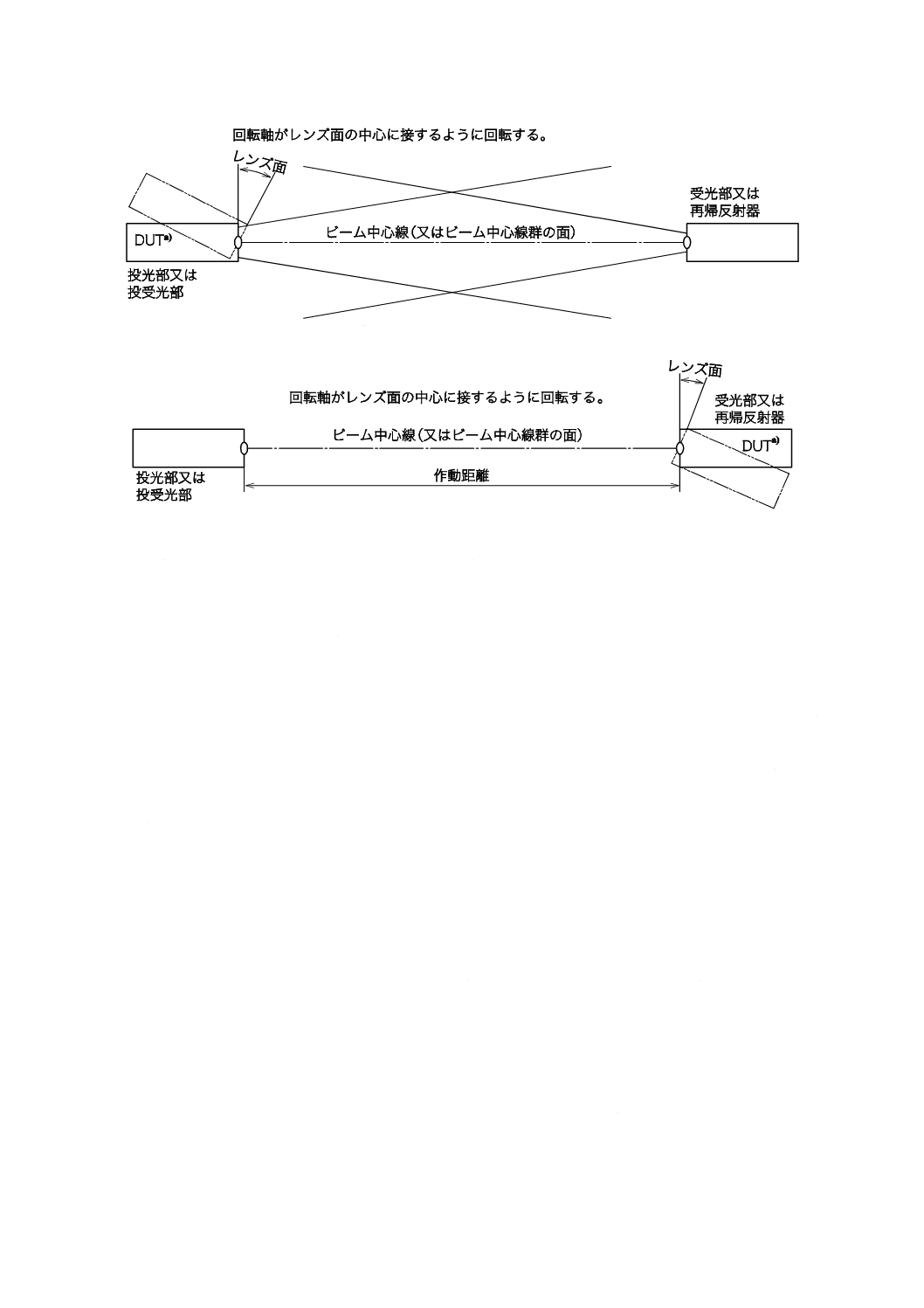
5.2.1.2.4
GRODのEAA試験
投光部又は投受光部の光学的アライメントを,受光部又は再帰反射器に対して固定し,受光部又は再帰
反射器のミスアライメント角(EAA)を測定しなければならない[図8 2)参照]。
受光部又は再帰反射器の光学的アライメントを投光部又は投受光部に対して固定し,投光部又は投受光
部のミスアライメント角(EAA)を測定しなければならない[図8 1)参照]。
これらの測定は,図6に示す全ての距離において次のように実施しなければならない。
AOPDを供給者が指定する最良の状態に位置合わせする。AOPDは角度目盛付きの回転テーブル上に設
定することが望ましい。図8に示す回転軸において試験する。
15
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 受光部を固定,投光部を回転
2) 投光部を固定,受光部を回転
注a) DUT(device under test)は,試験に供する装置。
再帰反射器を用いるライトカーテンにおいては,再帰反射器は固定して,投受光部のEAA試験だけを実施する。
図8−有効開口角(EAA)の測定方法
AOPDを起動し,次の手順を実施する。
a) 投光部又は投受光部を90°位置まで時計方向に回転する。OSSDはオフにならなければならない。
b) AOPD全体の電源をオフにし,再びオンにする。
5.2.1.2.2の分析に基づき,電源オフにしてから電源オンにするまで及び電源オンにしてから手順c)を始
めるまで,一定時間(例えば,ゲインコントロール回路の整定時間)待つことが必要になる。
c) 投光部又は投受光部の回転位置を,元の方向にOSSDがオンになるまで戻す。このときの角度及び距
離を記録する。続けて反時計方向に90°まで回し,OSSDがオンからオフに変化する角度及び距離を
記録する。
d) a)〜c)と同じ手順を反時計方向で行う。
e) a)〜d)の手順を反対側のユニット(受光部又は受投光部)に対して行う。
最小作動距離の規定値が3 mを超える場合は,その最小作動距離(図6参照)におけるEAAを決定す
るために同様の試験を実施しなければならない。
手順c)で記録された角度(EAA)が図6に示す角度より小さければ試験は合格とする。
長い距離まで作動する仕様のAOPDにおいては,結果が同じであることを示せる場合,NDフィルタを
用いて短い距離で試験をすることができる。
投光部のビーム指向性又は受光部の感度指向性が卵形,だ円形,長方形である場合又は水平若しくは垂
直以外の方向に伸びた指向性となるような設計においては,特別の注意が必要である。
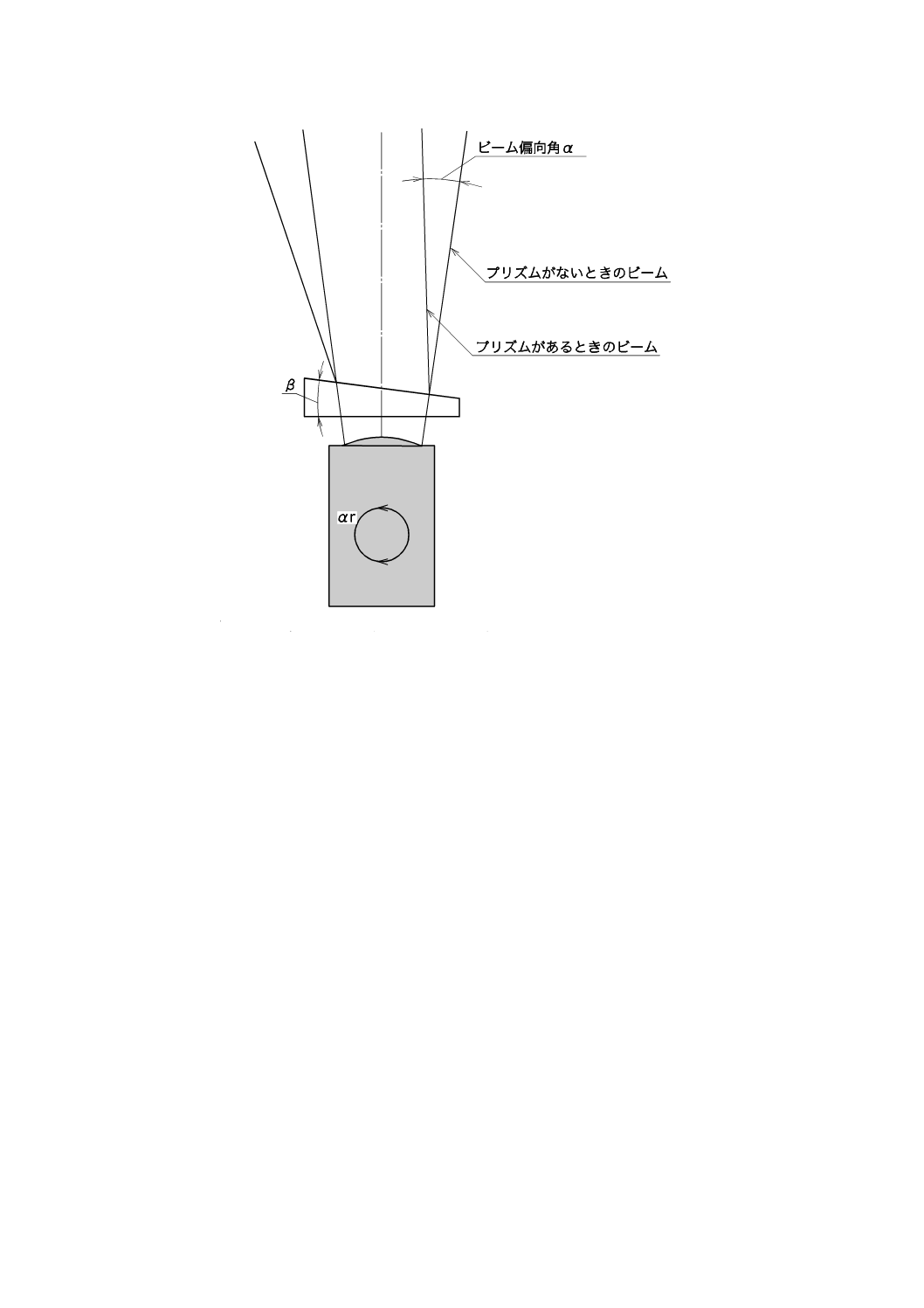
5.2.1.2.5
GRODのプリズム試験
マルチビーム機器及びライトカーテン機器の各ビームは,図6の要求に合致することを示さなければな
らない。
各ビームの特性を検証する方法の一つに,各ビームの前にくさび形プリズムを置く方法がある。精密な
16
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
くさび形プリズムは,ビーム個々の特性を評価できるように試験対象のビームを偏向させる。くさび形プ
リズムの試験に合格することによって,4.2.12のa)及びb)を満足したとみなす。
この手法の基本は,各ビームの個々の特性を評価するためにビームごとに行うことである(図9参照)。
投光器のEAAが受光器のEAAと異なる場合には,この検証手順は等価な方法を開発するための指針と
なる。その場合は,検証するシステムの設計に対して妥当な異なるEAA限度値を決定する必要がある。
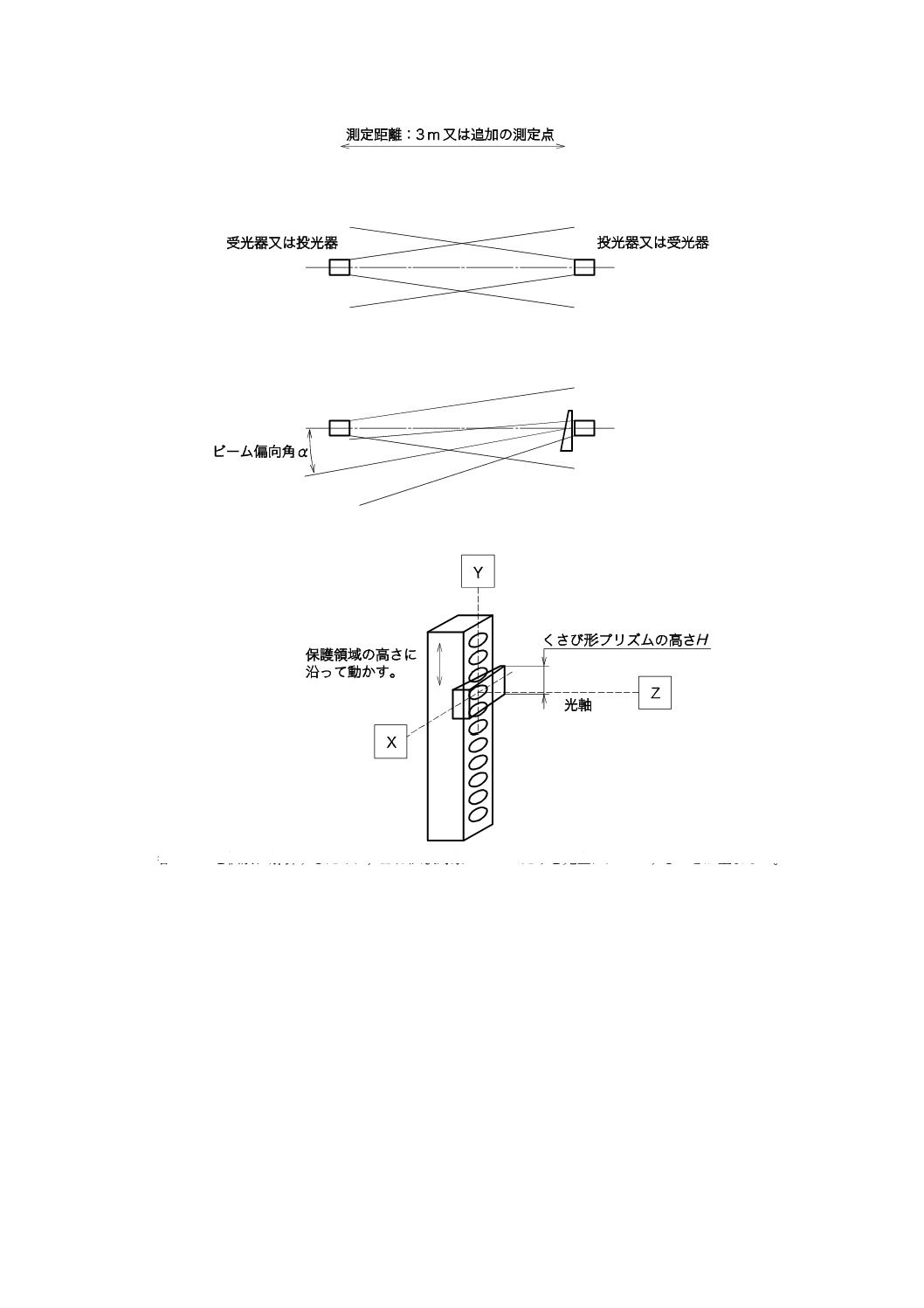
AOPDは,回転テーブル上に(原点に)最適にアライメント(位置決め)しなければならない。試験に
は,図6のMP1に適用するビーム偏向角をもつくさび形プリズムを用いなければならない。プリズムの高
さ(図10のH)は,少なくとも一つのビームを十分カバーしなければならないが,検知能力に相当する寸
法を超えてはならない。プリズム試験(図10)を,3 m又は装置の作動距離範囲内の可能な限り3 mに近
い値で行わなければならない(3 m以外の距離で試験を行う場合は,図6の式を用いて適切な偏向角を計
算しなければならない。)。
注記1 5.2.1.2.2の分析に基づいて,他の距離による試験が必要となることもある。
プリズム角βは,図11の式を用いて計算できる。
試験は次の手順で行わなければならない。
AOPDを起動して,次の手順を実施する。
a) OSSDの状態を確認する。オン状態になければならない。
b) プリズム中心が試験対象の投光部又は受光部の前になるように,プリズムを挿入する。
c) OSSDがオフ状態に移行し,オフ状態を続けなければならない。OSSDがオン状態にとどまっている
ときは,回転テーブルをビーム偏向方向にOSSDがオフになるまで回転させる。プリズムを取り除き
OSSDがオンに戻ることを確認する。
d) プリズムを180°回転させ,同じ試験対象ビームの前に挿入する。OSSDがオフ状態に移行し,オフ
状態を続けることを確認する。OSSDがオン状態にとどまっているときは,回転テーブルをビーム偏
向方向にOSSDがオフになるまで回転させる。プリズムを取り除きOSSDがオンに戻ることを確認す
る。
e) 回転テーブルの位置を変えずにプリズムを反対方向からOSSDがオフ状態に変化するまで挿入して,
手順c)及び手順d)を繰り返す。OSSDがオフになる位置が見つからない場合は,試験対象ビームのEAA
が過大であることが確認されたことになる。
注記2 上記の試験手順の目的は,いずれの方向からプリズムを挿入してもOSSDが状態変化するよ
うな回転テーブルの位置がただ一つあることを見つけることである。このことによって,両
方向のEAAが同じであることが検証される。
f)
回転テーブルをゼロ位置に戻し,各ビームに対して手順a)〜e)を繰り返す。プリズムの位置を変える
間OSSDの状態は変化してもよい。
この試験手順は,少なくとも最初及び最後のビームについては,試験対象システムを90°回転し,プリ
ズムをY軸に沿って,挿入して繰り返さなければならない(図10参照)。
5.2.1.2.2の分析で他の位置が不利であることが示される場合は,他の位置でも繰り返さなければならな
い。
この試験は,投光器の前及び受光器の前の両方で行わなければならない。
17
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
プリズムは,可能な限り光学系に近づける。
大きな偏向角を得るためには,プリズムを組み合わせて用いる必要もあり得る。
図9−各ビームのEAAを測定するプリズム試験
18
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
各ビームを個別に解析するために,Hは試験対象のビームだけを完全にカバーすることが望ましい。
図10−プリズムによるEAA試験
19
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
くさび形プリズムの偏向角の計算:
くさび形プリズムの偏向角は,そのプリズムの機械的角度,用いるガラスの屈折率及び波長に依
存する。プリズム角は,次の式で与えられる。
)1
(−
=nα
β
ここに,β:プリズム角
α:偏向角
n:屈折率
波長880 nmに対するガラスの屈折率1.51を用いると,偏向角2.5°に対するプリズム角は,
°
=
−
=
9
4
)1
51
1(
5
2
.
.
.
β
βが一定(4.9°)のとき,異なる波長に対する偏向角は次のようになる。
波長(nm)
屈折率 n
偏向角 α=β (n−1)(°)
400
1.5
4.9 (1.5−1)=2.45
880
1.51
4.9 (1.51−1)=2.5
1500
1.53
4.9 (1.53−1)=2.6
注記 波長が異なることによる測定誤差は400 nmに対し−0.05°,1 500 nmに対し+0.1°となる。
図11−くさび形プリズムの設計計算
5.2.1.3
GROD以外の技術に対する電気光学サブシステムの検証
5.2.1.3.1
一般事項
幾何学的に限定された光学設計を使用しないAOPDの場合は,4.1.2及び4.2.12の要求を満たすことを,
5.2.1.3.2〜5.2.1.3.7に従ったモデルベースのシミュレーションと試験との組合せによって検証しなければ
ならない。
注記 全ての設計手法を想定できないことから,これらの試験手順は,特別な設計手法には不適切で
あり,変更が必要になることがあるかもしれない。AOPDの設計によっては,ここに記載され
ている以外の手法が,より適したものになるかもしれず,それらが同等であることを示すこと
ができれば使用できる。
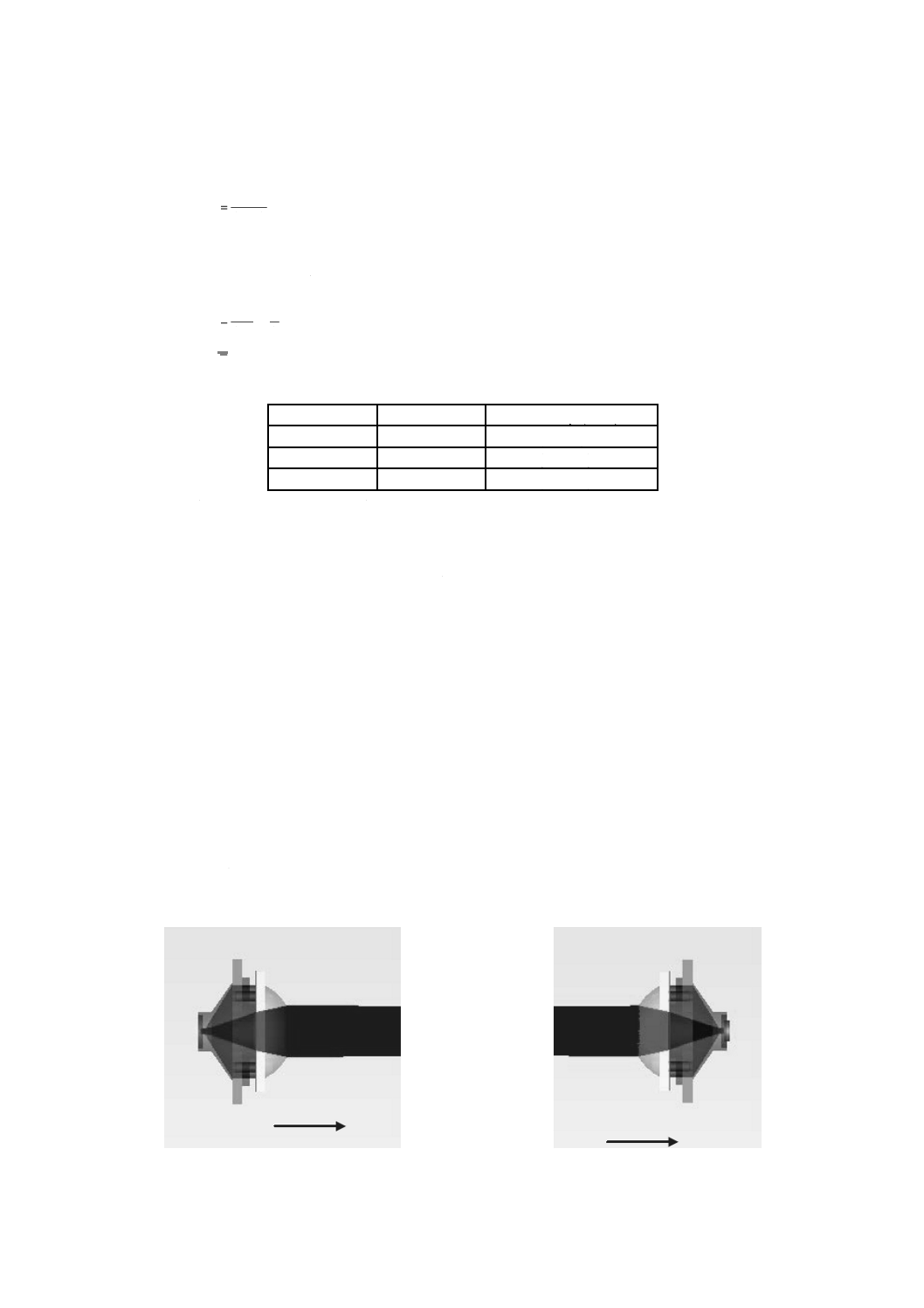
5.2.1.3.2
光学サブシステムモデルのモデリング及び検証
光学サブシステム(図12参照)の検証は,投光エレメントのシミュレーションモデルの作成から始まり,
受光エレメントを含む全ての光学関連のエレメント(例えば,絞り,ビームを形成する光学エレメント,
フロントウインドウ,光路内の電気又は機構部品)まで拡張しなければならない。
図12−光学サブシステムの例(左:投光器,右:受光器)
20
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
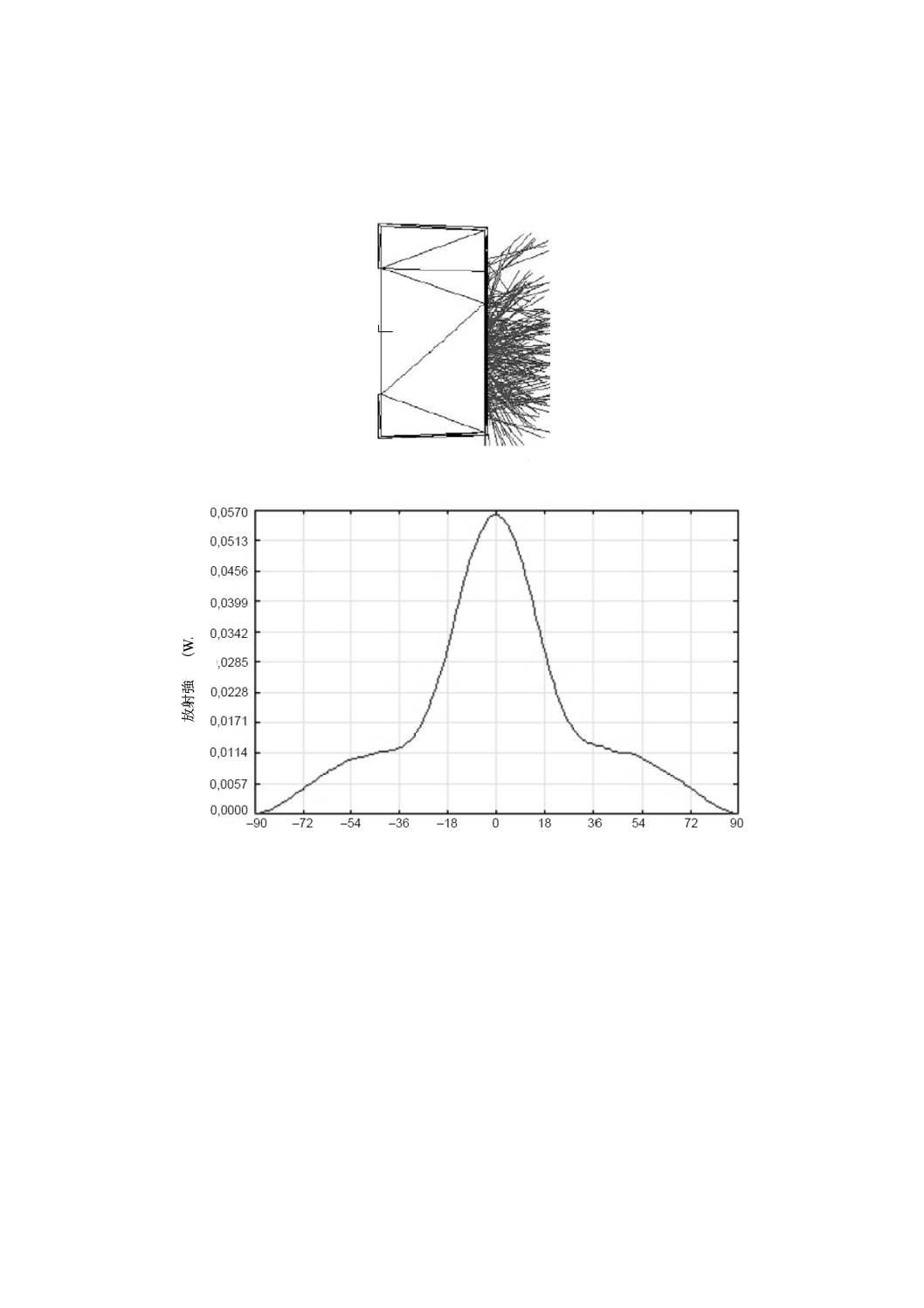
投光エレメントのモデル(図13参照)は,光学サブシステムにおいて使用される放射強度の分布を明ら
かにしなければならない。シミュレーションで使用されるデータは,投光エレメントの強度分布(図14
参照)の測定によって検証しなければならない。
図13−表面実装LEDモデルの例
放
射
強
度
(
W
/s
r)
角度(°)
図14−投光エレメントの強度分布の例
絞りがある場合は(図15参照),投光エレメントのモデルに加えなければならない。さらに,ビームを
形成する光学エレメント(例えば,レンズ)を追加する。その結果得られる開口角全域のエネルギー分布
を,シミュレーション及び測定によって明らかにしなければならない。

21
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図15−絞りによるビーム内部制限の投光モデルの例
モデリングの妥当性を証明するために,受光ユニットのモデル(例 ビームを形成する光学エレメント,
絞り及び受光エレメント−図16参照)を検証しなければならない。受光ユニットの検証は受光エレメン
トの面におけるエネルギー分布の測定によってしなければならない。
受光エレメント上の求められた強度又はエネルギーレベルは,計算によって検知器のスイッチング状態
(オン/オフ)と対応付けなければならない。
定義され,かつ,検証されたモデルは,光学サブシステムのいかなる位置においても強度又はエネルギ
ーの分布を分析できなければならない。モデルは,直列及び/又は調整の限界まで可変でなければならな
い。
ノンシーケンシャルレイトレーシング(ノンシーケンシャル光線追跡)が可能なツールを用い,予想さ
れるエネルギーレベルに適した数のレイ(光線)によってモデリングしなければならない。
注記 ノンシーケンシャルレイトレーシング(ノンシーケンシャル光線追跡)だけが,光の散乱及び
軸外のう(迂)回路を含んだビーム全体の分析に使用できる。
図16−機構部品による内部反射の光軸外の光成分がある受光ユニットの例
分析するビームの数はESPEの設計に関連する。同一のビーム設計を用いる設計の場合は,許容誤差条
件がよく検証されていれば一つのビームで十分かもしれない。同一ではないビーム設計が使用されている
場合は,分析に必要なビームの全ての組合せを考慮しなければならない。
5.2.1.3.3
シミュレーションによる検知能力の分析
光学サブシステムのモデルにおいて,AOPDの検知能力に従った試験片を組み込まなければならない(図
17参照)。最悪設計条件下での検知能力を検証するために,物体位置を変えてシミュレーションを行わな
ければならない。シミュレーションは,全ての作動距離において,アライメント及び/又は調整のいずれ

22
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の限界においても,危険側故障を招くような受光面における強度又はエネルギーレベルが発生しないこと
を検証しなければならない。
図17−試験片によって完全に遮光されていない光学サブシステムの例
注記 光学式レイトレースツールでのシミュレーションは,静止した試験片において有効である。さ
らなる計算によって,動いている試験片の影響を示すことに使うことができる。
シミュレーションに加えて,検知能力が5.2.1.1及び5.2.1.3.4の試験に合格することを検証しなければな
らない。
5.2.1.3.4
検知能力の追加試験
検知能力が,EAAによらない他の技術手段によって達成される場合には,少なくとも次の検知能力の追
加試験を実施しなければならない。
a) AOPDを,供給者仕様に基づいて(位置及び角度を)調整する。
b) 検知能力の2倍の大きさをもつ透過率30 %のNDフィルタを検知区域内に置く。
c) AOPDを起動し,30秒(5.2.1.2.2の分析によって必要ならばもっと長く)待つ。OSSDがオン状態に
あることを確認する。オフ状態の場合は,作動距離を短くして試験を再開しなければならない。
d) NDフィルタの前に試験片を挿入し,指定の応答時間以内にOSSDがオフ状態になることを確認する。
e) NDフィルタを取り去り,OSSDがオフ状態を継続することを確認する。
f)
5.2.1.2.2の分析において決定した,幾つかの位置で試験を繰り返す。
これらのテスト及び5.2.1.2.2の系統的に分析した結果を下に,5.4のどの試験に,応答時間の測定を追加
する必要があるかを確認しなければならない。
5.2.1.3.5
外部反射光の分析
5.2.1.3.6で定義された外部高反射面が存在する光学サブシステムモデル(図18参照)で,AOPDの検知
能力に従った試験片を使用しなければならない。
5.2.1.1に記載された物体検知のための要求を満足することを検証するために,5.2.1.3.6に従った作動距
離における試験片の様々な位置及び外部反射面の様々な位置でのシミュレーションを実施しなければなら
ない。
外部高反射面については,図1に従った斜線制限区域外のあらゆる位置を考慮しなければならない。
シミュレーションは,全てのアライメント及び/又は調整の限度内において,対応する傾き角に設置し
た外部高反射面の存在によって,受光面において危険側故障を招く強度又はエネルギーレベルが発生しな
いことを検証しなければならない。

23
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 受光ユニットへビームの一部が到達することによって,試験片が検知されないケース。
図18−限界に調整された投光ユニットの例
シミュレーションに基づいて,受光エレメントにおいて最大エネルギーレベルをもたらす,投光器と受
光器との(位置及び角度を)調整した位置(複数)及び高反射面の傾き角(複数)を決定しなければなら
ない。
5.2.1.3.6の試験では,こうして得られた最悪アライメント条件(複数)を使用しなければならない。
5.2.1.3.6
外部反射光試験
5.2.1.3.5の分析に従ってAOPDを最悪アライメントに設定し,一つ以上の高反射面をAOPDの近傍に置
いたとき,AOPDに危険側故障を生じないことを検証しなければならない。
これは,各ビームについて,供給者の仕様の範囲内の他の全ての条件で行わなければならない。
試験の手順は,次のとおりである。
この試験は,供給者による仕様範囲内の各作動距離(0.5 m,0.75 m,1.5 m及び3.0 m)で実施しなけれ
ばならない。
最小作動距離の規定値が3.0 mを超える場合は,試験はその最小作動距離で実施する。
試験は,各ビーム中心線について繰り返さなければならない。
5.2.1.3.5で得られた最悪アライメントにAOPDを設定した後,試験対象装置の電源をオフにし,再びオ
ンにする。
電源をオンにしてから,試験を始める前に一定時間(例えば,ゲインコントロ−ル回路の静定時間)待
つ必要がある場合もある。
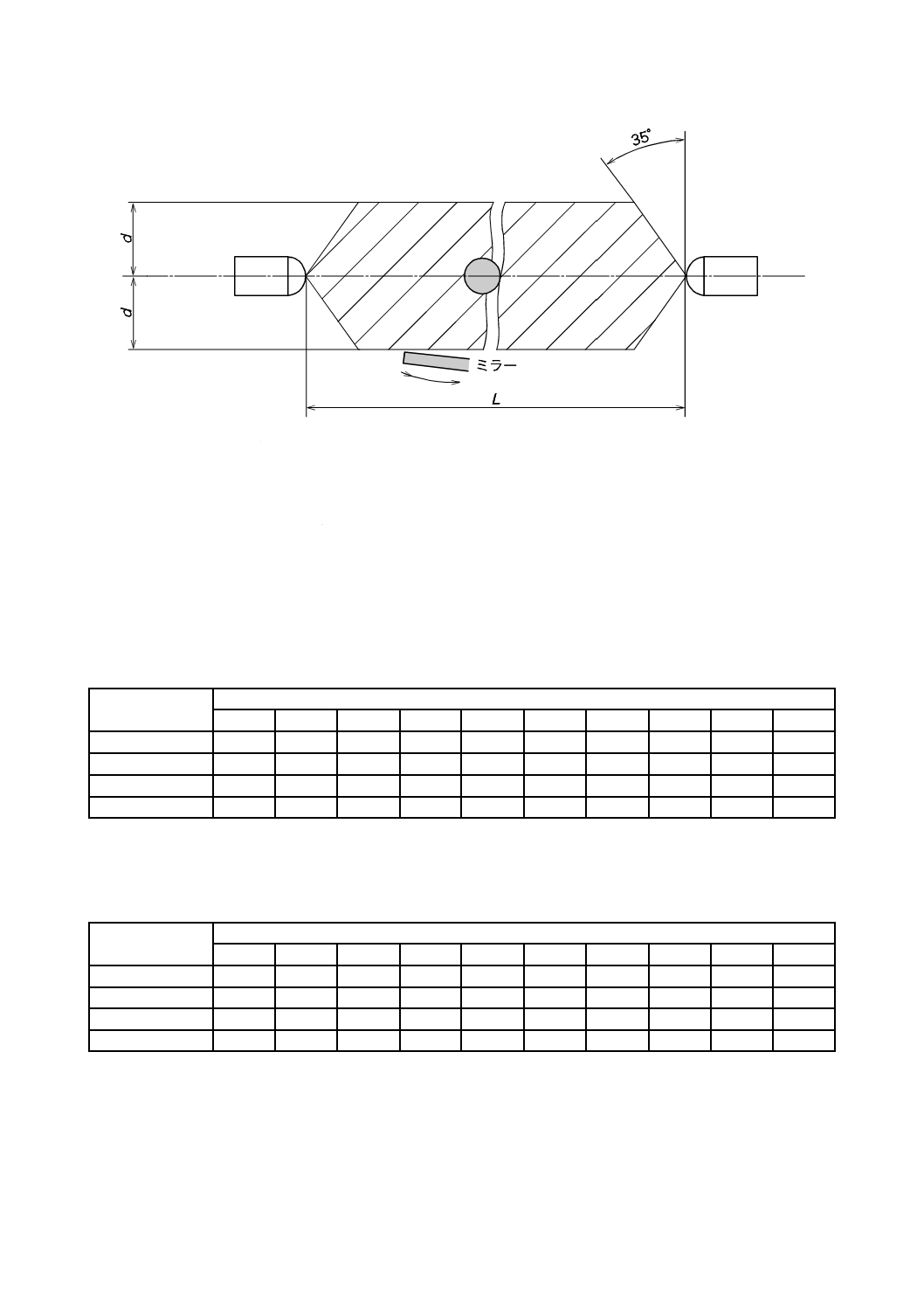
ビーム中心線に沿って置かれたミラーを,受光器において最大の強度又はエネルギーの光が達成される
ような位置及び角度で設置し,試験片をビーム中心線の中間点に置いてC試験(5.4.6.3参照)を行う(図
19参照)。
ミラーは,200 mm×200 mm以上の平面で,発光波長での反射率が0.9以上とする。
C試験を行うとき,投光器から受光器への直接光は試験片で完全に遮光されなければならないが,ミラ
ーからの間接光(反射光)を一部分であっても試験片が遮光してはならない。
24
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
タイプ4:d=131 mm,L=0〜3 000 mm
タイプ2:d=262 mm,L=0〜3 000 mm
図19−制限区域外にある反射面による外部反射光影響試験
5.2.1.3.7
ミスアライメント試験
表2及び表3に示す許容角度,又は図20の計算式によって計算される角度を超えるミスアライメントが
あるとき,OSSDがオフ状態にとどまることを検証しなければならない(図20参照)。
表2−タイプ2のESPEに対する最大許容ミスアライメント角(γ)
(ライトカーテンの寸法に対して規定)
単位 °
ライトカーテン
の作動距離(m)
最外側ビームの中心線間の距離(mm)
300
450
600
750
900
1 050
1 200
1 350
1 500
1 800
3.0以下
51.8
33.8
25.2
20.1
16.7
14.3
12.5
11.1
10.0
8.3
4.0
71.4
45.8
33.9
27.0
22.4
19.2
16.8
14.9
13.4
11.2
5.0
93.6
58.2
42.8
33.9
28.1
24.4
21.0
18.6
16.8
14.0
6.0
122.1
71.4
51.9
41.0
33.9
29.0
25.3
22.4
20.2
16.8
表3−タイプ4のESPEに対する最大許容ミスアライメント角(γ)
(ライトカーテンの寸法に対して規定)
単位 °
ライトカーテン
の作動距離(m)
最外側ビームの中心線間の距離(mm)
300
450
600
750
900
1 050
1 200
1 350
1 500
1 800
3.0以下
25.2
16.7
12.5
10.0
8.3
7.2
6.3
5.6
5.0
4.2
4.0
33.8
22.4
16.7
13.4
11.1
9.5
8.3
7.4
6.7
5.6
5.0
42.7
28.1
21.0
16.7
13.9
11.9
10.4
9.3
8.3
7.0
6.0
51.8
33.8
25.2
20.1
16.7
14.3
12.5
11.1
10.0
8.3
試験は次の手順で行わなければならない。
供給者の説明書に従ってAOPDを最適アライメントに設定し,OSSDがオン状態にあることを確認する。
図20に示すように,ミスアライメント角を0°からOSSDがオフになりオフにとどまる角度まで増大させ
る。そのような角度は,表2及び表3に示す角より小さくなければならない。続けてミスアライメント角
25
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
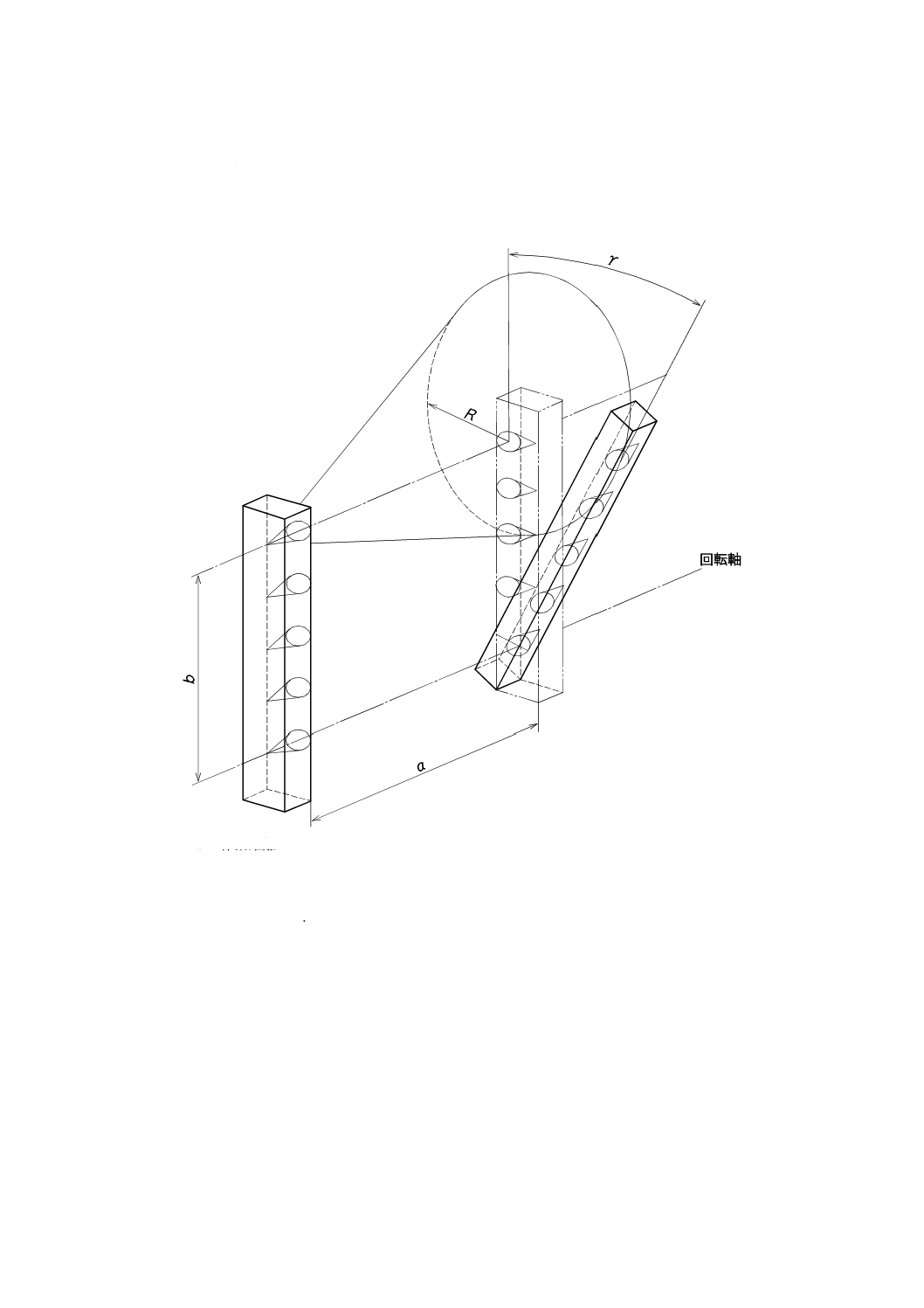
をゆっくりと180°まで増大させ,その間OSSDがオフにとどまらなければならない。γ(図20参照)が
160°より大きい場合は,この試験を行う必要はない。
注記 5.2.1.2.2の分析の結果によっては,(例えば,自動ゲインコントロールを許容するために)試験
手順の変更及び追加の試験が必要になることもある。
a =作動距離
b =最外側ビームのビーム中心間距離
R =光スポットの半径
γ =回転角度(°)であって,次の式による。
γ=2 arcsin (R/2b)
ただし,Rは次による。
タイプ2のAOPD: a≦3 mのとき R=260 mm
a>3 mのとき R=a×tan 5.0°
タイプ4のAOPD: a≦3 mのとき R=130 mm
a>3 mのとき R=a×tan 2.5°
図20−AOPDミスアライメント試験
5.2.1.4
再帰反射技術を用いるAOPD及び同じアセンブリ内に投光部及び受光部をもつAOPDに対する
追加試験
次の試験を,供給者による仕様の最小作動距離又は0.5 mのいずれか長い距離及び最大作動距離の両方
26
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
で実施しなければならない。
4.2.13に従った試験片を,検知区域内に光ビームの光軸に垂直に置いたときに,OSSDがオフ状態にな
ることを検証しなければならない。
この試験は,投受光部の近傍,再帰反射ターゲットの200 mm手前,ビームに沿った中間点及び他の電
気光学的な分析で特定されたその他の位置において実施しなければならない。
タイプ4のAOPDの場合,200 mm×200 mmのサイズの反射物体を,投受光エレメントの検知面に可能
な限り近く置いたときに,OSSDがオフ状態になることを検証しなければならない。
この反射物体は,EN 471のクラス2又は同等の再帰反射の要求を満たす反射面をもっていなければなら
ない。
注記 EN 471:2003の表5は,クラス2の再帰反射係数の最小値を,入光角5°及び参照角0.2°(12′)
において330 cd lx−1 m−2と定義している。
200 mm×200 mmより大きい反射面が必要かどうかは,5.2.1.2.2に記載される電気光学サブシステムの
分析によって決定しなければならない。
第1部の5.2に,次の試験を追加する。
5.2.9
波長
放射波長は,投光素子の試験成績書の検査又は実測試験のいずれかによって検証しなければならない。
5.2.10 放射強度
放射強度は,JIS C 6802又はJIS C 7550による測定及び供給者の技術文書によって検査することによっ
て検証しなければならない。
注記 この要求条件に対する簡単化した検証法は検討中である。
5.4
環境試験
第1部の5.4に,次の試験を追加する。
5.4.6
光干渉
5.4.6.1
一般事項
各試験は,作動距離3 m(又は供給者が指定する作動距離で3 mに最も近い値)において,かつ,最小
要求条件として示される条件の下で実施しなければならない。
注記1 5.4.6.2〜5.4.6.8は,最小要求条件の一部である。
次の場合には,追加試験を,異なる作動距離と環境条件との組合せの下で実施しなければならない。
− 検証試験のために特別の光源を必要とするような高いイミュニティレベルを供給者が指定していると
き及び/又は,
− 5.2.1.2.2の分析結果によって追加試験が必要なとき。
B試験(第1部の5.2.3.3参照)及びC試験の間,試験片は干渉光を妨げないように検知区域に挿入しな
ければならない。
5.4.6.4の試験のために,製造業者の指示に従ってシステムを最良に(位置及び角度を)調整しなければ
ならない。
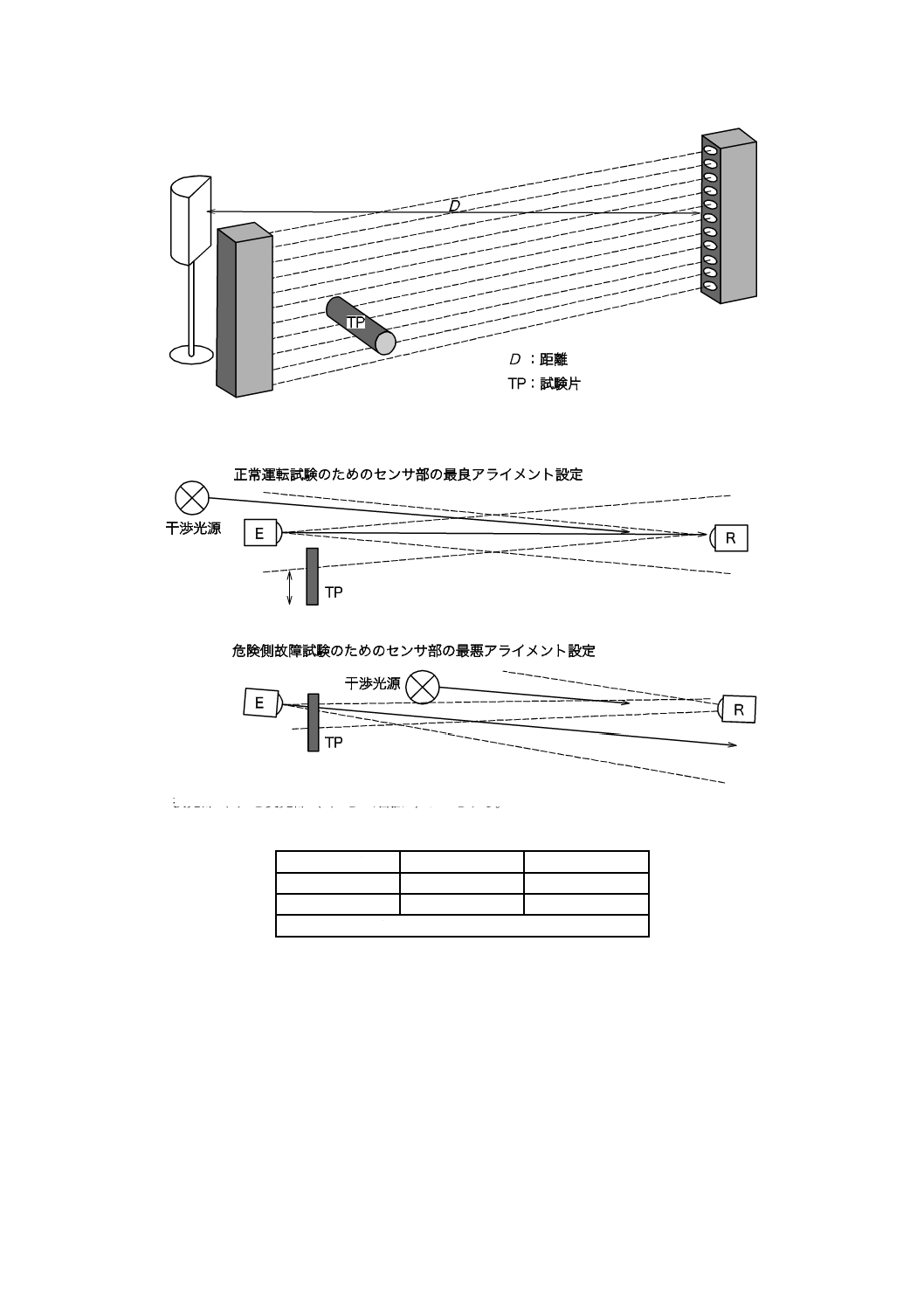
5.4.6.5,5.4.6.6及び5.4.6.7の試験においては,干渉光を受光部の光軸方向に(又は可能な限り光軸に近
く)向けて,投光部を正常作動可能な範囲の最大ミスアライメント角(最悪条件)に設定しなければなら
ない。この試験の設定は試験に供するAOPDの特性に合うように,5.2.1.2.2の分析及び5.2.1.2.4の試験方
法によって及び必要ならば更なる分析及び特性解析によって決定しなければならない(例として,図21,
図22,図23,図24及び図25を参照)。
27
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記2 AOPDの設計は多様化しているので,一つの試験方法が全ての設計のAOPDに適用できるわ
けではない。図21は試験構成の一例を示している。
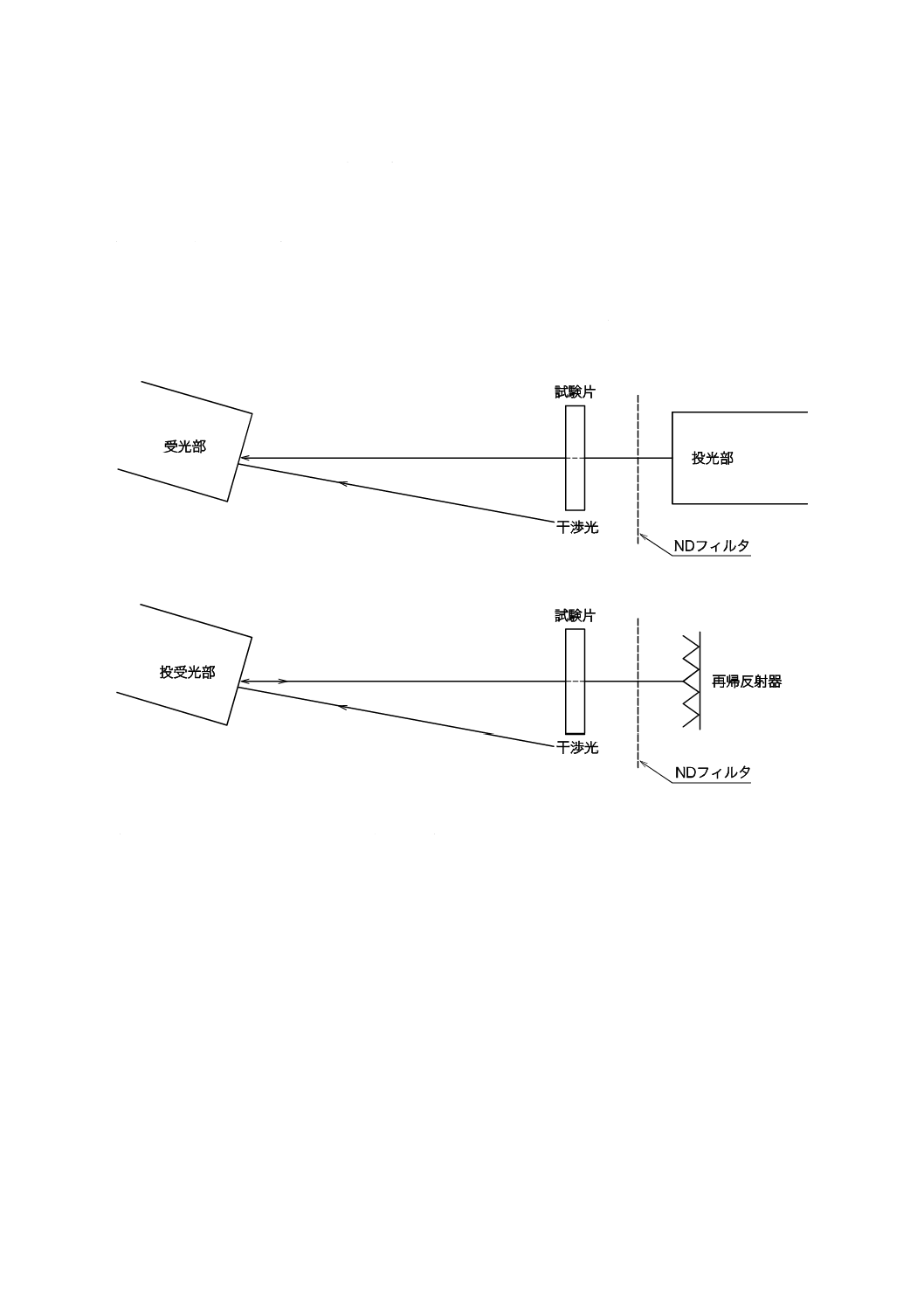
これらの試験において,試験結果が同じになる場合は,長い作動距離を,図21のように濃度(ND)フ
ィルタでシミュレートすることもできる。NDフィルタを用いる場合は,全ての試験を,NDフィルタを取
り付けた後に行わなければならない。
試験の設定には,AOPDの受光部に到達する光の特性に対してAOPDの作動に影響するどのような変更
も加えてはならない。反射器,鏡,フィルタ,ビーム分割器,窓などを用いる場合,光の特性(例えば,
分光分布,偏光)に対するどのような改変も試験結果に重大な影響を及ぼさないことを検証しなければな
らない。
注記1 危険側故障試験を行うときは,受光部又は投受光部を,起こり得る最大ミスアライメントの状態で作動
させる。
注記2 NDフィルタが偏光に影響する可能性に注意する。
図21−光干渉試験(直接法)
28
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
投光部(E)と受光部(R)との距離は,3 mとする。
干渉光源と受光部(R)との距離Dは,下の表による。
距離D a)
照度
備考
2 m
3 000 lx
危険側故障試験
3 m
1 500 lx
正常作動試験
注a) 正確な距離は光源の種類による。
図22−光干渉試験(ハロゲン光源の場合)
29
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
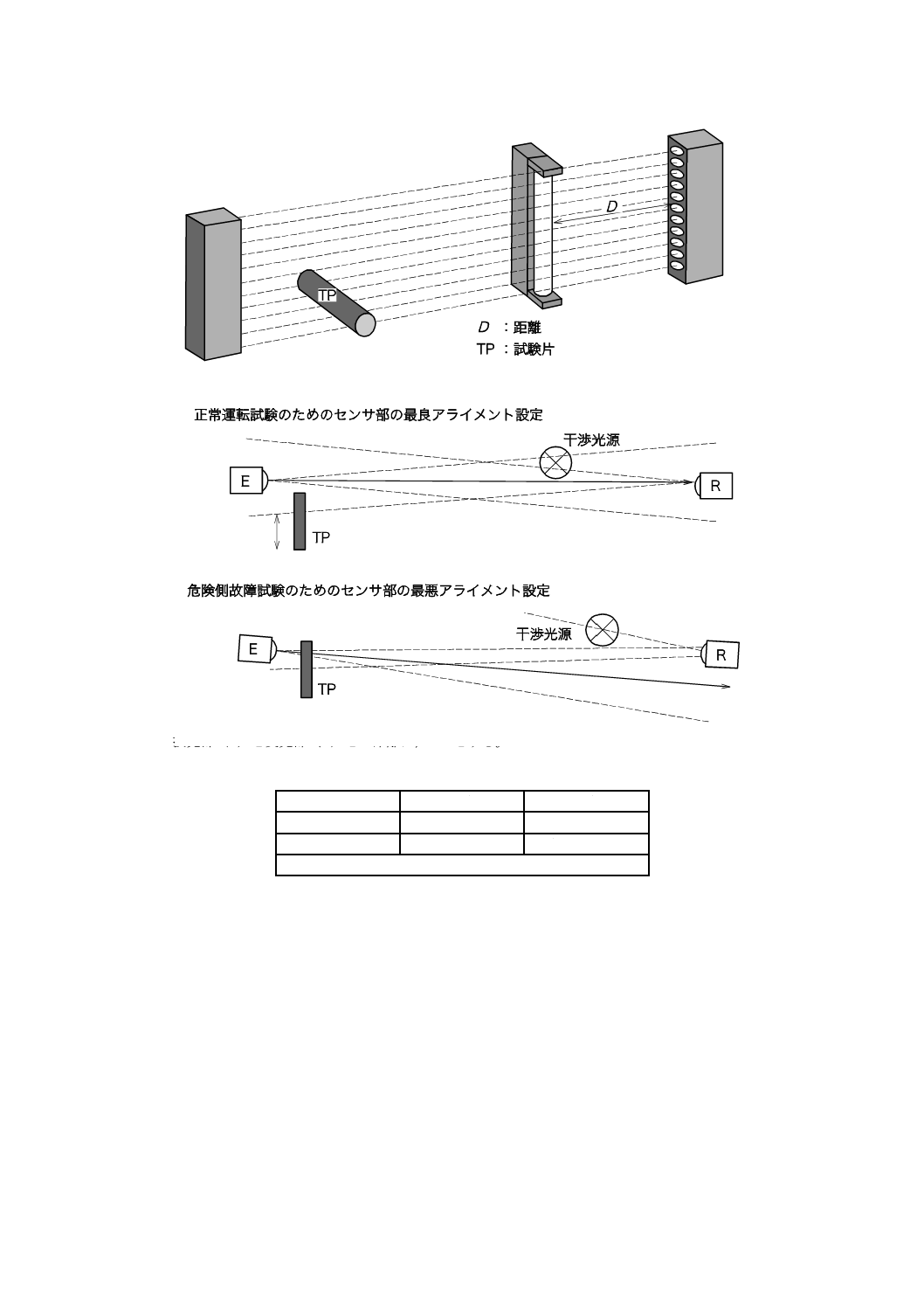
投光部(E)と受光部(R)との距離は,3 mとする。
干渉光源と受光部(R)との距離Dは,下の表による。
距離D a)
照度
備考
12 cm
3 000 lx
危険側故障試験
21 cm
1 500 lx
正常作動試験
注a) 正確な距離は光源の種類による。
図23−光干渉試験(蛍光灯光源の場合)
30
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
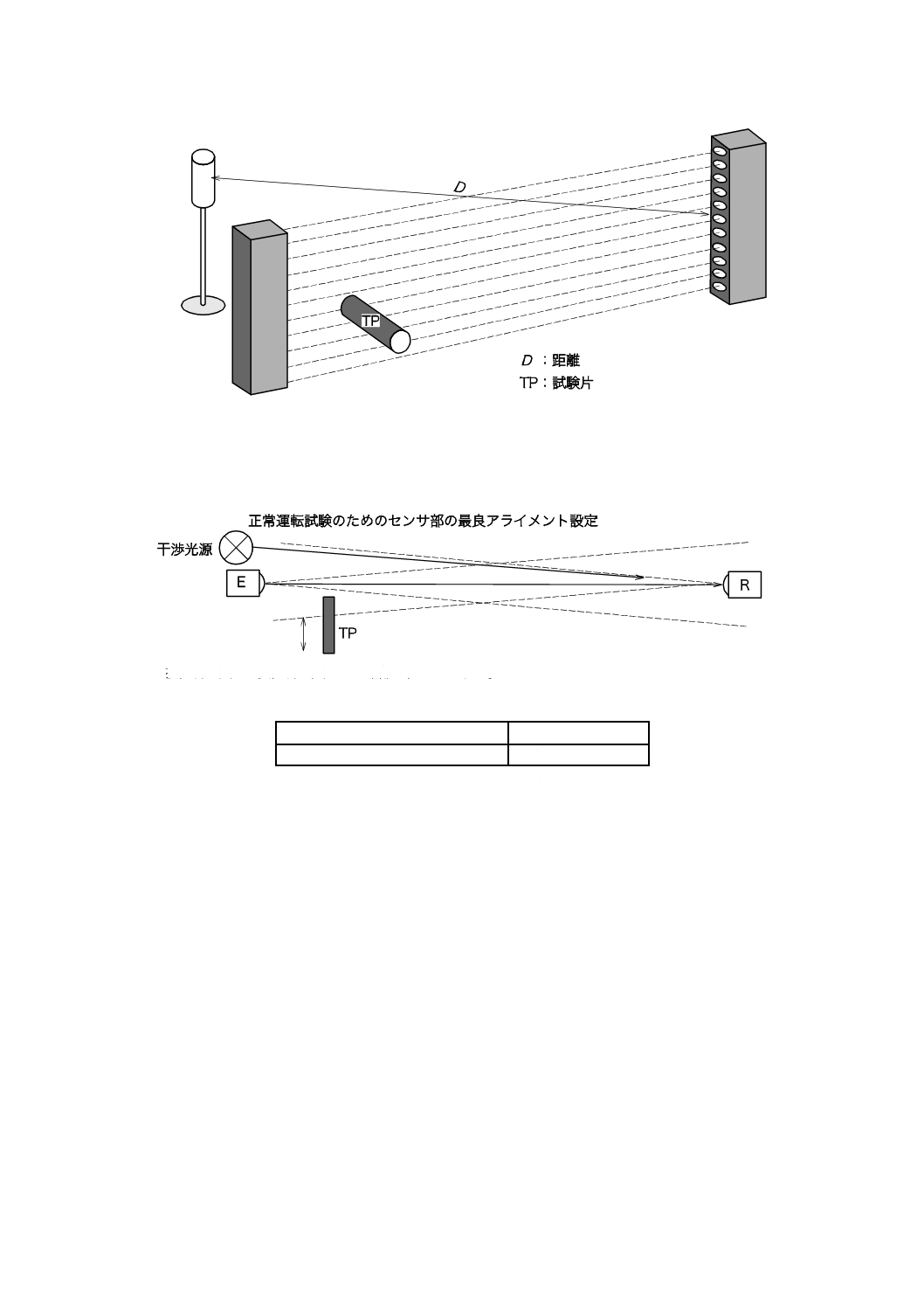
投光部(E)と受光部(R)との距離は,3 mとする。
干渉光源と受光部(R)との距離Dは,下の表による。
干渉光源と受光部(R)との距離D
備考
3.0 m
正常作動試験
図24−光干渉試験(キセノンフラッシュビーコン光源の場合)
31
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
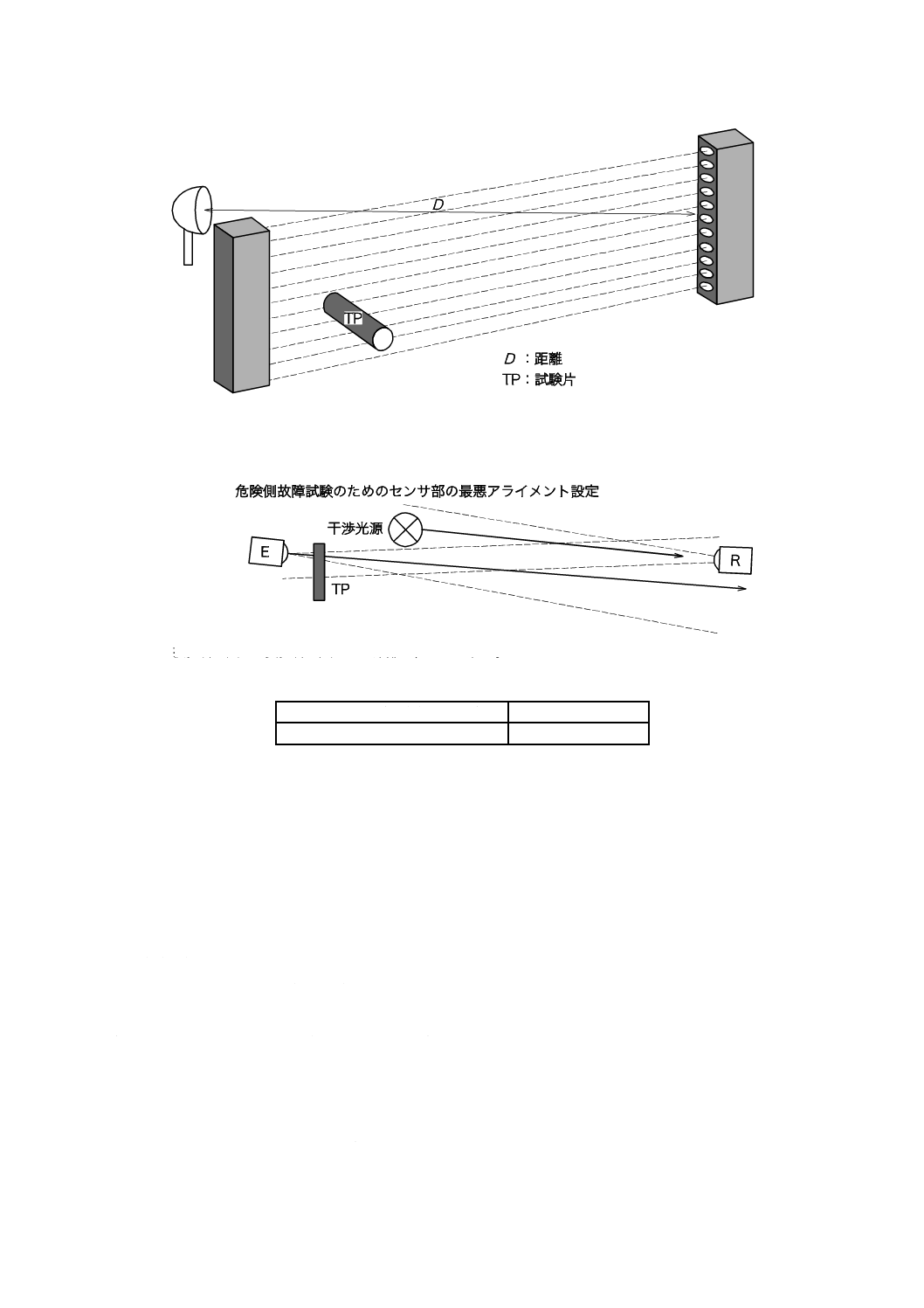
投光部(E)と受光部(R)との距離は,3 mとする。
干渉光源と受光部(R)との距離Dは,下の表による。
干渉光源と受光部(R)との距離D
備考
1.0 m
危険側故障試験
図25−光干渉試験(ストロボ光源の場合)
5.4.6.2
光源
光源には,次のものを用いなければならない。
a) 白熱灯光源 次の特性をもつ直線形ハロゲン(クォーツ)電球。
− 色温度:3 000〜3 200 K
− 入力電力:0.5〜1 kWの定格電力
− 定格電圧:100〜250 Vの間の任意の電圧
− 供給電圧:48〜62 Hzまでの正弦波交流で,定格電圧±5 %の範囲内の電圧
− 長さ:150〜250 mm(公称値)
ランプには,最小寸法が200 mm×150 mm,波長400〜1 500 nmにわたって偏差±5 %の範囲内の均一な
反射率をもつ,つや消し仕上げのパラボラ形反射器を付けなければならない。
注記 つや消しの前窓をもつランプを用いてもよい。この光源は分光分布が分かっており,電源周波
数の2倍の周波数で現れる変調特性も予測可能であり,ほぼ均一な強度分布のビームを作り出
す。太陽光及び作業現場の白熱灯照明をシミュレートするときに用いられる。
b) 蛍光灯光源 次の特性をもつ直線形蛍光管。
32
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 寸法:T8×1 200 mm(公称径26 mm)
− 定格電力:18〜20 W
− 色温度:3 000〜6 000 K
次の仕様の電子安定器と組み合わせて用いる。
− 作動周波数:25〜50 kHz
− 蛍光管に対応する定格電力で,定格供給電圧±5 %の範囲内で,反射鏡又は拡散板なしで使用。
c) フラッシュビーコン光源 次の特性をもつキセノンフラッシュ管(エンクロージャ・反射器・フィル
タなし)。
− フラッシュ持続時間:40〜1 200 μs(強度半減点までを測定)
− フラッシュ周波数:0.5〜2 Hz
− 1フラッシュの入力エネルギー:3〜5 J
d) ストロボ光源 次の特性をもつキセノンフラッシュ管(エンクロージャ・反射器・フィルタなし)。
− フラッシュ持続時間:5〜30 μs(強度半減点までを測定)
− フラッシュ周波数:5〜200 Hz
− 1フラッシュの入力エネルギー:0.05 J(200 Hz)〜0.5 J(5 Hz)
試験中,フラッシュ管の位置は固定する。
5.4.6.3
試験手順
注記 次のB試験及びC試験は,第1部の5.2.3に定義している。
試験手順1
1) ESPEのOSSDをオン状態にする。
2) 干渉光を点灯する(OSSDはオン状態にとどまらなければならない。)。
3) B試験を行う。
4) ESPEの電源を5秒間オフ後,電源を復帰させる(起動インタロックがあれば解除する)。
5) B試験を行う。
6) 干渉光を消灯する。
7) B試験を行う。
試験手順2
1) ESPEのOSSDをオン状態にする。
2) 干渉光を点灯する。
3) C試験を1分間繰り返し行う。
4) ESPEの電源を5秒間オフ後,電源を復帰させる(起動インタロックがあれば解除する)。
5) C試験を1分間繰り返し行う。
6) 干渉光を消灯する。
7) C試験を1分間繰り返し行う。
試験手順3
1) ESPEのOSSDをオン状態にする。
2) 干渉光を点灯する。
3) C試験を3分間繰り返し行う。
5.4.6.4
定常運転試験(最良アライメントの場合)
次の各干渉光を1個又は複数の受光部の光軸に向けて照射して,5.4.6.3の試験手順1を実施する。ESPE
33
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は試験中定常運転を継続しなければならない。
− 受光部面の計測照度が1 500 lxになるような5.4.6.2による白熱灯光源(図22参照)。
− 受光部のEAA内で3 mの距離に5.4.6.2によるフラッシュビーコン光源(図24参照)を置いて1分間
照射。
− 受光部面の計測照度が1 500 lxになるような5.4.6.2による蛍光灯光源(図23参照)。この試験は蛍光
管の中央及び両端(陽極及び陰極領域)からの光を用いる三つの形態で実施しなければならない。
注記 蛍光灯光源を用いる試験の目的の一つは,高い周波数で変調された放射光に対するAOPDの妨
害感受性を確認することである。
5.4.6.5
危険側故障試験−白熱光(3 000 lxで最悪アライメントの場合)
5.4.6.2による白熱灯光源を1個又は複数の受光部の光軸に向けて,受光部面の計測照度が3 000±300 lx
となるように照射して,5.4.6.3の試験手順2を実施する。試験中は危険側故障があってはならない(図22
参照)。
5.4.6.6
危険側故障試験−ストロボ光(最悪アライメントの場合)
5.4.6.2によるストロボ光源を1個又は複数の受光部の光軸に向けて照射して,5.4.6.3の試験手順3を実
施する。試験中は危険側故障があってはならない(図25参照)。ストロボ光源のフラッシュ速度は,3分
間に5〜200 Hzまで直線的に増加させ,この3分間にC試験を連続的に繰り返さなければならない。
5.4.6.7
危険側故障試験−蛍光灯光(3 000 lxで最悪アライメントの場合)
5.4.6.2による蛍光灯光源を1個又は複数の受光部の光軸に向けて受光部面の計測照度が3 000 lxとなる
ように照射したとき,危険側故障があってはならない(図23参照)。この試験は,蛍光管の中央及び両端
(陽極及び陰極領域)からの光を用いる三つの形態で実施しなければならない。5.4.6.3の試験手順2によ
る。
5.4.6.8
危険側故障試験−同一設計の投光部からの干渉光
同一設計のAOPD投光部からの放射光が直接又は再帰反射器(使用されている場合)を介してAOPD受
光部に向けられたとき,タイプ4のESPEには危険側故障があってはならない。5.2.1.2.2の分析によって
決定される最悪条件に対応して,最小限6個の位置を選定して試験しなければならない。AOPDは,供給
者が指定する最大作動距離で作動させて試験しなければならない。5.4.6.3の試験手順3を用いなければな
らない。試験片を検知区域に入れたとき,試験片を検知する又はOSSDがオフにならなければならない。
干渉を防止するために複数の異なったコードが必要な場合,これらの試験を実施するあいだは,製造業
者の説明書に従ってそれらのコードを使用しなければならない。
分析に基づいて,最悪の組合せとして,異なるサイズ及び検知能力のAOPDを用いて試験を実施しなけ
ればならない場合がある。
6
識別及び安全使用のためのマーキング
第1部の箇条6に,次を追加する。
6.1
一般事項
b)に次を追加する。
− 検知能力が異なるAOPD部分がある場合は,これらの部分及びその検知能力を各AOPDの外側にマー
キングして示さなければならない。マーキングできないとき(例えば,スペース不足)には,附属文
書中にその情報を含めなければならない。
− 最小及び最大の作動距離をマーキングしなければならない。
34
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 受光部及び投光部の取付けが正しくない場合(例えば,180°のミスアライメント)にもOSSDがオ
ン状態になり得る場合は,AOPDには互いに正しい取付け位置が明確に分かるようにマーキングしな
ければならない。
− ライトカーテンには,検知区域の限界点を明確にマーキングしなければならない。
− ビーム中心線を示すマーキングをしなければならない。
注記 ビーム中心線は,AOPDの位置を決定する要素の一つである。
7
附属文書
第1部の箇条7に,次を追加する。
f) に次を追加する。
検知能力が異なるAOPD部分がある場合は,異なる検知能力ごとに,AOPDの試験片の大きさ及び検知
能力をその検知能力を確認する手順及び検知機能の作動を視覚表示器によって確認する手順とともに示さ
なければならない。検知不可能な対象物の大きさに関する情報も含めなければならない。
i) に次を追加する。
AOPDを据え付ける場合の注意事項の詳細。これには,その装置のEAA又は機械上若しくは機械の近
傍にある反射面又は作業中の工作物がもつ反射面によって,AOPD検知能力がどのような影響を受けるか
を詳細に示す据付図面も含める。
v) に次を追加する。
検知器の作動確認のために必要となる,検知区域への試験片挿入法の詳細を,AOPDの識別可能な基準
(例えば,ビーム中心線)から見た全ての可能な接近方向からの挿入について示さなければならない。
その限度まで検知能力が維持される試験片又はその同等品の,最大速度を示さなければならない。
AOPDがライトカーテンの空間的位置を調整する手段をもつ場合には,調整の範囲及び対応する検知区
域の位置関係を附属文書の中に図式的に示さなければならない。ライトカーテンにおいては,投光部及び
受光部が,特に180°のミスアライメントを起こさず互いに正しく取り付けられるように明示した図面を
提供しなければならない。
ff) に次を追加する。
特定の光放射形態がAOPDに干渉することが分かっている場合は,次の主旨の記載を含めなければなら
ない。
“この形態の光放射が存在する特定の用途(例えば,クレーンのケーブルレス制御装置,溶接スパッタ
からの放射,ストロボ光の影響)では,AOPDの危険側故障を確実に防止するために追加の安全方策が必
要になることがある。”
第1部の箇条7に,次を追加する。
nn) ブランキング又はレデュースド・レゾリューションを用いるときは,JIS B 9715による最小距離を計
算するための情報。ブランキングを用いるときは,最小距離と最低検知能力(最悪ケース時)との関
係を吟味する必要があることを説明しなければならない。
注記 ブランキングなしの場合とは異なる最小距離にする必要があり得る。
35
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
oo) 検知区域のブランキングされたエリアを通して人が危険源に近づくことを防止する追加手段の説明が
IEC/TS 62046に示されている(反射表面の影響を含む)。
pp) 検知区域を設定した後,責任者が適切な試験片を用いてそれを検証することの勧告
qq) 同一設計の投光部からの光の干渉を最小化する方法の適切な手引き
rr) AOPDの一部としての再帰反射板を恒久的に固定する手順に関する情報
36
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
ESPEのオプション機能
次を除き,第1部の附属書Aを適用する。
A.1 一般事項
オプション機能に,次を追加する。
− ブランキング(A.9参照)
− リデュースド・レゾリューション(A.10参照)
− あらかじめ定義されたリデュースド・レゾリューション構成の選択(A.11参照)
第1部に,次のA.9〜A.11を追加する。
A.9 ブランキング
A.9.1 一般事項
ブランキングは,検知区域内の一つ以上のエリアにおいて,それぞれに定義されたサイズで,位置が固
定(フィックスブランキング)又は可動(フローティングブランキング)のマスキングを許す,AOPDに
装備されるオプション機能である。
これによって,附属物,機械部品などがマスクされ,AOPDによって検知されることがなくなる。ブラ
ンキングされたエリア以外での規定された光学分解能及び検知能力は,変わらないままでなければならな
い。
A.9.2 機能要求事項
ブランキングされた光軸が継続して遮光されていることを,監視しなければならない。
注記1 これは検知区域のブランキングされたエリアが,機械的手段によって遮光されていることを
確実なものにするためである。
注記2 機械式ガード及び機械部品の位置は,機械の振動又は他の影響によって少し動くことがあり,
それに伴い影響を受ける幾つかの光軸を,ブランキングにすることがあり得る。これは,規
定された検知能力が,一つ以上の光軸分だけブランキングエリアの境界で減少することにな
る。
注記3 光軸がブランキングされている通常運転の間は,ブランキングされた光軸の故障を検知する
ことができるとは限らない。
ブランキングエリアの構成及び設定(ティーチイン)は有資格者だけで行わなければならない。このこ
とは鍵,パスワード又は工具によって保証されなければならない。設定の間,OSSDはオフ状態でなけれ
ばならない。
A.9.3 検証
検査及び試験による検証は,次による。
− 一つ以上のブランキングされた光軸が遮光されなくなった場合,OSSDはオフ状態に移行し継続する
(例えば,監視の検証)。
− AOPDの規定された検知能力は,ブランキングエリアの外側では保持される。ただし,ブランキング
37
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
エリアとの境界において検知能力が減少する場合は例外である。
− ブランキングの設定は,鍵,パスワード又は工具なしでは変更できない。
− OSSDは,設定の間オフ状態である。
A.10 リデュースド・レゾリューション
A.10.1 一般事項
リデュースド・レゾリューション(無監視ブランキングともいう。)は,AOPDの検知能力を変える機能
である。
検知区域にある,検知能力未満で所定の直径をもった物体(例えば,ケーブル,チューブ)は無視され,
検知能力以上の物体は検知されなければならない。
注記1 例えば,一つ以上の隣接した光軸のグループの状態は,“無視”及び“監視しない”と指定で
きる。これらの光軸の遮光によって,OSSDはオフ状態にならない。
リデュースド・レゾリューションは,検知区域全体,又は定義された固定又は可動区域内においてだけ
有効にすることが可能である。
注記2 AOPDの位置決めを,JIS B 9715に従って計算するときは,その選択されたリデュースド・
レゾリューションが使用される。
A.10.2 機能要求事項
AOPDのリデュースド・レゾリューションの選択及び起動は,鍵,パスワード又は工具なしで可能にな
ってはならない。
検知能力の設定の間,OSSDはオフ状態にとどまらなければならない。
選択されたリデュースド・レゾリューションの検知能力は,適切な試験片によって検証しなければなら
ない。
40 mm以下の全ての選択可能な光学分解能に対する試験片は,供給者が提供しなければならない。
A.10.3 検証
検査及び試験によって次を検証する。
− リデュースド・レゾリューションの選択及び起動は,鍵,パスワード又は工具なしで可能になっては
ならない。
− 全ての選択可能なリデュースド・レゾリューションの検知能力は,仕様値としての検知区域全てに構
成され,そして適切な試験片で検証することが可能である。
A.11 ブランキング又はリデュースド・レゾリューションのあらかじめ定義された構成の選択
A.11.1 一般事項
安全距離が,分解能の選択できる最大値によって例外なく計算される場合は,A.11.2〜A.11.5は適用し
ない。この場合,製造業者は附属文書に適切な情報を与えなければならない。
エンクロージャに記載される[第1部の6.1 c)参照]検出能力は,分解能の選択できる最大値だけを明
示しなければならない。これらの要求は検査によって検証されなければならない。
注記1 ブランキング及び/又はリデュースド・レゾリューション構成の自動選択は,ミューティン
グ機能ではない(第1部のA.7参照)。
注記2 種々のブランキングの構成を使用する場合は,故障によって発生する意図しない構成の変更
は監視機能によって検知される。
38
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.11.2 タイプ2のAOPDに対する機能要求事項
AOPDが二つ以上のブランキング及び/又はリデュースド・レゾリューション構成をもっている場合は,
単一故障によってブランキング及び/又はリデュースド・レゾリューション構成の意図しない変更に至っ
てはならない,又は,意図しない変更に至る障害は周期試験によって検知されロックアウト状態にならな
ければならない。
外部装置からAOPDへ選択入力信号が送られる場合は,この外部装置は,他の適切な規格(例えば,JIS
B 9705-1,JIS B 9961)の関連要求を満足することが望ましい。
ブランキング及び/又はリデュースド・レゾリューション構成を意図して変更することを阻害する単一
故障は,次のいずれの場合にもAOPDをロックアウト状態に移行させなければならない。
− 他のブランキング及び/又はリデュースド・レゾリューション構成を有効にする要求があったとき
− 追加のブランキング及び/又はリデュースド・レゾリューション構成を有効にする要求があったとき
− 周期試験の結果によって
この場合,応答時間の仕様値は保持されなければならない,又はAOPDは周期試験の結果としてロック
アウト状態に移行しなければならない。
注記 個々のブランキング及び/又はリデュースド・レゾリューション構成が,供給者による異なる
応答時間の仕様値をもつことができる。
A.11.3 タイプ4のAOPDに対する機能要求事項
AOPDが二つ以上のブランキング及び/又はリデュースド・レゾリューション構成をもっている場合は,
単一故障によってブランキング及び/又はリデュースド・レゾリューション構成の意図しない変更に至っ
てはならない。
AOPDの危険側故障を生じない単一故障が検知されない場合は,AOPD内部の更なる故障の発生によっ
て危険側故障を招いてはならない。
外部装置からAOPDへ選択入力信号が送られる場合は,この外部装置は他の適切な規格(例えば,JIS B
9705-1,JIS B 9961)の関連要求を満足することが望ましい。
ブランキング及び/又はリデュースド・レゾリューション構成を意図して変更することを阻害する単一
故障は,次のいずれの場合にもAOPDをロックアウト状態に移行させなければならない。
− 他のブランキング及び/又はリデュースド・レゾリューション構成を有効にする要求があったとき
− 追加のブランキング及び/又はリデュースド・レゾリューション構成を有効にする要求があったとき
この場合,応答時間の仕様値は保持されなければならない。
注記 個々のブランキング及び/又はリデュースド・レゾリューション構成が,供給者による異なる
応答時間の仕様値をもつことができる。
A.11.4 タイプ2のAOPDに対する検証
ブランキング及び/又はリデュースド・レゾリューション構成への機能要求は,次のように検証されな
ければならない。
− 単一故障によってブランキング及び/又はリデュースド・レゾリューション構成の意図しない変更に
至ってはならない,又は意図しない変更に至る障害は周期試験によって検知されロックアウト状態に
なることの検証
− 単一故障がブランキング及び/又はリデュースド・レゾリューション構成の意図する変更を阻害しな
いこと,又はその故障によって周期試験の結果として,AOPDがロックアウト状態に移行することの
検証
39
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 共通原因故障が,ブランキング及び/又はリデュースド・レゾリューション構成の非作動又は変更に
至らないことの検証
− AOPDの応答時間の仕様値が,異なったブランキング及び/又はリデュースド・レゾリューション構
成間で切り替えた場合に保持されるか,又は周期試験の結果としてAOPDがロックアウト状態に移行
することの検証
異なったブランキング及び/又はリデュースド・レゾリューション構成に切り替えたときに,人が検知
区域内に既に存在する可能性を考慮する必要がある。
A.11.5 タイプ4のAOPDに対する検証
ブランキング及び/又はリデュースド・レゾリューション構成の選択への機能要求は,次のように検証
されなければならない。
− 単一故障によって,ブランキング及び/又はリデュースド・レゾリューション構成の意図しない変更
に至らないことの検証
− 単一故障がブランキング及び/又はリデュースド・レゾリューション構成の意図する変更を阻害しな
いことの検証
− 追加の故障が危険側故障に至らないことの,第1部の5.3.5に従った検証
− 共通原因故障が,ブランキング及び/又はリデュースド・レゾリューション構成の非作動又は変更に
至らないことの検証
− AOPDの応答時間の仕様値が,異なったブランキング及び/又はリデュースド・レゾリューション構
成間で切り替えた場合に保持されることの検証
異なったブランキング及び/又はリデュースド・レゾリューション構成に切り替えたときに,人が検知
区域内に既に存在する可能性を考慮する必要がある。
40
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
ESPE電気用品の単一障害一覧表
(5.3の危険側故障として考慮するもの)
第1部の附属書Bを適用する。
41
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書AA
(参考)
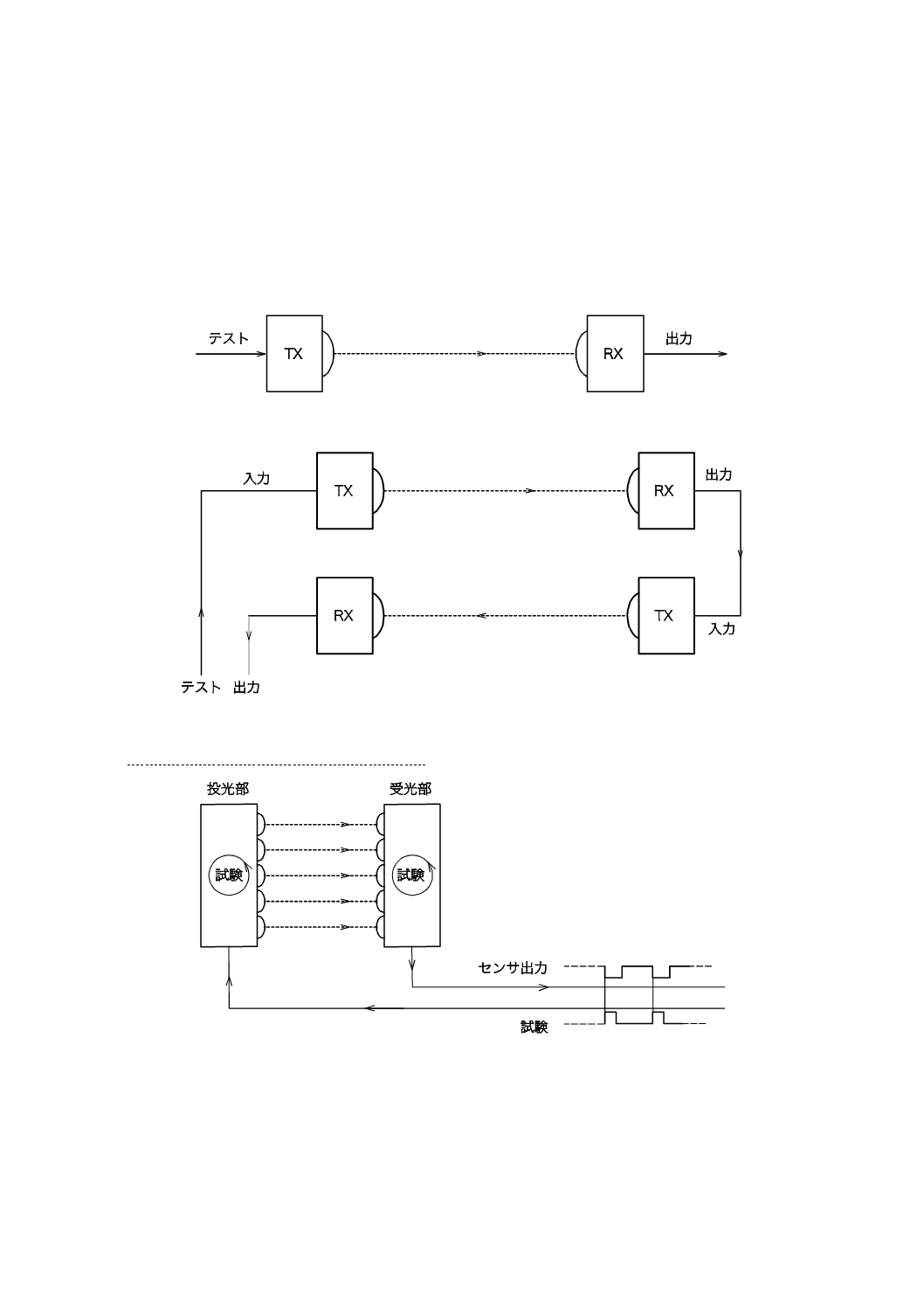
タイプ2 AOPDの周期試験構成
AA.1 外部から起動され評価される周期試験
この試験は外部から起動され,安全関連能力は外部で評価される。
図AA.1−シングルビーム検知装置
図AA.2−シングルビーム検知装置のカスケード接続
注記 TXは投光部,RXは受光部である。
図AA.3−マルチビームアセンブリの個別試験
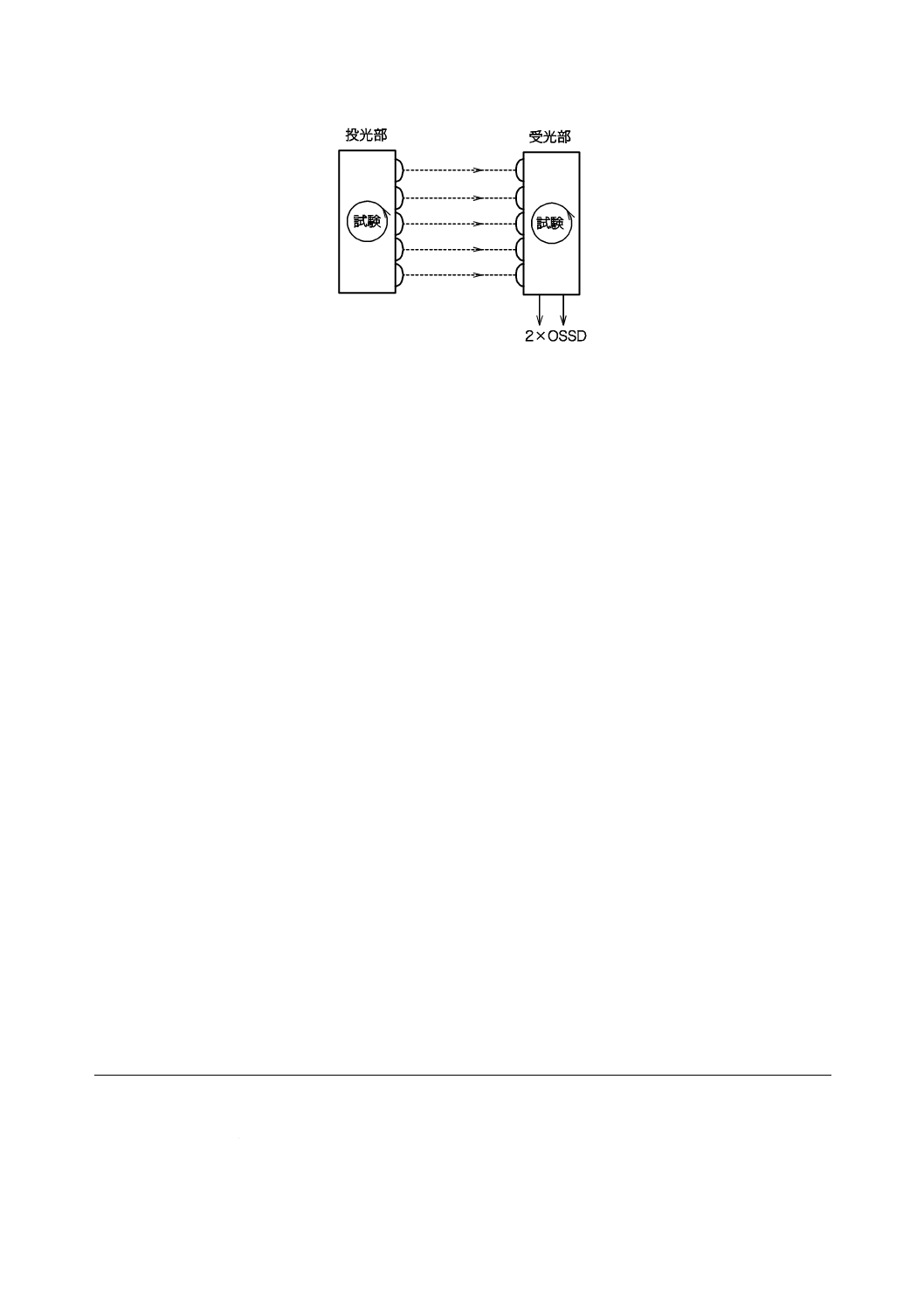
AA.2 内部から起動され評価される周期試験
この試験は内部から起動され,安全関連能力は内部で評価される。
42
B 9704-2:2017 (IEC 61496-2:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図AA.4−内部試験を行うタイプ2 AOPDの例
注記 他の構成も可能
参考文献
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
JIS B 9704-1の参考文献に記載された文献
JIS Z 8113 照明用語