B 9703:2019 (ISO 13850:2015)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 安全要求事項 ··················································································································· 3
4.1 一般要求事項 ················································································································ 3
4.2 作動条件及び設置環境 ···································································································· 6
4.3 非常停止機器 ················································································································ 6
4.4 アクチュエータとして使用するワイヤ又はロープ ································································· 8
4.5 非常停止機器の意図しない操作の防止················································································ 9
4.6 携行式オペレータコントロールステーション ······································································· 9
参考文献 ···························································································································· 10
B 9703:2019 (ISO 13850:2015)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
機械工業連合会(JMF)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工
業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が改正した日本工業規格である。
これによって,JIS B 9703:2011は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9703:2019
(ISO 13850:2015)
機械類の安全性−非常停止機能−設計原則
Safety of machinery-Emergency stop function-Principles for design
序文
この規格は,2015年に第3版として発行されたISO 13850を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
この規格は,機械類の安全性規格群の一つであり,その構成は次による。
タイプA規格(基本安全規格)−全ての機械類に適用できる基本概念,設計原則及び一般的側面を規定
する規格
タイプB規格(グループ安全規格)−広範な機械類に適用できる安全面又は安全防護物を規定する規格
タイプB1規格−特定の安全面(例えば,安全距離,表面温度,騒音)に関する規格
タイプB2規格−安全防護物(例えば,両手操作制御装置,インターロック装置,圧力検知装置,ガー
ド)に関する規格
タイプC規格(個別機械安全規格)−個々の機械又は機械群の詳細な安全要求事項を規定する規格
この規格はタイプB2規格である。
1
適用範囲
この規格は,機械における非常停止の機能的要求事項及び設計原則について規定する。
なお,使用するエネルギーの種類は限定しない。
この規格は,非常停止機能の一部である作動の反転若しくは制限,エミッション(例えば,放射,流体)
の回避,遮蔽,制動又は遮断のような機能を取り扱うものではない。
この規格の要求事項は,次のものを除く全ての機械に適用する。
− 非常停止機能がリスクを低減しない機械
− 手持ち形又は手操作形機械
注記1 電気/電子技術による非常停止機能を実現するための要求事項は,JIS B 9960-1に規定して
いる。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 13850:2015,Safety of machinery−Emergency stop function−Principles for design(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
2
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8361 油圧−システム及びその機器の一般規則及び安全要求事項
注記 対応国際規格:ISO 4413,Hydraulic fluid power−General rules and safety requirements for systems
and their components(MOD)
JIS B 8370 空気圧−システム及びその機器の一般規則及び安全要求事項
注記 対応国際規格:ISO 4414,Pneumatic fluid power−General rules and safety requirements for
systems and their components(MOD)
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
注記 対応国際規格:ISO 12100,Safety of machinery−General principles for design−Risk assessment
and risk reduction(IDT)
JIS B 9705-1 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
注記 対応国際規格:ISO 13849-1,Safety of machinery−Safety-related parts of control systems−Part1:
General principles for design(IDT)
JIS B 9960-1 機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:IEC 60204-1,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements(IDT)
JIS B 9961 機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能安全
注記 対応国際規格:IEC 62061,Safety of machinery−Functional safety of safety-related electrical,
electronic and programmable electronic control systems(IDT)
JIS C 8201-5-5 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第5節:機械的ラ
ッチング機能をもつ電気的非常停止機器
注記 対応国際規格:IEC 60947-5-5,Low-voltage switchgear and controlgear−Part 5-5: Control circuit
devices and switching elements−Electrical emergency stop device with mechanical latching function
(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 9700によるほか,次による。
3.1
非常停止(Eストップ),非常停止機能[emergency stop(E-stop),emergency stop function]
次のことを意図する機能。
− 人に対する危険源を,又は機械類若しくは工程中の加工物への損害を,避けるか又は低減する。
− 人間の単一の動作によって始動する。
(出典:JIS B 9700の3.40)
3.2
非常停止装置(emergency stop equipment)
非常停止機能を実行する制御システムの安全関連部。
注記 典型的な非常停止装置は,入力,処理及び出力要素で構成される。
3.3
非常停止機器(emergency stop device)
非常停止機能を始動するために使用される手動操作の制御機器。
(出典:JIS C 8201-5-5の3.2)
3
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.4
機械アクチュエータ(machine actuator)
機械を作動させる駆動機構。
注記 機械アクチュエータの例は,モータ,ソレノイド,空圧又は液圧シリンダである。
3.5
安全機能(safety function)
故障がリスクの増加に直ちにつながるような機械の機能。
(出典:JIS B 9700の3.30)
3.6
非常停止機器の制御範囲[span of control of emergency stop device(s)]
特定の非常停止機器の制御下にある,あらかじめ決められた機械類の範囲。
3.7
保護シュラウド(protective shroud)
非常停止機器の意図しない操作の可能性を低減するための機械的方策。
3.8
非常事態(emergency situation)
緊急に終了,又は回避することが必要な危険状態。
注記 非常事態は,次のような場合に発生する。
− 機械の正常な運転中(例えば,人の介入による,又は外部影響の結果として)
− 機能不良又は機械のいずれかの部分の故障の結果として
(出典:JIS B 9700の3.38)
3.9
オペレータコントロールステーション(operator control station)
同一のパネル上に固定された,又は同一のエンクロージャ内に配置された一つ以上のアクチュエータの
集合体。
注記 アクチュエータは,外部の力を受ける機器の部分である(JIS B 9960-1の3.1.1参照)。
4
安全要求事項
4.1
一般要求事項
4.1.1
非常停止機能
4.1.1.1
非常停止機能の目的は,人の挙動又は予期しない危険事象によって,現実に発生している,又は
切迫した非常事態を回避することである。
非常停止機能は,人間の単一の動作によって始動する。
4.1.1.2
非常停止機能は,いつでも利用可能かつ操作可能でなければならない。また,機械の全ての運転
モードにおいて,他の保護機能(例えば,捕捉された人の解放,消火)を損なうことなく,他の全ての機
能及び操作に優先するものでなければならない。
非常停止機能が作動した場合,
− 手動でリセットされるまで機能を維持しなければならない。
− 非常停止機能の始動によって停止した運転に対して,いかなる起動信号も有効となってはならない。
非常停止機能は,人間の意図した操作によってリセットされなければならない。非常停止機能のリセッ
4
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
トは,非常停止機器の解除によって作動しなければならない(4.1.4参照)。リセットによって機械が始動
してはならない。
注記 非常停止機能は,JIS B 9700に規定されている予期しない起動を防止するための方策とみなす
ことはできない。
4.1.1.3
非常停止機能は付加保護方策であり,安全防護方策及び他の機能又は安全機能の代替手段として
採用してはならない。
4.1.1.4
非常停止機能は,他の安全機能の有効性を損なってはならない。
注記 この目的のために,電磁チャック又は制動機器のような補助的な装置が確実に作動することが
必要な場合がある。
4.1.1.5
非常停止機能は,非常停止機器の作動後,新たな危険源が発生することなく,また,人の介在な
しに,機械の作動を適切な方法で停止するように設計しなければならない。
注記 適切な方法には,次を含む。
− 機械の必要な設計上の制約を考慮した最適な減速度の選定
− 停止カテゴリ(4.1.3参照)の選択
− あらかじめ決められた遮断順序の必要性
機械及び特定のリスクによっては,非常停止機能が,危害のリスクを最小にするために,非常停止機能
の一部である停止以外の機能(例えば,作動の反転又は制限,制動速度)を始動することがあるが,その
ような機能は,この規格では取り扱わない。
4.1.1.6
非常停止機能は,非常停止機器を作動する決定が,その結果の影響の考慮が要求されないように
設計されなければならない。
4.1.2
非常停止機器の制御範囲
各非常停止機器の制御範囲は,機械全体を包含しなければならない。例外として,例えば,連結された
全ての機械類を停止することが新たな危険源を生じる,又は生産に不必要な影響を及ぼす可能性がある場
合は,機械全体を一つの制御範囲とすることが適切ではない場合がある。
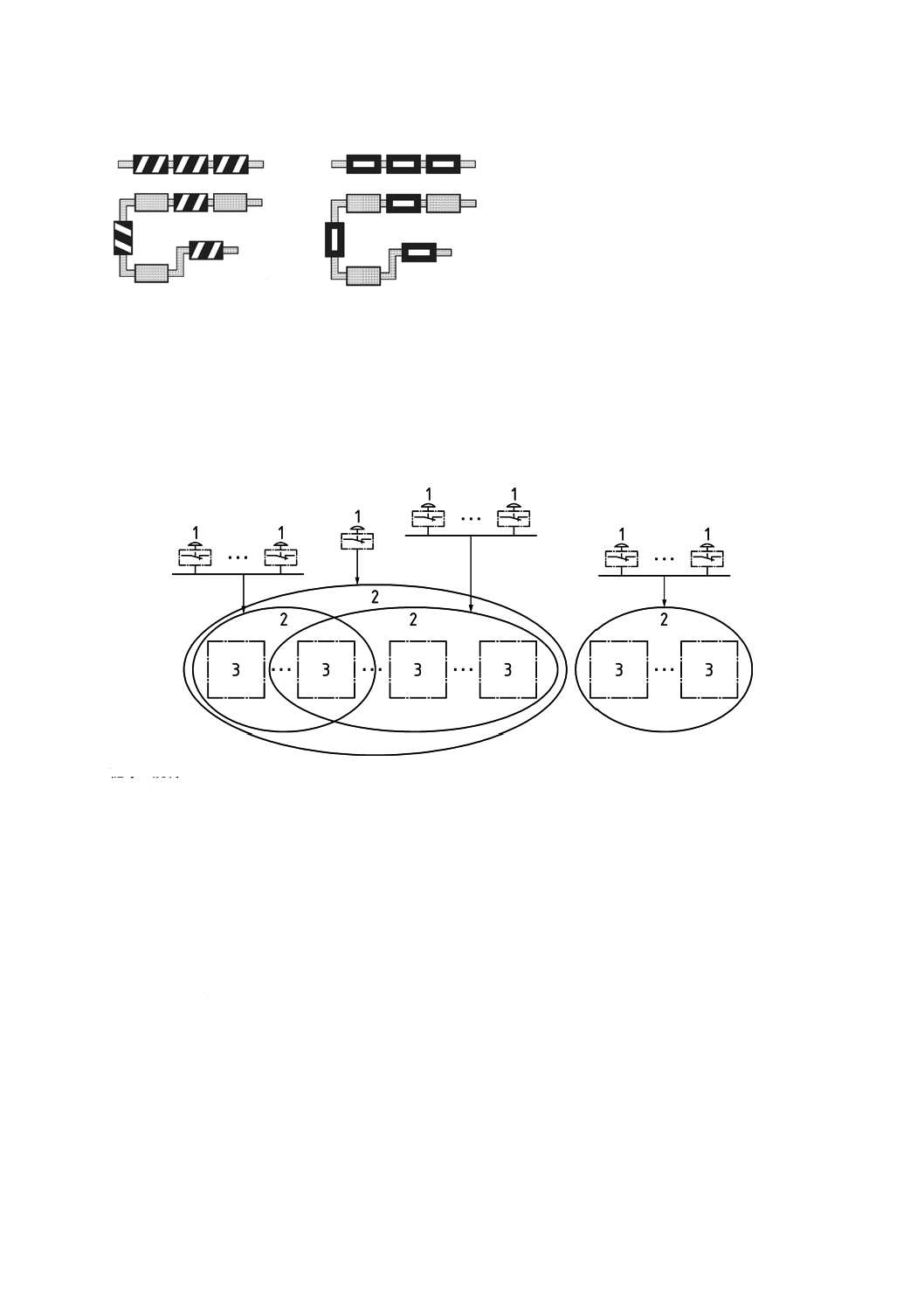
各制御範囲は,機械の一部,機械全体又は機械のグループを包含する場合がある(図1参照)。
異なる制御範囲が重なってもよい。
制御範囲の割当ては,次を考慮して決定しなければならない。
a) 機械の視認可能な範囲を基にした,機械の物理的な配置
b) 危険状態を認識することが可能であること(例えば,視認性,騒音,臭気)
c) 生産工程に関係するあらゆる安全性の影響
d) 危険源への予見可能な暴露
e) 可能性のある隣接する危険源
4.1.2.1
次の要求事項を満たす場合は,複数の制御範囲を適用することができる。
− 制御範囲は,明確に定義し,識別可能でなければならない。
− 非常停止機器は,非常停止を必要とする危険源と容易に関連付けられなければならない。
− 非常停止機器の制御範囲は,それぞれの非常停止機器の操作位置において識別可能でなければならな
い(4.1.1.6参照)。
注記 明確な識別は,図記号又は配置自体によって実現することができる。非常停止機器に関係する
文書若しくは指示書を読むこと,又は事前知識を要求することは避けることが望ましい。
例 次のような図記号を非常停止機器のそばに表示し,その機器の制御範囲を示す。
5
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− いかなる制御範囲においても,非常停止機器の作動が新たな危険源を生じてはならず,また,リスク
を増加させてはならない。
− ある制御範囲における非常停止機器の作動が,他の制御範囲における非常停止機能の始動を妨げては
ならない。
− 機械の使用上の情報は,非常停止機器の制御範囲に関する情報を含まなければならない。
実施可能な限り,異なる制御範囲をもつ非常停止機器は,互いに近い位置に配置してはならない。
記号の説明
1 非常停止機器
2 制御範囲
3 機械の一部又は機械
図1−制御範囲の概念を示す例
4.1.3
停止カテゴリ
非常停止は,次の停止カテゴリのいずれかに従う機能としなければならない(JIS B 9960-1参照)。
適切な停止カテゴリは,リスクアセスメントによって選定しなければならない。
a) 停止カテゴリ 0 機械アクチュエータへの動力の即時遮断による停止。
注記1 追加の制動が必要となる場合がある。
停止カテゴリ0の例は,次のとおり。
− 電気機械式開閉機器による機械の電気モータへの電力遮断
− 危険な部位とその機械アクチュエータ間との機械的分離(切離し)
− 液圧/空圧機械アクチュエータへの流体動力源遮断
− IEC 61800-5-2に従った動力駆動システムのセーフトルクオフ(STO)機能を使用した,電気モータ
(機械全体の全ての部分を包含する制御範囲)
(機械の特定の部分の制御範囲)
又は
又は
6
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
のトルク又は力を発生させるために必要な動力の除去
b) 停止カテゴリ1 停止するために機械アクチュエータへの動力を必要とし,停止したときに動力が遮
断される運動及び運転の停止。
停止カテゴリ1の例は,次のとおり。
− 動きを減速させ,停止したときに電気機械式開閉機器によってモータへの電力供給を除去する。
− IEC 61800-5-2に従った動力駆動システムの安全停止1(SS1)機能の使用
注記2 動力の除去については,トルク又は力を発生させるために必要な動力を除去すれば十分な
場合がある。これは,切離し,分離,スイッチングオフ又は電子的手段[例えば,IEC
61800-5-2に従った電力ドライブシステム(PDS)]によって,必ずしも断路することなく
達成できる。
4.1.4
非常停止機器の解除(例えば,アンラッチング)
作動した非常停止機器の効力は,非常停止機器のアクチュエータを解除するまで維持しなければならな
い。解除は,指令を始動した機器への人間の意図した操作によってだけ可能でなければならない。機器の
解除は,再起動を許可するだけで,機械類を再起動してはならない。
非常停止機器の作動後及び解除前に,作動した原因を発見するため,機械類を検査することを機械の取
扱説明書に記載しなければならない。
4.1.5
非常停止装置
4.1.5.1
非常停止機能を実行する制御システム又はサブシステムの安全関連部は,JIS B 9705-1及び/又
はJIS B 9961の関連要求事項に従わなければならない。
要求されるパフォーマンスレベル(PL)又はSILの決定においては,非常停止機能の目的を考慮するこ
とが望ましいが,最低条件はPLr=c又はSIL 1とする。
注記 非常停止機能は,JIS B 9705-1及び/又はJIS B 9961の要求事項を考慮した他の安全機能と,
安全関連部とを共有することができる。
4.1.5.2
非常停止機能を実行する電気装置は,JIS B 9960-1の関連要求事項に適合しなければならない。
4.1.5.3
非常停止機能を実行する液圧装置は,システム及びそのコンポーネントの設計,製造及び改造に
おいて,JIS B 8361の関連要求事項に適合しなければならない。
4.1.5.4
非常停止機能を実行する空圧装置は,システム及びそのコンポーネントの設計,製造及び改造に
おいて,JIS B 8370の関連要求事項に適合しなければならない。
4.2
作動条件及び設置環境
非常停止機能に使用されるコンポーネント,機器及び要素は,想定した作動条件及び設置環境の下で正
しく作動できるように選択,組立,相互に接続,固定及び保護しなければならない。これには,次を考慮
する。
− 作動頻度,及び例えば,作動頻度の少ない場合の定期試験の必要性
− 例えば,振動,衝撃,温度,放射(例えば,太陽からの紫外線),雨,雪,凍りつくような水,粉じん,
異物,湿気,腐食性物質及び流体による環境の制約
4.3
非常停止機器
4.3.1
非常停止機器は,操作を必要とするオペレータ及び他の人が容易に識別及び操作できるように設計
しなければならない。非常停止機器のアクチュエータは,次のいずれかのタイプを使用してもよい。
a) 手のひらで容易に操作できる押しボタン
b) ワイヤ,ロープ又はバー
7
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) ハンドル
d) 他の解決策が適用できない場合は,保護カバーなしの足踏みペダル
注記 非常停止を作動させる電源断路器については,JIS B 9960-1参照。
4.3.2
非常停止機器は,次の場所に配置しなければならない。
− リスクアセスメントの結果によって必要としない場合を除き,各オペレータコントロールステーショ
ン
− リスクアセスメントによって決定される他の場所
例えば,
− 出入口
− 機械類への介入,例えば,ホールド・ツゥ・ラン制御機能の操作が必要な場所
− 設計上,人と機械との干渉が想定される全ての場所(例えば,搬入/搬出区域)
非常停止機器は,操作を必要とするオペレータ及び他の人が直接近づくことができ,かつ,危険のない
操作ができるような位置に取り付けなければならない。
手で操作することを意図した非常停止機器のアクチュエータは,接近のための平面(例えば,床,プラ
ットフォーム)から0.6 m以上1.7 m以下の高さに取り付けることが望ましい。
足踏みペダルは,接近のための平面(例えば,床)に直接固定された場所に取り付けることが望ましい。
4.3.3
電気式非常停止機器は,機械的ラッチングの直接開路動作の原理を適用しなければならない。電気
式非常停止機器は,JIS C 8201-5-5に適合しなければならない。
注記 直接開路動作の原理の適用例は,押しボタンとの直接剛性結合によって開離する電気接点を用
いた非常停止機器である。JIS C 8201-5-1によれば,(接点の)直接開路動作とは,スイッチの
アクチュエータの規定動作が非弾性要素(例えば,ばねによらない)によって直接的に接点を
分離するものである。
4.3.4
空圧式又は液圧式非常停止機器は,機械的ラッチングによるポジティブな(直接)機械的作用の原
理(JIS B 9700の6.2.5参照)を適用しなければならない。
注記 空圧及び液圧システムは,一般的には,ばねによらないバルブの直接閉路を作動させる。
4.3.5
非常停止機器の作動は,非常停止機器のアクチュエータがかみ合わない場合でも(ラッチしない場
合でも),停止指令を発生しなければならない。
4.3.6
非常停止機器のアクチュエータは,赤でなければならない。アクチュエータ背後に背景があり,実
施可能な場合,背景は黄色でなければならない。
非常停止機器は,簡単な手段によって操作が容易に妨げられないような方法で設計及び設置しなければ
ならない。
注記 このような妨げは,ものが操作面の下に挟まったとき,又は無効化の意図があった場合に起こ
り得る。
解除(アンラッチ)するためにアクチュエータ上に鍵を必要とする非常停止機器は,使用しないほうが
よい。
非常停止アクチュエータが鍵の使用によってだけ解除できる場合は,手の傷害を避けるために,鍵の正
しい使用法を機械の取扱説明書に記載しなければならない。また,鍵はアクチュエータを解除するときに
だけ機器のアクチュエータにセットすることが望ましいことを示す警告を提供しなければならない。
4.3.7
アクチュエータ及びその背景のいずれにも,文字又は図記号を記載したラベルは付けないほうがよ
い。明確化のために図記号が必要な場合には,IEC 60417-5638の図記号を使用しなければならない(図2
8
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参照)。
アクチュエータ(ボタン)のアンラッチングの方向を明示する必要がある場合,その表示はアクチュエ
ータと同じ色又はほぼ同じ色でなければならない(JIS C 8201-5-5参照)。
注記 アンラッチングの表示(例えば,矢印)は,操作方向と誤認される可能性がある。
図2−非常停止の図記号(IEC 60417-5638: 非常停止)
4.3.8
非常停止機器を取外し可能(例えば,プラグ着脱可能な携行式教示ペンダント)又はケーブルレス
オペレータコントロールステーションに設置する場合は,少なくとも一つの非常停止機器は機械上で恒久
的に(例えば,固定された位置で)利用できなければならない。
さらに,有効な非常停止機器と無効な非常停止機器との混同を避けるために,次の方策のうち,少なく
とも一つを適用しなければならない。
− 照明によって有効な非常停止機器の色を変える。
− 無効な非常停止機器に自動(自己起動する)カバーを付ける。これが実施不可能な場合,手動カバー
を使用してもよい。その場合,カバーはオペレータコントロールステーションから外れないようにす
る。
− 取外し可能又はケーブルレスオペレータコントロールステーションの適切な保管場所を用意する。
有効な非常停止機器と無効な非常停止機器との混同を避けるために適用した方策を,機械の取扱説明書
に記載しなければならない。また,その方策の正しい実施方法を明示しなければならない。
4.3.9
非常停止機器がケーブルレスである場合,又はケーブルレスオペレータコントロールステーション
に組み込まれている場合は,この規格の要求事項に加え,JIS B 9960-1の関連要求事項を適用しなければ
ならない。
4.3.10 非常停止機器の意図しない操作に対する方策は,操作を妨げるリスクを生じてはならず,非常停止
機器への接近性を損なってはならない。これらの方策は,非常停止機器又はそのアクチュエータの視認性
を損なってはならない(4.5参照)。
4.4
アクチュエータとして使用するワイヤ又はロープ
4.4.1
ワイヤ又はロープを非常停止機器のアクチュエータとして使用する場合,容易に使用できるように
設計及び配置しなければならない。この目的のために,次を考慮しなければならない。
− 非常停止指令を出力するために必要な変位量
− 最大可能変位
− ワイヤ又はロープと最も近い物体との最小空間距離
− ワイヤ又はロープを目視しやすいようにする(例えば,マーカフラッグの使用による。)。
− 非常停止機器を働かせるためのワイヤ又はロープに加える力及びその方向
ロープ及びワイヤの色は,赤でなければならない。
ワイヤ及びロープを見やすくするためにマーカフラッグを使用する場合,マーカフラッグは赤及び黄色
でなければならない(例えば,赤及び黄色のストライプ,又は赤及び黄色を交互に並べる。)。
9
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 JIS C 8201-5-5参照。
非常停止機器の操作が,ワイヤの軸に沿って引っ張ることによる場合,いずれの方向にワイヤを引いて
も非常停止指令を発生しなければならない。
注記2 図2の図記号を使用することで,マーカフラッグを識別しやすくすることができる。
4.4.2
ワイヤ又はロープの緩み,破損又は外れが生じた場合は,非常停止指令を発生しなければならない。
4.4.3
非常停止機器を解除する手段は,その位置からワイヤ又はロープの全長が見えるようなところに配
置しなければならない。
4.4.4
非常停止機器の作動後及び解除前に,作動した原因を発見するため,ワイヤ又はロープの全長に沿
って機械類を検査することを機械の取扱説明書に記載しなければならない。ワイヤ又はロープのセッティ
ング,その後の調整などの情報も記載しなければならない。
4.5
非常停止機器の意図しない操作の防止
非常停止機器は意図しない操作を防止するように設計しなければならない。
実施可能な限り,意図しない操作は,機器の設置位置によって防止しなければならず,他の設計方策の
適用よりも優先しなければならない。
非常停止機器の操作は損なわれてはならない。非常停止機器の意図しない操作を防止するために,例え
ば,次の予防策をとることができる。
− 予見可能な激しい往来のある区域から離れた場所への非常停止機器の設置
− 非常停止機器のタイプの選択
− 非常停止機器の適切なサイズ又は形状の選択
− 操作盤のくぼんだ面への非常停止機器の取付け
意図しない操作を防ぐために必要な場合,及び他の方策が実施不可能な場合を除き,非常停止機器の周
囲への保護シュラウドの使用は避けることが望ましい。
保護シュラウドには,傷害を引き起こす可能性のある鋭利な角部及び端部,並びに粗い表面があっては
ならない。角部及び端部はばりを除去し,表面は滑らかでなければならない。
手で操作することを意図した非常停止機器については,意図しない操作に対する方策が,非常停止機器
の操作を必要とする機械オペレータ及び他の人の予見可能なあらゆる位置からの手のひらによる操作を妨
げてはならない。
4.6
携行式オペレータコントロールステーション
4.6.1
携行式オペレータコントロールステーションの非常停止機能
携行式オペレータコントロールステーションが機械を制御している間は,全ての非常停止機器が有効で
なければならない(4.3.8参照)。取外し可能なオペレータコントロールステーションの接続及び切離しの
影響をリスクアセスメントで考慮しなければならない。
4.6.2
ケーブルレスオペレータコントロールステーションの非常停止のリセット
ケーブルレス制御システムの一部の中断又は故障の後の動力復帰が,それ以前にケーブルレス非常停止
機器によって始動された非常停止状態のリセットを招いてはならない。
ケーブルレス制御機器で非常停止を始動した場合,リセットは,非常停止機器のラッチ状態を解除した
後でだけ可能でなければならない。
非常停止機器の制御範囲を視認できない場合は,非常停止の原因が除去されたことを確認するために,
携行式コントロールステーションの非常停止アクチュエータの解除に加え,機械類上又は機械類の周囲に
一つ以上の固定された補助的なリセット機器を備えなければならない。
10
B 9703:2019 (ISO 13850:2015)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS C 8201-5-1 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第1節:電気機械
式制御回路機器
注記 対応国際規格:IEC 60947-5-1,Low-voltage switchgear and controlgear−Part 5-1: Control circuit
devices and switching elements−Electromechanical control circuit devices(IDT)
[2] IEC 61800-5-2,Adjustable speed electrical power drive systems−Part 5-2: Safety requirements−Functional
[3] IEC 60417-DB,Graphical symbols for use on equipment (online database)