B 9225-3:2015 (ISO 11783-3:2007)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 概要······························································································································· 2
5 技術的要件 ······················································································································ 2
5.1 メッセージ・フレーム・フォーマット················································································ 2
5.2 プロトコル・データ・ユニット(PDU) ············································································ 8
5.3 PDUフォーマット(PF) ······························································································· 11
5.4 メッセージ・タイプ ······································································································ 13
5.5 メッセージの優先順位 ··································································································· 22
5.6 バス・アクセス ············································································································ 22
5.7 競合ベースの調停 ········································································································· 22
5.8 エラー検出 ·················································································································· 22
5.9 送信元アドレス(SA)及びパラメータ・グループ番号(PGN)割当てプロセス ························ 23
5.10 トランスポート・プロトコルファンクション ···································································· 25
5.11 プロトコル・データ・ユニット(PDU)処理要件 ······························································ 34
5.12 応用メモ ···················································································································· 34
附属書A(参考)ISO 11783 PDU処理−代表的受信ルーチン ························································ 36
附属書B(参考)トランスポート・プロトコル転送シーケンス−接続モード・データ転送の例 ··········· 38
附属書C(参考)通信モードの例 ··························································································· 45
B 9225-3:2015 (ISO 11783-3:2007)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本農業機械工業会(JAMMA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 9225の規格群には,次に示す部編成がある。
JIS B 9225-3 第3部:データリンク層
JIS B 9225-5 第5部:ネットワーク管理
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 9225-3:2015
(ISO 11783-3:2007)
農業機械−シリアル制御及び通信データ・
ネットワーク−第3部:データリンク層
Tractors and machinery for agriculture and forestry-
Serial control and communications data network-Part 3: Data link layer
序文
この規格は,2007年に第2版として発行されたISO 11783-3を基とし,トラクタと作業機との間におけ
る通信制御技術を製造業者間で共通化するため,技術的内容及び構成を変更することなく作成した日本工
業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,農業用トラクタと,直装,半直装,けん(牽)引又は自走の作業機とのシリアル・データ
網の制御及び通信に関する要件について規定する。その目的は,トラクタ又は作業機に直装されるセンサ
ー,アクチュエータ,制御素子と,情報保存・表示装置との間でのデータ転送形式及び方法を標準化する
ことである。農林業機器用電子システムは,開放型システム間相互接続(OSI)での提供を意図する。こ
の規格は,ネットワークによるコントローラ・エリア・ネットワーク(以下,CANという。)拡張データ・
フレーム利用及びデータリンク層について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 11783-3:2007,Tractors and machinery for agriculture and forestry−Serial control and
communications data network−Part 3: Data link layer(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9225-5 農業機械−シリアル制御及び通信データ・ネットワーク−第5部:ネットワーク管理
注記 対応国際規格:ISO 11783-5:2011,Tractors and machinery for agriculture and forestry−Serial
control and communications data network−Part 5: Network management(IDT)
ISO 11783-1:2007,Tractors and machinery for agriculture and forestry−Serial control and communications
data network−Part 1: General standard for mobile data communication
ISO 11783-7:2009,Tractors and machinery for agriculture and forestry−Serial control and communications
2
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
data network−Part 7: Implement messages application layer
ISO 11783-8:2006,Tractors and machinery for agriculture and forestry−Serial control and communications
data network−Part 8: Power train messages
ISO 11898-1,Road vehicles−Controller area network (CAN)−Part 1: Data link layer and physical signalling
ISO 15765-3:2004,Road vehicles−Diagnostics on Controller Area Networks (CAN)−Part 3: Implementation
of unified diagnostic services (UDS on CAN)
3
用語及び定義
この規格で用いる主な用語及び定義は,ISO 11783-1による。
4
概要
データリンク層は,物理リンクを通じて信頼性の高いデータ転送を可能にする。必要な同期,シーケン
ス制御,エラー制御及びフロー制御によるCAN・データ・フレーム送信で構成されている。フロー制御は,
一貫したメッセージ・フレーム・フォーマットを介して行われる。
5
技術的要件
5.1
メッセージ・フレーム・フォーマット
5.1.1
一般
メッセージ・フレーム・フォーマットは,CANの要件に適合しなければならない。この規格で参照する
CANの仕様は,ISO 11898-1の規定による。CANの仕様とこの規格との間に差異がある場合は,この規格
を適用する。
情報ルーティング関連の議論で,CANの文書は,コントローラ・アドレスを使用しないと規定している。
この(コントローラにアドレスを付与しない。)ことは,幾つかのCANの用途で正しいが,ISO 11783群
には当てはまらない。ISO 11783群によるネットワークの定義では,コントローラ・アドレスが,複数コ
ントローラが同じCAN IDフィールドを使うことを防ぐために必要とする。ISO 11783群に存在する多く
の追加必要事項は,CANでは規定されていない。
ISO 11898-1は,基本フレームと拡張フレームとの,二つのメッセージ・フレーム・フォーマットを規定
している。ISO 11898-1では,異なるフォーマットを見分けるために,コード化された特定ビットを用い
ることによって,二つのフォーマットが一つのネットワーク上に混在できることが暗示されている。上記
の点について,ISO 11783群もまた二つのメッセージ・フレーム・フォーマットに対応している。しかし,
この規格は,拡張フレーム・フォーマットだけを使い,標準化した通信方式を規定している。この規格で
は,全ての基本フレーム・フォーマットのメッセージは,独自形式で通信するためのものとして定義する。
したがって,ISO 11783群によるコントローラは,拡張フレーム・フォーマットを使用しなければなら
ない。基本フレーム・フォーマットのメッセージはネットワーク上に存在してもよいが,この規格に従う
必要がある。
注記 基本フレーム・コントローラはネットワーク管理メッセージに反応しないため,標準化した通
信方式をサポートできない。
CAN・データ・フレームは図1に示すように,異なるビットフィールドに解析される。CAN基本とCAN
拡張フレーム・メッセージとの間で,アービットレーション(調停)及びコントロール(制御)フィール
ドの数値とビット解析とは違う。図1 a) に示すように,CAN基本フレーム・メッセージはアービットレ
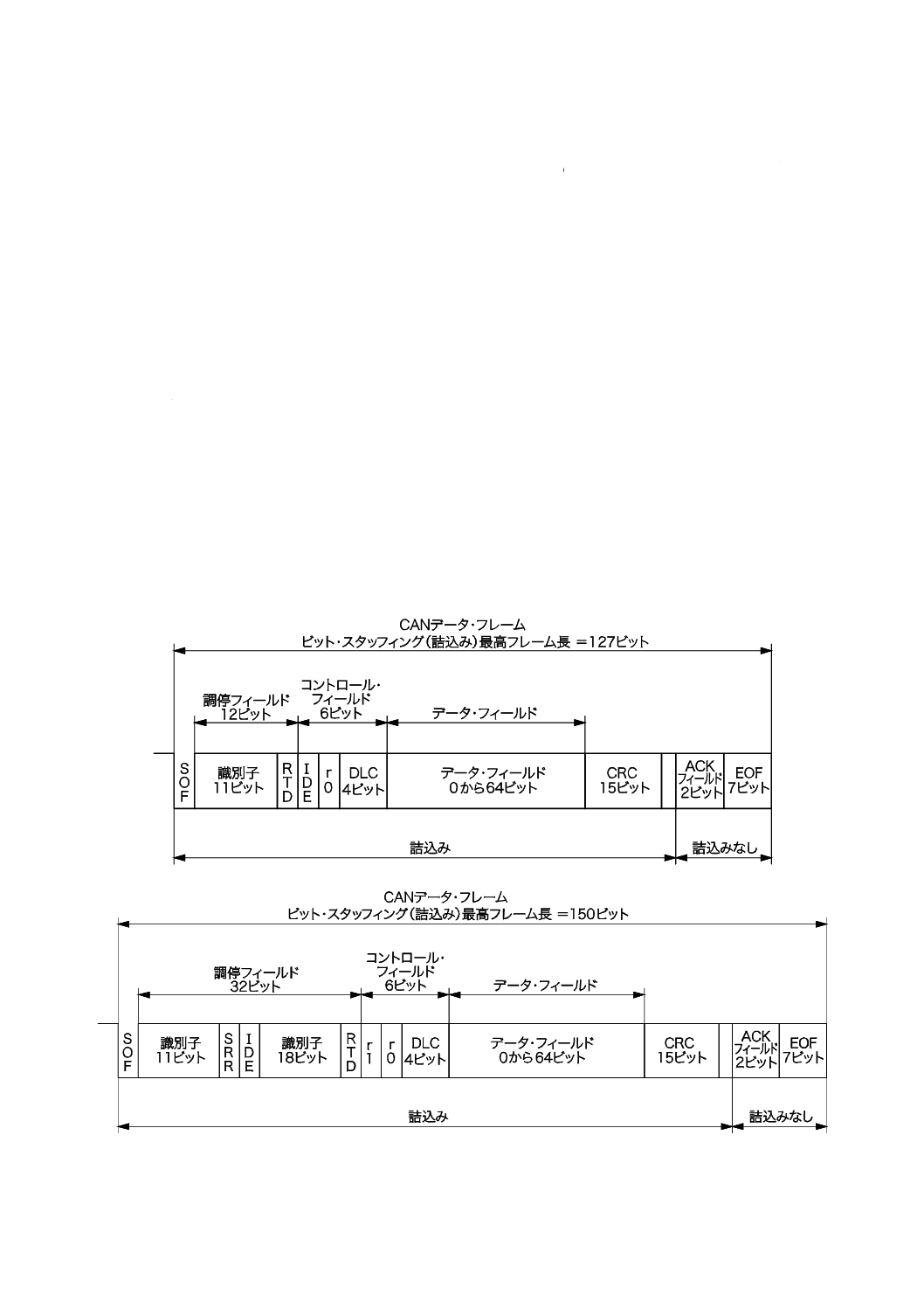
3
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ーション・フィールドに11のIDビットを含み,図1 b) に示すように,CAN拡張フレーム・メッセージ
のアービットレーション・フィールドが29のIDビットを含む。ISO 11783群は,CANメッセージ・フレ
ーム・フォーマットのアービットレーション・フィールドに,更にIDビットを定義した。これらの定義
は,表1に示す。
5.1.2
ISO 11783群(ISO 11898-1拡張フレーム・フォーマット)によるメッセージ・フレーム・フォー
マット
図1に示すCAN拡張フレーム・フォーマットは,単一のプロトコル・データ・ユニット(以下,PDU
という。)を含む。PDUは,アプリケーション層から規定された情報を含んだ次の七つの定義されたフィ
ールドで成り立つ。
− 優先順位(Priority)
− 拡張データ・ページ[Extended Data Page: EDP(以下,EDPという。)]
− データ・ページ[Data Page: DP(以下,DPという。)]
− PDUフォーマット[PDU Format: PF(以下,PFという。)]
− PDU特性(PDU Specific: PS) これは,送信先アドレス[Destination Address: DA(以下,DAという。)],
グループ拡張[Group Extension: GE(以下,GEという。)]又は専用であり得る。
− 送信元アドレス[Source Address: SA(以下,SAという。)]
− データ(Data)
(各フィールドの内容詳細は5.2,また,PFは5.3参照のこと)
a) CAN基本データ・フレーム・フォーマット
b) CAN拡張データ・フレーム・フォーマット
図1−CAN・データ・フレーム
4
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
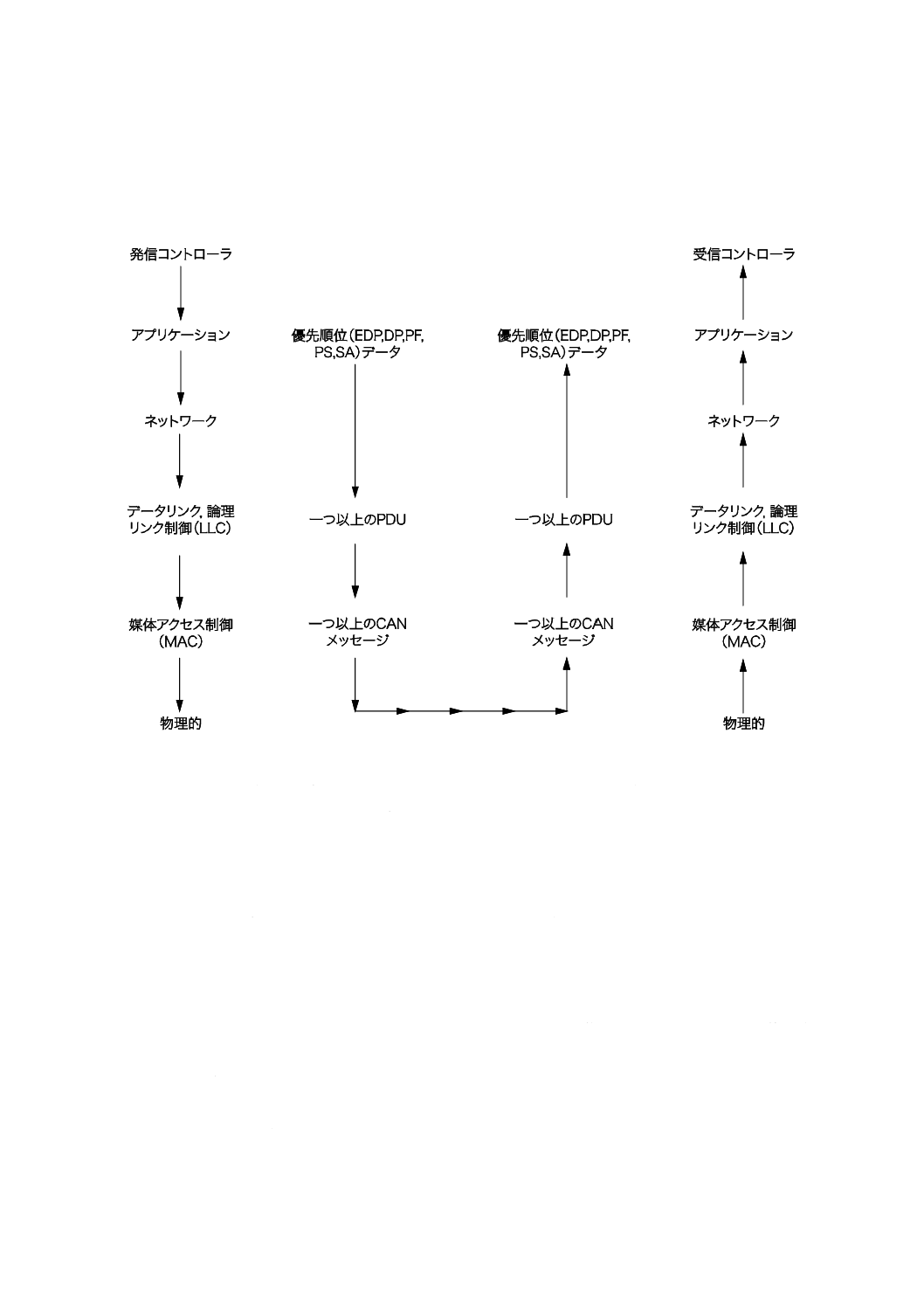
これらのフィールドは,一つ又は複数のCAN・データ・フレームにパッケージ化されていて,他のネッ
トワークコントローラへ物理的なメディアを介して送信される。ISO 11783群がサポートするOSIモデル
層は,図2に示す。パラメータ・グループ定義において,複数のCAN・データ・フレームを用いて情報送
信するように規定することが可能である。
図2−ISO 11783群によるOSIモデルのアプリケーション
表1は,ISO 11783群によるネットワーク上での11ビットID,ISO 11783群用29ビットID,CAN用11
ビットID及びCAN用29ビットID使用時のそれぞれのアービットレーション及びコントローラ・フィー
ルドを示している。
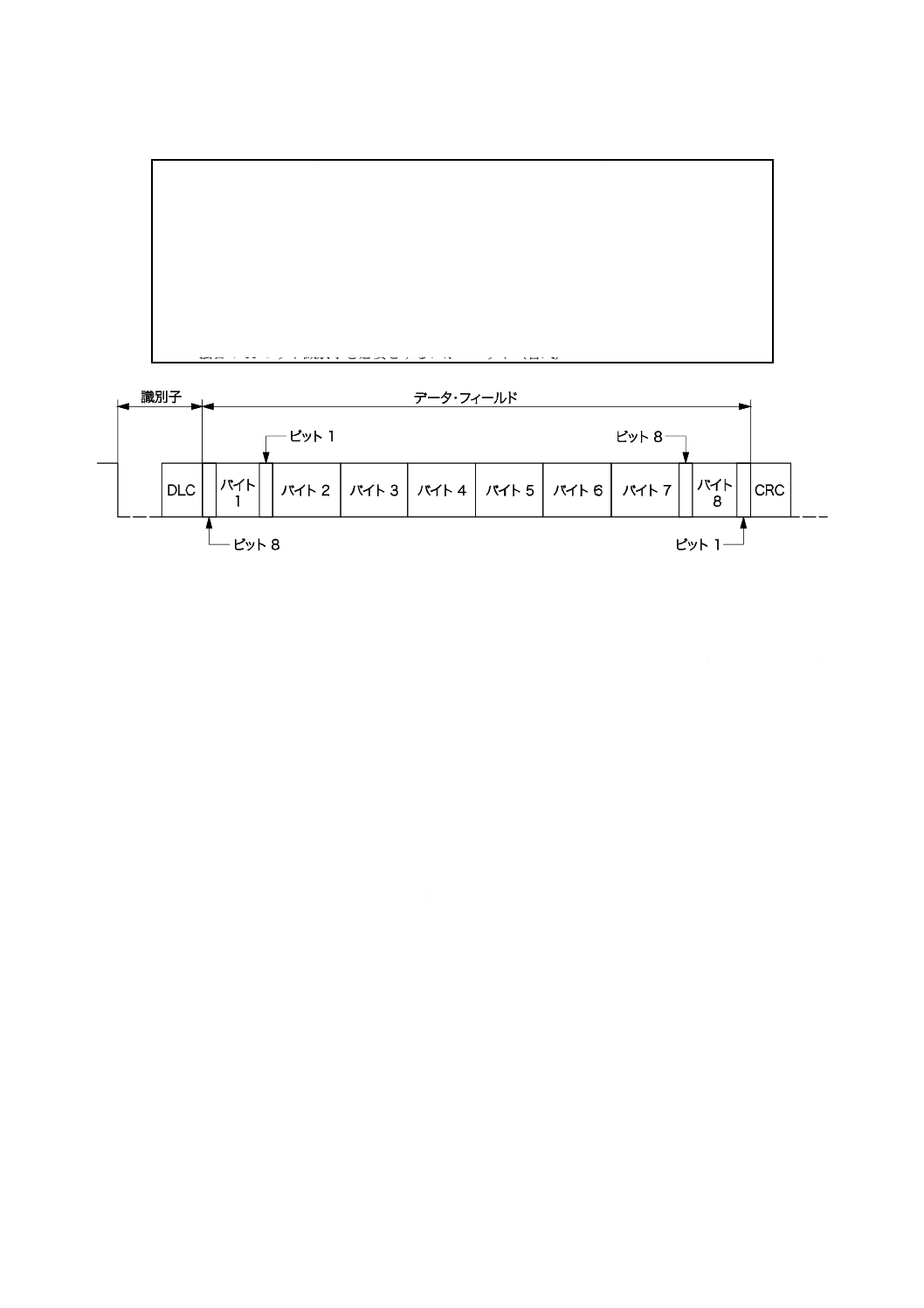
ISO 11783群による各ビット・フィールド割当の完全な定義は,5.3に示す。ISO 11783群で,CAN・デ
ータ・フレームのデータフィールドは,1〜8バイトとして規定している。1バイト目の最上位ビット(MSB)
であるビット8は,データ長コード(DLC)に最も近く最初に送信されるビットである。8バイト目の最
下位ビット(LSB)であるビット1は巡回冗長検査(CRC)に最も近く,送られるデータ・ビットの最後
である。図3参照。
注記 基本フレームを送受信するコントローラは,アービットレーション及びコントロールフィール
ドでSAを指定できるが,これらのアドレスはISO 11783群によるコントローラでは使用され
ていない。
EDP及びDPがそれぞれ1のとき,CANフレームは,ISO 15765-3によるフォーマットのフレームとし
て識別される。ISO 15765-3は,道路車両のCAN診断法を規定している。したがって,この場合のCAN・
フレーム・フォーマット処理は,ISO 11783群で指定されている定義には従わない。
5
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
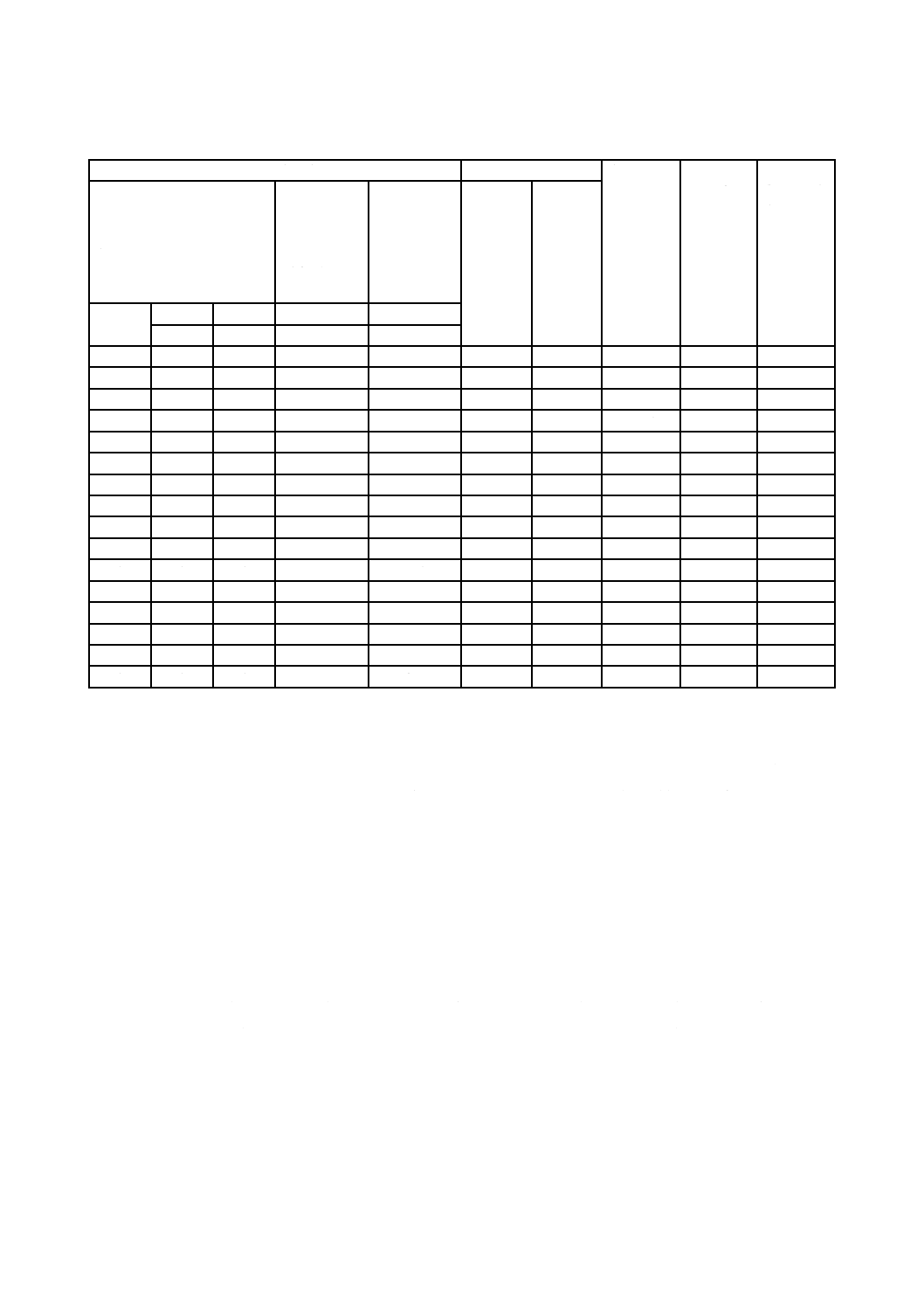
表1−CANの調停及び制御欄へのISO 11783群によるマッピング
ビット番号
29ビットID
11ビットID
CAN
ISO 11783群
CAN
ISO 11783群b)
1
SOF
SOF a)
SOF
SOF a)
2
ID28
P3
ID11
P3
3
ID27
P2
ID10
P2
4
IS26
P1
ID9
P1
5
ID25
EDP
ID8
ID8 a)
6
ID24
DP
ID7
ID7 a)
7
ID23
PF8
ID6
ID6 a)
8
ID22
PF7
ID5
ID5 a)
9
ID21
PF6
ID4
ID4 a)
10
ID20
PF5
ID3
ID3 a)
11
ID19
PF4
ID2
ID2 a)
12
ID18
PF3
ID1
ID1 a)
13
SRR(r)
SRR a)
RTR(x)
RTR a) (d)
14
IDE(r)
IDE a)
IDE(d)
IDE a)
15
ID17
PF2
R0
R0 a)
16
ID16
PF1
DLC4
DLC4
17
ID15
PS8
DLC3
DLC3
18
ID14
PS7
DLC2
DLC2
19
ID13
PS6
DLC1
DLC1
20
ID12
PS5
21
ID11
PS4
22
ID10
PS3
23
ID9
PS2
24
ID8
PS1
25
ID7
SA8
26
ID6
SA7
27
ID5
SA6
28
ID4
SA5
29
ID3
SA4
30
ID2
SA3
31
ID1
SA2
32
ID0
SA1
33
RTR(x)
RTR a) (d)
34
r1
r1 a)
35
r0
r0 a)
36
DLC4
DLC4
37
DLC3
DLC3
38
DLC2
DLC2
39
DLC1
DLC1
6
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−CANの調停及び制御欄へのISO 11783群によるマッピング(続き)
SOF :フレームビット始め
ID## :識別ビット子番号
SRR :代替遠隔(リモート)要求
RTR :遠隔転送要求ビット
IDE :識別拡張ビット
r#
:CAN確保ビット番号
DLC# :データ長コード・ビット番号
P#
:ISO 11783群による優先順位ビット番号
EDP :ISO 11783群によるEDP
SA# :ISO 11783群によるSAビット番号
DP
:ISO 11783群によるDP
PF# :ISO 11783群によるPFビット番号
PS# :ISO 11783群によるPS番号
(d)
:ドミナント(優性)ビット
(r)
:レセシブ(劣性)ビット
(x)
:メッセージによるビット状態
注a) ISO 11783群で変わらないCAN定義ビット
b) 独自の11ビット識別子を必要とするフォーマット(書式)
図3−CAN・データ・フィールド
5.1.3
パラメータ・グループ番号(PGN)
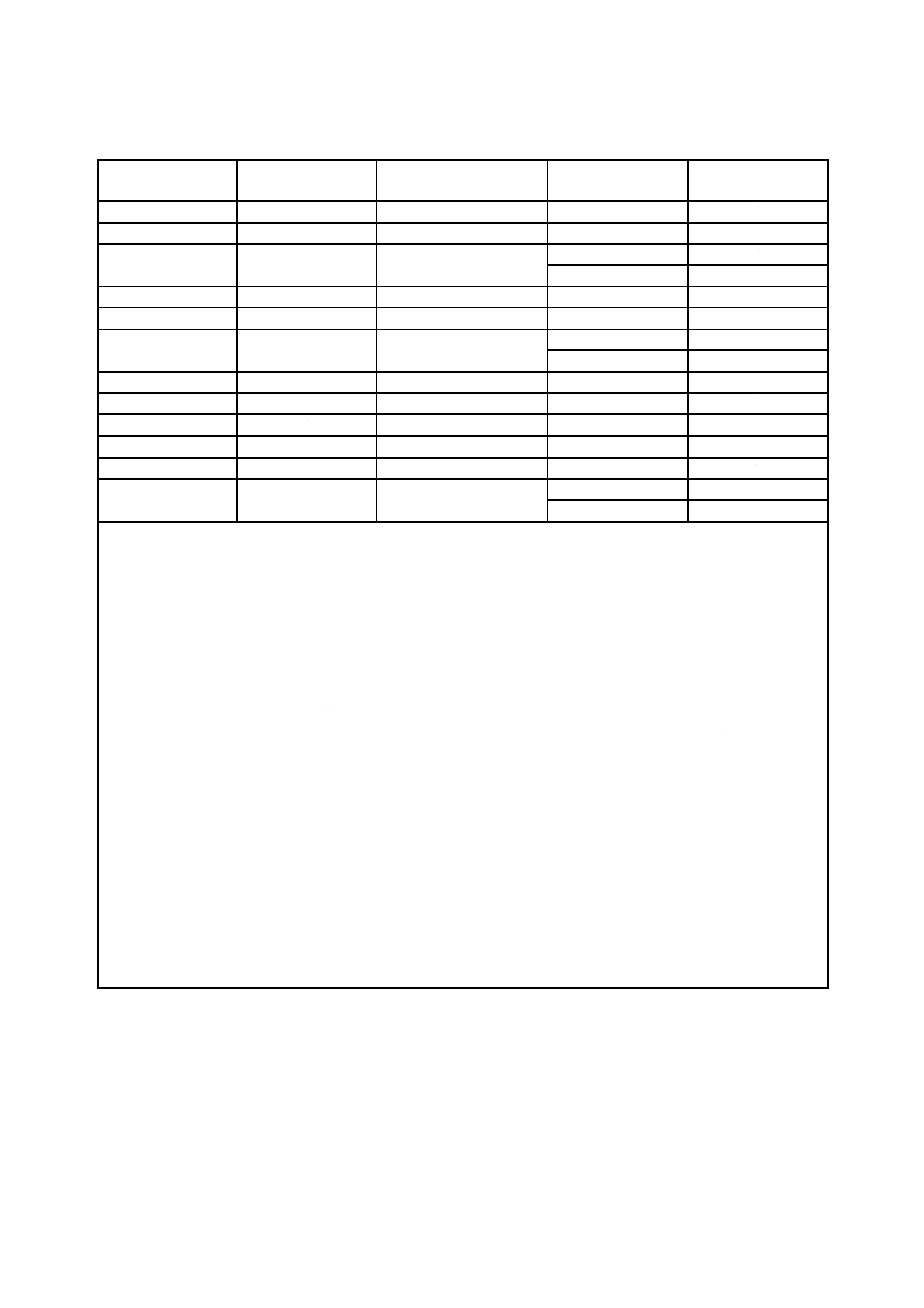
パラメータ・グループ番号(以下,PGNという。)は,CAN・データ・フレームのデータ・フィールド
の中にあるパラメータ・グループを識別するために24ビットで表す。24ビット値は,最下位バイトが最
初に送信され,中間バイト,最上位バイトの順に送信される(表2参照)。24ビットPGNは,6ビットの
ゼロ,EDP(1ビット),DP(1ビット),PF(8ビット)及びGE(8ビット)で規定される。
ビット・フィールドからPGNに変換する手順を次に示す。PGNの最上位バイトの上位6ビットはゼロ
に設定され,次の10ビットは,EDP,DP,PFを配置する。PFの値が240(F016,16進法F0)未満の場合
は,PGNの最下位バイトはゼロに設定される。それ以外は,GEの値に設定される。PGNの対応ビット及
び10進法への転換例を,表2に示す。
注記 131 072の全ての組合せ(217)がPGNとして割り当てできるわけではない。計8 672の組合せ
だけがPGNに割り当てできる{上記の転換手順を使い,2DP×[240+(16×256)]=8 672として
算出。ISO 11783-1:2007のPGN参照}。
7
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−PGNの例
PGN構成要素
PGN
割り当て
られるパ
ラメー
タ・グル
ープ数
累積パラ
メータ・
グループ
数
ISO又は
製造業者
割当て
PGN (MSB)
CAN・データ・フレームで
3番目に送信されるバイト
1
PGN
CAN・デー
タ・フレーム
で2番目に
送信される
バイト2
PGN (LSB)
CAN・デー
タ・フレーム
で1番目に
送信される
バイト3
10進法
の場合
16進法
の場合
ビット
8−3
EDP
DP
PF
PS
ビット2 ビット1 ビット8−1
ビット8−1
0
0
0
0
0
0
00000016
ISO
239
239
0
0
0
238
0
60928
00EE0016
0
0
0
239
0
61184
00EF0016
1
240
MF
0
0
0
240
0
61440
00E00016
ISO
3840
0
0
0
254
255
65279
00FEFF16
4080
0
0
0
255
0
65280
00FE0016
256
MF
0
0
0
255
255
65535
00FFFF16
4336
0
0
1
0
0
65536
01000016
0
0
1
238
0
126464
01EE0016
239
0
0
1
239
0
126720
01EF0016
240
4576
MF
0
0
1
240
0
126976
01F00016
4096
ISO
0
0
1
256
255
131071
01FFFF16
8672
5.1.4
ISO 11783群のISO 11898-1基本フレーム・フォーマット・メッセージへの対応
ISO 11783群ネットワーク上のコントローラは,CAN基本フレーム(11ビットID)フォーマット・メ
ッセージに対応することができる。CAN基本フレームはISO 11783群によるメッセージ構造と互換性がな
いが,同一バス上に二つのフォーマットが共存できるように,ISO 11783群には最低限の定義がされてい
る。この定義は,基本フレーム・フォーマットを使用するコントローラが,他のコントローラと干渉しな
いために独自形式で通信するよう定義されている。表1によると,11ビットIDフィールドは,次のよう
に構成される。上位3ビットが優先順位として使用され,下位8ビットがSAとPDUを示す。優先順位に
ついては,5.2.2で説明されている。SAについては,ISO 11783-1:2007の附属書Cで定義されている。
基本フレームと拡張フレームとの二つのメッセージが,同時にバスにアクセスすると不適切なバス・ア
ービットレーション(バス調停)が起こる。SAは,拡張フレーム・フォーマット・メッセージで使用さ
れる場合に比べて,基本フレーム・フォーマット・メッセージで使用される場合の方が,相対的に優位と
なる。11ビットID(基本フレーム)によるメッセージは,29ビットID(拡張フレーム)メッセージのEDP,
DP及びPFより高い優先度を示すSAをもつことができる。基本フレームの三つの優先ビットは,正しい
バス・アービットレーション(バス調停)を実現するために使用されなければならない。
重要 ISO 11783群は拡張フレーム・フォーマットを使い,標準通信方式を規定している。ISO 11898-1
にだけ準拠したハードウェアは,拡張フレーム・メッセージで通信されることを考慮していな
いので,そのネットワーク上で使用してはならない。
8
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.2
プロトコル・データ・ユニット(PDU)
5.2.1
一般
アプリケーション及び/又はネットワーク層は,一連の情報をPDUとして提供する。PDUは,CAN・
データ・フレームの各送信ごとに必須の情報をまとめるための枠組みである。ISO 11783群によるネット
ワークのPDUは,5.1.2で示した七つのフィールドから構成される。これらのフィールドは,CAN・デー
タ・フレームに含まれ,そして他のネットワークへ向け物理メディアを介して送信される。CAN・データ・
フレームごとに一つのPDUがある。
注記 幾つかのPGNの定義では,対応するデータを送信するために複数のCAN・データ・フレーム
を必要とする。
幾つかのCAN・データ・フレームのフィールドは,CAN仕様で完全に制御され,かつ,データ・リン
ク層上位のOSI層の全てで出てこないために,PDUの定義から除外される。PDUから除外されたCAN・
データ・フレームのフィールドには,SOF,SRR,IDE,RTR,CRC,ACK及びEOFの各フィールド,そ
して制御フィールドの一部が含まれている。これらは,CANプロトコルで定義され,ISO 11783群で変更
されず残る。
PDUフィールドは,5.2.2及び5.2.8に規定する(図4参照)。
優先順位
EDP,
DP,
PF,
PS,
SA,
データ
ビット数
...3...,
.1.,
.1.,
...8...,
...8...,
...8...,
...64...
図4−PDUフィールド
5.2.2
優先順位(P)
優先順位は,バス転送におけるメッセージ待ち時間の最適化だけに用いられ,受信コントローラでは,
全部無視する必要がある。任意のメッセージの優先順位は,最高の0 (0002) から最低の7 (1112) まで設定
することができる。制御に関する全てのメッセージのデフォルトは3 (0112) で,他の全ての情報,独自形
式の通信,リクエスト及びNACKの各メッセージのデフォルトは6 (1102) である。優先順位は,将来新た
なPGN値が割り当てられ,バス負荷が変わったときに上げたり下げたりすることが認められている。推奨
される優先順位は,PGNがアプリケーション層に関する規格に加えられたときに,各々のPGNに割り当
てられる。ただし,優先順位フィールドは,製造業者によるネットワーク調整の必要が生じる場合を考慮
して,再プログラムできるようにしておくのが望ましい。
5.2.3
拡張データ・ページ(EDP)
このビットは,CAN・データ・フレームのCAN IDの構造を決定するために,DPと組み合わせて使わ
れる。全てのISO 11783群によるメッセージは,送信時にEDPをゼロに設定しなければならない(EDP
及びDPのフィールドの使用定義は,表3を参照)。今後の定義は,新しいPDUフォーマット定義,優先
フィールド拡張又はアドレス・スペース増大を行うことで,PFフィールドを拡張することが可能となる。
5.2.4
データ・ページ(DP)
DPは,CAN・データ・フレームのCAN ID構造を決定するために,EDPと組み合わせて使われる。EDP
を0に設定すると,DPビットはPGN表記のページ0又はページ1を選定する(表3参照)。
9
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3−EDP及びDPの使用定義
EDP(ビット25)
DP(ビット24)
説明
CAN ID
CAN ID
0
0
ISO 11783群によるページ0のPGN
0
1
ISO 11783群によるページ1のPGN
1
0
ISO 11783群による予約
1
1
ISO 15765-3による定義のPGN
注記 CAN29ビットIDのEDP及びDPが“112”に設定されていると,ISO 15765-3によるメッセー
ジとして識別される。このことは,上記のCAN IDの以降(EDP及びDPから後ろ)の部分は,
ISO 11783群の規定によらないことを意味する。このフォーマットによるCANフレームは,ISO
11783群に規定されていない。
5.2.5
PDUフォーマット(PF)
PFは,PFを決定する8ビット・フィールドで,CAN・データ・フィールドへ割り当てられるPGNを決
定するフィールドの一つである。PGNは,情報を通信するときにCAN・データ・フレームが必要とする
情報を識別・分類するのと同様にコマンド,データ,リクエスト(Request),肯定回答(ACK)及び否定
回答(NACK)を識別・分類する。8データ・バイト以上の情報がある場合は,送信のためにマルチ・パ
ケット・メッセージが必要である。8データ・バイト以下であれば,単一のCAN・データ・フレームが使
われる。1分間当たりのエンジン回転(RPM)のように,パラメータがデータの一部分ならば,PGNは一
つ又はそれ以上のパラメータを表すことができる。PGNラベルは一つのパラメータだけを表すこともでき
るが,データ・フィールド8 B全てが使用できるように,複数パラメータをグループ化することが推奨さ
れている。
注記 Bは,バイト単位を示す記号(IEC 60027-2による。)である。
二つの独自形式の通信を行うためのPGNは,PDU1及びPDU2フォーマット両方で使用できるように定
義されている。独自形式の通信における情報の解釈は,製造業者間で異なる。
例 二つの異なるエンジンが同じSAを使用することもできるが,ある製造業者の独自形式の通信の
内容は他の製造業者と異なることがあり得る。
5.2.6
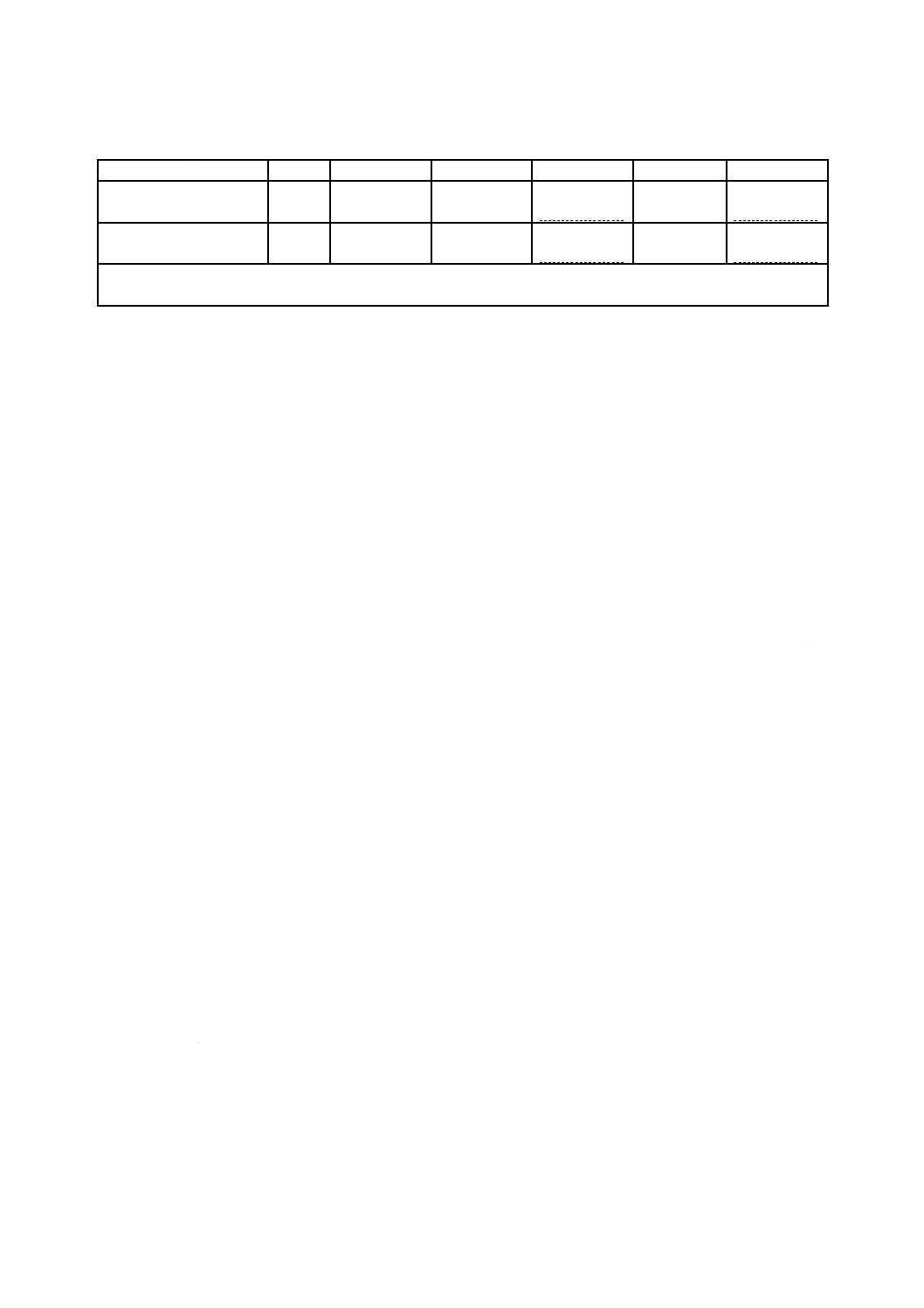
PDU特性(PS)
PSフィールドは,PFに依存し定義される8ビット・フィールドである。PFは,PSフィールドがDA又
はGEいずれかのフィールドであるか定める(表4参照)。
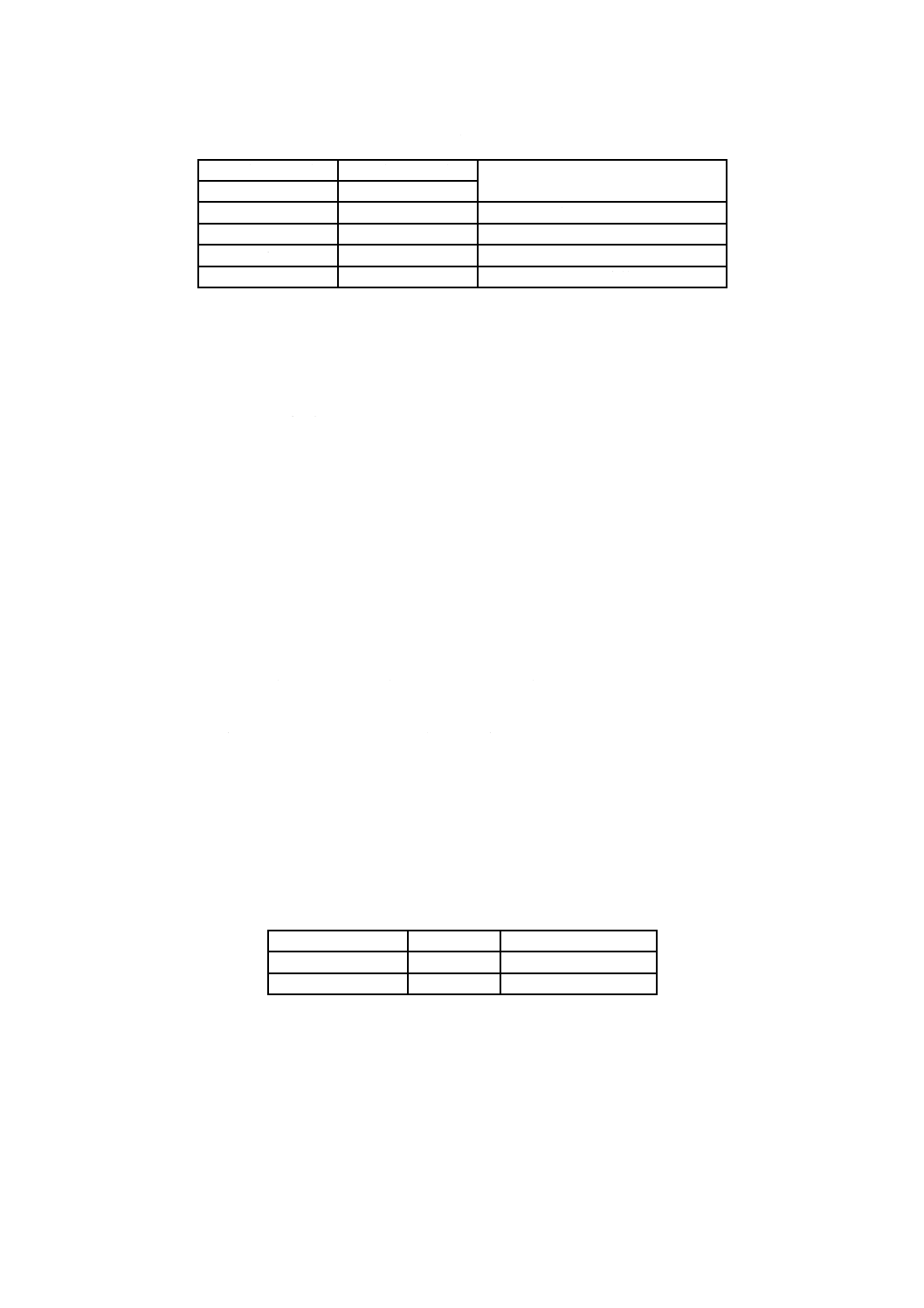
表4−PSフィールドの定義
PDUフォーマット
PF
PS
PDU1
0−239
送信先アドレス(DA)
PDU2
240−255
グループ拡張(GE)
DAフィールドは,メッセージの送信先を特定するアドレスを示す。他のコントローラは,このメッセ
ージに対し応答してはならない。グローバル送信先アドレス(設定値:255)の場合は,全てのコントロー
ラがメッセージの受信者として受信及び応答するよう要求する。
GEフィールドは,PFフィールドの下位4ビットと組み合わせて,DP当たり4 096のパラメータ・グル
ープを提供する。パラメータ・グループは,GEフォーマットのPDU(PDU2)だけ使用できる。
注記 PFフィールドの最上位4ビットが1に設定されると[111100002 (24010) 以上],それはPSフィ
10
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ールドがGEフィールドであることを示す。
また,240のパラメータ・グループが,送信先を指定可能なPDUフォーマット(PDU1)用として,各
データ・ページで使用できる。合計で8 672のパラメータ・グループが,現在利用可能な二つのデータペ
ージを使用して定義できる。
この合計は次のとおり計算される。[240+(16×256)]×2=8 672。240:DP当たり利用可能なPFフィー
ルド値の数(PDU1フォーマットのPSフィールドだけ=DAの数),16:GE値当たりのPF値の数(PDU2
フォーマットだけ),256:設定可能なGE値の数(PDU2フォーマットだけ),2:DPの数(両方のPF)。
5.3も参照。
5.2.7
送信元アドレス(SA)
SAフィールドは長さ8ビット長である。ネットワーク上には,指定されたSAをもつコントローラは,
一つだけでなければならない。
注記 アドレスの管理及び配置,そしてSAの重複を防止するための手順については,JIS B 9225-5
を参照。
5.2.8
データ・フィールド
5.2.8.1
0〜8バイトのデータ
所定のパラメータ・グループを表すために,8バイト以下のデータが必要な場合,CAN・データ・フレ
ームの8バイト全てを使用できる。今後,拡張する可能性が高い全PGNを新たに割り当てる際には,全て
8バイトの領域確保・予約することを推奨する。このことによって,パラメータの容易な追加と,データ・
フィールドの一部しか定義しなかった場合に,改訂前と(データ長が変わることで)非互換性が発生する
ことを回避する方法が提供される。一度,PGNに関連付けられたデータのバイト数が指定されると,変更
はできない(最初から拡張するように定義されない限りは,マルチ・パケットにもすることもできない。)。
CAN・データ長コード(DLC)は,8バイト以下の場合,定義されたパラメータ・グループの“データ長”
と同じ値に設定されている。それ以外のパラメータ・グループのデータ長が9バイト以上の場合,CAN DLC
は8に固定される。例えば,REQUEST PGN(59 904)は,パラメータ・グループ・データ長が3バイトな
ので,CAN DLCは3となる。CANデータ・フィールドが,特定グループの二次機能の伝達に使用される
間,CAN IDは常に同じなので,個々のグループ機能(5.4.6参照)は,同じデータ・フィールド長を使用
しなければならない。これらのグループ機能ではCAN・データ・フィールドに基づいて,二次機能の指定
に従って,さまざまな解釈(判断)が必要である。
5.2.8.2
9バイト〜1 785バイトのデータ
所定のパラメータ・グループを表すために,9〜1 785バイトのデータが必要とされる場合,このデータ
通信は複数のCAN・データ・フレームで行われる。この類のパラメータ・グループを表現するために,“マ
ルチ・パケット(多重パケット)”が使用される。マルチ・パケット可能と定められ,特例として転送する
9バイト未満のデータは,DLCを8に設定した単一CAN・データ・フレームで送信しなければならない。
いずれにせよ,転送されるパラメータ・グループが9バイト以上ある場合,“トランスポート・プロトコル”
機能が使用される。“トランスポートの接続管理機能”は,マルチ・パケット・パラメータ・グループの通
信の設定及び解除に使用される。“トランスポート・プロトコルのデータ転送機能”は,“パケット化”デ
ータが格納されている一連のCAN・データ・フレーム(パケット)で,そのデータ自体を通信するために
使用される。また,トランスポート・プロトコル機能は,フロー制御及び送信先指定した場合の転送(5.10
参照)におけるハンドシェイク機能を提供する。
特定のマルチ・パケット応答に関連付けられた全てのCAN・データ・フレームのCANデータ長コード
11
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(DLC)は,8でなければならない。全ての未使用データ・バイトは,“利用不可”(FF16) に設定する。パ
ケットごとのバイト数は固定されているが,ISO 11783群ではパケット数を可変又は固定のいずれかとし
てマルチ・パケット・メッセージを定義する。アクティブな診断コードのPGNは,可変のパケット数を用
いているマルチ・パケット・メッセージの例である。マルチ・パケットと定義されるパラメータ・グルー
プだけは,送信されるデータのバイト数が8を超えた場合に,トランスポート・プロトコルを使用してい
る。
5.3
PDUフォーマット(PF)
5.3.1
総則
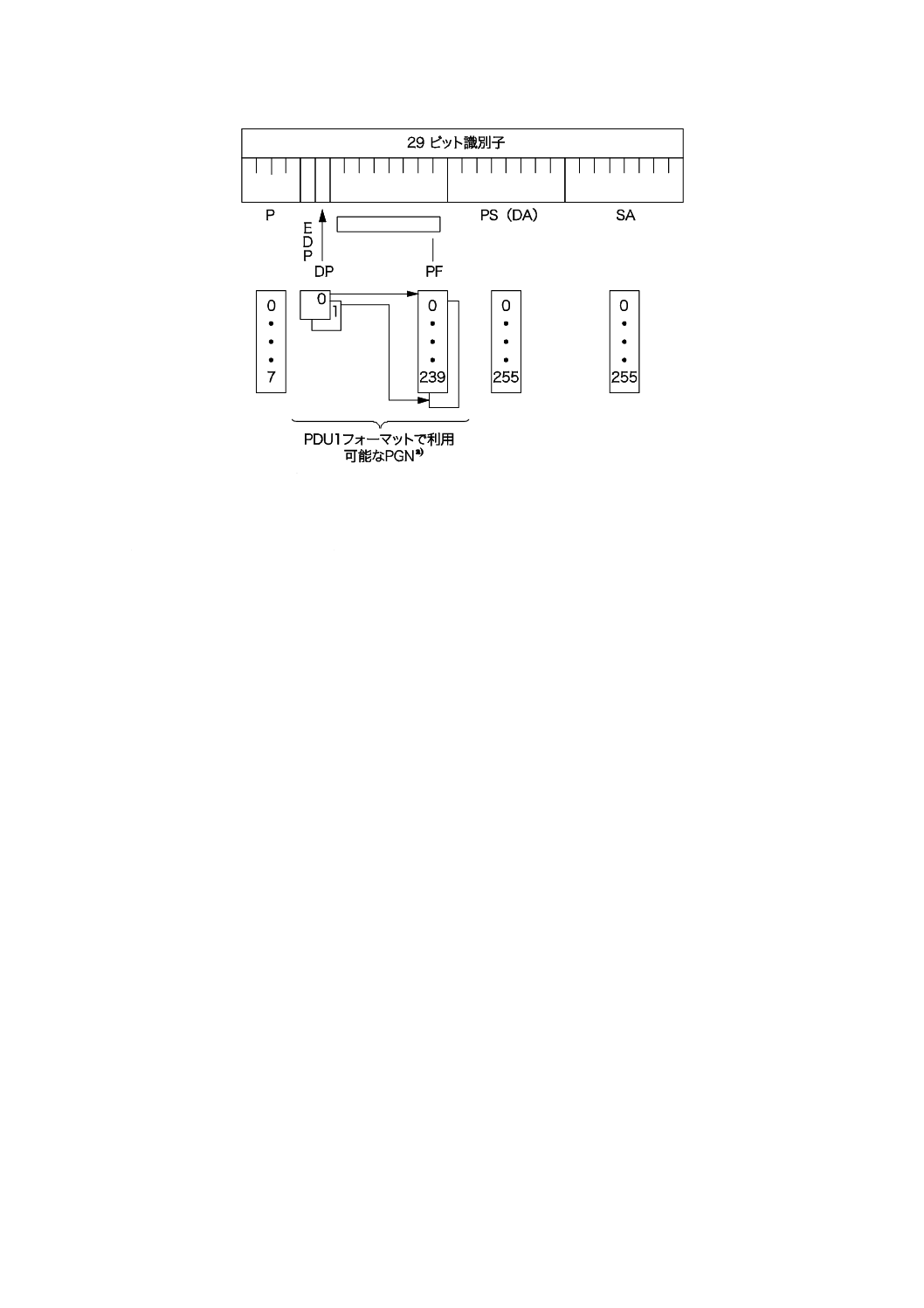
図5に示されている使用可能なPFは,PDU1(PS=DA)及びPDU2(PS=GE)として定義される。PDU1
は,特定のDA(コントローラ)へCAN・データ・フレームの通信を認める。PDU2は,送信先が特定さ
れないCAN・データ・フレームだけを通信する。二つの別々のPFは,送信先を指定した通信を提供する
とともに,より多くのPGNの組合せを提供するために規定される。
プロプライエタリー・パラメータ・グループの定義は,双方のPFが独自形式の通信を使用できるよう
に割り当てられている。標準化された独自形式の通信においては,識別子の使用によって競合を防ぐよう
に定められている。
二つのプロプライエタリーPGNの定義は,PDU1及びPDU2両方のフォーマットを使用できる。独自形
式の情報の解釈は,製造業者によって異なる(例参照)。
例 エンジン製造者の独自形式の通信では,両方が同じSAを使用している場合でも,別のエンジン
製造業者のものとは違う場合がある。
優先順位
EDP,
DP,
PF,
PS(DA),
SA,
データ
ビット数
...3...,
.1.,
.1.,
...8...,
...8...,
...8...,
...64...
a) PDU1
優先順位
EDP,
DP,
PF,
PS(GE),
SA,
データ
ビット数
...3...,
.1.,
.1.,
...8...,
...8...,
...8...,
...64...
b) PDU2
図5−使用可能なPDUフォーマット
5.3.2
PDU1フォーマット
PDU1フォーマットは,特定又はグローバルのいずれかに送信するパラメータ・グループを提供する。
PSフィールドはDAである。
PDU1フォーマットのメッセージは,リクエストを受けることも,自由に送信することもできる。
PDU1フォーマットのメッセージは,PF・フィールドによって決まる。PF・フィールド値が0〜239の値
のとき,メッセージはPDU1フォーマットとなる。PDU1メッセージのフォーマットは,図5に示す(図
6も参照)。
12
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注a) 現在,2×240=480
図6−PDU1フォーマット
送信先の指定が必要であり,送信周期が短い(一般に,100 ms未満)パラメータ・グループ(PDU1)
は,PF=0から始まり表7の境界x(又はx1)に向かって値が増える。
送信先の指定が必要であり,送信周期が長い(一般に,100 ms以上)パラメータ・グループは,PF=239
から始まり表7の境界x(又はx1)に向かって値が減る。表7参照。
PF=[239(EDP=0,DP=0)]は,独自形式の通信に割り当てられる。この場合,PSフィールドはDA
となる(5.4.6参照)。プロプライエタリーAのPGNは61 184である。
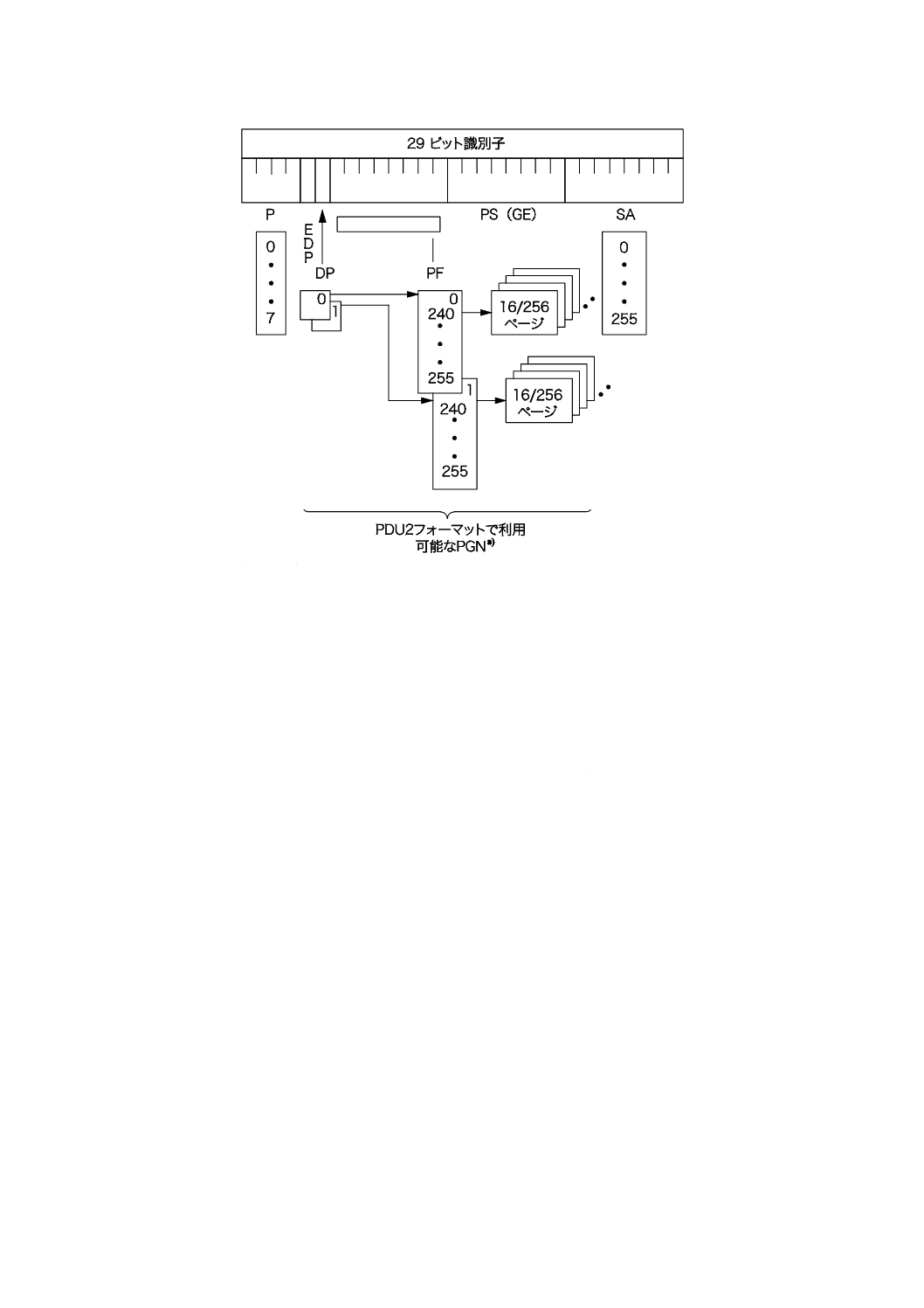
5.3.3
PDU2フォーマット
PDU2フォーマットは,グローバル・メッセージだけを送信するパラメータ・グループとして使用され
る。PDU2フォーマットのメッセージは,リクエストに応じることも,自由に送信することもできる。PDU2
フォーマットが選択された時点で,PGNは特定の送信先へ設定できない。PSフィールドはGEである。
PDU2フォーマット・メッセージは,PFが240から255の間で設定される(表5参照)。PDU2メッセー
ジのフォーマットは,図5に示す。また,図7も参照。
13
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注a) 現在,2×16×256=8 192
図7−PDU2フォーマット
高速更新レート(一般に,100 ms未満)で送信されるメッセージのPGNは,PF=240から始まり表7
の境界y(又はy1)に向かって値が増える。
リクエストされたときだけ送信されるメッセージ,状態が変更されたときに送信されるメッセージ,又
は低速更新レート(一般に,100 ms以上)で送信されるメッセージのPGNは,PF=254から表7の境界y
(又はy1)に向かって値が減少するように割り付けられる(表7参照)。
PF=255[(EDP=0,DP=0]は独自形式の通信用に割り当てられる1)。PSフィールドは,GEとして各
製造業者で定義及び使用を任されている(5.4.6参照)。プロプライエタリーBのためのPGNは,65 280か
ら65 535である。
注1) このエリアに割り当てられたものをプロプライエタリーBという。
5.4
メッセージ・タイプ
5.4.1
総則
現在サポートしている五つのメッセージ・タイプは,次による。
− コマンド
− リクエスト
− 送信・応答
− 肯定回答(ACK)
− グループ機能
特定のメッセージ・タイプは,その割り当てられたPGNによって識別される。RTRビットは,リモー
ト・フレームとしてCANプロトコルで定義されている。RTRビットは,レセシブ状態(論理値1)で使用
してはならない[したがって,遠隔転送要求(RTR=1)は,ISO 11783群によるネットワークで使用する
14
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ことはできない。]。
CAN・データ・フレームのデータ・フィールドに表されるマルチ・バイトのパラメータは,最下位バイ
ト(LSB)を最初に配置しなければならない。ASCIIデータのような例外については,あらかじめ適用す
る場所が示されている。2バイトのパラメータをCAN・データ・フレームのバイト7及びバイト8に配置
する場合,最下位ビットはバイト7に,最上位ビットはバイト8に置かれる。
5.4.2
コマンド
コマンド・メッセージ・タイプは,一つの送信元から特定された又はグローバル・アドレスを命令する
パラメータ・グループに分類される。送信先は,このコマンド・メッセージ・タイプに基づいて,特定な
働きをする。PDU1(PS=DA)及びPDU2フォーマット(PS=GE)の両方のメッセージをコマンドとして
使える。コマンド・メッセージ・タイプの例は,トランスミッション制御,アドレス要求及びトルク・ス
ピード制御を含む。
5.4.3
リクエスト
PGNによって識別されるリクエスト・メッセージ・タイプは,グローバル情報又は特定の宛先からの情
報を要求する機能を提供する。特定の送信先への要求は,“送信先指定の要求”として知られる。次に,リ
クエストPGNパラメータ・グループに割り当てたPGNの情報を示す。この情報は,ISO 11783群におけ
るパラメータ・グループを定義するフォーマットに基づいて規定している。
パラメータ・グループ名 :REQUEST
定義
:ネットワーク・コントローラ又はコントローラからパラメータ・グル
ープの要求に使われる。
送信周期
:一ユーザ当たりの要求は,一般的には毎秒2回又は3回以下が望まし
い。
データ長
:3バイト(このPGのCANフレームは,DLCを3に設定しなければな
らない。)
DP
:0
PF
:234
PS
:DA(グローバル又は特定)
デフォルトの優先順位
:6
パラメータ・グループ番号:59 904 (00EA0016)
バイト1,2,3
:リクエストするPGN[フィールドの定義及びバイト・オーダー(配置
順序は,5.1.3参照)]
表5は,PDU1及びPDU2のフォーマットPGNのリクエスト/応答の条件を示す。メッセージの送信元
コントローラが,リクエストの宛先アドレスが特定又はグローバルであるかどうかに基づいて,リクエス
ト先を指定することを示す。また,表5は,送信元のコントローラが8バイトより大きいPDU1及びPDU2
PGNのために,特定又はグローバル宛先アドレスに送信できることを,未承諾メッセージに示している。
PGNが8バイト以下のPDU2では,発信元コントローラはグローバルだけにデータを送信できる。
15
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5−PDU1及びPDU2送信,並びにリクエスト及び応答の条件
PDUフォーマット
データ長
B
リクエストPGN 59 904
応答
使用TP
1
≦8
特定DA
特定DA
不許可
1
≦8
グローバルDA
グローバルDA
不許可
1
≦8
なし
グローバルDA
不許可
特定DA
不許可
1
>8
特定DA
特定DA
RTS/CTS
1
>8
グローバルDA
グローバルDA
BAM
1
>8
なし
グローバルDA
BAM
特定DA
RTS/CTS
2
≦8
特定DA
グローバルDA
不許可
2
≦8
グローバルDA
グローバルDA
不許可
2
≦8
なし
グローバルDA
不許可
2
>8
特定DA
特定DA
RTS/CTS
2
>8
グローバルDA
グローバルDA
BAM
2
>8
なし
グローバルDA
BAM
特定DA
RTS/CTS
グローバル又は特定のアドレスにPGNを送信するかどうかを決定する操作の一般的な規則を,次に示す。
a) リクエストがグローバルアドレスに送信された場合,応答はグローバルアドレスに送信される。
NACK(5.4.5参照)は,グローバルリクエストに対する応答として許可されない。
b) リクエストが特定のアドレスに送信された場合,その応答は特定のアドレスに送信される。
PGNがサポートされていない場合は,NACKが必要である。
データ長が8バイトを超える場合は,トランスポート・プロトコルのRTS/CTSが特定のアドレスへの応答に
使用されなければならない。
例外
− PDU2フォーマットには宛先アドレス・フィールドが存在しないため,8バイト以下のPDU2フォーマット
PGNは,グローバルだけに送信されることがある。
− リクエストが特定アドレスであっても,アドレスクレームPGNは,グローバルアドレスに送信される(JIS B
9225-5参照)。
c) 定期的なブロードキャスト(同報通信)又は未承諾メッセージで,PDU1又はPDU2フォーマットPGNは,グ
ローバル又は特定のアドレスに送信することができる。
例外
− PDU2フォーマットにはアドレス・フィールドが存在しないため,8バイト以下のPDU2フォーマットPGN
は,グローバルアドレスだけに送信されることがある。
d) 上記から分かるように,これらの規則には例外がある。例外は,PGNが定義されているセクションの該当文書
に記載されていて,二つのタイプがある。
− 応答先アドレスは,リクエストアドレスを指定していない。幾つかの例は,上記に記載されている(アドレ
スクレームPGN及び肯定回答PGN)。
− PGNは,アドレス指定可能な全ての形式をサポートしていない。すなわち,一部のPGNは,PDU1又はPDU2
フォーマット・メッセージが使用可能なアドレスでは使用できない。
表6は,リクエストPGNの二つの使用例を示す。
16
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表6−ISO 11783群によるPDU1フォーマットで指定されたフィールドの使用
メッセージタイプ
PGN
PS(DA)
SA
データ1
データ2
データ3
グローバル・リクエスト 59 904
255
(応答側)
SA1
(要求側)
PGN LSB a)
最下位バイト
PGN
PGN MSB a)
最上位バイト
特定リクエスト
59 904
SA2
(応答側)
SA1
(要求側)
PGN LSB a)
最下位バイト
PGN
PGN MSB a)
最上位バイト
注a) データ・フィールド内のパラメータ・グループ番号(PGN)は,リクエストする情報を識別するために使用
される。
指定されたPGN値がサポートされていないことを示す否定回答(NACK)であっても,応答は,(リク
エスト時に)指定した宛先(グローバルではない。)からの返信が求められる。グローバルリクエストに対
して,指定されたPGNがコントローラによってサポートされていない場合,否定回答(NACK)してはな
らない。
注記1 一部のPGNはマルチ・パケットであるので,一つのリクエストに対して,複数のCAN・デ
ータ・フレームが,発生する可能性がある。
リクエストPGNは,指定した宛先アドレスが特定のパラメータ・グループをサポートしているかどうか
決定するために送信することができる(例 リクエストを受けた送信先のアドレスが応答を送信するかど
うか)。リクエストに対する応答は,PGNがサポートされているかによって決定される。サポートされて
いる場合は,受信側コントローラは,要求された情報を送信しなければならない。アクノリッジメントPGN
が適切(指定されたパラメータ・グループがサポートされている。)である場合は,制御バイトを,0,2
又は3に設定しなければならない。サポートされていない場合,受信側コントローラは,否定回答(NACK)
として,制御バイトを1に設定してアクノリッジメントPGNを送信しなければならない。ISO 11783群に
よるPF及びパラメータ・グループの残りの部分は,適切に記入されなければならない(5.4.5参照)。コン
トローラはこの方法(リクエストPGN)を使用しても,PG(受信されたときに)が返信するかどうかを
判断することはできない。
注記2 “サポートされていない”は,PGが送信されたが,届いていないことを意味する。
5.4.4
同報通信/応答
同報通信/応答メッセージ・タイプは,コントローラからの情報の任意の同報通信,又はコマンド若し
くはリクエストに対する応答のいずれかである。
5.4.5
入力の確認
入力の確認は二つの方式が利用できる。最初の方式は,CANプロトコルで規定されるものである。それ
はメッセージが少なくとも一つのコントローラで受信されること確認する“イン・フレーム”入力確認と
して定義されている。また,メッセージはCANエラー・フレームのないことによって,確認される。そ
れらがないことで,電源が入り接続状態にある他の(全ての)コントローラが,正常にメッセージを受信
したことを確認する。
入力確認の2番目の方式は,アプリケーション層によって定められており,“通常の同報通信の送信”の
回答,又は特定のコマンド若しくはリクエストへの“ACK”若しくは“NACK”の回答である。入力確認
パラメータ・グループの定義を次に示す。幾つかのパラメータ・グループに必要な応答確認は,アプリケ
ーション層で定義されている。
グループ機能値のパラメータは,あるコントローラがグループ機能パラメータ・グループ(5.4.6参照)
を用いる際に,応答確認されている個別のグループ機能を識別することを可能にする。グループ機能値は,
17
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
各グループ機能PGに固有の値である。グループ機能の値は,0から250までの範囲だけを使用すること
が望ましい。
パラメータ・グループ名: アクノリッジメント
定義:
コントローラが送受信間のハンドシェイク・メカニズムをアクノリッ
ジメントするためのパラメータ・グループ
送信周期:
PGN受信状態は入力確認を必要とする。
データ長:
8バイト
DP:
0
PF:
232
PS:
DA
デフォルト優先順位:
6
パラメータ・グループ番号: 59 392 (00E80016)
このメッセージ・タイプで使用されるパラメータのデータ範囲
コントロール・バイト:
0から3
下記定義参照
4から255
将来の標準化への割当予約
グループ機能値
0から250
グループ機能が使えるとき,個々のPGNに対して独自に
定義できる。ほとんどの場合,グループ機能パラメータ・
グループは,データ・フィールドの中の最初のバイト配
置される。
251から255 ISO 11783-7に定義された規格に従う。
ポジティブ・アクノリッジメント:コントロール・バイト=0
バイト: 1
コントロール・バイト=0,(ACK)
バイト: 2
グループ機能値(該当する場合)(5.4.6参照)
バイト: 3,4
将来の標準化への割当予約。これらバイトの各々をFF16として送信する。
バイト: 5
アドレス入力確認
バイト: 6
リクエストPGN(パラメータ・グループ番号の最下位8ビット分,ビット8が
MSB)
バイト: 7
リクエストPGN(パラメータ・グループ番号の第2バイト目,ビット8がMSB)
バイト: 8
リクエストPGN(パラメータ・グループ番号の最上位8ビット分,ビット8が
MSB)
ネガティブ・アクノリッジメント:コントロール・バイト=1
バイト: 1
コントロール・バイト=1,(NACK)
バイト: 2
グループ機能値(該当する場合)(5.4.6参照)
バイト: 3,4
将来の標準化への割当予約。これらバイトの各々をFF16として設定し送信する。
バイト: 5
アドレス負入力確認
バイト: 6〜8
リクエストPGN(上記参照)
アクセス拒否:コントロール・バイト=2
バイト: 1
コントロール・バイト=2,アクセス拒否(PGNでサポートされているがセキ
ュリティ上アクセスを拒否)
バイト: 2
グループ機能値(該当する場合)(5.4.6参照)
18
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト: 3,4
将来の標準化への割当予約。これらバイトの各々にFF16を設定して送信する。
バイト: 5
アクセス拒否をしたアドレス
バイト: 6〜8
リクエストPGN(上記参照)
応答不可:コントロール・バイト=3
バイト: 1
コントロール・バイト=3,応答不可(PGNでサポートされているが,ECUが
ビジー状態で応答できない,後でデータの再リクエストする。)
バイト: 2
グループ機能値(該当する場合)(5.4.6参照)
バイト: 3,4
将来の標準化への割当予約。これらバイトの各々にFF16を設定して送信する。
バイト: 5
ビジー状態のアドレス
バイト: 6〜8
リクエストPGN(上記参照)
5.4.6
グループ機能
グループ機能メッセージ・タイプは,特別な機能のグループのために使用される(プロプライエタリー
機能,ネットワーク管理機能,マルチ・パケット転送機能など)。各グループの機能は,割り当てられた
PGNで識別される。グループ機能のパラメータ・グループに割り当てられたPGNの情報を次に示す。こ
の機能は,データ構造内で定義される(一般的には,データ・フィールドの最初のバイトに機能を示す。)。
グループ機能のプロプライエタリー及びトランスポート・プロトコルの詳細は,5.4.7に規定されている。
プロプライエタリー・グループ機能は,独自形式による送信時に異なる製造業者間でCAN識別子が衝突
する問題を解消する手段を提供する。また,必要に応じてプロプライエタリーメッセージを受信し,区別
するための方法を提供する。グループ機能は,この規格で定義されたメッセージが不十分である場合は,
自分自身のリクエスト,肯定回答(ACK)又は否定回答(NACK)構造を提供してもよい。
PGN 59 904(5.4.3参照)を使用するリクエストは,グループ機能メッセージ・タイプの特定パラメータ・
グループが,サポートされているかを判断するために使用することができる。サポートされる場合,受信
コントローラは,入力確認ポジティブ・アクノリッジメントの0か,アクセス拒否の2か,又は応答不可
の3を制御バイトとしてアクノリッジメントPGNを送信する。サポートされない場合,受信コントローラ
は,ネガティブ・アクノリッジメント否定入力確認のために,制御バイトを1に設定してアクノリッジメ
ントPGNを送信する。ISO 11783群指定のPF及びパラメータ・グループの残り部分は,適切に設定しな
ければならない(5.4.5参照)。
注記 “サポートされない”とは,PGが送信されたが,届いていないことを意味する。
コントローラはこの方法(注釈:リクエストPGN)を使用しても,PG(受信されたときに)
が返信するかどうかを判断することはできない。
パラメータ・グループ名: プロプライエタリーA
定義:
製造業者が特定のコントローラと独自の通信を行えるように,宛先を
指定可能なPDUフォーマットを使用するプロプライエタリーPG。こ
のメッセージのデータ・フィールドがどのように使用されるかは,プ
ロプライエタリーメッセージを使用する場合,顕著な割合で(2 %以
上)システム・ネットワーク使用が回避されれば,製造業者が選択で
きる。
送信周期:
一ユーザ当たりの要求
データ長:
0から1 785バイト(マルチ・パケット・サポート)
DP:
0
19
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PF:
239
PS:
DA
デフォルト優先順位:
6
パラメータ・グループ番号: 61 184 (00EF0016)
バイト: 1〜8
製造業者固有の使用(5.1.3を参照)
このグループ機能によって使用されるパラメータのデータ範囲:ISOで定義なし
パラメータ・グループ名: プロプライエタリー A2
定義:
製造業者が特定のコントローラと独自の通信を行えるように,宛先を
指定可能なPDUフォーマットを使用するプロプライエタリーPG。こ
のメッセージのデータ・フィールドがどのように使用されるかは,プ
ロプライエタリーメッセージを使用する場合,顕著な割合で(2 %以
上)システム・ネットワーク使用が回避されれば,製造業者が選択で
きる。
送信周期:
一ユーザ当たりの要求
データ長:
0から1 785バイト(マルチ・パケット・サポート)
DP:
0
PF:
239
PS:
DA
デフォルト優先順位:
6
パラメータ・グループ番号: 126 720 (00EF0016)
バイト: 1〜8
製造業者固有の使用(5.1.3参照)
このグループ機能によって使用されるパラメータのデータ範囲:ISOで定義なし
パラメータ・グループ名: プロプライエタリー B
定義:
製造業者がPS(GE)フィールドを定義できるPDU2フォーマット・
メッセージを使用するプロプライエタリーPG。ただし,著しい割合2 %
以上のシステム・ネットワーク使用率は,避けなければならない。こ
のメッセージのPS(GE)とデータ・フィールドとが,どのように使
用されるかは,製造業者が選択する。これらメッセージのデータ長は,
各製造業者によって設定できる。したがって,二つの製造業者は同じ
GE値を使用する可能性があり,別のデータ長コードをもつ可能性も
ある。このため,この情報を受信するコントローラは,二つの製造業
者を区別する必要がある。
送信周期:
一ユーザ当たりの要求
データ長:
0から1 785バイト(マルチ・パケット・サポート)
データ頁:
0
PF:
255
PSフィールド:
GE(製造業者割当て)
デフォルト優先順位:
6
パラメータ・グループ番号: 65 280から65 535 (00EF0016から00FFFF16)
バイト: 1〜8
製造業者定義の使用(5.1.3参照)
20
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
このグループ機能によって使用されるパラメータのデータ範囲:
製造業者定義の使用は,結果的にはコンポーネント・サプライヤー及びSAごとに,データ長コー
ドが固有となる。複数のSAは,異なる目的でも同じプロプライエタリーB PGN値を使用できるので,
プロプライエタリーBパラメータ・グループ(PGN=65 280〜65 535)を使用する場合は,注意を払う
必要がある。
5.4.7
リクエスト2
リクエスト2 PGは,受信するコントローラがトランスファーPGN 51 712を使用するかどうかを特定す
る追加機能をもつ。受信するコントローラがトランスファーPGNの使用を指定することで,受信コントロ
ーラは,全てのコントローラにデータを送信する機能が与えられる。受信コントローラは,通常PGN 59 904
でリクエストされた同じPGN,及びそれぞれのコントローラでデータ設定されたPGNを受信することで
データを送信する(5.4.8参照)。PGN 59 904は,PGN転送のために正しくフォーマットされたものである。
例えば,トランスファーPGN選択パラメータがyes(012)の場合,応答はリクエストされたPGNに関連
する全ての既知データを含まなければならない。トランスファーPGN選択パラメータがNO(002)の場合
は,リクエスト2 PGNの結果は,リクエストPGN(59 904)と同じとなる。トランスファーPGN選択パラ
メータが00の場合のリクエスト2への応答は,トランスファーPGNに送信されず,リクエストPGN(す
なわち,PGN 59 904)で使用した場合と全く同じ場合は送信される。次の情報は,PGNをリクエスト2パ
ラメータ・グループに割り当てている。
指定されたコントローラが,PGNと複数のコントローラに送信しなければならない場合に,リクエスト
2及び転送PGNは必要となる。
例 作業機識別,コンポーネントID及びソフトウェア識別PGN
リクエスト2のサポートはオプションである。
パラメータ・グループ名: リクエスト2
定義:
ネットワーク・コントローラ又は複数のコントローラからのPGNを
リクエストするとき,及び応答を使用するか,又は転送PGNを使用
しないかを指定するために使用する。
送信周期:
一ユーザ当たりの要求は,一般的には毎秒2回又は3回以下が望まし
い。コントローラがリクエスト2をサポートする場合,宛先固有のア
ドレスを求められたPGがサポートされず,否定回答(NACK)が必
要となる。PGN 59 392を参照。
データ長:
8バイト(マルチ・パケット・サポート)
DP:
0
PF:
201
PS:
送信先あり(グローバル又は特定)
デフォルト優先順位:
6
パラメータ・グループ番号: 51 456(00C90016)
バイト1〜3:
リクエストされたPGN
バイト4:
特別指示
ビット3から8:
将来の標準化への割当予約
ビット1から2:
応答のためのトランスファーPGNを使用(00=なし,01=はい,
10=不定義,11=不許可)
21
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト5〜8:
将来の標準化への割当予約
5.4.8
転送(トランスファー)
トランスファーPGNは,リクエスト2に応じて与えられたPGNの複数データ・セットを報告するメカ
ニズムを提供する(5.4.7参照)。与えられたPGNのためのこれらの複数データ・セットは,各々のデータ
セットがJIS B 9225-5のNAMEによる4バイト長のラベルを必要とする。そのNAMEの4バイトは,各
コントローラを識別する。リクエストに応答するコントローラは,この応答で設定された最初のデータと
して,PGN 59 904と同じ情報を報告しなければならない。コントローラが一つのデータ・セットだけをも
つ場合,トランスファーPGを利用する一つのデータ・セットで応答しなければならない。
リクエスト2及びトランスファーPGNは,指定したコントローラが,PGN及び複数のコントローラに関
するデータを報告する必要がある場合に便利である。例としては,作業機識別,コンポーネントID,ソフ
トウェア識別などのPGNを含む。次に,転送パラメータ・グループにPGNを割り当てる。
パラメータ・グループ名:
トランスファー
定義:
“Use Transfer PGN(トランスファーPGNの使用)”がYesに設定さ
れている場合,リクエスト2に応答したデータ転送に使用される。
送信周期:
“トランスファーPGNの使用”=01でリクエスト2 PGNに応答
データ長:
9から1785バイト(マルチ・パケット・サポート)
DP:
0
PF:
202
PS:
DA(グローバル又は特定)
デフォルト優先順位:
6
パラメータ・グループ番号: 51 712 (00CA0016)
バイト1〜3:
リクエスト2で要求のPGN(PGN順序は,表2参照)
バイト4:
識別されたコントローラに関連した報告PGNのデータ長(例えば,
バイト5〜8で識別)
バイト5〜8:
PGN及びデータに関連付けられているコントローラID−JIS B
9225-5は,バイト5〜8で使用されているNAMEから4バイトを定
義している。
バイト5: ビット4から8 ファンクションインスタンス(最上位ビット8)
ビット1から3 ECUインスタンス(最上位ビット3)
バイト6: ビット1から8 ファンクション(最上位ビット8)
バイト7: ビット2から8 デバイス・クラス(最上位ビット8)
ビット1
予約済
バイト8: ビット8
自己設定可能(Self Configurable Capable)
ビット5から7 業界団体(最上位ビット7)
ビット1から4 デバイス・クラス・インスタンス(最上位ビット4)
バイト9〜x:
1個以上のデータ・セットを含むデータ・フィールド。データセッ
トに“リクエスト2によってリクエストされたPGN”,“コントロー
ラID”,そして“リクエスト2データによってリクエストされた
PGN”を含む場合(次のフォーマット定義参照)。
22
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
フォーマットa,b,c,d,b,c,d,b,c,d ...:
a
転送モードが“はい”に設定されている場合,リクエスト2によってリクエストされたPGN
b
最初のデータ・セット−連結されたECU IDと関連するPGNデータの長さ(長さ=b+c+d)
c
フィールドdが関連付けられているECU ID
d
特定ECUのためのリクエストPGNデータ
b
第2データ・セット−連結されたECU IDと関連するPGNデータの長さ
c
フィールドdが関連付けられているECU ID
d
第2特定ECUのためのリクエストPGNデータ
例 与えられた車両では,エンジンECUはトラクタ及びトレーラのVIN番号を関知する。別のコン
トローラが,01に設定されて使われているトランスファーPGNのVINをリクエストし,グロー
バル向けにリクエスト2を送信する。
エンジンからの応答は,次のいずれかによる。
− BAMのトランスファーPGNの転送は,トラクタVIN及びトレーラ用VINを報告する。
− 使われているトランスファーPGNが00の場合,BAMの応答は,トラクタ用VIN転送の,ト
ランスファーPGNを使用しない。
5.5
メッセージの優先順位
CAN・データ・フレームの優先順位は,ISO 11898-1に従う。CAN IDフィールド内の値は,メッセージ
優先順位を決定する。CAN ID(識別子)最小値(29ビット全てが0)が優先順位が最高で,最大値(29
ビット全てが1)が最低である。優先順位の割当ては,5.9に示すガイドラインに従ってアプリケーション
層で識別する。
5.6
バス・アクセス
バスが空いているときに,任意のコントローラはフレームの送信を開始することができる。二つ以上の
コントローラが同時にフレーム送信を開始した場合,バス・アクセスの競合はCAN・データ・フレームID
(識別子)を使用して,競合ベースの調停によって解決される。調停機能は,情報と時間のいずれも失わ
れないことを保証する。優先順位が最も高いフレームが付いている発信コントローラが,バス・アクセス
を得る。
5.7
競合ベースの調停
アービットレーション(調停)中は,全ての発信コントローラは,バス上で監視されているレベルで,
送信されたビットのレベルを比較している。これらのレベルが等しい場合,コントローラは送信し続ける
可能性がある。レセシブレベルが送信されドミナントレベルが検出された場合,そのコントローラは調停
を失い,別のビットを送信せずに脱退しなければならない。ドミナントレベルが送信されレセシブレベル
が検出された場合,そのコントローラはビット・エラーを検出する。
5.8
エラー検出
エラー検出には,次のような対策が提供される。
− 発信元のコントローラは,バス上で検出されたビット・レベルで送信されるビットのレベルを比較す
る(ビットモニタリング)。
− ビット巡回冗長検査(CRC)
− スタッフィング監視ビット幅5ビット(スタッフチェック)
− フレーム・フォーマット・チェック
注記 これらのエラー検出技術の詳細な説明については,ISO 11898-1を参照。
23
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.9
送信元アドレス(SA)及びパラメータ・グループ番号(PGN)割当てプロセス
5.9.1
一般
利用可能なPDUは,PDU1とPDU2との二つのフォーマットを提供する。パラメータ・グループは,PDU1
又はPDU2フォーマットのいずれかを使用するために特別に割り当てられている。一度フォーマットが割
り当てられると,他のフォーマットは,そのパラメータ・グループには使用できない。特定の宛先へパラ
メータ・グループを指示する必要がある度に,PDU1フォーマットを使用しなければならない。パラメー
タ・グループの割当ては,次の特性を使用して行わなければならない。
− 優先順位
− 更新率
− 他のネットワーク・コントローラへのパケット内データ重要度
− パラメータ・グループに関連付けられたデータの長さ
新しいSA又はPGN割当て要求を行うとき,この割当てプロセスにリクエストフォームが使用できる。
表7は,PGNを割り当てるためのテンプレートを提供する。優先コラムが各PGNの初期優先値を割り
当てるために使用されることに注意する。必要に応じて,ネットワークがOEM(オリジナル機器製造業者)
によってチューニングされるように,優先フィールドは,それぞれPGNの値のためにプログラムすること
ができる。任意のPGNをリクエストできるが,既に定期的に同報通信(ブロードキャスト)されているメ
ッセージには推薦されない。
メッセージは,幾つかの特定コントローラの一つを直接制御(コマンド)するように意図されたパラメ
ータである場合にだけ,送信先を必要とするPGNを割り当てられる。そうしなければ,任意のコントロー
ラがメッセージ内のパラメータにアクセスすることができるように,PGNは送信先なしで選択しなければ
ならない。
優先SAは,メッセージ優先順位,更新率,又は重要度を配慮することなく,順番に割り当てられる。
PGNは,PGN及びSAリクエストフォームで提供された基準に基づいて,表7のさまざまなセクション
に順番に割り当てられる。繰返し率が10 Hzに等しいか又はそれ以上のとき,マルチ・パケット・メッセ
ージが許可されないことに注意する。
5.9.2
アドレス割当て基準
ISO 11783群の未割当てアドレスの数が限られており,新アドレスの割当ては効率的に行わなければな
らない。システム内の最大割当てアドレス数は,256を超えてはならない。したがって,アドレス定義へ
の追加は,トラクタ又は作業機で,特定のファンクションを提供するユニットに限定しなければならない。
特定のファンクションの例としては,エンジン,トランスミッション,ブレーキ,燃料システムに現在定
義されているアドレスを含む。この規格の中で新しいアドレスの割当てに提案されたファンクションは,
現在定義されているアドレスと同じような適用範囲をもち,ほとんどのISO 11783群のユーザに有用であ
る。
ISO 11783群によるコントローラは,JIS B 9225-5に従ってアドレス自己設定をサポートされる。
5.9.3
パラメータ・グループ割当て基準
ISO 11783群で利用可能な未割当てのパラメータ・グループ数は,林業又は農業アプリケーションで提
案の可能性があることを考慮して制限されている。多数のパラメータ・グループの必要性は,ISO 11783
群に組み込まれているファンクションで緩和される。ISO 11783群の中では三つの主要な通信方式が存在
し,その各々の適切な使用が,利用可能なパラメータ・グループの効果的使用を可能にする。
− PDU1フォーマット(PS=DA,送信先指定があるときのコミュニケーション許可)
24
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− PDU2 フォーマット(PS=GE)
− 二つの事前定義された専用PGNを使用するプロプライエタリー通信。
これらの方法には適切な用途がある。同じメッセージが一つ又は別の送信先に送ることができるように
するには,送信先指定があるパラメータ・グループが必要となる。トルク制御メッセージは,エンジンへ
送信可能なメッセージであるとISO 11783群で定義される。複数エンジンの場合,このメッセージは目的
のエンジンにだけ送信されるべきであり,送信先指定パラメータ・グループが必要とされ割り当てられる。
PDU2フォーマット通信は,単一の送信先への単一又は複数の発信元から送信されたメッセージ,及び
複数の送信先に単一又は複数のソースから送信されたものを含め,幾つかの状況で適用される。メッセー
ジが一つ又は別の宛先に送信され両方宛てでない場合,PDU2通信は利用できない。
プロプライエタリー通信は,プロプライエタリーPGNの使用によって提供される。異なるPGNは,送
信先指定がないプロプライエタリー通信用,及び送信先指定があるプロプライエタリー通信に割り当てら
れている。これは,次の二つの代替機能を可能にする。
a) 特定の送信元は,ユーザの必要に応じて識別されたPSフィールド及びPDU2フォーマット(送信先
指定がない。)で,専用メッセージを送ることができる。
b) 診断コントローラは,コントローラの可能なグループのうち,特定の送信先への通信を指示するよう
な状況を考慮し,PDU1フォーマット(宛先)を使用できる。
例 エンジンは複数のコントローラを使用しているが,その全てのコントローラが同じネットワーク
に接続している間に診断を実行できるようにする。この場合は,専用プロトコルが送信先指定で
あり得るようにする必要がある。
専用通信は,次の二つの状況で有用である。
− 標準化された通信のために不必要な場合,
− 専用情報を通信することが重要である場合
単一製造業者によって構成されたコントローラ間通信の大部分は標準化を必要としない。標準化されて
いない通信の情報は,ネットワーク上,他のコントローラには一般的に有用ではない。このような状況で
は,プロプライエタリー・パラメータ・グループが使用できる。
パラメータ・グループの割当てを検討する場合は,プロプライエタリーの,そしてPDU2フォーマット
の通信方式を考慮するのがよい。プロプライエタリー情報が通信されている場合,又は通信される情報が
一般的関心事ではない場合は,プロプライエタリーの方法を使用する必要がある。情報が一般的関心事で
特定コントローラへのメッセージ指示を必要としない場合は,PDU2フォーマットの割当てを求めるべき
である。最後に,情報が一般的関心事であり,一つ又は別のコントローラへの指示を必要とする場合は,
送信先指定のアドレス指定が必要とされ,送信先PDU1フォーマットパラメータ・グループの割当てを求
められる。
5.9.4
データ・フィールド定義
CANベース・システムを使用してメッセージのオーバヘッドを最小限に抑えるには,データ・フィール
ド(全て8バイト)をフルに活用する必要がある。非常に時間が重要なメッセージの場合を除いて,関連
パラメータは8バイトのデータ・フィールドを埋めるために,グループ化する必要がある。この方針に従
うことによって,将来の割当てにPGNを保全する。パラメータ・グループの定義が,別のデータ・フィー
ルドの実用を許容するためには,強力な正当性が必要である。
25
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表7−ISO 11783群PGNテンプレート
EDP
DP
PF
PS
パラメータ・グループ定義
マルチ・パケット
PGN
0
0
0
DA
PDU1フォーマット−100 ms未満
NA
000
00
1
DA
|
256
|
境界x
_____
̲
|
|
00
238
DA
PDU1フォーマット−100 ms以上
許可
60 928
00
239
DA
PDU1フォーマット−専用A
−
61 184
00
240
0
PDU2フォーマット−100 ms未満
NA
61 440
00
240
1
|
61 441
|
境界y
_____
̲
|
00
254
254
|
65 278
00
254
253
PDU2フォーマット−100 ms以上
Yes
65 279
00
255
un
PDU2フォーマット−専用B
−
65 280−65 535
01
0
DA
PDU1フォーマット−100 ms未満
NA
65 536
01
1
DA
|
65 792
|
境界x1
_____
̲
|
01
238
DA
PDU1フォーマット−100 ms以上
126 464
01
239
DA
PDU1フォーマット−専用A2
許可
126 720
01
240
0
PDU2フォーマット−100 ms未満
NA
126 976
01
240
1
|
126 977
|
境界y1
_____
̲
|
01
255
253
|
01
255
254
PDU2フォーマット−100 ms以上
許可
131 070
01
255
255
PDU2フォーマット−100 ms以上
許可
131 071
DP
データ・ページ(1ビット)
PF
PDUフォーマット(8ビット)
PS
PDU特性フィールド(8ビット)
DA
送信先アドレス(8ビット)
PGN パラメータ・グループ番号(3ビット)
EDP 拡張データ・ページ(1ビット)
NA
不許可
un
未定義
5.10 トランスポート・プロトコルファンクション
5.10.1 一般
トランスポート・プロトコルファンクションは,大きく分けて二つの機能,すなわち,メッセージ“パ
ケット化”及び再組立て並びに接続管理に細分化されていることを認識して,データリンク層の一部とし
て記載する。これらの用語は,発信元のコントローラが送信要求(Request to Send)メッセージを送信す
るコントローラに対応すると説明され,受信コントローラは,送信可(Clear to Send)メッセージを送信す
るコントローラに対応すると説明される。
26
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.10.2 “パケット化”及び組立て
5.10.2.1 一般
8バイトより長いメッセージは,単一のCAN・データ・フレームに収まらない。したがって,それらは
幾つかのより小さいパケットに分割され,それらのパケットは,別々のCAN・データ・フレームで転送さ
れる。受信コントローラでは,個々のメッセージフレームが,受信されたパケットのシーケンス番号の順
序で受信され,再組み立てされる。
5.10.2.2 メッセージ・パケット
CAN・データ・フレームは,8バイトのデータ・フィールドを含む。大きなメッセージを構成する個々
のパケットは,個々にそれらが正しく再組み立てされるように個別で識別しなければならないので,デー
タ・フィールドの最初のバイトは,パケットのシーケンス番号として定義する。
個々のメッセージ・パケットは,1から255のシーケンス番号が割り当てられる。これは,255パケット
×7バイト/パケット=1 785バイトの最大メッセージ・サイズをもたらす。
5.10.2.3 シーケンス番号
シーケンス番号は,メッセージの“パケット化”の間に,ネットワーク上で転送するためにパケットに
割り当てられ,それらパケットをメッセージに再組み立てするパケットの受信において利用される。
シーケンス番号は,全体のメッセージが“パケット化”されて送信されるまで,1から始まり連続して
順番に,個々のパケットに割り当てられるものとする。パケットは,パケット1から始まる昇順に順次送
られなければならない。
5.10.2.4 パケット化
マルチ・パケット・メッセージは,データが単一のCAN・データ・フレームのデータ・フィールドに収
まらないものとして定義される(すなわち,8バイトより大きいデータ・フィールドをもつメッセージ)。
このプロトコルの目的のために,大きなメッセージは9バイト以上の文字列のパラメータ・グループで
あるとみなされる。最初のデータ転送パケットは,シーケンス番号1及び文字列の最初の7バイトが含ま
れている。第2番目の7バイトは,シーケンス番号2と,第3番目はシーケンス番号3などとともに,元
のメッセージの全てのバイトがISO 11783群で指定のCAN・データ・フレームが配置され送信されるまで,
一緒に別のデータ・フレームに配置される。
各データ転送パケット(送信シーケンス最後のパケット以外)は,元の大きなメッセージの7バイトを
含む。最後のパケットは,これがパケットのシーケンス番号であり,パラメータ・グループに関連するデ
ータの少なくとも1バイトである8バイトのデータ・フィールド,そして,全ての残りの未使用で,FF16
設定のバイトを含む。
マルチ・パケット・ブロードキャスト(同報通信)メッセージのパケット間の時間は,50 msから200 ms
でなければならない(5.12.3参照)。特定の送信先に向けたマルチ・パケット・メッセージの場合,送信コ
ントローラは,200 msのパケット(CTSは,複数を可能にする。)間の最大時間を維持する。受信コント
ローラは,データを含むパケットは全て同じ識別子をもっていることに注意しなければならない。
5.10.2.5 再組立て
データ・パケットは連続して受信される。マルチ・パケット・メッセージの各データパケットは,シー
ケンス番号順に,バイト列として組み立てなければならない。このバイト列は,長いメッセージを専属で
対応するアプリケーションに渡される。
27
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.10.3 接続管理
5.10.3.1 一般
接続管理は,送信先指定の転送を行うコントローラ間において,仮想接続の開放,使用及び遮断に関係
している。ISO 11783群に規定されている環境下での仮想接続は,単一PGNで示されている一つの大きい
メッセージを転送するために,二つのコントローラを一時的に接続することである(附属書B,図B.1及
び図B.2参照)。接続が一つから複数に対してである場合,フロー制御又は遮断は用意されていない(附属
書B及び図B.3参照)。
5.10.3.2 マルチ・パケット・ブロードキャスト
マルチ・パケット・メッセージは,非送信先指定とすることができる。すなわち,ブロードキャスト・
メッセージとなることができる。マルチ・パケット・メッセージをブロードキャストするには,コントロ
ーラは最初にブロードキャスト通知メッセージ(BAM)を送信する。このグローバルDAに送信されるべ
きメッセージは,ネットワーク上のコントローラに,長いメッセージに対する警告を含んでいる。BAMメ
ッセージには,ブロードキャストされる長いメッセージのPGNと,パケット化されるデータ長とそのパケ
ット数が含まれる。ブロードキャスト・データを必要とするコントローラは,そのメッセージを受信して
再び組み立てるのに必要なリソースを割り当てることが必要である。データ転送(Transfer)PGN(PGN=
60 160)は,関連するデータを送信するために使用される。
5.10.3.3 接続開始
接続は,コントローラがDAへ送信要求(Request to Send)メッセージを送信すると開始される。送信要
求メッセージには,全てのメッセージのバイトサイズ,転送される分割されたメッセージの数,一つのCTS
に対して送信することができる最大パケット数,そして転送されるメッセージのPGNが含まれる。
送信要求メッセージを受信すると,コントローラは接続するかどうかを選択できる。受信コントローラ
が接続を受け入れるためには,送信可(Clear to Send)メッセージを送信する。送信可メッセージには,受
け入れることができるメッセージのパケット数と,要求する最初のパケットのシーケンス番号が含まれる。
受信コントローラは,配信が許可されたパケット数を処理するための十分なリソースを確保しなければな
らない。新しく開かれた接続では,パケットのシーケンス番号は1となる。
注記 送信可メッセージは,メッセージのコンポーネント・フレームに対する全ての条件を含んでい
ない。
コントローラが接続を拒否するには,接続中止・メッセージで応答する。リソース不足,メモリ不足な
どの原因でも,接続を拒否することができる。
発信コントローラが受信コントローラ(すなわち,CTSコントローラ)からのCTSを受信したときは,
接続は発信コントローラ(すなわち,RTSコントローラ)で確立したと考えられる。RTSに応答したCTS
メッセージの送信が成功したときは,接続は受信コントローラで確立したと考えられる。これらの定義は,
接続を中止するために,いつ接続中止が送信されたかを判断するために使用される。受信コントローラは,
RTSメッセージを確認して,接続を確立しないと決定したとき,接続中止を送信しなければならない。こ
れによって送信コントローラは,タイムアウトを待つことなく新しい接続を開始することができる。
5.10.3.4 データ転送
データ転送は,接続されている発信コントローラが送信可(Clear to Send)メッセージを受信後に,開始
される。データ転送の結果がBAMの場合は例外で,この場合,送信可メッセージは使用しない。データ
転送用のPGNには,各パケットのCAN IDフィールドが含まれている。データ・フィールドの最初のバイ
トには,パケットのシーケンス番号が含まれている。
28
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
送信先指定メッセージの場合,受信コントローラは,コントローラ間のフロー制御を調整する役割をも
つ。接続がオープンの間に,受信コントローラが瞬間的にデータ・フローを停止したい場合,パケットの
番号をゼロに設定した送信可(Clear to Send)メッセージを使用しなければならない。フローを何秒間か停
止しなければならない場合,受信コントローラは発信コントローラとの接続を維持するため,Th s(0.5 s)
ごとに,送信可(Clear to Send)メッセージを繰り返し送信しなければならない。残りのビット・フィール
ドは全て1(“不定”)に設定される。
5.10.3.5 接続遮断
エラーがない状態であっても,接続遮断は2種類存在する。一つ目はグローバル送信先のエラーで,二
つ目は特定送信先のエラーである。送信先がグローバルの場合,接続遮断操作は,データ自体を受信終了
するまで実行されることはない(5.10.4.1及び5.10.4.5参照)。送信先指定メッセージが送信され,メッセ
ージの中の最後のパケットを受信したとき,受信コントローラは,発信コントローラにメッセージ終了の
確認メッセージを送信する。これは,受信コントローラによって接続が完了されたことを発信コントロー
ラに示す信号となる。肯定回答(ACK)完了のメッセージは,他のコントローラが次の接続を許可するた
めに必要となる。
接続中止(Connection Abort)メッセージは,グローバル送信先メッセージの場合,受信コントローラが
使用することは許可していない(5.10.4及び5.10.4.5参照)。送信先指定転送の場合は,発信又は受信コン
トローラのいずれでも,また,いつでも,接続を終了するために接続中止(Connection Abort)を使用でき
る(送信及び受信コントローラの接続が確立しているときの説明は,5.10.3.3参照)。例えば,受信コント
ローラがメッセージを処理するために使用できるリソースがないと判断した場合は,接続中止(Connection
Abort)メッセージを発信して,接続を遮断することができる。このメッセージを受信すると,既に受信し
た全てのメッセージ・パケットは破棄される。
いずれかのコントローラに障害が発生すると,接続が遮断する可能性がある。
例1 最後のパケットを受信してからT1秒以上の遅れかそれ以上の遅れが予想されるとき(CTS許
可時間を超えた場合)
例2 CTS送信後のT2 s以上の時間遅れ(送信コントローラの障害)
例3 最後のパケット送信後に,T3 s以上,CTS又はACKがない場合(受信コントローラの障害)
例4 “接続オープン状態に保持”へCTS(0)メッセージ後に,T4 s以上のCTSがない場合
これらの例では,いずれも接続が遮断される。
タイムアウト値は,Tr=200 ms,Th=500 ms,T1=750 ms,T2=1 250 ms,T3=1 250 ms,T4=1 050 ms
(タイムアウトに関して5.12.3及び図B.1も参照)である。発信又は受信コントローラのいずれかが,タ
イムアウトを含む何らかの理由で接続を遮断すると決定した場合,接続中止(Connection Abort)メッセー
ジを送信しなければならない。
この箇条及び5.10で与えられた定義によって,次の事例が示される。
a) ブロードキャスト通知メッセージに対する接続遮断は,次を含む。接続は閉じられていると考えられ
る。
1) 発信コントローラが最後のデータ転送パケットを送信するとき。
2) 受信コントローラが,次の状態のとき。
2.1) 最後の転送パケットを受信するとき。
2.2) 接続タイムアウトT1となったとき。
b) 送信要求(Request to Send)又は送信可(Clear to Send)メッセージに対する接続遮断は,次を含む。
29
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 発信コントローラが,次の状態のとき。
1.1) PGN全体にデータ転送が完了した時点でメッセージ終了確認(TP.CM̲EndOfMsgACK)を受信す
る。
1.2) 何らかの理由(例えば,T3又はT4タイムアウト)によって接続中止(Connection Abort)を送信
する。
1.3) 接続中止(Connection Abort)を受信する。
2) 受信コントローラが,次の状態のとき。
2.1) PGN全体のデータ転送が完了した時点でメッセージ終了確認(TP.CM̲EndOfMsgACK)を送信す
るとき。
2.2) 接続中止(Connection Abort)を受信するとき。
2.3) 何らかの理由で接続中止(Connection Abort)を送信するとき(例えば,T1又はT2接続タイムア
ウトなど,決定に応じた途中のセッション停止を含む。)。
5.10.4 トランスポート・プロトコル−接続管理メッセージ
5.10.4.1 接続管理メッセージ定義
このタイプのメッセージは,接続の開始及び遮断,並びにフロー制御を行うために使用される。トラン
スポート・プロトコルは,次の五つの転送プロトコル接続管理メッセージを提供する。送信要求接続モー
ド(Connection Mode Request to Send),送信可接続モード(Connection Mode Clear to Send),メッセージ終
了確認(End of Message Acknowledgment),接続中止(Connection Abort)及びブロードキャスト通知メッセ
ージ(Broadcast Announce Message)である。このメッセージのフォーマットは,トランスポート・プロト
コル(接続管理)のパラメータ・グループの定義の中で次のように示される。
パラメータ・グループ名: トランスポート・プロトコル接続管理(TP.CM)
定義:
9バイト以上のパラメータ・グループの転送に使用される。転送プロ
トコルの一部として定義されている各特定メッセージの定義は,次の
箇条で示す。
送信周期:
転送するPGNによる。
データ長:
8バイト
DP:
0
PF:
236
PS:
DA
デフォルト優先順位:
7
パラメータ・グループ番号: 60 416 (00EC0016)
このグループ機能によって使用されるパラメータのデータ範囲:
コントロール・バイト:
0から15,18,20から31,33から254は,今後割り当てられる予定
である。
全メッセージ・サイズ(バイト数):9から1 785(2バイト),0から8及び1 786から65 535は,
許可されていない。
全パケット数:
1から255(1バイト),0は不可。
最大パケット数:
2から255(1バイト),0及び1は不可。
送信可能パケット数:
0から255(1バイト)
次に送信するパケット数: 1から255(1バイト),0は不可。
30
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シーケンス番号:
1から255(1バイト),0は不可。
送信要求接続モード(TP.CM̲RTS):宛先固有
バイト: 1
コントロール・バイト=16,送信先指定送信要求(RTS)
バイト: 2,3
全メッセージ・サイズ,バイト数
バイト: 4
全パケット数
バイト: 5
一つのCTS(送信可)に対応して送信可能な最大パケット数。FF16は
発信コントローラに制限がないことを示す。
バイト: 6
要求された情報の送信を要求するPGN(パラメータ・グループ番号の
最下位8ビット分,ビット8がMSB)
バイト: 7
要求された情報の送信を要求するPGN(パラメータ・グループ番号の
第2番目バイト,ビット8がMSB)
バイト: 8
要求された情報の送信を要求するPGN(パラメータ・グループ番号の
最上位8ビット分,ビット8がMSB)
送信可接続モード(TP.CM̲CTS):送信先指定
バイト: 1
コントロール・バイト=17,送信先指定送信可(CTS)
バイト: 2
送信可能なパケット数。この値は,RTSメッセージのバイト5の値以
下とする。
バイト: 3
次に送信されるパケット番号
バイト: 4,5
将来の標準化への割当予約で,これらのバイトはFF16として送信しな
ければならない。
バイト: 6〜8
パケット・メッセージのPGN
メッセージ終了確認(TP.CM̲EndofMsgACK):送信先指定
バイト: 1
コントロール・バイト=19,メッセージ終了確認
バイト: 2,3
全てのメッセージ・サイズ,バイト数
バイト: 4
全パケット数
バイト: 5
将来の標準化への割当予約で,このバイトはFF16として送信しなけれ
ばならない。
バイト: 6〜8
パケット・メッセージのPGN
接続中止(TP.Conn̲Abort):送信先指定
バイト: 1
コントロール・バイト=255,接続中止
バイト: 2
接続中止理由
バイト: 3〜5
将来の標準化への割当予約で,これらのバイトはFF16として送信しな
ければならない。
バイト: 6〜8
パケット・メッセージのPGN
ブロードキャスト通知メッセージ(TP.CM̲BAM):グローバル送信先
バイト: 1
コントロール・バイト=32,ブロードキャスト通知メッセージ
バイト: 2,3
全メッセージ・サイズ,バイト数
バイト: 4
全パケット数
バイト: 5
将来の標準化への割当予約で,このバイトはFF16として送信しなけれ
ばならない。
31
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト: 6〜8
パケット・メッセージのPGN
5.10.4.2 送信要求接続モード(TP.CM̲RTS)
TP.CM̲RTSメッセージは,あるコントローラに,ネットワーク上の他コントローラが仮想接続を要求し
ていることを知らせる。TP.CM̲RTSメッセージは,送信元コントローラを示すSAフィールド,長いメッ
セージの受信対象コントローラを示すDA,そして送信されるPGNに対して適切に設定された残りのフィ
ールドからなるメッセージである。このメッセージのバイト5では,送信可(Clear to Send)メッセージで
指定される受信コントローラのパケット数を,送信コントローラがあらかじめ制限することを許可してい
る(図B.4及び図B.5参照)。受信コントローラがこの制限に応じる場合,発信コントローラは,いずれの
理由であっても,受信コントローラが受信していないパケットを再送信することができる。同じPGNに対
する同じSAのRTSを複数受信する場合,直近のRTSが有効になり,前のRTSは破棄しなければならな
い。この特定ケースでは,破棄されるRTSに対して送信される中止メッセージはない。TP.CM̲RTSは,
送信元コントローラだけ送信できる。
5.10.4.3 送信可接続モード(TP.CM̲CTS)
TP.CM̲CTSメッセージは,送信要求(Request To Send)メッセージに応答するために使用する。一定量
の長いメッセージに対する準備ができていることを,相手のコントローラに通知する。送信可能なパケッ
ト数は,送信元コントローラTP.CM̲RTSメッセージのバイト5の値を超えてはならない。接続が既に確
立された後,複数のCTSを受信した場合は,接続は切断しなければならない。送信元コントローラが接続
を切断するとき,接続中止(Connection Abort)メッセージを送信しなければならない。受信コントローラ
は,前のCTSからの最後のデータ・パケットを受信するか,タイムアウトするまで,次のCTSを送信し
てはならない。接続が確立されていない間にCTSを受信した場合,それは無視しなければならない。CTS
はフロー制御するだけでなく,そのCTSのパケットの番号(次に送信されるパケット番号)でデータ・パ
ケットをどこまで正しく受信したかを確認する。したがって,直前のCTSに基づいて送られた情報が破損
していた場合は,次のシーケンスパケットが送信される前に,破損情報のCTSを送信しなければならない。
この要件のために,長いメッセージを送信する送信元コントローラは,最後の送信可パケットの再送をす
るために,TP.CM̲RTSメッセージのバイト5を使用することができる。TP.CM̲CTSは,受信コントロー
ラだけで送信できる。
5.10.4.4 メッセージ終了確認(TP.CM̲EndofMsgACK)
TP.CM̲EndofMsgACKメッセージは,全てのメッセージが正しく受信され,再組み立てされたことを示
すメッセージで,長いメッセージを受信したコントローラから,その送信元コントローラへ伝えられる。
受信コントローラは,すぐにTP.CM̲EndofMsgACKを送信しないことで,セッションの最後のデータ転送
(Data Transfer)した後,接続を保持することができる。これによって受信コントローラは,(送信コント
ローラに要求して)パケットを再送させることが可能となる。メッセージ終了確認が,最後のデータ転送
の前に送信元コントローラによって受信された場合,送信元コントローラはそれを無視する。メッセージ
終了確認は,長いメッセージが正しく受信・再組み立てされたことを送信元コントローラに通知するため
に送信される。TP.CM̲EndOfMsgACKは受信コントローラだけで送信できる。
5.10.4.5 接続中止(TP.Conn̲Abort)
TP.Conn̲Abortメッセージは,仮想接続しているコントローラが,メッセージ転送を完了せずに接続を
切断するか,接続が初期化されることを防止するために使用する。
送信要求接続モード(Connection Mode Request To Send)・メッセージを受信すると,コントローラは接
続を求めるメッセージを処理するのに十分なリソースがあるかどうか決定しなければならない。例えば,
32
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
コントローラはシステム・ヒープからメモリを取得する必要があるが,全メッセージを十分受け入れる容
量を確保できないか,又は,コントローラが他のタスクに占有されていて,長いメッセージを扱うのに十
分なプロセッサ・サイクルを費やすことができないかである。これらの場合,接続中止(Connection Abort)
メッセージは,接続が確立されていない場合においても送信されることがある。この場合は,送信元コン
トローラが,接続を要求する際にタイムアウトを待たずに,他の仮想接続を試行できるようになっている。
何らかの理由で,送信元又は受信コントローラのいずれかが,タイムアウトを含め,データ転送を完了
する前に接続を切断することを決定した場合,適切な接続中止(Connection Abort)の理由とともに,接続
中止(Connection Abort)メッセージを送信しなければならない。表8には,接続中止の理由を示す。
送信元コントローラ(つまり,RTSコントローラ)は,CANプロトコル・コントローラによって接続中
止・メッセージを受信後に,直ちに送信を停止しなければならない。これが不可能な場合でも,データ・
パケット送信の停止プロセス中に,データ・パケット数が32,送信時間が50 msをそれぞれ超えてはなら
ない。接続中止・メッセージを送信又は受信した後,受信した全ての関連データ・パケットは無視しなけ
ればならない。TP.Conn̲Abortは,送信元コントローラ又は受信コントローラによって送信される。
表8−接続中止理由
値
説明
1
既に,一つ以上の接続管理セッションが存在するため,別の接続をサポートできない。
2
システム・リソースが別のタスクで必要であったため,この接続管理セッションが終了した。
3
タイムアウトが発生。これはセッションを閉じるために接続中止されたことを示す。
4−250
将来の標準化への割当予約。
251−255
ISO 11783-7及びISO 11783-8の定義による。
5.10.4.6 ブロードキャスト通知メッセージ(TP.CM̲BAM)
TP.CM̲BAMは,長いメッセージをブロードキャストしようとしているネットワーク上の全てのコント
ローラに通知するために使用する。これは,パラメータ・グループと送信されるバイト数で定義される。
TP.CM̲BAMメッセージ送信後,データ・トランスポート(Data Transport)メッセージで,“パケット化”
されたブロードキャスト・データが送信される。
TP.CM̲BAMは,送信元コントローラだけが送信する。
5.10.5 トランスポート・プロトコル−データ転送メッセージ(TP.DT)
TP.DTメッセージは,パラメータ・グループに関連付けられたデータを通信するために使用する。TP.DT
メッセージは,マルチ・パケット・メッセージを転送する際の個々のパケットである。例えば,一つの長
いメッセージを転送する際に五つのパケットに分割する必要がある場合は,5個のTP.DTメッセージが存
在する(TP.DTメッセージの使用例は,附属書B参照)。このメッセージのフォーマットは,次のパラメ
ータ・グループ定義で示される。
TP.DTは,発信コントローラだけで送信する。
パラメータ・グループ名: トランスポート・プロトコル−データ転送(TP.DT)
定義:
8バイト以上のデータをもつ“パラメータ・グループ”に関連付けら
れたデータの転送に使用される。
送信周期:
転送するPGNによる。
データ長:
8バイト
DP:
0
33
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PF:
235
PS:
DA[TP.CM̲BAMデータ転送はグローバル(DA=255)RTS/CTSデー
タ転送の場合はグローバル不可]
デフォルト優先順位:
7(優先順位は送信されるPGNに無関係)
パラメータ・グループ番号: 60 160 (00EB0016)
このメッセージ・タイプで使用されるパラメータのデータ範囲:
シーケンス番号:
1から255(1バイト)
バイト: 1
シーケンス番号
バイト: 2〜8
“パケット化”データ(7バイト)
マルチ・パケット・パラメータ・グループの最後のパケットは,8バイト未満の場合がある。(パケット
化したデータが7バイトに満たない場合)残りのバイトはFF16としなければならない。
5.10.6 接続制限
5.10.6.1 一般
あるコントローラが別のセッションを処理できない場合,他のコントローラの意図する接続開始を拒否
しなければならない。同じSAから既存のセッションと同じ宛先への異なるPGNのRTSも,同様に拒否
しなければならない。いずれの場合でも,新たに要求されたセッションは,接続中止(Connection Abort)
を送信することによって拒絶される。これはタイムアウトを待たずに,接続を希望するデバイスは新しい
接続に移動することができる。
5.10.6.2 コントローラがサポートすべき接続数及び種類
ネットワーク上の各コントローラは,1回に与えられた宛先で,一つの宛先固有の接続転送を発信する
ことができる。これはTP.DTだけがSA及びDAを含むためで,転送されるデータのPGNではない。
一つのマルチ・パケットBAM(すなわち,グローバル宛先)だけが,所定の時間に発信コントローラ
から送信できる。これはTP.DTが,実際のPGN又は接続識別子を含まないためである。しかし,受信コ
ントローラは,複数のマルチ・パケット・メッセージが,異なる発信コントローラ(すなわち,送信アド
レス)から,お互いに散りばめられて受信できることを認識しなければならない。
また,コントローラは,一つのRTS/CTSセッションと同じSAから同時に一つのBAMセッションをサ
ポートできる。したがって,受信コントローラは,それらを適切に分割して維持するために,二つのトラ
ンスポート・プロトコル・メッセージの宛先アドレスを使用しなければならない。トランスポート・プロ
トコル・メッセージの一つはグローバル,そしてもう一つの方は特定DAをもつ。TP.DTが実際のPGNも
接続識別子のいずれも含まないため,DAは両者の違いを区別するために使用しなければならない。
コントローラが,複数の同時トランスポート・プロトコル・セッション(RTS/CTS及び/又はBAM)
をサポートできるかどうかにかかわらず,同じSAから異なるDAに対して送信されるTP.DTメッセージ
は確実に区別できるようにしなければならない。受信側のコントローラは,メッセージを正しく受け取る
ためにDA及びSAを使用する必要がある。
5.10.6.3 意図されたトランスポート・プロトコルの使用
トランスポート・プロトコルは,9データ・バイト以上のPGNを転送するメカニズムを提供するために
開発された(5.2.8.2参照)。特定インスタンスの転送で,9データ・バイト未満をもちマルチ・パケットで
きるように定義されたPGNは,8へセットされたDLCと一つのCAN・データ・フレームに送信されなけ
ればならない(5.2.8.1参照)。
5.10.6.4 コンカレント(並列)PGN受信
34
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
特定のパラメータ・グループは,8バイト以下のときに,非トランスポート・プロトコル形式で送信可
能で,また,8バイトを超えるときは,トランスポート・プロトコル形式で送信することができる。同じ
PGのこれら二つの形式は,同時に送信することができる。
注記 PGNの非トランスポート・プロトコル形式は,セッションであるとはみなされないので,その
送信は同じPGNのトランスポート・プロトコル形式を閉じない。
5.11 プロトコル・データ・ユニット(PDU)処理要件
PDUの処理は,次の具体的な手順が必要である。PDUを解釈するために提案された順序は,附属書A
に記載されている。附属書Cは,ISO 11783群によるメッセージ・タイプの例と,使用されるPDUフォー
マットを示している。
コントローラは,データ・リンクの使用率が100 %のときに,メッセージ紛失防止に十分な速さで,デ
ータリンク・メッセージを処理できなければならない。これはまた,連続メッセージの低稼働率の状況で
各コントローラが,連続特性によるメッセージ逸失のない十分な速さで,メッセージを処理できることを
意味する。十分な速さでメッセージを処理するとは,メッセージが直ちに生成されなければならないとい
うことではなく,新しいメッセージが前のメッセージを行き過ぎてはならないということを意味する。
5.12 応用メモ
5.12.1 高データ速度
高速度で更新されるべきで,短い待ち時間を要求するデータは,可能であれば,ハードウェア・ベース
のメッセージ・フィルタリング使用を許容するのがよい。
5.12.2 スケジューリング要求
要求待ちの情報が,要求送信の前に受信された場合,要求スケジューリングを取り消すべきである。そ
の情報が,要求スケジューリングの50 ms前に受信した場合は,その要求は発令されない。ブロードキャ
ストすることが推奨される場合,パラメータ・グループは要求されるべきではない。推奨ブロードキャス
ト時間が,特別な場合の必要時間を上回るときに,例外が発生する可能性がある。
5.12.3 コントローラ応答時間及びタイムアウト初期設定
応答提供を要求されたとき,全てのコントローラは0.20 s(Tr)以内にそれをしなければならない。応答
を待機する全コントローラは,断念するか再試行する前に,少なくとも1.25 s(T3)待たなければならな
い。これらの時間は,ブリッジ間のバス・アクセス又はメッセージ転送に起因する全ての待ち時間が不要
なタイムアウトの原因とならないことを保証する。必要なときに,違う時間の値が特定のアプリケーショ
ンに使用できる。例えば,20 msの応答時間を高速コントロール・メッセージ用に設定できる。全てのバ
ッファ化されたメッセージの再配列(reordering)が,より早い応答を実現するために必要になることがあ
る。最小応答時間に制限はない。
特定宛先に向けられたマルチ・パケット・メッセージのパケット間の時間は0 msから200 msである。
これは,連続メッセージの発生できることと,連続メッセージが同じ識別子を含めることができることを
意味する。CTSメカニズムは,パケット間間隔の所定時間を確保するために使用できる(フロー制御)。
マルチ・パケット・ブロードキャスト・メッセージのパケット間の必要な時間間隔は,50 msから200 ms
である。50 msの最小時間は,受信コントローラが,CANハードウェアからメッセージを受け取る時間を
保証する。受信コントローラは,250 msのタイムアウト(すなわち,T1)を使用しなければならない。こ
れは,200 msの最大送信間隔より大きいタイムアウトを提供する。
ブリッジ内での最大転送遅延時間は50 msである。ブリッジ総数は10(つまり,トラクタ1台+トレー
ラ5台+重台車4台=10ブリッジ)に等しい。したがって,ネットワーク遅延の合計は,一方向に500 ms
35
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
である。
要求の再試行回数は,二つ(計三つの要求)までで,これはCTSがデータ・パケット(s)の再送を要
求するために使用される場合に適用される。
タイムアウトのマージンは,50 msである。
図B.1及び図B.3は,識別されたタイミングの要件を示す。図B.1で,タイム数はブリッジの最悪数を
想定した10ブリッジで計算されている。発信コントローラ要件が時間的価値(time value)以下であると
指定されるとき,受信コントローラのタイムアウト数値は,時間的価値(time value)として識別される。
注記 発信コントローラは,トランスミッター(送信機)との受信要件があり,受信コントローラは,
トランスミッター(送信機)との受信要件がある。
5.12.4 要求応答
要求されたパラメータ・グループを使用する全てのコントローラ,つまりリクエスターからのグローバ
ル要求のために応答は必要である。確認回答(Acknowledgment)は,グローバル要求には許可されない。
要求(例えば,“アドレス要求”)のためにグローバルDA(255)を使用するコントローラが,データを
要求した場合,コントローラ自体が応答を送信しなければならない。これは,全てのコントローラが反応
することが予想されるので必須である。要求を発令しているコントローラが応答しない場合,他のネット
ワーク・コントローラは,要求された情報について間違った結論を出してしまうことがある。
5.12.5 特定又はグローバル宛先へのPGN転送
ほとんどの場合,グローバル宛先に定期的にブロードキャストされたPGNを送信することが望まれる。
5.12.6 パケット推薦CTS数
通常の作業機稼働時には,CTS当たりに送信できるパケットの最大数を16に設定することを推奨する。
36
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
ISO 11783 PDU処理−代表的受信ルーチン
割込み受信
注記1 メッセージがCAN ICを介したマイクロプロセッサによって受信されると,解析,保存の必
要性及び保存先を判断するために,幾つかのテストが実行される。三つの優先ビットはバス・
アービットレーション(調停)だけに使用される。そのため受信コントローラの必要(使用)
はない。
注記2 指定コントローラが複数の機能を実行する場合,指定コントローラは複数のアドレスをもつ
ことができる。
PDU1 Format (DA = global):
PDU1 Format (DA = specific):
PDU2 Format: PDU2フォーマット
IF PGN = REQUEST PGN AND THE DESTINATION IS SPECIFIC
:特定要求
THEN
IF DA = ASSIGNED ADDRESS (destination)
THEN
SAVE 4 BYTE ID AND 3 DATA BYTES IN REQUEST QUEUE
IF PGN = REQUEST PGN AND THE DESTINATION IS GLOBAL
:グローバル要求
THEN
SAVE 4 BYTE ID AND 3 DATA BYTES IN REQUEST QUEUE
IF PF < 240
THEN
IF DA = GLOBAL
:PDU1フォーマット(DA=グローバル)
THEN
USE JUMP TABLE FOR PGN VALUES OF INTEREST AND
IF SA = ID OF SPECIAL INTEREST
THEN
SAVE 8 BYTES OF DATA IN DEDICATED BUFFER
ELSE
SAVE 12 BYTE MESSAGE (ID AND DATA) IN CIRCULAR QUEUE
ELSE DA = SPECIFIC
:PDU1フォーマット(DA=特定)
USE JUMP TABLE FOR PGN VALUES OF INTEREST AND
IF SA = ID OF SPECIAL INTEREST VALUES
THEN
SAVE 8 BYTES OF DATA IN DEDICATED BUFFER
37
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ELSE
SAVE 12 BYTE MESSAGE (ID AND DATA) IN CIRCULAR QUEUE
IF PF > OR = 240
:PDU2フォーマット
THEN
USE JUMP TABLE FOR PGN VALUES OF INTEREST AND
IF SA = ID OF SPECIAL INTEREST
THEN
SAVE 8 BYTES OF DATA IN DEDICATED BUFFER
ELSE
SAVE 12 BYTE MESSAGE (ID AND DATA) IN CIRCULAR QUEUE
38
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
トランスポート・プロトコル転送シーケンス−
接続モード・データ転送の例
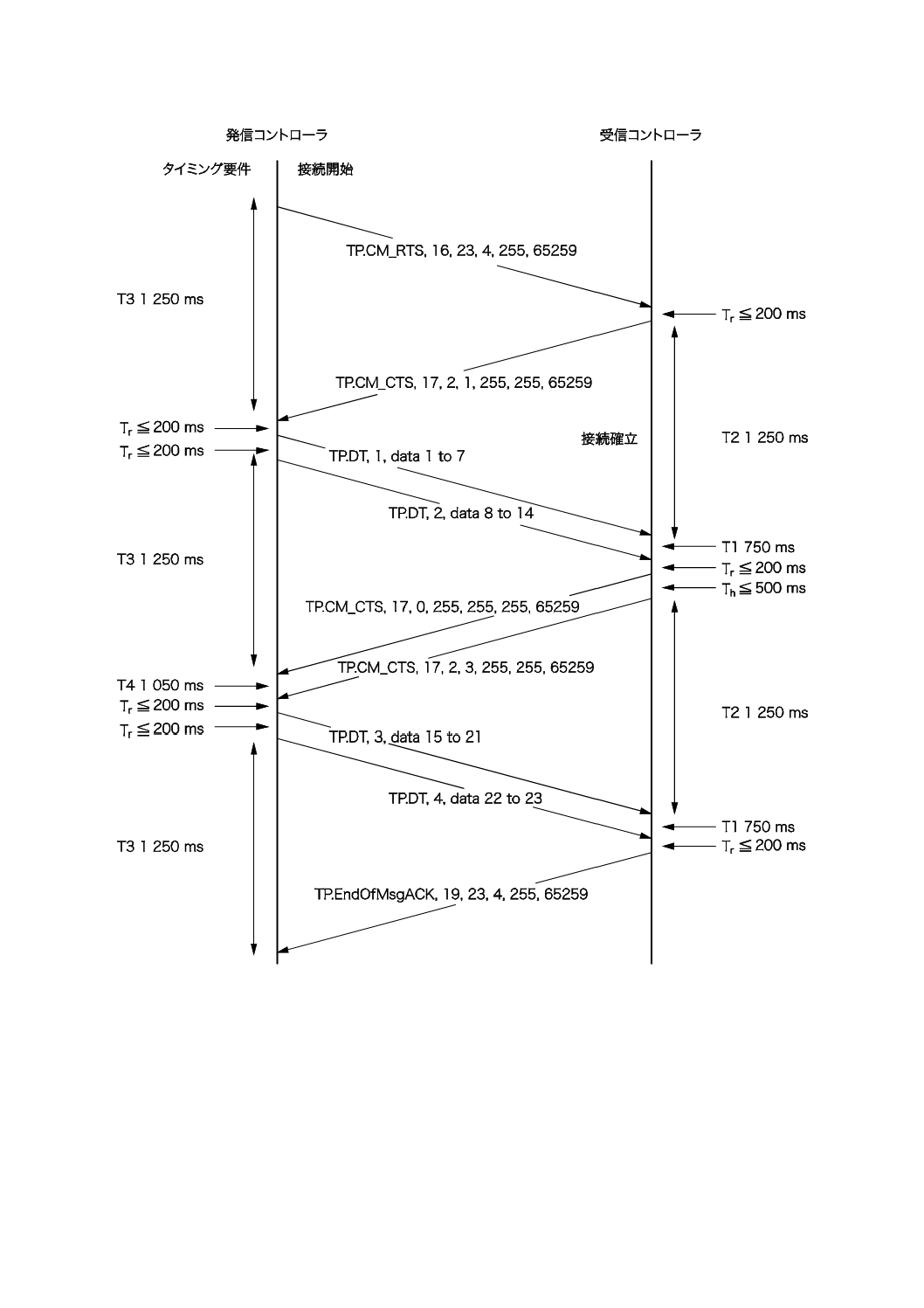
通常の状況下では,データ転送用のフローモデルは図B.1に示すフローに従う。発信コントローラは,
四つのパケットで転送されるパケット・メッセージに23バイトあることを示すTP.CM̲RTS(トランスポ
ート・プロトコル−接続管理,送信要求)を送信する。転送中データのPGNは65 259で,コンポーネン
トの識別である。
受信コントローラは,パケット1から始まり,二つのパケット処理をする用意があるTP.CM̲CTS(トラ
ンスポート・プロトコル−接続管理,送信可)の指示で応答をする。
発信コントローラは,TP.DT(トランスポート・プロトコル−データ転送メッセージ)を使用するネッ
トワーク上で,最初の二つのパケットを渡す。受信コントローラはそのとき,接続オープンを保持したい
が,その時点で全てのパケットを受信できないことを示すTP.CM̲CTS(トランスポート・プロトコル−接
続管理,送信可)を発信する。最大500 ms後,受信コントローラは,接続を保持するために別のTP.CM̲CTS
メッセージを送信する必要がある。この例では,パケット3とともに始まり,2以上のパケットを取れる
ことを示す別のTP.CM̲CTSを送信する。パケット3及び4が転送されると,受信コントローラは,予期
される全てのパケットが送信され,接続が今は閉じているとの判断を示すTP.EndOfMsgACK(トランスポ
ート・プロトコル−メッセージ終了確認)メッセージを送信する。パケット4は,バイト22及び23の有
効データ2バイトが含まれ,このパケット内の残りのデータ文字は,メッセージ長さが8バイトで利用不
可の255(FF16)として送信されることに注意する。
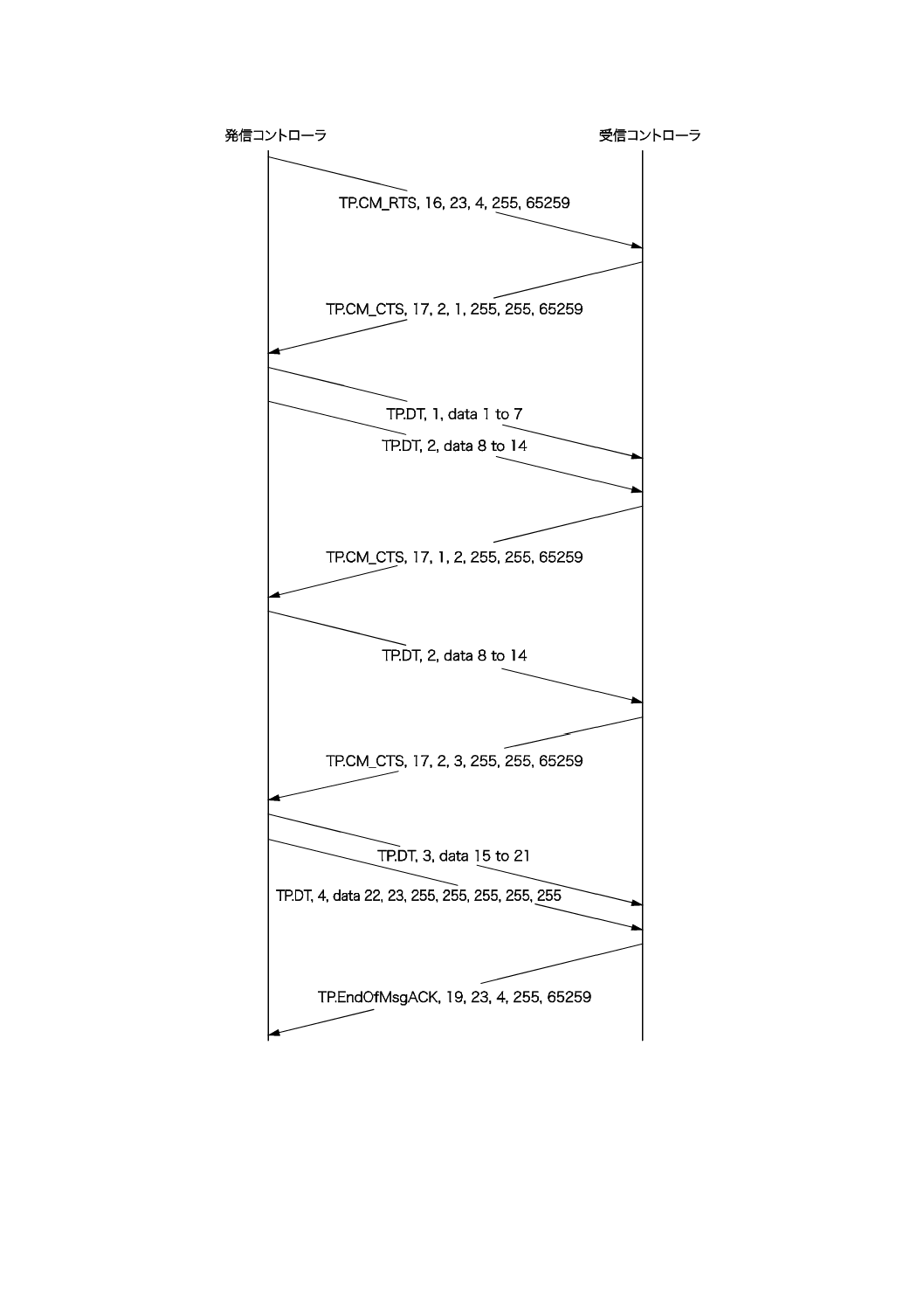
リンク上のエラーが発生した場合のメッセージ転送は,図B.2に示す。TP.CM̲RTS(トランスポート・
プロトコル−接続管理,送信要求)が転送され適切に応答されると,データはデータ転送段階中に失われ
る。
この状況では,送信要求は以前の例と同じように送信される。最初の二つのパケットは転送されるが,
パケット2がチェックサムに失敗するか,又は受信コントローラによってエラーとみなされる。受信コン
トローラは,単一のパケットを必要とし,パケットはパケット2であることを示すTP.CM̲CTSを転送す
る。発信コントローラは,パケット2の転送に従う。次に受信コントローラは,パケット3から始まり,
二つのパケットを必要とすることを示すCTSを渡す。このTP.CM̲CTSは,パケット1及び2が正しく受
信されたことの確認である。最後のパケットが正しく受信されると,受信コントローラは,全体のメッセ
ージが正しく受信されたことを伝えるTP. EndOfMsgACKを渡す。
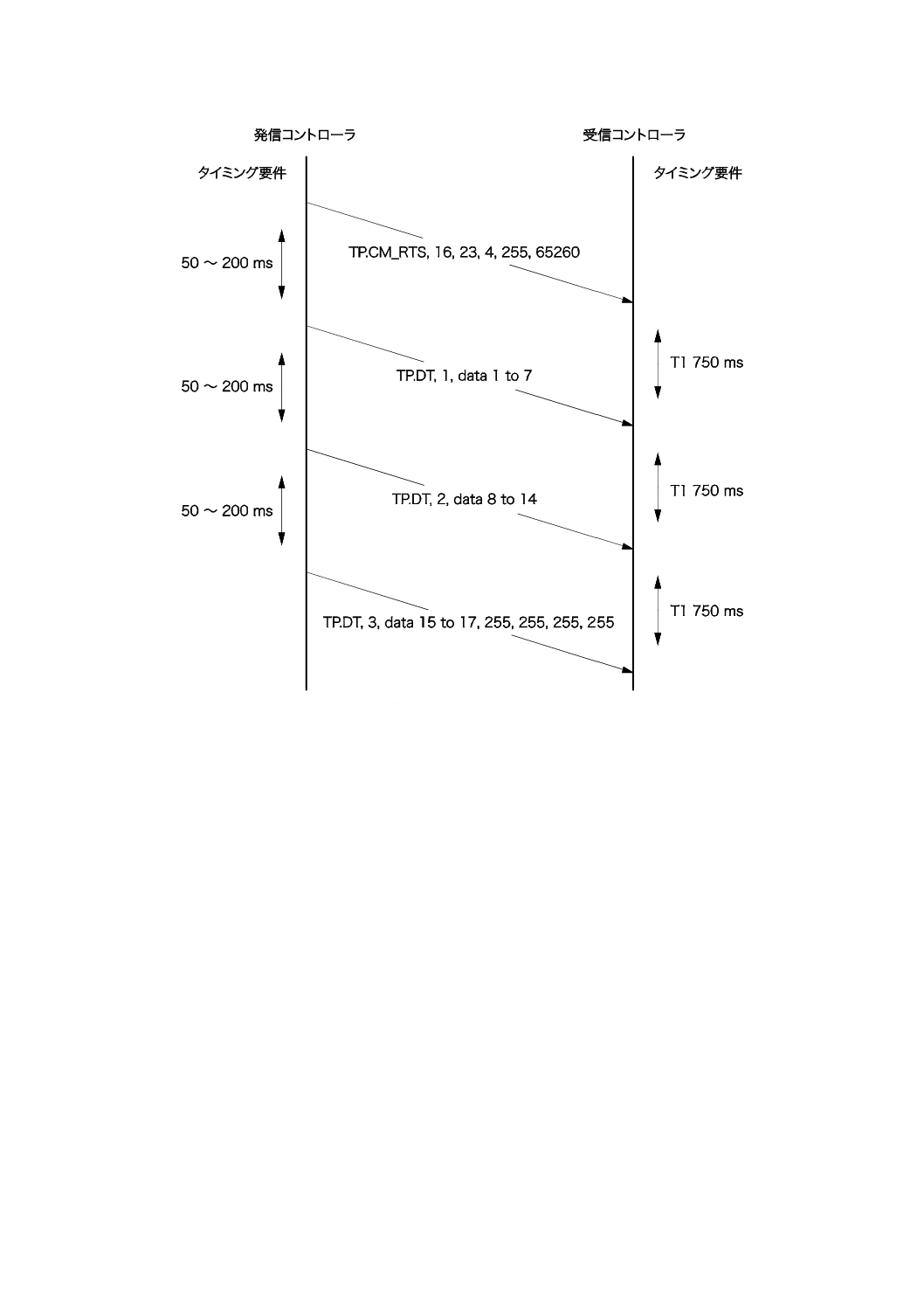
図B.3に示す状況では,コントローラはトランスポート・プロトコルのサービスを利用したマルチ・パ
ケット・メッセージを転送しようとしていることをネットワークに示している。この例では,トラクタの
識別PGN 65 260が,ネットワークへブロードキャストされている。発信コントローラは,データ・パケッ
トに続いてTP.CM̲BAMを最初に送信する。確認回答はいずれの受信コントローラでも実行されない。
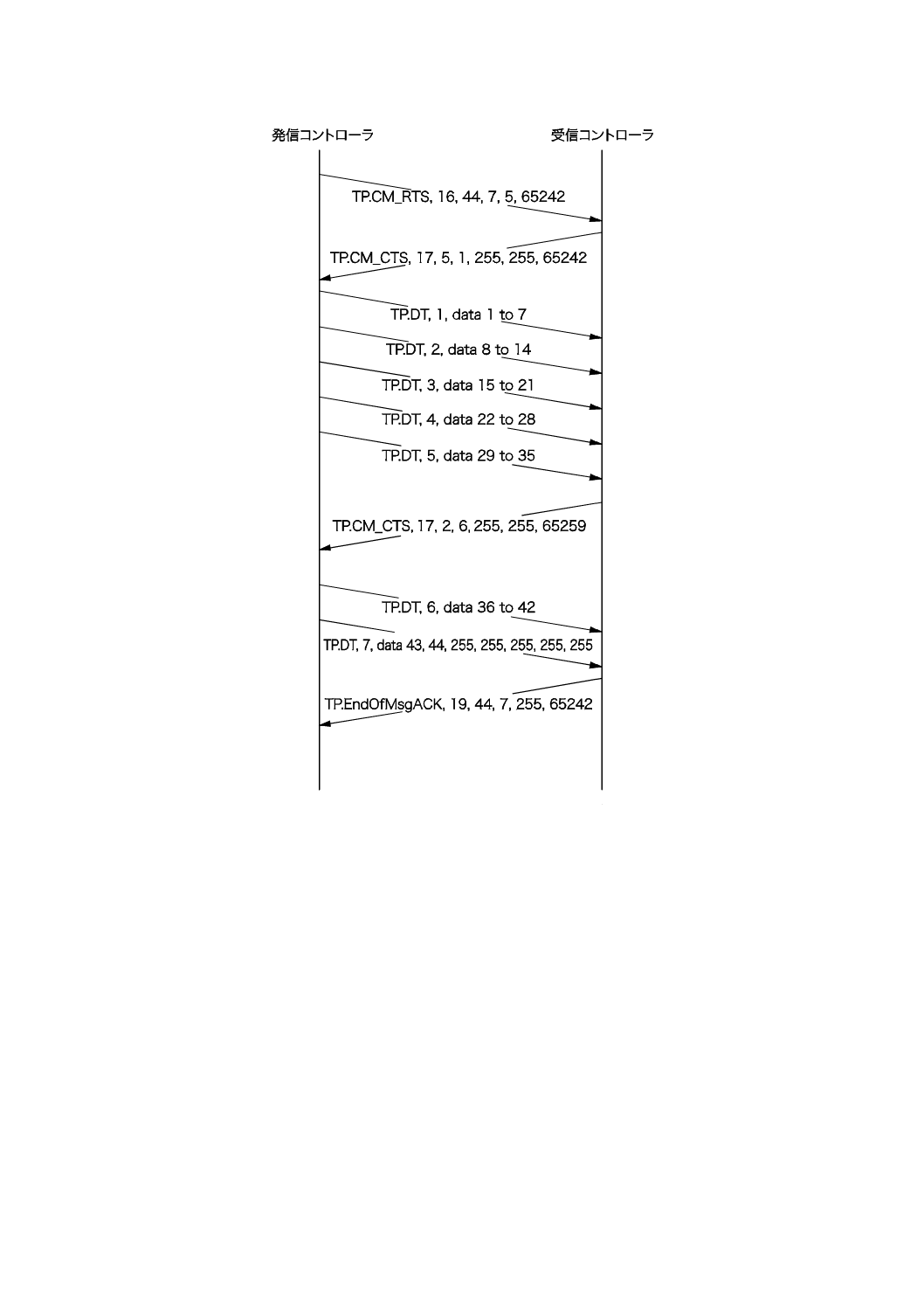
図B.4で,発信コントローラは,受信コントローラが転送されることを要求するパケット数を制限する
ため,パケット・パラメータの最大数を使用する。この例では,両方のコントローラが,パケット・パラ
メータの最大数をサポートしている。
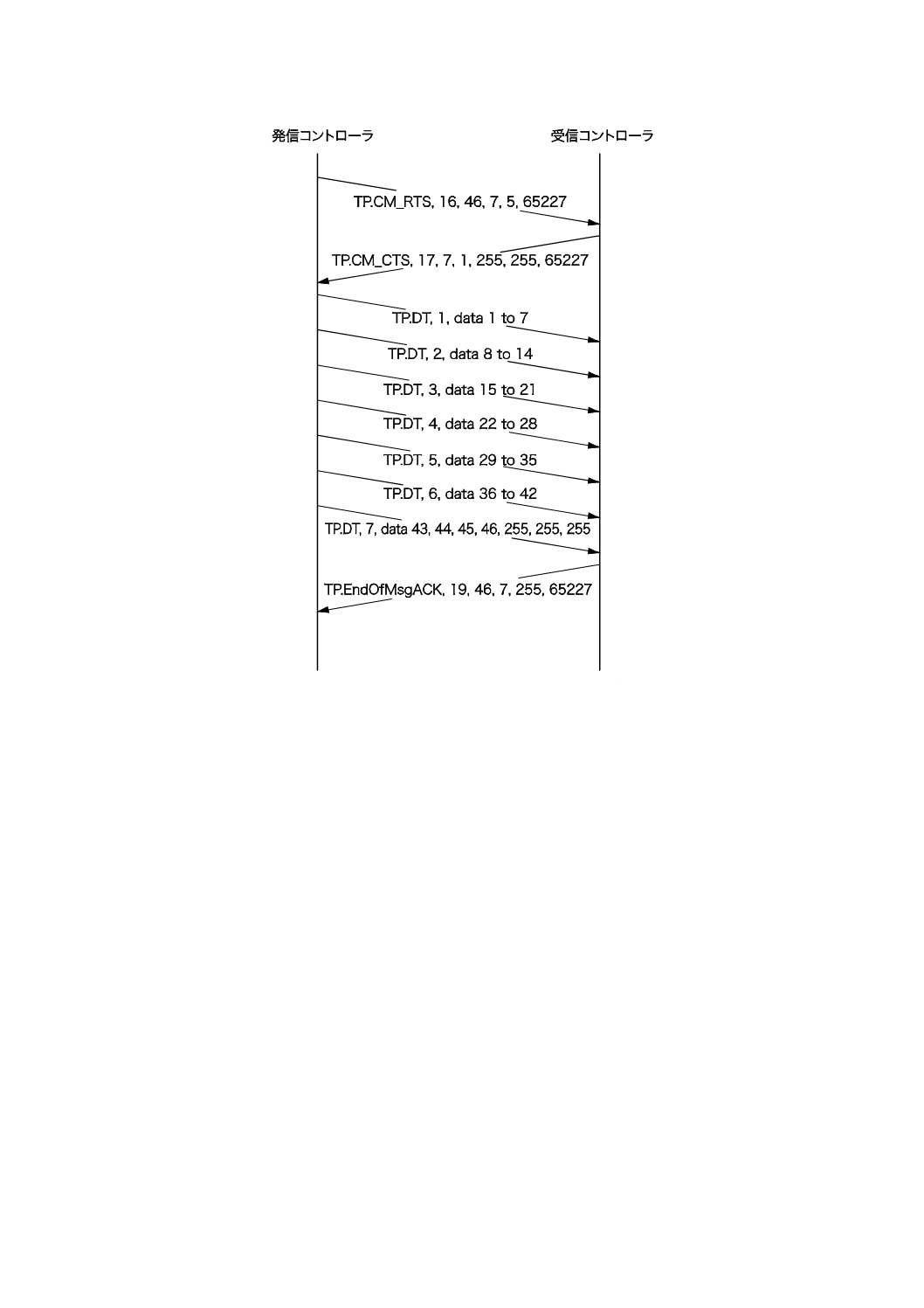
図B.5は,発信コントローラがパケット最大数のRTSパラメータをサポートしているが,受信側コント
39
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ローラがサポートしない状況を示している。この状況では,発信コントローラは,受信コントローラのCTS
制限に従わなければならない。この例で発信コントローラは,一度に5データだけを送信するのが望まし
いが,7データの転送パケットを送信しなければならない。
注意 この例で,受信コントローラが,パケット7のデータ転送後に,パケット1のCTSを送信する
場合,発信コントローラは情報を再計算しなければならない可能性がある。そのために,パケ
ット1の第2番目の送信は,PGNに含まれるデータの種類によって,元のパケット1から別の
データを含むことが可能である。例えば,65 242のようなPGNは静的なデータをもち,パケッ
ト1がその第2番目のデータ転送で異なる原因とはならない。PGN 65 227は動的なデータをも
ち,パケット1が異なる原因になり得る。
40
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.1−エラーなしデータ転送
41
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.2−エラーありデータ転送
42
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.3−ブロードキャスト・データ転送
43
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.4−パケット機能のRTS最大数を活用するデータ転送
44
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.5−パケット機能のRTS最大数を活用できないデータ転送
45
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
通信モードの例
この例は,エンジンが次のアクションを一般的にどのように実行するかを示している。
C.1 ブロードキャスト/応答/確認回答(BROADCAST/RESPONSE/ACK)
エンジン・シリアル番号[コンポーネントIDパラメータ・グループ番号=65 259 (00FEEB16)]を送信。
C.2 DESTINATION SPECIFIC REQUEST(PGN 59904):発信先特定の要求(PGN 59904)
エンジン・シリアル番号の特定要求を受信。送り返されたメッセージは,データを伴ったRESPONSE
か又はNACKである。C.4の例を参照。
C.2A GLOBAL REQUEST(グローバル要求)
エンジン・シリアル番号のためのグローバル要求を受信。送り返されるメッセージは,データをもつ特
定コントローラからのRESPONSE(応答)である。確認回答(Acknowledgement)はグローバルな要求に
は使用されない。
C.3 COMMAND(コマンド)
一部のコマンドでは,タスクが完了したことを示す特定の確認回答を受信することが望ましい場合があ
る。このような場合,メッセージはACK = COMMAND COMPLETE(確認回答=コマンド完了)か,又は
NACK = COMMAND NOT ABLE TO BE COMPLETED(否定回答=コマンド完了不可)のいずれかで返信
することができる。次の例は,ACK又はNACKで確認されたコマンドとして,“CF(コントロール機能)”
を使用している。
C.4 ACK(Acknowledgment 確認回答)
コマンド又は要求が処理されなかったことを示すために,NACKメッセージを送信する(無効要求)。
NACKメッセージは,データ・フィールド内の問題あるパラメータ・グループ番号(PGN)を含む。
COMMAND又はREQUESTのPGNを宛先(コントローラ宛先)で認識されない場合,それはまだNACK
である。PGNが認識されるが,パラメータが利用できない場合は,通常の応答が返信されるが,データ値
は233に設定されている。
46
B 9225-3:2015 (ISO 11783-3:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例
PF
PS(DA)
SA
DATA
1
ブロードキャスト
254
235(GE)
000
236 912
2
特定要求
234
000(DA)
003
PGN 65 259
1
応答
254
235(GE)
000
236 912
or
4
否定回答
232
255(DA)
000
01,255,255,255,255,PGN,65 239
2A
グローバル要求
234
233(DA)
003
PGN 65 259
1
応答
254
233(GE)
000
236 912
3
コマンド
CF
000(DA)
240
1
確認回答
232
255(DA)
000
00,255,255,255,255,PGN for CF
or
4
否定回答
232
232(DA)
000
01,255,255,255,255,PGN for CF
or
その他1)
注1) コマンドは,常にアクションが成功したかどうかを確認するためのメカニズムをもっ
ていなければならない。別の手段が利用可能な場合,ACKメッセージは必要ない。こ
れがバス・トラフィックを最小限にしている。例えば,エンジンへのトルク指令は,
トルクモードビットだけでなく,エンジンから来るトルク値を調べることで確認でき
る。
参考文献
[1] CAN Specification Version 2.0 Part B, Robert Bosch GmbH, September 1991
[2] SAE J1939-21:2004,Recommended practice for serial control and communications vehicle network−Part
21: Data link layer
[3] ISO 15765-3,Road vehicles−Diagnostics on Controller Area Networks (CAN)−Part 3: Implementation of
unified diagnostic services (UDS on CAN)
[4] IEC 60027-2,Letter symbols to be used in electrical technology−Part 2: Telecommunications and
electronics