B 8823-2 : 2001
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この工業規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,経済産業大臣が制定し
た日本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,
ISO 7752-2 : 1985 Lifting appliances−Controls−Layout and characteristics−Part 2:Basic arrangement and
requirement for mobile cranesを基礎として用いた。
JIS B 8823-2には,次に示す附属書がある。
附属書(参考) JISと対応する国際規格との対比表
JIS B 8823-2には,次に示す部編成がある。
JIS B 8823-1 クレーン−操作装置−操作レバー等の配置及び操作方法−第1部:一般
JIS B 8823-3 クレーン−操作装置−操作レバー等の配置及び操作方法−第3部:タワークレーン
JIS B 8823-4 クレーン−操作装置−操作レバー等の配置及び操作方法−第4部:ジブクレーン
JIS B 8823-5 クレーン−操作装置−操作レバー等の配置及び操作方法−第5部:天井走行クレーン及
び橋形クレーン
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8823-2 : 2001
クレーン−操作装置−
操作レバー等の配置及び操作方法−
第2部:移動式クレーン
Cranes−Controls−Layout and characteristics−
Part 2:Mobile cranes
序文 この規格は,1985年に第1版として発行されたISO 7752-2, lifting appliances−Controls−Layout and
characteristics−Part 2:Basic arrangement and requirement for mobile cranesを元に,対応する部分については
対応国際規格を翻訳し,技術的内容及び規格票の様式を変更することなく作成した日本工業規格であるが,
対応国際規格には規定されていない規定項目を日本工業規格として追加している。
なお,この規格で点線の下線を施してある箇所は,原国際規格にはない事項である。
この規格の制定の目的は,移動式クレーンの運転者が,異なったモデルのクレーンを運転する場合,運転
者の混乱又は緊急時の誤操作を少なくするため,クレーン作業中に使用される基本的な操作レバーに関す
る配列及び操作方法について定めることにある。
1. 適用範囲 この規格は,JIS D 6301で規定するすべての移動式クレーン(積載形トラッククレーンを
除く。)に適用する。この規格は,荷の巻上げ巻下げ,ジブの起伏,ジブの伸縮及び旋回についての基本操
作装置の配列,操作方法及び基本的な要求事項について規定する。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 7752-2 : 1985, Lifting appliances−Controls−Layout and characteristics−Part 2:Basic
arrangement and requirements for mobile cranes (MOD)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格のうちで,発行年を付記してあるものは,記載の年の版だけがこの規格の規定を構
成するものであって,その後の改正版・追補には適用しない。発効年を付記していない引用規格は,その
最新版(追補を含む)を適用する。
JIS B 0146-1 クレーン用語−第1部:一般
備考 ISO 4306-1 : 1990, Cranes−Vocabulary−Part 1:Generalからの引用事項は,この規格の該当事
項と同等である。
JIS B 0146-2 クレーン用語−第2部:移動式クレーン
2
B 8823-2 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 ISO 4306-2 : 1994, Cranes−Vocabulary−Part 2:Mobile cranesからの引用事項は,この規格の
該当事項と同等である。
JIS B 8823-1 クレーン−操作装置−操作レバー等の配置及び操作方法−第1部:一般
備考 ISO 7752-1, Lifting appliances−Controls−Layout and characteristics−Part 1:General principles
の一部がこの規格に対応する。
JIS D 6301 自走クレーンの構造性能基準
3. 定義 この規格で用いる主な用語の定義は,JIS B 0146-1,JIS B 0146-2によるほか,次による。
a) ジブが伸縮しない移動式クレーン 原動機を内蔵し,かつ,不特定の場所に移動させることができる
クレーンで,主ジブの長さが変わることのないもの,又は,継ぎジブによって主ジブの長さを変える
方式のもの。
b) ジブが伸縮する移動式クレーン 原動機を内蔵し,かつ,不特定の場所に移動させることができるク
レーンで,油圧シリンダー等によって主ジブの長さを伸縮させる方式のもの。
c) 基本操作装置 移動式クレーンの操作装置のうち,荷の巻上げ及び巻下げ,ジブの起伏,ジブの伸縮
及び旋回の4種類の基本的操作を行う装置。
d) 前後方向操作レバー 1本の操作レバーを前後に操作して1種類の操作を行うレバー。
e) クロスシフト操作レバー 1本の操作レバーを十字方向に操作して2種類の操作を行うレバー。
4. 前後方向操作レバーの配置 前後方向操作レバーをもつ移動式クレーンの基本操作装置の配列及び操
作方向は,次による。
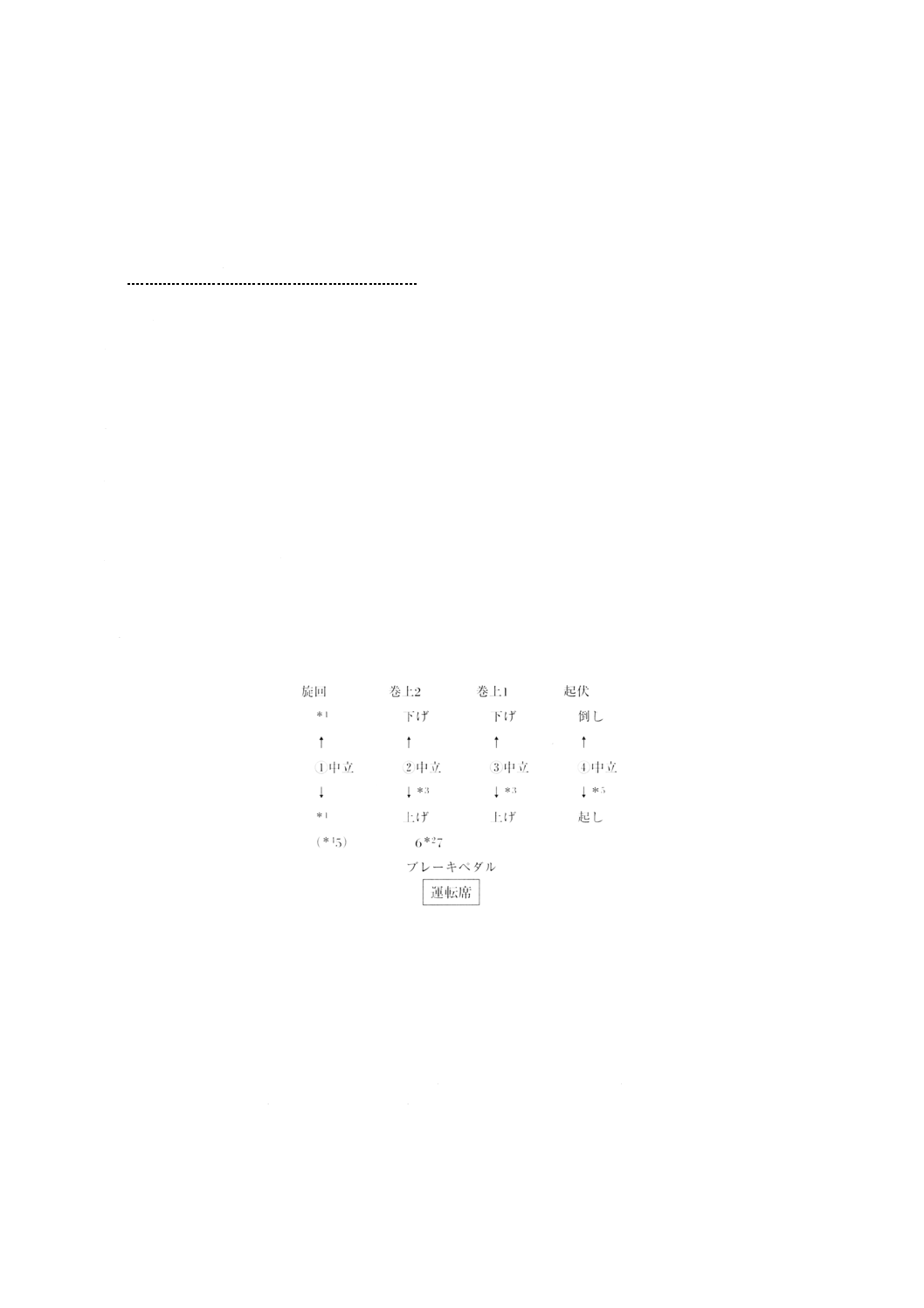
a) ジブが伸縮しない移動式クレーンの場合 ジブが伸縮しない移動式クレーンの場合は,図1による。
図1 ジブが伸縮しない移動式クレーンの場合
*1: 旋回操作は,運転席が機体の左側又は中央にある場合には,レバーを押すと右旋回,手前に引く
と左旋回となるように,また,運転席が機体の右側にある場合には,逆になるようにすること。
*2: ブレーキペダル(6及び7)は,踏むとブレーキが掛かり,荷を保持するか,又は荷の下降を制御
する。また,放すと元の状態に復帰し,ブレーキ力が開放される。
*3: 中立位置では,自動ブレーキを装備している移動式クレーンで,自動ブレーキモードに設定され
ている場合には,荷をその場に保持する。
*4: ペダル5は,巻上1,巻上2,起伏等のいずれかの操作を付加的に行う装置として設けてもよい。
この場合,巻上げについては,つま先を踏むと下げ,かかと(踵)を踏むと上げ,起伏について
は,つま先を踏むと倒し,かかとを踏むと起しとする。
*5: 中立位置では,ジブの角度をその状態に保持する機構でなければならない。
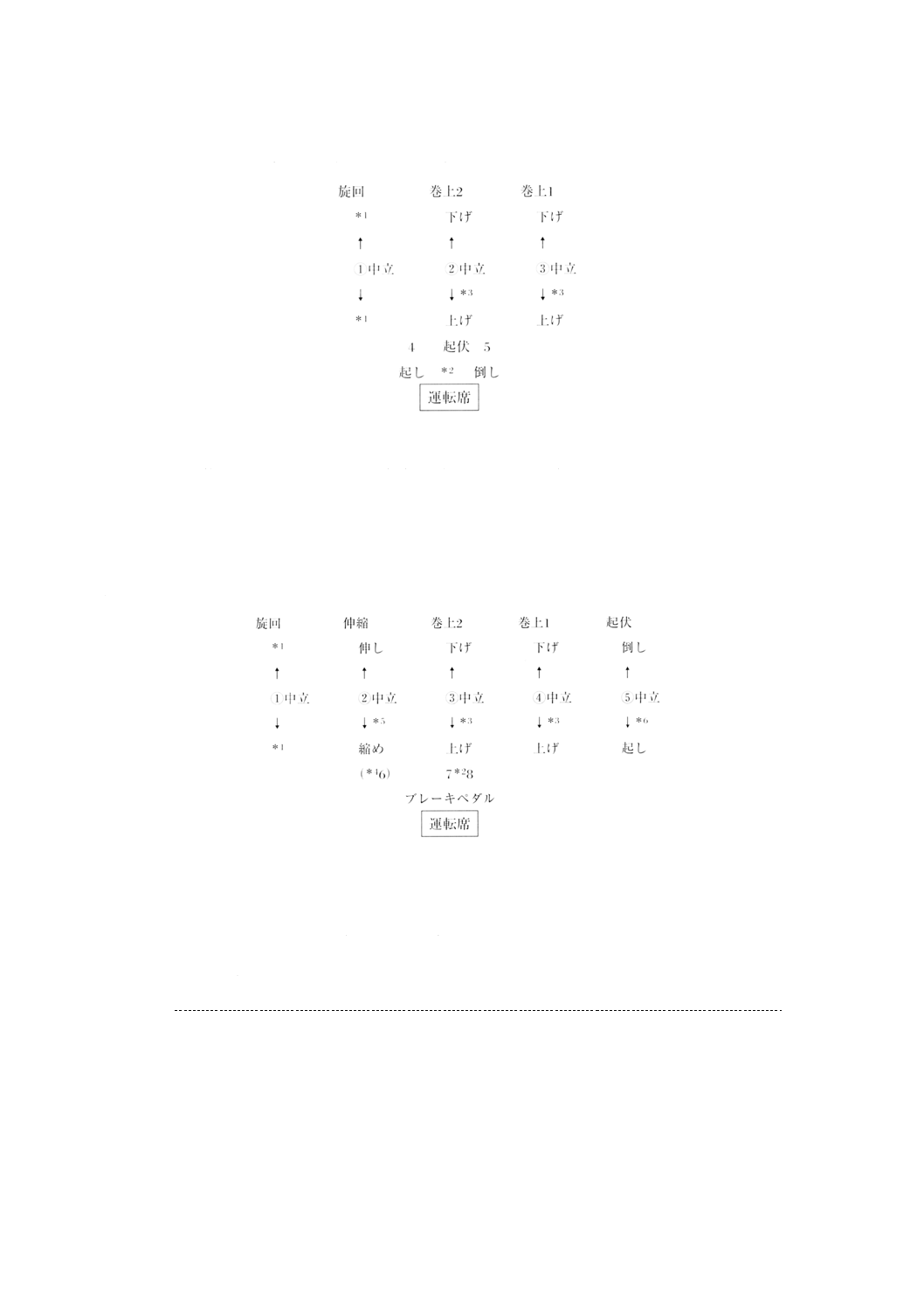
1) ジブ起伏操作をペダル操作で行う場合 ジブ起伏操作をペダル操作で行う場合の操作方法は,図2
3
B 8823-2 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
による。
なお,この操作方法は,やむを得ない場合だけとする。
図2 ジブ起伏操作をペダル操作で行う場合
*1: 旋回操作は,運転席が機体の左側又は中央にある場合には,レバーを押すと右旋回,手前に引く
と左旋回となるように,また,運転席が機体の右側にある場合には,逆になるようにすること。
*2: 4及び5は,いずれも踏むと起伏機構が作動し,放すと元の位置に復帰し,ジブの角度をその状態
に保持する。
*3: 巻上1及び巻上2は,中立位置で常に自動ブレーキが作動する機構でなければならない。
備考 起伏用ペダルは,1ペダル方式(つま先を踏むとジブの倒し,かかとを踏むと起こし,中立位置で
はジブの角度をその状態に保持する。)でもよい。
b) ジブが伸縮する移動式クレーンの場合 ジブが伸縮する移動式クレーンの場合は,図3による。
図3 ジブが伸縮する移動式クレーンの場合
*1: 旋回操作は,運転席が機体の左側又は中央にある場合には,レバーを押すと右旋回,手前に引く
と左旋回となるように,また,運転席が機体の右側にある場合には,逆になるようにすること。
*2: ブレーキペダル(7及び8)は,踏むとブレーキが掛かり,荷を保持するか,又は荷の下降を制御
する。また,放すと元の状態に復帰し,ブレーキ力が開放される。
*3: 中立位置では,自動ブレーキを装備している移動式クレーンで,自動ブレーキモードに設定され
ている場合には,荷をその場に保持する。
*4: ペダル6は,巻上1,巻上2,起伏等のいずれかの操作を付加的に行う装置として設けてもよい。
この場合,巻上げについては,つま先を踏むと下げ,かかとを踏むと上げ,起伏については,つ
ま先を踏むと倒し,かかとを踏むと起しとする。また,伸縮レバー②の代わりに用いてもよい。
この場合,つま先を踏むと伸ばし,かかとを踏むと縮め,中立位置ではジブの長さをその状態に
保持する。
*5: 中立位置では,ジブの長さをその状態に保持する機構でなければならない。
*6: 中立位置では,ジブの角度をその状態に保持する機構でなければならない。
備考:
ジブのセクションを独立に伸縮させるための追加のレバーを①と②の間に設けてもよい。
4
B 8823-2 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5. クロスシフト操作レバーの配置 クロスシフト操作レバーをもつ移動式クレーンの基本操作装置の配
列及び操作方向は,次による。
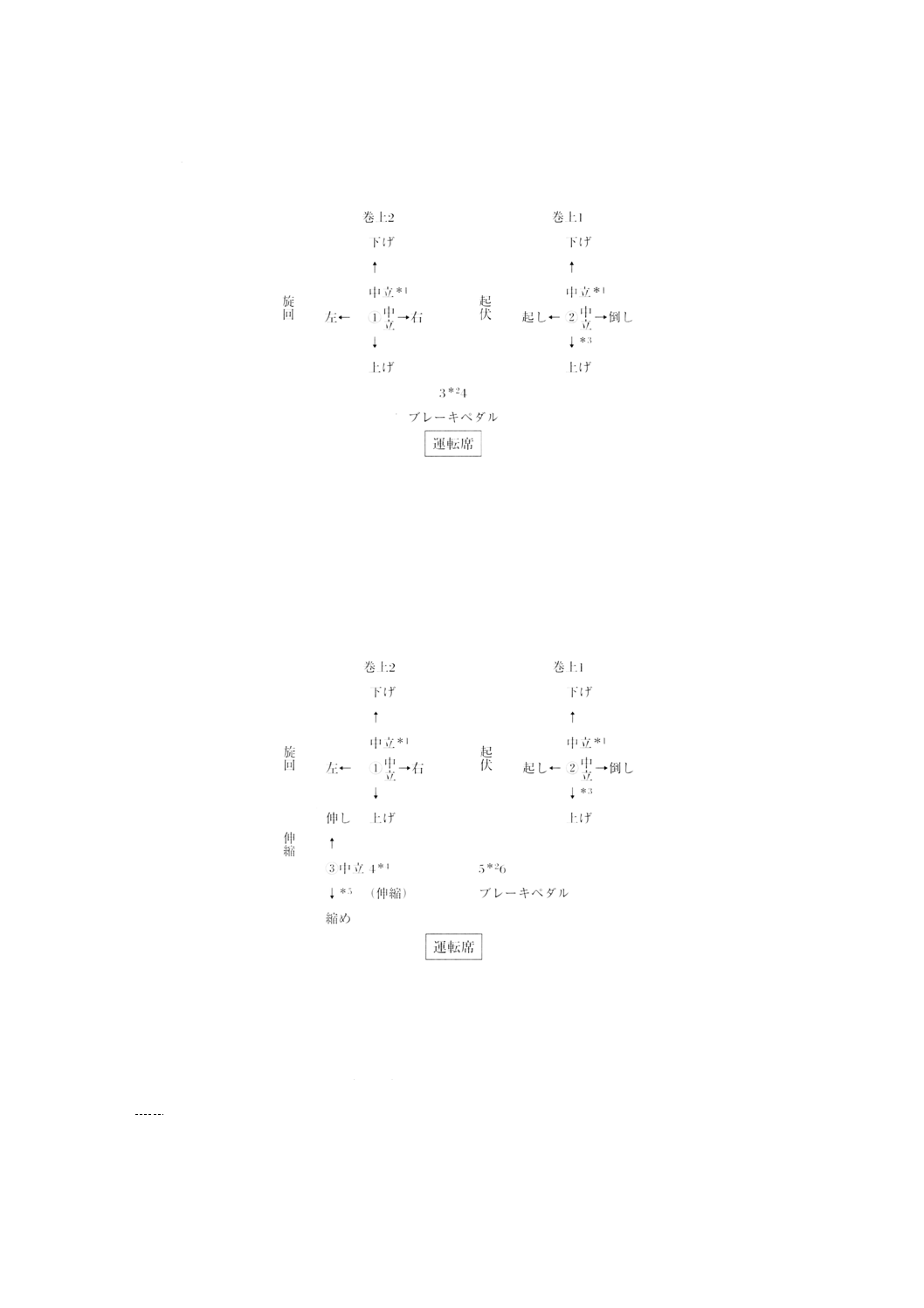
a) ジブが伸縮しない移動式クレーンの場合 ジブが伸縮しない移動式クレーンの場合は,図4による。
図4 ジブが伸縮しない移動式クレーンの場合
*1: 中立位置(巻上)では,自動ブレーキを装備している移動式クレーンで,自動ブレーキモードに
設定されている場合には,荷をその場に保持する。
*2: ブレーキペダル(3及び4)は,踏むとブレーキが掛かり,荷を保持するか,又は荷の下降を制御
する。また,放すと元の状態に復帰し,ブレーキ力が開放される。
*3: 中立位置(起伏)では,ジブの角度をその状態に保持する機構でなければならない。
備考:
巻上1及び巻上2が,中立位置で常に自動ブレーキが作動する機構となっている場合には,3
及び4をジブの起伏に使用してもよい。
b) ジブが伸縮する移動式クレーンの場合 ジブが伸縮する移動式クレーンの場合は,図5による。
図5 ジブが伸縮する移動式クレーンの場合
*1: 中立位置(巻上)では,自動ブレーキを装備している移動式クレーンで,自動ブレーキモードに
設定されている場合には,荷をその場に保持する。
*2: ブレーキペダル(5及び6)は,踏むとブレーキが掛かり,荷を保持するか,又は荷の下降を制御
する。また,放すと元の状態に復帰し,ブレーキ力が開放される。
*3: 中立位置(起伏)では,ジブの角度をその状態に保持する機構でなければならない。
*4: つま先を踏むと伸ばし,かかとを踏むと縮め,中立位置ではジブの長さをその状態に保持する。
*5: 中立位置では,ジブの長さをその状態に保持する機構でなければならない。
備考:
伸縮は,巻上2の代わりに①の前後方向としてもよい。また,③の代わりにペダル4(1ペダ
ル方式)を用いてもよい。
5
B 8823-2 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6. 遠隔操作
a) 操作装置の相対的位置と動きは,5.から6.によらなければならない。
b) クレーンの作動についての信号が故障したときには,停止する機構としなければならない。
c) 装置が故障したときには,緊急停止する機構としなければならない。
7. 一般的要求事項
a) 基本操作装置(操作レバー)は,運転者の操作位置から容易に手又は足がとどくよう配置しなければ
ならない。
b) レバー又はペダルは,特別な保持機構を用いることなしに,中立位置に保持することができる機構と
しなければならない。また,特定の機能のために意図的に抑制しない限り,運転者が手又は足を放し
た場合には,自動的に中立位置に戻る機構としなければならない。
c) レバー又はペダルの操作に要する力は,それぞれ160N及び225N以下としなければならない。
d) 操作長さは,レバーについては中立位置から各方向とも260mm以下,また,ペダルについても260mm
以下としなければならない。
8. 他のクレーン機能の操作装置 この規格で取り扱わない他の機能のための操作装置は,例えば,走行,
かじ取り装置,旋回ブレーキ,補助ジブ起伏,第3ドラムなどである。これらは,運転者の混乱及び物理
的干渉を生じないような配列及び操作方向としなければならない。
6
B
8
8
2
3
-2
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
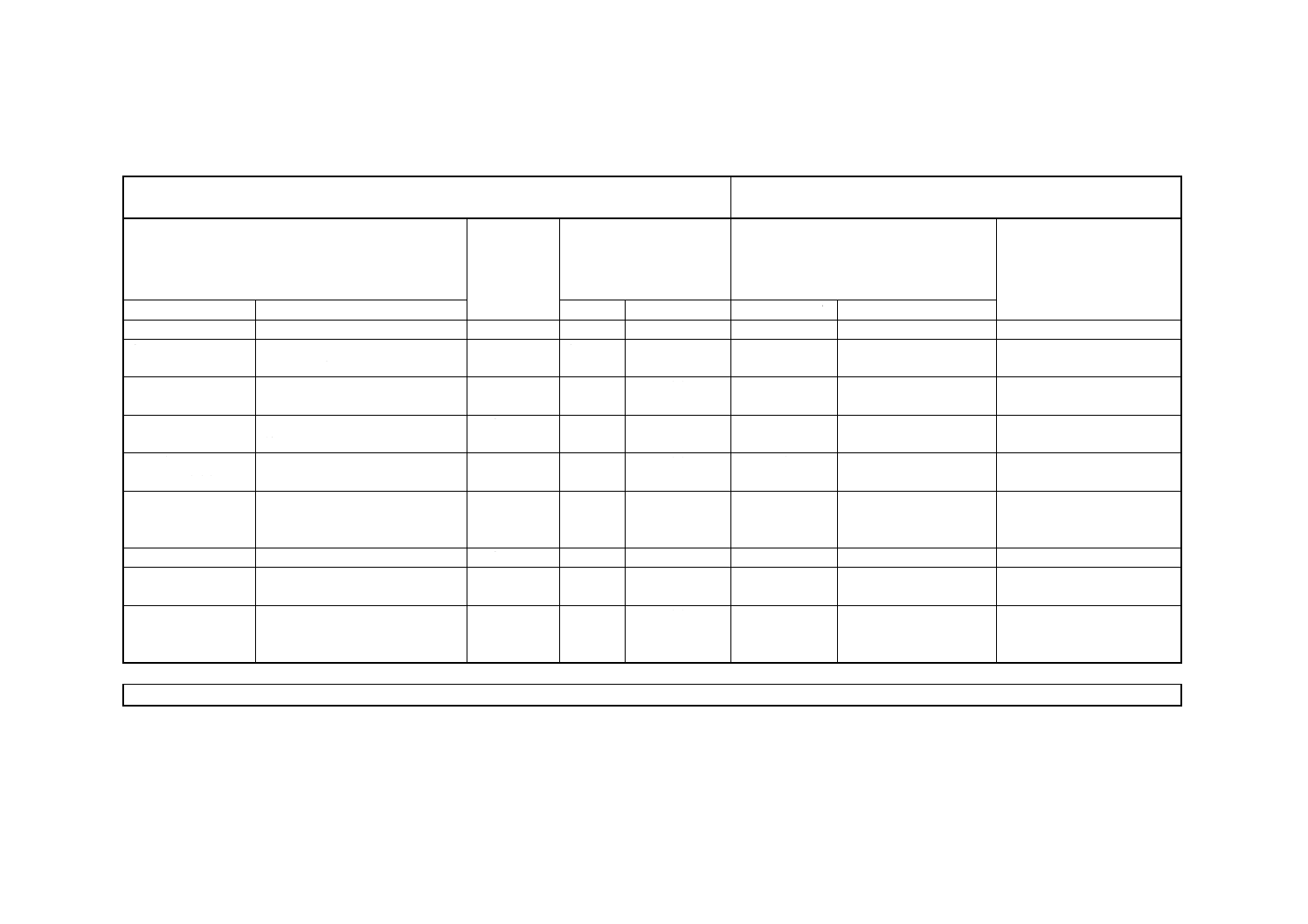
附属書(参考) JISと対応する国際規格との対比表
JIS B 8823-2:クレーン−操作装置−操作レバー等の配置及び操作方法 第2部:移動式クレー
ン
ISO 7752-2 : 1983 クレーン−操作装置−配置及び特性 第2部:移
動式クレーン
(I) JISの規定
(II) 国際規
格番号
(III) 国際規格の規定
(IV) JISと国際規格との技術的差異の項
目ごとの評価及びその内容
表示箇所:
表示方法:
(V) JISと国際規格との技
術的差異の理由及び今
後の対策
項目番号
内容
項目番号
内容
項目ごとの評価
技術的差異の内容
序文
制定の目的について規定
JISに同じ
1. 適用範囲
移動式クレーンの操作装置に
ついて規定
ISO 7752-2
1.
JISに同じ
IDT
−
−
2. 引用規格
JIS B 0146-1
JIS B 0146-2
同上
2.
JISに同じ
IDT
−
−
3. 定義
この規格で使用する用語を定
義
同上
3.
JISに同じ
IDT
−
−
4. 前後操作レバ
ーの配置
基本操作装置の配列及び操作
方向を規定
同上
4.
JISに同じ
MOD/追加
補助ペダルを追加した
国内の実情に合わせるため
5. クロスシフト
操作レバーの
配置
基本操作装置の配列及び操作
方向を規定
同上
5.
JISに同じ
MOD/追加
伸縮ペダルを追加した
国内の実情に合わせるため
6. 遠隔操作
基本的要求を規定
同上
6.
JISに同じ
IDT
−
−
7. 一般的要求事
項
一般的要求事項を規定
同上
7.
JISに同じ
IDT
−
−
8. 他のクレーン
機能の操作装
置
例外的な交差装置に対する注
意事項を規定
8.
JISに同じ
IDT
−
−
JISと国際規格との対応の程度の全体評価:MOD
備考1. 項目ごとの評価欄の記号の意味は,次のとおりである。
−IDT ················ 技術的差異がない。
−MOD/追加 ····· 国際規格にない規定項目又は規定内容を追加している。
2. JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
−MOD ·············· 国際規格を修正している。
7
B 8823-2 : 2001
7
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8823-2(クレーン−操作装置−操作レバー等の配置及び操作方法 第2部:移動式クレーン)
原案作成委員会 構成表(平成11年3月現在)
氏名
所属
(委員会)
石 川 義 雄
埼玉大学名誉教授
(委員)
中 嶋 誠
通商産業省機械情報産業局
穐 山 貞 治
通商産業省工業技術院
尾 添 博
労働省労働基準局
坂 井 浩
運輸省港湾局
中 尾 武 義
住友重機械工業株式会社
山 村 修 蔵
財団法人日本規格協会
松 村 史 朗
社団法人港湾荷役機械化協会
今 中 成 和
新日本製鐵株式会社
尾 崎 康 之
株式会社大林組
細 谷 俊 夫
鹿島建設株式会社
井 元 富美男
川崎製鉄株式会社
村 田 好 正
株式会社日通総合研究所
春 田 靖
三菱重工業株式会社
新 井 克 巳
石川島播磨重工業株式会社
斎 藤 透
日立機電工業株式会社
高 橋 信 人
株式会社日本起重機製作所
神 内 紘 典
株式会社神内電機製作所
後 藤 晋 司
コベルコ建機株式会社
白 井 良 昌
株式会社加藤製作所
鈴 木 政 男
株式会社日本起重機製作所
大 内 征 紀
社団法人日本クレーン協会
(事務局)
森 本 忠 三
社団法人日本クレーン協会
(分科会委員)
(主査)
伊 藤 廣
長岡技術科学大学教授
田 中 利 穂
通商産業省工業技術院
山 村 修 蔵
財団法人日本規格協会
藤 本 秀 樹
株式会社神戸製鋼所
尾 崎 康 之
株式会社大林組
江 口 隆 幸
日立建機株式会社
石 井 東起男
石川島建機株式会社
吉 田 孝 一
住友建機株式会社
白 井 良 昌
株式会社加藤製作所
久 保 公 洋
株式会社タダノ
神 田 英 治
鹿島建設株式会社
前 田 豊
労働省産業安全研究官
大 内 征 紀
社団法人日本クレーン協会
(事務局)
河 島 邦 寿
社団法人日本クレーン協会