B 8461 : 2002
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本ロボ
ット工業会 (JARA) /財団法人日本規格協会 (JSA) から,工業標準原案を具して日本工業規格を改正す
べきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS B 8461 : 1997は改正され,この規格に置き換えられる。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8461 : 2002
電子部品実装ロボット−インタフェース
PCB (printed circuit board) assembly robots−Interfaces
1. 適用範囲 この規格は,プリント配線板製造ラインを構成する際に,電子部品実装ロボット(以下,
ロボットという。)及び,その関連装置の機械的及び電気的インタフェース,並びにロボットのユーティリ
ティ接続方法について規定する。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0144 電子部品実装ロボット−用語
JIS B 9960-1 機械類の安全性−機械の電気装置−第1部:一般要求事項
JIS K 6332 空気用ゴムホース(エアーホース)
3. 定義 この規格で用いられる主な用語の定義は,JIS B 0144によるほか,次による。
a) 相手機械 ロボットにプリント配線板を搬入又は搬出する目的で接続する装置。
b) 外部装置 ロボットからデータを受け取ったり,ロボットにデータを与える装置の総称。データ作成
機,コンピュータ,ロボットなどがある。
c) ユーティリティ ロボットが稼働するために必要な動力源。
4. 機械的インタフェース
4.1
一般 ロボットと上流装置及び下流装置間における,基板搬送のための機械的インタフェースは,
4.2〜4.5による。
4.2
寸法によるプリント配線板の分類 寸法によるプリント配線板の分類は,表1による。
表1 寸法によるプリント配線板の分類
単位 mm
プリント配線板の分類
プリント配線板寸法
最小
最大
中形
50×50
330×250
大形
任意
330×250を超え510×460以下
4.3
プリント配線板に要求される条件 プリント配線板に要求される条件は,次による。
a) ロボットが実装できる基板厚さ及び基板反り許容値は,表2に示すとおりとする。
表2 基板厚さ及び基板反り許容値
プリント配線板の分類
中形
大形
基板厚さ
0.5〜2.0mm
1.0〜3.2mm
基板反り許容値
50mm当たり0.2mm以下で上反り,下反り共に1mm以下
2
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) ロボットが実装できる基板質量の最大許容値は,表3に示すとおりとする。
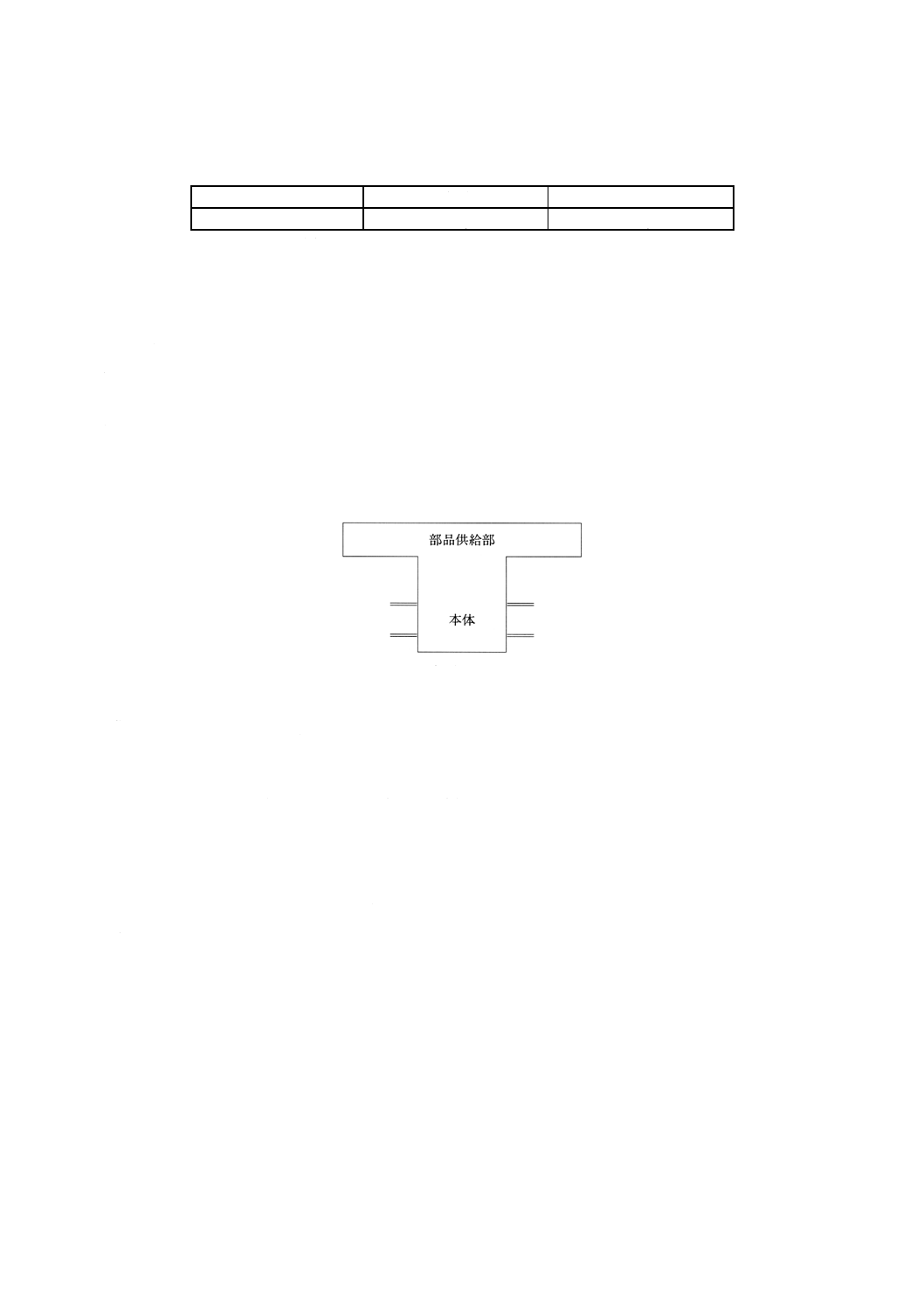
表3 基板質量の最大許容値
プリント配線板区分
中形
大形
基板質量の最大許容値
500g
2kg
4.4
基板搬送条件 基板搬送条件は,次による。
a) 基板搬送方向 基板搬送方向は,左流れ(ロボットを正面から見て右から左へと搬送する。)を推奨す
る。
b) 基板搬送基準面 基板寸法が変わった場合の基板搬送レールの幅方向の寸法変更時の固定側レールは,
手前側を基準とすることを推奨する。
c) 基板搬送高さ 基板搬送高さは,床面から基板搬送コンベヤ又は基板搬送レール上面まで900±15mm
とする。
d) 基板搬送レール突出し量 装置間の接続を容易にするために,プリント配線板の流れの上流側及び下
流側の基板搬送レールがロボット本体から突出することが望ましい。ただし,図1に示すように,部
品供給部などがロボット本体から突き出している場合は,これに沿った構造になっていることが望ま
しい。
図1 基板搬送レール突出し量
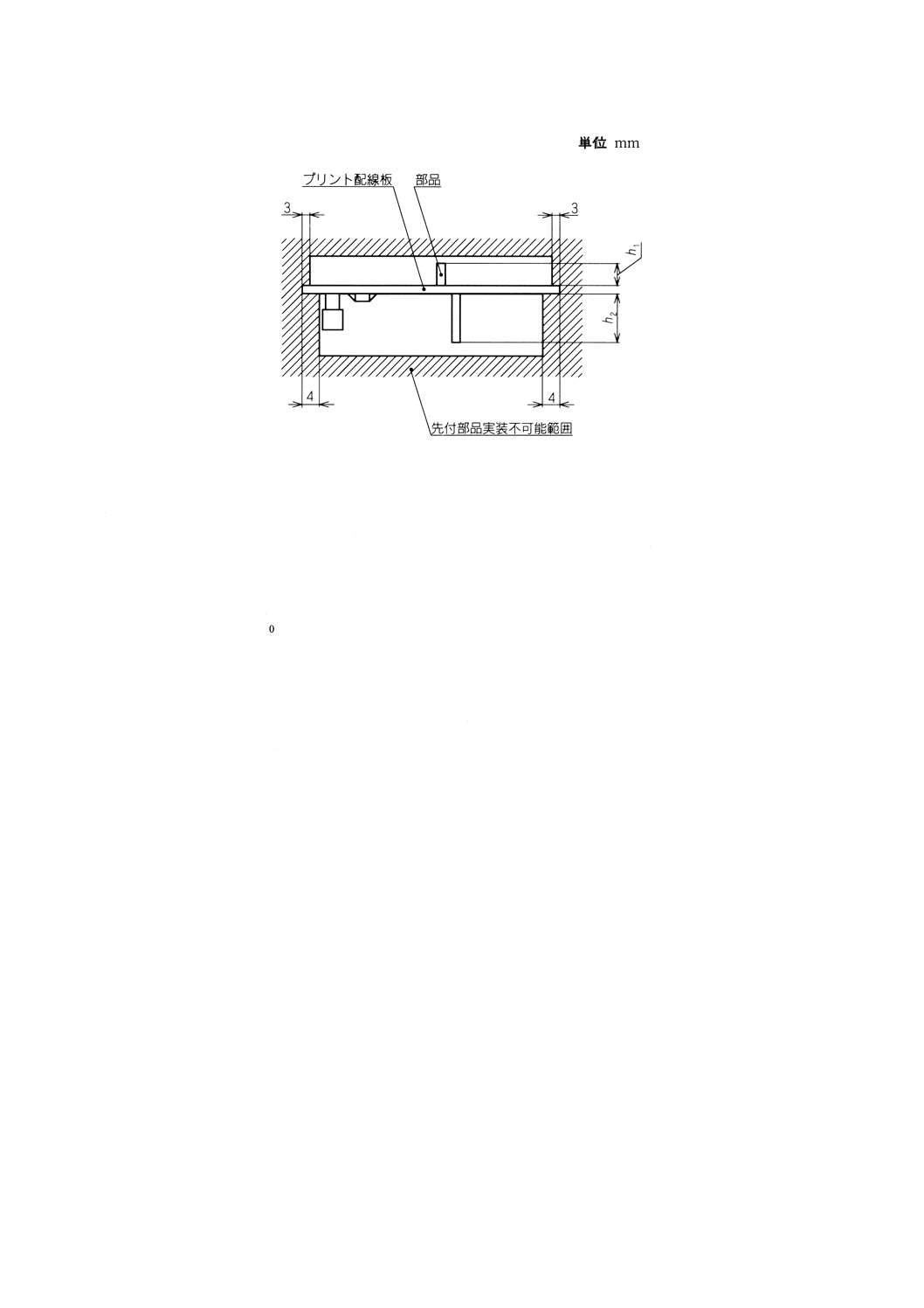
e) 基板搬送デッドスペース
1) プリント配線板上面は,プリント配線板端面から3mm以下とする。
2) プリント配線板下面は,プリント配線板端面から4mm以下とする。
3) プリント配線板から上の制約範囲は,以下による(図2参照)。
h1=6mm以上(表面実装部品装着機の場合)
h1=15mm以上(リード部品装着機の場合)
4) プリント配線板から下の制約範囲は,以下による(図2参照)。
h2=15mm以上(表面実装部品装着機の場合)
h2=6mm以上(リード部品装着機の場合)
5) 基準ピン,バックアップピンによる制約は任意とし,特に定めない。これらの内容を図2に示す。
3
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2 基板搬送デッドスペース
4.5
基板位置決め条件 基板位置決め条件は,次による。
a) 穴基準
1) 基準穴の位置は,プリント配線板端面からX方向,Y方向にそれぞれ5
0
5.0
−
mmとする。
2) 従属穴の位置は,プリント配線板端面からY方向に5
0
5.0
−
mmとする。
なお,X方向については特に定めない。
3) 基準穴直径は,4
0.10
+
mmを推奨する。
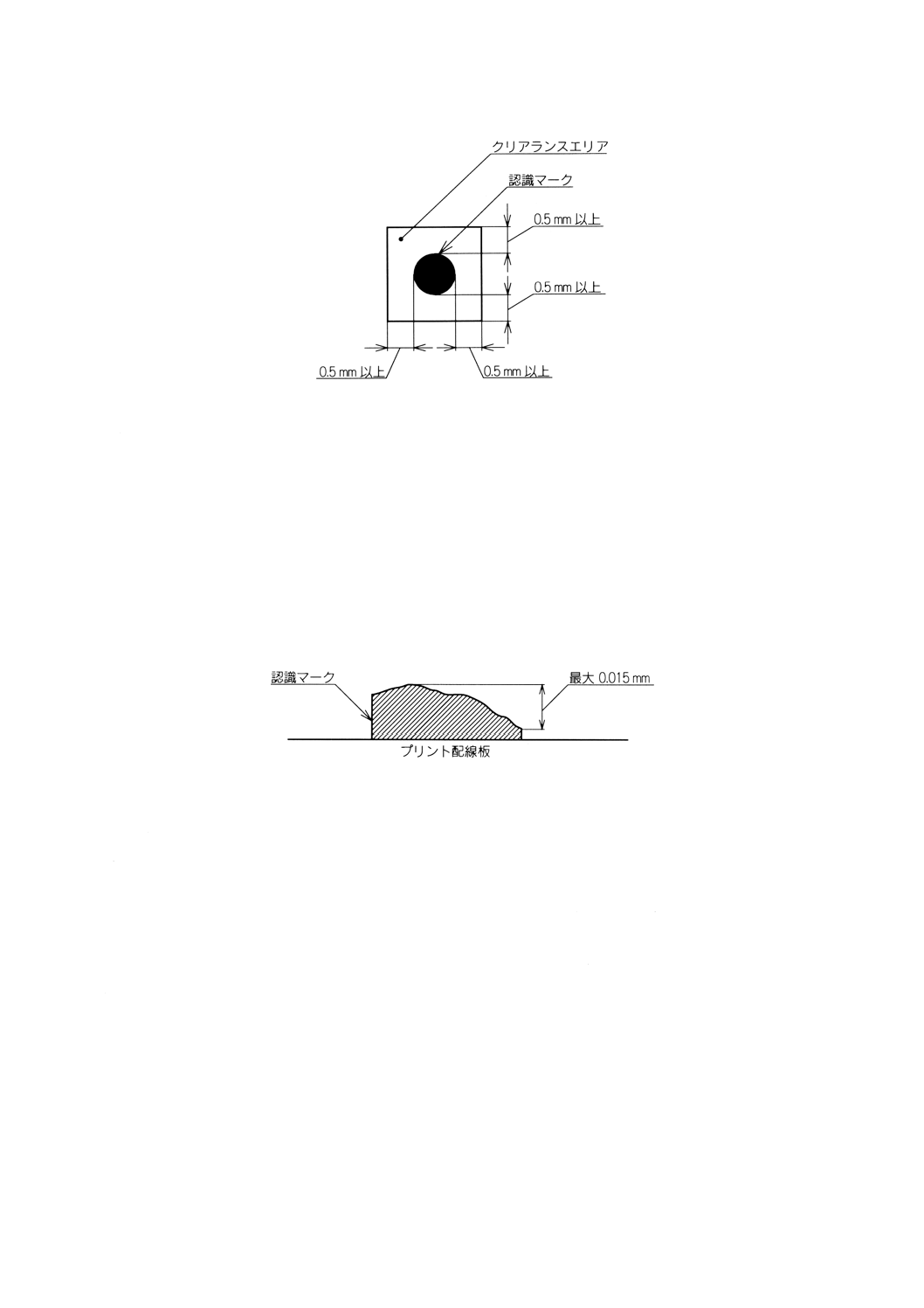
b) 認識マーク基準
1) 形状 認識マークの形状は,むらなく塗りつぶした円形とする(図3参照)。
2) 寸法 認識マークの最小直径は,0.5mmとする。最大直径は,2.0mmとする。
なお,この中で,0.5mm,1.0mm,2.0mmを推奨する。
3) 公差 プリント配線板上の認識マークの寸法公差は,認識マークの直径の±10%以下とする。
4) クリアランス 各々の認識マークの周囲には,導体パターン,ソルダレジスト,マーキングなどの
他のマークのないスペースがなくてはならない。このスペースの寸法は,認識マークの外周から
0.5mm以上の大きさの正方形とする(図3参照)。また,プリント配線板又は多面取りプリント配
線板の板端からの距離は特に規定しない。ただし,認識マークの周囲に必要なクリアランスを確保
しなければならない。
4
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 認識マーク及び周囲のクリアランス
5) 材料 認識マークは,コーティングを施していない銅,又はコーティングを施した銅とする。最適
な性能を得るためには,認識マーク表面と隣接するプリント配線板との明確なコントラストをもつ
ようにする。
備考 認識マークが確実に読み取れるように,酸化又は材質劣化がないよう注意を払わなければなら
ない。
6) コーティング 認識マークの表面は,透明な酸化防止コーティング,ニッケルめっき,すずめっき,
金めっき又はホットエアレベラはんだコーティングとする。
7) 平面度 個々の認識マークの表面の平面度は,0.015mm以内とする。ただし,ホットエアレベラ処
理のはんだたまりは除く(図4参照)。
図4 認識マークの断面及び高低差
5. 電気的インタフェース
5.1
一般 ロボットと上流装置及び下流装置間における,基板搬送のための電気的インタフェースは,
5.2〜5.4による。
5.2
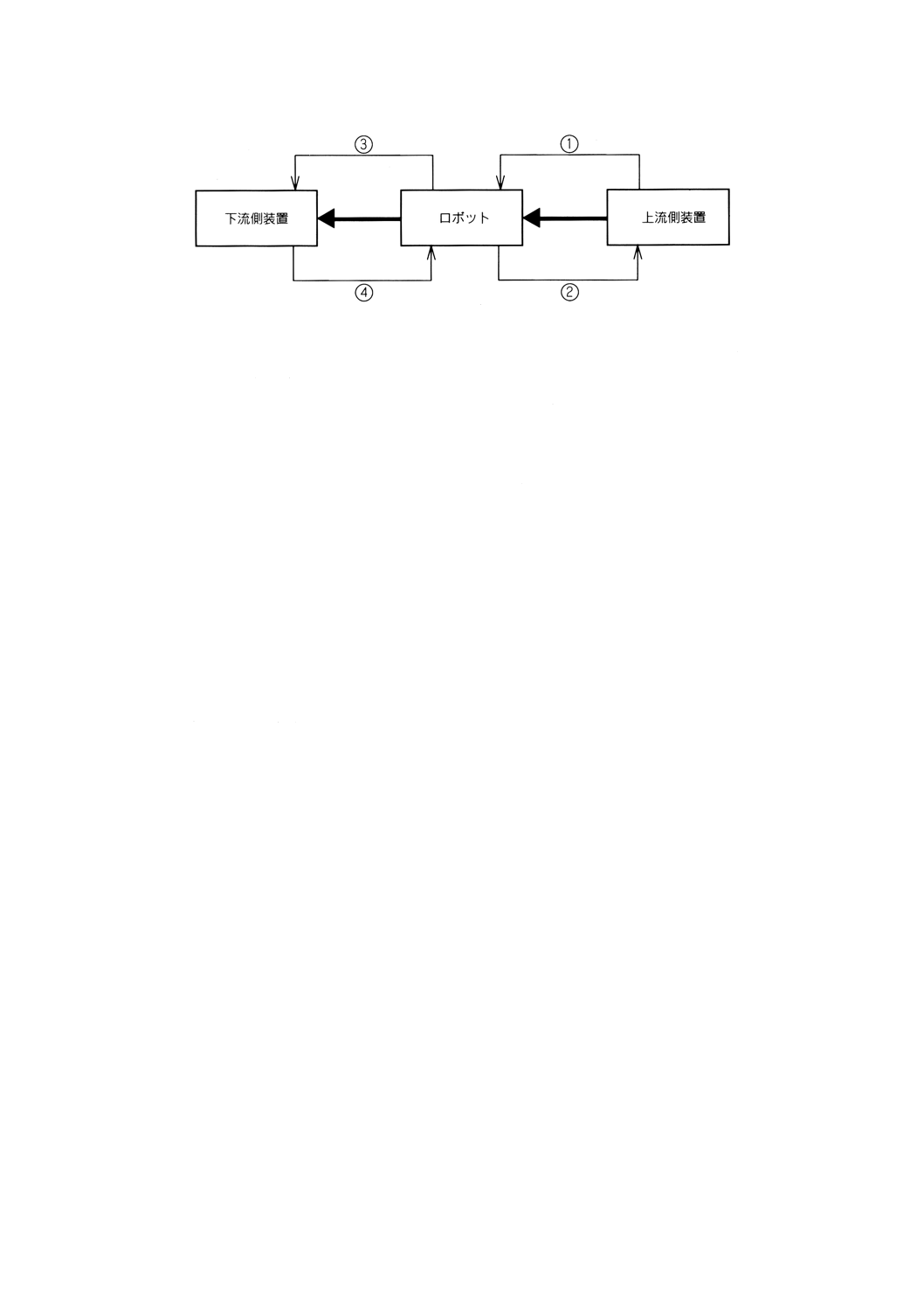
電気信号の種類と意味 ロボットと相手側機械にかかわる電気信号の接続概念図を図5に示す。図5
の中で,ロボットと上流側装置との間①②,及び下流側装置との間③④の電気信号を規定する。
a) 電気信号①は搬出要求入力信号と呼び,上流装置からプリント配線板の搬出要求を受ける信号。
b) 電気信号②は搬出許可出力信号と呼び,上流装置に対しプリント配線板を搬出させる信号。
c) 電気信号③は搬出要求出力信号と呼び,下流装置に対しプリント配線板の搬出を要求する信号。
d) 電気信号④は搬出許可入力信号と呼び,下流装置からプリント配線板の搬出許可を受ける信号。
5
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5 電気信号の接続概念図
5.3
入力及び出力信号標準インタフェース ロボットから上流装置及び下流装置に対し各信号を入力及
び出力するための電気信号条件は,次による。
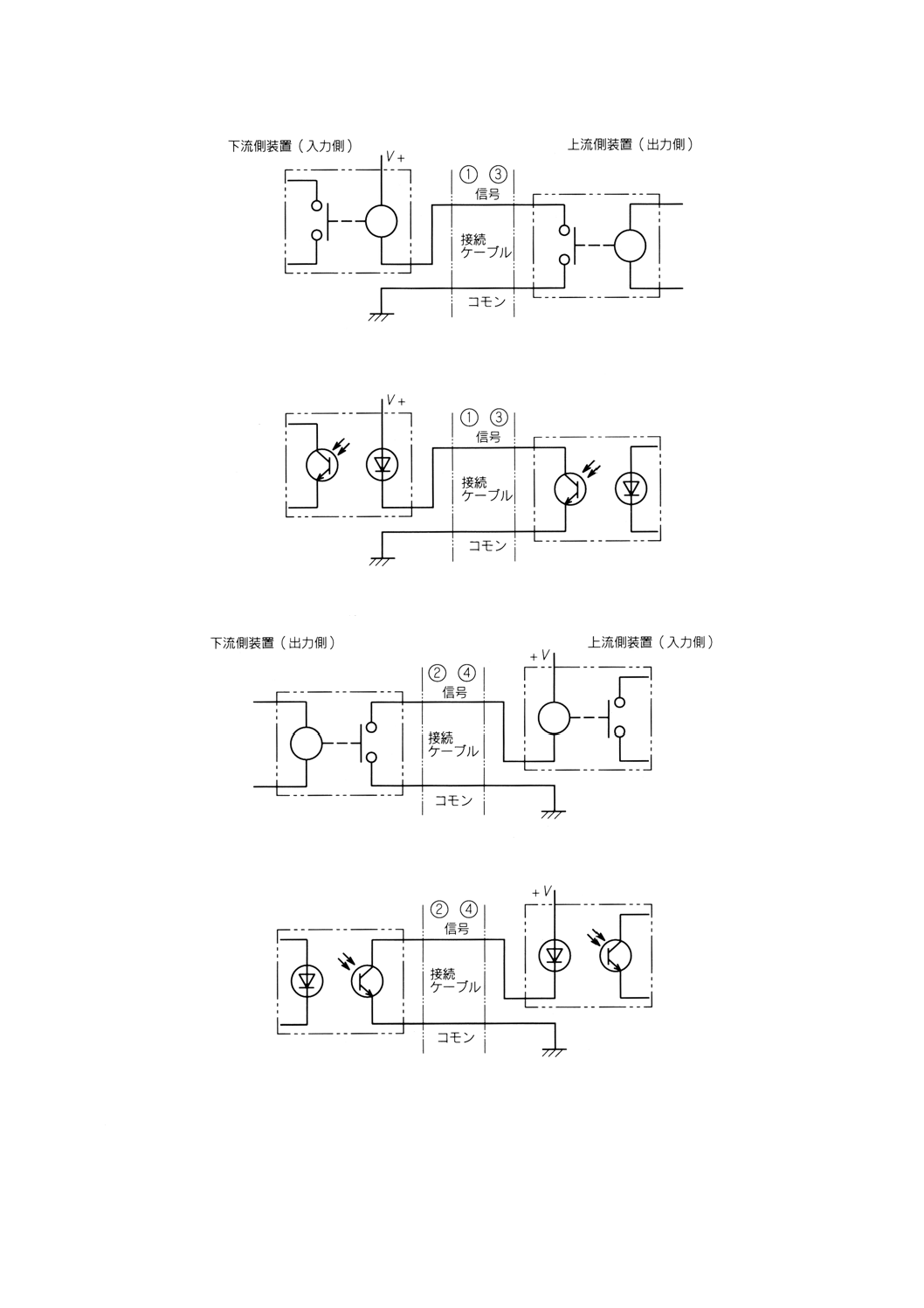
5.3.1
信号インタフェース 各装置共リレー接点又は電気的に絶縁されたオープンコレクタタイプのト
ランジスタとするが,次の電気的仕様を満足する場合はその限りではない。また,これら2種類を組み合
わせてもよい。
なお,図5の電気信号①及び③,電気信号②及び④は同じ条件になるので,電気信号①及び②のインタ
フェースで代表する。
各信号の入力回路,出力回路共に過負荷,過電流・静電気などによって破壊しないよう保護手段を設け
ることが望ましい。
a) 出力側回路の条件
引込電流 100mA以上
漏れ電流 0.5mA以下
最大電圧 80V以上
b) 入力側回路の条件
ON電流 40mA以下
OFF電流 0.5mA以下
電圧 DC24V±10%
c) 搬出要求信号接続 搬出要求信号線は,図6に示す信号とコモンとからなる。
6
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6 搬出要求信号接続図
d) 搬出許可信号線 搬出許可信号線は,図7に示す信号とコモンとからなる。
図7 搬出許可信号接続図
5.3.2
入力及び出力信号タイミング 各信号の条件は,次のとおりとする。
a) 搬出要求信号 上流装置で,プリント配線板搬出準備ができた状態を示す。装置によっては,常時“入”
になっていてもよい。
7
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 搬出許可信号 下流装置が,プリント配線板搬入可状態になったことを示す。プリント配線板搬入を
確認した状態で,“断”とする。
c) 搬出コンベヤ動作 動作開始は,コンベヤを制御している側の装置が搬出要求信号及び搬出許可信号
の状態によって作動させる。動作停止は,コンベヤを制御している側の装置がプリント配線板搬入確
認後一定時間動作させた後に停止させる(図8のTの基準値は,100msとする。)。
d) 搬出プリント配線板確認(搬入側センサ) 下流装置がプリント配線板を取り込める位置に搬送され
たことを検出し,コンベヤ制御部に知らせる。
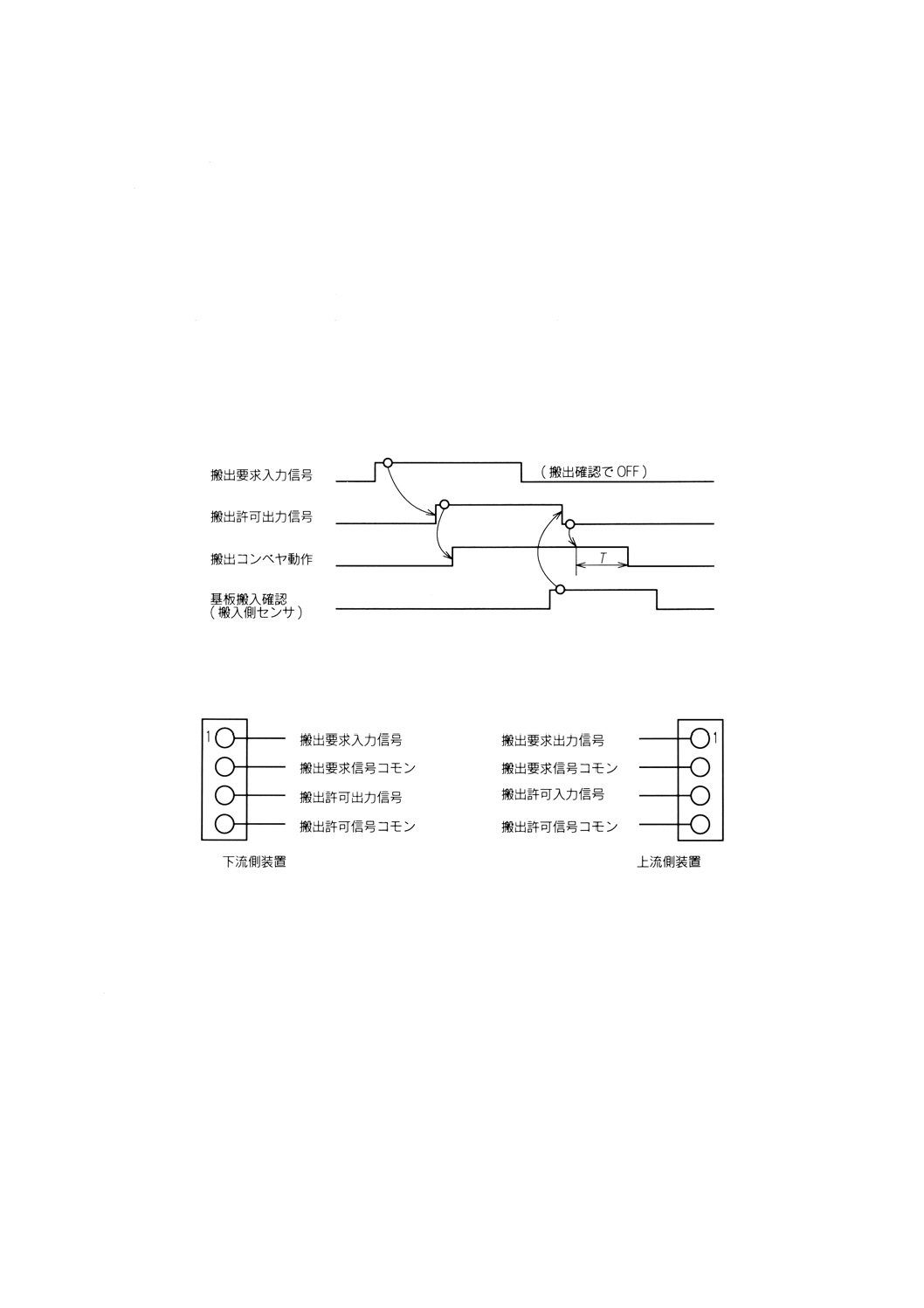
e) 信号発生条件とコンベヤ駆動条件 上流装置は,プリント配線板搬出準備が整った時点で搬出要求信
号を下流装置に出力する。下流装置は,その信号を受け搬出許可信号を上流装置に送る。搬出コンベ
ヤ制御を受け持っている装置は,コンベヤを始動させる。下流装置は,プリント配線板搬入を確認し
たところでその信号を受け,搬出許可信号を停止する。コンベヤ駆動装置は,その信号を受け,一定
時間駆動させた後にコンベヤを停止する。図8に信号タイミングを示す。
図8 信号タイミング
5.3.3
接続ターミナル信号 接続ターミナル信号の種類については特に規定しないが,信号配置について
は図9に示すような概念を適用する。信号配置は,据付説明書又は取扱説明書に明記する。
図9 接続ターミナル概念図
5.4 接続ケーブル仕様 接続ケーブルは,JIS B 9960-1によって要求されている仕様を満足するとともに,
ケーブル長は10m以下とする。
6. ユーティリティの接続
6.1
一般 ロボットが必要とする空気圧,電力などの動力用ユーティリティの接続方法は,6.2及び6.3
による。
6.2
空気圧用配管の接続
6.2.1
使用圧力 ロボットに用いる空気圧の最高使用圧力は,0.5MPa以下とする。
6.2.2
配管材 配管材は,ゴム(JIS K 6332による。),ポリアミド(ナイロン)及びポリウレタンを用い
た管とする。推奨する配管材を,表4に示す。
8
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4 推奨する配管材
材料
ポリウレタン
寸法mm
外径
内径
最小曲げ半径
10
6.5
27
12
8
35
最高使用圧力MPa
0.5
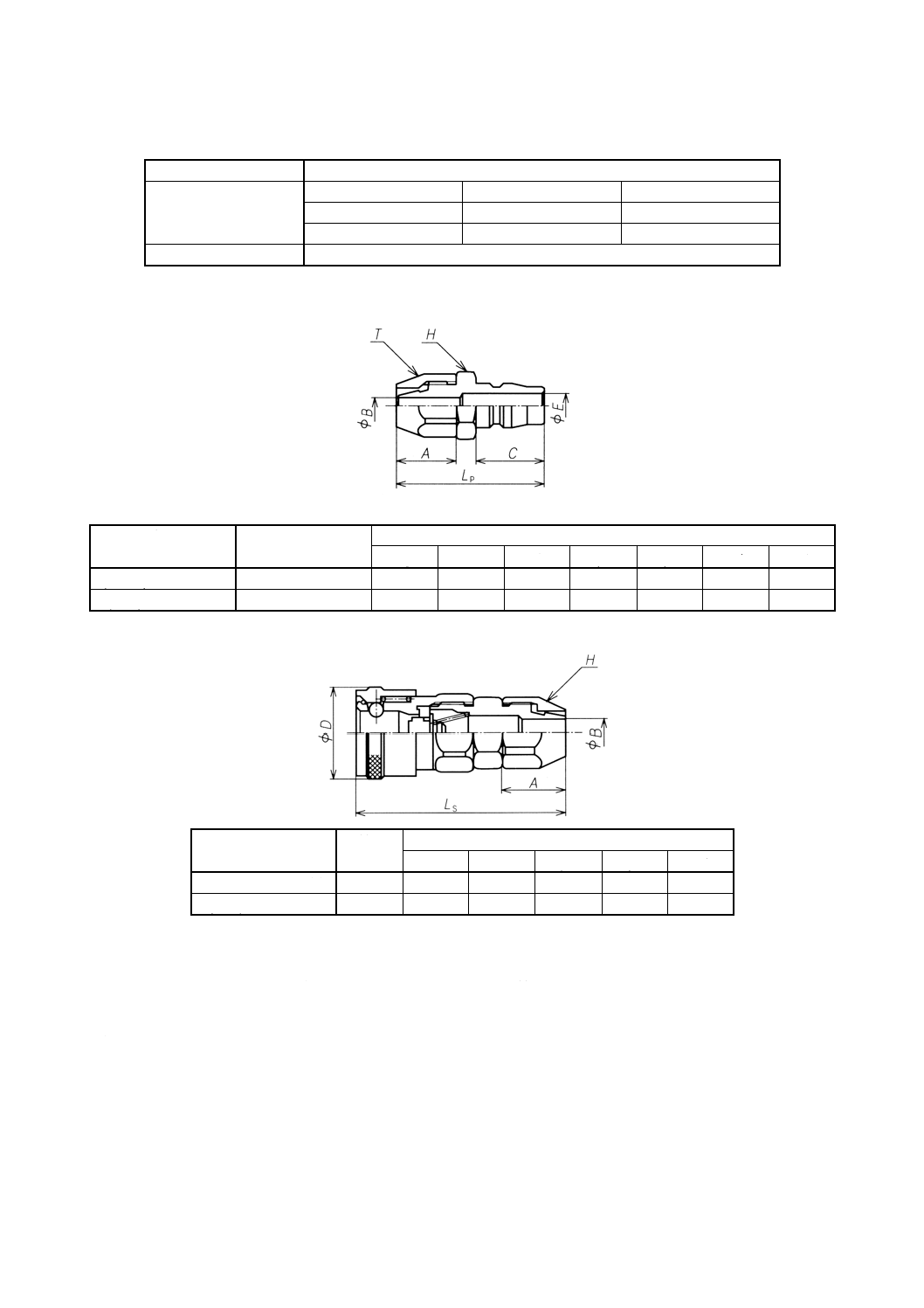
6.2.3
配管継手 配管継手は,意図せずに外れないものであること。プラグの例を図10に,ソケットの
例を図11に示す。
H及びTは,二面幅
適用
質量
g
寸法mm
Lp
C
A
φB
φE
H
T
φ6.5×φ10ホース用
40
43
20
17
5.3
7.5
17
17
φ8×φ12ホース用
50
45
20
19
7.5
7.5
19
19
図10 プラグ例
適用
質量
g
寸法mm
Ls
A
φD
φB
H
φ6.5×φ10ホース用
115
59.5
17
26.5
5.3
17
φ8×φ12ホース用
120
61.5
19
26.5
7.5
19
図11 ソケット例
6.2.4
接続口の表示及び表示方法 空気圧配管の接続口は,他の媒体の接続口と区別するため,接続口が
取り付けられている付近に見やすく十分な大きさで空気圧配管用の接続口であることを表示する。
6.2.5
配管の設置及び据付け
a) 設置 配管の接続位置は,周囲に配管を損傷する突起などがないものとする。設置高さは,床面から
200mm以上とする。
b) 支持 配管は,これを損傷させることなく,確実に支持されなければならない。
6.3
動力用電源の接続 動力用電源には様々な種類があり,ロボットの仕様に応じて異なるので,安全
性が確保され,各種法規に適合していることを確認して,目的に合わせ接続する。
9
B 8461 : 2002
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電子部品実装ロボットのインタフェースJIS改正原案作成専門委員会 構成表
氏名
所属
(委員長)
稲 垣 荘 司
技術士事務所“ロボティ”
(委員)
安 藤 嘉 則
群馬大学
佐々木 伸 彦
経済産業省
八 田 勲
経済産業省
橋 本 進
財団法人日本規格協会
高 島 覺
財団法人機械振興協会
黒 澤 豊 樹
黒澤R&D技術事務所
豊 島 協 一
TDK株式会社
長 田 道 春
株式会社デンソー
寺 内 常 雄
三菱電機株式会社
平 本 外 二
株式会社日立製作所
島 田 隆 治
ノードソン株式会社
古 内 幹 夫
富士機械製造株式会社
中 川 敏 夫
三洋ハイテクノロジー株式会社
中 野 和 幸
松下電器産業株式会社
本 田 義 信
ヤマハ発動機株式会社
里 田 潔
JUKI株式会社
(事務局)
佐 藤 公 治
社団法人日本ロボット工業会
三 浦 敏 道
社団法人日本ロボット工業会