B 8456-1:2017
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 ロボットの種類及び方式 ···································································································· 5
4.1 一般 ···························································································································· 5
4.2 駆動方式 ······················································································································ 5
4.3 動力源の方式 ················································································································ 5
4.4 入力方式 ······················································································································ 5
5 リスクアセスメント ·········································································································· 5
6 構造・形状・寸法・質量 ···································································································· 6
6.1 一般 ···························································································································· 6
6.2 拘束部 ························································································································· 6
6.3 外転運動を許容する構造 ································································································· 6
6.4 質量 ···························································································································· 6
6.5 最大突出半径及び外形寸法 ······························································································ 7
6.6 外部動力伝導線 ············································································································· 7
7 安全要求事項 ··················································································································· 7
7.1 一般 ···························································································································· 7
7.2 危険なアシスト力からの保護 ··························································································· 8
7.3 動力源の喪失又は遮断からの保護······················································································ 8
7.4 アクチュエータへの動力供給の遮断からの保護 ···································································· 9
7.5 バックドライバビリティ ································································································ 10
7.6 環境及び洗浄液に対する耐性 ·························································································· 10
7.7 アラート ····················································································································· 11
7.8 感電からの保護 ············································································································ 12
7.9 入力の遮断に対する保護 ································································································ 12
7.10 情報セキュリティ ········································································································ 12
8 性能要求事項 ·················································································································· 12
8.1 一般 ··························································································································· 12
8.2 最大アシスト力 ············································································································ 12
8.3 アシスト力指標 ············································································································ 13
8.4 腰部圧縮力低減指標 ······································································································ 13
9 ユーザマニュアル及び宣伝用の文書 ···················································································· 13
9.1 一般 ··························································································································· 13
B 8456-1:2017 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
9.2 用途 ··························································································································· 14
9.3 種類及び方式 ··············································································································· 14
9.4 最大アシスト力 ············································································································ 14
9.5 アシスト力指標 ············································································································ 14
9.6 腰部圧縮力低減指標 ······································································································ 14
9.7 定格使用回数又は定格使用時間 ······················································································· 15
9.8 質量 ··························································································································· 15
9.9 偏心距離 ····················································································································· 15
9.10 最大突出半径及び外形寸法 ···························································································· 16
9.11 可動範囲 ···················································································································· 16
9.12 安全関連部のパフォーマンスレベル ················································································ 16
9.13 使用上の情報 ·············································································································· 16
9.14 特別な資格及び法令上の手続 ························································································· 16
10 本体上の表示 ················································································································ 16
附属書A(規定)アシスト力指標及び腰部圧縮力低減指標の計算又は試験に用いる条件 ···················· 17
附属書B(参考)アシスト力指標及び腰部圧縮力低減指標の試験方法の例 ······································ 20
附属書C(規定)アシスト力指標及び腰部圧縮力低減指標の算出方法 ············································ 21
附属書D(参考)ユーザマニュアルの記載例 ············································································ 24
附属書E(参考)最大アシスト力の基準の根拠 ·········································································· 25
附属書F(参考)アシスト力指標及び腰部圧縮力低減指標の時間区間 ············································ 26
B 8456-1:2017
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本
工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格に従うことは,次の者の有する特許権等の使用に該当するおそれがあるので,留意する。
− 氏名:国立大学法人筑波大学,CYBERDYNE株式会社
− 住所:茨城県つくば市天王台一丁目1番1号,茨城県つくば市学園南2丁目2番1号
上記の,特許権等の権利者は,非差別的かつ合理的な条件でいかなる者に対しても当該特許権等の実施
の許諾等をする意思のあることを表明している。ただし,この規格に関連する他の特許権等の権利者に対
しては,同様の条件でその実施が許諾されることを条件としている。
この規格に従うことが,必ずしも,特許権の無償公開を意味するものではないことに注意する必要があ
る。
この規格の一部が,上記に示す以外の特許権等に抵触する可能性がある。経済産業大臣及び日本工業標
準調査会は,このような特許権等に関わる確認について,責任はもたない。
なお,ここで“特許権等”とは,特許権,出願公開後の特許出願又は実用新案権をいう。
JIS B 8456の規格群には,次に示す部編成がある。
JIS B 8456-1 第1部:腰補助用装着型身体アシストロボット
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8456-1:2017
生活支援ロボット−
第1部:腰補助用装着型身体アシストロボット
Personal care robots-Part 1: Physical assistant robots for lumbar support
序文
この規格は,腰補助用装着型身体アシストロボットの安全要求事項,性能要求事項などを規定する日本
工業規格である。
この規格は,安全要求事項として,低出力装着型身体アシストロボットの安全要求事項を規定するJIS B
8446-2を基礎として,さらに,腰補助用装着型身体アシストロボットに特有の安全要求事項を規定してい
る。そのため,この規格に適合するためには,JIS B 8446-2に規定するリスクアセスメントを実施するこ
とが必要である。
1
適用範囲
この規格は,JIS B 8446-2に規定する低出力装着型身体アシストロボット(以下,ロボットという。)の
うち,次の事項を満たすロボットについて規定する。
− ユーザの両大たい(腿)にベルトなどで装着し,さらに,腰部,腹部,胸部,肩部その他にベルトな
どで装着する。
− ユーザの入力に従ったアシスト力をユーザの大たい(腿)及び体幹に作用させる。
− ユーザの股関節及び/又は体幹を伸展する力,及び/又は屈曲を抑制する力をアシストする。
− ユーザの動作(運動補助,姿勢保持及び/又は物体操作)をアシストする。
なお,ロボットには,外部システム又は環境から得られる情報に従って,制御に関する設定を行うロボ
ットを含む。
注記1 低出力とは,ロボットのアシスト力が,ユーザの最大発揮力を超えないことをいう(JIS B
8445の6.1.2.2.1参照)。最大アシスト力の上限に関する要求事項は,7.2に規定している。
注記2 ユーザの股関節及び/又は体幹を伸展する力は,腰椎の圧縮力の要因となる。この圧縮力が
腰椎の許容負荷を超える場合に,腰痛が生じると考えられていることから,腰痛リスクの基
準として,腰椎の圧縮力が用いられている[1]。ユーザがロボットを使用するとき,ユーザの
発揮する股関節及び/又は体幹を伸展する力は,ロボットのアシスト力によって低減する。
この効果によって腰椎の圧縮力は低減し,腰痛リスクを低減できると考えられている。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
2
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8445:2016 ロボット及びロボティックデバイス−生活支援ロボットの安全要求事項
JIS B 8446-2:2016 生活支援ロボットの安全要求事項−第2部:低出力装着型身体アシストロボット
JIS B 9705-1 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
JIS B 9961 機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能安全
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
JIS K 5600-5-11 塗料一般試験方法−第5部:塗膜の機械的性質−第11節:耐洗浄性
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 8446-2によるほか,次による。
3.1
ユーザ(user)
ロボットを装着し,アシスト力を直接受ける人(JIS B 8446-2の3.1参照)。
3.2
オペレータ(operator)
ロボットの起動,停止,及び設定を行う人(JIS B 8446-2の3.2参照)。
注記 ユーザと同一の場合もある。
3.3
装着(attach)
ロボットの使用を始めるために,ロボットをユーザに取り付けること(JIS B 8446-2の3.19参照)。
3.4
脱装(detach)
ロボットの使用を終えるために,ロボットをユーザから取り外すこと(JIS B 8446-2の3.20参照)。
3.5
拘束部(restraint part)
アシスト力の伝達のために,ユーザとロボットとを拘束する,ロボットを構成する部分(JIS B 8446-2
の3.21参照)。
3.6
アシスト力(assistive force)
意図する動作のアシストのために,ロボットが出力する力・トルク(JIS B 8446-2の3.22参照)。
3.7
最大アシスト力(maximum assistive force)
通常使用においてロボットが出力可能なアシスト力の最大値。
3.8
装着部位(attaching body part)
ロボットの拘束部を取り付けるユーザの身体部位。
例 大たい(腿)部,腰部,腹部,胸部,肩部など。
3.9
駆動方式(drive system)
アシスト力を発生させるために,ロボット本体を駆動する方式。
3
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.9.1
電動式(electric drive)
アシスト力を発生させるために,電動アクチュエータ及び伝達要素を用いて,ロボット本体を駆動する
方式。
3.9.2
空気圧駆動式(pneumatic drive)
アシスト力を発生させるために,空気圧アクチュエータ及び伝達要素を用いて,ロボット本体を駆動す
る方式。
3.9.3
油圧駆動式(hydraulic drive)
アシスト力を発生させるために,油圧アクチュエータ及び伝達要素を用いて,ロボット本体を駆動する
方式。
3.10
動力源(power source)
アシスト力を発生させるために,ロボット本体を駆動する際のエネルギー源。
3.10.1
内部動力源式(internal power source)
動力源をロボット本体に搭載する方式。
注記 通常使用において,本体にバッテリー又は圧縮空気を充塡したタンクを搭載し,そこから電気
又は圧縮空気を供給するロボットは,内部動力源式に分類する。
3.10.1.1
動力源内蔵式(built-in power source)
内部動力源式のうち,ユーザ又はオペレータによって動力源を交換することを意図せず,動力源をロボ
ット本体に内蔵する方式。
3.10.1.2
動力源交換式(replaceable power source)
内部動力源式のうち,ユーザ又はオペレータによって動力源を交換することを意図する方式。
3.10.2
外部動力源式(external power source)
動力源をロボット本体に搭載せず,外部に設置する方式。
注記1 通常使用において,外部にバッテリー又は圧縮空気を充塡したタンクを設置し,そこから電
気又は圧縮空気を供給するロボットは,外部動力源式に分類する。
注記2 商用電源又は外部に設置されたコンプレッサーから電気又は圧縮空気の供給を受けるロボッ
トは,外部動力源式に分類する。
3.11
入力方式(input method)
ユーザがロボットのアシスト力を制御するために,ロボットが備える入力の方式。
3.11.1
生体信号入力式(biological signal input)
アシストを意図する身体部位の,ユーザの発揮力に相関する生体信号を入力とする方式。
4
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 生体電位信号による入力を含む。
3.11.2
運動入力式(motional input)
アシストを意図する身体部位の運動,姿勢などを入力とする方式。
3.11.3
操縦入力式(command input)
ユーザによる操縦操作を入力とする方式。
注記1 操縦装置,呼気スイッチ,音声による入力を含む。
注記2 ユーザの発揮力に相関しない生体信号(例 上腕部の生体電位信号)を入力とする場合を含
む。
注記3 アシストを意図しない身体部位の運動,姿勢など(例 ジェスチャー)を入力とする場合を
含む。
3.12
偏心距離(eccentric distance)
ロボットの重心位置と,ユーザの重心位置との3次元的な距離。
注記 外部動力源式のロボットの場合,ロボットの重心位置の評価に外部動力伝導線を考慮する(9.9
参照)。
3.13
最大突出半径(maximum projection radius)
上面図において,ロボットの外形に外接する,ユーザの重心位置を中心とする円の半径。
注記1 立位の装着状態を想定している。
注記2 外部動力源式のロボットの場合,最大突出半径の評価に外部動力伝導線は考慮しない(6.5
参照)。
3.14
定格使用回数(rated number of use)
製造業者が指定する動力源を使用した場合に,所定の運転条件において,一度のエネルギー充塡でアシ
スト可能な定形動作の回数。
3.15
定格使用時間(rated operating time)
製造業者が指定する動力源を使用した場合に,所定の運転条件における定形動作について,一度のエネ
ルギー充塡でアシスト可能な時間。
3.16
外部動力伝導線(external power conductor)
本体と外部動力源とをつな(繋)ぎ,本体にエネルギーを伝達する物体。
例 電動式の場合のケーブル,油圧駆動式又は空気圧駆動式の場合のホースなど。
3.17
バックドライバビリティ(back-drivability)
ロボットが静止している際の,ユーザの運動に対する追従性又はロボットの出力と逆方向のユーザの運
動に対する追従性。
5
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.18
アシスト力指標(Assistive Force Criterion, AFC)
ユーザがロボットを使用して特定の動作を行うときに,ロボットがユーザの発揮する力をどの程度低減
するかを表す指標。
3.19
腰部圧縮力低減指標(Lumbar Compression Reduction, LCR)
ユーザがロボットを使用して特定の動作を行うときに,ロボットがユーザの腰部圧縮力をどの程度低減
するかを表す指標。
4
ロボットの種類及び方式
4.1
一般
ロボットは,4.2〜4.4に従って分類する。
注記 この分類は,箇条7に規定する安全要求事項及び箇条8に規定する性能要求事項における区分,
箇条9に規定するユーザマニュアル並びに宣伝用の文書における記載に関わる。
4.2
駆動方式
ロボットは,アシスト力を発生させるアクチュエータの種類に基づいて,駆動方式を次のいずれかに分
類する。
− 電動式
− 空気圧駆動式
− 油圧駆動式
− その他の駆動方式
注記 その他の駆動方式のロボットとは,例えば,動作に合わせて電動アクチュエータと空気圧アク
チュエータとを使い分けるロボット,電動アクチュエータの出力と油圧アクチュエータの出力
とを合わせてアシスト力とするロボットなどをいう。
4.3
動力源の方式
ロボットは,アシスト力を発生させるためのエネルギー源を本体に搭載するかどうかによって,次のい
ずれか一つ以上に分類する。
− 内部動力源式のうち,動力源内蔵式
− 内部動力源式のうち,動力源交換式
− 外部動力源式
4.4
入力方式
ロボットは,ユーザがアシスト力を制御するための入力方式について,次のいずれか一つ以上に分類す
る。
− 生体信号入力式
− 運動入力式
− 操縦入力式
5
リスクアセスメント
ロボットのリスクアセスメントは,JIS B 8446-2の箇条4による。
注記 JIS B 8446-2の箇条4は,JIS B 8445の箇条4を引用し,JIS B 8445の箇条4は,JIS B 9700 [2]
6
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
のリスクアセスメントに関する要求事項を引用している。これらの規格によると,製造業者は
リスクアセスメントを行う前に,ロボットの意図する使用及び合理的に予見可能な誤使用を決
定する必要がある。ロボットの用途及び使用の限定は,意図する使用に含まれる。
6
構造・形状・寸法・質量
6.1
一般
ロボットは,適切かつ安全に装着及び脱装でき,かつ,ユーザの動作を過度に妨げないように設計し,
6.2〜6.6に適合しなければならない。
6.2
拘束部
ロボットの拘束部は,次のa)〜d)を満たさなければならない。
a) 拘束部の配置及び形状は,ユーザの装着部位に対応するように設計しなければならない。
b) 拘束部の構造及び配置は,ユーザが一人で工具なしに脱装できるように設計しなければならない。
c) 拘束部の圧迫力は,ユーザが工具なしに調整できなければならない。
d) 装着を衣服の上から行わないロボットの場合,拘束部には適切な滑りがなければならない。
注記1 拘束部の圧迫力を調整する方法として,締付力を調整できる面ファスナを利用したベルトな
どを利用する方法がある。
注記2 これらの要求事項は,JIS B 8446-2の5.9.2.3のa)及びd),並びにJIS B 8446-2の5.10.6.2の
b)に対応している。
6.3
外転運動を許容する構造
ロボットは,持ち上げ動作又は着座におけるユーザの股関節の外転運動(開脚)を許容するように設計
しなければならない。
注記1 外転運動を許容するために,受動自由度を配置する,適切な弾性をもつ材料を用いる,適切
な滑りのある拘束部を採用する,ユーザの体形に対して余裕のあるサイズの使用を推奨する
などの方法がある。
注記2 この要求事項は,JIS B 8446-2の5.10.2.1のb)に対応している。
6.4
質量
ロボットの質量は,次の質量の和とし,15 kg未満でなければならない。
− ロボット本体
− 内部動力源式のロボットの場合,動力源
− 外部動力源式のロボットの場合,外部動力伝導線
異なる仕様の動力源を利用可能な動力源交換式のロボットの場合,想定する動力源それぞれについて評
価しなければならない。
評価に用いる外部動力伝導線の長さは,製造業者が指定してもよい。ただし,ロボットの偏心距離の算
出に用いる外部動力伝導線の長さと一致していなければならない(9.9参照)。
なお,外部動力伝導線を下に垂らす構造のロボットであれば,外部動力伝導線が重力によって引っ張ら
れる影響を考慮して,評価に用いる外部動力伝導線の長さを定めることが望ましい。製造業者の指定がな
い場合は,1.5 mを用いてもよい。
注記1 ユーザがロボットを手に持って装着するため,人が手で取り扱ってよい質量基準を参考にし
ている。参考文献[3]によれば,低頻度かつ短時間の持ち上げを安全に行える質量基準は,成
人男性の場合は20 kg以下,成人女性の場合は15 kg以下である。この規格では,成人女性に
7
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
よる使用を考慮し,15 kgを採用した。
注記2 通常使用においてロボットに取り付けられる附属品(動力源を除く。)は,ロボット本体に含
まれると考える。
6.5
最大突出半径及び外形寸法
ロボットの左右幅,前後幅は,製造業者から提供されたロボットの上面図(寸法誤差を含む。)と一致し
ていなければならない。
ロボットの最大突出半径は,0.35 m以下でなければならない。
適合性は,製造業者から提供されたロボットの上面図及び製造業者の想定する代表的なユーザの重心位
置を用いて評価する。製造業者の想定する代表的なユーザの重心位置は,ロボットの偏心距離の算出に用
いるユーザの重心位置と一致していなければならない(9.9参照)。
外部動力源式のロボットの場合,外部動力伝導線は考慮しないでよい。
注記1 最大突出半径が0.35 mを超える場合,一般的な扉の開口幅0.7 mを通過できない,ユーザが
旋回運動する際にロボットが環境中の障害物に接触するなどのおそれが高くなる。通常使用
時に扉の通過を意図しないロボットであっても,非常時にユーザがロボットを装着したまま,
扉を通過して避難する可能性があるため,避難を妨げないために,この基準を満たす必要が
ある。
注記2 この規定を満たすことは,JIS B 8446-2の5.6.1に規定する,環境中の障害物との衝突などに
よって意図するロボットの動作を妨げるような極端な突出部に対する本質的安全設計に相当
する。
6.6
外部動力伝導線
ロボットの外部動力伝導線は,ユーザがロボットを装着した状態で,一人で工具なしに取り外せるよう
に設計しなければならない。
注記1 非常時にユーザがロボットを装着したまま避難する可能性があるため,避難を妨げないため
に,上記の規定を満たす必要がある。
注記2 この要求事項は,JIS B 8446-2の5.10.6.2のb)に対応している。
7
安全要求事項
7.1
一般
ロボットは,箇条5に規定するリスクアセスメントに基づいて設計し,JIS B 8446-2の箇条5に規定す
る安全要求事項及びこの規格の箇条6及び7.2〜7.10に適合しなければならない。
特定のリスクを受容可能とするために,制御システムをリスク低減手段として利用する場合は,その制
御システムを安全関連部とし,JIS B 8446-2の箇条6に適合しなければならない。安全関連部について,
JIS B 8446-2及びこの規格に,JIS B 9705-1に規定するパフォーマンスレベル(PL)の要求事項がある場
合は,必要に応じて,JIS B 9961に規定する安全インテグリティレベル(SIL)の要求事項として読み替え
てもよい。ロボットの使用を限定し,管理する場合は,JIS B 8446-2の箇条9に適合しなければならない。
注記1 パフォーマンスレベルと安全インテグリティレベルとの対応表は,JIS B 9705-1の表1(この
規格及びJIS B 9961の適用のための推奨情報)又はJIS B 9961の表1(この規格及びISO
13849-1:2006の適用の推奨案)[4]にある。
注記2 7.4には,アクチュエータへの動力供給の遮断からの保護を実現する安全関連部に対する要求
事項がある。JIS B 8446-2の6.1.1には,アクチュエータへの動力供給の遮断からの保護に該
8
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
当する機能は挙げられていない。
7.2
危険なアシスト力からの保護
危険なアシスト力からユーザを保護するために,ロボットは,次のa)又はb)を満たさなければならない。
a) 8.2に従って評価したロボットの最大アシスト力は,表1の規定を満たさなければならない。
b) ロボットは,オペレータが設定可能なアシスト力の制限機能を備えなければならない。また,使用開
始直後の初期設定におけるアシスト力の最大値は,表1の規定を満たさなければならない。
注記1 b)を適用する場合の本体上の表示への要求事項は,箇条10に規定している。
注記2 オペレータが設定可能なアシスト力の制限機能は,JIS B 8446-2の5.16.1.3のa)及びJIS B
8446-2の5.16.2.3のb)の方策に相当する。この機能を,安全関連制御システムによって実現
してもよい。
注記3 アシスト力を制限する方法には,単純に出力を飽和させるカットオフによる方法,十分に低
いゲインからアシストを開始しオペレータの操作によってゲインを調整する方法,制限の設
定範囲内でアシストを達成するアルゴリズムによる方法などがある。
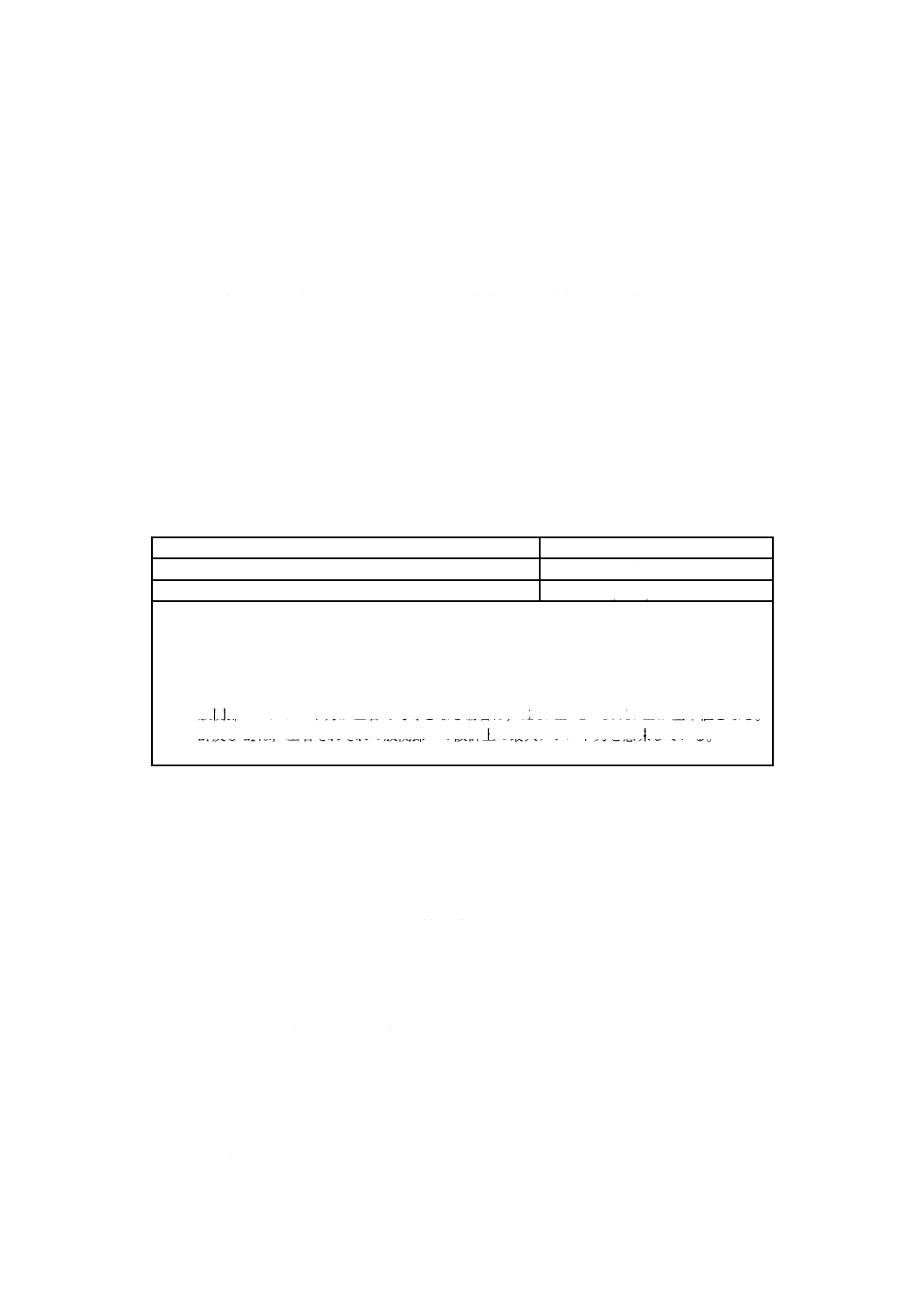
表1−ロボットの設計に対する最大アシスト力
単位 N・m
ロボットの設計
最大アシスト力
左右の股関節へのアシスト力が均等となる設計の場合
≦144 a), b)
左右の股関節へのアシスト力が均等とならない設計の場合
≦(a1+a2)/a1×72 a), c)
注a) JIS B 8446-2の表1の,股関節の最大発揮力が72 N・mであることから,股関節当たりの最
大アシスト力が72 N・mを超えない場合は,JIS B 8446-2の5.16.1及びJIS B 8446-2の5.16.2
において,ユーザのグループを定めない場合であっても,本質的安全設計がなされている
とみなせる(JIS B 8446-2の5.16.1.2及びJIS B 8446-2の5.16.2.2,並びにこの規格の附属書
Eを参照)。
b) 股関節へのアシスト力が左右で均等となる場合は,72 N・m×2=144 N・mが基準値となる。
c) a1及びa2は,左右それぞれの股関節への設計上の最大アシスト力を意味している。
ただし,a1>a2とする。
7.3
動力源の喪失又は遮断からの保護
通常使用中のロボットの動力源の喪失又は遮断は,アシスト力の低下又は喪失を引き起こし,アシスト
力によって低減していた分だけユーザの腰部圧縮力を増加させるおそれがある。このリスクが受容できな
い場合は,動力源の喪失又は遮断からユーザを保護するように設計しなければならない。
内部動力源式のロボットの場合は,通常使用中のロボットの動力源の喪失又は遮断のリスクが受容可能
なレベルになるまで,次のa)〜c)の順に保護方策を適用しなければならない。
a) 動力源交換式のロボットの場合は,動力源が容易に外れない構造1)又はカバー等で覆われるように設
計しなければならない。
b) 動力源交換式のロボットの場合は,動力源とロボット本体との接続部に異物,じんあい(塵埃)など
が入りにくいような設計をしなければならない。
c) 動力源のエネルギー残量を監視し,受容できないアシスト力の低下又は喪失が生じる前に,アラート
によってユーザに通知しなければならない(7.7参照)。
外部動力源式のロボットの場合は,通常使用中のロボットの動力源の喪失又は遮断のリスクが受容可能
なレベルになるまで,次のd)及びe)の順に保護方策を適用しなければならない。
d) 外部動力伝導線は,人体部位の意図しない引っかかり又は周辺構造物による絡み,圧迫などに対して,
9
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
十分な強度をもつか,又は他の方策によって保護するように設計しなければならない。
e) 動力源の性能を監視し,受容できないアシスト力の低下又は喪失が生じる前に,アラートによってユ
ーザに通知しなければならない(7.7参照)。
注記 a)〜e)は,JIS B 8445の5.3.3及びJIS B 8446-2の5.3.3の一部の要求事項に対応している。
注1) 容易に外れない構造とは,例えば,動力源を手で引き抜くことに耐えられる構造をいう。手で
引き抜く力の目安として,130 Nを用いてもよい。この値は,独立行政法人製品評価技術基盤
機構(NITE)の人間特性計測データベース(Human Characteristics Database)[5]における,手の
引張力に基づいている。
油圧駆動式及び空気圧駆動式のロボットの場合は,動力源が喪失又は遮断した場合に生じる,作動流体
の圧力低下速度を十分に小さくするか,又は動力源の喪失若しくは遮断に応じて,作動流体をアクチュエ
ータ内に残存させる設計を採用することによって,動力源の喪失又は遮断からのユーザの保護を実現して
もよい。ただし,この設計を,制御システム(ソフトウェアを含む。)の機能によって実現する場合は,そ
の制御システムを安全関連部とし,JIS B 9705-1に規定するパフォーマンスレベルPLb以上で実現しなけ
ればならない。
7.4
アクチュエータへの動力供給の遮断からの保護
動力源の喪失又は遮断以外の,通常使用中にアシスト力を発生させる全てのアクチュエータへの動力供
給が同時に遮断される単一の機能不全,誤動作又は故障は,アシスト力の低下又は喪失を引き起こし,ア
シスト力によって低減していた分だけユーザの腰部圧縮力を増加させるおそれがある。製造業者は,この
リスクを受容可能なレベルまで低減しなければならない。
製造業者は,次のa)又はb)を満たすことによって,この要求事項を満たしてもよい。
a) 該当する単一の機能不全,誤動作又は故障の発生確率を低減する方策として,関連する制御システム
(ソフトウェアを含む。)を安全関連部とし,JIS B 9705-1に規定するパフォーマンスレベルPLb以上
で実現する。
b) 該当する単一の機能不全,誤動作又は故障が発生した場合の保護方策として,次の全ての事項を満た
す安全関連部を備える。ただし,最終状態は静止でなくてもよい。
− 該当する単一の機能不全,誤動作又は故障を検出することで作動する。
− アシスト力を発生させる全てのアクチュエータの運動を制動する。
− 最大アシスト力を上回る制動力を,検出から0.2 s以内2) に発生できる。
− 作動中に,ユーザが手動で制動力を解除できるか,又は装着部位の運動若しくは手動で制動力に逆
らって動かせる。
− JIS B 9705-1に規定するパフォーマンスレベルでPLb以上を満たす。
注記1 ロック,摩擦ブレーキ,粘性ブレーキ,発電ブレーキなどを安全関連部としてもよい。
注記2 アシスト力を発生させる全てのアクチュエータへの動力供給が同時に遮断した場合,アシス
ト力によって低減していた分だけユーザの腰部圧縮力が増加することになり,傷害につな
(繋)がる可能性がある。このリスクは,JIS B 9705-1のリスクグラフにおいて,S1(軽傷),
F1(まれ/短時間)及びP2(回避不可能)とみなせるため,安全関連部に要求されるパフォ
ーマンスレベルはPLb以上となる。ユーザの腰部に急な負荷が掛かることによって,ユーザ
の操作する物体(人を含む。)を取り落とす可能性があるが,このリスクは,S1(軽傷),F1
(まれ/短時間)及びP1(回避可能)とみなせるため,安全関連部に要求されるパフォーマ
10
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ンスレベルはPLa以上となる。そのため,a)及びb)では,PLb以上のパフォーマンスレベル
を要求している。ただし,JIS B 9705-1のリスクグラフにおけるS1(軽傷)及びS2(重傷)
は,それぞれ“通常,回復可能な傷害”及び“通常,回復不可能又は死亡”とされている。
この規格が規定するロボットは低出力装着型身体アシストロボットであることから,アシス
ト力の喪失によって生じる可能性がある腰部の傷害は“通常,回復可能な傷害”と考え,S1
(軽傷)を採用した。この規格の適用範囲外となるが,高出力装着型身体アシストロボット
を腰補助用に適用した場合は,アシスト力の喪失によって生じる可能性のある腰部の傷害の
ひどさとして,S2(重傷)を採用することがより適切とならないか検討する余地がある。
注記3 アシスト力を発生させる全てのアクチュエータへの動力供給が同時に遮断された場合,ユー
ザの腰部にはその直前にアシスト力が担っていた全ての負荷が掛かる。十分早い応答速度で
安全関連部が作動し,その制動力がロボットの最大アシスト力を上回れば,急な負荷の増大
に起因する腰部への負荷を低減できると考えられる。
注記4 b)は,JIS B 8445の5.3.3.2のa)及びJIS B 8446-2の5.3.3.2のd)に対応している。
注2) 0.2 sは,腰部への急な負荷の増加に対して,人が十分な抗力を発揮するまでの応答時間の目安
である。負荷が増加する時刻を0 sとすると,背筋のEMGは約0.1 sで立ち上がり,約0.2 sで
最大となる[6]。これより早く安全関連部が作動することで,急なアシスト力の喪失によってユ
ーザの腰部に生じる危害のリスクを低減できると考えられる。
7.5
バックドライバビリティ
ロボットは,動力源の遮断された非制御時及び制御時において,バックドライバビリティをもたなけれ
ばならない。
適合性は,次の試験によって評価する。
− 非制御時のバックドライバビリティは,ロボットの軸を静止させた状態で,外力として表1の最大ア
シスト力の基準以下のトルクを与え,そのロボットの軸が外力の方向に動くかどうかで評価する。
− 片側の股関節に対応するロボットの軸に対して評価する場合は,外力として72 N・m以下のトルクを
与え,そのロボットの軸が外力の方向に動くかどうかで評価する。
− 制御時のバックドライバビリティは,ロボットの軸を静止させた状態で,ロボットに最大アシスト力
を出力させたときに,外力として最大アシスト力を超えるトルクをロボットの出力と逆方向に与え,
そのロボットの軸が外力の方向に動くかどうかで評価する。
− 片側の股関節に対応するロボットの軸に対して評価する場合は,外力としてその股関節当たりの最大
アシスト力を超えるトルクを与え,そのロボットの軸が外力の方向に動くかどうかで評価する。
注記1 制御時のバックドライバビリティの試験では,ロボットの出力するアシスト力が負の仕事を
している。
注記2 この要求事項は,JIS B 8446-2の5.10.2.3のb),5.10.4.2のb)及び5.10.5.2のb)に対応してい
る。
7.6
環境及び洗浄液に対する耐性
ロボットは,その使用環境に応じて,環境及び洗浄液に対する耐性をもたなければならない。また,ロ
ボットの意図する使用に,表2に規定する特定の用途が含まれる場合は,少なくとも表2に規定する環境
及び洗浄液に対する耐性をもたなければならない。単回使用又は複数回使用のカバーなどを,必要なとき
だけ取り付けることによって,この要求事項を満たしてもよい。
要求される環境に対する耐性への適合性は,JIS C 0920に規定する試験によって評価する。要求される
11
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
洗浄液に対する耐性への適合性は,JIS K 5600-5-11に規定する試験を行い,JIS B 8446-2に規定する表示
の消えがないこと,及び材料のぜい(脆)性が出ないことによって評価する。
注記1 この要求事項は,JIS B 8446-2の5.11及び5.14の一部の要求事項に対応している。
注記2 試験に用いる洗浄液及びその濃度は,意図する使用に応じて選定するのがよい。CDC,
“Guideline for Disinfection and Sterilization in Healthcare Facilities”,2008,厚生労働省,“ノロ
ウイルスに関するQ&A”,2015などが参考になる。例えば,イソプロピルアルコール,エタ
ノール,次亜塩素酸ナトリウム,四級アンモニウム塩性殺菌性洗浄溶液などが用いられる。
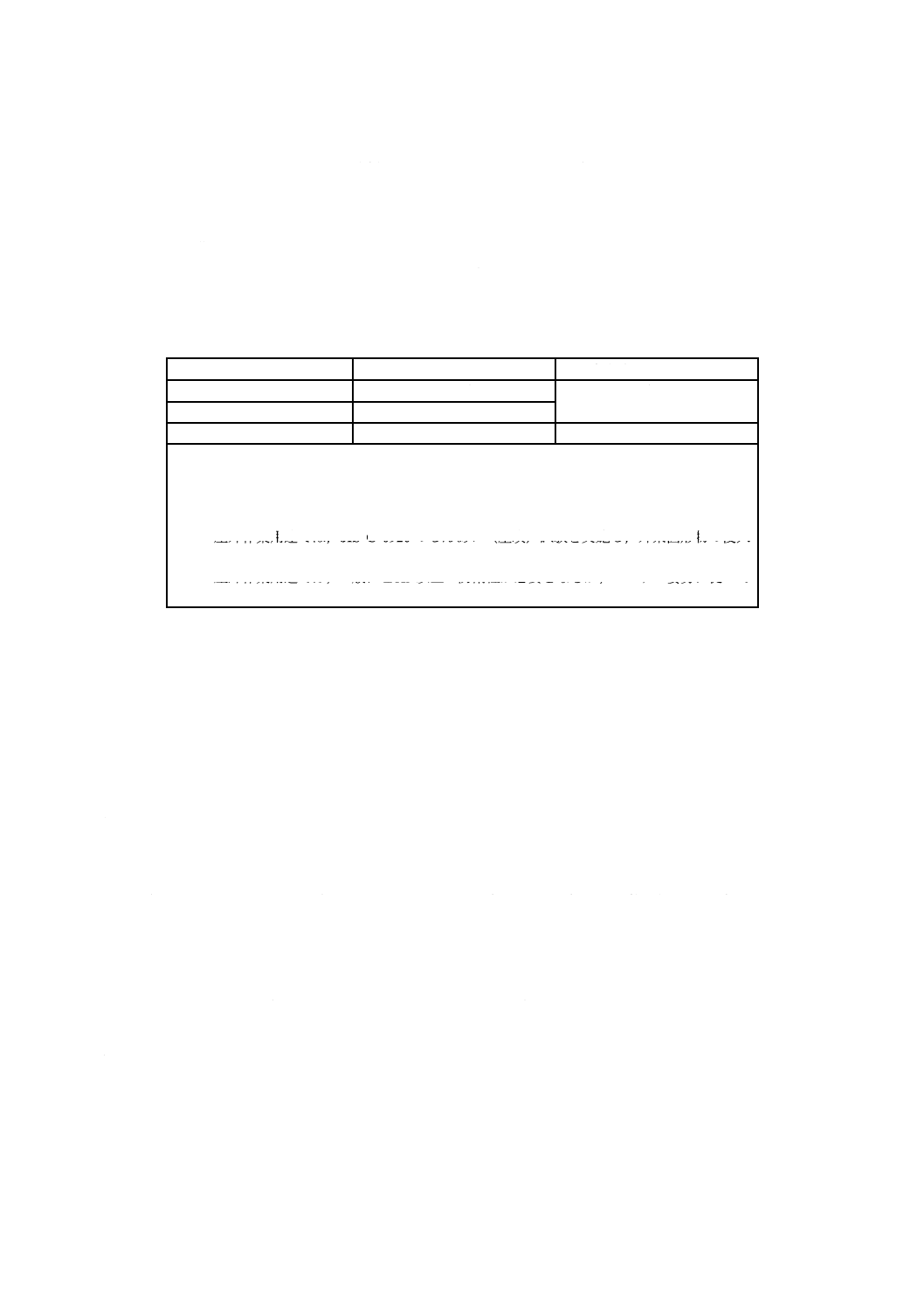
表2−ロボットの特定の用途に応じて要求される最低限の環境及び洗浄液に対する耐性
特定の用途
環境に対する耐性a)
洗浄液に対する耐性a)
入浴介助
IPX4,防湿
清掃及び消毒に対する耐性
排泄介助
IPX2
屋外作業
IPX3 b), c)
清掃に対する耐性
保護等級は,JIS C 0920に規定する保護等級(IPコード)による。
注a) この表は,ロボットの用途において最低限満たさなければならない耐環境性能及び耐
清掃性能を示している。意図する使用によっては,より高い保護等級,洗浄剤への耐
久性,耐腐食性,防爆性,耐塩性,温度耐性などが必要になる可能性がある。
b) 屋外作業用途では,JIS C 0920のじんあい(塵埃)試験を実施し,外来固形物の侵入
に対する保護等級をIP5X以上とすることが望ましい。
c) 屋外作業用途では,一般にIPX3以上の防雨性が必要となるが,ユーザの姿勢に従って
その姿勢が変わることが想定される場合は,IPX4以上とすることが望ましい。
7.7
アラート
ロボットは,使用上の情報によるリスク低減手段としてアラートを利用する場合,JIS B 8446-2の8.6
によるほか,視覚的信号,聴覚的信号及び触覚的信号のうち,一つ以上の信号でアラートを発しなければ
ならない。特に,一つの信号による情報伝達が十分でない場合には,補助的に他の信号を用いなければな
らない。これらの信号は,使用環境,使用する時間帯などによって適した強度が異なるため,自動,又は
ユーザが手動で強度を調節してもよい。
さらに,次のa)〜c)を満たすことが望ましい。
a) 視覚的信号をアラートに利用する場合は,ユーザの視界に入りやすい配置とする。また,この規格の
適用範囲であるロボットは,その構造上,ユーザが常時ロボット本体を注視できないおそれがあるた
め,補助的に聴覚的信号又は触覚的信号を用いることが望ましい。
注記1 昼間と夜間との違いなど,使用環境の照度によって適した視覚的信号の強度は異なる。
b) 聴覚的信号をアラートに利用する場合は,意図する使用環境においてユーザが聴き取れる音圧レベル
とする。
注記2 この規格のロボットは,装着によってユーザの耳と本体との位置関係が定まる。
注記3 適した聴覚的信号の強度は,病院と工場との違いなど,使用環境の暗騒音レベルによって
異なる。
c) 触覚的信号をアラートに利用する場合は,意図する使用においてユーザが気付くことができる強度,
パターンなどを採用する。アラートは,使用上の情報によるリスク低減手段であり,本質的安全設計
並びに安全防護及び付加保護方策を適用した後,更に残留するリスクを低減するために採用するのが
よい。
注記4 この規格のロボットは,その使用中にユーザの身体運動を伴うため,その意図する使用に
12
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
おいて,触覚的信号によるアラートに気付かないおそれがある。
注記5 ユーザの操作に対するフィードバック,情報提示などについても,この要求事項を考慮し
てもよい。
7.8
感電からの保護
ロボットは,ユーザ又はオペレータを感電から保護するために,JIS B 8446-2の5.3.1を満たさなければ
ならない。特に,屋外使用を意図するロボットなど,降雨時にぬ(濡)れた手でバッテリーを交換するお
それがある場合は,そのリスクを受容可能なレベルまで低減しなければならない。
7.9
入力の遮断に対する保護
ロボットは,センサの故障などによってユーザからの入力が遮断するリスクについて,そのリスクを受
容可能なレベルまで低減しなければならない。
7.10 情報セキュリティ
通常使用中に,ロボット本体が有線又は無線の手段によって,外部との通信が可能な場合,通信の喪失・
劣化,及び通信を経由した攻撃によるリスクを受容可能なレベルまで低減しなければならない。ロボット
は,次のa)〜c)を満たすことが望ましい。
a) 適切な暗号化,権限,及び/又は認証の設計を行い,適切な相手とだけ通信する。
b) データの破壊,改ざん又は消去の有無を適切な頻度及び方法で確認し,これらがあった場合には,シ
ステムを起動しない,アシスト力を発生しない,アシスト力を遮断するなどの安全な状態へ移行する,
修復を試みるなどの適切な措置を取る。
c) 通信の要求を高頻度で受けても,ロボットの通常使用に影響がない設計にする。
注記 a)〜c)は,機密性,完全性及び可用性の維持にそれぞれ対応する保護方策の例である。
8
性能要求事項
8.1
一般
ロボットは,ユーザの身体にアシスト力を及ぼすために,最大アシスト力について8.2に適合しなけれ
ばならない。
ロボットは,そのアシスト力によってユーザの発揮力を低減し,及び/又はユーザの身体への負荷を低
減するために,アシスト力指標について8.3に適合するか,又は腰部圧縮力低減指標について8.4に適合
しなければならない。アシスト力指標及び腰部圧縮力低減指標の計算又は試験に用いる条件は,附属書A
による。アシスト力指標及び腰部圧縮力低減指標の算出方法は,附属書Cによる。
8.2
最大アシスト力
ロボットの最大アシスト力は,6.4によって評価したロボットの質量,及び9.9によってユーザマニュア
ルに記載されたロボットの偏心距離を用いて,次に規定する下限値を超えなければならない。
最大アシスト力の下限値(N・m)=偏心距離(m)×0.766 044×質量(kg)×9.806 65(m/s2)
適合性は,最大アシスト力を次の方法で測定して評価する。
内部動力源式のロボットの場合,エネルギーを通常使用における最大まで充塡した動力源と,エネルギ
ー残量が通常使用における最小まで低下した動力源とのそれぞれを用いて評価する。外部動力源式のロボ
ットの場合,標準の外部動力源を用いて評価する。
ロボットの軸を静止させた状態で,ロボットに最大アシスト力を2 sの間連続して出力させる。計測は,
フォースゲージを用いて出力開始から1 s後に行う。これを3回行い,最大値を評価値として用いる。
測定に重力の影響がある場合には,ゼロ点補正などによってこれを取り除く。
13
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
さらに,最大アシスト力を出力できるよう,次に規定する事項を考慮する。
− アシスト力制限の設定が可能であれば,あらかじめアシスト力制限を最も緩和する設定を行う。
− ロボットの軸の角度によって最大アシスト力が異なる場合は,最大アシスト力を出力可能な角度で実
施する。
− 最大アシスト力を連続して出力可能な試験用のモードを用いる。
注記1 ロボットの最大アシスト力の下限は,体幹角度が前屈50°(例えば,股関節角度が屈曲75°
かつ膝関節角度が屈曲25°)のときに,ロボット自体を挙上するために必要なトルクとして
規定している。ロボットの出力がこの下限を超えるとき,ロボットはユーザの体幹の伸展動
作をアシストできる。
注記2 過大なアシスト力にあらがうことが傷害に至るかどうかは,アシスト力が筋・けん(腱)・じ
ん(靭)帯,又は関節に対して仕事をしたかどうかに依存するため,瞬間的なピーク値の評
価は妥当ではないと考えられる。このことから,ロボットの最大アシスト力を,2 sの連続出
力が可能な値として評価することとした。また,最大発揮力を超えるアシスト力が,0.2 s程
度を超えて継続した場合,人は防御反応を示して脱力することが期待できるため,ロボット
が最大アシスト力を連続出力する時間2 sは,評価に用いるのに十分な時間といえる[JIS B
8446-2の5.16.1.1の注記2及びJIS B 8446-2の5.16.1.5のa)参照]。
注記3 一般に,ロボットのアシスト力は,仕事をしない静止状態で最大となる。静止状態で評価す
る最大アシスト力と,運動状態(持ち上げ及び持ち下げ動作)におけるアシスト力とは大き
く異なる可能性がある。また,ロボットのアシスト力に角度依存性がある場合,アシスト力
の最大値は,角度ごとに大きく異なる可能性がある。C.3に従って算出するアシスト力指標
は,これらの影響を考慮した指標となっている。
8.3
アシスト力指標
ロボットのアシスト力指標
Lower
1000
AFC
,
Hold
1000
AFC
及び
Raise
1000
AFC
は,C.3に従って算出し,正でなければなら
ない。
適合性は,計算又は試験によって評価する。
注記1 アシスト力指標は,A.4に規定する基準動作を行ったときに,ロボットが出力するアシスト
力の指標であり,8.2で評価する最大アシスト力とは値が大きく異なる可能性がある。
注記2 アシスト力指標の試験方法の例を,附属書Bに示す。
8.4
腰部圧縮力低減指標
ロボットの腰部圧縮力低減指標
Lower
1000
LCR
,
Hold
1000
LCR
及び
Raise
1000
LCR
は,C.4に従って算出し,正でなければ
ならない。
適合性は,計算又は試験によって評価する。
注記1 腰部圧縮力低減指標は,A.4に規定する基準動作を行ったときに,ロボットがユーザの腰部
圧縮力をどの程度低減するかを表している。
注記2 腰部圧縮力低減指標の試験方法の例を,附属書Bに示す。
9
ユーザマニュアル及び宣伝用の文書
9.1
一般
ロボットのユーザマニュアルには,JIS B 8446-2の8.1,8.3及びこの規格の9.2〜9.14に規定する事項を
記載しなければならない。
14
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ロボットの宣伝用の文書には,9.2〜9.4,9.7,9.8,9.10,9.12及び9.14に規定する事項を記載しなけれ
ばならない。
注記1 宣伝用の文書とは,リーフレット,パンフレット,カタログ,ホームページなどをいう。
注記2 ユーザマニュアルの記載例は,附属書Dに示す。
9.2
用途
ロボットの用途を記載しなければならない。
注記1 ロボットによってアシストされたユーザの動作(運動補助,姿勢保持及び/又は物体操作)
によって実現されるタスクを,ロボットの用途と考えてよい。
注記2 ロボットの用途によって,要求される環境及び洗浄液に対する耐性が異なる(7.6参照)。
注記3 ロボットの用途は,ロボットの意図する使用に含まれる。ロボットの意図する使用の決定は,
リスクアセスメントを行うために必要となる(箇条5参照)。
9.3
種類及び方式
次の事項について,ロボットの種類及び方式を記載しなければならない。各事項において分類外の場合
は,必要に応じて,製造業者が定める名称を記載してもよいが,この規格の分類外であることを明記しな
ければならない。
− 装着部位
− 駆動方式(4.2)
− 動力源の方式(4.3)
− 入力方式(4.4)
9.4
最大アシスト力
8.2に従って評価したロボットの最大アシスト力を,N・m単位で記載しなければならない。内部動力源
式のロボットの場合は,エネルギーを通常使用における最大まで充塡した動力源を用いて評価した値を記
載しなければならない。有効数字2桁となるように丸めてもよい。
9.5
アシスト力指標
C.3に従って算出したロボットのアシスト力指標
Lower
1000
AFC
,
Lower
200
AFC
,
Hold
1000
AFC
,
Raise
1000
AFC
及び
Raise
200
AFC
を,
N・m単位で記載しなければならない。有効数字2桁となるように丸めてもよい。一部の基準動作だけをア
シストするロボットの場合は,アシストしない基準動作に対応するアシスト力指標について,該当しない
ことを明記しなければならない。
ロボットのアシスト力指標の算出に用いた,製造業者の想定するロボットの代表的なユーザの身長及び
体重,基準動作並びに評価方法(計算又は試験)を記載しなければならない。
アシスト力指標を補足するために,基準動作時にロボットが出力するアシスト力をグラフで示してもよ
い。ただし,縦軸にはC.3に規定するψを用い,横軸には時間を用いる。誤解を生じない場合には,横軸
に角度(体幹角度又は股関節角度)を用いてもよい。
注記 例えば,持ち上げ時のアシストだけを意図するロボットの場合は,
Lower
1000
AFC
,
Lower
200
AFC
及び
Hold
1000
AFC
について,該当しないことを明記する。
9.6
腰部圧縮力低減指標
C.4に従って算出したロボットの腰部圧縮力低減指標
Lower
1000
LCR
,
Lower
200
LCR
,
Hold
1000
LCR
,
Raise
1000
LCR
及び
Raise
200
LCR
を,N単位で記載しなければならない。有効数字2桁となるように丸めてもよい。一部の基準動作だけを
アシストするロボットの場合は,アシストしない基準動作に対応する腰部圧縮力低減指標について,該当
しないことを明記しなければならない。
15
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ロボットの腰部圧縮力低減指標の算出に用いた,製造業者の想定するロボットの代表的なユーザの身長
及び体重,基準動作並びに評価方法(計算又は試験)を記載しなければならない。
腰部圧縮力低減指標を補足するために,基準動作時の腰部圧縮力の低減度合いをグラフで示してもよい。
ただし,縦軸にはC.4に規定するψを用い,横軸には時間を用いる。誤解を生じない場合には,横軸に角
度(体幹角度又は股関節角度)を用いてもよい。
注記 例えば,持ち上げ時のアシストだけを意図するロボットの場合は,
Lower
1000
LCR
,
Lower
200
LCR
及び
Hold
1000
LCR
について,該当しないことを明記する。
9.7
定格使用回数又は定格使用時間
内部動力源式のロボット及び使用前に充塡したエネルギーを本体に供給し,使用中に再充塡しない動力
源を用いる外部動力源式のロボットの場合,ユーザマニュアルに記載された動力源それぞれについて,定
格使用回数又は定格使用時間を記載しなければならない。
定格使用回数及び定格使用時間はあくまで目安であり,使われ方によっては,実際の使用時間が大きく
異なることを記載してもよい。
その他の外部動力源式のロボットの場合は,該当しないことを明記しなければならない。
9.8
質量
a) 動力源内蔵式のロボット ロボット本体の質量及び内蔵する動力源の質量の和を記載しなければなら
ない。記載された質量が,動力源の質量を含むことを記載してもよい。
b) 動力源交換式のロボット ロボット本体の質量及び動力源の質量を,それぞれ記載しなければならな
い。大容量の動力源など,複数の動力源がある場合は,その質量を記載しなければならない。
c) 外部動力源式のロボット ロボット本体の質量及び外部動力伝導線の質量を,それぞれ記載しなけれ
ばならない。
注記 通常使用のためにロボットに取り付けられる附属品(動力源及び外部動力伝導線を除く。)は,
ロボット本体に含まれると考える。
9.9
偏心距離
次のように算出したロボットの偏心距離を記載しなければならない。
− ロボットの偏心距離は,ロボットの重心位置及び製造業者の想定する代表的なユーザの重心位置に基
づいて算出する。
− ロボットの重心位置は,製造業者から提供された3D CADなどのデータに基づいて計算した値を用い
てもよい。
− 製造業者の想定する代表的なユーザの重心位置は,最大突出半径の算出に用いるユーザの重心位置と
一致していなければならない(6.5参照)。
− ロボットの重心位置は,通常使用のためにロボットに取り付けられる附属品(動力源又は外部動力伝
導線を含む。)を含めて算出しなければならない。
− 外部動力源式のロボットの場合,外部動力伝導線を,本体の出口付近に巻き取った状態での重心位置
を算出しなければならない。
− 算出に用いる外部動力伝導線の長さは製造業者が指定してもよいが,質量の評価に用いる外部動力伝
導線の長さと一致していなければならない(6.4参照)。
注記1 ロボットの偏心距離が大きい場合は,ロボットはユーザの運動能力又はバランス能力を阻害
するおそれがある。
注記2 ロボットの偏心距離は,ユーザが作業中に操作する物体まで含めた重量バランスを考慮して
16
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
設計される場合がある。
注記3 外部動力伝導線を下に垂らす構造のロボットであれば,外部動力伝導線が重力によって引っ
張られる影響を考慮して,評価に用いる外部動力伝導線の長さを定めることが望ましい。製
造業者の指定がない場合は,1.5 mを用いてもよい。
9.10 最大突出半径及び外形寸法
6.5に従って評価したロボットの最大突出半径を記載しなければならない。また,ユーザマニュアルには,
ロボットの上面外形図上に,ロボットの最大突出半径,左右幅及び前後幅を図示しなければならない。
9.11 可動範囲
ロボットの各軸の可動範囲を,ロボットの外形図上に図示しなければならない。
9.12 安全関連部のパフォーマンスレベル
7.3及び/又は7.4の安全関連部に関する要求事項を適用する場合は,その安全関連部の情報及びそれが
満たすJIS B 9705-1に規定するパフォーマンスレベルを記載しなければならない。
9.13 使用上の情報
ユーザマニュアルに,次の事項に関する注意文を記載しなければならない。
− 過剰な連続使用によって,筋肉痛,筋力の低下などが生じる可能性があること。
− 腰部への負荷を低減するが,全ての腰痛を予防するものではないこと。
7.2のb)を適用する場合,ユーザマニュアルに,次の事項を記載しなければならない。
− アシスト力制限下での最大アシスト力
− アシスト力制限の設定方法
− アシスト力制限を誤った場合に備えた注意又は警告
− 誤動作,故障などによって,アシスト力制限が働かなくなった場合に備えた注意又は警告
外部動力源式のロボットにおいて,外部動力伝導線にユーザが足を引っ掛けることで,ユーザが転倒す
るリスクが残留リスクとなる場合は,警告文を記載しなければならない。
9.14 特別な資格及び法令上の手続
ロボットの使用に当たって,ユーザマニュアルによる情報の提供,製造業者による教育などを超えて,
特別な資格又は法令上の手続が必要となる場合は,その情報を記載しなければならない。
例 タンク所有者登録,高圧ガス製造事業届などがある。
10 本体上の表示
ロボットの本体上の表示は,JIS B 8446-2の8.1及び8.2によるほか,この規格の7.2のb)を適用する場
合,危険なアシスト力が生じることに対する注意又は警告を,本体に表示しなければならない。
17
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
アシスト力指標及び腰部圧縮力低減指標の計算又は試験に用いる条件
A.1 要旨
この附属書は,8.3及び9.5の要求事項に用いられるアシスト力指標,並びに8.4及び9.6の要求事項に
用いられる腰部圧縮力低減指標を計算又は試験するために必要な条件を規定する。
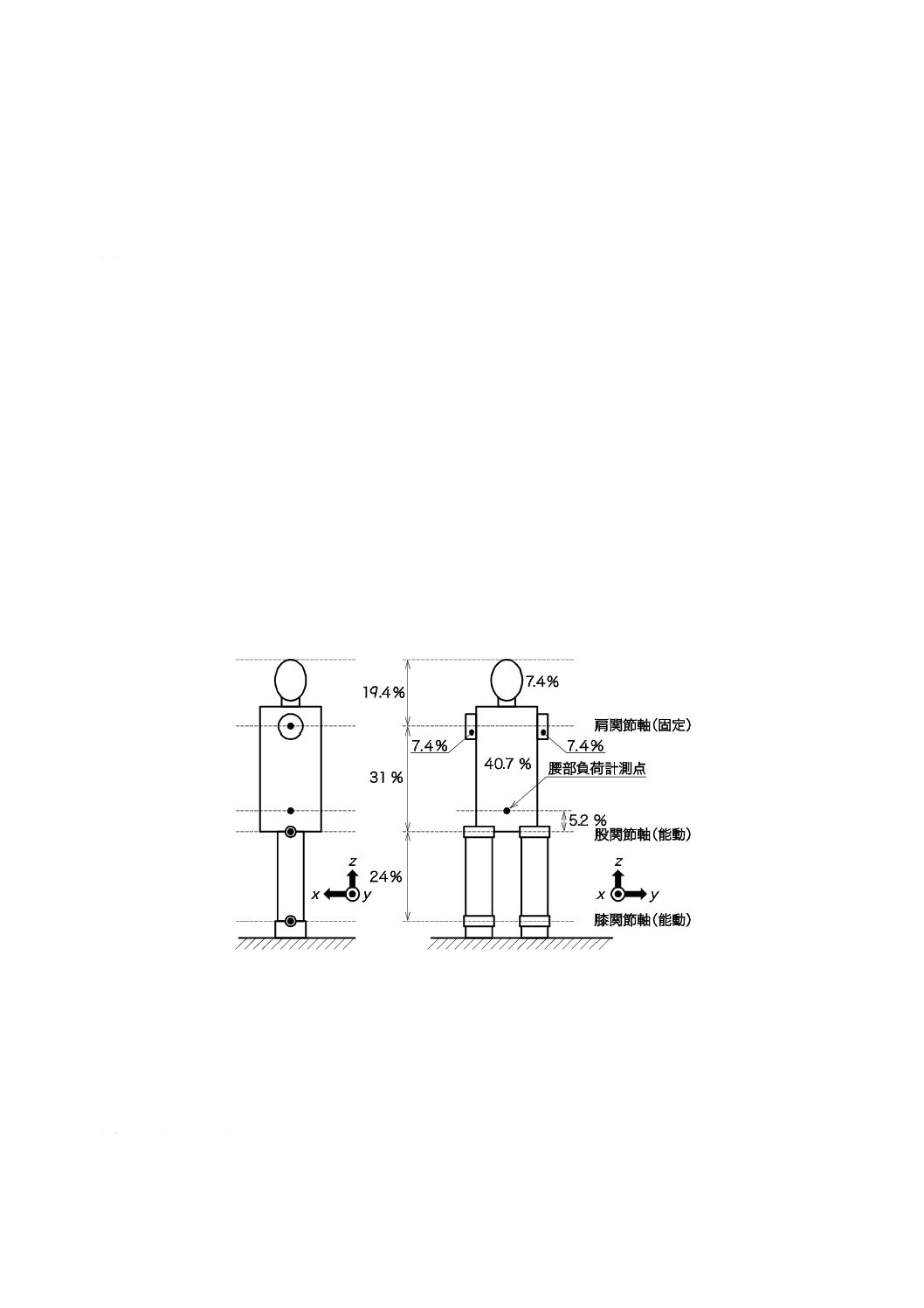
A.2 ユーザ人体モデル
製造業者の想定するロボットの代表的なユーザの身長,体重を100 %としたとき,ユーザ人体モデル各
部の寸法と質量との比率は,図A.1を満たさなければならない。図A.1に記載のない寸法及び質量は,製
造業者が定めてよい。
腰部z軸方向の圧縮力,及び腰部y軸周りのモーメントは,腰部負荷計測点において計測する。腰部負
荷計測点の構造は,腰部負荷計測点だけに,少なくともその点より上部の質量による負荷が掛かる構造と
する。
能動軸は,膝関節軸及び股関節軸だけとする。腕及び手のモデルを肩関節軸に取り付けてもよいが,そ
の場合は,腕及び手は動作中に鉛直下方向を向いているようにし,質量は片方の腕及び手について7.4 %
とする。
密度は一様を仮定してもよい。
注記1 寸法の比率は,国立研究開発法人産業技術総合研究所の成人男性骨格形状データ[7]に基づいている。同形状デ
ータにおいて,股関節軸からL5/S1脊椎円板の距離は,身長の約83/1 610(約5.2 %)である。そのため,腰
部負荷計測点は,ユーザ人体モデルの上半身に位置している。
注記2 腕及び手は,あらゆる姿勢において鉛直下方向を向いていることを仮定し,肩関節軸に質量を集中している。
注記3 質量の比率は,JIS T 0601-1 [8]の図A.19(人体質量分布の例)に従っている。
図A.1−ユーザ人体モデルの寸法及び質量の比率
A.3 ロボットモデル
ロボットのモデルは,動力源のモデル,ユーザ人体モデルへの装着方法,ユーザ人体モデルからの入力
18
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
方法を含め,製造業者が定めなければならない。アシスト力制限の設定がある場合は,あらかじめアシス
ト力制限を最も緩和する設定を用いなければならない。
A.4 基準動作
A.4.1 一般
ユーザ人体モデルは,A.4.2に規定する目標軌道に従って基準動作を行わなければならない。基準動作は,
目標体幹角度
target
tθ
,体幹角度を股関節角度と膝関節角度とに分配する係数k,動作ごとにかかる所要時間
tdで規定する。
アシスト力指標及び腰部圧縮力低減指標を求めるために,表A.1に規定する基準動作を行わなければな
らない。動作は直立状態(体幹角度0°)から開始し,持ち下げ,姿勢維持及び持ち上げを連続して行う。
ユーザ人体モデルからロボットへの入力は,A.4.4に従う。ロボットモデルのモード切替又は操縦入力が必
要な場合は,各動作ごとに区切って行ってよい。
表A.1の基準動作の一部だけをアシストするロボットであっても,動作は直立状態(体幹角度0°)か
ら開始し,持ち下げ,姿勢維持,持ち上げを連続して行う。
注記1
target
tθ
を50°として,人が持ち上げ及び持ち下げを行うときのkは,人が持つ荷の大きさ,
質量,個人差などによって1.3〜1.7程度のばらつきが生じる。そのため,この規格ではkに
1.5を採用した。
注記2 一般に,持ち上げ動作,持ち下げ動作及び姿勢維持動作をするときに,体幹角度を小さく維
持することが,腰部への負荷を小さくできるために好ましいとされている。このとき,kは
1.5より大きくなり,持ち上げ動作及び持ち下げ動作の所要時間tdも2 sより短くなることが
分かっている。例えば,体幹角度を25°として,人が実際に持ち上げ動作及び持ち下げ動作
をする場合,kは3.0程度になり,持ち上げ動作及び持ち下げ動作の所要時間tdは1.5 s程度
になる。性能の比較のために,これらの値を基準動作とした場合の,アシスト力指標及び腰
部圧縮力低減指標を算出してもよい。
表A.1−基準動作(
target
tθ
=50°,k=1.5及びtd=2 s)
基準動作
体幹角度θt(t) a)
所要時間td
持ち下げ
0°→50°
2 s
姿勢維持
50°
2 s
持ち上げ
50°→0°
2 s
注a) 体幹角度が50°となる姿勢は,一般に腰部への負荷が大きく,好ま
しくない姿勢とされているが,移乗介助,低い荷の持ち上げ,非熟
練者による作業などで起こり得る姿勢といえる。ロボットを使用す
ることで,このような姿勢による腰痛リスクをどの程度低減可能か
を評価するため,基準動作の体幹角度に50°を採用した。
A.4.2 目標軌道
時間tに対するユーザ人体モデルの体幹角度の目標軌道θt(t),股関節角度θh(t)及び膝関節角度θk(t)の目
標軌道は,次のとおり規定する。ただし,各動作の開始時刻を0とし,直立状態ではθt,θh及びθkは全て
0とする。パラメータa,b,c及びdの値は,直前の動作終了時の体幹角度
)0(
ˆtθ
と,動作終了時の体幹角
度θt(td)を用いて随時算出する。θˆは実際の角度を意味している。理想的には,持ち下げ動作では,θt(0)=0,
target
t
d
t
)
(
θ
θ
=
t
となる。姿勢維持動作では,常に
target
t
t)
(
ˆ
θ
θ
=
t
となる。持ち上げ動作では,
target
t
t)0(
θ
θ
=
,θt(td)
19
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
=0となる。さらに,全ての基準動作において,
0
)0(
t
=
θ&
,
0
)
(d
t
=
t
θ&
,
0
)0(
t
=
θ&&
,
0
)
(d
t
=
t
θ&&
とする。
− 体幹角度(°)
d
ct
bt
at
t
+
+
−
=
3
4
5
t)
(
θ
,
]
,0[
dt
t=
− 股関節角度(°)
)
(
k
)
(
t
h
t
t
θ
θ
=
− 膝関節角度(°)
)
(
)k
1(
)
(
t
k
t
t
θ
θ
−
=
注記1
)
(
ˆ
)
(
ˆ
)
(
ˆ
k
h
t
t
t
t
θ
θ
θ
+
=
の関係を利用している。
注記2 人が実際に持ち上げ動作,又は持ち下げ動作をする際の各角度の軌道は,時間の5次関数に
ほぼ一致している。
A.4.3 制御器
ユーザ人体モデルの制御器は,ロボットのアシストがある場合でも,A.4.2に規定する目標軌道について
−5°以上かつ+5°以内となる範囲で追従しなければならない。実際の動作にかかった時間dˆtは,目標軌
道を求めるために用いた所要時間tdと一致しなくてもよい。
注記 一般に,ロボットのアシスト力が存在することで,動作にかかる時間は変化する。
A.4.4 ロボットへの入力
運動入力式のロボットの場合,ユーザ人体モデルからの特別な入力はない。
生体信号入力式の場合,ユーザ人体モデルの股関節の実際の出力トルクをロボットに入力する。
操縦入力式の場合,ユーザマニュアルに従って,基準動作の前,基準動作中,及び/又は基準動作の間
の時間に,操縦操作をロボットに入力する。
20
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
アシスト力指標及び腰部圧縮力低減指標の試験方法の例
B.1
要旨
この附属書は,8.3及び9.5の要求事項に用いられるアシスト力指標,並びに8.4及び9.6の要求事項に
用いられる腰部圧縮力低減指標を,試験によって評価する方法を例示する。
B.2
一般
試験は形式試験として実施し,ロボットの代表的な供試品1台について行う。複数の供試品について試
験を実施し,その結果を評価してもよい。
供試品には,通常使用のためにロボットに取り付けられる附属品(動力源又は外部動力伝導線を含む。)
を取り付ける。
B.3
試験装置
A.2に規定するユーザ人体モデルの条件を満たし,A.4に規定する基準動作が可能な試験装置を用いる。
B.4
環境条件
試験は,ユーザマニュアルに記載された通常使用時の環境条件の範囲で実施する。
B.5
供試品の装着
ユーザマニュアルに記載された方法に従って,供試品を試験装置に取り付ける。
B.6
試験の実施
供試品を作動させ,試験装置にA.4に規定する基準動作を3セット行わせる。基準動作の間には,製造
業者の指定する休止時間を設けてよい。休止時間の間に,ロボットのモードを変更してもよい(例えば,
持ち下げモード,姿勢維持モード,持ち上げモードなど)。
内部動力源式のロボット,及び使用前に充塡したエネルギーを本体に供給し,使用中に再充塡しない動
力源を用いる外部動力源式のロボットの場合は,エネルギーを通常使用における最大まで充塡した動力源
を用いて試験を実施してもよい。
故障などによって,試験が継続できない場合は,その時点で中断する。
B.7
アシスト力指標及び腰部圧縮力低減指標の評価
アシスト力指標及び腰部圧縮力低減指標は,附属書Cに従って算出し,セット間平均をしたものを評価
値とする。
21
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
アシスト力指標及び腰部圧縮力低減指標の算出方法
C.1 要旨
この附属書は,8.3及び9.5の要求事項に用いられるアシスト力指標,並びに8.4及び9.6の要求事項に
用いられる腰部圧縮力低減指標を算出する方法を規定する。
C.2 一般
ロボットのアシスト力指標は,C.3に従って算出しなければならない。ロボットの腰部圧縮力低減指標
は,C.4に従って算出しなければならない。
もし,ローパスフィルターをユーザ人体モデルから得られたデータに適用する場合は,そのカットオフ
周波数は,10 Hzを下回ってはならない。
C.3 アシスト力指標
ロボットのアシスト力指標
Lower
1000
AFC
,
Lower
200
AFC
,
Hold
1000
AFC
,
Raise
1000
AFC
及び
Raise
200
AFC
は,表C.1に規定する時
刻t1及びt2を用いて,次の式で算出する。
[
]dt
t
t
ψ
t
t
t
t
t
t
)
(
ˆ
),
(
ˆ
1
AFC
2
1
1
2
h
ref
h
1
2
∫
−
=
−
τ
τ
ただし,
<
−
−
−
=
0
if
)
(
0
if
)
,
(
x
y
x
x
y
x
y
x
ψ
≧
)
(
ˆref
ht
τ
: A.4に規定する基準動作を行ったときに得られる,ユーザ人体モデルの股関節軸の出力トルク
(ロボットを使用しない場合)
)
(
ˆht
τ
: A.4に規定する基準動作を行ったときに得られる,ユーザ人体モデルの股関節軸の出力トルク
(ロボットを使用する場合)
とする。
注記1 一般に,ロボットのアシスト力が存在することで,動作にかかる時間及びユーザが発揮しな
ければならない力は変化する。そのため,この規格では,評価結果の安定性の向上を意図し
て,基準動作時の特定の時間区間における平均を指標とした。
注記2 A.4に規定する基準動作は抗重力動作であるため,
)(
ˆref
ht
τ
は常に負となることが期待できる。
このとき,ψ(x, y)=−(x−y)が常に用いられることになるが,この規格では,より一般性をも
つ形式でψを定義している。これによって,規定の動作を行うために必要なトルクと同じ方
向に,ロボットがトルクを出力する場合に,ψは正となる。
注記3 ψが正のとき,ロボットが出力する抗重力方向(伸展)のトルクによって,ユーザが発揮す
る抗重力方向(伸展)のトルクは低減しているか,又はロボットに逆らうために,重力方向
のトルクを発揮しているとみなせる。ψが負のとき,ロボットが出力する重力方向(屈曲)
のトルクによって,ユーザの発揮する抗重力方向(伸展)のトルクは増大しているとみなせ
る。
22
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
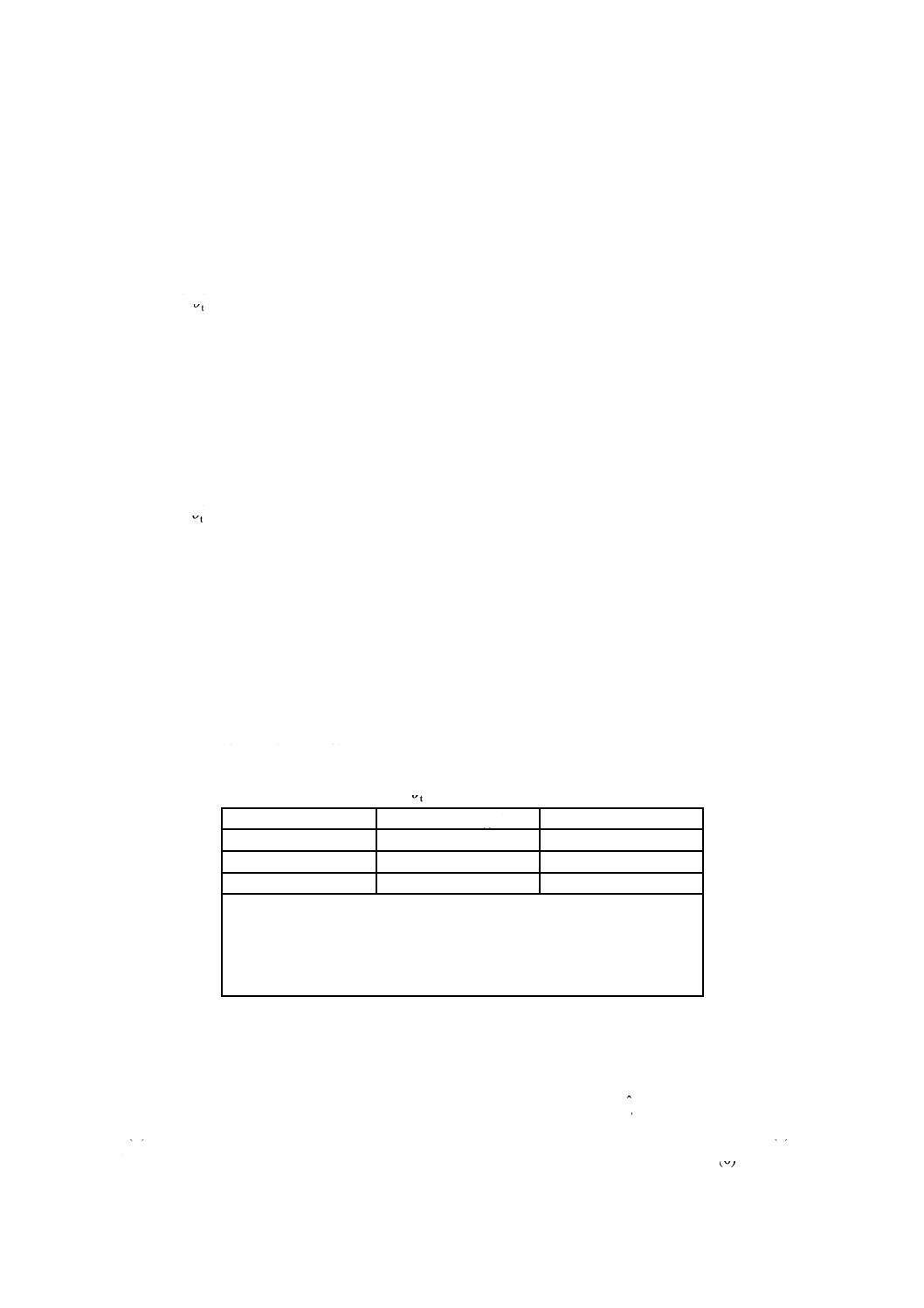
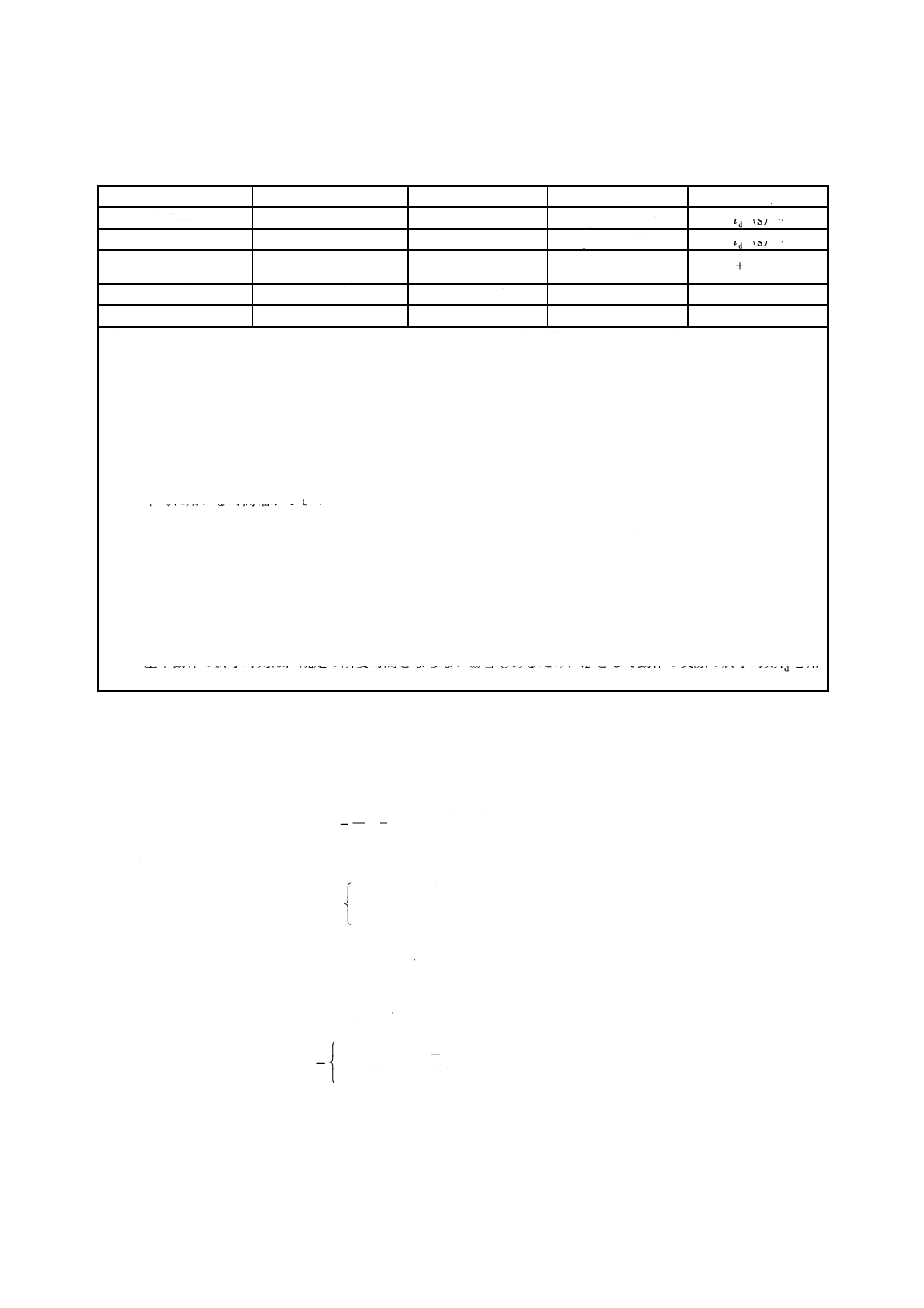
表C.1−ロボットのアシスト力指標及び腰部圧縮力低減指標を算出するための時間区間
アシスト力指標b)
腰部圧縮力低減指標b)
基準動作の動作名
時刻t1 a)
時刻t2 a)
Lower
1000
AFC
Lower
1000
LCR
持ち下げ
1
ˆd−
t
(s)c)
dˆt(s)c)
Lower
200
AFC
Lower
200
LCR
持ち下げ
2.0
ˆd−
t
(s)c)
dˆt(s)c)
Hold
1000
AFC
Hold
1000
LCR
姿勢維持
5.0
2
d−
t
(s)
5.0
2
d+
t
(s)
Raise
1000
AFC
Raise
1000
LCR
持ち上げ
0 s
1 s
Raise
200
AFC
Raise
200
LCR
持ち上げ
0 s
0.2 s
注a) t1及びt2で定義される時間区間[t1, t2]は,基準動作の持ち下げ,姿勢維持及び持ち上げにおけるそれぞれの開
始時刻を0 sとし,ロボットを使用しない場合に,ユーザの発揮するトルクが最も大きく,腰部への負荷が最
も大きくなる時間区間を含むように規定した(附属書F参照)。基準動作における関節角度の目標軌道は単調
増加又は単調減少であるため,アシスト力指標及び腰部圧縮力低減指標は特定の角度区間における平均と考
えることもできる。しかしながら,ロボットのアシスト力によって関節角度の軌道が変化すること,体幹角
度,股関節角度及び膝関節角度についてそれぞれ,又は同時に区間を規定するのが困難なこと,平均に用い
るデータ数が一定しないことから,この規格では,アシスト力指標及び腰部圧縮力低減指標を,角度区間に
おける平均とせず,時間区間における平均と規定した。
b) 平均に用いる時間幅が1 sの
Lower
1000
AFC
,
Hold
1000
AFC
,
Raise
1000
AFC
,
Lower
1000
LCR
,
Hold
1000
LCR
及び
Raise
1000
LCR
は,ロボットが基
準動作中に持続的にアシスト力を出力できているか,又は腰部負荷を低減できているかを表現する指標とみ
なせる。一方で,平均に用いる時間幅が0.2 sの
Lower
200
AFC
,
Raise
200
AFC
,
Lower
200
LCR
及び
Raise
200
LCR
は,基準動作にお
いて体幹角度が最も屈曲している短い時間区間だけに注目しているため,この時間区間に存在するユーザの
発揮するトルク又は腰部圧縮力のピークが,ロボットを使用することでどの程度低減できているかを表現す
る指標とみなせる(附属書F参照)。腰部への急な負荷の増加に対して,人が十分な力を発揮するまでの応答
時間の目安は0.2 sであることから(7.4の注記4参照),ピークの低減を評価するための時間幅として0.2 s
を採用した。
c) 基準動作の終了時刻は,規定の所要時間とならない場合もあるため,t2として動作の実際の終了時刻dˆtを用
いる。
C.4 腰部圧縮力低減指標
ロボットの腰部圧縮力低減指標
Lower
1000
LCR
,
Lower
200
LCR
,
Hold
1000
LCR
,
Raise
1000
LCR
及び
Raise
200
LCR
は,表C.1に規定す
る時刻t1及びt2を用いて,次の式で算出する。
[
]dt
t
F
t
F
ψ
t
t
t
t
t
t
)
(ˆ
),
(
ˆ
1
LCR
2
1
1
2
ref
1
2
∫
−
=
−
ただし,
<
−
−
−
=
0
if
)
(
0
if
)
,
(
x
y
x
x
y
x
y
x
ψ
≧
[
]
)
(
ˆ
)
(
ˆ
)
(
ˆ
ref
z
ref
y
ref
t
F
t
M
t
F
+
=ϕ
[
]
)
(
ˆ
)
(
ˆ
)
(ˆ
z
y
t
F
t
M
t
F
+
=ϕ
<
−
=
0
if
1.0
/
0
if
05
.0
/
)
(
x
x
x
x
x
≧
ϕ
)
(
ˆref
z
t
F
: A.4に規定する基準動作を行ったときに得られる,ユーザ人体モデルの腰部z軸方向の圧縮力
(ロボットを使用しない場合)
)
(
ˆzt
F
: A.4に規定する基準動作を行ったときに得られる,ユーザ人体モデルの腰部z軸方向の圧縮力
23
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(ロボットを使用する場合)
)
(
ˆref
yt
M
:A.4に規定する基準動作を行ったときに得られる,ユーザ人体モデルの腰部y軸周りのモーメ
ント(ロボットを使用しない場合)
)
(
ˆyt
M
: A.4に規定する基準動作を行ったときに得られる,ユーザ人体モデルの腰部y軸周りのモーメ
ント(ロボットを使用する場合)
とする。
注記1 一般に,ロボット及びロボットのアシスト力が存在することで,ユーザの腰椎の圧縮力は変
化する。そのため,この規格では,評価結果の安定性の向上を意図して,基準動作時の特定
の時間区間における平均を指標とした。
注記2 実際の人体では,腰部のy軸周りのモーメントによる姿勢の変化に抵抗するために,筋を緊
張させる必要がある。この筋の収縮力が,腰椎の圧縮力となることが知られている。一方で,
A.2に規定するユーザ人体モデルは,腰部のy軸周りのモーメントによって姿勢の変化が生
じない構造をしている。そのため,ロボットの腰部圧縮力低減指標の式には,腰部のy軸正
方向又は負方向のモーメントが,脊柱起立筋又は腹直筋によって支えられていると仮定して
補正した腰部の圧縮力F(t)及びF ref(t)を用いている。
なお,腰椎(L5/S1)から脊柱起立筋及び腹直筋までのモーメントアームとして,0.05 m及び0.1 mをそ
れぞれ利用している[9][10]。
注記3 A.4に規定する基準動作では,上体の質量が腰部z軸方向の圧縮力となるため,
)
(
ˆref
z
t
F
は常
に正となることが期待できる。このとき,ψ(x, y)=x−yが常に用いられることになるが,こ
の規格では,引張力が腰部の負荷になる場合を考慮した応用性と,アシスト力指標の式との
一貫性のために,より一般性をもつ形式でψを定義している。
注記4 ψが正のとき,ユーザが規定の動作を行う際の腰部圧縮力は低減しているとみなせる。ψが
負のとき,ユーザが規定の動作を行う際の腰部圧縮力は増加しているとみなせる。
24
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
ユーザマニュアルの記載例
D.1 記載例
表D.1は,箇条9に規定するユーザマニュアルの記載例である。
表D.1−ユーザマニュアルの記載例
JIS B 8456-1に基づく表示
項目
内容
対応する
箇条
用途
介護支援用
9.2
装着部位
両大たい(腿),腹部
9.3
駆動方式
電動式
9.3
動力源の方式
動力源交換式
9.3
入力方式
生体信号入力式
9.3
最大アシスト力
30 N・m
9.4
アシスト力指標
Lower
1000
AFC
28 N・m
9.5
Lower
200
AFC
30 N・m
Hold
1000
AFC
30 N・m
Raise
1000
AFC
28 N・m
Raise
200
AFC
30 N・m
JIS B 8456-1の附属書Bの試験による。身長170 cm,体重75 kgのユーザが,
体幹角度が50°となる持ち下げ,姿勢維持,持ち上げをした場合を想定。
腰部圧縮力低減指標
Lower
1000
LCR
1.1 kN
9.6
Lower
200
LCR
1.2 kN
Hold
1000
LCR
1.2 kN
Raise
1000
LCR
1.1 kN
Raise
200
LCR
1.2 kN
JIS B 8456-1の附属書Bの試験による。身長170 cm,体重75 kgのユーザが,
体幹角度が50°となる持ち下げ,姿勢維持,持ち上げをした場合を想定。
定格使用時間
3時間(目安。使い方によって異なる。)
9.7
質量
本体:2.6 kg
標準バッテリ:0.28 kg
9.8
偏心距離
3 cm
9.9
最大突出半径
22.8 cm
9.10
適用規格
− JIS B 8446-2
− JIS B 8456-1
− JIS B 9705-1,カテゴリ1,PLb,応答時間150 ms程度(非常ブレーキ)
9.1,9.12
25
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
最大アシスト力の基準の根拠
この規格の表1において,ロボットの設計に対する股関節当たりの最大アシスト力の基準として,72
N・mが規定されている。この基準は,JIS B 8446-2の表1において,ユーザのグループを定めない場合の
股関節の最大発揮力の基準が72 N・mとされていることを根拠にしている。
この最大発揮力は,JIS B 8446-2の表1の注記のとおり,独立行政法人製品評価技術基盤機構の人間特
性計測データベースに記載された,健常な75歳〜79歳女性(日本人)25 percentileの静止時の最大発揮力
に,1.8倍(静止時の筋繊維の最大発揮力を,遠心性等張運動時の筋繊維の最大発揮力に換算する係数[11])
を乗じて算出している。
同データベースでは,股関節屈曲角度が15°,45°及び90°,並びに股関節伸展角度が45°,90°及
び105°における静止時(等尺性)の最大発揮力の計測結果が示されている。JIS B 8446-2では,屈曲側
15°の値が,最大発揮力の根拠として利用されている。これは,屈曲側へのロボットの暴走はたとえあら
がえなかったとしても,ユーザの体に当たって止まるため傷害に至らず,一方で,伸展側への暴走は関節
への傷害に至るとして,屈曲側の最大発揮力が最も大きくなる15°のときの値を採用したことによる。
この規格の適用範囲のロボットは,股関節の伸展側の運動をアシストする機器のため,同基準をこの規
格の最大アシスト力の基準として採用することが適切と判断した。
26
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(参考)
アシスト力指標及び腰部圧縮力低減指標の時間区間
この規格の附属書Cは,ロボットのアシスト力指標
Lower
1000
AFC
,
Lower
200
AFC
,
Hold
1000
AFC
,
Raise
1000
AFC
及び
Raise
200
AFC
,
並びに腰部圧縮力低減指標
Lower
1000
LCR
,
Lower
200
LCR
,
Hold
1000
LCR
,
Raise
1000
LCR
及び
Raise
200
LCR
を算出するために,表C.1
に規定する時間区間を用いてる。この附属書は,持ち下げ,姿勢維持及び持ち上げの各基準動作を行った
場合のデータを例示するとともに,アシスト力指標及び腰部圧縮力低減指標の算出に用いる時間区間を図
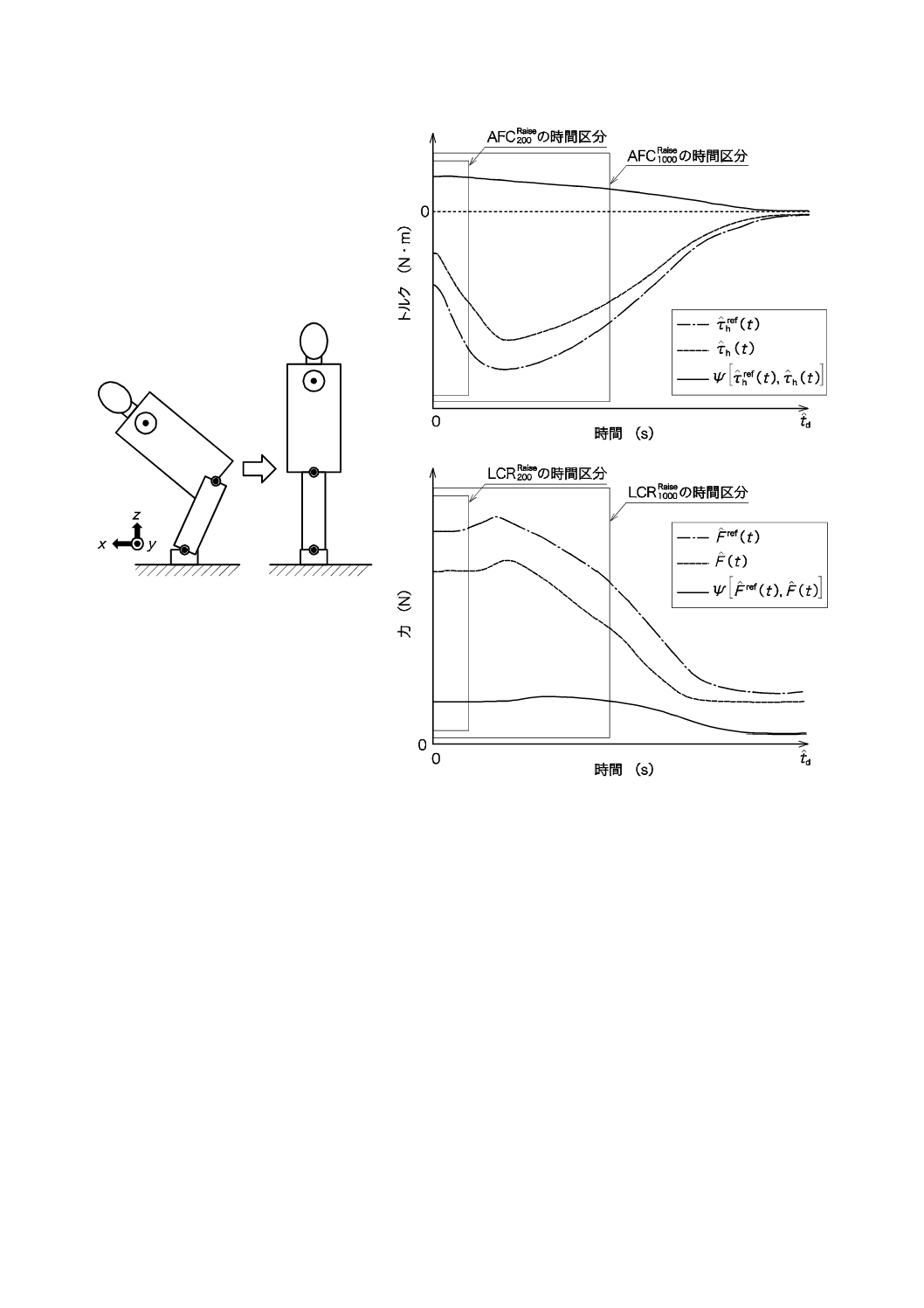
示することで,アシスト力指標及び腰部圧縮力低減指標がどのような意味をもつのかを説明する。
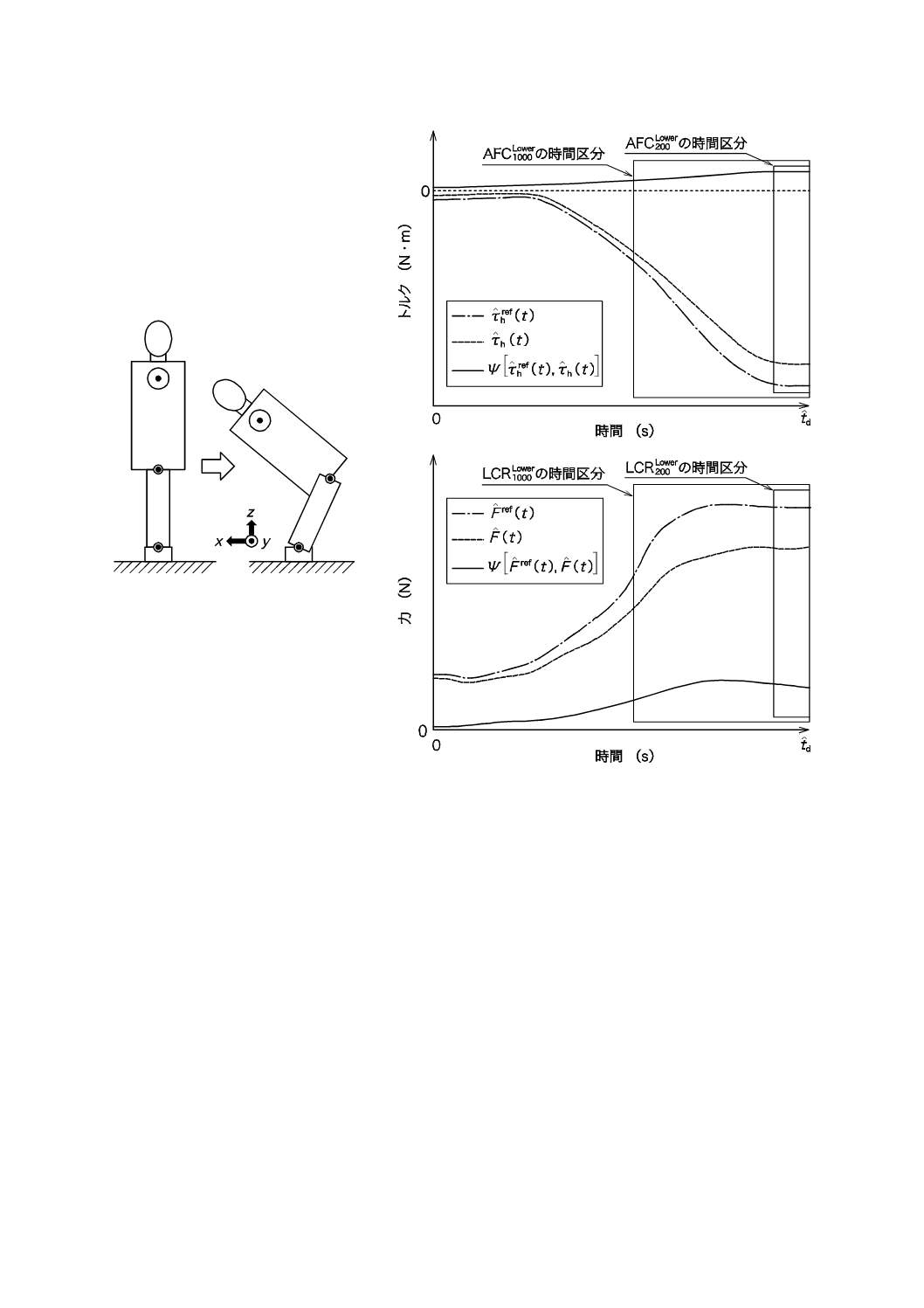
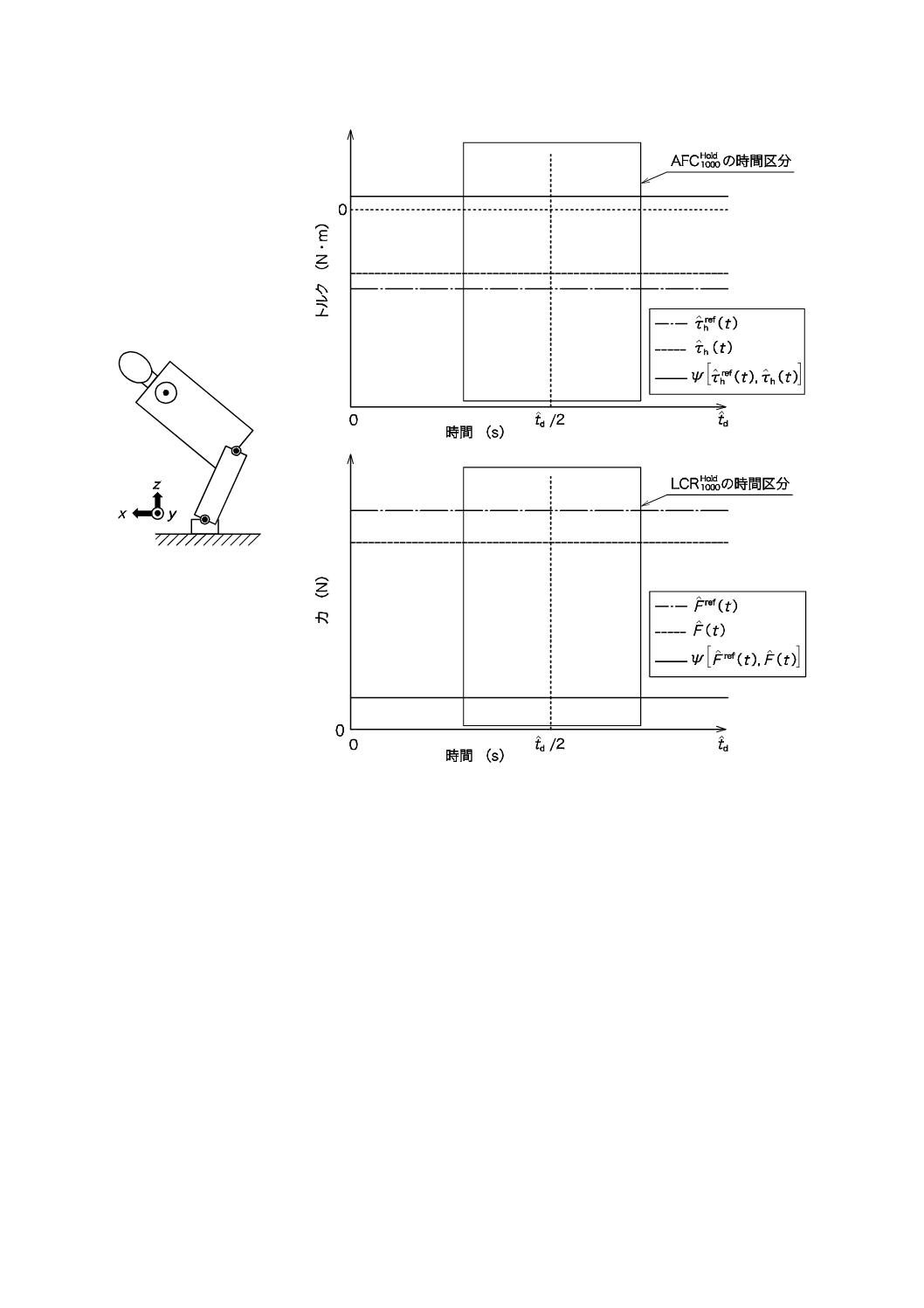
図F.1〜図F.3はそれぞれ,持ち下げ,姿勢維持及び持ち上げの各基準動作を行ったときに,ユーザ人体
モデルから得られたデータ,並びにアシスト力指標及び腰部圧縮力低減指標の算出に用いるψ及び時間区
間を例示している。
図F.1〜図F.3のように,平均の計算に用いる時間幅が1 sとなる
Lower
1000
AFC
,
Hold
1000
AFC
,
Raise
1000
AFC
,
Lower
1000
LCR
,
Hold
1000
LCR
及び
Raise
1000
LCR
は,最もアシスト力が必要な時間帯に,持続的にロボットがアシスト力を出力し,腰
部圧縮力を低減できているかを表す指標となっている。一方で,平均の計算に用いる時間幅が0.2 sとなる
Lower
200
AFC
,
Raise
200
AFC
,
Lower
200
LCR
及び
Raise
200
LCR
は,短い時間に注目することで,ユーザの発揮力と腰部圧縮力
との最大値がどの程度低減できているかを表す指標となっている。また,持ち下げ動作の
Lower
200
AFC
及び
Lower
200
LCR
は,持ち下げ後に静止する最後までロボットがアシスト力を出力し,腰部圧縮力を低減できてい
るかを表す指標にもなっている。持ち上げ動作の
Raise
200
AFC
及び
Raise
200
LCR
は,静止状態から持ち上げを始める
ときに,ロボットがアシスト力を出力し,腰部圧縮力を低減できているかを表す指標にもなっている。
27
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図F.1−持ち下げ動作時のデータの例及び時間区間
28
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図F.2−姿勢維持動作時のデータの例及び時間区間
29
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図F.3−持ち上げ動作時のデータの例及び時間区間
30
B 8456-1:2017
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] 山田陽滋,工藤直紀,鮎澤光,吉安祐介,吉田英一:“腰部負担評価のための基準データとシミュレー
タ”,日本ロボット学会誌,Vol.34,No.4,pp.244-248,2016.
[2] JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
[3] UK Ministry of Defence: “Management of health and safety in defence: arrangements” (JSP 375 part 2, volume
1), Chapter 10, “Manual handling”, 2016.
[4] ISO 13849-1:2006,Safety of machinery−Safety-related parts of control systems−Part 1: General principles
for design
[5] 独立行政法人製品評価技術基盤機構(NITE):人間特性計測データベース(Human Characteristics
Database)URL: http://www.tech.nite.go.jp/human/
[6] Wilder, D., et al. “Response To Sudden Load By Patients With Back Pain”, In Proceedings Of The First
American Conference On Human Vibration, 2006.
[7] 中村仁彦,山根克,諏訪元,近藤修,河内まき子,川地克明,持丸正明:“成人男性骨格形状データ”,
国立研究開発法人産業技術総合研究所H20PRO-905,2008.
[8] JIS T 0601-1 医用電気機器−第1部:基礎安全及び基本性能に関する一般要求事項
[9] Chaffin, D. B.: “A computerized biomechanical model−Development of and use in studying gross body
actions”, Journal of Biomechanics, Vol.2, No.4, pp.429-441, 1969.
[10] Jorgensen, M. J., et al.: “Sagittal plane moment arms of the female lumbar region rectus abdominis in an upright
neutral torso posture”, Clinical Biomechanics, Vol.20, No.3, pp.242-246, 2005.
[11] Choi, SJ., et al.: “Eccentric contraction-induced injury to type I, IIa, and IIa̲IIx muscle fibers of elderly adults”,
AGE, Vol.34, pp.215-226, 2012.