B 8446-1:2016
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 リスクアセスメント ·········································································································· 6
4.1 一般 ···························································································································· 6
4.2 危険源の同定 ················································································································ 6
4.3 リスク見積り ················································································································ 7
5 安全要求事項及び保護方策 ································································································· 7
5.1 一般 ···························································································································· 7
5.2 電池の充電に関連する危険源 ··························································································· 7
5.3 エネルギーの蓄積及び供給による危険源············································································· 8
5.4 ロボットの通常運転における起動及び再起動 ······································································ 10
5.5 静電電位 ····················································································································· 10
5.6 ロボットの形状による危険源 ·························································································· 10
5.7 放射による危険源 ········································································································· 11
5.8 電磁障害による危険源 ··································································································· 11
5.9 ストレス,姿勢及び使用法による危険源············································································ 12
5.10 ロボットの動作による危険源 ························································································· 13
5.11 耐久性不足による危険源 ······························································································· 19
5.12 誤った自律的判断及び動作による危険源 ·········································································· 19
5.13 動いている部品との接触による危険源 ············································································· 19
5.14 人がロボットに気付かないことによる危険源 ···································································· 20
5.15 危険な環境条件 ··········································································································· 21
5.16 位置確認及びナビゲーションの誤差による危険源 ······························································ 21
5.17 電気火災による危険源 ·································································································· 22
6 安全関連制御システムに対する要求事項 ·············································································· 24
6.1 要求安全性能 ··············································································································· 24
6.2 ロボットの停止 ············································································································ 24
6.3 運転空間の制限 ············································································································ 24
6.4 安全関連速度制御 ········································································································· 24
6.5 安全関連環境認識 ········································································································· 24
6.6 安定性制御 ·················································································································· 25
6.7 安全関連力制御 ············································································································ 25
6.8 特異点保護 ·················································································································· 25
6.9 ユーザインタフェースの設計 ·························································································· 25
B 8446-1:2016 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
6.10 運転モード ················································································································· 26
6.11 手動制御装置 ·············································································································· 26
7 検証及び妥当性確認 ········································································································· 26
8 使用上の情報 ·················································································································· 26
8.1 一般 ··························································································································· 26
8.2 マーキング又は表示 ······································································································ 26
8.3 ユーザマニュアル ········································································································· 27
8.4 サービスマニュアル ······································································································ 27
8.5 インストールマニュアル ································································································ 27
8.6 エラー及びアラート ······································································································ 28
9 使用の限定及び管理 ········································································································· 29
9.1 一般 ··························································································································· 29
9.2 教育及び訓練 ··············································································································· 29
9.3 環境整備 ····················································································································· 30
9.4 定期検査及び保守 ········································································································· 30
10 保護具 ························································································································· 31
11 外部システム ················································································································ 31
附属書A(参考)危険源の連鎖的な発展及びそのリスク低減························································ 33
附属書B(参考)ロボットの構造及び各部の名称 ······································································· 37
附属書C(参考)ロボットの典型的な危害の発生シーン ····························································· 39
附属書D(参考)検証及び妥当性確認のための試験条件の例························································ 42
附属書E(参考)教育及び訓練の具体例··················································································· 43
附属書F(参考)充電,感電及び電気的火災に関する試験の例 ····················································· 44
附属書G(参考)イミュニティ試験の例 ·················································································· 46
附属書H(参考)ロボットの温度に関する試験の例 ··································································· 47
附属書I(参考)静的安定性の試験の例 ··················································································· 48
附属書J(参考)動的安定性の試験の例 ··················································································· 49
附属書K(参考)安全関連物体との衝突に関する試験の例 ·························································· 51
附属書L(参考)ロボットの足ひ(轢)きに関する試験の例 ························································ 52
附属書M(参考)定期検査及び保守の例 ·················································································· 53
B 8446-1:2016
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本ロボット工業会(JARA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 8446の規格群には,次に示す部編成がある。
JIS B 8446-1 第1部:マニピュレータを備えない静的安定移動作業型ロボット
JIS B 8446-2 第2部:低出力装着型身体アシストロボット
JIS B 8446-3 第3部:倒立振子制御式搭乗型ロボット
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8446-1:2016
生活支援ロボットの安全要求事項−
第1部:マニピュレータを備えない静的安定
移動作業型ロボット
Safety requirements for personal care robots-
Part 1: Static stable mobile servant robot with no manipulator
1
適用範囲
この規格は,JIS B 8445の6.1.2.1(移動作業型ロボット)に規定するタイプ1.1又はタイプ1.2の生活支
援ロボットのうち,電源停止状態で転倒しない静的安定な移動機構をもつ自律移動を行うロボットであっ
て,搬送,掃除,案内などの作業を意図し,かつ,作業用のマニピュレータをもたないロボット(以下,
ロボットという。)の安全要求事項について規定する。
この規格は,次の全ての特徴をもつロボットについて適用する。
− 移動機構として,車輪,無限軌道などの3点支持以上の走行面への接点をもつ。
− 人の搭乗,人への装着などを意図していない。
− 移動機構は,充電式バッテリによって駆動され,ロボットの走行移動時に外部電源供給用及び通信用
ケーブルを使用しない。
− ロボット本体と分離された台車をけん(牽)引しない。
− 工場などで使用される有軌道台車のような目に見える経路を使用せず,自己位置認識,経路計画,走
行制御などによって自律的に経路を設定し,その設定された経路に基づいて移動を行う。
− 通常の使用における最大の運動エネルギーが1 235 Jを超えない(例 最大質量80 kgで定格最高速度
20 km/h,最大質量320 kgで定格最高速度10 km/h)。
この規格では,設定経路に基づいて移動を行う機能をロボットの基本機能として考え,これを達成する
ためのロボットの安全要求を規定する。
この規格が対象とするロボットには,基本機能を達成するために外部システムの支援を利用するロボッ
トも含む。これには,外部システムからの情報を入力とする,又は外部システムへの情報を出力とする安
全関連部をもつロボットも含む。ただし,IEC 60335-2-2で規定する家庭用の小形掃除機ロボット及びIEC
60335-2-107で規定するロボット芝刈機には適用しない。
注記 20 km/hを超える速度で移動するロボットは,JIS B 8445の箇条1(適用範囲)で適用外と規定
されている。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
2
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 8445:2016 ロボット及びロボティックデバイス−生活支援ロボットの安全要求事項
JIS B 9960-1 機械類の安全性−機械の電気装置−第1部:一般要求事項
JIS C 0365 感電保護−設備及び機器の共通事項
JIS C 0448 表示装置(表示部)及び操作機器(操作部)のための色及び補助手段に関する規準
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
JIS C 9335-2-29 家庭用及びこれに類する電気機器の安全性−第2-29部:バッテリチャージャの個別
要求事項
JIS C 60695-11-10 耐火性試験−電気・電子−第11-10部:試験炎−50 W試験炎による水平及び垂直
燃焼試験方法
JIS C 61000-4-3 電磁両立性−第4-3部:試験及び測定技術−放射無線周波電磁界イミュニティ試験
JIS C 61000-4-6 電磁両立性−第4-6部:試験及び測定技術−無線周波電磁界によって誘導する伝導
妨害に対するイミュニティ
ISO 7000,Graphical symbols for use on equipment−Registered symbols
ISO 13732-1,Ergonomics of the thermal environment−Methods for the assessment of human responses to
contact with surfaces−Part 1: Hot surfaces
ISO 13732-3,Ergonomics of the thermal environment−Methods for the assessment of human responses to
contact with surfaces−Part 3: Cold surfaces
IEC 60335-2-2,Household and similar electrical appliances−Safety−Part 2-2: Particular requirements for
vacuum cleaners and water-suction cleaning appliances
IEC 60335-2-107,Household and similar electrical appliances−Safety−Part 2-107: Particular requirements
for robotic battery powered electrical lawnmowers
IEC 61326-3-2,Electrical equipment for measurement, control and laboratory use−EMC requirements−Part
3-2: Immunity requirements for safety-related systems and for equipment intended to perform
safety-related functions (functional safety)−Industrial applications with specified electromagnetic
environment
IEC 62061:2012,Safety of machinery−Functional safety of safety-related electrical, electronic and
programmable electronic control systems
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 8445の箇条3(用語及び定義)によるほか,次による。
なお,この規格で用いるロボットの構造及び各部の名称を参考として附属書Bに示す。
3.1
ユーザ(user)
ロボットの提供するサービスの受益者(JIS B 8445の3.26参照)。
注記 オペレータはユーザとみなされる。
3.2
オペレータ(operator)
ロボットの起動,停止,及び設定を行う人(JIS B 8445の3.25参照)。
3
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 ユーザと同一の場合もある。
3.3
安全管理者(administrator)
環境整備を行う人。
注記 ユーザと同一の場合もある。
3.4
保守作業者(maintenance personnel)
ロボットの作動状態を維持するための保守・点検作業を行う人。
3.5
設置作業者(installation personnel)
ロボット及び環境システムの設置工事を行う人。
3.6
第三者(third party)
ユーザ,オペレータ,安全管理者,保守作業者及び設置作業者を除く人。
3.7
製造業者(manufacturer)
ロボットを設計し,製造する者又は組織。
3.8
エラー(error)
製造業者があらかじめ正しいと規定する値,値の範囲又は状態からの逸脱。
注記 エラーは,ロボットが計測,観測,計算及び推定することで検出される。
3.9
アラート(alert)
エラーを人に伝える信号。
注記 アラートは,人に注意を喚起したり,又は素早い行動を人に求めたりするときに用いられ,通
常,視覚的信号,聴覚的信号,触覚的信号などが用いられる。
3.10
電気火災(electric fire)
電気的な要因で発生する火災。
3.11
暴走状態(runaway state)
ロボットが製造業者の意図した以外の動作を行う状態又は制御不能の状態。
3.12
接触可能な部分(accessible part)
通常使用において,人が接触することができるロボットの部分又は表面。
注記 接触可能な部分は,JIS C 0922のテストプローブBなどによって確認できる。
3.13
意図する使用(intended use)
製造業者が想定する通常のロボットの用途,使用方法及び使用条件。
注記 意図する使用とは,JIS B 9700の3.23(意図する使用)では,使用上の情報によって定まるも
4
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
のとされているが,この規格では,設計の最初に定めるものをいう。
3.14
合理的に予見可能な誤使用(reasonably foreseeable misuse)
製造業者が予測できる範囲での,想定されるユーザによる,意図する使用を超えたロボットの使用方法。
注記 JIS B 9700の3.24(合理的に予見可能な誤使用)では,“設計者が意図していない使用方法であ
るが,容易に予測できる人間の挙動から生じる機械の使用”と定義されている。
3.15
定期検査(periodic inspection)
製造業者の指定する(運転)時間間隔及び検査方法で,ロボットの動作及び機能が正しく働くかを確認
する検査。
3.16
保守(maintenance)
ロボットの動作及び機能が正しく働くかを確認し,必要に応じてロボットを修理・調整すること。
3.17
環境整備(environmental maintenance)
安全のために環境側の条件を整えること。
注記 環境側の条件の例として,ロボットの稼動する空間の温度,湿度,照明条件,ロボットの周囲
にいる人の密集度などがある。
3.18
インストールマニュアル(installation manual)
ロボットの設置工事の方法,初期設定,起動方法などが記載された,設置作業者のための文書。
3.19
外部システム(external support system)
ロボットの使用環境などに設置された各種センサ,コントローラ,制御機器などで構成され,ロボット
本体と無線通信などをしながらロボットの運用を支援するシステム。
注記 外部システムの例として,環境に設置されたロボットの位置を検出するセンサによってロボッ
トの位置認識を支援するシステム,ブラインドコーナーから来る歩行者を検出して事前にロボ
ットに通知することで衝突のリスクを低減するシステムなどが挙げられる。
3.20
静的安定(statically stable)
動的なバランス制御を必要とせず,電源を切った状態でロボットが正立できること。
注記 移動機構が車輪,無限軌道などの3点支持以上で走行面へ接点をもつことによって,ロボット
は静的に安定する。一方,静的安定でないものとして,倒立制御を行うことで正立する移動機
構が挙げられる。
3.21
自律移動(self-navigation)
ロボット自身のもつ自己位置認識機能,走行制御機能などによって,軌道,人の操縦などがなくても目
的地への移動を行う機能。
3.22
移動機構(locomotion mechanism)
5
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
車輪,無限軌道などの接地部品,これを駆動するモータなどの駆動装置,ギアボックスなどの減速装置,
及び必要に応じてサスペンションなどの姿勢安定装置で構成されたロボットが移動するための機構。
3.23
有軌道台車(rail guided vehicle)
レールなどの軌道上を走行する台車。
注記 軌道によって経路が制限されるため,自律的な経路生成が不要になる。一方で,決まった経路
しか走行できないため,経路変更などが柔軟にできない。
3.24
経路(route)
目的に向けて移動するときにロボットが走行する道。
3.25
衝突(collision)
ロボットが移動時に,ロボット又はロボットの搭載物と他の物体とが相対速度をもって接触すること。
3.26
衝突回避(collision avoidance)
ロボットが衝突を避けること。
3.27
障害物回避(obstacle avoidance)
ロボットの移動を達成するために障害となる物体を回避すること。
3.28
足ひ(轢)き(running over foot)
車輪,無限軌道などが人の足に乗り上げること。
3.29
脱輪(dropping)
路面の凹面に車輪,無限軌道などが落ち込み,接地できない状態。
3.30
転倒(falling down)
ロボットが倒れたことによって,車輪,無限軌道などの意図する部位以外が接地している状態。
3.31
転落(falling off)
大きな段差によって,ロボット本体が通常の走行路面より下に落下すること。
3.32
踏破(traverse ability)
ロボットの移動機構が凹凸を乗り越えること。
3.33
ランドマーク(landmark)
ロボットが移動するときの目印。
注記 ロボットはランドマークとの相対位置関係によって,自己位置を推定することができる。ラン
ドマークとして,特別なマークなどの明示的なものもあるが,走行環境にある壁,設置物など
を用いることもできる。
6
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.34
バンパ(bumper)
ロボットの外周に設置され,障害物との接触の検知,衝突力などの緩和を行う機構又は装置。
3.35
操だ(舵)装置(steering unit)
ロボットの進行方向を変える装置。
注記 操だ(舵)装置には,自動車のように駆動輪の向きを直接変える構造もあるが,独立駆動した
2輪の回転差によって向きを変える構造もある。
3.36
制動装置(braking unit)
ロボットの動作を停止させる装置。
3.37
駆動装置(motor unit)
モータなどロボットの駆動源となる装置。
3.38
積載物(load)
ロボットが運搬するもの。ただし,人を含まない。
3.39
保護電子回路(protective electronic circuit)
異常運転条件の下で危険な状況を防止する電子回路。
注記 この回路の部品は,機能的目的にも用いてよい。
4
リスクアセスメント
4.1
一般
JIS B 8445の4.1(一般)による。ただし,必要な場合には,ロボットの使用を限定することによって,
特定の危険源が除去されていることを前提としてリスクアセスメントを行うことができる。また,使用の
限定を含むロボットの意図する使用は,ユーザマニュアルに記載しなければならない。
注記1 例えば,段差,障害物などのない環境,雨風が防げる環境,監督下にない子供がいない環境
などに限定することで,特定の危険源を除去することができる。
注記2 ロボットの使用を限定する手段及びその限定を保障する手段に関する要求事項は,箇条9に
規定している。
注記3 ロボットの使用の限定は,JIS B 9700の5.3(機械類の制限の決定)に規定されている機械類
の制限に相当する。
注記4 ユーザマニュアルに関する要求事項は,8.3に規定している。
4.2
危険源の同定
JIS B 8445の4.2(危険源の同定)による。
注記 ロボットにおいて,JIS B 8445の附属書A(生活支援ロボットの重要危険源のリスト)に記載
されている危険源が危害に発展する典型的な発生シーンを,附属書Cに示す。附属書Cは,JIS
B 8445の附属書Aと併せて参照することが望ましい。
7
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.3
リスク見積り
JIS B 8445の4.3(リスク見積り)による。
5
安全要求事項及び保護方策
5.1
一般
JIS B 8445の5.1(一般)によるほか,次による。
a) 各危険源について,本質的安全設計並びに安全防護及び付加保護方策を適用した後,それでも存在す
る残存リスクを低減するために採用する使用上の情報には,ロボットによるアラートを含む。
注記1 使用上の情報に関する要求事項は,箇条8に規定している。
注記2 JIS B 8445の5.1の第10段落では,使用上の情報によるリスク低減手段として,表示,マ
ーキング及びユーザマニュアルによる注意及び警告だけが想定されている。
b) 本質的安全設計並びに安全防護及び付加保護方策の適用が適切でなく,アラートだけでリスクを受容
可能なレベルまで低減する場合,ユーザ及び/又はオペレータがアラートに対し,必要な対処を取れ
ることを確実にしなければならない。アラート及びそれに対する必要な対処の情報は,ユーザマニュ
アルに記載しなければならない。
注記3 意図するユーザがアラートを知覚可能であり,かつ,アラートに反応して適切な時間で必
要な対処が取れることを確実にするのがよい。
c) 5.x又は5.x.xに示した危険源に関連するリスクを低減するために,二次的に引き起こされる危険源の
リスクを低減することで代替してもよい。
注記4 危険源の連鎖的な発展及びそのリスク低減に関する詳細を,附属書Aに示す。
d) ロボットの安全に関わる性能は,定期的な検査,部品交換,調整などによって,製造業者が規定する
範囲内に維持しなければならない。
ロボットを運用する環境は,製造業者が規定する範囲内に維持しなければならない。
ロボットのユーザは,製造業者の規定する適性を満足しなければならない。
注記5 定期検査の実施間隔及び実施方法,維持しなければならない環境条件及びその管理方法,
満たさなければならないユーザの適性条件及びその管理方法などに関する要求事項は,箇
条9に規定している。
e) 5.x.5及び5.x.x.5に示した試験は,必要に応じて実施しなければならない。検証及び妥当性確認のため
に,製造業者が5.x.5及び5.x.x.5に規定していない試験の必要性を特定した場合は,その試験を実施
することが望ましい。
なお,検証及び妥当性確認のための試験方法及びその判定方法の例を,附属書F〜附属書Lに示す。
5.2
電池の充電に関連する危険源
5.2.1
一般
JIS B 8445の5.2.1(一般)によるほか,次による。
a) JIS B 8445の5.2.1の第1段落の要求事項は,この規格の5.3.1及び5.17による。
注記1 感電への防護に関する要求事項は5.3.1に,電気火災への防護に関する要求事項は5.17に
規定している。
b) 5.17に適合するために,電気安全に関わる規格への適合を製造業者が選択した場合,ロボット本体に
電気的に接続する充電システムは,その選択した規格に適合しなければならない。
ロボット本体から取り外した電池を充電する充電システムについて,電気安全に関わる規格を適用
8
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する場合は,JIS C 9335-2-29を利用してもよい。
注記2 非接触形の充電器に対する規格は,現在国際規格化が検討されている。
c) 充電中の動作を意図しないロボットは,充電中に動作してはならない。充電中の,又は電源ケーブル
が接続されたままの動作を意図するロボットは,接続された電源ケーブルに起因するロボットの不安
定,断線,電気的接続部の外れなどによる影響を考慮しなければならない。
d) ロボットへの自動給電が意図されている場合,自動的に電気的な接続が生じることによる影響を考慮
しなければならない。
5.2.2
本質的安全設計
JIS B 8445の5.2.2(本質的安全設計)による。
5.2.3
安全防護及び付加保護方策
JIS B 8445の5.2.3(安全防護及び付加保護方策)による。ただし,JIS B 8445の5.2.3のb) に対応する
方策は,この規格の5.2.4に規定する。
5.2.4
使用上の情報
JIS B 8445の5.2.4(使用上の情報)によるほか,必要に応じて,充電システムは,充電状態を表示する
か,又は満充電となったとき,信号を発するようにしなければならない。
5.2.5
検証及び妥当性確認
JIS B 8445の5.2.5(検証及び妥当性確認)による。
5.3
エネルギーの蓄積及び供給による危険源
5.3.1
危険なエネルギー部との接触
5.3.1.1
一般
JIS B 8445の5.3.1.1(一般)によるほか,次による。
a) ロボットは,危険な充電部への偶然の接触から,適切に人を保護する構造を備えなければならない。
b) ロボットが,危険な電圧をもつ電源(商用電源など)を利用する場合,その危険な電圧に対する基礎
絶縁が絶縁破壊した場合であっても,人が感電しない構造を備えなければならない。
c) 動作状態において,ロボットの漏れ電流は過度になってはならず,かつ,ロボットは十分な耐電圧強
度を備えなければならない。
d) ロボットが備える電気絶縁物は,ロボットが使用される環境条件下において,絶縁劣化してはならな
い。
e) ロボットは,製造業者が指定する使用範囲において,液体及び湿気に対する耐性をもっていなければ
ならない。
5.3.1.2
本質的安全設計
JIS B 8445の5.3.1.2(本質的安全設計)による。
5.3.1.3
安全防護及び付加保護方策
JIS B 8445の5.3.1.3(安全防護及び付加保護方策)によるほか,必要に応じて,次のいずれかの方策を
適用しなければならない。
a) 電気安全に関わる規格のいずれかに適合する。ただし,各規格の定める感電保護クラス0は認めない。
注記 電気安全に関わる規格の例は,5.17.1による。5.17に適合するための規格と,5.3.1に適合す
るための規格とは同一にすることが望ましい。
b) JIS C 0365に規定する感電保護クラスI,クラスII又はクラスIIIを満たす。
5.3.1.4
使用上の情報
9
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8445の5.3.1.4(使用上の情報)による。
5.3.1.5
検証及び妥当性確認
JIS B 8445の5.3.1.5(検証及び妥当性確認)による。ただし,JIS B 8445の5.3.1.2(本質的安全設計)
のa) の安全超低電圧を超える電圧を使用する場合は,電気安全に関わる規格の定める漏れ電流試験及び
耐電圧試験を行い,適合しなければならない。漏れ電流試験は,ユーザ及びオペレータが接触可能な部分
に対して行う。
注記1 接触可能な部分であるかは,テストプローブによって確認できる。テストプローブの規格に
はJIS C 0922がある。意図する使用に応じて,適切なプローブを利用することが望ましい。
例えば,3歳の子供を想定する場合は,テストプローブ19を用いる。
注記2 試験の例を,附属書Fに示す。
5.3.2
貯蔵エネルギーの制御されていない解放
JIS B 8445の5.3.2(貯蔵エネルギーの制御されていない解放)による。
5.3.3
動力故障又は遮断
5.3.3.1
一般
JIS B 8445の5.3.3.1(一般)によるほか,次の事項が確実に行われるように,特に留意しなければなら
ない。
a) 停止によって通路を塞ぐ可能性のあるロボットは,人手によって容易に移動可能であるか,又は人が
容易に横をすり抜ける若しくは上部を乗り越えることが可能でなければならない。
b) 手動でのブレーキロックの解除を採用する場合は,6.11を適用しなければならない。
5.3.3.2
本質的安全設計
JIS B 8445の5.3.3.2(本質的安全設計)によるほか,必要に応じて,次の方策を適用しなければならな
い。
a) 人が手で押して止めることができる推力とする。
b) 停止していても人の手で移動できるような,ロボットの質量及び大きさとする。
c) 停止しているロボットを避けて人がすり抜け又は乗り越え可能な形状とする。
5.3.3.3
安全防護及び付加保護方策
JIS B 8445の5.3.3.3(安全防護及び付加保護方策)によるほか,必要に応じて,次の方策を適用しなけ
ればならない。
a) 利用できる内部エネルギー又は貯蔵動力(バッテリ容量など)が危険レベルに達したとき,自動的に
安全状態に入るようにする。
b) 手動によるブレーキのリリース機能をもつものとする。
c) 乗り越え可能なように,手動で変形できる構造とする。
注記 JIS B 8445の5.3.3.3のc) に対応する方策は,この規格の上記a) 及び5.3.3.4に規定している。
5.3.3.4
使用上の情報
JIS B 8445の5.3.3.4(使用上の情報)によるほか,必要に応じて,利用できる内部エネルギー又は貯蔵
動力(バッテリ容量など)が一定のしきい値を下回った場合には,ロボットはユーザ及び/又はオペレー
タに,アラートによってその状態を通知しなければならない(8.6を参照)。
5.3.3.5
検証及び妥当性確認
JIS B 8445の5.3.3.5(検証及び妥当性確認)による。
10
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4
ロボットの通常運転における起動及び再起動
5.4.1
一般
JIS B 8445の5.4.1(一般)による。
5.4.2
本質的安全設計
JIS B 8445の5.4.2(本質的安全設計)による。
5.4.3
安全防護及び付加保護方策
JIS B 8445の5.4.3(安全防護及び付加保護方策)によるほか,ロボットの起動後に,安全関連構成部品
にエラーがないことを確認するために実施する必要最小限の動作において,ロボットの出力は,その出力
によるリスクが受容可能な範囲にとどめられなければならない。
注記 起動後に安全関連構成部品にエラーがないことを確認するための必要最小限の動作は,JIS B
8445の5.4.2(本質的安全設計)の最終段落において許容されている。
5.4.4
使用上の情報
JIS B 8445の5.4.4(使用上の情報)による。ただし,JIS B 8445の5.4.2(本質的安全設計)の最終段落
又は5.4.3の付加保護方策を適用する場合は,ロボットが正常な状態にあることを確認する起動時の動作
についての情報をユーザマニュアルに記載しなければならない。
5.4.5
検証及び妥当性確認
JIS B 8445の5.4.5(検証及び妥当性確認)による。
5.5
静電電位
JIS B 8445の5.5(静電電位)による。
注記 試験の例を,附属書Gに示す。
5.6
ロボットの形状による危険源
5.6.1
一般
JIS B 8445の5.6.1(一般)によるほか,ロボット及びロボットから分離可能な構成部品における次の箇
所は,特に注意して設計しなければならない。
− 外郭
− 可動部
− ロボットの保守・点検時に,保守作業者が防護カバー,扉などを外して作業するために接近する箇所
− 環境との衝突などによって,意図するロボットの動作を妨げるような極端な突出部
5.6.2
本質的安全設計
JIS B 8445の5.6.2(本質的安全設計)によるほか,ロボットの突出部は,意図する動作を妨げないよう
に設計しなければならない。
5.6.3
安全防護及び付加保護方策
JIS B 8445の5.6.3(安全防護及び付加保護方策)によるほか,必要に応じて,次の方策を適用しなけれ
ばならない。
a) 環境の状況などに応じて,ロボットの突出部を減らす機構を採用する。
b) 環境との接触又は衝突による衝撃を緩和するための,材料・部材・制御をもつロボットの突出部を採
用する。
5.6.4
使用上の情報
JIS B 8445の5.6.4(使用上の情報)によるほか,必要に応じて,可動部による挟み込み,押し潰し,巻
き込みが,意図する使用を達成するために,実現可能な設計によって回避できない場合,使用時の注意・
11
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
警告をユーザマニュアルに含めなければならない。
5.6.5
検証及び妥当性確認
JIS B 8445の5.6.5(検証及び妥当性確認)による。
5.7
放射による危険源
5.7.1
有害な騒音
JIS B 8445の5.7.1(有害な騒音)による。
5.7.2
有害な振動
JIS B 8445の5.7.2(有害な振動)による。
5.7.3
有害な物質及び流動体
JIS B 8445の5.7.3(有害な物質及び流動体)による。
5.7.4
極端な温度
5.7.4.1
一般
JIS B 8445の5.7.4.1(一般)によるほか,材料及び接触時間ごとの極端な高温及び低温の基準は,それ
ぞれISO 13732-1及びISO 13732-3による。
注記1 JIS B 8445の5.7.4.1の注記の43 ℃は,意図して又は合理的に予見可能な誤使用によって,
人とロボットとが長時間接する場合であっても,人が低温やけどとならないと考えられる温
度上限を示している。
注記2 温度感覚の弱いユーザ(例えば,高齢者,幼児など)を意図する場合は,接触時間が長くな
る可能性を考慮して設計することが望ましい。
5.7.4.2
本質的安全設計
JIS B 8445の5.7.4.2(本質的安全設計)による。
5.7.4.3
安全防護及び付加保護方策
JIS B 8445の5.7.4.3(安全防護及び付加保護方策)による。
5.7.4.4
使用上の情報
JIS B 8445の5.7.4.4(使用上の情報)による。
5.7.4.5
検証及び妥当性確認
JIS B 8445の5.7.4.5(検証及び妥当性確認)によるほか,ロボットの通常使用(充電状態を含む。)にお
いて,ユーザ及びオペレータが触れる可能性があると製造業者が指定する部位の温度は,計測し,基準を
満たすことを確認しなければならない。
試験を行う場合は,通常使用においてユーザ及びオペレータが触れることを意図しているロボットであ
っても,ロボットだけで行ってよい。試験時の温度計測は,ユーザ及びオペレータが接触可能な部分を対
象に行う。試験には,製造業者が意図する通常使用時の最大出力を含む代表的な運転パターンを利用して
もよい。
注記 試験の例を,附属書Hに示す。
5.7.5
有害な非電離放射
JIS B 8445の5.7.5(有害な非電離放射)による。
5.7.6
有害な電離放射線
JIS B 8445の5.7.6(有害な電離放射線)による。
5.8
電磁障害による危険源
5.8.1
一般
12
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8445の5.8.1(一般)による。
5.8.2
本質的安全設計
JIS B 8445の5.8.2(本質的安全設計)による。
なお,6.1に規定する制御システムの諸機能に対する電磁イミュニティの要求として,JIS B 8445の5.8.2
に規定するIEC 62061:2012によるほか,IEC 61326-3-2を適用してもよい。
注記 制御システムの諸機能に対する電磁イミュニティ規格への適合は,JIS B 8445の5.8.2では本質
的安全設計として扱われている。
5.8.3
安全防護及び付加保護方策
JIS B 8445の5.8.3(安全防護及び付加保護方策)による。
5.8.4
使用上の情報
JIS B 8445の5.8.4(使用上の情報)による。
5.8.5
検証及び妥当性確認
JIS B 8445の5.8.5(検証及び妥当性確認)によるほか,次に示す試験を必要に応じて実施しなければな
らない。
電磁イミュニティ試験
− 試験方法 JIS C 61000-4-3,JIS C 61000-4-6又はこれらに準じる試験方法,JIS C 9335-1の19.11.4
又はこれらに準じる試験方法による。走行状態での試験は,評価を容易にするために,車輪を浮か
せた状態で行ってよい。
− 判定基準 停止機能が阻害されない,及びロボットが次の危険な動作をしない。
・ 停止状態から動き出す。
・ 走行状態からの意図しない動作(停止,走行方向の変化)をする。
注記 試験の例を,附属書Gに示す。
5.9
ストレス,姿勢及び使用法による危険源
5.9.1
一般
JIS B 8445の5.9.1(一般)による。
5.9.2
肉体的ストレス及び姿勢の危険源
5.9.2.1
一般
JIS B 8445の5.9.2.1(一般)によるほか,特に,荷物を搬送するロボットは,荷物の積下ろしの作業が
肉体的ストレスを与える可能性があるため,作業を行うための姿勢,必要となる力などを考慮して設計し
なければならない。
注記 JIS B 8445の5.9.2.1のb) は,一般に,ユーザ,オペレータなどがロボットを操作する場合に,
又は保守作業者がロボットを保守・点検する場合に,無理な姿勢とならないことを要求してい
る。
5.9.2.2
本質的安全設計
JIS B 8445の5.9.2.2(本質的安全設計)によるが,方策の一つに次を追加する。
− 人間工学を考慮した位置に荷物格納部,操作パネルなどを配置する設計とする。
5.9.2.3
安全防護及び付加保護方策
JIS B 8445の5.9.2.3(安全防護及び付加保護方策)によるが,方策として次も含める。
− 肉体的ストレスを軽減する位置へ荷物格納部を移動する機能を搭載する
− 荷物の積下ろし又は操作力をアシストする機能を搭載する
13
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.9.2.4
使用上の情報
JIS B 8445の5.9.2.4(使用上の情報)によるほか,必要に応じて,適切な荷下ろし方法,ロボットの操
作方法,肉体的ストレスを与える可能性があることなどをユーザマニュアルに記載するか,又はロボット
本体に表示しなければならない。
5.9.2.5
検証及び妥当性確認
JIS B 8445の5.9.2.5(検証及び妥当性確認)による。
5.9.3
精神的ストレス及び使用法による危険源
5.9.3.1
一般
JIS B 8445の5.9.3.1(一般)による。
5.9.3.2
本質的安全設計
JIS B 8445の5.9.3.2(本質的安全設計)に対応する方策は,この規格の6.9及び8.6による。
5.9.3.3
安全防護及び付加保護方策
安全防護及び付加保護方策は,この規格の6.9及び8.6による。
注記 JIS B 8445の5.9.3.3(安全防護及び付加保護方策)に,推奨する方策は記載されていない。
5.9.3.4
使用上の情報
JIS B 8445の5.9.3.4(使用上の情報)に対応する方策は,この規格の8.3による。
5.9.3.5
検証及び妥当性確認
JIS B 8445の5.9.3.5(検証及び妥当性確認)による。
5.10 ロボットの動作による危険源
5.10.1 一般
JIS B 8445の5.10.1(一般)による。
5.10.2 機械的な不安定性
5.10.2.1 一般
JIS B 8445の5.10.2.1(一般)によるほか,ロボットは,停止している状態において,ロボット自身の重
心による安定性だけでなく,人がもたれかかる力などに対しても安定性を保たなければならない。ただし,
ロボットの転倒によるリスクが受容される場合は,その限りではない。
注記 移動中の不安定性は,5.10.3を参照。
5.10.2.2 本質的安全設計
JIS B 8445の5.10.2.2(本質的安全設計)による。
5.10.2.3 安全防護及び付加保護方策
JIS B 8445の5.10.2.3(安全防護及び付加保護方策)による。
5.10.2.4 使用上の情報
JIS B 8445の5.10.2.4(使用上の情報)によるほか,必要に応じてロボットへのもたれかかりを禁止する
旨,もたれかかりを禁止する箇所などをユーザマニュアルに記載するか,又はロボット本体に表示しなけ
ればならない。
5.10.2.5 検証及び妥当性確認
JIS B 8445の5.10.2.5(検証及び妥当性確認)によるほか,次に示す試験を必要に応じて実施しなければ
ならない。
a) 停止状態での傾きに対する安定性試験
− 試験方法 製造業者が指定した傾斜面の最大斜度の110 %以上又は5°のいずれかの大きな角度に
14
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
傾けた傾斜面に対して,例えばサーボロックなどの手段によって車輪を固定し,ロボットが動かな
いように設置する。ロボットの設置方向は,重心のバランス上で一番不利になる方向とする。
− 判定基準 ロボットが転倒しない。
b) 加重状態に対する安定性
− 試験方法 ロボットを製造業者が指定した最大斜度の傾斜面において,例えばサーボロックなどの
手段によって車輪を固定し,想定される荷重,人などによるもたれかかりを考慮して,ロボットの
あらゆる方向から力を加える。ロボットの設置方向は,重心のバランス上で一番不利になる方向と
する。使用時に動かされる可能性があるドア,引出しなどは,意図する使用の範囲で最も不利な位
置に配置する。
− 判定基準 ロボットが転倒しない。
注記 試験の例を,附属書Iに示す。
5.10.3 移動中の不安定性
5.10.3.1 一般
JIS B 8445の5.10.3.1(一般)によるほか,製造業者は,次のカテゴリに関する要因を明確にし,これを
考慮して設計しなければならない。ただし,ロボットの意図した使用条件において起こり得る要因だけを
対象とする。
− 運転環境
− 故障
− 移動パターン
注記 ロボットの走行時の不安定の要因及びそれによって生じる不安定性の発生事象の例を表1に示
す。
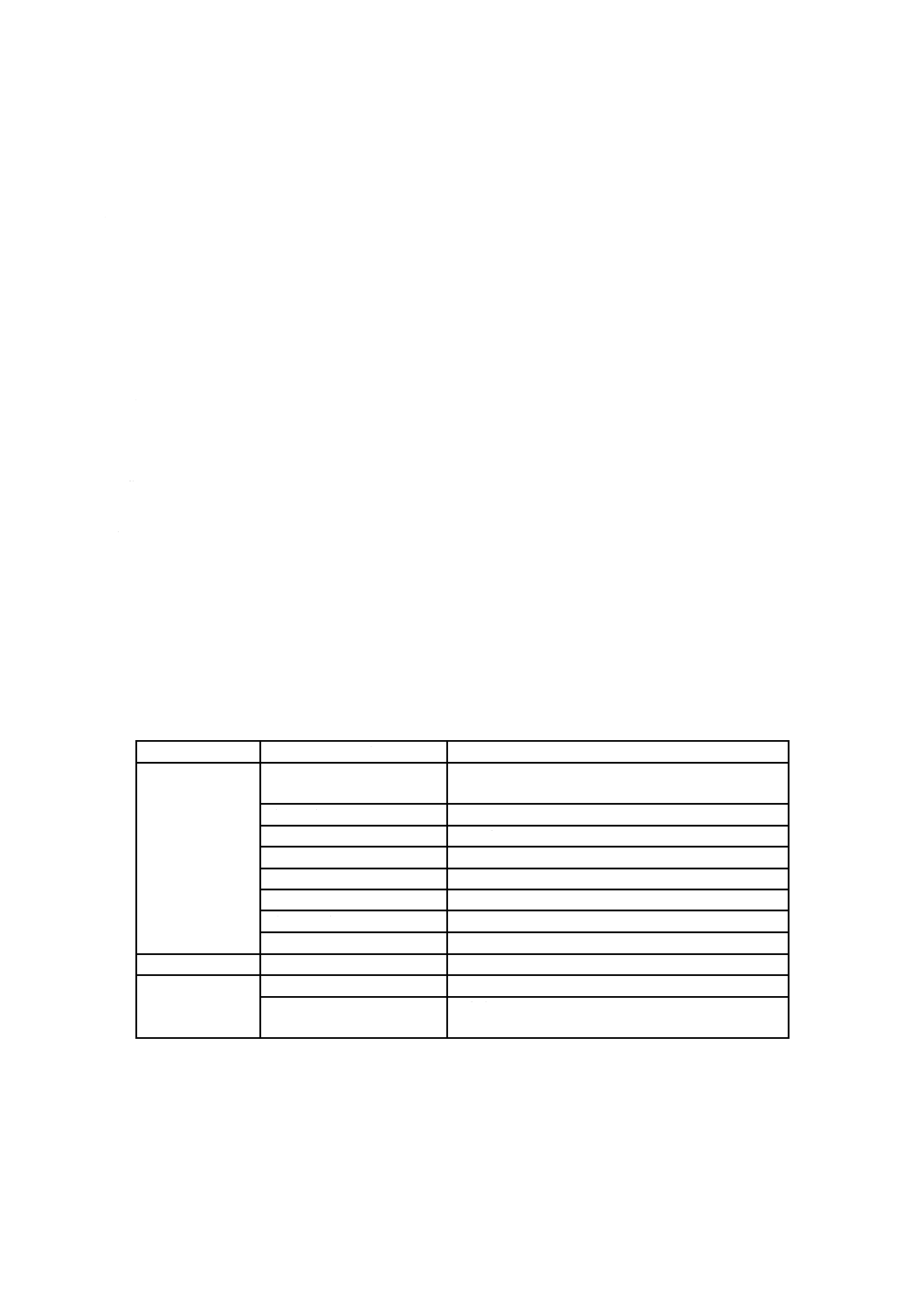
表1−走行時の不安定の要因及び発生事象の例
カテゴリ
要因の例
要因による不安定性の発生事象
運転環境
斜面
・登坂中の逆走,停止中のずり落ち
・下降中の制動不能
路面の大きな凸
・凸面へのつまず(躓)きによる転倒
路面の穴又は溝
・脱輪
路面の連続凹凸
・振動の増幅による転倒
路面のぬ(濡)れ
・スリップ,スピン,オーバーラン
車輪への異物の巻込み
・車輪のロックによる転倒
階段又は大きな穴
・転落
路面の状態の変化
・柔らかいじゅうたん(絨毯)への進入時の転倒
故障
駆動輪モータの故障
・車輪のロックによる転倒
移動パターン
急加速又は急減速(急停止) ・転倒
急カーブ又はUターン
・転倒
・スリップ,スピン,オーバーラン
走行時の不安定性は,複数の要因を組み合わせた条件も十分に考慮しなければならない。
転倒,転落などの不安定によるリスクは差し支えない(例えば,ロボットの質量が小さい場合,人が近
くにいないように環境が管理されている場合などは,5.10.3は適用しない。)。
5.10.3.2 本質的安全設計
15
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8445の5.10.3.2(本質的安全設計)による。
5.10.3.3 安全防護及び付加保護方策
JIS B 8445の5.10.3.3(安全防護及び付加保護方策)によるほか,次による。
a) 必要に応じて,不安定を検出して,保護停止する方策を適用しなければならない。
b) JIS B 8445の5.10.3.3のc) の方策は,環境の整備に当たるため,この規格の9.3を適用しなければな
らない。
c) JIS B 8445の5.10.3.3のg) に対応する方策は,使用上の情報に当たるため,この規格の5.10.3.4を適
用しなければならない。
5.10.3.4 使用上の情報
JIS B 8445の5.10.3.4(使用上の情報)によるほか,次による。
a) 必要に応じて,不安定を検出し,アラートを発する方策(例えば,音声,視覚信号若しくは振動又は
各種信号の組合せ)を適用しなければならない。
b) JIS B 8445の5.10.3.4の第1段落は,環境の整備に当たるため,この規格の9.3を適用する。
注記 アラートに関する要求事項は,8.6に規定している。
5.10.3.5 検証及び妥当性確認
JIS B 8445の5.10.3.5(検証及び妥当性確認)によるほか,次に示す試験を必要に応じて実施しなければ
ならない。
a) 走行安定性試験
− 試験方法 意図する使用条件において,例えば次に関して最も不利な走行路面の条件でロボットを
走行させる。
・ 走行路面の状態[素材,水ぬ(濡)れなど]
・ 走行路の傾き
・ 走行路の凹凸
意図する通常使用において,例えば次に関して最も不利な走行パターンでロボットを走行させる。
・ 急加速及び急減速(急停止)
・ 急カーブ及びUターン
・ 最高速度での走行
− 判定基準 ロボットが転倒しない。
さらに,次の事象は発生した場合でもその程度が許容範囲に収まる。
・ スリップ
・ オーバーラン
・ 斜面でのずり落ち
・ 逆走
b) 転落防止試験
− 試験方法 転落の可能性のある段差に向けて運用上想定する最高速度で走行させる。
− 判定基準 ロボットが手前で停止又は回避する。
注記 試験の例を,附属書Jに示す。
5.10.4 積載物運搬中の不安定性
5.10.4.1 一般
JIS B 8445の5.10.4.1(一般)によるほか,次による。
16
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 積載物の質量,慣性の増加などに起因するロボットの転倒を防止しなければならない。
b) 製造業者は,積載物に起因するリスクを許容範囲内とするために,ロボットの最大積載量を決定しな
ければならない。ただし,最大積載量を搭載した状態でも総質量が小さく,転倒によるリスクが受容
されるロボットの場合は,その限りではない。
注記1 JIS B 8445の5.10.4(荷重運搬中の不安定性)の題名の“荷重”は,3.38に規定する“積載
物”をいう。
注記2 積載物によるリスクは,製造業者が定めたロボットの箇所に積載する条件で評価する。
5.10.4.2 本質的安全設計
JIS B 8445の5.10.4.2(本質的安全設計)によるほか,必要に応じて,積載物の慣性によって不安定にな
らない質量及び重心の設計を適用しなければならない。
5.10.4.3 安全防護及び付加保護方策
JIS B 8445の5.10.4.3(安全防護及び付加保護方策)によるほか,必要に応じて,次の方策を適用しなけ
ればならない。
a) 積載物をロボットに固定する器具(ボルト,ラッチなど)に対応した部分(ねじ穴,フック,ステー
など)を備える。
b) ロボットが積載物を保持するための把持具を備え,かつ,その把持具によって積載物を保持する機能
を採用する。
c) 積載物の動特性の影響を軽減するための,バランサ及び/又はロボットによるバランス維持制御を採
用する。
注記1 JIS B 8445の5.10.4.3のa) に対応する方策は,上記のa) 及びb) に規定している。
注記2 JIS B 8445の5.10.4.3のa) の方策における,ユーザ,オペレータ及び/又は安全管理者へ
の要求事項は,この規格の5.10.4.4に含まれている。
5.10.4.4 使用上の情報
JIS B 8445の5.10.4.4(使用上の情報)による。
5.10.4.5 検証及び妥当性確認
JIS B 8445の5.10.4.5(検証及び妥当性確認)によるほか,次に示す試験を必要に応じて実施しなければ
ならない。ただし,積載物が定格最大質量のとき又は走行速度が定格最大速度のときが試験における最も
不利な条件でない場合には,製造業者は最も厳しい条件で試験を実施する。
積載物搭載時の走行安定性試験
− 試験方法 5.10.3.5のa) に次の積載条件を追加して試験する。
“積載物は,ロボットが最も不利な状態となるように積載する。”
− 判定基準 5.10.3.5のa) による。
注記 試験の例を,附属書Jに示す。
5.10.5 衝突時の不安定性
JIS B 8445の5.10.5(衝突時の不安定性)による。ただし,衝突によるロボットの転倒に関連するリス
クが受容される場合は,5.10.5を適用しない。
5.10.6 安全関連障害物との衝突
5.10.6.1 一般
JIS B 8445の5.10.8.1(一般)によるほか,ロボットは走行状態での接触(衝突)を生じない,又は生じ
ても受容できないリスクがないようにしなければならない。ただし,停止した状態での接触防止は考慮し
17
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なくてもよい。
注記1 ロボットは,走行状態で相対速度をもって人,環境などの安全関連物体と接触することによ
って,接触した物体に危険な衝撃力を与える可能性がある。
注記2 安全関連物体との接触後,その接触と加重とを継続し,接触した物体を壁などの別な物体に
挟み込むことによって,接触した物体に危険な押し潰し力を与える可能性がある。
5.10.6.2 本質的安全設計
JIS B 8445の5.10.8.2(本質的安全設計)によるが,方策として次も含める。
a) ロボットが最高速度及び最大質量(積載物の質量を含む。)で誤って第三者に衝突した場合であっても,
リスクが受容できる程度のロボットの最高速度及び最大質量を採用する。
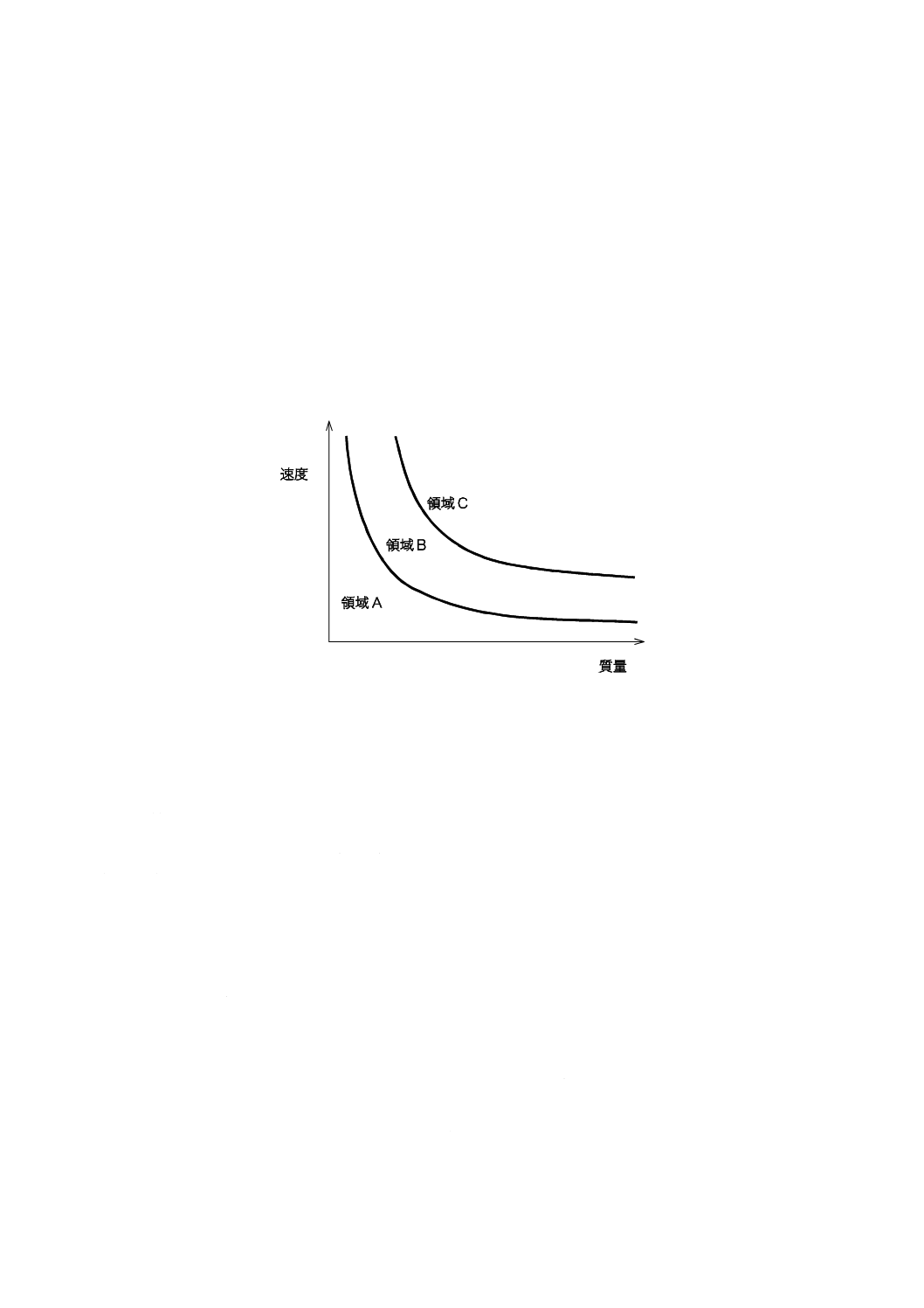
b) ロボットの運動エネルギーを図1の領域Aに制限する。
注記1 領域Aにあるロボットは,運動エネルギーが小さく,人との衝突のリスクが受容可能な,本質的に安全なロ
ボットであると考えられる。一方,領域B及び領域Cのロボットは,衝突のリスクが受容できない可能性が
あり,本質的に安全ではない。
注記2 領域A及び領域Bの境界は,第三者と一次衝突した場合のリスクについて,第三者のAIS1以下の確率が75 %
以上となることを基準としている。一次衝突による第三者の胸部変位が9 mm以下であれば,この基準を満た
すことができる。また,基準を満たす運動エネルギーの目安として,93 Jを用いることができる(例 最大質
量150 kg,定格最高速度4 km/h)。この運動エネルギーの目安は,接触部の形状を厚さ3 mmの平らな鉄板に
設定したロボットが3歳児相当のダミーへ衝突した場合の実験値に基づいている。実際のロボットでは,接
触部の素材,形状及び構造の違いを考慮することが望ましい。
注記3 注記2と同様に,領域B及び領域Cの境界は,AIS2以下の確率が75 %以上となることを基準としている。
一次衝突による第三者の胸部変位が30 mm以下であれば,この基準を満たすことができる。また,基準を満
たす運動エネルギーの目安として,472 Jを用いることができる(例 最大質量150 kg,定格最高速度9 km/h)。
この運動エネルギーの目安は,注記2の実験値から外挿して求められている。
注記4 注記2及び注記3における3歳児相当のダミーへの衝突に関する胸部変位及びAISの発生確率については,
米国運輸省道路交通安全局(NHTSA)が公開している以下の文書内,III. PROPOSED DUMMIES, INJURY
CRITERIA, AND OTHER CHANGESのB. Proposed Injury Criteria以下の,Chest Deflectionの項にある,3歳児
ダミーに代表される,幼児の胸部変位による傷害確率曲線の計算式を参考にして算出した。
PROPOSED AMENDMENT TO FMVSS No 213 FRONTAL TEST PROCEDURE
(http://icsw.nhtsa.gov/cars/rules/rulings/CPSupgrade/CPSRevise/PRE/)
注記5 AIS(Abbreviated Injury Scale)の定義は,Assoc. for the Advancement of Automotive Medicine (AAM), Abbreviated
Injury Scale (AIS) 2005-Update 2008を参照。
図1−運動エネルギーによるカテゴリ分類
18
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.10.6.3 安全防護及び付加保護方策
JIS B 8445の5.10.8.3(安全防護及び付加保護方策)によるが,必要に応じて,次の方策も含める。
a) ロボットが人に衝突する前に,本質的に安全な程度までロボットを減速する。
b) 通常使用時に図1の領域B及び領域Cにあるロボットは,衝突時において運動エネルギーのレベルが
領域Aとなるように制御する。このとき,該当する機能を安全関連部とし,6.1.5の要求を満たさなけ
ればならない。
c) 人の一次衝突及び押し潰しの傷害値が図1の領域Aと同程度となるように,次の方策を一つ以上適用
する。
− 衝突時のロボットの駆動力の供給を停止する。
− 衝突時の接触力を低減する構造を採用する。
− 衝突時にロボットの動作停止を行う。
5.10.6.4 使用上の情報
JIS B 8445の5.10.8.4(使用上の情報)によるほか,必要に応じて,次の方策を適用しなければならない。
a) 一次衝突の結果,安全関連障害物が転倒し,床などに対する二次衝突を起こす可能性があり,かつ,
この衝突が受容できない場合,警告文をユーザマニュアルに記載しなければならない。
b) ロボットの接近について,人の注意を喚起するために,信号(例 音声,照明など)によって通知し
なければならない。
注記1 衝突の可能性のある箇所での人への喚起,ブラインドミラーの設置などの手段によって,ロ
ボットの周囲の人に注意を喚起することも有効である。
注記2 外部システムによって,人とロボットとの接近を検知し,人に注意喚起することも有効であ
る。
5.10.6.5 検証及び妥当性確認
JIS B 8445の5.10.8.5(検証及び妥当性確認)によるほか,次に示す試験を必要に応じて実施しなければ
ならない。
a) 衝突試験
− 試験方法 ロボットを最高速度の状態で安全関連物体に向けて走行させる。このとき,安全関連物
体は静止又は移動してよいが,最悪の試験条件を構成するようにする。ただし,安全関連部による
回避,減速及び停止機能は作動させてもよい。安全関連物体として,ダミー人形を用いてもよい。
− 判定基準 ロボットが安全関連物体に衝突しない,又は衝突時も一次衝突の傷害値が図1の領域A
と同等である。
注記1 傷害値の代表的なものには,頭部傷害値HIC(Head Injury Criterion),首傷害値Nij(Neck
Injury)などがある。
b) 押し潰し試験
− 試験方法 ロボットを最高速度の状態で,壁の前の安全関連物体に向けて走行させる。ただし,安
全関連部による回避,減速及び停止機能は作動させてもよい。安全関連物体としてダミー人形を用
いてもよい。
− 判定基準 ロボットが安全関連物体を壁との間に挟み込まない,又は挟み込んだ場合も押し潰しに
よる傷害値若しくは押付力が図1の領域Aと同等である。
注記2 試験の例を,附属書Kに示す。
注記3 傷害値の代表的なものには,胸部変位量などがある。
19
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記4 a) 及びb) の試験は,ロボットが最高速度及び最大質量(積載物の質量を含む。)で誤って
第三者に衝突した場合のリスクについて,AIS1以下の確率が75 %以上となることを確認
するために行われる。
5.10.7 人とロボットとの相互作用中の危険な物理的接触
JIS B 8445の5.10.9(人とロボットとの相互作用中の危険な物理的接触)による。
5.11 耐久性不足による危険源
5.11.1 一般
JIS B 8445の5.11.1(一般)による。
5.11.2 本質的安全設計
JIS B 8445の5.11.2(本質的安全設計)による。
5.11.3 安全防護及び付加保護方策
JIS B 8445の5.11.3(安全防護及び付加保護方策)によるが,ロボットのライフサイクルを監視し,保
守時間又は寿命末期に達したとき,それ以上の使用から保護するために停止する方策も含む。
注記 JIS B 8445の5.11.3のd) に対応する方策は,この規格の5.11.3及び5.11.4のb) に規定してい
る。
5.11.4 使用上の情報
JIS B 8445の5.11.4(使用上の情報)によるほか,次による。
a) ロボットに充電池を使用する場合は,耐用年限及び/又は充放電回数の目安をユーザマニュアルに記
載しなければならない。
注記 耐用年限,充放電回数などの目安は,充電池の特性及び代表的な使用条件を考慮して定める
ことが望ましい。
b) 定期的に行う性能の確認内容,並びに交換が必要な消耗部品の使用限度及び/又は交換頻度に関する
情報及び管理方法をユーザマニュアルに記載しなければならない。
また,必要に応じて,ロボットのライフサイクルを監視し,保守時間又は寿命末期に達したとき,その
旨を通知してもよい。
5.11.5 検証及び妥当性確認
JIS B 8445の5.11.5(検証及び妥当性確認)によるほか,通常使用において,破壊が即座に受容できな
いリスクとなるロボットの部分がある場合は,その部分の強度及び耐久性は,次のいずれかの方法によっ
て検証しなければならない。
a) 最大負荷と安全率とを考慮した設計書の点検
b) 強度・耐久性試験
衝撃力が加わる機械要素の破壊が即座に受容できないリスクとなる場合は,その機械要素について,耐
久性試験を行うのがよい。また,耐久性試験の条件(負荷,時間,回数など)は,日常的な点検,定期的
な検査及び保守の間隔を考慮して設定することが望ましい。
5.12 誤った自律的判断及び動作による危険源
JIS B 8445の5.12(誤った自律的判断及び動作による危険源)による。
5.13 動いている部品との接触による危険源
5.13.1 一般
JIS B 8445の5.13.1(一般)によるほか,車輪,無限軌道などの移動機構が走行中に人の足をひ(轢)
く可能性がある場合には,これら車輪,無限軌道などと足との接触による危険源を考慮しなければならな
20
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
い。ただし,足ひ(轢)きによるリスクが受容されるロボットの場合は,この危険源を考慮しなくてもよ
い。
5.13.2 本質的安全設計
JIS B 8445の5.13.2(本質的安全設計)によるが,必要に応じて,次の方策を含める。
a) 車輪,無限軌道などは,足が接触できない位置に配置する。
b) 足ひ(轢)きによるリスクが許容範囲内となるようにロボットの軽量化を図る。
c) 足ひ(轢)きによるリスクが許容範囲内となるように,車輪,無限軌道などに柔らかい素材を用いる。
5.13.3 安全防護及び付加保護方策
JIS B 8445の5.13.3(安全防護及び付加保護方策)によるほか,必要に応じて,ひ(轢)く可能性のあ
る人の足などを検知し,回避又は停止する方策を適用しなければならない。
5.13.4 使用上の情報
JIS B 8445の5.13.4(使用上の情報)によるほか,必要に応じて,足を車輪,無限軌道などの下に近付
けないようにする旨の注意を,ユーザマニュアルに明記しなければならない。
5.13.5 検証及び妥当性確認
JIS B 8445の5.13.5(検証及び妥当性確認)によるほか,次に示す試験を必要に応じて実施しなければ
ならない。
足ひ(轢)き試験
− 試験方法 人を模した足型ゲージの前にロボットを置き,足型ゲージに向けて走行させる。
− 判定基準 駆動輪などが足型ゲージに乗り上げない,又は乗上時に足型ゲージに加わる圧力,摩擦
力などが小さく,乗上げによって生じる足の傷害が許容の範囲内である。
注記 試験の例を,附属書Lに示す。
5.14 人がロボットに気付かないことによる危険源
5.14.1 一般
JIS B 8445の5.14.1(一般)によるほか,次の事項について,ロボットの周囲の人に認知させることを
考慮しなければならない。
− ロボットが危険な状態にあること
− ロボットの存在
注記 特にロボットが急激な動作変化(例 急発進,急停止,急加速,急回転など)をするとき,第
三者がロボットの動作を予測・認知することが困難な場合があるため,動作変化を事前に知ら
せるなど,配慮することが望ましい。
5.14.2 本質的安全設計
JIS B 8445の5.14.2(本質的安全設計)に対応する方策は,この規格の5.14.4のa) 及びb) による。
5.14.3 安全防護及び付加保護方策
JIS B 8445の5.14.3(安全防護及び付加保護方策)による。
なお,JIS B 8445の5.14.3のa) 及びb) に対応する方策は,この規格の5.14.4のb) 及びa) による。
5.14.4 使用上の情報
JIS B 8445の5.14.4(使用上の情報)によるほか,ロボットの存在に対する注意を喚起するために,必
要に応じて,次の方策を適用しなければならない。
a) ロボットに目立つ外観をもたせる。
注記1 外観を目立たせるために,警告灯又はその他の光学装置を用いてもよい。
21
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 有害な騒音レベルにまで達しない,それと分かる音を発する。
注記2 音響発生器によって,音を発してもよい。
5.14.5 検証及び妥当性確認
JIS B 8445の5.14.5(検証及び妥当性確認)による。
5.15 危険な環境条件
5.15.1 一般
JIS B 8445の5.15.1(一般)によるほか,次による。
a) ロボットはその意図する使用に応じて,JIS C 0920の定める保護等級を満たすように設計しなければ
ならない。
注記 JIS B 8445の5.15.1の第2段落及び第4段落に対応するIPコードに関する要求事項に相当す
る。
b) ロボットが直射日光にさら(晒)される場合,ロボット表面及び内部の温度上昇,紫外線による表示
及び部材の劣化などによるリスクを考慮しなければならない。
5.15.2 本質的安全設計
JIS B 8445の5.15.2(本質的安全設計)による。
5.15.3 安全防護及び付加保護方策
JIS B 8445の5.15.3(安全防護及び付加保護方策)によるが,必要に応じて,次の方策を適用しなけれ
ばならない。
a) ダストの検知及びダストが受容できないレベルに達する前に保護停止を実行する。
b) 雪・氷・冷気条件の能動的検知,及び雪・氷の堆積量が受容できないレベルに達する前に保護停止を
実行する。
c) 保守のための定期的な運転休止又は停止を確実にする安全防護機能(これには一般に,点検,及び清
掃又は部品交換を含む。)を備える。運転休止の間隔は,例えば,腐食,砂,ダスト又は雪の堆積によ
って受容できないリスクレベルに到達するまでに要する時間に基づいて決定しなければならない。
注記 JIS B 8445の5.15.3(安全防護及び付加保護方策)のb),g) 及びh) に対応する方策は,この
規格の5.15.3のa)〜c) 及びこの規格の5.15.4のa)〜c) に規定している。
5.15.4 使用上の情報
JIS B 8445の5.15.4(使用上の情報)によるほか,必要に応じて,次の方策のうち一つ以上を適用しな
ければならない。
a) 5.15.3のa) に規定した保護停止が実行されたとき,必要な方策を講じるようにユーザに通知する。
b) 5.15.3のb) に規定した保護停止が実行されたとき,その理由をユーザに通知する。
c) 5.15.3のc) に規定した運転休止が実行されたとき,運転休止の目的をユーザに通知する。
5.15.5 検証及び妥当性確認
JIS B 8445の5.15.5(検証及び妥当性確認)による。
5.16 位置確認及びナビゲーションの誤差による危険源
5.16.1 一般
JIS B 8445の5.16.1(一般)によるほか,位置確認及びナビゲーションの誤差による危険源に関するリ
スクを低減するために,外部システムとの連携を用いてもよい。
5.16.2 本質的安全設計
JIS B 8445の5.16.2(本質的安全設計)による。
22
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.16.3 安全防護及び付加保護方策
JIS B 8445の5.16.3(安全防護及び付加保護方策)によるほか,必要に応じて,ロボットの位置を計測
している外部システムなどからの情報を用いて,ロボットの位置の補正を行う方策を適用しなければなら
ない。
5.16.4 使用上の情報
JIS B 8445の5.16.4(使用上の情報)によるほか,ナビゲーションマップの更新を手動で行う必要があ
る場合は,更新の要否,方法などに関する情報をユーザマニュアルに記載するか,又はロボット本体に表
示しなければならない。
5.16.5 検証及び妥当性確認
JIS B 8445の5.16.5(検証及び妥当性確認)による。
5.17 電気火災による危険源
5.17.1 一般
ロボットは,次を考慮して設計しなければならない。
a) ロボットは,単一故障又は合理的に予見可能な誤使用において,火災を発生してはならない。
b) 電池は,長時間の充電及び充電回路の単一故障状態においても,爆発及び火災を発生してはならない。
電池交換が可能なロボットは,電池交換に関連する合理的に予見可能な誤使用においても,火災を発
生してはならない。
ロボット本体に電気的に接続される全ての部分について,電気安全に関わる規格のいずれかに適合する
ことで,電気火災による危険源からの保護を実現してもよい。
いずれかの電気安全に関わる規格に適合しない場合には,電気火災による危険源からの保護のために,
5.17.2〜5.17.4を適用する。
注記1 電気安全に関わる規格には,JIS B 9960-1,JIS C 9335-1,JIS C 6950-1,JIS C 6065,JIS C
1010-1,JIS T 0601-1,IEC 62368-1(IEC 60950-1とIEC 60065との集約)などがある。
注記2 規格ごとに電気火災に対する保護方策の考え方は異なるため,ロボットの意図する使用目的
に合わせた規格を選択することが望ましい。
注記3 電気火災による危険源からの保護のためには,電気安全に関わる規格の要求事項のうち,関
連する要求事項だけを適用することが望ましい。
注記4 電気安全に関わる規格の要求事項には,電気火災による危険源からの保護に関連しない要求
事項も含まれる。それらの要求事項に適合することによって,5.2,5.3.1,5.5,5.7.4,5.7.5,
5.8及び5.15の電気に関わる要求事項に適合することもできる。
5.17.2 本質的安全設計
ロボットは,想定される温度条件下で発火しない部材を採用し,次の事項のうちの一つ以上を満たすよ
うに設計しなければならない。
a) 危険な短絡がない構造とする。
b) 火災の可能性が高い部分を覆うエンクロージャのうち,非金属部の材料の難燃性が,JIS C 60695-11-10
が規定するV-2(FV-2)以上を満たす。
c) 火災の可能性が高い部分を,防火エンクロージャによって覆う。
注記1 危険な短絡が起こる可能性がある電気回路は,火災の可能性が高い部分とみなす。
注記2 防火エンクロージャに対する要求事項は,電気安全に関わる規格に規定されている。
さらに,a) の方策を適用する場合には,次の方策を適用しなければならない。
23
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 端子台のねじなど,外れることで危険な短絡を生じる電気的接続部を確実に固定するか,又はカバー
を設置する。
e) 内部の断線によって危険な短絡を生じる配線を,強度・耐久性を超える屈曲,ねじれ,圧迫,凸部へ
の押し付け,引張りなどから保護する。
電池を用いる場合には,次の方策を適用しなければならない。
f)
電池又は電源ケーブルの逆接続をしない設計,又は逆接続によって発火しない設計とする。
注記3 例えば,汎用と異なる外形及び接続部形状の電池を採用することで,逆接続を防止できる。
また,リチウムイオン蓄電池を用いる場合には,安全性が確認された仕様の電池を使用しなければなら
ない。
注記4 例えば,JIS C 8712及びJIS C 8714などによって,安全性を確認する。
5.17.3 安全防護及び付加保護方策
必要に応じて,次の方策のうち一つ以上を適用しなければならない。
a) 高温になる可能性がある部材は,能動放熱装置(ファン又はその他の冷却装置)によって過度の高温
にならないようにする。
b) 逆接続,指定外の電池の使用などを検知し,通電をしない。
c) 発火を検知し,通電を止める。
5.17.4 使用上の情報
ユーザマニュアルには,次の事項を含めなければならない。
− 電池の交換を意図するロボットの場合,正しい電池の交換に必要な情報。
− 電池の交換を意図し,かつ,5.17.2のf) 又は5.17.3のb) を適用しないロボットの場合,誤った電池
交換(逆接続及び指定外の電池の使用)に備えた注意・警告。
電池の交換を意図し,かつ,5.17.2のf) 又は5.17.3のb) を適用しないロボットの場合,正しい電池の
交換に必要な情報をロボット本体に表示しなければならない。
ロボットは発火を検知した場合は,必要に応じてアラートを発しなければならない。
5.17.5 検証及び妥当性確認
電気安全に関わる規格の要求事項のうち,電気火災による危険源からの保護に関連する要求事項に適合
することを確認するか,又は単一故障状態及び合理的に予見可能な誤使用を模擬した試験を実施し,次の
事項を満足することを確認しなければならない。
− 爆発しない。
− 火災が発生しない,又は炎及び溶融金属がエンクロージャから放出しない。
試験はロボットだけで行い,次のいずれかの状態になるまで実施する。
− ロボットの表面温度が定常状態に達する。
− 電池が放電して停止する。
− 非復帰形の保護装置が作動する。
− 高温,短絡,故障などを検知して停止する。
単一故障状態及び合理的に予見可能な誤使用を模擬した試験は,製造業者が定める代表的な条件で行い,
次の事項を一つずつ適用する。ただし,5.17.2の本質的安全設計がされている部分には適用しない。
− 一つの電源の電圧変動
− 一つの電源ケーブルの逆接続
− 一つの電気的接続部の解放,及び隣接する電気的接続部への接触
24
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 一つの電気的接続部の誤接続
− 一つの能動放熱装置の停止
− 一つの放熱用の穴の閉鎖
− 一つの駆動部のロック
− 一つの電池の逆接続
− 一つの電池の過充電
注記 試験の例を,附属書Fに示す。
6
安全関連制御システムに対する要求事項
6.1
要求安全性能
6.1.1
一般
JIS B 8445の6.1.1(一般)による。
6.1.2
要求パフォーマンスレベル
JIS B 8445の6.1.3(選択した生活支援ロボットのタイプに対する要求パフォーマンスレベル)によるほ
か,安全関連速度制御及び危険な衝突の回避に関する要求パフォーマンスレベルは,この規格の6.1.5に
よる。
6.1.3
用途に固有のパフォーマンスレベル要求事項
JIS B 8445の6.1.4(用途に固有のパフォーマンスレベル要求事項)による。
6.1.4
代替方法
JIS B 8445の6.1.5(代替方法)による。
6.1.5
衝突時のロボットの運動エネルギー区分に応じたパフォーマンスレベルの要求事項
図1の領域B及び領域Cのロボットは,制御機能として,非接触での安全関連物体の検出及び速度低減
機能を備えなければならない。この機能に要求されるパフォーマンスレベルは,表2による。
表2−運動エネルギー区分(図1)に応じて必要とされる要求パフォーマンスレベル
領域
要求パフォーマンスレベル
領域B
PLb
領域C
PLd
注記 JIS B 8445の表1(生活支援ロボットのパフォーマンスレベル)の
安全関連速度制御で規定されているパフォーマンスレベルとの差
異は,この規格の適用範囲の差異に起因している。
6.2
ロボットの停止
JIS B 8445の6.2(ロボットの停止)による。
6.3
運転空間の制限
JIS B 8445の6.3(運転空間の制限)による。
6.4
安全関連速度制御
JIS B 8445の6.4(安全関連速度制御)によるほか,安全関連速度制御に関する要求パフォーマンスレベ
ルは,この規格の6.1.5による。
6.5
安全関連環境認識
JIS B 8445の6.5(安全関連環境認識)による。ただし,危険な衝突の回避に関する要求パフォーマンス
25
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
レベルは,この規格の6.1.5による。
6.6
安定性制御
JIS B 8445の6.6(安定性制御)による。
6.7
安全関連力制御
JIS B 8445の6.7(安全関連力制御)による。
6.8
特異点保護
JIS B 8445の6.8(特異点保護)による。ただし,JIS B 8445の6.8のc) の警告に関しては,この規格の
8.6の要求事項を満たさなければならない。
6.9
ユーザインタフェースの設計
6.9.1
一般
JIS B 8445の6.9.1(一般)によるほか,表示の見やすさのために,必要に応じて次の方策を適用しなけ
ればならない。
a) 適切な照明を装備する。
b) 適切なディスプレイを設計する。
さらに,誤操作に対する保護のためには,次の方法によることが望ましい。
− 操作入力を,適切な範囲に限定する設計を採用する。
− 操作可能な項目及び範囲だけを表示する設計を採用する。
− 操作入力時に入力確認を行い,誤操作を防止する設計を採用する。
− 操作入力を受け付けたことを適切に(例えば,音,光,振動,表示によって)フィードバックする設
計を採用する。
− 誤った入力があった場合に,適切にフィードバックする設計を採用する。
遠隔制御の場合,遠隔制御システムは,次の部分にだけ影響するように設計及び製作しなければならな
い。
− ロボットの関連する部分
− ロボットの関連する機能
注記 JIS B 8445の6.9.2(状態表示)に対応する要求事項は,この規格の6.9.1及び8.2に規定してい
る。
6.9.2
接続及び切断
JIS B 8445の6.9.3(接続及び切断)による。
6.9.3
複数ロボットに対する単一操縦装置
JIS B 8445の6.9.4(複数ロボットに対する単一操縦装置)による。
6.9.4
複数の操縦装置
JIS B 8445の6.9.5(複数の操縦装置)による。ただし,JIS B 8445の6.9.5のa) 及びg) の表示に関し
ては,この規格の8.2の要求事項を満たさなければならない。
6.9.5
無線又は着脱式操縦装置
JIS B 8445の6.9.6(無線又は着脱式操縦装置)による。
6.9.6
不正使用の防止
JIS B 8445の6.9.7(不正使用の防止)による。
26
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.10 運転モード
JIS B 8445の6.10(運転モード)による。ただし,JIS B 8445の6.10.1(一般)に規定する選択されたモ
ードの表示に関しては,この規格の8.2の要求事項を満たさなければならない。
6.11 手動制御装置
6.11.1 一般
JIS B 8445の6.11.1(一般)による。
6.11.2 状態表示
JIS B 8445の6.11.2(状態表示)に対応する要求事項は,この規格の6.9.1及び8.2に規定する。
6.11.3 ラベル表示
JIS B 8445の6.11.3(ラベル表示)に対応する要求事項は,この規格の8.2に規定する。
6.11.4 意図しない運転からの防護
JIS B 8445の6.11.4(意図しない運転からの防護)によるほか,操縦装置への誤った接触による意図し
ない運転によって発生するリスクが受容できない場合,その操縦装置を誤った接触から保護しなければな
らない。
注記1 例えば,停止が受容できない場合の停止ボタンは,誤った接触から保護するのがよい。
注記2 誤った接触からの保護方策には,ボタンの配置を工夫する,十分な押し時間を設定するなど
がある。
7
検証及び妥当性確認
JIS B 8445の箇条7(検証及び妥当性確認)によるほか,検証及び妥当性確認のために,5.x.5及び5.x.x.5
の試験を行うときに,試験条件について特に記載のない場合は,意図する使用の範囲に限定して条件を定
め,その条件を記録に残さなければならない。
注記 検証及び妥当性確認のための試験条件の例を,附属書Dに示す。
8
使用上の情報
8.1
一般
JIS B 8445の8.1(一般)によるほか,日付及び時刻の表記,並びに特定のシンボルは,文化圏によって
異なった理解をされるおそれがあることに注意するのがよい。
注記1 例えば,警告又は禁止を意図して“×”記号を用いる場合は,文化圏によって肯定と理解さ
れる場合があるため注意するのがよい。
注記2 日付及び時刻の表記について,情報交換のために適切であれば,JIS X 0301によることが望
ましい。
8.2
マーキング又は表示
JIS B 8445の8.2(マーキング又は表示)によるほか,次による。
a) JIS B 8445の8.2の第15段落から注記2までに対応する要求事項は,この規格の8.6に規定する。
b) 手動操作装置には,ISO 7000に従って,機能を明確に示すマーキング又は表示をしなければならない。
例えば,電源オン,(現在の)運転モード,故障が検出されたなど,操縦装置の状態は常に明確に表示
しなければならない。この状態は,ユーザ及び/又はオペレータの見やすい場所に表示することが望
ましい。
c) 遠隔制御の場合,各操縦装置は,どのユニットがロボットのどの部分を制御しているのかを明確に見
27
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
分けられるようにしなければならない。
d) 表示に用いる色の意味は,JIS C 0448又はJIS B 9960-1を用いてもよい。
e) 表示のために,視覚的信号を用いてもよい。
8.3
ユーザマニュアル
JIS B 8445の8.3(ユーザマニュアル)によるほか,ユーザマニュアルには,使用の限定を含むロボット
の意図する使用条件を記載しなければならない。
使用の限定を含むロボットの意図する使用条件として,少なくとも次の事項を明記しなければならない。
− 使用場所
− 走行路面
− 運用管理
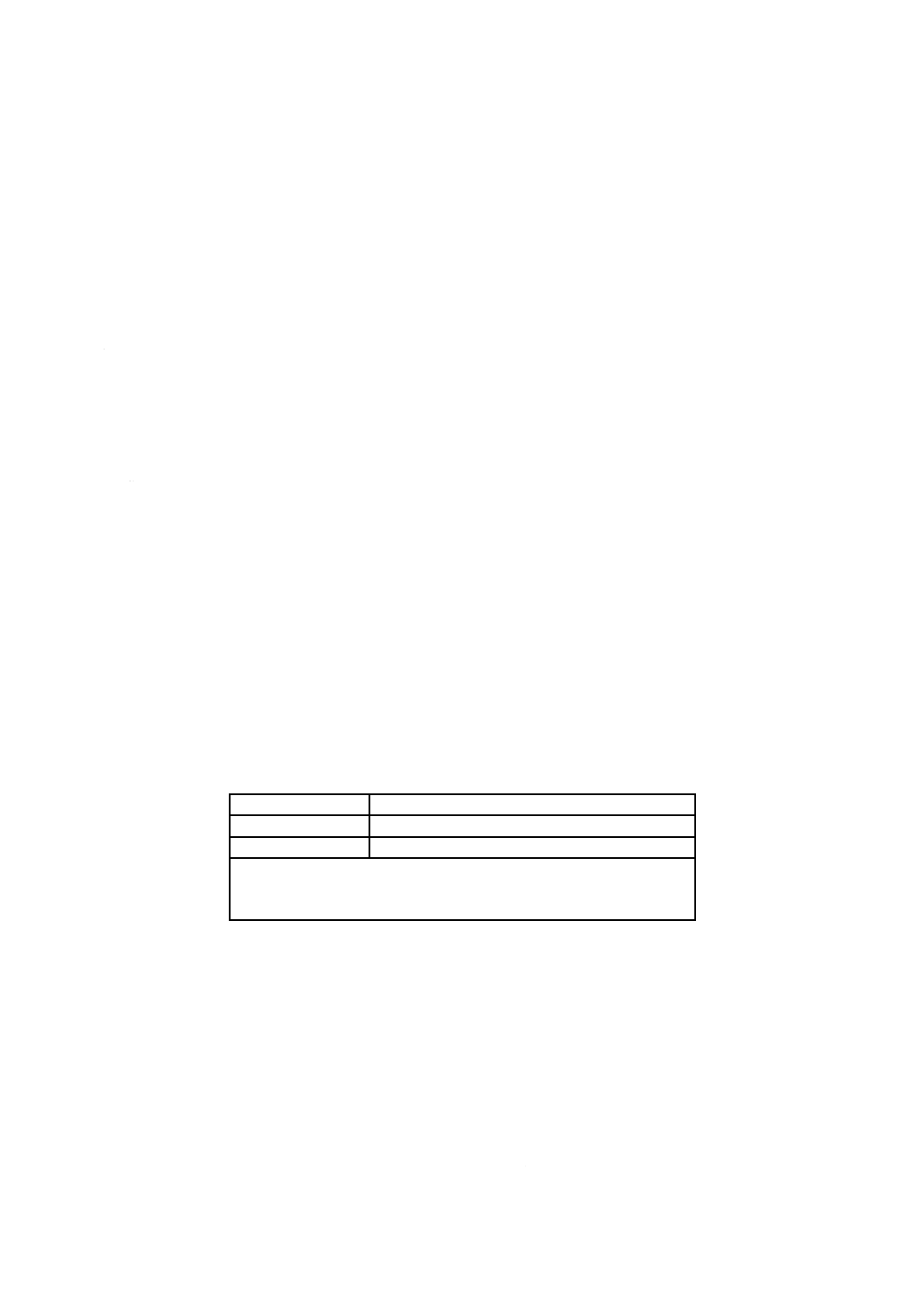
表3にユーザマニュアルに記載が必要なロボットの意図する使用条件の記載例を示す。
表3−ユーザマニュアルに記載が必要な意図する使用条件の記載例
項目
例
使用場所
・屋内
・温度:10 ℃〜40 ℃
・照明条件:(照度:150 lx〜1 000 lx)
・水の使用:しぶきがかかる
・回避障害物:(大きさ:幅10 cm,高さ:50 cm)
・第三者の特性:説明を受けた人だけ
走行路面
・最小通路幅:120 cm
・最大斜度:10°
・最大段差:20 mm
・最大溝幅:10 mm
・想定路面:タイル
運用管理
・安全管理者:要定期検査:要(頻度,実施内容)
8.4
サービスマニュアル
JIS B 8445の8.4(サービスマニュアル)による。
8.5
インストールマニュアル
インストールマニュアルには,一定の技術知識又は特別な技能を必要とするために,設置作業者だけが
実施する必要のある,ロボットの設置,インフラ工事,初期設定などに関する説明を含めなければならな
い。
設置,インフラ工事及び初期設定に関する説明は,ロボットの安全性,品質及び機能性を製造業者の指
定する水準に維持するために十分な情報を含んでいなければならない。
ロボットと併せて提供する情報には,必要な場合,次の事項を含めなければならない。
a) 搬送,設置,取付け及びインフラ工事に関する明確で包括的な説明
b) ロボットの初期設定に関する要求事項
c) 必要に応じて,ロボットの物理的環境条件に関する情報(例えば,照明条件など)
d) 次に関する情報(適宜)
− ロボットの初期設定のデータ
− 搬送手順
28
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 工事手順
− 初期設定手順
− ロボットの動作確認方法及びその手順
− 工事などに必要な機器のリスト
− 工事,初期設定などに必要な工具のリスト
e) 協調運転する複数のロボットの場合,安全防護,インタロック機能及び危険源に対するガードのイン
タロックの記述(相互接続図を含む。)
f)
環境システムと連携して動作するロボットの場合,通信経路及び通信プロトコルの確認方法,並びに
通信切断時のロボットの動作の確認方法
g) ロボットの安全防護策及びその機能確認の方法
h) 安全な設置及びインフラ工事,初期設定に関するリスク及びその保護方策,並びに残存リスクに関す
る情報
8.6
エラー及びアラート
危険源の発生,危険状態などのエラーをユーザ,オペレータ,安全管理者及び第三者に知らせるために,
アラート(例えば,視覚的信号,聴覚的信号,触覚的信号)を利用する場合は,必要に応じて,次の方策
のうち一つ以上を適用しなければならない。
a) エラーの緊急度及び優先度に応じて異なったアラートのパターンを採用する。
b) ユーザ,オペレータ及び安全管理者が取らなければならない対処方法に応じて異なったアラートのパ
ターンを採用する。
c) アラートを発することを意図した信号発生装置を,アラート以外にも用いる場合は,アラートの発生
を妨げない設計とする。
d) 緊急度及び優先度が低いアラートが,より緊急度及び優先度が高いアラートの発生を妨げない設計と
する。
e) エラーの原因が解消されたことをロボットが確認するか,又はユーザ,オペレータ若しくは安全管理
者の操作によって,ロボット若しくはアラートが停止するまで,アラートを継続する。
ロボットに複数のアラートを発する装置がある場合,互いのアラートを識別できることが望ましい。
注記1 識別のために,エラーごとにアラートを発する装置を一つに限定する方法,又は装置ごとに
パターンを変える方法がある。
注記2 エラーによっては,複数の装置からアラートを発せざるをえない場合がある(通信の切断な
ど)。
視覚的信号によるアラートに用いる色の意味は,JIS C 0448又はJIS B 9960-1を用いてもよい。ただし,
ロボットの意図する使用によっては,他の標準を考慮することが望ましい。
注記3 例えば,医療機器の警報システムを規定するJIS T 60601-1-8では,即座に人命が損なわれる
ようなエラーを警告することだけを目的に,赤の点滅を用いると規定されている。
注記4 例えば,JIS B 9706-1では,故障状態を示すために,赤を用いると規定されている。
合理的に可能な限り,持続的な注意を要する時間を短くし,アラートの数を少なくすることが望ましい。
注記5 アラートに気付くために,ユーザ及び/若しくはオペレータに持続的かつ長時間の注意が必
要となる場合,又はアラートが多すぎる場合,アラートの有効性を無にするような注意力の
欠如又は混乱をユーザ及び/又はオペレータにもたらすことがある。
適切なアラートのために,必要であれば,エラーの誤検出率及び/又はエラーの検出性能の検証をする
29
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ことが望ましい。
警告装置は,検査が容易に行えるように設計し,配置しなければならない。
注記6 定期検査に関する要求事項は,9.4に規定している。
9
使用の限定及び管理
9.1
一般
ロボットの使用を限定及び管理することによって,製造業者は,特定の危険源の除去又はリスクの低減
を行うことができる。製造業者は,ユーザ及びオペレータ,使用される環境条件,並びに安全に関わる性
能を維持する期間について,限定及び管理を適切に設定しなければならない。
ロボットの使用を限定する手段には,次のa)〜c) のような手段がある。
a) ユーザ及びオペレータの知識及び能力を限定する。
b) ロボットが使用される環境条件を限定する。
c) ロボットの安全に関わる性能が維持される期間を限定する。
注記1 ロボットはその意図する使用において,既に使用の限定が与えられている場合がある。この
場合,使用の限定による危険源の除去を前提としてリスクアセスメントを行える(4.1参照)。
注記2 ロボットの使用の限定は,JIS B 9700の5.3(機械類の制限の決定)に規定されている機械類
の制限に相当する。
さらに,ロボットの使用を管理する方法には,上記のa)〜c) に対応して,次のd)〜f) のような手段が
ある。
d) ユーザ及びオペレータの知識及び能力の限定を確実にするために,教育及び訓練を施す。
e) ロボットが使用される環境条件の限定を確実にするために,環境の整備を行う。
f)
設計寿命の間,ロボットの安全に関わる性能が維持されるために,定期的な検査を実施し,適切な保
守を行う。
注記3 ロボットの使用がd)〜f) の手段などによって管理されている場合,ユーザ又はオペレータが
意図的にロボットの使用の限定を超えて使用することは,合理的に予見可能な誤使用に含ま
ない。
9.2
教育及び訓練
製造業者が,特定の危険源の除去又はリスクの低減のために,ユーザ及びオペレータの知識及び能力を
限定し,かつ,それを保障するために,教育及び訓練を設定する場合は,次のa) 及びb) を満たさなけれ
ばならない。
a) 製造業者は,教育及び訓練しなければならない内容及び手段を特定し,ユーザ,オペレータ,並びに
教育及び訓練を担当する者に伝えなければならない。
b) 製造業者は,教育及び訓練されていないことに起因する,受容できないリスクを明確にし,ユーザ,
オペレータ,並びに教育及び訓練を担当する者に伝えなければならない。
注記1 安全管理者,設置作業者又は保守作業者が,教育及び訓練を担当する者となる場合がある。
注記2 教育及び訓練を担当する者は,教育及び訓練を確実にするために,製造業者から提供された
情報に基づいてリスクアセスメントを行い,教育及び訓練の計画を策定し,実施することが
望ましい。
注記3 教育及び訓練の具体例を,附属書Eに示す。
注記4 教育及び訓練の記録は,文書化し,一定期間保管することが望ましい。該当する者が教育及
30
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
び訓練を受けたことを証明する必要がある場合は,ライセンスを発行するなどの方法をとる
ことができる。
9.3
環境整備
製造業者が,特定の危険源の除去又はリスクの低減のために,ロボットが使用される環境条件を限定し,
かつ,それを保障するために,安全管理者による環境の整備を設定する場合は,次のa) 及びb) を満たさ
なければならない。
a) 製造業者は,環境を整備する手段を特定し,安全管理者に伝えなければならない。
b) 製造業者は,環境が整備されないことに起因する,受容できないリスクを明確にし,安全管理者に伝
えなければならない。
注記1 ユーザ又はオペレータが,環境の整備を担う場合がある。この場合,ユーザ又はオペレータ
は,安全管理者とみなされる。
注記2 ユーザ又はオペレータが,環境が整備されている場所だけにロボットを移動させる場合又は
安全関連障害物を避けながらロボットを移動させる場合がある。この場合,ユーザ又はオペ
レータは,安全管理者とみなされない。
注記3 設置作業者があらかじめ環境整備を行うことがある。この場合,設置作業者は安全管理者と
みなされる。
注記4 安全管理者は,環境の管理・維持を確実にするために,製造業者から提供された情報に基づ
いてリスクアセスメントを行い,運用の計画を策定し,実施することが望ましい。
注記5 ロボットの耐環境性に関する要求事項は,5.15に規定している。
注記6 環境を整備する手段を安全管理者に伝える方法には,ユーザマニュアル,サービスマニュア
ル,インストールマニュアルなどに記載するほか,安全管理者のためのマニュアルに記載す
る方法がある。
9.4
定期検査及び保守
製造業者は,ロボットがその設計寿命の間,保守を行わない場合でも安全に関わる性能を維持できるよ
う努力しなければならない。製造業者が,耐久性不足若しくは信頼性不足の危険源の除去,又はリスクの
低減のために,ロボットの安全に関わる性能が維持される期間を限定する場合は,製造業者は,定期的検
査及び/又は保守について,次のa)〜d) を満たさなければならない。
a) 製造業者は,定期検査の実施間隔,頻度及びタイミングを特定し,ユーザ,オペレータ,安全管理者,
又は保守作業者に伝えなければならない。
b) 製造業者は,検査及び保守サービスを提供する保守作業者への連絡手段を特定し,ユーザ,オペレー
タ又は安全管理者に伝えなければならない。
c) 製造業者は,保守の必要性を判断する手段及び保守の手段を特定し,保守作業者に伝えなければなら
ない。
d) 製造業者は,適切な検査及び保守が行われないことに起因する,受容できないリスクを明確にし,ユ
ーザ,オペレータ,安全管理者又は保守作業者に伝えなければならない。
注記1 ロボットの耐久性に関する要求事項は,5.11に規定している。
注記2 部分的な検査及び保守が,ユーザ,オペレータ又は安全管理者によって行われる場合がある。
この場合,ユーザ,オペレータ又は安全管理者は,保守作業者とみなされる。
注記3 検査のタイミングを通知するために,ロボット本体の機能又は遠隔サービスによって,ロボ
ットの劣化を検出・推定し,ユーザ,オペレータ,安全管理者又は保守作業者に通知しても
31
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
よい。
注記4 保守作業者への連絡手段には,保守作業者又は保守作業者の属する組織(製造業者の場合も
ある。)の住所,電話番号,URL,eメールアドレスなどがある。
注記5 保守の必要性を判断する手段として,検査における基準を設定するほか,稼働時間又は稼働
状況を利用する方法もある。
注記6 ユーザ,オペレータ又は安全管理者は,製造業者から提供された情報に基づいてリスクアセ
スメントを行い,定期検査及び保守の計画を策定し,実施することが望ましい。
注記7 定期検査及び保守の記録は,保守作業者が文書化し,一定期間保管することが望ましい。こ
の記録の写しは,ユーザ,オペレータ又は安全管理者に渡すことが望ましい。
安全管理者がロボットの安全に関する性能の劣化又はその予兆を捉え,適切に対処できるようにするた
めに,製造業者は安全に関わる性能が維持される期間,設計寿命などにかかわらず,9.1〜9.4の要求事項
に基づいた定期的検査及び保守を設定してもよい。特に,積載物の質量を含む総質量及び走行速度の大き
いロボット(例 図1の領域B及び領域Cのロボット)は考慮することが望ましい。
注記8 無人搬送車の定期検査及び保守に関連する規格には,JIS D 6802の5.2(運用)がある。
注記9 定期検査及び保守の例を,附属書Mに示す。
10 保護具
設計による保護方策を講じた後もなお人体が危険なエネルギーにさら(曝)されるリスクが受容できず,
製造業者がユーザに保護具の使用を求める場合,製造業者は,そのリスクを受容可能なレベルにまで軽減
する保護具の仕様を特定し,ユーザマニュアルに記載するか,又は仕様を満たす保護具を附属品として提
供しなければならない。
注記 特に頭部への衝撃による危害に対して注意を払うのがよい。
11 外部システム
ロボットは,障害物検出,ナビゲーションなどの機能を,ロボットの本体外に設置された外部システム
の支援によって達成してもよい。この場合,リスクアセスメントにおいて,ロボット本体だけでなく,外
部システム及びロボットと外部システムとの間の通信の切断又は不調を考慮しなければならない。特に,
衝突回避,階段などへの落下防止などの保護方策を支援する安全関連部として使用する場合,外部システ
ムもリスクアセスメントによって決定されたパフォーマンスレベルを達成しなければならない。
製造業者は,外部システムについて,必要に応じて次の事項を満足させなければならない。
a) ロボットの安全上必要な外部システムを定義し,安全関連部の場合は必要となる要求事項を達成する。
b) その外部システムの設置の要求事項及び設置方法を定義し,設置作業者に伝える。
c) その外部システムの保守の要求事項及び保守方法を定義し,保守作業者に伝える。
d) その外部システムの管理の要求事項及び管理方法を定義し,安全管理者に伝える。
e) リスクアセスメントに基づき,残留リスクを明確にして,ユーザ又は安全管理者に伝える。また,残
留リスクに対しての運用要件を明確にする。
注記1 外部システムによる支援の例には,次のようなものがある。
− 環境に配置されたセンサによるロボットの位置検出及び障害物検知
− ロボットの危険領域への接近を検知して,その侵入を防止する。
− 安全関連物体のロボットへの接近を検知して,ロボットにその接近を通知する。
32
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記2 外部システムを安全関連部としない場合(例 目的地への移動,設定経路の走行制御などの
ロボットのタスク実行に必要な基本機能として使用する。)でも,外部システムの効用によっ
て危険源の発生頻度を下げるのに有効な場合がある。これによって,関連する安全関連部へ
の要求パフォーマンスレベルは,発生頻度に基づいて下げられる可能性がある。
注記3 ロボットの自己位置認識の支援に外部システムを使用する場合の例
一般に,ロボット本体だけで自己位置認識を行う場合に比べて,自己位置認識の精度が上
がるため,結果的に,ロボットが所定の経路を外れて階段から転落するなどのリスクを低減
できる。この場合,例えば,階段を検出して転落前に停止するなどで,転落のリスクを低減
できる。
注記4 安全関連物体の検知への支援に外部システムを使用する場合の例
一般にロボット本体だけで安全関連物体検知を行う場合に比べて,ロボットの検出範囲を
超えて広い範囲の検知ができるため,結果的に,ロボットが安全関連物体との衝突などのリ
スクを低減できる。この場合,例えば,曲がり角などの死角から来る人の接近を事前に察知
し,衝突のリスクを低減できる。
33
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
危険源の連鎖的な発展及びそのリスク低減
この附属書は,5.1の“危険源に関連するリスクを低減するために,二次的に引き起こされる危険源のリ
スクを低減することで代替してもよい”という規定の背景となる考え方を示す。
A.1 用語及び定義
この附属書で用いる用語及び定義は,次による。
A.1.1
安全(safety)
受容できないリスクがない(JIS Z 8051:2004の3.1参照)。
A.1.2
リスク(risk)
危害の発生確率及びその危害の程度の組合せ(JIS Z 8051:2004の3.2参照)。
A.1.3
危害(harm)
人の受ける身体的傷害若しくは健康傷害,又は財産若しくは環境の受ける害(JIS Z 8051:2004の3.3参
照)。
A.1.4
ハザード(hazard)
危害の潜在的な源(JIS Z 8051:2004の3.5参照)。
注記 この規格の本体では,“危険源”と表記されているが,この附属書では“ハザード”と表記する。
A.1.5
危険状態(hazardous situation)
人,財産又は環境が,一つ以上のハザードにさらされる状況(JIS Z 8051:2004の3.6参照)。
A.1.6
リスク低減手段(risk reduction measure)
ハザードを除去又はリスクを低減する手段又は行動。
注記 この用語は,JIS Z 8051:2004の3.8で定義される保護方策(protective measure)と同一だが,保
護方策はその語感から本質的安全設計及び使用上の情報を含まないと誤解されるおそれがある
ため,リスク低減手段という用語を定義した。
A.1.7
安全状態(safe state)
差し迫ったハザードのない状態(JIS B 8445:2016の3.9参照)。
注記1 安全状態は,危険状態と対となる用語でないことに注意する必要がある。
注記2 ロボットは通常,安全状態から使用されることが想定されている。
注記3 ロボットの使用において,ハザード又は危険状態が意図的,又は意図せずに発生していると
きに,安全状態に移行することを目的として,リスク低減手段が講じられることがある。こ
34
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
のときの安全状態は,通常の使用開始時の安全状態と異なり,再び使用することを意図しな
いものがある。
A.2 ハザードの連鎖的な発展を考慮したリスクアセスメント
製造業者がリスクアセスメントを実施する場合,危害に直結する危険状態,及び危険状態に直結するハ
ザードをまず特定し,それらについて,リスク評価を行うことが重要である。受容できないリスクについ
てリスク低減手段を講じ,全体のリスクが許容可能となれば,それ以外の多くの“危険状態に直結しない”
ハザードは,全体のリスクに寄与しないこととなり,リスクアセスメントに伴う労力を軽減することがで
きる。
危険状態に直結しないハザードの例を次に挙げる。
− JIS B 8445の5.11(耐久性不足による危険源)の“耐久性不足”によるハザードは,それ自体で危険
状態とならず,JIS B 8445の5.10.3(移動中の不安定性)の“移動中の不安定性”による転落又は横
転を経て,安全関連物体に倒れ込むという危険状態を招き,その結果として,エネルギーの程度に応
じた危害を安全関連物体に与えることになる。
− 同様に,JIS B 8445の5.12(誤った自律的判断及び動作による危険源)の“誤った自律的判断及び動
作”によるハザード,JIS B 8445の5.16(位置確認及びナビゲーションの誤差による危険源)の“位
置確認及びナビゲーションの誤差”によるハザードは,それ自体では危険状態とならず,JIS B 8445
の5.10.8(安全関連障害物との衝突)の“安全関連障害物との衝突”という危険状態を招き,その結
果として,エネルギーの程度に応じた危害を安全関連物体に与えることになる。
これらの例では,JIS B 8445の5.11のハザードのリスクは,“安全関連物体に倒れ込む”という“二次
的な”危険状態のリスクを低減することによって代替できる。また,JIS B 8445の5.12及びJIS B 8445の
5.16のハザードのリスクは,“二次的な”JIS B 8445の5.10.8のハザードのリスクを低減することで代替で
きる。
このようなハザードの連鎖的な発展及びそのリスク低減は,ハザードの発生から危害に至るまでの遷移
を考慮すれば理解しやすい。
A.3 ハザードの連鎖的な発展を考慮したリスク低減手段
製造業者は,ロボットの安全を達成するために,受容できないリスクについてリスク低減手段を講じ,
リスクを受容可能なレベルまで低減する必要がある(箇条4参照)。リスクを低減するためには,危害の程
度を下げるか,又は危害の発生確率を下げる必要がある。
危害の程度を下げるには,危険状態におけるハザードのエネルギーの程度を下げる必要がある。また,
危害の発生確率を下げるには,危険状態の発生確率を下げるか,又はその危険状態から危害への遷移確率
を下げる必要がある。
危険状態の発生確率を下げるには,関連するハザードを除去するか,その発生確率を下げるか,又はそ
のハザードから危険状態への遷移確率を下げる必要がある。
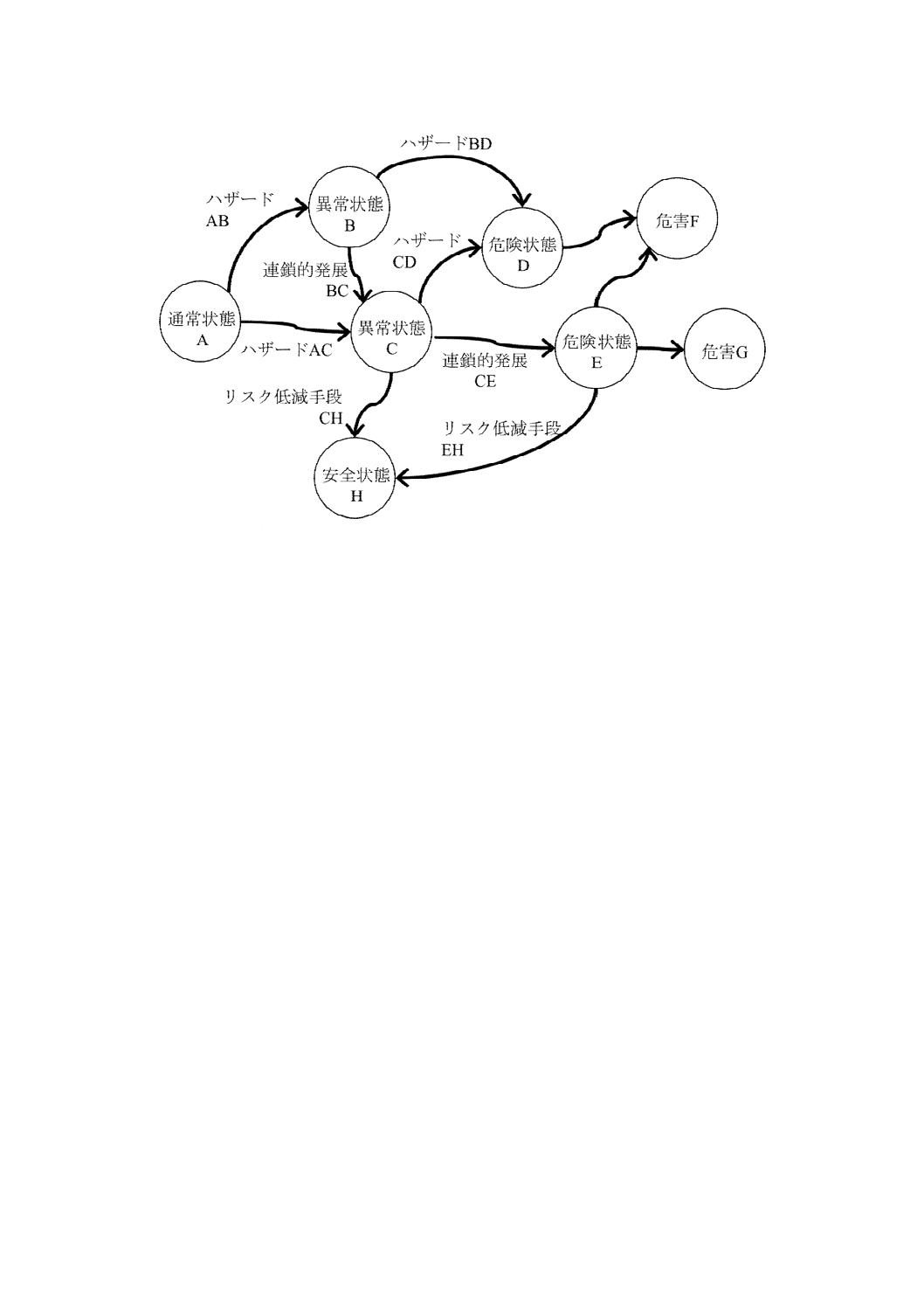
参考のために,通常状態,異常状態,危険状態,危害をノードとした状態遷移図の例を,図A.1に示す。
図A.1において,ハザードは通常状態から異常状態への遷移,又は異常状態から危険状態若しくは異なる
異常状態への遷移を意味するエッジとして表現できる。図A.1のようにリスクの構造を表現するとき,あ
るノードXの発生確率を下げるには,ノードXに遷移するエッジの遷移確率を下げるか,又はそのエッジ
の元となるノードの発生確率を下げればよい。
35
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 リスク低減手段によるハザードの除去は,該当するエッジを除去するか,又はそのエッジの
遷移確率をゼロにすることで表現できる。
注記2 危険状態におけるエネルギーの程度を下げることは,危険状態から危害への遷移確率を下げ
ることで表現できる。また,危険状態におけるエネルギーの程度が受容可能な程度より小さ
ければ,危害への遷移確率はゼロと表現できる。
注記3 ハザードが意図的に,又は意図せずに発生した後,リスク低減手段によって安全状態へ移行
することは,そのハザードの結果として生じる異常状態又は危険状態のノードから,安全状
態のノードへの遷移を表すエッジとして表現できる。
注記4 ある時間の後に,ある異常状態が別の異常状態又は危険状態に自動的に発展する場合がある。
これは,該当するノード間の遷移を意味するエッジとして表現できる。
注記5 状態遷移図による表現以外にも,リスクの構造を表現するモデルは多く知られている。
図A.1を元にリスク低減手段を検討する場合,例えば次の技法の適用が考えられる。
− EGの遷移確率をゼロにすることで,Gの発生確率をゼロにする。
− Dの発生確率をゼロにする(Dにつながるエッジの遷移確率をゼロにする。)ことで,Fに至るノード
をEだけとし,Fの発生確率を下げる。
− BD及びCEの遷移確率を下げ,D及びEの発生確率を下げる(この場合,A,B及びCの発生確率,
並びにAB及びACの遷移確率の安全への寄与は小さくなる。)。
− D及びEにおけるエネルギーの程度を下げ,受容可能な程度にまで,F及びGの発生確率を下げる(こ
のとき,DF,EF及びEGの遷移確率はゼロとみなせ,全ての発生確率及び遷移確率の安全への寄与
は小さくなる。)。
− EF,EGの遷移確率を下げ,F及びGの発生確率を下げる。
一般に知られているフォールトアボイダンス,フェールセーフ,フォールトトレランス及びフールプル
ーフの技法は,図A.1のようなリスクの構造において,ハザードに機能不全,故障及び誤使用を含めるこ
とで理解できる。
この規格に記載されたリスク低減手段は,リスクの構造を考慮した上で採用することが望ましい。
36
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.1−ハザードの連鎖的な発展及びそのリスク低減を表現する状態遷移図(例)
37
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
ロボットの構造及び各部の名称
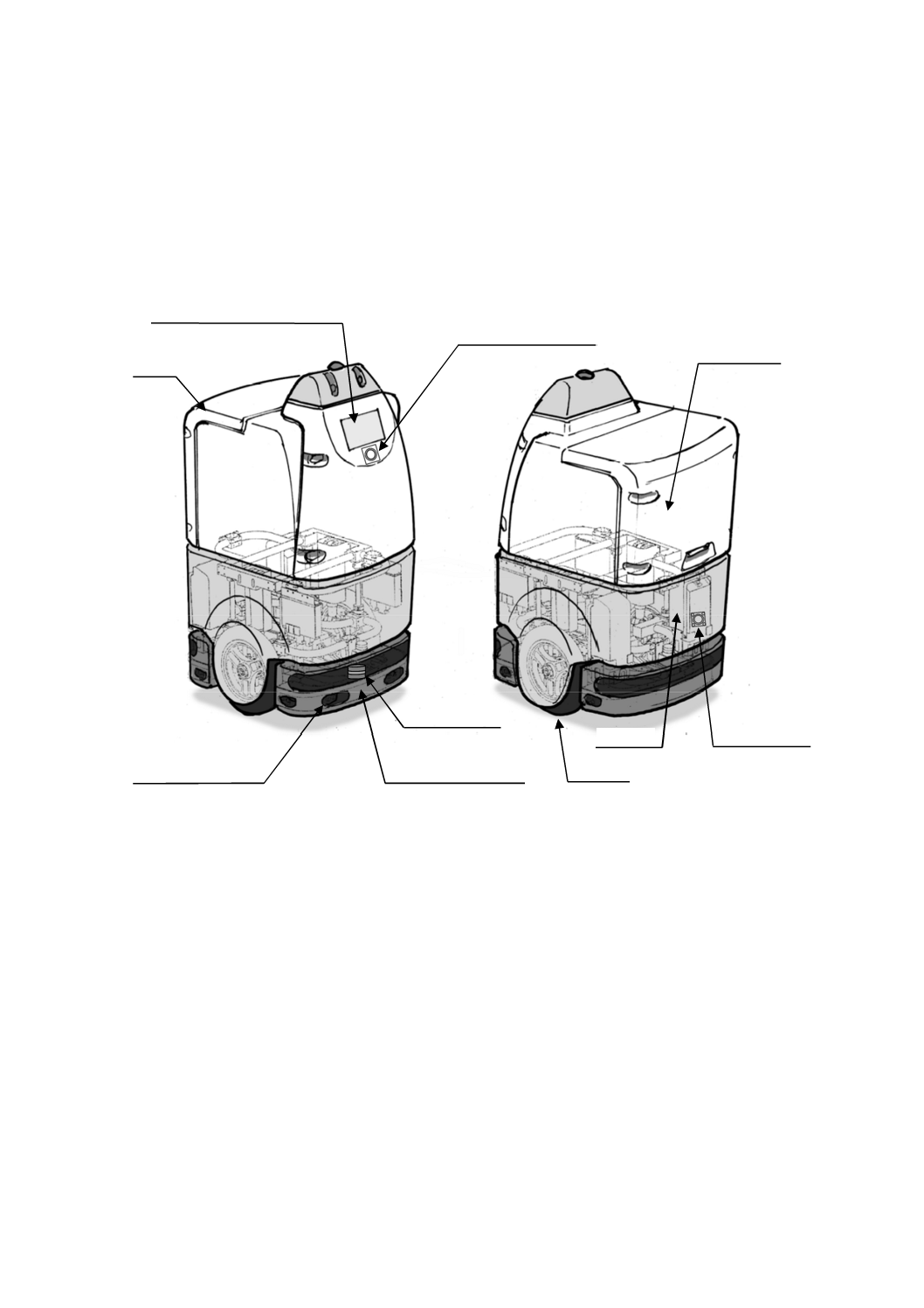
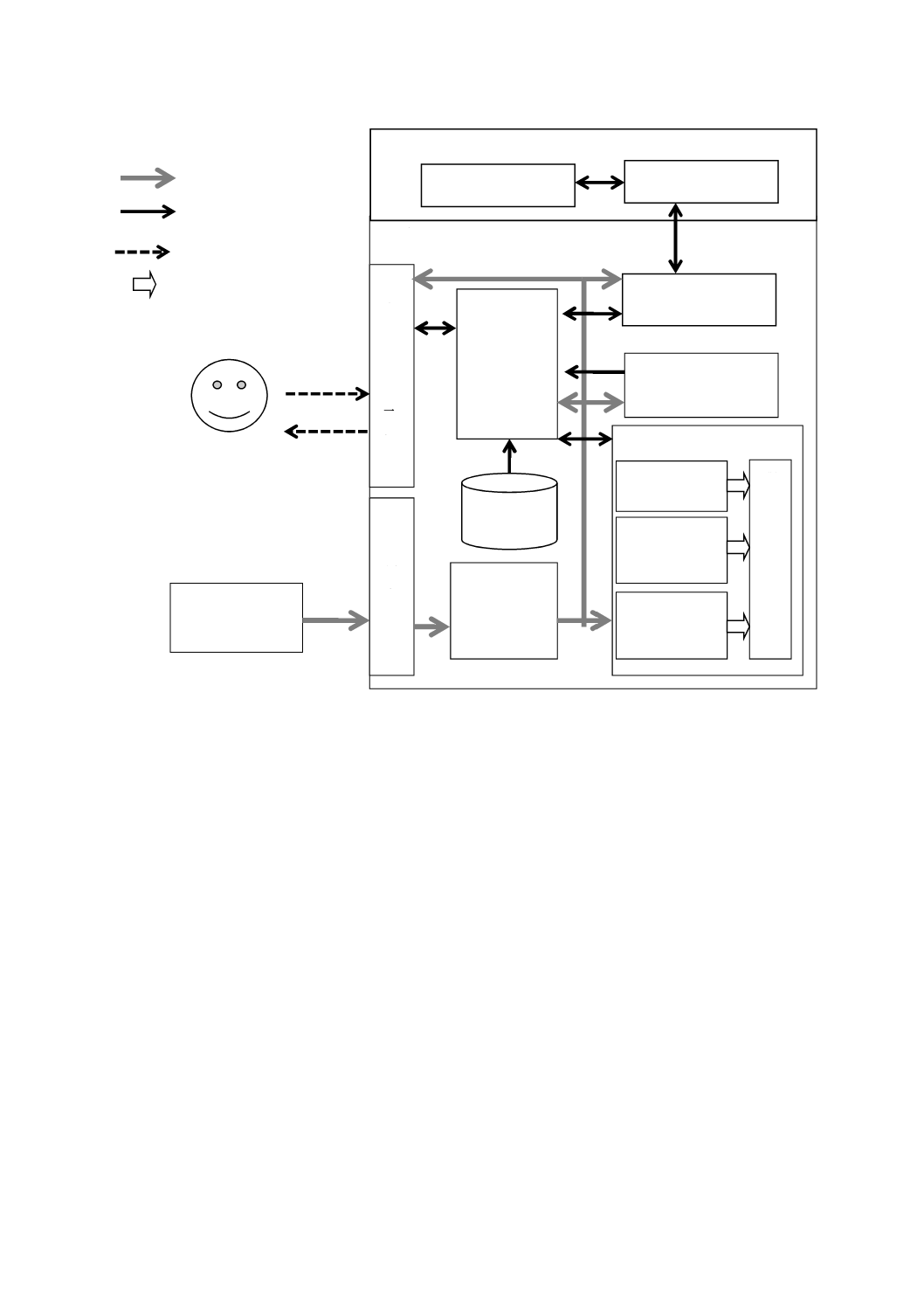
ロボットの構造及び各部の名称の例を図B.1に,システム構成の例を図B.2に示す。
図B.1−構造及び各部の名称(例)
バンパ(接触センサ)
路面(段差)センサ
障害物センサ
駆動輪
バッテリ
充電コネクタ
外装
操作インタフェース表示装置
非常停止機能ボタン
荷物格納部
38
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.2−システム構成(例)
ロボット
駆動機構
充電器
制御装置
バッテリ
駆動装置
(モータ)
操舵装置
充
電
コ
ネ
ク
タ
操
作
I/F
・
表
示
装
置
ユーザ
外部システム
通信装置
外界センサ
(障害物,路面)
通信装置
各種センサなど
制動装置
(ブレーキ)
駆
動
輪
地図情報
電源入力
情報入力
操作入力/情報提示
図中の矢印線
物理力
39
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
ロボットの典型的な危害の発生シーン
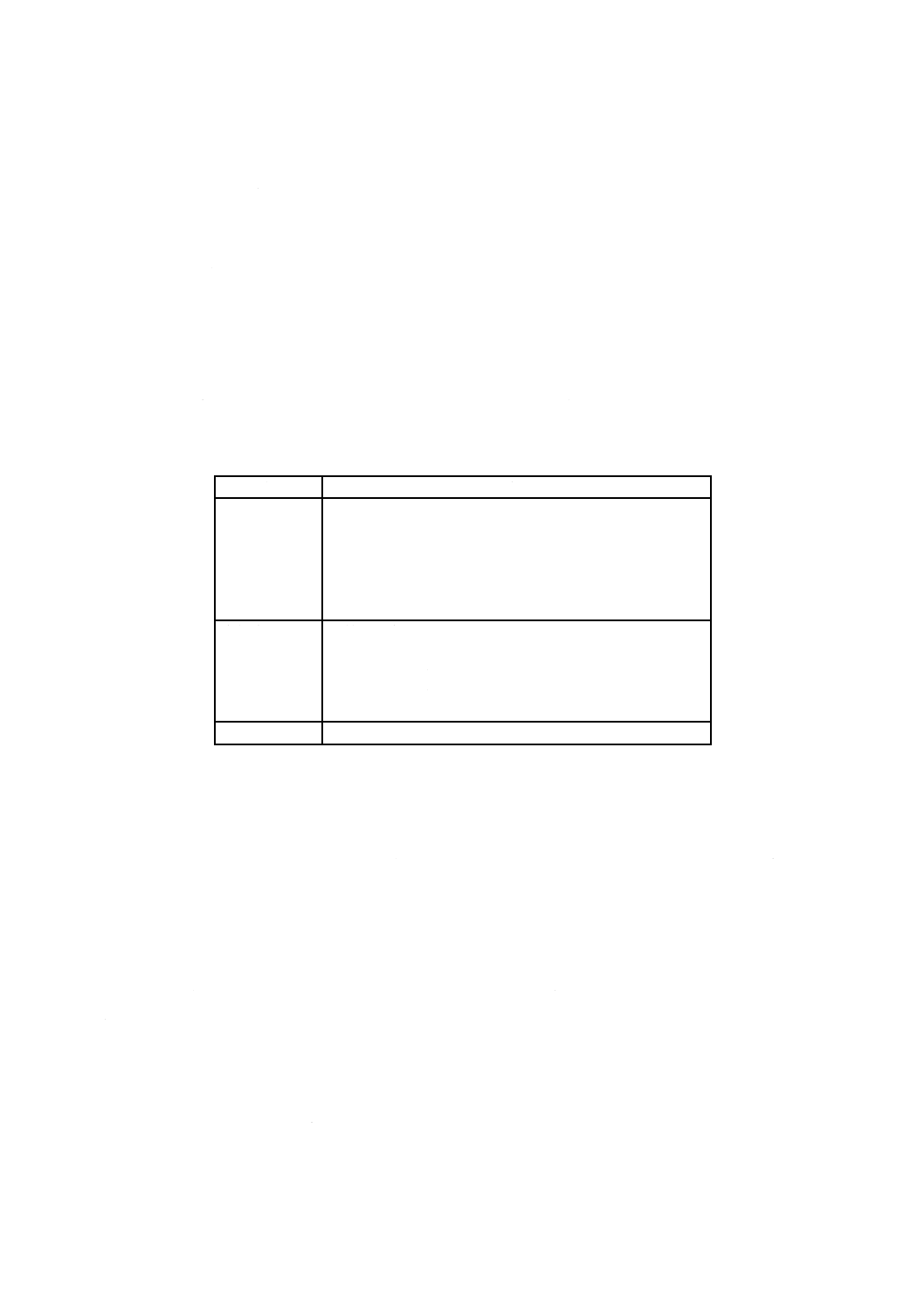
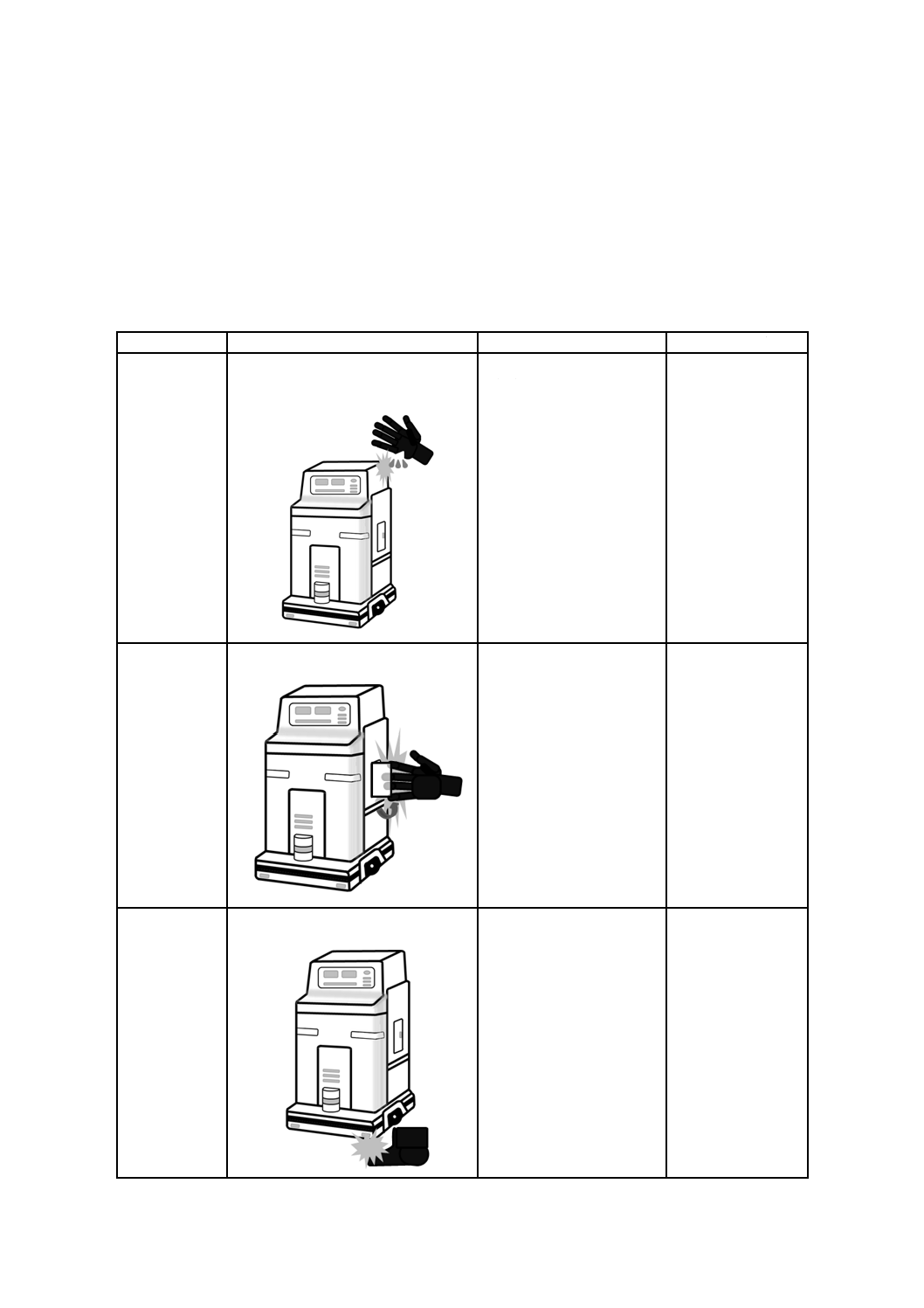
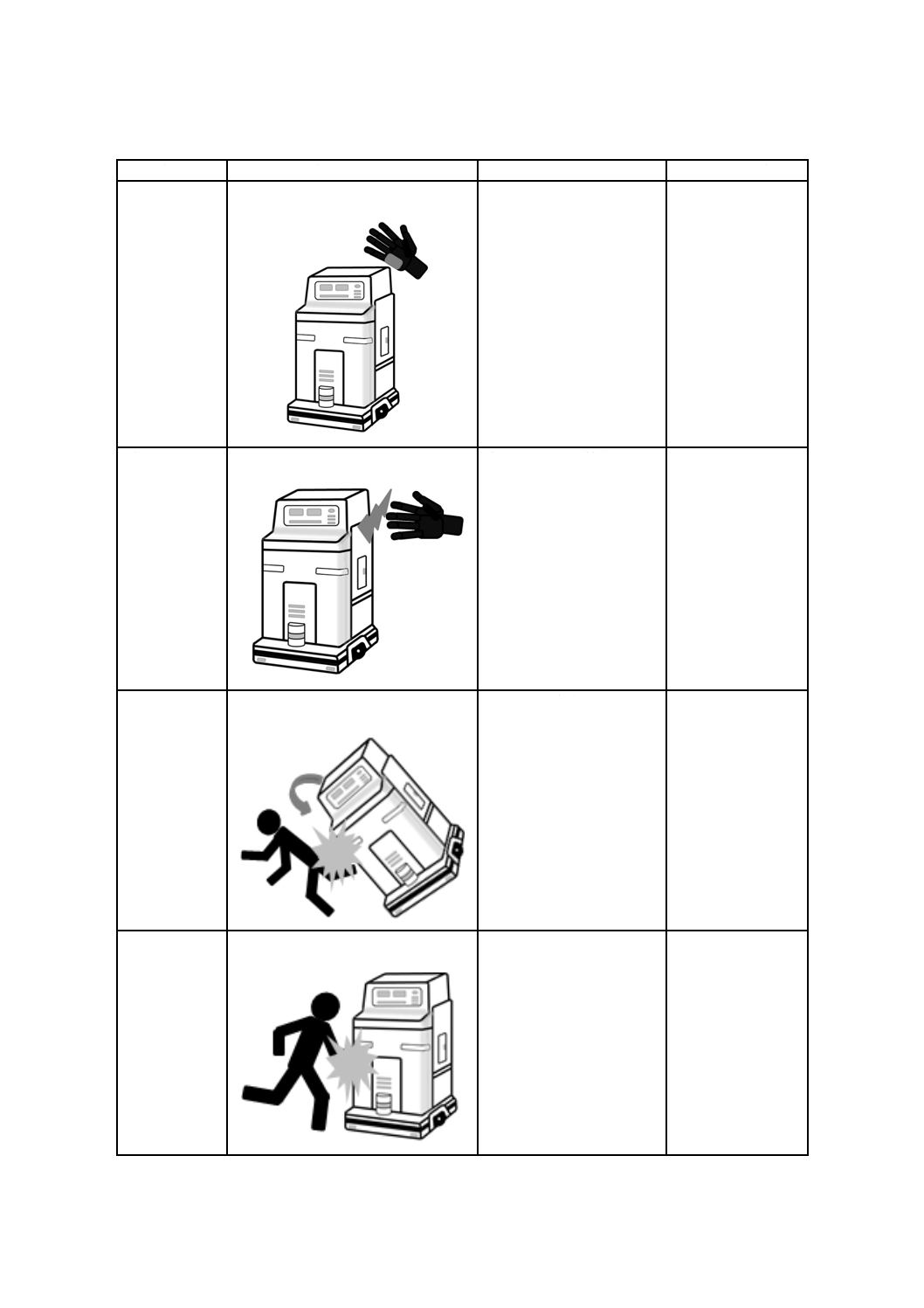
ロボットの典型的な危害の発生シーンの例を,表C.1に示す。
表C.1−典型的な危害の発生シーン(例)
危害の例
危害の発生シーン
原因
関連する危険源
切り傷
刺し傷
擦過傷
ロボットの接触部で手を切った。刺さ
った。擦れた。
接触部が鋭利(傷を生じる
形状)になっていた。
5.6
指詰め
可動部に挟まれた。巻き込まれた。
可動部に指又は手が入っ
た。
5.6
足ひ(轢)き
ロボットの車輪にひ(轢)かれた。
車輪の下に足が入った。
5.13
40
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
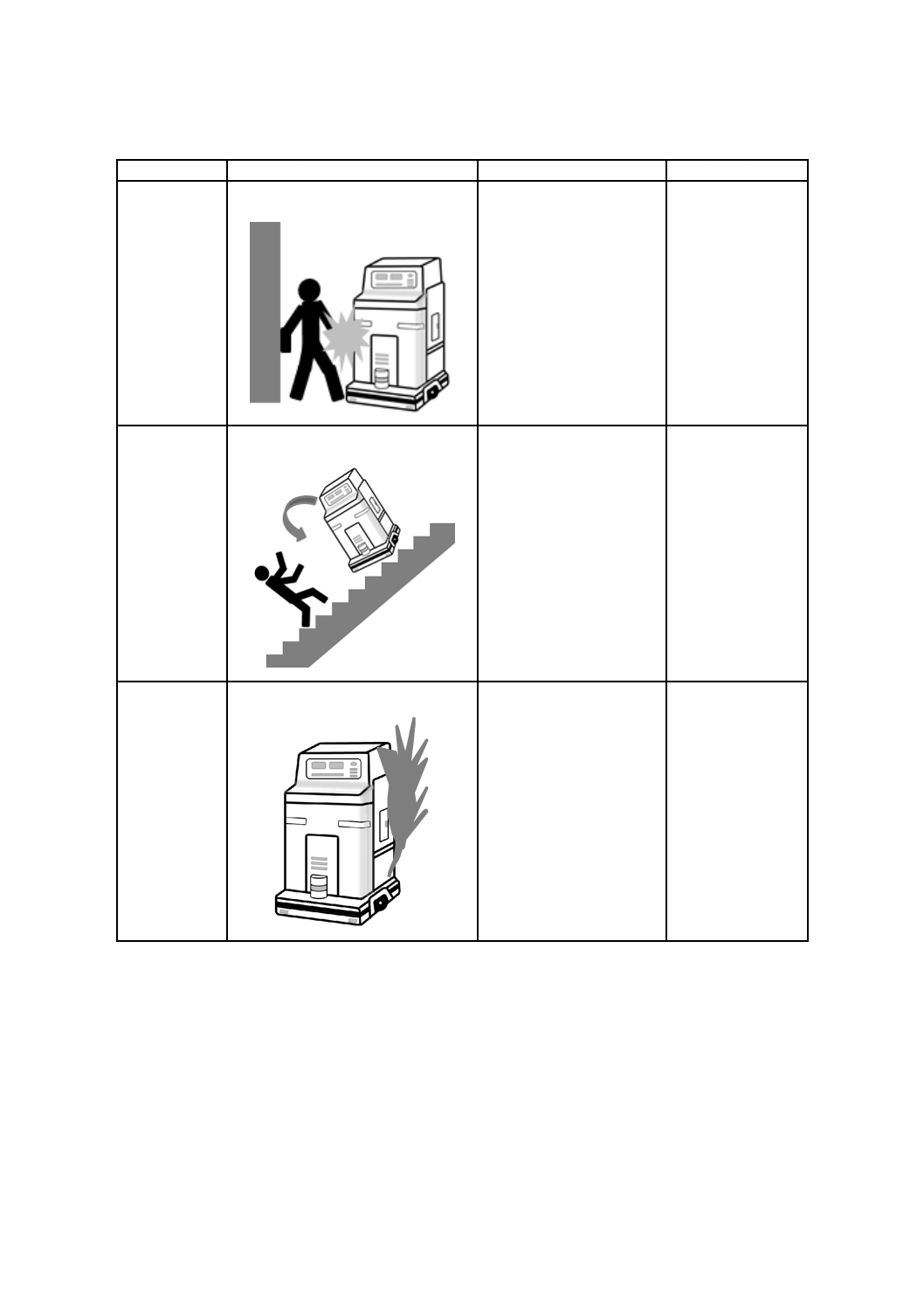
表C.1−典型的な危害の発生シーン(例)(続き)
危害の例
危害の発生シーン
原因
関連する危険源
やけど
ロボットに接触してやけどをした。
接触部が高温になってい
る。
5.7.4
感電
ロボットに接触して感電をした。
高電圧な端子に接触した。
5.2
5.3.2
5.5
押し潰し
ロボットが転倒して挟まれた。
ロボットが転倒した。
5.10.2
5.10.3
5.10.4
5.10.5
衝突
ロボットにぶつかった。
ロボットが人を避けられな
かった。
5.4
5.10.3
5.10.6
5.12
5.14
41
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
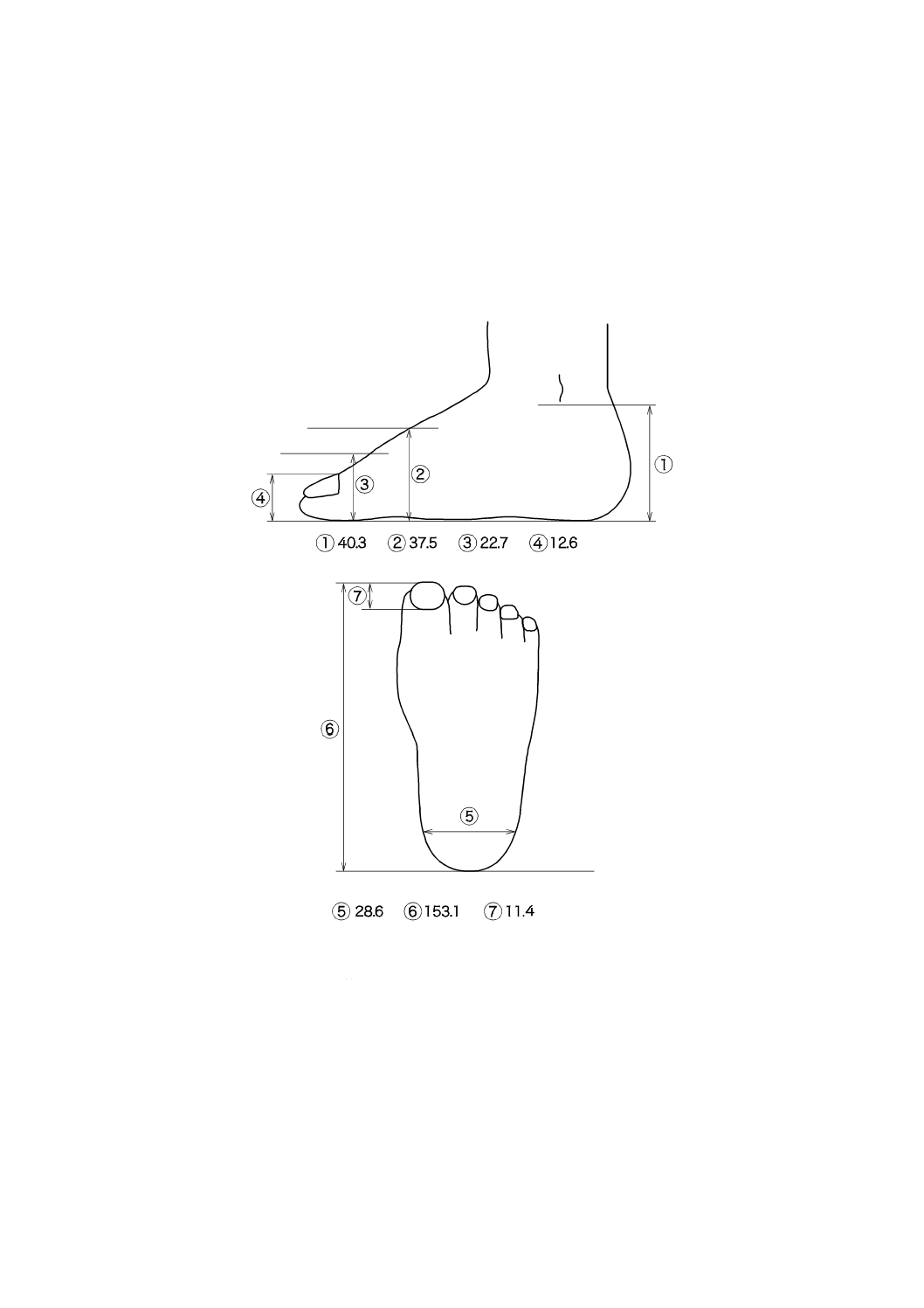
表C.1−典型的な危害の発生シーン(例)(続き)
危害の例
危害の発生シーン
原因
関連する危険源
挟み込み
ロボットと壁に挟まれた。
ロボットが人を避けられな
かった。
5.10.3
5.10.6
5.12
落下
ロボットが落ちてきて押し潰された。
ロボットが階段などから落
下した。
5.10.3
5.12
5.16
発火
ロボットが発火した。
電気的ショート。
5.17
42
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
検証及び妥当性確認のための試験条件の例
検証及び妥当性確認のための試験条件については,特に規定がない限り,試験は,JIS C 9335-1:2014の
5.4〜5.6,5.15,5.16,5.18及び5.19によるほか,次のD.1〜D.5を考慮するのがよい。
D.1 試験のための周囲温度
試験は風の影響がない場所で,通常,20±5 ℃の周囲温度で行う。ただし,この周囲温度が試験の合否
に影響を与える場合,23±2 ℃の周囲温度で行う。
注記 周囲温度は,ロボットからの放射熱の影響を受けないようにロボット周辺を測定した温度をい
う。
D.2 試験サンプル数
試験は,ロボット1台について行うが,関連する全ての試験に適合しなければならない。ただし,ロボ
ットの破壊を伴う試験については,別のサンプルで行ってもよい。試験は,少ないサンプルで実施するの
が基本であるが,破壊検査については,別サンプルを用意する必要がある。
D.3 試験状態
試験は,供給されたままのロボットで行う。ただし,現地で組み立てる部分がある場合は,ロボットに
附属した指示に従って組み立てた後,試験する。
D.4 傾斜角
傾斜面での使用を意図したロボットは,その最大傾斜角で最も厳しい状態で試験する。また,静的安定
性の試験などは,必要な場合,安全性を加味した傾斜角で試験を行う。ただし,水平面又は指定の傾斜角
での設置条件でだけ可能な試験に関しては,その条件による。
D.5 物品入れ
ロボットに物品入れがある場合は,特に規定がない限り,空の状態又は定格質量をもつ積載物を搭載し
た状態で試験する。
なお,積載物として,砂袋などを用いてもよい。積載物は,試験が最も厳しくなるように物品入れに配
置する。
43
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
教育及び訓練の具体例
安全な使用を行う上でユーザ(移動作業型の場合は,オペレータと同じ)の知識及び技量を担保するた
めに,必要に応じて,ユーザ(オペレータ)に次の項目についての教育及び訓練を実施するのがよい。
a) 起動及び終了の手順の教育及び訓練
b) 各種操作方法の教育及び訓練
c) 発生する危害の可能性及びその対処方法に関する教育及び訓練
44
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(参考)
充電,感電及び電気的火災に関する試験の例
充電,感電及び電気的火災に関しては,F.1〜F.3の試験によって適合を確認するのがよい。
F.1
充電における安全性試験
充電における安全性試験は,次による。
a) 単一故障状態 電池を切り離した状態で,電池充電回路を電源装置の定格出力電圧の100 %に調整す
る。充電回路で起こる可能性があり,かつ,起こった場合は過充電状態となるようなあらゆる単一故
障を一時的に模擬して,電池を充電する。試験時間を最小にするため,過充電電流が最大となる故障
状態を選択し,異常状態に陥らないことを確認する。
また,電池については,次のいずれの状態も生じてはならない。
1) 電池の被覆の亀裂,破損又は破裂によって,必要とされる絶縁に悪影響を与えるような化学物質の
漏出。
2) 電池の圧力調整弁からの液体の漏えい(洩)。ただし,ロボット内に漏えい(洩)物を保持すること
によって絶縁への損傷又はユーザに傷害を与えるリスクがない場合を除く。
3) ユーザを傷付けるような電池の爆発。
b) 逆接続 逆接続ができないことを確認する,又は逆接続が可能な構造であれば,JIS C 9335-1:2014の
附属書Bの7.1及び附属書Bの7.12の表示を確認する。
F.2
感電試験
感電試験は,次による。
a) 絶縁距離 JIS C 9335-1:2014の箇条29(空間距離,沿面距離及び固体絶縁)によるほか,次による。
ミクロ環境は,汚損度2とする。また,過電圧カテゴリはIIとする。ロボット使用時に接地しない回
路中の導体と接地との間の電圧を測定するときは,5 000 Ω±10 %の非誘導抵抗器を電圧測定器に接続
しなければならない。
b) 漏れ電流 ロボットの充電状態において,電源装置に入力電圧の上限電圧(日本国内で供給される単
相交流100 V電源の場合は106 V)の試験電圧を加え,通常動作で運転した後,電源装置の入力電源
の片側と可触絶縁物表面に接触させた面積が20 cm×10 cm以下の金属はく(箔)に接続した可触金属
部との間で,IEC 60990の図4[知覚又は反応に重み付けされた接触電流の測定ネットワーク
(Measuring network, touch current weighted for perception or reaction)]に規定する回路を使用して,漏え
い電流を測定する。
漏えい電流は,0.25 mA以下でなければならない。
F.3
電気的火災試験
電気的火災試験は,次による。
a) 通常使用状態における火災危険 適否は,電気的接続部に対してJIS C 9335-1の箇条28(ねじ及び接
続)及びJIS C 9335-1の箇条23(内部配線)に適合しているか否かによって判定する。
45
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 異常使用状態における火災危険 次の1) 及び2) の試験を実施した後,JIS C 9335-1:2014の19.13に
よって判定する。特に規定がない限り,非自己復帰形の保護装置が作動するまで又は定常状態に達す
るまで試験を継続する。電流ヒューズが動作した場合は,JIS C 9335-1:2014の19.12を適用する。故
意に弱くした部分が切れたままになった場合には,2番目の試料を用いて,関連する試験を再度行う。
この2回目の試験は,試験が支障なく完了しない限り,同じ状態で終了とならなければならない。
充電状態においては,電源装置の保護装置によって保護してもよい。
1) モータの異常 次を考慮してモータの異常を模擬し,JIS C 9335-1:2014の19.7及び19.8を適用す
る。
− JIS C 9335-1:2014の19.7の拘束試験においては,モータを,電池が放電してモータが動かなくな
るまでの時間又は定常状態に達するまでの時間のいずれか短い時間運転する。
− JIS C 9335-1:2014の19.8の過負荷試験においては,車輪用モータを,定常状態に達するまで,走
行状態で運転する。
2) 単一故障状態 JIS C 9335-1:2014の19.11及び19.14を適用する。ただし,JIS C 9335-1:2014の19.11.3
及び19.11.4を除く。
46
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(参考)
イミュニティ試験の例
静電気及び電磁波に関するイミュニティに関して,次の条件においてJIS C 9335-1:2014の19.11.4.1〜
19.11.4.7の試験は,サージ保護装置が動作したことを使用者が確認できない場合,一つのサージ保護装置
を遮断して実施する。
G.1
充電状態
充電中に停止している状態において,JIS C 9335-1:2014の19.11.4.1〜19.11.4.7の試験を適用する。ロボ
ットは,動き出してはならない。
G.2
走行状態
車輪が回転している状態において,JIS C 9335-1:2014の19.11.4.1〜19.11.4.7の試験の走行状態で可能な
試験を適用する。走行中に意図しない危険な動作があってはならない。また,箇条6の安全関連制御シス
テムの対象となる機能(例 バンパなどによる走行停止機能)が阻害されてはならない。
注記1 走行停止機能には,ブレーキ性能は含めないため,車輪を浮かせた状態で試験してもよい。
注記2 走行中の意図しない危険な動作には,例えば,片車輪だけの停止,意図しないバック走行,
意図しない急な加減速(急停止)などがある。
G.3
保護電子回路
保護電子回路の試験については,JIS C 9335-1:2014の19.11.4.1〜19.11.4.7の試験を適用する。
47
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(参考)
ロボットの温度に関する試験の例
H.1 試験の状態
温度に関して,次の状態において試験を行う。
− 充電状態
− 走行状態
H.2 試験の条件
試験は,次に規定する条件の下で確認を行う。
a) 設置条件 充電状態での試験においては,水平支持台の上にロボットを設置する。
走行状態での試験においては,障害物などがなく自由に走行する状態と同等の状態で,ロボットの
車輪が回転できる状態にする。
b) 温度測定方法 温度の測定方法は,JIS C 9335-1:2014の11.3による。また,温度の計測には,サーモ
グラフィーを使用してもよい。
c) 試験電圧 充電状態での試験においては,充電器の電源装置に入力電圧の上限電圧又は下限電圧のう
ち最も厳しい電圧(日本国内で供給される単相交流100 V電源の場合は94 V又は106 V)を加えた状
態で運転する。
走行状態での試験においては,内蔵する電池の電圧で運転する。
d) 運転時間 充電状態での試験においては,使用説明書に記載した電池の充電時間又は24時間のうち,
いずれか長い時間運転する。
走行状態での試験においては,電池が放電して動作しなくなるまで又は定常状態に達するまで(各
部の温度上昇が一定になるまで)の時間うち,いずれか短い時間運転する。
e) 運転条件 運転条件は,意図する使用条件において最も厳しい運転パターンを用いる。
f)
温度限度 温度限度は,JIS C 9335-1:2014の11.8による。
48
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書I
(参考)
静的安定性の試験の例
静的安定性は,I.1及びI.2のような試験によって適合を確認するのがよい。
I.1
停止状態での傾きに対する安定性
5°傾けた面の上に,あらゆる通常使用姿勢にしてロボットを置く。このとき,ロボットは動かさない。
ただし,ロボットを5°傾ける間に,ロボットの一部が水平支持面と接触する場合は,ロボットを水平支
持台の上に乗せてから最も不利となる方向に5°傾ける。
注記1 ロボットは,電源装置に接続しない。
注記2 車輪は,動かないようにしておく。
注記3 傾斜面については,使用最大傾斜角を考慮する。
ロボットは,定格質量以下の積載物を搭載した最も厳しい状態で実施する。
このとき,ロボットは転倒してはならない。
I.2
加重状態の安定性
ロボットに対して,使用最大傾斜角の斜面において,ロボットに次のa)〜c) のように加重する。
a) 総質量(定格質量の積載物を含む。)が25 kg以上のロボットは,そのロボットの質量の20 %に等し
い力(ただし,最大で250 N)を床から2 m以下の高さにおいて,上方向を除くあらゆる方向に加え
たとき,転倒してはならない。このとき,使用時に動かされる可能性があるドア,引出しなどは,使
用説明書の指示の範囲で最も不利な位置に配置する。
注記1 車輪は,動かないようにしておく。
b) ロボットは,床から1 mを超えない高さにある少なくとも12.5 cm×20 cmのあらゆる水平面に対して
最大モーメントとなる箇所に,800 Nの下向きの一定の力を加えたときに転倒してはならない。ドア,
引出しなどは,この試験の実施時には閉じておく。この800 Nの力は,約12.5 cm×20 cmの平面をも
つ適切な試験用工具で加える。下向きの力は,試験用工具の平面の全面をロボットに接触させること
によって加える。試験用工具は,ロボットの平らではない表面(例えば,波形又は曲線の表面)全部
に接する必要はない。
c) ユーザ及びサービス従事者以外の一般の人が自由にアクセスできるドア又は引出しがあるロボット
は,ロボットを水平面に置き,23 kgのおもりを開けたドア又は完全に開けた引出しのうち,より不利
な方の中心上に載せるか又は中心からつり下げる。
ロボットは,いずれの加重状態においても転倒してはならない。
注記2 a) 及びb) の数値は,JIS C 6950-1:2009によっている。
注記3 c) の数値は,JIS C 9335-2-5:2004によっている。
49
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書J
(参考)
動的安定性の試験の例
次の試験条件によって転倒,転落又はその他の許容範囲を超える異常な動作を生じることがないことを
確認するのがよい。
J.1
走行状態での不安定性
ロボットを定格最大速度以下の最も不利な速度にして,次のように走行させ,転倒がないことを確認す
る。
− 踏破可能な凸面 ロボットが乗り上げることができる最大の高さに対して,ロボットの片輪及び両輪
が段差を乗り上げるようにして走行させる。
− 踏破可能な凹面 ロボットが乗り越えることができる最大幅及び深さの溝に対して,ロボットの片輪
及び両輪が溝を乗り越えるようにして走行させる。
− 踏破不可能な凸面 凸面への衝突に関して停止又は回避を行わないロボットは,乗り上げできない高
さの段差に対して,ロボットを衝突させる。
− 連続の凹凸面 意図したロボットの走行路面に存在する連続した凹凸路面上を走行させる。
− 検知可能な障害物 凸面への衝突に関して停止又は回避を行うロボットは,ロボットの前方に検知で
きる障害物を置いた状態で走行させ,停止又は回避させる。
注記1 溝(エレベータの乗降口など)を横断できるロボットは,取扱説明書に記載された横断可能
な走行面の最大溝幅において,ロボットに対して一番厳しい角度で溝を横断させる。
注記2 可能性がある場合は,手すり,長机,低い天井,その他衝突すると転倒する可能性が疑われ
る障害物を模擬し,それへ向けて走行させる。
注記3 連続した凹凸路面の例として点字ブロックなどが挙げられる。
J.2
傾斜面の逆走
使用最大傾斜角の斜面の途中からロボットを発進させたとき,傾斜面を上れずに逆走(バック)する,
又は車輪の滑りによる許容する範囲を超える進行方向の変化がないことを確認する。このとき,床面は,
意図する使用条件の範囲で最も厳しい条件とする[例 水でぬ(濡)らす]。
注記 傾斜面については,使用最大傾斜角を考慮する。
J.3
転落に対する保護
転落を許容しないロボットに関して,転落に対する保護手段に関する検証は,製造業者のリスクアセス
メントによって決定する。適否については,リスクアセスメントによって決定された検証方法に基づいて
試験を行い,必要に応じて保護手段が作動し,転落が発生しないことを確認する。
J.4
車輪のロック
使用環境において,布などがからみついて車輪のロックの可能性がある場合は,最も転倒しやすくなる
ように,駆動輪の一部又は全てを走行中に外部から急激に停止させ,転倒がないことを確認する。
50
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 例えば,病院などの環境で用いる場合には,包帯などを巻き込むことで車輪を拘束されること
が考えられる。
上記の試験に関して,ロボットは次の運転パターンから最も不利となる組合せを選択して試験を行う。
− ロボットの定格最高速度
− ロボットが可能な範囲での急カーブ又はUターン
− ロボットが可能な範囲での急加速又は急減速(急停止)
また,負荷を搭載するロボットに関しては,定格以下の質量,大きさ及び動特性をもつ,砂袋などの積
載物を,最も厳しい条件で積載し,実施しなければならない。
51
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書K
(参考)
安全関連物体との衝突に関する試験の例
安全関連物体との衝突に関する試験は,次の試験条件において試験を行うのがよい。
K.1 衝突
障害物回避機能が安全関連部でない場合は無効にし,そうでない場合は有効にした状態で,衝突回避の
ためのロボットの停止機能が働かない位置,及び衝突時の危害が最も大きくなる方向から子供のダミー人
形(3歳児を想定)に向けて,定格最高速度で近付けたとき,ロボットは接触する前に停止するか又は規
定値以下の衝撃力で停止しなければならない。このとき,ロボットには定格の質量,大きさ,動特性をも
つ砂袋などの積載物を搭載する。
この規定値は,製造業者のリスクアセスメントによって決定する。また,衝突によってロボットの転倒
がないことを確認する。
K.2 押し潰し
ロボットを壁に向けて定格最高速度で走行させたとき,ロボットの最外周部が例えば,厚さ150 mmの
立方体を挟み込む前に停止するか,又は挟み込んでしまった場合に規定値以下の押付力で停止しなければ
ならない。この挟み込まれる物体の形状及び大きさ並びに押付力の規定値は,製造業者のリスクアセスメ
ントによって決定する。
注記1 150 mmは,子供の頭幅の平均値を基準とした。一般社団法人 人間生活工学研究センターの
2008年度の“子どもの身体寸法データベース”の数値を参照。
http://www.hql.jp/database/children/
注記2 上記の規定値として,AIS1相当となるHICなどを用いることができる。
52
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書L
(参考)
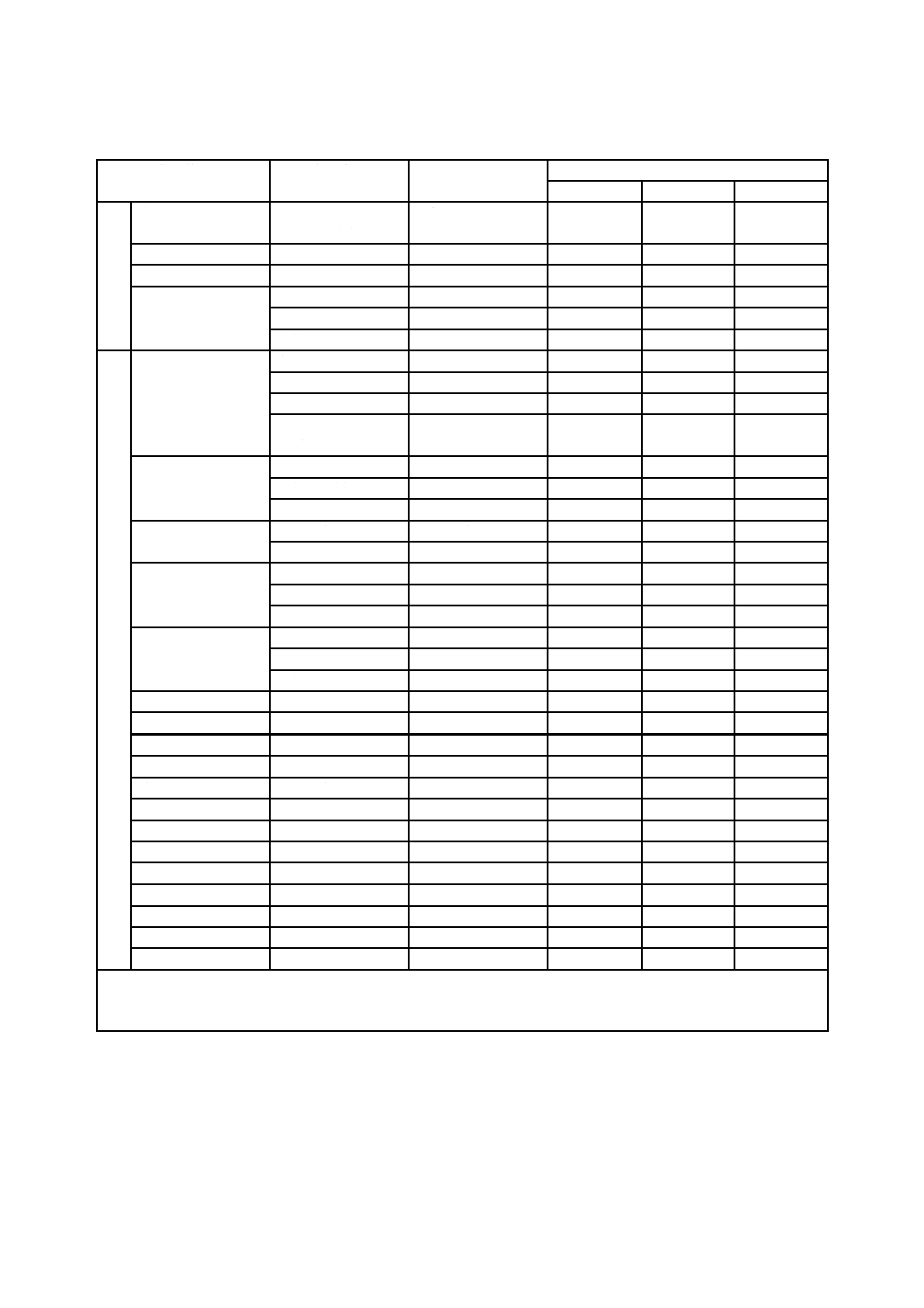
ロボットの足ひ(轢)きに関する試験の例
図L.1の足型ゲージによって,ロボットの車輪が足をひ(轢)かないことを確認する。
単位 mm
注記1 足型ゲージは,3歳児程度の平均値を基準とした。一般社団法人 人間生活工学研究センターの
2008年度の“子どもの身体寸法データベース”の数値を参照。http://www.hql.jp/database/children/
注記2 寸法が決められていない箇所は,任意である。
図L.1−足型ゲージの例
53
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書M
(参考)
定期検査及び保守の例
ロボットの定期検査及び保守に関する基準の例を示す。
M.1 点検項目及び点検時期
点検項目,点検内容,点検方法及び点検時期の例を,表M.1に示す。ロボットの種類,移載装置の構造,
地上側設備など,システムとして種々の形態が考えられるため,これらを追加・削除し,ロボットに合っ
た基準として使用することができる。また,点検時期,点検時の交換部品,交換部品の寿命及びその判断
基準並びに交換油脂の使用基準を明確にしておく。交換部品は,寿命がくる前の定期点検時に交換する。
M.2 保守作業者
ロボットの保守点検作業を行う保守作業者は,十分にロボットを理解した責任者の管理の下で作業を行
う。特に,定期点検については,ロボットの構造,周辺附属装置及び連携する外部システムを含むロボッ
トについて専門的な知識があり,一定の検査の経験をもつ者,対象となるロボットの保守・点検に関する
教育を受けた者,製造業者,専門の試験機関などに実施させる。
M.3 実施のポイント
実施のポイントは,次による。
a) 保守・点検を実施するに当たっては,チェックシートに基づき製造業者が提示する点検マニュアルに
沿って行う。特に,定期点検時は,定期点検基準書に基づいて点検を行い,この記録をロボットが廃
棄されるまで保存する。
b) 始業点検の結果は,定期点検時の資料とするために記録し,次の年次点検まで保存する。
c) 点検作業及び点検の結果見つかった異常箇所の補修作業は,保守点検及び調整修理の作業中であるこ
とを表示し,他の運転中のロボットの走行範囲外で行う。やむを得ず走行範囲内で行う場合は,他の
ロボットが障害物接触バンパ又は接近検出装置が働き作業場所内に侵入できないように,作業場所の
手前に立札などの障害物を設けてから作業する。
d) 月次点検又は年次点検を実施したときは,定期点検の実施年月を明らかにする標章をロボット及び周
辺附属装置に貼り付ける,又は点検記録を保管する。
54
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表M.1−点検項目,点検内容,点検方法及び点検時期の例
点検箇所
点検内容
点検方法
点検時期
始業時
定期:月次
定期:年次
環
境
・
付
帯
設
備
路面
路面の損傷
水・油の有無
目視
○
○
○
ランドマーク
損傷・遮蔽物
目視
○
○
○
障害物
障害物の有無
目視
○
○
○
充電器
充電量
電圧計・テスタ
○
接続端子の異常
目視・触感
○
○
損傷
目視
○
○
ロ
ボ
ッ
ト
本
体
車輪
亀裂及び損傷
目視
○
○
異常な磨耗
目視
○
異常音・がた
聴音・触感
○
○
○
ナット及びボルト
の緩み
スパナ
○
ドライブユニット
回転時の異音
聴音
○
○
○
取付けの緩み
スパナ
○
油漏れ
目視
○
○
○
制動装置
利き具合
操作・試験
○
◎
異常音
聴覚
○
○
○
モータ
異常音
聴覚
○
○
○
接続端子の異常
目視・触感
○
○
絶縁抵抗
テスタ
○
バッテリ
充電量
電圧計・テスタ
○
接続端子の異常
目視・触感
○
○
損傷
目視
○
○
外装・車体
損傷
目視
○
○
安全標識・銘板
汚れ・剝がれ
目視
○
○
○
配線
劣化・損傷
目視
○
冷却ファン
作動具合
聴覚・目視
○
○
○
障害物センサ
作動具合
試験
◎
◎
段差センサ
作動具合
試験
◎
◎
路面センサ
作動具合
試験
◎
◎
位置認識装置
作動具合
試験
◎
◎
バンパセンサ
作動具合
試験
◎
◎
各種スイッチ
作動具合
操作・試験
○
◎
◎
走行性能
走行性能劣化
試験
◎
各種表示装置
作動具合
目視・試験
○
◎
◎
警報機
作動具合
目視・試験
○
◎
◎
注記1 この附属書の例はJIS D 6802の附属書2を参照している。
注記2 ○は点検を必要とするものを示す。
注記3 ◎は特に試験を必要とするものを示す。試験方法は,JIS D 6805も参考にできる。
55
B 8446-1:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
JIS B 9706-1 機械類の安全性−表示,マーキング及び操作−第1部:視覚,聴覚及び触覚シグ
ナルの要求事項
JIS C 0922 電気機械器具の外郭による人体及び内部機器の保護−検査プローブ
JIS C 1010-1 測定用,制御用及び試験室用電気機器の安全性−第1部:一般要求事項
JIS C 6065 オーディオ,ビデオ及び類似の電子機器−安全性要求事項
JIS C 6950-1:2009 情報技術機器−安全性−第1部:一般要求事項
JIS C 8712 ポータブル機器用二次電池(密閉型小型二次電池)の安全性
JIS C 8714 携帯電子機器用リチウムイオン蓄電池の単電池及び組電池の安全性試験
JIS C 9335-1:2014 家庭用及びこれに類する電気機器の安全性−第1部:通則
JIS C 9335-2-5:2004 家庭用及びこれに類する電気機器の安全性−第2-5部:電気食器洗機の個
別要求事項
JIS D 6801 無人搬送車システム−用語
JIS D 6802 無人搬送車システム−安全通則
JIS D 6805 無人搬送車−特性・機能試験方法
JIS T 0601-1 医用電気機器−第1部:基礎安全及び基本性能に関する一般要求事項
JIS T 60601-1-8 医用電気機器−第1-8部:基礎安全及び基本性能に関する一般要求事項−副
通則:医用電気機器及び医用電気システムのアラームシステムに関する一般要求事項,試
験方法及び適用指針
JIS X 0301 情報交換のためのデータ要素及び交換形式−日付及び時刻の表記
JIS Z 8051:2004 安全側面−規格への導入指針
IEC 60065,Audio, video and similar electronic apparatus−Safety requirements
IEC 60950-1,Information technology equipment−Safety−Part 1: General requirements
IEC 60990,Methods of measurement of touch current and protective conductor current
IEC 62368-1,Audio/video, information and communication technology equipment−Part 1: Safety
requirements