B 8441:2005 (ISO 9409-2:2002)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本ロボ
ット工業会(JARA)/財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正すべきと
の申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS B 8441:1996は改正され,この規格に置き換えられる。
改正に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 9409-2:2002,Manipulating industrial
robots−Mechanical interfaces−Part 2: Shaftsを基礎として用いた。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
B 8441:2005 (ISO 9409-2:2002)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定義 ······························································································································ 2
4. 寸法 ······························································································································ 2
4.1 一般 ···························································································································· 2
4.2 座標系 ························································································································· 2
4.3 公差 ···························································································································· 2
4.4 負荷容量及びシャフト材料 ······························································································ 2
5. エンドエフェクタに対する要求事項 ···················································································· 2
6. 推奨する使用方法-配管配線のための用意 ··········································································· 3
7. 呼び方 ··························································································································· 3
8. 表示方法 ························································································································ 3
参考文献 ····························································································································· 6
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8441:2005
(ISO 9409-2:2002)
産業用マニピュレーティングロボット-メカニカル
インタフェース-シャフト形
Manipulating industrial robots-Mechanical interfaces-Part 2: Shafts
序文 この規格は,2002年に第2版として発行されたISO 9409-2:2002,Manipulating industrial robots−
Mechanical interfaces−Part 2: Shaftsを翻訳し,技術的内容及び規格票の様式を変更することなく作成した日
本工業規格である。
1. 適用範囲 この規格は,円形状突起をもつシャフト形メカニカルインタフェース(以下,メカニカル
インタフェースという。)の主要寸法,呼び方及び表示方法について規定する。これは,手動で装着するエ
ンドエフェクタの互換性及び取付の再現性を保証することを目的としたものである。
この規格は,負荷容量に関する事項は規定しない。
メカニカルインタフェースは,ロボットの定義に含まれない簡単なハンドリングシステム(ピックアン
ドプレース装置,マスタスレーブ装置など)にも適用できる。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 9409-2:2002,Manipulating industrial robots−Mechanical interfaces−Part 2: Shafts (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの規格のうちで,発行年又は発効年を付記してあるものは,記載の年の版だけがこの規格の規
定を構成するものであって,その後の改正版・追補には適用しない。
JIS B 0021:1998 製品の幾何特性仕様(GPS)−幾何公差表示方式−形状,姿勢,位置及び振れの公差
表示方式
備考 ISO/DIS 1101:1996 Geometrical Product Specifications(GPS)−Geometrical tolerancing−
Tolerances of form,orientation,location and run-outが,この規格と一致している。
JIS B 0134:1998 産業用マニピュレーティングロボット−用語
備考 ISO 8373:1994 Manipulating industrial robots−Vocabularyからの引用事項は,この規格の該当
事項と同等である。
JIS B 0401-1:1998 寸法公差及びはめあいの方式−第1部:公差,寸法差及びはめあいの基礎
備考 ISO 286-1:1998 ISO system of limits and fits−Part 1: Bases of tolerances,deviations and fitsが,
この規格と一致している。
JIS B 0401-2:1998 寸法公差及びはめあいの方式-第2部:穴及び軸の公差等級並びに寸法許容差の
2
B 8441:2005 (ISO 9409-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表
備考 ISO 286-2:1998 ISO system of limits and fits−Part 2: Tables of standard tolerance grades and limit
deviations for holes and shaftsが,この規格と一致している。
JIS B 8436:2004 産業用マニピュレーティングロボット−メカニカルインタフェース−フランジ形
備考 ISO 9409-1:2004 Manipulating industrial robots−Mechanical interfaces−Part 1: platesが,この
規格と一致している。
JIS B 8437:1999 産業用マニピュレーティングロボット−座標系及び運動の記号
備考 ISO 9787:1999 Manipulating industrial robots−Coordinate systems and motion nomenclatureが,
この規格と一致している。
3. 定義 この規格で用いる主な用語の定義は,JIS B 0134による。
4. 寸法
4.1
一般 円筒形の突起をもつメカニカルインタフェースの寸法は,図1,表1(形式1,エンドエフェク
タの取付姿勢を決めるための溝がないもの),又は,図2,表2(形式2,エンドエフェクタの取付姿勢を決
めるための溝があるもの)による。
系列1の寸法を用いるのが望ましい。補助の系列2は系列1の寸法が使用目的に不適切な場合に限り用
いる。
基準面は,図1及び図2に示すように定義する。エンドエフェクタを取り付けるとき,位置決めは基準
面に突き当てて行う(5.の備考を参照)。
4.2
座標系 JIS B 8437で定義するメカニカルインタフェース座標系の原点は,シャフトの中心軸と基
準面との交点とする。
+Zm軸は,原点からシャフト先端への向きにとる。
平取り面及び溝は,図1及び図2に示すように+Xm軸にあわせて設ける。平取り面は,エンドエフェク
タを固定する止めねじの座である。溝は,エンドエフェクタに取り付けたピンをはめあわせてエンドエフ
ェクタの取付姿勢を決めるためのものである。(5.参照)。
4.3
公差 メカニカルインタフェースの寸法公差はJIS B 0401-1及びJIS B 0401-2によって規定する。
幾何公差は JIS B 0021による。シャフト径(d1)は,すべての幾何公差についてのデータムである(図1及び
図2参照)。
4.4
負荷容量及びシャフト材料 シャフト形メカニカルインタフェースは,負荷容量の小さいロボット,
またエンドエフェクタが周辺装置間の狭い空間を動く場合に適している。
シャフト形メカニカルインタフェースが想定される負荷を支えるのに十分でないときには,フランジ形
メカニカルインタフェース(JIS B 8436)を用いることが望ましい。
5. エンドエフェクタに対する要求事項 エンドエフェクタは,対応面の寸法及び関連公差がこの規格で
規定する寸法及び公差に適合するものでなければならない。
メカニカルインタフェースの溝(b×l5)(図2,表2による)を用いてエンドエフェクタの取付姿勢を決め
る場合には,エンドエフェクタに位置決めピンを取り付けそれを溝にはめあわせることによって行う。平
行ピン(円筒形)を用いるのが望ましい。ピン軸は+Xm軸にあわせて設ける。
シャフト(d1×l1)は,エンドエフェクタを,例えば割り締めのように,摩擦結合によって取り付けること
3
B 8441:2005 (ISO 9409-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ができるように,十分な長さ及び強度をもたなければならない。
エンドエフェクタは,シャフト先端のねじ穴を用いて固定してもよい。
備考 シャフト先端は位置決めのための基準ではない。エンドエフェクタは基準面に突き当てて位置
決めする。
6. 推奨する使用方法−配管配線のための用意 配線,配管,雰囲気排出などのために,ねじ穴の先に貫
通穴を設けてもよい。貫通穴の直径(d4)は,ねじ(d3)の下穴径以下とする。
7. 呼び方 この規格に適合するメカニカルインタフェースの呼び方は,次のとおりとする。
呼び方コード
ISO 9409-2-T-d1
シャフト径
形式(T1又はT2)
この規格の対応国際規格の番号
例 シャフト径d1=10 mmで形式1のメカニカルインタフェースは,次のように呼ぶ。
ISO 9409−2−T1−10
8. 表示方法 メカニカルインタフェース及び対応するエンドエフェクタに呼び方を表示するときは,7.
による呼び方コードを容易に消えない方法で表示する。
4
B 8441:2005 (ISO 9409-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
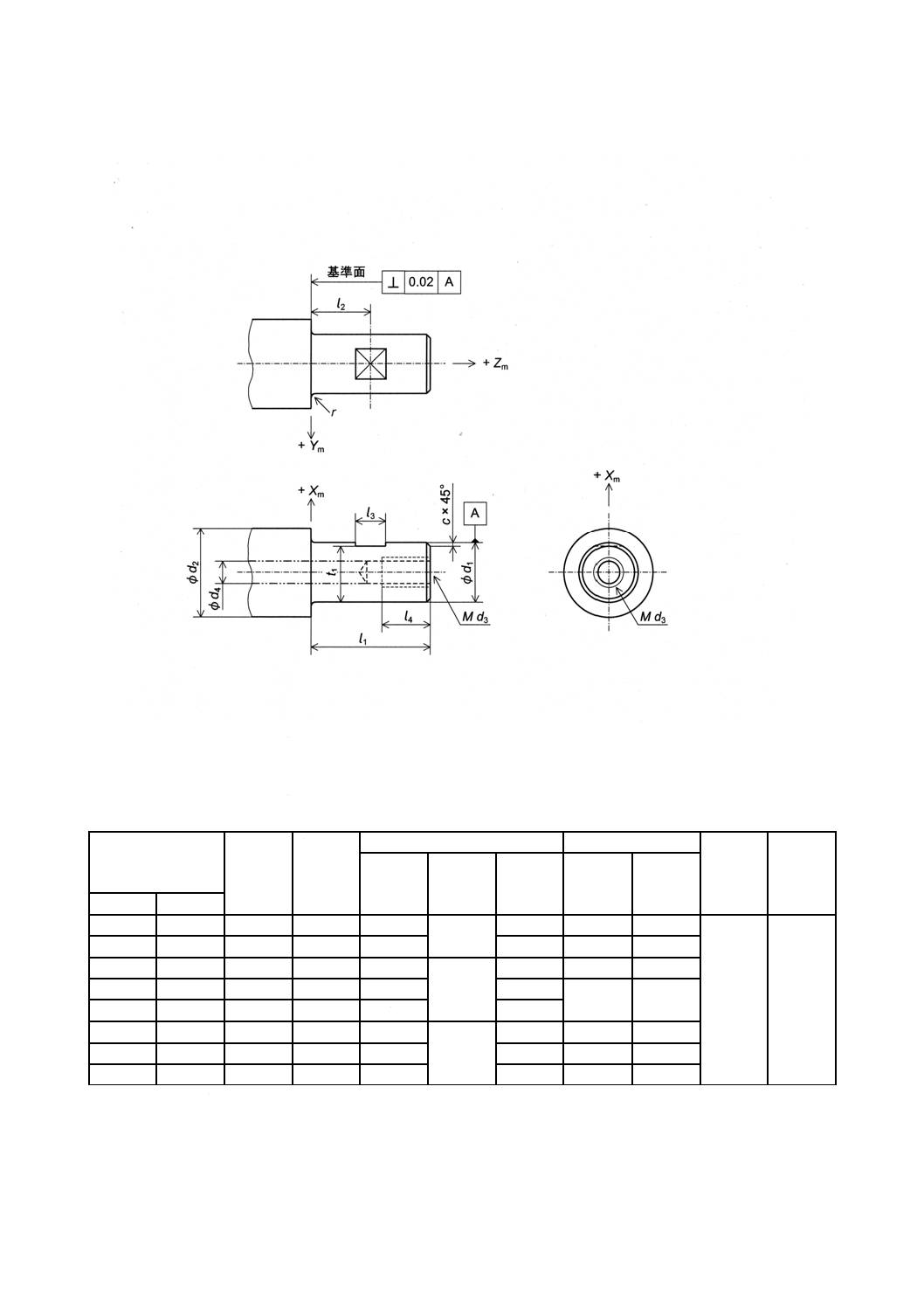
図 1 シャフト形メカニカルインタフェース形式1の形状
表 1 シャフト形メカニカルインタフェース形式1の寸法
単位 mm
シャフト径
d1
h7
基準面
外径
d2
最小
シャフ
ト長さ
l1
平取り面
めねじ
面取り
c
丸め
r
最大
位置
l2
長さ
l3
高さ
t1
呼び径
d3
深さ
l4
最小
系列1
系列2
6
12
20
10
6
5.5
M3
5
1
1
8
14
22
11
7.5
M4
7
10
16
25
12.5
8
9
M5
8
12
19
28
14
11
M6
10
14
21
30
15
13
16
23
32
16
10
15
M8
13
20
27
36
18
19
M10
16
25
32
40
20
24
M12
20
備考1. 系列1を優先する。
2. 寸法(d4)については,6.参照。
5
B 8441:2005 (ISO 9409-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
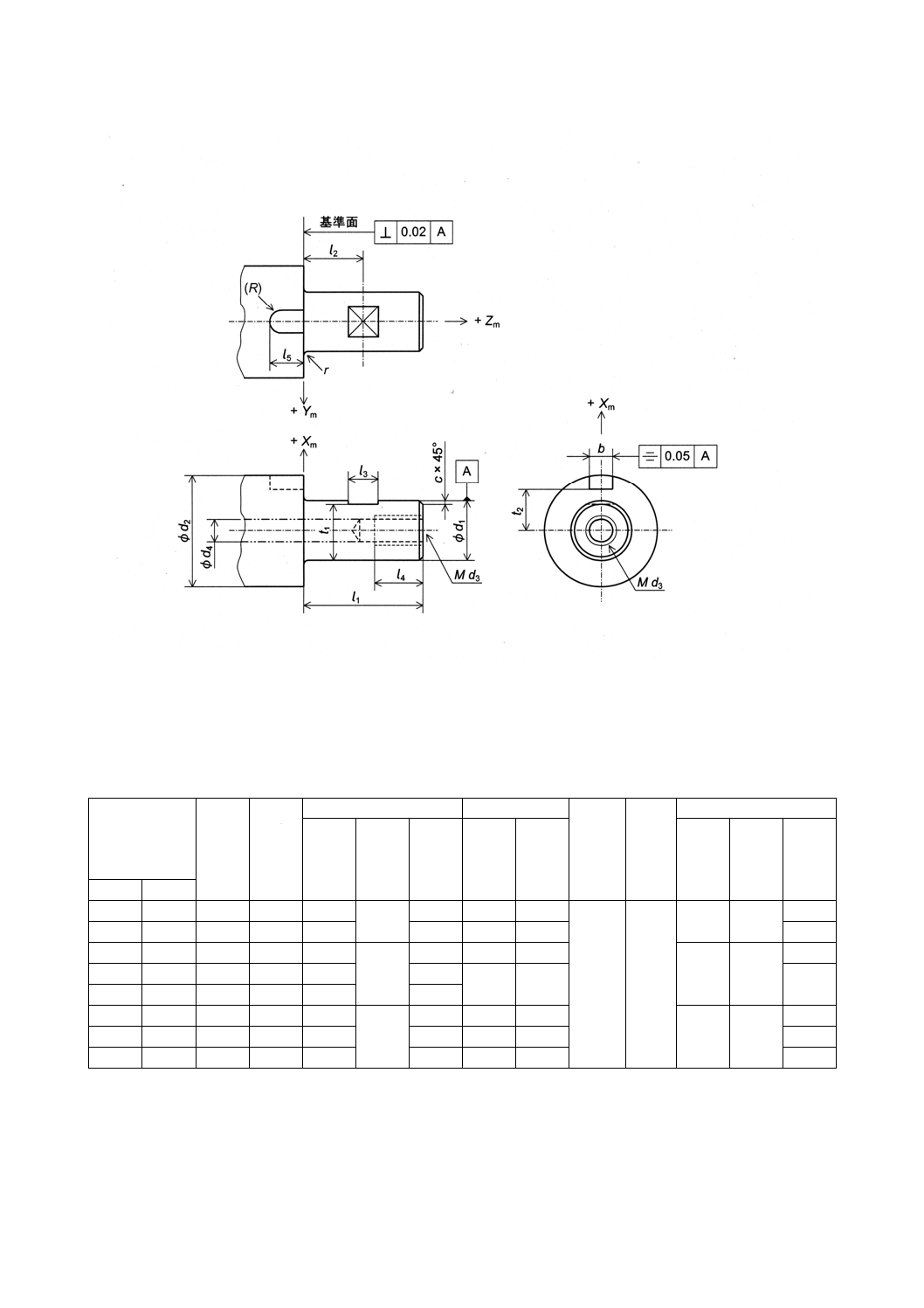
図 2 シャフト形メカニカルインタフェース形式2の形状
表 2 シャフト形メカニカルインタフェース形式2の寸法
単位 mm
シャフト
径
d1
h7
基準
面外
径
d2
最小
シャ
フト
長さ
l1
平取り面
めねじ
面取
り
c
丸め
r
最大
溝
位置
l2
長さ
l3
高さ
t1
呼び
径
d3
深さ
l4
幅
b
Js9
深さ
l5
高さ
t2
系列1 系列2
6
15
20
10
6
5.5
M3
5
1
1
3
4.5
4
8
17
22
11
7.5
M4
7
5
10
22
25
12.5
8
9
M5
8
4
6
7
12
24
28
14
11
M6
10
8
14
26
30
15
13
16
34
32
16
10
15
M8
13
6
9
11
20
38
36
18
19
M10
16
13
25
44
40
20
24
M12
20
16
備考1. 系列1を優先する。
2. 寸法(d4)については,6.参照。
6
B 8441:2005 (ISO 9409-2:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
JIS B 0205-2:2001 一般用メートルねじ−第2部:全体系
備考 ISO 261:1998 ISO general purpose metric screw threads-General planが,この規格と
一致している。