B 8437:2016 (ISO 9787:2013)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 座標系及び運動の記号の一般則 ··························································································· 3
4.1 右手直交座標系 ············································································································· 3
4.2 並進 ···························································································································· 3
4.3 回転 ···························································································································· 3
4.4 ロボット軸の番号の付け方 ······························································································ 4
5 座標系···························································································································· 4
5.1 ワールド座標系 O0−X0−Y0−Z0 ······················································································ 4
5.2 ベース座標系 O1−X1−Y1−Z1 ························································································· 4
5.3 メカニカルインタフェース座標系 Om−Xm−Ym−Zm ··························································· 5
5.4 エンドエフェクタ座標系,ツール座標系 Ot−Xt−Yt−Zt ······················································ 6
5.5 移動架台座標系 Op−Xp−Yp−Zp ····················································································· 6
5.6 作業座標系 Ok−Xk−Yk−Zk ··························································································· 7
5.7 対象物座標系 Oj−Xj−Yj−Zj ·························································································· 8
5.8 カメラ座標系 Oc−Xc−Yc−Zc ························································································· 8
附属書A(参考)機械構造別の座標系の例 ················································································ 9
B 8437:2016 (ISO 9787:2013)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
ロボット工業会(JARA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規
格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規
格である。
これによって,JIS B 8437:1999は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8437:2016
(ISO 9787:2013)
ロボット及びロボティックデバイス−
座標系及び運動の記号
Robots and robotic devices-
Coordinate systems and motion nomenclatures
序文
この規格は,2013年に第3版として発行されたISO 9787を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
この規格は,製造業及び非製造業の両環境において運転するロボット及びロボティックデバイスに関し,
その座標系を定義し規定する。また,ロボットの基本的な運動に関し,その名称及び記号を規定する。
附属書Aは,種々の機械構造へ適用した例を示す。
1
適用範囲
この規格は,ロボットの座標系について規定する。また,ロボットの基本的な運動の名称及び記号につ
いても規定する。これは,ロボットの調整,試験及びプログラミングを支援することを目的とする。
この規格は,JIS B 0134で定義する全てのロボット及びロボティックデバイスに適用する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 9787:2013,Robots and robotic devices−Coordinate systems and motion nomenclatures(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,記載の年の版を適用し,その後の改正版(追補を含む。)は適用しない。
JIS B 0134:2015 ロボット及びロボティックデバイス−用語
注記 対応国際規格:ISO 8373:2012,Robots and robotic devices−Vocabulary(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 0134によるほか,次による。
3.1
コンフィギュレーション,姿容(しよう)(configuration)
ある時刻における全てのジョイントの値の集合であり,ロボットの形状を完全に決定するもの。
注記 JIS B 0134の3.5参照。
2
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2
ベース取付面(base mounting surface)
腕とそれを支持する構造体との間の接合面。
注記 JIS B 0134の3.9参照。
3.3
移動架台(mobile platform)
移動ロボットの移動機能を実現する全ての構成部分を組み立ててできる架台。
注記 JIS B 0134の3.18参照。
3.4
ワールド座標系(world coordinate system)
地面に設定した座標系。ロボットの運動とは独立である。
注記 JIS B 0134の4.7.1参照。
3.5
ベース座標系(base coordinate system)
ベース取付面に設定した座標系。
注記 JIS B 0134の4.7.2参照。
3.6
メカニカルインタフェース座標系(mechanical interface coordinate system)
メカニカルインタフェースに設定した座標系。
注記 JIS B 0134の4.7.3参照。
3.7
エンドエフェクタ座標系,ツール座標系(tool coordinate system)
メカニカルインタフェースに取り付けたエンドエフェクタ又は工具に設定した座標系。
注記 JIS B 0134の4.7.5参照。
3.8
作動空間(working space)
手首基準点によって掃引される空間に,手首の各ジョイントの直進又は回転の範囲を加えた空間。
注記 JIS B 0134の4.8.4参照。
3.9
TCP,ツールセンタポイント(tool centre point,TCP)
与えられたアプリケーションにおいて,メカニカルインタフェース座標系上で定められた点。
注記 JIS B 0134の4.9参照。
3.10
移動架台基準点(mobile platform origin,mobile platform reference point)
移動架台座標系の原点。
注記 JIS B 0134の4.11参照。
3.11
作業座標系(task coordinate system)
作業場所に設定した座標系。Ok−Xk−Yk−Zkと表記する。
注記 JIS B 8443の3.3.5参照。
3
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.12
対象物座標系(object coordinate system)
対象物に設定した座標系。Oj−Xj−Yj−Zjと表記する。
注記 JIS B 8443の3.3.6参照。
3.13
カメラ座標系(camera coordinate system)
作業場を監視するセンサに設定した座標系。Oc−Xc−Yc−Zcと表記する。
注記1 任意に置かれた対象物の位置及び姿勢を検知するために視覚系を設置することがある。
注記2 JIS B 8443の3.3.7参照。
3.14
把握型グリッパ(grasp-type gripper)
指によって対象物を扱うグリッパ。
注記 JIS B 8443の4.1.2.1参照。
4
座標系及び運動の記号の一般則
4.1
右手直交座標系
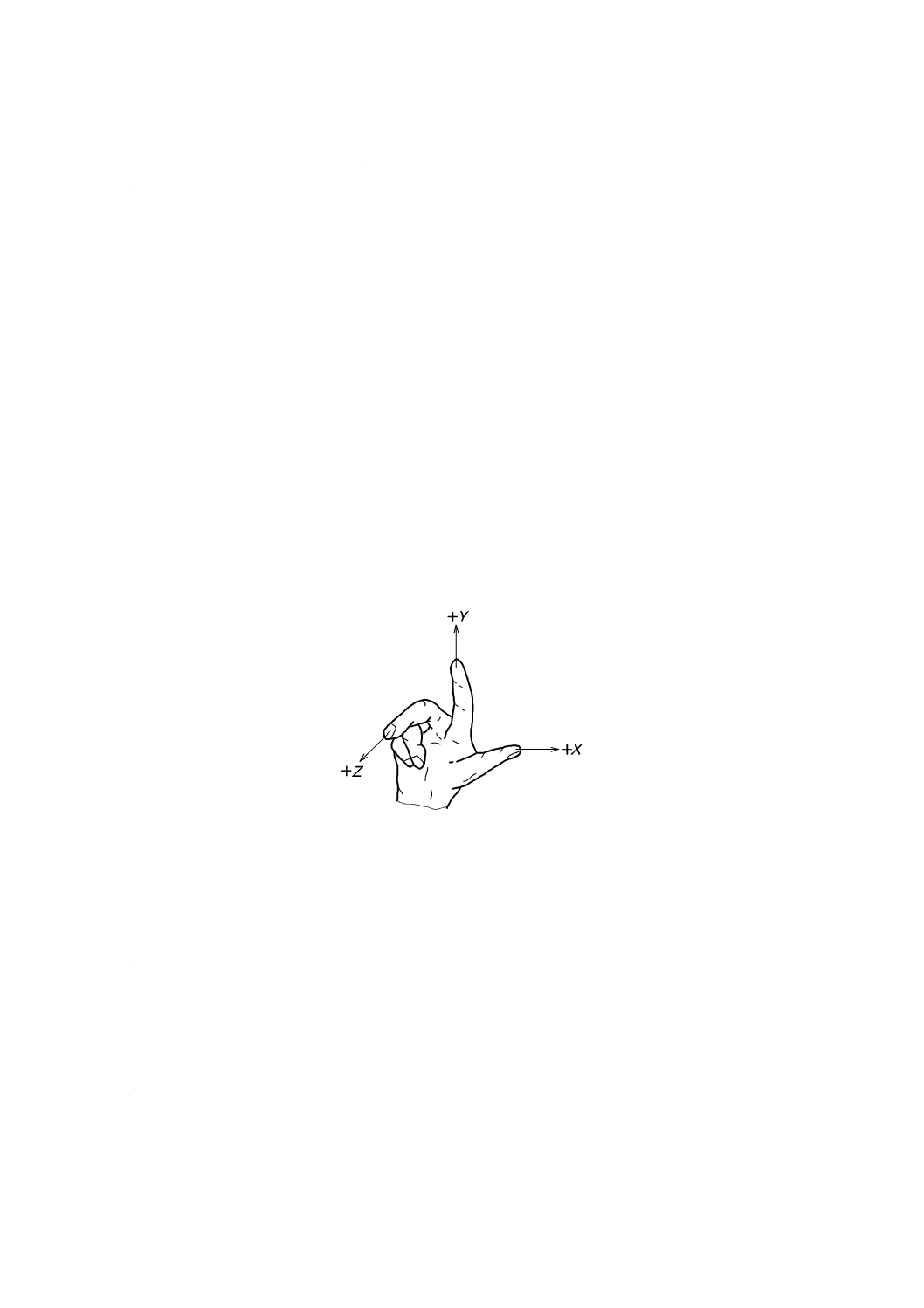
この規格で規定する全ての座標系は,図1に示すような右手直交座標系とする。
図1−右手直交座標系
4.2
並進
X,Y及びZ軸に沿っての並進は,次のように表す。
X軸に沿って,+x又は−x
Y軸に沿って,+y又は−y
Z軸に沿って,+z又は−z
4.3
回転
X,Y及びZ軸回りの回転は,次のように表す。
X軸回りに,+A又は−A
Y軸回りに,+B又は−B
Z軸回りに,+C又は−C
A,B及びCは,それぞれロール(roll),ピッチ(pitch)及びヨー(yaw)とも呼ぶ。
4
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A,B及びCの正の向きは,右ねじがそれぞれX,Y及びZの正の方向に進むときの回転方向である(図
2参照)。
一般の回転は,単独の回転の結合で表す。
A ロール
B ピッチ
C ヨー
図2−回転
4.4
ロボット軸の番号の付け方
ロボット軸に番号を付ける場合は,ベース取付面に近い方から順番に1,2,…とし,メカニカルインタ
フェースが付いた部分の軸の番号をmとする。
注記 ロボット軸の番号の付け方の例を,附属書Aに示す。
5
座標系
5.1
ワールド座標系 O0−X0−Y0−Z0
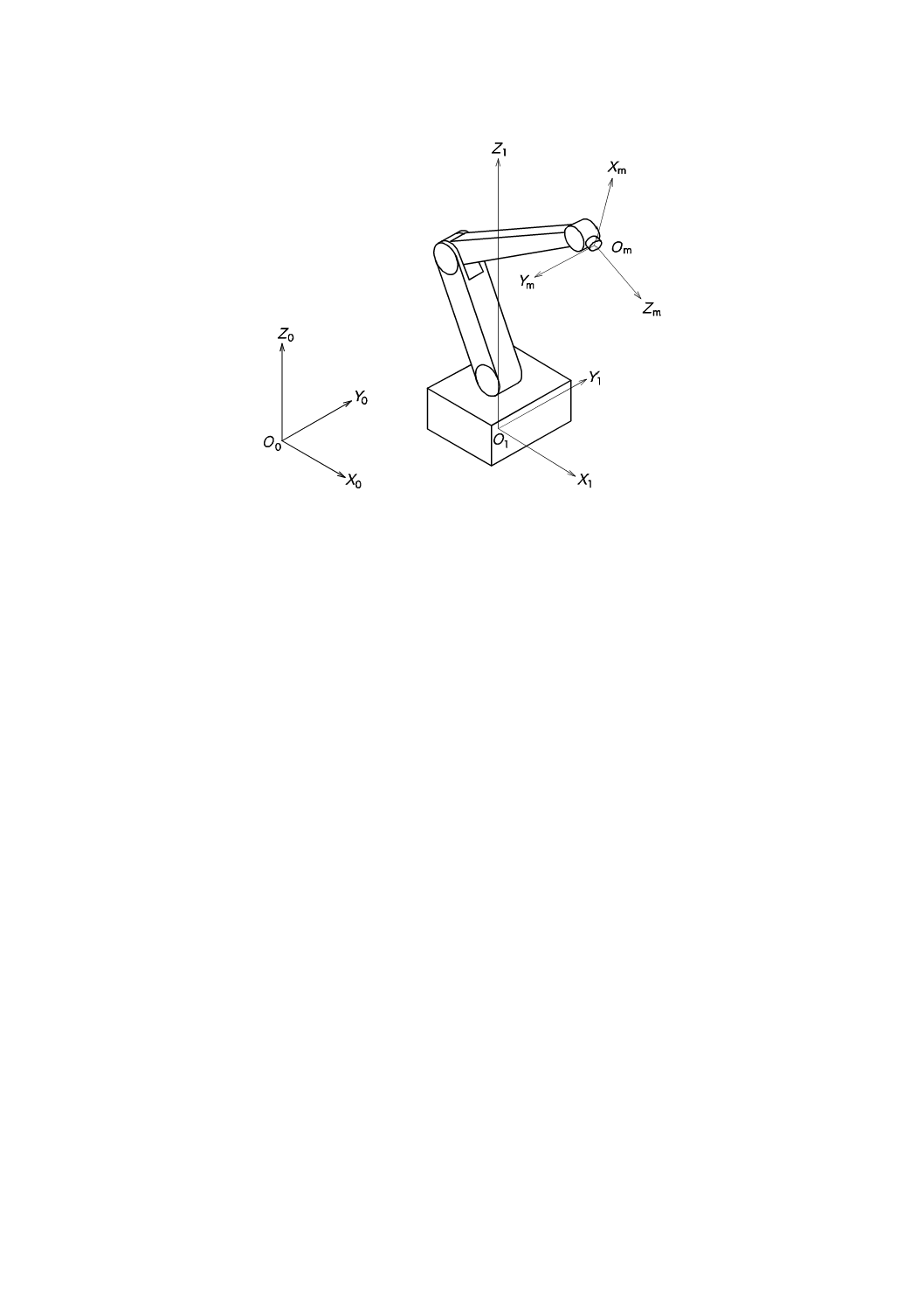
ワールド座標系の原点O0は,使用者が定める。+Z0軸は,重力加速度ベクトルと平行であるが,反対向
きである。+X0軸は,使用者が定める(図3参照)。
5.2
ベース座標系 O1−X1−Y1−Z1
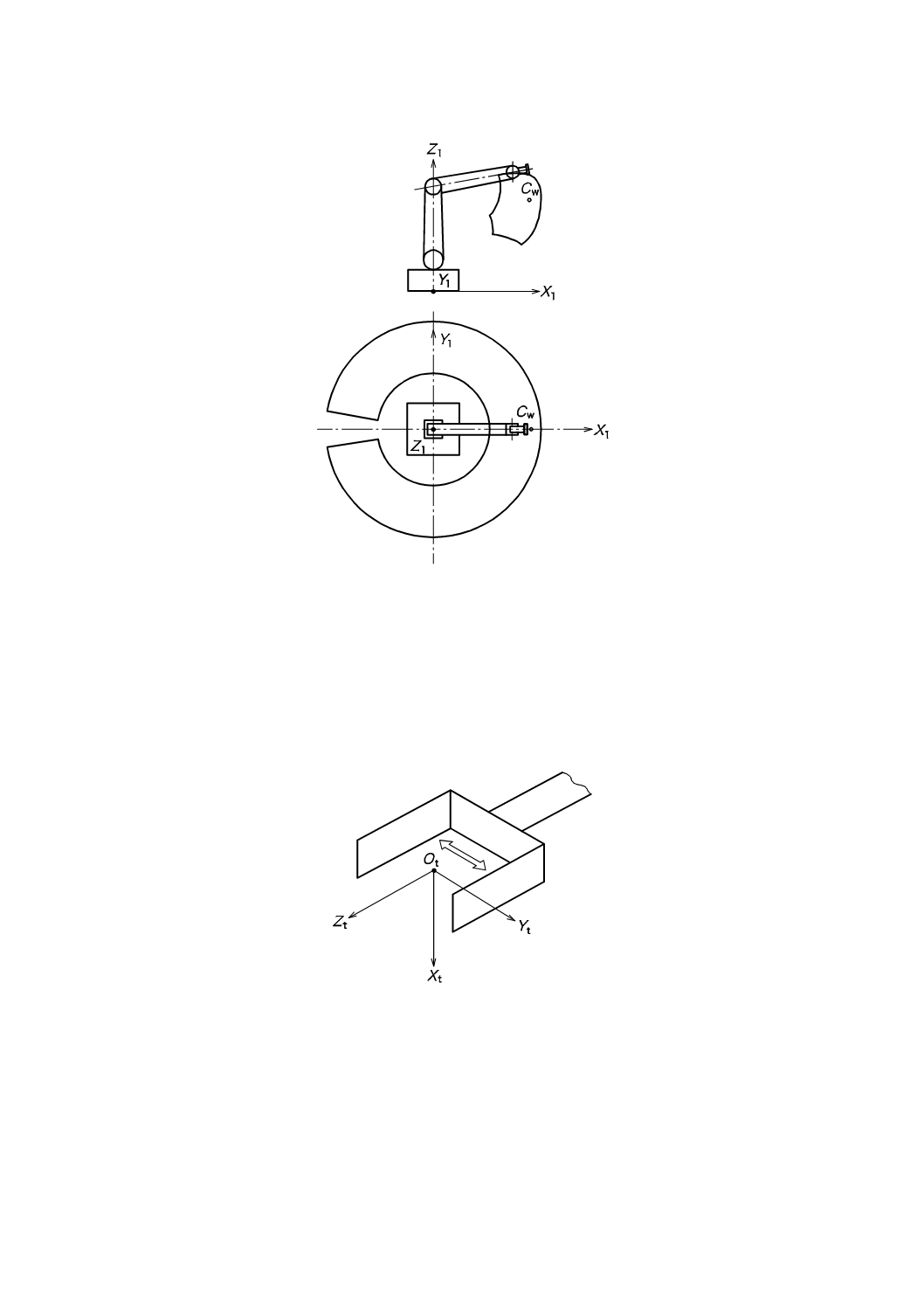
ベース座標系の原点O1は,ロボットの製造業者が定める。+Z1軸は,ベース取付面に直交し,ロボット
の機械構造のある向きにとる。+X1軸は,原点から,作動空間の中心点Cwをベース取付面に正射影した
点を通る向きにとる(図3及び図4参照)。ロボットの構造上この規定の適用が不都合な場合には,+X1
軸の方向は製造業者が定める。
注記 ベース座標系及びメカニカルインタフェース座標系の設定例を,附属書Aに示す。
5
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3−座標系の例
5.3
メカニカルインタフェース座標系 Om−Xm−Ym−Zm
メカニカルインタフェース座標系の原点Omは,メカニカルインタフェース中心点とする。+Zm軸は,
メカニカルインタフェースに直交し,それから遠ざかる向きにとる。+Xm軸は,メカニカルインタフェー
スがY1 Z1(X1 Y1)平面に平行に調整され,ロボットの一次軸及び二次軸がその中央に最も近く調整された
状態で+Z1(+X1)に平行である。ロボットの構造上この規定の適用が不都合な場合には,+Xm軸の位置
は製造業者が定める(図3参照)。
注記 ベース座標系及びメカニカルインタフェース座標系の設定例を,附属書Aに示す。
6
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4−ロボットの作動空間の例
5.4
エンドエフェクタ座標系,ツール座標系 Ot−Xt−Yt−Zt
エンドエフェクタ座標系の原点Otは,ツールセンタポイント(TCP)とする(図5参照)。+Zt軸は,
エンドエフェクタによるが,通常はエンドエフェクタの方向にとる。面内動作グリッパの場合には,+Yt
軸は指の運動平面上にとる。
図5−エンドエフェクタ座標系の例
5.5
移動架台座標系 Op−Xp−Yp−Zp
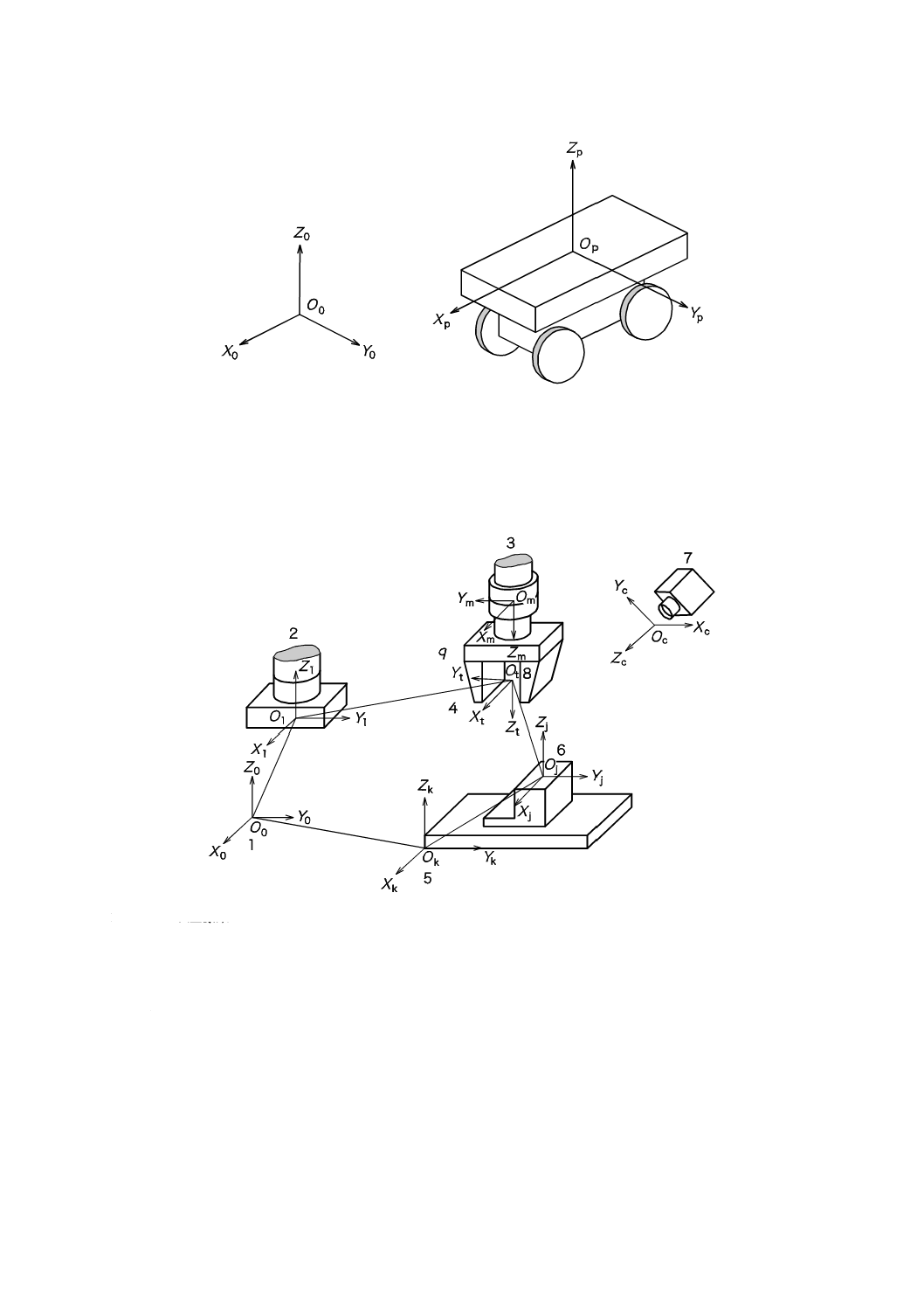
移動架台座標系の原点Opは,移動架台基準点とする。+Xp軸は,通常,移動架台の前方向にとる。+
Zp軸は,通常,移動架台の上方向にとる(図6参照)。
7
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6−移動架台座標系の例
5.6
作業座標系 Ok−Xk−Yk−Zk
作業座標系を,図7に示す。
1 ワールド座標系
2 ベース座標系
3 メカニカルインタフェース座標系
4 エンドエフェクタ座標系
5 作業座標系
6 対象物座標系
7 カメラ座標系
8 TCP(ツールセンタポイント)
9 グリッパ
図7−対象物ハンドリングにおける座標系
8
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.7
対象物座標系 Oj−Xj−Yj−Zj
対象物座標系を,図7に示す。
5.8
カメラ座標系 Oc−Xc−Yc−Zc
カメラ座標系を,図7に示す。
9
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
機械構造別の座標系の例
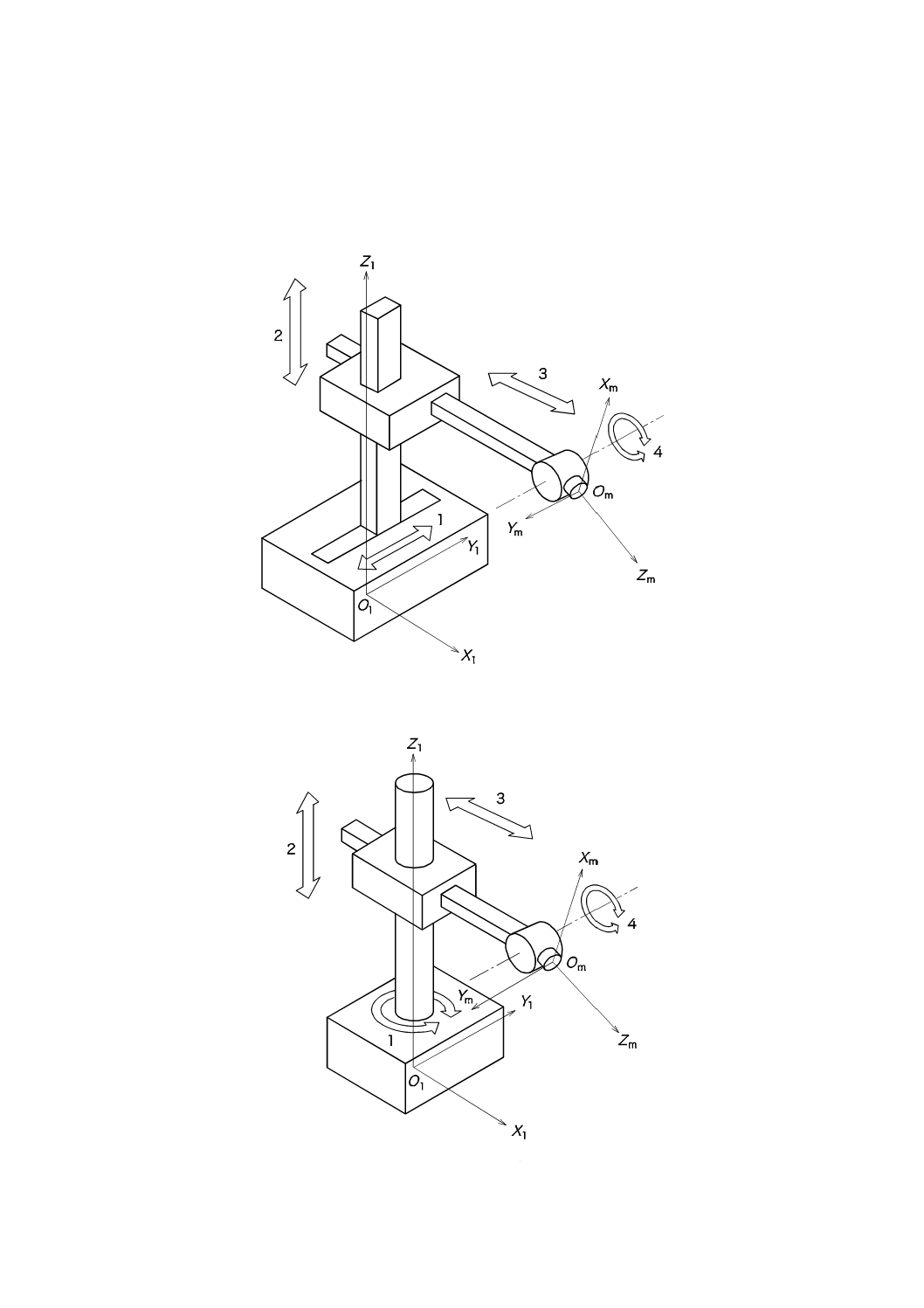
図A.1−直角座標ロボット
図A.2−円筒座標ロボット
10
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
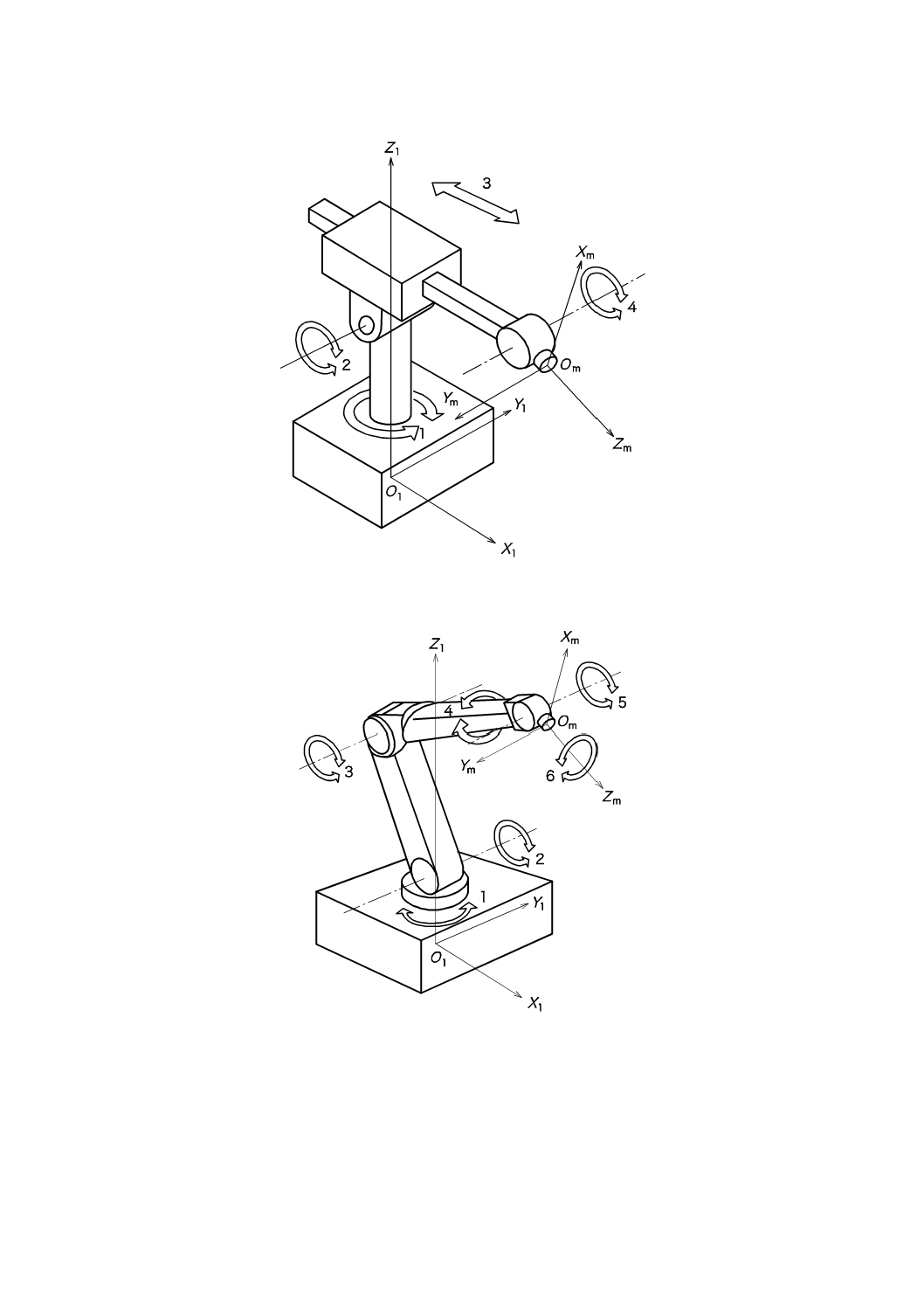
図A.3−極座標ロボット
図A.4−多関節ロボット
11
B 8437:2016 (ISO 9787:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
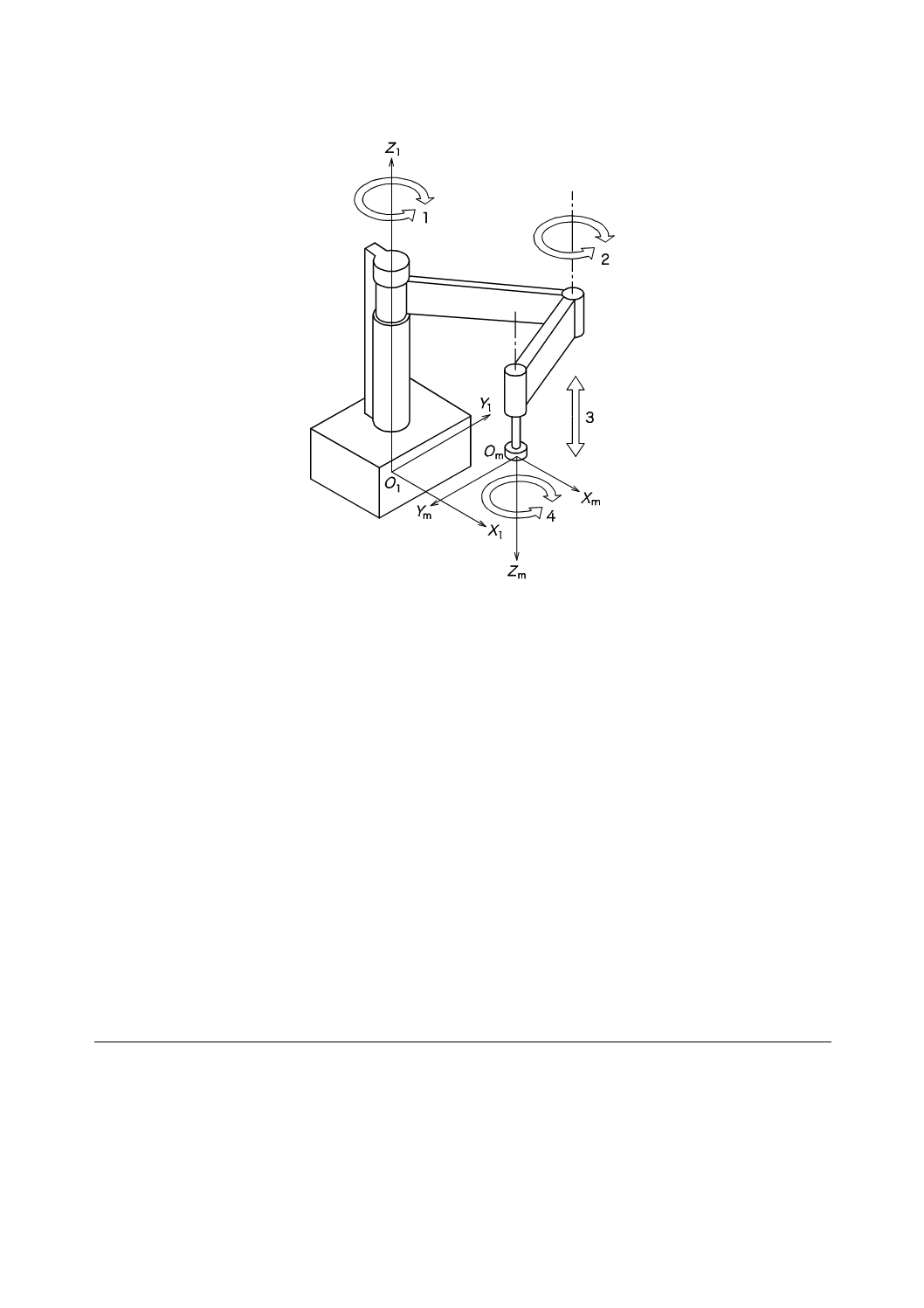
図A.5−スカラロボット
参考文献
[1] JIS B 8431:1999 産業用マニピュレーティングロボット−特性の表し方
[2] JIS B 8432:1999 産業用マニピュレーティングロボット−性能項目及び試験方法
[3] JIS B 8443:2000 産業用マニピュレーティングロボット−把握型グリッパによる対象物ハンドリング
−用語及び特性の表し方