B 8433-1:2015 (ISO 10218-1:2011)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 2
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 3
4 危険源同定及びリスクアセスメント ····················································································· 7
5 設計要求事項及び保護方策 ································································································· 8
5.1 一般 ···························································································································· 8
5.2 一般要求事項 ················································································································ 8
5.3 作動制御装置 ················································································································ 9
5.4 安全関連制御システム性能(ハードウェア及びソフトウェア) ··············································· 9
5.5 ロボット停止機能 ········································································································· 10
5.6 速度制御 ····················································································································· 11
5.7 運転モード ·················································································································· 12
5.8 ペンダント制御装置 ······································································································ 13
5.9 同時動作制御 ··············································································································· 15
5.10 協働運転要求事項 ········································································································ 15
5.11 特異点保護 ················································································································· 16
5.12 軸制限 ······················································································································· 17
5.13 駆動用動力なしの移動 ·································································································· 18
5.14 つり上げ対策 ·············································································································· 18
5.15 電気コネクタ ·············································································································· 18
6 安全要求事項及び保護方策の検証及び妥当性確認 ·································································· 19
6.1 一般 ··························································································································· 19
6.2 検証及び妥当性確認方法 ································································································ 19
6.3 要求される検証及び妥当性確認 ······················································································· 19
7 使用上の情報 ·················································································································· 19
7.1 一般 ··························································································································· 19
7.2 取扱説明書 ·················································································································· 20
7.3 表示 ··························································································································· 21
附属書A(参考)重要な危険源リスト ····················································································· 22
附属書B(規定)停止時間及び停止距離の測定方法 ···································································· 26
附属書C(参考)3ポジションイネーブル装置の機能的特徴 ························································ 28
附属書D(参考)任意選択の機能 ··························································································· 29
附属書E(参考)ラベル ······································································································· 31
附属書F(規定)安全要求事項及び方策の検証手段 ···································································· 32
B 8433-1:2015 (ISO 10218-1:2011) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
参考文献 ···························································································································· 39
B 8433-1:2015 (ISO 10218-1:2011)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
ロボット工業会(JARA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規
格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が改
正した日本工業規格である。
これによって,JIS B 8433-1:2007は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
JIS B 8433の規格群には,次に示す部編成がある。
JIS B 8433-1 第1部:ロボット
JIS B 8433-2 第2部:ロボットシステム及びインテグレーション
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8433-1:2015
(ISO 10218-1:2011)
ロボット及びロボティックデバイス−
産業用ロボットのための安全要求事項−
第1部:ロボット
Robots and robotic devices-
Safety requirements for industrial robots-Part 1: Robots
序文
この規格は,2011年に第2版として発行されたISO 10218-1を基に,技術的内容及び構成を変更するこ
となく作成した日本工業規格である。
JIS B 8433の規格群は,産業用ロボット及び産業用ロボットシステムに現れる特定の危険源を認識して
作成したものである。
JIS B 8433の規格群は,JIS B 9700で規定するタイプC規格である。このタイプC規格の規定がタイプ
A規格又はタイプB規格の規定と異なる場合は,タイプC規格の規定を優先する。
関連する機械類並びに危険,危険状態及び危険事象を含む範囲は,この規格の適用範囲に示す。
ロボットに関連する危険源は十分に認識されているが,危険源は,それぞれのロボットシステムに特有
のものであることが多い。危険源の数及び種類は,自動化プロセスの特性及び設置の複雑さに直接関係す
る。これらの危険源に関連したリスクは,使用するロボットの種類及びその用途,並びに設置方法,プロ
グラミング,運転及び保全の方法によって様々である。
注記 JIS B 8433の規格群で同定する全ての危険源は,どのロボットにも適用できるものではなく,
また,所定の危険状態に関連するリスクレベルはロボットごとに異なる。その結果として,安
全要求事項及び/又は保護方策がJIS B 8433の規格群の規定とは異なることになるかもしれな
い。保護方策の決定のためには,リスクアセスメントを実施するのがよい。
産業用ロボットの様々な使用によって変わりやすい危険源の性質を考えると,JIS B 8433の規格群は,
二つのパートに分割される。第1部は,ロボットの設計及び製造上の安全の保証のための手引(ガイダン
ス)を提供する。産業用ロボットのアプリケーションでの安全は,特定のロボットシステムインテグレー
ションの設計及び利用によって影響されるので,第2部は,ロボットインテグレーション,設置,機能試
験,プログラミング,運転,保守及び修理における人への安全防護の指針を提供する。
第1部は,産業用ロボットのための整合されたタイプC規格の最低限の要求事項に調和を保つことを確
実にするために,第2部の制定から得られる経験に基づいて改正された。改正された技術的要求事項は,
特異点,動力伝達の危険源の安全防護,動力喪失要求事項,安全関連制御回路性能,カテゴリ2の停止機
能の追加,モード選択,出動力制限要求事項,表示のための定義及び要求事項,並びに更新された停止時
間及び停止距離の測定並びに特徴を含むが,これらに限定はしない。
この規格は,この規格の制定日以前に製造されたロボットには適用しない。
2
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
適用範囲
この規格は,産業用ロボットの本質的安全設計,保護方策及び使用上の情報についての要求事項及び指
針について規定する。また,ロボットに関連する基本的な危険源を記述し,危険源に関連するリスクを除
去し,又は適切に低減するための要求事項についても規定する。
この規格は,産業用ロボットシステムとしてのロボットには言及しない。騒音はロボット単体の重要な
危険源とはみなさず,また,騒音はこの規格の適用範囲から除外する。
この規格は,非産業用ロボットには適用しないが,この規格及びJIS B 8433-2で確立された安全原則は
他のロボットに適用することができる。
注記1 非産業用ロボットへの適用例としては,水中ロボット,軍用ロボット,宇宙ロボット,遠隔
操作マニピュレータ,障がい者用補装具・補助器具,マイクロロボット(変位1 mm未満),
手術ロボット,健康管理ロボット,サービスロボット,消費者製品等があるが,これらに限
定しない。
注記2 ロボットシステム,インテグレーション及び設置のための要求事項は,JIS B 8433-2に含ま
れる。
注記3 特定の用途(例えば,溶接,レーザ切断,機械加工)によっては,更なる危険源が発生する
ことがある。これらのシステム関連の危険源は,ロボット設計時に考慮するのがよい。
注記4 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 10218-1:2011,Robots and robotic devices−Safety requirements for industrial robots−Part 1:
Robots(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 8432:1999 産業用マニピュレーティングロボット−性能項目及び試験方法
注記 対応国際規格:ISO 9283:1998,Manipulating industrial robots−Performance criteria and related
test methods(IDT)
JIS B 8433-2 ロボット及びロボティックデバイス−産業用ロボットのための安全要求事項−第2
部:ロボットシステム及びインテグレーション
注記 対応国際規格:ISO 10218-2,Robots and robotic devices−Safety requirements for industrial robots
−Part 2: Robot systems and integration(IDT)
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
注記 対応国際規格:ISO 12100,Safety of machinery−General principles for design−Risk assessment
and risk reduction(IDT)
JIS B 9703 機械類の安全性−非常停止−設計原則
注記 対応国際規格:ISO 13850,Safety of machinery−Emergency stop−Principles for design(IDT)
JIS B 9705-1:2011 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
注記 対応国際規格:ISO 13849-1:2006,Safety of machinery−Safety-related parts of control systems−
3
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Part 1: General principles for design(IDT)
JIS B 9960-1 機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:IEC 60204-1,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements(MOD)
JIS B 9961:2008 機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能
安全
注記 対応国際規格:IEC 62061:2005,Safety of machinery−Functional safety of safety-related electrical,
electronic and programmable electronic control systems(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 9700によるほか,次による。
3.1
作動制御器(actuating control)
制御装置内の機械的機構。
例 接点を開くロッド。
3.2
自動モード(automatic mode)
設定したタスクプログラムに従ってロボット制御システムが作動する運転モード。
(JIS B 0134:1998の5681参照)
3.3
自動運転(automatic operation)
ロボットがタスクプログラムを実行している状態。
注記 JIS B 0134:1998の5670を採用。
3.4
協働運転(collaborative operation)
特別の目的で設計したロボットが,定義した作業空間内で人間と直接協働して動く状態。
3.5
協働作業空間(collaborative workspace)
生産作業中にロボット及び人間が,同時に作業を遂行できる安全防護空間内の作業空間。
3.6
駆動用動力(drive power)
ロボットアクチュエータ用の単一の又は複数のエネルギー源。
3.7
エンドエフェクタ(end-effector)
ロボットがタスクを行えるように特別に設計されたメカニカルインタフェースに取り付けられる装置。
(JIS B 0134:1998の3120参照)
例 把持部,ナット締め具,溶接ガン,スプレーガン。
3.8
エネルギー源(energy source)
電気的,機械的,液圧,空気圧,化学的,熱的,位置エネルギー,運動エネルギー,又はその他の動力
4
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
源。
3.9
危険な動作(hazardous motion)
人間に肉体的危害又は健康被害を引き起こす可能性のある動作。
3.10
産業用ロボット(industrial robot)
産業オートメーション用途に用いるため,位置が固定又は移動し,3軸以上がプログラム可能で,自動
制御され,再プログラム可能な多用途マニピュレータ。
注記1 産業用ロボットは,次を含む。
− マニピュレータ(アクチュエータを含む)。
− 教示ペンダントを含む制御装置,及び通信インタフェース(ハードウェア及びソフトウェ
ア)。
注記2 ロボットコントローラによって制御されるあらゆる追加軸を含む。
注記3 この規格の目的では,次の装置を産業用ロボットとみなす。
− ハンドガイドロボット。
− 移動ロボットのマニピュレータ部分。
− 協働ロボット。
3.11
産業用ロボットシステム(industrial robot system)
システムは,次を含む。
− 産業用ロボット
− エンドエフェクタ
− ロボットがタスクを行うために必要なあらゆる機械類,設備,装置,外部の付加軸又はセンサ。
3.12
制限装置(limiting device)
ロボットの全ての動作を停止又は停止させるための最大空間を制限する手段。
3.13
局所制御(local control)
個々の機械の制御パネル又はペンダントだけによってシステム及びシステムの一部が操作されている状
態。
3.14
手動モード(manual mode)
オペレータによる直接制御を許可する制御状態。
注記1 教示点を設定する教示モードと呼ぶこともある。
注記2 JIS B 0134:1998の5682を修正。
3.15
ペンダント(pendant)
教示ペンダント(teach pendant)
ロボットにプログラムを教示,又はロボットを動作させることのできる制御システムに接続される手持
ちのユニット。
5
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(JIS B 0134:1998の5710参照)
3.16
プログラム(programme)
3.16.1
制御プログラム(control programme)
ロボットシステムの能力,動作及び応答を規定する固有のプログラム(inherent set of instruction)。
注記1 制御プログラムは固定であり,通常,ロボットの使用者は変更しない。
(JIS B 0134:1998の5120参照)
3.16.2
タスクプログラム(task programme)
ロボットシステムの所期のタスクを規定する(define)動作及び補助機能のプログラム。
注記1 通常,このプログラムは使用者が作成する。
注記2 アプリケーションとは作業の一般領域であり,タスクとはアプリケーションの中のある限定
された作業のことである。
(JIS B 0134:1998の5110参照)
3.16.3
プログラム検証(programme verification)
ロボットの経路及びプロセス性能を確認するためのタスクプログラムの実行。
注記 検証は,タスクプログラム実行中にツールの中心点によって描かれた経路全体又は経路の一部
分を含む。プログラムは,一つの命令又は複数の連続した命令でも実行することができる。検
証は,新しい用途及び既存の用途の詳細な調整・編集に用いる。
3.17
保護停止(protective stop)
安全防護目的で動作を中断し,再起動を容易にするためにプログラム論理を保持する停止方法。
3.18
ロボットアクチュエータ(robot actuator)
電気エネルギー,液圧エネルギー又は空気圧エネルギーを動作に変換する動力機構。
3.19
安全適合(safety-rated)
指定された安全関連の性能とともに,規定された安全機能をもつことによって特徴付けられている状態。
3.19.1
安全適合監視速度(safety-rated monitored speed)
ロボットフランジに関連する点(例えば,TCP)の直交速度,1軸又は複数の軸の速度のいずれかが規
定された制限値を超えた場合に,保護停止となる安全適合の機能。
3.19.2
安全適合低減速度(safety-rated reduced speed)
ロボット速度を250 mm/s以下に制限する安全適合監視速度。
注記1 安全適合低減速度制限は,低減制御機能に設定する必要はない。
注記2 安全適合監視速度と安全適合低減速度との違いは,安全適合監視速度制限が250 mm/sを超え
ない速度に設定できるかどうかである。
6
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.19.3
安全適合ソフト軸/空間制限(safety-rated soft axis and space limiting)
安全適合ソフト制限(safety-rated soft limit)
規定された十分な安全適合性能をもつソフトウェア又はファームウェアを基にしたシステムによって,
ロボットの動作範囲に設置された制限。
注記 安全適合ソフト制限は,停止開始点であってもよいし,制限を超えて動作しないことを確実に
することでもよい。
3.19.4
安全適合出力(safety-rated output)
規定された十分な安全適合性能をもつ出力信号。
3.19.5
安全適合区域の出力(safety-rated zone output)
安全適合ソフト制限に関連するロボット位置の状態を示す安全適合の出力。
注記 例えば,ロボット位置は区域内でも区域外でもよい。
3.19.6
安全適合監視停止(safety-rated monitored stop)
駆動源が切断されない状態でロボットが停止している状況で,ロボットが動作しないことを確実にする,
規定された十分な安全性能をもつ監視システム。
3.20
同時動作(simultaneous motion)
単一制御ステーションの制御下における2台以上のロボットの同時動作。これは,協調動作又は共通の
数学的関連をもつ同期の場合がある。
注記1 単一制御ステーションの例には,教示ペンダントがある。
注記2 協調は,マスタスレーブ方式として実行することが可能である。
3.21
単一制御点(single point of control)
ロボット動作の始動が一つの制御源からだけ可能で,かつ,他の制御源から優先して始動しないように
ロボットを運転できること。
3.22
特異点(singularity)
直角座標系における経路速度を維持しようとすると,ジョイント空間におけるジョイント速度が数学的
には無限大となる点。この点では運動学から導出されるヤコビ行列のランクがフルランクより小さくなる。
注記 実際の作業では,直角座標空間で定義され特異点の近くを通る運動は,高い軸速度を発生する
ことがある。この高速度は,オペレータにとっては予想できないことがある。
3.23
低減速度制御(reduced speed control)
低速制御(slow speed control)
速度が250 mm/s以下に制限された場合のロボット動作制御のモード。
注記 低減速度は,危険な動作からの回避又はロボットの停止のいずれかのために十分な時間を人に
与えることを意図している。
7
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.24
空間(space)
三次元の容積。
3.24.1
最大空間(maximum space)
製造業者が定めたロボット可動部が届く空間に,エンドエフェクタ及びワークが届く空間を加えた空間。
(JIS B 0134:1998の4420参照)
3.24.2
制限空間(restricted space)
最大空間の一部であり,超えてはならない限度を設定する制限装置によって制限する空間。
3.24.3
安全防護空間(safeguarded space)
周囲の安全防護で定義された空間。
3.25
教示(teach)
教示プログラミング(teach programming)
次のいずれかによって行われるプログラミング。
a) ロボットのエンドエフェクタを手動で導く。
b) 機械的なシミュレーション装置を手動で導く。
c) 教示ペンダントを使ってロボットに所望の動作をさせる。
3.26
ツールセンタポイント(tool center point,TCP)
メカニカルインタフェース座標系において,与えられたアプリケーションのために定義された点。
(JIS B 0134:1998の4200参照)
3.27
使用者(user)
ロボットを使用し,ロボットの運転に関連する要員に対して責任をもつ者。
4
危険源同定及びリスクアセスメント
附属書Aは,ロボットにあり得る危険源リストを示す。危険源分析では,発生する可能性のあるあらゆ
る危険源の同定を行わなければならない。
リスクアセスメントは,同定したそれらの危険源について行わなければならない。このリスクアセスメ
ントでは,次の事項を全て考慮しなければならない。
a) 教示,保全,設定及び掃除を含むロボットの所期の運転
b) 予期しない起動
c) 全方向からの要員の接近
d) 合理的に予見可能なロボットの誤使用
e) 制御システムの故障の影響
f)
必要な場合は,特定のロボット用途に関連した危険源
リスクは,最初は設計又は代替によって,次に,安全防護及び他の付加方策によって除去又は低減しな
8
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ければならない。あらゆる残留リスクは,他の方策(例えば,警告,標識,訓練)によって低減しなけれ
ばならない。
箇条5の要求事項は,附属書Aに示す危険源に対して,JIS B 9700に規定する安全防護を繰り返し適用
することによって得られたものである。
注記1 JIS B 9700は,危険源の同定及びリスク低減を実行する場合の要求事項及び指針を与える。
注記2 ロボットシステム,インテグレーション及び設置に対しての危険源同定及びリスクアセスメ
ントの要求事項は,JIS B 8433-2で扱う。
5
設計要求事項及び保護方策
5.1
一般
ロボットは,関連する危険源に対してJIS B 9700に従って設計しなければならない。重要な危険源では
あるが鋭利なエッジのような危険源については,この規格では扱わない。
ロボットは,5.2〜5.15の要求事項に適合するように設計・製作しなければならない。
5.2
一般要求事項
5.2.1
動力伝達構成品
一体となったカバー(例えば,ギアボックス)で保護されない,モータ軸,歯車,駆動ベルト又はリン
クのような構成品に起因する危険源の暴露は,固定又は可動ガードによって防止しなければならない。定
期的な保全のために取り除くことが必要な固定ガードの固定器具は,機械又はガードに取り付けたままに
しなければならない。可動ガードは,危険な機械機能が接触する前にその機能が停止するように,危険な
動作に対してインターロックをしなければならない。インターロックシステムの安全関連制御システム性
能は,5.4の要求事項に適合しなければならない。
5.2.2
動力の消失又は変化
動力の消失又は変化が,危険源となってはならない。
動力の再始動は,いかなる動作も引き起こしてはならない。
ロボットは,電気,液圧,空気圧又は真空圧の消失又は変化が危険源とならないように設計・製作しな
ければならない。設計によって保護できない危険源があれば,それらの危険源に対して他の保護方策での
保護をしなければならない。予想される使用に対して保護がない危険源は,使用のための情報を明確にし
なければならない。
注記 電源の要求事項は,JIS B 9960-1を参照。
5.2.3
構成品の機能不良
ロボットの構成品は,破損若しくは緩み又は蓄積エネルギーの放出によって生じる危険源を最小にする
ように設計・製作し,固定し又は内蔵しなければならない。
5.2.4
エネルギー源
ロボットに対しての危険なエネルギー源を全て遮断する方法を備えなければならない。この方法は,ロ
ックするか又はエネルギーが遮断された位置で安全を確保する能力を備えなければならない。
5.2.5
蓄積エネルギー
蓄積された危険なエネルギーを制御下で放出する方法を備えなければならない。蓄積エネルギーの危険
源を明確にするためのラベルを貼り付けなければならない。
注記 蓄積エネルギーは,空気アキュムレータ及び液圧アキュムレータ,キャパシタ,バッテリ,ば
ね,カウンタバランス,フライホイールなどからがある。
9
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.2.6
電磁両立性(EMC)
ロボットの設計・製作は,電磁妨害(EMI),無線周波妨害(RFI),及び静電気放電(ESD)の予想でき
る影響による危険な動作又は状態を防止しなければならない。
注記 設計情報としてJIS C 61000-6-2参照。
5.2.7
電気設備
ロボットの電気設備は,JIS B 9960-1の関連要求事項に従って設計・製作しなければならない。
5.3
作動制御装置
5.3.1
一般
動力又は動作を始動する作動制御装置は,5.3.2〜5.3.5に規定する性能基準を満たすように設計・製作し
なければならない。
5.3.2
意図しない操作からの保護
作動制御装置は,意図しない操作を防止するように製作又は配置しなければならない。例えば,適切に
設計された押しボタン又はキー選択スイッチを適切な場所に用いればよい。
5.3.3
状態表示
作動制御装置の状態は,例えば,“動力ʻ入ʼ”,“不具合(障害)検出”,“自動運転”のように明確に表示
しなければならない。
表示灯を使用しているのであれば,取付位置は適切で,色は,JIS B 9960-1に適合していなければなら
ない。
5.3.4
ラベル付け
作動制御装置には,その機能を明確に示すためにラベルを張り付けなければならない。
5.3.5
単一制御点
ロボット制御システムは,ロボットがペンダント又はその他の教示装置の制御下にある場合には,他の
制御元からのロボット動作の始動又は局所制御の選択変更を防止するように設計・製作しなければならな
い。
5.4
安全関連制御システム性能(ハードウェア及びソフトウェア)
5.4.1
一般
安全関連制御システム(電気,液圧,空気圧及びソフトウェア)は,リスクアセスメントの結果によっ
て5.4.3に示す代替の性能基準が適切であると決定しない限り,5.4.2に掲げる性能基準に適合しなければ
ならない。ロボット及び他の必要な設備の安全関連制御システムの性能は,使用上の情報に明確に記載し
なければならない。
注記1 安全関連制御システムをSRP/CS(制御システムの安全関連部)と呼ぶ場合がある。
この規格の目的に対し,安全関連制御システム性能は,次のように指定する。
− JIS B 9705-1の4.5.1で規定するパフォーマンスレベル(PL)及びカテゴリ
− JIS B 9961の5.2.4で規定する安全度水準(SIL)及びハードウェアフォールトトレランス要求事項
これら二つの規格は,類似しているが異なる方法で機能安全を取り扱う。JIS B 9705-1及びJIS B 9961
の要求事項は,これら二つの規格のそれぞれが意図する安全関連制御システムに使用するのが望ましい。
設計者は,二つの規格のいずれかを選択して使用してもよい。安全関連制御システム性能の決定に必要な
データ及び基準は,使用上の情報に含めなければならない。
注記2 ISO/TR 23849は,JIS B 9705-1の対応国際規格ISO 13849-1とJIS B 9961の対応国際規格IEC
62061との比較を示している。
10
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
北米で使用する“制御の信頼性(control reliability)”のような代替となる性能要求事項を提供する他の規
格を使用してもよい。安全関連制御システムの設計にこれら代替規格を使用する場合,同等のレベルのリ
スク低減を達成しなければならない。
安全関連制御システムの故障の全てには,JIS B 9960-1に従った停止カテゴリ0又は1にしなければな
らない。
5.4.2
性能要求事項
制御システムの安全関連部は,JIS B 9705-1で規定するカテゴリ3のアーキテクチャでのPL=d,又は
JIS B 9961で規定するプルーフテスト間隔が20年以上で,ハードウェアフォールトトレランスが1のSIL2
に適合するように設計しなければならない。
これは,特に次のことを意味する。
a) いずれの部分に単一の不具合(障害)が生じても安全機能の喪失にはつながらない。
b) 合理的に実行可能な場合は常に,単一の不具合(障害)は,安全機能の次の作動要求時又はその前に
検出できなければならない。
c) 単一の不具合(障害)発生時に,安全機能を常に実行し,検出した不具合(障害)が修復されるまで
安全状態を維持しなければならない。
d) 合理的に予見可能な不具合(障害)は,全て検出できなければならない。
要求事項 a)〜d) は,JIS B 9705-1で規定するカテゴリ3と同等であることを考慮する。
注記 単一の不具合(障害)検出の要求事項は,不具合(障害)が全て検出されることを意味しない。
その結果として,未検出の不具合(障害)の蓄積は,機械の意図しない出力及び危険状態の原
因となり得る。
5.4.3
他の制御システム性能基準
ロボット及びその意図したアプリケーションに対して行われる包括的リスクアセスメントの結果に基づ
き,5.4.2で規定した以外の安全関連制御システム性能を適切であると決定してもよい。
他の安全関連性能基準を選択することは,特に明示しなければならない。さらに,適切な制限及び注意
事項は,影響を受ける設備に付随して提供される使用上の情報に含めなければならない。
5.5
ロボット停止機能
5.5.1
一般
ロボットは,それぞれに,保護停止機能及び独立した非常停止機能をもたなければならない。これらの
機能は,外部保護装置への信号接続を備えなければならない。非常停止出力信号は任意で備えてもよい。
表1に非常停止と保護停止との機能の比較を示す。
表1−非常停止と保護停止との比較
パラメータ
非常停止
保護停止
始動位置
オペレータは迅速に妨害なく接近
保護装置については,始動位置はJIS B 9715に示
された最小距離の式によって決定する
始動
手動
自動,手動又は安全関連機能によって自動的な始動
安全関連
システム性能
5.4の性能要求事項に適合
5.4の性能要求事項に適合
リセット
手動だけ
手動又は自動
使用頻度
まれに
様々:運転の都度からまれに
目的
非常時
安全防護又はリスク低減
効果
全ての危険源へのエネルギー源を除去
安全防護された危険源を安全に制御
11
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.5.2
非常停止
ロボットは,一つ以上の非常停止機能をもたなければならない(JIS B 9960-1の停止カテゴリ0又は1)。
ロボット動作又は他の危険な状態を始動することのできる各制御ステーションは,手動で始動できる次
の非常停止機能を備えなければならない。
a) 5.4及びJIS B 9960-1の要求事項に適合する。
b) ロボットの他の全ての制御に優先する。
c) 全ての危険源を停止する。
d) ロボットアクチュエータから駆動用動力を除去する。
e) ロボットシステムによって制御される危険源の制御の能力を備える。
f)
リセットするまで維持する。
g) 手動動作によってだけリセットでき,リセット後は再起動を引き起こしてはならない。リセットは,
再起動を可能にすることだけでなければならない。
停止カテゴリ0又は1(JIS B 9960-1による)の選択は,リスクアセスメントから決定しなければならな
い。
非常停止出力信号を供給する場合は,次のいずれかによる。
− 出力信号は,ロボットの動力を除去しても機能し続ける。
− ロボットの動力供給を除去したときに出力信号の機能が継続しないならば,非常停止信号を生成しな
ければならない。
非常停止装置は,JIS B 9960-1及びJIS B 9703に適合しなければならない。
5.5.3
保護停止
ロボットは,外部の保護装置に接続するために設計した一つ以上の保護停止機能をもたなければならな
い。保護停止機能性能は,5.4の要求事項に適合しなければならない。
この停止機能は,全てのロボット動作を停止し,ロボット駆動用アクチュエータへの動力を除去又は制
御し,かつ,ロボットが制御する他のあらゆる危険源の制御を可能にしなければならない。この停止は,
手動又は制御論理によって始動してもよい。
少なくとも一つの保護停止機能は,JIS B 9960-1で規定している停止カテゴリ0又は1でなければなら
ない。ロボットは,JIS B 9960-1で規定している停止カテゴリ2を使用した追加保護停止機能をもっても
よい。停止カテゴリ2の保護停止機能は,ロボット停止後に駆動力を除去しないが,停止状態の監視が必
要となる。監視された停止状態での意図しないロボット動作,又は保護停止機能の不具合(障害)の検出
は,全てJIS B 9960-1で規定している停止カテゴリ0につながらなければならない。監視された停止機能
の性能は,5.4に適合しなければならない。この機能は,外部装置からの始動(保護装置から停止信号を入
力)してもよい。
注記 JIS B 9960-1の停止カテゴリ2の監視された停止機能は,IEC 61800-5-2が規定する安全な運転
停止(SOS)に対応した電力駆動システムによって得ることができる。
製造業者は,保護停止回路ごとの停止カテゴリを使用上の情報に含めなければならない。
5.6
速度制御
5.6.1
一般
ロボットのエンドエフェクタ取付フランジの速度,及びツールセンタポイント(以下,TCPという。)
の速度は,選択できる速度において制御可能でなければならない。TCPの速度を制御できるようにするた
めに,オフセット機能(取付フランジとTCPとの相対的な位置を決める)を備えなければならない。
12
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.6.2
低減速度制御運転
低減制御下の運転時は,TCP速度が250 mm/s以下でなければならない。できれば250 mm/sより遅い速
度も選択できることが望ましい。
5.6.3
安全適合の低減制御
安全適合の低減制御を備える場合,不具合(障害)が発生したときにTCPの速度が低減速度の制限(5.6.2
参照)を超さないように5.4.2に従って設計及び構成しなければならない。また,不具合(障害)が発生
した場合は,保護停止をしなければならない。
5.6.4
安全適合監視速度
安全適合の監視された速度を備える場合は,TCP速度又は軸速度を5.4.2に従って監視をしなければな
らない。もし,その選択した速度の制限を超えた場合は,保護停止しなければならない。
5.7
運転モード
5.7.1
モード選択
運転モードは,モード選択スイッチの各位置にロックすることができ,選択可能でなければならない(例
えば,各位置で抜差し可能なキースイッチ)。選択スイッチの各位置は,明確に識別ができ,一つの制御又
は一つの運転モードだけが選択されるものでなければならない。
選択スイッチはロボット機能の使用を制限する他の選択方法によって置き換えることも可能である(例
えば,アクセスコード)。
これらの手段は,
a) 選択された運転モードを明確に表示しなければならず,更に
b) それら自体によって,ロボット動作又は他の危険源を生じてはならない。
選択されたモードを表示するために任意選択で出力信号を出してもよい。安全関連目的の出力信号であ
る場合,出力は5.4の要求事項に適合しなければならない(附属書D参照)。
注記 モードのラベル化の方法は,附属書Eに図示する。
5.7.2
自動モード
自動モードでは,ロボットはタスクプログラムを実行しなければならない。また,安全防護は機能して
いなければならない。
全ての停止条件が検出されているならば,自動運転は動作してはならない。
このモードから切り替えた場合は,運転停止に至らなければならない。
5.7.3
手動低減速度
手動低減速度では,5.3.5及び5.6の規定に適合し,人間の介入によってロボットを運転することを確認
しなければならない。このモードでは,自動モードは禁止される。このモードは,ロボットのジョグ,教
示,プログラミング又はプログラム検証のために使用し,また,保全作業の実施時に用いる場合がある。
安全防護空間内からのロボットの手動制御は,次のいずれかと併用して低減速度で行わなければならな
い。
a) 5.8に従ったイネーブル装置と併用したホールド・ツウ・ラン
b) プログラム検証に対してだけであるが,5.8に従ったイネーブル装置と併用した起動/停止制御
使用上の情報には,可能であれば全ての人が安全防護空間の外側で手動運転モードを実行しなければな
らないという,適切な指示と警告とを含まなければならない。使用上の情報には,自動モードの選択をす
る前に一時中断したあらゆる安全防護物が完全にその機能を回復しなければならないことも説明しなけれ
ばならない。
13
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 このモードは,以前はT1又は教示として知られていた。
5.7.4
手動高速モード
このモードがある場合は,250 mm/sを超える速度が実行できる。このモードはプログラム検証に対して
のみ使用する。この場合,ロボットは次の事項を満足しなければならない。
a) 意図的な操作(例えば,ロボット制御パネル上のキースイッチ)及び追加の確認動作を必要とする手
動高速モードの選択手段を備える。
b) ロボット動作の継続を許可する,イネーブル装置を使ったホールド・ツウ・ラン機能をもった5.8に
適合したペンダントを備える。
c) 手動高速モードの選択時に,250 mm/sを超えない範囲で初期速度制限の設定ができる。
d) ペンダントには,初期値から多数のステップを踏んで最終プログラム値までの速度を徐々に増加調整
するオペレータのために手段を講じる。
e) ペンダントには,調整された速度の表示を備える。
f)
次のことを確実にする。
− イネーブル装置を押し込んだ後にイネーブル装置を中央位置にすることによって再始動したときに,
初期制限速度に制限する。
− 別個の意図的な操作は,イネーブル装置を離すか押し込む前に選択された高速に戻ることを要求さ
れる。
− 別個の高速動作を再開するオプションは,イネーブル装置を離してから5分以内に無効にしなけれ
ばならない。
高速動作を再開することとタイムアウトのオプションは,安全適合ではない。使用上の情報には,適切
な説明と警告とを含めなければならないし,全ての人が安全防護空間の外にいるとき,手動モードへの切
替えが可能でなければならない。自動モード選択の前に停止したあらゆる安全防護は全ての機能を回復し
なければならないことを,使用上の情報で指示しなければならない。
注記 この任意選択される手動高速モードは,以前はT2又は高速プログラム検証として知られてい
た。
5.8
ペンダント制御装置
5.8.1
一般
ペンダント制御装置又は他の教示制御装置が安全防護空間内からロボットを制御できる場合,5.3.5及び
5.8.2〜5.8.7の要求事項を適用しなければならない。
注記 これは,駆動用動力がロボットのいずれかの軸に与えられるときに,安全防護空間内からロボ
ットを制御する手動モードに用いるあらゆる装置に適用する。これは,ロボット搭載の手動制
御装置又は主/副教示制御装置のいずれを用いるかにかかわらず,動力供給下で教示を行うロ
ボットを含む。
5.8.2
動作制御
ペンダント又は教示制御装置によって始動するロボットの動作は,5.6に規定する低減制御下になければ
ならない。制御装置で手動高速の選択が可能な場合,ロボットは5.7.4に適合していなければならない。
5.8.3
イネーブル装置
ペンダント又は教示制御装置は,JIS B 9960-1に従って3ポジションスイッチをもたなければならない。
継続的に中央のイネーブル位置に保持されているとき,イネーブル装置はロボットの動作,及びロボット
によって制御された他の危険源を許可する。イネーブル装置は,次の性能特性をもたなければならない。
14
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 イネーブル装置の設計と設置とにおいては,継続的な操作に関する人間工学的な問題を考慮
することが重要である。
注記2 イネーブルの追加情報は,附属書Cにある。
a) イネーブル装置は,ペンダント制御装置に組み込まれ,又は物理的に分離(例 グリップタイプイネ
ーブル装置)していてもよいが,他の動作制御機能又は装置から独立して操作しなければならない。
b) 装置を放すか,又は中央イネーブル位置を超えて押された場合には,5.4及び5.5.3に従って危険源(例
ロボットの動作)を停止しなければならない。
c) イネーブル装置は完全に開放される必要がある。いっぱいに押された位置から中央位置に戻るとき,
ロボットの動作を許可してはならない。
d) 2個以上のイネーブルスイッチが,左手操作と右手操作とを変えることができるようにした単一のイ
ネーブル装置/ペンダントに搭載されるとき,いずれか又は全てのスイッチが,中央イネーブル位置
にあってもよい。
1) スイッチのうち一つだけが使用され中央イネーブル位置にあるとき,b) に述べられているように機
能しなければならない。
2) イネーブル装置の設計において,左右の手の交代操作を許可するために,両方のイネーブルスイッ
チが中央イネーブル位置に保持されることを許可している場合,一つのスイッチを放すことで保護
停止となってはいけない。しかし,いずれかのスイッチが完全に押されると,その他のスイッチの
制御に優先し保護停止とならなければならない。
使用上の情報には,この機能の操作の説明及び潜在的な危険源が存在するかもしれない旨の警告を含ま
なければならない。
注記3 複数のスイッチが中央イネーブル位置に保持されている場合に,それらの一つが意図的に放
されたのか,事故の結果として無意識に放されたのかは見分けることができない。
e) 二つ以上のイネーブル装置を使用中(すなわち,2人以上の人間がイネーブル装置をもって安全防護
空間内にいるとき),各装置が中央イネーブル位置に同時に保持されているときだけ動作が可能でなけ
ればならない。
f)
イネーブル装置の落下によって,動作可能となるような故障に至ってはならない。
g) イネーブル出力信号がある場合は,安全関連システムの電源が切れるときに停止条件の信号を出力し,
その出力信号は5.4に適合しなければならない。
h) イネーブル装置が中央イネーブル位置にある間にモードが変更になる場合は,保護停止が始動しなけ
ればならない。制御システムは,イネーブル装置が放され,駆動電源が供給される以前に再びイネー
ブル位置にあることを要求しなければならない。イネーブル装置の無効化を防ぐためのガイドライン
としてJIS B 9960-1を参照。
5.8.4
ペンダントの非常停止機能
ペンダント又は教示制御装置は,5.5.2に従った非常停止機能を備えなけらばならない。
5.8.5
自動運転の始動
ペンダント又は教示制御装置のいずれかだけを使用するロボットの自動運転は,可能であってはならな
い。自動モードが有効になる前に,安全防護空間の外側に配置された別の確認手段がなければならない。
5.8.6
ケーブルレス教示制御装置
ペンダント又は他の教示制御装置とロボット制御装置との接続にケーブルがない場合又は分離している
場合は,次による。
15
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) ペンダントが有効であることを示す視覚表示(例えば,教示ペンダントのディスプレイ)を備えなけ
ればならない。
b) 手動低減又は手動高速モード時に,通信の消失があれば,全ての制御されたロボットを保護停止にし
なければならない。通信が回復しても,別の意図的な操作なしにロボット動作を再起動させてはなら
ない。
c) 適用可能な適切な保管及び設計,使用上の情報によって,有効な非常停止装置と無効の非常停止装置
との混乱を回避しなければならない。使用上の情報には,保管及び設計の説明を含めなければならな
い。
d) データ通信(エラー訂正を含む)及び通信消失に対する最大応答時間は,使用上の情報に記載しなけ
ればならない。
5.8.7
複数のロボットの制御
ペンダント制御装置が多数のロボットを制御できる場合は,5.9の要求事項を適用しなければならない。
5.9
同時動作制御
5.9.1
単一ペンダント制御
1台以上のロボット制御装置を単一の教示ペンダントに接続してもよい。そのような構成の場合,教示
ペンダントは1台以上のロボットを独立に又は同時に動作させる能力をもたなければならない。手動運転
モードでは,ロボットシステムの全ての機能が一つのペンダントの制御下になければならない。
5.9.2
安全設計要求事項
同時動作用に設計されたロボットシステムの全てのロボットは,通常,同じ運転モード(例えば,手動
又は自動)及び同じ状態(例えば,動力入り又は切り)でなければならない。トラブルシューティング,
ランニングエラー又は試験中のためにサーボ接続がされていない状態の一つ以上のロボットがあっても,
それを可能にする能力がなければならない。これらの接続されないロボットは,同時動作には含めてはな
らない。
同時動作をするロボットに対して,それぞれのロボットは,動作をする前に選択しなければならない。
選択のためには,全てのロボットは同じ運転モード(例えば,手動低減速度)でなければならない。選択
されているロボットの選択箇所(例えば,ペンダント,制御キャビネット,又はロボット上)に選択され
ていることを表示しなければならない。選択されたロボットだけが動作可能でなければならない。
全てのロボットは,動作できない状態,すなわち,動力切りの状態を可能にしなければならない。動作
しているロボットの安全防護空間の内側から,明瞭に見える表示を備えなければならない。
選択されていない全てのロボットの予期しない起動は,防がなければならない。この機能は5.4の要求
事項に適合しなければならない。
5.10 協働運転要求事項
5.10.1 一般
協働運転のために設計されたロボットは,協働運転中であることを示す視覚表示を備えなければならず,
更に5.10.2〜5.10.5の一つ以上の要求事項に適合しなければならない。
5.10.2 安全適合の監視停止
人間が協働作業空間内に存在するときは,ロボットは停止しなければならない。停止機能は,5.4及び
5.5.3に適合しなければならない。人間が協働作業空間から離れると,ロボットは自動運転に復帰してもよ
い。
又は,ロボットは,JIS B 9960-1に従った停止カテゴリ2としてもよい。この停止は,一旦停止したら,
16
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4で規定する安全関連制御システムによって監視しなければならない。安全適合の監視停止機能の不具合
(障害)は,停止カテゴリ0としなければならない。
注記 ここで規定したことは,IEC 61800-5-2で規定しているSOSに相当する電気駆動システムが提
供するJIS B 9960-1の監視された停止カテゴリ2機能を含んでいる。
5.10.3 ハンドガイド
ハンドガイド装置がある場合,エンドエフェクタの近くに配置し,次を備えなければならない。
a) 5.5.2及び5.8.4に適合する非常停止
b) 5.8.3に適合するイネーブル装置
ロボットは安全適合監視速度機能が有効な状態で運転しなければならない(5.6.4参照)。安全適合の監
視された速度制限の値は,リスクアセスメントによって決定しなければならない。
5.10.4 速度及び間隔の監視
ロボットは,決められた速度及びオペレータとの間隔を保たなければならない。この機能は,ロボット
に組み込まれた複数の機能又は外部入力の組合せで達成してもよい。決められた速度又は間隔の維持の不
具合(障害)が検出されたときは,保護停止にならなければならない(5.5.3参照)。速度及び間隔の監視
機能は,5.4.2に適合していなければならない。
ロボットは,単に最終的な協働ロボットシステムの中の構成品であり,安全な協働運転に対しては十分
ではない。協働運転のアプリケーションは動的であり,アプリケーションシステム設計で実施されたリス
クアセスメントによって決定しなければならない。使用上の情報には,実行速度値と間隔の指示とを含め
なければならない。JIS B 8433-2は,協働運転を設計するために使用する。
オペレータとロボットとの相対速度は,最小安全離隔距離を計算するときに考慮する必要がある。最小
距離の要求事項はJIS B 9715にある。
5.10.5 本質的設計又は制御による動力及び力の制限
ロボットの動力又は力を制限する機能は,5.4に従わなければならない。いずれの制限値を超えた場合も
保護停止としなければならない。
ロボットは単に最終的な協働ロボットシステムの中の構成品であり,それだけでは安全な協働運転に対
しては十分ではない。協働運転のアプリケーションは,アプリケーションシステム設計で実施されたリス
クアセスメントによって決定しなければならない。使用上の情報には,制御されたロボットにおける制限
値の設定について詳細を含めなければならない。JIS B 8433-2は,協働運転を設計するために使用する。
5.11 特異点保護
特異点の近くを通過する直交座標空間で定義された動作は,軸の高速な動きを生成することがある。オ
ペレータはこの高速な動きを予測できない可能性がある。手動低減速度モード又はハンドガイド(5.10.3
参照)の状態にある場合,ロボット制御は次のいずれかによらなければならない。
a) 教示ペンダントを用いて開始する協調動作において,ロボットが特異点を通過する,又は回避する前
に,ロボットの動作を停止して警告をする(協調動作:ロボットの各軸が滑らかな運動を示しつつ各々
の終端点に同時に到着するような,かつTCPが規定された経路に沿って動くような各軸の運動の制
御)。
b) 聴覚又は視覚による警告信号を発信し,ロボットアームの各リンクの最大速度を250 mm/sに制限して
特異点の通過を継続する。
c) 特異点がいかなる危険な動作も引き起こさずに制御できる場合には,追加の保護は必要としない。
17
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.12 軸制限
5.12.1 一般
制限装置を使用することによって,ロボット周囲の制限空間を設定する手段を備えなければならない。
ロボットの1次軸(最大移動範囲をもつ軸)の動作を制限するために,調整可能な機械的ストッパの設置
手段を講じなければならない。ロボットは,5.12.2若しくは5.12.3又はその両方に適合していなければな
らない。これは,パラレルリンク機構など,構造上の制限があるロボットには適用しない。
ロボットが軸制限に到達したとき,ロボットは停止しなければならない。ロボット動作が軸制限点にそ
のままとどまるかどうかは,使用上の情報に記載するのが望ましい。
5.12.2 機械的及び電気機械的軸制限装置
2次軸及び3次軸(2番目,3番目に大きい移動範囲をもつ軸)は,調整可能な機械的制限装置又は非機
械的制限装置を取り付けられるようにしなければならない。
機械的ストッパは,定格負荷において最大速度状態で,かつ,最大伸張時及び最小伸張時の位置でロボ
ットの動作を停止できなければならない。機械的ハードストッパの試験は,いかなる停止の補助もない状
態で実施しなければならない。
動作範囲の制限を行う代替手段は,5.4.2の規定を実現できる設計・製作・設置が行われる場合だけ備え
ることができる。
電気機械的制限装置の制御回路性能は,5.4の要求事項に適合しなければならない。ロボット制御プログ
ラム及びタスクプログラムでは,電気機械的制限装置の設定を変えてはならない。
使用者は,調整可能な装置によって,制限空間の大きさを最小にできる。調整範囲は,箇条7で規定す
る使用上の情報に含めることが望ましい。
使用上の情報には,完全に停止する前の移動の監視時間及び距離を含めて,電気機械的な制限装置に対
しての最大速度での停止時間についての情報を含めなければならない。追加の情報は,附属書Bにある。
注記1 非機械的制限装置の例は,電気,空気圧及び液圧で位置決めするストッパ,又はロボットの
移動を制限して制限空間を定めるために用いるリミットスイッチ,ライトカーテン,レーザ
スキャン装置,プルコードのような装置を含む。
注記2 機械的ストッパは,調整後に留め具で固定する機械的ストッパを含む。
5.12.3 安全適合ソフト軸及び空間制限
ソフト制限とは,ロボット動作をソフトウェアで定義する制限である。空間制限は,包含する区域又は
除外区域となる幾何学的形状を定義し,定義された空間内でロボット動作を制限するか,又はロボットが
定義された空間内へ進入することを防ぐかのいずれかに用いる。
安全適合ソフト制限は,最大定格負荷及び最大速度においてロボットが停止できる制限空間を定義して,
この空間を縮小するための手段として用いてよい。制限空間は,停止距離を考慮して予測される実際の停
止位置として定義しなければならない。製造業者は,使用上の情報にその能力を記載し,この能力が保証
されないならば,安全適合ソフト制限を使用できないようにしなければならない。
安全適合ソフト制限に基づく軸及び空間のソフト制限機能を監視し,実行する制御プログラムは,5.4
に適合していなければならない。また,権限を与えられた作業員だけが変更可能としなければならない。
安全適合ソフト制限を超えたときは,保護停止しなければならない。制限を超えている間の動作は,5.6.3
で規定しているように低減速度でなければならない。安全制限の有効な設定及び構成の情報は,構成の変
更が容易に確認できるように,一意な識別子とともに可視化及び文書化したものでなければならない。
安全適合ソフト制限は,安全関連サブシステムの再初期化なしでは変更できない固定された領域として
18
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
設定しなければならないし,また,タスクプログラムの自動実行中に再構成してはならない。安全性適合
ソフト制限の変更の権限は保護され,確保されなければならない(例えば,パスワードを入力できる権限
をもった人を決める)。一度設定したら,安全適合ソフト制限は,電源を入れた状態で,常に有効でなけれ
ばならない。
使用上の情報には,安全適合ソフト制限のために完全に停止する前の監視時間及び移動距離を含めた最
大速度での停止時間についての情報を含めなければならない。追加の情報は,附属書Bにある。
動的制限空間アプリケーションでの安全適合の区域の出力は,5.4に適合しなければならない。出力のハ
ードウェア構成は,使用上の情報にて言及されなければならない。
注記1 安全適合ソフト制限は,5.12.2に記載しているように制限装置に適合しない追加軸の制御動
作では特に有用である。
注記2 安全性のソフト軸制限は,一様でないワークエリアでの動作又は障害物によって生じる挟ま
れ箇所(ピンチポイント)からの保護に有用である。
注記3 一意な識別子の例は,チェックサムであり,ソフト制限の構成が定義されたときにロボット
システムによって自動的に生成される一意な値とする。どのような構成の変更でも新しい値
を生成する。
5.12.4 動的制限装置
動的制限とは,ロボットシステムの運転の一部において,ロボットの制限空間が自動的に変更されるこ
とである。カム駆動のリミットスイッチ,ライトカーテン又は制御された格納式ハードストッパのような
(しかしこれらに限らない)制御装置によって,ロボットがタスクプログラムを実行中に制限空間内でロ
ボットの動作を更に制限するために用いる。このため,装置及び関連する制御システムは,定格負荷及び
定格速度の条件下でロボット動作を停止させる能力をもたなければならない。また,関連する安全適合シ
ステムは,リスクアセスメントを実施し,他のカテゴリの要求が決定されない限り,5.4.2に従わなければ
ならない。
5.13 駆動用動力なしの移動
ロボットは,非常時又は異常状態で,駆動用動力なしで軸が動かせるように設計しなければならない。
実行可能な場合は,一人で軸を動かすようにしなければならない。制御装置には容易に接近できなければ
ならないが,意図しない操作からは防護しなければならない。このための指示事項は,非常時又は異常状
態に対応する要員を訓練するための勧告とともに使用上の情報に含めなければならない。
使用上の情報には,重力及びブレーキ装置の解放が更に危険源を発生するという警告を含めなければな
らない。実施できるのであれば,警告文は,作動中の制御装置の近くに貼付しなければならない。
5.14 つり上げ対策
ロボット及びその附属構成品をつり上げるための指示及び対策は提供され,かつ,予測される負荷を扱
うのに十分でなければならない。
例 つり上げフック,アイボルト,ねじ穴,フォークポケット
注記 一人で容易に取り扱える小さなロボットには,適切で安全なつり上げのための指示で十分であ
る。
5.15 電気コネクタ
分離時又は切断時に危険源の原因となる電気コネクタは,意図しない分離を防止するよう設計・製作し
なければならない。
コネクタには誤接続を防止する手段を備えなければならない。
19
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
安全要求事項及び保護方策の検証及び妥当性確認
6.1
一般
ロボット製造業者は,箇条4及び箇条5に規定した原則に従って,適切な安全保護装置を含めた設計及
び製造の検証及び妥当性確認をしなければならない。
合理的に予見可能な危険源が同定され,修正活動がなされるのであれば,リスクアセスメントは評価の
再確認をするのが望ましい。
注記 それぞれのロボットに対して,附属書Aで同定される危険源は全てではないので,指定された
危険状況に関連するリスクのレベルはロボットによって異なるであろう。リスクアセスメント
は,それぞれのロボットに対して何が適切な保護方策なのかを導き出すものである必要がある。
6.2
検証及び妥当性確認方法
検証及び妥当性確認は,次の方法によって満足することができる。
ただし,これらに限定するものではない。
− A 目視検査
− B 実用試験
− C 測定
− D 運転中の観察
− E 用途特有の計画,回路図及び設計資料のレビュー
− F タスクに基づくリスクアセスメントのレビュー
− G 仕様書及び使用上の情報
表F.1を参照。
6.3
要求される検証及び妥当性確認
附属書Fは,検証若しくは妥当性確認又はその両方を実施しなければならないロボットの安全性に必要
なものとして同定された特定の性能要求事項を表にしたものである。適切な方法を使用して,要求事項は
その決定のための評価をしなければならない(要求事項がロボットの設計・製作に見合ったものであれば)。
注記1 表F.1にある項目は,それぞれのロボットに全てを適用しなくてもよい。それらの項目には
検証及び/又は妥当性確認が不可能であることがあるかもしれない。
注記2 表F.1は包括的でも制限でもない。特定のロボットの設計によっては,追加の検証要求事項
があるかもしれない。
注記3 適用可能な項目全てを検証若しくは妥当性確認又はその両方を確実に実施するのは,製造業
者の責任である。
注記4 表F.1をチェックリストとして使用するのであれば,その内容は,評価されるロボットの構
成要素及び評価のための適した方法を,再確認及び限定をする必要がある。
7
使用上の情報
7.1
一般
表示(例えば,標識,記号)及び指示資料(例えば,運転及び保全のマニュアル)は,JIS B 9700及び
JIS B 9960-1に従って,製造業者が提供しなければならない。
提供する場合,機械の警告装置(例えば,聴覚及び視覚の信号)を備える場合は,JIS B 9700及びJIS B
9960-1に適合しなければならない。
20
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2
取扱説明書
各ロボットには,7.1の要求事項に加えて,次の事項を含む取扱説明書又は適切なメディアを附属しなけ
ればならない。
a) 情報製造業者の商号,詳細な住所及び必要な連絡先情報,必要ならば,その公認の代表者又は代理者,
及び公認の供給者
b) ユーティリティ要求,床にかかる力,環境条件などの設置要求事項を含む立ち上げ,プログラミング
及び再起動手順の指示事項
c) 最初の使用及び生産に投入する前に,ロボット及びその保護方策の初期試験並びに検査をどのように
行うかについての指示事項(低減速度制御の機能的試験を含む。)
d) 5.5.2の非常停止出力信号及び5.8.3 d) の共通イネーブル回路を含む安全関連機能が作用するロボット
に対して,構成品の変更又は任意選択の設備(ハードウェアとソフトウェアとともに)の追加後に必
要な試験又は検査のための指示事項
e) 安全運転,並びに設定及び保全のための指示事項(安全作業の実践,危険なエネルギーの制御手順,
及び設備を運転する要員に必要な技術レベル達成のための訓練を含む。)
f)
全ての制御システムの配置及び機能についての指示事項(設定及び設置に必要な電気システム及び油
空圧システムのインタフェース回路図を含む。)
注記 これにはロボット又は他の制御装置,構成品及び所有資産の図は含まない。
g) ペンダントを用いる高速制御モードの選択性能についての情報
h) ロボットが手動高速で使用されることが予見できる場合,制限空間を設けなければならないことを機
械設計者に知らせるための指示事項
i)
制限装置の設置について,機械的制限機能の数,位置及び調整範囲を含めた情報
j)
全ての非機械的制限装置の数,位置及び実装についての指示事項
k) 動的制限の能力
l)
安全適合ソフト制限を使用するとき,停止距離を考慮して予測される実際の停止位置の情報
m) 安全関連制御システム性能を決定するのに必要なデータ及び基準を含めて,イネーブル装置の数及び
操作についての情報並びに追加装置の設置のための指示事項
n) 最大変位の3軸について,停止信号開始からの停止時間及び停止距離,又は角度の情報(附属書Bの
測定方法による)
o) 5.4で決定するロボットの安全機能の安全関連制御システム性能
p) ロボット内部の注油,制動又は伝動システム流体に使用される流体及び潤滑剤の仕様(プロセスに固
有の消耗品の正しい選択,準備,適用及び保全についての指針を含む。)
q) 機械によって又はその内部に捕捉された人間を解放する手段についての指針
r) 駆動力がないロボット軸動作への指示事項(重力及び制動装置の解放は,更なる危険となることへの
警告を含む。)
s)
非常及び異常状況への対応要員の訓練に対する推奨
t)
動作範囲及び負荷容量の限界を定義する情報(ワーク及びその保持器具の最大質量並びに重心位置を
含む。)
u) 機械の保全中の取付エラーを防止する手順
v) ロボットに適用する関連規格情報(第三者によって承認された全てのものも含む。)
w) ケーブルレスペンダントの通信喪失の検出のための応答時間
21
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
x) 機械の予測できる使用に関連しているが保護されていない危険源に関しての情報
y) 手動運転が安全防護空間の外側にいる人によって実行されるときの指示事項及び警告
z) 自動モードを選択する前に一時休止している安全防護が完全に復帰していなければならないことへの
指示事項
aa) ケーブルレスペンダント(構成品として装備されているのであれば)の適切な保管のための指示事項
bb) ケーブルレスペンダント(構成品として装備されているのであれば)の応答時間及び通信信号喪失に
関しての情報
cc) 各保護停止回路入力の停止カテゴリに関しての情報
製造業者が提供したことによる適用情報の変更又は追加は,ロボットシステムの変更又は追加を行う関
係者によって行われなければならない。
7.3
表示
各ロボットには,明確で読みやすく耐久性のある方法で,次の表示を行わなければならない。
a) 製造業者の商号及び詳細な住所,必要に応じて公認の供給者の商号及び住所
b) 機械の商標名称(例えば,産業用ロボット),及び型番号又は製造番号(あれば)。
c) 製造年月
d) 機械質量
e) 最大可動範囲及び最大可搬質量
f)
電気システム,及び該当する場合は油空圧システムについての供給データ(例えば,最低及び最高空
気圧力)
g) 該当する場合は,輸送及び設置のための,つり上げ箇所
ガード及び保護装置,並びにロボットの一部であるが装着されない他の部品は,それらの目的を明示し
なければならない。装着のために必要な他の情報も提供しなければならない。
22
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
重要な危険源リスト
表A.1はロボット及びロボットシステムの重要な危険源のリストである。
注記 表A.1の項目は,JIS B 9700から引用している。
表A.1−重要な危険源リスト
No.
種類
危険源の例
参照
箇条
原因
潜在的結果
1
機械的危険源
− ロボットアームの(背面を含む)全ての部分の
(通常又は予期しない)移動
− エンドエフェクタ又はロボットセルの全ての
可動部の(通常又は予期しない)移動
− 外部軸の(通常又は予期しない)移動
− エンドエフェクタの故障(分離)
− 作業位置でのエンドエフェクタ工具の移動
− ハンドリング運転中の機械又はロボットセル
部品の意図しない移動
− 材料又は製品の落下又は放出
− ジグ又は把持具の意図しない移動
− ツールの予期しない開放
− 連携している機械の予期しない移動
− 製品又は材料の取扱い(放出を含む)
− エンドエフェクタの鋭利な工具の動作(移動)
又は回転
− ロボット部の移動
− ロボットに保持された鋭利な部分の動作
− エンドエフェクタの工具の回転
− ロボットセル内の連携している機械又は機械
の工具の回転又は移動
− 全てのロボット軸の回転動作
− だぶだぶの衣服,長髪
− ロボットアームと全ての固定物との間
− エンドエフェクタと全ての固定物[柵,はり
(梁)など]との間
− 自動モード中に閉じ込められたオペレータの
ために準備されている(セル用扉を使っての)
ロボットセルからの脱出ができない状態
− 取付具の間(落下):シャトルの間,ユーティ
リティ
− エンドエフェクタ上又は外部軸上の,ハンドリ
ング中の部品及び連携している設備上の鋭利
な工具の移動又は回転
− エンドエフェクタの意図しない動作[丸と(砥)
石等のプロセスに特有のもの]
− 押し潰し
− せん断
− 切傷又は切断
− 巻込み
− 引込み又は捕捉
− 衝撃
− 突刺し又は突き通し
− こすれ,擦り傷
− 高圧流体/ガスの注入
又は噴出
4
5.2.1
5.2.3
5.5
5.6
5.7
5.8.4
5.9
5.10
5.11
5.12
5.13
5.14
23
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−重要な危険源リスト(続き)
No.
種類
危険源の例
参照
箇条
原因
潜在的結果
1
機械的危険源
(続き)
− エンドエフェクタ又は連携設備の意図しない
動作又は起動(ロボットで制御された外部軸を
含む)
− 蓄積された動力源からの潜在的エネルギーの
予期しない放出
2
電気的危険源
− 通電部又は接続部への接触
− システム内の種々の電圧の取り違え
− 電気的(電子的)回路内の個々の部品への接
触:例えば,コンデンサ
− アークフラッシュへの暴露
− 高電圧又は高周波を使用した処理。例えば,静
電塗装,電磁誘導加熱
− 高電圧を使用した溶接
− 感電
− 火及び蒸気によるやけ
ど
− 有毒ガスの吸引
− 電気スパークによる視
力障害
− ペースメーカへの影響
4
5.2.4
5.2.5
5.2.6
5.2.7
5.15
3
熱的危険源
− エンドエフェクタ又は関連する設備若しくは
ワークピースの高温表面
− 低温の表面又は低温の物体
− プロセスによって生じる爆発しやすい雰囲気,
例えば,塗装(粉末状の微粒子,粉体塗装),
可燃性溶剤,研磨じん(塵)及び切削切り粉
− プロセス維持に必要な過度な温度への暴露
− やけど
− 火災,爆発
− 熱源からの放射
− 有毒ガスの吸引
− 乾燥
4
4
騒音の危険源
− ロボットセル作業区域でのバランス,平衡感覚
の喪失
− 二人の作業者が,担当するタスクのために必要
な協調動作を,通常の会話を通してではできな
い状態
− 聴覚による危険警告信号を聞くあるいは理解
することを妨げるような高い又は注意散漫を
招くような周囲の騒音レベル
− 長時間にわたる高い騒音レベルへの暴露
− 聴覚,平衡感覚,自覚
の影響
− 言語能力,伝達,聴覚
による信号知覚への影
響
− 聴覚の喪失
この規
格の適
用範囲
からの
除外
5
振動の危険源
− 予期しない停止又は部品のはずれを引き起こ
す接続部,締結部及び構成品の緩み
− 疲労
− 神経障害
− 血管障害
4
5.2.3
6
放射の危険源
− ロボットシステムの適切な運転でのEMF妨害
− プロセスに関連する放射への暴露,例えば,ア
ーク溶接,レーザ
− やけど
− 疾患
4
7
材料/物質の危険
源
− 流体を必要とする構成品の保守,注油及び交換
− ロボットシステム及び保護システムの機械的
/電気的構成品の予期しない故障
− 中毒
− 腐食性有毒物又はちり
(塵)の吸引
− やけど
4
8
人間工学的危険源
− 設計が適切でなく,遠すぎたり高すぎたりする
教示ペンダント,人間−機械インタフェース
(HMI),タッチスクリーン又はオペレータ用
パネル
− 設計が適切でないロード/アンロード用作業
位置:部品箱の位置とロード/アンロード作業
区域との距離が遠い
− 疲労
− 衝撃
− 落下
− 注意散漫
− ストレス
− ヒューマンエラーの結
果
4
5.3.3
5.3.4
5.14
24
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−重要な危険源リスト(続き)
No.
種類
危険源の例
参照
箇条
原因
潜在的結果
8
人間工学的危険源
(続き)
− 設計が適切でないイネーブル装置
− 制御器具(ボタン・スイッチ等)の不適切な位
置
− 制御器具(ボタン・スイッチ等)の不注意操作
− 制御器具(ボタン・スイッチ等)の不適切な配
置のために接近が困難であり,更なる危険源へ
の暴露がある状態
− 予測できる保全活動(トラブルシューティン
グ,修理,調整)をする構成品の不適切な配置
のために接近が困難であり,更なる危険源への
暴露がある状態
− 照明が不十分な区域がゆえに危険源又は危険
状態の確認がしにくい状態
− 照明を妨げるエンクロージャの内部の構成品
− 適切な視野に配置されるべきHMIユニットが
高すぎたり低すぎる状態
9
機械を使用する環
境に関する危険源
− 環境に起因する設計上の懸念事項:例えば,地
震多発区域に設置
− 間違った又は不必要な活動をすることによる
真の問題と複雑な問題との誤認
− 一つの行動又は故障が危害のひどさを増大さ
せる。例えば,鋭利なエッジを避けようとして,
その代わりに高温の表面に接触してしまう
− 不可抗力(予定された
計画を妨げる天災)
− 誘引される故障
− 不安全な反射行動
4
10
危険源の組合せ
− ロボット,エンドエフェクタ又は連携する機械
の予期しない移動
− 電磁妨害又はエネルギー源からのサージによ
る機械制御装置の予測不可能な挙動
− ロボットシステムの起動指令を一人の人が出
したとき,このことが他の人には予測できない
状態
− 協働ロボット又は同時動作時における誤解
− サイクル途中での停止指令によるロボット停
止
− ロボットシステム速度が調整可能で,その結果
多様なタスクが種々の速度で実行される状態
− 制御装置の機能不全によってローディング用
テーブル又はエンドエフェクタで保持装置が
開放され,残留力(慣性,重力,ばね/エネル
ギー蓄積手段)によって飛び出す状態
− 制御装置の機能不全によってロボットアーム
のブレーキが開放され,ロボット構成部品が残
留力(慣性,重力,ばね/エネルギー蓄積手段)
によって予期せず動く状態
− ロボット,エンドエフェクタ,補助軸又は連携
している設備の予期しない移動
− 安全防護装置が故障し,期待どおりには機能し
ない状態
− 中断後のエネルギー供
給源の復帰
− 動力源の外部影響
− 予想外の起動
4
5.2.2
5.2.3
5.2.4
5.2.5
5.2.6
5.2.7
5.3.2
5.3.3
5.3.5
5.4
5.5
5.7
5.8
5.9
5.10
25
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−重要な危険源リスト(続き)
No.
種類
危険源の例
参照
箇条
原因
潜在的結果
10
危険源の組合せ
(続き)
− 連携する機械が故障し,期待どおりには機能し
ない状態
− 非固定のホース又は構成品が外れる,分離する
又は急に動く状態
− 不適切に設置されたことで予期しない動作/
危険源を生成する構成品
− 高速回転部品の破損又は部品保持設備からの
放出
− ロボットアーム又は連携設備の過負荷による
機械構成品の破損又は曲がり
− プロセス関連の放出物との接触(例えば,スポ
ット溶接)
− 部品保持装置の故障
− 未固定のロボット部品又は連携している機械
部品(重力の釣り合いによって停止している)
の落下又は横転
− 立上げ又は廃棄のときの取扱事故
− 適切に取り付けていない又は設置していない
場合に落下する可能性のある部品
− オペレータ区域又はロボットセルの照明不足
− セル床上の障害物
− 滑りやすい床
− 不適切なユーティリティの位置
− 特有な用途からの危険源
26
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
停止時間及び停止距離の測定方法
これは,全ての製造業者から標準化されたデータを確保するため,7.2 n) に規定する使用上の情報に記
載する測定法である。この情報は,安全防護装置を適用する場合に安全距離計算をするために必要である。
この情報を有効,かつ,実用的なものにするには,実際の動作条件を予測できるように値を最大条件まで
段階的に変えることが要求される。
試験は,適用可能な限りJIS B 8432の6.(性能試験条件)に適合しなければならない。これには次のも
のを含む。
a) 試験前にマニピュレータを暖機運転する。
b) 製造業者の要求事項どおりにロボットを固定する。
c) 動力,温度などの環境要求事項に適合する。
d) 適切な試験手順を確立する。
e) 測定方法を記述する。
製造業者は,通常の使用による停止性能の劣化を予測し,いつロボットを改修するのがよいかを勧告し
なければならない。
データの要求事項は,次による。
− 停止時間は,停止信号の始動から全てのマニピュレータの動作が止まるまでの時間で決定しなければ
ならない。
− 妥当性が確認されたシミュレーション値が利用できるのであれば,その値はシミュレーションで得て
もよい。
注記 このデータは,制御システムの特徴及び構成,例えばケーブルレスペンダントに起因する遅れ
時間によって異なる。
停止距離は,停止信号始動後に移動した総距離として決定しなければならない。距離は,直線又は角度
の適切な単位によって提示する。
JIS B 9960-1に従う停止カテゴリ0に対しては,最大条件(例えば,最大速度,最大負荷,最大変位)
の下での測定手順が十分といえる。ロボットが停止カテゴリ1の機能をもつときは,追加データ又は補正
係数を提示しなければならない。停止カテゴリ1に対しては,速度,負荷及びアームの伸長度合いに依存
する停止時間及び停止距離の値は,設計に基づくこれらの値が,最大値から導き出されるものではない限
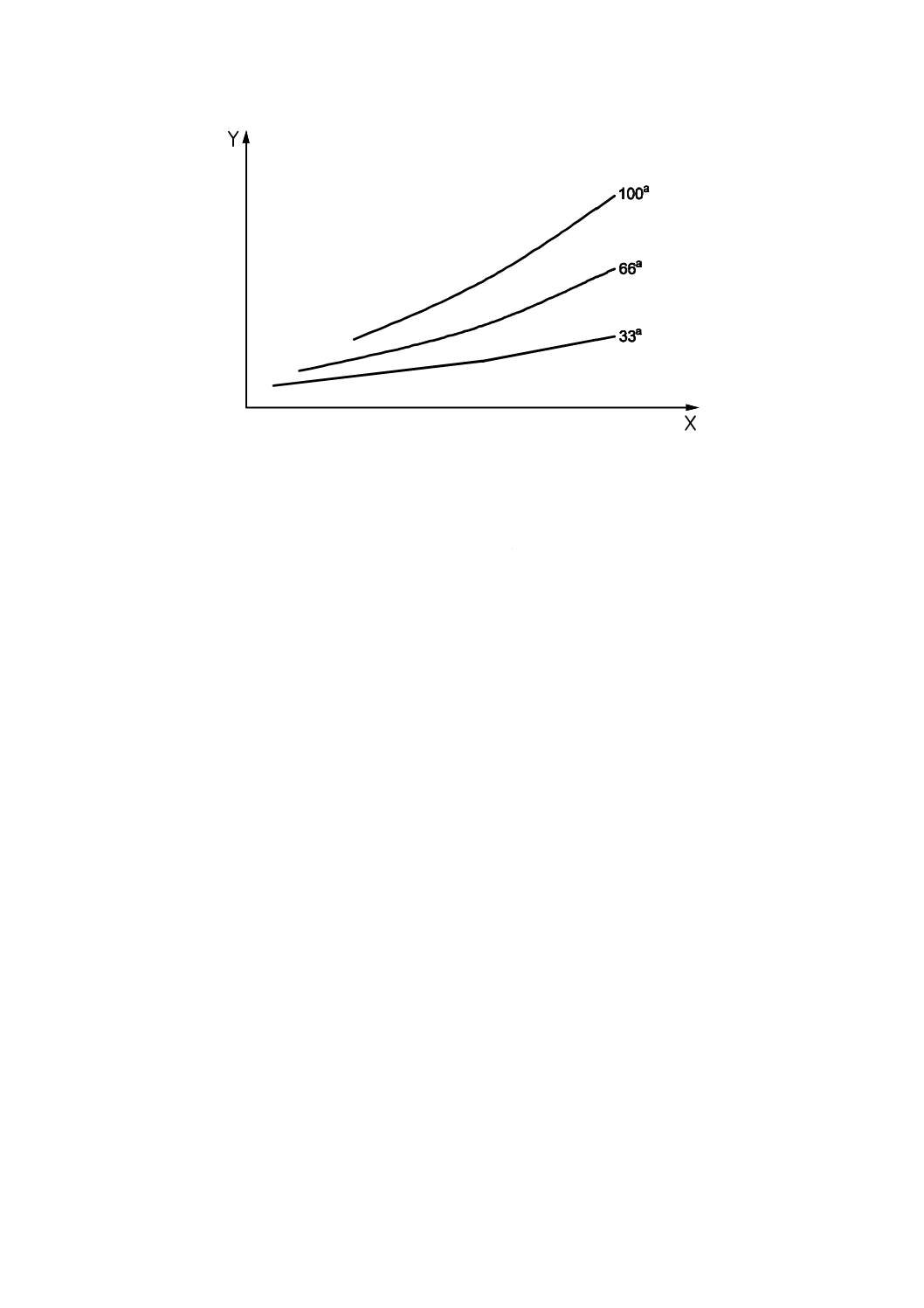
り,各々最大値の33 %,66 %及び100 %で測定する。この場合,100 %最大値は,中間値を得るための公
式とともに提示する必要がある。
速度,負荷及びアームの伸長度合いに使用する値は,最大値に相当するものでなければならない。実際
のツール及び負荷を付けたロボット実機による実際のセルにおいて,インテグレータ自身による停止時間
及び距離の測定をどのように行えばよいかの説明書は,製造業者が提供しなければならない。
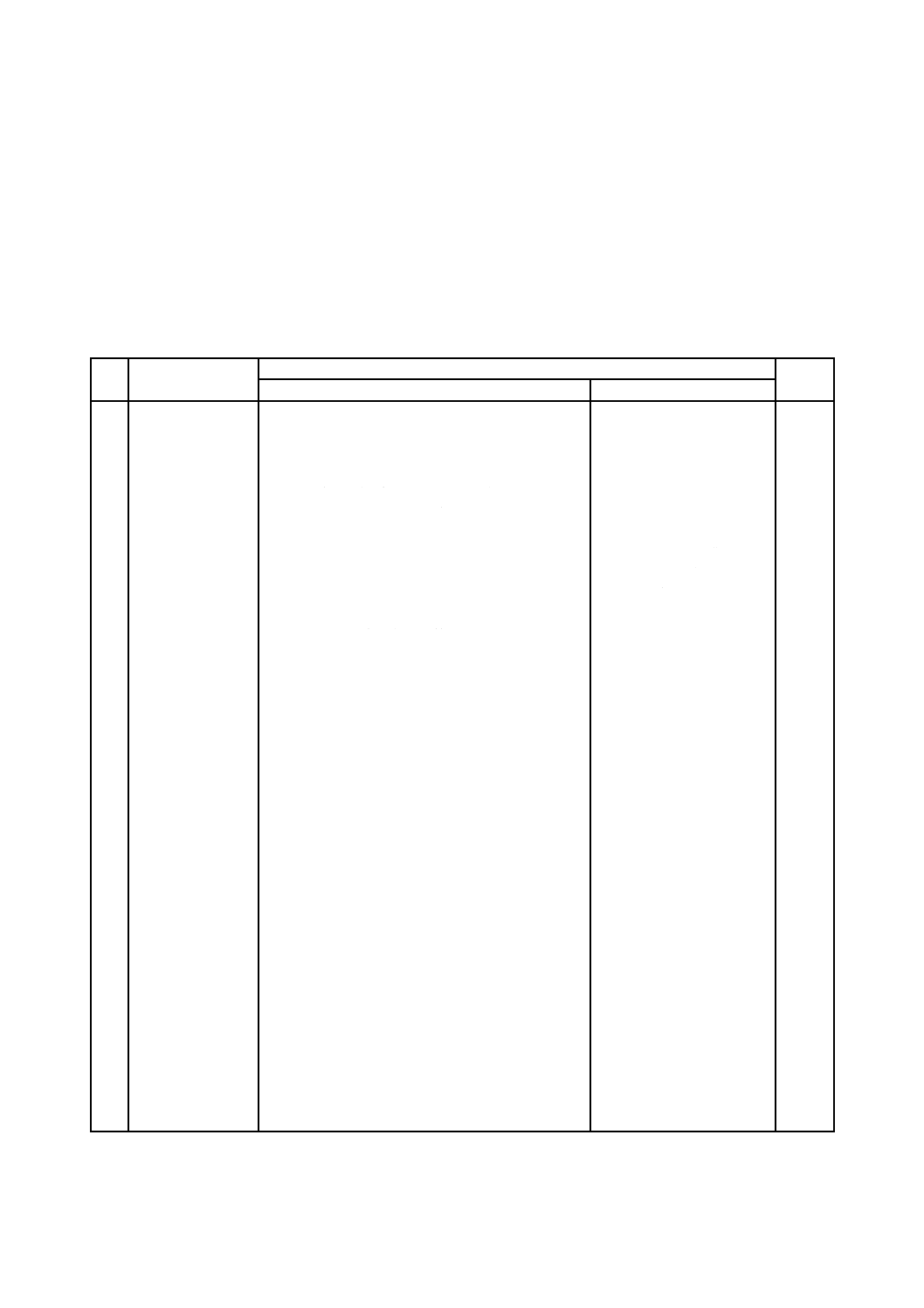
データは,最大変位の3軸について提示しなければならない。表現例を,図B.1に示す。
27
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
凡例
X 速度(mm/s)
Y 停止時間(s)
a
負荷%
注記 停止カテゴリ1における軸1の速度及び負荷に対する停止時間
図B.1−停止時間のグラフ例
28
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
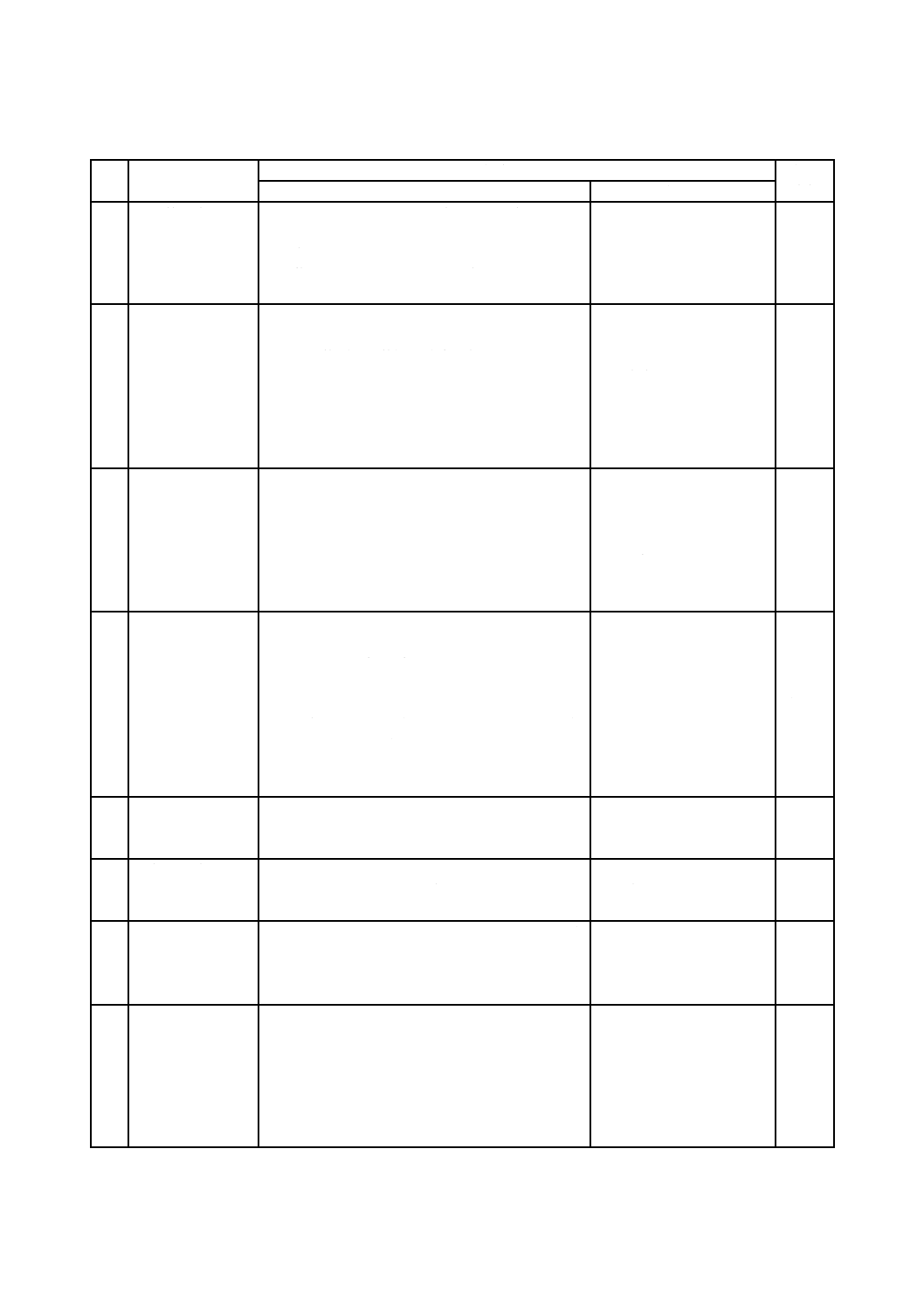
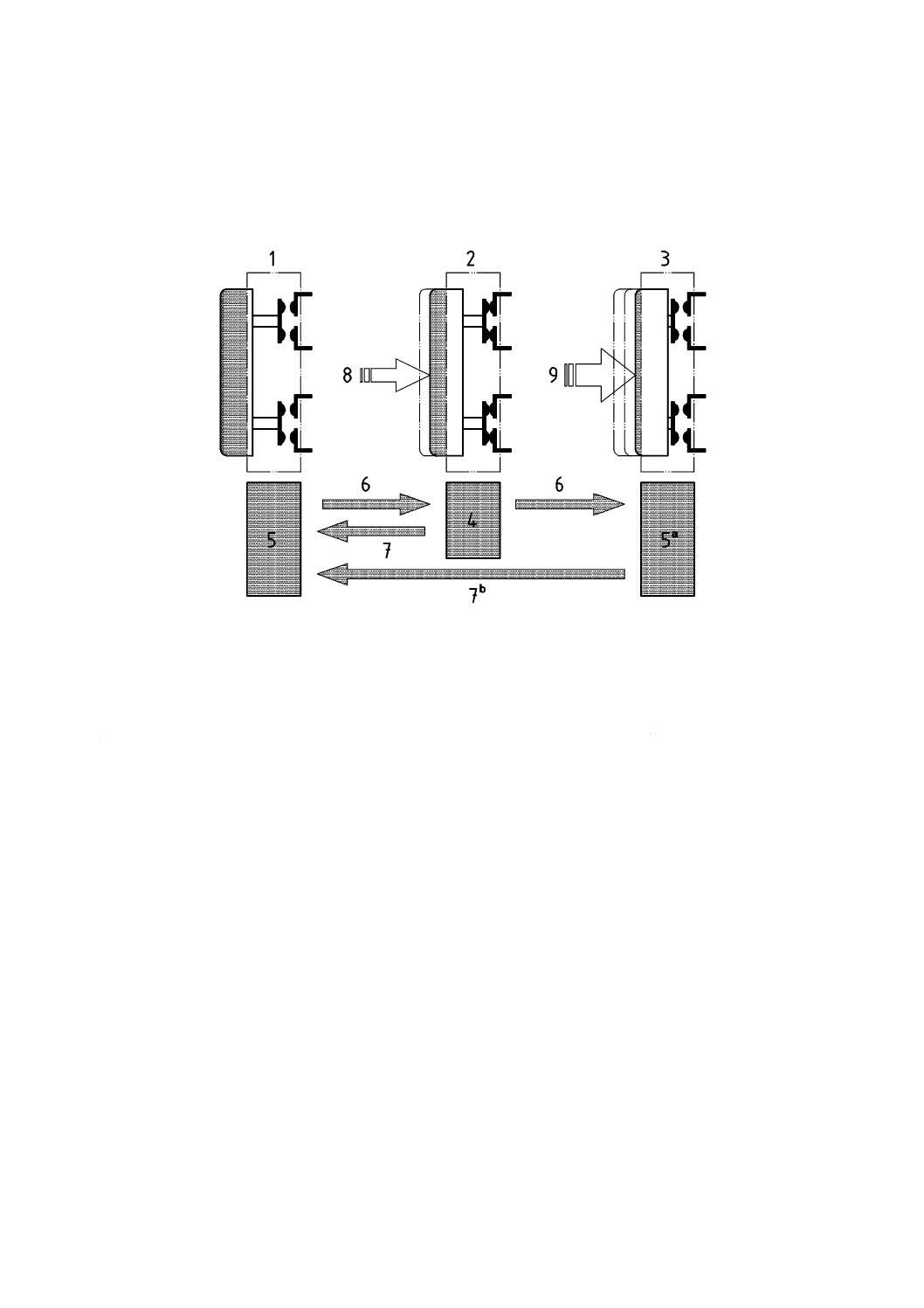
3ポジションイネーブル装置の機能的特徴
凡例
1 ポジション1
4 オン(ON)の状態
7 開放
2 ポジション2
5 オフ(OFF)の状態
8 軽く握る
3 ポジション3
6 押す
9 きつく握る
a
ポジション3まで完全に押し込むと,接点は再び開く。
b
操作部がポジション3からポジション1まで戻るとき,接点はポジション2を機能的に通過せずに開いたままで
なければならない。
図C.1−3ポジションイネーブル装置の機能的特徴
29
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
任意選択の機能
D.1 一般
箇条4〜箇条7で規定された要求事項は,ロボットの安全性を保証するための最低限のものである。ロ
ボットの安全性を高めるために多くの追加機能を付加できるが,従来必要とされる安全項目が必ずしも要
求されるわけではなく,JIS B 9705-1又は同類の規格に従った特定の安全関連性能基準を必要とするもの
ではない。
次の任意選択の機能は,重要性又は必要性について特に順序があるわけではない。これらの機能が装備
されたロボットは,使用中及び再利用時に高い柔軟性及び潜在的に高い安全性能をもつ。
注記1 ロボットが当初設計・製作された以外の用途で再使用される場合は,D.2,D.3及びD.4の機
能が設置の柔軟性を得るために重要となる。
注記2 D.5,D.6及びD.7の機能は“安全”機能ではないが,ロボットシステムの安全性を高める。
D.2 非常停止信号機能
a) 5.5.1の非常停止信号出力機能をもつ。これは,共通非常停止(ロボットを非常停止させるとともにシ
ステムが非常停止となる)のためのものである。
b) 5.5.2に従ったロボット制御装置の電源なしで機能する非常停止装置をもつ。
D.3 イネーブル装置機能
a) 複数のロボット及び設備を制御する共通回路に,イネーブル装置を相互接続するイネーブル装置の信
号出力機能をもつ。
b) 複数の追加イネーブル装置を一つのイネーブル回路に接続できる。
D.4 モード選択
a) モード選択状態の情報を安全関連制御システムに提供できる。
b) 出力信号は,5.7.1に適合しなければならない。
D.5 衝突防止検知
人間への危害防止に対して最も効果的であるには,ロボットは,衝突が検知されたとき停止し,警告信
号を発信し,オペレータの介入なしには他の位置へ移動しないのが望ましい。
D.6 全速度にわたる経路精度の維持
これは,危険な位置からロボット動作を監視する必要性を小さくできる。
D.7 軸及び空間の安全適合ソフト制限
5.12.3に規定したように,この制限は,除外空間の生成及び包含空間のプログラミング生成を可能とす
る。
30
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
D.8 停止性能の測定
ロボット停止性能測定及び監視が備わっている場合,ロボット停止性能測定及び監視は,次の機能のう
ち一つ以上をもつのが望ましい。
a) 次の作動時に,停止性能の測定及び記録のモードを選択する機能
b) 停止事象の開始を定義する入力(例えば,安全防護装置の入力,保護停止信号)を選択する機能
c) 停止性能の制限を超えた場合に警告するための制限値を設定する機能
31
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
ラベル
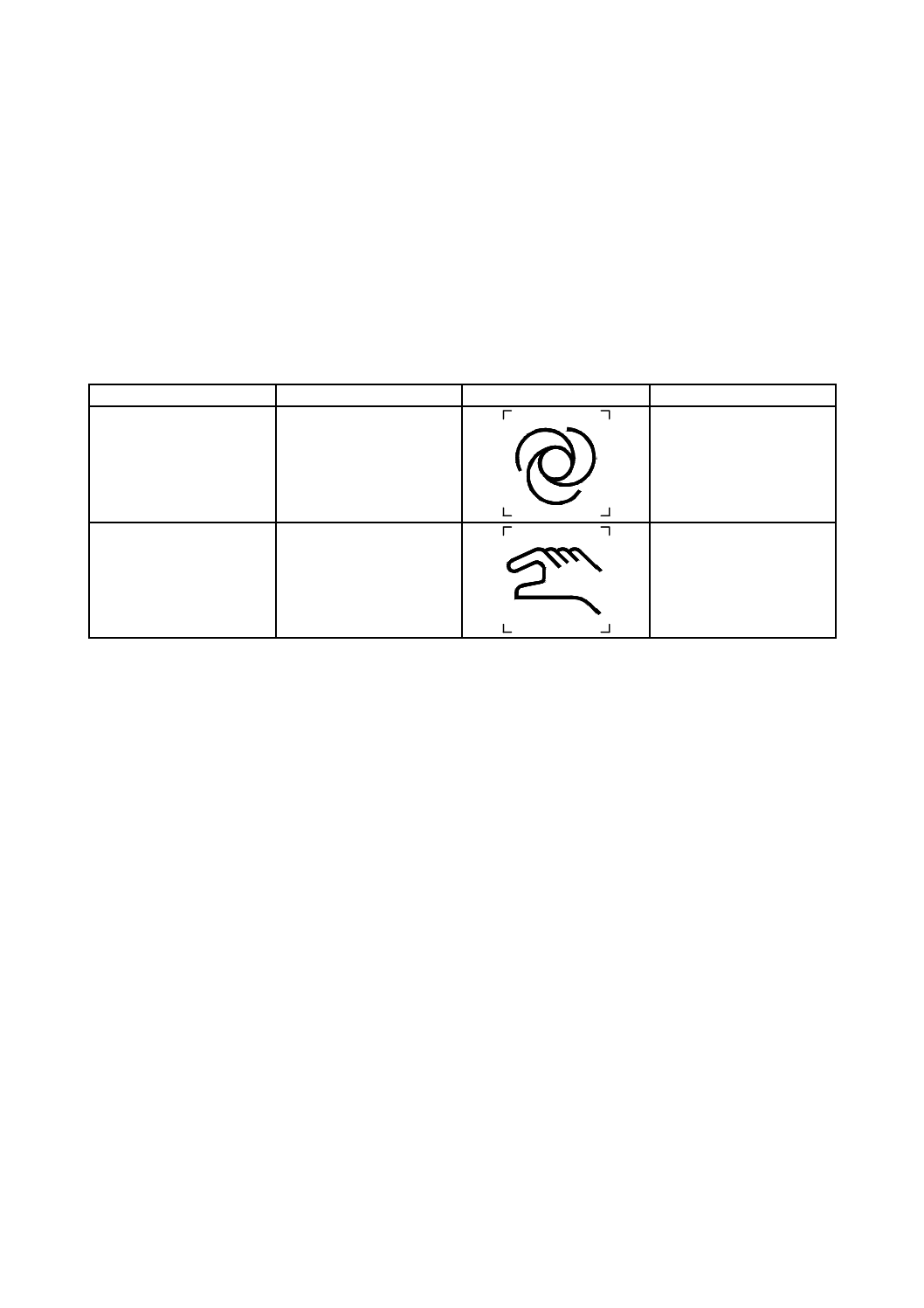
表E.1は,5.7で特定された運転モードを表示するために用いることができる図記号の例である。図記号
にはモード選択及び期待される性能の情報をできる限り明確に表示するため,追加の説明文を含んでもよ
い。
表E.1−ロボットモード運転ラベル
細分箇条番号
モード
図記号
ISO 7000の対応番号
5.7.2
自動モード
0017
5.7.3
手動低減速度
0096
32
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(規定)
安全要求事項及び方策の検証手段
表F.1は,検証及び/又は妥当性確認をしなければならないロボットの安全性に不可欠であることを同
定する特定の性能要求事項の表である。表中の×は,実施項目を表す。
この表の使用については,6.3を参照。
表F.1−安全要求事項及び方策の検証手段
箇条
適用可能な安全要求事項及び/又は方策
検証及び/又は妥当性
確認の方法(6.2参照)
A B C D E F G
5.2
一般要求事項
5.2.1
固定又は可動ガードは,モータ軸,歯車,駆動ベルト又はリンクのよう
な危険源への暴露を防止するように取り付ける。
×
×
5.2.1
定期的な保全のために,取り外すことを目的とした固定用装置は他の用
途に適用できない構造となっている。
×
×
5.2.1
可動ガードは,危険になる前に危険な移動が停止するように危険な移動
に対してのインターロックをとる。
× × × ×
5.2.1
インターロックシステムの安全関連制御システム性能は,5.4の要求事項
に適合している。
×
5.2.2
動力の消失又は変化が,危険源とならない。
×
× ×
5.2.2
動力の再始動は,動作の始動にならない。
×
× ×
5.2.2
電気,液圧,空気圧又は真空圧の動力源の消失又は変化が危険源となら
ない。
×
×
5.2.2
設計によって保護されない危険源に対して,他の保護方策で保護してい
る。
×
×
5.2.2
予想される使用に対して保護がない危険源は,使用上の情報を明確にし
ている。
× ×
5.2.3
ロボットの構成品は,破損若しくは緩み又は蓄積エネルギーの放出によ
って生じる危険源を最小にするように,設計・製作し,固定し,又は内
蔵している。
× ×
×
5.2.4
ロボットに対しての危険なエネルギー源を遮断する位置でロック又は固
定する能力がある。
× × ×
×
5.2.5
蓄積された危険なエネルギーを制御下で放出する手段がある。
×
×
×
5.2.5
蓄積エネルギーの危険源を特定できるラベルを貼付している。
×
5.2.6
電磁妨害(EMI),無線周波妨害(RFI),及び静電気放電(ESD)の予想
できる影響が危険な動作を引き起こさない。
× ×
×
5.2.7
ロボットの電気設備は,JIS B 9960-1の関連要求事項に従って設計・製作
されている。
× ×
×
×
5.3
作動制御装置
5.3.2
作動制御装置は,意図しない操作を防止するように製作又は配置されて
いる。
× ×
5.3.3
作動制御装置の状態は,明確に表示されている。
× ×
×
5.3.3
表示灯を使用しているのであれば,取付位置は適切で,色はJIS B 9960-1
に適合している。
×
×
33
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表F.1−安全要求事項及び方策の検証手段(続き)
箇条
適用可能な安全要求事項及び/又は方策
検証及び/又は妥当性
確認の方法(6.2参照)
A B C D E F G
5.3.4
作動制御装置には,その機能を明確に示すためのラベルが貼付されてい
る。
×
5.3.5
ロボット制御システムは,ロボットがペンダント又はその他の教示装置
の制御下にある間は,他の制御元からのロボット動作の始動又は局所制
御の選択変更ができない。
×
× ×
5.4
安全関連制御システム性能(ハードウェア及びソフトウェア)
5.4.1
設備が適合している安全関連制御システムの性能が,使用上の情報に明
確に記載されている。
×
×
5.4.1
安全関連制御システム性能の決定に必要なデータ及び基準は,使用上の
情報に含まれている。
×
5.4.2
制御システムの安全関連部はPL=d,構造カテゴリ3又は20年以上のプ
ルーフテスト間隔でのハードウェア不具合(障害)トレランス1のSIL2
に適合している。
×
×
5.4.2
単一の不具合(障害)が,安全機能の次の要求時又はその前に検出され
る。
×
× ×
5.4.2
単一の不具合(障害)発生時に,安全機能が常に働いて,検出された不
具合(障害)が修復されるまで安全状態が維持される。
×
× ×
5.4.2
合理的に予見可能な不具合(障害)は,全て検出される。
×
× × ×
5.4.3
安全関連性能基準の一つを選択することを明確にし,さらに,適切な制
限及び注意事項を使用上の情報に含めている。
×
× × × ×
5.5
ロボット停止機能
5.5.1
ロボットは,それぞれに保護停止機能及び独立した非常停止機能を備え
ている。
×
×
5.5.1
停止機能は,外部保護装置への信号接続を備えている。
×
×
5.5.2
ロボットは,一つ以上の非常停止回路を備えている。
×
5.5.2
各制御ステーションは,手動で始動できる非常停止機能を備えている。
× ×
×
5.5.2
非常停止機能は,手動操作だけリセット可能である。リセットで再起動
は可能となるが,リセットで再起動はしない。
× ×
× ×
×
5.5.2
停止カテゴリ0又は1の選択は,リスクアセスメントによって決定して
いる。
×
5.5.2
非常停止出力信号を出すとき,出力信号は,ロボット動力が除去されて
も機能し続ける,又は,出力信号が機能し続けないとき,非常停止信号
を生成する。
×
×
5.5.2
非常停止装置は,JIS B 9960-1及びJIS B 9703に適合している。
× ×
× ×
5.5.3
ロボットは,外部の保護装置への接続用に設計された一つ以上の保護停
止機能をもたなければならない。
×
×
5.5.3
保護停止機能性能は5.4の要求事項に適合している。
×
×
5.5.3
この停止機能は,全てのロボット動作を停止し,ロボット駆動用アクチ
ュエータへの動力を除去あるいは制御し,ロボットシステムによって制
御される他のあらゆる危険源の制御を可能にする。
×
× ×
5.5.3
少なくとも一つの保護停止機能は,停止カテゴリ0又は1である。
×
× ×
5.5.3
ロボットが追加の停止カテゴリ2を使用した保護停止機能をもっている
場合,保護停止機能の安全休止状態又は検出された故障でのロボットの
意図しない動作はJIS B 9960-1に従って停止カテゴリ0となる。
×
×
5.5.3
安全停止及び監視機能性能は5.4に適合している(これらの機能があれ
ば)。
×
34
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表F.1−安全要求事項及び方策の検証手段(続き)
箇条
適用可能な安全要求事項及び/又は方策
検証及び/又は妥当性
確認の方法(6.2参照)
A B C D E F G
5.5.3
使用上の情報には,保護停止回路入力ごとの停止カテゴリの説明が含ま
れている。
×
5.6
速度制御
5.6.1
取り付けられたフランジの速度及び選択されたTCPの速度は,選択可能
な速度で制御可能である。
× ×
×
5.6.1
オフセット機能はTCP速度を制御可能としたものである。
× × ×
×
5.6.2
低減制御で運転する場合,TCP速度は250 mm/sを超えない。
× ×
5.6.3
安全適合の低減が使用されるのであれば,5.4.2に従って不具合(障害)
状態での低減速度制限が超えないようになっている。
× ×
×
5.6.4
TCP速度が使用されるのであれば,5.4.2に従った監視がされている。
×
× ×
5.6.4
その速度が選択された速度を超えるものであれば,保護停止となる。
×
× ×
5.7
運転モード
5.7.1
運転モードは,モード選択スイッチの各位置にロックすることができ,
選択可能である。
× ×
5.7.1
選択スイッチの各位置は,明確に識別ができ,一つの運転モードだけが
選択される。
× ×
5.7.1
選択されたモードを明瞭に表示し,選択操作自体によって,ロボット動
作又は他の危険源が生じない。
× ×
× ×
5.7.1
安全関連目的の選択モードを示す出力信号は,5.4の要求事項に適合して
いる。
×
×
5.7.2
ロボットタスクプログラムが自動モードで実行されているときは,安全
防護が機能している。
×
× ×
5.7.2
停止条件が検出されている場合,自動運転にならない。
×
×
5.7.2
自動モードからの切り替えの場合,運転停止になる。
×
× ×
5.7.3
手動低減速度では,5.3.5及び5.6の要求事項に適合している。
× ×
×
5.7.3
手動低減速度は,人間の介入によるロボットの運転ができる。
×
× ×
5.7.3
安全防護空間からのロボットの手動制御は,ホールド・ツウ・ラン制御
及びイネーブル装置で低減可能である。
×
×
5.7.3
使用上の情報には,全ての人が安全防護空間の外側で手動運転モードを
実行すべきことを可能な限り含めている。
×
5.7.3
使用上の情報には,自動モード選択の前に一時中断したあらゆる安全防
護物が完全にその機能を回復しなければならないことの説明が含まれて
いる。
×
5.7.4
意図的な操作及び追加の確認動作での(手動高速モードの)選択ができ
る。
×
× ×
5.7.4
(手動高速モードを)選択したとき,初期速度は250 mm/sを超えない。 × × × × ×
5.7.4
イネーブル装置を使ったホールド・ツウ・ラン機能をもった5.8に適合し
たペンダントを備えている。
× ×
× ×
5.7.4
初期値から多数のステップを踏んで最終プログラム値までの速度を徐々
に増加調整する手段を講じている。
× ×
× ×
5.7.4
ペンダントには,調整された速度の表示がある。
× ×
×
5.7.4
イネーブル装置を離す,又は,押し込んだ後にイネーブル装置の中央位
置にすることによって再始動したときに,初期制限速度に制限される。
×
× ×
5.7.4
個別の意図的な動作があるときは,イネーブル装置を離す,又は押し込
む前に選択された高速に戻る。
×
× ×
35
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表F.1−安全要求事項及び方策の検証手段(続き)
箇条
適用可能な安全要求事項及び/又は方策
検証及び/又は妥当性
確認の方法(6.2参照)
A B C D E F G
5.7.4
高速動作に戻すオプションは,イネーブル装置を離してから5分以内に
無効になる。
×
× ×
5.7.4
使用上の情報には,適切な説明と警告とを含む。また,手動モードにす
るのは安全防護空間の外側にいる人が行う。
×
5.7.4
使用上の情報には,自動モードを選択する前に全ての中断した安全防護
が十分に機能を回復されることを含めている。
×
5.8
ペンダント制御装置
5.8.2
ペンダント又は教示制御装置によって始動するロボットの動作は,5.6に
規定する低減速度制御下にある。
× ×
×
5.8.2
制御装置で手動高速の選択が可能な場合,ロボットは5.7.4に適合してい
る。
×
× ×
5.8.3
ペンダントには,3ポジションのイネーブルスイッチがある。
× ×
×
5.8.3
中央(イネーブル)位置に継続的に保持されている場合,ロボット動作
及びロボットによって制御される他の危険源の動作を可能にする。
×
× ×
5.8.3 a)
イネーブル装置は,他の全ての動作制御機能/装置から独立して操作が
可能である。
×
×
5.8.3 b)
イネーブル装置を放すか/中央(イネーブル)位置を通過して押し込む
ことで,危険源(となる動作)を停止させる。
×
× ×
5.8.3 c)
(イネーブルスイッチを)押し込んだ状態から,中央位置に戻してもロ
ボットは動作しない。
×
× ×
5.8.3 d)
イネーブル装置にある複数のスイッチ:一つのスイッチが中央位置にあ
るとき,スイッチを離す/中央位置を通過して押し込むことが危険源(と
なる動作)を停止させる。
×
× ×
×
5.8.3 d)
イネーブル装置にある複数のスイッチ:中央位置を通過して押し込むこ
とで保護停止になる。
×
× ×
×
5.8.3 d)
イネーブル装置にある複数のスイッチ:一つ以上のスイッチが中央位置
にあるとき,追加のスイッチを離すことで保護停止にはならない。
×
× ×
×
5.8.3 d)
使用上の情報には,複数のイネーブルスイッチの説明及び潜在的に危険
源が存在することの警告を含めている。
×
5.8.3 e)
複数のイネーブル装置:全てのイネーブル装置が中央位置でなければ,
動作は可能とならない。
×
× ×
5.8.3 f)
イネーブル装置の落下で,動作するような故障にはならない。
×
5.8.3 g)
安全関連システムの電源が切れたら,イネーブル出力信号は停止信号と
なる。
×
×
5.8.3 g)
イネーブル出力信号は5.4に適合している。
×
×
5.8.3 h)
イネーブル装置が中央位置にあるときにモードが変更された場合,保護
停止が始動する。
×
× ×
5.8.3 h)
イネーブル装置が,中央位置でのモード変更をした後では,駆動電源が
加わる前にイネーブル装置を離し,再びイネーブル位置にする必要があ
る。
×
× ×
5.8.4
ペンダントは,5.5.2に従った非常停止機能を備えている。
× ×
×
5.8.4
ペンダント非常停止機能には,JIS B 9703に従った非常停止装置を使用す
る。
×
×
×
5.8.5
ロボットの自動運転の起動手段がペンダントだけであってはならない。
×
× ×
5.8.5
安全防護空間の外側に別の確認手段が備えられている。
×
× ×
5.8.6
ペンダントが有効であることを示す視覚表示を備えている。
× ×
× ×
36
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表F.1−安全要求事項及び方策の検証手段(続き)
箇条
適用可能な安全要求事項及び/又は方策
検証及び/又は妥当性
確認の方法(6.2参照)
A B C D E F G
5.8.6
ペンダントの通信の消失で保護停止になる。
×
×
5.8.6
通信が回復しても,別の意図的な操作をしないとロボット動作は再起動
しない。
×
×
5.8.6
有効な非常停止装置と無効の非常停止装置との混乱は,適切な保管又は
設計で回避されている。
× ×
×
5.8.6
使用上の情報には,適切な保管又は設計を含めてある。
×
5.8.6
データ通信及び通信消失に対する最大応答時間は,使用上の情報に記載
されている。
×
×
×
5.8.7
複数のロボットの制御能力は,5.9の要求事項を満足している。
×
× ×
5.9
同時動作制御
5.9.1
教示ペンダントは,1台以上のロボットを独立して又は同時に動作させる
能力をもっている。
×
× ×
5.9.1
手動運転モードでは,ロボットシステムの全ての機能が一つのペンダン
トの制御下にある。
× ×
× ×
5.9.2
サーボ接続がされていない状態の一つ以上のロボットがあっても,それ
が可能となっている。
×
× ×
5.9.2
同時動作を選択されたロボットシステム内の全てのロボット(の運転で)
は,同じ運転モードで,かつ,動作前に同じ状態としている。
× ×
× ×
5.9.2
それぞれのロボットは,動作する前に選択可能で,選択されたロボット
の表示は選択の位置にある。
× ×
×
5.9.2
動作しているロボットの表示は,安全防護空間の内側から明瞭に見える。 × ×
×
5.9.2
選択されていない全てのロボットの予期しない起動は起こらない。この
機能は5.4の要求事項に適合している。
×
×
5.10
協働運転要求事項
5.10.1
協働運転のために設計されたロボットには,協働運転中を示す視覚表示
を備えている。
× ×
× ×
5.10.1
ロボットは,5.10.2〜5.10.5の一つ以上の要求事項に適合している。
×
× ×
5.10.2
人間が協働作業空間内にいるときには,ロボットは停止する。
×
× ×
5.10.2
停止機能は,5.4及び5.5.3に適合している。
×
× ×
5.10.2
停止カテゴリ2であれば,その停止は5.4に従った安全関連制御システム
で監視されている。
×
× ×
5.10.2
安全適合の監視停止機能の不具合(障害)は,停止カテゴリ0となる。
×
× ×
5.10.3
ハンドガイド装置は,エンドエフェクタの近くに取り付けられている。
×
×
5.10.3
ハンドガイド装置の非常停止は,5.5.2及び5.8.4に適合している。
× ×
× ×
5.10.3
ハンドガイド装置は5.8.3に適合するイネーブル装置を備えている。
× ×
× ×
5.10.3
ロボットは,リスクアセスメントで決定した制限速度であって,安全適
合の監視速度機能が有効な状態で運転される。
× × × × ×
5.10.3
監視速度機能は,5.4に適合している。
×
× ×
5.10.3
監視速度が決められた制限速度を超えた場合,保護停止になる。
×
×
5.10.4
ロボットは,決められた速度及び間隔を維持している。
× ×
×
5.10.4
速度及び間隔の監視機能は,5.4.2に適合している。
×
×
5.10.4
決定された速度の不良又は間隔の維持の故障が検出されたとき,保護停
止になる。
× ×
×
5.10.4
協働運転の用途は,リスクアセスメントによって決定されている。
× ×
5.10.4
使用上の情報には,実行速度値の指示と間隔が含まれている。
×
37
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表F.1−安全要求事項及び方策の検証手段(続き)
箇条
適用可能な安全要求事項及び/又は方策
検証及び/又は妥当性
確認の方法(6.2参照)
A B C D E F G
5.10.4
協働運転の設計のためにJIS B 8433-2を使用している。
×
×
×
5.10.5
ロボットの動的動力出力,静止力及び速度/エネルギーは,5.4に従って
制限されている。
× ×
×
5.10.5
パラメータ制限を超えた場合,保護停止となる。
× ×
×
5.10.5
協働ロボットの用途は,アプリケーションシステム設計で実施されたリ
スクアセスメントによって決定されている。
×
× ×
5.10.5
使用上の情報には,ロボット制御のためのパラメータ制限設定について
の詳細を含めている。
×
5.11
特異点保護
5.11
教示ペンダントで始動した協調動作中にロボットが特異点を通過する又
は修正する前にロボット制御がロボットを停止し,警告を出す。
× × ×
5.11
ロボット制御は,聴覚又は視覚による警告信号を発信し,最大速度が250
mm/sに制限されたロボットアームの各リンクの速度で特異点の通過をさ
せる。
× × ×
×
5.11
特異点がいかなる危険な動作も引き起こさずに制御できる場合には,追
加の保護は必要としていない。
×
× × ×
5.12
軸制限
5.12.1
1次軸の動作を制限するための調整可能な機械的ストッパの設置手段を
設けてある。
× ×
×
5.12.1
ロボットは5.12.2若しくは5.12.3又はその両方に適合している(製作上
の制限がある構造を除く)。
× ×
×
5.12.1
ロボットが軸制限に到達したら,ロボットは停止する。
×
×
5.12.2
調整可能な機械的制限装置又は非機械的制限装置が2次軸及び3次軸に
もある。
×
×
×
5.12.2
機械的ストッパは,定格負荷において最大速度状態で,かつ,最大伸張
時及び最小伸張時でロボット動作を停止できる。
× × ×
×
5.12.2
機械的ハードストッパの試験は,停止の補助がない状態で行われている。 ×
×
5.12.2
電気機械的制限装置の制御回路性能は,5.4の要求事項に適合している。
×
×
5.12.2
ロボット制御プログラム及びタスクプログラムが,電気機械的制限装置
の設定変更を要求していない。
×
×
5.12.2
使用上の情報には,完全に停止する前の移動の監視時間及び距離を含め
て電気機械的な制限装置に対しての最大速度での停止時間についての情
報を含めている。
×
5.12.3
安全適合ソフト制限を使用しているとき,制限空間は,停止距離を考慮
して予測される実際の停止位置で定義している。
× × × ×
5.12.3
安全適合ソフト制限(使用するのであれば)の能力が使用上の情報に記
載されている。
×
5.12.3
安全適合ソフト制限を使用する制御プログラムは,5.4に適合している。
×
×
5.12.3
安全適合ソフト制限を使用する制御プログラムは,権限を与えられた要
員によってだけ変更可能になっている。
×
×
5.12.3
安全適合ソフト制限に違反があれば,保護停止となる。
×
×
5.12.3
制限違反が回復するまでの動作は,低減速度になる。
× ×
5.12.3
安全制限の設定及び構成の情報は,構成の変更が容易に確認できるよう
に特別な監修者による可視化及び文書化したものになっている。
×
×
38
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表F.1−安全要求事項及び方策の検証手段(続き)
箇条
適用可能な安全要求事項及び/又は方策
検証及び/又は妥当性
確認の方法(6.2参照)
A B C D E F G
5.12.3
使用上の情報には,安全適合ソフト制限のために完全に停止する前の監
視時間及び移動距離を含めた最大速度での停止時間についての情報を含
めている。
×
5.12.3
動的制限空間アプリケーションでの安全適合の区域出力は,5.4に適合し
ている。
×
×
5.12.3
出力のハードウェアの構成は,使用上の情報に記載されている。
×
5.12.3
安全適合ソフト制限は,安全関連サブシステムの再初期化なしに変更で
きない。また,タスクプログラムの自動的な実行中に再編成できない。
×
×
5.12.3
安全適合ソフト制限の変更の権限は保護され確保されている。
×
×
5.12.3
安全適合ソフト制限(使用されているのならば)は,電源を入れたら,
常に有効になる。
×
×
5.12.4
動的制限装置及び関連している制御システムは,定格負荷及び定格速度
でロボット動作を停止する能力をもっている。また,リスクアセスメン
トによって別のカテゴリの要求が決定されていない限り,関連する安全
関連制御システムは5.4.2に適合している。
× × × ×
5.13
駆動用動力なしの移動
5.13
ロボットが非常時又は異常状態のとき,駆動用動力がなくても一人で軸
が動かせるように設計されている。
× ×
× ×
5.13
制御装置は意図しない操作はできないようにしなければならないが,容
易に接近できる。
×
5.13
この実行のための指示事項は,非常時又は異常状態に対応する要員を訓
練するための勧告とともに使用上の情報に含めている。
×
5.13
使用上の情報には,重力及びブレーキ装置の解放が更に危険源を発生す
るという警告を含む。
×
5.13
警告文は,作動中の制御装置の近くに貼付されている(実施できるので
あれば)。
×
5.14
つり上げ対策
5.14
ロボット及びその附属構成品をつり上げるための指示及び対策を提供し
ており,かつ,予測される負荷を扱うのに十分である。
× ×
×
×
5.15
電気コネクタ
5.15
危険源の原因となる電気コネクタは,分離時又は切断時に,意図しない
分離を防止するよう設計・製作されている。
× ×
5.15
コネクタには誤接続を防止する手段が設けられている。
×
39
B 8433-1:2015 (ISO 10218-1:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS Z 8501 人間工学−作業システム設計の原則
[2] ISO 7000,Graphical symbols for use on equipment−Registered symbols
[3] JIS B 0134:1998 産業用マニピュレーティングロボット−用語
[4] JIS B 8436 産業用マニピュレーティングロボット−メカニカルインタフェース−フランジ形
[5] JIS B 8441 産業用マニピュレーティングロボット−メカニカルインタフェース−シャフト形
[6] JIS B 8431 産業用マニピュレーティングロボット−特性の表し方
[7] JIS B 9712 機械類の安全性−両手操作制御装置−機能的側面及び設計原則
[8] JIS B 9715 機械類の安全性−人体部位の接近速度に基づく安全防護物の位置決め
[9] JIS B 9714 機械類の安全性−予期しない起動の防止
[10] JIS B 9710 機械類の安全性−ガードと共同するインタロック装置−設計及び選択のための原則
[11] JIS B 9716 機械類の安全性−ガード−固定式及び可動式ガードの設計及び製作のための一般要求
事項
[12] ISO/TR 23849,Guidance on the application of ISO 13849-1 and IEC 62061 in the design of safety-related
control systems for machinery
[13] JIS C 61000-6-2 電磁両立性−第6-2部:共通規格−工業環境におけるイミュニティ
[14] IEC 61000-6-4,Electromagnetic compatibility (EMC)−Part 6-4: Generic standards−Emission standard for
industrial environments
[15] IEC 61496-2,Safety of machinery−Electro-sensitive protective equipment−Part 2: Particular requirements
for equipment using active opto-electronic protective devices (AOPDs)
[16] IEC 61800-5-2,Adjustable speed electrical power drive systems−Part 5-2: Safety requirements−Functional