B 8431 : 1999 (ISO 9946 : 1999)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,通商産業大臣が改正した日
本工業規格である。これによってJIS B 8431 : 1993は改正され,この規格に置き換えられる。
JIS B 8431には,次に示す附属書がある。
附属書A(参考) ロボットの特性表示の推奨様式
附属書B(参考) 性能項目の記号の表記−JIS B 8432から抜粋−
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8431 : 1999
(ISO 9946 : 1999)
産業用マニピュレーティング
ロボット−特性の表し方
Manipulating industrial robots−
Presentation of characteristics
序文 この規格は,1999年に改訂第2版として発行されたIS0 9946, Manipulating industrial robots−
Presentation of characteristicsを翻訳し,技術的内容及び規格票の様式を変更することなく作成した日本工業
規格である。
この規格の原国際規格は,産業用マニピュレーティングロボット(以下,ロボットという。)に関するISO
規格の一つである。他の規格は,安全性,性能項目及び試験方法,座標系,用語,メカニカルインタフェ
ースなどのテーマを扱っている。これらのISO規格は,相互に関連をもつとともに,他の分野のISO規格
とも関連している。
製造の環境下で使われるロボットの数は着実に増えてきており,そのためにロボットの特性を明確にし,
表示するための仕様書の様式を標準化する必要性が高まっている。
この規格の目的は,使用者及び製造業者が種々の形式のロボットの性能を把握し,比較するのを助けるこ
とにある。
附属書A(参考)に,ロボットの仕様を表示するための推奨する様式を示す。
附属書B(参考)は,性能項目の記号について説明している。
なお,この規格で点線の下線を施してある箇所は,原国際規格にはない事項である。
1. 適用範囲 この規格は,製造業者によるロボットの特性の表し方について規定する。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部分を構成
する。これらの引用規格のうちで,発効年を付記してあるものは,記載の年の版だけが有効であり,その
後の改正版・追補は適用されない。
JIS B 0134 : 1998 産業用マニピュレーティングロボット−用語
備考 ISO 8373 : 1994 Manipulating industrial robots−Vocabularyからの引用事項は,この規格の該
当事項と同等である。
JIS B 8432 : 1998 産業用マニピュレーティングロボット−性能項目及び試験方法
備考 ISO 9283 : 1998 Manipulating industrial robots−Performance criteria and related test methodsが,
この規格と一致している。
JIS B 8433 : 1993 産業用マニピュレーティングロボット−安全性
備考 ISO 10218 : 1992 Manipulating industrial robots−Safetyが,この規格と一致している。
2
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8436 : 1999 産業用マニピュレーティングロボット−メカニカルインタフェース−フランジ形
(A形)
備考 ISO 9409-1 : 1996 Manipulating industrial robots−Mechanical interfaces−Part 1:Plates (form A)
及びTechnical corrigendumが,この規格と一致している。
JIS B 8437 : 1999 産業用マニピュレーティングロボット−座標系及び運動の記号
備考 ISO 9787 : 1998 Manipulating industrial robots−Coordinate systems and motionsが,この規格と
一致している。
3. 定義 この規格では,JIS B 0134に規定する定義及び,次に示す定義を適用する。
3.1
作業領域の中心点 (Cw) (centre of the working space) 腕の各能動ジョイントの変位を作動範囲の中
間に置いたときの手首基準点の位置。
4. 単位 他に規定されていない限り,単位は次による。
− 長さ(ミリメートル)
mm
− 角度(ラジアン又は度)
rad又は°
− 時間(秒)
s
− 質量(キログラム)
kg
− 力(ニュートン)
N
− 速度(メートル/秒,ラジアン/秒,又は度/秒) m/s,rad/s又は°/s
5. 特性
5.1
一般 製造業者は,この項で規定された特性及び要求事項に関連した情報を,ロボット文書の一部
として提供する。
5.2
用途 ロボットの主な用途を明記する。
代表的な用途の例は,次のとおりである。
− ハンドリング
− 組立て
− スポット溶接
− アーク溶接
− 機械加工
− スプレー塗装
− 塗布
− 検査
5.3
動力源 ロボットシステム[機械構造部,制御ユニット,補助装置(例えば,グリッパ)などを含
む。]の正常運転のために必要なすべての外部動力源をその種類(例えば,電力,油圧,空気圧,又はそれ
らの併用)を含めて明記する。また各々のロボット部分が必要とする最大消費動力も記載する。これらの
仕様には,消費動力の許容される範囲及びその変動量が含まれる。
ロボットの軸及び補助的作動を制御するために使われる動力の種類(例えば,電力,油圧,空気圧)を
明記する。2種類以上の動力がある場合には,個々の作動ごとに使われる動力の内訳を記載する。
3
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4
機械構造 機械構造の形式及び機械的な軸の数を明記する。また,軸の運動を記載した構造の概略
図を添付する。この図は,作業領域(5.5参照)のところで必要とされる図の一部分であってもよい。
機械構造の例:
直角座標ロボット
円筒座標ロボット
極座標ロボット
関節ロボット
移動可能なロボットの場合には,誘導の方式を示す。
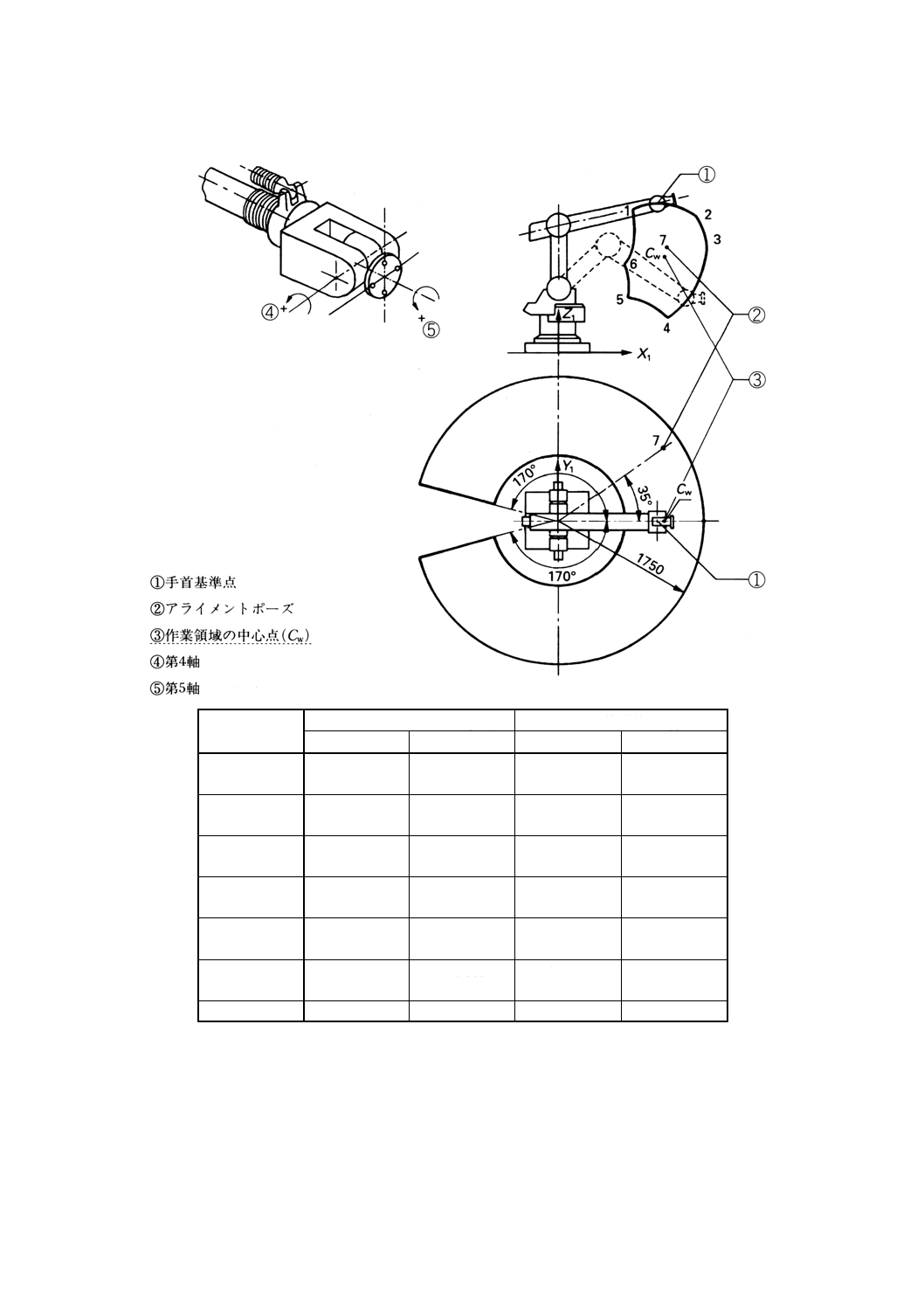
5.5
作業領域 手首基準点の作業領域の境界を,アライメントポーズ及び作業領域の中心点 (Cw) と合わ
せて,少なくとも二方向から見た図(手首基準点の最大到達点軌跡のベース座標系X1Y1平面への投影及び
X1Z1平面への投影,JIS B 8437参照)で示す。
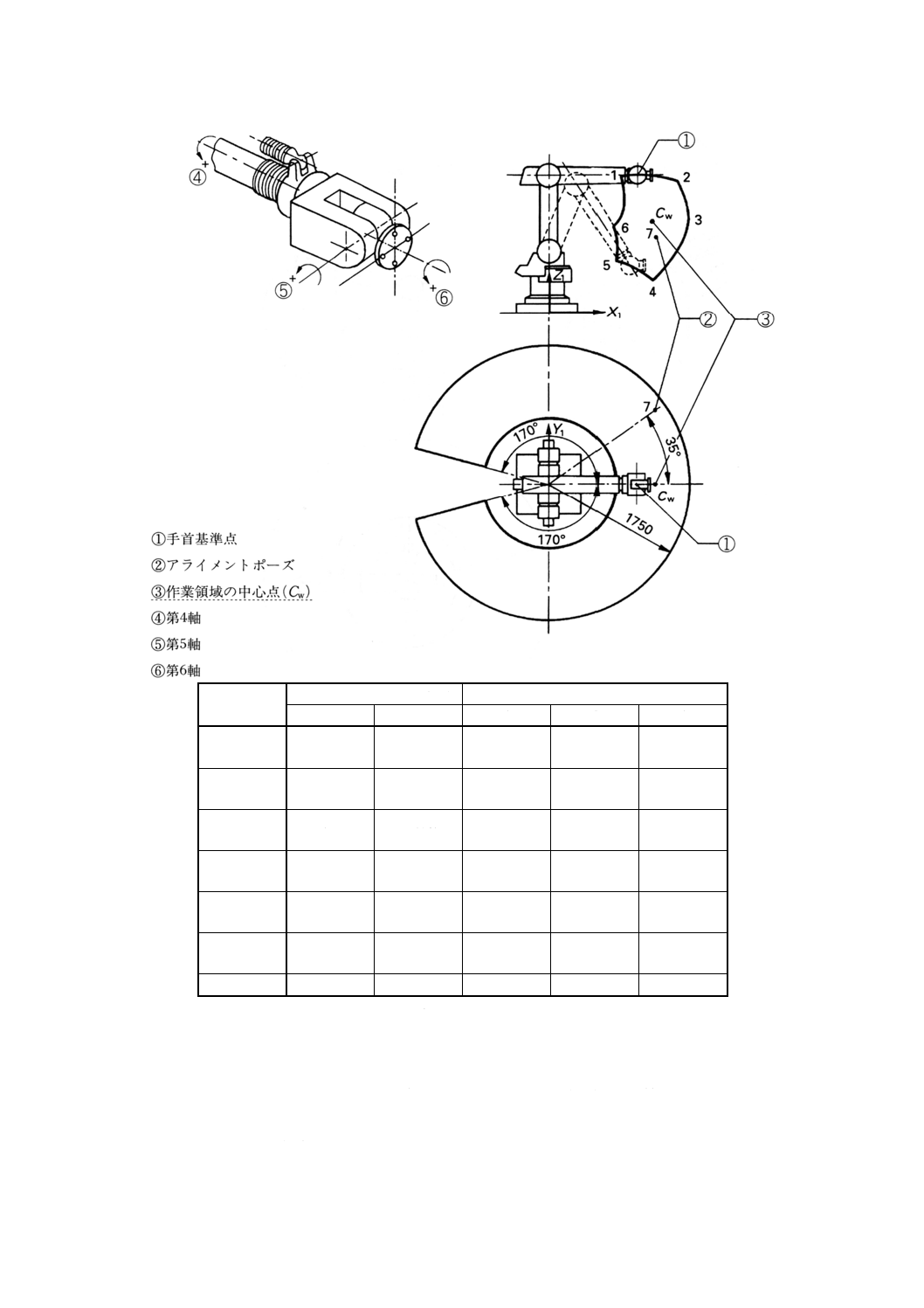
この図には,手首基準点の作業領域内の任意の点における手首の作動範囲を入れる(5軸ロボットの例
として図1を,6軸ロボットの例として図2を参照)。
図中,手首基準点の作業領域及び手首の作動範囲の詳細を,図1及び図2のような表の形で示すことが
推奨される。
4
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
領域内の点
手首基準点の作業領域 (mm)
手首の作動範囲 (°)
X1
Z1
4軸
5軸
1
925
1 635
+ 75
− 90
+170
−150
2
1 610
1 550
+ 75
− 90
±180
3
1 750
1 140
+ 75
−105
±180
4
1 310
345
+ 45
−120
±180
5
870
600
+ 45
−120
+150
−170
6
840
1 000
+ 75
−120
+140
−150
7
1 350
750
−
−
図1 5軸ロボットの作業領域の表示例
5
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
領域内の点
手首基準点の作業領域 (mm)
手首の作動範囲 (°)
X1
Z1
4軸
5軸
6軸
1
925
1 635
±210
+ 75
− 90
+170
−150
2
1 610
1 550
±210
+ 75
− 90
±180
3
1 750
1140
±210
+ 75
−105
±180
4
1 310
345
±210
+ 45
−120
±180
5
870
600
±210
+ 45
−120
+150
−170
6
840
1 000
±210
+ 75
−120
+140
−150
7
1 350
750
−
−
−
図2 6軸ロボットの作業領域の表示例
5.6
座標系 JIS B 8437に従ってベース座標系及びメカニカルインタフェース座標系を明記する。JIS B
8437との差異があれば,そのことを明示する。
5.7
外形寸法及び質量 機械構造部及び制御ユニットの外形寸法 (mm) 及び質量 (kg) を明記する。
5.8
ベース取付面 安全な運転を保証し,定格性能を得るために必要なベース取付面を指示し(例えば,
図示),ロボットベースの推奨する取付方法を指示する。
6
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
許容される取付位置及び姿勢を,各位置及び姿勢に対する安全及び性能の限界とともに明記することが
望ましい。
5.9
メカニカルインタフェース エンドエフェクタをロボットに取り付けるために必要なメカニカルイ
ンタフェースの図,仕様及び推奨事項を含む説明を用意する。国際規格に準拠したメカニカルインタフェ
ースの場合には,国際規格番号などを記載する(JIS B 8436参照)。
5.10 制御 次の項目を明記する。
− 制御ユニットの形式及び関連するすべての情報,例えば,容量,特殊装備(制御系統図など)。
− タスクプログラムのメモリ容量
基本容量
最大容量
− 運動制御方式
PTP
CP
− 運動制御の形式
サーボ
ノンサーボ
− 経路補間方式
直線
円
放物線
その他
− 制御軸数
基本的な軸数
付加の軸数(補間あり)
付加の軸数(補間なし)
− ペンダントの有無
− 入出力インタフェース
信号の種類及びレベル
連続又は多重シグナル
− データインタフェース
データフォーマット/制御フォーマット
− ネットワークインタフェース
物理的特性
通信プロトコル
5.11 タスクプログラミング及びプログラム格納 タスクプログラミング方式の種類及びプログラム格納
方法を明記する。
5.11.1 プログラミング方式の例
− 手動データ入力
− 教示
エンドエフェクタの手動誘導
7
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
機械式シミュレータによる誘導
ペンダントによる手動プログラミング
− オフライン
− 作業指示
5.11.2 プログラム格納方法の例
− データリンク
− ディスク
− テープ
− メモリカード
5.12 環境 定格性能を発揮できるような環境条件の限界を指示するか,又はロボットが環境に対してど
の程度保護されているかを明記する。
ロボットを損傷せずに,保管,輸送及び運転できる環境の限界が上記と異なる場合には,それも明記す
る。
環境条件には,例えば,次のものが含まれるが,必ずしもこれらに限定されない。
− 温度(作動及び格納/輸送) (℃)
− 相対湿度 (%)
− 高度 (m)
− 電磁妨害
− 粉じん・大気汚染
− 振動
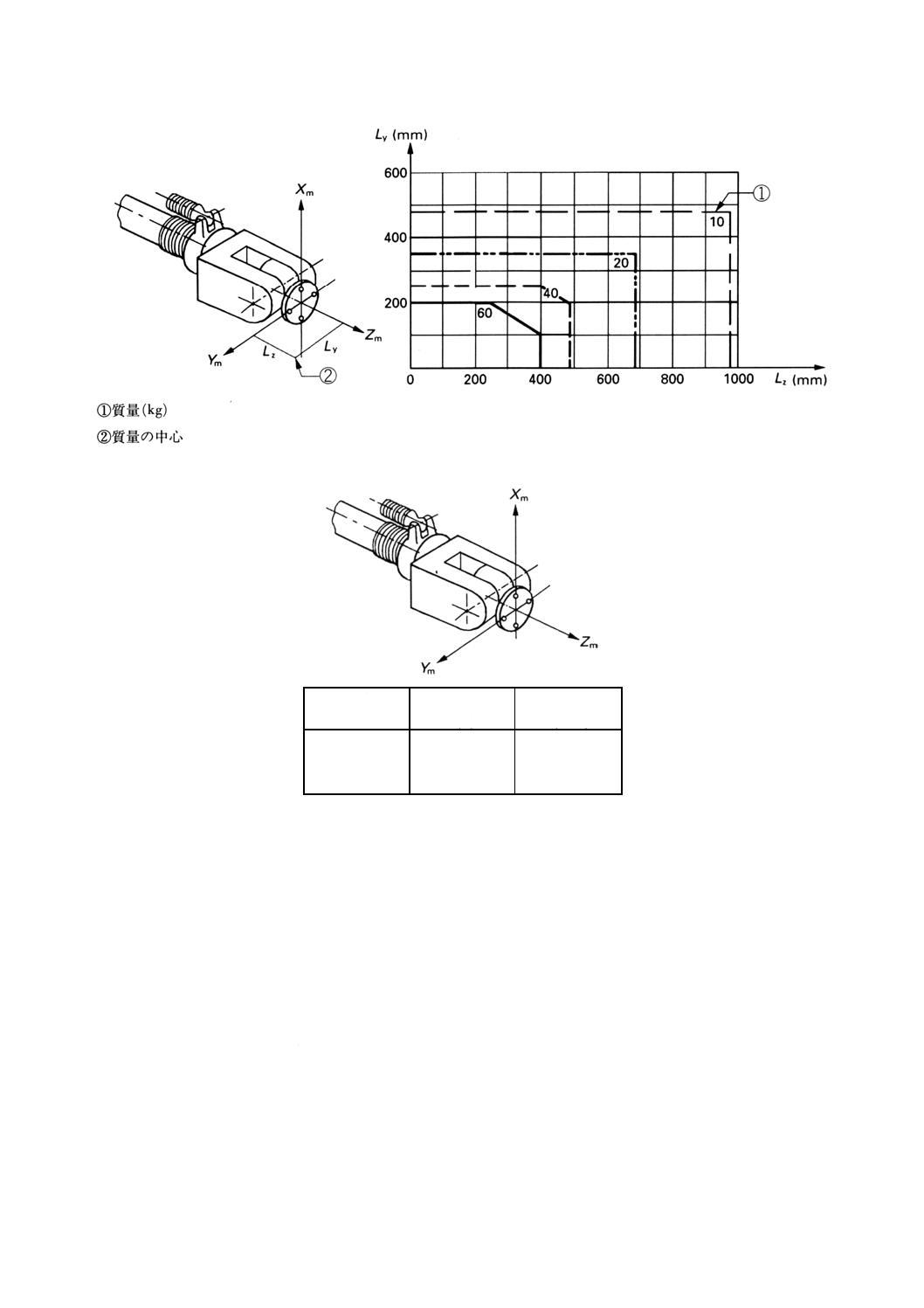
5.13 負荷 負荷特性を,次の量によって記載する。
− 質量 (kg)
− スラスト (N)
− トルク (N・m)
これらの値は,メカニカルインタフェース座標系で表示することが望ましい。
ロボットの定格負荷を明記する。質量の重心位置と最大質量との関係を図3のようなグラフで表すこと
が推奨される。
要求があれば,負荷の限界及びそれが他の規定された特性及び条件(例えば,速度,加速度)に及ぼす
影響を記載する。ロボットが付加質量(例えば,腕の上の質量)を運ぶことができる場合には,それを明
記する。
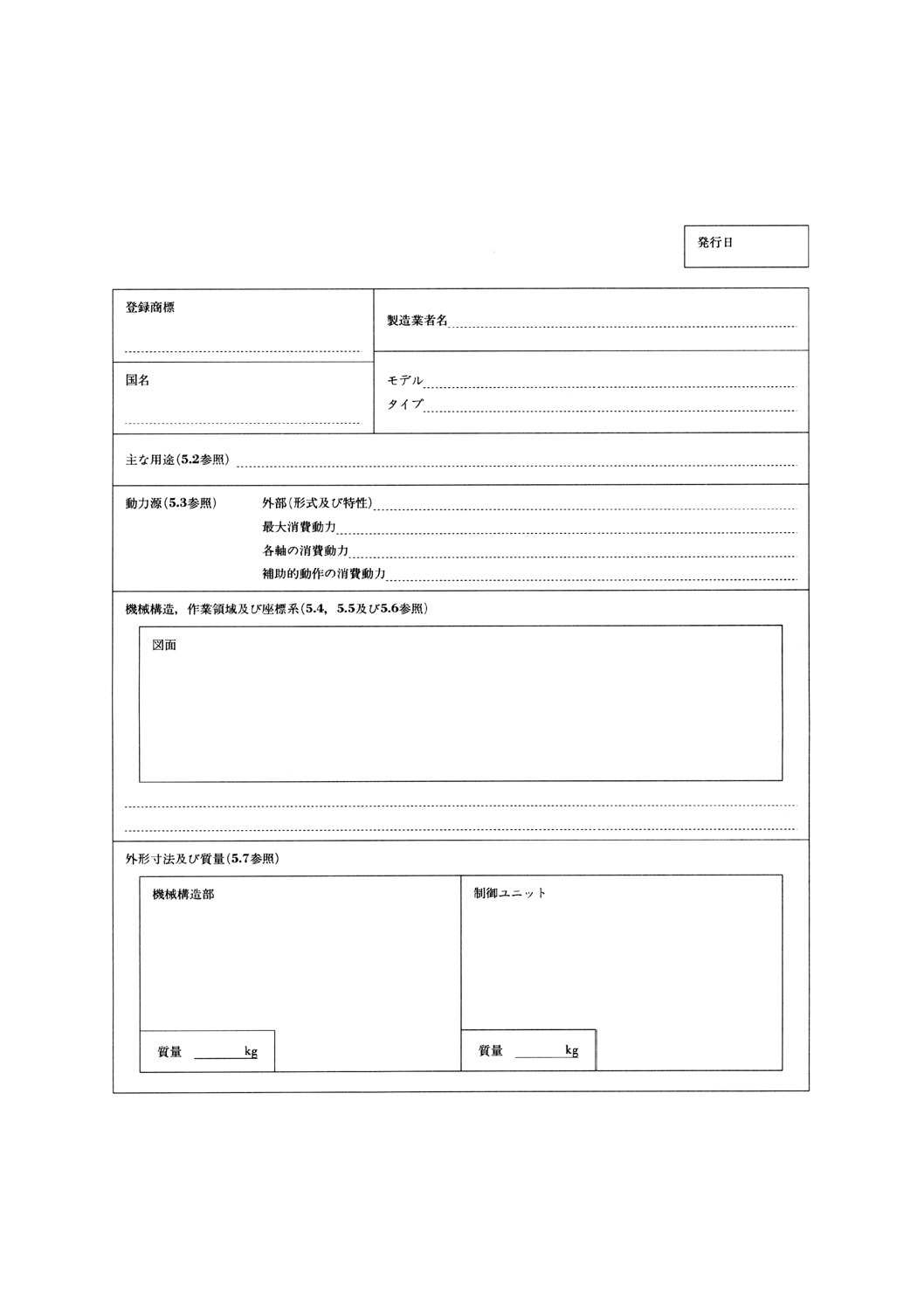
要求があれば,最大スラスト負荷及び最大トルク負荷を記載する(図4参照)。これらがロボットの姿容
によって変わる場合には,そのことを明記する。
8
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 質量負荷線図
座標軸
スラスト負荷
(N)
トルク負荷
(N・m)
Xm
Ym
Zm
図4 スラスト負荷及びトルク負荷
5.14 速度 他に規定がなければ,次の条件下における速度を明記する。
− 速度又は角速度が一定。
− 定格負荷が作用。
少なくとも次の事柄を記載する。
− 各軸ごとの最大単軸速度。
− 定格経路速度。経路形状及び関連の性能項目を併記。
5.15 最小変位 サーボ制御される各軸について,動かし得る最小の変位をミリメートル,ラジアン又は
度のいずれかの適切な単位で明記する。
5.16 性能項目 保証する性能項目に関して,JIS B 8432による情報を提示する。JIS B 8432に規定されて
いる性能項目は,次のとおりである。
ポーズ精度及びポーズ繰返し精度
多方向ポーズ戻り精度
距離精度及び距離繰返し精度
9
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
位置安定化時間
位置行過ぎ量
ポーズ特性のドリフト
交換精度
経路精度及び距離繰返し精度
姿勢変動経路精度
コーナリング特性
経路速度特性
最短移動時間
静的コンプライアンス
ウイービング特性
5.17 安全性 ロボットがJIS B 8433又は他の関連の安全規格に従っていることを明記する。
10
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(参考) ロボットの特性表示の推奨様式
11
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
14
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(参考) 性能項目の記号の表記
−JIS B 8432から抜粋−
附属書A(参考)の中で性能項目のために用いた記号は,JIS B 8432に準拠しており,それらの意味は,
次のとおりである。
AP
ポーズ精度
RP
ポーズ繰返し精度
vAP
多方向ポーズ戻り精度
AD
距離精度
RD
距離繰返し精度
t
位置安定化時間
OV
位置行過ぎ量
dAD ポーズ精度のドリフト
dRD ポーズ繰返し精度のドリフト
E
交換精度
AT
経路精度
RT
経路繰返し精度
CR
コーナ丸み誤差
CO
コーナ行過ぎ量
AV
経路速度精度
RV
経路速度繰返し精度
FV
経路速度変動
WS
ウイービング振幅誤差
WF
ウイービング周波数誤差
a,b,cは,それぞれX,Y及びZ軸回りの回転を表す。
pは,位置を表す。
lは,距離を表す。
16
B 8431 : 1999 (ISO 9946 : 1999)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
特性の表し方JIS改正原案作成専門委員会
氏名
所属
(委員長)
下 嶋 浩
東京工業大学
杉 本 浩 一
香川大学
松 元 明 弘
東洋大学
藤 田 昌 宏
通商産業省機械情報産業局
八 田 勲
工業技術院標準部
橋 本 進
財団法人日本規格協会
髙 島 覺
財団法人機械振興協会
稲 垣 荘 司
技術士事務所“ロボティ”
黒 澤 豊 樹
黒澤R&D技術事務所
寺 内 常 雄
三菱電機株式会社
竹 内 文 紀
株式会社不二越
岡 田 毅
ファナック株式会社
西 村 利 彦
株式会社神戸製鋼所
田 中 雅 人
株式会社安川電機