B 8397-3 : 2001 (ISO 4392-3 : 1993)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本フルードパワー工業会 (JFPA) /
財団法人日本規格協会 (JSA) から工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本
工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。今回の制定は,日本工業規
格を国際規格に整合させるため,ISO 4392-3 Hydraulic fluid power−Determination of characteristics of motors
−Part 3 : At constant flow and at constant torqueを基礎として用いた。
JIS B 8397-3には,次に示す附属書がある。
附属書A(規定) 測定精度の等級
附属書B(規定) 実用単位
JIS B 8397の規格群には,次に示す部編成からなる。
第1部:一定低速及び一定圧力条件
第2部:起動特性
第3部:一定流量及び一定トルク条件
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8397-3 : 2001
(ISO 4392-3 : 1993)
油圧−モータ特性の決定方法−
第3部:一定流量及び一定トルク条件
Hydraulic fluid power−Determination of characteristics of motors−
Part 3 : At constant flow and at constant torque
序文 この規格は,1993年に第1版として発行されたISO 4392-3, Hydraulic fluid power−Determination of
characteristics of motors−Part 3 : At constant flow and at constant torqueを翻訳し,技術的内容及び規格票の様
式を変更することなく作成した日本工業規格である。
1. 適用範囲 この規格は,定容量形又は可変容量形の回転形油圧モータを,一定流量及び一定トルク条
件のもとで低速特性を決定する方法を規定する。
油圧モータの安定した連続的なトルク出力に重大な影響をもつ振動が発生したり,油圧モータの接続さ
れているシステムに影響を及ぼすような低速での特性を決定する方法にも適用できる。
測定精度は,A,B,Cの3等級に分けられ,附属書Aに示す。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 4392-3 Hydraulic fluid power−Determination of characteristics of motors−Part 3 : At constant
flow and at constant torque (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0125 油圧及び空気圧用図記号
備考 ISO 1219-1 : 1991 Fluid power systems and components−Graphic symbols and circuit diagrams−
Part 1 : Graphic symbolsからの引用事項は,この規格の該当事項と同等である。
JIS B 0142 油圧及び空気圧用語
備考 ISO 5598 : 1985 Fluid power systems and components−Vocabularyからの引用事項は,この規格
の該当事項と同等である。
JIS B 8382 油圧−容積式ポンプ及びモータ−実容量の決定方法
備考 ISO 8426 : 1988 Hydraulic fluid power−Positive displacement pumps and motors−Determination
of derived capacityが,この規格と一致している。
JIS B 8384 油圧−容積式ポンプ・モータ及び一体形トランスミッション−定常状態における性能測
定
2
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 ISO 4409 : 1986 Hydraulic fluid power−Positive displacement pumps, motors and integral
transmissions−Determination of steady-state performanceが,この規格と一致している。
JIS B 8385 油圧−容積式ポンプ・モータ及び一体形トランスミッション−パラメータの定義及び文
字記号
備考 ISO 4391 : 1983 Hydraulic fluid power-pumps, and integral transmissions−Parameter definitions
and letter symbolsが,この規格と一致している。
JIS K 2001 工業用潤滑液−ISO粘度分類
備考 ISO 3448 : 1992 Industrial liquid lubricants−ISO viscosity classification. が,この規格と一致して
いる。
3. 定義 この規格で用いる主な用語の定義は,JIS B 8385及びJIS B 0142によるほか,次による。
3.1
完全モータ周期 (complete motor cycle) 漏れ量及び/又はトルクの測定値が繰り返すようになる
までのモータ出力軸の回転角の合計値。大部分のモータでは360度であるが,特殊な場合,例えば,内接
歯車モータのような場合には,出力軸が数回転することもある。
4. 記号
4.1
この規格で用いる物理量の文字記号と添字は,JIS B 8385による。単位は表1による。
4.2
付図1で使う図記号は,JIS B 0125による。
表1 記号及び単位
量
記号
次元
SI単位
回転速度
n
T-1
r/min
圧力,差力
p, △p
ML-1T-2
Pa
流量
q
L3T-1
m3/min
トルク
T
ML2T-2
N・m
時間
t
T
s
吐出し容積
V
L3
m3
温度
θ
℃
備考1. M=質量,L=長さ,T=時間,=温度
2. 結果の表示に使用される実用単位は,附属書Bによる。
5. 試験装置
5.1
油圧試験回路
5.1.1
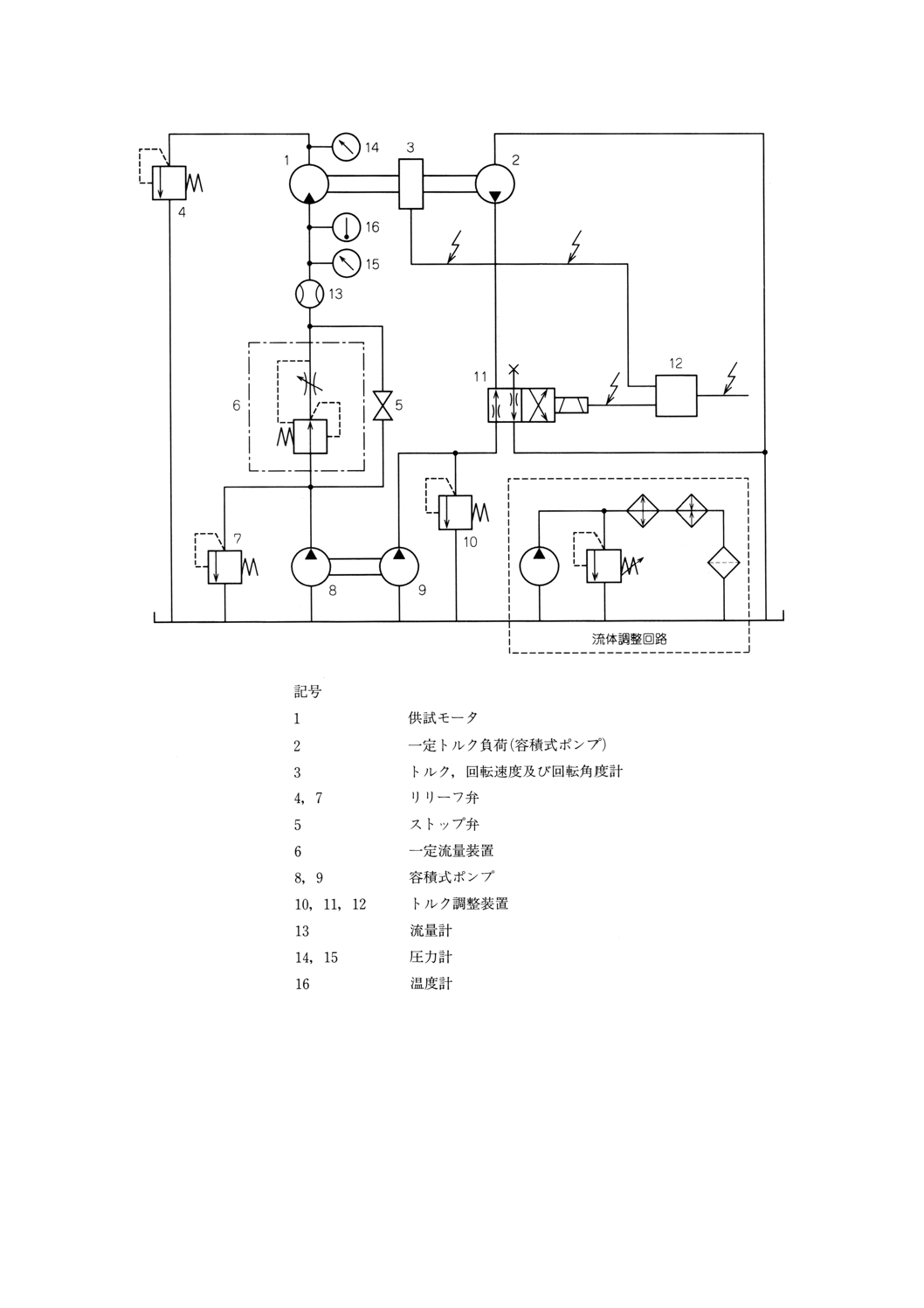
図1に示すような試験回路を使用しなければならない。
警告 図1は,代表的な試験回路を示すが,構成機器に故障が生じた場合の回路破損を防止するため
に必要なすべての安全装置は含んでいない。試験を行う場合には,人員と機器装置を保護する
ために,十分な配慮をすることが重要である。
3
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 代表的試験回路
4
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.2
ストップ弁5とリリーフ弁7を備えた流体調整回路(図1)を組込むものとする。試験操作温度に
速やかに到達するために,ストップ弁5を開いて高速で作動させてもよい。(8.2参照)。試験中はストップ
弁5を締めておく。
5.1.3
試験モータ,及び他の回路機器を保護するために必要なろ過並びに7.に指定する流体温度を維持す
るために流体調整回路を組込まなければならない。
5.1.4
一定のモータ供給流量は,粘度及び圧力補償付流量調整弁で得られる。
5.1.5
一定トルク負荷は,容積式ポンプ及び電子トルク信号フィードバック付の流量調整弁を使って得る
ことができる(又は磁力ブレーキや他の適当なシステムでもよい)。
5.2
試験設備
5.2.1
試験装置は5.1に指定する試験回路,及び図1に示す部品使用するものとする。
5.2.2
各試験で連続可変容積式モータが所定位置で不注意に容積が変化するのを防止するために固定装
置を設けるものとする。
5.3
操作方法
5.3.1
測定器は,次の供試モータのデータを測定するために選択し,取り付けられねばならない。
a) 入口流量
b) 入口温度(測定位置に関する指針は,JIS B 8384を参照)
c) 入口と出口圧力(測定位置に関する指針は,JIS B 8384を参照)
d) 出力トルク
e) モータ軸の速度及び位置角度
5.3.2
測定器の系統誤差は,選択した測定精度の等級と一致しなければならない(附属書A参照)。
5.3.3
予測される最大の基本データ周波数の10倍以上の分解能をもつ適切な記録計を選定し,取り付け
なければならない。
5.3.4
試験測定値は,軸角度の増加量が等しくなる位置で取り,そして測定数は,次の6.1b)で得られる
1回転当たりの押しのけ脈動の数の少なくとも10倍以上であることが望ましい。
6. 予備試験データ
6.1
モータ製造業者のデータ及びその他知られている事実を使って,次のようなデータを試験前に準備
する。
a) 定格圧力におけるモータの定格(幾何学的又は理論的)トルク(Tg,n又はTi,n)は,幾何学的又は理論
的容積に基づき,次式を用いて計算する。
π
2
.
g
n
n
g
V
p
T
×
∆
=
又は
π
2
.
i
n
n
i
V
p
T
×
∆
=
ここに, △Pn: 定格差圧
Vg: 押しのけ容積
Vi: 実容量(JIS B 8385参照)
b) モータ出力軸一回転当たりの容積脈動数を決定する。このとき,伝動装置が周波数に影響を与えるこ
とを考慮する。
5
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 次の公式を使い,基本データ周波数,feをヘルツで計算する。
容積脈動数
×
=60e
e
n
f
ここでneは試験速度で,1分間当たりの回転速度 (min-1) である。容積脈動数は6.1b)による。
6.2
製造業者が推奨するモータの定格回転数,nnを使って,次の公式によって定格速度での仮想(幾何
学的又は理論的)流量,qvg,n又はqvi,nを計算する。
qvg,n=nn×Vg
又は
qvi,n=nn×Vi
6.3
JIS K 2001 (ISO 3448) に従い流体の粘度を決定する。
6.4
6.1a)で決定した,定格トルクTg,n, Ti,nを使用して試験中に発生する最大出力トルクを見積る。
6.5
モータ出力軸と連結している回転部品の慣性モーメント及び流量調整弁とモータ入口ポートの間の
容積は,最小にしておくのがよい。
7. 試験条件 次の試験条件を適用しなければならない。
a) モータ入口での流体温度,θ:50℃又は80℃
b) 選択した試験温度に適合し,油圧モータの製造業者が承認する種類及び粘度の作動油を使用する。
c) モータの定格トルクの50%及び100%で試験を実施する。
d) 7c)で与えられる二つのトルク条件に対し,最低入口流量を定める。それは,モータの回転が停止する
最小の流量である。
e) 可変容量モータの場合は,製造業者が推奨する最小,最大容量を選択し,試験はこれらの最小,最大
容量で行う。
f)
可逆モータの場合は,試験は両方向回転で行う。
8. 試験手順
8.1
5.3.1及び図1に記載したように,モータ試験データを記録するために測定器と記録装置を接続する。
備考1. 試験前には,必要に応じモータケースを作動油で満たす。
8.2
システムの温度を安定させるため,測定を始める前に試験回路を稼動する。
8.3
できるだけトルクは,一定に保持し,ピークからピークへのトルク変化量は少なくとも平均値の4%
以内を目安とする。5.3.3で規定された要求事項を考慮する。
8.4
流量は,できるだけ一定に保ち,それを記録する。瞬間的流量変化は,5.3.3規定の仕様と一致し,
平均値の4%以内に保つものとする。
8.5
記録している間測定された入口温度は,±2℃以内一定に維持する。
8.6
要求される試験条件に対し,5.3.1に記載の変化量を同時に記録する。
8.7
完全モータ周期を得るために必要な回転量を得るまで記録を継続する。
8.8
データをディジタルで得る技術を使用するときは,予備テストで決定した速度及び圧力の最大及び
最小値に対し95%信頼度を備えたサンプリング間隔を選択する。
9. 結果の表現
備考2. 記号及び添字の説明については4.参照。
6
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.1
完全モータ周期上において均等に分配した位置における回転速度nφを決定する。
次に完全モータ周期上での平均回転速度,nmaを計算する。
z
n
n
n
n
n
z
ma
ϕ
ϕ
ϕ
ϕ
+
+
+
+
=
3
2
1
ここで
添字φ1,φ2,φ3…φZは,それぞれのシャフトの位置である。
Zは完全モータ周期当たりの読み取り数で,5.3.4に準じる。
9.2
次の公式を使い,各々選択した軸位置での回転速度の偏差,△nφを計算する。
△nφ=|nma−nφ|
9.3
一つの完全モータ周期上での平均速度偏差,△nmaを計算する。
z
n
n
n
n
n
Z
ma
ϕ
ϕ
ϕ
ϕ
∆
+
+
∆
+
∆
+
∆
=
∆
3
2
1
9.4
次の公式を使用して回転速度偏差指標,Iγnを決定する。
ma
ma
n
n
n
Ir
∆
=
又は
z
z
ma
ma
ma
n
n
n
n
n
n
n
n
n
n
Ir
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
+
+
+
−
+
+
−
+
−
=
2
1
2
1
9.5
次の公式を使い少なくとも一つの完全モータ周期に対する平均容積効率,ηv,maを計算する。
qve
n
V
ma
ma
i
ma
v
=
,
,
η
ここに
Vi,ma: 平均推定吐出し容積(JIS B 8382, B.2参照)
nma: 平均回転速度
qve: 体積流量
9.6
次の公式を使い,ピークからピークまでの相対速度偏差δnを計算する。
ma
n
n
n
n
min
max−
=
δ
9.7
選択した一つの軸の回転位置での実際の差圧,△pe,φを決定する。
△pe,φ=p1,φ−p2,φ
ここに
p1: 入口圧力
p2: 出口圧力
9.8
次の公式を使って,完全モータ周期上での実際の平均差圧,△pe,maを計算する。
z
p
p
p
p
z
e
e
e
ma
e
ϕ
ϕ
ϕ
,
2
,
1
,
,
∆
+
+
∆
+
∆
=
∆
9.9
次の公式を使って,各々選択した軸位置に対し,圧力偏差,△ (△pe, ) を計算する
△ (△pe,φ) =|△pe, ma−△pe,φ|
9.10 次の公式を使って,完全モータ周期上での平均差圧偏差△ (△pe,ma) を計算する
(
)
(
)(
)
(
)
z
p
p
p
p
z
e
e
e
ma
e
ϕ
ϕ
ϕ
,
2
,
1
,
,
∆
∆
+
+
∆
∆
+
∆
=
∆
∆
7
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.11 次の公式を使って,差圧偏差指標,Iγ△pを決定する。
(
)
ma
e
ma
e
p
p
p
Ir
,
,
∆
∆
=
∆
又は
z
p
p
p
p
p
p
Ir
z
e
ma
e
e
ma
e
e
ma
e
p
ϕ
ϕ
ϕ
,
,
2
,
,
1
,
,
∆
−
∆
+
+
∆
−
∆
+
∆
−
∆
=
∆
9.12 次の公式を使って,平均トルク効率,ηhm,maを計算する。
π
η
2
,
,
,
ma
i
ma
e
e
ma
nm
V
p
T
×
∆
=
9.13 次の公式を使って,ピークからピークまでの相対差圧の変動,δ△pを計算する。
ma
e
e
e
p
p
p
p
,
min
,
max
,
∆
∆
−
∆
=
∆
δ
10. 試験報告
10.1 概要 試験トルク及び流量条件を使って得られた関連する試験データ及び10.3に記載されている事
項は,試験報告に記録しなければならない。
10.2 試験データの表現 試験測定値及び測定値を元に計算された結果は,表の形式及び適宜グラフにし
て表さなければならない。
10.3 試験データ
10.3.1 概要 次のデータは,試験報告書に含まなければならない。
a) モータの種類
b) 使用した測定精度の等級(附属書A参照)
c) 油圧試験回路及び機器の種類
d) 試験流体の種類
e) 流体粘度(6.3参照)
10.3.2 試験結果 次の事項とともに,実施した試験条件でのトルクと流量の目標値を記録しなければなら
ない。
a) 流体の温度,θ[7a)参照]
b) 一定流量,一定トルク,一定温度での回転角度の関数としての回転速度
c) 一定流量,一定トルク,一定温度での回転角度の関数としての差圧
d) 押しのけ容積,Vg,又は推定吐出し容積,Vi
e) 一つの完全モータ周期における平均回転速度,nma(9.1参照)
f)
一つの完全モータ周期における平均速度偏差,△nma(9.3参照)
g) 速度偏差指標,Iγn(9.4参照)
h) 平均容積効率,ηv,ma(9.5参照)
i)
ピークからピークまでの相対速度,δn(9.6参照)
j)
一つの完全モータ周期における実際の差圧平均値,△Pe,ma(9.8参照)
k) 一つの完全モータ周期における実際の圧力偏差の平均値,△ (△Pe,ma) (9.10参照)
l)
差圧偏差指標,Iγ△p(9.11参照)
8
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
m) 平均トルク効率,ηhm,ma(9.12参照)
n) ピークからピークまでの相対差圧,δ△P(9.13参照)
9
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定) 測定精度の等級
備考3. この附属書の内容は,将来再審議され改正されることがある。
A.1 測定精度の等級 要求される精度に応じ,試験は関係者の同意のもとにA,B,Cの測定精度等級の
うちの一つで実施しなければならない。
備考4. 等級A及びBは,性能がより正確に定義する必要のある特別の場合を意図している。
備考5. 等級A及びBは,より正確な器具及び方法を必要とし,試験のコストが上昇することに注意
を向ける。
A.2 系統誤差 試験に用いられる装置又は手法は,較正,又は国際標準器との比較において,その系統誤
差が表A.1に示す限度を超えないことが証明されているものでなければならない。
備考6. 表A.1で示す限度は,速度,出力トルク,総入口流量と入口/出口圧力に対する百分比で,
測定された量の値に基づいており,測定器の最大指示値に基づくものではない。温度の限度
は摂氏温度であり,%ではない。
表A.1 構成中に決定される測定器の許容系統誤差
測定項目
各測定精度等級と許容系統誤差
A
B
C
速度,ne, %
±0.5
±1
±2
出力トルク,T2,e, %
±1.5
±3
±5
総流入流量,qv1,t,e, %
±2
±4
±6
入口/出口圧力,p1,eとp2,e, %
±0.8
±1.5
±3
入口温度,θ1,e, ℃
±0.5
±1
±2
10
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(規定) 実用単位
表又は図で表した試験結果は,表B.1で示す実用単位を使って表示してもよい。
表B.1 実用単位
用語
記号
SI単位
実用単位
回転速度
n
r/min
r/min
圧力,差圧
p, △p
Pa
bar(1)
流量
q
m3/s
dm3/s(2)
トルク
T
N・m
N・m
時間
t
s
s, ms
吐出し容積
V
m3
dm3
温度
θ
℃
℃
注(1) 1 bar=105Pa=10N/m2=0.1Mpa
(2) 1 dm3=1 L
11
B 8397-3 : 2001 (ISO 4392-3 : 1993)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS原案作成本委員会 構成表
氏名
所属
(委員長)
竹 中 俊 夫
東京工業大学名誉教授
香 川 利 春
東京工業大学
藤 田 昌 宏
通商産業省
橋 本 進
財団法人日本規格協会
村 井 孝 宣
財団法人機械振興協会
岡 安 英 雄
社団法人日本工作機械工業会
小 林 隆 博
コベルコ建機株式会社
渡 並 直
トヨタ自動車株式会社
荒 木 義 昭
株式会社日平トヤマ
黒 部 昌 徳
東芝機械株式会社
小 林 周 二
日精樹脂株式会社
美濃越 昌 二
日本電気株式会社
佐 藤 均
日立建機株式会社
岩 崎 正 弘
株式会社島津製作所
饗 庭 健 一
株式会社トキメック
築比地 仁
川崎重工業株式会社
(分科会主査)
小曽戸 博
内田油圧機器工業株式会社
小 宮 盛 雄
カヤバ工業株式会社
(事務局)
堀 切 俊 彦
社団法人日本フルードパワー工業会
三 浦 吉 成
社団法人日本フルードパワー工業会
油圧ポンプ・モータ分科会 構成表
氏名
所属
(主査)
小曽戸 博
内田油圧機器工業株式会社
饗 庭 健 一
株式会社トキメック
天 野 利 郎
住友精密工業株式会社
石 川 勝 司
株式会社コマツ
岩 崎 正 弘
株式会社島津製作所
越 智 大 記
住友イートン機器株式会社
神 谷 忠 佳
豊興工業株式会社
小 谷 盛 雄
カヤバ工業株式会社
佐 藤 均
日立建機株式会社
霜 浦 賢 一
株式会社ナブコ
須 原 正 明
ダイキン工業株式会社
橋 本 登志雄
油研工業株式会社
宮 本 彰
川崎重工業株式会社
吉 田 雅 雄
株式会社不二越
(事務局)
堀 切 俊 彦
社団法人日本フルードパワー工業会
(文責) 小曽戸 博)