B 8385 : 2000 (ISO 4391 : 1983)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,通商産業大臣が制定した日
本工業規格である。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8385 : 2000
(ISO 4391 : 1983)
油圧−ポンプ・モータ及び
一体形トランスミッション−
パラメータの定義及び文字記号
Hydraulic fluid power−Pumps, motors and integral transmissions−
Parameter definitions and letter symbols
序文 この規格は,1983年に第2版として発行されたISO 4391, Hydraulic fluid power−Pumps, motors and
integral transmissions−Parameter definitions and letter symbolsを翻訳し,技術的内容及び規格票の様式を変更
することなく作成した日本工業規格である。
1. 適用範囲 油圧システムにおいて動力は閉じられた回路内の加圧流体によって伝達,制御される。ポ
ンプは回転機械動力を流体動力に変換する機器である。モータは流体動力を回転機械動力に変換する機器
である。一体形トランスミッションは片回転の可変速軸による入力を,片回転又は両回転の可変速軸出力
に変換する。
この規格は油圧ポンプ,モータ及び一体形トランスミッションの主要な技術特性について述べ,系統的
に定義するものである。この規格においては,これら特性に記号をあてはめ個々のケースに対応する添字
を加えることで,より明確に定義する方法を示す。また,パラメータの次元解析も示している。
2. 適用分野 この規格は,油圧ポンプ,モータ及び一体形トランスミッションに関する文字記号,次元,
定義の正確な表現法について規定する。
しかし,運転条件によって左右される寿命,材料の疲労と摩耗に関し,確実に根拠のある用語は定義し
えない。この分野は保留事項となっており,それぞれの場合の正確な研究にゆだねられるべきである。
3. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0125 油圧及び空気圧用図記号
備考 ISO 1219 (Fluid power systems and components−Graphic symbols) からの引用事項は,この規格
の該当事項と同等である。
JIS B 0142 油圧及び空気圧用語
備考 ISO 5598 (Fluid power systems and components−Vocabulary) からの引用事項は,この規格の該
当事項と同等である。
JIS Z 8202-0 量及び単位−第0部:一般原則
2
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 ISO 31-0 (Quantities and units−Part 0 : General principles) からの引用事項は,この規格の該当
事項と同等である。
JIS Z 8202-1 量及び単位−第1部:空間及び時間
備考 ISO 31-1 (Quantities and units−Part 1 : Space and time) からの引用事項は,この規格の該当事
項と同等である。
JIS Z 8202-2 量及び単位−第2部:周期現象及び関連現象
備考 ISO 31-2 (Quantities and units−Part 2 : Periodic and related phenomena) からの引用事項は,この
規格の該当事項と同等である。
JIS Z 8202-3 量及び単位−第3部:力学
備考 ISO 31-3 (Quantities and units−Part 3 : Mechanics) からの引用事項は,この規格の該当事項と
同等である。
JIS Z 8202-4 量及び単位−第4部:熱
備考 ISO 31-4 (Quantities and units−Part 4 : Heat) からの引用事項は,この規格の該当事項と同等で
ある。
4. 定義 この規格で用いられる主な用語の定義は,JIS B 0142による。
5. 文字記号と添字の使用の指針
5.1
文字記号 文字記号については,7.を参照する。
5.2
文字記号のための添字 文字記号に用いられる添字については,8.を参照する。
5.3
文字記号と添字 記号の使い方は特別説明を要しないが,添字との組合せによって極めて多くの変
化が作られることになる。したがって,同じ事項に対し,記号と添字との異なる組合せが多くなり過ぎる
のを防ぐため,次の指針をもうける。
5.3.1
状況を明確にするため必要がある場合だけ,記号の右肩に文字 (P, M, T) を付けることにする。す
なわち,ポンプ,モータ及びトランスミッションに関する式を展開,比較する場合だけとする。
5.3.2
二つ又はそれ以上の添字が必要な場合には,それぞれの間にコンマを使用する。
5.3.3
第一番目の順位で使用するもの:0, 1, 2
5.3.4
第二番目の順位で使用するもの:3, b, d, e, g, h, hm, i, m, s, t, v, φ
5.3.5
第三番目の順位で使用するもの:c, dry, ex, f, fi, in, k, p, n
5.3.6
第四番目の順位で使用するもの:am, aux, lc, r, st
5.3.7
最後に使用するもの:a, ma, mi, max, min
5.3.8
添字付きの記号の使用例については,8.,9.,10.を参照する。
5.4
記号を付けない用語 記号を付けない用語は,12.を参照する。
6. 規格適合表示 この規格に適合することを試験報告書,カタログ及び販売資料において,記述する場
合は,次の文言を用いる。
“パラメータの定義と文字記号は,JIS B 8385(油圧−ポンプ・モータ及び一体形トランスミッション
−パラメータの定義及び文字記号)に適合する。”
7. 特性を表す文字記号
3
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.1
文字記号となるラテン及びギリシャ文字をアルファベット順に列挙
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
7.1.1
力
F
MLT−2
−
Force
7.1.2
周波数
f
T−1
−
Frequency
7.1.3
慣性モーメント
I
ML2
可動部分の慣性のモーメントから計算さ
れた値。
Moment of inertia
7.1.4
体積弾性係数
K
ML−1T−2
応力が物体の全側面に均一に加えられた
ときの,加わる応力と体積ひずみの関係。
圧縮率の逆数。
Bulk modulus
7.1.5
質量
m
M
−
Mass
7.1.6
回転速度
n
T−1
単位時間内の駆動軸の回転数。
Rotational frequency
(speed)
7.1.7
動力
P
ML2T−3
−
Power
7.1.8
圧力
p
ML−1T−1
ある特定点における静的圧力。
Pressure
7.1.9
質量流量
qm
MT−1
単位時間に流路の横断面を通過する流体
の質量。
Mass flow rate
7.1.10
体積流量
qv
L3T−1
単位時間に流路の横断面を通過する流体
の体積。
Volume flow rate
7.1.11
剛性
S
ML2T−2
ある軸に加わるトルクの変化と,その軸の
角位置の変化との比。
Stiffness
7.1.12
トルク
T
ML2T−2
−
Torque
7.1.13
時間
t
T
−
Time
7.1.14
瞬間押しのけ容
積
v
L3
軸のある位置での押しのけ容積。
Instantaneus
displacement
7.1.15
吐き出し容積
V
L3
1回の全ストローク,サイクル又は回転に
よって吐き出される,理論上は非圧縮な流
体の体積。
∫
=
πϕ
2
0vd
V
Swept volume
7.1.16
速度比
Z
1
二つの異なる装置の速度の比。
Speed ratio
7.1.17
熱膨張による体
積膨張係数
α
Θ−1
−
Volume coefficient of
thermal expansion
7.1.18
パラメータXの
変動幅
δX
1
Xがあるパラメータの場合に
mi
min
max
X
X
X
X
−
=
δ
Degree of irregularity
for parameter X
7.1.19
設定位置
ε
1
可変容量形の機器において,制御要素の位
置は,調整された位置における理論上の吐
出し容積Viと理論上の最大吐出し容積
Vi, maxとの比率で定められる。
max
i,
i
V
V
=
ε
Position of setting
7.1.20
効率
η
1
−
Efficiency
7.1.21
温度
θ
Θ
−
Temperature
7.1.22
角速度
ω
T−1
単位時間に軸が回転する角度(ラジアン
数)。
ω=2πn
Angular velocity
4
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2
その他の文字記号
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
7.2.1
回転方向
−時計回り
−反時計回り
R
L
1
1
測定者が軸端から見た方向で表す。
Direction of rotation
−clockwise
−anti-clockwise
8. 特性を表す文字記号に付ける添字
8.1
添字となるラテン及びギリシャ文字をアルファベット順に列挙
番号
用語
添字
定義又は意味と使用例
対応英語
(参考)
8.1.1
許容条件
a
性能及び寿命を許容差内とするための条件。
Acceptable
conditions
8.1.2
周囲
am
周囲環境 (Surrounding)
Ambient
8.1.3
補助
aux
−
Auxiliary
8.1.4
調整
b
−
Adjustment
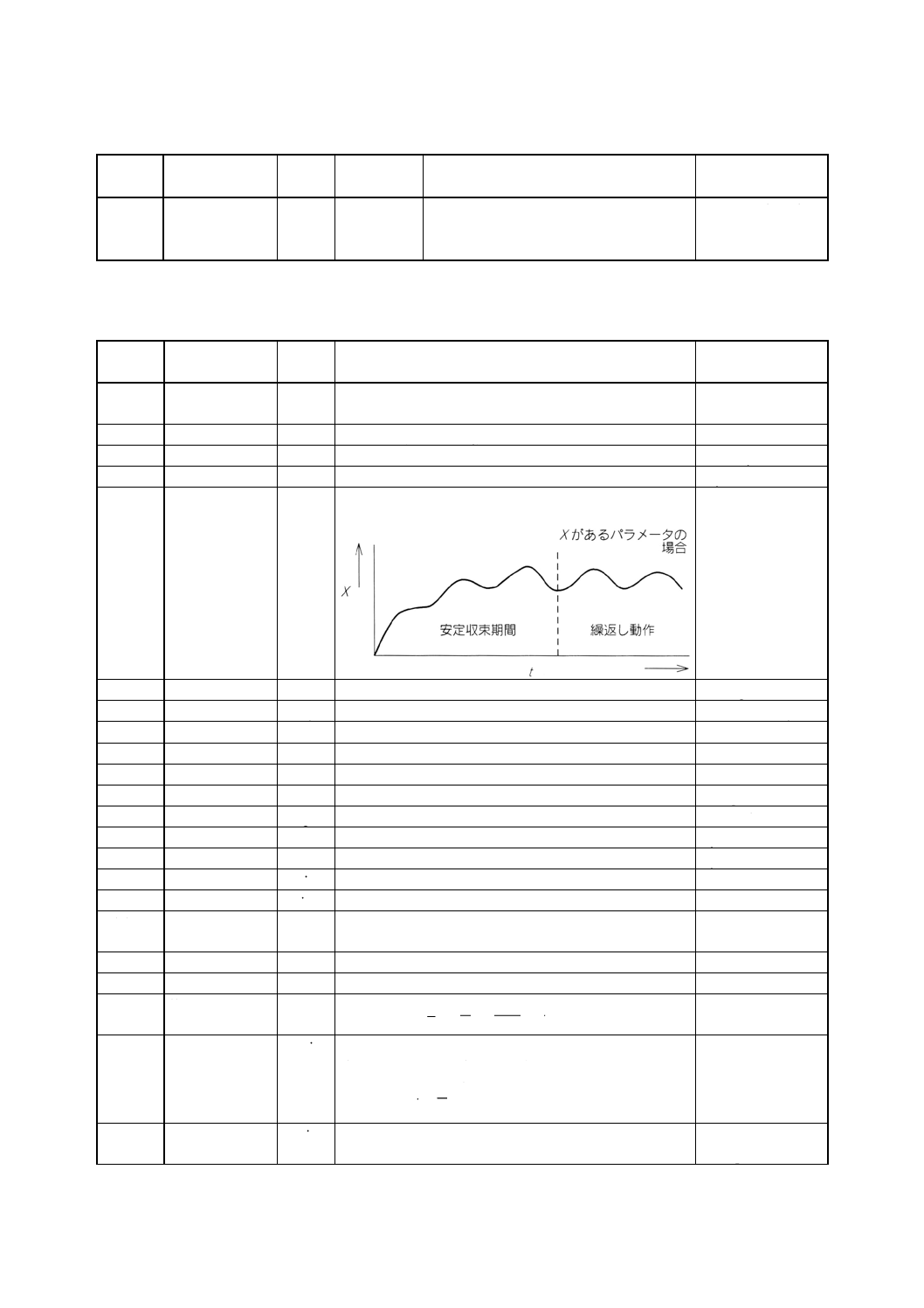
8.1.5
周期的安定(動
作)条件
c
関連するパラメータが繰り返し変動し,一定間隔で同様
に繰り返す条件。
Cyclic stabilized
conditions
8.1.6
ドレン
d
−
Drainage
8.1.7
乾燥の表示
dry
流体充てん(填)を考慮しない表示。
Indication of dry
8.1.8
測定値
e
直接測定又は(計器による)測定値からの計算値。
Measured value
8.1.9
外部
ex
−
External
8.1.10
流体
f
−
Fluid
8.1.11
充てん(填)度
fi
ポンプの不完全な充てん度を表示する。
Filling
8.1.12
幾何学的
g
幾何学的寸法による計算。
Geometric
8.1.13
油圧
h
−
Hydraulic
8.1.14
油圧機械的
hm
−
Hydraulic mechanical
8.1.15
理論的
i
−
Theoretical
8.1.16
内部の
in
−
Internal
8.1.17
圧縮性関連
k
−
Compressibility
related
8.1.18
局部的
lc
−
Local
8.1.19
機械的
m
−
Mechanical
8.1.20
算術平均
ma
n
X
X
X
X
n
2
1
ma
+
+
=
Λ
Arithmetic mean
8.1.21
積分平均
mi
時間積分によって得られる平均値。
時間tにおける1回転中の平均値。
∫
=
1
1
mi
1
t
oXdt
t
X
Integral mean
8.1.22
動作の限界条件
min
max
他のパラメータを固定したとき,あるパラメータが取り
得る限界値(最大値,最小値)。
Limiting conditions
of operation
5
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
添字
定義又は意味と使用例
対応英語
(参考)
8.1.23
定格条件
n
特定の試験の結果から,機器又はシステムに推奨される
安定運転条件。一般にカタログでは“定格性能”が表示
される。
Rated conditions
8.1.24
ピーク割合
P
ピークは,許容される最大値を超えるインパルスの大き
さの割合である。ピークは,短時間中に平均値を超える
値として定義される。
Peak duty related
8.1.25
不連続的動作条
件
r
8.1.15又は8.1.27で述べられているように関連するパラ
メータが安定条件に到達していない条件。
Discontinuous
conditions of
operation
8.1.26
損失
s
−
Losses
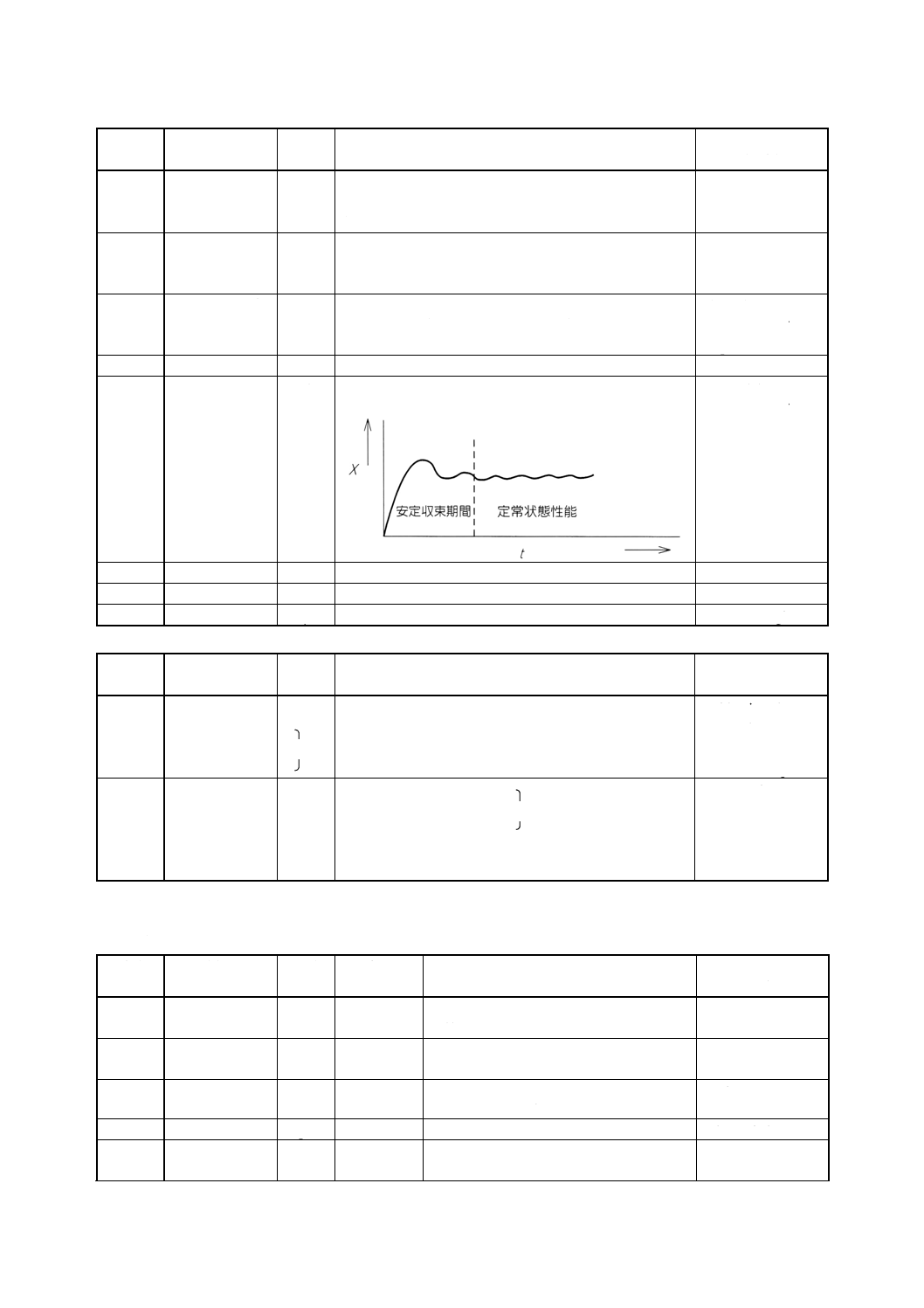
8.1.27
安定動作条件
st
安定収束期間後に,関連するパラメータがほとんど変動
しない条件。
Steady state
conditions of
operation
8.1.28
合計値
t
その他の値も含めたパラメータの全体の値。
Total value
8.1.29
容積値
v
−
Volumetric value
8.1.30
回転角
φ
−
Rotational angle
8.2
その他の添字
番号
用語
添字
定義又は意味と使用例
対応英語
(参考)
機器の位置
Position in unit
8.2.1
0
中立
0 Neutral condition
8.2.2
1 (1) 入口又は入力
1 Inlet or input
8.2.3
2
出口又は出力
2 Outlet or output
8.2.4
機器の形式
P
ポンプ
Type of unit
8.2.5
M
モータ 記号の右肩に付ける。
P Pump
8.2.6
T
一体形トランスミッション
M Motor
T Integral
transmission
注(1) 添字0,1及び2以外にも表示のために添字が必要な場合は,入口は奇数,出口は偶数を使用する。
9. 一般特性を表すため添字をつけた文字記号の使用例
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
9.1
乾燥質量
mdry
M
流体(作動油)が充てんされていない機器
の質量。
Dry mass
9.2
流体質量
mf
M
機器に充てんされた,動作に十分な流体
(作動油)の質量。
Fluid mass
9.3
総(使用)質量
mt
M
使用できる状態の機器の質量。
mt=mdry+mf
Total (working) mass
9.4
容積損失
qvs
L3T−1
−
Volumetric loss
9.5
トルク損失
Ts
ML2T−2
TsP=Te−Ti又は
TsM=Ti−Te
Torque loss
6
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
9.6
温度差
∆θ
Θ
(2)
Differential
temperature
9.7
周囲温度
θam
Θ
装置が動作する周囲の温度。
Ambient temperature
9.8
ドレン温度
θd,f
Θ
外部ドレンの流体温度。
Fluid drainage
temperature
9.9
流体温度
θf
Θ
ある特定点で計測される流体温度。
Fluid temperature
9.10
入口流体温度
θ1,f
Θ
機器の入口で計測される流体温度。
Fluid inlet
temperature
9.11
出口流体温度
θ2,f
Θ
機器の出口で計測される流体温度。
Fluid outlet
temperature
9.12
局部温度
θ1c
Θ
装置の特定点における温度。
Local temperature
注(2) ∆は差の値を示す。
10. ポンプ・モータを表すため添字をつけた文字記号の使用例
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
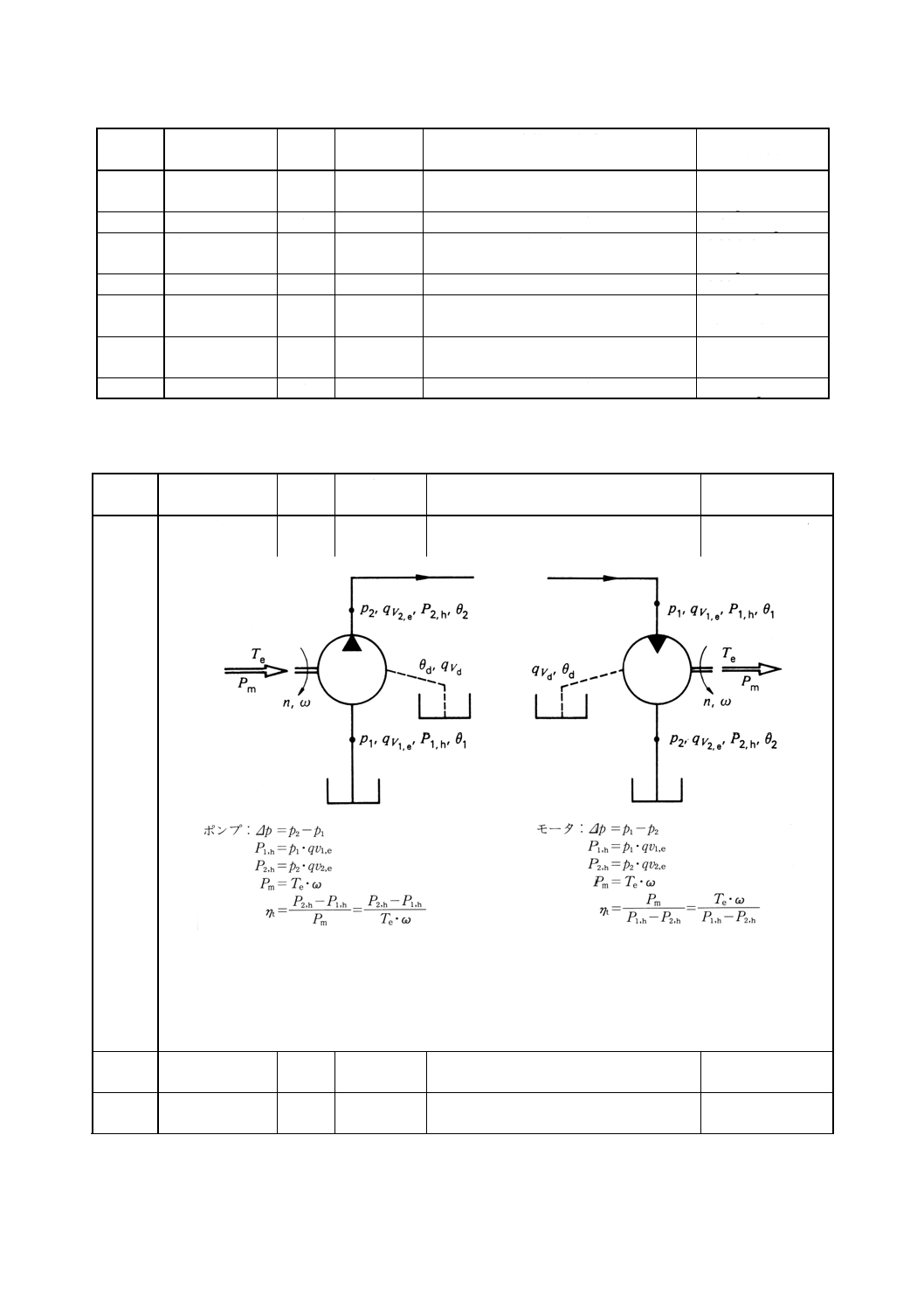
10.1
エネルギー変換
−
−
一般
Transformation of
energy
流体の体積ひずみエネルギーを利用することは,実際には不可能であるので,次の定義を採用する。
定義:有効流量は,ポンプの出口又はモータの入口における圧力及び温度条件下の実際の流量である。
これ以外の条件下で流量を測定する場合は,有効流量の決定に当たって,修正が必要になる。
差圧∆pは,ポンプ又はモータの出口と入口における静圧力の差である。
出口と入口との間に運動エネルギー又は位置エネルギーの差がある場合には,その差∆pについて修
正すること。
10.2
油圧ポンプ
−
−
回転機械エネルギーを流体エネルギーに
変換する機器。
Hydraulic pumps
10.3
油圧モータ
−
−
流体エネルギーを回転機械エネルギーに
変換する機器
Hydraulic motors
7
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
10.4
調整(操作)力
Fb
MLT−2
摩擦,圧力,速度,方向及び調整時間を含
むすべての条件において,調整に用する最
大の(操作)力。
Adjusting force
10.5
許容調整周波数
fb,a
T−1
その機器が指示された行程又は角度に調
整されるための周波数。
Acceptable frequency
of adjustment
10.6
乾燥慣性モーメ
ント
Idry
ML2
機械部品の慣性によるモーメント。
Dry moment of
inertia
10.7
流体慣性モーメ
ント
If
ML2
−
Moment of inertia of
fluid
10.8
全慣性モーメン
ト
It
ML2
全質量(流体及び機械)の慣性によるモー
メント。
It=Idry+If
Total moment of
inertia
10.9
油圧動力
Ph
ML2T−3
−
Hydraulic power
10.10
理論動力
Pi
ML2T−3
PiP=qvi・∆p=Ti・ω
PiM=qvi・∆p=Ti・ω
Theoretical power
10.11
呼び動力
Pn
ML2T−3
駆動原動機の定格動力。
Nominal power
10.12
モータ動力
PmM
ML2T−3
PmM=Te・ω
Motor power
10.13
ポンプ動力
PmP
ML2T−3
PmP=Te・ω
Pump power
10.14
差圧
∆p
ML−1T−2
∆pP=p2−p1
∆pM=p1−p2
Differential pressure
10.15
最低(入口/出
口)圧力
pmin
ML−1T−2
Pmin
,1p
: ポンプ入口における最低許容圧
力。
Mmin
,2
p
: 確実に動作をするためのモータ
の最低出口圧力。
Minimum
(inlet/outlet)
pressure
10.16
最高(出口/入
口)圧力
pmax
ML−1T−2
Pmax
,2
p
: 定常状態におけるポンプの最大
許容出口圧力。
Mmax
,1p
: 定常状態におけるモータの最大
許容入口圧力。
他の動作条件の場合は,これ以外
の記号を用いて,最高圧力の値を
定義することができる。
Maximum
(outlet/inlet)
pressure
10.17
ピーク圧力
pp
ML−1T−2
比較的短時間の間に最高使用圧力を超え
る圧力。
Peak pressure
10.18
有効流量
qve
L3T−1
pPv2,e:ポンプ出口の実際の流量。
qMv1,e:モータ入口の実際の流量
測定点で示された温度と圧力において計
測された流量。
Effective flow
10.19
理論流量
qvi
L3T−1
qPvi=Vi・n, qMvi=Vi・n
Theoretical flow
10.20
外部容積損失
qvs,ex
L3T−1
qPvs,ex:外部漏れによる出力損失。
qMvs,ex:外部漏れを考慮した入力の増加。
Volumetric external
losses
10.21
流体充てん(填)
損失
qvs,fi
L3T−1
ポンプの(内部流体)充てん度による出力
の損失。
Volumetric filling
losses
10.22
内部容積損失
qvs,in
L3T−1
qPvs,in:内部漏れによる出力損失。
qMvs,in:内部漏れを考慮した入力の増加。
Volumetric internal
losses
10.23
圧縮性損失
qvs,k
L3T−1
K
Δp
qv
qv
qv
v
q
)
(
ex
s,
in
s,
1
k
s,
P
−
−
=
Volumetric
compressibility
losses
10.24
調整トルク
Tb
ML2T−2
−
Adjusting torque
8
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
10.25
有効トルク
Te
ML2T−2
ω
m
e
P
T=
Effective torque
10.26
理論トルク
Ti
ML2T−2
π
2
i
i
Δp
V
T =
Theoretical torque
10.27
油圧−機械損失
(トルク損失)
Ts
ML2T−2
TSP=Te−Ti
TSM=Ti−Te
Hydraulic-mechanica
l losses (torque
losses)
10.28
起動トルク
T0
ML2T−2
特定条件下の与えられた差圧で停止から
回り始める際にモータ出力軸が出し得る
最小トルク。
Starting torque
10.29
調整時間
tb
T
調整に必要な時間。
Time of adjustment
10.30
最短調整時間
tb,min
T
所定の調整角度になるために必要な最短
時間。
Shortest time of
adjustment
10.31
全調整時間
tb,t
T
全調整の行程と角度を考慮した調整に要
する時間。
Total time of
adjustment
10.32
有効吐出し容積
Ve
L3
n
qv
V
e
2,
Pe=
,
n
qv
V
e,1
M
e
=
Effective swept
volume
10.33
押しのけ容積
Vg
L3
容積式ポンプ又はモータが1回転当たりに
押しのける幾何学的体積。
Geometric swept
volume
10.34
推定吐出し容積
Vi
L3
定められた最低作動圧力で,二つの異なる
回転速度から得られた(ポンプの)吐出し
容積又は,(モータの)吸込み容積。
0
,2
Pi
→
=
p
e
Δn
Δqv
V
∆
0
1
2
1
e,2
2
e,2
)
(
)
(
→
−
−
=
Δp
n
n
n
n
qv
qv
0
,1
M
i
→
=
p
e
n
Δqv
V
∆
∆
0
1
2
1
e,1
2
e,1
)
(
)
(
→
−
−
=
Δp
n
n
n
n
qv
qv
Derived swept
volume
10.35
全効率
ηt
1
m
h
i,
h
2,
e
i
1
e,2
m
h
v
Pt
P
P
P
T
T
qv
qv
−
=
=
=
η
η
η
h
2,
h,1
m
i
e
e
1,
1
m
h
v
Mt
P
P
P
T
T
qv
qv
−
=
=
=
η
η
η
Overall efficiency
10.36
容積効率
ηv
1
i
e
2,
Pv
qv
qv
=
η
,
e,1
i
Mv
qv
qv
=
η
Volumetric efficiency
10.37
トルク効率
ηhm
1
e
i
Pm
h
T
T
=
η
,
i
e
Mm
h
T
T
=
η
Hydraulic mechanical
efficiency
10.38
ゼロ位置
ε=0
1
吐出し容積ゼロ(ε=0)に相当。
Zero position
機械部品の弾性(変形)と遊びが,流体の物理・化学特性又は空気の混入による流体体積変化と同様に無
視できる場合には,次の式が成立する。
qPv2,e=qvi−(qvs,in+qvs,ex)−qvs,k
qMv1,e=qvi+qvs,in+qvs,ex+qvs,k
9
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11. 一体形トランスミッションを表すため添字を付けた文字記号の使用例
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
11.1
一体形トランス
ミッション
−
−
1個以上の油圧ポンプと1個以上の油圧モ
ータを組み合わせた1個の装置。
使用時のポンプとモータの機能は,特定さ
れた時点におけるそれぞれの実際の機能
によって決定される。入力軸はエネルギー
源と結合され,出力軸は負荷と結合されモ
ータによって駆動される。
Integral transmission
11.2
出力(軸)回転速
度
nM
T−1
出力軸の単位時間当たりの回転数。
Output shaft speed
11.3
理論出力回転速
度
niM
T−1
M
i
Pi
P
i
P
Mi
V
V
n
Z
n
n
=
=
Theoretical output
speed
11.4
入力(軸)回転速
度
nP
T−1
入力軸の単位時間当たりの回転数。
Input shaft speed
11.5
モータ軸に結合
した機械部品の
慣性モーメント
ImM
ML2
モータ軸に結合したすべての機械部品の
慣性モーメント。
Moment of inertia of
moving
mechanical parts
connected to the
motor shaft
11.6
ポンプ軸に結合
した機械部品の
慣性モーメント
IMP
ML2
ポンプ軸に結合したすべての機械部品の
ポンプ軸に対する慣性モーメント。
Moment of inertia of
moving
mechanical parts
connected to the
pump shaft
11.7
補助駆動用入力
動力
Paux
ML2T−3
ブーストポンプと冷却システムを駆動す
るために必要な機械的動力入力の合計。
Power input to
auxiliary drive
11.8
補助駆動入力ト
ルク
Taux
ML2T−2
補助装置(ブーストポンプと冷却システ
ム)を駆動するために必要な入力トルクの
合計。
Auxiliary drive input
torques
11.9
理論出力トルク
TiM
ML2T−2
Pi
M
i
Pi
i
Pi
M
i
V
V
T
Z
T
T
=
=
Theoretical output
torque
11.10
入力トルク
TP
ML2T−2
トランスミッションへのすべての入力ト
ルクの合計。
Input torque
11.11
理論速度比
Zi
1
M
i
Pi
i
V
V
Z=
Theoretical speed
ratio
11.12
全効率
ηt
1
P
Pe
M
M
e
Pm
M
m
t
ω
ω
η
=
=
T
T
P
P
Overall efficiency
11.13
設定パラメータ
−
−
−
Setting parameters
11.13.1
設定位置
εP
εM
1
ポンプ軸とモータ軸に,それぞれ取り付け
られた装置(の位置)。
Position of setting
11.13.2
ゼロ位置
εP=0
1
ポンプは吐出し容積ゼロ位置。
Zero position
11.13.3
最大吐出し容積
位置
εP=1
εM=1
1
ポンプ及びモータは最大吐出し容積位置。 Maximum swept
volume position
11.13.4
最高回転速度位
置
εP=1
εM=min
1
ポンプは最大位置,モータは最小位置。
出力(軸)回転速度=最高回転速度。
Maximum speed
position
10
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
記号
次元
定義又は意味
対応英語
(参考)
11.13.5
中立位置
εM=0
1
モータは吐出し容積ゼロ位置に調整(中立
位置の機能はバイパス弁を開放すること
で設計的に実現できる)。
Neutral position
11.13.6
自由位置
εP=0
εM=0
1
ポンプとモータは,共に吐出し容積ゼロ位
置にある。
Free position
12. 文字記号のない用語の意味
番号
用語
定義又は意味
対応英語
(参考)
12.1
開ループ制御
吐出し容積の設定は独立したパラメータで決定される。
Open loop control
12.2
閉ループ制御
吐出し容積の設定は,流量,圧力又は動力などの相互依存するパラ
メータによって決定される。
Closed loop control
12.3
定圧制御
圧力をある限界内で一定に保つために制御設定が変動する。
Constant pressure
control
12.4
動力制御
あらかじめ定められた動力特性に追従するように制御設定が変動
する。
Power control
12.5
出力流量制御
あらかじめ定められた流量特性に追従するように制御設定が変動
する。
Output flow control
12.6
動力制御装置
与えられた特性をもつ動力曲線を得るために制御設定が変動する。 Power regulator
12.7
トルク制御装置
与えられた特性をもつトルク曲線を得るために制御設定が変動す
る。
Torque regulator
12.8
速度制御装置
与えられた特性をもつ速度曲線を得るために制御設定が変動する。 Speed regulation
“開ループ制御”という用語は,ここでは入力パラメータ (ε,n,…) が出力パラメータ (ε,n,…) やシステムに関
連したパラメー夕 (V,qv,p,…) に対して,それら出力パラメータの影響を受けずに作用する場合に用いる。
そのような動作をするすべての要素は,制御ループとして意味付けされ,最終的に結合されて出力の制御構成要素
となる。“閉ループ制御”又は“調整制御”という用語は,出力パラメータが制御ループ内にあり,制御メカニズムに
よって同一になるような1個以上の選択された量と比較される場合に用いる。
例示をすると,出力の制御構成要素はポンプの吐出し量を変更する部分である。出力パラメータは,流量そして吐出
し圧力になる。
12.9
回路
(油圧)トランスミッションの流体通路。
Circuit
12.10
開回路
流体が再還流する前にタンクに直接戻る回路。
Open circuit
12.11
ブーストポンプ
のない開回路
ポンプがタンクから全流量
を吸い込む開回路
Open circuit without
boost pump
12.12
ブーストポンプ
のある開回路
ポンプがブーストポンプから
全流量を供給される開回路。
Open circuit with
boost pump
12.13
閉回路
戻り(管路の)液体が直接ポンプ入口に戻る回路。
Closed circuit
11
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義又は意味
対応英語
(参考)
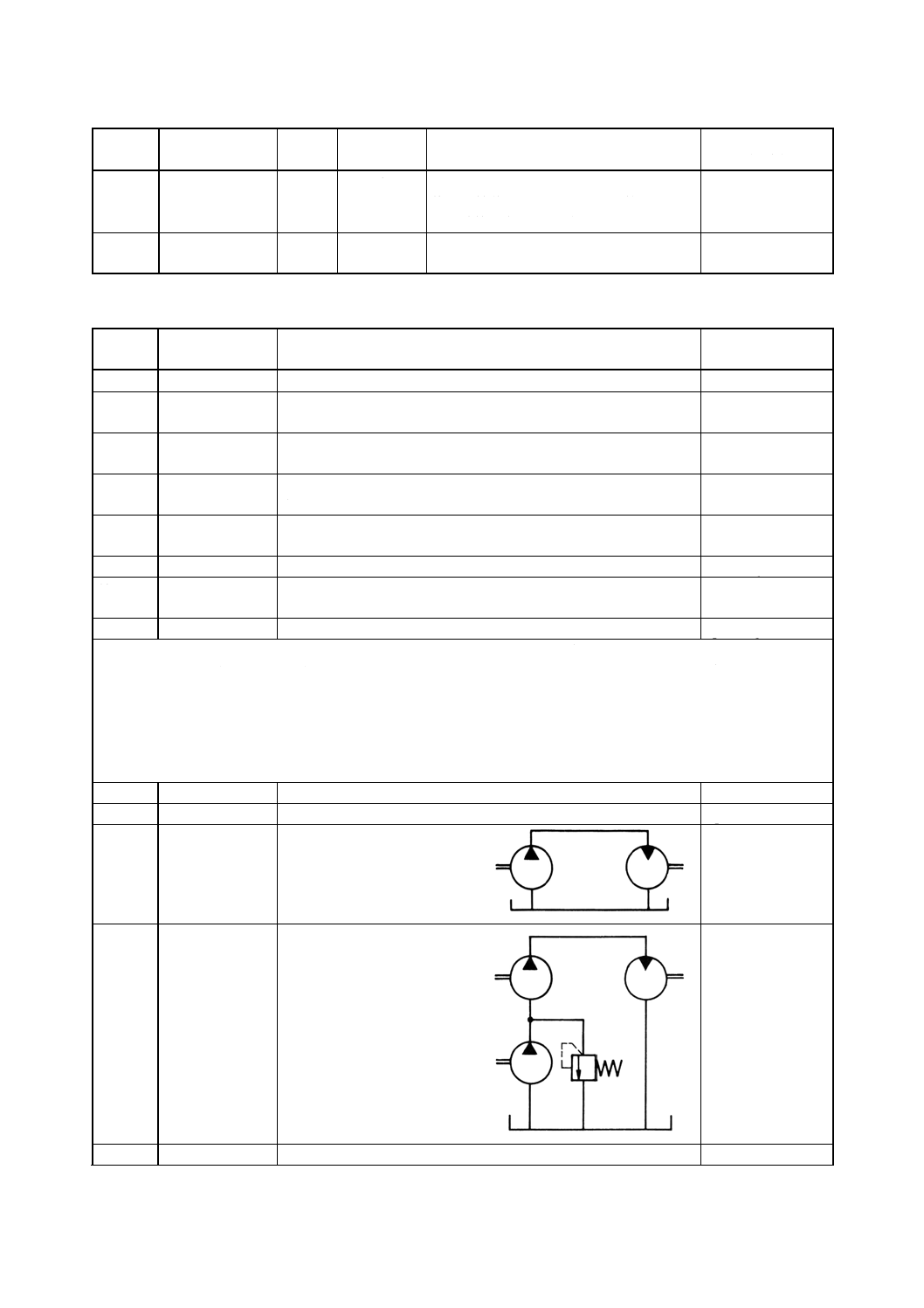
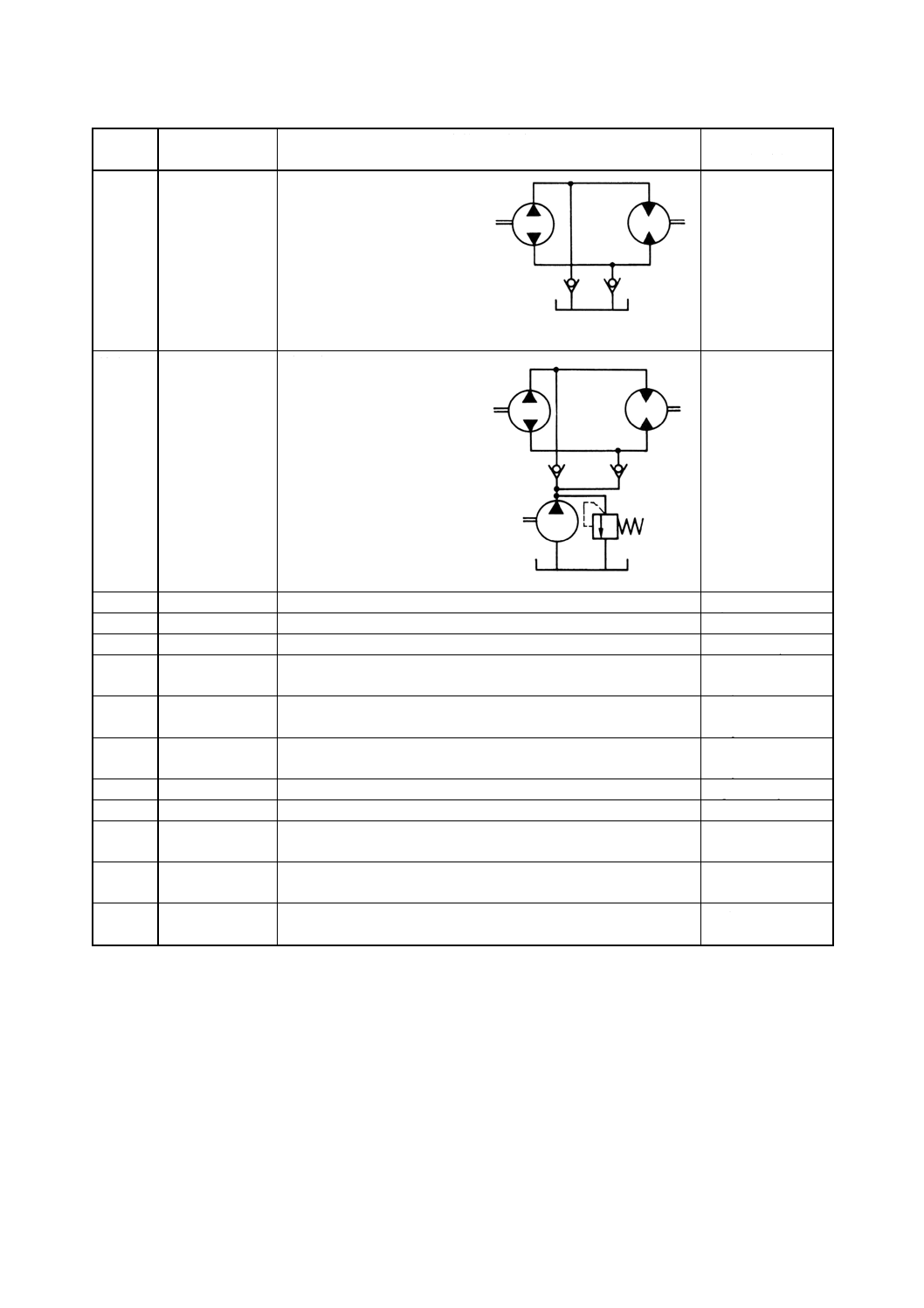
12.14
ブーストポンプ
のない閉回路
ポンプが油圧モータから
大部分を供給され,残りを
タンクから直接吸い込む回
路。
Closed circuit
without boost
pump
12.15
ブーストポンプ
のある閉回路
ポンプが油圧モータから
大部分を供給され,残りを
補助ブーストポンプから得
る回路。
Closed circuit with
boost pump
12.16
調整
設定の変更。
Adjustment
12.17
個別調整
ポンプ及びモータを別個のアクチュエータで調整する。
Individual adjustment
12.18
組合せ調整
ポンプ及びモータを共通のアクチュエータで調整する。
Combined adjustment
12.19
同時調整
ポンプ及びモータを同時に共通のアクチュエータで調整する。
Simultaneous
adjustment
12.20
逐次調整
ポンプ及びモータを共通のアクチュエータで順次に調整する。
Sequential
adjustment
12.21
制御調整
設定を,速度及びトルクとは無関係に変更する。
Controlled
adjustment
12.22
規制調整
設定を,速度及びトルクに応じて変更する。
Regulated adjustment
12.23
動力伝達
動力が入力軸と出力軸の間で伝達される方式。
Power transmission
12.24
単純動力伝達
動力が油圧によってポンプからモータに伝達される方式。
Simple power
transmission
12.25
多重動力伝達
動力が油圧によって,1台又は数台のポンプから,1台又は数台以
上のモータに伝達される方式。
Multiple power
transmission
12.26
分割動力伝達
動力の一部が,油圧によって入力軸から出力軸に伝達される方式。 Split power
transmission
12
B 8385 : 2000 (ISO 4391 : 1983)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8385 整合化本委員会 構成表
氏名
所属
(委員長)
竹 中 俊 夫
東京工業大学名誉教授
島 田 公 雄
中央大学理工学部
中 嶋 誠
通商産業省機械情報産業局
○ 本 間 清
工業技術院標準部
○ 橋 本 繁 晴
財団法人日本規格協会
村 井 孝 宣
財団法人機械振興協会技術研究所
岡 安 英 雄
社団法人日本工作機械工業会
荒 木 義 昭
株式会社日平トヤマ
黒 部 昌 徳
東芝機械株式会社
渡 並 直
トヨタ自動車株式会社
藤 田 勝
石川島汎用機械株式会社
吉 松 英 昭
株式会社神戸製鋼所
石 井 進
内田油圧機器工業株式会社
門 泰 一
太陽鉄工株式会社
木 原 和 幸
株式会社トキメック
小 池 一 夫
イハラサイエンス株式会社
(分科会主査)
○ 小曽戸 博
内田油圧機器工業株式会社
手 塚 昂 宏
カヤバ工業株式会社
中 西 康 二
黒田精工株式会社
根 本 圭 介
三菱電線工業株式会社
平 野 謙 一
油研工業株式会社
二 見 安 亮
CKD株式会社
山 崎 一 彦
山信工業株式会社
(事務局)
三 浦 吉 成
社団法人日本フルードパワー工業会第1技術部
○ 堀 切 俊 彦
社団法人日本フルードパワー工業会第2技術部
○印は,分科会を兼ねる。
第一原案作成分科会 構成表
氏名
所属
(主査)
小曽戸 博
内田油圧機器工業株式会社
饗 庭 健 一
株式会社トキメック
天 野 利 郎
住友精密工業株式会社
石 川 勝 司
株式会社コマツ
岩 崎 正 弘
株式会社島津製作所
梅 田 時 彦
川崎重工業株式会社
神 谷 忠 佳
豊興工業株式会社
小 宮 盛 雄
カヤバ工業株式会社
佐 藤 均
日立建機株式会社
庄 司 幸 広
株式会社不二越
須 原 正 明
ダイキン工業株式会社
常 深 正 博
株式会社ナブコ
橋 本 登志雄
油研工業株式会社
八 田 典 生
住友イートン機器株式会社
(事務局)
堀 切 俊 彦
社団法人日本フルードパワー工業会第2技術部
(文責 小曽戸 博)