B 7912-4:2016
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 一般······························································································································· 2
4.1 要求事項 ······················································································································ 2
4.2 試験手順1:簡易試験手順 ······························································································· 2
4.3 試験手順2:標準試験手順 ······························································································· 2
5 簡易試験手順 ··················································································································· 3
5.1 測定場所の設定 ············································································································· 3
5.2 測定 ···························································································································· 3
5.3 計算 ···························································································································· 4
5.4 調査測定 ······················································································································ 4
6 標準試験手順 ··················································································································· 4
6.1 測定場所の設定 ············································································································· 4
6.2 測定 ···························································································································· 5
6.3 計算 ···························································································································· 6
6.4 統計的検定 ··················································································································· 8
6.5 合成標準不確かさの評価(タイプA及びタイプB) ····························································· 9
附属書A(参考)簡易試験手順の例 ························································································ 11
附属書B(参考)標準試験手順の例 ························································································ 13
附属書C(参考)不確かさバジェット表の計算例(タイプA及びタイプB) ·································· 16
附属書JA(参考)主な記号の解説 ·························································································· 19
附属書JB(参考)JISと対応国際規格との対比表 ······································································ 20
B 7912-4:2016
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
測量機器工業会(JSIMA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業
規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業
規格である。これによって,JIS B 7912-4:2006は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 7912の規格群には,次に示す部編成がある。
JIS B 7912-1 第1部:理論
JIS B 7912-2 第2部:レベル
JIS B 7912-3 第3部:セオドライト
JIS B 7912-4 第4部:光波測距儀
JIS B 7912-5 第5部:トータルステーション
JIS B 7912-6 第6部:回転レーザ
JIS B 7912-8 第8部:GNSS(RTK)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 7912-4:2016
測量機器の現場試験手順−第4部:光波測距儀
Field procedures for testing geodetic and surveying instruments-
Part 4: Electro-optical distance meters (EDM measurements to reflectors)
序文
この規格は,2012年に第2版として発行されたISO 17123-4を基とし,統計的検定についてISO 2854
及びJIS Z 9041-2の表現に合わせるため,技術的内容を変更して作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JBに示す。
1
適用範囲
この規格は,反射プリズムを使用した光波測距儀による作業を実施する前に,当該作業への適応性を確
認するための試験手順について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 17123-4:2012,Optics and optical instruments−Field procedures for testing geodetic and surveying
instruments−Part 4: Electro-optical distance meters (EDM measurements to reflectors)(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 7912-1:2014 測量機器の現場試験手順−第1部:理論
注記 対応国際規格:ISO 17123-1:2010,Optics and optical instruments−Field procedures for testing
geodetic and surveying instruments−Part 1: Theory(MOD)
JIS Z 8101-1 統計−用語及び記号−第1部:一般統計用語及び確率で用いられる用語
注記 対応国際規格:ISO 3534-1:2006,Statistics−Vocabulary and symbols−Part 1: General statistical
terms and terms used in probability(IDT)
JIS Z 8103 計測用語
ISO 4463-1,Measurement methods for building−Setting-out and measurement−Part 1: Planning and
organization, measuring procedures, acceptance criteria
ISO 7077,Measuring methods for building−General principles and procedures for the verification of
dimensional compliance
2
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ISO 7078,Building construction−Procedures for setting out, measurement and surveying−Vocabulary and
guidance notes
ISO/IEC Guide 98-3:2008,Uncertainty of measurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM:1995)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS Z 8101-1及びJIS Z 8103によるほか,次による。
3.1
スケール誤差
光波測距儀に用いられる変調周波数の偏差によって,距離に比例して生じる誤差。
3.2
ゼロ点補正量
距離の長短に関係なく存在する一定の誤差を補正する量。
4
一般
4.1
要求事項
使用者は,使用する測量機器が,実施する作業に適した精密さを満たしているかどうかを試験すること
が重要である。
光波測距儀及びその附属品は,製造業者の取扱説明書に記載されている方法によって常に調整した状態
で使用しなければならない。また,三脚と反射プリズムとは,製造業者の推奨する製品を用いる。
この試験は,気象条件,特に温度勾配の影響を受けるため,曇天下で微風のある天候において最もよい
結果が得られる。測量する場所によって,気象条件が変化する可能性があるため,測量時の実際の気象条
件及びそのときの周囲状況を記録しておくのがよい。測定時の条件は,要求された測量が実際に実行され
るときの予想される条件に合わせるのがよい(ISO 7077及びISO 7078による。)。
この規格は,箇条5及び箇条6に現場における二つの異なった試験手順について規定する。使用者は,
その作業の特定要求条件に最も適している試験手順を選ばなければならない。
注記 主な記号の解説を,附属書JAに示す。
4.2
試験手順1:簡易試験手順
簡易試験手順は,使用する光波測距儀の試験結果がISO 4463-1に従った許容偏差の範囲にあることを確
認する方法である。
この手順は,少数の観測で行う。したがって,信頼性の高い標準偏差を得ることはできない。現場条件
の下で,より正確な評価が必要な場合には,箇条6に規定する標準試験手順を採用することが望ましい。
この試験方法は,基線距離が既知の基線場を利用する。そのような基線場がない場合は,この規格の試
験手順で調査する光波測距儀より精確さの高い光波測距儀を用いて基線距離を決定する必要がある。より
精確さの高い光波測距儀を利用できない場合は,標準試験手順による。
4.3
試験手順2:標準試験手順
標準試験手順は,附属品を含め現場条件の下で使用する光波測距儀の精密さの最も確からしい評価値を
決定するために採用する。
標準試験手順は,既知ではない基線場を用いて測点の全ての組合せによる距離測定から成り立っている。
l測定距離の標準偏差は,全ての組合せ測定での最小二乗法によって求める。光波測距儀のスケール誤差
3
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,この手順では検出できない。しかし,スケール誤差は,この試験の標準偏差s,及びゼロ点補正量δ
には何の影響も与えない。スケール誤差を判定するためには,光波測距儀の変調周波数を周波数カウンタ
などで点検しておかなければならない。
箇条6に規定する試験手順は,使用する光波測距儀の精密さを決定できるように考えられている。この
精密さの試験結果は,1測定距離の標準偏差sでタイプAの標準不確かさuとして次のように表す。
s=uISO-EDM
さらに,この手順は,次へも適用する。
− 一組の測量チームによる附属品などを含めた1台の機器を使用するときの測定の精密さ
− l台の機器の測定の精密さの経時変化
− よく似た現場条件で複数の機器を用いた場合の,各々の機器が達成可能な測定の精密さの比較
統計的検定は,得られた標準偏差sが,事前に与えられている当該機器の標準偏差σの母集団に属する
か否か,二つの試験サンプルが同じ母集団に属するか否か,及びゼロ点補正量δがゼロ又は事前に与えら
れた値δ0とみなせるか否かの判定に適用する(6.4参照)。
5
簡易試験手順
5.1
測定場所の設定
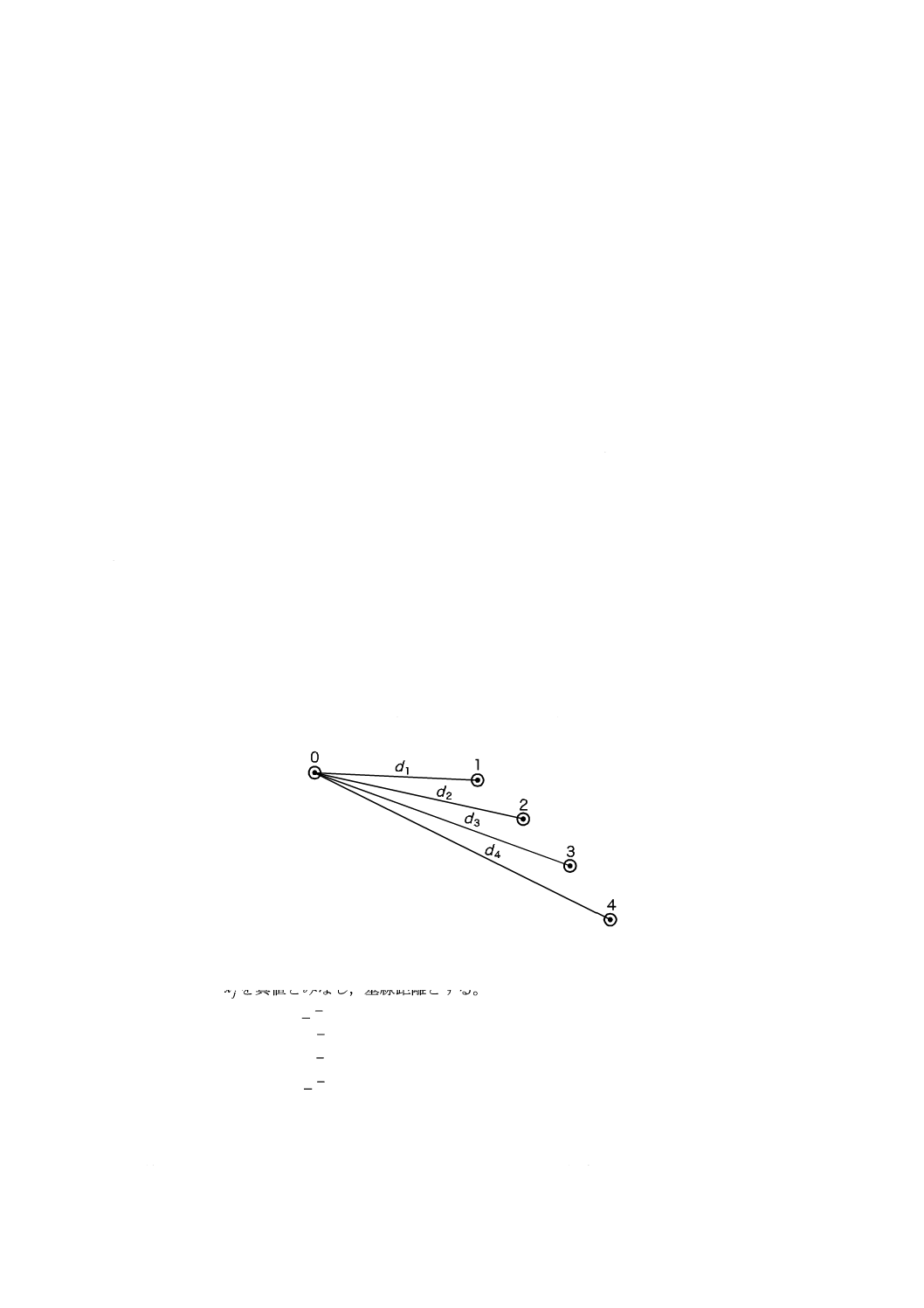
測定場所(基線場)は,固定された機械点(0)と反射プリズムが固定された4測点(1〜4)とからなる
(図1)。4本の基線の距離は,試験する光波測距儀の通常の使用範囲にする(例えば,20 m〜200 m)。反
射プリズムが固定的に設置できない場合は,地上に測点くいを設置しておくのがよい。
4本の基線距離は,より精確さの高い光波測距儀で少なくとも3回測定し,気象補正を行って決定しな
ければならない。気象補正は,気温及び気圧を機械側及びプリズム側で個々に測定し,その平均値を使用
する(補正量は,温度1 ℃当たり1 ppm,気圧3 hPa当たり1 ppm)。
図1−測点と機械点との配置
気象補正後の値
jxを真値とみなし,基線距離とする。
4
4
3
3
2
2
1
1
x
d
x
d
x
d
x
d
=
=
=
=
5.2
測定
機器を設置するときは,致心に十分注意を払わなければならない。
各基線に対する測定は,3回行わなければならない。そのとき気象補正のために気温及び気圧を測定し
4
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ておかなければならない。測定値x1, x2, x3, x4は,3回測定の平均値で気象補正後の値とする。
5.3
計算
全ての基線距離(dj)と測定値(xj)との差dj−xjは,実施する測量であらかじめ決められた許容偏差±
p(ISO 4463-1)の範囲内でなければならない。pが与えられていない場合は,
j
j
x
d−
≦2.5×sでなければ
ならない。ただし,sは,箇条6に従って求めた1測定距離の標準不確かさuISO-EDMである。
j
j
x
d−
が実施する測量に対してあまりにも大きい場合は,その主原因を見つけるために,次の測定を行
うのがよい。
簡易試験手順の計算例を,附属書Aに示す。
5.4
調査測定
dj−xjが全て同一符号なら,何らかの系統的な誤差が考えられる。これは,スケール誤差又はゼロ点誤差
によることが多い。
スケール誤差が考えられる場合は,周波数カウンタで光波測距儀の変調周波数を確認するか,又は製造
業者のサービス部門に連絡をするのがよい。
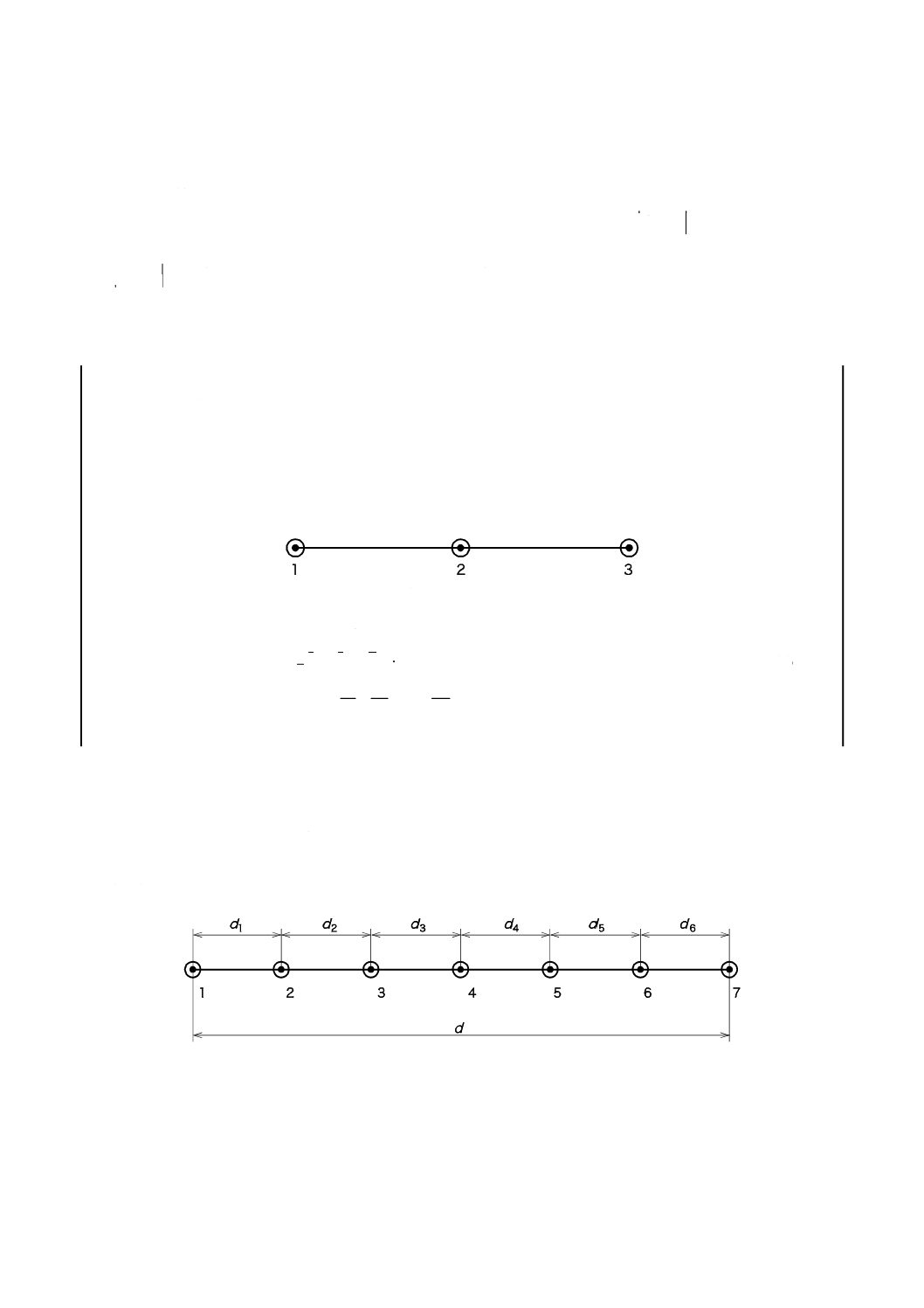
ゼロ点補正量δを確認するには,3 cm以下の直線性をもつ臨時の基線(50 m程度)を設ける(図2参照)。
3本の三脚を確実に固定し,致心に注意して機器を設置する。
図2−ゼ口点補正量確認の配置
各測点間の距離を測定し,ゼロ点補正量は,式(1)によって求める。
3
2
2
1
3
1
,
,
,
δ
−
−
=
········································································· (1)
ここに,
δ: ゼロ点補正量
2,3
1,2
3,1
及び
,
: 各測点間の距離
系統的な原因が見つけられない場合は,箇条6の標準試験手順を実施することが望ましい。
6
標準試験手順
6.1
測定場所の設定
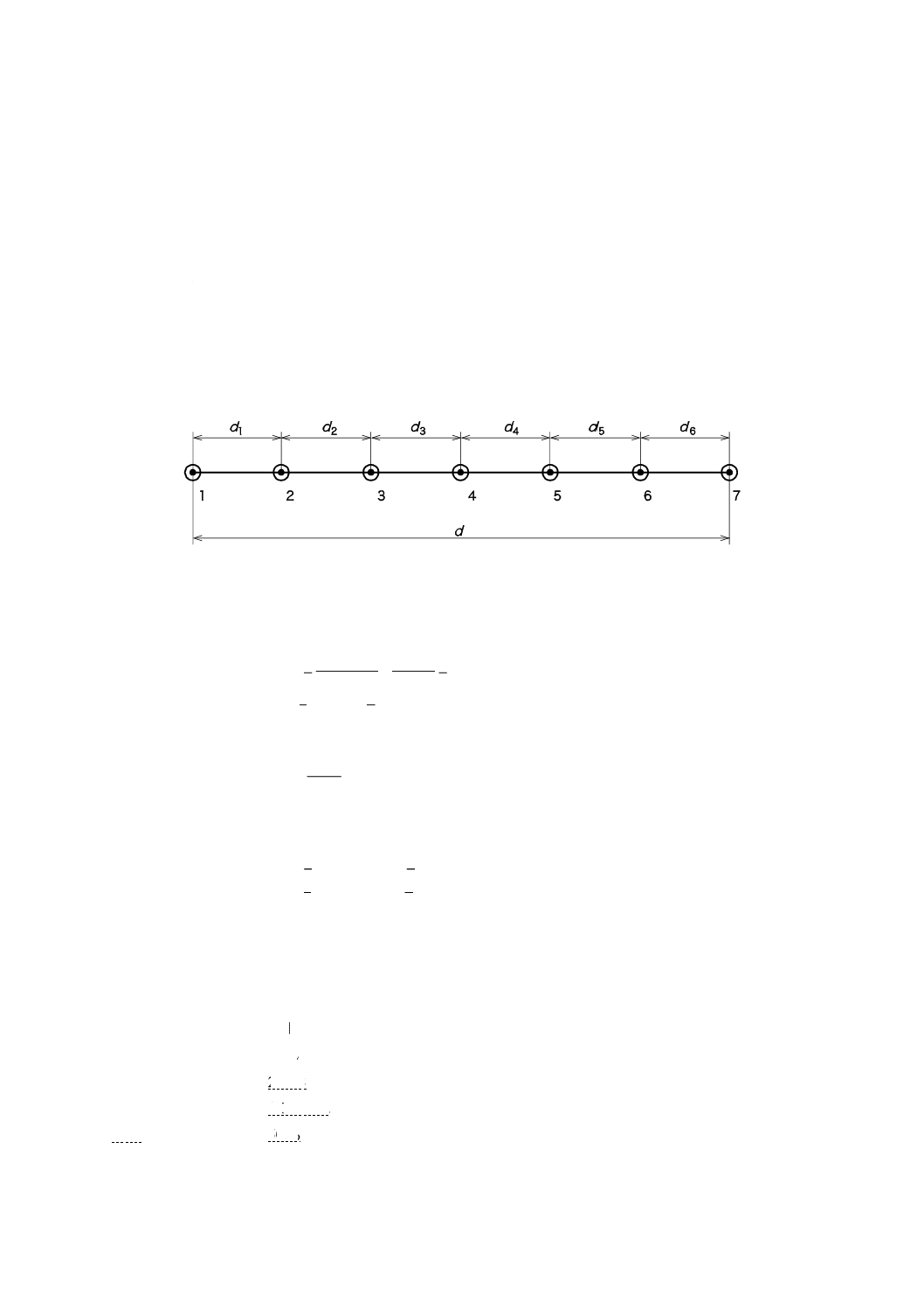
長さ約300 m〜600 mの直線上に図3に示すように7点を設定する。全長は,光波測距儀の使用が予定
される作業に合わせて設定することもできる。測点は,測定を行っている間は安定であるよう留意する(図
3参照)。
図3−測点と機械点との配置
A:21の異なる距離による基線の設定
基線の最もよい配置は,6.2に従った測定基線21個の組合せによる距離が全て異なるようにd1〜d6の六
つの基線距離で選定された配置である。
5
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次に,基線上の7測点間を六つの距離に分割する一例を示す。
1
6
1
5
1
4
1
3
1
2
1
32
,
16
8
,
4
2
,
63
d
d
d
d
d
d
d
d
d
d
d
d
=
=
=
=
=
=
·································································· (2)
ここに,dは,予定している基線の全長である。
B:サイクリックエラーを考量した基線設定
光波測距儀にサイクリックエラーが考えられる場合は,サイクリックエラーの影響が標準不確かさ
uISO-EDM及びゼロ点補正量δに含まれるように基線距離を決定しなければならない。
注記 位相差測定方式の場合は,サイクリックエラーの発生が想定されるのでB方式が望ましい。
7測点間の六つの基線距離及び全長は,式(3)〜式(6h)によって求める。
15
5
6
0
λ
.
d
β
−
=
············································································ (3)
ここに,
d: 基線の全長
λ: 光波測距儀の最高変調周波数の波長
また,
2
λ
μ
β
×
=
··············································································· (4)
μ: β0にβが最も近くなるように選んだ整数
72
λ
γ=
····················································································· (5)
六つの基線距離及び基線の全長は,次の式によって求める。
d1=λ+β+3γ ············································································ (6a)
d2=λ+3β+7γ ········································································· (6b)
d3=λ+5β+11γ ········································································· (6c)
d4=λ+4β+9γ ·········································································· (6e)
d5=λ+2β+5γ ·········································································· (6f)
d6=λ+γ ················································································· (6g)
d=6λ+15β+36γ ······································································ (6h)
6.2
測定
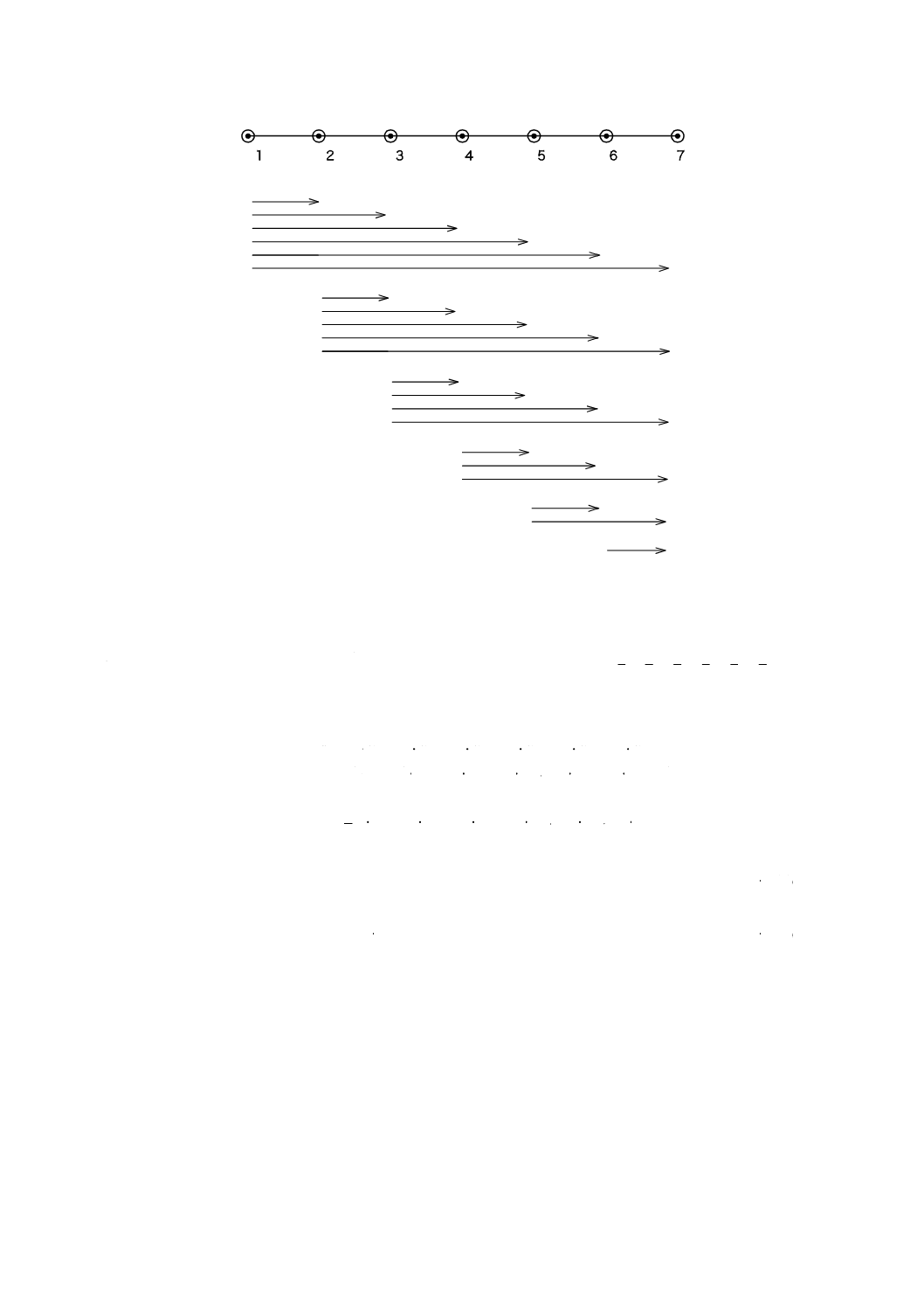
七つの測点間の21通りの測定(図4参照)は,1日で完了しなければならない。全測定中,致心に十分
注意を払わなければならない。全ての距離で良好な反射光の状態で測定する。測定は,視程がよく測定光
を遮る状況が生じないようなときに開始する。気象補正は,各距離で気温,気圧及び湿度を機械側及びプ
リズム側で個々に測定し,各距離での平均値を使用する(補正量は,温度1 ℃当たり1 ppm,気圧3 hPa
当たり1 ppm)。
なお,湿度は,測定を省略することができる。
6
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4−測定する距離
6.3
計算
光波測距儀が示した生の観測値
q
p
x,
~
(p:機械点,q:測点)に気象補正を行わなければならない。この
補正後の測定値xp,qを最小二乗法によって評価する。未知数は,6個の距離
7,6
6,5
5,4
4,3
3,2
2,1
,
,
,
,
,
y
y
y
y
y
y
及びゼ
ロ点補正量δの7個である。
21の観測方程式は,式(7)となる。
δ
y
y
y
y
y
y
r
x
δ
y
y
y
y
y
y
r
x
δ
y
y
y
y
y
y
r
x
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
−
+
+
+
+
+
=
+
−
+
+
+
+
+
=
+
−
+
+
+
+
+
=
+
1
1
0
0
0
0
0
1
0
0
0
0
1
1
1
0
0
0
0
0
1
7
6
6
5
5
4
4
3
3
2
2
1
7
6
7
6
7
6
6
5
5
4
4
3
3
2
2
1
3
1
3
1
7
6
6
5
5
4
4
3
3
2
2
1
2
1
2
1
Μ
·············· (7)
行列式で表せば,式(8)となる。
x+r=F(y) ················································································ (8)
残差は,式(9)となる。
r=Ay−x ·················································································· (9)
ここに,Aは,21の距離測定値の調整を行うための[21×7]の計画行列である。
7
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A=
1
2
3
4
5
6
7
1
1
0
0
0
0
0
−1
2
1
1
0
0
0
0
−1
3
1
1
1
0
0
0
−1
4
1
1
1
1
0
0
−1
5
1
1
1
1
1
0
−1
6
1
1
1
1
1
1
−1
7
0
1
0
0
0
0
−1
8
0
1
1
0
0
0
−1
9
0
1
1
1
0
0
−1
10
0
1
1
1
1
0
−1
11
0
1
1
1
1
1
−1
12
0
0
1
0
0
0
−1
13
0
0
1
1
0
0
−1
14
0
0
1
1
1
0
−1
15
0
0
1
1
1
1
−1
16
0
0
0
1
0
0
−1
17
0
0
0
1
1
0
−1
18
0
0
0
1
1
1
−1
19
0
0
0
0
1
0
−1
20
0
0
0
0
1
1
−1
21
0
0
0
0
0
1
−1
x:[21×1]の観測ベクトル
y:[7×1]の未知数の推定値ベクトル
r:[21×1]の残差ベクトル
=
=
=
=
7,6
7,5
3,1
2,1
7,6
6,5
5,4
4,3
3,2
2,1
7,6
7,5
3,1
2,1
r
r
r
r
y
y
y
y
y
y
x
x
x
x
Μ
Μ
r
y
l
x
δ
······························ (10)
ガウス−マルコフモデルによる最小二乗法の解ベクトルは,次式で求まる。
(
)
Px
A
PA
A
y
T
T
1
−
=
····································································(11)
全ての測定は,同じ重みで相関がないと考えられ,重み行列Pは単位行列となる。このため,Pは計算
式では省略できる。
正規方程式は,式(12)となる。
A
A
N
T
=
··············································································· (12)
最終的に式(13)となる。
x
A
N
y
T
1
−
=
··········································································· (13)
測定距離の標準偏差sは,式(14)で求まる。
ν
r
rT
s=
··············································································· (14)
8
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
d=21: 測定した距離の数
u=7: 未知数の推定値の数
ν=d−u=14: 自由度
各距離の出力推定値yk及びゼロ点補正量δの標準偏差は,余因子行列対角要素式(17)として求まる。
1
−
=N
Q
················································································· (15)
()
6
1...,
,
k
s
y
s
k,k
k
=
=
Q
···························································· (16)
7
7,
δ
s
s
Q
=
············································································ (17)
最終的に各距離のタイプA評価の標準不確かさは,式(18)で表される。
()
()
6
,...,
2,1
=
=
k
y
s
y
u
k
k
························································ (18)
ゼロ点補正量δについては,
δ
δ
s
u=
·················································································· (19)
さらに,
s
u
=
EDM
-
ISO
············································································· (20)
標準試験手順の計算の例を,附属書Bに示す。
6.4
統計的検定
6.4.1
一般
統計的検定は,標準試験手順だけに適用する。
試験結果の評価のために,次の値を用い統計的検定を行わなければならない。
− 1測定距離の標準偏差:s
− ゼロ点補正量δ及びその標準偏差:sδ
そして,次の三つの統計的検定を行う(表1参照)。
a) 計算で得られた標準偏差sは,製造業者が示している値,又は事前に決めた別の値σ0よりも小さいか?
b) 二つの異なったサンプルから求めた標準偏差s及びs~は,それぞれのサンプルの自由度の数νが同じ
だと仮定したとき,同じ母集団に属しているか?
標準偏差s及びs~は,次のいずれかから求めることができる。
− 異なる時間帯に同じ機器を用いて行った二つの測定のサンプル
− 異なる機器を用いて行った二つの測定のサンプル
c) ゼロ点補正量δは,0か(δ0=0)。又は製造業者が示したゼロ点補正量δ0の反射プリズムを使用した
ときδ=δ0か?
次の検定においては,信頼水準(1−α)を0.95とし,この規格の測定手順に従い自由度は14とする。
表1−統計的検定
問
帰無仮説
対立仮説
a)
σ≦σ0
σ>σ0
b)
σ=σ~
σ≠σ~
c)
δ=δ0
δ≠δ0
注記 帰無仮説ではサンプル測定の結果算出した標準偏差をもたらす
母集団の統計量を検証するためσをsの代わりに用いる。
6.4.2
問a)
測定して得た標準偏差sが,次の条件を満たすならば,製造業者が表明する,又は他の方法であらかじ
9
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
め決められた母集団の理論的標準偏差σ0より小さいか等しいという帰無仮説は棄却することができない。
()
ν
ν
2
1
0
≦
α
χ
σ
s
−
×
····································································· (21)
()
14
14
≦
2
95
0
0
.
χ
σ
s
×
··································································· (22)
()
68
23
14
2
95
0
.
χ.
=
······································································· (23)
30
1
14
68
23
≦
0
0
.
σ
.
σ
s
×
=
×
·························································· (24)
そうでなければ,帰無仮説は棄却される。
6.4.3
問b)
二つの異なったサンプルから求めた標準偏差(s及びs~)が,同じ母集団に属するかどうかを検定する。
次の条件を満たすなら,対応する帰無仮説σ=σ~は棄却することができない。
(
)
(
)
ν
ν
ν
ν
,
F
s
s
,
F
α
α
2
1
2
2
2
1
≦
~
≦
1
−
−
······················································ (25)
(
)
(
)
14
14
≦
~
≦
14
14
1
975
0
2
2
975
0
,
F
s
s
,
F
.
.
··················································· (26)
(
)
98
2
14
14
975
0
.
,
F.
=
····································································· (27)
98
2
≦
~
≦
34
0
2
2
.
s
s
.
······································································ (28)
そうでなければ,帰無仮説は棄却される。
6.4.4
問c)
次の条件を満たすならば,ゼロ点補正量δと製造業者が示したゼロ点補正量δ0とが等しいという帰無仮
説は,棄却することができない。
()
ν
2
1
0≦
α
δt
s
δ
δ
−
×
−
································································· (29)
()
14
≦
975
0
0
.
δt
s
δ
δ
×
−
································································ (30)
45
0
7
7
.
s
s
s
,
δ
×
=
×
=
Q
······························································ (31)
()
14
2
14
975
0
.
t.
=
········································································· (32)
14
2
≦
0
.
s
δ
δ
δ×
−
····································································· (33)
そうでなければ,帰無仮説は棄却される。
測定回数が異なる場合には,その自由度に対応する
()
ν
2
1α
χ−
,
(
)
ν
ν,
Fα2
1−
,
()
ν
2
1α
t−
などの値を採用しなけ
ればならない。それらの値は,JIS B 7912-1又は統計の参考書から得られる。
6.5
合成標準不確かさの評価(タイプA及びタイプB)
6.5.0A 一般
必要に応じ測定結果の信頼性評価のため,バジェット表を作成し,合成標準不確かさを評価することが
できる。
6.5.1
最終距離及び合成標準不確かさ
求める最終距離Dfinal及び測定の合成標準不確かさu(D)は,表2に示す代表的な影響量によって式(34)及
び式(35)として表せる。
Dfinal=f(Dm, δ, f, t, p, rh, e, r, rf) ····················································· (34)
10
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
()
(
)
()
()
()
()
()
()
()
()
rf
u
r
u
e
u
rh
u
p
u
t
u
f
u
δ
u
D
u
D
u
m
2
2
2
2
2
2
2
2
2
EDM
-
ISO
+
+
+
+
+
+
+
+
=
···· (35)
光波測距儀の測定の不確かさバジェットの例を,附属書Cに示す。
6.5.2
不確かさバジェット
光波測距儀を用いて行う測定の不確かさの要因(影響量)の代表例を,表2に示す。
表2−光波測距儀の測定の不確かさ
不確かさ要因(影響の量)
記号
評価
分布
I. 光波測距儀関連の要因
距離測定Dmの精密さ
最小二乗法による評価
uISO-EDM
タイプA
正規分布
ゼロ点補正量δ 最小二乗法による評価
uδ
タイプA
正規分布
光波測距儀の変調周波数
uΔf
タイプB
正規分布
II. 大気に関する要因
気温
uΔt
タイプB
正規分布
気圧
uΔp
タイプB
正規分布
相対湿度
uΔrh
タイプB
正規分布
III. 機器の設置に関する要因
光波測距儀の致心
ue
タイプB
一様分布
反射プリズムの致心
ur
タイプB
一様分布
IV. 一般的な不確かさ要因
丸めによる不確かさ(最小表示)
uDisp
タイプB
一様分布
上側及び下側の限界の値又は推定値及びこの区間内に存在する確率から個々の影響量の標準不確かさを
計算する。詳細な手引がISO/IEC Guide 98-3:2008の4.3に記載されている。
合成標準不確かさを算出した後,測定の精確さを示すために拡張不確かさを示すことは有用である。拡
張不確かさは,包含係数k=2とすれば式(36)で求まる。
U=2×u(D) ············································································ (36)
標準試験手順の不確かさバジェット表の計算例を,附属書Cに示す。
11
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
簡易試験手順の例
注記 各例の計算は,最初から最後まで最大桁数で行っているが,中間の値及び最終結果は丸めた値
として示している。
A.1 測定条件
測定場所の4本の基線の参照値は,精度確認された光波測距儀で測定し決定され,その値は次のとおり
とする。
m
248
.
152
m
502
.
76
m
055
.
54
m
784
.
21
4
3
2
1
=
=
=
=
x
x
x
x
箇条6の標準試験手順によって求めたl測定距離の標準不確かさuISO-EDMは,次の値とする。
uISO-EDM=1.8 mm
A.2 測定
観測者 日測 太郎
天候 晴れ
気温 18 ℃
気圧 1 009 hPa
使用機種及び機番 NN xxx 630401
測定日 2003-04-15
測定結果を,表A.1に示す。
12
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−測定結果
1
2
3
4
xj,k
3
3
1∑
=
=k
j,k
j
x
x
dj
(dj−xj)
m
m
m
mm
21.786
21.785
21.785
21.784
−1
21.785
54.054
54.051
54.053
54.055
2
54.053
76.502
76.505
76.504
76.502
−2
76.504
152.243
152.247
152.245
152.248
3
152.245
ケース1: 許容偏差があらかじめ決められている場合:p=±5 mm
ケース2: 許容偏差pが与えられていない場合:
j
j
x
d−
≦2.5×1.8 mm=4.5 mm
両方の場合とも許容値内のため,この光波測距儀は目的とする測量業務に使用できる。
13
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
標準試験手順の例
注記1 各例の計算は,最初から最後まで最大桁数で行っているが,中間の値及び最終結果は丸めた
値として示している。
注記2 計算結果として採用する数値を太字とし,単位記号を付記した。付記した単位記号も太字に
なっているが,これは見やすさを考えたためで,一般的なルールではない。
B.1
測定基線の条件
図B.1−測点と機械点との設定
設定距離d1, ……, d6の値を基線全長と光波測距儀の変調波長とから求める。基線全長を600 m,波長λ
を20 mとすれば,式(3)〜式(5)から,
m
00
30
m
10
m
33
31
15
m
20
5
6
m
600
0
.
μ
β
.
.
β
=
×
=
=
×
−
=
μ=3を選択すれば,βはβ0に近い。
m
8
277
0
72
m
20
.
γ
=
=
これらの値を用いて点間の距離d1, ……, d6及び全長dは,式(6a)〜式(6h)によって求める。
m
28
20
m
06
173
m
39
81
m
94
111
m
00
580
m
50
142
m
83
50
6
3
5
2
4
1
.
d
.
d
.
d
.
d
.
d
.
d
.
d
=
=
=
=
=
=
=
B.2
測定
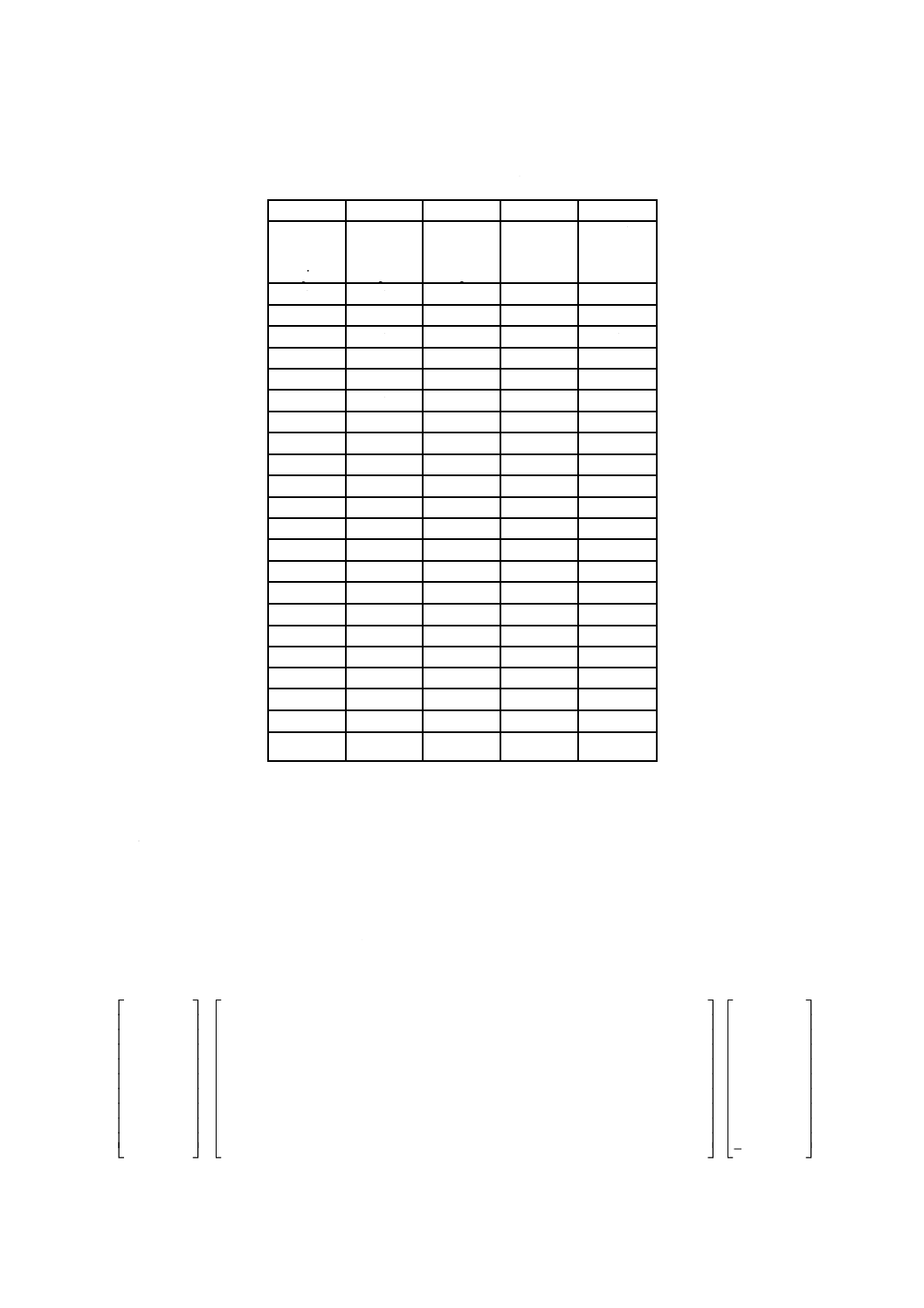
表B.1の列l〜列4に21個の測定結果を示す。列4は,補正(気象補正及び水平距離換算)後の値xp,q
である。列5は,B.3の計算の結果得られる残差rp,qである。
観測者 日測 三郎
天候 晴れ
気温 27 ℃
気圧 1 006 hPa
湿度 50 %
使用機種及び機番 NNxxx 630401
14
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定日 2003-04-15
表B.1−測定結果及び残差
1
2
3
4
5
測定順
(Dist No)
j
機械点
(Pt)
p
測点
(Pt)
q
測定値
xp,q
m
残差
rp,q
mm
1
1
2
50.801
+2.9
2
1
3
162.806
+2.3
3
1
4
335.904
−1.5
4
1
5
478.407
−5.8
5
1
6
559.810
−1.0
6
1
7
580.098
+3.1
7
2
3
112.007
−3.9
8
2
4
285.096
+1.3
9
2
5
427.594
+2.0
10
2
6
509.004
−0.2
11
2
7
529.292
+3.8
12
3
4
173.091
+1.9
13
3
5
315.592
−0.4
14
3
6
396.999
+0.4
15
3
7
417.295
−3.5
16
4
5
142.494
+3.4
17
4
6
223.904
+1.2
18
4
7
244.200
−2.8
19
5
6
81.409
−2.5
20
5
7
101.697
+1.6
21
6
7
20.293
−2.2
∑
0.0
表B.1のxp,q及びrp,qは,次による。
xp,q: 観測ベクトルの要素
rp,q: 残差ベクトルの要素
B.3
計算
ガウス−マルコフモデルの解ベクトルは,次式となる。
x
QA
y
T
=
及び
1
−
=N
Q
−
×
−
−
−
−
−
−
−
−
−
−
=
×
=
147.793
6
892.875
1
643.708
3
824.689
4
008.182
5
980.018
3
167.826
2
0
0.200
1
0.057
1
0.057
1
0.057
1
0.057
1
0.057
1
0.057
1
0.057
0
0.302
5
0.126
3
0.016
3
0.016
3
0.016
3
0.016
1
0.057
5
0.126
0
0.302
5
0.126
3
0.016
3
0.016
3
0.016
1
0.057
3
0.016
5
0.126
0
0.302
5
0.126
3
0.016
3
0.016
1
0.057
3
0.016
3
0.016
5
0.126
0
0.302
5
0.126
3
0.016
1
0.057
3
0.016
3
0.016
3
0.016
5
0.126
0
0.302
5
0.126
1
0.057
3
0.016
3
0.016
3
0.016
3
0.016
5
0.126
0
0.302
29
0.001
08
20.292
80
81.407
65
142.498
22
173.094
37
112.004
22
50.805
x
A
Q
y
T
15
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表B.1に示した残差は,式(9)(r=Ay−x)に従って求める。
ゼロ点補正量δは,解ベクトルyの最後の項y1,7として求まる。
y1,7=δ=0.001 29 ≈ 0.001 3 m=1.3 mm
式(14)に従って1測定距離の標準偏差sを求める。
mm
3.2
=
=
=
−
=
=
m
2
003
.0
7
21
146
000
.0
EDM
-
ISO
u
s
s
T
ν
r
r
ここに,νは,自由度でν=d−u=14である。
ゼロ点補正量の標準偏差sδは,式(17)に従って次のように求める。
mm
1.45
=
×
=
=
2
0
mm
2
3
7,7
.
.
s
s
s
δ
δ
Q
B.4
統計的検定
B.4.1 問a) による統計的検定(標準偏差sが事前に決めた値σ0より小さいか等しい。)
mm
9.3
≦
mm
2.3
30
.1
mm
0.3
≦
mm
2.3
14
mm
2.3
mm
0.3
0
×
=
=
=
ν
σ
s
上記の不等式は成立するため,信頼水準95 %で,帰無仮説(測定で得られた標準偏差s=3.2 mmが事前
に決めた値σ0=3.0 mmより小さいか等しい。)は棄却できない。
B.4.2 問b) による統計的検定(標準偏差s及び1~sは,同じ母集団に属しているか。)
98
.2
≦
64
.0
≦
34
.0
98
.2
≦
mm
0.
16
mm
2.
10
≦
34
.0
14
mm
0.4
~
mm
2.3
2
2
1
=
=
=
ν
s
s
上記の不等式は成立するため,信頼水準95 %で帰無仮説(試験で得られた標準偏差s=3.2 mm及び1~s=
4.0 mmは,同じ母集団に属している。)は棄却できない。
B.4.3 問c) による統計的検定(ゼロ点補正量δは,ゼロに等しいか。)
mm
1.3
≦
mm
3.1
14
.2
mm
45
.1
≦
mm
3.1
mm
45
.1
mm
3.1
14
mm
2.3
×
=
=
=
=
δ
δ
ν
s
s
上記の不等式は成立するため,信頼水準95 %で帰無仮説(ゼロ点補正量δはゼロに等しい。)は棄却で
きない。
16
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
不確かさバジェット表の計算例(タイプA及びタイプB)
注記1 各例の計算は,最初から最後まで最大桁数で行っているが,中間の値及び最終結果は丸めた
値として示している。
注記2 計算結果として採用する数値を太字とし,単位記号を付記した。付記した単位記号も太字に
なっているが,これは見やすさを考えたためで,一般的なルールではない。
C.1 測定条件
この規格の標準試験手順に従った試験を実施した光波測距儀を使用する。試験の結果は,附属書Bのと
おりである。
使用する光波測距儀は,標準試験手順によって評価された。測定結果は,附属書Bに示されており,次
の条件で測定された。
想定する観測業務の距離:600 m
天候:晴れ, 気温:27 ℃, 気圧:1 006 hPa, 相対湿度:50 %
標準試験手順の結果から,578.345 m地点の一素子プリズムまでの距離測定の合成不確かさを,次の情
報を用いて求める。
なお,使用した光波測距儀は,次の条件で補正量が0となる。
気温:10 ℃, 気圧:1 013 hPa, 相対湿度:0 %, ゼロ点補正量:0.0 mm
− 距離測定の不確かさは,附属書Bから次のようになる。
補正前の測定値 Dm=578.345 m
距離測定の標準不確かさ uISO-EDM=3.2 mm
ゼロ点補正量 δ=1.3 mm
ゼロ点補正量の標準不確かさ sδ=uδ=1.45 mm
− 変調周波数
変調周波数の相対誤差
ppm
0
0
Δ
.
f
f=
:(製造業者などの測定データから)
変調周波数の不確かさは,光波測距儀の仕様書などから0.5 ppmとする。
uΔf=0.5 ppm
− 温度
測定時の温度と標準大気との差 Δt=17 ℃
温度測定の不確かさは,経験値から1 ℃とする。
uΔt=1.0 ℃
1 ppm/1 ℃を係数として,気象補正量,標準不確かさを求める。
− 気圧
測定時の気圧と標準大気との差 Δp=−7 hPa
気圧測定の不確かさは,経験値から1 hPaとする。
17
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
uΔp=1 hPa
−0.3 ppm/1 hPaを係数として,気象補正量,標準不確かさを求める。
− 湿度
測定時の相対湿度と標準大気との差 Δrh=+50 %
湿度測定の標準不確かさは,経験値から20 %とする。
uΔrh=20 %
0.005 ppm/1 %を係数として,気象補正量,標準不確かさを求める。
− 致心
光波測距儀の致心量 e=0 mm
光波測距儀の致心の標準不確かさは,経験値から0.7 mmとし,一様分布として見積もる。
mm
4
0
3
7
0
.
.
ue
≈
=
プリズムの致心量 r=0 mm
プリズムの致心の標準不確かさは,経験値から0.7 mmとし,一様分布として見積もる。
mm
4
0
3
7
0
.
.
ur
≈
=
− 表示分解能
表示分解能 Disp=1 mm
表示分解能の標準不確かさは,最少桁表示1 mmの一様分布として見積もる。
()
mm
3
0
3
2
1
.
udisp
≈
=
タイプBの標準不確かさは,経験値又は一般的知識によって見積もる。
C.2 不確かさバジェットの例
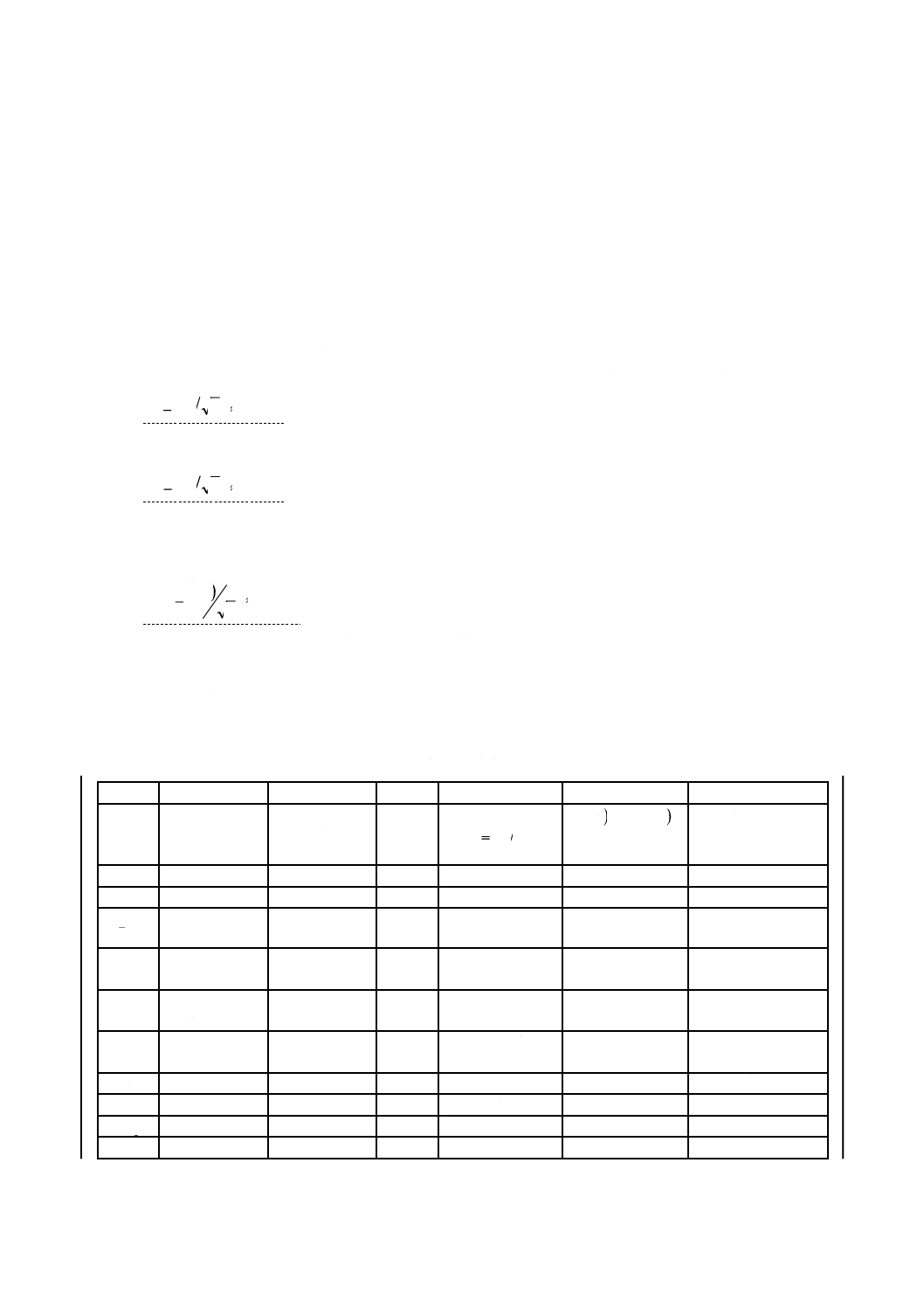
不確かさバジェットの例を,表C.1に示す。
表C.1−不確かさバジェットの例
1
2
3
4
5
6
7
入力量
Xi
入力推定値
xi
標準不確かさ
u(xi)
分布
感度係数
i
i
x
f
c
∂
∂
≡
()
()
i
i
i
x
u
c
x
u
×
≡
~
578 m換算
mm
評価のタイプ
Dm
578.345 m
3.2 mm
正規
1
3.2
A,最小二乗法評価
δ
1.3 mm
1.5 mm
正規
1
1.5
A,最小二乗法評価
f
f
Δ
0
0.5 ppm
正規
Dm
0.3
B,経験値
Δt
(Δt=17 ℃)
+9.8 mm
1.0 ℃
正規
1×10−6×Dm
0.6
B,一般的知識
Δp
(Δp=−7 hPa)
+1.2 mm
1 hPa
正規
−0.3×10−6×Dm
0.2
B,一般的知識
Δrh
(Δrh=50 %)
+0.1 mm
20 %
正規
0.005×10−6×Dm
0.1
B,一般的知識
e
0
0.4 mm
一様
1
0.4
B,一般的知識
r
0
0.4 mm
一様
1
0.4
B,経験値
Disp
0
0.3 mm
一様
1
0.3
B,一般的知識
Dfinal
578.357
3.7 mm
18
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表C.1−不確かさバジェットの例(続き)
1
8
9
10
入力量
Xi
要因
参照するJIS B
7912-1の式
確率分布
Dm
距離u(Dm)
式(17)
δ
ゼロ点補正量u(δ)
式(19)
f
f
Δ
光波測距儀の変調周波数
u(Δf/f)
式(56)
a+=0.5; a−=−0.5; a=0.5
p=67 %
Δt
温度u(Δt)
式(56)
a+=1.0; a−=−1.0; a=1.0
p=67 %
Δp
気圧u(Δp)
式(56)
a+=1.0; a−=−1.0; a=1.0
p=67 %
Δrh
相対湿度u(Δrh)
式(56)
a+=20; a−=−20; a=20
p=67 %
e
光波測距儀の致心u(e)
式(57)
a+=0.7; a−=−0.7; a=0.7
p=100 %
r
プリズムの致心u(r)
式(57)
a+=0.7; a−=−0.7; a=0.7
p=100 %
Disp
デジタル表示u(Disp)
式(57)
a+=0.5; a−=−0.5; a=0.5
p=100 %
最終距離:Dfinal=Σ入力推定値=578.357 4 m
合成標準不確かさucEDMは不確かさの伝ぱ(播)則から得られ,与えられた状況下での光波測距儀によ
る距離測定の不確かさの推定値を示す。
mm
66
3
2
2
2
2
Δ
2
Δ
2
Δ
2
Δ
2
2
578
EDM
.
u
u
u
u
u
u
u
u
u
u
Disp
r
e
rh
p
t
f
δ
D
c
=
+
+
+
+
+
+
+
+
=
不確かさ要因の幾つかは不確かさバジェットの集計結果に影響を与えないが,このことを明確にしてお
くことが重要である。
C.3 拡張不確かさ
産業上,学術的応用において,測定における不確かさを区間で提示することが有用な場合がある。この
ような区間が必要な場合は,次式で拡張不確かさを求める。
UEDM578=k・ucEDM578
正規分布を仮定し,k=2とすれば,
UEDM578=2×3.66 ≈ 7.3 mm
となり,信頼の水準95 %に相当する区間は±7.3 mmとなる。
注記 拡張不確かさの表記は,多くて2桁である。
19
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
主な記号の解説
A
[21×7]の計画行列
d
標準試験手順の基線の全長
k
包含係数
p
簡易試験のための許容差(ISO 4463-1)
P
重み行列
Q
余因子行列
r
[21×7]の残差ベクトル
rp,q
機械点p,測点qの残差ベクトルの要素
x
[21×7]の観測ベクトル
xp,q
機械点p,測点qの観測ベクトルの要素
y
[7×1]の未知数ベクトル
s
測定距離の標準偏差
U
拡張不確かさ
u
標準不確かさ
uISO-EDM 標準試験手順で求めた1距離測定の標準不確かさ
λ
光波測距儀の最高変調周波数の波長
ν
自由度
δ
ゼロ点補正量
σ
試験で得られる観測値の母集団の母標準偏差
σ0
統計的検定のために事前に決めた値
参考文献
[1] ISO/IEC Guide 98-1,Uncertainty of measurement−Part 1: Introduction to the expression of uncertainty in
measurement
[2] ISO 9849,Optics and optical instruments−Geodetic and surveying instruments−Vocabulary
[3] ISO/IEC Guide 99,International vocabulary of metrology−Basic and general concepts and associated terms
(VIM)
注記 上記のガイドは,TS Z 0032:2012[国際計量計測用語−基本及び一般概念並びに関連用語
(VIM)]として公表されている。
[4] ISO 2854:1976,Statistical interpretation of data−Techniques of estimation and tests relating to means and
variances
[5] JIS Z 9041-2:1999 データの統計的な解釈方法−第2部:平均と分散に関する検定方法と推定方法
20
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(参考)
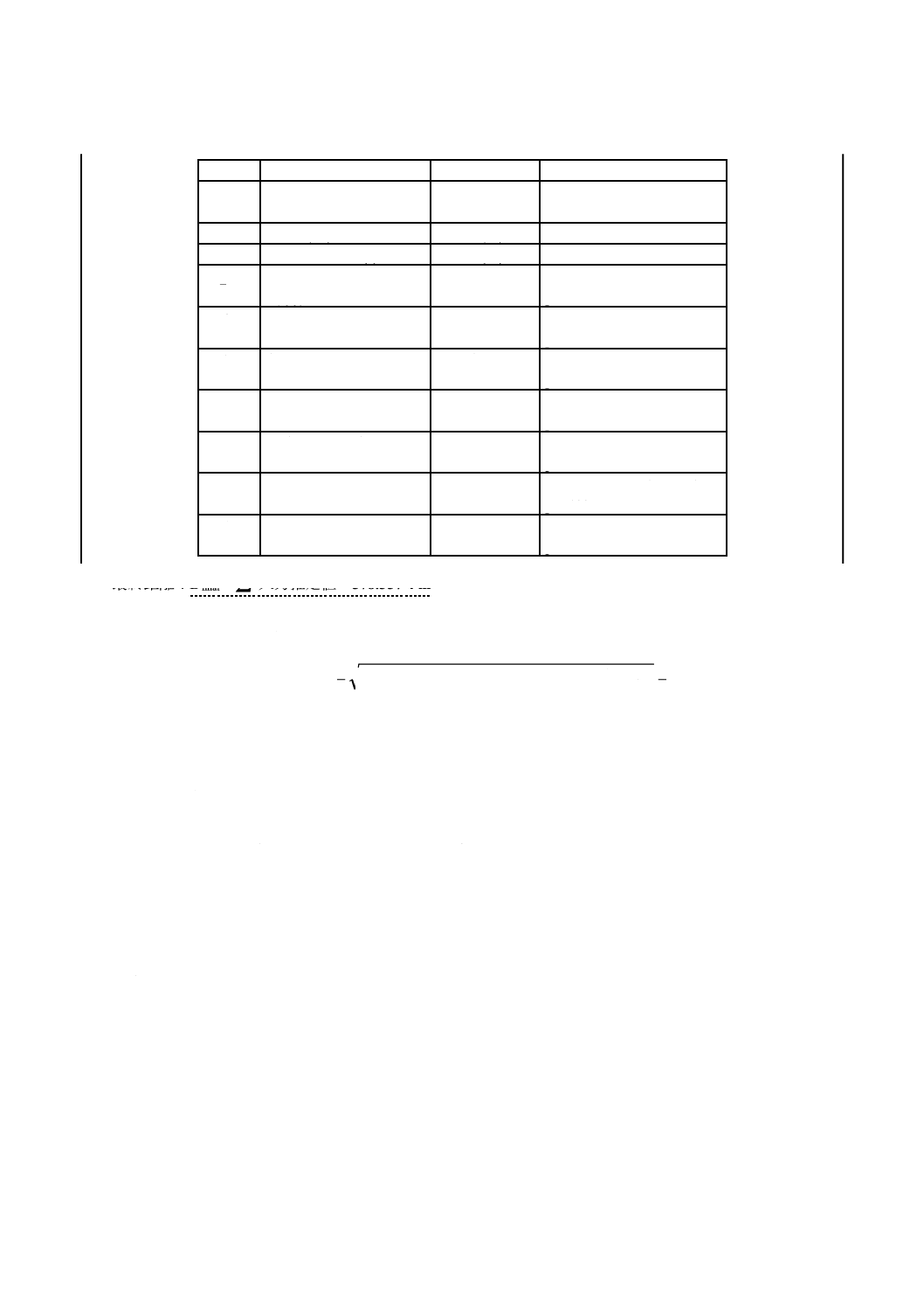
JISと対応国際規格との対比表
JIS B 7912-4:2016 測量機器の現場試験手順−第4部:光波測距儀
ISO 17123-4:2012,Optics and optical instruments−Field procedures for testing geodetic
and surveying instruments−Part 4: Electro-optical distance meters (EDM measurements to
reflectors)
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの評
価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3 用語及び
定義
JIS Z 8101-1及びJIS
Z 8103によるほか次に
よる。
3.1 スケール誤差
3.2 ゼロ点補正量
3
追加
JIS化に際し,“スケール誤差”,“ゼロ
点補正量”の用語を定義し明確にした。
その他については,対応するJISを追加
した。
用語を引用した規格の違いによるも
のであり,技術的な差異はない。
5 簡易試験
手順
5.1 測定場所の設定
5.1
jx=djの右辺
と左辺を入れ
替えた。
変更
記号変更で,技術的な差異はない。
ISOに修正提案を行う。
5.3 計算
5.4 調査測定
5.3
5.4
基線距離を
jx
からdjと表記
するように変
更した。
記号変更で,技術的な差異はない。
ISOに修正提案を行う。
6 標準試験
手順
6.1 試験場所の設定
B:サイクリックエラ
ーを考量した基線設定
6.1 B
JISにほぼ同じ 変更
基線距離は式(3)から式(6h)によって決定
されるため技術的差異はない。式の説明
及びλ/2に関する記述を削除し簡潔な表
現とした。変調周波数について最高の周
波数であることを明確にした。
6.2 測定
6.2
JISに同じ
追加
気象補正を行うための測定条件を簡易
測定の内容に,附属書との整合性を考
え,湿度を加えて記述し明確にした。技
術的差異はない。
2
B
7
9
1
2
-4
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
21
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの評
価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
6 標準試験
手順(続き)
6.3 計算
6.3
JISにほぼ同じ 変更
“系統効果の補正”という記述に括弧書
きで気象補正と書かれていた部分を具
体的に“気象補正”に置き換え,“系統
効果の補正”を削除した。
変更
式(14),式(17)及び式(20)の記号をS0から
sに変更し,併せてB.3及びB.4の関連
部分の変更を行った。技術的な差異はな
い。
JISに同じ
追加
余因子行列対角要素式(17)として求ま
る。式番号追記
6.4 統計的検定
6.4.1
JISに同じ
追加
ゼロ点補正量δの標準偏差の記号sδを追
記した。
6.4.1 a)
JISに同じ
変更
σからσ0へ変更した。
母集団の“σ”と区別するため。
表1
JISに同じ
変更
表1の統計的検定の問a)の帰無仮説と対
立仮説の標準偏差をsからσに,σをσ0
に変更した。
統計的検定で規定値と比較する試験
機の標準偏差は,測定サンプルから
求められる“s”ではなく,それをも
たらした母集団の“σ”である。
JISに同じ
変更
表1の統計的検定に注記を追加した。
帰無仮説ではサンプル測定の結果算出
した標準偏差をもたらす母集団の統計
量を検証するためσをsの代わりに使用
する。
統計的検定で規定値と比較する試験
機の標準偏差は,測定サンプルから
求められる“s”ではなく,それをも
たらした母集団の“σ”であり,σと
sの関係を明確にするため。
6.4.2
JISに同じ
変更
σからσ0へ変更した。
母集団の“σ”と区別するため。
6.5 合成標準不確かさ
の評価(タイプA及び
タイプB)
6.5
追加
6.4(統計的検定)だけを実施し,6.5を
省略できることを明確にし,日本の実情
で誤解がないようにした。技術的な差異
はない。
6.5.1 最終距離及び合
成標準不確かさ
6.5.1
JISに同じ
追加
式(34),式(35)及び表2の説明を加え,分
かりやすくした。技術的な差異はない。
2
B
7
9
1
2
-4
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
22
B 7912-4:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの評
価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
6 標準試験
手順(続き)
6.5.2 不確かさバジェ
ット
6.5.2
追加
表2の説明文及び表2に記号の欄を追加
し分かりやすくした。技術的な差異はな
い。
JISに同じ
削除
Dm及びδの説明は“以前の最小二乗法に
よる評価”であるが分かりやすくするた
め“以前の”を削除した。
JISに同じ
追加
拡張不確かさの算出式が記載されてい
ないため,JIS B 7912-1に従い式(36)を
追記した。技術的な差異はない。
附属書A
(参考)
簡易試験手順の例
Annex A
附属書B
(参考)
標準試験手順の例
Annex B
.
附属書C
(参考)
不確かさバジェット表
の計算例(タイプA及
びタイプB)
Annex C
附属書JA
(参考)
主な記号の解説
−
追加
主要な記号についての解説を表にまと
め追加した。技術的な差異はない。
JISと国際規格との対応の程度の全体評価:ISO 17123-4:2012,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
B
7
9
1
2
-4
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。