2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 7560-1992
液位測定用自動レベル計
Automatic level gauges for measuring the level of liquid in tanks
1. 適用範囲 この規格は,タンクなどに収納されている液体の体積を求めるために液位(1)を自動測定す
る計器(以下,レベル計という。)の一般的要件について規定する。
なお,測定原理の異なる個々のレベル計に関する個別要件は,附属書に規定する。
注(1) タンクなどの基準点から液面までの距離。上部基準点からの距離をアレージ又はアウテージ,
下部基準点からの距離をディップ又はインネージという。
備考 この規格の引用規格を,次に示す。
JIS B 0155 工業プロセス計測制御用語
JIS C 0903 一般用電気機器の防爆構造通則
JIS C 0920 電気機械器具及び配線材料の防水試験通則
JIS Z 8103 計測用語
JIS Z 8703 試験場所の標準状態
2. 用語の定義 この規格で用いる主な用語の定義は,JIS Z 8103及びJIS B 0155によるほか,次による。
(1) フロート−スプリングバランス式レベル計 液面に浮かぶ物体(フロート)に接続した測定テープ又
は測定ワイヤを定トルクばねによって緊張させ,液面に追従するフロートの位置を測定テープ又は測
定ワイヤの繰出し(巻取)長さによって液位を測定するレベル計。
(2) ディスプレーサ−サーボバランス式レベル計 測定しようとする液体中ではそれ自身が沈降する物
体(ディスプレーサ)を液面につり下げ,そのディスプレーサに作用する浮力が常に一定になるよう,
サーボバランス機構によってディスプレーサの位置を液面に自動平衡させ,液面に追従するディスプ
レーサの位置を測定テープ又は測定ワイヤの繰出し(巻取)長さによって液位を測定するレベル計。
(3) マイクロ波式レベル計 液面に向かって発射したマイクロ波が,液面で反射して戻ってくるまでの伝
搬時間から液位を測定するレベル計。
(4) 静電容量式レベル計 タンクなどに設置されたセンサの静電容量が液位に応じて変化することを利用
して,この静電容量を検出して液位を測定するレベル計。
(5) 誤差 レベル計の指示値から標準器による測定値を引いた値。
(6) ヒステリシス差 液面の上昇時と下降時とにおける同一液位に対するレベル計の指示値の差の絶対値。
(7) 感度 レベル計が液位の変化に感じる度合い。
3. 種類及び等級
3.1
種類 レベル計の種類及びその記号は測定原理によって区分し,表1のとおりとする。
2
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1 種類
種類
記号
構造
フロート−スプリングバランス式レベル計
0l
附属書1参照
ディスプレーサ−サーボバランス式レベル計
02
マイクロ波式レベル計
03
附属書2参照
静電容量式レベル計
04
附属書3参照
その他
09
−
3.2
等級 レベル計の等級及びその記号は性能によって区分し,表2のとおりとする。
表2 等級
等級
記号
A級
A
B級
B
C級
C
S1級
S1
S2級
S2
4. 性能(2)
注(2) 製造又は修理した工場の試験装置によって確認される性能であり,タンクなどに取り付けて,
実際に測定する状態における性能を示すものではない。
4.1
誤差 レベル計の誤差は,7.3.1によって試験したとき,等級に応じて表3の許容値を超えてはなら
ない。
表3 誤差の許容値
等級
許容値
A級
測定液位の±0.02% ただし,液位が10m以下のときは±2mm
B級
測定液位の±0.05% ただし,液位が5m以下のときは±2.5mm
C級
測定液位の±0.08% ただし,液位が5m以下のときは±4mm
S1級 任意の液位について±7.5mm
S2級 任意の液位について±10mm
備考 現場指示と遠隔信号出力の両方法をもつ場合は,その各々につい
て等級を表示してもよい。
4.2
ヒステリシス差 レベル計のヒステリシス差は,7.3.2によって試験したとき,等級に応じて表4の
許容値を超えてはならない。
表4 ヒステリシス差の許容値
等級
許容値
mm
A級
1
B級
3
C級,S1級及びS2級
−
4.3
感度 レベル計の感度は,7.3.3によって試験したとき,等級に応じて表5を満足しなければならな
い。
3
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5 感度
等級
感度
A級及びS1級 2mmの液位変化に対し,1mm以上の指示変化を生じること。
B級及びS2級 4mmの液位変化に対し,2mm以上の指示変化を生じること。
C級
−
4.4
耐圧 レベル計の受圧部は,7.3.4によって試験したとき,局部的な変形,漏れなどの異状が生じて
はならない。
4.5
絶縁抵抗 交流電源を用いるレベル計は,電源端子と接地端子との間の絶縁抵抗が,7.3.5によって
試験したとき,10MΩ以上でなければならない。ただし,直流電源を用いる場合は製造業者の指定による。
4.6
耐電圧 交流電源を用いるレベル計は,7.3.6によって試験したとき,表6の試験電圧に1分間耐え
なければならない。
表6 耐電圧
単位V
定格電圧 (E)
試験電圧
150以下
1 000
150を超えるもの
2E+1 000
5. 構造
5.1
測定範囲 測定範囲の上限及びその記号は,表7のとおりとする。
表7 測定範囲の上限
測定範囲の上限
m
記号
5
5
10
10
15
15
20
20
25
25
5.2
指示 指示は,次のとおりとする。
(1) 指示は現場若しくは遠隔又はその両方とし,それらの組合せ及び記号は表8のとおりとする。
表8 現場指示・遠隔指示の組合せ
指示の組合せ
記号
指示の組合せ
記号
現場指示だけ
01
現場指示及び遠隔アナログ信号出力
11
遠隔アナログ信号出力だけ
10
現場指示及び遠隔デジタル信号出力
21
遠隔デジタル信号出力だけ
20
現場指示並びに遠隔アナログ及びテジタル信号出力
31
遠隔アナログ及びデジタル信号出力
30
備考 指示方式がアレージ方式のものについては,記号の末尾にUを付ける。
(2) 目量は,等級に応じて表9のとおりとする。
表9 目量
単位mm
等級
目量
A級及びS1級
1以下
B級及びS2級
2以下
C級
10以下
4
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3
最高使用圧力 最高使用圧力及びその記号は,表10のとおりとする。
表10 最高使用圧力
最高使用圧力
Mpa
記号
大気圧
A
0.1
L1
0.5
L2
1.0
L3
2.0
M
3.0
H1
4.0
H2
5.4
防爆 爆発性雰囲気が存在するおそれのある場所に設置されるレベル計は,JIS C 0903に規定する
防爆の種類のうち,表11のいずれかに適合しなければならない。
表11 防爆構造
構造
記号
耐圧防爆構造
d
本質安全防爆構造
i
安全増防爆構造
e
特殊防爆構造
s
5.5
防水 屋外に設置されるレベル計は,JIS C 0920に規定する防水の種類のうち,表12のいずれかに
適合する構造でなければならない。
表12 防水構造
構造
記号
防滴I形
W1
防滴II形
W2
防雨形
W3
防まつ形
W4
防噴流形
W5
6. 材料 レベル計の材料は,使用環境及び被測定物に対して十分な耐食性をもち,機械的に堅ろう(牢)
で,かつ,耐久性に優れたものでなければならない。
7. 性能試験方法
7.1
試験条件
7.1.1
環境 誤差,ヒステリシス差及び感度の試験は,次の温度及び湿度の環境で行う。ただし,特殊な
環境で使用されるものは,受渡当事者間の協議によるものとする。
温度:20±2℃(3)
ただし,用いた標準器の値を,温度に対して補正などを行うことによって判定に疑義が生じない場
合は,5〜35℃(4)であってもよい。
なお,試験中の温度変化は,±2℃以内であること。
注(3) JIS Z 8703に規定する標準状態の温度20℃,温度2級。
(4) JIS Z 8703に規定する常温。
相対湿度:65±5%(5)
5
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ただし,用いた標準器の値を,湿度に対して補正などを行うことによって判定に疑義が生じない場
合は,45〜85%(6)であってもよい。
注(5) JIS Z 8703に規定する標準状態の湿度65%,湿度5級。
(6) JIS Z 8703に規定する常湿。
7.1.2
取付け レベル計は,製造業者が指定する姿勢又は通常使用される姿勢で試験装置に取り付けるも
のとする。なお,試験の結果に影響を与える附属機器をもつレベル計は,これらを接続して試験を行う。
7.1.3
電源 電源を必要とするレベル計では,次の電源を用いるものとする。
電圧:定格電圧±10%
周波数:定格周波数±2%
7.2
試験装置 試験に用いる装置,測定器などは,試験されるレベル計の等級に見合った適正な試験結
果が得られる安定度及び精度をもつものとする。
7.3
試験方法
7.3.1
誤差試験 レベル計を試験装置に正しく取り付け,試験装置の液面又は模擬液面(以下,液面とい
う。)と測定の基準点及びレベル計のゼロ点とを調整した後,次のいずれかの手順によって行う。
(1) 測定範囲の全体にわたって液面などを移動させ,誤差を測定できる場合は,次による。
(a) 測定範囲を等分した5点以上の液位を誤差測定点として定める。
(b) 液面を基準点から測定範囲の上限まで移動させながら,上記の誤差測定点のそれぞれに達したとき
移動を止める。
(c) 各測定点において,液面が安定した状態でレベル計の指示値 (In) を読み取り,基準点から液面まで
の長さ (Qn) を標準器によって測定する。
(d) 各測定点における上昇時誤差 (Run) を次の式によって算出する。
Eun=In−Qn
(e) 液面を,A級及びS1級のレベル計の場合は測定範囲の上限より2mm以上,B級,C級及びS2級の
レベル計の場合は測定範囲の上限より4mm以上それぞれ超えた位置まで移動させた後,測定範囲
の上限から基準点まで移動させながら,上記(b),(c)及び(d)と同様の手順によって下降時誤差 (Edn)
を算出する。
備考 上昇時誤差及び下降時誤差のすべてが,等級に応じて表3の許容値を超えてはならない。
(2) 測定範囲の全体にわたって液面を移動させ,誤差を測定することが困難な場合は,次による。
(a) 液面などを移動させて誤差を測定できる最大の長さについて(1)と同様の手順によって5点以上の上
昇時誤差 (Eun) 及び下降時誤差 (Edn) を求める。
(b) 各測定点における上昇時誤差と下降時誤差との平均 (Emn) を算出し,次の式によって液位Xと誤差
Yとの1次近似式を求める。
Y=aX+b
ここに,
2
2
)
(
)
(
n
n
mn
n
mn
n
Q
Q
n
E
Q
E
Q
n
a
Σ
−
Σ
Σ
Σ
−
Σ
=
n
Q
a
E
b
n
mn
Σ
−
Σ
=
Qn: 標準器によって測定した各測定点の液位
Emn: 各測定点の平均誤差
n: 誤差測定点の数
(c) 上記1次近似式のXに,各測定点の液位 (Qn) を代入して求めた誤差 (Ecn) と上記平均誤差 (Emn) と
6
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の偏差の最大値をcとし,実測した誤差測定点を超える測定範囲における誤差を次の式によって推
定する。
Y=aX+b±c
ここに, c= | Ecn−Emn | max
備考 実測した上昇時誤差及び下降時誤差,並びに推定した誤差のすべてが,等級に応じて表3の許
容値を超えてはならない。
(3) レベル計を構成する要素機器(例えば,検出器,変換器,指示器)それぞれの誤差が個別の試験によ
って評価できる場合は,各誤差の2乗和平方根によってレベル計全体の誤差を求めてもよい。この場
合,誤差は測定範囲を等分した5点以上の液位について求めるものとする。
なお,静電容量式レベル計を,この方法によって試験する場合の手順を,附属書3に示す。
(4) 判定に疑義が生じないと認められる場合は,受渡当事者間の協定によって,上記(1),(2)及び(3)以外の
方法によってもよい。
7.3.2
ヒステリシス差試験 ヒステリシス差の試験は,7.3.1で得られた液面の上昇方向と下降方向の同
一測定点における指示値の差を求めて行う。
7.3.3
感度試験 感度の試験は,測定範囲内の数点について,液位又は液位に相当する入力を,A級及び
S1級のレベル計では2mm相当,B級及びS2級のレベル計では4mm相当増加及び減少させ,指示の変化
を読み取って行う。
7.3.4
耐圧試験 耐圧の試験は,レベル計の受圧部分を,最高使用圧力の1.5倍の水圧又は1.25倍の気圧
に10分間保持して行う。
7.3.5
絶縁抵抗試験 絶縁抵抗の試験は,電源端子と接地端子との間の抵抗を500Vの絶縁抵抗計によっ
て測定して行う。
7.3.6
耐電圧試験 耐電圧の試験は,電源端子と接地端子との間に,周波数50Hz又は60Hzの正弦波に
近い交流電圧を1分間加えて行う。
8. 取付施工上の注意事項 タンクへの取付けに当たっては,タンクの変形,タンク附属物の位置及び動
作,測定液の動揺,気候条件(雨,風,日照など)などが測定に影響を及ぼさないよう,レベル計の取付
位置,取付方法,支持,保護対策などに注意する。
なお,各種別のレベル計についての注意事項は,附属書1〜3の個別要件に示す。
9. 表示 レベル計には見やすい箇所に,次の事項を容易に消えない方法で表示しなければならない。
(1) 種類又はその記号
(2) 等級又はその記号
(3) 製造業者名又はその略号
(4) 製造番号
(5) 製造業者の定める製品の名称又は形式
7
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1 フロート−スプリングバランス式及び
ディスプレーサ−サーボバランス式レベル計
1. 適用範囲 この附属書は,フロート−スプリング式及びディスプレーサ−サーボバランス式レベル計
の個別要件について規定する。
2. 用語の定義 この附属書で用いる主な用語の定義は,次による。
(1) 本体 測定テープ又は測定ワイヤの移動量を機械的又は電気的な方法で液位情報に変換し,表示又は
遠隔伝送する機器。
(2) フロート(浮子) 液面に浮かび,液面に追従して鉛直方向に動く液位検出素子。
(3) ディスプレーサ それ自身は液体中に沈降する物体で,本体によってつられ,サーボバランス機構に
よって液面に追従して鉛直方向に動く液位検出素子。
(4) 測定テープ フロート又はディスプレーサに接続され,一定張力で本体に巻き取られる,定間隔の穴
付き金属製帯状テープ。
(5) 測定ワイヤ フロート又はディスプレーサに接続され,一定張力で本体に巻き取られる針金。
(6) ガイドプーリ 測定テープ又は測定ワイヤの鉛直方向の動きを円滑に方向転換してタンク外に引き出
すためのプーリ。
(7) バランサ ディスプレーサの浮力変化を検出する機器。
(8) アイソレータ 加圧されたタンクなどにおいて,本体とタンクなどとを一時的に遮断する保全用の装
置。
(9) キャリブレーションチャンバ タンクなどに設置されているレベル計の校正,点検及び整備に使用さ
れるチャンバ。
(10) スティルパイプ 液体の流動によるフロート又はディスプレーサの動揺を小さくするため,タンク内
に鉛直に設けた管。フロート又はディスプレーサはその中を上下する。
(11) ガイドワイヤ 液体の流動によるフロート又はディスプレーサの流れを防止するため,タンク内に鉛
直に張った針金。フロート又はディスプレーサは,このガイドワイヤに沿って上下する。
(12) ガイドワイヤノブ ガイドワイヤの上部固定用金具。タンクなど自体の伸縮の影響を吸収するため,
ばねを内蔵している。
3. 構造
3.1
フロート−スプリングバランス式レベル計 フロート−スプリングバランス式レベル計の一般的な
構造例を附属書1図1に示す。
8
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
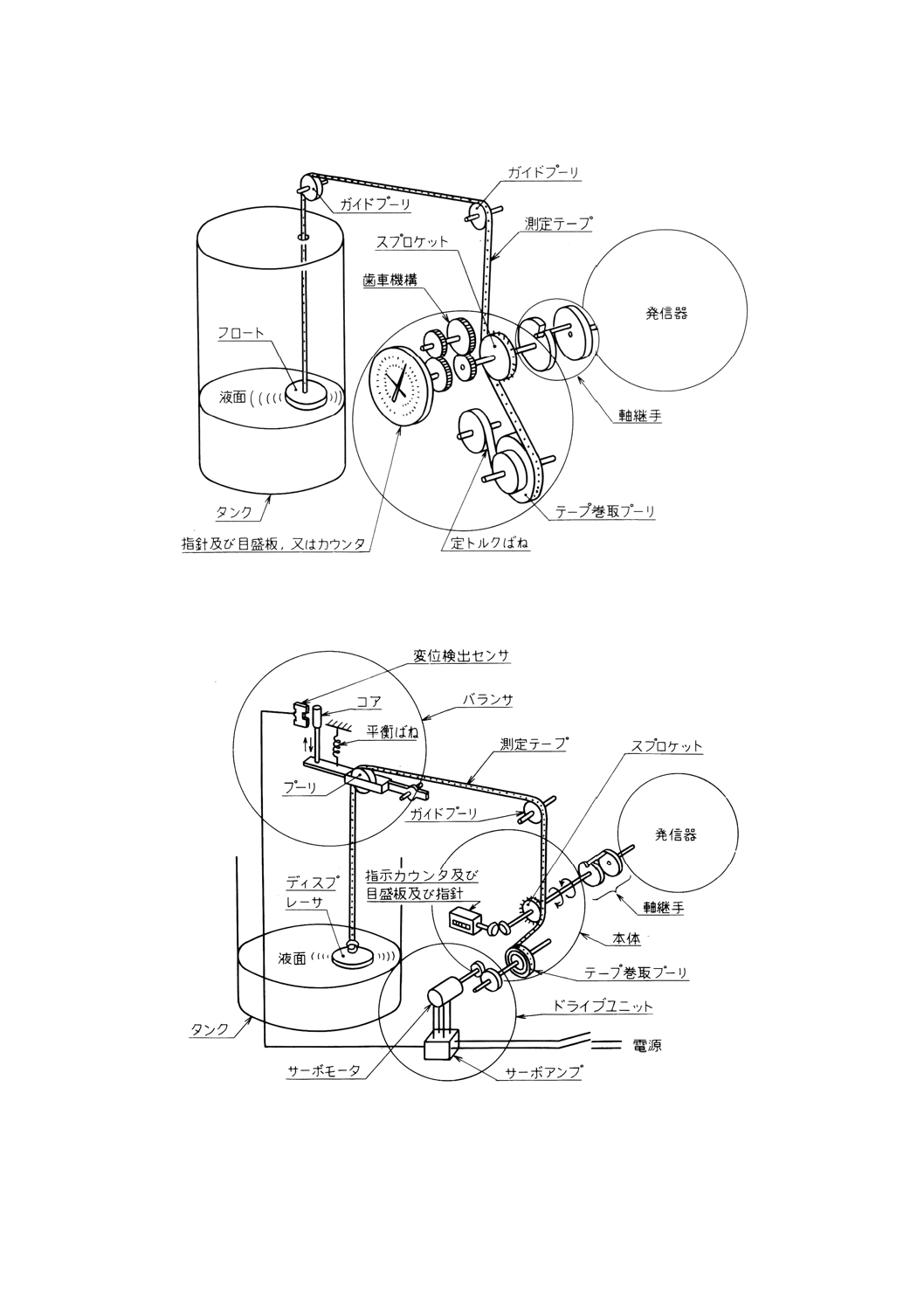
附属書1図1 フロート−スプリングバランス式レベル計(例)
3.2
デイスプレーサ−サーボバランス式レベル計 ディスプレーサ−サーボバランス式レベル計の一般
的な構造例を附属書1図2(テープ式)及び附属書1図3(ワイヤ式)に示す。
附属書1図2 テープ式(例)
9
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
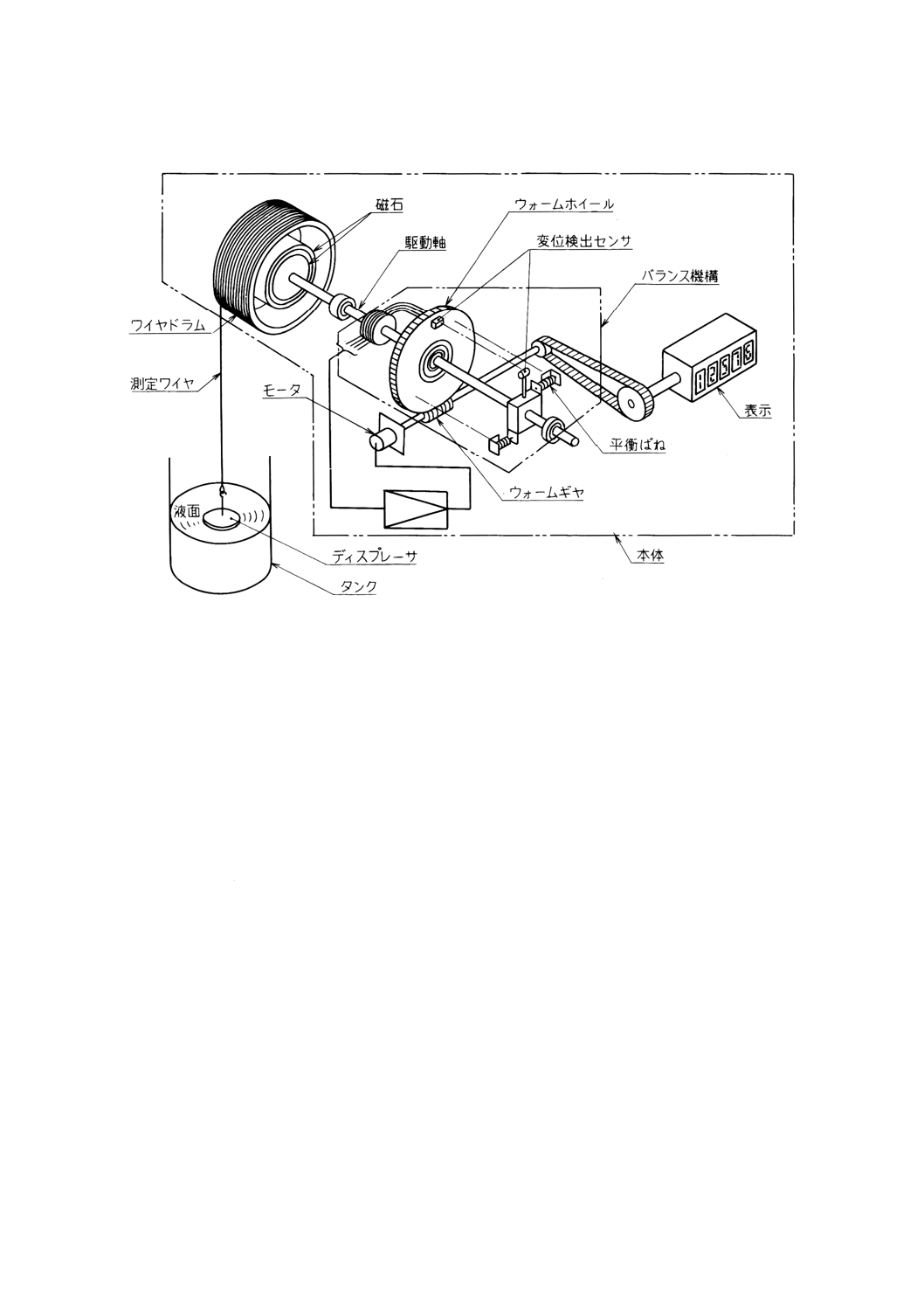
附属書1図3 ワイヤ式(例)
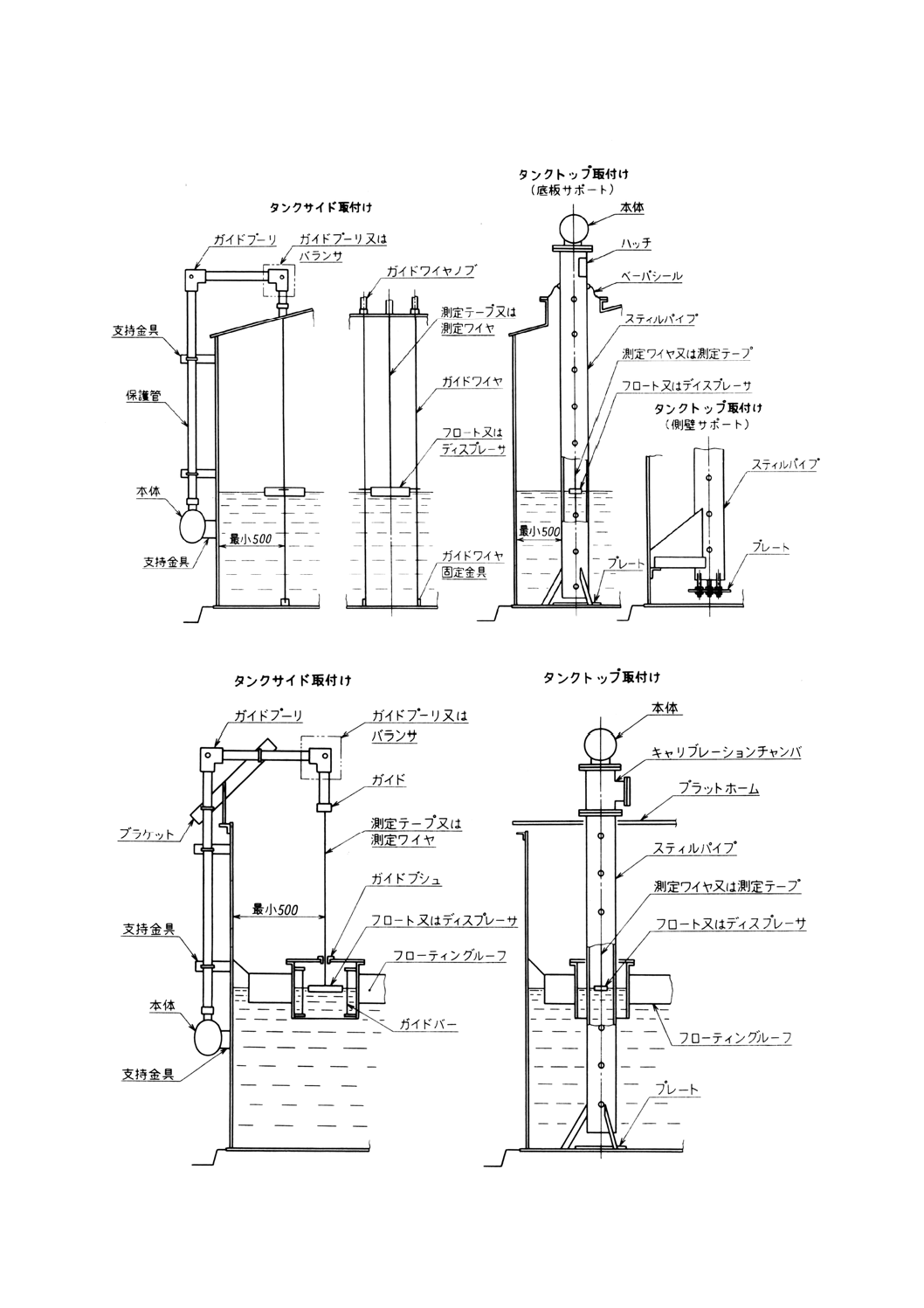
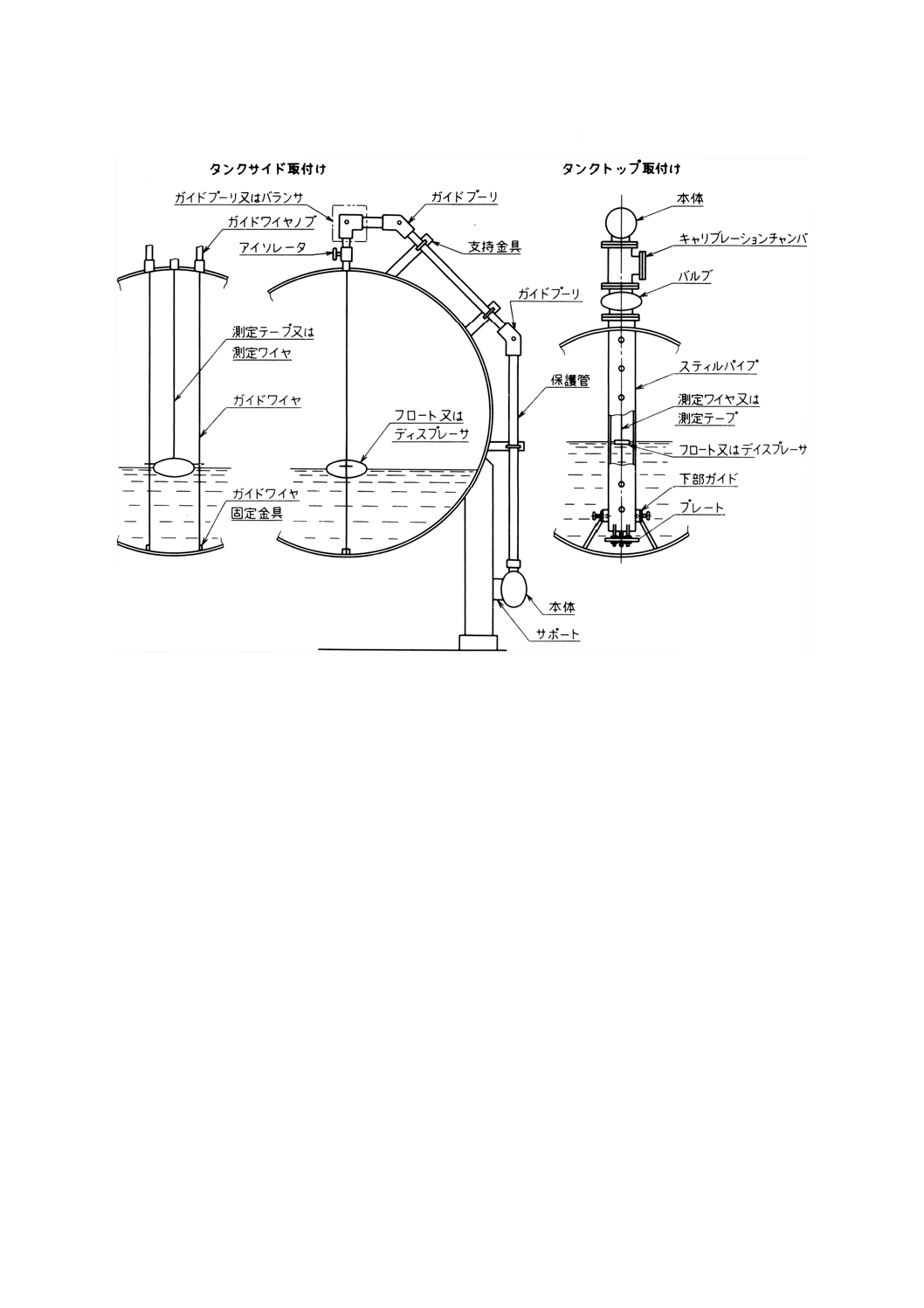
4. 取付施工上の注意事項 タンクなどへの取付施工に当たっては,以下の事項に注意するのがよい。
なお,タンクなどにおける機器の代表的な配置例を附属書1図4(コーンルーフタンクの場合),附属書
1図5(フローティングルーフタンクの場合)及び附属書1図6(球形タンクの場合)に示す。
(1) ガイドワイヤは鉛直に取り付ける。
(2) 測定テープ又は測定ワイヤの保護管は,接続部の内側に段差及び溶接ばりがなく,内面が滑らかなも
のを用い,わん曲及び傾斜がないように取り付ける。
(3) タンクなどの変形が測定に重大な影響を及ぼすおそれがないよう,各機器の取付位置に配慮する。
(4) 本体は,保全などに際して特に足場を必要としない位置で,指示部が見やすい高さに取り付けること。
(5) 測定テープ又は測定ワイヤをタンクなどの外へ取り出す位置は,検尺口に隣接させる。
(6) フロート又はディスプレーサは液の受入,払出及びかくはん(攪拌)による液の動揺の影響が小さい
位置に取り付ける。
なお,この影響が避けられない場合は,板,パイプなどによる防波対策を施す。
(7) スティルパイプは内面が滑らかで,管の内・外の液位に差が生じないよう側面に一定間隔の穴又はス
リットが設けられているものを用い,鉛直に取り付ける。
(8) 測定テープ又は測定ワイヤは,施工中及び取付け後にねじれ,折り曲げなどが生じないように取り付
ける。
(9) 測定液が可燃性で,絶縁性が高い場合は,タンクなどとレベル計との間に導通を取り,かつ,スティ
ルパイプ又はガイドワイヤを設ける。
10
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1図4 コーンルーフタンクの取付け例
附属書1図5 フローティングルーフタンクの取付け例
11
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1図6 球形タンクの取付け例
12
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2 マイクロ波式レベル計
1. 適用範囲 この附属書は,マイクロ波式レベル計の個別要件について規定する。
2. 用語の定義 この附属書で用いる主な用語の定義は,次による。
(1) マイクロ波 波長が3〜300nm(周波数にして100〜1GHz)程度の電磁波。
(2) アンテナ マイクロ波のエネルギーを,主として空間を通して送り又は受けるための器具。
(3) レーダビーム アンテナから放射された,指向性があるマイクロ波。
(4) レーダエコー 送信されたマイクロ波のうち,液面で反射して戻ってきたマイクロ波。
(5) 導波管 マイクロ波のエネルギーを効率よく伝送するために適当な太さをもった中空の金属管。
(6) スティルパイプ 液面の動揺によるレーダエコーの乱れを防ぐとともに,管内をマイクロ波の伝送路
として使用するための金属性の管。
(7) 不感帯 レーダビームの電界強度が不安定になるため,正確な液位の測定ができなくなるアンテナ近
辺の領域。
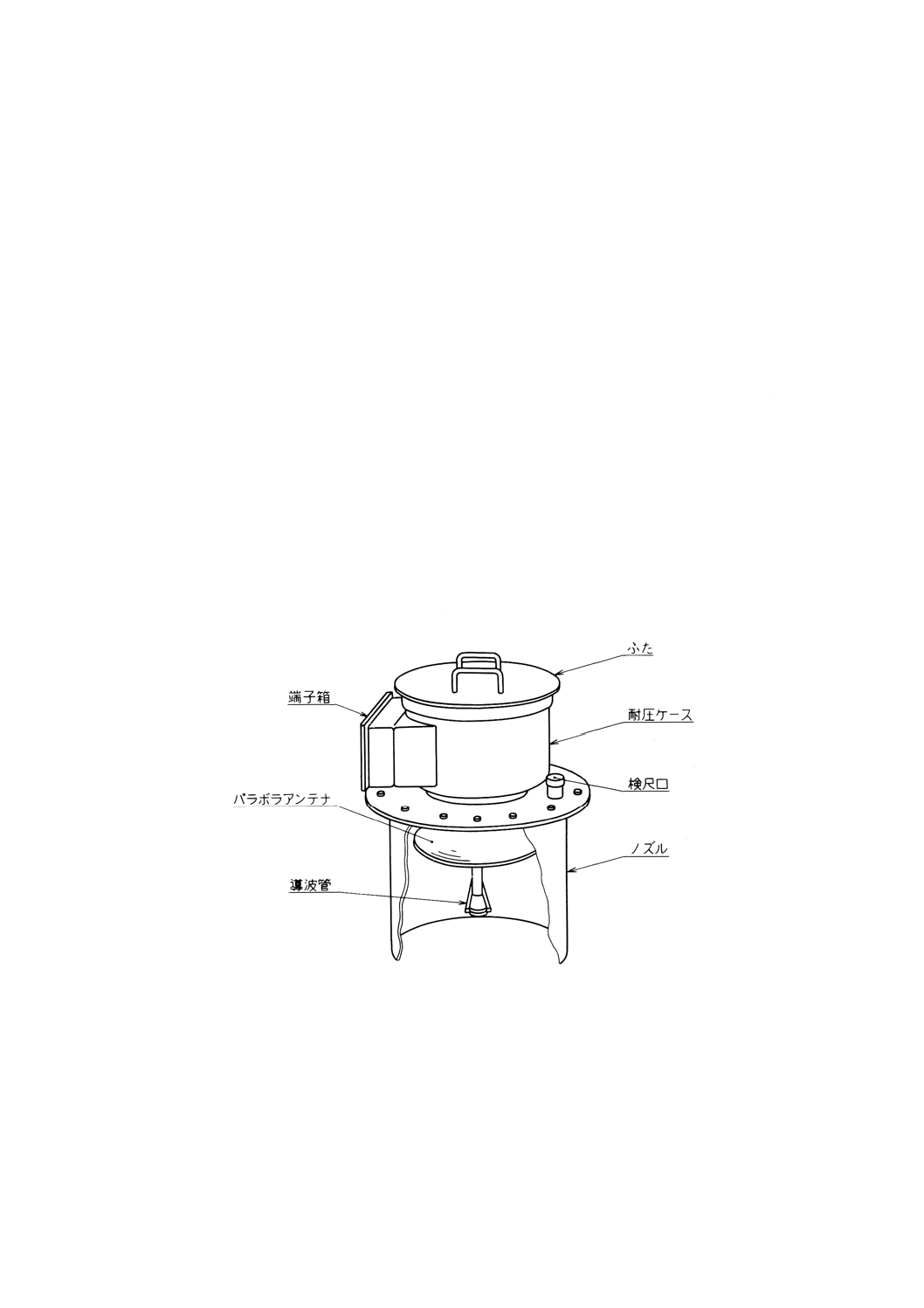
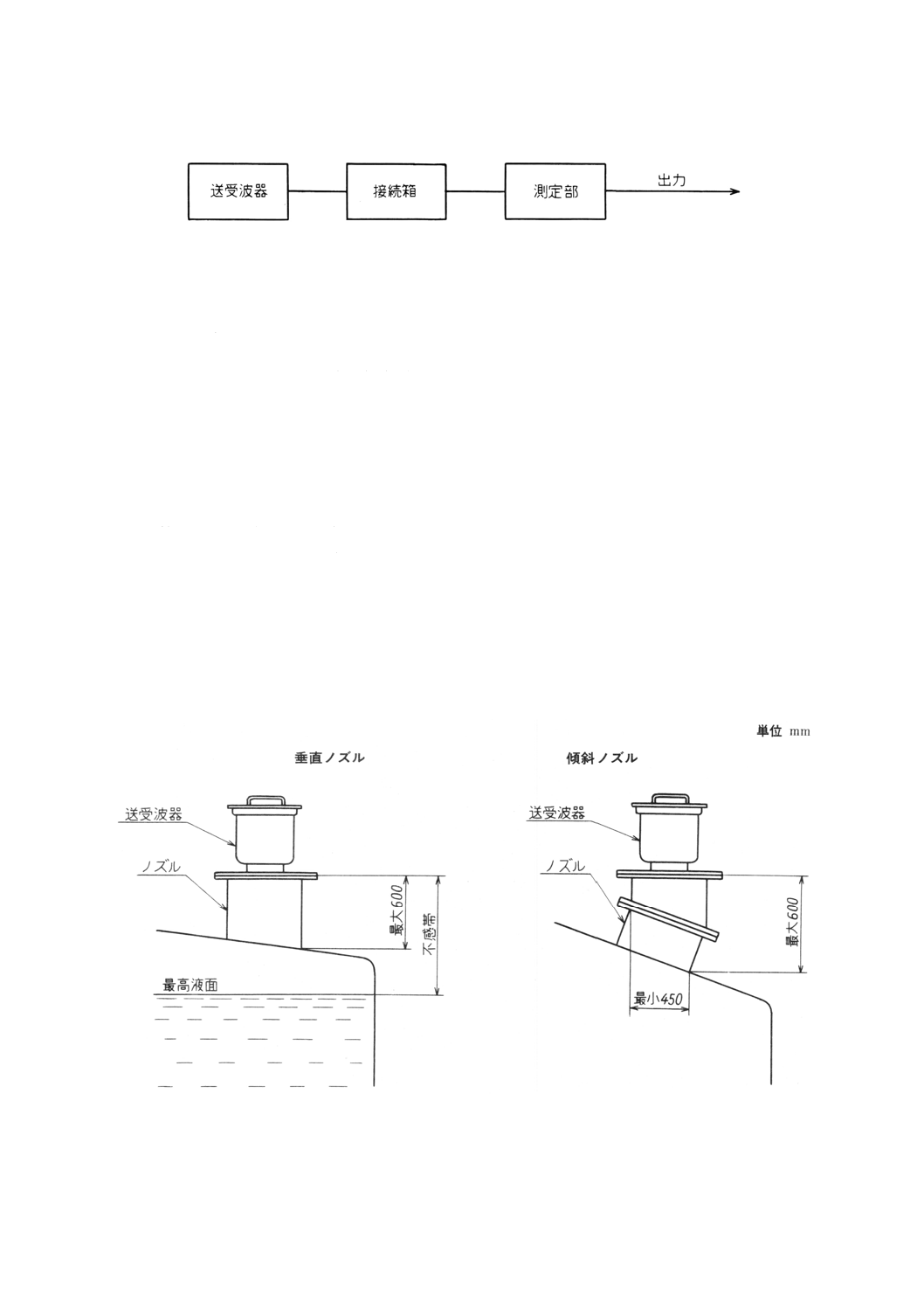
3. 構造 マイクロ波式レベル計の送受波器の構造例を附属書2図1に,マイクロ波式レベル計のシステ
ム構成を附属書2図2に示す。
附属書2図1 マイクロ波式レベル計送受波器(例)(コーンルーフタンクの場合)
13
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2図2 システム構成図
備考1. 送受波器 タンクなどの上部に設置され,測定部からの制御信号によってマイク
ロ波の送受信を行い,液面までの距離に比例した周波数差を検出して液位信号に
変換し,測定部へ伝送する。
2. 接続箱 送受波器へ電源を供給するとともに,送受波器と測定部との信号伝送の
中継を行う。
3. 測定部 入出力インタフェース部,信号処理部,表示処理部及び電源部によって
構成され,全システムの制御,各送受波器からの液位信号の処理及び外部コンピ
ュータなどへの信号伝送を行う。
4. 取付施工上の注意事項 タンクなどへの取付施工に当たっては,以下の事項に注意するのがよい。
なお,タンクなどにおける機器の代表的な配置例を附属書2図4(コーンルーフタンクの場合),附属書
2図5(フローティングルーフタンクの場合)及び附属書2図6(球形タンクの場合)に示す。
(1) 送受波器は,液の受入,払出及びかくはん(攪拌)による液面の動揺が測定に及ぼす影響が小さく,
かつ検尺口に近い位置に取り付ける。
(2) スティルパイプを用いない場合は,次による。
(a) マイクロ波はタンク内の自由空間を伝搬するので,伝搬経路内にレーダビームを反射させる配管な
どの構造物がない位置に送受波器を取り付ける。
(b) レベル計の不感帯を考慮して,最高液面まで測定できるよう,またレーダビームが妨害されずに送
受信できるよう,送受波器取付用ノズルの大きさ及び取付位置に注意する(附属書2図3参照)。
附属書2図3 ノズルの取付け
(c) 送受波器のフランジは,水平に取り付ける。
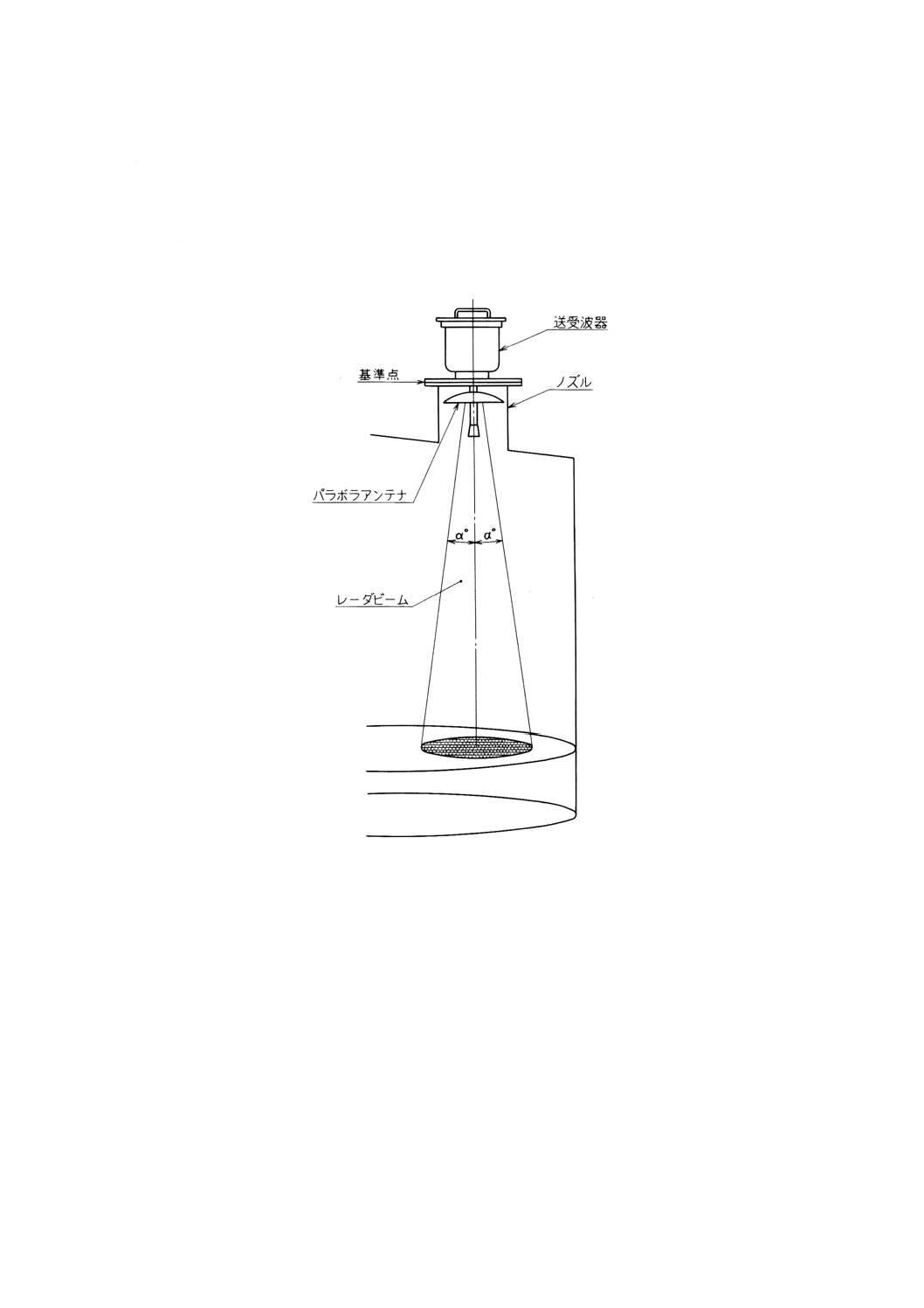
備考 スティルパイプを用いない場合は,送受波器には一般にパラボラアンテナを用いる(附属書2
図4参照)。
14
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(3) スティルパイプを用いる場合は,内面が滑らかで,パイプ内・外の液位に差が生じないよう側面に一
定間隔の穴又はスリットが設けられているものを用い,鉛直に取り付ける。
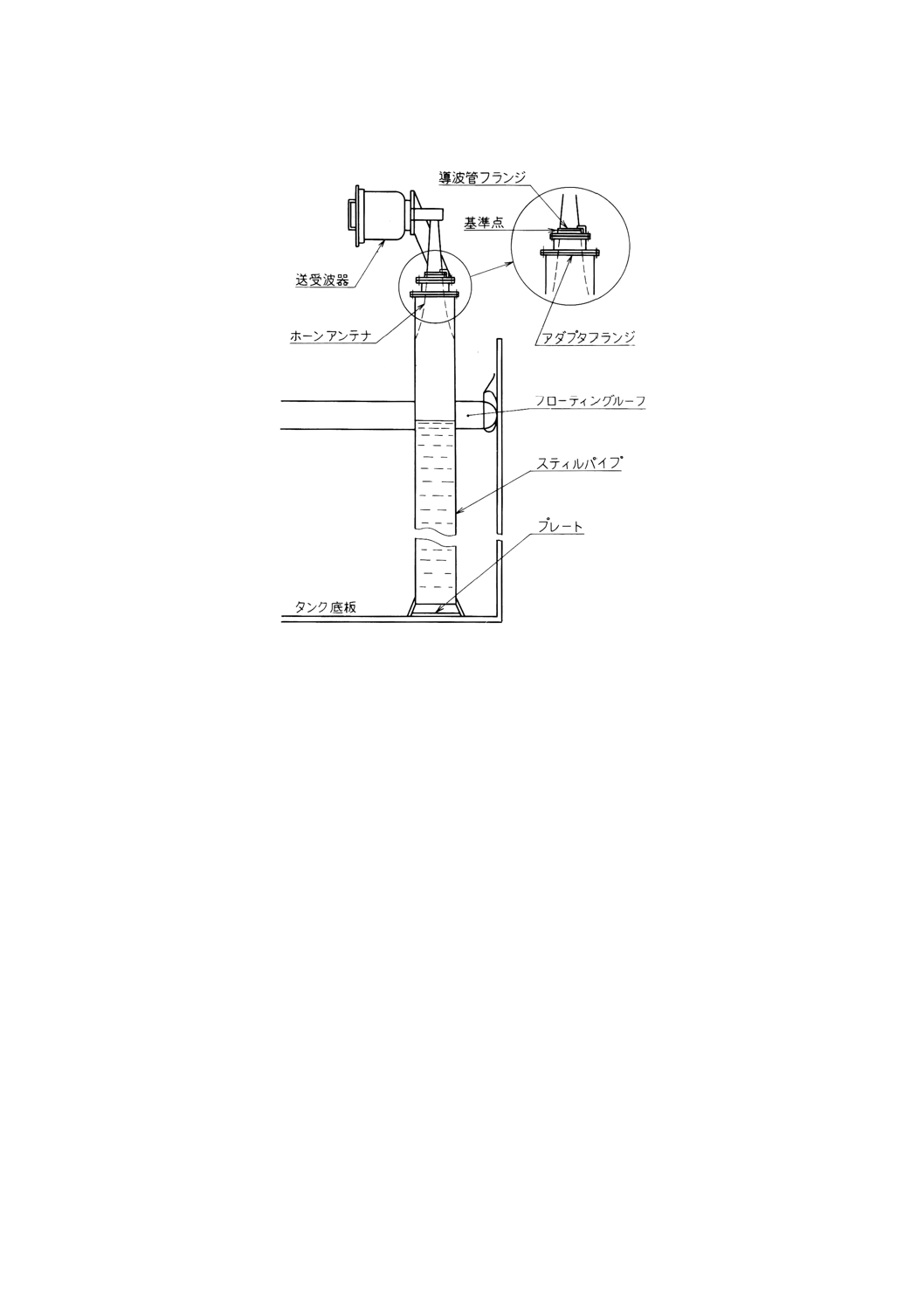
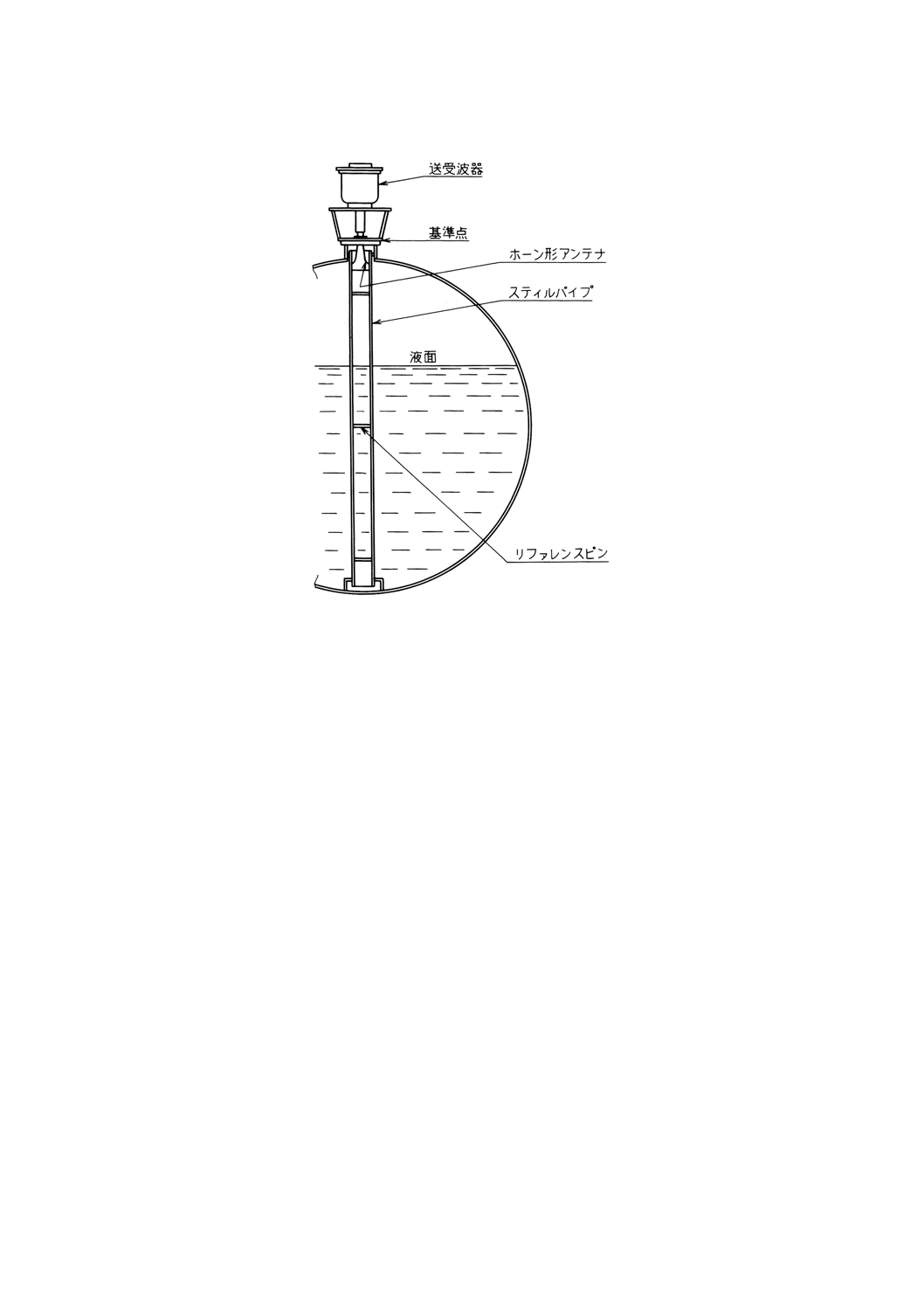
備考 フローティングルーフタンク及び球形タンクでは,一般にスティルパイプを用いる。スティル
パイプは導波管としても機能し,送受波器にはホーンアンテナを用いる(附属書2図5及び6
参照)。
附属書2図4 コーンルーフタンクへの送受波器の取付け例
15
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2図5 フローティングルーフタンクへの送受波器の取付け例
16
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2図6 球形タンクへの送受波器の取付け例
備考 取付け後,必要なときにレベル計の精度を検証
するためにスティルパイプ内にリファレンスピ
ンを取り付け,タンクなどの基準点からその位
置までの距離を正確に測定しておくとよい。測
定モードをチェックモードに切り換えると,測
定部がリファレンスピンの位置を測定し,あら
かじめ測定しておいた値と比較することによっ
て,随時,精度を検証することができる。
17
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書3 静電容量式レベル計
1. 適用範囲 この附属書は,静電容量式レベル計の個別要件について規定する。
2. 用語の定義 この附属書で用いる主な用語の定義は,次による。
(1) メインセンサ 液面の変化を静電容量とし検出するセンサ。外側の円筒電極を外部電極,内側の電極
を内部電極という。
(2) リファレンスセンサ メインセンサと同じ構造の電極で,液の比誘電率を測定するために使用するセ
ンサ。
(3) 気中静電容量 センサが液に全く浸っていないときの静電容量。
(4) 全液中静電容量 センサが完全に液に浸っているときの静電容量。
(5) センサアセンブリ 1個又は複数個のメインセンサと1個のリファレンスセンサとから構成される液
位検出部。
(6) ガイドパイプ センサを保持するため,タンク内に設置される管。
(7) センサベース センサアセンブリを定置するための受け台。
(8) サポートブラケット センサアセンブリを取り付ける支持金具。
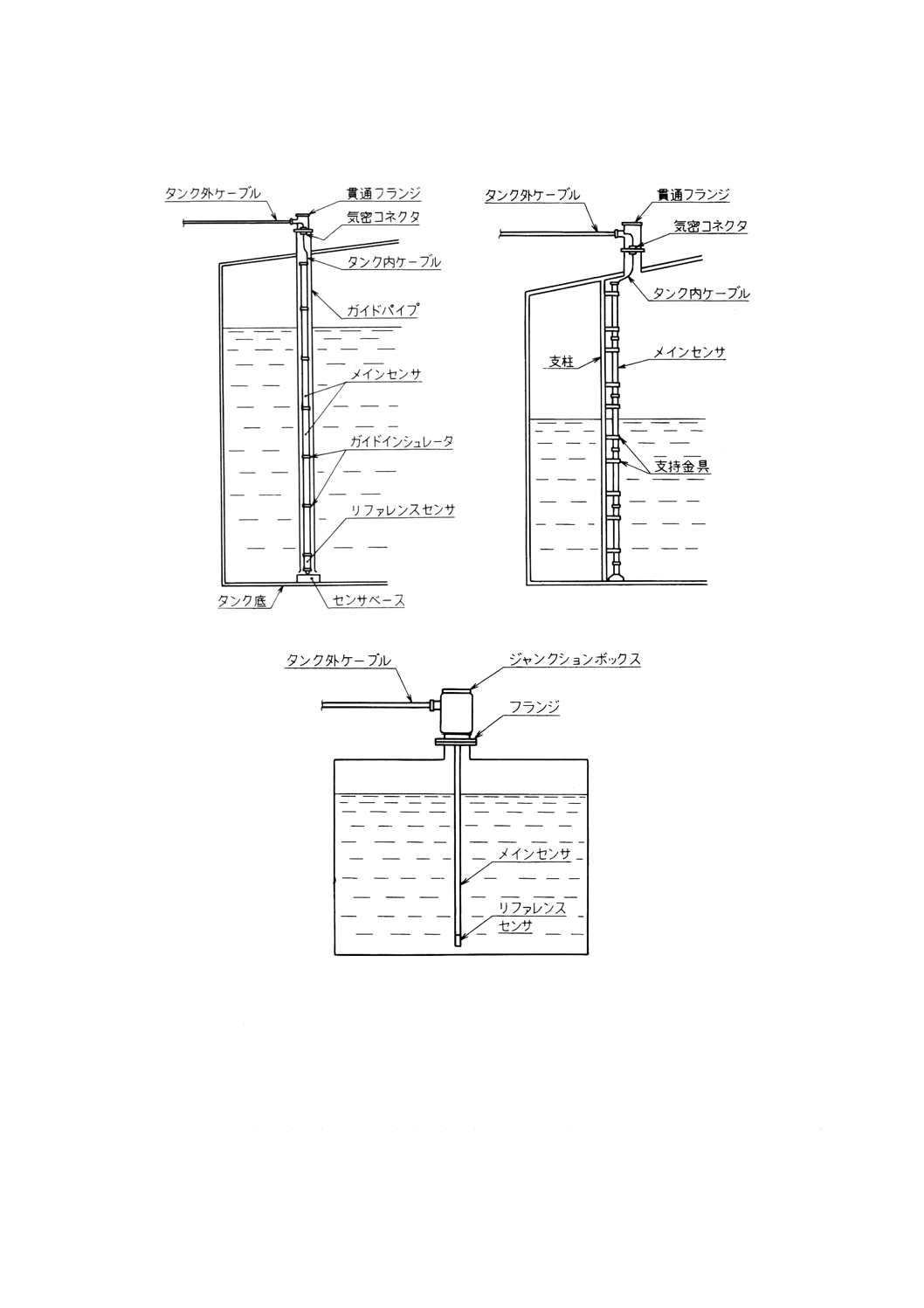
3. 取付施工上の注意事項 タンクなどへの取付施工に当たっては,以下の事項に注意するのがよい。
なお,タンクなどにおける機器の代表的な構造及び配置例を附属書3図1(ガイドパイプ支持方式),附
属書3図2(支柱支持方式)及び附属書3図3(フランジ取付方式)に示す。
(1) ガイドパイプは内面が滑らかで,管の内・外の液面に差が生じないよう,側面に一定間隔の穴又はス
リットがあるものを用い,鉛直に取り付ける。
(2) センサアセンブリは,液の受入,払出及びかくはん(攪拌)による液面の動揺などの影響が小さい位
置に取り付ける。
(3) 液面より上部にあるメインセンサに液がかからないよう,液の受入ノズル,シャワーなどの位置に注
意する。
(4) 取付け後,各機器内部の結露などによって絶縁不良が生じないよう注意する。特に,貫通フランジの
防水性を確保する。
(5) 工事後,センサベースの高さ及び測定基準点の位置を正確に測定する。
(6) サポートブラケットは,鉛直に取り付ける。
18
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書3図1 ガイドパイプ支持方式
附属書3図2 支柱支持方式
附属書3図3 フランジ取付方式
4. 誤差の試験方法 本体7.3.1の(3)に従い,センサアセンブリ及び指示部それぞれの誤差を個別の試験
によって評価する場合は,次による。
(1) センサアセンブリの誤差 センサアセンブリの誤差を,次によって求める。
(1.1) センサアセンブリを構成する一つのメインセンサについて,その測定範囲を等分した3点以上の液
位を誤差測定点として定め,以下の手順によってそのメインセンサの誤差を測定する。
(a) メインセンサの気中静電容量C1.E,全液中静電容量C1.F及び全長Lをそれぞれ標準器によって測定
する。
19
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(b) メインセンサを液中に挿入していき,浸せき長さが上記誤差測定点の一つに達したとき,液面が安
定した状態で,メインセンサの出力C1.1及び浸せき長さl1.1をそれぞれ標準器によって測定する。
(c) その測定点における誤差E1.1を次の式によって算出する。
1.1
.1
.1
.1
1.1
1.1
l
L
C
C
C
C
E
E
F
E
−
×
−
−
=
(d) 他の誤差測定点についても,(b)及び(c)によってC1.2, C1.3…を測定し,E1.2, E1.3…を算出する。
(e) 各測定点における誤差E1.1, E1.2…の絶対値のうち最も大きい値をそのメインセンサの最大誤差とす
る。
(1.2) すべてのメインセンサについて(1.1)の(a)〜(e)を行い,各メインセンサの最大誤差のうち最も大きい
値をセンサアセンブリの最大誤差Esmaxとする。
(2) 指示部の誤差 指示部の誤差は,次によって求める。
(a) 計測指示部に,液位に相当する信号を入力できるよう標準可変コンデンサを接続する。
(b) 各メインセンサの測定範囲を含み,かつ,センサアセンブリの測定範囲を等分した5点以上の液位
を計測指示部の誤差測定点として定める。
(c) 誤差測定点H1, H2, ……Hiのそれぞれに相当する静電容量を標準可変コンデンサによって計測指示
部に入力し,指示値I1, I2, ……, Iiを読み取り,次の式によって各測定点における計測指示部の誤差,
Ep1, Ep2, ……, Epi求め,その絶対値のうち最も大きい値を計測指示部の最大誤差Epmaxとする。
すなわち,
Epi=Ii−Hi
Epmax= | Epi | max
(3) 総合誤差 次の式によって,センサアセンブリと計測指示部とを総合したレベル計の誤差の絶対値
ETmaxを算出する。
2
max
2
max
max
)
(
)
(
p
s
T
E
E
E
+
=
備考 ±ETmaxが,等級に応じ本体表3の許容値を超えてはならない。
20
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考 レベル計の測定原理
序文 この参考は,レベル計の測定原理について記述するものであり,規定の一部ではない。
1. フロート−スプリングバランス式レベル計の測定原理 液面にフロートを浮かべておくと,液面に追
従してフロートは鉛直方向に上下する。フロートのこの移動量を機械的物理量又は電気的物理量に変換し
て測定する。
一端がフロートに接続された測定テープは,ガイドプーリ及びスプロケットを介して定トルクスプリン
グによってテープ巻取プーリに巻き取られ,フロートはきっ(吃)水をほぼ一定に保って液面に追従する。
測定テープには一定ピッチで穴が開けられており,この穴とスプロケットとがか(噛)み合ってフロート
の移動量がスプロケットの回転角に変換される。液位を指示するための指針若しくはカウンタ又は遠隔伝
送のための発信器は,スプロケットによって駆動される(附属書1図1参照)。
2. ディスプレーサ−サーボバランス式レベル計の測定原理 自動平衡システムによって常に一定の力
で液面にバランスされたディスプレーサは,液面に追従して鉛直方向に上下する。ディスプレーサのこの
移動量を,機械量又は電気量に変換して測定する。
(1) テープ式 一端がディスプレーサに接続された測定テープは,プーリ,ガイドプーリ及びスプロケッ
トを介してテープ巻取プーリに巻き取られる。バランサからの信号によってサーボアンプを介してサ
ーボモータが駆動され,プーリに一定トルクが供給される。測定テープには一定ピッチで穴が開けら
れており,この穴とスプロケットとがか(噛)み合ってディスプレーサの移動量がスプロケットの回
転角に変換される。液位を指示するための指針若しくはカウンタ又は遠隔伝送のための発信器は,ス
プロケットによって駆動される。
液位が上昇するとディスプレーサの浮力が増加し,バランサの平衡ばねは収縮する。この収縮量が
変位検出センサで検出され,サーボモータのドライブユニットへフィードバックされる。サーボモー
タは,測定テープを巻き取る方向へ回転し,ディスプレーサはあらかじめ設定されたきっ水面で平衡
する。
液位が下降するときはこれと逆の動作となる(附属書1図2参照)。
(2) ワイヤ式 一端がディスプレーサに接続された測定ワイヤは,ワイヤドラムに巻き取られる。ワイヤ
ドラムは,直接又は軸継手を介して駆動軸と連結している。ワイヤドラムに働くトルクは,一端を駆
動軸,他の一端をウォームギヤに接続された平衡ばねと平衡している。
液位が変化し,ディスプレーサに働く浮力が変化するとバランス機構の平衡ばねが伸縮する。この
伸縮量が変位検出センサで検出され,モータへフィードバックされる。モータはウォームギヤ,ウォ
ームホイールを介してワイヤドラムを回転させ,ディスプレーサはバランス機構であらかじめ設定さ
れたきっ水面で平衡する。ワイヤドラムの回転角,すなわち,モータの回転角を長さに変換すること
によって液位の表示又は遠隔発信を行う(附属書1図3参照)。
3. マイクロ波式レベル計の測定原理 送信信号は,導波管内を伝搬して導波管の先端で反射し,パラボ
ラアンテナに向けて発射される。パラボラアンテナで反射したマイクロ波はタンク内を伝搬して液面で反
射し,送信信号の伝搬経路を逆にたどって送受波器に受信される(附属書2図1参照)。
21
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
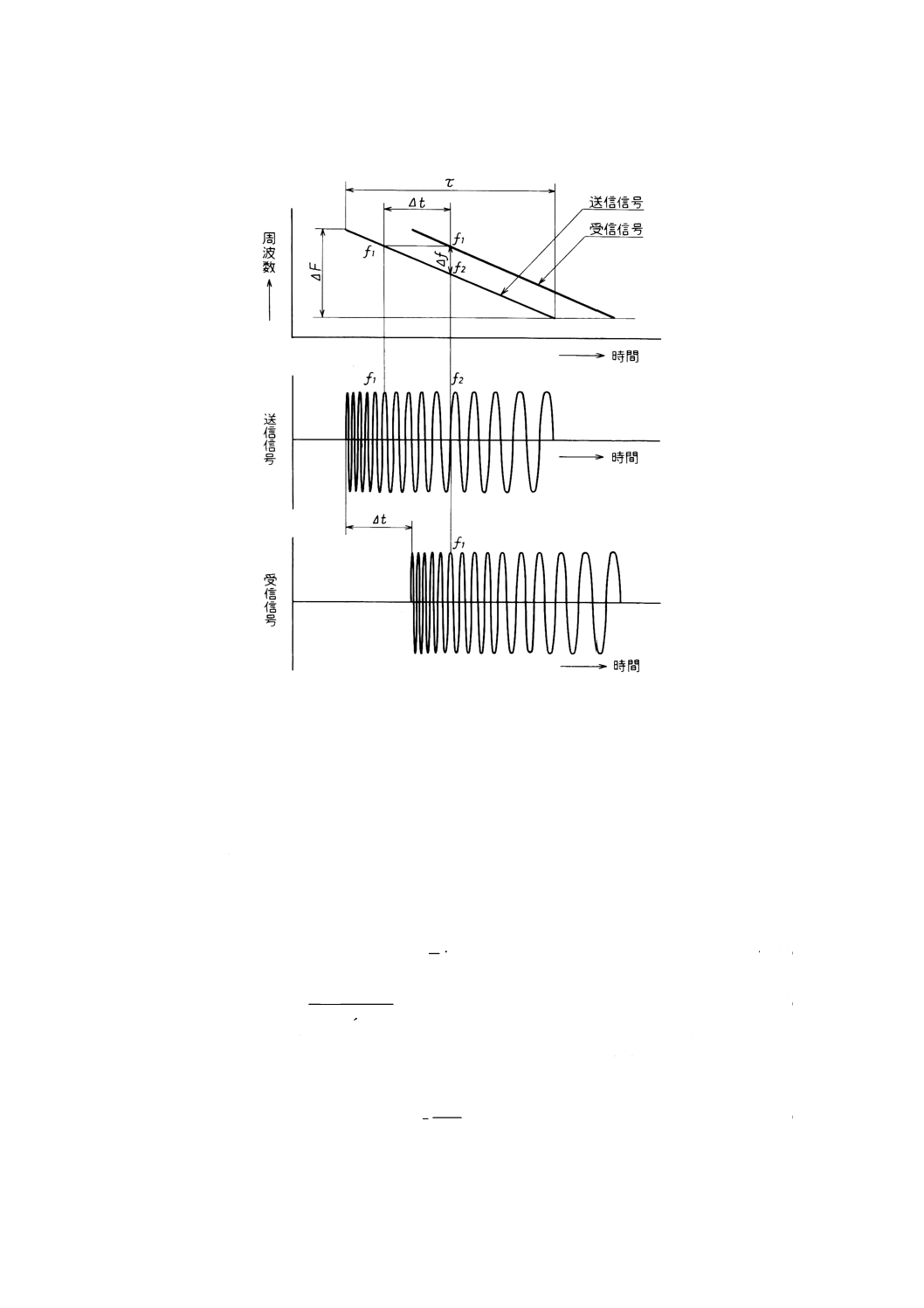
マイクロ波を利用した液位測定には,一般にマイクロ波の周波数を時間とともに直線的に変化させて送
信する周波数変調連続波方式(FM−CWレーダ)が用いられる。
マイクロ波の周波数を時間とともに変化させて発射すると,液面で反射して受信される受信信号と,そ
のときに発射される送信信号との間に周波数の差が生じる。
参考図1において,送受波器から周波数f1の信号を発射すると,伝搬時間∆t経過後にその周波数f1の信
号が受信される。このときの送信信号周波数はf2に変化しており,受信信号周波数f1と送信信号周波数f2
との間には,f1−f2 (∆f) の周波数差が生じる。この周波数差は伝搬時間に比例し,この伝搬時間は送受波
器から液面までの距離に比例する。したがって,周波数差を測定することによって液位を求めることがで
きる。
すなわち,
D :送受波器から液面までの距離 (m)
∆t :距離Dをマイクロ波が往復する伝搬時間 (s)
C :マイクロ波の自由空間における速度(物理定数:3×108m/s)
f1 :ある時刻に受信された受信信号の周波数 (Hz)
f2 :周波数f1の信号を受信したときに送信される送信信号の周波数 (Hz)
∆f :距離Dに対応する周波数の差 (Hz)
∆F :FM−CW系の周波数全変動幅 (Hz)(1)
τ :FM−CW系の周波数全変動の時間 (s)(1)
とすると,
距離Dをマイクロ波が往復する伝搬時間∆tは,
C
D
t
2
=
∆
·················································································· (1)
受信信号周波数と,そのときに送信される送信信号周波数との差∆fは,
τ
F
t
f
f
f
∆
∆
=
−
=
∆
2
1
·································································· (2)
式(1)及び式(2)から,
τ
F
C
D
f
∆
=
∆
2
··········································································· (3)
したがって,測定距離Dは,
f
F
C
D
∆
∆
=
τ
2
········································································· (4)
ここで
F
C
∆
τ
2
は定数であり,これをKとおくと
D=K・∆f ·················································································· (5)
となり,周波数差∆fを測定することによって測定距離Dを求めることができる。
注(1) 機器によってあらかじめ定められた定数。
22
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考図1 測定原理図(マイクロ波式レベル計)
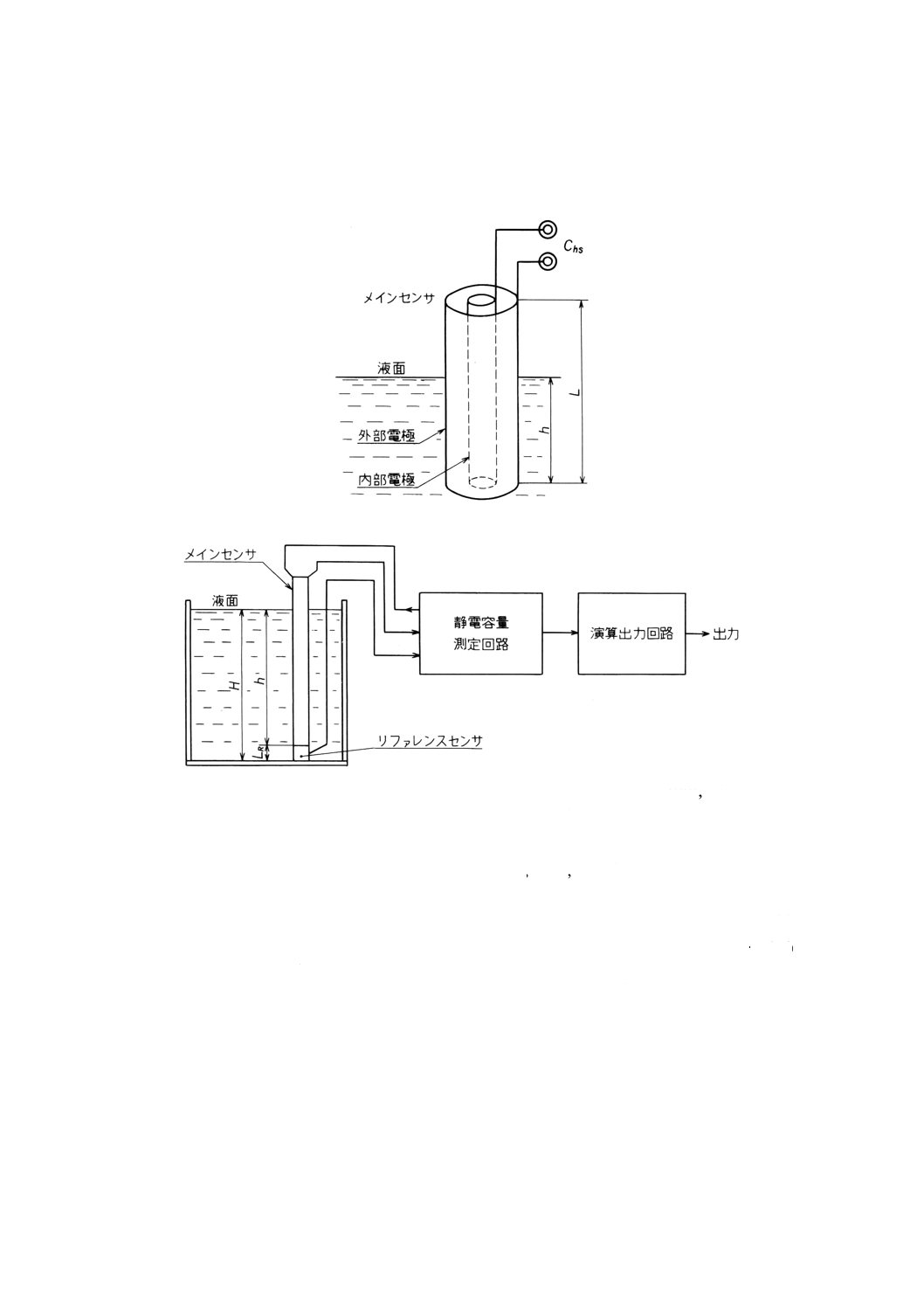
4. 静電容量式レベル計の測定原理 一対の同軸円筒電極間の静電容量は,それが液に浸っている部分の
長さによって変化することを利用して液位を測定する。
参考図2において,メインセンサの静電容量Chsは液位hに比例して増減する。液位がゼロからhにな
ったときの静電容量の増加量は式(6)によって表され,したがって,液位hは式(7)のとおりとなる。
式(7)において,L及びCESはメインセンサの寸法及び構造によって定まる定数であり,Chs及びεを知る
ことによってhを求めることができる。
εはメインセンサの下部に,全長が常に液中に没するリファレンスセンサを置いて,その全液中静電容量
CFRを測定し,式(8)によって求める。
L
h
C
C
C
ES
ES
hs
)1
(−
=
−
ε
······························································· (6)
)1
(
)
(
−
−
=
ε
ES
ES
hs
C
C
C
L
h
········································································ (7)
ここに, Chs: 液位がhのときのメインセンサの静電容量 (pF)
CES: メインセンサの気中静電容量 (pF)
ε: 液の比誘電率
ER
FR
C
C
=
ε
·························································· (8)
CFR:リファレンスセンサの全液中静電容量 (pF)
CER:リファレンスセンサの気中静電容量 (pF) (リ
23
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ファレンスセンサの寸法及び構造によって定
まる定数)
L: メインセンサの全長 (mm)
参考図2 測定原理図
参考図3 システム構成
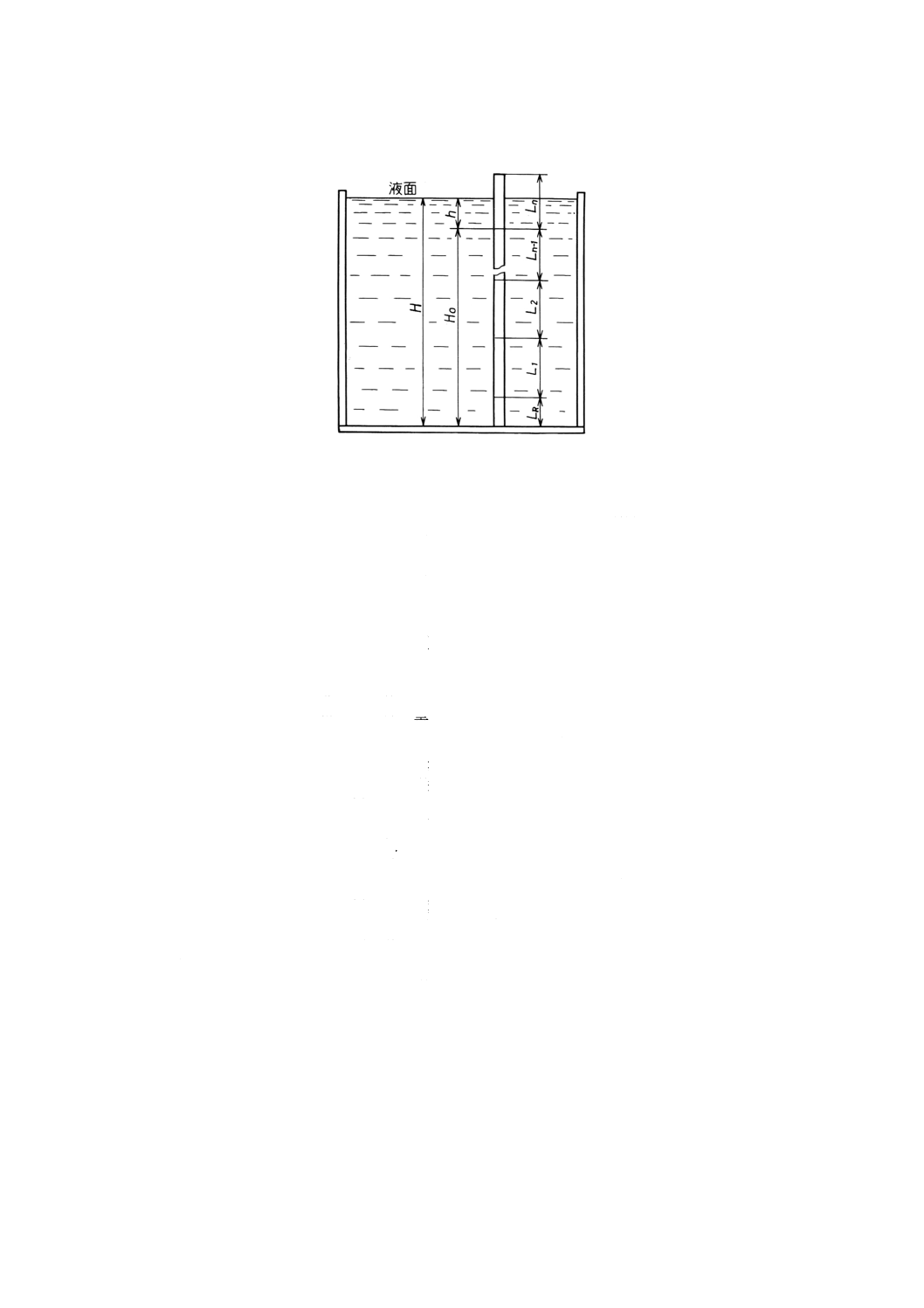
測定範囲が広い場合は,参考図4に示すようにメインセンサを必要本数 (L1 L2, ……, Ln) 接続したセン
サアセンブリを用いて全測定範囲を測定する。すなわち,液面が存在するn番目のメインセンサ領域内で
の液位hを,そのメインセンサによって上記のとおり測定し,そのメインセンサより下部の長さH0をリフ
ァレンスセンサ及びそれぞれのメインセンサの全長 (LR, L1, L2, ……, Ln-1) から式(9)によって求め,これら
を加えて液位Hとする[式(10)]。
H0=LR+L1+L2+……+Ln-1 ························································· (9)
H=h+H0 ··············································································· (10)
ここに,
H: n番目のメインセンサによって測定した長さ (mm)
LR: リファレンスセンサの全長 (mm)
L1……Ln-1: 各メインセンサの全長 (mm)
H: 液位 (mm)
24
B 7560-1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考図4 センサアセンブリによる場合
液位測定用自動レベル計原案作成委員会 構成表
氏名
所属
(委員長)
稲 坂 光 司
株式会社金門製作所
坂 東 一 彦
通商産業省機械情報産業局計量行政室
桐 山 和 臣
工業技術院標準部機械規格課
渡 辺 紀 之
工業技術院計量研究所力学部流体計測研究室
鈴 木 惟 夫
社団法人日本海事検定協会検査二部
酒 井 顕
財団法人新日本検定協会検査部
宮 城 好 宏
大蔵省関税局輸入課
本 田 達 穂
出光興産株式会社製造部工務課
菊 池 義 彦
東燃テクノロジー株式会社プロジェクト部
樽 崎 敏 貢
日石エンジニアリング株式会社計装設計部
佐 藤 定 世
東京電力株式会社燃料部
伊 藤 健
東京ガス株式会社工場建設グループ
小 栗 謙
日輝株式会社計装システム部
高 橋 幹 雄
千代田化工建設株式会社制御システム部
佐 野 剛
東京計装株式会社第2設計部
栄 久 男
桜エンドレス株式会社製造統括部
桜 井 秀 樹
株式会社トキメック計測技術部
重 野 守 男
株式会社チノー標準技術部
陸 川 薫
株式会社ニレコプロセス営業部
渡 辺 達 昭
日本航空電子工業株式会社特機部
松 原 弘 保
能研工業株式会社商品企画部
(事務局)
松 村 正 勝
社団法人日本計量器機工業連合会
重 森 明
社団法人日本計量器機工業連合会