B 7440-6:2004 (ISO 10360-6:2001)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人日本規格協会(JSA)から,工業標準
原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大
臣が制定した日本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 10360-6:2001,Geometrical Product
Specifications(GPS)−Acceptance and reverification tests for coordinate measuring machines(CMM)−Part
6:Estimation of errors in computing Gaussian associated featuresを基礎として用いた。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
JIS B 7440-6には,次に示す附属書がある。
附属書A(規定)基準データセットの生成手順
附属書B(参考)GPSマトリックス
JIS B 7440の規格群には,次に示す部編成がある。
JIS B 7440-1 第1部:用語
JIS B 7440-2 第2部:寸法測定
JIS B 7440-3 第3部:ロータリテーブル付き座標測定機
JIS B 7440-4 第4部:スキャン測定
JIS B 7440-5 第5部:マルチスタイラス測定
JIS B 7440-6 第6部:ソフトウェア検査
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 7440-6:2004
(ISO 10360-6:2001)
製品の幾何特性仕様(GPS)−
座標測定機(CMM)の受入検査及び定期検査−
第6部:ソフトウェア検査
Geometrical Product Specifications(GPS)−Acceptance and reverification
tests for coordinate measuring machines(CMM)−Part 6:Estimation of errors
in computing Gaussian associated features
序文 この規格は,2001年に第1版として発行されたISO 10360-6:2001,Geometrical Product
Specifications(GPS)−Acceptance and reverification tests for coordinate measuring machines(CMM)−Part
6:Estimation of errors in computing Gaussian associated featuresを翻訳し,技術的内容及び規格票の様式を変更
することなく作成した日本工業規格である。
この規格は,製品の幾何特性仕様(GPS)規格の一つであり,GPS基本規格(TR B 0007参照)として取り扱
う。この規格は,サイズ,距離,半径,角度,形状,姿勢,位置,振れ及びデータムに関する規格チェー
ンのリンク番号5に関係する。
この規格と他の規格及びGPSマトリックスとの間の詳細な関係は,附属書Bを参照のこと。
座標測定技術は,測定物の形体を評価するために工業計測において広く使われている。一般的な要求は
実形体を座標測定したデータセットに,当てはめ形体を当てはめることである。この当てはめはソフトウ
ェアによって行う。
当てはめ形体を計算するソフトウェアは,形体のサイズ,形,位置及び姿勢を記述する当てはめ形体の
パラメータを規定する。他の当てはめ形体及び他の情報と結びついて,形体を含む計算を実行するとき,
及び測定物が寸法及び位置の仕様を満足する範囲を決めるときに,これらのパラメータは有効である。
これらの形体を計算するソフトウェアの品質が,当てはめ形体から決定された情報の信頼性に影響を与
える。
この規格で定義する検査は,座標測定機又は他の座標測定システムによって測定され,計算された当て
はめ形体のパラメータの正確さを評価する。当てはめ形体を計算するために様々な判断基準(例えば,残
差のユークリッドノルム又はチェビシェフノルムを最小化すること。)が使われるが,この検査は拘束条件
のない最小二乗当てはめ形体のために設計されたソフトウェアに適用できる。
ソフトウェアは長期にわたり安定なので,座標測定機の定期検査の場合,この規格のソフトウェア検査
は,受入検査によって得られる情報と比較して新しい情報及び異なる情報を通常与えない。しかし,被検
ソフトウェアに起こり得る変造又は改変の後に行うソフトウェアの定期検査は有用である。
既存のソフトウェアに関して,その性能の評価はこの規格の要求を実施することによってだけ得られる
わけではない。しかし,このことはソフトウェアが測定の正しい計算を実行する能力をもたないことを意
味するわけではない。
2
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この規格は,当てはめ形体のパラメータの値に関して検査のために提出されたソフトウェアに適用する。
検査手順は,基準データセットにその被検ソフトウェアを適用し,基準結果と得られた結果とを比較する。
1. 適用範囲 この規格は,座標測定から当てはめ形体を計算するために用いるソフトウェアを検査する
方法について規定する。適用する形体は,(二次元及び三次元の)直線,平面,(二次元及び三次元の)円,
球,円筒,円すい及び輪環とする。
ソフトウェアによって取り扱われるそれぞれの形体に関して,一つ以上の別の検査が要求される。
この検査はソフトウェアに関してだけ行われ,座標測定システムからは独立である。
備考 当てはめ形体の寸法のパラメータに関するパフォーマンス値が,座標測定機の製造業者が与え
た寸法測定における座標測定機の指示誤差(JIS B 7440-2参照)と比較して有意な大きさならば,
このソフトウェアは測定システムに適用するには不適切である。しかし,この検査の結果とし
て得られたパフォーマンス値が小さい場合でも,ソフトウェアが当てはめ形体を計算するのに
適しているという完全な保証を与えるわけではない。
この規格では,形体の全体及び極度に部分的でない形体の一部分を取り扱う。形体の全体のための検査
と形体の一部分のための検査とに分けられ,ソフトウェアに一方又は両方の検査を行う。
非常に大きな頂角をもつ円すいはこの検査の対象としない。
備考1. 非常に大きな頂角をもつ当てはめ円すいは,実用上は使われず,安定な計算のできるソフト
ウェアは広く利用されていない。
2. この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 10360-6:2001,Geometrical Product Specifications(GPS)−Acceptance and reverification tests for
coordinate measuring machines(CMM)−Part 6:Estimation of errors in computing Gaussian
associated features (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格のうちで,発行年を付記してあるものは,記載の年の版だけがこの規格の規定を構
成するものであって,その後の改正版・追補には適用しない。発効年を付記していない引用規格は,その
最新版(追補を含む。)を適用する。
JIS B 0641-1 製品の幾何特性仕様(GPS)−製品及び測定装置の測定による検査−第1部:仕様に対す
る合否判定基準
備考 ISO 14253-1:1998 Geometrical Product Specifications(GPS)−Inspection by measurement of
workpieces and measuring equipment−Part 1:Decision rules for proving conformance or
non-conformance with specificationsが,この規格と一致している。
JIS B 0672-1 製品の幾何特性仕様(GPS)−形体−第1部:一般用語及び定義
備考 ISO 14660-1:1999 Geometrical product specifications(GPS)−Geometrical features−Part
1:General terms and definitionsが,この規格と一致している。
JIS B 0672-2 製品の幾何特性仕様(GPS)−形体−第2部:円筒及び円すいの測得中心線,測得中心面
並びに測得形体の局部寸法
備考 ISO 14660-2:1999 Geometrical product specifications(GPS)−Geometrical features−Part
3
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2:Extracted median line of a cylinder and a cone, extracted median surface, local size of an
extracted featureが,この規格と一致している。
JIS B 7440-1 製品の幾何特性仕様(GPS)−座標測定機(CMM)の受入検査及び定期検査−第1部:用語
備考 ISO 10360-1:2000 Geometrical Product Specifications(GPS)−Acceptance and reverification tests
for coordinate measuring machines(CMM)−Part 1:Vocabularyが,この規格と一致している。
JIS B 7440-2 製品の幾何特性仕様(GPS)−座標測定機(CMM)の受入検査及び定期検査−第2部:寸法
測定
備考 ISO 10360-2:2001 Geometrical Product Specifications(GPS)−Acceptance and reverification tests
for coordinate measuring machines(CMM)−Part 2:CMMs used for measuring sizeが,この規格と
一致している。
(VIM) International Vocabulary of Basic and General Terms in Metrology,BIPM,IFCC,IEC,ISO,IUPAC,
IUPAP,OIML,2nd edition 1993
3. 定義 この規格で用いる主な用語の定義は,JIS B 0672-1,JIS B 0672-2,JIS B 7440-1及びVIMによ
る。
4. 基本的な要求事項 ソフトウェア供給者によって,次の基本的な要求事項を満足しなければならない。
a) 被検ソフトウェアは明確で,かつ,固有の識別子をもたなければならない(例えば,リリース番号)。
検査結果を被検ソフトウェアの他のバージョンに不適切に適用してはならない。検査機関は,被検
ソフトウェアの(ライセンスの)所有者の依頼を受け,検査成績書に報告されるリリース番号によっ
て識別される基準データセットに基づく検査を再実行し,検査認証を行うことが認められる。
b) 被検ソフトウェアは,次の方法を与えなければならない。
1) システムの測定作業及びソフトウェア補正の部分を回避した,基準データセットの直接入力及び適
切な数値精度(8.参照)での被検パラメータ値の出力。
2) 二次元の当てはめ形体(二次元の直線及び円)を計算するために被検ソフトウェアへの二次元座標の
入力。もしも,これができないならば,基準データセットのそれぞれの点のZ座標にダミーとして
0を追加してもよい。したがって,xy平面に形体を投影することになる。
備考 測定システムには入出力手続きが,数値精度を制限する場合がある。この制限は,得られた検
査結果において被検ソフトウェアにとって不利となり得る。
c) 入出力の方法は,検査機関と合意がなければならない。
備考 標準フォーマットで,標準的にコンピュータで読むことができるメディアを使うことが便利で
ある。
d) 被検ソフトウェアが検査するそれぞれの形体に対応して,形体の被検パラメータ表現の説明書が供給
されなければならない。
備考 基準パラメータ表現は,表3に示す。
e) 被検ソフトウェアが検査するそれぞれの形体及び検査種類(表2参照)に対応して,適切なパラメータ
クラス(位置,姿勢,サイズ又は角度)(9.3参照)の最大許容誤差MPEqの一覧表を与えなければなら
ない。
5. 基準データセット及び基準パラメータ値
4
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1
一般 被検ソフトウェアを検査する目的で使われる基準データセットと対応する基準パラメータ値
は,附属書Aで規定する手順に従って生成しなければならない。基準データセットは,形体のサイズ,形,
位置,姿勢及びサンプリング点の範囲をシミュレーションするように設計されている。基準データセット
は,プロ−ビング誤差を含む典型的な座標測定機の測定誤差及び形体の形状偏差をもシミュレーションす
るように設計されている。
附属書Aに従うある基準データセット及び基準パラメータ値は,異なる被検ソフトウェアの検証のため
には用いてはならない(附属書A.1参照)。
5.2
パラメータ値の初期値 被検ソフトウェアは,ソフトウェアへの一部の入力点(通常最初の複数の
入力点)が既定のサンプリングパターンをもっていることを必要とするかもしれない。この入力点は,パラ
メータ値の初期値を決めるために用いる。この要求が被検ソフトウェアの取扱説明書に書かれていて,ソ
フトウェア供給者の要求があった場合,検査機関は既定のサンプリングパターンと一致する付加的な点を
生成しなければならない。これらの付加的な点を,附属書Aに従って生成されるデータに追加することに
よって,基準データセットを形成する。これらの事項は,検査成績書に記載しなければならない[11. k)5)
を参照]。
備考1. 被検ソフトウェアは,当てはめ形体のパラメータ値を決定するため,通常,繰り返し計算を
用いる。このために,パラメータ値の初期値を計算するために一部の点を区別する必要があ
る。
2. 最小二乗当てはめ円筒を説明のために使う。例えば,基準データセットの最初の6点は初期
値を決めるための点として区別する。最初の3点と次の3点によって定義される円の中心を
結ぶ直線が当てはめ円筒の軸の近似値となり,これらの円の半径が当てはめ円筒の半径の近
似値となる。
3. パラメータ値の初期値を必要としない被検ソフトウェアは,より安定(robust)であり実形体
を測定する特別なサンプリングパターンを必要としない。
6. 被検パラメータ値及び変換被検パラメータ値 それぞれのソフトウェア供給者によって,パラメータ
表現は異なるので,検査のためには,被検パラメータ値は,必要ならば変換規則を適用して変換被検パラ
メータ値にする。変換被検パラメータ値は,基準パラメータ値と同じパラメータ表現になり,基準パラメ
ータ値と比較することができる。
この目的のために,ソフトウェア供給者は,被検パラメータ表現についての詳細を供給しなければなら
ない。
必要ならば,検査機関は適切な変換規則を導入し,適用しなければならない。
変換被検パラメータ値を作るときに余分な不確かさが付け加わることがないように,ソフトウェア供給
者が被検パラメータ値を適切な数値精度(8.参照)で与えることが望ましい。
被検ソフトウェアは,幾つかの基準データセットに関して結果が出せない場合がある。
備考 結果が出せない場合は,例えば,次の理由による。
a) データセットが被検ソフトウェアの適用範囲外にあるので処理することができない(例
えば,データ セットがあまりにも多くのデータ点を含んでいる場合又はデータ点が不適
切に分布している場合。)。
b) 繰り返しアルゴリズムの収束性の欠如。
c) ソフトウェアの実行中に生じた致命的なエラー(例えば,浮動小数点のオーバフロー又
5
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は負の数の平方根を採ろうとすること。)。
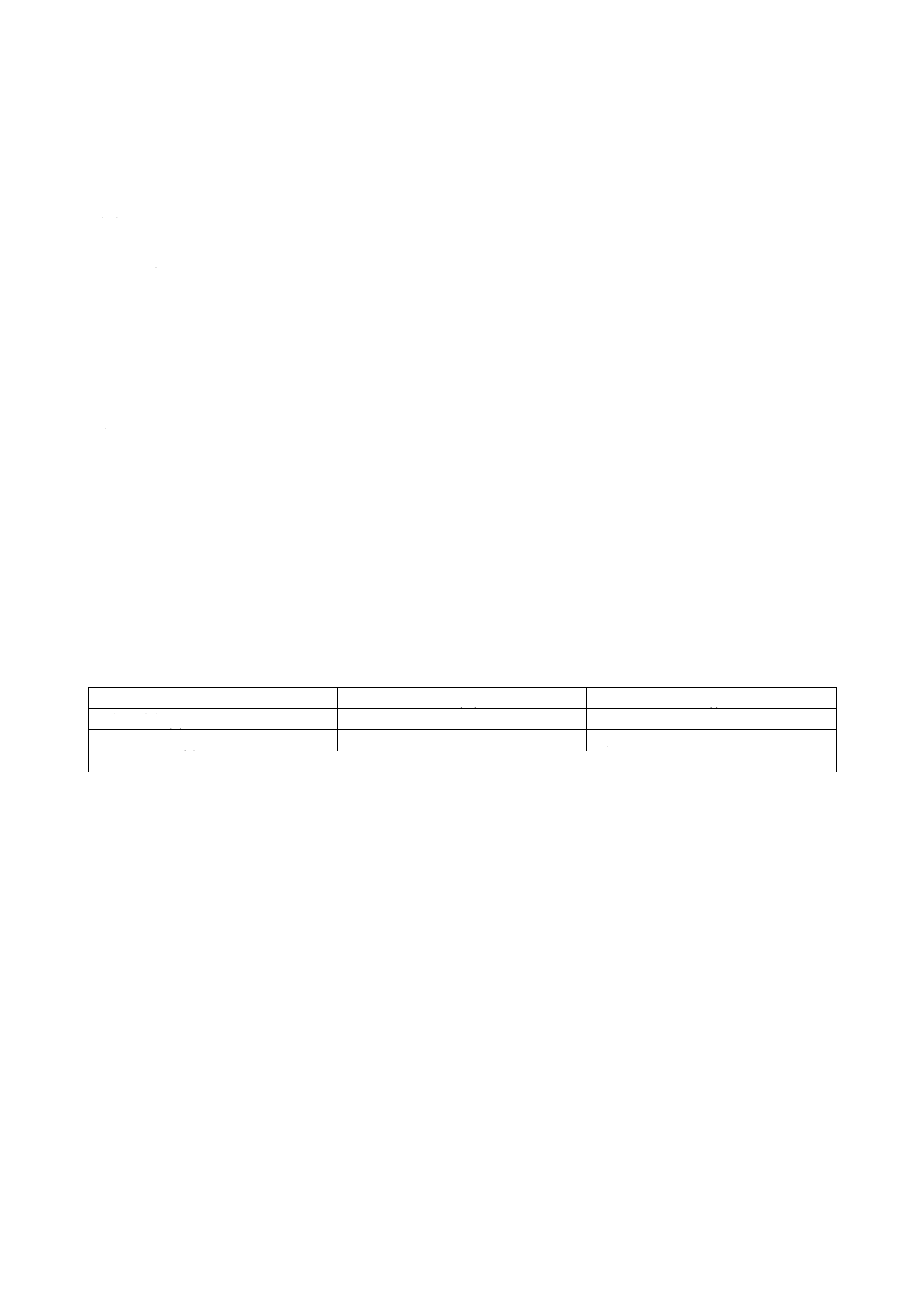
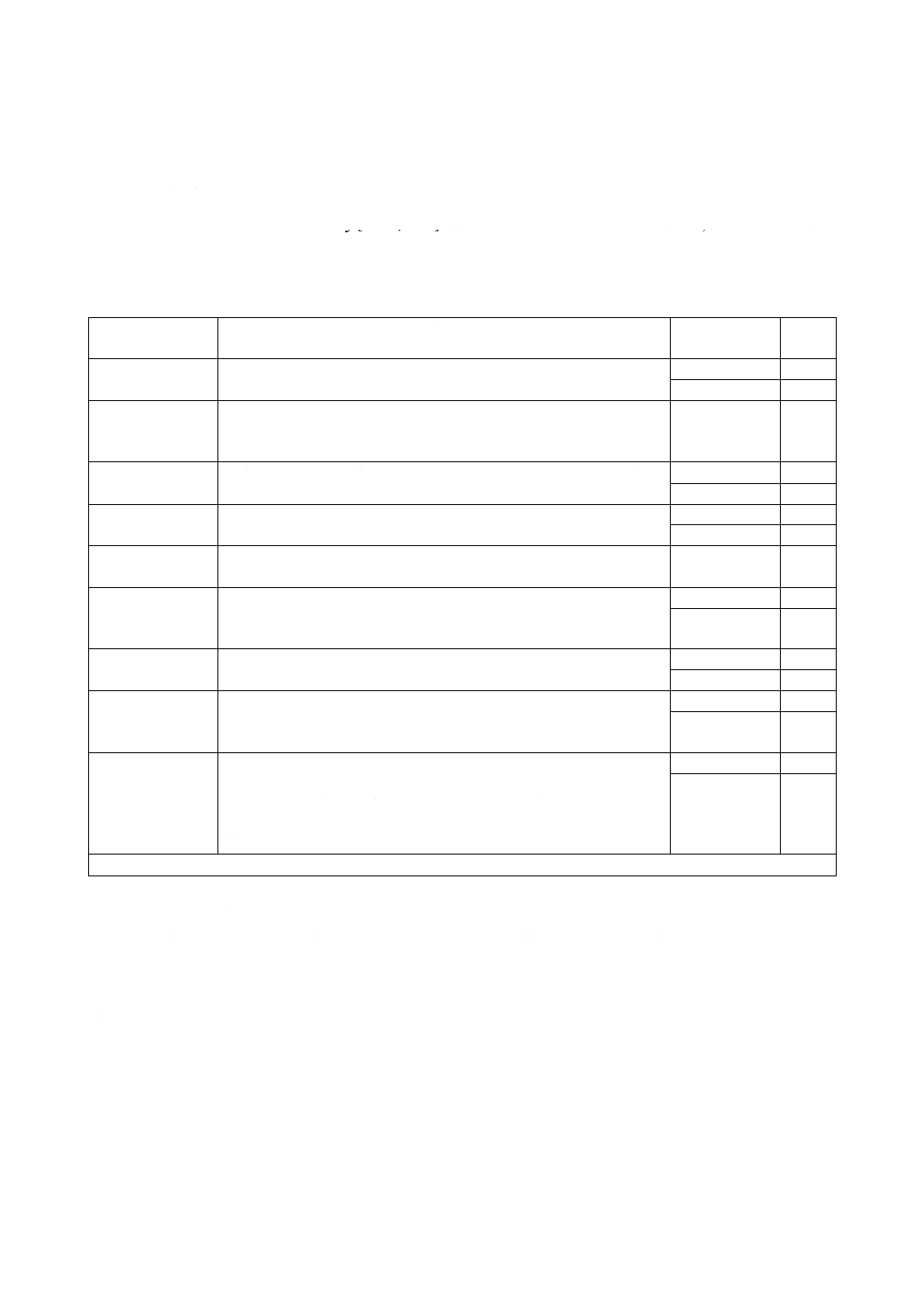
7. 単位 表1で規定する単位を使わなければならない。
表 1 単位
基準データセット
基準パラメータ値
点の座標値
mm
−
位置パラメータ
−
mm
サイズパラメータ
−
mm
角度パラメータ
−
rad
姿勢パラメータ
−
(無次元) a
変換被検パラメータ値と対応する基準パラメータ値との差及び不確かさを提示するために,マイクロメートル及びマ
イクロラジアンを,検査成績書で使うことができる。
注a 姿勢パラメータを方向余弦によって表現する。
8. 数値の不確かさ 情報の入出力及び計算上の数値の表現に使われるけた数の有限性によって生じる数
値の不確かさを見積もるのは,検査機関の責任である。この数値の不確かさは,検査成績書(11.参照)で
報告される不確かさの記述に含まれなければならない。
備考1. 情報の入出力には,ソフトウェア供給者によって提出される被検パラメータ値と同様に,検
査機関がコントロールする基準データセットの点の座標値及び基準パラメータ値がある。
2. 計算機上の表現は,変換規則を適用する場合及びq値を計算する場合[9.3 d)参照]には,基準
ソフトウェアの場合には,基準データセットから基準パラメータ値を計算する場合に生じる
数値の不確かさに影響を与え(図2参照),データ生成の場合には,基準パラメータ値から基
準データセットを計算する場合に生じる数値の不確かさに影響を与える(図3参照)。
3. 数値の不確かさは,最小二乗当てはめ形体が基準データセットによっていかにうまく定義さ
れるか,又は当てはめ問題の数値条件(基準パラメータ値に対する基準データセットの座標値
の感度係数)にも依存する。この条件は,形体の種類並びに基準データセットの点の数及び位
置によって影響を受ける。
4. 解析的な評価が簡単でない場合は,シミュレーションによって数値の不確かさを見積もるこ
とができる。
基準対が生成される方法によって,基準データセット又は基準パラメータ値の一方の適切な不確かさが
決定されているならば,検査機関は他方を正確なものとみなしてもよい。
9. 検査方法の適用
9.1
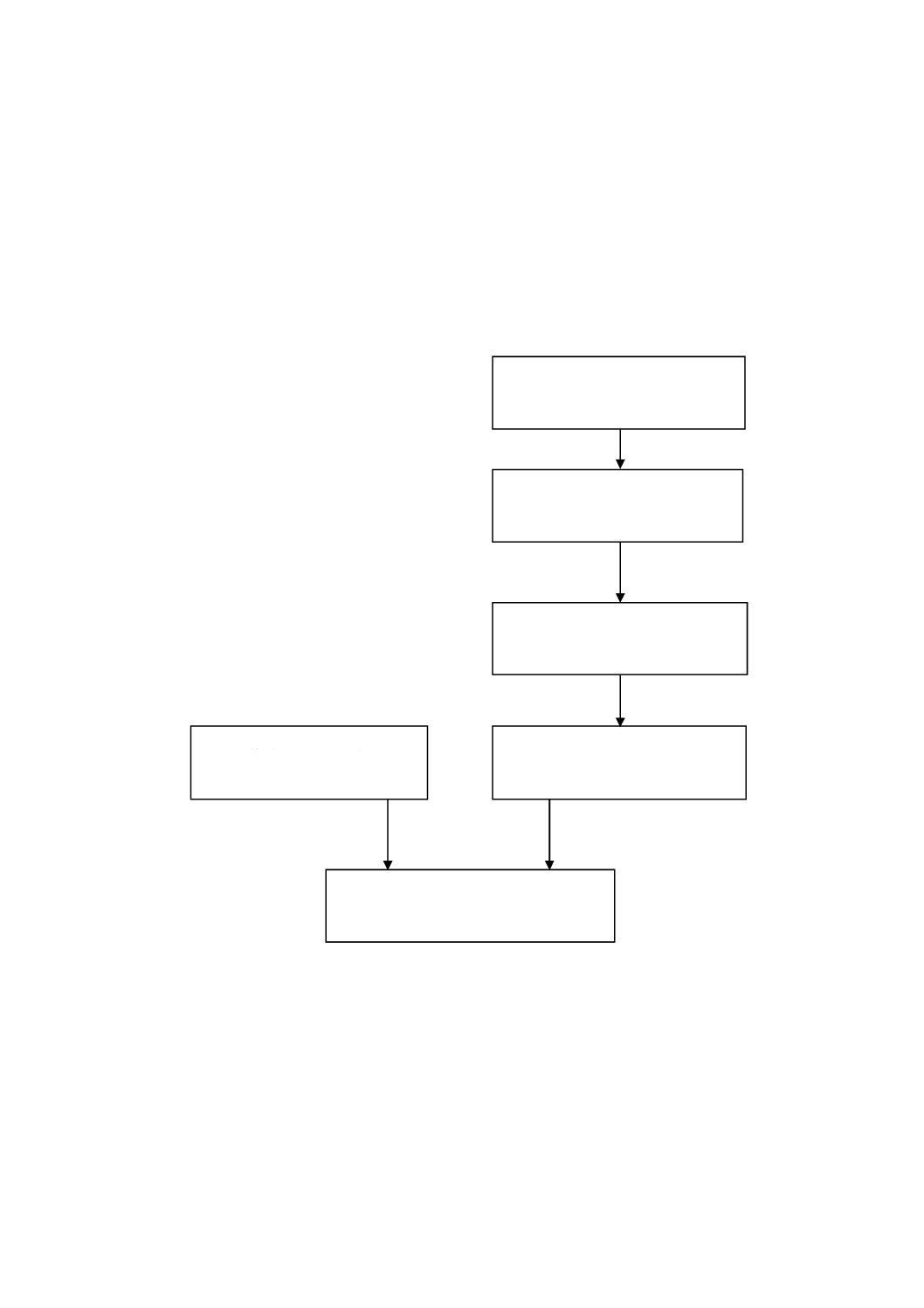
原理 検査方法の原理は,変換被検パラメータ値を基準パラメータ値(図1参照)と比較することであ
る。被検パラメータ値を得るために被検ソフトウェアを基準データセットに適用し,これらの被検パラメ
ータ値に変換規則を適用することによって,変換被検パラメータ値を得る。それぞれの基準データセット
と対応する基準パラメータ値は,検査目的の基準対とみなされる。
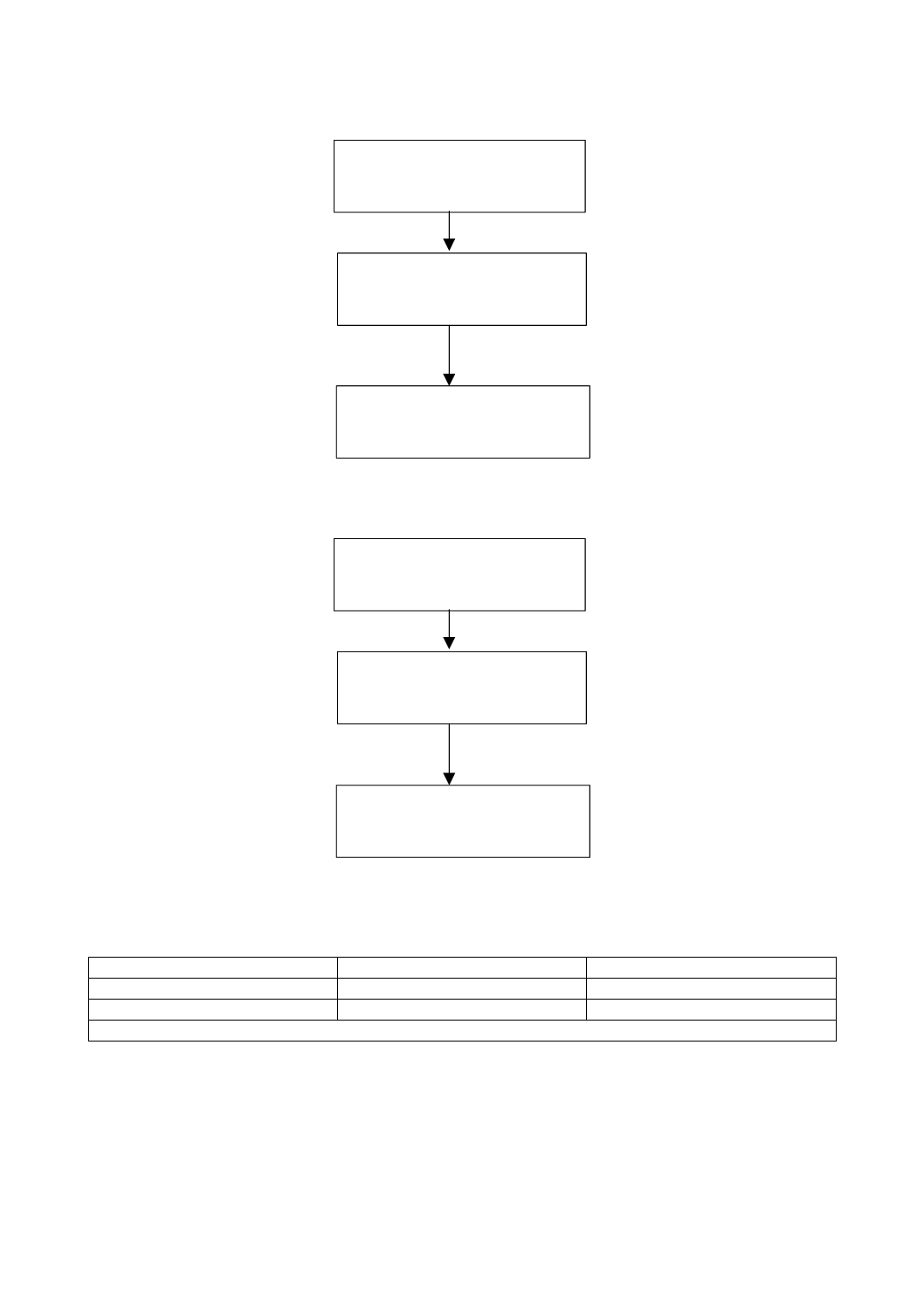
備考 検査機関は,例えば,図2又は図3に示すように基準ソフトウェア又はデータ生成ソフトウェ
アを使って基準対を供給する。
それぞれの検査(例えば,完全な形体又は形体の一部分を計算するために)又は大小のノイズ若しくは
形状偏差に対応して,異なるソフトウェアを使われる場合がある。したがって,表2にまとめるように4
6
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
種類の検査が用意されている。簡略検査は対応する標準検査の一部であり,厳格な応用のために設計され
ていないソフトウェアのために用いる。ソフトウェア供給者は,被検ソフトウェアが受ける検査を選んで
もよい。選ばれた検査は,検査成績書に記載しなければならない。
備考 二次元及び三次元の直線及び平面に関しては,形体の一部分を定義することができないので,
形体の一部分に対する簡略検査,形体の一部分に対する標準検査は,これらの形体には適用し
ない。
個々の検査が,それぞれの形体及びそれぞれの検査種類に関して実行されなければならない(表2参照)。
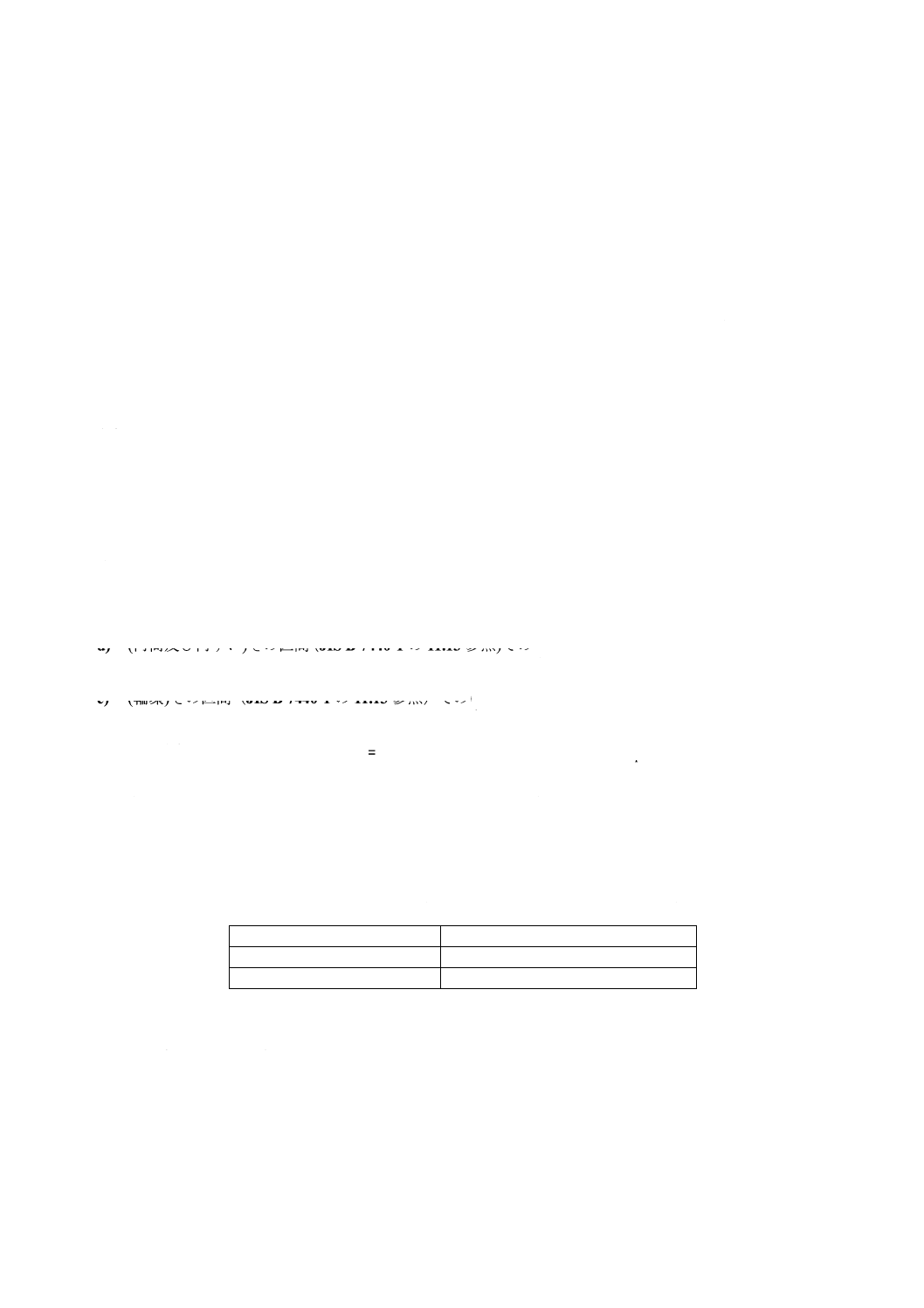
図 1 検査方法の原理
基準データセット
変換被検パラメータ値
被検ソフトウェア
比較
基準パラメータ値
被検パラメータ値
7
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
基準データセット
基準ソフトウェア
基準パラメータ値
図 2 基準対を作るために基準ソフトウェアを使う
基準パラメータ値
データ生成ソフトウェア
基準データセット
図 3 基準対を作るためにデータ生成ソフトウェアを使う
表 2 検査の種類
簡略検査
標準検査
形体の全体
形体の全体に簡略検査
形体の全体に標準検査
形体の一部分
形体の一部分に簡略検査b
形体の一部分に標準検査b
注b 二次元及び三次元の直線及び平面には利用できない。
9.2
比較の基準 それぞれの形体の基準データセットを対応する形体に適用する被検ソフトウェアに関
して,変換被検パラメータ値を基準パラメータ値と比較する基準は,次に定義するパラメータ値のクラス
(位置,姿勢,サイズ又は角度)のパフォーマンス値pである。
a) 位置パラメータ 変換被検パラメータ値と基準パラメータ値とによって定義された位置(x0,y0)又は(x0,
8
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
y0,z0)(表3参照)の間のユークリッド距離。
b) 姿勢パラメータ 変換被検パラメータ値と基準パラメータ値とによって定義された単位ベクトル(a,
b)又は(a,b,c)(表3参照)の間の正の角度。
大変小さな角度になる場合があるので,pを評価する場合には,重大な数値誤差を生じないように,
特別に注意しなければならない。vとwが二つの単位ベクトルであるとすると,数値的に安定な式は,
次による。
−
=
2
arcsin
2
w
v
p
c) サイズパラメータ 変換被検パラメータ値の集合及び基準パラメータ値の集合の中の対応するサイズ
パラメータ
1,rr又は2r(表3参照)の正の差。二つのサイズパラメータ1r及び2rがある輪環の場合には,
二つの正の差の大きい方をとる。
d) 角度パラメータ 変換被検パラメータ値と基準パラメータ値の集合の中で角度パラメータψ(表3参
照)の正の差。
パフォーマンス値の大きさは,変換被検パラメータ値がどれくらいうまく対応する基準パラメータ値と
比較することができるかという測度である。値が小さいほど,合致度がよい。
9.3
手順 検査機関は,それぞれの形体及びそれぞれの検査種類に関して,次のステップを踏まなけれ
ばならない。
a) 被検パラメータ値を得るために,その形体に関する基準データセットに被検ソフトウェアを適用する
ようにソフトウェア供給者に指示する。もしも,ソフトウェア供給者がソフトウェアのコピーを提供
したならば,このステップを検査機関が実行してもよい。
b) 検査が実行でき,検査結果が有効である測定空間を記述するようにソフトウェア供給者に要求する。
c) 被検ソフトウェアがパラメータ値を作り出す形体の基準データセットに関して,
1) 被検パラメータ表現が基準パラメータ表現と異なっているならば,変換規則を被検パラメータ値に
適用して変換被検パラメータ値を作らなければならない。さもなければ,被検パラメータ値を変換
被検パラメータ値とみなさなければならない。
2) 形体にとって適切なパラメータ値のクラス(位置,姿勢,サイズ又は角度)に関して,9.2に規定し
たとおり,パフォーマンス値pを定義する。
3) 対象となる形体が,二次元の円,球又は円すいでないならば,変換被検パラメータ値の集合の中で
姿勢パラメータの符号を変えた後,姿勢パラメータに関するパフォーマンス値を再度計算する。こ
れらのパラメータに関して,ステップ2)を繰り返す。そして,よい方の結果を選ぶ。
備考1. 直線又は軸の姿勢パラメータの符号がすべて変えられたならば,結果として得られるパラメ
ータは,同じ直線又は軸(しかし,反対の方向を指している。)となる。したがって,もしも
姿勢パラメータがあるならば,検査は姿勢に対応する変換被検パラメータ値によって定義す
るベクトルと対応する基準パラメータ値とを比較すること,又はすべての符号を変えた被検
パラメータ値によって定義するベクトルと対応する基準パラメータ値とを比較することが必
要である。
2. 円すいの軸の姿勢を定義する単位ベクトルは,その頂点の方向を指しているので,円すいは
軸の方向が反転できない唯一の形体である(表3参照)。
d) 形体のパラメータ値のそれぞれのクラス(位置,姿勢,サイズ又は角度)に関して,ステップc) 2)で
9
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
定義したパフォーマンス値pの最大値として,全体としての値qを定義する。
e) 形体のパラメータのそれぞれのクラス(位置,姿勢,サイズ又は角度)に関して,次の形式で検査成績
書に検査結果の記録を記載する。
1) 対応する値qとその数値的な不確かさ。
2) 被検ソフトウェアが基準データセットに関して被検パラメータ値を作ることに失敗した場合,“n
個のデータセットで失敗”(nは失敗した基準データセットの数)と失敗しなかった被検パラメータ
値から導出された対応する値qとその数値的な不確かさ。
10. 仕様との適合 “失敗”がなく,JIS B 0641-1に従う数値の不確かさを考慮して,どのq値も対応す
る最大許容誤差MPEqより大きくないならば,被検ソフトウェアの性能は,検証されたと考える。検査機
関が仕様との適合を数値的に評価した場合には,この評価結果は検査成績書の一部となる。
11. 検査成績書 検査機関が発行する検査成績書は,次の事項を含んでいなければならない。
a) 名称(例えば,検査成績書)
b) ソフトウェア供給者の名前及び住所並びに検査を実施した場所及び被検ソフトウェアを基準データセ
ットに適用した場所
c) シリアル番号のような検査成績書の個別の識別子並びにそれぞれのページ及び全ページ数の識別
d) 申請者の名前及び住所
e) 被検ソフトウェアのリリース番号
f)
ハードウェアの識別子
g) 検査の依頼日,検査の実施に合意した日及び検査実施日
h) この規格に従って検査を実施する効果の説明
i)
基準データセットのリリース番号
j)
検査成績書が有効である測定空間のサイズ
k) 検査されたそれぞれの形体及びそれぞれの検査種類に関して,
1) 形体の種類(例えば,円筒)
2) 検査の種類(例えば,形体の全体に標準検査)
3) 対応する不確かさの記述を含んだ検査結果(9.3参照)
4) (検査機関が仕様との適合を評価した場合だけ)指定されたMPEqと適合するという記述
5) パラメータ値の初期値を決めるために基準データセットの中の特定の点の集合を被検ソフトウェア
が使用したか否かの確認
l)
発行日,検査成績書の内容に責任をとることができる者の署名及び肩書き,又はそれと同等に保証さ
れた識別
m) 結果は,検査したソフトウェア及び基準データセットに関してだけ有効であるという記述
n) 検査成績書は,完全に複写する場合を除いて,検査機関の文書による承認なしには,その一部だけを
複製してはならないという記述
10
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
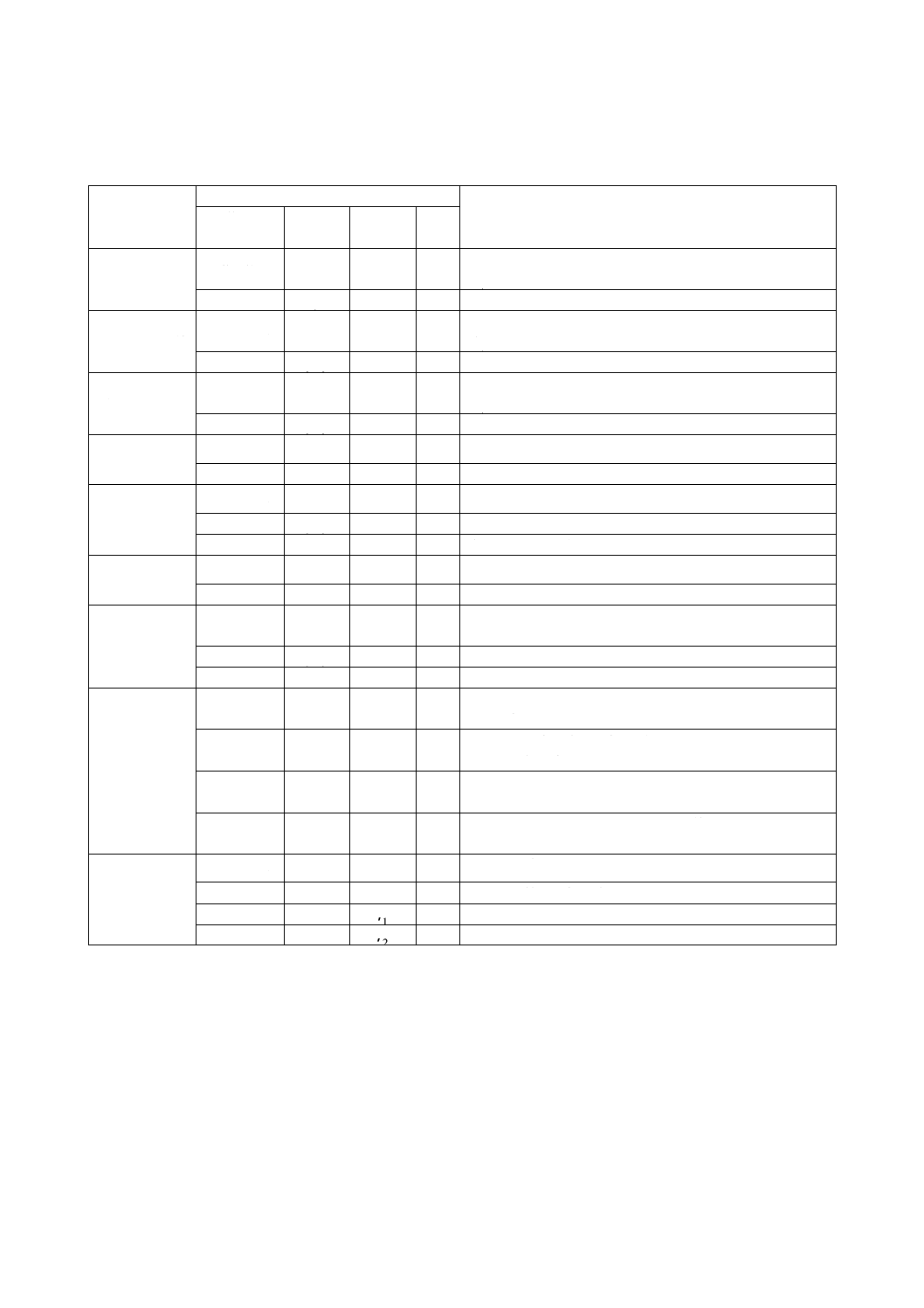
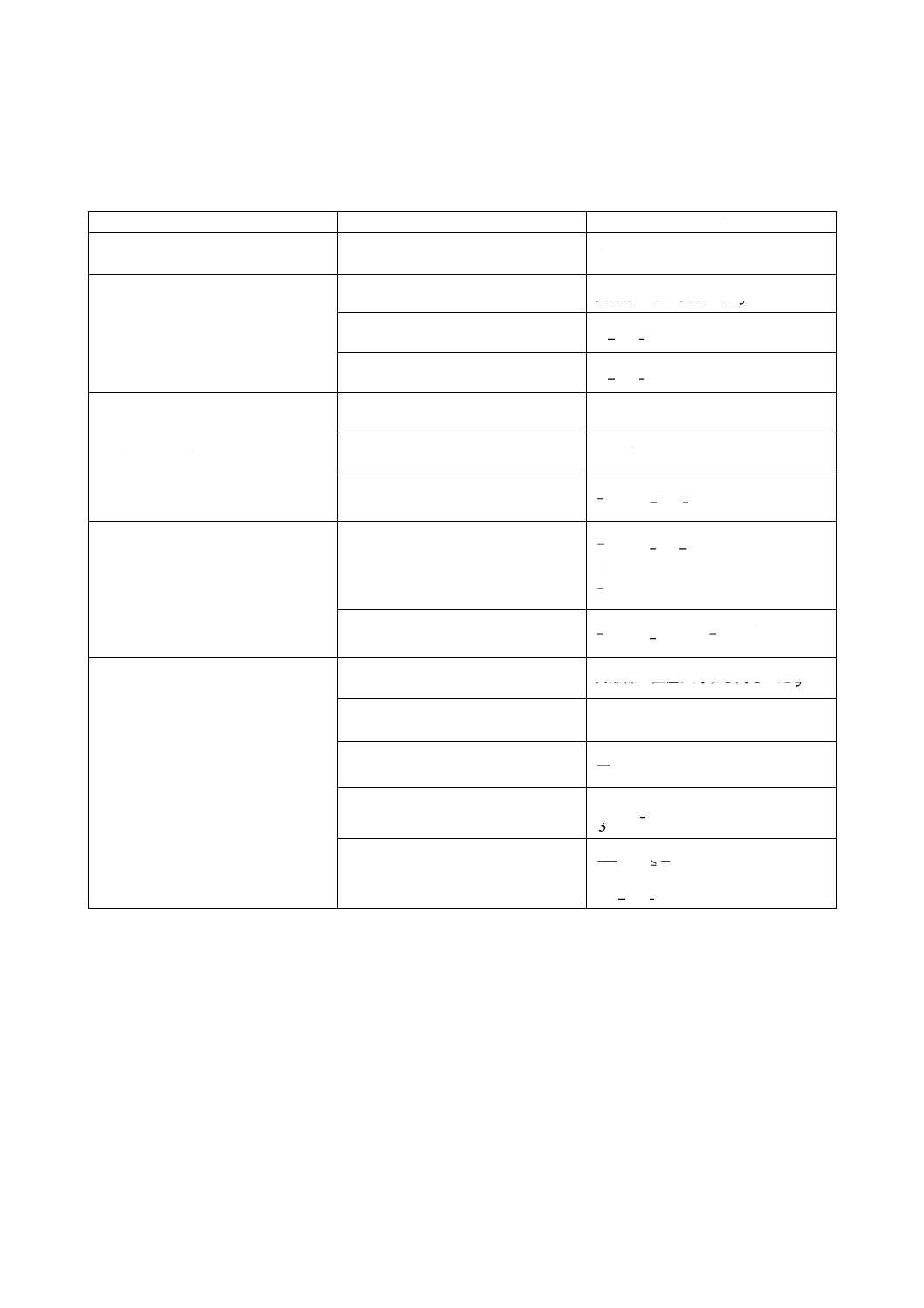
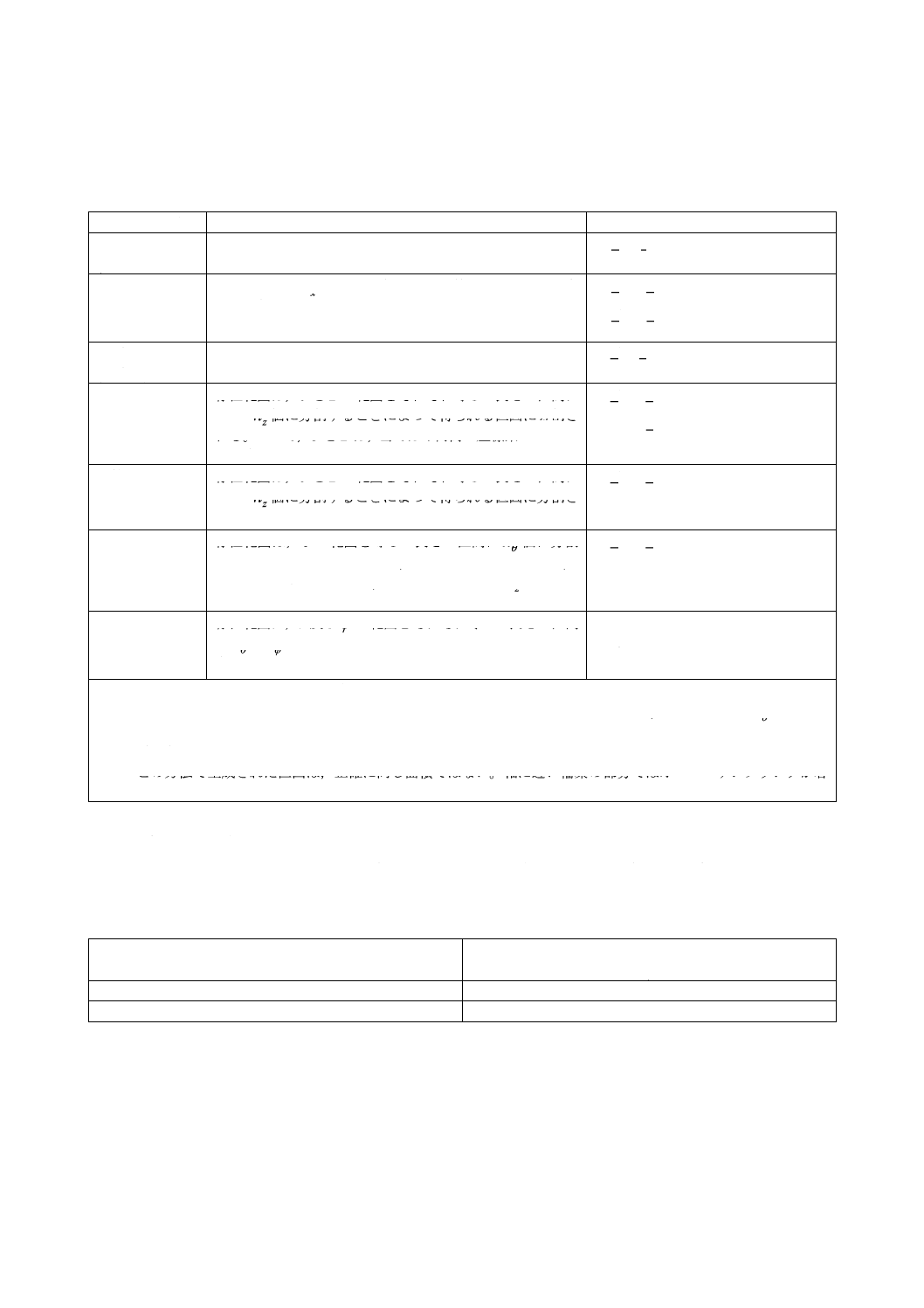
表 3 当てはめ形体の基準パラメータ表現
当てはめ形体
当てはめ形体のパラメータ
備考
位置
姿勢
サイズ
角度
mm
mm
rad
(二次元)直線
0
0
,
xy
−
−
−
定義しているデータセットの重心(当てはめ直線の上にあ
る)
−
,ab
−
−
当てはめ直線の方向余弦
(三次元)直線
0
0
0
,
,
xyz
−
−
−
定義しているデータセットの重心(当てはめ直線の上にあ
る)
−
,,
abc
−
−
当てはめ直線の方向余弦
平面
0
0
0
,
,
xyz
−
−
−
定義しているデータセットの重心(当てはめ平面の上にあ
る)
−
,,
abc
−
−
当てはめ平面の法線の方向余弦
(二次元)円
0
0
,
xy
−
−
−
当てはめ円の中心
−
−
r
−
当てはめ円の半径
(三次元)円
0
0
0
,
,
xyz
−
−
−
当てはめ円の中心
−
,,
abc
−
−
当てはめ円を含む平面の法線の方向余弦
−
−
r
−
当てはめ円の半径
球
0
0
0
,
,
xyz
−
−
−
当てはめ球の中心
−
−
r
−
当てはめ球の半径
円筒
0
0
0
,
,
xyz
−
−
−
定義しているデータセットの重心に最も近い当てはめ円
筒の軸上の点
−
,,
abc
−
−
当てはめ円筒の軸の方向余弦
−
−
r
−
当てはめ円筒の半径
円すい
0
0
0
,
,
xyz
−
−
−
定義しているデータセットの重心に最も近い当てはめ円
すいの軸上の点
−
,,
abc
−
−
円すいの頂点の方向を指す単位ベクトルとなる,当てはめ
円すいの軸の方向余弦
−
−
r
−
点
0
0
0
(,
, )
xyz
で円すいの軸に垂直に測定された,当ては
め円すいの半径
−
−
−
ψ
当てはめ円すいの頂角(円すいの母線と軸の間の角度の2
倍に等しい)
輪環
0
0
0
,
,
xyz
−
−
−
当てはめ輪環の中心
−
,,
abc
−
−
当てはめ輪環の軸の方向余弦
−
−
1r
−
当てはめ輪環の管の円形断面の半径
−
−
2r
−
当てはめ輪環の環の平均半径
11
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定)基準データセットの生成手順
A.1 序文 この附属書は,異なるリリースの同等性が保証されるように基準データセットを生成する手順
を記述する。したがって,この附属書は主として検査機関及びソフトウェア開発者のためのものである。
基準データセットのすべてのリリースは,一意のリリース番号によって区別しなければならない。同じ
リリースは,一度だけ完全な検査を実施するために使うことができる。すなわち,検査が以前の検査の繰
り返しでないならば,異なる検査成績書は,異なる基準データセットのリリース番号を報告しなければな
らない(本体5.1参照)。
それぞれの当てはめ形体に関して,四つの異なる種類の基準データセットが可能である(附属書A表1
参照)。
a) FI及びPI基準データセットはそれぞれ,
− 形体の全体
− 形体の一部分
の標準検査のためだけに用いる(本体表2参照)。
b) FM及びPM基準データセットはそれぞれ,
− 形体の全体
− 形体の一部分
の簡略検査及び標準検査の両方のために用いる。
附属書A表1 基準データセットの種類とその頭文字
形体の計算が容易(M)
形体の計算が困難(I)
形体の全体(F)
FM
FI
形体の一部分(P)
PM a
PI a
注a
二次元又は三次元の直線又は平面には適用できない。
それぞれの当てはめ形体及び基準データセットの種類に関して,10組の基準データセットが与えられる。
それらは,feature.reference̲data̲set̲type set̲numberと名付けられている。ここで,featureは{Line2D,Line3D,
Plane,Circle2D,Circle3D,Sphere,Cylinder,Cone,Torus}のリストから選ばれる形体の識別子であり,
reference̲data̲set̲typeは,{FM,FI,PM,PI}のリストから選ばれる基準データセットの種類の識別子で
ある。set̲numberは,0〜9の範囲で基準データセットの1けたの順序数である。有効な基準データセット
名の例は,Circle3D.PI8,torus.PM0などである。
備考 それぞれの当てはめ形体に関して,簡略検査は10組の基準データセット(FM又はPM)を含む。
一方,標準検査は20組の基準データセット(FM及びFI又はPM及びPI)を含む。
基準データセットの点は,直方体状の測定空間内に配置されている。基準座標系は,直方体の中心を原
点とし,直方体の辺の方向に各軸が向いている。ソフトウェア供給者が規定した直方体のサイズを検査成
績書に記載する[11. j)参照]。
それぞれの基準データセットは,次のステップに従い生成されなければならない。
− 当てはめ形体の公称存在範囲を生成する。
− 公称存在範囲の形を変えることによって形状偏差を与える。
12
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 公称存在範囲はサンプリングされ,変形した存在範囲に垂直に投影される公称点を生成する。
− ガウス分布した平均値が,0のノイズをプロ−ビング及び他の誤差をシミュレートするために,それ
ぞれの点に加える。
上述のステップを次のように規定する。
A.2 ランダムな生成 この手順では,多くの値をランダムに生成しなければならない。ランダムな生成
は,次の規則に従わなければならない。
a) 区間[a,b](axb
≤ ≤
)で規定されたスカラー値x:二つのデータセットに関してはx=a及びx=bをと
る。他のデータセットに関しては,[0,1]に一様分布した乱数値yを生成し,x=a1-ybyを計算する。
b) 二つの区間[a,b]及び[c,d](axb
≤ ≤
又はcxd
≤ ≤
)で規定されたx:データセットを五つのデー
タセット2組に分ける。それぞれのグループに関して,区間[a,b]及び区間[c,d]で規則a)に従っ
てxを生成する。
c) 区間[a,b](anb
≤ ≤
)で規定された整数値n:上記のa)を適用し,最も近い整数値に切り上げる。
d) 二次元の姿勢(単位ベクトルnによって表現される。):二つのデータセットに関して,n=(1,0)及び
n=(0,1)をとる。他のデータセットに関しては,区間[0,2π]に一様分布した乱数値ϕを生成し,
n=(cosϕ,sinϕ)を計算する。
e) 三次元の姿勢(単位ベクトルnによって表現される):三つのデータセットに関して,n=(1,0,0),n=(0,1,0)
及びn=(0,0,1)をとる。他のデータセットに関しては,区間[0,2π]及び区間[-1,1]で一様分布した
二つの乱数θ及びzをそれぞれ生成し,(
)z
z
z
,
1
sin
,
1
cos
2
2
−
−
=
θ
θ
n
を計算する。
f)
既定値(区間の極限又は座標系の方向)が上記のa)b)c)d)及びe)に従ってランダムにとられた基準デ
ータセットを,区間[0,9]で一様分布した整数値を生成することによって選ぶ。それは,基準データ
セットの識別子として使われる。
g) (データセットの存在範囲を含む最小の凸領域内の選ばれた点によって定義される)局在化:測定空
間の定義域内に一様分布した二次元又は三次元の値をランダムに生成する。データセットの存在範囲
が完全には測定範囲に含まれないならば,条件が満足されるまで繰り返し,基準点を生成する。
h) 形状偏差(A.4参照):それぞれのフーリエ級数に関して,区間[-1,1]及び区間[0,2π]で一様分布
した二つの乱数値x及びϕを生成する。それらは,それぞれ任意単位での振幅及び位相として使われ
る。サンプリング(A.5参照)後,すべての点で生じる形状偏差を計算し,その絶対値の最大値xmax
を導出する。区間[-1,1]で一様分布した乱数値κを生成し,すべての形状偏差を係数
max
/x
κζ
で再
設計する。ここで,ζはA.4で規定する最大形状偏差である。
i)
サンプリング(A.5参照):(二次元及び三次元の)直線,平面及び(二次元及び三次元の)円に関して,
それぞれの存在範囲の部分集合内で一様分布する点を生成する。他の当てはめ形体に関しては,存在
範囲の部分集合の範囲内で一様分布するように,点の曲面座標系での二つの値をランダムに生成する。
附属書A表5の最初の脚注の定義を満たさない円すいの場合は,z座標を定義域
min
max
[
,
]
z
z
で生成す
る変わりに
2
min
(
)
z
cz
=
+
とする。ここで,cは区間
2
2
min
max
[
,
]
z
z
で一様分布する乱数である。
j)
ノイズ(A.6参照):サンプリングしたそれぞれの点について,附属書A表6で規定する標準偏差をも
つ平均値0の正規乱数を生成する。当てはめ形体(二次元の円,球,円筒,円すい,輪環)の公称デ
ータの存在範囲に垂直で外向きの単位ベクトルu,又は当てはめ形体(平面)の姿勢単位ベクトル
(,,)
abc又は当てはめ形体(二次元直線)の単位ベクトル(,)
abを90度時計回りに回転することによ
13
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
って得られるベクトルとして,又は当てはめ形体(三次元の直線,三次元の円)の制約された方向に優
先して上記のd)に従い,存在範囲に垂直な平面内の二次元の姿勢としてuを生成する。xuをノイズベ
クトルとする。
備考1. a)に従って生成した値xは,対数一様分布の特性をもっている。
2. e)に従って生成された単位ベクトルnは,単位球上に一様分布する。
3. h)に従って生成された形状偏差は,規定された区間[0,ζ]で一様分布する最大形状偏差を
もつ。
4. 特に円すいの場合に,i)に従って生成されたサンプリング点は,円すいの存在範囲上に一様
に分布する。
A.3 公称存在範囲の生成 存在範囲が選ばれる当てはめ形体の姿勢は,姿勢をもたない二次元の円及び
球を除いて,ランダムに選ばれなければならない。付加的な姿勢は,対応する当てはめ形体にそれぞれの
存在範囲を局在化するために必要とされる。それらは,次の規則(A.2参照)に従ってランダムに生成さ
れなければならない。
a) (平面)長方形の辺の方向:平面内の二次元の姿勢を生成する。
b) (円)円弧の中点の方を向いた半径方向ベクトルの姿勢:円の平面内の二次元の姿勢を生成する。
c) (球)その区間(JIS B 7440-1の11.13参照)での(,)
θφの中心値によって定義される点への半径方向ベク
トルの姿勢:三次元の姿勢を生成する。
d) (円筒及び円すい)その区間(JIS B 7440-1の11.13参照)での(
)
,z
θ
の中心値によって定義された点への
軸からの最短ベクトルの姿勢:軸に垂直な平面内にある二次元の姿勢を生成する。
e) (輪環)その区間(JIS B 7440-1の11.13参照)での(
)
,θϕの中心値によって定義された点への軸からの
最短ベクトル及び環からの最短ベクトルの姿勢:軸に垂直な平面内及び軸を含む平面内で二つの二次
元の姿勢を生成する。これは,2
0
r=
とすることによって,輪環を半径1rの球に縮退させ,三次元の
姿勢を生成することと等価である。
存在範囲内の任意の2点間距離の最大値として定義される存在範囲のサイズは,附属書A表2で規定す
る測定空間の割合で規定された区間内でランダムに生成されなければならない。それは,直方体の最も短
い辺として定義される。
附属書A表2 存在範囲のサイズによって覆われる測定空間のサイズの割合
基準データセットの種類
割合の範囲
FM,FI
[10 %,90 %]
PM,PI
[1 %,15 %]又は[85 %,99 %]
存在範囲の局在化は,ランダムに生成されなければならない。存在範囲は,附属書A表3に列挙したさ
らなる要求を満たさねばならない。
14
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A表3 存在範囲のさらなる仕様
当てはめ形体
基準データセットの種類
仕様b
(二次元及び三次元)直線
−
さらなる仕様なし
平面
−
長方形の辺の長さの比ξ
FM
1
10
ξ
≤≤
FI
1
100
ξ
≤≤
(二次元及び三次元)円
−
中心角α
FM,FI
rad
2
rad
π
α
π
≤
≤
PM,PI
rad
rad
8
1
π
α
π
≤
≤
球
FM,FI
rad
2
rad
2
1
π
θ
π
≤
≤
rad
rad
2
1
π
φ
π
≤
≤
PM,PI
rad
2
1
,
rad
8
1
π
φ
θ
π
≤
≤
円筒
−
円形部の直径に対する高さの比ξ
F
rad
2
rad
π
θ
π
≤
≤
P
rad
rad
4
π
θ
π
≤
≤
M
1
10
3ξ
≤
≤
I
1
1
20
3
ξ
≤
≤
又は
10
100
ξ
≤≤
15
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
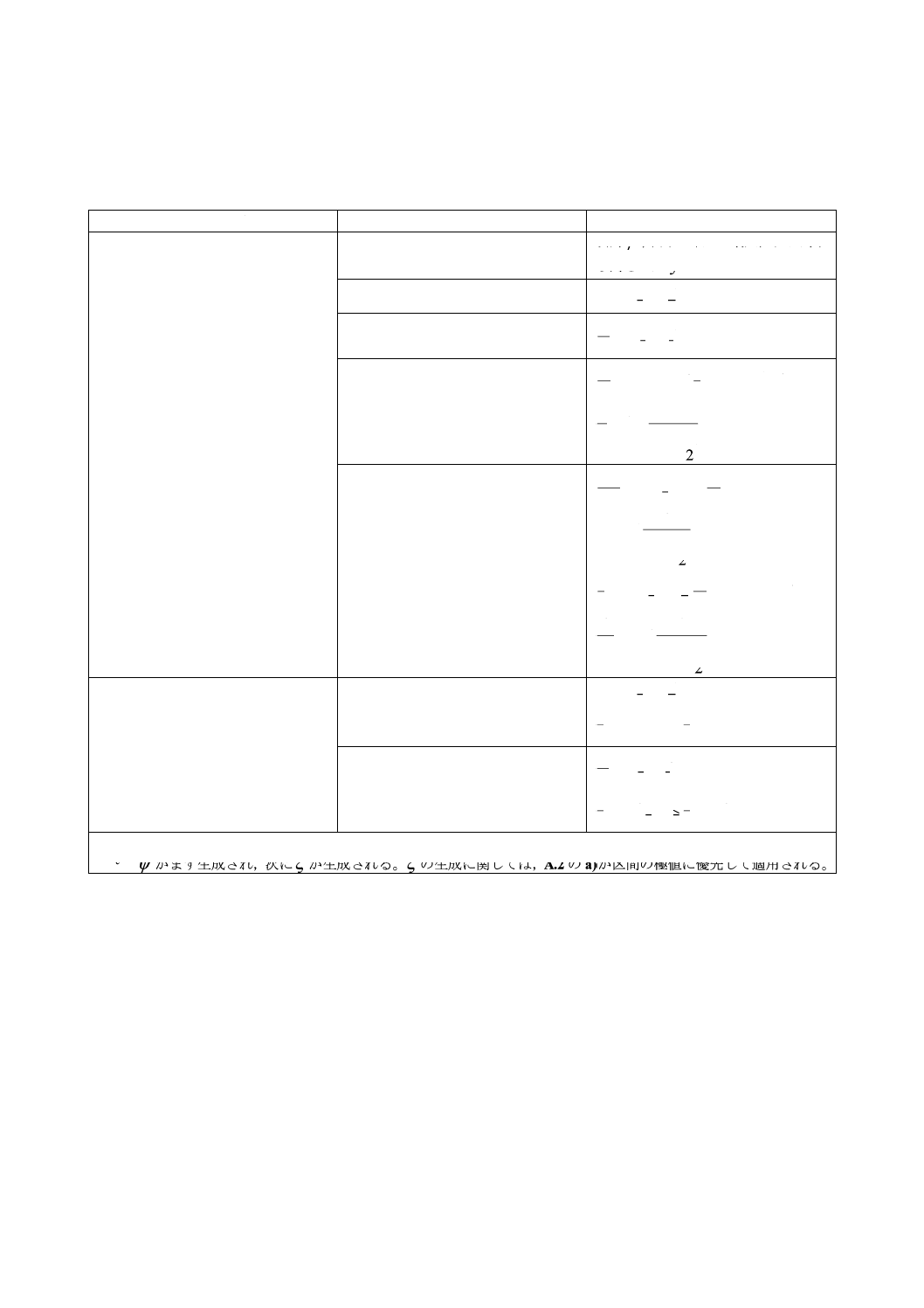
附属書A表3 存在範囲のさらなる仕様(続き)
当てはめ形体
基準データセットの種類
仕様b
円すい
−
頂角ψ,円すい台cの最大直径に対す
る高さの比ξ
F
rad
2
rad
π
θ
π
≤
≤
P
rad
rad
4
π
θ
π
≤
≤
M
rad
3
2
rad
15
1
π
ψ
π
≤
≤
及び
1
1
4
2tan2
ξ
ψ
≤
≤
I
rad
15
1
rad
100
1
π
ψ
π
≤
≤
及び
1
5
2tan2
ξ
ψ
≤ ≤
又は,
rad
10
9
rad
3
2
π
ψ
π
≤
≤
及び
1
1
15
2tan2
ξ
ψ
≤
≤
輪環
FM,FI
rad
2
rad
π
θ
π
≤
≤
rad
2
3
rad
2
1
π
φ
π
≤
≤
PM,PI
rad
rad
2
π
θ
π
≤
≤
rad
4
5
rad
4
3
π
φ
π
≤
≤
注b 表で使用する記号の幾何学的な定義に関しては,JIS B 7440-1の11.13を参照。
c ψがまず生成され,次にξが生成される。ξの生成に関しては,A.2のa)が区間の極値に優先して適用される。
16
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4 形状偏差の重ね合わせ それぞれの存在範囲は,附属書A表4の規則に従って変形されなければな
らない。サンプル点の最大形状偏差ζ[A.2 h)参照]は,基準データセットの種類(FM,PM)に関しては10-4,
基準データセットの種類(FI,PI)に関しては10-3が存在範囲のサイズに掛けられる。
附属書A表4 公称存在範囲に形状偏差を加える規則
当てはめ形体
規則
基準データセ
ットの種類
n
(二次元)直線
線分に次数nまでのフーリエ級数を加える。
FM
3
FI
6
(三次元)直線
線分を含む二つの直交する平面を選び,それぞれの平面内で線分を二
次元直線と同様に変形する。変形された線分は,三次元の線分の変形
結果の平面への投影となっている。
−
−
平面
長方形のそれぞれの方向に次数nまでの二次元フーリエ級数を加え
る。
FM
3
FI
6
(二次元)円
円弧は,円の中心に座標原点をとる極座標系で表現される。二次元直
線と同様に次数nまでのフーリエ級数によって変形される。
FM,PM
5
FI,PI
8
(三次元)円
円を含む平面内で,円弧を二次元の円と同様に変形する。外接長方形
は平面と同様に変形する。
−
−
球
球は球の中心に原点をもつ球面座標系で表現される。生じる長方形は,
極点に対応する長方形の辺を同じ値となるように制限し,次数nのフ
ーリエ級数を加えられ平面と同様に変形されるd。
FM,PM
5
FI,PI
8
円筒
円筒は軸に沿った円筒座標系で表現される。生じる長方形はそれぞれ
の方向に次数nのフーリエ級数を加え,平面と同様に変形されるa。
FM,PM
5
FI,PI
8
円すい
円すいは軸に合わせた円筒座標系で表現される。生じる長方形はそれ
ぞれの方向に次数nのフーリエ級数を加え,平面と同様に変形される。
生じた形状偏差は長方形よりもむしろ円すいに垂直である。
FM,PM
5
FI,PI
8
輪環
一般的な輪環の点pはp=r2(θ)+r1(θ,φ)と表現される。ここで,θは
軸回りの角度であり,φは環r2回りの角度である。環からpの最短距
離r1とする。結果の長方形r1(θ,φ)はそれぞれの方向に次数nのフー
リエ級数を加え,平面と同様に変形される。環は三次元の円と同様に
変形される。
FM,PM
5
FI,PI
8
注d この制限は,変形された存在範囲の連続性を保証する。
A.5 サンプリング それぞれの公称存在範囲は,附属書A表5に規定するように,(二次元の存在範囲の
場合には)多くの同じ長さの直線分に分割され,(三次元の存在範囲の場合には)多くの等しい面積の区画
に分割されなければならない。
公称サンプリング点は,それぞれの部分集合内でランダムに生成され,変形された存在範囲に,公称存
在範囲に垂直に,投影されなければならない。
17
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A表5 直線分又は区画に公称存在範囲を分割するための仕様
当てはめ形体
仕様
パラメータ値
(二次元)直線
(三次元)直線
存在範囲は等しい長さのn本の線分に分割される。
4
100
n
≤ ≤
平面
存在範囲は,xn行
y
n列の格子に規則的に配置された長方
形に分割される。
2
10
2
10
x
y
n
n
≤
≤
≤
≤
(二次元)円
(三次元)円
存在範囲は,等しい長さのn本の円弧に分割される。
5
100
n
≤ ≤
球
存在範囲は,θとzの範囲をそれぞれ等しい長さの区間に
nθ,
zn個に分割することによって得られる区画に分割さ
れる。ここで,θとzは,当てはめ円筒の座標系(,,)
r
z
θ
の角度座標値及び高さ座標値であるe。
3
10
2
10
z
n
n
θ
≤
≤
≤
≤
円筒
存在範囲は,θとzの範囲をそれぞれ等しい長さの区間に
nθ,
zn個に分割することによって得られる区画に分割さ
れる。
3
10
3
10
z
n
n
θ
≤
≤
≤
≤
円すい
存在範囲は,θの範囲を等しい長さの区間にnθ個に分割
され,z(原点は頂点にある)の範囲を極値の二乗の差(す
なわち,
2
2
1
i
i
z
z
−−
が一定)が等しくなるようにznの区間に
分割されるf。
3
10
3
10
z
n
n
θ
≤
≤
≤
≤
輪環
存在範囲は,θ及びϕの範囲をそれぞれ等しい長さの区間
にnθ,nϕ個に分割することによって得られる区画に分割
されるg。
4
10
3
10
n
n
θ
ϕ
≤
≤
≤
≤
注e
球のサンプリング面積が極と赤道で異なることがないように,円筒座標系で分割する。
f
円すい台の半径の範囲が平均半径の1 %以下(ほぼ円筒の円すい又は薄い円すい板)のとき,式は,nθ次の任意
のiについて
1
i
i
z
z
−−
を定数とすることによって近似できる。その結果,頂点の仰角の悪条件の問題を解くこと
ができる。
g この方法で生成された区画は,正確に同じ面積ではない。軸に近い輪環の部分ではオーバーサンプリングが容
認される。
A.6 プロ−ビング誤差及び偶然誤差の重ね合わせ それぞれの点は,附属書A表6で規定される標準偏差
をもつノイズのランダムベクトル[A.2 j)参照]によってかき乱される。異なる点のノイズベクトルは,互い
に統計的に独立であると仮定される。
附属書A表6 ノイズ成分の標準偏差
基準データセットの種類
ノイズの標準偏差
μm
FM,PM
2
FI,PI
10
18
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(参考)GPSマトリックス
この附属書は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではない。
GPSマトリックスモデル詳細は,TR B 0007を参照する。
B.1
規格及びその利用についての情報 この規格は,座標測定機で最小二乗当てはめ形体を計算するた
めに用いるソフトウェアの誤差を評価する方法を規定している。この規格の検査は,
−直線,平面,円,球,円筒,円すい及び輪環を計算するソフトウェアに適用する。
−座標測定機によって測定したデータの最小二乗評価のために用いる。
−ソフトウェアだけで実行されるので,座標測定機から独立している。
B.2
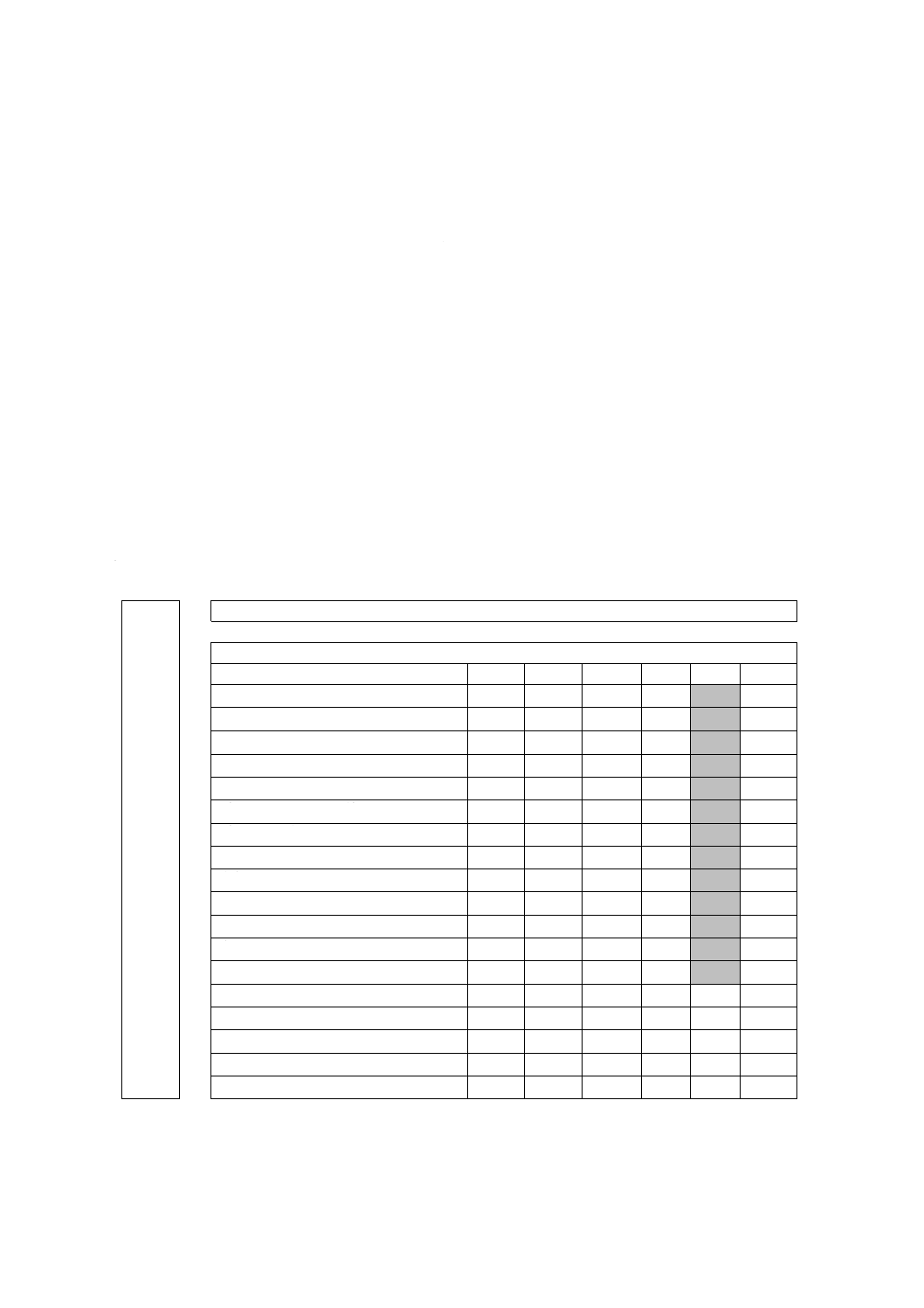
GPSマトリックスにおける位置付け この規格は,附属書B図1に示すGPS基本マトリックスにお
けるサイズ,距離,半径,角度,形状,姿勢,位置,振れ及びデータムの規格チェーンのリンク番号5に
関係する。
B.3
関連規格 関連国際規格は,附属書B図1に示す規格チェーンに含まれた規格である。
GPS
原理
規格
GPS共通規格
GPS一般規格
リンク番号
1
2
3
4
5
6
サイズ
距離
半径
角度
データムに無関係な線の形状
データムに関係する線の形状
データムに無関係な面の形状
データムに関係する面の形状
姿勢
位置
円周振れ
全振れ
データム
粗さ曲線
うねり曲線
断面曲線
表面欠陥
エッジ
附属書B図1
参考文献
19
B 7440-6:2004 (ISO 10360-6:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 0021 製品の幾何特性仕様(GPS)−幾何公差表示方式−形状,姿勢,位置及び振れの公差表示方
式
備考 ISO DIS/1101 Geometrical Product Specifications(GPS)−Geometrical tolerancing−Tolerancing
of form,orientation,location and run-outが,この規格と一致している。
JIS B 0022 幾何公差のためのデータム
備考 ISO 5459:1981 Technical drawings−Geometrical tolerancing−Datums and datum-systems for
geometrical tolerancesからの引用事項は,この規格の該当事項と同等である。
JIS B 7440-3 製品の幾何特性仕様(GPS)−座標測定機(CMM)の受入検査及び定期検査−第3部:ロー
タリテーブル付き座標測定機
備考 ISO 10360-3:2000 Geometrical product speciications(GPS)−Acceptance and reverification test for
coordinate measuring machines(CMM)−Part 3:CMMs with the axis of a rotary table as the fourth
axisが,この規格と一致している。
JIS B 7440-4 製品の幾何特製仕様(GPS)−座標測定機(CMM)の受入検査及び定期検査−第4部:スキ
ャン測定
備考 ISO 10360-4:2000 Geometrical product specifications(GPS)−Acceptance an reverification test for
coordinate measuring machines(CMM)−Part 4:CMMs used in scanning measuring modeが,この規
格と一致している。
JIS B 7440-5 製品の幾何特性仕様(GPS)−座標測定機(CMM)の受入検査及び定期検査ー第5部:マル
チスタイラス測定
備考 ISO 10360-5:2000 Geometrical product specifications(GPS)−Acceptance and reverification test
for coordinate measuring machines(CMM)−Part 5:CMMs using multiple-stylus probing systemsが,
この規格と一致している。
TR B 0007 製品の幾何特性仕様(GPS)−マスタープラン
備考 ISO/TR 14638:1995 Geometrical Product Specifications(GPS)−Masterplanが,この規格と一致
している。