B 6331-2:2013 (ISO 13041-2:2008)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 一般事項 ························································································································· 3
4.1 測定単位 ······················································································································ 3
4.2 JIS B 6190-7及びJIS B 6191の引用 ··················································································· 3
4.3 機械の水平出し ············································································································· 3
4.4 検査の順序 ··················································································································· 3
4.5 実施する検査 ················································································································ 3
4.6 測定器 ························································································································· 3
4.7 測定方法図 ··················································································································· 3
4.8 ソフトウェア補正 ·········································································································· 3
4.9 最小許容値 ··················································································································· 3
4.10 機械の分類 ·················································································································· 4
4.11 直進運動 ····················································································································· 4
4.12 タレット−工具保持部品(要素) ···················································································· 4
4.13 機械の大きさの区分 ······································································································ 4
4.14 機械の形態 ·················································································································· 5
5 静的精度検査 ··················································································································· 9
5.1 工作主軸 ······················································································································ 9
5.2 工作主軸と直進運動軸との関係························································································ 12
5.3 直進軸の運動の角度偏差 ································································································ 18
5.4 直進軸の運動の真直度偏差······························································································ 22
5.5 タレット,工作主軸及び工具主軸····················································································· 25
6 回転軸の精度 ·················································································································· 30
6.1 工作主軸の回転精度 ······································································································ 30
6.2 工具主軸の回転精度 ······································································································ 32
附属書A(参考)3点法 ········································································································ 34
参考文献 ···························································································································· 36
B 6331-2:2013 (ISO 13041-2:2008)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本工作機械工業会(JMTBA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
今回,対応国際規格に合わせた部編成を導入し,JIS B 6331の第2部として制定した。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 6331の規格群には,次に示す部編成がある。
JIS B 6331-1 第1部:水平工作主軸をもつ機械の静的精度
JIS B 6331-2 第2部:垂直工作主軸をもつ機械の静的精度
JIS B 6331-3 第3部:逆さ工作主軸をもつ機械の静的精度
JIS B 6331-4 第4部:直進及び回転運動軸の位置決め精度
JIS B 6331-5 第5部:送り速度,主軸速度及び補間運動の精度
JIS B 6331-6 第6部:工作精度検査
JIS B 6331-7 第7部:座標平面内における輪郭性能の評価
JIS B 6331-8 第8部:熱変形試験
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 6331-2:2013
(ISO 13041-2:2008)
数値制御旋盤及びターニングセンタ−検査条件−
第2部:垂直工作主軸をもつ機械の静的精度
Test conditions for numerically controlled turning machines
and turning centres-Part 2: Geometric tests for machines with
a vertical workholding spindle
序文
この規格は,2008年に第1版として発行されたISO 13041-2を基に,技術的内容及び構成を変更するこ
となく作成した日本工業規格である。
1
適用範囲
この規格は,JIS B 6190-7及びJIS B 6191に基づいて,垂直工作主軸をもつ数値制御(NC)旋盤(以下,
NC立て旋盤という。)及び垂直工作主軸をもつターニングセンタ(以下,立て形ターニングセンタという。)
の静的精度並びにそれに対応する許容値について規定する。
この規格は,NC立て旋盤及び立て形ターニングセンタの構造形態並びにそれらに共通する特徴につい
て規定する。さらに,この規格では,用語及び制御軸の名称(図1〜図4)についても規定する。
この規格は,機械の静的精度検査だけを扱い,一般に精度検査前に実施しておく機械の運転試験(例え
ば,振動,異音,スティックスリップ)又は特性試験(例えば,主軸回転速度,送り速度)には適用しな
い。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 13041-2:2008,Test conditions for numerically controlled turning machines and turning centres−
Part 2: Geometric tests for machines with a vertical workholding spindle(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,記載の年の版を適用し,その後の改正版(追補を含む。)は適用しない。
JIS B 6190-7:2008 工作機械試験方法通則−第7部:回転軸の幾何精度試験
注記 対応国際規格:ISO 230-7:2006,Test code for machine tools−Part 7: Geometric accuracy of axes of
rotation(IDT)
JIS B 6191:1999 工作機械−静的精度試験方法及び工作精度試験方法通則
注記 対応国際規格:ISO 230-1:1996,Test code for machine tools−Part 1: Geometric accuracy of
2
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
machines operating under no-load or finishing conditions(MOD)
JIS B 6310:2003 産業オートメーションシステム−機械及び装置の制御−座標系及び運動の記号
注記 対応国際規格:ISO 841:2001,Industrial automation systems and integration−Numerical control of
machines−Coordinate system and motion nomenclature(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
旋盤(turning machine)
工作物を回転させ,主としてバイトなどの静止工具を使用して,外丸削り,中ぐり,突切り,正面削り,
ねじ切りなどの切削加工を行う工作機械。
3.2
手動操作(manual control)
作業者が機械の各運動を個々に始動し,制御する運転モード。
3.3
数値制御(NC)(numerical control)
コンピュータ数値制御(CNC)(computerized numerical control)
工作物に対する工具の位置,速度,その他加工に必要な作業の工程などを数値情報で指令する制御。
(JIS B 0181:1998参照)
3.4
普通旋盤(manually controlled turning machine)
数値制御加工プログラムによらずに作業者が加工工程ごとに制御又は始動させる旋盤。
3.5
数値制御旋盤(numerically controlled turning machine)
NC旋盤(NC turning machine)
数値制御(NC,3.3参照)又はコンピュータ数値制御(CNC,3.3参照)によって運転する旋盤。
3.6
数値制御立て旋盤(numerically controlled vertical spindle-turning machine)
工作物を垂直な工作主軸上に取り付け,かつ,工具ではなく工作物を回転させて切削エネルギーを与え
る数値制御旋盤。
注記1 この機械の自動機能は,数値制御(NC)によって制御する。
注記2 工作主軸が逆さになった,すなわち,主軸の下端に工作物保持具を備えた立て旋盤について
は,JIS B 6331-3を参照。
3.7
立て形ターニングセンタ(vertical spindle-turning centre)
工具主軸を備え,かつ,工作主軸をその軸周りに回転させて位置決めすることができる能力をもった数
値制御立て旋盤。
注記1 この機械には,工具マガジンから自動で工具を交換するような機能又はY軸運動のような機
能をもつものもある。
注記2 工作主軸が逆さになった,すなわち,主軸の下端に工作物保持具を備えた立て旋盤について
3
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,JIS B 6331-3を参照。
4
一般事項
4.1
測定単位
この規格では,長さ,長さの偏差及び許容値は,ミリメートル(mm)で表す。角度は,度(°)で表
し,角度の偏差及び許容値は,長さの比(例えば,0.00x/1 000)で表すが,場合によってはマイクロラジ
アン(μrad)又は秒(″)を使用することがある。ただし,これらの間には,次の関係がある。
0.010/1 000=10×10−6=10 μrad≒2″
4.2
JIS B 6190-7及びJIS B 6191の引用
この規格を適用するに当たって,特に検査前の機械の据付け,主軸及び他の運動部品の暖機運転,測定
方法並びに測定器の推奨精度については,JIS B 6191による。
箇条5に規定する各検査事項の“測定手順”欄には,その検査に関係する試験方法通則,JIS B 6190-7
及びJIS B 6191の細分箇条を示す。検査事項の内容が試験方法通則に対応する場合には,それぞれの試験
方法通則の細分箇条番号を引用する。各検査事項(G1〜G21)にはそれぞれに対応する許容値を規定して
いる。
4.3
機械の水平出し
機械の検査を行う前に,機械は,製造業者の指示に従って水平出しをするのが望ましい(JIS B 6191の
3.11を参照)。
4.4
検査の順序
この規格に規定する検査の順序は,実際の検査の順序を決めるものではない。測定器の取付け及び検査
が容易にできるように,検査は,どのような順序で行ってもよい。
4.5
実施する検査
機械を検査するときは,必ずしもこの規格に規定した全ての検査を行う必要はない。又は行うことがで
きない。この検査が受渡しのために必要なとき,使用者は,製造業者との協定に基づいて関心のある機械
の構成要素及び/又は特性に関係する検査事項を選択してもよい。検査事項は,機械を発注するときに明
確にしなければならない。実施する検査事項の指定がなく,また,その検査に要する経費についての協定
もない状態でこの規格を受取検査に引用するだけでは,受渡当事者相互間を拘束することにはならない。
4.6
測定器
箇条5及び箇条6の測定器欄に示す測定器は,例としてだけ示したものである。同じ物理量が測定でき,
少なくとも同じ精度をもつ他の測定器を使用してもよい。変位計の目量は,0.001 mm又はそれよりも小さ
いものとする。
4.7
測定方法図
箇条5及び箇条6に示す測定方法図は,簡素化のために,一つの機械の形態だけを例示する。
4.8
ソフトウェア補正
幾何偏差,位置決め偏差,輪郭偏差及び熱変形を組込みソフトウェア機能を使って補正できる場合には,
この検査でその補正を使用するか否かについては,受渡当事者間の協定に基づいて決定することが望まし
い。ソフトウェア補正を使用したときには,検査結果に使用したことを記述する。
4.9
最小許容値
この規格に規定する測定長さと異なる長さで許容値を決定する場合は[JIS B 6191の2.311(測定単位及
び測定範囲)参照],許容値の最小値が0.005 mmであることを考慮する。

4
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.10 機械の分類
この規格で対象としている機械は,次の二つの基本形態に分類する。
A形:シングルコラム形(図1)
B形:ダブルコラム形(図2)
B形は,さらに次の形態に分類する。
− 固定コラム−門形
− 移動形コラム−ガントリ形
4.11 直進運動
簡素化のために,図1及び図2に例として示す全ての機械の直進運動は,JIS B 6310に規定する軸の名
称を使って文字と数字とで表す(例えば,X,X1,X2など)。全ての例において,文字U,V及びWを用
いることができる。
4.12 タレット−工具保持部品(要素)
機械の構造形態に依存するが,切削工具(静止工具又は回転工具)は,ラム及び/又は横ラム,及び/
又はタレットに取り付けることができる。自動工具交換装置も使用できる。しかし,この規格は,自動工
具交換に伴う検査については規定しない。
4.13 機械の大きさの区分
機械の大きさの区分は,表1による。
表1−機械の大きさの区分
区分基準a)
区分1
区分2
区分3
区分4
チャックの呼び径b)
d
d≦500
500<d≦1 000
1 000<d≦5 000
d>5 000
工作主軸/テーブルの直径
D
D≦500
500<D≦1 000
1 000<D≦5 000
D>5 000
注a) チャックの呼び径を選ぶか,又は工作主軸/テーブルの直径を選ぶかは,製造業者による。
b) チャックの呼び径(800以下)については,JIS B 6006-1,JIS B 6006-2及びJIS B 6006-3参照。
5
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
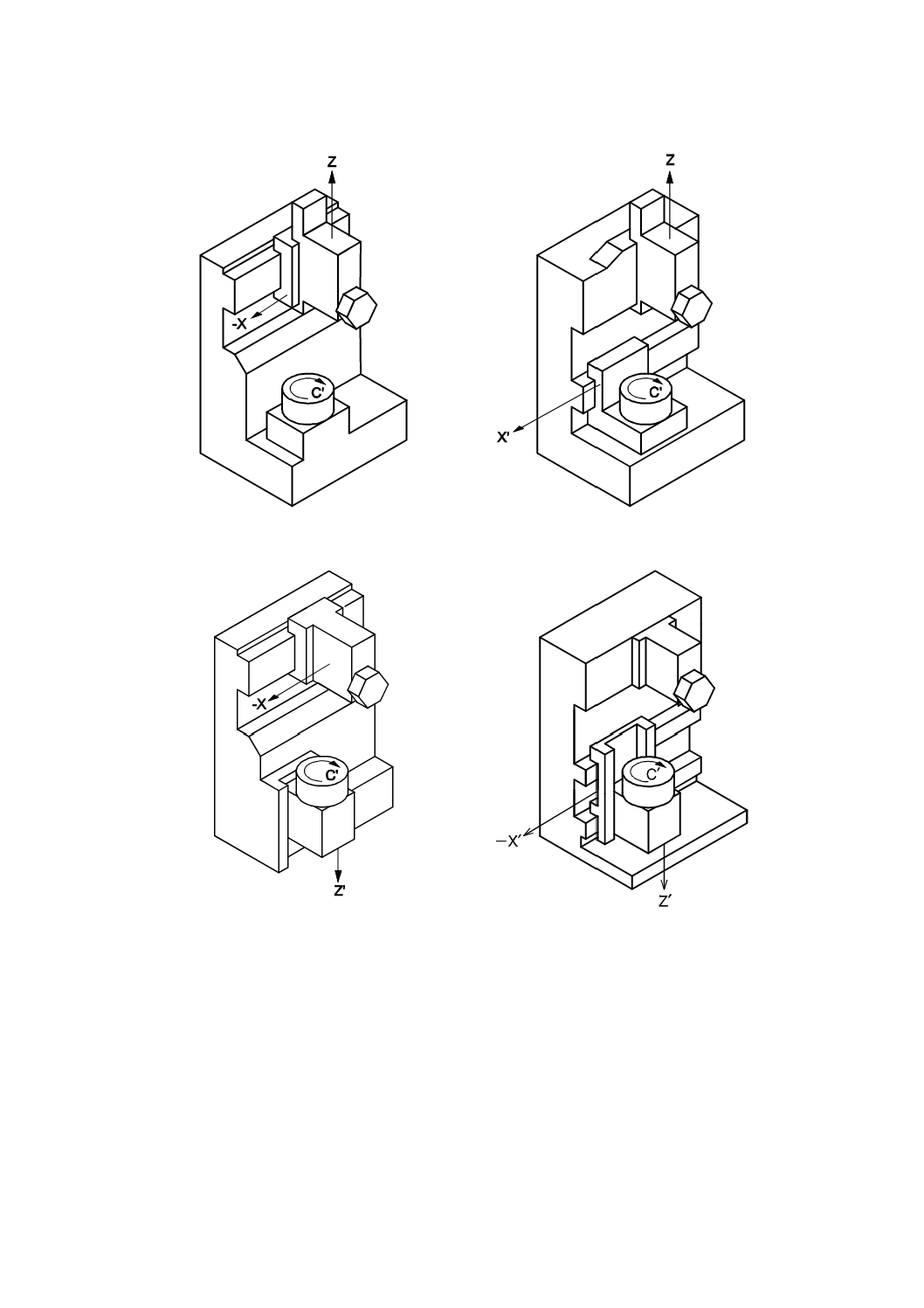
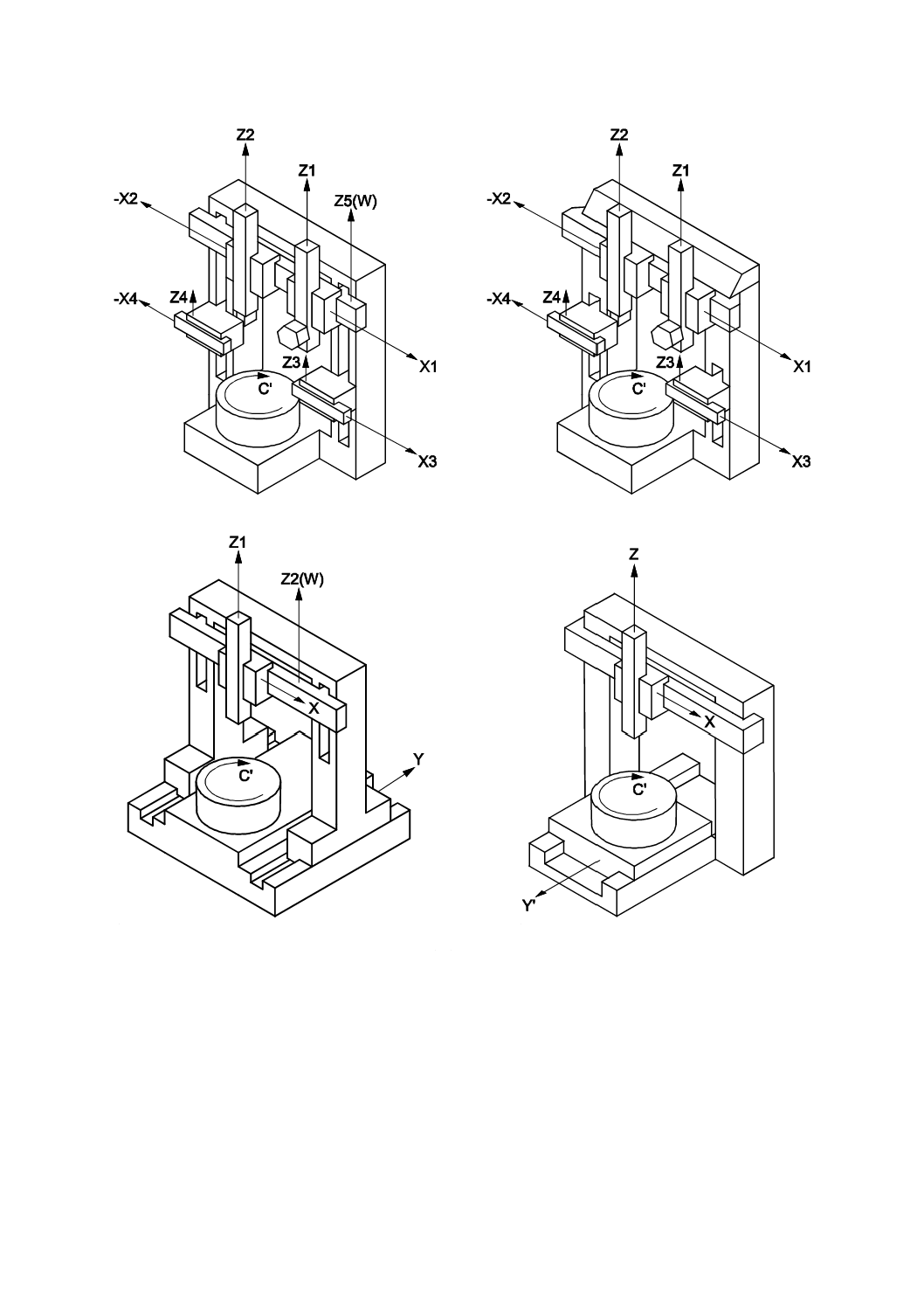
4.14 機械の形態
a) タレットが2方向に移動する形態
b) タレットが垂直に移動し工作主軸が水平に
移動する形態(水平移動形工作主軸)
c) タレットが水平に移動し工作主軸が垂直に
移動する形態(垂直移動形工作主軸)
d) 工作主軸が2方向に移動する形態
図1−基本形態:シングルコラム形の例(A形)
6
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 固定コラム,昇降クロスレール
b) 固定コラム,固定クロスレール
c) 移動形コラム(ガントリ形),昇降クロスレール
d) 固定コラム(門形),移動形工作主軸台
図2−基本形態:ダブルコラム形の例(B形)
7
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
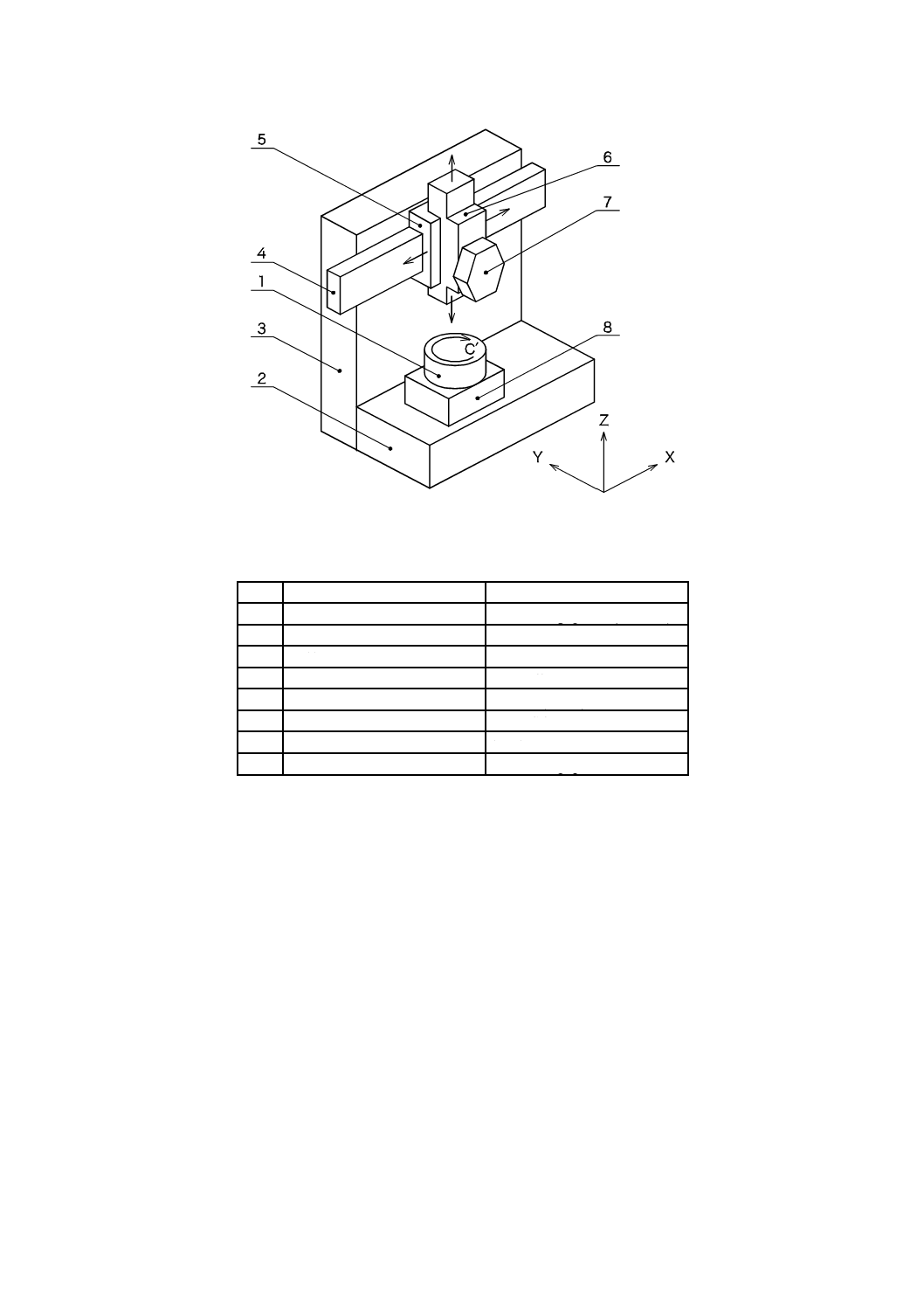
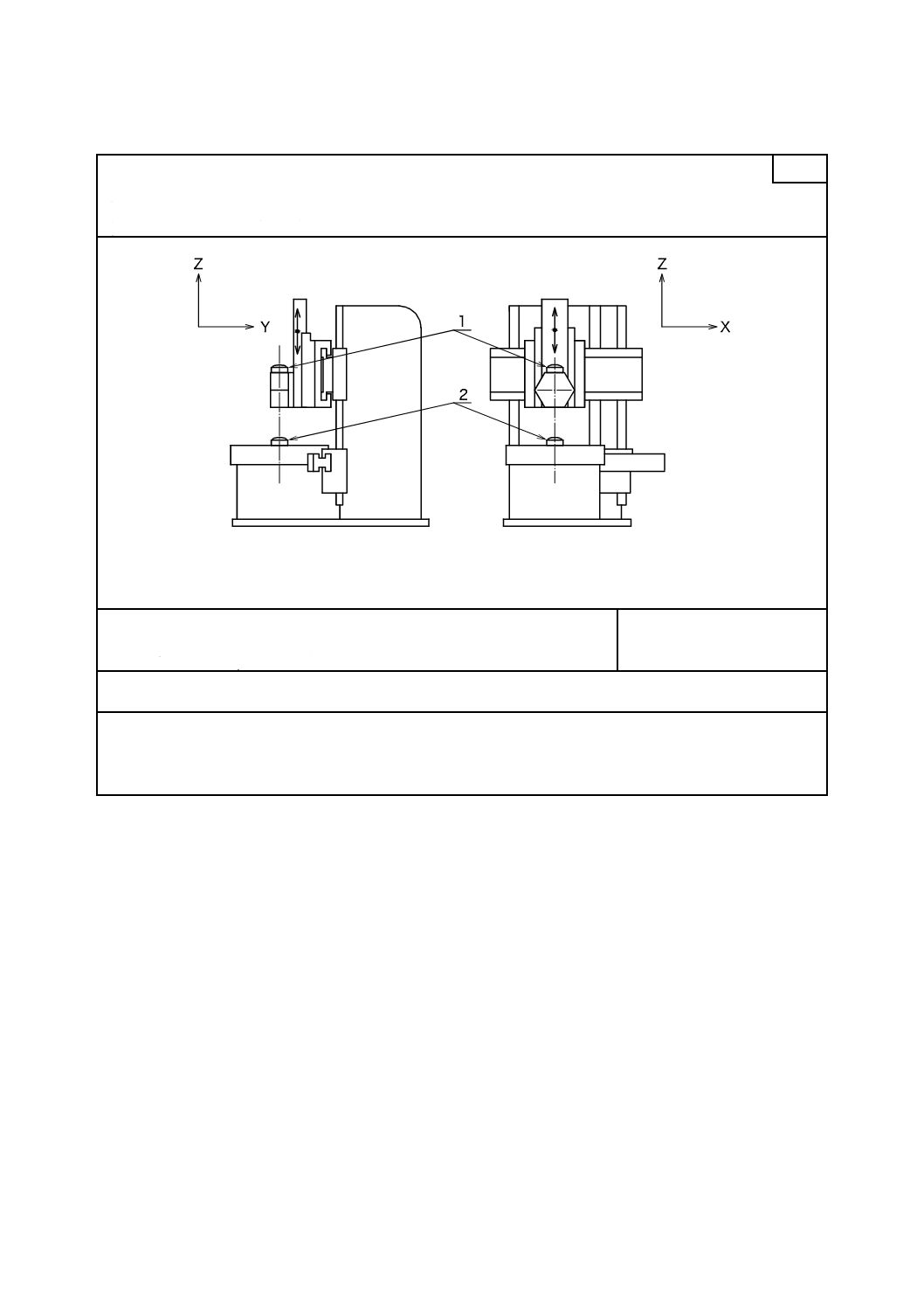
図3−シングルコラムをもつ機械
表2−図3に対応する用語
番号
名称
対応英語
1
工作主軸(回転テーブル)
workholding spindle (turntable)
2
ベース
base
3
コラム
column
4
クロスレール
cross rail
5
サドル
railhead (saddle)
6
タレットスライド
turret slide
7
タレット
turret
8
工作主軸頭
workholding spindle head
8
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
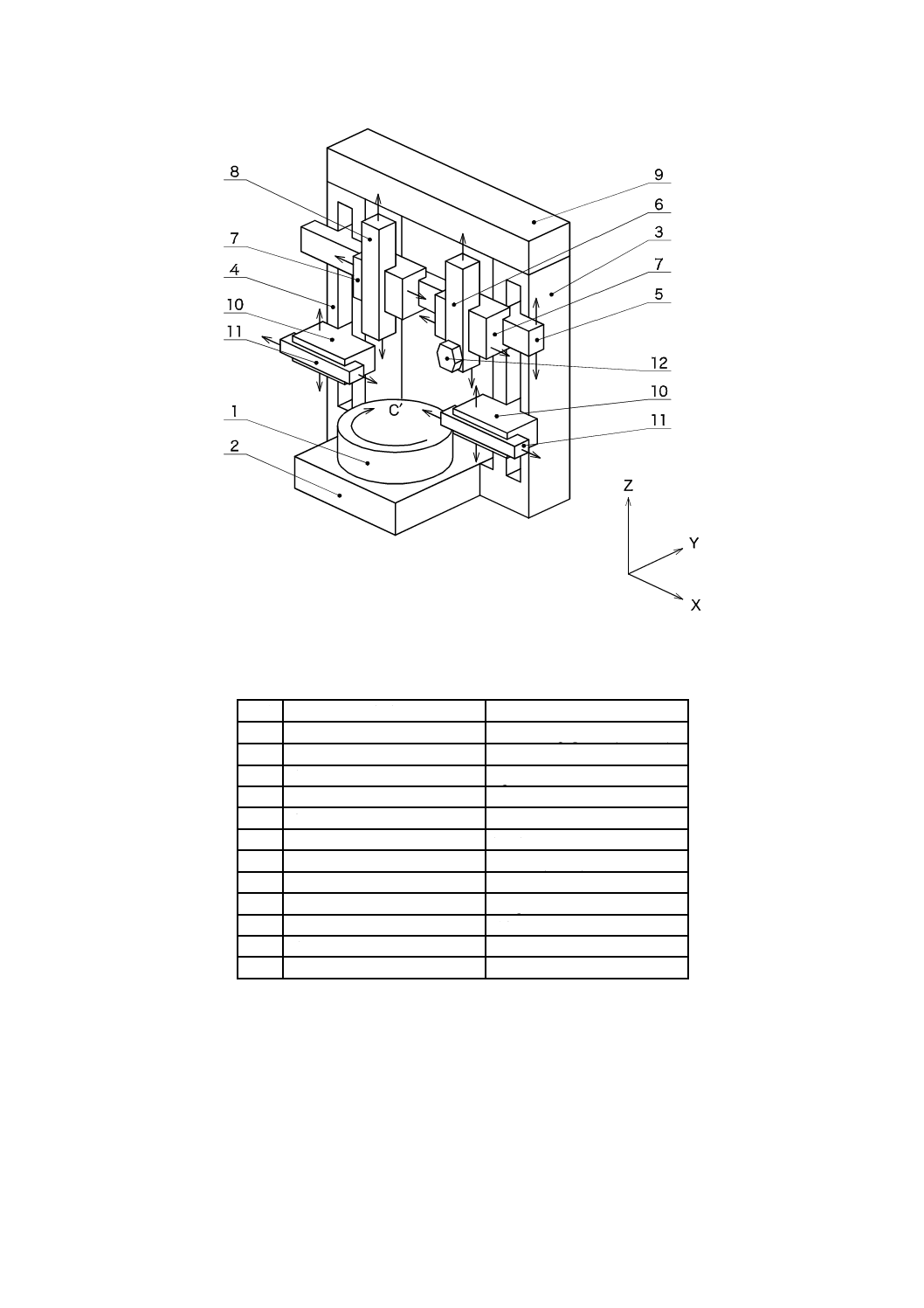
図4−ダブルコラムをもつ機械
表3−図4に対応する用語
番号
名称
対応英語
1
工作主軸(回転テーブル)
workholding spindle (turntable)
2
ベース
base
3
右コラム
right-hand column
4
左コラム
left-hand column
5
クロスレール
cross rail
6
タレットスライド
turret slide
7
サドル
railhead (saddle)
8
ラム
railhead ram
9
ブリッジ
bridge
10
サイドヘッド
side head
11
サイドヘッドラム
side head ram
12
タレット
turret
9
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
静的精度検査
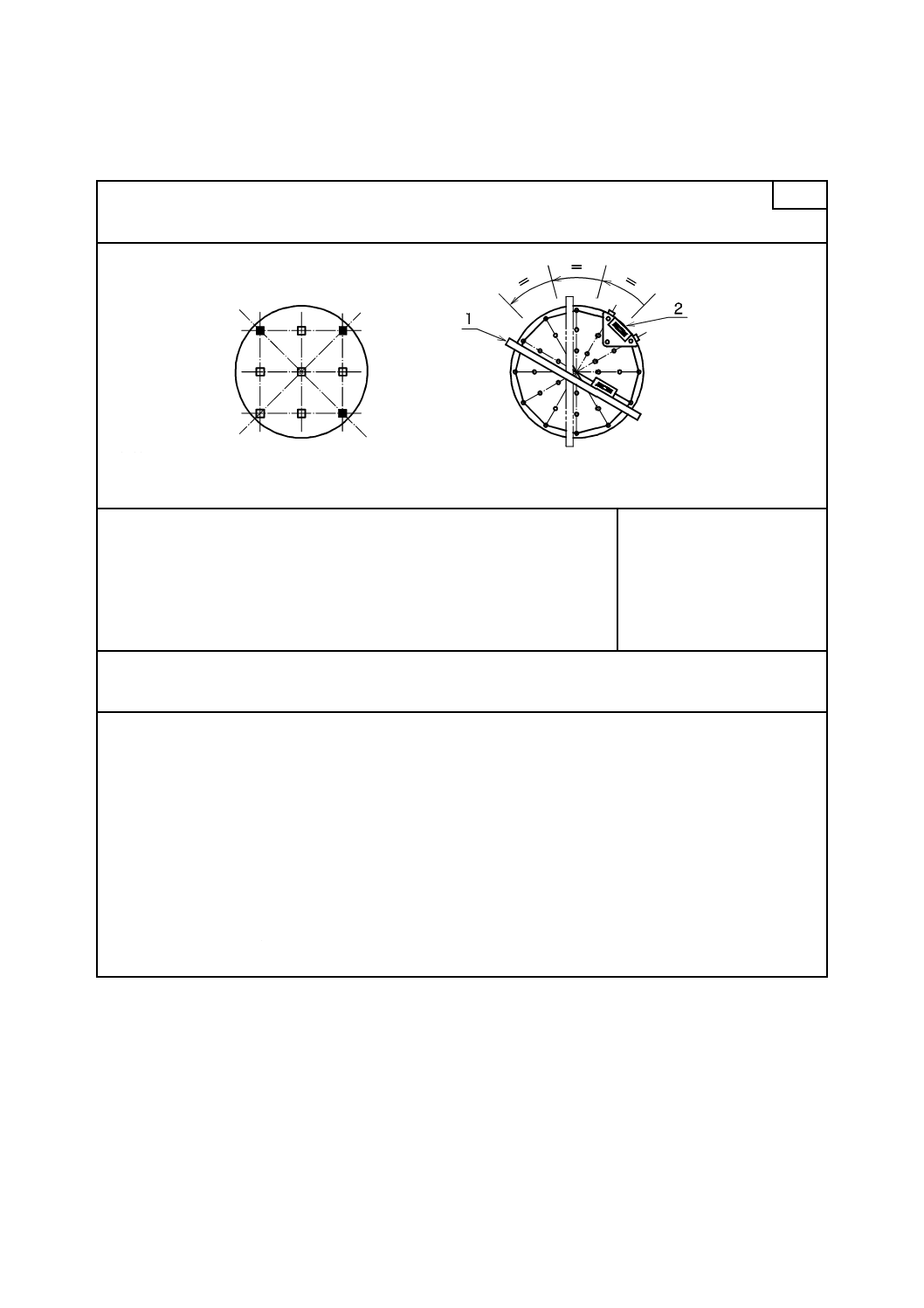
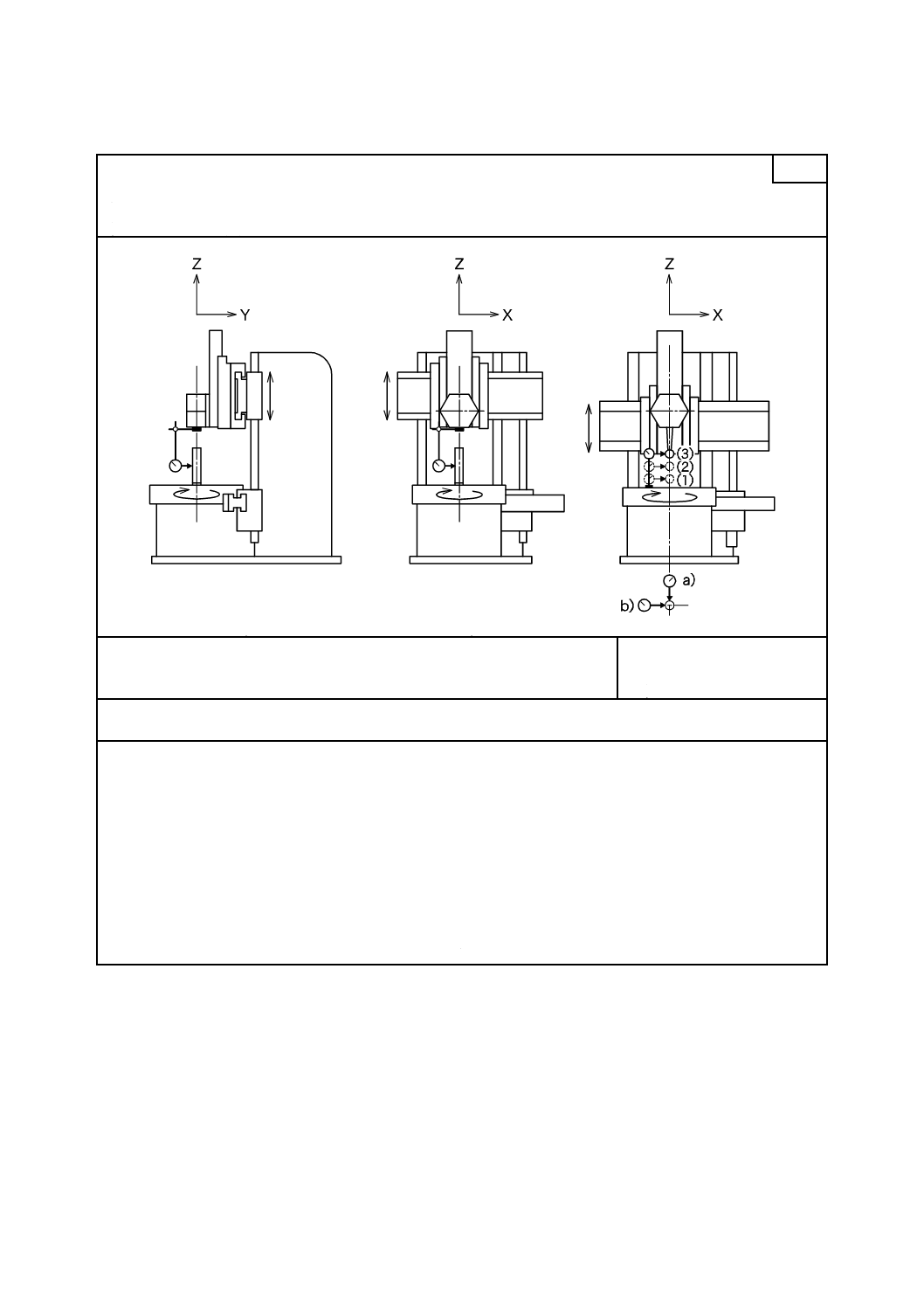
5.1
工作主軸
検査事項
工作主軸端面(回転テーブル上面)の平面度
なお,この検査は回転テーブルをもつ機械に適用する。
G1
測定方法図
記号
代替方法
1
案内用ジグ
2
3点式支持具
許容値
300について0.01
区分1
区分2
区分3
区分4 1)
0.02
0.03
0.07
0.07
注1) 区分4の機械については,直径が1 000増すごとに,許容値に0.01を
加える。
回転テーブル上面は,中高であってはならない。
測定値
測定器
直定規,ブロックゲージ及び変位計,又は光学式測定器
代替方法については,案内用ジグ,支持ブロック,精密水準器及び3点式支持具
測定手順及びJIS B 6191の細分箇条
5.322及び5.324
代替方法(精密水準器を用いて行う検査):5.323.2
1) 円周方向検査
精密水準器は,回転テーブル上に置いた3点式支持具の上に定置する。
この3点式支持具は,回転テーブルの円周に沿って等間隔に移動させる。
2) 直径方向検査
精密水準器は,回転テーブル上に,案内用ジグに沿って直径方向に平行に定置する。
精密水準器は,この案内用ジグに沿って等間隔にとった位置に移動させる。
案内用ジグを,3点式支持具の支持位置が連続するように移動させるか,又は最大12等分(最小30°)するよう
に移動させ,この手順を繰り返す。
なお,受渡当事者間で協定することを条件として,円周方向検査を省略してもよい。
10
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
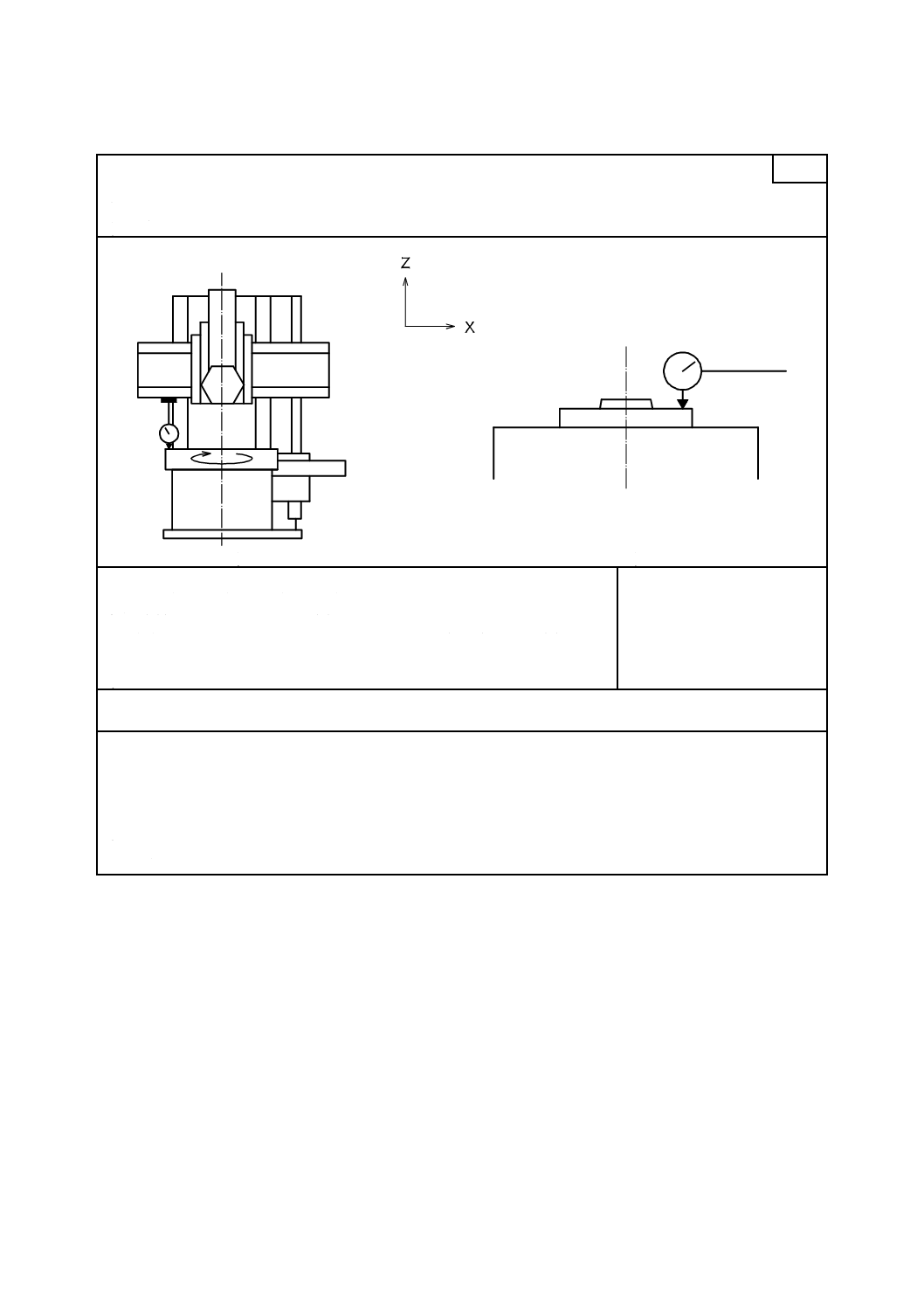
検査事項
工作主軸の面振れ
a) 回転テーブル上面の面振れ
b) 主軸端面の面振れ
G2
測定方法図
a)
b)
許容値
区分1 区分2 区分3 区分4
a) 1) 0.01
0.02
0.035
0.05
注1) a)の区分4の機械については,直径が1 000増すごとに,許容値に0.01
を加える。
b) 0.01
0.015
0.02
0.02
測定値
a)
b)
測定器
変位計
測定手順及びJIS B 6191の細分箇条
5.632
a) 変位計は,機械の固定部分に取り付け,回転テーブルの上面をセルフカットしたときに工具を当てた位置から
約180°離れた,回転テーブルの周縁にできるだけ近い位置に測定子を当てる。
クロスレール及びサドルは,できれば固定する。
b) 測定は,最大直径上で行う。
注記 回転テーブルを外すのが困難な場合には,この検査は行う必要はない。
11
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
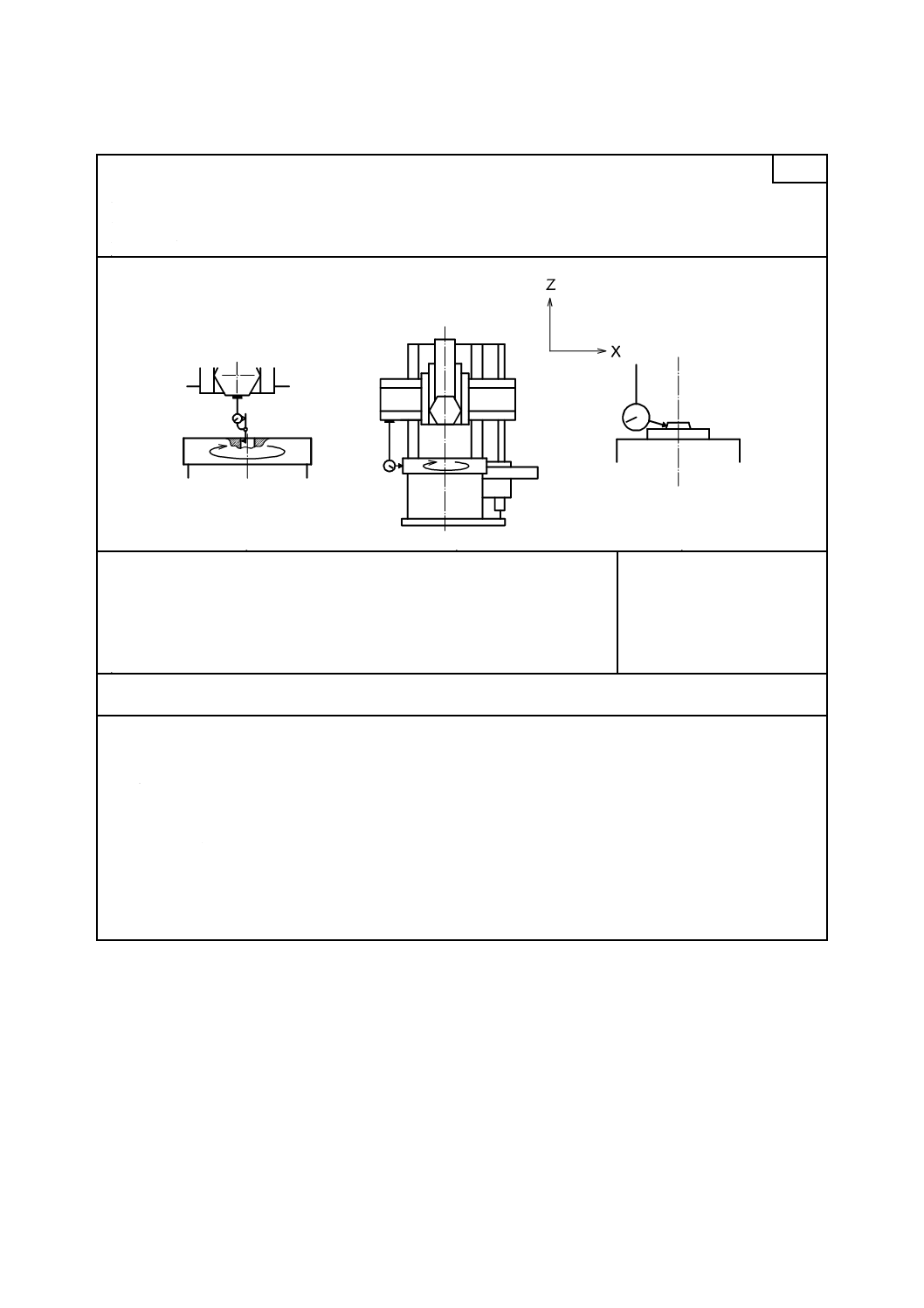
検査事項
工作主軸の振れ
a) 工作主軸(回転テーブル)中心穴の振れ
b) 工作主軸(回転テーブル)外周面の振れ(工作主軸に中心穴がない場合)
c) 工作主軸の振れ
G3
測定方法図
a)
b)
c)
許容値
区分1 区分2 区分3 区分4
a)及びb) 1)
0.01
0.02
0.035
0.05
注1) b)の区分4の機械については,直径が1 000増すごとに,許容値に0.01
を加える。
c)
0.01
0.015
0.02
0.02
測定値
a)
b)
c)
測定器
変位計
測定手順及びJIS B 6191の細分箇条
a) 5.611.4及び5.612.2
変位計は,回転テーブル中心穴をセルフカットしたときに工具を当てた位置から約180°離れた位置に当て
る。
クロスレール,サドル及びスライドは,できれば固定する。
変位計は,機械の固定部に定置する。
b) 5.611.4及び5.612.2
変位計は,回転テーブル外周面をセルフカットしたときに工具を当てた位置から約180°離れた位置に当て
る。
c) 5.612.2
被測定面が円すいの場合には,変位計の測定子は,接触面に垂直に当てる。
12
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
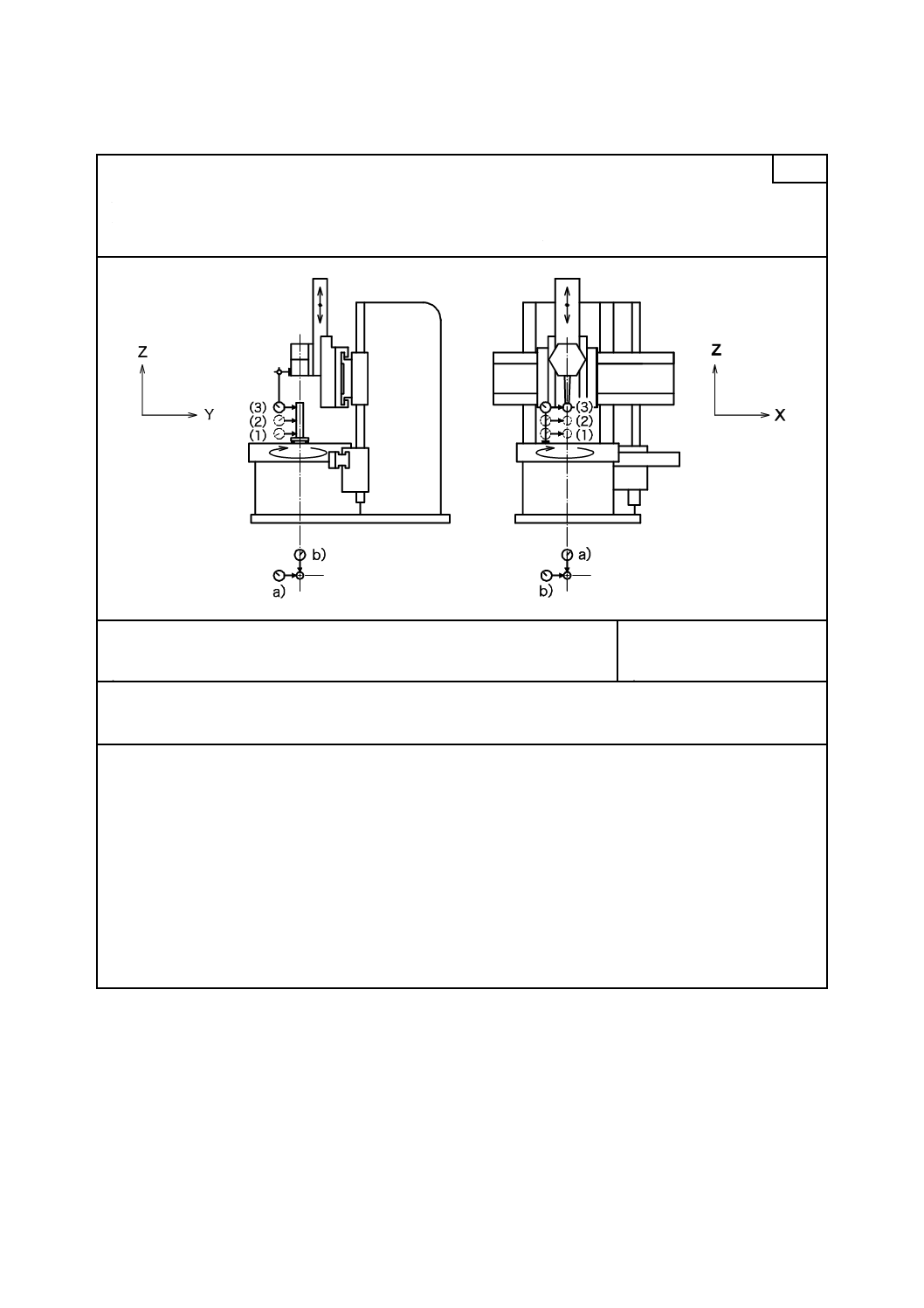
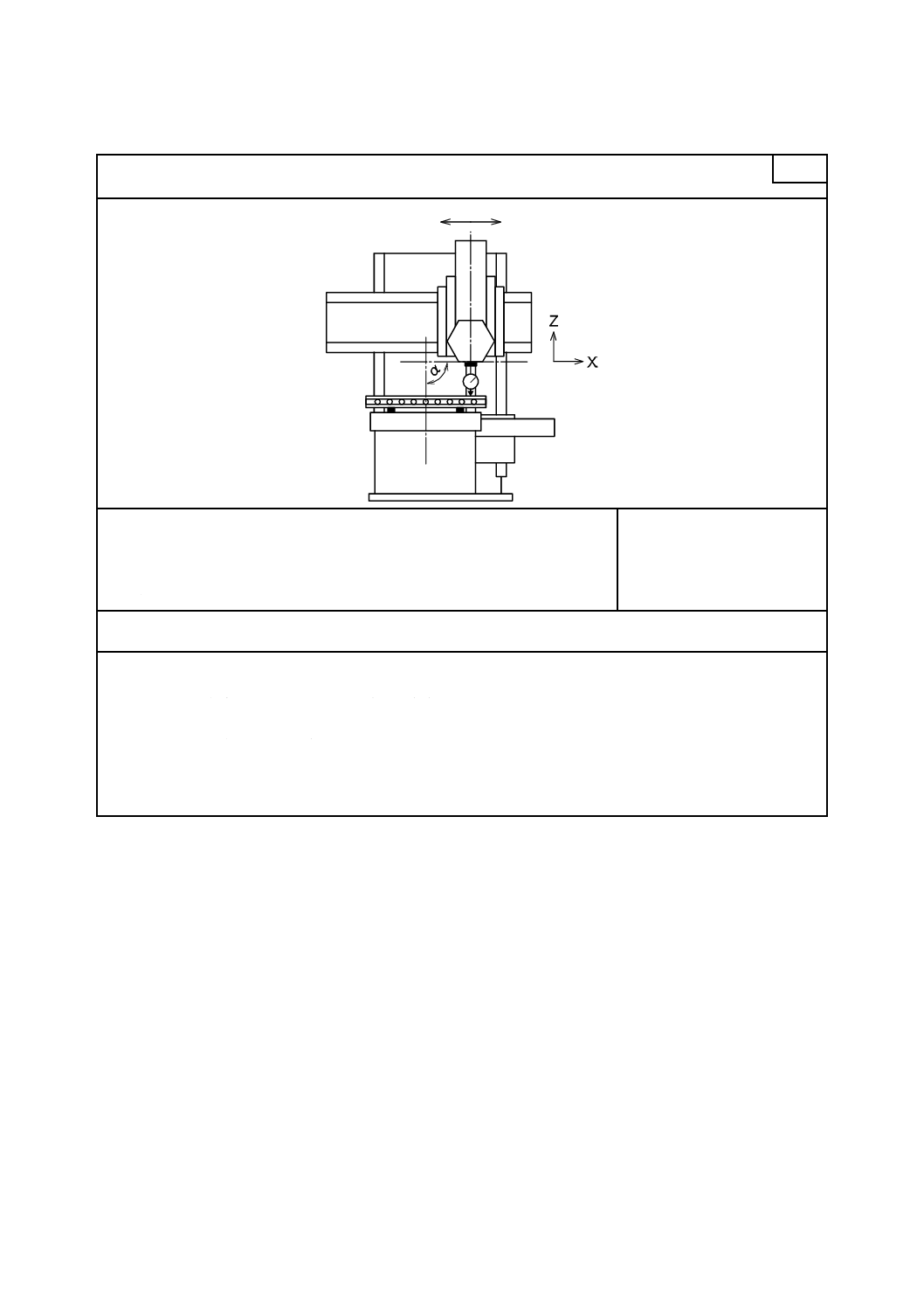
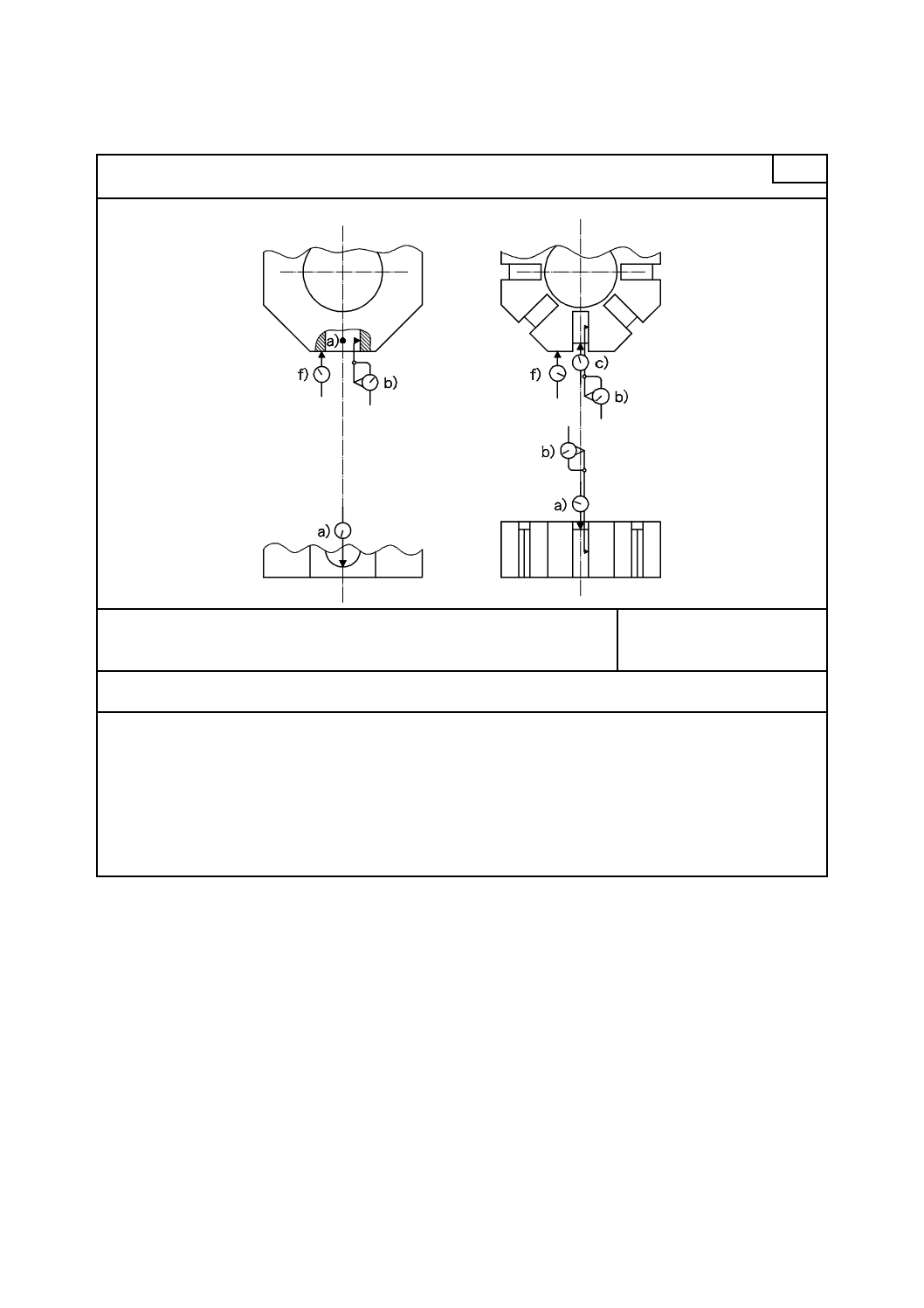
5.2
工作主軸と直進運動軸との関係
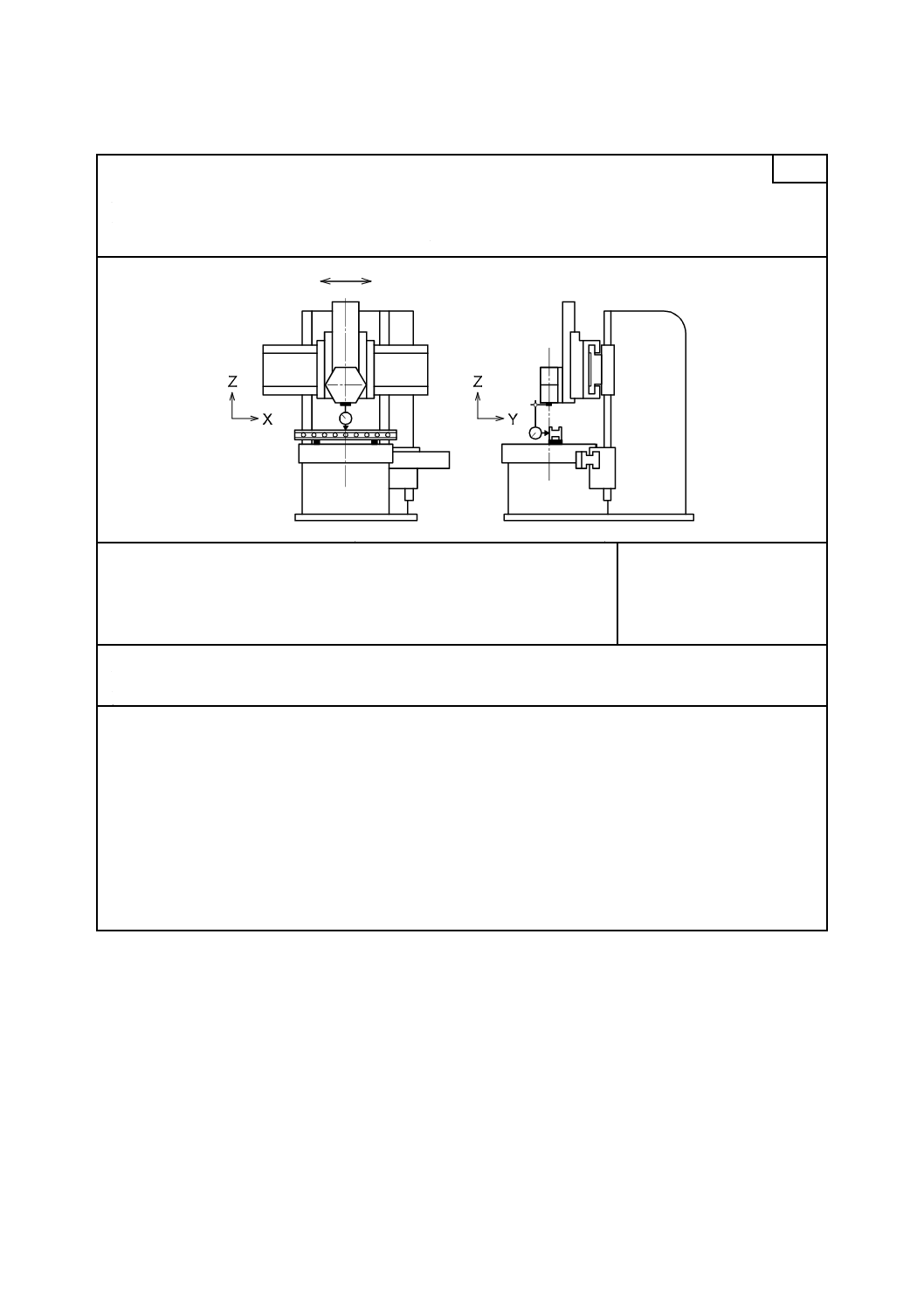
検査事項
ラム又はタレットスライド(Z軸)運動と工作主軸の回転軸(C'軸)との平行度
a) YZ面内で[EA(0C')Z]
b) ZX面内で[EB(0C')Z]
注記 クロスレール上にある他のラム及びタレットスライドにも適用できる。
G4
測定方法図
代替方法
許容値
a) 測定長さ300について,0.015
b) 測定長さ300について,0.01
測定値
a)
b)
測定器
テストバー又は円筒スコヤ,変位計及び調整ブロック
代替方法:精密鋼球及び変位計
測定手順及びJIS B 6191の細分箇条
5.412.1及び5.422.3
YZ面内において,工作主軸を回転させて振れの平均位置に置き,次に,ラムを上位置(3),中位置(2),下位置(1)
まで連続的にZ方向に移動させて,読みの最大差を求める。この最大差を,YZ面内の平行度偏差とする。この測
定は,ZX面内についても行う。
代替方法
この場合には,鋼球は,Z軸の移動を使って位置決めし,測定は,(1),(2)及び(3)の各位置で行う。0°及び180°
で読みを取り,この二つの読みの差を,それぞれの位置(1),(2)及び(3)について記録する。この読みの最大差をYZ
面内の平行度偏差とする。この測定は,ZX面内についても行う。
測定する機械が調整可能なクロスレールを備えている場合には,クロスレールが下,中,上の位置にある状態で,
この測定を行うのが望ましい。この測定は,全てのラム又はタレットスライドに適用する。
13
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
検査事項
サドル(X軸)運動と工作主軸の回転軸(C'軸)運動との直角度[EB(0C')X]
G5
測定方法図
許容値
測定長さ300について,又は300以下の軸移動量について
区分1及び2 0.020
区分3及び4 0.030
偏差の向き α≧90°
測定値
測定器
直定規,調整ブロック及び変位計
測定手順及びJIS B 6191の細分箇条
5.422.22及び5.522.2
直定規は,調整ブロックを用いて工作主軸の回転軸に直角に定置する。
測定は,変位計を工具位置に近いタレット上に定置し,直定規にその測定子を当てて行う。
又は,工作テーブル上面にほぼ平行に直定規を定置する。
測定は,X軸運動の数箇所で行い,次に,主軸を180°回して同じX位置で2回目の読みを取る。これら2回の
読みの平均値を,直角度の偏差とする。
創成された面は,受渡当事者間の特別な協定がない場合には,中低とする。
14
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
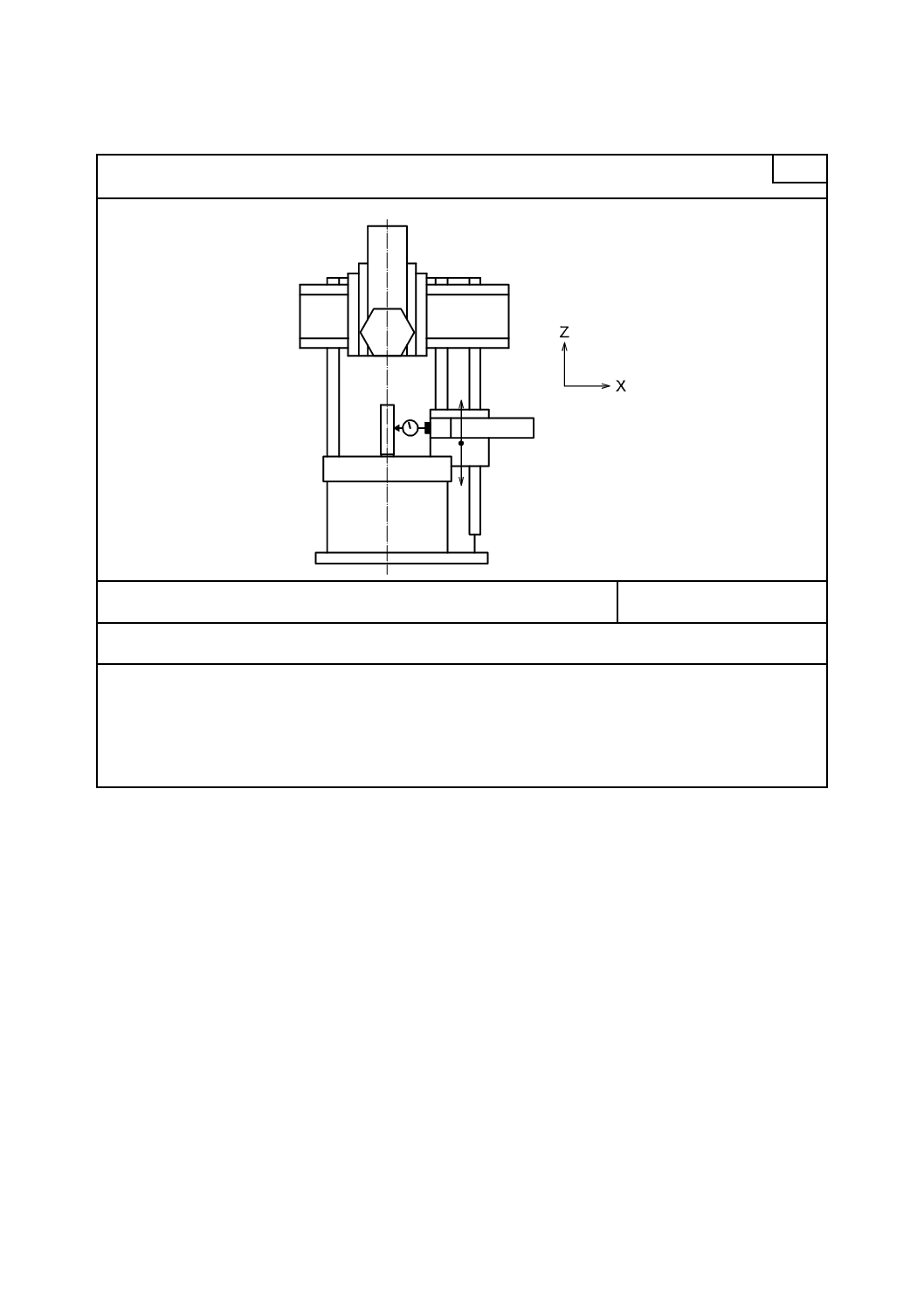
検査事項
サイドヘッド(Z軸)運動と工作主軸の回転軸(C'軸)との平行度[EB(0C')Z]
G6
測定方法図
許容値
測定長さ300について 0.02
測定値
測定器
テストバー又は円筒スコヤ,及び変位計
測定手順及びJIS B 6191の細分箇条
5.422.3
工作主軸を振れの平均位置に置いて,Z方向にサイドヘッドを移動させ,読みの最大差を取る。
又は,Z軸の数箇所の位置で読みを取り,工作主軸を180°回転させて,Z軸の同じ位置で読みを取る。これら2
回の測定の平均値を,平行度の偏差とする。
この測定は,全てのサイドヘッドについて行う。
15
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
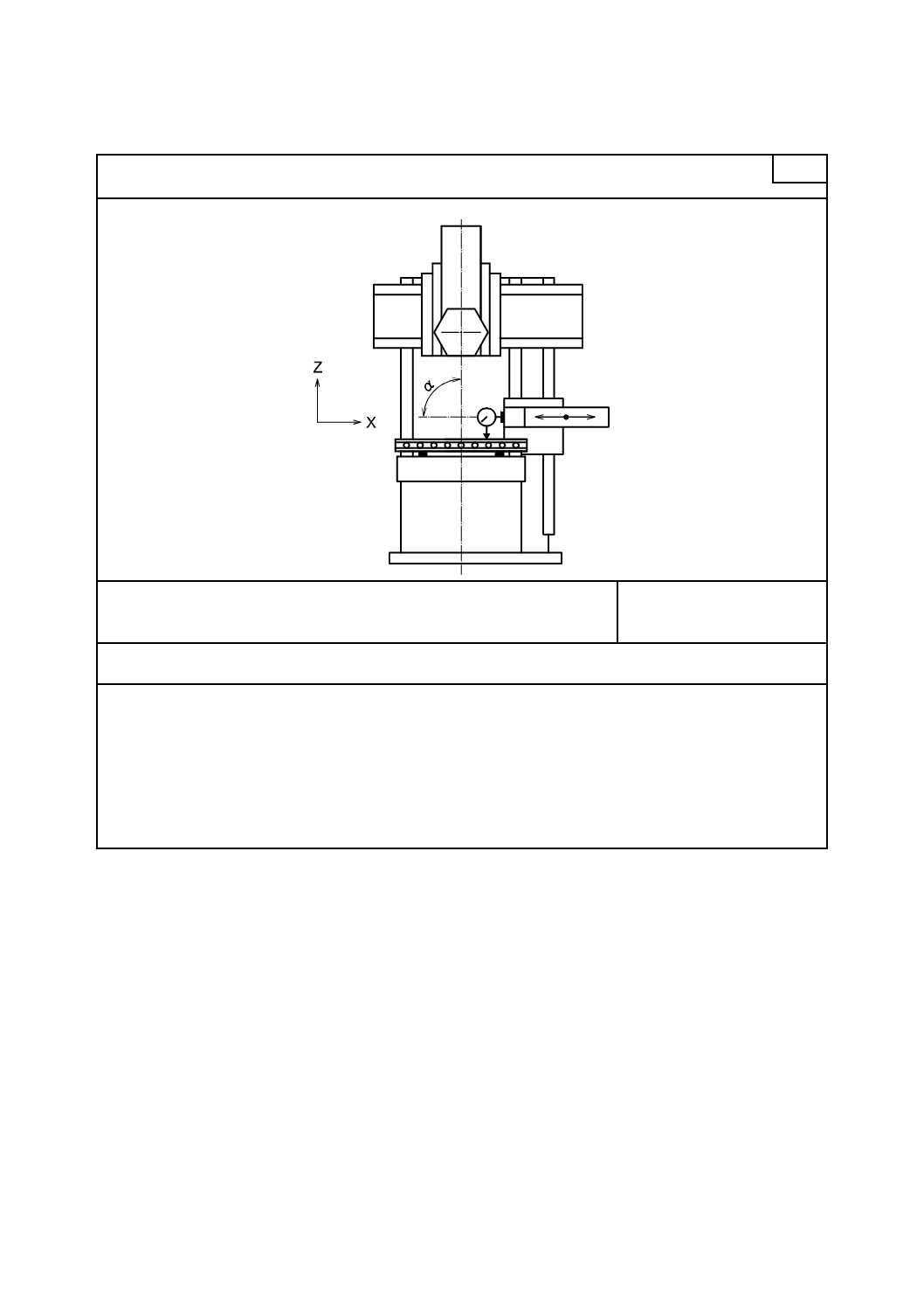
検査事項
サイドヘッドラム(X軸)と工作主軸の回転軸(C'軸)との直角度[EB(0C')X]
G7
測定方法図
許容値
測定長さ300について 0.02
偏差の向き α≧90°
測定値
測定器
直定規,調整ブロック及び変位計
測定手順及びJIS B 6191の細分箇条
5.522.2
サイドヘッドは,固定する。
直定規は,調整ブロックを用いて工作主軸の回転軸に直角に定置する。
測定は,変位計をサイドヘッドに定置し,直定規にその測定子を当てて行う。
又は,工作テーブル上面にほぼ平行に直定規を定置する。X軸の数箇所で読みを取り,次にC'軸を180°回して
同じX位置で2回目の読みを取る。これら2回の読みの平均値を,直角度の偏差とする。
この測定は,全てのサイドヘッドに適用する。
16
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
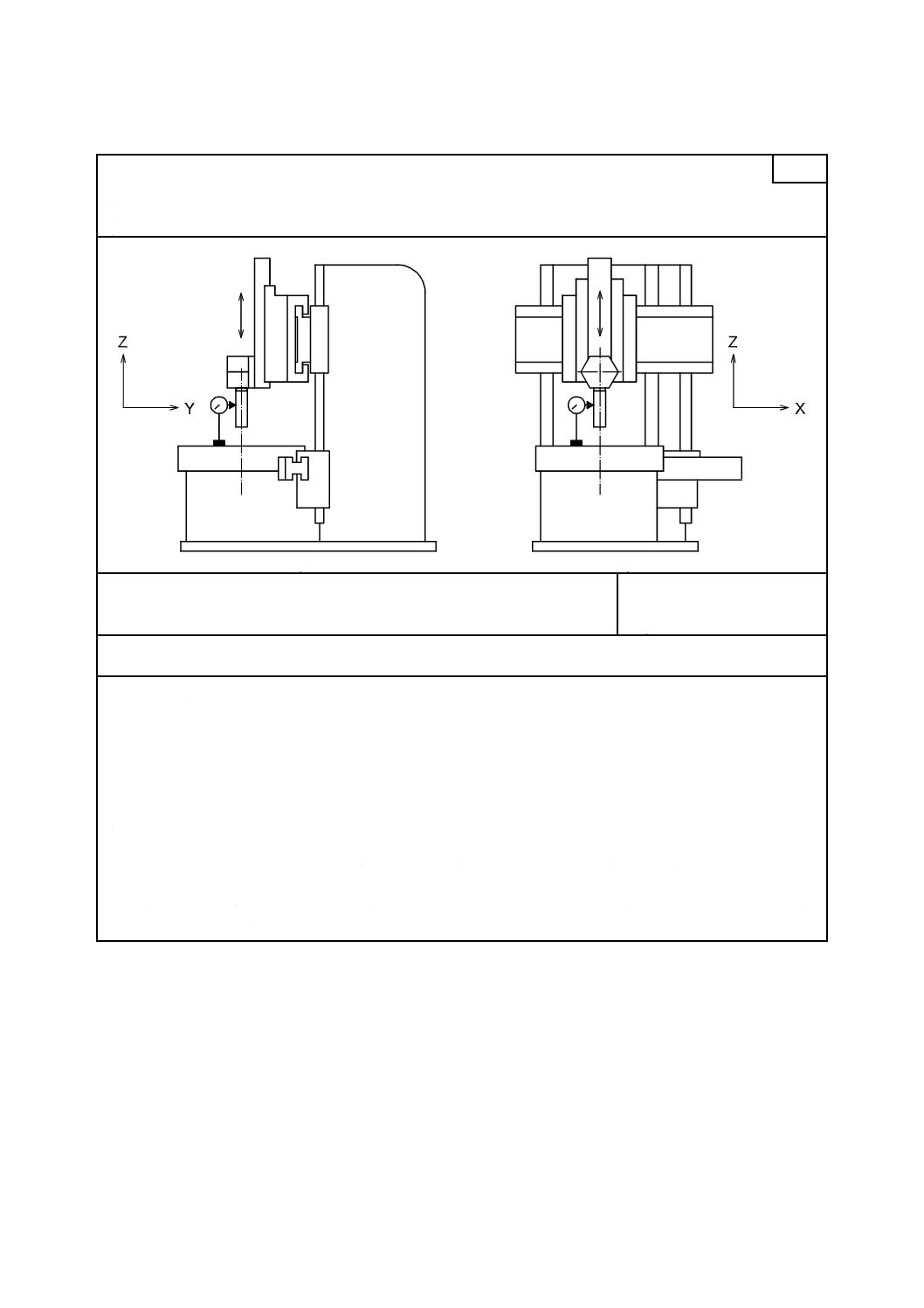
検査事項
工具主軸の回転軸(C'軸)とラム,タレットスライド又はクロスレール(Z軸)運動との平行度
a) YZ面内で[EA(0C)Z]
b) ZX面内で[EB(0C)Z]
G8
測定方法図
a)
b)
許容値
a)及びb)
測定長さ300について0.02
測定値
a)
b)
測定器
変位計及びテストバー
測定手順及びJIS B 6191の細分箇条
5.412.1及び5.422.3
テストバーは,回転工具主軸に取り付ける。
注記 工作主軸は,固定するのが望ましい。
a) 変位計は,工作主軸に取り付け,Y方向に平行に,その測定子をテストバーに当てる。主軸を回して変位計の
振れの幅からテストバーの平均位置を決める。変位計は,この平均位置でゼロに合わせる。次に,ラム,タレ
ットスライド又はクロスレールを測定範囲のもう一方の位置まで移動させ,変位計の読みを記録する。
b) 変位計は,工作主軸に取り付け,X方向に平行に,その測定子をテストバーに当てる。主軸を回して変位計の
振れの幅からテストバーの平均位置を決める。変位計は,この平均位置でゼロに合わせる。次に,ラム,タレ
ットスライド又はクロスレールを測定範囲のもう一方の位置まで移動させ,変位計の読みを記録する。
又は,
Z軸の数箇所で読み取り,次に工具主軸を180°回して同じZ位置で2回目の読みを取る。これら2回の読み
の平均値を,平行度の偏差とする。
17
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
検査事項
クロスレール(Z軸)運動と工作主軸の回転軸(C'軸)との平行度
a) YZ面内で[EA(0C')Z]
b) ZX面内で[EB(0C')Z]
G9
測定方法図
a)
b)
代替方法
許容値
a)及びb)
測定長さ300について,0.02
測定値
a)
b)
測定器
変位計及びテストバー又は円筒スコヤ
測定手順及びJIS B 6191の細分箇条
5.422.3
工作主軸を回転させて振れの平均位置に置き,クロスレールをZ方向に移動させて読みの最大差を求める。又は,
クロスレールのZ軸の数箇所で読み取り,次に工作主軸を180°回して同じZ位置で2回目の読みを取る。これら
2回の読みの平均値を,平行度の偏差とする。
代替方法
この場合には,鋼球は,クロスレールのZ軸の移動を使って位置決めし,測定は,3か所の位置(1),(2)及び(3)
でそれぞれ行う。0°及び180°で読みを取り,この二つの読みの差を,それぞれ3か所の位置(1),(2)及び(3)につ
いて記録する。読みの差の最大差を,YZ面内の平行度偏差とする。この測定は,ZX面内についても行う。
クロスレールの動きの中央及び両端において,この測定を行うのが望ましい。
18
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
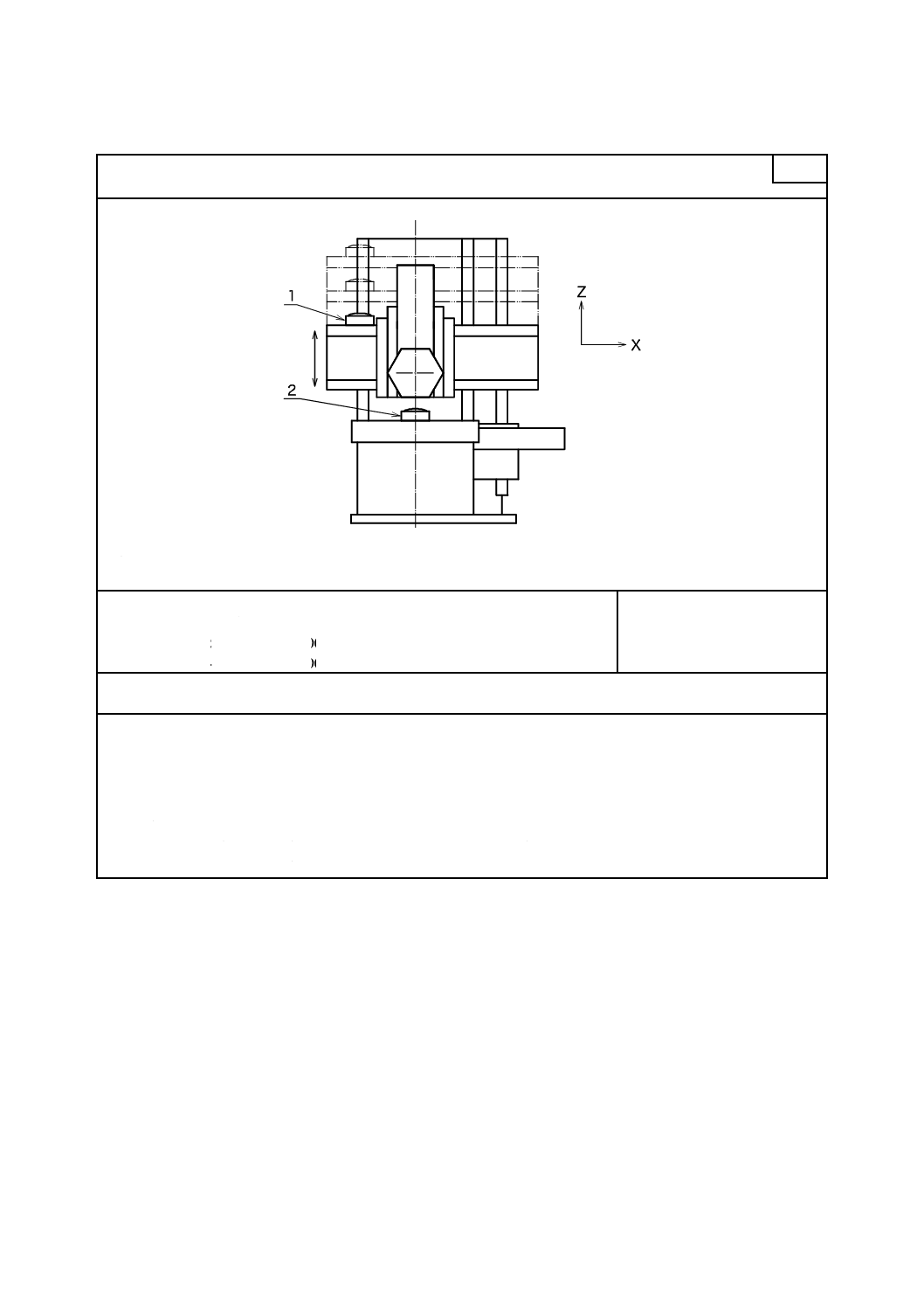
5.3
直進軸の運動の角度偏差
検査事項
クロスレール(Z軸)運動の角度偏差(垂直ZX面内で)(EBZ)
G10
測定方法図
記号
1
測定用精密水準器
2
基準用精密水準器
許容値
測定長さ1 000以下について
区分1及び2 0.02/1 000 (20 μrad又は4″)
区分3及び4 0.04/1 000 (40 μrad又は8″)
測定値
測定器
精密水準器
測定手順及びJIS B 6191の細分箇条
5.232.21
測定用精密水準器は,クロスレール上の中央位置の適切な面の上に定置し,読みを取る。
サドルは,クロスレールの中央位置に置く。
クロスレールの運動によって,クロスレールと工作主軸との両方に角度偏差が生じる場合は,二つの角度偏差の
差分を求めたことを記述する。
この差分測定を適用する場合には,基準用精密水準器は,工作主軸上に定置する。
クロスレールは,可能な場合には,各位置で固定する。
19
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
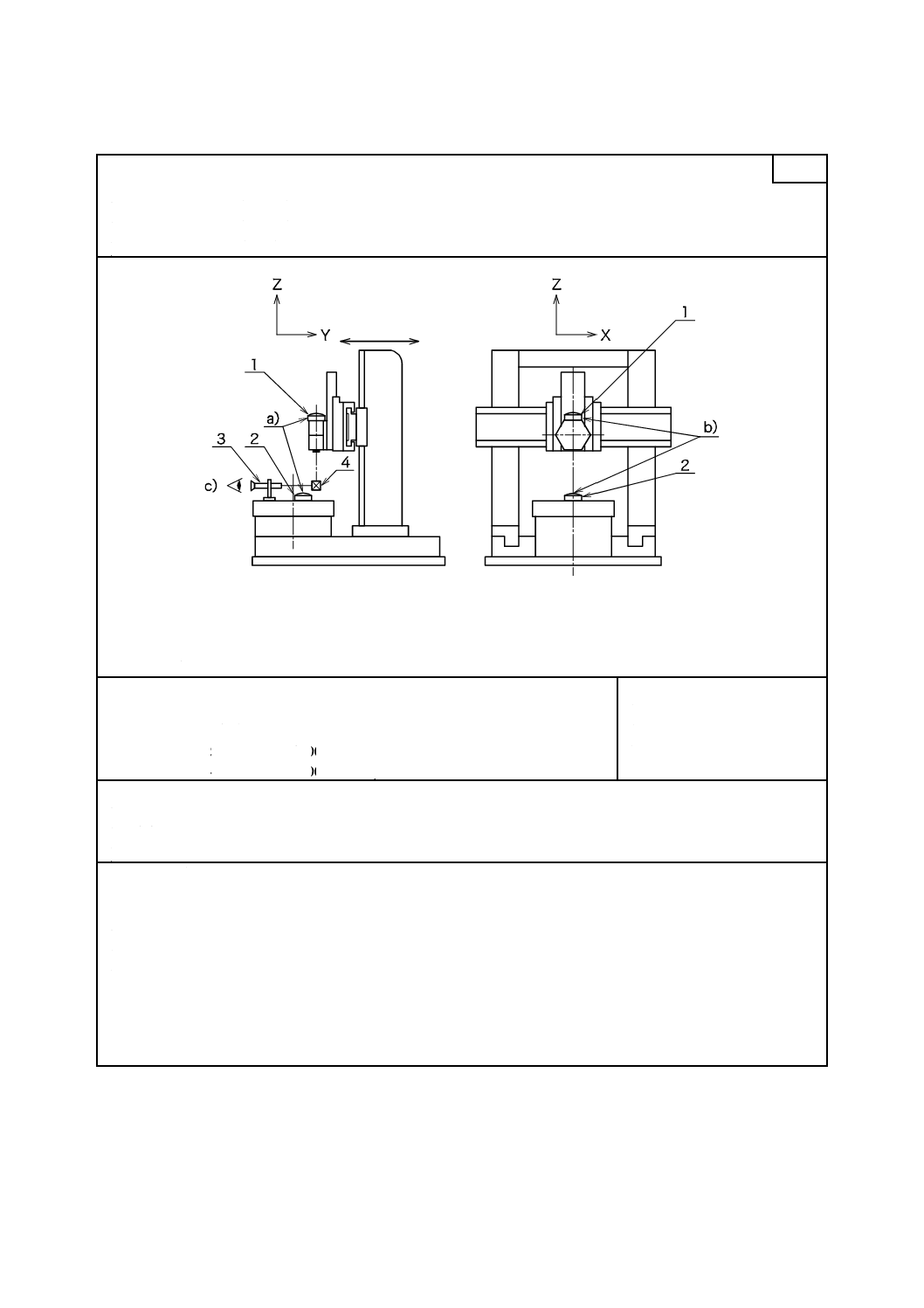
検査事項
移動形コラム(ガントリ形)又は移動形工作主軸台(門形)のY方向における角度偏差
a) YZ面内で EAY(ピッチ)
b) ZX面内で EBY(ロール)
c) XY面内で ECY(ヨー)
G11
測定方法図
記号
1
測定用精密水準器
2
基準用精密水準器
3
オートコリメータ
4
反射鏡
許容値
a),b)及びc)
測定長さ1 000以下について
区分1及び2 0.02/1 000 (20 μrad又は4″)
区分3及び4 0.04/1 000 (40 μrad又は8″)
測定値
a)
b)
c)
測定器
a) 精密水準器,又は光学式角度偏差測定器
b) 精密水準器
c) 光学式角度偏差測定器
測定手順及びJIS B 6191の細分箇条
5.231.3及び5.232.2
測定用精密水準器又は光学式角度偏差測定器は,固定したタレット上に定置する。
a) Y軸方向に平行に定置
b) X軸方向に平行に定置
c) Z軸方向に直角に定置
工作主軸台又はコラムのY軸運動によって,工作主軸及びコラムの両方に角度偏差が生じる場合は,二つの角度
偏差の差分を求めたことを記述する。
基準用精密水準器は,固定した工作主軸(回転テーブル)上に定置する。
測定は,運動の両方向において移動経路に沿って等間隔に少なくとも5か所の位置で行う。
20
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
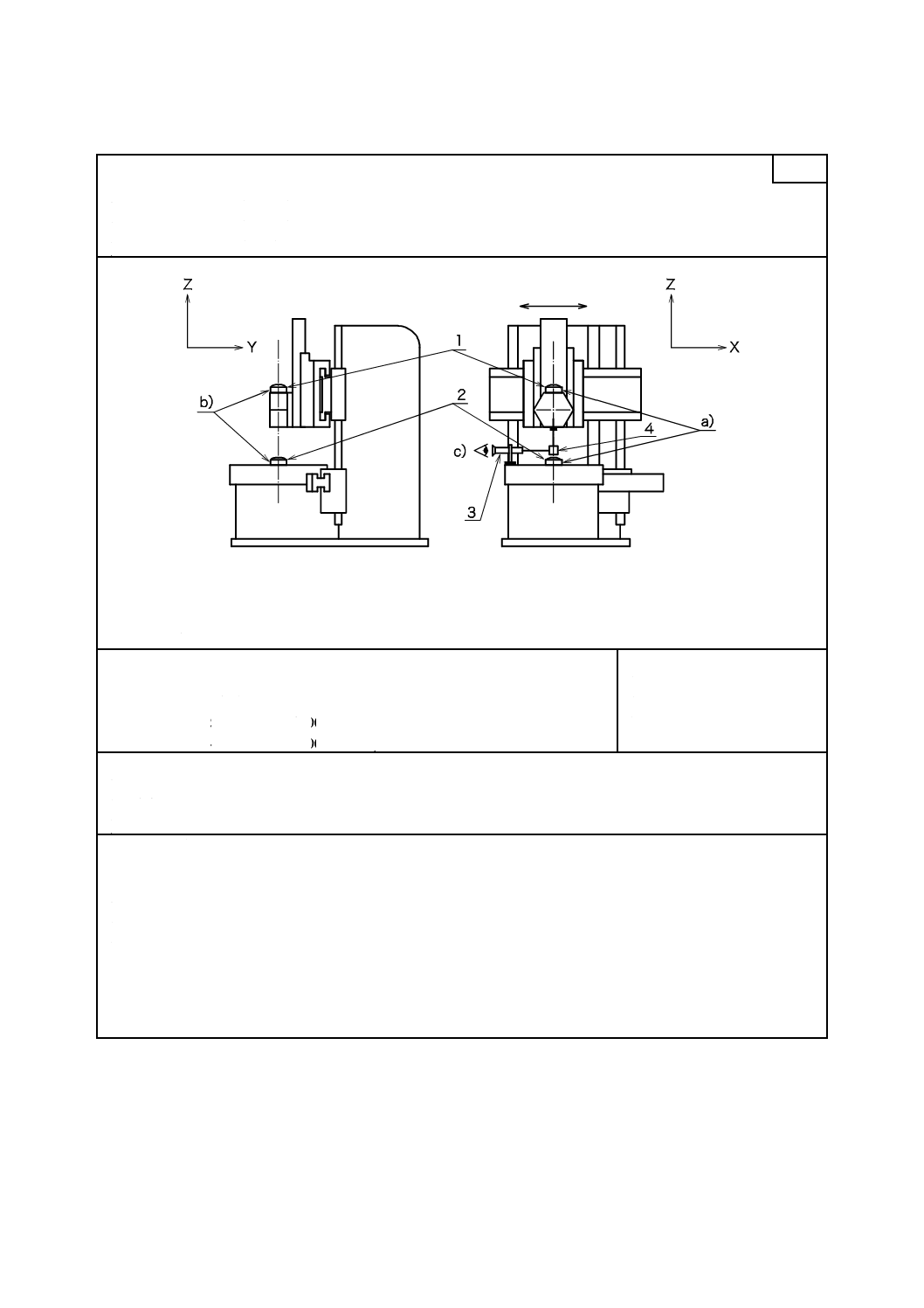
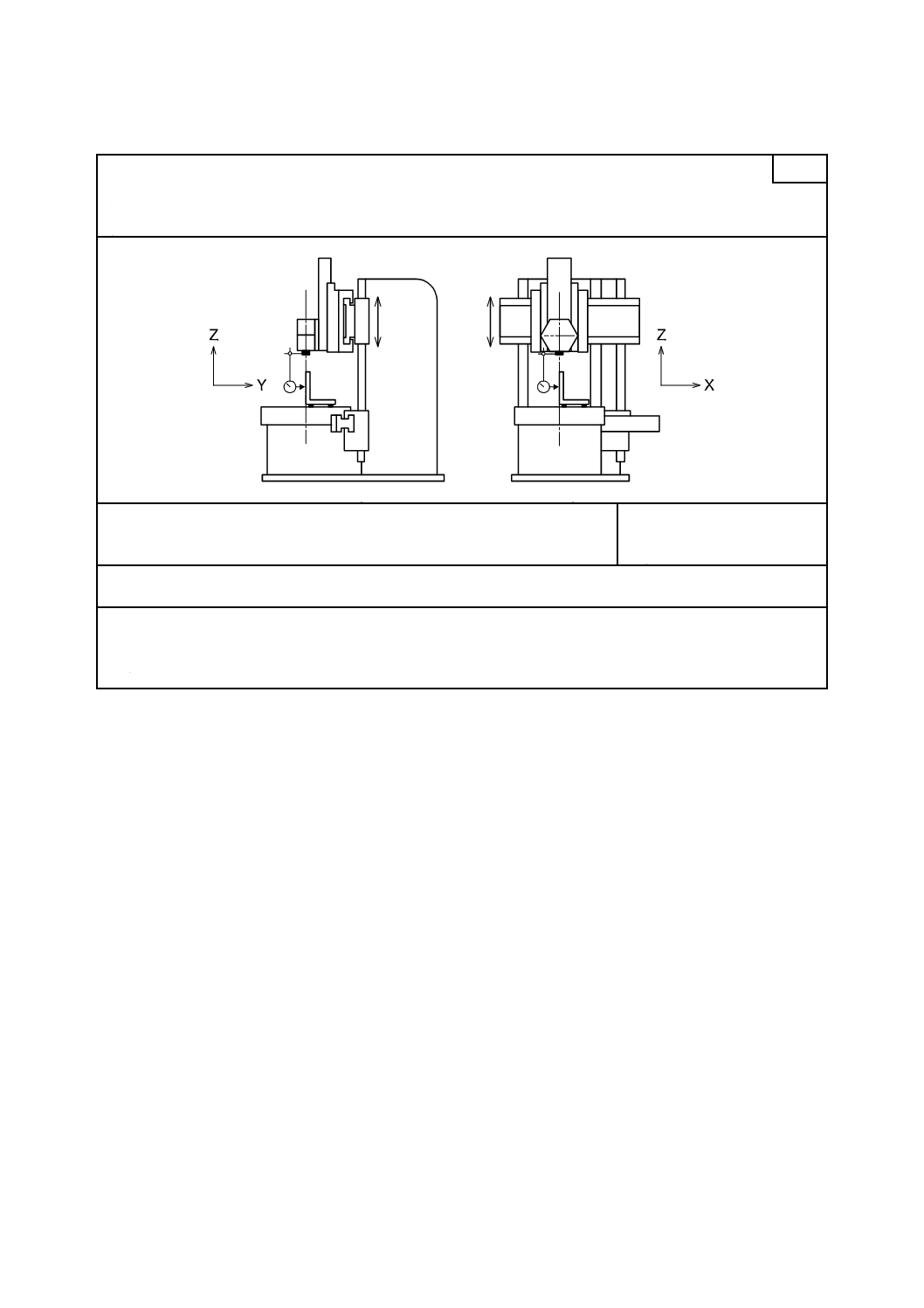
検査事項
クロスレール上のサドル(X軸)運動の角度偏差
a) ZX面内で EBX(ピッチ)
b) YZ面内で EAX(ロール)
c) XY面内で ECX(ヨー)
G12
測定方法図
記号
1
測定用精密水準器
2
基準用精密水準器
3
オートコリメータ
4
反射鏡
許容値
a),b)及びc)
測定長さ1 000以下について
区分1及び2 0.02/1 000 (20 μrad又は4″)
区分3及び4 0.04/1 000 (40 μrad又は8″)
測定値
a)
b)
c)
測定器
a) 精密水準器,又は光学式角度偏差測定器
b) 精密水準器
c) 光学式角度偏差測定器
測定手順及びJIS B 6191の細分箇条
5.231.3及び5.232.2
測定用精密水準器又は光学式角度偏差測定器は,タレット上に定置又はタレットの工具位置に取り付ける。
a) X軸方向に平行に定置
b) Y軸方向に平行に定置
c) Z軸方向に直角に定置
サドルの運動によって,タレット及び工作主軸の両方に角度偏差が生じる場合は,二つの角度偏差の差分を求め
たことを記述する。
基準用精密水準器は,工作主軸(回転テーブル)上に定置する。
測定は,運動の両方向において移動経路に沿って等間隔に少なくとも5か所の位置で行う。
21
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
検査事項
ラム及びタレットスライド(Z軸)運動の角度偏差
a) YZ面内で EAZ(X軸周り)
b) XZ面内で EBZ(Y軸周り)
G13
測定方法図
a)
b)
記号
1
測定用精密水準器
2
基準用精密水準器
許容値
測定長さ1 000以下について
0.02/1 000 (20 μrad又は4″)
測定値
測定器
精密水準器又は光学式角度偏差測定器
測定手順及びJIS B 6191の細分箇条
5.231.3及び5.232.2
測定用精密水準器は,タレット上に定置し,基準用精密水準器は工作主軸(回転テーブル)上に定置する。
測定は,運動の両方向において移動経路に沿って等間隔に少なくとも5か所の位置で行う。
22
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4
直進軸の運動の真直度偏差
検査事項
クロスレール上のサドル(X軸)運動の真直度
a) ZX面内で(EZX)
b) XY面内で(EYX)1)
注1) この検査は,ターニングセンタだけに適用する。
G14
測定方法図
a)
b)
許容値
a)及びb)
測定長さ1 000について0.015
測定長さが500増えるごとに,0.01を加える。
部分許容値:測定長さ500について0.01
測定値
a)
b)
測定器
a) 直定規,調整ブロック及び変位計,又は光学式測定器
b) 直定規,調整ブロック及び変位計,光学式測定器,又は鋼線及び測定顕微鏡
測定手順及びJIS B 6191の細分箇条
5.232.1
コラム又は工作主軸(回転テーブル)がY方向に移動可能な場合には,ラム又はタレット穴の軸中心線を,工作
主軸の回転軸中心線上に位置決めする。
コラムは,Y軸方向に移動でき,かつ,固定できる場合には,工作主軸に近い位置に位置決めし,固定する。ク
ロスレールは,動きの中央位置に位置決めし,固定する。
真直基準(直定規,反射鏡,アライメントテレスコープ,又は鋼線)は,サドルの運動に平行に工作主軸上に定
置する。
平行とは,運動の両端での読みが同じ値になることを意味し,かつ,この場合には,読みの最大差が真直度の偏
差となる。
変位計,干渉計,目標物又は測定顕微鏡は,工作主軸(回転テーブル)に近い工具取付け位置に取り付ける。
23
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
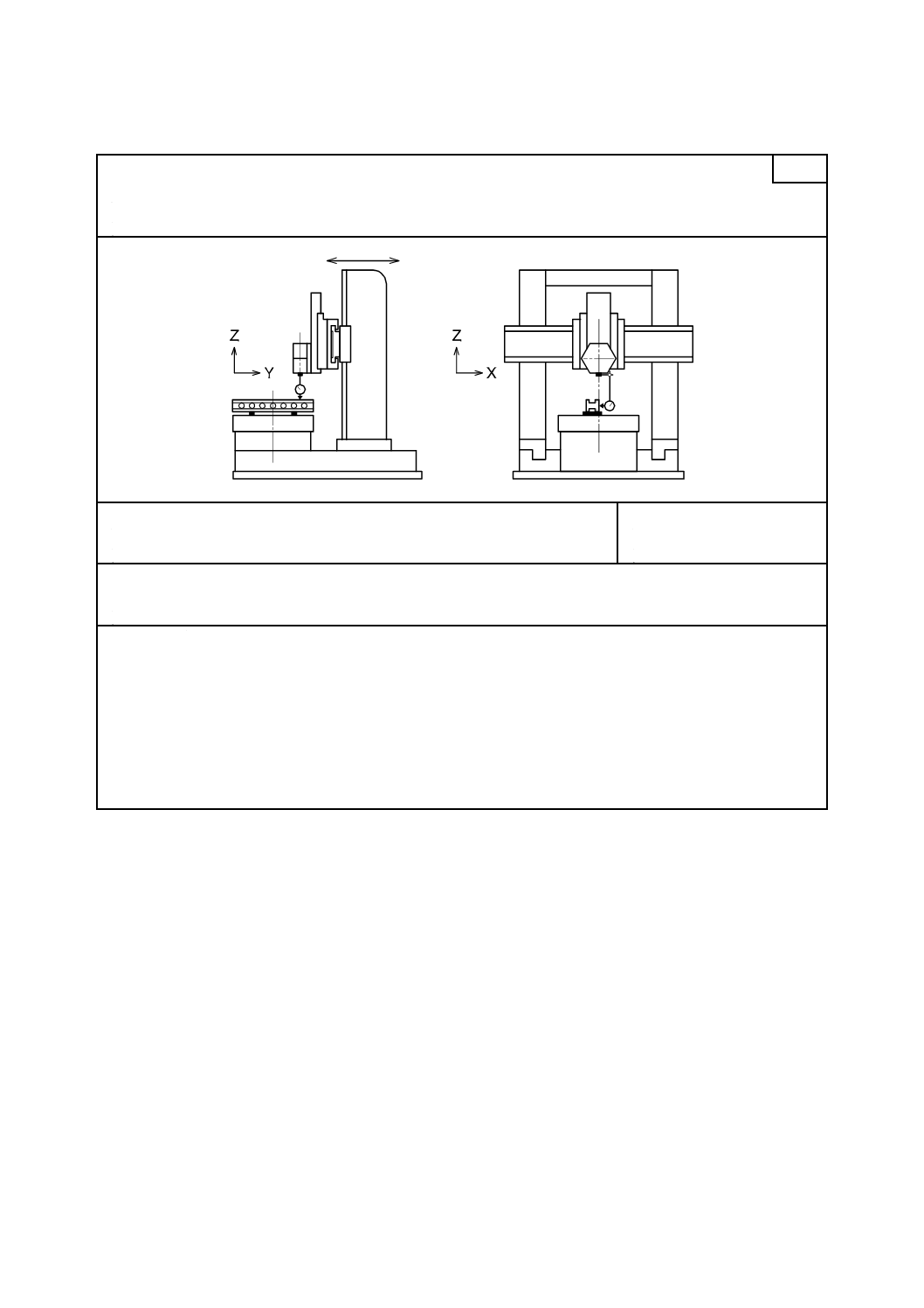
検査事項
移動形コラム(ガントリ形)又は移動形工作主軸台(Y軸)運動の真直度
a) YZ面内で(EZY)
b) XY面内で(EXY)
G15
測定方法図
a)
b)
許容値
a) 測定長さ500について,0.02
b) 測定長さ500について,0.04
測定値
a)
b)
測定器
a) 直定規,調整ブロック,及び変位計又は光学式測定器
b) 直定規,調整ブロック及び変位計,光学式測定器,又は鋼線及び測定顕微鏡
測定手順及びJIS B 6191の細分箇条
5.212.11
可能であれば,クロスレールは,動きの中央で固定し,ラムは測定位置で固定する。
真直基準(直定規,反射鏡,アライメントテレスコープ,又は鋼線)は,コラムの運動に平行に工作主軸上に定
置する。
平行とは,運動の両端での読みが同じ値になることを意味し,この場合には,読みの最大差が真直度の偏差とな
る。
変位計,干渉計,目標物又は測定顕微鏡は,工作主軸(回転テーブル)に近い工具取付け位置近傍に取り付ける。
測定線は,工作主軸の回転中心に近づけるのが望ましい。
24
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
検査事項
クロスレール(Z軸)運動の真直度
a) YZ面内で(EYZ)
b) ZX面内で(EXZ)
G16
測定方法図
a)
b)
許容値
a)及びb)
測定長さ300について,0.02
測定値
a)
b)
測定器
直角定規若しくは円筒スコヤ及び調整ブロック又はテストバー,並びに変位計
測定手順及びJIS B 6191の細分箇条
5.212.11
直角定規又は円筒スコヤは,測定長さの両端で読みが等しくなるように調整ブロックを用いて工作主軸(回転テ
ーブル)上に定置する。
25
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.5
タレット,工作主軸及び工具主軸
5.5.1
タレット及び工作主軸
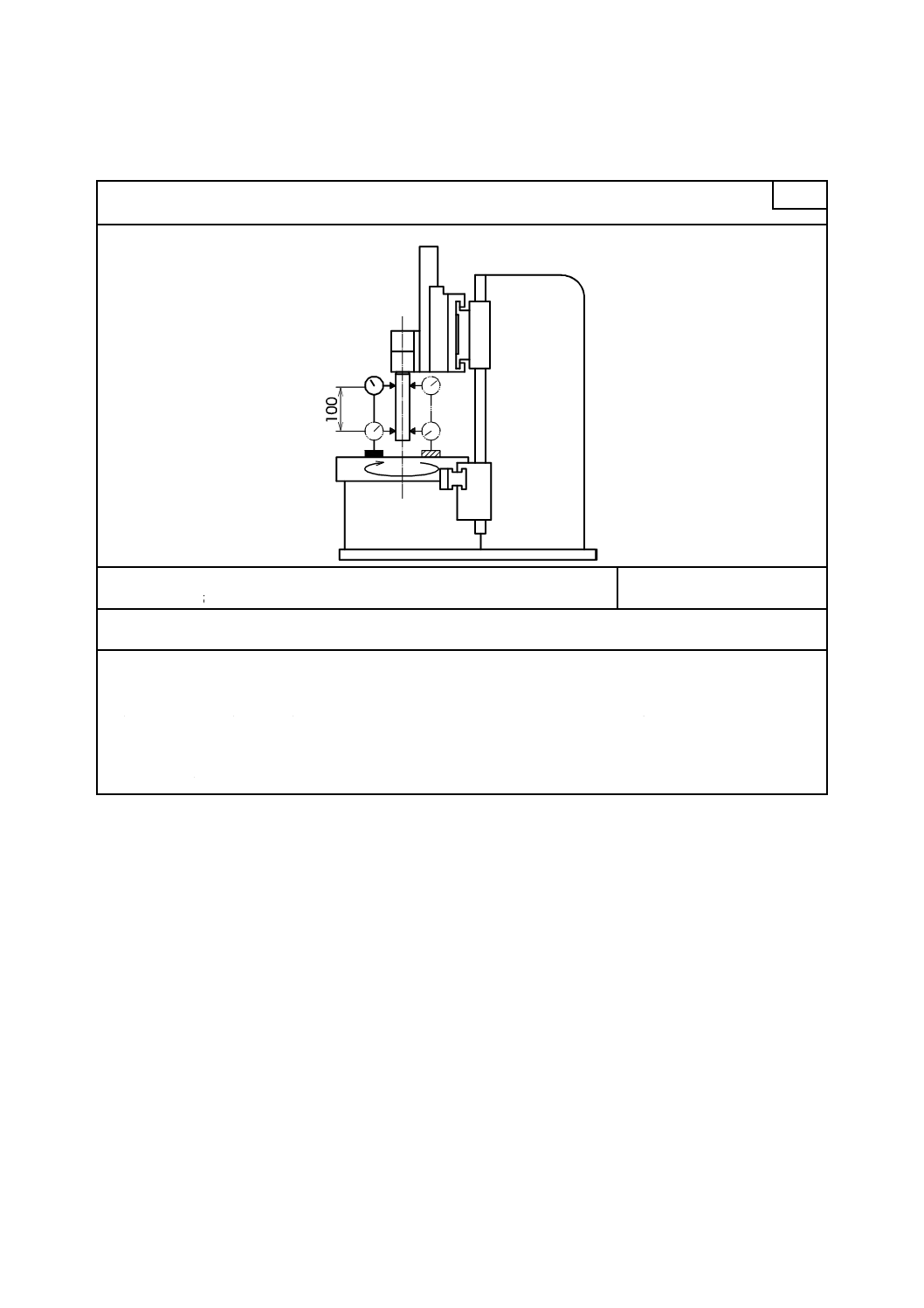
検査事項
タレット穴の軸中心線と工作主軸の回転軸(C'軸)との同軸度
G17
測定方法図
許容値
0.025
測定値
測定器
テストバー及び変位計
測定手順及びJIS B 6191の細分箇条
5.442
十分な長さのテストバーをタレットの穴の一つに差し込む。
変位計は,工作主軸上に固定し,ラム,タレットスライド又はクロスレールは垂直方向に移動させずに,その測
定子をタレットの工具取付け穴に近く及び100 mm離れた位置でテストバーに当てる。
全ての工具取付け穴について同じ測定を行う。
測定値は,変位計の読みの1/2とする。
26
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
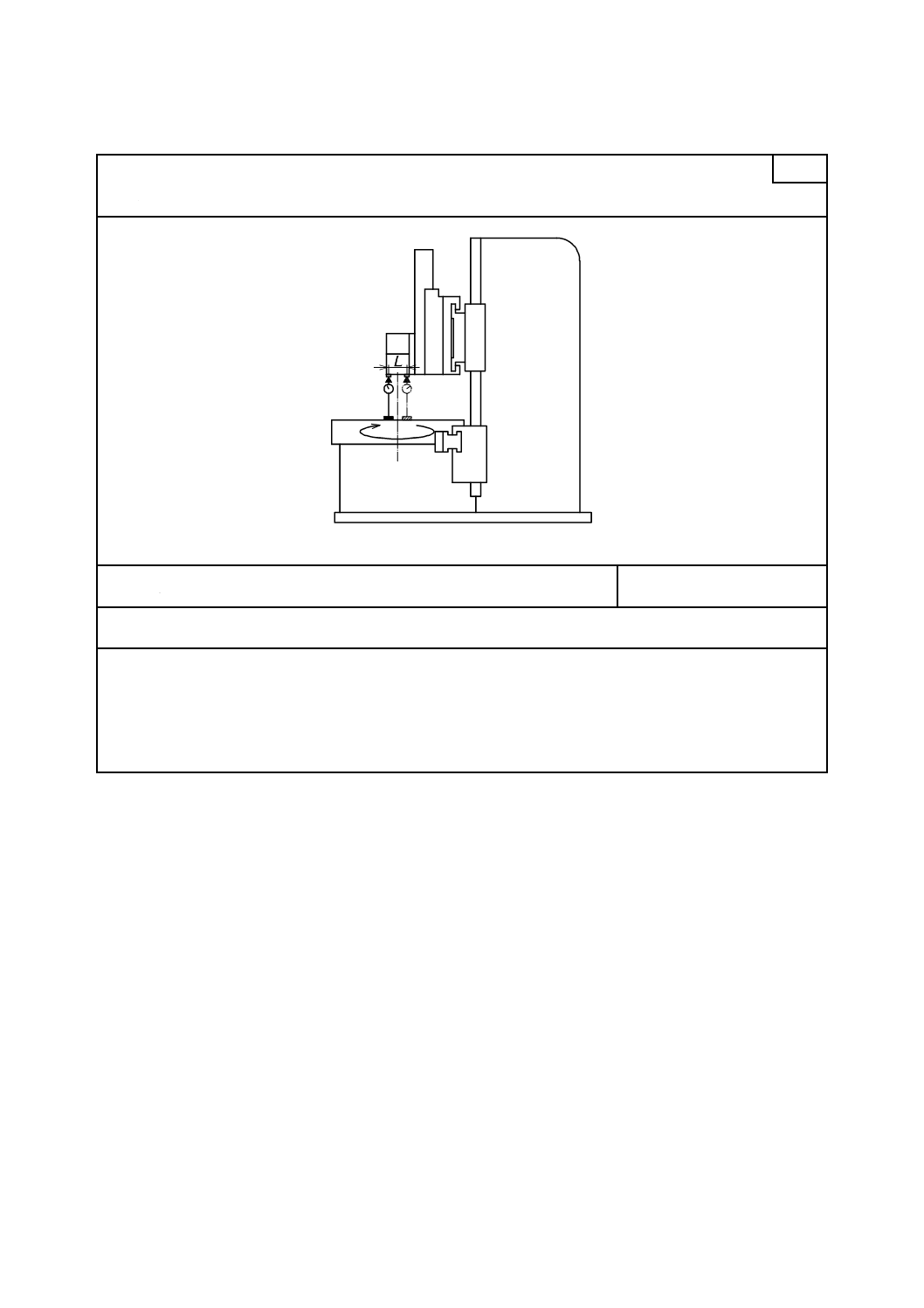
検査事項
タレットの工具取付け面と工作主軸(回転テーブル)の回転軸との直角度
注記 この検査は,工作主軸の回転軸に直角なタレットの工具取付け面についても行う。
G18
測定方法図
記号
L
測定直径
許容値
0.02/100
測定値
測定器
変位計及び基準ブロック
測定手順及びJIS B 6191の細分箇条
5.512.1
変位計は,工作主軸(回転テーブル)上に固定し,タレットの工具取付け面に取り付けた基準ブロックに当てる。
工作主軸を回転させ,できるだけ大きな直径でタレットの工具取付け面に変位計が当たるように調整し,読みの
最大差を測定する。
この測定は,タレットの全ての工具取付け面について行う。
27
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.5.2
タレット及び工具主軸
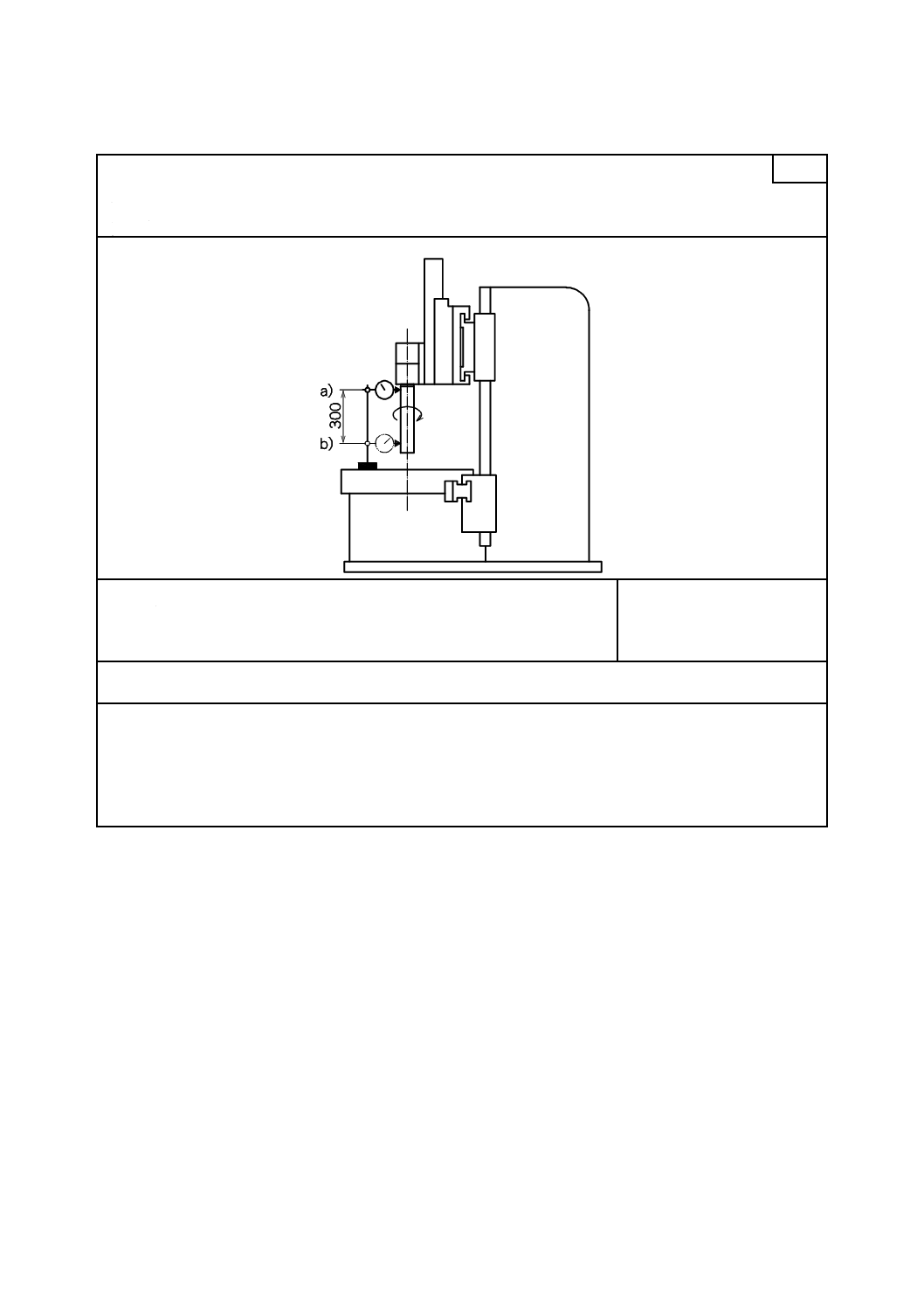
検査事項
工具主軸のテーパ穴の振れ
a) 主軸端で
b) 主軸端から300 mmの位置で
G19
測定方法図
許容値
Df≦200 a) 0.010 b) 0.020
Df>200 a) 0.015 b) 0.030
ここに,Dfは,主軸端の外径
測定値
a)
b)
測定器
変位計及びテストバー
測定手順及びJIS B 6191の細分箇条
5.612.3
工作主軸(回転テーブル)上に変位計を定置し,工具主軸にテストバーをはめる。
変位計は,位置a)にできるだけ近づけて当てて,工具主軸を回転させ,読みを取る。
位置b)についても同じ測定を行う。
この測定は,全ての工具主軸について行う。
28
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.5.3
タレット割出し精度
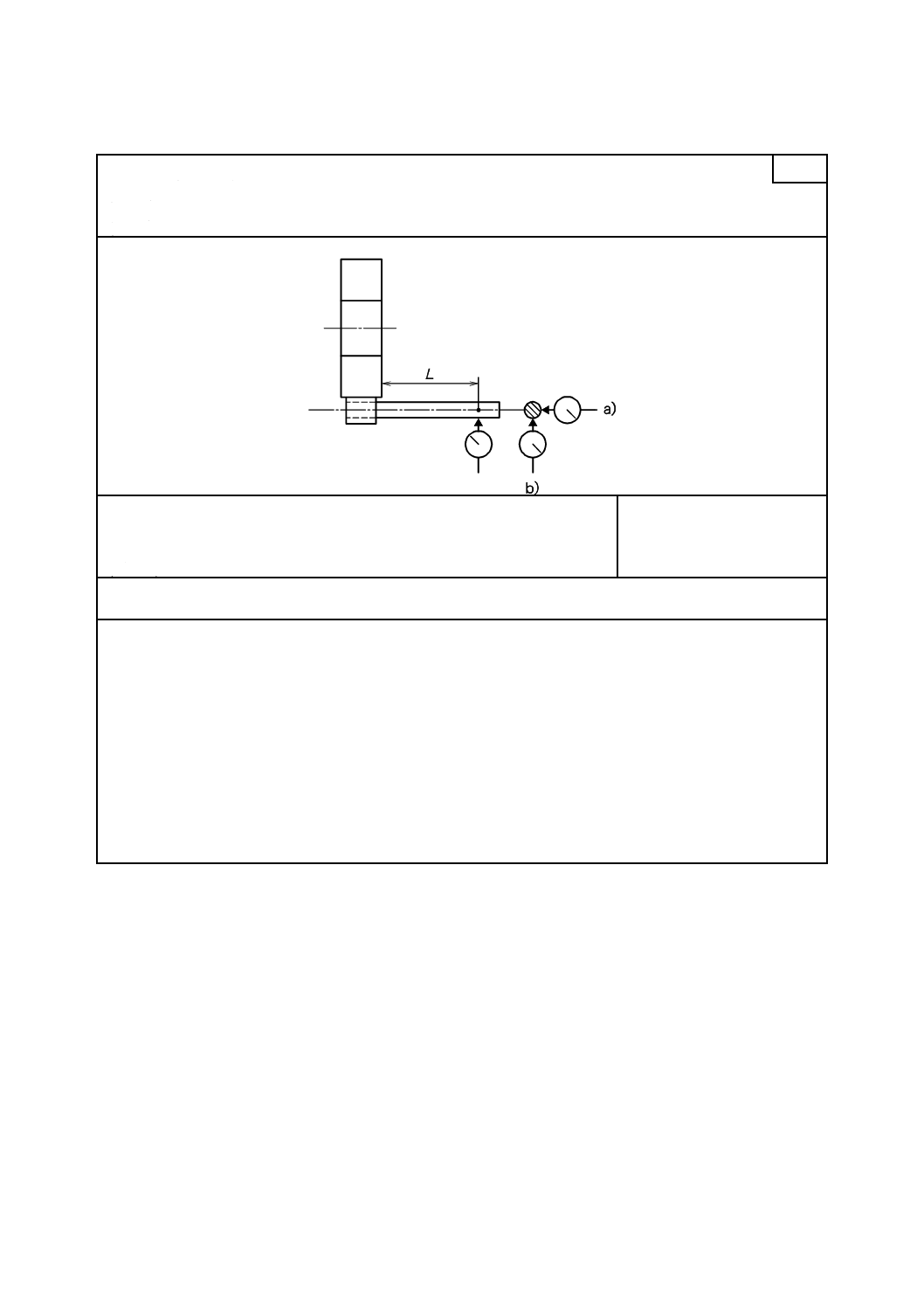
検査事項
タレット割出しの繰返し性
a) X方向
b) Z方向
G20
測定方法図
許容値
区分1 区分2 区分3及び区分4
L=50 L=100 L=100
a)及びb)
0.005
0.010
0.015
測定値
a)
b)
測定器
テストバー及び変位計
測定手順及びJIS B 6191の細分箇条
6.42
測定は,タレットの正面又は工具取付け面から長さLの位置で行う。タレットは,動きの中央に置き,変位計は,
0°及び90°の測定位置でテストバーに接触するように位置決めする。タレットの機械座標位置及び変位計の読み
を記録する。
次に,タレットは,変位計に触れない位置まで移動させ,360°割り出し,記録した機械座標位置に戻す。そのと
きの変位計の読みを記録する。
この測定を3回繰り返す。変位計は,この測定の開始時にゼロに合わせるのが望ましい。3回の読みの最大差を,
測定値とする。
変位計は,工作主軸台上に取り付けるのが望ましい。
この測定は,少なくとも三つの異なるタレット割出し位置で行うのが望ましい。それぞれの割出し位置で,変位
計はゼロに合わせるのが望ましい。
29
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
検査事項
タレット割出しの精度
G21
測定方法図
許容値
区分1
区分2,区分3及び区分4
0.030
0.040
測定値
測定器
変位計
測定手順及びJIS B 6191の細分箇条
変位計の測定子がタレットの基準穴又は基準溝に接触するように,その測定子を位置a),b)及びc)に位置決めす
る。このときのタレットの位置及び変位計の読みを取る。タレットの基準面を用いる場合には,位置c)の変位計の
代わりに位置f)の変位計を用いる。
タレットを割り出すために,適切な直進軸を移動させて,タレットの測定面から変位計を離し,タレットを次の
位置に割り出し,元の測定位置に変位計を戻す。
全てのタレット位置について3回の測定を行い,次に,タレットの繰返し性の影響を最小にするために各割出し
位置の読みを平均する。全ての変位計の読み平均値の最大差をタレットの割出し精度とする。
30
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
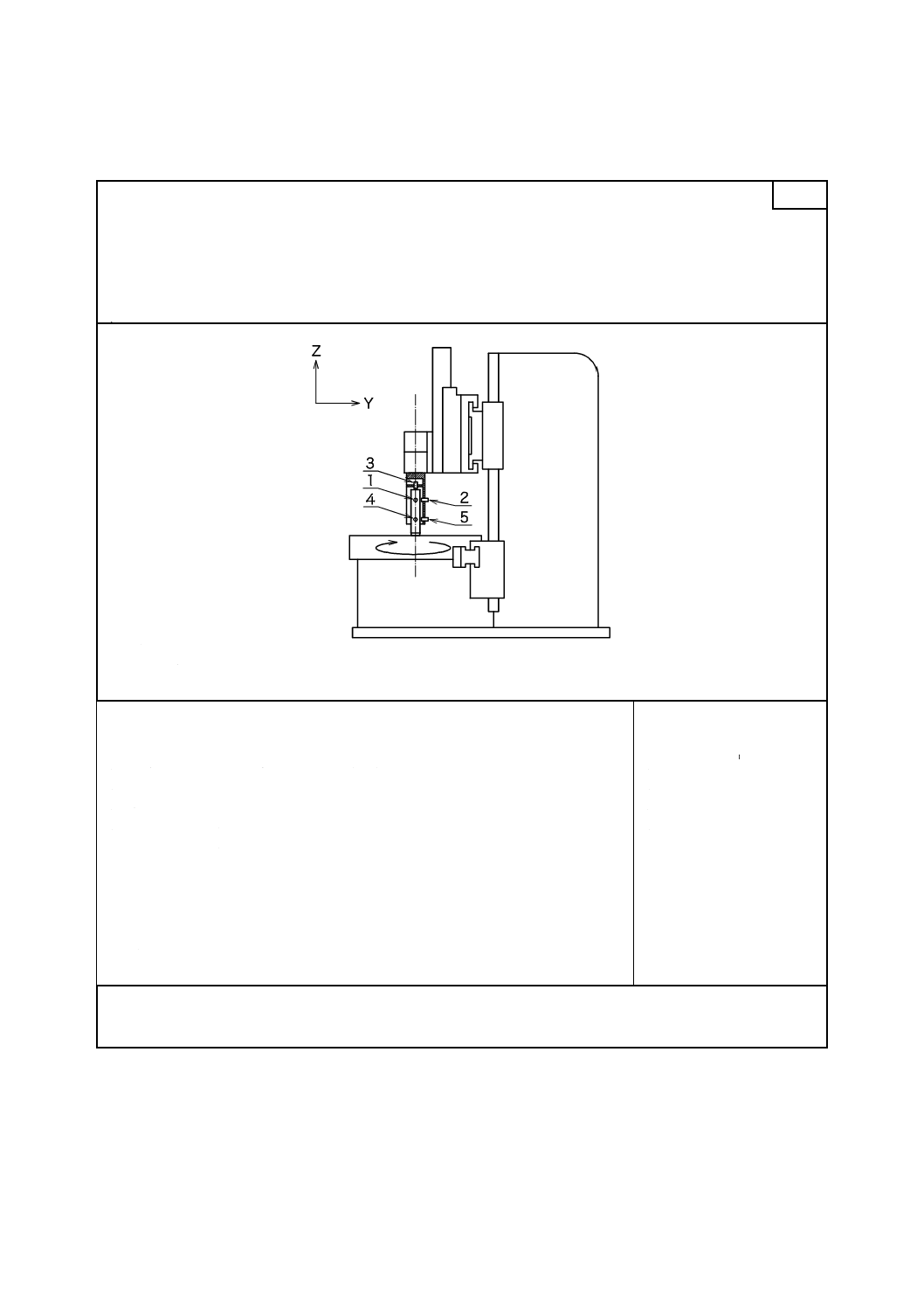
6
回転軸の精度
6.1
工作主軸の回転精度
検査事項
工作主軸(C'軸)の回転軸の誤差運動
a) X方向における半径方向誤差運動(EXC)
b) Y方向における半径方向誤差運動(EYC)(ターニングセンタだけについて)
c) 軸方向誤差運動(EZC)
d) X軸回りの傾斜誤差運動(EAC)(ターニングセンタだけについて)
e) Y軸回りの傾斜誤差運動(EBC)
R1
測定方法図
記号
1〜5
変位計
注記 変位計2及び5は,ターニングセンタ用である。
許容値
最高速度に対する百分率
10 %
50 %
100 %
a) X方向における半径方向誤差運動(EXC)
b) Y方向における半径方向誤差運動(EYC)
c) 軸方向誤差運動(EZC)
d) X軸回りの傾斜誤差運動(EAC)
e) Y軸回りの傾斜誤差運動(EBC)
最低速度が,最高速度の10 %を超える場合には,それに代えて,主軸は,最低速
度で運転するのが望ましい。
また,製造業者が,機械受入手順の契約にこの検査を含めることを協定する場合
には,その協定で適用することになる公差を定義するのが望ましい。
注記 この規格の改正時には,この測定に許容値を入れることになるかもしれ
ない。
測定値
最高速度に対する百分率
10 % 50 % 100 %
a)
b)
c)
d)
e)
測定器
テストバー,非接触変位計及び角度測定器,又は二つの精密球(主軸平均線に対して僅かに偏心して配列した)
及び非接触変位計
31
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定手順及びJIS B 6190-7の細分箇条
この検査は,固定感度方向の主軸検査である(JIS B 6190-7:2008の5.5)。
測定器を取り付け終えた後に,受渡当事者間で協定がなされない場合には,10分間最高速度の50 %で主軸を暖機
する。
全誤差運動の定義及び全誤差運動の値は,それぞれJIS B 6190-7:2008の3.2.4及び3.5.1による。
a),b) 全半径方向誤差運動の値EXC及びEYC(変位計4及び5を用いて)
半径方向誤差運動の測定は,JIS B 6190-7:2008の5.5.3による。半径方向誤差運動は,できるだけ主軸端近くで測
定する(測定方法図の変位計4及び5)。
各半径方向誤差運動EXC及びEYCについては,最小二乗円(LSC)中心(JIS B 6190-7:2008の3.4.3)と合わせて
全誤差運動極座標表示(JIS B 6190-7:2008の3.3.1)したグラフを提供する。
c) 全軸方向誤差運動の値EZC(変位計3を用いて)
軸方向誤差運動の測定は,JIS B 6190-7:2008の5.5.4による。
軸方向誤差運動EZCについては,極座標(PC)中心(JIS B 6190-7:2008の3.4.1)と合わせて全誤差運動極座標表
示(JIS B 6190-7:2008の3.3.1)したグラフを提供する。
d),e) 全傾斜誤差運動の値EAC及びEBC(それぞれ,変位計2及び5,変位計1及び4)
傾斜誤差運動の測定は,JIS B 6190-7:2008の5.5.5による。傾斜誤差運動は,また,一つの非接触変位計で測定で
きる(JIS B 6190-7:2008の5.5.5.3)。
各傾斜誤差運動EAC及びEBCについては,極座標(PC)中心(JIS B 6190-7:2008の3.4.1)と合わせて全誤差運動
極座標表示(JIS B 6190-7:2008の3.3.1)したグラフを提供する。
これらの検査について,次のパラメタを記載する。
1) 測定した半径方向及び軸方向の位置
2) 使用した全てのジグ,目標物及び取付具
3) 測定装置の配置
4) 測定中に測定装置に接続されている直進テーブル又は回転テーブルの位置
5) 感度方向の向き,例えば,軸方向,半径方向,又は必要に応じて,その中間の方向
6) 測定結果の表示,例えば,誤差運動の値,極座標表示グラフ,時間表示グラフ,周波数表示グラフ
7) 主軸の回転速度(静的誤差運動については速度はゼロ)
8) 時間(秒)又は主軸回転数
9) 適切な暖機又は慣らしの手順
10) 測定器の周波数応答(Hz又は1回転当たりの山の数),電気フィルタのロールオフ特性,デジタル測定器に
おいては,変位の分解能及びサンプリングレート
11) 誤差運動を報告するタレットに対する変位計の位置及び向きを含む構造ループ,主軸の軸線及び基準座標軸
が配置されている指定された要素,並びにこれらの要素に接続されている要素
12) 測定の日時
13) 全ての測定器の形式及び校正状態
14) 室温のような測定に影響を及ぼす他の運転条件
傾斜測定を行う必要がない場合(受渡当事者間の協定による。)には,三つの変位計(1,2及び3)だけを使用し,
かつ,テストバーを精密球に代えてよい。
この検査は,附属書Aに記載する3点法を使って行ってもよい。
32
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
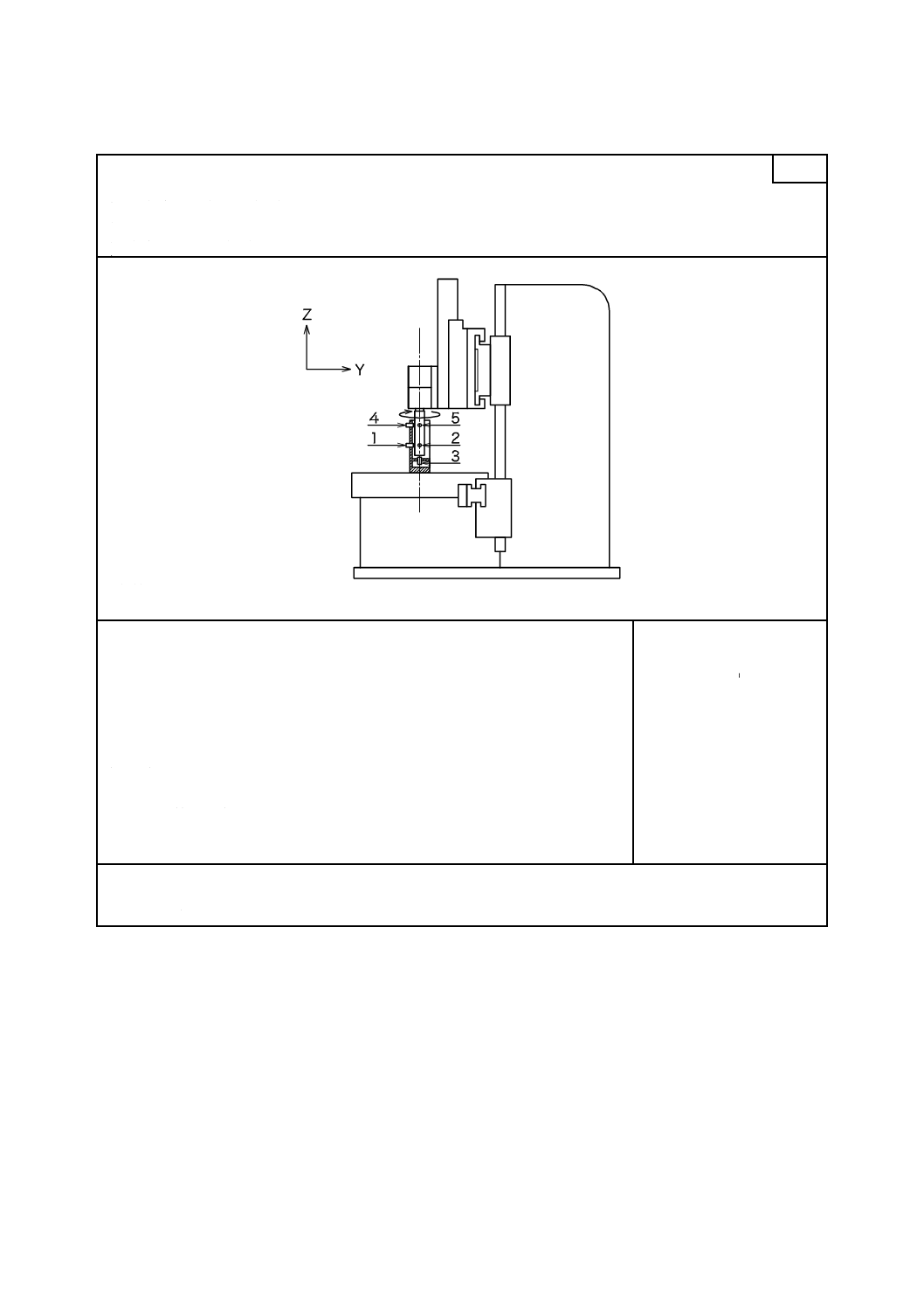
6.2
工具主軸の回転精度
検査事項
工具主軸(回転工具)(C)の回転軸の誤差運動
a) 半径方向誤差運動(ERC)
b) 軸方向誤差運動(EZC)
c) 傾斜誤差運動(ETC)
R2
測定方法図
記号
1〜5
変位計
許容値
最高速度に対する百分率
10 %
50 %
100 %
a) 全半径方向誤差運動の値(ERC)
b) 全軸方向誤差運動の値(EZC)
c) 全傾斜誤差運動の値(ETC)
最低速度が,最高速度の10 %を超える場合には,それに代えて,主軸は,最低速
度で運転するのが望ましい。
また,製造業者が,機械受入手順の契約にこの検査を含めることを協定する場合
には,その協定で適用することになる公差を定義するのが望ましい。
注記 この規格の改正時には,この測定に許容値を入れることになるかもしれ
ない。
測定値
最高速度に対する百分率
10 % 50 % 100 %
a)
b)
c)
測定器
テストバー,非接触変位計及び角度測定器,又は二つの精密球(主軸平均線に対して僅かに偏心して配列した)
及び非接触変位計
33
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定方法及びJIS B 6190-7の細分箇条
この検査は,回転感度方向の主軸検査である(JIS B 6190-7:2008の5.4)。
測定器を取り付け終えた後に,受渡当事者間で協定がなされない場合には,10分間最高速度の50 %で主軸を暖機
する。
全誤差運動の定義及び全誤差運動の値は,それぞれJIS B 6190-7:2008の3.2.4及び3.5.1による。
a) 全半径方向誤差運動の値ERC(変位計1及び2を用いて)
半径方向誤差運動の測定は,JIS B 6190-7:2008の5.4.2による。半径方向誤差運動は,できるだけ主軸端近くで測
定する(測定方法図の変位計1及び2)。
半径方向誤差運動ERCについては,最小二乗円(LSC)中心(JIS B 6190-7:2008の3.4.3)と合わせて全誤差運動
極座標表示(JIS B 6190-7:2008の3.3.1)したグラフを提供する。
b) 全軸方向誤差運動の値EZC(変位計3を用いて)
軸方向誤差運動の測定は,JIS B 6190-7:2008の5.4.4による。
軸方向誤差運動EZCについては,極座標(PC)中心(JIS B 6190-7:2008の3.4.1)と合わせて全誤差運動極座標表
示(JIS B 6190-7:2008の3.3.1)したグラフを提供する。
c) 全傾斜誤差運動の値ETC(変位計1,2,4及び5)。
傾斜誤差運動の測定は,JIS B 6190-7:2008の5.4.3による。傾斜誤差運動は,また,一つの非接触変位計で測定で
きる(JIS B 6190-7:2008の5.4.3.2)。
傾斜誤差運動ETCについては,極座標(PC)中心(JIS B 6190-7:2008の3.4.1)と合わせて全誤差運動極座標表示
(JIS B 6190-7:2008の3.3.1)したグラフを提供する。
これらの検査について,次のパラメタを記載する。
1) 測定した半径方向,軸方向又は面の位置
2) 使用した全てのジグ,目標物及び取付具
3) 測定装置の配置
4) 測定中に測定装置に接続されている直進テーブル又は回転テーブルの位置
5) 感度方向の向き,例えば,軸方向,半径方向,又は必要に応じて,その中間の方向
6) 測定結果の表示,例えば,誤差運動の値,極座標表示グラフ,時間表示グラフ,周波数表示グラフ
7) 主軸の回転速度(静的誤差運動については速度はゼロ)
8) 時間(秒)又は主軸回転数
9) 適切な暖機又は慣らしの手順
10) 測定器の周波数応答(Hz又は1回転当たりの山の数),電気フィルタのロールオフ特性,デジタル測定器に
おいては,変位の分解能及びサンプリングレート
11) 誤差運動を報告する工作主軸に対する変位計の位置及び向きを含む構造ループ,主軸の軸線及び基準座標軸
が配置されている指定された要素,並びにこれらの要素に接続されている要素
12) 測定の日時
13) 全ての測定器の形式及び校正状態
14) 室温のような測定に影響を及ぼす他の運転条件
傾斜測定を行う必要がない場合(受渡当事者間の協定による。)には,三つの変位計(1,2及び3)だけを使用し,
かつ,テストバーを精密球に代えてよい。
この検査は,附属書Aに記載する3点法を使って行ってもよい。
34
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
3点法
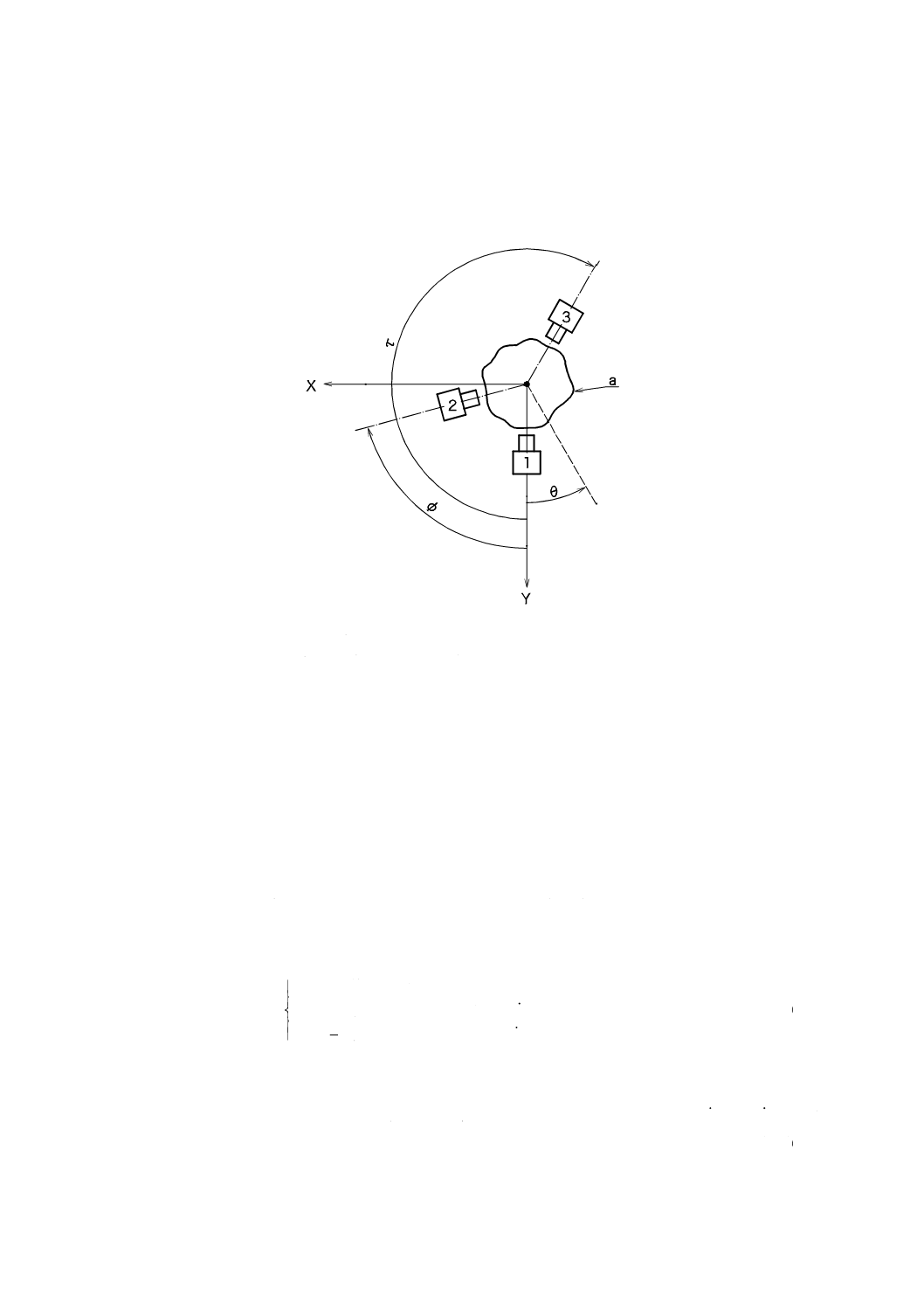
記号
1〜3 変位計
θ
Y軸から測った角度
τ
変位計1と変位計3との間の角度
φ
変位計1と変位計2との間の角度
a
真円度の輪郭曲線
図A.1−3点測定方法
回転軸の誤差の測定に使用する基準器の真円度偏差は,測定結果に影響を及ぼす。“不完全な”基準器に
対して半径方向に向けて配列した3個の変位計を用いる次の測定方法は,回転軸の測定に及ぼす基準器の
真円度偏差の影響を排除する一つの方法である。
図A.1に示すように,変位計1と変位計2との間の角度をφ,変位計1と変位計3との間の角度をτと
する。Y軸から測った角度をθとする。基準器(テストバー)の真円輪郭は,r(θ)として表せる。さらに,
x(θ)とy(θ)とは,それぞれX方向及びY方向の半径方向誤差運動を表す。
これらの三つの変位計の出力信号は,式(A.1)となる。
+
+
+
=
+
+
+
=
+
=
τ
θ
x
τ
θ
y
τ
θ
r
θ
S
θ
x
θ
y
θ
r
θ
S
θ
y
θ
r
θ
S
sin
)
(
cos
)
(
)
(
)
(
sin
)
(
cos
)
(
)
(
)
(
)
(
)
(
)
(
3
2
1
φ
φ
φ
········································ (A.1)
変位計1,2及び3の出力信号に,係数“1,p,q”を乗じると,その和S(θ)は,次式のようになる。
)
(
)
sin
sin
(
)
(
)
cos
cos
1(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
3
2
1
θ
y
τ
q
p
θ
x
τ
q
p
τ
θ
qr
θ
pr
θ
r
θ
qS
θ
pS
θ
S
θ
S
+
+
+
+
+
+
+
+
+
=
+
+
=
φ
φ
φ
··························································································· (A.2)
35
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
−
−
=
−
−
=
⇔
=
+
=
+
+
)
sin(
sin
)
sin(
sin
0
sin
sin
0
cos
cos
1
φ
φ
φ
φ
φ
τ
q
τ
τ
p
τ
q
p
τ
q
p
···································· (A.3)
式(A.3)を満たすようにp,q,φ,τを選ぶと,式(A.2)は,誤差運動x(θ)及びy(θ)に無関係になる。参照
した基準器の輪郭r(θ)は,次のようになる。
(
)
∑
=
+
=
N
k
k
k
kθ
B
kθ
A
θ
r
2
sin
cos
)
(
··················································· (A.4)
したがって,S(θ)は,次のようになる。
(
)
(
)
[
]
{
(
)
(
)
[
]
}
kθ
B
kτ
q
k
p
A
kτ
q
k
p
kθ
B
kτ
q
k
p
A
kτ
q
k
p
θ
S
k
k
N
k
k
k
sin
cos
cos
1
sin
sin
cos
sin
sin
cos
cos
1
)
(
2
+
+
+
+
−
+
+
+
+
+
=∑
=
φ
φ
φ
φ
····· (A.5)
+
=
+
+
=
kτ
q
k
p
β
kτ
q
k
p
α
k
k
sin
sin
cos
cos
1
φ
φ
························································· (A.6)
式(A.6)のαk及びβkを代入すると,S(θ)のフーリエ係数,すなわち,Fk,Gkは,式(A.7)で表せる。
+
−
=
+
=
k
k
k
k
k
k
k
k
k
k
B
α
A
β
G
B
β
A
α
F
································································· (A.7)
参照した基準器の真円輪郭のフーリエ係数Ak,Bkは次のようになる。
+
−
=
+
−
=
2
2
2
2
k
k
k
k
k
k
k
k
k
k
k
k
k
k
β
α
F
β
G
α
B
β
α
G
β
F
α
A
·································································· (A.8)
次に,X及びY方向における半径誤差運動は,次のようになる。ここに,r)は,参照した基準器の推定
真円輪郭を表す。
[
]
{
}
−
=
−
−
+
−
=
)
(
)
(
)
(
sin
cos
)
(
)
(
)
(
)
(
)
(
1
1
2
θ
r
θ
S
θ
y
θ
r
θ
S
θ
r
θ
S
θ
x
)
)
)
φ
φ
φ
································· (A.9)
36
B 6331-2:2013 (ISO 13041-2:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS B 0181:1998 産業オートメーションシステム−機械の数値制御−用語
注記 対応国際規格:ISO 2806:1994,Industrial automation systems−Numerical control of machines−
Vocabulary(IDT)
[2] JIS B 6006-1:2008 工作機械−ツーピースジョー付自己求心チャックの寸法及び静的精度検査−第1
部:クロスキー形手動チャック
注記 対応国際規格:ISO 3442-1:2005,Machine tools−Dimensions and geometric tests for self-centring
chucks with two-piece jaws−Part 1: Manually operated chucks with tongue and groove type jaws
(IDT)
[3] JIS B 6006-2:2008 工作機械−ツーピースジョー付自己求心チャックの寸法及び静的精度検査−第2
部:クロスキー形パワーチャック
注記 対応国際規格:ISO 3442-2:2005,Machine tools−Dimensions and geometric tests for self-centring
chucks with two-piece jaws−Part 2: Power-operated chucks with tongue and groove type jaws(IDT)
[4] JIS B 6006-3:2008 工作機械−ツーピースジョー付自己求心チャックの寸法及び静的精度検査−第3
部:セレーション形パワーチャック
注記 対応国際規格:ISO 3442-3:2007,Machine tools−Dimensions and geometric tests for self-centring
chucks with two-piece jaws−Part 3: Power-operated chucks with serrated jaws(IDT)
[5] JIS B 6202:1998 普通旋盤−精度検査
注記 対応国際規格:ISO 1708:1989,Acceptance conditions for general purpose parallel lathes−Testing
of the accuracy(MOD)
[6] JIS B 6217:1998 タレット旋盤及び単軸自動旋盤−精度検査
注記 対応国際規格:ISO 6155:1998,Machine tools−Test conditions for horizontal spindle turret and
single spindle automatic lathes−Testing of the accuracy(MOD)
[7] JIS B 6331-1:2006 数値制御旋盤及びターニングセンタ−検査条件−第1部:水平工作主軸をもつ機
械の静的精度
注記 対応国際規格:ISO 13041-1:2004,Test conditions for numerically controlled turning machines and
turning centres−Part 1: Geometric tests for machines with a horizontal workholding spindle(IDT)
[8] JIS B 6331-3:2013 数値制御旋盤及びターニングセンタ−検査条件−第3部:逆さ工作主軸をもつ機
械の静的精度
注記 対応国際規格:ISO 13041-3:2009,Test conditions for numerically controlled turning machines and
turning centres−Part 3: Geometric tests for machines with inverted vertical workholding spindles
(MOD)
[9] SHINNO, H., MITSUI, K., TATSUE, Y., TANAKA, N., OMINO, T., TABATA, T., NAKAYAMA, K. A new
method for evaluating error motion of ultra precision spindle. Ann. CIRP, 1987, 36, pp. 381-384
[10] MITSUI, K. Development of a new measuring method for spindle rotation accuracy by three points method. In:
DAVIES, B.J., editor. Proceedings of the 23rd International Machine Tool Design and Research Conference,
Manchester 1982-09-14 to 15, pp. 115-121. UMIST, Manchester