5
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
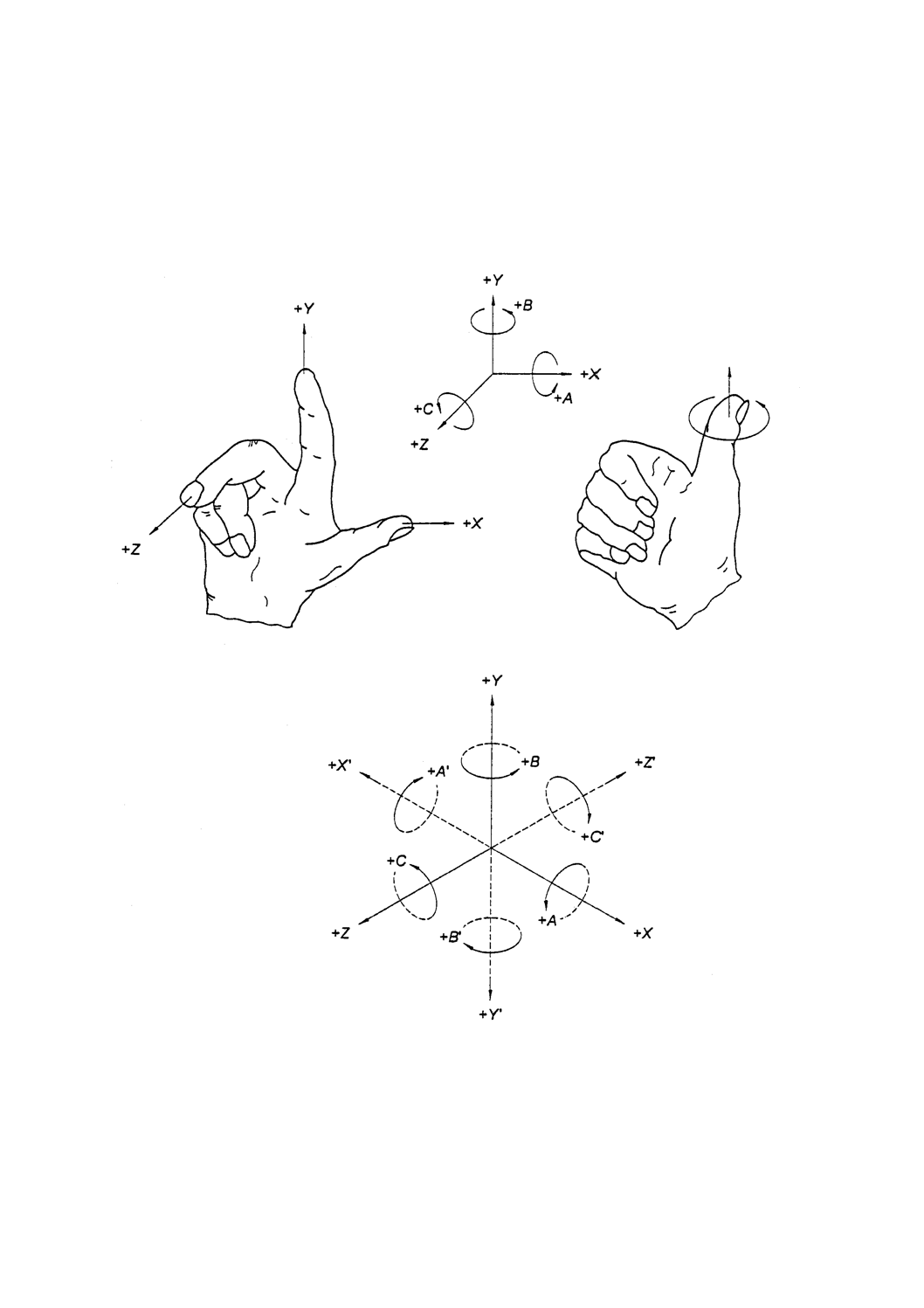
附属書A(規定)機械運動の例
附属書A図 1 右手座標系
+X,+Y 又は +Z
+A,+B
又は +C
B 6310:2003 (ISO 841:2001)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本工作
機械工業会(JMTBA)/財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正すべき
との申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS B 6310:1998は改正され,この規格に置き換えられる。
改正に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 841:2001,Industrial automation
systems − Numerical control of machines − Coordinate system and motion nomenclatureを基礎として用いた。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
JIS B 6310には,次に示す附属書がある。
附属書A(規定)機械運動の例
B 6310:2003 (ISO 841:2001)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定義 ······························································································································ 2
4. 機械の座標系 ·················································································································· 2
4.1 座標系の表示 ················································································································ 2
4.2 座標系の原点 ················································································································ 2
4.3 Z軸····························································································································· 2
4.4 X軸 ···························································································································· 2
4.5 Y軸 ···························································································································· 3
4.6 回転軸 ························································································································· 3
5. 機械の主運動 ·················································································································· 3
5.1 運動の表示 ··················································································································· 3
5.2 運動の方向 ··················································································································· 3
6. 付加運動 ························································································································ 3
6.1 直進運動 ······················································································································ 3
6.2 回転運動 ······················································································································ 3
6.3 使用文字の制限 ············································································································· 3
6.4 付加運動の方向 ············································································································· 3
7. 機械の図表示 ·················································································································· 4
7.1 機械の図表示の例 ·········································································································· 4
7.2 図表示 ························································································································· 4
附属書A(規定)機械運動の例 ······························································································· 5
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 6310:2003
(ISO 841:2001)
産業オートメーションシステム−機械及び装置の制
御−座標系及び運動の記号
Industrial automation systems - Numerical control of machines - Coordinate
system and motion nomenclature
序文 この規格は,2001年に第2版として発行されたISO 841:2001,Industrial automation systems −
Numerical control of machines − Coordinate system and motion nomenclatureを翻訳し,技術的内容及び規格
票の様式を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,原国際規格にはない事項である。
1. 適用範囲 この規格は,産業オートメーションシステムにおける数値制御機械及び類似の座標系並び
に運動の記号について規定する。
備考1. 数値制御機械では,すべての軸がベース又はフレームに取付けられ,すべての運動は一つの
基準座標系上で表される。
2. この規格は,規格の簡素化のため,数値制御工作機械だけでなく一般の機械についても規定
する。産業ロボットに関する座標系及び運動の記号については,JIS B 8437に規定されてい
る。
3. この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide21に基づき,IDT(一致している),MOD(修
正している),NEQ(同等でない)とする。
ISO 841:2001,Industrial automation systems − Numerical control of machines − Coordinate
system and motion nomenclature (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0181 産業オートメーションシステム−機械の数値制御−用語
備考 ISO 2806 : 1994 Industrial automation systems - Numerical control of machines - Vocabularyから
の引用事項は,この規格の該当事項と同等である。
JIS B 6315-1 機械の数値制御−プログラムフォーマット及びアドレスワードの定義−第1部:位置決
め,直線運動及び輪郭制御システム用データフォーマット
備考 ISO 6983-1 : 1982 Numerical control of machines - Program format and definition of address
words − Part 1 : Data format for positioning, line motion and contouring control systemsからの
引用事項は,この規格の該当事項と同等である。
JIS B 8437 産業用マニピュレーティングロボット−座標系及び運動の記号
2
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 ISO 9787 : 1998 Manipulating industrial robots − Coordinate sytems and motion nomenclature
からの引用事項は,この規格の該当事項と同等である。
3. 定義 この規格で用いる主な用語の定義は,JIS B 0181による。
4. 機械の座標系
4.1
座標系の表示 機械の座標系は,X,Y,Zの三つの直進軸,及び,そのぞれの軸回りのA,B,C
の三つの回転軸を持つ右手直交座標系とする。(附属書A 図1参照)
4.2
座標系の原点 機械座標系の原点位置は,機械製造業者が定める。
4.3
Z軸
4.3.1
一般 Z軸は,機械の主軸に平行にとる。機械が主軸をもたない場合については,4.3.4及び4.3.5
を参照のこと。
備考1. ミーリング,研削,ボーリング,ドリリング及びタッピングに使用される機械では,主軸は
工具を回転させる。
2. 旋盤,円筒研削盤及び回転面を形成する類似の機械では,主軸は工作物を回転させる。
4.3.2
複数の主軸をもつ機械 複数の主軸をもつ場合は,できるだけ工作物取付面に垂直な1軸を主軸と
して選択する。
4.3.3
主軸が旋回する機械 主軸が旋回する場合のZ軸は,主軸が旋回原点位置にあるときの主軸に平
行にとる。旋回原点位置で,主軸は工作物取付面に垂直となることが望ましい。
主軸の軸線が旋回でき,その運動の範囲内で軸線が基準3軸系のどれか一つの軸に平行になる場合には,
その基準軸がZ軸である。
旋回運動の範囲内で,主軸が基準3軸系の2軸に平行となるときは,Z軸は,機械の作業テーブルの工
作物取付面に垂直な基準軸にとる。このとき,保持ブラケットやアングルプレートのような補助ジグを無
視する。
4.3.4
主軸をもたない機械 カッティングマシン及び成形機械では,Z軸は工作物取付面に垂直にとるの
が望ましい。座標測定機では,Z軸は重力加速度方向と同一直線上(すなわち,地表面に垂直)にとるの
が望ましい。
4.3.5
Z軸の方向 カッティングマシン及び成形機械では,+Z軸方向は工作物から工具ホルダ方向にと
る。
備考 旋盤では,心押し台は,工具ホルダと考える。
座標測定機では,+Z軸方向は重力加速度と反対方向(すなわち,地球表面から離れていく方向)にとる。
4.4
X軸
4.4.1
一般 可能な限り,X軸は水平にとる。
4.4.2
工具が回転する機械
Z軸が水平な場合:X軸の正の向きは,Z軸の負の方向に見て右にとる。
Z軸が垂直で,単一コラムの場合:X軸の正の向きは,機械正面からコラムを見て右にとる。
Z軸が垂直で,ガントリ形の場合:X軸の正の向きは,主軸から左手ガントリサポートを見て右にとる
(4.3.1備考1.参照)。
4.4.3 工作物を回転させる機械 X軸はラジアル方向かつクロススライドに平行にとる。その正の向きは,
回転軸から遠ざかる方向にとる(4.3.1備考2.参照)。
3
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4.4
主軸を持たない機械 カッティングマシンの場合は,X軸はカッティングの主方向と平行にとり,
その正の向きはカッティングの主方向とする。
座標測定機の場合は,X軸及びその正の向きは製造業者が定める。
4.5
Y軸 Y軸の正の向きは,右手直交座標系の方向に従う(附属書A 図1参照)
4.6
回転軸A,B,C
4.6.1
回転軸の表示 A,B,Cは,それぞれ直進軸X,Y,Z回りの回転軸とする。
4.6.2
回転軸の方向 A,B,C軸の正の向きは,それぞれX,Y,Z軸の正の方向に右ねじが進む方向に
とる。(附属書A 図1参照)
5. 機械の主運動
5.1
運動の表示 機械座標系の軸に平行な機械直進運動は,それぞれX,Y,Zと表示する。その座標系
の軸回りの機械回転運動を,それぞれA,B,Cと表示する。
5.2
運動の方向
5.2.1
一般 直進軸又は回転軸の正の方向の運動は,正の位置の値を増加させ,負の位置の値を減少さ
せる。
文字による表示は,工具又は工作物のどちらかの運動の表示に使用する。
5.2.2
工具の運動の表示 工具が動くときは,運動の方向と軸の方向とは同じになる。正の運動は,+X,
+Y,+Z,+A,+B,・・・のように表示する。
5.2.3
工作物の運動の表示 工作物が動くときは,運動の方向と軸の方向とは逆となる。逆の方向を表示
するため,正の運動は,+X′,+Y′,+Z′,+A′,+B′,・・・のように表示する。(すなわち,軸の
方向−X=工作物の運動+X′)。
6. 付加運動
6.1
直進運動 主直進運動X,Y,Zのそれぞれに平行な第二の直進運動があるときは,それぞれU,V,
Wと表示する。同様に,第三の直進運動に対しては,それぞれP,Q,Rと表示する。X,Y,Zに平行で
ない直進運動があるときは,最も都合のよいようにU,V,W,P,Q又はRと表示してもよい。
主直進運動は主軸の最も近くにとり,第二の直進運動は次に近いところに,第三の直進運動は最も遠い
ところにとる。
フライス盤の面削りスライドのバイトの運動は,U又はPで表示することが望ましい。
マルチユニット又は多数の平行運動をもつ機械では,それらの運動の表示は文字と数字又は文字のイン
デックス(例えば,X1,X2・・・)とを用いて表示してもよい。数字のインデックスはゼロより大きい正の
整数とする。主直進運動はインデックスをもってももたなくてもよい。このように1台の機械において,
インデックスをもつ運動ともたない運動があってもよい。
6.2
回転運動 主回転運動に加えて,A,B若しくはCに平行な,又は複合した,又は旋回する第二の回
転運動があるときは,その運動はD又はE(これらの文字が使用できれば)で表示する。直進運動と同様
に,回転運動においてもインデックスによる表示を用いてもよい(6.1参照)。
6.3
使用文字の制限 ある文字(例えば,G,M,F)は運動に対して使用してはならない(JIS B 6315-1
参照)。
6.4
付加運動の方向 付加運動の方向は,主機械運動方向と同様にして定める(5.2参照)
4
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
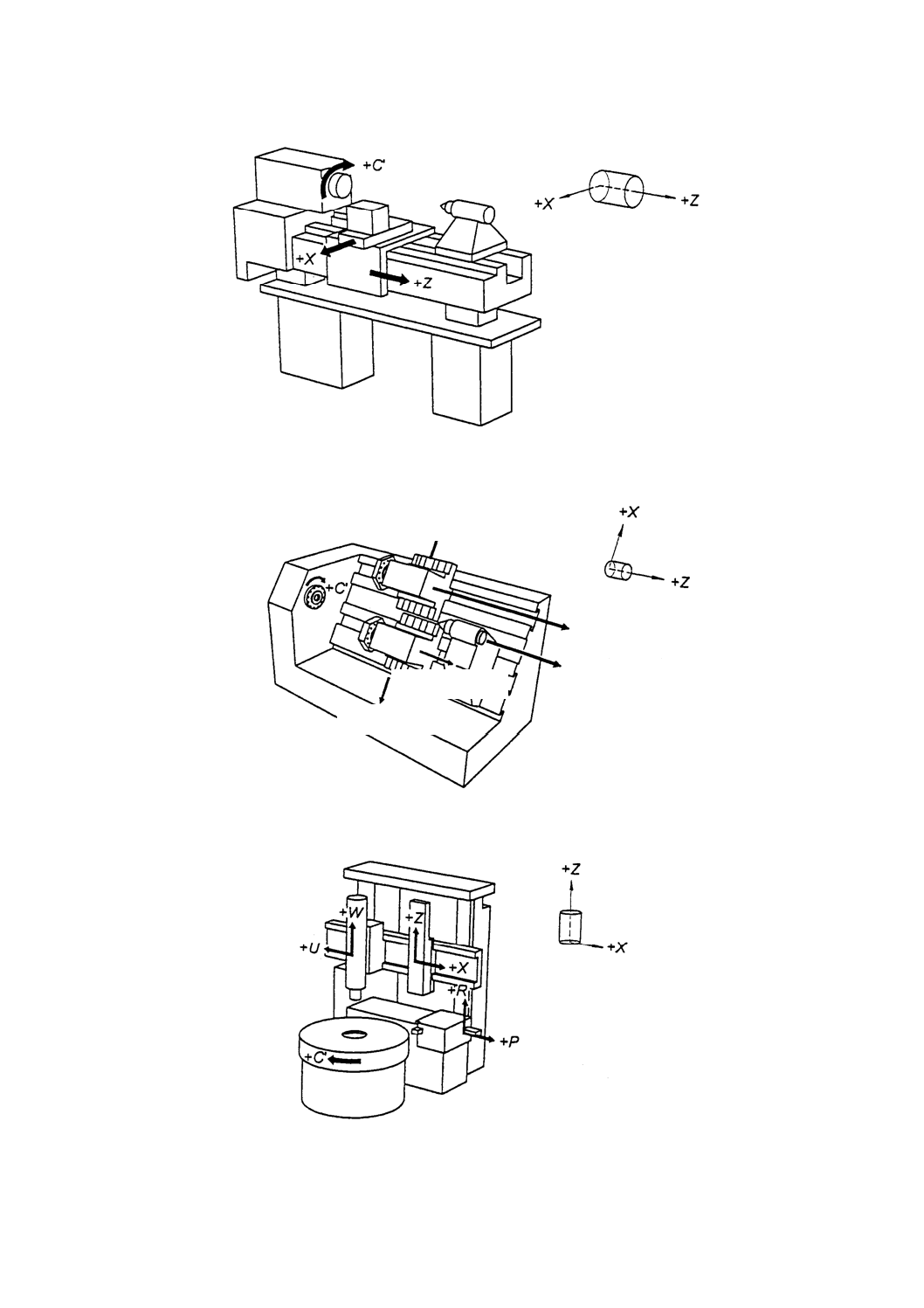
7. 機械の図表示
7.1
機械の図表示の例 附属書Aの規格の図表示は,それらの機械に対する例示である。この規格の本
体と与えられた図表示の間の矛盾は,図表示を優先する。
7.2
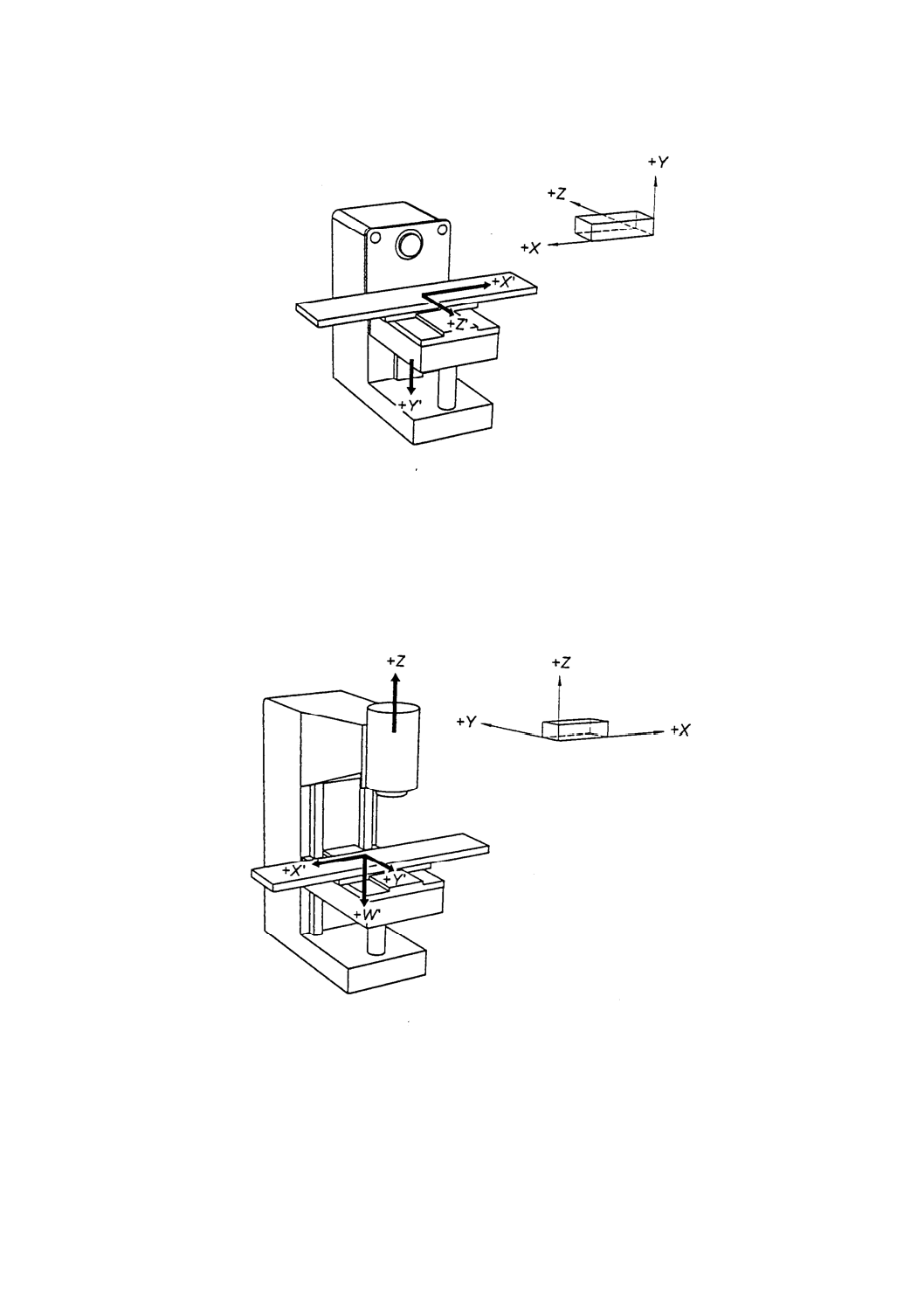
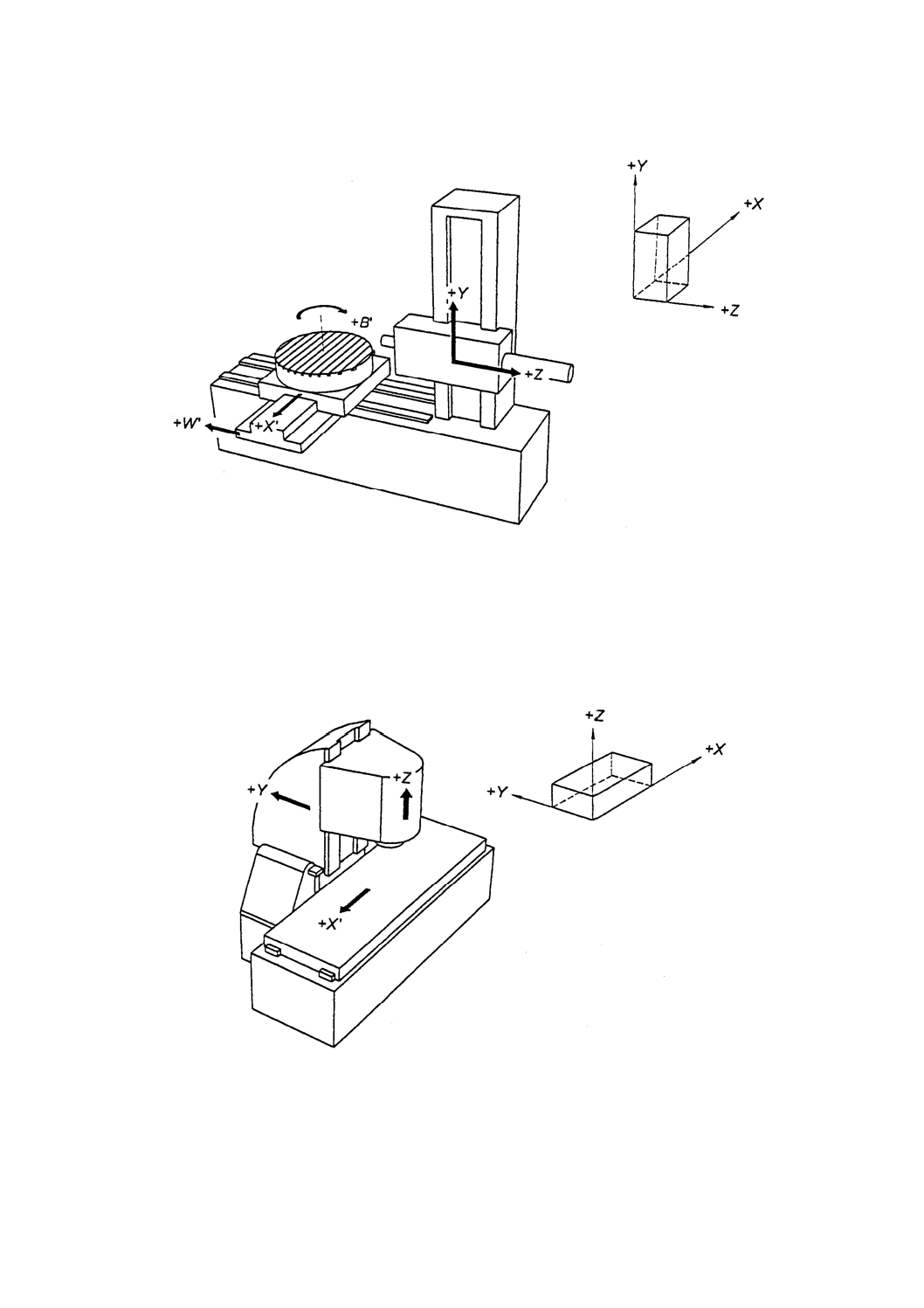
図表示 図表示は,各機械の機械座標系と機械運動とを示す。文字は,軸と機械運動を示し,矢印
は正の運動の方向を示す。
5
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定)機械運動の例
附属書A図 1 右手座標系
+X,+Y 又は +Z
+A,+B
又は +C
6
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A図 2 普通旋盤
+X(又は+X1)
+R(又は+Z3)
+Z(又は+Z1)
+W(又は+Z2)
+U(又は+X2)
附属書A図 3 タレット旋盤
附属書A図 4 立て旋盤
7
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
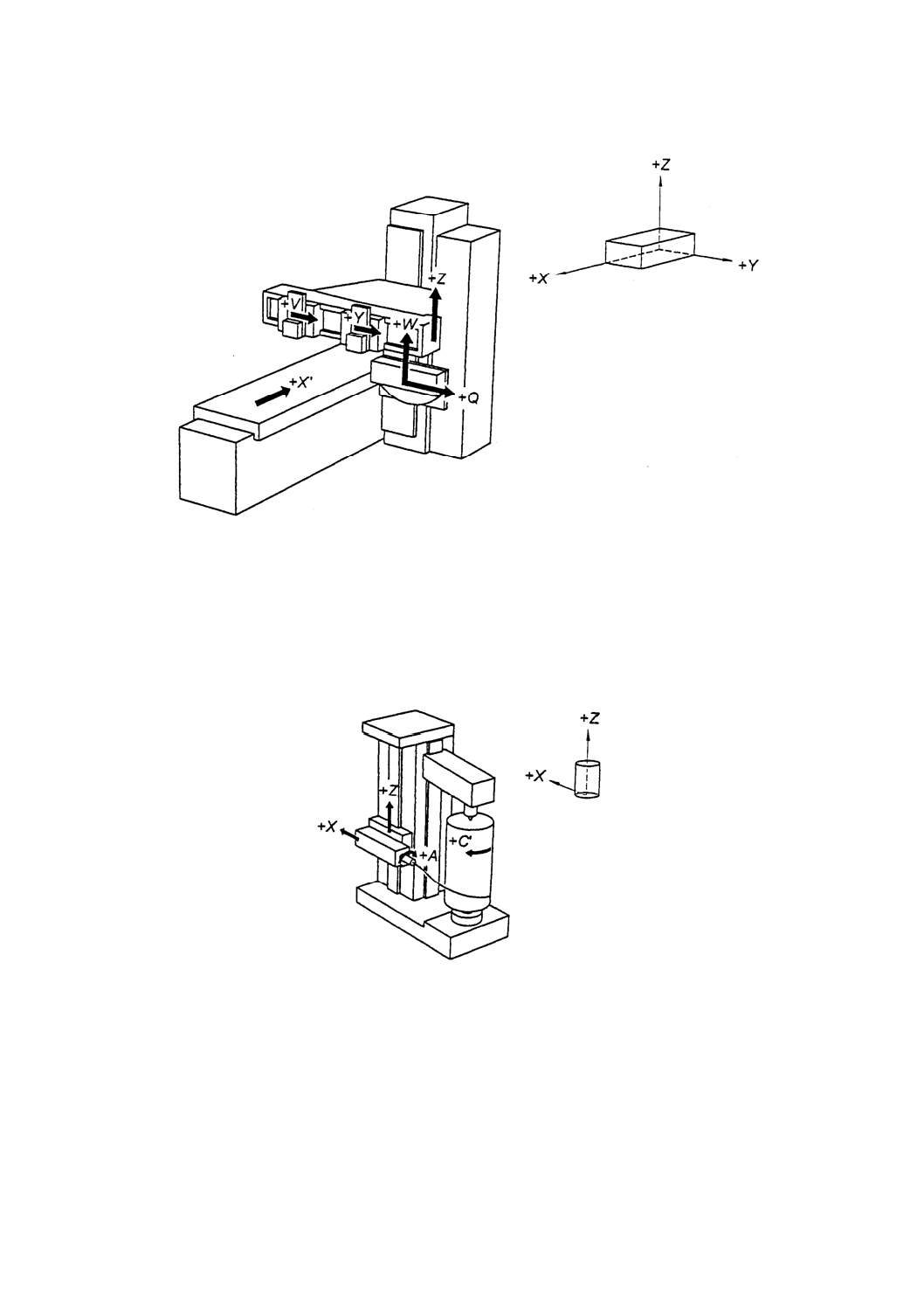
附属書A図 5 横フライス盤(ひざ形)
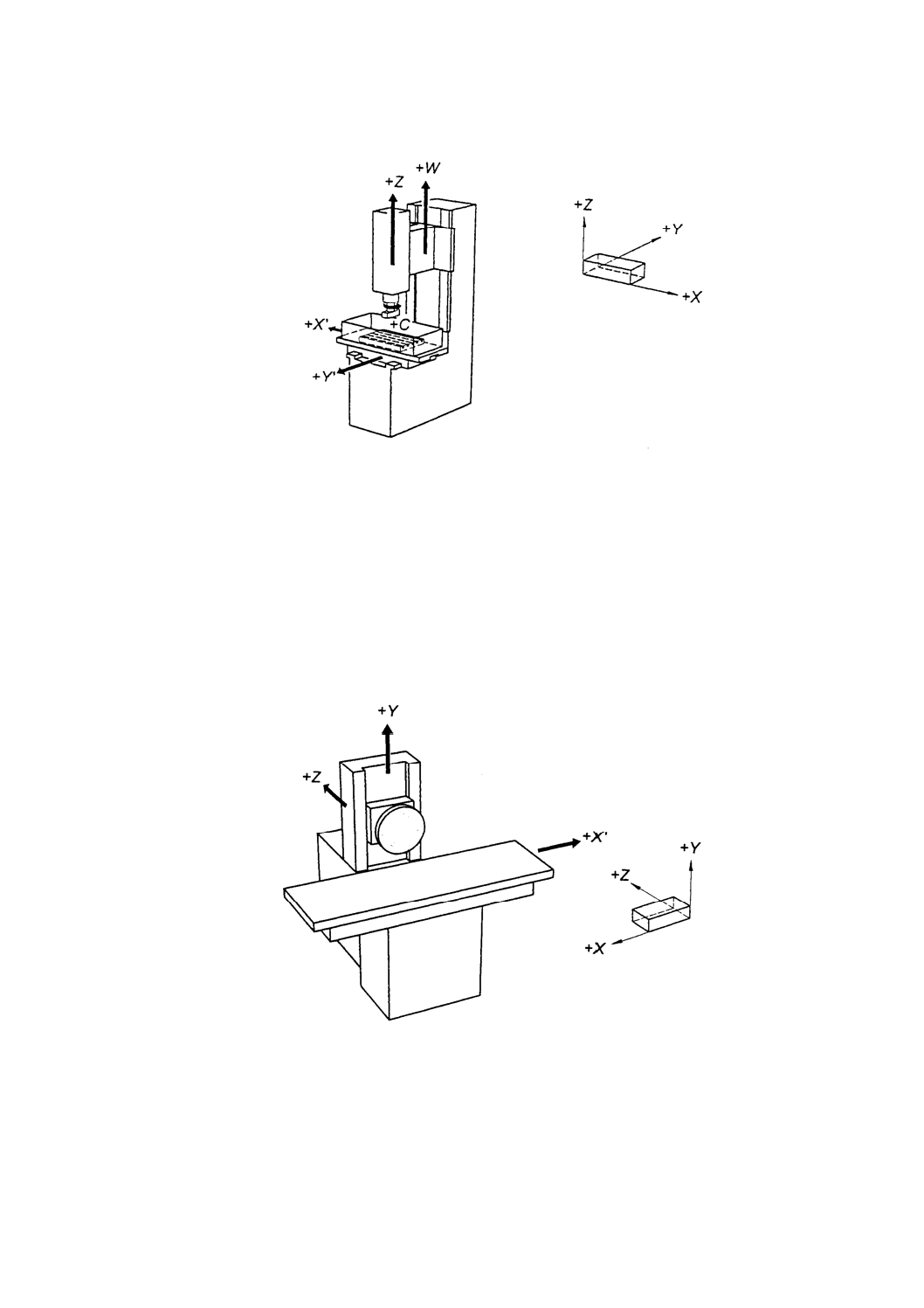
附属書A図 6 立てフライス盤(ひざ形)
8
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
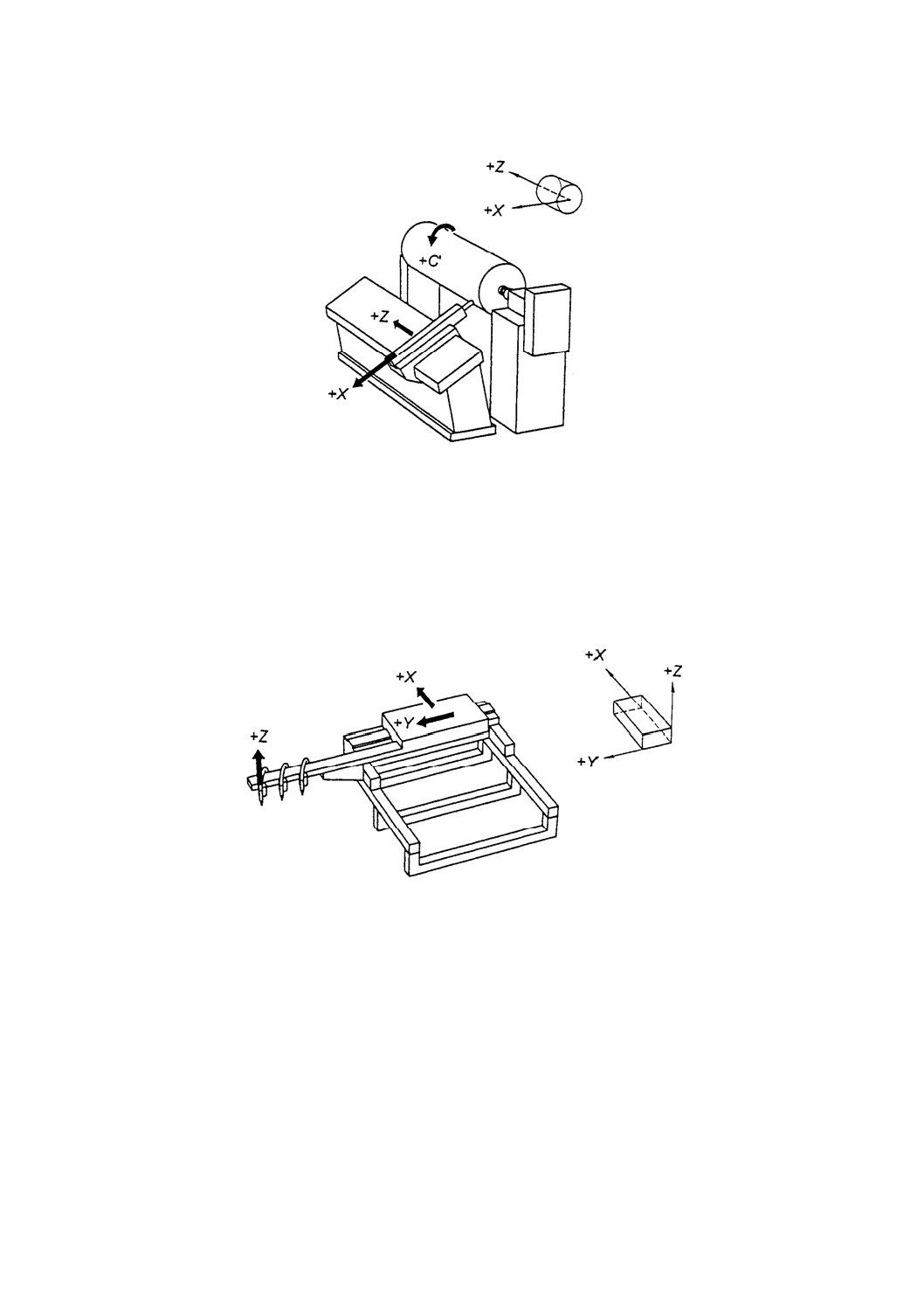
附属書A図 7 横中ぐり盤(テーブル形)
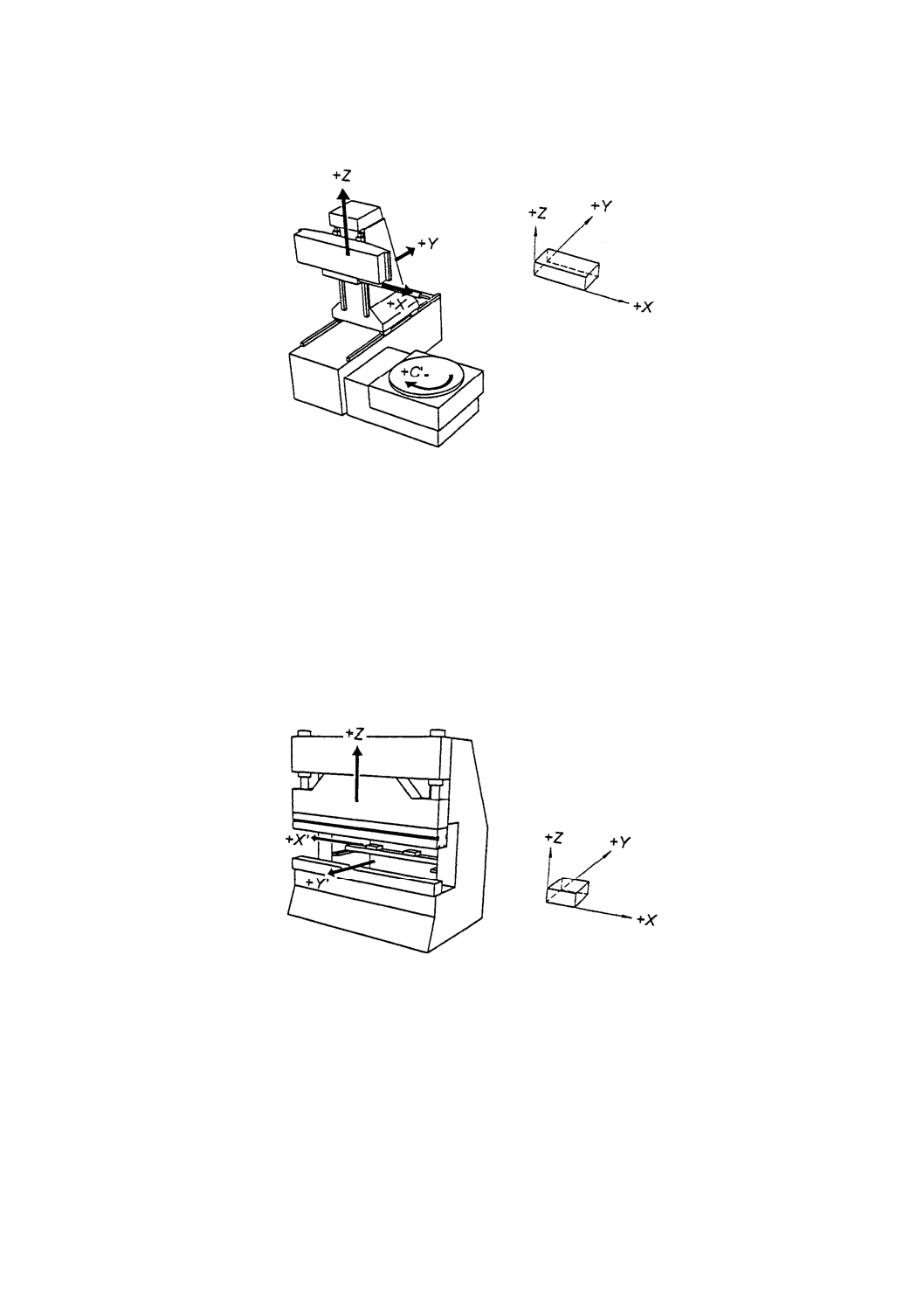
附属書A図 8 立てフライス盤(ベッド形)
9
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
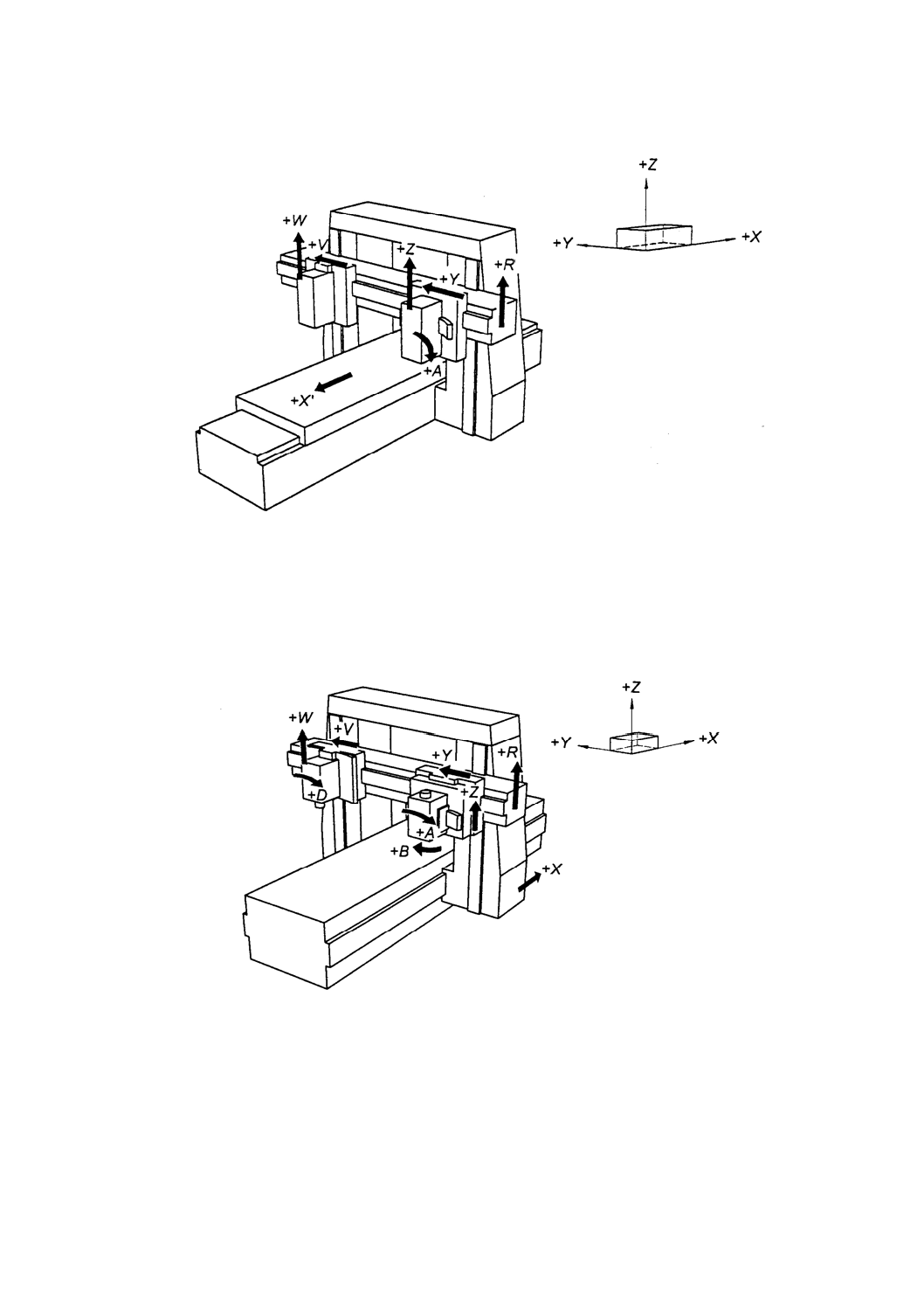
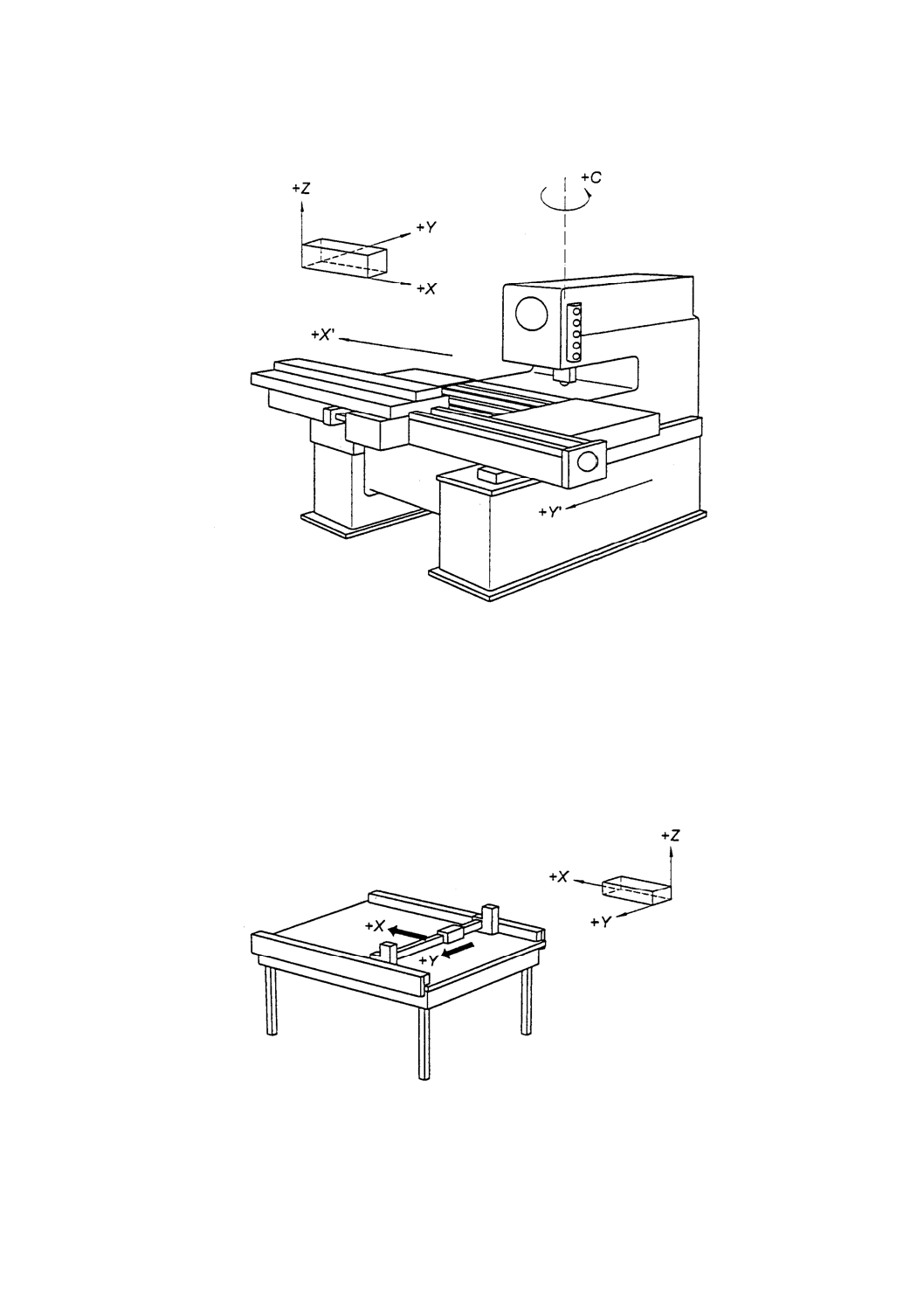
附属書A図 9 プラノミラー(門形)
附属書A図 10 プラノミラー(ガントリ形)
10
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
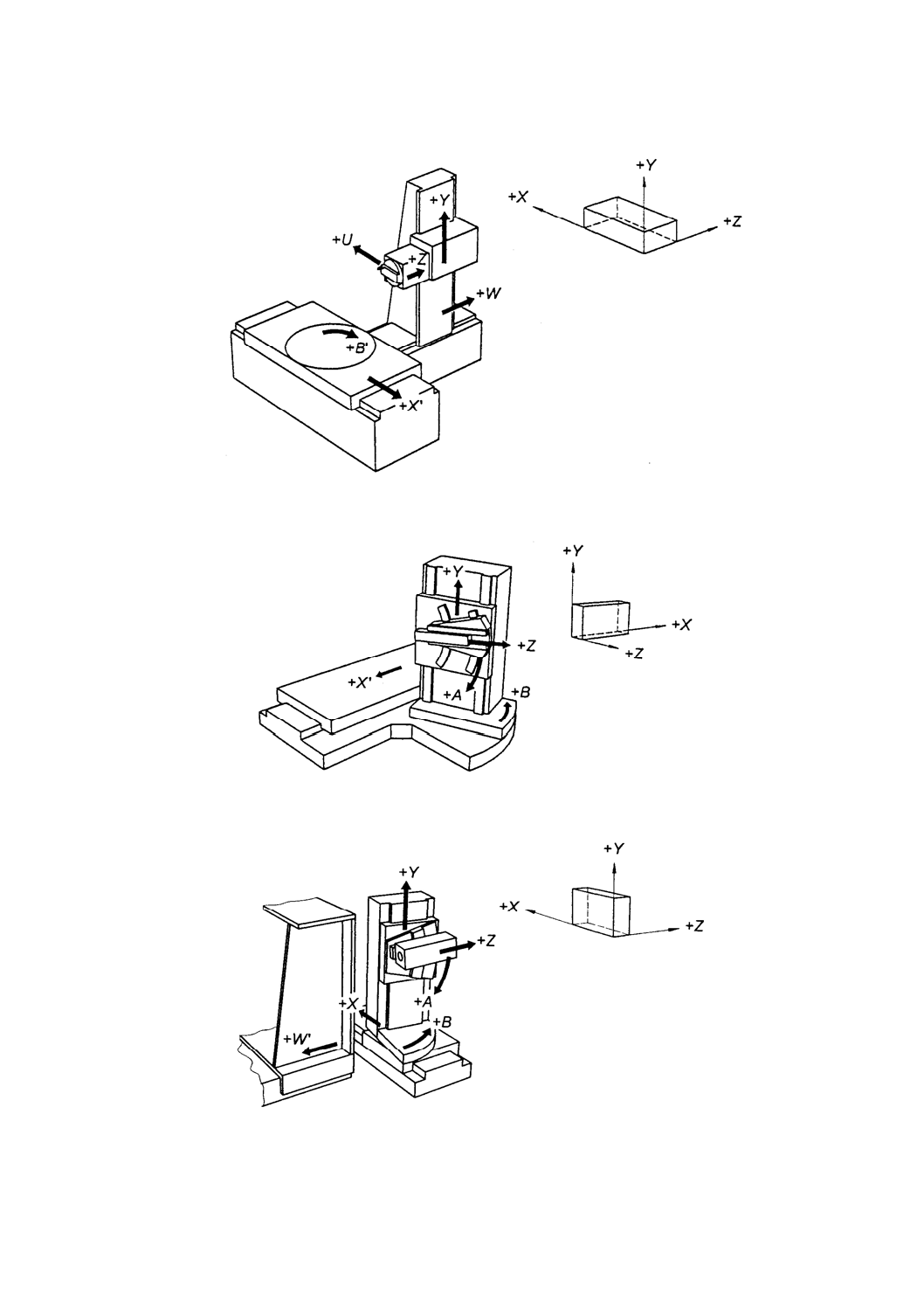
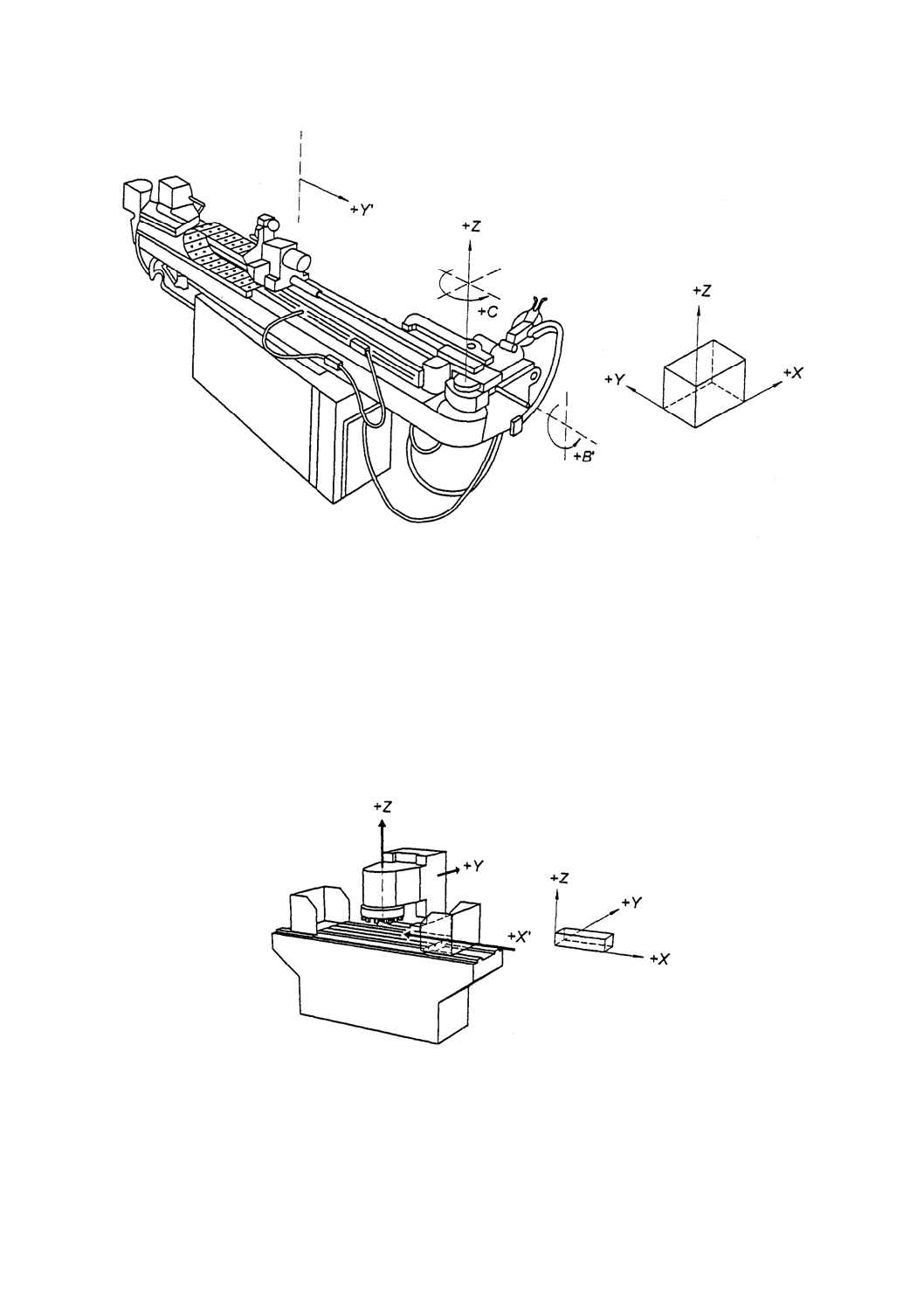
附属書A図 11 横中ぐり盤(床上形)
附属書A図 12 輪郭フライス盤(1)
附属書A図 13 輪郭フライス盤(2)
11
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
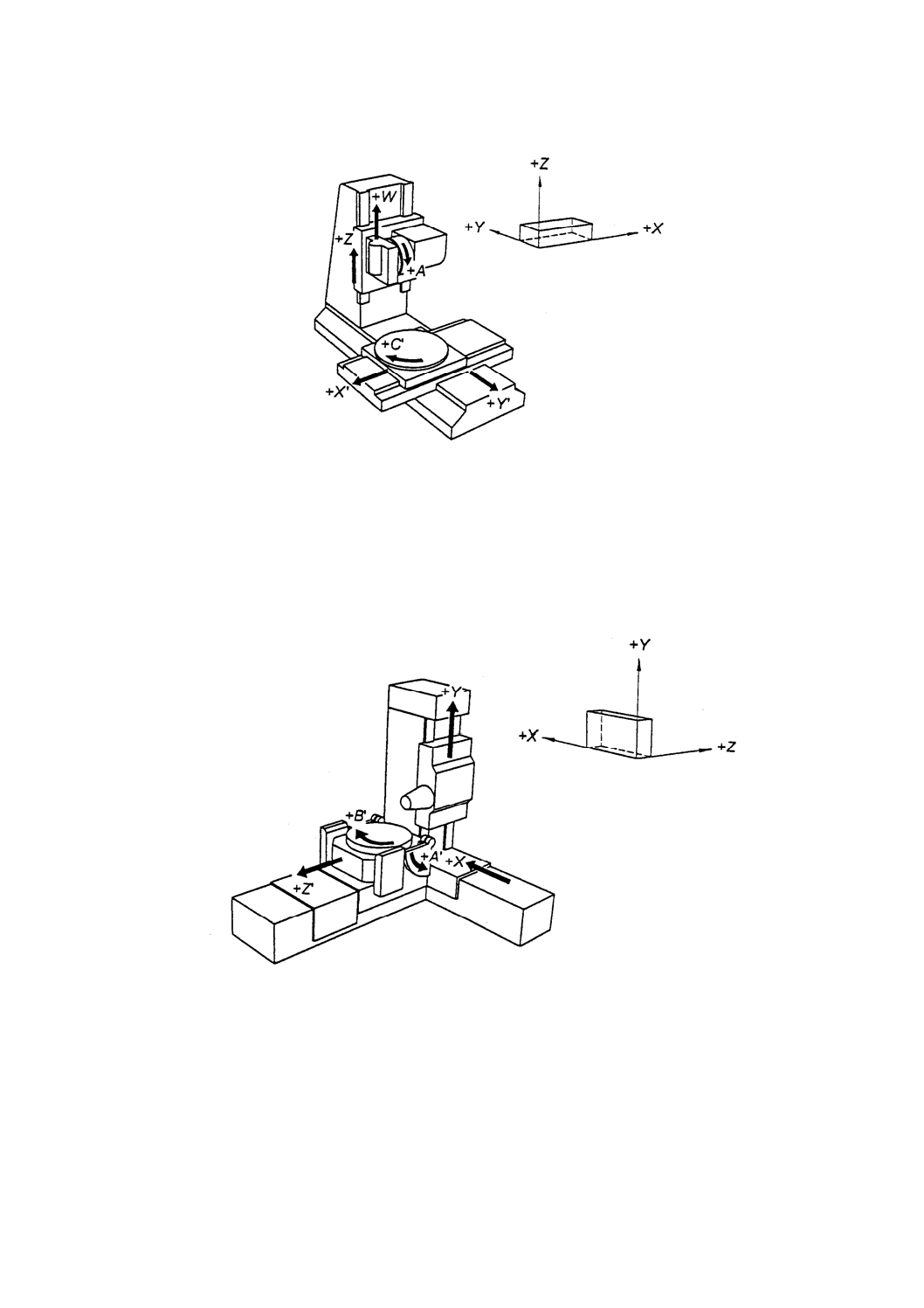
附属書A図 14 輪郭フライス盤(3)
附属書A図 15 輪郭フライス盤(4)
12
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
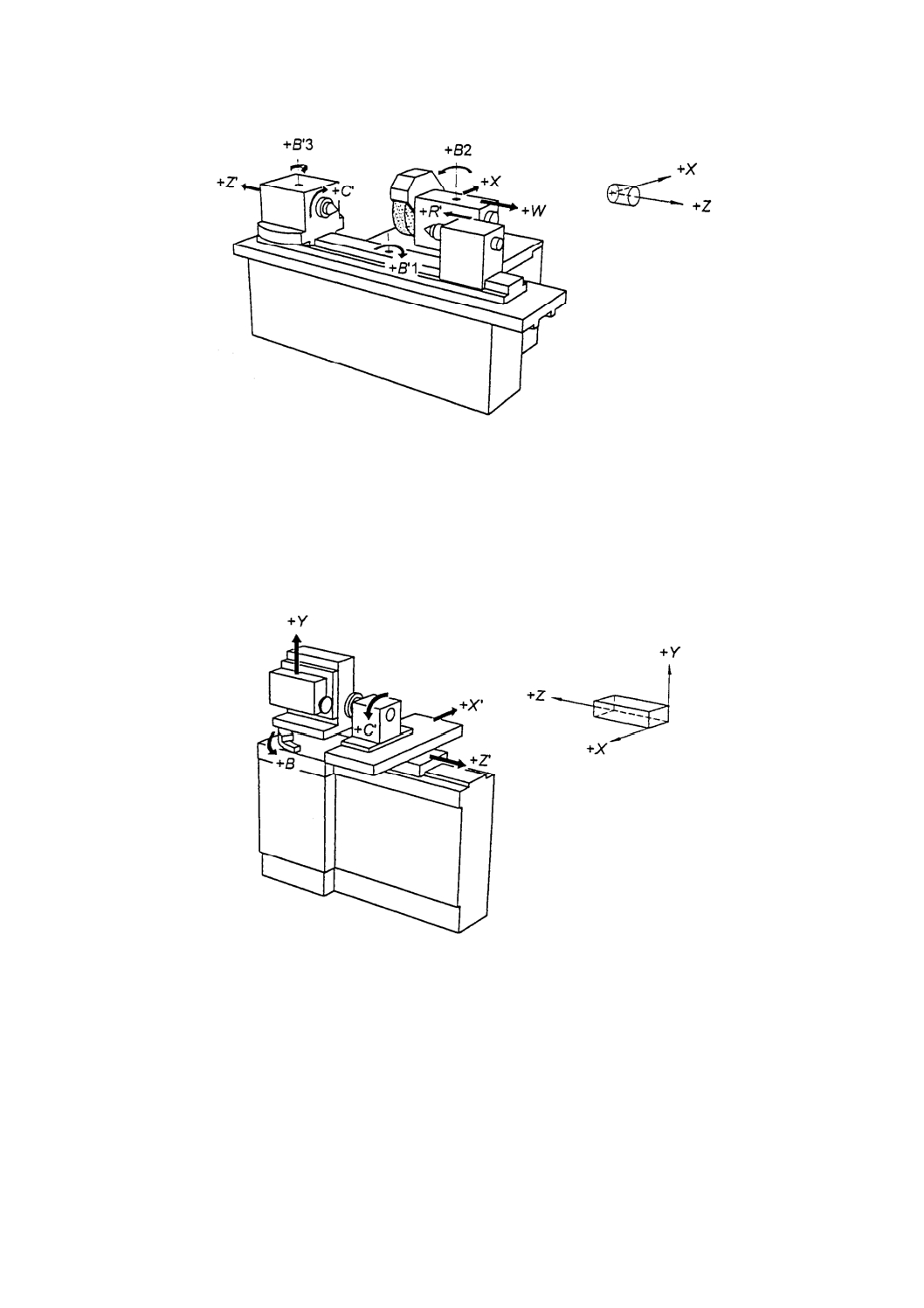
附属書A図 16 円筒研削盤
附属書A図 17 工具研削盤
13
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A図 18 平削り盤
附属書A図 19 立て巻線機
14
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A図 20 横巻線機
附属書A図 21 フレーム切断機
15
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A図 22 パンチプレス
附属書A図 23 製図機械
16
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A図 24 チューブベンダ
附属書A図 25 立て軸平面研削盤
17
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A図 26 形彫り放電加工機
附属書A図 27 横軸平面研削盤
18
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
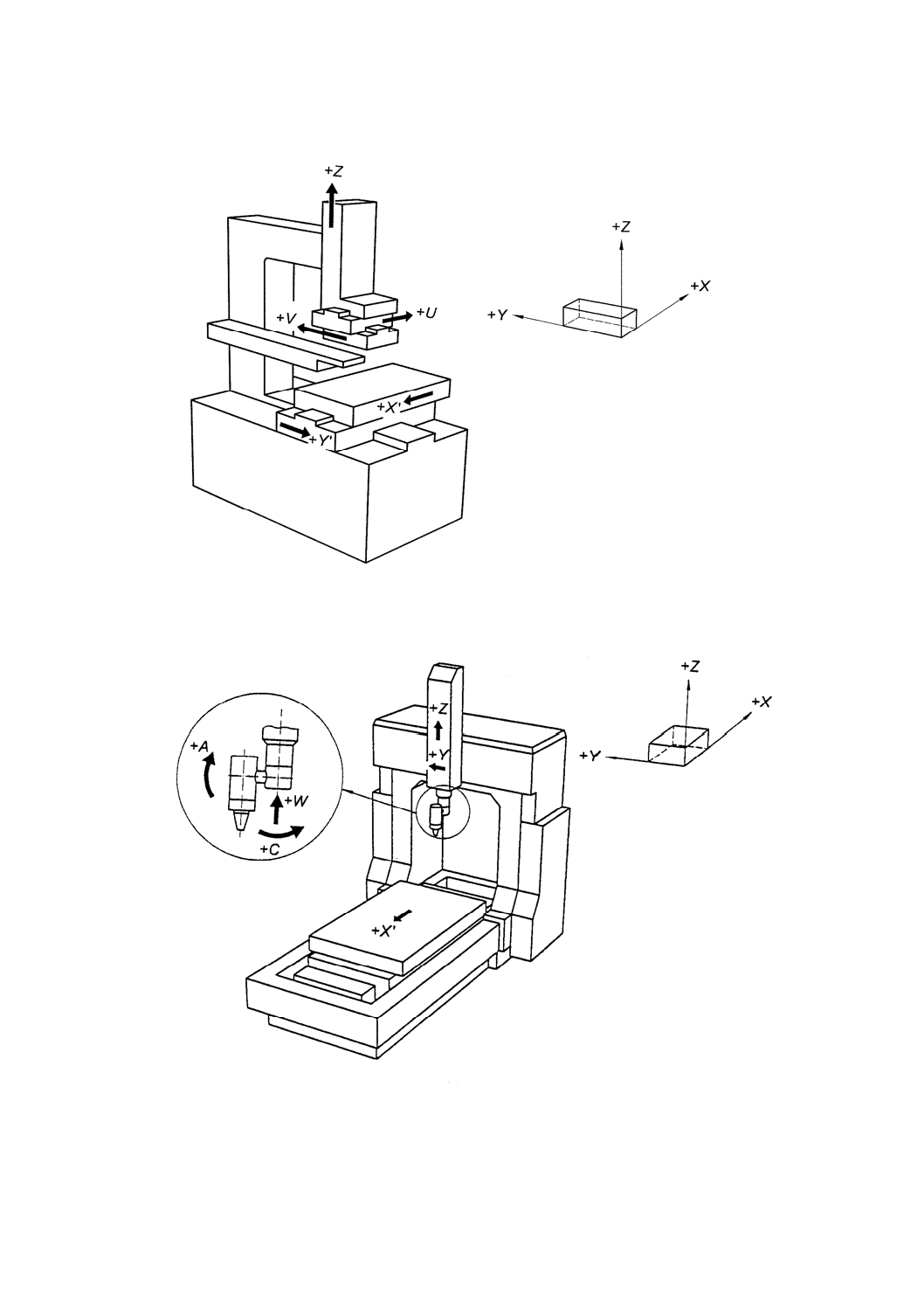
附属書A図 28 座標測定器
附属書A図 29 プレスブレーキ
19
B 6310:2003 (ISO 841:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A図 30 ワイヤ放電加工機
附属書A図 31 レーザ加工機