B6011:2004 (ISO 447:1984)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本工作
機械工業会(JMTBA)/財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正すべき
との申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。これ
によってJIS B 6011:1967は改正され,この規格に置き換えられる。
改正に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 447:1984,Machine tools−Direction
of operation of controlsを基礎として用いた。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
B6011:2004 (ISO 447:1984)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 一般原則 ························································································································ 1
2.1 レバー操作 ··················································································································· 1
2.2 押しボタン操作 ············································································································· 1
2.3 ハンドル車操作 ············································································································· 2
3. 特例 ······························································································································ 2
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 6011:2004
(ISO 447:1984)
工作機械−操作方向
Machine tools−Direction of operation of controls
序文 この規格は,1984年に第2版として発行されたISO 447,Machine tools−Direction of operation of
controlsを翻訳し,技術的内容を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,原国際規格にはない事項である。
1. 適用範囲 この規格は,工作機械の操作要素の操作方向及び,それに対応する操作対象の運動方向に
ついて規定する。ただし,この規格は,機械が正規の状態にある間,同一方向に連続回転する要素(例え
ば,電動機)には適用しない。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 447:1984,Machine tools−Direction of operation of controls (IDT)
2. 一般原則 この規格が特別な理由で,適用できない場合には,機械に表示板で操作方向とそれに対応
する操作対象の運動方向とを明確に表示しなければならない。
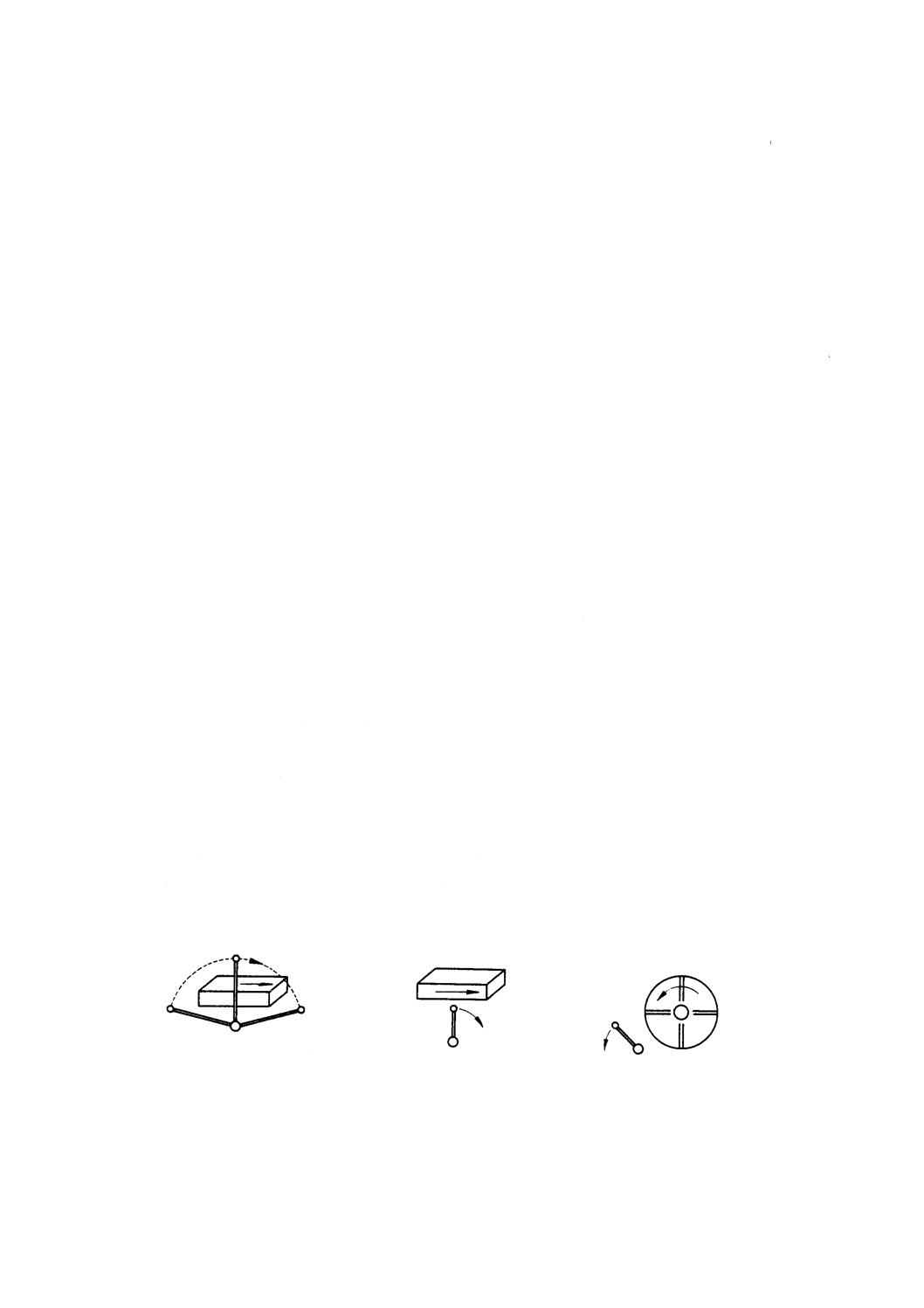
2.1
レバー操作 レバーの動きは,次のとおりとする。
− 直進運動の操作については,中立位置の両側にあるレバーの終端位置を結ぶ線が,操作対象の
運動方向とほぼ平行になるように配置する。
− 回転運動の操作については,レバーの旋回平面が,操作対象の旋回平面に平行になるように配
置する。
いずれの場合においても,レバーの動きは,操作対象の運動方向と同一でなければならない。
この規定は,手動による運動の操作(図1参照)だけでなく,動力による運動の起動操作(図2,図3
参照)にも適用する。
2.2
押しボタン操作
図 1
図 2
図 3
2
B 6011:2004 (ISO 447:1984)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
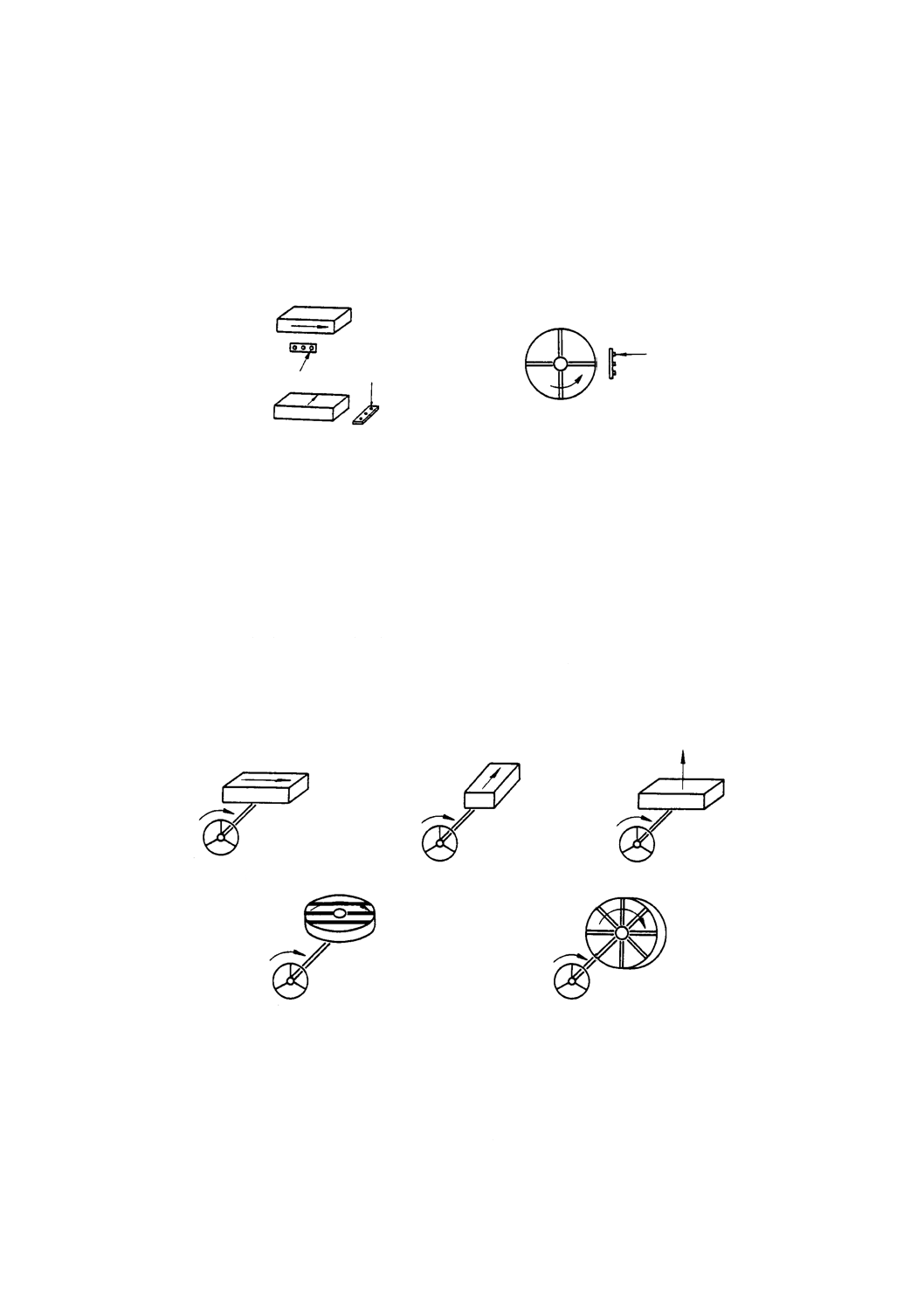
2.2.1
固定操作 押しボタンの配列は,操作対象の運動方向と平行とし,右側のボタン,最も向こう側の
ボタン及び最上段のボタンの操作によって,それぞれ右方,向こう側,及び上方へ運動するようにしなけ
ればならない(操作位置にいる作業者から見た場合)。
この原則は,直進運動を伴う操作対象(図4参照)だけでなく,回転運動を伴う操作対象にも適用する。
ただし,後者の場合には,押しボタンの配列に最も近い操作対象の円周部分の全体的な運動方向を考慮し
たものとする(図5参照)。
2.2.2
移動操作(例えば,ペンダント操作) 2.2.1の原則は適用できるが,180°以上旋回できる移動操
作盤の場合には,運動方向のあいまいさを防ぐため機械の概略を表示する必要がある。
2.3
ハンドル車操作 ハンドル車を時計回りに回転(作業者は,ハンドル車を取付けてある軸端側に向
いているものとする。)させたときの操作対象の運動方向は,次による。
− 直進運動の場合は,右方,向こう側,又は上方(ハンドル車軸が垂直な場合には,作業者位置
にいる作業者から見たとき,又はハンドル車軸が水平な場合には,ハンドル車の軸端側に向い
ているとき)(図6〜図8参照)。
− 回転運動の場合は,時計回りの回転(作業者が,操作対象の付いている主軸端又は軸端に向か
っているとき)(図9及び図10参照)。
− 半径方向の運動の場合は,中心に向かう動き(例えば,チャックの締付け)。
3. 特例
3.1
操作対象の運動の方向(垂直方向の上下,水平方向の左右及び水平方向の前後)が,任意に切換え
られる装置によって変えることができる場合には,最も多く使用する一つの方向に2.の原則を適用する。
図 4
図 5
図 6
図 7
図 8
図 9
図 10
3
B 6011:2004 (ISO 447:1984)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2
同一レバーを主運動と送り運動との両方の運転開始に用いる場合には,送り運動に2.の原則を適用
する。