B 1518:2013
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 量記号···························································································································· 4
5 ラジアル玉軸受 ················································································································ 5
5.1 基本動ラジアル定格荷重 ································································································· 5
5.2 動等価ラジアル荷重 ······································································································· 6
5.3 基本定格寿命 ················································································································ 9
6 スラスト玉軸受 ··············································································································· 10
6.1 基本動アキシアル定格荷重 ····························································································· 10
6.2 動等価アキシアル荷重 ··································································································· 11
6.3 基本定格寿命 ··············································································································· 12
7 ラジアルころ軸受 ············································································································ 13
7.1 基本動ラジアル定格荷重 ································································································ 13
7.2 動等価ラジアル荷重 ······································································································ 14
7.3 基本定格寿命 ··············································································································· 15
8 スラストころ軸受 ············································································································ 15
8.1 基本動アキシアル定格荷重 ····························································································· 15
8.2 動等価アキシアル荷重 ··································································································· 17
8.3 基本定格寿命 ··············································································································· 18
9 修正定格寿命 ·················································································································· 18
9.1 一般 ··························································································································· 18
9.2 信頼度係数 ·················································································································· 19
9.3 システムアプローチに基づく寿命修正係数 ········································································· 19
附属書A(参考)汚染係数の詳細な計算方法 ············································································ 29
附属書B(参考)疲労限荷重の計算 ························································································ 39
附属書C(参考)アンギュラ玉軸受の基本動定格荷重の不連続性·················································· 43
附属書D(参考)参考文献 ···································································································· 47
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 48
B 1518:2013
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
ベアリング工業会(JBIA)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本
工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS B 1518:1992は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 1518:2013
転がり軸受−動定格荷重及び定格寿命
Rolling bearings-Dynamic load ratings and rating life
序文
この規格は,2007年に第2版として発行されたISO 281を基とし,用語及び定義を追加するなど,技術
的内容を変更して作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,JIS B 1511に規定する軸受関連の規格によって設計し,JIS G 4805に規定している鋼材又
はこれと同等の品質が得られる合金鋼を最適な硬さに焼入れし,製造した転がり軸受の基本動定格荷重及
び定格寿命の計算方法について規定する。
この規格は,通常の使用条件下において,信頼度が90 %である基本定格寿命の計算方法に加え,異なっ
た信頼度,潤滑状態,潤滑剤の汚染及び疲労限荷重を考慮した修正定格寿命の計算方法も規定する。
この規格を適用する場合の注意事項を,次に示す。
− この規格は,摩耗,腐食及び電食の影響は考慮していない。
− この規格は,転動体が直接,軸の外周面又はハウジングの内面を転がる構造の場合には,それらの軌
道が軸受の軌道と同等でなければ適用できない。
− この規格を適用する複列ラジアル軸受及び複式スラスト軸受は,対称形の軸受とする。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 281:2007,Rolling bearings−Dynamic load ratings and rating life(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0104 転がり軸受用語
注記 対応国際規格:ISO 5593:1997,Rolling bearings−Vocabulary(MOD)
JIS B 0124 転がり軸受−量記号
注記 対応国際規格:ISO 15241:2001,Rolling bearings−Symbols for quantities(MOD)
JIS B 1511 転がり軸受総則
2
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 1519 転がり軸受−静定格荷重
注記 対応国際規格:ISO 76:2006,Rolling bearings−Static load ratings(IDT)
JIS G 4805 高炭素クロム軸受鋼鋼材
ISO/TR 1281-1:2008,Rolling bearings−Explanatory notes on ISO 281−Part 1: Basic dynamic load rating
and basic rating life
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 0104によるほか,次による。
3.1
寿命(life)
軸受の軌道輪,軌道盤又は転動体のいずれかに材料の疲れの最初の形跡が現れるまでの,一方の軌道輪
又は軌道盤の,他の軌道輪又は軌道盤に対する総回転数。
注記 寿命は,ある一定の回転速度における運転時間数で表してもよい。
3.2
信頼度(reliability)
一群の同じ軸受を同一の条件で運転したとき,特定の寿命に達するか,又はそれを超えることが期待さ
れる軸受の個数の総個数に対する割合。
注記 個々の軸受の信頼度は,その軸受が特定の寿命に達するか又はそれを超える確率である。
3.3
定格寿命(rating life)
基本動ラジアル定格荷重又は基本動アキシアル定格荷重に基づく寿命の予測値。
3.4
基本定格寿命(basic rating life)
通常使用条件において,信頼度が90 %のときの定格寿命。
3.5
修正定格寿命(modified rating life)
90 %及びそれを超える信頼度,疲労限荷重,潤滑剤の汚染,特別な運転条件のいずれか又は組合せに対
して修正した定格寿命。
3.6
基本動ラジアル定格荷重(basic dynamic radial load rating)
軸受が100万回転の基本定格寿命に理論上耐えるような,一定の静止ラジアル荷重。
注記 単列アンギュラコンタクト軸受の場合には,この基本動ラジアル定格荷重は,両軌道輪間に相
対的に純ラジアル変位を生じさせる荷重のラジアル分力を指す。
3.7
基本動アキシアル定格荷重(basic dynamic axial load rating)
軸受が100万回転の基本定格寿命に理論上耐えるような,一定の中心アキシアル荷重。
3.8
動等価ラジアル荷重(dynamic equivalent radial load)
実際の荷重条件の下で達成する軸受の寿命と同じ寿命が得られるような,軸受にかかる一定の静止ラジ
アル荷重。
3
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.9
動等価アキシアル荷重(dynamic equivalent axial load)
実際の荷重条件の下で達成する軸受の寿命と同じ寿命が得られるような,軸受にかかる一定の中心アキ
シアル荷重。
3.10
疲労限荷重(fatigue load limit)
軌道の最大荷重接触部で疲労限応力σuとなる,軸受にかかる荷重。
3.11
ころ直径(roller diameter)
定格荷重の計算に適用する理論上の直径。
注記1 円すいころでは,ころの大端及び小端の理論上のかどの直径の算術平均値である。
注記2 対称な形状のころでは,ころの長さ方向の中央を通るラジアル平面内の直径である。
注記3 非対称凸面ころでは,無負荷時における,ころと,つばのない軌道との接触点での直径の近
似値である。
3.12
ころ有効長さ(effective roller length)
定格荷重の計算に適用する,ころと内輪軌道又はころと外輪軌道との接触長さのうち,短い方の理論上
の最大接触長さ。
注記 通常,ころ長さからころの面取寸法を減じた寸法,又は軌道の幅から研削逃げ寸法を減じた寸
法のうち,小さい方の寸法である。
3.13
呼び接触角(nominal contact angle)
軸受中心軸に垂直な平面(ラジアル平面)と,軌道輪又は軌道盤から転動体に伝わる合力の呼び作用線
とのなす角度。
注記 非対称ころの場合には,呼び接触角はつばがない軌道(通常は,外輪の軌道)との接触で決ま
る。
3.14
玉セットのピッチ径(pitch diameter of ball set)
軸受内の1列の玉の中心を含む円の直径。
3.15
ころセットのピッチ径(pitch diameter of roller set)
軸受内の1列のころの中央で,ころ中心軸と交わる円の直径。
3.16
通常使用条件(conventional operating conditions)
軸及びハウジングに適切に取り付けられ,外的要因から保護され,適切な潤滑下において通常の荷重を
受け,極度の温度条件下にさらされることなく,かつ,極度な低速又は高速回転ではない軸受の使用条件。
3.17
粘度比(viscosity ratio)
実際の運転温度における油の動粘度と,基準動粘度との比。
4
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.18
油膜パラメータ(film parameter)
油膜厚さと,接触する2表面の合成粗さ[二乗平均平方根粗さ(rms)の二乗和の平方根]との比。通常,
軸受寿命への影響評価に使用される。
3.19
圧力粘度係数(pressure-viscosity coefficient)
転動体接触部における,油膜圧力が粘度に及ぼす影響を示す係数。
3.20
粘度指数(viscosity index)
温度が潤滑油粘度に及ぼす影響を示す指数。
3.21
疲労限応力(fatigue stress limit)
軸受材料に疲れが生じない最大応力。
3.22
基準動粘度(reference kinematic viscosity)
運転状態において,適正な潤滑に必要な動粘度。
3.23
動ラジアル荷重係数(dynamic radial load factor)
動等価荷重を計算するとき,ラジアル荷重に乗じる係数。
3.24
動アキシアル荷重係数(dynamic axial load factor)
動等価荷重を計算するとき,アキシアル荷重に乗じる係数。
4
量記号
この規格で用いる主な量記号は,JIS B 0124によるほか,次による。
aISO
:寿命計算のシステムアプローチ(基本定格寿命に種々の条件を加味する方式)に基づいた寿命修
正係数
a1
:信頼度係数
bm
:通常使用する材料及び製造品質による定格係数(軸受の形式で変わる。)
Ca
:基本動アキシアル定格荷重(N)
Cr
:基本動ラジアル定格荷重(N)
Cu
:疲労限荷重(N)
C0a
:基本静アキシアル定格荷重1)(N)
C0r
:基本静ラジアル定格荷重1)(N)
D
:軸受外径(mm)
Dpw
:玉又はころセットのピッチ径(mm)
Dw
:玉の呼び直径(mm)
Dwe
:ころ直径(mm)
d
:軸受内径(mm)
e
:係数X及び係数Yの選定のためのFa/Frの限界値
5
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
eC
:汚染係数
Fa
:アキシアル荷重(実際の軸受荷重のアキシアル分力)(N)
Fr
:ラジアル荷重(実際の軸受荷重のラジアル分力)(N)
fc
:基本動定格荷重の計算に用いる係数
f0
:基本静定格荷重の計算に用いる係数1)
i
:転動体の列数
Lnm
:破損確率n %の修正定格寿命(×106回転)
Lwe
:ころの有効長さ(mm)
L10
:基本定格寿命(×106回転)
n
:回転速度(min−1)
P
:動等価荷重(N)
Pa
:動等価アキシアル荷重(N)
Pr
:動等価ラジアル荷重(N)
S
:信頼度(残存確率)(%)
X
:動ラジアル荷重係数
Y
:動アキシアル荷重係数
Z
:単列軸受の転動体の個数,又は各列が同数の転動体をもつ多列軸受の1列当たりの転動体の個数
α
:呼び接触角(°)
κ
:粘度比(=ν/ν1)
Λ
:油膜パラメータ
ν
:運転時の動粘度(mm2/s)
ν1
:基準動粘度(mm2/s)
σ
:(実際の)応力(N/mm2)
σu
:軌道材料の疲労限応力(N/mm2)
注1) C0a,C0r及びf0の量及び定義については,JIS B 1519を参照。
5
ラジアル玉軸受
5.1
基本動ラジアル定格荷重
5.1.1
1個のラジアル玉軸受の基本動ラジアル定格荷重
ラジアル玉軸受の基本動ラジアル定格荷重は,次の式(1)又は式(2)によって求める。
Dw≦25.4 mmの場合,
(
)
8.1
w
3/2
7.0
c
m
r
cos
D
Z
i
f
b
C
α
=
·························································· (1)
Dw>25.4 mmの場合,
(
)
1.4
w
3
2
0.7
c
m
r
cos
647
.3
D
Z
i
f
b
C
α
=
···················································· (2)
ここで,係数bm及び係数fcの値は,表1及び表2による。
この式は,深溝玉軸受及びアンギュラ玉軸受では,内輪の軌道溝半径(以下,溝半径という。)が0.52 Dw
の値を超えず,かつ,外輪の溝半径が0.53 Dwの値を超えない場合に適用し,自動調心玉軸受では,内輪
の溝半径が0.53 Dwの値を超えない場合に適用する。
6
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
軸受の基本動ラジアル定格荷重は,小さな溝半径を採用することによって必ずしも増加するものではな
いが,上記に示した値よりも大きな溝半径を用いると減少する。この場合には,これに対応する小さな係
数fcの値を用いなければならない。
この減少した係数fcの値は,ISO/TR 1281-1の式(15)による。
表1−ラジアル玉軸受の係数bmの値
軸受の形式
bm
深溝玉軸受,アンギュラ玉軸受(入れ溝付き軸受を除く),
インサート軸受,自動調心玉軸受,マグネト玉軸受
1.3
入れ溝付き軸受
1.1
5.1.2
組合せ軸受の基本動ラジアル定格荷重
5.1.2.1
2個の単列深溝玉軸受をユニットとして使用する場合
2個の同じ内部仕様2) の単列深溝玉軸受が同一軸に並べて取り付けられ,ユニット(一対取付け)とし
て機能する場合には,その一組の軸受の基本動ラジアル定格荷重は,1個の複列深溝玉軸受として計算す
る。
注2) ここでいう“内部仕様”とは,定格荷重の計算に必要となる玉の呼び直径,玉の個数,玉セッ
トのピッチ径,軌道溝半径,呼び接触角などの組合せである。
5.1.2.2
単列アンギュラ玉軸受の背面配列及び正面配列の場合
2個の同じ内部仕様2) の単列アンギュラ玉軸受が同一軸に並べて取り付けられ,背面配列又は正面配列
のユニット(一対取付け)として機能する場合には,その一組の軸受の基本動ラジアル定格荷重は,1個
の複列アンギュラ玉軸受として計算する。
5.1.2.3
並列配列の場合
2個以上の同じ内部仕様2) の単列深溝玉軸受又は単列アンギュラ玉軸受が同一軸に並べて取り付けられ,
並列配列のユニット(一対取付け又は多数取付け)として機能する場合には,基本動ラジアル定格荷重は,
1個の単列軸受の基本動ラジアル定格荷重に軸受の個数の0.7乗を乗じて求める。これらの軸受は,軸受間
での荷重分布が等しくなるように適切に製造され,取り付けられなければならない。
5.1.2.4
個々に交換可能な軸受の場合
個々に交換できる特別な単列軸受を組み合わせた軸受配列の場合には,5.1.2.3は適用しない。
5.2
動等価ラジアル荷重
5.2.1
1個のラジアル玉軸受の動等価ラジアル荷重
一定のラジアル荷重及びアキシアル荷重を受ける,深溝玉軸受及びアンギュラ玉軸受の動等価ラジアル
荷重は,次の式(3)によって求める。
a
r
r
YF
XF
P
+
=
············································································ (3)
ここで,係数X及び係数Yの値は,表3による。これらの係数は,5.1.1に示す溝半径の軸受に適用する。
その他の溝半径をもつ軸受の場合には,係数X及び係数Yは,ISO/TR 1281-1の5.2による。
7
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
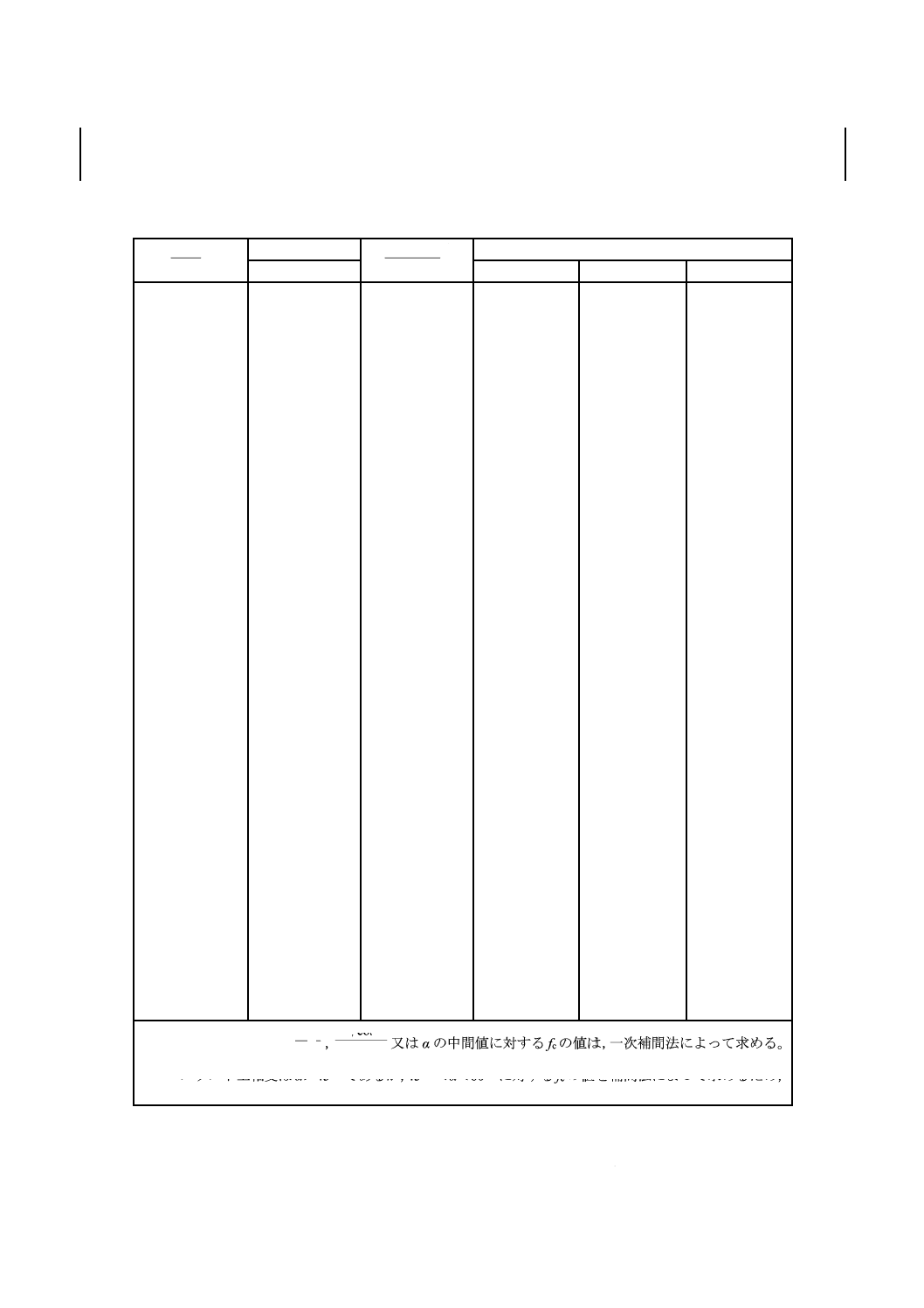
表2−ラジアル玉軸受の係数fcの値
pw
wcos
D
D
α a)
fc
単列深溝玉軸受,
単列・複列アンギ
ュラ玉軸受
複列深溝玉軸受
単列・複列自動調
心玉軸受
マグネト玉軸受
0.01
29.1
27.5
9.9
9.4
0.02
35.8
33.9
12.4
11.7
0.03
40.3
38.2
14.3
13.4
0.04
43.8
41.5
15.9
14.9
0.05
46.7
44.2
17.3
16.2
0.06
49.1
46.5
18.6
17.4
0.07
51.1
48.4
19.9
18.5
0.08
52.8
50
21.1
19.5
0.09
54.3
51.4
22.3
20.6
0.1
55.5
52.6
23.4
21.5
0.11
56.6
53.6
24.5
22.5
0.12
57.5
54.5
25.6
23.4
0.13
58.2
55.2
26.6
24.4
0.14
58.8
55.7
27.7
25.3
0.15
59.3
56.1
28.7
26.2
0.16
59.6
56.5
29.7
27.1
0.17
59.8
56.7
30.7
27.9
0.18
59.9
56.8
31.7
28.8
0.19
60
56.8
32.6
29.7
0.2
59.9
56.8
33.5
30.5
0.21
59.8
56.6
34.4
31.3
0.22
59.6
56.5
35.2
32.1
0.23
59.3
56.2
36.1
32.9
0.24
59
55.9
36.8
33.7
0.25
58.6
55.5
37.5
34.5
0.26
58.2
55.1
38.2
35.2
0.27
57.7
54.6
38.8
35.9
0.28
57.1
54.1
39.4
36.6
0.29
56.6
53.6
39.9
37.2
0.3
56
53
40.3
37.8
0.31
55.3
52.4
40.6
38.4
0.32
54.6
51.8
40.9
38.9
0.33
53.9
51.1
41.1
39.4
0.34
53.2
50.4
41.2
39.8
0.35
52.4
49.7
41.3
40.1
0.36
51.7
48.9
41.3
40.4
0.37
50.9
48.2
41.2
40.7
0.38
50
47.4
41
40.8
0.39
49.2
46.6
40.7
40.9
0.4
48.4
45.8
40.4
40.9
注a) 表に示していない
pw
wcos
D
D
αの中間値に対するfcの値は,一次補間法によって求める。
8
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
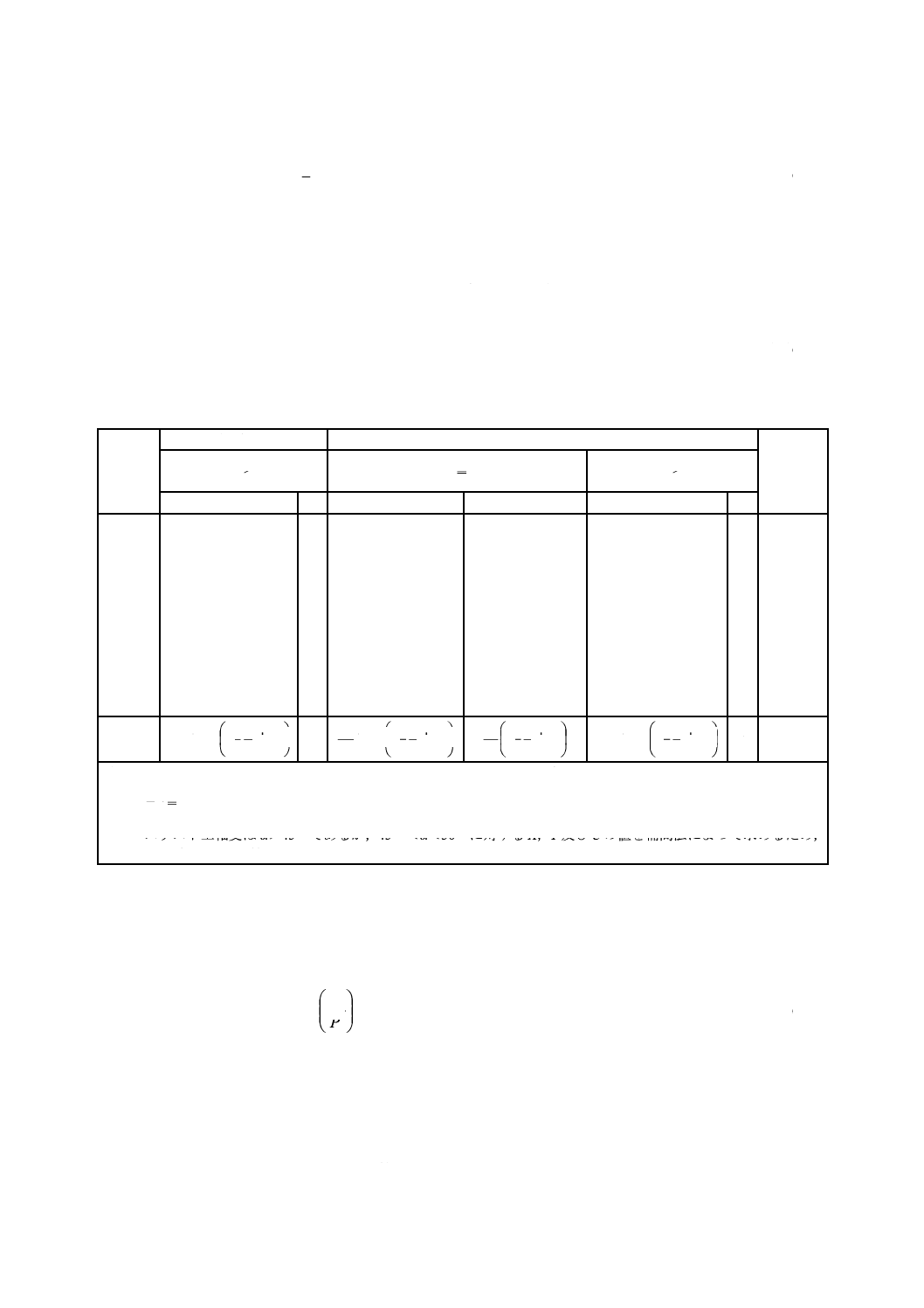
表3−ラジアル玉軸受の係数X及び係数Yの値
軸受の形式
アキシアル
荷重比a), b)
単列軸受
複列軸受
e
e
F
F≦
r
a
e
F
F>
r
a
e
F
F≦
r
a
e
F
F>
r
a
X
Y
X
Y
X
Y
X
Y
深溝玉軸受
0r
a
0
C
F
f
c)
2
w
a
iZD
F
1
0
0.56
1
0
0.56
0.172
0.172
2.3
2.3
0.19
0.345
0.345
1.99
1.99
0.22
0.689
0.689
1.71
1.71
0.26
1.03
1.03
1.55
1.55
0.28
1.38
1.38
1.45
1.45
0.3
2.07
2.07
1.31
1.31
0.34
3.45
3.45
1.15
1.15
0.38
5.17
5.17
1.04
1.04
0.42
6.89
6.89
1
1
0.44
0r
a
0
C
iF
f
c)
2
w
a
ZD
F
1
0
0.56
1
0.78
単列
軸受
複列
軸受
ア
ン
ギ
ュ
ラ
玉
軸
受
α=5°
0.173
0.172
2.3
2.78
3.74
0.19
0.23
0.346
0.345
1.99
2.4
3.23
0.22
0.26
0.692
0.689
1.71
2.07
2.78
0.26
0.3
1.04
1.03
1.55
1.87
2.52
0.28
0.34
1.38
1.38
1.45
1.75
2.36
0.3
0.36
2.08
2.07
1.31
1.58
2.13
0.34
0.4
3.46
3.45
1.15
1.39
1.87
0.38
0.45
5.19
5.17
1.04
1.26
1.69
0.42
0.5
6.92
6.89
1
1.21
1.63
0.44
0.52
α=10°
0.175
0.172
1
0
0.46
1.88
1
2.18
0.75
3.06
0.29
0.35
0.345
1.71
1.98
2.78
0.32
0.7
0.689
1.52
1.76
2.47
0.36
1.05
1.03
1.41
1.63
2.29
0.38
1.4
1.38
1.34
1.55
2.18
0.4
2.1
2.07
1.23
1.42
2
0.44
3.5
3.45
1.1
1.27
1.79
0.49
5.25
5.17
1.01
1.17
1.64
0.54
7
6.89
1
1.16
1.63
0.54
α=15°
0.178
0.172
1
0
0.44
1.47
1
1.65
0.72
2.39
0.38
0.357
0.345
1.4
1.57
2.28
0.4
0.714
0.689
1.3
1.46
2.11
0.43
1.07
1.03
1.23
1.38
2
0.46
1.43
1.38
1.19
1.34
1.93
0.47
2.14
2.07
1.12
1.26
1.82
0.5
3.57
3.45
1.02
1.14
1.66
0.55
5.35
5.17
1
1.12
1.63
0.56
7.14
6.89
1
1.12
1.63
0.56
α=20°
−
−
1
0
0.43
1
1
1.09
0.7
1.63
0.57
α=25°
−
−
0.41
0.87
0.92
0.67
1.41
0.68
α=30°
−
−
0.39
0.76
0.78
0.63
1.24
0.8
α=35°
−
−
0.37
0.66
0.66
0.6
1.07
0.95
α=40°
−
−
0.35
0.57
0.55
0.57
0.93
1.14
α=45°
−
−
0.33
0.5
0.47
0.54
0.81
1.34
自動調心玉軸受
1
0
0.4
0.4 cot α
1
0.42 cot α 0.65
0.65 cot α
1.5 tan α
マグネト玉軸受
1
0
0.5
2.5
−
−
−
−
0.2
9
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3−ラジアル玉軸受の係数X及び係数Yの値(続き)
注a) アキシアル荷重比の最大許容値は,軸受の設計(ラジアル内部すきま及び軌道溝の深さ)によって異なる。
アキシアル荷重比は,いずれかの式を基にして計算する。
b) 表に示していない
0r
a
0
C
F
f
,
0r
a
0
C
iF
f
,
2
w
a
iZD
F
,
2
w
a
ZD
F
又はαの中間値に対するX,Y及びeの値は,一次補間法
によって求める。
c) f0の値については,JIS B 1519を参照。
5.2.2
組合せ軸受の動等価ラジアル荷重
5.2.2.1
単列アンギュラ玉軸受の背面配列及び正面配列の場合
2個の同じ内部仕様2) の単列アンギュラ玉軸受が同一軸に並べて取り付けられ,背面配列又は正面配列
のユニット(一対取付け)として機能する場合には,その一組の軸受の動等価ラジアル荷重は,1個の複
列アンギュラ玉軸受として計算する。
注記 2個の同じ内部仕様2) の単列深溝玉軸受を背面配列又は正面配列で用いる場合には,使用者は
動等価ラジアル荷重の計算方法を軸受製造業者に相談することが望ましい。
5.2.2.2
並列配列の場合
2個以上の同じ内部仕様2) の単列深溝玉軸受又は単列アンギュラ玉軸受が同一軸に並べて取り付けられ,
並列配列のユニット(一対取付け又は多数取付け)として機能する場合には,その2個以上の軸受の動等
価ラジアル荷重は,単列軸受に対する係数X及び係数Yの値を用いて計算する。
表3のアキシアル荷重比
0r
a
0
C
F
f
,
0r
a
0
C
iF
f
又は
2
w
a
iZD
F
,
2
w
a
ZD
F
の値は,i=1とし,1個の軸受に対するアキ
シアル荷重Fa及び基本静ラジアル定格荷重C0rの値を用いて求める。ただし,動等価ラジアル荷重の計算
式に用いるラジアル荷重Fr及びアキシアル荷重Faの値は,その配列にかかる全荷重とする。
5.3
基本定格寿命
5.3.1
寿命計算式
ラジアル玉軸受の基本定格寿命は,次の式(4)によって求める。
3
r
r
10
=P
C
L
·············································································· (4)
基本動ラジアル定格荷重Cr及び動等価ラジアル荷重Prの値は,5.1及び5.2による。
この寿命計算式は,2個以上の単列軸受を組み合わせたユニット(一対取付け又は多数取付け)にも適
用する。この場合には,基本動ラジアル定格荷重Crは,5.1.2によって計算する。動等価ラジアル荷重Pr
は,5.2.2による係数X及び係数Yの値を用いて,ユニットにかかる全荷重に対して計算する。
5.3.2
寿命計算式の荷重制限
寿命計算式は,広範囲の軸受荷重に対して適用できる。ただし,非常に大きな荷重が作用するときは,
玉と軌道との接触面に有害な塑性変形を生じる場合がある。したがって,使用者は,動等価ラジアル荷重
PrがC0r又は0.5 Crのいずれかの値を超える場合には,寿命計算式が適用できるか否かを確認するため,軸
受製造業者に相談することが望ましい。
なお,非常に荷重が小さい場合には,異なる故障モードを生じる可能性がある。このような故障モード
での寿命については,この規格では対象としない。
10
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
スラスト玉軸受
6.1
基本動アキシアル定格荷重
6.1.1
単列スラスト玉軸受の基本動アキシアル定格荷重
単式スラスト玉軸受又は複式スラスト玉軸受の基本動アキシアル定格荷重は,次の式(5)〜式(8)によって
求める。
Dw≦25.4 mmで,α=90°の場合,
1.8
w
3
2
c
m
a
D
Z
f
b
C=
······································································ (5)
Dw≦25.4 mmで,α≠90°の場合,
(
)
1.8
w
3
2
0.7
c
m
a
tan
cos
D
Z
f
b
C
α
α
=
····················································· (6)
Dw>25.4 mmで,α=90°の場合,
1.4
w
3
2
c
m
a
647
.3
D
Z
f
b
C=
································································ (7)
Dw>25.4 mmで,α≠90°の場合,
(
)
1.4
w
3
2
0.7
c
m
a
tan
cos
647
.3
D
Z
f
b
C
α
α
=
·············································· (8)
ここで,Zは一方向に荷重を受ける玉の個数(単式軸受では玉の個数,複式軸受では片側の玉の個数)
であり,bm=1.3である。また,係数fcの値は,表4によって,軌道盤の溝半径が0.54 Dwの値を超えない
場合に適用する。
軸受の基本動アキシアル定格荷重は,小さな溝半径を採用することによって必ずしも増加するものでは
ないが,上記に示した値よりも大きな溝半径を用いると減少する。この場合には,これに対応する小さな
係数fcの値を用いなければならない。
この減少した係数fcの値は,α≠90°の軸受の場合には,ISO/TR 1281-1の式(20),α=90°の軸受の場合
には,ISO/TR 1281-1の式(25)による。
6.1.2
複列又は多列スラスト玉軸受の基本動アキシアル定格荷重
同一寸法の玉を用い,同一方向の荷重を受ける複列又は多列スラスト玉軸受の基本動アキシアル定格荷
重は,次の式(9)によって求める。
(
)
3/10
10/3
a
10/3
2
a
2
10/3
1
a
1
2
1
a
−
+
+
+
×
+
+
+
=
n
n
n
C
Z
C
Z
C
Z
Z
Z
Z
C
Λ
Λ
············· (9)
Ca1,Ca2,…,Canは,玉の個数がZ1,Z2,…,Znの単列スラスト玉軸受の基本定格荷重であり,6.1.1に
規定した単列軸受の式によって求める。
6.1.3
組合せ軸受の基本動アキシアル定格荷重
6.1.3.1
並列配列の場合
2個以上の同じ内部仕様3) の単式スラスト玉軸受が同一軸に並べて取り付けられ,並列配列のユニット
(一対取付け又は多数取付け)として機能する場合には,基本動アキシアル定格荷重は,1個の軸受の基
本動アキシアル定格荷重に軸受の個数の0.7乗を乗じて求める。これらの軸受は,軸受間での荷重分布が
等しくなるように適切に製造され,取り付けられなければならない。
注3) ここでいう“内部仕様”とは,定格荷重の計算に必要となる玉の呼び直径,玉の個数,玉セッ
トのピッチ径,軌道溝半径,呼び接触角などの組合せである。
11
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.1.3.2
個々に交換可能な軸受の場合
個々に交換できる単式軸受を組み合わせた軸受配列の場合には,6.1.3.1は適用しない。
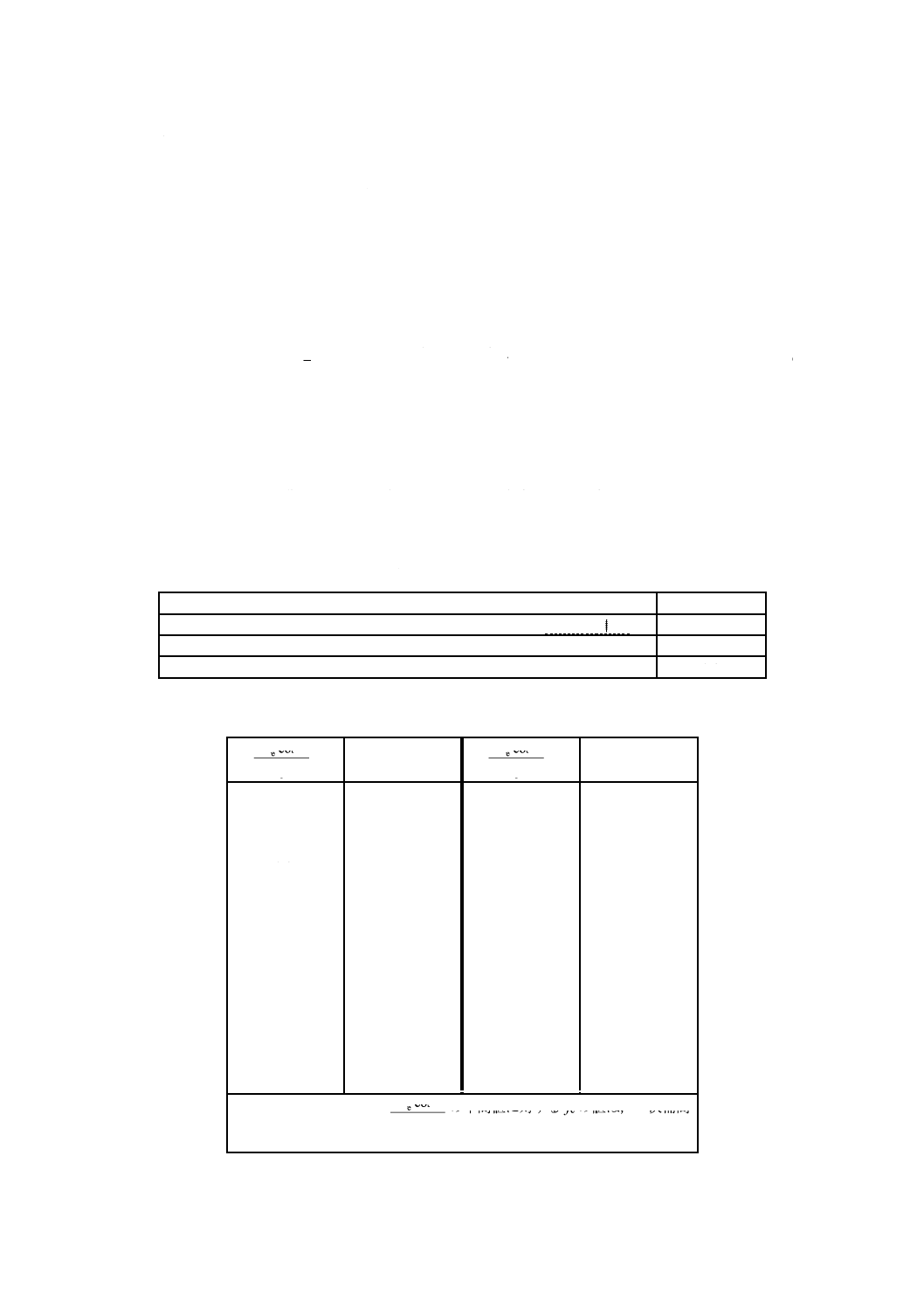
表4−スラスト玉軸受の係数fcの値
pw
w
D
D
a)
fc
pw
w
cos
D
D
αa)
fc
α=90°
α=45°b)
α=60°
α=75°
0.01
36.7
0.01
42.1
39.2
37.3
0.02
45.2
0.02
51.7
48.1
45.9
0.03
51.1
0.03
58.2
54.2
51.7
0.04
55.7
0.04
63.3
58.9
56.1
0.05
59.5
0.05
67.3
62.6
59.7
0.06
62.9
0.06
70.7
65.8
62.7
0.07
65.8
0.07
73.5
68.4
65.2
0.08
68.5
0.08
75.9
70.7
67.3
0.09
71
0.09
78
72.6
69.2
0.1
73.3
0.1
79.7
74.2
70.7
0.11
75.4
0.11
81.1
75.5
−
0.12
77.4
0.12
82.3
76.6
−
0.13
79.3
0.13
83.3
77.5
−
0.14
81.1
0.14
84.1
78.3
−
0.15
82.7
0.15
84.7
78.8
−
0.16
84.4
0.16
85.1
79.2
−
0.17
85.9
0.17
85.4
79.5
−
0.18
87.4
0.18
85.5
79.6
−
0.19
88.8
0.19
85.5
79.6
−
0.2
90.2
0.2
85.4
79.5
−
0.21
91.5
0.21
85.2
−
−
0.22
92.8
0.22
84.9
−
−
0.23
94.1
0.23
84.5
−
−
0.24
95.3
0.24
84
−
−
0.25
96.4
0.25
83.4
−
−
0.26
97.6
0.26
82.8
−
−
0.27
98.7
0.27
82
−
−
0.28
99.8
0.28
81.3
−
−
0.29
100.8
0.29
80.4
−
−
0.3
101.9
0.3
79.6
−
−
0.31
102.9
−
−
−
−
0.32
103.9
−
−
−
−
0.33
104.8
−
−
−
−
0.34
105.8
−
−
−
−
0.35
106.7
−
−
−
−
注a) 表に示していない
pw
w
D
D,
pw
wcos
D
D
α又はαの中間値に対するfcの値は,一次補間法によって求める。
b) スラスト玉軸受はα>45°であるが,45°<α<60°に対するfcの値を補間法によって求めるため,
α=45°に対する値を示す。
6.2
動等価アキシアル荷重
一定のラジアル荷重及びアキシアル荷重を受けるα≠90°のスラスト玉軸受の動等価アキシアル荷重は,
12
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次の式(10)によって求める。
a
r
a
YF
XF
P
+
=
·········································································· (10)
ここで,係数X及び係数Yの値は,表5による。これらの係数は,軌道盤の溝半径が0.54 Dwの値を超
えない場合に適用する。
その他の溝半径をもつ軸受の場合には,係数X及び係数Yは,ISO/TR 1281-1の5.2による。
アキシアル荷重だけを受けるα=90°のスラスト玉軸受の動等価アキシアル荷重は,次の式(11)によって
求める。
a
a
F
P=
···················································································(11)
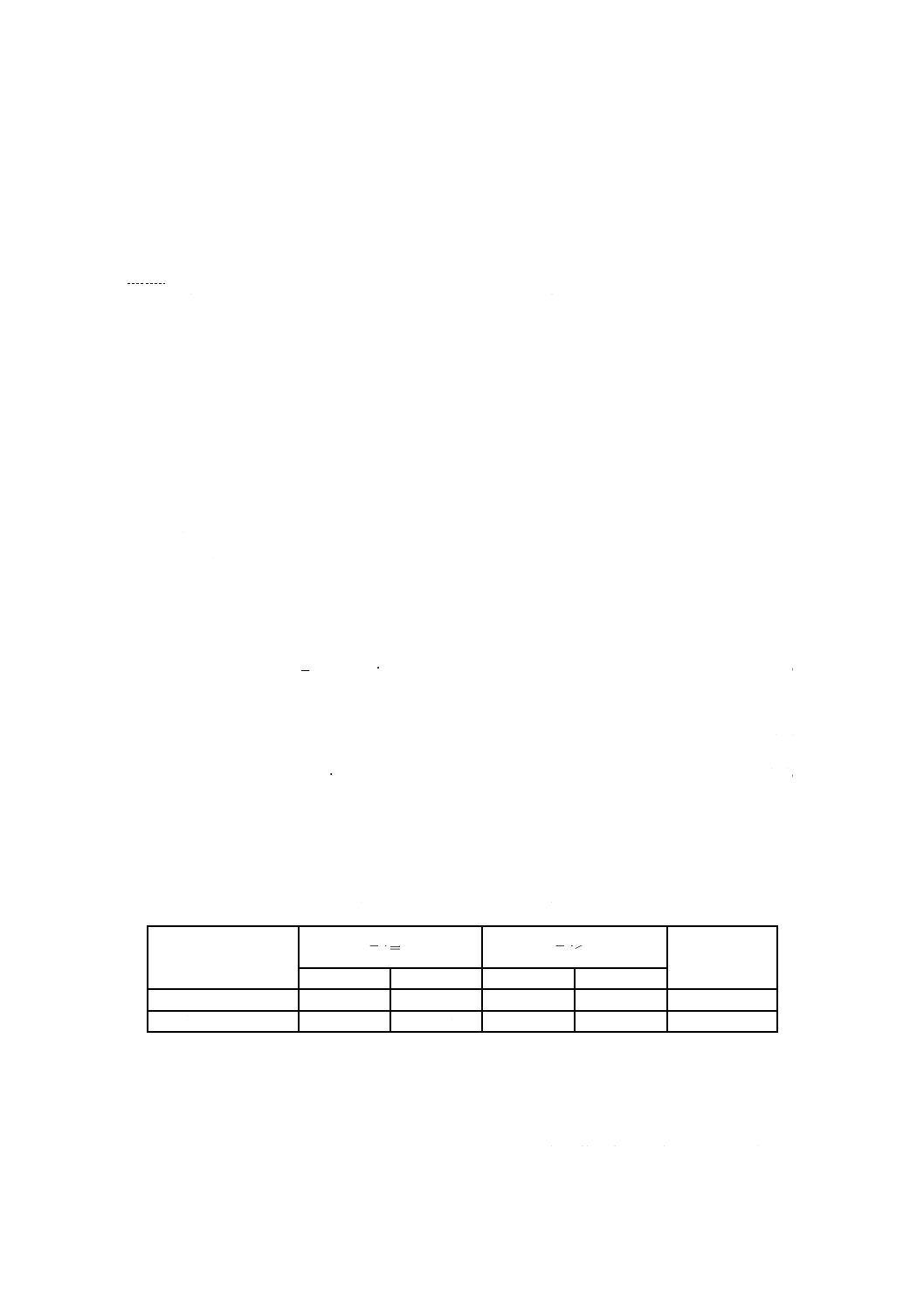
表5−スラスト玉軸受の係数X及び係数Yの値
α a)
単式軸受b)
複式軸受
e
e
F
F>
r
a
e
F
F≦
r
a
e
F
F>
r
a
X
Y
X
Y
X
Y
45°c)
0.66
1
1.18
0.59
0.66
1
1.25
50°
0.73
1.37
0.57
0.73
1.49
55°
0.81
1.6
0.56
0.81
1.79
60°
0.92
1.9
0.55
0.92
2.17
65°
1.06
2.3
0.54
1.06
2.68
70°
1.28
2.9
0.53
1.28
3.43
75°
1.66
3.89
0.52
1.66
4.67
80°
2.43
5.86
0.52
2.43
7.09
85°
4.8
11.75
0.51
4.8
14.29
α≠90°
−
α
α
sin
3
2
1
tan
25
.1
1
−
α
α
sin
3
1
1
tan
13
20
−
α
sin
3
1
1
13
10
−
α
α
sin
3
2
1
tan
25
.1
1
1.25 tan α
注a) 表に示していないαの中間値に対するX,Y及びeの値は,一次補間法によって求める。
b)
e
F
F≦
r
a
の場合には,単式軸受を使用するのは,適切ではない。
c) スラスト玉軸受はα>45°であるが,45°<α<50°に対するX,Y及びeの値を補間法によって求めるため,
α=45°に対する値を示す。
6.3
基本定格寿命
6.3.1
寿命計算式
スラスト玉軸受の基本定格寿命は,次の式(12)によって求める。
3
a
a
10
=P
C
L
············································································ (12)
基本動アキシアル定格荷重Ca及び動等価アキシアル荷重Paの値は,6.1及び6.2による。
6.3.2
寿命計算式の荷重制限
寿命計算式は,広範囲の軸受荷重に対して適用できる。ただし,非常に大きな荷重が作用するときは,
玉と軌道との接触面に有害な塑性変形を生じる場合がある。したがって,使用者は,動等価アキシアル荷
重Paが0.5 Caを超える場合には,寿命計算式が適用できるか否かを確認するため,軸受製造業者に相談す
13
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ることが望ましい。
なお,非常に荷重が小さい場合には,異なる故障モードを生じる可能性がある。このような故障モード
での寿命については,この規格では対象としない。
7
ラジアルころ軸受
7.1
基本動ラジアル定格荷重
7.1.1
1個のラジアルころ軸受の基本動ラジアル定格荷重
ラジアルころ軸受の基本動ラジアル定格荷重は,次の式(13)によって求める。
(
)
27
29
we
4
3
9
7
we
c
m
r
cos
D
Z
L
i
f
b
C
α
=
················································· (13)
ここで,係数bm及び係数fcの値は,表6及び表7による。表7の係数fcの値は,軸受に荷重が作用する
とき,最大荷重を受けるころと軌道との間の接触応力が,ころの長さ方向に均等である場合に適用できる
最大の値である。
ころと軌道との接触面に著しい応力集中が生じる場合には,表7より小さな係数fcの値を用いることが
望ましい。このような応力集中は,例えば,ころが正確に案内されない軸受,又はころの長さが,ころの
直径の2.5倍を超える軸受では,ころと軌道との接触部中央及び端部に生じることがある。
表6−ラジアルころ軸受の係数bmの値
軸受の形式
bm
円筒ころ軸受,円すいころ軸受,ソリッド形針状ころ軸受,棒状ころ軸受
1.1
シェル形針状ころ軸受
1
自動調心ころ軸受
1.15
表7−ラジアルころ軸受の係数fcの最大値
pw
wecos
D
D
αa)
fc
pw
wecos
D
D
αa)
fc
0.01
52.1
0.16
88.5
0.02
60.8
0.17
88.7
0.03
66.5
0.18
88.8
0.04
70.7
0.19
88.8
0.05
74.1
0.2
88.7
0.06
76.9
0.21
88.5
0.07
79.2
0.22
88.2
0.08
81.2
0.23
87.9
0.09
82.8
0.24
87.5
0.1
84.2
0.25
87
0.11
85.4
0.26
86.4
0.12
86.4
0.27
85.8
0.13
87.1
0.28
85.2
0.14
87.7
0.29
84.5
0.15
88.2
0.3
83.8
注a) 表に示していない
pw
wecos
D
D
αの中間値に対するfcの値は,一次補間
法によって求める。
14
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.1.2
組合せ軸受の基本動ラジアル定格荷重
7.1.2.1
背面配列及び正面配列の場合
2個の同じ内部仕様4) の単列ラジアルころ軸受が同一軸に並べて取り付けられ,背面配列又は正面配列
のユニット(一対取付け)として機能する場合には,その一組の軸受の基本動ラジアル定格荷重は,1個
の複列軸受として計算する。
注4) ここでいう“内部仕様”とは,定格荷重の計算に必要となるころ直径,ころの有効長さ,ころ
の個数,ころセットのピッチ径,呼び接触角などの組合せである。
7.1.2.2
背面配列及び正面配列で個々に交換可能な軸受の場合
個々に交換できる2個の軸受とみなされる軸受配列の場合には,7.1.2.1は適用しない。
7.1.2.3
並列配列の場合
2個以上の同じ内部仕様4) の単列ラジアルころ軸受が同一軸に並べて取り付けられ,並列配列のユニッ
ト(一対取付け又は多数取付け)として機能する場合には,基本動ラジアル定格荷重は,1個の単列ラジ
アルころ軸受の基本動ラジアル定格荷重に軸受の個数の7/9乗を乗じて求める。これらの軸受は,軸受間
での荷重分布が等しくなるように適切に製造され,取り付けられなければならない。
7.1.2.4
並列配列で個々に交換可能な軸受の場合
個々に交換できる単列軸受を組み合わせた軸受配列の場合には,7.1.2.3は適用しない。
7.2
動等価ラジアル荷重
7.2.1
1個のラジアルころ軸受の動等価ラジアル荷重
一定のラジアル荷重及びアキシアル荷重を受けるα≠0°のラジアルころ軸受の動等価ラジアル荷重は,
次の式(14)によって求める。
a
r
r
YF
XF
P
+
=
·········································································· (14)
ここで,係数X及び係数Yの値は,表8による。
α=0°のラジアルころ軸受がラジアル荷重だけを受ける場合の動等価ラジアル荷重は,次の式(15)によ
って求める。
r
r
F
P=
··················································································· (15)
注記 α=0°のラジアルころ軸受のアキシアル負荷能力は,軸受の設計及び製造技術によって大きく
変化する。したがって,α=0°の軸受がアキシアル荷重を受ける場合には,使用者は等価荷重
及び寿命について,軸受製造業者に相談することが望ましい。
表8−ラジアルころ軸受の係数X及び係数Yの値
軸受の形式
e
F
F≦
r
a
e
F
F>
r
a
e
X
Y
X
Y
単列,α≠0°
1
0
0.4
0.4 cot α
1.5 tan α
複列,α≠0°
1
0.45 cot α
0.67
0.67 cot α
1.5 tan α
7.2.2
組合せ軸受の動等価ラジアル荷重
7.2.2.1
接触角をもつ単列ころ軸受の背面配列及び正面配列の場合
接触角をもつ2個の同じ内部仕様4) の単列ころ軸受が同一軸に並べて取り付けられ,背面配列又は正面
配列のユニット(一対取付け)として機能し,7.1.2.1に従って1個の複列軸受と考えられる場合には,動
15
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
等価ラジアル荷重は,表8の複列軸受に対する係数X及び係数Yの値を用いて計算する。
7.2.2.2
並列配列の場合
接触角をもつ2個以上の同じ内部仕様4) の単列ころ軸受が同一軸に並べて取り付けられ,並列配列のユ
ニット(一対取付け又は多数取付け)として機能する場合には,その2個以上の軸受の動等価ラジアル荷
重は,表8の単列軸受に対する係数X及び係数Yの値を用いて計算する。
7.3
基本定格寿命
7.3.1
寿命計算式
ラジアルころ軸受の基本定格寿命は,次の式(16)によって求める。
3
10
r
r
10
=P
C
L
·········································································· (16)
基本動ラジアル定格荷重Cr及び動等価ラジアル荷重Prの値は,7.1及び7.2による。
この寿命計算式は,2個以上の単列軸受を組み合わせたユニット(一対取付け又は多数取付け)にも適
用する。この場合には,基本動ラジアル定格荷重Crは,7.1.2によって計算する。動等価ラジアル荷重Pr
は,7.2.2による係数X及び係数Yの値を用いて,ユニットにかかる全荷重に対して計算する。
7.3.2
寿命計算式の荷重制限
寿命計算式は,広範囲の軸受荷重に対して適用できる。ただし,非常に大きな荷重が作用するときは,
ころと軌道との接触面に著しい応力集中を生じる場合がある。したがって,使用者は,動等価ラジアル荷
重Prが0.5 Crを超える場合には,寿命計算式が適用できるか否かを確認するため,軸受製造業者に相談す
ることが望ましい。
なお,非常に荷重が小さい場合には,異なる故障モードを生じる可能性がある。このような故障モード
での寿命については,この規格では対象としない。
8
スラストころ軸受
8.1
基本動アキシアル定格荷重
8.1.1
単列スラストころ軸受の基本動アキシアル定格荷重
一方向の荷重を受ける全てのころと軌道盤とが,同一の軌道で接触するときに限り,単列軸受として取
り扱う。
単式スラストころ軸受又は複式スラストころ軸受の基本動アキシアル定格荷重は,次の式(17)及び式(18)
によって求める。
α=90°の場合,
27
29
we
4
3
9
7
we
c
m
a
D
Z
L
f
b
C=
··························································· (17)
α≠90°の場合,
(
)
27
29
we
4
3
9
7
we
c
m
a
tan
cos
D
Z
L
f
b
C
α
α
=
··········································· (18)
ここで,Zは一方向の荷重を受けるころの個数である。
一つの共通なころ中心軸上に数個のころを配列した軸受では,これらのころを,それぞれのころの有効
長さLweの和に等しい有効長さをもつ1個のころとみなして取り扱う。
係数bm及び係数fcの値は,表9及び表10による。表10の係数fcの値は,軸受に荷重が作用するとき,
最大荷重を受けるころと軌道との接触応力が,ころの長さ方向に均等である場合に適用できる最大の値で
16
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ある。
ころと軌道との接触面に著しい応力集中が生じる場合には,表10より小さな係数fcの値を用いることが
望ましい。このような応力集中は,例えば,ころが正確に案内されない軸受,又はころの長さが,ころの
直径の2.5倍を超える軸受では,ころと軌道との接触部中央及び端部に生じることがある。
ころと軌道との接触面で大きな滑りを生じるような構造のスラストころ軸受(例えば,ころセットのピ
ッチ径に比べて,ころの長さが長いスラスト円筒ころ軸受など)には,表10より小さな係数fcの値を用い
ることが望ましい。
表9−スラストころ軸受の係数bmの値
軸受の形式
bm
スラスト円筒ころ軸受,スラスト針状ころ軸受
1
スラスト円すいころ軸受
1.1
スラスト自動調心ころ軸受
1.15
表10−スラストころ軸受の係数fcの最大値
pw
we
D
D
a)
fc
pw
wecos
D
D
αa)
fc
α=90°
45°<α<60°60°≦α<75°75°≦α<90°
0.01
105.4
0.01
109.7
107.1
105.6
0.02
122.9
0.02
127.8
124.7
123
0.03
134.5
0.03
139.5
136.2
134.3
0.04
143.4
0.04
148.3
144.7
142.8
0.05
150.7
0.05
155.2
151.5
149.4
0.06
156.9
0.06
160.9
157
154.9
0.07
162.4
0.07
165.6
161.6
159.4
0.08
167.2
0.08
169.5
165.5
163.2
0.09
171.7
0.09
172.8
168.7
166.4
0.1
175.7
0.1
175.5
171.4
169
0.11
179.5
0.11
177.8
173.6
171.2
0.12
183
0.12
179.7
175.4
173
0.13
186.3
0.13
181.1
176.8
174.4
0.14
189.4
0.14
182.3
177.9
175.5
0.15
192.3
0.15
183.1
178.8
176.3
0.16
195.1
0.16
183.7
179.3
−
0.17
197.7
0.17
184
179.6
−
0.18
200.3
0.18
184.1
179.7
−
0.19
202.7
0.19
184
179.6
−
0.2
205
0.2
183.7
179.3
−
0.21
207.2
0.21
183.2
−
−
0.22
209.4
0.22
182.6
−
−
0.23
211.5
0.23
181.8
−
−
0.24
213.5
0.24
180.9
−
−
0.25
215.4
0.25
179.8
−
−
17
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表10−スラストころ軸受の係数fcの最大値(続き)
pw
we
D
D
a)
fc
pw
wecos
D
D
αa)
fc
α=90°
45°<α<60°60°≦α<75°75°≦α<90°
0.26
217.3
0.26
178.7
−
−
0.27
219.1
−
−
−
−
0.28
220.9
−
−
−
−
0.29
222.7
−
−
−
−
0.3
224.3
−
−
−
−
注a) 表に示していない
pw
we
D
D又は
pw
wecos
D
D
αに対するfcの値は,一次補間法によって求める。
8.1.2
複列又は多列スラストころ軸受の基本動アキシアル定格荷重
同一方向の荷重を受ける複列又は多列スラストころ軸受の基本動アキシアル定格荷重は,次の式(19)に
よって求める。
(
)
2/9
9/2
a
we
9/2
2
a
2
we
2
9/2
1a
1
we
1
we
2
we
2
1
we
1
a
−
+
+
+
×
+
+
+
=
n
n
n
n
n
C
L
Z
C
L
Z
C
L
Z
L
Z
L
Z
L
Z
C
Λ
Λ
········ (19)
Ca1,Ca2,…,Canは,ころの個数がZ1,Z2,…,Zn及びころの長さがLwe1,Lwe2,…,Lwenの単列スラス
トころ軸受の基本動アキシアル定格荷重であり,8.1.1に規定した単列軸受の式によって求める。
なお,全てのころと軌道盤とが,同一の軌道で接触するときは,単列軸受として取り扱う。
8.1.3
組合せ軸受の基本動アキシアル定格荷重
8.1.3.1
並列配列の場合
2個以上の同じ内部仕様5) の単式スラストころ軸受が同一軸に並べて取り付けられ,並列配列のユニッ
ト(一対取付け又は多数取付け)として機能する場合には,基本動アキシアル定格荷重は,1個の軸受の
基本動アキシアル定格荷重に軸受の個数の7/9乗を乗じて求める。これらの軸受は,軸受間での荷重分布
が等しくなるように適切に製造され,取り付けられなければならない。
注5) ここでいう“内部仕様”とは,定格荷重の計算に必要となるころ直径,ころの有効長さ,ころ
の個数,ころセットのピッチ径,呼び接触角などの組合せである。
8.1.3.2
個々に交換可能な軸受の場合
個々に交換できる単式軸受を組み合わせた軸受配列の場合には,8.1.3.1は適用しない。
8.2
動等価アキシアル荷重
一定のラジアル荷重及びアキシアル荷重を受けるα≠90°のスラストころ軸受の動等価アキシアル荷重
は,次の式(20)によって求める。
a
r
a
YF
XF
P
+
=
·········································································· (20)
ここで,係数X及び係数Yの値は,表11による。
アキシアル荷重だけを受けるα=90°のスラストころ軸受の動等価アキシアル荷重は,次の式(21)によっ
て求める。
a
a
F
P=
·················································································· (21)
18
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表11−スラストころ軸受の係数X及び係数Yの値
軸受形式
e
F
F≦
r
a
e
F
F>
r
a
e
X
Y
X
Y
単式,α≠90°
−a)
−a)
tan α
1
1.5 tan α
複式,α≠90°
1.5 tan α
0.67
tan α
1
1.5 tan α
注a)
e
F
F≦
r
a
の場合には,単式軸受を使用するのは,適切ではない。
8.3
基本定格寿命
8.3.1
寿命計算式
スラストころ軸受の基本定格寿命は,次の式(22)によって求める。
3
10
a
a
10
=P
C
L
·········································································· (22)
基本動アキシアル定格荷重Ca及び動等価アキシアル荷重Paの値は,8.1及び8.2による。
この寿命計算式は,2個以上の単式スラストころ軸受を組み合わせたユニット(一対取付け又は多数取
付け)にも適用する。この場合には,基本動アキシアル定格荷重Caは,8.1.3によって計算する。動等価
アキシアル荷重Paは,8.2による単式軸受の係数X及び係数Yの値を用いて,ユニットにかかる全荷重に
対して計算する。
8.3.2
寿命計算式の荷重制限
寿命計算式は,広範囲の軸受荷重に対して適用できる。ただし,非常に大きな荷重が作用するときは,
ころと軌道との接触部に著しい応力集中を生じる場合がある。したがって,使用者は,動等価アキシアル
荷重Paが0.5 Caを超える場合には,寿命計算式が適用できるか否かを確認するため,軸受製造業者に相談
することが望ましい。
なお,非常に荷重が小さい場合には,異なる故障モードを生じる可能性がある。このような故障モード
での寿命については,この規格では対象としない。
9
修正定格寿命
9.1
一般
長年にわたって,基本定格寿命L10を軸受性能の評価基準として用いることで満足した結果が得られて
いる。この寿命は,JIS B 1511に規定する軸受関連規格によって設計し,JIS G 4805に規定する鋼材又は
これと同等の品質が得られる合金鋼を用い,高い品質で製造した軸受の,通常使用条件における信頼度
90 %の寿命を表している。
しかし,使用箇所においては,異なる信頼度及び/又は特定の潤滑状態と汚染状況とを考慮した,より
正確な寿命計算が必要になってきている。高品質の軸受鋼では,運転状態が良好で,かつ,一定のヘルツ
接触応力以下の場合には,軸受鋼の疲労限を超えなければ,基本定格寿命L10に比べて非常に長い軸受寿
命が得られることが知られている。他方,良好でない運転状態では,軸受寿命は基本定格寿命L10より短
くなる。
この規格では,疲労寿命計算にシステムアプローチを取り入れた。この手法では,各要因の変動及び相
互作用が軸受寿命に及ぼす影響を,転動体接触部及び内部に生じる付加的応力として考慮している。
19
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この規格では,信頼度係数a1に加え,寿命計算のシステムアプローチに基づいた寿命修正係数aISOを導
入した。これらの係数は,破損確率n %の修正定格寿命において次の式(23)のように用いる。
10
ISO
1
m
L
a
a
Ln=
········································································· (23)
各々の信頼度に対する信頼度係数a1は,9.2による。また,システムアプローチに基づく寿命修正係数
aISOの評価方法は,9.3による。
9.2
信頼度係数
信頼度は,3.2に定義している。修正定格寿命は,式(23)によって求める。信頼度係数a1の値は,表12
による。
注記 表12で,信頼度95 %から99 %のa1の値は,1992年版に規定する値を僅かに修正している。
表12−信頼度係数a1の値
信頼度
(%)
Ln m
a1
90
L10 m
1
95
L5 m
0.64
96
L4 m
0.55
97
L3 m
0.47
98
L2 m
0.37
99
L1 m
0.25
99.2
L0.8 m
0.22
99.4
L0.6 m
0.19
99.6
L0.4 m
0.16
99.8
L0.2 m
0.12
99.9
L0.1 m
0.093
99.92
L0.08 m
0.087
99.94
L0.06 m
0.080
99.95
L0.05 m
0.077
9.3
システムアプローチに基づく寿命修正係数
9.3.1
一般
JIS G 4805に規定する鋼材又はこれと同等の品質が得られる合金鋼は,潤滑条件,潤滑剤の清浄度及び
他の運転条件が良好ならば,ある荷重条件下では寿命が無限となる。
一般的に用いる高品質材料を使い,高い製造品質で加工した軸受では,約1.5 GPaの接触応力のときに
疲労限応力になる。この応力値は,製造品質及び運転条件によって生じる応力増加分を考慮に入れている。
製造品質及び/又は材料品質が低い場合には,疲労限応力は低くなる。
しかしながら,多くの用途では接触応力は1.5 GPaより大きく,しかも,運転条件によっては付加的応
力が生じるため,その分だけ軸受寿命が低下する。
次に示すような運転時の影響は,作用する応力,材料の強度などと関連付けることができる。
− 圧痕によるエッジ応力の発生
− 薄い油膜条件下における軌道と転動体間との接触領域での応力増加
− 温度上昇による材料の疲労限応力の低下,すなわち,材料強度の低下
20
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 内輪しめしろによるフープ応力の増加
軸受寿命への様々な影響は,相互に依存している。したがって,疲労寿命計算に対するシステムアプロ
ーチは,各要因の変動及び相互作用の影響を考慮していることから適切な手法である。修正寿命計算のシ
ステムアプローチでは,寿命修正係数aISOを求めるための実用的な手法を開発してきた。この手法は,軸
受鋼の疲労限応力を考慮している。また,軸受寿命に及ぼす潤滑及び異物の影響を容易に評価できる(9.3.3
参照)。
運転中の軸受におけるラジアル内部すきまの影響及び軸受の取付誤差に起因する軌道の不均一な圧縮応
力に関する理論的な説明は,ISO/TS 16281(参考文献[5])を参照。
9.3.2
疲労限荷重
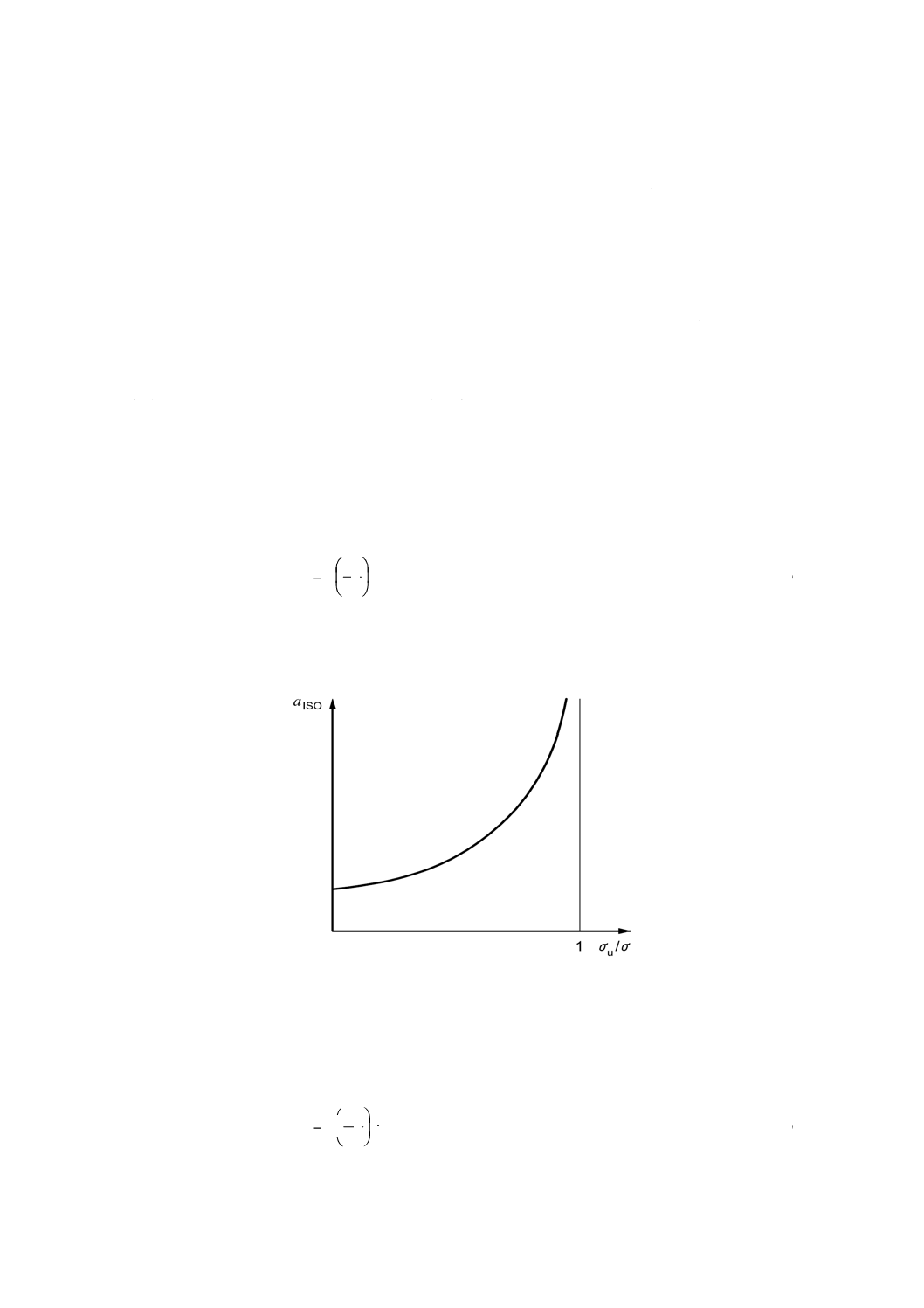
寿命修正係数aISOは,影響要因をできるだけ多く考慮した実際の応力で疲労限応力を除した,σu/σの関
数で表すことができる(図1参照)。
図1は,任意の潤滑状態で,実際の応力σが疲労限応力σuまで低下するとき,寿命修正係数aISOが無限
大に漸近することを示す。従来は軸受寿命計算の評価基準として,転がり方向に平行な,軌道表面下のせ
ん断応力(参考文献[10])が用いられてきた。したがって,図1は,せん断疲れ強さで表すこともできる。
図1は,次の式(24)で表すことができる。
=
σ
σ
f
a
u
ISO
·········································································· (24)
軌道に疲れが生じる応力は,主に軸受の内部荷重分布及び最大荷重接触部での表面下の応力分布に依存
する。実際の計算を簡単にするために,疲労限荷重Cuを導入した(参考文献[10])。
図1−寿命修正係数aISO
JIS B 1519の静定格荷重と類似の手法によって,疲労限荷重Cuは,軌道の最大荷重接触部で疲労限応力
σuに達した時点の軸受荷重と定義する。したがって,比σu/σは比Cu/Pで十分近似でき,寿命修正係数aISO
は次の式(25)で表すことができる。
=
P
C
f
a
u
ISO
·········································································· (25)
疲労限荷重Cuの計算では,次の影響を考慮しなければならない。
21
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 軸受の形式,大きさ及び内部幾何形状
− 転動体及び軌道の形状
− 製造品質
− 軌道材料の疲労限
疲労限荷重Cuの値は,附属書Bの式を用いて計算できる。
また,動等価荷重Pは,式(3),式(10),式(11),式(14),式(15),式(20)及び式(21)によって求める。
9.3.3
寿命修正係数を算定する実用的な方法
9.3.3.1
一般
寿命修正係数aISOは,理論解析と実験検証及び実際の使用結果とを結び付けて求めることができる。こ
の規格では,軸受形式,疲労限荷重及び軸受荷重に加えて,寿命修正係数aISOに次の項目の影響を考慮し
ている。
− 潤滑(潤滑剤の種類,潤滑剤の粘度,軸受の速度,軸受の大きさ及び添加剤)
− 環境(汚染レベル及び密封性)
− 汚染粒子(軸受の大きさ及び潤滑方法並びにろ過に関係する,粒子の硬さ及び大きさ)
− 取付け(組立中の清浄度,例えば十分なフラッシング,供給油のろ過など)
軸受のすきま及び取付誤差が軸受寿命に与える影響は,ISO/TS 16281(参考文献[5])を参照。
寿命修正係数aISOは,次の式(26)によって求める。
=
κ
,
u
C
ISO
P
C
e
f
a
···································································· (26)
係数eC及び係数κは,汚染及び潤滑状態をそれぞれ考慮している。これらを,9.3.3.2及び9.3.3.3に示
す。
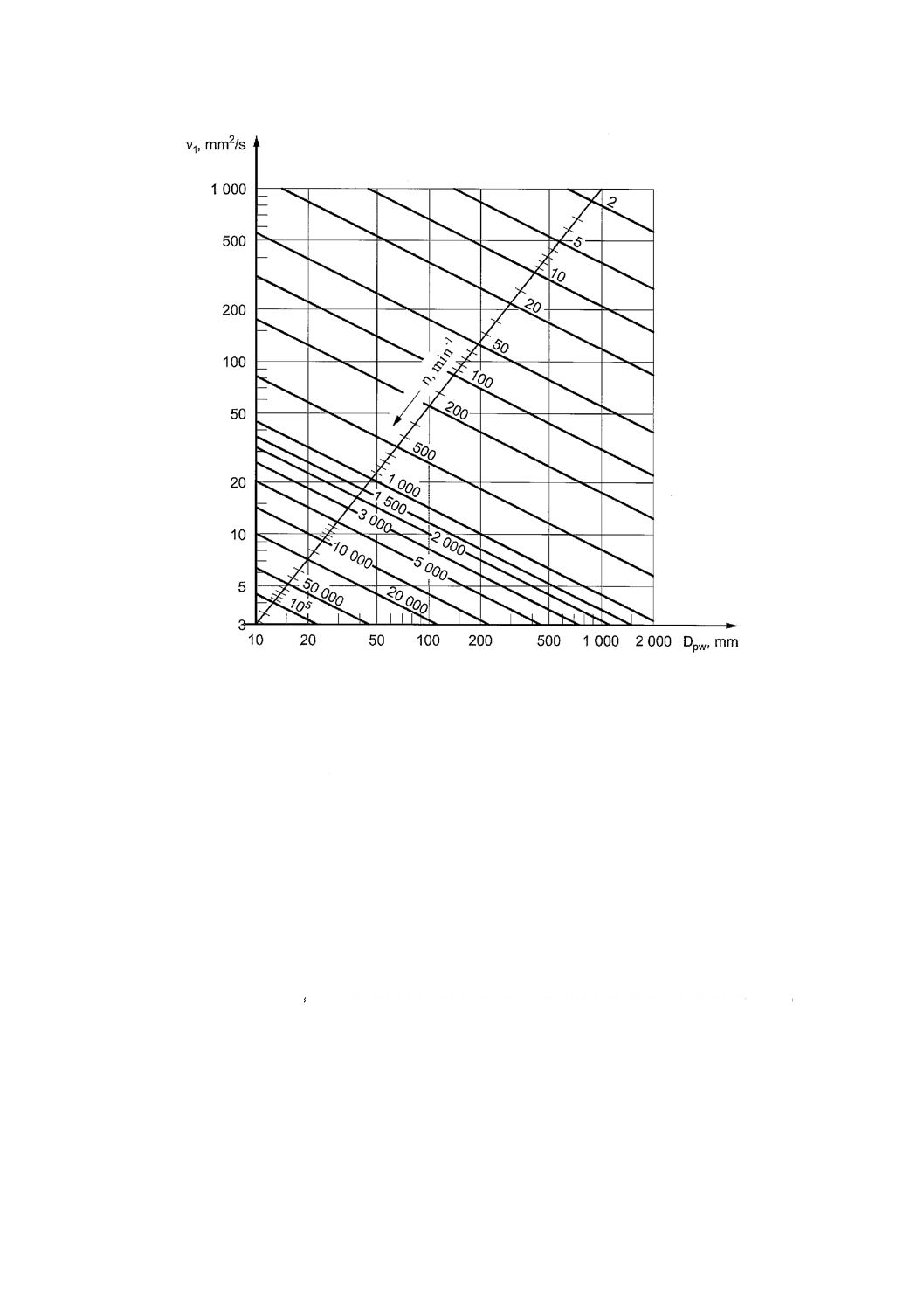
寿命修正係数aISOの値は,軸受形式ごとに図3〜図6によって求める。
9.3.3.2
汚染係数
潤滑剤が固体粒子で汚染され,粒子が軌道と転動体との間に入り込むと,軌道に圧痕が生じる場合があ
る。これらの圧痕においては,局部的に応力が増加して,転がり軸受の寿命が低下する。この潤滑剤の汚
染による寿命低下は,汚染係数eCによって考慮する。
潤滑油膜中の固体粒子による寿命低下は,次の項目に依存する。
− 粒子の種類,大きさ,硬さ及び量
− 潤滑剤の油膜厚さ(粘度比κ,9.3.3.3参照)
− 軸受の大きさ
汚染係数の指標は,表13による。これは,十分な潤滑状態の軸受についての代表的な汚染レベルを示す
ものである。より正確で詳細な指標は,附属書Aの線図又は式を参照。これらの値は,硬さ及びじん性の
異なる粒子が混合している場合に有効で,その場合には,硬い粒子が修正定格寿命を決定する。ISO 4406
(参考文献[3])の清浄度クラスを超えるような大きく硬い粒子が存在する場合には,軸受寿命は定格寿命
より著しく低下する。
水又は他の液体による汚染は,この規格では考慮していない。
重度の汚染状態(汚染係数eCが0に近い場合)では,摩耗によって故障する可能性があり,軸受寿命は
22
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
修正定格寿命の計算値より,極端に短くなることがある。
表13−汚染係数eCの指標
汚染レベル
eC
Dpw<100 mm
Dpw≧100 mm
極めて高い清浄度
粒子の大きさは潤滑剤の油膜厚さ程度で,実験室レベルの環境
1
1
高い清浄度
極めて細かなフィルタでろ過された油,標準的なグリース封入
軸受及びシール軸受
0.8〜0.6
0.9〜0.8
標準清浄度
細かなフィルタでろ過された油,標準的なグリース封入軸受及
びシールド軸受
0.6〜0.5
0.8〜0.6
軽度の汚染状態
潤滑剤が僅かに汚染
0.5〜0.3
0.6〜0.4
普通の汚染状態
シールなし,粗いフィルタ使用,摩耗粉及び周辺から粒子が侵
入する環境
0.3〜0.1
0.4〜0.2
重度の汚染状態
著しく汚染された周辺環境,かつ,軸受の密封性が不十分な状
態
0.1〜0
0.1〜0
極度の汚染状態
0
0
9.3.3.3
粘度比
9.3.3.3.1
粘度比の計算
潤滑剤は,転がり接触表面を分離するために有効に作用する。潤滑剤によって適正な潤滑膜を形成する
ためには,軸受が運転温度に達したときに,必要最小限の粘度を確保する必要がある。潤滑剤による分離
状態は,基準動粘度ν1に対する運転時の動粘度νの比である粘度比κで表す。運転時の動粘度νは,運転
温度での潤滑剤の粘度である。
1ν
ν
κ=
··················································································· (27)
転がり接触面間に十分な潤滑膜を形成するためには,潤滑剤は,運転温度において一定の最小粘度を保
たなければならない。運転時の動粘度νが高くなるに従って,軸受寿命は長くなる。
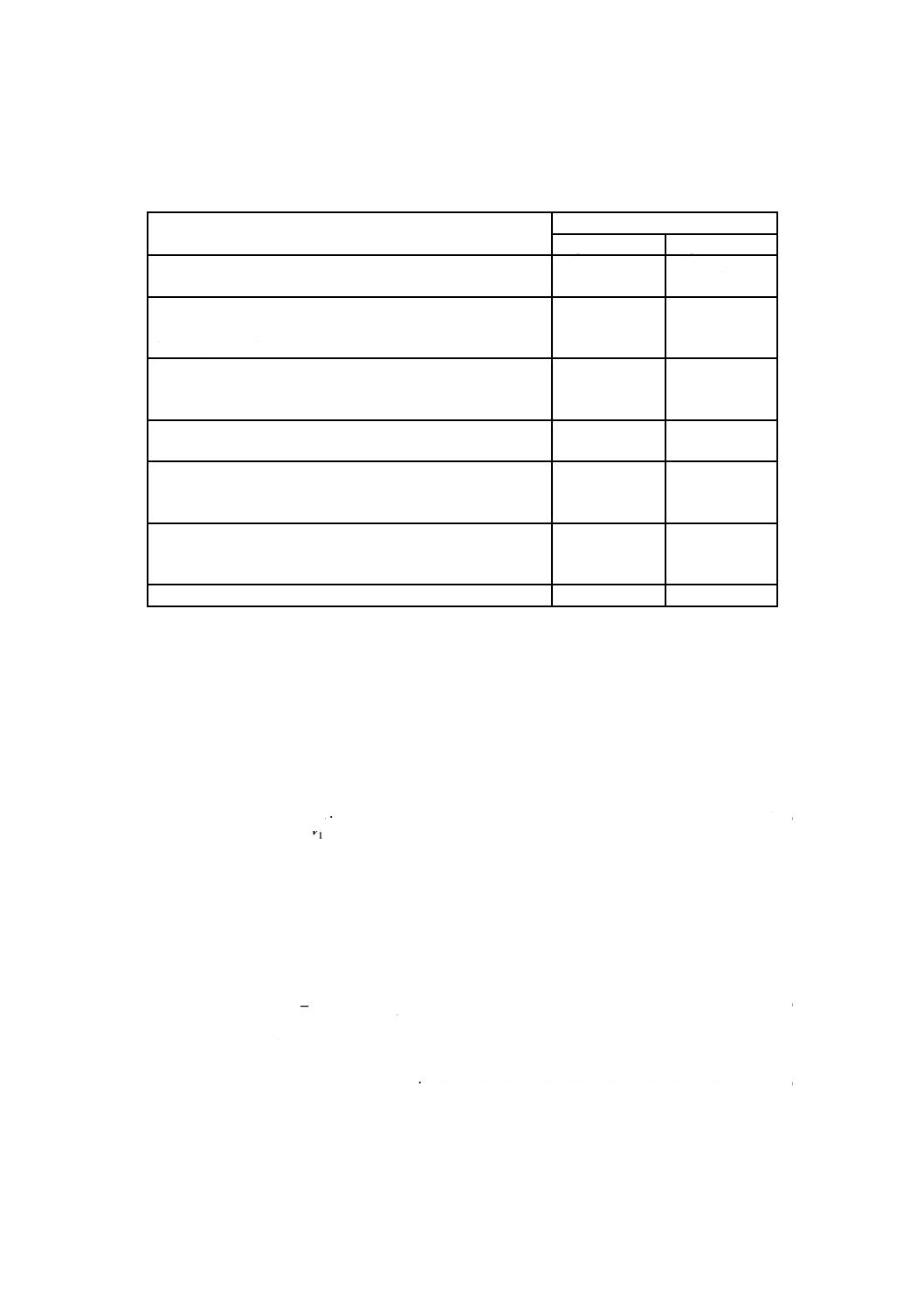
基準動粘度ν1は,軸受の速度及びピッチ径Dpw[平均軸受直径 (d+D)/2を用いることも可能。]で決ま
る図2の線図によるか,又は次の式(28)若しくは式(29)によって求める。
n<1 000 min−1の場合,
0.5
pw
0.83
1
000
45
−
−
=
D
n
ν
······························································· (28)
n≧1 000 min−1の場合,
0.5
pw
0.5
1
500
4
−
−
=
D
n
ν
·································································· (29)
23
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2−基準動粘度ν1
9.3.3.3.2
粘度比の計算での制限
粘度比κの計算は,鉱油を使用し,良好な製造品質で加工された軸受の軌道面の場合に適用する。
式(28)及び式(29)並びに図2の線図は,合成炭化水素(SHC)系の潤滑油などの合成油の場合にも,近似
の結果を得ることができる。40 ℃で合成油と鉱油との粘度が同じ場合には,合成油は,圧力粘度係数は小
さいが,粘度指数が大きい(すなわち,温度に対する粘度の変化が少ない)ため,運転温度が変化しても
鉱油とほぼ同じ油膜が形成される。
例えば,特別な軌道面の仕上げ加工,特定の圧力粘度係数,特定の密度など,詳しい粘度比κ値が必要
な場合には,油膜パラメータΛを適用する。油膜パラメータΛに関しては,参考文献[7]などを参照。
油膜パラメータΛを計算することによって,粘度比κは,近似的に次の式(30)によって求めることがで
きる。
1.3
Λ
≈
κ
·················································································· (30)
9.3.3.3.3
グリース潤滑
式(28)及び式(29)並びに図2の線図は,グリースの基油粘度にも同様に適用できる。ただし,グリース潤
滑ではグリースの流動性が悪いため(にじみ出る能力が低いため)潤滑が不十分となり,接触部が著しい
枯渇状態になって,寿命が低下する可能性がある。
9.3.3.3.4
極圧添加剤の検討
κ<1かつeC≧0.2で,極圧添加剤が含まれた潤滑剤を使用する場合には,汚染係数eC及び寿命修正係数
24
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
aISOの計算にκ=1の値を用いることができる。この場合,寿命修正係数aISOの値が3を超えるときには,
極圧添加剤を含まない潤滑剤とした粘度比κの値で寿命修正係数aISOを計算し,aISOは3以下とする。
粘度比κの値が増加するのは,有効な極圧添加剤を用いることによって,接触面に良好な潤滑効果が期
待できるからである。eC<0.2の汚染状態の場合には,極圧添加剤の効果は,実際の汚染潤滑条件下で調べ
なければならない。極圧添加剤の効果は,実際の用途又は適切な軸受試験で検証しておくことが望ましい。
9.3.3.4
寿命修正係数の計算
寿命修正係数aISOは,図3〜図6を用いるか,又は次の式(31)〜式(42)の計算によって求める。線図及び
式で用いられている疲労限荷重Cu,汚染係数eC及び粘度比κの求め方を,9.3.2,9.3.3.2及び9.3.3.3に示
す。
汚染係数eCの指標は,表13による。より正確で詳細な指標は,附属書Aの線図又は式によって求める
ことができる。
実用上,寿命修正係数はaISO≦50とする。また,PC
e
u
C
>5の場合にもaISO≦50を適用する。
κ>4の場合には,κ=4とする。
κ<0.1の場合の寿命修正係数aISOの値は,これまでの経験及び実績に基づいては計算できず,κ<0.1に
対する寿命修正係数aISOの値は,式及び図の適用外である。
注記 図3〜図6は,対応国際規格をそのまま複製して用いているため,小数点は,“,”を用いて表し
ている。
25
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3−寿命修正係数aISO(ラジアル玉軸受)
図3の曲線は,式(31)〜式(33)に基づいている。
0.1≦κ<0.4の場合,
9.3
1/3
u
C
0.83
381
0.054
ISO
9
2.264
1
2.567
1
0.1
−
−
−
=
P
C
e
a
κ
······················· (31)
0.4≦κ<1の場合,
9.3
1/3
u
C
0.83
87
0.190
ISO
7
1.998
1
2.567
1
0.1
−
−
−
=
P
C
e
κ
a
························ (32)
1≦κ≦4の場合,
9.3
1/3
u
C
0.83
739
0.071
ISO
7
1.998
1
2.567
1
0.1
−
−
−
=
P
C
e
κ
a
······················· (33)
26
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4−寿命修正係数aISO(ラジアルころ軸受)
図4の曲線は,式(34)〜式(36)に基づいている。
0.1≦κ<0.4の場合,
9.185
0.4
u
C
381
0.054
ISO
3
1.399
9
1.585
1
0.1
−
−
−
=
P
C
e
κ
a
························· (34)
0.4≦κ<1の場合,
9.185
0.4
u
C
87
0.190
ISO
8
1.234
9
1.585
1
0.1
−
−
−
=
P
C
e
κ
a
························· (35)
1≦κ≦4の場合,
9.185
0.4
u
C
739
0.071
ISO
8
1.234
9
1.585
1
0.1
−
−
−
=
P
C
e
κ
a
························· (36)
27
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5−寿命修正係数aISO(スラスト玉軸受)
図5の曲線は,式(37)〜式(39)に基づいている。
0.1≦κ<0.4の場合,
9.3
1/3
u
C
0.83
381
0.054
ISO
3
9
2.264
1
2.567
1
0.1
−
−
−
=
P
C
e
κ
a
······················· (37)
0.4≦κ<1の場合,
9.3
1/3
u
C
0.83
87
0.190
ISO
3
7
1.998
1
2.567
1
0.1
−
−
−
=
P
C
e
κ
a
······················· (38)
1≦κ≦4の場合,
9.3
1/3
u
C
0.83
739
0.071
ISO
3
7
1.998
1
2.567
1
0.1
−
−
−
=
P
C
e
κ
a
······················· (39)
28
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6−寿命修正係数aISO(スラストころ軸受)
図6の曲線は,式(40)〜式(42)に基づいている。
0.1≦κ<0.4の場合,
9.185
0.4
u
C
381
0.054
ISO
2.5
3
1.399
9
1.585
1
0.1
−
−
−
=
P
C
e
κ
a
························· (40)
0.4≦κ<1の場合,
9.185
0.4
u
C
87
0.190
ISO
2.5
8
1.234
9
1.585
1
0.1
−
−
−
=
P
C
e
κ
a
························· (41)
1≦κ≦4の場合,
9.185
0.4
u
C
739
0.071
ISO
2.5
8
1.234
9
1.585
1
0.1
−
−
−
=
P
C
e
κ
a
························· (42)
29
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
汚染係数の詳細な計算方法
A.1 一般
汚染係数eCを簡易的に求める方法は,9.3.3.2による。この附属書では,汚染係数eCを求めるための,
より詳細な計算方法を示し,加えて,種々の要因が汚染に及ぼす影響の度合いを線図で示す。汚染係数eC
が決まれば,その値を9.3.3.4に示した寿命修正係数の計算に使用できる。
汚染係数eCは,次の潤滑方式に応じて,線図又は計算式のいずれかを使って求める。
− 軸受に給油する前にオンラインフィルタでろ過する循環給油
− 油浴潤滑又はオフラインフィルタでろ過する循環給油
− グリース潤滑
オイルミスト潤滑において,汚染係数eCを決める汚染レベルを推定するには,ISO/TR 1281-2(参考文
献[4])を参照。
A.2 量記号
この附属書で用いる量記号は,箇条4によるほか,次による。
x
:JIS B 9932(参考文献[2])に従って校正した汚染粒子の大きさ[μm(c)]
βx(c)
:汚染粒子の大きさxに対するろ過比(記号xは上記を参照)
記号(c)は,粒子の大きさx μmの粒子計数が,JIS B 9932に従って校正した液体用自動粒子計数器(APC:
Automatic optical single-particle counter)によって行われたことを表す。
A.3 種々の潤滑方法に対する,線図及び計算式を選定するための条件
A.3.1 オンラインフィルタを備えた循環給油
JIS B 8356-8(参考文献[1])による汚染粒子の大きさxに対するろ過比βx(c)が,線図及び計算式の選定に
最も影響する。図A.1〜図A.4は,ISO 4406(参考文献[3])による汚染コードに対する汚染係数ecを求め
る線図及び計算式を示す。汚染レベルは主に,オンラインフィルタを通過する前の油の状態に対応する。
注記 測定精度を上げても,サンプリングした油を用いて清浄度を正確に測定することは,非常に困
難であることが研究によって分かっている。入念な注意を払っても,測定に用いる油を汚染し
ないようにすることは難しく,かつ,油の添加剤を汚染粒子として測定する可能性がある。非
常に清浄な油を分析する場合には,外部の汚染によって誤った測定結果を得る可能性が最も高
くなる。
オンラインフィルタを用いた循環給油方式において,一定期間,油がフィルタを通過すると,
通常,油の清浄度はよくなる。したがって,オンラインフィルタ通過前の油の汚染レベルが,
循環給油における実際の油の清浄度を表しているとしてもよい。オンラインフィルタ循環給油
方式で適切なeC線図又は計算式を選択する際に,汚染粒子の大きさxに対するろ過比βx(c)を主
たる影響の要因として用いるのは,正確な清浄度の測定が困難なためである。
A.3.2 油浴潤滑
30
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
油浴潤滑,又はオフラインフィルタだけを備えた循環給油の場合の線図及び計算式は,汚染レベルによ
ってISO 4406の汚染コードに基づき選択する。
A.3.3 グリース潤滑
グリース潤滑の場合には,汚染レベルに応じた推奨線図及び計算式を示した表A.1に基づいて選択する。
A.3.4 軸受の取付け及び潤滑油の供給
予測どおりの寿命を得るためには,運転開始時に新油を潤滑システムに供給し,更に適時,新油を給油
して適切な運転条件に保つことが重要である。
特に,高い清浄度での運転を期待する場合には,軸受を取付け後に,装置の十分なフラッシングを実施
することが大切である。また,潤滑システムに供給する前に,新油をろ過することも重要である。その際
に使用するフィルタは,潤滑システムで用いられるフィルタと少なくとも同程度で,効率的なものでなけ
ればならない。
A.4 オンラインフィルタを備えた循環給油の汚染係数eC
オンラインフィルタを備えた循環給油の場合には,軸受に油を供給する前に,図A.1〜図A.4の線図又
は計算式によって汚染係数eCを決定することができる。最初に,ろ過比βx(c)によって適用できる線図又は
計算式を決める。選択された汚染粒子の大きさx(c)に対するろ過比βx(c)の値は,各々の線図に示す値と同
等又はそれ以上としなければならない。
なお,潤滑システムの清浄度は,ISO 4406による汚染コードの範囲内とする。
注記 図A.1〜図A.4は,対応国際規格をそのまま複製して用いているため,小数点は,“,”を用いて
表している。
式:
−
=
3
/1
pw
C
3
566
.0
1
D
a
e
,ここにa=0.086 4 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/13/10,−/12/10,−/13/11,−/14/11
図A.1−オンラインフィルタβ6(c)=200の循環給油の汚染係数eC
ISO 4406コード −/13/10
31
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式:
−
=
3/1
pw
C
7
998
.0
1
D
a
e
,ここにa=0.043 2 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/15/12,−/16/12,−/15/13,−/16/13
図A.2−オンラインフィルタβ12(c)=200の循環給油の汚染係数eC
ISO 4406コード −/15/12
式:
−
=
3/1
pw
C
9
632
.1
1
D
a
e
,ここにa=0.028 8 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/17/14,−/18/14,−/18/15,−/19/15
図A.3−オンラインフィルタβ25(c)≧75の循環給油の汚染係数eC
ISO 4406コード −/17/14
32
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式:
−
=
3/1
pw
C
2
336
.2
1
D
a
e
,ここにa=0.021 6 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/19/16,−/20/17,−/21/18,−/22/18
図A.4−オンラインフィルタβ40(c)≧75の循環給油の汚染係数eC
ISO 4406コード −/19/16
33
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.5 フィルタのない油潤滑又はオフラインフィルタを備えた油潤滑の汚染係数eC
フィルタのない油潤滑又はオフラインフィルタを備えた油潤滑の場合には,汚染係数eCは,図A.5〜図
A.9の線図又は計算式から求める。線図又は計算式は,各線図に示すISO 4406による汚染コードに基づき
選択する。
注記 図A.5〜図A.9は,対応国際規格をそのまま複製して用いているため,小数点は,“,”を用いて
表している。
式:
−
=
3/1
pw
C
6
679
.0
1
D
a
e
,ここにa=0.086 4 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/13/10,−/12/10,−/11/9,−/12/9
図A.5−フィルタのない油潤滑又はオフラインフィルタを備えた油潤滑の汚染係数eC
ISO 4406コード −/13/10
34
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式:
−
=
3/1
pw
C
141
.1
1
D
a
e
,ここにa=0.028 8 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/15/12,−/14/12,−/16/12,−/16/13
図A.6−フィルタのない油潤滑又はオフラインフィルタを備えた油潤滑の汚染係数eC
ISO 4406コード −/15/12
式:
−
=
3/1
pw
C
67
.1
1
D
a
e
,ここにa=0.013 3 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/17/14,−/18/14,−/18/15,−/19/15
図A.7−フィルタのない油潤滑又はオフラインフィルタを備えた油潤滑の汚染係数eC
ISO 4406コード −/17/14
35
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式:
−
=
3/1
pw
C
4
516
.2
1
D
a
e
,ここにa=0.008 64 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/19/16,−/18/16,−/20/17,−/21/17
図A.8−フィルタのない油潤滑又はオフラインフィルタを備えた油潤滑の汚染係数eC
ISO 4406コード −/19/16
式:
−
=
3/1
pw
C
4
897
.3
1
D
a
e
,ここにa=0.004 11 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
ISO 4406コードの範囲:−/21/18,−/21/19,−/22/19,−/23/19
図A.9−フィルタのない油潤滑又はオフラインフィルタを備えた油潤滑の汚染係数eC
ISO 4406コード −/21/18
36
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.6 グリース潤滑の汚染係数eC
グリース潤滑の汚染係数eCは,図A.10〜図A.14の線図又は計算式から求める。表A.1は,適切な線図
又は計算式を選定するために用いる。実際の条件に最も適合した運転状態を選択する。
注記 図A.10〜図A.14は,対応国際規格をそのまま複製して用いているため,小数点は,“,”を用い
て表している。
表A.1−グリース潤滑の場合の線図及び計算式の選択
運転状態
汚染レベル
・ 非常に清潔な組立後,十分なフラッシングを実施。運転中の密封性は非常に良好。
連続的な給脂又は短い間隔で給脂を実施。
・ 運転条件に対して有効な密封効果をもち,寿命に対して十分なグリースが封入され
た,シール軸受。
高い清浄度
図A.10
・ 清潔な組立後,フラッシングを実施。運転中の密封性は良好。軸受製造業者の仕様
に従って給脂を実施。
・ 運転条件に対して適切な密封効果をもち,グリースが封入された軸受。例えば,シ
ールド軸受。
標準清浄度
図A.11
・ 清潔に組立を実施。運転中の密封性は中程度。軸受製造業者の仕様に従って給脂を
実施。
軽度及び普通の
汚染状態
図A.12
・ 一般的な作業場で組立を実施。組立後の軸受及び関連部品の洗浄が不十分。運転中
の密封性が悪い。給脂間隔が軸受製造業者の推奨間隔より長い。
重度の汚染状態
図A.13
・ 汚染された環境で組立を実施。不十分な密封性。長い給脂間隔。
極度の汚染状態
図A.14
式:
−
=
3/1
pw
C
6
679
.0
1
D
a
e
,ここにa=0.086 4 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
図A.10−グリース潤滑の汚染係数eC−高い清浄度
37
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式:
−
=
3/1
pw
C
141
.1
1
D
a
e
,ここにa=0.043 2 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
図A.11−グリース潤滑の汚染係数eC−標準清浄度
Dpw<500 mmの場合,式:
−
=
3/1
pw
C
887
.1
1
D
a
e
,ここにa=0.017 7 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
Dpw≧500 mmの場合,式:
−
=
3/1
pw
C
677
.1
1
D
a
e
,ここにa=0.017 7 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
図A.12−グリース潤滑の汚染係数eC−軽度及び普通の汚染状態
38
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式:
−
=
3/1
pw
C
662
.2
1
D
a
e
,ここにa=0.011 5 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
図A.13−グリース潤滑の汚染係数eC−重度の汚染状態
式:
−
=
3/1
pw
C
06
.4
1
D
a
e
,ここにa=0.006 17 κ0.68Dpw0.55,ただし,a>1の場合はa=1とする。
図A.14−グリース潤滑の汚染係数eC−極度の汚染状態
39
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
疲労限荷重の計算
B.1
一般
この附属書では,軸受の形式,大きさ及び軸受内部の幾何形状,転動体及び軌道の形状並びに軌道材料
の疲労限を考慮した疲労限荷重Cuの推奨計算方法を記載する。
本体に示す指針及び制限事項は,この附属書にも適用する。
疲労限荷重Cuは,それ単独では軸受選定の評価基準として用いない。転がり軸受を,疲労限より小さい
軸受荷重で運転しても,必ずしも無限の寿命とはならない。転がり軸受の実際の用途では,境界潤滑又は
混合潤滑並びに潤滑剤の汚染によって軌道材料に付加的応力が生じ,疲労限荷重より小さな軸受荷重でも
局部的に軌道材料の疲労限を超える場合がある。このような潤滑及び潤滑剤の汚染の影響は,9.3及び附
属書Aを参照。
B.2
量記号
この附属書で用いる量記号は,箇条4によるほか,次による。
E
:縦弾性係数(N/mm2)
E(χ)
:第2種完全だ円積分
e
:外輪又はハウジング軌道盤の添字
F(ρ) :相対曲率差
i
:内輪又は軸軌道盤の添字
K(χ) :第1種完全だ円積分
Qu
:単一接触の疲労限荷重(N)
re
:外輪の軌道溝半径(mm)
ri
:内輪の軌道溝半径(mm)
γ
:補助変数
pw
wcos
D
α
D
γ=
vE
:ポアソン比
ρ
:接触面の曲率(mm−1)
Σρ
:曲率の和(mm−1)
σHu
:軌道材料が疲労限に到達するヘルツ接触応力(N/mm2)
φ
:転動体の角度位置(°)
χ
:接触だ円の短軸に対する長軸の比
B.3
疲労限荷重Cu
B.3.1 一般
寿命修正係数aISOは,9.3.2で規定したように,疲労限荷重を動等価荷重で除した,Cu/Pで表すことがで
きる。
軸受の疲労限荷重Cuの詳細な計算方法をB.3.2に示す。転動体と軌道間との接触応力は,1.5 GPaとし
40
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
た。この接触応力の値は,JIS G 4805に規定する鋼材又はこれと同等の品質が得られる合金鋼を用いて製
造した転がり軸受に対する推奨値である。
疲労限荷重Cuの簡易計算法を,B.3.3に示す。
B.3.2 疲労限荷重Cuの詳細な計算方法
B.3.2.1 単一接触の疲労限荷重
B.3.2.1.1 一般
単一接触の疲労限荷重とは,軌道材料の応力がその材料の疲労限に達したときの荷重である。点接触の
場合には,この荷重は単純な数値解析で計算できるが,応力分布が一様にならない線接触の場合には,複
雑な数値解析が必要となる。
B.3.2.1.2 玉軸受
疲労限荷重Cuの計算では,玉及び軌道の実際の曲率半径を用いる。
内輪(又は軸軌道盤)と玉との単一接触及び外輪(又はハウジング軌道盤)と玉との単一接触における
疲労限荷重は,次の式(B.1)によって求める。
()2
e
i,
e
i,
2
E
e
i,
3
Hu
e
i,
u
Σ
1
3
π
32
×
−
×
=
ρ
χ
E
E
ν
χ
σ
Q
········································ (B.1)
接触だ円の短軸に対する長軸の比は,次の式(B.2)によって求める。
0
)
(
1
)
(
)
(
1
2
1
2
=
−
−
−
−
ρ
F
χ
E
χ
K
χ
···················································· (B.2)
式(B.2)の第1種完全だ円積分は,次の式(B.3)によって求める。
(
)
ϕ
ϕ
d
χ
χ
K
2
1
2
π
0
2
2
sin
1
1
1
)
(
−
∫
−
−
=
·············································· (B.3)
式(B.2)の第2種完全だ円積分は,次の式(B.4)によって求める。
(
)
ϕ
ϕ
d
χ
χ
E
2
1
2
π
0
2
2
sin
1
1
1
)
(
∫
−
−
=
················································ (B.4)
式(B.1)の内輪(又は軸軌道盤)と玉との接触部の曲率の和は,次の式(B.5)によって求める。
−
−
+
=
i
w
w
i
2
1
2
2
Σ
r
D
γ
D
γ
ρ
························································· (B.5)
式(B.1)の外輪(又はハウジング軌道盤)と玉との接触部の曲率の和は,次の式(B.6)によって求める。
−
+
−
=
e
w
w
e
2
1
2
2
Σ
r
D
γ
D
γ
ρ
························································· (B.6)
式(B.2)の内輪(又は軸軌道盤)と玉との接触部の相対曲率差は,次の式(B.7)によって求める。
i
w
i
w
i
2
1
2
2
1
)
(
r
D
γ
r
D
F
−
−
+
+
−
=
γ
γ
γ
ρ
······························································· (B.7)
41
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式(B.2)の外輪(又はハウジング軌道盤)と玉との接触部の相対曲率差は,次の式(B.8)によって求める。
e
w
e
w
e
2
1
2
2
1
)
(
r
D
γ
r
D
F
−
+
−
+
+
−
=
γ
γ
γ
ρ
······························································· (B.8)
内輪(又は軸軌道盤)軌道の最大荷重接触部での疲労限荷重Qui,及び外輪(又はハウジング軌道盤)軌
道の最大荷重接触部での疲労限荷重Queを求める場合には,実際の玉及び軌道の曲率半径を使用する。
疲労限荷重Cuを計算する場合には,Qui又はQueの小さい値を用いる。すなわち,次の式(B.9)になる。
(
)
ue
ui
u
,
min
Q
Q
Q=
···································································· (B.9)
自動調心玉軸受の場合には,別途考慮する必要がある。
B.3.2.1.3 ころ軸受
最大荷重を受けている,内輪(又は軸軌道盤)軌道面における単一接触の疲労限荷重Qui,及び外輪(又
はハウジング軌道盤)軌道面における単一接触の疲労限荷重Queを求める場合には,転動体及び軌道の曲
率半径及び輪郭などの,実際の形状を考慮する。
応力分布が一様にならない線接触の場合には,複雑な数値解析が必要となる。適用可能な計算方法は,
参考文献[6],[8]及び[11]を参照。
なお,参考文献[9]の2円筒の線接触に対するヘルツ応力の式は,この場合には適切ではない。
B.3.2.2 軸受の疲労限荷重
B.3.2.2.1 一般
軸受としての疲労限荷重Cuは,最大転動体荷重の基で式(B.9)によって求めた疲労限荷重Quを,次の式
(B.10)〜式(B.17)に代入して計算する。
B.3.2.2.2 ラジアル玉軸受
Dpw≦100 mmの場合,
α
i
Q
Z
C
cos
8
228
.0
u
u=
··············································· (B.10)
Dpw>100 mmの場合,
0.5
pw
u
u
100
cos
8
228
.0
=
D
α
i
Q
Z
C
····································· (B.11)
B.3.2.2.3 スラスト玉軸受
Dpw≦100 mmの場合,
α
Q
Z
C
sin
u
u=
························································· (B.12)
Dpw>100 mmの場合,
0.5
pw
u
u
100
sin
=
D
α
Q
Z
C
··············································· (B.13)
B.3.2.2.4 ラジアルころ軸受
Dpw≦100 mmの場合,
α
i
Q
Z
C
cos
3
245
.0
u
u=
··············································· (B.14)
Dpw>100 mmの場合,
0.3
pw
u
u
100
cos
3
245
.0
=
D
α
i
Q
Z
C
····································· (B.15)
B.3.2.2.5 スラストころ軸受
Dpw≦100 mmの場合,
α
Q
Z
C
sin
u
u=
························································· (B.16)
42
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Dpw>100 mmの場合,
0.3
pw
u
u
100
sin
=
D
α
Q
Z
C
··············································· (B.17)
B.3.3 疲労限荷重Cuの簡易計算法
B.3.3.1 一般
玉軸受及びころ軸受の疲労限荷重Cuは簡易的に,次の式(B.18)〜式(B.21)によって求めることができる。
注記 この簡便法による計算結果は,B.3.2で示した詳細な計算方法による結果とかなり異なる場合が
あるので,詳細な計算方法を使用することが望ましい。
B.3.3.2 玉軸受
Dpw≦100 mmの場合,
22
0
u
C
C=
································································· (B.18)
Dpw>100 mmの場合,
0.5
pw
0
u
100
22
=
D
C
C
······················································ (B.19)
B.3.3.3 ころ軸受
Dpw≦100 mmの場合,
2.8
0
u
C
C=
································································ (B.20)
Dpw>100 mmの場合,
0.3
pw
0
u
100
2.8
=
D
C
C
····················································· (B.21)
注記 係数8.2は,ある程度ころの形状によって変わる。
43
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
アンギュラ玉軸受の基本動定格荷重の不連続性
C.1 一般
接触角α=45°を境に,アンギュラ玉軸受をラジアル軸受として考えた場合と,スラスト軸受として考
えた場合とでは,基本動アキシアル定格荷重の計算結果が僅かに異なり不連続となる。これは,ラジアル
軸受としてのアンギュラ玉軸受(α≦45°)の,玉の直径に対する軌道溝半径の比(以下,溝半径の比と
いう。)が,スラスト軸受としてのアンギュラ玉軸受(α>45°)の溝半径の比と異なるためである。この
附属書では,この不連続について記載する。
さらに,ラジアル軸受の溝半径の比を用いて,45°<α<90°のアンギュラ玉軸受(以下,スラストア
ンギュラ玉軸受という。)を製造したり,スラスト軸受の溝半径の比を用いて,0<α≦45°のアンギュラ
玉軸受(以下,ラジアルアンギュラ玉軸受という。)を製造することがあり,実際の溝半径の比を用いた基
本動アキシアル定格荷重を計算又は比較することが必要となる場合がある。この附属書では,この規格に
基づき計算する基本動ラジアル定格荷重Cr及び基本動アキシアル定格荷重Caから,実際の溝半径の比を
用いた基本動アキシアル定格荷重を求める方法を記載する。
C.2 量記号
この附属書で用いる量記号は,箇条4によるほか,次による。
Caa
:スラスト軸受(α>45°)の補正基本動アキシアル定格荷重(N)
Car
:ラジアル軸受(α≦45°)の補正基本動アキシアル定格荷重(N)
re
:外輪の軌道溝半径(mm)
ri
:内輪の軌道溝半径(mm)
λ
:減少係数
C.3 ラジアル及びスラストアンギュラ玉軸受の定格荷重及び等価荷重を計算する場合の差異
ラジアル軸受とした場合の寿命と,スラスト軸受とした場合の寿命との比較では,両方の軸受は同じ外
部アキシアル荷重Faだけを受けているとする。
a) スラストアンギュラ玉軸受の場合には,基本定格寿命は次の式による。
3
a
a
3
a
a
10
=
=
F
C
P
C
L
基本動アキシアル定格荷重Caの計算に使用する変数を,次に示す。
− 溝半径の比ri/Dw≦0.54及びre/Dw≦0.54
− 減少係数λ=0.9
− Y係数(Ca=Cr/Y)
ここに,
α
α
Y
0.333sin
1
0.4cot
−
=
···································································· (C.1)
44
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) ラジアルアンギュラ玉軸受の場合には,基本定格寿命は次の式(C.2)による。
3
a
a
3
a
r
3
r
r
10
=
=
=
F
C
YF
C
P
C
L
····················································· (C.2)
基本動ラジアル定格荷重Crの計算に使用する変数を,次に示す。
− 溝半径の比ri/Dw≦0.52及びre/Dw≦0.53
− 減少係数λ=0.95
− Y係数(Ca=Cr/Y)
全ての玉が負荷を受けた場合(ほとんどのスラスト玉軸受)のY係数は,式(C.1)によって求める。式(C.1)
の中の1−0.333 sinαは,全ての玉が負荷を受けることによる影響を考慮したもので,表4に記載したスラ
ストアンギュラ玉軸受の係数fcの値では,この1−0.333 sinαの影響を考慮に入れている。
ラジアル軸受は主にラジアル荷重を受け,無負荷となる玉及び/又は軽負荷の玉が多い。したがって,
Y係数を表3のラジアルアンギュラ玉軸受として計算した場合には,1−0.333 sinαによる影響は小さくな
る。
C.4 ラジアルアンギュラ玉軸受の補正基本動アキシアル定格荷重Carとスラストアンギュラ玉軸受の補
正基本動アキシアル定格荷重Caaとの比較
C.4.1 一般
通常,ラジアルアンギュラ玉軸受の補正基本動アキシアル定格荷重Car及びスラストアンギュラ玉軸受
の補正基本動アキシアル定格荷重Caaは,アキシアル荷重が支配的な用途で運転される軸受に必要となる
ことが多いので,各々の補正基本動アキシアル定格荷重の求め方を記載する。
これらの補正基本動アキシアル定格荷重は,それぞれ,式(C.3),式(C.4),式(C.7)及び式(C.8)によって計
算できる。ただし,接触角αはアキシアル荷重の影響を受けずに一定と仮定しているので,接触角が小さ
い軸受が重荷重を受けた場合には,計算誤差が生じる。
しかしながら,C.3で示したように,ラジアル軸受とスラスト軸受とでは,異なった溝半径の比,減少
係数λ及びY係数の値を用いて基本動ラジアル定格荷重Cr及び基本動アキシアル定格荷重Caを計算する。
正しい計算及び比較を行うためには,溝半径の比,減少係数λ及びY係数を同一の値にして,基本動ラジ
アル定格荷重Cr及び基本動アキシアル定格荷重Caを,ラジアル軸受(α≦45°)の補正基本動アキシアル
定格荷重Car及びスラスト軸受(α>45°)の補正基本動アキシアル定格荷重Caaに計算し直さなければな
らない。
C.4.2 ラジアル軸受の溝半径の比(ri/Dw≦0.52及びre/Dw≦0.53)をもつアンギュラ玉軸受の補正基本動
アキシアル定格荷重の求め方
アンギュラ玉軸受(α≦45°)の基本動ラジアル定格荷重Crから,ラジアル軸受としての補正基本動ア
キシアル定格荷重を求める方法は,次の式(C.3)による。
(
)
r
ar
sin
0.333
1
tan
2.37
C
α
α
C
−
=
·················································· (C.3)
アンギュラ玉軸受(α>45°)の基本動アキシアル定格荷重Caから,スラスト軸受としての補正基本動
アキシアル定格荷重を求める方法は,次の式(C.4)による。
a
aa
1.24C
C=
··········································································· (C.4)
45
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ラジアル軸受としてのアンギュラ玉軸受(α≦45°)の基本定格寿命は,次の式(C.5)による。
3
a
ar
10
=
F
C
L
··········································································· (C.5)
スラスト軸受としてのアンギュラ玉軸受(α>45°)の基本定格寿命は,次の式(C.6)による。
3
a
aa
10
=
F
C
L
·········································································· (C.6)
C.4.3 スラスト軸受の溝半径の比(ri/Dw≦0.54及びre/Dw≦0.54)をもつアンギュラ玉軸受の補正基本動
アキシアル定格荷重の求め方
アンギュラ玉軸受(α≦45°)の基本動ラジアル定格荷重Crから,ラジアル軸受としての補正基本動ア
キシアル定格荷重を求める方法は,次の式(C.7)による。
(
)
r
ar
sin
0.333
1
tan
1.91
C
α
α
C
−
=
··················································· (C.7)
アンギュラ玉軸受(α>45°)の基本動アキシアル定格荷重Caから,スラスト軸受としての補正基本動
アキシアル定格荷重を求める方法は,次の式(C.8)による。
a
aa
C
C=
················································································ (C.8)
C.5 計算例
C.5.1 α=45°のアンギュラ玉軸受の基本動アキシアル定格荷重の不連続性
α=45°のアンギュラ玉軸受について,ラジアル軸受と考えた場合の補正基本動アキシアル定格荷重Car
と,スラスト軸受と考えた場合の補正基本動アキシアル定格荷重Caaとを次によって比較する。計算に用
いる軸受は,ラジアル軸受の溝半径の比をもち,(Dwcosα)/Dpw=0.16及びi=1とする。
a) ラジアル軸受としての補正基本動アキシアル定格荷重の計算
ラジアル軸受の基本動ラジアル定格荷重Crは,式(1)のCr=K fcによって計算する。ここで,Kは全ての
パラメータを含む係数で,ラジアル軸受とスラスト軸受とで同じ値である。
なお,fc=59.6である(表2参照)。
ラジアル軸受としての補正基本動アキシアル定格荷重Carは,式(C.3)から次のようになる。
(
)
K
K
C
108
59.6
45
sin
0.333
1
45
tan
2.37
ar
=
×
×
°
−
×
°
×
=
b) スラスト軸受としての補正基本動アキシアル定格荷重の計算
スラスト軸受の基本動アキシアル定格荷重Caは,式(6)のCa=K fc tanαによって計算する。
なお,fc=85.1である(表4参照)。
スラスト軸受としての補正基本動アキシアル定格荷重Caaは,式(C.4)から次のようになる。
K
K
C
106
tan45
85.1
1.24
aa
=
°
×
×
×
=
この計算によって,α=45°のアンギュラ玉軸受をラジアル軸受とした場合とスラスト軸受とした場合
とでは,補正基本動アキシアル定格荷重には不連続が生じるものの,Car≈Caaで,大きな誤差がないことが
確認できる。
C.5.2 α=40°のアンギュラ玉軸受の補正基本動アキシアル定格荷重Carの求め方
α=40°のアンギュラ玉軸受の補正基本動アキシアル定格荷重Carの求め方を次によって示す。
46
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
計算に用いる軸受は,ラジアル軸受又はスラスト軸受の溝半径の比をもち,α=40°,Dw/Dpw=0.091,
Dw=7.5 mm,Z=27及びi=1とする。
a) ラジアル軸受の溝半径の場合の補正基本動アキシアル定格荷重の計算
表2から,(Dw cos 40°)/Dpw=0.091×cos 40°=0.07に対して,fc=51.1である。ラジアル玉軸受の基本動
ラジアル定格荷重は,式(1)によって求める。
(
)
(
)
651
18
7.5
27
40
cos
51.1
1.3
cos
1.3
1.8
3
2
0.7
1.8
w
3
2
0.7
c
r
=
×
×
°
×
×
=
=
D
Z
α
f
C
注記 ここで計算した基本動ラジアル定格荷重Crは,ラジアル軸受の溝半径の比に基づいている。
式(C.3)によって,ラジアル軸受の溝半径の比をもつα=40°の単列アンギュラ玉軸受の補正基本動アキ
シアル定格荷重Carは,次のように求まる。
(
)
151
29
651
18
40
sin
0.333
1
40
tan
2.37
ar
=
×
°
×
−
×
°
×
=
C
N
200
29
ar=
C
b) スラスト軸受の溝半径の場合の補正基本動アキシアル定格荷重の計算
式(C.7)によって,スラスト軸受の溝半径の比をもつα=40°の単列アンギュラ玉軸受の補正基本動アキ
シアル定格荷重Carは,次のように求まる。
(
)
493
23
651
18
40
sin
0.333
1
40
tan
1.91
ar
=
×
°
×
−
×
°
×
=
C
N
500
23
ar=
C
このCarの差は,ラジアル軸受とスラスト軸受との溝半径の比の違いによるものである。
C.5.3 α=60°のアンギュラ玉軸受の補正基本動アキシアル定格荷重Caaの求め方
α=60°のアンギュラ玉軸受の補正基本動アキシアル定格荷重Caaの求め方を次によって示す。
計算に用いる軸受は,スラスト軸受又はラジアル軸受の溝半径の比をもち,α=60°,Dw/Dpw=0.091,
Dw=7.5 mm,Z=27及びi=1とする。
a) スラスト軸受の溝半径の場合の補正基本動アキシアル定格荷重の計算
表4から,(Dw cos 60°)/Dpw=0.091×cos 60°=0.046に対して,fc=61.12である。スラスト玉軸受の基本
動アキシアル定格荷重は,式(6)によって求める。
(
)(
)
(
)
663
28
7.5
27
tan60
60
cos
61.12
1.3
tan
cos
1.3
1.8
3
2
0.7
1.8
w
3
2
0.7
c
a
=
×
×
°
×
°
×
×
=
=
D
Z
α
α
f
C
注記 ここで計算した基本動アキシアル定格荷重Caは,スラスト軸受の溝半径の比に基づいている。
式(C.8)によって,スラスト軸受の溝半径の比をもつα=60°の単列アンギュラ玉軸受の補正基本動アキ
シアル定格荷重Caaは,次のように求まる。
663
28
a
aa
=
=C
C
N
700
28
aa=
C
b) ラジアル軸受の溝半径の場合の補正基本動アキシアル定格荷重の計算
式(C.4)によって,ラジアル軸受の溝半径の比をもつα=60°の単列アンギュラ玉軸受の補正基本動アキ
シアル定格荷重Caaは,次のように求まる。
542
35
663
28
1.24
24
.1
a
aa
=
×
=
=
C
C
N
500
35
aa=
C
このCaaの差は,スラスト軸受とラジアル軸受との溝半径の比の違いによるものである。
47
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
参考文献
[1] JIS B 8356-8 油圧用フィルタ性能評価方法−第8部:フィルタエレメントのろ過性能試験(マルチパ
ステスト法)
注記 対応国際規格:ISO 16889:1999,Hydraulic fluid power filters−Multi-pass method for evaluating
filtration performance of a filter element(IDT)
[2] JIS B 9932 油圧−液体用自動粒子計数器の校正方法
注記 対応国際規格:ISO 11171:1999,Hydraulic fluid power−Calibration of automatic particle counters
for liquids(IDT)
[3] ISO 4406,Hydraulic fluid power−Fluids−Method for coding the level of contamination by solid particles
[4] ISO/TR 1281-2:2008,Rolling bearings−Explanatory notes on ISO 281−Part 2: Modified rating life
calculation, based on a systems approach to fatigue stresses
[5] ISO/TS 16281,Rolling bearings−Methods for calculating the modified reference rating life for universally
loaded bearings
[6] DE MUL, J.M., KALKER, J.J., FREDRIKSSON, B. The Contact Between Arbitrarily Curved Bodies of Finite
Dimensions, Transactions of the ASME, Journal of Tribology, 108, Jan. 1986, pp. 140-148
[7] HARRIS, T.A. Rolling Bearing Analysis, 4th Edition, John Wiley & Sons Inc., 2001
[8] HARTNETT, M.J. A General Numerical Solution for Elastic Body Contact Problems, ASME, Applied
Mechanics Division, 39, 1980, pp. 51-66
[9] HERTZ, H. Über die Berührung fester elastischer Körper und über die Härte, Verhandlungen des Vereins zur
Beförderung des Gewerbefleißes, 1882, pp. 449-463
[10] IOANNIDES, E., BERGLING, G., GABELLI, A. An Analytical Formulation for the Life of Rolling Bearings,
Acta Polytechnica Scandinavica, Mechanical Engineering Series No. 137, The Finnish Academy of Technology,
1999
[11] REUSNER, H. Druckflächenbelastung und Oberflächenverschiebung im Wälzkontakt von Rotationskörpern,
Diss. TH Karlsruhe, 1977
48
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS B 1518:2013 転がり軸受−動定格荷重及び定格寿命
ISO 281:2007 Rolling bearings−Dynamic load ratings and rating life
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲
転がり軸受の基本
動定格荷重及び定
格寿命の計算方法
について規定
1
JISとほぼ同じ
追加
JIS B 1511及びJIS G 4805を
引用した。
日本国内において技術領域を明
確にする必要性から規定した。
2 引用規格
3 用語及び
定義
3.11 ころ直径
3.11
JISに同じ
追加
JISに,対称な形状のころに関
する注記を追加した。
対応国際規格の定期見直し時に
提案する。
3.21〜3.24
−
−
追加
3.21“疲労限応力”,3.22“基準
動粘度”,3.23“動ラジアル荷
重係数”及び3.24“動アキシア
ル荷重係数”,の用語及び定義
を追加した。
対応国際規格の定期見直し時に
提案する。
4 量記号
aISO,
Lnm
4
JISに同じ
変更
aISOについて,寿命計算に用い
る修正係数であることの説明
を追加した。
修正定格寿命の説明を追加し,
“破損確率n %”の量記号nを
削除した。
複数の量記号nが定義されている
ことから,破損確率nの量記号を
削除した。
2
B
1
5
1
8
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
49
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
5 ラジアル
玉軸受
5.1.1
5.1.1
JISにほぼ同じ
追加
表1に“マグネト玉軸受”を追
加した。
対応国際規格の“Radial contact
ball bearings”に対して,JISでは
“深溝玉軸受”と記載しているこ
とから,“マグネト玉軸受”が除
外されないように追記した。技術
的差異はない。
5.1.2.1
5.2.2
5.1.2.1
5.2.2
−
追加
“内部仕様”に関する注を追加
した。
“内部仕様”に関する技術領域を
明確にする必要性から,注を追記
した。
6 スラスト
玉軸受
6.1.1 単列スラス
ト玉軸受の基本動
アキシアル定格荷
重
6.1.1
−
追加
“玉の個数”の説明を追加し
た。
複式軸受の場合の“玉の個数”を
明確にするため追記した。
対応国際規格の定期見直し時に
提案する。
6.1.3 組合せ軸受
の基本動アキシア
ル定格荷重
−
−
追加
“6.1.3 組合せ軸受の基本動ア
キシアル定格荷重”の箇条を追
加した。
スラスト玉軸受の組合せ軸受は,
実用に供されているため,追記し
た。
対応国際規格の定期見直し時に
提案する。
7 ラジアル
ころ軸受
7.1.1 1個のラジ
アルころ軸受の基
本動ラジアル定格
荷重
7.1.1
−
追加
表6に“棒状ころ軸受”を追加
した。
JIS B 0104転がり軸受用語に規定
する“棒状ころ軸受”を追記した。
7.1.2
7.2.2
7.1.2
7.2.2
−
追加
“内部仕様”に関する注を追加
した。
“内部仕様”に関する技術領域を
明確にする必要性から,注を追記
した。
8 スラスト
ころ軸受
8.1.3
8.1.3
−
追加
“内部仕様”に関する注を追加
した。
“内部仕様”に関する技術領域を
明確にする必要性から,注を追記
した。
2
B
1
5
1
8
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
50
B 1518:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
附属書B(参
考)
疲労限荷重の計算
Annex B
JISに同じ
変更
JISでは自動調心玉軸受に関し
て,簡潔に記載した。
規格の利用者に分かりやすい記
載に変更した。
対応国際規格の定期見直し時に
提案する。
附属書C(参
考)
アンギュラ玉軸受
の基本動定格荷重
の不連続性
Annex C
JISに同じ
追加
計算例を追記した。
分かりやすくするために計算例
を追加した。
JISと国際規格との対応の程度の全体評価:ISO 281:2007,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
2
B
1
5
1
8
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。