B 1192-3:2018
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 種類及び等級 ··················································································································· 1
5 ボールねじの精度 ············································································································· 2
5.1 代表移動量誤差及び変動 ································································································· 2
5.2 ねじ軸各部の精度 ·········································································································· 3
5.3 ナットの取付部の精度 ···································································································· 5
5.4 ねじ軸の半径方向の全振れ精度 ························································································ 6
5.5 基準トルク変動率の許容域 ······························································································ 8
6 測定方法························································································································· 9
6.1 測定場所の状態 ············································································································· 9
6.2 代表移動量誤差及び変動 ································································································· 9
6.3 ねじ軸各部の振れ精度 ··································································································· 10
6.4 ナットの取付部の精度 ··································································································· 14
6.5 ねじ軸の半径方向の全振れ精度 ······················································································· 17
6.6 動トルク ····················································································································· 18
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 20
B 1192-3:2018
(2)
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本工作機器工業会(JMAA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
これによって,JIS B 1192:2013は廃止され,その一部を分割して制定したこの規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS B 1192の規格群には,次に示す部編成がある。
JIS B 1192-1 第1部:用語及び記号
JIS B 1192-2 第2部:呼び径及び呼びリード
JIS B 1192-3 第3部:精度測定方法
JIS B 1192-4 第4部:軸方向静剛性
JIS B 1192-5 第5部:静定格荷重,動定格荷重及び寿命
日本工業規格 JIS
B 1192-3:2018
ボールねじ−第3部:精度測定方法
Ball screws-Part 3: Acceptance conditions and test method
序文
この規格は,2006年に第2版として発行されたISO 3408-3を基とし,国際規格には規定されておらず,
日本工業規格で規定していた精度等級(C系列)を追加したため,技術的内容を変更して作成した日本工
業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,ボールねじの精度測定方法,測定条件及び許容値について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 3408-3:2006,Ball screws−Part 3: Acceptance conditions and acceptance tests(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 1192-1 ボールねじ−第1部:用語及び記号
注記 対応国際規格:ISO 3408-1:2006,Ball screws−Part 1: Vocabulary and designation(MOD)
JIS K 2001 工業用潤滑油−ISO粘度分類
JIS Z 8703 試験場所の標準状態
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 1192-1による。
4
種類及び等級
ボールねじの種類には,位置決め用にC系列及びCp系列があり,搬送用にCt系列がある。
種類に対応した各系列の等級は,表1による。
2
B 1192-3:2018
表1−種類及び等級
種類
系列記号
等級
位置決め用
C
0,1,3,5
Cp
0,1,3,5
搬送用
Ct
0,1,3,5,7,10
5
ボールねじの精度
5.1
代表移動量誤差及び変動
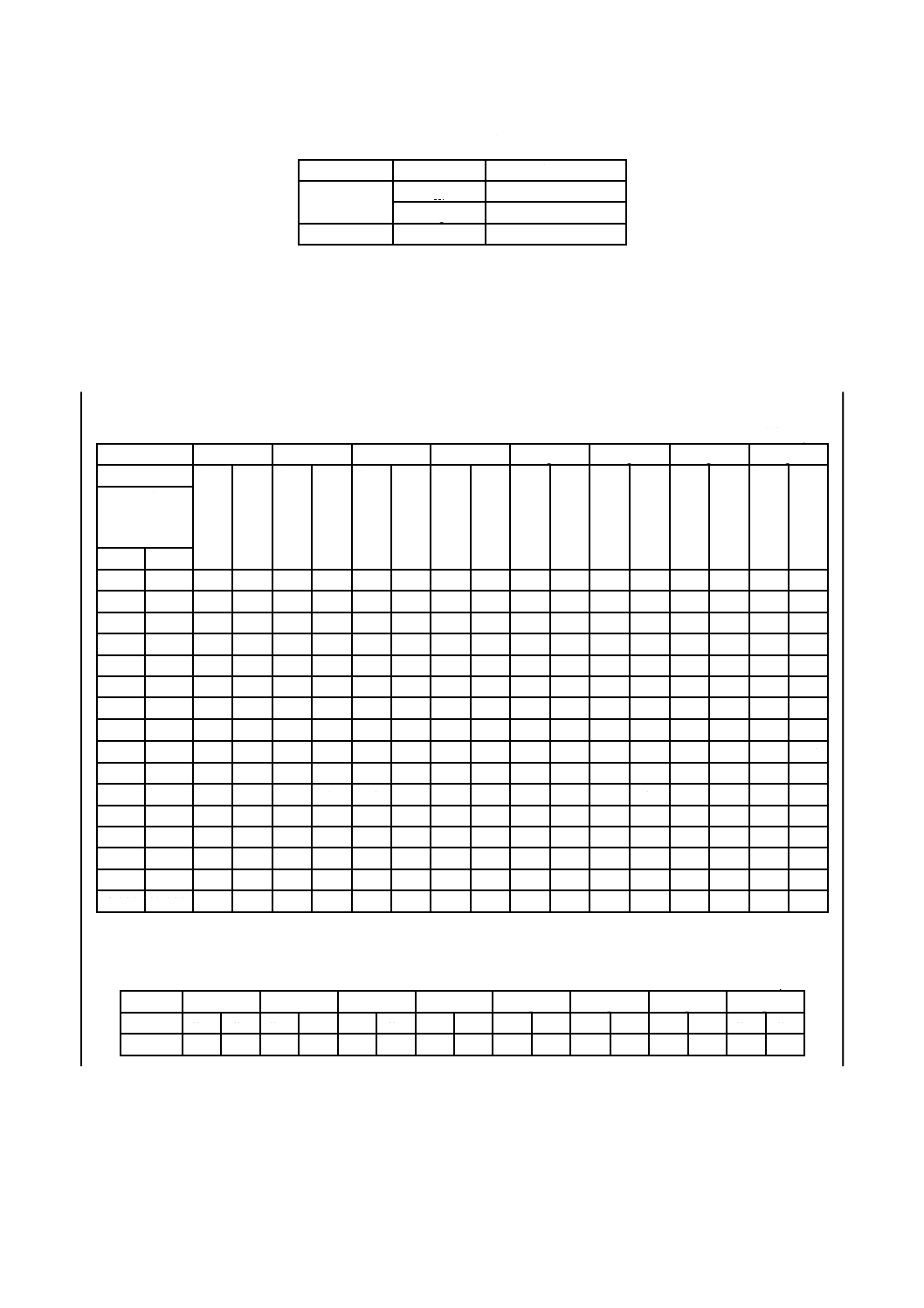
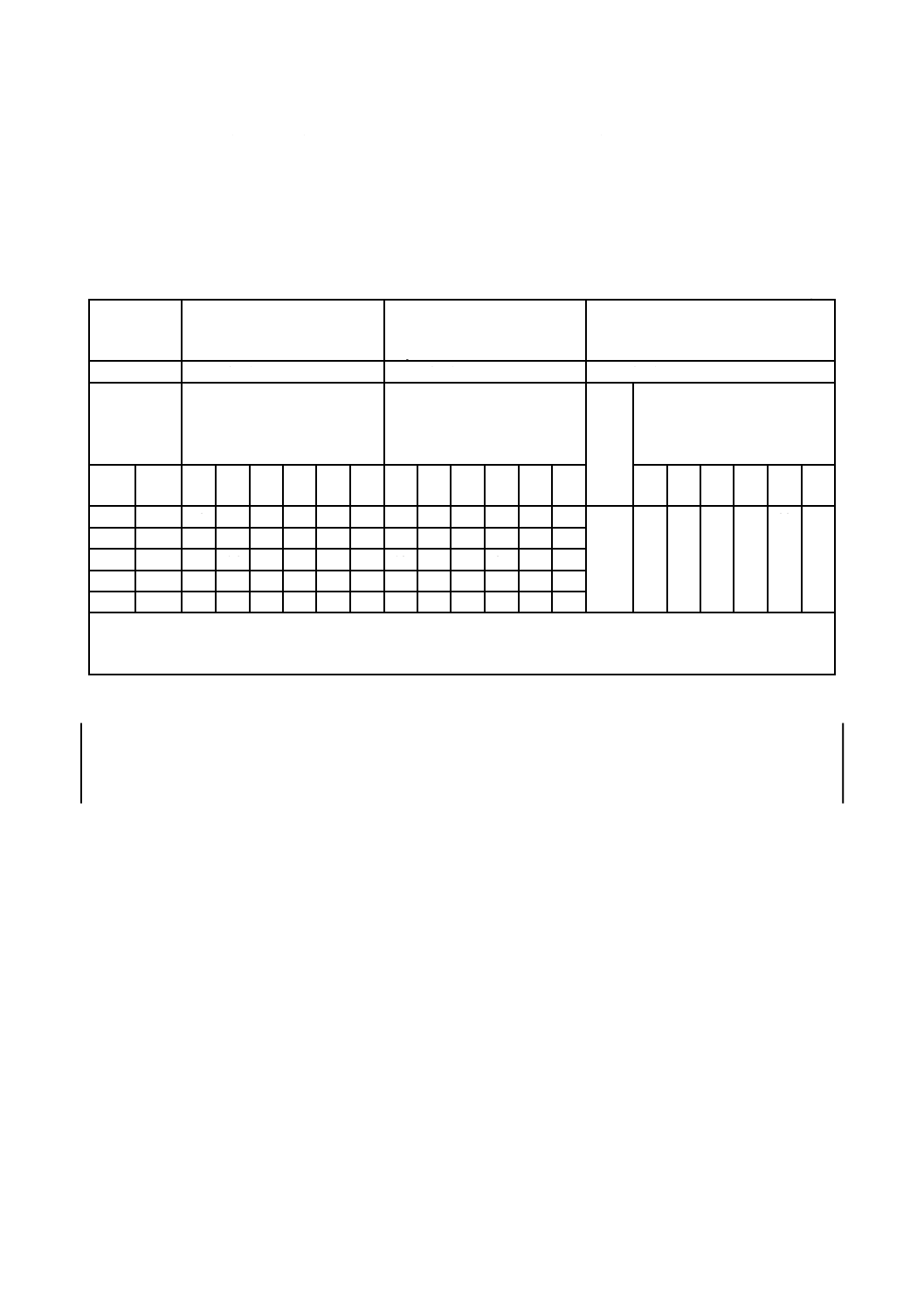
ボールねじの代表移動量誤差及び変動は,6.2によって測定したとき,その許容値は,それぞれ表2〜表
4に適合しなければならない。
表2−位置決め用ボールねじに対する代表移動量誤差及び変動の許容値
単位 μm
等級
C0
C1
C3
C5
Cp0
Cp1
Cp3
Cp5
項目
代表 変動 代表 変動 代表 変動 代表 変動 代表 変動 代表 変動 代表 変動 代表 変動
ねじ部有効
長さlu(mm)
移動
量誤
差
移動
量誤
差
移動
量誤
差
移動
量誤
差
移動
量誤
差
移動
量誤
差
移動
量誤
差
移動
量誤
差
を超え 以下
ep
vu
ep
vu
ep
vu
ep
vu
ep
vu
ep
vu
ep
vu
ep
vu
−
315
4
3.5
6
5
12
8
23
18
4
3.5
6
6
12
12
23
23
315
400
5
3.5
7
5
13
10
25
20
5
3.5
7
6
13
12
25
25
400
500
6
4
8
5
15
10
27
20
6
4
8
7
15
13
27
26
500
630
6
4
9
6
16
12
30
23
6
4
9
7
16
14
32
29
630
800
7
5
10
7
18
13
35
25
7
5
10
8
18
16
36
31
800 1000
8
6
11
8
21
15
40
27
8
6
11
9
21
17
40
34
1000 1250
9
6
13
9
24
16
46
30
9
6
13
10
24
19
47
39
1250 1600
11
7
15
10
29
18
54
35
11
7
15
11
29
22
55
44
1600 2000
−
−
18
11
35
21
65
40
−
−
18
13
35
25
65
51
2000 2500
−
−
22
13
41
24
77
46
−
−
22
15
41
29
78
59
2500 3150
−
−
26
15
50
29
93
54
−
−
26
17
50
34
96
69
3150 4000
−
−
32
18
62
35
115
65
−
−
32
21
62
41
115
82
4000 5000
−
−
−
−
76
41
140
77
−
−
−
−
76
49
140
99
5000 6300
−
−
−
−
−
−
170
93
−
−
−
−
−
−
170
119
6300 8000
−
−
−
−
−
−
213
115
−
−
−
−
−
−
−
−
8000 10000
−
−
−
−
−
−
265
140
−
−
−
−
−
−
−
−
表3−位置決め用ボールねじに対する変動の許容値
単位 μm
等級
C0
C1
C3
C5
Cp0
Cp1
Cp3
Cp5
項目
v300
v2π
v300
v2π
v300
v2π
v300
v2π
v300
v2π
v300
v2π
v300
v2π
v300
v2π
許容値
3.5
3
5
4
8
6
18
8
3.5
3
6
4
12
6
23
8
3
B 1192-3:2018
表4−搬送用ボールねじに対する代表移動量誤差及び変動の許容値
単位 μm
等級
Ct0
Ct1
Ct3
Ct5
Ct7
Ct10
項目
代表移動量誤差(ep)
300
u
p
300v
l
e
×
±
=
で計算するa)。
変動
変動(vu)
規定しない。
変動(v300)
3.5
6
12
23
52
210
変動(v2π) 規定しない。
注a) ep:代表移動量誤差(μm)
lu:ねじ部有効長さ(mm)
v300:任意の300 mmに対する変動(μm)
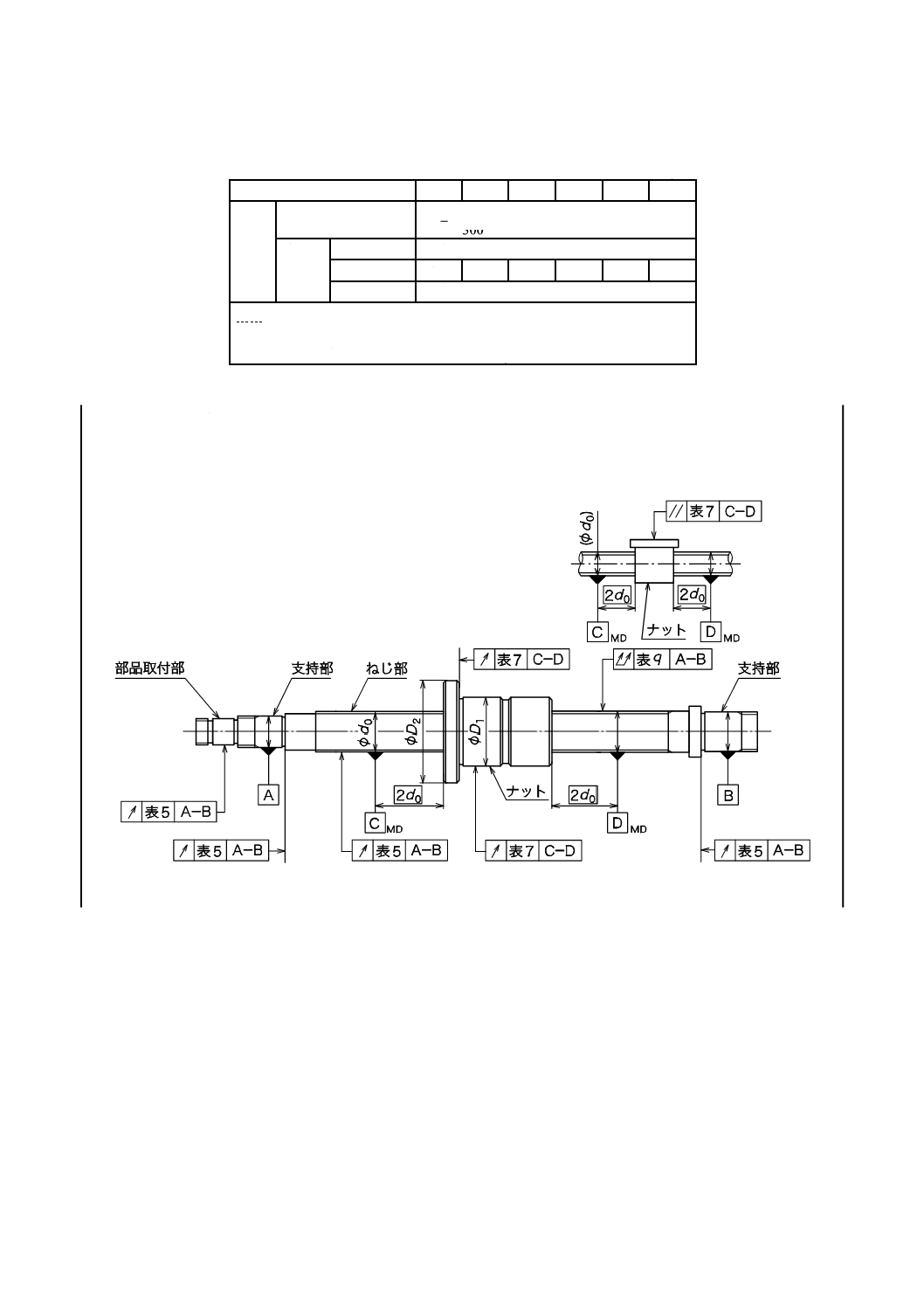
5.2
ねじ軸各部の精度
5.2.1
C系列ボールねじのねじ軸各部の円周振れ
ねじ軸の支持部軸線に対するねじ溝面及び部品取付部外径の半径方向の円周振れ並びに支持部端面の円
周振れの許容値は,6.3.1によって測定したとき,表5の規定に適合しなければならない(図1参照)。
図1−C系列ボールねじの各部の円周振れ及び平行度(例)
4
B 1192-3:2018
表5−C系列ボールねじのねじ軸各部の円周振れの許容値
単位 μm
項目
ねじ軸の支持部軸線に対するねじ溝
面の半径方向の円周振れ許容値a) Jp
又はKp及び部品取付部外径の半径方
向の円周振れ許容値Mp
ねじ軸の支持部軸線に対する支持部
端面の円周振れ許容値Np
測定方法
図4及び図5参照
図6参照
呼び径d0 (mm)
等級
等級
を超え
以下
C0
C1
C3
C5
C0
C1
C3
C5
−
8
3
5
8
10
2
3
4
5
8
12
4
5
8
11
2
3
4
5
12
20
4
6
9
12
2
3
4
5
20
32
5
7
10
13
2
3
4
5
32
50
6
8
12
15
2
3
4
5
50
80
7
9
13
17
3
4
5
7
80
125
−
10
15
20
−
4
6
8
注a) この項目の測定には,ねじ軸軸線の全振れの影響が含まれるので,その補正が必要となる。
その補正方法としては,ねじ軸全長と,支点から測定点までの距離(L1,L2)との比によっ
て(図4参照),表9のねじ軸軸線の全振れ許容値から補正値を求め,表5の許容値に加え
て適用する。
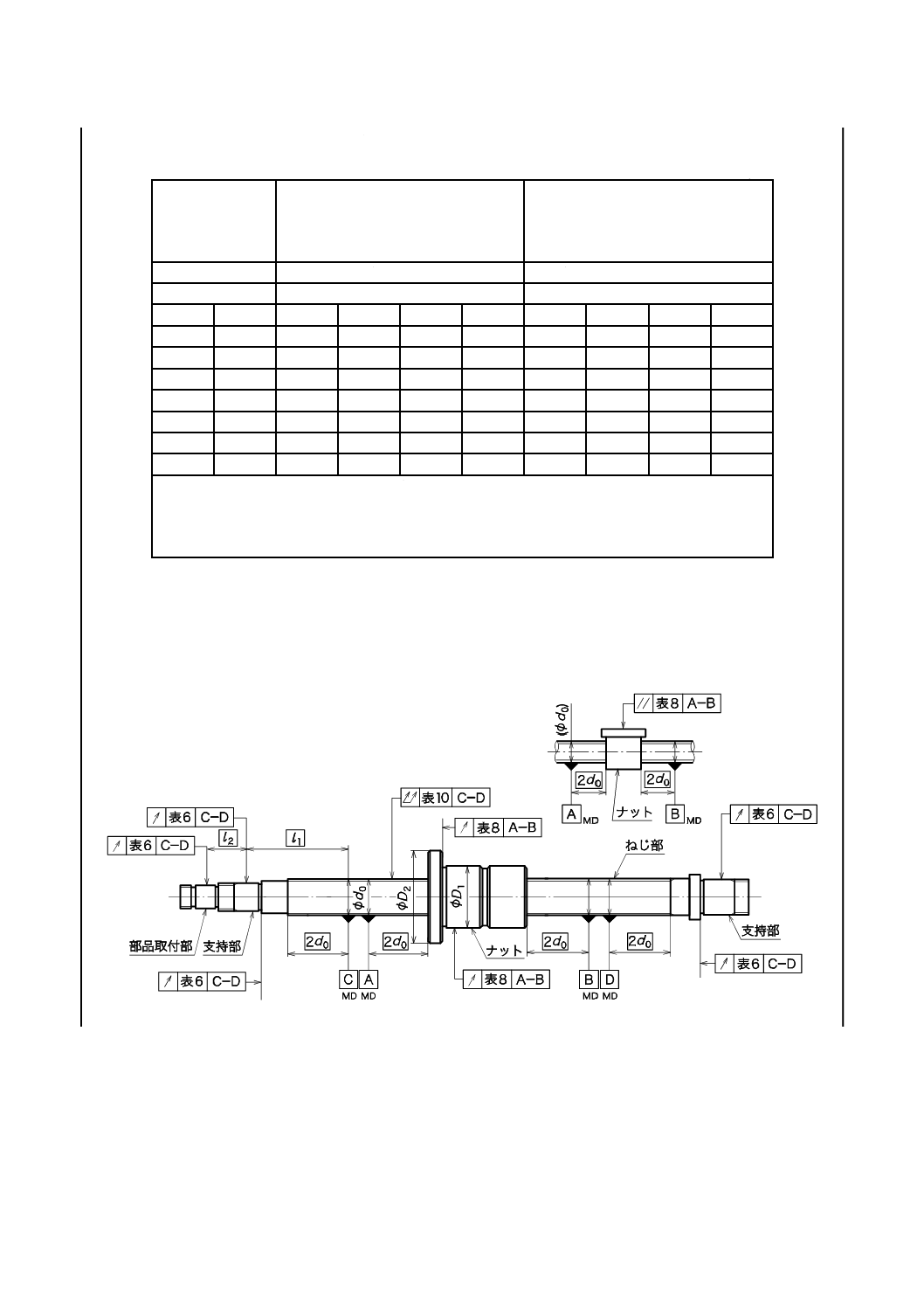
5.2.2
Cp系列及びCt系列ボールねじのねじ軸各部の円周振れ
ねじ軸のねじ部軸線に対する支持部外径及び部品取付部外径の半径方向の円周振れ並びにねじ部軸線に
対する支持部端面の円周振れの許容値は,6.3.2によって測定したとき,表6の規定に適合しなければなら
ない(図2参照)。
図2−Cp系列及びCt系列ボールねじの取付部の円周振れ及び平行度(例)
5
B 1192-3:2018
表6−Cp系列及びCt系列ボールねじのねじ軸各部の円周振れの許容値
単位 μm
項目
ねじ軸のねじ部軸線に対す
る支持部外径の半径方向の
円周振れ許容値a)Pp
ねじ軸のねじ部軸線に対す
る部品取付部外径の半径方
向の円周振れ許容値b)Qhp
ねじ軸のねじ部軸線に対する支持部端
面の円周振れ許容値Rhp
測定方法
図7参照
図8参照
図9参照
呼び径
d0(mm)
測定
基準
長さ
l
(mm)
等級
等級
呼び径
d0(mm)
等級
を
超
え
以
下
Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7 Ct10 Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7 Ct10
を
超
え
以
下
Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7 Ct10
6 20
80 −
10
12
20
40
63 −
5
6
8
12
16
6
63 −
3
4
5
6
10
20 50
125
12
16
25
50
80
6
8
10
16
20
63 125
4
5
6
8
12
50 125
200
16
20
32
63 100
8
10
12
20
25 125 200
−
6
8
10
16
125 200
315
−
25
40
80 125
−
12
16
25
32
−
注a) l1が測定基準長さlを超える場合は,表6にl1/lを乗じて補正する。
b) l2が測定基準長さlを超える場合は,表6にl2/lを乗じて補正する。
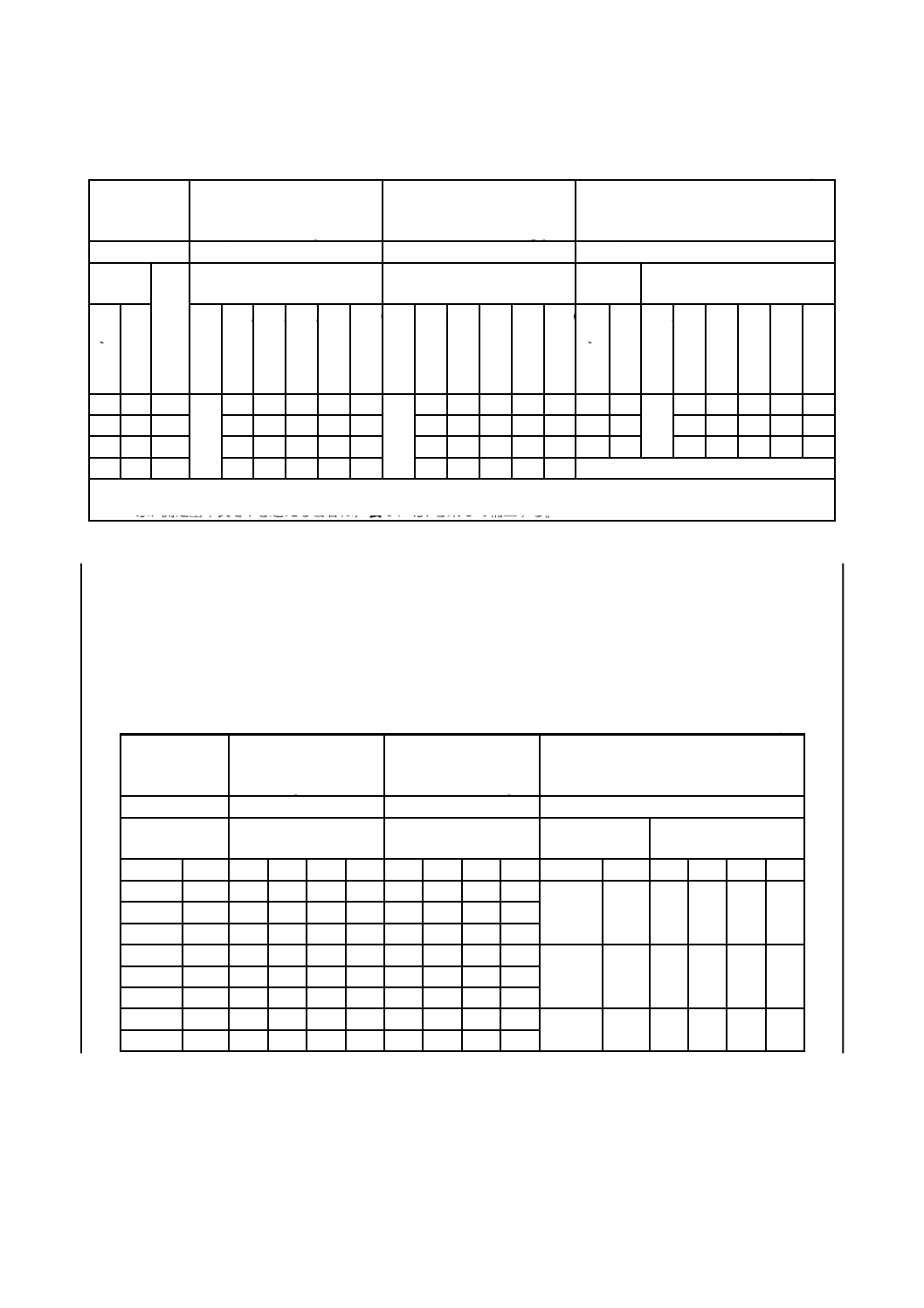
5.3
ナットの取付部の精度
5.3.1
C系列ボールねじのナットの取付部の円周振れ及び平行度
ねじ軸のねじ部軸線に対するナット基準面又はフランジ取付面の円周振れ,及びナット外周面の半径方
向の円周振れ又はナット外周面の平行度の許容値は,6.4.1によって測定したとき,表7の規定に適合しな
ければならない(図1参照)。
表7−C系列ボールねじのナットの取付部の円周振れ及び平行度の許容値
単位 μm
項目
ナット基準面又はフラ
ンジ取付面の円周振れ
許容値T1p
ナット外周面(円筒形
の場合)の半径方向の
円周振れ許容値U1p
ナット外周面(平面形取付面の場合)の
平行度許容値V1hp又はWhp
測定方法
図10参照
図11参照
図12参照
ナット外径
D1(mm)
等級
等級
測定基準長さ
ln1(mm)
等級
を超え
以下
C0
C1
C3
C5
C0
C1
C3
C5
を超え
以下
C0
C1
C3
C5
−
20
5
6
8
10
5
6
9
12
−
50
5
6
8
10
20
32
5
6
8
10
6
7
10
12
32
50
6
7
8
11
7
8
12
15
50
80
7
8
10
13
8
10
15
19
50
100
7
8
10
13
80
125
7
9
12
15
9
12
20
27
125
160
8
10
13
17
10
13
22
30
160
200
−
11
14
18
−
16
25
34
100
200
−
10
13
17
200
250
−
12
15
20
−
18
28
38
6
B 1192-3:2018
5.3.2
Cp系列及びCt系列ボールねじのナットの取付部の円周振れ及び平行度
ねじ軸のねじ部軸線に対するナットのフランジ取付面の円周振れ,ナット外周面の半径方向の円周振れ
又はナット外周面の平行度の許容値は,6.4.2によって測定したとき,表8の規定に適合しなければならな
い(図2参照)。
表8−Cp系列及びCt系列ボールねじのナットの取付部の円周振れ及び平行度の許容値
単位 μm
項目
ナットのフランジ取付面の円
周振れ許容値T2p
ナット外周面(円筒形の場合)
の半径方向の円周振れ許容値
U2p
ナット外周面(平面形取付面の場合)
の平行度許容値V2hp
測定方法
図13参照
図14参照
図15参照
ナット外径
D1又はフラ
ンジ外径D2
(mm)
等級
等級
測定
基準
長さ
ln2
等級
を超え 以下 Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7 Ct10 Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7 Ct10
(mm)
Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7 Ct10
16
32
8
10
12
16
20
−
8
10
12
16
20
−
100
14
16
20
25
32
−
32
63
10
12
16
20
25
−
10
12
16
20
25
−
63
125
12
16
20
25
32
−
12
16
20
25
32
−
125
250
16
20
25
32
40
−
16
20
25
32
40
−
250
500
−
−
32
40
50
−
−
−
32
40
50
−
注記 ナット外周面の平行度(平面形取付面の場合)許容値は,測定基準長さ100 mmに対し適用する。測定長さが測
定基準長さ100 mmと異なる場合には補正して適用する。その補正は,表8の値に(実際の測定長さ)/(測定
基準長さ100 mm)を乗じて行う。
5.4
ねじ軸の半径方向の全振れ精度
5.4.1
C系列ボールねじのねじ軸支持部軸線に対するねじ部外径の半径方向の全振れ
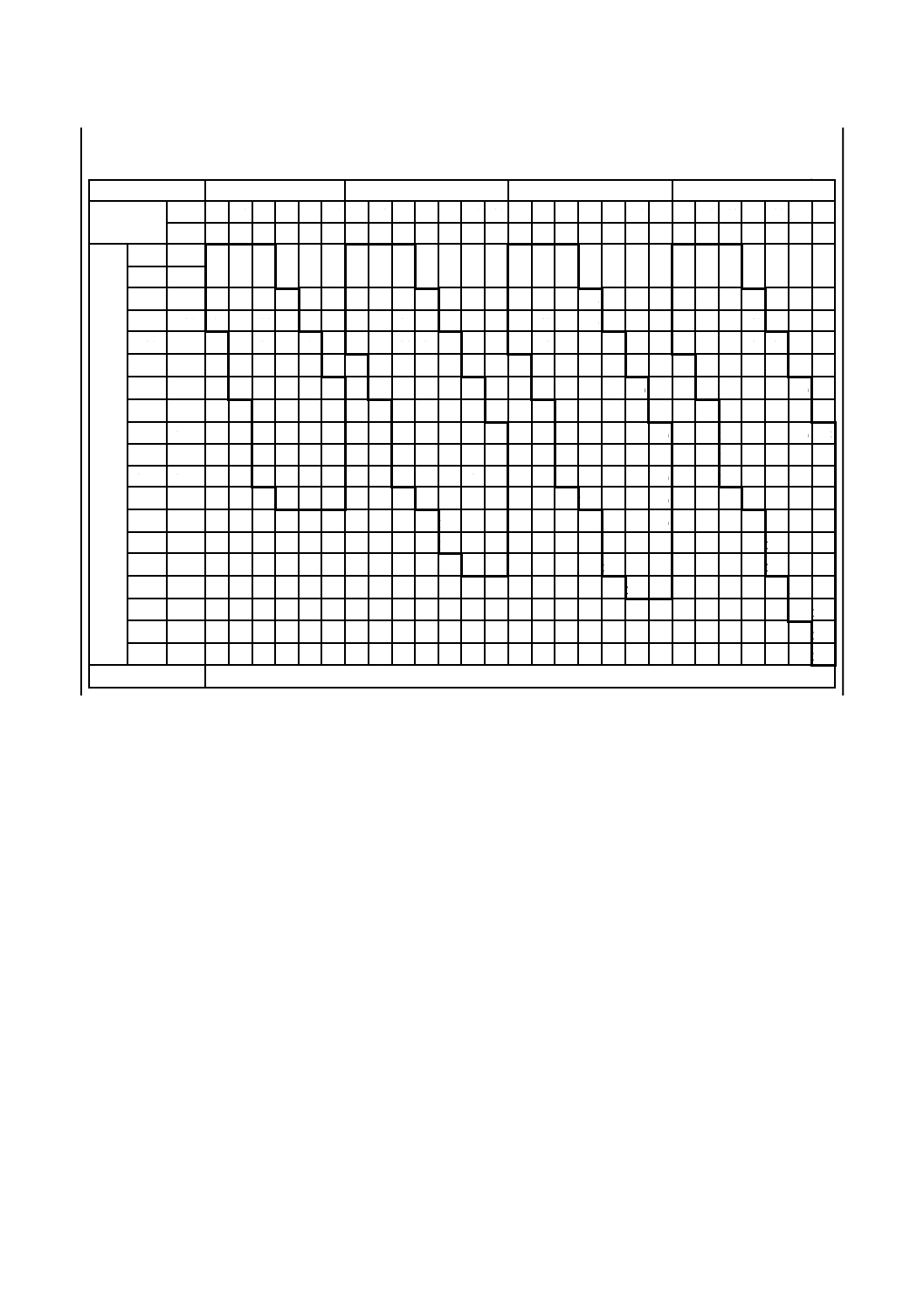
ねじ軸支持部軸線に対するねじ部外径の半径方向の全振れ許容値は,6.5.1によって測定したとき,表9
の規定に適合しなければならない(図1参照)。
7
B 1192-3:2018
表9−C系列ボールねじのねじ軸支持部軸線に対するねじ部外径の半径方向の全振れの許容値Xp
単位 μm
等級
C0
C1
C3
C5
呼び径d0
(mm)
を超え −
8 12 20 32 50 −
8 12 20 32 50 80 −
8 12 20 32 50 80 −
8 12 20 32 50 80
以下
8 12 20 32 50 80
8 12 20 32 50 80 125
8 12 20 32 50 80 125
8 12 20 32 50 80 125
ね
じ
軸
全
長
を超え 以下
−
125 15 15 15
20 20 15
25 25 20
35 35 35
125
200 25 20 20 15
30 25 20 15
35 35 25 20
50 40 40 35
200
315 35 25 20 20
40 30 25 20
50 40 30 30
65 55 45 40
(mm)
315
400
35 25 20 15
45 40 30 25 20
60 50 40 35 25
75 65 55 45 35
400
500
45 35 25 20
50 40 30 25
65 50 40 30
80 60 50 45
500
630
50 40 30 20 15
60 45 35 25 20
70 55 45 35 30
90 75 60 50 40
630
800
50 35 25 20
60 40 30 25
70 55 40 35
90 70 55 45
800 1 000
65 45 30 25
75 55 40 30 25
95 65 50 40 30
120 85 65 50 45
1 000 1 250
85 55 40 30
95 65 45 35 30
120 85 60 45 35
150 100 75 60 50
1 250 1 600
110 70 50 40
130 85 60 45 35
160 110 75 55 40
190 130 95 70 55
1 600 2 000
95 65 45
120 80 55 40
140 95 70 50
170 120 85 65
2 000 2 500
100 70 50
120 85 60
150 110 80
2 500 3 150
130 90 60
160 110 75
200 140 95
3 150 4 000
120 80
220 150 100
260 180 120
4 000 5 000
200 130
240 160
5 000 6 300
310 210
6 300 8 000
280
8 000 10 000
370
測定方法
図16参照
8
B 1192-3:2018
5.4.2
Cp系列及びCt系列ボールねじのねじ軸ねじ部軸線に対するねじ部外径の半径方向の全振れ
ねじ軸ねじ部軸線に対するねじ部外径の半径方向の全振れ許容値は,6.5.2によって測定したとき,表10
の規定に適合しなければならない(図2参照)。
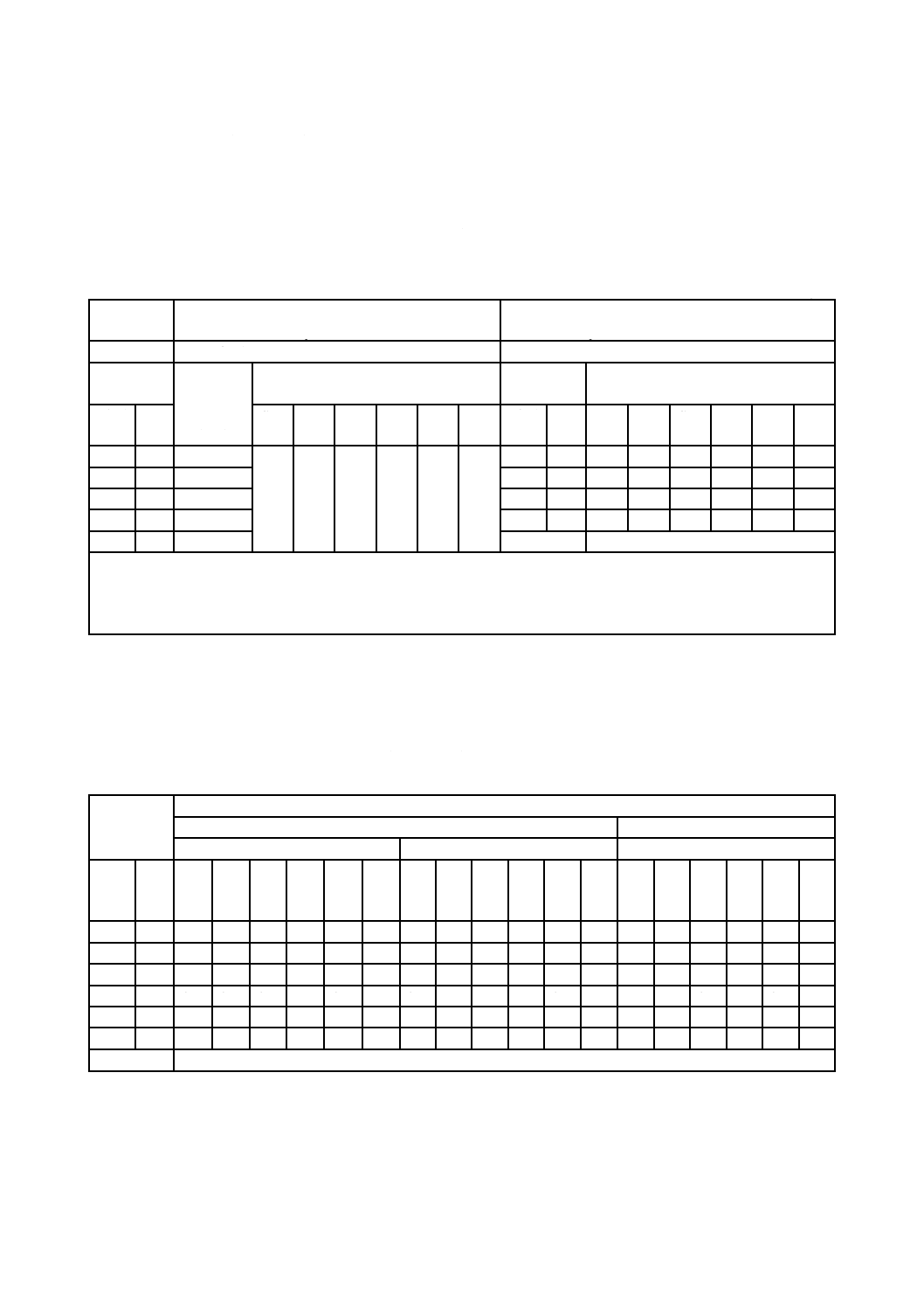
表10−Cp系列及びCt系列ボールねじの測定基準長さ及び
細長比に対するねじ軸ねじ部外径の半径方向の全振れの許容値
単位 μm
項目
測定基準長さに対するねじ軸ねじ部外径の半径方
向の全振れ許容値Yp
細長比に対するねじ軸ねじ部外径の半径方向の全
振れ許容値Zp
測定方法
図17参照
図17参照
呼び径d0
(mm)
測定基準
長さl3
等級
細長比a)
等級
を超え 以下
(mm)
Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7
Ct10 を超え 以下 Cp0,
Ct0
Cp1,
Ct1
Cp3,
Ct3
Cp5,
Ct5
Ct7
Ct10
6
12
80
16
20
25
32
40
80
−
40
32
40
50
64
80
160
12
25
160
40
60
48
60
75
96
120
240
25
50
315
60
80
80
100
125
160
200
400
50
100
630
80
100
128
160
200
256
320
640
100
200
1250
注記1 測定長さが測定基準長さl3と異なる場合,その全振れ許容値は,表10の値に(測定長さ)/(測定基準長さ
l3)の比を乗じたものとする。
注記2 ねじ部長さが測定基準長さl3の4倍以上の場合は,細長比に対する全振れ許容値(最大)を適用する。
注a) 細長比とは,ねじ軸のねじ部有効長さluをボールねじの呼び径d0で除した値lu/ d0をいう。
5.5
基準トルク変動率の許容域
C系列,Cp系列及びCt系列ボールねじの基準トルク変動率の許容域は,6.6によって測定したとき,表
11の規定に適合しなければならない。
表11−C系列,Cp系列及びCt系列ボールねじの基準トルク変動率の許容域
単位 %
基準トルク
Tp0
(N・m)
ねじ部有効長さlu
4 000 mm以下
4 000 mmを超え10 000 mm以下
細長比:40以下
細長比:40を超え60以下
−
を超え 以下 C0,
Cp0,
Ct0
C1,
Cp1,
Ct1
C3,
Cp3,
Ct3
C5,
Cp5,
Ct5
Ct7 Ct10 C0,
Cp0,
Ct0
C1,
Cp1,
Ct1
C3,
Cp3,
Ct3
C5,
Cp5,
Ct5
Ct7 Ct10 C0,
Cp0,
Ct0
C1,
Cp1,
Ct1
C3,
Cp3,
Ct3
C5,
Cp5,
Ct5
Ct7 Ct10
0.2
0.4 ±30 ±35 ±40 ±50 −
− ±40 ±40 ±50 ±60 −
−
−
−
−
−
−
−
0.4
0.6 ±25 ±30 ±35 ±40 −
− ±35 ±35 ±40 ±45 −
−
−
−
−
−
−
−
0.6
1.0 ±20 ±25 ±30 ±35 ±40 − ±30 ±30 ±35 ±40 ±45 −
−
− ±40 ±45 ±50 −
1.0
2.5 ±15 ±20 ±25 ±30 ±35 − ±25 ±25 ±30 ±35 ±40 −
−
− ±35 ±40 ±45 −
2.5
6.3 ±10 ±15 ±20 ±25 ±30 − ±20 ±20 ±25 ±30 ±35 −
−
− ±30 ±35 ±40 −
6.3
10.0
−
− ±15 ±20 ±30 −
−
− ±20 ±25 ±35 −
−
− ±25 ±30 ±35 −
測定方法
図18参照
9
B 1192-3:2018
6
測定方法
6.1
測定場所の状態
ボールねじの測定場所の状態は,JIS Z 8703に規定する標準状態の温度を20 ℃とし,その許容差は,
リードの測定については1級,その他の測定については15級とする。
6.2
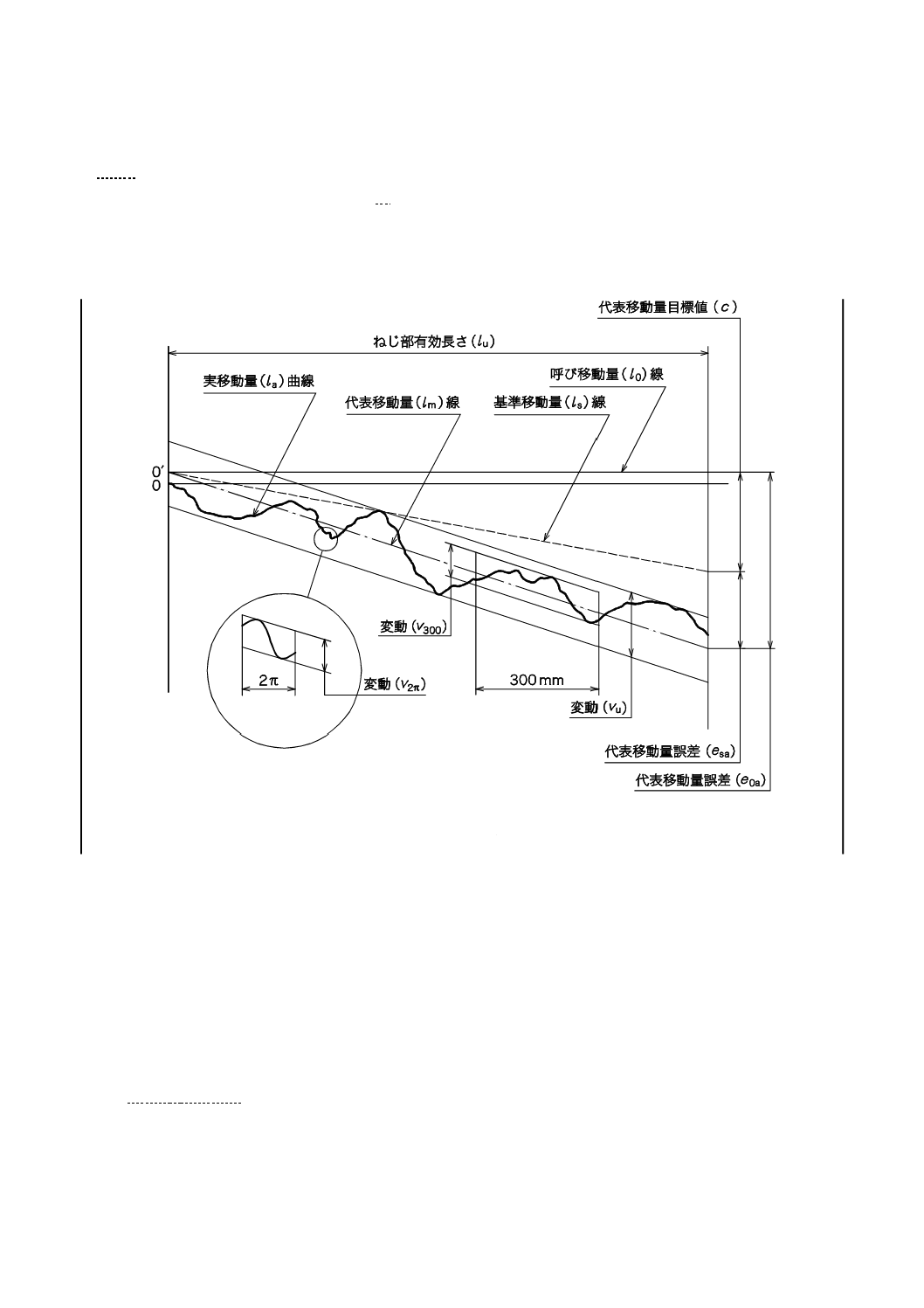
代表移動量誤差及び変動
代表移動量誤差(e0a又はesa)及び変動(vu,v300及びv2π)の測定方法は,図3による。
注記 許容値については,表2〜表4参照。
図3−代表移動量誤差及び変動の測定方法
a) ねじ軸の支持方法は,支点間の自重たわみの影響による測定誤差が極力含まれないように支持する。
b) 実移動量(la)の測定は,連続測定方法又はねじ軸を固定し,回転角度の同じ位置で表12に示す測定
間隔を最大とする測定方法のいずれかによる。
なお,実移動量については,ねじ軸単体の測定で代用してもよい。
c) 代表移動量(lm)及び変動(vu及びv300)については,最小二乗法,簡単で適切な近似法又は作図によ
って求める。
ねじ部有効長さ(lu)全域での代表移動量目標値(c)と代表移動量(lm)との差を代表移動量誤差
(eoa又はesa)とする。代表移動量目標値(c)が,呼び移動量(l0)と等しい場合はeoa,その他の場
合はesaで表す。
d) 変動(v2π)の測定は,1リード内における連続測定によるか,又は1リードごとに9回の測定(45°
ごとに0°から360°までの9回の測定)で行う。測定位置は,ねじ軸の有効ねじ部の両端近傍及び中
央とする。
10
B 1192-3:2018
表12−300 mm当たりの最少測定箇所数(測定間隔)
単位 mm
等級
C,Cp,Ct
呼びリードPh0
2.5以下
2.5を超え5以下
5を超え10以下
10を超え20以下 20を超え40以下
0
20
20
15
6
−
1
15
15
10
5
−
3
10
10
5
4
2
5
6
6
3
3
1
7
3
3
1
1
1
10
1
1
1
1
1
注記 ねじ軸単体の測定に当たっては,測定子をねじ溝面の片側に当ててもよい。この際,ねじ溝面と測
定子との接触位置は,ボールねじにおけるねじ溝面とボールとの接触位置が望ましい。
6.3
ねじ軸各部の振れ精度
6.3.0
ねじ軸の支持方法
ねじ軸の支持方法は,ねじ軸精度の測定時にその曲がり及び傾きの影響による測定誤差が極力含まれな
いように正確に支持する。
6.3.1
C系列ボールねじのねじ軸各部の振れ精度
6.3.1.1
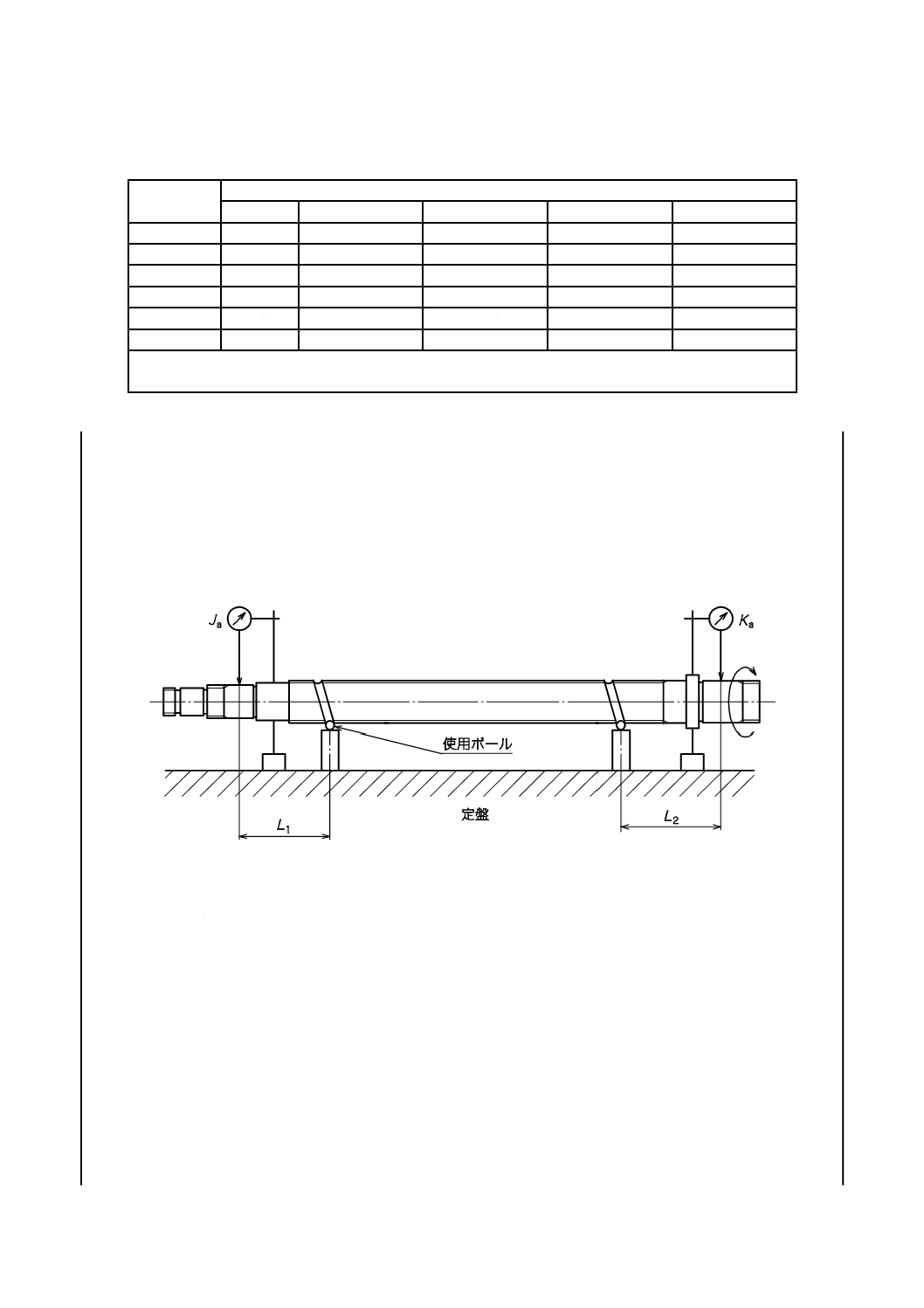
ねじ軸の支持部軸線に対するねじ溝面の半径方向の円周振れJa又はKa
ねじ軸の支持部軸線に対するねじ溝面の半径方向の円周振れの測定方法は,図4による。
注記1 許容値については,表5参照。
注記2 ねじ軸軸線の全振れの影響による補正方法。
Jp'=Jp+Xp×(L1/L) 又はKp'=Kp+Xp×(L2/L)
ここに, Jp'及びKp': 補正後の円周振れ許容値
Jp及びKp: 円周振れ許容値(表5参照)
Xp: 全振れ許容値(表9参照)
L: 全長
L1又はL2: 支点から測定点までの距離
図4−ねじ軸の支持部軸線に対するねじ溝面の半径方向の円周振れの測定方法
測定方法は,図4に示すように,ねじ軸をねじ部両端の近傍において,使用ボール及び同寸法の複数の
ボールを用いて支え,ねじ軸の支持部外径に測定子を当て,軸を1回転させたときの振れJa及びKaを測
定し,この二つの値をねじ軸の支持部軸線に対するねじ溝面の半径方向の円周振れとする。
この場合,組み立てたナット又は専用ジグを利用して,ねじ軸を支持してもよい。
11
B 1192-3:2018
6.3.1.2
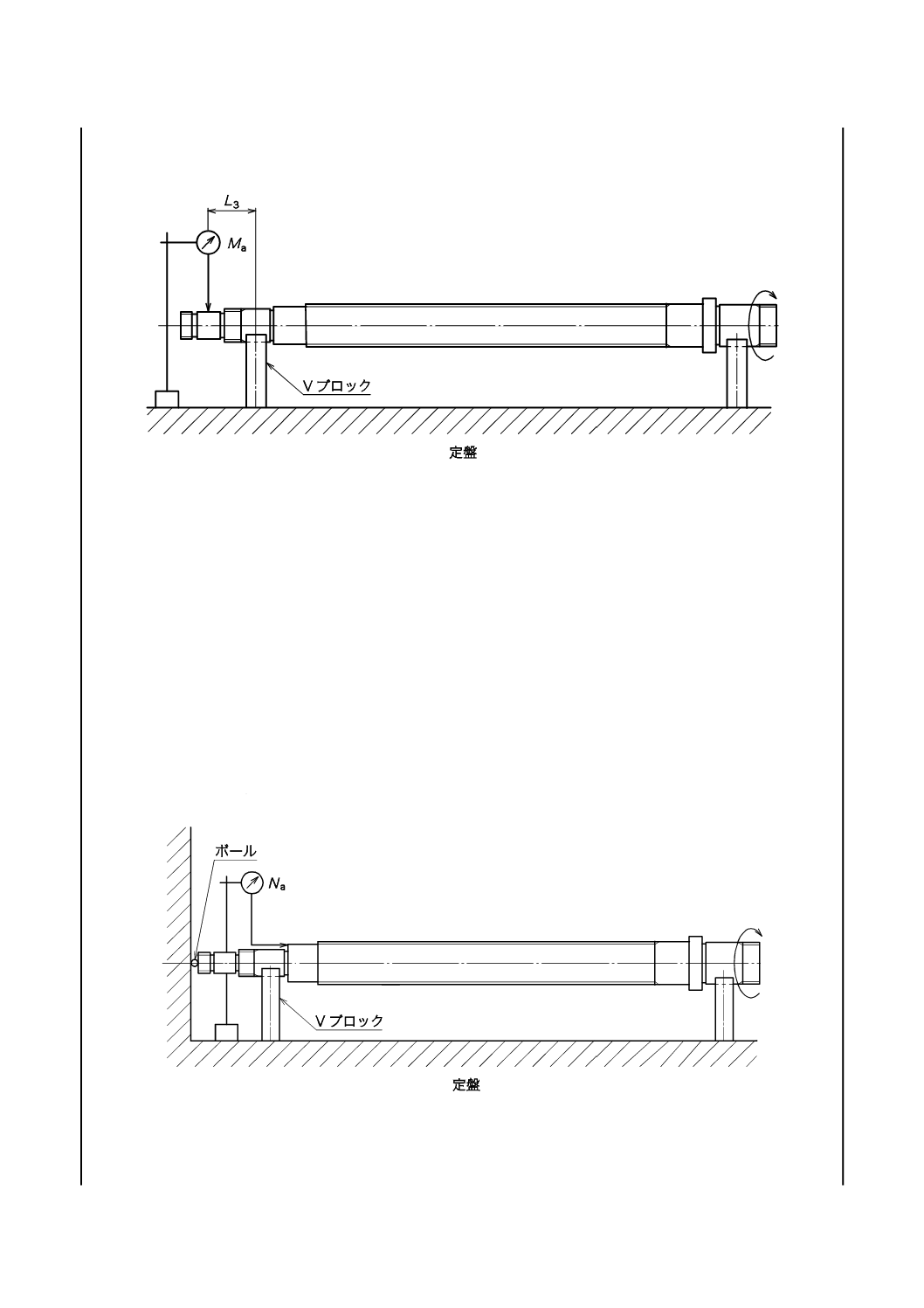
ねじ軸の支持部軸線に対するねじ部品取付部外径の半径方向の円周振れMa
ねじ軸の支持部軸線に対する部品取付部外径の半径方向の円周振れの測定方法は,図5による。
注記1 許容値については,表5参照。
注記2 ねじ軸軸線の全振れの影響による補正方法。
Mp'=Mp+Xp×(L3/L)
ここに, Mp': 補正後の円周振れ許容値
Mp: 円周振れ許容値(表5参照)
Xp: 全振れ許容値(表9参照)
L: 全長
L3: 支点から測定点までの距離
図5−ねじ軸の支持部軸線に対するねじ部品取付部外径の半径方向の円周振れの測定方法
測定方法は,図5に示すように,ねじ軸をその支持部においてVブロックなどを用いて水平に支え,部
品取付部の外径に測定子を当て,ねじ軸を1回転させたときの振れMaを測定し,この値をねじ軸の支持
部軸線に対する部品取付部外径の半径方向の円周振れとする。
6.3.1.3
ねじ軸の支持部軸線に対する支持部端面の円周振れNa
ねじ軸の支持部軸線に対する支持部端面の円周振れの測定方法は,図6による。
注記 許容値については,表5参照。
図6−ねじ軸の支持部軸線に対する支持部端面の円周振れの測定方法
12
B 1192-3:2018
測定方法は,図6に示すように,ねじ軸の片端をボールを介して固定面に突き当てながら支持部におい
て,Vブロックなどを用いて水平に支え,その支持部端面に測定子を当て,ねじ軸を1回転したときの振
れNaを測定し,この値をねじ軸の支持部軸線に対する支持部端面の円周振れとする。
6.3.2
Cp系列及びCt系列ボールねじのねじ軸各部の振れ精度
6.3.2.1
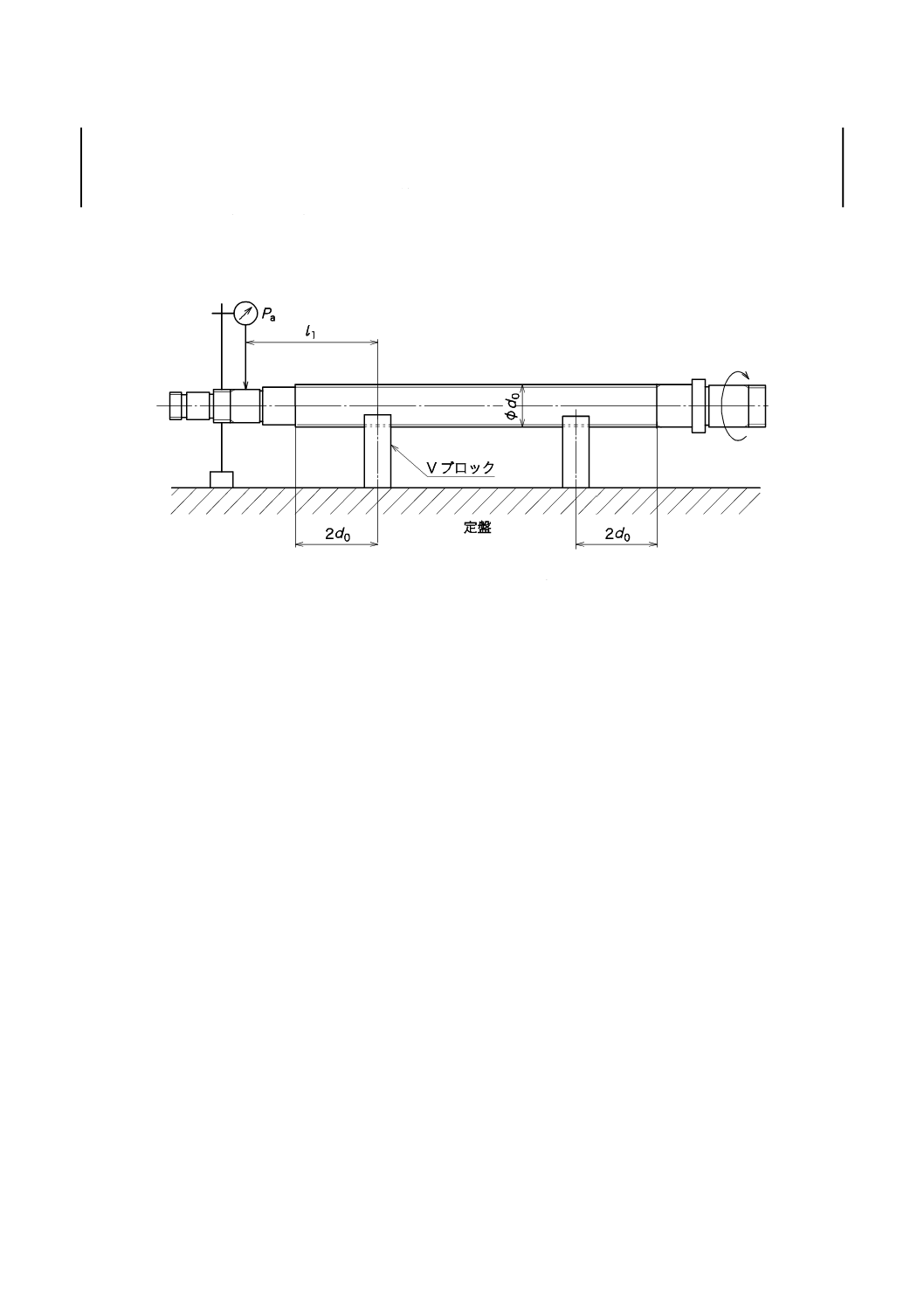
ねじ軸のねじ部軸線に対する支持部外径の半径方向の円周振れPa
ねじ軸のねじ部軸線に対する支持部外径の半径方向の円周振れの測定方法は,図7による。
注記1 許容値については,表6参照。
注記2 支点から測定点までの距離が測定基準長さを超える場合の補正方法。
Pp'=Pp×l1/l
ここに, Pp': 補正後の円周振れ許容値
Pp: 円周振れ許容値(表6参照)
l: 測定基準長さ(表6参照)
l1: 支点から測定点までの距離
図7−ねじ軸のねじ部軸線に対する支持部外径の半径方向の円周振れの測定方法
測定方法は,図7に示すように,ねじ軸をねじ部両端から呼び径の2倍の距離(2d0)においてVブロ
ックなどで支え,支持部外径に測定子を当て,ねじ軸を1回転させたときの振れPaを測定し,この値をね
じ軸の支持部軸線に対する支持部外径の半径方向の円周振れとする。
6.3.2.2
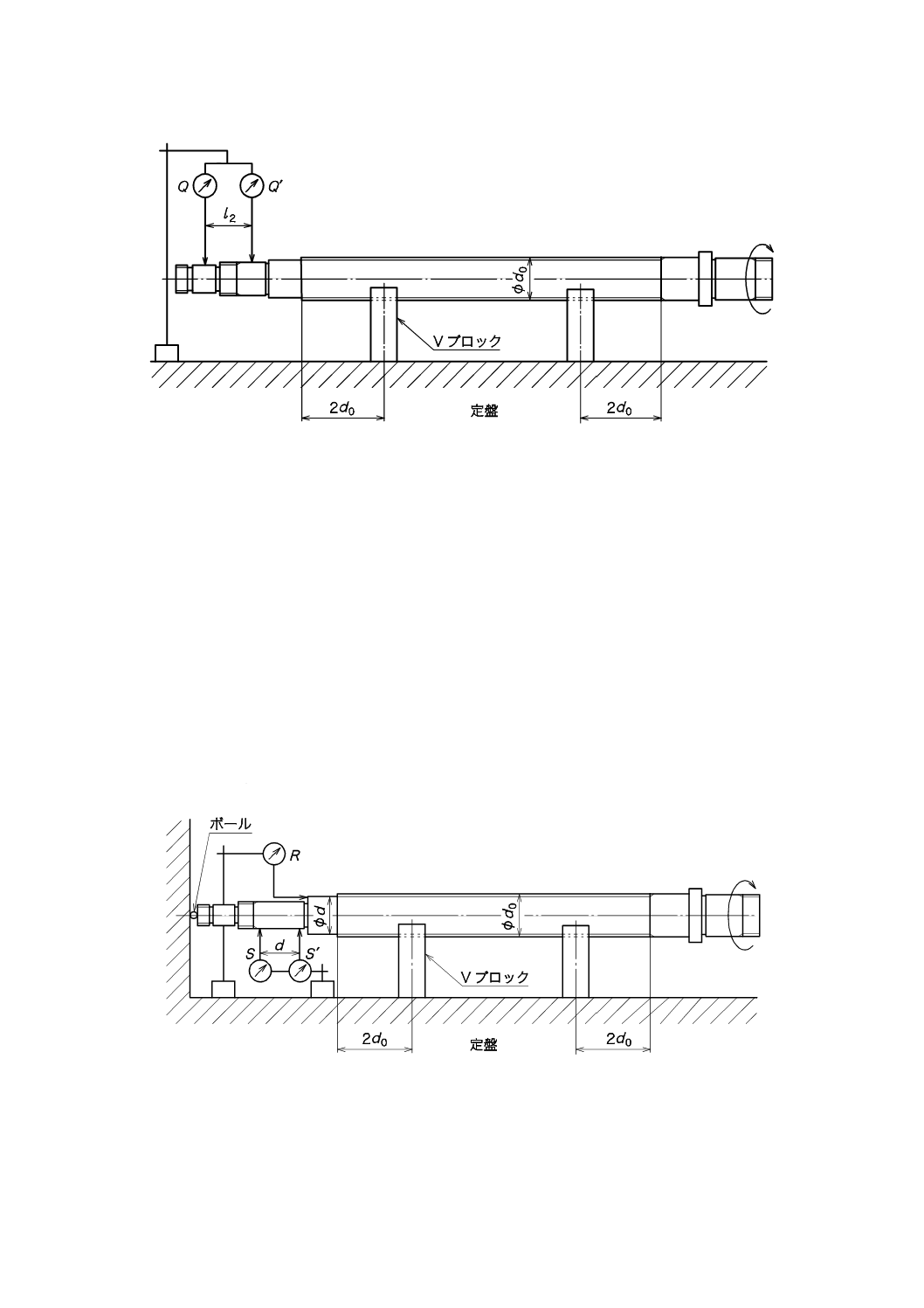
ねじ軸のねじ部軸線に対する部品取付部外径の半径方向の円周振れQha
ねじ軸のねじ部軸線に対する部品取付部外径の半径方向の円周振れの測定方法は,図8による。
13
B 1192-3:2018
注記1 QhaはQ−Q'の最大値。
注記2 許容値については,表6参照。
注記3 測定子間距離が測定基準長さを超える場合の補正方法。
Qhp'=Qhp×l2/l
ここに, Qhp': 補正後の円周振れ許容値
Qhp: 円周振れ許容値(表6参照)
l: 測定基準長さ(表6参照)
l2: 測定子間距離
図8−ねじ軸のねじ部軸線に対する部品取付部外径の半径方向の円周振れの測定方法
測定方法は,図8に示すように,ねじ軸をねじ部両端から呼び径の2倍の距離(2d0)においてVブロ
ックなどで支え,支持部外径及び部品取付部外径に測定子を当て,ねじ軸を1回転させたときの振れQと
Q'との差の最大値を測定し,この値をねじ軸の支持部軸線に対する部品取付部外径の半径方向の円周振れ
とする。
6.3.2.3
ねじ軸のねじ部軸線に対する支持部端面の円周振れRha
ねじ軸のねじ部軸線に対する支持部端面の円周振れの測定方法は,図9による。
注記1 RhaはR+(S−S')の最大値。
注記2 許容値については,表6参照。
注記3 測定子間隔を確保できない場合のRhaの求め方。
Rha=R+(S−S')×(d/d')
図9−ねじ軸のねじ部軸線に対する支持部端面の円周振れの測定方法
14
B 1192-3:2018
測定方法は,図9に示すように,ねじ軸の片端をボールを介して固定面に突き当てながら,ねじ軸をね
じ部両端から呼び径の2倍の距離(2d0)においてVブロックなどで支え,測定子を支持部端面に当てる
とともに,支持部外径にdの間隔で2個の測定子を当て,ねじ軸を1回転させたときの振れRに支持部2
か所の振れSとS'との差を加えた値を,ねじ軸ねじ部軸線に対する支持部端面の円周振れとする。
なお,支持部外径に当てる測定子間隔dに確保できない場合には,可能な測定子間隔(d')とし,その
ときの振れSとS'との差にd/d'を乗じた値で代用する。
6.4
ナットの取付部の精度
6.4.0
ねじ軸の支持方法
ねじ軸の支持方法は,ナットの精度の測定にねじ軸の曲がり及び傾きの影響による測定誤差が極力含ま
れないように正確に支持する。
6.4.1
C系列ボールねじのナット取付部の精度
6.4.1.1
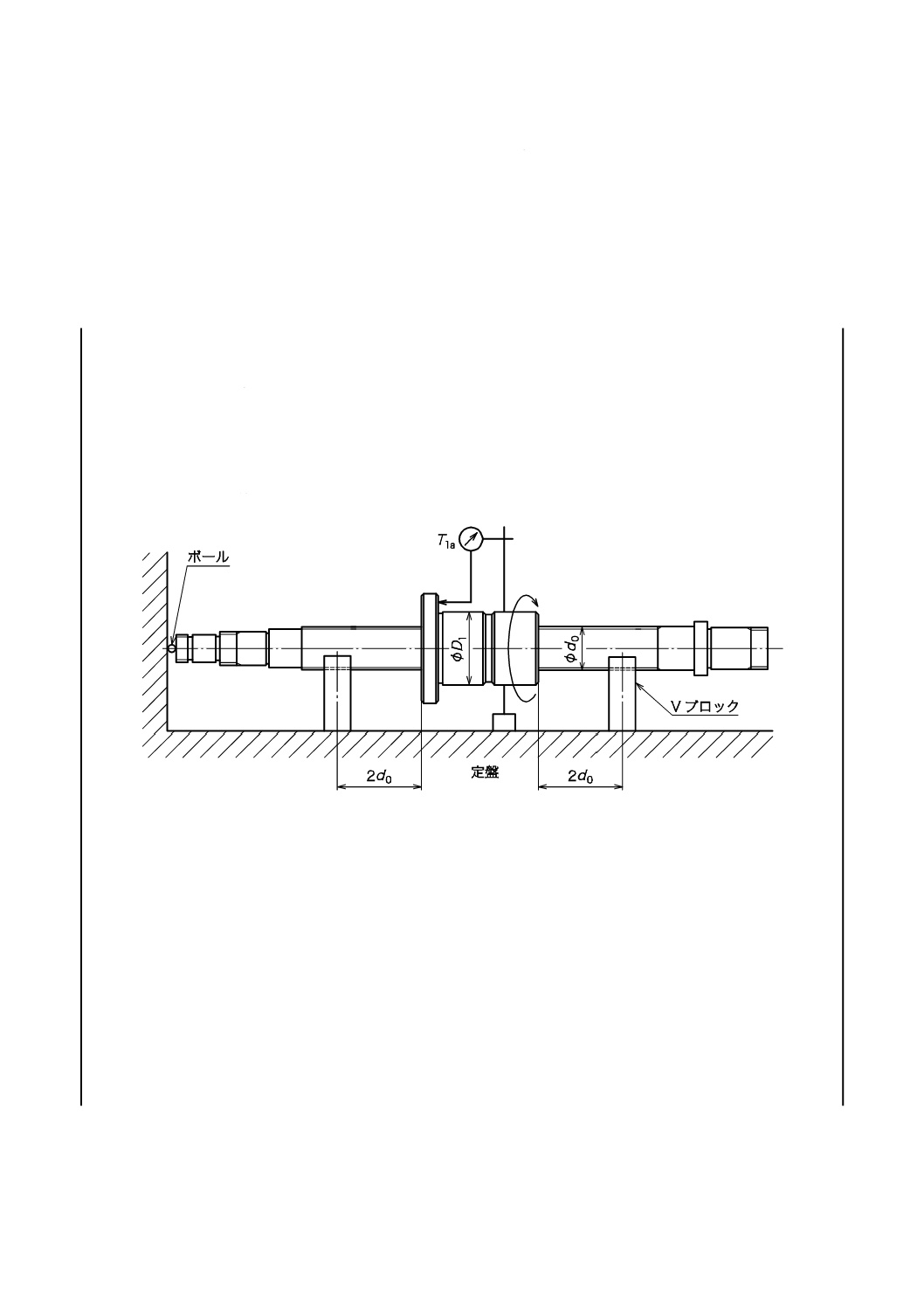
ねじ軸のねじ部軸線に対するナット基準面又はフランジ取付面の円周振れT1a(予圧ナットだけ
に適用)
ねじ軸のねじ部軸線に対するナット基準面又はフランジ取付面の円周振れの測定方法は,図10による。
注記 許容値については,表7参照。
図10−ねじ軸のねじ部軸線に対するナット基準面又はフランジ取付面の円周振れの測定方法
測定方法は,図10に示すように,ねじ軸をナット両端面から呼び径の2倍(2d0)の位置のねじ軸外径
においてVブロックなどで支え,その先端をボールを介して固定面に突き当て,ナットの基準面,フラン
ジ取付面のナット外径又はフランジ外径にできる限り近い位置に測定子を当て,ねじ軸とナットとを同時
回転させたときの振れT1aを測定し,この値をねじ軸のねじ部軸線に対するナット基準面又はフランジ取
付面の円周振れとする。また,受渡当事者間の協定によって,ねじ軸を両センタ支持で測定してもよい。
6.4.1.2
ねじ軸のねじ部軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れU1a(予圧ナ
ットだけに適用)
ねじ軸のねじ部軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れの測定方法は,図11
による。
15
B 1192-3:2018
注記 許容値については,表7参照。
図11−ねじ軸のねじ部軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れの測定方法
測定方法は,図11に示すように,ねじ軸をナット両端面から呼び径の2倍(2d0)の位置で固定し,ナ
ットの外周面に測定子を当て,ナットを1回転させたときの振れU1aを測定し,この値をねじ軸のねじ部
軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れとする。
6.4.1.3
ねじ軸のねじ部軸線に対するナット外周面(平面形取付面の場合)の平行度V1ha又はWha(予圧
ナットだけに適用)
ねじ軸のねじ部軸線に対するナット外周面(平面形取付面の場合)の平行度の測定方法は,図12による。
a) 測定方法1
b) 測定方法2
注記1 平行度 V1ha=V1−V1'又はWha=W−W'。
注記2 許容値については,表7参照。
図12−ねじ軸のねじ部軸線に対するナット外周面(平面形取付面の場合)の平行度の測定方法
測定方法は,図12に示すように,ねじ軸を,ナット両端面から呼び径の2倍(2d0)のねじ部外径にお
いてVブロックなどを用いて支え,取付面の2点の定盤からの高さV1及びV1'を測定し,又は図12 b)に示
すように,ナット取付面を基準にして,ナット近傍のねじ部外径の2点の定盤からの高さW及びW'を測
定し,各々2点の高さの差をねじ軸のねじ部軸線に対するナット外周面(平面形取付面の場合)の平行度
とする。
これらの場合のV1−V1'間又はW−W'間の距離は,表7の測定基準長さとする。
16
B 1192-3:2018
6.4.2
Cp系列及びCt系列ボールねじのナット取付部の精度
6.4.2.1
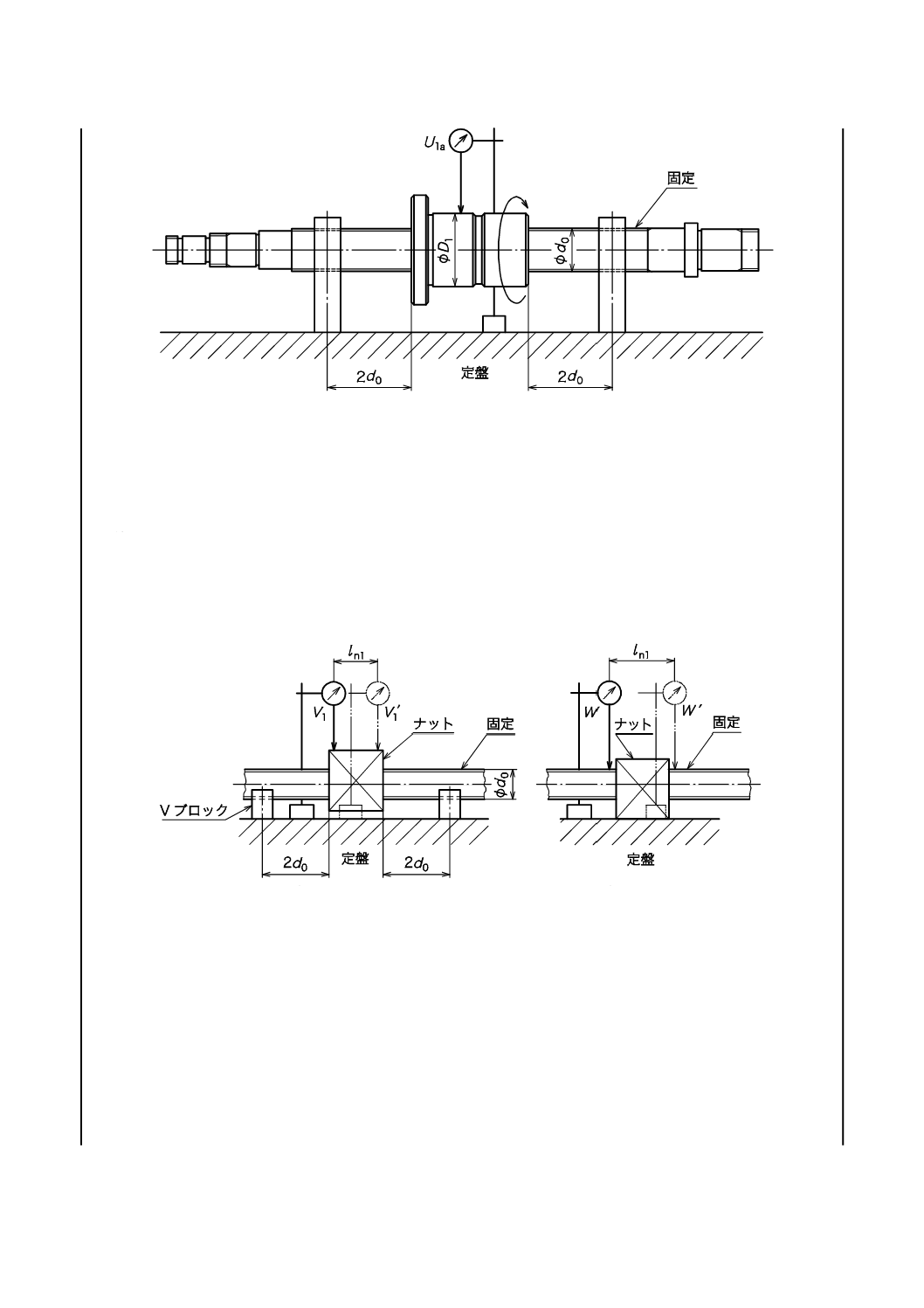
ねじ軸のねじ部軸線に対するナットのフランジ取付面の円周振れT2a(予圧ナットだけに適用)
ねじ軸のねじ部軸線に対するナットのフランジ取付面の円周振れの測定方法は,図13による。
注記 許容値については,表8参照。
図13−ねじ軸のねじ部軸線に対するナットのフランジ取付面の円周振れの測定方法
測定方法は,図13に示すように,ねじ軸をナット両端面から呼び径の2倍(2d0)の位置のねじ軸外径
においてVブロックなどで支え,その先端をボールを介して固定面に突き当て,フランジ取付面のフラン
ジ外径にできる限り近い位置に測定子を当て,ねじ軸とナットとを同時回転させたときの振れT2aを測定
し,この値をねじ軸のねじ部軸線に対するナットのフランジ取付面の円周振れとする。
6.4.2.2
ねじ軸のねじ部軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れU2a(予圧ナ
ットだけに適用)
ねじ軸のねじ部軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れの測定方法は,図14
による。
注記 許容値については,表8参照。
図14−ねじ軸のねじ部軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れの測定方法
測定方法は,図14に示すように,ねじ軸をナット両端面から呼び径の2倍(2d0)の位置で固定し,ナ
ットの外周面に測定子を当て,ナットを1回転させたときの振れU2aを測定し,この値をねじ軸のねじ部
17
B 1192-3:2018
軸線に対するナット外周面(円筒形の場合)の半径方向の円周振れとする。
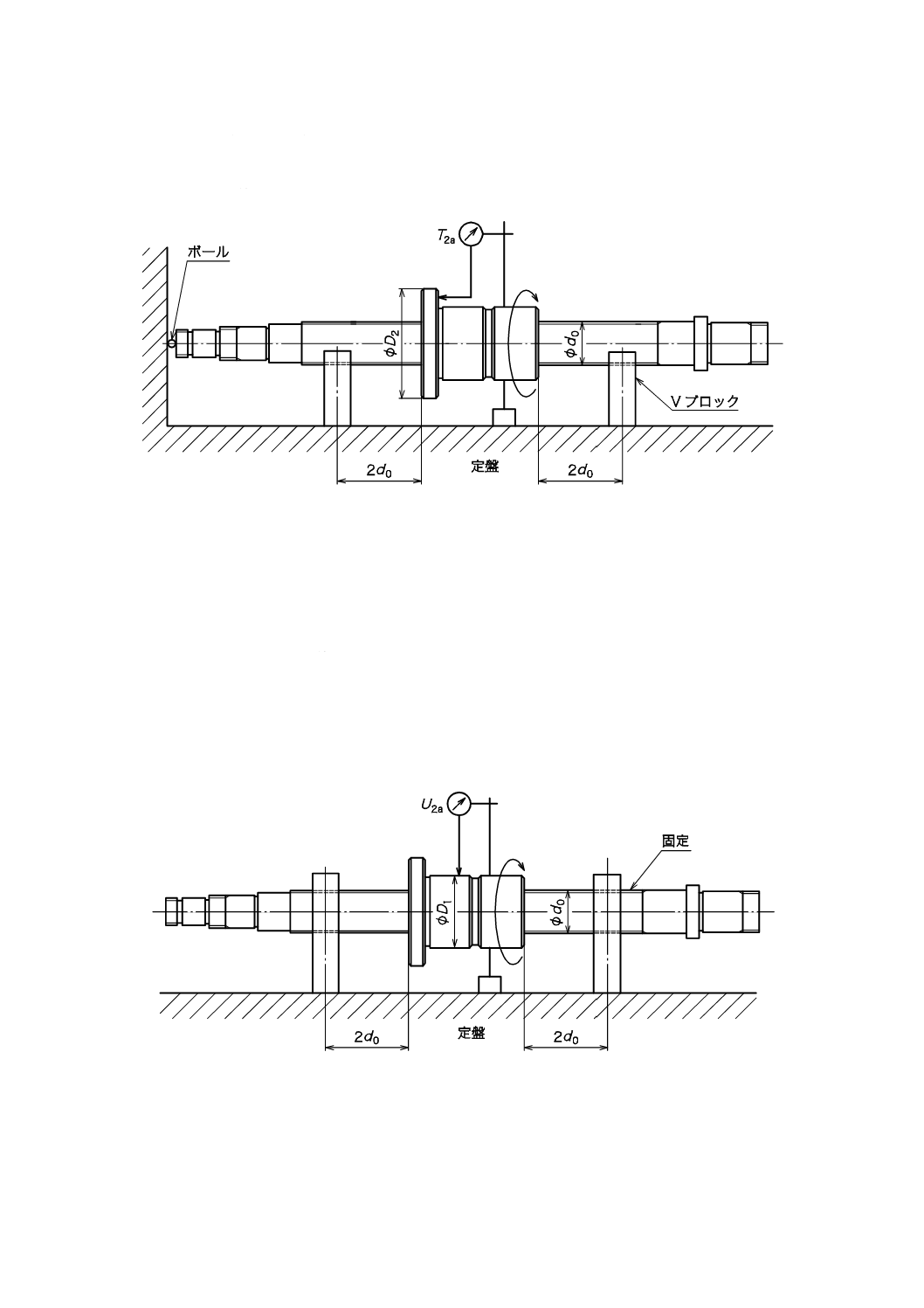
6.4.2.3
ねじ軸のねじ部軸線に対するナット外周面(平面形取付面の場合)の平行度V2ha(予圧ナットだ
けに適用)
ねじ軸のねじ部軸線に対するナット外周面(平面形取付面の場合)の平行度の測定方法は,図15による。
注記1 平行度 V2ha=V2−V2'。
注記2 許容値については,表8参照。
注記3 測定長さが,測定基準長さと異なる場合の補正方法
V2hp'=V2hp×ln2/100
ここに,V2hp': 補正後の平行度許容値
V2hp: 平行度許容値(表8参照)
ln2: 測定長さ
図15−ねじ軸のねじ部軸線に対するナット外周面(平面形取付面の場合)の平行度の測定方法
測定方法は,ねじ軸を図15に示すように支え,測定子を取付面に垂直に当て,取付面の所定の測定長さ
にわたる定盤からの高さの差によって求める。
6.5
ねじ軸の半径方向の全振れ精度
6.5.1
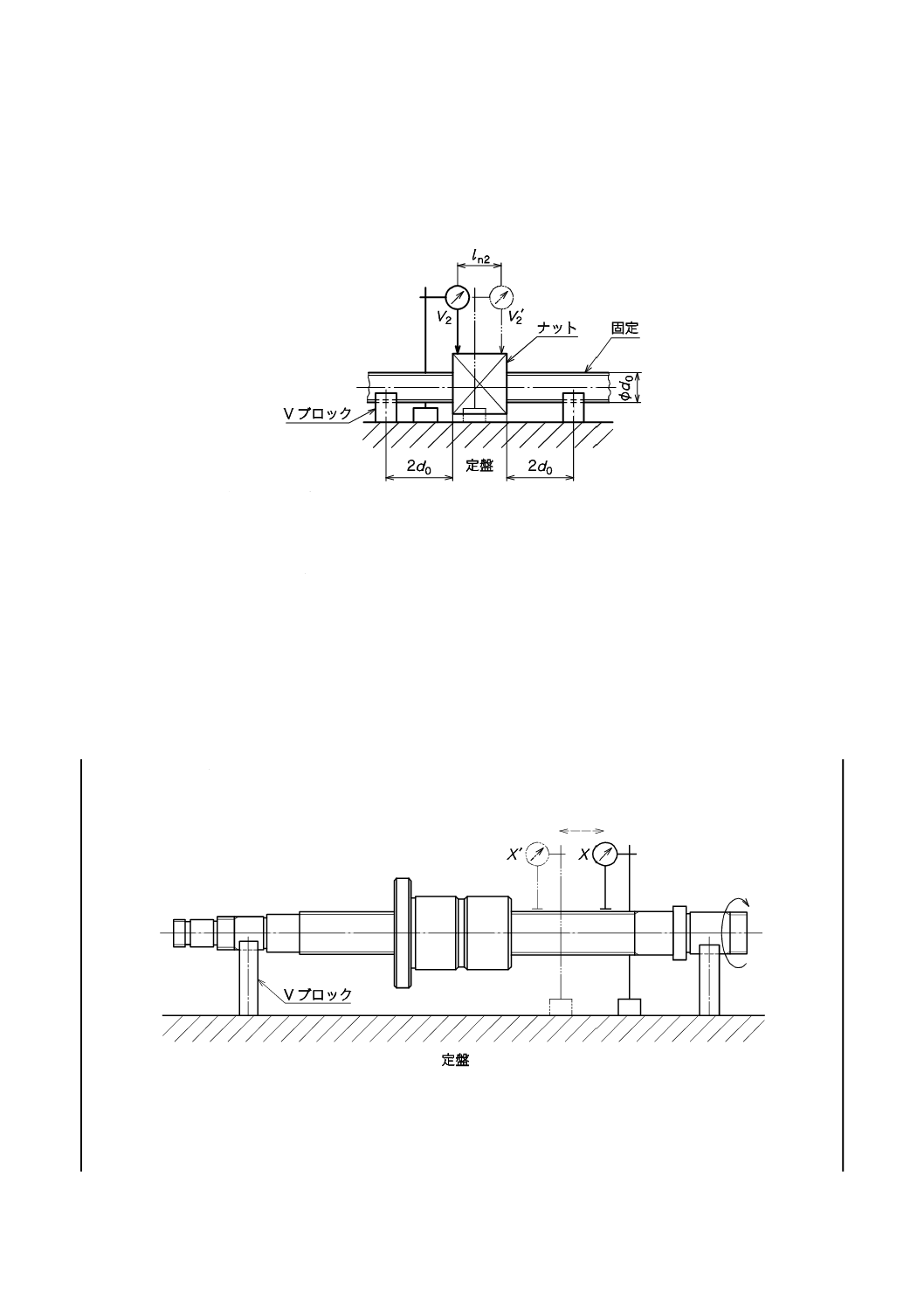
C系列ボールねじのねじ軸支持部軸線に対するねじ部外径の半径方向の全振れXa
ねじ軸の支持部軸線に対するねじ部外径の半径方向の全振れの測定方法は,図16による。
注記1 全振れXaは測定値X, X',… の最大値。
注記2 許容値については,表9参照。
図16−C系列ボールねじのねじ軸支持部軸線に対するねじ部外径の半径方向の全振れの測定方法
18
B 1192-3:2018
測定方法は,図16に示すように,ねじ軸をその支持部においてVブロックなどを用いて水平に支え,
測定子をねじ軸の外周に当て,ねじ軸を1回転させたときの振れX,X' …を軸方向数箇所の位置について
測定し,その最大値によって求める。また,受渡当事者間の協定によって,ねじ軸を両センタ支持で測定
してもよい。
なお,ナットをねじ軸に組み込んだ状態で測定を行う場合は,測定に支障を来さないようにその位置に
配慮する。
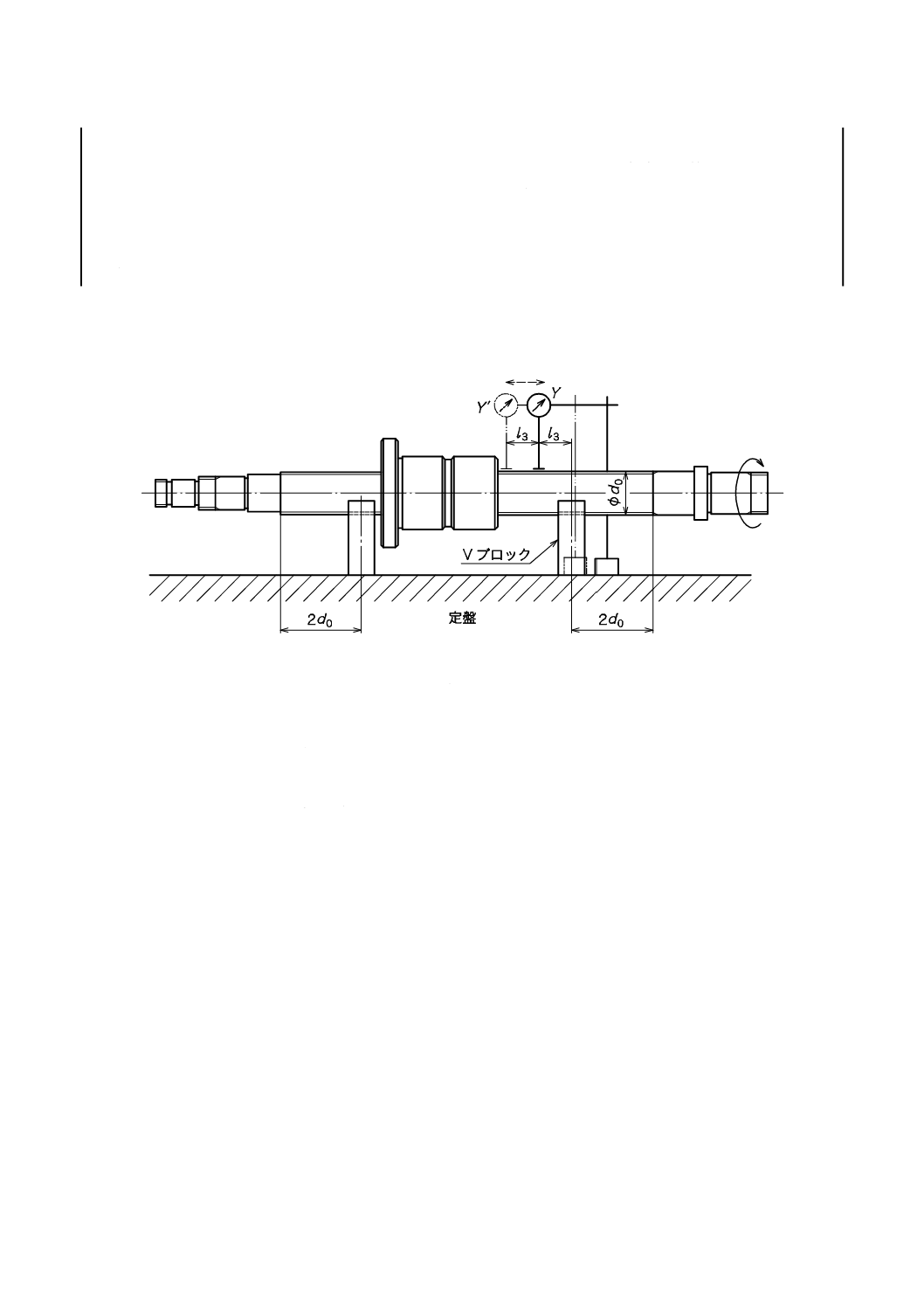
6.5.2
Cp系列及びCt系列ボールねじのねじ軸ねじ部軸線に対するねじ部外径の半径方向の全振れYa又
はZa
ねじ軸のねじ部軸線に対するねじ部外径の半径方向の全振れの測定方法は,図17による。
注記1 全振れYa又はZaは測定値Y, Y',… の最大値。
注記2 許容値については,表10参照。
注記3 測定長さが測定基準長さと異なる場合の補正方法。
Yp'=Yp×l/l3又はZp'=Zp×l/l3
ここに,
Yp': 補正後の全振れ許容値
Zp': 補正後の全振れ許容値(ねじ部長さが測定基準長さl3の4倍以上の場合)
Yp又はZp: 全振れ許容値(表10参照)
l3: 測定基準長さ(表10参照)
l: 測定長さ
図17−Cp系列及びCt系列ボールねじのねじ軸ねじ部軸線に対する
ねじ部外径の半径方向の全振れの測定方法
測定方法は,図17に示すように,ねじ軸をねじ部端面から呼び径の2倍(2d0)の位置の外径において
Vブロックなどを用いて支え,測定子をねじ軸の外周面に当て,ねじ軸を1回転させたときの振れY,Y'
…又はZ,Z'…を基準測定長さl3ごとに軸方向数箇所の位置について測定し,その最大値によって求める。
ねじ部長さが,測定基準長さl3の2倍未満の場合は,測定位置はねじ部の中央とする。
なお,ナットをねじ軸に組み込んだ状態で測定を行う場合は,測定に支障を来さないようにその位置に
配慮する。また,受渡当事者間の協定によって,ねじ軸を両センタ支持で測定してもよい。
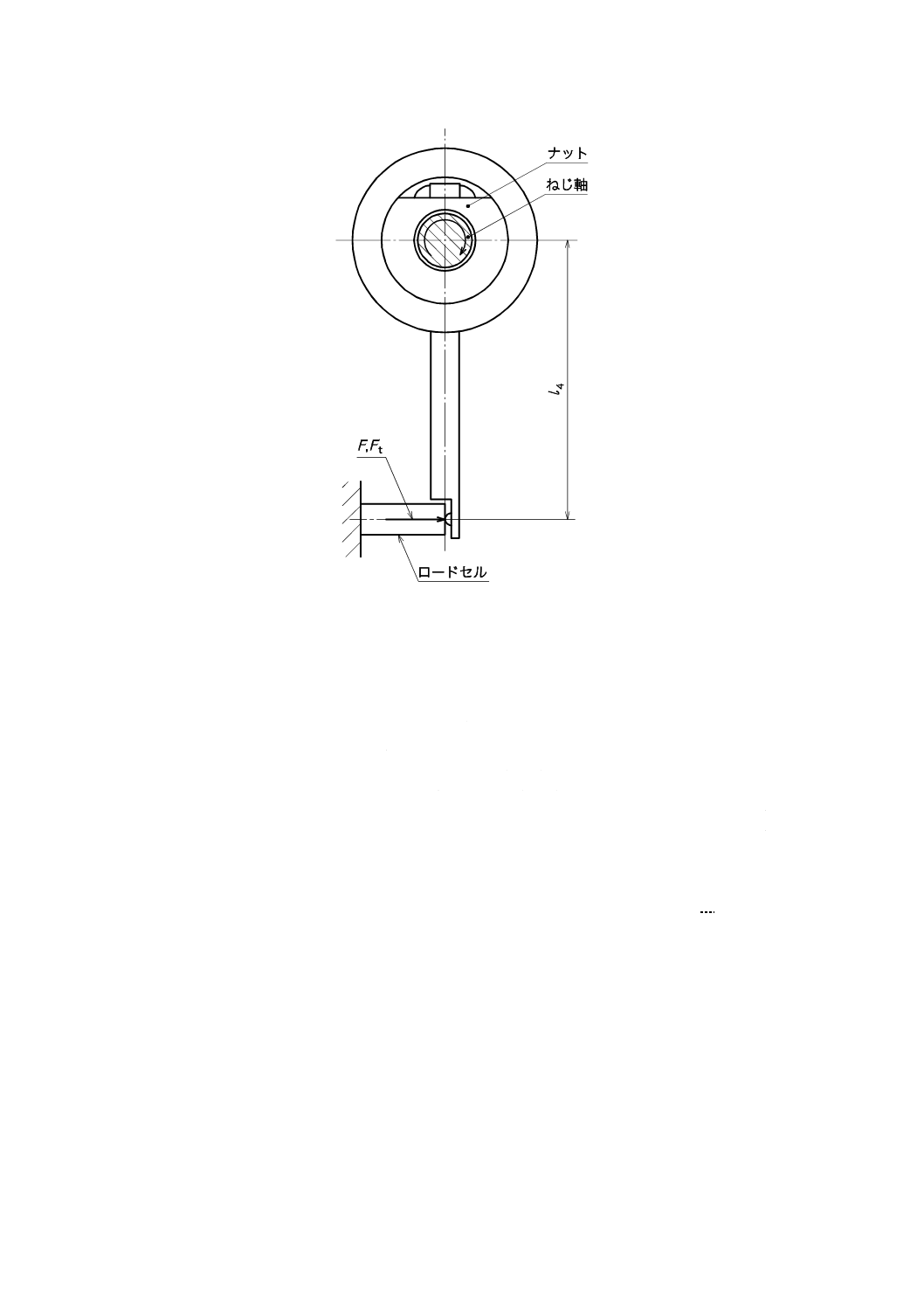
6.6
動トルク
動トルクの測定方法は,図18による。
19
B 1192-3:2018
注記 基準トルク変動率の許容域については,表11参照。
図18−動トルクの測定方法
予圧動トルク又は予圧全動トルクは,図18に示すように,測定条件でねじ軸を回転させたとき,ナット
を停止させておくために必要な力(F又はFt)を測定し,測定値にその力の作用線と直角方向に測定した
ねじ軸中心との距離(l4)を乗じて,次の式によって算出する。
Tp=F×l4 又は Tt=Ft×l4
ここに,
Tp: 予圧動トルク(N・m)
Tt: 予圧全動トルク(N・m)
F: ナットを停止させておくための力(シールなしの場合)(N)
Ft: ナットを停止させておくための力(シール付きの場合)(N)
l4: F又はFtの作用線と直角方向に測定したねじ軸中心までの距
離(m)
なお,測定条件は,測定回転速度を100 min−1とし,使用する潤滑油の粘度を,JIS K 2001に規定する
ISO VG 100とする。
20
B 1192-3:2018
附属書JA
(参考)
JISと対応国際規格との対比表
JIS B 1192-3:2018 ボールねじ−第3部:精度測定方法
ISO 3408-3:2006,Ball screws−Part 3: Acceptance conditions and acceptance tests
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
全体
様式
−
−
変更
ISO規格とJISにおける測定方
法の記載様式が異なる。
我が国独自のC系列を追加している
ため,使いやすさ,他の部編成との
一貫性を加味して,従来のJISを踏
襲した様式とした。
ISO規格との技術的内
容の違いを記載
−
−
追加
従来のJISのC系列を追加した。
そのため,C系列の規格は全て側
線又は点線の下線となる。
側線及び点線の下線が多いが,技
術的内容はほぼ同じである。
C系列は,我が国独自の規格である
が,海外でも一部適用され始めたた
め,従来のJISをそのまま残した。
今後,ISOへ採用を働きかける。
1 適用範囲 ボールねじの精度測定
方法,測定条件及び許容
値について規定
1
JISとほぼ同じ
削除
ISO規格の図1の構成図を削除
した。
このため,以降の図番号にずれが
生じた。
JISでは第1部の図1に明白に図示
されており,重複するため。
2 引用規格 引用した規格を記載
2
ISO 230-1
ISO 286-2
変更
JISではトルク測定に使用する
潤滑油の粘度,及び試験場所の標
準状態を引用した。
使用者にとって引用規格を掲載した
方が分かりやすいと判断した。
2
B
1
1
9
2
-3
:
2
0
1
8
21
B 1192-3:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
4 種類及び
等級
ボールねじの種類及び
等級を規定
4.1
JISとほぼ同じ
追加
JISでは,C系列の規格を追加
した。
従来から我が国で使用されてきた規
格であるため,従来のJISを踏襲した。
−
4.2.1
代表移動量誤差の許容
値の出典,及び有効長さ
に対する変動(許容値)
の計算式を記載
削除
JISでは,代表移動量誤差の許
容値の出展,及び有効長さに対
する変動(許容値)の計算式を
削除した。
ISO規格の計算値と対応する代表移
動量誤差の許容値(E2)が一致しない
ため混乱を招く。また,計算式は我が
国で一般的なC系列に適用できない
式であるため削除した。
−
4.2.2.2 代表移動量誤差を計算
で求める方法を記載
削除
ISO規格では計算によって求め
る方法として,最小二乗法の計
算式を記載しているが,JISで
は,6.2の測定方法で,最小二乗
法という用語だけを記載した。
最小二乗法は一般的な計算式であり,
従来のJISでも記載していない。
−
4.2.2.3 代表移動量誤差及び変
動を作図で求める方法
を記載
削除
ISO規格では,作図によって求
める方法として図3 a),b)を記
載している。
JISでは,第1部の図3 a),b)に記載
しており,重複するため削除した。
5 ボールね
じの精度
−
5.1
等級及び代表移動量誤
差,変動の測定方法を規
定
削除
ISO規格では種類別の等級を規
定し,代表移動量誤差,変動の
測定方法として図3を記載して
いる。
我が国では一般的に使用されている
測定方法ではなく混乱を避けるため
削除した。
5.1 代表移動量誤差及
び変動
5.2
JISとほぼ同じ
追加
JISでは表4において,代表移
動量誤差の計算式の記号説明
を追加した。
記号の説明があった方が,分かりやす
いため従来のJISを踏襲した。
5.2.1 C系列ボールねじ
のねじ軸各部の円周振
れ及び5.2.2 Cp系列及
びCt系列ボールねじの
ねじ軸各部の円周振れ
−
−
追加
JISでは,幾何公差に対する図
示例を図1(C系列)及び図2
(Cp及びCt系列)に記載した。
幾何公差に対する図示例を示した方
が分かりやすいため,従来のJISを踏
襲した。
5.2.2 Cp系列及びCt系
列ボールねじのねじ軸
各部の円周振れ
5.3
JISとほぼ同じ
追加
円周振れ公差記号及び全振れ
公差記号を追加した。以降同
様。
ISO規格にはないが,分かりやすくす
るため追加した。
今後,ISO規格への採用を働きかけ
る。
2
B
1
1
9
2
-3
:
2
0
1
8
22
B 1192-3:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
6 測定方法 6.1 測定場所の状態
−
−
追加
JISでは,測定場所の状態を規
定した。
従来のJISを踏襲した。
6.2 代表移動量誤差及
び変動
5.2
JISとほぼ同じ
追加
JISでは,代表移動量誤差及び
変動の計算及び作図による求
め方を追加した。
また,JISでは変動(v2π)につ
いて,1リードごとの測定点を
詳しく記載した。
計算及び作図による求め方を記載し
たほうが分かりやすいため,従来の
JISを踏襲した。
変動(v2π)については,詳しく記載し
た方が分かりやすいと判断した。
6.2 代表移動量誤差及
び変動 図3
5.2
JISとほぼ同じ
変更
ISO規格では移動量誤差及び変
動を個々に図示しているが,JIS
では図3に統合した。
図を統合した方が分かりやすいと判
断し,従来のJISを踏襲した。
6.3.2.3 ねじ軸のねじ部
軸線に対する支持部端
面の円周振れ
5.3
JISとほぼ同じ
追加
JISでは,測定子間隔を確保で
きない場合の実測値の算出方
法を追加した。
ISO規格にはないが,従来のJISを踏
襲した。
−
5.4
機能試験として動トル
ク及び軸方向剛性の測
定方法を記載
削除
JISでは軸方向剛性の測定方法
(E13)は削除した。
ISO規格では許容値が規定されてい
ないため削除した。
附属
書A
表A-1で代表移動量誤
差の計算結果を記載
(3 150 mmを超える範
囲並びに7級及び10級)
削除
JISでは表A-1は削除した。
JISでは,表2に3 150 mmを超える
許容値も記載しており重複すること,
またISO規格で規定のないCp7,Cp10
の許容値は必要ないと判断した。
表A-2で代表移動量の
300 mm当たりの測定間
隔を記載
削除
JISでは表A-2は削除した。
JISの6.2の測定方法 表12と重複す
るため。
表A-3で超過移動量を
規定
削除
JISでは表A-3は削除した。
我が国ではこの用語の概念がなく,第
1部でも削除したため。
JISと国際規格との対応の程度の全体評価:ISO 3408-3:2006,MOD
2
B
1
1
9
2
-3
:
2
0
1
8
23
B 1192-3:2018
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
B
1
1
9
2
-3
:
2
0
1
8