A 8426:2019 (ISO 15818:2017)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
4 つり上げ箇所 ··················································································································· 4
4.1 位置及び数 ··················································································································· 4
4.2 強度 ···························································································································· 4
5 固縛箇所························································································································· 5
5.1 位置及び数 ··················································································································· 5
5.2 加速度係数 ··················································································································· 6
5.3 強度 ···························································································································· 7
6 つり上げ箇所及び固縛箇所−共通の要求事項 ········································································· 9
6.1 位置についての共通要求事項 ··························································································· 9
6.2 材料要求事項 ··············································································································· 10
6.3 引抜き式器具 ··············································································································· 10
6.4 共通の器具 ·················································································································· 10
7 識別······························································································································ 10
8 つり上げ及び固縛の説明 ··································································································· 10
9 検証······························································································································ 12
附属書A(規定)機械分解時のつり上げ及び固縛の所要情報························································ 13
附属書B(参考)土工機械のつり上げ,積み付け,固縛及び輸送−方法及び推奨事項 ······················· 14
附属書C(参考)たすき掛け固縛配置での固縛箇所に作用する力の計算方法 ··································· 19
A 8426:2019 (ISO 15818:2017)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本建設機械施工協会(JCMA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8426:2019
(ISO 15818:2017)
土工機械−つり上げ及び固縛箇所−性能要求事項
Earth-moving machinery-Lifting and tying-down attachment points-
Performance requirements
序文
この規格は,2017年に第1版として発行されたISO 15818を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,JIS A 8308に定義する土工機械のつり上げ箇所及び固縛箇所の性能要求事項について規定
する。
この規格は,製造業者が,そのためのつり上げ箇所又は固縛箇所を用いて個別につり上げるか又は固縛
しようとしている土工機械の構成部品又は部分組立品にも適用する。
注記1 ある種の構成部品(例えば,タイヤ,車輪,履帯の組立品,油圧シリンダ)は,特定の固縛
箇所がなくても確実に固縛できる。
この規格は,次の輸送方式に適用する。
− クレーンでのつり上げ(例えば,移動式クレーン,門形クレーン)
− 道路輸送(例えば,トラック,トレーラ)
− 鉄道輸送(例えば,コンテナ車,交換式荷台,セミトレーラ,トラックなどとの組合せ輸送を含む。)
− 海上輸送
この規格は,次の輸送方式には適用しない。
− 航空輸送
− 操車場での入換えとなる貨車に乗っている土工機械の鉄道輸送
注記2 国家又は地域の規制が,より,厳しいことがある。
この規格は,機械を鉄道車両・作業船などの床面に取り付けて作業を行わせる場合の,機械の取付けに
ついての要求事項を含まない。
注記3 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 15818:2017,Earth-moving machinery−Lifting and tying-down attachment points−
Performance requirements(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8302 土工機械−運転員及び整備員の乗降用・移動用設備
注記 対応国際規格:ISO 2867,Earth-moving machinery−Access systems
JIS A 8308 土工機械−基本機種−用語
注記 対応国際規格:ISO 6165,Earth-moving machinery−Basic types−Identification and terms and
definitions
JIS A 8310-1 土工機械−操縦装置及び表示用識別記号−第1部:共通識別記号
注記 対応国際規格:ISO 6405-1,Earth-moving machinery−Symbols for operator controls and other
displays−Part 1: Common symbols
ISO 7000,Graphical symbols for use on equipment−Registered symbols
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS A 8308によるほか,次による。
3.1
つり上げ箇所(lifting attachment point)
機械又はその分解部分をつり上げるときに用いる機器で,機械に取り付けられるもの,又はその一部で
あるもの。
注記 つり上げ箇所は,孔,リフティングアイ,又は,製造業者が規定する機械の特定部分であるこ
とがある。
3.2
つり上げ用具(lifting accessory)
機械又はその分解部分をつり上げるときに用いる用具の組合せ(例えば,シャックル,ワイヤロープ,
スリング,チェーン)。
3.3
固縛箇所(tying-down attachment point)
機械又はその分解部分を輸送する際に固縛するために用いる機器で,機械に取り付けられるもの,又は
その一部であるもの。
注記 固縛箇所は,孔,固縛アイ,又は製造業者が規定する機械の特定部分であることがある。
3.4
固縛用具(tying-down accessory)
機械又はその分解部分を輸送のために固縛し,くくり付けるときに用いる用具の組合せ(例えば,チェ
ーン,ワイヤロープ,シャックル,止め木,輪止め)。
3.5
スリング(sling)
チェーン,ワイヤロープ,繊維ロープのような玉掛用具の組立品で,上部又は下部の端末に結合して,
つり上げ箇所(3.1)に荷掛けするのに好適となるようにするもの。
3
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.6
機械つり上げ配置(machine lifting configuration)
製造業者が推奨する,機械をつり上げるための配置。
3.7
機械固縛配置(machine tying-down configuration)
製造業者が推奨する,機械を輸送するための配置。
3.8
強度計算用の機械の質量
3.8.1
各分解部分の質量(mass of each disassembled unit)
輸送のために分解する機械の各部分(例えば,構成部品,部分組立品,本体)の質量。
注記 これは,各部分のつり上げ箇所(3.1)又は固縛箇所(3.3)に作用する外力を計算するのに用い
る。
3.8.2
計算用機械総質量(whole machine mass for calculation)
全ての構成部品及び取付部品が付いた状態のキャブ,キャノピ,運転員保護構造の組合せ並びに機械の
製造業者が承認するいかなるエクイップメント及びアタッチメントの組合せを含み,満タンの流体系は含
むが積み荷は除く全ての組み合わせのうち最大となる機械の質量。
注記 これは,機械丸ごとのつり上げ箇所(3.1)又は固縛箇所(3.3)に作用する外力を計算するのに
用いる。
3.9
分配つり上げ力(distributed lifting force)
(機械の)つり上げ中につり上げ装置からつり上げ用具(3.2)を通して各つり上げ箇所(3.1)に作用す
る力。
注記 荷の不均等な分布及びつり上げ用具が垂直でないため,各つり上げ箇所に作業する分配つり上
げ力の大きさと方向は違うことがある。
3.10
分配固縛力(distributed tying-down force, restraining force)
(機械の)輸送中に輸送用機器から固縛用具(3.4)を通して各固縛箇所(3.3)に作用する可能性がある
力。
3.11
最大使用負荷質量,WLL(working load limit)
つり上げ用具(3.2)が,製造業者が規定する条件の下でつり上げるよう設計された最大の負荷質量。
3.12
固縛用具の使用荷重,LC(lashing capacity)
固縛用具(3.4)が使用時に耐える許容最大荷重(力)。
3.13
輸送用機器(transport vehicle)
土工機械を搭載して輸送する手段で,機械を固縛する相手となるもの。
4
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.14
保証荷重(力)(proof force)
分配つり上げ力(3.9)又は分配固縛力(3.10)に保証係数を掛け合わせた計算荷重(力)。
3.15
破断荷重(力)(breaking force)
分配つり上げ力(3.9)又は分配固縛力(3.10)に安全係数を掛け合わせた計算荷重(力)。
3.16
有効な固縛箇所の数(number of effective tying-down attachment points, n)
ある方向の力に対して,同時に(計算に)使用できる固縛箇所(3.3)の数。
3.17
有効なつり上げ箇所の数(number of effective lifting attachment points, n)
同時に(計算に)使用できるつり上げ箇所(3.1)の数。
3.18
固縛動作(lashing)
土工機械の輸送中に固縛用具(3.4)の適切な使用によって(荷となる)機械の輸送用機器(3.13)に対
する動きを拘束すること。
3.19
分力 FRx,FRy(resultant force)
輸送中に荷(土工機械)に作用する力に応じて固縛箇所(3.3)に作用する力のx方向成分及びy方向成
分。輸送用機器(3.13)の縦方向(前後方向)がx方向,横方向がy方向となる。
4
つり上げ箇所
4.1
位置及び数
つり上げ用具を介してつり上げるときに,機械の質量に起因するつり上げ力が,比較的良好に分配され,
つり合いがとれるように十分な数のつり上げ箇所を配置しなければならない。
適切な中央つり上げ箇所(図B.2参照)がない場合は,つり上げ箇所は,適切な安定とつり合いのため
に現実的な最大の間隔としなければならない。
つり上げ箇所は,つり上げ用具の端末を,ずれを防ぐと予測できる箇所に掛けるように設計しなければ
ならない。
4.2
強度
輸送手法に応じて,つり上げ箇所は,機械を丸ごとつり上げるための,又は,分解部分をつり上げるた
めの強度要求事項を満足しなければならない。荷重が対称である場合の強度要求事項は,表1による。
対称性がない場合を考慮して,代替方法として,各つり上げ箇所の強度要求事項は,各分解部分の質量
(3.8.1)又は計算用機械総質量(3.8.2)及び重心に対するつり上げ箇所の位置を用いて個別に計算しなけ
ればならない。保証荷重に対しては,保証係数1.5を適用し,破断荷重に対しては,安全係数4を適用し
て計算しなければならない。
各つり上げ箇所の強度は,箇条9によって検証しなければならない。
フックのような,開放端のあるつり上げ箇所は,相手のつり上げ用具が意図せずに外れるのを防止する
ための,はずれ止め又は他の(適切な)装置がなくてはならない。
5
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
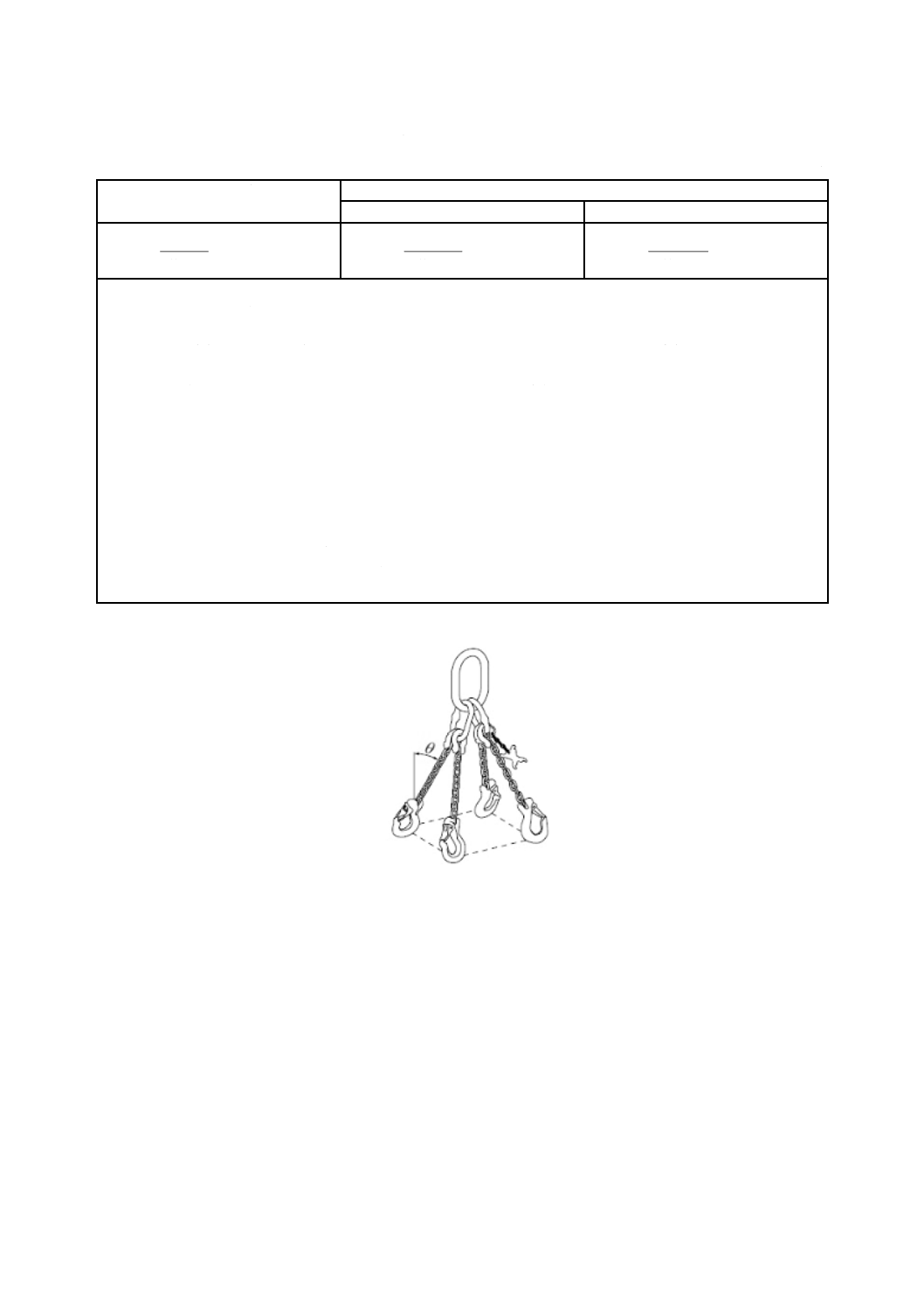
表1−つり上げ箇所−強度要求事項−対称負荷
単位 N
分配つり上げ力
強度要求事項
保証荷重
破断荷重
θ
cos
×
×
n
mg
θ
cos
5.1
×
×
×
n
mg
θ
cos
0.4
×
×
×
n
mg
m:計算用機械総質量又は各分解部分の質量(kg)
g:重力による加速度 (g = 9.8 m/s2)
n:荷重が対称な場合の計算に用いる次に規定する有効なつり上げ箇所の数
− つり上げ箇所1か所の場合は,1。機械の質量の重心に対して対称な配置のつり上げ箇所2か所で,チェーン
長さとつり角度が均等な場合は,2
− 荷が剛体で,機械の質量の重心に対して対称な配置のつり上げ箇所4か所又はそれ以上で,チェーン長さと
つり角度が均等な場合は,2
− 機械の質量の重心に対して対称な配置のつり上げ箇所3か所で,チェーン長さとつり角度が均等な場合は,3
− 荷が剛体でなく,機械の質量の重心に対して対称な配置のつり上げ箇所4か所で,チェーン長さとつり角度
が均等な場合は,3
− 機械の質量の重心に対して対称な配置のつり上げ箇所4か所で,チェーン長さとつり角度が均等で,荷のバ
ランスをとることが確実(例えば,車台の揺動,車軸の揺動,バランスをとるつり上げ用具の使用)な場合
は,4
θ:つり上げ箇所(図1)での垂直線とスリング脚部とのなす角度。これは,例えば,運転室,原動機カバーなど機
械への損傷を防ぐために制約がある。計算に用いる角度は60°又はつり上げ用具による機械への損傷を防ぐ最
大限の角度で製造業者が規定する値とする。1本づりの場合のつり上げ角度は,0°。
図1−つり上げ箇所−垂線とスリング脚部との角度
5
固縛箇所
5.1
位置及び数
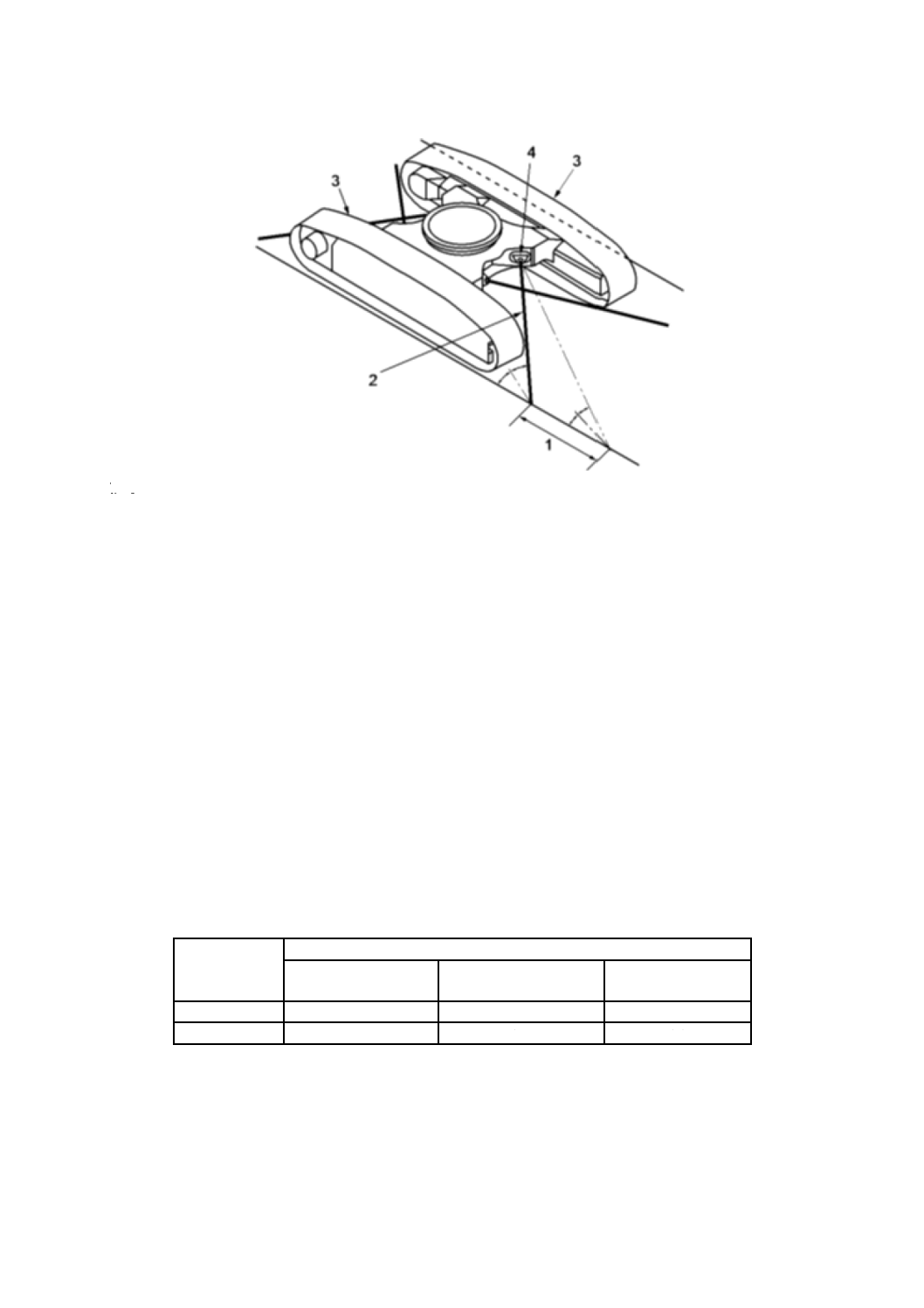
固縛箇所は,機械の製造業者の指示に従って,固縛箇所を使用する際に,固縛用具が損傷しないように
配置しなければならない(図2参照)。
6
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号
1 適切な角度を保つ範囲
2 固縛用具(固縛用具に対する損傷を防ぐような適切な角度範囲内に固縛箇所を配置)
3 機械の履帯
4 固縛箇所
図2−固縛箇所−適切な角度範囲
十分な数の固縛箇所を配置して,固縛用具への分配固縛力が許容範囲内となるようにしなければならな
い。
ある固縛箇所を,縦方向及び横方向の両方(の負荷)に対してnを求める計算に用いる場合は,その固
縛箇所は,縦方向及び横方向の負荷の両方で必要な強度をもっていなければならない。その固縛箇所は,
しかしながら,両方向における強度要求を同時に満たす必要はない。
5.2
加速度係数
特定の輸送形式(道路,鉄道及び海上)に応じた加速度係数は,表2〜表4に規定する。これらの係数
は,機械に作用する最大の作用力を規定し,5.3に規定する強度要求事項を計算するためのものである。
注記 表2〜表4の値は参考文献[3]から引用している。
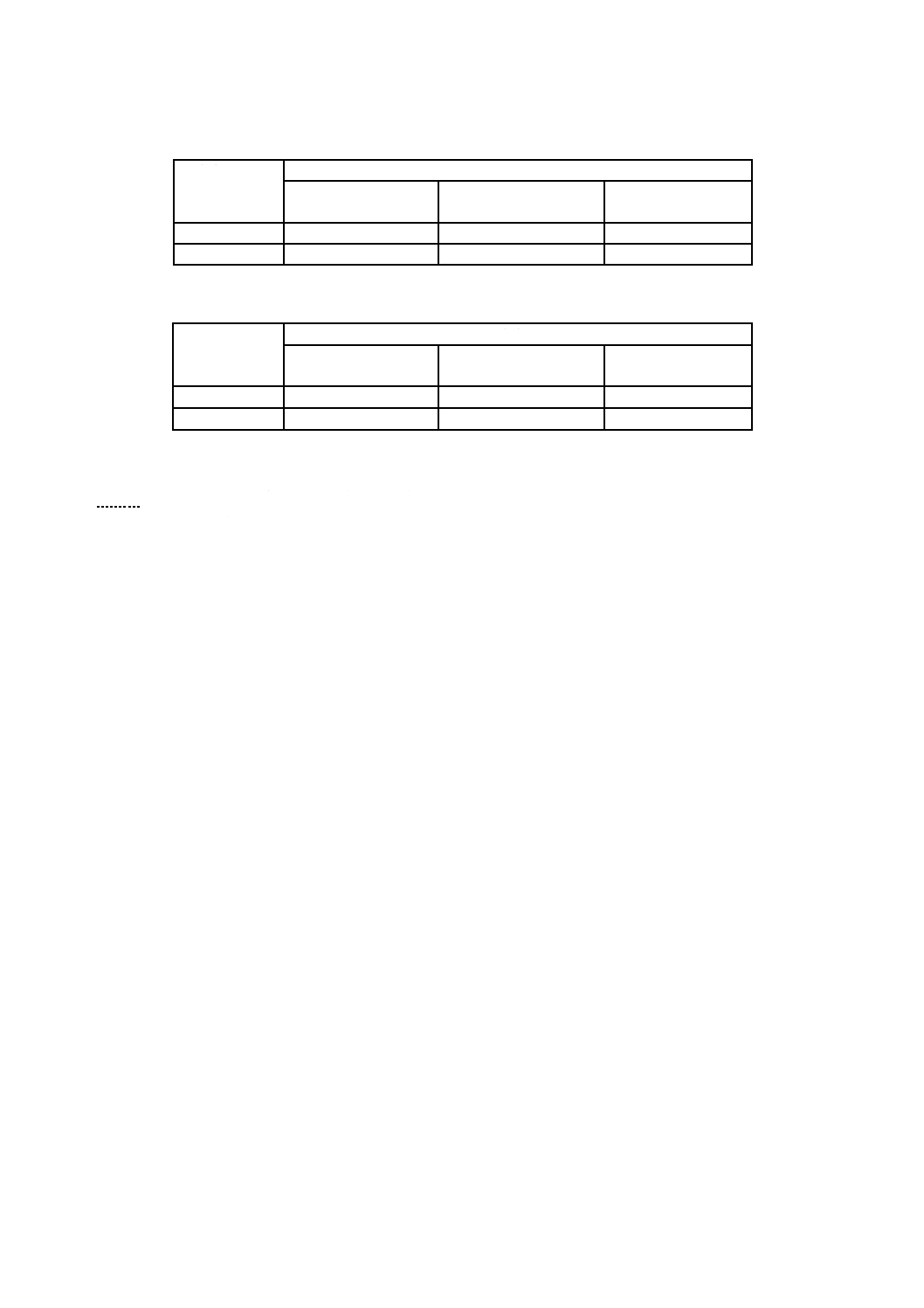
表2−道路輸送での加速度係数
固定方向
加速度係数
Cx
縦方向
Cy
横方向
Cz
垂直下向き
縦方向
0.8
−
1.0
横方向
−
0.5
1.0
7
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3−鉄道輸送での加速度係数
固定方向
加速度係数
Cx
縦方向
Cy
横方向
Cz
垂直下向き
縦方向
1.0
−
1.0
横方向
−
0.5
0.7
表4−海上輸送での加速度係数
固定方向
加速度係数
Cx
縦方向
Cy
横方向
Cz
垂直下向き
縦方向
0.4
−
0.2
横方向
−
0.8
1.0
5.3
強度
5.3.1A 各固縛箇所は,輸送手法(道路,鉄道又は海上)に応じて,5.3.1又は5.3.2のいずれかの強度要求
事項を満足し,箇条9によって検証しなければならない。
5.3.1
有効な固縛箇所の数が2以下の場合は,各固縛箇所は表5の強度要求を満足しなければならない。
8
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
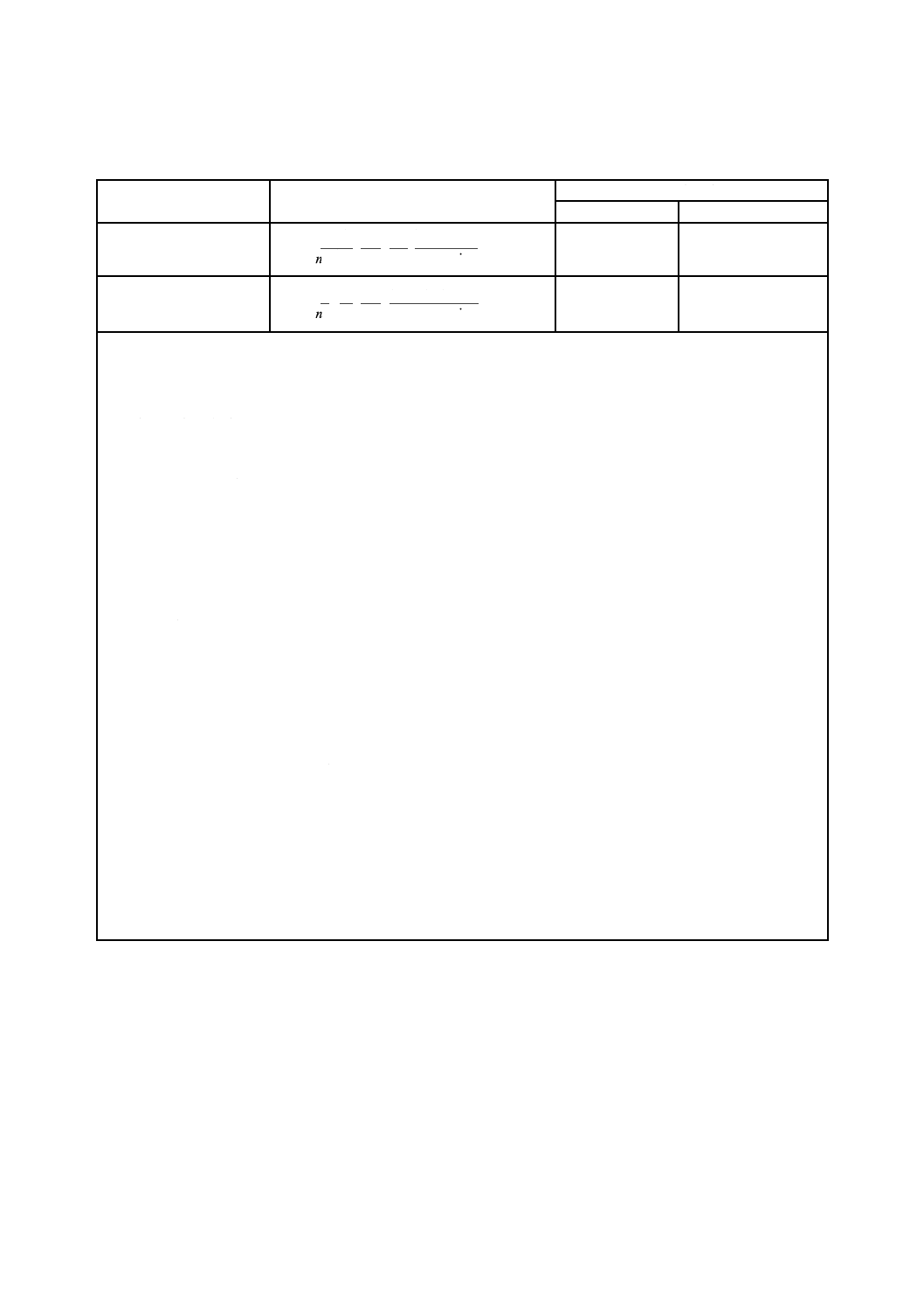
表5−固縛箇所−強度要求事項
単位 N
輸送用機器に対する力の
作用方向
分力
強度要求
保証荷重
破断荷重
縦方向
(
)
(
)
α
μ
β
α
μ
sin
cos
cos
D
x
z
D
x
Rx
×
+
×
×
×
×
×
−
=n
m
C
C
F
g
1.25×FRx
2×FRx
横方向
(
)
(
)
α
μ
β
α
μ
sin
cos
cos
D
y
z
D
y
Ry
×
+
×
×
×
×
×
−
=n
m
C
C
F
g
1.25×FRy
2×FRy
m:計算用機械総質量又は各分解部分の質量(kg)
g:重力による加速度 (g=9.8 m/s2)
n:この表を用いて計算する際の各方向に同時に用いる有効な固縛箇所の数で最大2
α:固縛箇所での固縛用具と(荷を置く)平面との間の角度。運転取扱説明書に角度αが負とならない旨を示すこと
を製造業者に推奨する。
βx:輸送用機器の荷を置く平面上で,固縛箇所において,縦方向と固縛用具とのなす角度
βy:輸送用機器の荷を置く平面上で,固縛箇所において,横方向と固縛用具とのなす角度でβy=90°−βx
μD:設計のための動摩擦係数(参照値μD=0.2)
FRx:分力で,荷によって各有効固縛箇所に作用する力の縦方向の成分
FRy:分力で,荷によって各有効固縛箇所に作用する力の横方向の成分
Cx,Cy及びCzは,重力加速度gと掛け合わせて荷に作用する加速度a=C×gを与える加速度係数である。
Cx:縦方向の加速度係数
Cy:横方向の加速度係数
Cz:垂直方向の加速度係数
記号の一部は,図3に示す。
より大形の機械では,又は,1か所若しくは複数の特定の固縛箇所が強度要求に耐えられない場合は,機械を固
定するための,その他の(十分な強度の止め木のような)補助的な方法を運転取扱説明書に明示しなければならな
い。その代わりに,製造業者が保証し,取扱説明書に明示し,機械固縛配置の要求事項の一部として規定されてい
る場合は,機械と輸送用機器の床面との間に,例えば,ゴムをかませて,摩擦係数を増加させてもよい(例えば,
EN 12195-1:2003のTable B.1参照)。
摩擦係数が,参照値(0.2)と異なる場合は,土工機械の製造業者が保証し,運転取扱説明書に明示しなければな
らない。駐車制動装置の能力(JIS A 8340-1:2011の附属書JF又はJIS A 8325)が摩擦の作用よりも小さい場合は,
摩擦力の計算値を駐車制動装置の能力で置き換えなければならない。さもなければ,製造業者はその代わりとなる
固定方法を運転取扱説明書及び荷締め用小冊子に明示しなければならない(8.4参照)。
土工機械は輸送用機器と同じ方向を向けて搭載するとは限らず,その輸送用機器に対して向ける方向が一方向以
上となることがあり得る。それに加えて,製造業者は一般にはその向きの角度を決めることはできない。そのため,
設計及び検証した各固縛方法について,適切な角度の範囲を規定し,運転取扱説明書にこの幾何学的情報の範囲が
許容できる最大である旨を警告することを推奨する。
計算のために歯止めを使用することの効果を含んでもよい。この場合,歯止めの使用は運転取扱説明書及び,も
し使用するならば,荷締め用小冊子にも明示しなければならない。
9
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
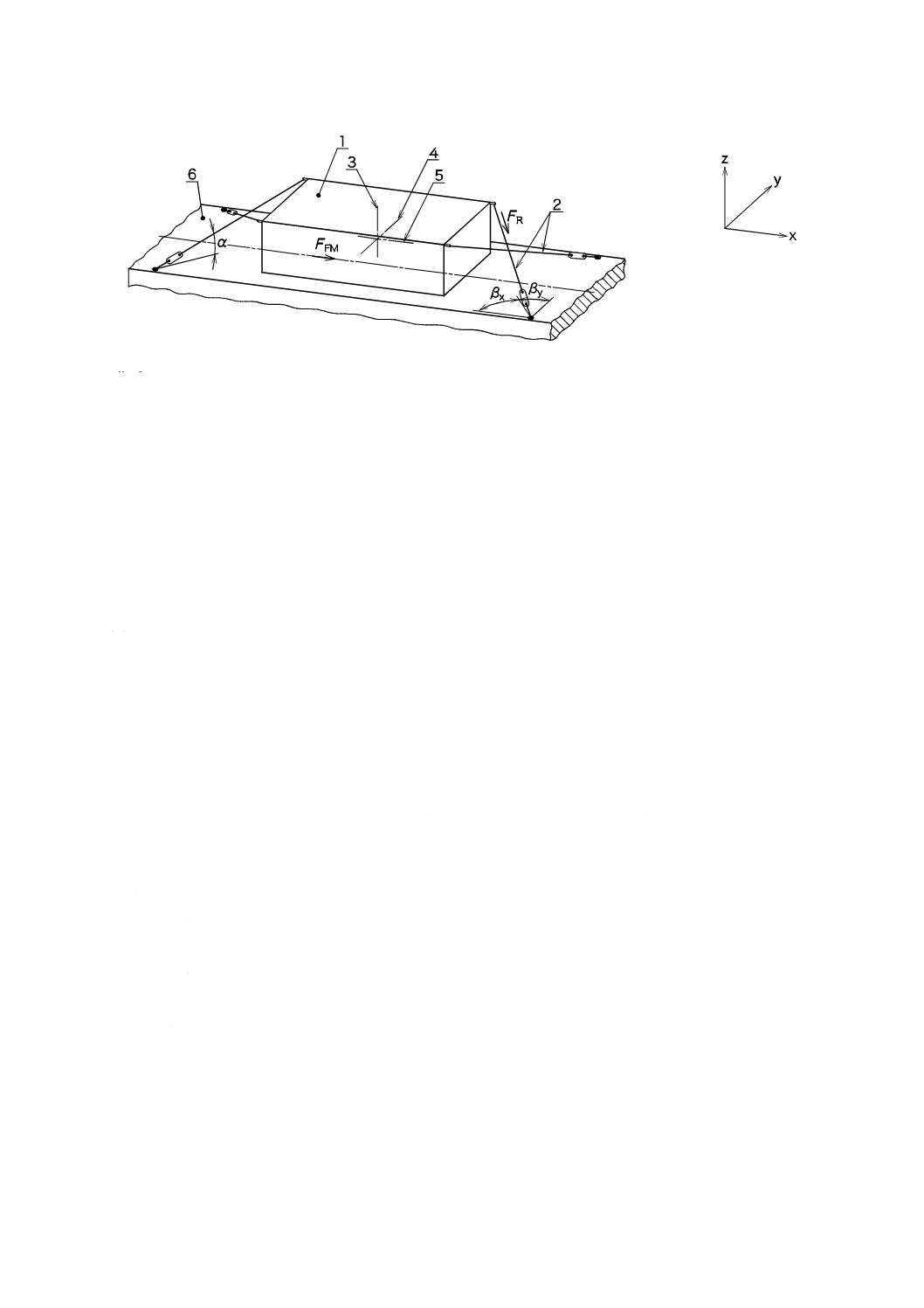
記号
1 荷
2 固縛動作
3 垂直方向軸
4 横方向軸
5 縦方向軸
6 積載面
FR 固縛動作の拘束力
FFM 垂直方向の力FZに基づく摩擦力
注記 図記号の定義については,表5及び附属書C参照
図3−機械の固縛
5.3.2 一般的な固縛手段と輸送用機器との固縛力には,制約がある。有効な固縛箇所の数n=2では,計算
で求めた固縛力が,人力で作業可能な寸法の固縛に用いる装置の能力を超える場合は,追加の手段が必要
となる。
− 固縛箇所の追加,n>2
− 摩擦係数の増加(例えば,滑り止めマット)
− 止め具の使用(例えば,歯止め)
ある単一の方向に対して2か所以上の固縛箇所を備える場合は,各固縛箇所への分配固縛力は,固縛用
具の弾性変形及びその他の固縛装置(例えば,摩擦マット,止め木)の影響を考慮して評価しなければな
らない。この規格の強度要求事項に適合するためには,計算で求めた分配固縛荷重を,保証荷重に対して
1.25倍,破断荷重に対して2倍しなければならない。
注記 附属書Cは,道路輸送,鉄道輸送,海上輸送でのたすき掛け固縛(図3参照)の計算方法を規
定している。
6
つり上げ箇所及び固縛箇所−共通の要求事項
6.1
位置についての共通要求事項
つり上げ及び固縛箇所は,JIS A 8302の原則に従って,接近できることが望ましい。接近する必要があ
る場合,外部の接近手段を用いてもよい(例えば,持ち運べる作業台)。
つり上げ箇所及び固縛箇所の周りには,対応する(つり上げ/固縛)用具の固定に十分な空間を設けな
ければならない。
つり上げ箇所及び固縛箇所は,製造業者の説明に従って機械をつり上げ/固縛するときに,対応する(つ
り上げ/固縛)用具が鋭い端部などによって損傷しないように配置しなければならない。
10
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
つり上げ箇所及び固縛箇所は,対応する(つり上げ/固縛)用具と機械とが(つり上げ又は固縛箇所を
除いて)接触しないように配置しなければならない。これが避けられない場合は,運転取扱説明書に特定
の対策を取扱説明書及び機械上に記述しなければならない(例えば,つり上げのためのつりビーム及び固
縛のための端部への当てもの)。
つり上げ箇所及び固縛箇所の孔などの寸法は,対応する(つり上げ/固縛)用具に対して適切なもので
あることが望ましい。
機械の構造部材をつり上げ又は固縛箇所として使用する場合は,対応する(つり上げ/固縛)用具をそ
の構造部材に掛ける方法を運転取扱説明書に記述しなければならない。
6.2
材料要求事項
つり上げ箇所及び固縛箇所は,破断(破損)する前に永久変形(降伏)又は同等の目視できる兆候を示
して,その箇所が過大負荷を受けていることが明瞭となるような材料で製造しなければならない。
6.3
引抜き式器具
つり上げ箇所及び固縛箇所に引抜き式器具を使用する場合,使用の際に器具を保持する手段及び不使用
時に保持又は保管する手段を備えなければならない。
6.4
共通の器具
ある器具をつり上げ及び固縛の両方に使用する場合は,4.2及び5.3の強度要求事項の両方を満足しなけ
ればならない。ただし,同時に評価する必要はない。
7
識別
7.1
機械丸ごとのつり上げ箇所は,その箇所に隣接するISO 7000の図記号1368を用いてJIS A 8310-1
に従って識別しなければならない。図記号は,機械の色に対して明瞭に目立つ色彩とすることが望ましい。
7.2
機械丸ごとの固縛箇所は,その箇所に隣接するISO 7000の図記号2069を用いてJIS A 8310-1に従
って識別しなければならない。図記号は,機械の色に対して明瞭に目立つ色彩とすることが望ましい。
7.3
つり上げ箇所及び固縛箇所は,運転取扱説明書に文書及び図を用いて明瞭に記述することが望まし
い。
7.4
機械の最大質量は,機械のすぐに見える場所[例えば,製造銘板(JIS A 8313)又は取扱い銘板]に
明示することが望ましい。
7.5
構成部品又は部分組立品のつり上げ箇所及び固縛箇所で,機械丸ごとのつり上げ又は固縛を意図し
ていないものは,7.1及び7.2の図記号を表示してはならない。その代わりに,これらの箇所は,製造業者
の説明文書(例えば,運転取扱説明書,整備解説書,現場組立説明書)で文章と図を用いて明瞭に記述し
なければならない。
8
つり上げ及び固縛の説明
8.1
機械の製造業者は,土工機械のつり上げ,固縛及び輸送について運転取扱説明書で説明しなければ
ならない。
例 機械固縛配置及び機械つり上げ配置(附属書B参照)
注記 運輸業の熟練者は,機械の特定の輸送用機器への固縛方法の専門家として,この規格の基本的
な要求事項に抵触しない限り,製造業者の説明する方法だけにこだわらず融通を利かせること
もある。
機械の製造業者は,つり上げ用具によって機械が損傷を受けるのを防ぐための情報を提供することを推
11
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
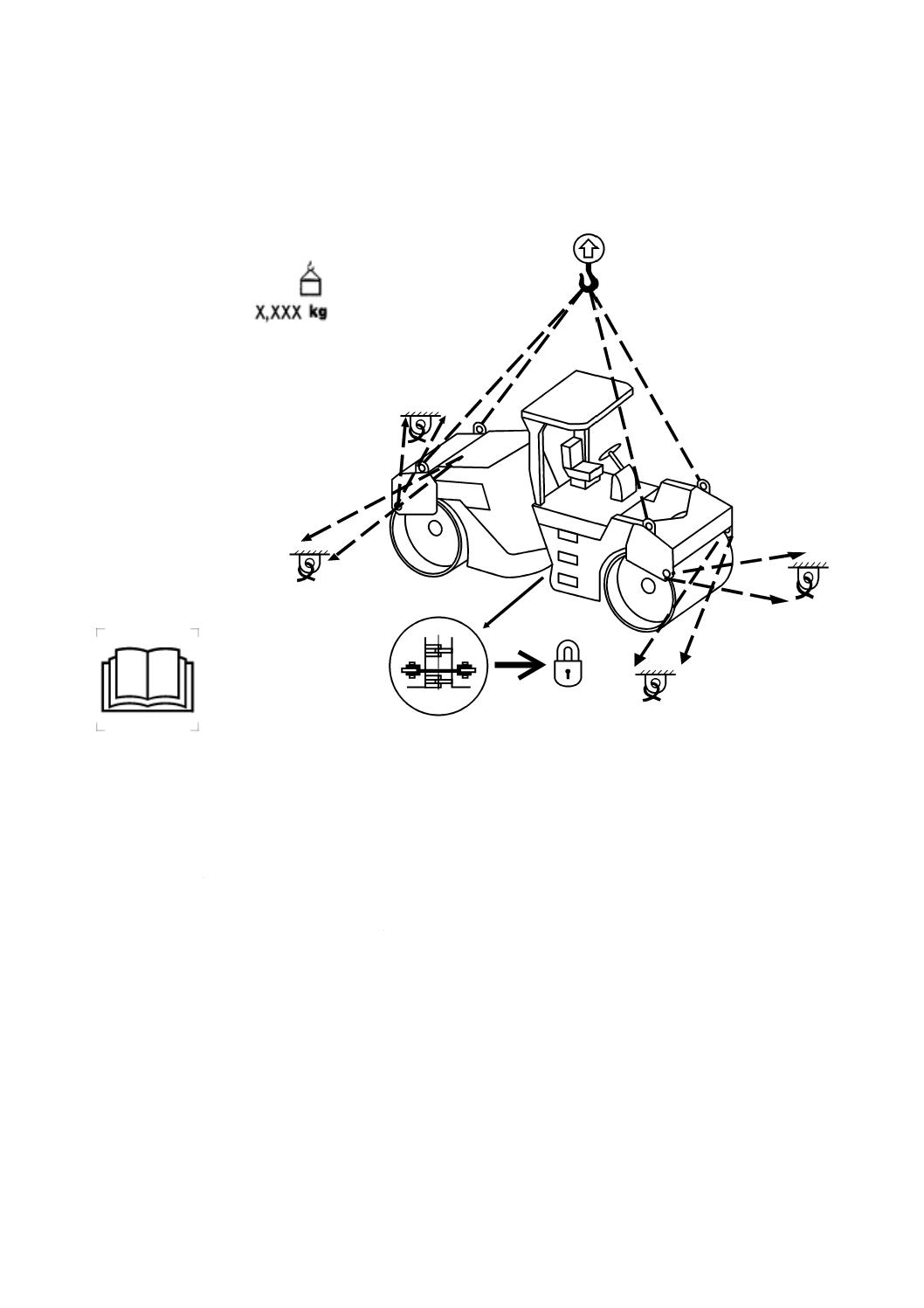
奨する。製造業者は機械の使用者に図1の角度θが60°を超えないように知らせることが望ましい。機械
の製造業者は,つり上げ及び固縛の説明を,機械の外部から見える,望ましくは単一の(又は数枚の)表
示札に,表示することが望ましい。例を図4に示す。
図4−つり上げ及び固縛の説明
機械の製造業者は,例えば,つりビーム,輪止め,摩擦材料及びその使用が必要な場合は,そのような
追加手段を明示しなければならない。
荷積み面,道板及び機械の接触面は清掃して,氷,雪などの滑りやすい物質の付着を避ける旨の通知を
提供しなければならない。
運転取扱説明書は,地域,国又は地方の条件に適した特定の固縛の説明事項を追加的に提供してもよい。
8.2
土工機械が,機械の使用者による輸送又はつり上げのために分解することを意図している場合,各
分解部分の質量は,製造業者が提供する運転取扱説明書又は別の文書に示されなければならない(附属書
A参照)。
8.3
運転取扱説明書は,つり上げ用具の角度の許容範囲を示さなければならない。運転取扱説明書は,
固縛用具の角度の許容範囲を示さなければならない。運転取扱説明書は,また,その固縛用具の角度の許
容範囲に対応する各固縛箇所に作用する分配固縛力の計算最大値を示さなければならない。運転取扱説明
書は,計算用機械総質量(3.8.2)又は各分解部分の質量(3.8.1)に対応して,適切な最大使用負荷質量の
つり上げ用具又は適切な使用荷重の固縛用具を推奨することが望ましい。
注記 運転取扱説明書に,つり上げ用具及び固縛用具(ワイヤロープ,チェーンスリング及び類似用
12
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
具)で,機械の,つり上げ及び固縛箇所の特定の配置について最大の角度に関する要求事項を
満足する最小限の長さのものについての示唆を含むことは,実際の使用者にとって多くの情報
を与える可能性がある。
運転席が施錠されていて,つり上げ又は固縛作業者が運転取扱説明書を利用できない状況で機械をつり
上げ又は固縛することが予期できる場合は,つり上げ及び固縛のための推奨事項を含む機械上のラベル又
は別の小冊子(8.4に規定する荷締め用小冊子のような)を用意することが望ましい。
8.4
土工機械の固縛に関するより詳細な説明を提供することが望ましい場合,機械を輸送するためにど
のような方法をとるかを示す荷締め用小冊子を使用するのが現実的である。
注記 固縛用の説明札は,EN 12195-1では荷締め用小冊子と呼ぶ。
8.5
運転取扱説明書は,つり上げ箇所及び固縛箇所を点検する要求を含めなければならない。これに加
えて,製造業者は,つり上げ箇所又は固縛箇所が過負荷の兆候を示した場合(6.2参照),製造業者の説明
に従って交換することが必要なことを通知しなければならない。
9
検証
つり上げ箇所に対する強度要求事項(4.2)及び固縛箇所に対する強度要求事項(5.3)は,機械的試験,
計算又は実績のある供給者の部品の使用によって検証しなければならない。
固縛箇所に関しては,製造業者が規定する最も厳しい条件を与える(道路,鉄道又は海上)輸送方式を
考慮しなければならない。
保証荷重の検証に当たり,要求される保証荷重を負荷して次に除荷した後で構造物に目視可能な永久変
形があってはならない。
注記 つり上げ用具又は固縛用具(例えば,チェーン,フック,シャックル)との接触による局部的
な変形は,構造物の永久変形とはみなさない。
破断荷重の検証に当たり,要求される破断荷重を負荷した後で目視可能な破損(破壊)があってはなら
ない。つり上げ又は固縛箇所の永久変形は許容される。
13
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
機械分解時のつり上げ及び固縛の所要情報
A.1 分解のための所要情報
機械を丸ごと輸送するのが困難な大形の土工機械は,分解する必要がある。
分解のための情報は,運転取扱説明書又は組立手順書に記述し,次による。
a) 各分解構成部品の仕様
1) 分解部品番号
2) 分解部品名
3) 主要寸法(mm単位)
4) 質量(トン単位又はキログラム単位)
5) 数量(適宜)
6) 備考(必要な場合)
b) 方法及び事前の注意
1) つり上げ方法及び事前の注意
2) 固縛方法及び事前の注意
3) 特殊工具(必要な場合)
14
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
土工機械のつり上げ,積み付け,固縛及び輸送−方法及び推奨事項
B.1
概要
土工機械のつり上げ,積み付け,固縛及び輸送のための手引及び図B.1から図B.6の事例を示す。
B.2
つり上げ方法及びつり上げ配置
B.2.1 一般
一番上のつり上げフックは,機械の重心の上方で,3か所又は4か所のつり上げ箇所からのつりビーム
とつながるところに位置し,重心の垂線上にあることが望ましい。荷につり上げ用具を掛けるつり上げ箇
所は,機械の重心より上側にあることが望ましい。
製造業者は,各機械の型式又は機種に応じてつり上げ用具の特性及び各スリングの脚部の長さについて
の手引を提供することが望ましい(図B.1及び図B.2並びに図B.3A,図B.4及び図B.5参照)。
B.2.2 安全なつり上げのための事前の注意事項
原動機は停止し,操縦装置は(操作を不能とする手段が利用できる場合)操作不能とし,駐車制動装置
及び旋回駐車制動装置のような機械の動作の制動装置を適用することが望ましい。また,上部旋回式の機
械の旋回ロック及び車体屈折式機械の屈折ロック装置のような機械の動作のロック装置はロック位置とし,
変速機はか(嚙)み合い位置とすることを,各装置が備わり,かつ,そうするのが適切である場合は推奨
する。
機械は,つり上げ用具及びつり上げ箇所に衝撃荷重がかからないように,平衡を保ちつつ徐々につり上
げることが望ましい。
つり上げ方法及び事前の注意事項は,運転取扱説明書及び整備解説書に記述することが望ましい。
B.3
固縛方法及び固縛配置
B.3.1 一般
製造業者は,各機械の型式又は機種に応じて最適の固縛方法及び固縛用具について運転取扱説明書に記
載することが望ましい(図B.3〜図B.6参照)。
B.3.2 機械の固縛のための準備事項
原動機は停止し,操縦装置は(操作を不能とする手段が利用できる場合)操作不能とする。適切である
場合は旋回駐車制動装置及び駐車制動装置を適用する。
B.3.3 荷崩れの防止
機械は,機械の固縛箇所を,固縛用具を用いて輸送用機器に確実に荷締めすることが望ましい。
B.3.4 上部旋回体の旋回防止
[アタッチメント及びエクィップメント(作業装置)を含む]上部旋回体は,輸送状態での固定を確実
にするため,その機械専用の(自動又は手動)器具,又はその他の固縛用具で固縛することが望ましい。
B.3.5 アタッチメント及びエクィップメント(作業装置)の動きの防止
機械のアタッチメント及びエクィップメント(作業装置)で,機械に備え付けの拘束手段では確実でな
く,輸送用機器の動作範囲を超えて動く可能性がある場合は,動きを防止しなければならない。動く可能
15
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
性のあるエクィップメントを固縛用具で拘束するための指示を提供することが望ましい。
輸送時の振動によって突き出る可能性がある油圧シリンダのように固定されない部品は,トレーラの荷
台にアタッチメント,可動性脚部などを置く又は固縛用具を用いて拘束するか,又はその両方で確実に固
定することが望ましい。
注記 一部のアタッチメントには,アタッチメント又は可動性の脚部が輸送用機器の外側に伸びない
ことを確実とする手段(例えば,スタビライザの可動部のチェックバルブ)を備えるものがあ
る。
B.3.6 車体屈折式の車体屈折防止
車体屈折式機械では,機械を固縛する前に,屈折ロックをロック位置にすることが望ましい。
B.4
つり上げ及び固縛用具の性能
つり上げ用具の最大使用負荷質量(WLL)は,表1に規定した対応するつり上げ箇所の強度要求に一致
することを,また,固縛用具の使用荷重(LC)は,表5に規定した対応する固縛箇所の強度要求に一致す
るか又は上回ることを,運転取扱説明書で推奨することが望ましい。
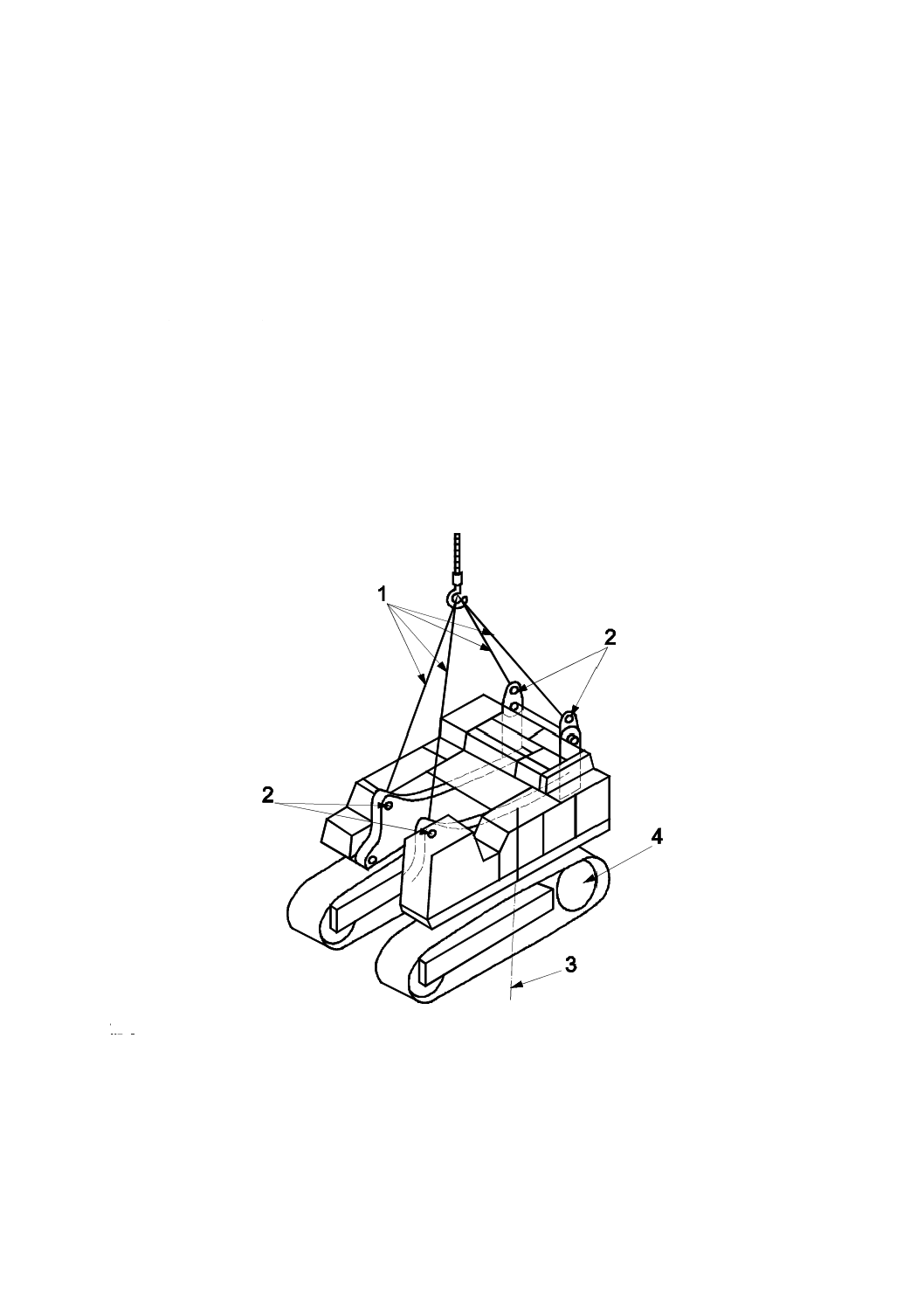
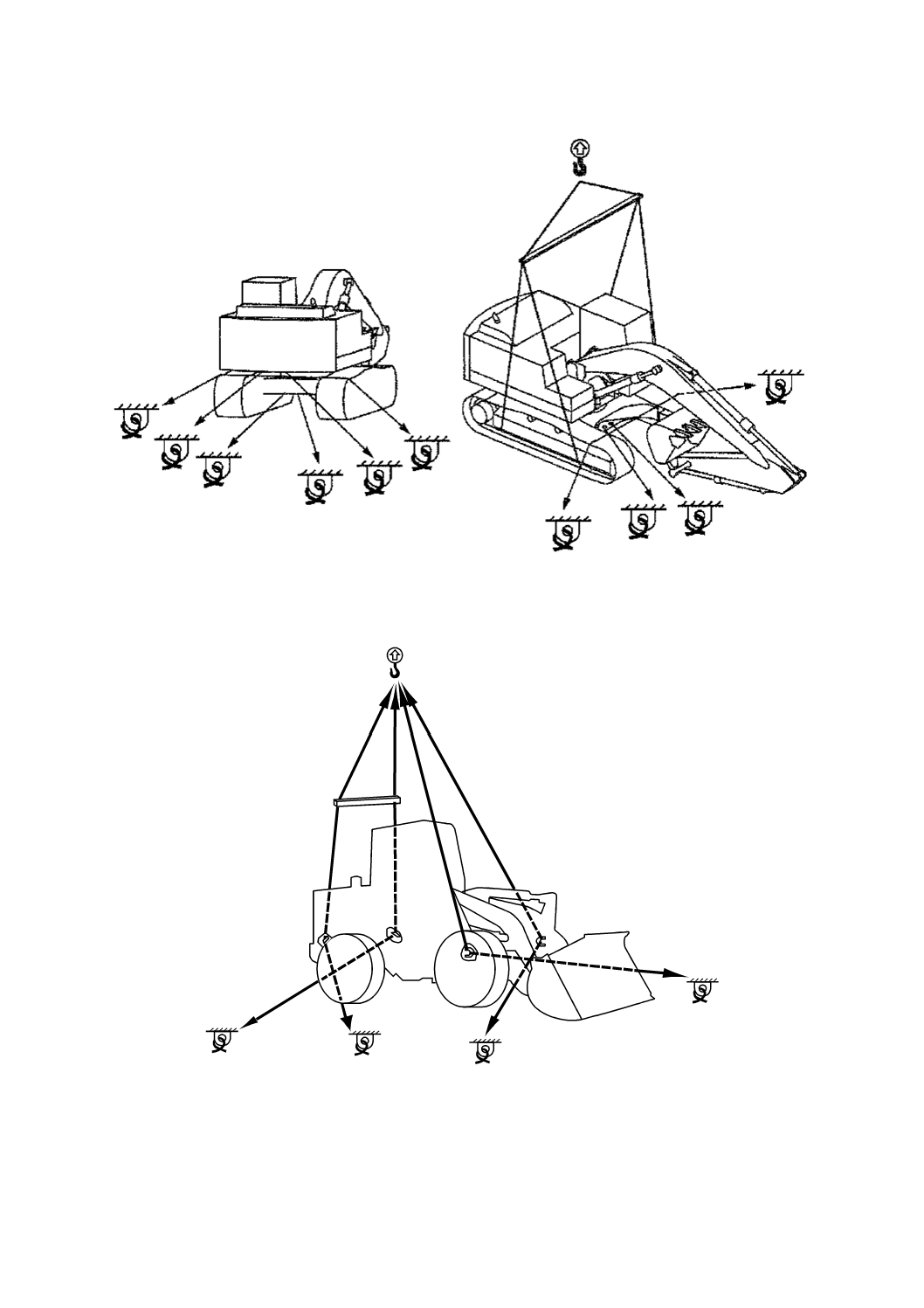
記号
1 つり上げ用具
2 つり上げ箇所の位置(アイ)
3 重心を通る垂線の側面投影
4 スプロケット
図B.1−油圧ショベルのつり上げ方法及びつり上げ箇所の位置の例
16
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
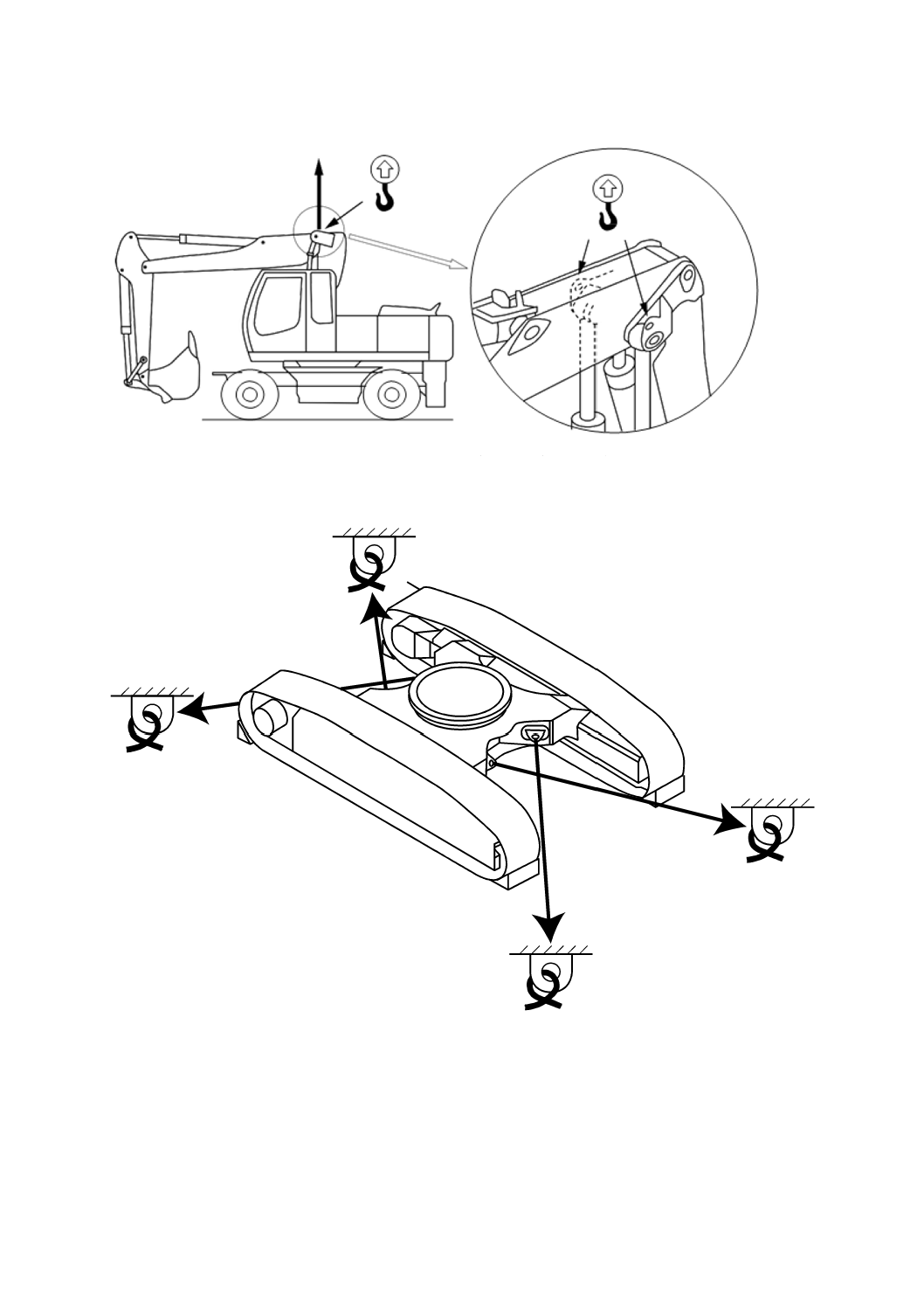
図B.2−車輪式油圧ショベルのつり上げ方法及びつり上げ箇所の位置の例
図B.3−履帯式油圧ショベルの固縛方法及び固縛箇所の位置の例
17
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.3A−履帯式油圧ショベルのつり上げ方法及びつり上げ箇所並びに固縛方法及び固縛箇所の位置の例
図B.4−ローダのつり上げ方法及びつり上げ箇所並びに固縛方法及び固縛箇所の位置の例
18
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
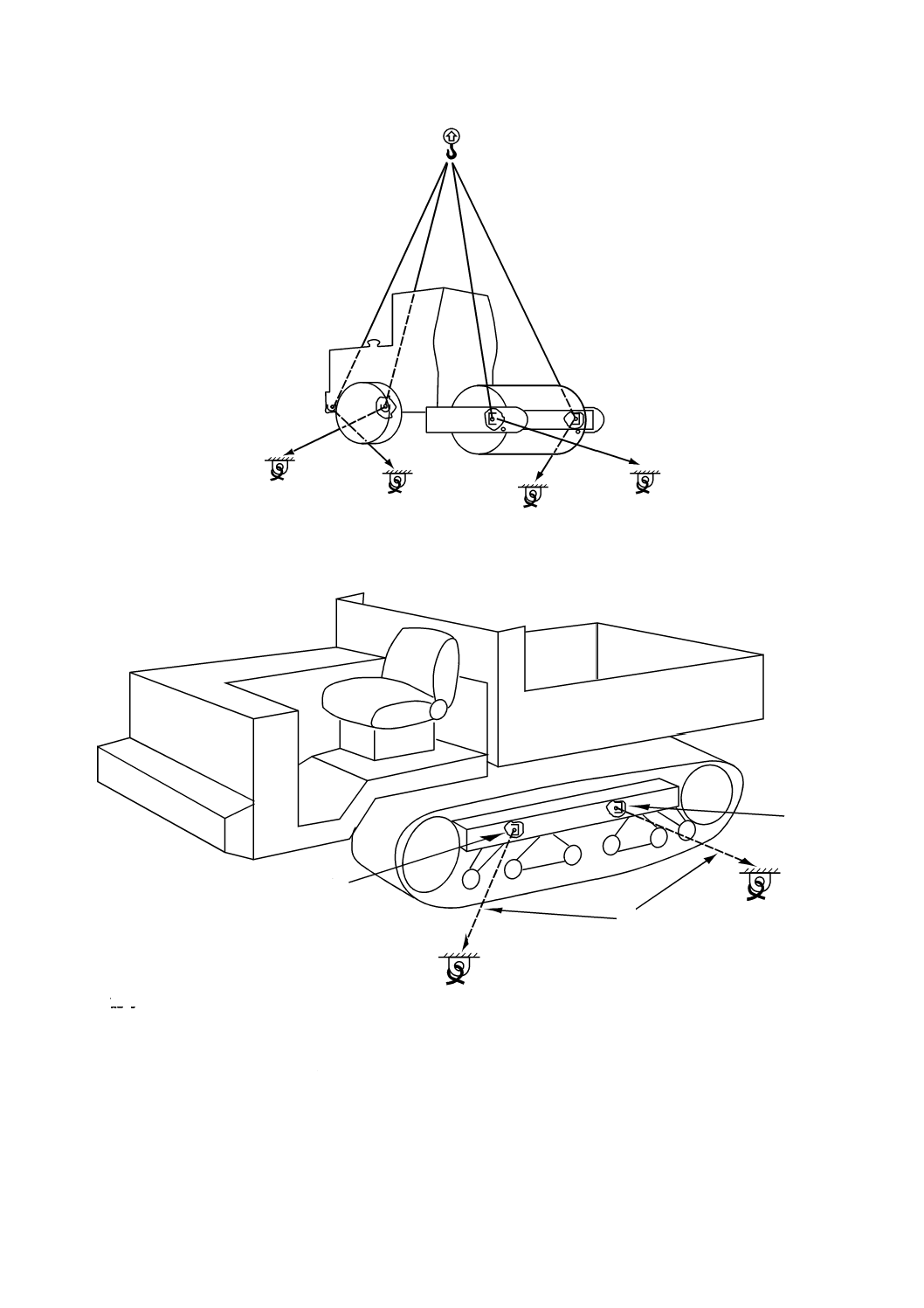
図B.5−締固め機械のつり上げ方法及びつり上げ箇所並びに固縛方法及び固縛箇所の位置の例
2
2
1
記号
1 固縛用具
2 固縛箇所
図B.6−履帯式ダンパ(不整地運搬車)の固縛方法及び固縛箇所の位置の例
19
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
たすき掛け固縛配置での固縛箇所に作用する力の計算方法
C.1 一般
たすき掛け固縛配置での固縛箇所に作用する力の計算方法を次に示す。
C.2 たすき掛け固縛
たすき掛け固縛とは,固縛動作の際,垂直方向への角度(α)に加えて,縦方向に対する角度(βx)と,
横方向に対する角度(βy)とが発生することによる,二つの異なる角度での二組の固縛動作の組合せをい
う(図3参照)。
これによって,荷を完全に拘束するための固縛動作の数を,8から4に減らすことができる。
C.3 たすき掛け固縛における力の釣合い
EN 12195-1によって,縦方向又は横方向の力の釣合いは,式(C.1)〜式(C.4)となる。
y
x,
FR
FM
y
Rx,
2
F
F
F
F
=
+
+
×
·························································· (C.1)
(
)
g
g
×
×
=
×
×
+
×
×
×
+
×
×
×
y
x,
R
z
D
R
y
x,
sin
2
cos
cos
2
C
m
F
C
m
F
α
μ
β
α
····· (C.2)
(
)
(
)
g
×
×
×
−
=
×
×
+
×
×
m
C
C
F
z
D
y
x,
R
D
y
x,
sin
cos
cos
2
μ
α
μ
β
α
················ (C.3)
(
)
(
)
α
μ
β
α
μ
sin
cos
cos
2
D
y
x,
z
D
y
x,
R
×
+
×
×
×
×
×
−
=
g
m
C
C
F
············································ (C.4)
ここに, Cx,Cy,Cz,g,m,μD,α,βx及びβy: 表5参照
FR: 固縛動作の拘束力
FFM: 垂直方向の力FZに基づく摩擦力
FFR: 拘束力FRに基づく摩擦力
Fx: 荷に作用する縦方向の力
Fy: 荷に作用する横方向の力
Fz: 荷に作用する垂直方向の力
20
A 8426:2019 (ISO 15818:2017)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] EN 818 (all parts),Short link chain for lifting purposes−Safety
[2] EN 1677 (all parts),Components for slings−Safety
[3] EN 12195-1:2003,Load restraint assemblies on road vehicles−Safety−Part 1: Calculation of lashing forces
[4] EN 12195-3,Load restraint assemblies on road vehicles−Safety−Part 3: Lashing chains
[5] EN 13155,Cranes−Safety−Non-fixed load lifting attachments
[6] IMO/ILO/UN ECE, Guidelines for packing of cargo transport units
[7] JIS A 8313 土工機械−製品識別番号(PIN)
[8] ISO 16798,Links of Grade 8 for use with slings
[9] JIS A 8340-1:2011 土工機械−安全−第1部:一般要求事項
[10] JIS A 8325 土工機械−履帯式機械−制動装置の性能要求事項及び試験方法