A 8411-1:2006 (ISO 6746-1:2003)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本建設
機械化協会(JCMA)/財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正すべき
との申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS A 8411-1:1998は改正され,この規格に置き換えられる。
改正に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 6746-1:2003,Earth-moving
machinery−Definitions of dimensions and codes−Part 1: Base machineを基礎として用いた。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
JIS A 8411-1には,次に示す附属書がある。
附属書A(規定)高さ
附属書B(規定)幅
附属書C(規定)長さ
附属書D(規定)半径
附属書E(規定)角度
JIS A 8411の規格群には,次に示す部編成がある。
JIS A 8411-1 第1部:本体
JIS A 8411-2 第2部:作業装置
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定義 ······························································································································ 1
4. 一般 ······························································································································ 2
5. コード体系 ····················································································································· 3
附属書A(規定)高さ ··········································································································· 5
附属書B(規定)幅 ·············································································································· 7
附属書C(規定)長さ ··········································································································· 8
附属書D(規定)半径 ·········································································································· 10
附属書E(規定)角度 ·········································································································· 11
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8411-1:2006
(ISO 6746-1:2003)
土工機械−寸法及びコードの定義−
第1部:本体
Earth-moving machinery-Definitions of dimensions and codes-
Part 1: Base machine
序文 この規格は,2003年に第3版として発行されたISO 6746-1,Earth-moving machinery−Definitions of
dimensions and codes−Part 1: Base machineを翻訳し,技術的内容及び規格票の様式を変更することなく作成
した日本工業規格である。
1. 適用範囲 この規格は,土工機械の本体の寸法に関する用語及びコードについて規定する。
同時に,この規格は,用語及び仕様項目の規格において類似寸法を定義するための参照方式及び識別す
るためのコード方式についても規定する。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 6746-1:2003,Earth-moving machinery−Definitions of dimensions and codes−Part 1: Base
machine (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。この引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8308 土工機械−基本機種−用語
備考 ISO 6165:2001,Earth-moving machinery−Basic types−Vocabularyが,この規格と一致してい
る。
3. 定義 この規格で用いる主な用語の定義は,JIS A 8308によるほか,次による。
3.1
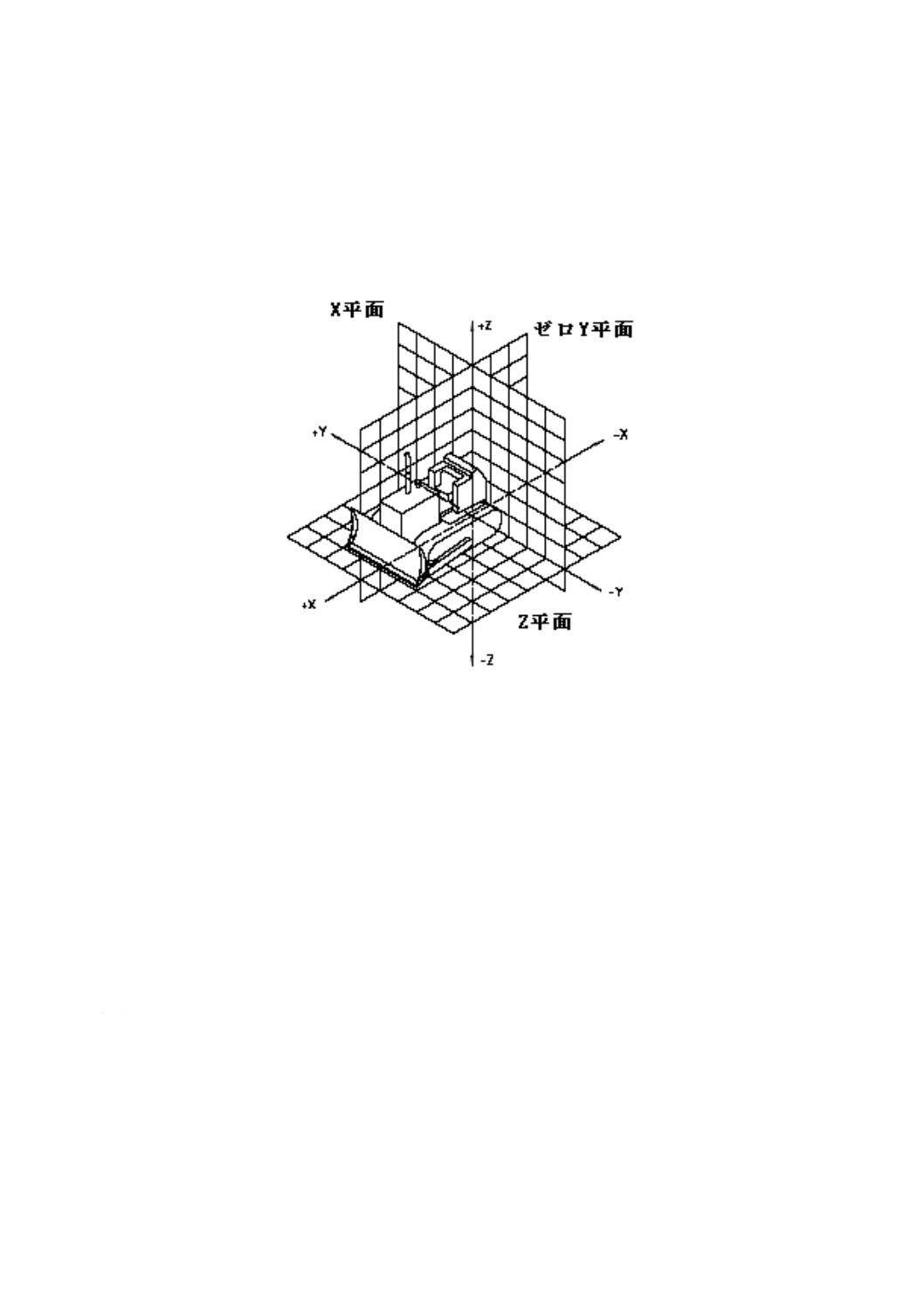
三次元座標方式(three-dimensional reference system) 土工機械の寸法を定義するために用いる座標方
式(図1参照)。
3.1.1
ゼロY平面(zero Y plane) 本体の前後方向の中心線を通る垂直平面。
3.1.2
X平面(X plane) Y平面に直交する垂直平面。
3.1.3
Z平面(Z plane) X平面及びY平面に直交する水平面。
3.1.4
正の座標(positive coordinate) 正の方向は,ゼロX平面の前方,ゼロY平面の右方向及びゼロZ平
面の上方の座標。
備考1. X,Y,Zの各軸(ゼロ平面)の交点は,通常,適切に定められ基準点(例えば,JIS A 8318
に定義するSIP,機関のクランクシャフト中心線,トラクタドーザの起動輪又は後車軸の中
2
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
心線,機械の測定のための地表線)とする。
2. 機械部品(例えば,機関,座席)だけを示すときは,その軸の位置及びX,Y,Z各軸(ゼ
ロ平面)の交点からの正の方向は,機械部品が通常,予想される方向付け(例えば,機械の
前方に対する機関の第1シリンダ,前方に向いた座席)による。
3. 機械及び/又は作業装置を示すときは,右から左に走行(前進)するように図示する。
図 1 三次元座標方式
3.2
基準地表面(ground reference plane)GRP 機械が測定のために置かれるゼロZ平面。
本体の場合は堅い水平な表面,作業装置に対しては堅い水平な表面又は締め固められた地面。
備考 いずれの表面を用いるかは,機械及びその作業装置の使用意図による。それぞれの機種の用語
及び仕様項目の日本工業規格を作成するときに,そのいずれであるかを規定する必要がある。
3.3
本体(base machine) 製造業者の仕様書によって,キャブ,キャノピ又はROPSのような運転員保護
構造を含み,個々に規定する作業装置(エクイップメント及びアタッチメント)を装着しないが,作業装
置を装着するための台座を備える機械。
4. 一般 本体の寸法及び符号を附属書A〜Eに三次元座標方式で図示(図1参照)し,5.に規定するコ
ード方式で,寸法とそれに割り当てるコードを示す。作業装置の寸法及び符号の定義は,JIS A 8411-2を
参照。
附属書に例を示すが,それ以外のものを認めないわけではない。それぞれの機種の用語及び仕様項目の
規格で,本体の寸法を定義し識別コードを割り当てる場合は同一の通則によるのがよい。
そのような寸法を定めるため,三次元座標方式を用いなければならない。
3
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5. コード体系 本体の,それぞれの寸法には,一つの大文字と参照番号とで構成されるコードが割り当
てられる。
本体の寸法を表す一つの大文字を,次に示す。
H = 高さ(附属書A参照)
W= 幅 (附属書B参照)
L = 長さ(附属書C参照)
R = 半径(附属書D参照)
A = 角度(附属書E参照)
土工機械の機種別の用語及び仕様項目の規格を作成する場合に,その本体の寸法に対して,必要に応じ
て,一つ以上の参照番号を該当する一つの大文字に付け加えてもよい。
5
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
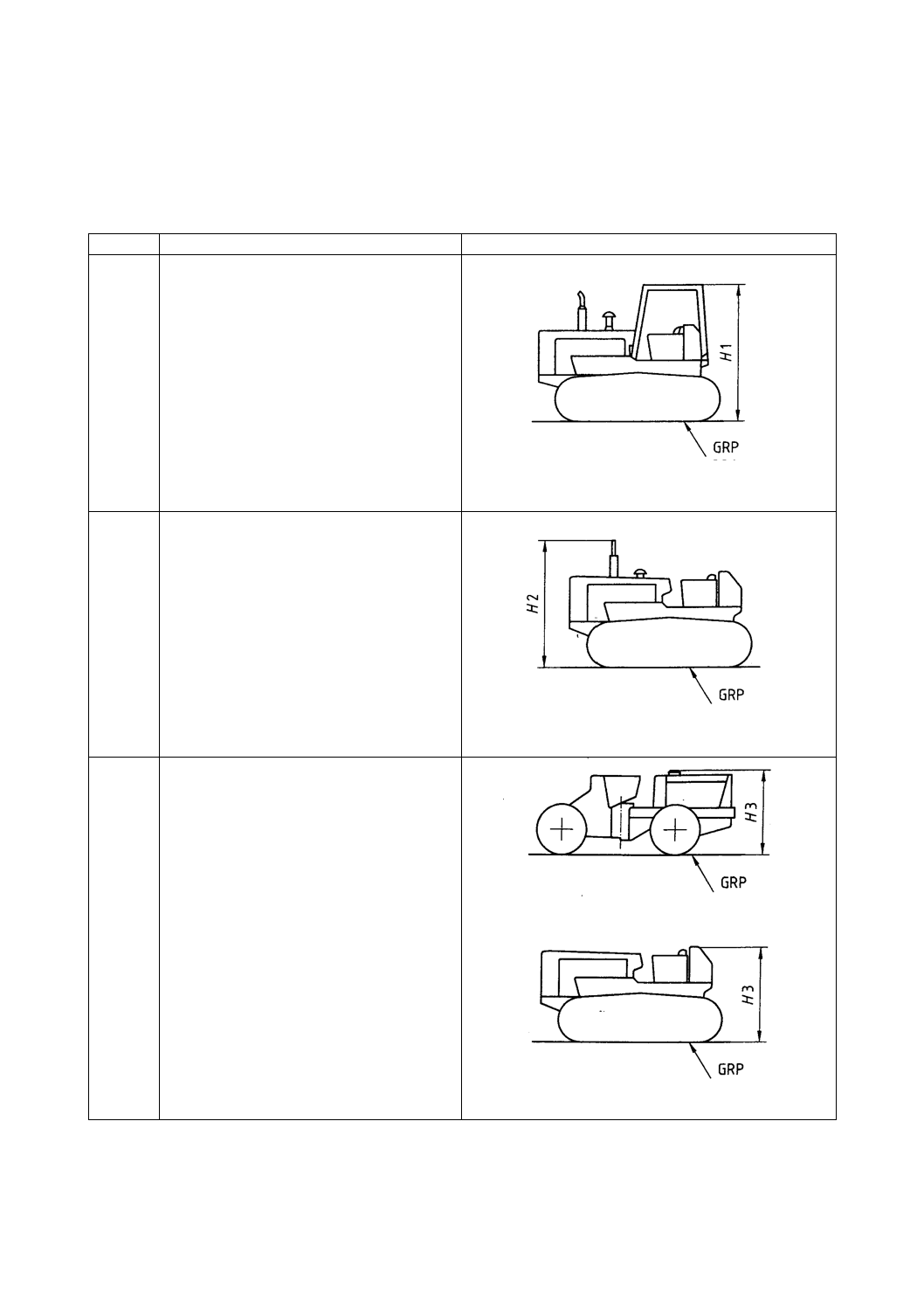
附属書A(規定)高さ
この附属書は,本体の高さを定義し,そのコードを規定する。
コード
定義
略図
H1
全高 GRPからのキャブ,ROPSなどの運転員
保護装置付き機械の最も高い部分とのZ座標
上の距離。めり込みのない堅い地面上でのグロ
ーサ高さを含む。
H2
全高(キャブ又はROPSなし) GRPからの
キャブ又はROPSなしの機械の最も高い部分
とのZ座標上の距離。めり込みのない堅い地
面上でのグローサ高さを含む。
H3
出荷高さ 出荷時に通常取り外す部分を取り
外した後の,本体の最も高い部分とGRPとの
Z座標上の距離。めり込みのない堅い地面上で
のグローサ高さを含む。
6
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
コード
定義
略図
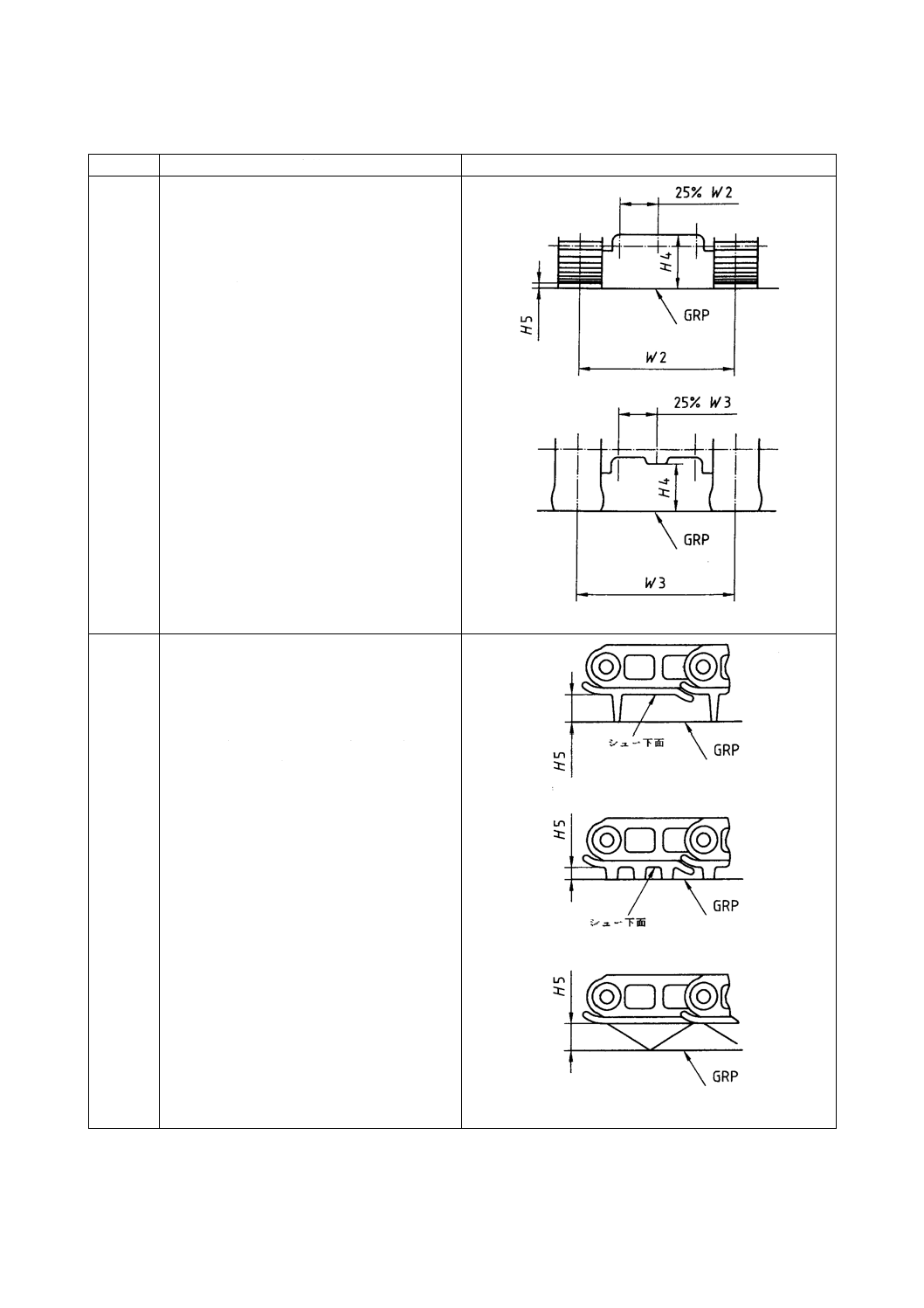
H4
最低地上高 GRPと機械の中心部とのZ座標
上の距離。
備考 機械の中心部とは,ゼロZ平面の左
右各方向に履帯中心間距離(W2)又
は輪距(W3)の25 % の範囲内をい
う。
H5
グローサ高さ シュー下面とグローサ先端を
通る二つのZ平面でシュー下面を通るものと
グローサ先端を通るものとの間のZ座標上の
距離。
三角シューの場合は,二つのZ平面で履帯
リンク取付面を通るものとグローサ先端を通
るものとの間の距離とする。
7
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
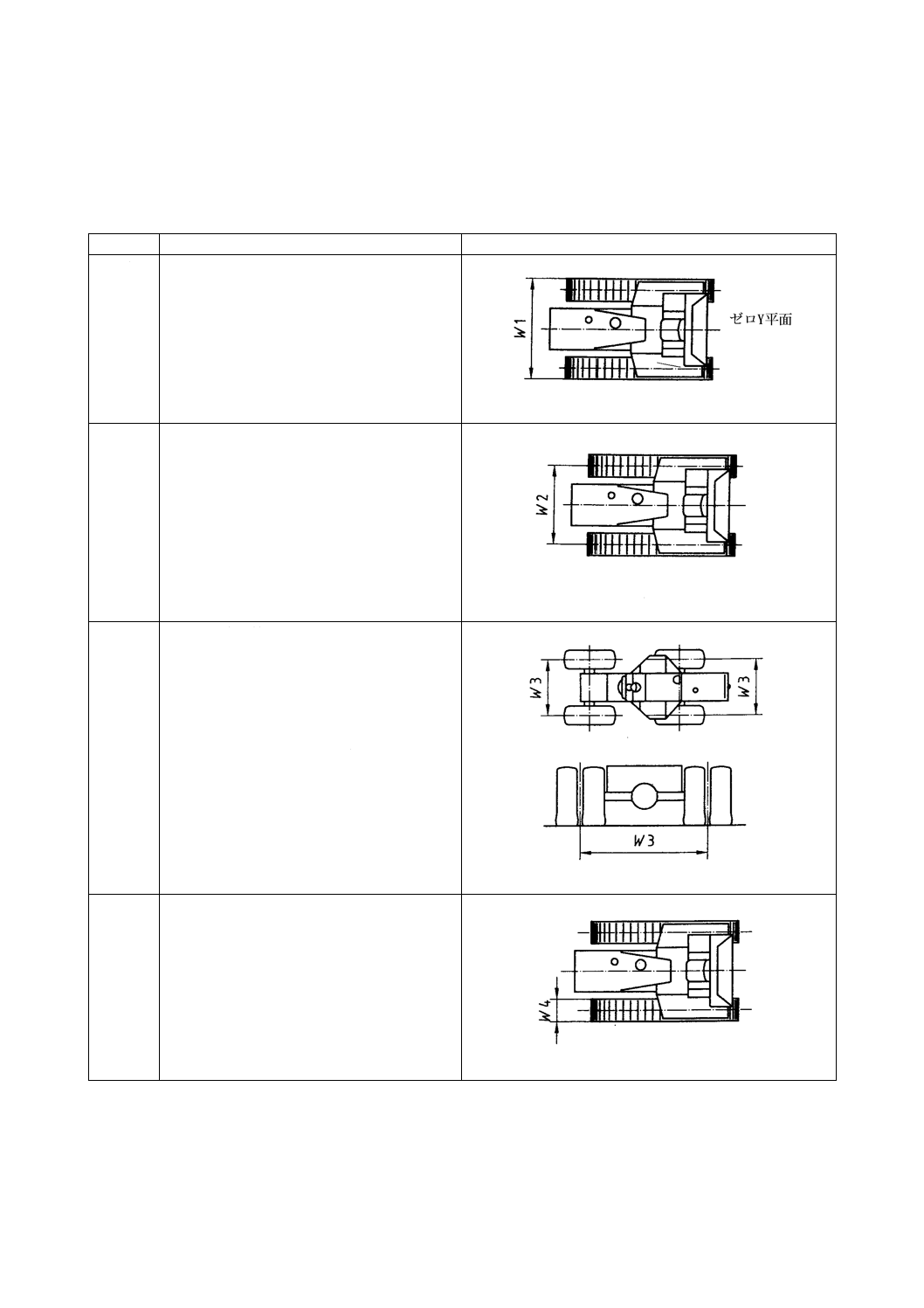
附属書B(規定)幅
この附属書は,本体の幅を定義し,そのコードを規定する。
コード
定義
略図
W1
全幅 ゼロY平面の両側で,それぞれ機械の
最も遠い部分を通る二つのY平面間のY座標
上の距離。
W2
履帯中心間距離 左右起動輪歯幅の中心を通
る二つのY平面間のY座標上の距離。
W3
輪距 左右車輪の中心を通る二つのY平面間
のY座標上の距離。
備考1. 複輪の場合は,左右複輪の中心を
通る二つのY平面間のY座標上
の距離。
2. もし,輪距が前後二つ以上の場合
は,それぞれを表示する。
W4
履帯幅 同一履板の両側端を通る二つのY平
面間のY座標上の距離。
8
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C(規定)長さ
この附属書は,本体の長さを定義し,そのコードを規定する。
コード
定義
略図
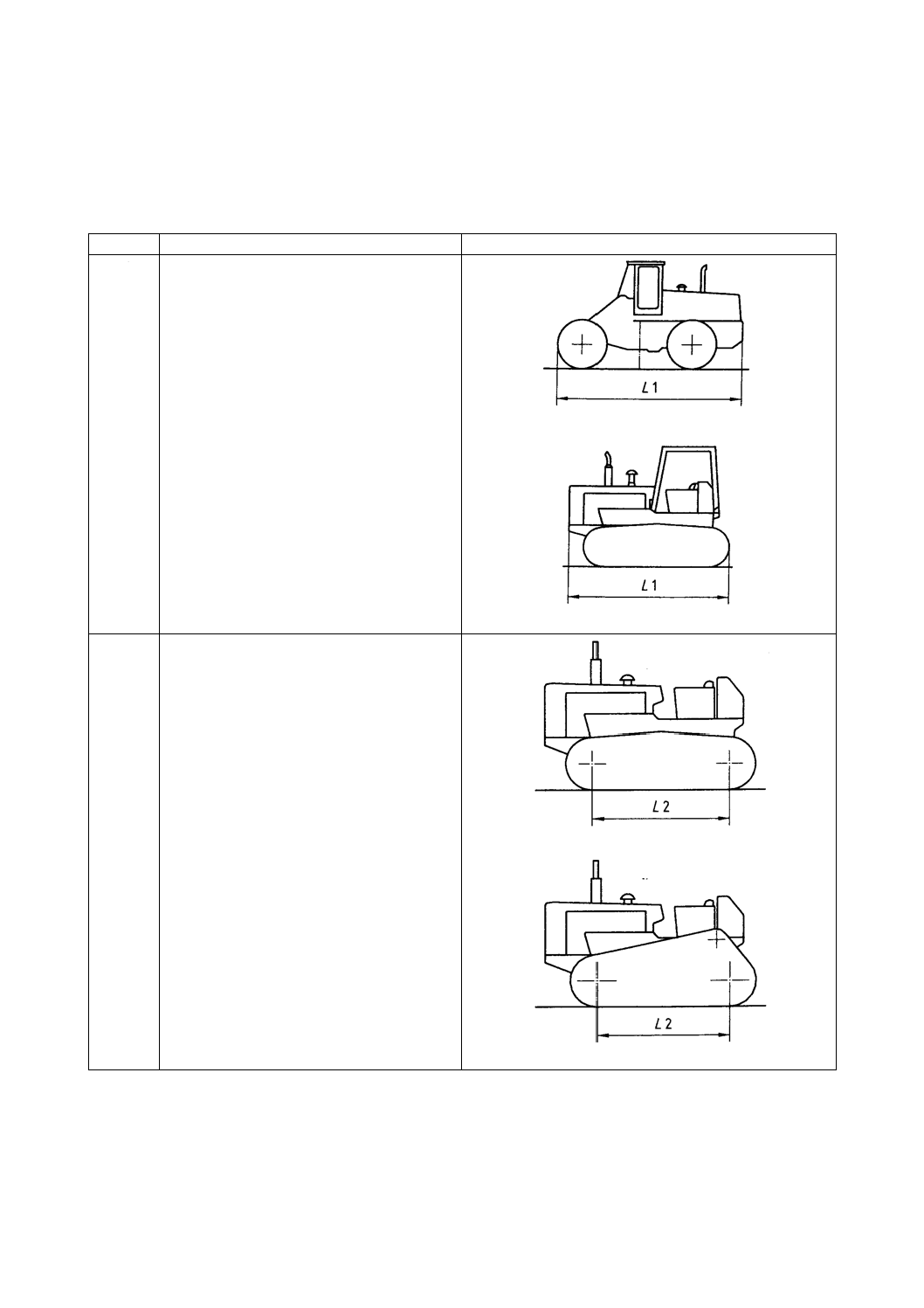
L1
全長 二つのX平面で機械の最前端部を通る
ものと最後端部を通るものとの間のX座標上
の距離。
L2
輪距(履帯式) 二つのX平面で前部誘導輪
軸を通るものと起動輪又は後部誘導輪を通る
ものとの間のX座標上の距離。
9
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
コード
定義
略図
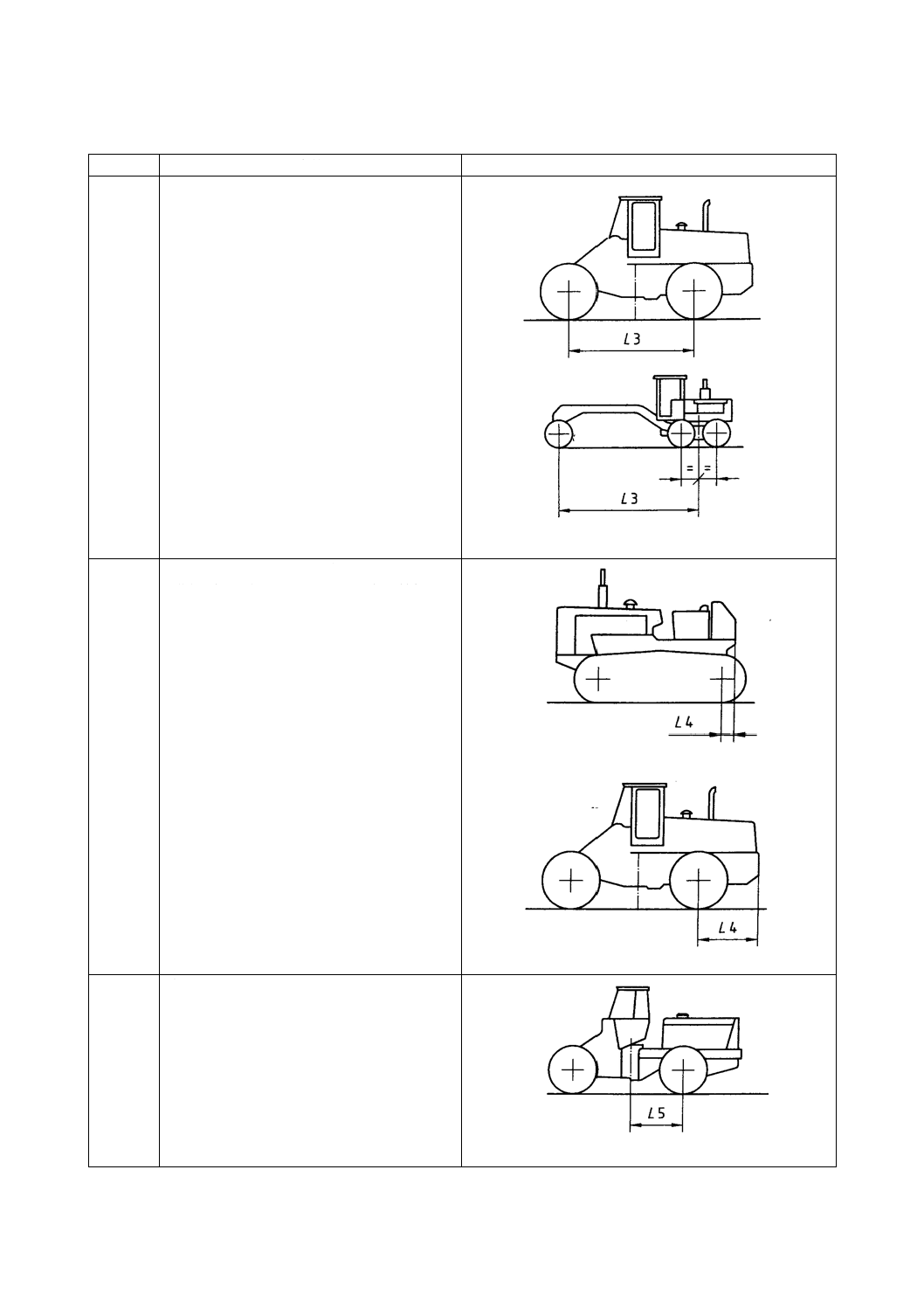
L3
輪距(車輪式) 二つのX平面で前輪の中心
を通るものと後輪の中心を通るものとの間の
X座標上の距離。
備考 後部タンデム式の機械では,後輪の
中心をタンデム二軸間の中心線と
する。
L4
後部取付面オーバーハング
(履帯式機械)二つのX平面で起動輪軸又は
後部誘導輪を通るものと機械の後部取付面を
通るものとの間のX座標上の距離。
(車輪式機械)二つのX平面で後車輪中心を
通るものと機械の後部取付面を通るものとの
間のX座標上の距離。
L5
後輪軸から車体屈折中心への距離 後輪軸と
車体屈折ヒンジ中心とのX座標上の距離。
10
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D(規定)半径
この附属書は,本体の半径を定義し,そのコードを規定する。
コード
定義
略図
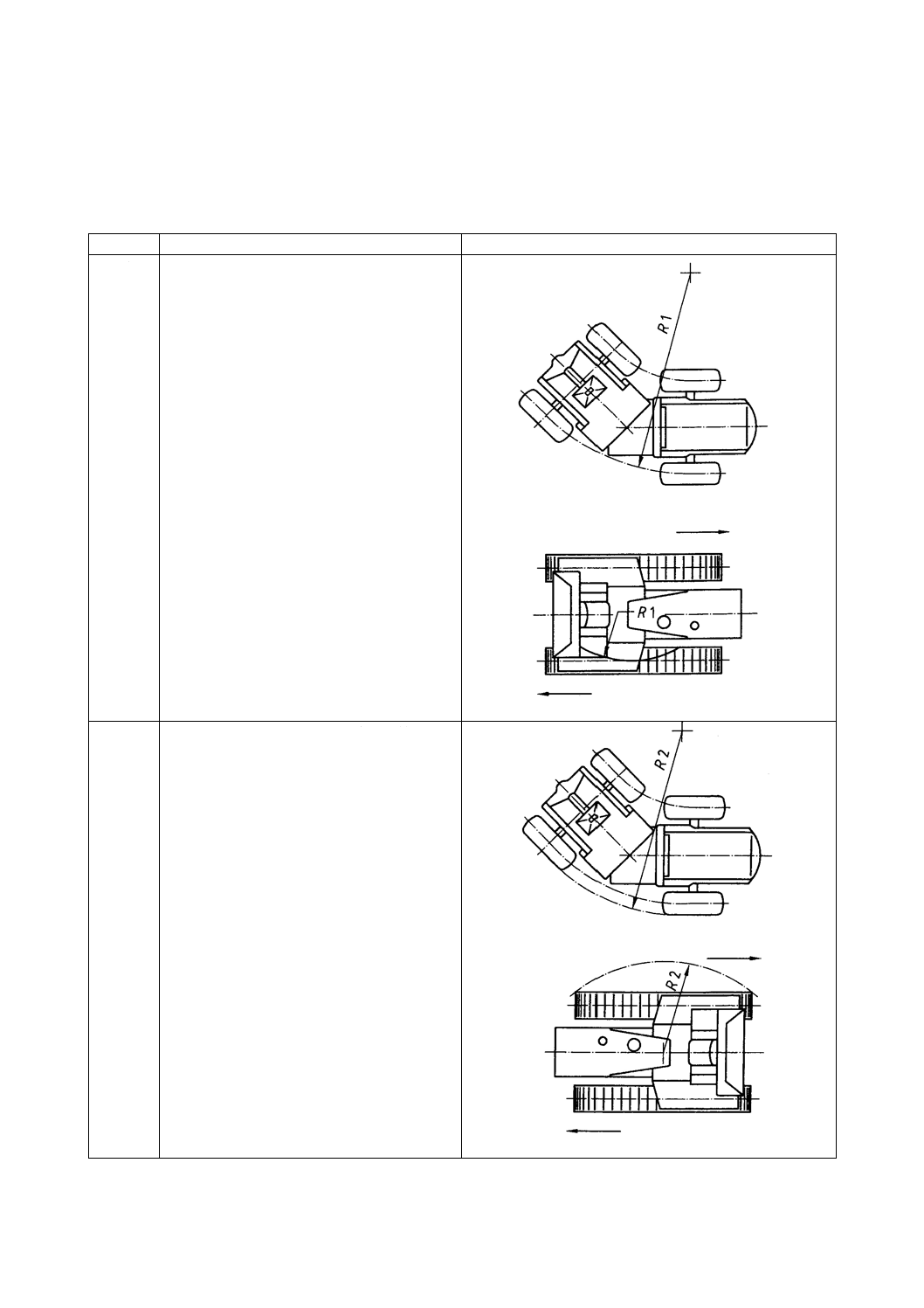
R1
最小回転半径 機械が実際に最小の回転を行
っているとき,回転中心と最大円を描く履帯又
はタイヤの中心線間のZ平面上の距離。
備考 左右独立操向式履帯では,R1は機
械中心から求める。
R2
機械最外側回転半径 機械が実際に最小の回
転を行っているとき,回転中心と外側間とのZ
平面上の距離。
備考 左右独立操向式履帯では,R2は機
械中心から求める。
11
A 8411-1:2006 (ISO 6746-1:2003)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E(規定)角度
この附属書は,本体の角度を定義し,そのコードを規定する。
コード
定義
略図
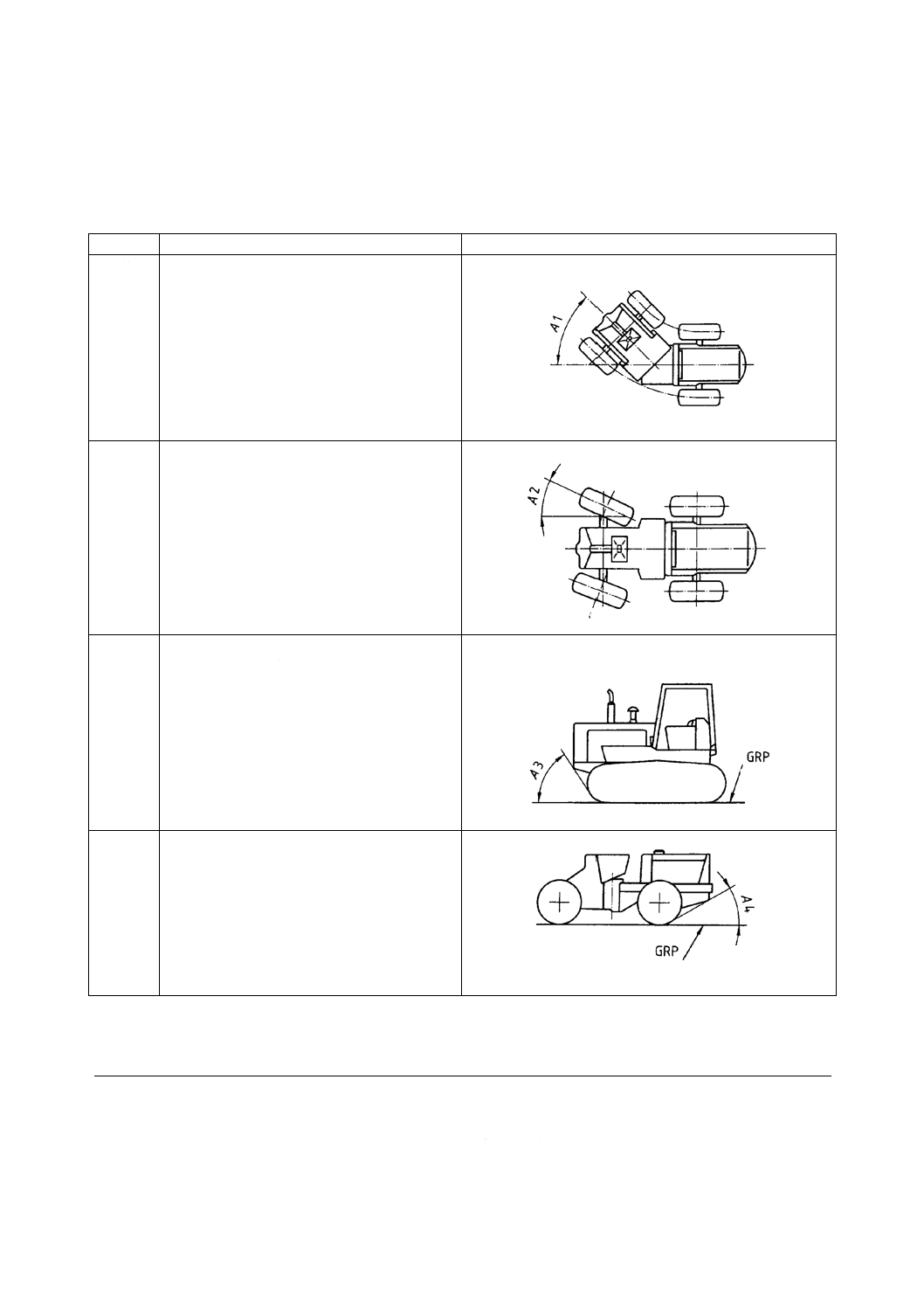
A1
最大屈折角度(アーティキュレート式の場合)
直進状態から左又は右に機械を最大に屈折
させたとき,機械の後部と前部の中心線とがな
すZ平面上の角度。
A2
アッカーマンかじ取り角 直進状態から左又
は右に前輪若しくは後輪を最大かじ取り位置
に振ったときの車軸のZ平面上の角度。
A3
アプローチ角 前輪タイヤ又は履帯前方の外
周に接し,その前方で本体構造のいかなる部分
もこの平面下にないような平面とGRPとの間
のY平面内の最大角。
A4
デパーチャ角 後輪タイヤ又は履帯後方の外
周に接し,その後方で本体構造のいかなる部分
もこの平面下にないような平面とGRPとの間
のY平面内の最大角。
参考文献 JIS A 8318 土工機械−座席基準点(SIP)
参考 ISO 5353:1995,Earth-moving machinery, and tractors and machinery for agriculture and
forestry−Seat index pointが,この規格と一致している。