A 8408:2012
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 遠隔操縦に関する要求事項 ································································································· 3
4.1 一般要求事項 ················································································································ 3
4.2 信号の信頼性 ················································································································ 4
4.3 遠隔操作器 ··················································································································· 4
4.4 有線操縦 ······················································································································ 4
4.5 非常停止 ······················································································································ 5
4.6 選択スイッチ ················································································································ 5
4.7 衝突,衝撃及び振動 ······································································································· 5
4.8 周囲環境からの保護 ······································································································· 5
4.9 電源 ···························································································································· 5
4.10 警報機器 ····················································································································· 6
4.11 走行 ··························································································································· 6
4.12 形式情報 ····················································································································· 6
4.13 警告表示の図記号 ········································································································· 6
5 前進方向の表示 ················································································································ 7
6 取扱説明 ························································································································· 7
附属書JA(参考)JISと対応国際規格との対比表 ······································································· 8
A 8408:2012
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本建設機械施工協会(JCMA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が制定した日本工業規格であ
る。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8408:2012
土工機械−遠隔操縦の安全要求事項
Earth-moving machinery-Safety requirements for remote operator control
序文
この規格は,2005年に第1版として発行されたISO 15817を基とし,無線操縦する機械の走行速度の上
限を明確とするため,技術的内容を変更して作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。また,附属書JAは対応国際規格にはない事項であ
る。
1
適用範囲
この規格は,JIS A 8308に規定する土工機械に用いる無線遠隔操縦装置及び有線遠隔操縦装置の安全要
求事項について規定する。
この規格は,運転員が遠隔操縦する機械には適用するが,運転員の補助無しに機械の作業を可能にする
自律操縦装置には適用しない。この規格は,遠隔操縦ではない機械に装着したアタッチメントの遠隔操縦
には適用しない。
この規格は,遠隔操縦装置の性能基準については規定しない。“無線操縦”を細分箇条の題名として使用
しているときは,その細分箇条の規定は,無線遠隔操縦装置だけに適用し,“有線操縦” を使用している
ときは,有線操縦装置だけに適用する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 15817:2005,Earth-moving machinery−Safety requirements for remote operator control(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8308 土工機械−基本機種−用語
注記 対応国際規格:ISO 6165,Earth-moving machinery−Basic types−Identification and terms and
definitions(MOD)
JIS A 8311 土工機械−運転員の視野−測定方法及び性能基準
注記 対応国際規格:ISO 5006,Earth-moving machinery−Operatorʼs field of view−Test method and
performance criteria(IDT)
2
A 8408:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS A 8312 土工機械−安全標識及び危険表示図記号−通則
注記 対応国際規格:ISO 9244,Earth-moving machinery−Machine safety labels−General principles
(MOD)
JIS A 8316 土工機械−電磁両立性(EMC)
注記 対応国際規格:ISO 13766,Earth-moving machinery−Electromagnetic compatibility(IDT)
JIS A 8325 土工機械−履帯式機械−制動装置の性能要求事項及び試験方法
注記 対応国際規格:ISO 10265,Earth-moving machinery−Crawler machines−Performance
requirements and test procedures for braking systems(IDT)
JIS A 8340-1 土工機械−安全−第1部:一般要求事項
注記 対応国際規格:ISO 3450,Earth-moving machinery−Braking systems of rubber-tyred machines−
Systems and performance requirements and test procedures(MOD)
JIS B 9960-1:2008 機械類の安全性−機械の電気装置−第1部:一般要求事項
注記 対応国際規格:IEC 60204-1:2005,Safety of machinery−Electrical equipment of machines−Part 1:
General requirements(MOD)
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
注記 対応国際規格:IEC 60529,Degrees of protection provided by enclosures (IP Code)(IDT)
JIS C 60068-2-32 環境試験方法−電気・電子−自然落下試験方法
注記 対応国際規格:IEC 60068-2-32,Basic environment testing procedures−Part 2: Tests−Test Ed:
Free fall(IDT)
ISO 15998,Earth-moving machinery−Machine-control systems (MCS) using electronic components−
Performance criteria and tests for functional safety
ISO 17063,Earth-moving machinery−Braking systems of pedestrian-controlled machines−Performance
requirements and test procedures
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
遠隔操縦(remote control,remote operator control)
機械とは分離した遠隔操作器から機械に装着された受信器への,有線又は無線信号の伝達による機械の
操縦。
3.2
遠隔操縦装置(remote control system)
遠隔操縦する機械に運転情報及び操作の指令を伝達する装置。
注記 遠隔操縦装置は,遠隔操作器及び受信器からなる。
3.3
遠隔操縦運転(remote-controlled operation)
有線又は無線によって,機械から離れた位置にいる運転員が行う機械の運転。
3.4
遠隔操作器(remote control box)
離れた位置から,機械を操縦するために,所要の全ての運転機能を起動させる操作装置を備えた機器。
3
A 8408:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 (遠隔操縦のための)信号は,遠隔操作器と受信器との間で送受信される。
3.5
受信器(receiving unit)
機械に搭載され,遠隔操作器から発信した信号を受信し,それら信号を機械を運転する指令信号に変換
する機器。
注記 受信器は,次の構成要素からなる。
− 遠隔操作機器からの信号を受信する受信部
− 信号の内容を確認するための監視部
− 機械の制御機器を駆動するための出力部
受信器には,確認のための信号を返す手段を含んでもよい。
3.6
操縦ケーブル(control cable)
(有線式遠隔操縦で)遠隔操作器と受信器との間で信号を伝達する電線。
3.7
危険範囲(hazard zone)
機械及びその装備の動作が原因で傷害発生の可能性がある機械の使用範囲で,機械の製造業者が指定す
る範囲。
3.7A
危険領域
意図された使用のもとでの機械及びその準備の動作及び/又は現場環境が原因で傷害発生の可能性があ
り,現場での対策として作業者,有人車両などの入場を制限する領域。
4
遠隔操縦に関する要求事項
4.1
一般要求事項
4.1.1
設計
遠隔操縦装置は,次の条件のときは,遠隔操縦される機械の全ての動作が停止して,安全な状態を保持
するよう設計しなければならない。
a) 遠隔操作をしていないとき。
b) 遠隔操縦装置の電源が中断したとき。
c) 遠隔操作器と受信器との間の交信が中断したとき。
d) 機械本体の動力低下によって遠隔操縦装置のいずれかの部分の機能が中断したとき。
e) (遠隔操縦用の)信号の減衰。
4.1.2
無線操縦
無線遠隔操縦の機械が遠隔操縦の交信範囲外にあるときは,機械は停止して,安全な状態でとどまらな
くてはならない。
無線遠隔操縦装置を搭載した数台の機械が近接して作業する場合,それぞれの遠隔操縦装置には,遠隔
操縦を始める前に,運転員が操作する対象の機械を識別する手段を備えていなくてはならない。
この目的のため,運転員が遠隔操縦を開始するときに特別な灯火[例えば,4.10に規定する運転席付近
に置く黄色又はだいだい(橙)色の回転灯]の操作を行うことを推奨する。
4
A 8408:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2
信号の信頼性
信号を伝達する装置は,異常な電磁放射,一時的信号減衰,遠隔操作器の故障などによって生じる誤信
号によって,機械が誤動作するのを防止する誤信号検出装置及び/又は補正装置を備えなければならない。
情報交信プロトコルは,通信経路及び伝達される情報の完全性を保証しなければならない。完全性を確認
できない場合は,機械は直ちに安全な状態で停止しなければならない。
遠隔操縦装置は,JIS A 8316に規定する電磁両立性の要求事項に適合しなければならない。
4.3
遠隔操作器
4.3.1
設計
機械は,非常停止を除き,同時に複数の遠隔操作器から遠隔操縦可能であってはならない。
遠隔操作器は,遠隔操縦装置を起動・停止させる入り切り操作のための,キースイッチのような装置又
はアクセスコードのような手段を備えていなければならない。
遠隔操作器は,機械運転員の自由な動きをできる限り妨げない設計とする。
4.3.2
操作装置
4.3.2.1
中立位置
遠隔操作器上の全ての操作装置は,運転員がそれらを放したときには中立位置に戻らなくてはならない。
操作装置が中立位置にあるとき,その結果起こる機械の動作は,対応する機械本来の操縦装置を中立位置
にしたときの動作と同じでなければならない。ただし,機械本体及び作業装置の操作に機能上の固定位置
がある場合は,結果として起こる機械の動作が危険源となる可能性がある場合を除き,運転員がたとえ他
の全ての操作装置を放したときでも,その固定位置によって起動した機能は継続してもよい。
4.3.2.2
表示
遠隔操作器の操縦装置には,機械本体及び作業装置の動作方向を示す操作表示が,機械本体上の操作表
示(もしあれば)と同じもので明確に表示されていなければならない(JIS A 8310-1及びJIS A 8310-2参
照)。
4.3.2.3
意図しない誤作動の防止
遠隔操作器上の操縦装置は,意図しない誤作動が起き得ないよう配置,動作ロック又は防護しなければ
ならない。遠隔操作機器が運転員の手から落ちたり,運転員が転倒したときに意図しない動作が起きない
よう防護する手段を設けなければならない。
遠隔操作器上には,無認可の者が起動するのを防止するため,操作装置が不作動状態となって操作でき
ないようにする手段を設けなければならない。
4.3.2.4
制動・停止機能
遠隔操作器上の走行操作が中立位置のときには,(製造業者が規定する最大傾斜で)機械を静止状態で保
持できなくてはならない。遠隔操縦する機械の制動装置は,JIS A 8340-1,JIS A 8325又はISO 17063のい
ずれかに適合しなければならない。
4.3.2.5
運転席の操縦装置の優先
一般的に運転席にある直接の操縦装置は,それが装着されている場合には,遠隔操縦装置よりも優先す
る。操縦装置の選択については,4.6参照。
4.4
有線操縦
(有線操縦は)運転員が危険範囲の外側の位置から機械を操縦できなくてはならない。
操縦ケーブルは,十分な長さをもち,柔軟で運転員が危険範囲外の安全な操縦位置にいることができな
ければならない。引張力に関し,使用する可とう(撓)電気ケーブル及び接続部は,JIS B 9960-1:2008の
5
A 8408:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13.4.2及び13.4.3に適合しなければならない。
操縦ケーブルが過度に引っ張られて,制御機器が作動して(意図しない機械の動作が生じて)はならな
い。
4.5
非常停止
4.5.1
一般事項
遠隔操作器及び機械上に非常停止機器を設けなければならない。
非常停止機器を起動すると直ちに機械の全ての危険な動作が安全な方法で停止しなければならない。
4.5.2
特性
非常停止機器を意図的にリセットさせない限り,機械の運転が再開可能であってはならない。
非常停止機器を複数備えている場合,操作中又は起動した非常停止機器の全てがリセット操作されない
限り,機械の運転が再開可能であってはならない。
4.5.3
非常停止ボタン
非常停止は,一般に押しボタン式とする。そのための機器又はその表示は,赤色とする(JIS C 8201-5-1
参照)。
非常停止ボタンの背景は,対比の強い色とする。
非常停止ボタンは,フェールセーフ設計とする。
4.5.4
機械
遠隔操縦する機械には,その進行方向外の地上にいる人が操作できる非常停止ボタン又は他の手段を備
えるのがよい。
4.6
選択スイッチ
機械上に直接操縦装置を備えている場合(直接操縦),機械上の運転席に直接操縦又は遠隔操縦のいずれ
かを選択するスイッチを備えなければならない。
選択(直接操縦又は遠隔操縦)手段は,キースイッチ若しくはアクセスコード,又は施錠可能な運転室
のスイッチの使用だけ可能とする。
4.7
衝突,衝撃及び振動
遠隔操作器及び受信器は,運転時の衝撃が機械の意図しない動作を引き起こさない設計でなければなら
ない。
遠隔操作器は,次の試験に耐えなければならない。
− JIS C 60068-2-32による自由落下試験
− ISO 15998による衝撃試験(11 msにおいて衝撃負荷15 G)
受信器は,ISO 15998による振動試験に耐えなければならない。
4.8
周囲環境からの保護
4.8.1
遠隔操作器
遠隔操作器の周囲環境からの防護等級は,IP 65(JIS C 0920)とする。
4.8.2
受信器
受信器の対環境防護等級は,その取付け位置による。受信器が運転室内又は同様の位置にある場合はIP
54に,ほかの場合はIP 65にそれぞれ適合しなければならない。
4.9
電源
4.9.1
一般
遠隔操作器,停止装置又は受信器の電源が切れた場合,機械の意図しない危険な動作が生じてはならな
6
A 8408:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
い。全ての操作及び運転機能は,中立位置に戻らなくてはならない。その結果,機械の全ての動作は,安
全に停止しなければならず,制動装置は自動的に作動するのが望ましい。
電源が復帰したときに意図しない機械の危険な動作が生じてはならない。遠隔操縦運転は,通信の復帰
操作を行った後にだけ可能とする。
4.9.2
遠隔操作器
遠隔操作器に電力が供給されていることを,光学的な装置(発光ダイオード又は操作盤上の灯火)で表
示するのがよい。
4.10 警報機器
機械が作業中は,遠隔操縦又は直接操縦のいずれの操縦モードであっても,機械に取り付けられた黄色
又はだいだい(橙)色の回転灯が点灯しなければならない。その回転灯を運転席(JIS A 8311による目の
位置)又はその至近に設置して,周囲の人に機械が遠隔操縦されていることを示さなければならない。
注記 機械が作動中で遠隔操縦の信号伝達状態が正常であることを示す緑色回転灯,及び機械に何ら
かの重大な故障が発生したり,又は何らかの故障が生じて機械が停止したりするのを示す赤色
回転灯を組み合わせて機械に取り付けてもよい。
機械を遠隔操縦しているときは,遠隔操作器から機械の警笛(例えばホーン)を操作可能でなければな
らない。
4.11 走行
4.11.1 無線操縦
走行速度は,7 km/hを超えてはならない。ただし,運転員が機械に随伴して移動する必要がなく,かつ,
運転員及び他の作業者などが危険領域に立ち入り禁止の場合には7 km/hを超える走行速度としてもよい
が,現状の技術,現場条件及び現場管理によって決定する上限を設けなければならない。
7 km/hを超える速度に設定する場合には,危険領域の諸状況及びその設定速度によって機械転倒などの
事故がもたらされ,立ち入り禁止区域に対策作業員が入場しなければならなくなることに繋がり,更なる
事故発生などのリスクが高まることを考慮して危険領域及び速度を設定しなければならない。
4.11.2 有線操縦
走行速度は,歩行者の歩く速度以下とし,6 km/hを超えてはならない。
4.12 形式情報
次の情報は,遠隔操縦装置に恒久的な方法で取り付けなければならない。
a) 製造業者名
b) 形式名
c) 製造年
d) 製造番号
形式情報は,遠隔操作器と受信器との関係を明確に示し,遠隔操作器及び運転室内又は運転室近くの読
みやすい表面に明示しなければならない。
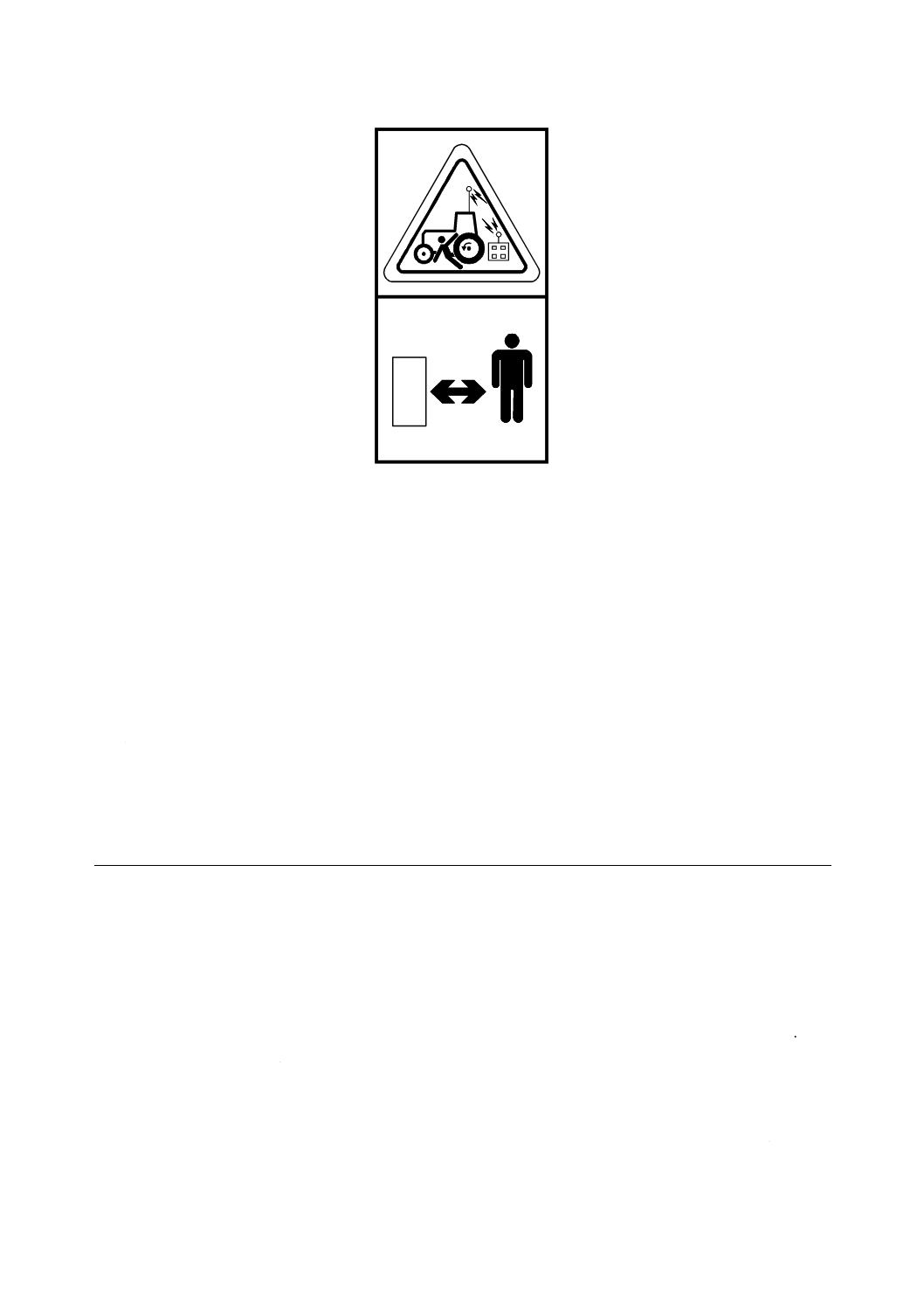
4.13 警告表示の図記号
機械が遠隔操縦できるものであることを示す危険源の図記号を,JIS A 8312に従って機械上に表示しな
ければならない。その表示は,機械の周りに人が近づかないように明確に指示するものでなければならな
い。
例 図1参照。
7
A 8408:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1
5
前進方向の表示
例えば,ショベル系掘削機械のように360°旋回式の機械は,足回りの全側面に前進方向を表示して,
遠隔操縦を行う運転員に機械の走行方向を知らせなければならない。
6
取扱説明
遠隔操縦する機械の取扱説明書には,無線操縦のときに遠隔操作器から機械を運転できる推奨最大安全
距離に関する情報を含まなければならない。それ以外にも,斜面での作業,荷の運搬,特殊な条件及び環
境での機械使用,停止手順及び遠隔操作器の保守のための安全行動などの遠隔操縦特有の情報も含めなけ
ればならない。
取扱説明書には,次の警告記事又は同様の記事を含まなければならない。
“警告 この機械は遠隔操縦できる。機械は不意に動くことがある。機械に近づいてはならない。”
参考文献 JIS A 8310-1 土工機械−操縦装置及び表示用識別記号−第1部:共通識別記号
注記 対応国際規格:ISO 6405-1,Earth-moving machinery−Symbols for operator controls and
other displays−Part 1: Common symbols(IDT)
JIS A 8310-2 土工機械−操縦装置及び表示用識別記号−第2部:特定機種,作業装置及び附属
品識別記号
注記 対応国際規格:ISO 6405-2,Earth-moving machinery−Symbols for operator controls and
other displays−Part 2: Specific symbols for machines, equipment and accessories,
Amendment 1:1997及びAmendment 2:2004(MOD)
JIS C 8201-5-1 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第1節:電
気機械式制御回路機器
注記 対応国際規格:IEC 60947-5-1,Low-voltage switchgear and controlgear−Part 5-1: Control
circuit devices and switching elements−Electromechanical control circuit devices(IDT)
8
A
8
4
0
8
:
2
0
1
2
8
A
8
4
0
8
:
2
0
1
2
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
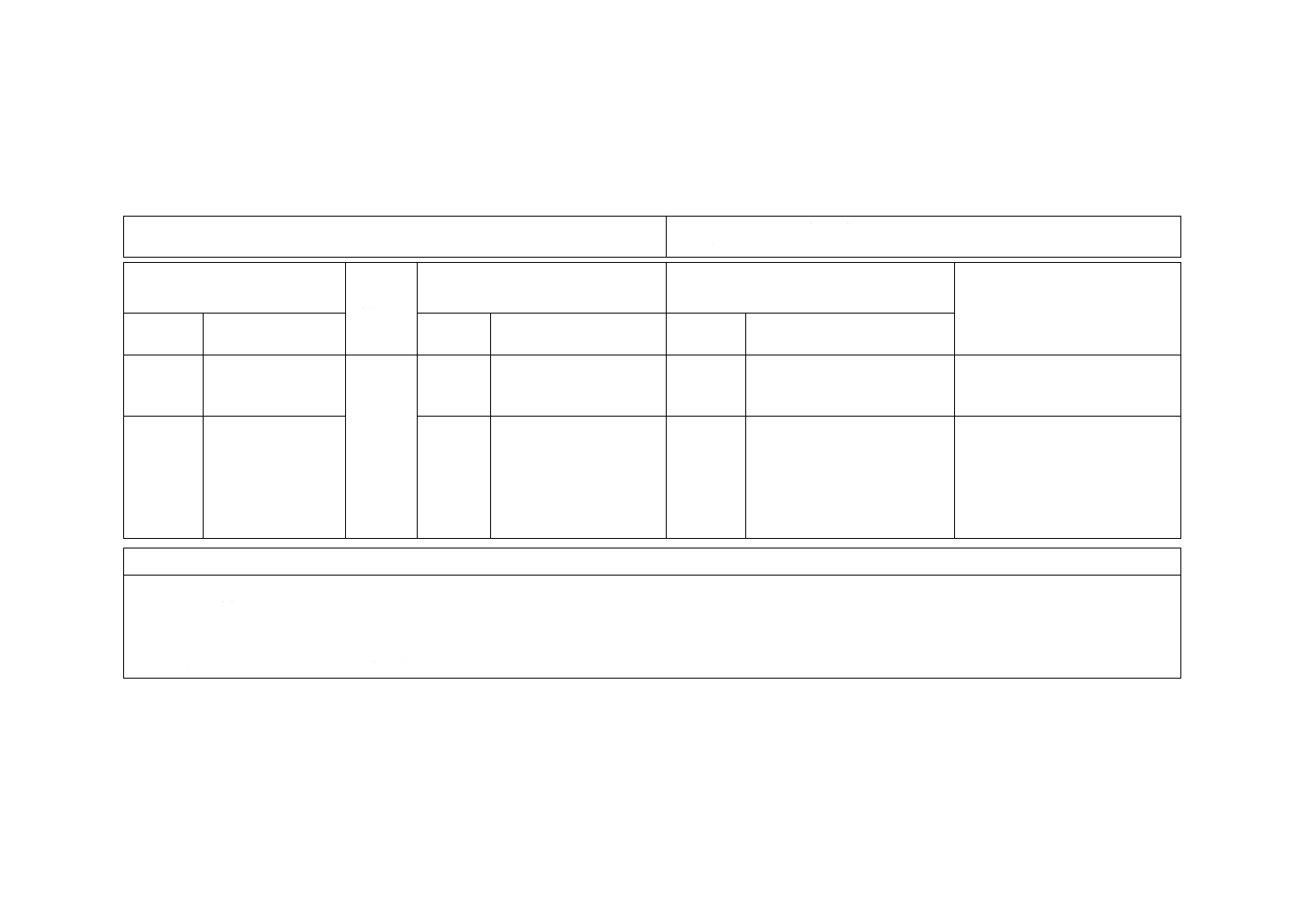
附属書JA
(参考)
JISと対応国際規格との対比表
JIS A 8408:2012 土工機械−遠隔操縦の安全要求事項
ISO 15817:2005 Earth-moving machinery−Safety requirements for remote operator
control
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
3.7A 危険
領域
立入を制限する危
険領域を定義。
−
−
追加
ISOにない立入を制限する区
域について,“危険範囲”とは
別に定義している。
JISの内容を国際規格に提案す
る。
4.11 走行
4.11.1 無線操縦
走行速度の一般的
な上限,特定条件下
での上限及び留意
事項を規定。
4.11.1
走行速度の一般的な上限
10 km/h,特定条件下での
上限緩和を規定。
変更
走行速度の一般的な上限を10
km/hから7 km/hに変更。特定
条件下では上限がなかったの
を上限設定に関して追加規定
し,またその際の留意事項も追
加規定。
ISOでは特定条件下では上限がな
かったのをJISとして安全面でそ
れでよいかという観点で変更し
ている。JISに基づいて国際規格
見直しの提案を行う。
JISと国際規格との対応の程度の全体評価:ISO 15817:2005,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。