Z 4952:2012 (IEC 62464-1:2007)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 用語,記号及び定義 ·········································································································· 3
3.1 用語及び定義 ················································································································ 3
3.2 記号 ···························································································································· 6
4 基本画像パラメータの決定手順 ·························································································· 12
4.1 全ての手順に対する一般的要求事項 ·················································································· 12
4.2 信号ノイズ比 ··············································································································· 13
4.3 均一性 ························································································································ 15
4.4 2次元のスライス厚及びスライスプロファイル ··································································· 18
4.5 2次元幾何学的ひずみ(歪) ··························································································· 22
4.6 空間分解能 ·················································································································· 27
4.7 ゴーストアーチファクト ································································································ 29
5 不変性試験 ····················································································································· 32
5.1 目的及びその根拠 ········································································································· 32
5.2 試験器具への要求事項 ··································································································· 33
5.3 撮像特性 ····················································································································· 33
5.4 測定手順 ····················································································································· 33
5.5 データ解析,結果の報告及び許容差 ·················································································· 34
附属書A(規定)代替法 ······································································································· 35
附属書B(参考)理論的根拠 ································································································· 46
附属書C(参考)参考文献 ···································································································· 59
定義した用語の索引 ············································································································· 61
Z 4952:2012 (IEC 62464-1:2007)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本画像医療システム工業会
(JIRA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべき
との申出があり,日本工業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が制定した日本工業
規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
Z 4952:2012
(IEC 62464-1:2007)
磁気共鳴画像診断装置−
第1部:基本画質パラメータの決定方法
Magnetic resonance equipment for medical imaging-
Part 1: Determination of essential image quality parameters
序文
この規格は,2007年に第1版として発行されたIEC 62464-1を基に,技術的内容及び対応国際規格の構
成を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,多くの医用MR装置の重要な画質パラメータ決定のために必要な測定手順について規定す
る。この規格で取り扱う測定手順は,次の事項に適用する。
− 受入試験での品質評価
− 不変性試験での品質保証
さらに,この規格の適用範囲外であるが,形式試験にも有効な場合がある。
この規格は,次の事項については適用しない。
− 受入試験及び不変性試験の性能要求水準
− 4 T以上の高磁場MR装置の画質評価(特に記載のない限り)
− MR適合性で問題となる画質
− 特殊な診断法[血流画像,かん(灌)流,拡散,放射線治療,画像支援治療応用など]
− 形式試験
この規格の適用範囲は,臨床画像ではなく,試験器具の画質特性の測定に限定する。
この規格で規定する測定手順は,次を対象にする。
a) この規格に規定した受入試験及び不変性試験を行い,適合性を実証することができる製造業者
b) この規格に規定した方法を使用して,MR装置の性能を確認できる試験機関
c) この規格を基準とすることができる監督官庁
d) この規格に規定した方法を使用して,受入試験及び不変性試験を行う責任部門(3.1.24参照)
この規格が規定する基本画質パラメータ及びその測定方法は,次による。
− 信号ノイズ比
− 均一性
2
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− スライス厚及びスライスプロファイル
− 幾何学的ひずみ(歪)
− 空間分解能
− ゴースト
この規格は,推奨する測定手順について規定する。代替法を附属書Aに記載する。推奨する試験方法は,
代替法と置き替えてもよい。必要な場合は,この規格に規定していない別の方法を使用してもよいが,こ
の場合,これらの試験方法について,この規格に規定した方法に対する同等性を実証し,妥当性を確認し
なければならない。採用した代替試験方法の妥当性の確認は,注目するパラメータに対し,この規格の測
定法と同等以上の感度を示し,無関係なパラメータに対しては低い感度を示すことを証明することが望ま
しい。全ての方法は,結果を定量的に残さなければならない。
規定した方法及び代替法の理論的根拠及び陥りやすい過ちを,附属書Bに記載した。
この規格は,MR装置の基本的画質パラメータについて,品質保証に適した不変性試験についても規定
する。現状の自動化された手順に自由度は多くはないが,代替する不変性試験の例を附属書Aに記載する。
必要な場合は,この規格に規定していない別の不変性試験も使用してよい。責任部門の品質保証プログラ
ムの必要性によって,試験の目的,試験の品質,データ解析の感度などを決めておくのがよい。
この規格は,MR装置の総合特性に対して感度の高い重要なパラメータの傾向分析及び迅速な試験によ
る,再現性のある自動測定手段の確立を重視する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62464-1:2007,Magnetic resonance equipment for medical imaging−Part 1: Determination of
essential image quality parameters(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS Z 4005 医用放射線機器−定義した用語
注記 対応国際規格:IEC 60788,Medical electrical equipment−Glossary of defined terms(MOD)
JIS Z 4951 磁気共鳴画像診断装置−基礎安全及び基本性能
注記 対応国際規格:IEC 60601-2-33:2002,Medical electrical equipment−Part 2-33: Particular
requirements for the safety of magnetic resonance equipment for medical diagnosis(IDT)
JIS T 0601-1:2012 医用電気機器−第1部:基礎安全及び基本性能に関する一般要求事項
注記 対応国際規格:IEC 60601-1:2005,Medical electrical equipment−Part 1: General requirements for
basic safety and essential performance(MOD)
3
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
用語,記号及び定義
この規格で用いる主な用語,記号及び定義は,次による。
3.1
用語及び定義
3.1.1
受入試験(ACCEPTANCE TEST)
契約仕様を満たしているかどうかを確認するために,新しい機器が設置されるか,又は既存の機器に大
幅な改造が行われた後に実施する試験。
(JIS Z 4752-1,定義3.2.4参照)
3.1.2
附属文書(ACCOMPANYING DOCUMENT)
ME機器,MEシステム,機器又は附属品に附属し,責任部門又は操作者のために,特に基礎安全及び
基本性能に関する情報を記載した文書。
(JIS T 0601-1:2012,定義3.4参照)
3.1.3
アーチファクト(ARTEFACT)
被写体内部の構造を表さない像で,はっきりした構造が目に見えるもの。
3.1.4
ピクセル帯域幅(BANDWIDTH PER PIXEL)
サンプリングウィンドウ(窓幅)の逆数。
注記 ピクセル帯域幅に代わって等価な値を制御盤上に表示してもよい。
3.1.5
体幹部用試験器具(BODY TEST DEVICE)
患者の体幹部を表す試験器具。体幹部用ファントムのこと。
3.1.6
不変性試験(CONSTANCY TEST)
次のいずれかのために実施する一連の試験。
− 機器の性能が設定基準を満足することを確認する。
− 機器の構成要素の性能変化を早期に発見する。
(JIS Z 4752-1,定義3.2.6参照)
3.1.7
四肢用試験器具(EXTREMITY TEST DEVICE)
患者の四肢を表す試験器具。四肢用ファントムのこと。
3.1.8
撮像領域,FOV(FIELD OF VIEW又はFOV)
操作者によって要求される画像領域のサイズ。
注記 画像領域が正方形又は長方形の場合は,それに対応して一つの辺又は二つの辺の長さをmm単
位で指定する。
3.1.9
幾何学的ひずみ(歪)(GEOMETRIC DISTORTION)
予測される実際の測定対象構造の位置と,画像でのその構造の空間的位置との偏差。
4
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.10
ゴースト(GHOSTING ARTEFACT)
間違った位置に現れる実在の構造の複製又はその一部を表すアーチファクト。
3.1.11
頭部用試験器具(HEAD TEST DEVICE)
患者の頭部を表す試験器具。頭部用ファントムのこと。
3.1.12
画像データ(IMAGE DATA)
再構成された収集データ。
3.1.13
画像ノイズ(IMAGE NOISE)
画像中の予測される信号値からのランダムな変動。
3.1.14
意図する使用(INTENDED USE)
意図する目的(INTENDED PURPOSE)
製造業者が供給する仕様,説明及び情報に従った製品,プロセス又はサービスの使用。
(JIS T 0601-1:2012,定義3.44参照)
3.1.15
アイソセンタ(ISOCENTRE)
MR装置における空間エンコード傾斜磁場強度がゼロになる点。
注記 一般に最も静磁場均一性の高い領域に一致する。
3.1.16
磁気共鳴画像診断装置,MR装置(MAGNETIC RESONANCE EQUIPMENT又はMR EQUIPMENT)
患者のMR検査(in-vivo)を目的とした医用電気機器。MR装置は,電源から表示モニタに至る,全て
のハードウェア及びソフトウェアで構成される。
注記 MR装置は,プログラム可能な医用電気機器(Programmable Electrical Medical System,略称
PEMS)である。
(JIS Z 4951,定義 201.3.218参照)
3.1.17
磁気共鳴画像診断装置,MRシステム(MAGNETIC RESONANCE SYSTEM又はMR SYSTEM)
MR装置,表示装置,制御装置,エネルギー供給装置を含む附属品の全体。立入制限区域がある場合は,
これも含む。
(JIS Z 4951,定義201.3.220参照)
3.1.18
製造業者(MANUFACTURER)
ME機器の設計,製造,こん(梱)包若しくはラベリング,又はMEシステムの組合せ若しくは変更に
責任を負う個人又は法人。その業務が個人若しくは法人又は代理を受けた第三者によって行われるか否か
は問わない。
(JIS T 0601-1:2012,定義3.55参照)
5
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.19
操作者(OPERATOR)
機器を取り扱う人。
(JIS T 0601-1:2012,定義3.73参照)
3.1.20
高周波コイル,RFコイル(RADIO FREQUENCY COIL又はRF COIL)
高周波電磁場を送信又は受信するために用いるコイル又はプローブ。
3.1.21
再構成パラメータ(RECONSTRUCTION PARAMETERS)
MR装置において,デジタル信号から画像への変換を一意的に決定するパラメータの一式。
3.1.22
基準位置(REFERENCE POSITION)
仕様容積内にあらかじめ定義した点。
注記 通常,基準位置はコイルの対称軸上にあり,仕様容積の重心に合致する。
3.1.23
関心領域(REGION OF INTEREST又はROI)
そのときにおいて,特別な関心のある画像上の位置決めされた部分。
(JIS Z 4752-2-6,定義3.3.9参照)
3.1.24
責任部門(RESPONSIBLE ORGANIZATION)
ME機器又はMEシステムの使用及び保守に責任をもつ実体。
注記1 責任をもつ実体とは,例えば,病院,個々の臨床医又は非医療従事者である。家庭用では,
患者,操作者及び責任部門は,全く同一の人であってもよい。
注記2 “使用”には,教育及び訓練を含んでいる。
(JIS T 0601-1:2012,定義3.101参照)
3.1.25
信号ノイズ比,SNR(SIGNAL TO NOISE RATIO又はSNR)
信号をノイズレベルで除した比率。
3.1.26
スライスプロファイル(SLICE PROFILE)
MR装置において,スライスに直交した方向のMR信号強度の集まり。
3.1.27
スライス厚(SLICE THICKNESS)
MR装置において,スライスプロファイルの半値幅(FWHM)。
3.1.28
空間分解能(SPATIAL RESOLUTION)
MR装置において,変調伝達関数(MTF)の大きさが要求されるしきい(閾)値を超える最大空間周波
数の逆数の半分。
3.1.29
仕様面積(SPECIFICATION AREA)
6
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
MR装置の仕様容積と画像面とが交差する部分。
3.1.30
仕様容積(SPECIFICATION VOLUME)
MR装置で製造業者がその内部の画像性能仕様を保証する撮像容積。
注記 この容積の外側の画像又はその画像の一部は,必ずしも性能仕様を満たすとは限らないが,診
断目的であれば有用なことがある。
3.1.31
試験器具(TEST DEVICE)
画像試験を行う対象物。ファントムのこと。
3.1.32
均一性(UNIFORMITY)
ノイズ及び有限なデータ収集(トランケーションアーチファクト)の影響を除いた,均質な試験器具の
画像において強度の空間的な一様性。
3.2
記号
この規格では,次の記号を使用する。
3.2.1
a
プレートの幅
3.2.2
AAD
ピクセル信号値の平均絶対偏差
3.2.3
b
プレートの長さ
3.2.4
|b(x)|
周期く(矩)形関数の振幅画像
3.2.5
b0,b1,b2及びb3
曲線近似定数
3.2.6
B0
静磁場
3.2.7
B1
高周波磁場
3.2.8
BW
帯域幅
7
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.9
BWpix
ピクセル帯域幅
3.2.10
BWim
画像の帯域幅
3.2.11
対応国際規格の記号(BWGE)を不採用とした。
注記 附属書Bで,対応国際規格を一部削除した箇所だけに用いられている記号のため,不採用とし
た。
3.2.12
対応国際規格の記号(BWSiemens)を不採用とした。
注記 附属書Bで,対応国際規格を一部削除した箇所だけに用いられている記号のため,不採用とし
た。
3.2.13
C
画像中心でのROIのピクセル信号の平均値
3.2.14
dp
近接するプレート間の距離
3.2.15
d
試験器具の直径
3.2.16
dm
画像上で計測した球状試験器具の直径
3.2.17
D(Xi)
拡大スライスプロファイル。引き伸ばされたスライスプロファイルのこと。
3.2.18
ESF(x)
エッジ広がり関数
3.2.19
F(ν)
く(矩)形関数のフーリエ変換
3.2.20
FT{}
フーリエ変換
3.2.21
FWHM
8
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
半値幅
3.2.22
g(x)
周期く(矩)形関数
3.2.23
G(t)
傾斜磁場
3.2.24
Grd, ph, sel
読出し,位相エンコード及びスライス選択方向の傾斜磁場
3.2.25
IG
ゴースト信号の強度
3.2.26
IN
ノイズレベル
3.2.27
L
プレートの周期性
3.2.28
LSF(x)
線広がり関数
3.2.29
m(ν)
空間周波数νの変調
3.2.30
MTF(ν)
変調伝達関数
3.2.31
n
プレートの数
3.2.32
N
ROI中のピクセル数
3.2.33
Nd
測定した半径の数
3.2.34
Ntot
ROIのヒストグラムの中で値がT以上のピクセル数
9
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.35
NU
不均一性
3.2.36
p
スライスに平行なスラブ厚
3.2.37
R
試験器具の半径
3.2.38
RD
相対的な幾何学的ひずみ(歪)
3.2.39
rmax
最大幾何学的ひずみ(歪)
3.2.40
r
測定したN個の半径の平均値
3.2.41
rρ
磁石中心からのピクセルの距離
3.2.42
s
台形の辺
3.2.43
S
ピクセル信号値の平均
3.2.44
Si
それぞれのピクセル信号値
3.2.45
S(Xi)
位置Xiのピクセル信号値
3.2.46
Secho
通常エコーの信号強度
3.2.47
Sstim.echo
スティミュレイテッドエコーの信号強度
10
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.48
SD
ピクセル信号値の標準偏差
3.2.49
T
ピクセル信号値のしきい(閾)値
3.2.50
T1
縦緩和時間
3.2.51
T2
横緩和時間
3.2.52
TE
エコー時間。エコータイムともいう。
3.2.53
TR
繰返し時間
3.2.54
TRF
RFパルス持続時間
3.2.55
U
均一性
3.2.56
V
カラーコーディングに使うしきい(閾)値
3.2.57
w(x, y, z)
位置(x, y, z)での信号強度への相対重み関数
3.2.58
wi
i番目の測定でのスライス厚
3.2.59
wd
離散微分の影響を除去する重み付け因子
3.2.60
対応国際規格の記号(WFS)を不採用とした。
注記 附属書Bで,対応国際規格を一部削除した箇所だけに用いられている記号のため,不採用とし
た。
11
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.61
Xi
位置
3.2.62
α
フリップ角
3.2.63
αs
スラブ傾斜角
3.2.64
γ
磁気回転比
3.2.65
δ
幾何学的ひずみ(歪)の大きさ
3.2.66
δ'
幾何学的ひずみ(歪)の実効値
3.2.67
Δi(P)
測定点がROIの境界に正確に選ばれなかったための幾何学的誤差
3.2.68
Δi(ε)
中心ずれによる幾何学的誤差
3.2.69
Δi(δ)
幾何学的ひずみ(歪)による幾何学的誤差
3.2.70
ΔB0(rρ)
ピクセル位置での静磁場不均一性
3.2.71
Δf
周波数のずれ
3.2.72
ΔG(rρ)
ピクセル位置での傾斜磁場直線性からの誤差
3.2.73
Δr(rρ)
ピクセルの幾何学的位置ずれ
12
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.74
ΔT
時間遅れ
3.2.75
Δx
x方向のピクセルサイズ
3.2.76
Δy
y方向のピクセルサイズ
3.2.77
ε
中心ずれ
3.2.78
θ
y軸に対する試験器具の回転角
3.2.79
θr
r軸とx軸との間の角度
3.2.80
σδ
幾何学的ひずみ(歪)の収差
3.2.81
ν
空間周波数
3.2.82
νc
カットオフ周波数
3.2.83
νN
ナイキスト周波数
3.2.84
φ
信号の(一定)位相
4
基本画像パラメータの決定手順
4.1
全ての手順に対する一般的要求事項
4.1.1
試験器具への要求事項
試験器具は,試験する受信コイルに適したサイズ及び形状からなるもの(例えば,ポリプロピレン,ア
クリル製容器)でなければならない。それは,定在波の影響を避けるために,十分に小さな誘電率及び導
電率をもつMR信号を生成する材質(例えば,水,シリコンオイル)で満たさなければならない。
13
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この信号生成材質のMR特性(スピン密度ρ,T1,T2)は,人体に近いものでなければならない(代表
的な値は,T1<1 200 ms,T2>50 ms,スピン密度ρ=ρH20±20 %)。これは,純水に適切な緩和時間調整剤
(常磁性イオン)を添加することで作ることができる。できる限り人体と同等の値を用い,極端な値は避
けるのが望ましい。試験器具の温度は,22 ℃±4 ℃でなければならない。
これらの要求事項についての例外事項は,必要な場所に明記する。
4.1.2
画像再構成に関する要求事項
全ての画像は,MR装置の臨床用の標準再構成アルゴリズムで処理しなければならない。特に指定しな
い限り,操作者によって選択することができる全てのフィルタを無効にしなければならない。フィルタに
は,例えば,ひずみ(歪)補正,スムージング及びエッジ強調を含める。無効にできない場合には,使用
したフィルタ全てを結果に示す。解析する画像は,画像アーチファクトが,ほぼ皆無のものでなければな
らない。
これらの要求事項についての例外事項は,必要な場所に明記する。
4.1.3
撮像に関わる要求事項
特に指定のない限り,全ての画像収集の前に標準の臨床用プレスキャンによる補正をしなければならな
い。
4.2
信号ノイズ比
4.2.1
目的及びその根拠
画像SNRは,MR装置の臨床有用性に関連するパラメータであり,ハードウェア性能を顕著に表す指標
でもある。経験から,システム校正,ゲイン,コイルチューニング,RFシールド又は他の同様なパラメー
タの変化は通常,画像SNRの対応する変化に表れる。
SNR,スライス厚及び空間分解能の試験において,加算回数についての例外はあるが,同じパルスシー
ケンス及びパラメータを用い,これら三つの試験結果間の関係を制御するという目的もある。
4.2.2
試験器具への要求事項
一般的な臨床の場で見られる画像ノイズ特性に近づけるために,受信コイルの負荷の電気的特性は,約
50 kg〜90 kgの患者と同等にしなければならない。負荷は,試験器具又はほかの再現可能な手段によって
加えてもよい。負荷が,約50 kg〜90 kgの患者を臨床撮像のときに正しく位置決めした場合と同様である
ことを試験によって確認する。次の電気的パラメータが指定する誤差以内である場合には,負荷は同等で
あるとみなすことができる。
− コイル3 dB帯域幅:±15 %
− コイルインピーダンス:振幅±20 %,位相±20 %
− コイル中心周波数シフト:中心周波数の±1 %
代替的に又は追加的に,他の手段(必要な高周波パワーに必要な特定のフリップ角など)を,約50 kg
〜90 kgの患者の負荷への適格性を確認して使用することができる。
信号生成物質を含む体幹部用試験器具の形状は,円筒,球又は回転だ(楕)円体とする。その最小断面
積は,直径200 mmの円となる。
信号生成物質を含む頭部用試験器具の形状は,円筒,球又は回転だ(楕)円体とする。その最小断面積
は,直径150 mmの円となる。
信号生成物質を含む四肢用試験器具の形状は,任意の形状でよい。その最小断面積は,仕様面積の85 %
でよい。
14
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2.3
撮像条件
次のパルスシーケンスを使用することが望ましい。
− 撮像中心をアイソセンタの±30 mmに合わせた,2次元のシングルスピンエコー,シングルスライス
シーケンス
− 撮像面:トランスバース,サジタル,コロナルの順[以下,横断面,し(矢)状面,冠状面という。]
− TR=1 000 ms又は信号生成物質のT1値の3倍以上の値のいずれか大きい方
− TE=30 ms又は信号生成物質のT2値の1/3以下の値のいずれか小さい方
− ピクセル帯域幅:100±3 Hz
− 頭部用コイルの撮像領域:250 mm
− 体幹部用コイルの撮像領域:440 mm
− 頭部用コイルの撮像領域は250 mm,体幹部用コイルの撮像領域は440 mm,その他の全てのコイルの
撮像領域は,画像面内で最大RFコイル寸法の110 %を超えてはならない。
− マトリクスサイズ:256×256
− スライス厚:5 mm
− 信号加算は行わない。
スライス厚及び空間分解能の測定では,信号加算をしてもよいが,同一のパルスシーケンス及び再
構成パラメータを使用する。
4.2.4
測定手順
RFコイル内への試験器具は,代表的な検査手順に従って位置決めを行う。
渦状アーチファクト防止のため,試験器具を配置してから撮影開始までに適切な時間(例えば,大きな
試験器具の場合は,15分)待つ。撮像スライスは,仕様面積が最大となるように基準位置を通って設定し
なければならない。できる限りコイルの対称軸に沿うか又は直交させるのが望ましい。
測定については,二つの撮像(画像1及び画像2)を,最初のスキャン終了から第2のスキャンの開始
まで連続して5分以内で実行する。撮像の間に,調整又は校正を実行してはならない。SNRを測定するパ
ルスシーケンスで,4.4及び4.6に規定するスライス厚及び空間分解能を確認する。また,4.4及び4.6に
規定する方法を用いる。
注記 この方法で,公称スライス厚及び空間分解能が達成されていることを確認する。
4.2.5
データ解析及び許容差
関心領域(ROI)は,試験器具の信号を生成する容積の画像において,少なくとも85 %の領域に相当す
る一定の幾何学的領域の中心に配置しなければならない。
ステップ1 画像1のROI内の平均ピクセル値を測定する。結果として得られる数値(からベースライ
ンピクセルオフセット値を減算したもの)を画像信号(S)とする。
ステップ2 次の式で,ピクセルごとに符号付き差分画像(画像3)を計算する。
画像3=画像1−画像2
減算処理では,当該MR装置に許される最小(又は最大)ピクセル値を超える値(負の
値など)の発生によって生じる誤差は,避けなければならない。
ステップ3 ステップ1で画像信号(S)を計測したROIを画像3の同じ位置に移し,ROI内の標準偏
差(SD)を計算する。SDを√2で除して,画像間減算によるノイズの振幅増加を除去する
と画像ノイズを得ることができる。
ステップ4 式(1)でSNRを求める。
15
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
=
2
SNR
SD
S
············································································ (1)
4.2.6
結果の報告
結果の報告には,次の項目を含めなければならない。
パラメータ
単位
SNR
スライス厚(4.4によって測定した結果)
mm
空間分解能(4.6によって測定した結果)
mm
撮像面方向
周波数及び位相エンコード方向
仕様面積−サイズ及び形状
mm2
コイル寸法
mm
コイル名称及びタイプ
試験器具の断面積−サイズ及び形状
mm2
ROI−サイズ及び形状
mm2
基準位置
データ収集マトリクスサイズ
撮像領域
mm2
公称ボクセルサイズ(Δx,Δy,選択したスライス厚)
mm
スライス厚(測定値)
mm
空間分解能(測定値)
mm
試験器具の充てん(塡)物
試験器具充てん(塡)物のT1値
ms
試験器具充てん(塡)物のT2値
ms
試験器具の塩化物及び濃度
g/l
ピクセル帯域幅
Hz/pixel
パルスシーケンスの繰返し時間(TR)
ms
エコー時間(TE)
ms
加算回数
パルスシーケンス スピンエコー又はグラディエントエコー
使用フィルタ(使用していれば)
結果には,測定誤差の推定値を添付しなければならない。
全ての選択した再構成パラメータ及び再現性を保証するその他の関連情報の一覧を記載する。
4.3
均一性
4.3.1
目的及びその根拠
全てのMR用コイルに適合する均一性の指標を計算するための測定手順を規定する。結果として,典型
的なMR画像での低周波の不均一性を示すことができる。測定は,典型的な臨床に使われる領域を表す部
分で行う。
4.3.2
試験器具への要求事項
コイルの均一性特性を測るためには,均一な試験器具を使用しなければならない。これは,コイルタイ
プごとに異なってもよい。
試験器具の寸法及び形状には,少なくともコイルの仕様面積を含まなければならない。
RFコイルの負荷は,均一性測定に影響を与えないので,試験器具の設計にRFコイルへの負荷を考慮す
る必要はない。
16
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.3.3
撮像条件
次のパルスシーケンスを使用することが望ましい。
− 撮像中心をアイソセンタの±30 mmに合わせた,2次元のシングルスピンエコー,シングルスライス
シーケンス
− 撮像面:横断面,し(矢)状面,冠状面(の順)
− TR=1 000 ms又は信号生成物質のT1値の3倍以上の値のいずれか大きい方
− TE=30 ms又は信号生成物質のT2値の1/3以下の値のいずれか小さい方
− ピクセル帯域幅:100±3 Hz
− 頭部用コイルの撮像領域:250 mm
− 体幹部用コイルの撮像領域:440 mm
− 頭部用コイルの撮像領域は250 mm,体幹部用コイルの撮像領域は440 mm,その他の全てのコイルの
撮像領域は,画像面内で最大RFコイル寸法の110 %を超えてはならない。
− マトリクスサイズ:256×256
− スライス厚:5 mm
− 信号加算は行ってよい。
4.3.4
測定手順
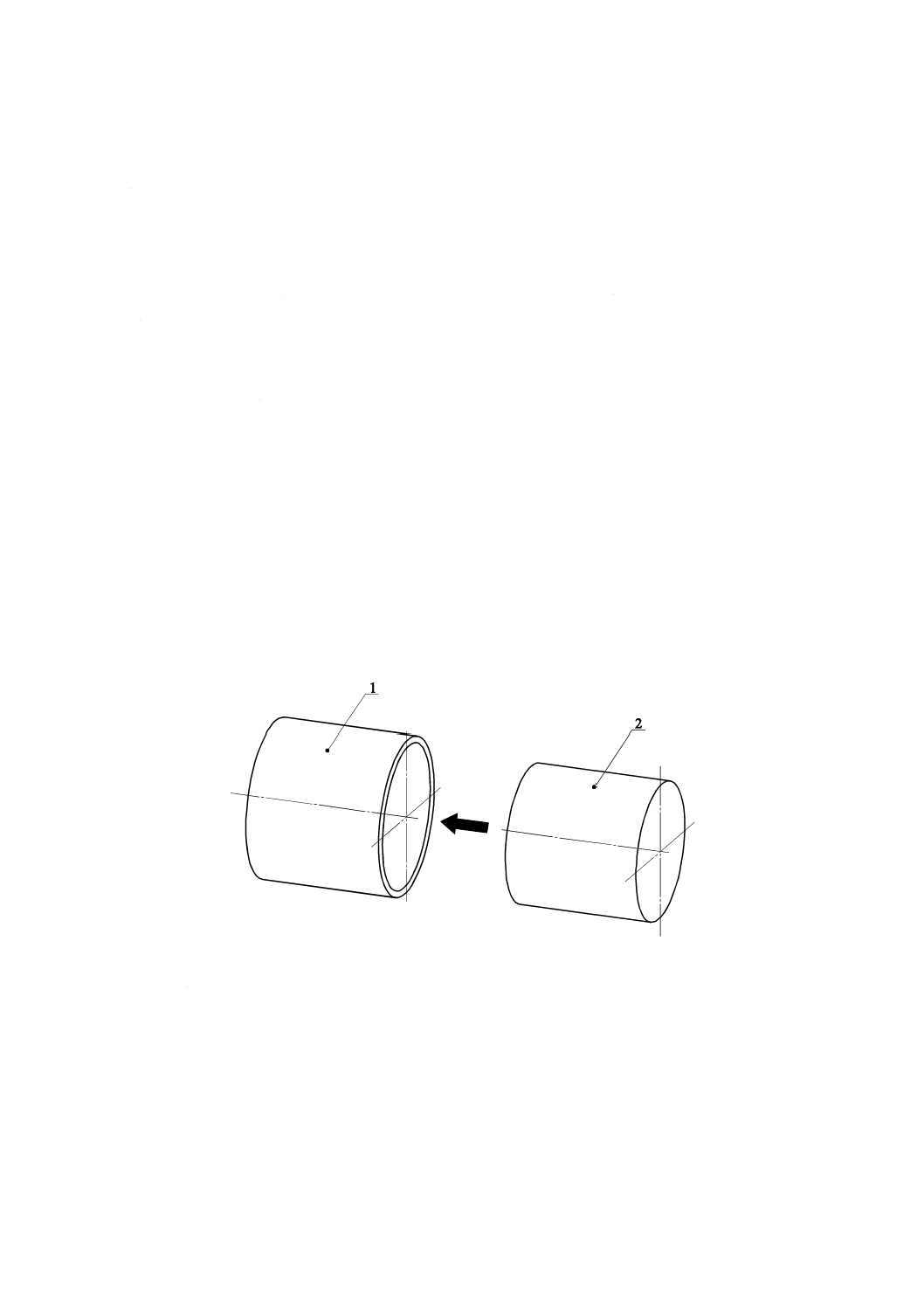
RFコイル内への試験器具は,代表的な検査手順に従って位置決めを行う(図1及び図2参照)。
渦状アーチファクト防止のため,試験器具を配置してから撮像開始までに,適切な時間(例えば,大き
な試験器具の場合は,15分)待つ。画像面は,仕様面積が最大となるように基準位置を通って設定しなけ
ればならない。できるだけコイルの対称軸に沿うか又は直交させることが望ましい。
構成品
1 RFコイル
2 試験器具
図1−均一な試験器具をRFコイルに挿入する
17
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
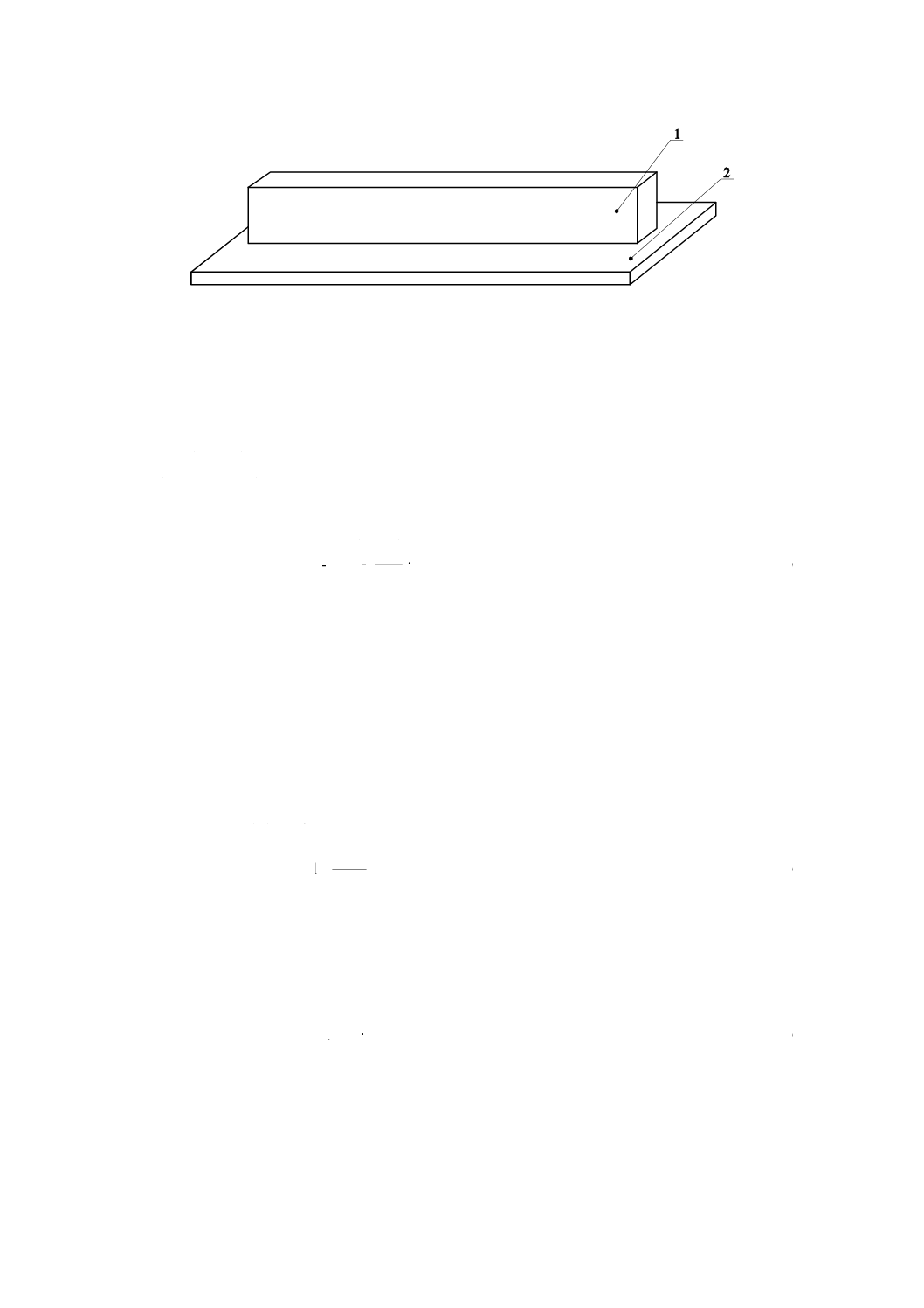
構成品
1 試験器具
2 RFコイル
図2−表面コイル上の試験器具の位置
ボリュームコイルは,横断面,し(矢)状面,冠状面の各面につき1枚の画像を収集し,コイル1個に
つき3枚の画像を収集する。
4.3.5
データ解析及び許容差
ROI上の信号についての平均絶対偏差(AAD)を,式(2)で定義する。
(
)
∑
=
−
=
N
i
i
N
S
S
AAD
1
······································································ (2)
ここに,
Si: ROIの中の個々のピクセル信号値
S: ROIの中の全てのピクセル信号値の平均
|Si−S|: ピクセルiについての偏差の絶対値
N: ROIの中のピクセル数
評価する各コイルについて,各画像上の試験器具領域に一つのROIを決めて,均一性を計算しなければ
ならない。
a) 仕様面積内で信号を発生する領域の85 %を含むようにROIを設定する。信号を発生する領域は,ア
ーチファクトを避けるため仕様面積を超えなければならない。
b) ROIについて信号値の平均及びAADを計算する。
c) 式(3)で,均一性(U)を求める。
S
AAD
U
−
=1
············································································· (3)
ここに,
U: 均一性の測定値
試験器具の信号領域の平均値(S)で除することによって,各コイルについて出力を正規化する。全ての
評価した断面の均一性(U)を記録する。
不均一性(NU)は,式(4)で定義する。
U
NU
−
=1
··············································································· (4)
4.3.6
結果の報告
結果の報告には,次の項目を含めなければならない。
18
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
パラメータ
単位
均一性U又は不均一性NU
撮像面方向
周波数及び位相エンコード方向
仕様面積−サイズ及び形状
mm2
コイル寸法
mm
コイル名称及びタイプ
試験器具の断面積−サイズ及び形状
mm2
ROI−サイズ及び形状
mm2
基準位置
データ収集マトリクスサイズ
撮像領域
mm2
公称ボクセルサイズ(Δx,Δy,選択したスライス厚)
mm
スライス厚(測定値)
mm
空間分解能(測定値)
mm
試験器具の充てん(塡)物
試験器具充てん(塡)物のT1値
ms
試験器具充てん(塡)物のT2値
ms
試験器具の塩化物及び濃度
g/l
ピクセル帯域幅
Hz/pixel
パルスシーケンスの繰返し時間(TR)
ms
エコー時間(TE)
ms
加算回数
パルスシーケンス スピンエコー又はグラディエントエコー
使用フィルタ(使用していれば)
結果には,測定誤差の推定値を添付しなければならない。
全ての選択した再構成パラメータ及び再現性を保証するその他の関連情報の一覧を記載する。
4.4
2次元のスライス厚及びスライスプロファイル
4.4.1
目的及びその根拠
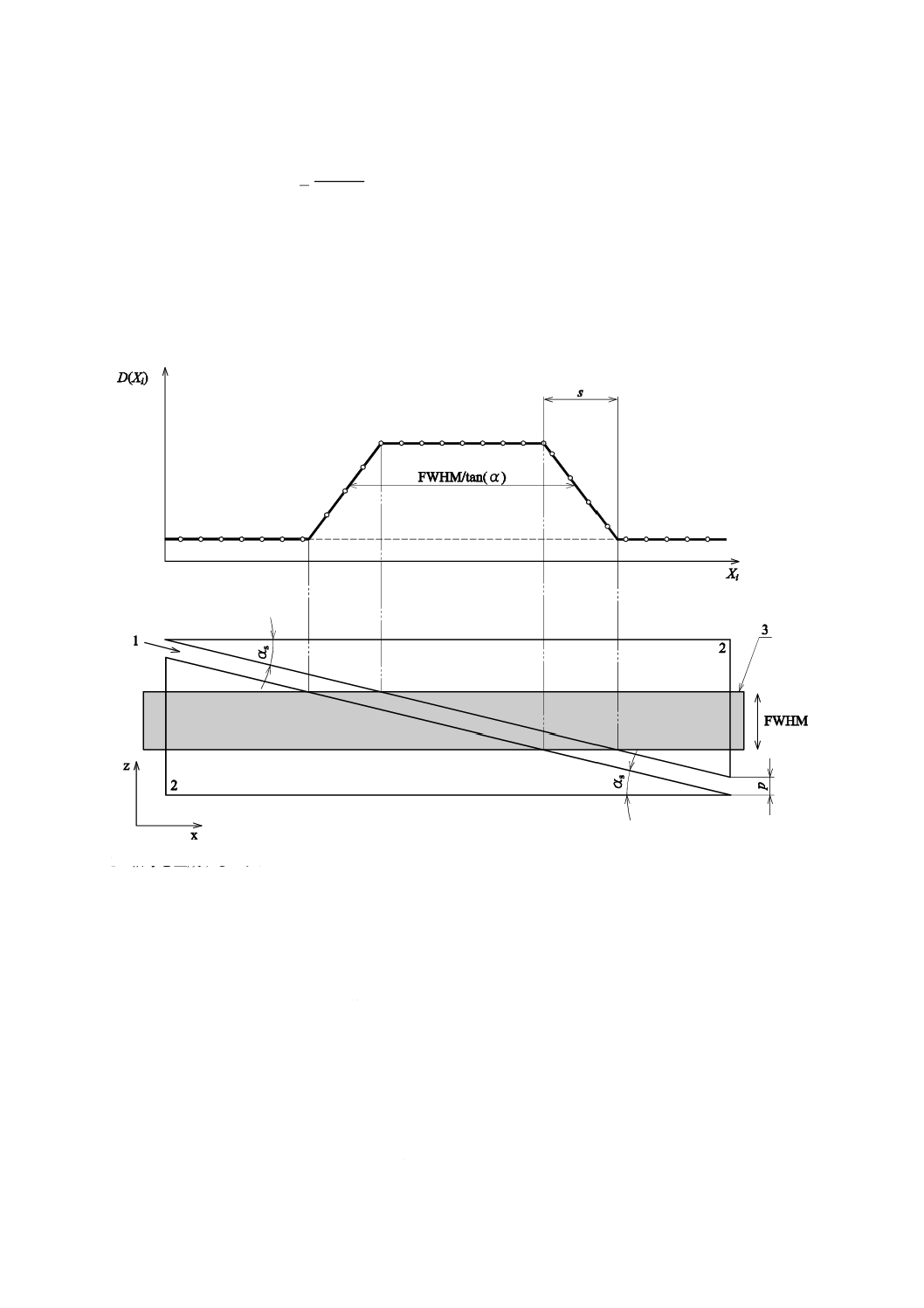
2次元のスライス厚及びスライスプロファイルの測定法を規定する。スライス厚は,信号を発生する薄
い材料からなる傾斜スラブの信号強度プロファイルを測定することによって決まる(“ホットプレート法”
と呼ばれる。)。測定法には,試験器具の傾きによって生じる回転誤差の補正を含める。
この方法は,また,最終結果をプロットするために引き伸ばされたスライスプロファイルが必要となる。
SNR,スライス厚及び空間分解能の試験において,加算回数についての例外があるが,同じパルスシー
ケンス及びパラメータを用い,これら三つの試験結果間の密接な関係を制御するという目的もある。
スライス厚は,RFパルス波形,パルス印加順序及び送信ゲイン,RFの均一性,傾斜磁場の選択並びに
その他のパラメータに依存するので,MR装置及びその画質に適切な調整がなされていることに対する重
要な測定項目である。
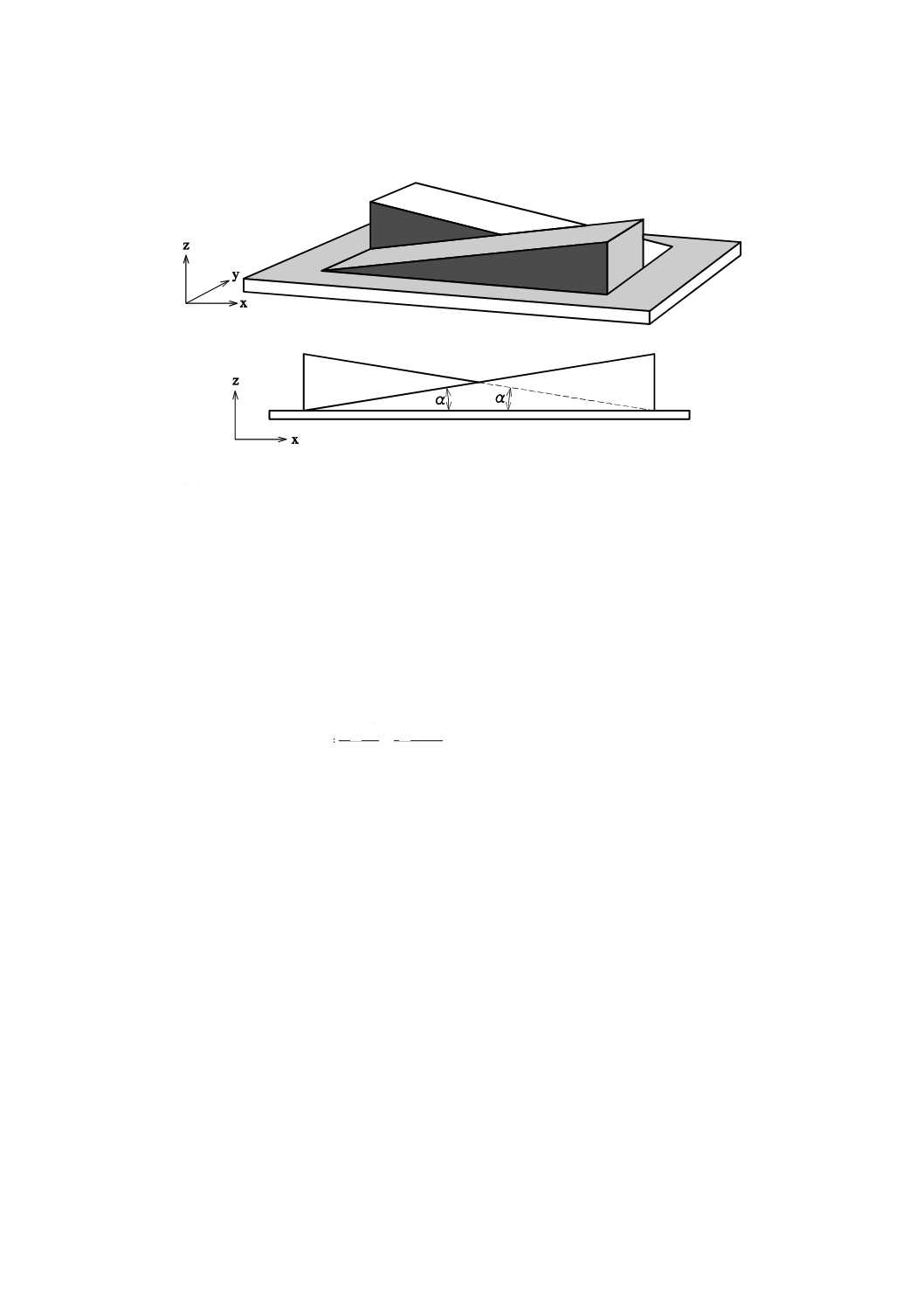
4.4.2
試験器具への要求事項
試験器具は,MR信号を発生する材料の周囲をMR信号を発生しない材料で囲んだ,対向する2個の薄
い傾斜スラブで構成する。両スラブの傾斜した表面は,画像のいずれか1軸と角度αsをなす(αsの範囲は,
8°〜12°。)。傾斜スラブは,台形の信号強度プロファイルを示す(図3参照。対向する傾斜したスラブの
一方だけが表示されていることに注意する。)。スラブ厚(p)が大きくなるほど,台形の辺sは測定するプ
ロファイルの半値幅に対して大きくなる。FWHM/tanαsのsに対する比を,5以上にするには次でなければ
19
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ならない。
5
FWHM
≦
p
また,信頼できる結果を得るには,スライスプロファイルのSNRが20以上でなければならない[上部
の平たん(坦)部分の平均信号値と平たん(坦)部分から離れたところの標準偏差との比で,画像のSNR
ではない]。一般に,一回の信号収集によって得られるSNRは,非常に低い。SNRは,加算するか(測定
時間が延びるが),又は試験器具が回転していない場合は,傾斜方向に直角な近接する列に対して,スライ
スプロファイルを加算することによって改善することができる。
1 信号を生成するスラブ
2 くさび形試験器具
3 x−y面のスライス
注記 対向する第2のスラブは,図を分かりやすくするために示していない。
図3−傾斜スラブ法での信号強度分布
RFコイルへの負荷は,スライスプロファイル及びスライス厚の測定に影響を与えないので,試験器具
の設計にRFコイルへの負荷を考慮する必要はない。
4.4.3
撮像条件
スライスプロファイル及びスライス厚の測定値は,パルスシーケンスの種類,RFパルスの形状及び試験
器具溶液のT1緩和時間に依存する。
次の撮像条件を使用するのが望ましい。
− 撮像中心をアイソセンタの±30 mmに合わせた,2次元のシングルスピンエコー,シングルスライス
20
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シーケンス。
− 撮像面:横断面,し(矢)状面,冠状面(の順)
− TR=1 000 ms又は信号生成物質のT1値の3倍以上の値のいずれか大きい方
− TE=30 ms又は信号生成物質のT2値の1/3以下の値のいずれか小さい方
− ピクセル帯域幅:100±3 Hz
− マトリクスサイズ:256×256
− スライス厚:5 mm
− 撮像領域及びマトリクスは,スライス厚が少なくとも20ピクセル以上の領域に画像化できるように設
定されなければならない。すなわち,ピクセルサイズは,FWHM/(20 tanαs)未満にしなければならない。
− 信号加算は行ってよい。
撮像領域及びマトリクスを,スライス厚が少なくとも20ピクセル以上の領域に画像化できるよう設定す
る場合は,3 mmのスライス厚を選択してもよい。すなわち,ピクセルサイズは,FWHM/(20 tanαs)未満に
する。
これは,αs=11.3°の試験器具を用い,256×256マトリクスを用いた場合の最大FOVが,5 mmスライ
スは320 mm,3 mmスライスは190 mmであることを意味する。
SNR及び空間分解能を決定するために,同一のシーケンス(加算は行わない。)及び再構成パラメータ
を使用しなければならない。
4.4.4
測定手順
撮像を横断面,し(矢)状面,及び冠状面の各断面で実行しなければならない。試験器具の向きを撮像
スライスの方向に確実に合わせる手段を講じなければならない。調整は,対向する傾斜スラブのスライス
厚の測定値を比較することによって確認することができる。対向するスラブで測定したスライス厚の差が
10 %未満でなければならない。
4.4.5
データ解析及び許容差
傾斜スラブ法は,スラブの傾斜した表面の方向xのピクセル強度グラフを作成する。位置Xiにおけるピ
クセル強度をS(Xi)で表す。S(Xi)のFWHMを直線補間によって決定する。次に,スライス厚を拡大プロフ
ァイルS(Xi)のFWHMとtan(αs)との積として計算する。
測定に含まれる可能性のある誤差の発生源には,次のものがある。
− 不十分なSNR
− FWHMを決定するための補間
− ピクセル寸法
− スラブ角の誤差
− 試験器具のx軸及びz軸に対する回転
− 画像の不均一性
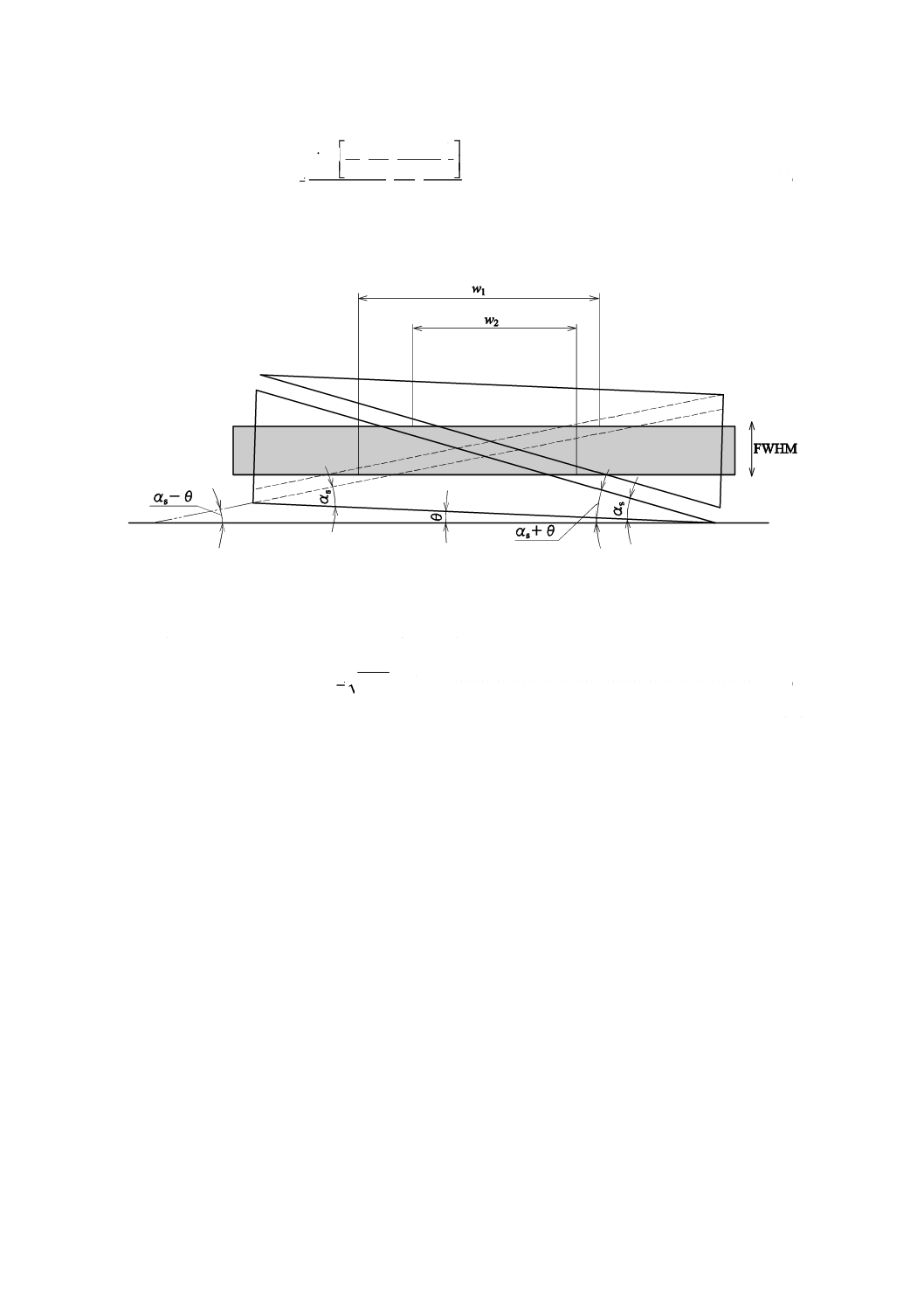
試験器具の回転は,誤差を引き起こす。試験器具がz軸の周りに回転すると(図4参照),スラブの画像
が回転する。このことによって,y軸方向の隣接する行の信号の加算平均が困難になる。試験器具がx軸
の周りに回転する場合も,同様の問題を生じる。しかし,最大の誤差は,試験器具がy軸の周りに回転す
る場合に生じる。これは,スラブ傾斜角αsが変化するためである。例えば,1:5のスラブ,αsが11.3°に
おいて回転角度が1°でも,αs及びスライス厚に9 %の誤差が生じる。
試験器具のy軸の周りの回転角度θは,対向する2個のスラブで測定した二つの実測スライス厚w1及び
w2から,式(5)で算出することができる。
21
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
)
(
)
2
sin(
)
(
sin
1
2
s
1
2
1
+
−
=
−
w
w
w
w
α
θ
·························································· (5)
さらに,式(6)で補正スライス厚を求める。
FWHM=w1 tan(α+θ) ·································································· (6)
図4−試験器具の回転補正
破線は,対向するスラブの位置を示す。
相乗平均をとることによっても,正しい結果の近似が得られる。
)
tan(
FWHM
s
2
1
α
w
w
=
······························································· (7)
αs=11.3°,θ=2°,スライス厚が3 mmの場合には,相乗平均によって3.05 mmの値が得られ,相加平
均によって3.10 mmの値が得られる。θ=4°になると,相乗平均によって3.20 mmのスライス厚が得られ,
相加平均によって3.44 mmの値が得られる。
4.4.6
結果の報告
結果の報告には,次の項目を含めなければならない。
22
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
パラメータ
単位
測定スライス厚(FWHM)
mm
1/4値幅
mm
試験器具のスラブ厚
mm
αs
°
これら測定の信号強度プロファイルのグラフ
送信に用いたRFコイル
撮像面方向
周波数及び位相エンコード方向
仕様面積−サイズ及び形状
mm2
コイル寸法
mm
コイル名称及びタイプ
試験器具の断面積−サイズ及び形状
mm2
ROI−サイズ及び形状
mm2
基準位置
データ収集マトリクスサイズ
撮像領域
mm2
公称ボクセルサイズ(Δx,Δy,選択したスライス厚)
mm
スライス厚(測定値)
mm
空間分解能(測定値)
mm
試験器具の充てん(塡)物
試験器具充てん(塡)物のT1値
ms
試験器具充てん(塡)物のT2値
ms
試験器具の塩化物及び濃度
g/l
ピクセル帯域幅
Hz/pixel
パルスシーケンスの繰返し時間(TR)
ms
エコー時間(TE)
ms
加算回数
パルスシーケンス スピンエコー又はグラディエントエコー
使用フィルタ(使用していれば)
結果には,測定誤差の推定値を添付しなければならない。
全ての選択した再構成パラメータ及び再現性を保証するその他の関連情報の一覧を記載する。
4.5
2次元幾何学的ひずみ(歪)
4.5.1
目的及びその根拠
2次元幾何学的ひずみ(歪)の測定及び報告方法について規定する。2次元幾何学的ひずみ(歪)は,次
の方法で測定する。
− 幾何学的ひずみ(歪)のスケール:画像から計測するN個の放射状に計測された距離の平均値と試験
器具の実際の放射状に計測された距離との差。
− 幾何学的ひずみ(歪)の収差:Nd個の放射状に計測された距離の測定値のばらつきについての標準偏
差。
− 最大幾何学的ひずみ(歪):実際の試験器具で放射状に計測された距離と画像上で放射状に計測された
距離の値との差の最大値。
− この試験では,傾斜磁場ひずみ(歪)補正フィルタを使用してもしなくてもよい。
4.5.2
試験器具への要求事項
試験器具は,幾何学的ひずみ(歪)が仕様面積の85 %を含むROIで測定できるように設計しなければ
23
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ならない。
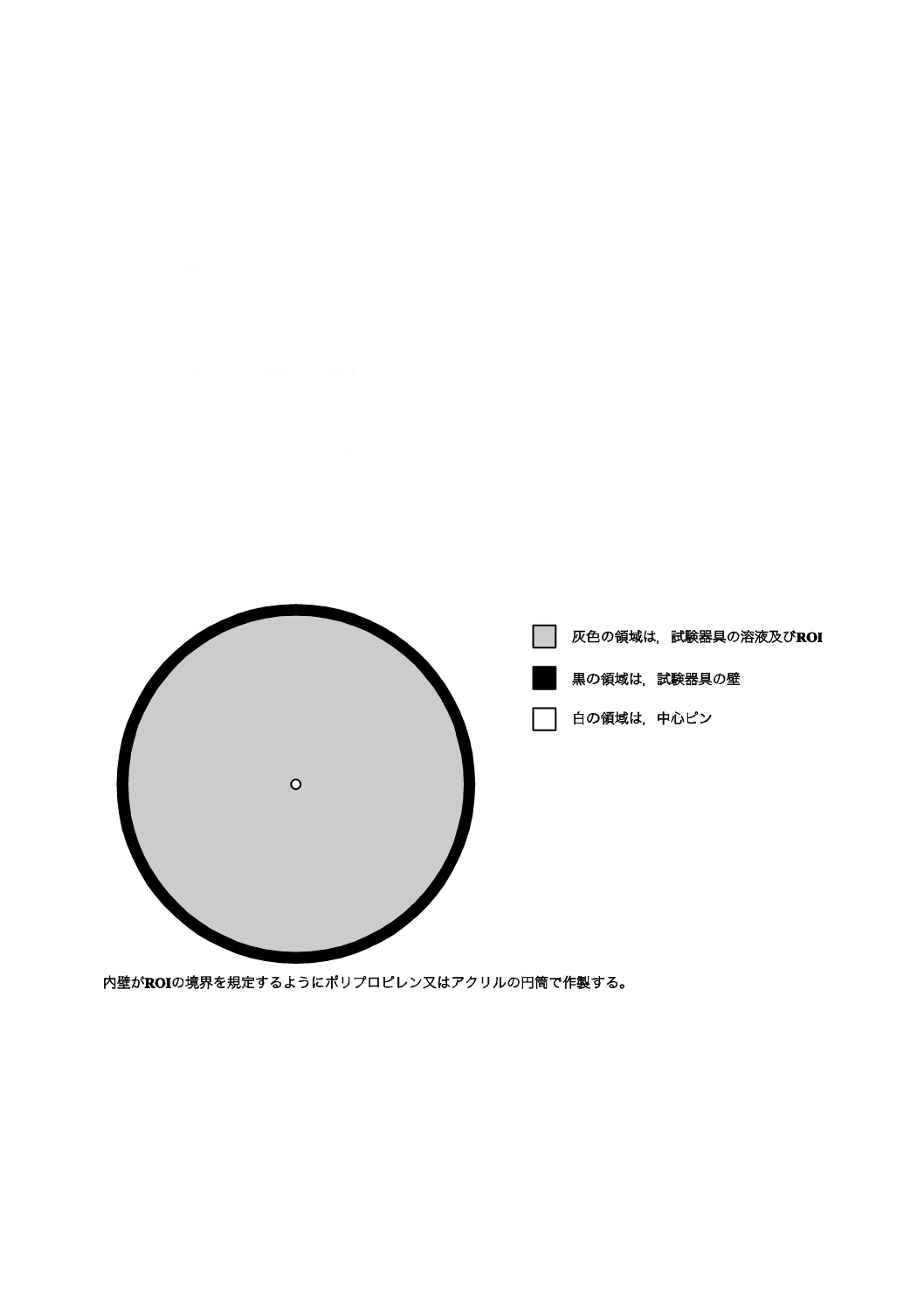
ROIの形状は,球の仕様容積については円,だ(楕)円体の仕様容積に対してはだ(楕)円でなければ
ならない。試験器具は,円筒又は球状で,溶液と試験器具の壁との境界が測定点の位置を決定する(図5
及び図6参照)。
試験器具は,最も大きい場合の角度が22.5°の分割となるように円周上に等間隔で配置した周辺の一連
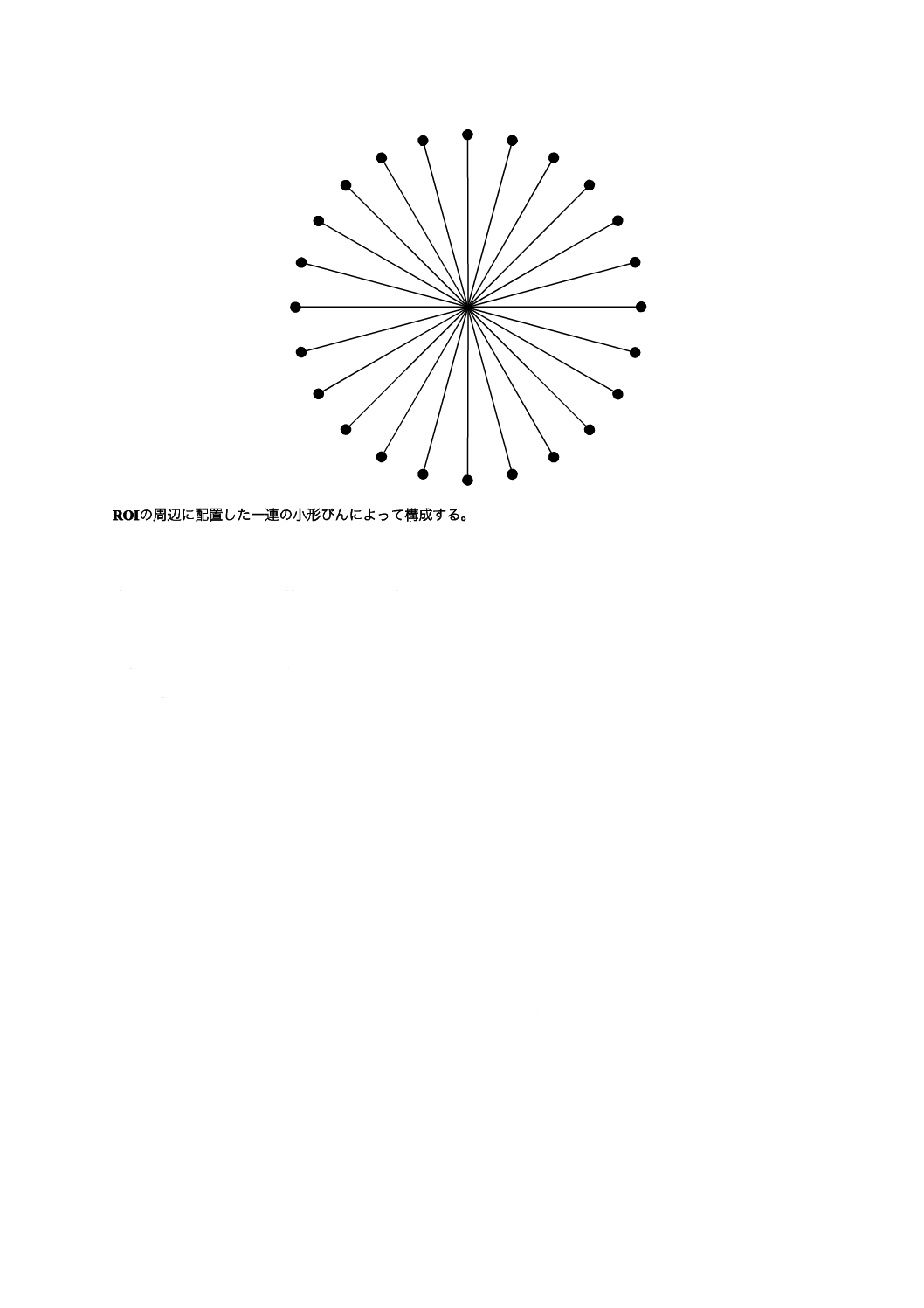
の穴,ピン,管又は他の明確な規則的な構造物を使って構成してもよい(図6参照)。ピン又は他の構造物
を,試験器具の幾何学的中心に配置しなければならない。ピンの直径は,全ての半径測定において参照中
心を明確にすることによって誤差を最小にするために,1 mm〜2 mmとする。中心ピンがない場合は,試
験器具の中心を画像上での幾何学的位置から決めてもよい。だ(楕)円体の仕様容積では,二つのピンが
必要であり,各々はだ(楕)円の焦点に置く。
試験器具の厚さは,スライスの湾曲の影響を最小にするため,測定に使用されるスライス厚の,少なく
とも2倍でなければならない。
RFコイルの負荷は,幾何学的ひずみ(歪)測定に影響を与えないので,試験器具の設計にRFコイルへ
の負荷を考慮する必要はない。
球の仕様容積のための試験器具例を,図5及び図6に示す。それらは,ポリプロピレン又はアクリルの
円筒(図5)で作られ,内壁がROIの境界を決定するか,又は配列された幾つかの小形びんでROIの境
界が決定される。
図5−球の仕様容積のための試験器具例
24
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6−球の仕様容積のための試験器具例
4.5.3
撮像条件
次のパルスシーケンスを使用することが望ましい。
− 撮像中心をアイソセンタの±30 mmに合わせた,2次元のシングルスピンエコー,シングルスライス
シーケンス
− 撮像面:横断面,し(矢)状面,冠状面(の順)
− TR=1 000 ms又は信号生成物質のT1値の3倍以上の値のいずれか大きい方
− TE=30 ms又は信号生成物質のT2値の1/3以下の値のいずれか小さい方
− ピクセル帯域幅:100±3 Hz
− マトリクスサイズ及び撮像領域(FOV)は,ピクセルサイズの大きさによる誤差を最小にするため,
両方のピクセル寸法が1 mm以下となるように選択する。
− スライス厚:5 mm
− 信号加算は行ってよい。
− この試験では,幾何学的ひずみ(歪)補正フィルタを使用してもよい。
幾何学的ひずみ(歪)補正フィルタは,この試験に限り使用してもよい。操作者が選択できる他の全て
のフィルタは,無効にしなければならない。 無効にできない場合には,使用している全てのフィルタを結
果に記載する。
4.5.4
測定手順
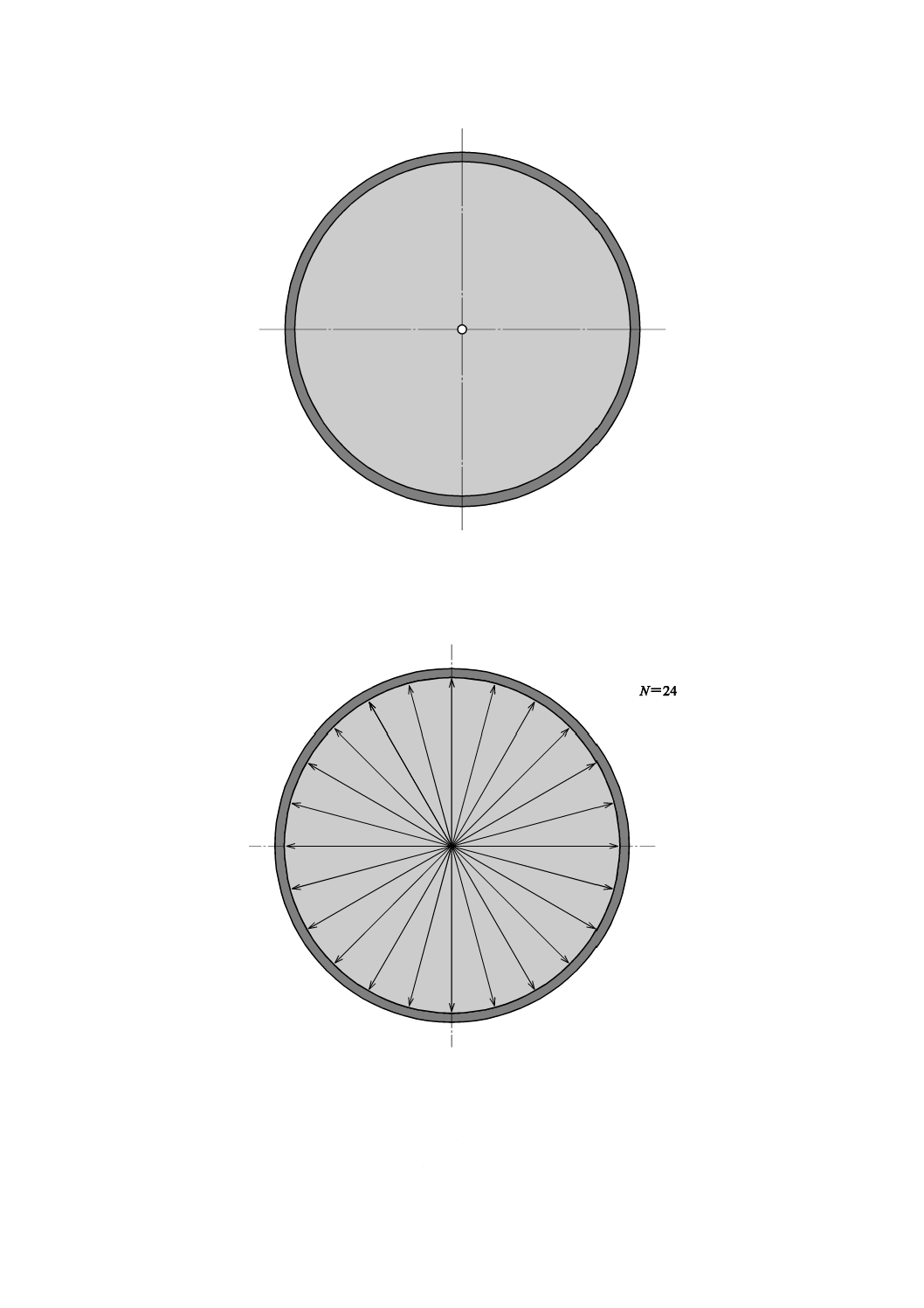
試験器具を,三つの直交する方向(図7参照)横断面,し(矢)状面,冠状面の順に中心を磁石のアイ
ソセンタに合わせて配置する。
25
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図7−試験器具の中心を通る二つの直線
幾何学的中心とROIの周辺の1点との距離を計測する。計測は,ROIの周辺に均一に配置するN点に
ついて,繰り返し行う。近接する計測点の角度は,22.5°以下でなければならない(図8参照)。
図8−計測する距離
4.5.5
データ解析及び許容差
それぞれの得られた画像より計測したNd個の放射状に計測した距離の平均値rと試験器具の実際の放
射状に計測された距離Rとの差を幾何学的ひずみ(歪)の大きさとし,式(8)によって求める。
26
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
R
r
−
=1
δ
················································································· (8)
計測したNd個の放射状に計測した距離の標準偏差としての幾何学的ひずみ(歪)の収差を,式(9)によ
って算出する。
1
)
(
1
d
2
1
d
−
−
=
∑
=N
r
r
R
N
i
i
δ
σ
··································································· (9)
最大幾何学的ひずみ(歪)を,式(10)によって計算する。
)
max(
max
ir
r
=
·········································································· (10)
幾何学的ひずみ(歪)の大きさ及び収差は,相補的な情報を与える。δ=0かつσδ≠0の場合は,半径サ
イズの変化,つまり幾何学的ひずみ(歪)である。δ≠0かつσδ=0のときは,スケールの変動である。
4.5.6
結果の報告
結果の報告には,次の項目を含めなければならない。
パラメータ
単位
幾何学的ひずみ(歪)の大きさ
幾何学的ひずみ(歪)の収差
最大幾何学的ひずみ(歪)
試験器具寸法(図面)及び許容差
°
撮像面方向
傾斜磁場非線形性の補正[ひずみ(歪)補正]
あり・なし
周波数及び位相エンコード方向
仕様面積−サイズ及び形状
mm2
コイル寸法
mm
コイル名称及びタイプ
試験器具の断面積−サイズ及び形状
mm2
ROI−サイズ及び形状
mm2
基準位置
データ収集マトリクスサイズ
撮像領域
mm2
公称ボクセルサイズ(Δx,Δy,選択したスライス厚)
mm
スライス厚(測定値)
mm
空間分解能(測定値)
mm
試験器具の充てん(塡)物
試験器具充てん(塡)物のT1値
ms
試験器具充てん(塡)物のT2値
ms
試験器具の塩化物及び濃度
g/l
ピクセル帯域幅
Hz/pixel
パルスシーケンスの繰返し時間(TR)
ms
エコー時間(TE)
ms
加算回数
パルスシーケンス スピンエコー又はグラディエントエコー
使用フィルタ(使用していれば)
結果には,測定誤差の推定値を添付しなければならない。
全ての選択した再構成パラメータ及び再現性を保証するその他の関連情報の一覧を記載する。
27
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.6
空間分解能
4.6.1
目的及びその根拠
特別に設計した試験器具を使った空間分解能の測定方法について規定する。
周期的パターンの変調を測定することによって,特定の空間分解能が達成されているかどうかを決定す
る。
SNR,スライス厚及び空間分解能の試験において,加算回数についての例外はあるが,同じパルスシー
ケンス及びパラメータを用い,これら三つの試験結果間の密接な関係を制御するという目的もある。
4.6.2
試験器具への要求事項
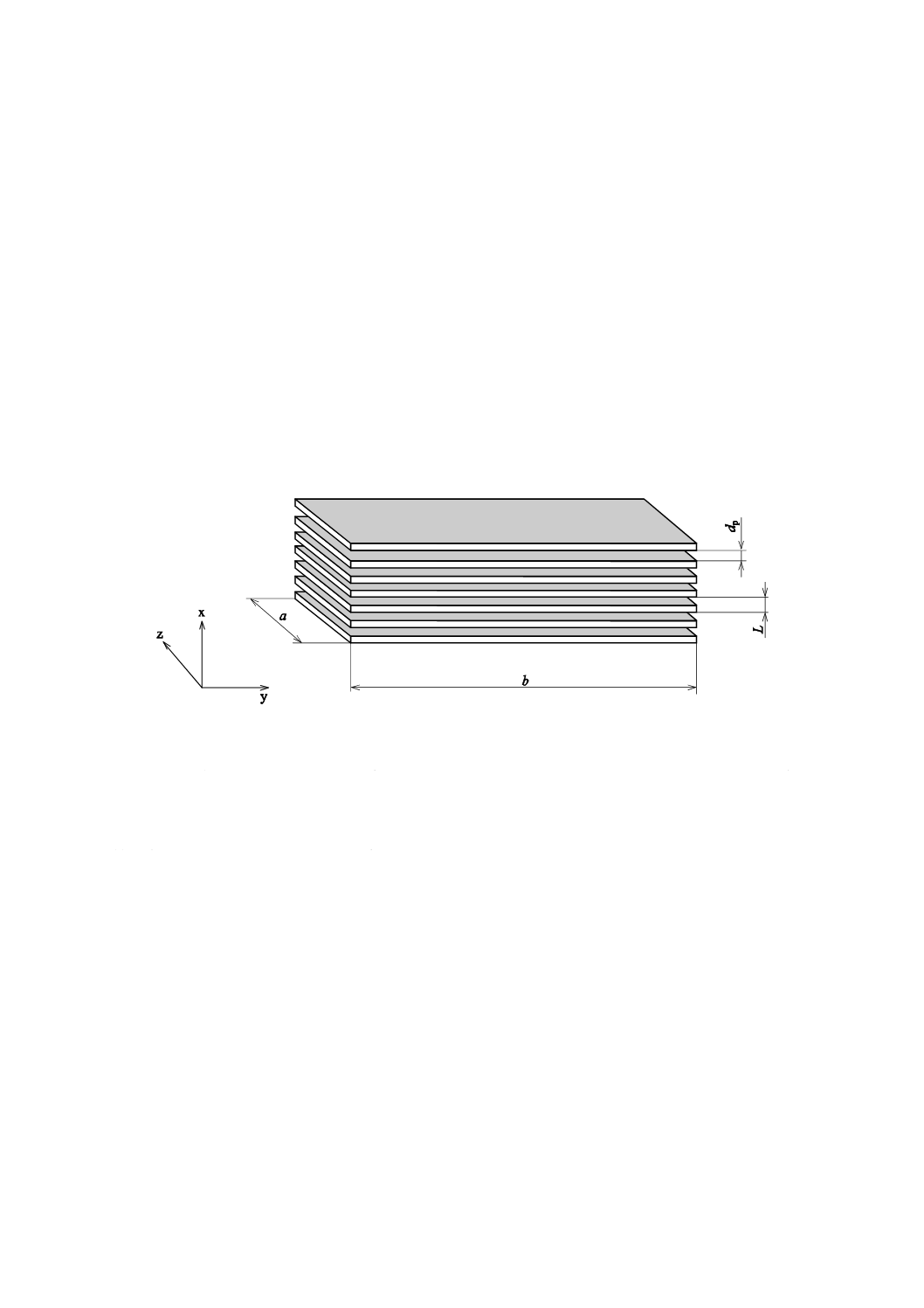
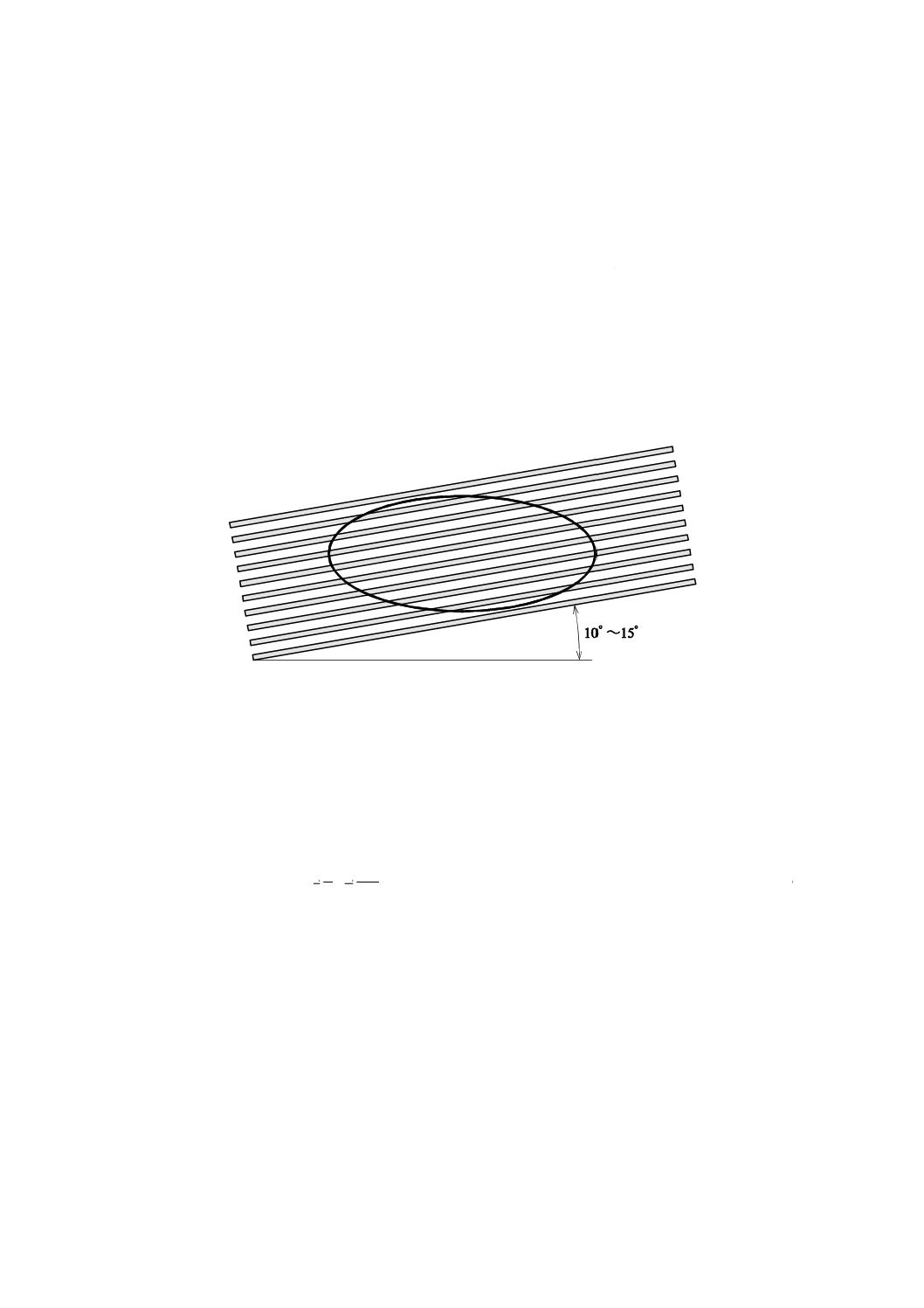
試験器具は,図9に示すように周期的パターンを含む。このパターンは,周期(L)で層数(n)が10
以上の平行なプレートで構成される。二つの近接するプレート間の距離はdp,プレートの厚みは(L−dp)
で,その比(dp/L)は,0.61〜0.70の間の値とする。MR信号を発生しないプレートの周囲を,MR信号を
発生する材料で囲む。プレートの幅(a)は,少なくともスライス厚の2倍で,プレートの長さ(b)は,
少なくともLの10倍とする。そのような試験器具では,n個の1/Lラインペアが生まれる。
図9−周期的パターン
RFコイルの負荷は,空間分解能の測定に影響を与えないので,試験器具の設計にRFコイルへの負荷を
考慮する必要はない。
4.6.3
撮像条件
最も均一なRFコイルを用いなければならない。
次のパルスシーケンスを使用することが望ましい。
− 撮像中心をアイソセンタの±30 mmに合わせた,2次元のシングルスピンエコー,シングルスライス
シーケンス
− 撮像面:横断面,し(矢)状面,冠状面(の順)
− TR=1 000 ms又は信号生成物質のT1値の3倍以上の値のいずれか大きい方
− TE=30 ms又は信号生成物質のT2値の1/3以下の値のいずれか小さい方
− ピクセルの大きさ及び撮像領域(ピクセルサイズ Δx=撮像領域/マトリクスサイズ)は,次の条件
で調整する。
4Δx>L
− ピクセル帯域幅:100±3 Hz
− スライス厚:5 mm
− 信号加算は行ってよい。
28
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
SNR(信号加算不可)及びスライス厚の決定のために,同一のシーケンス及び再構成パラメータを使用
しなければならない。
4.6.4
測定手順
撮像面は,試験器具のxy面に平行に設定しなければならない。撮像面は,z(スライス)方向でプレー
トの中央に配置しなければならない。図10に示すように,試験器具の長軸と画像のy軸とのなす角度が
10°〜15°でなければならない。パターンによって決定できるのは,このx軸に沿った分解能だけである。
したがって,二つの方向の空間分解能を評価するために,二つの直交する周期パターンの画像を収集しな
ければならない。
SNRの最小値は,少なくとも50である。SNRの測定値が,4.2で規定した方法で,ターゲットのSNR
値に達するまで,シーケンスの信号加算回数を増やす。
4.6.5
データ解析及び許容差
図10−周期的パターンの画像及びROIの位置
周期的パターン上に1個のだ(楕)円形ROIを配置する。だ(楕)円のROIが設定できない場合は,
円形,長方形又は正方形のROIを使用する。ROIはできる限り大きくなければならないが,図9に示す
ように,y方向について試験器具外側の二つの板に触れてはならない。また,試験器具の長さの90 %以上
をカバーしてはならない。ROI内の全てのピクセルのピクセル信号値の平均(S)及び標準偏差(SD)を
決定する。標準偏差及び平均値を使って,空間周波数v=1/Lでの変調m(v)を求める。
S
SD
L
v
m
=
=
)
1
(
·········································································(11)
変調因子m≧0.56の場合は,目標とした分解能が達成できている。
4.6.6
結果の報告
結果の報告には,次の項目を含めなければならない。
29
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
パラメータ
単位
m(v=1/L)
構造を分解できたか否か(例 変調因子m≧0.56)
yes又はNo
空間周波数 v=1/L
mm−1
撮像面方向
周波数及び位相エンコード方向
仕様面積−サイズ及び形状
mm2
コイル寸法
mm
コイル名称及びタイプ
試験器具の断面積−サイズ及び形状
mm2
ROI−サイズ及び形状
mm2
基準位置
データ収集マトリクスサイズ
撮像領域
mm2
公称ボクセルサイズ(Δx,Δy,選択したスライス厚)
mm
スライス厚(測定値)
mm
空間分解能(測定値)
mm
試験器具の充てん(塡)物
試験器具充てん(塡)物のT1値
ms
試験器具充てん(塡)物のT2値
ms
試験器具の塩化物及び濃度
g/l
ピクセル帯域幅
Hz/pixel
パルスシーケンスの繰返し時間(TR)
ms
エコー時間(TE)
ms
加算回数
パルスシーケンス スピンエコー又はグラディエントエコー
使用フィルタ(使用していれば)
結果には,測定誤差の推定値を添付しなければならない。
全ての選択した再構成パラメータ及び再現性を保証するその他の関連情報の一覧を記載する。
4.7
ゴーストアーチファクト
4.7.1
目的及びその根拠
この規格では,ゴースト信号の振幅を測定し,それを平均信号の振幅及びシステムノイズレベルと比較
する。
4.7.2
試験器具への要求事項
試験器具サイズは,画像FOVの50 %以上であってはならない。
4.7.3
撮像条件
次のパルスシーケンスを使用することが望ましい。
− 撮像中心をアイソセンタの±30 mmに合わせた,2次元シングルスライスのグラディエントエコーシ
ーケンス
− 撮像面:横断面(周波数エンコード方向:上下方向),し(矢)状面(周波数エンコード方向:体軸方
向),冠状面(周波数エンコード方向:左右方向)(この順番に)撮像する。
− TR=603 ms
− TE=25 ms
− フリップ角:30°
− 頭部用コイルの撮像領域:250 mm
30
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 体幹部用コイルの撮像領域:440 mm
− 頭部用コイルの撮像領域は250 mm,体幹部用コイルの撮像領域は440 mm,その他の全てのコイルの
撮像領域は,画像面内で最大RFコイル寸法の110 %を超えてはならない。
− ピクセル帯域幅:100±3 Hz
− スライス厚:10 mm
− 信号加算は行ってよい。
正確な結果を求めるために,4.2で規定した最小SNRは,100以上でなければならない。必要な場合は,
スライス厚及び信号加算回数を除いた他のパルスシーケンスのパラメータを,SNRが100以上になるよう
に調整する。
4.7.4
測定手順
RFコイル内での試験器具は,代表的な検査手順に従って位置決めを行う。
渦状アーチファクト防止のため,試験器具を配置してから撮像開始までに,適切な時間(例えば,大き
な試験器具の場合は,15分)待つ。画像面は,仕様面積が最大となるように基準位置を通って設定しなけ
ればならない。できるだけコイルの対称軸に沿うか又は直交させることが望ましい。
4.2で規定した負荷方法を使用する。
4.7.5
データ解析及び許容差
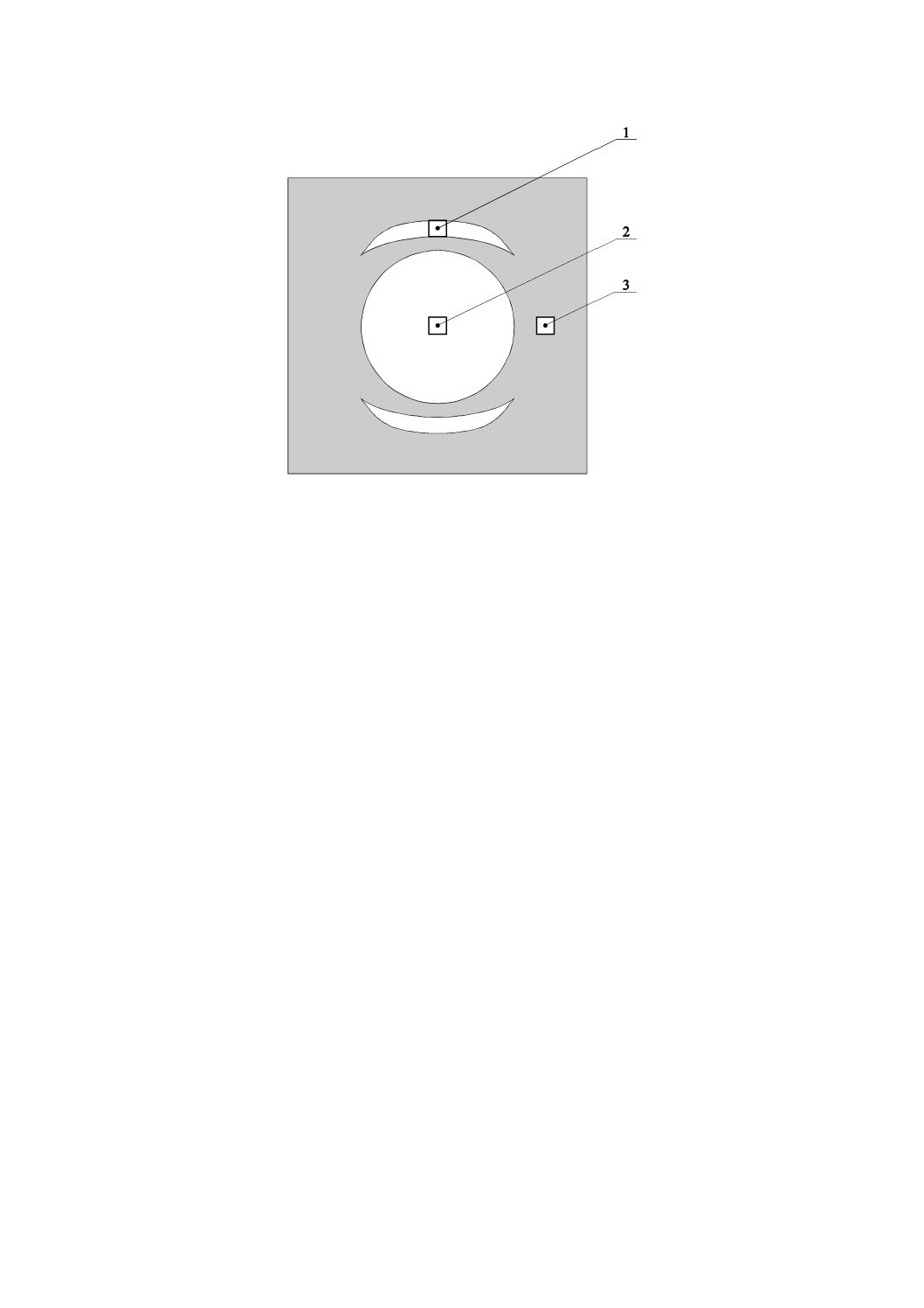
ゴーストレベルを特徴づけるために,次の三つの測定が必要である。
− 正方形の25ピクセルROI(5×5ピクセル)で最も強いゴースト部分でのゴースト信号レベル
− 試験器具内の少なくとも25ピクセルのROI中の平均信号レベル
− 読出し方向に試験器具及び全てのゴーストから十分に離れた,少なくとも25ピクセルのバックグラウ
ンド領域でのノイズの標準偏差
最も強いゴーストを見つけるために,ウィンドウ幅を1に設定し,最も輝度の高いゴーストが現れるま
でウィンドウレベルを変更する。このゴーストは,位相エンコード方向の試験器具外の領域に現れる。最
も強い25ピクセルでのゴースト信号(IG)を測定し,記録する。
ノイズの標準偏差は,周波数エンコード方向の試験器具領域を越えた領域で決める(図11参照)。少な
くとも25ピクセルのROI内で標準偏差を測定し,INを求める。
0.655
N
標準偏差
=
I
········································································ (12)
ここで0.655は,シングルチャンネルコイルについての再構成プロセスでの振幅画像に対するノイズ補
正因子である。マルチチャンネルコイルについては,再構成に依存した別の補正因子が必要である(参考
文献[3]参照)。
少なくとも25ピクセルのROIを用いて,試験器具内の平均信号値(S)を測定する。
ゴースト対信号比(IG/S)を求める。
ゴースト対ノイズ比(IG/IN)を求める。
信号対ノイズ比(S/IN)を求める。
この試験での最小SNR値は,100であるので,ゴースト信号レベルに対するノイズ補正は必要ない。
31
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1 ゴースト測定ROI
2 平均信号測定ROI
3 ノイズ測定ROI
図11−試験器具並びに信号,ゴースト及びノイズ測定のための関心領域(ROI)の測定範囲
4.7.6
結果の報告
結果の報告には,次の項目を含めなければならない。
32
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
パラメータ
単位
平均信号値 S
平均ゴーストレベル G
ノイズレベルN
G/S
G/N
S/N
撮像面方向
周波数及び位相エンコード方向
仕様面積−サイズ及び形状
mm2
コイル寸法
mm
コイル名称及びタイプ
試験器具の断面積−サイズ及び形状
mm2
ROI−サイズ及び形状
mm2
基準位置
データ収集マトリクスサイズ
撮像領域
mm2
公称ボクセルサイズ(Δx,Δy,選択したスライス厚)
mm
スライス厚(測定値)
mm
空間分解能(測定値)
mm
試験器具の充てん(塡)物
試験器具充てん(塡)物のT1値
ms
試験器具充てん(塡)物のT2値
ms
試験器具の塩化物及び濃度
g/l
ピクセル帯域幅
Hz/pixel
パルスシーケンスの繰り返し時間(TR)
ms
エコー時間(TE)
ms
加算回数
パルスシーケンス スピンエコー又はグラディエントエコー
使用フィルタ(使用していれば)
結果には,測定誤差の推定値を添付しなければならない。
全ての選択した再構成パラメータ及び再現性を保証するその他の関連情報の一覧を記載する。
5
不変性試験
5.1
目的及びその根拠
MR装置に適した基本的な画質パラメータについて品質保証プログラムの中で使用する一連の不変性試
験への最低限の要求事項を示す。
不変性試験は,一連の迅速,簡単,高感度,堅ろう(牢),かつ,効果的な試験によって,MR装置の全
体的な状態を点検する。このような試験は,必ずしも不具合を診断するためのものである必要はなく,装
置の適正動作を検証することが目的である。これらの試験で,性能の低下が検出された場合は,サービス
エンジニアが別の診断試験を実行して不具合点の抽出及び修正を行えばよい。MR装置の受入試験を実行
したり,MR装置の再性能試験をしたり,又は問題点についての必要な診断をすることが,これらの測定
の意図ではない。目的は,MR装置が受け入れ時に最初に試験されたのとほぼ同じレベルで動作を続けて
いることを保証することである。経時変化を監視するために,測定を定期的に,かつ,一貫して実施する
ことが重要である。
33
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
磁場均一性についての試験は,特に規定していないことに注意する(例えば,MR装置に磁性体がない
かどうかの判定。)。この項目を除外した唯一の理由は,有効な不変性試験条件[迅速,簡単,高感度,堅
ろう(牢)かつ,効果的であること]を満たすような簡単で早いシーケンス又は位相マップ法が規定でき
ないためである。
MR装置に適した,定期的な品質保証プログラム(以下,QAプログラムという。)をなす不変性試験の
測定手順の必要最小限の組合せを提案することが目的である。附属書Bでは,この規格の不変性試験の要
求事項を満たす広範囲で高速なMR装置に対するQAプログラムの例を記載する。5.2〜5.5に規定する測
定手順は,不変性試験の画像を一貫して,かつ,繰り返して解析する高速の自動アルゴリズムの使用を規
定する。
5.2
試験器具への要求事項
ここでは,不変性試験の概念及び要求事項だけを規定しているので,試験器具は特定しない。したがっ
て,要求される試験及び関連プロトコルに適している場合は,製造業者が提供する試験器具,又は他の試
験器具を使用してもよい。製造業者の試験器具を用いる場合は,操作及びデータ報告を簡単にする製造業
者が提供する一部の自動機能を使うことができる。この自動機能は,MR装置に最適化されている場合も
あり,結果としてより細やかな試験が行えることにもなる。
この試験は,別のサイズの試験器具に適用してよい。
5.3
撮像特性
特定のパルスシーケンスは定義しないが,約5分〜10分間の3回〜4回の撮像で全ての要求する試験が
完了しなければならない。
5.4
測定手順
様々な標準的な不変性試験(この規格も含まれる。)とは別に,異なった方法及びアルゴリズムが,今日
一般に使われている。例えば,多くの試験方法が,他の規格の機能強化版である。可能であれば一貫して
再現性のよい方法でQA画像の分析を行う速くて自動的なアルゴリズムを使用することが重要である。可
能な測定手順の組合せを,附属書Aに示す。
不変性試験には,適用できる場合は,次の試験が必要である。
項目
記録として残す事項
中心周波数
−
RFの校正
−
幾何学的精度
試験器具サイズ
信号ノイズ比(SNR)
SNRの最大値
ゴーストレベル
SNRの最小値,TR値
幾つかのMR装置では,プリスキャンによる校正間に,静磁場を常に特定の動作周波数に合わせるので,
中心周波数試験は必要としない。そのようなシステムでは,中心周波数の記録は,不要である。試験は,
共通の撮像を含む。一例を挙げれば,SNR測定は,ゴースト試験及び幾何学的ひずみ(歪)試験の一部と
組み合わせることができる可能性がある。4.7.3に規定するゴーストシーケンスを,直交する方向に2回行
う場合は,約5分の全撮像時間内に,SNRを2回,ゴーストを2回,そしてそれぞれの軸に沿った各1回
の幾何学的精度の計測を行い,十分なデータを得ることが可能である。
ここに列記されたパラメータの測定手順は,MR装置のタイプごとに異なる可能性があるし,この規格
に規定した測定手順に基づいている可能性もある。可能であれば,一貫して再現性のよいやり方でQA画
34
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
像の分析を行う速くて自動的なアルゴリズムを使用することが重要である。したがって,この箇条では,
試験方法を特定せず,推奨方法も記載しない。不変性試験に適した代替測定手順を,A.5に記載する。
5.5
データ解析,結果の報告及び許容差
一般に,MR装置の据付直後に不変性試験を実行し,この最初の試験結果を,その後の経時変化分析の
基準値として用いることができる。
測定結果は,より効果的なデータ解析のために自動的に記録しなければならない。試験結果は,数値で
表現し,合否で表現してはならない。数値結果から,使用者が傾向を観察する場合,QA試験に不合格に
なる前にMR装置の事前診断を可能にする。
35
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
代替法
A.1 4.2(信号ノイズ比)について
この箇条は,試験器具によるSNR測定の二つの代替方法について規定する。
A.1.1 代替法:代替のノイズ決定法によるSNR測定
A.1.1.1 目的及びその根拠
ノイズを4.2で規定した方法とは別の方法で計測する試験器具を使用した信号ノイズ比測定方法につい
て規定する。最短TRでのノイズ画像を,試験器具を本来の位置においてRF励起を行わずに収集する。ノ
イズ計測に影響を与えることなくTRを最短にできる。
この代替法は,箇条4で規定した方法よりも速く,差分画像に顕著に現れる,信号のつぎはぎを作るよ
うな,システムのいかなるドリフト問題にも左右されない。しかし,この代替法は,見えないような僅か
なバックグラウンドノイズアーチファクトに対して敏感である。
使用者は,箇条4に規定したように,ここでもSNR測定と空間分解能及びスライス厚の測定との緊密な
相関を期待する。
標準の臨床画像再構成ソフトウェアが,画像上のバックグラウンドノイズ領域の特性を抑制する場合,
又は特性を変更する場合は,この方法は使用できない。一般にこの方法は,ノイズレベルが画像対象だけ
の関数であり,直接,画像位置に関係しない画像を生成する撮像及び再構成系にだけ使用することができ
る。
A.1.1.2 試験器具への要求事項
試験器具への要求事項は,箇条4に規定した一般的要求事項,及び4.2.2で規定している特定の要求事項
と同一である。
A.1.1.3 撮像条件
ノイズスキャンの撮像パラメータは,4.2で特定されている要求事項と同一であるが,TRは全ての他の
要求事項(例えば,帯域幅,マトリクスサイズなど)とつじつまの合うよう最小値まで短縮できる。ノイ
ズスキャンのパラメータは,TRを除いて箇条4で規定したスライス厚及び空間分解能の収集条件に適合し
なければならない。
ノイズ画像を収集する間は,RF増幅器を停止するか,又はその出力を抑制する。受信減衰器(又はゲイ
ン制御)及び画像再構成のスケーリングが信号画像の場合(最初の撮像)と同じであることを確認する。
画像は,また,4.2に規定した一般的ガイドラインに従って再構成しなければならない。
A.1.1.4 測定手順
測定手順は,4.2に規定する手順と同一である。
A.1.1.5 データ解析及び許容差
4.2に規定される解析手段と同じ方法を用いなければならないが,ステップ2〜5を次のように置き換え
る。
− ステップ2:適用しない。
− ステップ3:ノイズ振幅画像(2回目の撮像)のROI内のピクセル値についての標準偏差(SD)を測
定する。
36
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− ステップ4:画像ノイズを次によって推定する。
− シングルチャンネル振幅画像の場合は,参考文献[1]を使って
655
.0
2
)π
4(
N
SD
SD
I
≒
−
=
− 実部画像の場合は,IN=SD
− nチャンネルアレイコイルによる振幅画像が使われる場合には,nチャンネル用の適切な補正因子
を使用しなければならない(参考文献[2]参照)。
− ステップ5:SNRは,次の式によって求める。
N
SNR
I
S
=
A.1.1.6 結果の報告
結果の報告事項は,4.2.6による。
A.1.1.7 参考文献
SNR測定及びノイズの決定についての情報は,ヘンケルマン(Henkelman)[1]及びコンスタンティナイ
デス(Constantinides)ほか[2]の参考文献を参照するとよい。
A.1.2 代替法:単一画像でのSNR
A.1.2.1 目的及びその根拠
単一画像による測定は,試験器具を使ってその元の位置で行う。この方法の利点は,必ず一回の画像収
集だけで行われることである。したがって,この代替法は,箇条4で規定する方法より速く,差分画像に
現れる信号のつぎはぎを引き起こす,システムのいかなるドリフト問題にも左右されない。しかし,この
代替法は,画像のバックグラウンドでのノイズを決めるための補正については,ひどく敏感である。
A.1.2.2 試験器具への要求事項
4.2.2を参照。
A.1.2.3 撮像条件
4.2.3を参照。
A.1.2.4 測定手順
単一の撮像を行うことを除いて,4.2.4を参照。
A.1.2.5 データ解析及び許容差
A.1.1.5を参照。ステップ3は,次の規定事項と置き換える。
ステップ3:画像のバックグラウンドでゴーストのない部分を決めてROIを設定し,ピクセル値の標準
偏差(SD)を決める。シングルコイルでの振幅画像で評価している場合には,画像ノイズは,
655
.0
2
)π
4(
N
SD
SD
I
≒
−
=
実部画像で評価する場合は,IN=SD
この代替法は,シングルチャンネルコイルについてだけに有効である。マルチチャンネルコイルを使っ
たフェーズドアレイシステムでMR信号を同時収集する場合には,この式は成り立たない。この代替法は,
シングルチャンネルコイル及び信号の成分が線形に結合されるマルチチャンネルコイルに有効である。さ
らに,手の込んだ結合方法(例えば,二乗和の平方根)を使うマルチチャンネルコイルには有効でない。
37
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
それぞれの測定結果は,環境条件,試験器具パラメータ,システム校正に依存する。
A.2 4.3(均一性)について
均一性は,様々な方法で測定することができる。均一性測定の一つの代替法を示す。
A.2.1 目的及びその根拠
この規格で示す試験器具,撮像条件及び測定手順は,等高線法として知られる特定の方法によってデー
タを解析するために使うことができる。リニアコイル,ボリュームコイル及び組み合わせたコイル(例え
ば,フェーズドアレイ)などの多くの異なるタイプのRFコイルが,信号検出に使われる。全てのコイル
タイプが,MRが多様な臨床に適用するための画像の最適化に大変有用である。しかし,RFコイルは,カ
バーする領域及び容積のすみずみまで同じレベルのMR信号を検出することはできない。この信号検出レ
ベルの変動は,“信号均一性”という言葉で特徴付けることができる。この測定手順は,一つのコイルの検
出性能を,他のコイルと比較することによって均一性に対する実用的な目安となる。
A.2.2 試験器具への要求事項
4.3.2を参照。
A.2.3 撮像条件
4.3.3を参照。
A.2.4 測定手順
4.3.4を参照。
A.2.5 データ解析及び許容差
測定におけるノイズの影響を最小にするために,画像に9点のローパスフィルタ関数を使っての畳込み
を許容する。
次の手順で,グレイスケールコードマップを作成する。
a) 画像の中央に所定の統計的精度を確保するために十分な数のピクセルを含むROIを選択し,その平均
値を決定する(例えば,400ピクセルで5 %の精度)。ROIが異常な信号特性を示す領域(例えば,誘
電共振による高信号領域の中心)である場合は,複数のROIの平均を使用する。
b) 全領域のピクセル信号値を調べて,各々のピクセルについて,中心ROIの平均値からの差の大きさに
従ってグレイレベルを決める。平均値からV %まで大きい信号のピクセルは,中央のグレイレベルと
する。平均値よりV %以上大きく,2V %より小さいピクセルは,中央レベルの次に明るいグレイレベ
ルとする。平均値からV %小さく,2V %までは小さくないピクセルは,中央レベルの次に暗いグレイ
レベルとする。2V %より大きなピクセルは白に,2V %より小さいピクセルは黒に決める。実際的なV
の値は,10(ボリュームコイルの場合)又は20(特殊目的のコイルの場合)である。
c) 上記の手順によって,平均値に対して次に示す画像レンジの異なる5段階のグレイレベル表示が作ら
れる。
− 最も低い信号値〜−2V %
− −2V %〜−V %
− −V %〜+V %
− +V %〜+2V %
− +2V %〜最も高い信号値
これら五つの大きさの異なる帯域は,コイルエレメントの周りの複雑な構造を示すことなしに,不
均一性の位置及び構造を可視化する。
38
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) モニタ上にグレイスケールでコード化した画像を示す。等高線の形をプロットするのは難しいので,
均一性を表すヒストグラム計算を実施する。ヒストグラム計算は,以下のように行う。
− ヒストグラム計算のROIを決める。
サイズ及び形状は,コイルタイプによる。
− ピクセル値がT以上のヒストグラムROIの中のピクセル数を決め(例えば,黒でないピクセル),
Ntotとする。しきい(閾)値(T)はバックグラウンドのノイズレベルの約10倍とする。
− 各々のグレイの値について,パーセント比を計算する。
tot
N
セル数
あるグレイの値のピク
パーセント比=
− パーセント比は,均一性を特定するために使うことができる。
A.2.6 結果の報告
報告書は,少なくとも以下の内容を含んでいなければならない(4.2.6で与えられた報告内容に加えて)。
パラメータ
単位
ピクセル数T〜C−2V
%
ピクセル数C−2V〜C−V
%
ピクセル数C−V〜C+V
%
ピクセル数C+V〜C+2V
%
ピクセル数C+2V〜最大値
%
A.3 4.4(2次元のスライス厚及びスライスプロファイル)について
A.3.1 全般
傾斜スラブ法は,指定した線に沿った信号強度のグラフを得る機能を用いて,ほとんどのMR装置で実
行することができるため,傾斜ウェッジ法よりも単純である。しかし理想的なく(矩)形スライスは,く
(矩)形でなく,台形の信号強度プロファイルを示す(図3参照)。スライスに対してスラブが厚くなるほ
ど,台形の上底に対して側辺が長くなる。スラブ厚がスライス厚に近づくにつれ,測定するスライス強度
プロファイルは,三角形に近づく。この影響を抑制するためにスラブを薄くすると,スラブを減らすこと
によって信号強度が減り,ノイズが無視できなくなる。適切なスラブ厚は,測定するスライス厚に基づい
て選択することができる。これが不可能な場合は,コントラストノイズ比を増加させるために複数回の収
集が必要になる場合がある。
A.3.2 代替法:2次元のスライス厚及びスライスプロファイル:ウェッジ法
A.3.2.1 目的及びその根拠
この箇条では,MR信号を出さない材料のウェッジを使った,2次元撮像のスライス厚及びスライスプ
ロファイル測定法について記述する。
代替法は,指定した線に沿った信号強度のグラフを得る機能を用いて,ほとんどのMR装置で実行する
ことができるため簡単である。また,測定することのできるスライス厚についての制約がないので,より
融通が利く。しかし,この代替法は,信号強度プロファイルの微分ソフトウェアが必要であり,一般にそ
れは,臨床用MR装置には備わっていない。さらに,数値微分がノイズレベルを増加させ,ベースライン
が変動することによって信号の不均一性が増す。
A.3.2.2 試験器具への要求事項
試験器具は,信号を発生する材料で構成され,信号を発生しない材質からなる2個の対向するウェッジ
を組み込んでいる(図A.1参照)。両方のウェッジの傾斜した表面は,撮像面と5°〜15°の角度αをなす。
39
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
スライスに直交する方向をz,ウェッジの傾斜方向をx,xに直交する方向をyとする。
図A.1−ウェッジ試験器具
A.3.2.3 撮像条件
撮像条件は,4.4.3で規定した方法による。
A.3.2.4 測定手順
測定手順は,4.4.4で規定した方法による。
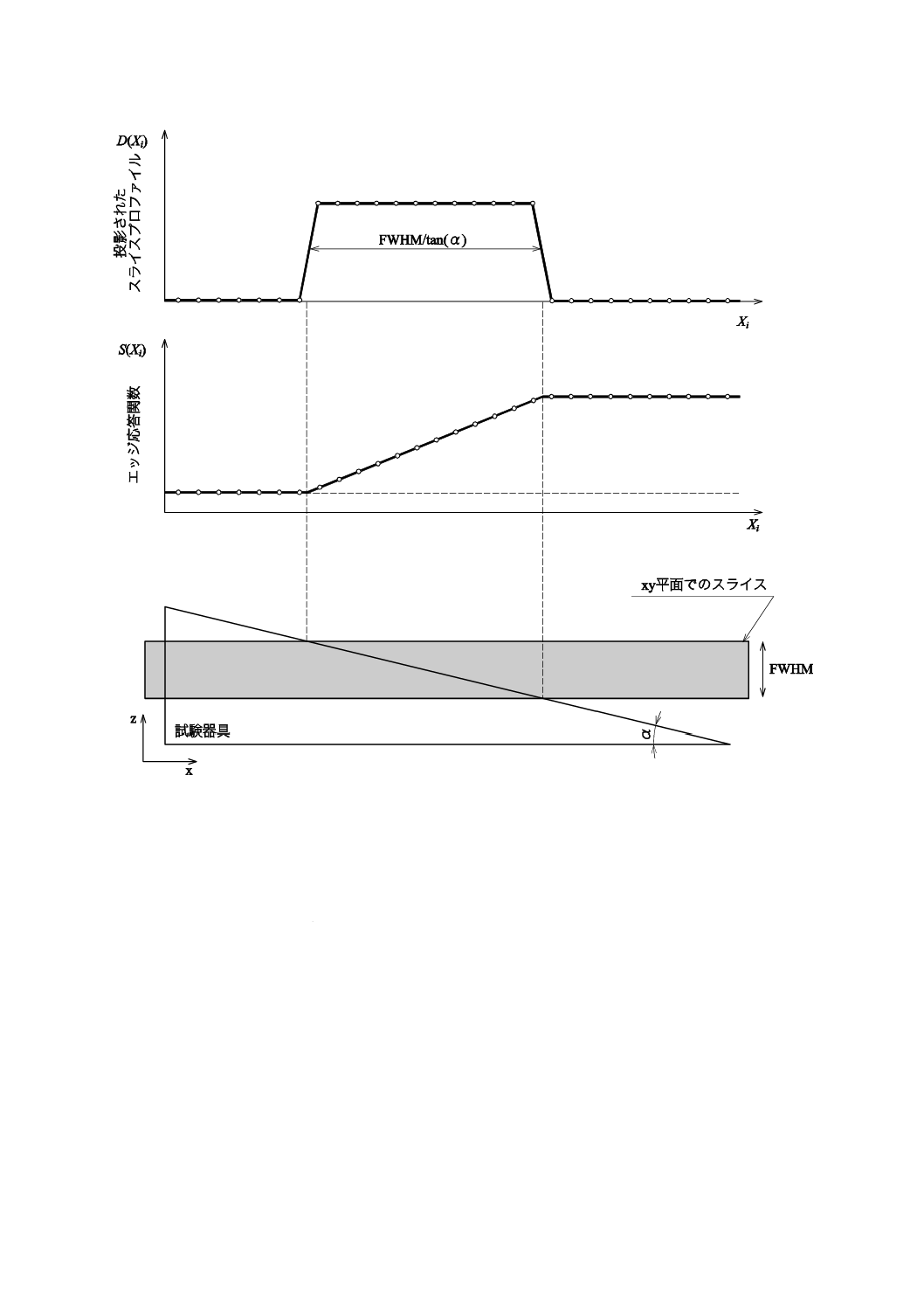
A.3.2.5 データ解析及び許容差
ウェッジ法では,ウェッジの傾斜方向(x)のピクセル強度をグラフ化する(図A.2参照)。位置Xiにおけ
るピクセル強度をS(Xi)とする。SNRを向上させるため複数の行のピクセルを加算平均してもよい。信号強
度のグラフを距離で微分して拡大スライスプロファイルD(Xi)を求める。これは,隣接するピクセルの信号
強度差を求め,そのピクセル間の距離で除することによって算出する。すなわち,
[
]
)
(
)
(
)
(
)
(
1
1
−
−
−
−
=
i
i
i
i
i
X
X
X
S
X
S
X
D
D(Xi)のFWHMを直線補間によって決定する。次に,スライス厚を拡大プロファイルD(Xi)のFWHMと
tan αとの積として求める。
40
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.2−ウェッジ試験器具を用いたスライスプロファイル及びスライス厚の測定
この方法は,プロファイルの微分をとるが,その微分操作は,プロファイルのノイズレベルを増加させ
るので,要求される画像SNRは,4.4で規定されるものより高い必要がある。収集の信号加算回数を増加
させるのは,時間がかかる解決法である。試験器具が回転しない場合,SNRは,傾斜に直交する方向に隣
接する列の幾つかのスライスプロファイルを加算平均することによって改善することができる。加算平均
する前に,各々のプロファイルの端が共通の点に対して正確に一致していることを確認する。それを行わ
ない場合,4.4に記載されるエラーが,この代替法においても現れる。
さらに,微分演算は,画像不均一性を引き起こし,スライスFWHMの決定に誤差をもたらすようなベ
ースラインの変動をプロファイルにもち込む。
A.3.2.6 結果の報告
結果の報告事項は,4.4.6による。
41
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4 4.6(空間分解能)について
A.4.1 代替法:完全な変調伝達関数による決定
A.4.1.1 目的及びその根拠
箇条4で規定した分解能の解析方法は,標準ROIでの統計的測定及び簡単な公式を用いたときに有効な
結果をもたらすが,独自の試験器具が必要となる。代替法として,完全な変調伝達関数MTF(ν)が,単純
な試験器具で得られるエッジ広がり関数ESF(x)を計測することで求められる。しかし,完全なMTFを求
めることは,非線形な振幅画像での計算を避けるために複素領域画像を要求するプロセスである。
完全な変調伝達関数は,参考文献[3]に従って決めなければならない。
A.4.1.2 試験器具への要求事項
試験器具は,コントラストの異なる二つの領域から構成しなければならない。これは,MR信号を発生
する材質に囲まれた信号を出さないブロック,又はその逆の構成によって実現できる。MR信号を出さな
いブロックの端部に撮像面を合わせることによって,MR信号部と非信号部との間で急激な変化が起こる。
エッジは画像の一軸に対して平行に配置しなければならない。
A.4.1.3 撮像条件
撮像条件は,4.6の要求事項に適合しなければならない。ピクセルサイズΔxは,4.6で選択した空間分
解能を確保するために必要なサイズとしなければならない。
解析する画像は,画像アーチファクトが実質的にないもので,実部と虚部とを含まなければならない。
SNR(信号加算不可)及びスライス厚の測定条件を決定するために,同一のシーケンス及び再構成パラ
メータを使用しなければならない。
A.4.1.4 測定手順
線広がり関数LSF(x)は,得られた平均離散プロファイル[エッジ広がり関数ESF(xj)の複素(離散)微分]
から算出する。
1
1)
(
ESF
)
(
ESF
)
(
ESF
)
(
LSF
−
−
−
−
→
=
j
j
j
j
x
x
x
x
x
dx
d
x
変調伝達関数は,LSF関数を正規化したフーリエ変換である。
()
0
d
d
)}
FT{LSF(
)}
FT{LSF(
(0)
)
(
MTF
=
=
ν
x
x
w
ν
w
ν
離散微分の周波数応答は,次の式による重み付け因子で取り除かれる。
)
2π
(
sin
1
)
(
d
N
vv
c
v
w
=
ここに,
x
vN
∆
=21: サンプリングのナイキスト周波数
この手順の結果は,両方向のMTFを与える。この両方向のMTFから,片方のMTFを正MTFと負
MTFとの平均として求めなければならない。
微分操作は,ノイズを増幅するので,適切なSNRを得るために近接する多くのプロファイルを平均する
ことが必要となる。平均化は,微分の前又は後で行うことができる。プロファイルの位置合わせ(少なく
とも,ピクセルの1/10以下)は重要である。それを行わない場合には,MTFに異常な分解能の劣化が現
れる。
42
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4.1.5 結果の報告
0≦v≦1.5vcの範囲のMTFを,グラフで表し,カットオフ周波数(vc)を,片側のMTFが0.8に等しい
ところで決める。
MTFを計算する前に,傾斜磁場が正しく校正されていることを確認する。MTFを求めるときには,実
際のピクセルサイズを正確に知るために,公称撮像領域と実際の撮像領域とが一致していることが重要で,
それを行わない場合,MTFの空間周波数軸が誤ったスケールになってしまう。結果の報告は,少なくとも
次の項目を含む(4.6.6の報告内容に加えて)。
パラメータ
単位
カットオフ周波数(vc)
mm−1
A.5 箇条5(不変性試験)について
A.5.1 不変性試験の代替法
A.5.1.1 試験器具
不変性試験において,試験器具は,4.1.1に規定した仕様を満たす直径100 mm〜300 mmの球状の体積を
もつものでなければならない。全ての測定は,一つの試験器具で行う。
A.5.1.2 撮像特性
最小限の撮像で不変性試験を行うために,撮像パラメータは,全ての試験に適合することを推奨する。
例えば,最適なゴースト感度を示すTRを選択する。他の不変性試験へのTRの影響は,最小にする。全て
の画像収集は,アイソセンタにおいてグラディエントリコールパルスシーケンスを使って行わなければな
らない。
− TR=603 ms
− TE=25 ms
− フリップ角:30°
− 撮像領域:400 mm
− マトリクス:256×256
− スライス厚:10 mm
− 加算回数:1
画像は,表示のための追加的修正(補間,フィルタ処理など)を行うことなく,MR装置の標準の臨床
用再構成アルゴリズムによって処理しなければならない。そのような,操作者が選択できるフィルタは,
全て選択してはならない。これが不可能な場合は,用いたフィルタを報告書に示さなければならない。画
像は,振幅画像で表示する。
適切なRFコイルに対して,負荷を含む試験器具をそのアイソセンタに設定しなければならない。試験
器具位置の十分な再現性を,RFコイル位置及びアイソセンタについて保証しなければならない。渦状ア
ーチファクトを防ぐために,撮影開始前に試験器具を十分な時間静止させる。
仕様容積は,少なくとも,RF頭部コイルの中心で直径100 mmの球状体積(DSV)を取り囲まなければ
ならない。体幹部撮像では,仕様容積は,少なくともRF体部コイルの中心で直径200 mmの球状体積(DSV)
を取り囲まなければならない。
MR撮像に要求される試験は,組み合わせて,出力結果は,各々の方向だけの一回の撮像から得られて
もよい。それによって装置QA試験全体の所要時間を約10分に制限することができ,また,試験結果は,
数値で表し,合否としては表さない。
43
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
通常は,MR装置の据付直後に受入試験を行い,その最初のQA試験の結果は,それに続く経時変化分
析の基準値として使用することができる。
A.5.1.3 測定手順
不変性試験において,要求されるスキャン特性測定手順が示される。次に規定する手順に,少なくとも
有効性及び信頼性の点で同等ならば,他の手法を使用してもよい。QA画像の解析を,一貫性があり,繰
り返し可能な方法で解析する迅速で自動化されたアルゴリズムで行うことが重要である。
重要なことは,実施する方法を,経時変化を監視できるようにするために,連続し,一貫して使用する
ことである。特定の構成の試験ごとに違いがある可能性がある。
A.5.1.3.1 中心周波数
この試験の目的は,システムの1H原子核の共鳴周波数を決めることである。二つの異なる測定手法及
びそれと等価な手順を使うことができる。
非選択RF励起及び自由誘導減衰信号(FID)の検出を行い,時間領域のデータをフーリエ変換すること
によって1Hのピーク位置を同定し,共鳴周波数を決定する。
3方向のスライス選択RFパルスで体積領域を選択励起し,直交する傾斜磁場でスティミュレイテッドエ
コー(STEAM,VOSY)を生成する。時間領域のデータをフーリエ変換することによって1Hのピーク位
置を同定し,共鳴周波数を決定する。
自由誘導減衰信号及びエコー信号各々の測定時間によって決まるデータ解析用の公称周波数分解能は,
20 Hz以下でなければならない。
結果の報告には,次の項目を含まなければならない。
パラメータ
単位
1H原子核の中心周波数
1/s=Hz
再現性を保証するために,周波数分解能,励起ボリュームサイズ及び位置並びに関連する情報を記載す
る。
A.5.1.3.2 RFの校正
RFの校正は,特定のフリップ角を得るために必要なRFパワーの決定に基づいて行う。スピンエコーと
スティミュレイテッドエコーとの信号比が,次のシーケンスの結果から,計算できる。
ドエコー”
“スティミュレイテッ
‐
‐
‐
‐
“エコー”
‐
‐
‐
‐
E
E
E
21
21
2
21
T
T
T
T
α
α
α
∆
ここで,最初にフリップ角α(未知)のく(矩)形(時間領域)で時間幅TRFのRFパルスを印加する。
1/2TE時間後に,次のフリップ角2αのく(矩)形(時間領域)で時間幅2TRFのRFパルスが送信される。
続いて1/2TE時間後にエコー信号(通常エコー)が収集される。さらにΔT時間後に,フリップ角αのく
(矩)形(時間領域)で時間幅TRFのRFパルスが印加され,1/2TE時間後にスティミュレイテッドエコー
を生成する。第2及び第3のRFパルスによって生じるエコー同士が干渉することを避けるために,2番目
のスピンエコーがスティミュレイテッドエコーの後ろに生成されるように,ΔTを十分大きくする。RFパ
ルスとデータ収集期間との間に,一定強度の傾斜磁場を印加する。これによってスライス選択励起が行わ
れる。緩和項を無視する(TE≪T1,∆T≪T1)ことによって,“通常エコー”及び“スティミュレイテッドエ
コー”の信号強度は,次のように表すことができる。
()
α
i
S
3
echo
sin
expφ
=
()
α
α
i
S
cos
sin
exp
3
stim.echo
φ
=
ここに,
φ: MR装置によって与えられる信号の(一定)位相
44
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
スピンエコー及びスティミュレイテッドエコーの時間領域のデータは,フーリエ変換される。中央の励
起スライス(両方のスペクトラムでのゼロ周波数成分)でのフリップ角αは,次のように計算できる。
2
echo
stim.echo
echo
cos
S
S
S
α
ρ
ρ
ρ
=
ここに,
echo
Sρ
: スピンエコースペクトラムでのゼロ周波数成分
stim.echo
Sρ
: スティミュレイテッドエコースペクトラムでのゼロ周
波数成分
α=90°とするために必要なRFパワー(任意単位)を記録しなければならない。
報告は,次の項目を含まなければならない。
パラメータ
単位
フリップ角α=90°となるRFパワー
任意単位
選択したシーケンスパラメータ(TE,ΔT)を示し,再現性を保証するその他の関連情報を記載する。
A.5.1.3.3 幾何学的精度
収集画像内の対象物のサイズは,読出しと位相エンコードとの間に加える傾斜磁場の時間積分の逆数(ゼ
ロモーメント)[
]1
)(
−
∫
dt
t
G
に比例する。対象物のサイズは,周波数及び位相エンコード両方向傾斜磁場の直
線性の空間的変化にさらに影響される。傾斜磁場の直線性は,傾斜磁場コイルの設計で決まるので,単純
なシステム校正によって変えることはできないが,画像の後処理アルゴリズムによって補正することがで
きる。B0(静磁場)不均一性は,それぞれの位相エンコードステップにおいて一定なので,読出し方向の
みの対象物のサイズを変える。x,y及びz方向について,一方は位相エンコード,他方は周波数エンコー
ドとした2回の撮像を行うことで,傾斜磁場に起因する空間的変化とB0不均一性とを分離することが可能
となる。
三つの2次元画像を収集しなければならない。
− 撮像面:横断面,位相エンコード方向:前後方向
− 撮像面:し(矢)状面,位相エンコード方向:頭尾方向
− 撮像面:冠状面,位相エンコード方向:左右方向
球状試験器具の直径dmを画像上で計測し,試験器具の直径dと比較する。相対偏差RDを,検討してい
る周波数及び位相エンコードに対する全ての3方向について算出する。
z
y
x
z
y
x
z
y
x
d
d
RD
,
,
uency
phase/freq
m,,
,
uency
phase/freq
,
,
=
結果の報告は次の項目を含まなければならない。
45
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
パラメータ
単位
phase
m,
x
d
mm
frequency
m,
x
d
mm
x
d
mm
phase
x
RD
frequency
x
RD
frequency
phase
x
x
RD
RD
−
phase
m,
y
d
mm
frequency
m,
y
d
mm
y
d
mm
phase
y
RD
frequency
y
RD
frequency
phase
y
y
RD
RD
−
phase
m,
zd
mm
frequency
m,
zd
mm
zd
mm
phase
z
RD
frequency
z
RD
frequency
phase
z
z
RD
RD
−
A.5.1.3.4 ゴーストレベル
ゴーストレベルを計算するための代替法について規定する。代替法は,ゴーストレベル画像のSNRが
100以下で,ノイズレベルが,測定したゴースト強度の重要な要素になっている場合に有用である。その
他のシーケンス,収集,測定及び結果の報告は,4.7に規定する方法に適合しなければならない。
ゴーストレベルは,次のように定義する。
S
I
I
)
(
N
G−
A.5.1.3.5 信号ノイズ比
不変性試験の目的でSNRを計算する代替法は,A.1に規定したSNRの代替測定法と同一で,更に簡素
化している。不変性試験は,一般に迅速に行われなければならないので,試験器具溶液の設定に要する時
間については,次に記載するようにしてよい。
A.5.2 陥りやすい過ち
不変性試験は,迅速に行うので,QA画像の質を低下させる試験器具溶液の安定性(例えば,渦)によ
って問題が生じる可能性がある。この問題を最小にするように,最大限の処置を講じなければならない。
例えば,試験の順番を渦の影響が最小になるようにする[例えば,幾何学的ひずみ(歪)試験を最初に行
う。]。さらに,結果は,アイソセンタに対する試験器具の位置に影響を受ける可能性がある。連続した不
変性試験の間,試験器具の位置が変化しないことを確認する。試験器具の位置を記録することが有効な場
合がある。
46
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
理論的根拠
B.1
目的及びその根拠について
測定結果は,試験器具パラメータ,システム校正,操作者のトレーニング,安定するまでの時間などの
環境条件に依存する。結果のばらつきを抑えるために,これらのパラメータを制御することが重要である。
変動を最小にし,かつ,感度を最大にするために,この規格では,各々のパラメータについて一つの測
定方法に限定する。幾つかの代替法は,附属書Aで記載した。
この規格は,試験器具溶液及び形状を規定しているが,異なる製造業者の試験器具を使用することは,
結果のばらつきに結びつく可能性がある。
B.2
箇条4(基本画像パラメータの決定手順)について
この規格の一部の試験は,更なるサブシステム解析を目指している(例えば,フリップ角校正のための
RFパワーの要求事項)。一方別の試験では,システム全体の性能を解析する(例えば,SNR)。したがって,
サブシステム試験から始めて,SNR試験で終わるようにすることで,時間効率は上がる。MR装置に何か
不具合がある場合は,SNR試験が問題の原因を必ずしも特定するわけではない。全てのサブシステム試験
が成功するなら,システムレベルの試験も合格する傾向が強い。しかし,システム試験を最初に行って成
功しなかった場合は,該当するサブシステムを調整した後で,再度システム試験を繰り返して行う必要が
ある。
B.3
4.2(信号ノイズ比)について
B.3.1 理論的根拠
B.3.1.1 試験器具:常磁性溶液の温度依存性
スピン密度N,MR緩和時間T1及びT2の試験器具に,エコー時間TE及び繰返し時間TRの理想的なスピ
ンエコーパルスシーケンスを用いると,式(B.1)で表すことのできる信号Sを得る。
2
E
1
Re
e
1
T
T
T
T
N
S
−
−
−
=
·································································· (B.1)
T1及びT2の変化に対する信号の感度は,式(B.2)で表すことができる。
+
−
=
∂∂
+
∂∂
=
−
−
1
21
R
2
2
1
1
2
E
1
Re
e
dT
T
T
N
dT
TS
dT
TS
dS
T
T
T
T
2
2
2
E
2
E
1
R
e
e
1
dT
T
T
N
T
T
T
T
−
−
−
···················································· (B.2)
式(B.2)を式(B.1)で除し,次の結果を得る。
47
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
E
1
R
2
E
1
R
2
E
1
R
e
e
1
e
e
1
e
e
2
22E
1
2
1
R
T
T
T
T
T
T
T
T
T
T
T
T
N
T
T
T
N
T
T
T
N
S
S
−
−
−
−
−
−
−
∆
−
+
∆
−
=
∆
······················ (B.3)
常磁性イオンを添加した水のT2値は,1 MHzを超えるラーモア周波数については,ほとんど周波数に依
存しないとみなせる。常磁性イオンを含む溶液の緩和時間特性は,式(B.4)及び(B.5)で近似することができ
る。
T
T
1
T
k1
T
k1
Ea
10
1
CN
e
T
1
1
0
+
=
−
························································ (B.4)
T
T
2
T
k1
T
k1
Ea
20
2
CN
e
T
1
1
0
+
=
−
······················································· (B.5)
ここに,
T1: 縦緩和時間
T2: 横緩和時間
T10: 温度T0=25 ℃における水のT1値(=3.56 s)
T20: 温度T0=25 ℃における水のT2値(=2.20 s)
T: 常磁性イオンを含む溶液の温度
Ea: 3.088×10−20 J
k: ボルツマン定数(=1.38×10‒23 J/K)
C1: 特定の種類のイオンに対する定数
C2: 特定の種類のイオンに対する別の定数
N: 容積当たりのイオン数(=6.022×1023 mol/l)
参考文献[1],[2]
T1/T10<10及びT2/T20<10である水溶性常磁性イオン溶液については,緩和時間特性に対する水の温度
依存性の相対的寄与は無視できる。例えば,銅イオン(Cu2+)を緩和剤として用いると,温度に対するT2
及びT1の感度は,式(B.6)のように表すことができる(参考文献[5]参照)。
TT
T
T
T
T
∆
∆
∆
≒
≒
2
2
1
1
··································································· (B.6)
∆T=8 K及びT=295 Kと仮定すると,指定温度範囲にわたるT1及びT2の変化は,2.7 %以下である。式
(B.3)及び指定されたT1,T2,TE,TR及び温度の値から,式(B.7)を得る。
29
002
.0
≒
SS
∆
······································································· (B.7)
したがって,指定された温度範囲にわたる信号強度の変化は,0.2 %にすぎず,仕様に従えば,SNR用
試験器具からの信号は,比較的温度に依存しないとみなせる。
B.3.1.2 試験器具:水溶液の緩和時間の調整
水溶液において,所望の緩和時間T1及びT2を得るための緩和剤として,常磁性イオンを使用する。
特定の種類の常磁性イオンのイオン濃度におけるT1及びT2の依存性は,式(B.8)及び(B.9)による。
N
1
T
k1
T
k1
Ea
10
1
CN
e
T
1
1
0
+
=
−
T
······················································· (B.8)
48
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
N
2
T
k
1
T
k
1
Ea
20
2
C
N
e
T
1
1
0
+
=
−
T
···················································· (B.9)
銅イオンについては,定数C1N及びC2Nは,C1N=8.67×1020 s/l及びC2N=8.07×1020 s/l [Schenck/9]と与え
られる。純水に加えた硫酸銅(CuSO4・5H2O)濃度の依存性は,図B.1による。1.25 g/lの濃度の硫酸銅
(CuSO4・5H2O)を使用した場合の緩和時間は,約T1≒270 ms及びT2≒240 msである。
図B.1−硫酸銅(CuSO4・5H2O)濃度に対する緩和時間T1,T2の依存性
B.3.1.3 試験器具:電気伝導度及び誘電特性
表B.1に,磁場強度,筋肉の誘電率及び電気伝導度,適正な電気伝導度を得るのに必要な水100 ml当た
りの塩化ナトリウムのグラム数,並びに所定の周波数における試験器具内の波長を示す。試験器具の寸法
が約半波長を超えると,定在波によって不均一性を生じる可能性がある。
49
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表B.1−試験器具の電気伝導度及び誘電率
磁場強度
T
周波数
MHz
筋肉の誘電
率(εr)
筋肉及び塩化ナ
トリウムの電気
伝導度
S/m
塩化ナトリウ
ムの質量分率
g/100 ml
塩化ナトリウ
ムの誘電率(εr)
塩化ナトリ
ウムの波長
m
0.1
4.26
631.33
0.58
0.283
78.40
7.96
0.2
8.51
249.35
0.63
0.309
78.31
3.98
0.3
12.77
156.95
0.65
0.316
78.29
2.65
0.4
17.03
122.44
0.65
0.319
78.28
1.99
0.5
21.29
106.03
0.66
0.320
78.28
1.59
0.6
25.54
96.98
0.66
0.321
78.27
1.33
0.7
29.80
91.45
0.66
0.322
78.27
1.14
0.8
34.06
87.82
0.66
0.323
78.27
1.00
0.9
38.32
85.29
0.66
0.324
78.26
0.89
1
42.57
83.44
0.67
0.325
78.26
0.80
1.1
46.83
82.04
0.67
0.326
78.26
0.72
1.2
51.09
80.95
0.67
0.327
78.25
0.66
1.3
55.35
80.06
0.67
0.328
78.25
0.61
1.4
59.60
79.32
0.67
0.330
78.25
0.57
1.5
63.86
78.70
0.68
0.331
78.24
0.53
1.6
68.12
78.15
0.68
0.332
78.24
0.50
1.7
72.37
77.67
0.68
0.334
78.23
0.47
1.8
76.63
77.24
0.69
0.335
78.23
0.44
1.9
80.89
76.84
0.69
0.337
78.22
0.42
2
85.15
76.47
0.69
0.338
78.22
0.40
2.5
106.43
74.86
0.71
0.348
78.19
0.32
3
127.72
73.43
0.73
0.358
78.15
0.27
3.1
131.98
73.15
0.74
0.360
78.14
0.26
3.5
149.01
72.05
0.75
0.369
78.11
0.23
4
170.29
70.69
0.78
0.381
78.07
0.20
4.5
191.58
69.35
0.80
0.393
78.03
0.18
5
212.87
68.03
0.83
0.405
77.99
0.16
5.5
234.15
66.74
0.85
0.417
77.95
0.15
6
255.44
65.49
0.87
0.429
77.91
0.13
6.5
276.73
64.30
0.90
0.441
77.87
0.12
7
298.01
63.17
0.92
0.452
77.83
0.11
7.5
319.30
62.09
0.94
0.463
77.80
0.11
8
340.59
61.08
0.96
0.473
77.76
0.10
市販されているほとんどの装置の磁場強度において,0.3 %NaCl溶液が患者の電気伝導度に近いとみな
される。体幹部用試験器具の長さは,約2 Tにおける波長にほぼ等しい。このような高磁場強度において
は,定在波による不均一性を避けるために,より低い誘電率の材料(例えば,シリコンオイルなど)が必
要になる可能性がある。
B.3.1.4 試験器具:長さ,半径及び厚さの関数としての負荷
半径r(最大r=a),長さL,電気伝導度σ及び密度ρの円筒形の試験器具を想定する。第1次近似で,角
振動数ω及び二乗平均磁気誘導B1rmsのバードケージ形RF送信コイルにおける平均の比吸収率(SAR)は,
式(B.10)のように表すことができる。
50
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(
)
ρ
ω
σ
ρ
ω
σ
4
a
1
B
L
dr
L
r
2
2
r
1
B
SAR
2
2rms
2
2
0
2
2rms
2
ave
=
π
π
=∫
a
a
······························ (B.10)
吸収される平均出力(固定のB1rmsに対する試験器具の損失に比例)は,平均SARと質量[mass=ρ(2πr2L)]
との積になり,式(B.11)のように表すことができる。
4
L
a
1
B
L
a
SAR
P
4
2rms
2
2
ave
ave
π
=
π
=
ω
σ
ρ
·········································· (B.11)
円筒形の試験器具を配置した半径0.2 mの体幹部用RF送信コイル又は半径0.1 mの頭部用RF送信コイ
ルには,患者と同等の負荷がかかる。したがって,電気伝導度がσ2で半径=α長さ=βL(ここでβ≦1)の
円筒に対する平均出力と,患者と同等の負荷のかかった円筒に対する平均出力との比Rは,式(B.12)のよ
うに表すことができる。
σ
β
α
σ
R
4
2
=
··········································································· (B.12)
σ2=σ/α4 βの場合,この試験器具は,患者と同等の負荷となる(すなわちR=1)。
内径=α及び長さ=βL(β≦1)の円筒形の試験器具については,吸収出力と患者を模した試験器具に吸
収される出力との比R2は,式(B.13)のように表すことができる。
σ
β
α
σ
R
)
(1
4
2
2
−
=
···································································· (B.13)
σ2=σ/(1−α4)βの場合は,この円筒形の試験器具は,患者と同等の負荷となるはずである(すなわちR2
=1)。
代表的な試験器具に必要な質量分率C%(H2O 100 g当たりのNaClのグラム数)は,次の式で表すこと
ができる。
ψ
σ
η
2
%=
C
ここに,
η: 0.493 % m/Siemens
ψ: 1.015
B.3.1.5 撮像条件:フィルタ
この箇条の撮像条件並びに同様の箇条の他の画質パラメータ及び測定方法の規定では,画像再構成のた
めの特別なフィルタ技術の適用を認めない。画像は,表示のための追加処理(補間,フィルタ処理,非線
形フィルタなど)を行うことなく,MR装置で処理しなければならない。このような,操作者が選択でき
るフィルタは,全て選択できない状態にしなければならない。
外すことのできないフィルタの例として,k空間の端部を処理する時間領域アポダイゼーションフィル
タがある。これらの幾つかのフィルタは,ギブスのリンギングアーチファクトの視覚的な影響を幾分低下
させるために使用され,また,ある製造業者は,k空間の形を正方形又は長方形から円形又はだ(楕)円
形に変える,より積極的なフィルタを使用している。これらのより積極的なフィルタによって,k空間に
おけるフィルタ前と後との領域比の平方根の逆数分,画像SNRが改善する。
パラレルイメージング技術も,また,コイルの空間感度特性を補償する画像空間領域のフィルタを導入
している可能性がある。これらの画像均一性の補正フィルタは,画像SNRの空間的変動をもたらす可能
性がある。最新世代のパラレルイメージングコイルは,これらの空間変動に依存しており,よって空間フ
ィルタプロセスは,パラレルイメージング技術と不可分のものであると考えられるので,それらはSNR
の結果を変えるであろう。そのためこの規格の全ての画像試験は,パラレルイメージング技術なしで実施
51
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
することが要求される。しかし,これらの空間フィルタが,画像SNR及び均一性に結果としての変化を伴
って標準のパラレルイメージングでない画像法でも時折適用される可能性がある。そのためこの規格では,
これらのフィルタは,使用してはならない。
この規格で画像フィルタの使用を許す唯一の状況がある。幾つかのMR装置の製造業者は,その画像再
構成プロセスに傾斜磁場のひずみ(歪)補正フィルタを搭載している。このフィルタは,画像再構成プロ
セスに組み込まれていると考えられ,使用できる。
B.3.1.6 撮像条件:帯域幅
ノイズは,サンプリング数が一定に保たれる場合は,受信機の帯域幅の平方根に依存する。信号は,通
常はT1緩和時間よりも2けた短い読出し時間内に収集される。したがって,読出し中の緩和は,一般に無
視できる。信号ノイズ比は,帯域幅が狭くなるほど向上する。しかし,狭い帯域幅は読出し時間の延長を
意味する。結局,帯域幅を狭めることによって読出し中のT1緩和が原因で信号損失が増加(SNRが低下)
する結果となる。
B.3.1.7 1.5 T以上の高磁場用試験器具
1.5 T以上の高磁場では,水のような高い誘電率をもつ物質で満たされた試験器具では,定在波が発生す
る(誘電現象)。これらの定在波は,特に3 T以上の静磁場強度のSNR又は均一性のような画像試験を混
乱させる可能性がある。低誘電率のシリコンオイルは,定在波問題を軽減する助けとなる。しかし,シリ
コンオイルは,そのままで使用したとき,試験器具として適切でない緩和特性を示す可能性がある。ある
シリコンオイル(例えば,SF96-50ポリジメチルシロキサン)のMR緩和特性は,Gd[TMHD][トリス(2,2,6,6-
テトラメチル-3,5 ペプタンジオネイト)ガドリニウム(III)]の濃度を変えて加えることによって調整す
ることができる。重量比で4/1 000までの濃度に対応する実験的緩和特性に対する精度のよい曲線近似式
が求められている。上記シリコンオイルにて,重量比1/1 000単位のGd[TMHD]の濃度をcとする。曲線
近似定数b0,b1,b2及びb3(表B.2参照)による緩和特性(T1及びT2:ミリ秒単位)は,式(B.14)のよう
に表される。
)
(
1
3
3
2
2
1
0
2
1
c
b
c
b
c
b
b
T
+
+
+
=
又は
··················································· (B.14)
表B.2−緩和近似パラメータ(Gd[TMHD]の重量比4/1 000以下の濃度の場合)
曲線近似定数
1.5 T
3 T
T1緩和特性
T2緩和特性
T1緩和特性
T2緩和特性
b0
1.143E-03
2.023E-03
9.658E-04
2.013E-03
b1
3.530E-03
6.960E-03
1.033E-03
1.231E-02
b2
−2.209E-03
−3.625E-03
−4.816E-04
−5.599E-03
b3
6.789E-04
1.061E-03
1.866E-04
1.381E-03
B.3.2 陥りやすい過ち:試験器具での渦流
この試験では,試験器具又はMR装置の不安定性は,起こりうる局所的な信号ロス,パルスシーケンス
に依存するゲインなどと同様に,全てゴーストとして記録する。特に,試験器具の中の水はMR装置内に
配置する手順中に渦流を生じる。この渦流は,一般に約15分で安定する。したがって,最良の測定精度の
点から,最初のスキャンを開始するまでに試験器具を装置内に15分間放置する。
B.3.3 参考文献
詳細の情報については,参考文献[1],[2],[4]及び[5]を参照。
52
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.4
4.3(均一性)について
B.4.1 理論的根拠
MR装置に用いるRFコイルは,同じMR信号でも場所によって信号の検出感度が異なる可能性がある。
コイル感度分布は,コイルの設計によって決まる。その分布によって,コイルの全信号強度に寄与する位
置(x, y, z)での信号強度への相対重み関数w(x, y, z)が決まる。このような空間重み関数の測定では,均一
な試験器具を用い,RF送信コイルによって(理想的には)容積全体にわたって均一に励起する。
この箇条では,送受信コイルの送受信特性及び受信専用コイルの受信特性を決定する測定手順について
記載する。これらの特性は,“コイル分布”という用語で要約できる。これは,任意の条件下で,コイル内
のどの領域が特定の撮像の指定事項に合っているかを示す指標である。
MR検査では多くの種類のコイルを用いる。特に,別々のシングルコイルを組み合わせて一つにした(ア
レイ)コイルシステムは,臨床の撮像において非常に有用である。このようなコイルシステムの特性を十
分に評価するには,次に規定する方法に従って,配列されている各コイルを別々に測定しなければならな
い。
B.4.2 AAD法の理論
2次元画像データの解析には,AAD(平均絶対偏差)均一性測定法を用いなければならない。この方法
は,アレイ構造を含むボリュームコイル及び表面コイルに等しく機能する。
平均絶対偏差(AAD)は,次の式で求める。
(
)
∑
=
−
=
N
i
i
N
Y
Y
AAD
1
ここで,Yはデータの平均値,|Y|はYの絶対値である。この方法は,平均値からの差を二乗しないので,
分散及び標準偏差よりは極端な測定値の影響を受けにくい。
磁場強度が1.5 T以上のMR装置については,試験器具内に定在波の発生を防ぐため,オイル入り試験
器具を用いるのが望ましい。参考文献[1]を参照。
この方法を適切な頭部用コイルに適用すると,均一性は,98 %に近づく。
B.4.3 定在波
1.5 T以上の磁場強度では,水溶液を含む円筒形の試験器具内に定在波が発生する可能性がある。このよ
うな条件下では,均一性の試験の結果,不自然に低い均一性となる可能性がある。この問題については,
附属書Cの参考文献を参照する。1.5 Tを超える磁場強度の場合は,オイル入り試験器具を用いるのが望
ましい。
B.5
4.5[2次元幾何学的ひずみ(歪)]について
B.5.1 理論的根拠
臨床画像上の対象物の空間的位置関係は,検査対象物の実際の空間的位置関係に一致する。これは,MR
装置に不可欠な特性の一つである。しかし,複数の技術的要因が,この画像上の位置関係に影響を与える
可能性がある。
幾何学的ひずみ(歪)は,そのピクセルの位置における磁場強度と公称値とのずれによって生じる。局
所磁場強度は,静磁場B0と傾斜磁場系の磁場との重ね合わせである。スピンエコー及びグラディエントエ
コーシーケンスでのこれらの磁場強度値の公称値からの差によって,そのピクセルの位置における2次元
画像面内のひずみ(歪)が決まり,関係式(B.15)〜(B.18)を得る。
53
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G
x
r
ΔG
G
r
ΔB
r
Δx
rd
rd
rd
0
)
(
)
(
)
(
+
=
···················································· (B.15)
G
y
r
ΔG
r
Δy
ph
ph)
(
)
(
=
································································ (B.16)
G
z
r
ΔG
G
r
ΔB
r
Δz
sel
sel
sel
0
)
(
)
(
)
(
+
=
····················································· (B.17)
2
2
2
)
(
)
(
)
(
)
(
r
Δz
r
Δy
r
Δx
r
Δr
ρ
ρ
ρ
+
+
=
··········································· (B.18)
直交座標系において,xは読出し方向,yは位相エンコード方向及びzはスライス選択方向である。
ここに,
rρ: 磁石中心からのピクセルの距離
ΔB0(rρ): ピクセル位置での静磁場不均一性
ΔG(rρ): ピクセル位置での傾斜磁場直線性からの誤差
Grd, ph, sel: 読出し,位相エンコード及びスライス選択方向の
傾斜磁場
Δr(rρ): ピクセルの幾何学的位置ずれ
位相エンコード方向の式(B.16)は,静磁場B0の不均一性からの寄与を含まない。静磁場の不均一性は読
出し方向及びスライス選択方向にだけ影響を与える。静磁場の不均一性の影響は,式(B.15)及び(B.17)に示
すように,関連する傾斜磁場の相対強度に左右される。傾斜磁場の直線性誤差は,全ての方向に影響を与
えるが,傾斜磁場に起因するひずみ(歪)の量は,傾斜磁場強度とは無関係である。
静磁場不均一性及び傾斜磁場による画像ひずみ(歪)は,アイソセンタ近くでは非常に小さく,アイソ
センタからの距離が離れるにしたがって,コイル設計に依存して増加する。
MR装置によって引き起こされる幾何学的ひずみ(歪)に加えて,患者又は試験器具の透磁率も,また,
ひずみ(歪)を引き起こす。局所磁場強度の変化量は,一般に1×10−6の範囲,すなわち,1.0 Tにおいて
43 Hz又は1.5 Tにおいて64 Hzの範囲である。これは,ピクセル帯域幅が100 Hz/pixelを超える通常の撮
像シーケンスを用いれば,磁化率の変化による読出し方向へのひずみ(歪)の量は無視できることを意味
する。特殊な撮像法,例えばEPIでは,一回のデータ収集で,全てのデータを集めるので,位相エンコー
ド方向の実効的な帯域幅は大変狭く,極度の磁化率アーチファクトが生じる場合がある。
空間的に変動する幾何学的ひずみ(歪)は,信号密度の変動をもたらす。幾何学的に拡大・縮小する対
象物は,信号強度の減少・増加を受ける。
注記 システムによっては,幾何学的ひずみ(歪)補正フィルタを,操作者が有効又は無効にするこ
とを許すものがある。フィルタが有効又は無効の状態で幾何学的ひずみ(歪)画像を収集する
ことは,有用な追加情報を与える場合がある。
B.5.2 陥りやすい過ち
B.5.2.1 誤差の要因
幾何学的ひずみ(歪)がない画像でさえ,δ及びσδがゼロに等しくなるのは,半径計測のために選択し
た参照中心が試験器具の幾何学的中心に正確に対応しているときに限られる。この中心ずれは,測定点数
Nを増やしても減少しない。
正確に周上に測定点を選ばないと,第二のエラーが引き起こされる。測定点数Nを増加させると,測定
点を周内及び周外に選ぶ可能性が等しくなり,δのエラーは減少する。
54
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.5.2.2 幾何学的ひずみ(歪)スケールについての誤差の効果
δの中心ずれの影響についての見積もりは,式(B.19)で与えられる(図B.2参照)。
(
)(
)2
2
2
sin
cos
r
r
θ
r
ε
θ
r
R
+
+
=
······················································· (B.19)
r>0でε/R≪1であるので
−
−
r
r
θ
R
ε
θ
R
ε
R
r
2
2
sin
2
1
cos
1
≒
··············································· (B.20)
図B.2−中心ずれ
Nd≫1の場合にrを得るよい近似は,
r
r
r
dθ
θ
Rε
θ
Rε
R
r
∫
−
−
=
2π
0
2
2
sin
21
cos
1
2π1
····································· (B.21)
−
=
⇒
2
4
1
1
R
ε
R
r
····························································· (B.22)
式(8)を参照して,実際の画像での幾何学的ひずみ(歪)の大きさと中心ずれの寄与とを含む幾何学的ひ
ずみ(歪)の実効値を得る。
δ
Rε
δ
+
=
′
2
41
······································································ (B.23)
B.5.2.3 幾何学的ひずみ(歪)の収差への誤差の影響
式(B.20)を参照して,i番目の半径の測定距離は,次のように評価することができる。
()
()
()
δ
ε
P
r
r
i
i
i
i
Δ
Δ
Δ
+
+
+
=
························································ (B.24)
ここで,Δi(P)は,測定点がROIの境界に正確に選ばれなかったための誤差,Δi(ε)は中心ずれ,Δi(δ)は,
幾何学的ひずみ(歪)からの寄与である。
式(B.20)へ式(B.24)を代入し,Nd≫1についてΔi(P),Δi(ε)及びΔi(δ)が独立変数であるから,混合項を無視
すると,次の結果が得られる。
()
()
()
1
Δ
Δ
Δ
1
σ
d
1
2
2
2
d
−
+
+
=
∑
=
N
δ
ε
P
R
N
i
i
i
i
'δ
············································· (B.25)
55
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
及び
()
()
()
−
+
+
−
∑
∑
=
=
1
Δ
Δ
1
Δ
1
σ
d
1
2
2
d
1
2
d
d
N
P
ε
N
δ
R
N
i
i
i
N
i
i
'δ≦
··································· (B.26)
()
()
1
Δ
Δ
1
σ
σ
d
1
2
2
d
−
+
+
∑
=
N
P
ε
R
N
i
i
i
δ
'δ≦
················································· (B.27)
式(B.20)及び式(B.22)から,次の結果が得られる。
()
+
−
=
i
r,
i
r,
i
i
θ
R
ε
θ
R
ε
R
r
r
ε
cos2
4
1
cos
Δ
2
≒
·································· (B.28)
式(B.27)へ式(B.28)を代入し,Nd≫1に対して角度についての定積分近似及びε非線形項を無視し,次の
結果を得る。
()
[
]ε
P
R
δ
'
δ
+
+
Δ
1
σ
σ≦
······························································ (B.29)
Δ(P)≦εと仮定するのが合理的で,次の結果を得る。
Rε
δ
'
δ
+
σ
σ≒
········································································· (B.30)
B.5.2.4 結論
幾何学的ひずみ(歪)の実効値は,ε/Rの2次項に依存し,幾何学的ひずみ(歪)の実効的収差は,1次
項に依存する。
測定される幾何学的ひずみ(歪)の値は,次のようになる。
2
>
′
Rε
δ
又は
Rε
'>
δ
σ
上の式は,真の画像の幾何学的ひずみ(歪)に対して無視できない大きさである。
注記 この測定は,ソフトウェアによるひずみ(歪)補正を行う場合と,行わない場合とではまった
く異なった情報を与える。
傾斜磁場のひずみ(歪)補正が行われているなら,臨床画像における補正後の残りのひずみ(歪)が見
える。
傾斜磁場のひずみ(歪)補正が行われていないなら,傾斜磁場コイルによる物理的ひずみ(歪)が見え
る。この情報は,例えばスライス選択のように,ひずみ(歪)を補正することができない場合について重
要である。

56
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.6
4.6(空間分解能)について
B.6.1 理論的根拠
空間分解能は,用いたパルスシーケンス及び緩和時間に応じて,公称分解能とは異なる可能性がある。
線形応答の撮像システムの特性は,変調伝達関数(MTF)で表すことができる。
周期L,幅dの無限周期く(矩)形関数g(x)は,次のように表される。
)
π
2
cos(
)
π
sin(
)1
(
π2
)
(
3,2,1
Lx
n
Ld
n
n
Ld
x
g
n
n
∑…
=
−
+
=
周期Lが,ピクセルサイズΔx=撮像領域/マトリクスサイズとして次の条件を満たした場合,
L<4 Δx
画像システムは,高い空間周波数(2/L,3/L,…)を伝えない。よって,振幅画像|b(x)|の画像は,基本
周波数だけで構成される。
)
π
2
(
cos
)
(π
sin
)
1
(
MTF
π2
‒
)
(
Lx
Ld
L
Ld
x
b
=
d/L≧0.603で,b(x)が実関数の場合,b(x)が負の値をとることはないので,絶対値がとれる。
)
π
2
(
cos
)
(π
sin
)
1
(
MTF
π2
‒
)
(
)
(
Lx
Ld
L
Ld
x
b
x
b
=
=
標準偏差(SD)及び平均値(S)は,次の式で求める。
(
)
)
1
(
MTF
π)
(
sin
π
2
‒
)
(
1
)
(
1
1/2
0
2
0
L
L
d
dx
S
x
b
L
SD
Ld
dx
x
b
L
S
L
L
=
=
=
=
∫
∫
標準偏差を平均値で除したものは,
)
1
MTF(
π
π)
sin(
2
L
LdLd
S
SD=
したがって,d/L=0.61の場合,MTFは,SDとSとの比に比例する。
S
SD
S
SD
Ld
Ld
L
×
=
=
1.44
π)
sin(
2
π
)
1
MTF(
d/L≧0.603の線形パターンの使用は,測定したSD/Sの比とMTFとの線形依存関係を保証する。
プレートの数が有限なので,対象は,ゼロ周波数及び±1/L以外の周波数を含む。無限周期く(矩)形
関数の周波数スペクトルに対して,幅nLのく(矩)形関数のフーリエ変換F(ν)の畳込みを行う。
()
(
)
ν
ν
nL
ν
F
2π
π
sin
=
測定結果は,周波数1/Lの変調伝達関数でなく,1/L(1−1/n)から1/L(1+1/n)の区間の平均である。この
対象の周波数区間の平均変調m(1/L)を,次の式で定義する。
S
SD
L
m
≡
)1(
MTFの形が異なる撮像システム同士の比較には,問題があることがよく知られている。この問題を限定
するには,標準のフーリエ撮像シーケンス(k空間内の中央での長方形のMTFが1)を用いる必要がある。
57
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
したがって,1から0へ急激に落ちるMTFを識別するためにMTF≧0.8の下限が必要である。これは,標
準の直交フーリエMR撮像で分解能を表すのに十分である。
56
.0
8.0
π
)π
sin(
2
)
1
(
=
×
LdLd
L
m
≧
B.6.2 陥りやすい過ち
だ(楕)円形のフィルタは,この規格で規定される試験では検出することができない。く(矩)形のk
空間が充てん(塡)されていることを確認するためには,45°に近い角度での追加測定が必要である。
B.7
4.7(ゴーストアーチファクト)について
B.7.1 理論的根拠
この箇条では,MR画像に生じるゴーストレベルの測定方法について述べる。“理想的な”原データを変
調するあらゆる不安定性が,画像再構成の際にゴーストを引き起こす可能性がある。
ゴーストの振幅及び位置は,変調のフーリエ変換に左右される。ゴーストの振幅がノイズレベルを超え
るときは,画像にゴーストが現れる可能性がある。ゴーストの振幅がノイズレベルを超え,かつ,ゴース
トの位置が選択した撮像領域(FOV)を超えるときは,ゴーストが画像内に折り返す。不安定性の可能性
となる源は,動き,補償されていない渦電流,不完全なクラッシャーパルス,高周波の干渉及びドリフト
である。
B.7.2 陥りやすい過ち
一部の不安定性及びゴーストは,TRが電源周期の整数倍(すなわち,60 Hzシステムについては16.7 ms,
50 Hzシステムについては20 ms)の場合には消える。この問題を避けるため電源周期の整数倍でない値を
選ぶ(例えば,TR=603 ms)。この値に設定できない場合は,電源周期の整数倍でなければ他のTRに設定
してよい。
冷凍機が画像に振動及びゴーストを引き起こす可能性がある。そのような装置の電源を撮像中に入れて
おくのが一般的な場合は,ゴーストを評価する際に装置の電源を入れた状態にすることが重要である。
ゴーストの位置は,その原因の“位相エンコード軸の周波数”のスペクトルに対応する。指定された位
相エンコードマトリクス(=256)に対して,不安定性の“位相エンコード軸の周波数”が128(撮像領域
の半分)を超える場合は,“位相エンコード軸の周波数”/(128の倍数)を超えるピクセル数に相当する
位置にゴーストが折り返す。ここで,128の倍数≦“位相エンコード軸の周波数”である。
ゴーストを見つける場合には,ウィンドウ幅を1に設定し,最も輝度の高いゴーストが現れるまでウィ
ンドウレベルを変更して,このピクセルを測定することが重要である。
ノイズレベルと同じレベルの場合は,ゴーストを検出するのが困難である。したがって,ゴーストを検
出するには高いSNR(SNR≧100)が必要になる。SNRが高くないと,一部のゴーストを検出できない可
能性がある。指定されたパルスシーケンスのSNRが不十分な場合は,SNR向上のためにスライス厚の増
加,撮像領域の増加,ピクセル帯域幅の減少,又はマトリクスサイズの減少若しくはフリップ角の増加を
行ってもよい。TEが減少するにつれて,検出される不安定性が減少するので,TEを変更してはならない。
同様に,複数の収集を加算平均してはならない。これは,ゴーストの不安定性が撮像条件と同期しないと
想定すると,加算平均によってゴーストレベルが低下するためである。
ゴースト試験は,必ず均一なボリュームコイル(例えば,バードケージ形コイル)を用いて実行しなけ
ればならない。励起及び検出が不均一な場合は,ゴースト測定に失敗する。
58
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
RFコイルに実際の患者の負荷と同等の負荷をかけることも重要である。このように負荷をかけないと,
臨床上観察されるゴーストよりもはるかに大きなゴースト(場合によっては信号低下)が不安定性によっ
て引き起こされる可能性がある。
この試験では,スライスワープは扱わない。ゴーストの評価には,面内スライスで十分なためである。
この測定には,潜在的な誤差の元として次のものが含まれる。
‒
不十分なSNR(SNR>信号とゴーストとの望ましい下限=100)
‒
不適切に設定されたROI(混ざらずに計測される量だけが望ましい)
B.7.3 参考文献
詳細な情報については,ウッド(Wood)らの参考文献[13]を参照する。
B.8
箇条5(不変性試験)について
B.8.1 理論的根拠
この規格とは別に,それぞれの施設では,この規格で概要を示した必要最小限のQAプログラムを網羅
している統合したQA方針を独自に開発できる。有効なQA試験とは,迅速,簡単,高感度,堅ろう(牢)
(ロバスト)かつ効果的なものをいう。試験が迅速でない場合は,大切な臨床撮像時間が削られて,患者
の検査が犠牲になる。試験が簡単(例えば,容易に設定できる)でない場合は,適切に実施できない,又
は間違った結果となる可能性がある。明らかに感度の高い試験だけが有用な情報を与える。試験は,意図
した目的に対して感度が高く,重要でない因子に対しては感度は低く,その影響を受けないものでなけれ
ばならない。時系列的な傾向を捕らえるのに十分な頻度で行う場合だけ,その試験は有効である。試験頻
度が不十分な場合とは,ほとんど遂行できていないということである。また,必要以上の頻度で行った場
合は,貴重な時間を浪費することである。
不変性試験プログラムの周期は,決められていない。製造業者は,ルーチンとして行う不変性試験に幾
つかの試験を導入してもよい。
データ解析を,例えば,リービー−ジェニングス(Levey-Jennings)チャート及びウェストガード
(Westgard)則(標準偏差の2倍以上の点は不良,同方向の3点は傾向を示す,いかなる2点においても
標準偏差の3倍以上の飛びは不良など)が適用できる古典的な品質管理チャート法を用いて行うことがで
きる。
不変性試験の個々の試験についての説明は,次による。
− 中心周波数
− 長期間の安定性を監視し,MR装置が規定した受信帯域幅の中にあることを確認する。
− RF校正
− RF送信サブシステムを監視し,経時的な画像コントラストの変化を確認する。
− 幾何学的精度
− 傾斜磁場及び静磁場の経時変化を監視する。
− 信号ノイズ比(SNR)
− 全システム,特に受信サブシステムの経時変化を監視する。
− ゴーストレベル
− 短期のシステム安定性を監視する。
59
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
参考文献
[1]
HENKELMAN, RM. Measurement of signal intensities in the presence of noise in MR images. Med. Phys.,
1985, 12, p.232-233.
[2]
CONSTANTINIDES CD., ATALAR, E., MCVEIGH, ER. Signal-to-Noise Measurements in Magnitude
Images from NMR Phased Arrays. Magn. Reson. Med., 1997, 38, p. 852-857.
[3]
STECKNER, M., DROST, D. and PRATO, F. Computing the modulation transfer function of a magnetic
resonance imager. Medical Physics, 1994, 21 (3), p.483-489.
[4]
GORE, JC., KENNAN, RP. and ZHONG, J. MRI Contrast Agents−Principles and Constraints. In The
Physics of MRI: 1992 AAPM Summer School Proceedings, 1992, p.48-505.
[5]
SCHENCK, JF. The role of magnetic susceptibility in magnetic resonance imaging: MRI magnetic
compatibility of the first and second kind. Med. Phys., 1996, 23(6): p. 815-850.
[6]
TOFTS, PS., BARKER, GJ., DEAN, TL., GALLAGHER, H., GREGORY, AP. and CLARKE, RN. A low
dielectric constant customized phantom design to measure RF coil non-uniformity. Magnetic Resonance
Imaging, 1997, Volume 15, No 1, p. 69-75.
[7]
NEMA MS-3:2003, Determination of Image Uniformity in diagnostic Magnetic Resonance Imaging.
National Electrical Manufacturers Association, 1300 North 17th Street, Suite 1847, Rosslyn, VA 22209.
[8]
SIMMONS, A., TOFTS, PS., BARKER, GJ., ARRIDGE, SR. Sources of Non-uniformity at 1.5T. Magnetic
Resonance in Medicine, 1994, 32(1): 121-8.,
[9]
MAGNUSSON P., OLSSON LE. Image Analysis methods for assessing levels of IMAGE PLANE
non-uniformity and stochastic noise in magnetic resonance imaging of a homogenous phantom. Medical
Physics, Aug 2000, Volume 27(8): p. 1980-1994.
[10] BARKER, GJ, SIMMONS A., ARRIDGE, SR., TOFTS, PS. A simple method for investigating the effects
of non-uniformity of radio-frequency transmission and reception in MRI. British Journal of Radiology, Jan
1998, 71 (841): p. 59-67.
[11] TOFTS, PS. Standing wave in uniform water phantoms. Journal of Magnetic Resonance, 1994, 104:
p.143-147,
[12] WICKS, DA., BARKER, GJ., TOFTS, PS. Correction of intensity non-uniformity in MR images of any
orientation. Magnetic Resonance Imaging, 1993, 11(2): p.183-196.
[13] WOOD, ML. and XIANG, QS. Motion Artifacts and Remedies. In The Physics of MRI, the American
Association of Physicists in Medicine (AAPM) Monograph No. 21: P. Sprawls and M. Bronskill, eds.,
American Institute of Physics, New York, New York, 1993, p 383-411.
[14] IEC 60601-2-33:2002,Medical electrical equipment−Part 2-33: Particular requirements for the safety of
magnetic resonance equipment for medical diagnosis
[15] JIS Z 4752-1 医用画像部門における品質維持の評価及び日常試験方法−第1部:総則
注記 対応国際規格:IEC 61223-1:1993,Evaluation and routine testing in medical imaging
departments−Part 1: General aspects(IDT)
60
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
[16] JIS Z 4752-2-6:2001 医用画像部門における品質維持の評価及び日常試験方法−第2-6部:不変性
試験−医用X線CT装置
注記 対応国際規格:IEC 61223-2-6:1994,Evaluation and routine testing in medical imaging
departments−Part 2-6: Constancy tests−X-ray equipment for computed tomography(IDT)
61
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
定義した用語の索引
用語の索引元及びその記号
JIS Z 4005 医用放射線機器−定義した用語(IEC 60788) ···················································· rm-..-..
JIS T 0601-1 医用電気機器−第1部:基礎安全及び基本性能に関する一般要求事項の箇条3 ·········NG-2.
この規格の箇条3 ················································································································3.x
注記 記号の後の数字は,該当する用語の番号又はこの規格の細分箇条番号を表す。
アイソセンタ ISOCENTRE ·······························································································3.1.15
アクセサリ(附属品) ACCESSORY ········································································· JIS T 0601-1
アーチファクト ARTEFACT ······························································································ 3.1.3
意図する使用/意図する目的 INTENDED USE/INTENDED PURPOSE ·······································3.1.14
医用電気機器 MEDICAL ELECTRICAL EQUIPMENT (ME EQUIPMENT) ··························· JIS T 0601-1
医用電気システム MEDICAL ELECTRICAL SYSTEM (ME SYSTEM) ································ JIS T 0601-1
受入試験 ACCEPTANCE TEST ··························································································· 3.1.1
画像データ IMAGE DATA ································································································3.1.12
画像ノイズ IMAGE NOISE ·······························································································3.1.13
画像面 IMAGE PLANE ····································································································rm-37
関心領域 REGION OF INTEREST (ROI) ···············································································3.1.23
患者 PATIENT ······································································································ JIS T 0601-1
幾何学的ひずみ(歪) GEOMETRIC DISTORTION ································································ 3.1.9
機器 EQUIPMENT ··············································································································rm
基準位置 REFERENCE POSITION ······················································································3.1.22
既定の基準(設定基準) ESTABLISHED CRITERIA ·························································· rm-70-04
基本性能 ESSENTIAL PERFORMANCE······································································ JIS T 0601-1
基礎安全 BASIC SAFETY ······················································································· JIS T 0601-1
均一性 UNIFORMITY ·····································································································3.1.32
空間分解能 SPATIAL RESOLUTION ···················································································3.1.28
高周波コイル RADIO FREQUENCY COIL (RF COIL)······························································3.1.20
ゴースト GHOSTING ARTEFACT ······················································································3.1.10
再構成パラメータ RECONSTRUCTION PARAMETERS ··························································3.1.21
撮像領域 FIELD OF VIEW (FOV) ························································································ 3.1.8
試験器具 TEST DEVICE ··································································································3.1.31
四肢用試験器具 EXTREMITY TEST DEVICE ········································································· 3.1.7
仕様面積 SPECIFICATION AREA ·······················································································3.1.29
仕様容積 SPECIFICATION VOLUME ··················································································3.1.30
信号ノイズ比(信号対ノイズ比) SIGNAL TO NOISE RATIO (SNR) ·········································3.1.25
スライス厚 SLICE THICKNESS ·························································································3.1.27
スライスプロファイル SLICE PROFILE ··············································································3.1.26
製造業者 MANUFACTURER ···················································································· JIS T 0601-1
62
Z 4952:2012 (IEC 62464-1:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
責任部門 RESPONSIBLE ORGANIZATION ·········································································· 3.1.24
操作者 OPERATOR ········································································································· 3.1.19
体幹部用試験器具 BODY TEST DEVICE ·············································································· 3.1.5
立入制限区域 CONTROLLED ACCESS AREA ································································ JIS Z 4951
電源 SUPPLY MAINS ···························································································· JIS T 0601-1
頭部用試験器具 HEAD TEST DEVICE ················································································ 3.1.11
半値幅 FULL WIDTH HALF MAXIMUM (FWHM) ································································· 3.2.21
ピクセル帯域幅 BANDWIDTH PER PIXEL ··········································································· 3.1.4
附属文書 ACCOMPANYING DOCUMENTS ·········································································· rm-82
不変性試験 CONSTANCY TEST ························································································· 3.1.6
変調伝達関数 MODULATION TRANSFER FUNCTION (MTF) ··············································· rm-73-05
MR検査 MAGNETIC RESONANCE EXAMINATION ······················································ JIS Z 4951
MRシステム MAGNETIC RESONANCE SYSTEM (MR SYSTEM) ······································ JIS Z 4951
MR装置 MAGNETIC RESONANCE EQUIPMENT (MR EQUIPMENT) ································· JIS Z 4951