X 6305-6:2013 (ISO/IEC 10373-6:2011)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語,定義,略語及び記号 ································································································· 2
3.1 用語及び定義 ················································································································ 2
3.2 略語及び記号 ················································································································ 3
4 試験における一般適用条件 ································································································· 5
4.1 試験環境 ······················································································································ 5
4.2 試験前の状態 ················································································································ 5
4.3 許容誤差 ······················································································································ 5
4.4 寄生インダクタンス ······································································································· 6
4.5 総合的測定の不確かさ ···································································································· 6
5 JIS X 6322-1:2011及びJIS X 6322-2:2011のパラメタの試験用ジグ及び回路 ································· 6
5.1 測定器に関する最小要求事項···························································································· 6
5.2 校正用コイル ················································································································ 6
5.3 PCD試験アセンブリの構成 ······························································································ 7
5.4 基準PICC ···················································································································· 9
6 JIS X 6322-1:2011のパラメタに関する試験 ··········································································· 11
6.1 PCDの試験 ················································································································· 11
6.2 PICCの試験 ················································································································ 12
7 JIS X 6322-2:2011のパラメタに関する試験 ··········································································· 14
7.1 PCDの試験 ················································································································· 14
7.2 PICCの試験 ················································································································ 17
8 JIS X 6322-3:2011及びJIS X 6322-4:2011のパラメタ試験 ························································ 21
8.1 PCDの試験 ················································································································· 21
8.2 PICCの試験 ················································································································ 21
附属書A(規定)PCD試験アンテナ ······················································································· 22
附属書B(参考)PCD試験アンテナの調整 ··············································································· 28
附属書C(規定)センスコイル ······························································································ 30
附属書D(規定)基準PICCのアンテナ配置 ············································································· 32
附属書E(規定)変調度及び波形の解析方法 ············································································· 33
附属書F(参考)周波数特性の評価用プログラム ······································································· 97
附属書G(規定)追加のPICC試験方法 ················································································· 105
附属書H(規定)追加のPCD試験方法 ··················································································· 159
附属書I(規定)PCD用高速伝送選択の試験方法 ······································································ 194
X 6305-6:2013 (ISO/IEC 10373-6:2011) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
参考文献 ··························································································································· 205
X 6305-6:2013 (ISO/IEC 10373-6:2011)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
ICカードシステム利用促進協議会(JICSAP)及び一般財団法人日本規格協会(JSA)から,工業標準原案
を具して日本工業規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が
改正した日本工業規格である。
これによって,JIS X 6305-6:2010は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS X 6305の規格群には,次に示す部編成がある。
JIS X 6305-1 第1部:一般的特性
JIS X 6305-2 第2部:磁気ストライプ付きカード
JIS X 6305-3 第3部:外部端子付きICカード及び接続装置
JIS X 6305-5 第5部:光メモリカード
JIS X 6305-6 第6部:非接触(外部端子なし)ICカード−近接型
JIS X 6305-7 第7部:非接触(外部端子なし)ICカード−近傍型
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
X 6305-6:2013
(ISO/IEC 10373-6:2011)
識別カードの試験方法−
第6部:非接触(外部端子なし)ICカード−近接型
Identification cards-Test methods-Part 6: Proximity cards
序文
この規格は,2011年に第2版として発行されたISO/IEC 10373-6を基に,技術的内容及び構成を変更す
ることなく作成した日本工業規格である。
また,この規格は,JIS X 6301に定義された識別カードのパラメタ及び国際流通用としてのこの識別カ
ードの使用方法のうち,外部端子のない近接型のICカード,及びこれと結合する結合機器を規定する規格
群(JIS X 6322)に関連し,その試験方法について規定する。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,JIS X 6301:2005に基づく識別カードの特性評価試験方法について規定する。各試験方法は,
一つ以上の基本規格と相互に関連をもつ。基本規格とは,例えば,JIS X 6301,又は識別カードを使用し
た情報記憶技術に関する一つ以上の追加規格などである。
注記1 許容値の基準は,この規格の中にはなく,ほかの規格の中に規定されているものがある。
注記2 この規格で規定する試験方法は,項目別に実施される。供試されたカードについて,全ての
項目を順番に試験する必要はない。
注記3 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO/IEC 10373-6:2011,Identification cards−Test methods−Part 6: Proximity cards(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
JIS X 6305の一部であるこの規格の試験方法は,JIS X 6322-1,JIS X 6322-2,JIS X 6322-3及びJIS X
6322-4で規定されている近接型ICカード(PICC)に関して適用する。
JIS X 6305-1は,複数のICカード技術に共通の試験方法を定義し,その他の各部がそれぞれの技術に特
有の試験について扱う。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,記載の年の版を適用し,その後の改正版(追補を含む。)は適用しない。
JIS C 61000-4-2:2012 電磁両立性−第4-2部:試験及び測定技術−静電気放電イミュニティ試験
注記 対応国際規格:IEC 61000-4-2:2008,Electromagnetic compatibility (EMC)−Part 4-2: Testing and
measurement techniques−Electrostatic discharge immunity test(IDT)
2
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS X 6301:2005 識別カード−物理的特性
注記 対応国際規格:ISO/IEC 7810:2003,Identification cards−Physical characteristics(IDT)
JIS X 6322-1:2011 識別カード−非接触(外部端子なし)ICカード−近接型−第1部:物理的特性
注記 対応国際規格:ISO/IEC 14443-1:2008,Identification cards−Contactless integrated circuit cards
−Proximity cards−Part 1: Physical characteristics(IDT)
JIS X 6322-2:2011 識別カード−非接触(外部端子なし)ICカード−近接型−第2部:電力伝送及び
信号インタフェース
注記 対応国際規格:ISO/IEC 14443-2:2010,Identification cards−Contactless integrated circuit cards
−Proximity cards−Part 2: Radio frequency power and signal interface(IDT)
JIS X 6322-3:2011 識別カード−非接触(外部端子なし)ICカード−近接型−第3部:初期化及び衝
突防止
注記 対応国際規格:ISO/IEC 14443-3:2011,Identification cards−Contactless integrated circuit cards
−Proximity cards−Part 3: Initialization and anticollision(IDT)
JIS X 6322-4:2011 識別カード−非接触(外部端子なし)ICカード−近接型−第4部:伝送プロトコ
ル
注記 対応国際規格:ISO/IEC 14443-4:2008,Identification cards−Contactless integrated circuit cards
−Proximity cards−Part 4: Transmission protocol(IDT)
3
用語,定義,略語及び記号
この規格で用いる主な用語,定義,略語及び記号は,JIS X 6322-1:2011,JIS X 6322-2:2011,JIS X
6322-3:2011及びJIS X 6322-4:2011によるほか,次による。
3.1
用語及び定義
3.1.1
基本規格
この試験方法を実施するに当たって,参照として使用される規格。
3.1.2
カスケードレベル数(CascadeLevels)
PICCのカスケードレベルの総数。
3.1.3
“Class 1” PICC
JIS X 6322-1:2011に規定するようにアンテナを配置し,7.2.4に規定する“Class 1” PICCの最大負荷影響
試験を満足するPICC。
3.1.4
コマンドセット(Command Set)
初期応答及び衝突防止処理中に使用するPICCコマンドの集合。
注記 A型については,JIS X 6322-3:2011の6.4を参照。B型については,JIS X 6322-3:2011の7.5 を
参照。
3.1.5
無応答(Mute)
規定するタイムアウト(例 FWTの期間終了)までに応答がないこと。
3
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.6
PICCの状態(PICC States)
初期化及び衝突防止中のPICCの異なる状態。
注記 A型については,JIS X 6322-3:2011の6.3を参照。B型については,JIS X 6322-3:2011の7.4を
参照。
3.1.7
シナリオ(Scenario)
この規格に規定する試験方法を使用する典型的なプロトコル及びアプリケーションに特化した通信を定
義する手順。
3.1.8
試験初期状態(Test Initial State,TIS)
コマンドセットの特定PICCコマンドを実行する前のPICCの状態。
3.1.9
試験方法
規格を満たしていることを確認するために,識別カードの特性を試験する方法。
3.1.10
試験目標状態(Test Target State,TTS)
コマンドセットの特定PICCコマンドを実行した後のPICCの状態。
3.2
略語及び記号
この規格で用いる略語及び記号は,次による。
注記 太字の大括弧“[ ]”に囲まれている項目は,任意選択値とする。
b“xxxxx”
2進数のビット表現
“XY”
16進数の表現方法,XYは,16進数に相当
ATA(cid)
ATTRIBに対する応答,すなわち (mbli+cid CRC̲B)
mbliは,任意の16進数表記の値(JIS X 6322-3:2011の7.11を
参照)
ATTRIB(cid,fsdi)
ATQBのPUPI,CID=cid 及び最大フレーム長符号化値= fsdiを設
定した省略時値のATTRIBコマンド,すなわち (“1D” PUPI cid
“01 00” CRC̲B)
DUT
Device under test
試験対象品
ESD
Electro-static
Discharge
静電気放電
I(c)n(inf [,CID = cid][,NAD = nad] [,~CRC])
連鎖ビットc∈{1,0},ブロック番号n∈{1,0}及び情報フィールド
infからなるJIS X 6322-4:2011に規定するI-block
必要がなければ,CID及びNADとも伝送しない。
CID = cid∈{0...15}が規定されている場合,第2パラメタとして
CIDを伝送する。
NAD = nad∈{0...“FF”}が規定されている場合,第3パラメタとし
てNADを伝送する(CIDがない場合は,第2パラメタとして)。
'~CRC'が規定されていない場合,PICCの型によって正しいCRC
を省略時値(例 CRC̲A又はCRC̲B)として伝送する。
IUT
Implementation Under
Test (ISO/IEC 9646)
試験対象装置(ISO/IEC 9646参照)
IUTは,この規格では試験対象のPCDとする。
LT
Lower
Tester 下位試験装置(ISO/IEC 9646参照)
4
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(ISO/IEC 9646)
PCD試験装置のPICCをエミュレートする部分
m
Modulation index
変調度
Mute
無応答
指定されたタイムアウト時間内に応答がないこと。
N/A
非適用
PPS(cid,dri,dsi)
CID = cid, DRI = dri 及び DSI = dsiをもつ省略時値のPPS要求,
すなわち,(“D” + cid “11” dsi × 4 + dri CRC̲A)
R(ACK [,CID = cid] [,~CRC])n
JIS X 6322-4:2011に規定するブロック番号nのR(ACK)ブロック
任意選択のCID及び~CRCの記号の定義は,前出のI(c)nブロッ
クで規定したものと同じである。
R(NAK [,CID = cid][,~CRC])n
JIS X 6322-4:2011に規定するブロック番号nのR(NAK)ブロック
任意選択のCID及び~CRCの記号の定義は,前出のI(c)nブロッ
クで規定したものと同じである。
RATS(cid, fsdi)
CID = cid及びFSDI value = fsdiをもつ省略時値RATSコマンド,
すなわち, (“E0” fsdi × 16+cid CRC̲A)
READY(l)
カスケードレベルl l ∈ {1, 2, 3}におけるREADY状態,例えば,
READY(2) は,PICC カスケードレベル2
READY*(l)
カスケードレベルl l ∈ {1, 2, 3}におけるREADY*状態,例えば,
READY*(2) は,PICC カスケードレベル2
REQB(N)
JIS X 6322-3:2011の7.7.4で規定するNをもつREQBコマンド
S(WTX)(WTXM [,CID = cid][,~CRC])
JIS X 6322-4:2011で規定するパラメタWTXMをもつS(WTX)ブ
ロック
任意選択のCID及び~CRCの記号の定義は,前出のI(c)nブロッ
クで規定したものと同じである。
S(DESELECT [,CID = cid] [,~CRC])
JIS X 6322-4:2011で規定するS(DESELECT)ブロック
任意選択のCID及び~CRCの記号の定義は,前出のI(c)nブロッ
クで規定したものと同じである。
SAK(cascade)
カスケードビットb3=“1”としたSELECT(l)応答
SAK(complete)
カスケードビットb3=“0”としたSELECT(l)応答
SEL(c)
レベルcのセレクトコード,すなわち,
(SEL(1) = “93”, SEL(2) = “95”, SEL(3) = “97”)
SELECT(l)
カスケードレベルlのSELECTコマンド
すなわち,
SELECT(1) = (“93 70” UIDTX1 BCC CRC̲A)
SELECT(2) = (“95 70” UIDTX2 BCC CRC̲A)
SELECT(3) = (“97 70” UIDTX3 BCC CRC̲A)
SLOTMARKER(n)
スロット番号nをもつSlot-MARKERコマンド,すなわち,(16 ×
(n − 1) + 5 CRC̲B)
TB-PDU
Transmission
Block
Protocol Data Unit
I-block,R-block及びS-blockで構成
TEST̲COMMAND1(1)
連鎖しない一つのI-blockで構成する試験コマンド(特に指定が
ないときに用いる。)
注記 このコマンドは,PICCのフレーム長の最大値に依存
する。
TEST̲COMMAND1(n),
n > 1
n個(n>1)の連鎖I-blockで構成する試験コマンド(特に指定がな
いときに用いる。),(PCD側で連鎖)
注記 このコマンドは,PICCのフレーム長の最大値に依存
する。
TEST̲COMMAND1(n)k
連鎖しているTEST̲COMMAND1(n)のk番目のI-blockのINFフ
ィールド
注記 このコマンドは,PICCのフレーム長の最大値に依存
する。
5
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
TEST̲COMMAND2(n),
n > 1
n個(n>1)の連鎖のI-blockで構成する応答を想定する省略時値試
験コマンド
注記 このコマンドは,PCDのフレーム長の最大値に依存す
る。
TEST̲COMMAND3
FWT時間よりも大きい処理時間を必要とする一つのI-blockから
なる試験コマンド(特に指定がないときに用いる。)
TEST̲RESPONSE1(n)
TEST̲COMMAND1(n)の応答のINFフィールド
注記 この応答は,常に連鎖していない。
TEST̲RESPONSE2(n)
TEST̲COMMAND2(n)の応答
注記 この応答は,PCDのフレーム長の最大値に依存する。
TEST̲RESPONSE2(n)k
連鎖しているTEST̲COMMAND2(n)のk番目のI-blockのINFフ
ィールド
注記 この応答は,PCDのフレーム長の最大値に依存する。
TEST̲RESPONSE3
TEST̲COMMAND3のI-block応答
注記 この応答は,常に連鎖していない。
TM- PDU
Test Management
Protocol Data Unit
試験管理プロトコルのデータ単位(ISO/IEC 9646-1のPDU参照)
UIDTXI
カスケードレベルIで伝送されるUID 32ビットのデータ(表1
参照)
UT
Upper Tester
上位試験装置(ISO/IEC 9646規格群参照),PCD試験装置の主
制御部
UT̲APDU
Upper Tester
Application Protocol
Data Unit:
上位試験装置のアプリケーションプロトコルデータ単位,RFイ
ンタフェースを介してPCDからLTへ送られるデータのパケッ
ト
WUPB(N)
JIS X 6322-3:2011の7.7.4に規定するNをもつWUPBコマンド
~X
ビット列Xの反転ビットで構成するビット列又はビット列Xと
異なるビット列
X[[a..b]]
ビット列Xのビット位置aからbまでのビット(a及びbを含む。)
を取り出したビット列
a>bの場合,ビット列は,くう(空)とする。
X[[n]]
ビット列Xのビット位置nにおけるビット
先頭ビットを位置1とする。
X[n]
ビット列Xのバイト位置nにおけるバイト
先頭バイトを位置1とする,すなわち,
(X[n] = X[[(n − 1) × 8 + 1..n × 8]] )
表1−UIDからUIDTXへの対応表
カスケードレベル
シングル UID PICC
ダブル UID PICC
トリプル UID PICC
UIDTX1
UID0 UID1 UID2 UID3
“88” UID0 UID1 UID2
“88” UID0 UID1 UID2
UIDTX2
−
UID3 UID4 UID5 UID6
“88” UID3 UID4 UID5
UIDTX3
−
−
UID6 UID7 UID8 UID9
4
試験における一般適用条件
4.1
試験環境
特に別途指定のない限り,試験環境は,23 ℃±3 ℃,相対湿度40 %〜60 %とする。
4.2
試験前の状態
この規格で規定する各試験方法では,PICC又はPCDの試験環境を事前調整する必要はない。
4.3
許容誤差
特に別途指定のない限り,数値化された値に対する許容誤差は,±5 %以内にするように,試験装置の
6
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
性能(例えば,直線性)及び試験仕様(例えば,試験装置の調整)を維持しなければならない。
4.4
寄生インダクタンス
抵抗及びキャパシタは,寄生インダクタンスを無視できることが望ましい。
4.5
総合的測定の不確かさ
この試験方法によって測定された各値の不確かさを,試験結果報告書の中に記載しなければならない。
不確かさを記述する基本的情報は,TS Z 0033:2012で与えられる。
5
JIS X 6322-1:2011及びJIS X 6322-2:2011のパラメタの試験用ジグ及び回路
この箇条は,JIS X 6322-1:2011及びJIS X 6322-2:2011に関するPICC又はPCDの動作を検証するための
試験用ジグ及び回路について規定する。試験ジグは,次のものを含む。
− 測定器(5.1参照)
− 校正用コイル(5.2参照)
− PCD試験アセンブリの構成(5.3参照)
− 基準PICC(5.4参照)
これらは,5.1〜5.4で規定する。
5.1
測定器に関する最小要求事項
5.1.1
オシロスコープ
デジタルサンプリングオシロスコープは,その適切なスケールで8ビット以上の分解能をもち,少なく
とも500 Mサンプリング/秒以上の性能でなければならない。また,最低250 MHzの帯域幅をもたなけれ
ばならない。数学的解析装置及び外部ソフトウェア(附属書E及び附属書F参照)によって解析するため
に,オシロスコープは,記録したデータをテキストファイルで出力できることが望ましい。
注記 総合帯域幅は,オシロスコープ及びプローブの帯域幅の合成となる。
5.2
校正用コイル
この細分箇条は,校正用コイルの寸法,厚さ及び特性を規定する。
5.2.1
校正用コイルカードの寸法
校正用コイルカードは,JIS X 6301:2005にID-1型として規定する縦・横寸法の実効範囲の中に,その
外周に沿って1ターンのコイルを含んでいなければならない(図1参照)。
コイル72×42 mm
1ターン
JIS X 6301で規定する
ID-1型の外形
接続端子
図1−校正用コイル
コイル72 mm×42 mm
1ターン
7
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.2.2
校正用コイルカードの厚さ及び材質
校正用コイルカードの厚さは,ID-1型の厚さより薄くなければならない。それは,適宜な絶縁材料で構
成しなければならない。
5.2.3
コイルの特性
校正用コイルカードのコイルは,1ターンでなければならない。そのコイルの外形寸法は72 mm×42 mm
とし,四隅の角の半径は5 mmでなければならない。これらの誤差は±2 %とする。
注記1 磁界を感知するコイル内側の面積は,約3 000 mm2とする。
コイルは,銅はく(箔)35 μm厚の印刷配線板(PCB)上に印刷配線コイルとして作る。トラック幅は,
500 μm±20 %とする。接続端子のパッドは,1.5 mm×1.5 mmとする。
注記2 13.56 MHzにおいて,インダクタンスは約250 nH,抵抗値は約0.4 Ωになる。
13.56 MHzで並列容量Cp<14 pFの等価入力アドミッタンス及び並列抵抗Rp>9 kΩをもつ高インピーダン
スのオシロスコープのプローブを使用して,コイルに誘起する(開放)電圧を測定しなければならない。
校正用コイル及びその引出し端子部の共振周波数は,60 MHz以上でなければならない。
注記3 プローブ系に寄生する浮遊容量が35 pF未満のとき,その系全体の共振周波数は60 MHz以
上になる。
磁界の強さから開放電圧に変換する係数は,A/m(rms)当たり,0.32 V (rms)になる[ピーク ツー ピーク
電圧の場合の係数は,A/m(rms)当たり,900 mV (p-p)になる。]。
注記4 高インピーダンスのオシロスコープのプローブの接地線は,できる限り短く20 mm未満にす
るか又は同軸接続にすることが望ましい。
5.3
PCD試験アセンブリの構成
PCD試験アセンブリは,直径150 mmのPCD試験アンテナ及び平行に配置した二つのセンスコイル(セ
ンスコイルa及びセンスコイルb)によって構成しなければならない。その試験器の組立てを図2に示す。
これらのセンスコイルは,互いに信号の位相が逆になるように配線しなければならない。10 Ωの可変抵抗
P1は,PICC又は他の磁気結合製品がない状態において,両者のセンスコイルの平衡をとるように調整す
る。浮遊容量を含めてプローブの容量負荷は,14 pF未満でなければならない。
注記1 接続配線の容量及びオシロスコーププローブの容量は,再現性をよくするように小さく維持
することが望ましい。
注記2 非対称な組立ての場合,予期しない組立て誤りを避けるために,可変抵抗P1の調整範囲は,
僅か10 Ωとする。10 Ωの可変抵抗P1で調整が取れない場合には,組立て全体の対称性を点
検することが望ましい。
注記3 高インピーダンスのオシロスコープのプローブの接地線は,できる限り短く20 mm未満にす
るか又は同軸接続にすることが望ましい。
8
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
センスコイルb
センスコイルa
PCD
アンテナ
240Ω
±1%
P1
10Ω
オシロスコープへ
プロ−ブ
同一長さのツイストペア
配線又は同軸ケーブル
100 mm未満
+
+
+
+
ー
ー
ー
ー
・
・
240Ω
±1%
図2−試験器の組立て(原理図)
5.3.1
PCD試験アンテナ
PCD試験アンテナは,直径150 mmとし,その構造は,附属書Aの寸法図に従わなければならない。
PCD試験アンテナの同調調整は,インピーダンスアナライザ,ネットワークアナライザ又はLCRメー
タを用いて行うのが望ましい。インピーダンスアナライザ,ネットワークアナライザ又はLCRメータを利
用できないとき,同調調整は,附属書Bに示す手順に従って行ってもよい。
5.3.2
センスコイル
センスコイルの寸法は,100 mm×70 mm,四隅の角の半径は10 mmでなければならない。センスコイル
構造は,附属書Cの寸法図に従わなければならない。
5.3.3
PCD試験アセンブリの配置
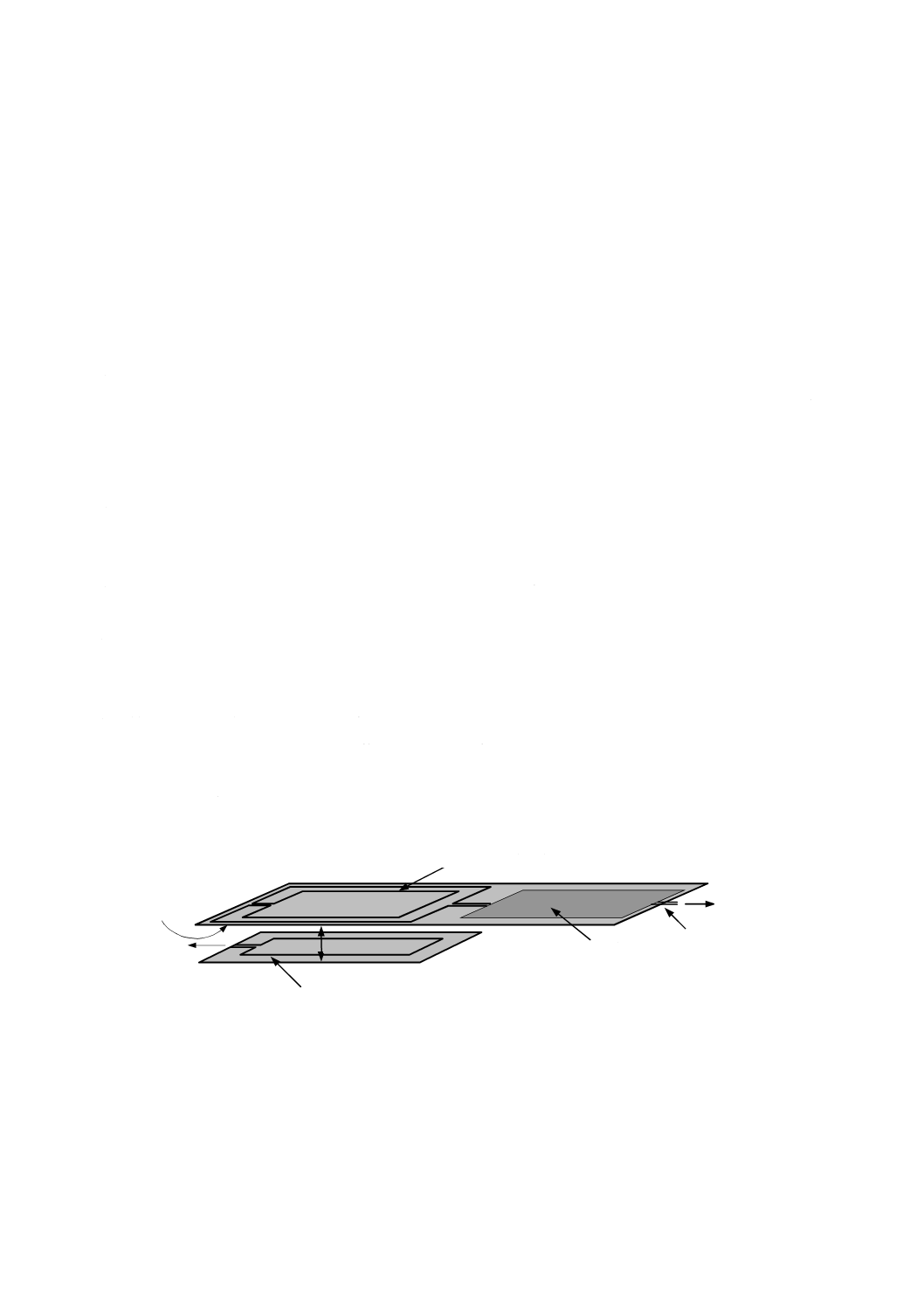
センスコイル及びPCD試験アンテナは,その中心軸を一致させ,図3に示すように,その銅はく(箔)
面の間隔を37.5 mmとし,平行に配置しなければならない。その組立て精度は,±0.5 mmより小さくしな
ければならない。DUTのコイルと校正用コイルとの間隔は,PCD試験アンテナのコイルと相対し等間隔に
しなければならない。
注記 これらの距離間隔は,PICCの典型的な動作距離を表している。
プローブ
9
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
37.5 mm
37.5 mm
DUT
導体
センスコイル a
PCD試験アンテナ
sense coil b
センスコイル b
校正用コイル
図3−PCD試験アセンブリの配置
5.4
基準PICC
PCDの動作空間内で,PCDの次の性能を試験するために,基準PICCを規定する。
− Hmin以上でHmaxを超えない磁界を生成する。
− PICCへ電力供給する。
− PICCへ変調信号を送信する。
− PICCからの負荷変調信号を受信する。
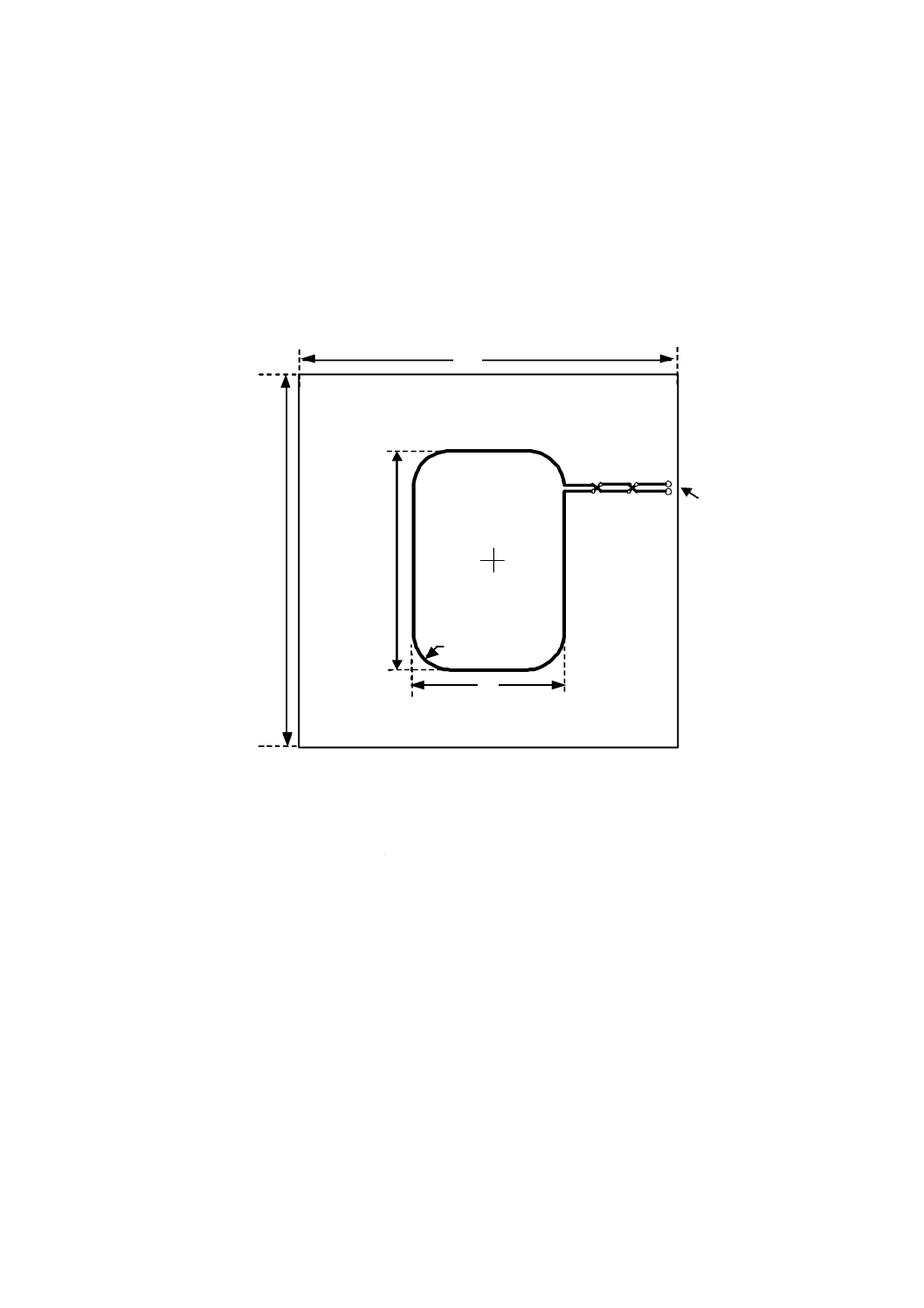
5.4.1
基準PICCの寸法
基準PICCは,JIS X 6301:2005にID-1型として規定する縦・横寸法のコイル部及び回路部を含む領域で
構成しなければならない。PICCに要求される機能をエミュレートする回路部の領域は,コイル部の外側に
あり,試験装置に挿入して実行できるようにし,また,試験に影響しないようにしなければならない。こ
の寸法は,図4に示すようにしなければならない。
図4−基準PICCの寸法
10
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4.2
基準PICCの構成
基準PICCの構成を附属書Dに規定する。
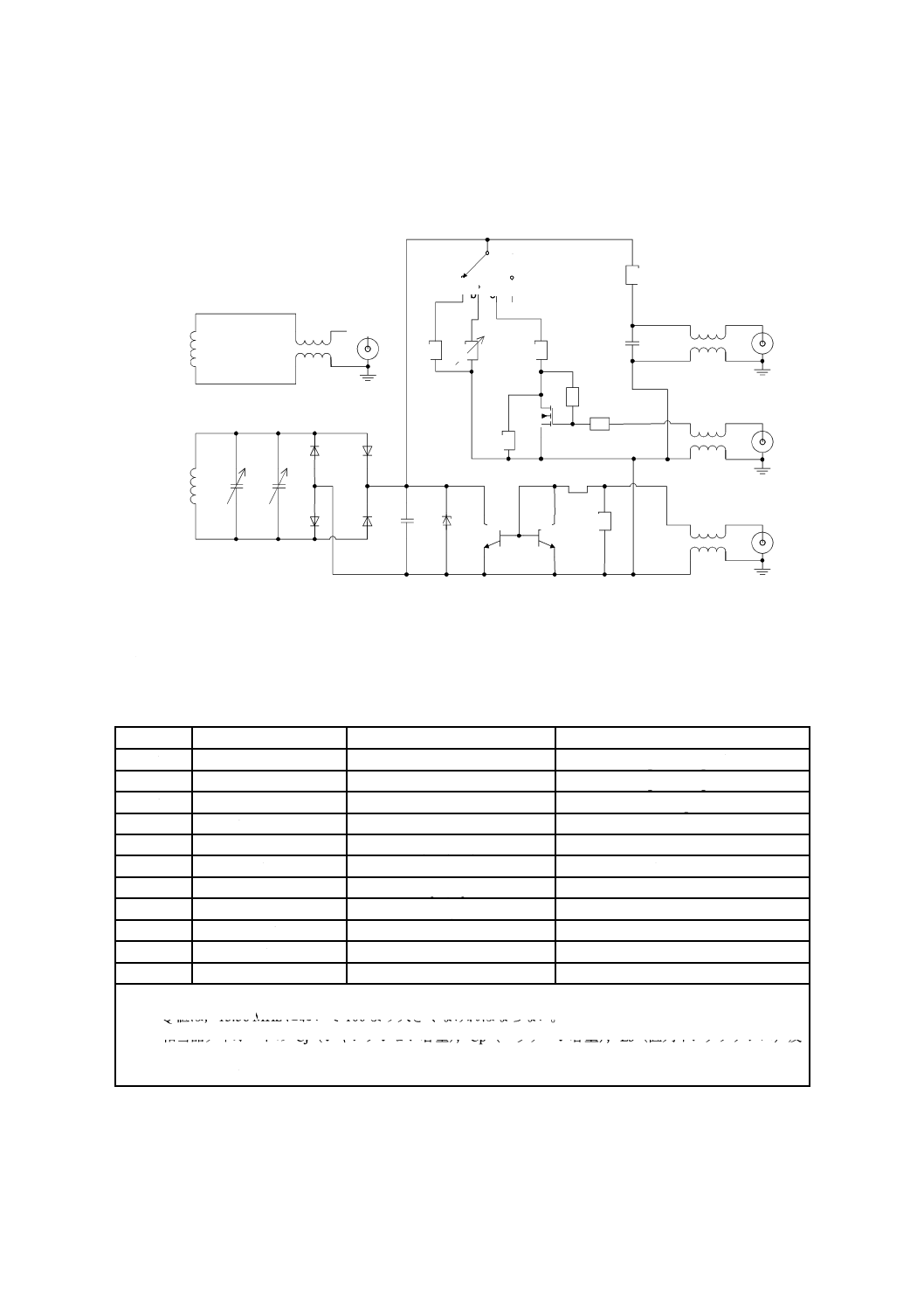
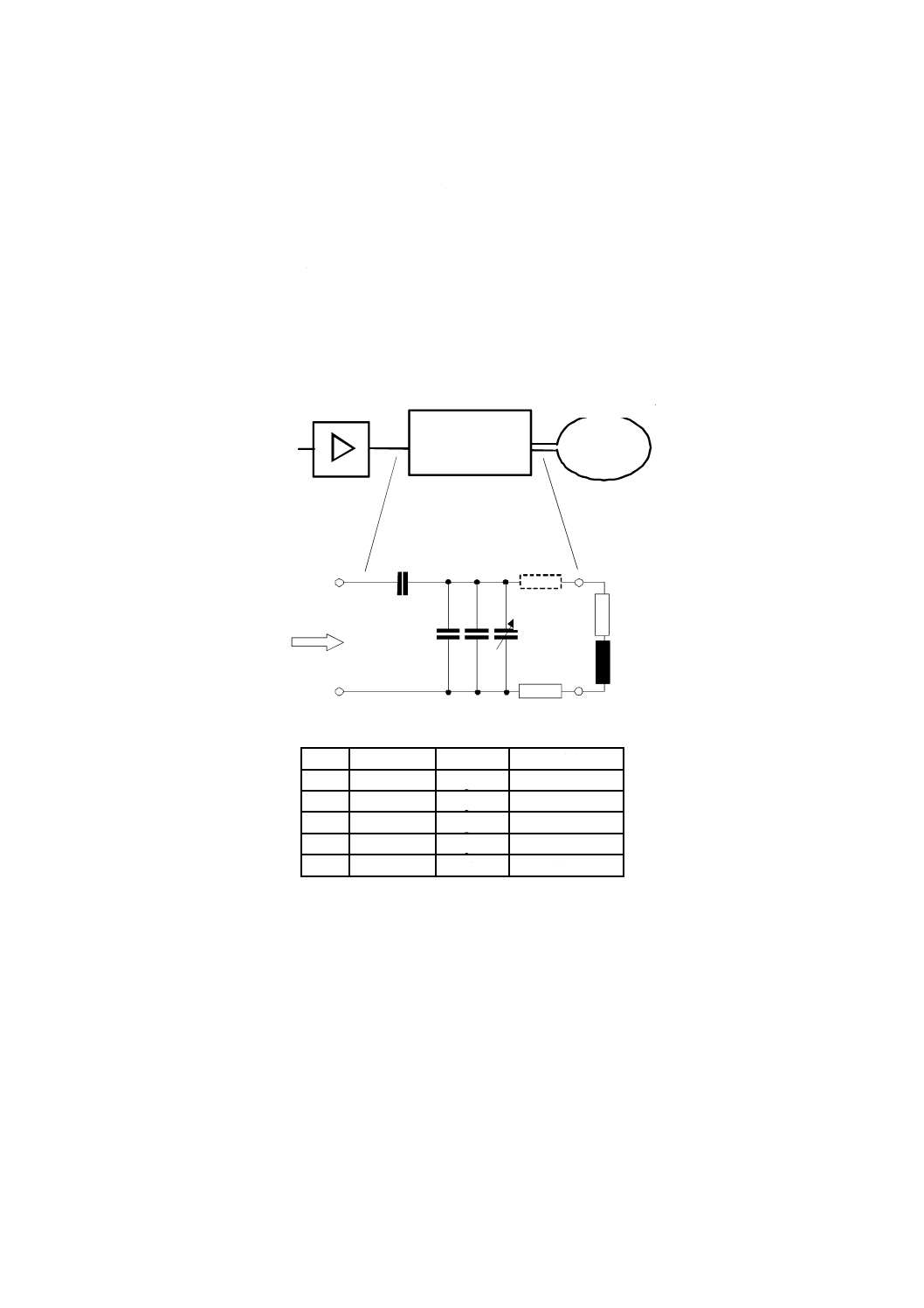
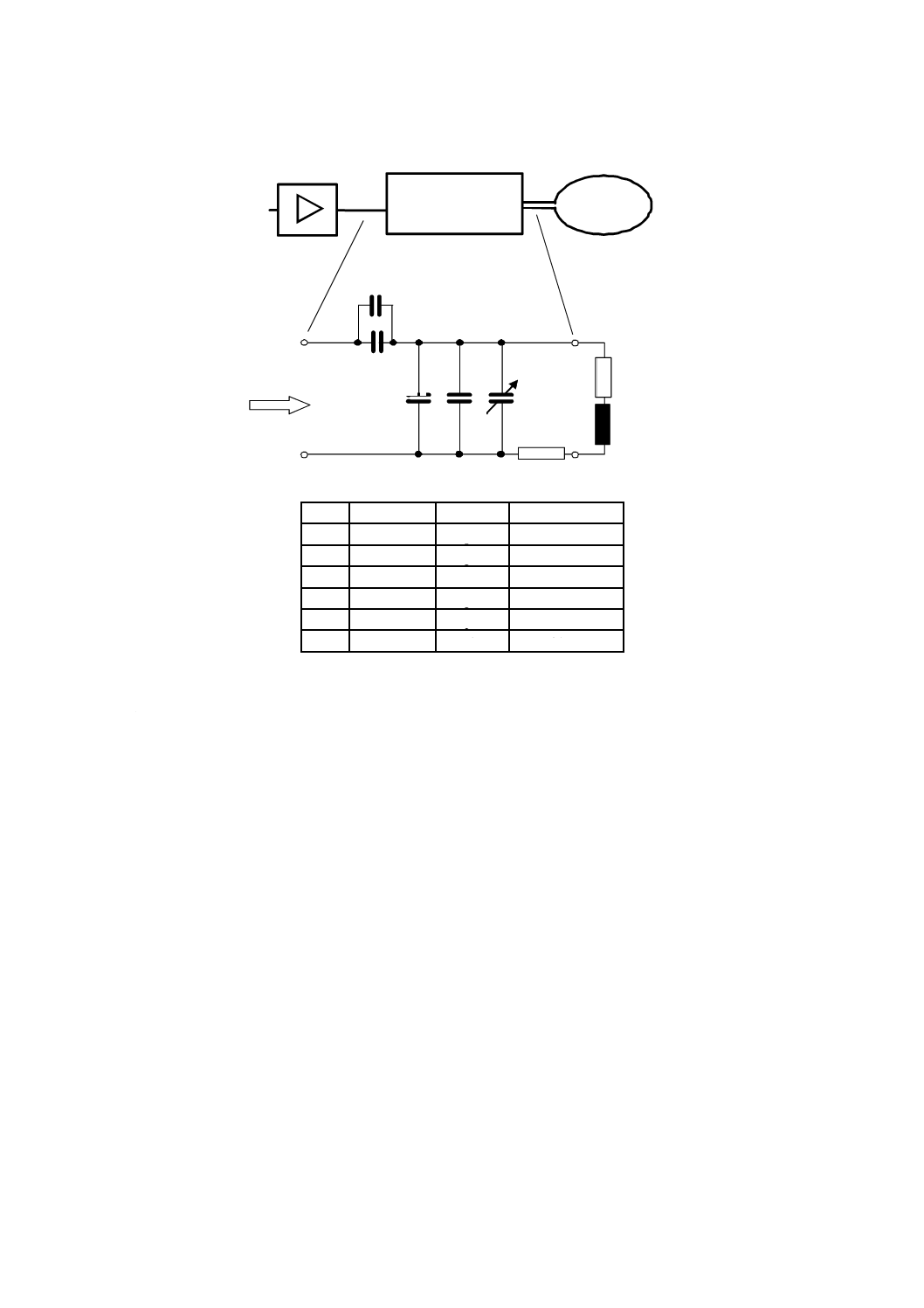
基準PICCは,図5に示す回路図及び表2に示す部品表を適用しなければならない。
C1
L1
(主コイル)
L2
(ピックアップ
コイル)
D1
Q 1b
C2
Q1a
R 5
R3
CMF4
D2
D3
D4
C3
Dz
C4
J1
Q 2
R9
R6
R8
R7
CON2
CMF 2
CON4
R1
ab
c d
R4
CON3
CMF 3
CON1
CMF 1
R2
図5−基準PICCの回路図
注記 ジャンパJ1の“d”の位置は,RFUとする。
表2−基準PICCの部品表
部品
値
部品
値
L1
附属書D参照
C1
7 pF 〜 50 pF b)
L2
附属書D参照
C2
3 pF 〜 10 pF b)
R1
1.8 kΩ
C3
27 pF
R2
0 kΩ 〜 2 kΩ a)
C4
1 nF
R3
220 Ω
D1, D2, D3, D4
BAR43S 又は相当品c)
R4
51 kΩ
Dz
BZX84, 15 V又は相当品c)
R5
51 Ω
Q1a, Q1b
BCV61A又は相当品
R6
500 kΩ
Q2
BSS83又は相当品
R7
110 kΩ
CMF1, CMF2, CMF3, CMF4
ACM3225 -102-2P又は相当品
R8
51 Ω
CON1, CON2, CON3, CON4
RF コネクタ
R9
1.5 kΩ
注a) 10回転のポテンショメータを使用することが望ましい。
b) Q値は,13.56 MHzにおいて100より大きくなければならない。
c) 相当品ダイオードのCj(ジャンクション容量),Cp(パッケージ容量),Ls(直列インダクタンス)及
びRs(直列抵抗)の値に注意することが望ましい。データシートにそれらの値の記述がないかもしれ
ないので注意する。
CON1に負荷変調信号を与えなければならない。負荷変調は,PCD試験アセンブリで決めることができ
る。負荷変調信号を使用しないとき,負荷変調信号発生器は,接続しないか又は0 Vに設定しなければな
11
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
らない。
CON2の電圧で,CON3のDC電圧が要求値になるまで基準PICCの負荷を調整することができる。
高入力インピーダンスの電圧計を使用して,基準PICCのDC電圧をCON3で測定しなければならない。
ツイスト線又は同軸ケーブルを使用することが望ましい。
高入力インピーダンスのオシロスコープのプローブを使用して,PCDの波形のパラメタをCON4で抽出
する。高インピーダンスのオシロスコープのプローブの接地線は,できる限り短く20 mm未満にするか又
は同軸接続にすることが望ましい。
5.4.3
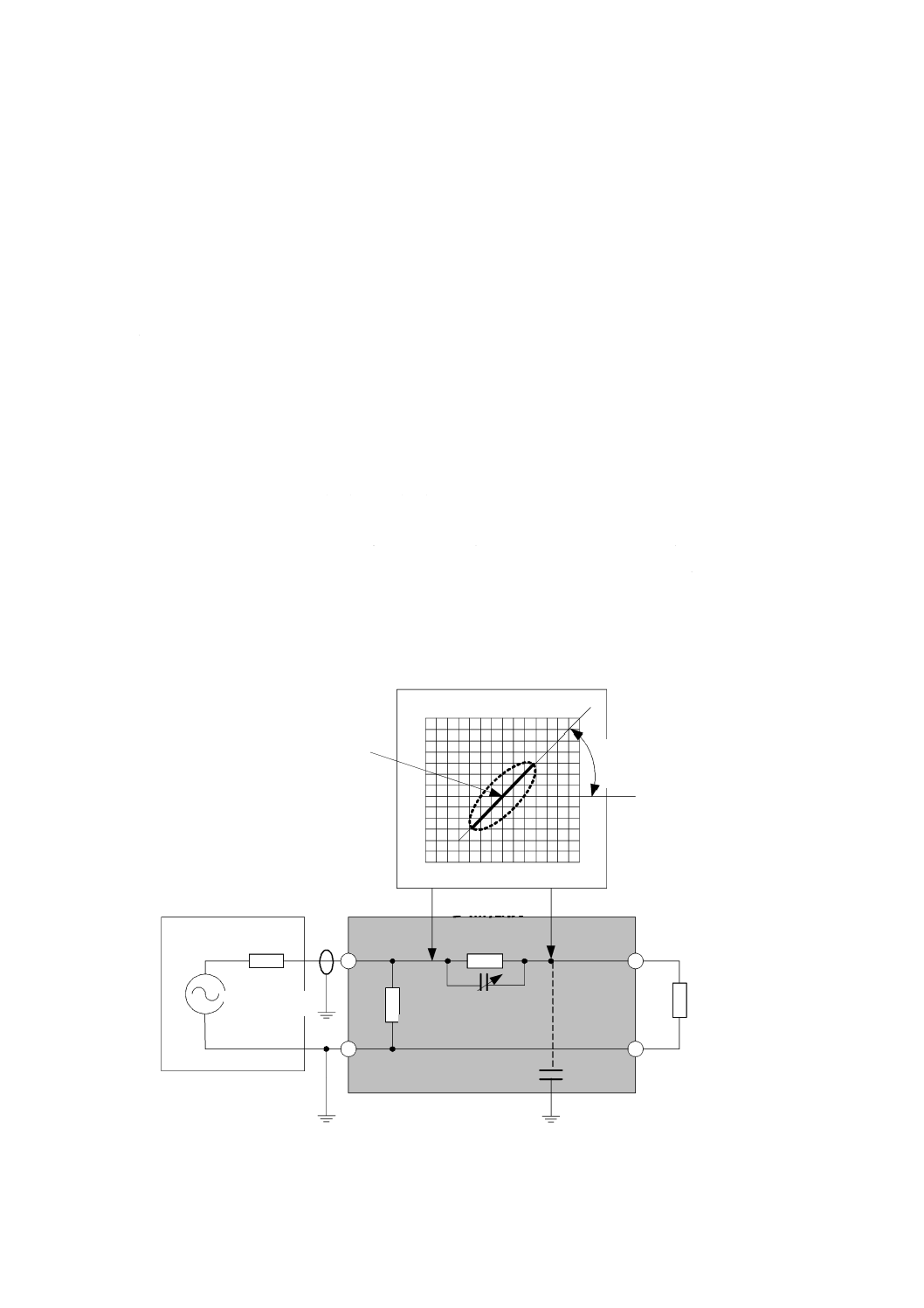
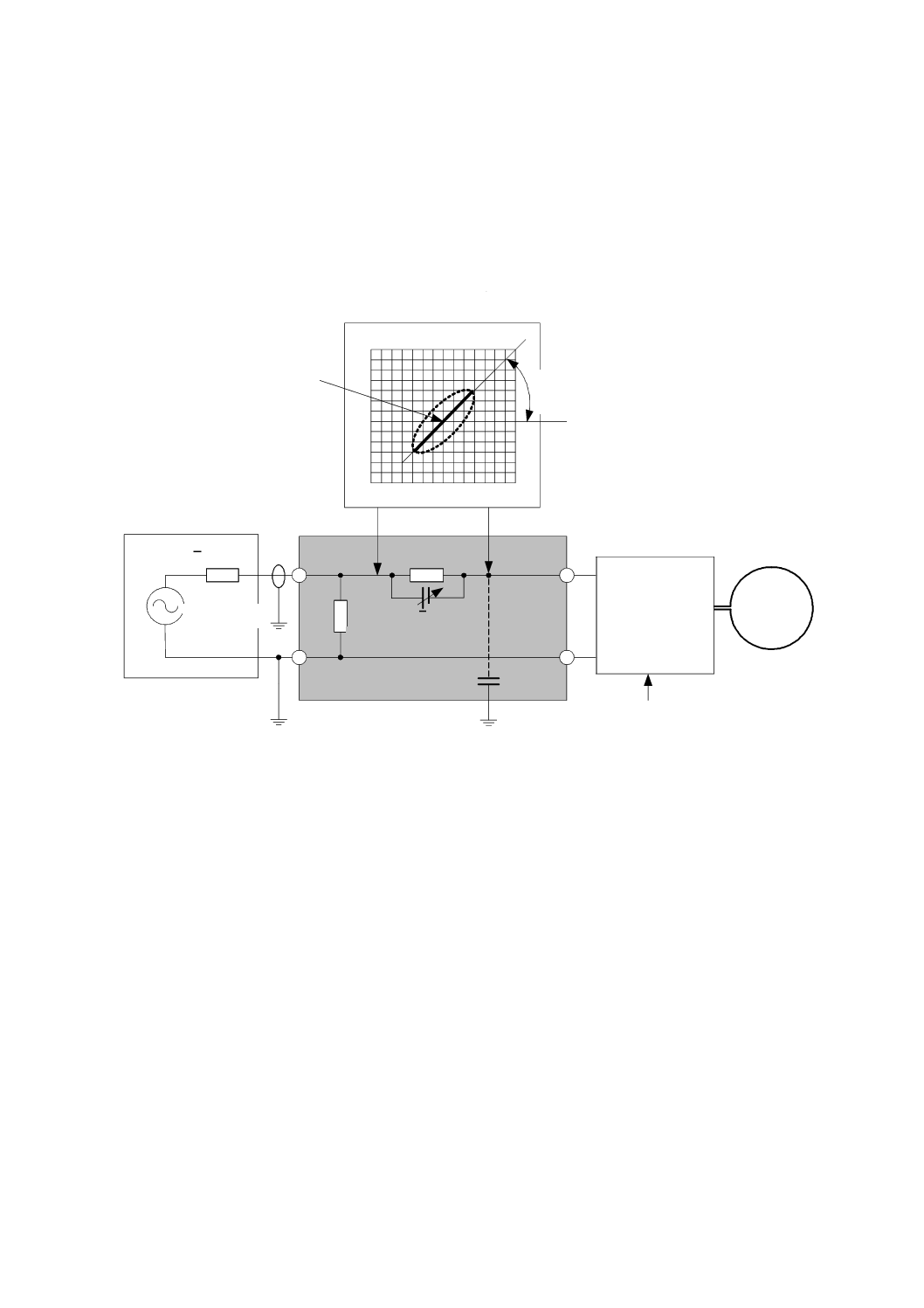
基準PICCの共振周波数の調整
基準PICCの共振周波数は,次の手順で校正する。
a) ジャンパJ1を“a”に設定する。
b) 校正用コイルを直接信号発生器に接続し,そして基準PICCのコネクタCON3に高入力インピーダン
ス電圧計を接続する。他の全てのコネクタは,試験で使う同じ装置に接続する。
c) 結合させる二つのコイル(校正用コイル及び基準PICCの主コイル)の中心軸上に距離 d = 10 mm離
して基準PICCを配置する(図6参照)。
d) 希望する共振周波数に設定した正弦波信号で校正用コイルを駆動する。
e) CON3でDC電圧が最大になるようにキャパシタC1及びC2を調整する。
f)
CON3でDC電圧が6 Vになるように,信号発生器の出力を調整する。
g) 手順e)の後,最大電圧が6 Vになるまで,手順e)及びf)を繰り返す。
h) 校正用コイルでHminの動作条件を生成するようにPCD試験アセンブリを校正する。
i)
PCD試験アセンブリのDUTの位置に基準PICCを置く。ジャンパJ1を“b”の位置に切り換える。
CON3でDC電圧が6 V得られるように,R2を調整する。動作磁界の状態は,校正用コイルで電圧を
観測することによって確かめ,必要ならば調整する。
j)
得られたR2の値で手順b)〜g)を繰り返す。
注記 測定される校正用コイルの複素数インピーダンスの抵抗分が最大値に達しており,CON3で6 V
になるよう十分な電力が供給される場合,信号発生器の代わりに,ベクトルネットワークアナ
ライザを使用してもよい。
信号発生器へ
電圧計へ
CON3
基準PICC回路
ピックアップコイル(表面)
校正用コイル(表面)
d
主コイル(裏面)
図6−基準PICCの周波数調整の設定(原理図)
6
JIS X 6322-1:2011のパラメタに関する試験
6.1
PCDの試験
6.1.1
交流磁界
12
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.1.1.1
目的
この試験は,PICCの存在するいかなる場所でも,JIS X 6322-1:2011で規定する平均値を超える磁界を
PCDが生成しないことを確認する。
6.1.1.2
試験手順
a) 5.4.3のa)〜g)で規定する手順に従い,基準PICCの共振周波数を19 MHzに調整する。
b) PCD試験アセンブリがJIS X 6322-1:2011で規定する平均磁界強度を校正用コイル上に発生するよう
に校正する。
c) PCD試験アセンブリのDUTの位置に基準PICCを置く。ジャンパJ1を“b”の位置に切り換える。コ
ネクタCON3でDC電圧が3 V得られるように,R2を調整する。校正用コイルの電圧を観測すること
によって,動作磁界の状態を確かめなければならない。必要ならば調整しなければならない。
注意 R2の値は,55 Ω〜65 Ωの間が望ましい。
d) 試験対象PCDの磁界内の適切な位置に基準PICCを置く。CON3でDC電圧は,3Vを超えてはならな
い。
e) 超えた場合,JIS X 6322-1:2011で規定する30秒間の最大値及び平均磁界強度を確認するために,最大
値及び平均値のDC電圧を測定し,同じ変換係数を使い,磁界強度に変換する。
6.1.1.3
試験成績書
試験成績書には,CON3で測定したDC電圧を記載しなければならない。
6.2
PICCの試験
6.2.1
交流磁界
この試験の目的は,13.56 MHzの交流磁界にさら(曝)されたPICCの特性を確認することである。
6.2.1.1
試験ジグ
交流磁界を発生するために,PCD試験アセンブリを使用する。
6.2.1.2
試験手順
試験手順は次のようになる。
a) 校正用コイルで測定した磁界強度を10 A/m(rms)になるように,PCD試験アンテナに信号発生器を接
続して,PCD試験アセンブリのRF電力を調整する。
b) 試験対象PICCをDUTの位置に置き,必要ならば,PCD試験アンテナを駆動するRF電力を直ちに再
調整する。
c) 5分後,少なくとも5秒間DUTの位置からPICCを抜いておく。
d) 校正用コイルで測定した磁界強度を12 A/m(rms)になるように,PCD試験アンテナに信号発生器を接
続して,PCD試験アセンブリのRF電力を調整する。
e) 試験対象PICCをDUTの位置に置き,必要ならば,PCD試験アンテナを駆動するRF電力を直ちに再
調整する。
f)
次に示すデューティサイクルでこの磁界を5分間ASK100%変調する。
− 5秒間 0 A/m(rms)
− 25秒間12 A/m(rms)
g) PICCが正常動作することを確認する。
6.2.1.3
試験成績書
試験成績書には,PICCが正常動作したか否かを記載しなければならない。
13
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.2.2
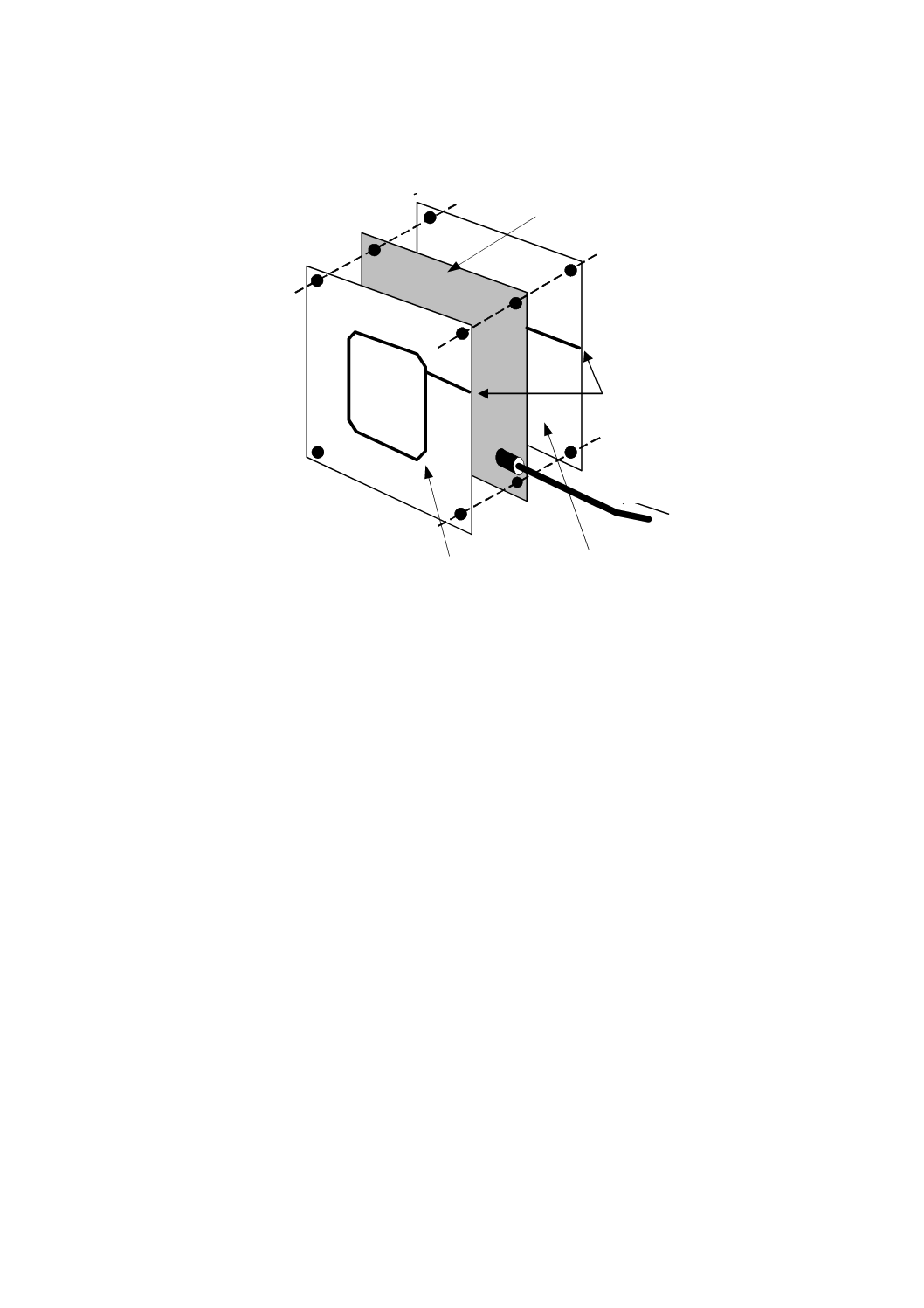
静電気試験
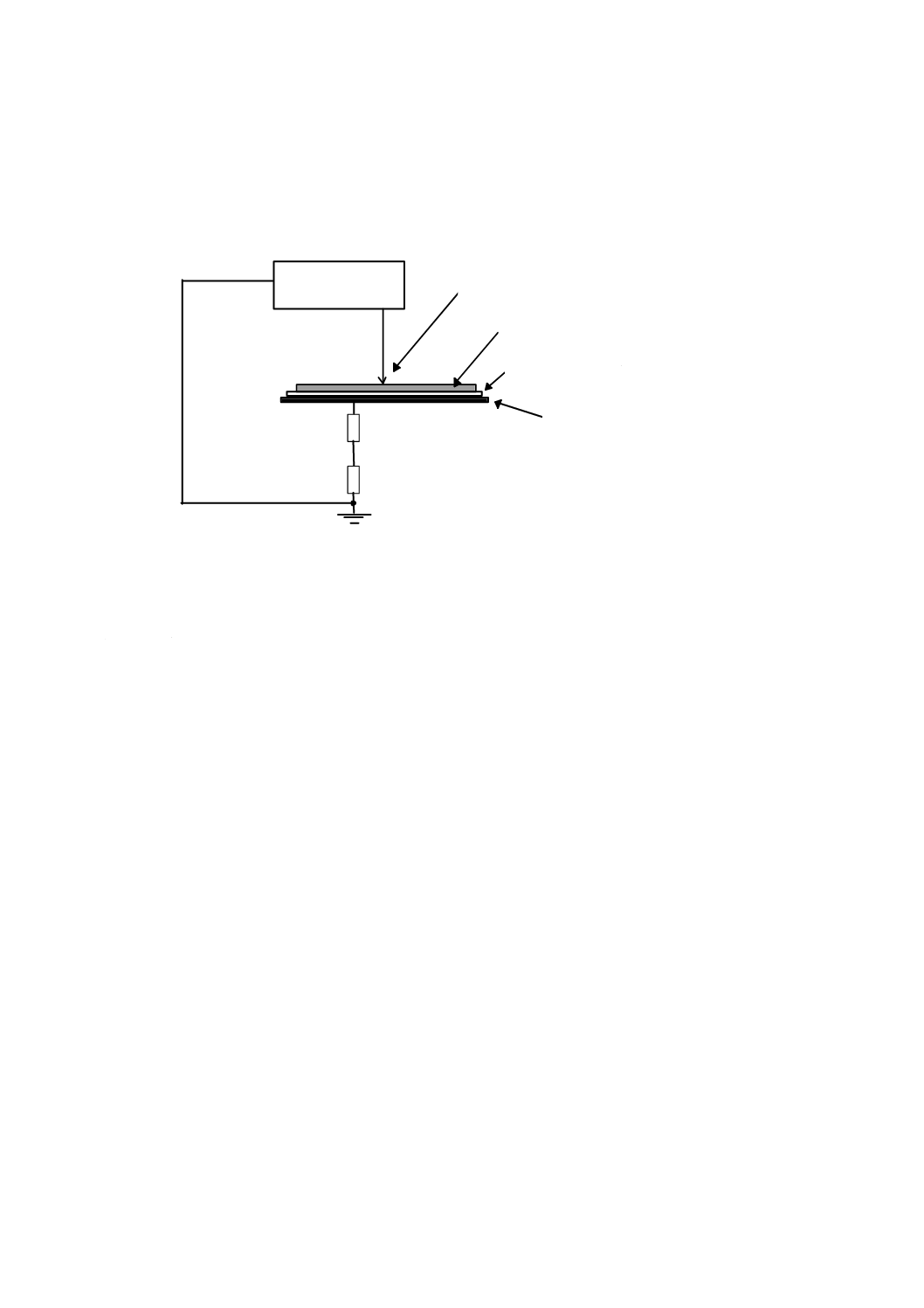
この試験の目的は,試験対象品カードに静電気放電(ESD)することによって,試験対象品カード内のIC
の性能を調べることになる。試験対象PICCに,人体モデルを模して静電気放電(ESD)させた後,基本動作
を確認する(図7参照)。
厚さ0.5 mm の絶縁板
PICC
放電電極
ESD試験器
木製の台に敷いた導電板
(接地)
470 kΩ
470 kΩ
図7−ESD試験の回路
6.2.2.1
試験ジグ
JIS C 61000-4-2:2012を参照。
a) ESD試験器の主要特性
− 電荷蓄積キャパシタ:150 pF±10%
− 放電抵抗:330 Ω±10%
− 充電抵抗:50 MΩ〜100 MΩ
− 立上がり時間:0.7 ns〜1 ns
b) 選択項目
− 試験装置の形態:卓上型
− 放電方法:導体を直接試験対象品に接触させ,放電
− ESD試験器の放電電極:直径8 mmの球型プローブ
6.2.2.2
試験手順
試験装置の接地端子と,カードを載せた導電板とを接続する。
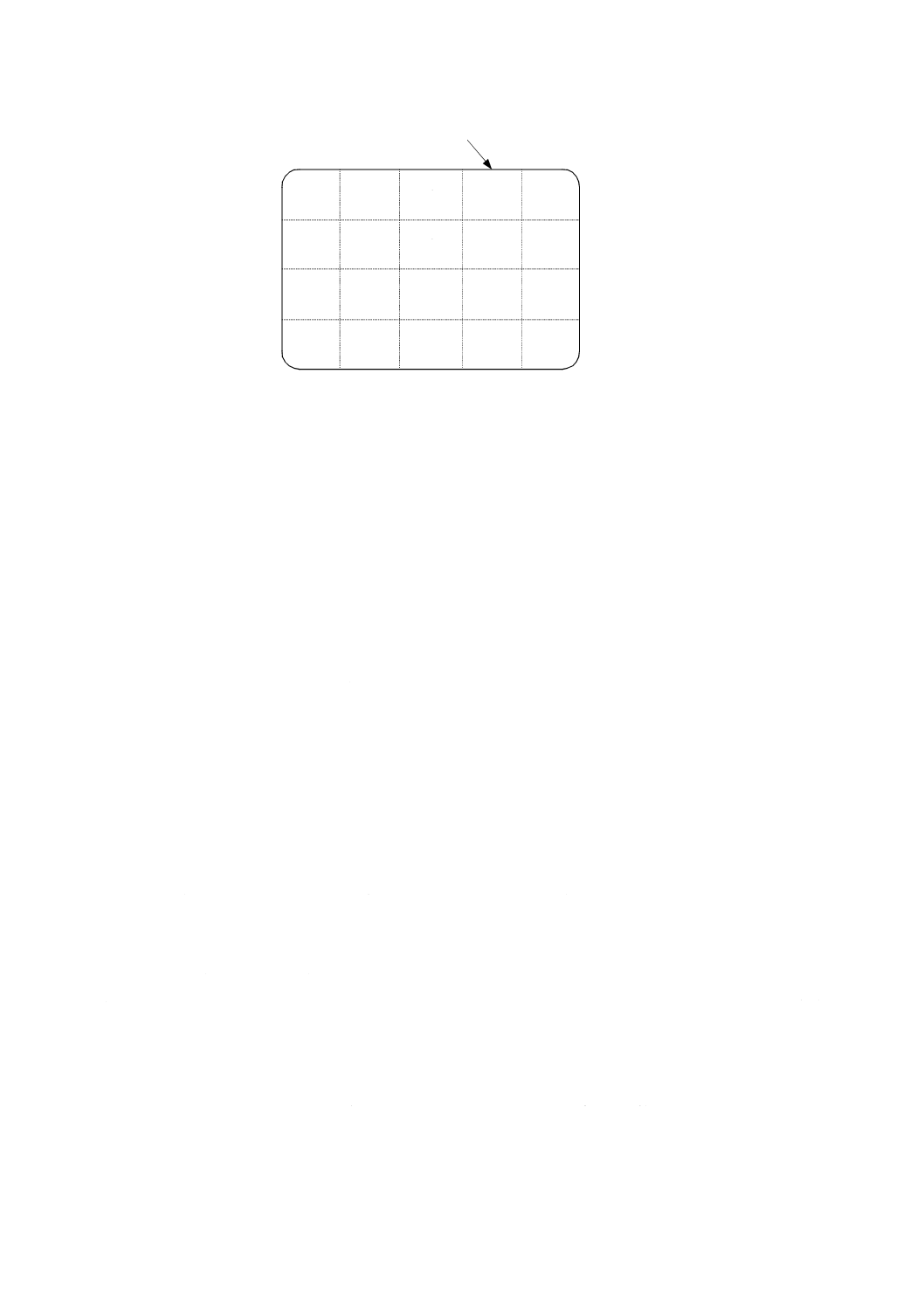
図8に示す20の区分域ごとに,順極性の電圧を連続して放電させる。その後,逆極性にして,同様に繰
り返す。少なくとも10秒間の間隔でパルス休止時間をおき,繰り返す。
注意 区分域に外部端子を含むとき,その端子には放電をさせてはならない。
試験終了後,PICCが正常に動作することを確認する。
14
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
上端の基準辺
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
図8−ESD試験におけるPICC上の区分域
6.2.2.3
試験成績書
試験成績書には,PICCが正常動作したか否かを記載しなければならない。
7
JIS X 6322-2:2011のパラメタに関する試験
7.1
PCDの試験
次に示す全ての試験は,PCD製造業者が規定する動作空間で実施されなければならない。
7.1.1
PCDの磁界強度
7.1.1.1
目的
この試験は,PCDの動作空間内の磁界強度を測定する。
注記 試験は,PCDへのPICC負荷の影響も受ける。
7.1.1.2
試験手順
最大磁界強度Hmaxの試験手順
a) 5.4.3のa)〜g)で規定する手順に従い,基準PICCの共振周波数を19 MHzに調整する。
b) 校正用コイル上で磁界Hmaxの状態にするようにPCD試験アセンブリを調整する。
c) PCD試験アセンブリのDUTの位置に基準PICCを置く。ジャンパJ1を“b”の位置に切り換えて,コ
ネクタCON3で測定されるDC電圧を3 Vになるように,R2を調整する。代わりの方法として,ジャ
ンパJ1を“c”の位置に設定して,コネクタCON3のDC電圧が3 Vになるように,CON2の印加電
圧を調整してもよい。いずれの場合も,校正用コイルの電圧を観測することによって,動作磁界の状
態を確かめなければならない。必要ならば調整しなければならない。
注意 R2の値は,75 Ω〜85 Ωが望ましい。代わりの方法(ジャンパJ1を“c”の位置に設定する方
法)を使用する前に,少なくとも1回この範囲にあることを確認する。
d) 試験対象PCDの定義された動作空間内に基準PICCを置く。CON3におけるDC電圧は,3 Vを超え
てはならない。
最小磁界強度Hminの試験手順
a) 5.4.3の手順に従い,基準PICCの共振周波数を13.56 MHzに調整する。
b) 校正用コイル上で磁界Hminの状態にするようにPCD試験アセンブリを調整する。
c) PCD試験アセンブリのDUTの位置に基準PICCを置く。ジャンパJ1を“b”の位置に切り換えて,コ
ネクタCON3で測定されるDC電圧を3 Vになるように,R2を調整する。代わりの方法として,ジャ
15
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ンパJ1を“c”の位置に設定して,コネクタCON3のDC電圧が3 Vになるように,CON2の印加電
圧を調整してもよい。いずれの場合も,校正用コイルの電圧を観測することによって,動作磁界の状
態を確かめなければならない。必要ならば調整しなければならない。
注意 R2の値は,400 Ω〜550 Ωが望ましい。代わりの方法(ジャンパJ1を“c”の位置に設定する
方法)を使用する前に,少なくとも1回この範囲にあることを確認する。
d) 試験対象PCDの定義された動作空間内に基準PICCを置く。CON3におけるDC電圧は,3 Vを超え
なければならない。
7.1.1.3
試験成績書
試験成績書には,選択した測定条件下(ジャンパJ1を“b”又は“c”の位置)で磁界強度Hmin及びHmax
になるように調整されたR2又は可変負荷回路に対して,CON3で測定したDC電圧を記載しなければなら
ない。
7.1.2
“Class 1” PICCの動作に適用するPCDの磁界強度
7.1.2.1
目的
次の追加するPCDの試験は,PCDと“Class 1” PICCとの間での互換性のために必要である。
この試験は,より大きい負荷影響(loading effect)を与えるように調整された基準PICCを使用すること
を除いて,7.1.1において指定されたPCDの磁界強度の試験に類似している。
注記 “Class 1” PICCの負荷影響は,この試験で使用した基準PICCの負荷影響よりも小さい(“Class 1”
PICCの最大負荷影響の試験は,7.2.4を参照。)。これは,“Class 1” PICCのアンテナ寸法及び位
置が基準PICC(附属書D参照)のアンテナ寸法及び位置に類似している場合,Hminが,“Class
1”用 PCDの動作空間において供給されることを保証している。
異なるアンテナ寸法及び/又は位置をもつPICCのために,他のクラスは,各クラスに対応
する基準PICCを作製してもよい。
7.1.2.2
試験手順
7.1.1のHmin試験の手順において規定したPCDの動作磁界強度の試験を,CON3で3 Vの代わりに6 V
を得るように調整された基準PICCによって繰り返さなければならない。
注記 この試験で使用する基準PICCの校正は,7.1.1で規定した校正方法と同じである。
7.1.2.3
試験成績書
試験成績書には,選択した測定条件下で磁界強度Hminになるように調整された,R2又は可変負荷回路
に対して,CON3で測定したDC電圧を記載しなければならない。
注記 DC電圧6 Vを超える動作範囲は,“Class 1” PICCの動作空間と規定する。
7.1.3
PCDからPICCへの電力伝送
7.1.3.1
目的
この試験は,PCDが動作空間内のどのPICCに対してもある一定の電力を供給できることを確認するた
めに使用される。
7.1.3.2
試験手順
a) 5.4.3のa)〜g)で規定する手順に従い,基準PICCの共振周波数を19 MHzに調整し,ジャンパJ1を“a”
の位置にしておく。
b) 試験対象PCDの動作空間に基準PICCを置く。コネクタCON3のDC電圧は,3 Vを超えなければな
らない。
16
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.1.3.3
試験成績書
試験成績書には,測定条件下で定義された動作空間内で,CON3のDC電圧を記載しなければならない。
7.1.4
変調度及び波形
7.1.4.1
目的
この試験は,JIS X 6322-2:2011において定義するPCD磁界の変調度,立上がり時間,立下がり時間及び
オーバシュートの値を確認する。
7.1.4.2
試験手順
a) 定義された動作空間の任意の位置に校正用コイルを置き,適切なオシロスコープの上にコイルの誘導
電圧を表示する。変調度及び波形解析プログラム(附属書E参照)を使用して,変調度及び波形特性
を確認する。
b) 5.4.3のa)〜g)で規定する手順に従い,基準PICCの共振周波数を16.5 MHzに調整し,ジャンパJ1を
“c”の位置に切り換える。
c) PCD動作空間内の任意に選んだ位置に基準PICCを置く。
d) コネクタCON3でDC電圧3 Vを得るように,CON2でDC電圧を調整する。又は“Class 1”に対応する
場合,任意選択として6 Vを得るように,CON2でDC電圧を調整する。
注記1 選択した位置でDC電圧が6 Vに達することができない場合,最大達成可能な電圧で試験
するのが望ましい。
e) CON4での無変調の電圧が,適切なオシロスコープ(要求仕様は,5.1.1参照)によって測定して1 Vpp
以下の場合,代わりのピックアップコイルを波形特性の確認のために使用する。
注記2 代わりのピックアップコイルは,半径15 mmの8の字の形状で,結合度を最小にするため
に,基準PICCからできるだけ離し,そして,誘導電圧を最大にするために,PCDアンテ
ナにできるだけ接近させることが望ましい。
また,8の字形状のコイルにある二つのループの一方をPCDアンテナの内側,もう一方
をその外側に配置することが望ましい。
f)
CON4の電圧又は代わりのピックアップコイルの電圧から附属書Eに規定する解析プログラムを使用
して変調度及び波形特性を確認する。
g) 動作空間の中で位置を変えて手順c)〜f)を繰り返す。
注記3 動作空間の中の校正用コイルの選択した位置は,測定結果に影響しないようにする。
注記4 基準PICCの負荷は,PICCの最悪な負荷影響を示すものではない。共振周波数が搬送周波
数に近い場合(例えば,15 MHz又は13.56 MHz),さらに大きな負荷影響が生じることが
ある。
7.1.4.3
試験成績書
試験成績書は,決めた動作空間及び負荷の有無の条件で,測定したPCD磁界の変調度,立上がり時間,
立下がり時間及びオーバシュート値を記載しなければならない。
7.1.5
負荷変調の受信
7.1.5.1
目的
この試験は,PCDがJIS X 6322-2:2011に対応するPICCの負荷変調を正しく検出することを確認するた
めに使用する。
7.1.5.2
試験手順
基準PICC及びその校正手順を用いることによって,負荷変調に対するPCDの感度を評価できる。基準
17
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PICCは,全ての形式のPICCの負荷影響をエミュレートするものではない。
a) 5.4.3に従い,基準PICCの共振周波数を13.56 MHzに調整し,ジャンパJ1を“c”の位置に切り換え
る。
b) PCDの動作空間内の任意に選んだ位置に基準PICCを置く。
c) コネクタCON3でDC電圧3 Vが得られるよう,CON2に加えるDC電圧を調整する。また,“Class 1”
に対応する場合,CON3でDC電圧6 Vを得るように,CON2に加えるDC電圧を調整する。
d) CON1に変調信号を与えて応答を発生させる。このとき,変調信号の振幅は,初めは十分に小さくし,
PCDが少なくとも10回連続して応答を検出するまで,増大させていく。
e) 基準PICCをPCD試験アセンブリのDUTの位置に置く。
f)
CON3で同じ電圧を与えるようにPCD試験アセンブリの磁界強度Hを調整し,この校正用コイルの
電圧を読むことによって対応する磁界強度を記録する。
g) 7.2.1に従い,基準PICCの負荷変調振幅VLMAを測定する。そして,測定地点の磁界強度を関係式に
代入して得られる標準限界値と比較する。この測定したVLMA値をPCDの感度と定義し,標準限界値
と比較するために,(磁界強度を変えながら)この測定を繰り返す。
h) 動作空間の中で位置を変えてb)〜g)を繰り返す。
i)
基準PICCの共振周波数を15 MHzに変えて,a)〜h)を繰り返す。
注記1 試験範囲は,13.56 MHz以下の12 MHz,10 MHzなどの共振周波数に拡張してもよい。
注記2 PICC負荷変調の受信を良好にするために,PCD感度を標準限界値より低くすることが望ま
しい。
注記3 この試験は,PCD受信がPICC負荷変調の位相に無関係であることを確認していない。
その結果,それはJIS X 6322-2:2011に適合するPICCからの信号を正しく受信できるかは
保証できない。
7.1.5.3
試験成績書
試験成績書には,少なくとも基準PICCの共振周波数が15 MHz及び13.56 MHzのときの各試験位置で
測定したPCDの負荷変調感度を記載しなければならない。
7.2
PICCの試験
7.2.1
PICCの送信
7.2.1.1
目的
この試験の目的は,JIS X 6322-2:2011において規定される[Hmin,Hmax]の動作範囲中でのPICCの負荷
変調振幅VLMAを決定することである。また,JIS X 6322-2:2011において規定するように,それらの対応
する変調範囲でA型及びB型のPICCの機能を決定しなければならない。
注記 fc/64,fc/32及びfc/16のビット伝送速度に対しての負荷変調試験は,必要ない。
7.2.1.2
試験手順
手順1:図2に示すセンスコイルa,センスコイルbなどを含む回路(負荷変調試験回路)及び図3の
PCD試験アセンブリを使用する。
校正用コイルによって測定して,信号発生器がPCD試験アンテナに供給するRF電力を必要な磁界強度
に調整する。図2の負荷変調試験回路の出力をデジタルサンプリングオシロスコープに接続する。10 Ωの
ポテンショメータP1は,残留搬送波を最小化するために調整しなければならない。
この信号は,一つのセンスコイルを短絡させることによって得られた信号より少なくとも40 dB低くな
ければならない。
18
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注意 PICC負荷変調振幅の試験は,Hminから始まるPICCの動作を正しく確認するため,磁界強度を
0 A/m(rms)から増大させることが望ましい。
手順2:試験対象PICCは,センスコイルaと同一の中心軸上のDUTの位置に置かなければならない。
PCD試験アンテナに供給されるRF電力は,必要な磁界強度に再調整しなければならない。
JIS X 6322-3:2011において定義されるREQA及びREQBコマンドシーケンスは,PICCから信号又は負
荷変調信号の応答を得るためにPCD試験アセンブリから送らなければならない。
デジタルサンプリングオシロスコープ上に副搬送波の負荷変調波形を少なくとも6サイクル分表示し,
コンピュータソフトウェアプログラム(附属書Fで例示するのと同様の)による解析のために,サンプリ
ングデータをファイルに保存する。
注記1 低振幅負荷変調に適切な同期方法を適用することが望ましい。
(附属書Fで例示するのと同様の)適切なコンピュータソフトウェアを使用して,サンプリングした変
調波形の正確に副搬送波6サイクル分を,バートレット窓を用いてフーリエ変換する。純粋な正弦波信号
のピーク値を基準としてスケールを合わせて,離散的フーリエ変換を使用する。過渡的効果を最小化する
ために,無変調サイクル又は副搬送波の位相偏移直後の副搬送波サイクルの解析は避ける。離散的フーリ
エ変換は,試験対象PICCが生成する側波帯の周波数で実行しなければならない(すなわち,fc+fs及びfc
−fs)。
fc+fs及びfc−fsの上下の側波帯の結果として生じているピーク振幅値は,JIS X 6322-2:2011の8.2.2に
おいて定義する値以上でなければならない。
注記2 B型 PICC負荷変調試験のために,FFT(高速フーリエ変換)付きオシロスコープは,過渡
現象がなく,かつ,位相偏移のない多くの副搬送波サイクル(すなわち,JIS X 6322-2:2011
の9.2.5で定義されるTR1の同期時間の安定した部分又はJIS X 6322-3:2011の7.1.4において
定義されるSOFの安定した部分)の解析に使用してもよい。
7.2.1.3
試験成績書
試験成績書には,fc+fs及びfc−fsの上下側波帯の測定されたピーク振幅値,適用磁界及び変調度を記
載しなければならない。
7.2.2
PICCの受信
7.2.2.1
目的
この試験の目的は,PCDのコマンドを受信するPICCの能力を確認することである。
7.2.2.2
A型PICC
7.2.2.2.1
伝送速度fc/128の試験条件
JIS X 6322-2:2011の図4で定義されたA型 PICCの変調波形のタイミングパラメタ領域の境界でタイミ
ングについて三つの試験条件を定義する。
− 条件1:t1−t2の最大値及びt3の最大値,並びにオーバシュートなし
− 条件2:PCD試験アセンブリを用いて達成可能なt1−t2の最小値及びそのときのt3の最大値,並び
にオーバシュートの最大値
− 条件3:PCD試験アセンブリを用いて達成可能なt3の最小値及びそのときのt1−t2の最大値,並び
にオーバシュートの最大値
注記 t2の終わりの搬送波の振幅が4 %より少ないようにすることが望ましい。
これらの三つの試験条件は,少なくともHmin及びHmaxを使用して試験しなければならない。ここでパラ
メタt1は,条件1及び条件3のとき指定された最大値とし,条件2のとき指定された最小値とする。
19
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2.2.2.2
伝送速度fc/64,fc/32及びfc/16の試験条件
JIS X 6322-2:2011の図7,図8及び図9で定義されたA型 PICCの変調波形のタイミングパラメタ領域
の境界でタイミングについて三つの試験条件を定義する。
− 条件1:t1−t5の最大値及びt6の最大値,並びにオーバシュートなし
− 条件2:PCD試験アセンブリを用いて達成可能なt1−t5の最小値及びそのときのt6の最大値,並び
にオーバシュートの最大値
− 条件3:PCD試験アセンブリを用いて達成可能なt6の最小値及びそのときのt1−t5の最大値,並び
にオーバシュートの最大値
これらの三つの試験条件は,少なくともHmin及びHmaxを使用して試験しなければならない。ここで,
− パラメタaは,条件1を使用する場合は,規定の最大値とし,条件2及び条件3を使用する場合は,
PCD試験アセンブリに関する達成可能な場合の最小値とする。
− パラメタt1は,条件1及び条件3を使用する場合は,規定の最大値とし,条件2を使用する場合は,
規定した最小値とする。
7.2.2.2.3
試験手順
7.2.2.2.1に定義する条件で,PICCは,REQAにATQAをもって応答しなければならない。
任意選択のビット伝送速度fc/64に対応するPICCは,ビット伝送速度fc/64を選択した後,7.2.2.2.2に定
義する条件で動作しなければならない。このPICCは,ビット伝送速度fc/64で伝送されたI-blockに正し
く応答しなければならない。
任意選択のビット伝送速度fc/32に対応するPICCは,ビット伝送速度fc/32を選択した後,7.2.2.2.2に定
義する条件で動作しなければならない。このPICCは,ビット伝送速度fc/32で伝送されたI-blockに正し
く応答しなければならない。
任意選択のビット伝送速度fc/16に対応するPICCは,ビット伝送速度fc/16を選択した後,7.2.2.2.2に定
義する条件で動作しなければならない。このPICCは,ビット伝送速度fc/16で伝送されたI-blockに正し
く応答しなければならない。
7.2.2.3
B型PICC
7.2.2.3.1
試験条件
JIS X 6322-2:2011の図14,図15,図16及び図17で定義されたB型 PICCの変調波形のタイミングパ
ラメタ領域の境界でタイミングについて三つの試験条件を定義する。
− 条件1:tf及びtrの最大値,並びにアンダシュート及びオーバシュートなし
− 条件2:PCD試験アセンブリを用いて達成可能なtfの最小値及びそのときのtrの最大値,並びにア
ンダシュート及びオーバシュートの最大値
− 条件3:PCD試験アセンブリを用いて達成可能なtrの最小値及びそのときのtfの最大値,並びにア
ンダシュート及びオーバシュートの最大値
これらの三つの試験条件は,少なくとも次の条件を使用して試験しなければならない。
− Hmin及びHmax
− そのときの磁界強度において変調度mの最大値及び最小値(JIS X 6322-2:2011の図13参照)
7.2.2.3.2
試験手順
7.2.2.3.1に定義する条件で,fc/128のビット伝送速度で動作しているPICCは,REQBにATQBをもって
応答しなければならない。
任意選択のビット伝送速度fc/64に対応するPICCは,ビット伝送速度fc/64を選択した後,7.2.2.3.1に定
20
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
義する条件で動作しなければならない。このPICCは,ビット伝送速度fc/64で伝送されたI-blockに正し
く応答しなければならない。
任意選択のビット伝送速度fc/32に対応するPICCは,ビット伝送速度fc/32を選択した後,7.2.2.3.1に定
義する条件で動作しなければならない。このPICCは,ビット伝送速度fc/32で伝送されたI-blockに正し
く応答しなければならない。
任意選択のビット伝送速度fc/16に対応するPICCは,ビット伝送速度fc/16を選択した後,7.2.2.3.1に定
義する条件で動作しなければならない。このPICCは,ビット伝送速度fc/16で伝送されたI-blockに正し
く応答しなければならない。
7.2.2.4
試験成績書
試験成績書は,ビット伝送速度fc/128を必須として,その動作を確認しなければならない。
一つ以上の任意選択の高速ビット伝送に対応するPICCに関しては,試験成績書は,対応する伝送速度
のその動作を確認しなければならない。使用した試験条件は,試験成績書の中に記載しなければならない。
7.2.3
PICCの共振周波数(参考)
7.2.3.1
目的
この試験は,PICCの共振周波数を計測するために使用できる。
二つ以上のPICCが同一のPCD活性化磁界内に存在するとき,各PICCの共振周波数は,低下する。
PICCの共振周波数の設計には注意を払うことが望ましい。
注意 共振周波数は,測定中使用する磁界強度にも影響される。
7.2.3.2
試験手順
PICCの共振周波数は,校正用コイルに接続したインピーダンスアナライザ又はネットワークアナライザ
若しくはLCRメータを使用して測定する。PICCは,校正用とPICCとの二つのコイルの中心軸が一致し
ている状態で,校正用コイルから10 mmの距離に置くのが望ましい。共振周波数は,測定された複素イン
ピーダンスの抵抗部が最大になるときの周波数である。
7.2.3.3
試験成績書
この試験を適用するとき,試験成績書には,PICCの共振周波数及び試験条件を記載しなければならない。
7.2.4
“Class 1” PICCの最大負荷影響
7.2.4.1
目的
次の追加のPICC試験は,PCDと“Class 1” PICC(JIS X 6322-1:2011参照)との互換性をとるために必要
である。
注記 “Class 1” PICCのアンテナ寸法及び配置が基準PICC(附属書D参照)のアンテナ寸法及び配置
に類似している場合に限り,この試験は,相互運用性を改善する。異なるアンテナ寸法及び/
又は配置のPICCのために,他のクラスを,それぞれのクラスに対して,対応する基準PICCに
よって作成してもよい。
7.2.4.2
試験手順
HminでのPICCの負荷影響は,PCD試験アセンブリを使用して測定する。それは,13.56 MHzで共振さ
せ,HminでCON3に6 Vを得るように設定した基準PICCの負荷影響を超えてはならない。
この詳細手順は次のとおりとする。
a) 5.4.3において説明するように,基準PICCを13.56 MHzに調整する。
b) 校正用コイル上にHminの動作磁界を生成するように,PCD試験アセンブリを調整する。
c) PCD試験アセンブリ上のDUTの位置に基準PICCを置く。ジャンパJ1を“b”の位置に切り換えて,
21
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
コネクタCON3で測定される6 VのDC電圧を得るように,R2を調整する。代わりの方法として,ジ
ャンパJ1を“c”の位置に置き,コネクタCON3で6 VのDC電圧を得るように,CON2の印加電圧
を調整してもよい。両方の場合に,動作磁界の条件は,校正用コイル上の電圧を観測することによっ
て確認しなければならない。
注意 R2の値は,900 Ω〜1 000 Ωが望ましい。代わりの方法を使用する前に,少なくとも1回この
範囲を確認する。
d) 基準PICCを取り除く。
e) PCD試験アセンブリ上のDUTの位置に試験対象PICCを置く。
f)
校正用コイルによって観測した磁界強度Hcを測定する。
磁界強度Hcは,Hminより大きくなければならない。
7.2.4.3
試験成績書
試験成績書には,Hcの値を記載しなければならない。
8
JIS X 6322-3:2011及びJIS X 6322-4:2011のパラメタ試験
8.1
PCDの試験
附属書H及び附属書Iによる。
8.2
PICCの試験
附属書Gによる。
22
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
PCD試験アンテナ
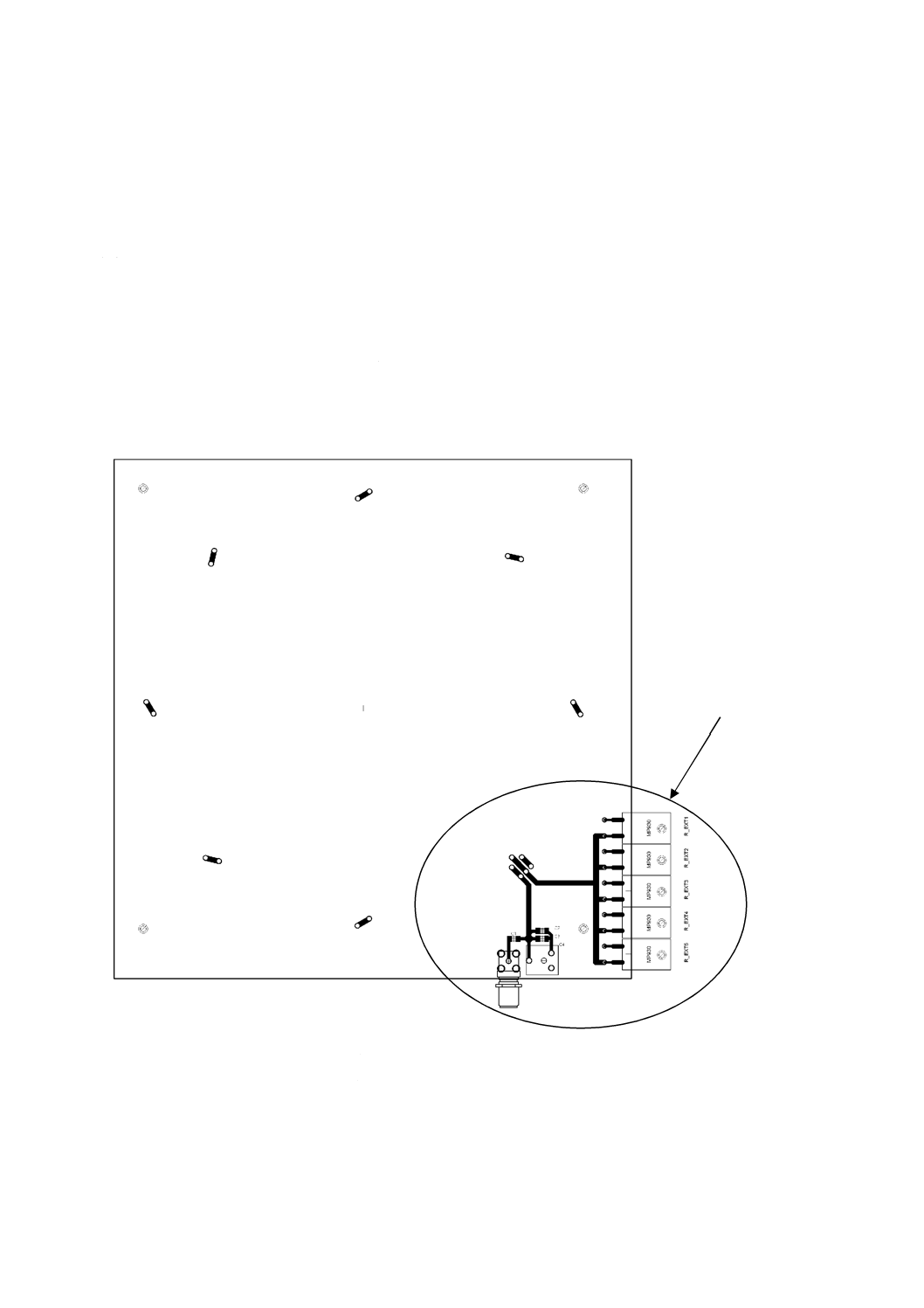
A.1 インピーダンス整合回路を含むPCD試験アンテナの配置図
図A.1,図A.2,図A.3及び図A.4は,PCD試験アンテナの配置図を示す。描画は,実寸法でない。
アンテナコイルのパターン幅は,1.8 mmとする(スルーホールは除く。)。
アンテナコイルのパターンは,インピーダンス整合回路から開始し,45°ごとに交差する。
プリント基板(PCB):材質 FR4,厚さ1.6 mm,両面,銅はく(箔)35 μm。
注記1 インピーダンス整合回路部は,参考とする。
注記2 プリント基板及び抵抗Rextは,市販品を使用してもよい。
図A.1−インピーダンス整合回路を含むPCD試験アンテナの配置図
ビット伝送速度fc/128用(表面)
インピーダンス
整合回路
23
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
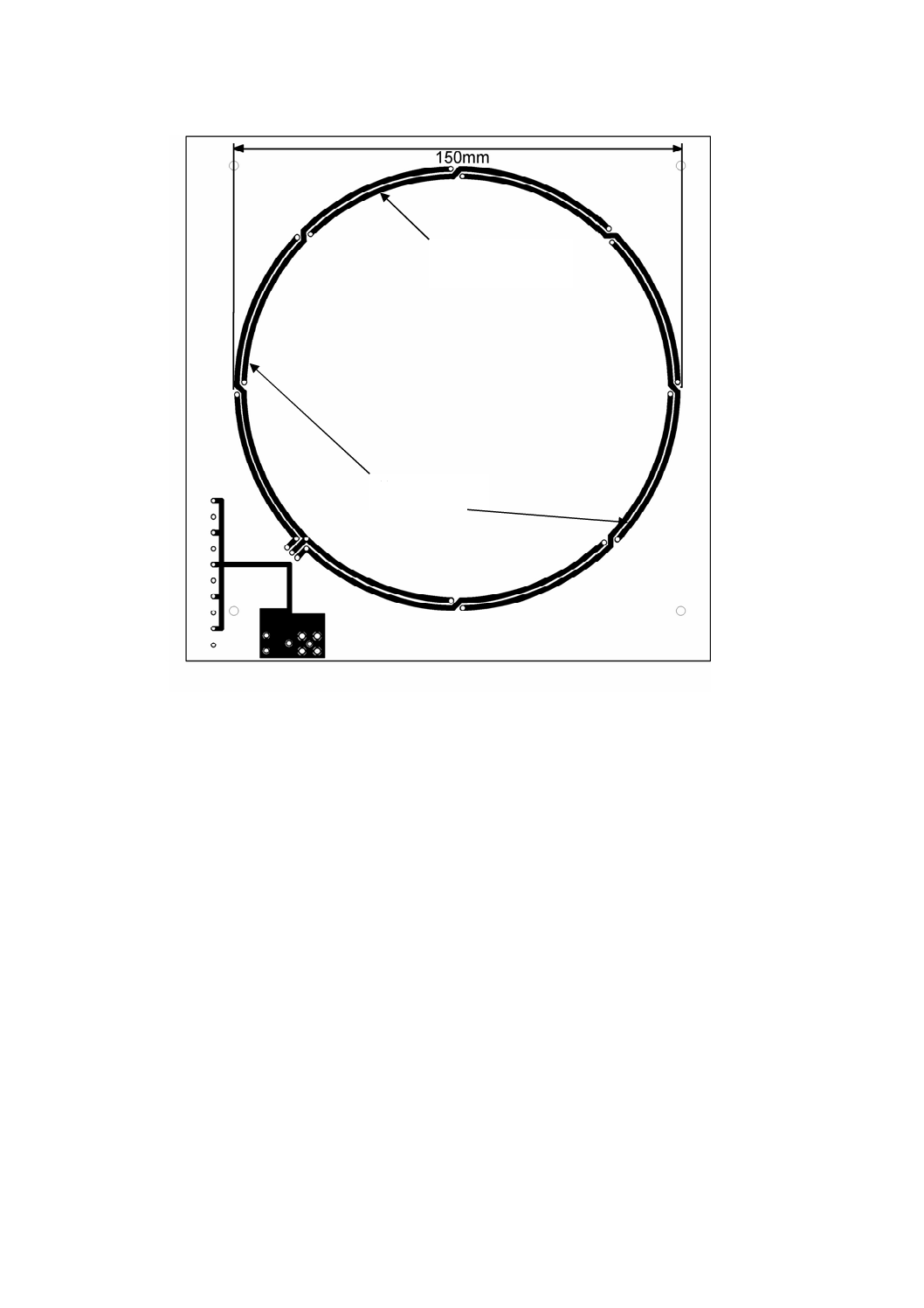
図A.2−インピーダンス整合回路を含むPCD試験アンテナの配置図
ビット伝送速度fc/128用(裏面)
接地パターン
アンテナコイル
24
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
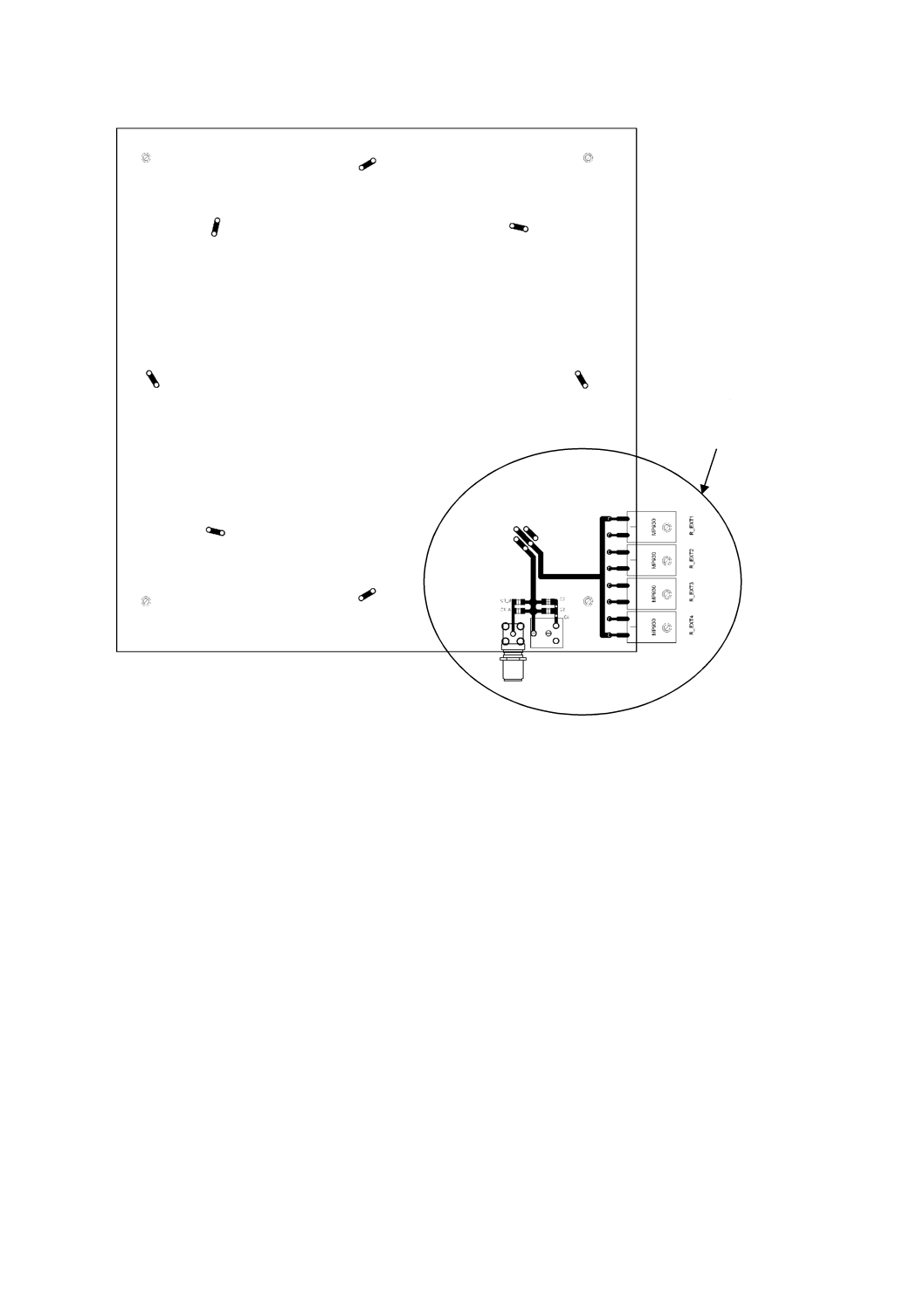
図A.3−インピーダンス整合回路を含むPCD試験アンテナの配置図
ビット伝送速度fc/64, fc/32及びfc/16用(表面)
インピーダンス
整合回路
25
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
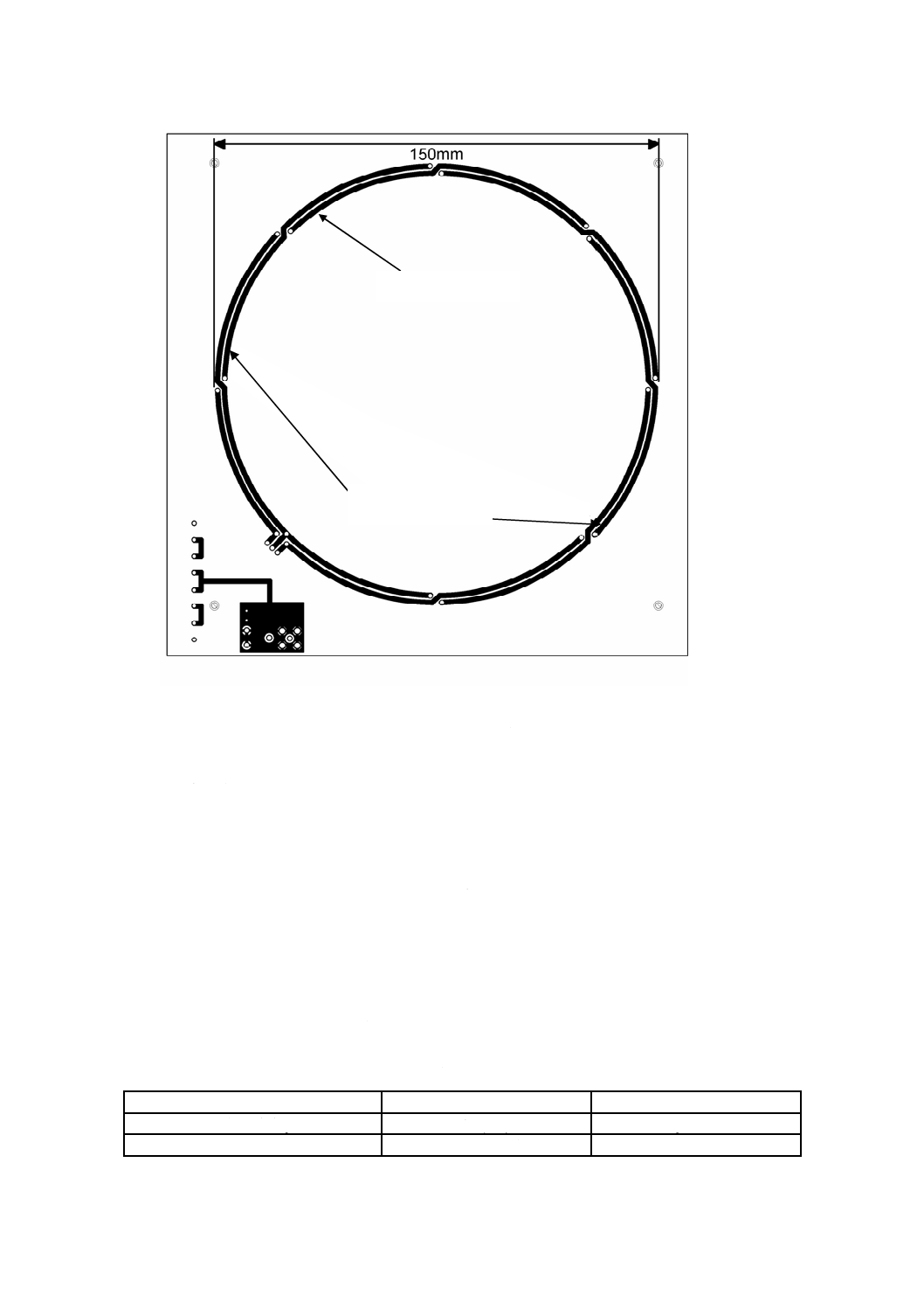
Ground
compensation
Antenna coil
図A.4−インピーダンス整合回路を含むPCD試験アンテナの配置図
ビット伝送速度fc/64, fc/32及びfc/16用(裏面)
A.2
インピーダンス整合回路
アンテナインピーダンス(Rant,Lant)は,整合回路(A.2.1及びA.2.2参照)によって,信号発生器の出
力インピーダンス(Z=50 Ω)に整合させる。キャパシタC1,C1a,C1b,C2及びC3は,固定値とする。入
力インピーダンスの位相は,可変キャパシタC4によって調整できる。
5.3及びこの附属書に規定されるPCD試験アセンブリは,各部品の過熱を避けるために,測定時間を制
限する。試験を連続して行う場合,放熱を改善しなければならない。各部品の許容最大電圧及び最大耐熱
温度に注意をしなければならない。
二つのインピーダンス整合回路が記載されている。ビット伝送速度fc/128用のインピーダンス整合回路,
並びにビット伝送速度fc/64, fc/32及びfc/16用インピーダンス整合回路の二つのインピーダンス整合回路
を記載する。表A.1にそれぞれの使用条件を示す。
表A.1−インピーダンス整合回路の使用条件
インピーダンス整合回路
磁界強度
ビット伝送速度
ビット伝送速度 fc/128
12 A/m (rms)まで
fc/128
ビット伝送速度 fc/64, fc/32及び fc/16
7.5 A/m (rms)まで
fc/128〜fc/16
アンテナコイル
接地パターン
26
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 アンテナ整合インピーダンスの 許容範囲は,±5 Ω及び位相±10°とする。
注記2 Rextは,アンテナコイルの接地側に配置する。
注記3 電力及び電圧には,安全な許容幅を含む。
注記4 50 Ω出力インピーダンスで出力可変の低ひずみ線形電力増幅器は,7.2.2で規定するREQA
及びREQBを伝送するためにA型及びB型の変調信号を発生できることが望ましい。出力
電力は,磁界強度Hを1.5 A/m (rms)〜12 A/m (rms) に調整できることが望ましい。7.5 A/m
(rms) を超えた動作磁界にするとき,磁界の発生時間に注意することが望ましい。
A.2.1 ビット伝送速度fc/128用インピーダンス整合回路
50 Ω
電力増幅器
インピーダンス
整合回路
L ant
R ext
Z = 50 Ω
C4
R ant
C1
C3
C2
アンテナコイル
部品表
値
単位
許容値
C1
47
pF
200 V
C2
180
pF
200 V
C3
22
pF
200 V
C4
2〜27
pF
200 V
Rext
0.94
Ω
10 W
図A.5−ビット伝送速度fc/128用インピーダンス整合回路
注記1 Rextは,4.7 Ω 2 Wの抵抗を5個並列に接続してもよい。
注記2 Rextは,図A.5に示すように破線の位置に配置してもよい。
注記3 Rextは,動作磁界が7.5 A/m (rms)以下の場合は,4 Wとしてもよい。
注記4 アンテナの浮遊容量は,図A.5に表示していない。
A.2.2 ビット伝送速度fc/64, fc/32及びfc/16用インピーダンス整合回路
27
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
50 Ω
電力増幅器
Z=50 Ω
Rant
アンテナコイル
Lant
Rext
C1a
C2 C3 C4
C1b
インピーダンス
整合回路
部品表
値
単位
許容値
C1a
82
pF
200 V
C1b
8.2
pF
200 V
C2
150
pF
200 V
C3
10
pF
200 V
C4
2〜27
pF
200 V
Rext
4.7
Ω
20 W
図A.6−ビット伝送速度fc/64, fc/32及びfc/16用インピーダンス整合回路
注記1 Rextは,4.7 Ω 5 Wの抵抗を2個直列にしたものを並列に接続してもよい。
注記2 Rextは,アンテナコイルの接地側に配置することが望ましい。
注記3 アンテナの浮遊容量は,図A.6に表示していない。
28
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
PCD試験アンテナの調整
図B.1及び図B.2は,アンテナのインピーダンスを駆動回路のそれに合わせるために,位相調整の二つ
の手順を示す。この二つの調整手順の後,信号発生器を試験用アンテナ出力端子に直接接続しなければな
らない。
手順1 基準抵抗として高精密抵抗 50 Ω±1 %(例えば,50 Ω BNC終端抵抗)を,信号発生器の出
力とアンテナコネクタとの間に挿入する。オシロスコープの二つのプローブをその直列基準
抵抗の両端に接続する。オシロスコープの画面をXYモードにして,リサージュ図形を表示
する。信号発生器は,次のように設定する。
− 波形
正弦波
− 周波数
13.56 MHz
− 振幅
2 V (rms)〜5 V (rms)
出力は,二つ目の高精密抵抗 50 Ω±1 %(例えば,50 Ω BNC終端抵抗)で終端する。出
力に並列接続したプローブは,少量の浮遊容量 Cprobeをもつ。参照抵抗に並列に接続された
調整用キャパシタCcalは,Ccal = Cprobeの場合,プローブのキャパシタを補正する。
リサージュ図形が完全に閉じたとき,プローブのキャパシタは補正される。
R1 = 50Ω
13.56MHz
信号発生器
参照抵抗
50Ω
校正抵抗
50Ω
Ccal = Cprobe
Cprobe
100Ω
X
Y
オシロスコープ
角度
50Ωに対応
閉じたとき
φ=0
出力
図B.1−校正方法(手順1)
29
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 磁界によって誘起電圧を発生させないように,プローブの接地線は密着して配線しなければな
らない。
手順2 手順1で設定した同じ値を使用して,手順2では整合回路をアンテナ出力に接続する。アン
テナ基板上のキャパシタC4は,位相φを0に調整するために使われる。
R1 = 50Ω
13.56MHz
信号発生器
参照抵抗
50Ω
Ccal = Cprobe
Cprobe
100Ω
X
Y
オシロスコープ
角度
50Ωに対応
閉じたとき
φ=0
出力
インピーダン
ス整合回路
アンテナ
コイル
位相調整:C4
図B.2−校正方法(手順2)
30
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
センスコイル
C.1
センスコイルの配置
図C.1は,センスコイルの配置を示す。
単位 mm
1 7 0
1 7 0
1 0 0
7 0
R = 1 0
接続位置
図C.1−センスコイルa及びセンスコイルbの配置
寸法単位はmm(図は実寸法でない。)。
センスコイルのパターン幅は,0.5 mm±20 %とする(スルーホールを除く。)。
コイルの寸法は,外側の寸法を示す。
プリント基板(PCB):材質 FR4,厚さ1.6 mm,両面,銅はく(箔) 35 μm
注記 プリント基板は,市販品を使用してもよい。
C.2
センスコイルの組立図
図C.2は,センスコイルの組立図を示す。
31
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
接続位置
センスコイルb
センスコイルa
PCD試験アンテナ
13.56MHz
図C.2−センスコイルの組立図
32
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
基準PICCのアンテナ配置
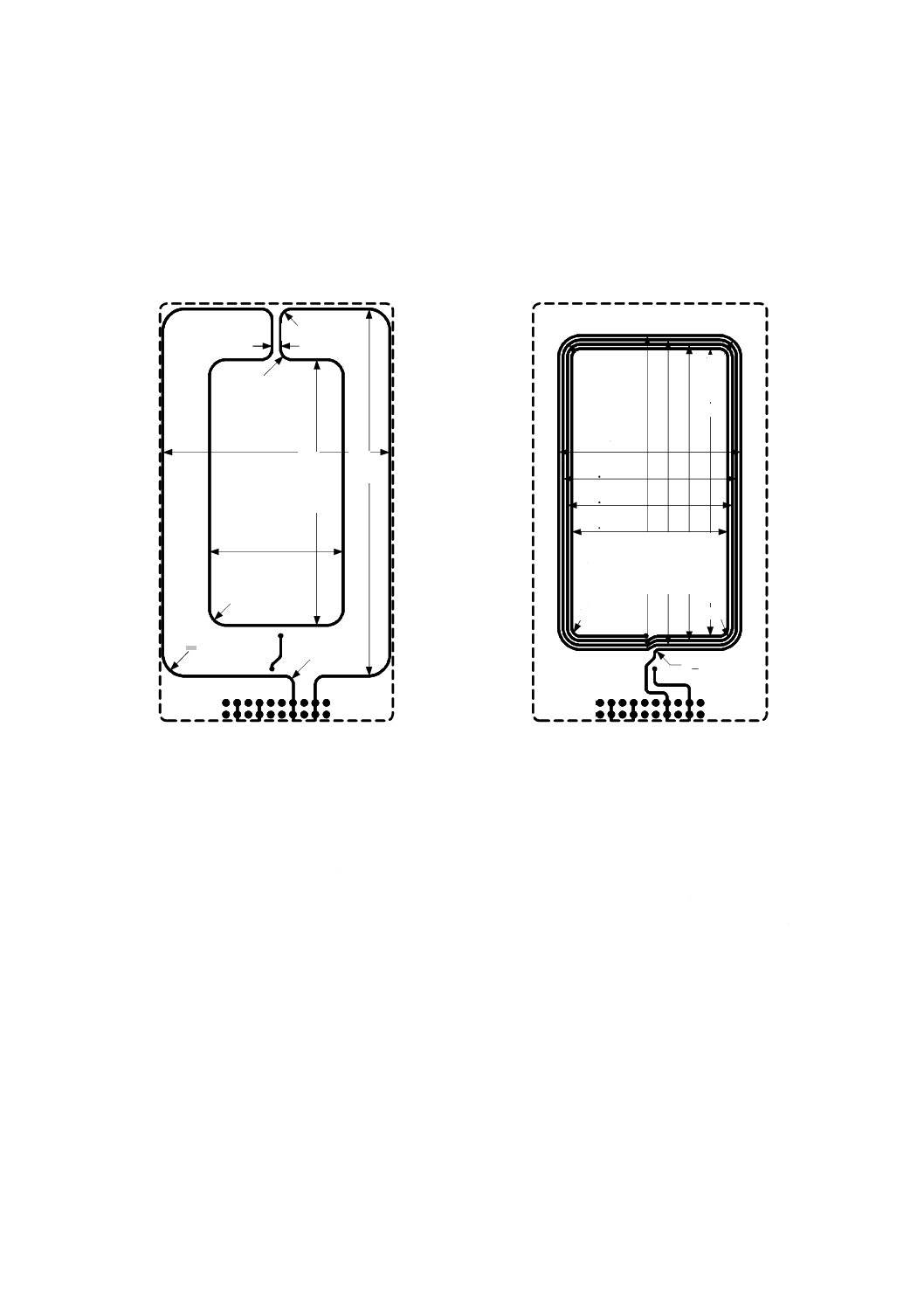
図D.1は,基準PICCのアンテナ配置を示す。
(ピックアップコイル,表面)
(主コイル,裏面)
図D.1−アンテナの配置
寸法は,パターンの中心とする(実寸法でない。)。
ピックアップコイル及び主コイルの中心は,一致させなければならない。
二つのコイルのパターン幅及び余白は,0.5 mm±20 %でなければならない。
プリント基板(PCB):材質 FR4,厚さ 0.76 mmで誤差±10 %,両面,銅はく(箔) 35 μm
注記1 13.56 MHzにおいて,主コイルのインダクタンスL1は,2.3 μH±10 %,抵抗は,1.8 Ω±10 %
である。
注記2 13.56 MHzにおいて,ピックアップコイルのインダクタンスL2は,375 nH±10 %,抵抗は,
0.65 Ω±10 %である。
注記3 プリント基板は,市販品を使用してもよい。
=
2
m
m
41 .50 mm
39 . 50 mm
37 . 50 mm
35 . 50 mm
r = 1 mm
7
1
.5
0
m
m
r
1
6
9
.5
0
m
m
6
7
.5
0
m
m
6
5
.5
0
m
m
=
3
m
m
2
r
=
5
m
m
4
r
=
4
m
m
3
r
r = 2.5 mm
51.90 mm
1. 90 mm
6
0
.5
0
m
m
30.60 mm
r = 3. 8 mm
r = 2. 5 mm
r = 5 mm
r= 2 mm
8
3
.6
0
m
m
33
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(規定)
変調度及び波形の解析方法
E.1
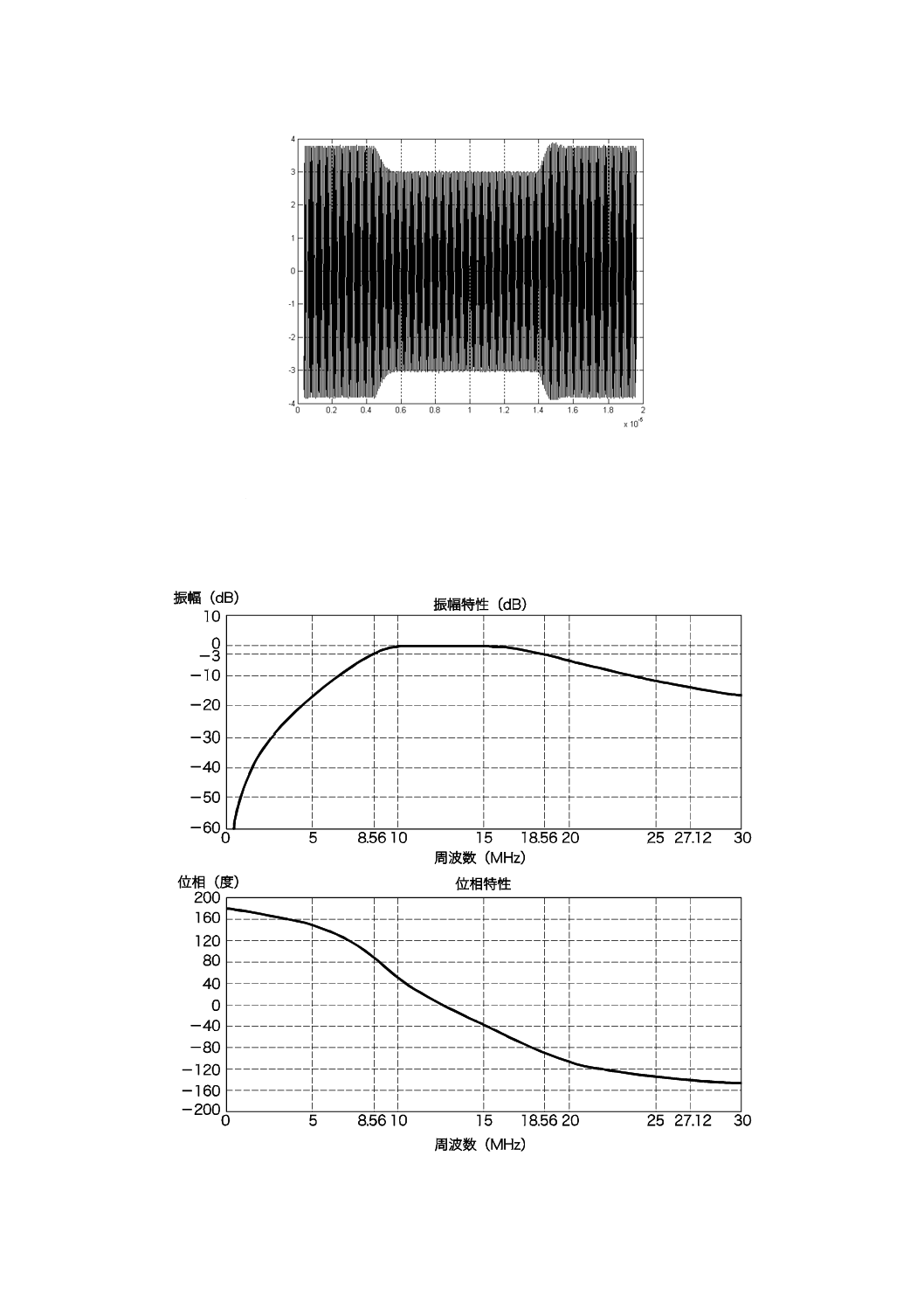
概要
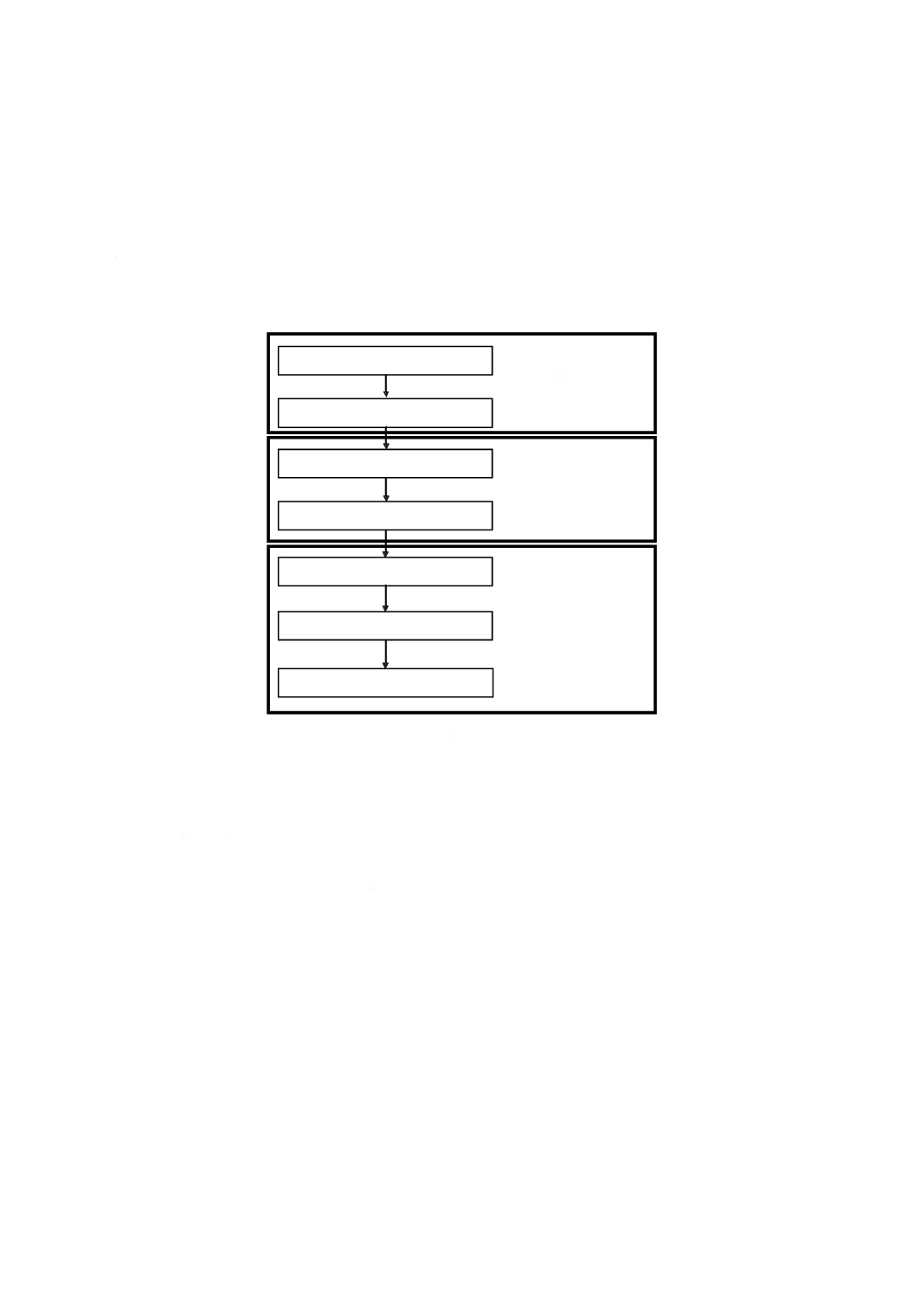
変調度及び波形の解析方法の動作原理を,図E.1に示す。
図E.1−変調度及び波形の解析方法の手順
各ブロックについて次のE.2〜E.8で規定する。
E.2
サンプリング
信号を取り込むオシロスコープは,5.1.1に規定する要求仕様を満足しなければならない。一つの変調パ
ルス(図E.2参照)の時間及び電圧のデータは,適切なコンピュータに転送しなければならない。
フィルタリング
包絡線の生成
包絡線の平滑化
変調度
サンプリング
前処理
処理
パラメタ決定
タイミング
オーバシュート・アンダシュート
34
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図E.2−変調パルス
E.3
フィルタリング
中心周波数13.56 MHzで3dB帯域幅10 MHzの4次のバタワース型の帯域通過フィルタを用いてDC及
び高調波を排除しなければならない。フィルタ特性を図E.3に示す。
図E.3−フィルタ特性
35
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.4
包絡線の生成
フィルタされた信号は,ヒルベルト(Hilbert)変換しなければならない。そしてこの複素数変換の振幅
で信号の包絡線を示す。
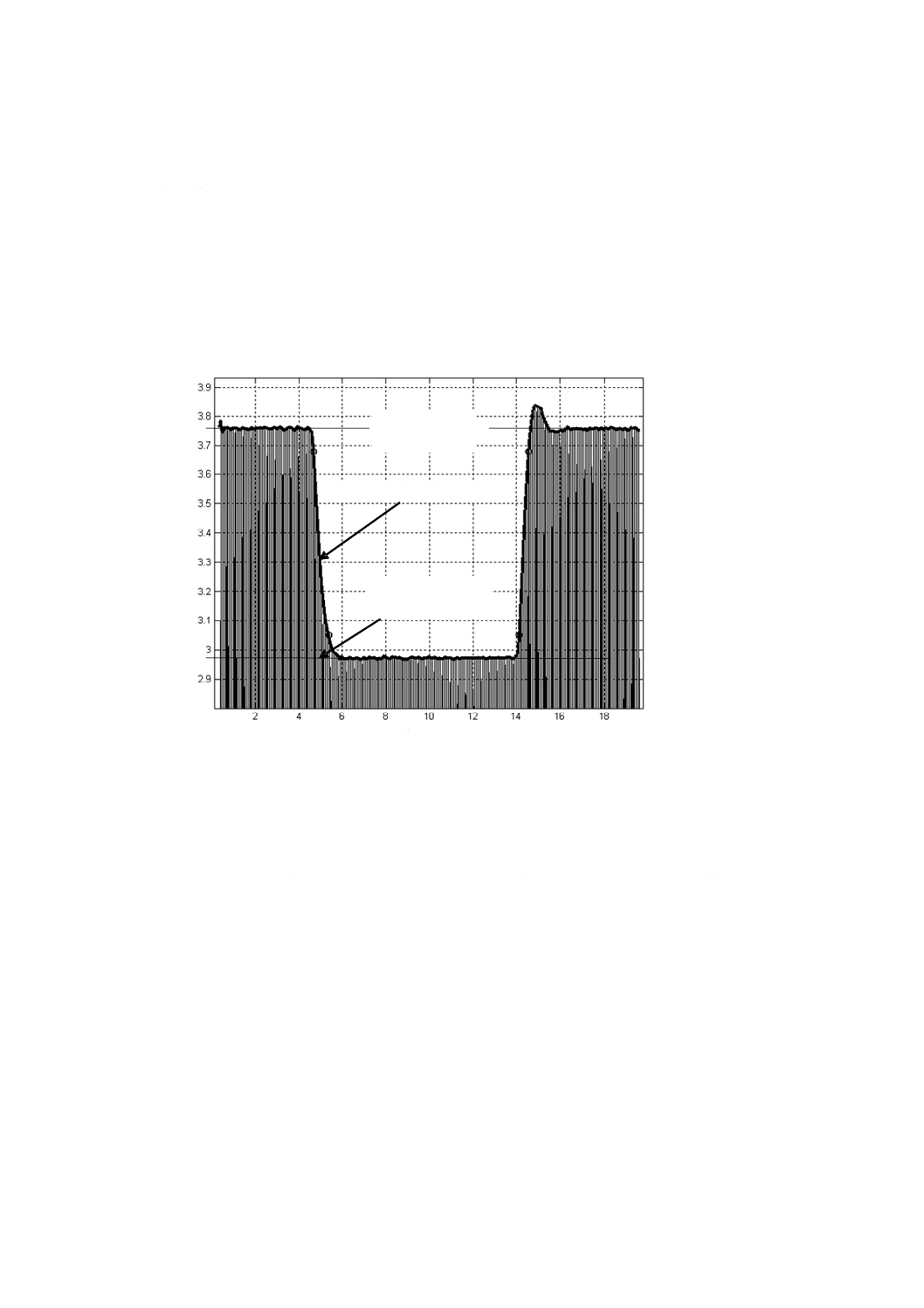
E.5
包絡線の平滑化
包絡線信号は,移動平均型のフィルタで平滑しなければならない。そのフィルタの周期は,搬送波の1
周期とする。平滑された包絡線信号を図E.4に示す。
平滑された包絡線信号
初期包絡線信号
振幅
変調された包絡線
信号振幅
振幅(V)
時間(µs)
図E.4−包絡線の平滑化
E.6
変調度の計測
初期及び変調された包絡線信号の振幅は,平滑された包絡線信号のヒストグラムを計算して決めなけれ
ばならない。初期及び変調された包絡線信号の振幅を最大頻度の値で表す。A型の変調信号に対しては,
初期包絡線信号だけをヒストグラム方式を使って決めなければならない。
E.7
タイミングの計測
立上がり時間及び立下がり時間は,JIS X 6322-2:2011の規定に従って決めることが望ましい。
E.8
オーバシュート及びアンダシュートの計測
JIS X 6322-2:2011の規定に従って,オーバシュート及びアンダシュートの値を決める前に,既に平滑さ
れた包絡線信号を搬送波の3周期分の移動平均型のフィルタで更に平滑化しなければならない。
36
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.9
変調度及び波形解析のプログラム(参考)
C言語で書かれた次のプログラムは,変調度及び波形解析の手段の例として提供される。
このC言語の解析手段は,同じフォルダに置かれた六つの異なったファイルで構成されている。
37
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.9.1 structures.h
/*************************************************************************/
/*structures.h
*/
/*This code contains the structures to save important results
*/
/*************************************************************************/
#ifndef STRUCTURES̲H
#define STRUCTURES̲H
typedef struct esl
{
double volt;
double time;
struct esl *sig;
}ESL;
typedef struct times
{
double tf; // Type B
double tr; // Type B
double b; // Type B
double trstartind; // Type B
double trendind; // Type B
double tfstartind; // Type B
double tfendind; // Type B
double t1; // Type A (all bit rates)
double t1startind; // Type A (all bit rates)
double t1start; // Type A (all bit rates)
double t1endind; // Type A (all bit rates)
double t2; // Type A
double t2startind; // Type A
double t2start; // Type A
double t3; // Type A
double t3end; // Type A
double t3endind; // Type A
double t4; // Type A
double t4endind; // Type A
double t5; // Type A (higher bit rates)
double t5startind; // Type A (higher bit rates)
38
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
double t6; // Type A (higher bit rates)
double t6end; // Type A (higher bit rates)
double t6endind; // Type A (higher bit rates)
double a; // Type A (higher bit rates)
double tploone; //Type A (higher bit rates)
}TIMES;
typedef struct shootreader
{
double shootind;
double shootind̲b;
double hf̲reader;
double hr̲reader;
double above;
double above̲b;
}SHOOTREADER;
#endif
39
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.9.2 fftrm.h
/************************************************************************/
/*fftrm.h
*/
/*This is the header file for fftrm.c
*/
/************************************************************************/
#ifndef FFTRM̲H
#define FFTRM̲H
#define RE(z) ((z).r)
#define IM(z) ((z).i)
typedef float real;
typedef double doublereal;
typedef struct { real r, i; } complex;
typedef struct { doublereal r, i; } doublecomplex;
int zffts (int debug, doublecomplex *X, int M);
int ziffts (int debug, doublecomplex *X, int M);
void zfftrmc(doublecomplex *X, int M, int P, float D);
void rmpo (int *rv, int *rvp );
#endif
40
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.9.3 fftrm.c
/*************************************************************************/
/*fftrm.c
*/
/*This code contains the necessary function for Fourier and inverse Fourier */
/* transformation
*/
/*************************************************************************/
#include <stdio.h>
#include <math.h>
#include <malloc.h>
#include "fftrm.h"
#ifndef M̲PI
#define M̲PI 3.1415926535897932384626433832795
#endif
float *WR;
float *WI;
doublereal *DWR;
doublereal *DWI;
void rmpo( int *rv, int *rvp )
{
int value̲h;
int n;
n = 1;
*rvp = -1;
value̲h = 1;
while ( value̲h > 0 )
{
value̲h = *rv - n;
(*rvp)++;
n += n;
}
}
41
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
void zfftrmc( doublecomplex *X, int M, int P, float D )
{
int MV2,MM1,J,I,K,L,LE,LE1,IP,IQ,IND,IND1,R;
int I1,J1;
float A,B;
float WCOS,WSIN;
float VR,VI;
float ARG;
static int IPOTC;
static float DALT;
DWR = (doublereal *)calloc(M,sizeof(doublereal));
DWI = (doublereal *)calloc(M,sizeof(doublereal));
/* if (IPOTC == P & D == DALT) goto warmstart; */
IPOTC = P;
DALT = (float)D;
LE = 1;
IND = 0;
for (L=1;L<=P;L++)
{
LE1 = LE;
LE = LE*2;
DWR[IND] = 1.0;
DWI[IND] = 0.0;
ARG = (float)M̲PI/(float)LE1;
WCOS = (float)cos(ARG);
WSIN = (float)(D*sin(ARG));
for (R=1;R<=LE1;R++)
{
IND1 = IND+1;
A = (float)DWR[IND];
B = (float)DWI[IND];
DWR[IND1] = A*WCOS - B*WSIN;
DWI[IND1] = B*WCOS + A*WSIN;
++IND;
42
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
}
}
/* warmstart: */
MV2=M/2;
MM1=M-1;
J=1;
for (I=1; I<=MM1; I++)
{
if (I >= J)
goto P1;
J1 = J-1;
I1 = I-1;
VR = (float)RE(X[J1]);
VI = (float)IM(X[J1]);
RE(X[J1]) = RE(X[I1]);
IM(X[J1]) = IM(X[I1]);
RE(X[I1]) = VR;
IM(X[I1]) = VI;
P1: K = MV2;
P2: if (K >= J) goto P3;
J = J-K;
K = K/2;
goto P2;
P3: J = J+K;
}
IND = 0;
LE = 1;
for (L=1; L<=P; L++)
{
LE1 = LE;
LE = LE*2;
43
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
for (R=0; R<LE1; R++)
{
WCOS = (float)DWR[IND];
WSIN = (float)DWI[IND];
IND = IND+1;
for (IQ=R; IQ<M; IQ+=LE)
{
IP = IQ+LE1;
A = (float)RE(X[IP]);
B = (float)IM(X[IP]);
VR = A*WCOS - B*WSIN;
VI = B*WCOS + A*WSIN;
RE(X[IP]) = RE(X[IQ]) - VR;
IM(X[IP]) = IM(X[IQ]) - VI;
RE(X[IQ]) = RE(X[IQ]) + VR;
IM(X[IQ]) = IM(X[IQ]) + VI;
}
}
}
free(DWR);
free(DWI);
}
/*=======================================================================*/
/*̲̲̲1-D FFT with respect to a spatial coordinate̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲*/
/*=======================================================================*/
int zffts( int debug, doublecomplex *X, int M )
{
int P;
float D;
D = -1.0;
rmpo( &M, &P);
44
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
if ( debug )
{
printf("P = %d¥n",P);
printf("FFT ...¥n");
}
zfftrmc( X, M, P, D); /* fftrm.c */
return 0;
}
/*=======================================================================*/
/*̲̲̲1-D Inverse FFT with respect to a spatial coordinate̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲̲*/
/*=======================================================================*/
int ziffts( int debug, doublecomplex *X, int M )
{
int i;
int P;
float D;
D = 1.0;
rmpo( &M, &P);
if ( debug )
{
printf("P = %d¥n",P);
printf("IFFT ...¥n");
}
zfftrmc( X, M, P, D); /* fftrm.c */
/*̲̲̲Multiply with 1/M̲̲̲̲*/
for (i=0; i<M; i++)
{
RE(X[i]) /= (doublereal)M;
IM(X[i]) /= (doublereal)M;
}
return 0;
45
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
}/*End of fftrm.c*/
46
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.9.4 hilbert.h
/*************************************************************************/
/*hilbert.h
*/
/*This code contains the necessary functions for extracting envelope
*/
/*************************************************************************/
#ifndef HILBERT̲H̲
#define HILBERT̲H̲
/*This function reads the sampled data recorded in the file*/
int ReadData(void);
/*This function performs the Fourier transform*/
void Fft(void);
/*This function performs the necessary phase shift*/
void PhaseShifting(void);
/*This function performs the inverse Fourier transform*/
void Ifft(void);
/*Envelope reconstruction is done by this function*/
int EnvelopeReconstruction(void);
/*Hilbert main function*/
void hilbert(char *fnamep);
#endif /* HILBERT̲H̲ */
47
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.9.5 hilbert.c
/** * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * /
/ * * * This program extract the envelope of modulated carrier
* * * /
/ * * * Input:
* * * /
/ * * * File in text format containing a table of two columns
* * * /
/ * * * (time and test PCD output voltage vd)
* * * /
/ * * *
* * * /
/ * * * Data format of input-file:
* * * /
/ * * *
* * * /
/ * * * One data-point per line,
* * * /
/ * * *
* * * /
/ * * * {time[seconds], sense-coil-voltage[volts])
* * * /
/ * * *
* * * /
/ * * * Data-points shall be equidistant time
* * * /
/ * * * Minimum sampling rate: 100 MSamples/second
* * * /
/ * * * example for spreadsheet file (start in next line):
* * * /
/ * * * (time) , (voltage )
* * * /
/ * * * 3.00000e-06,1.00
* * * /
/ * * * 3.00200e-06,1.01
* * * /
/ * * *
* * * /
/ * * * Run:
* * * /
/ * * * hilbert Filename.txt
* * * /
/ * * * or
* * * /
/ * * * hilbert (default file name input.txt)
* * * /
/ * * *
* * * /
/*************************************************************************/
/*hilbert.c
*/
/*Main program
*/
/*************************************************************************/
# include <stdio.h>
# include <math.h>
# include <malloc.h>
# include <ctype.h>
# include <string.h>
# include "fftrm.h"
#define MAX̲POINT 200000
48
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
#ifndef M̲PI
#define M̲PI 3.1415926535897932384626433832795
#endif
int debug=0;
int fftdebug=0;
double *Gvalue;
double *Gtime;
double *Gr;
double *Gi;
double *Gc;
doublecomplex *Gt̲ifft;
/*File containing the input data*/
char *InputFileName ="input.txt";
int SampledPoints=0;
int N;
int row;
const int col=2;
int ReadData(void)
{
float a,b;
int i=0;
FILE *fp1;
i=0;
SampledPoints=0; //IA
if ((fp1 = fopen(InputFileName,"r")) == NULL)
{
printf("Cannot open input file.¥n");
return 1;
}
while(!feof(fp1))
{
fscanf(fp1,"%e,%e¥n", &a, &b);
49
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Gtime[SampledPoints] = a;
Gvalue[SampledPoints] = b;
SampledPoints++;
if (SampledPoints>= MAX̲POINT) break;
}
fclose(fp1);
fp1=fopen("inputfile.txt","w");
if (!fp1)
{
fprintf(stdout,"Can't write the sampled data in inputfile.txt. ¥n");
return 1;
}
for(i=0; i<SampledPoints; i++)
fprintf(fp1,"%e¥n",Gvalue[i]); /*Gtime[i] has been omitted*/
fclose(fp1);
if(debug)
{
fp1=fopen("inputtime.txt","w");
if (!fp1)
{
fprintf(stdout,"Can't write the sampled data in inputtime.txt. ¥n");
return 1;
}
for(i=0; i<SampledPoints; i++)
fprintf(fp1,"%e¥n",Gtime[i]); /*Gtime[i] has been omitted*/
fclose(fp1);
}
if(debug)
{
if((fp1=fopen("inputfile.bin","wb"))!=NULL)
{
fwrite(Gvalue,sizeof(double),SampledPoints,fp1);
fclose(fp1);
}
}
if(SampledPoints<N)
{
50
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
for(i=SampledPoints;i<=N;i++)
{
Gvalue[i] = 0;
}
}
return 0;
}/*End Of Function ReadData;*/
void Fft(void)
{
doublecomplex *Gt̲freq;
FILE *fp1,*fp2,*fp3;
int k,num1,num2;
Gt̲freq = (doublecomplex *)calloc(sizeof(doublecomplex),row);
/* FFT Procedure Starts for Sampled Data*/
for(k=0;k<=N;k++)
{
RE(Gt̲freq[k])=Gvalue[k];
IM(Gt̲freq[k])=0.0;
}
if(debug)
{
if((fp3=fopen("f.bin","wb"))!=NULL)
{
fwrite(Gvalue,sizeof(double),row,fp3);
fclose(fp3);
}
}
zffts(fftdebug,Gt̲freq,row);/*FFT is done in spatial coordinate*/
for (k=0;k<=N;k++)
{
Gr[k]=RE(Gt̲freq[k]);
Gi[k]=IM(Gt̲freq[k]);
}
/* FFT Procedure Ends for Sampled Data*/
51
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
/* Writing The Real And Imaginary Part Of Reflected Part for Debuging*/
/* Writing the real part of sampled data*/
if(debug)
{
if((fp1=fopen("Gr.bin","wb"))!=NULL)
{
num1=fwrite(Gr,sizeof(double),row,fp1);
fclose(fp1);
}
else
fprintf(stdout,"Can't Open Gr.bin");
// Writing the img part of sampled data
if((fp2=fopen("Gi.bin","wb"))!=NULL)
{
num2=fwrite(Gi,sizeof(double),row,fp2);
fclose(fp2);
}
else
fprintf(stdout,"Can't Open Gi.bin");
fprintf(stdout,"Num of Real Part Data after FFT = %d¥n",num1);
fprintf(stdout,"Num of Img Part Data after FFT = %d¥n",num2);
}
free(Gt̲freq);
}/* End Of The Function Fft */
void PhaseShifting(void)
{
double *tempr, *tempi;
int k;
FILE *fp1;
tempr = (double *)calloc(sizeof(double),row);
tempi = (double *)calloc(sizeof(double),row);
52
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
for ( k=0; k<=N; k++ )
{
tempr[k]=Gr[k];
tempi[k]=Gi[k];
}
for ( k=0; k<=ceil(N/2); k++ )
{
Gr[k] = tempi[k];
Gi[k] = -tempr[k];
}
for ( k=(int)ceil(N/2)+1; k<=N; k++ )
{
Gr[k] = -tempi[k];
Gi[k] = tempr[k];
}
if(debug)
{
if((fp1=fopen("ffrpt.bin","wb"))!=NULL)
{
fwrite(Gr,sizeof(double),row,fp1);
fclose(fp1);
}
if((fp1=fopen("ffipt.bin","wb"))!=NULL)
{
fwrite(Gi,sizeof(double),row,fp1);
fclose(fp1);
}
}
free (tempr);
free (tempi);
}/*End of PhaseShifting() function*/
void Ifft(void)
{
double *Gt̲tmp; /* It takes the real part of R̲ifft*/
double *Gt̲tmpi;
FILE *fp1;
53
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
int k,i;
Gt̲tmp = (double *)calloc(sizeof(double),row);
Gt̲tmpi = (double *)calloc(sizeof(double),row);
for (k=0;k<=N;k++)
{
Gt̲ifft[k].r=Gr[k];
Gt̲ifft[k].i=Gi[k];
}
ziffts(fftdebug,Gt̲ifft,row);/*IFFT of the signal in spatial coordinate*/
// End of IFFT
for (k=0;k<=N;k++)
{
Gt̲tmp[k]=Gt̲ifft[k].r;
}
if(debug)
{
fp1=fopen("ifft.txt","w");
if (!fp1)
fprintf(stdout,"Can't write in file");
for(i=0; i<=N; i++)
fprintf(fp1,"%.4e¥n",(Gt̲ifft[i].r));
fclose(fp1);
}
if(debug)
{
if((fp1=fopen("iffrpt.bin","wb"))!=NULL)
{
fwrite(Gt̲tmp,sizeof(double),row,fp1);
fclose(fp1);
}
if((fp1=fopen("iffipt.bin","wb"))!=NULL)
{
fwrite(Gt̲tmpi,sizeof(double),row,fp1);
fclose(fp1);
}
54
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
}
free(Gt̲tmp );
free(Gt̲tmpi );
}/* End Of Function Ifft*/
int EnvelopeReconstruction(void)
{
FILE *fp1;
int k;
doublecomplex *G; /*Input signal read from input file in complex form*/
doublecomplex *Ganalytical;/*Analytical function of our input signal*/
double *test;
double *sqrtr;
double *sqrti;
G = (doublecomplex *)calloc(sizeof(doublecomplex),row);
Ganalytical = (doublecomplex *)calloc(sizeof(doublecomplex),row);
test = (double *)calloc(sizeof(double),row);
sqrtr=(double *)calloc(sizeof(double),row);
sqrti=(double *)calloc(sizeof(double),row);
for (k=0;k<=N;k++)
{
RE(G[k]) = Gvalue[k];
IM(G[k]) = 0.0;
}
for (k=0;k<=N;k++)
{
RE(Ganalytical[k])=G[k].r;
IM(Ganalytical[k])=Gt̲ifft[k].r;
}
for (k=0;k<=N;k++)
{
sqrtr[k]=sqrt(Ganalytical[k].r*Ganalytical[k].r+Ganalytical[k].i*Ganalytical[k
].i);
}
55
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
fp1=fopen("output.txt","w");
if (!fp1)
{
fprintf(stdout,"Can't write extracted envelope in output.txt.¥n");
free(G);
free(Ganalytical);
free(test);
free(sqrtr);
free(sqrti);
return 1;
}
for(k=0; k<SampledPoints; k++)
fprintf(fp1,"%e,%e¥n",Gtime[k],sqrtr[k]);
fclose(fp1);
free(G);
free(Ganalytical);
free(test);
free(sqrtr);
free(sqrti);
return 0;
}
/*Main Function*/
void hilbert(char *fnamep)
{
int status=0,i=1;
char fname[256];
strcpy(fname, fnamep);
InputFileName= fname;
//Reading the sampled data
do
{
N=(int)pow(2,i)-1;
i++;
}while (MAX̲POINT > N);
if (debug)
56
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
printf("N= %d¥n",N);
row=N+1;
Gvalue = (double *)calloc(sizeof(double),row);
Gtime = (double *)calloc(sizeof(double),row);
Gr = (double *)calloc(sizeof(double),row);
Gi = (double *)calloc(sizeof(double),row);
Gt̲ifft = (doublecomplex *)calloc(sizeof(doublecomplex),row);
Gc = (double *)calloc(sizeof(double),row);
status = ReadData();
if (status== 1) goto MainExit;
/*Does FFT*/
Fft();
/*Appropriate Phase has been Shifted*/
PhaseShifting();
/*Does IFFT*/
Ifft();
/*Envelope Reconstruction */
status = EnvelopeReconstruction();
if (status== 1) goto MainExit;
MainExit:
free(Gvalue);
free(Gtime);
free(Gr);
free(Gi);
free(Gt̲ifft);
free(Gc);
}/*End Of Main*/
57
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.9.6 functs.c
/*************************************************************************/
/*functs.c
*/
/*This code contains all functions which provide the program functionality. */
/*Main function of the whole program can be found at the end of this file. */
/*************************************************************************/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <ctype.h>
#include <math.h>
#include "structures.h"
#include "hilbert.h"
#define MAX̲SAMPLES 200000
#ifndef M̲PI
#define M̲PI 3.1415926535897932384626433832795
#endif
// Reads a line from a file (f) and returns two char arrays (s and t)
// It is used to read files written in "comma separation" format.
void read̲line (FILE *f, char *s, char *t)
{
int a=0;
int i=0;
a=fgetc(f); /* Takes chars from the file pointed by f */
while (isspace(a)) /* spaces at the beginning of line are taken out */
{
a=fgetc(f);
}
while (a!=',' && a!=EOF) /* spaces at the beginning of line are taken out */
{
t[i++]=(char)a;
a=fgetc(f);
}
t[i]='¥0';
i=0;
58
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a=fgetc(f);
while (a!='¥n' && a!=EOF)
{
s[i++]=(char)a;
a=fgetc(f);
}
s[i]='¥0'; /* We add the line end */
}
// Reads a line from a file (f) and discards it.
void skip̲line (FILE *f)
{
int a=0;
a=fgetc(f);
while (a!='¥n' && a!=EOF)
{
a=fgetc(f);
}
}
// Creates a ESL node with the given volt and time parameters
ESL *createnodef(double voltf, double timef)
{
ESL *new=NULL;
new=(ESL *)malloc(sizeof(ESL));
if (new!=NULL)
{
new->volt=voltf;
new->time=timef;
new->sig=NULL;
}
else
fprintf(stderr,"Memory Error");
return new;
}
// Frees the allocated memory for ESL nodes
void freelist(ESL *first) // frees ESL list
{
ESL *to̲free;
59
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
while (first->sig!=NULL)
{
to̲free=first;
first=first->sig;
free(to̲free);
}
}
// Creates a TIME node with the given volt and time parameters
void createtime(TIMES *new, double tr, double tf, double b, double trstartind, double
trendind, double tfstartind, double tfendind, double t1, double t1startind, double
t1start, double t1endind, double t2, double t2startind, double t2start, double t3,
double t3end, double t3endind, double t4, double t4endind, double t5, double
t5startind, double t6, double t6end, double t6endind, double a, double tploone)
{
new->tf=tf;
new->tr=tr;
new->b=b;
new->trstartind=trstartind;
new->trendind=trendind;
new->tfstartind=tfstartind;
new->tfendind=tfendind;
new->t1=t1;
new->t1startind=t1startind;
new->t1start=t1start;
new->t1endind=t1endind;
new->t2=t2;
new->t2startind=t2startind;
new->t2start=t2start;
new->t3=t3;
new->t3end=t3end;
new->t3endind=t3endind;
new->t4=t4;
new->t4endind=t4endind;
new->t5=t5;
new->t5startind=t5startind;
new->t6=t6;
new->t6end=t6end;
new->t6endind=t6endind;
new->a=a;
60
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
new->tploone=tploone;
}
// Inserts a ESL node (new) in a list pointed by "first"
void insert̲node(ESL **first, ESL *new)
{
ESL *p=NULL;
ESL *previous=NULL;
if (new!=NULL)
{
p=*first;
if (p==NULL)
{
*first=new;
}
else
{
while (p!=NULL)
{
previous=p;
p=p->sig;
}
previous->sig=new;
}
}
}
/* Multiplies order polynomials supposing (x^2 + b*x + c) */
/* b and c are complex values stored in a table where even elements are */
/* real and odd elements imaginary */
double *mult̲poli (int num̲pol, double *b, double *c)
{
int i=0;
int y=0;
double *real;
double *imag;
double *vector;
double *new̲real;
double *new̲imag;
double real̲b=0;
61
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
double real̲c=0;
double imag̲b=0;
double imag̲c=0;
real=(double *)calloc(4*num̲pol, sizeof(double));
imag=(double *)calloc(4*num̲pol, sizeof(double));
new̲real=(double *)calloc(4*num̲pol, sizeof(double));
new̲imag=(double *)calloc(4*num̲pol, sizeof(double));
vector=(double *)calloc(4*num̲pol, sizeof(double));
real[0]=c[0];
real[1]=b[0];
real[2]=1;
imag[0]=c[1];
imag[1]=b[1];
imag[2]=0;
for (i=3; i<(4*num̲pol); i++)
{
real[i]=0;
imag[i]=0;
}
for (y=1; y<num̲pol; y++)
{
// Selects values b and c
real̲b=b[2*y];
real̲c=c[2*y];
imag̲b=b[2*y+1];
imag̲c=c[2*y+1];
for (i=0; i<=(2*num̲pol-2); i++)
{
// Starts with coeff "c"
new̲real[i]+=real[i]*real̲c-imag[i]*imag̲c;
new̲imag[i]+=real[i]*imag̲c+imag[i]*real̲c;
// Continues with coeff "b"
new̲real[i+1]+=real[i]*real̲b-imag[i]*imag̲b;
new̲imag[i+1]+=real[i]*imag̲b+imag[i]*real̲b;
// Finishes with coeff "1"
new̲real[i+2]+=real[i];
62
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
new̲imag[i+2]+=imag[i];
}
// Update Values
for (i=0;i<(4*num̲pol); i++)
{
real[i]=new̲real[i];
imag[i]=new̲imag[i];
new̲real[i]=0;
new̲imag[i]=0;
}
}
for (y=0; y<(2*num̲pol); y++)
{
vector[2*y]=imag[y];
vector[2*y+1]=real[y];
}
free (new̲imag);
free (new̲real);
free (imag);
free (real);
return (vector);
}
// Part of the calculation of the butterworth coeffs.
double *butter̲d̲coeffs(double freq1, double freq2)
{
int butter̲order=2;
int index=0;
double theta=0;
// M̲PI *(freq2-freq1)/2.0
double cp=0;
// cosine of phi
double *vec̲r=0;
// z^-2 coefficients
double *vec̲t=0;
// z^-1 coefficients
double *dcoeff=0;
// d coefficients
double pole̲ang=0; // pole angle
double divisor=0;
63
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
cp = cos(M̲PI*(freq2+freq1)/2.0);
theta = M̲PI*(freq2-freq1)/2.0;
vec̲r=(double *)calloc(2*butter̲order,sizeof(double));
vec̲t=(double *)calloc(2*butter̲order,sizeof(double));
for(index=0;index<butter̲order;++index)
{
pole̲ang=M̲PI*(double)(2*index+1)/(double)(2*butter̲order);
divisor=sin(2*theta)*sin(pole̲ang)+1.0;
vec̲r[2*index]=cos(2*theta)/divisor;
vec̲r[2*index+1]=sin(2*theta)*cos(pole̲ang)/divisor;
vec̲t[2*index]=-2.0*cp*(cos(theta)+sin(theta)*sin(pole̲ang))/divisor;
vec̲t[2*index+1]=-2.0*cp*sin(theta)*cos(pole̲ang)/divisor;
}
dcoeff=mult̲poli(butter̲order,vec̲t,vec̲r);
dcoeff[4]=dcoeff[1];
dcoeff[3]=dcoeff[3];
dcoeff[2]=dcoeff[5];
dcoeff[1]=dcoeff[7];
dcoeff[0]=1;
for(index=5;index<=2*butter̲order;index++)
dcoeff[index]=0;
free(vec̲t);
free(vec̲r);
return(dcoeff);
}
// Calculates the Butterworth filter coefficients
void butterworth̲coeffs(double freq1, double freq2, double *dfiltercoeff, double
*cfiltercoeff)
{
// n filter order
// freq1, freq2 lower/uppercutoff frequencies
64
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
double sf;
// scaling factor
double *dcoeff;
// d coefficients
double cotan=0;
// cotangent of theta
/* calculate the d coefficients */
dcoeff=butter̲d̲coeffs(freq1,freq2);
/* d coefficients for 4th order butterworth */
dfiltercoeff[0]=dcoeff[0];
// Always 1
dfiltercoeff[1]=dcoeff[1];
dfiltercoeff[2]=dcoeff[2];
dfiltercoeff[3]=dcoeff[3];
dfiltercoeff[4]=dcoeff[4];
/* scalling factor for the c filter coefficients (Butterworth 4th order */
cotan=1.0/tan(M̲PI*(freq2-freq1)/2.0);
sf=(1.0/(((cotan+sqrt(2)/2)*(cotan+sqrt(2)/2))+1/2));
/* c coefficients for 4th order butterworth*/
cfiltercoeff[0]=1*sf;
cfiltercoeff[1]=0*sf;
cfiltercoeff[2]=-2*sf;
cfiltercoeff[3]=0*sf;
cfiltercoeff[4]=1*sf;
free(dcoeff);
}
// Checks if the data input is adequate to our algorithms
int datacheck(int posval, int negval, int samplesp, double tlast,FILE *pointfile)
{
double diffr=0.0;
char timestr1[25];
char timestr2[25];
char voltstr[25];
double timestrf1=0;
double timestrf2=0;
double cut̲sample=0;
double delta̲t=0;
double val̲t=0;
int loop=0;
65
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
double linf=0;
int lind=0;
// Checks that there are (nearly) much positive as negative values
if (posval>negval)
diffr=(posval-negval)/((posval+negval)/2);
else
diffr=(negval-posval)/((posval+negval)/2);
if (diffr>0.8)
fprintf(stdout,"Data Corrupted: Too little negative (or positive) values¥n");
// L=n*p with P=2*pi and n=1,2,3... - Cuts data
rewind (pointfile);
read̲line(pointfile,voltstr,timestr1);
read̲line(pointfile,voltstr,timestr1);
read̲line(pointfile,voltstr,timestr1); // Skips csv header if present or not
read̲line(pointfile,voltstr,timestr1);
while (voltstr[0]!='¥0')
{
read̲line(pointfile,voltstr,timestr2);
loop++;
}
loop=loop+3;
rewind(pointfile);
for (lind=0; lind<loop; lind++)
{
read̲line(pointfile,voltstr,timestr2);
}
timestrf1=atof(timestr1);
// t(4)
timestrf2=atof(timestr2);
// t(end)
cut̲sample=((1/13.56e6)/((timestrf2-timestrf1)/(loop-1)));
linf=samplesp;
while (linf>0)
{
linf=linf-cut̲sample;
}
linf+=cut̲sample;
samplesp=samplesp-linf-3;
66
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
// At least 7 points per sample
delta̲t=tlast-timestrf1;
val̲t=delta̲t/samplesp;
if (val̲t>(1/13.56e6)/7)
fprintf(stdout, "More samples points needed - Nyquist¥n");
return (samplesp);
}
// Finds the most frequent value(s) of the given signal, Hmax (Types A/B) and Hmin
(Type B).
void Hmaxfinder(double *env, double *Hmax, double *Hmin, int numsamples)
{
int hist[2001]={0}; // IA Changed memory access violation. Increased +1
int hi̲low̲i=0;
double tophist=0;
double bothist=100;
double diffhist=0;
double value=0;
int histind=0;
int max̲i=0;
int min̲i=0;
double max=0;
double min=0;
// Finds higher and lower values of samples
for (hi̲low̲i=0; hi̲low̲i<MAX̲SAMPLES; hi̲low̲i++)
{
if (env[hi̲low̲i]!=0)
{
if (env[hi̲low̲i]<bothist)
bothist=env[hi̲low̲i];
if (env[hi̲low̲i]>tophist)
tophist=env[hi̲low̲i];
// Finds limits for the histogram
}
}
diffhist=tophist-bothist;
for (hi̲low̲i=0; hi̲low̲i<numsamples; hi̲low̲i++)
{
if (env[hi̲low̲i]!=0)
67
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
{
value=env[hi̲low̲i];
histind=(int)(2000*((value-bothist)/diffhist)); // Performs a lineal
quantization
hist[histind]++;
}
}
for (hi̲low̲i=0; hi̲low̲i<1000; hi̲low̲i++)
{
if (hist[hi̲low̲i]>min) // Searches most frequent value in the lower half of
the form
{
min=hist[hi̲low̲i];
min̲i=hi̲low̲i;
}
*Hmin=(bothist+(diffhist/2000)*(min̲i));
}
for (hi̲low̲i=1001; hi̲low̲i<2000; hi̲low̲i++)
{
if (hist[hi̲low̲i]>max) // Search most frequent value in the upper half of
the form
{
max=hist[hi̲low̲i];
max̲i=hi̲low̲i;
}
*Hmax=(bothist+(diffhist/2000)*(max̲i));
}
}
// Linear convolution (z= x convolve y)
void LinearConvolution(double X[],double Y[], double Z[], int lenx, int leny)
{
double *zptr,s,*xp,*yp;
int lenz;
int i,n,n̲lo,n̲hi;
lenz=lenx+leny-1;
zptr=Z;
68
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
for (i=0;i<lenz;i++)
{
s=0.0;
n̲lo=0>(i-leny+1)?0:i-leny+1;
n̲hi=lenx-1<i?lenx-1:i;
xp=X+n̲lo;
yp=Y+i-n̲lo;
for (n=n̲lo;n<=n̲hi;n++)
{
s+=*xp * *yp;
xp++;
yp--;
}
*zptr=s;
zptr++;
}
}
int envfilt(double *output, double *toutput, int filterlength, double tini, double
tend, int lengthp, double *envelope)
{
int cofpi=0;
int xx=0;
double cofp=0.0;
int lengthp1=0;
double lengthf=0;
double cof[2000]={0};
double points=0.0;
int pointsi=0;
int lengthtotal=0;
cofp=(73.75e-9)/((tend-tini)/(lengthp));
cofpi=cofp+0.5;
lengthf=cofpi*filterlength;
points=(5*73.75e-9)/((tend-tini)/(lengthp-1));
pointsi=(int)points+1;
lengthp1=lengthp;
for (xx=0; xx<lengthf; xx++)
69
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
cof[xx]=1/lengthf;
for (xx=lengthf+1; xx<2000; xx++)
cof[xx]=0;
LinearConvolution(cof, output, envelope, lengthf, lengthp);
for (xx=0; xx<(pointsi); xx++) // "Cuts" envelope
{
envelope[xx]=0.0;
toutput[xx]=0.0;
envelope[lengthp1-xx]=0.0;
toutput[lengthp1-xx]=0.0;
}
for (xx=lengthp1+1; xx<MAX̲SAMPLES; xx++)
{
envelope[xx]=0.0;
toutput[xx]=0.0;
}
lengthtotal=lengthp1-2*(pointsi);
return (lengthtotal);
}
// Performs the search of a certain level (target) in the envelope, i.e. 5% ,60%,
90% in Type A, 106 kbit/s
int localizador(double *env, double *toutput, double target, ESL **crosses, int
env̲length)
{
int flag=0;
double diff;
ESL *new;
double v;
double t;
int crosscounter=0;
int locat̲index=0;
int locat̲index̲start=0;
while (env[locat̲index]==0.0) // Leaves 0s out
70
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
locat̲index++;
locat̲index̲start=locat̲index;
if (env[locat̲index]-target>0)
{
for (locat̲index=locat̲index̲start;
locat̲index<env̲length+locat̲index̲start-1; locat̲index++)
{
diff=env[locat̲index]-target;
if (diff<0 && flag==0 && env[locat̲index]!=0.0) // At the beginning or
after an odd occurrence, envelope is over "target" level
{
flag=1; // down!
v=target;
t=toutput[locat̲index-1]+((toutput[locat̲index]-toutput[locat̲index-
1])/(env[locat̲index]-env[locat̲index-1])*(target-env[locat̲index-1]
));
new=createnodef(v,t);
insert̲node(crosses,new);
crosscounter++;
}
if (diff>0 && flag==1 && env[locat̲index]!=0.0) // After first (or even)
occurrence, envelope is under "target" level
{
flag=0; // up!
v=target;
t=toutput[locat̲index-1]+((toutput[locat̲index]-toutput[locat̲index-
1])/(env[locat̲index]-env[locat̲index-1])*(target-env[locat̲index-1]
));
new=createnodef(v,t);
insert̲node(crosses,new);
crosscounter++;
}
// Returns all occurrences with time and volt level in a list
}
}
else
fprintf(stdout,"Signal is not ---|̲̲̲|--- ¥n");
return (crosscounter); // Also returns how many occurrences appeared
}
// Function that calculates the relevant times
void tfinder(char type, double *env, double *toutput, double tini, double Hmax,
double Hmin, int rate, int env̲length, TIMES *timeres)
{
double *envc=NULL;
double *envc2=NULL;
ESL *crosses=NULL;
ESL *crosses2=NULL;
71
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ESL *crosses3=NULL;
ESL *crosses̲WORK=NULL;
double ninety=0.0;
double five=0.0;
double sixty=0.0;
double tp90one=0.0;
double tp90two=0.0;
double tp5one=0.0;
double tp5two=0.0;
double tp60two=0.0;
double vp90one=0.0;
double vp90two=0.0;
double vp5one=0.0;
double vp5two=0.0;
double vp60two=0.0;
double tphione=0.0;
double tphitwo=0.0;
double vphione=0.0;
double vphitwo=0.0;
double tpmidone=0.0;
double vpmidone=0.0;
double tploone=0.0;
double tplotwo=0.0;
double vplotwo=0.0;
double t1=0.0;
double t2=0.0;
double t3=0.0;
double t4=0.0;
double t5=0.0;
double t6=0.0;
int flag=0;
int flag2=0;
int flag3=0;
int flag̲improv=0;
int x̲improv=0;
double minvolt=0.0;
double highrate̲low=0.0;
double highrate̲mid=0.0;
double highrate̲hi=0.0;
double a=0.0;
double t6end=0.0;
double t5startind=0.0;
double t6endind=0.0;
double b=0.0;
double B̲low=0.0;
double B̲hi=0.0;
72
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
double tr=0.0;
double tf=0.0;
double tfstartind=0.0;
double tfendind=0.0;
double trstartind=0.0;
double trendind=0.0;
double t2startind=0.0;
double t2start=0.0;
double t1startind=0.0;
double t1start=0.0;
double t3end=0.0;
double t4endind=0.0;
double t3endind=0.0;
double t1endind=0.0;
double oscmin=0.0;
double osctmin=0.0;
double oscmax=0.0;
double osctmax=0.0;
ESL *crossescopy=NULL;
double tim3=0.0;
int index̲A=0;
int index̲A2=0;
int index̲chain=0;
int i=0;
b=Hmin;
envc=env;
envc2=envc;
switch (type)
{
case 'A':
{
switch (rate)
{
case 106:
{
ninety=Hmax*0.9;
five=Hmax*0.05;
sixty=Hmax*0.6;
flag2=localizador(envc,toutput,five,&crosses2,env̲length); // Finds 5%
73
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
of Hmax
if (flag2==2) // if there are two occurrences, there´s no problem...
{
tp5one=crosses2->time; // Temporary values are stored for future use
vp5one=crosses2->volt;
tp5two=crosses2->sig->time;
vp5two=crosses2->sig->volt;
freelist(crosses2);
}
else if (flag2==0) // ...if there is no occurrence...
fprintf(stdout,"5 percent of Hmax not reached - maybe wrong type or
bitrate? ¥n");
else if (flag2>2) // ...if there are more than two occurrences...
{ // ...it must be checked that "peaks" comply the ISO restrictions
while (toutput[index̲A]<crosses2->sig->time)
index̲A++;
oscmin=envc2[index̲A];
for (index̲chain=0; index̲chain<flag2-2; index̲chain++)
{
crosses2=crosses2->sig;
}
while (toutput[index̲A]<=crosses2->time)
{
if (envc2[index̲A]>oscmax)
{
oscmax=envc2[index̲A];
osctmax=toutput[index̲A];
}
index̲A++;
}
while (envc2[index̲A2]==0)
{
index̲A2++;
}
74
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
while (envc2[index̲A2]>oscmax)
{
index̲A2++;
}
oscmin=envc2[index̲A2];
osctmin=toutput[index̲A2];
if (osctmax-osctmin>5e-7)
fprintf(stdout,"Monotony not fulfilled ¥n");
tp5one=crosses2->time; // Temporary values are stored for future use
vp5one=crosses2->volt;
tp5two=crosses2->sig->time;
vp5two=crosses2->sig->volt;
freelist(crosses2);
}
flag=localizador(envc,toutput,ninety,&crosses,env̲length); // Finds 90% of
Hmax
if (flag>=2)
{
crosses̲WORK=crosses; // Copy of crosses to work with
while (x̲improv<flag)
{
if (crosses̲WORK->time<tp5one)
{
tp90one=crosses̲WORK->time; // Temporary values are stored for future
use
vp90one=crosses̲WORK->volt;
}
if (crosses̲WORK->time>tp5two && flag̲improv==0)
{
tp90two=crosses̲WORK->time; // Temporary values are stored for future
use
vp90two=crosses̲WORK->volt;
flag̲improv=1;
}
crosses̲WORK=crosses̲WORK->sig;
75
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
x̲improv++;
}
freelist(crosses);
}
else // ...otherwise...
{
fprintf(stdout,"90 %% of Hmax not found - Noise Too High ¥n");
}
flag3=localizador(envc,toutput,sixty,&crosses3,env̲length); // Finds 60%
of Hmax
if (flag3==2) // if there are two occurrences, there´s no problem...
{
tp60two=crosses3->sig->time; // Temporary values are stored for future
use
vp60two=crosses3->sig->volt;
freelist(crosses3);
}
t1=tp5two-tp90one; // Definitive values are calculated and stored for display
t2=tp5two-tp5one;
t3=tp90two-tp5two;
t4=tp60two-tp5two;
t1start=tp90one; // Other important values for the coming functions
t2start=tp5one;
t3end=tp90two;
t1startind=vp90one;
t1endind=vp5two;
t2startind=vp5one;
t3endind=vp90two;
t4endind=vp60two;
createtime(timeres,0,0,0,0,0,0,0,t1,t1startind,t1start,t1endind,t2,t2startind,
t2start,t3,t3end,t3endind,t4,t4endind,0,0,0,0,0,0,0);
}
break;
case 212:
case 424:
76
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
case 848:
{
ninety=Hmax*0.9;
while (env[index̲A]==0.0) // Finds first value different of 0.0
index̲A++;
minvolt=env[index̲A];
while (env[index̲A]!=0.0) // All values are considered
{
if (env[index̲A]<minvolt)
{
minvolt=env[index̲A]; // Finds minimal voltage
}
index̲A++;
}
highrate̲low=minvolt+0.1*(Hmax-minvolt); // Calculates target
flag=localizador(envc,toutput,highrate̲low,&crosses,env̲length);
// Finds target
if (flag==2) // ...if there are two occurrences, there´s no problem...
{
tploone=crosses->time; // Temporary values are stored for future use
tplotwo=crosses->sig->time;
vplotwo=crosses->sig->volt;
}
else if (flag>2) // if there are more than two occurrences...
{ // ...it must be checked that "peaks" comply the ISO restrictions
while (toutput[index̲A2]<crosses->time || toutput[index̲A2]==0)
index̲A2++;
oscmin=envc2[index̲A2];
while (envc2[index̲A2]<=oscmin)
{
oscmin=envc2[index̲A2];
index̲A2++;
}
osctmin=toutput[index̲A2];
crossescopy=crosses;
77
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
for (i=1; i<(flag-1); i++)
crossescopy=crossescopy->sig;
tim3=crossescopy->time;
while (toutput[index̲A2]<tim3)
index̲A2++;
oscmax=envc2[index̲A2];
while (toutput[index̲A2]<tim3)
{
if (oscmax<envc2[index̲A2])
{
oscmax=envc2[index̲A2];
osctmax=toutput[index̲A2];
}
index̲A2++;
}
if (oscmax-oscmin>(0.09*(Hmax-oscmin)))
fprintf(stdout,"Monotony not fulfilled ¥n");
for (i=1; i<(flag-1); i++)
crosses=crosses->sig;
tploone=crosses->time; // Temporary values are stored for future use
tplotwo=crosses->sig->time;
vplotwo=crosses->sig->volt;
}
freelist(crosses);
highrate̲hi=ninety+0.1*minvolt; // Calculates target
flag=localizador(envc,toutput,highrate̲hi,&crosses2,env̲length);
// Finds target
if (flag>=2)
{
crosses̲WORK=crosses2;
while (x̲improv<flag)
{
if (crosses̲WORK->time<tploone)
{
tphione=crosses̲WORK->time; // Temporary values are stored for future
78
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
use
vphione=crosses̲WORK->volt;
}
if (crosses̲WORK->time>tplotwo && flag̲improv==0)
{
tphitwo=crosses̲WORK->time; // Temporary values are stored for future
use
vphitwo=crosses̲WORK->volt;
flag̲improv=1;
}
crosses̲WORK=crosses̲WORK->sig;
x̲improv++;
}
freelist(crosses2);
}
else // ...otherwise...
{
fprintf(stdout,"90 %% of Hmax not reached! - Noise Too High? ¥n");
}
highrate̲mid=(Hmax+minvolt)/2; // Calculates target
flag=localizador(envc,toutput,highrate̲mid,&crosses3,env̲length);
// Finds target
if (flag==2) // ...if there are two occurrences, there´s no problem...
{
tpmidone=crosses3->time; // Temporary values are stored for future use
vpmidone=crosses3->volt;
freelist(crosses3);
}
else // ...otherwise...
fprintf(stdout,"Noise Too High ¥n");
t1=tplotwo-tphione; // Definitive values are calculated and stored for display
t5=tplotwo-tpmidone;
t6=tphitwo-tplotwo;
a=minvolt;
t6end=tphitwo; // Other important values for the coming functions
t1start=tphione;
t1startind=vphione;
79
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
t5startind=vpmidone;
t1endind=vplotwo;
t6endind=vphitwo;
createtime(timeres,0,0,0,0,0,0,0,t1,t1startind,t1start,t1endind,0,0,0,0,0,0,0,
0,t5,t5startind,t6,t6end,t6endind,a,tploone);
}
break;
}
}
break;
case 'B':
{
B̲low=b+0.1*(Hmax-b); // Calculates target
flag=localizador(envc,toutput,B̲low,&crosses,env̲length); // Finds target
if (flag>=2)
{
crosses̲WORK=crosses;
tploone=crosses̲WORK->time; // Temporary values are stored for future use
while (x̲improv<flag)
{
tplotwo=crosses̲WORK->time; // Temporary values are stored for future use
vplotwo=crosses̲WORK->volt;
crosses̲WORK=crosses̲WORK->sig;
x̲improv++;
}
freelist(crosses);
}
else
{
fprintf(stdout,"Monotony not fulfilled¥n");
}
B̲hi=Hmax-0.1*(Hmax-b); // Calculates target
flag=localizador(envc,toutput,B̲hi,&crosses2,env̲length); // Finds
target
if (flag>=2)
{
x̲improv=0;
flag̲improv=0;
80
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
crosses̲WORK=crosses2;
while (x̲improv<flag)
{
if (crosses̲WORK->time<tploone)
{
tphione=crosses̲WORK->time; // Temporary values are stored for future
use
vphione=crosses̲WORK->volt;
}
if (crosses̲WORK->time>tplotwo && flag̲improv==0)
{
tphitwo=crosses̲WORK->time; // Temporary values are stored for future
use
vphitwo=crosses̲WORK->volt;
flag̲improv=1;
}
crosses̲WORK=crosses̲WORK->sig;
x̲improv++;
}
freelist(crosses2);
}
else
{
fprintf(stdout,"Monotony not fulfilled¥n");
}
tf=tploone-tphione; // Definitive values are calculated and stored for display
tr=tphitwo-tplotwo;
tfstartind=tphione; // Other important values for the coming functions
tfendind=tploone;
trstartind=tplotwo;
trendind=tphitwo;
createtime(timeres,tr,tf,b,trstartind,trendind,tfstartind,tfendind,0,0,0,0,0,0
,0,0,0,0,0,0,0,0,0,0,0,0,0);
}
break;
}
}
// Checks monotony on the falling edge
81
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
void monocheck(double *env, double *toutput, double Hmax, TIMES *timesp, int rate,
char type)
{
double tinit=0.0;
double tend=0.0;
double compare=0.0;
double timer0=0.0;
double timer1=0.0;
double volt0=0.0;
double volt1=0.0;
int counter=0;
int flag̲mono=0;
switch (type)
{
case 'A':
{
switch (rate)
{
case 106:
{
while (env[counter]==0)
counter++;
tinit=timesp->t1start;
tend=timesp->t2start;
while (toutput[counter]<tinit)
counter++; //find first value
while (toutput[counter]<tend)
{
compare=env[counter];
if (compare<env[counter+1])
{
timer0=toutput[counter];
volt0=env[counter];
while (volt0<env[counter+1]) // growing values...
{
counter++;
82
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
volt0=env[counter];
}
timer1=toutput[counter]; // ...max.value -> time
if (timer1-timer0>5e-6)
fprintf(stdout,"Monotony not fulfilled ¥n");
}
else
counter++;
}
}
break;
case 212:
case 424:
case 848:
{
while (env[counter]==0)
counter++;
tinit=timesp->t1start;
tend=timesp->t1endind;
while (toutput[counter]<tinit)
counter++; //find first value
while (env[counter]>tend)
{
compare=env[counter];
if (compare<env[counter+1])
{
volt0=env[counter];
volt1=volt0;
while (volt0<env[counter+1]) // growing values...
{
counter++;
volt0=env[counter];
}
if (volt1-volt0>0.09*(Hmax-volt0))
fprintf(stdout,"Monotony not fulfilled ¥n");
}
else
counter++;
83
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
}
}
break;
}
}
break;
case 'B':
{
while (env[counter]==0)
counter++;
tinit=timesp->tfstartind;
tend=timesp->tfendind;
while (toutput[counter]<tinit)
counter++; //find first value
while (toutput[counter]<tend)
{
compare=env[counter];
if (compare<env[counter++])
flag̲mono=1;
}
if (flag̲mono==1)
fprintf(stdout, "Monotony not fulfilled ¥n");
}
break;
}
}
// Function that calculates the overshoot times
void overshoot(TIMES *timesp, double Hmax, double *env2, double *toutput, int rate,
char type, int samples, SHOOTREADER *shootreader)
{
double shootind=0.0;
double shootind̲b=0.0;
double hr̲reader=0.0;
double hf̲reader=0.0;
double above=0.0;
double above̲b=10.0;
double start=0.0;
int index̲samples=0;
84
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
switch (type)
{
case 'A':
{
switch (rate)
{
case (106):
{
start=timesp->t3end;
while (toutput[index̲samples]<=start)
index̲samples++;
while (index̲samples<=samples)
{
if (env2[index̲samples]>above)
{
above=env2[index̲samples];
shootind=toutput[index̲samples];
}
index̲samples++;
}
}
break;
case (212):
case (424):
case (848):
{
start=timesp->t6end;
while (toutput[index̲samples]<=start)
index̲samples++;
while (index̲samples<=samples)
{
if (env2[index̲samples]>above)
{
above=env2[index̲samples];
shootind=toutput[index̲samples];
}
index̲samples++;
85
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
}
if (above<Hmax) // In very strange cases if there´s no overshoot, the
highest point
above=Hmax; // in the curve can be cutted off by envfilt, producing
a negative hr
}
break;
}
}
break;
case 'B':
{
start=timesp->trendind;
while (toutput[index̲samples]<start) // Starts at the rising edge
index̲samples++;
while (index̲samples<=samples)
{
if (env2[index̲samples]>above)
{
above=env2[index̲samples];
shootind=toutput[index̲samples];
hr̲reader=(above-Hmax)/(Hmax-timesp->b);
if (hr̲reader<0) // In very strange cases if there´s no overshoot, the
highest point
hr̲reader=0; // in the curve can be cutted off by envfilt, producing
a negative hr
}
index̲samples++;
}
index̲samples=0;
start=timesp->tfendind;
while (toutput[index̲samples]==0)
index̲samples++;
while (toutput[index̲samples]<start)
index̲samples++
while (toutput[index̲samples]<(timesp->trstartind))
86
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
{
if (env2[index̲samples]<above̲b && env2[index̲samples]!=0)
{
above̲b=env2[index̲samples];
shootind̲b=toutput[index̲samples];
hf̲reader=(timesp->b-above̲b)/(Hmax-timesp->b);
}
index̲samples++;
}
}
break;
}
shootreader->shootind=shootind;
shootreader->shootind̲b=shootind̲b;
shootreader->hr̲reader=hr̲reader;
shootreader->hf̲reader=hf̲reader;
shootreader->above=above;
shootreader->above̲b=above̲b;
}
// Calculates the modulation index "m"
double modulation(char type, double Hmax, double b)
{
double m=0;
switch (type)
{
case 'A':
{
// m is not defined for Type A
}
break;
case 'B':
{
m=100*(Hmax-b)/(Hmax+b); // In %
}
break;
}
return (m);
}
87
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
// Displays on screen the results of the calculations
void display(char type, int rate, SHOOTREADER *shootreader2, TIMES *timesp, double
Hmax, double m)
{
double ovs=0;
double ovsb1=0;
double ovsb2=0;
fprintf (stdout,"¥n"); // 2nd set of functions, on debug purposes
switch (type)
{
case 'A':
{
fprintf(stdout,"---RESULTS------------¥n");
fprintf(stdout,"Type A - Bitrate %d¥n", rate);
fprintf(stdout,"---Overshoot----------¥n");
ovs=(((shootreader2->above)-Hmax)/(Hmax-timesp->a))*100;
if (ovs>0)
fprintf(stdout,"Overshoot = %f %% ¥n", ovs);
else
fprintf(stdout,"Overshoot = 0 %% ¥n");
switch (rate)
{
case (106):
{
fprintf(stdout,"---timings------------¥n");
fprintf(stdout,"t1 = %f microsec. ¥n", (timesp->t1)*1e6);
fprintf(stdout,"t1 = %f/fc ¥n", (timesp->t1)*13.56e6);
fprintf(stdout,"t2 = %f microsec. ¥n", (timesp->t2)*1e6);
fprintf(stdout,"t2 = %f/fc ¥n", (timesp->t2)*13.56e6);
fprintf(stdout,"t3 = %f microsec. ¥n", (timesp->t3)*1e6);
fprintf(stdout,"t3 = %f/fc ¥n", (timesp->t3)*13.56e6);
fprintf(stdout,"t4 = %f microsec. ¥n", (timesp->t4)*1e6);
fprintf(stdout,"t4 = %f/fc ¥n", (timesp->t4)*13.56e6);
fprintf(stdout,"---amplitudes---------¥n");
fprintf(stdout,"Hmax = %f volts ¥n", Hmax);
fprintf(stdout,"Max. Amplitude = %f volts ¥n", (shootreader2- >above));
}
break;
case (212):
case (424):
case (848):
{
88
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
fprintf(stdout,"hovs = %f ¥n", (((shootreader2->above- Hmax)/Hmax)));
fprintf(stdout,"---timings------------¥n");
fprintf(stdout,"t1 = %f microsec. ¥n", (timesp->t1)*1e6);
fprintf(stdout,"t1 = %f/fc ¥n", (timesp->t1)*13.56e6);
fprintf(stdout,"t5 = %f microsec. ¥n", (timesp->t5)*1e6);
fprintf(stdout,"t5 = %f/fc ¥n", (timesp->t5)*13.56e6);
fprintf(stdout,"t6 = %f microsec. ¥n", (timesp->t6)*1e6);
fprintf(stdout,"t6 = %f/fc ¥n", (timesp->t6)*13.56e6);
fprintf(stdout,"---amplitudes---------¥n");
fprintf(stdout,"Hmax = %f volts ¥n", Hmax);
fprintf(stdout,"a = %f %% of Hinitial ¥n", ((timesp->a)/Hmax));
}
break;
}
}
break;
case 'B':
{
fprintf(stdout,"---RESULTS------------¥n");
fprintf(stdout,"Type B - Bitrate %d¥n", rate);
fprintf(stdout,"---timings------------¥n");
fprintf(stdout,"tf = %f microsec. ¥n", (timesp->tf)*1e6);
fprintf(stdout,"tf = %f/fc ¥n", (timesp->tf)*13.56e6);
fprintf(stdout,"tr = %f microsec. ¥n", (timesp->tr)*1e6);
fprintf(stdout,"tr = %f/fc ¥n", (timesp->tr)*13.56e6);
fprintf(stdout,"---modulation---------¥n");
fprintf(stdout,"m = %f %% ¥n", m);
fprintf(stdout,"---amplitudes---------¥n");
fprintf(stdout,"a = %f volts ¥n", Hmax);
fprintf(stdout,"b = %f volts ¥n", timesp->b);
fprintf(stdout,"---Overshoots---------¥n");
fprintf(stdout,"hf = %f %% of Hinitial-b¥n", (shootreader2-
>hf̲reader)*100);
fprintf(stdout,"hr = %f %% of Hinitial-b¥n", (shootreader2-
>hr̲reader)*100);
ovsb1=(timesp->b-(shootreader2->above̲b))*1000;
ovsb2=((shootreader2->above)-Hmax)*1000;
if (ovsb1>0)
fprintf(stdout,"hf = %f milivolts ¥n", ovsb1);
else
fprintf(stdout,"hf = 0 milivolts ¥n");
89
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
if (ovsb2>0)
fprintf(stdout,"hr = %f milivolts ¥n", ovsb2);
else
fprintf(stdout,"hr = 0 milivolts ¥n");
}
break;
}
}
// Main Function
int main (int argc, char *argv[])
{
char type;
int rate;
char voltstr[25]; // intermediate char array to modify the voltage values
char timestr[25]; // intermediate char array to modify the time values
double snum=0;
double tnum=0;
double t=0;
int filterlength=0;
double Hmax=0;
double Hmin=0;
double Hmax2=0;
double Hmin2=0;
FILE *pointfile=NULL;
FILE *input̲u2=NULL;
FILE *poutput=NULL;
double m=0.0;
int length=0;
double val=0;
int posval=0;
int negval=0;
double tini=0;
double tfin=0;
int samples=0;
int out̲i=0;
int length̲total=0;
int sample̲ini=0;
int sample̲end=0;
int flag̲cut=0;
90
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
int samplesp=0;
int fi=0; // Filter generic index
double b1=0; // Filter parameters
double b2=0;
double b3=0;
double b4=0;
double b5=0;
double a1=0;
double a2=0;
double a3=0;
double a4=0;
double a5=0;
double freq1=0;
double freq2=0;
double as[5]={0};
double bs[5]={0};
double t0=0;
double tlast=0;
int lineskip=0;
double *voutput=malloc (sizeof(double)*MAX̲SAMPLES);
double *toutput=malloc (sizeof(double)*MAX̲SAMPLES);
double *envelope=malloc (sizeof(double)*MAX̲SAMPLES);
double *vfilter=malloc (sizeof(double)*MAX̲SAMPLES);
double *tfilter=malloc (sizeof(double)*MAX̲SAMPLES);
TIMES *timesp=(TIMES *)malloc(sizeof(TIMES));
TIMES *timesp2=(TIMES *)malloc(sizeof(TIMES));
SHOOTREADER *shootreader2=(SHOOTREADER *)malloc(sizeof(SHOOTREADER));
if (voutput!=NULL && toutput!=NULL && envelope !=NULL && vfilter!=NULL &&
tfilter!=NULL && timesp!=NULL && timesp2!=NULL && shootreader2!=NULL)
{
memset(voutput, 0, MAX̲SAMPLES);
memset(toutput, 0, MAX̲SAMPLES);
memset(envelope, 0, MAX̲SAMPLES);
memset(vfilter, 0, MAX̲SAMPLES);
memset(tfilter, 0, MAX̲SAMPLES);
type=*argv[1];
rate=atoi(argv[2]);
if ((type!='A' && type!='B') || (rate!=106 && rate!=212 && rate!=424 &&
rate!=848))
91
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
{
fprintf(stdout, "Wrong Type (A or B) or Bitrate (106, 212, 424, 848)");
}
else
{
pointfile=fopen(argv[3],"r");
input̲u2=fopen("intermediate.txt","w"); // modifiedintermediate amplitude
vector
if(pointfile!=NULL && input̲u2!=NULL)
{
//1. LOAD DATA + CHECKING DATA (WITHOUT FILTER)
for (lineskip=0; lineskip<10; lineskip++) // Skips the first 10 lines
which are the header of csv files
{
skip̲line (pointfile);
}
read̲line (pointfile,voltstr, timestr);
t0=atof(timestr);
while (!feof(pointfile)) // We are reading the lines of the voltage input
file
{
if (voltstr[0]!='¥0')
{
snum=atof(voltstr);
tnum=atof(timestr);
if(snum<0)
negval++;
else
posval++;
vfilter[samplesp]=snum;
tfilter[samplesp]=tnum;
samplesp++;
read̲line (pointfile,voltstr, timestr);
}
tlast=tfilter[samplesp-1];
}
samplesp=samplesp+3;
samplesp=datacheck(posval, negval, samplesp, tlast, pointfile);
tlast=tfilter[samplesp];
92
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
//2. DATA FILTER 10 MHz BANDPASS
freq1=8.56e6/(1/(2*((tlast-t0)/(samplesp-1))));
freq2=18.56e6/(1/(2*((tlast-t0)/(samplesp-1))));
butterworth̲coeffs(freq1, freq2, as, bs);
b1=bs[0];
b2=bs[1];
b3=bs[2];
b4=bs[3];
b5=bs[4];
a1=as[0];
a2=as[1];
a3=as[2];
a4=as[3];
a5=as[4];
for (fi=0; fi<samplesp; fi++)
{
if (fi<7 || fi>samplesp-7)
voutput[fi]=0;
else
voutput[fi]=(b1*vfilter[fi]+b2*vfilter[fi-1]+b3*vfilter[fi-
2]+b4*vfilter[fi-3]+b5*vfilter[fi-4]-a2*voutput[fi-1]-a3*voutput
[fi-2]- a4*voutput[fi-3]-a5*voutput[fi-4])/a1;
}
rewind (pointfile);
lineskip=0;
for (lineskip=0; lineskip<10; lineskip++) // Skips the first 10 lines
which are the header of csv files
{
skip̲line (pointfile);
}
for (fi=0; fi<(samplesp-7); fi++) /* We are reading the lines of the voltage
input file */
{
val=voutput[fi];
read̲line (pointfile,voltstr,timestr);
93
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
fprintf(input̲u2,"%s,%f¥n",timestr,val);
length++;
}
//3. HILBERT TRANSFORM AND THE COMPLEX ENVELOPE
rewind(input̲u2);
hilbert("intermediate.txt"); // performs Hilbert transform
poutput=fopen("output.txt","r"); // Hilbert transform output vector
read̲line (poutput,voltstr,timestr);
tini=atof(timestr);
rewind (poutput);
if(poutput!=NULL)
{
while (!feof(poutput)) // We are reading the lines of the voltage input
file */
{
read̲line (poutput,voltstr,timestr);
if (timestr[0]!='¥0')
{
snum=atof(voltstr);
voutput[samples]=snum;
t=atof(timestr);
toutput[samples]=t;
samples++;//==>US // Same variable as the one in Hmaxfinder
tfin=t;
}
}
}
else
fprintf(stdout,"Error in Hilbert transform¥n");
//4. USING A SMOOTHING FILTER (MOV. AVG) TO REDUCE THE NOISE
filterlength=1;
length̲total=envfilt(voutput, toutput, filterlength, tini, tfin, samples,
envelope);
//5. 100% OF H̲INITIAL
Hmaxfinder(envelope, &Hmax, &Hmin, length̲total);
94
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
//6. COMPUTING THE ISO BASED TIMES
tfinder(type,envelope,toutput,tini,Hmax,Hmin,rate,length̲total,times
p);
//7. CHECKING FOR ISO DEFINED MONOTONY
monocheck(envelope, toutput, Hmax, timesp, rate, type);
out̲i=0;
while (out̲i<MAX̲SAMPLES) // Finds how many zeros are at the beginning
of vector envelope
{
if (envelope[out̲i]==0 && flag̲cut==0)
{
sample̲ini=out̲i;
tini=toutput[sample̲ini+1];
}
if (envelope[out̲i]!=0)
{
flag̲cut=1;
sample̲end=out̲i;
tfin=toutput[sample̲end];
}
out̲i++;
}
samples=sample̲end-sample̲ini-1; //==>US
for (out̲i=0; out̲i<samples; out̲i++)
{
voutput[out̲i]=envelope[out̲i+sample̲ini+1];
toutput[out̲i]=toutput[out̲i+sample̲ini+1];
}
for (out̲i=samples+1; out̲i<MAX̲SAMPLES; out̲i++)
{
voutput[out̲i]=0.0;
toutput[out̲i]=0.0;
}
95
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
tini=toutput[0];
tfin=toutput[samples];
//8. OVERSHOOT OF THE READER
fprintf (stdout,"¥n"); // 2nd set of functions, "New Line" printed
for debug purposes
filterlength=3;
length̲total=envfilt(voutput, toutput, filterlength, tini, tfin,
samples, envelope); // 2nd Filtering to find the alternate envelope
Hmaxfinder(envelope, &Hmax2, &Hmin2, length̲total);
tfinder(type,envelope,toutput,tini,Hmax2,Hmin2,rate,length̲total,
timesp2);
monocheck(envelope, toutput, Hmax2, timesp2, rate, type);
// The parameters of the alternate envelope are calculated
overshoot(timesp2,Hmax2,envelope,toutput,rate,type,samples,
shootreader2); // This time the over- and undershoots are found
//9. MODULATION
m=modulation(type, Hmax, timesp->b);
//10. DISPLAY
display(type, rate, shootreader2, timesp, Hmax, m);
}
else if (pointfile==NULL || input̲u2!=NULL)
fprintf(stdout,"file(s) could not be opened ¥n");
fclose(pointfile);
fclose(input̲u2);
}
}
else
fprintf(stdout, "Memory could not be allocated");
free (voutput);
free (toutput);
free (envelope);
free (vfilter);
free (tfilter);
free (timesp);
free (timesp2);
96
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
free (shootreader2);
return 0;
}
97
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(参考)
周波数特性の評価用プログラム
C言語で書かれた次のプログラムは,PICCの周波数特性の振幅の計算例として提供される。
/***************************************************************/
/*** This program calculates the Fourier coefficients
***/
/*** of load modulated voltage of a PICC according
***/
/*** the ISO/IEC 10373-6 Test methods
***/
/*** The coefficients are calculated at the frequencies:
***/
/*** Carrier: fc (=13.5600 for 13.56 MHz)
***/
/*** Upper sideband: 14.4075 MHz
***/
/*** Lower sideband: 12.7125 MHz
***/
/***************************************************************/
/*** Input:
***/
/*** File in CSV Format containing a table of two
***/
/*** columns (time and test PCD output voltage vd, clause 7) ***/
/***
***/
/*** data format of input-file:
***/
/*** -------------------------
***/
/*** - one data-point per line:
***/
/*** (time[seconds], sense-coil-voltage[volts])
***/
/*** - contents in ASCII, no headers
***/
/*** - data-points shall be equidistant time
***/
/*** - minimum sampling rate: 100 MSamples/second
***/
/*** - modulation waveform centered
***/
/*** (max. tolerance: half of subcarrier cycle)
***/
/***
***/
/***
***/
/*** example for spreadsheet file (start in next line):
***/
/*** (time) (voltage)
***/
/*** 3.00000e-06,1.00
***/
/*** 3.00200e-06,1.01
***/
/*** .....
***/
/***************************************************************/
/*** RUN:
***/
/*** “exefilename” [filename1[.csv] ... filename[.csv] ]
***/
/***************************************************************/
98
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
/*** ISO/IEC 10373-6 DFT CALCULATION
***/
/*** Program Version 2.1 Release 2008
***/
/***************************************************************/
#include <stdio.h>
#include <string.h>
#include <math.h>
#define MAX̲SAMPLES 50000
#define MAX̲POINTS 500
#define MAX̲MOYENNE 200
double pi; /* pi=3.14.... */
/* Array for time and sense coil voltage vd */
double vtime[MAX̲SAMPLES]; /* time array */
double vd[MAX̲SAMPLES]; /* Array for different coil voltage */
/***************************************************************/
/*** Read CSV File Function
***/
/***
***/
/*** Description:
***/
/*** This function reads the table of time and sense coil
***/
/*** voltage from a File in CSV Format
***/
/***
***/
/*** Input: filename
***/
/***
***/
/*** Return: Number of samples (sample Count)
***/
/*** 0 if an error occurred
***/
/***
***/
/*** Displays Statistics:
***/
/***
***/
/*** Filename, SampleCount, Sample rate, Max/Min Voltage
***/
/***************************************************************/
int readcsv(char* fname)
{
double a,b;
double max̲vd,min̲vd;
99
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
int i;
FILE *sample̲file;
/************ Open File ***********************************/
if (!strchr(fname, '.')) strcat(fname, ".csv");
if ((sample̲file = fopen(fname, "r"))== NULL)
{
printf("Cannot open input file %s.¥n",fname);
return 0;
}
/**********************************************************/
/* Read CSV File */
/**********************************************************/
max̲vd=-1e-9F;
min̲vd=-max̲vd;
i=0;
while (!feof(sample̲file))
{
if (i>=MAX̲SAMPLES)
{
printf("Warning: File truncated !!!¥n");
printf("To much samples in file %s¥b¥n",fname);
break;
}
fscanf(sample̲file,"%Lf,%Lf¥n", &a, &b);
vtime[i] = a;
vd[i] = b;
if (vd[i]>max̲vd) max̲vd=vd[i];
if (vd[i]<min̲vd) min̲vd=vd[i];
i++;
}
fclose(sample̲file);
/************ Displays Statistics ************************/
printf("¥n***********************************************¥n");
printf("¥nStatistics: ¥n");
100
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
printf(" Filename : %s¥n",fname);
printf(" Sample count: %d¥n",i);
printf(" Sample rate : %1.0f MHz¥n",1e-6/(vtime[1]-vtime[0]));
printf(" Max(vd) : %4.0f mV¥n",max̲vd*1000);
printf(" Min(vd) : %4.0f mV¥n",min̲vd*1000);
return i;
}/**************** End ReadCsv ***************/
/***************************************************************/
/*** DFT : Discrete Fourier Transformation
***/
/***************************************************************/
/*** Description:
***/
/*** This function calculate the Fourier coefficient
***/
/***
***/
/*** Input: Number of samples
***/
/*** Global Variables:
***/
/***
***/
/*** Displays Results:
***/
/***
***/
/*** Carrier coefficient
***/
/*** Upper sideband coefficient
***/
/*** Lower sideband coefficient
***/
/***
***/
/***************************************************************/
void dft(int count)
{
double c0̲real,c0̲imag,c0̲abs,c0̲phase;
double c1̲real,c1̲imag,c1̲abs,c1̲phase;
double c2̲real,c2̲imag,c2̲abs,c2̲phase;
int N̲data,center,start;
double w0,wu,wl;
double Wb; /* Bartlett window coefficient */
int i,k;
double fc; /* add variable for carrier frequency */
fc=13.56e6;
w0=(double)(fc*2.0)*pi; /* carrier 13.56 MHz */
101
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
wu=(double)(1.0+1.0/16.0)*w0; /* upper sideband 14.41 MHz */
wl=(double)(1.0-1.0/16.0)*w0; /* lower sideband 12.71 MHz */
c0̲real=0; /* real part of the carrier Fourier coefficient */
c0̲imag=0; /* imag part of the carrier Fourier coefficient */
c1̲real=0; /* real part of the up. sideband Fourier coefficient */
c1̲imag=0; /* imag part of the up. sideband Fourier coefficient */
c2̲real=0; /* real part of the lo. sideband Fourier coefficient */
c2̲imag=0; /* imag part of the lo. sideband Fourier coefficient */
center=(count+1)/2; /* center address */
/********** signal selection ******************************/
/* Number of samples for six subcarrier periods */
N̲data=(int)(0.5+6*16.0F/(vtime[2]-vtime[1])/fc);
/* Note: (vtime[2]-vtime[1]) is the scope sample rate */
start=center - (int) N̲data / 2;
/******************* DFT ********************************/
for( i=0;i<=N̲data-1;i++)
{
/* Bartlett window */
if ((N̲data & 1) == 0)
{
/* N̲data is even */
if (i < (int) N̲data /2)
{
Wb=2.0F*i/(double)(N̲data - 1);
}
else
{
Wb=2.0F*(N̲data-i-1)/(double)(N̲data - 1);
}
}
else
{
102
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
/*N̲data is odd */
if (i < (int) N̲data /2)
{
Wb=2.0F*i/(double)(N̲data - 1);
}
else
{
Wb=2.0F-2.0F*i/(double)(N̲data - 1);
}
}
k=i+start;
c0̲real=c0̲real+vd[k]*(double)cos(w0*vtime[k])*Wb;
c0̲imag=c0̲imag+vd[k]*(double)sin(w0*vtime[k])*Wb;
c1̲real=c1̲real+vd[k]*(double)cos(wu*vtime[k])*Wb;
c1̲imag=c1̲imag+vd[k]*(double)sin(wu*vtime[k])*Wb;
c2̲real=c2̲real+vd[k]*(double)cos(wl*vtime[k])*Wb;
c2̲imag=c2̲imag+vd[k]*(double)sin(wl*vtime[k])*Wb;
}
/******************* DFT scale ***************************/
c0̲real=4.0F*c0̲real/(double) N̲data;
c0̲imag=4.0F*c0̲imag/(double) N̲data;
c1̲real=4.0F*c1̲real/(double) N̲data;
c1̲imag=4.0F*c1̲imag/(double) N̲data;
c2̲real=4.0F*c2̲real/(double) N̲data;
c2̲imag=4.0F*c2̲imag/(double) N̲data;
/* Note: 4.0F includes the correction coef. of the Bartlett window */
/**************** absolute Fourier coefficient **********/
c0̲abs=(double)sqrt(c0̲real*c0̲real + c0̲imag*c0̲imag);
c1̲abs=(double)sqrt(c1̲real*c1̲real + c1̲imag*c1̲imag);
c2̲abs=(double)sqrt(c2̲real*c2̲real+c2̲imag*c2̲imag);
/************** Phase of Fourier coefficient **********/
103
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c0̲phase=(double)atan2(c0̲imag,c0̲real);
c1̲phase=(double)atan2(c1̲imag,c1̲real);
c2̲phase=(double)atan2(c2̲imag,c2̲real);
/************** Result Display **************************/
printf("¥n¥nResults: ¥n");
printf("Carrier ");
printf("Abs: %7.3fmV ",1000*c0̲abs);
printf("Phase: %3.0fdeg¥n",c0̲phase/pi*180);
printf("Upper sideband ");
printf("Abs: %7.3fmV ",1000*c1̲abs);
printf("Phase: %3.0fdeg¥n",c1̲phase/pi*180);
printf("Lower sideband ");
printf("Abs: %7.3fmV ",1000*c2̲abs);
printf("Phase: %3.0fdeg¥n¥n",c2̲phase/pi*180);
printf("¥n***********************************************¥n");
return;
}/**************** End DFT ***************/
/***************************************************************/
/*** MAIN Program ***/
/***************************************************************/
int main(unsigned short paramCount,char *paramList[])
{
char fname[256];
unsigned int i,sample̲count;
pi = (double)atan(1.0)*4; /* calculate pi */
printf("¥n***********************************************¥n");
printf("¥n**** ISO/IEC 10373-6 PICC Test-Program
****¥n");
printf("¥n**** Version: 2.1 NOVEMBER 2008
****¥n");
printf("¥n****
****¥n");
printf("¥n***********************************************¥n");
/************* No Input Parameter
*****************/
if (paramCount==1)
{
printf("¥nCSV File name :");
scanf("%s",fname);
104
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
if (!strchr(fname, '.')) strcat(fname, ".csv");
if (!(sample̲count=readcsv(fname))) return 0;
dft(sample̲count);
}
else
{
/************* Input Parameter Loop *****************/
for (i=1;i<paramCount;i++)
{
strcpy(fname,paramList[i]);
if (!strchr(fname, '.')) strcat(fname, ".csv");
if (!(sample̲count=readcsv(fname))) break;
dft(sample̲count);
}
}
return 0;
}/*********************** End Main ***************************/
105
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(規定)
追加のPICC試験方法
G.1
PICC試験装置及び附属品
この箇条は,JIS X 6322-3:2011に従い,PICCの動作について確かめるための試験装置及び試験回路を定
義する。試験装置としては,次を含む。
− 校正用コイル(5.2参照)
− PCD試験アセンブリの構成(5.3参照)
− デジタルサンプリングオシロスコープ(5.1.1参照)
試験回路のRF性能が結果に影響しないことを保証するために,注意を払わなければならない。
G.1.1 入出力プロトコルのエミュレーション
PICC試験装置は,PICCを試験するのに必要なA型PICC及びB型PICCのプロトコルをエミュレート
できなければならない。
G.1.2 受信モードでの入出力キャラクタタイミングの生成
PICC試験装置は,JIS X 6322-3:2011に従い,入出力ビット列を生成できなければならない。
PICC試験装置は,タイミングパラメタの値(スタートビットの長さ,保護時間,ビット幅,リクエスト保
護時間,フレーム開始信号の幅及びフレーム終了信号の幅)を設定できなければならない。
G.1.3 RF入出力プロトコルの測定及び観測
PICC試験装置は,クロック周波数に同期して,RF入力・受信信号ラインの論理的“低”位状態及び“高”
位状態のタイミングを観測し,測定できなければならない。PICC試験装置は,PICC副搬送波を観測でき
なければならない。
G.1.4 プロトコル解析
PICC試験装置は,JIS X 6322-3:2011及びJIS X 6322-4:2011で規定されるA型PICC及びB型PICCの
プロトコルによって入出力ビット列を解析し,さらなるプロトコル解析のための論理的なデータの流れを
抽出できなければならない。
G.1.5 RFUフィールド
RFUフィールドを試験の間,絶えず観測し,割り当てた省略時値となっていることを常に確認しなけれ
ばならない。RFUフィールドが省略時値に設定されていない場合には,常に,試験は,不合格とし,試験
したPICCを不適合としなければならない。
G.1.5.1 RFU値
機能フィールドを試験の間,絶えず観測し,規格で示された機能値又は規格で示された個別値だけを含
むことを常に確認しなければならない。機能フィールドが両者に設定されていない(すなわち,RFU又は
制限した値に設定されている。)場合には,常に,試験は,不合格とし,試験したPICCを不適合としなけ
ればならない。
G.1.5.2 タイミング測定
PICC試験装置は,次のフレーム形式及びタイミング値を連続的に観測しなければならない。
A型PICCについて
−
PCDからPICCのフレーム遅延時間(JIS X 6322-3:2011の6.2.1.1参照)
106
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
−
フレーム形式(JIS X 6322-3:2011の6.2.3参照)
−
フレーム待ち時間(JIS X 6322-4:2011の7.2参照)
B型PICCについて
−
キャラクタ,フレーム形式及びタイミング(JIS X 6322-3:2011の7.1参照)
−
フレーム待ち時間(JIS X 6322-4:2011の7.2参照)
一覧表にしたタイミング規制の一つが違反する場合には,試験は不合格とし,試験したPICCを不適合
としなければならない。
G.1.5.3 タイミング測定報告
表G.59にA型PICCの測定タイミング値を,及び/又は,表G.60にB型PICCの測定タイミング値を
記入する。
G.2
試験方法と基本規格の要件との関係
表G.1に,A型PICCに適用する試験の一覧を示す。表G.2に,B型PICCに適用する試験の一覧を示す。
表G.3に,A型PICC及びB型PICCに適用する試験の一覧を示す。
JIS X 6322-4:2011に適合するPICCは,JIS X 6322-3:2011にも適合するのが望ましく,かつ,A型B型
に応じたJIS X 6322-3:2011及びJIS X 6322-4:2011両方の項目の試験を行うことが望ましい。
JIS X 6322-3:2011に適合し, JIS X 6322-4:2011に適合せず,かつ,ACTIVE状態又はACTIVE*状態
(G.3.3.7,G.3.3.12,及びG.4.4.6参照)にいるPICCは,JIS X 6322-3:2011に関連しないフレームに対して,
いかなるフレーム形式(無応答を含む。)で応答してもよい。
表G.1−A型PICCプロトコルの論理操作のための試験方法
この規格による試験方法
対応要件
細分箇条
名称
基本規格
箇条・細分箇条
G.3.2
ポーリング
JIS X 6322-3:2011
箇条5
G.3.3
A型PICCの状態遷移の試験
JIS X 6322-3:2011
6.3,6.4及び6.5
G.3.4
A型PICCの衝突防止の扱い
JIS X 6322-3:2011
6.4.2
G.3.5
RATSの扱い
JIS X 6322-4:2011
5.6.1.2
G.3.6
PPS要求の扱い
JIS X 6322-4:2011
5.6.2.2
G.3.7
FSDの扱い
JIS X 6322-4:2011
5.1
表G.2−B型PICCプロトコルの論理操作のための試験方法
この規格による試験方法
対応要件
細分箇条
名称
基本規格
箇条・細分箇条
G.4.2
ポーリング
JIS X 6322-3:2011
箇条5
G.4.3
PICCの反応
JIS X 6322-3:2011
7.1
G.4.4
B型PICCの状態遷移の試験
JIS X 6322-3:2011
7.4〜7.12
G.4.5
B型PICCの衝突防止の扱い
JIS X 6322-3:2011
7.4〜7.12
G.4.6
ATTRIBの扱い
JIS X 6322-3:2011
7.10
G.4.7
最大フレームサイズの扱い
JIS X 6322-3:2011
7.10.4
107
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.3−A型又はB型PICCの論理操作のための試験方法
この規格による試験方法
対応要件
細分箇条
名称
基本規格
箇条・細分箇条
G.5.2
JIS X 6322-4:2011シナリオにおけるPICCの反応 JIS X 6322-4:2011
箇条7
G.5.3
PICCの誤り検出の扱い
JIS X 6322-4:2011
7.5.6
G.5.4
CIDにおけるPICCの反応
JIS X 6322-4:2011
7.1.1.2
G.5.5
NADにおけるPICCの反応
JIS X 6322-4:2011
7.1.1.3
G.3
A型PICCの初期化に対する試験方法
G.3.1 序文
箇条G.3の試験は,A型PICCがJIS X 6322-3:2011及びJIS X 6322-4:2011の箇条5の活性化手順に従う
かどうかを判定する。JIS X 6322-4:2011に適合することが要求されない場合,JIS X 6322-4:2011のコマン
ドを含む全ての試験は適用しなくてもよい。
G.3.2 シナリオG.1:ポーリング
G.3.2.1 目的
この試験は,JIS X 6322-3:2011の箇条5に従ったREQAコマンドを受信するときのA型PICCの動作を
判定する。
G.3.2.2 手順
三つの異なる動作磁界1.5,4.5及び7.5 A/m (rms)に対し,次の手順を実行する。
a) PICCを動作磁界中に設置し,磁界を調整する。
b) PICCをリセットするための最小時間(JIS X 6322-3:2011の5.4参照),RF動作磁界を停止する。
c) RF動作磁界を発生する。
d) 5 ms後,有効なREQA コマンドフレームを送出する。
e) PICC応答の有無及び内容を記録する。
f)
PICCをリセットするための最小時間(JIS X 6322-3:2011の5.4参照),RF動作磁界を停止する。
g) RF動作磁界を発生する。
h) 5 ms後,有効なREQB コマンドフレーム(B型PICCの変調方式及びビット符号化を使用)を送出す
る。
i)
さらに,5 ms後,有効なREQA コマンドフレームを送出する。
j)
PICC応答の有無及び内容を記録する。
G.3.2.3 試験成績書
表G.4の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.4−シナリオG.1:ポーリングの試験結果の判定
説明
試験結果
手順e)及び手順j)のPICC応答が有効なATQAの場合
合格
手順e)又は手順j)のPICC応答が無効なATQAの場合
不合格
G.3.3 A型PICCの状態遷移の試験
G.3.3.1 目的
この試験は,JIS X 6322-3:2011の6.3に規定されるA型PICCの状態遷移の仕組みが正しく動作するこ
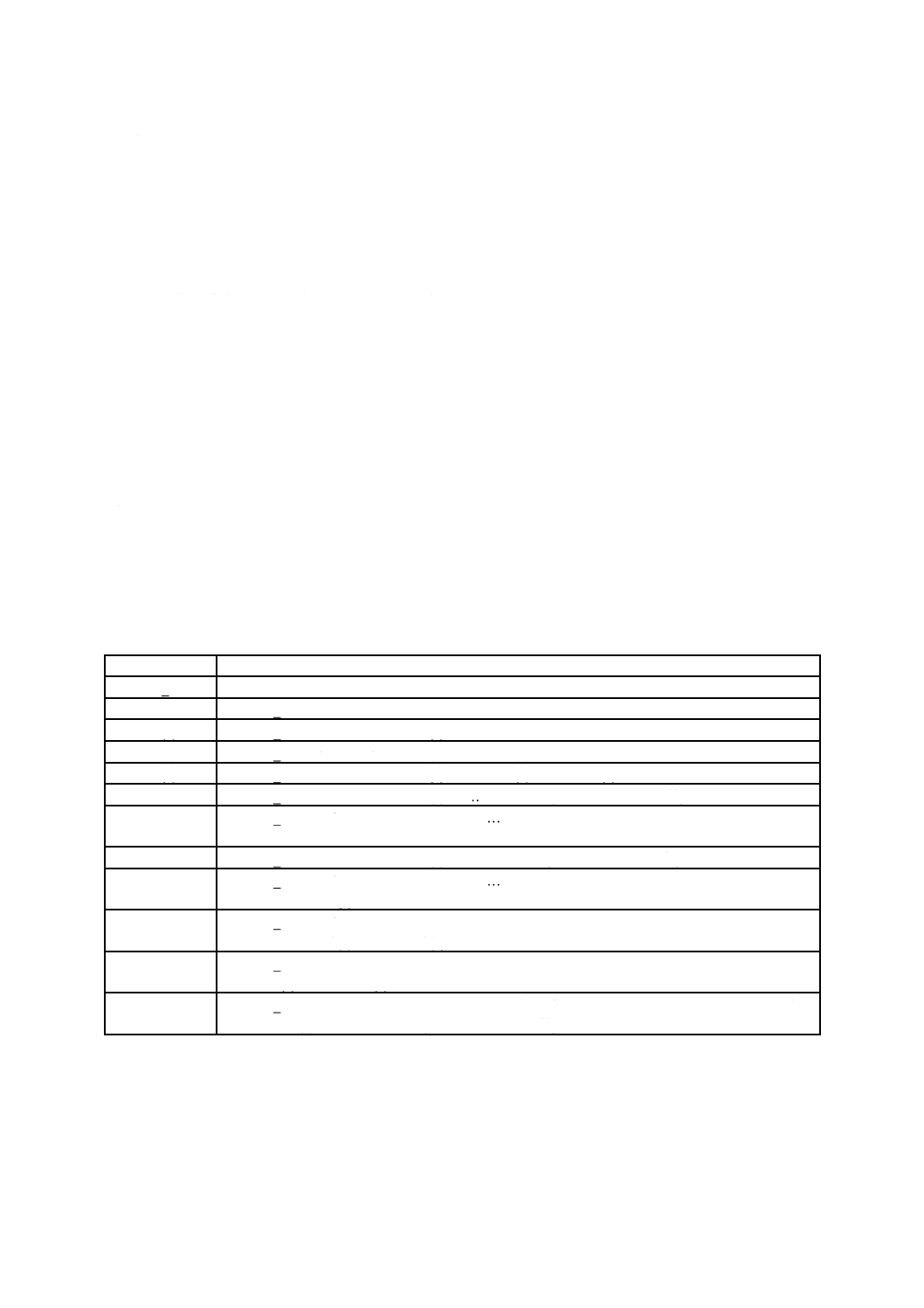
108
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とを確認する。
G.3.3.2 一般的な試験の概要
A型PICCの状態遷移の仕組みを徹底的に試験するため,全ての状態において,全ての起こり得る状態
遷移の正当性を確認しなければならない。ある状態遷移を用いてある状態になることの検証を次のように
行う。
最初に,PICCをリセットし,試験初期状態(TIS)にする。この状態は,遷移(T)を確認しなければ
ならない状態の集合(StateSet)から遷移した状態の一つとなる。
次に,遷移の集合(TransitionSet)から遷移(T)を実行する。状態遷移の実行後,PICCが期待される目
標状態(TTS)になっていることを確認する。
PICCの状態遷移の仕組みを直接点検することができないため,この確認方法に難しさがある。
この問題を解決するためには,状態遷移を追加実行しPICCの応答を確認する。この目的のため,PICC
応答からできるだけ正確に状態を判定できる遷移を選択する。
G.3.3.2.1 PICCを試験初期状態(TIS)にする機能
表G.5で規定する状態遷移コマンドを連続処理することによって,PICCを“状態TIS”にする。一般的
な方法を次に示す。
PICCを“状態TIS”にするために,表G.5の中から対応する状態遷移の連続処理を見つける。次に,表
G.6で対応するコマンドを見つけることによって,表G.5の状態遷移連続処理欄に示した状態遷移を連続
して実行する。PICC応答の内容及び正当性を常に確認する。
表G.5−状態遷移連続処理表
TIS
状態遷移連続処理
POWER̲OFF
---
IDLE
POWER̲OFF → IDLE
READY(1)
POWER̲OFF → IDLE → READY(1)
READY(2)
POWER̲OFF → IDLE → READY(1) → READY(2)
READY(3)
POWER̲OFF → IDLE → READY(1) → READY(2) → READY(3)
ACTIVE
POWER̲OFF → IDLE → READY(1) → … → READY(カスケードレベル数)→ ACTIVE
PROTOCOL
POWER̲OFF → IDLE → READY(1) → … → READY(カスケードレベル数) → ACTIVE →
PROTOCOL
HALT
POWER̲OFF → IDLE → READY(1) → …→ READY(カスケードレベル数) → ACTIVE → HALT
READY*(1)
POWER̲OFF → IDLE → READY(1) → … → READY(カスケードレベル数) → ACTIVE →
HALT → READY*(1)
READY*(2)
POWER̲OFF → IDLE → READY(1) → … → READY(カスケードレベル数) → ACTIVE →
HALT → READY*(1) → READY*(2)
READY*(3)
POWER̲OFF → IDLE → READY(カスケードレベル数) → ACTIVE → HALT → READY*(1) →
READY*(2) → READY*(3)
ACTIVE*
POWER̲OFF → IDLE → READY(1) → …→ READY (カスケードレベル数)→ ACTIVE → HALT
→ READY*(1) → …→ READY*(カスケードレベル数) → ACTIVE*
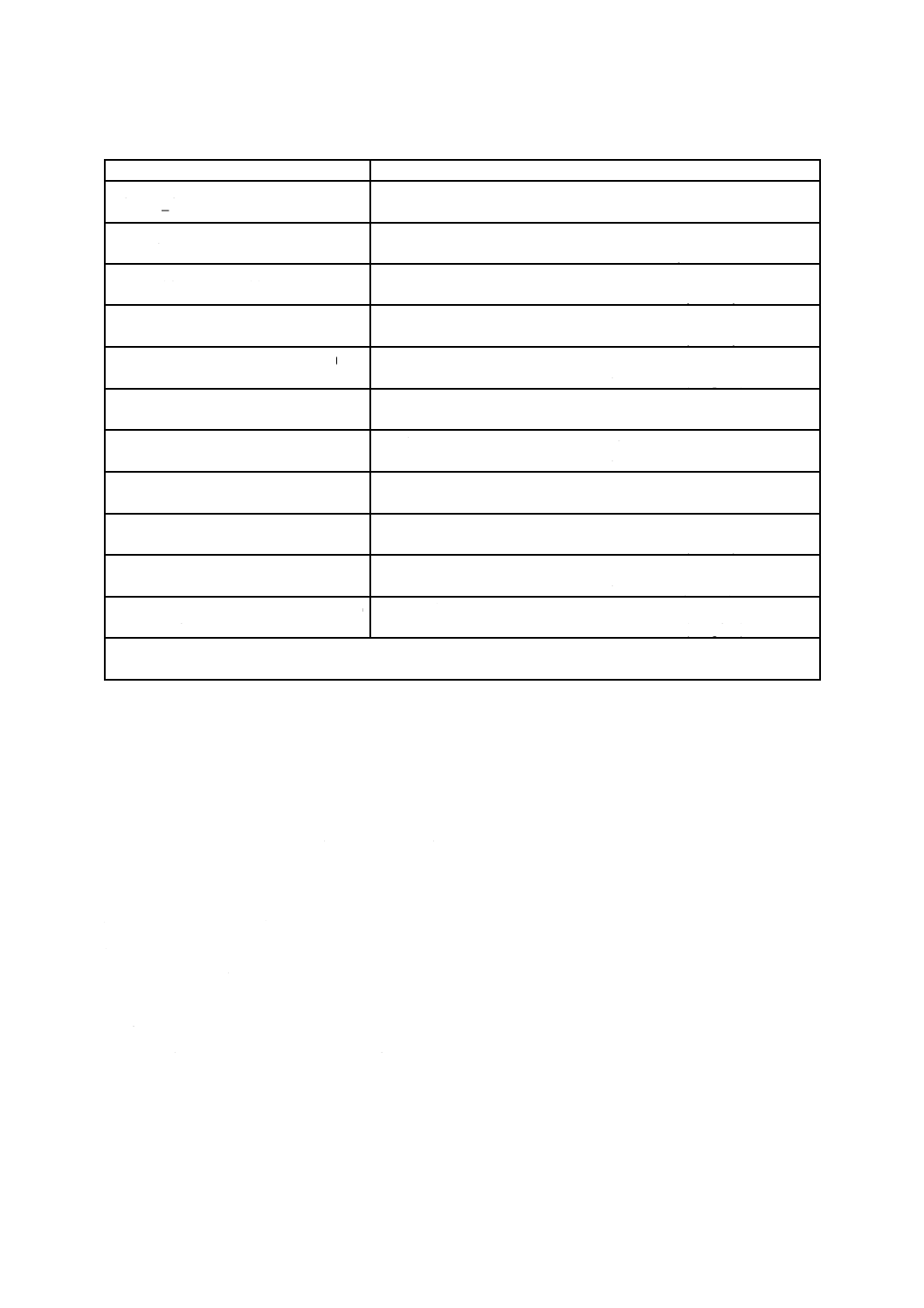
109
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.6−状態遷移表
状態 → 次の状態
PICC試験装置
PICC
POWER̲OFF→ IDLE
電源を入れる(RF動作磁界発生)。 →
←
無応答
IDLE → READY(1)
REQA
→
←
ATQA
READY(1) → READY(2)
SELECT(1) a)
→
←
SAK (cascade)
READY(2) → READY(3)
SELECT(2) a)
→
←
SAK (cascade)
READY(カスケードレベル数) →
ACTIVE
SELECT (カスケードレベル数) a)
→
←
SAK (complete)
ACTIVE → PROTOCOL
RATS(0,0)
→
←
ATS
ACTIVE → HALT
HLTA
→
←
無応答
HALT→ READY*(1)
WUPA
→
←
ATQA
READY*(1) → READY*(2)
SELECT(1)
→
←
SAK (cascade)
READY*(2) → READY*(3)
SELECT(2)
→
←
SAK(cascade)
READY*(カスケードレベル数)
→ACTIVE*
SELECT (カスケードレベル数)
→
←
SAK (complete)
注a) SELECTコマンドを送る前に,PICCのUID(特に乱数で生成したUID)を得るために衝突防止コマンドを
先行してもよい。
G.3.3.2.2 試験目標状態(TTS)の正当性を確認する作業
表G.7は,状態遷移を示し,PICCが状態Sであるかを確認するために用いる。PICC応答の内容(例え
ば,ATQA,SAKなど)は,JIS X 6322-3:2011及びJIS X 6322-4:2011に適合しているか徹底的に確認する
のが望ましい。これらの試験が,PICCの状態を変えても差し支えないことに注意する。
1回の試験では,READY(l) 状態とREADY*(l)状態との区別,及び,ACTIVE状態とACTIVE*状態との
区別ができない。“*”が付いた状態と付かない状態を区別するため次の手順を実行する。
a) TTSを確認せずに,2回目の試験をする。
b) REQA コマンドを送出する。PICC応答は,無応答でなければならない。
c) REQA コマンドを送出する。
d) PICC応答が無応答の場合,この確認作業開始時,PICC状態は“*”が付いた状態にいたことが分かる。
e) それ以外の場合,この確認作業開始時,PICC状態は“*”が付かない状態にいたことが分かる。
1回の試験では,READY*(l)状態とHALT状態との区別,及び,ACTIVE*状態とHALT状態との区別が
できない。
HALT状態を区別するため次の手順を実行する。
f)
TTSを確認せずに,2回目の試験をする。
g) WUPAコマンドを送出する。PICC応答は,ATQAでなければならない。
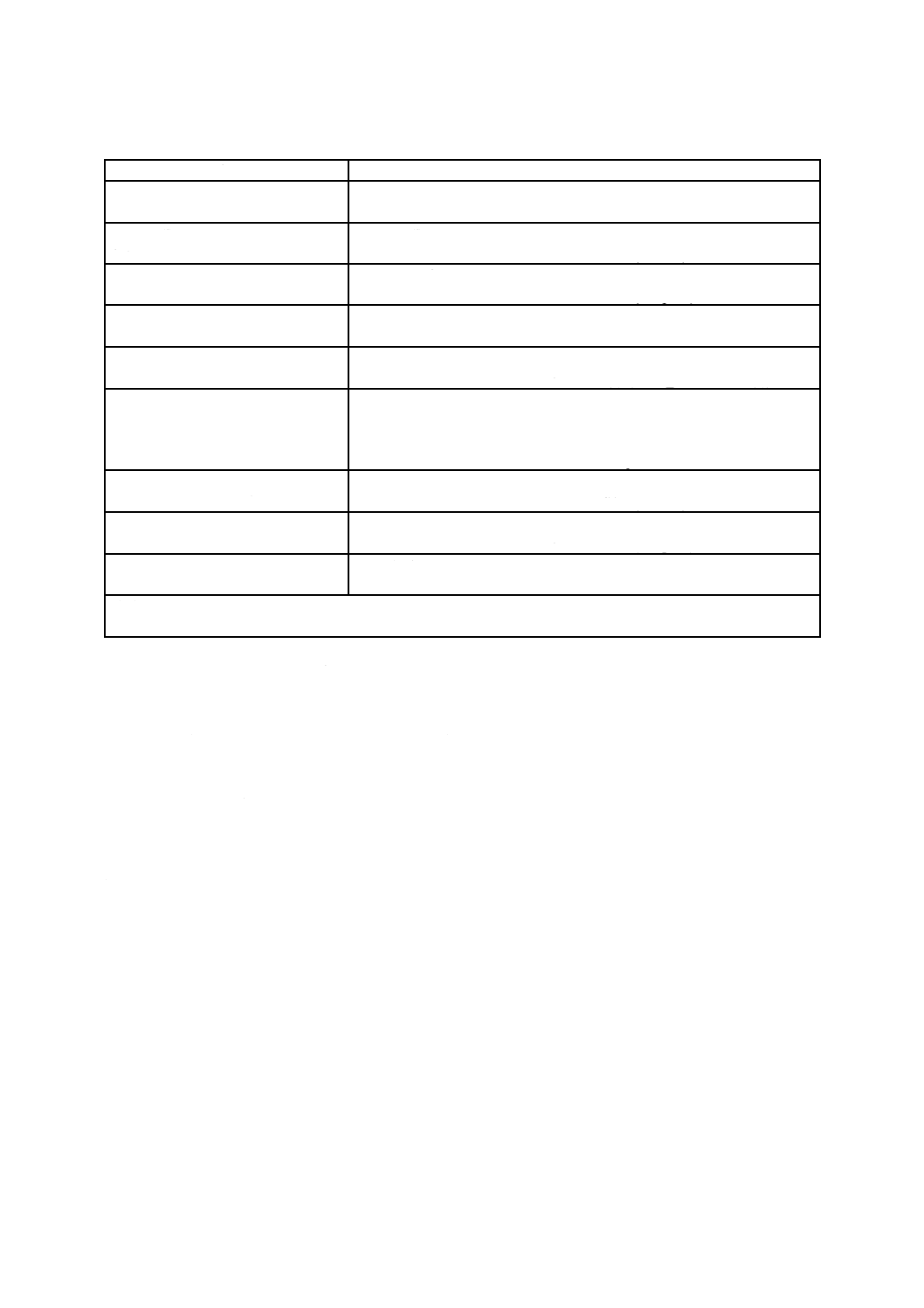
110
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.7−TTSの確認
状態 S
PICC試験装置
PICC
IDLE
REQA
→
←
ATQA
READY(l),
l < カスケードレベル数
SELECT (l) a)
→
←
SAK (cascade)
READY(l),
l = カスケードレベル数
SELECT (l) a)
→
←
SAK (complete)
ACTIVE
RATS (0,0)
→
←
ATS
PROTOCOL
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
HALT
REQA
WUPA
→
←
→
←
無応答
ATQA
READY*(l),
l < カスケードレベル数
SELECT (l)
→
←
SAK (cascade)
READY*(l),
l = カスケードレベル数
SELECT (l)
→
←
SAK (complete)
ACTIVE*
RATS(0,0)
→
←
ATS
注a) SELECTコマンドを送る前に,PICCのUID(特に乱数で生成したUID)を得るために衝突防止コマンドを
先行してもよい。
G.3.3.3 シナリオG.2:IDLE状態のA型PICCの動作
G.3.3.3.1 目的
この試験は,JIS X 6322-3:2011の6.3.2に従って,IDLE状態のA型PICCの動作を判定する。
G.3.3.3.2 手順
表G.8の各項目に対し,次の手順を実行する。
a) PICCをIDLE状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
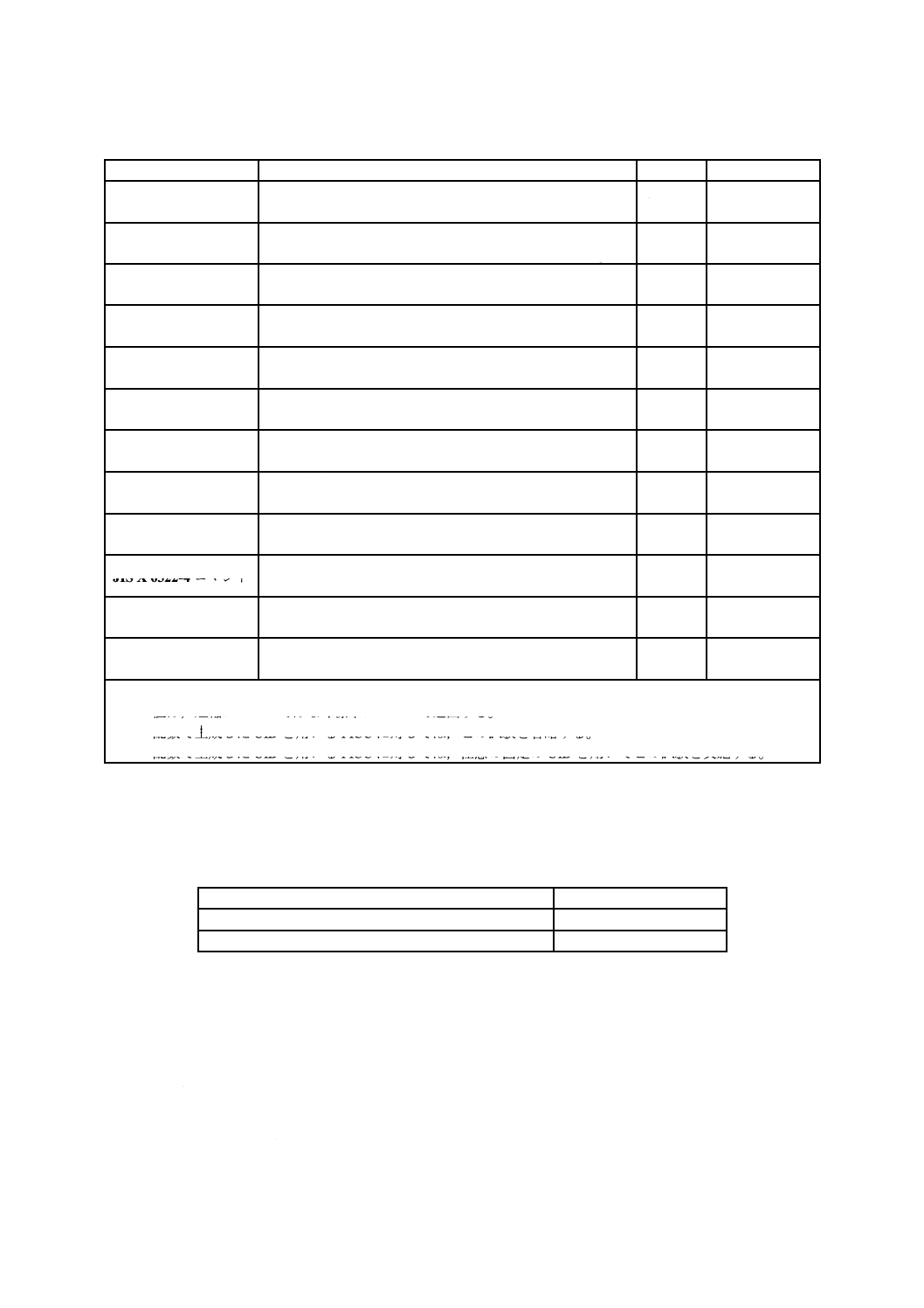
111
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.8−IDLE状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
ATQA
1 172/fc
READY(1)
WUPA
WUPA
→
←
ATQA
1 236/fc
READY(1)
HLTA
HLTA
→
←
無応答
IDLE
AC c)
(“93” NVB UIDTX1[[1..n1]] ) a)
→
←
無応答
IDLE
nAC d)
(“93” NVB ~UIDTX1[[1.. n1]] ) a)
→
←
無応答
IDLE
SELECT c)
SELECT(1)
→
←
無応答
IDLE
nSELECT d)
(“93 70” ~UIDTX1[[1..32]] BCC CRC̲A)
→
←
無応答
IDLE
RATS
RATS(0,0)
→
←
無応答
IDLE
PPS
PPS(0,0,0)
→
←
無応答
IDLE
JIS X 6322-4コマンド I(0)0(TEST̲COMMAND1(1))
→
←
無応答
IDLE
DESELECT
S(DESELECT)
→
←
無応答
IDLE
誤り条件
(“26”) b)
→
←
無応答
IDLE
注a) 1≦n1≦32とする。
b) 値は,短縮フレームではなく標準フレームで送出する。
c) 乱数で生成したUIDを用いるPICCに対しては,この試験を省略する。
d) 乱数で生成したUIDを用いるPICCに対しては,任意の固定のUIDを用いてこの試験を実施する。
G.3.3.3.3 試験成績書
表G.9の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.9−IDLE状態のA型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.3.4 シナリオ G.3:READY(1)状態のA型PICCの動作
G.3.3.4.1 目的
この試験は,JIS X 6322-3:2011の6.3.3に従って,カスケードレベル1のREADY状態のA型PICCの動
作を判定する。
G.3.3.4.2 手順
全てのPICCについて表G.10の各項目に対し,次の手順を実行する。
a) PICCをREADY(1)状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
112
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
113
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.10−READY(1)状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
IDLE
WUPA
WUPA
→
←
無応答
IDLE
HLTA
HLTA
→
←
無応答
IDLE
AC g)
(b “0”の後で分割
される場合)
(“93” NVB UIDTX1[[1..n1]] ) a)
→
←
n1が32に等しい場合には
(BCC)
その他の場合には
(UIDTX1[[n1+1..32]] BCC) a)
1 172/fc READY(1)
AC g)
(b “1”の後で分割
される場合)
(“93” NVB UIDTX1[[1..n2]] ) b)
→
←
n2が32に等しい場合には
(BCC)
その他の場合には
(UIDTX1[[n2+1..32]] BCC) b)
1 236/fc READY(1)
nAC g)
(UID不一致)
(“93” NVB ~UIDTX1[[1..n3]])f)
→
←
無応答
IDLE
SELECT g)
SELECT(1)
→
←
SAK d)
FDT c)
TTS e)
nSELECT g)
(UID不一致)
(“93 70” ~UIDTX1 BCC CRC̲A)
→
←
無応答
IDLE
誤り条件
(“93 70” UIDTX1 BCC ~CRC̲A)
→
←
無応答
IDLE
JIS X 6322-4 コ
マンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
IDLE
DESELECT
S(DESELECT)
→
←
無応答
IDLE
RATS
RATS(0,0)
→
←
無応答
IDLE
PPS
PPS(0,0,0)
→
←
無応答
IDLE
注a) 1≦n1≦32で,UIDTX1[[n1]] = 0とする。そのような数が存在しない場合には,試験を省いてもよい。
b) 1≦n2≦32で,UIDTX1[[n2]] = 1とする。そのような数が存在しない場合には,試験を省いてもよい。
c) FDTは,最終ビットがb“0”の場合1 172/fc (約86.43 μs),最終ビットがb“1”の場合1 236/fc(約91.15 μs)とす
る(基本規格のマージン参照)。
d) SAKのカスケードビットは,シングルサイズUID PICCでは0に,ダブル及びトリプルサイズUID PICC
では1にしなければならない。
e) シングルサイズUID PICCは,ACTIVE状態でなければならない。ダブル及びトリプルサイズUID PICCは,
READY状態でなければならない。
f) 1≦n3≦32とする。
g) AC又はSELECTコマンドを送る前に,PICCのUID(特に乱数で生成したUID)を得るために衝突防止コ
マンドを先行してもよい。
G.3.3.4.3 試験成績書
表G.11の説明に従って,表G.61の該当欄に試験結果を記入する。

114
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.11−READY(1)状態のA型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.3.5 シナリオ G.4:READY(2)状態のA型PICCの動作
G.3.3.5.1 目的
この試験は,JIS X 6322-3:2011の6.3.3に従って,カスケードレベル2のREADY状態のA型PICCの動
作を判定する。この試験は,ダブル又はトリプルサイズUIDのPICCだけに適用する。
G.3.3.5.2 手順
全てのダブルサイズUID及びトリプルサイズUIDのPICCについて表G.12の各項目に対し,次の手順
を実行する。
a) PICCをREADY(2)状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
115
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.12−READY(2)状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
IDLE
WUPA
WUPA
→
←
無応答
IDLE
HLTA
HLTA
→
←
無応答
IDLE
AC g)
(b “0”の後で分割
される場合)
(“95” NVB UIDTX2[[1..n1]] ) a)
→
←
n1が32に等しい場合には
(BCC)
その他の場合には
(UIDTX2[[n1+1..32]] BCC) a)
1 172/fc
READY(2)
AC g)
(b “1”の後で分割
される場合)
(“95” NVB UIDTX2[[1..n2]] ) b)
→
←
n2が32に等しい場合には
(BCC)
その他の場合には
(UIDTX2[[n2+1..32]] BCC) b)
1 236/fc
READY(2)
nAC g)
(UID不一致)
(“95” NVB ~UIDTX2[[1..n3]] )f)
→
←
無応答
IDLE
SELECT g)
SELECT(2)
→
←
SAK d)
FDT c)
TTS e)
nSELECT g)
(UID不一致)
(“95 70” ~UIDTX2 BCC CRC̲A) →
←
無応答
IDLE
誤り条件
(“95 70” UIDTX2 BCC ~CRC̲A) →
←
無応答
IDLE
JIS X 6322-4 コ
マンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
IDLE
DESELECT
S(DESELECT)
→
←
無応答
IDLE
RATS
RATS(0,0)
→
←
無応答
IDLE
PPS
PPS(0,0,0)
→
←
無応答
IDLE
注a) 1≦n1≦32で,UIDTX2[[n1]] = 0とする。そのような数が存在しない場合には,試験を省いてもよい。
b) 1≦n2≦32で,UIDTX2[[n2]] = 1とする。そのような数が存在しない場合には,試験を省いてもよい。
c) FDTは,最終ビットがb“0”の場合1 172/fc (約86.43 μs),最終ビットがb“1”の場合1 236/fc (約91.15 μs)
とする(基本規格のマージン参照)。
d) SAKのカスケードビットは,ダブルサイズUID PICCでは0に,トリプルサイズUID PICCでは1にしな
ければならない。
e) ダブルサイズUID PICCは,ACTIVE状態でなければならない。トリプルサイズUID PICCは,READY
状態でなければならない。
f) 1≦n3≦32とする。
g) AC又はSELECTコマンドを送る前に,PICCのUID(特に乱数で生成したUID)を得るために衝突防止
コマンドを先行してもよい。
G.3.3.5.3 試験成績書
表G.13の説明に従って,表G.61の該当欄に試験結果を記入する。
116
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.13−READY(2)状態のA型PICCの動作の試験結果の判定
説明
試験結果
PICCがシングルサイズUIDの場合
適用外(NA)
PICCがダブル又はトリプルサイズUIDで,手順に示すように応答した場合
合格
その他の場合
不合格
G.3.3.6 シナリオ G.5:READY(3)状態のA型PICCの動作
G.3.3.6.1 目的
この試験は,JIS X 6322-3:2011の6.3.3に従って,READY状態のA型PICCの動作を判定する。この試
験は,トリプルサイズUIDのPICCだけに適用する。
G.3.3.6.2 手順
全てのトリプルサイズUIDのPICCについて表G.14の各項目に対し,次の手順を実行する。
a) PICCをREADY(3)状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
117
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.14−READY(3)状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
IDLE
WUPA
WUPA
→
←
無応答
IDLE
HLTA
HLTA
→
←
無応答
IDLE
AC e)
(b “0”の後で分割
される場合)
(“97” NVB UIDTX3[[1..n1]] ) a)
→
←
n1が32に等しい場合には
(BCC)
その他の場合には
(UIDTX3[[n1+1..32]] BCC) a)
1 172/fc
READY(3)
AC e)
(b “1”の後で分割
される場合)
(“97” NVB UIDTX3[[1..n2]] ) b)
→
←
n2が32に等しい場合には
(BCC)
その他の場合には
(UIDTX3[[n2+1..32]] BCC) b)
1 236/fc
READY(3)
nAC e)
(UID不一致)
(“97” NVB ~UIDTX3[[1..n3]])d)
→
←
無応答
IDLE
SELECT e)
SELECT(3)
→
←
SAK (complete)
FDT c)
ACTIVE
nSELECT e)
(UID不一致)
(“97 70” ~UIDTX3 BCC CRC̲A)
→
←
無応答
IDLE
誤り条件
(“97 70” UIDTX3 BCC ~CRC̲A)
→
←
無応答
IDLE
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
IDLE
DESELECT
S(DESELECT)
→
←
無応答
IDLE
RATS
RATS(0,0)
→
←
無応答
IDLE
PPS
PPS(0,0,0)
→
←
無応答
IDLE
注a) 1≦n132で,UIDTX3[[n1]] = 0とする。そのような数が存在しない場合には,試験を省いてもよい。
b) 1≦n2≦32で,UIDTX3[[n2]] = 1とする。そのような数が存在しない場合には,試験を省いてもよい。
c) FDTは,最終ビットがb“0”の場合1 172/fc (約86.43 μs),最終ビットがb“1”の場合1 236/fc (約91.15 μs)と
する(基本規格のマージン参照)。
d) 1≦n3≦32とする。
e) AC又はSELECTコマンドを送る前に,PICCのUID(特に乱数で生成したUID)を得るために衝突防止
コマンドを先行してもよい。
G.3.3.6.3 試験成績書
表G.15の説明に従って,表G.61の該当欄に試験結果を記入する。
118
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.15−READY(3)状態のA型PICCの動作の試験結果の判定
説明
試験結果
PICCがシングル又はダブルサイズUIDの場合
適用外(NA)
PICCがトリプルサイズUIDで,手順に示すように応答した場合
合格
その他の場合
不合格
G.3.3.7 シナリオ G.6:ACTIVE状態のA型PICCの動作
G.3.3.7.1 目的
この試験は,JIS X 6322-3:2011の6.3.4に従って,ACTIVE状態のA型PICCの動作を判定する。
G.3.3.7.2 手順
表G.16の各項目に対し,次の手順を実行する。
a) PICCをACTIVE状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
表G.16−ACTIVE状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
IDLE
WUPA
WUPA
→
←
無応答
IDLE
AC
(“93” NVB UIDTX1[[1..n1]] ) a)
→
←
無応答 b)
IDLE
nAC
(“93” NVB ~UIDTX1[[1..n1]] ) a)
→
←
無応答 b)
IDLE
HLTA
HLTA
→
←
無応答
HALT
SELECT
SELECT(1)
→
←
無応答 b)
IDLE
nSELECT
(“93 70” ~UIDTX1 BCC CRC̲A)
→
←
無応答 b)
IDLE
RATS
RATS(0,0)
→
←
ATS
<65 536/fc PROTOCOL
誤り条件
(“E0 00” ~CRC̲A)
→
←
無応答 b)
IDLE
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答 b)
IDLE
DESELECT
S(DESELECT)
→
←
無応答 b)
IDLE
PPS
PPS(0,0,0)
→
←
無応答 b)
IDLE
注a) 1≦n1≦32とする。
b) 無応答又は製造業者専用の応答
119
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.3.3.7.3 試験成績書
表G.17の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.17−ACTIVE状態のA型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.3.8 シナリオ G.7:HALT状態のA型PICCの動作
G.3.3.8.1 目的
この試験は,JIS X 6322-3:2011の6.3.5に従って,HALT状態のA型PICCの動作を判定する。
G.3.3.8.2 手順
表G.18の各項目に対し,次の手順を実行する。
a) PICCをHALT状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
表G.18−HALT状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
HALT
WUPA
WUPA
→
←
ATQA
1 236/fc
READY*(1)
HLTA
HLTA
→
←
無応答
HALT
AC
(“93” NVB UIDTX1[[1..n1]] ) a)
→
←
無応答
HALT
nAC
(“93” NVB ~UIDTX1[[1..n1]] ) a)
→
←
無応答
HALT
SELECT
SELECT(1)
→
←
無応答
HALT
nSELECT
(“93 70” ~UIDTX1 BCC CRC̲A)
→
←
無応答
HALT
RATS
RATS(0,0)
→
←
無応答
HALT
誤り条件
標準フレームの中の(“52”)
→
←
無応答
HALT
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
HALT
DESELECT
S(DESELECT)
→
←
無応答
HALT
PPS
PPS(0,0,0)
→
←
無応答
HALT
注a) 1≦n1≦32とする。
120
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.3.3.8.3 試験成績書
表G.19の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.19−HALT状態のA型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.3.9 シナリオ G.8:READY*(1)状態のA型PICCの動作
G.3.3.9.1 目的
この試験は,JIS X 6322-3:2011の6.3.6に従って,カスケードレベル1のREADY*状態のA型PICCの
動作を判定する。
G.3.3.9.2 手順
表G.20の各項目に対し,次の手順を実行する。
a) PICCをREADY*(1)状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
121
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.20−READY*(1)状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
HALT
WUPA
WUPA
→
←
無応答
HALT
HLTA
HLTA
→
←
無応答
HALT
AC
(b“0”の後で分割
される場合)
(“93” NVB UIDTX1[[1..n1]] ) a)
→
←
n1が32に等しい場合には
(BCC)
その他の場合には
(UIDTX1[[n1+1..32]] BCC ) a)
1 172/fc
READY*(1)
AC
(b “1”の後で分割
される場合)
(“93” NVB UIDTX1[[1..n2]] ) b)
→
←
n2が32に等しい場合には
(BCC)
その他の場合には
(UIDTX1[[n2+1..32]] BCC) b)
1 236/fc
READY*(1)
nAC
(UID不一致)
(“93” NVB ~UIDTX1[[1..n3]] )f)
→
←
無応答
HALT
SELECT
SELECT(1)
→
←
SAK d)
FDT c)
TTS e)
nSELECT
(UID不一致)
(“93 70” ~UIDTX1 BCC CRC̲A)
→
←
無応答
HALT
誤り条件
(“93 70” UIDTX1 BCC ~CRC̲A)
→
←
無応答
HALT
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
HALT
DESELECT
S(DESELECT)
→
←
無応答
HALT
RATS
RATS(0,0)
→
←
無応答
HALT
PPS
PPS(0,0,0)
→
←
無応答
HALT
注a) 1≦n1≦32で,UIDTX1[[n1]] = 0とする。そのような数が存在しない場合には,試験を省いてもよい。
b) 1≦n2≦32で,UIDTX1[[n2]] = 1とする。そのような数が存在しない場合には,試験を省いてもよい。
c) FDTは,最終ビットがb“0”の場合1 172/fc (約86.43 μs),最終ビットがb“1”の場合1 236/fc (約91.15 μs)
とする(JIS X 6322-3:2011の6.2.1.1のマージン参照)。
d) SAKのカスケードビットは,シングルサイズUID PICCでは0に,ダブル及びトリプルサイズUID PICC
では1にしなければならない。
e) シングルサイズUID PICCは,ACTIVE*状態でなければならない。ダブル及びトリプルサイズUID PICC
は,READY*状態でなければならない。
f) 1≦n3≦32とする。
G.3.3.9.3 試験成績書
表G.21の説明に従って,表G.61の該当欄に試験結果を記入する。
122
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.21−READY*(1)状態のA型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.3.10 シナリオ G.9: READY*(2)状態のA型PICCの動作
G.3.3.10.1 目的
この試験は,JIS X 6322-3:2011の6.3.6に従って,カスケードレベル2のREADY*状態のA型PICCの
動作を判定する。この試験は,ダブルサイズUID又はトリプルサイズUIDのPICCにだけ適用する。
G.3.3.10.2 手順
表G.22の各項目に対し,次の手順を実行する。
a) PICCをREADY*(2)状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
123
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.22−READY*(2)状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
HALT
WUPA
WUPA
→
←
無応答
HALT
HLTA
HLTA
→
←
無応答
HALT
AC
(b “0”の後で分
割される場合)
(“95” NVB UIDTX2[[1..n1]] ) a)
→
←
n1が32に等しい場合には
(BCC)
その他の場合には
(UIDTX2[[n1+1..32]] BCC) a)
1 172/fc
READY*(2)
AC
(b “1”の後で分
割される場合)
(“95” NVB UIDTX2[[1..n2]] ) b)
→
←
n2が32に等しい場合には
(BCC)
その他の場合には
(UIDTX2[[n2+1..32]] BCC) b)
1 236/fc
READY*(2)
nAC
(UID不一致)
(“95” NVB ~UIDTX2[[1..n3]] ) f)
→
←
無応答
HALT
SELECT
SELECT(2)
→
←
SAK d)
FDT c)
TTS e)
nSELECT
(UID不一致)
(“95 70” ~UIDTX2 BCC CRC̲A)
→
←
無応答
HALT
誤り条件
(“95 70” UIDTX2 BCC ~CRC̲A)
→
←
無応答
HALT
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
HALT
DESELECT
S(DESELECT)
→
←
無応答
HALT
RATS
RATS(0,0)
→
←
無応答
HALT
PPS
PPS(0,0,0)
→
←
無応答
HALT
注a) 1≦n1≦32で,UIDTX2[[n1]] = 0とする。そのような数が存在しない場合には,試験を省いてもよい。
b) 1≦n2≦32で,UIDTX2[[n2]] = 1とする。そのような数が存在しない場合には,試験を省いてもよい。
c) FDTは,最終ビットがb“0”の場合1 172/fc (約86.43 μs),最終ビットがb“1”の場合1 236/fc (約91.15 μs)
とする(JIS X 6322-3:2011の6.2.1.1のマージン参照)。
d) SAKのカスケードビットは,ダブルサイズUID PICCでは0に,トリプルサイズUID PICCでは1にしな
ければならない。
e) ダブルサイズUID PICCは,ACTIVE*状態でなければならない。トリプルサイズUID PICCは,READY*
状態でなければならない。
f) 1≦n3≦32とする。
G.3.3.10.3 試験成績書
表G.23の説明に従って,表G.61の該当欄に試験結果を記入する。
124
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.23−READY*(2)状態のA型PICCの動作の試験結果の判定
説明
試験結果
PICCがシングルサイズUIDの場合
適用外(NA)
PICCがダブル又はトリプルサイズUIDで,手順に示すように応答した場合
合格
その他の場合
不合格
G.3.3.11 シナリオ G.10:READY*(3)状態のA型PICCの動作
G.3.3.11.1 目的
この試験は,JIS X 6322-3:2011の6.3.6に従って,カスケードレベル3のREADY*状態のA型PICCの
動作を判定する。この試験は,トリプルサイズUIDのPICCにだけ適用する。
G.3.3.11.2 手順
表G.24の各項目に対し,次の手順を実行する。
a) PICCをREADY*(3)状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
125
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.24−READY*(3)状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
HALT
WUPA
WUPA
→
←
無応答
HALT
HLTA
HLTA
→
←
無応答
HALT
AC
(b“0”の後で分割
される場合)
(“97” NVB UIDTX3[[1..n1]] ) a)
→
←
n1が32に等しい場合には
(BCC)
その他の場合には
(UIDTX3[[n1+1..32]] BCC) a)
1 172/fc
READY*(3)
AC
(b“1”の後で分割
される場合)
(“97” NVB UIDTX3[[1..n2]] ) b)
→
←
n2が32に等しい場合には
(BCC)
その他の場合には
(UIDTX3[[n2+1..32]] BCC) b)
1 236/fc
READY*(3)
nAC
(UID不一致)
(“97” NVB ~UIDTX3[[1..n3]]) d)
→
←
無応答
HALT
SELECT
SELECT(3)
→
←
SAK (complete)
FDT c)
ACTIVE*
nSELECT
(UID不一致)
(“97 70” ~UIDTX3 BCC CRC̲A) →
←
無応答
HALT
誤り条件
(“97 70” UIDTX3 BCC ~CRC̲A) →
←
無応答
HALT
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
HALT
DESELECT
S(DESELECT)
→
←
無応答
HALT
RATS
RATS(0,0)
→
←
無応答
HALT
PPS
PPS(0,0,0)
→
←
無応答
HALT
注a) 1≦n1≦32で,UIDTX3[[n1]] = 0とする。そのような数が存在しない場合には,試験を省いてもよい。
b) 1≦n2≦32で,UIDTX3[[n2]] = 1とする。そのような数が存在しない場合には,試験を省いてもよい。
c) FDTは,最終ビットがb“0”の場合1 172/fc (約86.43 μs),最終ビットがb“1”の場合1 236/fc (約91.15 μs)
とする(JIS X 6322-3:2011の6.2.1.1のマージン参照)。
d) 1≦n3≦32とする。
G.3.3.11.3 試験成績書
表G.25の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.25−READY*(3)状態のA型PICCの動作の試験結果の判定
説明
試験結果
PICCがシングル又はダブルサイズUIDの場合
適用外(NA)
PICCがトリプルサイズUIDで,手順に示すように応答した場合
合格
その他の場合
不合格
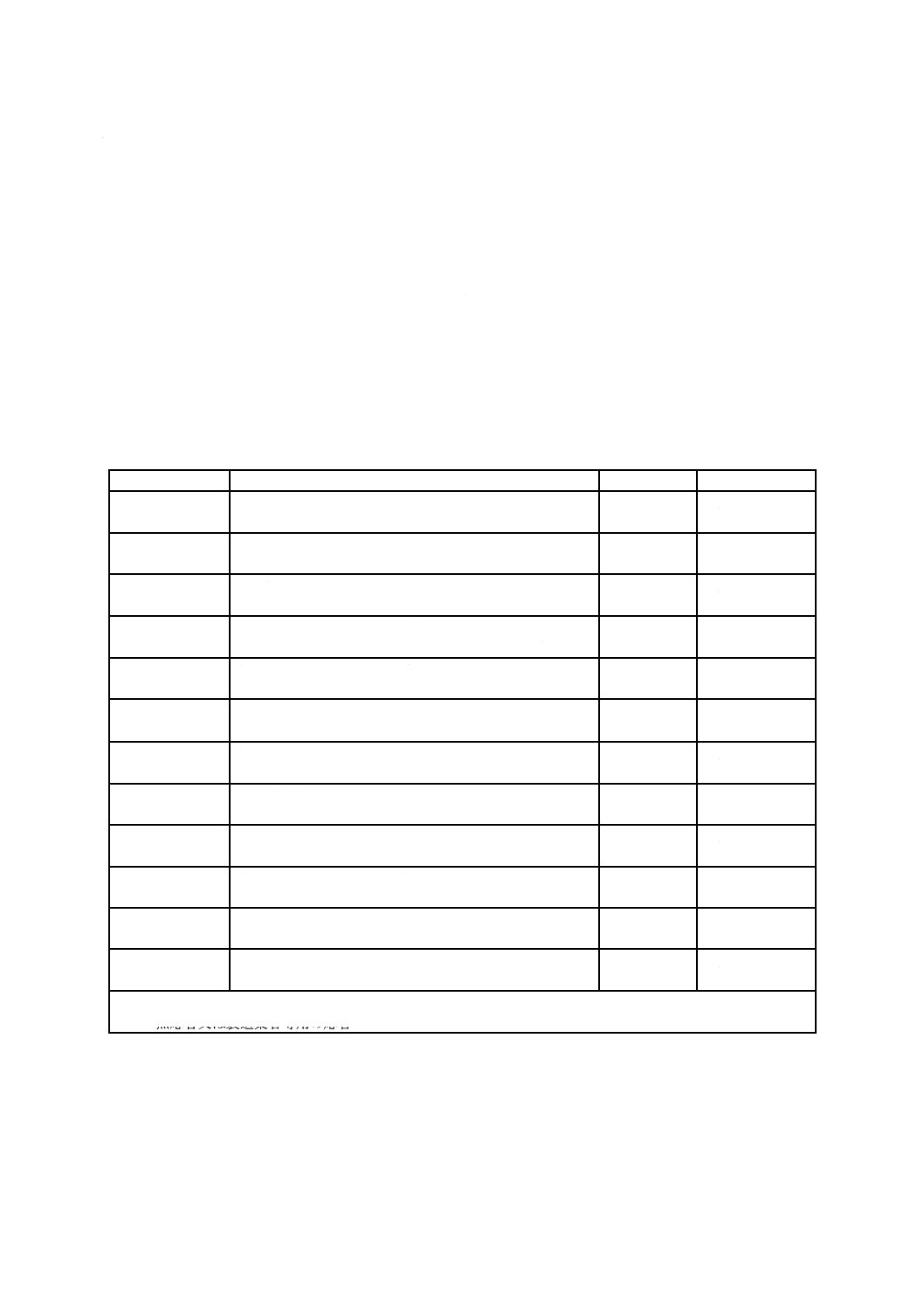
126
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.3.3.12 シナリオ G.11:ACTIVE*状態のA型PICCの動作
G.3.3.12.1 目的
この試験は,JIS X 6322-3:2011の6.3.7に従って,ACTIVE*状態のA型PICCの動作を判定する。
G.3.3.12.2 手順
表G.26の各項目に対し,次の手順を実行する。
a) PICCをACTIVE状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICC欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
表G.26−ACTIVE*状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
HALT
WUPA
WUPA
→
←
無応答
HALT
HLTA
HLTA
→
←
無応答
HALT
AC
(“93” NVB UIDTX1[[1..n1]] ) a)
→
←
無応答 b)
HALT
nAC
(“93” NVB ~UIDTX1[[1..n1]] ) a)
→
←
無応答 b)
HALT
SELECT
SELECT(1)
→
←
無応答 b)
HALT
nSELECT
(“93 70” ~UIDTX1 BCC CRC̲A)
→
←
無応答 b)
HALT
RATS
RATS(0,0)
→
←
ATS
< 65 536/fc
PROTOCOL
誤り条件
(“E0 00” ~CRC̲A)
→
←
無応答 b)
HALT
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答 b)
HALT
DESELECT
S(DESELECT)
→
←
無応答 b)
HALT
PPS
PPS(0,0,0)
→
←
無応答 b)
HALT
注a) 1≦n1≦32とする。
b) 無応答又は製造業者専用の応答
G.3.3.12.3 試験成績書
表G.27の説明に従って,表G.61の該当欄に試験結果を記入する。
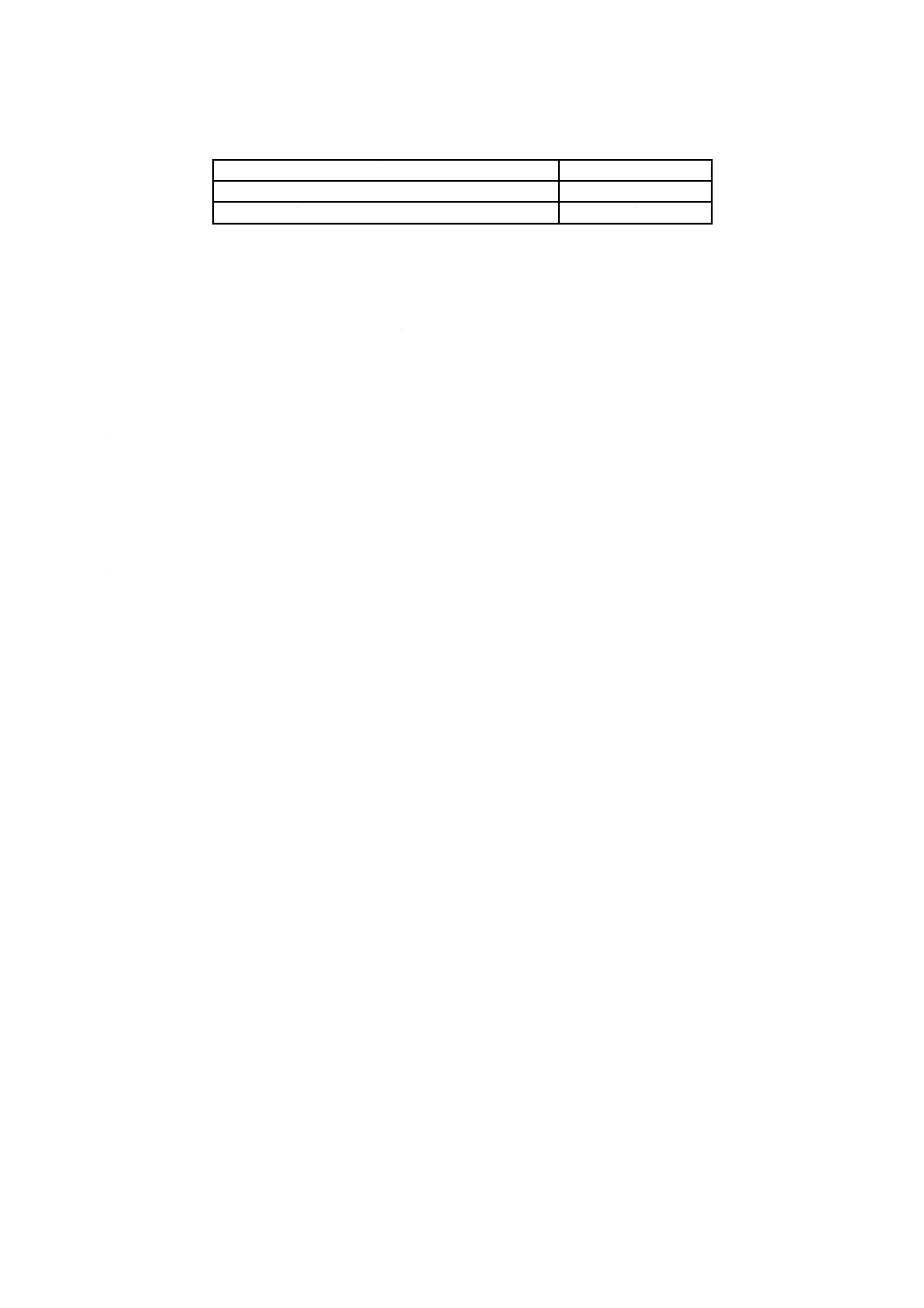
127
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.27−ACTIVE*状態のA型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.3.13 シナリオ G.12:PROTOCOL状態のA型PICCの動作
G.3.3.13.1 目的
この試験は,JIS X 6322-4:2011に従って,PROTOCOL状態のA型PICCの動作を判定する。
この試験によって,活性化したPICCが衝突防止及び初期化コマンドに応答しないことを確認しなければな
らない。
G.3.3.13.2 手順
表G.28の各項目に対し,次の手順を実行する。
a) PICCをPROTOCOL状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICC欄に示す応答になることを確認する。
d) PICC応答が無応答でない場合,PICCのフレーム遅延時間がFDTの欄に示す値に合致することを確認
する。
e) PICCがTTSの欄に示す状態になることを確認する。
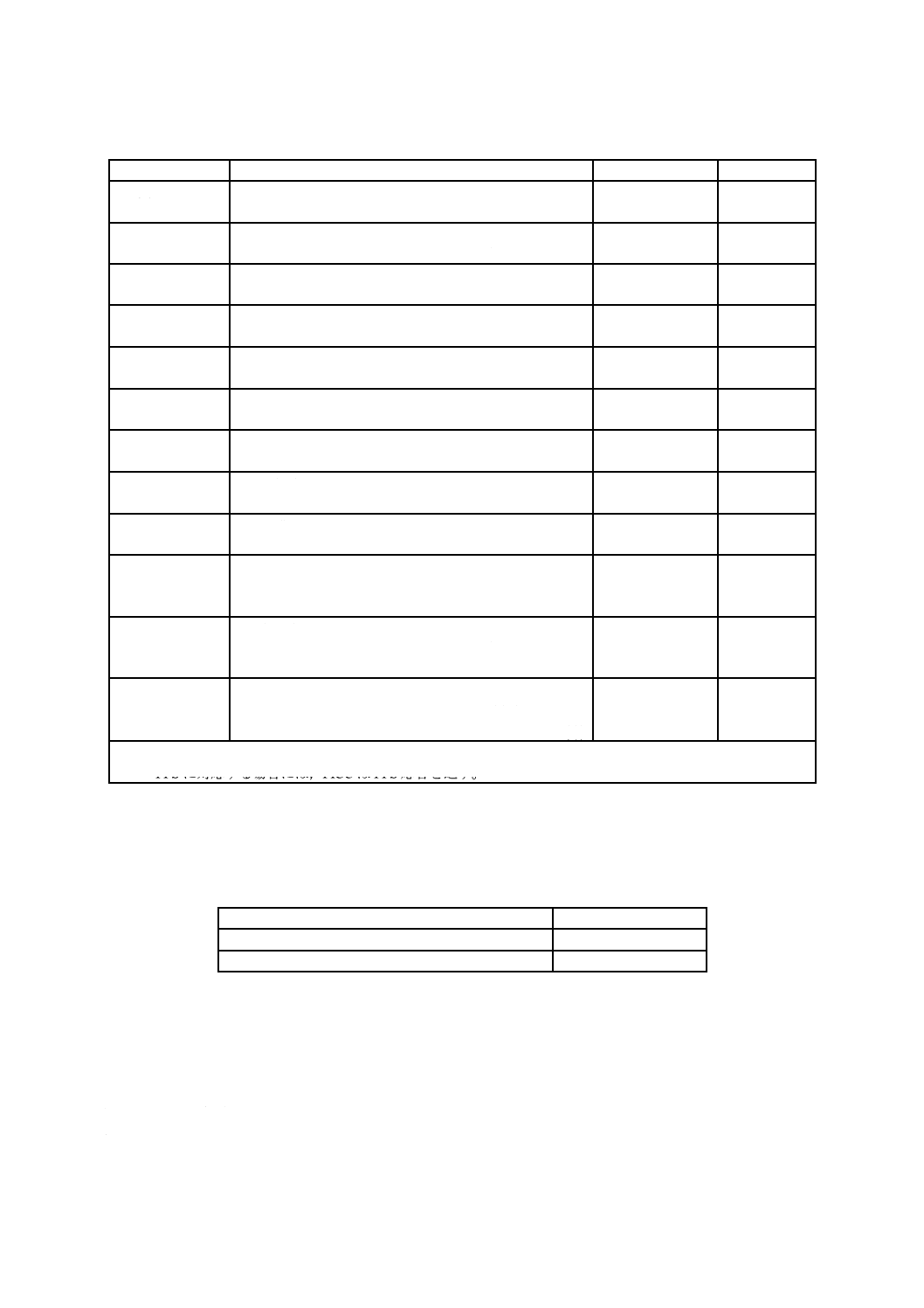
128
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.28−PROTOCOL状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQA
REQA
→
←
無応答
PROTOCOL
WUPA
WUPA
→
←
無応答
PROTOCOL
AC
(“93” NVB UIDTX1[[1..n1]] ) a)
→
←
無応答
PROTOCOL
nAC
(“93” NVB ~UIDTX1[[1..n1]] ) a)
→
←
無応答
PROTOCOL
HLTA
HLTA
→
←
無応答
PROTOCOL
SELECT
SELECT(1)
→
←
無応答
PROTOCOL
nSELECT
(“93 70” ~UIDTX1 BCC CRC̲A)
→
←
無応答
PROTOCOL
RATS
RATS(0,0)
→
←
無応答
PROTOCOL
誤り条件
(“93 70” UIDTX1 BCC ~CRC̲A)
→
←
無応答
PROTOCOL
DESELECT
S(DESELECT)
→
←
S(DESELECT)
65 536/fc
JIS X 6322-4:2011
の8.1に規定
HALT
PPS
PPS(0,0,0)
→
←
無応答又はPPS
応答b)
PROTOCOL
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲
RESPONSE1(1))
< FWT
PROTOCOL
注a) 1≦n1≦32とする。
b) PPSに対応する場合には,PICCはPPS応答を返す。
G.3.3.13.3 試験成績書
表G.29の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.29−PROTOCOL状態のA型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.4 シナリオ G.13:A型PICCの衝突防止の扱い
G.3.4.1 目的
この試験は,JIS X 6322-3:2011の6.5.3に従って,全ビットでの衝突防止ループを実行する。
G.3.4.2 手順
a) PICCを動作磁界中に設置する。
b) PICCをREADY(1)状態にする。
c) 次に示す擬似コード(Procedure AnticollisionA)を実行する。
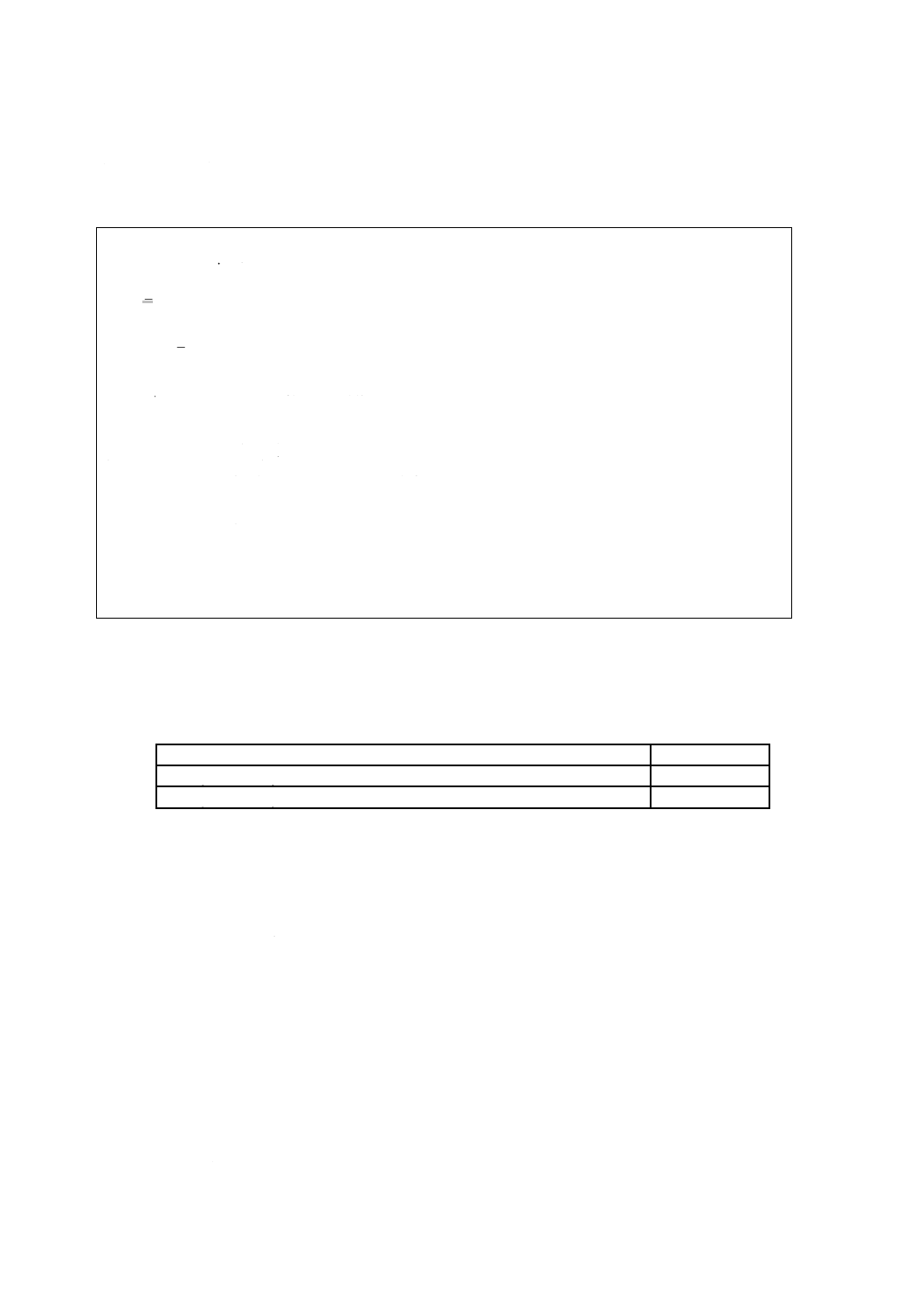
129
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) PICCをREADY* (1)状態にする。
e) 次に示す擬似コード(Procedure AnticollisionA)を実行する。
擬似コード:A型PICCの衝突防止手順
1 Procedure AnticollisionA
2 // TPDUSend and TPDURecv are PCD specific functions
3 // to send and receive frames
4
5 for c = 1 to CascadeLevels do
6
7 // anticollision over UID bits
8 for p = 1 to 32 do
9 // enter desired cascade level
10 if c≧2 then TPDUSend(SELECT(1))
11 if c = 3 then TPDUSend(SELECT(2))
12 // anticollision with matched bit
13 NVB[[1..4]] = (p + 16) mod 8
14 NVB[[5..8]] = (p + 16) div 8
15 TPDUSend (SEL(c) NVB UIDTXc[[1..p]])
16 if TPDURecv() ≠ (UIDTXc[[p+1..32]] BCC) then return FAIL
17 // anticollision with unmatched bit
18 TPDUSend(SEL(c) NVB UIDTXc[[1..p-1]] ~UIDTXc[[p]])
19 if TPDURecv() ≠ Mute then return FAIL
20 // re-enter READY(1) (resp. READY*(1)) state
21 TPDUSend (WUPA)
22 end for
23 end for
24 return PASS
G.3.4.3 試験成績書
表G.30の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.30−A型PICCの衝突防止の扱いの試験結果の判定
説明
試験結果
手順c)及び手順e)のProcedure AnticollisionAの実行結果がPASSの場合
合格
手順c)又は手順e)のProcedure AnticollisionAの実行結果がFAILの場合
不合格
G.3.5 RATSの扱い
RATSの扱いは,G.3.3.7及びG.3.3.12において試験される。
シナリオG.14:不良RATSの後のRATS
JIS X 6305-6:2009(追補1)で規定したシナリオ14を削除する。
シナリオG.15:RATSの後のRATS
JIS X 6305-6:2009(追補1)で規定したシナリオ15を削除する。
G.3.6 PPS要求の扱い
G.3.6.1 目的
この試験は,JIS X 6322-4:2011の5.6.2.2に従って,A型PICCによるPPS要求の扱いを判定する。
G.3.6.2 手順
G.16〜G.19の各シナリオに対し,次の手順を実行する。
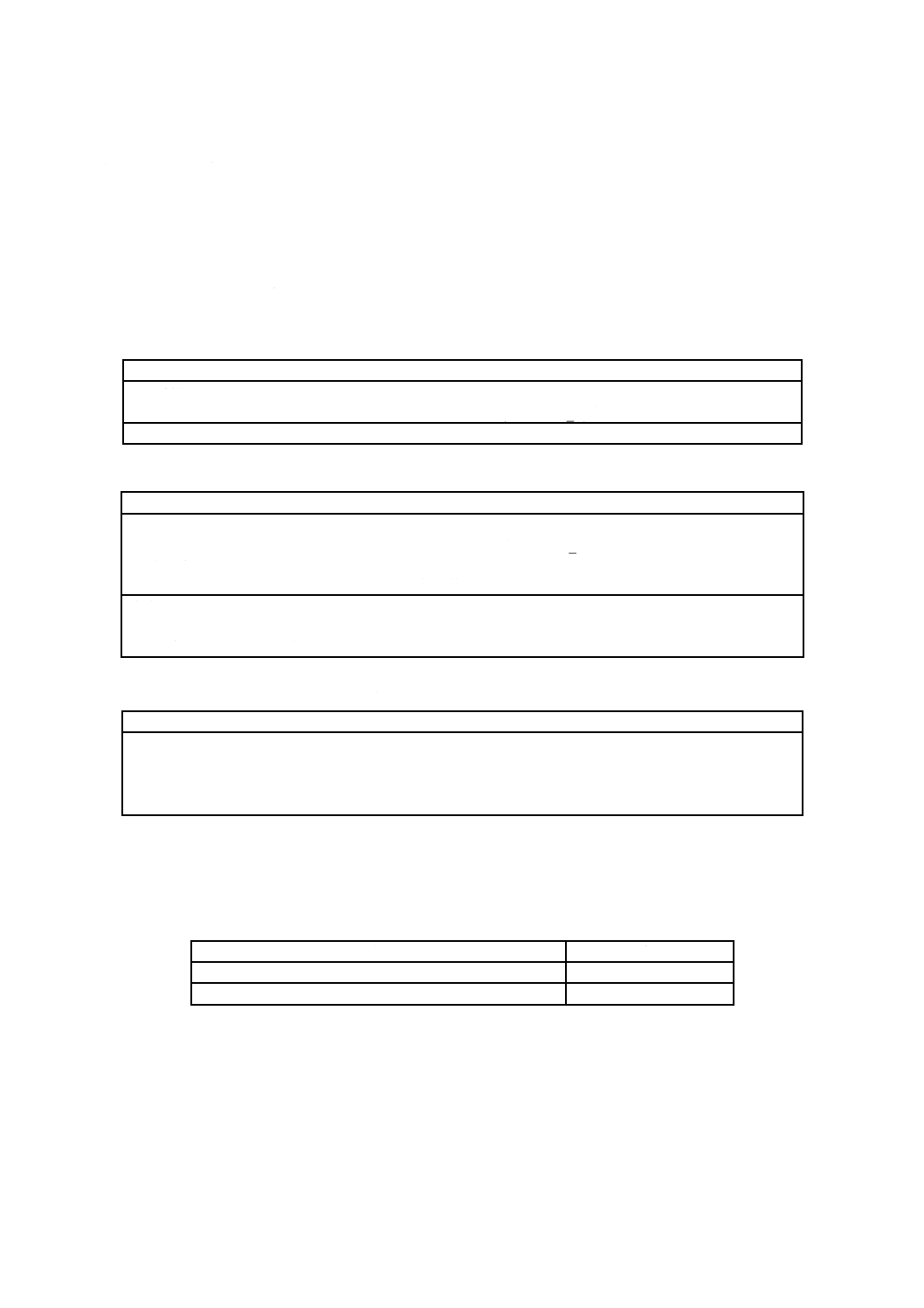
130
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) PICCをPROTOCOL状態にする。
b) 表のPICC試験装置の欄に示すようにコマンドを送る。
c) PICCの応答がPICCの欄に示された応答に一致していることを確認する。
d) PICCがPROTOCOL状態であることを確認する。
シナリオG.16:パラメタ変更なしのPPS
JIS X 6305-6:2009(追補1)で規定したシナリオ16を削除する。
シナリオG.17:PPS1なしのPPS
PICC試験装置
PICC
(“D0 01” CRC̲A)
→
←
無応答 又は (“D0” CRC̲A) a)
注a) いずれの応答も有効。
シナリオG.18:PPS後のPPS
PICC試験装置
PICC
PPS(0,0,0)
→
←
無応答 又は (“D0” CRC̲A) a)
PPS(0,0,0)
→
←
無応答
注a) 応答の有無は,PICCがPPSに対応しているか否かに依存する。PICCがどのような変更可能なパラメ
タにも対応しない場合には,PCDがそのようなPICCにPPSを送ってはならないので,PPS要求に対
応しなくてもよい(JIS X 6322-4:2011の箇条5直下の6番目参照)。
シナリオG.19:受信されなかったPPS後のPPS
PICC試験装置
PICC
(“D0 11 00” ~CRC̲A)
→
←
無応答
PPS(0,0,0)
→
←
無応答
G.3.6.3 試験成績書
表G.31の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.31−PPS要求の扱いの試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.3.7 シナリオG.20:FSDの扱い
G.3.7.1 目的
この試験は,JIS X 6322-4:2011の5.1に従って,RATSが提示するFSD値をA型PICCが採用すること
を判定する。
G.3.7.2 手順
FSDIの値0〜8の各々に対し,次の手順を実行する。
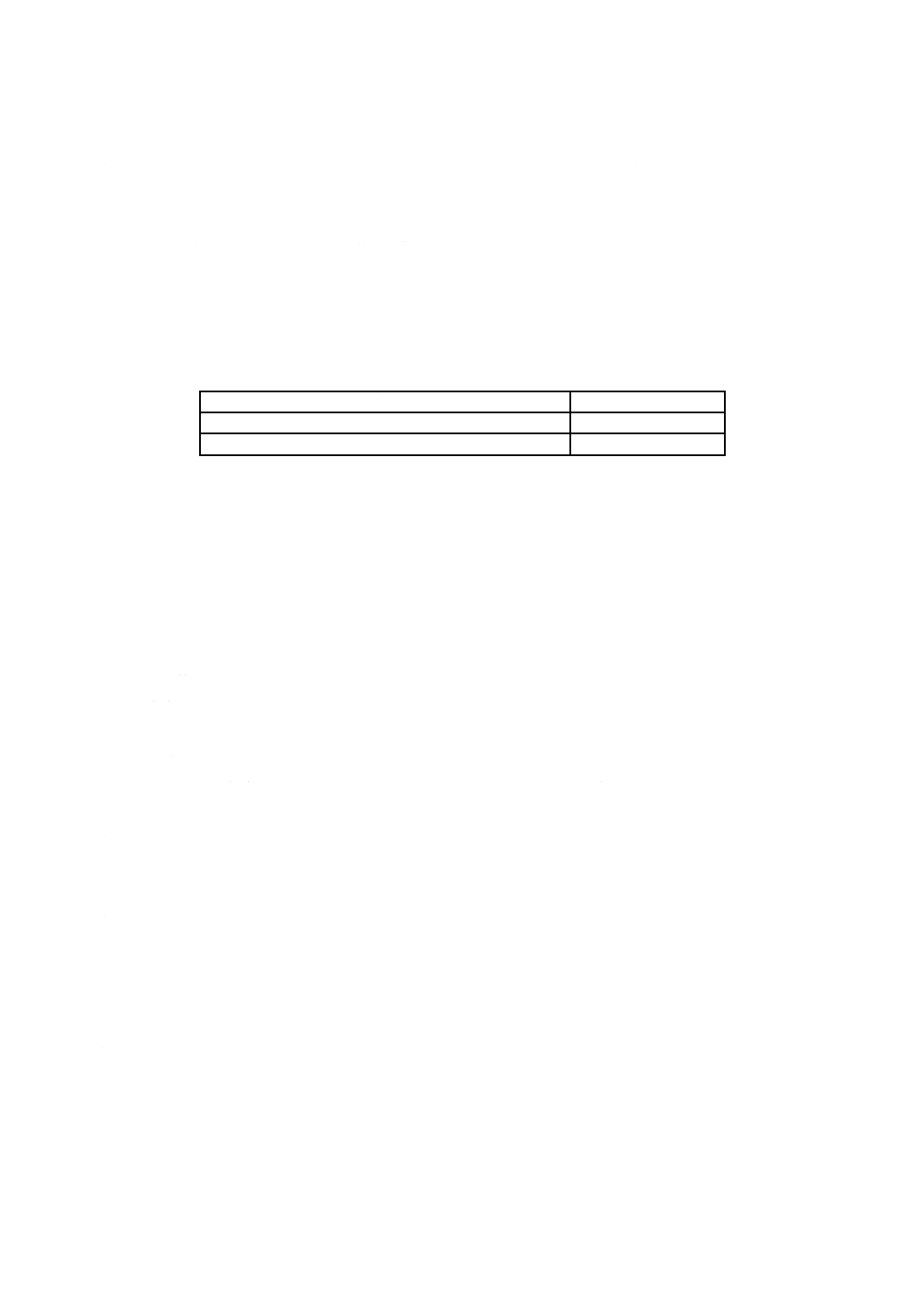
131
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) PICCをACTIVE状態にする。
b) 各試験において当該パラメタfsdiを設定したRATS(0,fsdi) コマンドを送出する。
c) PICCからの応答が有効なATSであり,そのサイズがFSD以下であることを確認する。
注記 PICCは,TEST̲COMMAND2(2)を受け入れるために追加のシーケンスを要求してもよい。
d) I-block I(0)0(TEST̲COMMAND2(2)) を送出する。
e) PICCから送られるI-blockのサイズがFSD以下であることを確認する。
G.3.7.3 試験成績書
表G.32の説明に従って,表G.61の該当欄に試験結果を記入する。
表G.32−シナリオG.20:FSDの扱いの試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4
B型PICCの初期化に対する試験方法
G.4.1 序文
箇条G.4は,B型PICCがJIS X 6322-3:2011の規格に従うかどうかを試験する。JIS X 6322-4:2011の規
格に従う必要がない場合,JIS X 6322-4:2011のコマンドを含む全ての試験を適用しなくてもよい。
PICCがN > 1のREQB・WUPBコマンド又はSlot-MARKERコマンド(JIS X 6322-3:2011の7.6.1参照)
を採用しない場合,これらのコマンドを含む全ての試験を適用しなくてもよい。
G.4.2 シナリオ G.21:ポーリング
G.4.2.1 目的
この試験は,JIS X 6322-3:2011の箇条5に従って,REQBを受信するときのB型PICCの動作を判定す
る。
G.4.2.2 手順
三つの異なる動作磁界1.5,4.5及び7.5 A/m (rms)に対し,次の手順を実行する。
a) PICCを動作磁界中に設置し,磁界を調整する。
b) JIS X 6322-3:2011の5.4に従い,PICCをリセットするための最小時間,RF動作磁界を停止する。
c) RF動作磁界を発生する。
d) 5 ms後,有効なREQB(1)コマンドフレームを送出する。
e) PICC応答の有無及び内容を記録する。
f)
JIS X 6322-3:2011の5.4に従い,PICCをリセットするための最小時間,RF動作磁界を停止する。
g) RF動作磁界を発生する。
h) 5 ms後,有効なREQAコマンドフレーム(A型PICCの変調方式を使用)を送出する。
i)
さらに,5 ms後,有効なREQB(1)コマンドフレームを送出する。
j)
PICC応答の有無及び内容を記録する。
G.4.2.3 試験成績書
表G.33の説明に従って,表G.62の該当欄に試験結果を記入する。
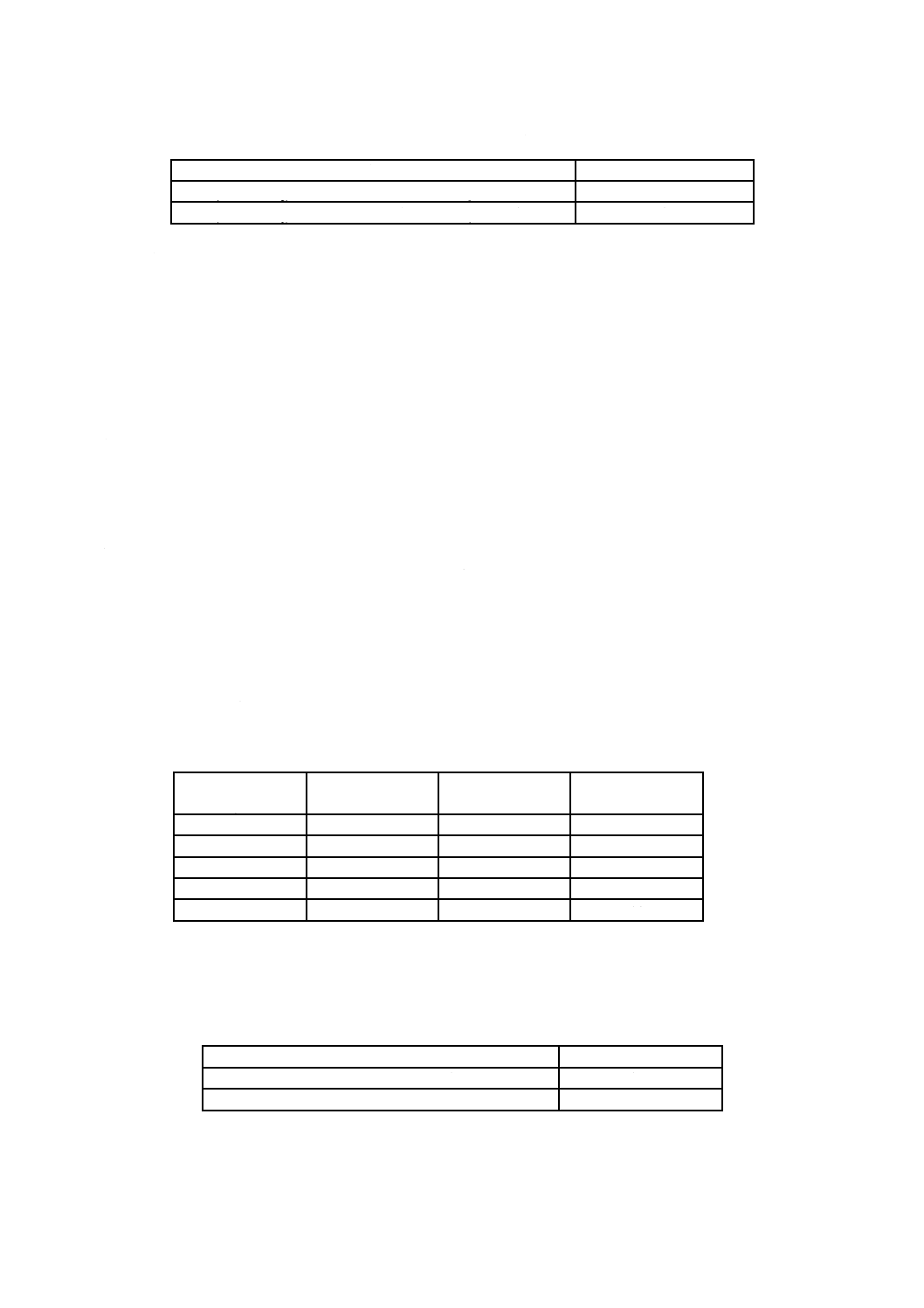
132
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.33−シナリオG.21:ポーリングの試験結果の判定
説明
試験結果
手順e)及び手順j)のPICCの応答が有効なATQBの場合
合格
手順e)又は手順j)のPICCの応答が無効なATQBの場合
不合格
G.4.3 シナリオ G.22:PICCの反応
G.4.3.1 目的
この試験は,JIS X 6322-3:2011の7.1.1,7.1.2,7.1.4及び7.1.5に従って,PCDメッセージを受信すると
きのB型PICCの動作を判定する。
G.4.3.2 手順
表G.34の各行に対し,次の手順を実行する。
a) 参照PICCを動作磁界中に設置する。
b) 表G.34に従って,PICC試験装置のフレームパラメタを設定する。
c) REQBコマンドを送出する。
d) PICC応答の有無,内容及びタイミングを記録する。
e) PICC応答のフレーム形式が次に従うかを確認する。
・ PICC応答は,有効なATQBでなければならない。
・ SOF論理0タイミングは,10〜11 etuでなければならない。
・ SOF論理1タイミングは,2〜3 etuでなければならない。
・ EOF論理0タイミングは,10〜11 etuでなければならない。
・ TR0タイミングは,64/fs≦TR0≦256/fsの範囲でなければならない。
・ TR1タイミングは,80/fs≦TR1≦200/fsの範囲でなければならない。
・ PICCは,EOF終了後,0〜2 etuで副搬送波を止めなければならない。
表G.34−B型PICCフレームパラメタ
EGT
[μs]
SOF (論理0)
[etu]
SOF (論理1)
[etu]
EOF
[etu]
0
10
2
10
57
10
2
10
0
11
2
10
0
10
3
10
0
10
2
11
G.4.3.3 試験成績書
表G.35の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.35−シナリオG.22:PICCの反応の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4.4 B型PICCの状態遷移の試験
この試験は,JIS X 6322-3:2011の7.4に規定されるB型PICCの状態遷移の仕組みが正しく動作するこ
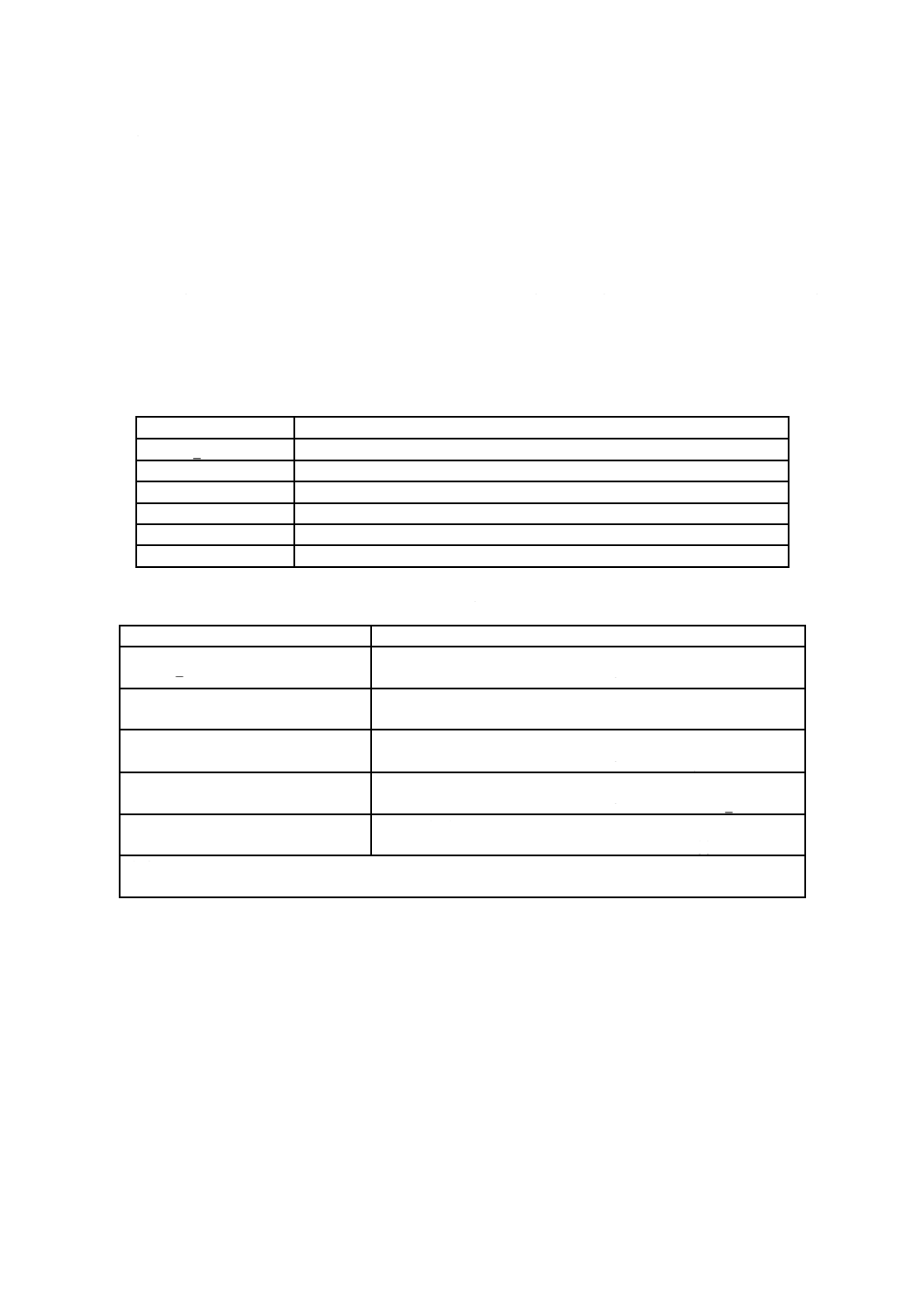
133
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とを確認する。
G.4.4.1 一般的な試験の概要
この試験の概要は,A型PICCで示した手順と同様とする(G.3.3.2参照)。
G.4.4.1.1 PICCを試験初期状態(TIS)にする機能
表G.37で規定する状態遷移コマンドを連続処理することによって,PICCを状態TISにする。一般的な
方法を次に示す。
PICCを状態TISにするために,表G.36の中から対応する状態遷移の連続処理を見つける。次に,状態
遷移表で対応するコマンドを見つけることによって,この欄に示した状態遷移を連続して実行する。PICC
応答の内容及び正当性を常に確認する。
表G.36−状態遷移連続処理表
TIS
状態遷移連続処理
POWER̲OFF
---
IDLE
Power Off → IDLE
READY REQUESTED
Power Off → IDLE → READY REQUESTED
READY DECLARED
Power Off → IDLE → READY DECLARED
PROTOCOL
Power Off → IDLE → READY DECLARED → PROTOCOL
HALT
Power Off → IDLE → READY DECLARED → HALT
表G.37−状態遷移表
状態 → 次の状態
PICC試験装置
PICC
POWER̲OFF→ IDLE
電源を入れる(RF動作磁界発生)。 →
←
無応答
IDLE → READY REQUESTED
REQB(16)
→
←
無応答 a)
IDLE → READY DECLARED
REQB(1)
→
←
ATQB
READY DECLARED → HALT
HLTB
→
←
“00” CRC̲B
READY DECLARED → PROTOCOL
ATTRIB(0,0)
→
←
ATA(0)
注a) PICCが1番目のスロットを選択した場合,PICCが,ATQBを応えなくなるまでREQBコマンドを再
送信しなければならない。
G.4.4.1.2 試験目標状態(TTS)の正当性を確認する機能
次の表G.38は状態遷移を示し,PICCが状態TTSであるかを確認するために用いる。PICCの応答の内
容(例えば,ATQBなど)は,JIS X 6322-3:2011及びJIS X 6322-4:2011に適合しているか徹底的に確認す
るのが望ましい。
注記 試験によって,PICCの状態が変わってもよい。
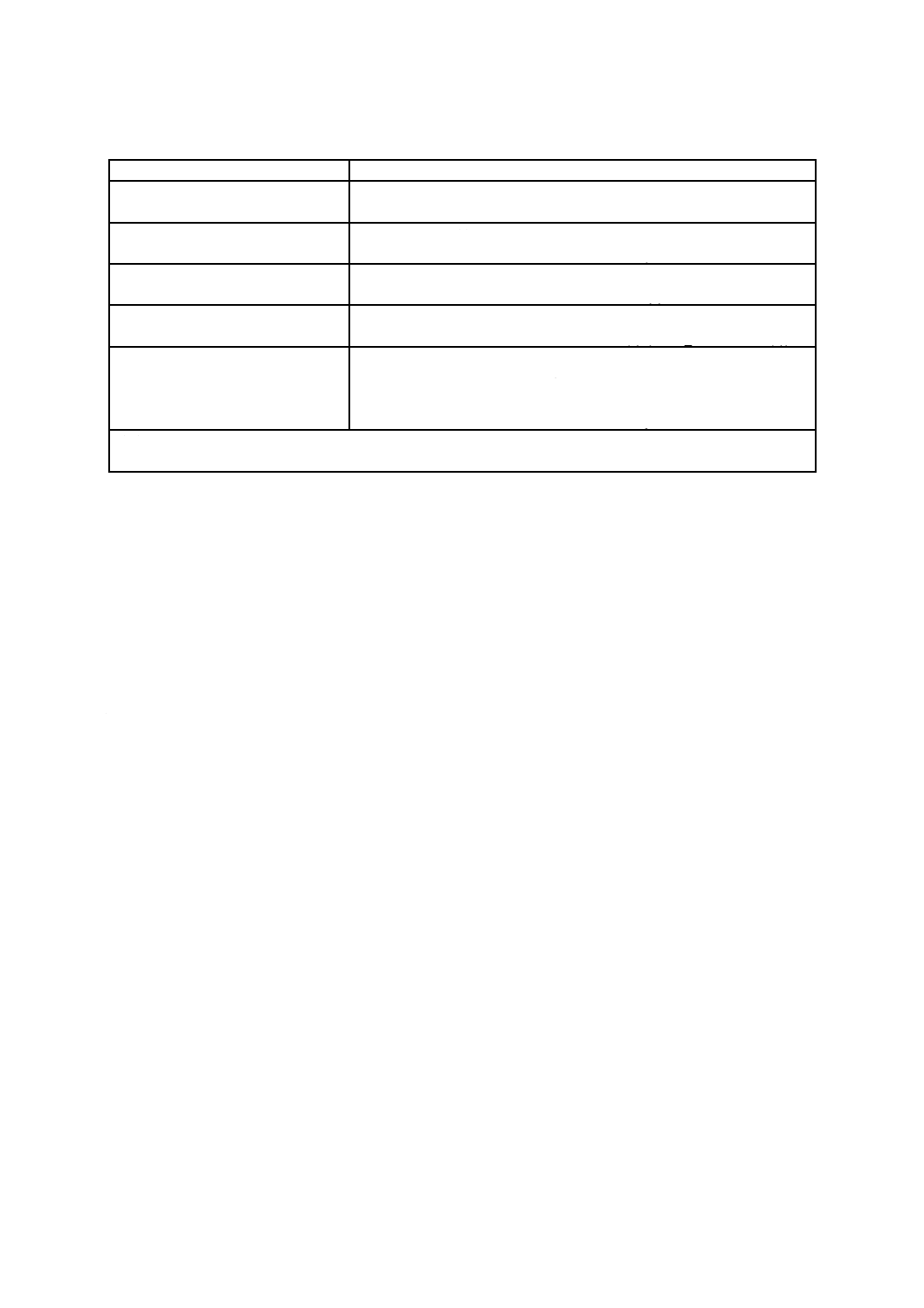
134
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.38−TTSの確認
TTS
PICC試験装置
PICC
IDLE
REQB(1)
→
←
ATQB
READY REQUESTED
SLOTMARKER (n) a)
→
←
ATQB
READY DECLARED
ATTRIB(0,0)
→
←
ATA(0)
PROTOCOL
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
HALT
REQB(1)
→
←
無応答
WUPB(1)
→
←
ATQB
注a) 選択されたPICCのスロットが不明なので,ATQBを受信するまで,スロット値の異なるSlot-MARKER
コマンドを再送信しなければならない。
G.4.4.2 シナリオ G.23:IDLE状態のB型PICCの動作
G.4.4.2.1 目的
この試験は,JIS X 6322-3:2011の7.4.4に従って,IDLE状態のB型PICCの動作を判定する。
G.4.4.2.2 手順
表G.39の各行に対し,次の手順を実行する。
a) PICCをIDLE状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICCがTTSの欄に示す状態になることを確認する。
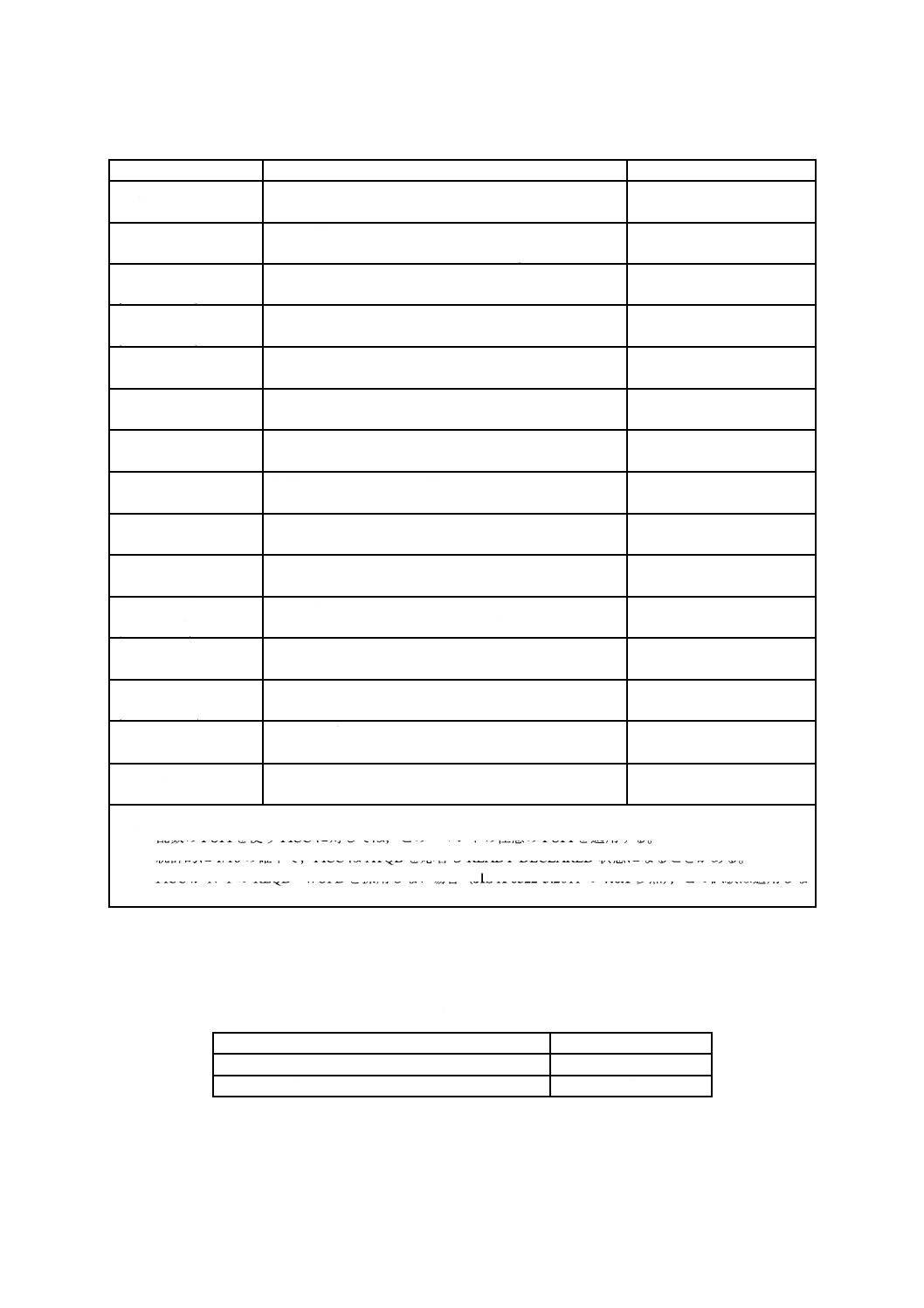
135
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.39−IDLE状態からの遷移
遷移
PICC試験装置
PICC
TTS
REQB
REQB(1)
→
←
ATQB
READY DECLARED
WUPB
WUPB(1)
→
←
ATQB
READY DECLARED
REQB
(CRC不一致)
(“05 00 00” ~CRC̲B)
→
←
無応答
IDLE
WUPB
(CRC不一致)
(“05 00 08” ~CRC̲B)
→
←
無応答
IDLE
HLTB b)
HLTB
→
←
無応答
IDLE
ATTRIB b)
ATTRIB(0,0)
→
←
無応答
IDLE
Slot-MARKER
SLOTMARKER(n) a)
→
←
無応答
IDLE
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
IDLE
DESELECT
S(DESELECT)
→
←
無応答
IDLE
REQB
(AFI不一致)
REQB(1,nAFI)
→
←
無応答
IDLE
WUPB
(AFI不一致)
WUPB(1, nAFI)
→
←
無応答
IDLE
HLTB
(PUPI不一致)
HLTB(~PUPI)
→
←
無応答
IDLE
ATTRIB
(PUPI不一致)
ATTRIB(0,0, ~PUPI )
→
←
無応答
IDLE
REQB d)
REQB(16) c)
→
←
無応答
READY REQUESTED
WUPB d)
WUPB(16) c)
→
←
無応答
READY REQUESTED
注a) nは,2≦n≦16の全ての値で実行しなければならない。
b) 乱数のPUPIを使うPICCに対しては,このコマンドの任意のPUPIを適用する。
c) 統計的に1/16の確率で,PICCはATQBを応答しREADY-DECLARED状態になることがある。
d) PICCがN>1のREQB・WUPBを採用しない場合(JIS X 6322-3:2011の7.6.1参照),この試験は適用しな
い。
G.4.4.2.3 試験成績書
表G.40の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.40−シナリオ G.23:IDLE状態のB型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4.4.3 シナリオ G.24:READY-REQUESTED状態(sub-state)のB型PICCの動作
PICCがN>1のREQB・WUPBを採用しない場合,又はSlot-MARKERコマンドを採用しない場合
136
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(JIS X 6322-3:2011の7.6.1参照),このシナリオは適用しない。
G.4.4.3.1 目的
この試験は,JIS X 6322-3:2011の7.4.5に従って,READY REQUESTED状態(sub-state)のB型PICCの動
作を判定する。
G.4.4.3.2 手順
表G.41の各項目に対し,次の手順を実行する。
a) PICCをREADY-REQUESTED状態(sub-state)にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICCがTTSの欄に示す状態になることを確認する。
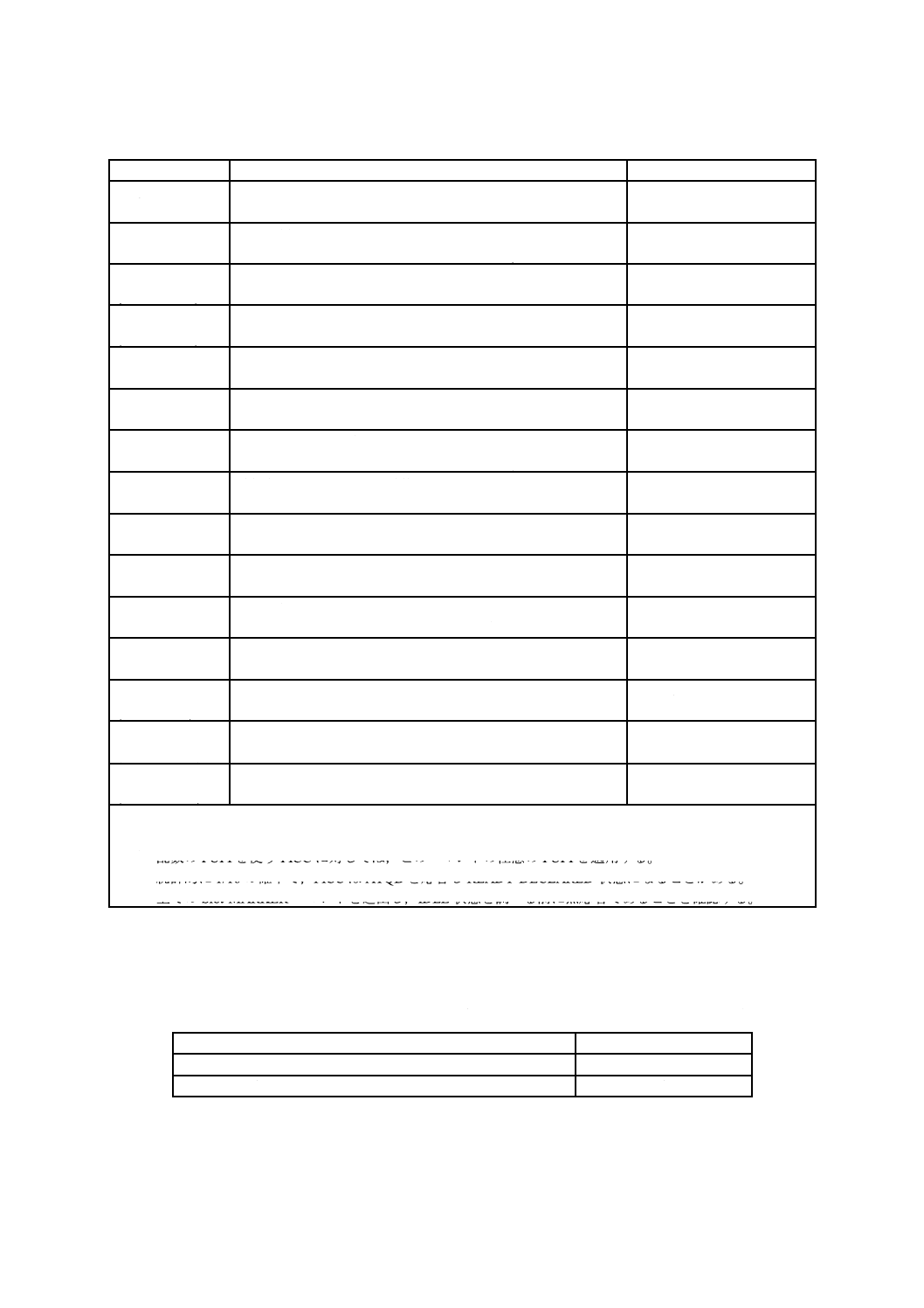
137
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.41−READY-REQUESTED状態(sub-state)からの遷移
遷移
PICC試験装置
PICC
TTS
REQB
REQB(1)
→
←
ATQB
READY DECLARED
WUPB
WUPB(1)
→
←
ATQB
READY DECLARED
REQB
(CRC不一致)
(“05 00 00” ~CRC̲B)
→
←
無応答
READY REQUESTED
WUPB
(CRC不一致)
(“05 00 08” ~CRC̲B)
→
←
無応答
READY REQUESTED
HLTB b)
HLTB
→
←
無応答
READY REQUESTED
ATTRIB b)
ATTRIB(0,0)
→
←
無応答
READY REQUESTED
Slot-MARKER
SLOTMARKER(n) a)
→
←
ATQB 又は 無応答
READY DECLARED
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
READY REQUESTED
DESELECT
S(DESELECT)
→
←
無応答
READY REQUESTED
REQB
REQB(16) c)
→
←
無応答
READY REQUESTED
WUPB
WUPB(16) c)
→
←
無応答
READY REQUESTED
REQB
(AFI不一致)
REQB(1,nAFI)
→
←
無応答
IDLE d)
WUPB
(AFI不一致)
WUPB(1, nAFI)
→
←
無応答
IDLE d)
HLTB
(PUPI不一致)
HLTB(~PUPI)
→
←
無応答
READY REQUESTED
ATTRIB
(PUPI不一致)
ATTRIB(0,0, ~PUPI )
→
←
無応答
READY REQUESTED
注a) nは,2≦n≦16の全ての値で実行しなければならない。PICCは,nのただ一つの値でATQBを応答し,
他の値は無応答でなければならない。
b) 乱数のPUPIを使うPICCに対しては,このコマンドの任意のPUPIを適用する。
c) 統計的に1/16の確率で,PICCはATQBを応答しREADY-DECLARED状態になることがある。
d) 全てのSlot-MARKERコマンドを送出し,IDLE状態を調べる前に無応答であることを確認する。
G.4.4.3.3 試験成績書
表G.42の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.42−シナリオ G.24:READY-REQUESTED状態(sub-state)のB型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4.4.4 シナリオ G.25:READY- DECLARED状態(sub-state)のB型PICCの動作
G.4.4.4.1 目的
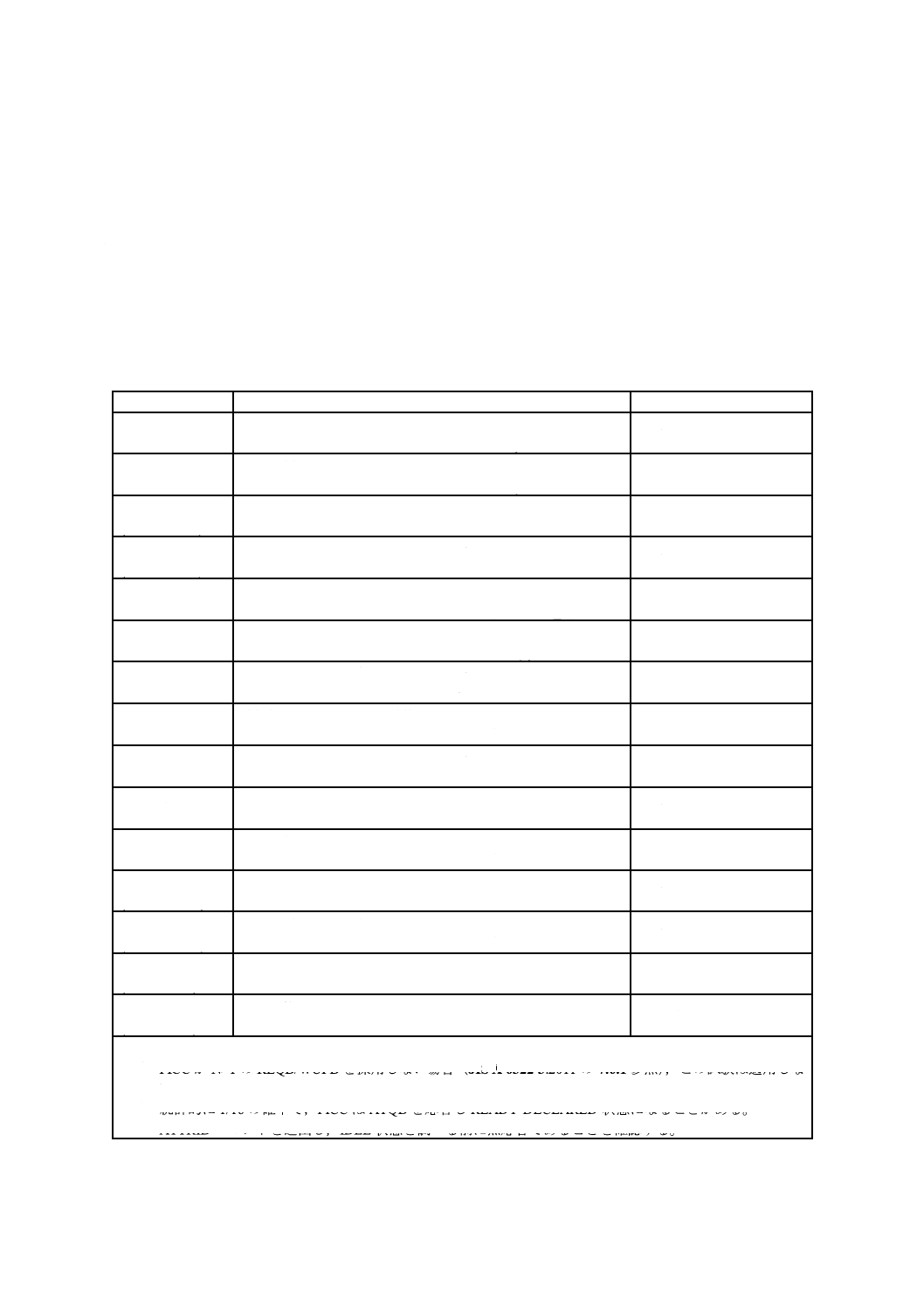
138
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この試験は,JIS X 6322-3:2011の7.4.6に従って,READY-DECLARED状態(sub-state)のB型PICCの動
作を判定する。
G.4.4.4.2 手順
表G.43の各項目に対し,次の手順を実行する。
a) PICCをREADY-DECLARED状態(sub-state)にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICCがTTSの欄に示す状態になることを確認する。
表G.43−READY-DECLARED状態(sub-state)からの遷移
遷移
PICC試験装置
PICC
TTS
REQB
REQB(1)
→
←
ATQB
READY DECLARED
WUPB
WUPB(1)
→
←
ATQB
READY DECLARED
REQB
(CRC不一致)
(“05 00 00” ~CRC̲B)
→
←
無応答
READY DECLARED
WUPB
(CRC不一致)
(“05 00 08” ~CRC̲B)
→
←
無応答
READY DECLARED
HLTB
HLTB
→
←
(“00” CRC̲B)
HALT
ATTRIB
ATTRIB(0,0)
→
←
ATA(0)
PROTOCOL
Slot-MARKER
SLOTMARKER(n) a)
→
←
無応答
READY DECLARED
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
READY DECLARED
DESELECT
S(DESELECT)
→
←
無応答
READY DECLARED
REQB b)
REQB(16) c)
→
←
無応答
READY REQUESTED
WUPB b)
WUPB(16) c)
→
←
無応答
READY REQUESTED
HLTB
(PUPI不一致)
HLTB(~PUPI)
→
←
無応答
READY DECLARED
ATTRIB
(PUPI不一致)
ATTRIB(0,0, ~PUPI )
→
←
無応答
READY DECLARED
REQB
(AFI不一致)
REQB(1,nAFI)
→
←
無応答
IDLE d)
WUPB
(AFI不一致)
WUPB(1, nAFI)
→
←
無応答
IDLE d)
注a) nは,2≦n≦16の全ての値で実行しなければならない。
b) PICCがN>1のREQB/WUPBを採用しない場合(JIS X 6322-3:2011の7.6.1参照),この試験は適用しな
い。
c) 統計的に1/16の確率で,PICCはATQBを応答しREADY-DECLARED状態になることがある。
d) ATTRIBコマンドを送出し,IDLE状態を調べる前に無応答であることを確認する。
139
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.4.4.4.3 試験成績書
表G.44の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.44−シナリオ G.25:READY- DECLARED状態(sub-state)のB型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4.4.5 シナリオ G.26:HALT状態のB型PICCの動作
G.4.4.5.1 目的
この試験は,JIS X 6322-3:2011の7.4.8に従って,HALT状態のB型PICCの動作を判定する。
G.4.4.5.2 手順
表G.45の各項目に対し,次の手順を実行する。
a) PICCをHALT状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICCがTTSの欄に示す状態になることを確認する。
140
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.45−HALT状態からの遷移
遷移
PICC試験装置
PICC
TTS
REQB
REQB(1)
→
←
無応答
HALT
WUPB
WUPB(1)
→
←
ATQB
READY DECLARED
WUPB
(CRC不一致)
(“05 00 08” ~CRC̲B)
→
←
無応答
HALT
HLTB
HLTB
→
←
無応答
HALT
ATTRIB
ATTRIB(0,0)
→
←
無応答
HALT
Slot-MARKER
SLOTMARKER(n) a)
→
←
無応答
HALT
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
無応答
HALT
DESELECT
S(DESELECT)
→
←
無応答
HALT
WUPB
(AFI不一致)
WUPB(1, nAFI)
→
←
無応答
IDLE
REQB
(AFI不一致)
REQB(1,nAFI)
→
←
無応答
HALT
HLTB
(PUPI不一致)
HLTB(~PUPI)
→
←
無応答
HALT
ATTRIB
(PUPI不一致)
ATTRIB(0,0, ~PUPI )
→
←
無応答
HALT
WUPB b)
WUPB(16) c)
→
←
無応答
READY REQUESTED
注a) nは,2≦n≦16の全ての値で実行しなければならない。
b) PICCがN>1のREQB/WUPBを採用しない場合(JIS X 6322-3:2011の7.6.1参照),この試験は適用しな
い。
c) 統計的に1/16の確率で,PICCはATQBを応答しREADY-DECLARED状態になることがある。
G.4.4.5.3 試験成績書
表G.46の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.46−シナリオ G.26:HALT状態のB型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4.4.6 シナリオ G.27:PROTOCOL状態のB型PICCの動作
G.4.4.6.1 目的
この試験は,JIS X 6322-4:2011に従って,PROTOCOL状態のB型PICCの動作を判定する。
この試験は,活性化状態のPICCがどの初期化コマンドにも応答しないことを確認する。
G.4.4.6.2 手順
表G.47の各項目に対し,次の手順を実行する。
141
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) PICCをPROTOCOL状態にする。
b) PICC試験装置の欄に示すコマンドを送出し,状態を遷移させる。
c) PICC応答がPICCの欄に示す応答になることを確認する。
d) PICCがTTSの欄に示す状態になることを確認する。
表G.47−PROTOCOL状態からの遷移
遷移
PICC試験装置
PICC
FDT
TTS
REQB
REQB(1)
→
←
無応答
PROTOCOL
WUPB
WUPB(1)
→
←
無応答
PROTOCOL
REQB
(CRC不一致)
(“05 00 00” ~CRC̲B)
→
←
無応答
PROTOCOL
WUPB
(CRC不一致)
(“05 00 08” ~CRC̲B)
→
←
無応答
PROTOCOL
HLTB
HLTB
→
←
無応答
PROTOCOL
ATTRIB
ATTRIB(0,0)
→
←
無応答
PROTOCOL
Slot-MARKER
SLOTMARKER(n) a)
→
←
無応答
PROTOCOL
JIS X 6322-4
コマンド
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
< FWT
PROTOCOL
DESELECT
S(DESELECT)
→
←
S(DESELECT)
HALT
WUPB
(AFI不一致)
WUPB(1, nAFI)
→
←
無応答
PROTOCOL
REQB
(AFI不一致)
REQB(1,nAFI)
→
←
無応答
PROTOCOL
HLTB
(PUPI不一致)
HLTB(~PUPI)
→
←
無応答
PROTOCOL
ATTRIB
(PUPI不一致)
ATTRIB(0,0, ~PUPI )
→
←
無応答
PROTOCOL
注a) nは,2≦n≦16の全ての値で実行しなければならない。
G.4.4.6.3 試験成績書
表G.48の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.48−シナリオ G.27:PROTOCOL状態のB型PICCの動作の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4.5 シナリオ G.28:B型PICCの衝突防止の扱い
G.4.5.1 目的
この試験の目的は,JIS X 6322-3:2011の7.4.1に従って,B型PICCの衝突防止の扱いを判定する。
この試験の中核は,Procedure AnticollisionB(N,出力パラメタchi2)で,擬似コードで定義されている。
142
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
手順では,REQB(N)コマンドとそれに続くSlot-MARKERコマンドとを256回送出し,N個のスロットの
各々がPICCによって何回選択されたかを計数する。手順では,PICCが各REQB(N)要求に対してただ一つ
のスロットを対応させているかどうかを確認する。そうでない場合には,試験はFAILを返す。
B型PICCの衝突防止は,スロットの無作為選択に基づいているので,確認のために統計的手法を使用
しなければならない。全ての統計的検査法の本質に基づき,PICCが正しく反応する場合でもこの試験で不
合格となることがある。この不合格を統計的な用語で“第1種の誤り”と呼ぶ。この誤りを完全に避ける
ことはできない。代わりに,この誤りの発生確率は,いわゆる“有意水準”αによって制御できる。これ
は,より小さいαが“第1種の誤り”の発生を少なくすることを意味する。しかしながら,これは,でき
るだけ小さいαを選択するのが望ましい,という意味ではない。なぜならば,αがより小さい場合に,試
験で不良PICC(すなわち,正しい確率でスロットを選択しないPICC)が合格となる確率が高くなるため
である。統計的な用語で,これを“第2種の誤り”と呼ぶ。
さらに,PICCは,等しい確率(すなわち,1/N)でN個のスロットの各々を選択しなければならない。
これを確認するために,全てのスロットに対して統計的なχ2検定を実行しなければならない。この試験の
結果は,χ2α(N−1)五分位点と比較しなければならない値chi2となる。
注記 五分位点(quintile)とは,統計学上の数であり,総サンプルの1/5を含む分布関数の確率変数
の値である。
G.4.5.2 手順
統計的検査法の一つが手順e)で不合格となる場合には,試験所は,このパラメタNに対する試験の再実
行を選択してもよい。
N=2,4,8及び16の各々の値に対して,次の手順を実行する。
a) 有意水準α=0.005を選択し,表G.49から対応する。
χ2α(N−1) 五分位点を見つける。表G.49によって他のαの値を選択することは任意である。
b) PICCをリセットする。
c) AnticollisionB(N, chi2)を実行する。
d) AnticollisionBがFAILを返す場合には,試験結果を不合格とする。
e) chi2≦χ2α(N−1)の場合には,試験結果を合格とし,それ以外は試験結果を不合格とする。
表G.49−五分位点の値
α
χ2α(N−1)
χ2α(1)
χ2α(3)
χ2α(7)
χ2α(15)
0.1(任意選択)
2.706
6.251
12.017
22.307
0.05(任意選択)
3.841
7.815
14.067
24.996
0.01(任意選択)
6.635
11.345
18.475
30.578
0.005
7.879
12.838
20.278
32.801
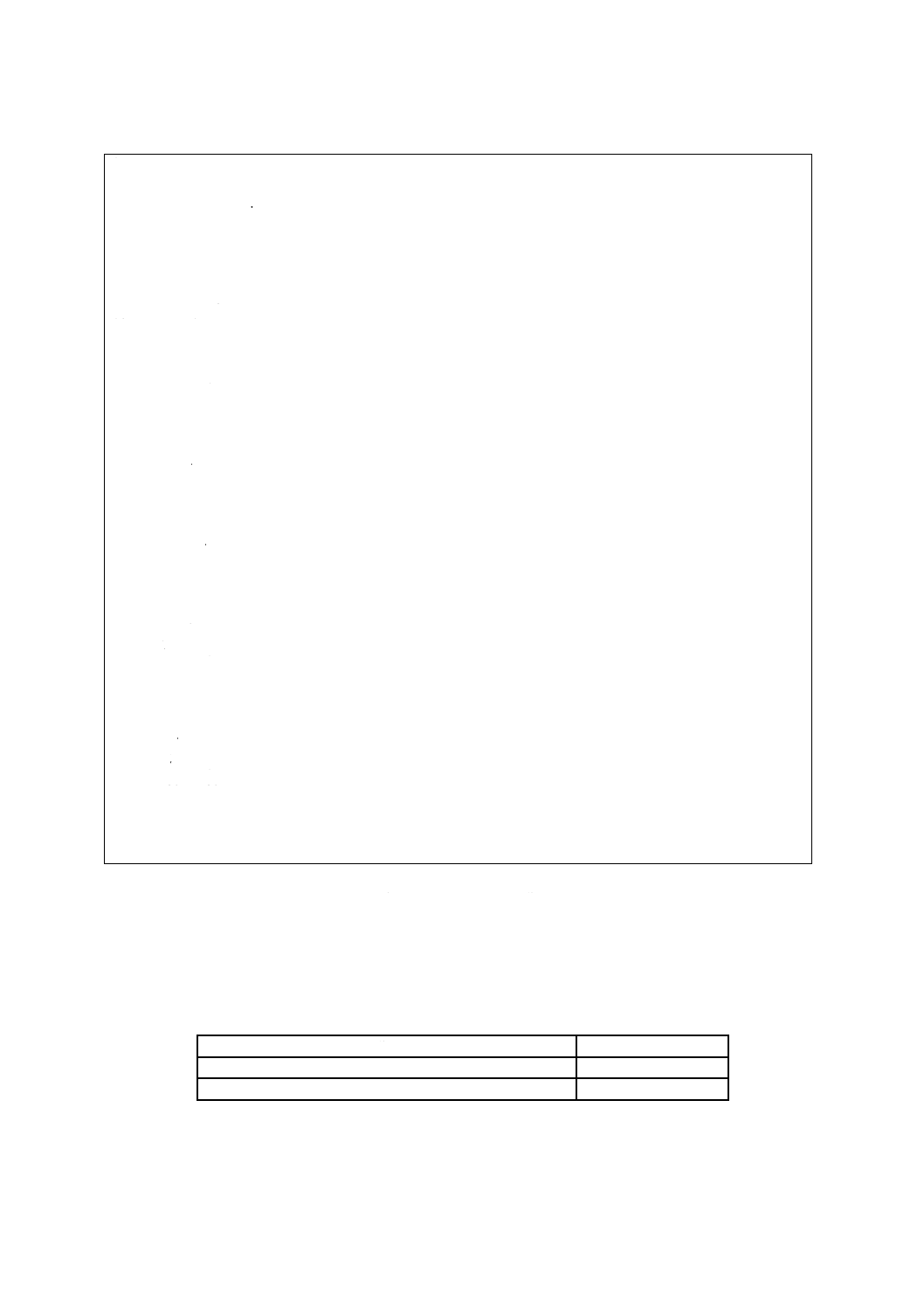
143
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
擬似コード:B型PICCの衝突防止手順
1 Procedure AnticollisionB(N, chi2)
2
3 // TPDUSend and TPDURecv are PCD specific functions
4 // to send and receive TPDU frames
5
6 // probability for selecting slot
7 p = 1/N
8
9 // clear slot counters
10 for i from 1 to N do
11 Slots[i] = 0
12 endfor
13
14 // collect data
15 for i from 1 to 256 do
16 Reset the PICC
17 TPDUSend (REQB(N))
18 if TPDURecv() = ATQB then
19 Slots[1] = Slots[1]+1
20 endif
21 for j from 2 to N do
22 TPDUSend (SLOTMARKER(j))
23 if TPDURecv () = ATQB then
24 Slots[j] = Slots[j]+1
25 endif
26 endfor
27 endfor
28
29 // check that exactly
30 // one slot has been selected at each run
31 cnt = 0
32 for i from 1 to N do
33 cnt = cnt + Slots[i]
34 endfor
35 if cnt ≠ 256 then
36 return FAIL
37 endif
38 chi2 = 0
39 for i from 1 to N do
40 chi2 = chi2 + Slots[i]*Slots[i]
41 endfor
42 chi2 = chi2*N/256 ‒ 256
43 return PASS
注記 上記の43でPASSを返した場合に限り,手順e)に進む。
G.4.5.3 試験成績書
表G.50の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.50−シナリオ G.28:B型PICCの衝突防止の扱いの試験結果の判定
説明
試験結果
全ての衝突防止試験手順がPASSを返した場合
合格
いずれかの衝突防止試験手順が値FAILを返した場合
不合格
G.4.6 ATTRIBの扱い
G.4.6.1 目的
144
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この試験は,JIS X 6322-3:2011の7.10に従って,ATTRIBコマンドでのB型PICCの動作を判定する。
G.4.6.2 手順
G.29及びG.30の各シナリオに対し,次の手順を実行する。
a) PICCをREADY-DECLARED状態(sub-state)にする。
b) PICC試験装置に示すようにコマンドを送る。
c) PICCの応答がPICC欄で与えられたものに従うことを確認する。
d) PICCがPROTOCOL状態にあることを確認する。
シナリオ G.29:PUPI不一致のATTRIB
PICC試験装置
PICC
(“1D” ~PUPI “00 00 01 00” CRC̲B)
→
←
無応答
ATTRIB(0,0)
→
←
ATA(0)
シナリオ G.30:無効ATTRIBの後のATTRIB
PICC試験装置
PICC
(“1D” PUPI “00 00 01 00” ~CRC̲B)
→
←
無応答
ATTRIB(0,0)
→
←
ATA(0)
G.4.6.3 試験成績書
表G.51の説明に従って,表G.62の該当欄に試験結果を記入する。
表G.51−ATTRIBの扱いの試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.4.7 シナリオ G.31:最大フレームサイズの扱い
G.4.7.1 目的
この試験は,JIS X 6322-3:2011の7.10.4に従って,B型PICCが採用するFSDサイズを判定する。
G.4.7.2 手順
FSDIの値0〜8の各々に対し,次の手順を実行する。
a) PICCをG.4.4.1.1に示したREADY-DECLARED状態(sub-state)にする。
b) 当該試験においてパラメタfsdiを設定したATTRIB(0, fsdi)コマンドを送出する。
c) PICCがATA(0)を応答することを確認する。
注記 PICCは,TEST̲COMMAND2(2)を受信するために追加の手順を要求してもよい。
d) I-block I(0)0(TEST̲COMMAND2(2) )を送出する。
e) PICCからのI-block応答のサイズがFSD以下であることを確認する。
G.4.7.3 試験成績書
表G.52の説明に従って,表G.62の該当欄に試験結果を記入する。
145
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.52−シナリオ G.31:最大フレームサイズの扱いの試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.5
A型PICC又はB型PICCの論理操作のための試験方法
G.5.1 序文
箇条G.5は,活性化状態のPICCがJIS X 6322-4:2011に従うことを確かめる試験を含む。G.5はA型PICC
及びB型PICCに適用する。
G.5.1.1 PICC活性化手順
PICC活性化とは,PICCをJIS X 6322-4:2011で定義するプロトコルブロックを交換してもよい状態にす
る処理である。この手順は,PICCのタイプに依存する。
注記 PICCは,シナリオの手順1を受信するために追加の手順を要求してもよい。
G.5.1.1.1 A型PICCの活性化
a) PICCをG.3.3.2.1に示したACTIVE状態にする。
b) RATS(cid,fsdi)を送出する。
c) PICC応答が有効なATSであることを確認する。
G.5.1.1.2 B型PICCの活性化
a) PICCをG.4.4.1.1に示したREADY-DECLARED状態(sub-state)にする。
b) ATTRIB(cid,fsdi)を送出する。
c) PICC応答が有効なATAであることを確認する。
G.5.2 JIS X 6322-4:2011 シナリオにおけるPICCの反応
G.5.2.1 目的
この試験は,JIS X 6322-4:2011の箇条7に対するPICCの振舞いを判定する。 この試験は,JIS X
6322-4:2011の附属書Bのプロトコルシナリオを実施する。
G.5.2.2 手順
G.32〜G.54の各シナリオに対し,次の手順を実行する。
a) CID=0及びFSDI=0として,G.5.1.1に示したようにPICCを活性化する。
b) シナリオの各手順を実行する。
1) PICC試験装置欄に示すようにコマンドを送る。
2) PICCの応答がPICC欄で与えられたものに一致することを確認する。
c) 終了する。
シナリオ G.32:I-blockの交換
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
2
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
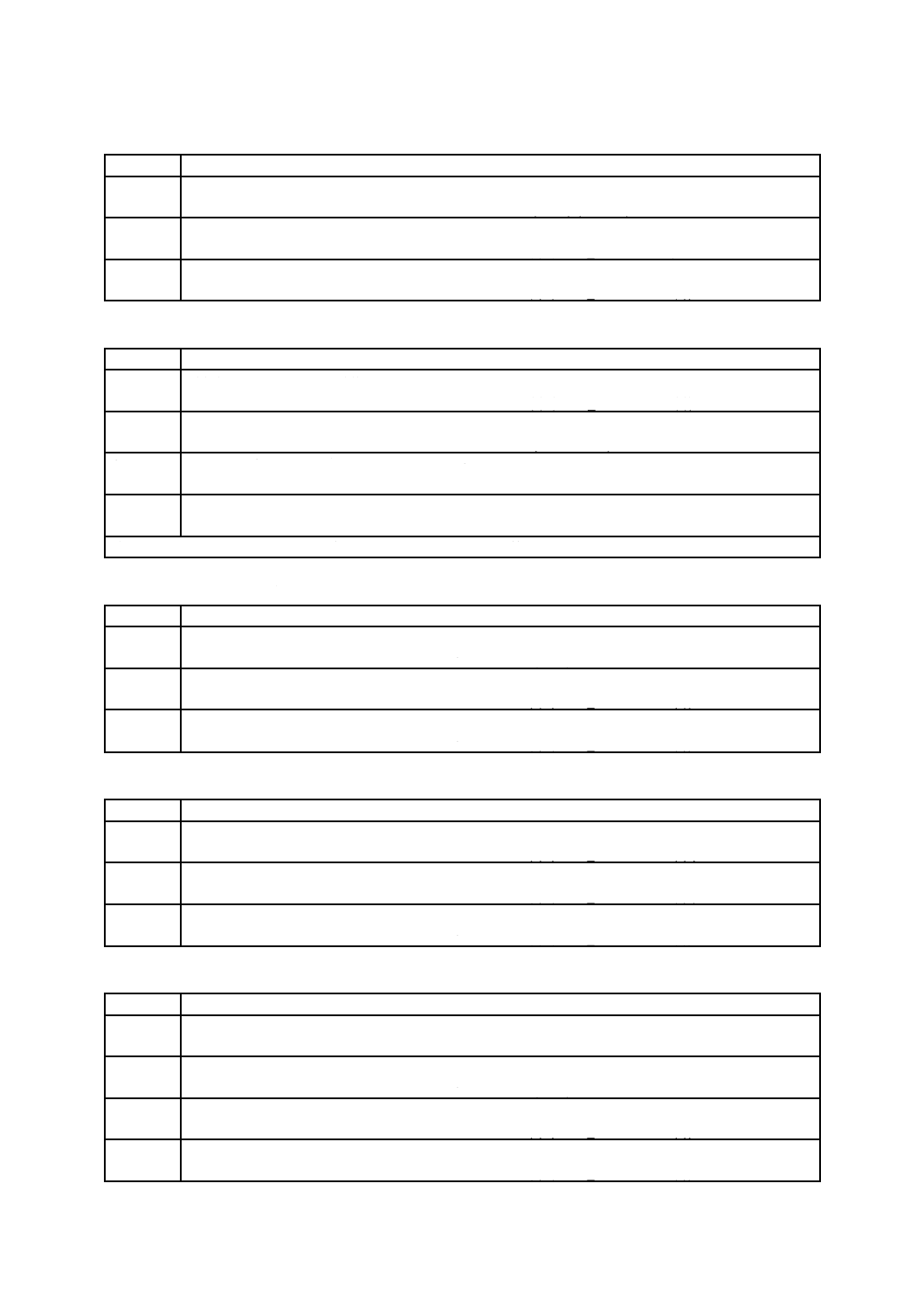
146
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.33:待ち時間延長の要求
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND3)
→
←
S(WTX) (WTXM)
2
S(WTX) (WTXM)
→
←
I(0)0(TEST̲RESPONSE3)
3
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.34:DESELECT
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
2
S(DESELECT)
→
←
S(DESELECT)
3
REQA 又は REQB(1) a)
→
←
無応答
4
WUPA 又は WUPB(1) a)
→
←
ATQA 又は ATQB a)
注a) 左のコマンドはA型PICC,右のコマンドはB型PICCに使用する。
シナリオ G.35:PCDがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(1)0(TEST̲COMMAND1(2)1)
→
←
R(ACK)0
2
I(0)1(TEST̲COMMAND1(2)2)
→
←
I(0)1(TEST̲RESPONSE1(2))
3
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
シナリオ G.36:PICCがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND2(2))
→
←
I(1)0(TEST̲RESPONSE2(2)1)
2
R(ACK)1
→
←
I(0)1(TEST̲RESPONSE2(2)2)
3
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
シナリオ G.37:プロトコルの開始
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1), ~CRC)
→
←
無応答
2
R(NAK)0
→
←
R(ACK)1
3
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
4
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
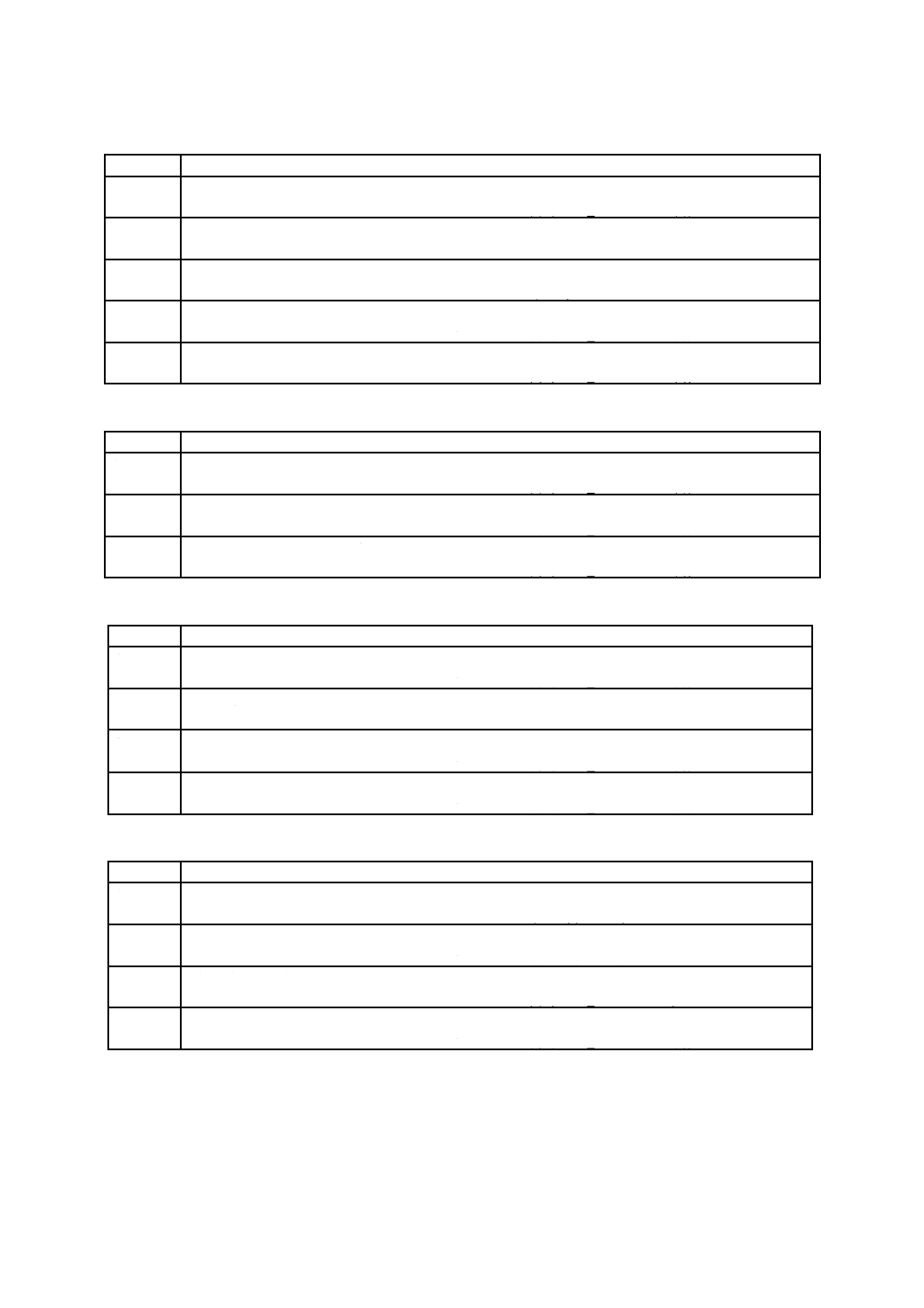
147
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.38:複数I-blockの交換
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
2
I(0)1(TEST̲COMMAND1(1), ~CRC)
→
←
無応答
3
R(NAK)1
→
←
R(ACK)0
4
I(0)1(TEST̲COMMAND1(1) )
→
←
I(0)1(TEST̲RESPONSE1(1))
5
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
シナリオ G.39:I-blockの交換1
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
2
R(NAK)0
→
←
I(0)0(TEST̲RESPONSE1(1))
3
I(0)1(TEST̲COMMAND1(1) )
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.40:I-blockの交換2
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
2
R(NAK, ~ CRC)0
→
←
無応答
3
R(NAK)0
→
←
I(0)0(TEST̲RESPONSE1(1))
4
I(0)1(TEST̲COMMAND1(1) )
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.41:待ち時間延長の要求
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND3)
→
←
S(WTX)(WTXM)
2
R(NAK)0
→
←
S(WTX)(WTXM)
3
S(WTX)(WTXM)
→
←
I(0)0(TEST̲RESPONSE3)
4
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
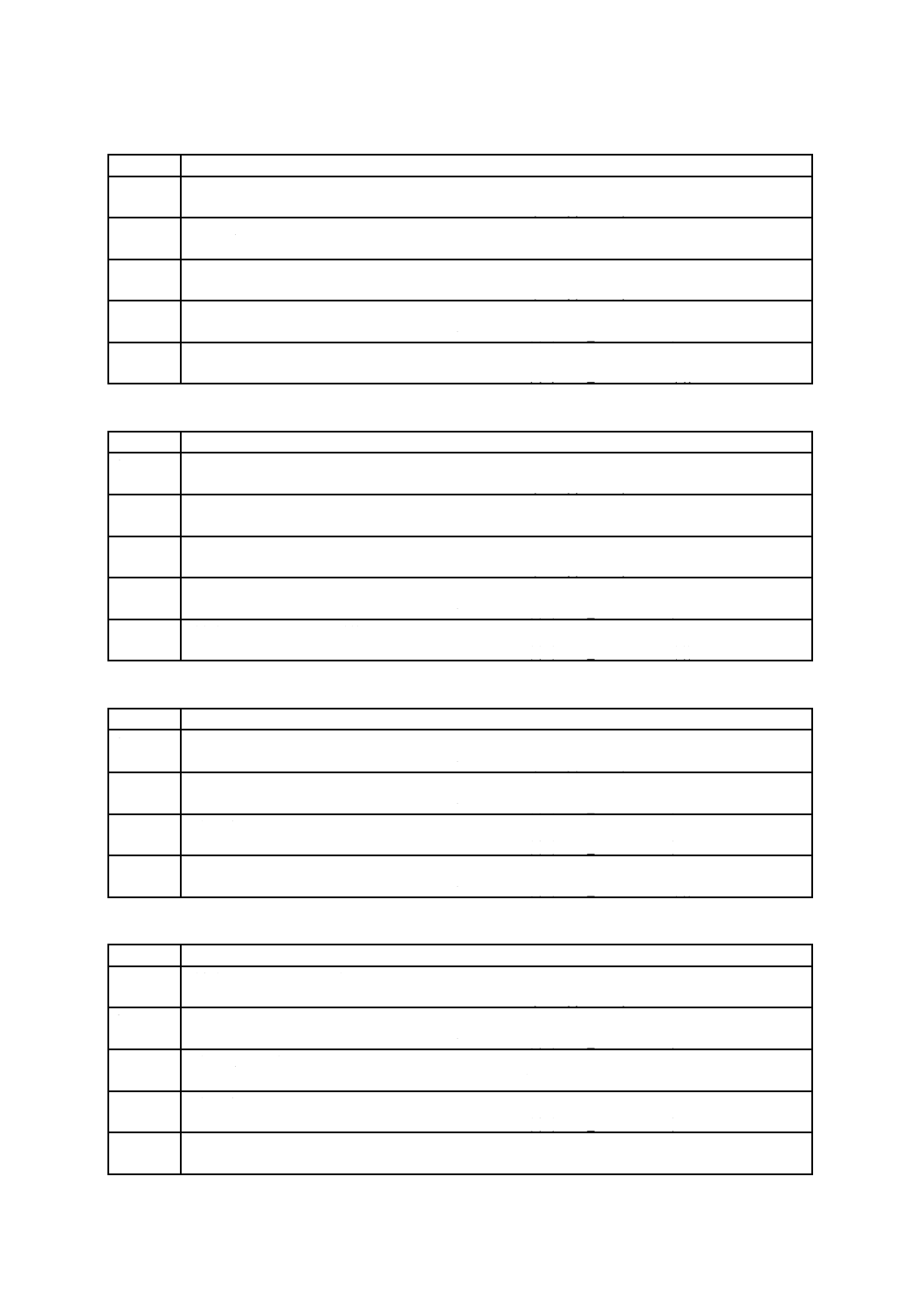
148
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.42:待ち時間延長の要求
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND3)
→
←
S(WTX)(WTXM)
2
R(NAK, ~ CRC)0
→
←
無応答
3
R(NAK)0
→
←
S(WTX)(WTXM)
4
S(WTX)(WTXM)
→
←
I(0)0(TEST̲RESPONSE3)
5
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.43:待ち時間延長の要求
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND3)
→
←
S(WTX)(WTXM)
2
S(WTX)(WTXM, ~CRC)
→
←
無応答
3
R(NAK)0
→
←
S(WTX)(WTXM)
4
S(WTX)(WTXM)
→
←
I(0)0(TEST̲RESPONSE3)
5
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.44:待ち時間延長の要求
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND3)
→
←
S(WTX)(WTXM)
2
S(WTX)(WTXM)
→
←
I(0)0(TEST̲RESPONSE3)
3
R(NAK)0
→
←
I(0)0(TEST̲RESPONSE3)
4
I(0)1(TEST̲COMMAND1(1) )
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.45:待ち時間延長の要求
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND3)
→
←
S(WTX)(WTXM)
2
S(WTX)( WTXM)
→
←
I(0)0(TEST̲RESPONSE3)
3
R(NAK, ~ CRC)0
→
←
無応答
4
R(NAK)0
→
←
I(0)0(TEST̲RESPONSE3)
5
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
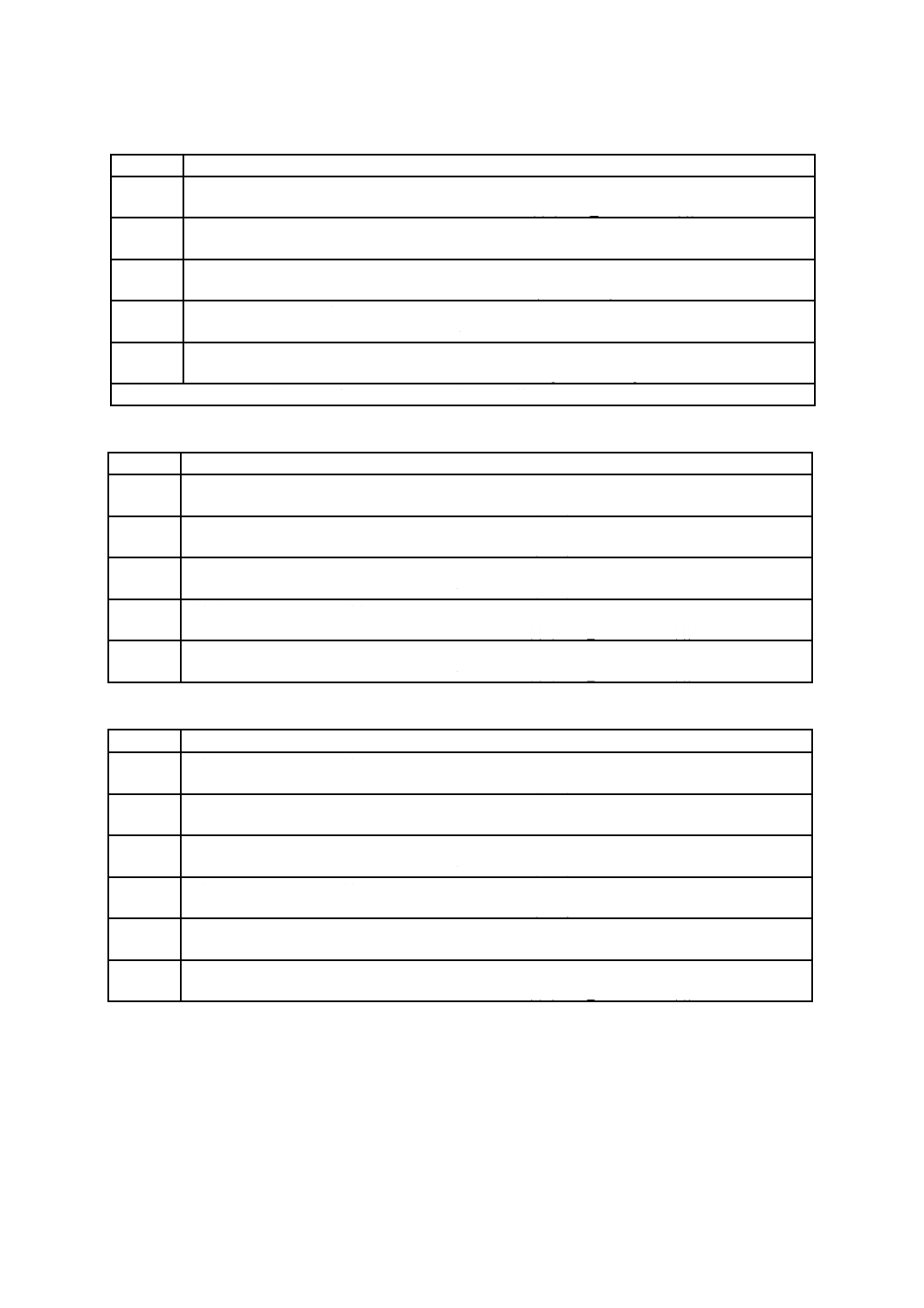
149
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.46:DESELECT
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
2
S(DESELECT, ~CRC)
→
←
無応答
3
S(DESELECT)
→
←
S(DESELECT)
4
REQA 又は REQB(1) a)
→
←
無応答
5
WUPA 又は WUPB(1) a)
→
←
ATQA 又は ATQB a)
注a) 左のコマンドはA型PICC,右のコマンドはB型PICCに使用する。
シナリオ G.47:PCDがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(1)0(TEST̲COMMAND1(3)1)
→
←
R(ACK)0
2
R(NAK)0
→
←
R(ACK)0
3
I(1)1(TEST̲COMMAND1(3)2)
→
←
R(ACK)1
4
I(0)0(TEST̲COMMAND1(3)3)
→
←
I(0)0(TEST̲RESPONSE1(3))
5
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.48:PCDがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(1)0(TEST̲COMMAND1(3)1)
→
←
R(ACK)0
2
I(1)1(TEST̲COMMAND1(3)2, ~CRC)
→
←
無応答
3
R(NAK)1
→
←
R(ACK)0
4
I(1)1(TEST̲COMMAND1(3)2)
→
←
R(ACK)1
5
I(0)0(TEST̲COMMAND1(3)3)
→
←
I(0)0(TEST̲RESPONSE1(3))
6
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
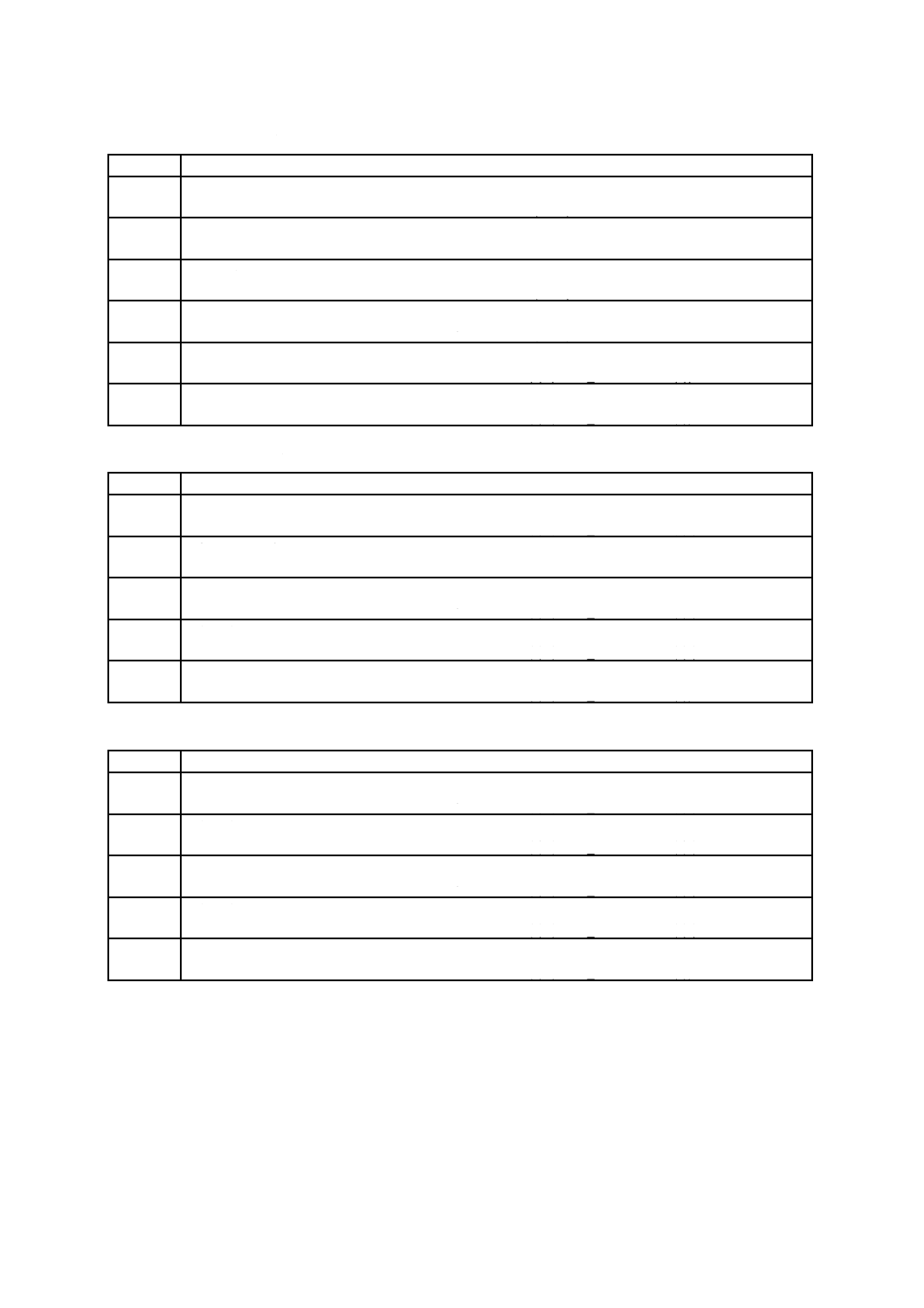
150
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.49:PCDがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(1)0(TEST̲COMMAND1(3)1)
→
←
R(ACK)0
2
R(NAK, ~CRC)0
→
←
無応答
3
R(NAK) 0
→
←
R(ACK)0
4
I(1)1(TEST̲COMMAND1(3)2)
→
←
R(ACK)1
5
I(0)0(TEST̲COMMAND1(3)3)
→
←
I(0)0(TEST̲RESPONSE1(3))
6
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.50:PICCがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND2(3))
→
←
I(1)0(TEST̲RESPONSE2(3)1)
2
R(ACK, ~CRC)1
→
←
無応答
3
R(ACK)1
→
←
I(1)1(TEST̲RESPONSE2(3)2)
4
R(ACK)0
→
←
I(0)0(TEST̲RESPONSE2(3)3)
5
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
シナリオ G.51:PICCがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND2(3))
→
←
I(1)0(TEST̲RESPONSE2(3)1)
2
R(ACK)1
→
←
I(1)1(TEST̲RESPONSE2(3)2)
3
R(ACK)1
→
←
I(1)1(TEST̲RESPONSE2(3)2)
4
R(ACK)0
→
←
I(0)0(TEST̲RESPONSE2(3)3)
5
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
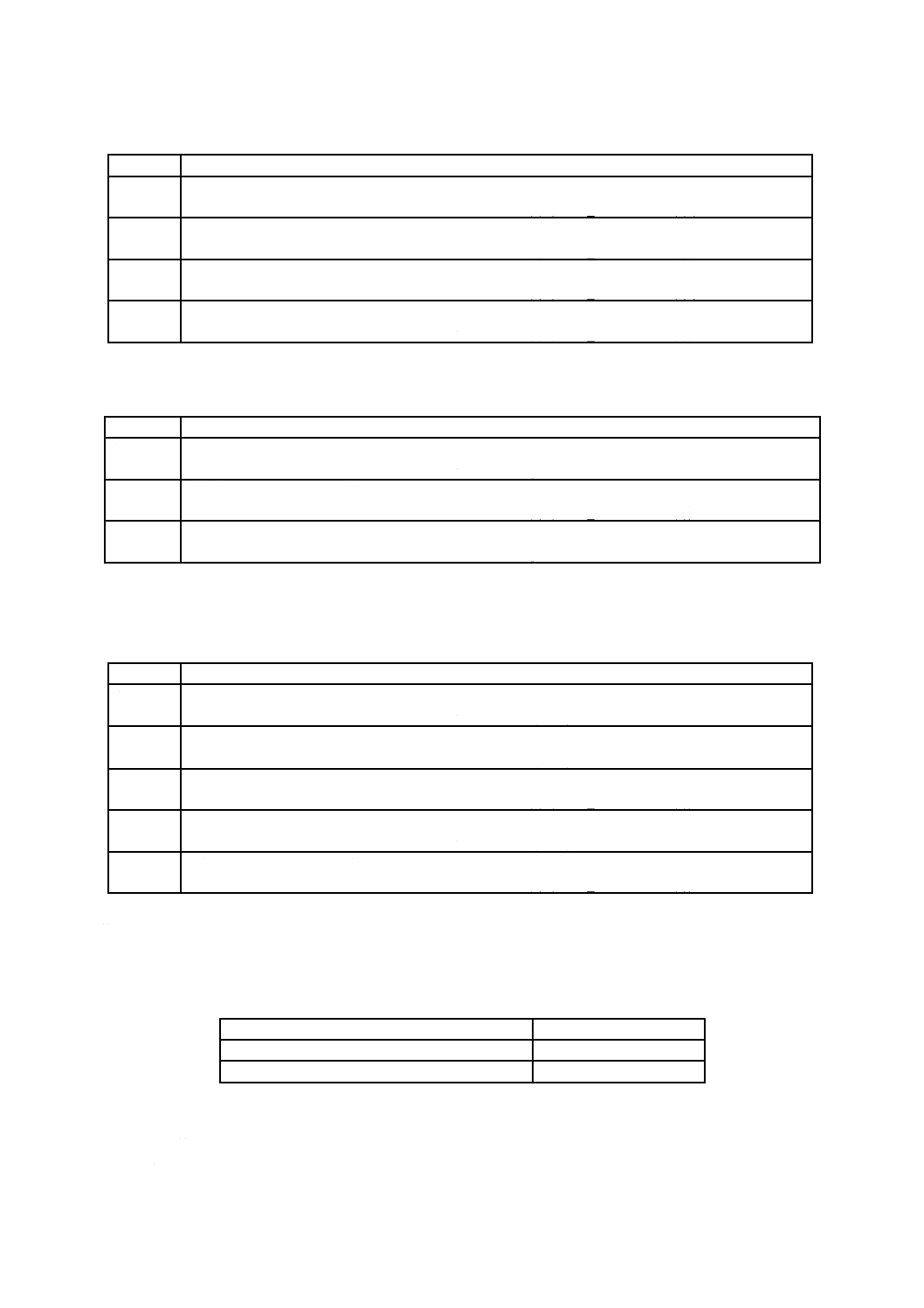
151
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.52:PICCがブロック連鎖を使用
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND2(2))
→
←
I(1)0(TEST̲RESPONSE2(2)1)
2
R(NAK)0
→
←
I(1)0(TEST̲RESPONSE2(2)1)
3
R(ACK)1
→
←
I(0)1(TEST̲RESPONSE2(2)2)
4
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
シナリオ G.53:PICCの存在確認 方法1
注記1 このシナリオは,削除された旧シナリオと置き換える。
手順
PICC試験装置
PICC
1
I(empty)0
→
←
I()0
2
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
3
I(empty)0
→
←
I()0
注記2 I(empty)0 は,I(0)0(empty)という意味である。I()0 は,I(0)0()という意味である。
シナリオ G.54:PICCの存在確認 方法2
注記3 このシナリオは,削除された旧シナリオと置き換える。
手順
PICC試験装置
PICC
1
R(NAK)0
→
←
R(ACK)1
2
R(NAK)0
→
←
R(ACK)1
3
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
4
R(NAK)1
→
←
R(ACK)0
5
I(0)1(TEST̲COMMAND1(1))
→
←
I(0)1(TEST̲RESPONSE1(1))
G.5.2.3 試験成績書
表G.53の説明に従って,表G.63の該当欄に試験結果を記入する。
表G.53−JIS X 6322-4:2011 シナリオにおけるPICCの反応の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.5.3 PICCの誤り検出の扱い
G.5.3.1 目的
この試験は,JIS X 6322-4:2011の7.5.6に規定するPICCの誤り検出機構を判定する。
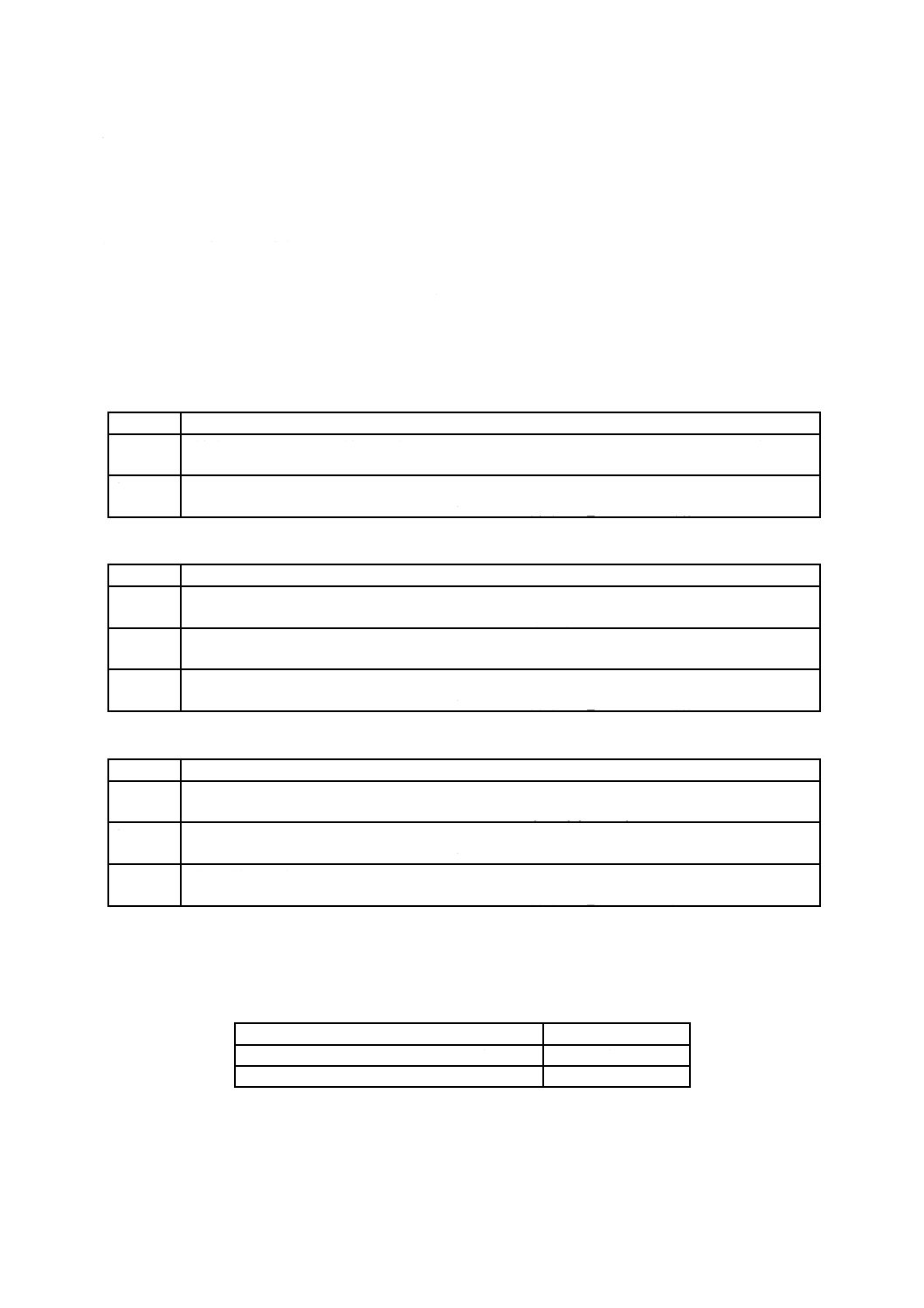
152
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.5.3.2 手順
G.55〜G.57の各シナリオに対し,次の手順を実行する。
a) 参照PICCを動作磁界内に置く。
b) CID=0及びFSDI=0として,G.5.1.1に示したようにPICCを活性化する。
c) シナリオの各手順を実行する。
1) PICC試験装置欄に示すようにコマンドを送る。
2) PICCの応答がPICC欄に示したものに一致することを確認する。
d) 終了する。
注記 次のシナリオの参照欄に,JIS X 6322-4の7.5.3〜7.5.6における参照規則を記載する。
シナリオ G.55:I-blockのCRC不良
手順
PICC試験装置
PICC
参照
1
I(0)0(TEST̲COMMAND1(1), ~CRC)
→
←
無応答
7.5.6.1 a)
2
I(0)0(TEST̲COMMAND1(1))
→
←
I(0)0(TEST̲RESPONSE1(1))
シナリオ G.56:連鎖したI-blockのCRC不良
手順
PICC試験装置
PICC
参照
1
I(1)0(TEST̲COMMAND1(2)1)
→
←
R(ACK)0
2
I(0)1(TEST̲COMMAND1(2)2, ~CRC)
→
←
無応答
7.5.6.1 a)
3
I(0)1(TEST̲COMMAND1(2)2)
→
←
I(0)1(TEST̲RESPONSE1(2))
シナリオ G.57:S(WTX)-blockのCRC不良
手順
PICC試験装置
PICC
参照
1
I(0)0(TEST̲COMMAND3)
→
←
S(WTX) (WTXM)
2
S(WTX)(WTXM, ~CRC)
→
←
無応答
7.5.6.1 a)
3
S(WTX)(WTXM)
→
←
I(0)0(TEST̲RESPONSE3)
G.5.3.3 試験成績書
表G.54の説明に従って,表G.63の該当欄に試験結果を記入する。
表G.54−PICCの誤り検出の扱いの試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.5.4 CIDにおけるPICCの反応
G.5.4.1 目的
この試験は,JIS X 6322-4:2011の7.1.1.2に従って,CID符号化に対するPICCの反応を判定する。
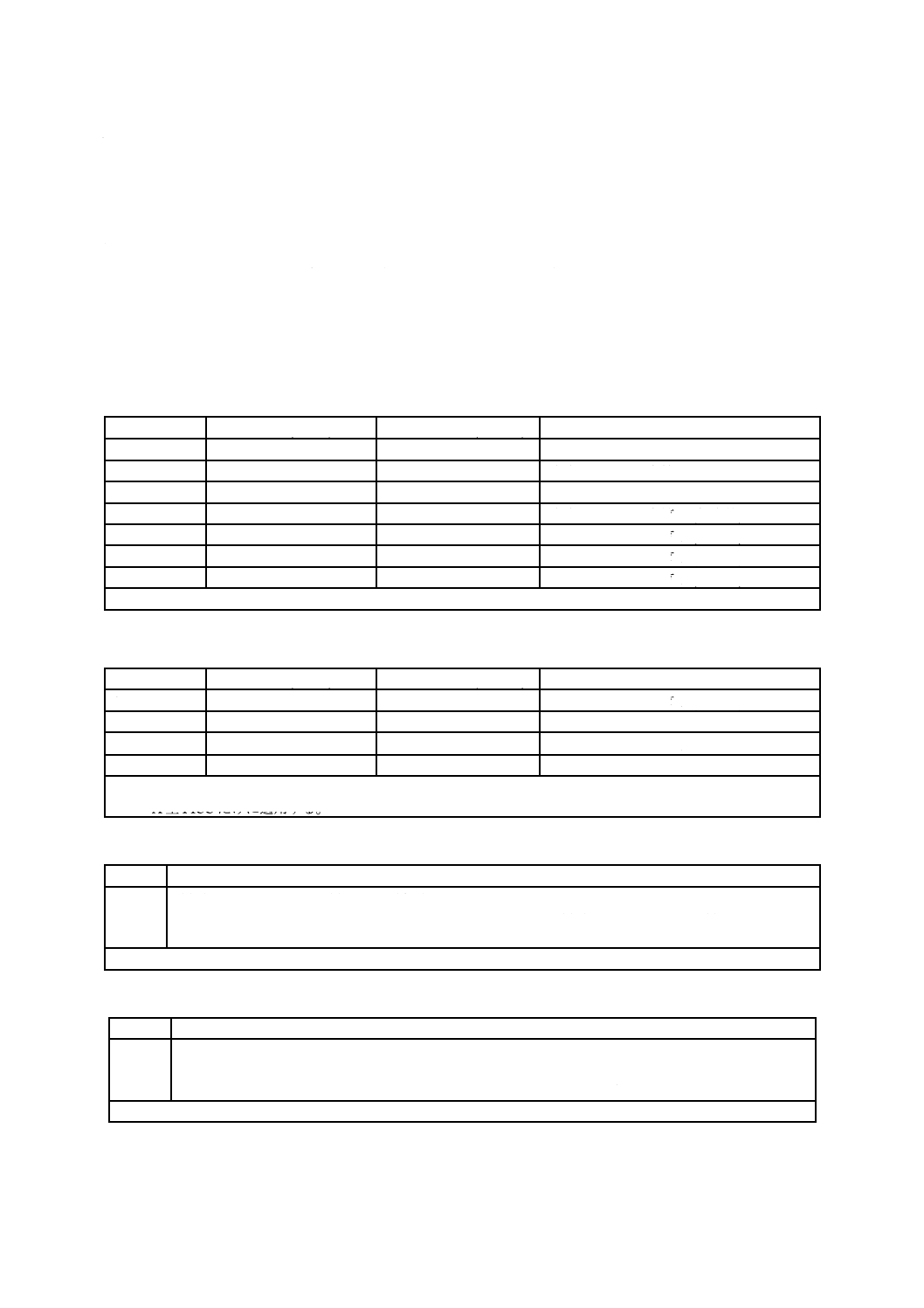
153
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.5.4.2 手順
G.58〜G.62の各シナリオに対し,次の手順を実行する。PICCのCID対応の有無に応じて,適切なCID
試験条件表を使用する。
CID試験条件表の表G.55又は表G.56の各行に対し,次を実行する。
a) 割当てCID欄で示すcidassでPICCを活性化する。
b) 対応するシナリオで示すブロック交換を実行する。CID試験条件表のコマンドCID欄に示すcidcmdを
使用する。
c) PICCの応答がシナリオのPICC欄に示す応答に一致することを確認する。PICCの応答に二つの選択
肢が示される場合,期待される応答は,CID試験条件表のPICC応答の期待値から判定する。
表G.55−CID試験条件表(PICCがCIDに対応している場合)
試験番号a)
割当てCID (cidass)
コマンドCID (cidcmd)
PICC応答の期待値
1
1
1
試験シナリオの応答 1
2
0
0
試験シナリオの応答 1
3
0
CIDなし
試験シナリオの応答 1
4
1
CIDなし
試験シナリオの応答 2 (無応答)
5
0
1
試験シナリオの応答 2 (無応答)
6
1
0
試験シナリオの応答 2 (無応答)
7
2
1
試験シナリオの応答 2 (無応答)
注a) 示されている全シナリオで,この表の全試験番号を試験しなければならない。
表G.56−CID試験条件表(PICCがCIDに対応していない場合)
試験番号a)
割当てCID (cidass)
コマンドCID (cidcmd)
PICC応答の期待値
1
0
0
試験シナリオの応答 2 (無応答)
2
0
CIDなし
試験シナリオの応答 1
3
0
1
試験シナリオの応答 2 (無応答)
4 b)
1
CIDなし
試験シナリオの応答 1
注a) 示されている全シナリオで,この表の全試験番号を試験しなければならない。
b) A型PICCだけに適用する。
シナリオ G.58:I-blockのCID
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1), CID = cidcmd)
→
←
応答1: I(0)0(TEST̲RESPONSE1(1), CID= cidcmd)
応答2: 無応答 a)
注a) 表G.55又は表G.56によって,応答1又は応答2となる。
シナリオ G.59:連鎖したI-blockのCID
手順
PICC試験装置
PICC
1
I(1)0(TEST̲COMMAND1(2)1,CID = cidcmd)
→
←
応答1: R(ACK, CID= cidcmd)0
応答2: 無応答 a)
注a) 表G.55又は表G.56によって,応答1又は応答2となる。
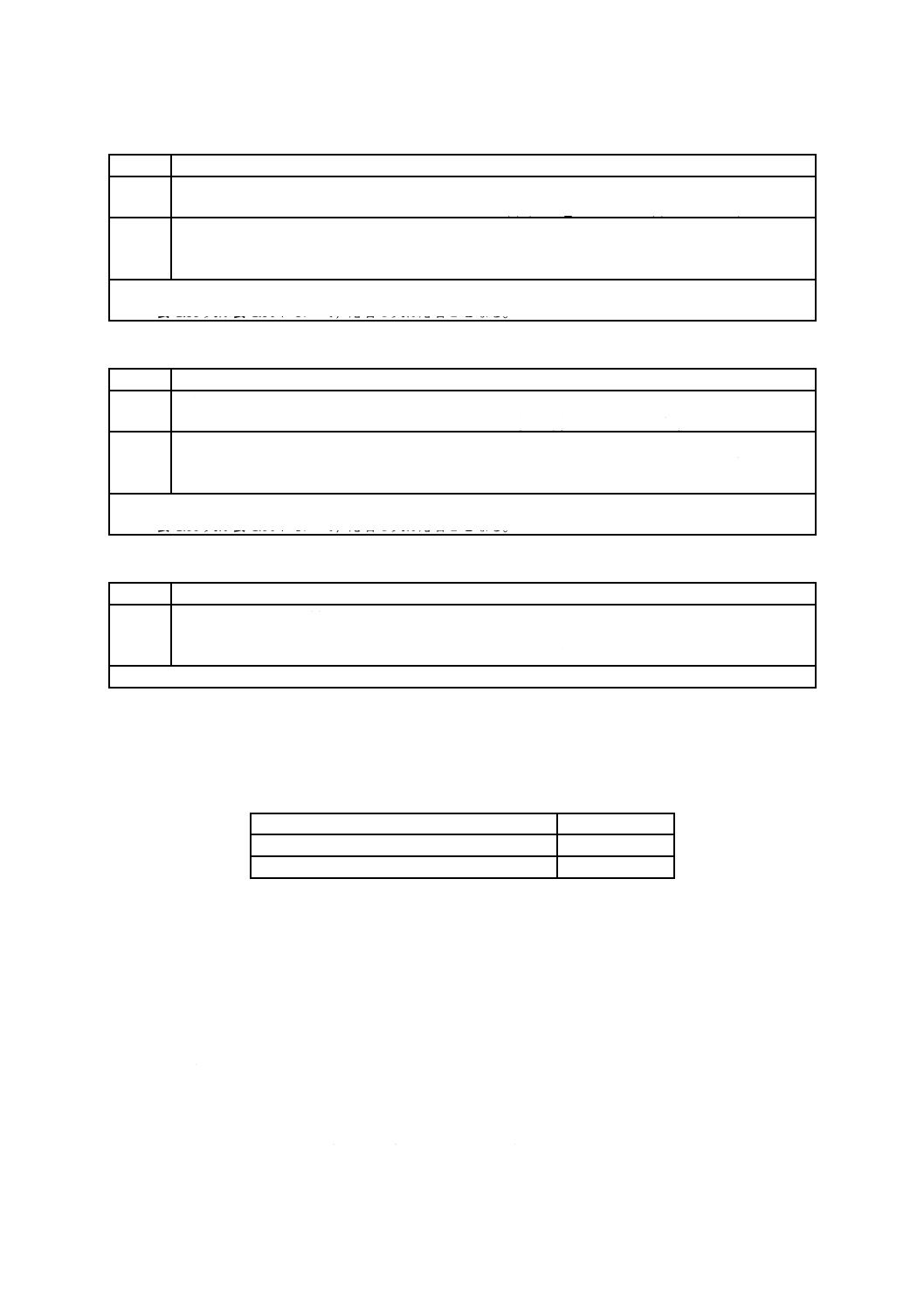
154
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.60:R-blockのCID
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND2(3), CID a)= cidass)
→
←
I(1)0(TEST̲RESPONSE2(3)1,CID= cidass)
2
R(ACK, CID a)= cidcmd) 1
→
←
応答1: I(1)1(TEST̲RESPONSE2(3)2,CID a)= cidcmd)
応答2:無応答 b)
注a) CIDに対応していないPICCに対しては,CIDなしとする。
b) 表G.55又は表G.56によって,応答1又は応答2となる。
シナリオ G.61:S(WTX)-blockのCID
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND3, CID a)= cidass)
→
←
S(WTX)(WTXM, CID= cidass)
2
S(WTX,)(WTXM, CID a)= cidcmd)
→
←
応答1: I(0)0(TEST̲RESPONSE3,CID a)= cidcmd )
応答2: 無応答 b)
注a) CIDに対応していないPICCに対しては,CIDなしとする。
b) 表G.55又は表G.56によって,応答1又は応答2となる。
シナリオ G.62:S(DESELECT)-blockのCID
手順
PICC試験装置
PICC
1
S(DESELECT, CID= cidcmd)
→
←
応答1: S(DESELECT, CID= cidcmd)
応答2: 無応答 a)
注a) 表G.55又は表G.56によって,応答1又は応答2となる。
G.5.4.3 試験成績書
表G.57の説明に従って,表G.63の該当欄に試験結果を記入する。
表G.57−CIDにおけるPICCの反応の試験結果の判定
説明
試験結果
手順に示すようにPICCが応答した場合
合格
その他の場合
不合格
G.5.5 NADにおけるPICCの反応
G.5.5.1 目的
この試験は,JIS X 6322-4:2011の7.1.1.3に従って,NAD符号化に対するPICCの反応を判定する。
G.5.5.2 手順
G.63〜G.65の各シナリオに対し,次の手順を実行する。
CID=0及びFSDI=0として,G.5.1.1に示したようにPICCを活性化する。
シナリオの各手順を実行する。
a) PICC試験装置欄に示すようにコマンドを送る。
b) PICCの応答がPICC欄で与えられたものと一致することを確認する。
nは,b4及びb8がb“0”に設定された有効なNADの任意の値とする。
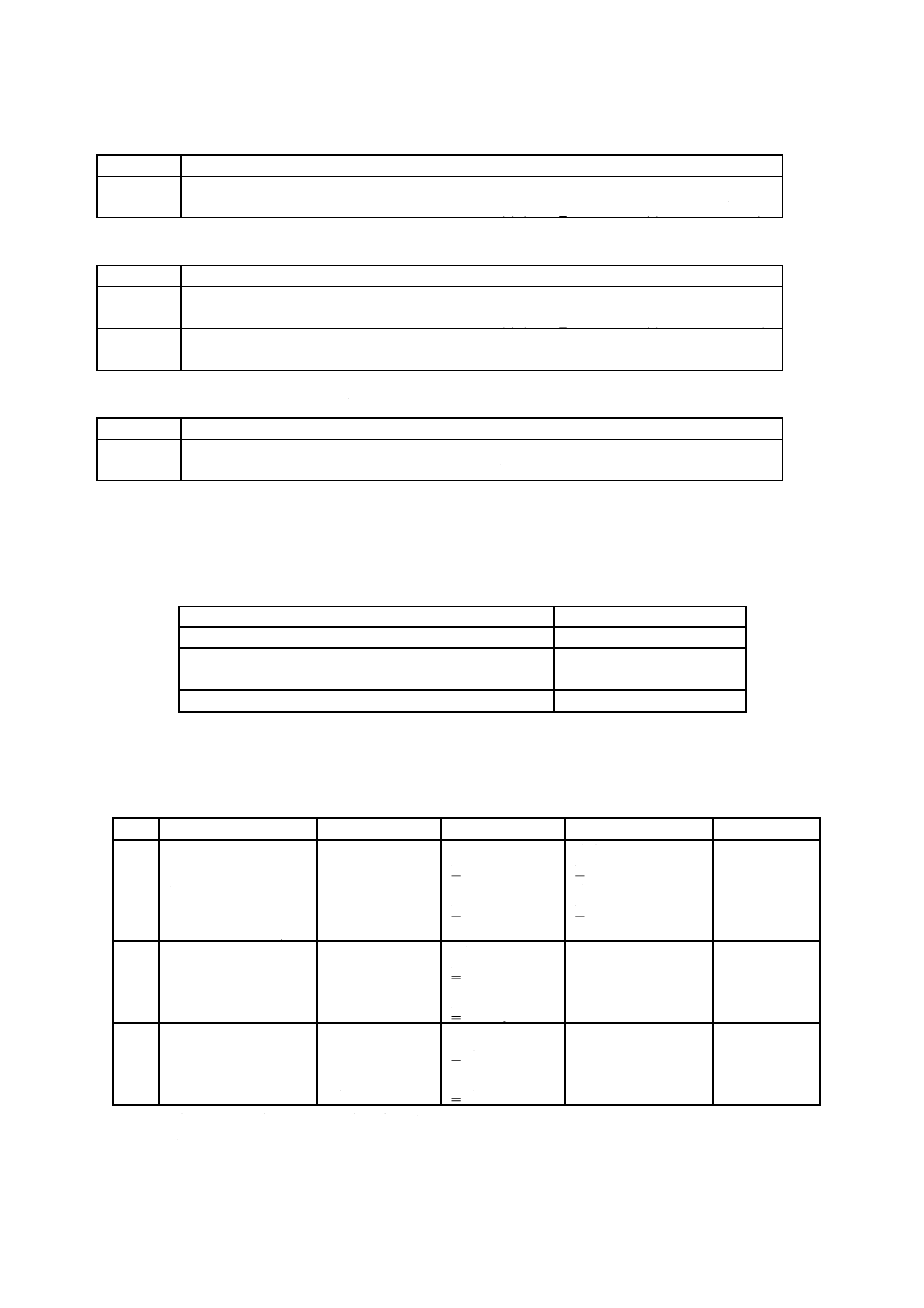
155
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオ G.63:NADに対応しているPICCのI-blockのNAD
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1), NAD=n)
→
←
I(0)0(TEST̲RESPONSE1(1),NADを含む。)
シナリオ G.64:NADに対応しているPICCの連鎖I-blockのNAD
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND2(3), NAD=n)
→
←
I(1)0(TEST̲RESPONSE2(3)1,NADを含む。)
2
R(ACK)1
→
←
I(1)1(TEST̲RESPONSE2(3)2,NADを含まず)
シナリオ G.65:NADに対応していないPICCのI-blockのNAD
手順
PICC試験装置
PICC
1
I(0)0(TEST̲COMMAND1(1), NAD=n)
→
←
無応答
G.5.5.3 試験成績書
表G.58の説明に従って,表G.63の該当欄に試験結果を記入する。
表G.58−NADにおけるPICCの反応の試験結果の判定
説明
試験結果
PICCに対しシナリオを適用しない場合
適用外(NA)
PICCに対しシナリオを適用するとき,手順に示すように
PICCが応答した場合
合格
その他の場合
不合格
G.6
試験結果報告
表G.59−A型PICC規定タイミング表
項番
パラメタ
JIS参照規格
最小値
最大値
測定値
1
PCDからPICCへのフ
レーム遅延時間
(REQA,WUPA,
ANTICOLLISION及び
SELECT コマンド)
JIS X 6322-3:2011
の6.2.1.1
最終ビット b“1”
≧ 1 236/fc
最終ビット b“0”
≧ 1 172/fc
最終ビット b“1”
≧ 1 236/fc +0.4μs
最終ビット b“0”
≧ 1 172/fc +0.4μs
2
RATS及び非活性化フ
レーム遅延時間
JIS X 6322-4:2011
の8.1
最終ビット b“1”
≧ 1 236/fc
最終ビット b“0”
≧ 1 172/fc
65 536/fc
(約4.8 ms)
3
PCDからPICCへのフ
レーム遅延時間
(項番2を除くフレー
ム)
JIS X 6322-3:2011
の6.2.1.1及びJIS
X 6322-4:2011の
8.1
最終ビット b“1”
≧ 1 236/fc
最終ビット b“0”
≧ 1 172/fc
(256/fs)×2FWI
(約302.06 µs ×2FWI)
FWI =
Max FDT=
注記 全タイミング値は,搬送波周波数fc = 13.56 MHz及びビット伝送速度=fc/128(約106 kbit/s)で計
算する。
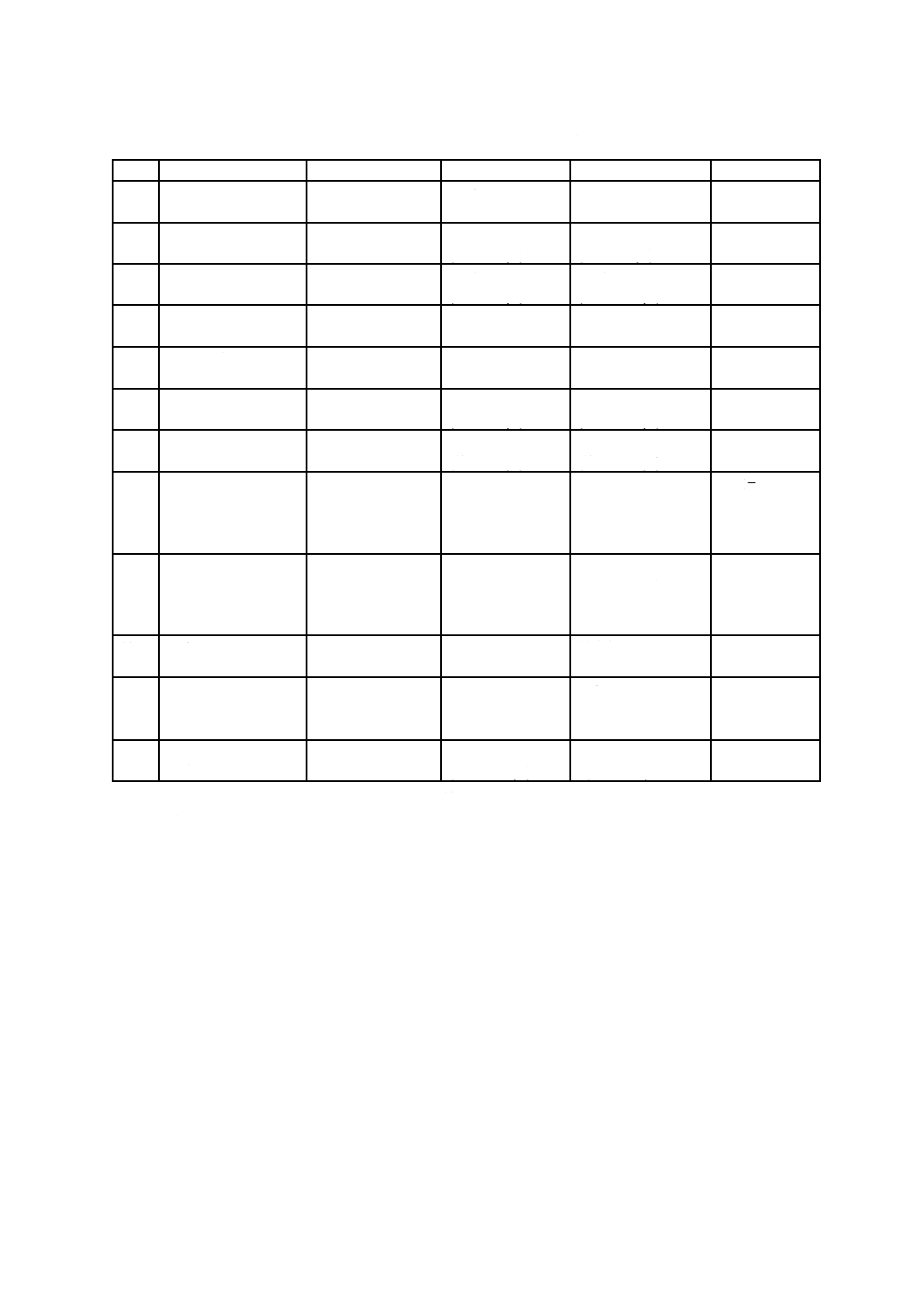
156
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.60−B型PICC規定タイミング表
項番
パラメタ
JIS参照規格
標準最小値
標準最大値
測定値
1
SOF論理0
JIS X 6322-3:2011
の7.1.4
10 etu
(約94.40 µs)
11 etu
(約103.83 µs)
2
SOF論理1
JIS X 6322-3:2011
の7.1.4
2 etu
(約18.88 µs)
3 etu
(約28.32 µs)
3
EOF論理0
JIS X 6322-3:2011
の7.1.5
10 etu
(約94.40 µs)
11 etu
(約103.83 µs)
4
ビット境界
JIS X 6322-3:2011
の7.1.1
(n ‒ 1/8) etu
(n + 1/8) etu
5
PICC からPCDへの
EGT
JIS X 6322-3:2011
の7.1.2
0 µs
19 µs
6
ATQBのTR0
JIS X 6322-3:2011
の7.1.6
64/fs
(約75.52 µs)
256/fs
(約302.06 µs)
7
ATQBのTR1
JIS X 6322-3:2011
の7.1.6
80/fs
(約94.40 µs)
200/fs
(約235.99 µs)
8
ATQB以外のTR0
JIS X 6322-3:2011
の7.1.6
JIS X 6322-3:2011
の7.10.3
JIS X 6322-3:2011
の表30の規定値
(256/fs)×2FWI
(約302.06 µs×2FWI)
FWI =
Max TR0 =
9
ATQB以外のTR1
JIS X 6322-3:2011
の7.1.6
JIS X 6322-3:2011
の7.10.3
JIS X 6322-3:2011
の表31の規定値
200/fs
(約235.99 µs)
10
TR2
JIS X 6322-3:2011
の7.9.4.4
JIS X 6322-3:2011
の表27の規定値
最大値なし
11
EOFの終わりから副
搬送波終了までの過
渡時間
JIS X 6322-3:2011
の7.1.7
0
2 etu
12
非活性化フレーム待
ち時間
JIS X 6322-4:2011
の8.1
64/fs + 80/fs
(約169.92 µs)
65 536/fc
(約4.8 ms)
注記 全タイミング値は,搬送波周波数fc = 13.56 MHz及びビット伝送速度=fc/128(約106 kbit/s)で計
算する。
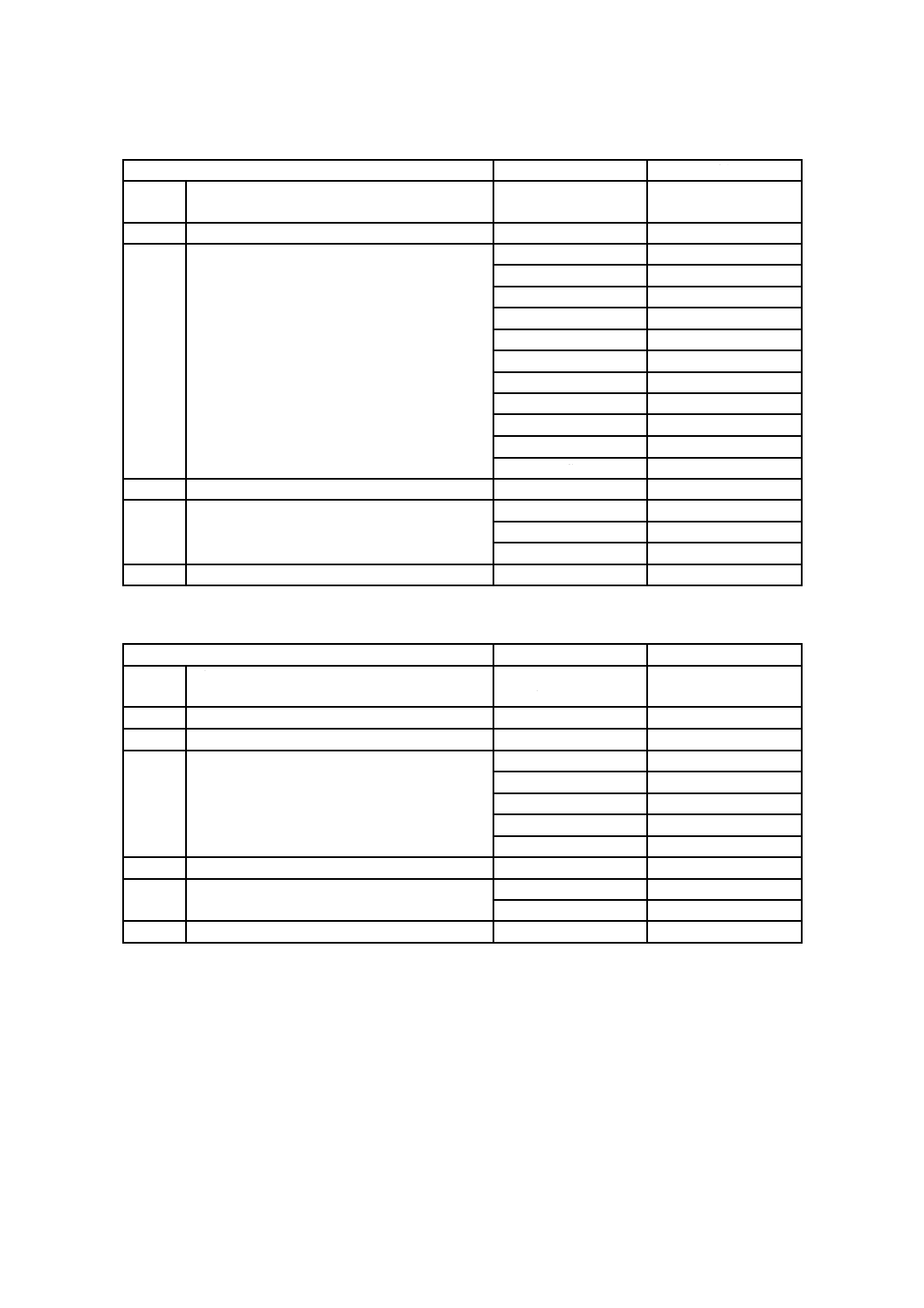
157
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.61−A型PICC固有の試験結果報告
この規格による試験方法
シナリオ番号
試験結果
箇条
パラメタ
この規格の
試験シナリオ番号
合格,不合格,又は
適用外(NA)
G.3.2
ポーリング
シナリオ G.1
G.3.3
A型PICCの状態遷移の試験
シナリオ G.2
シナリオ G.3
シナリオ G.4
シナリオ G.5
シナリオ G.6
シナリオ G.7
シナリオ G.8
シナリオ G.9
シナリオ G.10
シナリオ G.11
シナリオ G.12
G.3.4
A型PICCの衝突防止の扱い
シナリオ G.13
G.3.6
PPS要求の扱い
シナリオ G.17
シナリオ G.18
シナリオ G.19
G.3.7
FSDの扱い
シナリオ G.20
表G.62−B型PICC固有の試験結果報告
この規格による試験方法
シナリオ番号
試験結果
箇条
パラメタ
この規格の
試験シナリオ番号
合格,不合格,又は
適用外(NA)
G.4.2
ポーリング
シナリオ G.21
G.4.3
PICCの反応
シナリオ G.22
G.4.4
B型PICCの状態遷移の試験
シナリオ G.23
シナリオ G.24
シナリオ G.25
シナリオ G.26
シナリオ G.27
G.4.5
B型PICCの衝突防止の扱い
シナリオ G.28
G.4.6
ATTRIBの扱い
シナリオ G.29
シナリオ G.30
G.4.7
最大フレームサイズの扱い
シナリオ G.31
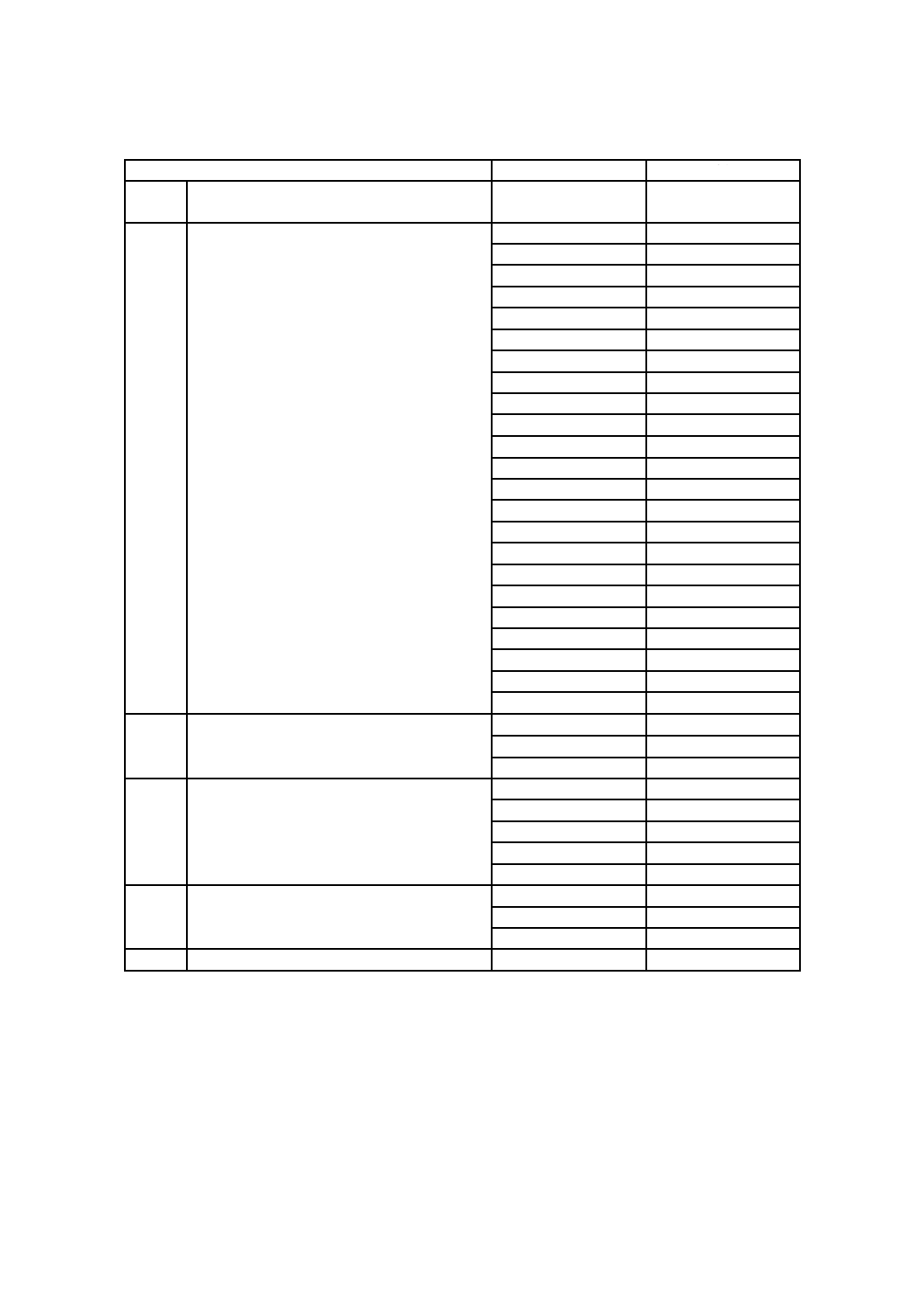
158
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表G.63−A型/B型PICC共通の試験結果報告
この規格による試験方法
シナリオ番号
試験結果
箇条
パラメタ
この規格の
試験シナリオ番号
合格,不合格,又は
適用外(NA)
G.5.2
JIS X 6322-4:2011 シナリオにおけるPICCの
反応
シナリオ G.32
シナリオ G.33
シナリオ G.34
シナリオ G.35
シナリオ G.36
シナリオ G.37
シナリオ G.38
シナリオ G.39
シナリオ G.40
シナリオ G.41
シナリオ G.42
シナリオ G.43
シナリオ G.44
シナリオ G.45
シナリオ G.46
シナリオ G.47
シナリオ G.48
シナリオ G.49
シナリオ G.50
シナリオ G.51
シナリオ G.52
シナリオ G.53
シナリオ G.54
G.5.3
PICCの誤り検出の扱い
シナリオ G.55
シナリオ G.56
シナリオ G.57
G.5.4
CIDにおけるPICCの反応
シナリオ G.58
シナリオ G.59
シナリオ G.60
シナリオ G.61
シナリオ G.62
G.5.5
NADにおけるPICCの反応
シナリオ G.63
シナリオ G.64
シナリオ G.65
G.1.5.1
RFU値
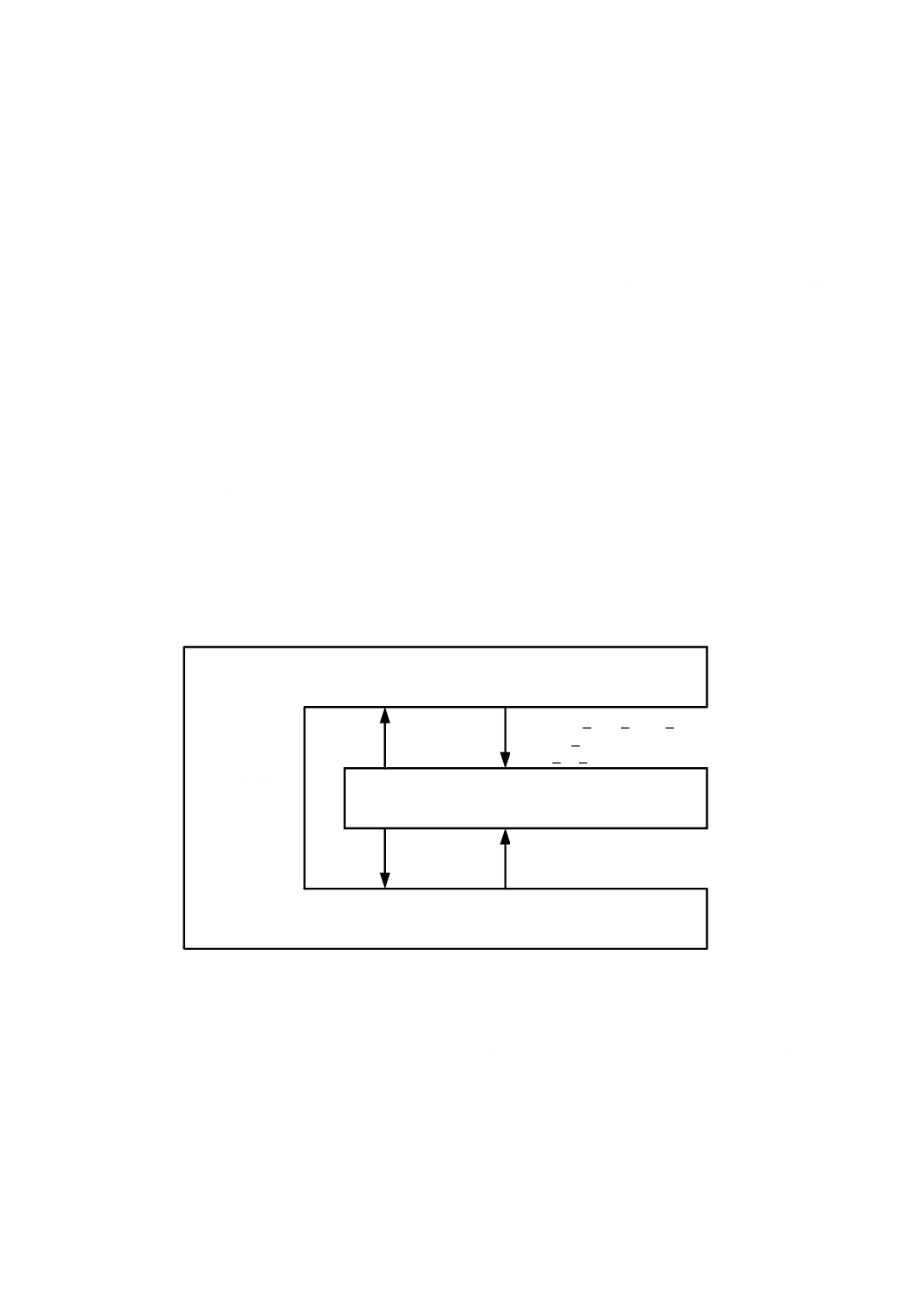
159
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(規定)
追加のPCD試験方法
H.1 PCD試験装置及び附属品
この箇条は,JIS X 6322-3:2011及びJIS X 6322-4:2011に従い,PCDの動作を確認するためのPCD試験
装置及び試験回路を定義する。
H.1.1 試験方法
ISO/IEC 9646規格群の抽象化モデルを選択し,試験対象PCDとLTとの間のJIS X 6322規格群のプロ
トコル試験に対してローカル試験方法を適用する。
H.1.2 PCD試験装置の構成
PCD試験装置は,次の二つの部分(図H.1参照)で構成する。
− 上位試験装置(UT)(試験対象PCDに適合したホストインタフェースをもつパーソナルコンピュー
タでもよい。)
− 下位試験装置(LT)
試験対象PCDは,試験対象装置(IUT)として扱う。
PCDが製品に組み込まれている場合には,UTを含む。この場合には,幾つかの試験は適用できなくて
もよい。また,この規格に特定の要求事項がない場合には,試験結果は,性能の報告だけでよい。
試験対象装置
(IUT = PCD)
上位試験装置(UT)
下位試験装置(LT )
PCD試験装置
TM-PDUs
TB -PDUs
INITIALIZE̲ PCD̲ TEST ̲MODE
INITIATE̲ANTICOLLISION
SEND̲UT̲APDU
I-blocks
R-blocks
S-blocks
図H.1−試験装置の概念的な構造
PCD試験装置のLT部は,次を含む。
− A型及びB型のプロトコルのエミュレートが可能な,ハードウェア及びソフトウェアで構成する
PICCエミュレータ。
− デジタルサンプリングオシロスコープ(5.1.1参照)
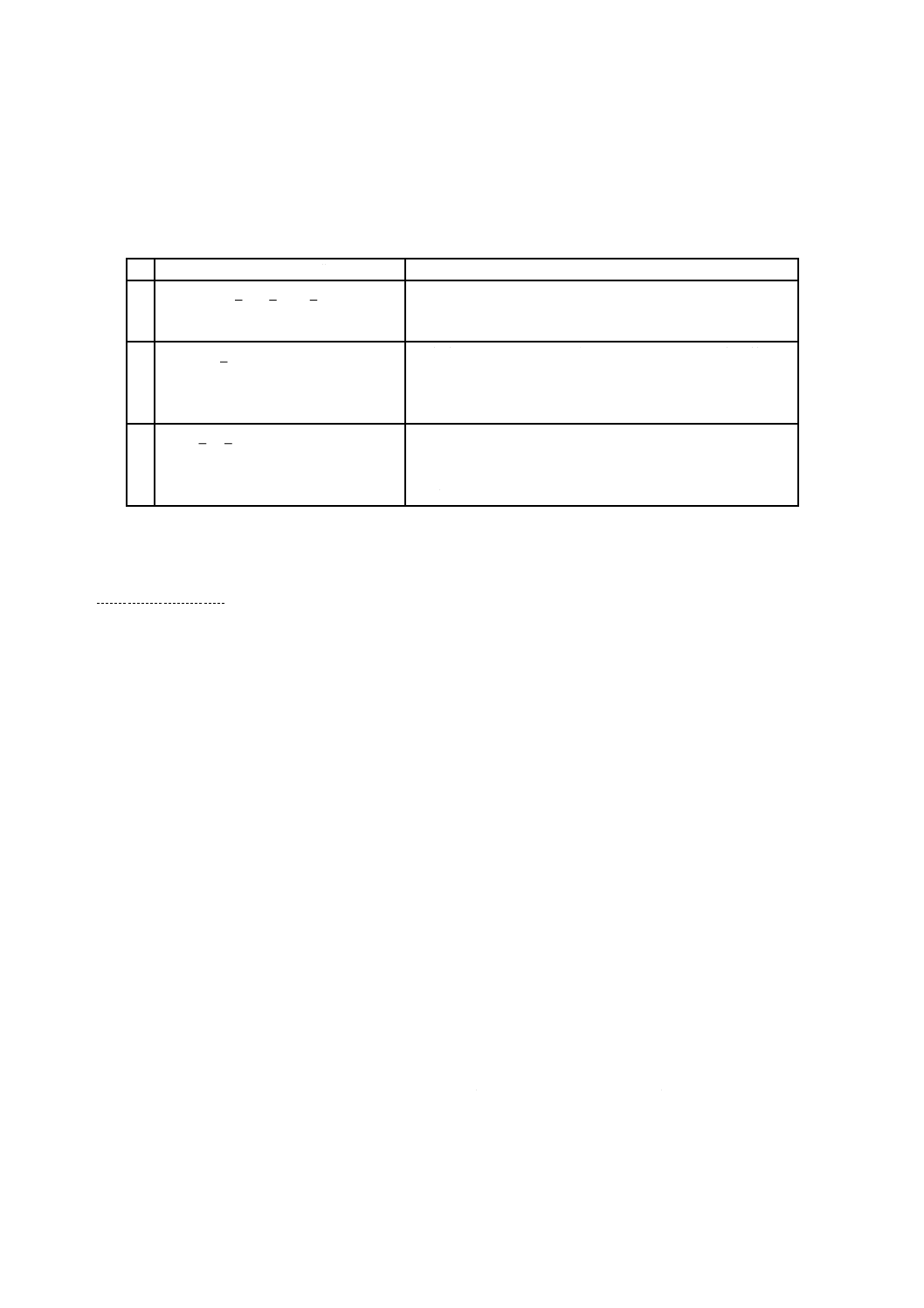
160
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.1.3 PCD試験装置のインタフェース
UT及びIUTは,TM-PDU(試験管理プロトコルのデータ単位)を用いて通信する。TM-PDUの定義は,
製品に依存し,IUT製造業者によって規定され,表H.1に要求される動作を指示しなければならない。
表H.1−論理インタフェースコマンド
TM-PDUの名称
要求されるIUTの動作
1
INITIALIZE̲PCD̲TEST̲MODE
電源オンの状態に戻す(IUTが衝突防止ループに遷移すると
期待される。)。
IUTは,この動作の結果を示すコードをUTに返す。
2
INITIATE̲ANTICOLLISION
衝突防止手順を開始する(IUTが初期化に続いて自動的に衝
突防止手順を開始する場合,この手順は,くう(空)でもよ
い。)。
IUTは,この動作の結果を示すコードをUTに返す。
3
SEND̲UT̲APDU
IUTは,RFインタフェースを介してUT̲APDUをLTに送信
し,この動作の結果を示すコードをUTに返す。IUTからの
応答は,送信したUT̲APDUに対するLTの応答を含まなけ
ればならない。
PCD試験装置は,UTインタフェースを介してIUT製造業者によって提供されるIUTユーティリティ情
報を初期化し,LTインタフェースを介して必要な手順,プロトコル及び解析を実行するために,それ自体
(PCD試験装置)を構成することができなければならない。
H.1.4 入出力プロトコルのエミュレート
PCD試験装置は,LTインタフェースにおいて試験シナリオを実行するために要求されるA型及びB型
のプロトコル,並びにPICCアプリケーションをエミュレートできなければならない。LTは,送信パケッ
トを要求された長さの連鎖ブロックに分割できなければならない。
次の任意選択を個別にシミュレートするためにLTを構成できなければならない。
− NAD及びCIDの構成
− フレームサイズ,ビット伝送速度及び試験方法の実装に要求される他のパラメタ
H.1.5 伝送方式における入出力キャラクタタイミングの生成
PCD試験装置は,LTインタフェースにおいて,JIS X 6322-3:2011に従い,入出力ビット列を生成でき
なければならない。タイミングパラメタ:[すなわち,スタートビット持続時間,拡張保護時間(B型だけ),
ビット持続時間,フレーム遅延時間,フレーム開始信号の幅及びフレーム終了信号の幅]を設定できなけ
ればならない。A型の試験目的のために,LTは,選択されたビット位置(複数)でビット衝突をシミュレ
ートできなければならない。
H.1.6 RF入出力プロトコルの観測及び測定
PCD試験装置は,LTインタフェースにおいて,PCDによって伝送された論理“低”状態及び“高”状
態のタイミングを観測し,測定できなければならない。
H.1.7 プロトコル解析
PCD試験装置は,JIS X 6322-3:2011及びJIS X 6322-4:2011で規定されるA型及びB型のプロトコルに
従って,LTインタフェースにおいて入出力ビット列を解析し,プロトコルを更に解析するために論理的な
データの流れを抽出できなければならない。
161
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.1.8 プロトコル活性化手順
H.1.8.1 衝突防止試験方法のための活性化手順
次の手順で,LTを活性化する。
a) A型又はB型プロトコルをエミュレートするためにLTを構成する。
b) UTは,INITIALIZE̲PCD̲TEST̲MODE (TM-PDU)をPCDに送信する。
c) UTは,INITIATE̲ANTICOLLISION (TM-PDU)をPCDに送信する。
H.1.8.2 A型プロトコル試験方法のための活性化手順
次の手順で,LTを活性化する。
a) A型プロトコルをエミュレートするためにLTを構成する。
b) UTは,INITIALIZE̲PCD̲TEST̲MODE (TM-PDU)をPCDに送信する。
c) UTは,INITIATE̲ANTICOLLISION (TM-PDU)をPCDに送信する。PCDは,JIS X 6322-3:2011の箇条
6で定義される衝突防止手順(リクエスト,衝突防止ループ,及び選択)を適用しなければならない。
PCDは,JIS X 6322-4:2011の箇条5で定義されるプロトコル活性化手順を適用しなければならない。
d) PCDは,活性化手順の実行結果をUTに報告する。
H.1.8.3 B型プロトコル試験方法のための活性化手順
次の手順で,LTを活性化する。
a) B型プロトコルをエミュレートするためにLTを構成する。
b) UTは,INITIALIZE̲PCD̲TEST̲MODE (TM-PDU)をPCDに送信する。
c) UTは,INITIATE̲ANTICOLLISION (TM-PDU)をPCDに送信する。PCDは,JIS X 6322-3:2011の箇条
7で定義される衝突防止手順を適用しなければならない。
d) PCDは,活性化手順の実行結果をUTに報告する。
H.1.9 試験シナリオ
H.1.9.1 概要
この規格で定義するPCDの試験は,実行すべき試験シナリオを要求する。この試験シナリオは,“典型
的なプロトコル及びアプリケーションに特化した通信”とし,プロトコル及びアプリケーションに特化し
た機能で,通常の使用でみられ,PCDに実装される機能に依存する。
典型的な試験シナリオは,H.1.3で定義したコマンドTM-PDUのセットとする。
試験シナリオは,これらの試験を実施する装置で定義され,試験成績とともに記録しなければならない。
試験シナリオは,通常の使用で利用されると予想されるPCDの代表的な機能の部分集合を,望ましくは,
PCDが可能な場合は全機能を,包含しなければならない。
注記 試験装置は,実装したプロトコル及び機能に関する情報を要求してもよい。
送信されるUT̲APDUは,次のうちの一つでもよい。
− PCD試験装置が決定するUT̲TEST̲COMMAND1は,PCDのブロック連鎖処理を必要としない試験
シナリオで通常使用するコマンドとしてISOコマンドとする(PCDがブロック連鎖を行うように決
めた場合には,試験シナリオは,試験所で修正されるのが望ましい。)。
− PCD試験装置が決定するUT̲TEST̲COMMAND2は,PCDのブロック連鎖処理をする試験シナリオ
で通常使用するコマンドとしてISOコマンドとする。
H.1.9.2 試験シナリオ例
典型的な試験シナリオは,次のとおりでよい。
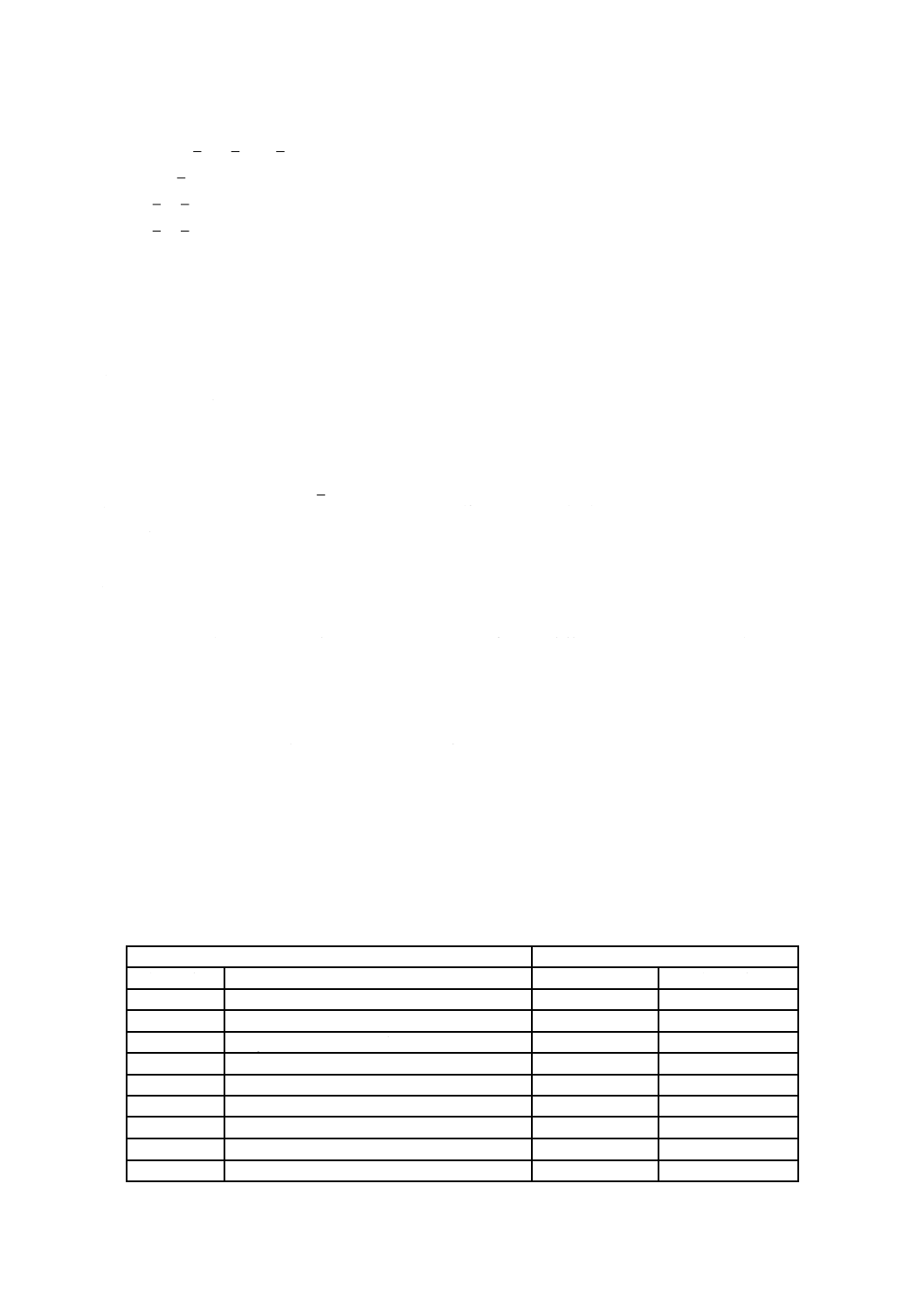
162
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
INITIALIZE̲PCD̲TEST̲MODE
INITIATE̲ANTICOLLISION
SEND̲UT̲APDU (UT̲TEST̲COMMAND1)
SEND̲UT̲APDU (UT̲TEST̲COMMAND2)
….
H.1.10 UT,LT及びPCDの動作
UT,LT及びPCDの動作を,次にまとめる。
a) UTは,H.1.8で定義するように活性化手順を実行する。
b) 活性化手順に支障を来した場合には,PCDは,例外処理を行う。この例外処理は,誤りをUTに報告
することを含めてもよい。
c) 衝突防止の試験方法の場合には,PCD試験装置は,ここで試験を終わる。プロトコル試験方法に対し
てUTは,次の手順を継続して実施する。
d) UTは,最初のコマンドUT̲APDUをPCDに送信する。
e) PCDは,このコマンドUT̲APDUを,TB-PDUを使用してLTに伝送することが期待される。PCDは,
現在のUT̲APDUを適切なTB-PDU(I-blocks)に分割し,最初のI-blockをLTに送信し,応答ブロッ
クを待つ。JIS X 6322-4:2011に従い,PCDは,通信ブロックを管理する。
f)
コマンドUT̲APDUは,LTが受信する。LTは,応答UT̲APDUをPCDに送信する。JIS X 6322-4:2011
に従い,LTは通信ブロック(TB-PDU)を管理する(PCD又はPICCの最大フレームサイズのいずれ
かによって強制されない場合にも,LTはいつでも,ブロック連鎖機構を使用してもよい。)。PCDは,
LTから受信した応答UT̲APDUをUTへ伝送することが期待される。
g) コマンドがプロトコルレベルで失敗した場合には(すなわち,誤りがPCDで検出された場合),PCD
は,例外処理を行う。例外処理は,誤りをUTに報告することを含めてもよい。
h) コマンドが成功した場合には,PCDは,成功結果をUTに報告する。ここで,試験シナリオがLTに
送信する追加UT̲APDUを定義する場合には,UTは,次のUT̲APDUをPCDに送信する。この繰返
し処理は,最後の試験UT̲APDUを送信するまで続く。
H.1.11 試験方法と根拠規格の要件との関係
表H.2,表H.3及び表H.4における全ての試験を実行し,その試験結果を対応するH.6の表を用いて報
告しなければならない。
表H.2−A型固有の試験方法
この規格の試験方法
対応要件
細分箇条
名称
基本規格
細分箇条
H.2.1
PICCからPCDへのフレーム遅延時間
JIS X 6322-3:2011 6.2.1.2
H.2.2
リクエスト保護時間
JIS X 6322-3:2011 6.2.2
H.2.3
ATQA中のビット衝突の扱い
JIS X 6322-3:2011 6.5.2
H.2.4
衝突防止ループの扱い
JIS X 6322-3:2011 6.5.3
H.2.5
RATS及びATSの扱い
JIS X 6322-4:2011 5.6.1.1
H.2.6
PPS応答の扱い
JIS X 6322-4:2011 5.6.2.1
H.2.7
フレームサイズ選択機構
JIS X 6322-4:2011 5.2.3
H.2.8
開始フレーム保護時間の扱い
JIS X 6322-4:2011 5.2.5
H.2.9
PCDによる活性化におけるCIDの扱い
JIS X 6322-4:2011 5.6.3
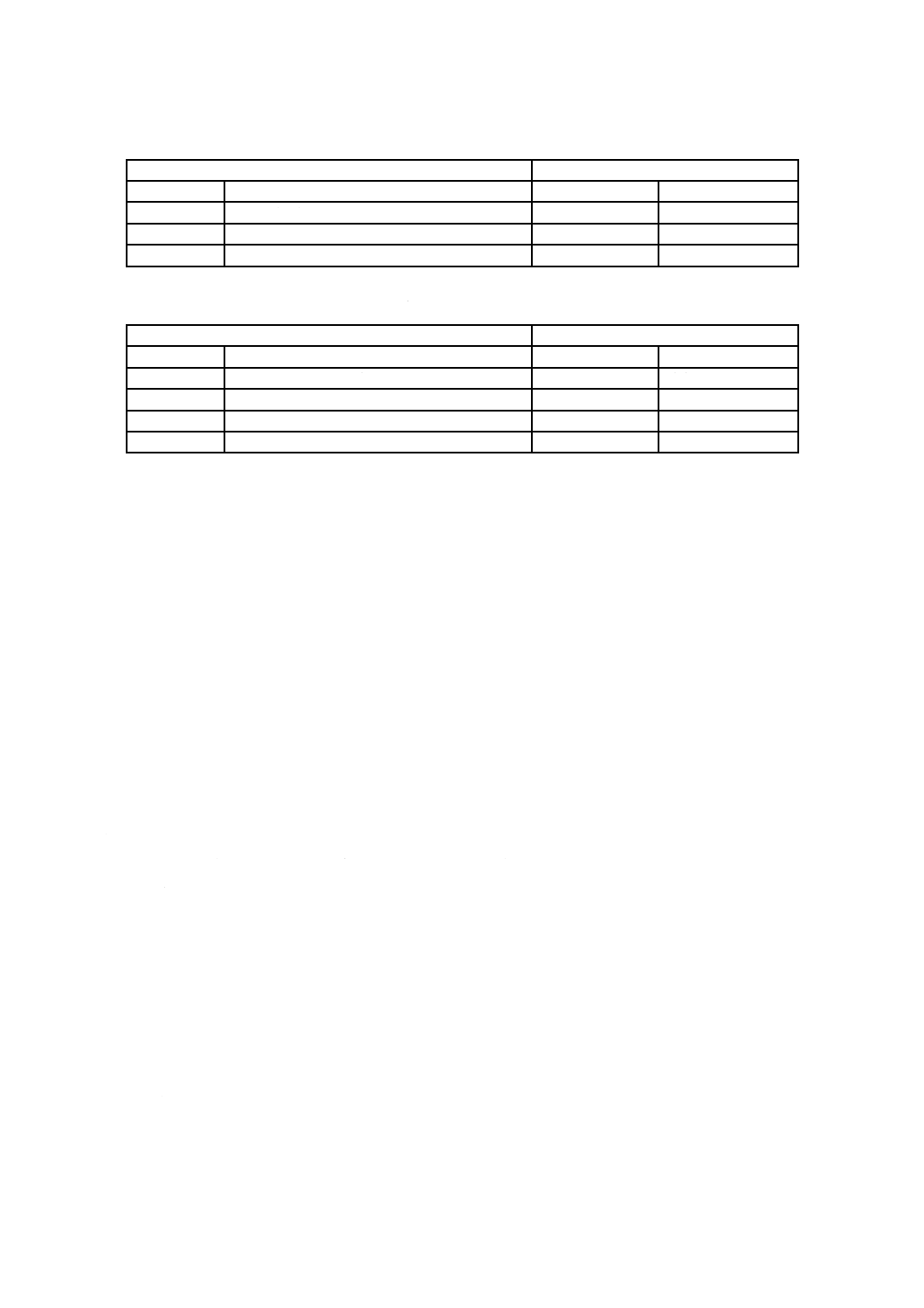
163
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.3−B型固有の試験方法
この規格の試験方法
対応要件
細分箇条
名称
基本規格
細分箇条
H.3.1
入出力伝送タイミング
JIS X 6322-3:2011 7.1
H.3.2
フレームサイズ選択機構
JIS X 6322-3:2011 7.9
H.3.3
PCDによる活性化におけるCIDの扱い
JIS X 6322-3:2011 7.10
表H.4−論理操作のための試験方法
この規格の試験方法
対応要件
細分箇条
名称
基本規格
箇条・細分箇条
H.4.1
ポーリングループの扱い
JIS X 6322-3:2011 箇条5
H.4.2
待ち時間延長要求に対するPCDの反応
JIS X 6322-4:2011 7.3
H.4.3
誤り検出及び回復
JIS X 6322-4:2011 7.5.6
H.4.4
ブロック連鎖中のNADの扱い
JIS X 6322-4:2011 7.1.1.3
H.2 A型固有の試験方法
H.2.1 PICCからPCDへのフレーム遅延時間
この試験は,PICCフレームと次のPCDフレームとの間のタイミングを判定することを目的とする。
H.2.1.1 試験装置
H.1を参照。
H.2.1.2 手順
LTをPCDの動作空間中に設置する。
次の処理中,RF入力及び受信データを絶えず観測し,JIS X 6322-2:2011の規定に一致していることを確
認しなければならない。通信の論理的内容と同様に,全ての信号変化(レベル及びタイミング)を記録し
なければならない。次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDが有効なREQA・WUPAコマンドフレームを送信するまで待機する。
c) LTは,有効なATQAを応答する。
d) LTは,JIS X 6322-3:2011の図7によってPCDが有効な衝突防止コマンドを送信するまで待機する。
e) LTによって伝送された最後の変調からPCDによって伝送された最初のポーズまでの時間を測定する
(JIS X 6322-3:2011の6.2.1.2参照)。
H.2.1.3 試験成績書
信号記録を報告する。 フレーム遅延時間の測定値を表H.21の項目1に記入し,表H.23の該当欄につ
いても記入する。
H.2.2 リクエスト保護時間
この試験は,二つの連続するREQA・WUPAコマンドのリクエスト保護時間を判定することを目的とす
る。この試験は,REQA・WUPAを連続して送信するPCDに関係している。
H.2.2.1 試験装置
H.1を参照。
H.2.2.2 手順
LTをPCDの動作空間中に設置する。
164
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次の処理中,RF入力及び受信データを絶えず観測し,JIS X 6322-2:2011の規定に一致していることを確
認しなければならない。通信の論理的内容と同様に,全ての信号変化(レベル及びタイミング)を記録し
なければならない。次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDが有効なREQA・WUPA コマンドフレームを送信するまで待機する。LTは,無応答のま
までいる。
c) LTは,PCDが次の有効なREQA・WUPA コマンドフレームを送信するまで待機する。LTは,無応答
のままでいる。
d) 二つの連続したREQA・WUPAの開始ビット間の時間を測定する(JIS X 6322-3:2011の6.2.2参照)。
H.2.2.3 試験成績書
信号記録を報告する。リクエスト保護時間の測定値を表H.21の項目2に記入し,表H.23の該当欄につ
いても記入する。
H.2.3 ATQA中のビット衝突の扱い
この試験は,PCDによるATQA中のビット衝突の扱いを判定することを目的とする。
H.2.3.1 試験装置
H.1を参照。
H.2.3.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDが有効なREQA・WUPA コマンドフレームを送信するまで待機する。
c) ビットN(N=1〜16)でビット衝突するようにシミュレートしたATQAで応答するために,LTを調整
する。このビット衝突は,対応するパリティビットでも衝突を引き起こす。
H.2.3.3 試験成績書
表H.5に従って,表H.23の該当欄に試験結果を記入する。
表H.5−ATQA中のビット衝突の扱いの試験結果の判定
説明
試験結果
PCDが,ビット対応の衝突防止ループを開始する場合
合格
その他の場合
不合格
H.2.4 衝突防止ループの扱い
この試験は,JIS X 6322-3:2011の6.5.3に従い,ビット衝突防止ループの扱いを判定することを目的とす
る。
H.2.4.1 試験装置
H.1を参照。
H.2.4.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
H.2.4.2.1 手順1(シングルサイズUID)
次の手順を実行する。
165
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDが有効なREQA・WUPA コマンドフレームを送信するまで待機する。
c) LTは,ビットフレーム衝突防止及びシングルサイズUID(ビットb8及びb7がb“00”に等しい。)
を示すATQAを応答する。
d) PCDは,ANTICOLLISIONコマンド“93 20”(カスケードレベル1)を送信しなければならない。
e) LTは,UID CL1 (uid0 uid1 uid2 uid3 BCC)を応答する。
f)
PCDは,SELECTコマンド“93 70” uid0 uid1 uid2 uid3 BCC CRC̲Aを送信しなければならない。
g) LTは,UIDが完全であることを示すSAK(カスケードビットb3をb“0”に設定した状態)を応答す
る。
シナリオH.1−シングルサイズUIDのPICCに対する衝突防止ループの扱い,手順1
試験
PCD
LT
段階
REQA・WUPA
REQA・WUPA
→
←
ATQA(シングルサイズUID)
1
ANTICOLLISION
レベル 1
ANTICOLLISIONコマンドレベル1
(“93 20”)
→
←
UID CL1
(uid0 uid1 uid2 uid3 BCC)
2
SELECT
SELECTコマンド (“93 70” uid0
uid1 uid2 uid3 BCC CRC̲A)
→
←
SAK(complete)
3
H.2.4.2.2 手順2(ダブルサイズUID)
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDが有効なREQA・WUPA コマンドフレームを送信するまで待機する。
c) LTは,ビットフレーム衝突防止及びダブルサイズUID(ビットb8及びb7がb“01”に等しい。)を
示すATQAを応答する。
d) PCDは,ANTICOLLISIONコマンド “93 20” (カスケードレベル1)を送信しなければならない。
e) LTは,UID CL1 (“88” uid0 uid1 uid2 BCC)を応答する。
f)
PCDは,SELECTコマンド“93 70 88” uid0 uid1 uid2 BCC CRC̲Aを送信しなければならない。
g) LTは,SAK(カスケードビットb3をb“1”に設定した状態)を応答する。
h) PCDは,カスケードレベルを増加させ,ANTICOLLISIONコマンド“95 20”(カスケードレベル2)
を送信しなければならない。
i)
LTは,UID CL2 (uid3 uid4 uid5 uid6 BCC)を応答する。
j)
PCDは,SELECTコマンド“95 70” uid3 uid4 uid5 uid6 BCC CRC̲Aを送信しなければならない。
k) LTは,UIDが完全であることを示すSAK(カスケードビットb3をb“0”に設定した状態)を応答す
る。
166
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.2−ダブルサイズUIDのPICCに対する衝突防止ループの扱い,手順2
試験
PCD
LT
段階
REQA・WUPA
REQA・WUPA
→
←
ATQA (ダブルサイズUID)
1
ANTICOLLISION
レベル 1
ANTICOLLISIONコマンドレベル1
(“93 20”)
→
←
UID CL1
(“88” uid0 uid1 uid2 BCC)
2
SELECT
SELECTコマンド (“93 70 88” uid0
uid1 uid2 BCC CRC̲A)
→
←
SAK(cascade)
3
ANTICOLLISION
レベル 2
ANTICOLLISIONコマンドレベル2
(“95 20”)
→
←
UID CL2
(uid3 uid4 uid5 uid6 BCC)
4
SELECT
SELECTコマンド (“95 70” uid3
uid4 uid5 uid6 BCC CRC̲A)
→
←
SAK(complete)
5
H.2.4.2.3 手順3(トリプルサイズUID)
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDが有効なREQA・WUPA コマンドフレームを送信するまで待機する。
c) LTは,ビットフレーム衝突防止及びトリプルサイズUID(ビットb8及びb7がb“10”に等しい。)
を示すATQAを応答する。
d) PCDは,ANTICOLLISIONコマンド“93 20”(カスケードレベル1)を送信しなければならない。
e) LTは,UID CL1 (“88” uid0 uid1 uid2 BCC)を応答する。
f)
PCDは,SELECTコマンド“93 70 88” uid0 uid1 uid2 BCC CRC̲Aを送信しなければならない。
g) LTは,SAK(カスケードビットb3をb“1”に設定した状態)を応答する。
h) PCDは,カスケードレベルを増加させ,ANTICOLLISIONコマンド“95 20”(カスケードレベル2)
を送信しなければならない。
i)
LTは,UID CL2 (“88” uid3 uid4 uid5 BCC)を応答する。
j)
PCDは,SELECTコマンド“95 70 88” uid3 uid4 uid5 BCC CRC̲Aを送信しなければならない。
k) LTは,SAK(カスケードビットb3をb“1”に設定した状態)を応答する。
l)
PCDは,カスケードレベルを増加させ,ANTICOLLISIONコマンド“97 20”(カスケードレベル3)
を送信しなければならない。
m) LTは,UID CL3 (uid6 uid7 uid8 uid9 BCC)を応答する。
n) PCDは,SELECTコマンド“97 70” uid6 uid7 uid8 uid9 BCC CRC̲Aを送信しなければならない。
o) LTは,UIDが完全であることを示すSAK(カスケードビットb3をb“0”に設定した状態)を応答す
る。
167
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.3−トリプルサイズUIDのPICCに対する衝突防止ループの扱い,手順3
試験
PCD
LT
段階
REQA・WUPA
REQA・WUPA
→
←
ATQA (トリプルサイズUID)
1
ANTICOLLISION
レベル 1
ANTICOLLISIONコマンドレベル1
(“93 20”)
→
←
UID CL1
(“88” uid0 uid1 uid2 BCC)
2
SELECT
SELECTコマンド
(“93 70 88” uid0 uid1 uid2 BCC
CRC̲A)
→
←
SAK(cascade)
3
ANTICOLLISION
レベル 2
ANTICOLLISIONコマンドレベル2
(“95 20”)
→
←
UID CL2
(“88” uid3 uid4 uid5 BCC)
4
SELECT
SELECTコマンド
(“95 70 88” uid3 uid4 uid5 BCC
CRC̲A)
→
←
SAK(cascade)
5
ANTICOLLISION
レベル 3
ANTICOLLISIONコマンドレベル3
(“97 20”)
→
←
UID CL3
(uid6 uid7 uid8 uid9 BCC)
6
SELECT
SELECTコマンド (“97 70” uid6 uid7
uid8 uid9 BCC CRC̲A)
→
←
SAK(complete)
7
H.2.4.2.4 手順 4(全ビットでの衝突防止ループ,シングルサイズUID)
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,有効なREQA又はWUPAコマンドフレームをPCDが送信するまで待機する。
c) LTは,ビットフレーム衝突防止及びシングルサイズUID(ビットb8及びb7がb“00”に等しい。)
を示すATQAを応答する。
d) PCDは,ANTICOLLISIONコマンド“93 20”を送信しなければならない。
e) LTは,各ビットで衝突をエミュレートし,パリティビットを含む40ビットのビット列を応答する。
f)
値kを1から31まで変更しながら,手順g)〜h)を繰り返す。
g) PCDは,ANTICOLLISIONコマンド“93”NVB UIDTX1[[1..k]]を送信しなければならない。ここで,
UIDTX1[[1..k-1]]は,くう(空)(すなわち,k=1)又はPCDによって既知の値のいずれかとし,UIDTX1[[k]]
は,PCDによって選択された任意のビットとする。
h) LTは,全ビットで衝突をエミュレートし,パリティビットを含む(40−k)ビットのビット列を応答す
る。
i)
PCDは,ANTICOLLISIONコマンド“93 60” UIDTX1[[1..32]]を任意選択して送信してもよい。この
場合には,LTは,BCCを応答する。
注記 任意選択のANTICOLLISIONコマンドは,段階番号を変更しない。
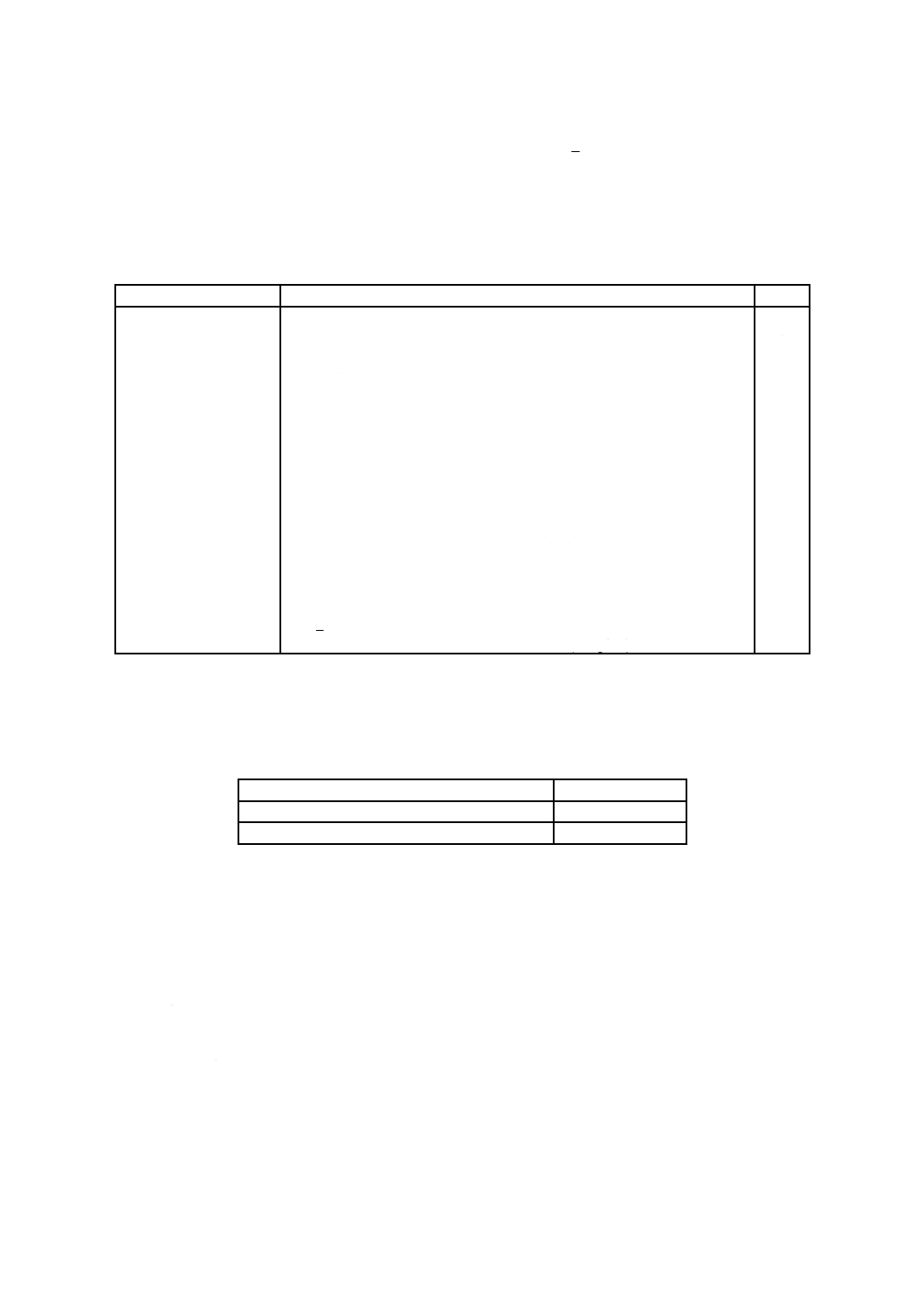
168
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
j)
PCDは,SELECTコマンド“93 70” UIDTX1[[1..32]] BCC CRC̲Aを送信しなければならない。手順
i)で任意選択せず,実行しない場合には,BCCは,PCDによって計算され付与される。
k) LTは,UIDが完全であることを示すSAK(カスケードビットb3をb“0”に設定した状態)を応答す
る。
シナリオH.4−全ビットでの衝突防止ループの扱いPICC,手順4
試験
PCD
LT
段階
REQA・WUPA
REQA・WUPA
→
←
ATQA (シングルサイズUID)
1
ANTICOLLISION
ANTICOLLISIONコマンド
(“93 20”)
→
←
40ビットの完全な衝突フレーム
2
ANTICOLLISION
(k ビット UIDPARTIAL)
1 ≦k≦ 31
ANTICOLLISIONコマンド
(“93” NVB UIDTX1[[1..k]])
→
←
(40 ‒ k)ビットの衝突フレーム
k+2
OPTIONAL
ANTICOLLISION
(32 ビット UIDPARTIAL)
ANTICOLLISIONコマンド
(“93 60”UIDTX1[[1..32]])
→
←
(BCC)
SELECT
SELECTコマンド
(“93 70” UIDTX1[[1..32]] BCC
CRC̲A )
→
←
SAK(complete)
34
H.2.4.3 試験成績書
表H.6に従って,表H.23の該当欄に試験結果を記入する。
表H.6−衝突防止ループの扱いの試験結果の判定
説明
試験結果
PCDコマンド手順が期待どおりの場合
合格
その他の場合
不合格
H.2.5 RATS及びATSの扱い
この試験は,JIS X 6322-4:2011の5.6.1.1に従い,PCDによるRATS及びATSの扱いを判定することを
目的とする。
H.2.5.1 試験装置
H.1を参照。
H.2.5.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
H.2.5.2.1 手順 1
次の手順を用いる。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,関連する衝突防止メッセージを応答し,PCDが有効なRATSコマンドフレームを送信するま
で待機する。
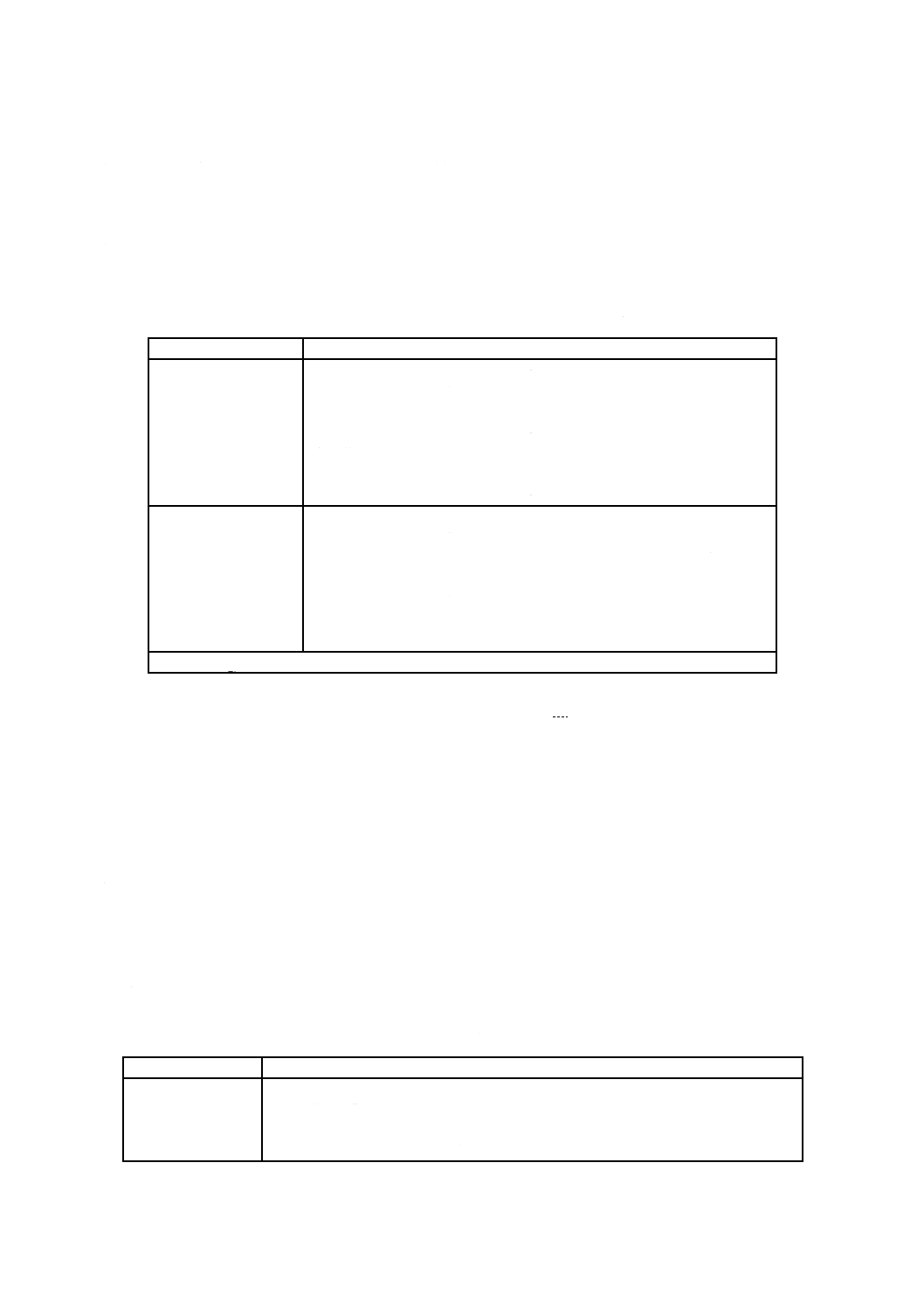
169
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) LTは,RATSに応答しない(無応答)。
d) PCDは,有効なRATSコマンドフレームを送信してもよい。
e) PCDが2番目のRATSを送信した場合には,LTは,RATSに応答しない(無応答)。
f)
PCDは,JIS X 6322-4:2011の箇条8で定義された非活性化手順を開始しなければならない。
g) 無応答の代わりに誤ったATSフレーム(不良CRC̲Aを使用した状態で)を用いて手順a)〜f)を繰り
返す。
シナリオH.5−RATS及びATSの扱い,手順 1
試験
PCD
LT
無応答
RATSコマンドフレーム
(例 “E0 01” CRC̲A)
→
←
無応答
RATSコマンドフレーム
(例 “E0 01” CRC̲A)
→
←
無応答
非活性化開始
DESELECT
→
誤ったATSフレーム
RATSコマンドフレーム
(例 “E0 01” CRC̲A)
→
←
誤ったATSフレームa)
RATSコマンドフレーム
(例 “E0 01” CRC̲A)
→
←
誤ったATSフレームa)
非活性化開始
DESELECT
→
注a) 手順g)で決まる。
注記 RATSコマンドを2回送信してもよいという仕様は,JIS X 6322-4:2011の5.6.1.1を参照。
H.2.5.2.2 手順 2
次の手順を用いる。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,関連する衝突防止メッセージを応答し,PCDが有効なRATSコマンドフレームを送信するま
で待機する。
c) LTは,TAバイトのない有効なATSを応答する。
d) PCDは,表H.1に従って動作結果コードをUTに返信しなければならない。
e) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
f)
PCDは,任意のI-block[くう(空)を含む。]を,可能であればPICC存在確認手順の後に,LTに送
信するよう期待される。
シナリオH.6−RATS及びATSの扱い,手順2
試験
PCD
LT
正しいATS
RATSコマンドフレーム
(例 “E0 01” CRC̲A)
→
←
ATS
継続操作
任意のI-block[くう(空)を含む。]
→
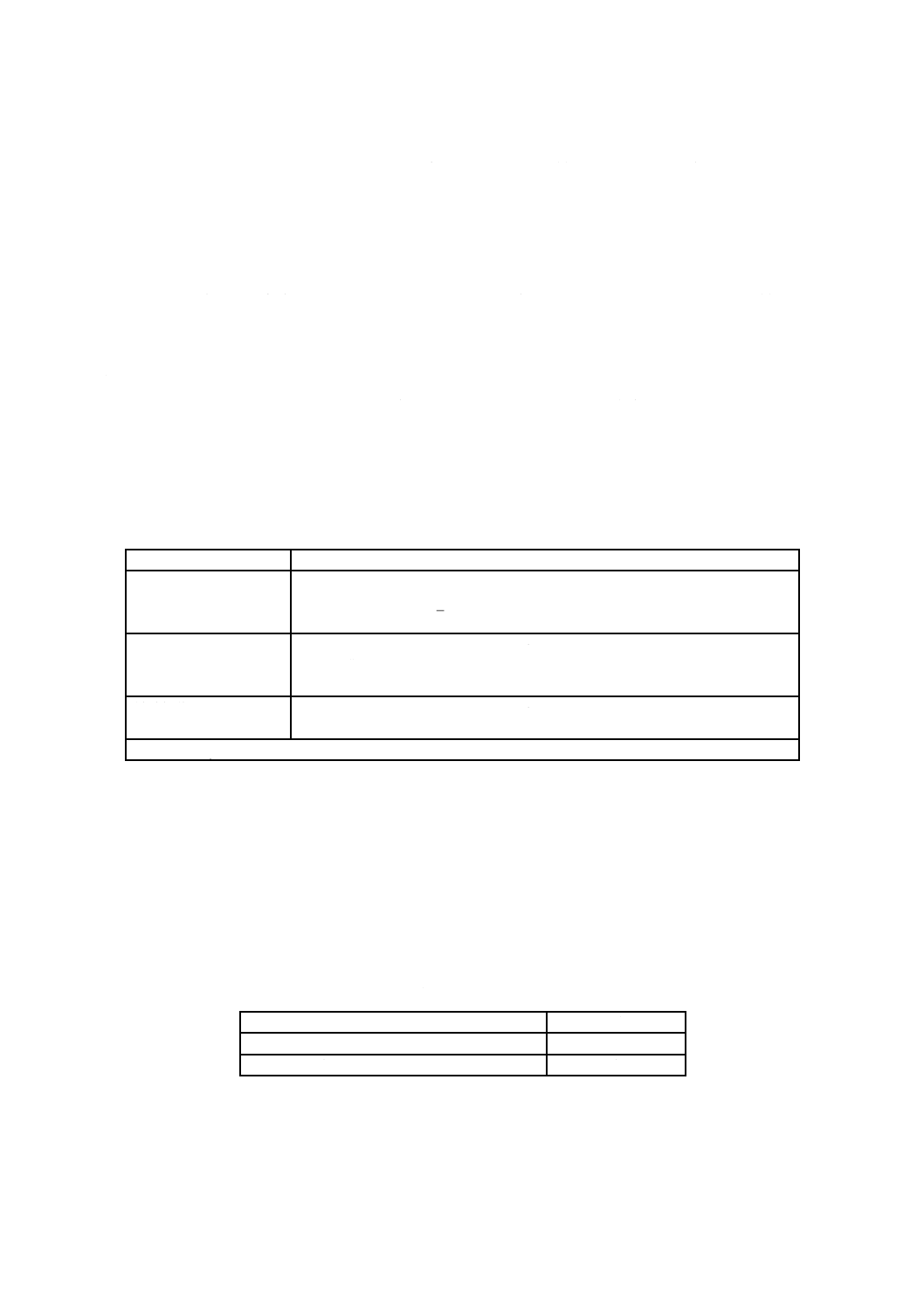
170
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.2.5.2.3 手順3
PCDがJIS X 6322-4:2011の5.6.1.1に従う任意選択のRATS再送信を使用しない場合には,この手順を
省略する。
PCDがJIS X 6322-4:2011の5.6.1.1に従う任意選択のRATS再送信を使用する場合には,次の手順を用
いる。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,関連する衝突防止メッセージを応答し,PCDが有効なRATSコマンドフレームを送信するま
で待機する。
c) PCDがRATSを伝送した場合には,LTは,RATSに反応しない(無応答)。
d) PCDがRATSを再送信した場合には,LTは,有効なATSを応答する。
e) PCDは,任意のI-block[くう(空)を含む。]を,可能であればPICC存在確認手順の後に,又はPPS
要求をLTに送信するよう期待される。
f)
無応答の代わりに誤ったATSフレーム(不良CRC̲Aを使用した状態で)を用いて手順a)〜e)を繰り
返す。
シナリオH.7−RATS及びATSの扱い,手順3
試験
PCD
LT
無応答
又は
誤ったATSフレーム
RATSコマンドフレーム
(例 “E0 01” CRC̲A)
→
←
無応答/誤ったATSフレームa)
PCDのRATS再送信
RATSコマンドフレーム
(例 “E0 01” CRC̲A)
→
←
ATS
継続操作
任意のI-block[くう(空)を含
む。]又はPPS要求
→
注a) 手順f)で決まる。
注記 シナリオH.7の記号“/”は,次に示すように“置き換え”の意味に解釈する。まず,LTの応
答を“/”の左側に記されている“無応答”として手順a)〜e)を実行する。その後,手順f)に
示すように,“無応答”の代わりに“/”の右側に記されている“誤ったATSフレーム”を用
いて再度手順a)〜e)を実行する。
H.2.5.3 試験成績書
表H.7に従って,表H.23の該当欄に試験結果を記入する。
表H.7−RATS及びATSの扱いの試験結果の判定
説明
試験結果
PCDコマンド手順が期待どおりの場合
合格
その他の場合
不合格
H.2.6 PPS応答の扱い
この試験は,JIS X 6322-4:2011の5.6.2.1に従って,PPS要求の扱いを判定することを目的とする。
この試験は,PICC活性化手順の一部としてプロトコル及びパラメタの選択機構を使用するPCDだけに
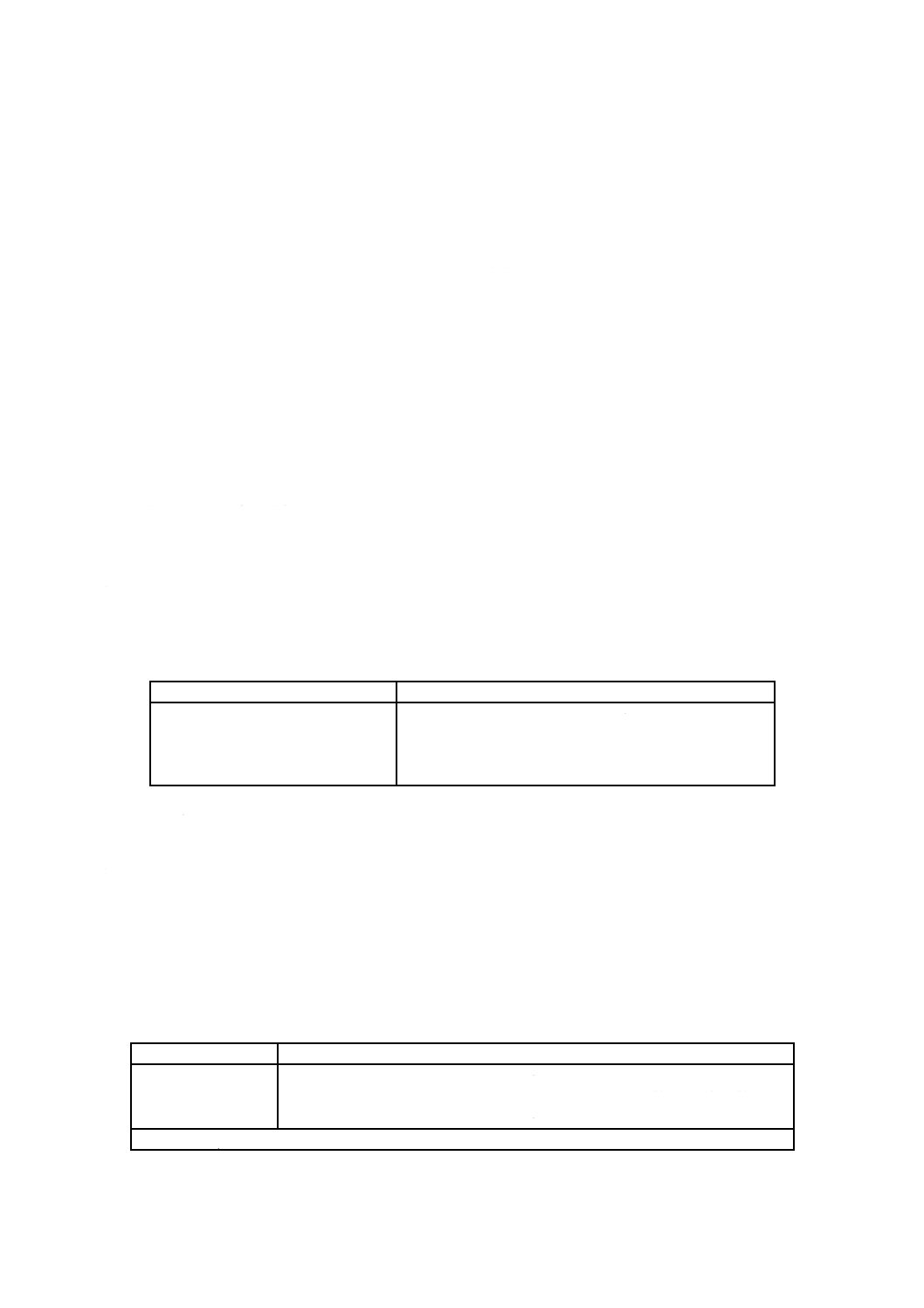
171
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
適用可能とする。PCDがPPS機構を使用しない場合には,試験報告書の該当欄を適用外(N/A)とする。
H.2.6.1 試験装置
H.1を参照。
H.2.6.2 準備手順
PCDをこの試験で必要な状態にするために,次の手順を用いる。
a) LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
b) UTは,H.1.8.1に従い活性化手順を実行する。
c) LTは,関連する衝突防止メッセージを応答し,PCDがRATSを送信するまで待機する。
d) LTは,有効なTA≠“00”(高速のビット伝送速度に対応していることを示し,PPSは,このPICCに
よって対応されており,PCDは,PPS手順を実行してもよい。)のATSを応答する。
H.2.6.2.1 手順 1
手順H.2.6.2の直後に次の手順を用いる。
a) LTは,PCDが有効なPPS要求を送信するまで待機する。PPS開始バイト,パラメタ0及びパラメタ1
がRFU値を含んでいないことを確認する。
注記 PPS要求を送信することは,必須ではない。
b) LTは,PPS応答を応答する。
c) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
d) PCDは,選択されたパラメタを使用してI-blockを,(可能であればPICC存在確認手順の後に)伝送
しなければならない。
シナリオH.8−PPS要求及び応答の取扱い,手順 1
試験
PCD
LT
正しいPPS応答
PPS要求
→
←
PPS応答
パラメタ設定及び継続操作
UTが提供するI-block
→
H.2.6.2.2 手順 2
手順H.2.6.2の直後に次の手順を用いる。
a) LTは,PCDが有効なPPS要求を送信するまで待機する。
b) LTは,誤ったPPS応答(不良CRC̲Aを用いた)を返信する。
c) 既定のビット伝送速度を用いて,PCDは,有効なPPS要求を再送信してもよく,又は操作(例えば,
I-blockを送信する。)を継続してもよい。
d) PPS要求への応答なし(無応答)で処理を繰り返す。
シナリオH.9−PPS要求及び応答の取扱い,手順 2
試験
PCD
LT
誤ったPPS応答
又は
無応答
PPS要求
→
←
誤ったPPS応答 又は 無応答 a)
任意選択のPPS要求 又は I-block
→
注a) 手順d)で決まる。
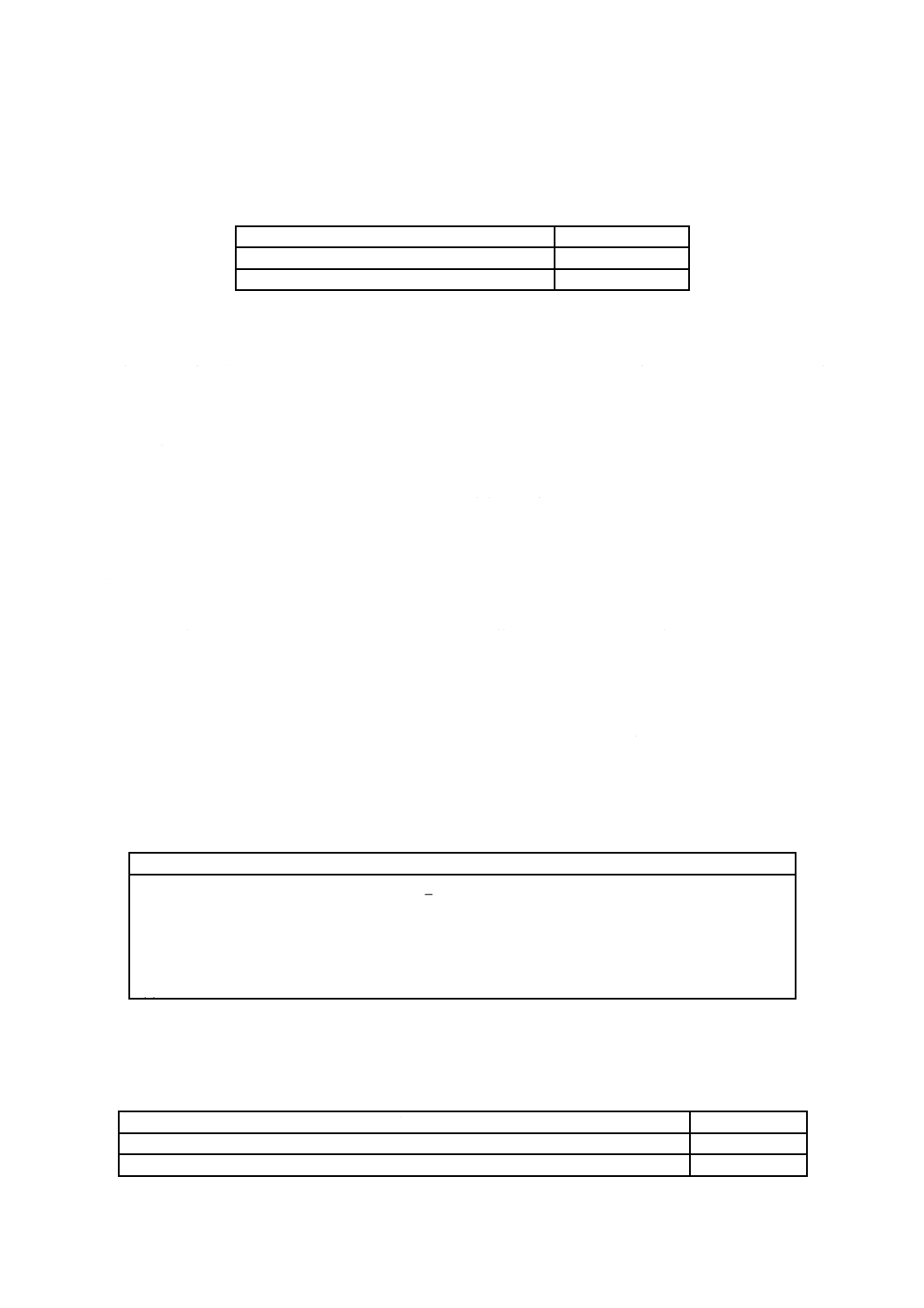
172
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.2.6.3 試験成績書
表H.8に従って,表H.23の該当欄に試験結果を記入する。
表H.8−PPS要求及び応答の扱いの試験結果の判定
説明
試験結果
PCDコマンド手順が期待どおりの場合
合格
その他の場合
不合格
H.2.7 フレームサイズ選択機構
この試験は,伝送フレームのサイズの正しい扱いについて確認することを目的とする。伝送フレームサ
イズは,FSCI指示値よりも長くしてはならない。少なくとも0,1及び8に設定したFSCIに対し,この試
験を実行しなければならない。
H.2.7.1 試験装置
H.1を参照。
H.2.7.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,関連する衝突防止メッセージを応答し,PCDが有効なRATSコマンドフレームを送信するま
で待機する。
c) LTは,有効なATSを用いて応答する。この試験の目的のために,LTは,構成バイトT0 =“70”を返
信する(JIS X 6322-4:2011の5.2.3参照)。PPS要求がある場合には,LTは,次の手順を続行する前に
PPS応答を返信する。
LTによって受け入れられるフレームの最大サイズは,FSCIによる。
d) UTは,LTによって受け入れられるフレームの最大サイズより大きいデータ長のSEND̲UT̲APDU
(UT̲TEST̲COMMAND2)をPCDに送信する。
e) PCDは,FSCIに従って,次の最大長のI(1)0ブロックを送信しなければならない。
シナリオH.10−フレームサイズ選択機構
PCD
LT
RATSコマンドフレーム (例 “E0 01” CRC̲A)
→
←
ATS,T0 = “70”
任意選択のPPS要求は,可能であり,LTによって,I-block
より前に処理される。
→
←
PPS応答(PPS要求の場合)
I(1)0 (FSCIに従った最大長)
→
H.2.7.3 試験成績書
表H.9に従って,表H.23の該当欄に試験結果を記入する。
表H.9−フレームサイズ選択機構の試験結果の判定
説明
試験結果
PCDの動作が,全ての試験したFSCIの値に対して期待したシナリオに一致する場合
合格
その他の場合
不合格
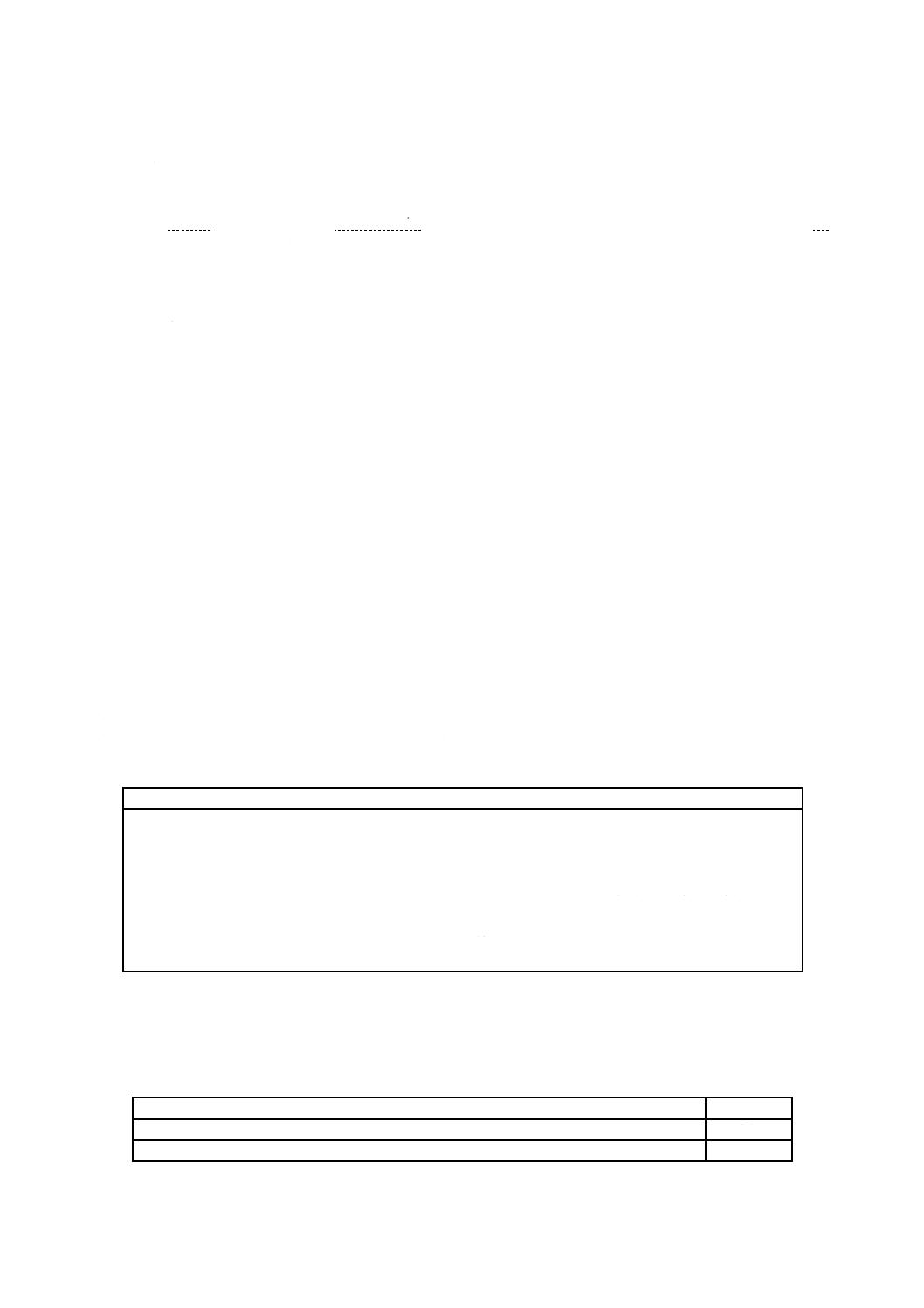
173
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.2.8 開始フレーム保護時間の扱い
この試験は,JIS X 6322-4:2011の5.2.5に従って,PCD伝送タイミングを判定することを目的とする。
この試験は,SFGIを少なくとも0,1及び14に設定して実行しなければならない。
注記 SFGI (start-up frame guard time index)とは,開始フレーム保護時間整数値である(JIS X
6322-4:2011参照)。
H.2.8.1 試験装置
H.1を参照。
H.2.8.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の処理中,RF入力及び受信データを絶えず観測し,JIS X 6322-2:2011の規定に一致していることを確
認しなければならない。通信の論理的内容と同様に,全ての信号変化(レベル及びタイミング)を記録し
なければならない。
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,関連する衝突防止メッセージを応答し,PCDが有効なRATSコマンドフレームを送信するま
で待機する。
c) LTは,有効なATSを用いて応答する。この試験の目的のために,LTは,構成バイトTB(1)として“0E”
を返信する(JIS X 6322-4:2011の5.2.5参照)。PPS要求がある場合には,LTは,次の手順を続行する
前にPPS応答を返信する。
値“0E”=b“00001110”の意味:
LTが受け入れるフレーム遅延の最小値は,(256×16/fc)×214(約4 949 ms)である。
d) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
e) PCDは,約4 949 msの最小遅延の後,次のI(0又は1)0ブロックを送信しなければならない。
シナリオH.11−開始フレーム保護時間機構
PCD
LT
RATSコマンドフレーム (例 “E0 01” CRC̲A)
→
←
ATS,TB (1) =“0E”
任意選択のPPS要求は,可能であり,I-blockより前にLTによ
って処理される。
→
←
PPS応答(PPS要求の場合)
I(0又は1)0
[ SFGT の経過後に送信する。 SFGT = (256 × 16/fc) ×214 (約
4 949 ms)]
→
H.2.8.3 試験成績書
表H.10に従って,表H.23の該当欄に試験結果を記入する。
表H.10−開始フレーム保護時間の扱いの試験結果の判定
説明
試験結果
PCDの動作が,全ての試験したSFGIの値に対して期待したシナリオに一致する場合
合格
その他の場合
不合格
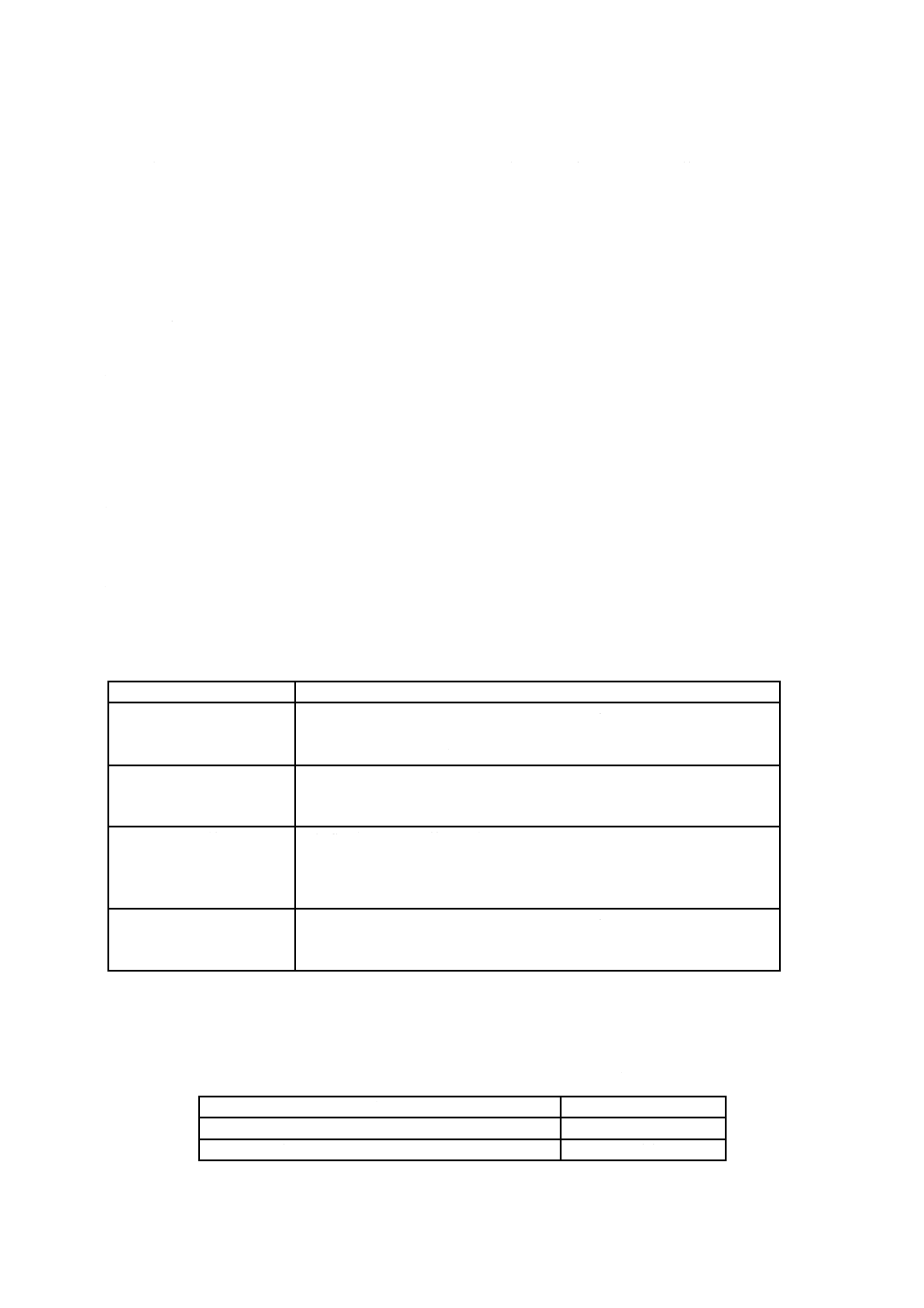
174
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.2.9 PCDによる活性化におけるCIDの扱い
この試験は,JIS X 6322-4:2011の5.6.3に従って,CIDの扱いを判定することを目的とする。
この試験は,UTがCIDを選択できる場合には,少なくとも0,1及び14に設定されたCIDに対し実行
しなければならない。それら以外の場合には,PCDによって選択されたCIDだけを使用しなければならな
い。
H.2.9.1 試験装置
H.1を参照。
H.2.9.2 手順
次のa)〜c)の手順で,PCDをこの試験を行うのに必要な状態にする。
a) LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
b) UTは,H.1.8.1に従い活性化手順を実行する。
c) LTは,関連する衝突防止メッセージを応答し,PCDがRATSを送信するまで待機する。LTは,ATS
を用いて応答する。
シナリオH.12の各試験にPCDが対応しているとき,次のd)〜h)の手順を適用する。
d) PCDをこの試験を行うのに必要な状態にする。
e) LTは,PCDがPCD欄に説明するコマンドを適用するまで待機する。
f)
LTは,LT欄に説明するように応答する。
g) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
h) PCDは,PCD欄に説明する条件を適用してI-blockをLTに送信すると期待される。
シナリオH.12−CIDの扱い
試験
PCD
LT
CID=nが0に等しくなく,
CID対応を受信
RATS (CIDが0に等しくない。)
→
←
ATS(CID対応)
CIDを使用する任意の有効コマンド
→
CID=nが0に等しくなく,
CID非対応を受信
RATS (CIDが0に等しくない。)
→
←
ATS(CID非対応)
CIDのない任意の有効コマンド
→
CID=nが0に等しく,CID
対応を受信
RATS (CIDが0に等しい。)
→
←
ATS(CID対応)
CID=0を使用する,又はCIDのない任意の
有効コマンド
→
CID=nが0に等しく,CID
非対応を受信
RATS (CIDが0に等しい。)
→
←
ATS(CID非対応)
CIDのない任意の有効コマンド
→
H.2.9.3 試験成績書
表H.11に従って,表H.23の該当欄に試験結果を記入する。
表H.11−PCDによる活性化におけるCIDの扱いの試験結果の判定
説明
試験結果
PCDコマンド手順が期待どおりの場合
合格
その他の場合
不合格
175
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.3
B型固有の試験方法
H.3.1 入出力伝送タイミング
この試験は,JIS X 6322-3:2011の7.1に従って,PCD伝送タイミングを判定することを目的とする。
H.3.1.1 試験装置
H.1を参照。
H.3.1.2 手順
LTをPCDの動作空間中に設置する。
次の処理中,RF入力及び受信データを絶えず観測し,JIS X 6322-2:2011の規定に一致していることを確
認しなければならない。通信の論理的内容と同様に,全ての信号変化(レベル及びタイミング)を記録し
なければならない。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) PCDが送信したキャラクタ中のビット境界のタイミングを解析する(JIS X 6322-3:2011の7.1.1参照)。
c) PCDが送信した連続する二つのキャラクタ間の拡張保護時間(EGT)を解析する(JIS X 6322-3:2011の
7.1.2参照)。
d) PCDが送信したSOFのタイミングを解析する(JIS X 6322-3:2011の7.1.4参照)。
e) PCDが送信したEOFのタイミングを解析する(JIS X 6322-3:2011の7.1.5参照)。
f)
PCDのSOF以前のタイミングを解析する(JIS X 6322-3:2011の7.1.7参照)。
H.3.1.3 試験成績書
信号記録を報告する。H.3.1.2のb)〜f)までの測定した値を,表H.22の該当欄に記入し,表H.24の該当
欄に試験結果を記入する。
H.3.2 フレームサイズ選択機構
この試験は,JIS X 6322-3:2011の7.9に従って,フレームサイズ選択機構を解析することを目的とする。
この試験は,最大フレームサイズコードを少なくとも0,1及び8に設定し実行しなければならない。
H.3.2.1 試験装置
H.1を参照。
H.3.2.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDが有効なREQB・WUPBコマンドフレームを送信するまで待機する。
c) LTは,ATQBを応答する。ここで,LTのPUPIを“12 23 34 45”とし,LTは,CIDに対応すると仮
定する。この試験の目的のために,LTは,“01”に等しい第2番目のプロトコル情報バイトを返す(JIS
X 6322-3:2011の7.9.4参照)。この値は,LTの対応する最大フレームサイズが16バイトであり,LT
がJIS X 6322-4:2011に適合していることを示す。
d) PCDは,有効なATTRIBコマンドフレームを送信しなければならない。
e) LTは,ATTRIBコマンドに対する応答を送信する。
f)
PCDは,表H.1に従って,動作結果コードをUTに返信しなければならない。
g) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND2)をPCDに送信する。
h) PCDは,シナリオH.13のPCD欄に示すように,ブロックの長さが16バイト以下のI(1)0ブロックを
送信しなければならない。
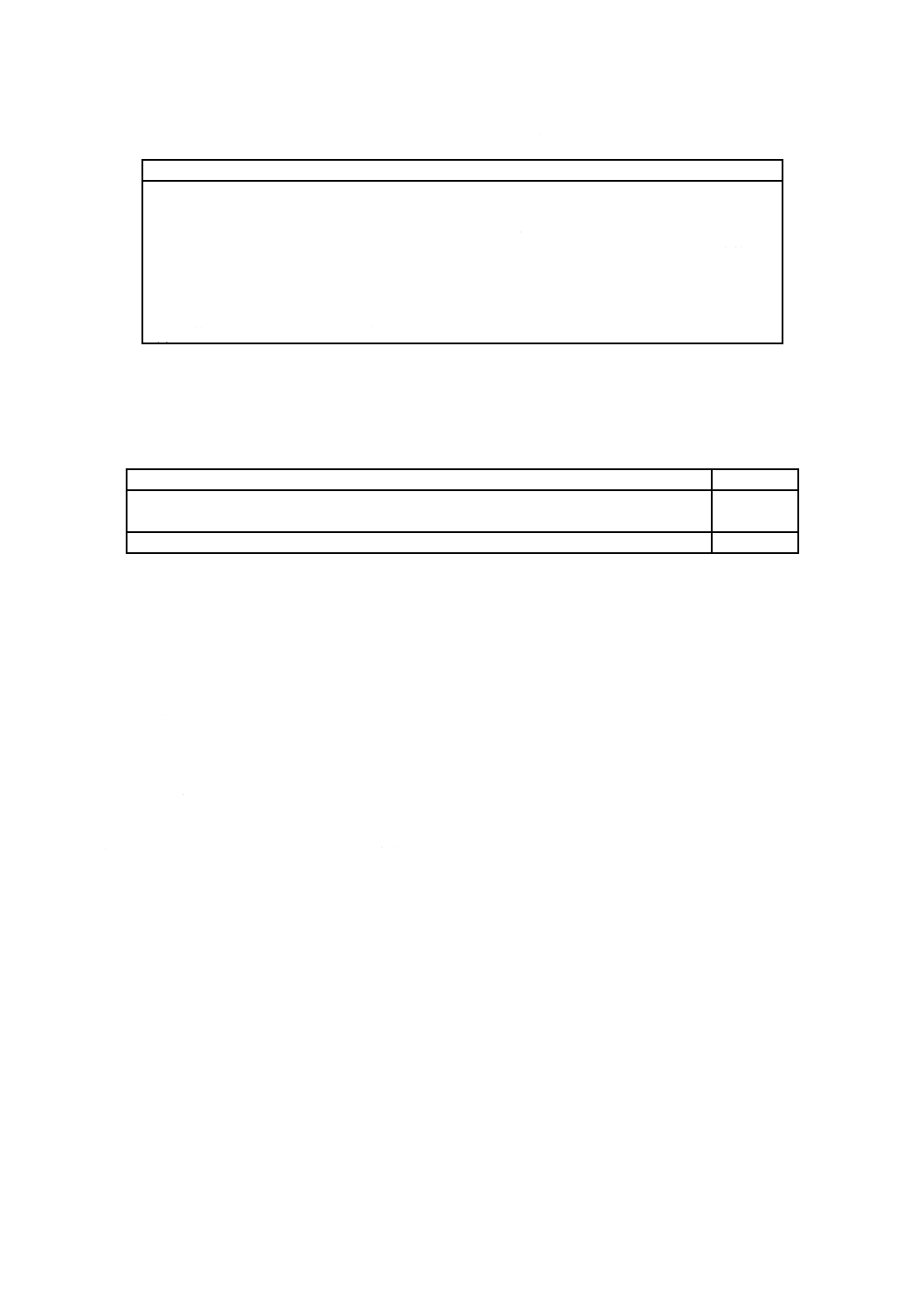
176
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.13−フレームサイズ選択機構
PCD
LT
REQB・WUPB
→
←
ATQB
ATTRIBコマンドフレーム
→
←
ATTRIBコマンドに対する応答
I(1)0
(INFは,最初のブロック連鎖とし,それは,
UT̲TEST̲COMMAND2の先頭ブロックを含む。
I(1)0の最大長は,16バイトとする。)
→
H.3.2.3 試験成績書
表H.12に従って,表H.24の該当欄に試験結果を記入する。
表H.12−フレームサイズ選択機構の試験結果の判定
説明
試験結果
最大フレームサイズコードの設定が少なくとも0,1及び8に対して,PCDの動作が,試験
シナリオで期待したものに一致する場合
合格
その他の場合
不合格
H.3.3 PCDによる活性化におけるCIDの扱い
この試験は,JIS X 6322-3:2011に従って,CIDの扱いを判定することを目的とする。
この試験は,UTがCIDを選択できる場合には,少なくとも0,1及び14に設定されたCIDに対して実
行しなければならない。ほかには,PCDによって選択されたCIDだけが使用されなければならない。
H.3.3.1 試験装置
H.1を参照。
H.3.3.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
H.3.3.2.1 手順 1
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDがREQB・WUPBコマンドを送信するまで待機する。
c) LTは,任意選択フレームビット(b2,b1)がb“00”に等しいATQBを送信する。これは,CID及びNAD
に対応しないことを意味する。
d) LTは,PCDがATTRIBコマンドを送信するまで待機する。PCDは,Param 4のバイト値が0に等し
い有効なATTRIBコマンドフレームを送信しなければならない。
e) LTは,CID値が0に等しいATTRIBコマンドに対する応答を送信する。
f)
PCDは,表H.1に従って,動作結果コードをUTに返信しなければならない。
g) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
h) PCDは,NAD及びCIDなしで次のI(0又は1)0ブロックを送信しなければならない。
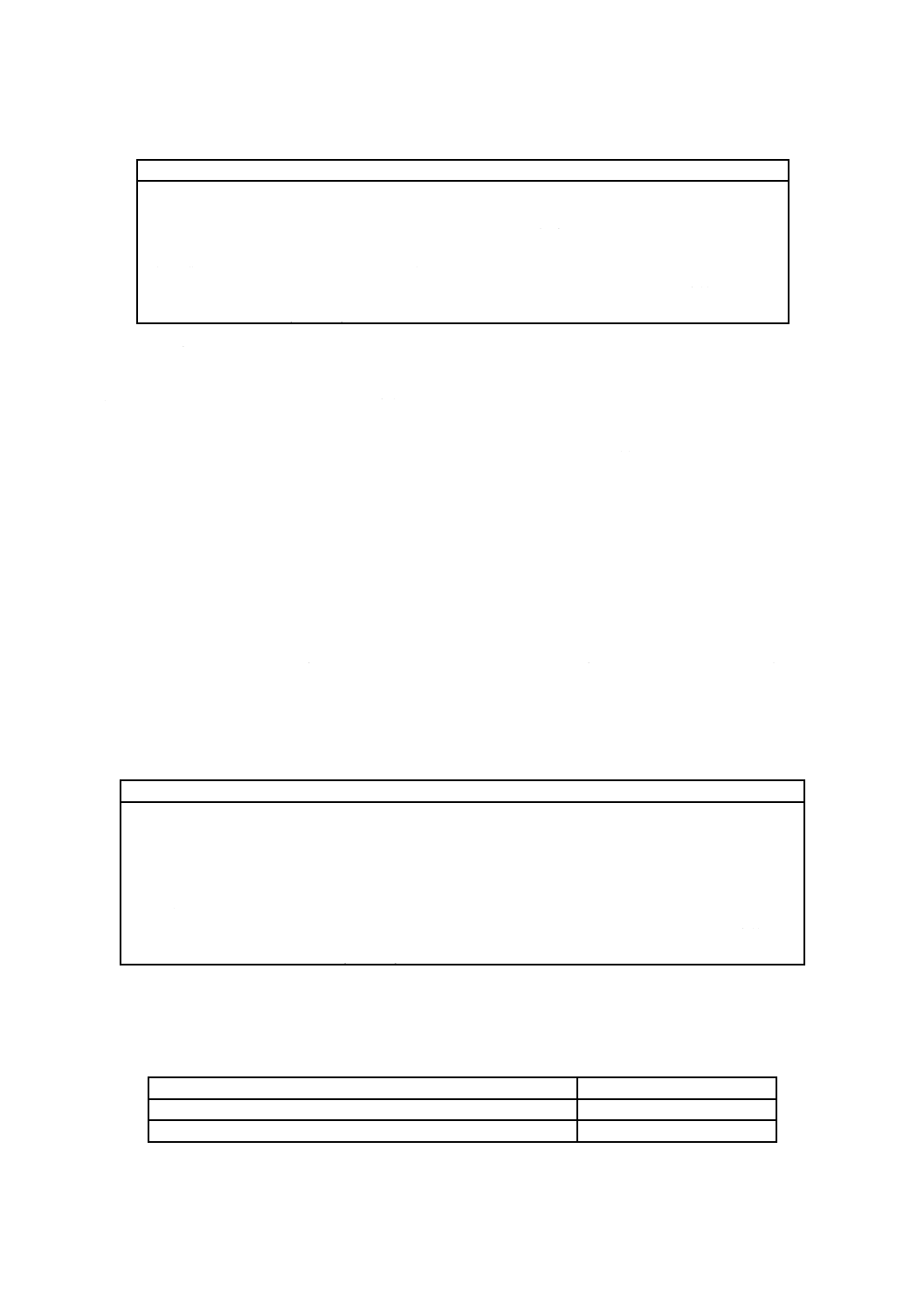
177
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.14−CIDの扱い,手順 1
PCD
LT
REQB・WUPB
→
←
任意選択フレームビット(b2,b1)がb“00”
のATQB
ATTRIBコマンドフレーム
(例 “1D 12 23 34 45 00 05 01 00” CRC̲B)
→
←
ATTRIBコマンドに対する応答
NAD及びCIDなしのI(0又は1)0
→
H.3.3.2.2 手順 2
次の手順を実行する。
a) UTは,H.1.8.1に従い活性化手順を実行する。
b) LTは,PCDがREQB・WUPBコマンドを送信するまで待機する。
c) LTは,任意選択フレームビット(b2,b1)が b“01”に等しいATQBを送信する。これは,CIDに対応
し,NADに対応しないことを意味する。
d) LTは,PCDがATTRIBコマンドを送信するまで待機する。PCDは,Param 4のバイト値が“0X”(CID=X
であり,Xは,0〜14の値)に等しい有効なATTRIBコマンドフレームを送信しなければならない。
e) LTは,PCDが手順d)でParam 4のバイト値に割り当てたCID値でATTRIBコマンドに対する応答を
送信する。
f)
PCDは,表H.1に従って動作結果コードをUTに返信しなければならない。
g) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
h) PCDは,PCDが手順d)で割り当てたCID値を用いるか,又は,任意選択として,CID=0の場合には,
CIDを用いないで,次のI(0又は1)0ブロックを送信しなければならない。PCDは,このI(0又は1)0
ブロックにNADを使用してはならない。
シナリオH.15−CIDの扱い,手順 2
PCD
LT
REQB・WUPB
→
←
任意選択フレームビット(b2,b1)がb
“01”のATQB
CID値Xが0〜14のATTRIBコマンドフレーム
(例 Param 4 = “0X”)(例 “1D 12 23 34 45 00 05 01 0X”
CRC̲B)
→
←
ATTRIBコマンドに対する応答
NADなしで,CID値が“0X”のI(0又は1)0
→
H.3.3.3 試験成績書
表H.13に従って,表H.24の該当欄に試験結果を記入する。
表H.13−PCDによる活性化におけるCIDの扱いの試験結果の判定
説明
試験結果
PCDコマンド手順が期待どおりの場合
合格
その他の場合
不合格
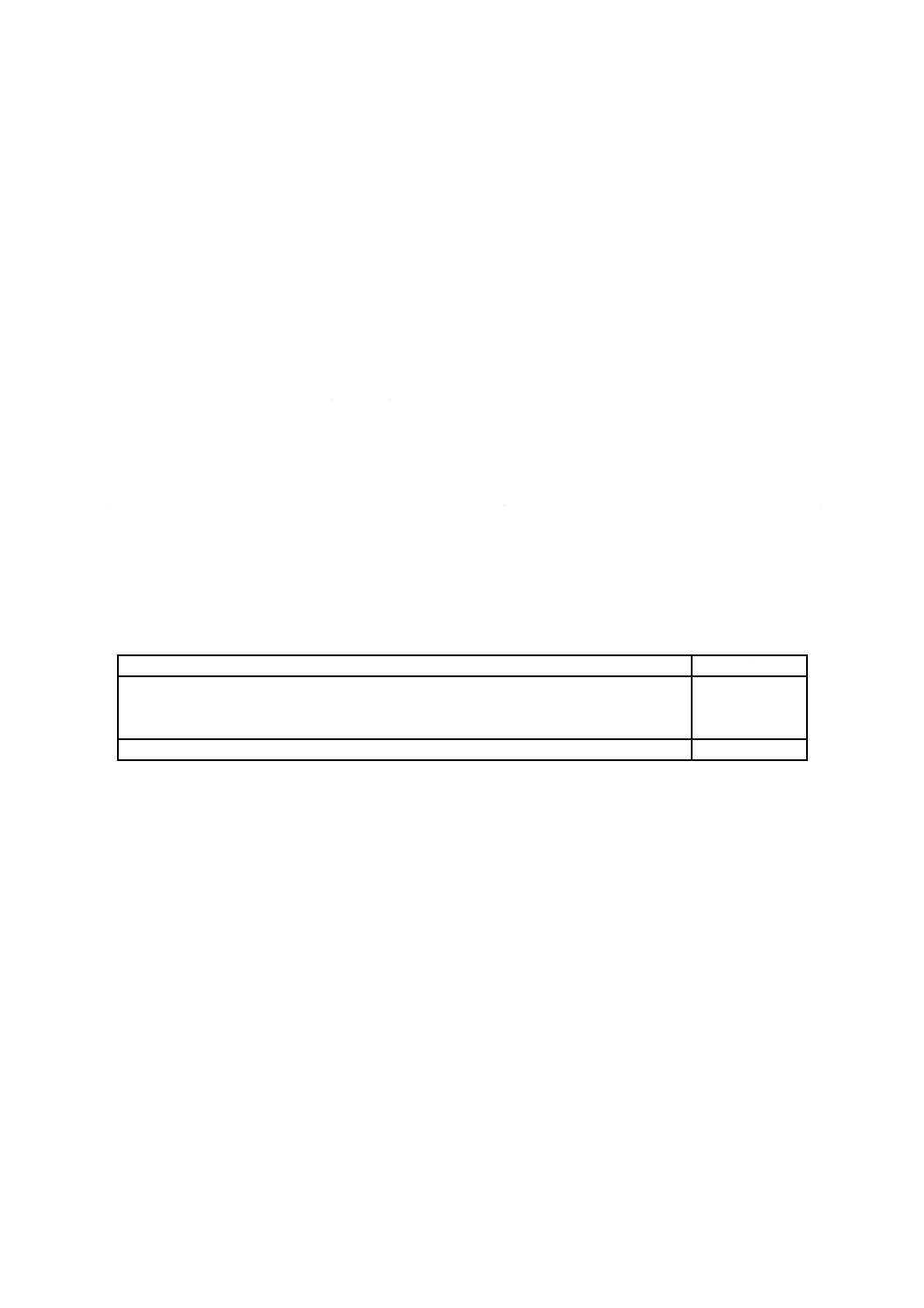
178
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.4 PCDの論理操作に対する試験方法
H.4.1を除いて,この箇条で記述された全ての試験方法は,二度(A型信号インタフェースで一度,及び,
B型信号インタフェースで一度)適用しなければならない。
H.4.1 ポーリングループの扱い
この試験は,ポーリング中のPCDの動作を判定することを目的とする。JIS X 6322-3:2011の5.1で規定
する条件を適用しなければならない。
H.4.1.1 試験装置
H.1を参照。
H.4.1.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の処理中,RF入力及び受信データを絶えず観測し,JIS X 6322-2:2011の規定に一致していることを確
認しなければならない。通信の論理的内容と同様に,全ての信号変化(レベル及びタイミング)を記録し
なければならない。次の手順を実行する。
a) UTは,H.1.8.1に従いプロトコル活性化手順を実行する。
b) PCDが有効なREQA・WUPA コマンドフレーム及び有効なREQB・WUPBコマンドフレームを任意
の順序及び繰返しで送信するまで,LTは,待機する。
H.4.1.3 試験成績書
表H.14に従って,表H.25の該当欄にA型及びB型両方の試験結果を記入する。
表H.14−ポーリングループの扱いの試験結果の判定
説明
試験結果
PCDが,REQA・WUPAコマンドフレーム及びREQB・WUPBコマンドフレームをそれぞ
れ少なくとも1度送信し,A型及びB型のコマンドの時間間隔が少なくとも5 msある場
合。JIS X 6322-3:2011の5.1で規定する条件を適用しなければならない。
合格
その他の場合
不合格
H.4.2 待ち時間延長要求に対するPCDの反応
この試験は,PICCがフレーム待ち時間延長要求(JIS X 6322-4:2011の7.3参照)を使用する場合のPCD
の動作を判定することを目的とする。PCDによるWTX維持の仕組みについても試験する。
LTがB型PICCをエミュレートする場合には,この試験は,TR0及びTR1をLTの省略時値に設定し,
少なくとも0,1及び14に設定されたFWIに対して実行しなければならない。
この試験は,表H.15に従って,少なくとも1,3及び59に設定されたWTXMに対して実行しなければ
ならない。
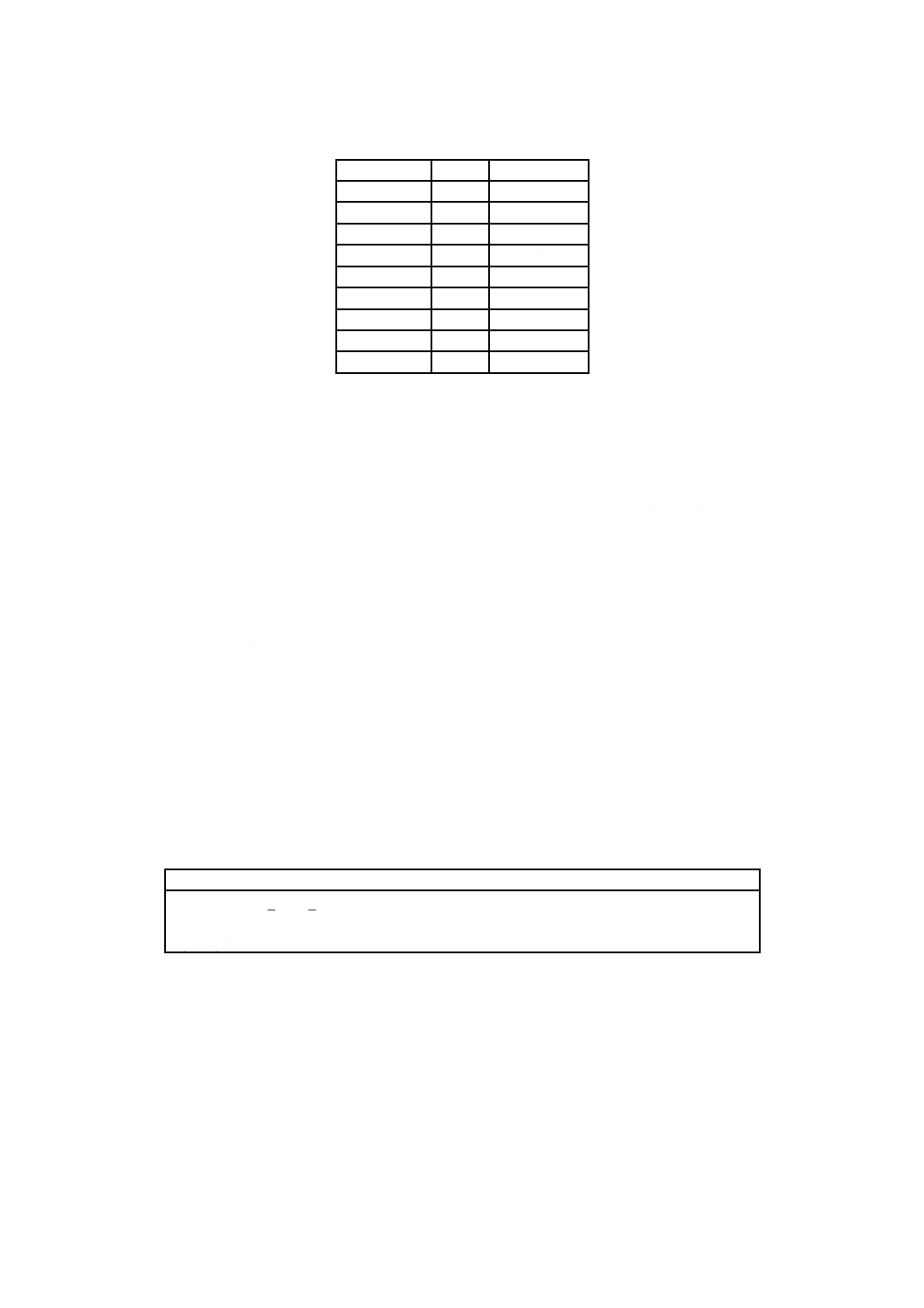
179
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.15−最小の組合せ
組合せ
FWI
WTXM
1
0
1
2
0
3
3
0
59
4
1
1
5
1
3
6
1
59
7
14
1
8
14
3
9
14
59
H.4.2.1 試験装置
H.1を参照。
H.4.2.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の処理中,RF入力及び受信データを絶えず観測し,JIS X 6322-2:2011の規定に一致していることを確
認しなければならない。 通信の論理的内容と同様に,全ての信号変化(レベル及びタイミング)を記録し
なければならない。
UTは,A型に対してはH.1.8.2に従い,B型に対してはH.1.8.3に従い,プロトコル活性化手順を実行
する。
H.4.2.2.1 手順 1(JIS X 6322-4:2011の7.3)
手順H.4.2.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI(0)0ブロックをPCDがLTに送信するまで,LTは,
待機する。
c) LTは,フレーム待ち時間延長するためS(WTX)要求を送信する。
d) PCDは,INF(b6〜b1)=WTXMとなっているS(WTX)応答を送信しなければならない。
シナリオH.16−LTの待ち時間延長要求に対するPCDの反応,手順 1
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
S(WTX)要求
S(WTX)応答
→
H.4.2.2.1.1 期待する結果
PCDコマンドは,全ての組合せで,H.4.2で定義される全てのFWI値及びWTXM値に対し,シナリオ
H.16によることが期待される。全ての実施した試験に合格した場合にだけ,試験に合格とする。
H.4.2.2.1.2 試験成績書
表H.16に従って,表H.25の該当欄にA型及びB型両方の試験結果を記入する。
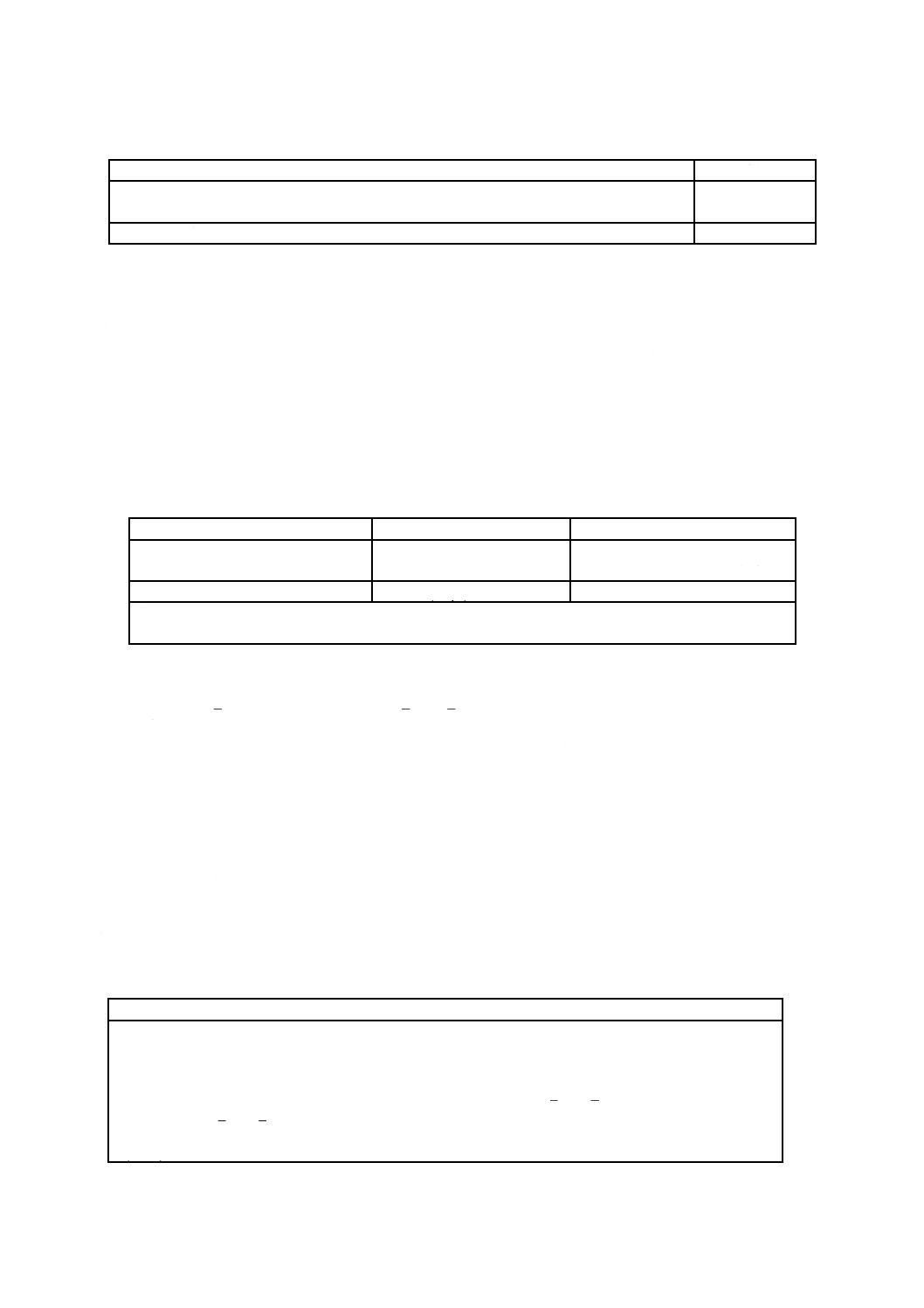
180
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.16−待ち時間延長要求に対するPCDの反応,手順 1の試験結果の判定
説明
試験結果
PCDが,H.4.2で定義される全てのFWI値及びWTXM値(試験するための最小の組合せは
表H.15で与えられる。)に対し,INF(b6〜b1) = WTXMでS(WTX)応答を送信する場合
合格
その他の場合
不合格
H.4.2.2.2 手順 2(JIS X 6322-4:2011の7.3)
手順H.4.2.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,S(WTX)要求を送信する。
d) PCDは,INF(b6〜b1)=WTXMとしたS(WTX)応答を送信しなければならない。期待した応答に一致し
ない場合には,ここで試験を終了する。
e) 次のビットタイミングパラメタをLTに設定する。
パラメタ
値
参照
一時的なフレーム応答時間
FWTTEMP
WTXM×(256×16/fc)×2FWI
JIS X 6322-3:2011の7.9.4.3
JIS X 6322-4:2011の7.2 及び 7.3
JIS X 6322-3:2011で定義されるEGT 最大値 (19 μs)
JIS X 6322-3:2011の7.1.2
注記 フレーム応答時間は,受信フレームのEOF後縁と次に送信されるフレームのSOF前縁との間の時
間と定義される。
f)
LTは,b)で送られたUT̲TEST̲COMMAND1コマンドの応答を送信する。
g) PCDは,UT̲APDU応答(コマンドUT̲TEST̲COMMAND1に対する応答)をUTに伝送することが
期待される。
h) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
i)
INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。PCDは,ここでFWTをリセットしなければならない。
j)
LTは,少なくとも期待されたFWTの間,無応答のままでいる。このことは,PCDに対するFWTタ
イムアウトを意味する。
k) PCD応答の有無,内容,及びタイミングを記録する。PCDは,FWTタイムアウトの後にだけ,R(NAK)
ブロックを送信しなければならない(JIS X 6322-4:2011の7.5.4.2)。
l)
手順i)のPCDフレームの終了から手順k)のPCDフレームの開始までの時間を測定し記録する。
シナリオH.17−LTの待ち時間延長要求に対するPCDの反応,手順 2
PCD
LT
I(0)0 (INF = UT̲TEST̲COMMAND1)
→
←
S(WTX)要求(WTXMは,試験設定による。)
S(WTX)応答
→
←
I(0)0 (INF = UT̲TEST̲COMMAND1に対する応答)
I(0)1 (INF = UT̲TEST̲COMMAND1)
→
←
無応答
R(NAK)
→
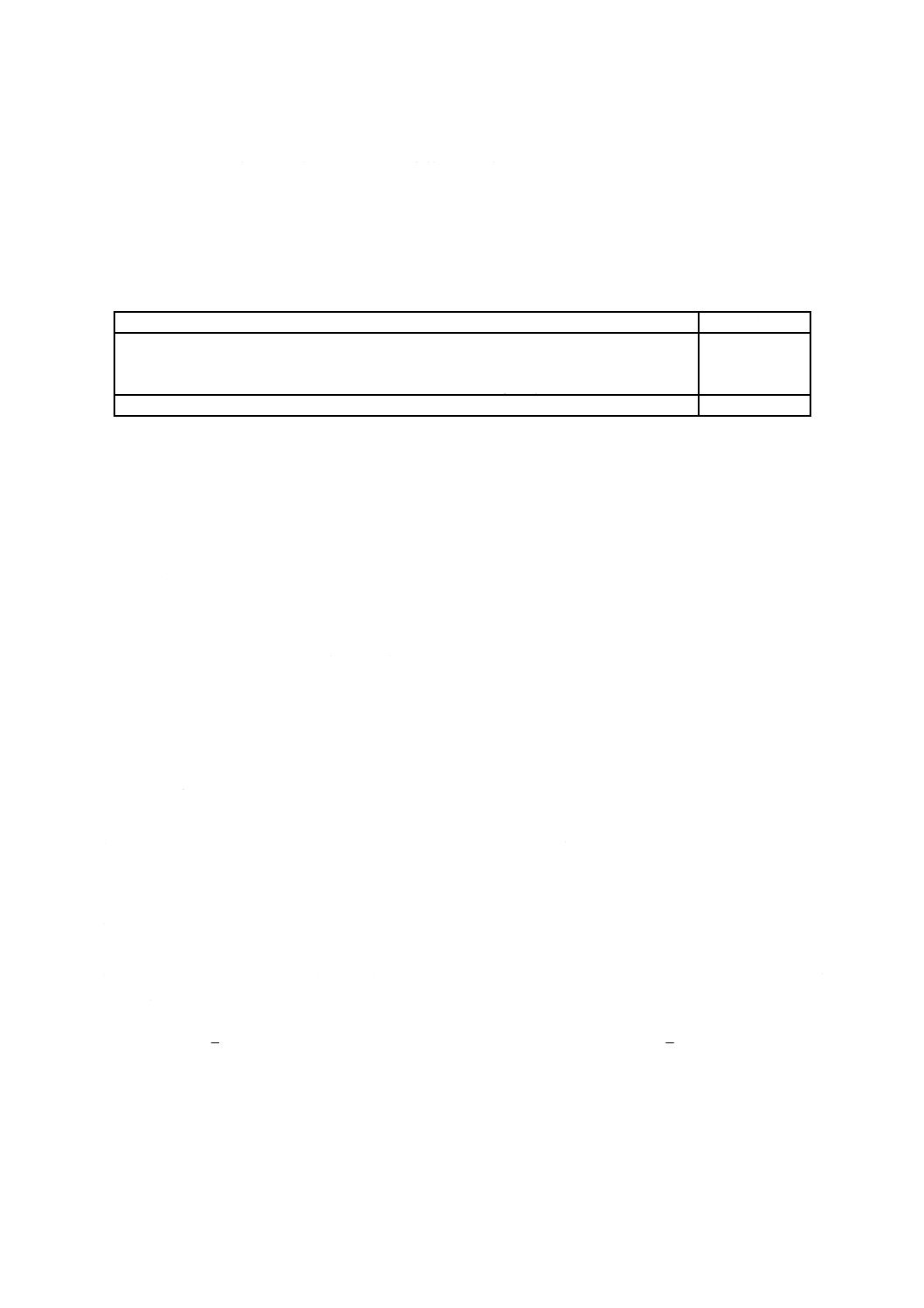
181
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.4.2.2.2.1 期待する結果
PCDコマンドは,全ての組合せで,H.4.2で定義される全てのFWI及びWTXM値に対し,シナリオH.17
によることが期待される。これらの異なった値の全ての試験に合格した場合にだけ,試験に合格とする。
H.4.2.2.2.2 試験成績書
表H.17に従って,表H.25の該当欄にA型及びB型両方の試験結果を記入する。
表H.17−待ち時間延長要求に対するPCDの反応,手順 2の試験結果の判定
説明
試験結果
TEST̲COMMAND1に対する応答がUTに返送されなかった場合,又は,PCDがH.4.2で定
義される少なくとも一つのFWI値及びWTXM値の組合せ(試験するための最小の組合せは
表H.15で与えられる。)に対するFWTタイムアウト前にR(NAK)を送信した場合
不合格
その他の場合
合格
H.4.3 誤り検出及び回復
この試験は,JIS X 6322-4:2011の7.5.6に従って,誤りが起きたときのPCDの動作を判定することを目
的とする。
注記 この細分箇条では,“誤りのあるブロック”とは,不良CRCをもつフレームとする。
H.4.3.1 試験装置
H.1を参照。
H.4.3.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の処理中,RF入力及び受信データを絶えず観測し,JIS X 6322-2:2011の規定に一致していることを確
認しなければならない。通信の論理的内容と同様に,全ての信号変化(レベル及びタイミング)を記録し
なければならない。
UTは,A型に対してはH.1.8.2に従い,B型に対してはH.1.8.3に従い,プロトコル活性化手順を実行
する。
H.4.3.2.1 手順 1(JIS X 6322-4:2011の附属書Bにおけるシナリオ12)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,誤りのあるI-blockをPCDに送信する。
d) PCDは,R(NAK)0を送信しなければならない。
e) LTは,I-blockをPCDに送信する(このI-blockは,UT̲TEST̲COMMAND1に対するUT̲APDU応答
を含む。)。
f)
PCDは,UT̲APDU応答をUTに伝送することが期待される。UTは,このUT̲APDU応答が正しく受
け入れられることを確認する。
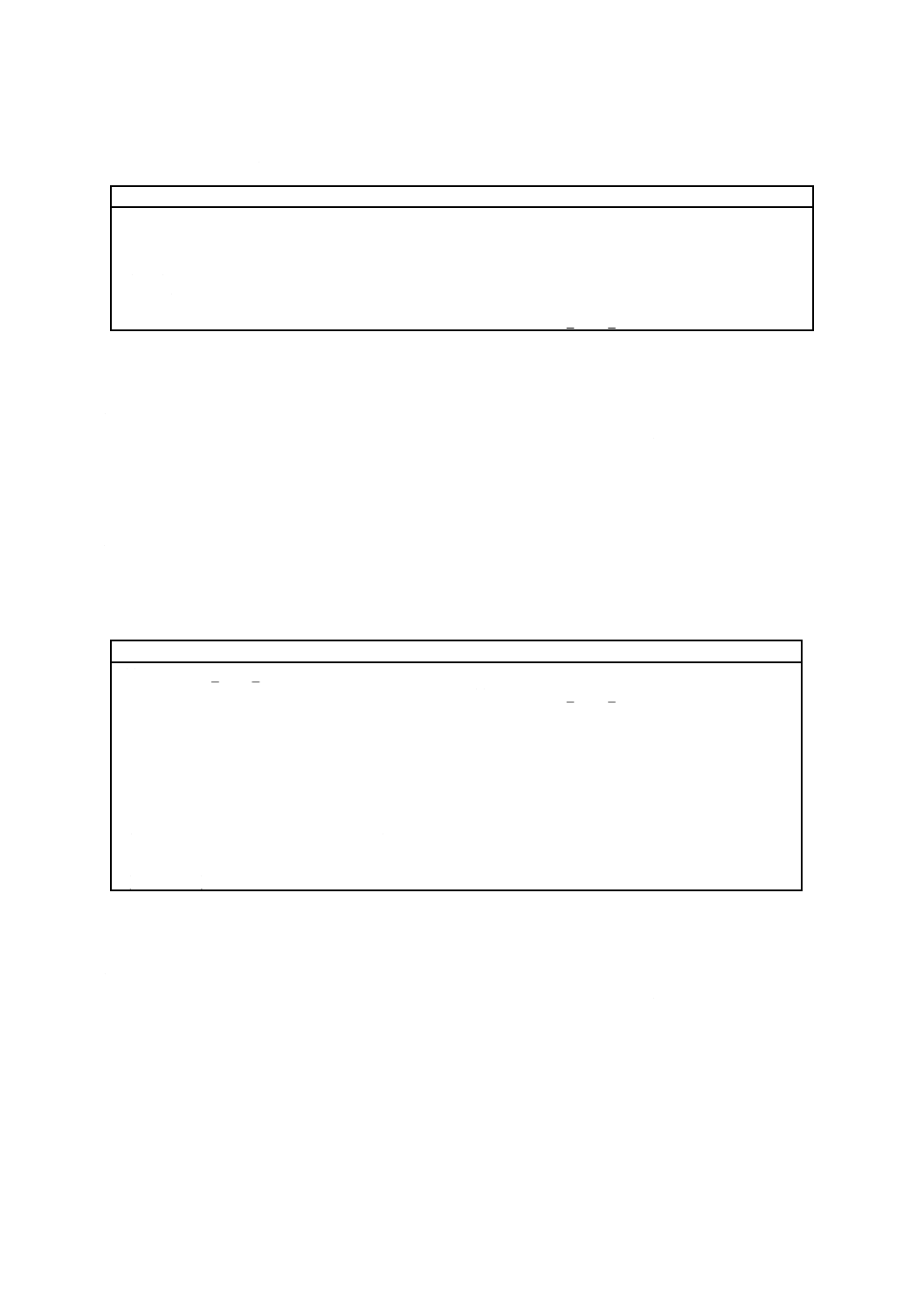
182
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.18−PCDによる誤り検出及び伝送誤りの回復
(JIS X 6322-4:2011の附属書Bにおけるシナリオ12),手順 1
PCD
LT
I(0)0(INF=UT̲TEST̲COMMAND1)
→
←
I(0)0 (INF = UT̲TEST̲COMMAND1に対する応答,
不良CRC)
R(NAK)0
(“BA” CID CRC又は“B2” CRC)
→
←
I(0)0 (INF= UT̲TEST̲COMMAND1に対する応答)
H.4.3.2.2 手順 2(JIS X 6322-4:2011の7.5.4.2 規則 4)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,誤りのあるブロックをPCDに送信する。
d) PCDは,R(NAK)0を送信しなければならない。
e) LTは,2度目の無効なブロックをPCDに送信する。
f)
PCDは,R(NAK)0又はS(DESELECT)要求のいずれかを送信しなければならない。
シナリオH.19−PCDによる誤り検出及び伝送誤りの回復,手順 2
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
I(0)0 (INF= UT̲TEST̲COMMAND1に対する応答,
不良CRC)
R(NAK)0
(“BA” CID CRC又は“B2” CRC)
→
←
I(0)0 (INF= UT̲TEST̲COMMAND1に対する応答,
不良CRC)
R(NAK)0
(“BA” CID CRC若しくは“B2” CRC)
又は
S(DESELECT)
→
H.4.3.2.3 手順 3(JIS X 6322-4:2011の7.5.4.2 規則4)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,無応答のままでいる。
d) PCDからの全ての応答を記録する。PCDは,少なくとも1回R(NAK)0を送信しなければならない。
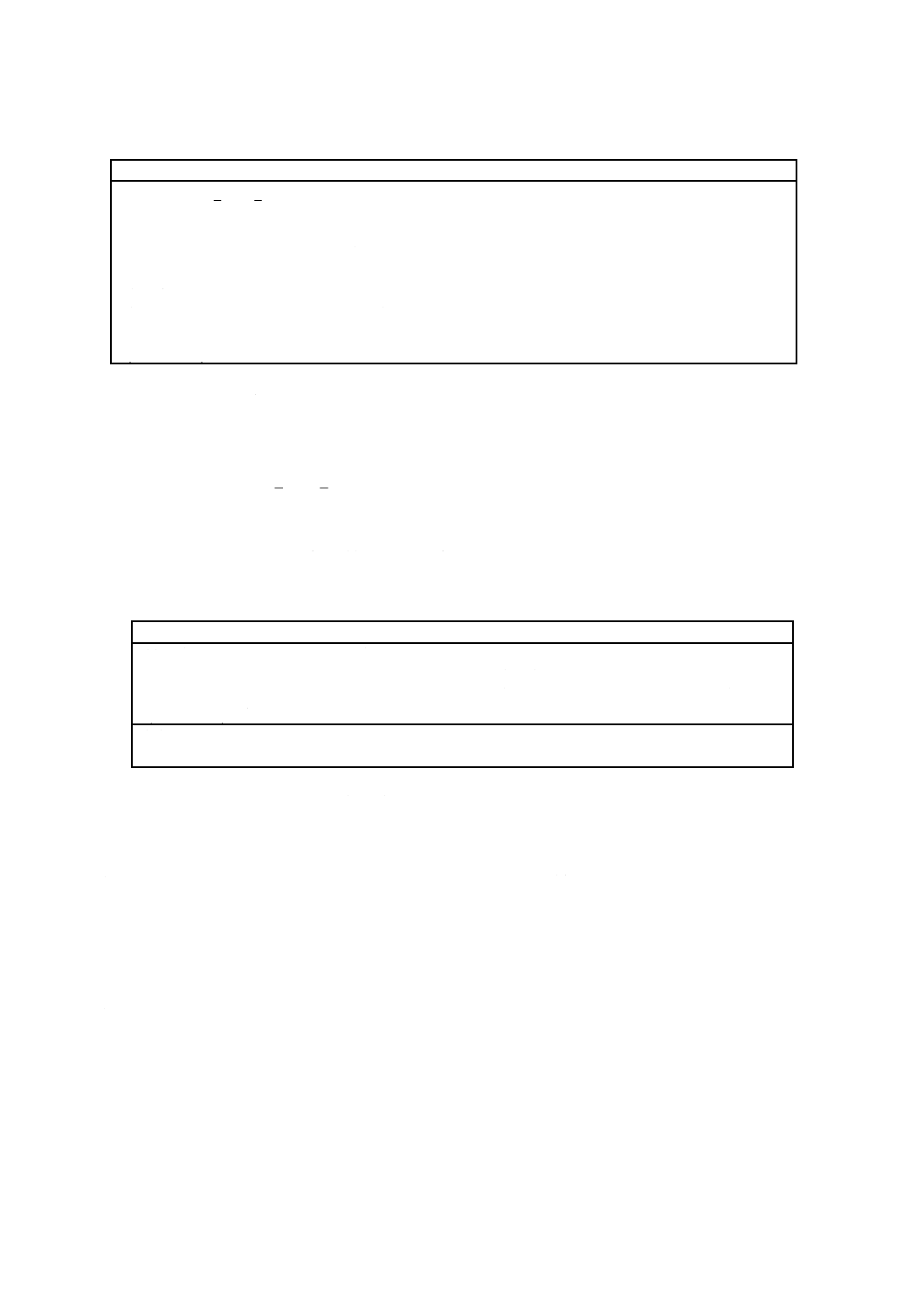
183
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.20−PCDによる誤り検出及び伝送誤りの回復,手順 3
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
無応答
R(NAK)0
(“BA” CID CRC又は“B2” CRC)
→
←
無応答
R(NAK)0
(“BA” CID CRC若しくは“B2” CRC)
又は
S(DESELECT)
→
H.4.3.2.4 手順 4(JIS X 6322-4:2011の7.5.4.2 規則 7)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,(プロトコルに違反して)R(ACK)0を送信する。
d) PCDは,S(DESELECT)要求を送信しなければならない。
シナリオH.21−PCDによる誤り検出及びプロトコル誤りの回復,手順4
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
R(ACK)0
(“AA” CID CRC又は“A2” CRC)a)
S(DESELECT)要求
→
注a) PCDブロックがCIDを含んでいる場合には,左側が選択され,その他の場合には,右側が選択さ
れなければならない。
H.4.3.2.5 手順 5 (ブロック連鎖中) (JIS X 6322-4:2011の7.5.4.2 規則5,及び,JIS X 6322-4:2011の
附属書Bにおけるシナリオ23)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,ブロック連鎖の最初のIブロックのI(1)0を送信して,PCDからの応答を待つ。
d) PCDは,R(ACK)1を送信しなければならない。
e) LTは,誤りのあるIブロックのI(0)1をPCDに送信する。
f)
PCDは,R(ACK)1を送信しなければならない。
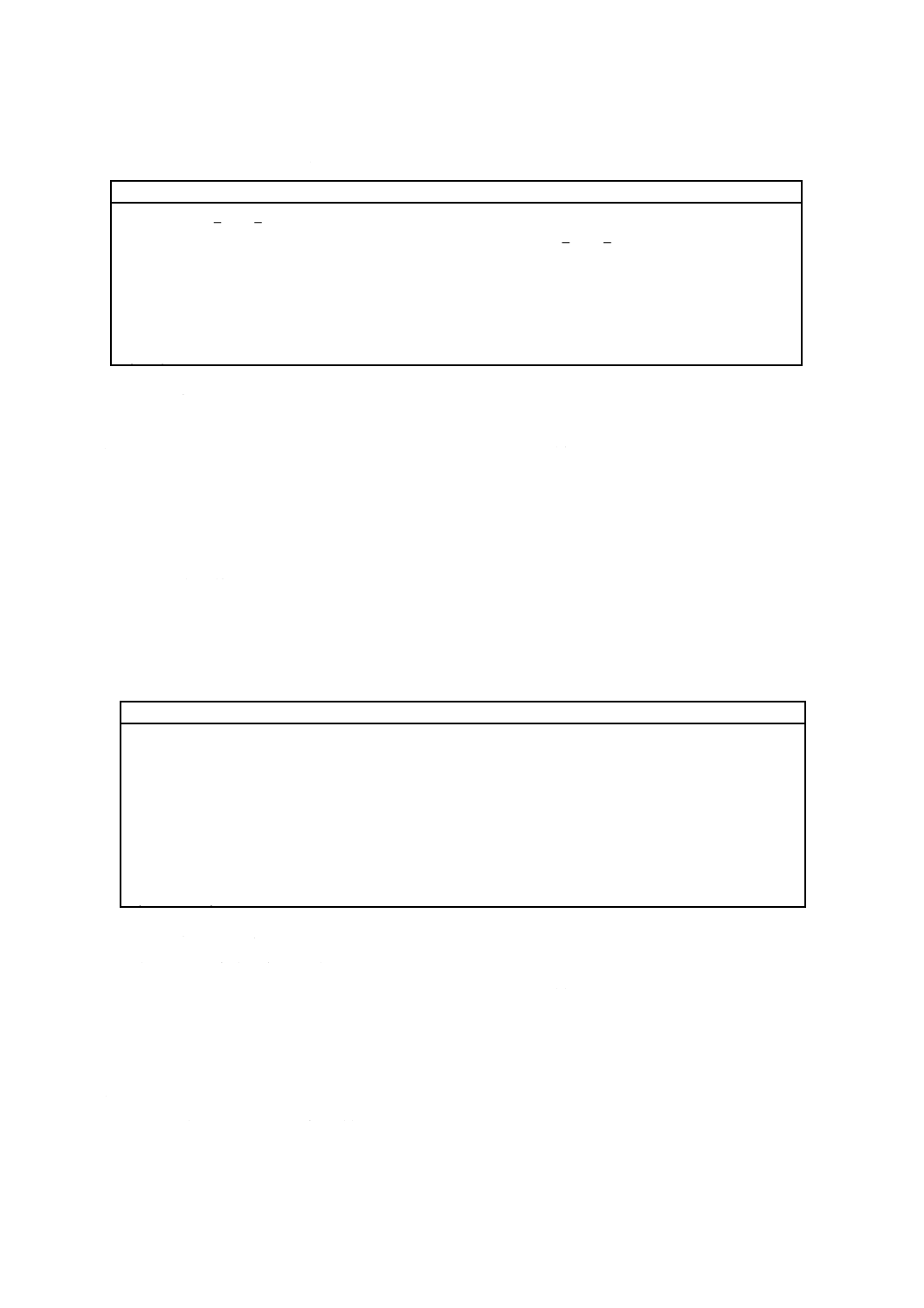
184
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.22−PCDによる誤り検出及び伝送誤りの回復,
手順 5(JIS X 6322-4:2011の附属書Bにおけるシナリオ23)
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
I(1)0 (INF=UT̲TEST̲COMMAND1に対する応答の
先頭ブロック連鎖)
R(ACK)1
(“AB” CID CRC又は“A3” CRC)
→
←
I(0)1 (INF=UT̲TEST̲COMMAND1に対する応答の
最終ブロック連鎖,不良CRC)
R(ACK)1
→
H.4.3.2.6 手順 6(JIS X 6322-4:2011の7.5.4.2)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,誤りのあるブロックをPCDに送信する。
d) PCDは,R(NAK)0を送信しなければならない。
e) LTは,無応答のままでいる。
f)
PCDからの全ての応答を記録する。PCDは,R(NAK)0又はS(DESELECT)のいずれかを送信しなけれ
ばならない。
シナリオH.23−PCDによる誤り検出及び伝送誤りの回復,手順 6
PCD
LT
I(0)0(INF=UT̲TEST̲COMMAND1)
→
←
I(0)0(INF=UT̲TEST̲COMMAND1に対する応答,
不良CRC)
R(NAK)0
(“BA” CID CRC又は“B2” CRC)
→
←
無応答
R(NAK)0
又は
S(DESELECT)要求
→
H.4.3.2.7 手順 7(JIS X 6322-4:2011の7.5.6,及び,JIS X 6322-4:2011の附属書Bにおけるシナリオ14)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,誤りのあるS(WTX)要求を送信する。
d) PCDは,R(NAK)0を送信しなければならない。
e) LTは,有効なS(WTX)要求を送信する。
f)
PCDは,S(WTX)応答で返さなければならない。
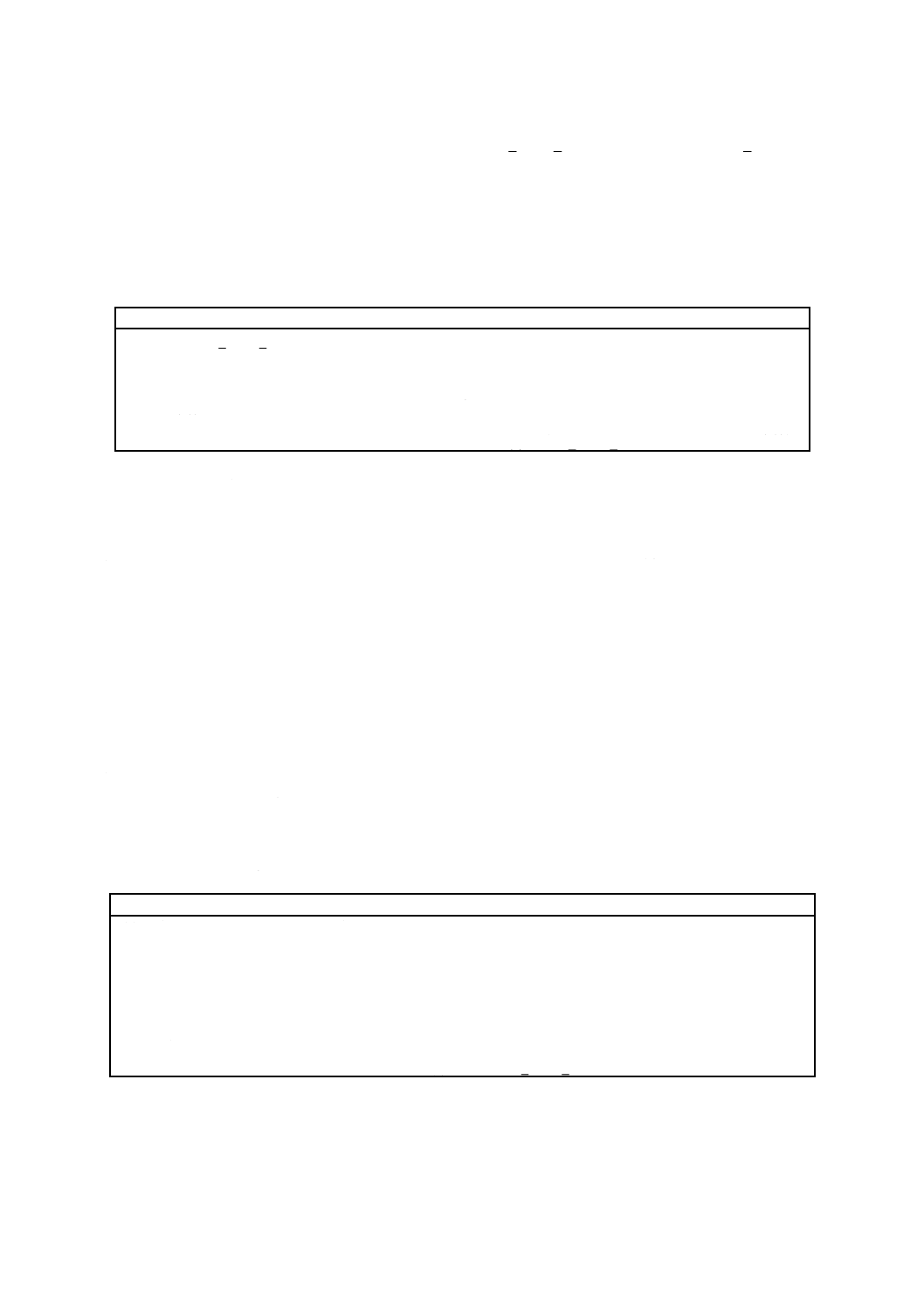
185
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
g) LTは,I-blockをPCDに送信する(このI-blockは,UT̲TEST̲COMMAND1に対するUT̲APDU応答
を含む。)。
h) PCDは,UT̲APDU応答をUTに伝送することが期待される。UTは,このUT̲APDU応答が正常に受
け入れられることを確認する。
シナリオH.24−PCDによる誤り検出及び伝送誤りの回復,
手順7(JIS X 6322-4:2011の附属書Bにおけるシナリオ14)
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
S(WTX)要求,不良CRC
R(NAK)0 (“BA” CID CRC又は“B2” CRC)
→
←
S(WTX)要求
S(WTX)応答
→
←
I(0)0 (UT̲TEST̲COMMAND1に対する応答)
H.4.3.2.8 手順 8(JIS X 6322-4:2011の7.5.6,及び,JIS X 6322-4:2011の附属書Bにおけるシナリオ17)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) INFフィールドをUT̲TEST̲COMMAND1としたI-blockをPCDがLTに送信するまで,LTは,待機
する。
c) LTは,S(WTX)要求ブロックを送信する。
d) PCDは,S(WTX)応答で返さなければならない。
e) LTは,誤りのあるIブロックのI(0)0を送信する。
f)
PCDは,R(NAK)0を送信しなければならない。
g) PCDのFWTが拡張されたままでいることを確認するために,LTは,R(NAK)0とI(0)0との間の最大タ
イミングで有効なIブロックの I(0)0を送信する。
h) PCDは,UT̲APDU応答をUTに伝送することが期待される。UTは,このUT̲APDU応答が正常に受
け入れられることを確認する。
シナリオH.25−PCDによる誤り検出及び伝送誤りの回復,
手順8 (JIS X 6322-4:2011の附属書Bにおけるシナリオ17)
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
S(WTX)要求
S(WTX)応答
→
←
I(0)0(INF= UT̲TEST̲COMMAND1に対する応答,不良CRC)
R(NAK)0
(“BA” CID CRC又は“B2” CRC)
→
←
I(0)0 (INF=UT̲TEST̲COMMAND1に対する応答)
H.4.3.2.9 手順 9(ブロック連鎖中) (JIS X 6322-4:2011の附属書Bにおけるシナリオ20)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(三つのブロック連鎖を生じるUT̲TEST̲COMMAND2)をPCDに送信する。
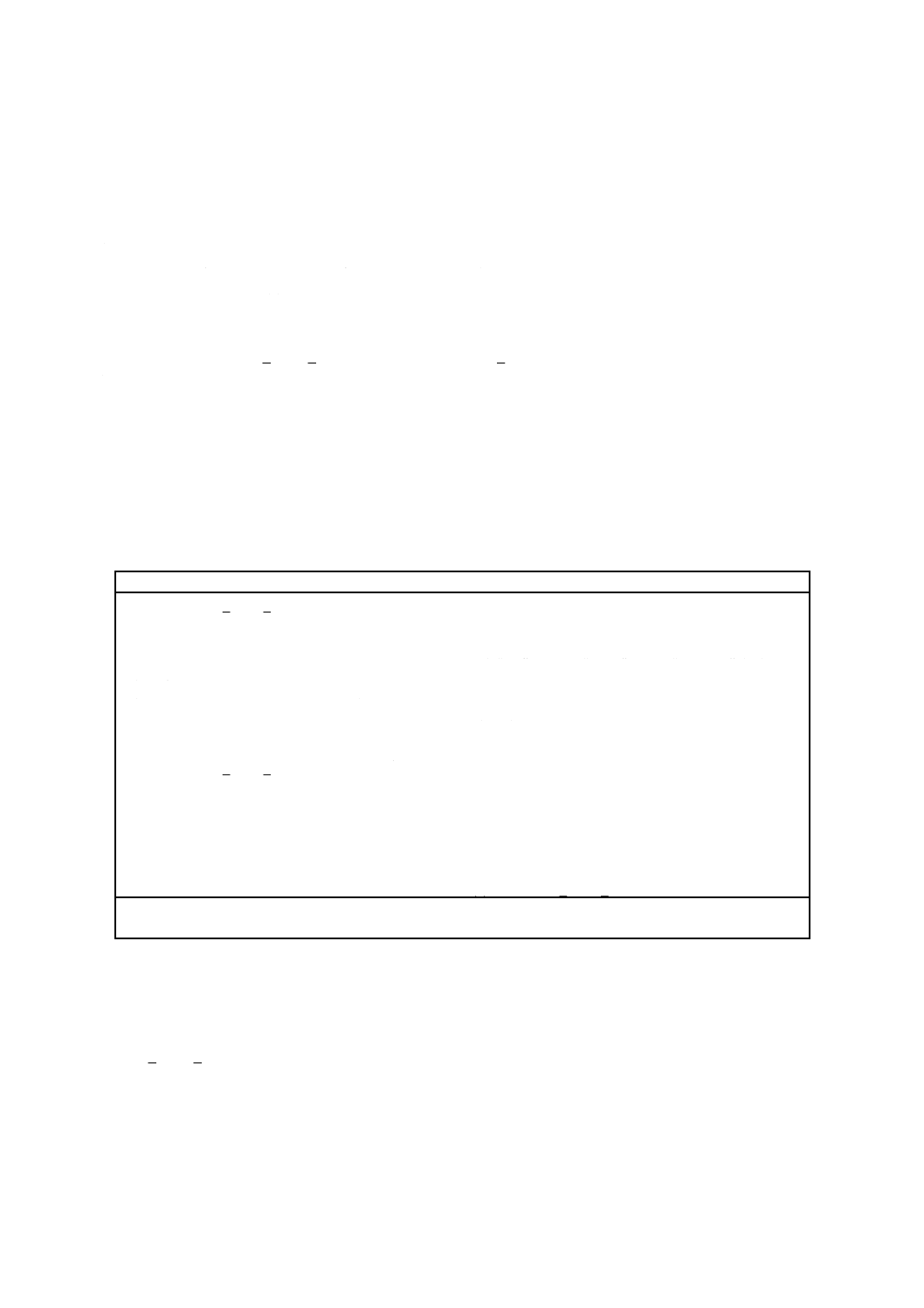
186
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) UT̲TEST̲COMMAND2の最初の連鎖ブロックのINFフィールドで,I-blockI(1)0をPCDがLTに送信
するまで,LTは,待機する。
c) LTは,誤りのあるR(ACK)0を送信する。
d) PCDは,R(NAK)0を送信しなければならない。
e) LTは,R(ACK)0を送信する。
f)
PCDは,ブロック連鎖の次のブロックのI(1)1を送信しなければならない。
g) LTは,R(ACK)1を送信する。
h) PCDは,ブロック連鎖の最後のブロックのI(0)0を送信しなければならない。
i)
LTは,I-block(UT̲TEST̲COMMAND2に対するUT̲APDU応答を含む。)をPCDに送信する。
j)
PCDは,UT̲APDU応答をUTに伝送することが期待される。UTは,このUT̲APDU応答が正常に受
け入れられることを確認する。
注記 UTがPCDにTEST̲COMMAND2を三つの連鎖ブロックを使って送信させることができない場
合には,手順c)の伝送誤り後のブロック番号付け及びブロック連鎖が適切に行われることを確
認する試験目的を反映するように,期待された手順を変更する。
シナリオH.26−PCDによる誤り検出及び伝送誤りの回復,
手順 9 (ブロック連鎖中) (JIS X 6322-4:2011の附属書Bにおけるシナリオ20)
PCD
LT
I(1)0(INF = UT̲TEST̲COMMAND2の先頭
ブロック連鎖)
→
←
R(ACK)0, 不良CRC
(“AA” CID “00 00”又は“A2 00 00”)a)
R(NAK)0
(“BA” CID CRC又は“B2” CRC)
→
←
R(ACK)0
(“AA” CID CRC又は“A2” CRC)a)
I(1)1(INF = UT̲TEST̲COMMAND2の2番
目のブロック連鎖)
→
←
R(ACK)1
(“AB” CID CRC又は“A3” CRC)a)
I(0)0(INF = UT̲TEST̲COMMAND2の最終
ブロック連鎖)
→
←
I(0)0(INF= UT̲TEST̲COMMAND2に対する応答)
注a) PCDフレームがCIDを含んでいる場合には,左側が選択され,その他の場合には,右側が選択されな
ければならない。
H.4.3.2.10 手順 10(ブロック連鎖中) (JIS X 6322-4:2011の附属書Bにおけるシナリオ21参照)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(三つのブロック連鎖を生じるUT̲TEST̲COMMAND2)をPCDに送信する。
b) UT̲TEST̲COMMAND 2の最初の連鎖ブロックのINFフィールドで,I-blockI(1)0をPCDがLTに送信
するまで,LTは,待機する。
c) LTは,R(ACK)0を送信する。
d) PCDは,次の連鎖ブロックI(1)1を送信しなければならない。
e) LTは,無応答のままでいる。
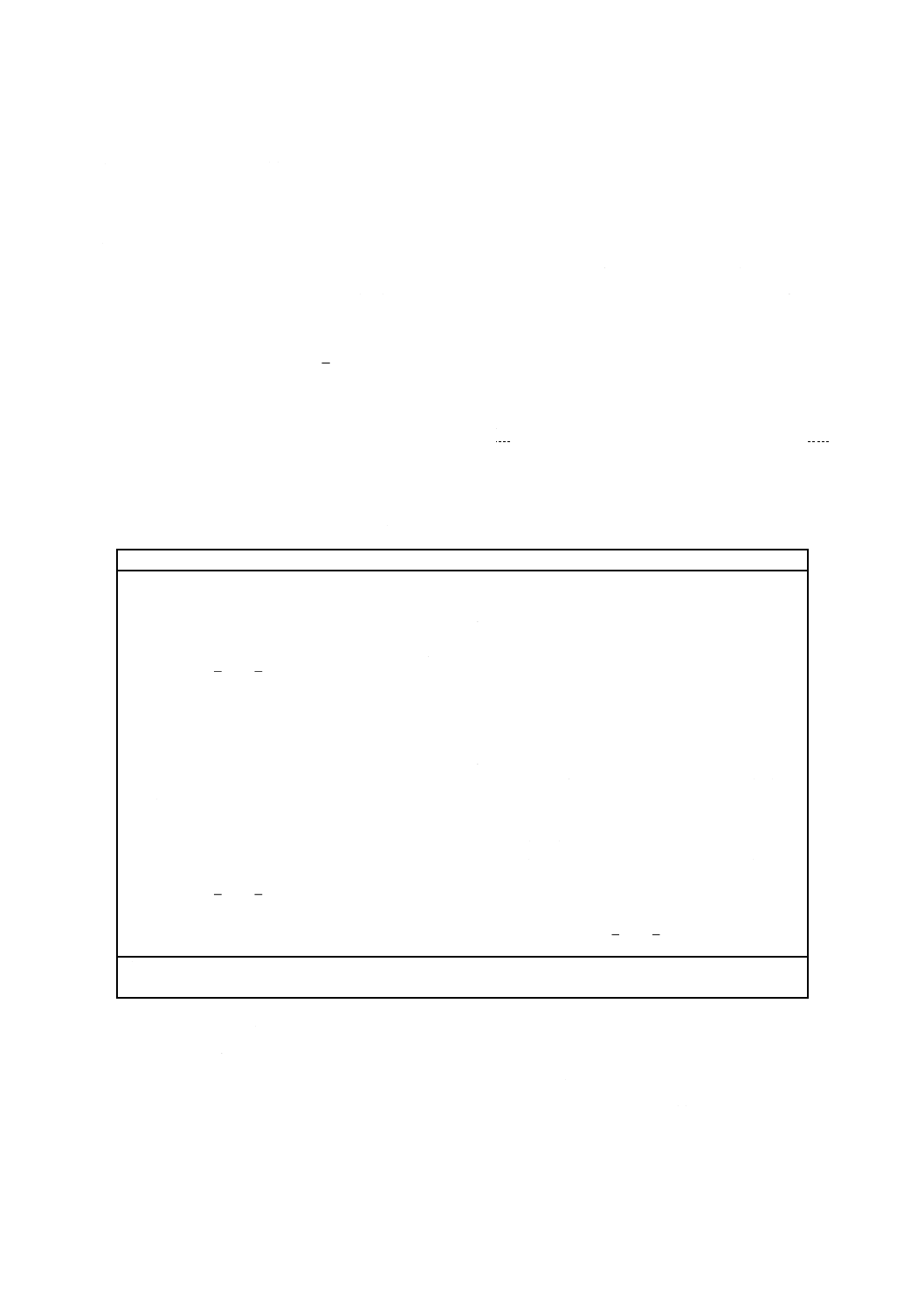
187
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
f)
PCDは,R(NAK)1を送信しなければならない。
g) LTは,R(ACK)0を送信する。
h) PCDは,前のI-blockのI(1)1をLTに再度送信しなければならない。
i)
LTは,R(ACK)1を送信する。
j)
PCDは,最後の連鎖ブロックI(0)0を送信しなければならない。
k) LTは,I-block(UT̲TEST̲COMMAND2に対するUT̲APDU応答を含む。)をPCDに送信する。
l)
PCDは,UT̲APDU応答をUTに伝送することが期待される。UTは,このUT̲APDU応答が正常に受
け入れられることを確認する。
注記1 UTがPCDにTEST̲COMMAND2を三つの連鎖ブロックを使って送信させることができない
場合には,手順c)の無応答後のブロック番号付け及びブロック連鎖が適切に行われることを
確認する試験目的を反映するように,期待された手順を変更する。
注記2 上記a)〜l)の手順は,次のシナリオH.27(JIS X 6322-4:2011の附属書Bにおけるシナリオ 21
参照)と一致するように修正している。
シナリオH.27−PCDによる誤り検出及び伝送誤りの回復,
手順 10(ブロック連鎖中) (JIS X 6322-4:2011の附属書Bにおけるシナリオ21)
PCD
LT
I(1)0 (INF = UT̲TEST̲COMMAND2の先頭ブロック
連鎖)
→
←
R(ACK)0
(“AA” CID CRC又は“A2” CRC)a)
I(1)1(INF = UT̲TEST̲COMMAND2の2番目のブロッ
ク連鎖)
→
←
無応答
R(NAK)1 (“BB” CID CRC又は“B3” CRC)
→
←
R(ACK)0
(“AA” CID CRC又は“A2” CRC)a)
I(1)1(INF = UT̲TEST̲COMMAND2の2番目のブロッ
ク連鎖)
→
←
R(ACK)1
(“AB” CID CRC又は“A3” CRC)a)
I(0)0(INF = UT̲TEST̲COMMAND2の最終ブロック連
鎖)
→
←
I(0)0(INF= UT̲TEST̲COMMAND2に対する
応答)
注a) PCDブロックがCIDを含んでいる場合には,左側が選択され,その他の場合には,右側が選択されな
ければならない。
H.4.3.2.11 手順 11(ブロック連鎖中) (JIS X 6322-4:2011の附属書Bにおけるシナリオ24)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) UT̲TEST̲COMMAND1のINFフィールドで,I-blockのI(0)0をPCDがLTに送信するまで,LTは,
待機する。
c) LTは,ブロック連鎖を示すI-blockのI(1)0を送信する。
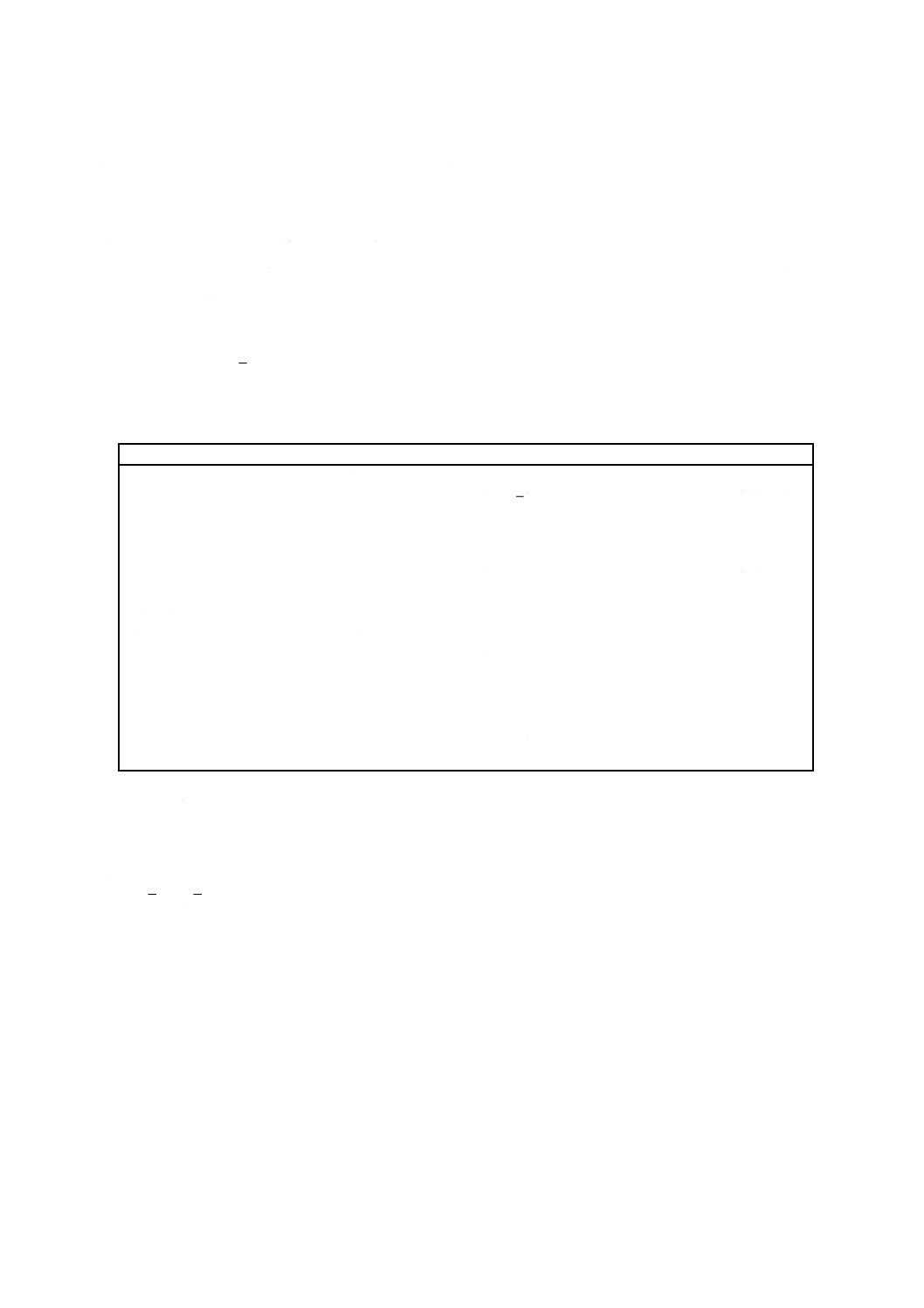
188
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) PCDは,R(ACK)1を送信しなければならない。
e) LTは,誤りのあるI-blockのI(1)1をPCDに送信する。
f)
PCDは,R(ACK)1を送信しなければならない。
g) LTは,誤りのないI-blockのI(1)1を再送信する。
h) PCDは,R(ACK)0を送信しなければならない。
i)
LTは,最後の連鎖ブロックのI-blockI(0)0(UT̲TEST̲COMMAND1に対するUT̲APDU応答を含む。)
をPCDに送信する。
j)
PCDは,全てのブロック連鎖セグメントを含むUT̲APDU応答をUTに伝送することが期待される。
UTは,このUT̲APDU応答が正常に受け入れられることを確認する。
シナリオH.28−PCDによる誤り検出及び伝送誤りの回復,
手順 11(ブロック連鎖中) (JIS X 6322-4:2011の附属書Bにおけるシナリオ24)
PCD
LT
I(0)0 (INF=UT̲TEST̲COMMAND1)
→
←
I(1)0(INF = UT̲TEST̲COMMAND1に対する応答の先頭
ブロック連鎖)
R(ACK)1
(“AB” CID CRC又は“A3” CRC)
→
←
I(1)1(INF = UT̲TEST̲COMMAND1に対する応答の2番
目のブロック連鎖,不良CRC)
R(ACK)1
(“AB” CID CRC又は“A3” CRC)
→
←
I(1)1(INF = UT̲TEST̲COMMAND1に対する応答の2番
目のブロック連鎖)
R(ACK)0
(“AA” CID CRC又は“A2” CRC)
→
←
I(0)0(INF = UT̲TEST̲COMMAND1に対する応答の最終
ブロック連鎖)
H.4.3.2.12 手順 12(JIS X 6322-4:2011の7.5.4.2 規則8)
手順H.4.3.2の直後に次の手順を用いる。
a) UTは,SEND̲UT̲APDU(UT̲TEST̲COMMAND1)をPCDに送信する。
b) UT̲TEST̲COMMAND1のINFフィールドでI-blockをPCDがLTに送信するまで,LTは,待機する。
c) LTは,無応答のままでいる。
d) PCDがR(NAK)0ブロックを送信するまで,LTは,待機する(PCDは,R-blockを2回以上送信して
もよい。)。
e) LTは,無応答のままでいる。
f)
PCDがS(DESELECT)要求をLTに送信するまで,LTは,待機する。
g) LTは,無応答のままでいる。
h) PCDからの応答を記録する。PCDは,S(DESELECT)要求を再送信又はLTを無視しなければならない。
189
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオH.29−PCDによる誤り検出及び伝送誤りの回復,手順 12
PCD
LT
I(0)0(INF=UT̲TEST̲COMMAND1)
→
←
無応答
R(NAK)0
(“BA” CID CRC又は“B2” CRC)
→
←
無応答
S(DESELECT)要求
(“CA” CID CRC又は“C2” CRC)
→
←
無応答
PCD応答
→
H.4.3.3 試験成績書
表H.18に従って,表H.25の該当欄にA型及びB型両方の試験結果を記入する。
表H.18−誤り検出及び回復の試験結果の判定
説明
試験結果
PCDコマンド手順が期待どおりの場合
合格
その他の場合
不合格
H.4.4 ブロック連鎖中のNADの扱い
この試験は,PCDが適切な方法でNADを維持することを確認することを目的とする。
H.4.4.1 試験装置
H.1を参照。
H.4.4.2 手順
LTをPCDの動作空間中に設置し,PCDコマンドの有無及び内容を記録する。
次の手順を実行する。
a) NADに対応しているLTを構成する。
b) シナリオH.26の手順を繰り返す。
H.4.4.3 試験成績書
表H.19に従って,表H.25の該当欄にA型及びB型両方の試験結果を記入する。
表H.19−ブロック連鎖中のNADの扱いの試験結果の判定
説明
試験結果
PCDがブロック連鎖の先頭パケットだけでNADを使用する場合,又はNADを
使用しない場合
合格
その他の場合
不合格
H.5 PCDが送信するパケットの連続観測
この試験は,PCDが,送信したフレーム中のいかなるRFUビットをも,RFUビットとして記述された
省略時値以外の値に設定しないことを確認することを目的とする。さらに,この試験は,RFU値に設定し
たフィールドが全くないことも確認しなければならない。また,試験は,R-block及びS-blockがプロトコ
ル定義に一致していること,並びにパケットの先頭バイトに関して与えられた規則に違反していないこと
も確認しなければならない。
190
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.5.1 RFUフィールド
RFUフィールドを試験の間,絶えず観測し,割り当てられた省略時値となっていることを常に確認しな
ければならない。RFUフィールドが省略時値に設定されない場合には,常に,試験は,不合格とし,試験
したPCDを不適合としなければならない。
H.5.2 RFU値
機能フィールドを試験の間,絶えず観測し,規格で示された機能値又は規格で示された個別値だけを含
むことを常に確認しなければならない。
機能フィールドが両者に設定されていない場合には,常に,試験は,不合格とし,試験したPCDを不適
合としなければならない。
H.5.3 R-block
R-blockは,INFフィールドを決して含んではならない(JIS X 6322-4:2011の7.1.1.1参照)。
H.5.4 S-block
WTXブロックの場合,S-blockは,1バイトのINFフィールドを含まなければならない。その他の場合,
S-blockは,INFフィールドを含んではならない(JIS X 6322-4:2011の7.1.1.1参照)。
H.5.5 PCB
PCBバイトは,許容された値を含まなければならない(JIS X 6322-4:2011の7.1.1.1及びJIS X 6322-4:2011
の附属書C参照)。
H.5.6 A型初期化フレーム
A型の初期化フレームは,許容された値を含まなければならない(JIS X 6322-3:2011の6.4.1及び6.5.3.2
参照)。
H.5.7 試験装置
H.1を参照。
H.5.8 手順
全ての試験手順及びシナリオの実行中,通信の論理的な内容を常に記録しなければならない。
H.5.9 試験成績書
表H.20に従って,表H.25及び表H.27の該当欄にA型及びB型両方の試験結果を記入する。
表H.20−PCDが送信するパケットの連続観測の試験結果の判定
説明
試験結果
PCDが,次の全ての条件を満足する場合
・全ての送信したフレーム中のRFUビットを省略時値に設定する場合
・どのフィールドにもRFU値を決して設定しない場合
・R-block及びS-blockの長さ規則に違反していない場合
・ブロック及びフレームの先頭バイトの符号化規則に違反していない場合
(JIS X 6322-4:2011の附属書Cに参考としてまとめられている。)
合格
PCDが,次の少なくとも一つの条件に該当する場合
・送信したフレーム中の少なくとも一つのRFUビットを省略時値以外の値に設定する場合
・いずれかのフィールドをRFU値に設定する場合
・R-block又はS-blockの長さ規則に違反する場合
・ブロック及びフレームの先頭バイト符号化規則に違反する場合
(JIS X 6322-4:2011の附属書Cに参考としてまとめられている。)
不合格
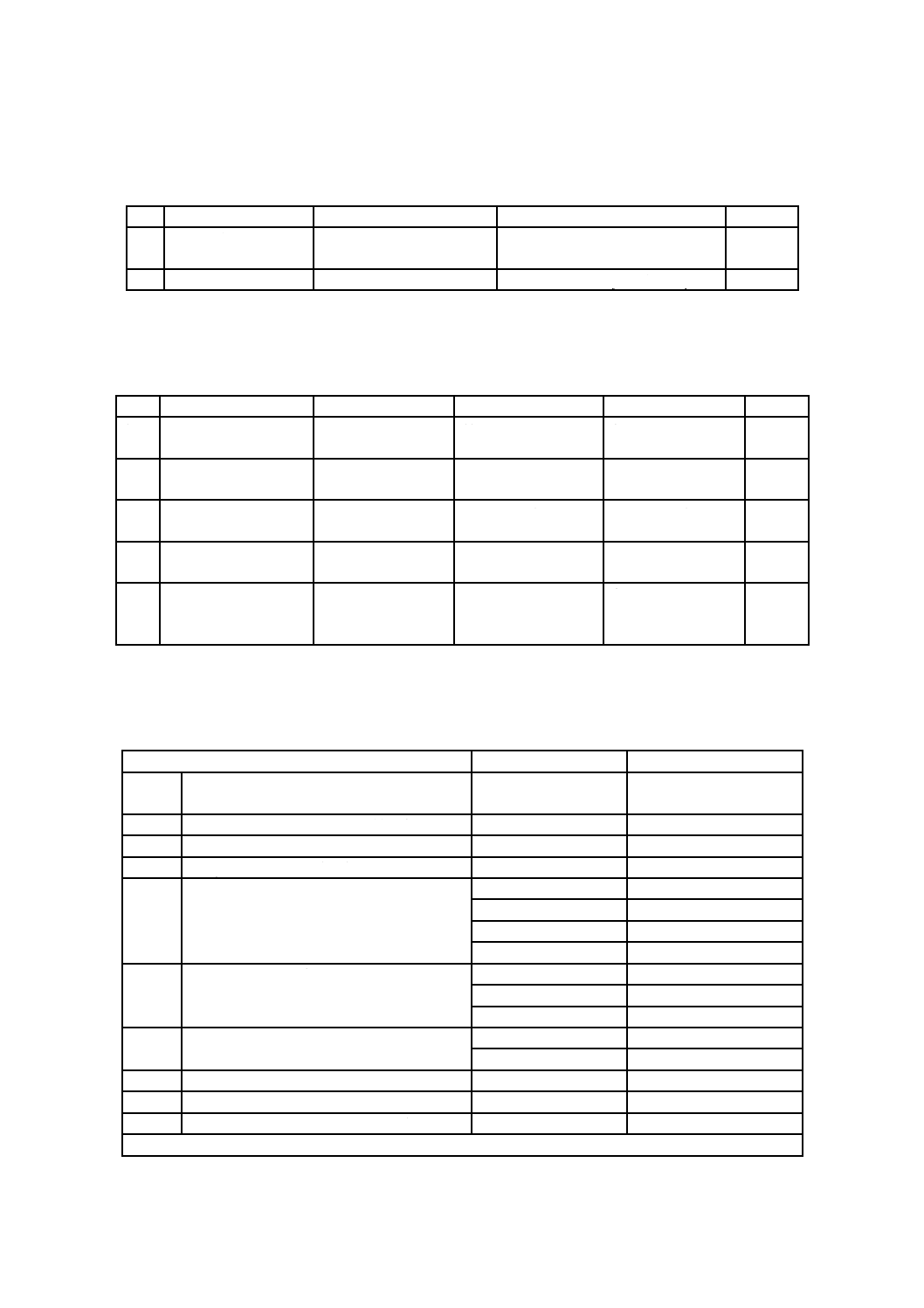
191
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.6
試験結果報告
表H.21−A型固有のタイミング表
No
パラメタ
引用JIS
引用する値
測定値
1
PICCからPCDへのフ
レーム遅延時間
JIS X 6322-3:2011の6.2.1.2 少なくとも1 172/fc(約 86 μs)
2
リクエスト保護時間
JIS X 6322-3:2011の6.2.2
少なくとも7 000/fc(約 512 μs)
注記 全てのタイミング値は,搬送波の周波数fc=13.56 MHz及びビット伝送速度fc/128(約106 kbit/s)
に対し計算する。
表H.22−B型固有のタイミング表
No
パラメタ
引用JIS
最小値
最大値
測定値
1
SOF論理0
JIS X 6322-3:2011の
7.1.4
10 etu (約94.40 μs) 11 etu(約103.83 μs)
2
EOF論理0
JIS X 6322-3:2011の
7.1.5
10 etu (約94.40 μs) 11 etu(約103.83 μs)
3
ビット境界
JIS X 6322-3:2011の
7.1.1
(n ‒ 0.125) etu
(n + 0.125) etu
4
PCDからPICCへの
EGT
JIS X 6322-3:2011の
7.1.2
0 μs
57 μs
5
PICCのEOF開始と
PCD SOF開始との間
の最小時間間隔
JIS X 6322-3:2011の
7.1.7
10 etu + 32/fs
なし
注記 全てのタイミング値は,搬送波の周波数fc=13.56 MHz及びビット伝送速度fc/128(約106 kbit/s)
に対し計算する。
表H.23−A型固有の試験方法に対する試験結果報告
この規格の試験方法
シナリオ番号
試験結果
細分
箇条
パラメタ
この規格の
試験シナリオ番号
合格,不合格,又は
適用外(NA)a)
H.2.1
PICCからPCDへのフレーム遅延時間
H.2.2
リクエスト保護時間
H.2.3
ATQA中のビット衝突の扱い
H.2.4
衝突防止ループの扱い
シナリオH.1
シナリオH.2
シナリオH.3
シナリオH.4
H.2.5
RATS及びATSの扱い
シナリオH.5
シナリオH.6
シナリオH.7
H.2.6
PPS応答の扱い
シナリオH.8
シナリオH.9
H.2.7
フレームサイズ選択機構
シナリオH.10
H.2.8
開始フレーム保護時間の扱い
シナリオH.11
H.2.9
PCDによる活性化におけるCIDの扱い
シナリオH.12
注a) 幾つかの手順からなる試験の場合,個々の手順が合格である場合にだけ合格と記す。
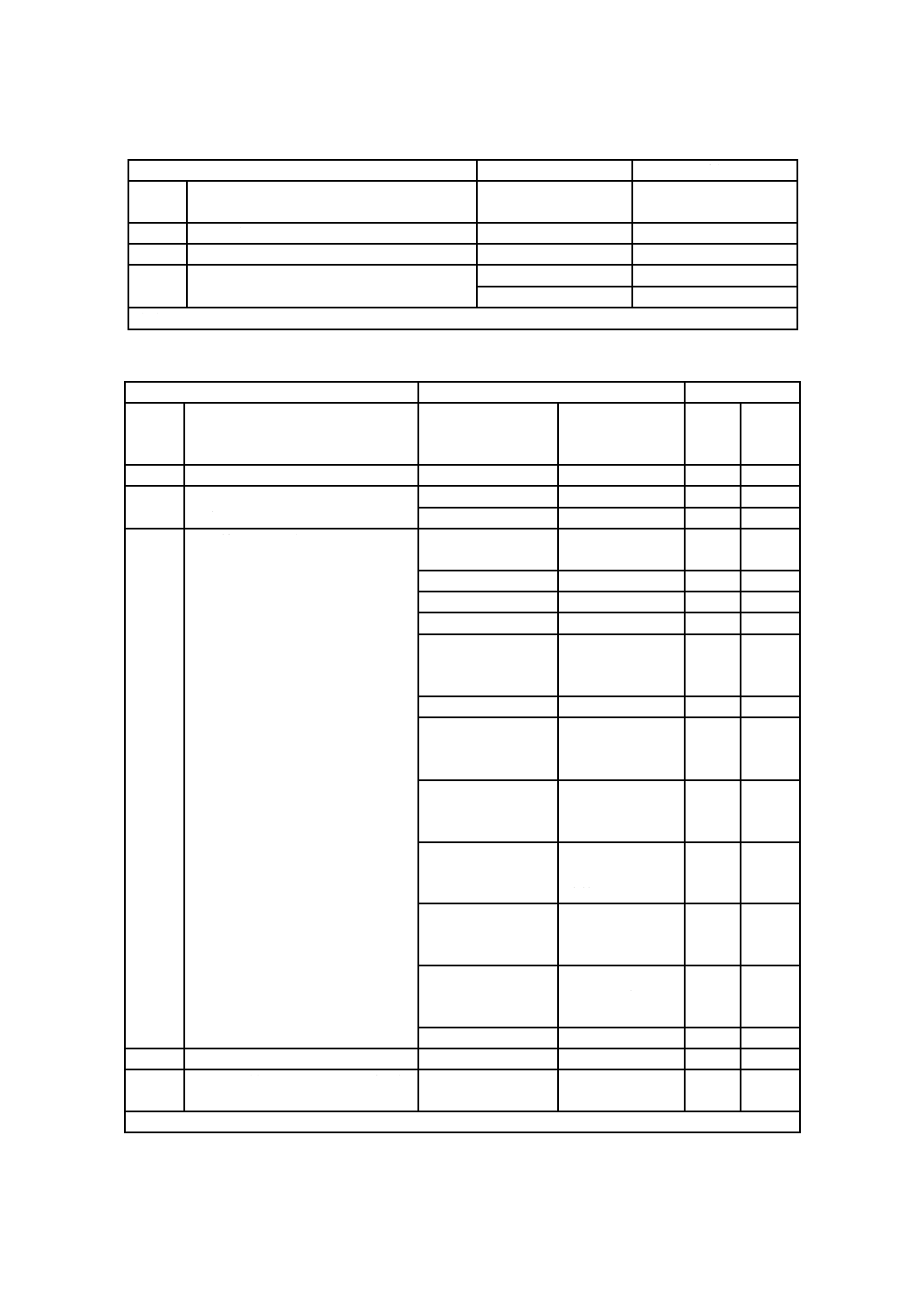
192
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.24−B型固有の試験方法に対する試験結果報告
この規格の試験方法
シナリオ番号
試験結果
細分
箇条
パラメタ
この規格の
試験シナリオ番号
合格又は不合格a)
H.3.1
入出力伝送タイミング
H.3.2
フレームサイズ選択機構
シナリオH.13
H.3.3
PCDによる活性化におけるCIDの扱い
シナリオH.14
シナリオH.15
注a) 幾つかの手順からなる試験の場合,個々の手順が合格である場合にだけ合格と記す。
表H.25−PCDの論理操作に対する試験方法に対する試験結果報告
この規格の試験方法
シナリオ番号
試験結果
細分
箇条
パラメタ
この規格の
試験シナリオ番号
JIS X 6322-4:2011
の附属書Bの試
験シナリオ番号
A型a)
B型a)
H.4.1
ポーリングループの扱い
H.4.2
待ち時間延長要求に対するPCDの
反応
シナリオH.16
シナリオH.17
H.4.3
誤り検出及び回復
シナリオH.18
シナリオ12
Iブロックの交換
シナリオH.19
シナリオH.20
シナリオH.21
シナリオH.22
シナリオ23
PICCがブロック
連鎖を使用
シナリオH.23
シナリオH.24
シナリオ14
待ち時間延長の
要求
シナリオH.25
シナリオ17
待ち時間延長の
要求
シナリオH.26
シナリオ20
PCDがブロック
連鎖を使用
シナリオH.27
シナリオ21
PCDがブロック
連鎖を使用
シナリオH.28
シナリオ24
PICCがブロック
連鎖を使用
シナリオH.29
H.4.4
ブロック連鎖中のNADの扱い
H.5
PCDが送信するパケットの連続観
測
注a) 幾つかの手順からなる試験の場合,個々の手順が合格である場合にだけ合格と記す。
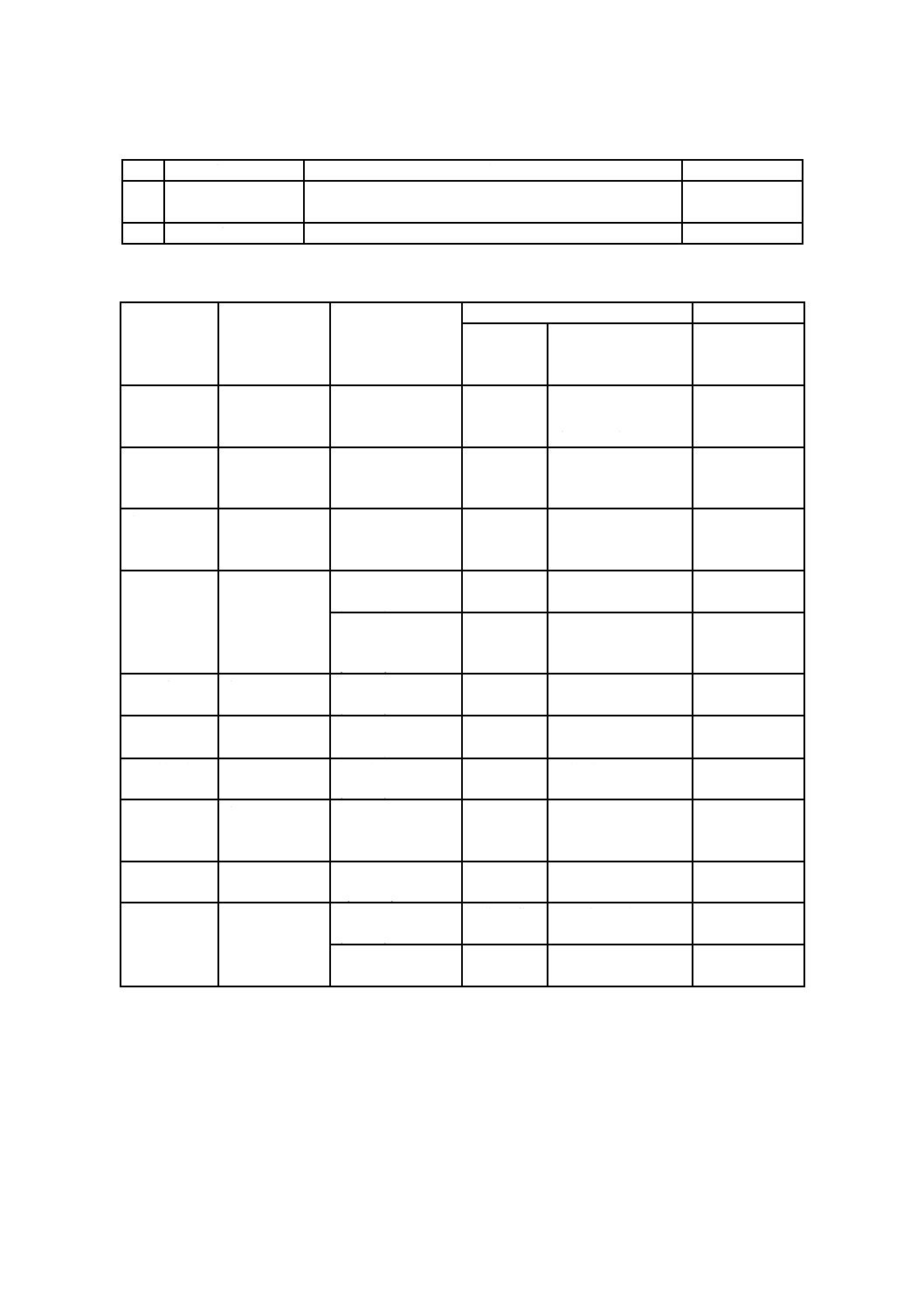
193
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.26−試験範囲の報告
No
パラメタ
説明
情報
1
ブロック連鎖
16バイト以上をサポートするコマンドがある場合にだけ
試験する。
2
NADの扱い
表H.27−PCDのRFUに関する報告
名称
PCDコマンド
RFUフィールド/
値
値
試験結果
省略時
違反
合格,不合格,
又は
実行せず
短フレーム
A型PICC
REQA/WUPA
RFU値
JIS X 6322-3:2011の
表3でRFUとして規
定される全ての値
SEL符号化
SEL
RFU値
JIS X 6322-3:2011の
表7でRFUとして規
定される全ての値
AFI
REQB/WUPB
RFU値
JIS X 6322-3:2011の
表22でRFUとして
規定される全ての値
PARAM
REQB/WUPB
RFUフィールド
(b8〜b5)
b“000”
他の全ての値
スロットの数の
RFU値
(b3〜b1)
b“101”
b“110”
b“111”
Param1
ATTRIB
RFUフィールド
(b2〜b1)
b“00”
他の全ての値
TR0最小値
ATTRIB
RFU値
(b8〜b7)
b“11”
TR1最小値
ATTRIB
RFU値
(b6〜b5)
b“11”
Param 2
ATTRIB
RFU値
(b4〜b1)
“9”(b“1001”)〜
“F”(b“1111”)の
全ての値
Param 3
ATTRIB
RFUフィールド
(b8〜b4)
b“00000” 他の全ての値
Param 4
ATTRIB
RFUフィールド
(b8〜b5)
b“0000”
他の全ての値
RFU値
(b4〜b1)
“F”(b“1111”)
194
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書I
(規定)
PCD用高速伝送選択の試験方法
I.1
試験装置
この試験におけるPCD試験装置は,この試験実行中,伝送速度を変更する機能をもたなければならない。
試験装置は,試験手順の各段階で伝送速度を変更できなければならない。
I.2
手順
PCDの動作磁界中にPCD試験装置を置く。
I.2.1
A型に対する試験手順
表I.1に規定するインタフェースバイトTA(1)の全ての値に対して,次の手順を繰り返さなければならな
い。
a) JIS X 6322-3:2011に規定する活性化手順を実行する。
b) PCDは,JIS X 6322-4:2011に規定するRATSコマンドを送出しなければならない。
c) PCD試験装置は,表I.1に基づくTA(1)を含む有効なATSを返信する。
d) PCDは,表I.1に基づくPPS1を設定する有効なPPSを任意選択として送出してもよい。
e) PCDがPPSを送出した場合,PCD試験装置は,受信したPPS を有効なPPSと認識する。
f)
PCDは,選択した伝送速度を使用して,I(0)0ブロックを送出しなければならない。
注記1 このブロックは,I(1)0でもよいが,JIS X 6322-4:2011の7.5.5.2に規定するPICCの存在試
験2aの場合は,R(NAK)でもよい。
g) PCD試験装置は,選択された伝送速度で有効な応答を送出する。PCDがPCD試験装置からの応答を
受け取ったことを確認する。
注記2 以降の手順は,PCDが製品の中に組み込まれた場合は適用しなくてもよい。
h) PCDは,選択された伝送速度でS(DESELECT)要求を送出しなければならない。
i)
PCD試験装置は,選択した伝送速度を使用して,有効なS(DESELECT)応答を送出する。PCDがPCD
試験装置からの応答を受け取ったことを確認する。
j)
PCDは,fc/128の伝送速度で有効なWUPAコマンドを送出しなければならない。
k) PCD試験装置は,有効なATQAを応答する。
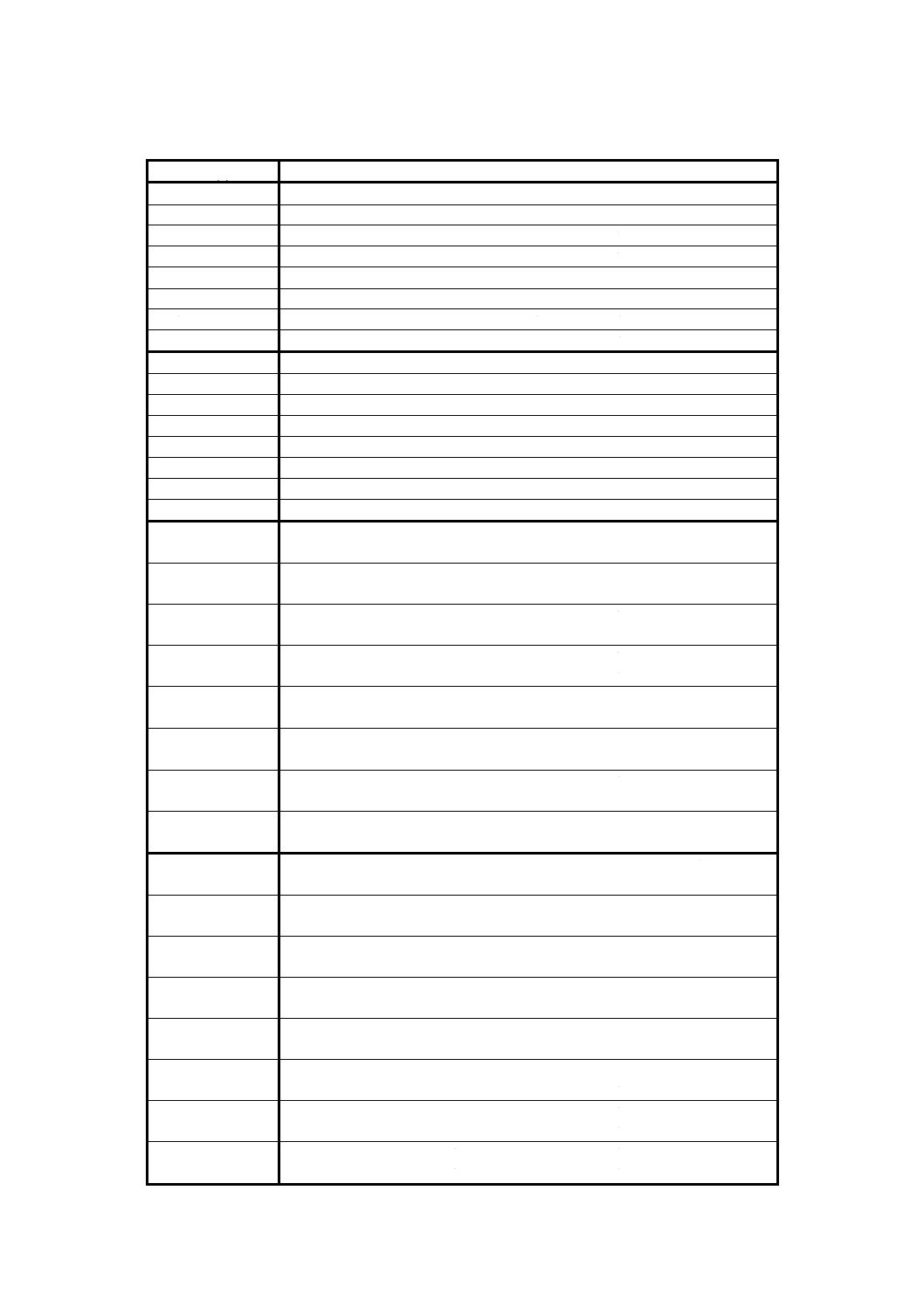
195
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表I.1−TA(1)を含むATS受信後のPCDの正しい状態
TA(1)
PPS1に設定する有効なパラメタ
b"10000000"
b"00000000"a)
b"10010001"
b"00000101", b"00000000"
b"10100010"
b"00001010", b"00000000"
b"10110011"
b"00000101", b"00001010", b"00000000"
b"11000100"
b"00001111", b"00000000"
b"11010101"
b"00000101", b"00001111", b"00000000"
b"11100110"
b"00001010", b"00001111", b"00000000"
b"11110111"
b"00000101", b"00001010", b"00001111", b"00000000"
b"00000000"
b"00000000"a)
b"00000001"
b"00000001", b"00000000"
b"00000010"
b"00000010", b"00000000"
b"00000011"
b"00000001", b"00000010", b"00000000"
b"00000100"
b"00000011", b"00000000"
b"00000101"
b"00000001", b"00000011", b"00000000"
b"00000110"
b"00000010", b"00000011", b"00000000"
b"00000111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00010000"
b"00000000"
b"00000100"
b"00010001"
b"00000001", b"00000000"
b"00000101", b"00000100"
b"00010010"
b"00000010", b"00000000"
b"00000110", b"00000100"
b"00010011"
b"00000001", b"00000010", b"00000000"
b"00000101", b"00000110", b"00000100"
b"00010100"
b"00000011", b"00000000"
b"00000111", b"00000100"
b"00010101"
b"00000001", b"00000011", b"00000000"
b"00000101", b"00000111", b"00000100"
b"00010110"
b"00000010", b"00000011", b"00000000"
b"00000110", b"00000111", b"00000100"
b"00010111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00000101", b"00000110", b"00000111", b"00000100"
b"00100000"
b"00000000"
b"00001000"
b"00100001"
b"00000001", b"00000000"
b"00001001", b"00001000"
b"00100010"
b"00000010", b"00000000"
b"00001010", b"00001000"
b"00100011"
b"00000001", b"00000010", b"00000000"
b"00001001", b"00001010", b"00001000"
b" 00100100"
b"00000011", b"00000000"
b"00001011", b"00001000"
b"00100101"
b"00000001", b"00000011", b"00000000"
b"00001001", b"00001011", b"00001000"
b"00100110"
b"00000010", b"00000011", b"00000000"
b"00001010", b"00001011", b"00001000"
b"00100111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00001001", b"00001010", b"00001011", b"00001000"
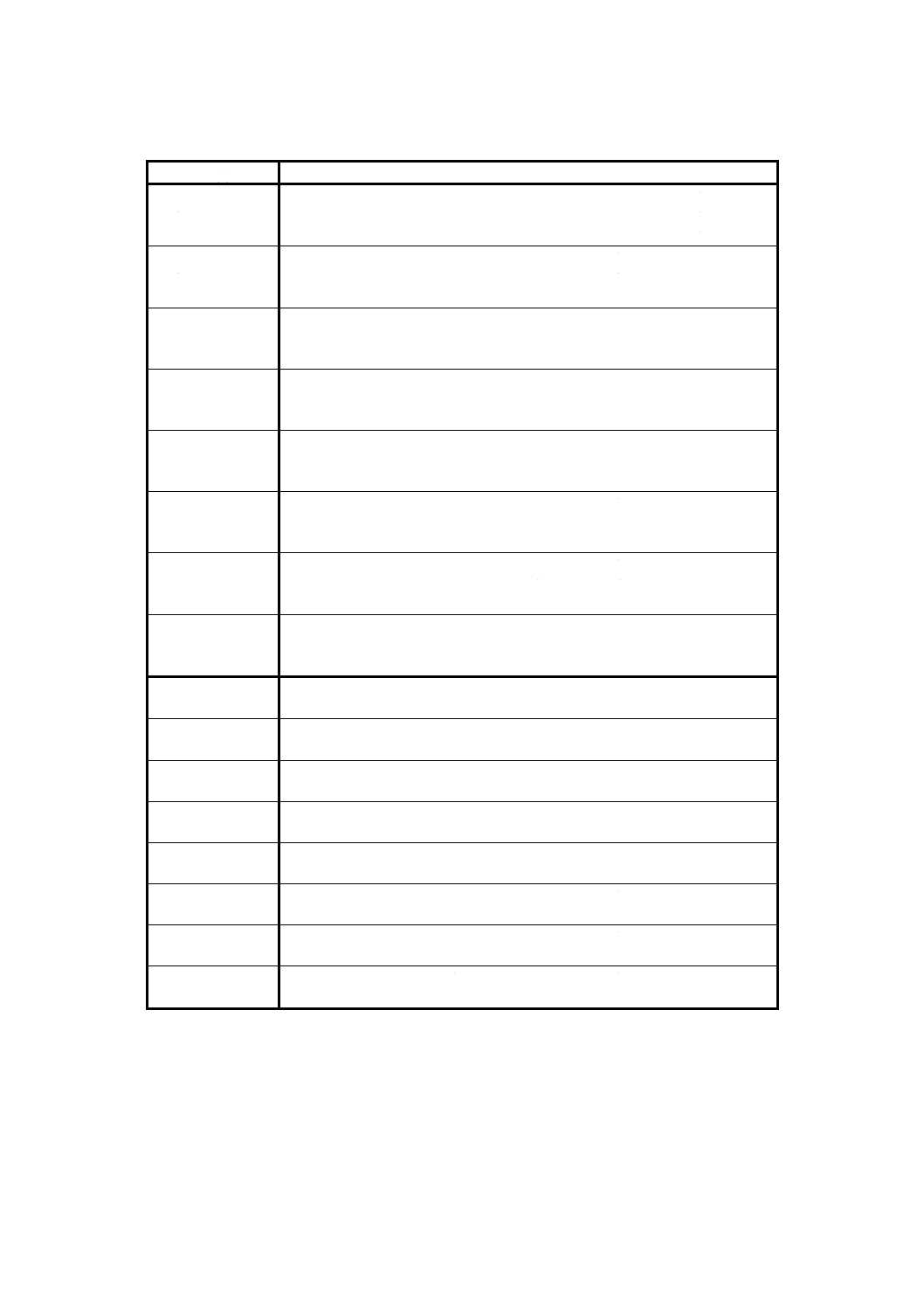
196
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表I.1−TA(1)を含むATS受信後のPCDの正しい状態(続き)
TA(1)
PPS1に設定する有効なパラメタ
b"00110000"
b"00000000"
b"00000100"
b"00001000"
b"00110001"
b"00000001", b"00000000"
b"00000101", b"00000100"
b"00001001", b"00001000"
b"00110010"
b"00000010", b"00000000"
b"00000110", b"00000100"
b"00001010", b"00001000"
b"00110011"
b"00000001", b"00000010", b"00000000"
b"00000101", b"00000110", b"00000100"
b"00001001", b"00001010", b"00001000"
b"00110100"
b"00000011", b"00000000"
b"00000111", b"00000100"
b"00001011", b"00001000"
b"00110101"
b"00000001", b"00000011", b"00000000"
b"00000101", b"00000111", b"00000100"
b"00001001", b"00001011", b"00001000"
b"00110110"
b"00000010", b"00000011", b"00000000"
b"00000110", b"00000111", b"00000100"
b"00001010", b"00001011", b"00001000"
b"00110111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00000101", b"00000110", b"00000111", b"00000100"
b"00001001", b"00001010", b"00001011", b"00001000"
b"01000000"
b"00000000"
b"00001100"
b"01000001"
b"00000001", b"00000000"
b"00001101", b"00001100"
b"01000010"
b"00000010", b"00000000"
b"00001110", b"00001100"
b"01000011"
b"00000001", b"00000010", b"00000000"
b"00001101", b"00001110", b"00001100"
b"01000100"
b"00000011", b"00000000"
b"00001111", b"00001100"
b"01000101"
b"00000001", b"00000011", b"00000000"
b"00001101", b"00001111", b"00001100"
b"01000110"
b"00000010", b"00000011", b"00000000"
b"00001110", b"00001111", b"00001100"
b"01000111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00001101", b"00001110", b"00001111", b"00001100"
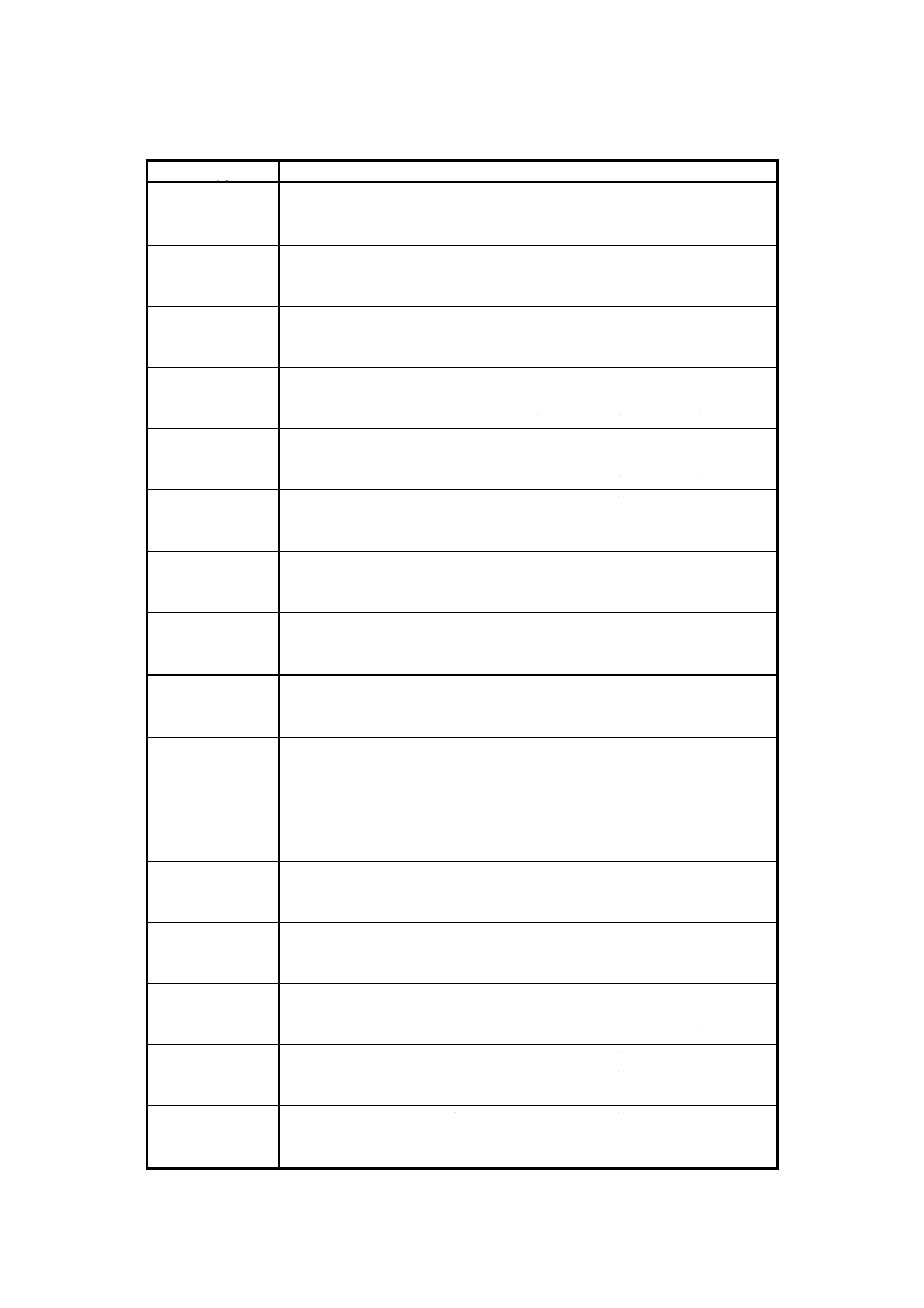
197
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表I.1−TA(1)を含むATS受信後のPCDの正しい状態(続き)
TA(1)
PPS1に設定する有効なパラメタ
b"01010000"
b"00000000"
b"00000100"
b"00001100"
b"01010001"
b"00000001", b"00000000"
b"00000101", b"00000100"
b"00001101", b"00001100"
b"01010010"
b"00000010", b"00000000"
b"00000110", b"00000100"
b"00001110", b"00001100"
b"01010011"
b"00000001", b"00000010", b"00000000"
b"00000101", b"00000110", b"00000100"
b"00001101", b"00001110", b"00001100"
b"01010100"
b"00000011", b"00000000"
b"00000111", b"00000100"
b"00001111", b"00001100"
b"01010101"
b"00000001", b"00000011", b"00000000"
b"00000101", b"00000111", b"00000100"
b"00001101", b"00001111", b"00001100"
b"01010110"
b"00000010", b"00000011", b"00000000"
b"00000110", b"00000111", b"00000100"
b"00001110", b"00001111", b"00001100"
b"01010111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00000101", b"00000110", b"00000111", b"00000100"
b"00001101", b"00001110", b"00001111", b"00001100"
b"01100000"
b"00000000"
b"00001000"
b"00001100"
b"01100001"
b"00000001", b"00000000"
b"00001001", b"00001000"
b"00001101", b"00001100"
b"01100010"
b"00000010", b"00000000"
b"00001010", b"00001000"
b"00001110", b"00001100"
b"01100011"
b"00000001", b"00000010", b"00000000"
b"00001001", b"00001010", b"00001000"
b"00001101", b"00001110", b"00001100"
b"01100100"
b"00000011", b"00000000"
b"00001011", b"00001000"
b"00001111", b"00001100"
b"01100101"
b"00000001", b"00000011", b"00000000"
b"00001001", b"00001011", b"00001000"
b"00001101", b"00001111", b"00001100"
b"01100110"
b"00000010", b"00000011", b"00000000"
b"00001010", b"00001011", b"00001000"
b"00001110", b"00001111", b"00001100"
b"01100111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00001001", b"00001010", b"00001011", b"00001000"
b"00001101", b"00001110", b"00001111", b"00001100"
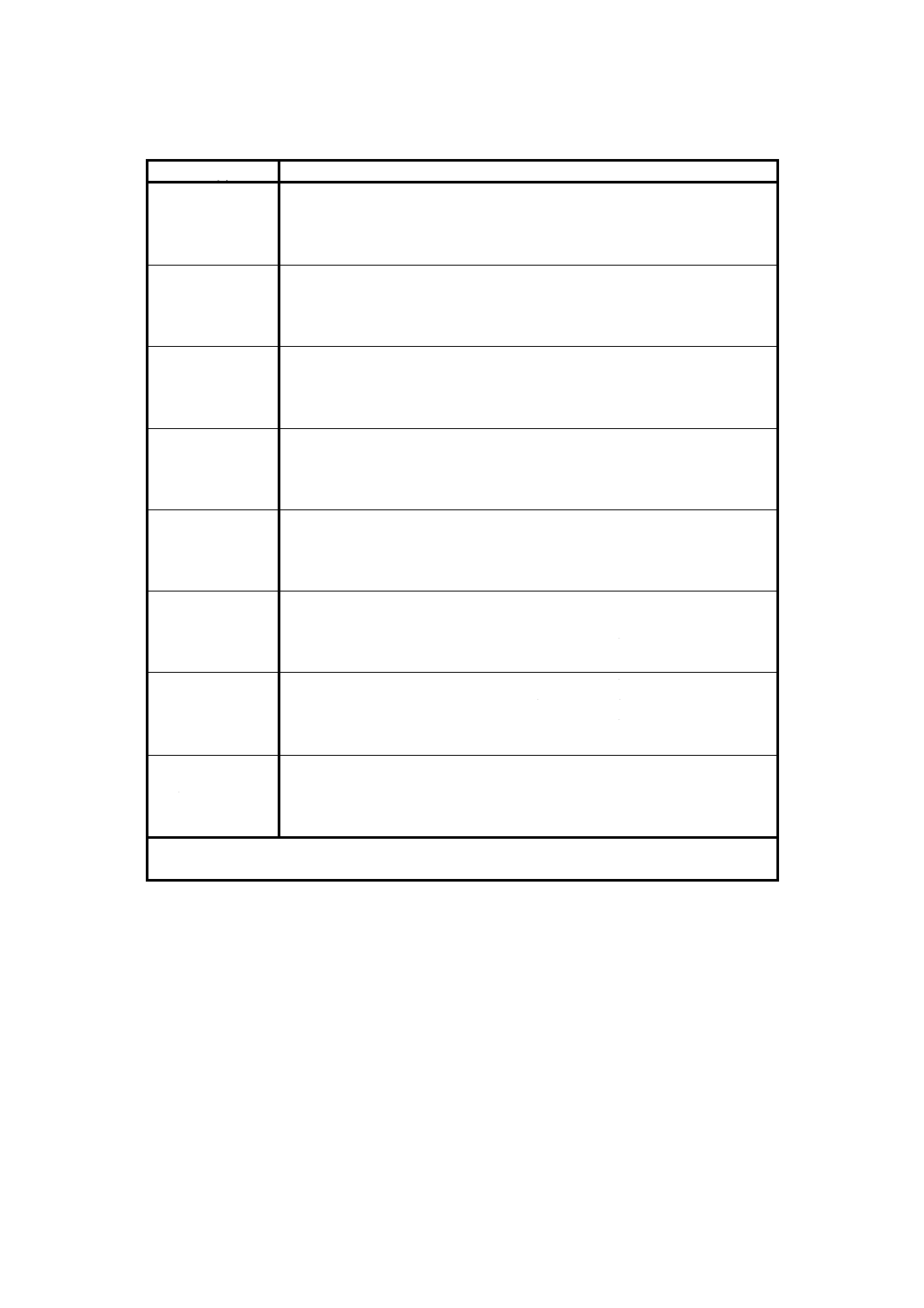
198
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表I.1−TA(1)を含むATS受信後のPCDの正しい状態(続き)
TA(1)
PPS1に設定する有効なパラメタ
b"01110000"
b"00000000"
b"00000100"
b"00001000"
b"00001100"
b"01110001"
b"00000001", b"00000000"
b"00000101", b"00000100"
b"00001001", b"00001000"
b"00001101", b"00001100"
b"01110010"
b"00000010", b"00000000"
b"00000110", b"00000100"
b"00001010", b"00001000"
b"00001110", b"00001100"
b"01110011"
b"00000001", b"00000010", b"00000000"
b"00000101", b"00000110", b"00000100"
b"00001001", b"00001010", b"00001000"
b"00001101", b"00001110", b"00001100"
b"01110100"
b"00000011", b"00000000"
b"00000111", b"00000100"
b"00001011", b"00001000"
b"00001111", b"00001100"
b"01110101"
b"00000001", b"00000011", b"00000000"
b"00000101", b"00000111", b"00000100"
b"00001001", b"00001011", b"00001000"
b"00001101", b"00001111", b"00001100"
b"01110110"
b"00000010", b"00000011", b"00000000"
b"00000110", b"00000111", b"00000100"
b"00001010", b"00001011", b"00001000"
b"00001110", b"00001111", b"00001100"
b"01110111"
b"00000001", b"00000010", b"00000011", b"00000000"
b"00000101", b"00000110", b"00000111", b"00000100"
b"00001001", b"00001010", b"00001011", b"00001000"
b"00001101", b"00001110", b"00001111", b"00001100"
注a) PPSコマンドは,この場合使用されない。PPSコマンドは,PICCに適用されていない可能性
がある。
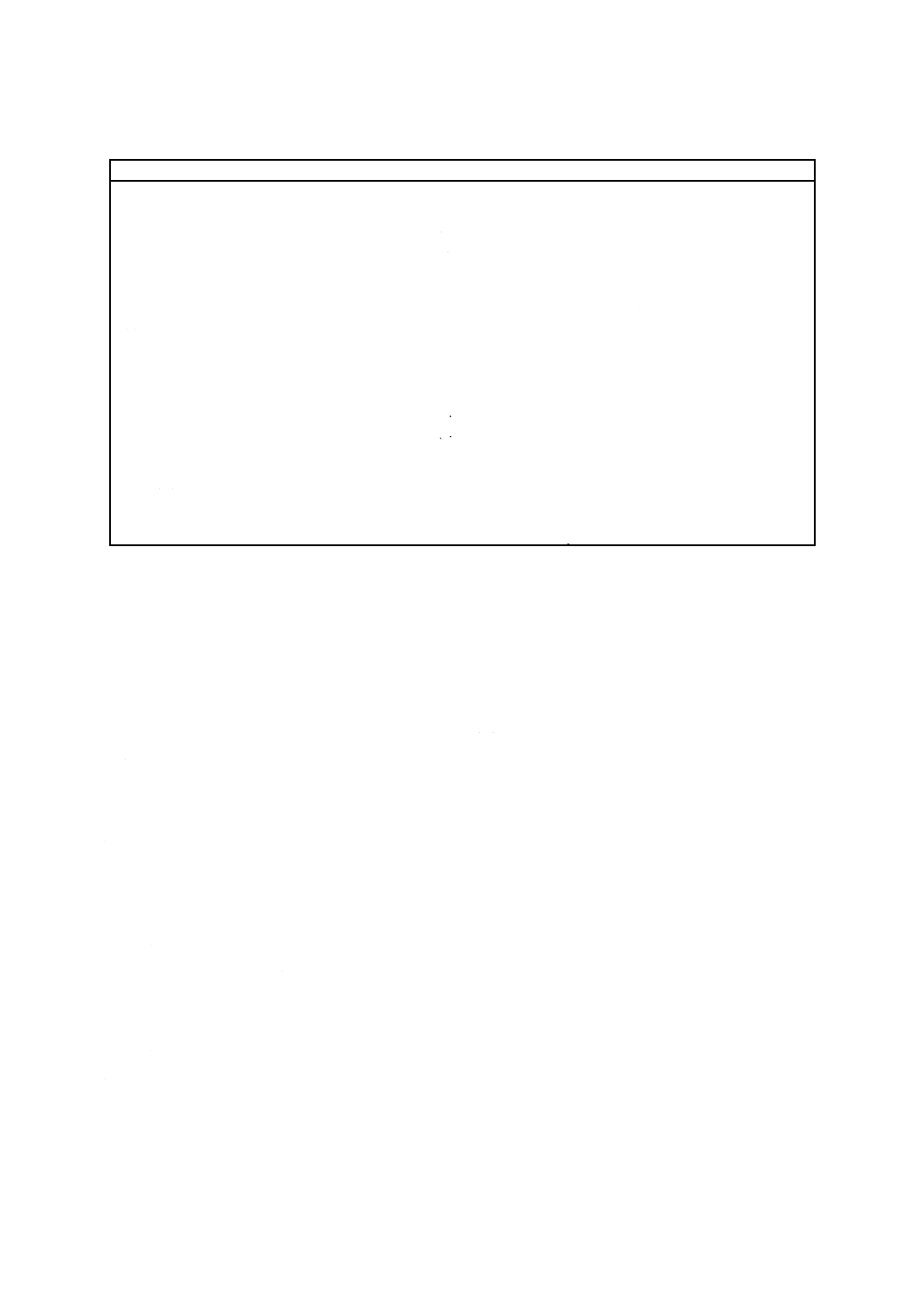
199
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオI.1−高速伝送選択 A型,手順1
PCD
PCD試験装置
RATSコマンドフレーム
(“E0 01” CRC̲A)
→
←
表I.1に基づくTA(1),ATS
表I.1−TA(1)を含むATS受信後のPCDの正しい
状態に基づく任意選択のPPS要求
→
←
PPS応答
(伝送速度 fc/128使用)
I(0)0
(選択された伝送速度使用)
→
←
I(0)0
(選択された伝送速度使用)
S(DESELECT) 要求
→
←
S(DESELECT)応答
(選択された伝送速度使用)
WUPA
(伝送速度 fc/128使用)
→
←
ATQA
(伝送速度 fc/128使用)
I.2.1.1
期待される結果
PCDは,72の各試験項目において,シナリオI.1に示されるように動作しなければならない。
I.2.1.2
試験成績書
PCDが72の各試験項目において,シナリオI.1のように正しく動作する場合,この試験は,合格とする。
試験成績書は,72の各試験項目に,PCDが選択した伝送速度を記述することが望ましい。
I.2.2
B型に対する試験手順
表I.2に規定するプロトコル情報バイトの許容伝送速度の全ての値に関して,次の手順を繰り返さなけ
ればならない。
a) PCDは有効なREQBコマンドフレームを送出しなければならない。
b) PCD試験装置は,表I.2による許容伝送速度を含む有効なATQBを応答する。
c) PCDは,表I.2によるParam 2に設定する有効なパラメタを含むATTRIBコマンドを送出しなければ
ならない。
d) PCD試験装置は,ATTRIBコマンドに対する有効な応答で受信したATTRIBに応答する。
e) PCDは,Param 2で選択した伝送速度を使用して,I(0)0ブロックを送出しなければならない。
注記1 このブロックは,I(1)0でもよいが,JIS X 6322-4:2011の7.5.5.2に規定するPICCの存在試
験2aの場合はR(NAK)でもよい。
f)
PCD試験装置は,Param 2で選択された伝送速度で有効な応答を送出する。PCDがPCD試験装置から
の応答を受け取ったことを確認する。
注記2 以降の手順は,PCDが製品の中に組み込まれた場合は適用しなくてもよい。
g) PCDは,選択された伝送速度でS(DESELECT)要求を送出しなければならない。
h) PCD試験装置は,選択した伝送速度を使用して,有効なS(DESELECT)応答を送出する。PCDがPCD
試験装置からの応答を受け取ったことを確認する。
i)
PCDは,fc/128の伝送速度で有効なWUPBコマンドを送出しなければならない。
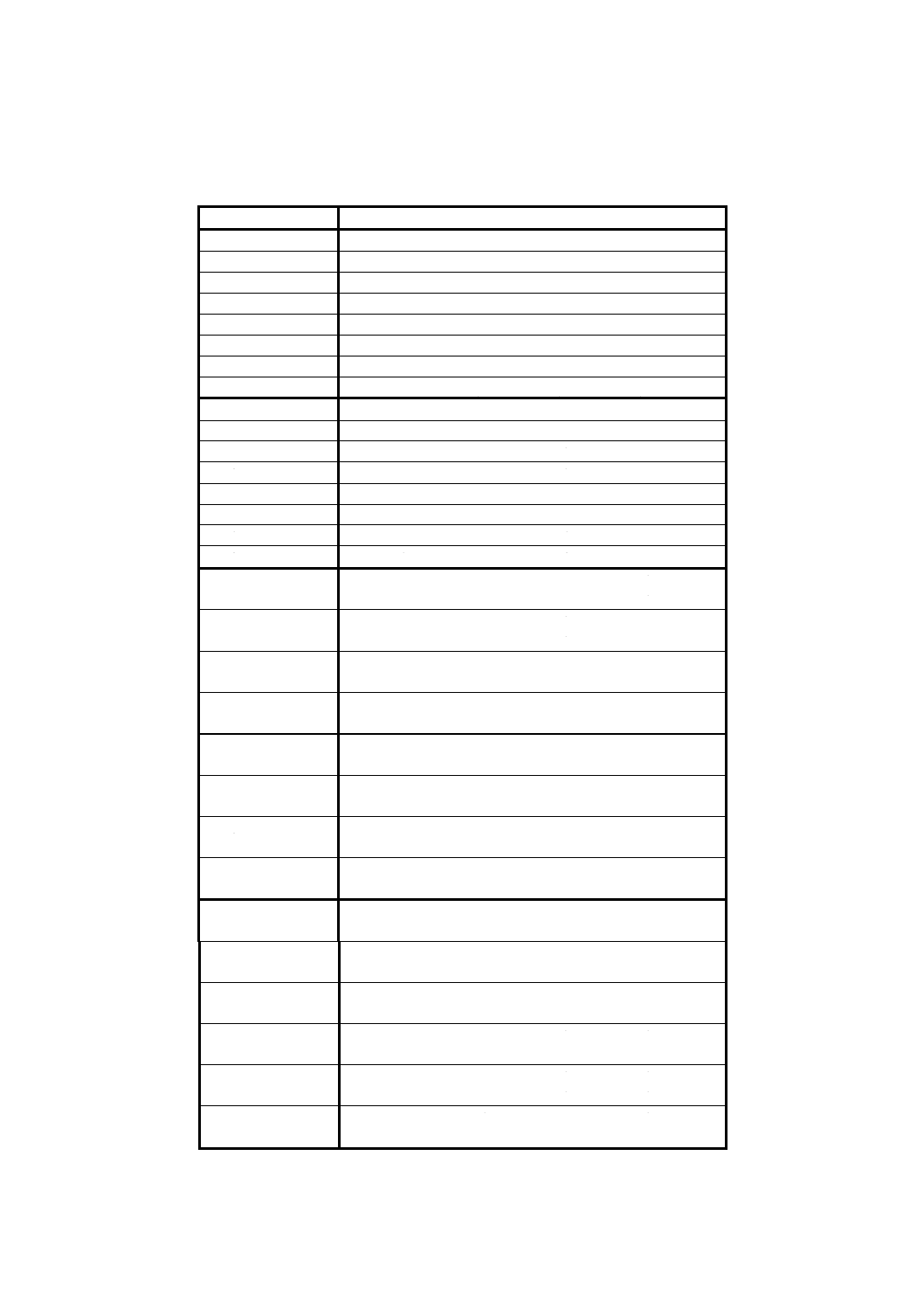
200
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
j)
PCD試験装置は,表I.2による許容伝送速度を含む有効なATQBを応答する。
表I.2−ATQB後のPCDの正しい状態
許容伝送速度
Param 2を設定する有効なパラメタa)
b"10000000"
b"0000xxxx"
b"10010001"
b"0101xxxx", b"0000xxxx"
b"10100010"
b"1010xxxx", b"0000xxxx"
b"10110011"
b"0101xxxx", b"1010xxxx", b"0000xxxx"
b"11000100"
b"1111xxxx", b"0000xxxx"
b"11010101"
b"0101xxxx", b"1111xxxx", b"0000xxxx"
b"11100110"
b"1010xxxx", b"1111xxxx", b"0000xxxx"
b"11110111"
b"0101xxxx", b"1010xxxx", b"1111xxxx", b"0000xxxx"
b"00000000"
b"0000xxxx"
b"00000001"
b"0001xxxx", b"0000xxxx"
b"00000010"
b"0010xxxx", b"0000xxxx"
b"00000011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"00000100"
b"0011xxxx", b"0000xxxx"
b"00000101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"00000110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"00000111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"00010000"
b"0000xxxx"
b"0100xxxx"
b"00010001"
b"0001xxxx", b"0000xxxx"
b"0101xxxx", b"0100xxxx"
b"00010010"
b"0010xxxx", b"0000xxxx"
b"0110xxxx", b"0100xxxx"
b"00010011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0100xxxx"
b"00010100"
b"0011xxxx", b"0000xxxx"
b"0111xxxx", b"0100xxxx"
b"00010101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0111xxxx", b"0100xxxx"
b"00010110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"00010111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"00100000"
b"0000xxxx"
b"1000xxxx"
b"00100001"
b"0001xxxx", b"0000xxxx"
b"1001xxxx", b"1000xxxx"
b"00100010"
b"0010xxxx", b"0000xxxx"
b"1010xxxx", b"1000xxxx"
b"00100011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"1001xxxx", b"1010xxxx", b"1000xxxx"
b"00100100"
b"0011xxxx", b"0000xxxx"
b"1011xxxx", b"1000xxxx"
b"00100101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"1001xxxx", b"1011xxxx", b"1000xxxx"
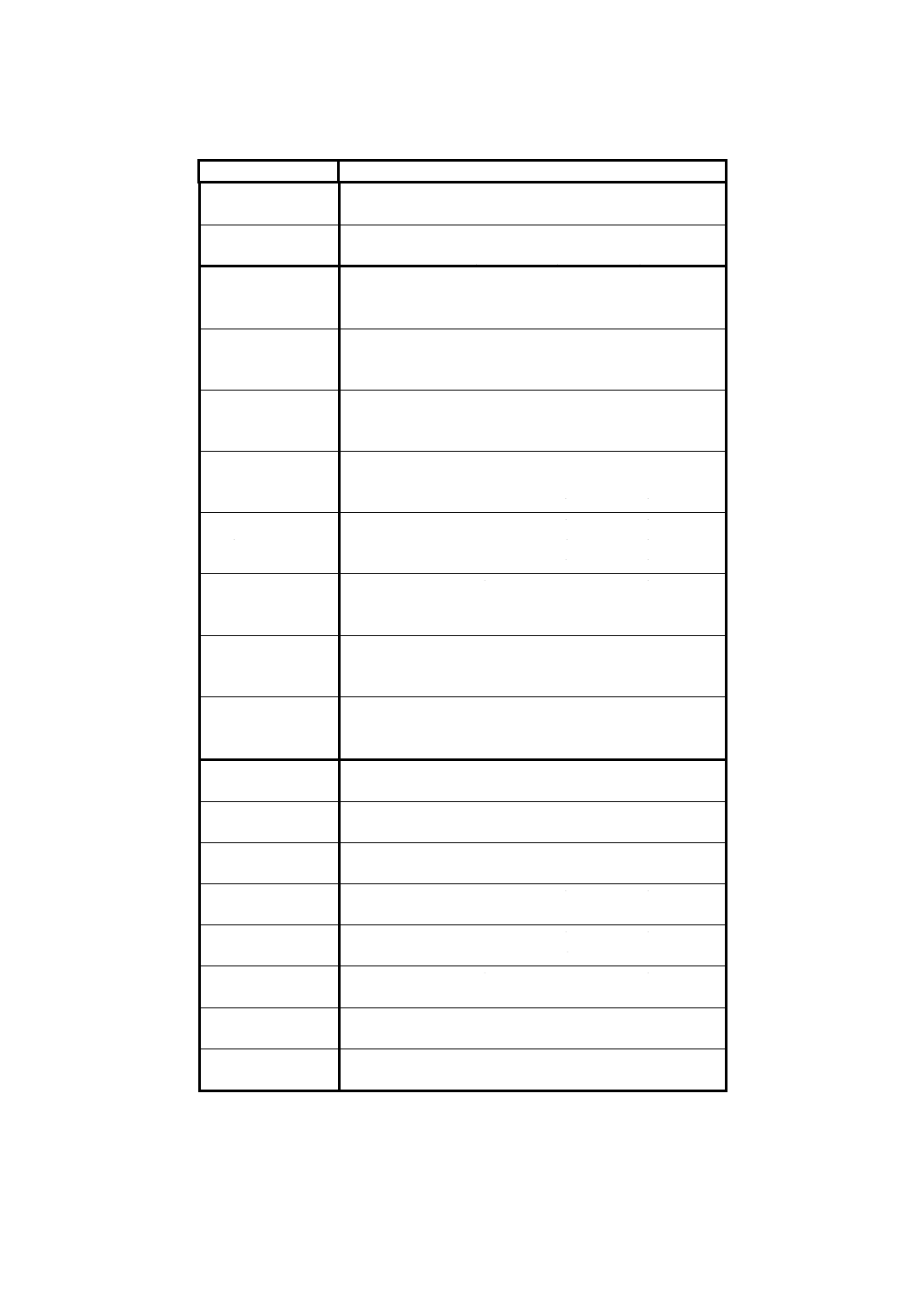
201
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表I.2−ATQB後のPCDの正しい状態(続き)
許容伝送速度
Param 2を設定する有効なパラメタa)
b"00100110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"00100111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"1001xxxx", b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"00110000"
b"0000xxxx"
b"0100xxxx"
b"1000xxxx"
b"00110001"
b"0001xxxx", b"0000xxxx"
b"0101xxxx", b"0100xxxx"
b"1001xxxx", b"1000xxxx"
b"00110010"
b"0010xxxx", b"0000xxxx"
b"0110xxxx", b"0100xxxx"
b"1010xxxx", b"1000xxxx"
b"00110011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0100xxxx"
b"1001xxxx", b"1010xxxx", b"1000xxxx"
b"00110100"
b"0011xxxx", b"0000xxxx"
b"0111xxxx", b"0100xxxx"
b"1011xxxx", b"1000xxxx"
b"00110101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0111xxxx", b"0100xxxx"
b"1001xxxx", b"1011xxxx", b"1000xxxx"
b"00110110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"00110111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"1001xxxx", b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"01000000"
b"0000xxxx"
b"1100xxxx"
b"01000001"
b"0001xxxx", b"0000xxxx"
b"1101xxxx", b"1100xxxx"
b"01000010"
b"0010xxxx", b"0000xxxx"
b"1110xxxx", b"1100xxxx"
b"01000011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"1101xxxx", b"1110xxxx", b"1100xxxx"
b"01000100"
b"0011xxxx", b"0000xxxx"
b"1111xxxx", b"1100xxxx"
b"01000101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"1101xxxx", b"1111xxxx", b"1100xxxx"
b"01000110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"1110xxxx", b"1111xxxx", b"1100xxxx"
b"01000111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"1101xxxx", b"1110xxxx", b"1111xxxx", b"1100xxxx"
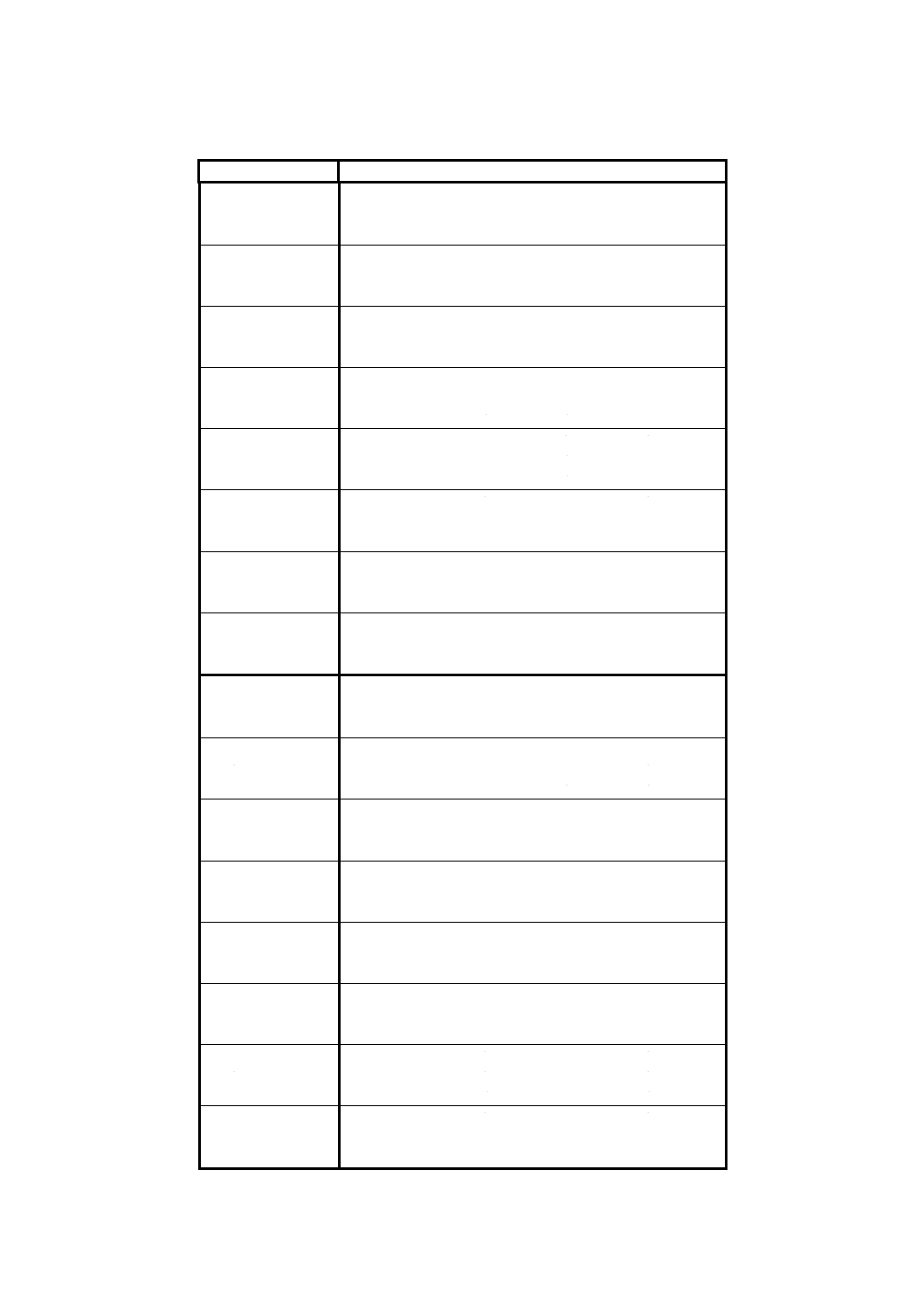
202
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表I.2−ATQB後のPCDの正しい状態(続き)
許容伝送速度
Param 2を設定する有効なパラメタa)
b"01010000"
b"0000xxxx"
b"0100xxxx"
b"1100xxxx"
b"01010001"
b"0001xxxx", b"0000xxxx"
b"0101xxxx", b"0100xxxx"
b"1101xxxx", b"1100xxxx"
b"01010010"
b"0010xxxx", b"0000xxxx"
b"0110xxxx", b"0100xxxx"
b"1110xxxx", b"1100xxxx"
b"01010011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0100xxxx"
b"1101xxxx", b"1110xxxx", b"1100xxxx"
b"01010100"
b"0011xxxx", b"0000xxxx"
b"0111xxxx", b"0100xxxx"
b"1111xxxx", b"1100xxxx"
b"01010101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0111xxxx", b"0100xxxx"
b"1101xxxx", b"1111xxxx", b"1100xxxx"
b"01010110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"1110xxxx", b"1111xxxx", b"1100xxxx"
b"01010111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"1101xxxx", b"1110xxxx", b"1111xxxx", b"1100xxxx"
b"01100000"
b"0000xxxx"
b"1000xxxx"
b"1100xxxx"
b"01100001"
b"0001xxxx", b"0000xxxx"
b"1001xxxx", b"1000xxxx"
b"1101xxxx", b"1100xxxx"
b"01100010"
b"0010xxxx", b"0000xxxx"
b"1010xxxx", b"1000xxxx"
b"1110xxxx", b"1100xxxx"
b"01100011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"1001xxxx", b"1010xxxx", b"1000xxxx"
b"1101xxxx", b"1110xxxx", b"1100xxxx"
b"01100100"
b"0011xxxx", b"0000xxxx"
b"1011xxxx", b"1000xxxx"
b"1111xxxx", b"1100xxxx"
b"01100101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"1001xxxx", b"1011xxxx", b"1000xxxx"
b"1101xxxx", b"1111xxxx", b"1100xxxx"
b"01100110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"1110xxxx", b"1111xxxx", b"1100xxxx"
b"01100111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"1001xxxx", b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"1101xxxx", b"1110xxxx", b"1111xxxx", b"1100xxxx"
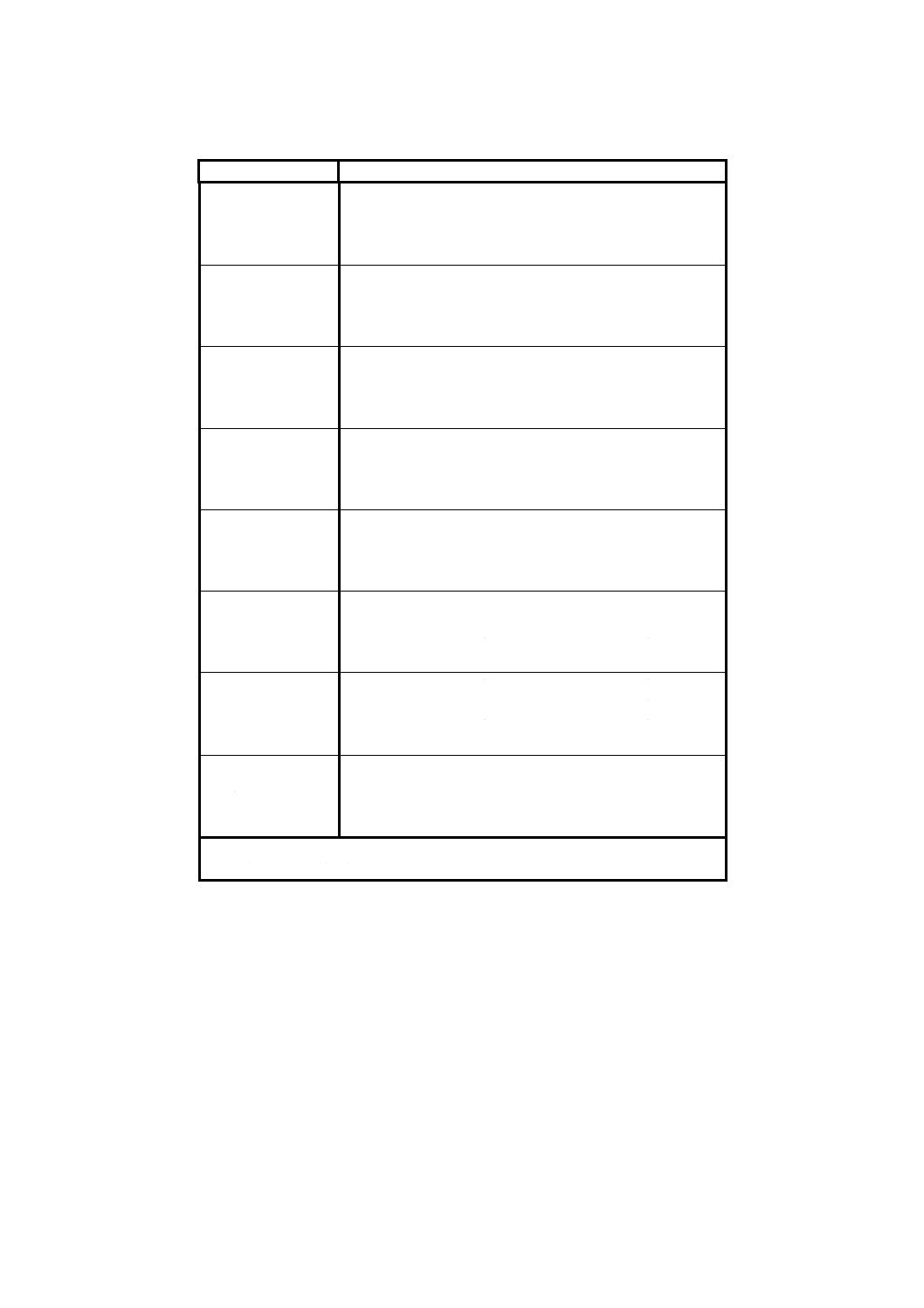
203
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表I.2−ATQB後のPCDの正しい状態(続き)
許容伝送速度
Param 2を設定する有効なパラメタa)
b"01110000"
b"0000xxxx"
b"0100xxxx"
b"1000xxxx"
b"1100xxxx"
b"01110001"
b"0001xxxx", b"0000xxxx"
b"0101xxxx", b"0100xxxx"
b"1001xxxx", b"1000xxxx"
b"1101xxxx", b"1100xxxx"
b"01110010"
b"0010xxxx", b"0000xxxx"
b"0110xxxx", b"0100xxxx"
b"1010xxxx", b"1000xxxx"
b"1110xxxx", b"1100xxxx"
b"01110011"
b"0001xxxx", b"0010xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0100xxxx"
b"1001xxxx", b"1010xxxx", b"1000xxxx"
b"1101xxxx", b"1110xxxx", b"1100xxxx"
b"01110100"
b"0011xxxx", b"0000xxxx"
b"0111xxxx", b"0100xxxx"
b"1011xxxx", b"1000xxxx"
b"1111xxxx", b"1100xxxx"
b"01110101"
b"0001xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0111xxxx", b"0100xxxx"
b"1001xxxx", b"1011xxxx", b"1000xxxx"
b"1101xxxx", b"1111xxxx", b"1100xxxx"
b"01110110"
b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"1110xxxx", b"1111xxxx", b"1100xxxx"
b"01110111"
b"0001xxxx", b"0010xxxx", b"0011xxxx", b"0000xxxx"
b"0101xxxx", b"0110xxxx", b"0111xxxx", b"0100xxxx"
b"1001xxxx", b"1010xxxx", b"1011xxxx", b"1000xxxx"
b"1101xxxx", b"1110xxxx", b"1111xxxx", b"1100xxxx"
注a) Param 2の下位4ビットは,PCDが受信できる最大フレームサイズを符号化
するために利用する。
204
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シナリオI.2−高速伝送選択 B型,手順2
PCD
PCD試験装置
REQB
(“05 00 00” CRC̲B)
→
←
表I.2に基づく許容伝送速度,ATQB
表I.2に基づくParam 2,ATTRIB コマンド
→
←
ATTRIB コマンドの応答
(伝送速度 fc/128使用)
I(0)0
(選択された伝送速度使用)
→
←
I(0)0
(選択された伝送速度使用)
S(DESELECT)
要求
→
←
S(DESELECT) 応答
(選択された伝送速度使用)
WUPB
(伝送速度 fc/128使用)
→
←
ATQB
(伝送速度 fc/128使用)
I.2.2.1
期待される結果
PCDは,72の各試験項目において,シナリオI.2に示されるように動作しなければならない。
I.2.2.2
試験成績書
PCDが72の各試験項目において,シナリオI.2のように正しく動作する場合,この試験は,合格とする。
試験成績書は,72の各試験項目に,PCDが選択した伝送速度を記述することが望ましい。
205
X 6305-6:2013 (ISO/IEC 10373-6:2011)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] TS Z 0033:2012 測定における不確かさの表現のガイド
注記 対応国際規格:ISO/IEC Guide 98-3:2008,Uncertainty of measurement−Part 3: Guide to the
expression of uncertainty in measurement (GUM:1995)(IDT)
[2] ISO/IEC 9646-1:1994,Information technology−Open Systems Interconnection−Conformance testing
methodology and framework−Part 1: General concepts
[3] ISO/IEC 9646-2:1994,Information technology−Open Systems Interconnection−Conformance testing
methodology and framework−Part 2: Abstract Test Suite specification
[4] ISO/IEC 9646-3:1998,Information technology−Open Systems Interconnection−Conformance testing
methodology and framework−Part 3: The Tree and Tabular Combined Notation (TTCN)
[5] ISO/IEC 9646-4:1994,Information technology−Open Systems Interconnection−Conformance testing
methodology and framework−Part 4: Test realization
[6] ISO/IEC 9646-5:1994,Information technology−Open Systems Interconnection−Conformance testing
methodology and framework−Part 5: Requirements on test laboratories and clients for the conformance
assessment process
[7] ISO/IEC 9646-6:1994,Information technology−Open Systems Interconnection−Conformance testing
methodology and framework−Part 6: Protocol profile test specification
[8] ISO/IEC 9646-7:1995,Information technology−Open Systems Interconnection−Conformance testing
methodology and framework−Part 7: Implementation Conformance Statements