X 6250:2009 (ISO/IEC 17341:2006)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
第1章 一般事項 ················································································································· 1
1 適用範囲 ························································································································· 1
2 適合性···························································································································· 2
2.1 光ディスク ··················································································································· 2
2.2 製造システム ················································································································ 2
2.3 情報再生システム ·········································································································· 2
2.4 互換性 ························································································································· 2
3 引用規格 ························································································································· 2
4 用語及び定義 ··················································································································· 2
5 表記法···························································································································· 4
5.1 数値表記 ······················································································································ 4
5.2 略式名称 ······················································································································ 5
6 略語······························································································································· 5
7 ディスクの概要 ················································································································ 6
8 一般要求事項 ··················································································································· 7
8.1 環境条件 ······················································································································ 7
8.2 安全性 ························································································································· 8
8.3 耐燃性 ························································································································· 8
9 基準測定装置 ··················································································································· 8
9.1 光学系 ························································································································· 8
9.2 光学ビーム ··················································································································· 9
9.3 読取りチャネル1 ·········································································································· 10
9.4 ディスククランプ ········································································································· 10
9.5 ディスクの回転 ············································································································ 10
9.6 ウォブルチャネル(読取りチャネル2) ············································································ 10
9.7 トラッキングチャネル(読取りチャネル2) ······································································ 11
9.8 基準サーボシステム ······································································································ 11
第2章 ディスクの寸法,機械的特性及び物理的特性 ································································ 13
10 寸法特性 ······················································································································ 13
10.1 基準面 ······················································································································· 14
10.2 全体寸法 ···················································································································· 15
10.3 第1遷移領域 ·············································································································· 15
10.4 第2遷移領域 ·············································································································· 15
10.5 クランプゾーン ··········································································································· 15
X 6250:2009 (ISO/IEC 17341:2006) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
10.6 第3遷移領域 ·············································································································· 16
10.7 情報ゾーン ················································································································· 16
10.8 リム領域 ···················································································································· 16
10.9 許容公差についての注意 ······························································································· 16
11 機械的特性 ··················································································································· 16
11.1 質量 ·························································································································· 16
11.2 慣性モーメント ··········································································································· 16
11.3 ダイナミックインバランス ···························································································· 16
11.4 軸方向の振れ量 ··········································································································· 16
11.5 半径方向の振れ量 ········································································································ 17
12 情報ゾーンの光学的特性 ································································································· 17
12.1 屈折率 ······················································································································· 17
12.2 基板の厚さ ················································································································· 17
12.3 反射率 ······················································································································· 18
12.4 複屈折 ······················································································································· 18
12.5 角度偏差 ···················································································································· 18
第3章 情報フォーマット ···································································································· 19
13 データフォーマット ······································································································· 19
13.1 データフレーム ··········································································································· 19
13.2 スクランブルドフレーム ······························································································· 21
13.3 ECCブロック ············································································································· 22
13.4 記録フレーム ·············································································································· 23
13.5 変調及びNRZI変換 ····································································································· 24
13.6 物理セクタ ················································································································· 25
13.7 記録ユニット(RUN)のレイアウト ················································································ 26
13.8 直流成分抑圧制御 ········································································································ 27
14 トラックフォーマット ···································································································· 28
14.1 トラック形状 ·············································································································· 28
14.2 トラック経路 ·············································································································· 29
14.3 トラックピッチ ··········································································································· 29
14.4 トラックレイアウト ····································································································· 29
第4章 情報ゾーンのフォーマット ························································································ 47
15 情報ゾーンの概要 ·········································································································· 47
16 情報ゾーンのレイアウト ································································································· 47
16.1 物理セクタ番号(PSN) ······························································································· 48
17 リードインゾーン ·········································································································· 48
17.1 イニシャルゾーン ········································································································ 49
17.2 インナーディスクテストゾーン ······················································································ 49
17.3 インナードライブテストゾーン ······················································································ 49
X 6250:2009 (ISO/IEC 17341:2006) 目次
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
17.4 ガードゾーン1 ············································································································ 49
17.5 予約ゾーン1 ··············································································································· 49
17.6 予約ゾーン2 ··············································································································· 49
17.7 インナーディスク識別ゾーン ························································································· 50
17.8 予約ゾーン3 ··············································································································· 51
17.9 リファレンスコードゾーン ···························································································· 51
17.10 バッファゾーン1 ······································································································· 51
17.11 制御データゾーン ······································································································· 51
17.12 バッファゾーン2 ······································································································· 53
18 データゾーン ················································································································ 53
19 リードアウトゾーン ······································································································· 53
19.1 バッファゾーン3 ········································································································· 53
19.2 アウターディスク識別ゾーン ························································································· 53
19.3 ガードゾーン2 ············································································································ 54
19.4 予約ゾーン4 ··············································································································· 54
19.5 アウタードライブテストゾーン ······················································································ 54
19.6 アウターディスクテストゾーン ······················································································ 54
19.7 ガードゾーン3 ············································································································ 54
20 論理セクタ番号の割当て(LSN) ····················································································· 55
21 フォーマッティング ······································································································· 55
21.1 プリフォーマッティング ······························································································· 56
21.2 バックグラウンドフォーマッティング ············································································· 56
21.3 フォーマッティングなしのシーケンシャル記録 ································································· 57
22 ディスク制御ブロック ···································································································· 58
22.1 ディスク制御ブロックのフォーマット ············································································· 58
22.2 フォーマッティングDCB(FDCB)のフォーマット ··························································· 60
22.3 書込み禁止DCB (WDCB) のフォーマット ······································································· 63
第5章 グルーブの特性 ······································································································· 65
23 概要 ···························································································································· 65
24 試験方法 ······················································································································ 65
24.1 環境 ·························································································································· 65
24.2 基準測定装置 ·············································································································· 65
24.3 信号の定義 ················································································································· 66
25 グルーブ信号の特性 ······································································································· 67
25.1 位相深さ ···················································································································· 67
25.2 プッシュプル信号 ········································································································ 67
25.3 クロストラック信号 ····································································································· 67
25.4 正規化ウォブル信号 ····································································································· 67
25.5 ウォブルの特性 ··········································································································· 67
X 6250:2009 (ISO/IEC 17341:2006) 目次
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
第6章 記録層の特性 ·········································································································· 68
26 試験方法 ······················································································································ 68
26.1 環境 ·························································································································· 68
26.2 基準測定装置 ·············································································································· 68
26.3 記録条件 ···················································································································· 68
26.4 測定条件 ···················································································································· 69
27 記録済み信号の特性 ······································································································· 69
27.1 チャネルビット長 ········································································································ 69
27.2 信号の定義 ················································································································· 69
27.3 読取りの安定性 ··········································································································· 71
28 追加試験の条件 ············································································································· 71
28.1 試験環境 ···················································································································· 71
28.2 信号の定義 ················································································································· 72
29 記録層の品質 ················································································································ 73
29.1 欠陥 ·························································································································· 73
29.2 データエラー ·············································································································· 74
第7章 ユーザデータの特性 ································································································· 74
30 試験方法 ······················································································································ 74
30.1 環境 ·························································································································· 74
30.2 基準測定装置 ·············································································································· 74
31 記録ユニットの最低品質 ································································································· 75
31.1 トラッキング ·············································································································· 75
31.2 ユーザ記録データ ········································································································ 75
附属書A(規定)80 mmディスク ··························································································· 76
附属書B(規定)データゾーンの拡張フォーマット情報の構造 ····················································· 80
附属書C(規定)光反射の測定 ······························································································ 81
附属書D(規定)複屈折の測定 ······························································································ 83
附属書E(規定)ジッタの測定 ······························································································ 85
附属書F(規定)位相差トラッキングエラー信号の測定 ······························································ 88
附属書G(規定)テスト用記録パルス波形 ··············································································· 92
附属書H(規定)8-16変調 ···································································································· 95
附属書I(規定)最適パワー制御 ··························································································· 104
附属書J(規定)論理から物理アドレスへの変換 ······································································ 109
附属書K(参考)グルーブウォブル振幅の測定 ········································································ 110
附属書L(参考)輸送 ········································································································· 112
附属書M(参考)欠陥管理及び物理フォーマット ····································································· 113
附属書N(参考)ビデオコンテンツプロテクション··································································· 114
附属書O(参考)ADIPの物理フォーマット情報の使い方 ·························································· 115
附属書P(参考)現行及び将来の仕様で使用する値 ··································································· 117
X 6250:2009 (ISO/IEC 17341:2006) 目次
(5)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
X 6250:2009 (ISO/IEC 17341:2006)
(6)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人光産業技術振興協会(OITDA)及び財
団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工
業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格には+RWの規定及びDVDの規定とが存在する。この規格に準拠した製品を製造,販売する場
合は,複数の特許権の使用に該当するおそれがあるので留意されたい。
なお,この規格に関連する特許ライセンスを行っている会社として,コーニンクレッカ・フィリップス・
エレクトロニクス・エヌ・ヴィ及び株式会社リコーなどがある。
上記の特許権等の権利者は,日本工業標準調査会に対して,非差別的及び合理的な条件で,いかなる者
に対しても当該特許権等の実施を許諾等する意思のあることを表明している。ただし,この規格に関連す
る他の特許権等の権利者に対しては,同様の条件でその実施が許諾されることを条件としている。
この規格に従うことが,必ずしも,特許権の無償公開を意味するものではないことに注意する必要があ
る。
この規格の一部が,上記の会社のもつ特許権以外の特許権,出願公開後の特許出願,実用新案権又は出
願公開後の実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業
標準調査会は,このような特許権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出
願にかかわる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
X 6250:2009
(ISO/IEC 17341:2006)
120 mm(4.7 GB/面)及び80 mm(1.46 GB/面)
+RWフォーマット光ディスク(4倍速まで)
Information technology-Data interchange on 120 mm and 80 mm optical
disk using +RW format-Capacity: 4.7 Gbytes and 1.46 Gbytes per side
(Recording speed up to 4X)
序文
この規格は,2006年に第3版として発行されたISO/IEC 17341を基に,技術的内容及び対応国際規格の
構成を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
第1章 一般事項
1
適用範囲
この規格は4.7ギガバイト及び9.4ギガバイトの容量をもつ120 mmリライタブル光ディスクの機械的特
性,物理的特性及び光学的特性を規定する。また,これらのディスクによって情報交換を可能とする記録
部及び未記録部の信号品質,データフォーマット並びに記録方法を規定する。データは,相変化方法を使
い,記録,読取り及び書換えが繰返し可能とする。このディスクを+RWと称する。
この規格は,1.46ギガバイト及び2.92ギガバイトの容量をもつ80 mmのディスクについても規定する。
80 mmのディスクは,寸法に関するパラメタを除き,120 mmのディスクと同一の特性をもつ。そのすべ
てのパラメタは,附属書Aに規定する。
この規格は,次の項目を規定する。
− 直径80 mm及び120 mmの片面又は両面のディスク(箇条7参照)
− 適合条件
− ディスクの試験環境,使用環境及び保存環境
− データ処理システム間の機械的互換のためのディスクの機械特性,物理特性及び寸法特性
− トラック及びセクタの物理的配置,誤り訂正符号及び符号化方法を含むディスク上の情報のフォー
マット
− データ処理システムが,ディスク上のデータ読取りを可能にするためのディスク上に記録した信号
の特性
この規格によって,ディスクドライブ間のディスクの互換性を確立する。また,ボリューム及びファイ
ル構造の規定によって,データ処理システム間の完全なデータ互換性を確立する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO/IEC 17341:2006,Information technology−Data interchange on 120 mm and 80 mm Optical Disk
2
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
using +RW format−Capacity: 4,7 Gbytes and 1,46 Gbytes per Side (Recording speed up to 4X)
(IDT)
なお,対応の程度を表す記号(IDT)は,ISO/IEC Guide 21に基づき,一致していることを示す。
2
適合性
2.1
光ディスク
この規格は,片面か両面かでディスクのタイプを規定する。ディスクは,この規格のタイプの要求事項
を満たすとき,この規格に適合する。
2.2
製造システム
製造システムは,製造するディスクが2.1に合致するとき,この規格に適合する。
2.3
情報再生システム
情報再生システムは,2.1に適合するディスクを取り扱うことができるとき,この規格に適合する。
2.4
互換性
製造システム及び情報再生システムの適合を主張するには,引用する他の関連する規格を記載した一覧
表を付けなければならない。その記載には,関連する規格の番号,利用可能な光ディスクのタイプ(必要
に応じて),並びに再生だけなのか又は記録及び再生の両方をサポートするのか否かを記載しなければなら
ない。
3
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,記載の年の版を適用する。
JIS X 6241:2004 120 mm DVD−再生専用ディスク
注記 対応国際規格:ISO/IEC 16448:2002,Information technology−120 mm DVD−Read-only disk
(IDT)
JIS X 6242:2004 80 mm DVD−再生専用ディスク
注記 対応国際規格:ISO/IEC 16449:2002,Information technology−80 mm DVD−Read-only disk
(IDT)
ISO/IEC 4873:1991,Information technology−ISO 8-bit code for information interchange−Structure and rules
for implementation
ECMA-287:2002,Safety of electronic equipment, 2nd edition
ディスクの効率性及びデータの信頼性は,バックグラウンドフォーマット及び欠陥管理によって改善す
ることができる。そのようなシステムの例は,附属書Mに記載する。
4
用語及び定義
この規格で用いる主な用語及び定義は,次による。
4.1
チャネルビット(channel bit)
2進数の値“0”及び“1”を,ディスク上のピット及びマークで表す要素。
3
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2
クランプゾーン(clamping zone)
クランプ装置機構によってクランプ力が加わるディスクの環状の部分。
4.3
ディジタル総計値(digital sum value)
10進数の+1をビット“1”及び10進数の−1をビット“0”に割り当てることによって,ビットストリ
ームから得た算術和。
4.4
ディスク基準面(disk reference plane)
ディスクをクランプするための基準となる,ディスク表面にある理想の平面であって,理想的なスピン
ドルの回転軸に対して垂直に位置する面。
4.5
ダミー基板(dummy substrate)
透明又は不透明であって,ディスクを,(場合によっては記録層も)機械的に支持する層。
4.6
入射面(entrance surface)
最初に光ビームがディスクに入射する面。
4.7
フィールド(field)
セクタの一部分。
4.8
グルーブ(groove)
情報を記録する前に使用され,トラックの位置決めに用いるディスクの溝。
注記 グルーブは,グルーブ間の領域(ランド)よりも入射面に近く位置する。記録はグルーブに行
う。
4.9
インタリーブ(interleaving)
データをバーストエラーの影響がないようにするため,データの最小単位の物理的な並びを再配置する
プロセス。
4.10
マーク(mark)
ピット,非晶質,その他の形態,又は光学的に検出できる形態をもった記録層の特性部分。
注記 マーク及びスペースのパターンによってディスク上のデータを表現する。
4.11
相変化(phase change)
記録膜に光ビームを照射して加熱することによって,可逆的に非晶質状態から結晶状態,又はその逆方
向に変化する物理現象。
4.12
物理セクタ(physical sector)
ディスクの情報ゾーンに存在するトラックの中で,アドレス指定可能な最小領域。
4
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.13
記録層(recording layer)
製造時及び/又は使用時にデータを記録したディスクの層。
4.14
リードソロモン符号(reed-solomon code)
エラー検出又は訂正の符号。
4.15
基準速度(reference velocity)
26.156 25 Mbit/sの公称チャネルビットレートの線速度。
4.16
スペース(space)
結晶,非ピット,その他の形態,又は光学的に検出できる形態をもった記録層の特性部分。
注記 マーク及びスペースのパターンによってディスク上のデータを表現する。
4.17
基板(substrate)
記録層を機械的に支持する透明な円盤状の基体。これを通して光ビームで記録層にアクセスする。
4.18
トラック(track)
連続スパイラルの360°,1回転分。
4.19
トラックピッチ(track pitch)
隣接したトラックの中心線間を半径方向で測定した距離。
4.20
ビデオコンテンツプロテクションシステム(Video Contents Protection System)
+R又は+RWのビデオフォーマットで記録されているビデオデータを承認なくコピー及び/又は再配布
することを禁止する方法。
4.21
ウォブル(wobble)
トラックの平均中心線からの連続的な正弦波状の偏位。そのウォブルの位相変調データは位置情報を含
んでいる。
4.22
ゾーン(zone)
ディスクの環状領域。
5
表記法
5.1
数値表記
測定値は,該当規格値の最下位けた(桁)に丸める。例えば,+0.01のプラス許容差及び−0.02のマイ
ナス許容差をもつ1.26という規格値は,1.235以上1.275未満の測定値の範囲を許容する。
10進数は,0〜9の数字で表す。
16進数は,括弧でくくった,0〜9のアラビア数字とA〜Fのアルファベットとで表す。
5
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ビット値は,“0”及び“1”で表す。
2進数及びビットパターンは,左側を最上位ビットとし,“0”及び“1”の一連で表す。nビットのパタ
ーンで,ビットb(n-1)は,最上位ビット(msb) とし,ビットb0は,最下位ビット(lsb) としなければならない。
ビットb(n-1) を最初に記録する。
2進数の負の値は,2の補数で表す。
各データフィールドでは,データは,バイト0とする最上位のバイト(MSB) を最初に記録し,最下位バ
イト(LSB) を最後に記録する。
8nビットの1フィールドで,ビットb(8n-1) は,最上位ビット(msb)とし,ビットb0は,最下位ビット(lsb)
としなければならない。ビットb(8n-1) を最初に記録する。
5.2
略式名称
例えば,特定のトラック,フィールドなどは,頭を大文字にした略式の名称で表記する。
6
略語
この規格で用いる略語は,次による。
a.c.
alternating current 交流
ADIP
Address in Pre-groove プリグルーブ内アドレス
ASM
Asymmetry 信号の非対称性
BP
Byte Position バイト位置
BPF
Band Pass Filter 帯域フィルタ
CAV
Constant Angular Velocity 一定角速度
CLD
Constant Linear Density 一定線密度
CLV
Constant Linear Velocity 一定線速度
d.c.
direct current 直流
DCB
Disk Control Block ディスク制御ブロック
DCC
d.c. Component suppression Control 直流成分抑圧制御
DOW
Direct Over Write ダウ
DSV
Digital Sum Value ディジタル総計値
ECC
Error Correction Code 誤り訂正符号
EDC
Error Detection Code 誤り検出符号
EI
Extended Information 拡張情報
FDCB
Formatting DCB フォーマットDCB
HF
High Frequency 高周波
ID
Identification Data 識別データ
IED
ID Error Detection code ID誤り検出符号
LPF
Low Pass Filter 低域フィルタ
LSB
Least Significant Byte 最下位バイト
lsb
Least Significant Bit 最下位ビット
LSN
Logical Sector Number 論理セクタ番号
MSB
Most Significant Byte 最上位バイト
msb
Most Significant Bit 最上位ビット
6
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
NA
Numerical Aperture 開口数
NRZ
Non Return to Zero 非ゼロ復帰
NRZI
Non Return to Zero Inverted 非ゼロ反転復帰
NSL
Normalized Slicing Level 正規化しきい値
OPC
Optimum Power Control 最適パワー制御
OTP
Opposite Track Path 対向トラック経路
PAA
Physical Address in ADIP ADIP物理アドレス
PBS
Polarizing Beam Splitter 偏光ビームスプリッタ
PI
Parity of Inner-code 内符号パリティ
PLL
Phase Locked Loop 位相同期ループ
PO
Parity of Outer-code 外符号パリティ
PP
Push-Pull プッシュプル
pp
peak-to-peak ピークからピークまで
PSN
Physical Sector Number 物理セクタ番号
PTP
Parallel Track Path 平行トラック経路
RIN
Relative Intensity Noise 相対ノイズ強度
RPM
Revolutions per Minute 回転/分
RS
Reed-Solomon code リードソロモン符号
RSV
Reserved (in use by specific applications) 予備
RUN
Recording Unit 記録ユニット
SNR
Signal to Noise Ration 信号対雑音比
SPS
Start Position Shift 開始位置シフト
SYNC
Synchronization code 同期符号
7
ディスクの概要
この規格の対象の光ディスクは,一つ又は二つの記録層を内側に設けた基板2枚を接着層によってはり
合わせて構成する。ディスクの中心位置決めは,読取り側のディスク中心孔のエッジで行う。クランプは,
クランプゾーンで行う。この規格は,次の二つのタイプのディスクを提供する。
タイプS
基板,一つの記録層及びダミー基板からなり,記録層には,一方向からのアクセスが可能とする。容量
の公称値は,120 mmディスクで4.7ギガバイト,80 mmディスクで1.46ギガバイトとする。
タイプD
2枚の基板及び二つの記録層からなり,ディスクの一方向からは,これらの記録層の一方にだけアクセ
スが可能とする。容量の公称値は,120 mmディスクで9.4ギガバイト,80 mmディスクで2.92ギガバイ
トとする。
データは,結晶状態の記録層に集光した光学ビームを照射して非晶質状態に変化させ,その部分をマー
クとして記録する。また,非晶質状態と結晶状態との相変化を利用し,ディスクの記録層に書換えができ
る。データは,相変化の非晶質状態と結晶状態との反射率の違いを利用して,集光した光学ビームで読み
出すことができる。ビームは,ディスクの透明な基板を通して,記録層にアクセスする。
図1にこれらのタイプを図示する。

7
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1−+RWディスクのタイプ
8
一般要求事項
8.1
環境条件
8.1.1
試験環境条件
試験環境条件は,ディスク近傍の空気が次の条件を満たす環境とする。
温度
23 ℃±2 ℃
相対湿度
45 %〜55 %
大気圧
60 kPa〜106 kPa
ディスクに結露があってはならない。少なくとも,48時間この環境に放置してから試験する。試験前に
は,ディスク製造業者の取扱説明書に従いディスクの入射面の汚れを落とすことが望ましい。
別に規定しない限り,すべての試験及び測定は,この試験環境条件で行わなければならない。
8.1.2
動作環境条件
規定した測定環境で,この規格のすべての要求事項を満たすディスクは,動作環境条件において環境パ
ラメタの規定範囲にわたってデータ交換ができなければならない。
動作環境条件は,ディスク近傍の空気が次の条件を満たす環境とする。
温度
5 ℃〜55 ℃
相対湿度
3 %〜85 %
絶対湿度
1 g/m3〜30 g/m3
大気圧
60 kPa〜106 kPa
温度変動
最大10 ℃/h
相対湿度変動 最大10 %/h
ディスクに結露があってはならない。この条件にさらしたディスクは,動作前に少なくとも2時間,環
タイプ S
タイプ D
基板
基板
記録層
記録層
記録層
接着層
接着層
ダミー基板
基板
入射面
入射面
入射面
8
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
境条件に放置してから使用する。
8.1.3
保存環境条件
保存環境条件は,ディスク近傍の雰囲気が次の条件を満たす環境とする。
温度
−10 ℃〜55 ℃
相対湿度
3 %〜90 %
絶対湿度
1 g/m3〜30 g/m3
大気圧
60 kPa〜106 kPa
温度変動
最大15 ℃/h
相対湿度変動 最大10 %/h
ディスクに結露があってはならない。
8.1.4
輸送
この規格は,輸送条件を規定しないが,指針を附属書Lに示す。
8.2
安全性
ディスクは,情報処理システムにおいて意図された方法での使用時又は想定される使用時に,ECMA-287
の安全性に関する要求事項を満たさなければならない。
8.3
耐燃性
ディスク及びその構成要素は,ECMA-287に規定するHB材料の耐燃性クラス以上のクラスに適合する
材料で作る。
9
基準測定装置
この規格の要求事項に適合するために,光学特性の測定には基準測定装置を使用しなければならない。
これらの装置の重要部品は,次に定義する特性をもつ。
9.1
光学系
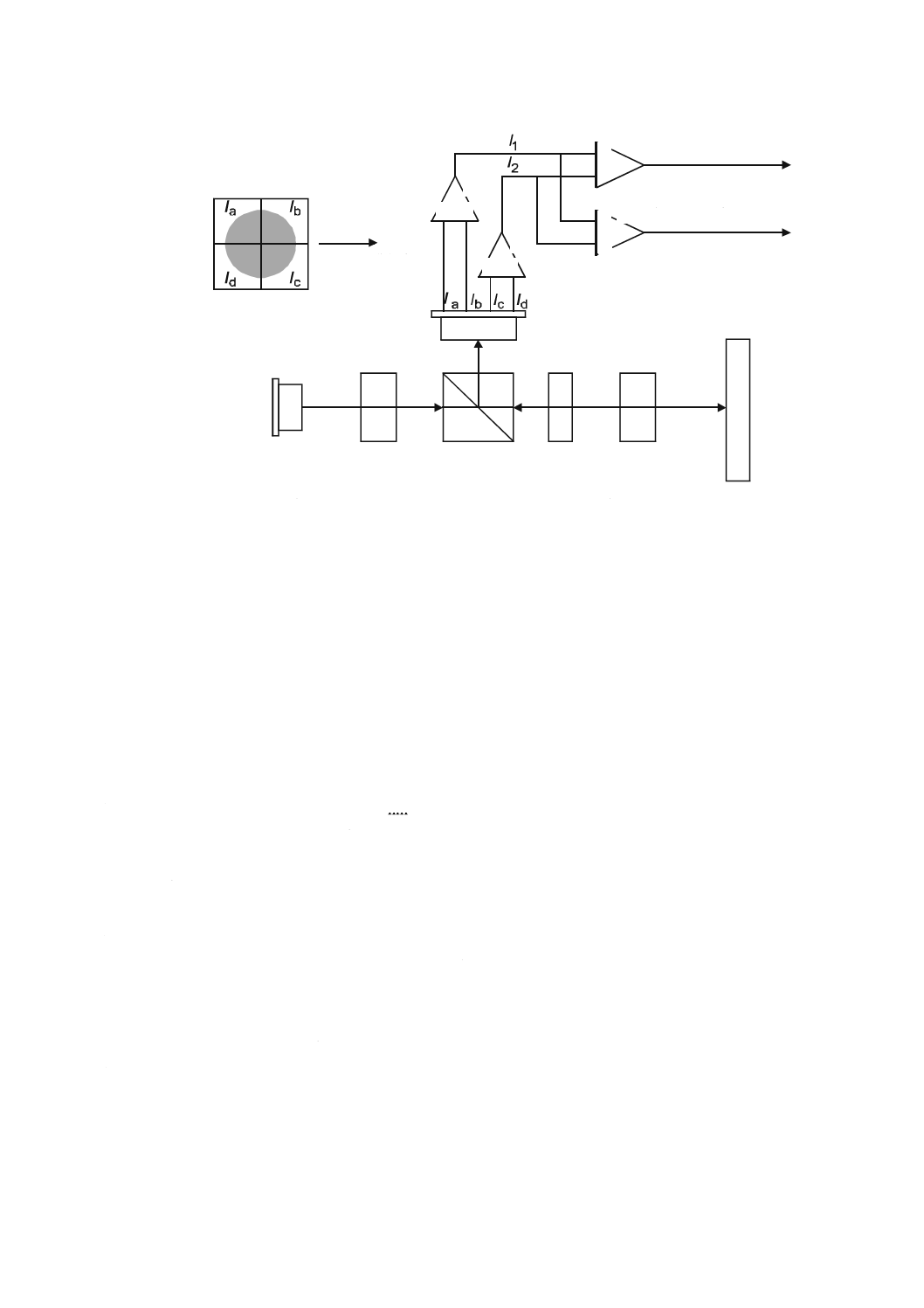
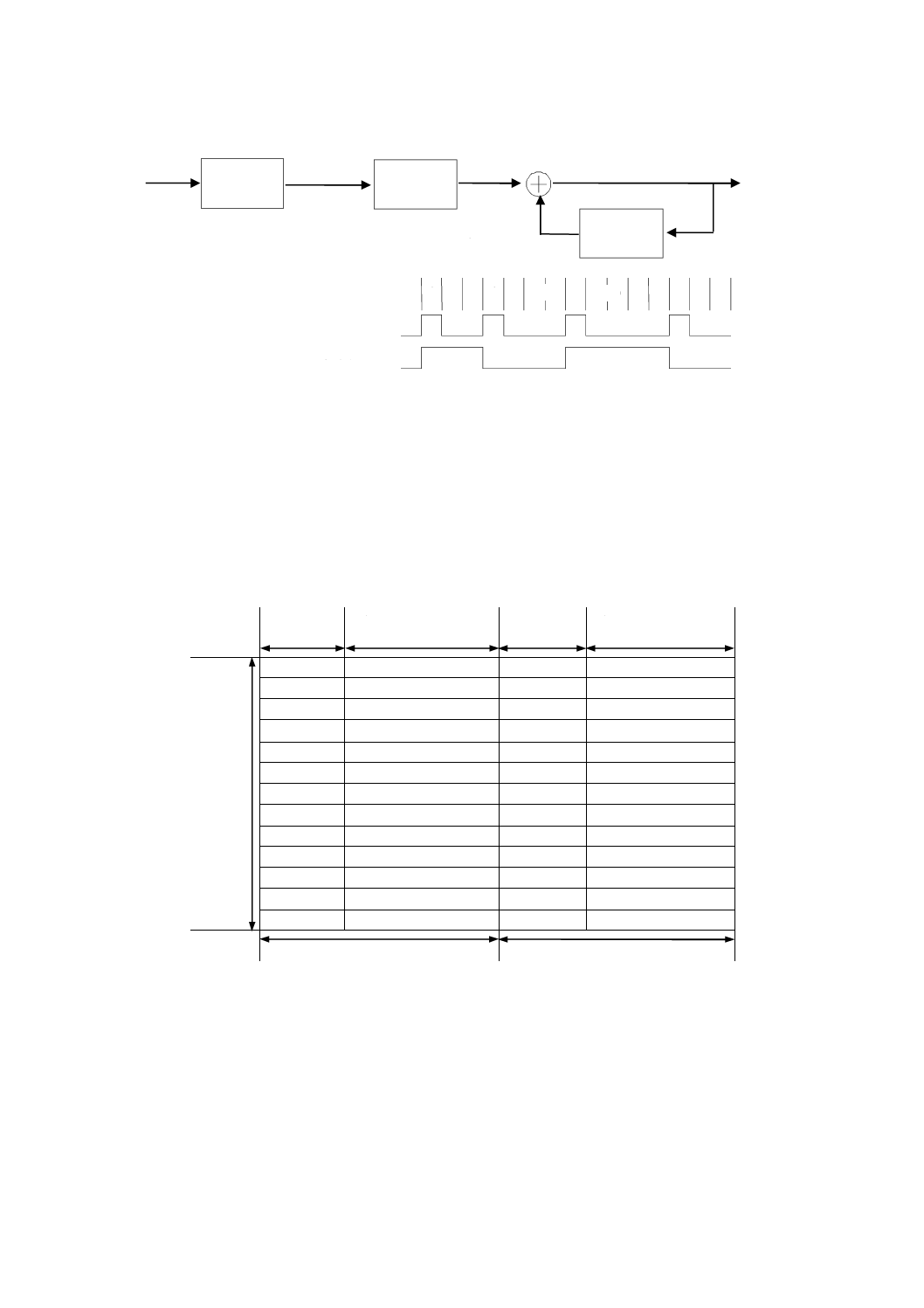
記録(オーバーライト)及び再生パラメタを測定するために使用する基準測定装置の光学系の基本構成
を,図2に示す。図2と同じ性能が提供できる場合,構成要素及びその位置が異なってもよい。光学系は,
測定精度に影響しないように,ディスク入射面から反射した検出光を最小化しなければならない。
9
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A
B
C
D
E
レーザダイオード
コリメータレンズ
偏光ビームスプリッタ
1/4波長板
対物レンズ
F
G
H1,H2,H3,H4
Ia,Ib,Ic,Id
I1,I2
光ディスク
四分割フォトディテクタ
直流結合増幅器
フォトディテクタGの出力電流
H3,H4の出力電流
図2−基準測定装置の光学系
偏光ビームスプリッタC及び1/4波長板Dの組合せによって,レーザダイオードAからの入射光と光デ
ィスクFからの反射光とは分離される。偏光ビームスプリッタCのP-S強度/反射率の比は,100以上とす
る。
9.2
光学ビーム
記録及び読取りに使用する光学ビームは,次の特性をもつ。
a) 波長(λ)
655 nm
10
5
+
−
nm
b) 開口数
0.65±0.01
c) 対物レンズは,厚さ0.6 mmで屈折率が1.55の基板による球面収差を補正しなければならない。
d) 単層ディスクの理想基板を通過した後の波面収差
最大0.033 λ rms
e) 対物レンズ上のひとみ(瞳)の縁での光強度
半径方向は最大光強度の35 %〜50 %
接線方向は最大光強度の45 %〜60 %
f)
偏光
円偏光
g) 読取りパワー(平均)
0.7 mW±0.1 mW(直流又は400 MHz以上で変調した高周波)
h) 記録パワー及びパルス幅 附属書G参照
i)
レーザダイオードの相対ノイズ強度 (RIN)
最大−134 dB/Hz
RIN (dB/Hz)=10 log[(交流光パワー実効値/Hz)/直流光パワー実効値]
-
+
読取りチャネル2
B
A
C
D
E
F
G
G
トラック進行方向
読取りチャネル1
+
+ +
+
+
+
H3
H1
H2
H4
10
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3
読取りチャネル1
読取りチャネル1は,記録層のマーク及びスペースから信号を生成する。この読取りチャネルは,相変
化によるマーク及びスペースの反射率の変化を利用してユーザが記録した情報の再生に使用する。読取り
チャネルのフォトディテクタに接続する前置増幅器は,直流成分から20 MHzまで1 dB以内の平たん(坦)
な帯域をもつ。
ジッタの測定のためのPLL及びスライサなどの特性は,附属書Eに規定する。
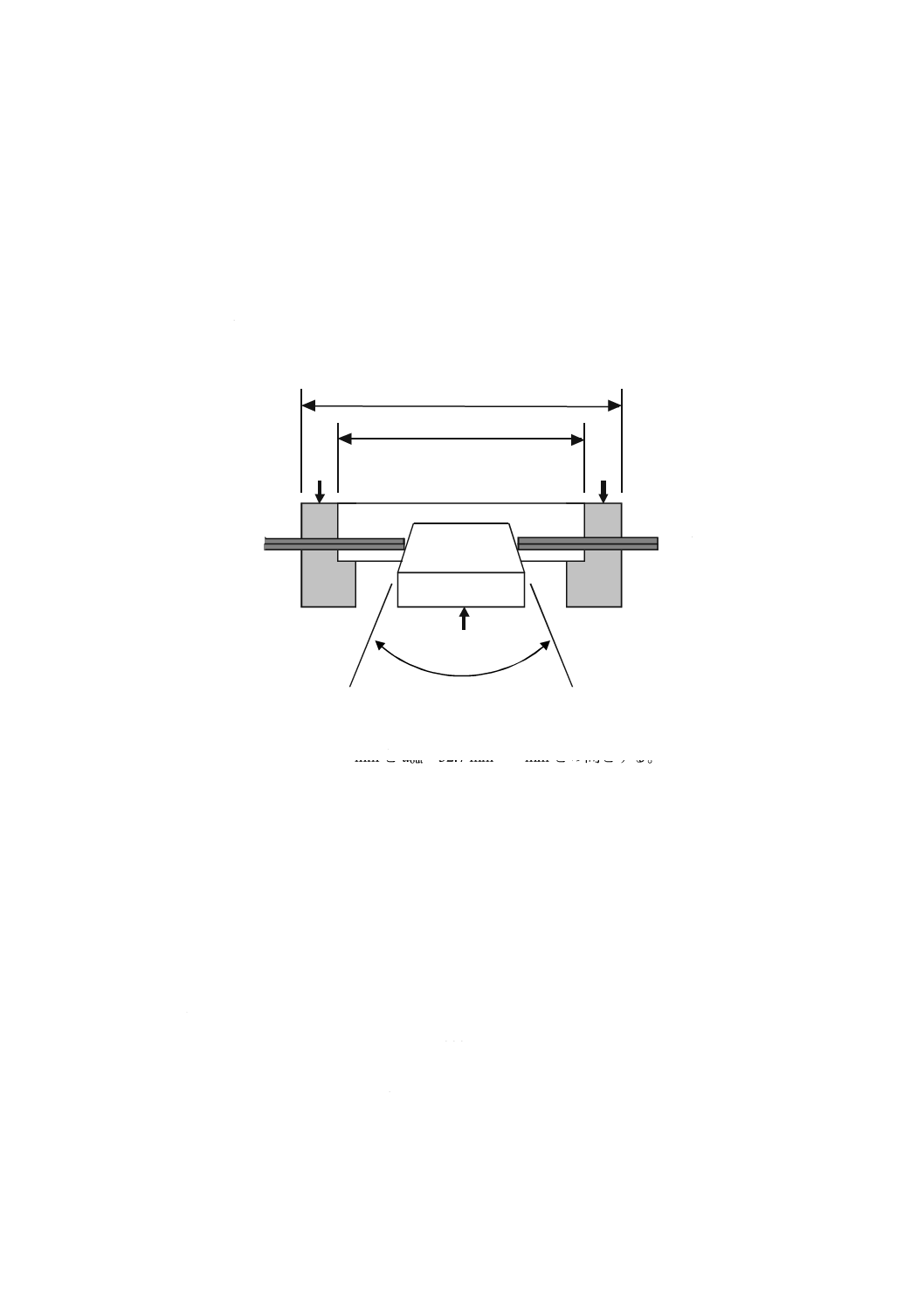
9.4
ディスククランプ
測定のために,ディスクは,クランプゾーン(10.5参照)のほとんどを覆う二つの同心状リングの間で
固定する。上側のクランプ領域は,下側のクランプ領域と同じ直径をもたなければならない(図3参照)。
図3−クランプ及びチャックの条件
クランプ領域は,din=22.3 mm
0.5
0.0
+
mmとdout=32.7 mm
0.0
0.5
−
mmとの間とする。
クランプ力は,F1=2.0 N±0.5 Nとする。クランプ力及びディスク中心孔のリムに加わるチャック力F2
によって生じる力のモーメントによるディスクの反りを防ぐために,F2は,0.5 Nを超えてはならない(図
3参照)。
テーパコーン角度αは,40.0°±0.5°とする。
9.5
ディスクの回転
再生時の実際の回転速度は,公称チャネルビットレートが 26.156 25 Mbit/sのとき,3.49 m/s±0.03 m/s
の基準速度とする。ディスクの回転方向は,対物レンズからみて反時計方向とする。
記録時の実際の回転速度は,リードインゾーンのADIP補助フレームにある物理フォーマット情報で指
定するパラメタのすべての速度を含む(14.4.1.1及び14.4.2参照)。
注記 ディスクの回転速度は半径位置に依存する。角速度=60×実速度 / (2π×r) RPM。
ディスクのテスト時に,角速度は,10 000 RPMを超えてはならない。
9.6
ウォブルチャネル(読取りチャネル2)
装置の読取りチャネル2は,記録時にディスク上でアドレス位置決めを制御するウォブル信号に使用す
る。ウォブル信号は,対物レンズの出射ひとみ(瞳)の後で2分割した光量の差信号(I1−I2)とし,読取
りチャネル2によって生成する。読取りチャネルのフォトディテクタに接続する前置増幅器は,直流成分
α
din
F2
dout
F1
F1
光ディスク
11
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
から20 MHzまで1 dB以内の平たん(坦)な帯域をもつ。
9.7
トラッキングチャネル(読取りチャネル2)
装置の読取りチャネル2は,光ビームの半径方向のトラッキングサーボを制御するトラッキングエラー
信号を供給する。半径方向のトラッキングエラーは,対物レンズの出射ひとみ(瞳)の後で2分割した光
量の差信号(I1−I2)とし,読取りチャネル2によって生成する。
軸方向のトラッキングエラーを生成する方法は,基準測定装置に規定しない。
9.8
基準サーボシステム
9.8.1
正規化サーボ伝達関数
軸方向及び半径方向のトラッキングサーボを規定する開ループ伝達関数。
Hs (iω) は,式(1)による。
()
0
0
2
0
s
3
i
1
i3
1
i
3
1
i
ω
ω
ω
ω
ω
ω
ω
H
+
+
×
×
=
························································ (1)
ここに,
i:
1
−
ω: 2π f
ω0: 2π f0
f0は,開ループ伝達関数の0 dBクロスオーバ周波数とする。
サーボの位相進み遅れ回路のクロスオーバ周波数は,次による。
進み交差周波数:
遅れ交差周波数:f2=f0×3
最大許容残留トラッキングエラーemaxに等しい振幅をもつ正弦波状偏位での周波数fXは,最大想定加速
度αmaxに対応して次による。
max
max
0
π
2
1
e
f
α
=
ディスクからのトラッキングエラー信号は大きな変動をもつため,それぞれの基準サーボループに入力
するトラッキングエラー信号は,規定したバンド幅を保障するため一定のレベル(効果的なループ利得校
正のため)に調整しなければならない。
9.8.2
軸方向のトラッキング基準サーボ
軸方向のトラッキングのために,正規化サーボ伝達関数 (Hs) のクロスオーバ周波数f0=ω0/(2π) は,式
(2)による。αmaxは,軸方向の最大加速度想定値8.0 m/s2の1.5倍とする。最大許容トラッキングエラーemax
は,このαmaxの結果から0.20 μmとする。
したがって,クロスオーバ周波数f0は,次による。
kHz
1.2
10
20
.0
5.1
8
3
π
2
1
3
π
2
1
6
max
max
0
=
×
×
×
=
×
=
−
e
f
α
··································· (2)
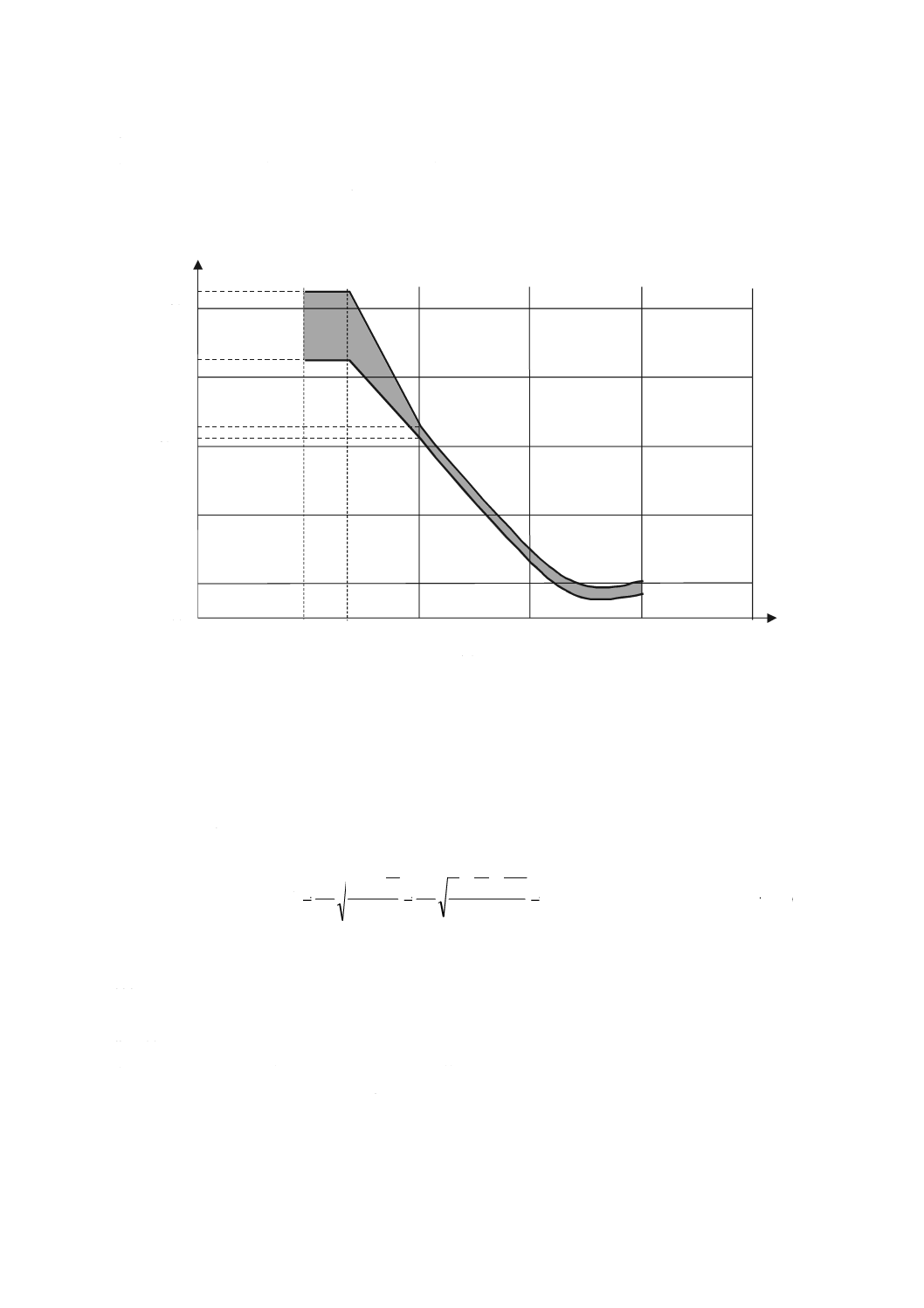
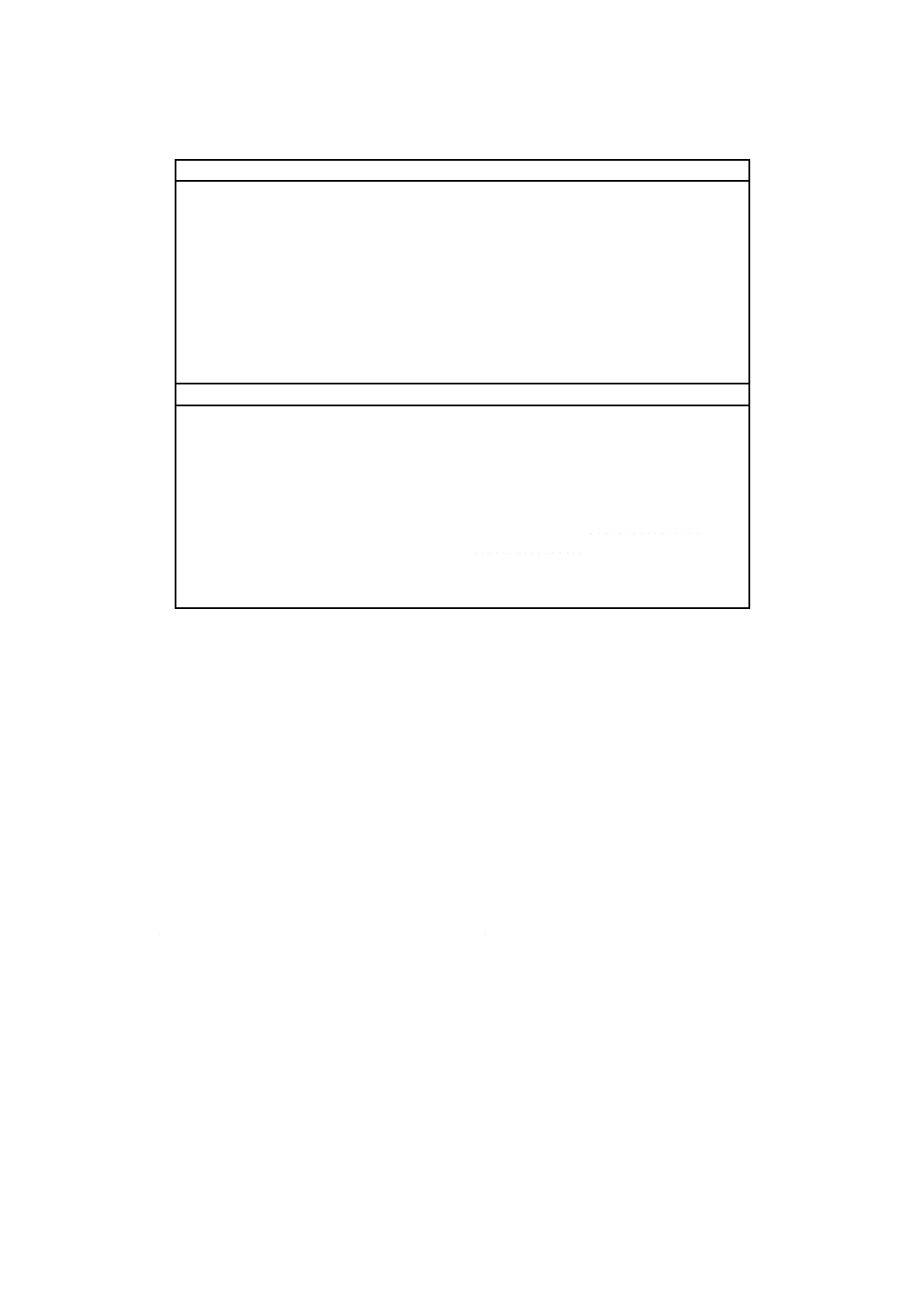
軸方向のトラッキング基準サーボの開ループ伝達関数Hに対し|1+H|は,図4に模式的に示すハッチン
グ領域内になければならない。
100 Hz〜10 kHzの帯域幅 |1+H| は,|1+HS| の20 %以内でなければならない。
26 Hz〜100 Hzの帯域幅 |1+H| は,次の4点で囲まれる範囲内とする。
1) 100 Hzで41.7 dB(100 Hzで |1+HS|−20 %)
3
0
1
f
f=
12
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2) 100 Hzで45.2 dB(100 Hzで |1+HS|+20 %)
3) 26 Hzで65.1 dB(26 Hzで |1+HS|−20 %)
4) 26 Hzで85.1 dB(26 Hzで |1+HS|−20 %に20 dBを加える。)
9.5 Hz〜26 Hzの帯域幅 |1+H| は,65.1 dBと85.1 dBとの間になければならない。
図4−軸方向のトラッキング基準サーボ
9.8.3
半径方向のトラッキング基準サーボ
半径方向のトラッキングのために,正規化サーボ伝達関数(HS)のクロスオーバ周波数f0=ω0/(2π) は,
式(3)による。αmaxは軸方向の最大加速度想定値1.1 m/s2の1.5倍とする。最大許容トラッキングエラーemax
は,このαmaxの結果から0.022 μmとする。
したがって,クロスオーバ周波数f0は,次による。
kHz
4.2
10
022
.0
5.1
1.1
3
π
2
1
3
π
2
1
6
max
max
0
=
×
×
×
=
×
=
−
e
f
α
································· (3)
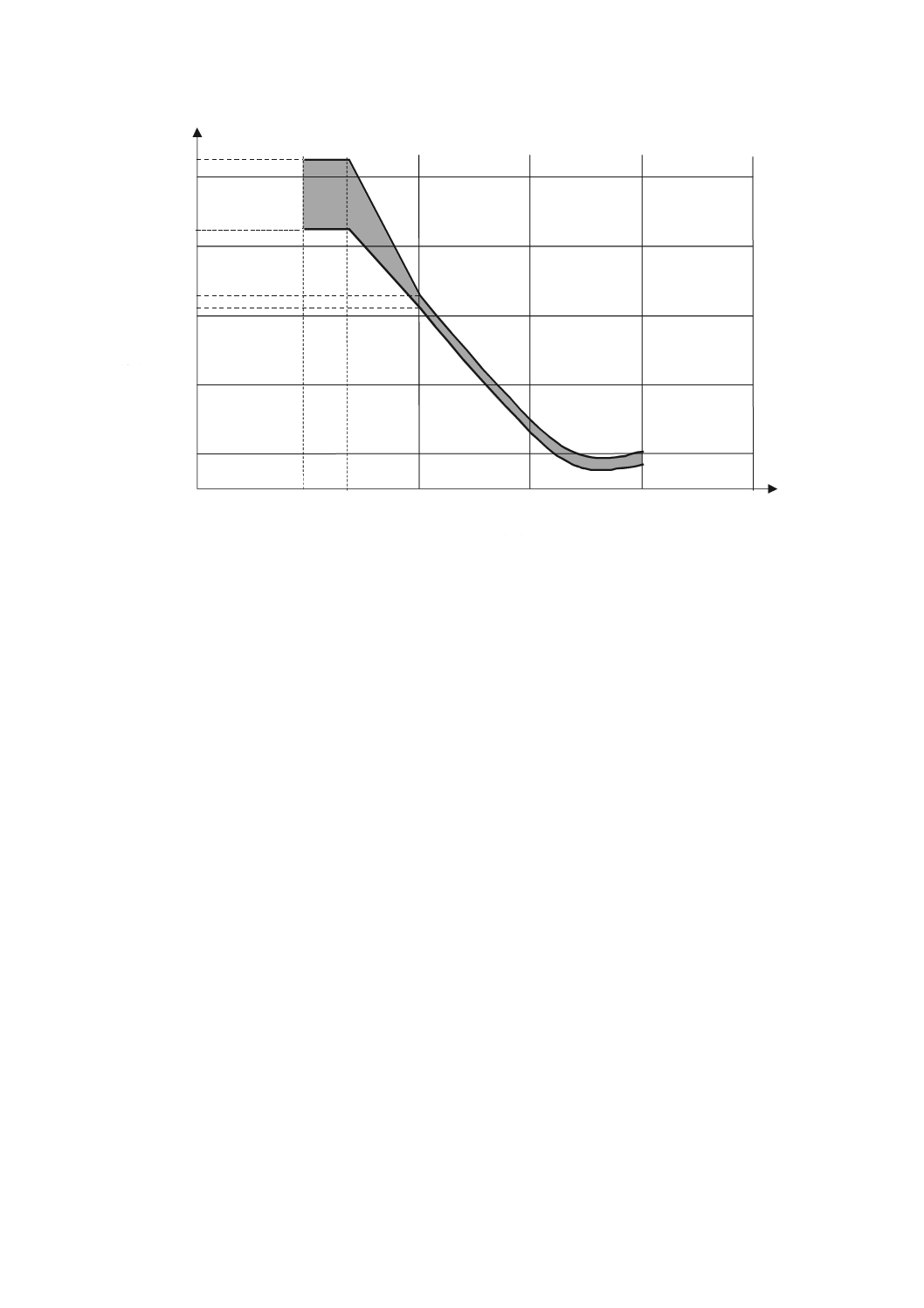
半径方向のトラッキング基準サーボの開ループ伝達関数Hに対し|1+H| は,図5に模式的に示すハッチ
ング領域内になければならない。
100 Hz〜10 kHzの帯域幅 |1+H| は,|1+HS| の20 %以内でなければならない。
28.2 Hz〜100 Hzの帯域幅 |1+H| は,次の4点で囲む範囲内とする。
1) 100 Hzで43.7 dB(100 Hzで |1+HS|−20 %)
2) 100 Hzで47.2 dB(100 Hzで |1+HS|+20 %)
3) 28.2 Hzで65.6 dB(28.2 Hzで |1+HS|−20 %)
4) 28.2 Hzで85.6dB(28.2 Hzで |1+HS|−20 %に20 dBを加える。)
9.5 Hz〜28.2 Hzの帯域幅 |1+H| は,65.6 dBと85.6 dBとの間になければならない。
-10
85.1
80
65.1
60
45.2
41.7
20
0
1
100
1 000
10 000
9.5
26
100 000
周波数 (Hz)
利
得
(dB)
13
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5−半径方向のトラッキング基準サーボ
第2章 ディスクの寸法,機械的特性及び物理的特性
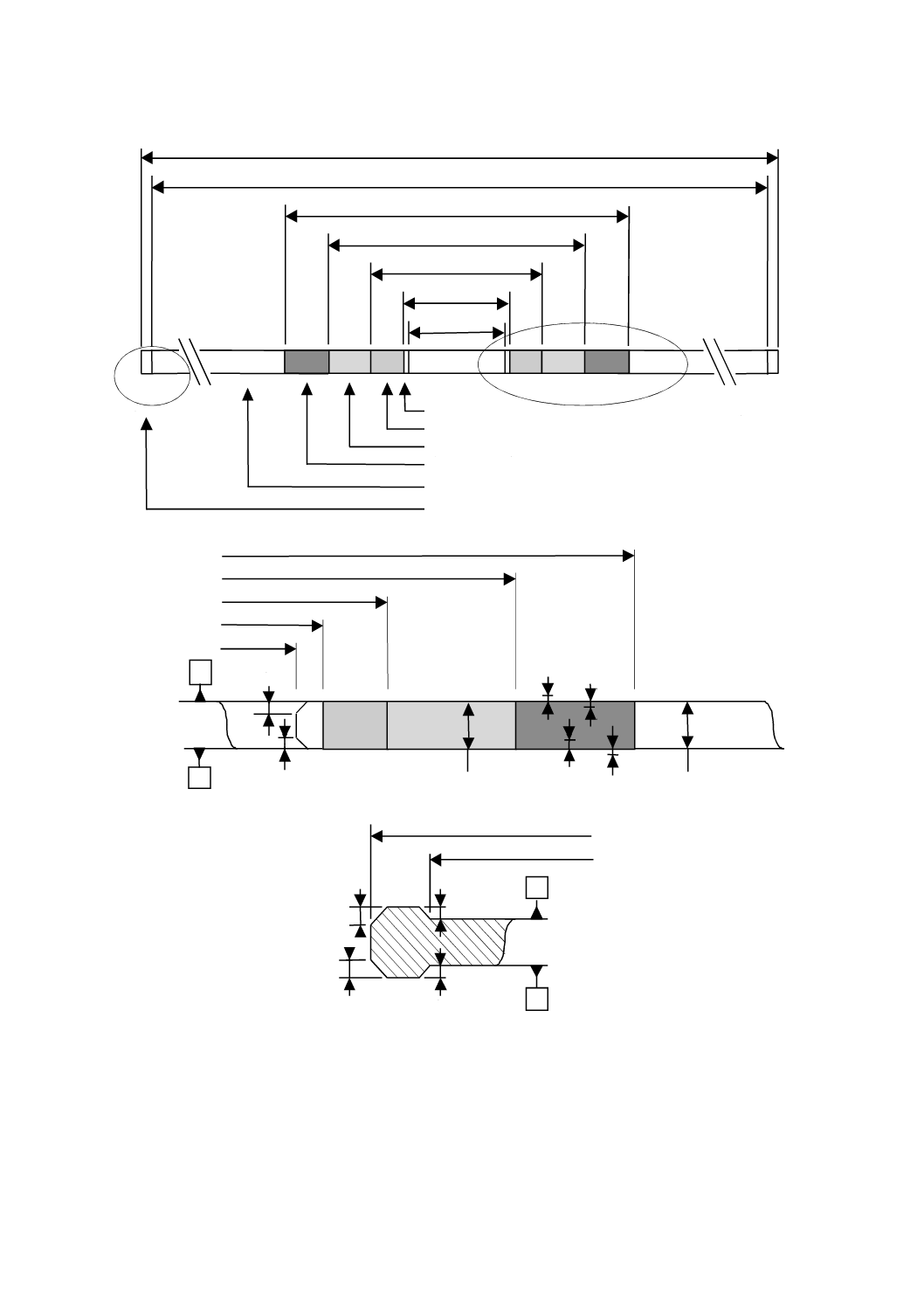
10 寸法特性
寸法特性は,ディスクの互換性及び適合をとるうえで必要なパラメタを規定する。設計の自由度がある
ところは,機能特性の要素を規定するにとどめる。寸法要求事項は,図6に示す。ディスクの各部分につ
いて,中心孔から外周リムまでを規定する。
-10
80
65.6
60
47.2
43.7
20
0
1
100
1 000
10 000
9.5
28.2
100 000
周波数 (Hz)
85.6
利
得
(dB)
14
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
遷移領域及びクランプゾーン(拡大図)
リム領域(拡大図)
図6−ディスクの寸法
10.1 基準面
寸法は,二つの基準面P及びQを基準とする。
基準面Pは,主基準面とし,クランプゾーン(10.5参照)の下面を置く面とする。
リム領域
第2遷移領域
第3遷移領域
リム領域
遷移領域及びクランプゾーン
d1
第1遷移領域
クランプゾーン
情報ゾーン
d7
d6
d5
d4
d3
d2
h6
h6
h7
h7
P
Q
d1
d7
h2
e1
Q
d2
d3
d4
d5
d6
h3
e2
P
h5
h5
h1
h4
15
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
基準面Qは,クランプゾーンの上面の高さで基準面Pと平行な面とする(図6参照)。
10.2 全体寸法
ディスクの直径は,次による。
d1=120.00 mm±0.30 mm
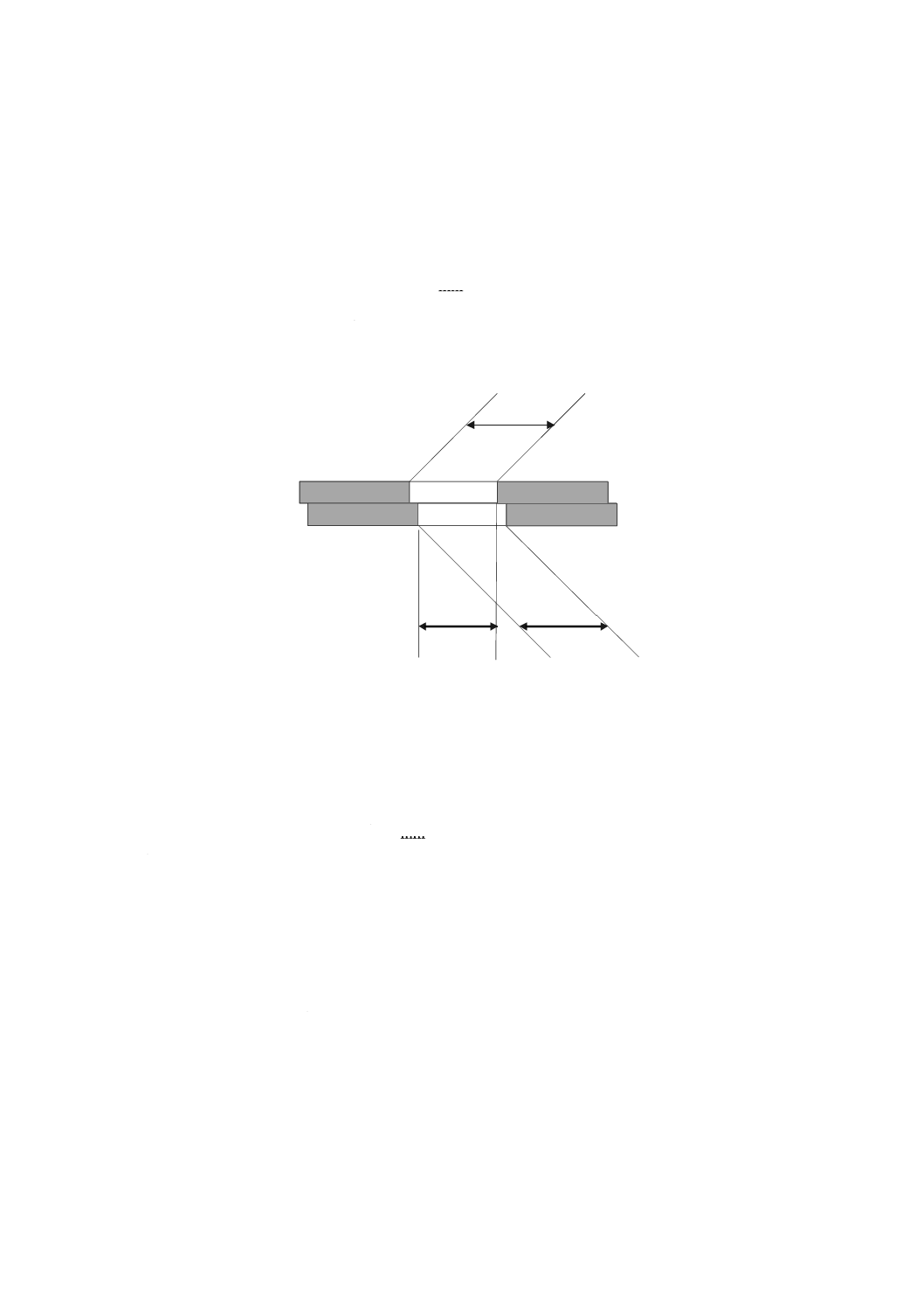
基板又はダミー基板の中心孔の直径は,次による(図7参照)。
dsubstrate=15.00 mm
0.15
0
+
mm
2枚の基板をはり合わせたとき,ディクスの中心孔の直径は,次による。
d2≧15.00 mm
図7−組立ディスクのあな(孔)
中心孔の両方のエッジは,ばりがあったり,とがった形状であったりしてはならない。それらのエッジ
は,次のとおりに丸めるか又は面取りをしなければならない。
h5≦0.1 mm
ディスクの厚さは,次による。
e1=1.20 mm
0.30
06
.0
+
−
mm
10.3 第1遷移領域
第1遷移領域は,直径d2と次の直径とで囲まれた領域とする。
d3≧16.0 mm
この領域は,基準面Pより上及び/又は基準面Qより下で最大0.10 mmとする。
10.4 第2遷移領域
第2遷移領域は,直径d3と次の直径とで囲まれた領域とする。
d4≦22.0 mm
この領域は,基準面P及び/又は基準面Qを超えて最大0.05 mmとし,平たん(坦)でない部分及びば
りがあってもよい。
10.5 クランプゾーン
このゾーンは,直径d4と次の直径とで囲まれた領域とする。
d5≧33.0 mm
dsubstrate
d2
dsubstrate
16
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
各面のクランプゾーンは,0.1 mm以内とし,平たん(坦)でなければならない。クランプゾーンの上面,
すなわち,基準面Qと,下面,すなわち,基準面Pとの間隔は0.1 mm以内とし,両面は,平行でなけれ
ばならない。
クランプゾーンのディスク厚さe2は,次による。
e2=1.20 mm
0.20
10
.0
+
−
mm
10.6 第3遷移領域
第3遷移領域は,直径d5と次の直径とで囲まれた領域とする。
d6≦44.0 mm
この領域の上面は,基準面Qからの高さがh1だけ高くなってもよく,h2だけ低くなってもよい。
h1≦0.25 mm
h2≦0.10 mm
この領域の下面は,基準面Pからの高さがh3だけ高くなってもよく,h4だけ低くなってもよい。
h3≦0.10 mm
h4≦0.25 mm
10.7 情報ゾーン
情報ゾーンは,直径d6と次の直径とで囲まれた領域とする。
d7≧117.5 mm
このゾーンは,リードインゾーン,データゾーン及びリードアウトゾーンで構成する。
10.8 リム領域
リム領域は,直径d7〜直径d1に囲まれた領域とする。この領域は,基準面P又は基準面Qからの高さ
がh6だけ高くてもよい。
h6≦0.1 mm
ディスクの外周エッジは,ばりがあったり,とがった形状であったりしてはならない。それらのエッジ
は,次のとおりに丸めるか又は面取りをしなければならない。
h7≦0.2 mm
10.9 許容公差についての注意
10.6〜10.8で規定するhiで示す各々の高さは,相互に独立とする。例えば,第3遷移領域の上面がh2だ
け基準面Qから下がっている場合,この領域の下面が必ずしもh3だけ基準面Pから上がっていなくても
よいことを意味している。寸法が同じ数値“一般的には最大値”の場合,実際の値が同一でなければなら
ないことを意味していない。
11 機械的特性
11.1 質量
ディスクの質量は,13.0 g〜20.0 gの範囲内とする。
11.2 慣性モーメント
回転軸に関するディスクの慣性モーメントは,最大0.040 g・m2とする。
11.3 ダイナミックインバランス
回転軸に関するディスクのダイナミックインバランスは,最大2.5 g・mmとする。
11.4 軸方向の振れ量
3.49 m/sの基準速度(9.5参照)で回転させ,軸方向のトラッキングのための基準サーボをもつ光学シス
17
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
テムで測定するとき,基準面に垂直の方向での公称位置からの記録層の偏差は,0.30 mm以下とする。
軸方向トラッキングの基準サーボで測定した10 kHz以下の残留トラッキングエラーは,0.13 μm以下と
する(対物レンズの移動は,記録層への光学ビームの焦点で移動する。)。
測定フィルタは,次のバタワース低域フィルタとする。
fc (−3 dB):10 kHz,傾斜:−80 dB/decade
11.5 半径方向の振れ量
ディスクの外周エッジの振れは,0.30 mm pp以下とする。
トラックの半径方向の振れは,70 μm pp以下とする。
3.49 m/sの基準速度(9.5参照)で回転させて,半径方向トラッキングの基準サーボで測定した1.1 kHz
以下の残留トラッキングエラーは,0.015 μm以下とする。
測定フィルタは,次のバタワース低域フィルタとする。
fc (−3 dB):1.1 kHz,傾斜:−80 dB/decade
半径方向トラッキング基準サーボを用いて20 msの積算時間で測定した1.1 kHz〜10 kHzの周波数帯域で
の残留エラー信号のノイズ実効値は,0.016 μm以下とする。
測定フィルタは,次のバタワース帯域フィルタとする。
周波数範囲 (−3 dB):1.1 kHz,傾斜:+80 dB/decade
周波数範囲 (−3 dB):10 kHz,傾斜:−80 dB/decade
12 情報ゾーンの光学的特性
12.1 屈折率
情報ゾーンにおける基板の屈折率は,1.55±0.10とする。
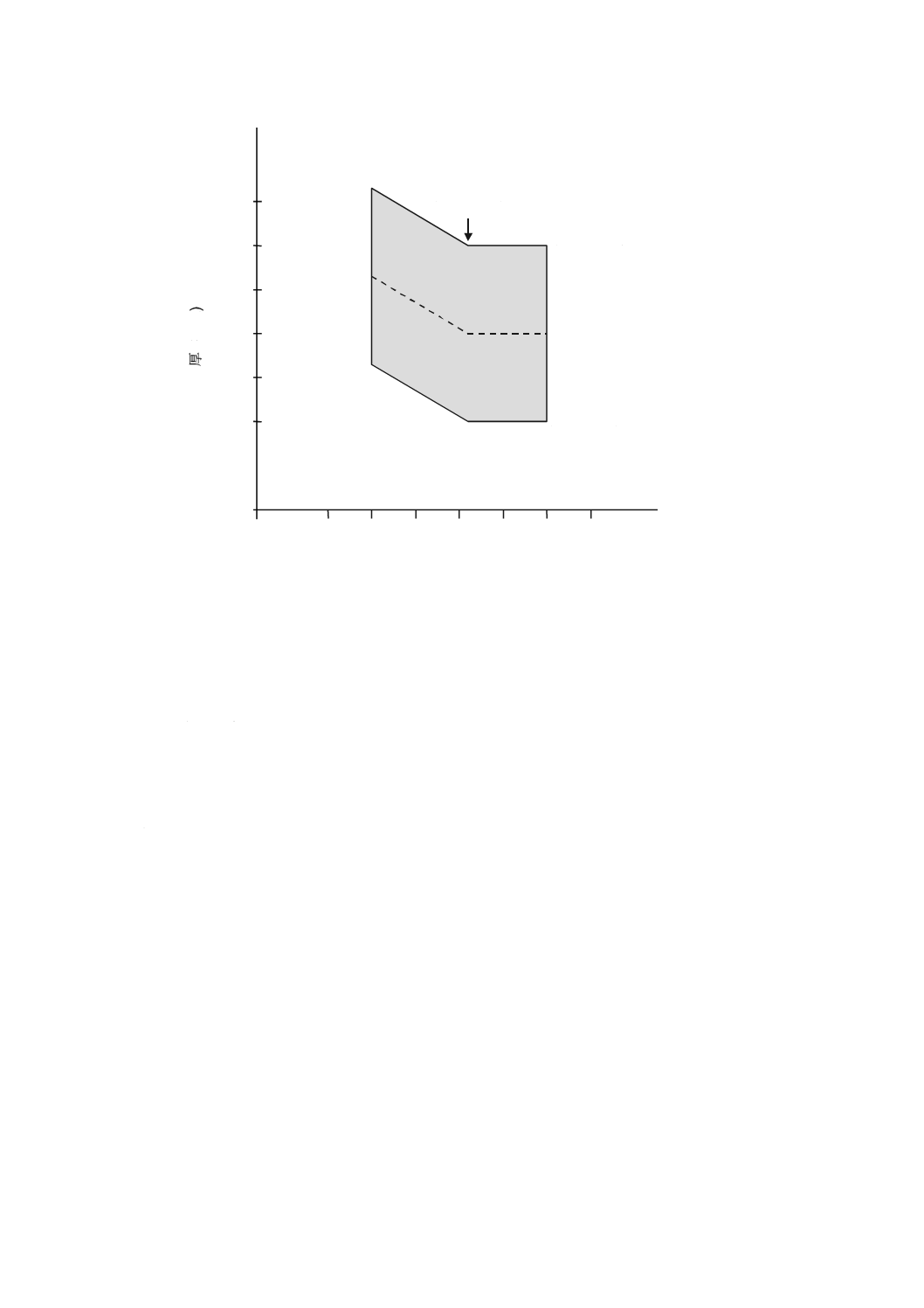
12.2 基板の厚さ
入射面から記録層までの基板厚さは,基板の屈折率の関数とし,図8の囲まれた領域とする。
18
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図8−基板の厚さ
12.3 反射率
基板のダブルパス光学的透過及び記録層の反射率は,ディスクの反射率Rとして一緒に測定する。Rの
値は,附属書Cによって測定し,情報ゾーンでは,次による。
未記録のグルーブにおいてRdは,18 %〜30 %とする。
記録済みのグルーブにおいてR14Hは,18 %〜30 %とする。
12.4 複屈折
基板の複屈折は,附属書Dによって測定し,60 nm以下とする。
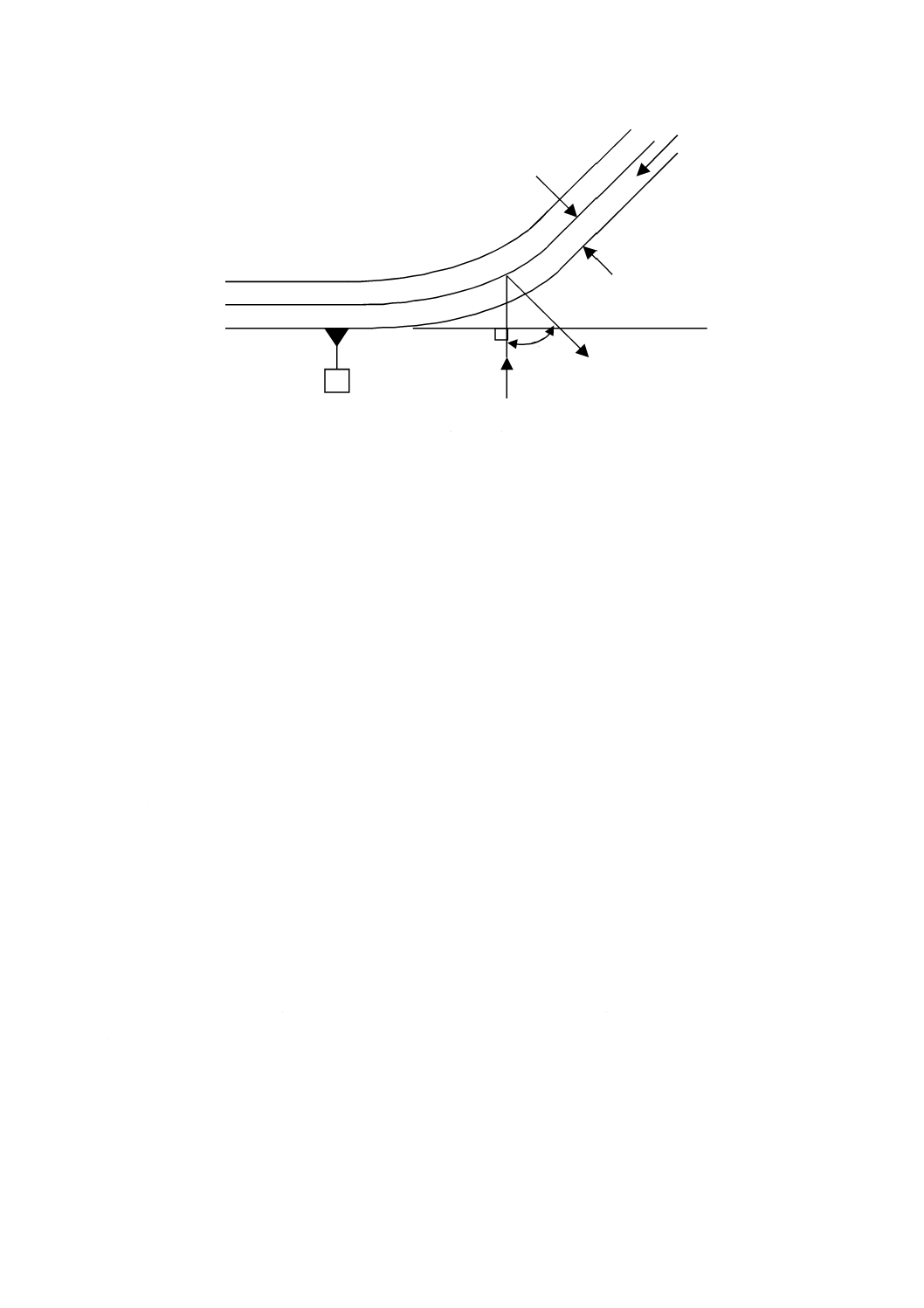
12.5 角度偏差
角度偏差は,基準面Pに垂直に入射する光と反射する光との間の角度αとする(図9参照)。入射光は,
0.3 mm〜3.0 mm範囲の直径をもつ。この角度αは,入射面及び記録層と入射面との非平行によるゆがみを
含む。
1.40
1.50
1.60
1.70
0.600
0.580
0.620
(1.45; 0.633)
(1.65; 0.620)
(1.56; 0.620)
(1.45; 0.593)
(1.56; 0.580)
(1.65; 0.580)
厚
さ
(m
m
)
屈折率
19
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図9−角度偏差α
その角度偏差は次による。
半径方向:|α|≦0.70°
1回転の半径方向のαの偏差は,最大0.80°ppとする。
接線方向:|α|≦0.30°
第3章 情報フォーマット
13 データフォーマット
ホストから受け取ったデータを,主データという。主データを,ディスクに記録する前に,次の順に変
換し,フォーマットを行う。
− データフレーム
− スクランブルドフレーム
− ECCブロック
− 記録フレーム
− 物理セクタ
− 記録ユニット
これらのステップは,13.1〜13.8で規定する。
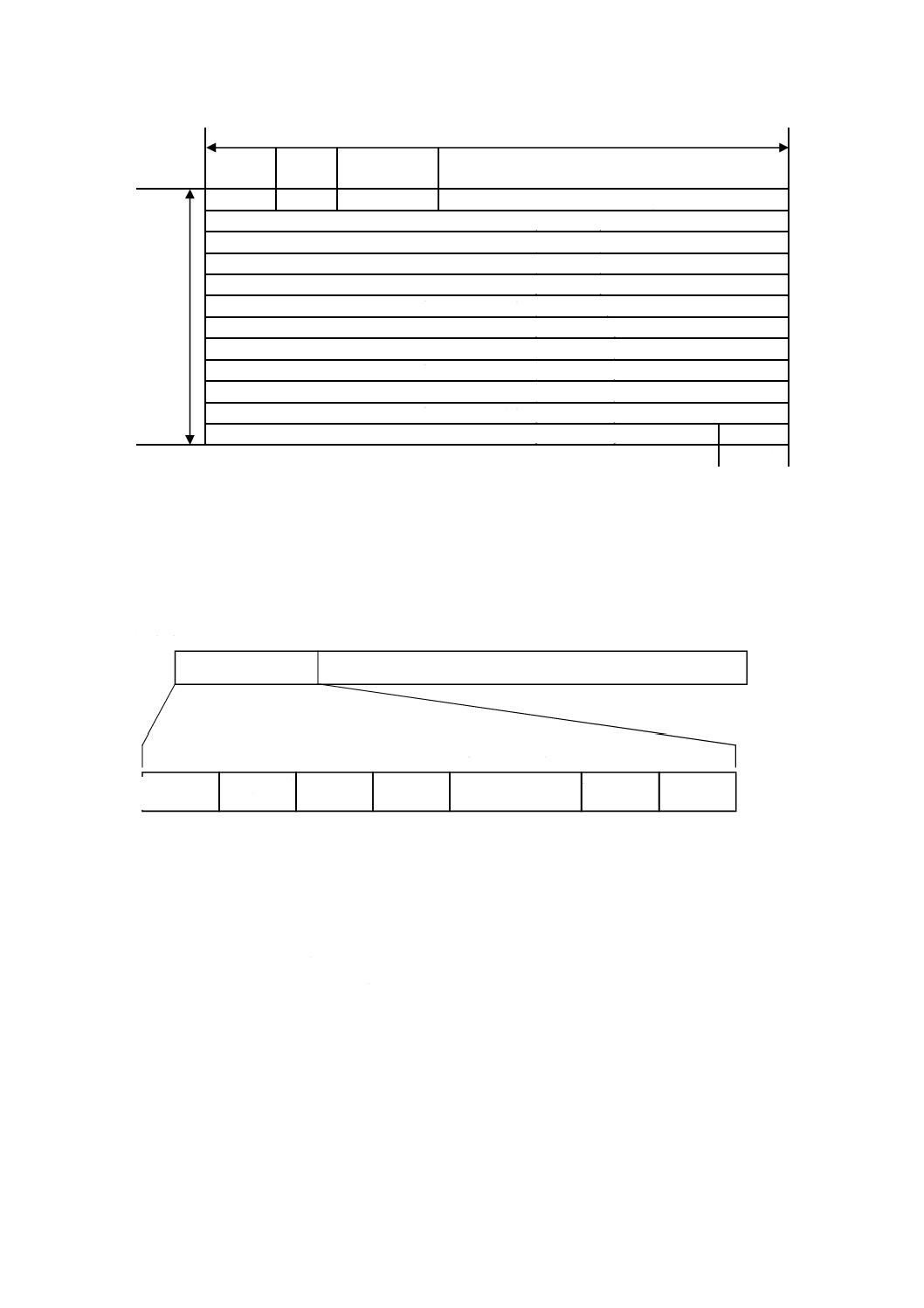
13.1 データフレーム
データフレームは,各行172バイトを含む12行の配列に配置した2 064バイトによって構成する(図10
参照)。最初の行は,4バイトからなる識別データ (ID),2バイトからなるID誤り検出符号 (IED),6バイ
トからなる予備バイト (RSV) の三つのフィールド及び160バイトの主データによって構成する。次の10
行は,各172バイトの主データからなり,最後の行は,168バイトの主データ及び4バイトの誤り検出符
号 (EDC) によって構成する。2 048バイトの主データは,D0〜D2 047とする。
基板
α
入射ビーム
反射ビーム
入射面
記録層
P
20
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
172バイト
4
バイト
2
バイト
6
バイト
12行
ID
IED
RSV
主データ160バイト (D0〜D159)
主データ172バイト (D160〜D331)
主データ172バイト (D332〜D503)
主データ172バイト (D504〜D675)
主データ172バイト (D676〜D847)
主データ172バイト (D848〜D1 019)
主データ172バイト (D1 020〜D1 191)
主データ172バイト (D1 192〜D1 363)
主データ172バイト (D1 364〜D1 535)
主データ172バイト (D1 536〜D1 707)
主データ172バイト (D1 708〜D1 879)
主データ168バイト (D1 880〜D2 047)
EDC
4バイト
図10−データフレーム
13.1.1 識別データ(ID)
このフィールドは,4バイトで構成し,そのビットは,最下位ビット(lsb)をb0とし,最上位ビット(msb)
をb31とする連続した番号付けをする(図11参照)。
セクタ情報
物理セクタ番号
(msb) b31
b24 b23
b0 (lsb)
b31
b30
b29
b28
b27
b26
b24
b25
セクタフォー
マットタイプ
トラッキング
方法
反射率
予備
ゾーンタイプ
データタイプ レイヤ番号
図11−識別データ(ID)
セクタ情報である最上位バイトのビットは,次による。
ビットb31
CLDフォーマットを示す“0”に設定する。
ビットb30
グルーブトラッキングを示す“1”に設定する(箇条14参照)。
ビットb29
反射率が40 %以下を示す“1”に設定する。
ビットb28
“0”に設定する。
ビットb27及びb26
次の値に設定する。
データゾーン
“00”
リードインゾーン
“01”
リードアウトゾーン
“10”
ビットb25
書換えデータを示す“1”に設定する。
ビットb24
入射面から一つの記録層だけアクセスできることを示す“0”に設定する。
21
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ビットb0〜b23の最下位3バイトは,物理セクタ番号を2進数表示で表す。ECCブロックの最初の物理
セクタ番号は,16の整数倍とする。
13.1.2 ID誤り検出符号(IED)
図10に示す配列のすべてのバイトをCi,j (i=0〜11,j=0〜171)とするとき,IEDのバイトは,C0,j (j=4
〜5) で表す。これらの設定は,次による。
()
()
()x
G
x
x
I
x
C
x
j
j
j
E
2
5
5
4
0,
mod
=
IED
−
=∑
=
ここに,
I (x):
j
j
j,x
C
−
=∑
3
3
0
0
GE (x): (x+1)(x+α)
αは原始多項式P (x)=x8+x4+x3+x2+1の原始根とする。
13.1.3 予備バイト(RSV)
このフィールドは,6バイトで構成する。最初のバイトは,アプリケーションで規定する。アプリケー
ションで規定しない場合は,これを予備とし,(00)とする。残りの5バイトは,予備とし,すべて(00)とす
る。
どのような状況であっても,ホストから受け取ったデータ以外のものをこのフィールドに記録すること
があってはならない。
注記 レコーダ及びドライブは,ユーザが任意に定義した数値をフィールドに何らかの方法で記録す
るように作られているか又は記録できるようにこれらの機器を容易に改造できるとき,このド
ライブは,回避装置とみなす。
13.1.4 誤り検出符号(EDC)
この4バイトのフィールドには,先行するデータフレームの2 060バイトにわたって計算した誤り検出
符号を入れる。データフレームを,IDフィールドの最初のバイトの最上位ビットで始まり,EDCフィー
ルドの最下位ビットで終了する単一のビットフィールドとしたとき,この最下位ビットをb0とし,最上位
ビットをb16 511とし,EDCの各ビットbiは,i=0〜31に対し次による。
()
()
()x
G
x
I
x
x
i
i
i
mod
b
EDC
31
0
=
=∑
=
ここに,
I (x):
i
i
ix
∑
=
511
16
32
b
G (x): x32+x31+x4+1
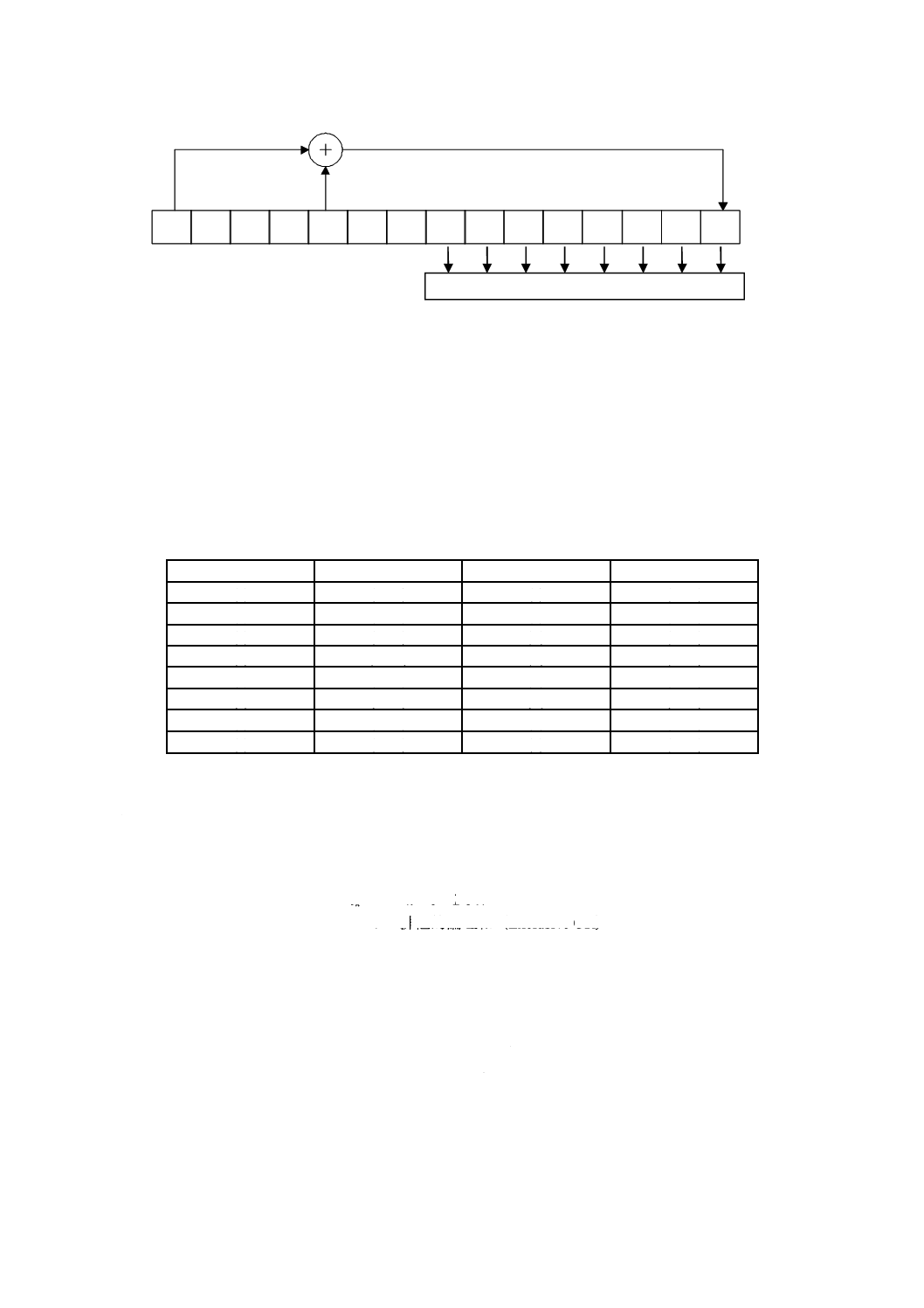
13.2 スクランブルドフレーム
2 048主データバイトは,図12に示すシフトレジスタのビットr7 (msb)〜r0 (lsb) のビットが,8ビットシ
フトごとに,スクランブルをかけるバイトを表すフィードバックビットシフトレジスタ回路によって,ス
クランブルする。
22
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図12−フィードバックシフトレジスタ
データフレームのスクランブル処理を始めるとき,シフトレジスタのビットr14〜r0は,表1の値にプリ
セットする。同じプリセット値は,16個の連続したデータフレームに使用する。16グループの16データ
フレームの後に,手順は最初から繰り返す。初期のプリセット番号は,データフレームのIDフィールド
のシフトレジスタのビットb7 (msb)〜b4 (lsb) のビットによって表す値と等しい。表1は,16初期プリセッ
ト番号に相当するシフトレジスタの初期プリセット値を表す。
表1−シフトレジスタの初期値
初期プリセット番号
初期プリセット値
初期プリセット番号
初期プリセット値
(0)
(0001)
(8)
(0010)
(1)
(5500)
(9)
(5000)
(2)
(0002)
(A)
(0020)
(3)
(2A00)
(B)
(2001)
(4)
(0004)
(C)
(0040)
(5)
(5400)
(D)
(4002)
(6)
(0008)
(E)
(0080)
(7)
(2800)
(F)
(0005)
シフトレジスタのビットr7〜r0の初期値の部分は,スクランブルをかけるバイトS0として取り出す。そ
の後,8ビットシフトが2 047回繰り返し,レジスタr7〜r0によって,スクランブルをかける2 047バイト
をS1〜S2 047として取り出さなければならない。データフレームの主データバイトDkは,次によってスク
ランブルバイトD′kとする。
D′k=Dk○
+Sk k=0〜2 047
ここに,
○
+: 排他的論理和(Exclusive OR)
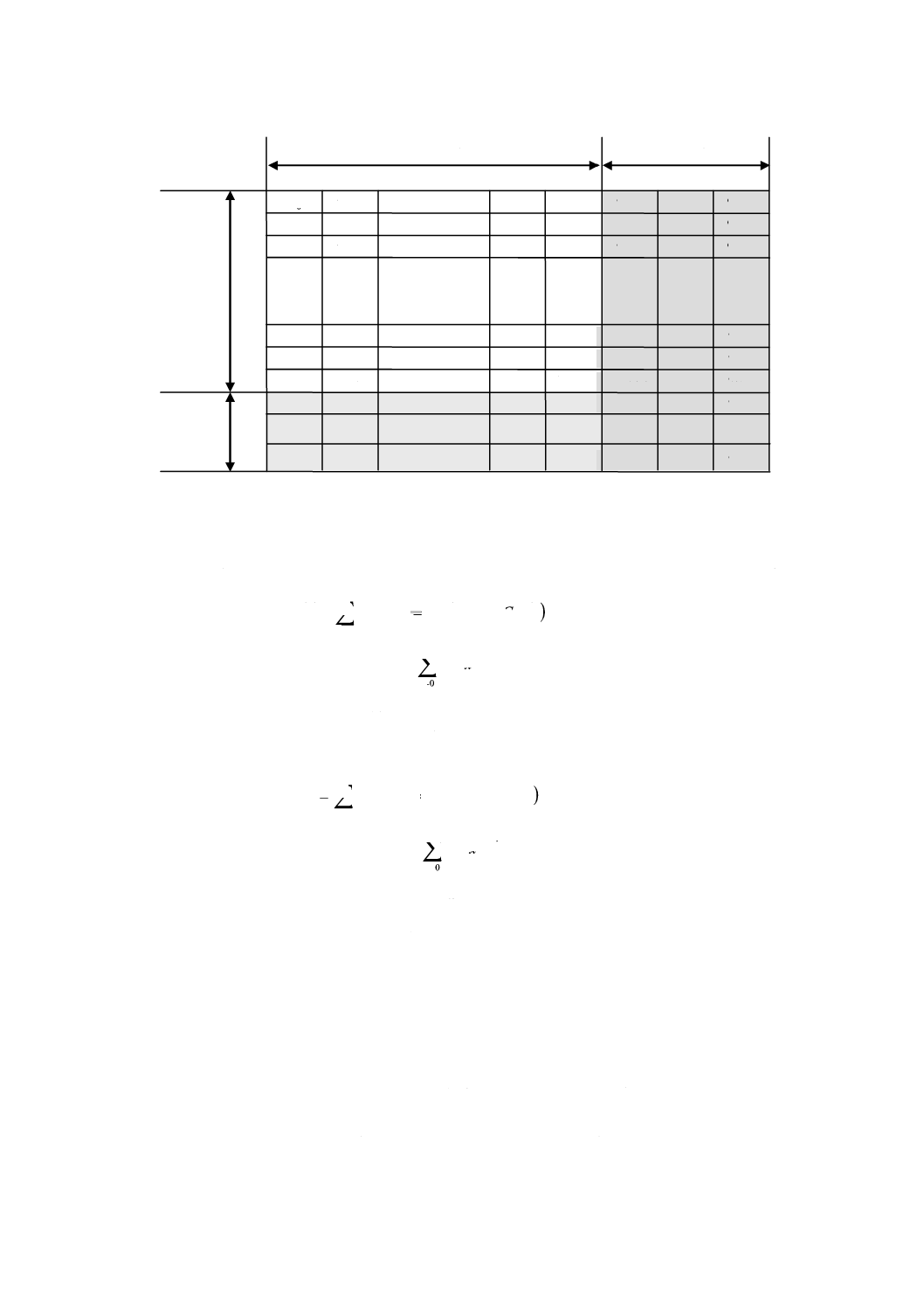
13.3 ECCブロック
ECCブロックは,16連続スクランブルドフレームを,図13に示すように,各行172バイトを192行に
配列する。各172列に外符号パリティ(PO)16バイトを加え,その結果208行になった各行に内符号パ
リティ(PI)10バイトを加える。完全なECCブロックは,各行182バイトの208行によって構成する。
この配列のバイトは,iが行数でjが列数とするBi, jとし,次による。
i=0〜191及びj=0〜171に対するBi, jは,スクランブルドフレームからのバイト。
i=192〜207及びj=0〜171に対するBi, jは,POのバイト。
i=0〜207及びj=172〜181に対するBi, jは,PIのバイト。
r 14
r 13
r 11
r 12
r 10
r 9
r 7
r 8
r 6
r 5
r 3
r 4
r 2
r 1
r 0
各8ビットシフトのSk
23
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
192行
B 0
B 1 ,0
B 2 ,0
B 0 ,1
B 0 ,170
B 0 ,171
B 0 ,172
B 0 ,181
B 1 ,1
B 1 ,170
B 1 ,171
B 1 ,172
B 1 ,181
B 2 ,1
B 2 ,170
B 2 ,171
B 2 ,172
B 2 ,181
B 190 ,0 B 190 ,1
B 190 ,170 B 190 ,171 B 190 ,172
B 190 ,181
B 189 ,0 B 189 ,1
B 189 ,170 B 189 ,171 B 189 ,172
B 189 ,181
B 207 ,0 B 207 ,1
B 207 ,170 B 207 ,171 B 207 ,172
B 207 ,181
B 191 ,0 B 191 ,1
B 191 ,170 B 191 ,171 B 191 ,172
B 191 ,181
B 192 ,0 B 192 ,1
B 192 ,170 B 192 ,171 B 192 ,172
B 192 ,181
16行
10バイト
PI
172バイト
PO
,0
図13−ECCブロック
PO及びPIのバイトは,次の式による。
列j=0〜171の各列の16 POバイトは,剰余多項式Rj (x) で定義し,外符号RS (208,192,17) を形成する。
()
()
()x
G
x
x
I
x
B
x
R
j
i
i
j
i,
j
PO
16
207
192
207
mod
=
=∑
=
−
ここに,
Ij(x):
i-
i
j
i,x
B
191
191
0∑
=
GPO(x):
(
)
∏
+
15
0
=
k
k
α
x
行i=0〜207の各行の10 PIバイトは,剰余多項式Ri (x) で定義し,内符号RS (182,172,11) を形成する。
()
()
()x
G
x
x
I
x
B
x
R
i
j
j
j
i,
i
PI
10
181
172
181
mod
=
=∑
=
−
ここに,
Ii(x):
j
-
j
j
i,x
B
171
171
0∑
=
GPI(x):
(
)
∏
+
9
0
=
k
k
α
x
αは原始多項式P (x)=x8+x4+x3+x2+1の原始根とする。
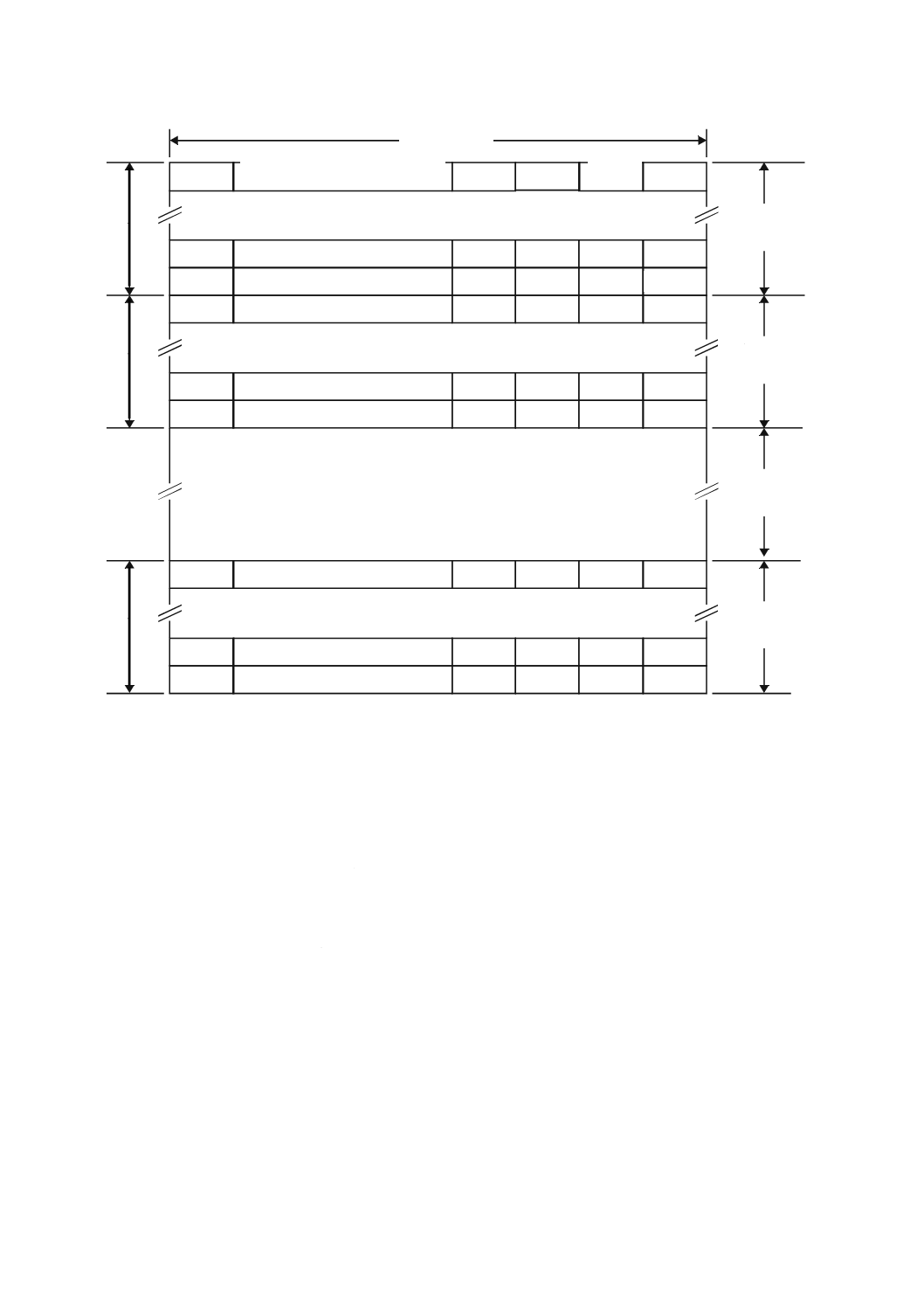
13.4 記録フレーム
16個の記録フレームは,ECCブロックの12行ごとの後に,16 PO行の一つをインタリーブすることに
よって算出する(図14参照)。これは,ECCブロックのバイトBi, jを,次の式に対するBm, nとして再配置
することによって算出する。
m=i+int [i / 12]
及びn=j
(i≦191の場合)
m=13×(i−191)−1
及びn=j
(i≧192の場合)
ここに,
int [x]: x以下の最大の整数
ECCブロックの37 856バイトは,各セクタ2 366バイトからなる16個の記録フレームとして再配置す
る。各記録フレームは,各行182バイトからなる13行の配列を構成する。
24
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
182 bytes
13
rows
B0,0
B11,0
B12,0
B23,0
B192,0
B193,0
B191,0
B207,0
B180,0
B0,171
B11,171
B192,171
B193,171
B191,171
B
,171
207
B180,171
B12,171
B
,171
23
B0,172
B11,172
B192,172
B193,172
B191,172
B
,172
207
B180,172
B12,172
B
,172
23
B0,181
B11,181
B192,181
B193,181
B191,181
B
,181
207
B180,181
B12,181
B
,181
23
13
rows
13
rows
Recording
Frames 2 - 14
Recording
Frame 0
Recording
Frame 1
Recording
Frame 15
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
図14−ECCブロックから得た記録フレーム
13.5 変調及びNRZI変換
各記録フレームの8ビットバイトは,二つの“1”の間に最小2個の“0”及び最大10個の“0”を含む
RLL (2,10) というラン長の制限をもつ16ビット符号語に変換する。附属書Hは,適用する変換表を規定
する。主変換表及び代替変換表は,各8ビットバイトに対して4状態の一つと16ビット符号語とを規定す
る。各8ビットバイトに対して,変換表は,相当する符号語だけでなくエンコードする次の8ビットバイ
トの状態を示す。
16ビット符号語は,ディスクに記録する前に,チャネルビットにNRZI変換する(図15参照)。チャネ
ルクロック長は2連続したチャネルビットの間の時間とする。
182バイト
記録フレーム
0
記録フレーム
1
記録フレーム
2〜14
13行
記録フレーム
15
13行
13行
25
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図15−NRZI変換
13.6 物理セクタ
物理セクタの構造は,図16に示すように,各行が二つの同期フレームからなる13行で構成する。一つ
の同期フレームは,表2の同期符号の一つと1 456チャネルビットとで構成し,1 456チャネルビットは,
記録フレームの一つの行のそれぞれの第1及び第2の91個の8ビットバイトを表す。物理セクタの第1
行は記録フレームの第1行を表し,物理セクタの第2行は記録フレームの第2行を表し,以下同様とする。
32チャネルビ
ット
1 456チャネルビット
32チャネルビ
ット
1 456チャネルビット
SY0
SY5
SY1
SY5
SY2
SY5
SY3
SY5
SY4
SY5
SY1
SY6
13行
SY2
SY6
SY3
SY6
SY4
SY6
SY1
SY7
SY2
SY7
SY3
SY7
SY4
SY7
同期フレーム
同期フレーム
図16−物理セクタ
物理セクタの記録は,第1行の第1同期フレームで始まり,第2行の第2同期フレームに続き,行ごと
に以下同様とする。同期符号及び16チャネルビットの状態は,13.8に定義する。
16チャネルビット
NRZI変換パルス
8ビット
バイト
NRZ変換
変調器
排他的論理和
1 T遅延
16ビット
符号語
T=1チャネルクロック間隔
1
NRZ変換信号:
NRZI変換信号:
16ビット符号語パターン:
0
0
0
0 0 0
0 0 0 0
0 0
1
1
1
26
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−同期符号
状態1及び状態2
主同期符号
副同期符号
(msb)
(lsb) (msb)
(lsb)
SY0=0001001001000100 0000000000010001 0001001000000100 0000000000010001
SY1=0000010000000100 0000000000010001 0000010001000100 0000000000010001
SY2=0001000000000100 0000000000010001 0001000001000100 0000000000010001
SY3=0000100000000100 0000000000010001 0000100001000100 0000000000010001
SY4=0010000000000100 0000000000010001 0010000001000100 0000000000010001
SY5=0010001001000100 0000000000010001 0010001000000100 0000000000010001
SY6=0010010010000100 0000000000010001 0010000010000100 0000000000010001
SY7=0010010001000100 0000000000010001 0010010000000100 0000000000010001
状態3及び状態4
主同期符号
副同期符号
(msb)
(lsb) (msb)
(lsb)
SY0=1001001000000100 0000000000010001 1001001001000100 0000000000010001
SY1=1000010001000100 0000000000010001 1000010000000100 0000000000010001
SY2=1001000001000100 0000000000010001 1001000000000100 0000000000010001
SY3=1000001001000100 0000000000010001 1000001000000100 0000000000010001
SY4=1000100001000100 0000000000010001 1000100000000100 0000000000010001
SY5=1000100100000100 0000000000010001 1000000100000100 0000000000010001
SY6=1001000010000100 0000000000010001 1000000001000100 0000000000010001
SY7=1000100010000100 0000000000010001 1000000010000100 0000000000010001
13.7 記録ユニット(RUN)のレイアウト
図17にRUNのレイアウトを示す。
1個のRUNは,単一ECCブロック内の16個の物理セクタを1セットとして,その整数倍(M≧1)で
構成する。M個のECCブロックの先頭には,リンクの位置が不正確な場合の影響を低減するために8チ
ャネルビットを配置する。ただし,最後の物理セクタの最後尾の8チャネルビットは記録時には使わない。
リンクの8チャネルビット及び次の同期符号SY0(状態1/2又は状態3/4から選択する。)は,13.5で規定
するラン長の制限を満たすように無作為に選択する。
ECCブロックNで始まるM個のECCブロック(M≧1)の各RUNは,次のように記録する。
ECCブロックN−1中のリンクのための8チャネルビット
全ECCブロックN〜N+M−2(Mは2以上とする。)
ECCブロックN+M−1 (記録しない最終の8チャネルビットを除く。)
ECCブロックN−1までが記録されておらず,ECCブロックNから始まるRUNを記録するとき,その
RUNは,すべての主データバイトを (00) に設定したダミーECCブロックN−1をもつように拡張する。
27
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図17−記録ユニットのレイアウト
13.7.1 記録ユニットの位置
16個の物理セクタからなる各々のECCブロックは,四つのADIP語に対応する(14.4.1.1参照)。RUN
は,二つの最下位ビットを無視した物理セクタ番号 (PSN) が,ADIPのローカル物理アドレス (PAA) に
対応するようにトラックの構造上に配置する。PSNは,次による。
PSN=4×PAA+i
ここに,
i: 0,1,2及び3
例えば,物理セクタ番号 (030000)〜(030003) は,物理ADIPアドレス (00C000) に対応する。
理論上のRUNの開始位置の基準は,二つの最下位アドレスビットを (00) に設定するADIP語のADIP
語同期ユニットに続くウォブル15とする(14.4.1.1及び図21参照)。理論上の開始位置は,読取りチャネ
ル2から得られたウォブル信号で先述のウォブル15の中心であるゼロクロスの位置から8チャネルビット
分,後の位置とする。
各記録の開始は,理論上の開始位置から±5チャネルビット以内とする。
記録時のチャネルビットクロックは,ウォブル周波数に位相同期しなければならない。
13.8 直流成分抑圧制御
半径方向のトラッキング及び高周波信号の検出を確実にするために,チャネルビットパターンのストリ
ームの低周波成分は,できる限り低く保つことが望ましい。これを達成するために,ディジタル総計値(DSV,
4.3参照)は,できるだけ低く保つようにする。変調の始めのDSVは,0に設定する。
DSVの現在値を減少させる幾つかの方法を,次に示す。
a) 主同期信号と副同期信号との間の同期符号を選択する。
b) 0〜87の範囲の8ビットバイトに対して,代替変換表(表H.2参照)は,すべての状態に対して代わ
8 T
最大±5T
理論的開始位置
実際の開始位置
ウォブル15の中間
M ECCブロック
記録される部分
リンク
8チャネル
ビット
記録時に
無視される
部分
以前に記録したものはオーバーライトする
ECCブロック
ECCブロック
ECCブロック
ECCブロック
N
N+M-1
N+M
N-1
ECCブロック
N
ECCブロック
N+M-1
最後の8
チャネル
ビット
28
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
るべき16ビット符号語を示す。
c) 88〜255の範囲の8ビットバイトに対して,指定した状態が1又は4のとき,RLLの要求事項を満た
す場合,16ビット符号語を状態1又は状態4から選択できる。
これらの可能性を活用するため,ストリーム1及びストリーム2の二つのデータストリームを各同期フ
レームに対して生成し,ストリーム1は主同期符号で,ストリーム2は同期符号の同じ分類の副同期符号
で,各々開始する。両ストリームは,個別に変調するので,主同期符号と副同期符号とのビットパターン
間の差異によって異なったDSVを生成する。
b) 及びc) の場合,一つの8ビットバイトを表すのに二つの可能性がある。各ストリームのDSVは,こ
の選択を行う8ビットバイトの手前から一つ前の8ビットバイトまで計算する。最も低い|DSV|のストリー
ムを選択し,もう一つのストリームに複製する。それから次の8ビットバイトの符号語表現の一つがスト
リーム1に入り,他の一つは,ストリーム2に入る。この動作は,b) 又はc) の発生の都度繰り返す。
b) の場合は,両ストリームでの同じパターン位置で常に起こるが,c) の場合は,例えば,前の8ビッ
トバイトで規定した次の状態が1又は4の代わりに2又は3になり得るために,ストリームの一つで起こ
るが他の一つでは起こらない可能性がある。その場合,次の三つの手順を適用する。
1) 両ストリームの|DSV|を比較する。
2) c) の場合が起こるストリームの|DSV|がもう一つのストリームの|DSV|より小さいとき,c) の場合が
起こったストリームを選択し,他のストリームに複製する。次の8ビットバイトの符号語表現の一
つがこのストリームに入り,もう一方は,もう一方のストリームに入る。
3) c) の場合が起こったストリームの|DSV|が他のストリームのものより大きいときc) の場合は無視
し,その8ビットバイトは,規定した状態に従って決める。
b) 及びc) の場合,|DSV|が等しいとき,ストリーム1又はストリーム2の選択の決定は,規定しない。
a) の場合の手順は,次による。
1) 同期フレームの終わりで,b) 又はc) のいずれかが発生した場合に,両方の同期フレームのDSVを
計算し,より低い|DSV|をもつストリームを選択し,もう一方のストリームに複製する。そして,適
切なカテゴリの次の主同期符号及び副同期符号のそれぞれのストリームに挿入する。
2) 同期フレームの終わりでDSVが,+63より大きいか又は−64より小さい場合,そのとき同期フレ
ームの始めの同期符号は,主同期信号から副同期信号に変えるか又はその逆にする。これによって
小さい|DSV|を得られるならば,その変更を決定し,|DSV|がより小さくなければ,元の同期符号を
保持する。
DSVの計算中,DSVの実際値は,−1 000と+1 000との間を変動する可能性があり,DSVのカウント
範囲は,少なくとも−1 024〜+1 023がよい。
14 トラックフォーマット
14.1 トラック形状
情報ゾーン(10.7参照)の領域には,単一スパイラルのグルーブからなるトラックがある。各々のトラ
ックは,この連続したスパイラルの1回転分から成り立つ。各トラックの形状は,第5章によって定義す
る。データの記録は,このグルーブに行う。
情報ゾーン上のトラックは,中心線から位相変調した正弦波状にウォブルしており,このウォブルにデ
ィスクの位置情報を含める。
トラックは,情報ゾーンでは連続していて,その開始位置は,半径22.00 mm(最大)とし,終了位置は,
29
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
半径58.75 mm(最小)とする。
14.2 トラック経路
トラック経路は,内周から外周へと連続する1本のスパイラルであり,リードインゾーンから始まりリ
ードアウトゾーンの終了位置で終わる。ここにおいて,ディスクの回転方向は光ピックアップヘッド側か
ら見て反時計方向とする。
14.3 トラックピッチ
トラックピッチは,隣接したトラックの各平均トラックセンター線間距離を半径方向に測定する。トラ
ックピッチは,0.74 μm±0.03 μmとし,情報ゾーン内での平均値は,0.74 μm±0.01 μmとする。
14.4 トラックレイアウト
トラックのウォブルは,トラックの仮想的中心線からの正弦波状偏位であり,その波長は,4.265 6 μm
±0.045 0 μmとし,32チャネルビットの長さに相当する。
ディスク製造時に,このウォブル正弦波を発生させる発振器の全高調波ひずみは,−40 dB以下とする。
ウォブルは,そのウォブル繰返しを交互に反転することによって位相変調する。このウォブル変調によっ
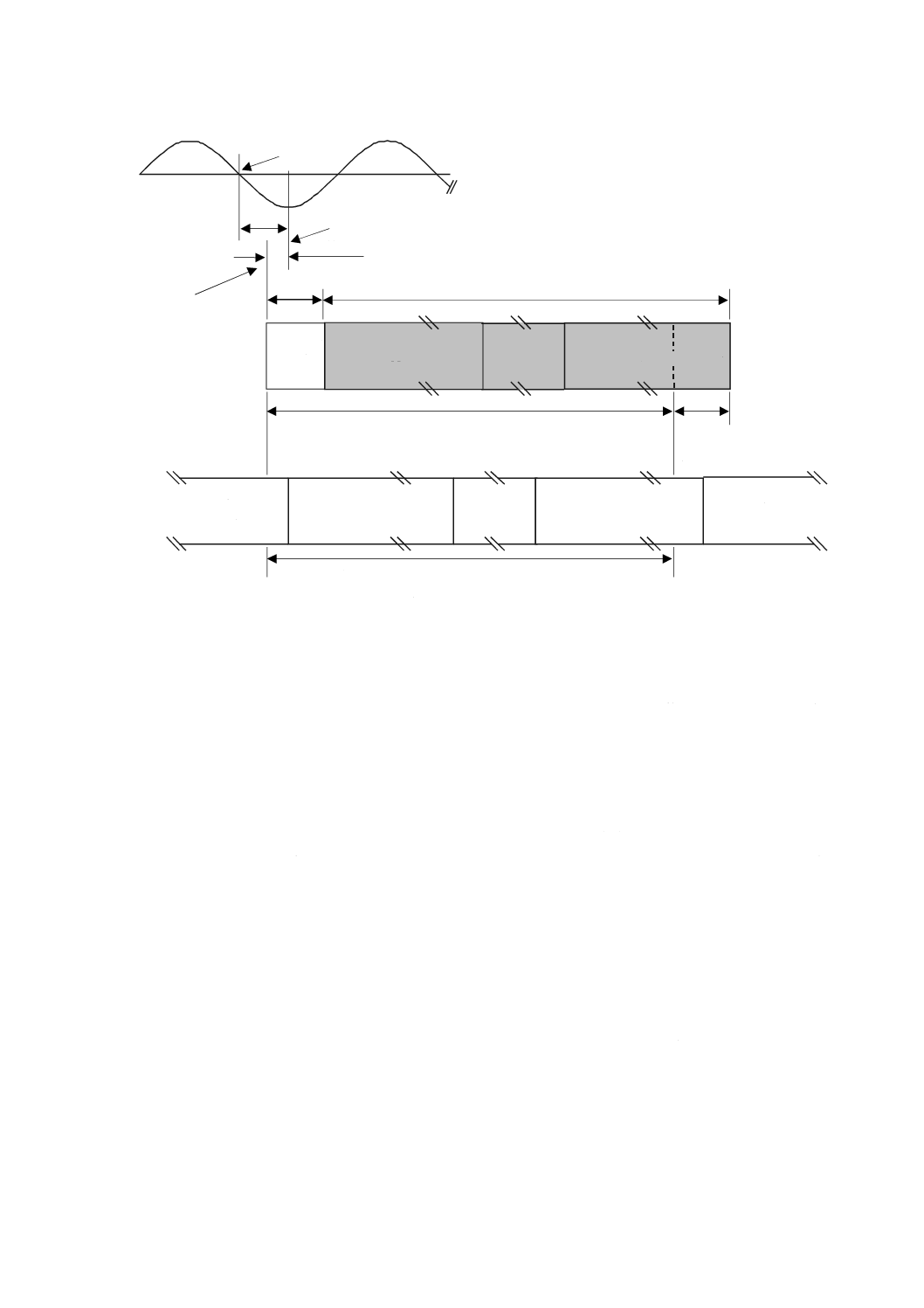
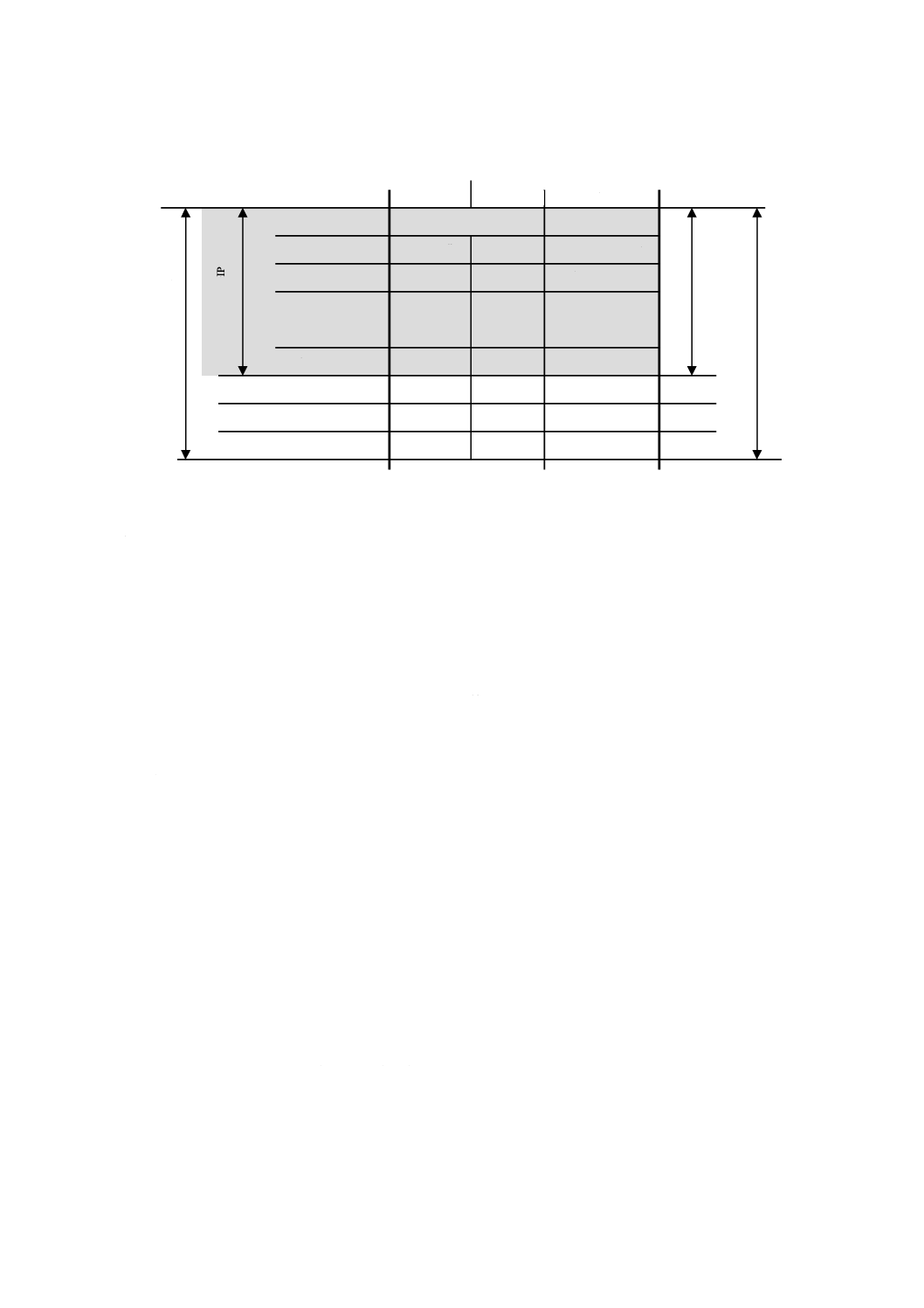
て格納する情報を,プリグルーブ内アドレス又はADIPと呼ぶ(14.4.1.1参照)。
14.4.1 ADIP情報
ディスクに記録するデータは,ウォブルに格納するADIP情報に対して正しい位置関係で記録しなけれ
ばならない。したがって,93個のウォブル長さが,二つの同期フレーム長さに相当する。この93個のウ
ォブル部分のうち,最初の8個のウォブル部分にADIP情報を含む(図18参照)。
1ウォブルは,32チャネルビット長に等しい (=32T)。
1 ADIPユニットは,二つの同期フレーム当たり,八つの変調したウォブルに等しい。
図18−ADIPの構造
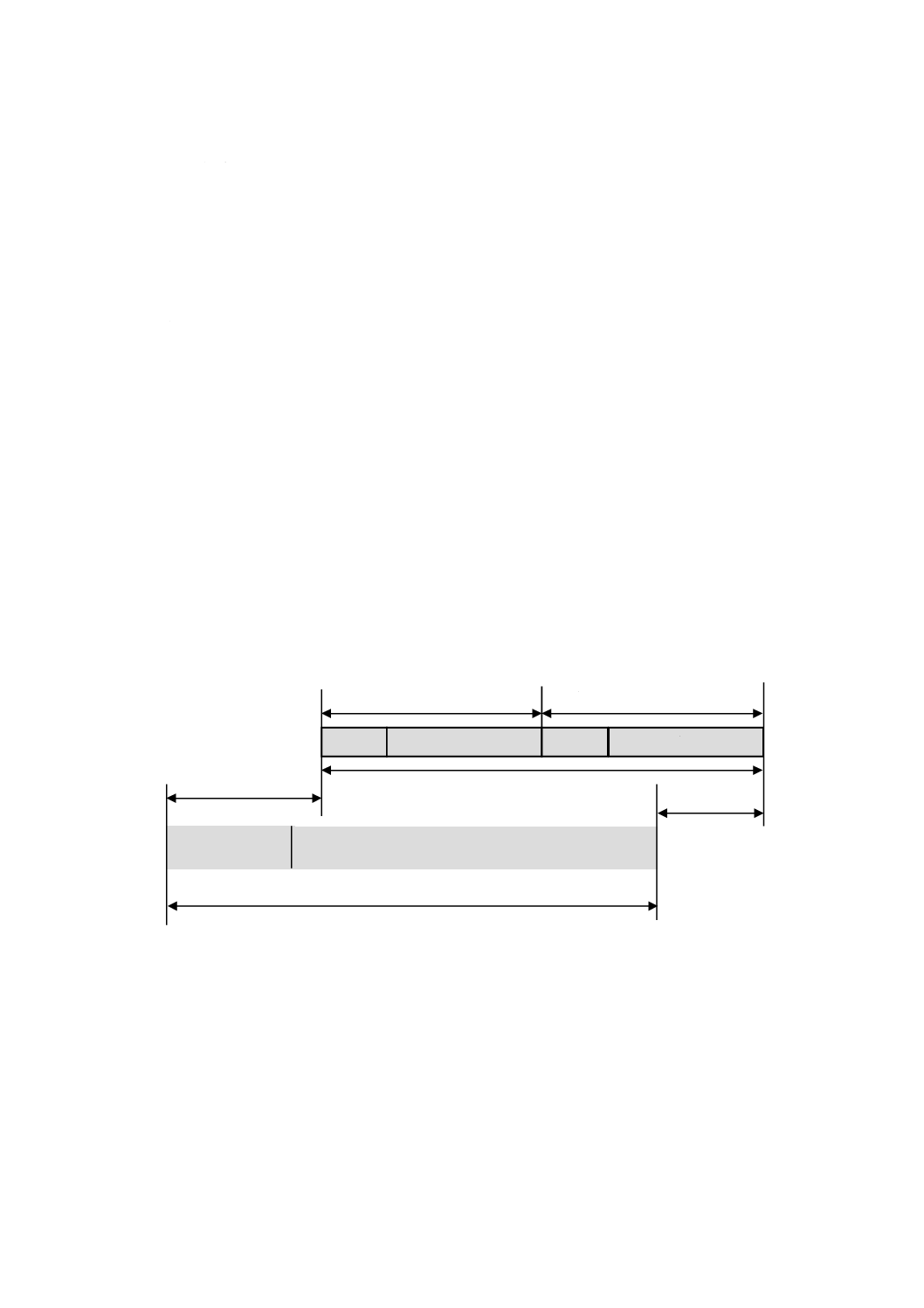
14.4.1.1 ADIP語の構造
52個のADIPユニットが,まとまって1個のADIP語を構成する。すなわち1個のADIP語は,4×13×
2同期フレーム,すなわち4物理セクタに相当する。
各々のADIP語は,1個のADIP同期ユニットと51個のADIPデータユニットとで構成する。
1個のADIP同期ユニットは,ADIP語同期のための4個の反転ウォブルと非反転の連続ウォブルとで構
成する。
1個のADIPデータユニットは,ビット同期のための一つの反転ウォブル,3個の非反転の連続ウォブル
93ウォブル
16ウォブル
16ウォブル
1 488チャネルビット
2同期フレーム
85個の位相変調のないウォブル信号
1 488チャネルビット
データ
データ
同期
同期
1 ADIPユニット
=8ウォブル
30
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
及び1個のデータビットを表す4個のウォブルで構成する(14.4.1.3参照)。
図19−ADIP語の構造
データビットに含む情報を,次に示す。
ビット1:
予備。“0”に設定する。
ビット2〜23:
これらの22ビットは,物理アドレスを含む。
データビット2が最上位ビットで,データビット23が最下位ビットとする。
アドレスは,一つのADIP語ごとに1ずつ増えてゆく。
情報ゾーンの最初のアドレスは,物理アドレス(00C000)がディスク半径24.00
mm+0.0 mm /−0.2 mmの位置とする。
物理アドレス(098150)は,リードアウトゾーンの最初のアドレスに相当し,デ
ィスク半径にして58.0 mm以下の位置とする。
ビット24〜31:
これらの8ビットは,ディスクに関する補助情報を含む。
連続した256個のADIP語から選んだビット24〜31は,256バイトの情報を
もつADIP補助フレームを形成する。各々のADIP補助フレームの最初のバイ
トは,256の倍数の物理アドレスをもつADIP語の部分に書く[物理アドレス=
(xxxx00)]。
ディスクのリードインゾーンの補助バイトは,物理フォーマット情報を格納し
なければならない。この256バイトの内容は,表3及び14.4.2で定義する。
ディスクのデータゾーンの補助バイトは,拡張フォーマット情報を格納してよ
い(附属書B参照。)。使用しない場合は,すべてのバイトを(00)に設定する。
ディスクのリードアウトゾーンの補助情報バイトは,(00)に設定する。
ビット32〜51:
これらの20ビットは,ADIP情報についてのエラー訂正パリティとして用い
る(14.4.1.2参照)。
14.4.1.2 ADIPエラー訂正
ADIPのエラー訂正のために,ADIPデータビットを,4ビット単位のニブルとしてグループ化する。デ
ータビットのニブルへの配置を,図20で定義する。ビット0は,ダミービットでエラー訂正器の便宜のた
ウォブル 0 ウォブル 1〜3
ウォブル 4〜7
1 ECCブロック
同期ユニット
データユニット
データユニット
データユニット
ビット同期
ビット同期
ビット同期
ADIP語同期
A
D
IP
語
4
A
D
IP
語
4
物
理
セ
ク
タ
〃
データビット 1
データビット 2
データビット 51
〃
〃
〃
〃
〃
31
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
めに“0”とする。
ニブルN0
ビット0
ビット1
ビット2
ビット3
6
ニブル
ADIP
アドレス
ニブルN1
ビット4
ビット5
:
:
:
:
:
:
:
:
ビット20
:
:
ビット23
:
ビット24
:
:
:
2
ニブル
補助
情報
ニブルN7
ビット28
:
:
ビット31
ニブルN8
ビット32
:
:
:
5
ニブル
ニブル用
R-S
ECC
:
:
:
:
:
:
:
:
:
:
ニブルN12
ビット48
ビット49
ビット50
ビット51
図20−ADIPエラー訂正の構造
ニブルを基にしたリードソロモンコードRS(13.8.6)を生成し,その中で五つのパリティニブルN8〜N12
までを,多項式R(x)の余りで定義する。
()
()
()x
G
x
x
I
x
N
x
R
i
i
i
PA
5
12
8
12
mod
=
=∑
=
−
ここに,
I (x): ∑
=
−
7
0
7
i
i
ix
N
GPA (x):
(
)
∏
=
+
4
0
k
k
xα
αは,原始多項式P(x)=x4+x+1の原始根“0010”とする。
また,五つのパリティニブルN8〜N12のすべてのビットは,記録前に反転しておく。
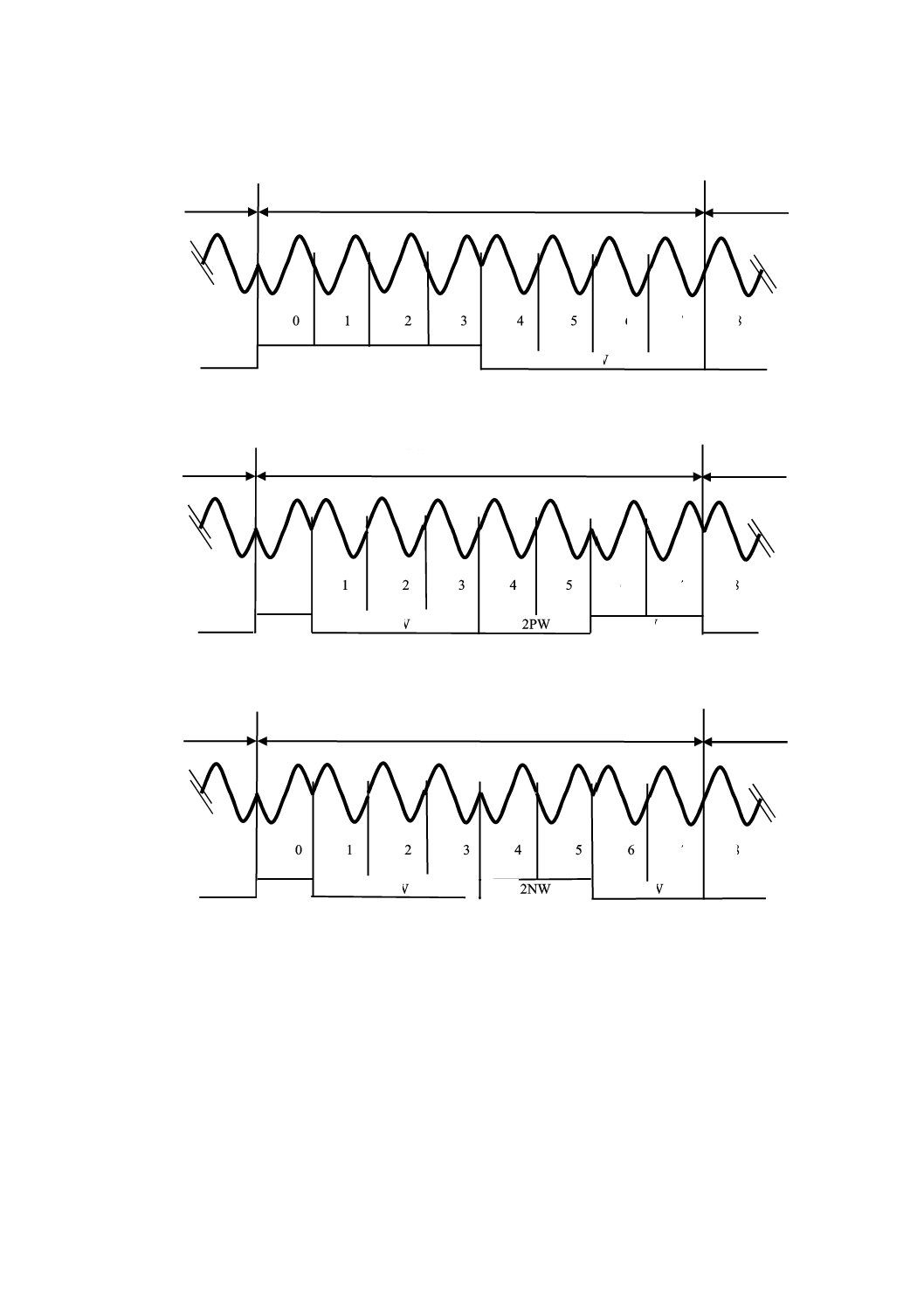
14.4.1.3 ADIPの変調規則
ADIPユニットは,8ウォブルサイクルの中の正弦波の幾つかを反転させて変調する。
変調は,次による。
− PWを正のウォブルとする。このときウォブルは,ディスクの内周側へ向かって偏位を開始する。
− NWを負のウォブルとする。このときウォブルは,ディスクの外周側へ向かって偏位を開始する。
− 反転のない,単純なウォブルはすべてPWとする。
図21にADIPの変調規則を示す。
32
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ADIP語同期部の変調:
“0”を示すADIP変調:
“1”を示すADIP変調:
図21−ADIP変調規則
14.4.2 ADIP中の物理フォーマット情報
物理フォーマット情報は,表3に示す256バイトで構成する。ADIPには,ディスクに関連する情報及
び記録時に最適記録パワー制御(OPC)アルゴリズム動作を実行するための記録ストラテジと呼ぶレーザ
出力に関する各種のパラメタを含む(附属書G及び附属書I参照)。これらの情報は,ディスクを初期化
するときに制御データゾーン(17.11.1参照)にコピーする。
4NW 4PW
ウォブル番号92 0 1 2 3 4 5 6 7 8
ADIP同期ユニット
1NW 3PW 2PW 2NW
ウォブル番号92 0 1 2 3 4 5 6 7 8
“0”を示すADIPのパターン
1NW 3PW 2NW 2PW
ウォブル番号92 0 1 2 3 4 5 6 7 8
“1”を示すADIPのパターン
33
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
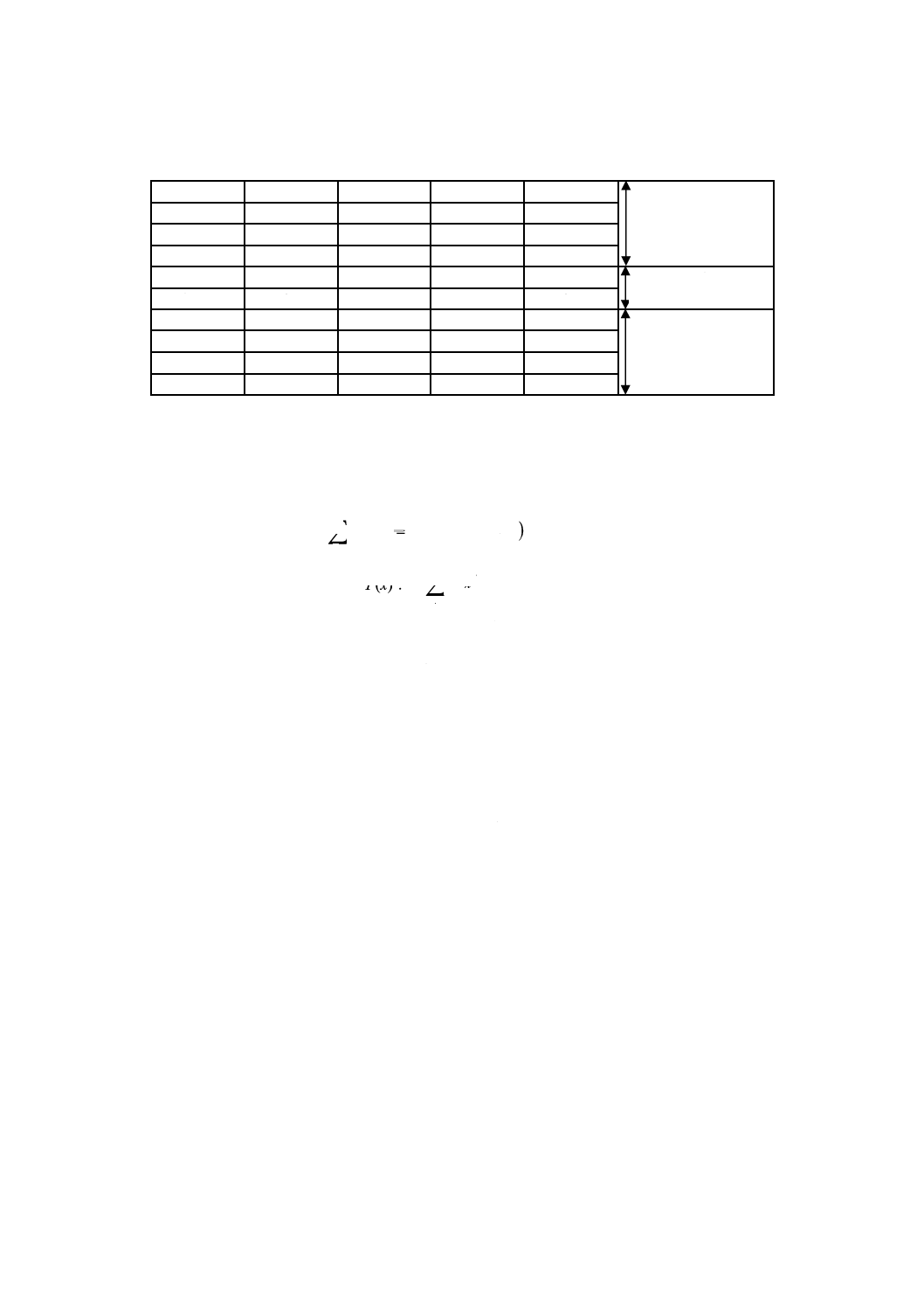
表3−物理フォーマット情報
バイト番号
内容
バイト数
0
ディスクカテゴリ及びバージョン番号
1
1
ディスクサイズ
1
2
ディスク構造
1
3
記録密度
1
4〜15
データゾーン位置の指定
12
16
一般フラッグビット
1
17
ディスクアプリケーションコード
1
18
拡張情報の有無の参照子
1
19〜26
ディスク製造業者ID
8
27〜29
メディアタイプID
3
30
ディスク製造の改訂履歴番号
1
31
ADIPのバイト63までに使用している物理フォーマット情報バイトの数
1
32
基本記録ストラテジに対応する記録速度の範囲
1
33
基準速度での最大読取りパワーPr
1
34
基準速度でのPIND
1
35
基準速度でのρ
1
36
基準速度でのε1
1
37
基準速度でのε2
1
38
基準速度でのγtarget
1
39
上位速度での最大読取りパワーPr
1
40
上位速度でのPIND
1
41
上位速度でのρ
1
42
上位速度でのε1
1
43
上位速度でのε2
1
44
上位速度でのγtarget
1
45
中間速度での最大読取りパワーPr
1
46
中間速度でのPIND
1
47
中間速度でのρ
1
48
中間速度でのε1
1
49
中間速度でのε2
1
50
中間速度でのγtarget
1
51
先頭パルスTtopの継続時間
1
52
マルチパルスTmpの継続時間
1
53
先頭パルスの進み時間dTtop
1
54
基準速度での消去の進み時間dTera
1
55
上位速度での消去の進み時間dTera
1
56
中間速度での消去の進み時間dTera
1
57〜63
予備 すべて (00)
7
64〜95
EIブロック0
32
96〜127
EIブロック1
32
128〜159
EIブロック2
32
160〜191
EIブロック3
32
192〜223
EIブロック4
32
224〜255
EIブロック5
32
34
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4−物理フォーマット情報(続き)
[対応国際規格にある表4(続き)は,表3に統合したため,不採用とした。]
この規格では,異なる記録速度範囲をもつ2種類のディスクを定義する。各々の記録速度におけるレー
ザ出力に関するパラメタの詳細は,別のブロック(EIブロック,14.4.2.3参照)に定義する。これまでに,
表5に示すディスク(xとは倍速を示す。)を規定しており,これらのADIP情報は,表5に示すようにEI
ブロックの情報も含む。
表5−ディスクの種類
ディスクの種類
基本記録ストラテジ
バイト32〜63
(1x〜2.4x)
4x記録ストラテジ
EIブロックフォーマット1
(1.6x〜4x)
注記
2.4 x
+
−
このディスクは
3.49〜8.44 m/sの記録速度
だけに使用
4x
+
+
このディスクは
3.49〜8.44 m/s及び5.77〜
13.95 m/sの記録速度で使用
注記 +:存在する −:存在しない
(両記録ストラテジは,完全CAV記録に対応している。)
14.4.2.1 バイト0〜31までの一般情報
バイト0:ディスクカテゴリ及びバージョン番号
ビットb7〜b4
ディスクカテゴリを定義する。
ビットb7を“1”と設定する場合,+R/+RW規格とする(箇条3参照)。
ビットb6を“0”と設定する場合,単層ディスクとする。
ビットb5〜b4を“01”と設定する場合,+RWディスクとする。
ビットb3〜b0
規格のバージョン番号を定義する。
“0010”に設定する場合,この規格とする。
このバージョン番号は,バイト32〜63のデータで定義するディスクであるこ
とを識別する。ドライブが,このバージョン番号をディスクから読み取れな
かった場合は,上記バイト32〜63のデータを使って記録を行ってはならない
(附属書O参照)。
バイト1:ディスクサイズ及び最大転送レート
ビットb7〜b4
ディスクサイズを定義する。
“0000”に設定する場合,120 mmディスクとする。
ビットb3〜b0
ディスクの最大再生転送レートを定義する。
“1111”に設定する場合,最大再生レートは規定しない。
バイト2:ディスク構造
ビットb7〜b4
“0000”に設定する。
ビットb3〜b0
ディスクの記録層のタイプを定義する。
35
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
“0100”に設定する場合,書換形の記録層とする。
バイト3:記録密度
ビットb7〜b4
情報ゾーンの平均チャネルビット長を定義する。
“0000”に設定する場合,0.133 μmとする。
ビットb3〜b0
ディスクの平均トラックピッチを定義する。
“0000”に設定する場合,0.74 μmとする。
バイト4〜15:データゾーン位置の指定
バイト4
(00) に設定する。
バイト5〜7
(030000) に設定する場合,データゾーンの最初の物理セクタ番号が
PSN 196 608とする。
バイト8
(00) に設定する。
バイト9〜11
(26053F) に設定する場合,データゾーンの最後の取り得る物理セクタ番号が
PSN 2 491 711とする。
バイト12〜15
(00) に設定する。
バイト16:一般フラッグビット
このバイトは (00) に設定する。
注記 対応国際規格では,ビデオアプリケーションの場合のビデオコンテンツプロテクション
のビット設定について規定しているが,この規格はデータアプリケーションについて規
定するものであるため,この細分箇条の規定は不要であり,不採用とした。
バイト17:ディスクアプリケーションコード
このバイトは,ディスクをある特殊な用途に制限して使うような場合に設定する。ドライブがこ
の特殊な用途について判定できない場合,また,この用途に沿った動作ができない場合は,この
ディスクに記録してはならない。
(00) の場合は,一般用途のディスクとする(このコードをもつディスクには,すべてのドライブ
がいかなる制限もなく記録することができる。)。
それ以外のコードは予備とする。
バイト18:拡張情報の参照子
ビットb7〜b6
予備 (00) に設定する。
ビットb5〜b0
これらのビットの各々がEIブロックの有無を示す。
バイト(64+i×32)〜(95+i×32)からなるEIブロックiを使用する場合には,
ビットbi を“1”に設定する。これ以外の場合,biは,“0”に設定する。
バイト19〜26:ディスク製造業者ID
これらの8バイトは,ディスク製造業者を特定する。この名前にはISO/IEC 4873に従ったG0set
+SPACEの範囲内の文字コードを使用する。先頭から使用して,残りのバイトは,(00) に設定す
る。ディスク製造業者IDを使わない場合,これらの3バイトは,(00) に設定する。
バイト27〜29:メディアタイプID
ディスク製造業者が異なるタイプのメディアを作る場合,この3バイトで特定する。このディス
クの特定には,ISO/IEC 4873に従ったG0set+SPACEの範囲内の文字コードを使用する。先頭か
ら使用して,残りのバイトは,(00) に設定する。メディアタイプIDを使わない場合は,これら
の3バイトは,(00) に設定する。
36
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 異なる特性のディスクでは,他とは異なるディスク製造業者IDとメディアタイプIDと
の固有の組合せをもつようにする。したがって,バイト19〜29の記入内容については,
+RWシステムのライセンサによる承認を必要とする。
バイト30:ディスク製造の改訂履歴番号
このバイトは,2値表示によるディスクの改訂履歴番号を識別する。すべての同一ディスク製造
業者ID及びメディアタイプIDをもつディスクは,そのディスクの改訂履歴番号にかかわらず同
じ記録特性をもたなければならない(ただし,多少の差異は,認める。ドライブには,無関係と
する。)。このバイトの内容は,ディスク製造業者が任意に決めることができる。
ディスクの改訂履歴番号を使わない場合は,このバイトは,(00) に設定する。
バイト31:ADIPのバイト63までに使用している物理フォーマット情報の数
このバイトは,バイト0〜63の基本物理フォーマット情報の中で実際に使用しているバイトの数
を示す,2値による一組の8ビットの数字で表す。これは,57バイトの物理フォーマット情報を
使用していることを示す (39) に設定する。
14.4.2.2 基本記録ストラテジのパラメタ:バイト32〜63
バイト32:基本記録ストラテジに対応する主記録速度
このバイトは,バイト33〜63の物理フォーマット情報で規定するディスクの各定数を適用する最
低の記録速度を示す。この記録速度は,3.49 m/sec(基準速度Vref)に等しく,nを用いて次によ
る。
n=10×Vref(nは,整数値に丸める。)
この値は,基準記録速度3.49 m/sからCAVでの上位速度8.44 m/sまでの範囲を示す (23) に設定
する。この規格では,基本記録ストラテジを適用する記録速度として,次の三つを規定する。
基準速度3.49 m/s
中間速度5.95 m/s
上位速度8.44 m/s
バイト33:基準速度での最大読取りパワーPr
このバイトは,ミリワット単位を用いて表示した基準速度での最大読取りパワーPrを示す。
Prは,nを用いて次による。
n=20×(Pr−0.7)
バイト34:基準速度でのPIND
PINDは,OPCアルゴリズムで使用するPwoを求めるときの初期値とする(附属書I参照)。この
バイトは,基準速度でのPtargetに対するミリワットを単位としたPINDを,nを用いて次による。
n=20×(PIND−5)
バイト35:基準速度でのρ
このバイトは,OPCアルゴリズムで使用する基準速度でのピーク記録パワーを得る増倍率ρを与
える(OPCについては,附属書I参照)。ρは,nを用いて次による。
n=100×ρ
バイト36:基準速度でのε1
このバイトは,OPCアルゴリズムで使用する基準速度での消去パワーの記録パワーに対する比率
ε1を示す(OPCについては,附属書I参照)。ε1は,nを用いて次による。
n=200×ε1
37
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト37:基準速度でのε2
このバイトは,OPCアルゴリズムで使用する基準速度でのバイアスパワーの記録パワーに対する
比率ε2を示す(OPCについては,附属書I参照)。ε2は,nを用いて次による。
n=200×ε2
バイト38:基準速度でのγ target
このバイトは,OPCアルゴリズムで使用する基準速度でのγを求めるときの初期値γ targetを示す
(OPCについては,附属書I参照)。γ targetは,nを用いて次による。
n=20×γ target
バイト39:上位速度での最大読取りパワーPr
このバイトは,ミリワット単位を用いて表示した上位速度での最大読取りパワーPrを示す。Prは,
nを用いて次による。
n=20×(Pr−0.7)
バイト40:上位速度でのPIND
PINDは,OPCアルゴリズムで使用するPWOを求めるときの初期値とする(附属書I参照)。この
バイトは,上位速度でのP targetに対するミリワットを単位としたPINDを,nを用いて次による。
n=20×(PIND−5)
バイト41:上位速度でのρ
このバイトは,OPCアルゴリズムで使用する上位速度でのピーク記録パワーを得る増倍率ρを与
える(OPCについては,附属書I参照)。ρは,nを用いて次による。
n=100×ρ
バイト42:上位速度でのε1
このバイトは,OPCアルゴリズムで使用する上位速度での消去パワーの記録パワーに対する比率
ε1を示す(OPCについては,附属書I参照)。ε1は,nを用いて次による。
n=200×ε1
バイト43:上位速度でのε2
このバイトは,OPCアルゴリズムで使用する上位速度でのバイアスパワーの記録パワーに対する
比率ε2を示す(OPCについては,附属書I参照)。ε2は,nを用いて次による。
n=200×ε2
バイト44:上位速度でのγ target
このバイトは,OPCアルゴリズムで使用する上位速度でのγを求めるときの初期値γ targetを示す
(OPCについては,附属書I参照)。γ targetは,nを用いて次による。
n=20×γ target
バイト45:中間速度での最大読取りパワーPr
このバイトは,ミリワット単位を用いて表示した中間速度での最大読取りパワーPrを示す。
これはnを用いて次による。
n=20×(Pr−0.7)
バイト46:中間速度でのPIND
PINDは,OPCアルゴリズムで使用するPwoを求めるときの初期値とする(附属書I参照)。この
バイトは,中間速度でのP targetに対するミリワットを単位としたPINDを,nを用いて次による。
n=20×(PIND−5)
38
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト47:中間速度でのρ
このバイトは,OPCアルゴリズムで使用する中間速度でのピーク記録パワーを得る増倍率ρを与
える(OPCについては,附属書I参照)。ρは,nを用いて次による。
n=100×ρ
バイト48:中間速度でのε1
このバイトは,OPCアルゴリズムで使用する中間速度での消去パワーの記録パワーに対する比率
ε1を示す(OPCについては,附属書I参照)。ε1は,nを用いて次による。
n=200×ε1
バイト49:中間速度でのε2
このバイトは,OPCアルゴリズムで使用する中間速度でのバイアスパワーの記録パワーに対する
比率ε2を示す(OPCについては,附属書I参照)。ε2は,nを用いて次による。
n=200×ε2
バイト50:中間速度でのγ target
このバイトは,OPCアルゴリズムで使用する中間速度でのγを求めるときの初期値γ targetを示す
(OPCについては,附属書I参照)。γ targetは,nを用いて次による。
n=20×γ target
バイト51:先頭パルスTtopの継続時間
このバイトは,記録するときのNRZI信号に対応する記録パルス列の最初のパルスの継続時間を
示す(附属書G参照)。この値は,変動部分及び固定部分の二つから構成する (Ttop=Ttop,var+Ttop,fix)。
このバイトのビット7〜4は,チャネルビットクロック長Tを分数の形で表す変数部分で,ビッ
ト3〜0は定数部分をナノ秒単位で表示する(表6参照)。
なお,表6で,予備の部分は使用してはならない。
表6−先頭パルスの継続時間
ビット7〜4
Ttop,var (T)
ビット3〜0
Ttop,fix (ns)
0000
0
0000
予備
0001
1/6
0001
2
0010
2/6
0010
4
0011〜1111
予備
0011
6
0100
8
0101
10
0110
12
0111
14
1000〜1111
予備
バイト52:マルチパルスTmpの継続時間
このバイトは,記録するときの先頭パルスを除いた同一パルス列の一つのパルスの継続時間を示
す(附属書G参照)。この値は,変動部分と固定部分の二つから構成する (Tmp=Tmp,var+Tmp,fix)。
このバイトのビット7〜4は,チャネルビットクロック長Tを分数の形で表す変数部分で,ビッ
ト3〜0は定数部分をナノ秒単位で表示する(表7参照)。
なお,表7で,予備の部分は使用してはならない。
39
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表7−マルチパルスの継続時間
ビット7〜4
Tmp,var (T)
ビット3〜0
Tmp,fix (ns)
0000
0
0000
予備
0001
1/6
0001
2
0010〜1111
予備
0010
4
0011
6
0100
8
0101
10
0110〜1111
予備
バイト53:先頭パルスの進み時間dTtop
このバイトのビット7〜4は,NRZI信号に対応する記録パルス列の,先頭パルスの進み時間を示
す(附属書G参照)。この値は,NRZI信号の最初のパルスの立下がり部分からの進み量として,
実際のチャネルビットクロック長Tの分数の形で,次のように表す(表8参照)。ビット3〜0は
“0000”に設定する。
なお,表8で,予備の部分は使用してはならない。
表8−先頭パルスの進み時間
ビット7〜4
dTtopの進み時間 (T)
0000
0
0001
1/6
0010
2/6
0011
3/6
0100
4/6
0101〜1111
予備
バイト54:基準速度での消去の進み時間dTera
このバイトのビット7〜4は,基準速度で記録するときに,NRZIチャネルビットの立下がりから
始まる消去タイミングの進み時間を示す(附属書G参照)。この値は,実際のチャネルビットク
ロック長Tの分数の形で,表9のように表す。ビット3〜0は“0000”に設定する。
なお,表9で,予備の部分は使用してはならない。
バイト55:上位速度での消去の進み時間dTera
このバイトのビット7〜4は,上位速度で記録するときに,NRZIチャネルビットの立下がりから
始まる消去タイミングの進み時間を示す(附属書G参照)。この値は,実際のチャネルビットク
ロック長Tの分数の形で,表9のように表す。ビット3〜0は“0000”に設定する。
なお,表9で,予備の部分は使用してはならない。
バイト56:中間速度での消去の進み時間dTera
このバイトのビット7〜4は,中間速度で記録するときに,NRZIチャネルビットの立下がりから
始まる消去タイミングの進み時間を示す(附属書G参照)。この値は,実際のチャネルビットク
ロック長Tの分数の形で,表9のように表す。ビット3〜0は“0000”に設定する。
なお,表9で,予備の部分は使用してはならない。
40
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表9−消去の進み時間
ビット7〜4
進み時間dTera (T)
0000
0
0001
1/6
0010
2/6
0011
3/6
0100〜1100
予備
1101
-3/6
1110
-2/6
1111
-1/6
バイト57〜63:予備 すべて (00)
これらのバイトは,すべて (00) とする。
14.4.2.3 拡張情報ブロック (EIブロック)−バイト (64+i×32)〜(95+i×32)
6個のEIブロックは,将来の拡張に備えたものである(i=0〜5)。このブロックは,各々32バイトで構
成し,これらのバイトには,例えば,代替の記録ストラテジ又は他の先進的なパラメタを格納する。パラ
メタのセットが1個のEIブロックに入らない場合は,継続ビットで特定する追加ブロックを続けて追加で
きる。
EIブロックが存在するか否かは,バイト18に適時表示する。同ブロックを使用しない場合は,すべて
の32バイトは,(00)に設定する。
バイト64+i×32:EIブロックiのフォーマット番号/継続ビット
ビットb6〜b0は,バイト (65+i×32)〜(95+i×32) までのデータが属すフォーマット番号を示す。
ビットb7を“1”に設定した場合,関連するEIブロックは独立したブロックでなく先行するEI
ブロックの続きとする。この場合,継続するEIブロックのフォーマット番号と先行するEIブロ
ックのフォーマット番号は同じでなければならない。
一つのディスクは,複数のEIブロックをもつ。各EIブロックの内容は,対応するフォーマット
番号にて規定した定義に従い翻訳する。また,同一のフォーマット番号のEIブロックの内容は,
同一のフォーマットにて翻訳する。同一のフォーマット番号であっても,その中で規定するパラ
メタは,ディスクによっては異なる値を取り得る。
ブロックiのフォーマット番号を読み取れないドライブは,そのEIブロック内のデータを使って
はならない(附属書O参照)。
フォーマット番号を“255”に設定する場合,対応するEIブロックは,独立したものではなく一
つ前のEIブロックから連続した内容をもつ。ある記録ストラテジの情報が32バイトでは格納し
きれない場合に,このような使い方をする。
注記 EIブロックiの内容は,その中に定義するフォーマット番号によって認識し,それは,
そのブロック内だけで有効とする。また,ADIP補助フレーム中のEIブロックの位置は,
これに無関係とする。したがって,フォーマット番号nをもつEIブロックは,いかなる
位置i (i=0〜5) にも存在できる。ドライブは,常にEIブロックの内容を読み,正しい
記録ストラテジを得る。
バイト65+i×32〜95+i×32
この32バイトは,同一のフォーマット番号で認識し,各パラメタを設定する。
41
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
14.4.2.3.1 “4倍速”に適用する記録ストラテジのための拡張情報
このEIブロックは,5.77 m/s〜13.95 m/sの記録速度を適用するときのパラメタを定義する(表10参照)。
4倍速とは,3.49 m/s(基準速度)の1.66倍〜4倍の記録速度とする。また,この速度の範囲は,CAV記録
での2 300 rpmに相当する。
注記 この速度範囲は,基本記録ストラテジが適用している速度範囲と重複している。
最適な記録品質を得るために,幾つかのパラメタは,次の三つの速度範囲で別々に定義する
− 下位速度5.77 m/s
(1.66倍速)
− 中間速度9.86 m/s
(2.8倍速)
− 上位速度13.95 m/s
(4倍速)
ディスクが“4倍速”の速度条件で記録できない場合は,このEIブロックは使用せず,すべてのバイト
を(00)に設定する。
バイト18:拡張情報の有無の参照子
このバイトは,EIブロック0を使用する場合は,“xxxx xxx1”に設定する。
表10−EIブロック0
バイト番号
内容
バイト数
64
継続ビット/フォーマット番号
1
65
予備 (00) に設定
1
66
EIブロック0のパラメタの下位記録速度
1
67
EIブロック0のパラメタの上位記録速度
1
68
下位速度での最大読取りパワーPr
1
69
下位速度でのPIND
1
70
下位速度でのρ
1
71
下位速度でのε1
1
72
下位速度でのε2
1
73
下位速度でのγtarget
1
74
上位速度での最大読取りパワーPr
1
75
上位速度でのPIND
1
76
上位速度でのρ
1
77
上位速度でのε1
1
78
上位速度でのε2
1
79
上位速度でのγtarget
1
80
中間速度での最大読取りパワーPr
1
81
中間速度でのPIND
1
82
中間速度でのρ
1
83
中間速度でのε1
1
84
中間速度でのε2
1
85
中間速度でのγtarget
1
86
先頭パルスTtopの継続時間
1
87
マルチパルスTmpの継続時間
1
88
下位速度での先頭パルスの進み時間dTtop
1
89
上位速度での先頭パルスの進み時間dTtop
1
90
中間速度での先頭パルスの進み時間dTtop
1
91
下位速度での消去の進み時間dTera
1
92
上位速度での消去の進み時間dTera
1
93
中間速度での消去の進み時間dTera
1
94〜95
予備(00) に設定
1
42
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイト64:EIブロック0のフォーマット番号
このバイトは,“0000 0001”に設定する。これは,フォーマット1で書いており,また継続する
ブロックでないことを示し,バイト65〜95は次による。
バイト65:予備
(00)に設定。
バイト66:EIブロック0のパラメタの下位記録速度
このバイトは,このEIブロック0で規定するディスクの各パラメタを適用する最低の記録速度を
示す。この速度は,次による。
n=4×VLower,EI 0
(nは,整数値に丸める。)
これは,下位記録速度VLower,EI 0 5.75 m/sを示す (17) に設定する。
バイト67:EIブロック0のパラメタの上位記録速度
このバイトは,このEIブロック0で規定するディスクの各パラメタを適用する最大の記録速度を
示す。この速度は,次による。
n=4×VUpper,EI 0
(nは,整数値に丸める。)
これは,上位記録速度VUpper,EI 0 14 m/s(4倍速)を示す (38) に設定する。
バイト68:下位速度での最大読取りパワーPr
このバイトは,ミリワット単位を用いて表示した主速度での最大読取りパワーPrを示す。Prは,n
を用いて次による。
n=20×(Pr−0.7)
バイト69:下位速度でのPIND
PINDは,OPCアルゴリズムで使用するPwoを求めるときの初期値とする(附属書I参照)。下位
速度でのPtargetに対するミリワットを単位としたPINDを,nを用いて次による。
n=5×(PIND−5)
バイト70:下位速度でのρ
このバイトは,OPCアルゴリズムで使用する下位速度でのピーク記録パワーを得る増倍率ρを与
える(OPCについては,附属書I参照)。ρは,nを用いて次による。
n=100×ρ
バイト71:下位速度でのε1
このバイトは,OPCアルゴリズムで使用する下位速度での消去パワーの記録パワーに対する比率
ε1を示す(OPCについては,附属書I参照)。ε1は,nを用いて次による。
n=200×ε1
バイト72:下位速度でのε2
このバイトは,OPCアルゴリズムで使用する下位速度でのバイアスパワーの記録パワーに対する
比率ε2を示す(OPCについては,附属書I参照)。ε2は,nを用いて次による。
n=200×ε2
バイト73:下位速度でのγ target
このバイトは,OPCアルゴリズムで使用する下位速度でのγを求めるときの初期値γ targetを示す
(OPCについては,附属書I参照)。γ targetは,nを用いて次による。
n=20×γ target
バイト74:上位速度での最大読取りパワーPr
43
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
このバイトは,ミリワット単位を用いて表示した最大速度での最大読取りパワーPrを示す。Prは,
nを用いて次による。
n=20×(Pr−0.7)
バイト75:上位速度でのPIND
PINDは,OPCアルゴリズムで使用するPtargetを求めるときの初期値とする(附属書I参照)。上位
速度でのPtargetに対するミリワットを単位としたPINDを,nを用いて次による。
n=5×(PIND−5)
バイト76:上位速度でのρ
このバイトは,OPCアルゴリズムで使用する上位速度でのピーク記録パワーを得る増倍率ρを与
える(OPCについては,附属書I参照)。ρは,nを用いて次による。
n=100×ρ
バイト77:上位速度でのε1
このバイトは,OPCアルゴリズムで使用する上位速度での消去パワーの記録パワーに対する比率
ε1を示す(OPCについては,附属書I参照)。ε1は,nを用いて次による。
n=200×ε1
バイト78:上位速度でのε2
このバイトは,OPCアルゴリズムで使用する上位速度でのバイアスパワーの記録パワーに対する
比率ε2を示す(OPCについては,附属書I参照)。ε2は,nを用いて次による。
n=200×ε2
バイト79:上位速度でのγ target
このバイトは,OPCアルゴリズムで使用する上位速度でのγを求めるときの初期値γ targetを示す
(OPCについては,附属書I参照)。γ targetは,nを用いて次による。
n=20×γ target
バイト80:中間速度での最大読取りパワーPr
このバイトは,ミリワット単位を用いて表示した中間速度での最大読取りパワーPrを示す。Pr
は,nを用いて次による。
n=20×(Pr−0.7)
バイト81:中間速度でのPIND
PINDは,OPCアルゴリズムで使用するPtargetを求めるときの初期値とする(附属書I参照)。中間
速度でのPtargetに対するミリワットを単位としPINDを,nを用いて次による。
n=5×(PIND−5)
バイト82:中間速度でのρ
このバイトは,OPCアルゴリズムで使用する中間速度でのピーク記録パワーを得る増倍率ρを与
える(OPCについては,附属書I参照。)。ρは,nを用いて次による。
n=100×ρ
バイト83:中間速度でのε1
このバイトは,OPCアルゴリズムで使用する中間速度での消去パワーの記録パワーに対する比率
ε1を示す(OPCについては,附属書I参照)。ε1は,nを用いて次による。
n=200×ε1
バイト84:中間速度でのε2

44
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
このバイトは,OPCアルゴリズムで使用する中間速度でのバイアスパワーの記録パワーに対する
比率ε2を示す(OPCについては,附属書I参照)。ε2は,nを用いて次による。
n=200×ε2
バイト85:中間速度でのγ target
このバイトは,OPCアルゴリズムで使用する中間速度でのγを求めるときの初期値γ targetを示す
(OPCについては,附属書I参照)。γ targetは,nを用いて次による。
n=20×γ target
バイト86:先頭パルスTtopの継続時間
このバイトは,記録するときの,NRZI信号に対応する記録パルス列の先頭パルスの継続時間を
示す(附属書G参照)。この値は,定数部分と変数部分の二つから構成する (Ttop=Ttop,var+Ttop,fix)。
このバイトのビット7〜4は,実際のチャネルビットクロック長の分数の形で表す変数部分で,ビ
ット3〜0は定数部分をナノ秒単位で表示する(表11参照)。
なお,表11で規定しないビットの組合せは使用してはならない。
表11−先頭パルスの継続時間
ビット7〜4
Ttop,var (T)
ビット3〜0
Ttop,fix (ns)
0000
0
0000
予備
0001
1/6
0001
0.6
0010
2/6
0010
1.2
0011
3/6
0011
1.8
0100
4/6
0100
2.4
0101
5/6
0101
3.0
0110
6/6
0110
3.6
0111
7/6
0111
4.2
1000
8/6
1000
4.8
1001〜1111
予備
1001
5.4
1010
6.0
1011
6.6
1100
7.2
1101
7.8
1110
8.4
1111
9.0
バイト87:マルチパルスTmpの継続時間
このバイトは,記録するとき,先頭パルスを除いた同一パルス列の一つのパルスの継続時間を示
す(附属書G参照)。この値は,変動部分及び固定部分の二つから構成する (Tmp=Tmp,var+Tmp,fix)。
このバイトのビット7〜4は,チャネルビットクロック長を分数の形で表す変数部分で,ビット3
〜0は定数部分をナノ秒単位で表示する(表12参照)。
なお,表12で規定しないビットの組合せは使用してはならない。
45
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表12−マルチパルスの長さ
ビット7〜4
Tmp,var (T)
ビット3〜0
Tmp,fix (ns)
0000
0
0000
予備
0001
1/16
0001
0.6
0010
2/16
0010
1.2
0011
3/16
0011
1.8
0100
4/16
0100
2.4
0101
5/16
0101
3.0
0110
6/16
0110
3.6
0111
7/16
0111
4.2
1000
8/16
1000
4.8
1001〜1111
予備
1001
5.4
1010
6.0
1011〜1111
予備
バイト88:下位速度での先頭パルスの進み時間dTtop
このバイトのビット7〜4は,下位速度で記録するときに,NRZI信号に対応する記録パルス列の,
先頭パルスの進み時間を示す(附属書G参照)。この値は,NRZI信号の最初のパルスの立下がり
部分からの進み量として,チャネルビットクロック長Tの分数の形で,表13による。ビット3
〜0は“0000”に設定する。
なお,表13で規定しないビットの組合せは使用してはならない。
バイト89:上位速度での先頭パルスの進み時間dTtop
このバイトのビット7〜4は,上位速度で記録するときに,NRZI信号に対応する記録パルス列の,
先頭パルスの進み時間を示す(附属書G参照)。この値は,NRZI信号の最初のパルスの立下がり
部分からの進み量として,チャネルビットクロック長Tの分数の形で,表13による。ビット3
〜0は“0000”に設定する。
なお,表13で規定しないビットの組合せは使用してはならない。
バイト90:中間速度での先頭パルスの進み時間dTtop
このバイトのビット7〜4は,中間速度で記録するときに,NRZI信号に対応する記録パルス列の,
先頭パルスの進み時間を示す(附属書G参照)。この値は,NRZI信号の最初のパルスの立下がり
部分からの進み量として,チャネルビットクロック長Tの分数の形で,表13による。ビット3
〜0は“0000”に設定する。
なお,表13で規定しないビットの組合せは使用してはならない。
46
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表13−先頭パルスの進み時間
ビット7〜4
dTtopの進み時間 (T)
0000
0
0001
1/16
0010
2/16
0011
3/16
0100
4/16
0101
5/16
0110
6/16
0111
7/16
1000〜1011
予備
1100
-4/16
1101
-3/16
1110
-2/16
1111
-1/16
バイト91:下位速度での消去の進み時間dTera
このバイトのビット7〜4は,下位速度で記録するときに,NRZIチャネルビットの立下がりから
始まる消去タイミングの進み時間を示す(附属書G参照)。この値は,実際のチャネルビットク
ロック長Tの分数の形で表14による。ビット3〜0は“0000”に設定する。表14で規定しない
ビットの組合せは使用してはならない。
バイト92:上位速度での消去の進み時間dTera
このバイトのビット7〜4は,上位速度で記録するときに,NRZIチャネルビットの立下がりから
始まる消去タイミングの進み時間を示す(附属書G参照)。この値は,実際のチャネルビットク
ロック長Tの分数の形で表14による。ビット3〜0は“0000”に設定する。表14で規定しない
ビットの組合せは使用してはならない。
バイト93:中間速度での消去の進み時間dTera
このバイトのビット7〜4は,中間速度で記録するときに,NRZIチャネルビットの立下がりから
始まる消去タイミングの進み時間を示す(附属書G参照)。この値は,実際のチャネルビットク
ロック長Tの分数の形で表14による。ビット3〜0は“0000”に設定する。
なお,表14で規定しないビットの組合せは使用してはならない。
47
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表14−消去パルスの進み時間
ビット7〜4
進み時間dTera (T)
0000
4/16
0001
5/16
0010
6/16
0011
7/16
0100
8/16
0101
9/16
0110
10/16
0111
11/16
1000
-4/16
1001
-3/16
1010
-2/16
1011
-1/16
1100
0
1101
1/16
1110
2/16
1111
3/16
バイト94〜95:予備
これらのバイトは,すべて(00)に設定する。
第4章 情報ゾーンのフォーマット
15 情報ゾーンの概要
情報ゾーンは,ディスクのデータ交換にかかわるすべての情報を格納する。情報ゾーンは,リードイン
ゾーン,データゾーン及びリードアウトゾーンの三つの部分で構成する。 両面ディスクでは,一つの面に
一つの情報ゾーンをもつ。データゾーンは,ユーザの記録するデータを格納する場所とする。リードイン
ゾーンは,制御情報を格納する。リードアウトゾーンは,データゾーンに連続し,制御情報を格納する。
内周部及び外周部に設けた機器エリアは,ディスクの試験のために使用する。
リードインゾーン,データゾーン及びリードアウトゾーンは,一つの連続した記録可能な領域として認
識し,記録は相変化現象を利用して行う。
16 情報ゾーンのレイアウト
片面ディスクの情報ゾーン及び両面ディスクの各面の情報ゾーンは,表15のように分割する。表15で
幾つかのゾーンは,その場所の存在する半径を示しているが,それはそのゾーンの最初又は最後のトラッ
クの中央部の位置を示す公称値となる。
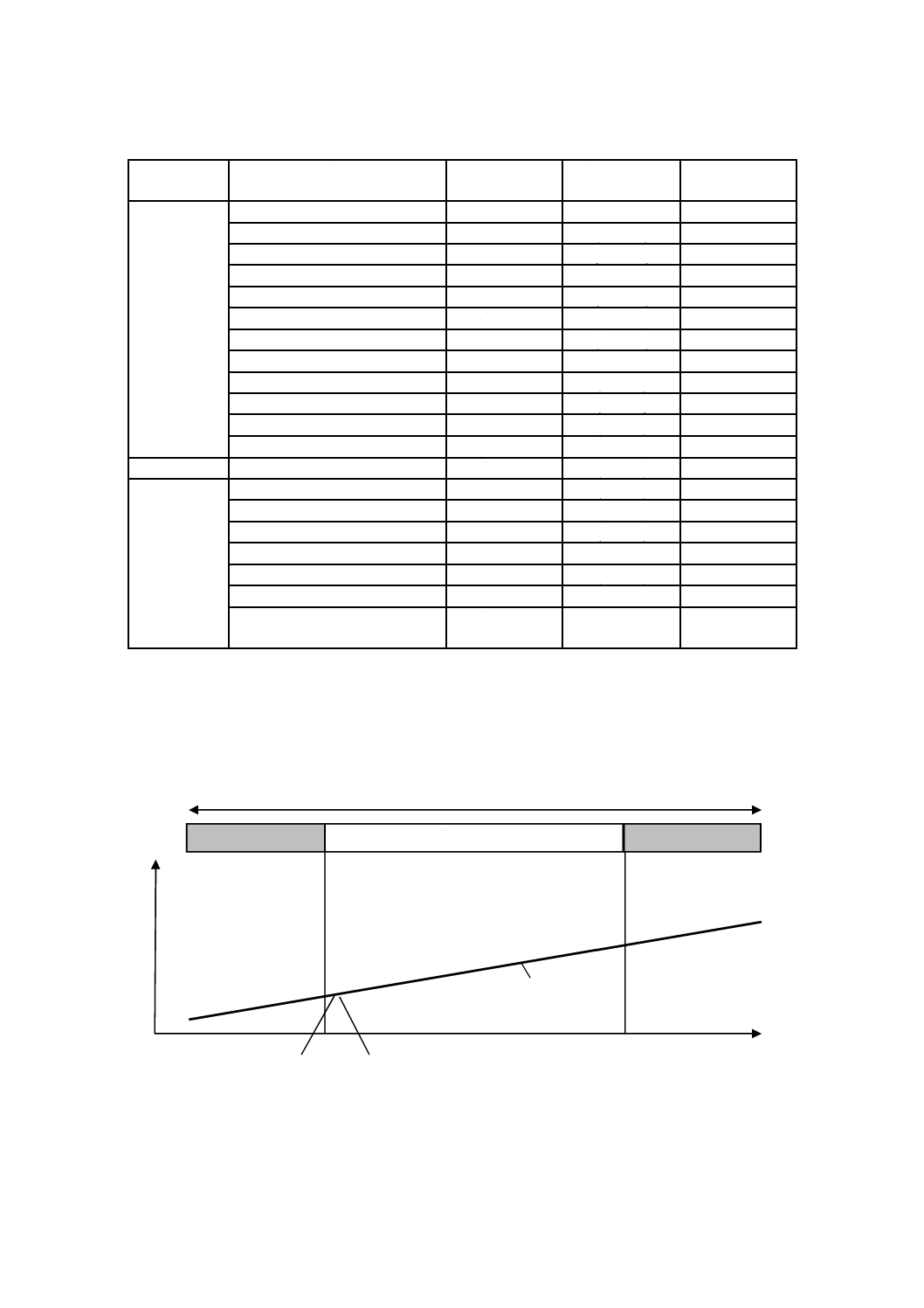
48
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表15−全面フォーマットした情報ゾーンのレイアウト
ゾーン
内容
公称半径
mm
開始セクタ番号
物理セクタ数
リードイン
イニシャルゾーン
開始22.000
(01D830)
公称52 304
インナーディスクテストゾーン
開始23.400
(02A480)
2 048
インナードライブテストゾーン
(02AC80)
12 288
ガードゾーン1
(02DC80)
512
予約ゾーン1
開始23.782
(02DE80)
4 096
予約ゾーン2
開始23.886
(02EE80)
64
インナーディスク認識ゾーン
(02EEC0)
256
予約ゾーン3
(02EFC0)
64
リファレンスコードゾーン
開始23.896
(02F000)
32
バッファゾーン1
(02F020)
480
制御データゾーン
(02F200)
3 072
バッファゾーン2
(02FE00)
512
データ
データゾーン
開始24.000
(030000)
2 295 104
リードアウト
バッファゾーン3
開始58.000
(260540)
768
アウターディスク認識ゾーン
(260840)
256
ガードゾーン2
(260940)
4 096
予約ゾーン4
開始58.053
(261940)
4 096
アウタードライブテストゾーン
(262940)
12 888
アウターディスクテストゾーン
(265940)
2 048
ガードゾーン3
開始58.246
終了≧58.500
(266140)
公称24 400
16.1 物理セクタ番号(PSN)
データゾーンの最初の物理セクタは,PSN (030000) とする。PSNはすべての情報ゾーン内で,そのアド
レスは一つずつ増加する(図22参照)。
(02FFFF) (030000)
図22−物理セクタの番号付け
17 リードインゾーン
リードインゾーンは,情報ゾーンの内周側にあり,図23で示す部分で構成する。
リードインゾーン
リードアウトゾーン
データゾーン
情報ゾーン
PSN
アドレス
ディスク半径
49
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図23では,各部分の最初の物理セクタ番号及び最後の物理セクタを,16進法及び10進法で表示してお
り,各部分に含む物理セクタ数を,10進法で表示する。
初めて使用するディスクには,リードインゾーンにデータは何もない。ディスクのファイナライズ後,
17.1〜17.12に従って,リードインゾーンに記録しなければならない。
17.1 イニシャルゾーン
イニシャルゾーンでのデータフレームの主データは,記録時に,すべて (00) に設定する。イニシャル
ゾーンでの記録は,最大半径22.6 mmから開始する。この規格は,イニシャルゾーンの物理セクタ数を規
定しない。
注記 データゾーンの最初の物理セクタの物理セクタ番号を大きくすることによって,0以下の物理
セクタ番号がイニシャルゾーンに現れないようにする。
17.2 インナーディスクテストゾーン
2 048個の物理セクタをディスク製造業者の試験用に割り当て,このゾーンの主データは,(00) に設定
する。
17.3 インナードライブテストゾーン
12 288個の物理セクタをドライブ試験及びOPCアルゴリズム用に割り当て,このゾーンの主データは
(00) に設定する。
17.4 ガードゾーン1
このガードゾーンは,ユーザデータを含む情報ゾーンを試験書込みゾーンから分離するための緩衝領域
として使用する。このゾーンを記録するとき,主データは (00) に設定する。このゾーンは,512個の物理
セクタからなる。
17.5 予約ゾーン1
予約した4 096個の物理セクタ(256個のECCブロック)。使用しない場合は,すべてのバイトを (00) に
設定する。
17.6 予約ゾーン2
予約した64個の物理セクタ。使用しない場合は,すべてのバイトを (00) に設定する。
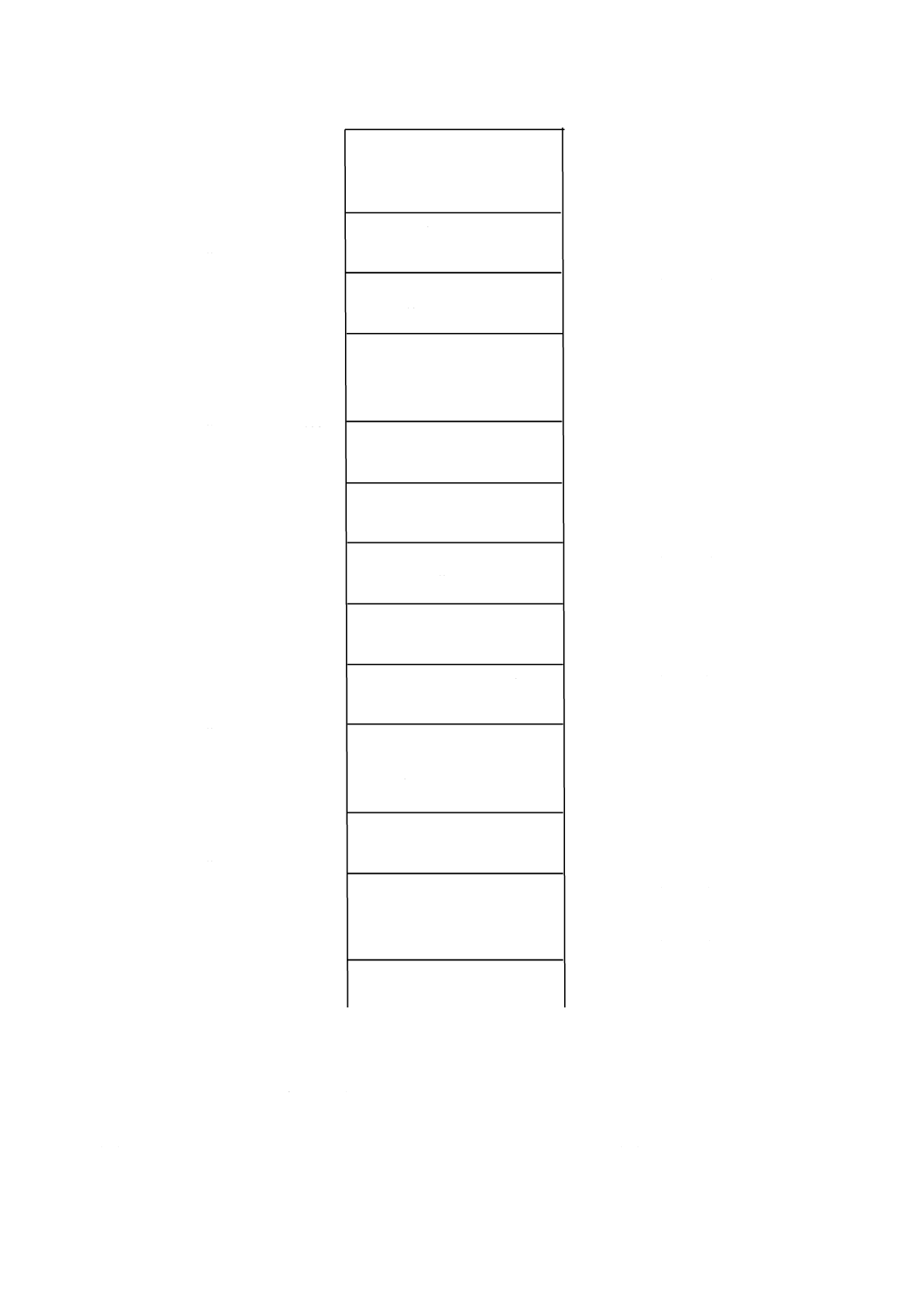
50
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図23−インナードライブ領域
17.7 インナーディスク識別ゾーン
256個の物理セクタは,データ交換の情報用のために割り当てる。1個のECCブロックからなる16個の
物理セクタの各集合は,箇条22に示すディスク制御ブロック (DCB) とするか,又はすべての主データを
(00) で記録するかのいずれかとする。このゾーンでは,主データをすべて (00) で記録したECCブロック
物理セクタ192 127
物理セクタ175 231
物理セクタ187 520
物理セクタ188 032
物理セクタ192 511
物理セクタ173 183
物理セクタ187 519
物理セクタ188 031
物理セクタ192 191
物理セクタ192 543
物理セクタ(02DC7F)
物理セクタ(02DE7F)
物理セクタ(02DC80)
物理セクタ(02EE7F)
物理セクタ(02DE80)
物理セクタ(02EE80)
物理セクタ(02EEBF)
物理セクタ(02EFBF)
物理セクタ(02A47F)
物理セクタ(02EFFF)
イニシャルゾーン
すべての物理セクタで
主データを(00)に設定
データゾーン
インナーディスクテストゾーン
2048物理セクタ
予約ゾーン1
4096物理セクタ
インナーディスク識別ゾーン
256物理セクタ
制御データゾーン
3 072物理セクタ
リファレンスコードゾーン
32物理セクタ
インナードライブテストゾーン
12 288物理セクタ
物理セクタ(02A480)
物理セクタ173 184
物理セクタ(02AC80)
物理セクタ(02AC7F)
物理セクタ175 232
ガードゾーン1
512物理セクタ
主データを(00)に設定
予約ゾーン2
64物理セクタ
物理セクタ192 128
物理セクタ(02EEC0)
物理セクタ192 192
予約ゾーン3
64物理セクタ
物理セクタ(02EFC0)
物理セクタ192 447
物理セクタ192 448
物理セクタ192 512
物理セクタ(02F000)
バッファゾーン1
480物理セクタ
主データを(00)に設定
物理セクタ192 544
物理セクタ(02F01F)
物理セクタ(02F020)
バッファゾーン2
512物理セクタ
主データを(00)に設定
物理セクタ(02F1FF)
物理セクタ(02FDFF)
物理セクタ(02FFFF)
物理セクタ(030000)
物理セクタ(02F200)
物理セクタ(02FE00)
物理セクタ193 023
物理セクタ193 024
物理セクタ196 095
物理セクタ196 096
物理セクタ196 607
物理セクタ196 608
51
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に続く各ECCブロックも,主データはすべて (00) を記録しなければならない。
17.8 予約ゾーン3
予約した64個の物理セクタ。使用しない場合は,すべてのバイトを (00) に設定する。
17.9 リファレンスコードゾーン
記録済みのリファレンスコードゾーンは,ディスク上で特定のチャネルビットパターンを生成する二つ
のECCブロックからなる32個の物理セクタで構成する。各々の対応するデータフレームのすべての2 048
主データバイトを (AC) に設定する。さらに,各ECCブロックの最初のデータフレームの最初の160主デ
ータバイトに適用する以外に,これらのデータフレームにスクランブルを適用してはならない。
17.10 バッファゾーン1
このゾーンは,30個のECCブロックすなわち480個の物理セクタで構成する。このゾーンのデータフ
レームの主データは,すべて (00) に設定する。
17.11
制御データゾーン
このゾーンは,192個のECCブロックすなわち3 072個の物理セクタで構成する。各ECCブロックの
16個の物理セクタの内容は,ほかで規定しない限り192回繰り返す。制御データブロックの構造を,図
24に示す。
物理フォーマット情報
2 048バイト
ディスク製造情報
2 048バイト
出版元情報
14×2 048バイト
図24−制御データブロックの構造
17.11.1 物理フォーマット情報
この情報は,表16に示す2 048バイトで構成する。これは,ディスク及びフォーマット情報を含む。
52
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表16−物理フォーマット情報
バイト番号
内容
バイト数
0
ディスクカテゴリ及びバージョン番号
1
1
ディスクサイズ
1
2
ディスク構造
1
3
記録密度
1
4〜15
データゾーン位置の指定
12
16
一般フラッグビット
1
17
ディスク応用コード
1
18
拡張情報の有無の参照子
1
19〜26
ディスク製造業者ID
8
27〜29
メディアタイプID
3
30
ディスクの改訂履歴番号
1
31
ADIPのバイト63までに使用している物理フォーマット情報の数
1
32〜63
基本記録ストラテジのパラメタ
32
64〜95
EIブロック0
32
96〜127
EIブロック1
32
128〜159
EIブロック2
32
160〜191
EIブロック3
32
192〜223
EIブロック4
32
224〜255
EIブロック5
32
256〜2 047
予備 すべて(00)
1 792
表17−物理フォーマット情報(続き)
(対応国際規格にある表17は,表16に統合したため,不採用とした。)
バイト0から255の情報は,ディスクを初期化するときにADIPデータから複写し,データゾーンの終
了位置を変更した場合など,ディスクの実際の状態を反映するように変更する。すべての256バイトは同
じフォーマットで定義し,表3及び14.4.2で定義する物理フォーマット情報と同じ内容をもつ。ただし,
次のバイトは除く。
バイト1:ディスクサイズ及び最大転送レート
ビットb7〜b4は,14.4.2のバイト1と同じとする。
ビットb3〜b0は,最大再生転送レートを定義する。
これらのビットは,アプリケーションが必要とする最大のリードアウト速度によって決まる次の
値のうちの一つに設定してもよい。
“0000”に設定する場合, 2.52 Mbits/sの最大転送レートを示す(27.3の注記参照)。
“0001”に設定する場合, 5.04 Mbits/sの最大転送レートを示す(27.3の注記参照)。
“0010”に設定する場合,10.08 Mbits/sの最大転送レートを示す。
“1111”に設定する場合,最大転送レートを規定しないことを示す。
その他のすべての組合せは予備であり,それらを使用してはならない。
バイト4〜15:データゾーン位置の指定
バイト4〜8は,14.4.2のバイト4〜8と同じとする。
バイト9〜11が,制御データゾーンの最初の16個のECCブロックにある場合,それらは,デー
53
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
タゾーン記録部の最後の物理セクタのセクタ番号を設定する。
バイト9〜11が,残りの176個のECCブロックにある場合,それらすべてに,データゾーン記録
部の最後の物理セクタのセクタ番号を設定するか,又はそれらすべてに,データゾーンが取り得
る最後の物理セクタのPSN2 491 711を示す (26053F) に設定する。
バイト12〜15は,14.4.2のバイト12〜15と同じとする。
バイト16:一般フラッグビット
すべて(00)に設定する。
注記 対応国際規格では,この細分箇条において,コピープロテクションシステムを使用する
場合のビット設定ついて規定しているが,この規格では不要であり,不採用とした。
バイト256〜2 047:予備
これらの残りのバイトは,予備で,すべて (00) に設定する。
17.11.2 ディスク製造情報
この規格では,これら2 048バイトの形式及び内容を規定しない。これらは,データ交換時には無視す
る。
17.11.3 出版元情報
これら28 672バイトは,すべて(00)に設定する。
どのような場合でも,ホストから受信したデータは,このフィールドに記録してはならない。
注記 レコーダ及びドライブは,ユーザが任意に定義した数値をフィールドに何らかの方法で記録す
るように作られているか又は記録できるようにこれらの機器を容易に改造できるとき,このド
ライブは,回避装置とみなす。
17.12 バッファゾーン2
この記録済みゾーンは,32個のECCブロックすなわち512個の物理セクタで構成する。このゾーンで
は,データフレームの主データは,すべて(00)に設定する。
注記 対応国際規格では,この細分箇条において,コピープロテクションシステムを使用する場合の
設定について規定しているが,この規格では不要であり,不採用とした。
18 データゾーン
ユーザデータを記憶するための2 295 104個の物理セクタで構成する。データゾーンの開始半径は,物理
ADIPアドレス(00C000)の位置によって決定し,最大終了半径は,物理ADIPアドレス(098150)の位
置によって決定する(14.4.1.1のビット2〜23及び13.7.1参照)。
19 リードアウトゾーン
リードアウトゾーンは,情報ゾーンの外周側に位置する。リードアウトゾーンは,図25で示す部分で構
成する。各部分の最初及び最後の物理セクタの物理セクタ番号は,図25では16進法及び10進法で表示し,
各部分に含む物理セクタ数は,10進法で表示する。
19.1 バッファゾーン3
この記録済みのゾーンは,768個の物理セクタで構成する。バッファゾーン3の開始位置は,(260540)
以下とする。このゾーンのデータフレームの主データは,すべて(00)に設定する。
19.2 アウターディスク識別ゾーン
256個の物理セクタは,データ交換の情報用のために割り当てる。1個のECCブロックすなわち16個の
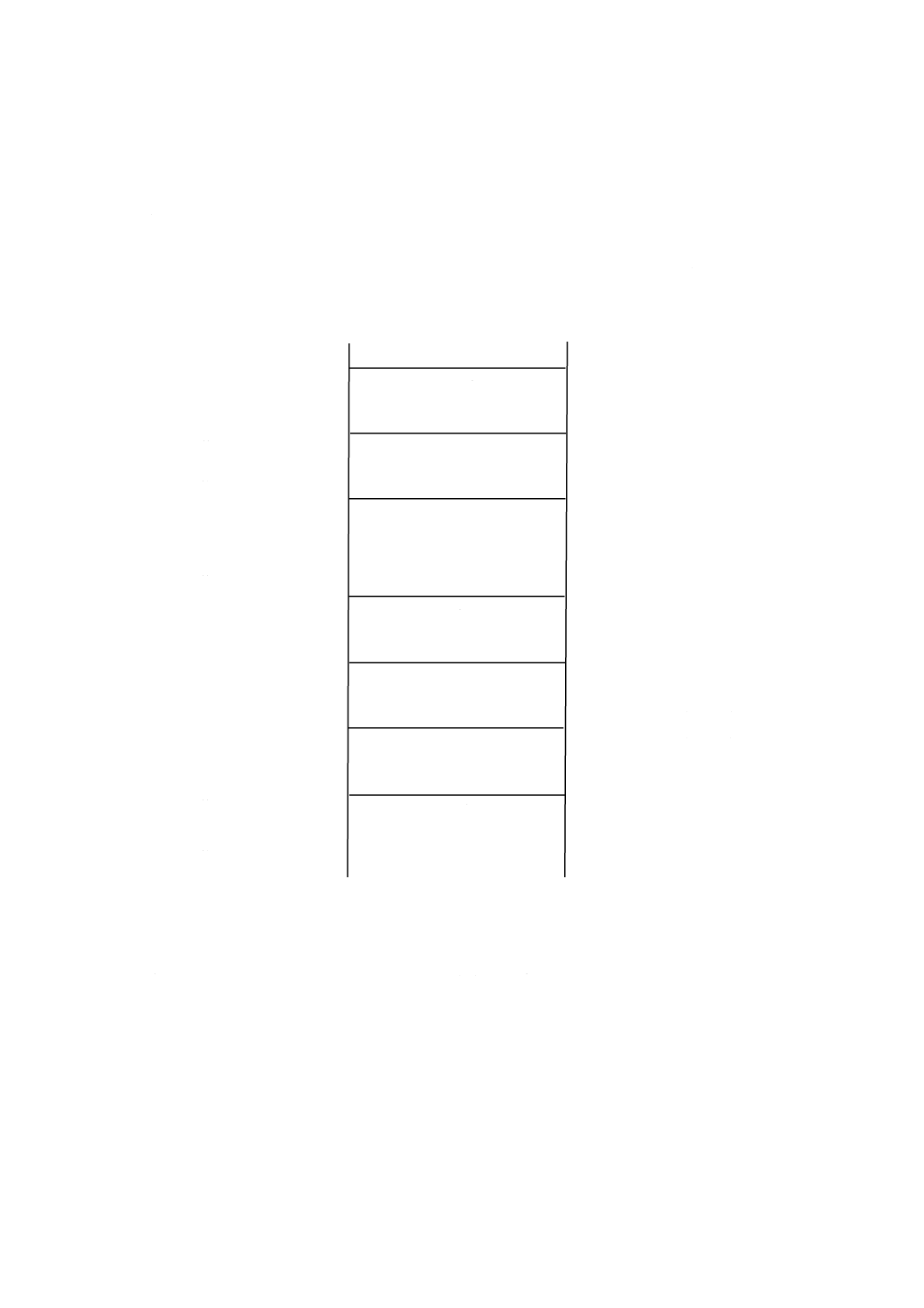
54
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
物理セクタの各集合は,ディスク制御ブロック(DCB)とするか,すべて(00)の主データで記録してい
るかのいずれかとする。このゾーンの内容は,最後のインナーディスク識別ゾーンの内容と等しくなけれ
ばならない。
19.3 ガードゾーン2
このガードゾーンは,ユーザデータを含む情報ゾーンを,テスト記録ゾーンから分離するための緩衝領
域として使用する。このゾーンは,主データをすべて(00)に設定した最小限4 096個の物理セクタで構
成する。
図25−リードアウトゾーン
19.4 予約ゾーン4
4 096個の物理セクタを予約し,これらはすべて (00) に設定する。
19.5 アウタードライブテストゾーン
ドライブ試験及びOPCアルゴリズム用に予約した12 288個の物理セクタで構成する。
19.6 アウターディスクテストゾーン
2 048個の物理セクタをディスク製造業者の試験用に予約する。
19.7 ガードゾーン3
このゾーンは,主データを(00)に設定した24 400個の物理セクタで構成する。
物理セクタ2 491 712
物理セクタ2 492 479
物理セクタ2 492 480
物理セクタ(260540)
データゾーン
バッファゾーン3
768物理セクタ
アウターディスク識別ゾーン
256物理セクタ
ガードゾーン2
4 096物理セクタ
主データを(00)に設定
物理セクタ2 492 735
物理セクタ2 492 736
物理セクタ2 496 831
物理セクタ(26083F)
物理セクタ(260840)
物理セクタ(26093F)
物理セクタ(260940)
物理セクタ(26193F)
予約ゾーン4
4 096物理セクタ
ガードゾーン3
24 400物理セクタ
主データを(00)に設定
アウタードライブテストゾーン
12 288物理セクタ
アウターディスクテストゾーン
12 288物理セクタ
物理セクタ(261940)
物理セクタ2 496 832
物理セクタ(26293F)
物理セクタ(262940)
物理セクタ(265940)
物理セクタ(266140)
物理セクタ(26593F)
物理セクタ(26613F)
物理セクタ(26C08F)
物理セクタ2 500 927
物理セクタ2 500 928
物理セクタ2 513 215
物理セクタ2 513 216
物理セクタ2 515 263
物理セクタ2 515 264
物理セクタ2 539 663
55
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
20 論理セクタ番号の割当て(LSN)
論理セクタ番号 (LSN) は,最初のPSN(030000)に位置するLSN 0から,データゾーンの終わりの位
置まで,連続して割り当てる(附属書J参照)。
21 フォーマッティング
情報ゾーンのすべての領域が記録済みの場合は,ディスクは完全にフォーマットしているとみなす。ECC
ブロックの主データバイトは,ユーザデータを含むことができるか,又はすべてのバイトを (00) に設定
したダミーデータに設定することができる。ダミーデータに設定したECCブロックを含むすべてのECC
ブロックは,箇条13に従って記録しなければならない。
リードインゾーンに,少なくともインナーディスクテストゾーン,インナードライブテストゾーン,ガ
ードゾーン1,予約ゾーン1,予約ゾーン2,インナーディスク識別ゾーン,予約ゾーン3,リファレンス
コードゾーン,バッファゾーン1,制御データゾーン及びバッファゾーン2が記録済みの場合は,ディス
クが部分的にフォーマットしているとみなす。
ディスクの状態を示すために,ディスク識別ゾーンに,フォーマッティングディスク制御ブロック
(FDCB)を記録しなければならない(22.2参照)。
注記 再生専用ドライブによるデータ読出しを可能にするために,ディスクをフォーマットするか,
又はシーケンシャル記録を行う。
フォーマッティングは,プリフォーマッティング及びバックグラウンドフォーマッティングの二つの方
法で行うことができる。また,フォーマッティングなしでシーケンシャル記録を行うこともできる。
1) プリフォーマッティング 多くの記録メディアで使用されている従来からのフォーマッティング方
法。プリフォーマッティング処理後,ディスクは完全にフォーマットする。プリフォーマッティン
グ処理が完了するまで,ディスクにユーザデータを記録してはならない。
プリフォーマッティング処理は,次のステップで行う。
− リードインゾーンの記録
− データゾーンの記録
− リードアウトゾーンの記録
− データゾーンのベリファイ(任意)(21.1.1及び21.2.4参照)
2) バックグラウンドフォーマッティング アプリケーションからアクセスしていない間にドライブ自
身によって実行するフォーマット方法。バックグラウンドフォーマッティング処理中に,ユーザデ
ータをディスクに記録してもよい。初期化ステップの後は,いつでもディスクが交換可能となる。
バックグラウンドフォーマッティング処理は,次のステップで行う。
− 初期化
− デアイシング(21.2.2参照)
− ファイナライゼーション
− ベリフィケーション
未使用のディスクには,常に初期化を適用するが,他のステップは任意とする。
ディスクを使用する3番目の方法を次に示す。
3) フォーマッティングなしのシーケンシャル記録 この場合,データゾーンの最後の部分に続いてデ
ータを追記することによって,ディスクへの記録を行う。
56
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
21.1 プリフォーマッティング
プリフォーマッティングを適用する場合,ユーザデータをディスクに記録する前にこれを行わなければ
ならない。
インナーディスク識別ゾーン及びアウターディスク識別ゾーンには,プリフォーマッティングを実行中
であることを示すFDCBを22.2によって記録しなければならない。
他のすべてのゾーンは,箇条17,箇条18及び箇条19によって記録する。
ディスクが完全にフォーマッティングした後,そのディスクを取り出す前に,ドライブはFDCBを更新
しなければならない。
21.1.1 ベリフィケーション
任意選択的にデータゾーンをべリファイすることができる。この処理中に,データゾーンのすべての
ECCブロックが正確に記録されているかどうかを検査する。
21.2 バックグラウンドフォーマッティング
プリフォーマッティング処理にはかなり時間がかかるため,ユーザが空ディスクをすぐに使用したい場
合には,プリフォーマッティングの代わりに,バックグラウンドフォーマッティングを使用することがで
きる。バックグラウンドフォーマッティング処理するとき,最小限のデータ量だけをディスクに記録し,
その後,アプリケーションがディスクを使用することができる。バックグラウンドフォーマッティングを
許可しているディスクに対し,アプリケーションがディスクにアクセスしていない間に,ドライブがフォ
ーマッティングを更に進めることができる。未記録領域にユーザデータを記録することは,その領域をフ
ォーマットしているとみなす。
21.2.1 初期化
バックグラウンドフォーマッティング処理するときは,リードインゾーンのインナーディスクテストゾ
ーン,インナードライブテストゾーン,ガードゾーン1,予約ゾーン1,予約ゾーン2,インナーディスク
識別ゾーン,予約ゾーン3,リファレンスコードゾーン,バッファゾーン1,制御データゾーン及びバッフ
ァゾーン2の記録から始めるのがよい(表15参照)。いかなる場合でも,ディスクの取出し前に,これら
の領域を記録する。
インナーディスク識別ゾーンには,22.2に従って,FDCBを記録しなければならない。箇条17に従って,
他のすべてのゾーンを記録しなければならない。
リードアウトゾーンのバッファゾーン3,アウターディスク識別ゾーン及びガードゾーン2を記録する
ことができる(任意)。
初期化後に,アプリケーションがディスクを利用することができる。
21.2.2 デアイシング
デアイシングは,データゾーンのすべてのECCブロックにデータを記録する処理とする。デアイシング
中は,データゾーンの未記録領域には,すべて (00) のバイトを含むECCブロックか,又は,アプリケー
ションが要求したときはユーザデータを記録する。テンポラリリードアウトをもつ部分的にフォーマット
したディスクをデアイシング処理する場合は,データフレームのIDフィールドのビットb27〜b26を“00”
に設定し,データゾーンをもつことを示すECCブロックで,テンポラリリードアウトを上書きする(21.3
参照)。
すべて記録済みの領域は,インナー(及びアウター)ディスク識別ゾーンの中のフォーマットディスク
制御ブロック (FDCB) のフォーマットビットマップに登録しなければならない。アプリケーションがドラ
イブにディスクアクセスを要求しないときは,ドライブが制御するデアイシング処理をバックグラウンド
57
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
で続行することができる。アプリケーションがディスクアクセスを要求するときは,デアイシング処理を
一時中断して,ディスクの制御をアプリケーションに返す。未記録領域へアプリケーションによって要求
した記録の結果は,FDCBに登録する。バックグラウンドでデアイシングを行っているときは,ドライブ
はFDCBの更新を行うことが望ましい。バックグラウンドでデアイシングを行っている最中にディスク取
出しの要求があるときは,ドライブは,FDCBを更新した後にディスクを排出する。
21.2.3 ファイナライゼーション
デアイシング処理が終了し,データゾーンのすべての領域が記録済みとなったときは,ドライブは,箇
条19によって,リードアウトゾーンを追記しなければならない。
アウターディスク識別ゾーンは,インナーディスク識別ゾーンと同じDCBを含まなければならない(箇
条22参照)。
箇条17によってイニシャルゾーンを追加することによって,リードインゾーンの記録を完了しなければ
ならない。
21.2.4 ベリフィケーション(任意)
ベリフィケーションは,データゾーンのすべてのECCブロックを読み取り,検査する処理とする。ECC
ブロックが信頼できないと判明した場合,欠陥管理システムを用いて,このブロックを置換することがで
きる。
インナーディスク識別ゾーン及びアウターディスク識別ゾーンの中のフォーマットディスク制御ブロッ
ク (FDCB) の最終ベリファイアドレス (LVA) ポインタには,ベリファイ済みの領域が登録されなければ
ならない。ディスクをアクセスしていない間は,ドライブが制御するベリフィケーション処理をバックグ
ラウンドで続行することができる。アプリケーションがディスクのアクセスを要求するときは,ベリフィ
ケーション処理を一時中断して,ディスクの制御をアプリケーションに返す。バックグラウンドでベリフ
ィケーションを行うときは,ドライブはFDCBの更新を続ける方がよい。バックグラウンドでベリフィケ
ーションが行っている最中にディスク取出しの要求があるときは,ドライブは,ディスクを排出する前に
FDCBを更新しなければならない。
21.3 フォーマッティングなしのシーケンシャル記録
ディスクをシーケンシャル記録だけで使用する場合,ディスクを排出する前に,最後に記録したユーザ
データの直後にテンポラリリードアウトゾーンを記録した方がよい。アプリケーションは,テンポラリリ
ードアウトゾーンをユーザデータで上書きすることによって,ディスクに追加データを書き込むことがで
きる。その場合,新しいテンポラリリードアウトゾーンをユーザデータ直後に続いて記録する。
FDCBでのフォーマット状態(22.2参照)は,“一部フォーマット済み”に設定し,最終記録アドレスは,
最後に連続して記録したデータゾーンのECCブロックの最後のPSNに設定する。その場合には,フォー
マットビットマップを使用してはならない。他のすべてのビットはそれらに応じて適切に設定する。
テンポラリリードアウトゾーンは,次のルールを満たさなければならない。
− テンポラリリードアウトゾーン中のデータフレームのIDフィールドのビットb27〜b26は,リードアウ
トゾーンを示す“10”に設定する。
− テンポラリリードアウトゾーンの長さは,表18で示す規則に従うのがよいが,少なくとも64ECCブ
ロックでなければならない。
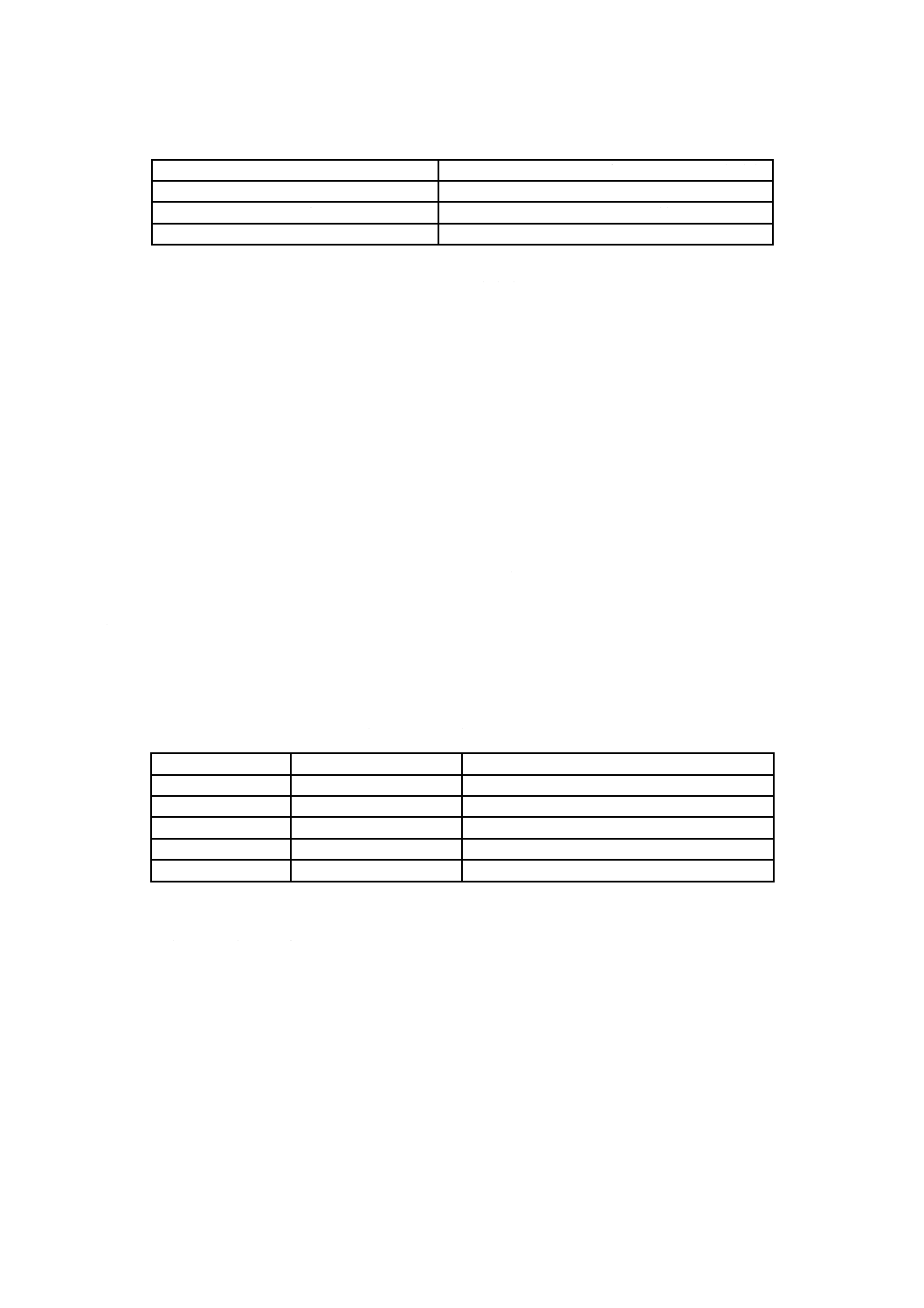
58
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表18−テンポラリリードアウトゾーンの終了位置
データゾーンの記録部分の長さ(終了半径) テンポラリリードアウトゾーンの終了位置(半径)
34.0 mm以下の場合
35.0 mm 最小
34.0 mm〜57.5 mmの場合
データゾーン終了半径+1.0 mm 最小
57.5 mm〜58.0 mmの場合
58.5 mm
− テンポラリリードアウトゾーンの主データはすべて (00) がよい。
− テンポラリリードアウトゾーンの49番目〜64番目のECCブロックには,19.2によって,テンポラリ
アウターディスク識別ゾーンを含むことができる(任意)。
− テンポラリリードアウトゾーンの終了位置と半径58 mmに位置するバッファゾーン3の間に,未記録
領域があってもよい。
22 ディスク制御ブロック
ディスク制御ブロックは,この規格で規定したディスクの互換性を保つための追加情報を含んでいる。
DCBは,ディスクのインナー識別ゾーン及びアウターディスク識別ゾーンに記録する。新たにDCBを定
義する場合,互換性を確保するため,最初の40個のデータバイトは,同じフォーマットでなければならな
い。フォーマット処理の状態を反映し,何らかの一般情報を保持するために,特別なDCBを定義する。
各DCBのタイプ,すなわち,(00000000),(FFFFFFFE) 又は (FFFFFFFF) 以外の何らかの特定な内容を
示す記述子は,インナーディスク識別ゾーン及びアウターディスク識別ゾーンで,それぞれ一度だけ現れ
る。
22.1 ディスク制御ブロックのフォーマット
各ディスク制御ブロックの主データを,表19に示す。
表19−ディスク制御ブロックのフォーマット
DCBの物理セクタ
主データのバイト位置
内容
0
D0〜D3
内容記述子
0
D4〜D7
DCBの内容及び使用方法が不明な場合の処理
0
D8〜D39
ドライブID
0
D40〜D2 047
特有の内容記述子
1〜15
D0〜D2 047
特有の内容記述子
バイトD0〜D3:内容記述子
(00000000)の場合,DCBは使用してない。
これに続くインナーディスク認識ゾーン及びアウターディスク認識ゾーンのすべ
てのDCBの内容記述子は,(00000000)に設定する。
残りすべてのバイト,表19の物理セクタ0のD4〜D2 047及び物理セクタ1〜15の
D0〜D2 047は,(00)に設定する。
(46444300)に設定する場合,このDCBは,22.2で定義する。
(57444300)に設定する場合,このDCBは,22.3で定義する。
(FFFFFFFE)に設定する場合,このDCBは,不良であり使用してはならない。
(FFFFFFFF)に設定する場合,このDCBは,事前に使用したものであり,現在は再利用可能
59
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とする。
残りすべてのバイト,表19の物理セクタ0のD4〜D2 047及び物理セクタ1〜15の
D0〜D2 047は,(00)に設定する。
内容記述子の他のすべての値は予備とする。
インナーディスク識別ゾーン又はアウターディスク識別ゾーンに追加した新しい各DCBは,最
初の有効な未使用のDCB[内容記述子=(00000000) 又は (FFFFFFFF)]の場所に記録する。
セションのインナーディスク識別ゾーンで,(00000000),(FFFFFFFE)又は(FFFFFFFF)に設定
しない内容記述子をもつ各DCBは,個々のセションのアウターディスク識別ゾーンで,同一の
DCBをもたなければならない。インナーディスク識別ゾーンにあるDCBの現れる順序は,アウ
ターディスク識別ゾーンにあるDCBの現れる順序と必ずしも同じではない。
バイトD4〜D7:DCBの内容及び使用方法が不明な場合の処理
これらのビットは,DCBの内容及び使用方法をドライブが判定できない場合(例えば,内容記述
子が既知の値に設定していない場合)の処理を規定する。これらのバイトは個々の32ビットで構
成するフィールドを形成する。
ビットb31〜b4
予備
これらのビットは,すべて“0”に設定する。
ビットb3
DCB更新
“1”に設定する場合,現DCBを更新することはできない。その他の場合は,
“0”に設定する。
ビットb2
フォーマット
“1”に設定する場合,ディスクの再フォーマットはできない。
ビットb1
DCB読取り保護
“1”に設定した場合,このDCBの中の情報は,再生機器内部だけによる使用
を意味し,再生機器外に転送してならない。それ以外では,“0”に設定する。
ビットb0
データゾーン記録
“1”に設定する場合,データゾーンでの記録はできない。それ以外では,“0”
に設定する。
バイトD8〜D39:ドライブID
バイトD8〜D39は固有の記述子を含み,DCBを書き込むドライブを識別する。この固有のドライ
ブ識別子のフォーマットは,次による。
− バイトD8〜D23
ドライブの製造業者を識別する。この名前は,ISO/IEC 4873に従って,G0集合からの
文字及びSPACE文字によって表示する。残りのバイトは,使用しない場合(00)に設定す
る。
− バイトD24〜D35
ドライブのモデル名/型番号を識別する。このモデル名/型番号は,ISO/IEC 4873に従
って,G0集合からの文字及びSPACE文字によって表示しなければならない。残りのバイ
トは,使用しない場合(00)に設定する。
− バイトD36〜D39
ドライブ固有のシリアル番号を含む。この4バイトは,一つの32ビットの2進数で構成
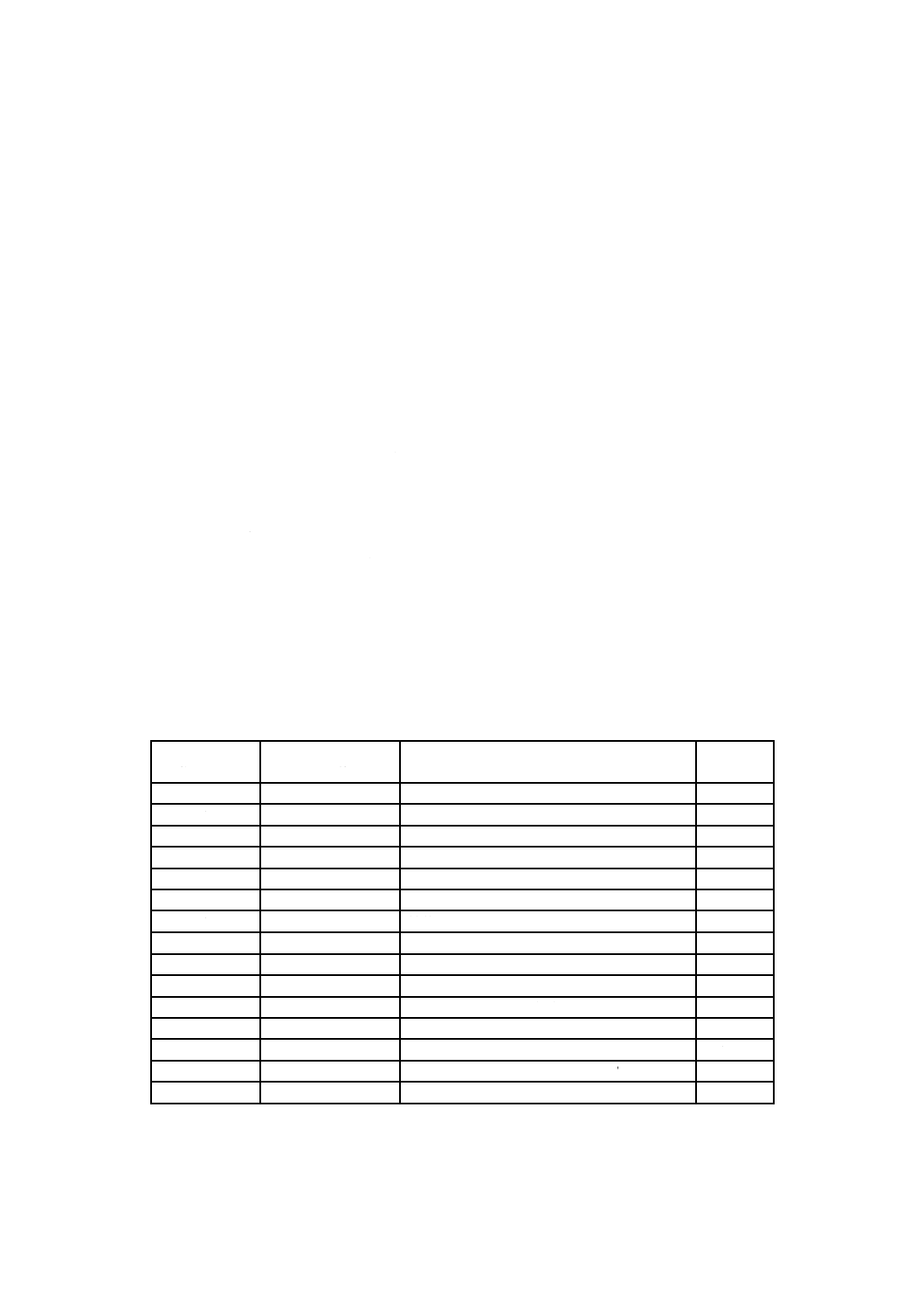
60
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する。
バイトD40〜D2 047:内容記述子に特有のバイト
これらのバイトは,実際の内容記述子の値をもつDCBのフォーマット記述で定義する。
物理セクタ1〜15バイトD0〜D2 047:内容記述子に特有のバイト
これらのバイトは,実際の内容記述子の値をもつDCBのフォーマット記述で定義する。
22.2 フォーマッティングDCB(FDCB)のフォーマット
インナーディスク認識ゾーン及びアウターディスク識別ゾーンは,両方ともディスクの状態を反映する
1個のDCBを含まなければならない。インナーディスク認識ゾーン及びアウターディスク識別ゾーンの
FDCBは同一であり,表20で定義する内容をもたなければならない。
物理セクタ0バイトD0〜D3:内容記述子
これらのバイトは,フォーマットDCBを識別し,(46444300)に設定する。これは,文字“FDC”及び
バージョン番号0を示す。
物理セクタ0バイトD4〜D7:内容記述子が不明な場合の処理
(0000000D)に設定する。このDCBがドライブが理解できない場合,DCBを更新したり,ディスクを
再フォーマット化したりしてはならない。また,ドライブからホストコンピュータへDCB情報を転送す
ることはできるが,データゾーンへの記録はできない。
物理セクタ0バイトD8〜D39:ドライブID
これらのバイトは,22.1で規定するとおり,ドライブIDを含む。
物理セクタ0バイトD40〜D43:FDCB更新回数
これらのバイトは,FDCBが更新動作が行われた回数を示す。FDCBを生成すると,このフィールドは,
(00000000)に設定し,FDCBを再書込みするごとに,1ずつ増加する。
表20−FDCBのフォーマット
ECCブロック
の物理セクタ
主データの
バイト位置
内容
バイト数
0
D0〜D3
内容記述子
4
0
D4〜D7
内容記述子が不明な場合の処理
4
0
D8〜D39
ドライブID
32
0
D40〜D43
FDCB更新回数
4
0
D44〜D47
フォーマット状態及びモード
4
0
D48〜D51
最終記録アドレス
4
0
D52〜D55
最終ベリファイアドレス
4
0
D56〜D59
ビットマップ開始アドレス
4
0
D60〜D63
ビットマップ長
4
0
D64〜D95
ディスクID
32
0
D96〜D127
アプリケーションに依存するバイト
32
0
D128〜D191
DCBリスト
16×4
0
D192〜D2 047
予備(00)に設定
1 856
1〜9
D0〜D2 047
フォーマッティングビットマップ
9×2 048
10〜15
D0〜D2 047
予備(00)に設定
6×2 048
物理セクタ0バイトD44〜D47:フォーマット状態及びモード
バイトD44:フォーマット状態フラグ(表20A参照)
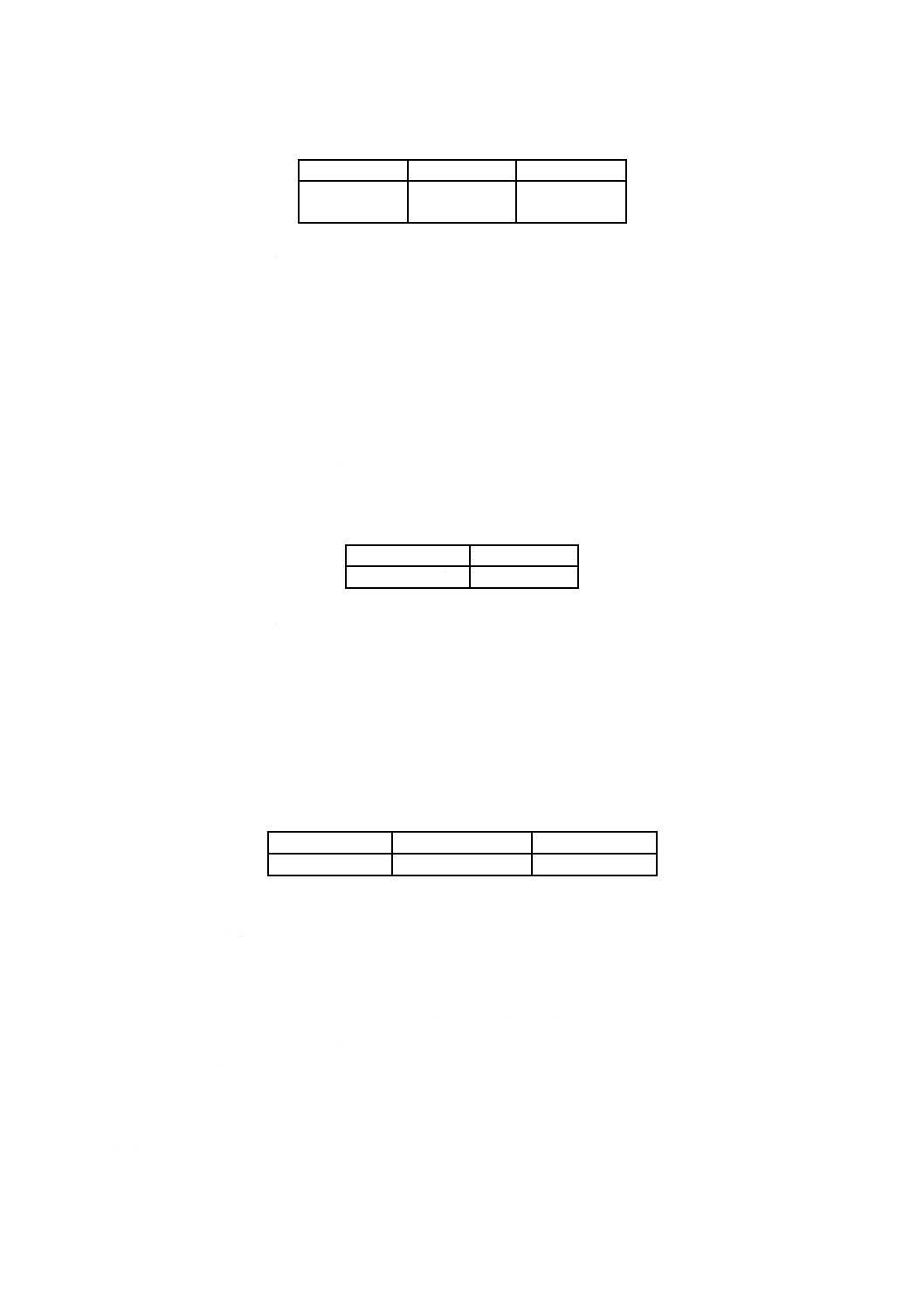
61
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表20A−フォーマット状態
ビット7〜6
ビット5
ビット4〜0
フォーマット
状態
フォーマッテ
ィング開始
予備
ビット7〜6:“00” ディスクは,フォーマットしていない。
“01” ディスクは,部分的にフォーマットしている。
“10” ディスクは,ユーザによって完全にフォーマットしている。
“11” ディスクは,製造業者によって完全にフォーマットしている。
ビット5:“0” ディスク上のFDCBは,ディスクの実際の状態を反映する。
“1” ドライブのフォーマット処理を実行中であり,ディスク上のFDCBは,ディスク
の実際の状態を反映しなくてもよい。
ビット4〜0:予備。
バイトD45:ベリファイ状態フラグ(表20B参照)
表20B−ベリファイ状態フラグ
ビット7〜6
ビット5〜0
ベリファイ状態
予備
ビット7〜6:“00” ディスクは,ベリファイしていない。
“01” ディスクは,部分的にベリファイしている。
“10” ディスクは,ユーザによって完全にベリファイしている。
“11” ディスクは,製造業者によって完全にベリファイしている。
ビット5〜0:予備。
バイトD46:記録状態フラグ(表20C参照)
表20C−記録状態フラグ
ビット7
ビット6〜5
ビット4〜0
リードイン状態
リードアウト状態
予備
ビット7:“0” リードインは,PSN (02A480)〜(02FFFF) まで記録している。
“1” リードインは,完全に記録している。
ビット6〜5:“00” リードアウトは,未記録とする。
“01” テンポラリリードアウトは,記録済みとする。
“10” リードアウトは,PSN (260540)〜(26193F) の間,記録済みとする(箇条19及び
21.2.1参照)。
“11” リードアウトは,すべて記録済みとする。
ビット4〜0:予備。
バイトD47:予備
(00) に設定する。

62
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
物理セクタ0バイトD48〜D51:最終記録アドレス(LWA)
これらの4バイトは,PSN (030000) から開始するデータゾーン(リードアウトゾーン属性を含まない。)
が連続して記録した部分の最後のECCブロックの最後のPSNを示す。
[PSN (030000) とLWAとの間に未記録のECCブロックがあってはならない。]これらを使用しない場
合,LWAを (00000000) に設定する。
注記 古いドライブでは,最初のECCブロックが未記録の場合に,LWAを(0002FFF)又は(00030000)
に設定することができる。この設定は,(00000000)と解釈するのがよい。
フォーマットが終了した後,LWAを(00000000)に設定してもよい。
物理セクタ0バイトD52〜D55:最終ベリファイアドレス(LVA)
これらの4バイトは,PSN (030000) から開始する連続して検証した領域の最後のアドレスを示す。これ
らを使用しない場合,LVAを (00000000) に設定する。
物理セクタ0バイトD56〜D59:ビットマップ開始アドレス(BSA)
これらの4バイトは,フォーマットビットマップで表示される最初のECCブロックのアドレスを示す。
この値は,最終記録アドレスより小さいか,又は等しい。ディスクを完全にフォーマットした場合,又は
フォーマットビットマップを使用しない場合は,(00000000) に設定する。
物理セクタ0バイトD60〜D63:ビットマップ長
これらの4バイトは,フォーマットビットマップで表示されるECCブロックの番号を示す。ディスクを
完全にフォーマットした場合,又はフォーマットビットマップを使用しない場合は,(00000000) に設定す
る。
物理セクタ0バイトD64〜D95:ディスクID
これらの32バイトは,ディスクの初期化時に,統計上ランダムな256ビットの2進数で記録しなければ
ならない。
物理セクタ0バイトD96〜D127:アプリケーションに依存するバイト
このフィールドは,32バイトで構成し,アプリケーションによる使用を目的に予約し,特定のコピー保
護データなどの情報を記録する。アプリケーションがこの設定を規定しない場合,バイトは (00) に設定
する。
物理セクタ0バイトD128〜D191:DCBのリスト
実際に有効なDCBにアクセス時間と信頼性改善のために,これらの各ロケーションに含むDCBの内容
記述子を用いて,インナーディスク情報ゾーン及びアウターディスク情報ゾーンの16個のロケーションを
示すリストを,格納するのが望ましい。表21に従って,このリストをフォーマットしなければならない。
表21−DCBリストのフォーマット
ECCブロック
の物理セクタ
主データの
バイト位置
内容
バイト数
0
D128〜D131
ロケーション0にあるDCBの内容記述子
4
0
D132〜D135
ロケーション1にあるDCBの内容記述子
4
0
:
:
:
0
D(128+i×4)〜D(131+i×4) ロケーションiにあるDCBの内容記述子
4
0
:
:
:
0
D188〜D191
ロケーション15にあるDCBの内容記述子
4
63
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バイトD(128+i×4)〜D(131+i×4):ロケーションiにあるDCBの内容記述子
4バイトからなる各グループ情報によって,このFDCBが保持されているディスク識別ゾーン(インナ
ー又はアウター)に存在する,指定したロケーションにあるDCBの内容記述子(22.1,バイトD0〜D3参
照)を表示しなければならない。
インナーディスク識別ゾーンのロケーションiは,PSN (02EEC0)+i×16から始まるECCブロックとす
る。
アウターディスク識別ゾーンのロケーションiは,PSN (260840)+i×16から始まるECCブロックとする。
DCBのリストは,FDCB自体を含まなくてはならない。FDCBのロケーションは,0に制限されない。
これらを使用しない場合は,DCBのリストは,すべて (00000000) に設定する。
注記 旧タイプのドライブでは,DCBのリストに情報を正確に反映できないかもしれない。
物理セクタ0バイトD192〜D2 047:予備
これらのバイトは,予備で (00) に設定する。
物理セクタ1〜9バイトD192〜D2 047:フォーマットビットマップ
FDCBの物理セクタ1〜9は,ビットマップを含む。この場合,各ビットは,1個のECCブロックの記
録状態を反映する。セクタ1の主データバイトD0のビット0 (lsb) は,ビットマップ開始アドレスを示す
最初のECCブロックを表し,セクタ1の主データバイトD0のビット1は,ビットマップ開始アドレスが
示すECCブロックの次のECCブロックを表す。ビットマップに後続する物理セクタ1〜9の中の残りのす
べてのビットは,“0”に設定する。
ビットマップの中のECCブロックは,シーケンス番号iで識別する。ここに,iは,ビットマップ開始
アドレスで,ECCブロックに対し,0から開始する。セクタkの主データバイトDmのビットnは,ビット
マップ開始アドレスからi番目のECCブロックを表す。
i=[(k−1)×2 048+m]×8+nここに,k=1〜9,m=0〜2 047,n=0〜7とする。
i番目のECCブロックの最初の物理セクタのアドレスは,ビットマップ開始アドレス+i×16とする。
i番目のECCブロックを表すビットを“1”に設定する場合,i番目のECCブロックが未記録とする。
i番目のECCブロックを表すビットを“0”に設定する場合,i番目のECCブロックが記録済みとする。
物理セクタ10〜15バイトD0〜D2 047:予備
これらのセクタのすべてのバイトは,(00) に設定する。
22.3 書込み禁止DCB (WDCB) のフォーマット
インナーディスク識別ゾーン及びアウターディスク識別ゾーンは,ディスクの書込み禁止状態を反映す
るDCBを任意に含んでもよい。インナー及びアウターディスク識別ゾーンのWDCBは,同一とし,その
内容は,表22で定義する。
64
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表22−WDCBのフォーマット
ECCブロック
の物理セクタ
主データの
バイト位置
内容
バイト数
0
D0〜D3
内容記述子
4
0
D4〜D7
内容記述子が不明な場合の処理
4
0
D8〜D39
ドライブID
32
0
D40〜D43
WDCB更新回数
4
0
D44〜D47
書込み禁止動作
4
0
D48〜D63
予備 (00) に設定
16
0
D64〜D95
WDCBパスワード
32
0
D96〜D2 047
予備 (00) に設定
1 952
1〜15
D0〜D2 047
予備 (00) に設定
15×2 048
物理セクタ0バイトD0〜D3:内容記述子
これらのバイトは,書込み禁止DCBを示し,文字“WDC”及びバージョン番号0を表す(57444300) に
設定する。
物理セクタ0バイトD4〜D7:内容記述子が不明な場合の処理
これは (0000000F) に設定し,このDCBをドライブが判定できない場合に次の処理を行う。
DCBを上書きしてはならない。
ディスクを再フォーマットしてはならない。
データゾーンへの書き込みを許可してはならない。
ドライブからホストコンピュータへのDCB情報の転送を許可してはならない。
物理セクタ0バイトD8〜D39:ドライブID
これらのバイトは,22.1で規定するとおり,ドライブIDを含まなくてはならない。
物理セクタ0バイトD40〜D43:WDCB更新回数
これらのバイトは,WDCBの更新動作の回数を示す。WDCBを生成すると,このフィールドは,
(00000000)に設定し,WDCBを再書込みするごとに,1ずつ増やす。
物理セクタ0バイトD44〜D47:書込み禁止についての規定
この4バイトすなわち32ビットで一つのフィールドを構成し,これらのビットは,次の許容動作及び要
求動作を規定する。
ビットb31〜b8: 予備。
これらのビットは,すべて“0”に設定する。
ビットb7:
書込み禁止変更
“0”に設定する場合,書込み禁止状態のビットb6〜b0を変更してもよい。
“1”に設定し,ホストから受信するパスワードがこのDCBのWDCBパスワードと同
じ場合には,書込み禁止状態のビットb6〜b0を変更してもよい。
“1”に設定し,ホストから受信するパスワードがこのDCBのWDCBパスワードと異
なる場合には,書込み禁止状態のビットb6〜b0を変更してはならない。
ビットb6〜b2: 予備
これらのビットは,すべて“0”に設定する。
ビットb1,b0: 書込み禁止状態
65
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
“11”に設定する場合,ディスク上のいずれの領域にも記録してはならない。
“10”に設定する場合,附属書M参照。
“01”に設定する場合,ディスク上のデータゾーン(リードインゾーンの最後とリード
アウトゾーンの最初との間のすべての領域)に記録してはならない。
“00”に設定する場合,ディスク上のすべての領域で記録することができる。
注記 データゾーン内のユーザデータ領域は,欠陥管理システムを使用した場合のユーザデータの格
納をさす。これは,可能な節約とディスクのデータゾーンにある欠陥管理システムのテーブル
領域を書込み禁止から除くことを意味する。この場合,欠陥管理システムは使用可能のままで
いることができる。
物理セクタ0バイトD48〜D63:予備
これらのバイトは予備で,(00) に設定する。
物理セクタ0バイトD64〜D95:WDCBパスワード
これらのバイトは,ISO/IEC 4873に従って,G0集合及びSPACEからの32文字までで構成するユーザ
定義のパスワードを含まなければならない。残りのバイトは,使用しない場合,(00)に設定する。
WDCBパスワードフィールドのすべてのバイトを (00) に設定する場合,書込み禁止規定フィールドの
32ビットはすべて“0”に設定する。
WDCBパスワードフィールドをすべて (FF) に設定する場合,ディスクは上書き禁止とする。書込み禁
止規定フィールドのビットb7,b1,及びb0は“1”に設定する。
物理セクタ0バイトD96〜D2 047:予備
これらのバイトは予備で,(00) に設定する。
物理セクタ1〜15バイトD0〜D2 047:予備
これらのセクタのすべてのバイトは,(00) に設定する。
第5章 グルーブの特性
23 概要
すべての記録は,グルーブ領域内だけで行う。グルーブの中心線は,トラックの平均的中心線から,位
相変調のある正弦波でウォブルしている。物理アドレス情報は,この位相変調のあるウォブルから復号で
きる。
ディスク上のグルーブ情報のフォーマットは,14.4で定義する。箇条9による基準測定装置を使用する
ものとして,箇条25では,グルーブからの信号について規定する。
24 試験方法
24.1 環境
箇条25のすべての信号は,8.1.1で定義する試験環境条件にあるディスクに対して規定範囲内とする。
24.2 基準測定装置
箇条25で規定するすべての信号は,箇条9による基準測定装置の指示したチャネルで測定する。この測
定装置は,これらの試験を目的として,次の特性を満たす。
24.2.1 光学系及び機械系
集束光ビームは,9.2のa)〜i) で定義する。ディスクは,9.5に従って,回転する。

66
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
24.2.2 読取りパワー
読取りパワーは,ディスクの入射面に入射したパワーとし,0.7 mW±0.1 mWとする。
24.2.3 読取りチャネル
測定装置には,二つの読取りチャネルがある。読取りチャネル1は,対物レンズの出射ひとみ(瞳)で,
総光量の和信号 (I1+I2) とする。読取りチャネル2は,対物レンズの出射ひとみ(瞳)の後で,2分割し
た光量の差信号 (I1−I2) とする。これらのチャネルは,箇条9に従って実装する。
プッシュプル及びクロストラック信号は,読取りチャネルの信号を,カットオフ周波数30 kHzの一次低
域フィルタを通過させて測定する。
ウォブル信号は,読取りチャネルの信号を,周波数帯域25 kHz,傾斜:+20 dB / decade〜周波数帯域4.0
MHz,傾斜:−20 dB / decadeの一次帯域フィルタを通過させて測定する。
24.2.4 トラッキング
信号の測定中は,光ビームの焦点と記録層との間の軸方向トラッキングエラーは,0.20 μm以下とする。
さらに,光ビームの焦点とトラックの中心との間の半径方向トラッキングエラーは,0.022 μm以下とする。
24.3 信号の定義
すべての信号は,フォトディテクタの出力電流に対して直線関係にあり,したがって,ディテクタの受
光パワーに対して直線関係にある。
図26−トラックを交差するときの読取りチャネルでのグルーブ信号
プッシュプル信号
プッシュプル信号は,光ビームの焦点がトラックを交差するときの読取りチャネル2の信号で,フィル
タ通過後の正弦波状の差信号 (I1−I2) とする。半径方向のトラッキング用の信号として測定装置を用いる。
クロストラック信号
クロストラック信号は,光ビームの焦点がトラックを交差するときの読取りチャネル1の信号で,フィ
ルタ通過後の正弦波状の和信号 (I1+I2) とする。
0レベル
半径位置
(I
1
+
I
2
)m
ax
(I
1
+
I
2
)p
p
(I
1
+
I
2
)m
in
(I
1
−
I
2
)p
p
ランド
グルーブ
67
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ウォブル信号
ウォブル信号IWは,測定装置が最小限のトラッキング規定を満たすときの読取りチャネル2の信号で,
フィルタ通過後の正弦波状の差信号 (I1−I2) とする。
25 グルーブ信号の特性
25.1 位相深さ
グルーブの位相深さは,最大で90°とする。
25.2 プッシュプル信号
プッシュプル信号PPのピークからピークまでの値は,次の範囲とする。
a) 記録前:
(
)
(
)
(
)
[
]
56
.0
2
/
38
.0
min
2
1
max
2
1
PP
2
1
≦
≦
I
I
I
I
I
I
+
+
+
−
記録前のプッシュプル信号の最大の変動幅は,次による。
15
.0
min
max
min
max
<
+
−
PP
PP
PP
PP
b) 記録後:
(
)
(
)
(
)
[
]
56
.0
2
/
25
.0
min
2
1
max
2
1
PP
2
1
≦
≦
I
I
I
I
I
I
+
+
+
−
c) 未記録グルーブのプッシュプル信号に対する記録済みグルーブのプッシュプル信号の比率は,0.75〜
1.25の範囲とする。
25.3 クロストラック信号
未記録ディスクのクロストラック信号は,次の要求に合致しなければならない。(I1+I2)min値が,グルー
ブ中心ででている(信号の極性の反転がないとする。)。
25.4 正規化ウォブル信号
トラックのセンターラインからの偏位は,正規化ウォブル信号によって測定する。ウォブルグルーブの
中心の標準のトラックセンターラインからの偏位量は,附属書Kに従って計算する。
ウォブル信号は,振幅が隣接するトラックからのウォブルの正の干渉によって強調されない場所,すな
わち,未記録トラックの位相変調していないウォブル部分で測定する。
正規化ウォブル信号は,次による。
(
)
30
.0
20
.0
PP
2
1
min
-
pp
W,
≦
≦
I
I
I
−
ウォブル信号の振幅が,隣接するトラックからのウォブルの正の干渉によって強調される場所では,最
大のウォブル信号は,次による。
6.2
min
-
pp
W,
max
-
pp
W,
≦
I
I
25.5 ウォブルの特性
記録前ウォブル信号の平均の狭帯域SNRは,1 kHz幅の分解能で測定を行い,45 dBを超えなければな
らない。記録後ウォブル信号の平均の狭帯域SNRは,1 kHz幅の分解能で測定を行い,38 dBを超えなけ
ればならない。
68
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
第6章 記録層の特性
26 試験方法
ディスク上の情報のフォーマットは,箇条13で定義する。箇条27は,箇条9で定義する基準測定装置
の使用して得る記録済みグルーブからの信号について規定する。
ここでは,記録情報の平均品質を規定する。欠陥などで生じる規定値からの局部的な偏差は,トラッキ
ングエラー又はデータフィールドのエラーの原因となり得る。これらのエラーについては,箇条29及び第
7章に記述する。
26.1 環境
27.2.2〜27.2.6までのすべての信号は,8.1.1で定義する試験環境の条件にあるディスクに対して規定範囲
内とする。
26.2 基準測定装置
27.2.2〜27.2.6までに規定するすべての信号は,箇条9で規定した基準測定装置の指示したチャネルで測
定する。この測定装置は,これらの試験の目的として,次の特性を満たす。
26.2.1 光学系及び機械系
集束ビームは,9.2 a)〜i) で定義する特性を満たす。ディスクは,9.5に従って,回転する。
26.2.2 読取りパワー
読取りパワーは,ディスクの入射面に入射したパワーとし,0.7 mW±0.1 mWとする。
26.2.3 読取りチャネル
測定装置には二つの読取りチャネルがある。読取りチャネル1は,対物レンズの出射ひとみ(瞳)で,
総光量の和信号 (I1+I2) とする。読取りチャネル2は,2等分した対物レンズの出射ひとみ(瞳)で,光
量の差信号 (I1−I2) とする。これらのチャネルは,箇条9に従って実装する。
プッシュプル及びクロストラック信号は,読取りチャネルの信号を,カットオフ周波数30 kHzの一次低
域フィルタの通過後,測定する。
読取りチャネル1からの信号は,ジッタの測定時以外には,波形等化しない。読取り信号を2値化する
ためのしきい値を,書き込む間,パラメタ変化によって,マーク及びスペースサイズの変動の影響を最小
化するように制御する。附属書Eの特性を満たす読取りチャネル1を使用して,ジッタ測定を行う。
26.2.4 トラッキング
記録中及び信号の測定中,光ビームの焦点と記録層との間の軸方向のトラッキングエラーは,0.20 μm
以下とする。さらに,光ビームの焦点とトラックの中心との間の半径方向のトラッキングエラーは,0.022
μm以下とする。
注記 速い記録速度又は再生速度においては,これらの最大値以下のトラッキングエラーを得るため
に,高度サーボシステムを必要とすることがある。
26.2.5 試験速度
書込み試験は,関連する記録ストラテジを用いて,14.4.2で定義するディスクの速度で行う。
すべての読取り試験は,基準速度で行う。
26.3 記録条件
マーク及びスペースは,レーザの出力を変調して,ディスク上に書き込む。
26.3.1 記録パルス波形
レーザパワーを,附属書Gにある記録パルス波形の一つに従って変調する。
3T〜14Tは,記録パルスのマルチパルス列を適用して記録する。
69
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記録パワーは,記録パワー(Pw),消去パワー(Pe)及び冷却パワー(Pc)の三つのレベルをもつ。こ
れらは,ディスクの入射表面での光パワーであり,マーク及びスペースを書き込むために使用する。これ
ら三つのパワーレベルの値を,附属書Iに従って最適化する。
実際のPw,Pe及びPcの誤差は,最適値の5 %以内とする。
26.3.2 記録パワー
最適化した記録パワーPwo,Peo及びPcoは,次の範囲とする。
14.4.2.2で定義する基本記録ストラテジの場合:
8.0 mW ≦ Pwo ≦ 16.0 mW
3.0 mW ≦ Peo ≦ 9.0 mW
0.1 mW ≦ Pco ≦ 0.7 mW
14.4.2.3.1で定義する4倍速の記録ストラテジの場合:
11.0 mW ≦ Pwo ≦ 22.0 mW
3.0 mW ≦ Peo ≦ 11.0 mW
0.1 mW ≦ Pco ≦ 0.7 mW
26.4 測定条件
ジッタの試験は,ディスクの情報ゾーンで,(m-2),(m-1),m,(m+1),(m+2) と指定する五つの隣接す
るトラックのグループで行う。ジッタは,14.4.2.2のバイト32及び14.4.2.3で定義するEIブロックに規定
するすべての記録速度で測定する。
ジッタの測定は,附属書Eに記述するシステムを使用する。
ジッタは,次の手順に従って測定する。
26.3.1に従って,五つのすべてのトラック上に10回ランダムデータを記録する。
26.2で規定する条件下でのトラックmのデータを読み取る。
27 記録済み信号の特性
次の信号は,26.3.1で規定した記録条件を用いて記録した後に測定する。
27.1 チャネルビット長
記録ユニットごとの平均チャネルビット長は,次を満たさなくてはならない。
133.3 nm±1.4 nm
27.2 信号の定義
すべての信号は,フォトディテクタの出力電流に対して直線関係にあり,したがって,ディテクタの受
光パワーに対して直線関係にある。
27.2.1 高周波信号(HF)
HF信号は,読取りチャネル1で生成される4分割フォトディテクタの電流の和とする。HF信号は,記
録層の情報を表す記録マーク及びスペースによって変調する。
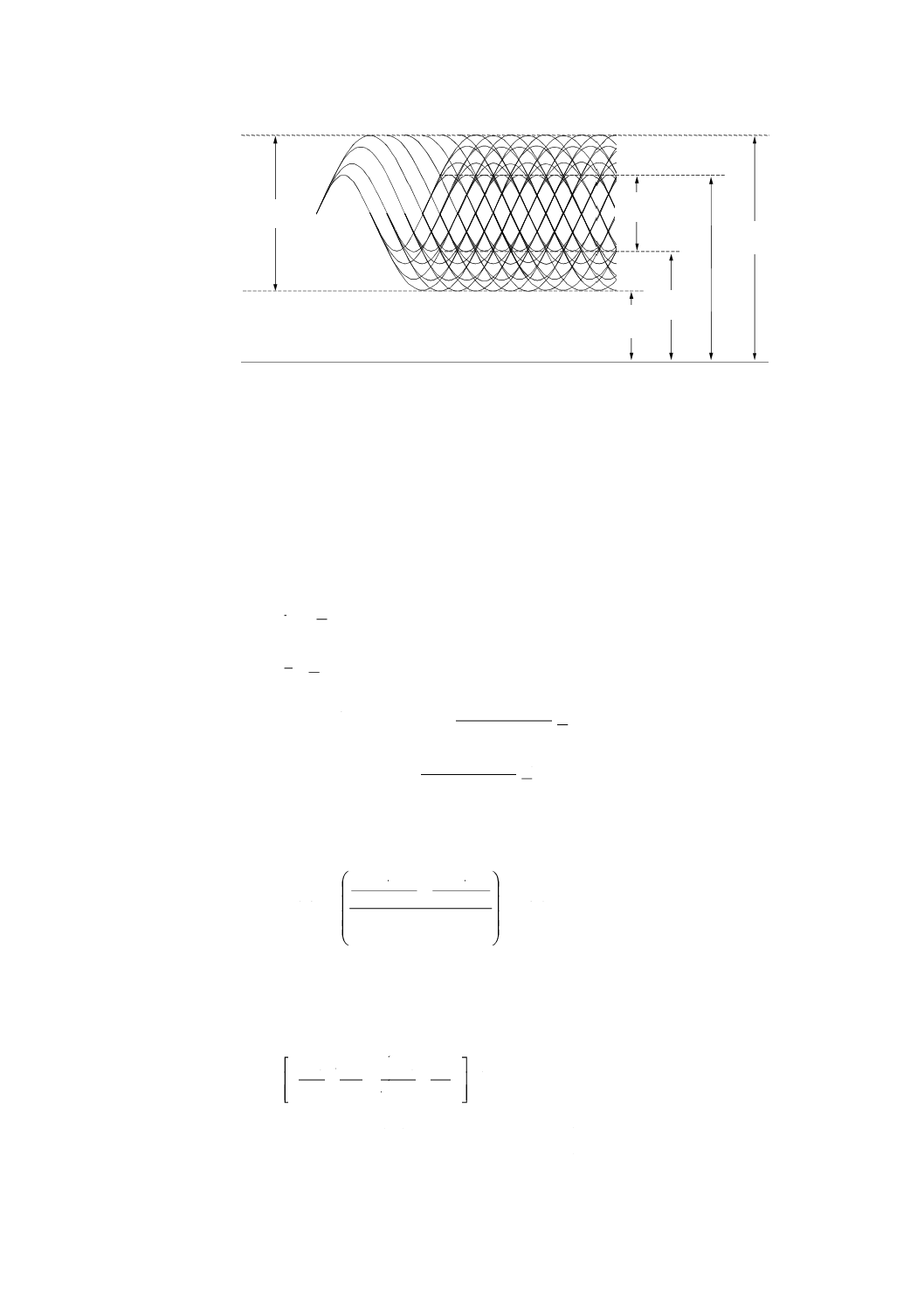
70
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
0レベル
I
1
4
I
1
4
L
I
3
L
I
3
I
3
H
I
1
4
H
図27−変調振幅
27.2.2 変調振幅
変調振幅I14は,最長記録マーク及びスペースによって発生したピークからピークまでの値とする(図
27参照)。ピークの値I14Hは,高域フィルタ前のHF信号のピーク値とする。変調振幅I3は,最短記録マー
ク及びスペースによって発生したピークからピークまでの値とする。0レベルは,ディスクを挿入しない
ときの測定装置から得る信号レベルとする。これらのパラメタは,異なるオーバーライト回数の場合,及
び異なる記録速度で実行する場合にもすべての条件下において,次の範囲とする。
60
.0
H
14
14≧
I
I
15
.0
14
3≧
I
I
一つのディスク内では,
0.25
Hmax
14
Hmin
14
Hmax
14
≦
I
I
I
−
1回転周期内では,
15
.0
Hmax
14
14Hmin
Hmax
14
≦
I
I
I
−
27.2.3 信号の非対称性
信号の非対称性は,次による。
15
.0
2
2
05
.0
14
L
3
H
3
L
14
H
14
+
+
−
+
−
≦
≦
I
I
I
I
I
27.2.4 正規化しきい値ジャンプ
二つの連続するECCブロック間では,いずれの場合も,正規化しきい値 (NSL) ジャンプは,次の範囲
とする。
(
)(
)
(
)(
)
50
.0
1
L,
3
1
H,
3
2
L,
3
2
H,
3
1
L,
3
1
H,
3
2
L,
3
2
H,
3
≦
−
+
−
+
−
+
I
I
I
I
I
I
I
I
ここに, I3H, 1及びI3L, 1は,リンク位置直前のI3レベルを示す。
I3H, 2及びI3L, 2は,リンク位置直前のI3レベルを示す。
71
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この規定は,二つのECCブロック(500 DOWサイクルまで)が,異なるオーバーライト回数の場合及
び異なる速度で記録する場合にも満たさなければならない。
27.2.5 ジッタ
ジッタは,2値化した読取り信号の時間変動の標準偏差σとする。この2値化した読取り信号は,HF読
取りチャネルからのHF信号を波形等化器及び低域フィルタを通した後,スライスして生成する(附属書
E参照)。立上がりエッジ及び立下がりエッジのジッタをPLLクロックで測定し,チャネルビットクロッ
ク周期によって正規化する。
ジッタは,附属書Eで規定する回路を使用して,基準速度で測定する。
ジッタの測定には,26.4で規定する条件を使用する。
測定したジッタは,最大で9.0 %とする。
27.2.6 クロストラック信号
クロストラック信号は,光ビームがトラックを交差するときに,読取りチャネル1において,フィルタ
を通過した正弦波状の和信号 (I1+I2) とする。クロストラック信号は,次による。
(
)
(
)
13
.0
max
2
1
PP
2
1
≧
I
I
I
I
+
+
27.3 読取りの安定性
気温55 ℃及び読取りパワー0.8 mWで読み取る場合,27.2.2〜27.2.6で規定するすべてのパラメタは,100
万回繰返し読み取った後でも規定範囲内とする。
注記 読取りパワーが同じでも基準速度より速度が遅い場合には,読取りの安定性は,低下する。
28 追加試験の条件
この規格に従った記録済みディスクを,JIS X 6241に従ったピックアップヘッドで測定する場合は,次
の基本信号規定を満足しなければならない。
28.1 試験環境
次を除くすべての条件は,26.1〜26.2.5と同じにする。
28.1.1 光学系
データの読取りに使用する集束光ビームの特性は,次による。
a) 波長(λ)
650 nm±5 nm
b) 開口数
0.60±0.01
c) 対物レンズは,厚さ0.6 mm及び屈折率1.55の平行基板による球面収差を補正しなければならない。
d) 単層ディスクの理想基板を通過した後の波面収差
最大0.033×λ rms
e) 対物レンズのひとみ(瞳)の縁での光強度
半径方向では最大光強度の60 %〜70 %
接線方向では最大光強度の90 %以上
f)
偏光
円偏光
g) 読取りパワー
0.7 mW±0.1 mW
h) レーザダイオードの相対ノイズ強度(RIN)* 最大−134 dB/Hz
注*
RIN=10 log[(交流光パワー実効値/Hz)/直流光パワー実効値](dB/Hz)
72
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
28.2 信号の定義
次の信号の定義は,27.2及び細分箇条を参照。
28.2.1 変調振幅
60
.0
H
14
14≧
I
I
15
.0
14
3≧
I
I
一つのディスク内では,
33
.0
Hmax
14
Hmin
14
Hmax
14
≦
I
I
I
−
(PBSあり)
一つのディスク内では,
20
.0
Hmax
14
14Hmin
14Hmax
≦
I
I
I
−
(PBSなし)
1回転周期内では,
15
.0
14Hmax
Hmin
14
Hmax
14
≦
I
I
I
−
(PBSあり)
1回転周期内では,
10
.0
Hmax
14
Hmin
14
Hmax
14
≦
I
I
I
−
(PBSなし)
28.2.2 信号の非対称性
15
.0
2
2
05
.0
14
L
3
H
3
L
14
H
14
+
+
−
+
−
≦
≦
I
I
I
I
I
28.2.3 ジッタ
ジッタは,附属書Eで規定する回路を使用して,基準速度で測定する。ジッタの測定は,26.4で規定す
る条件を使用する。測定したジッタは,最大で9.0 %とする。
28.2.4 クロストラック信号 (
)
(
)
10
.0
max
2
1
PP
2
1
≧
I
I
I
I
+
+
28.2.5 位相差トラッキングエラー信号
図28で示す四分割フォトディテクタ各素子の出力電流は,Ia,Ib,Ic及びIdで識別する。
位相差トラッキングエラー信号は,光ビームがトラックを交差するとき,ディテクタの対角の対間の位
相差:位相(Ia+Ic)−位相(Ib+Id)から導く(図29及び附属書F参照)。
位相差トラッキング信号は,30 kHzのカットオフの低域フィルタをかける。
この信号は,次の規定を満たす(図29参照)。
振幅 正のゼロ交差において,半径方向のオフセット0.10 μmがあるとき,
1.1
5.0
/
Δ
〜
=
T
t
。ここで,t
Δ
は,フォトディテクタ素子の対角の対間の出力電流の和信号の位相差から導く平均時間差とし,Tはチャ
ネルビットクロック周期とする。
非対称性 非対称性は次による(図29参照)。
2.0
2
1
2
1
≦
T
T
T
T
+
−
ここに,
T1:
T
t
Δ
の正のピーク値
T2:
T
t
Δ
の負のピーク値
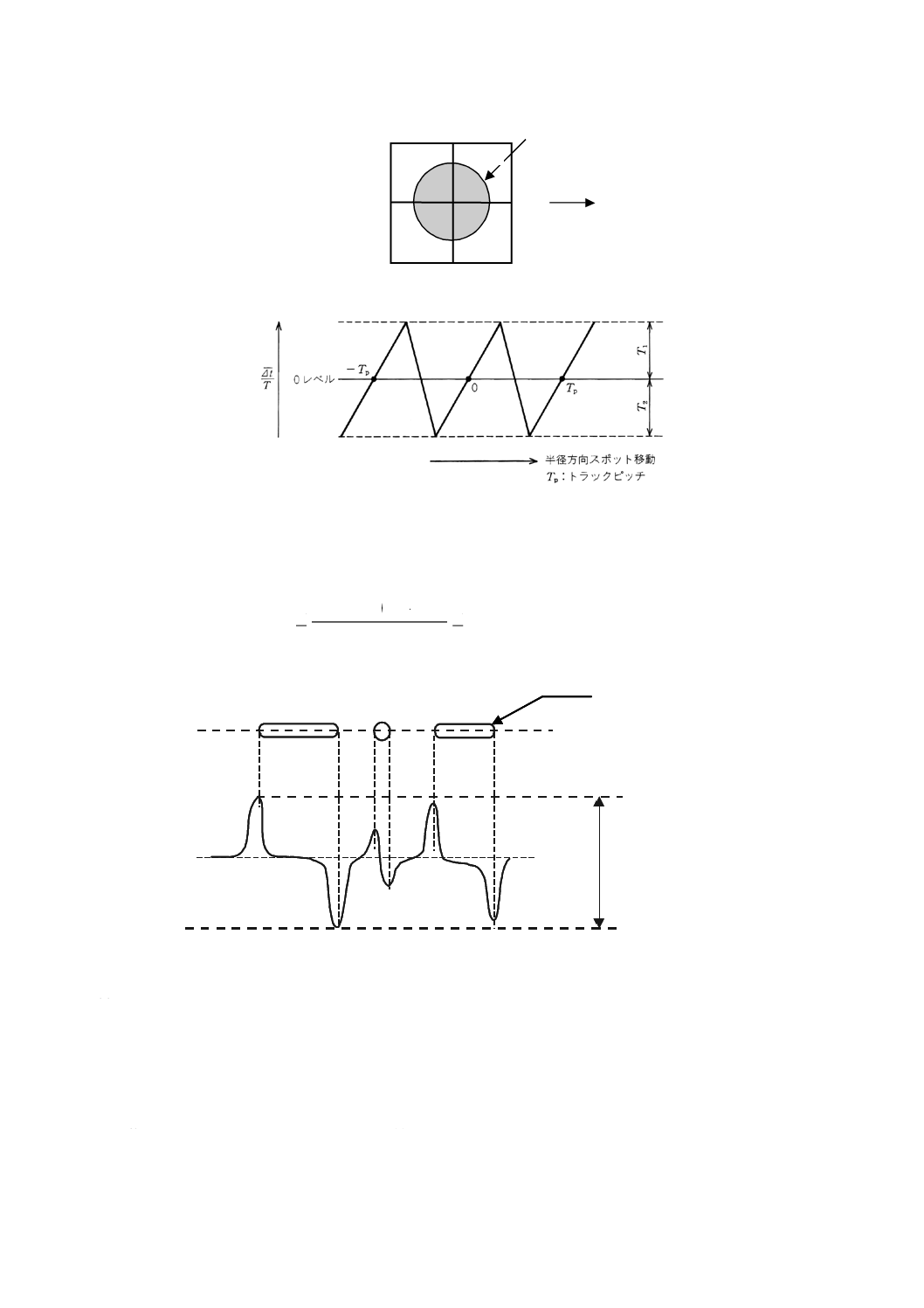
73
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図28−四分割フォトディテクタ
図29−位相差トラッキングエラー信号
28.2.6 接線方向のプッシュプル信号
この信号は,差動出力 (Ia+Id)−(Ib+Ic)の瞬時レベルから導く。この信号は,次による(図30参照)。
(
)(
)
[
]
9.0
0
14
pp
c
b
d
a
≦
≦
I
I
I
I
I
+
−
+
(I +I )-(I +I )
a d
bc
p-p
マーク
(I +I )-(I +I )
a d
bc
p-p
マーク
図30−接線方向のプッシュプル信号
29 記録層の品質
ディスク上のデータの完全性のために,記録層は,次の初期品質規定を満たさなければならない。
29.1 欠陥
欠陥は,気泡及び黒点とする。欠陥の直径は,次の規定を満たす。
− 気泡については,最大100 μmとする。
− 複屈折を発生させる黒点については,最大200 μmとする。
− 複屈折を発生させない黒点については,最大300 μmとする。さらに,欠陥は,トラックの走査方向
光ビーム
接線方向
Ib
Ic
Ia
Id
[(Ia+Id)−(Ib+Ic)]pp
74
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の80 mmの距離内で,次の規定を満たす。
− 30 μmより大きい欠陥長の総和の最大値は,300 μmとする。
− 欠陥の数は,最大6個とする。
29.2 データエラー
バイトエラーは,1バイト内の一つ以上のビットがそれらの元の記録値と比較して,間違った値をもつ
場合に起こる。
13.3で定義するECCブロックの行に,少なくとも1バイトのエラーがある場合は,その行は,PIエラ
ーと判定する。
13.3で定義するECCブロックの行に,五つより多いエラーバイトがある場合は,その行は,“訂正不能
PI”と呼ぶ。
ディスクは,リードインゾーンの開始からリードアウトゾーンの終了までの連続した単一の記録処理の
中で,任意のデータを用いて書き込まれる(“ディスクアットワンス”モード)。
初期記録後の再生において,エラー訂正システムが検出するエラーは,次の規定を満たす。
− どの8連続ECCブロックにおいても,エラー訂正前のPIエラーの総数は280以下とする。
− どのECCブロックでも,訂正不能PIの行の数は,4個以下とする。
第7章 ユーザデータの特性
30 試験方法
箇条31では,この規格に従って,ディスク上のユーザデータの適合性を検査するための一連の測定法に
ついて示す。これは,ユーザ記録データの読みやすさを検査する。データは任意と仮定する。データは,
8.1.2で規定した動作環境及び記録装置によって記録する。読取り試験は,箇条9で定義した基準測定装置
上で行う。
箇条26が欠陥を無視しているのに対して,箇条31は,欠陥を読取り信号の不可避な劣化として扱う。
欠陥の重大性は,30.2で定義する読取りチャネルのエラー検出及び訂正回路によるエラーの訂正可能性に
よって決定する。箇条31の規定は,データ交換に必要な最低限のデータの品質を定義する。
30.1 環境
31.1及び31.2のすべての信号は,8.1.2で定義した動作環境条件の範囲にあるすべての環境において,規
定の範囲内になければならない。試験前には,ディスクの製造業者の指示に従って,ディスクの入射表面
の汚れを取り除かなければならない。
30.2 基準測定装置
箇条31で規定するすべての信号は,箇条9で定義した基準測定装置の指示したチャネルで測定する。こ
の測定装置は,これらの試験の目的として,次の特性を満たす。
30.2.1 光学系及び機械系
集束光ビームは,9.2 a)〜i) で定義する特性を満たす。ディスクは,9.5に従って回転する。
30.2.2 読取りパワー
読取りパワーは,ディスクの入射面に入射したパワーとし0.7 mW±0.1 mWとする。
30.2.3 読取りチャネル
測定装置には,二つの読取りチャネルがある。読取りチャネル1は,対物レンズの出射ひとみ(瞳)の
総光量の和信号 (I1+I2) とする。読取りチャネル2は,2等分した対物レンズの出射ひとみ(瞳)におい
75
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
て,光量の差信号 (I1−I2) とする。これらのチャネルは,9.3及び9.6に従って実装する。
読取りチャネル1からの信号は,前処理として,波形等化し,フィルタを通す。読取り信号を2値化す
るためのしきい値は,記録中のパラメタ変動によるマーク及びスペースサイズの変化の影響を最小化する
ように制御する。箇条31で規定するディスクの品質を測定するための,波形等化器,フィルタ及びスライ
サ並びにPLLの特性は,ジッタ測定に関して附属書Eで規定するものと同一とする。
30.2.4 エラー訂正
データバイトのエラーの訂正は,13.3の定義に基づくエラー検出及び訂正システムによって行う。
30.2.5 トラッキング
信号の測定中,光ビームの焦点と記録層との間の軸方向のトラッキングエラーは,0.20 μm以下とし,
光ビームの焦点とトラックの中心との間の半径方向のトラッキングエラーは,0.022 μm以下とする。
31 記録ユニットの最低品質
この箇条では,データ交換に要求される記録ユニットのデータの最低品質を規定する。品質は,箇条9
及び附属書Eで定義する基準測定装置上で測定する。
バイトエラーは,一つのバイト内で一つ以上のビットが間違った値をもつ場合に発生し,ECC及びEDC
回路で検出する。
31.1 トラッキング
光ビームの焦点は,意図なくトラックをジャンプしてはならない。
31.2 ユーザ記録データ
読取りチャネル1で読み取る記録ユニットのユーザ記録データは,13.3で定義するエラー訂正で訂正で
きないバイトエラーを含んではならない。訂正できないバイトエラーが発生した場合は欠陥管理システム
を使うことができる(附属書M参照)。
76
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
80 mmディスク
序文
この附属書は,1.46ギガバイト及び2.92ギガバイトの容量をもつ80 mmディスクについて規定する。
A.1 80 mmディスクの特性
80 mmディスクのすべての機械的特性,物理的特性及び光学的特性は,次に挙げる項目を除いて本体に
規定するものと同じにしなければならない。
全体寸法(10.2参照)
ディスクの直径d1は,次による。
d1=80.00 mm±0.30 mm
情報ゾーン(10.7参照)
情報ゾーンは,直径d6及び次に示す直径d7とで囲む領域とする。
d7≧77.5 mm
情報ゾーンは,リードインゾーン,データゾーン及びリードアウトゾーンで構成する。
質量(11.1参照)
ディスクの質量は,6.0 g〜9.0 gとする。
慣性モーメント(11.2参照)
回転軸に関するディスクの慣性モーメントは,最大0.010 g・m2とする。
ダイナミックインバランス(11.3参照)
回転軸に関するディスクのダイナミックインバランスは,最大1.5 g・mmとする。
トラックの形状(14.1参照)
トラックは,情報ゾーン内で連続する。グルーブトラックは,半径22.0 mm(最大)から始まり,半径
38.75 mm(最小)で終了する。
ADIP語の構造,ビット2〜23(14.4.1.1参照)
リードアウトゾーンの最初のアドレスとなる物理ADIPアドレス (0379CC) は,最大半径38.00 mmに位
置する。
一般情報−バイト 0〜31(14.4.2.1参照)
a) バイト1−ディスクサイズ ビットb7〜b4は,ディスクサイズを規定し,80 mmディスクを示す“0001”
に設定する。
b) バイト4〜15−データゾーン位置の指定 バイト9〜11は,データゾーンの最大取り得る物理セクタ
としてPSN 911 151を示す (0DE72F) に設定する。
他のバイトは本体と同じとする。
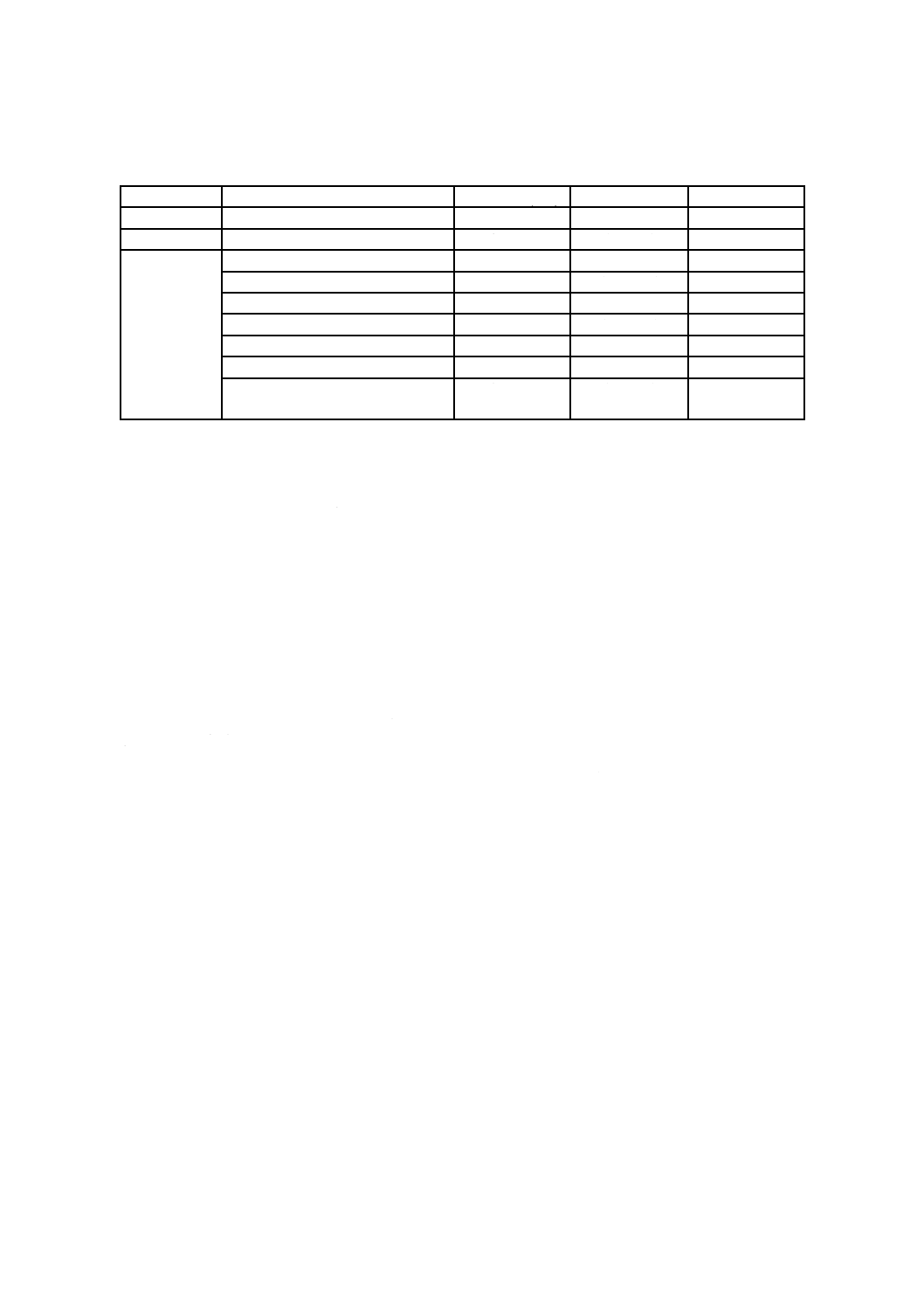
77
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
情報ゾーンのレイアウト(箇条16参照)
表A.1−全面フォーマットした情報ゾーンのレイアウト
ゾーン
内容
公称半径 (mm)
開始セクタ番号
物理セクタ数
リードイン
120 mmディスクとすべて同じ
−
−
−
データ
データゾーン
開始 24.000
(030000)
714 544
リードアウト
バッファゾーン3
開始 38.000
(0DE730)
768
アウターディスク識別ゾーン
(0DEA30)
256
ガードゾーン2
(0DEB30)
4 096
予約ゾーン4
開始 38.082
(0DFB30)
4 096
アウタードライブテストゾーン
(0E0B30)
12 288
アウターディスクテストゾーン
(0E3B30)
2 048
ガードゾーン3
開始 38.375
終了≧38.500
(0E4330)
公称7 936
物理フォーマット情報(17.11.1参照)
バイト4〜15−データゾーン位置の指定
バイト9〜11は,次のように規定する。
バイト9〜11が,制御データゾーンの最初の16個のECCブロックにある場合,それらは,データゾー
ン記録部の最後の物理セクタのセクタ番号を規定する。
バイト9〜11が,残りの176個のECCブロックにある場合,それらすべてに,データゾーン記録部の最
後の物理セクタのセクタ番号を規定するか,又はそれらすべてに,データゾーンが取り得る最後の
物理セクタとなる PSN 911 151を指定する (0DE72F) に設定する。
他のバイトは本体と同じとする。
データゾーン(箇条18参照)
ユーザデータ領域での記録用の714 544個の物理セクタとする。
データゾーンの開始半径は,物理ADIPアドレスの位置(00C000)によって決定し,最大終了半径は,
ADIP物理アドレスの位置(0379CC)によって決定する(14.4.1.1のビット2〜23及び13.7.1参照)。
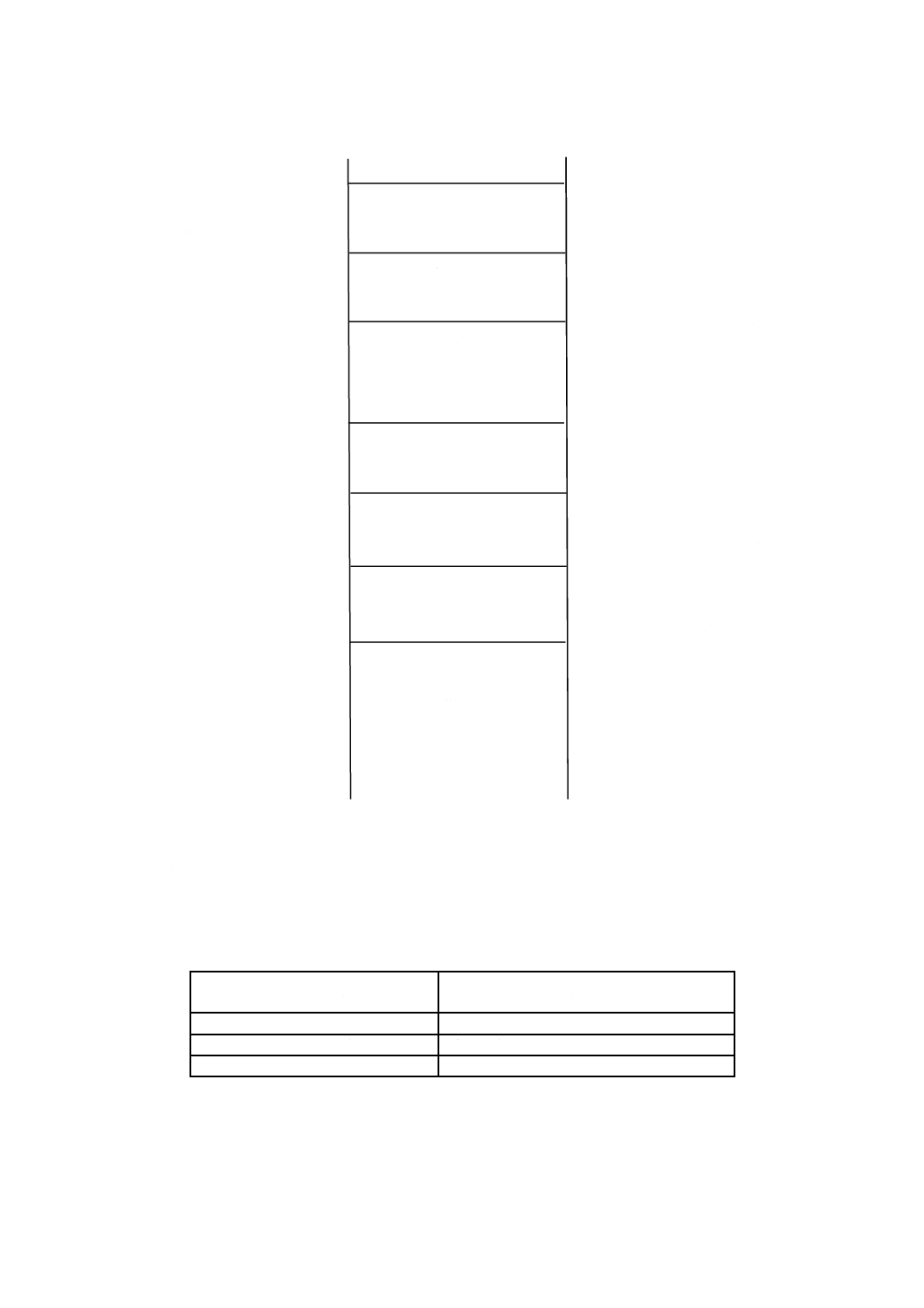
78
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
リードアウトゾーン(箇条19参照)
図A.1−リードアウトゾーン
バッファゾーン3(19.1参照)
バッファゾーン3の開始位置は,(0DE730)以下とする。
シーケンシャル記録(21.3参照)
表A.2−テンポラリリードアウトゾーンの終了位置
データゾーンの記録した部分の長さ
(終了半径)
テンポラリリードアウトゾーンの終了位置
(半径)
34.0 mm以下の場合
35.0 mm 最小
34.0 mm〜37.5 mmの場合
データゾーン終了半径+1.0 mm 最小
37.5 mm〜38.0 mmの場合
38.5 mm
テンポラリリードアウトゾーンの終了位置と,半径38 mmに位置するバッファゾーン3との間に,未記
録領域があってもよい。
物理セクタ番号911 152
物理セクタ番号 911 919
物理セクタ番号 911 920
物理セクタ番号(0DE730)
データゾーン
バッファゾーン3
768物理セクタ
アウターディスク識別ゾーン
256物理セクタ
ガードゾーン2
4 096物理セクタ
主データを(00)に設定
物理セクタ番号 911 175
物理セクタ番号 911 176
物理セクタ番号 911 271
物理セクタ番号(0DEA2F)
物理セクタ番号(0DEA30)
物理セクタ番号(0DEB2F)
物理セクタ番号(0DEB30)
物理セクタ番号(0DFB2F)
アウタードライブテストゾーン
12 288物理セクタ
アウターディスクテストゾーン
2 048物理セクタ
予約ゾーン
4 096物理セクタ
ガードゾーン3
7 936物理セクタ
主データを(00)に設定
物理セクタ番号 911 272
物理セクタ番号(0DFB30)
物理セクタ番号(0E0B2F)
物理セクタ番号(0E0B30)
物理セクタ番号(0E3B2F)
物理セクタ番号(0E3B30)
物理セクタ番号(0E4330)
物理セクタ番号(0E432F)
物理セクタ番号(0E622F)
物理セクタ番号 920 367
物理セクタ番号 920 368
物理セクタ番号 932 655
物理セクタ番号 932 656
物理セクタ番号 934 703
物理セクタ番号 934 704
物理セクタ番号 942 639
79
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
FDCBのフォーマット(22.2参照)
バイトD46−記録状態フラグ
ビット6〜5は,次のように規定する。
“00” リードアウトは,未記録とする。
“01” テンポラリリードアウトは,記録済みとする。
“10” リードアウトは,PSN (0DE730)〜(0DFB2F) の間,記録済みとする(箇条19及び21.2.1
参照)。
“11” リードアウトは,すべて記録済みとする。
80
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
データゾーンの拡張フォーマット情報の構造
(対応国際規格では,この附属書において,コピープロテクションシステムでの暗号化・解凍などのデ
ータゾーンにおけるADIP補助フレームについて規定しているが,この規格では不要であり,不採用とし
た。)
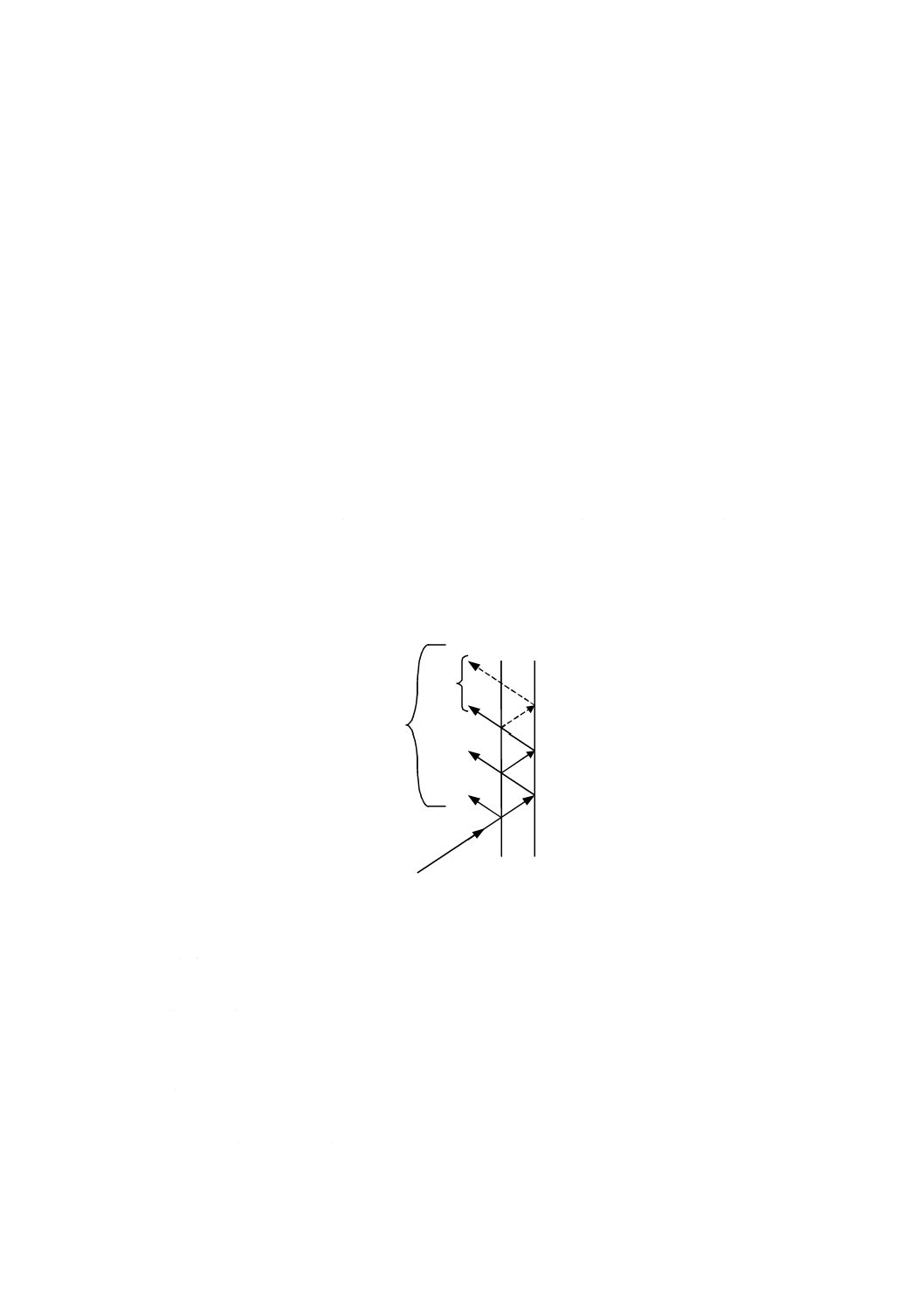
81
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
光反射の測定
序文
この附属書は,光反射の測定について規定する。
C.1 校正方法
ディスクの反射率は,幾つかの方法で測定する。最も一般的な方法は,平行光法及び集束光法の二つで
ある。
プレーヤで使用するには,反射率の分かった基準ディスクを用いる集束光法が最も適切で簡単な方法だ
が,基準ディスクの校正には平行光法がより簡単である。
集束光法で反射率を測定する場合,ディスクの反射層から返って来た光 (Im) だけがフォトディテクタ上
に落ちる。ディスク表面からの反射光及び記録層間の内部反射からの光は,大部分がフォトディテクタ外
に落ちる。平行光法では,“総”反射 (I//) だけが測定されるので,反射層からの“主”反射を決定するに
は計算が必要となる。
良好な基準ディスク,例えば,金の反射鏡面をもつ厚さ0.6 mmのガラスディスクを用いる。この基準
ディスクは,図C.1に示すように平行光で測定する。
図C.1−反射の校正
図C.1の各事項は,次による。
R=記録層の反射率(ダブルパスでの基板透過を含む)
rs=入射面の反射率
Rref=集束光で測定した反射率(Im / IBで定義する。)
R//=平行光で測定した反射率(I// / IBで定義する。)
IB=入射光
Is=入射面の反射による反射光
Im=記録層の反射による主反射光
Is
Im
Iint
I//
R
rs
IB
82
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Iint=入射面及び記録層間の内部反射による反射光
I//=測定値(Is+Im+Iint)
入射面の反射率は,次による。
2
S
1
1
+
−
=nn
r
ここに,
n: 基板の屈折率
主反射Im=I//−Is−IintからRrefを次のように導く。
(
)(
)
(
)
−
×
−
−
×
−
=
//
S
S
//
2
S
ref
2
1
1
R
r
r
R
r
R
基準ディスクは,基準測定装置で測定する。集束光で測定した基準ディスクから得る全ディテクタ電流
(I1+I2)は,上記の方法で計算してImとする。
ここにアレンジメントは校正し,集束光反射率は,入射面の反射率とは無関係になり,ダブルパスでの
基板透過を含む記録層の反射率に線形に比例した値となる。
C.2 測定方法
a) 未記録情報ゾーンの反射率 基準測定装置を用いた反射率の測定法は,次による。
1) 校正した反射率Rrefをもつ基準ディスクから,全ディテクタ電流 (I1+I2)s を測定する。
2) 測定対象となるディスクのグルーブトラック領域から,全ディテクタ電流 (I1+I2)gを測定する。こ
の場合,測定するグルーブトラック及びその両側に隣接する二つのトラックは未記録でなければな
らない。未記録状態にするにはOPCアルゴリズムによって決定したPeパワーをトラックに照射し
て行う(附属書I参照)。
3) 未記録ディスクの反射率Rdは,次による。
(
)
(
)
ref
S
2
1
g
2
1
d
R
I
I
I
I
R
×
+
+
=
b) 記録済み情報ゾーンの反射率 基準測定装置を用いた反射率の測定法は,次による。
1) 校正した反射率Rrefをもつ基準ディスクからの全ディテクタ電流 (I1+I2)sを測定する。
2) 測定対象となるディスクの記録済みグルーブトラックからI14Hを測定する。この場合,測定するト
ラックの両側に隣接する少なくとも二つのトラックは記録済みでなければならない。トラックへの
記録はOPCアルゴリズムによって決定した最適パワーを用いて行う(附属書I参照)。
3) 記録したディスクの反射率R14Hは,次による。
(
)
ref
S
2
1
H
14
H
14
R
I
I
I
R
×
+
=
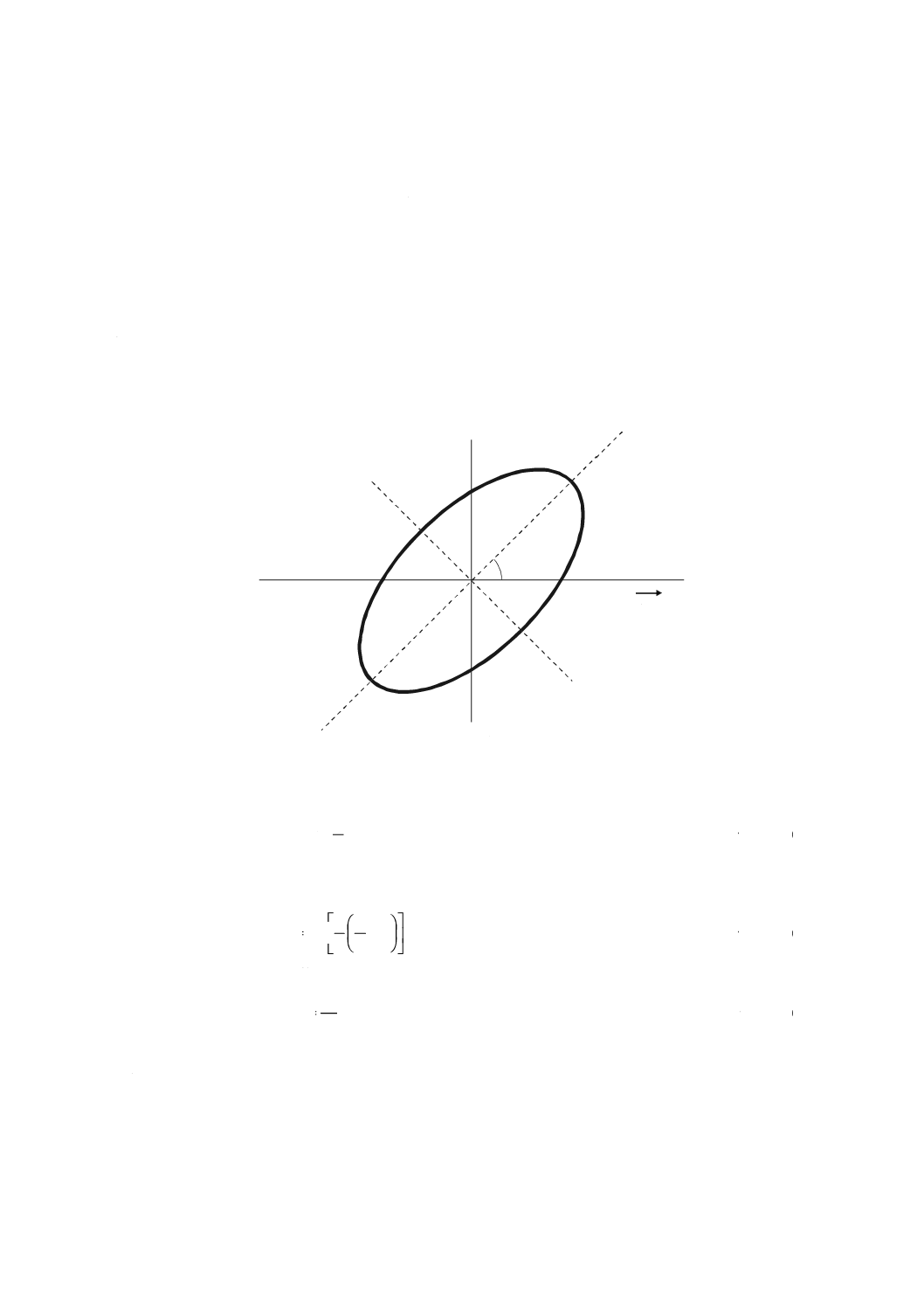
83
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
複屈折の測定
序文
この附属書は,複屈折の測定について規定する。
D.1 測定原理
複屈折を測定するために,平行光の円偏光を使用する。位相遅延は,反射光のだ円率を観測することに
よって測定する(図D.1参照)。
図D.1−だ円率e=b/a及び方位θをもつだ円
だ円の方位θは,光学軸の方位で決定する。
4
π
−
=γ
θ
·············································································· (D.1)
ここに,
γ: 光学軸と半径方向との間の角度
だ円率e=b/aは,位相遅延δの関数を表す。
−
=
δ
2
π
2
1
tan
e
·································································· (D.2)
位相遅延δが既知のとき,複屈折BRは,波長の分数として表す。
δ
λ
π
2
=
BR
mm ········································································ (D.3)
このように,ディスクから反射しただ円偏光を観測することによって複屈折を測定でき,光学軸の方位
も評価できる。
D.2 測定条件
D.1に規定する複屈折の測定は,次の条件で行う。
半径方向
a
b
θ
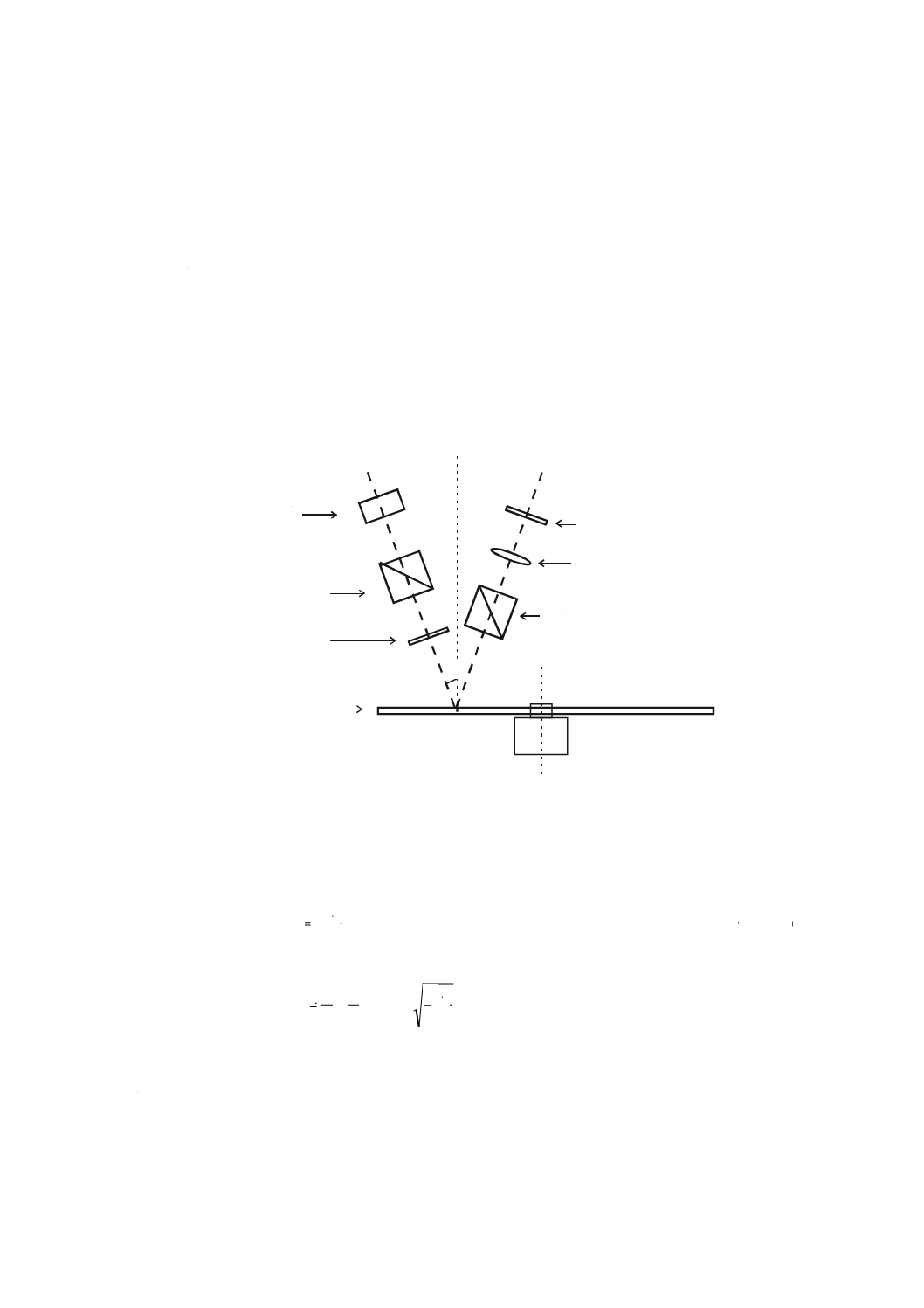
84
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
反射での測定モード
:ダブルパス測定法
レーザ光の波長
:640 nm±15 nm
光ビーム径 (FWHM)
:1.0 mm±0.2 mm
基準面Pに垂直な半径方向の面に関する半径方向の入射光の角度β
:7.0°±0.2°
ディスク装着
:水平
回転
:1 Hz以下
温度及び相対湿度
:8.1.1の規定による。
D.3 測定装置の例
この規格は,複屈折を測定する特定の測定装置を規定しないが,この測定に適した装置の例を図D.2に
示す。
図D.2−複屈折測定装置の例
偏光子(消光比≒10−5)にコリメートしたレーザ光源からの光は,1/4波長板によって円偏光にする。反
射光のだ円率は,回転検光子及びフォトディテクタで分析する。ディスクのあらゆる位置に対して強度の
最小及び最大値を測定する。だ円率はこのとき,
max
min
2
I
I
e=
·············································································· (D.4)
式(D.2),式(D.3)及び式(D.4)を組み合わせて,次を得る。
max
min
arctan
π
4
I
I
BR
×
−
=
λ
λ
この装置は,次のように容易に校正できる。
− Iminは,偏光子又は1/4波長板を測定することによって0に設定する。
− 鏡面を測定するときは,Imin=Imax
表面反射による直流的変化以外に,表面反射及び記録面からの反射のために交流成分が生じる可能性が
ある。この交流成分は,基板が限りなく平らで光源の干渉性が高いときにだけ顕著となる。
ディスク
1/4 波長板
偏光子
レーザ
回転検光子
コリメータレンズ
フォトディテクタ
β
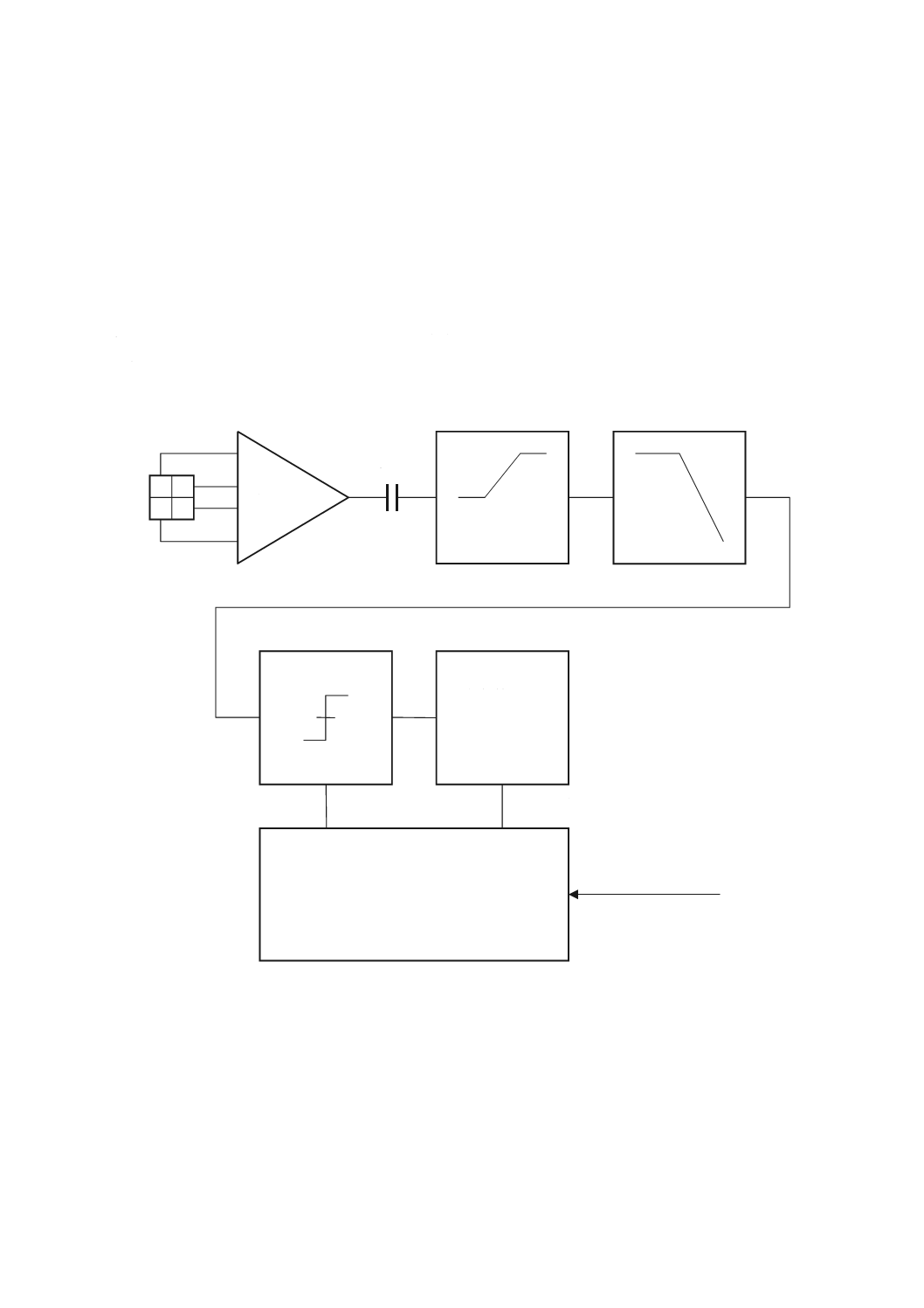
85
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(規定)
ジッタの測定
序文
この附属書は,ジッタの測定について規定する。
E.1
ジッタ測定のためのシステム図及びユーザデータの特性表示
一般システム図を,図E.1に示す。
図E.1−ジッタ測定のための一般システム図
前置増幅器
四分割
ディテクタ
HF 信号
交流カップリング
LPF
EQ
スライサ
PLL
全データエッジ
クロック信号
位相検出器
フィルタ
VCO
回転パルスからの
開始・停止信号
ジッタアナライザ
(例えば,タイムインターバルアナライザ)
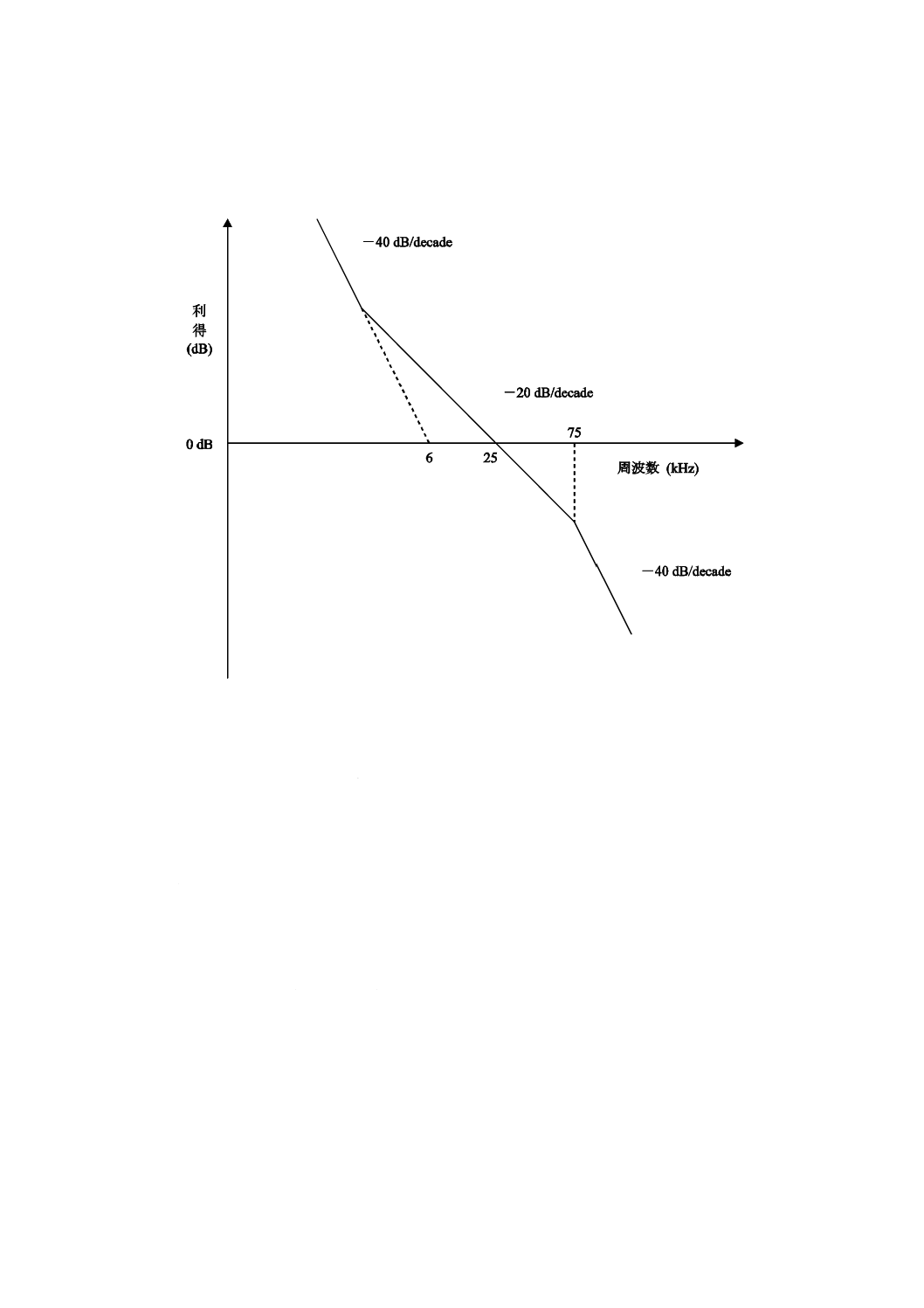
86
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.2
PLLの開ループ伝達関数
PLLの開ループ伝達関数を,図E.2に示す。
図E.2−PLLの開ループ伝達関数の図表示
E.3
スライサ
スライサは,閉ループ−3 dBで帯域幅5 kHzの1次積分フィードバック型オートスライサとする。
E.4
測定条件
フォトディテクタ前置増幅器の帯域幅は,遅延ひずみを防ぐために20 MHz以上とする。
等化器:伝達関数H(z)=1.364z−2−0.182(1+z−4)をもつ3タップトランスバーサルフィルタ
低域フィルタ:6次ベッセルフィルタ,fc(−3 dB)=8.2 MHz
フィルタ及び波形等化
− 利得変動:最大1 dB(7 MHz以下)
− 群遅延変動:最大1 ns(7 MHz以下)
− (5.0 MHzでの利得−0 Hzでの利得):3.2 dB±0.3 dB
交流カップリング(高域フィルタ)=1次,fc (−3 dB)=1 kHz
角度偏差の修正:直流偏差だけ修正する。
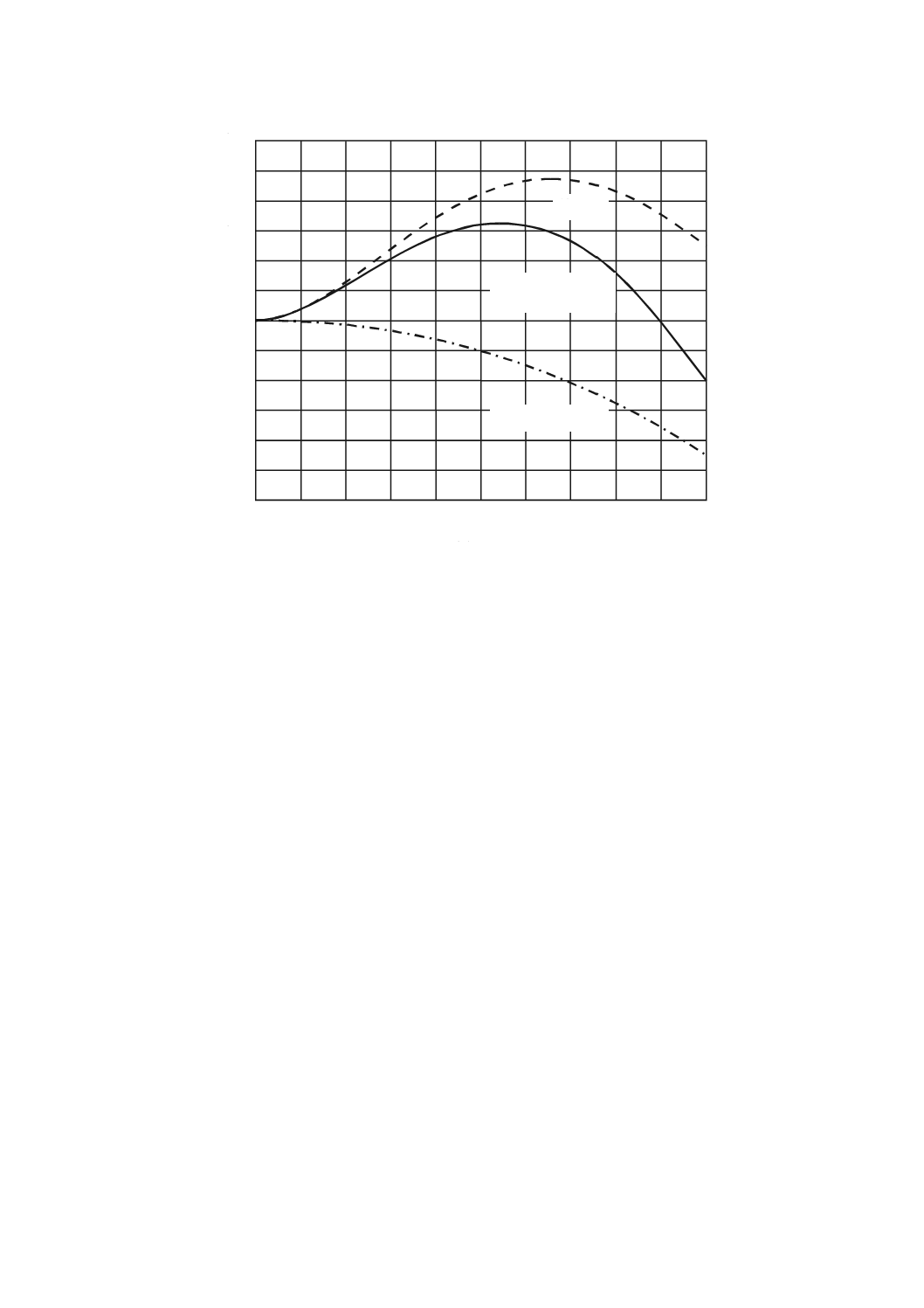
87
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図E.3−波形等化及び低域フィルタの周波数特性
E.5
測定
1回転中のすべての立上がり及び立下がりエッジのジッタを測定する。
利
得
(dB)
+6
0
−3
−6
周波数 (MHz)
0
5
10
等化器
ベッセルフィルタ
等化器+
ベッセルフィルタ
+3
88
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(規定)
位相差トラッキングエラー信号の測定
序文
この附属書は,位相差トラッキングエラー信号の測定について規定する。
F.1
位相差トラッキングエラー信号の測定方法
トラッキングエラー測定の基準回路を,図F.1に示す。四分割フォトディテクタの対角の対の各出力は,
次の伝達関数によって定義した波形等化の後に独立して2値化する。
()
ω
ω
ω
i
10
7.4
1
i
10
6.1
1
i
8
7
×
×
+
×
×
+
=
−
−
H
比較器の利得は,最小の信号振幅でも出力が完全飽和に達しなければならない。2値化したパルス信号
のエッジ(信号B1及びB2)の位相は,相互に比較し時間進み信号C1及び時間遅れ信号C2を作る。位相
比較器は,個々のエッジに応じて,Δtiの符号(正負)に応じ,信号C1又はC2を出力する。トラッキン
グエラー信号は,低域フィルタによってC1及びC2信号を平滑化し,単位利得差動増幅器の手段で差し引
くことによって作る。低域フィルタは,30 kHzで−3 dBの遮断周波数をもつ1次フィルタとする。
Tの1 %は,0.38 nsのように非常に小さい時間差を測定しなければならないので,回路実装に当たって
は特別な注意をしなければならない。また,注意深い平均化が必要となる。
四分割フォトディテクタの対角の対からの二つの信号間の平均時間差は,次による。
∑
=
i
Δ
1
Δ
t
N
t
ここに,
N: 立上がり及び立下がりの両方のエッジの数
F.2
タイムインターバルアナライザを使用しない
T
t/
Δ
の測定
相対時間差
T
t/
Δ
は,C1及びC2信号の振幅及び読取り信号の周波数成分を基準化している場合のトラ
ッキングエラー信号の振幅で表す。トラッキングエラー振幅TVE
Δ
と時間差との関係は,次による。
n
V
T
t
V
NnT
t
V
T
t
TVE
pc
pc
i
pc
i
i
Δ
Δ
Δ
Δ
×
=
=
=
∑
∑∑
ここに,
Vpc: C1及びC2信号の振幅
Ti: 3T〜14Tの範囲内で読取り信号の実際の長さ
nT: 実際の長さの重み付き平均
NnT: 平均時間の総和
トラッキングの利得の規格は,トラッキングエラー振幅を用いて,半径方向のオフセット0.1 μmで,次
のように書き換えることができる。
n
V
TVE
n
V
pc
pc
1.10
Δ
50
.0
≦
≦
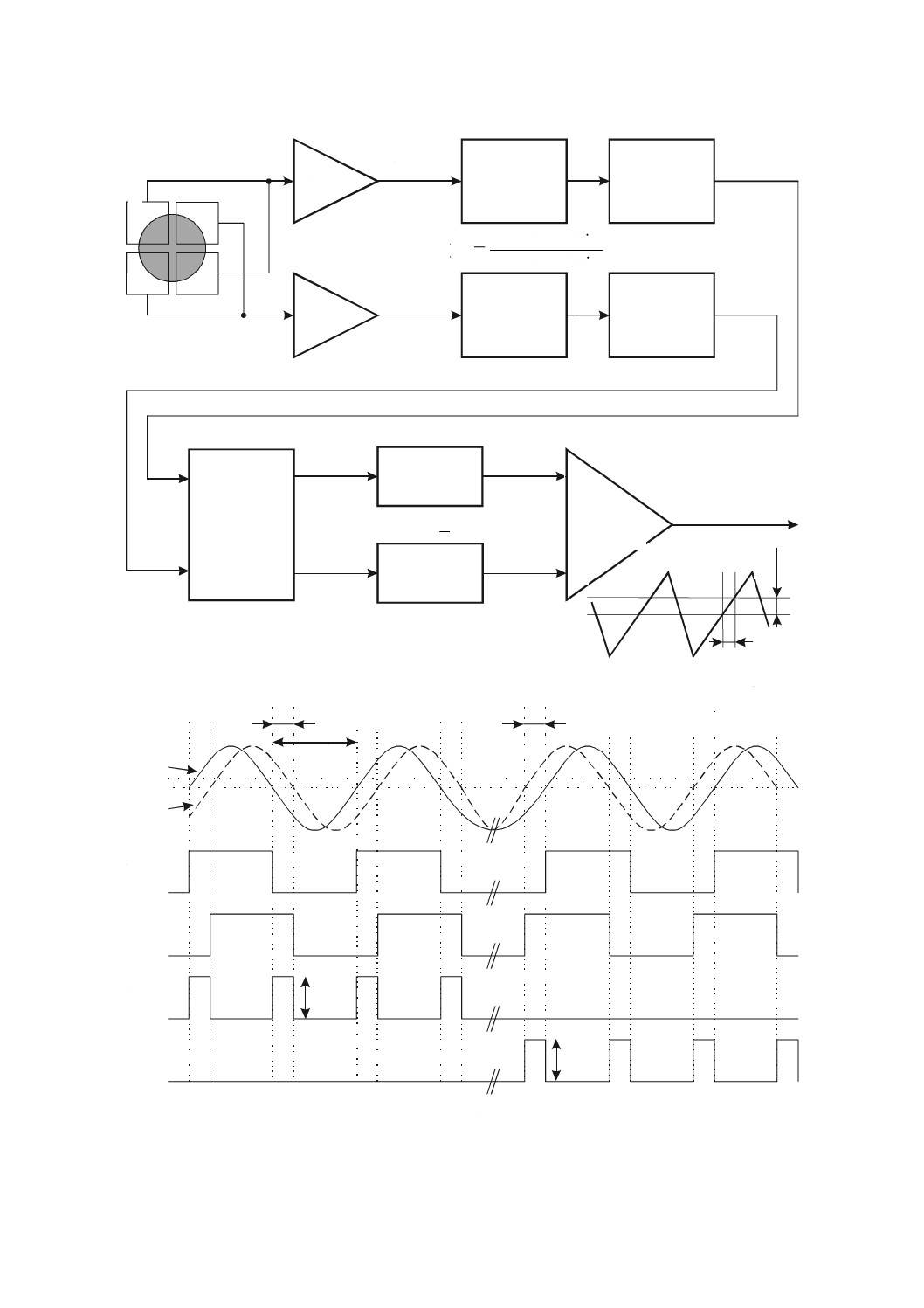
89
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図F.1−トラッキングエラー測定回路
∆ti=正
Vpc
Ti
∆ti=負
信号 A1
信号 A2
信号 B1
信号 B2
信号 C1
信号 C2
Vpc
Ia
増幅器
波形等化器
H(iω)
レベル比較器
位相比較器
差動増幅器
(利得1)
信号 A1
信号TVE
トラッキングエラー
(0.1 μm)
ω
ω
ω
H
i
10
4.7
1
i
10
6.1
1
)
i(
8
7
×
×
×
×
−
−
+
+
=
1次LPF
fc (−3 dB) = 30 kHz
増幅器
信号 A2
波形等化器
H(iω)
レベル比較器
信号 B1
信号 B2
低域フィルタ
+
信号 C1
−
信号 C2
低域フィルタ
∆
T
V
E
Ib
Ic
Id
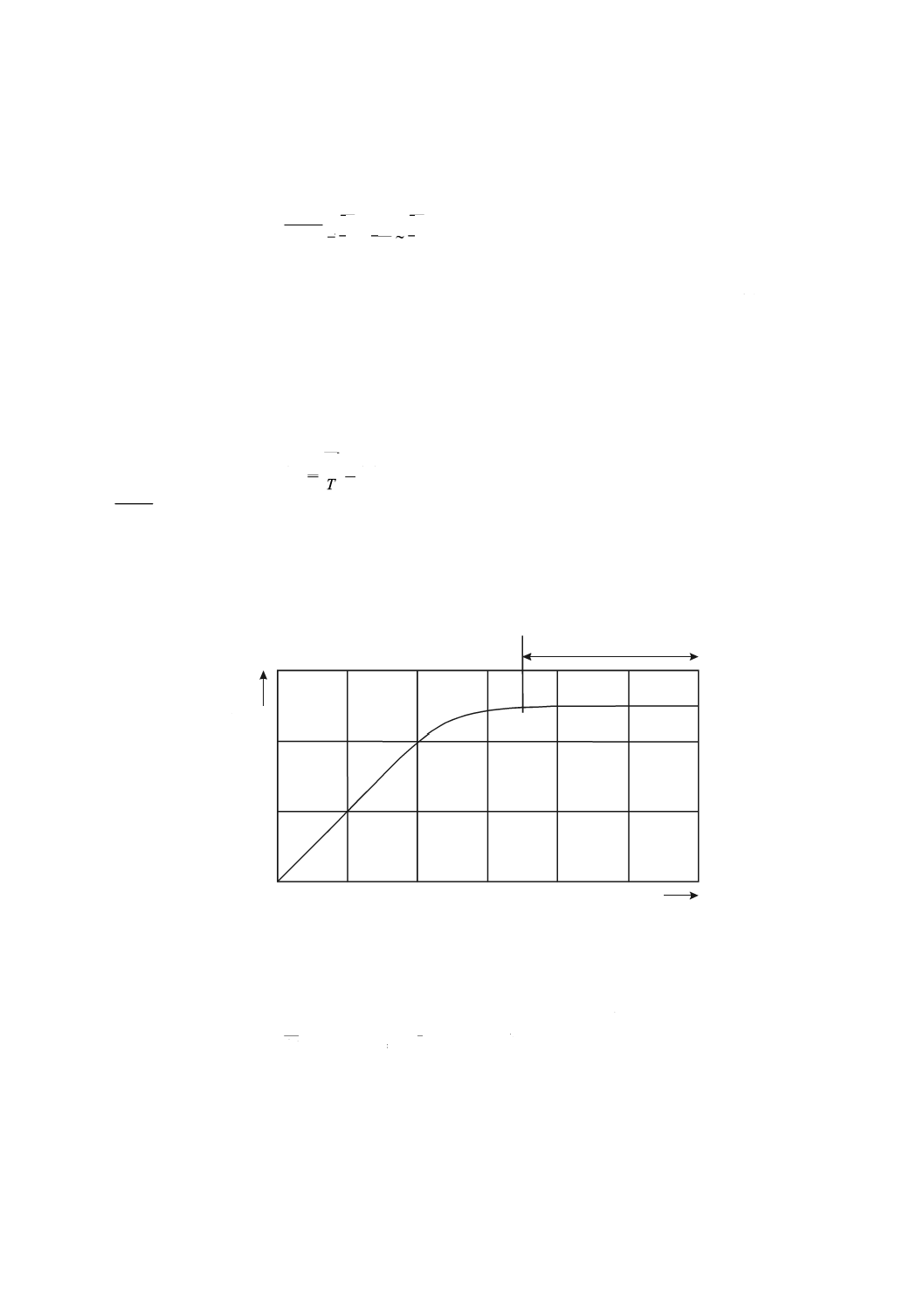
90
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
F.3
回路の校正
Vpc≒5Vとし,測定したnの値をおおむね5とすると,トラッキングエラー振幅TVE
Δ
と時間差t
Δとの
関係は,次のとおり簡略化することができる。
T
t
n
V
T
t
TVE
Δ
Δ
Δ
pc≈
×
=
8-16変調の平均ラン長nはデータ成分及び平均化時間に依存する。したがって,回路は5Tラン長で変
調した信号と一致する固定周波数で校正する。この目的のために周波数が2.616 MHzの正弦波信号を使用
する。
信号C1及びC2のパルスは,通常グラウンドレベルと供給電圧の間で切り換わる出力信号をもつディジ
タルゲート回路によって生成する。この電圧の振れ幅は約5 Vと考えられるが,適用する技術によっては,
5 Vから大きく外れる場合がある。
DPD信号の公式規格は,半径方向のオフセット0.1 μmで,次による。
1.1
Δ
5.0
≦
≦Tt
TVE
Δ
による測定は,Vpcの実際値及びnに影響される。したがって,次のような校正手順を適用する。
F.3.1
比較器の飽和
レベル比較器の利得が,信号B1及びB2が方形波信号のすべての実際の入力信号レベルにあっているこ
とを確かめる。この場合,TVE信号の振幅は入力信号の振幅に依存しない。
図F.2−トラッキングエラー信号振幅と比較器入力信号振幅との関係
F.3.2
n及びVpcの校正
上述したn及びVpcの偏差,場合によっては他の回路パラメタの理由で補正係数Kは,次による。
(
)
(
)
測定値
真の値
TVE
K
T
t
Δ
/
Δ
×
=
これは次のような方法で実現する。
a) 周波数が2.616 MHzで,位相差をもつ二つの正弦波信号A1及びA2を生成し,二つの波形等化回路に
注入する。
飽和領域
比較器入力信号振幅
TVE信号
振幅
0
0
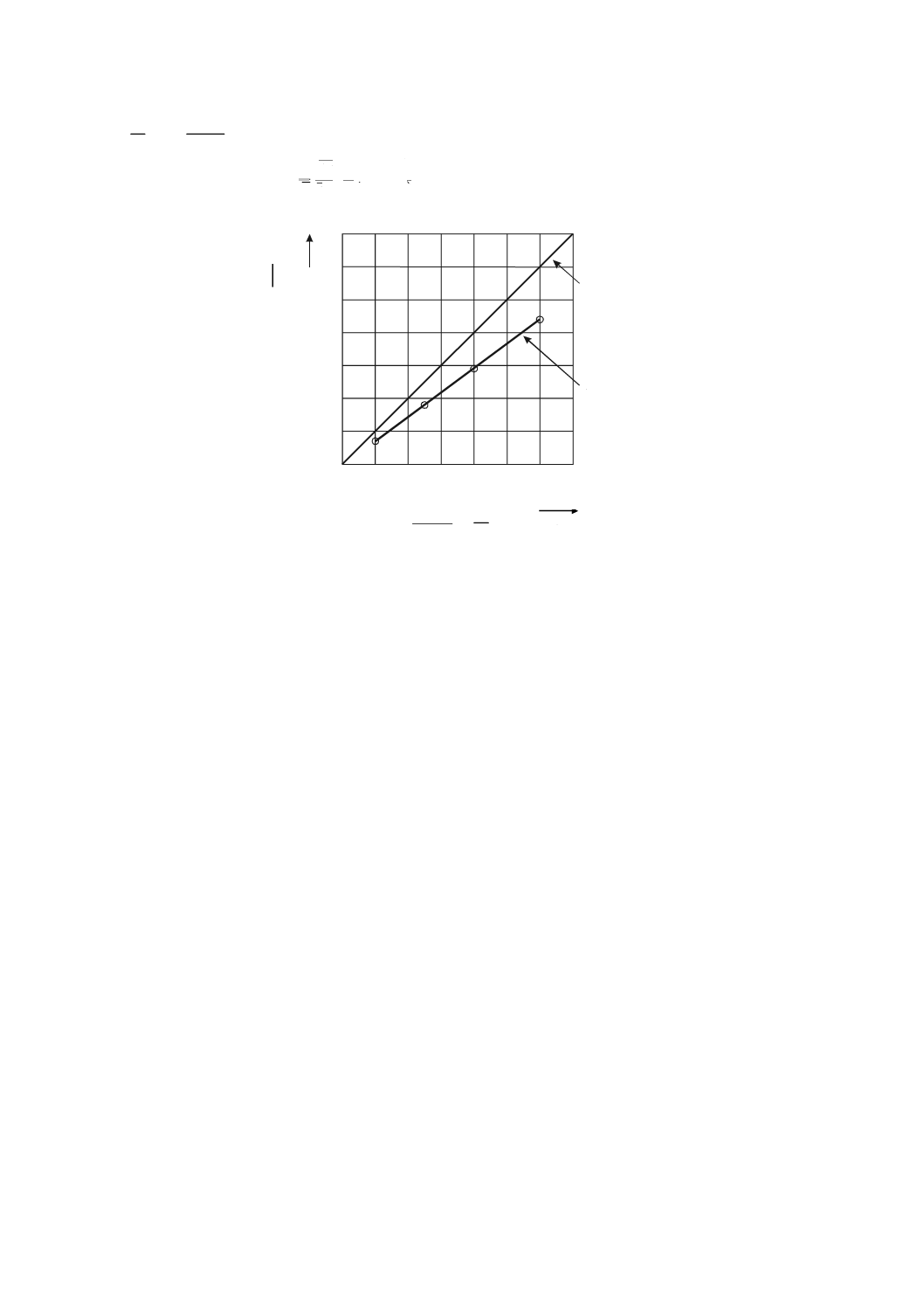
91
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b)
T
t/
Δ
とTVE
Δ
との関係を測定し,図F.3からKを決定する。
(
)
(
)
測定値
注入値
TVE
T
t
K
Δ
/
Δ
=
図F.3−TVE
Δ
と
T
t/
Δ
との関係
0
0.2 0.4 0.6 0.8 1.0 1.2
∆
T
V
E
0
0.2
0.4
0.6
0.8
1.0
1.2
Vpc=5V,n=5の場合の
理論ライン
実測ラインの例
∆t / T
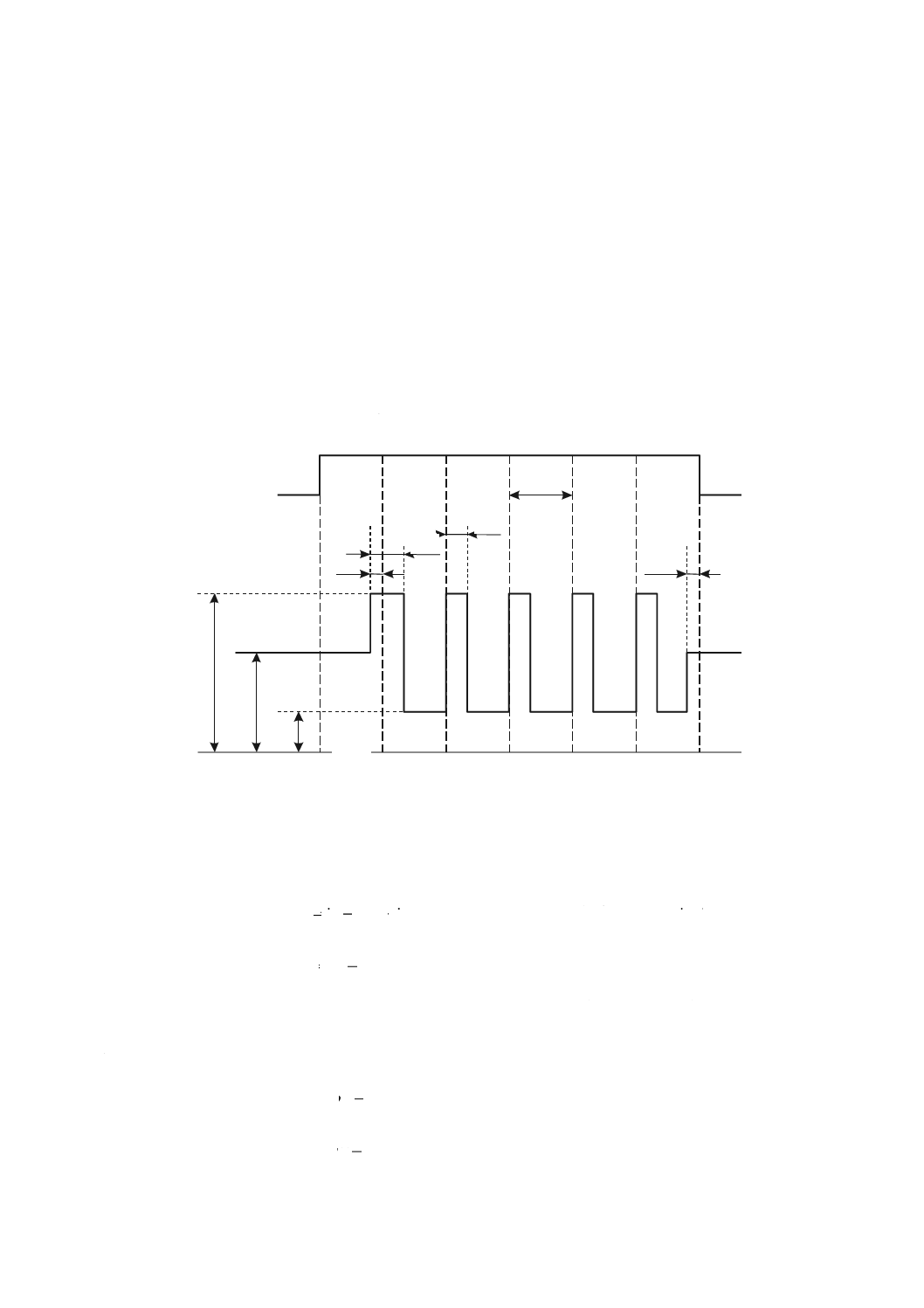
92
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(規定)
テスト用記録パルス波形
序文
この附属書は,異なる速度範囲に対して,異なる記録ストラテジを用いるために,次の二つを規定する。
これらは,同じ記録パルス波形を用いるが,時間分解能が異なる。
− NRZIデータから得る記録パルス波形及びチャネルクロックを,図G.1に示す。記録パルス波形は,
N-1個のパルスで構成する。ここに,Nはチャネルクロック周期の数で表すNRZIの長さとする。
− Pp,Pe及びPbの値は,OPCアルゴリズムに従って決定する(附属書I参照)。最小マーク,最小ス
ペース及び8Tマークの記録パルス波形の例を図G.2に示す。
図G.1−記録パルス波形
G.1
基本記録ストラテジの時間パラメタ
Ttop及びTmpのパルス幅は,それぞれ14.4.2.2のバイト51及びバイト52に記載のとおりとする。継続時
間は,一部が固定で一部が記録速度によって決まる変動量とする。
は整数)
,
(
〜
=
及び
〜
=
j
i
j
i
j
i
T
7
1
2
0
ns
5.0
ns
2
T
6
1
W
top
±
×
+
×
=
は整数)
,
(
〜
=
及び
〜
=
n
m
n
m
n
m
T
5
1
1
0
ns
5.0
ns
2
T
6
1
W
mp
±
×
+
×
=
先頭パルスの進み時間及び消去の進み時間は,それぞれ14.4.2.2のバイト53及びバイト54,55,56に
記載のとおりとする。継続時間は,記録速度によって可変だが,記録するクロック周期に対して固定の比
率とする。
W
top
T
6
1
d
×
=p
T
p=0〜4(pは整数)
W
era
T
6
1
d
×
=q
T
q=−3〜3(qは整数)(正の値は,図G.1に示すように進み
0 mW
Pp
Tmp
dTtop
TW
NRZI チャネルビット
Ttop
dTera
Pe
Pb
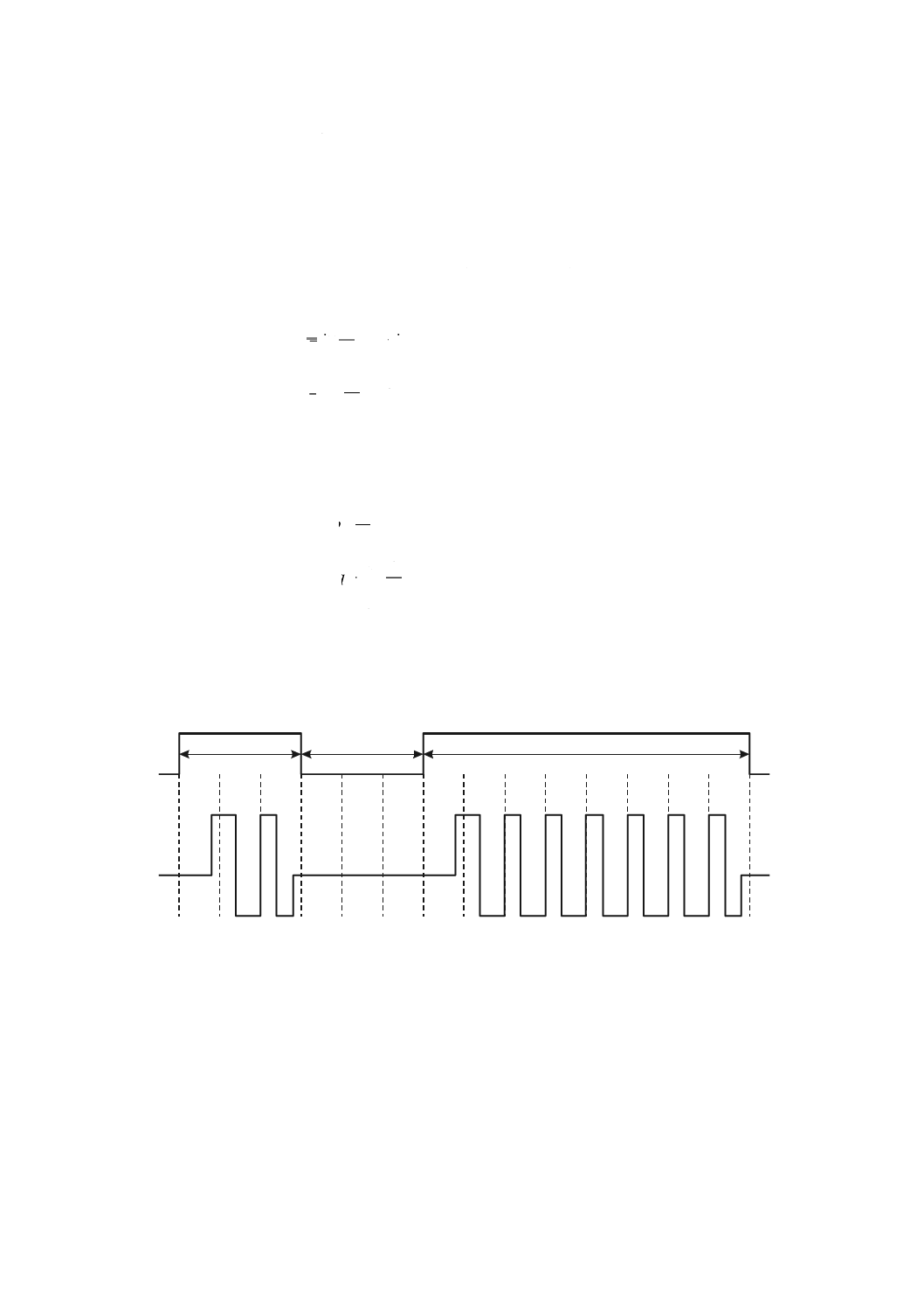
93
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を意味する)
レーザパワーは,Ttop及びTmpパルスの後で,それぞれ少なくとも1 nsの間,バイアスレベルに切り換え
る。
G.2
“4倍速”記録ストラテジの時間パラメタ
Ttop及びTmpのパルス幅は,それぞれ14.4.2.3.1のバイト86及びバイト87に記載のとおりとする。継続
時間は,一部が固定で一部が記録速度によって決まる変動量とする。
ns
3.0
ns
6.0
T
16
1
W
top
±
×
+
×
=
j
i
T
i=0〜8及びj=1〜15(i,jは整数)
ns
3.0
ns
6.0
T
16
1
W
mp
±
×
+
×
=
n
m
T
m=1〜8及びn=1〜10(m,nは整数)
先頭パルスの進み時間及び消去の進み時間は,それぞれ14.4.2.3.1のバイト88,89,90及びバイト91,
92,93に記載のとおりとする。継続時間は,記録速度によって可変であるが,記録するクロック周期に対
して固定の比率とする。
W
top
T
16
1
d
×
=p
T
p=−4〜7(pは整数)
(
)
W
top
T
16
1
4
d
×
+
=q
T
q=−8〜7(qは整数)(正の値は,図G.1に示すよう
に進みを意味する)
レーザパワーは,Ttop及びTmpパルスの後で,それぞれ少なくとも1 nsの間,バイアスレベルに切り換え
る。ただし,最後のTmpパルスの後は,この時間を0に減じることができる。
図G.2−マルチパルスの例
G.3
立上がり及び立下がり時間
立上がり時間Tr,及び立下がり時間Tfは,図G.3に示すように最大2 nsとする。取り得るオーバーシュ
ート量は,ステップサイズ(P1,P2及びP3)の20 %未満とする。
3 Tマーク
NRZI データ
3 Tスペース
8 Tマーク
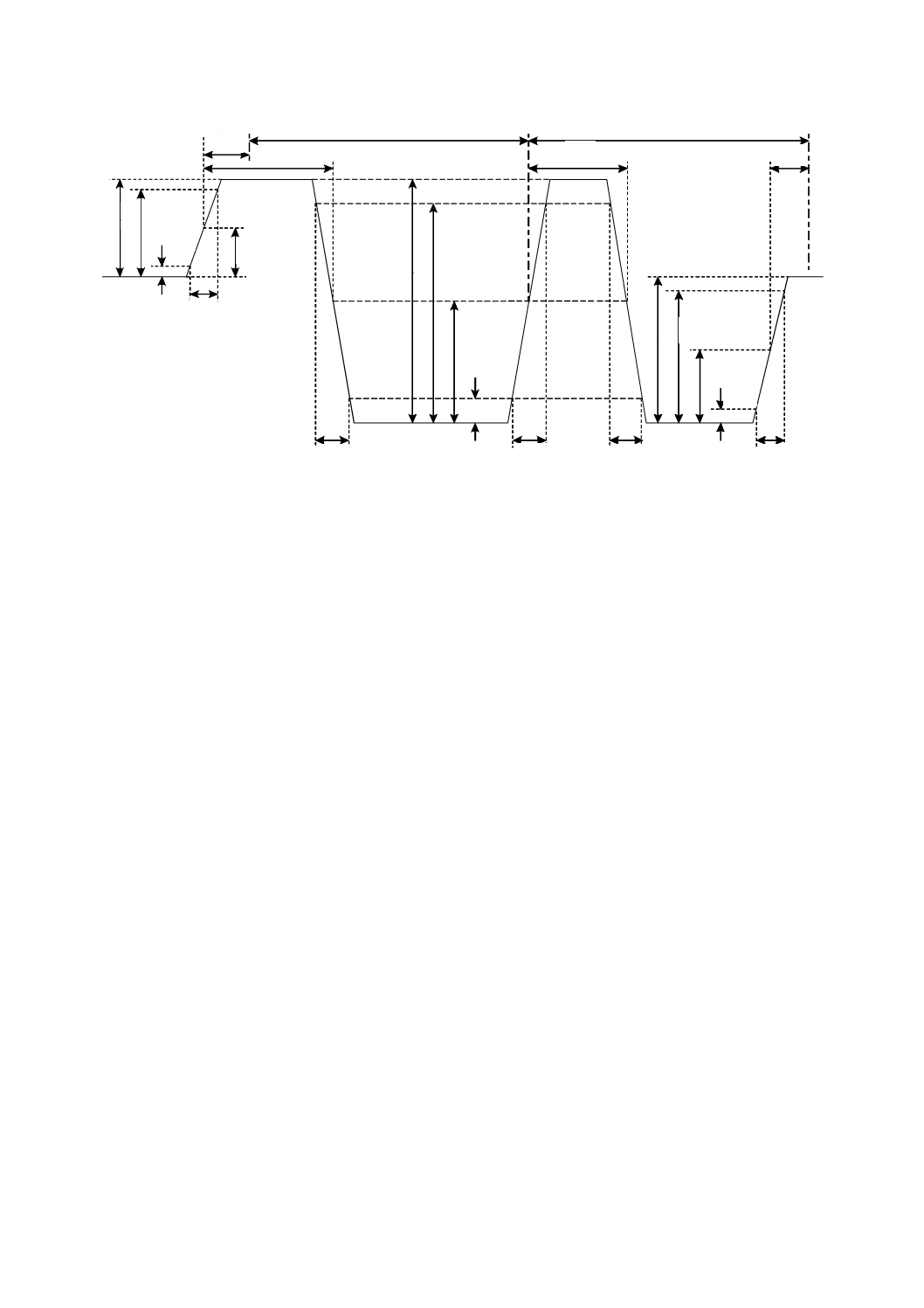
94
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図G.3−立上がり時間及び立下がり時間
0.5P1
Tr1
Tr1
0.1P1
0.9P1
P1
dTtop
Ttop
TW
0.9P2
P2
0.5P2
0.1P2
Tr2
Tf1
Tf2
Tr3
0.9P3
P3
0.5P3
0.1P3
Tmp
TW
dTera
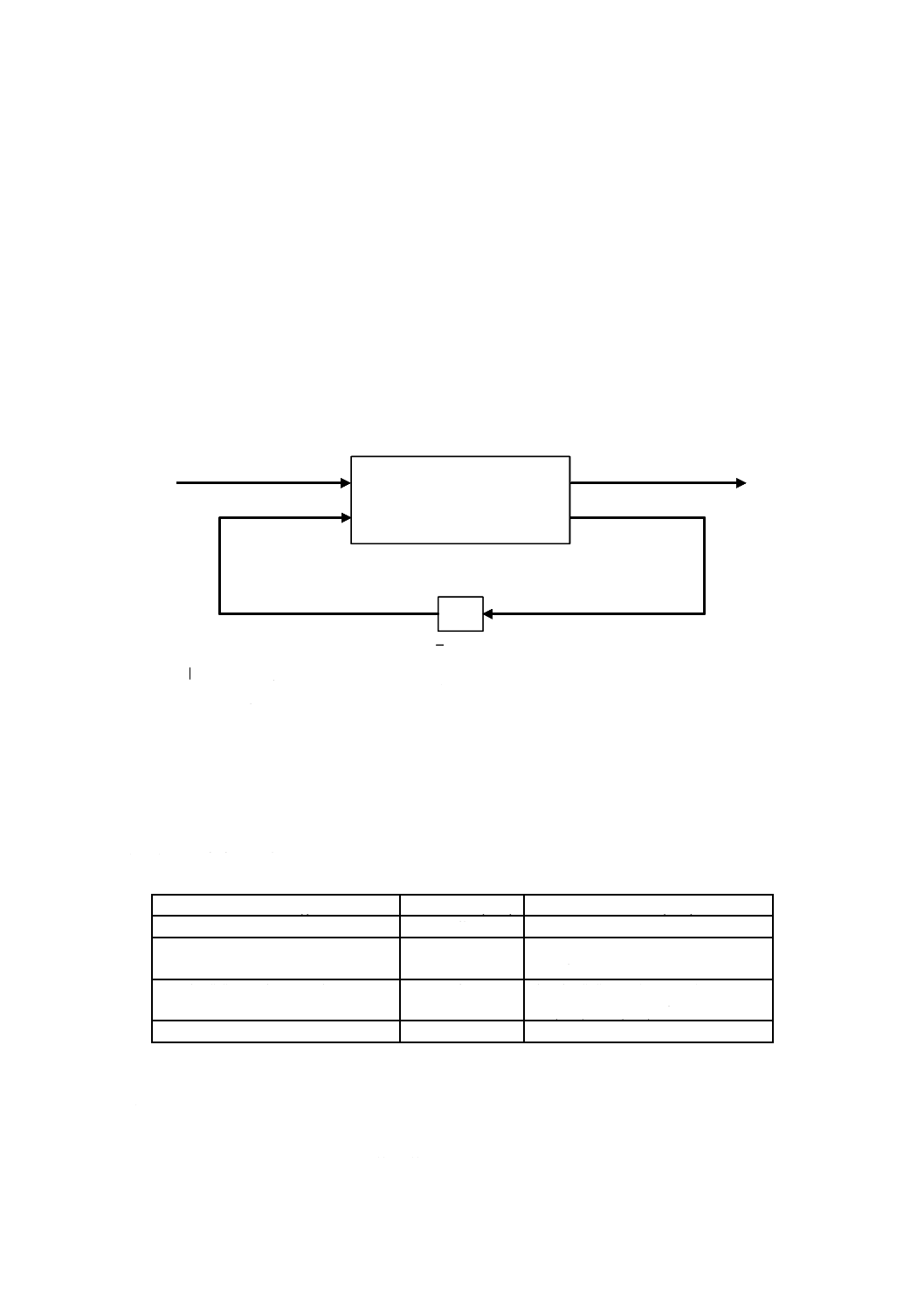
95
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(規定)
8-16変調
序文
この附属書は,8-16変調について規定する。
H.1 8-16変調
8-16変調は,RLL(2,10) の要求事項を満たす。符号化システムを図H.1に,変換表を表H.1及び表H.2
に示す。表H.1及び表H.2は,8ビットバイトを16ビット符号語に変換した表を示す。図H.1は,符号語
及び関係状態規定がどのように生じているかを図示する。図H.2は状態の決定を示す。
T
変換テーブル
状態S(t)
8ビットバイトB(t)
16ビット符号語X(t)
次の状態S(t+1)
T = 1変換遅延
図中の記号は,次による。
T
変換テーブル
状態S(t)
8ビットバイトB(t)
16ビット符号語X(t)
次の状態S(t+1)
T = 1変換遅延
図中の記号は,次による。
図中の記号は,次による
X(t)=H[B(t), S(t)] X15(t)=msb及びX0(t)=lsb
S(t+1)=G[B(t), S(t)]
Hは,変換テーブルからの出力関数
Gは,変換テーブルからの次の状態の出力関数
図H.1−符号語生成システム
符号語X(t)の状態は,隣接する二つの“1”の間で最小2及び最大10の“0”がなければならないという
RLL(2,10) の要求事項を満たすように選ぶ。
符号語X (t)
次の状態S (t+1)
符号語X (t+1)
末尾部“0”が1個又はなし
状態1
先頭部“0”が2個から9個まで
末尾部“0”が2個から5個まで
状態2
先頭部“0”が1個又は5個まで及び
X15 (t+1),X3 (t+1)=0,0
末尾部“0”が2個から5個まで
状態3
先頭部“0”が0個又は5個まで及び
X15 (t+1),X3 (t+1) ≠0,0
末尾部“0”が6個から9個まで
状態4
先頭部“0”が1個又はなし
図H.2−状態の決定
注記 記録したデータを復号するとき,元の主データを再構築するためには符号器の知識を必要とす
ることに留意されたい。
B (t)=H−1 [X (t), S (t)]
96
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
誤り伝ぱ(播)を含むために,そのような状態依存の復号を避けるのがよい。この8-16変調の場合には,
状態についての知識をほとんどの場合必要としないように変換表を選んでいる。テーブルから集められる
ように,幾つかの場合で,二つの8ビットバイト,例えば,表H.1の状態1及び状態2における8ビット
バイト5及び6は,同じ16ビット符号語を生成する。表の構成によって,この明らかなあいまいさを解決
する。
実際,二つの同一符号語が“状態”を離れる場合,その一つは“状態2”に行き,他方は“状態3”に行
く。ビットX15及びX3の設定がこの二つの状態で常に異なっているために,どの符号語も次の符号語のビ
ットX15及びX3と一緒に符号語それ自体を解析することによって一義的に復号することができる。
B (t)=H−1 [X (t),X15 (t+1),X3 (t+1)]
13.8のDCC要求事項を満たすことを約束するために,代替変換表(表H.2)を含める。
97
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.1−主変換表
8ビット
バイト
状態1
状態2
状態3
状態4
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
0
0010000000001001
1
0100000100100000
2
0010000000001001
1
0100000100100000
2
1
0010000000010010
1
0010000000010010
1
1000000100100000
3
1000000100100000
3
2
0010000100100000
2
0010000100100000
2
1000000000010010
1
1000000000010010
1
3
0010000001001000
2
0100010010000000
4
0010000001001000
2
0100010010000000
4
4
0010000010010000
2
0010000010010000
2
1000000100100000
2
1000000100100000
2
5
0010000000100100
2
0010000000100100
2
1001001000000000
4
1001001000000000
4
6
0010000000100100
3
0010000000100100
3
1000100100000000
4
1000100100000000
4
7
0010000001001000
3
0100000000010010
1
0010000001001000
3
0100000000010010
1
8
0010000010010000
3
0010000010010000
3
1000010010000000
4
1000010010000000
4
9
0010000100100000
3
0010000100100000
3
1001001000000001
1
1001001000000001
1
10
0010010010000000
4
0010010010000000
4
1000100100000001
1
1000100100000001
1
11
0010001001000000
4
0010001001000000
4
1000000010010000
3
1000000010010000
3
12
0010010010000001
1
0010010010000001
1
1000000010010000
2
1000000010010000
2
13
0010001001000001
1
0010001001000001
1
1000010010000001
1
1000010010000001
1
14
0010000001001001
1
0100000000100100
3
0010000001001001
1
0100000000100100
3
15
0010000100100001
1
0010000100100001
1
1000001001000001
1
1000001001000001
1
16
0010000010010001
1
0010000010010001
1
1000000100100001
1
1000000100100001
1
17
0010000000100010
1
0010000000100010
1
1000001001000000
4
1000001001000000
4
18
0001000000001001
1
0100000010010000
2
0001000000001001
1
0100000010010000
2
19
0010000000010001
1
0010000000010001
1
1001000100000000
4
1001000100000000
4
20
0001000000010010
1
0001000000010010
1
1000100010000000
4
1000100010000000
4
21
0000100000000010
1
0000100000000010
1
1000000010010001
1
1000000010010001
1
22
0000010000000001
1
0000010000000001
1
1000000001001001
1
1000000001001001
1
23
0010001000100000
2
0010001000100000
2
1000000001001000
2
1000000001001000
2
24
0010000100010000
2
0010000100010000
2
1000000001001000
3
1000000001001000
3
25
0010000010001000
2
0100000000100100
2
0010000010001000
2
0100000000100100
2
26
0010000001000100
2
0010000001000100
2
1000000000100010
1
1000000000100010
1
27
0001000100100000
2
0001000100100000
2
1000000000010001
1
1000000000010001
1
28
0010000000001000
2
0100000010010000
3
0010000000001000
2
0100000010010000
3
29
0001000010010000
2
0001000010010000
2
1001001000000010
1
1001001000000010
1
30
0001000001001000
2
0100000100100000
3
0001000001001000
2
0100000100100000
3
31
0001000000100100
2
0001000000100100
2
1001000100000001
1
1001000100000001
1
32
0001000000000100
2
0001000000000100
2
1000100100000010
1
1000100100000010
1
33
0001000000000100
3
0001000000000100
3
1000100010000001
1
1000100010000001
1
34
0001000000100100
3
0001000000100100
3
1000000000100100
2
1000000000100100
2
35
0001000001001000
3
0100001001000000
4
0001000001001000
3
0100001001000000
4
36
0001000010010000
3
0001000010010000
3
1000000000100100
3
1000000000100100
3
37
0001000100100000
3
0001000100100000
3
1000010001000000
4
1000010001000000
4
38
39
40
41
0010000000001000
0010000001000100
0010000010001000
0010000100010000
3
3
3
3
0100100100000001
0010000001000100
0100010010000001
0010000100010000
1
3
1
3
0010000000001000
1001000010000000
0010000010001000
1000010010000010
3
4
3
1
0100100100000001
1001000010000000
0100010010000001
1000010010000010
1
4
1
1
42
0010001000100000
3
0010001000100000
3
1000001000100000
2
1000001000100000
2
43
0010010001000000
4
0010010001000000
4
1000010001000001
1
1000010001000001
1
44
0001001001000000
4
0001001001000000
4
1000001000100000
3
1000001000100000
3
45
0000001000000001
1
0100010001000000
4
1000001001000010
1
0100010001000000
4
46
0010010010000010
1
0010010010000010
1
1000001000100001
1
1000001000100001
1
47
0010000010001001
1
0100001001000001
1
0010000010001001
1
0100001001000001
1
48
0010010001000001
1
0010010001000001
1
1000000100010000
2
1000000100010000
2
49
0010001001000010
1
0010001001000010
1
1000000010001000
2
1000000010001000
2
50
0010001000100001
1
0010001000100001
1
1000000100010000
3
1000000100010000
3
98
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.1−主変換表(続き)
8ビット
バイト
状態1
状態2
状態3
状態4
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
51
0001000001001001
1
0100000100100001
1
0001000001001001
1
0100000100100001
1
52
0010000100100010
1
0010000100100010
1
1000000100100010
1
1000000100100010
1
53
0010000100010001
1
0010000100010001
1
1000000100010001
1
1000000100010001
1
54
0010000010010010
1
0010000010010010
1
1000000010010010
1
1000000010010010
1
55
0010000001000010
1
0010000001000010
1
1000000010001001
1
1000000010001001
1
56
0010000000100001
1
0010000000100001
1
1000000001000010
1
1000000001000010
1
57
0000100000001001
1
0100000010010001
1
0000100000001001
1
0100000010010001
1
58
0001001001000001
1
0001001001000001
1
1000000000100001
1
1000000000100001
1
59
0001000100100001
1
0001000100100001
1
0100000001001001
1
0100000001001001
1
60
0001000010010001
1
0001000010010001
1
1001001000010010
1
1001001000010010
1
61
0001000000100010
1
0001000000100010
1
1001001000001001
1
1001001000001001
1
62
0001000000010001
1
0001000000010001
1
1001000100000010
1
1001000100000010
1
63
0000100000010010
1
0000100000010010
1
1000000001000100
2
1000000001000100
2
64
0000010000000010
1
0000010000000010
1
0100000001001000
2
0100000001001000
2
65
0010010000100000
2
0010010000100000
2
1000010000100000
2
1000010000100000
2
66
0010001000010000
2
0010001000010000
2
1000001000010000
2
1000001000010000
2
67
0010000100001000
2
0100000000100010
1
0010000100001000
2
0100000000100010
1
68
0010000010000100
2
0010000010000100
2
1000000100001000
2
1000000100001000
2
69
0010000000010000
2
0010000000010000
2
1000000010000100
2
1000000010000100
2
70
0001000010001000
2
0100001000100000
2
0001000010001000
2
0100001000100000
2
71
0001001000100000
2
0001001000100000
2
0100000010001000
2
0100000010001000
2
72
0001000000001000
2
0100000100010000
2
0001000000001000
2
0100000100010000
2
73
0001000100010000
2
0001000100010000
2
1000000001000100
3
1000000001000100
3
74
0001000001000100
2
0001000001000100
2
0100000001001000
3
0100000001001000
3
75
0000100100100000
2
0000100100100000
2
1000010000100000
3
1000010000100000
3
76
0000100010010000
2
0000100010010000
2
1000001000010000
3
1000001000010000
3
77
0000100001001000
2
0100000001000100
2
0000100001001000
2
0100000001000100
2
78
0000100000100100
2
0000100000100100
2
1000000100001000
3
1000000100001000
3
79
0000100000000100
2
0000100000000100
2
1000000010000100
3
1000000010000100
3
80
0000100000000100
3
0000100000000100
3
0100000010001000
3
0100000010001000
3
81
0000100000100100
3
0000100000100100
3
1000100001000000
4
1000100001000000
4
82
0000100001001000
3
0100000001000100
3
0000100001001000
3
0100000001000100
3
83
0000100010010000
3
0000100010010000
3
1000000010001000
3
1000000010001000
3
84
0000100100100000
3
0000100100100000
3
1001001001001000
2
1001001001001000
2
85
86
87
88
89
90
91
92
93
94
95
0001000000001000
0001000001000100
0001000010001000
0001000100010000
0001001000100000
0010000000010000
0010000010000100
0010000100001000
0010001000010000
0010010000100000
0000001000000010
3
3
3
3
3
3
3
3
3
3
1
0100000100010000
0001000001000100
0100001000100000
0001000100010000
0001001000100000
0010000000010000
0010000010000100
0100000000010001
0010001000010000
00100100001.00000
0100100100000010
3
3
3
3
3
3
3
1
3
3
1
0001000000001000
1001001000100100
0001000010001000
1001001001001000
1001000010000001
1000100100010010
1000100100001001
0010000100001000
1000100010000010
1000100001000001
1000010010010010
3
2
3
3
1
1
1
3
1
1
1
0100000100010000
1001001000100100
0100001000100000
1001001001001000
1001000010000001
1000100100010010
1000100100001001
0100000000010001
1000100010000010
1000100001000001
0100100100000010
3
2
3
3
1
1
1
1
1
1
1
96
0000000100000001
1
0100100010000001
1
1000010010001001
1
0100100010000001
1
97
0010010010001001
1
0100010000100000
2
0010010010001001
1
0100010000100000
2
98
0010010010010010
1
0010010010010010
1
1001001000000100
2
1001001000000100
2
99
0010010001000010
1
0010010001000010
1
1001001000100100
3
1001001000100100
3
100
0010010000100001
1
0010010000100001
1
1000010001000010
1
1000010001000010
1
101
0010001001001001
1
0100010010000010
1
0010001001001001
1
0100010010000010
1
99
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.1−主変換表(続き)
8ビット
バイト
状態1
状態2
状態3
状態4
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
102
0010001000100010
1
0010001000100010
1
1000010000100001
1
1000010000100001
1
103
0010001000010001
1
0010001000010001
1
1000001001001001
1
1000001001001001
1
104
0010000100010010
1
0010000100010010
1
1000001000100010
1
1000001000100010
1
105
0010000010000010
1
0010000010000010
1
1000001000010001
1
1000001000010001
1
106
0010000100001001
1
0100001000010000
2
0010000100001001
1
0100001000010000
2
107
0010000001000001
1
0010000001000001
1
1000000100010010
1
1000000100010010
1
108
0001001001000010
1
0001001001000010
1
1000000100001001
1
1000000100001001
1
109
0001001000100001
1
0001001000100001
1
1000000010000010
1
1000000010000010
1
110
0001000100100010
1
0001000100100010
1
1000000001000001
1
1000000001000001
1
111
0001000100010001
1
0001000100010001
1
0100000010001001
1
0100000010001001
1
112
0001000010010010
1
0001000010010010
1
1001001001001001
1
1001001001001001
1
113
0001000001000010
1
0001000001000010
1
1001001000100010
1
1001001000100010
1
114
0001000010001001
1
0100010000100000
3
0001000010001001
1
0100010000100000
3
115
0001000000100001
1
0001000000100001
1
1001001000010001
1
1001001000010001
1
116
0000100100100001
1
0000100100100001
1
1001000100010010
1
1001000100010010
1
117
0000100010010001
1
0000100010010001
1
1001000100001001
1
1001000100001001
1
118
0000100001001001
1
0100010001000001
1
0000100001001001
1
0100010001000001
1
119
0000100000100010
1
0000100000100010
1
1000100100100100
2
1000100100100100
2
120
0000100000010001
1
0000100000010001
1
1000100100000100
2
1000100100000100
2
121
0000010000001001
1
0100001001000010
1
0000010000001001
1
0100001001000010
1
122
0000010000010010
1
0000010000010010
1
1000100000100000
2
1000100000100000
2
123
0010010010000100
2
0010010010000100
2
1000010010000100
2
1000010010000100
2
124
0010010000010000
2
0010010000010000
2
1000010000010000
2
1000010000010000
2
125
0010001000001000
2
0100001000100001
1
0010001000001000
2
0100001000100001
1
126
0010001001000100
2
0010001001000100
2
1000001001000100
2
1000001001000100
2
127
0001000100001000
2
0100000100100010
1
0001000100001000
2
0100000100100010
1
128
0010000100100100
2
0010000100100100
2
1000001000001000
2
1000001000001000
2
129
0000100010001000
2
0100000100010001
1
0000100010001000
2
0100000100010001
1
130
0010000100000100
2
0010000100000100
2
1000000100100100
2
1000000100100100
2
131
0010000000100000
2
0010000000100000
2
1001001000000100
3
1001001000000100
3
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
0001001000010000
0000100000001000
0001000010000100
0001000000010000
0000100100010000
0000100001000100
0000010001001000
0000010010010000
0000010000100100
0000010000000100
0000010000000100
0000010000100100
0000010001001000
0000010010010000
0000100000001000
0000100001000100
0000100010001000
0000100100010000
2
2
2
2
2
2
2
2
2
2
3
3
3
3
3
3
3
3
0001001000010000
0100000010010010
0001000010000100
0001000000010000
0000100100010000
0000100001000100
0100000001000010
0000010010010000
0000010000100100
0000010000000100
0000010000000100
0000010000100100
0100000010000100
0000010010010000
0100000000010000
0000100001000100
0100000010000100
0000100100010000
2
1
2
2
2
2
1
2
2
2
3
3
2
3
2
3
3
3
1000100100100100
0000100000001000
1000100000100000
1000010010000100
1000010000010000
1000001001000100
0000010001001000
1000001000001000
1001000010000010
1000000100000100
1000000100100100
1000000100000100
0000010001001000
1001000001000000
0000100000001000
1000000000100000
0000100010001000
1000000000100000
3
2
3
3
3
3
2
3
1
2
3
3
3
4
3
2
3
3
1000100100100100
0100000010010010
1000100000100000
1000010010000100
1000010000010000
1000001001000100
0100000001000010
1000001000001000
1001000010000010
1000000100000100
1000000100100100
1000000100000100
0100000010000100
1001000001000000
0100000000010000
1000000000100000
0100000010000100
1000000000100000
3
1
3
3
3
3
1
3
1
2
3
3
2
4
2
2
3
3
150
0001000000010000
3
0001000000010000
3
0100000100001000
3
0100000100001000
3
151
0001000010000100
3
0001000010000100
3
1000000001000000
4
1000000001000000
4
152
0001000100001000
3
0100001000010000
3
0001000100001000
3
0100001000010000
3
100
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.1−主変換表(続き)
8ビット
バイト
状態1
状態2
状態3
状態4
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
153
0001001000010000
3
0001001000010000
3
1001000001000001
1
1001000001000001
1
154
0010000000100000
3
0010000000100000
3
0100000100001000
2
0100000100001000
2
155
0010000100000100
3
0010000100000100
3
1001000100100100
3
1001000100100100
3
156
0010000100100100
3
0010000100100100
3
1000100100100010
1
1000100100100010
1
157
0010001000001000
3
0100000000100001
1
0010001000001000
3
0100000000100001
1
158
0010001001000100
3
0010001001000100
3
1000100100000100
3
0100100100000000
4
159
0010010000010000
3
0010010000010000
3
1001001001000100
2
1001001001000100
2
160
0010010010000100
3
0010010010000100
3
1001001000001000
2
1001001000001000
2
161
0000001000010010
1
0100000000010000
3
1000100100010001
1
0100000000010000
3
162
0000001000001001
1
0100100100100100
2
1000100010010010
1
0100100100100100
2
163
0000000100000010
1
0100100100100100
3
1000100010001001
1
0100100100100100
3
164
0000000010000001
1
0100100100010010
1
1000100001000010
1
0100100100010010
1
165
0010010010010001
1
0010010010010001
1
1001000100100100
2
1001000100100100
2
166
0010010000100010
1
0010010000100010
1
1001000100000100
2
1001000100000100
2
167
0010010001001001
1
0100100100000100
2
0010010001001001
1
0100100100000100
2
168
0010010000010001
1
0010010000010001
1
1001001001000100
3
1001001001000100
3
169
0010001000010010
1
0010001000010010
1
1000100000100001
1
1000100000100001
1
170
0010000100000010
1
0010000100000010
1
1000010010010001
1
1000010010010001
1
171
0010001000001001
1
0100100000100000
3
0010001000001001
1
0100100000100000
3
172
0010000010000001
1
0010000010000001
1
1000010001001001
1
1000010001001001
1
173
0001001000100010
1
0001001000100010
1
1000010000100010
1
1000010000100010
1
174
0001001000010001
1
0001001000010001
1
1000010000010001
1
1000010000010001
1
175
0001000100010010
1
0001000100010010
1
1000001000010010
1
1000001000010010
1
176
0001000010000010
1
0001000010000010
1
1000001000001001
1
1000001000001001
1
177
0001001001001001
1
0100100010000010
1
0001001001001001
1
0100100010000010
1
178
0001000001000001
1
0001000001000001
1
1000000100000010
1
1000000100000010
1
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
0000100100100010
0000100100010001
0001000100001001
0000100010010010
0000100001000010
0000100010001001
0000100000100001
0000010010010001
0000010000100010
0000010001001001
0000010000010001
0000001001001000
0000001000100100
0000001000000100
0010010010001000
0010010001000100
0010010000001000
0010001000100100
0010001000000100
0010001001001000
0001001001000100
0001000100100100
0001000100000100
0001001000001000
0001000000100000
1
1
1
1
1
1
1
1
1
1
1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
0000100100100010
0000100100010001
0100100000100000
0000100010010010
0000100001000010
0100010010000100
0000100000100001
0000010010010001
0000010000100010
0100100001000001
0000010000010001
0100010010000100
0100010000010000
0100001001000100
0100010000010000
0010010001000100
0100010010010010
0010001000100100
0010001000000100
0100010001000010
0001001001000100
0001000100100100
0001000100000100
0100010000100001
0001000000100000
1
1
2
1
1
3
1
1
1
1
1
2
2
2
3
2
1
2
2
1
2
2
2
1
2
1000000010000001
0100100100001001
0001000100001001
0100010010001001
0100001001001001
0000100010001001
1001000000100000
1000100100001000
1000100010000100
0000010001001001
1000100000010000
1000010010001000
1000010001000100
1000010000001000
0010010010001000
1000001001001000
0010010000001000
1000001000100100
1000001000000100
0010001001001000
0100001000001000
1001000000100000
1000100100001000
0001001000001000
1000100010000100
1
1
1
1
1
1
2
2
2
1
2
2
2
2
2
2
2
2
2
2
2
3
3
2
3
1000000010000001
0100100100001001
0100100000100000
0100010010001001
0100001001001001
0100010010000100
1001000000100000
1000100100001000
1000100010000100
0100100001000001
1000100000010000
0100010010000100
0100010000010000
0100001001000100
0100010000010000
1000001001001000
0100010010010010
1000001000100100
1000001000000100
0100010001000010
0100001000001000
1001000000100000
1000100100001000
0100010000100001
1000100010000100
1
1
2
1
1
3
2
2
2
1
2
2
2
2
3
2
1
2
2
1
2
3
3
1
3
101
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.1−主変換表(続き)
8ビット
バイト
状態1
状態2
状態3
状態4
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
204
0000100010000100
2
0000100010000100
2
1000010010001000
3
1000010010001000
3
205
0000100000010000
2
0000100000010000
2
1000010001000100
3
1000010001000100
3
206
0000100100001000
2
0100001000100010
1
0000100100001000
2
0100001000100010
1
207
0000010010001000
2
0100001000010001
1
0000010010001000
2
0100001000010001
1
208
0000010001000100
2
0000010001000100
2
1000001000100100
3
1000001000100100
3
209
0000010000001000
2
0100000100010010
1
0000010000001000
2
0100000100010010
1
210
0000001000000100
3
0100000010000010
1
1000010000001000
3
0100000010000010
1
211
0000001000100100
3
0100000100100100
2
1000001001001000
3
0100000100100100
2
212
0000001001001000
3
0100000100000100
2
1000001000000100
3
0100000100000100
2
213
0000010000001000
3
0100000001000001
1
0000010000001000
3
0100000001000001
1
214
0000010001000100
3
0000010001000100
3
0100001000001000
3
0100001000001000
3
215
0000010010001000
3
0100000000100000
2
0000010010001000
3
0100000000100000
2
216
0000100000010000
3
0000100000010000
3
1001001000010000
3
1001001000010000
3
217
0000100010000100
3
0000100010000100
3
1001000100000100
3
1001000100000100
3
218
0000100100001000
3
0100000100000100
3
0000100100001000
3
0100000100000100
3
219
0001000000100000
3
0001000000100000
3
0100000100001001
1
0100000100001001
1
220
0001000100000100
3
0001000100000100
3
1001001000010000
2
1001001000010000
2
221
0001000100100100
3
0001000100100100
3
1001000100001000
2
1001000100001000
2
222
0001001000001000
3
0100000100100100
3
0001001000001000
3
0100000100100100
3
223
0001001001000100
3
0001001001000100
3
1001001000001000
3
1001001000001000
3
224
0010001000000100
3
0010001000000100
3
1000100000010000
3
1000100000010000
3
225
0010001000100100
3
0010001000100100
3
1001001001000010
1
1001001001000010
1
226
227
228
229
230
0010001001001000
0010010000001000
0010010001000100
0010010010001000
0010000001000000
3
3
3
3
4
0100001001000100
0100100100000100
0010010001000100
0100000000100000
0010000001000000
3
3
3
3
4
0010001001001000
0010010000001000
1001000100001000
0010010010001000
1001001000100001
3
3
3
3
1
0100001001000100
0100100100000100
1001000100001000
0100000000100000
1001001000100001
3
3
3
3
1
231
232
233
234
235
236
237
238
239
240
0000001001001001
0000001000100010
0000001000010001
0000000100010010
0000000100001001
0000000010000010
0000000001000001
0010010000010010
0010001000000010
0010010000001001
1
1
1
1
1
1
1
1
1
1
0100100100100010
0100100010000100
0100100000010000
0100000001000000
0100100100010001
0100100010010010
0100100001000010
0010010000010010
0010001000000010
0100100010000100
1
2
2
4
1
1
1
1
1
3
1001000100100010
1001000100010001
1001000010010010
1001000010001001
1001000001000010
1001000000100001
1000100100100001
1000100010010001
1001000010000100
0010010000001001
1
1
1
1
1
1
1
1
3
1
0100100100100010
0100100010000100
0100100000010000
0100000001000000
0100100100010001
0100100010010010
0100100001000010
1000100010010001
1001000010000100
0100100010000100
1
2
2
4
1
1
1
1
3
3
241
242
243
244
245
246
247
248
249
250
0010000100000001
0001001000010010
0001000100000010
0001001000001001
0001000010000001
0000100100010010
0000100010000010
0000100100001001
0000100001000001
0000010010010010
1
1
1
1
1
1
1
1
1
1
0010000100000001
0001001000010010
0001000100000010
0100100000100001
0001000010000001
0000100100010010
0000100010000010
0100010010010001
0000100001000001
0000010010010010
1
1
1
1
1
1
1
1
1
1
1001000010000100
1000000010000000
1000100001001001
0001001000001001
1000100000100010
1000100000010001
1000010000010010
0000100100001001
1000010000001001
1000001000000010
2
4
1
1
1
1
1
1
1
1
1001000000000100
1000000010000000
1000100001001001
0100100000100001
1000100000100010
1000100000010001
1000010000010010
0100010010010001
1000010000001001
1000001000000010
2
4
1
1
1
1
1
1
1
1
251
252
253
254
0000010001000010
0000010010001001
0000010000100001
0000001001000100
1
1
1
2
0000010001000010
0100010000100010
0000010000100001
0100010000010001
1
1
1
1
1000000100000001
0000010010001001
0100100010001001
1001000000010000
1
1
1
2
1000000100000001
0100010000100010
0100100010001001
0100010000010001
1
1
1
1
255
0000001000001000
2
0100001000010010
1
1000100100010000
2
0100001000010010
1
102
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.2−代替変換表
8ビット
バイト
状態1
状態2
状態3
状態4
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
0
0000010010000000
4
0000010010000000
4
0100100001001000
2
0100100001001000
2
1
0000100100000000
4
0000100100000000
4
0100100001001000
3
0100100001001000
3
2
0001001000000000
4
0001001000000000
4
0100100000001001
1
0100100000001001
1
3
0000001001000000
4
0100010000000001
1
1000001000000000
4
0100010000000001
1
4
0000000100100000
3
0100100000000010
1
1001000000000100
3
0100100000000010
1
5
0000000010010000
3
0100001000000000
4
1001000000100100
3
0100001000000000
4
6
0000000001001000
3
0100100000000100
2
1001000001001000
3
0100100000000100
2
7
0000000001001000
2
0100000100000000
4
1001000000000100
2
0100000100000000
4
8
0000000010010000
2
0100100010010000
3
1001000000100100
2
0100100010010000
3
9
0000000100100000
2
0100100000100100
2
1001000001001000
2
0100100000100100
2
10
0000010001000000
4
0000010001000000
4
1001001001000000
4
1001001001000000
4
11
0000100010000000
4
0000100010000000
4
1000100001001000
3
1000100001001000
3
12
0001000100000000
4
0001000100000000
4
0100010001001000
3
0100010001001000
3
13
0010001000000000
4
0010001000000000
4
1000100000000100
3
1000100000000100
3
14
0000001000100000
3
0100100000000100
3
1001000010010000
3
0100100000000100
3
15
0000000100010000
3
0100100010010000
2
1001000100100000
3
0100100010010000
2
16
0000000010001000
3
0100001000000001
1
0100100000001000
3
0100001000000001
1
17
0000000001000100
3
0100010000000010
1
0100100010001000
3
0100010000000010
1
18
0000000001000100
2
0100100000100100
3
1001000010010000
2
0100100000100100
3
19
0000000010001000
2
0100100100100000
3
1001000100100000
2
0100100100100000
3
20
0000000100010000
2
0100100100100000
2
0100010001001000
2
0100100100100000
2
21
0000001000100000
2
0100100000010010
1
0100100000001000
2
0100100000010010
1
22
0000010010000001
1
0000010010000001
1
1000100000100100
3
1000100000100100
3
23
0000100100000001
1
0000100100000001
1
1000100010010000
3
1000100010010000
3
24
0001001000000001
1
0001001000000001
1
0100100010001000
2
0100100010001000
2
25
0010010000000001
1
0010010000000001
1
1000100000000100
2
1000100000000100
2
26
0000000001001001
1
0100010000000100
3
1000010000000001
1
0100010000000100
3
27
0000000010010001
1
0100000100000001
1
1000100000000010
1
0100000100000001
1
28
0000000100100001
1
0100010000000100
2
1001000000001001
1
0100010000000100
2
29
0000001001000001
1
0100001000000010
1
1001000000010010
1
0100001000000010
1
30
0000100001000000
4
0000100001000000
4
1000100000100100
2
1000100000100100
2
31
0001000010000000
4
0001000010000000
4
1000100001001000
2
1000100001001000
2
32
0010000100000000
4
0010000100000000
4
0100010000001001
1
0100010000001001
1
33
0000010000100000
3
0000010000100000
3
0100100001001001
1
0100100001001001
1
34
0000001000010000
3
0100010000010010
1
1000100100100000
3
0100010000010010
1
35
0000000100001000
3
0100100000010001
1
1001000000001000
3
0100100000010001
1
36
0000000010000100
3
0100000010000000
4
1001000001000100
3
0100000010000000
4
37
0000010000100000
2
0000010000100000
2
1000001000000001
1
1000001000000001
1
38
0000000010000100
2
0100010000100100
3
1000100010010000
2
0100010000100100
3
39
0000000100001000
2
0100010000100100
2
1000100100100000
2
0100010000100100
2
40
0000001000010000
2
0100100000100010
1
1001000000001000
2
0100100000100010
1
41
0000010001000001
1
0000010001000001
1
1000010000000010
1
1000010000000010
1
42
0000010010000010
1
0000010010000010
1
1000000100000000
4
1000000100000000
4
43
0000100010000001
1
0000100010000001
1
1001000001000100
2
1001000001000100
2
44
0000100100000010
1
0000100100000010
1
1000100000001001
1
1000100000001001
1
45
0001000100000001
1
0001000100000001
1
1001000010001000
3
1001000010001000
3
46
47
48
0001001000000010
0010001000000001
0010010000000010
1
1
1
0001001000000010
0010001000000001
0010010000000010
1
1
1
1001000100010000
1000100000010010
0100010000001000
3
1
3
1001000100010000
1000100000010010
0100010000001000
3
1
3
49
0000000001000010
1
0100100010010001
1
1001000000010001
1
0100100010010001
1
50
0000000010001001
1
0100100001000100
3
1001000000100010
1
0100100001000100
3
103
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.2−代替変換表(続き)
8ビット
バイト
状態1
状態2
状態3
状態4
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
符号語
msb lsb
次の
状態
51
0000000010010010
1
0100010010010000
3
1001000001001001
1
0100010010010000
3
52
0000000100010001
1
0100010010010000
2
1001000010010001
1
0100010010010000
2
53
0000000100100010
1
0100100001000100
2
1001000100100001
1
0100100001000100
2
54
0000001000100001
1
0100100100100001
1
1001001001000001
1
0100100100100001
1
55
0000001001000010
1
0100100100010000
3
0100001000001001
1
0100100100010000
3
56
0001000001000000
4
0001000001000000
4
1001001000100000
3
1001001000100000
3
57
0010000010000000
4
0010000010000000
4
1001000010001000
2
1001000010001000
2
58
0010010010010000
3
0010010010010000
3
1001000100010000
2
1001000100010000
2
59
0010010001001000
3
0100100100010000
2
0010010001001000
3
0100100100010000
2
60
0010010000100100
3
0010010000100100
3
1001001000100000
2
1001001000100000
2
61
0010010000000100
3
0010010000000100
3
0100001001001000
2
0100001001001000
2
62
0001001001001000
3
0100000010000001
1
0001001001001000
3
0100000010000001
1
63
0001001000100100
3
0001001000100100
3
0100001001001000
3
0100001001001000
3
64
0001001000000100
3
0001001000000100
3
0100010010001000
3
0100010010001000
3
65
0000100100100100
3
0000100100100100
3
0100100100001000
3
0100100100001000
3
66
0000100100000100
3
0000100100000100
3
1000010000000100
3
1000010000000100
3
67
0000100000100000
3
0000100000100000
3
1000010000100100
3
1000010000100100
3
68
0000010010000100
3
0000010010000100
3
1000010001001000
3
1000010001001000
3
69
0000010000010000
3
0000010000010000
3
1000010010010000
3
1000010010010000
3
70
0000001001000100
3
0100001000000100
2
1000100000001000
3
0100001000000100
2
71
0000001000001000
3
0100100000010000
3
1000100010001000
3
0100100000010000
3
72
0000000100100100
3
0100010001000100
3
1000100100010000
3
0100010001000100
3
73
0000000100000100
3
0100001000100100
3
1001000000010000
3
0100001000100100
3
74
0000010000010000
2
0000010000010000
2
1000100001000100
3
1000100001000100
3
75
0001001001001000
2
0100001000000100
3
0001001001001000
2
0100001000000100
3
76
0000010010000100
2
0000010010000100
2
0100010000001000
2
0100010000001000
2
77
0000100000100000
2
0000100000100000
2
0100010010001000
2
0100010010001000
2
78
0010010001001000
2
0100000100000010
1
0010010001001000
2
0100000100000010
1
79
0000100100000100
2
0000100100000100
2
0100100100001000
2
0100100100001000
2
80
0000100100100100
2
0000100100100100
2
1000010000000100
2
1000010000000100
2
81
0001001000000100
2
0001001000000100
2
1000010000100100
2
1000010000100100
2
82
0001001000100100
2
0001001000100100
2
1000010001001000
2
1000010001001000
2
83
0010010000000100
2
0010010000000100
2
1000010010010000
2
1000010010010000
2
84
0010010000100100
2
0010010000100100
2
1000100000001000
2
1000100000001000
2
85
0010010010010000
2
0010010010010000
2
0100010001001001
1
0100010001001001
1
86
0000000100000100
2
0100001000100100
2
1000100001000100
2
0100001000100100
2
87
0000000100100100
2
0100010001000100
2
1000100010001000
2
0100010001000100
2
104
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書I
(規定)
最適パワー制御
序文
この附属書は,ディスクを記録する最適パワーの制御について規定する。
I.1
最適記録パワー
最適記録パワーPwo,Peo及びPcoは,ディスク,ドライブ及び記録速度によって決まる。
実際に記録する速度で,実際に使用するディスクと記録機との組合せに対するPwo,Peo及びPcoの値
の決定を,最適パワー制御手順と呼ぶ(OPC手順)。
高感度なOPC手順については,変調度対パワー曲線m (Pw) は,正規化傾斜γ[γ=(dm/dPw)/(m/Pw)で表
される約0.5〜2.0の値,図I.1参照]をもつパワーの関数として,変調度の変化が十分取れるパワー範囲
で決めなければならない。OPC手順は,実際のディスク,ドライブの組合せ及び記録速度での,γ=γtarget
に対するパワーのPtarget値を決める。
図I.1−変調度とγのパワーとの関係
OPC手順を行いやすくするために,PIND,γtarget,ρ,ε1及びε2の値を,物理フォーマット情報の中に規定
する。これらの値は,実際の最適値Pwo,Peo及びPcoを決める試験記録での開始値として使用する。
Pwo,Peo及びPcoを決めるためのパラメタ間の関係は,次の式及び図I.1に示す。
H
14
14
I
I
m=
:
HF信号の変調振幅
W
W
/
d
/
d
P
m
P
m
=
γ
:
関数m(Pw) の正規化傾斜
PIND:
物理情報ゾーンのPtargetの指示推定値
Ptarget=Pw(γtargetにおける): γ=γtargetでの記録パワー
m(Pw)
Ptarget
Pp
m
γ
γtarget
記録パワー Pw
m
P
P
m
w
w
d
d
×
=
γ
105
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ρ:
Ppoを得る増倍率
Pwo=ρ×Ptarget:
最適記録パワー
ε1:
消去/記録パワー比
ε2:
バイアス/記録パワー比
Peo=ε1×Pwo:
最適消去パワーPeo
Pbo=ε2×Pwo:
最適バイアスパワーPbo
I.2
変調及びパワー関数の関係を表す数式モデル
ランダムな測定誤差及びノイズの影響を最小化するために,変調度対パワー曲線を次の関数によって近
似する。
(
)
−
×
=
w
1
w
thr
max
P
P
m
P
m
ここに, mmax: 最大変調度(飽和レベル)
Pthr: しきい値パワー
この近似から計算されるγ値は,次による。
(
)
thr
thr
w
w
P
P
P
P
−
=
γ
そして,Ptargetは,次による。
+
×
=
target
thr
target
1
1γ
P
P
その結果,関数f(Pw)=Pw×m(Pw)は,Pw×m(Pw)=mmax×(Pw−Pthr)で表される直線になる。
Pei=ε1×Pwi及びPc=ε2×ρ×PINDを使い,異なる記録パワーPwiで,ランダムな8〜16符号化データを
試験記録することによって,対応する変調の値miを得る。
直線Pw×m(Pw)=mmax×(Pw−Pthr)を幾つかの座標点 (Pwi, mi×Pwi) に近似することによって,mmax及
びPthrの点を簡単に決めることができる(この近似の精度の限界によって,mmaxは1を超える値にとる。)。
図I.2−異なったパワーで記録した交流結合HF信号
直線近似
Pw × m(Pw)
Pthreshold
記録パワー Pw
106
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
I.3 メディアパラメタの決定手順
物理フォーマット情報のPIND(Ptargetの指示値),γtarget,ρ,ε1及びε2の値を決めるために,メディア製造
業者はメディアの最適記録パワーPwo,Peo及びPcoを,最初に見つけなければならない。これは,Pw,
Pe及びPcの幾つかの組合せによる試験記録と,記録結果としてのパラメタを27.2.2〜27.2.6に従って測定
することによって行う。その場合,記録は,最大速度,基準速度及び最低速度で行い,再生は,基準速度
で行う。これらの測定は,9.2に記載の光学系を用いて,23 ℃で行う。
Pw=Pwo,Pe=Peo及びPc=Pcoの組合せを選ぶことによって,記録パラメタが最適となり,ε1=Peo/Pwo
及びε2=Pco/Pwoの比率が確定する。
注記 すべての記録パラメタを上記の方法で最適化することができない場合は,メディア製造業者の
提供するパラメタに従う。
次の段階で,物理フォーマット情報に規定する他のパラメタを決定する。
ディスク製造業者は,目標記録パワーPINDの指示推定値の選択肢を作らなければならない。
γtarget値の決定手順
Pei=ε1×Pwi及びPc=ε2×ρ×PINDを使い,0.9×PIND〜1.1×PINDの範囲の異なる記録パワーPwiで,ラン
ダムな8〜16符号化データを記録した後,結果としてのmiを測定する。記録及びmiの測定は,9.2に従う
基準記録機を使用して,T=23 ℃で行わなければならない。
次に,得られた測定点に対してI.2で示した直線近似を行い,γtarget値を次のように計算する。
thr
IND
thr
target
P
P
P
−
=
γ
注記1 最適記録パワーは,10回書換えを行った後に,最適な記録結果を与えるパワーを目的として
作られている。
注記2 変調度の測定を正確に行うために,パワー範囲は,一番低いパワー値での変調度が30 %以
上になるように選ぶ。
I.4 装置に対するOPC手順の例
Pei=ε1×Pwi及びPc=ε2×ρ×PINDを用いて,異なる記録パワー Pwiでランダムな8〜16符号化データを
試験記録することによって,対応する変調の値miを得る。
直線Pw×m(Pw)=mmax×(Pw−Pthr) を幾つかの座標点 (Pwi, mi×Pwi) に近似することによって,mmax及
びPthrの点を簡単に決めることができる。
次に規定のパワー範囲に対するPtargetを,物理フォーマット情報で与えられたγtargetを用いて計算する(I.2
参照)。
数式モデルは一次近似なので,十分正確なPtargetになるまで,補間又は上記の手順を繰り返すことが必要
になる。
補間手順の例を次に示す。
− 直線近似のために,二つの中心パワー値を選ぶ。 Pfit, 1=0.95×PIND及びPfit, 2=1.05×PIND
− 0.9×Pfit, 1〜1.1×Pfit, 1の範囲のパワーPwiで測定したmi値から,対応するPtarget,1値を決める。
− 0.9×Pfit, 2〜1.1×Pfit, 2の範囲のパワーPwiで測定したmi値から,対応するPtarget,2値を決める。
ここに,Ptargetを点(Ptarget, 1,Pfit, 1)と(Ptarget, 2,Pfit, 2)を結ぶ直線と,Ptarget=Pfitで代表される直線の交
差から計算する。結果は,次のようになる。
107
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
fit,1
fit,2
target,1
target,2
fit,2
target,1
fit,1
target,2
target
P
P
P
P
P
P
P
P
P
+
−
−
×
−
×
=
この手順を必要に応じて繰り返し,最終精度を改善する。
得られたPtargetを用いて,Pwo,Peo及びPcoを,次のようにして求める(ρ,ε1,ε2は物理フォーマット
情報で与えられる)。
Pwo=ρ×Ptarget
Peo=ε1×Pwo
Pco=ε2×Pwo
注記3 OPC手順は,ドライブテストゾーン又はディスクテストゾーンのように,この目的のために
特別に規定するディスクの領域で行い,その領域の中でランダムに選んだ場所で行うことが
望ましい。
OPCの結果の精度向上のため,ドライブテストゾーン及びディスクテストゾーンを初期化
するのがよい。続いて,物理フォーマット情報のPw=ρ×PIND,Pe=ε1×Pw及びPe=ε2×Pw
によって決定する記録パワーを使用し,すべて(00)をこの領域に書き込む。
その後に,使用するトラック(ブランクディスクでも同様に)を,Peパワー (Pe=ε1×ρ
×PIND) だけを用いてトラックに照射し,消去しなければならない。OPC手順の後は,使用
したトラックを,公称パワーでオーバーライトしなければならない。この場合,主データを
(00) に設定するとともにアドレス情報を (ID+IED) に修正したセクタを用いる。
注記4 同じ記録ストラテジを用いる一つの速度範囲内では,このOPC手順を使って決めた一つの線
速度v1での比率Pp/ρ×PINDを,他の線速度v2での最適パワーPpを決めるのに用いる。これ
は,他の線速度での指示パワーPIND及び増倍率ρを使って,次の式で与えられる。
1
IND
1
1
2
IND
2
2
p
p
v
v
v
v
v
v
P
ρ
P
P
ρ
P
×
×
×
=
I.5
異なる書換え条件下でのメディアマージン
異なる速度でオーバーライトした場合に,誤りのないデータ互換を保証するために,ディスクは次の方
法で試験されなければならない。
− 最初にブランクディスクを,3.49 m/s(1倍速)で,この附属書に記述されているOPC手順を用いて
決めた最適記録パワーで,1回記録する。
− 記録済みの情報を,13.95 m/s(4倍速)で,この附属書に記述されているOPC手順を用いて決めた最
適記録パワーの0.9倍のパワーで,1回書き換える。
− その結果,連続する任意の8ECCブロックの訂正前PIエラーの総数が,280を超えてはならない(29.2
参照)。
記録及び測定は,箇条9及び附属書Eで定義した基準記録機で行わなければならない。
I.6
最適でない記録パワー及びディスク寿命にかかわるメディアマージン
ドライブ実装においては実用的な精度を要求するため,ディスクはいくらかのマージンを作って,最適
パワーからのずれを許容しなければならない。したがって,次の要件を満たすことが求められる。
実際の記録パワーPpが,0.85×Pwo〜1.1×Pwoの範囲で,14.4.2に指示される公称値によるε1及びε2
を用いたPe=ε1×Pw及びPc=ε2×Pwで,10回の書換え時,すべての規定を満たさなければならない。さ
108
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
らにジッタは,Pwoを用いた500回までの書換えで10 %以下でなければならない。ディスクは,少なく
とも1 000回の書換えまですべてのパラメタが規定を満たすのがよい。
109
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書J
(規定)
論理から物理アドレスへの変換
序文
この附属書は,論理から物理アドレスへの変換について規定する。
J.1
論理から物理アドレスへの変換
論理から物理アドレスへの変換は,適用する欠陥管理システムに依存する。したがって,論理セクタ番
号付けの最初と最後の物理アドレスは,箇条20で規定する値とは異なる。
110
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書K
(参考)
グルーブウォブル振幅の測定
序文
この附属書は,グルーブウォブル振幅の測定について記載するものであって,規定の一部ではない。
K.1 ウォブル信号とウォブル振幅との関係
ウォブル振幅のnm値を直接測定することは容易でないが,正規化したウォブル信号から導くことがで
きる。その理論上の計算は,次による。
ウォブル信号のピーク値IWは,次による。
×
×
×
=
p
a
A
I
π
2
sin
Wp
ここに,
a: ウォブル振幅
p: ラジアルエラー信号のトラックピッチ
A: ラジアルエラー信号のピーク値
図K.1にパラメタa,p,A及びIWpを示す。グルーブは,グルーブの平均化した中心からグルーブの実
際の中心の間で,最大偏位“a”(ウォブル振幅)を生じる。正規化したウォブル信号は,次による。
(
)
×
×
=
×
×
=
−
p
a
A
I
I
I
I
π
2
sin
2
2
Wp
pp
2
1
Wpp
ここに,
(I1−I2)pp: 2×A
ウォブル信号IWは,ウォブル振幅aだけでなくトラックピッチpに依存する。正規化によって,グルー
ブ寸法,光スポット形状及び光学収差の影響を除く。
K.2 正規化ウォブル信号の許容差
上述の正規化ウォブル信号の数式から,25.4で規定した許容差は,既知のトラックピッチ“p”=0.74 μm
に対してnm値に変換する。
下限0.15は,a=18 nmに相当する。
上限0.25は,a=30 nmに相当する。
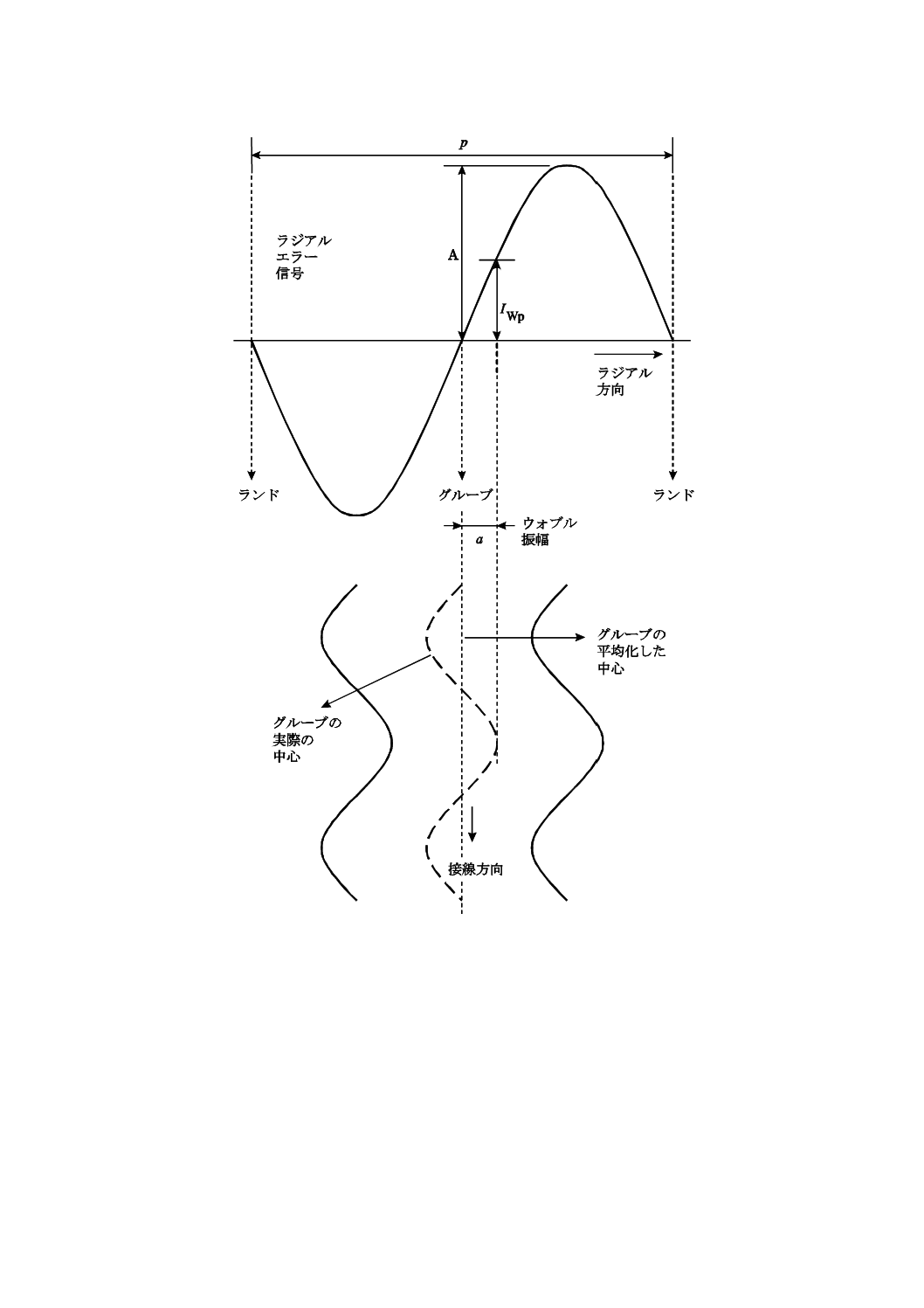
111
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図K.1−グルーブのウォブル振幅
112
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書L
(参考)
輸送
序文
この附属書は,輸送について記載するものであって,規定の一部ではない。
L.1
概要
輸送は,例えば,異なる期間,様々な輸送方法によって,そして世界の各所で,広い範囲の温度及び湿
度の変動の中で行われるので,輸送又は包装の必す(須)条件を規定することは不可能である。
L.2
包装
包装の形態は,送付元と受領先との間で合意を得ておくことが望ましいが,そのような合意がない場合
は,送付元の責任とする。次のような損害を考慮しておくことが望ましい。
L.2.1 温度及び湿度
断熱及び包装は,輸送の見込まれる期間中にわたる保存条件を維持するように設計することが望ましい。
L.2.2 衝撃負荷及び振動
a) ディスクの形状にひずみを与える機械的負荷を避ける。
b) ディスクの落下を避ける。
c) ディスクは,適切な衝撃吸収材料を含む堅い箱にこん包することが望ましい。
d) 個装箱は,清浄な内部並びに汚れ及び湿気の侵入を防ぐシールをした構造をもつことが望ましい。
113
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書M
(参考)
欠陥管理及び物理フォーマット
序文
この附属書は,欠陥管理及び物理フォーマットについて記載するものであって,規定の一部ではない。
M.1 欠陥管理及び物理フォーマット
一般的な記録応用の効率及びデータの信頼性を改善するために,この規格に従う+RWディスクは,バッ
クグラウンドフォーマット及び欠陥管理システムと組み合わせる。そのようなシステムを,通称“マウン
トレイニア欠陥管理(Mount Rainier Defect Management)”とも呼ぶ。
114
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書N
(参考)
ビデオコンテンツプロテクション
(対応国際規格では,この附属書において,ビデオアプリケーションの場合のビデオコンテンツプロテ
クションについて規定しているが,この規格はデータアプリケーションについて規定するものであるため,
この附属書は不要であり,不採用とした。)
115
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書O
(参考)
ADIPの物理フォーマット情報の使い方
序文
この附属書は,ADIPの物理フォーマット情報の使い方について記載するものであって,規定の一部で
はない。
O.1 ADIPの物理フォーマット情報の使い方
ADIPの物理フォーマット情報を十分に生かすために,次の規則を推奨ガイドラインとして記載する(図
O.1参照)。
ドライブが,ADIPを読んで次の情報を確認する場合
1) バイト0のディスクカテゴリを確認する。
⇒ ディスクが+R又は+RWであるかを決定する。
ドライブが,ディスクアプリケーションコードを反映する場合
2) バイト17のアプリケーションコードを確認する。
⇒ ドライブが,特定のディスクアプリケーションコードの規則に従うことができない場合は,ド
ライブはディスクへの記録を阻止しなければならない。
ドライブが,“メディア認識”を行える場合(例えば,ドライブが,一義的にディスク製造業者及びメディ
アタイプを決定でき,そのディスクの最適な記録パラメタセットを自身のメモリにもっている場合)
3) ディスク製造業者及びメディアタイプIDを確認する(バイト19〜29)。
⇒ ドライブのメモリから,この特定ディスクに最適な記録ストラテジを選ぶ。
ドライブが,メディア認識に失敗する場合
4) バイト0のバージョン番号を確認する。
⇒ バージョン番号が未知の場合,バイト32〜63の内容を使用しない。
⇒ バージョン番号が既知の場合,正しいバージョン番号をもつ規格書に従って,バイト32〜63
を解釈する。
5) バイト18を調べて,EIブロックの有無を確認する。
⇒ EIブロックがない場合,基本記録ストラテジを使用する。
EIブロックがある場合
6) 存在する各EIブロックのフォーマット番号を確認する。
⇒ フォーマット番号が未知の場合,そのEIブロックの内容を使用しない。
⇒ フォーマット番号が既知の場合,正しいバージョン番号をもつ規格書に従って,EIブロックを
解釈する。
上述によって,ドライブが最適な記録速度及び記録ストラテジを次の選択肢の中から選択できる。
⇒ バイト32〜63で定義する基本記録ストラテジ(1〜2.4倍速)を使用する。
⇒ 既知のEIブロックの一つから,記録ストラテジを使用する。
⇒ 関係するバイトに示している,ドライブで実際に利用可能としている記録速度から,使用可能
な記録ストラテジを使用する(利用可能とする記録速度は,この規格の将来の版にも適用する。)。
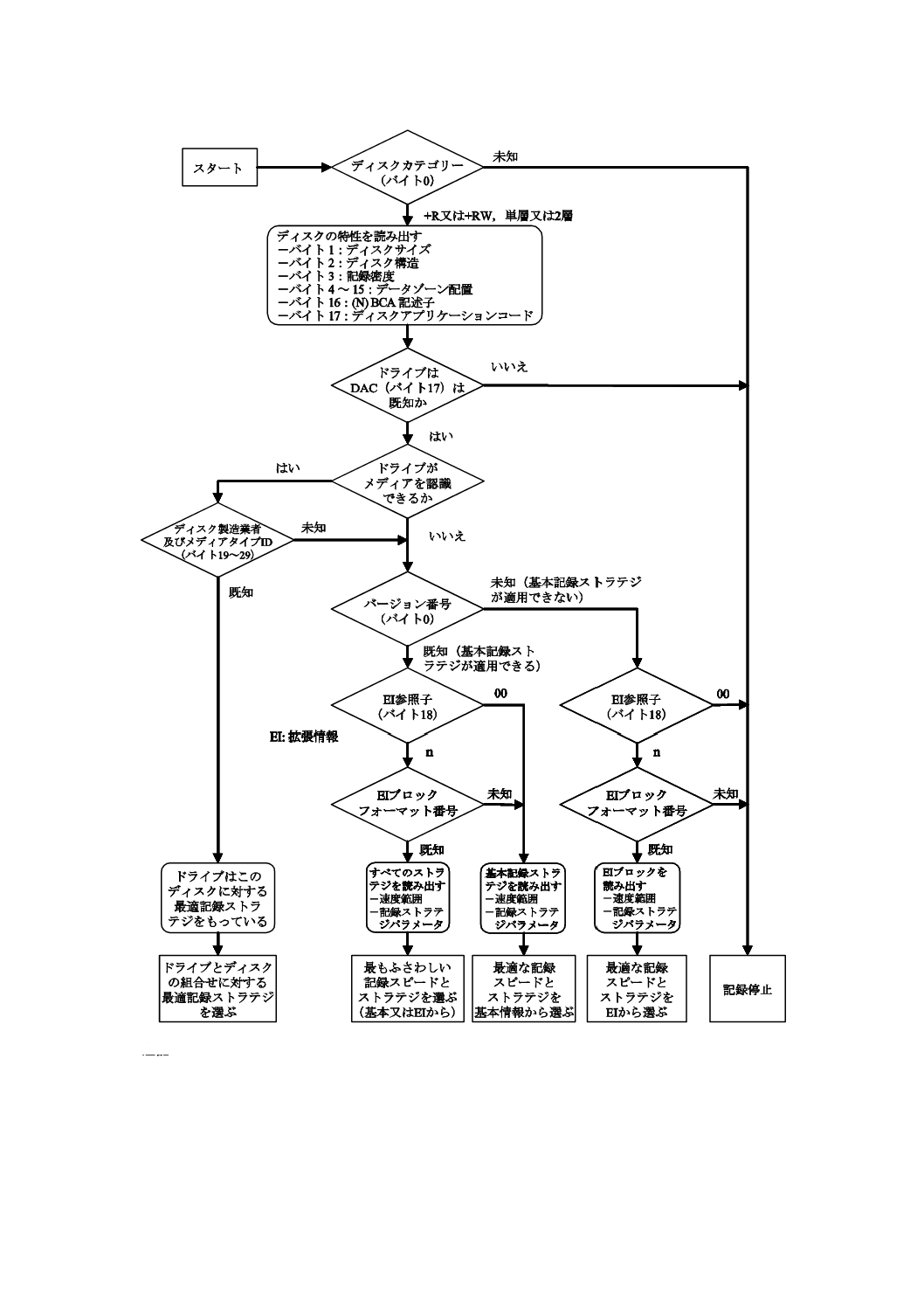
116
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記
一つのディスク上に一つ以上のEIブロックが存在する可能性がある。
図O.1−ADIP内の物理フォーマット情報の使い方を示したフローチャート
117
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書P
(参考)
現行及び将来の仕様で使用する値
序文
この附属書は,現行及び将来の仕様で使用する値について記載するものであって,規定の一部ではない。
P.1
現行及び将来の仕様で使用する値
この規格で指定するバイト設定値は,+RWフォーマットのディスクに適合する書換え形ディスクに関連
する。近い将来,他の分類のディスクが規格化されることが見込まれる。したがって,次の値はこれら他
のディスクのために使うことを推奨する。さらに取り得るビットパターンは,将来の規格を対象としてい
る。
すべての規格は見直しをするので,この附属書の情報は,変更される可能性がある。したがって,指示
された規格の最新版を参照して,この情報の確認を行うことを推奨する。
識別データ
ビットb31
次の値に設定する。
“0”は,CLDフォーマットを示す。
“1”は,ゾーンフォーマットを示す。
ビットb30
次の値に設定する。
“0”は,ピットトラッキングを示す。
“1”は,グルーブトラッキングを示す。
ビットb29
次の値に設定する。
“0”は,PBSを使用した光学系で反射率が40 %を超えるときを示す。
“1”は,PBSを使用した光学系で反射率が40 %以下のときを示す。
ビットb28
予約済みで“0”に設定する。
ビットb27〜b26 次の値に設定する。
“00” データゾーン
“01” リードインゾーン
“10” リードアウトゾーン
“11” ミドルゾーン
ビットb25
次の値に設定する。
“0”は,再生専用データを示す。
“1”は,再生専用データ以外を示す。
ビットb24
次の値に設定する。
“0”は,2層ディスクのレイヤ0を示す。
“1”は,2層ディスクのレイヤ1を示す。
“0”は,単層ディスクを示す。
ビットb23〜b0 物理セクタ番号を指定する。
118
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
リードインにあるADIPの物理フォーマット情報
バイト0 ディスクカテゴリ及びバージョン番号
ビットb7〜b4 ディスクカテゴリを指定する。
“0000”に設定する場合,これらは,DVD再生専用ディスクを示す。
“1001”に設定する場合,これらは,+RWディスクを示す。
“1010”に設定する場合,これらは,+R単層ディスクを示す。
ビットb3〜b0は,バージョン番号を指定する。同時にビットb7〜b4は,関連規格を指定する。
b7〜b4を“0000”,b3〜b0を“0000”に設定する場合,JIS X 6241及びJIS X 6242を示す。
b7〜b4を“1001”,b3〜b0を“0010”に設定する場合,この規格を示す。
b7〜b4を“1010”,b3〜b0を“0001”に設定する場合,+Rシステムを示す。
バイト1 ディスクサイズ及び最大転送レート
ビットb7〜b4は,ディスクサイズを指定する。
“0000”に設定する場合,120 mmディスクとする。
“0001”に設定する場合,80 mmディスクとする。
ビットb3〜b0は,最大転送レートを指定する。
“0000”に設定する場合,2.52 Mbits/sの最大転送レートとする。
“0001”に設定する場合,5.04 Mbits/sの最大転送レートとする。
“0010”に設定する場合,10.08 Mbits/sの最大転送レートとする。
“1111”に設定する場合,最大転送レートを指定しない。
バイト2 ディスク構造
ビットb7
“0”に設定する。
ビットb6 及びb5は,ディスクタイプを指定する。
“00”に設定する場合,単層記録とする。
“01”に設定する場合,2層記録とする。
ビットb4
“0”に設定する。
ビットb3〜b0は,レイヤタイプを指定する。
ビットb3
“0”に設定する。
ビットb2
次のように設定する。
“0”の場合,ディスクが書換え可能なデータゾーンをもっていないことを示す。
“1”の場合,ディスクが書換え可能なデータゾーンをもっていることを示す。
ビットb1
次のように設定する。
“0”の場合,ディスクが記録可能なデータゾーンを含まないことを示す。
“1”の場合,ディスクが記録可能なデータゾーンを含むことを示す。
ビットb0
次のように設定する。
“0”の場合,ディスクがエンボスで形成するデータゾーンを含まないことを示す。
“1”の場合,ディスクがエンボスで形成するデータゾーンを含むことを示す。
バイト3 記録密度
ビットb7〜b4は,平均チャネルビット長を指定する。
“0000”に設定する場合,0.133 μmとする。
“0001”に設定する場合,0.147 μmとする。
119
X 6250:2009 (ISO/IEC 17341:2006)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
“0010”に設定する場合,0.205 μm〜0.218 μmの範囲の平均長とする。
“1000”に設定する場合,0.176 37 μmとする。
ビットb3〜b0は,平均トラックピッチを指定する。
“0000”に設定する場合,0.74 μmのトラックピッチとする。
“0001”に設定する場合,0.80 μmのトラックピッチとする。