2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
X 5709-1991
(ISO/IEC 9072-2 : 1989)
遠隔操作−
第2部 プロトコル仕様
Information processing systems−Text communication−
Remote Operations−Part 2 : Protocol specification
日本工業規格としてのまえがき
この規格は,1989年に第1版として発行されたISO/IEC 9072-2 (Information processing systems−Text
communication−Remote Operations−Part 2 : Protocol specification) を基に,技術的な内容及び規格票の様式
を変更することなく作成した日本工業規格である。
0. 序文 この規格は,遠隔操作サービス要素 (ROSE) が提供するサービスに対するプロトコルを規定す
る。ROSEは,分散した開放型システム環境において相互動作する応用を支援する応用サービス要素の一
つである。この規格は,多くの応用が共通に使用する一連の応用サービス要素を定義する規格の一つであ
る。
この規格は,分散した応用エンティティ間の相互動作を遠隔操作としてモデル化し,相互動作を遠隔操
作記法を用いて定義する。ROSEは,一方の応用エンティティが遠隔操作を要求し,他方の応用エンティ
ティがその実行を試みて,結果を報告するという相互動作のための遠隔操作を提供する。
1. 適用範囲 この規格は,遠隔操作(JIS X 5708参照)のプロトコル(抽象構文)及び手順を規定する。
この規格は,次に示すサービス及びプロトコルを使用してROSEサービスを提供する。
(1) アソシエーション制御サービス要素(以下,ACSEという。)サービス(JIS X 5701参照)
(2) ACSEプロトコル(JIS X 5702参照)
(3) プレゼンテーションサービス(JIS X 5601参照)
(4) 任意選択として,高信頼転送サービス要素(以下,RTSEという。)サービス(ISO/IEC 9066-1参照)
(5) 任意選択として,RTSEプロトコル(ISO/IEC 9066-2参照)
ROSE手順を,次の点に関して定義する。
(1) RTSEサービス又はプレゼンテーションサービスを使用した同位ROSEプロトコル機械間の相互動作
(2) ROSEプロトコル機械及びそのサービス利用者間の相互動作
この規格は,これらの手順を実装するシステムのための適合性の要件を規定する。
2. 引用規格 この規格で引用する規格を,次に示す。これらの規格がこの規格の本文中で引用された場
合は,この規格の規定の一部とみなす。
(1) ISO/IEC 7498 : 1984 Information processing systems−Open Systems Interconnection−Basic
2
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Reference Model
備考 JIS X 5003(開放型システム間相互接続の基本参照モデル)−1987が,この国際規格と技術
的に一致している。
(2) ISO/TR 8509 : 1987 Information processing systems−Open Systems Interconnection−Service
conventions
備考 JIS X 5201(開放型システム間相互接続−基本コネクション型セションサービス定義)−1991
の参考(開放型システム間相互接続のサービス記法)が,この国際規格と技術的に一致
している。
(3) ISO 8649 : 1988 Information processing systems−Open Systems Interconnection−Service definition
for the Association Control Service Element
備考 JIS X 5701(開放型システム間相互接続−アソシエーション制御サービス要素のサービス定
義)−1991が,この国際規格と一致している。
(4) ISO 8650 : 1988 Information processing systems−Open Systems Interconnection−Protocol
specification for the Association Control Service Element
備考 JIS X 5702(開放型システム間相互接続−アソシエーション制御サービス要素のプロトコル
仕様)−1991が,この国際規格と一致している。
(5) ISO 8822 : 1988 Information processing systems−Open Systems Interconnection−Connection
oriented presentation service definition
備考 JIS X 5601(開放型システム間相互接続−コネクション型プレゼンテーションサービス定義)
−1991が,この国際規格と一致している。
(6) ISO 8824 : 1987 Information processing systems−Open Systems Interconnection−Specification of
Abstract Syntax Notation One (ASN.1)
備考 この国際規格に対応する規格として,JIS X 5603[開放型システム間相互接続の抽象構文記
法1 (ASN.1) 仕様]−1990が制定されている。JIS X 5603は,この国際規格に対して日
本語が使用できるように拡張されている。
(7) ISO 8825 : 1987 Information processing systems−Open Systems Interconnection−Specification of
basic encoding rules for Abstract Syntax Notation One (ASN.1)
備考 JIS X 5604[開放型システム間相互接続の抽象構文記法1 (ASN.1) の基本符号化規則仕様]
−1990が,この国際規格と一致している。
(8) ISO/IEC 9066-1 : 1989 Information processing systems−Text communication−Reliable Transfer−
Part 1 : Model and service definition
(9) ISO/IEC 9066-2 : 1989 Information processing systems−Text communication−Reliable Transfer−
Part 2 : Protocol specification
(10) ISO/IEC 9072-1 : 1989 Information processing systems−Text communication−Remote Operations−
Part 1 : Model, notation and service definition
備考 JIS X 5708(遠隔操作−第1部モデル,記法及びサービス定義)−1991が,この国際規格と
一致している。
3. 用語の定義
3.1
基本参照モデルで定義した用語 この規格は,JIS X 5003で定義した次の用語を使用する。
3
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(a) 応用層 (Application Layer)
(b) 応用プロセス (application-process)
(c) 応用エンティティ (application-entity)
(d) 応用サービス要素 (application-service-element)
(e) 応用プロトコルデータ単位 (application-protocol-data-unit)
(f) 応用プロトコル制御情報 (application-protocol-control-information)
(g) プレゼンテーションサービス (presentation-service)
(h) プレゼンテーションコネクション (presentation-connection)
(i) セションサービス (session-service)
(j) セションコネクション (session-connection)
(k) 転送構文 (transfer syntax)
(l) 利用者要素 (user-element)
3.2
サービス記法で定義した用語 この規格は,JIS X 5201の参考で定義した次の用語を使用する。
(a) サービス提供者 (service-provider)
(b) サービス利用者 (service-user)
(c) 確認型サービス (confirmed service)
(d) 非確認型サービス (non-confirmed service)
(e) 提供者起動型サービス (provider-initiated service)
(f) プリミティブ (primitive)
(g) 要求,要求プリミティブ (request, request primitive)
(h) 指示,指示プリミティブ (indication, indication primitive)
(i) 応答,応答プリミティブ (response, response primitive)
(j) 確認,確認プリミティブ (confirm, confirm primitive)
3.3
プレゼンテーションサービスで定義した用語 この規格は,JIS X 5601で定義した次の用語を使用
する。
(a) 抽象構文 (abstract syntax)
(b) 抽象構文名 (abstract syntax name)
(c) プレゼンテーションコンテキスト (presentation context)
3.4
アソシエーション制御サービスで定義した用語 この規格は,JIS X 5701で定義した次の用語を使
用する。
(a) 応用アソシエーション,アソシエーション (application-association, association)
(b) 応用コンテキスト (application context)
(c) アソシエーション制御サービス要素 (Association Control Service Element)
3.5
高信頼転送サービスで定義した用語 この規格は,ISO/IEC 9066-1で定義した次の用語を使用する。
(a) 高信頼転送サービス要素 (Reliable Transfer Service Element)
3.6
ROSEサービスで定義した用語 この規格は,JIS X 5708で定義した次の用語を使用する。
(a) アソシエーション起動側応用エンティティ,アソシエーション起動側
(association-initiating-application-entity, association-initiator)
(b) アソシエーション応答側応用エンティティ,アソシエーション応答側
(association-responding-application-entity, association-responder)
4
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(c) 起動側応用エンティティ,起動者 (invoking-application-entity, invoker)
(d) 実行側応用エンティティ,実行者 (performing-application-entity, performer)
(e) 要求側 (requester)
(f) 受諾側 (acceptor)
(g) 連結操作 (linked-operations)
(h) 親操作 (parent-operation)
(i) 子操作 (child-operation)
(j) RO記法 (RO-notation)
(k) 遠隔操作サービス要素 (Remote Operation Service Element)
(l) ROSE提供者 (ROSE-provider)
(m) ROSE利用者 (ROSE-user)
(n) RTSE利用者 (RTSE-user)
(o) 遠隔操作 (Remote Operations)
3.7
この規格で定義する用語 この規格で定義する用語は,次のとおりとする。
3.7.1
遠隔操作プロトコル機械 (remote-operation-protocol-machine) この規格で規定する遠隔操作サー
ビス要素のプロトコル機械。
3.7.2
要求側遠隔操作プロトコル機械 (requesting-remote-operation-protocol-machine) サービス利用者が
ある遠隔操作サービス要素の要求側である遠隔操作プロトコル機械。
3.7.3
受諾側遠隔操作プロトコル機械 (accepting-remote-operation-protocol-machine) サービス利用者が
ある遠隔操作サービス要素の受諾側である遠隔操作プロトコル機械。
4. 略語
4.1
データ単位 この規格では,データ単位に関する次の略語を使用する。
APDU 応用プロトコルデータ単位 (application-protocol-data-unit)
4.2
応用プロトコルデータ単位の種類 この規格では,応用プロトコルデータ単位に関する次の略語を
使用する。
ROIV
RO-INVOKE応用プロトコルデータ単位 (RO-INVOKE application-protocol-data-unit)
RORS RO-RESULT応用プロトコルデータ単位 (RO-RESULT application-protocol-data-unit)
ROER RO-ERROR応用プロトコルデータ単位 (RO-ERROR application-protocol-data-unit)
RORJ
RO-REJECT応用プロトコルデータ単位 (RO-REJECT application-protocol-data-unit)
4.3
その他の略語 この規格では,次の略語を使用する。
AE
応用エンティティ (Application Entity)
ACSE
アソシエーション制御サービス要素 (Association Control Service Element)
ASE
応用サービス要素 (Application Service Element)
RO(又はROS) 遠隔操作 (Remote Operations)
ROPM
遠隔操作プロトコル機械 (Remote Operations Protocol Machine)
ROSE
遠隔操作サービス要素 (Remote Operations Service Element)
RT
高信頼転送 (Reliable Transfer)
RTSE
高信頼転送サービス要素 (Reliable Transfer Service Element)
5
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
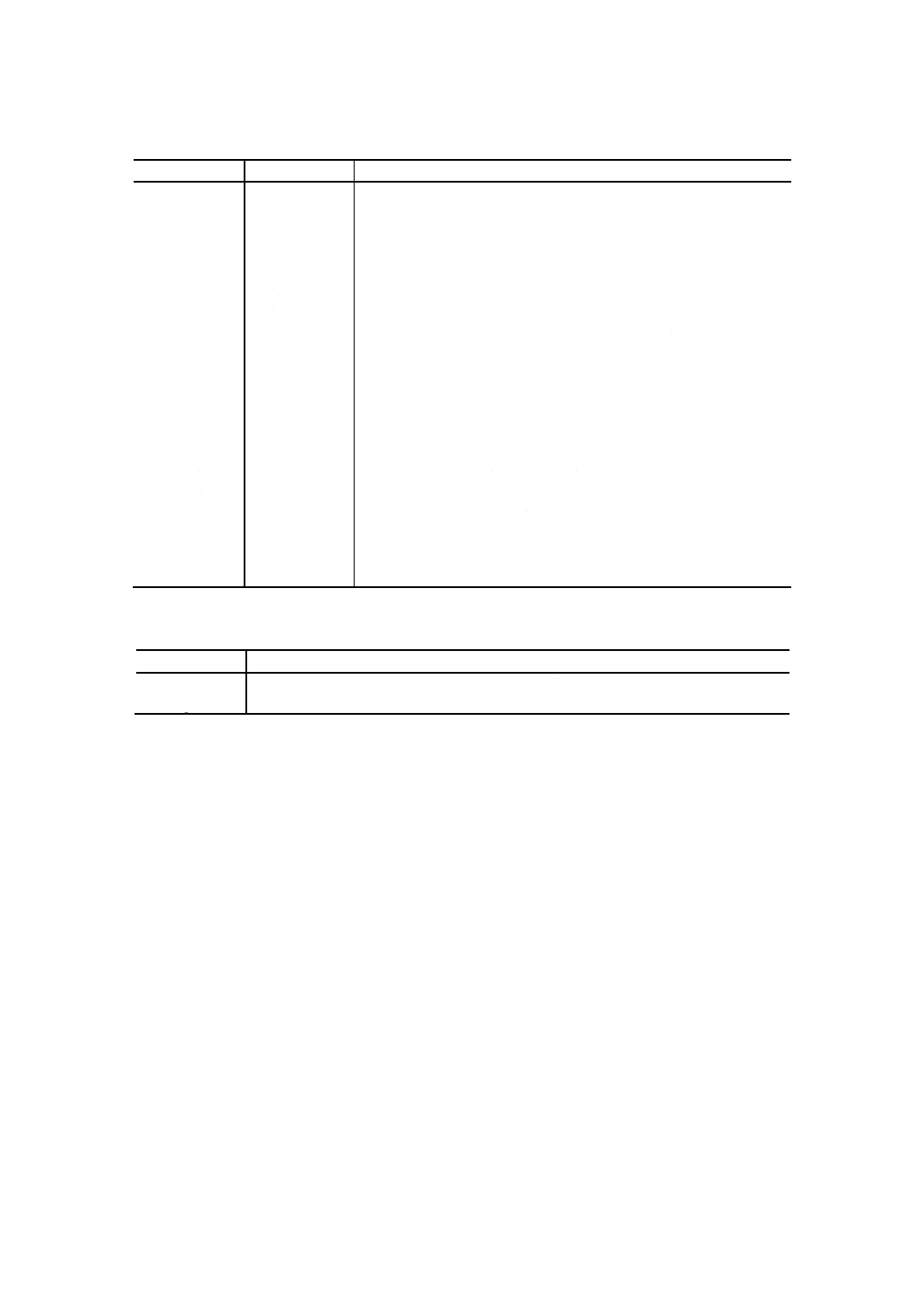
5. 記法 この規格は,ROSEのAPDUフィールドを表形式で表す。7.では,各ROSE APDUを表で規定
する。表中の各フィールドは,次のとおり表記する。
要求
送信側に関連する要求プリミティブ
指示
受信側に関連する指示プリミティブ
応答
送信側に関連する応答プリミティブ
確認
受信側に関連する確認プリミティブ
sp
送信側又は受信側がROPM
各ROSE APDUの構造については,JIS X 5603の抽象構文記法を用いて,9.で規定する。
6. プロトコルの概要
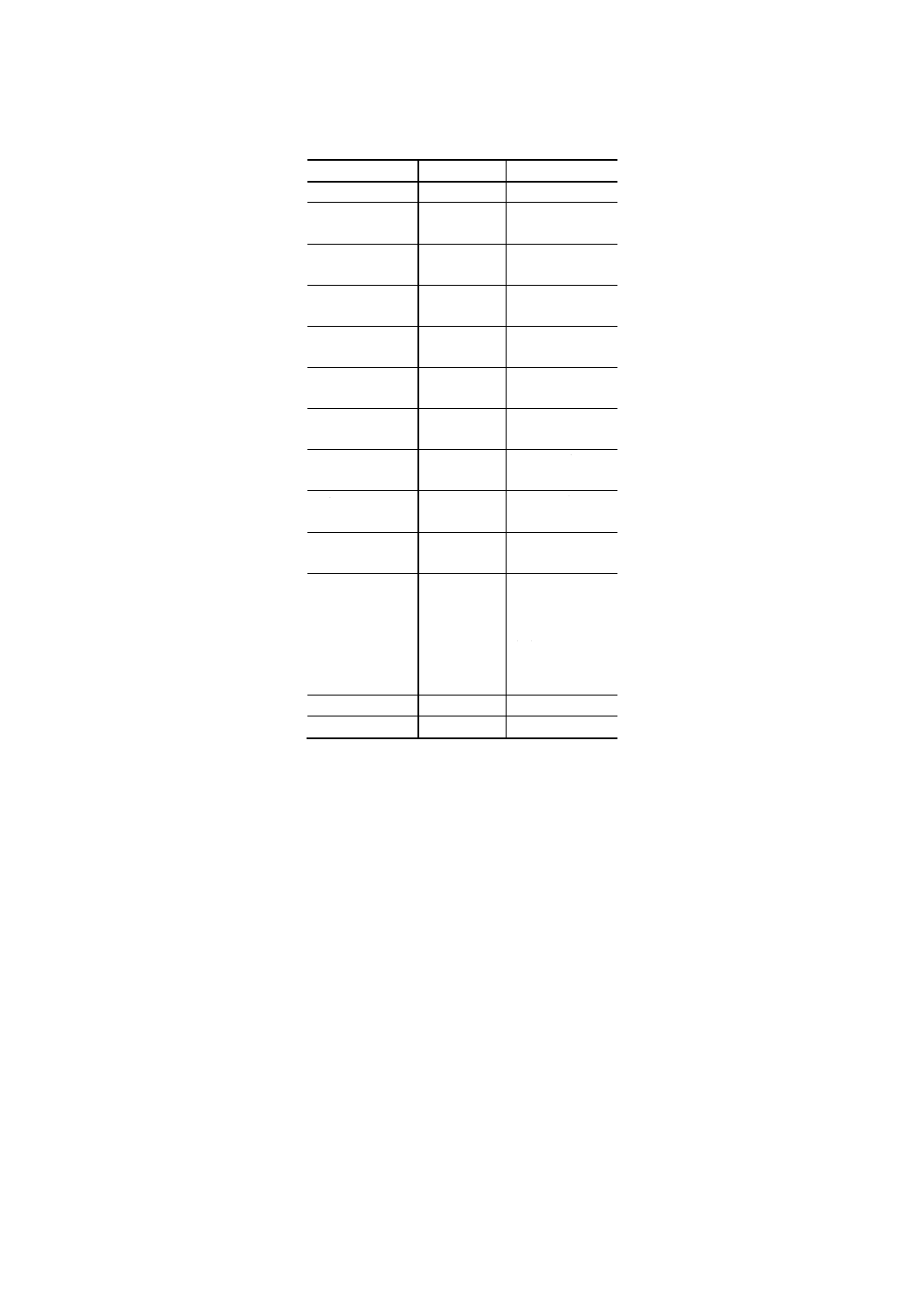
6.1
サービスの提供 この規格で規定するプロトコルは,JIS X 5708で規定されたROSEサービスを提
供する。
これらのサービスを表1に示す。
表1 ROSEサービスの一覧
サービス
型
RO-INVOKE
非確認型
RO-RESULT
非確認型
RO-ERROR
非確認型
RO-REJECT-U
非確認型
RO-REJECT-P
提供者起動型
6.2
サービスの使用 この規格で規定するプロトコルは,同位の応用エンティティ (AE) 間において
ROSE APDUの形式で情報を伝送するための転送サービスを必要とする。
転送サービスは,次のいずれかを使用してよい。
(a) RTSEが応用コンテキストに含まれる場合,RTSEサービス
(b) RTSEが応用コンテキストに含まれない場合,プレゼンテーションサービス
いずれの場合でも,ACSEサービスによって確立及び解放される応用アソシエーションが存在する。
6.2.1
RTSEサービスの使用 RTSEが応用コンテキストに含まれる場合,ROPMは,RT-TRANSFERサ
ービス及びRT-TURN-GIVEサービスの唯一の利用者とする。
送信権をもっている起動側AEだけが,RT-CLOSEサービスによって応用アソシエーションの解放を要
求することができる。このため,RTSE利用者及びROPMは,RT-TURN-PLEASEサービスの利用者となる。
ROPMは,RT-U-ABORT及びRT-P-ABORTのサービスを利用する。
6.2.2
プレゼンテーションサービスの使用 RTSEが応用コンテキストに含まれない場合,ROPMは
P-DATAサービスの利用者とする。
6.3
モデル ROPMは,JIS X 5708で規定されたサービスプリミティブによって,サービス利用者と通
信を行う。起動された各ROPMは,単一の応用アソシエーションを制御する。
次に示すサービスプリミティブがROPMを起動する。
(1) サービス利用者からのROSEサービス要求プリミティブ
(2) RTSEサービス又はプレゼンテーションサービスの指示プリミティブ及び確認プリミティブ
ROPMは,起動後,次のプリミティブを発行する。
(1) 利用者にROSEサービス指示プリミティブ
(2) RTSEサービス又はプレゼンテーションサービスの要求プリミティブ
6
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
RTSEが応用コンテキストに含まれる場合,ROPMは,RT-TRANSFER指示,RT-TRANSFER要求及び
RT-TRANSFER確認のサービスプリミティブを使用する。RTSEが応用コンテキストに含まれない場合,
ROPMは,プレゼンテーションサービスのP-DATA要求及びP-DATA指示のサービスプリミティブを使用
する。この場合,転送は,確認されない。
ROPMは,次に示すサービスプリミティブの受信と,これに依存する動作の発生とを,分割できない。
(1) ROSEサービスプリミティブ
(2) RTSEサービス又はプレゼンテーションサービスのサービスプリミティブ
APDUの交換中は,アソシエーション起動側AE及びアソシエーション応答側AEの両方が存在するも
のとする。これらのAEの作成方法は,この規格では規定しない。
操作の実行中は,同位AE間に応用アソシエーションが存在するものとする。この応用アソシエーショ
ンの確立方法及び解放方法は,この規格では規定しない(JIS X 5708,JIS X 5701,JIS X 5702,ISO/IEC
9066-1及びISO/IEC 9066-2参照)。
備考 終端システムでは,実装依存の内部的な機構によって,各応用アソシエーションを識別するこ
とができる。
これによって,ROSEサービス利用者及びROPMが,アソシエーションを参照することがで
きる。
7. 手順要素 ROSEプロトコルは,次の手順要素から構成する。
(a) 起動
(b) 結果応答
(c) 誤り応答
(d) 利用者拒否
(e) 提供者拒否
7.〜9.では,これらの各手順要素について,関連するAPDUの概要を示し,ROSEサービスプリミティ
ブ,生成されるAPDU及び使用される転送サービスの間の関係について規定する。ここでは,転送サービ
ス,転送サービス提供者,転送要求及び転送指示を一般的な用語として使用する。8.では,ROSEサービ
スプリミティブを,RTSEサービス又はプレゼンテーションサービスと対応付ける方法を規定する。
9.では,JIS X 5603で規定された記法を使用して,ROSE APDUについて規定する。
7.1
起動
7.1.1
目的 AE(起動者)は,相手AE(実行者)に対して操作の実行を要求するために,起動手順を使
用する。
7.1.2
使用するAPDU 起動手順は,RO-INVOKE (ROIV) APDUを使用する。ROIV APDUのフィールド
を表2に示す。
表2 ROIV APDUのフィールド
フィールド名
有無
送信側
受信側
起動ID
必す
要求
指示
連結ID
利用者選択
要求
指示
操作値
必す
要求
指示
引数
利用者選択
要求
指示
7.1.3
起動手順 起動手順は,次の事象の発生によって開始する。
7
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(a) 要求者からのRO-INVOKE要求プリミティブ
(b) 転送指示プリミティブの利用者データとしてのROIV APDU
7.1.3.1
RO-INVOKE要求プリミティブ 要求側ROPMは,RO-INVOKE要求プリミティブのパラメタ値
からROIV APDUを生成し,転送要求プリミティブを発行する。転送要求プリミティブの利用者データパ
ラメタは,ROIV APDUを含む。
要求側ROPMは,転送サービス提供者からの転送指示プリミティブ又は要求者からの他のサービスプリ
ミティブのいずれかを待つ。
7.1.3.2
ROIV APDU 受諾側ROPMは,その同位ROPMから転送指示プリミティブの利用者データとし
てROIV APDUを受信する。受諾側ROPMは,ROIV APDUのフィールドを受諾できない場合,提供者拒
否手順を実行し,RO-INVOKE指示プリミティブを発行しない。
受諾側ROPMは,ROIV APDUを受諾できる場合,受諾者にRO-INVOKE指示プリミティブを発行する。
RO-INVOKE指示プリミティブのパラメタは,ROIV APDUから生成する。
受諾側ROPMは,転送サービス提供者からの転送指示プリミティブ又は受諾者からの他のサービスプリ
ミティブのいずれかを待つ。
7.1.4
ROIV APDUフィールドの使用方法 ROIVフィールドの使用方法は,次のとおりとする。
7.1.4.1
起動ID これは,RO-INVOKE要求プリミティブの起動IDパラメタ値とする。これは,
RO-INVOKE指示プリミティブの起動IDパラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とするが,提供者拒否手順で使用できる。
7.1.4.2
連結ID これは,RO-INVOKE要求プリミティブの連結IDパラメタ値とする。これは,
RO-INVOKE指示プリミティブの連結IDパラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とする。
7.1.4.3
操作値 これは,RO-INVOKE要求プリミティブの操作値パラメタの値とする。これは,
RO-INVOKE指示プリミティブの操作値パラメタの値として使用する。
このフィールドの値は,ROPMに対して透過とする。
7.1.4.4
引数 これは,RO-INVOKE要求プリミティブの引数パラメタ値とする。これは,RO-INVOKE
指示プリミティブの引数パラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とする。
7.2
結果応答
7.2.1
目的 AE(実行者)は,成功した操作の結果を相手AE(起動者)に転送するために,結果応答手
順を使用する。
7.2.2
使用するAPDU 結果応答手順は,RO-RESULT (RORS) APDUを使用する。
RORS APDUのフィールドを表3に示す。
表3 RORS APDUのフィールド
フィールド名
有無
送信側
受信側
起動ID
必す
要求
指示
操作値
利用者選択
要求
指示
結果
利用者選択
要求
指示
7.2.3
結果応答手順 結果応答手順は,次の事象の発生によって開始する。
(a) 要求者からのRO-RESULT要求プリミティブ
(b) 転送指示プリミティブの利用者データとしてのRORS APDU
8
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2.3.1
RO-RESULT要求プリミティブ 要求側ROPMは,RO-RESULT要求プリミティブのパラメタ値
からRORS APDUを生成し,転送要求プリミティブを発行する。転送要求プリミティブの利用者データパ
ラメタは,RORS APDUを含む。
要求側ROPMは,転送サービス提供者からの転送指示プリミティブ又は要求者からの他のサービスプリ
ミティブのいずれかを待つ。
7.2.3.2
RORS APDU 受諾側ROPMは,その同位のROPMから転送指示プリミティブの利用者データ
としてRORS APDUを受信する。受諾側ROPMはRORS APDUのフィールドを受諾できない場合,提供者
拒否手順を実行し,RO-RESULT指示プリミティブを発行しない。
受諾側ROPMは,RORS APDUを受諾できる場合,受諾者にRO-RESULT指示プリミティブを発行する。
RO-RESULT指示プリミティブパラメタは,RORS APDUから生成する。
受諾側ROPMは,転送サービス提供者からの転送指示プリミティブ又は受諾者からの他のサービスプリ
ミティブのいずれかを待つ。
7.2.4
RORS APDUフィールドの使用方法 RORSフィールドの使用方法は,次のとおりとする。
7.2.4.1
起動ID これは,RO-RESULT要求プリミティブの起動IDパラメタ値とする。これは,
RO-RESULT指示プリミティブの起動IDパラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とするが,提供者拒否手順で使用できる。
7.2.4.2
操作値 これは,RO-RESULT要求プリミティブの操作値パラメタの値とする。これは,
RO-RESULT指示プリミティブの操作値パラメタの値として使用する。
このフィールドの値は,ROPMに対して透過とする。
このフィールドは,結果フィールドが存在する場合だけ,存在する。
7.2.4.3
結果 これは,RO-RESULT要求プリミティブの結果パラメタ値とする。これは,RO-RESULT指
示プリミティブの結果パラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とする。
7.3
誤り応答
7.3.1
目的 AE(実行者)によって操作が正常に処理されなかった場合,相手AE(起動者)に対して誤
り情報を転送するために,誤り応答手順を使用する。
7.3.2
使用するAPDU 誤り応答手順は,RO-ERROR (ROER) APDUを使用する。
ROER APDUのフィールドを表4に示す。
表4 ROER APDUのフィールド
フィールド名
有無
送信側
受信側
起動ID
必す
要求
指示
誤り値
必す
要求
指示
誤りパラメタ
利用者選択
要求
指示
7.3.3
誤り応答手順 誤り応答手順は,次の事象の発生によって開始する。
(a) 要求者からのRO-ERROR要求プリミティブ
(b) 転送指示プリミティブの利用者データパラメタとしてのROER APDU
7.3.3.1
RO-ERROR要求プリミティブ 要求側ROPMは,RO-ERROR要求プリミティブのパラメタ値か
らROER APDUを生成し,転送要求プリミティブを発行する。転送要求プリミティブの利用者データパラ
メタは,ROER APDUを含む。
要求側ROPMは,転送サービス提供者からの転送指示プリミティブ又は要求者からの他のサービスプリ
9
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ミティブのいずれかを待つ。
7.3.3.2
ROER APDU 受諾側ROPMは,その同位ROPMから転送指示プリミティブの利用者データと
してROER APDUを受信する。受諾側ROPMは,ROER APDUのフィールドを受諾できない場合,提供者
拒否手順を実行し,RO-ERROR指示プリミティブは発行しない。
受諾側ROPMは,ROER APDUを受諾できる場合,受諾者にRO-ERROR指示プリミティブを発行する。
RO-ERROR指示プリミティブのパラメタは,ROER APDUから生成する。
受諾側ROPMは,転送サービス提供者からの転送指示プリミティブ又は受諾者からの他のサービスプリ
ミティブのいずれかを待つ。
7.3.4
ROER APDUフィールドの使用方法 ROERフィールドの使用方法は,次のとおりとする。
7.3.4.1
起動ID これは,RO-ERROR要求プリミティブの起動IDパラメタ値とする。これは,RO-ERROR
指示プリミティブの起動IDパラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とするが,提供者拒否手順で使用できる。
7.3.4.2
誤り値 これは,RO-ERROR要求プリミティブの誤り値パラメタの値とする。これは,RO-ERROR
指示プリミティブの誤り値パラメタの値として使用する。
このフィールドの値は,ROPMに対して透過とする。
7.3.4.3
誤りパラメタ これは,RO-ERROR要求プリミティブの誤りパラメタのパラメタ値とする。これ
は,RO-ERROR指示プリミティブの誤りパラメタのパラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とする。
7.4
利用者拒否
7.4.1
目的 AEは,相手のAEの要求(起動)又は応答(結果又は誤り)を拒否するために,利用者拒
否手順を使用する。
7.4.2
使用するAPDU 利用者拒否手順は,RO-REJECT (RORJ) APDUを使用する。更に提供者拒否手順
も,このRORJ APDUを使用する。利用者拒否手順が使用するRORJ APDUのフィールドを表5に示す。
表5 利用者拒否で使用するRORJ APDUのフィールド
フィールド名
有無
送信側
受信側
起動ID
必す
要求
指示
問題(次のいずれか)
必す
要求
指示
起動上の問題
結果応答上の問題
誤り応答上の問題
7.4.3
利用者拒否手順 利用者拒否手順は,次の事象の発生によって開始する。
(a) 要求者からのRO-REJECT-U要求プリミティブ
(b) 転送指示プリミティブの利用者データパラメタとしてのRORJ APDU
7.4.3.1
RO-REJECT-U要求プリミティブ 要求側ROPMは,RO-REJECT-U要求プリミティブのパラメ
タ値からRORJ APDUを生成し,転送要求プリミティブを発行する。転送要求プリミティブの利用者デー
タパラメタは,RORJ APDUを含む。
要求側ROPMは,転送サービス提供者からの転送指示プリミティブ又は要求者からの他のサービスプリ
ミティブのいずれかを待つ。
7.4.3.2
RORJ APDU 受諾側ROPMは,その同位ROPMから転送指示プリミティブの利用者データパラ
メタとしてRORJ APDUを受信する。受諾側ROPMは,RORJ APDUのフィールドを受諾できない場合,
RO-REJECT-U指示プリミティブを発行しない。
10
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
受諾側ROPMは,RORJ APDUを受諾でき,かつ,そのフィールドが利用者拒否(すなわち,“起動上の
問題”,“結果応答上の問題”又は“誤り応答上の問題”)の場合は,受諾者にRO-REJECT-U指示プリミテ
ィブを発行する。RO-REJECT-U指示プリミティブのパラメタ(起動ID及び拒否理由)は,RORJ APDU
から生成する。
受諾側ROPMは,転送サービス提供者からの転送指示プリミティブ又は受諾者からの他のサービスプリ
ミティブのいずれかを待つ。
7.4.4
RORJ APDUフィールドの使用方法 RORJフィールドの使用方法は,次のとおりとする。
7.4.4.1
起動ID これは,RO-REJECT-U要求プリミティブの起動IDパラメタ値とする。これは,
RO-REJECT-U指示プリミティブの起動IDパラメタ値として使用する。
このフィールドの値は,ROPMに対して透過とする。
7.4.4.2
問題 これは,RO-REJECT-U要求プリミティブの問題パラメタ値とする。これは,RO-REJECT-U
指示プリミティブの問題パラメタ値として使用する。
利用者拒否手順で使用する値は,次のいずれかとする。
(a) 起動上の問題 RO-INVOKE指示プリミティブに対する利用者拒否は,次のいずれかの値とする。
(1) 二重起動 起動IDパラメタが,JIS X 5708の割当て規則に違反していることを示す。
(2) 認識不能操作 操作がROSE利用者間で合意したものでないことを示す。
(3) 引数型誤り 操作引数の型がROSE利用者間で合意したものでないことを示す。
(4) 資源限界 操作実行側ROSE利用者が資源限界のために起動された操作を実行できないことを示す。
(5) 起動側解放中 アソシエーション起動側が応用アソシエーションの解放中のため,起動された操作
を実行できないことを示す。
(6) 認識不能連結ID 進行中の操作の中に,指定された連結IDと同じ起動IDをもつ操作がないことを
示す。
(7) 予期しない連結応答 起動された操作(連結IDによって参照したもの)が親操作でないことを示
す。
(8) 予期しない子操作 起動された子操作が,起動された親操作(連結IDによって参照したもの)の
許可したものでないことを示す。
(b) 結果応答上の問題 RO-RESULT指示プリミティブに対する利用者拒否は,次のいずれかの値とする。
(1) 認識不能起動 進行中の操作の中に,指定された起動IDをもつものがないことを示す。
(2) 予期しない結果応答 起動した操作が結果を報告しないことを示す。
(3) 結果型誤り 結果パラメタの型がROSE利用者間で合意したものでないことを示す。
(c) 誤り応答上の問題 RO-ERROR指示プリミティブに対する利用者拒否は,次のいずれかの値とする。
(1) 認識不能起動 進行中の操作の中に,指定された起動IDをもつものがないことを示す。
(2) 予期しない誤り応答 起動した操作が誤りを報告しないことを示す。
(3) 認識不能誤り 報告された誤りがROSE利用者間で合意したものでないことを示す。
(4) 予期しない誤り 報告された誤りが,起動された操作に対して該当しない報告であることを示す。
(5) パラメタ型誤り 誤りパラメタの型がROSE利用者間で合意したものでないことを示す。
7.5
提供者拒否
7.5.1
目的 ROPMが問題を検出した場合,ROSE利用者及び同位ROPMにそのことを通知するために,
提供者拒否手順を使用する。
11
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.5.2
使用するAPDU 提供者拒否手順は,RO-REJECT (RORJ) APDUを使用する。更に利用者拒否手順
でも,このRORJ APDUを使用する。
提供者拒否手順で使用するRORJ APDUのフィールドを表6に示す。
表6 提供者拒否で使用するRORJ APDUのフィールド
フィールド名
有無
送信側
受信側
起動ID
必す
sp
指示
問題
一般的な問題
必す
sp
指示
7.5.3
提供者拒否手順 提供者拒否手順は,次の事象の発生によって開始する。
(a) 転送指示プリミティブの利用者データとして受諾不能なAPDU
(b) 転送指示プリミティブの利用者データとして問題パラメータが“一般的な問題”であるRORJ APDU
(c) APDUの転送の失敗(例えば,アソシエーションの異常終了)
7.5.3.1
受諾不能APDU 受信側ROPMは,その同位ROPMから転送指示プリミティブの利用者データ
としてAPDUを受信する。受信側ROPMは,RORJ APDU以外のAPDUのフィールドを受諾できない場合,
問題フィールドに“一般的な問題”を指定し,かつ,起動IDフィールドに拒否したAPDUの起動IDを指
定したRORJ APDUを生成し,転送要求プリミティブを発行する。転送要求プリミティブの利用者データ
は,RORJ APDUを含む。
受諾不能APDUがRORJ APDUの場合,新しいRORJ APDUを生成及び転送しない。受諾不能APDUが
RORJ APDUの場合又はAPDUを拒否した回数が局所的に指定した回数を超えた場合,応用アソシエーシ
ョンを異常解放する。
応用アソシエーションを異常解放しない場合,受信側ROPMは,転送サービス提供者からの転送指示プ
リミティブ又は要求者からの他のサービスプリミティブのいずれかを待つ。
7.5.3.2
RORJ APDU 受信側ROPMは,その同位ROPMから転送指示プリミティブの利用者データとし
てRORJ APDUを受信する。受信側ROPMは,RORJ APDUのフィールドを受諾できない場合,受諾不能
APDUに対する提供者拒否手順を実行する。
受信側ROPMは,RORJ APDUを受諾でき,かつRORJ APDUの問題フィールドが“一般的な問題”の
場合は,受諾者にRO-REJECT-P指示プリミティブを発行する。RO-REJECT-P指示プリミティブの起動ID
パラメタ及び拒否理由パラメタは,RORJ APDUから生成する。
受信側ROPMは,転送サービス提供者からの転送指示プリミティブ又は受諾者からの他のサービスプリ
ミティブのいずれかを待つ。
7.5.3.3
APDUの転送の失敗 送信側ROPMは,転送要求プリミティブによってAPDUを転送できない
場合(例えば,アソシエーションの異常解放の場合),転送されていないAPDUごとに要求者に
RO-REJECT-P指示プリミティブを発行する。
RO-REJECT-P指示プリミティブの返送パラメタは,RO-INVOKE要求,RO-RESULT要求,RO-ERROR
要求又はRO-REJECT-U要求のサービスプリミティブのパラメタを含む。
転送されなかったAPDUに対応する返送パラメタのすべてを要求者に発行した後に,応用アソシエーシ
ョンが存在する場合,この応用アソシエーションは,異常解放する。
7.5.4
RORJ APDUフィールドの使用方法 RORJフィールドの使用方法は,次のとおりとする。
12
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.5.4.1
起動ID これは,拒否されたAPDUの起動IDフィールド及びRO-REJECT-P指示プリミティブ
の起動IDパラメタとする。拒否されたAPDUの起動IDフィールドが検出されない場合,このフィールド
の型及び値は,NULLとする。この場合,RO-REJECT-P指示プリミティブの起動IDパラメタは,省略す
る。
7.5.4.2
問題(一般的な問題) これは,RO-REJECT-P指示プリミティブの問題パラメタ値とする。提供
者拒否手順で使用する値は,次のとおりとする。
(a) 一般的な問題 APDUに対する提供者拒否は,次のいずれかの値とする。
(1) 認識不能APDU 型識別子によって示されるAPDUの型が,この規格で定義する四つ型のいずれで
もないことを示す。
(2) 型誤りAPDU APDUの構造がこの規格に適合しないことを示す。
(3) 構造不正APDU APDUの構造がJIS X 5603及びJIS X 5604で規定された記法及び符号化に適合し
ないことを示す。
8. 使用するサービスとの対応付け ここでは,ROPMが次のサービスのいずれかを使用してAPDUを転
送する方法を規定する。
(a) RTSEサービス
(b) プレゼンテーションサービス
8.1ではRTSEサービスとの対応付けを規定し,8.2ではプレゼンテーションサービスとの対応付けを規
定する。
すべてのROSEサービスは,使用中の名前付き抽象構文を識別し,この識別情報を使用するRTSEサー
ビス又はプレゼンテーションサービスに対応付ける。しかし,この対応付けは,この規格では規定しない。
参考 ROSEの抽象構文は,ROSE利用者の抽象構文中に含まれる。したがって,ROSEは抽象構文名
をもたず,ROSE利用者の抽象構文名をそのROSE利用者及びROSEの組合せに対する抽象構
文名とする。
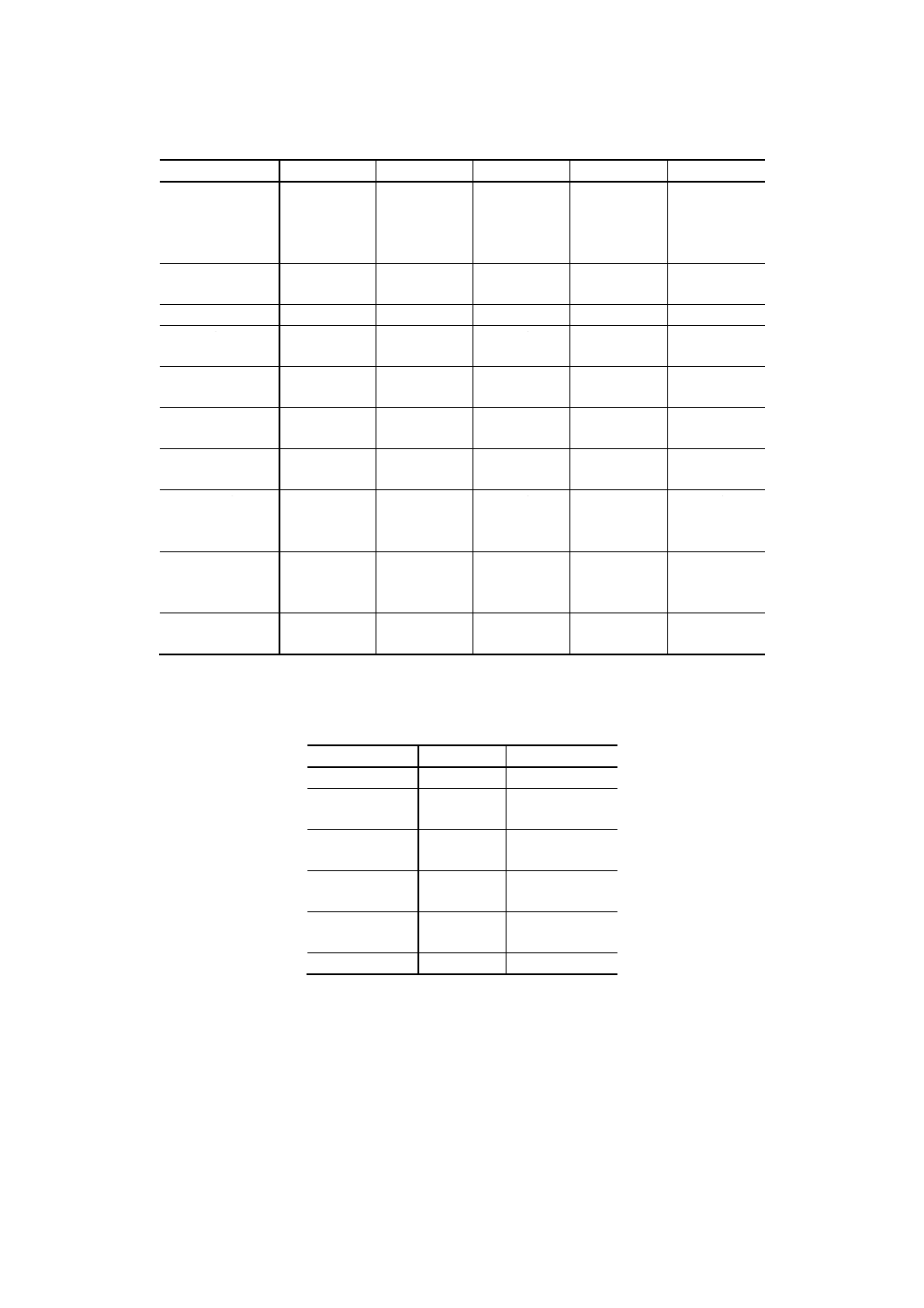
8.1
RTSEサービスとの対応付け ここでは,ISO/IEC 9066-1で規定されたRTSEサービスプリミティ
ブをROPMが使用する方法を規定する。
ROSEサービスプリミティブ及びAPDUとRTSEサービスプリミティブとの対応付けを表7に示す。
表7 RTSEサービスとの対応付け
ROSEサービス
APDU
RTSEサービス
RO-INVOKE要求/指示
ROIV
RT-TRANSFER要求/指示/確認
RO-RESULT要求/指示
RORS
RT-TRANSFER要求/指示/確認
RO-ERROR要求/指示
ROER
RT-TRANSFER要求/指示/確認
RO-REJECT-U要求/指示
RORJ
RT-TRANSFER要求/指示/確認
RO-REJECT-P指示
RORJ
RT-TRANSFER要求/指示/確認
送信権の管理(要求)
−
RT-TURN-PLEASE要求/指示
(譲渡)
−
RT-TURN-GIVE要求/指示
8.1.1 送信権の管理 ROPMは,RT-TRANSFERサービスを使用する前に送信権をもたなければならない。
送信権をもたないROPMは,転送待機しているAPDUの優先順位の中で最も高い値を優先パラメタに指
定してRT-TURN-PLEASE要求プリミティブを発行できる。
送信権をもつROPMは,転送するAPDUがない場合,RT-TURN-GIVE要求プリミティブを発行できる。
13
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ROPMは,RT-TURN-PLEASE指示プリミティブで指示された以上の優先順位をもつAPDUがない場合,
RT-TURN-PLEASE指示の応答としてRT-TURN-GIVE要求プリミティブを発行しなければならない。ROPM
は,RO-TURN-GIVE要求プリミティブを発行後,より低い優先順位をもち転送待機しているAPDUがあ
る場合,そのAPDUの優先順位の中で最も高い値を優先パラメタに指定してRT-TURN-PLEASE要求プリ
ミティブを発行できる。
8.1.1.1
RT-TURN-PLEASEサービスの使用方法 ROPMは,送信権をもたない場合にだけ,送信権を要
求するためにRT-TURN-PLEASE要求プリミティブを発行できる。RT-TURN-PLEASEサービスは,非確認
型サービスとする。
RT-TURN-PLEASEサービスパラメータの使用方法は,次のとおりとする。
(1) 優先順位 転送待機しているAPDUの優先順位の中で最も高い値を指定する。
8.1.1.2
RT-TURN-GIVEサービスの使用方法 ROPMは,送信権をもつ場合にだけ,その同位ROPMに
送信権を譲渡するためにRT-TURN-GIVE要求プリミティブを発行できる。RT-TURN-GIVEサービスは,
非確認型サービスとする。
8.1.2
APDUの転送 APDUは,RT-TRANSFERサービスの利用者データとして転送する。ROPMは,送
信権をもち,かつ,未受信のRT-TRANSFER確認プリミティブがない場合にだけ,RT-TRANSFER要求プ
リミティブを発行できる。
8.1.2.1
RT-TRANSFERサービスの使用方法 RT-TRANSFERサービスは,確認型サービスとする。
RT-TRANSFER要求プリミティブのパラメタの使用方法は,次のとおりとする。
(1) APDU 転送されるAPDU。最大長の制限はない。
(2) 転送時間 送信側ROPMの実装で指定する。APDUの優先順位に関連付けてもよい。
RT-TRANSFER指示プリミティブのパラメタの使用方法は,次のとおりとする。
(1) APDU 転送されたAPDU。最大長の制限はない。
RT-TRANSFER確認プリミティブのパラメタの使用方法は,次のとおりとする。
(1) APDU 転送時間内に転送されなかったAPDU。結果パラメタの値が,“APDU未転送”の場合は,こ
のパラメタだけが通知される。この場合,ROPMは,返送パラメタをもつRO-REJECT-P指示プリミ
ティブを発行する。
(2) 結果 パラメタ値“APDU転送済み”は肯定確認を示し,パラメタ値“APDU未転送”は否定確認を
示す。
8.2
プレゼンテーションサービスとの対応付け ここでは,JIS X 5601で規定されたプレゼンテーショ
ンサービスプリミティブをROPMが使用する方法を規定する。ROSEサービスプリミティブ及びAPDUと
プレゼンテーションサービスプリミティブとの対応付けを表8に示す。
表8 プレゼンテーションサービスとの対応付け
ROSEサービス
APDU
プレゼンテーションサービス
RO-INVOKE要求/指示
ROIV
P-DATA要求/指示
RO-RESULT要求/指示
RORS
P-DATA要求/指示
RO-ERROR要求/指示
ROER
P-DATA要求/指示
RO-REJECT-U要求/指示
RORJ
P-DATA要求/指示
RO-REJECT-P指示
RORJ
P-DATA要求/指示
8.2.1
参考 この箇条は,対応国際規格に合わせて欠番とする。
8.2.2
APDUの転送 APDUは,P-DATAサービスの利用者データとして転送する。
14
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2.2.1
P-DATAサービスの使用 P-DATAサービスは,非確認型サービスとする。
P-DATA要求及びP-DATA指示のプリミティブのパラメタの使用方法は,次のとおりとする。
(1) 利用者データ 転送されるAPDU。最大長の制限はない。
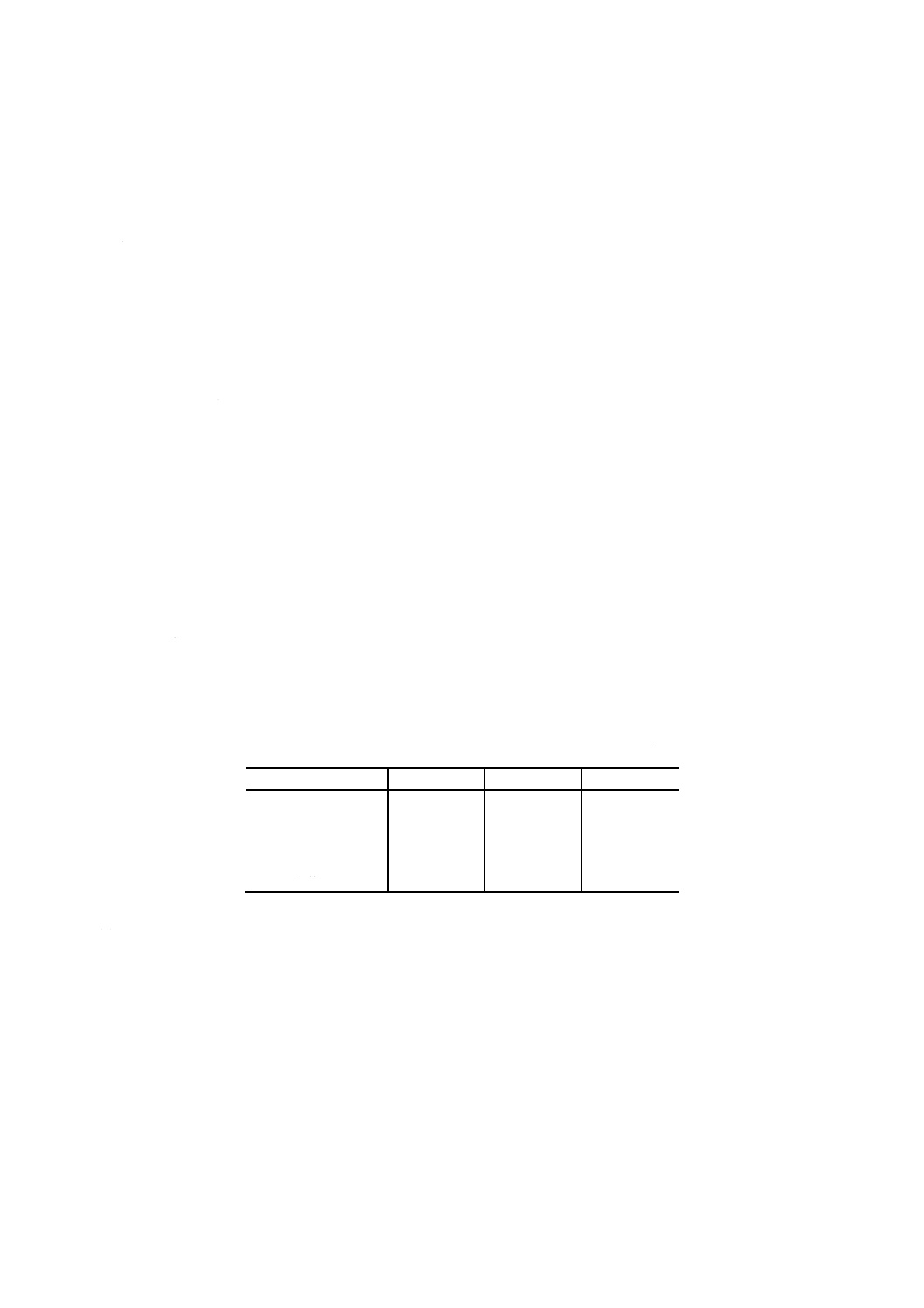
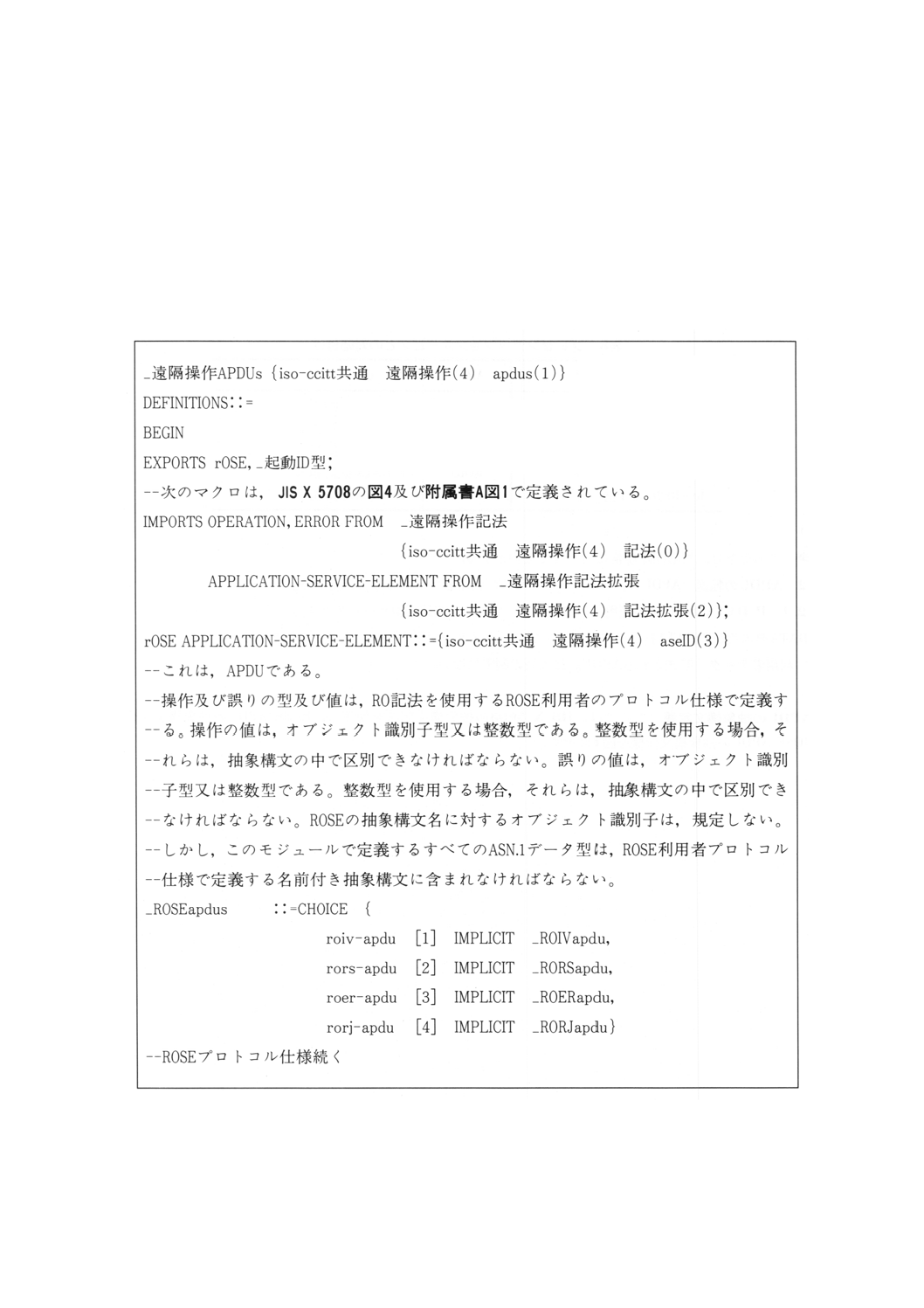
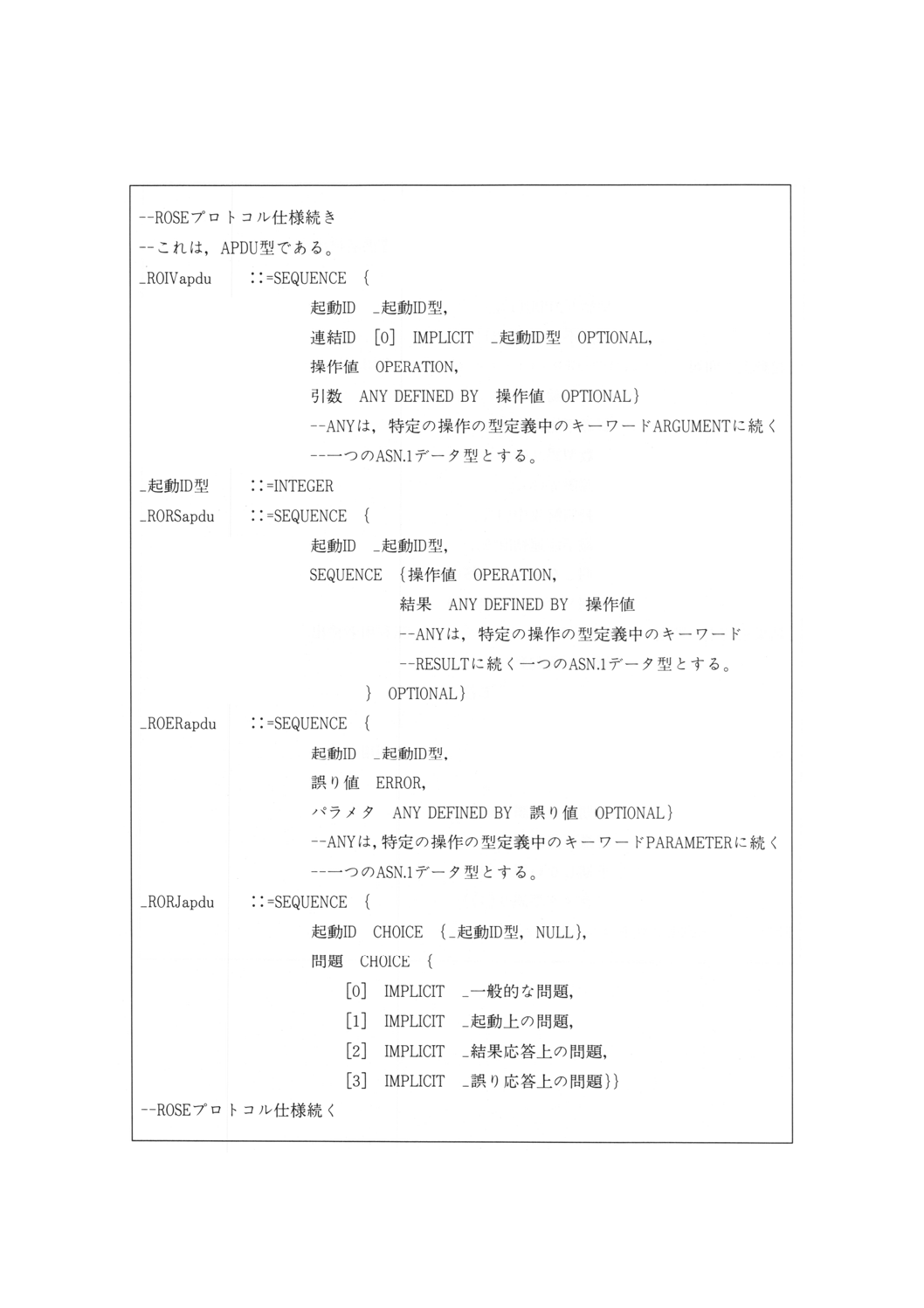
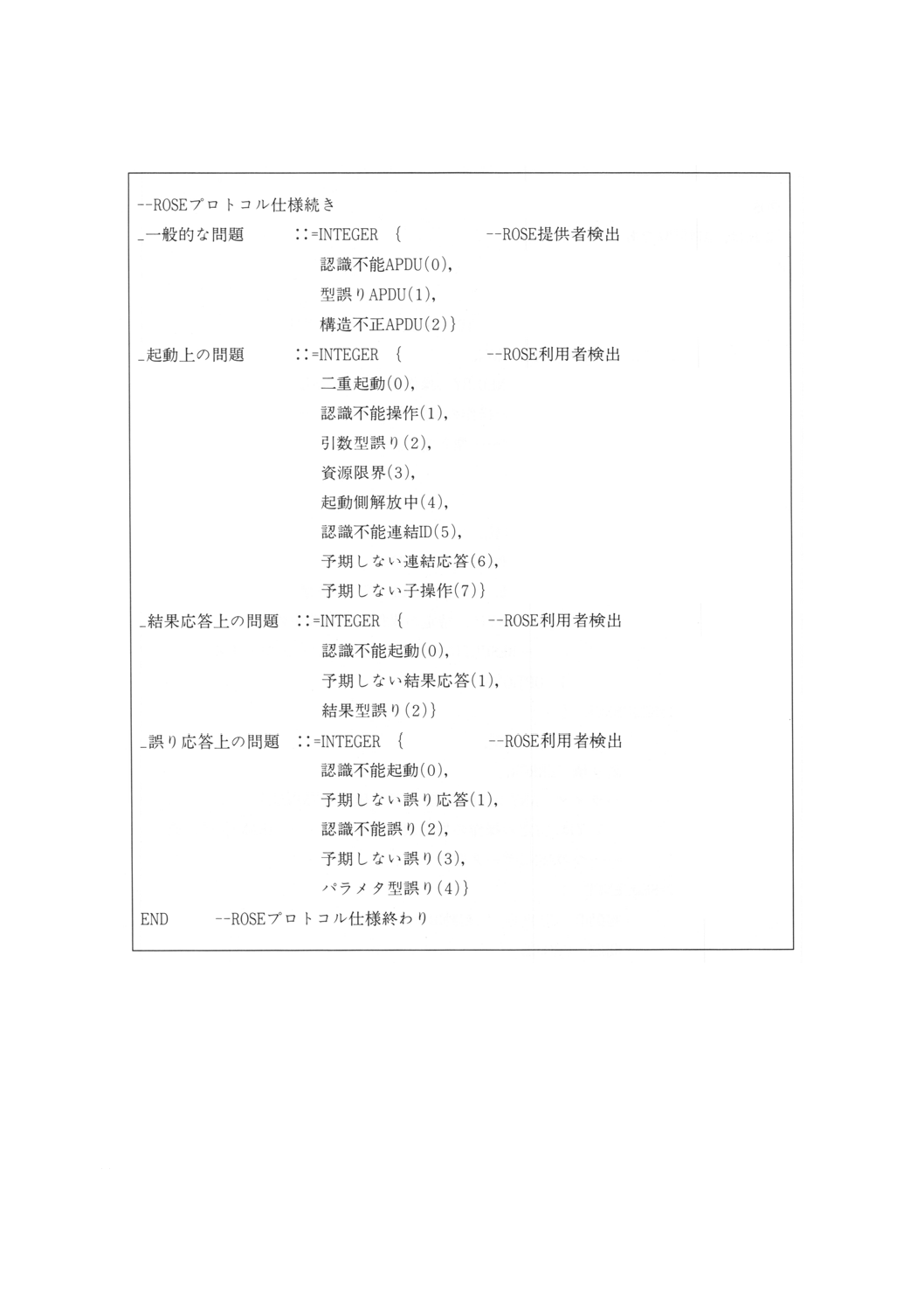
9. APDUの抽象構文定義 ここでは,JIS X 5603の抽象構文記法を使用し,ROSE APDUの抽象構文を
規定する。ROSE APDUの抽象構文仕様を図1に示す。
図1 ROSEプロトコルの抽象構文仕様
15
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
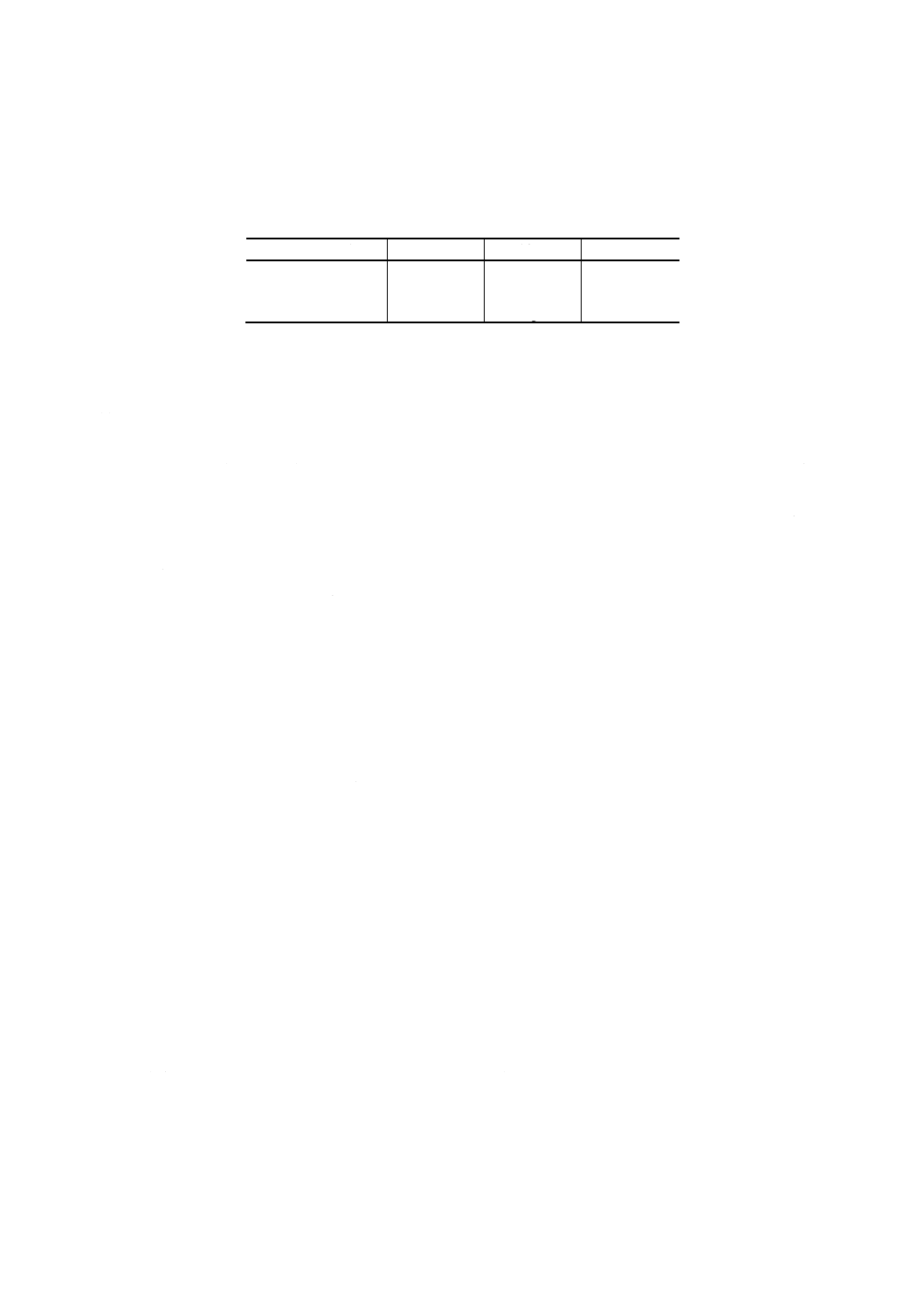
図1 ROSEプロトコルの抽象構文仕様(続き)
16
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
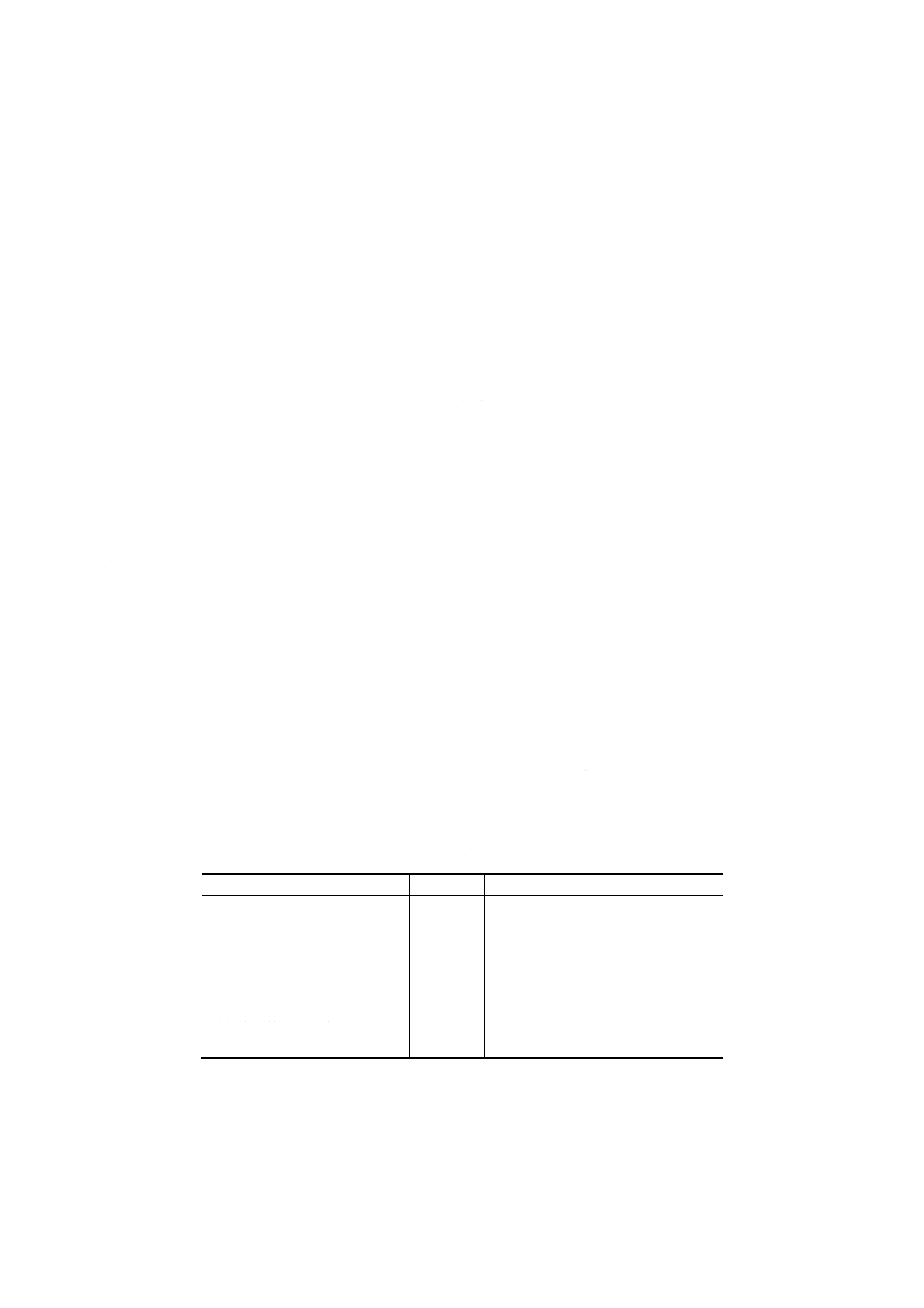
図1 ROSEプロトコルの抽象構文仕様(続き)
10. 適合性 この規格に適合する実装は,10.1〜10.3で示す要件を満足しなければならない。
10.1 記述要件 この規格への適合性を主張する実装者は,使用する応用コンテキストを記述しなければ
ならない。
この記述は,実装システムでの下位サービスへの対応付けが次のいずれであるかを含まなければならな
い。
(a) ROSEからRTSEへの対応付け
(b) ROSEからプレゼンテーションサービスへの対応付け
(c) (a)及び(b)の両方
17
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.2 静的要件 システムは,9.で規定したAPDUの抽象構文定義に適合しなければならない。
10.3 動的要件 システムは,次の動的要件の両方を満たさなければならない。
(a) 7.で規定した手順要素
(b) 8.で規定した使用するサービスの対応付け
18
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定) ROPM状態遷移表
A.1 概要 この附属書は,状態遷移表によって一つの遠隔操作プロトコル機械 (ROPM) を規定する。状態
遷移表は,応用アソシエーションの状態,プロトコル上で発生する入力事象,実行される動作及びその結
果の応用アソシエーションの状態の間の関係を示す。
ROPM状態遷移表は,ROPMの形式定義を構成するものではないが,7.及び8.で規定した手順要素をよ
り正確に記述する。
この附属書は,次の表を含む。
(a) 附属書A表1は,各入力事象の省略名,発生元並びに名前及び説明を規定する。発生元は,次のいず
れかとする(附属書A表1で使用する発生元の名称を括弧内に示す。)。
(1) ROSEサービス利用者(ROSE利用者)
(2) 同位のROPM(同位ROPM)
(3) 転送処理部以外のROPM (ROPM)
(4) ROPMの転送処理部 (ROPM-TR)
(5) プレゼンテーションサービス提供者(PS提供者)及びアソシエーション制御サービス要素 (ACSE),
又は高信頼転送サービス要素 (RTSE)
(b) 附属書A表2は,ROPMの状態の省略名を規定する。
(c) 附属書A表3は,ROPM-TRの状態の省略名を規定する。
(d) 附属書A表4は,出力事象の省略名,出力先並びに名前及び説明を規定する。出力先は,次のいずれ
かとする(附属書A表4で使用する出力先の名称を括弧内に示す。)。
(1) ROSEサービス利用者(ROSE利用者)
(2) 同位のROPM(同位ROPM)
(3) 転送処理部以外のROPM (ROPM)
(4) ROPMの転送処理部 (ROPM-TR)
(5) プレゼンテーションサービス提供者(PS提供者)及びアソシエーション制御サービス要素 (ACSE),
又は高信頼転送サービス要素 (RTSE)
(e) 附属書A表5は,述語を規定する。
(f) 附属書A表6は,ROPMの状態遷移表を規定する。
(g) 附属書A表7は,RTSEが応用コンテキストに含まれている場合のROPM-TRの状態遷移表を規定す
る。
(h) 附属書A表8は,RTSEが応用コンテキストに含まれていない場合のROPM-TRの状態遷移表を規定
する。
A.2 記法 入力事象(行)と状態(列)との交点を欄という。
状態遷移表において,空欄は,ROPMで定義されていない入力事象と状態との組合せを表す(A.3.1参
照)。
空白でない欄は,ROPMで定義された入力事象と状態との組合せを表す。この欄は,一つ以上の動作を
含む。動作には,必す(須)のもの又は条件によるものがある。必す(須)の動作は,その欄の唯一の動
19
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
作とする。
必す(須)の動作は,次の(a)及び(b)を含む。
(a) 0個以上の出力事象
(b) 遷移後の状態
条件付きの動作は,次の(a)及び(b)を含む。
(a) 述語及び論理演算子(^は,NOTを表す。)からなる述語式
(b) 必す(須)の動作[この必す(須)の動作は,述語式が真のときにだけ使用される。]
A.3 ROPMの動作 ROPMの状態遷移表は,0個以上の出力事象及び遷移後の応用アソシエーションの状
態を用いてROPMの動作を規定する。
A.3.1 無効な交点 空欄は,入力事象と状態との無効な交点を示す。交点が無効な場合,次のいずれかの
動作を行う。
(a) 入力事象がRTSE利用者からのときは,ROPMの動作は,この規格では規定しない。
(b) 入力事象が受信APDU,PS提供者,ACSE又はRTSEに関連しているときの動作は,次のいずれかと
する。
(1) ROPMがAA-AB要求事象をROPM-TRに発行する。
(2) ROPM-TRがABORT要求事象をRTSE又はACSEに発行し,AA-AB指示事象をROPMに発行する。
A.3.2 有効な交点 状態と入力事象との交点が有効な場合は,次のいずれかの動作を行う。
(a) 欄が必す(須)の動作を含むときは,ROPMは,指定された動作を実行する。
(b) 欄が条件付きの動作を一つ以上含むときは,ROPMは,真である述語式のそれぞれについて指定され
た動作を実行する。すべての述語式が真でないときは,ROPMは,A.3.1で規定した動作を実行する。
20
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A表1 入力事象
省略名
発生元
名前及び説明
AA-ESTAB
RTSE
肯定RT-OPEN応答プリミティブ又は肯定RT-OPEN確認プリミティブ
AA-ESTAB
ACSE
肯定A-ASSOCIATE応答プリミティブ又は肯定A-ASSOCIATE確認プリミテ
ィブ
RO-INV要求
ROSE利用者
RO-INVOKE要求プリミティブ
RO-RES要求
ROSE利用者
RO-RESULT要求プリミティブ
RO-ERR要求
ROSE利用者
RO-ERROR要求プリミティブ
RO-RJU要求
ROSE利用者
RO-REJECT-U要求プリミティブ
ROIV
同位ROPM
TRANS指示事象の利用者データである有効なRO-INVOKE APDU
RORS
同位ROPM
TRANS指示事象の利用者データである有効なRO-RESULT APDU
ROER
同位ROPM
TRANS指示事象の利用者データである有効なRO-ERROR APDU
RORJu
同位ROPM
TRANS指示事象の利用者データである有効なRO-REJECT APDU
(利用者拒否)
RORJp
同位ROPM
TRANS指示事象の利用者データである有効なRO-REJECT APDU
(“一般的な問題”として提供者拒否)
APDUua
同位ROPM
TRANS指示事象の利用者データである受諾できないAPDU
TRANS指示
ROPM-TR
APDUの転送指示
TRANS要求
ROPM
APDUの転送要求
P-DATA指示
PS提供者
P-DATA指示プリミティブ
RT-TR指示
RTSE
RT-TRANSFER指示プリミティブ
RT-TR確認+
RTSE
肯定RT-TRANSFER確認プリミティブ
RT-TR確認−
RTSE
否定RT-TRANSFER確認プリミティブ
RT-TR指示
RTSE
RT-TURN-PLEASE指示プリミティブ
RT-TG指示
RTSE
RT-TURN-GIVE指示プリミティブ
AA-REL
RTSE
RT-CLOSE応答プリミティブ又はRT-CLOSE確認プリミティブ
AA-REL
ACSE
肯定A-RELEASE応答プリミティブ又は肯定A-RELEASE確認プリミティブ
AA-AB要求
ROPM
応用アソシエーションの異常中断
AA-AB指示
ROPM-TR
異常中断された応用アソシエーション
ABORT指示
RTSE
RT-P-ABORT指示プリミティブ又はRT-U-ABORT指示プリミティブ
ABORT指示
ACSE
A-ABORT指示プリミティブ又はA-P-ABORT指示プリミティブ
附属書A表2 ROPMの状態
省略名
名前及び説明
STA01
アイドル(アソシエーションなし)
STA02
アソシエーションあり
附属書A表3 ROPM-TRの状態
省略名
名前及び説明
STA10
アイドル(アソシエーションなし)
STA20
アソシエーションあり,トークン割当てあり,転送なし
STA21
アソシエーションあり,トークン割当てあり,転送中
STA22
アソシエーションあり,トークン割当てなし,転送なし
STA23
アソシエーションあり,トークン割当てなし,転送要求あり
STA100
アイドル(アソシエーションなし)
STA200
アソシエーションあり
21
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A表4 出力事象
省略名
出力先
名前及び説明
RO-INV指示
ROSE利用者
RO-INVOKE指示プリミティブ
RO-RES指示
ROSE利用者
RO-RESULT指示プリミティブ
RO-ERR指示
ROSE利用者
RO-ERROR指示プリミティブ
RO-RJU指示
ROSE利用者
RO-REJECT-U指示プリミティブ
RO-RJP指示
ROSE利用者
RO-REJECT-P指示プリミティブ
ROIV
同位ROPM
TRANS要求事象の利用者データであるRO-INVOKE APDU
RORS
同位ROPM
TRANS要求事象の利用者データであるRO-RESULT APDU
ROER
同位ROPM
TRANS要求事象の利用者データであるRO-ERROR APDU
RORJu
同位ROPM
TRANS要求事象の利用者データであるRO-REJECT利用者拒否APDU
RORJp
同位ROPM
TRANS要求事象の利用者データであるRO-REJECT提供者拒否APDU
TRANS要求
ROPM-TR
APDUの転送要求
TRANS指示
ROPM
APDUの転送指示
P-DATA要求
PS提供者
P-DATA要求プリミティブ
RT-TR要求
RTSE
RT-TRANSFER要求プリミティブ
RT-TP要求
RTSE
RT-TURN-PLEASE要求プリミティブ
RT-TG要求
RTSE
RT-TURN-GIVE要求プリミティブ
AA-AB要求
ROPM-TR
応用アソシエーションの異常中断
AA-AB指示
ROPM
異常中断された応用アソシエーション
ABORT要求
RTSE
RT-U-ABORT要求プリミティブ
ABORT要求
ACSE
A-ABORT要求プリミティブ
附属書A表5 述語
符号
名前及び説明
p1
受諾できないAPDUがRORJ APDUでなく,かつ,拒否の回数が定められた値を超えない。
p2
トークンが最初にROPM-TRに割り当てられていた。
22
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
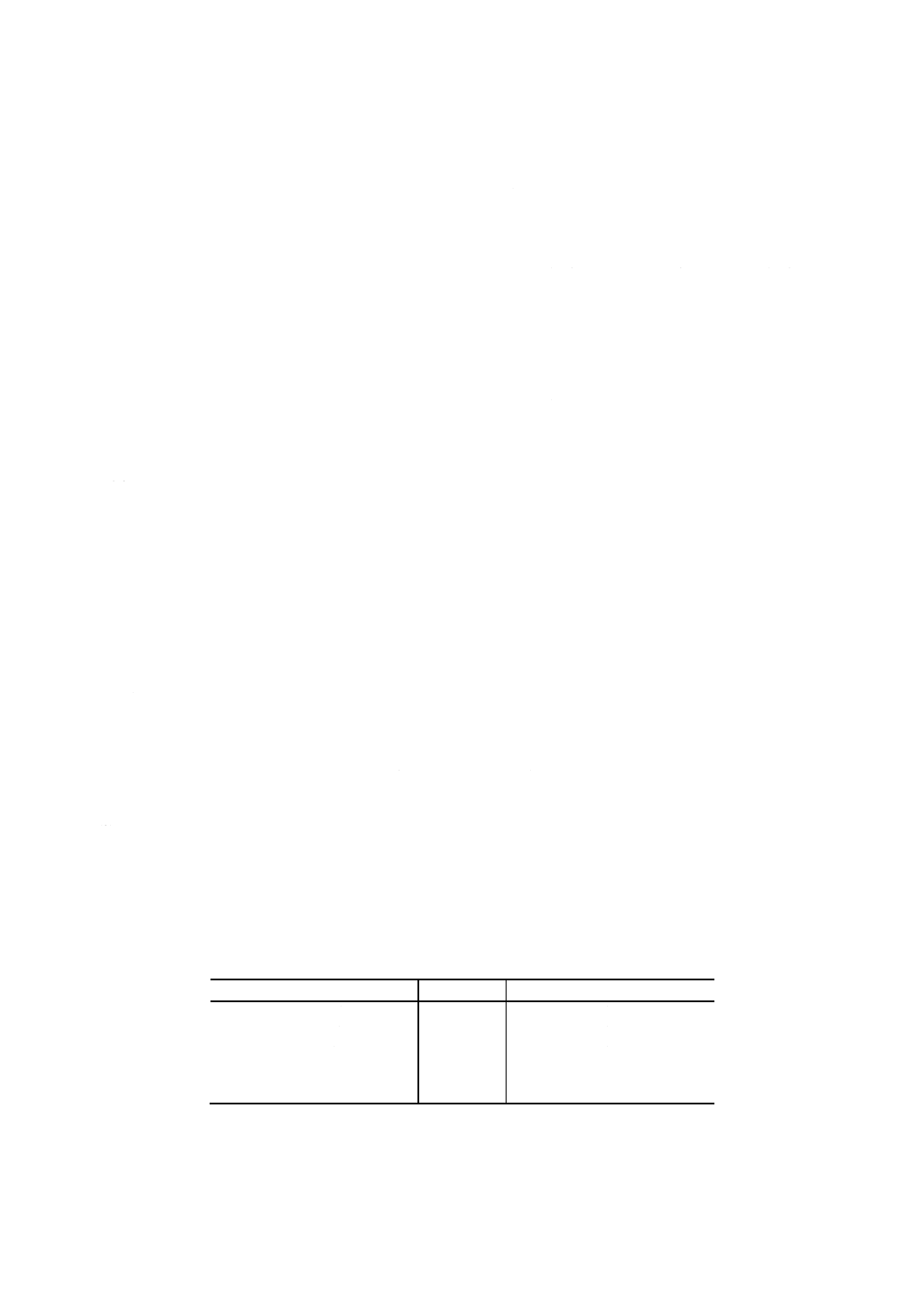
附属書A表6 ROPM状態遷移表
STA01
STA02
AA-ESTAB
STA02
RO-INV要求
ROIV
STA02
RO-RES要求
RORS
STA02
RO-ERR要求
ROER
STA02
RO-RJU要求
RORJu
STA02
ROIV
RO-INV指示
STA02
RORS
RO-RES指示
STA02
ROER
RO-ERR指示
STA02
RORJu
RO-RJU指示
STA02
RORJp
RO-RJP指示
STA02
APDUua
p1 :
RORJp
STA02
^p1 :
AA-AB要求
STA01
AA-AB指示
STA01
AA-REL
STA0l
23
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A表7 RTSEによる転送のためのROPM-TR状態遷移表
STA10
STA20
STA21
STA22
STA23
AA-ESTAB
p2 :
STA20
^p2 :
STA22
TRANS要求
RT-TR要求
RT-TP要求
STA21
STA23
RT-TR確認+
STA20
RT-TR確認−
RO-RJP指示
STA20
RT-TR指示
TRANS指示
TRANS指示
STA22
STA23
RT-TP指示
RT-TG要求
STA22
STA21
RT-TG指示
RT-TR要求
STA20
STA21
AA-AB要求
RO-RJP指示
RO-RJP指示
ABORT要求
ABORT要求
ABORT要求
ABORT要求
STA10
STA10
STA10
STA10
ABORT指示
RO-RJP指示
RO-RJP指示
AA-AB指示
AA-AB指示
AA-AB指示
AA-AB指示
STA10
STA10
STA10
STA10
AA-REL
STA10
RO-RJP指示
STA10
RO-RJP指示
STA10
STA10
附属書A表8 プレゼンテーションサービスによる
転送のためのROPM-TR状態遷移表
STA100
STA200
AA-ESTAB
STA200
TRANS要求
P-DATA要求
STA200
P-DATA指示
TRANS指示
STA200
AA-AB要求
ABORT要求
STA100
ABORT要求
AA-AB指示
STA100
AA-REL
STA100
24
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(参考) この規格とCCITT勧告X.410-1984との差異
この附属書では,遠隔操作の記法及びプロトコルに関して,CCITT勧告X.410-1984をこの規格で変更し
た点を示す。
B.1 マクロ
B.1.1 新規マクロ 次の二つのマクロを追加した。
(a) BINDマクロ
(b) UNBINDマクロ
B.1.2 操作マクロ 次の変更を行った。
(a) 値記法 INTEGERをCHOICE {INTEGER, OBJECT IDENTIFIER} に変更した。
(b) 結果生成規則における名前付き型 必す(須)から任意選択に変更した。更に,連結操作の生成規則
を追加した。
B.1.3 ERRORマクロ 次の変更を行った。
(a) 値記法 INTEGERをCHOICE {INTEGER, OBJECT IDENTIFIER} に変更した。
B.2 応用プロトコルデータ単位
B.2.1 APDU 次の変更を行った。
(a) 選択代替 明示的タグ付けを暗黙的タグ付けに変更した。
B.2.2 起動 次の追加及び変更を行った。
(a) SEQUENCEに任意選択で連結ID要素を追加した。
(b) 引数要素を必す(須)から任意選択に変更した。
B.2.3 結果返送 次の追加及び変更を行った。
(a) 操作値フィールド及びSEQUENCEを追加した。
(b) 結果要素を必す(須)から任意選択に変更した。
B.2.4 拒否 次の追加を行った。
(a) “̲起動上の問題”に値3〜7を追加した。
B.3 手順及び対応付け
B.3.1 使用サービスへの対応付け 次の二つの追加を行った。
(a) RTSEが応用コンテキストに含まれない場合のプレゼンテーションサービスとの対応付け
(b) BIND及びUNBINDの対応付け
B.4. 1984年版と1988年版との実装間の相互接続 B.2.1及びB.2.3(a)によって,1984年版及び1988年版の
実装の間の相互接続は不可能である。B.2.1の変更は,X.400シリーズ実装者ガイド第5版に示されている。
25
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C(参考) オブジェクト識別子の値の割当て
この規格及びJIS X 5708で割り当てたオブジェクト識別子は,次のとおりである。
{iso-ccitt 共通 遠隔操作 (4) 記法 (0)}
--JIS X 5708で定義したASN.1モジュール
{iso-ccitt 共通 遠隔操作 (4) apdus (1)}
--この規格で定義したASN.1モジュール
{iso-ccitt 共通 遠隔操作 (4) 記法拡張 (2)}
--JIS X 5708で定義したASN.1モジュール
{iso-ccitt 共通 遠隔操作 (4) aseID (3)}
--この規格で定義したASE識別子
{iso-ccitt 共通 遠隔操作 (4) aseID-ACSE (4)} --JIS X 5708で定義したASE識別子
26
X 5709-1991 (ISO/IEC 9072-2 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
OSI遠隔操作JIS原案作成委員会 構成表 (敬称略,順不同)
氏名
所属
(委員長)
西 村 卓 美
日本電信電話株式会社ネットワーク高度化推進本部
(幹事)
馬 渡 恭三郎
シャープ株式会社技術本部情報技術開発センター
(幹事)
茂 木 一 明
日本電気株式会社基本ソフトウェア開発本部方式開発部
粟 屋 英 司
三菱電機株式会社コンピュータ製作所コンピューター方
式統轄部
井 上 雅 喜
株式会社日立製作所ソフトウェア開発本部第2DC設計部
篠 塚 誠
沖電気工業株式会社コンピュータシステム開発本部ソフ
トウェア開発第2部
末 永 敏 昭
日本ユニシス株式会社システムプロダクト本部通信シス
テム2部
西 本 一 志
松下電器産業株式会社情報通信関西研究所
吉 江 信 夫
住友電気工業株式会社情報電子研究所
沖 野 英 明
工業技術院標準部
吹 訳 正 憲
通商産業省機械情報産業局
(協力者)
大 越 冬 彦
三菱電機株式会社コンピュータ製作所
(協力者)
白 川 美 佳
沖電気工業株式会社コンピュータシステム開発本部ソフ
トウェア開発第2部
(協力者)
寺 島 理江子
松下電器産業株式会社情報通信関西研究所
(事務局)
宇 野 喜 博
財団法人日本規格協会情報技術標準化研究センター
情報部会 規格調整専門委員会WG3 構成表(敬称略,順不同)
氏名
所属
(主査)
徳 永 英 二
日本アイ・ビー・エム株式会社標準推進担当
森 宗 正
日本ユニシス株式会社研究開発部
佐 藤 健
日本INSソフトウェア株式会社ネットワーク技術本部
高 畠 丈 夫
富士通株式会社技術管理本部