T 9265:2019
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 種類······························································································································· 7
4.1 用途による区分 ············································································································· 7
4.2 構造による区分 ············································································································· 7
5 リスクマネジメントによる設計 ··························································································· 8
6 外観及び構造 ··················································································································· 8
6.1 外観 ···························································································································· 8
6.2 構造 ···························································································································· 8
7 性能······························································································································· 9
8 試験方法························································································································· 9
8.1 試験条件 ······················································································································ 9
8.2 安定性試験 ·················································································································· 10
8.3 静的強度試験 ··············································································································· 15
8.4 耐久性試験 ·················································································································· 16
8.5 ブレーキ試験 ··············································································································· 17
8.6 休息用椅子の強度試験 ··································································································· 18
9 検査······························································································································ 18
10 表示 ···························································································································· 19
11 取扱説明書 ··················································································································· 19
附属書JA(参考)設計における配慮事項 ················································································· 20
附属書JB(参考)JISと対応国際規格との対比表 ······································································ 22
T 9265:2019
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
福祉用具・生活支援用具協会(JASPA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具
して日本工業規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正
した日本工業規格である。これによって,JIS T 9265:2012は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
T 9265:2019
福祉用具−歩行補助具−歩行車
Assistive products for walking-Rollators and walking tables
序文
この規格は,2005年に第2版として発行されたISO 11199-2及び第1版として発行されたISO 11199-3
を基とし,試験方法を明確にするために,技術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JBに示す。また,附属書JAは対応国際規格にはない事項である。
1
適用範囲
この規格は,フレームの下端に2個以上の車輪をもった,両手・両腕又は上部体幹で身体を支え操作す
る歩行補助具(以下,歩行車という。)について規定する。車軸間の距離が250 mm未満のものは除く。ま
た,体重をかけるとロックする車輪1) は車輪とみなさない。
注1) 体重をかけるとロックする車輪とは,ハンドルに50 N以下の力を負荷したときに,車輪以外の
脚が接地し,車輪ではなく脚が負荷を支える構造又は車輪を確実に固定する構造のものをいう。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 11199-2:2005,Walking aids manipulated by both arms−Requirements and test methods−Part 2:
Rollators
ISO 11199-3:2005,Walking aids manipulated by both arms−Requirements and test methods−Part 3:
Walking tables(全体評価:MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,その最新版(追補を含む。)を適用する。
JIS T 0102 福祉関連機器用語[支援機器部門]
注記 対応国際規格:ISO 9999,Assistive products for persons with disability−Classification and
terminology(MOD)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS T 0102によるほか,次による。
3.1
使用者体重(user mass)
2
T 9265:2019
歩行車使用者の体重。
3.2
最大長さ(maximum length)
調節を最大にしたときの歩行車の最大外径寸法で,通常の使用状態で移動方向に対して平行に測定した
値[図2 a) の4及び図2 b) の3参照]。
3.3
最大幅(maximum width)
調節を最大にしたときの歩行車の最大外径寸法で,通常の使用状態で移動方向に対して直角に測定した
値[図2 a) の5及び図2 b) の4参照]。
3.4
高さ(height)
ハンドグリップ後方参照点から地面までの垂直距離[図2 a) 及び図2 b) の6参照]。
3.5
回転幅(turning width)
歩行車を180°回転させることのできる最小の平行な壁の距離[図2 a) 及び図2 b) の1参照]。
3.6
ハンドグリップ(handgrip)
歩行車を使用中に通常手で握る部分(図3参照)。
3.7
アナトミックハンドグリップ(anatomic handgrips)
手の形状に合わせて握りやすく作られたハンドグリップ。
3.8
ハンドグリップ前方参照点(front handgrip reference point)
ハンドグリップの先端から後方30 mmまでにあるハンドグリップ上面の点(図3の2参照)。
3.9
ハンドグリップ後方参照点(rear handgrip reference point)
ハンドグリップの後端から前方30 mmまでにあるハンドグリップ上面の点(図3の1参照)。
3.10
ハンドグリップ長さ(handgrip length)
手を置くハンドグリップの長軸方向に測った長さ(図3の3参照)。
注記 ハンドグリップの先端及び後端の位置が明確でない場合は,使用者体重を支え得るハンドグリ
ップ全体の長さがハンドグリップ長さとなる。
3.11
ハンドグリップ幅(handgrip width)
手を置くハンドグリップの最も太い部分を水平方向に測った長さ(図3の4参照)。
3.12
ハンドル(handle)
ハンドグリップが付いている部位。
3.13
ブレーキ握り距離(brake grip distance)
3
T 9265:2019
ハンドグリップ長さの中央でハンドルの中心線に垂直に測ったハンドグリップの上面とブレーキハンド
ルの下面との距離(図4の1参照)。
3.14
前腕サポート(forearm support)
前腕を置く水平な部分[図1 c) の1参照]。腕を所定の位置に保持するハンドグリップの付いたハンド
ルと組み合わされる場合がある。
3.15
駐車ブレーキ(parking brake)
停止状態を維持するためのブレーキ。
3.16
制動ブレーキ(running brake)
歩行中に使用者が操作して止めるブレーキ。ブレーキの効果は加えられた力に比例する。
3.17
圧力ブレーキ(pressure brake)
ハンドグリップに垂直な力がかかると働く制動ブレーキ(図6参照)。
3.18
車輪幅(wheel width)
力がかかっていない状態で,歩行面から上方5 mm以内で測定した車輪のタイヤの最大幅(図5の3参
照)。
3.19
サポートテーブル(supporting table)
ウォーキングテーブル形の歩行車を使うときに腕を置くための上体を囲む水平な部分[図1 b) の1参
照]。
3.20
サポート高さ(supporting height)
ウォーキングテーブル形のサポートテーブルの腕を置く位置から地面までの垂直距離[図2 b) の5参
照]。
3.21
基準線(datum line)
サポートテーブルの最上面の進行方向と直角となる水平線で
− ハンドル付きのサポートテーブルでは,ハンドルを一番前に調節したときの,ハンドグリップの後面
の下の部分から300 mm後の線[図2 b) の7と9参照]。
− ハンドルなしのサポートテーブルでは,サポートテーブルの前端から300 mm後の線。
− 前腕サポートでは,ハンドグリップの後面の下の部分からの距離が300 mmなくとも,雨とい形状の
中央を通る線[図2 b) 左上図の9参照]。
3.22
基準点(datum point)
基準線の中央[図2 b) の8参照]。
3.23
先ゴム(tips)
4
T 9265:2019
歩行器の脚端部が地面と接触する部分に取り付けたゴム製キャップ[図2 a) の3参照]。
注記 先ゴムは車輪に加えて,圧力ブレーキとして四輪の歩行車に使われることもある。
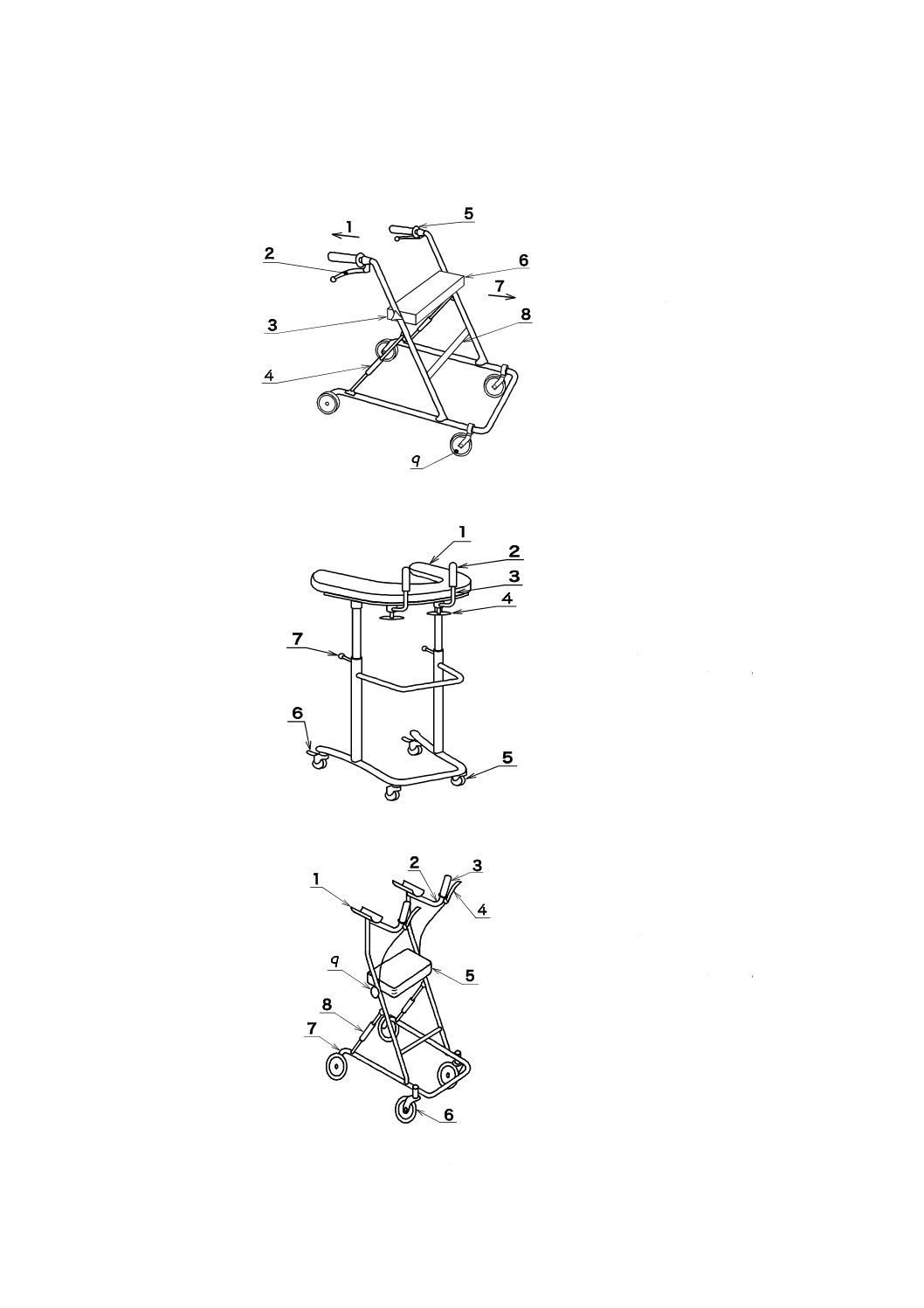
記号
1 後方
2 ブレーキハンドル
3 高さ調節機構
4 折畳み機構
5 ハンドル/ハンドグリップ
6 休息用椅子
7 前方
8 補強部品
9 車輪
a) ロレータ形の例
記号
1 サポートテーブル
2 ハンドグリップ
3 ハンドル
4 ハンドル調節機構
5 車輪
6 駐車ブレーキ
7 高さ調節機構
b) ウォーキングテーブル形車輪付きサポートテーブルの例
記号
1 前腕サポート
2 ハンドル
3 ハンドグリップ
4 ブレーキハンドル
5 休息用椅子
6 車輪
7 ブレーキ
8 折畳み機構
9 高さ調節機構
c) ウォーキングテーブル形車輪付き前腕サポートの例
図1−各部の名称
5
T 9265:2019
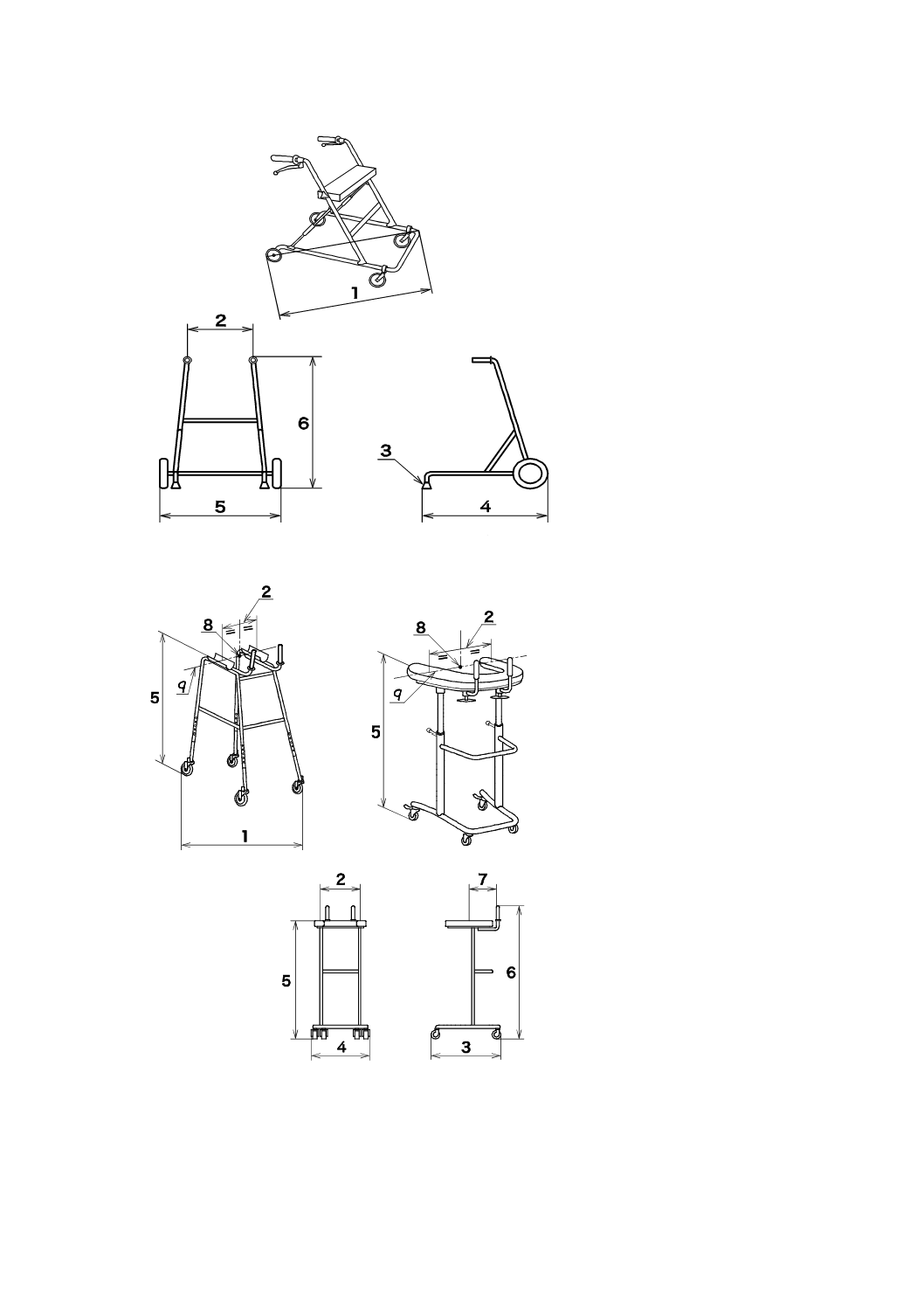
記号
1 回転幅
2 ハンドル間距離
3 先ゴム
4 最大長さ
5 最大幅
6 高さ
a) ロレータ形
記号
1 回転幅
2 サポート点間距離
3 最大長さ
4 最大幅
5 サポート高さ
6 高さ
7 ハンドグリップ及び基準線距離
8 基準点
9 基準線
b) ウォーキングテーブル形
図2−寸法の定義
6
T 9265:2019
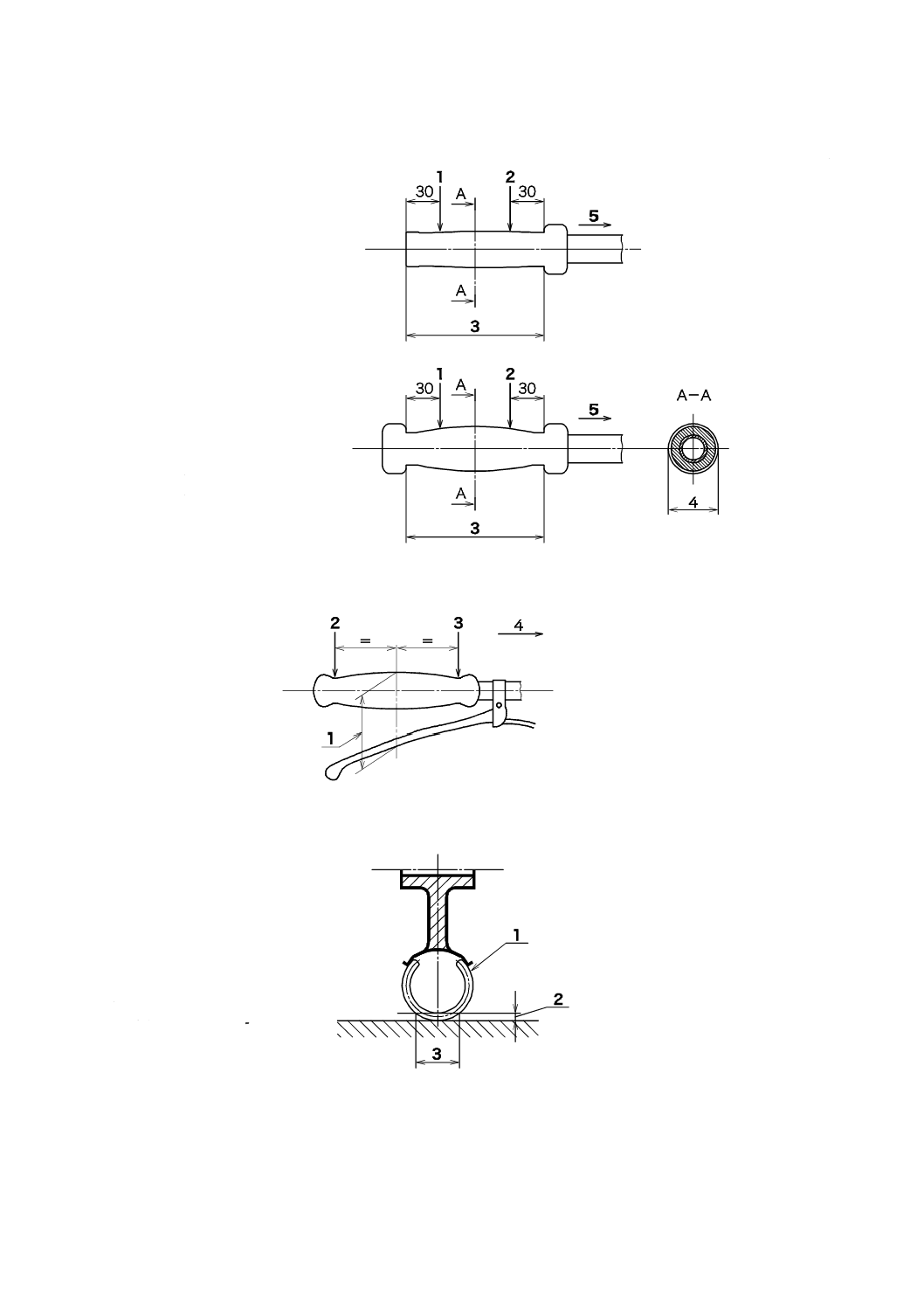
単位 mm
記号
1 ハンドグリップ後方参照点
2 ハンドグリップ前方参照点
3 ハンドグリップ長さ
4 ハンドグリップ幅
5 前方
図3−ハンドグリップの詳細
記号
1 ブレーキ握り距離
2 ハンドグリップ後方参照点
3 ハンドグリップ前方参照点
4 前方
図4−ブレーキ握り距離
記号
1 タイヤ
2 歩行面より0から5 mm
3 車輪幅
図5−車輪幅の測定
7
T 9265:2019
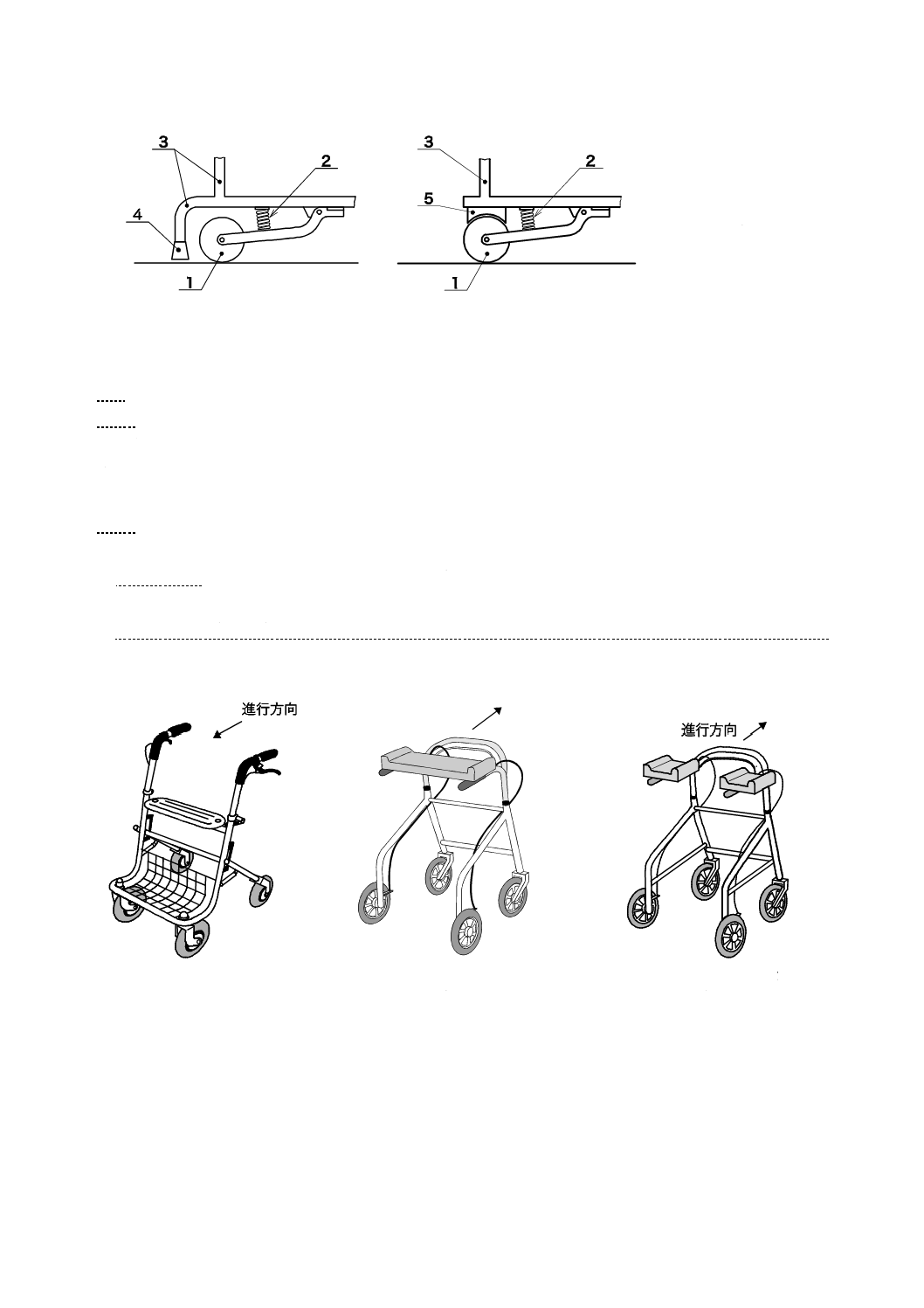
記号
1 車輪
2 ばね
3 フレーム
4 先ゴム
5 ブレーキパッド
a) 先ゴムブレーキ
b) パッドブレーキ
図6−圧力ブレーキの例
4
種類
4.1
用途による区分
用途による区分は,次による。
a) 室内用 室内だけの使用のために製造されたもの。
b) 室外用 主に室外使用のために製造されたもの。
4.2
構造による区分
構造による区分は,次による。
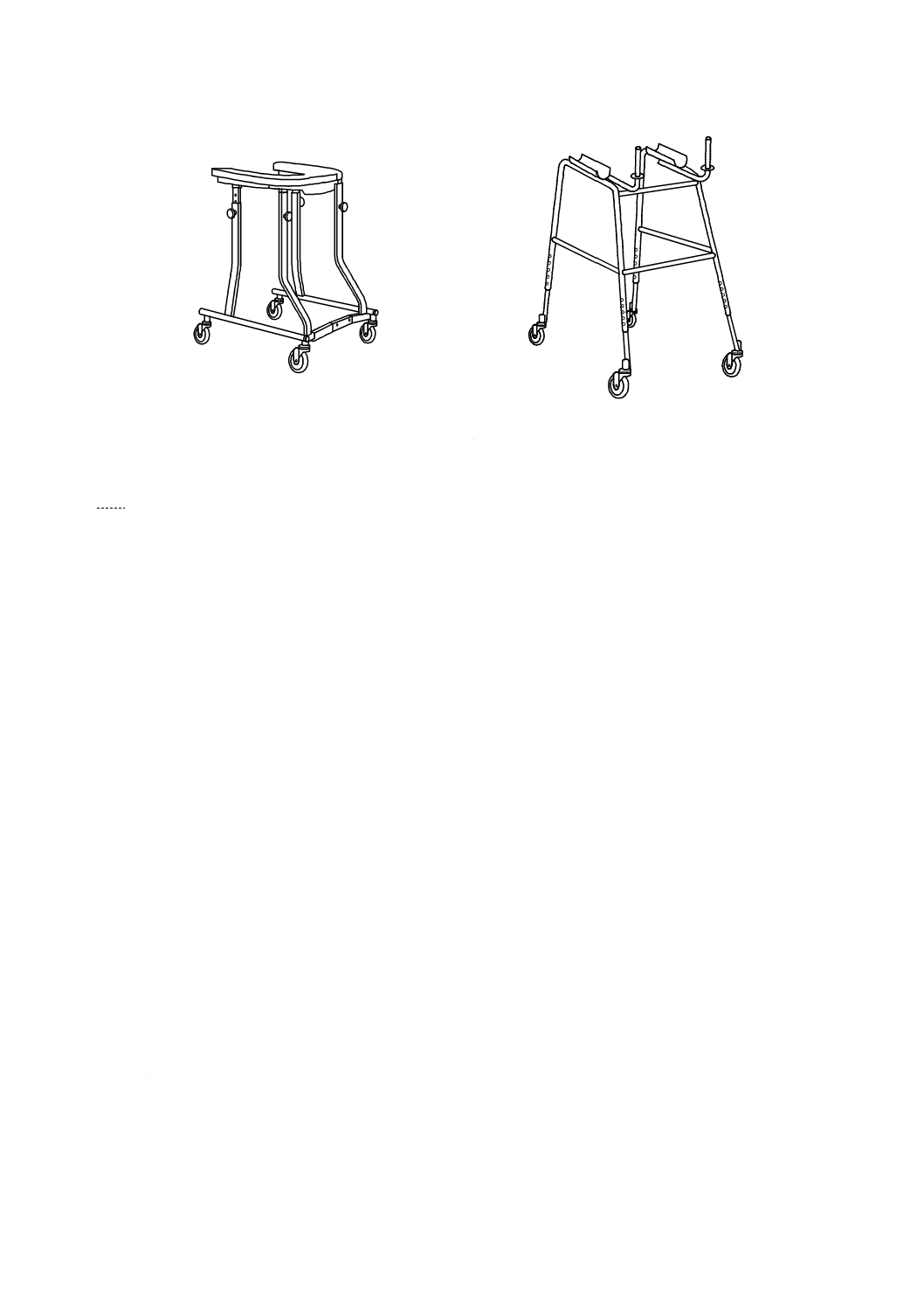
a) ロレータ形 ハンドグリップによって体重を支える構造のもの[図7のa) 参照]。ハンドグリップに
加え前腕サポートによって支えるものもある[図7のb) 及びc) 参照]。
b) ウォーキングテーブル形 サポートテーブル又は前腕サポートによって体重を支える構造のもの。ハ
ンドグリップのあるものとないものとがある。(図8参照)
a) ハンドグリップ付き
b) ハンドグリップ及び
前腕サポート付き
(一体形)
c) ハンドグリップ及び
前腕サポート付き
(分離形)
図7−ロレータ形の例
進行方向
8
T 9265:2019
a) サポートテーブル付き(ハンドグリップなし)
b) 前腕サポート付き(ハンドグリップ付き)
図8−ウォーキングテーブル形の例
5
リスクマネジメントによる設計
リスクマネジメントによる設計は,隙間に手及び足の指が挟まるリスクについて実施する。これは,製
造業者又は販売業者が実施するもので,実施手順及び結果を文書化し維持しなければならない。また,関
連する要因として附属書JAに例示した事項を設計において配慮することが望ましい。
6
外観及び構造
6.1
外観
歩行車には使用者等が触れた場合に身体にきずを生じる又は衣類を損傷するばり,鋭いエッジ又は突起
があってはならない。
6.2
構造
歩行車の構造は,次による。
a) 前輪の直径は,75 mm以上とする。
b) 室外用の前輪の直径は,180 mm以上とする。
c) 室外用の前輪の幅は,22 mm以上とする。
d) ロレータ形及びウォーキングテーブル形の室外用は,移動中に使用者が容易に操作できる制動ブレー
キを装備しなければならない。
e) 休息用椅子を備えた3輪以上のロレータ形,3輪以上の室外用ロレータ形及びウォーキングテーブル
形は,駐車ブレーキを装備しなければならない。
なお,このブレーキは,制動ブレーキと組み合わせてもよい。
f)
制動ブレーキ握り距離(図4参照)は,75 mm以下でなければならない。
g) ブレーキは,摩耗,ワイヤの伸びなどが生じたときに,ブレーキ効果を維持するための調整ができる
構造でなければならない。
例示 ブレーキパッド位置の調整及びブレーキパッド自体の交換など。
h) ブレーキ性能は折畳み,引伸ばし又は調節操作によって影響を受けてはならない。
i)
高さ調節装置には,伸張可能な最高位置を明示する。
j)
ハンドルは調節ができてもよいが,確実に固定されなければならない。また,設定する最大位置を超
9
T 9265:2019
えて危険な位置になることを防止する停止装置を設けるか,又は調節の安全限界を示す警告を表示し
なければならない。
k) 本体を折り畳むことのできる機構のものは,歩行に使用するときには折畳み機構が固定されなければ
ならない。
l)
ハンドグリップ幅は,20 mm以上50 mm以下とする。ただし,アナトミックハンドグリップには適用
しない。
m) ハンドグリップは,ハンドルに確実に固定されなければならない。
n) ハンドグリップは,取外しができるか,又は洗浄が容易でなければならない。
o) 車輪がない場合は,脚の先端に先ゴムを備え,確実に取り付けられていなければならない。
p) 車輪がない場合は,先ゴムは交換可能とする。
q) 歩行路面と接触する先ゴムの底面は,直径35 mm以上なければならない。
7
性能
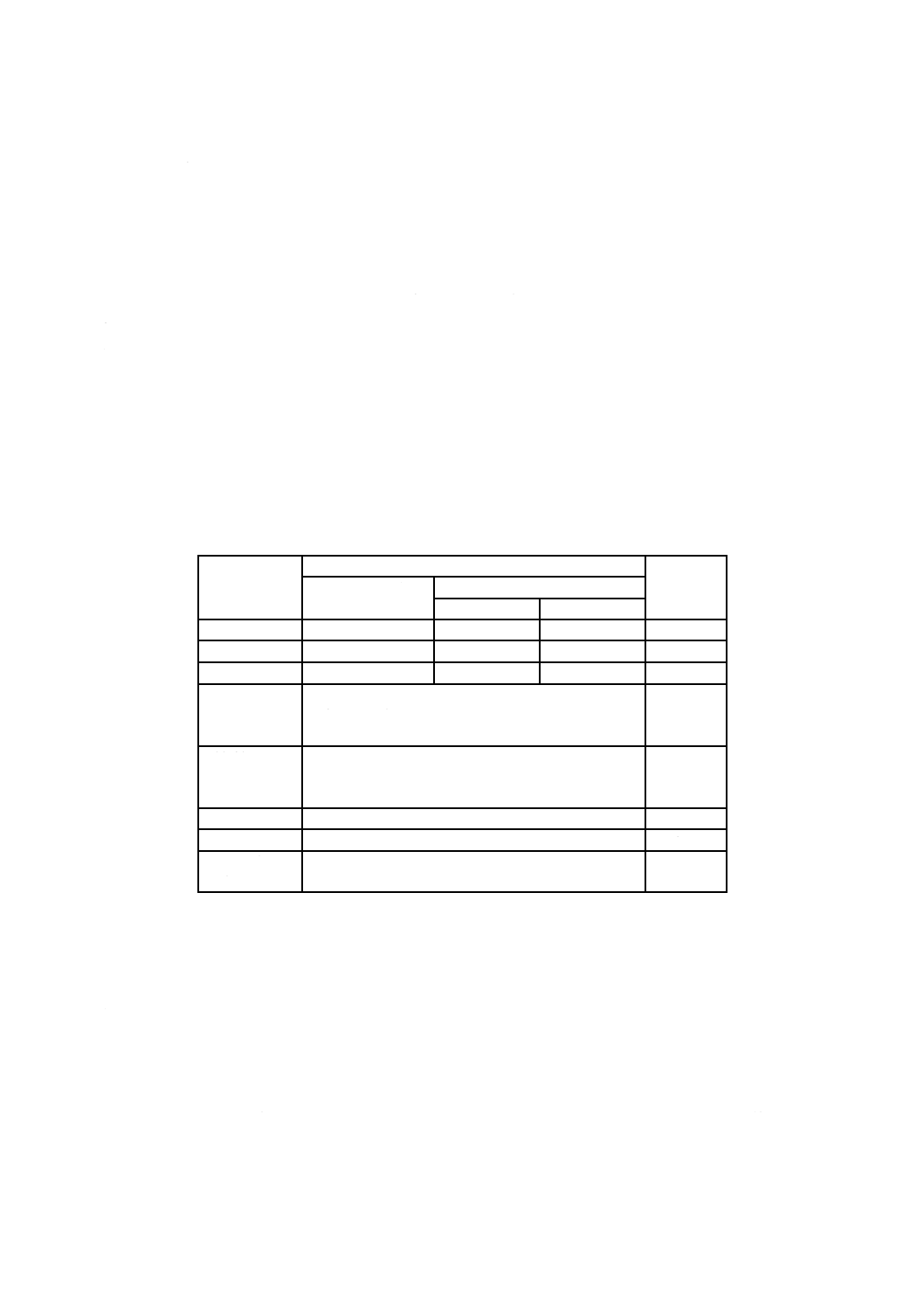
歩行車の性能は,表1による。
表1−性能
項目
性能
試験項目
ロレータ形
(室内用・室外用)
ウォーキングテーブル形
室内用
室外用
前方安定性
15°以上
10°以上
15°以上
8.2.2
後方安定性
7°以上
4°以上
7°以上
8.2.3
側方安定性
3.5°以上
3.5°以上
4.5°以上
8.2.4
静的強度
亀裂又は破損があってはならない。
脚部がその先ゴムを貫通してはならない。
高さの永久変形が1 %を超えてはならない。
8.3
耐久性
調節及び折畳み機構が意図どおりに働く。
亀裂又は破損があってはならない。
脚部がその先ゴムを貫通してはならない。
8.4
制動ブレーキ
1分間で10 mmを超えない。
8.5.2
駐車ブレーキ
1分間で10 mmを超えない。
8.5.3
休息用椅子の
強度
亀裂又は破損があってはならない。
8.6
8
試験方法
8.1
試験条件
a) 試験は,室温21 ℃±5 ℃で行う。
b) 高さ調節は,最高の位置にして試験を行う。
c) 車輪は,最も不利な状態にして試験を行う。
d) ハンドルは,最も前にする。
e) 幅調整サポートテーブルは最大幅とする。
f)
前腕サポートの調節が可能な場合には,最も不安定と考えられる位置で,進行方向の中心線に対し,
前腕サポート先端部をできる限り10°に近く内側に水平に向け,その角度を記録する。
g) 制動ブレーキ及び駐車ブレーキは,試験手順に指定がない限り,作動させない。
10
T 9265:2019
h) 安定性試験において,本体が傾く前にテーブルなどが動かないように確実に固定しておく。
i)
試験は,安定性,ブレーキ性能,休息用椅子の強度,静的強度,耐久性の順に行い,全ての試験を1
台の供試体で行う。
j)
各試験前及び試験終了時の点検における欠損などは,全て試験報告書に記入し,引き続き行う試験に
よる異常と確実に区別する。
8.2
安定性試験
8.2.1
一般
安定性試験は,次による。
a) 傾斜台は,表面の摩擦が試験結果に影響しないよう,供試体の車輪が,表面加工によって滑らない素
材とする。
b) 傾斜台の角度を変化させるなどによって,供試体が移動する場合には試験結果に影響を及ぼさない範
囲で横方向への移動など,移動を抑制するストッパを追加してもよい。
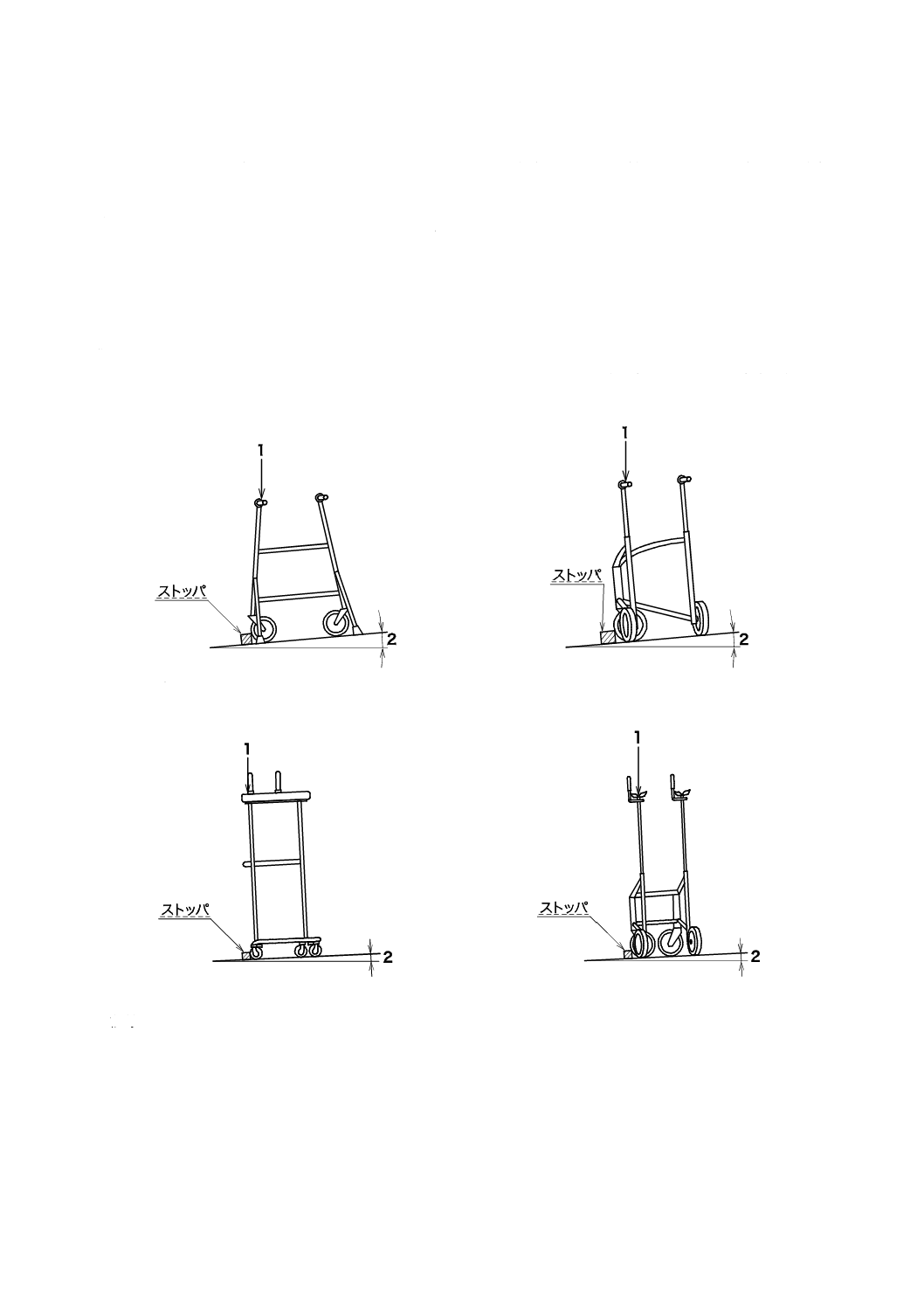
8.2.2
前方安定性試験
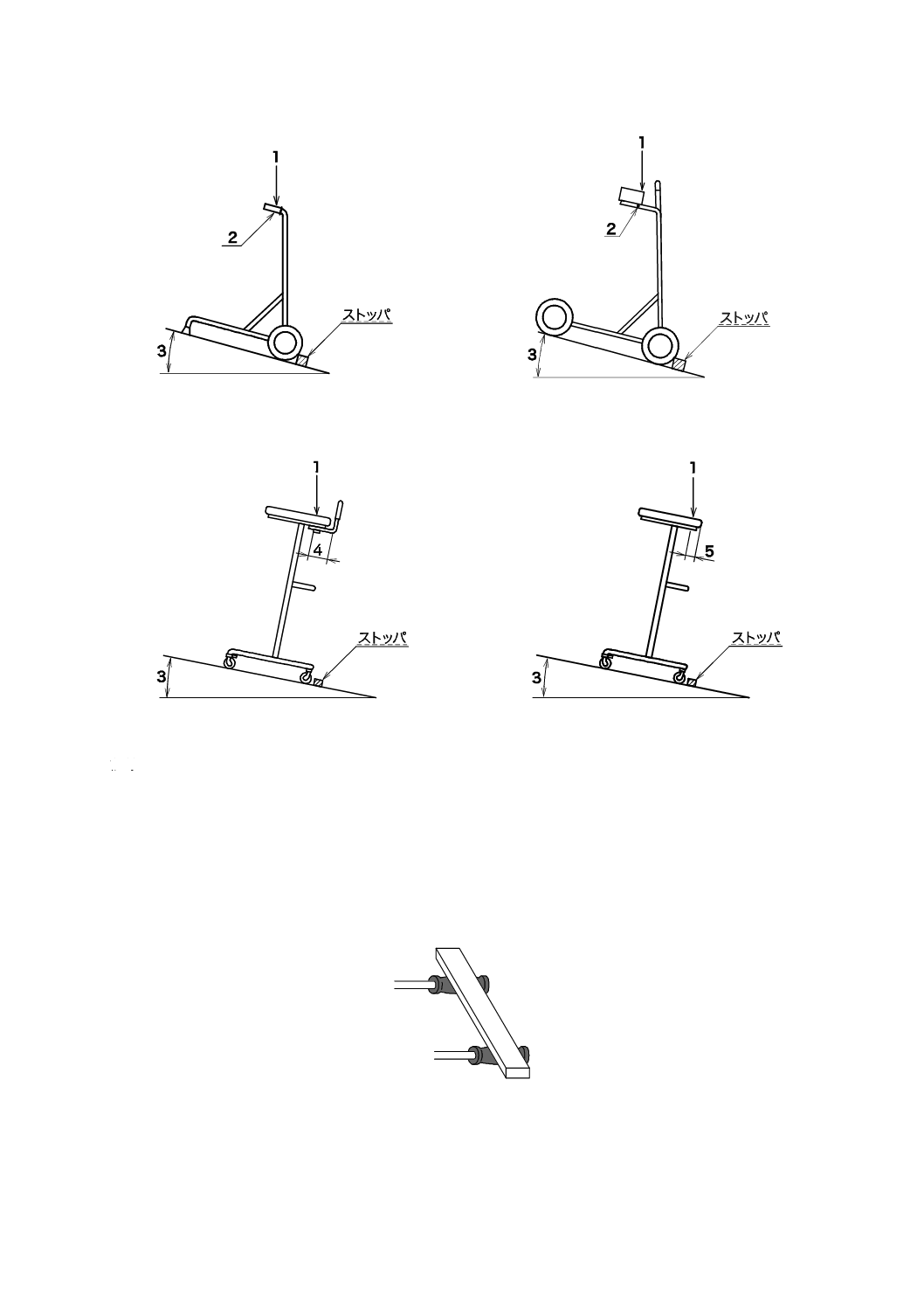
前方安定性試験は,次による(図9参照)。
a) 丁番と平行な高さ30 mmのストッパを取り付けた傾斜台を用意する。
b) 傾斜台を水平にし,ストッパに供試体の左右の前輪を接触させ静置する。
c) このとき旋回する車輪の接地点は,前後共に内向きとする。
d) ロレータ形の場合には,左右二つのハンドグリップ前方参照点を結ぶ線を中心とした部位に幅30 mm
の荷重用当て板2) を載せ,当て板の質量を含み25 kgのおもりを当て板のほぼ中央部に載せる。
注2) おもりの積載位置(図9の1参照)は,一般に空間となるため幅30 mmの板を左右のハンド
グリップ間に渡して積載する(図10参照)。
ロレータ形でハンドグリップに加え前腕サポートがある場合には,ロレータ形だけでなくウォーキ
ングテーブル形の試験方法も検討し,安定性において最も不利な試験条件で試験を行う。
e) ウォーキングテーブル形の場合は,次による。
1) ハンドグリップがある場合は,ハンドグリップの内側下端から135 mm±5 mm使用者側で,左右方
向にテーブル又は前腕サポートを通過する線の中央位置に,25 kgのおもりを載せる。
2) ハンドル又はハンドグリップがない場合には,サポートテーブルの前縁から60 mm±5 mm使用者
側の位置を中心とした部位に幅30 mmの荷重用当て板を進行方向に直角に載せ,当て板の質量を含
み25 kgのおもりを当て板のほぼ中央部に載せる。
f)
おもりの積載方法は,安定性に影響を与えない方法とする。
g) 試験は,この状態で傾斜台角度を変動させ,歩行車が転倒する角度を測定し,0.5°の単位まで記録す
る。
h) 供試体に荷物かごなどの収納部がある場合には,上記手順に加え,収納部に表示質量分のおもり又は
表示質量がない場合には,10 kg±2 %のおもりを入れ,上記の手順と同様の方法によって,試験を行
う。
11
T 9265:2019
a) ロレータ形
(ハンドグリップだけの例)
b) ロレータ形
(ハンドグリップ及び前腕サポート付きの例)
c) ウォーキングテーブル形
(ハンドグリップありの例)
d) ウォーキングテーブル形
(ハンドグリップなしの例)
記号
1 おもりの積載位置
2 ハンドグリップ前方参照点
3 傾斜角度
4 135 mm±5 mm(ハンドグリップあり)
5 60 mm±5 mm(ハンドグリップなし)
図9−前方安定性試験
図10−荷重用当て板の例
12
T 9265:2019
8.2.3
後方安定性試験
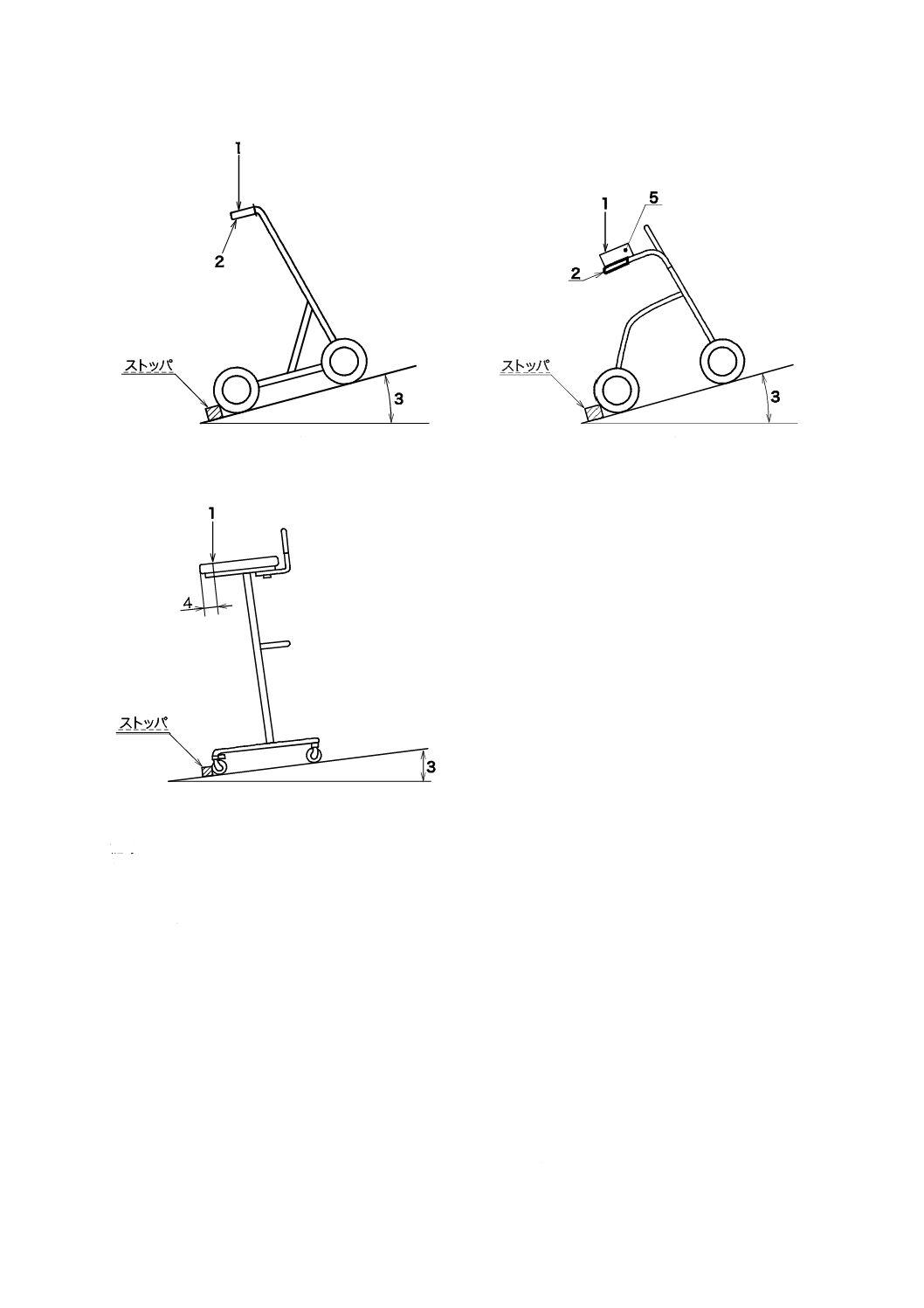
後方安定性試験は,次による(図11参照)。
a) 丁番と平行な高さ30 mmのストッパを取り付けた傾斜台を用意する。
b) 傾斜台を水平にし,ストッパに供試体の左右の後輪を接触させ静置する。
c) ロレータ形の場合には,左右二つのハンドグリップ後方参照点を結ぶ線を中心とした部位に幅30 mm
の荷重用当て板を載せ,当て板の質量を含み25 kgのおもりを当て板のほぼ中央部に載せる。
ロレータ形でハンドグリップに加え前腕サポートがある場合には,ロレータ形だけでなくウォーキ
ングテーブル形の試験方法も検討し,安定性において最も不利な試験条件で試験を行う。
d) ウォーキングテーブル形の場合には,後端から内側30 mm±5 mmの点を結ぶ線を中心とした部位に
幅30 mmの荷重用当て板を載せ,当て板の質量を含み25 kgのおもりを当て板のほぼ中央部に載せる。
e) おもりの積載方法は,安定性に影響を与えない方法とする。
f)
この状態で傾斜台角度を変動させ,歩行車が転倒する角度を測定し,0.5°の単位まで記録する。
g) 供試体に荷物かごなどの収納部がある場合には,上記手順に加え,収納部に表示質量分のおもり又は
表示質量がない場合には,10 kg±2 %のおもりを入れ,上記手順と同様の方法によって,試験を行う。
13
T 9265:2019
a) ロレータ形
(ハンドグリップだけの例)
b) ロレータ形
(ハンドグリップ及び前腕サポート付きの例)
c) ウォーキングテーブル形
(ハンドグリップありの例)
記号
1 おもりの積載位置
2 ハンドグリップ後方参照点
3 傾斜角度
4 30 mm±5 mm
5 前腕サポート
図11−後方安定性試験
8.2.4
側方安定性試験
側方安定性試験は,次による。
a) 丁番と平行な高さ30 mmのストッパを取り付けた傾斜台を用意する。
b) 傾斜台を水平にし,ストッパに供試体の片側の前輪をストッパに垂直に接触させ,同じ側の後輪又は
先ゴムと前輪の中心とを結ぶ線がストッパと平行になるように設置する。
c) 後輪が固定式の場合,前輪の中心と後輪の中心とを結んだ線が丁番の中心軸に対して,平行となるよ
14
T 9265:2019
うに設置するため,後輪はストッパと接触していない状態となる(図13参照)。
d) ロレータ形の場合には,図12 a) 及びb) に示すように,傾斜台の丁番に最も近いハンドグリップ前方
参照点とハンドグリップ後方参照点との間の中央に25 kgのおもりを載せる。
e) ウォーキングテーブル形の場合には,図12 c) 及びd) に示すように,傾斜台の丁番に最も近いハンド
グリップの後方300 mmの点に25 kgのおもりを載せる。
f)
おもりの積載方法は,安定性に影響を与えない方法とする。
g) この状態で傾斜台角度を変動させ,供試体が転倒する角度を測定し,0.5°の単位まで記録する。
h) 試験は左右両方について行い,それぞれの結果を記録する。
i)
供試体に荷物かごなどの収納部がある場合には,上記手順に加え,収納部に表示質量分のおもり又は
表示質量がない場合には,10 kg±2 %のおもりを入れ,上記手順と同様の方法によって,試験を行う。
a) ロレータ形で2輪と2脚をもつ例
b) ロレータ形で3輪をもつ例
c) ウォーキングテーブル形サポートテーブルをもつ例
d) ウォーキングテーブル形前腕サポートをもつ例
記号
1 おもりの積載位置
2 傾斜角度
図12−側方安定性試験
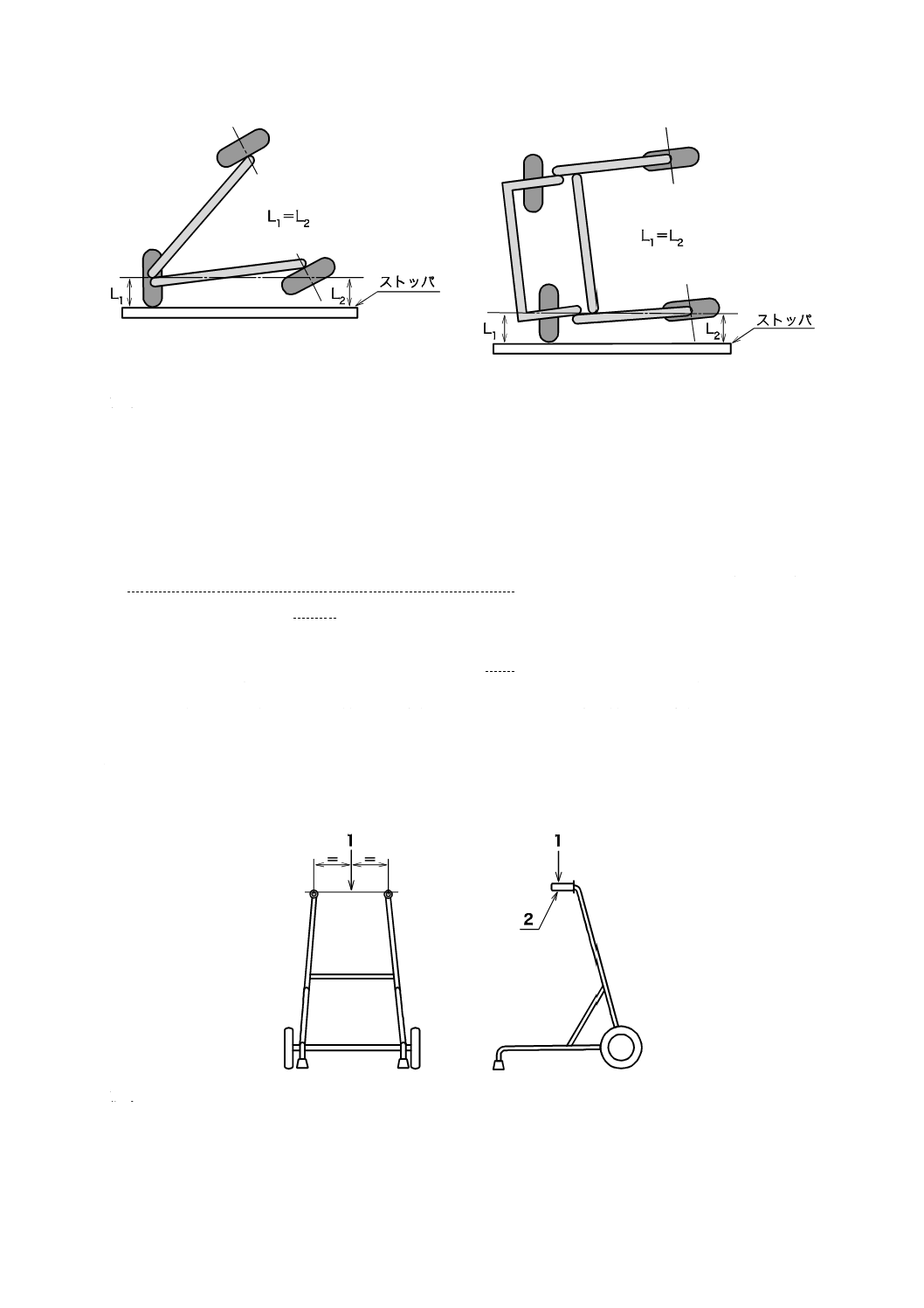
15
T 9265:2019
a) 3輪の場合
b) 4輪の場合
記号
L1 車輪半径
L2 車輪半径と同距離
図13−側方安定性試験時の車輪位置
8.3
静的強度試験
静的強度試験は,次による。
a) 左右のハンドグリップ後方参照点を結ぶ線の中心に幅80 mmの荷重用当て板の重心を合わせて載せ,
当て板の質量を含み25 N±2 %に相当する力を10秒以上保持する(図14参照)。力を除いた後に高さ
を測定する。
b) 左右のハンドグリップ後方参照点を結ぶ線の中心に幅80 mmの荷重用当て板の重心を合わせて載せ,
当て板の質量を含み1 200 N±2 %に相当する力を2秒以上の時間をかけて鉛直に負荷し,5秒以上保
持する(図14参照)。ただし,最大使用者体重が100 kgでない場合,最大使用者体重1 kg当たり12.0
N±2 %の力を試験力とする。この試験力は,420 Nを下回ってはならない。
c) 試験力を取り除いた後に高さを測定し,a) の測定値との差を永久変形とする。この永久変形のa) の
測定値に対する比率(%)を算出する。
記号
1 力の負荷位置
2 ハンドグリップ後方参照点
図14−静的強度試験(ハンドル部)
16
T 9265:2019
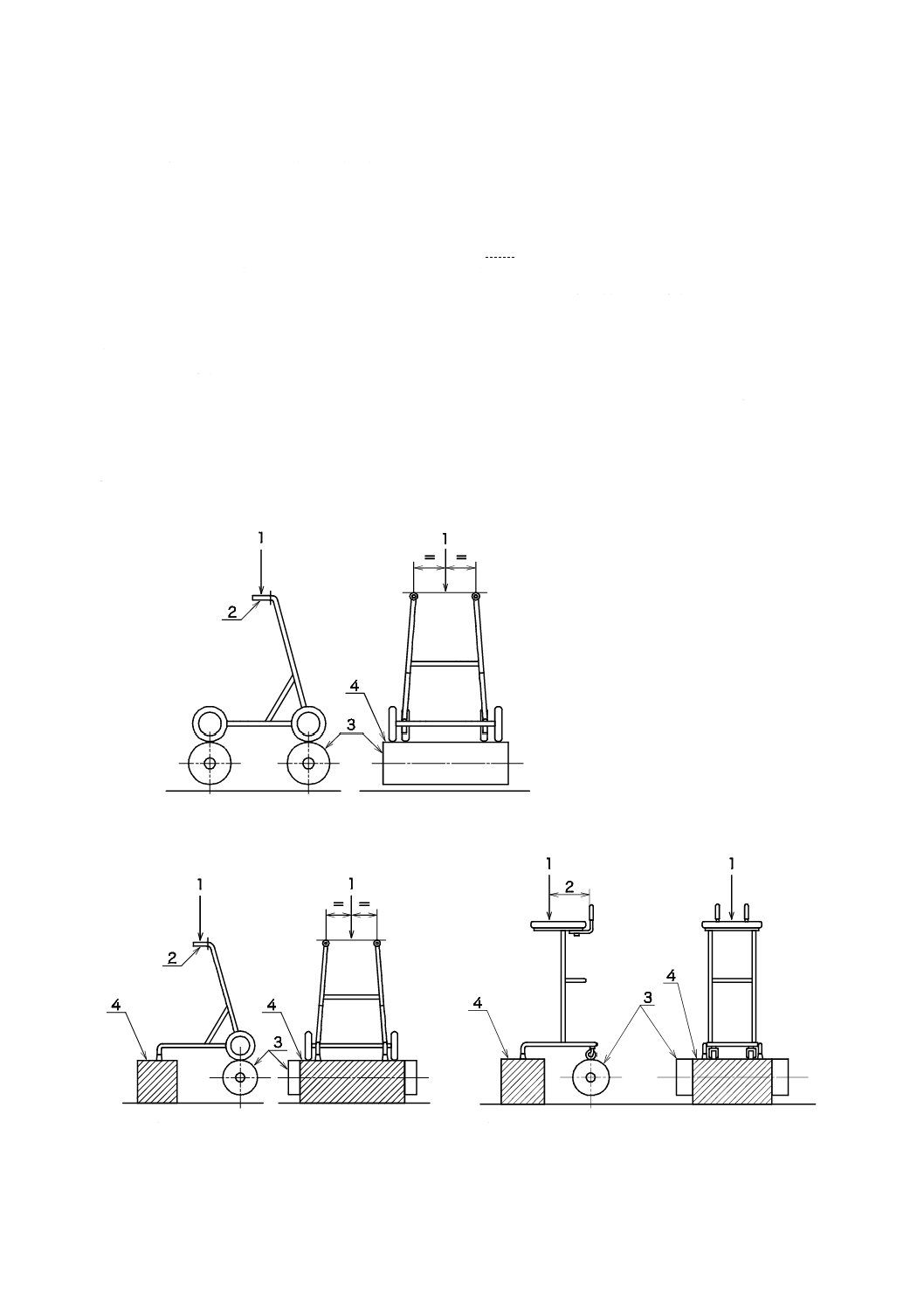
8.4
耐久性試験
耐久性試験は,次による(図15参照)。
a) 供試体の車輪に負荷をした後に除荷する。この1回の操作の間に0.4 m以上の距離を進む速度で移動
するドラム面に置き,先ゴムは水平な固定面に置く。
b) 左右のハンドグリップ後方参照点を結ぶ線の中心に幅80 mmの荷重用当て板の重心を合わせて載せ,
当て板の質量を含み800 N±2 %相当の力を鉛直に負荷した後,除荷する操作を1回として,この操作
を20万回繰り返す。ただし,最大使用者体重が100 kgでない場合,最大使用者体重1 kg当たり8.0 N
±2 %の力を試験力とする。この試験力は280 N±2 %を下回ってはならない。
c) 繰返し負荷の周期は,毎分60回を超えてはならない。
d) ドラムの直径は250 mm±25 mmとし,供試体のホイール中心とドラム中心の水平方向のずれ距離は5
mm以上あってはならない。試験中にホイール中心とドラムの中心との距離を1万回程度ごとに確認
し,5 mm以上離れた場合は5 mm以内に調整する。
e) 前後脚に車輪がある場合,全ての車輪を同時に可動させ,試験を行う。
f)
耐久性試験においては,ドラム式試験装置又はベルト式試験装置のいずれを使用してもよい。
記号
1 力の負荷位置
2 ハンドグリップ後方参照点
3 ドラム
4 水平な固定面(先ゴム)
a) 前後脚に車輪がある場合
b) ロレータ形2輪と2脚をもつ場合
c) ウォーキングテーブル形2輪と2脚をもつ場合
図15−耐久性試験
17
T 9265:2019
8.5
ブレーキ試験
8.5.1
一般
ブレーキ試験は,次による。
a) 圧力ブレーキは制動ブレーキの試験を行う。
b) 一つの車輪だけに作用するブレーキの場合,左右両方のブレーキを同時に試験する。
c) 集中ブレーキのように,複数の車輪に同時に作用するブレーキの場合は,制動ブレーキ試験及び駐車
ブレーキ試験を別々に試験する。
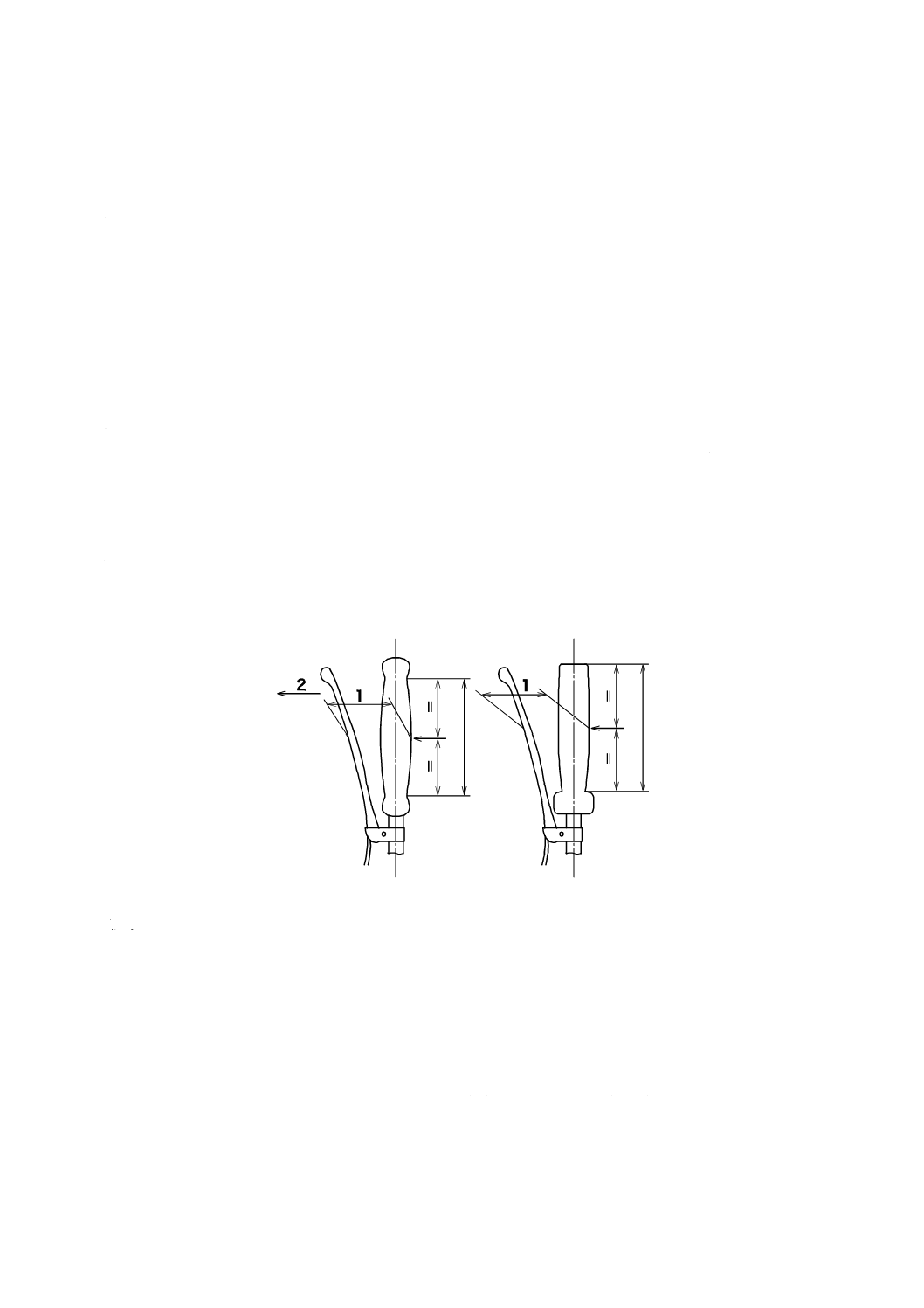
8.5.2
制動ブレーキ試験
制動ブレーキ試験は,次による。
a) 傾斜台の上に供試体をその前進方向が丁番に向かう方向に静置し,前輪を前進方向に向ける。ブレー
キ握り距離を測定してミリメートル単位で記録する(図16参照)。
b) 左右のハンドグリップの前方を結ぶ線の中心に幅80 mmの荷重用当て板の重心を合わせて載せ,当て
板の質量を含み最大使用者体重1 kg当たり0.5 kg±2 %相当のおもりを当て板のほぼ中央部に載せる。
c) 加えるおもりは,17.5 kg±2 %を下回ってはならない。
d) 次に,制動ブレーキにグリップ間の距離方向に沿って40 N±2 %の引張力,又は60 N±2 %の押込み
力のいずれかブレーキをかけることができる方向に加える。
e) この状態で傾斜台を6°傾け,1分間放置して車輪が回転しないことを確認する。
f)
車輪が回転した場合には,歩行車が10 mm移動するのに要した時間を測定する。
a)
b)
記号
1:ブレーキ握り距離
2:前方
図16−ブレーキ握り距離測定
8.5.3
駐車ブレーキ試験
駐車ブレーキ試験は,次による。
a) 丁番と平行に高さ8 mmのストッパを取り付けた傾斜台の上に,供試体を静置する。
b) ストッパに前脚を接触させる。
c) 駐車ブレーキ握り距離(図16参照)をミリメートル単位まで測定し,記録する。ただし,圧力ブレー
18
T 9265:2019
キのついた歩行車には適用しない。
d) 駐車ブレーキの操作力(セット及び解除に要する力)を測定し,ニュートン単位まで記録する。
e) ブレーキ装置がハンドグリップを握り締めるような形状でない場合には,ブレーキレバーの端部から
20 mm内側に力を加える点とし,ブレーキレバー軸に垂直に力を加え操作力を測定する。
f)
左右のハンドグリップ前方参照点を結ぶ線の中心に幅80 mmの荷重用当て板の重心を合わせて載せ,
当て板の質量を含み50 kg±2 %相当のおもりを当て板のほぼ中央部に載せる。ただし,最大使用者体
重が100 kgでない場合,最大使用者体重1 kg当たり0.5 kg±2 %のおもりを試験質量とする。この試
験質量は17.5 kg±2 %を下回ってはならない。
g) この状態で駐車ブレーキをロック状態にして,傾斜台を6°傾け,ストッパを静かに取り除く。
h) 1分間放置したとき,車輪が回転しないことを確認する。
i)
車輪が回転した場合には,歩行車が10 mm移動するのに要した時間を測定する。
8.6
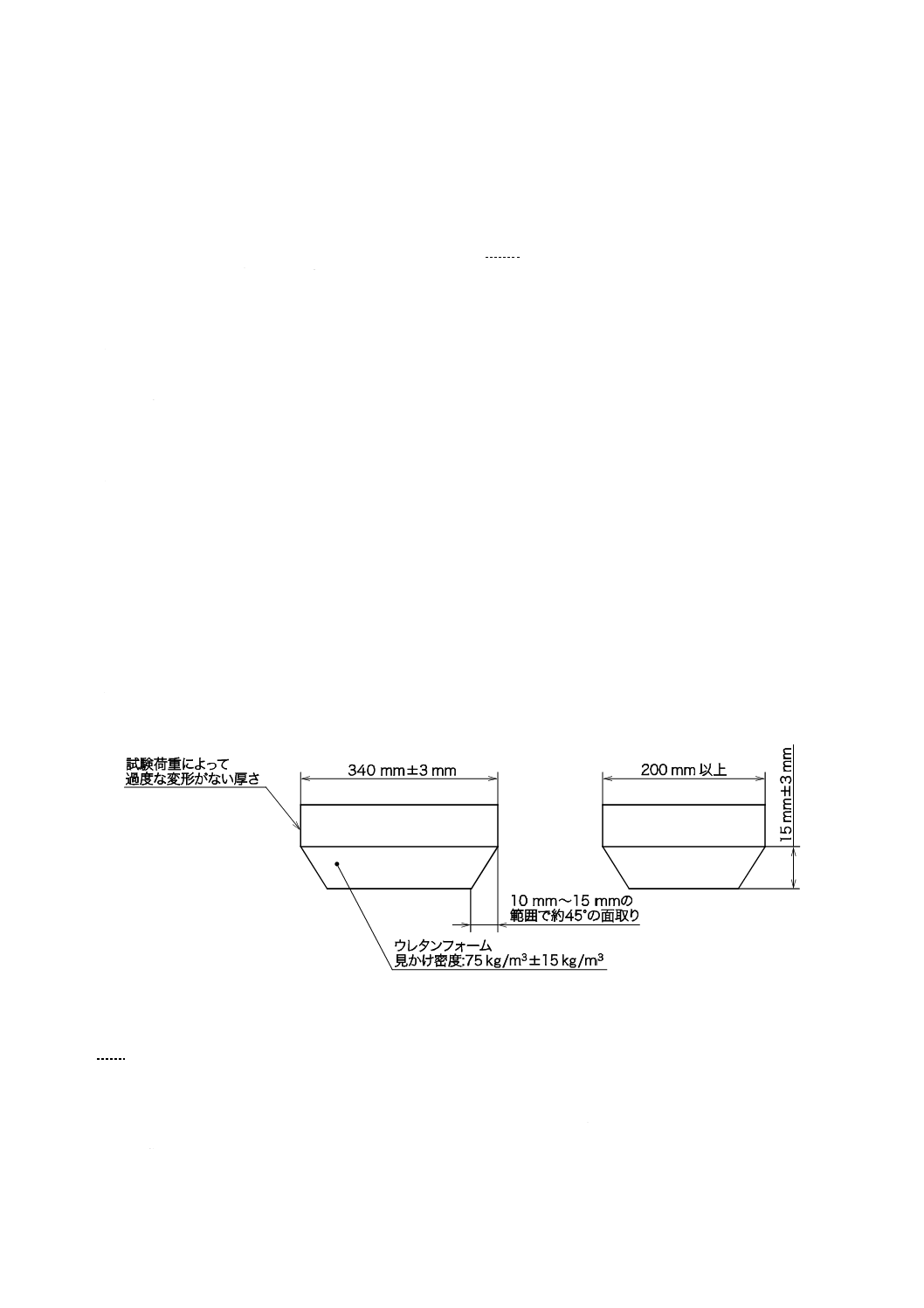
休息用椅子の強度試験
休息用椅子の強度試験は,次による。
a) 休息用椅子強度試験用当て板は剛体で,幅340 mm±3 mm,奥行き200 mm以上,厚さは試験荷重に
よる過度な変形がないものとする。当て板の底面には,ウレタンフォーム(厚さ15 mm±3 mm,見か
け密度75 kg/m3±15 kg/m3)が貼付されており,その角は10 mmから15 mmの範囲で約45°の面取り
がされているものとする(図17参照)。
b) 休息用椅子上に,当て板を載せる。このとき,当て板の中心と休息用椅子の中心とを一致させる。
c) 休息用椅子当て板の中心に1 200 N±2 %(当て板の質量を含む。)の力を2秒以上の時間をかけて加
え,2分以上保持する。
d) 最大使用者体重が100 kgでない場合,最大使用者体重1 kg当たり12.0 N±2 %の力を試験力とする。
e) この試験荷重は,420 N±2 %を下回ってはならない。
図17−休息用椅子強度試験用当て板の図
9
検査
歩行車の検査は,形式検査3) と受渡検査4) とに区分し,検査の項目は,それぞれ次の項目を箇条8及び
目視によって試験したとき,箇条6,箇条7,箇条10及び箇条11に適合したものを合格とする。
なお,形式検査及び受渡検査の抜取検査の方式は,受渡当事者間の協議によって定める。
注3) 製品の品質が設計で示した全ての特性を満足するかどうか判定するための検査。
19
T 9265:2019
4) 既に形式検査に合格したものと同じ設計・製造による製品の受渡しをする場合,必要と認める
特性を満足するものであるかどうかを判定するための検査。
a) 形式検査項目
1) 外観
2) 構造
3) 性能
4) 表示及び取扱説明書
b) 受渡検査項目
1) 外観
2) 表示及び取扱説明書
10
表示
この規格の全ての要求事項に適合した歩行車には,見やすい箇所に容易に消えない方法で,次の事項を
表示しなければならない。ただし,a) の種類は省略してもよい。
a) 名称又は規格番号,及び種類
b) 最大使用者体重
c) ハンドルが横方向に調節できる場合は,ハンドルの長軸の中心線と移動方向の最大許容角度
d) 製造業者名又は販売業者名,及びその住所
e) 製造業者の形式及び製造番号
f)
製造年月又は略号
g) “室内用”か“室外用”の表示
h) 各部品に高さ調節の最大伸張位置
i)
最大幅及び最大高さ
11
取扱説明書
取扱説明書には,次の事項を記載しなければならない。
a) 最大高さ。ウォーキングテーブル形については,支持台の最大高さ。
b) 最小高さ。ウォーキングテーブル形については,支持台の最小高さ。
c) ウォーキングテーブル形は,長さ,幅などの全ての調節を最大にしたときの回転幅。
d) 保守方法及び適切な洗剤の説明を含むクリーニング方法,腐食及び経年劣化を回避するための注意
e) 使用上の注意
f)
ブレーキの調整方法
g) 組立て,調整及び折畳み又は引出しの方法
h) 可動部品と固定部品間との安全距離についての予防措置に関する警告
i)
ロレータ形は,バスケット,トレイ,ショッピングバッグなどの質量を支持する製品を併用する場合
の制限,注意など
j)
製造業者若しくは輸入業者の名称又はその略号,並びに住所,電話番号及びFax番号
20
T 9265:2019
附属書JA
(参考)
設計における配慮事項
JA.1
福祉用具に関連して起こる可能性があるハザード及び関連する要因例
福祉用具に関連して起こる可能性があるハザード及び関連する要因の例を示す。ただし,全てを網羅し
ているわけではなく,ハザード及び要因を特定する手助けとなる。
a) 可動部分(介助者,子供などが手,足,指などを挟み込む構造の存在)に関する危険性
例 歩行車の一部に指を入れた場合に挟まれてけがをしないか。
b) 接触アレルギー誘発性などに関する危険性
例 適切な表示がされているか。
c) 他の機器と併用される場合の不適合性
例 ベッドなどからの移乗を行う場合に問題はないか。
d) 廃棄物及び/又は福祉用具の廃棄による汚染
例 ごみとして燃やす場合などに有毒な物質を排出しないか。
e) 不適切な操作説明,例えば,
1) 複雑すぎる操作説明
2) 使いにくい,まとまりのない取扱説明書
例 専門用語を不必要に使っていないか。
f)
合理的に予見できる誤使用
例 座ったまま移動する用具として使ってしまった場合にも問題はないか。
g) 製品の寿命に関する適切な情報提供
例 一部の部品が他に比べて製品の寿命が短いなどの場合。
JA.2
多様なユーザに対する人間工学的検討項目
高齢者,障害者などの身体機能の低下によって多様なニーズをもつユーザに対する人間工学的検討項目
の例を示す。ただし,全てを網羅しているわけではなく,項目を特定する手助けとなる。
注記 JIS Z 8071の箇条7(人間の能力及び特性)などが参考となる。
a) 動作能力の低下,筋力の低下及び体力の低下による意図しない動き
例 自動車運転中の反応時間は,19歳〜29歳に対し60歳以上は3倍以上(1.5秒〜3.8秒)であっ
た[1]。
b) 機器の操作力の低下
例 押す力は30歳代に対して60歳代はその約70 %であった[2]。
注記1 JIS T 9241-2では,手指による操作は5 N,手又は腕による操作は105 N,足による操作は
300 N,回転(ノブ)による操作は1.9 Nm以下としている。
注記2 ISO 11199-2では,駐車ブレーキをかける力及び解除する力は,押す力については60 Nを
超えてはならない,また,引く力については40 Nを超えてはならないとしている。
c) 認知症を含む使用者の知的能力の低下及び短期記憶能力の低下した使用者による使用
例 短期記憶に関わる単語の再生は,20歳〜29歳では約14語であるのに対し,60歳以上では約7
21
T 9265:2019
語であった[3]。
d) 平衡を保ち転倒を避ける能力の低下した使用者による使用
例 閉眼における立位時の動揺軌跡は,20歳代に対し60歳代ではその約1.23倍であった[4]。
e) 色知覚能力の低下,視力の低下,触覚感度の低下などによる不十分な情報取得
例 近距離での生活視力は,35歳〜44歳が約1.05に対して65歳〜74歳では約0.6であった[5]。
参考文献
[1] 独立行政法人産業技術総合研究所・人間福祉医工学研究部門編;人間計測ハンドブック,pp.770-771,
2003年9月,朝倉書店
[2] 独立行政法人製品評価技術基盤機構データベースより
[3] 佐藤方彦 監修;人間工学基準数値数式便覧,第1版3刷,p.169,1999年3月,技報堂出版
[4] 佐藤方彦 監修;人間工学基準数値数式便覧,第1版3刷,p.97,1999年3月,技報堂出版
[5] 独立行政法人産業技術総合研究所・人間福祉医工学研究部門編;人間計測ハンドブック,p.444,2003
年9月,朝倉書店
JIS T 9241-2 移動・移乗支援用リフト−第2部:移動式リフト
JIS Z 8071 規格におけるアクセシビリティ配慮のための指針
EN BS 12182:1999,Technical aids for disabled persons−General requirements and test methods
附属書JB
(参考)
JISと対応国際規格との対比表
JIS T 9265:2019 福祉用具−歩行補助具−歩行車
ISO 11199-2:2005,Walking aids manipulated by both arms−Requirements and test
methods−Part 2: Rollators
ISO 11199-3:2005,Walking aids manipulated by both arms−Requirements and test
methods−Part 3: Walking tables
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲 2個以上の車輪をも
つ
ISO
11199-2
ISO
11199-3
1
ウォーキングテーブル
は車輪のないものも含
む。
変更
歩行車及び歩行テーブルを一つの
規格にしたために差異を生じたが
実質的な違いはない。
体重制限なし
使用者体重35 kg以上
削除
JISは体重が少ない高齢者も対象と
した。
国際規格の見直しの際,提案を行
う。
体重をかけるとロ
ックする車輪
追加
JISは車輪とみなさない。
国際規格の見直しの際,提案を行
う。
車軸間が250 mm未
満のもの
追加
JISはドラムに載らないものを外し
た。
国際規格の見直しの際,提案を行
う。
3 用語及び
定義
用語及び定義を規
定
3
追加
ISO規格には“アナトミックハンド
グリップ”の規定はないがJISとほ
ぼ同じ。
実質的な違いはない。
4 種類
用途による区分
−
−
追加
JISは室内用と室外用とに区分。
実質的な違いはない。
構造による区分
−
−
追加
JISはハンドグリップに加え前腕サ
ポートをもつロレータ形も対象と
した。
実質的な違いはない。
5 リスクマ
ネジメント
による設計
隙間に手及び足の
指が挟まるリスク
について実施
−
追加
JISは指の挟みこみによるリスク分
析を追加。
危険防止のため規定した。
国際規格の見直しの際,提案を行
う。
4.9
生体適合性
変更
JISはリスクマネジメントとして附
属書JAで参考とした。
今後の検討課題とする。
2
T
9
2
6
5
:
2
0
1
9
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
5 リスクマ
ネジメント
による設計
(続き)
ISO
11199-2
ISO
11199-3
4.5
4.6
路面への着色
削除
評価の一般化が困難。
国際規格の見直しの際,提案を行
う。
4.11
4.9
皮膚及び衣類への着色
削除
評価の一般化が困難。
国際規格の見直しの際,提案を行
う。
8 試験方法 傾斜台,ストッパ及
び当て板,おもり
5
試験方法
追加
JIS認証のため試験方法の詳細を規
定。
実質的な違いはない。
5.1
附属品
削除
JISは標準品だけの規定とした。
実質的な違いはない。
8.2 安定性
試験
荷物かご
5.6
5.7
附属品
変更
JISはかごに表示質量分のおもりを
入れて試験。
試験方法を明確にした。
5.6
5.7
アクセサリー装着
削除
装着時の安定性。
出荷時の試験としては採用できな
い。今後の検討課題とする。
ストッパの高さ
−
−
追加
安定性試験の結果に影響しない高
さを規定した。
実質的な違いはない。
8.4 耐久性
試験
試験装置
5.12
5.11
追加
ドラム式試験装置に加えベルト式
試験装置での試験を認めた。
実質的な違いはない。ISOへ改訂
提案済。
9 検査
形式検査及び受渡
検査項目
−
−
追加
認証に必要なため規定。
実質的な違いはない。
附属
書A
削除
推奨事項
参考規定のため,実質的な違いは
ない。
附属書JA
(参考)
設計における配慮
事項
−
−
追加
設計時の配慮事項を説明した。
実質的な違いはない。
JISと国際規格との対応の程度の全体評価:(ISO 11199-2:2005,ISO 11199-3:2005,MOD)
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
T
9
2
6
5
:
2
0
1
9