T 9209:2018
(1)
目 次
ページ
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 試験条件························································································································· 2
5 試験方法························································································································· 4
5.1 回転性能試験 ················································································································ 4
5.2 キャスタ耐衝撃性試験 ···································································································· 5
5.3 走行耐久性試験 ············································································································· 7
5.4 空転状態確認試験 ·········································································································· 8
6 試験報告書 ······················································································································ 9
附属書A(規定)走行耐久性試験装置 ····················································································· 10
T 9209:2018
(2)
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本
工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
T 9209:2018
電動6輪車椅子の試験方法
Test methods for six-wheel electric wheelchairs
1
適用範囲
この規格は,電動6輪車椅子の試験方法について規定する。ただし,JIS T 9203に規定する自操用のハ
ンドル形,室内形,簡易形及び特殊形並びに介助用の標準形,簡易形及び特殊形電動車椅子は除く。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,その最新版(追補を含む。)を適用する。
JIS T 9203 電動車椅子
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS T 9203によるほか,次による。
3.1
電動6輪車椅子
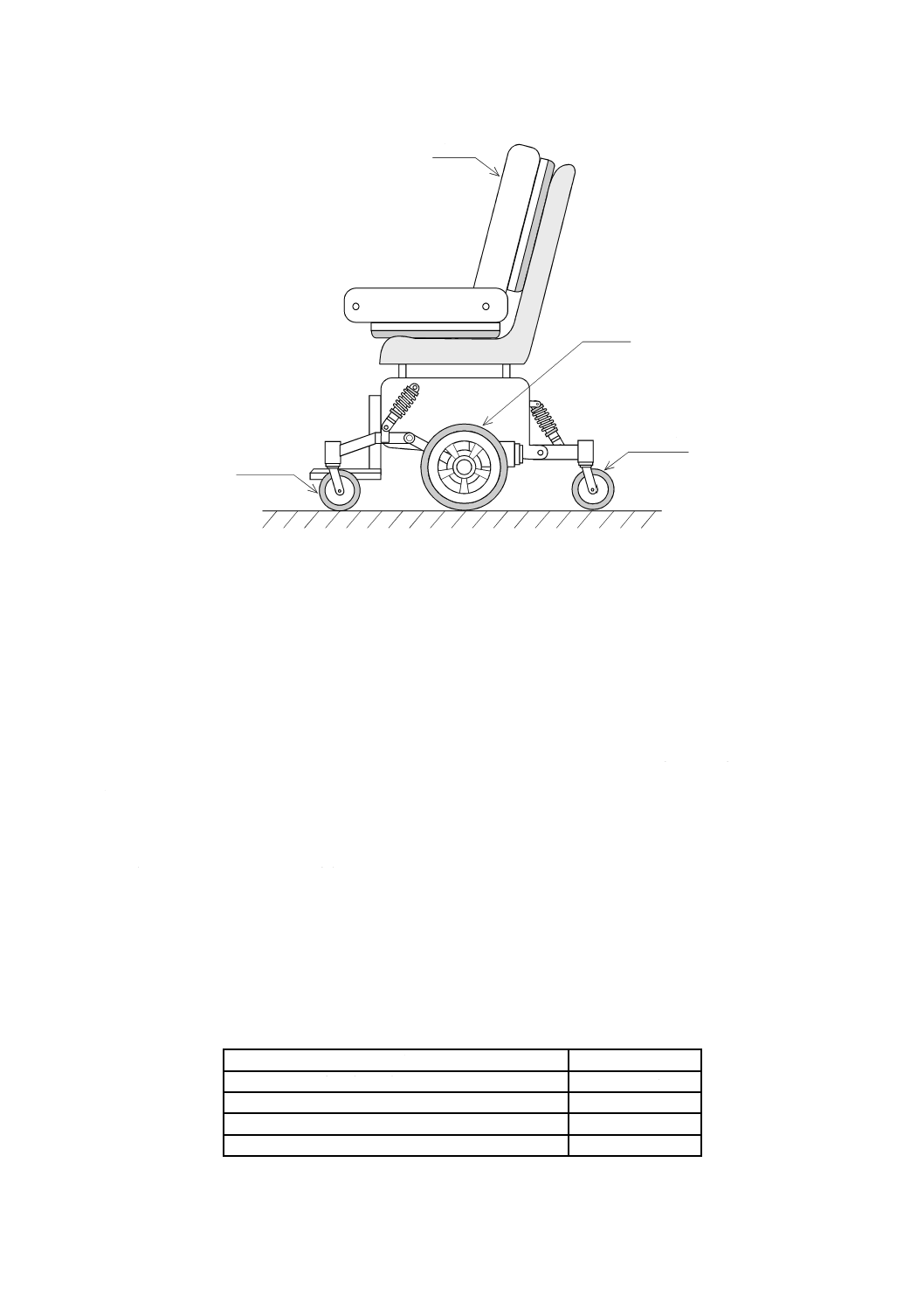
駆動輪の前方及び後方にそれぞれ一組のキャスタをもち,使用者最低体重を加えたとき,六つの全ての
車輪が水平面に接地する電動車椅子(図1参照)。
注記 この規格で用いるキャスタは,JIS B 8923で定義する旋回キャスタに相当する。
2
T 9209:2018
ダミー
駆動輪
キャスタ
キャスタ
図1−電動6輪車椅子の例
3.2
使用者最低体重
製造事業者が指定した,電動6輪車椅子が意図する性能を発揮するために必要な使用者の最低体重。
4
試験条件
試験条件は,次による。
a) 試験時の温度は,特に指定のない限り,20 ℃±15 ℃とし,試験実施時の温度及び湿度を記録する。
b) 試験に用いる試験路面は,平たんでなければならない。
なお,試験路面の摩擦係数は,JIS T 9203の附属書G(テストブロック)に規定する0.75〜1.00に
なるようにする。
c) 試験に用いるバッテリは,定格の75 %以上充電したものを用いる。
d) 空気入りタイヤの空気圧は,製造事業者の指定値に調整する。空気圧の範囲が定められている場合は,
その最高値に調整する。
e) 調節機能のある電動6輪車椅子は,表1の標準状態で試験を行う。調節機能はあるが,表1の標準状
態に調節できない電動6輪車椅子は,できる限りそれに近い不安定な状態とする。
表1−電動6輪車椅子の標準状態
区分
標準状態
フット・レッグサポート高
床面から50 mm
シート角度
4°
シートバックサポート角度
100°
フットサポートとレッグサポートとの角度
90°
3
T 9209:2018
f)
座位変換形の走行耐久性試験(5.3)は,調整範囲の中で表2の最も不安定な状態においても試験を行
う。
表2−電動6輪車椅子の最も不安定な状態
電動6輪車椅子部品の調整
最も不安定な状態
後方安定性
前方安定性
側方安定性
シート位置(垂直)
高い
高い
高い
バックサポート角度(リクライニング)
後方
前方
直立
シート角度(傾斜)
後方
前方
直立
g) プログラムによってパラメータを設定できる電動6輪車椅子は,標準出荷状態とする。
h) 試験は必要に応じて,予備走行した後に行う。
i)
ブレーキワイヤーの遊びは,製造事業者の指定値とする。
j)
規定のない項目は,最も不利な条件で試験を実施する。ただし,調節機能のない電動6輪車椅子はこ
の限りでない。
k) 回転性能試験(5.1)を除く試験は,JIS T 9203の附属書E(テストダミー)に規定するテストダミー
(以下,ダミーという。)を載せるか又は乗員が搭乗して行う。乗員の場合は,おもり(調整用砂袋な
ど)をシート上に左右均等に搭載し,おもり及び着衣を含めた質量が表3又は表4に規定する乗員体
重となるように調整する。また,乗員は電動6輪車椅子のシート中央に座り,バックサポート基準面
に添った姿勢とし,足はフットサポートの中央に載せ試験を実施する。
l)
キャスタ耐衝撃性試験(5.2)及び走行耐久性試験(5.3)は,表3に規定するダミー質量又は乗員体重
を用いて行う。
m) 空転状態確認試験(5.4)は,表4に規定するダミー質量又は乗員体重を用いて行う。
表3−電動6輪車椅子の使用者最大体重に対応するダミー質量又は乗員体重
単位 kg
使用者最大体重
ダミー質量又は乗員体重
25以下
25
25を超え
50以下
50
50を超え
75以下
75
75を超え 100以下
100
表4−電動6輪車椅子の使用者最低体重に対応するダミー質量又は乗員体重
単位 kg
使用者最低体重
ダミー質量又は乗員体重
25以下
なし
25を超え
50以下
25
50を超え
75以下
50
75を超える
75
4
T 9209:2018
5
試験方法
5.1
回転性能試験
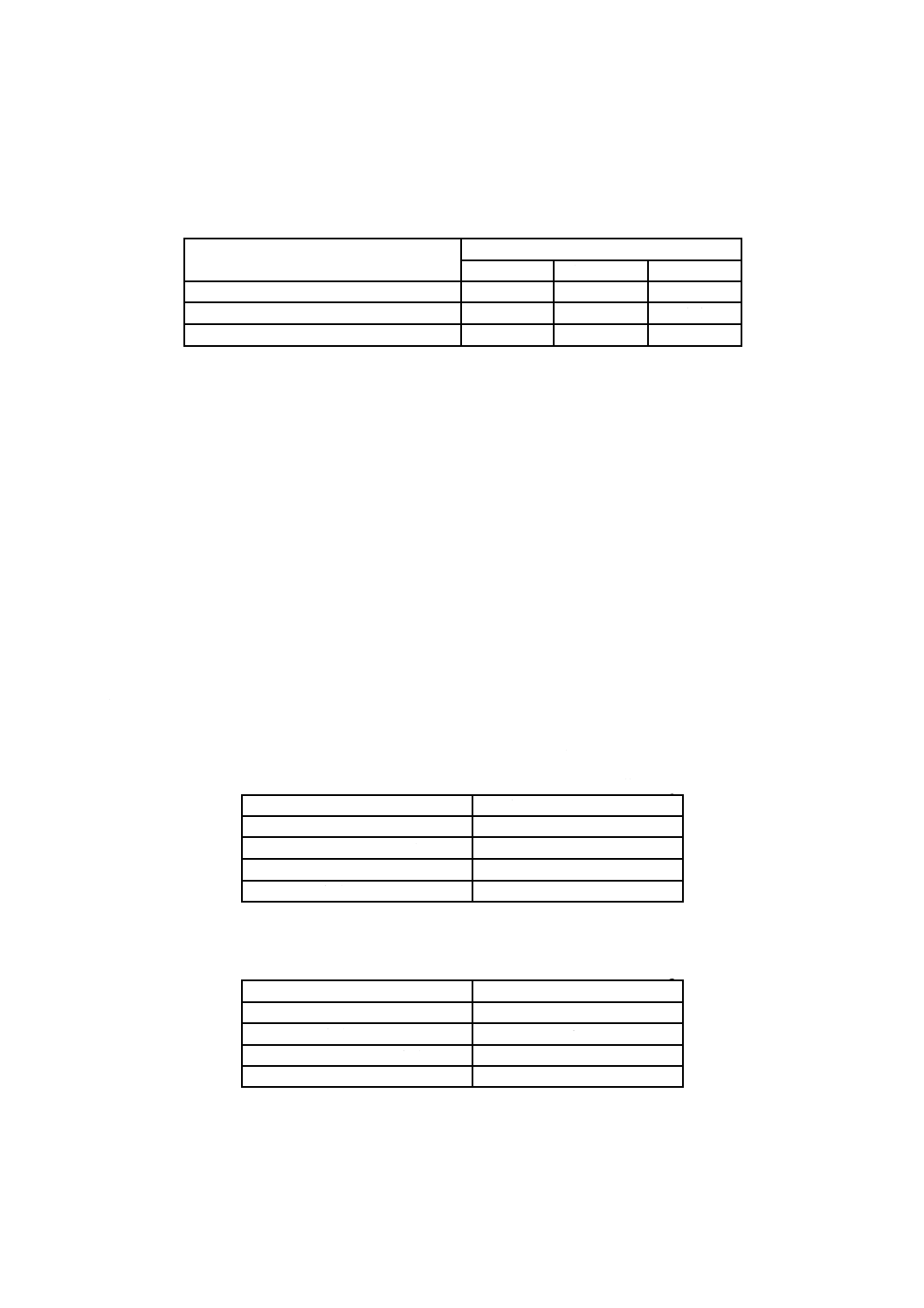
図2に示すように,ついたての幅(L)が0.9 m,1.2 m及び1.6 mになるように設置した試験路を,1回
の操作で,ついたてに触れずに180°の回転ができるか確認する。回転ができた最小のついたての幅(m)
を回転性能として記録する。
なお,回転操作に複数のモードを設定できる車椅子は最も小回りができる状態に設定して試験を実施し,
設定モードを記録する。
− 回転性能0.9 mは0.9 m幅のついたての間でついたてに触れずに180°の回転ができる場合。
− 回転性能1.2 mは1.2 m幅のついたての間でついたてに触れずに180°の回転ができる場合。
− 回転性能1.6 mは1.6 m幅のついたての間でついたてに触れずに180°の回転ができる場合。
幅(L)
ついたて間の中心
ついたて
a) 回転性能試験(左右駆動輪の中心で回転する電動6輪車椅子の例)
図2−回転性能試験
5
T 9209:2018
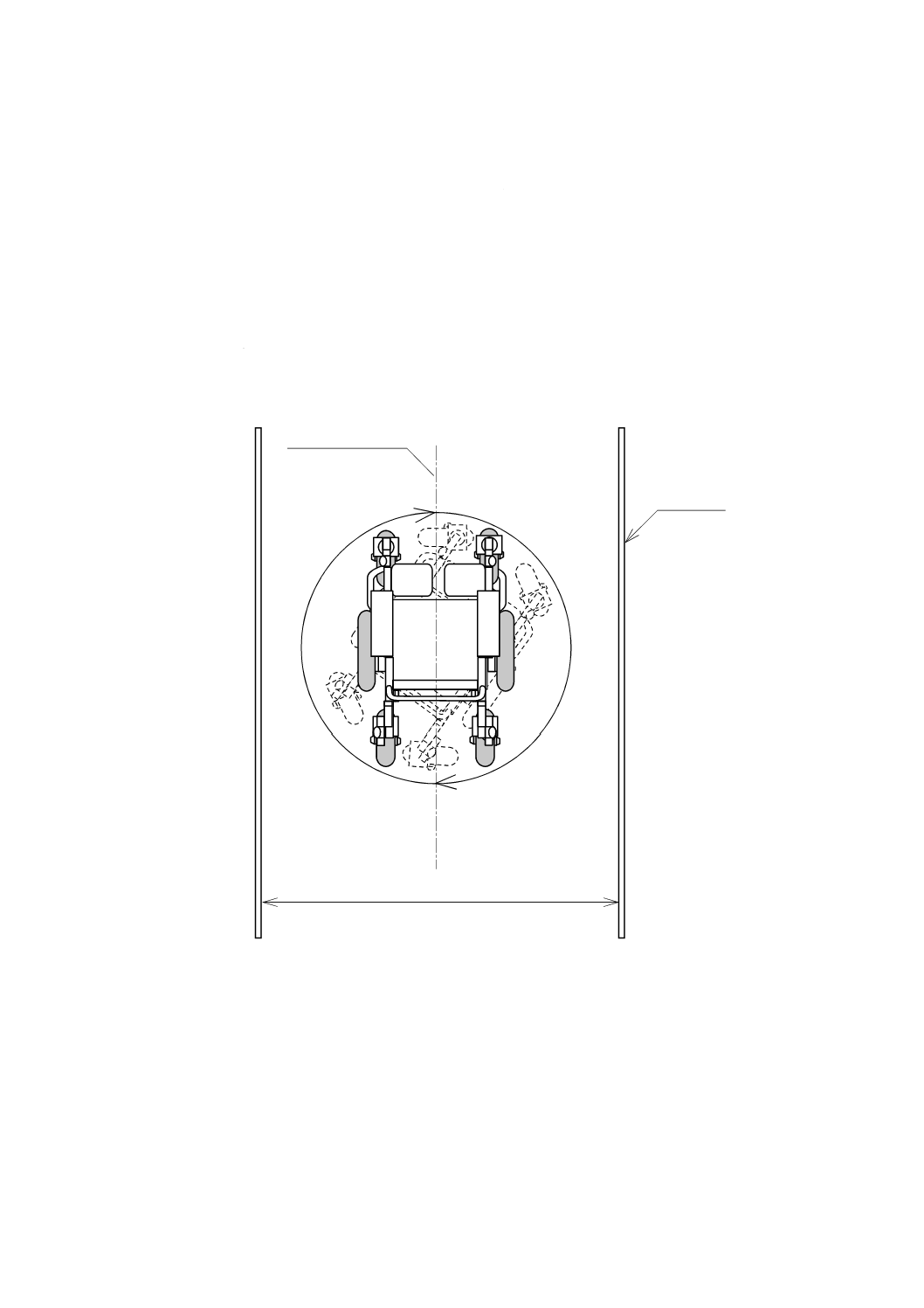
幅(L)
ついたて
ついたて間の中心
b) 回転性能試験(右駆動輪を中心に回転する電動6輪車椅子の例)
図2−回転性能試験(続き)
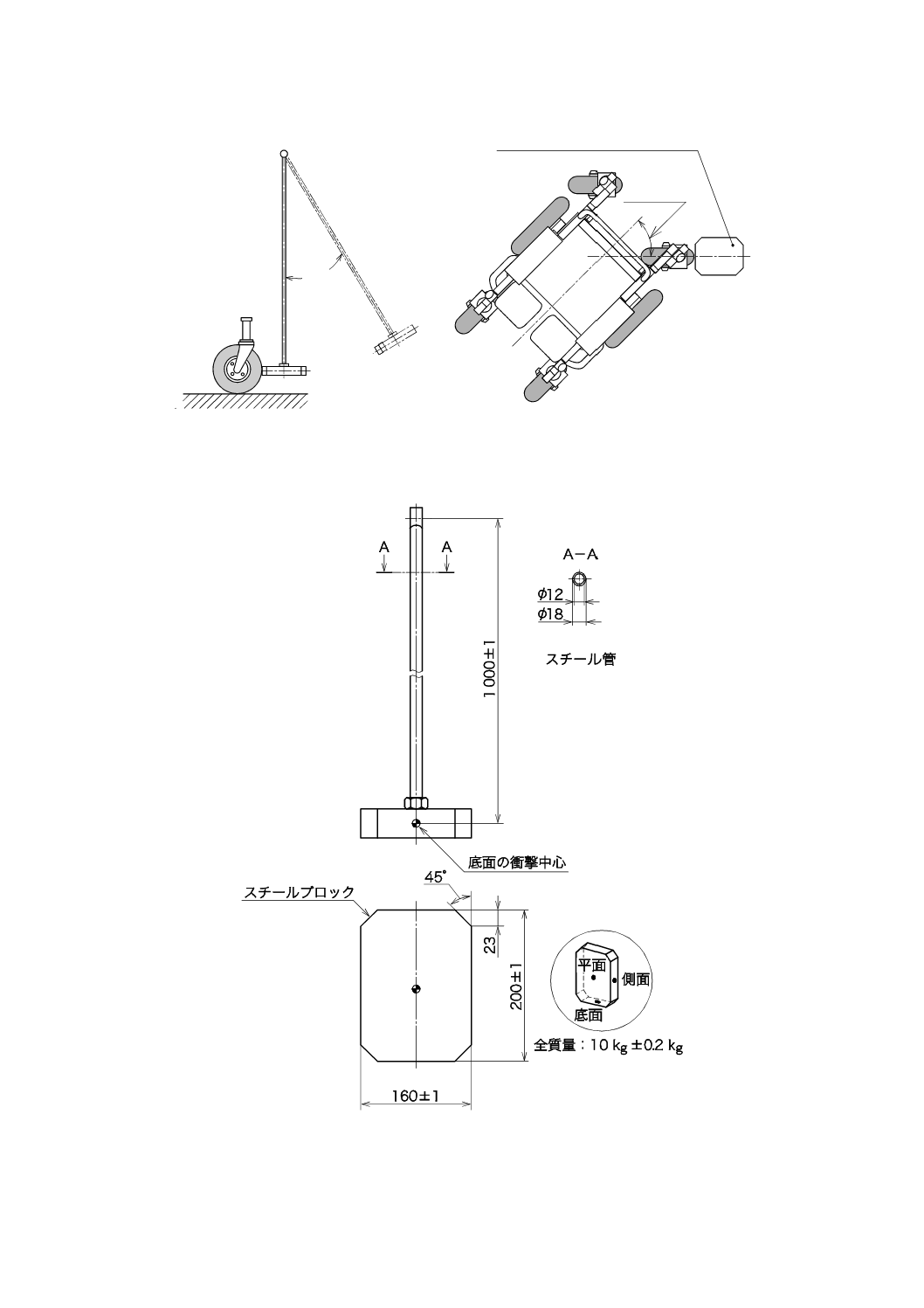
5.2
キャスタ耐衝撃性試験
図3に示す電動6輪車椅子に箇条4 l) のダミーを載せ,又は乗員が搭乗し,ブレーキ及びクラッチを開
放した状態で水平な試験平面上に置き,前輪のキャスタの場合は,前進状態で電動6輪車椅子の縦軸に対
し45°±5°の角度に設定する。後輪のキャスタの場合は,後進状態で電動6輪車椅子の縦軸に対し45°
±5°の角度に設定する。図4の質量10 kg±0.2 kgのおもりを,式(1)で求めた衝突角度θからキャスタの
車輪にそれぞれ1回衝突させ,JIS T 9203の附属書C(評価要件)によって評価要件を確認する。
なお,衝突位置は,キャスタ車軸の水平線上±5 mmの高さとする。また,おもりの平面が水平になる
ようにして底面の衝撃中心で試験を行う。
(
)377
/
1
cos
w
dM
M+
−
=
θ
···························································· (1)
ここに,
θ: 衝突角度(°)
Md: ダミー質量(kg)
Mw: 電動6輪車椅子質量(kg)
6
T 9209:2018
45±5°
耐衝撃性試験用おもり
θ
図3−キャスタ耐衝撃性試験(後輪の例)
単位 mm
図4−耐衝撃性試験用おもり
7
T 9209:2018
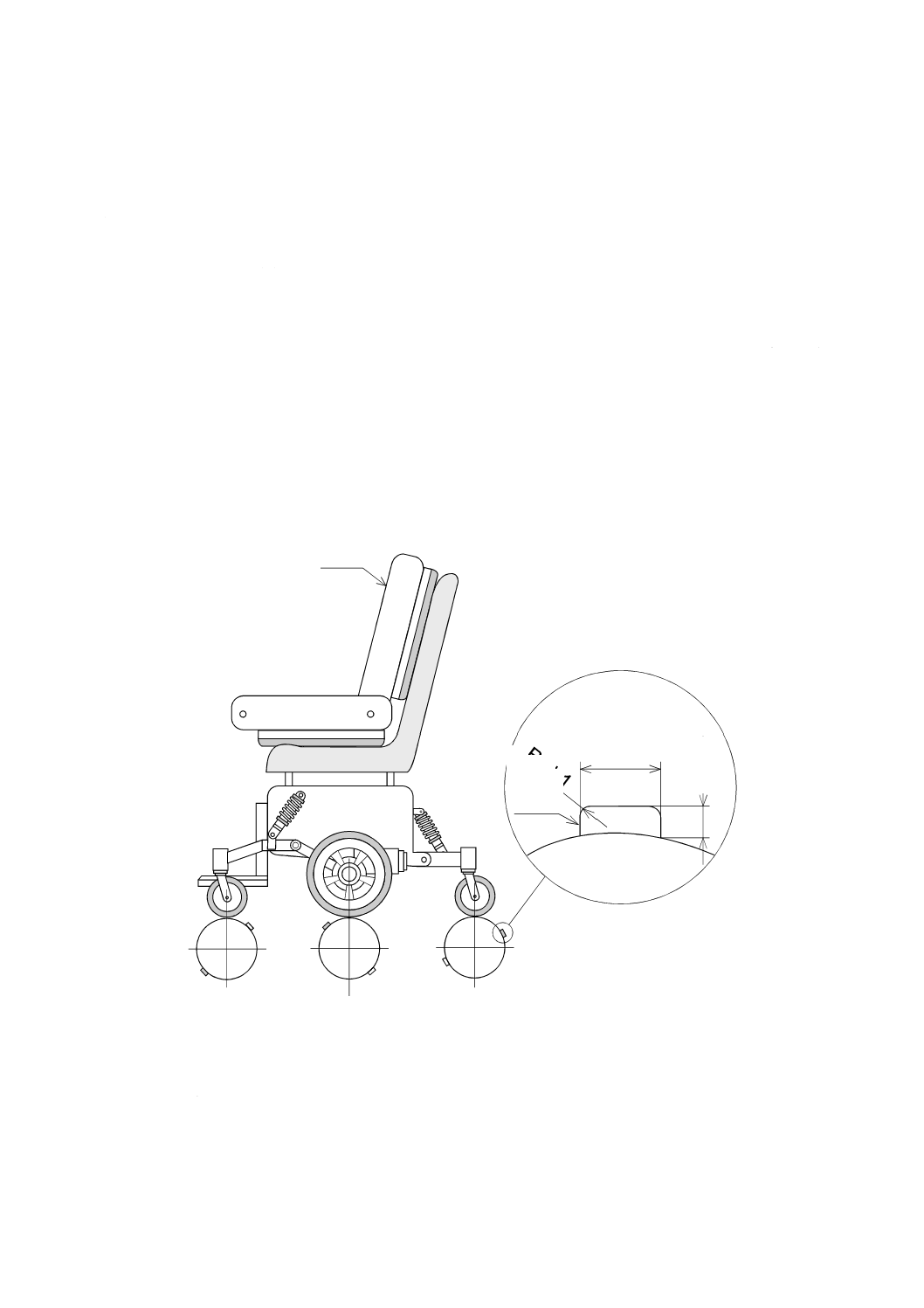
5.3
走行耐久性試験
5.3.1
標準形の走行耐久性試験
標準形の走行耐久性試験は,次による(図5参照)。
a) 予備電流の測定 走行可能状態にある電動6輪車椅子を,平たんな路面上で予備走行した後,1.0 m/s
±0.1 m/sの速度で走行させたときの電動6輪車椅子のバッテリ電流値を予備電流値とする。
b) 走行耐久性試験 箇条4 l) のダミーを載せ,又は乗員が搭乗した走行可能状態にある電動6輪車椅子
を,それぞれの車輪がドラム1回転中に1回段差を乗り越えるように位置決めをする。段差を取り除
いて,電動6輪車椅子自体の駆動システムによって基準ドラムを回転させ,基準ドラムの周速度を1.0
m/s±0.1 m/sにして電動6輪車椅子のバッテリ電流値がa) で測定した予備電流値の±5 %になるよう
に基準ドラムの回転抵抗を調整する。次に,段差を取り付けて200 000回試験し,JIS T 9203の附属
書Cによって評価要件を確認する。
なお,段差及びダミーの載せ方についてはJIS T 9203の12.4.2(走行耐久性試験)に,試験装置の
構成は附属書Aに,試験装置の準備,ダミーの拘束方法などについてはJIS T 9203の附属書F(ダミ
ーの車椅子への拘束方法)による。また,電動6輪車椅子の駆動電源は,外部電源を用いてもよい。
単位 mm
段差
R6
±1
36±3
1
2±
1
ダミー
図5−走行耐久性試験
5.3.2
座位変換形の走行耐久性試験
5.3.2.1
試験条件
標準状態及び最も不利な状態の2通りで試験を行う。
a) ティルト機構の付いた電動6輪車椅子のシート角度は,シートの角度調整部分が最小ティルトのスト

8
T 9209:2018
ッパに当たってから5°±1°起こした状態にて試験する。角度は,角度計(デジタル角度計など)を
使用して測定する。
b) 箇条4 l) のダミーを搭載する。
c) フット・レッグサポートにエレベーティング機能があるものについては,エレベーティング機能が試
験中に動かないように固定する。
d) メカロック等が試験中に縮む場合は,調整してもよい。
5.3.2.2
試験方法
試験方法は,5.3.1による。
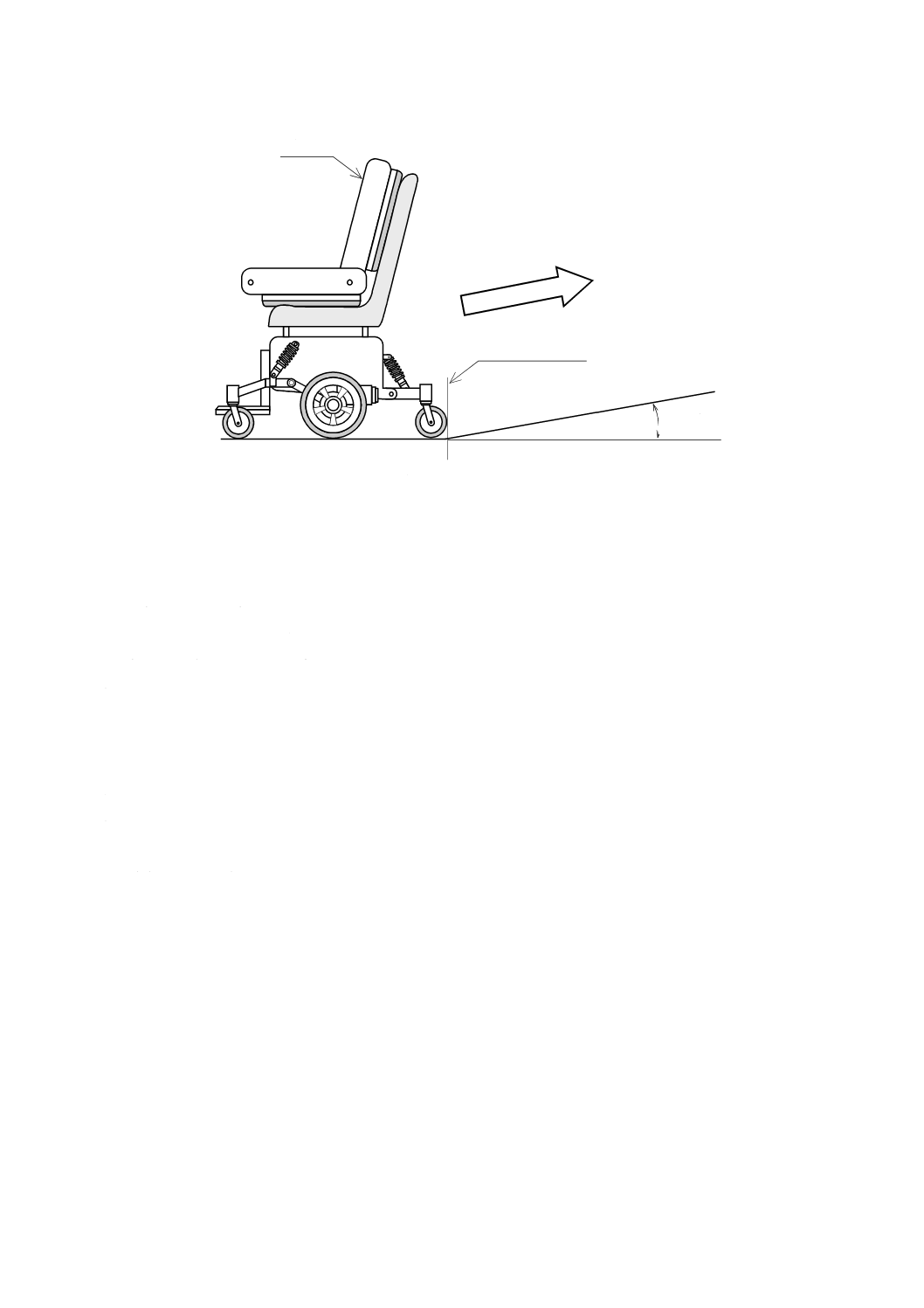
5.4
空転状態確認試験
電動6輪車椅子が水平面から3°,6°及び10°の傾斜角度をもつ斜面に登坂できる試験路,及び箇条4
m) によって表4の質量を加えた電動6輪車椅子を用意する。水平面からそれぞれの角度の斜面に対して,
助走せず前進方向で登坂する操作を行い,駆動輪が空転することなく登坂が可能な最大の角度を,空転し
ない前進走行における登坂性能として記録する[図6 a) 参照]。
前進と同様に,水平面からそれぞれの角度の斜面に対して後進方向で助走なしで登坂する操作を行い,
駆動輪が空転することなく登坂が可能な最大の角度を,空転しない後進走行における登坂性能として記録
する[図6 b) 参照]。
a) 前進方向で登坂
図6−空転状態確認試験
傾斜角度
ダミー
スタート位置
9
T 9209:2018
b) 後進方向で登坂
図6−空転状態確認試験(続き)
6
試験報告書
試験報告書には,次の項目を記載しなければならない。
a) 規格番号又は規格名称
b) 試験機関の名称及び所在地
c) 製造事業者の名称及び所在地
d) 試験報告書の発行日
e) 電動6輪車椅子の形式及び製造番号
f)
使用したダミーの大きさ及び質量,又は人が搭乗して試験を行った場合には,おもり及び着衣を含め
た乗員体重
g) 試験中の電動6輪車椅子装備の写真
h) 電動6輪車椅子に転倒防止装置及び縁石乗り上げ装置の装着が認められているか。認められている場
合,これらの装置を試験時に装着したか否か。
i)
箇条5の試験結果
j)
試験実施時の温度及び湿度
傾斜角度
ダミー
スタート位置
10
T 9209:2018
附属書A
(規定)
走行耐久性試験装置
A.1 走行耐久性試験装置の構成
5.3で使用する試験装置の構成は,次による。
a) 電動6輪車椅子のトレッドより少なくとも100 mm幅の広い,ドラム径が直径200 mm±25 mmの金属
製の水平で平行な三つの円筒形のドラムで構成する。ドラム間の距離は,試験する電動6輪車椅子の
ホイールベースと同一寸法に調整する。
b) 図5に示すように,それぞれのドラムは二つの段差を備えている。
c) 基準ドラム上に電動6輪車椅子の駆動輪を据え付ける。そして,前輪をもう一方のドラムに据え付け,
更に後輪をもう一方のドラムに据え付ける。
d) 電動6輪車椅子の拘束は,駆動輪の車軸又はできる限り駆動輪の車軸に近い電動6輪車椅子のフレー
ムで行う。
注記1 拘束部は,それぞれの端部にボールジョイントが付いた金属棒から構成されるものが望ま
しい。
e) 横方向の動きは,±50 mmとし,垂直方向の動きは,制限しないようにする。
注記2 横方向の動きの制限は,帯状の布ひもで行うことが望ましい。
f)
±0.01 m/sの精度で,基準ドラムの周速度を測定する。
g) 基準ドラムの回転数を計測する。
h) 電動6輪車椅子自体の駆動システムによって基準ドラムを駆動する。
i)
基準ドラムの周速度は,1.0 m/s±0.1 m/s,他のドラムは基準ドラムより2 %〜7 %の範囲で回転を速く
する。
j)
基準ドラムの回転抵抗は,電動6輪車椅子のモータによって導かれる電流が5.3.1 b) で示す制限範囲
内で,基準ドラムの速度設定値が持続されるように調整する。
注記3 通常,電動6輪車椅子の正確なモータ電流値が得られるように駆動する必要がある。
参考文献 JIS B 8923 産業用キャスタ