T 9206:2017 (ISO 7176-21:2009)
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 3
4 車椅子の分類 ··················································································································· 4
5 要求事項························································································································· 5
5.1 一般事項 ······················································································································ 5
5.2 車椅子の駆動 ················································································································ 5
5.3 搭載形バッテリ充電器を備えた車椅子················································································ 6
5.4 非搭載形及び携帯形バッテリ充電器··················································································· 8
6 試験装置························································································································· 9
6.1 支持システム ················································································································ 9
6.2 放電接地ストラップ ······································································································· 9
6.3 車輪速度モニタ ············································································································· 9
6.4 ステアリングモニタ ······································································································· 9
6.5 充電器試験用負荷 ········································································································· 10
7 準備······························································································································ 10
7.1 車椅子−駆動状態 ········································································································· 10
7.2 車椅子−非駆動状態 ······································································································ 10
7.3 搭載形バッテリ充電器を備えた車椅子··············································································· 11
7.4 非搭載形及び携帯形バッテリ充電器·················································································· 11
8 試験順序························································································································ 11
9 エミッションの試験方法 ··································································································· 11
9.1 電源端子妨害波 ············································································································ 11
9.2 放射エミッション ········································································································· 11
9.3 高調波電流エミッション ································································································ 12
9.4 電圧変動及びフリッカ ··································································································· 12
10 イミュニティの試験方法 ································································································· 12
10.1 静電気放電イミュニティ ······························································································· 12
10.2 放射無線周波電磁界イミュニティ ··················································································· 14
10.3 ファストトランジェント/バーストイミュニティ ······························································ 15
10.4 サージイミュニティ ····································································································· 16
10.5 伝導妨害イミュニティ ·································································································· 16
10.6 電源周波数磁界イミュニティ ························································································· 16
10.7 電圧ディップ及び短時間停電イミュニティ ······································································· 16
T 9206:2017 (ISO 7176-21:2009) 目次
(2)
ページ
11 車輪速度変化の計算 ······································································································· 17
12 試験報告書 ··················································································································· 17
13 情報開示 ······················································································································ 18
14 取扱説明書 ··················································································································· 18
T 9206:2017 (ISO 7176-21:2009)
(3)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,日本福祉用具・生
活支援用具協会(JASPA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業
規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業
規格である。
これによって,JIS T 9206:2001は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
T 9206:2017
(ISO 7176-21:2009)
電動車椅子・バッテリ充電器の
電磁両立性要件及び試験方法
Requirements and test methods for electromagnetic compatibility of
electrically powered wheelchairs and scooters, and battery chargers
序文
この規格は,2009年に第2版として発行されたISO 7176-21を基に,技術的内容及び構成を変更するこ
となく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
警告
この規格で規定する試験方法のうち,十分な予防措置を講じないと人体に対して有害となるものが含ま
れている。それらは,述べられている試験方法が技術的に適切であることについて言及しているに過ぎず,
試験者の健康及び安全に関して製造業者又は試験機関の法律的責任を免除するものではない。
1
適用範囲
この規格は,最高時速15 km/h以下の,屋内用及び屋外用電動車椅子の電磁エミッション及び電磁イミ
ュニティに関する要件並びに試験方法について規定する。また,手動車椅子に動力装置を取り付けたもの
に適用する。また,二人乗り以上として設計したものには適用しない。
さらに,電動車椅子のバッテリ充電器についても要件を規定する。
注記1 この規格における“車椅子”(以下,車椅子という。)は,電動車椅子,ハンドル形電動車椅
子及び手動車椅子に動力装置を取り付けたものをいう。
注記2 この規格において“最高時速15 km/h以下の……について規定する。”とされているが,日本
国内では,道路交通法施行規則で定める基準に適合する原動機を用いる身体障害者用の車い
すについては,道路交通法上歩行者とされている。
注記3 この規格における“電動車椅子”とは,JIS T 9203のJA.1(電動車椅子形式分類)の全ての
ことを指す。
注記4 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 7176-21:2009,Wheelchairs−Part 21: Requirements and test methods for electromagnetic
compatibility of electrically powered wheelchairs and scooters, and battery chargers(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
T 9206:2017 (ISO 7176-21:2009)
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,記載の年の版を適用し,その後の改正版(追補を含む。)は適用しない。
JIS C 61000-3-2:2011 電磁両立性−第3-2部:限度値−高調波電流発生限度値(1相当たりの入力電
流が20 A以下の機器)
注記 対応国際規格:IEC 61000-3-2:2005,Electromagnetic compatibility (EMC)−Part 3-2: Limits−
Limits for harmonic current emissions (equipment input current ≤ 16 A per phase),Amendment 1:
2008及びAmendment 2: 2009(MOD)
JIS C 61000-4-2:2012 電磁両立性−第4-2部:試験及び測定技術−静電気放電イミュニティ試験
注記 対応国際規格:IEC 61000-4-2:2008,Electromagnetic compatibility (EMC)−Part 4-2: Testing and
measurement techniques−Electrostatic discharge immunity test(IDT)
JIS C 61000-4-3:2012 電磁両立性−第4-3部:試験及び測定技術−放射無線周波電磁界イミュニティ
試験
注記 対応国際規格:IEC 61000-4-3:2010,Electromagnetic compatibility (EMC)−Part 4-3: Testing and
measurement techniques−Radiated, radio-frequency, electromagnetic field immunity test(IDT)
JIS C 61000-4-4:2015 電磁両立性−第4-4部:試験及び測定技術−電気的ファストトランジェント/
バーストイミュニティ試験
注記 対応国際規格:IEC 61000-4-4:2012,Electromagnetic compatibility (EMC)−Part 4-4: Testing and
measurement techniques−Electrical fast transient/burst immunity test(IDT)
JIS C 61000-4-5:2009 電磁両立性−第4-5部:試験及び測定技術−サージイミュニティ試験
注記 対応国際規格:IEC 61000-4-5:2005,Electromagnetic compatibility (EMC)−Part 4-5: Testing and
measurement techniques−Surge immunity test(IDT)
JIS C 61000-4-6:2006 電磁両立性−第4-6部:試験及び測定技術−無線周波電磁界によって誘導する
伝導妨害に対するイミュニティ
注記 対応国際規格:IEC 61000-4-6:2003,Electromagnetic compatibility (EMC)−Part 4-6: Testing and
measurement techniques−Immunity to conducted disturbances, induced by radio-frequency fields
(MOD)
JIS C 61000-4-8:2016 電磁両立性−第4-8部:試験及び測定技術−電源周波数磁界イミュニティ試験
注記 対応国際規格:IEC 61000-4-8:2009,Electromagnetic compatibility (EMC)−Part 4-8: Testing and
measurement techniques−Power frequency magnetic field immunity test(IDT)
JIS C 61000-4-11:2008 電磁両立性−第4-11部:試験及び測定技術−電圧ディップ,短時間停電及び
電圧変動に対するイミュニティ試験
注記 対応国際規格:IEC 61000-4-11:2004,Electromagnetic compatibility (EMC)−Part 4-11: Testing
and measurement techniques−Voltage dips, short interruptions and voltage variations immunity tests
(IDT)
ISO 7176-5:2008,Wheelchairs−Part 5: Determination of dimensions, mass and manoeuvring space
ISO 7176-9:2009,Wheelchairs−Part 9: Climatic tests for electric wheelchairs
ISO 7176-15:1996,Wheelchairs−Part 15: Requirements for information disclosure, documentation and
labelling
ISO 7176-22:2014,Wheelchairs−Part 22: Set-up procedures
3
T 9206:2017 (ISO 7176-21:2009)
IEC 61000-3-3:2013,Electromagnetic compatibility (EMC)−Part 3-3: Limits−Limitation of voltage changes,
voltage fluctuations and flicker in public low-voltage supply systems, for equipment with rated current ≤
16 A per phase and not subject to conditional connection
CISPR 11:2015,Industrial, scientific and medical equipment−Radio-frequency disturbance characteristics−
Limits and methods of measurement
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
駆動輪(drive wheel)
車椅子を駆動させる車輪,又はそのような車輪の組の中の一つ。
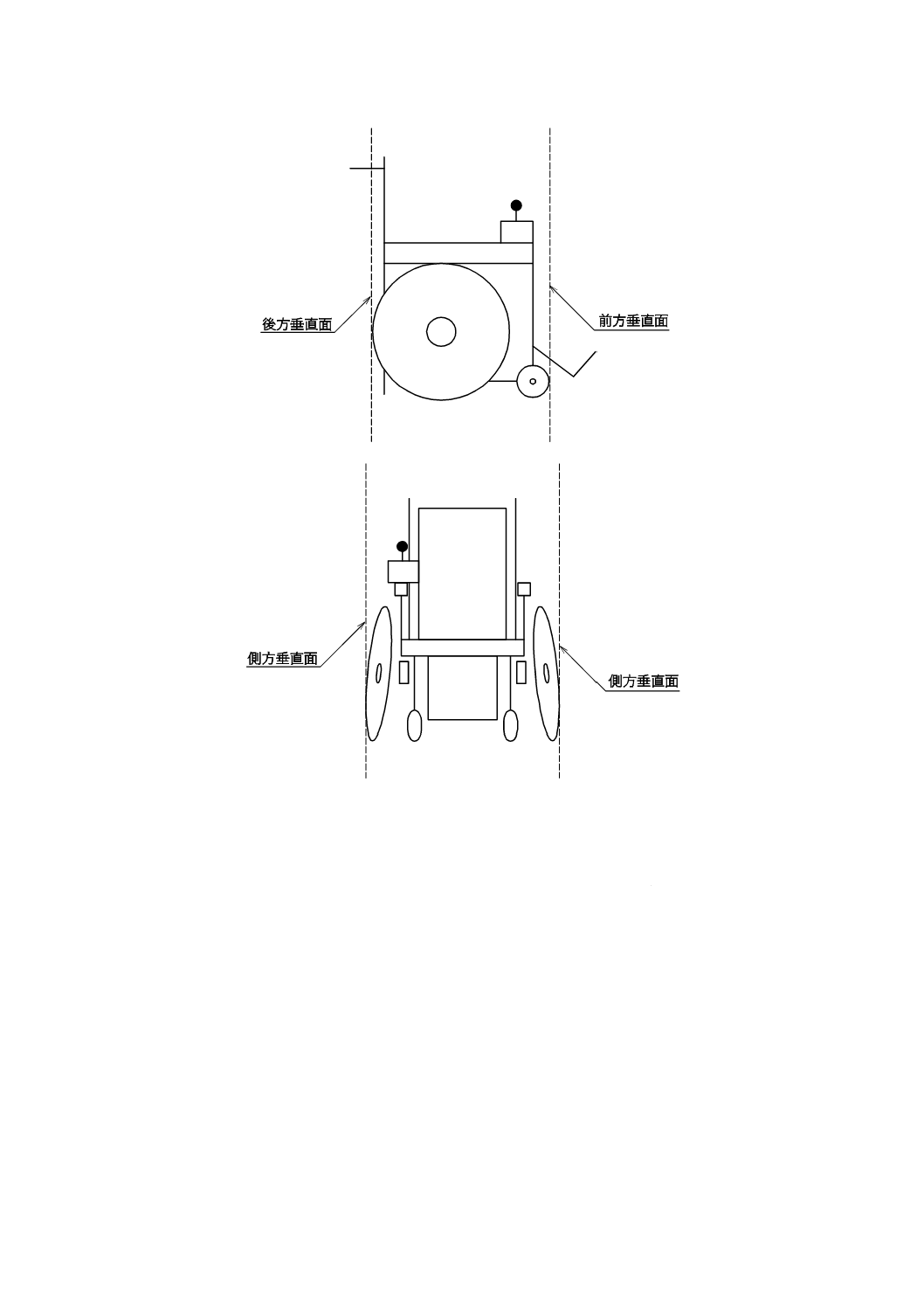
3.2
前方垂直面(front vertical plane)
前進方向に対して垂直で,最も前方の車輪の前端に接する垂直面(図1参照)。
3.3
後方垂直面(rear vertical plane)
前進方向に対して垂直で,最も後方の車輪の後端に接する垂直面(図1参照)。
3.4
側方垂直面(side vertical plane)
前進方向に対して平行で,車椅子の側方で最も外側車輪の外側端に接する垂直面(図1参照)。
3.5
非搭載形バッテリ充電器(off-board battery charger)
独立した自立形のバッテリ充電器で,工具なしで車椅子から取り外せるもの。
3.6
携帯形バッテリ充電器(carry-on battery charger)
持ち運びができるバッテリ充電器。
3.7
搭載形バッテリ充電器(on-board battery charger)
車椅子に組み込まれているバッテリ充電器で,工具を使用しないと取り外せないもの。
4
T 9206:2017 (ISO 7176-21:2009)
図1−基準面
4
車椅子の分類
車椅子の分類は,次による。
− カテゴリA:電子式差動操だ(舵)装置及び電子制御ブレーキを備えた車椅子
− カテゴリB:サーボ操だ装置及び電子制御ブレーキを備えた車椅子
− カテゴリC:手動操だ装置及び電子制御ブレーキを備えた車椅子
− カテゴリD:電子式差動操だ装置及び手動制御ブレーキを備えた車椅子
− カテゴリE:サーボ操だ装置及び手動制御ブレーキを備えた車椅子
− カテゴリF:電子式速度制御,手動操だ装置及び手動制御ブレーキを備えた車椅子
− カテゴリG:単純なON/OFFモータ,手動操だ装置及び手動制御ブレーキを備えた車椅子
注記 重複分類を可とする。
5
T 9206:2017 (ISO 7176-21:2009)
5
要求事項
5.1
一般事項
全ての車椅子は,5.2に適合しなければならない。
なお,搭載形バッテリ充電器を備えた車椅子は,5.3にも適合しなければならない。
非搭載形バッテリ充電器及び携帯形バッテリ充電器(以下,非搭載形及び携帯形バッテリ充電器という。)
は,5.4に適合しなければならない。
注記 5.2,5.3及び5.4における多くの要求事項で2秒間の観察期間を規定している。これは,観察期
間が経過した後に試験中の車椅子又は充電器の誤作動を容認するものではない。無限の経過期
間を設定することは実用的ではなく,試験中に車椅子又は充電器が誤作動しても試験結果とし
て2秒間以内に誤作動したこととする。
5.2
車椅子の駆動
5.2.1
放射エミッション
車椅子は9.2.1によって試験したとき,CISPR 11のグループ1のクラスBに規定する放射エミッション
限度値に適合しなければならない。
5.2.2
静電気放電(ESD)イミュニティ
車椅子は,10.1.1.1及び10.1.1.2の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合
しなければならない(箇条8参照)。
車椅子は,接触放電では±2 kV,±4 kV及び±6 kVの試験レベルを,気中放電では±2 kV,±4 kV及
び±8 kVの試験レベルを用いて10.1.1.1によって試験したとき及び±8 kVの試験レベルを用いて10.1.1.2
によって試験したとき,次の要求事項を満たさなければならない。
a) 車椅子の駆動システムは,放電中及び放電後2秒間,又はプログラム可能な静電気放電[ESD(以下,
ESDという。)]発生器を用いる場合には一連の放電試験の間5.2.5の要求事項に適合しなければなら
ない。
b) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は,放電中及び放電後2秒間,又はプログラム可能なESD発生器を用いる場合には一連の放電
試験の間,動いてはならない。
5.2.3
放射無線周波電磁界イミュニティ
車椅子は,10.2.1の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければな
らない(箇条8参照)。
車椅子は,26 MHz〜2.5 GHzの周波数範囲で20 V/mの試験レベルを用いて10.2.1によって試験したとき,
次の要求事項を満たさなければならない。
a) 車椅子の駆動システムは,印加した無線周波電磁界において,5.2.5の要求事項に適合しなければなら
ない。
b) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は,印加した無線周波電磁界において,動いてはならない。
5.2.4
電源周波数磁界イミュニティ
車椅子は,10.6の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければなら
ない(箇条8参照)。
車椅子は,50 Hz及び60 Hzの周波数においてJIS C 61000-4-8に規定する試験レベル4を用いて10.6に
よって試験したとき,次の要求事項を満たさなければならない。
6
T 9206:2017 (ISO 7176-21:2009)
a) 車椅子の駆動システムは,印加した電源周波数磁界において,5.2.5の要求事項に適合しなければなら
ない。
b) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は,印加した電源周波数磁界において,動いてはならない。
注記 他の磁界イミュニティの要求事項も検討中。
5.2.5
速度及び方向の安定性
5.2.5.1
速度
カテゴリA〜Fの車椅子(電子式速度制御を備えた車椅子)では,箇条11によって算出した平均車輪速
度変化率ΔSavgが,±20 %を超えてはならない。
注記 正の値は加速,負の値は減速を示す。
カテゴリGの車椅子(電子式速度制御を備えない車椅子)では,当該要求事項は適用しない。
5.2.5.2
操だ装置
カテゴリA及びDの車椅子(電子式差動操だ装置を備えた車椅子)では,箇条11によって算出した差
動輪の速度変化率ΔSdiffが±25 %を超えてはならない。
注記 正の値は右折に,負の値は左折に相当する。
カテゴリB及びEの車椅子(サーボ操だ装置を備えた車椅子)では,この最大許容変化率は操だ用サー
ボの位置又は操だ角度の,ISO 7176-5によって定義する回転半径の4 mに相当しなければならない。
カテゴリC,F及びGの車椅子(手動操だ装置を備えた車椅子)では,当該要求事項は適用しない。
5.3
搭載形バッテリ充電器を備えた車椅子
5.3.1
電源端子妨害波
車椅子は,9.1.1によって試験したときCISPR 11のグループ1のクラスBに規定する電源端子妨害波の
限度値に適合しなければならない。
5.3.2
放射エミッション
車椅子は9.2.2によって試験したとき,CISPR 11のグループ1のクラスBに規定する放射エミッション
限度値に適合しなければならない。
5.3.3
高調波電流エミッション
車椅子は,9.3.1によって試験したとき,JIS C 61000-3-2の要求事項に適合しなければならない。
5.3.4
電圧変動及びフリッカ
車椅子は,9.4.1によって試験したとき,IEC 61000-3-3の要求事項に適合しなければならない。
5.3.5
静電気放電イミュニティ
車椅子は,10.1.2の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければな
らない(箇条8参照)。
車椅子は,接触放電では±2 kV,±4 kV及び±6 kV,気中放電では±2 kV,±4 kV及び±8 kVの試験
レベルを用いて10.1.2によって試験したとき,放電中及び放電後2秒間,又はプログラム可能なESD発生
器を用いる場合には一連の放電試験の間,次の要求事項を満たさなければならない。
a) 駆動輪は回転してはならない。
b) 自動ブレーキは解除されてはならない。
c) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は動いてはならない。
バッテリ充電器は,10.1.2によって試験したとき,人的介入を伴わずに仕様に従い機能し続けなければ
7
T 9206:2017 (ISO 7176-21:2009)
ならない。
5.3.6
放射無線周波電磁界イミュニティ
車椅子は,10.2.2の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければな
らない(箇条8参照)。
車椅子は,80 MHz〜1.0 GHzの周波数範囲で3 V/mの試験レベルを用いて10.2.2によって試験したとき,
次の要求事項を満たさなければならない。
a) 駆動輪は回転してはならない。
b) 自動ブレーキは解除してはならない。
c) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は動いてはならない。
バッテリ充電器は,10.2.2によって試験したとき,人的介入を伴わずに仕様に従い機能し続けなければ
ならない。
5.3.7
ファストトランジェント/バーストイミュニティ
車椅子は,10.3.1の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければな
らない(箇条8参照)。
車椅子は,JIS C 61000-4-4に規定する試験レベル2を用いて10.3.1によって試験したとき,次の要求事
項を満たさなければならない。
a) 駆動輪は回転してはならない。
b) 自動ブレーキは解除してはならない。
c) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は動いてはならない。
バッテリ充電器は,10.3.1によって試験したとき,人的介入を伴わずに仕様に従い機能し続けなければ
ならない。
5.3.8
サージイミュニティ
車椅子は,10.4.1の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければな
らない(箇条8参照)。
車椅子をJIS C 61000-4-5に規定する試験レベル3を用いて10.4.1によって試験したとき,サージ印加中
及びサージ印加後2秒間は次の要求事項を満たさなければならない。
a) 駆動輪は回転してはならない。
b) 自動ブレーキは解除してはならない。
c) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は動いてはならない。
バッテリ充電器は,10.4.1によって試験したとき,人的介入を伴わずに仕様に従い機能し続けなければ
ならない。
5.3.9
伝導妨害イミュニティ
車椅子は,10.5.1の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければな
らない(箇条8参照)。
車椅子は,150 kHz〜80 MHzの周波数範囲でJIS C 61000-4-6に規定する試験レベル2を用いて10.5.1に
よって試験したとき,次の要求事項を満たさなければならない。
a) 駆動輪は回転してはならない。
8
T 9206:2017 (ISO 7176-21:2009)
b) 自動ブレーキは解除してはならない。
c) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は動いてはならない。
バッテリ充電器は,10.5.1によって試験したとき,人的介入を伴わずに仕様に従い機能し続けなければ
ならない。
5.3.10 電圧ディップ及び短時間停電イミュニティ
車椅子は,10.7.1の試験の前後において,ISO 7176-9に規定する機能上の要求事項に適合しなければな
らない(箇条8参照)。
車椅子は,JIS C 61000-4-11に規定する試験レベルクラス2を用いて10.7.1によって試験したとき,電
圧ディップ及び/又は短時間停電中並びに電圧ディップ及び/又は短時間停電後2秒間は次の要求事項を
満たさなければならない。
a) 駆動輪は回転してはならない。
b) 自動ブレーキは解除してはならない。
c) 駆動用ではない電動装置(例えば,電動補助付きレッグサポート,スタンドアップ機能付き着座装置
など)は動いてはならない。
バッテリ充電器は,10.7.1による試験中及び試験後に,機能の一時的喪失又は性能の劣化を示してもよ
いが,妨害がなくなったときにバッテリ充電器は人的介入を伴わずに正常な性能を回復しなければならな
い。
5.4
非搭載形及び携帯形バッテリ充電器
5.4.1
電源端子妨害波
バッテリ充電器は,9.1.2によって試験したとき,CISPR 11のグループ1のクラスBに規定する電源端
子妨害波の限度値に適合しなければならない。
5.4.2
放射エミッション
バッテリ充電器は,9.2.3によって試験したとき,CISPR 11のグループ1のクラスBに規定する放射エ
ミッション限度値に適合しなければならない。
5.4.3
高調波電流エミッション
バッテリ充電器は,9.3.2によって試験したとき,JIS C 61000-3-2の要求事項に適合しなければならない。
5.4.4
電圧変動及びフリッカ
バッテリ充電器は,9.4.2によって試験したとき,IEC 61000-3-3の要求事項に適合しなければならない。
5.4.5
静電気放電イミュニティ
バッテリ充電器は,接触放電では±2 kV,±4 kV及び±6 kV,気中放電では±2 kV,±4 kV及び±8 kV
の試験レベルを用いて10.1.3によって試験したとき,放電中及び放電後2秒間,又はプログラム可能なESD
発生器を用いる場合には一連の放電試験の間,人的介入を伴わずに仕様に従い機能し続けなければならな
い。
5.4.6
放射無線周波電磁界イミュニティ
バッテリ充電器は,80 MHz〜1.0 GHzの周波数範囲で3 V/mの試験レベルを用いて10.2.3によって試験
したとき,人的介入を伴わずに仕様に従い機能し続けなければならない。
5.4.7
ファストトランジェント/バーストイミュニティ
バッテリ充電器は,JIS C 61000-4-4に規定する試験レベル2を用いて10.3.2によって試験したとき,人
的介入を伴わずに仕様に従い機能し続けなければならない。
9
T 9206:2017 (ISO 7176-21:2009)
5.4.8
サージイミュニティ
バッテリ充電器は,JIS C 61000-4-5に規定する試験レベル2を用いて10.4.2によって試験したとき,人
的介入を伴わずに仕様に従い機能し続けなければならない。
5.4.9
伝導妨害イミュニティ
バッテリ充電器は,150 kHz〜80 MHzの周波数範囲でJIS C 61000-4-6に規定する試験レベル2を用いて
10.5.2によって試験したとき,人的介入を伴わずに仕様に従い機能し続けなければならない。
5.4.10 電圧ディップ及び短時間停電イミュニティ
バッテリ充電器は,JIS C 61000-4-11に規定する試験レベルクラス2を用いて10.7.2によった試験中及
び試験後に,機能の一時的喪失又は性能の劣化を示してもよいが,妨害がなくなったときにバッテリ充電
器は人的介入を伴わずに正常な性能を回復しなければならない。
6
試験装置
6.1
支持システム
支持システムは,車椅子の車体を固定し,駆動輪の回転を可能にし,車椅子を支持することができる木
製ブロック,タイヤ,ロープ,ストラップ及び/又はこれらと同様な装置で構成する。
この支持システムは,非導電性の材料で構成する。また,車椅子とその周囲にある物体との間に導電路
を形成してはならない。
注記 支持システム全体は非導電性の材料を用いることによって,試験中の電磁界の乱れを防止し,
試験状態の車椅子の意図しない接地を防止することができる。絶縁被膜(塗料など)のある金
属製構造物は不適切である。帯電した車椅子フレームからの放電(10.1.1.2)では,木材の種類
によっては支持システムへの使用が不適切なものがある。
この支持システムでは,車椅子を0.1 m以上もち上げてはならない。各車輪は0.1 mの範囲内で別々の
高さでもよく,支持システムの上に置かれた後,車椅子は水平でなくてもよい。
6.2
放電接地ストラップ
放電接地ストラップは,長さ2 m以下のワイヤーケーブル又は編組線で,車椅子と金属グランド面との
間のインピーダンスが低いものを使用する。
このストラップがワイヤーケーブルの場合には,断面積は,15 mm2以上でなければならない。
このストラップが編組線の場合,編み方は高周波用の良品質の同軸ケーブル外導体に用いられている編
み方と同様とする。この編み幅は,平らにした場合20 mm以上でなければならない。
6.3
車輪速度モニタ
車輪速度モニタは,5 %の精度で各駆動輪の回転速度を観測し,実測回転速度から,箇条11に規定する
式によって,平均車輪速度変化及び差動輪の速度変化率を算出する。
車輪速度モニタの時定数は,0.1秒を超えてはならない。また,車椅子とグランド面との間に導電路を形
成してはならない。車輪速度モニタは,試験中に測定する電磁界を乱したり,発生する電磁界から影響を
受けてはならない。
6.4
ステアリングモニタ
ステアリングモニタは,サーボ操だの位置又は操向角度を10 %の精度で観測できなければならない。
注記 ステアリングモニタは,カテゴリB及びEの車椅子の試験時にだけ用いる。
ステアリングモニタの時定数は,0.1秒を超えてはならない。また,車椅子とグランド面との間に導電路
を形成してはならない。ステアリングモニタは,試験中に測定する電磁界を乱したり,発生する電磁界か
10
T 9206:2017 (ISO 7176-21:2009)
ら影響を受けてはならない。
6.5
充電器試験用負荷
充電器試験用負荷は,バッテリ充電器製造業者指定の次の物品で構成され,充電器との使用に適した方
法で接続する。
1) バッテリ充電器で指定する公称電圧,種別及び最小の公称容量をもつバッテリセット
2) 適切な長さ,断面積及び絶縁物をもつ導体
3) バッテリセットと,バッテリ充電器の出力接続部との共用が可能な接続部
バッテリ充電器をバッテリセットに接続するためのケーブルの長さは,バッテリ充電器製造業者の指定
のない場合,充電器の出力ケーブルに,長さが2 m±0.1 mのケーブルを用いる。充電器製造業者が導体の
断面積を指定していない場合,充電器の出力ケーブルの導体の断面積より大きい断面積をもつ導体を用い
る。
バッテリ充電器とバッテリセットとを接続しているケーブルが,バッテリ端子に接続するために分かれ
てしまう場合,最小のループ面積となるよう配置する。
バッテリ充電器が特定の車椅子専用バッテリ充電器の場合,指定された最小の公称容量バッテリを備え
た車椅子を充電器試験用負荷として用いてもよい。
7
準備
7.1
車椅子−駆動状態
7.1.1
セットアップ
車椅子はISO 7176-22の規定によって準備する。ダミーは,取り付けない。車椅子が開放形バッテリを
備え,試験中に傾ける場合,バッテリを公称電圧と種別が同じ密閉形バッテリに交換する。
注記 車椅子のバッテリは,一部の試験の準備において,放電することがある(7.3及び7.4参照)。
車椅子は,6.1に規定する支持システムによって支持する。
支持システムは,各試験ごとに要求したグランド面上又はテーブル上に設置しなければならない。
各試験ごとに要求した車輪速度モニタ(6.3参照)とステアリングモニタ(6.4参照)を準備しなければ
ならない。
車椅子は,製造業者の発行する取扱説明書指定の動作をするよう準備する。
車椅子の能力に影響を及ぼす可能性がある操作可能な調整項目は,製造業者の発行する説明書指定の範
囲内で最大能力を発揮するよう設定する。
その設定値は,記録しなければならない。
例 最高前進速度,最高後進速度,最高感度,最大加速度,最大減速度,最大ブレーキ力及び最短時
間遅れ。
7.1.2
動作
車椅子の電源を入れる。
制御部の設定を,最高前進速度の(50 %±10) %とする。
さらに,カテゴリB及びEの車椅子(サーボ操だ装置付き車椅子)に関しては,サーボ操だを直進位置
(操向角度が0°±1°)にする。
7.2
車椅子−非駆動状態
車椅子は,7.1.1の規定によって準備をする。車椅子の電源を入れる。
制御部の設定を,駆動輪が回転せず,自動ブレーキは全て掛かった状態とする。
11
T 9206:2017 (ISO 7176-21:2009)
7.3
搭載形バッテリ充電器を備えた車椅子
車椅子は,7.2に規定された準備をする。特定の試験用との指定がない限り,車椅子のバッテリセットは,
バッテリ製造業者指定のカットオフ電圧まで許容誤差
5
0
+%以内で放電する。
バッテリ充電器の取扱いは,製造業者の発行する取扱説明書の指示による。
注記 バッテリセットの放電は,車椅子の動作又は,5時間率を超えない放電率の補助負荷を用いて
もよい。
7.4
非搭載形及び携帯形バッテリ充電器
特定の試験用との指定がない限り,充電器試験用負荷(6.5参照)のバッテリセットは,バッテリ製造業
者指定のカットオフ電圧まで許容誤差
5
0
+%以内で放電する。バッテリ充電器の取扱いは,製造業者指定の
負荷の代わりに充電器試験用負荷を用いる場合を除いて,製造業者の発行する取扱説明書の指示による。
注記 バッテリセットの放電は,車椅子の動作又は5時間率を超えない放電率の補助負荷を用いても
よい。
8
試験順序
試験は,1台の車椅子又はバッテリ充電器で行うことが望ましい。試験中の車椅子又は充電器は,試験
とは無関係な不具合が起きた場合は,修理又は交換してもよい。
試験順序は任意とする。
ISO 7176-9に規定する機能上の要求事項は,全てのイミュニティ試験が完了してから確認する。各々の
イミュニティ試験が行われている間は機能上の要求事項を確認する必要はない。
9
エミッションの試験方法
9.1
電源端子妨害波
9.1.1
搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
車椅子は,CISPR 11によって,床置形装置として電源端子妨害波試験を行う。
9.1.2
非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
充電器試験用負荷(6.5参照)はCISPR 11によって,床置形装置として配置する。
バッテリ充電器は,CISPR 11によって,卓上形装置として電源端子妨害波試験を行う。
9.2
放射エミッション
9.2.1
車椅子の駆動
車椅子を7.1によって準備する。
支持システムをグランド面上に設置する。
各試験の開始前に,車椅子の方向とアンテナの高さの各組合せ全てについて,妨害波レベルを最大化す
るように車椅子の駆動部以外の制御部を調節する。
車椅子は,CISPR 11によって,床置形装置として放射エミッション試験を行う。試験中は,駆動部以外
の制御部の設定を維持する。
9.2.2
搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
車椅子は,CISPR 11によって,床置形装置として放射エミッション試験を行う。
12
T 9206:2017 (ISO 7176-21:2009)
9.2.3
非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
充電器試験用負荷(6.5参照)はCISPR 11によって,床置形装置として配置する。
バッテリ充電器はCISPR 11によって,卓上形装置として放射エミッション試験を行う。
9.3
高調波電流エミッション
9.3.1
搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
車椅子のバッテリセットを完全に充電し,次に5時間率I5±5 %で60分間±5分間,放電する。
車椅子はJIS C 61000-3-2によって,高調波電流エミッション試験を行う。
9.3.2
非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
充電器試験用負荷(6.5参照)のバッテリセットを完全に充電し,次に5時間率I5±5 %で60分間±5分
間,放電する。
バッテリ充電器はJIS C 61000-3-2によって,高調波電流エミッション試験を行う。
9.4
電圧変動及びフリッカ
9.4.1
搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
車椅子はIEC 61000-3-3によって,電圧変動及びフリッカ試験を行う。
9.4.2
非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
バッテリ充電器はIEC 61000-3-3によって,電圧変動及びフリッカ試験を行う。
10 イミュニティの試験方法
10.1 静電気放電イミュニティ
10.1.1 車椅子の駆動
10.1.1.1 人からの放電
車椅子を7.1によって準備する。
車椅子は,次を例外として,JIS C 61000-4-2によって,床置形装置として試験する。
− 垂直結合板(vertical coupling plane, VCP)を使用して,間接的放電試験を行う。
− 水平結合板は使用しない。
支持システムをグランド面上に設置する。
車椅子を試験用に準備した後,放電箇所はESD発生器の放電電極を用いて接触できる次の箇所とする。
a) 各モータケーシング,ギアボックスケーシング,ケーブル,コネクタハウジング,操作レバー又はボ
タン,調節ノブ及びインジケータに各1か所。
b) 電子回路のきょう(筐)体については,直方体形状の各面に1か所。
c) 電子回路の非直方体形状のきょう体については,同等の直方体形状のきょう体に最もよく似た,最多
6面までの各面に1か所。
d) 車椅子のフレームがほぼ直方体形状の場合,各面に1か所。
e) 車椅子のフレームが直方体形状ではない場合,同等の直方体形状のフレームの面に最もよく似た,最
多6面までの各面に1か所。
13
T 9206:2017 (ISO 7176-21:2009)
各放電箇所に対し,要求された各試験レベルで,各極性(プラス及びマイナス)について各10回の放電
を行う。
JIS C 61000-4-2によって接触放電又は気中放電を行う。
10.1.1.2 帯電した車椅子フレームからの放電
車椅子がカーペット上で運転されて帯電した後,接地された金属物体に接触して放電する状態をシミュ
レートするため,車椅子を試験する。
この試験については,JIS C 61000-4-2の床置形装置要件によって形成した基準グランド面を用いる。
車椅子を7.1によって準備する。支持システムをグランド面上に設置する。
放電は,6.2に規定する放電接地ストラップを介して行う。このストラップの一端をグランド面に接続し,
他端を放電に用いる。ESD発生器の放電リターンケーブル及び放電ストラップの両方を,低インピーダン
スボンドを介してグランド面に接続する。
放電箇所は,車椅子が通常の運転中に,接地された金属物体に接触する可能性のある車椅子の周囲の各
場所に1か所を設定する。
ESD発生器を気中放電用にセットアップする。
注記 気中放電モードでESD発生器を用いることによって,車椅子のフレームに確実に帯電させるこ
とができる。
各放電箇所について,次の試験を行う。
ESD発生器の放電電極を,放電試験箇所に最も近い車椅子のフレームの部分に電気的に直接接触させ,
フレームを試験レベルに帯電させる。ESD発生器を車椅子から離し,放電ストラップをできるだけ早く放
電箇所へ動かして放電を行う。
各放電箇所に対し,各極性(プラス及びマイナス)について,各10回の放電を行う。
10.1.2 搭載形バッテリ充電器を備えた車椅子
試験方法は,10.1.1.1によるほか,次による。
1) 車椅子を7.3によって準備する。
2) 電源コードを最大限伸ばす。
3) 車椅子本体,又はフレームから出る位置にできるだけ近い電源コード上に,追加の放電箇所を設定
する。
10.1.3 非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。充電器試験用負荷(6.5)はJIS C 61000-4-2の規定によって,
床置形装置として配置する。
バッテリ充電器はJIS C 61000-4-2によって,卓上形装置として試験を行う。
放電箇所は次による。
a) 各ケーブル,コネクタハウジング,操作レバー又はボタン,調節ノブ及びインジケータに各1か所。
b) バッテリ充電器のきょう体がほぼ直方体形状の場合,各面に1か所。
c) バッテリ充電器のきょう体が直方体形状ではない場合,同等の直方体形状きょう体の面に最もよく似
た,最多6面までの各面に1か所。
各放電箇所に対し,要求された各試験レベルで,各極性(プラス及びマイナス)について各10回の放電
を行う。
JIS C 61000-4-2によって接触放電又は気中放電を行う。
14
T 9206:2017 (ISO 7176-21:2009)
10.2 放射無線周波電磁界イミュニティ
10.2.1 車椅子の駆動
10.2.1.1 一般事項
車椅子を7.1によって準備する。
車椅子はJIS C 61000-4-3によって卓上形装置として,放射無線周波電磁界イミュニティ試験を行う。周
波数ステップサイズは,元の周波数の1 %を超えない。
注記 必要な電界の均一性の達成を容易にするため,卓上形装置に関する要求事項を適用する。
アンテナ進行波電力を適宜調整して,規定のレベルより強い電界強度で試験してもよい。
各周波数ステップにおいて,進行波電力は,校正された電界強度の電力に調整するか,又は適切な場合,
更に高い電界強度に必要な電力に調節する。変調をかけた後,パワーアンプが飽和していないことを確認
するため,進行波電力を観測する。電力は一つの周波数において,2秒間以上発生しなければならない。
車輪速度及び該当するのであればサーボ操だ角度も2秒間後に測定する。
10.2.1.2及び10.2.1.3に規定する二つの試験方法のいずれを用いてもよい。周波数範囲のある部分に一つ
の方法を用い,他の部分に別の方法を用いてもよい。
10.2.1.2 電波無響室又は半電波無響室による試験方法
JIS C 61000-4-3に規定する電波無響室又は半電波無響室を用いる。車椅子の方向は,次による。
a) 図1の基準面の前方垂直面はアンテナに直面
b) 図1の基準面の後方垂直面はアンテナに直面
c) 図1の基準面の側方垂直面はアンテナに直面。アンテナは,車椅子の制御装置が配置されている側に,
又は制御装置が中央に配置されている場合は,車椅子の電子装置の大部分が配置されている側面,又
は大部分の電気ケーブルが配線されている側面に向ける。
車椅子は,アンテナに最も近いいずれかの垂直面(図1参照)が均一電磁界領域(uniform field area, UFA)
に一致するように位置決めする。車椅子の各方向について,水平及び垂直偏波の両方の試験を行う。
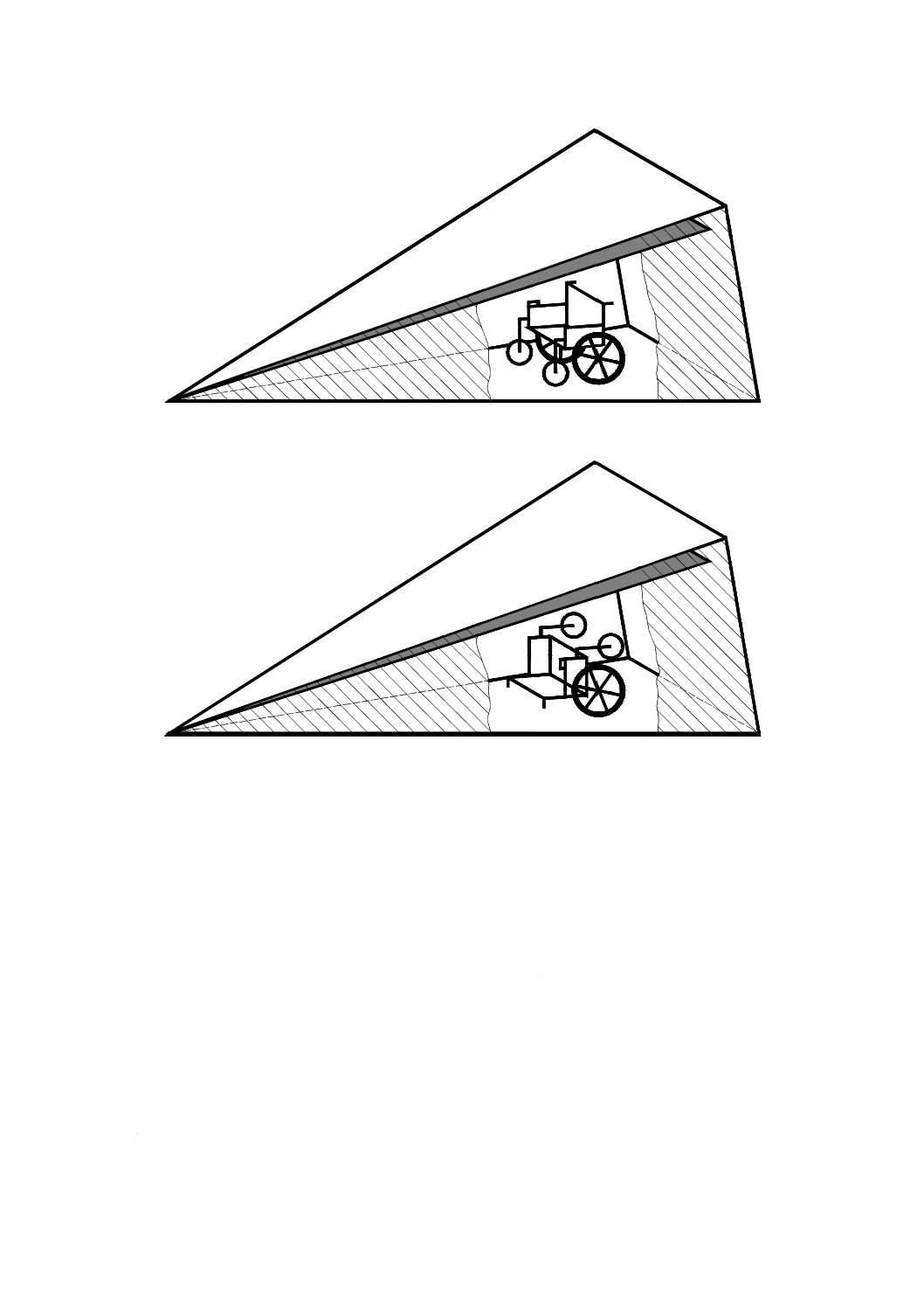
10.2.1.3 GTEMセルによる試験方法
製造業者が指定する最大試供機器(equipment under test,EUT。以下,EUTという。)サイズが車椅子よ
り大きいギガヘルツ・トランスバース・電磁セル(以下,GTEMという。)を用いる。
車椅子の方向は,次による。
a) 車椅子が直立状態で,その前面がGTEMセルの頂点に最も近くなるように設置(垂直偏波)(図2参
照)。
b) 車椅子が仰向きの状態で,その頂部がGTEMセルの頂点に最も近くなるよう設置(水平偏波)(図3
参照)。
垂直偏波では,均一電磁界領域が車椅子の(前方垂直面から後方垂直面までの)幾何学的中心にくるよ
うに,車椅子を位置決めする。水平偏波では,均一電磁界領域が車椅子の最上部と車輪の最下部との間の
中心にくるように,車椅子を位置決めする(図2及び図3参照)。
15
T 9206:2017 (ISO 7176-21:2009)
図2−GTEMセルにおける垂直偏波
図3−GTEMセルにおける水平偏波
10.2.2 搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備し,10.2.1によって試験する。
10.2.3 非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
充電器試験用負荷(6.5)はJIS C 61000-4-3の規定によって,床置形装置として配置する。
バッテリ充電器はJIS C 61000-4-3によって,卓上形装置として放射無線周波電磁界イミュニティ試験を
行う。
周波数を連続的に上げる場合,増加率は500 ms当たり1 %を超えてはならない。
周波数を段階的に上げていく場合,周波数の各ステップは元の周波数の1 %を超えてはならない。各周
波数での滞在時間は500 ms以上とする。
バッテリ充電器の各方向にアンテナ面を向けて,水平及び垂直偏波の両方の試験を行う。
10.3 ファストトランジェント/バーストイミュニティ
10.3.1 搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-4よって,床置形装置として試験を行い,次による。
16
T 9206:2017 (ISO 7176-21:2009)
− 100 kHzの繰返し率を用いる。
− 試験電圧の両極性を用いる。
− 試験電圧の各極性について,1分間以上2分間未満の試験を行う。
10.3.2 非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-4によって,卓上形装置として試験を行い,次による。
− 充電器試験用負荷(6.5)はJIS C 61000-4-4の規定によって,床置形装置として配置する。
− 100 kHzの繰返し率を用いる。
− 試験電圧の両極性を用いる。
− 試験電圧の各極性について,1分間以上2分間未満の試験を行う。
10.4 サージイミュニティ
10.4.1 搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-5によって,次のサージイミュニティ試験を行う。
− 0°,90°,180°及び270°のそれぞれに,正極パルスを5回及び負極パルスを5回印加する。
− 60秒以内の周期で連続パルスを印加する。
10.4.2 非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-5によって,次のサージイミュニティ試験を行う。
− 0°,90°,180°及び270°のそれぞれに,正極パルスを5回と負極パルスを5回印加する。
− 60秒以内の周期で連続パルスを印加する。
10.5 伝導妨害イミュニティ
10.5.1 搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-6によって,伝導妨害イミュニティ試験を行う。各周波
数の滞在時間は2秒間以上とする。
10.5.2 非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-6によって,伝導妨害イミュニティ試験を行う。各周波
数の滞在時間は2秒以上とする。
10.6 電源周波数磁界イミュニティ
車椅子を7.1によって準備する。
車椅子は,JIS C 61000-4-8によって,卓上形装置として電源周波数磁界イミュニティ試験を行う。印加
した電源周波数磁界の各方向について1分間以上,車椅子を試験する。
注記 JIS C 61000-4-8は,EUTを囲う十分な大きさの誘導コイルについて規定している。ただし,車
椅子の非電気部はコイルから出てもよい。
10.7 電圧ディップ及び短時間停電イミュニティ
10.7.1 搭載形バッテリ充電器を備えた車椅子
車椅子を7.3によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-11によって,電圧ディップ及び短時間停電試験を行う。
17
T 9206:2017 (ISO 7176-21:2009)
10.7.2 非搭載形及び携帯形バッテリ充電器
バッテリ充電器を7.4によって準備する。
バッテリ充電器のAC電源部は,JIS C 61000-4-11によって,電圧ディップ及び短時間停電試験を行う。
11 車輪速度変化の計算
2輪駆動の車輪をもつ全ての車椅子について,平均速度変化率ΔSavgは,式(1)によって算出する。
100
5.0
Δ
off
r,
off
r,
on
r,
off
l,
off
l,
on
l,
avg
×
−
+
−
×
=
S
S
S
S
S
S
S
····································· (1)
ここに, Sl,off: 7.1.2によって試験前に準備したときの左車輪速度
Sl,on: 試験中の左車輪速度
Sr,off: 7.1.2によって試験前に準備したときの右車輪速度
Sr,on: 試験中の右車輪速度
代わりに,2輪駆動で機械式差動装置付車椅子(電子式差動操だ装置なしの車椅子)のカテゴリB,C,
E及びFの車椅子は,一つの車輪をロックした状態で,他方のモニタされた,拘束されずに回転している
駆動の車輪速度だけでよい。この場合,平均車輪速度変化は,シングル駆動の車輪をもつ車椅子のために
次の式で計算する。シングル駆動の車輪だけをもつ車椅子のために,かつ,一つの車輪だけの速度をモニ
タすることで,式(2)のように百分率として,ΔSavgを算出する。
100
Δ
off
off
on
avg
×
−
=
S
S
S
S
································································· (2)
ここに, Soff: 7.1.2によって試験前に準備したときの車輪速度
Son: 試験中の車輪速度
式(3)のように百分率として,差動輪の速度変化ΔSdiffを算出する。
100
Δ
off
r,
off
r,
on
r,
off
l,
off
l,
on
l,
diff
×
−
−
−
=
S
S
S
S
S
S
S
··········································· (3)
ここに, Sl,off: 7.1.2によって試験前に準備したときの左車輪速度
Sl,on: 試験中の左車輪速度
Sr,off: 7.1.2によって試験前に準備したときの右車輪速度
Sr,on: 試験中の右車輪速度
12 試験報告書
試験報告書には,次の項目を記載しなければならない。
a) JIS T 9206によって試験を行った旨
b) 試験機関の名称及び所在地
c) 車椅子製造業者及び/又はバッテリ充電器製造業者の名称及び所在地
d) 試験報告書の発行日
e) 車椅子及び/又はバッテリ充電器の形式番号,製造番号及び/又はロット番号
f)
車椅子及び/又はバッテリ充電器の構成:7.1.1によって規定されているセットアップ記録を含む。
g) 車椅子及び/又はバッテリ充電器がこの規格の必要条件を満たしたかどうか
注記 試験要件について,何らかの不備が生じたとき,試験手順の要点を確認できるような追加情
報を要求することができる。
18
T 9206:2017 (ISO 7176-21:2009)
13 情報開示
次の情報は,ISO 7176-15が規定するように,開示しなければならない。
a) 車椅子及び/又はバッテリ充電器の形式番号及び/又は一義的に車椅子及び/又はバッテリ充電器を
識別するための情報。
b) 車椅子及び/又はバッテリ充電器がこの規格の必要条件を満たしたかどうか。
14 取扱説明書
取扱説明書には,ISO 7176-15によるほか,電動車椅子の使用環境における電磁放射源からの干渉によ
るリスクに関する警告についても記載しなければならない。電磁放射源には,携帯電話,電子商品監視シ
ステムなどがあるが,これらに限定するものではない。
参考文献 JIS T 9203:2016 電動車椅子