T 1506:2018
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 記号一覧························································································································· 4
5 形状······························································································································· 4
6 性能······························································································································· 5
6.1 音響作動周波数 ············································································································· 5
7 安全······························································································································· 5
8 試験······························································································································· 5
8.1 音響作動周波数 ············································································································· 5
8.2 出力 ···························································································································· 6
8.3 空間のピーク時間的ピーク音圧 ························································································ 6
8.4 超音波振動子の有効範囲 ································································································· 6
8.5 総合感度 ······················································································································ 6
9 性能の表示 ····················································································································· 10
10 附属文書の明細項目 ······································································································· 10
11 サンプリング方法 ·········································································································· 11
附属書A(参考)標的の選択及び標的平面波反射損失の決定························································ 12
附属書B(参考)一般的な試験装置及び試験手順 ······································································· 18
附属書C(参考)音響減衰器の往復挿入損失の決定 ··································································· 20
附属書D(参考)理論的根拠 ································································································· 22
附属書E(参考)参考文献 ···································································································· 23
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 24
T 1506:2018
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人電子
情報技術産業協会(JEITA)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日
本工業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が改正した日本工業規格である。
これによって,JIS T 1506:2005は改正され,この規格に置き換えられた。
なお,この規格の改正公示日から3年間までJIS T 1506:2005を適用することができる。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
T 1506:2018
超音波装置−超音波手持探触子形ドプラ胎児心拍動
検出装置−性能要求事項,試験方法及び表示
Ultrasonics-Hand-held probe Doppler foetal heartbeat detectors-
Performance requirements and methods of measurement and reporting
序文
この規格は,1994年に第1版として発行されたIEC 61266を基とし,我が国の市場状況を考慮して,技
術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,次の事項について規定する。
− 完全な状態の超音波手持探触子形ドプラ胎児心拍動検出装置(以下,装置という。)の性能試験方法
− 装置の性能に対する要求事項
− 装置の性能の表示に対する要求事項
− 装置の性能に関する附属文書によって,製造業者が表明した場合の要求事項
この規格は,単一超音波ビームを発生し,連続波超音波又は準連続波超音波を使用したドプラ法によっ
て母体腹壁から胎児心拍動の情報を得るために用いる,手持の探触子によって構成する装置について適用
する。ただし,複数の超音波ビームを用い,患者に平面探触子を装着して使用するような形式の連続監視
装置については,適用外である。
この規格は,装置の設計規格ではない。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61266:1994,Ultrasonics−Hand-held probe Doppler foetal heartbeat detectors−Performance
requirements and methods of measurement and reporting(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS T 0601-1 医用電気機器−第1部:基礎安全及び基本性能に関する一般要求事項
注記 対応国際規格:IEC 60601-1,Medical electrical equipment−Part 1: General requirements for basic
2
T 1506:2018
safety and essential performance
IEC 61157:2013,Standard means for the reporting of the acoustic output of medical diagnostic ultrasonic
equipment
IEC 61161:2013,Ultrasonics−Power measurement−Radiation force balances and performance requirements
IEC 62127-1:2013,Ultrasonics−Hydrophones−Part 1: Measurement and characterization of medical
ultrasonic fields up to 40 MHz
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS T 0601-1によるほか,次による。
なお,この規格の文中で用いた太字は,この規格及びJIS T 0601-1の定義で規定した用語であることを
示す。この規格で定義した用語が,太字で表記していない場合,定義は適用せず意味は文脈に沿って解釈
する。
3.1
音響結合媒体(acoustic coupling medium)
音響伝達を維持するために探触子と体表面との間に置いた物質。
3.2
音響作動周波数(acoustic working frequency)
超音波音場に設置したハイドロホンの出力の観察から得られる音響信号の周波数。
この規格での使用に当たっては,信号は,ゼロクロス周波数法によって分析する(IEC/TR 60854及び
IEC 62127-1の3.3.1参照)。
3.3
連続波超音波(continuous wave ultrasound)
連続又は数十回続く準連続の超音波振動。
3.4
ドプラ周波数(Doppler frequency)
散乱体と探触子との間に関係した作動に起因する超音波散乱波の周波数の変化。送信波と受信波との周
波数の差である。
3.5
超音波振動子の有効範囲(effective area of the ultrasonic transducer active element)
探触子表面から5 mmの距離での−6 dBビームの領域(IEC 62127-1の3.7参照)。
単位:平方ミリメートル,mm2
3.6
ドプラ信号(Doppler signal)
ドプラ周波数での信号。
3.7
装置(equipment)
超音波手持探触子形ドプラ胎児心拍動検出装置。
3.8
公称音響作動周波数(nominal acoustic working frequency)
設計者又は製造業者によって提示された音響作動周波数値。
3
T 1506:2018
3.9
出力(output power)
特定された媒体中(水中が望ましい。)で,特定の状況下でほぼ自由な音場内の超音波トランスジューサ
によって放射された時間平均超音波出力(IEC 61161の3.2参照)。
記号:P
単位:ワット,W
3.10
総合感度(overall sensitivity)
特定の速度をもち,探触子から特定の距離に位置して動く,標的平面波反射損失が既知の模擬先端標的
(3波長よりも直径が短い。)からのドプラ信号(ノイズレベルよりも上の信号)を検出する装置の能力を
測る基準。
C
B
d
A
S
+
+
=
)
(
ここに, A(d): 探触子からの距離dでの標的に対する標的平面波反射損失
(dB)
B: 音響進路全体にわたる往復減衰(dB)。そこには,音響減衰
器,全ての結合窓及び水の進路の往復減衰も含む。
C: 信号対雑音比(dB)
S: 総合感度
単位: デシベル,dB
3.11
探触子(probe)
超音波エネルギーの送信と受信とを受けもつ,超音波トランスジューサの振動子を含む組立部品。必要
があれば,他の構成部分を含む場合もある。
3.12
受信部(receiver unit)
少なくとも可聴領域内のドプラ信号を作り出す,探触子からの超音波信号を処理する装置の部分。
3.13
信号出力部(signal output part)
他の機器,例えば,表示,記録又はデータを処理するための機器への,出力信号電圧又は電流の供給を
意図した規定を受けない装置の部分。
注記 通常,装置の信号出力部は,イヤホン,ヘッドホン,スピーカ若しくは他の音響機器の接続が
許容された受信部の出力ターミナル,又はコネクタである。
3.14
空間のピーク時間的ピーク音圧(spatial-peak temporal-peak acoustic pressure)
超音波音場での,正の最大瞬時音圧又は負の最大瞬時音圧の絶対値(IEC 62127-1の3.43,3.45及び3.63
参照)。
単位:パスカル,Pa
3.15
標的平面波反射損失(target plane-wave reflection loss)
標的からのある指定された距離での,180°後方反射された超音波音場の音圧と,標的対称軸の共軸平面
波内で,標的を取り除いた場合のその位置での音圧との比。損失は正の数値として表現する。
4
T 1506:2018
記号:A
単位:デシベル,dB
3.16
送信部(transmitter unit)
探触子を作動させるための,高周波連続波電気信号又は高周波準連続波電気信号を発生する装置の部分。
4
記号一覧
a
球又は棒状標的の半径
A(d) 距離dでの標的平面波反射損失(dB)
B
全音響行程にわたる往復減衰(dB)
Ba
音響減衰器の往復挿入損失(dB)
Bw
結合窓の往復挿入損失(dB)
C
信号対雑音比(dB)
c
媒体中の音速
d
超音波トランスジューサ又は探触子の表面と標的との距離
f
超音波周波数
k
(=2π/λ)波数
P
超音波トランスジューサの出力
Pa
音響出力
S
装置の総合感度
t
音響窓の厚さ
Ur
標的のその位置でのハイドロホン又は超音波トランスジューサのp-p信号
Ut
標的から特定された距離でのハイドロホン又は超音波トランスジューサのp-p信号
Vs
ドプラ信号の実効値電圧
Vn
雑音の実効値電圧
Z
電気的インピーダンス
α
媒体中の平面波振幅減衰係数
λ
超音波の波長
5
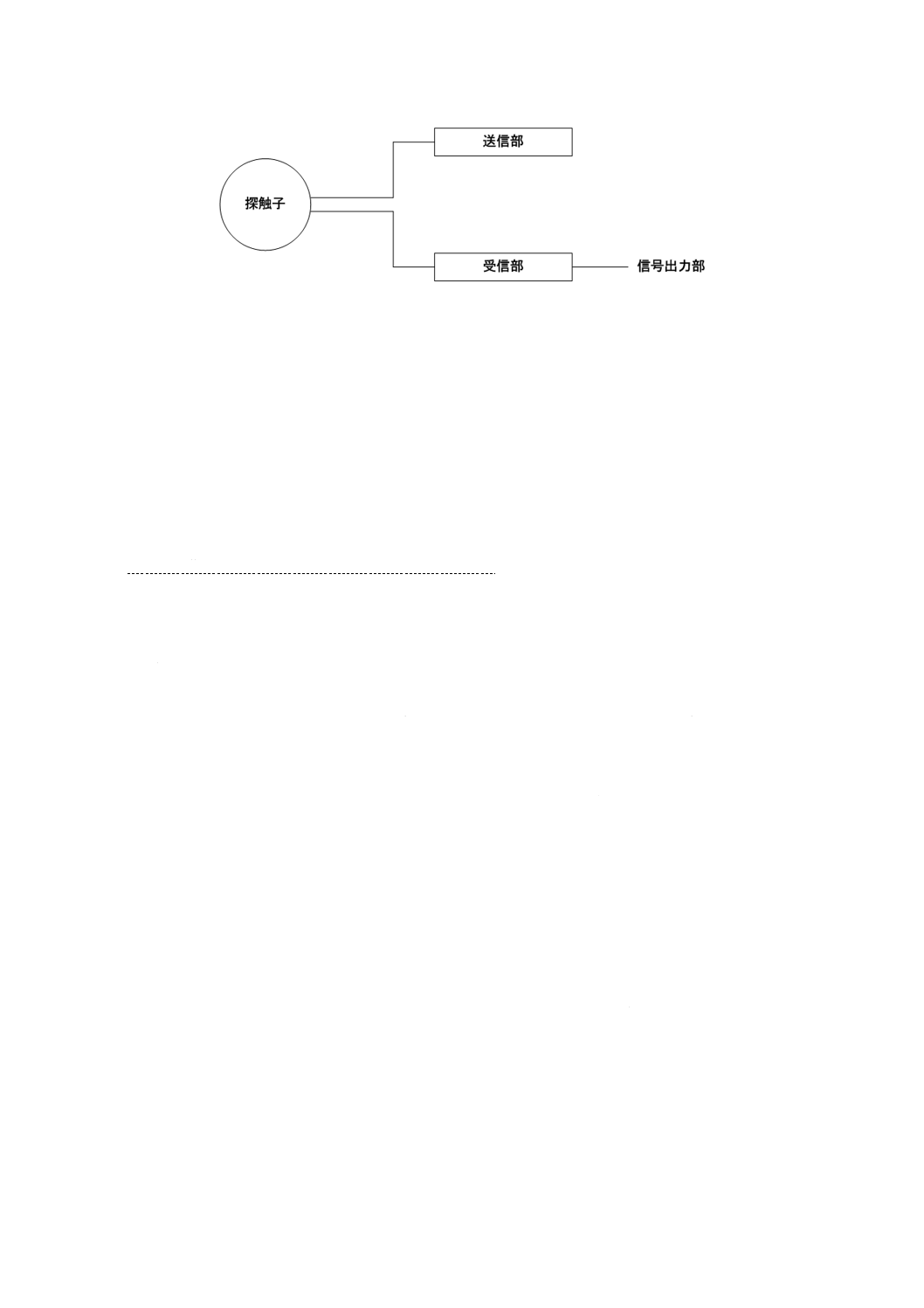
形状
図1に示すとおり,装置は,通常次のモジュールによって構成する[モジュールは,同一きょう(筐)
体内に組み込む場合と組み込まない場合とがある。]。
− 探触子
− 送信部
− 受信部
− 信号出力部
5
T 1506:2018
図1−装置構成のブロックダイアグラム
6
性能
6.1
音響作動周波数
音響作動周波数は,箇条10に従って設計者又は製造業者によって公表された公称音響作動周波数値の
±15 %を超えてはならない。
適合性は,8.1の試験方法による。
7
安全
装置の安全は,JIS T 0601-1による。
注記 JIS T 0601-1の個別規格を参考にしてもよい。
8
試験
全ての試験は,22.5 ℃±5 ℃の脱気水を使用する。
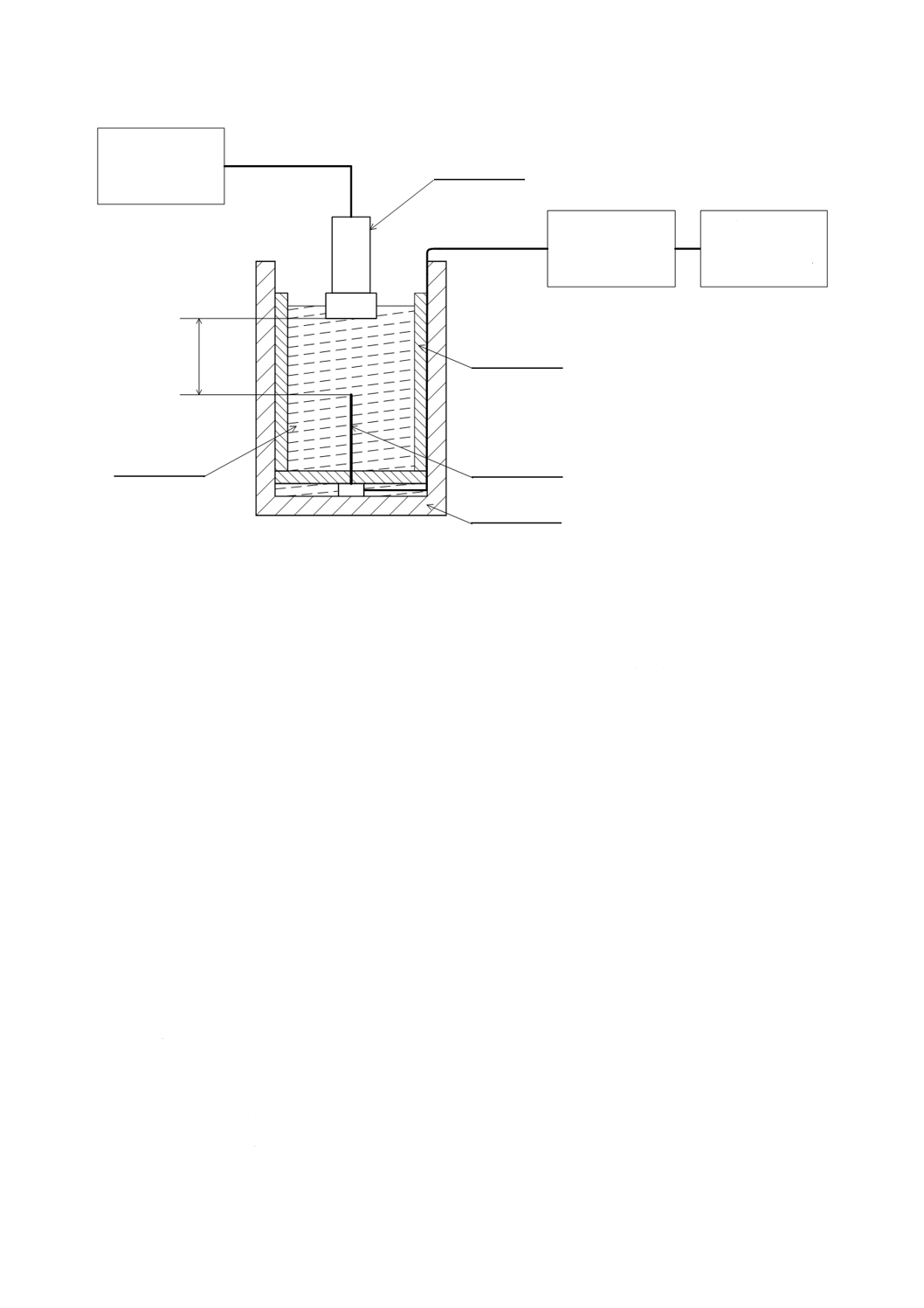
8.1
音響作動周波数
装置の音響作動周波数は,図2で示した音響結合法によって決定する。ハイドロホンは,クラスBハイ
ドロホンとしてIEC 62127-1に従わなければならない。ハイドロホンの振動子は,水槽の中央部,少なく
とも側面及び底面から5 cm離れたところに設置する。音響減衰材は,横にそれた(不必要な)反射波の減
衰のために水槽に並べて使用する。ハイドロホンは,最大信号を得られるよう照準を合わせなければなら
ない。装置を真の連続波モードで使用するとき,周波数カウンタは,音響作動周波数の決定に使用するこ
とができる。この場合は,周波数カウンタに十分な感度があれば増幅器は使用しなくてもよい。この目的
に使用する周波数カウンタは,装置の公称音響作動周波数の140 %以上平たんな周波数応答をもたなけれ
ばならない。
準連続波モード又は掃引周波数モード,他のモードで使用する場合は,音響作動周波数は,IEC/TR 60854
に記載されているようなオシロスコープのゼロクロス法を用い,ハイドロホンによって検出された波形に
よって決定する。
複数の周波数を使用する装置の場合は,音響作動周波数を,公称音響作動周波数として公表されたそれ
ぞれについて計測する(箇条10参照)。周波数を掃引する装置の場合は,音響作動周波数を,掃引周波数
範囲の最小及び最大の周波数で計測する(箇条10参照)。
音響作動周波数の計測での総合精度は,信頼率95 %で±1 %とする。
6
T 1506:2018
図2−音響作動周波数測定のためのブロックダイアグラム
8.2
出力
出力は,IEC 61161に従って放射力バランスを使用するか,又はハイドロホン及びIEC 62127-1で規定
する手順によって,音圧の正方形を空間的に集めたものを用いて決定する。出力の計測での総合的な不確
かさは,±50 %を超えないか,又は4 mWを超えてはならない。いずれの場合も信頼率95 %以上である。
ただし,出力がIEC 61157の4.2.5に従わないような装置の場合は,出力の測定での総合的不確かさは,信
頼率95 %で±30 %よりも良くなければならない。計測装置は,国家計測標準に比較校正していることが望
ましい。
8.3
空間のピーク時間的ピーク音圧
空間のピーク時間的ピーク音圧は,全超音波音場においてIEC 62127-1に規定する試験方法か,又はこ
れと同等の試験方法を使用して決定する。ハイドロホンは,IEC 62127-1に従わなければならない。ハイ
ドロホンは,IEC 62127-1で与えられた相互依存又は平面の走査方法によるか,これと同等と認めること
を示し得るか,又は精度がより良い方法によって校正することが望ましい。ハイドロホンの校正が妥当な
ものとして,国家計測標準に比較校正していることが望ましい。
全超音波音場での空間のピーク時間的ピーク音圧が探触子面から5 mm未満で生じる場合は,空間のピ
ーク時間的ピーク音圧は,探触子面からの距離が少なくとも5 mm離れた超音波音場の部分で決定する。
8.4
超音波振動子の有効範囲
超音波振動子の有効範囲は,超音波ビームの方向に垂直平面で,かつ,IEC 62127-1の箇条6の方法を
用いて探触子面から5 mmの距離で走査したハイドロホンによって決定する。
8.5
総合感度
総合感度は,装置の実際の使用条件を模擬するための8.5.1及び8.5.2の方法を用いて,決定する。試験
方法の不確かさは,(信頼率67 %での)次の値を超えないことが望ましい。
標的反射損失:±3 dB
脱気水
水槽
ハイドロホン
音響減衰材
2 cm≦d≦5 cm
d
被試験装置
増幅部
周波数カウンタ
又は
オシロスコープ
探触子
7
T 1506:2018
再現性
:±3 dB
総合精度
:±6 dB
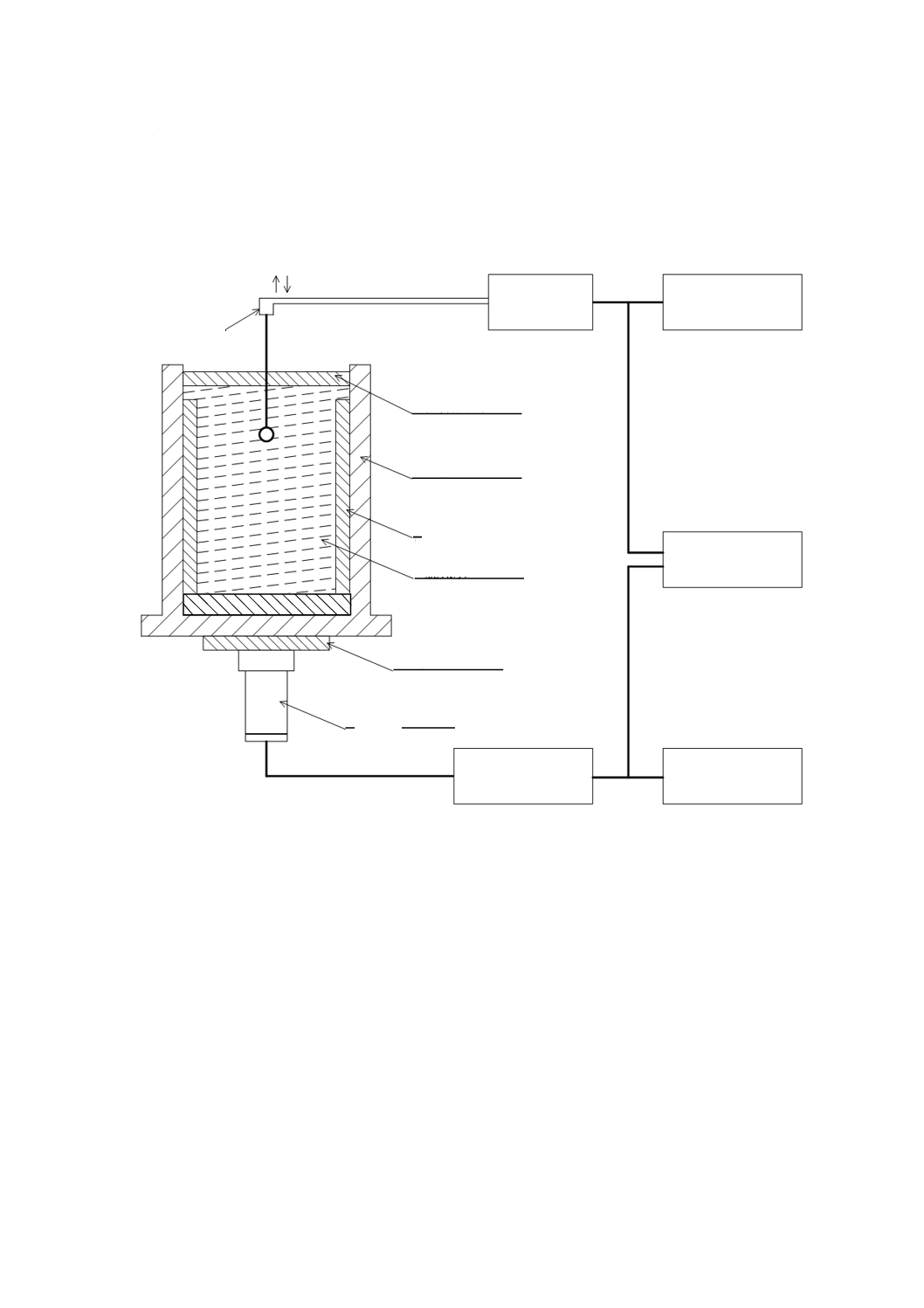
総合感度の決定は,探触子によって生成された超音波音場に置いた小さい振動標的を用いて行う。図3
に試験方法の基本的概要を図示したブロックダイアグラムを示す。また,附属書Dに理論的根拠の資料を
示す。
図3−総合感度試験方法の基本概念を説明するブロックダイアグラム
8.5.1
試験装置
試験装置は,次による。
8.5.1.1
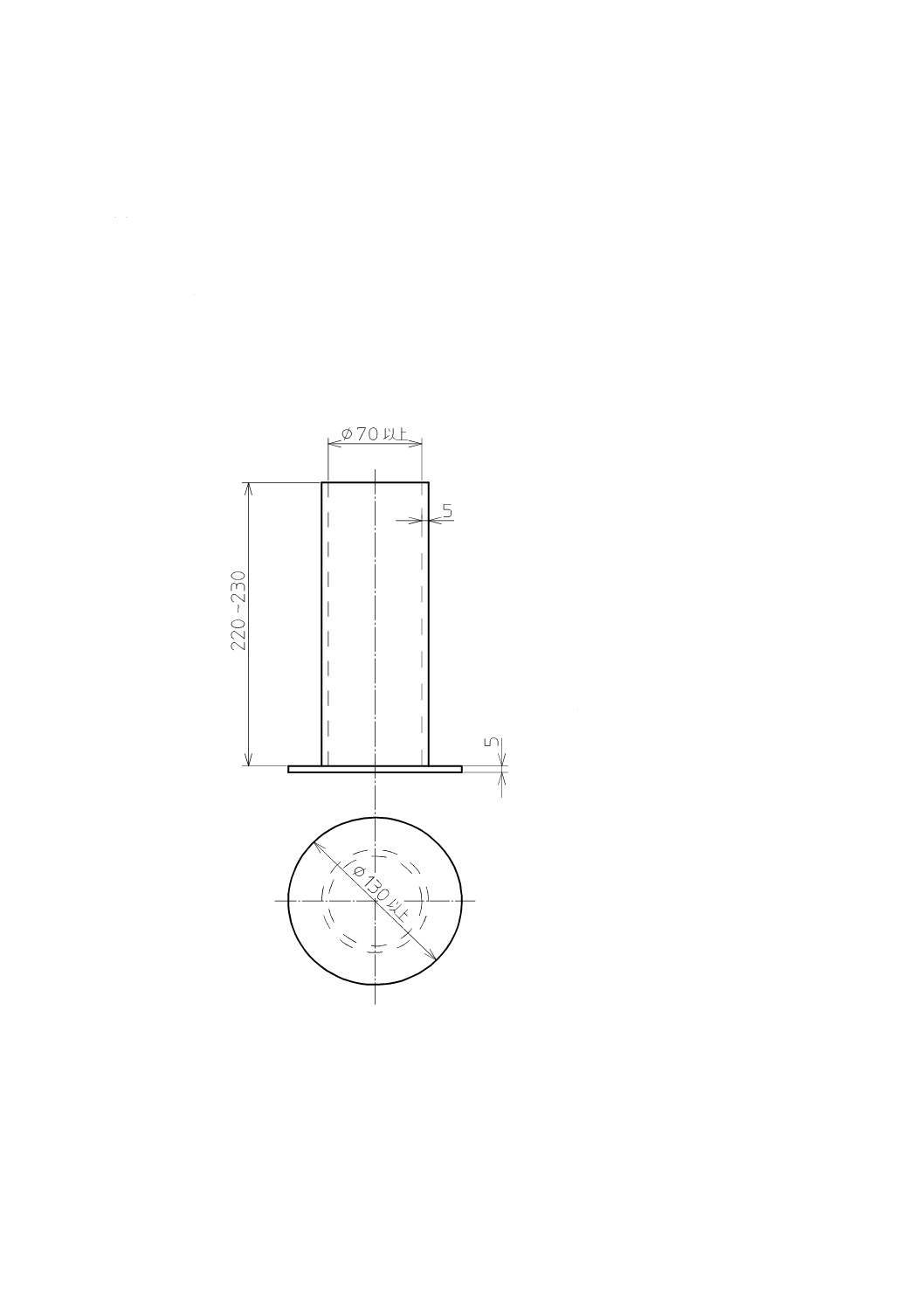
標的反射体
音響作動周波数において標的平面波反射損失が既知の小さい標的反射体を使用する(附属書A参照)。
標的の直径は,音響作動周波数の3波長を超えてはならない。標的は,小さい球又は先端標的(先が平
面又は半球面の長い棒状のもの)のいずれであってもよい。標的は,特性音響インピーダンスが0.6×106
kgm−2s−1〜3.5×106 kgm−2s−1の範囲の材質で作ったものであることが望ましい。標的平面波反射損失は,
標的を使用する周波数帯全体にわたって±3 dB以内であることを確認する。
標的平面波反射損失は,被試験装置の音響作動周波数で決定する。多周波数装置又は掃引周波数装置で
は,標的平面波反射損失を音響作動周波数帯にわたって決定する。
標的平面波反射損失は,8.5.2に規定した総合感度の決定に使用する入射超音波ビームと同一のものにつ
いて,標的の軸の方向で決定する。附属書Aに使用できる試験方法の資料を示してある。
探触子
音響減衰器
脱気水
音響減衰材(必要なとき)
水槽
音響減衰材
オシロスコープ
波形発生器
実効値測定装置
被試験装置
標的反射体を
もつ支持部
電気機械的
駆動部
8
T 1506:2018
標的平面波反射損失は,四つの距離50 mm,75 mm,100 mm及び200 mmで決定する。
8.5.1.2
駆動部
標的は,往復運動の中間帯域において一定速度でのこぎり波状の振動をつくる,電気機械的駆動部に取
り付ける。標的の作動の振幅は,標的の全体又は棒状の標的の先端が常時水中に浸っている状態であるこ
とが望ましい。励振周波数及び振幅は,10 cm/s〜40 cm/sの範囲の速度を標的に与えることが望ましい。
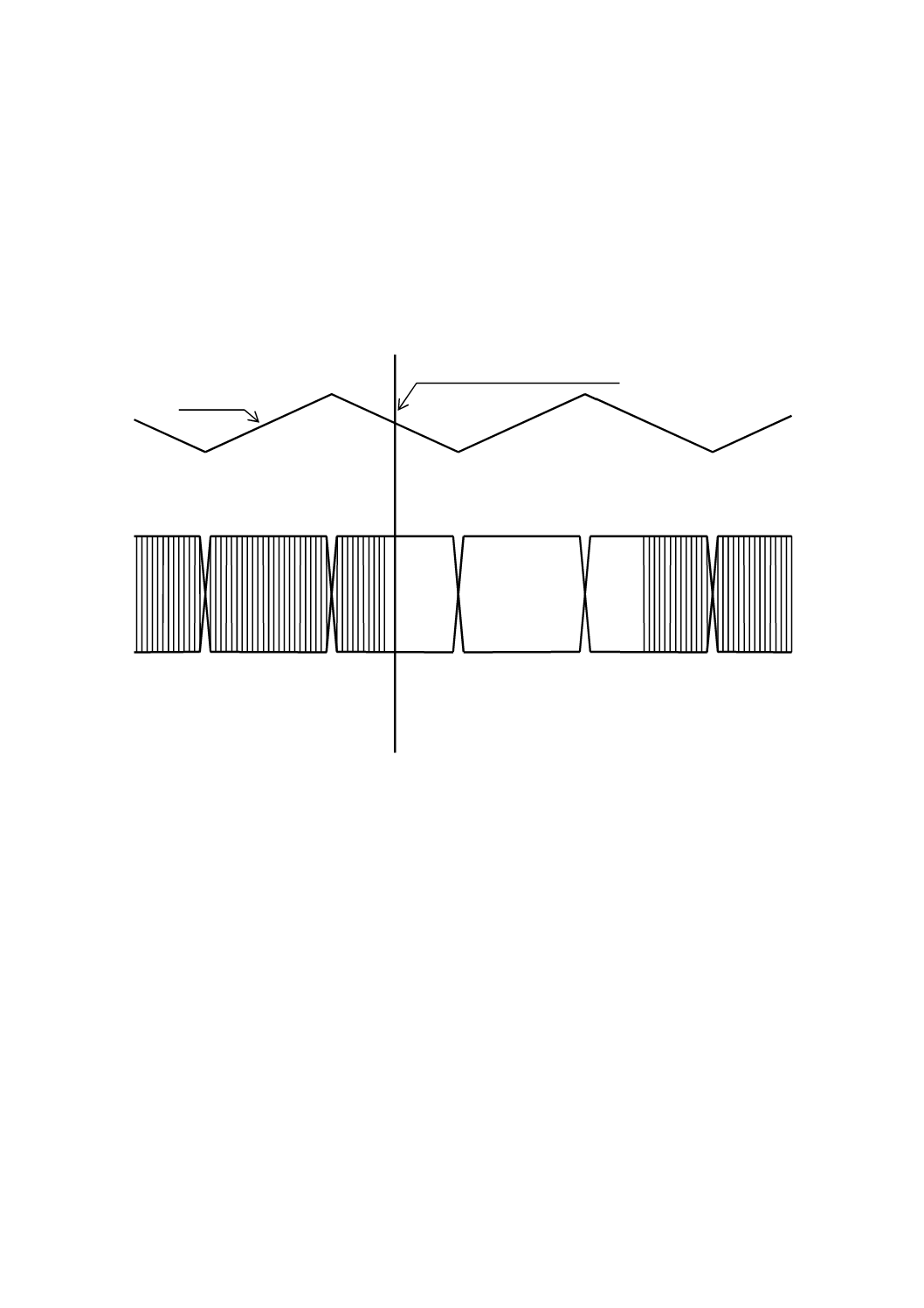
ドプラ周波数及び標的速度は,明確に示されなければならない。この計測は,図4で示すように,標的の
往復運動の極と波形が安定した後の波形の領域との間で行う。標的と探触子面との距離は,調整可能とす
る。
図4−標的を動かすための三角波に関してドプラ信号レベルを決定するためのサンプル点
8.5.1.3
試験容器
試験容器は,探触子と接する部分が音響的に透明な窓にした,音響結合媒体を使用することが望ましい。
探触子の水平位置は,一直線になるように調整する。探触子の方向は,超音波ビームが試験容器の軸とほ
ぼ一直線にする。標的の表面を除いて,探触子音場内の全ての表面で起こる可能性のある擬似的動きが起
こらないように配慮する。
音響減衰材は,試験容器に並べ,かつ,水面に標的支持部を取り囲むように置く。
注記 附属書Bに,音響窓に探触子を結合し,その探触子の垂直方向上部に振動する標的を置いた試
験容器を説明した。それに代わる試験容器としては,水に浸した探触子面をもつ試験水槽の底
に標的があるものを使用することもできる。後者の形状では,探触子と標的との距離の変化を
考慮せず,音響減衰器(8.5.1.6参照)を容易に挿入することができる。
8.5.1.4
実効値信号測定
信号出力部での信号の実効値レベルの一つの決定手段としては,8.5.1.2に規定したものを使用する。実
効値電圧計を使用する場合は,読取り値が標的の往復運動の最中の中間領域での値を表しているというこ
とを確実にするための確認が行われなければならない。
ドプラ信号
測定位置(傾斜部分のほぼ中央)
励振波形
9
T 1506:2018
8.5.1.5
スピーカ(音響出力部)
音響出力が利用できない場合は,スピーカ又は他の音響出力部は,被試験装置の信号出力部に接続する
ことが望ましい。
8.5.1.6
音響減衰器
音響減衰器は,標的からのドプラシフトしたエコーレベルの実際的な条件を作るために,探触子と標的
との間の超音波音場に挿入する。減衰器の位置は,探触子とできる限り近づける。減衰器は,測定される
感度の範囲をカバーする挿入損失の範囲をもたなければならない。最も厚い減衰器は,20 dB以上の往復
挿入損失をもたなければならない。減衰器は,誤差±0.05 mmの一定の厚さの材料のシートで,25 %未満
の前面振幅反射係数をもたなければならない。往復挿入損失(減衰)は,この総合感度試験の間か,又は
それに先立って測定する(附属書C参照)。個々の減衰挿入損失の精度は,音響作動周波数の範囲で信頼
限界95 %において,±1 dB又はそれ以上でなければならない。幾つかの減衰器を重ねて使用するとき,減
衰器の厚さの総合計は20 mmを超えてはならない。減衰器の表面に空気が入らないように注意することが
望ましい。水,他の適切な液体,又はゲルを,音響結合媒体として使うことが望ましい。
探触子から標的へ,及びその戻りの超音波が通過する間の往復減衰の総合計Bを決定する。この減衰は,
水槽の音響の結合器窓(図3において例として示した底プレート)の挿入損失も含まなければならない。
信号減衰の総合計は,次の式によって算出する。
w
a
B
B
B
+
=∑
ここに, ΣBa: 減衰器の全挿入損失
Bw: 全結合窓にわたっての挿入損失。一定の条件の下では無視で
きる(附属書C参照)。
8.5.2
測定手続
装置の総合感度の測定は,次に従って行う(図3に示した試験システムの例参照)。
8.5.2.1
水槽を水で満し,探触子面がほぼ試験容器の中心となり,探触子を超音波ビームが標的に当たる
ように向けた試験装置を準備する。探触子と標的との間の距離dは,8.5.2.6に規定した距離のうちの一つ
に設定する。超音波ビームに関連した標的は,標的反射損失の決定のために使用したものと同一でなけれ
ばならない(8.5.1.1参照)。
8.5.2.2
実効値電圧測定システムは,信号出力部に接続する。オシロスコープは,標的駆動部の電気信号
と被試験装置とに接続する。探触子は,図3に例示するような試験装置と接続する。
8.5.2.3
被試験装置の音量調整器は,標的が作動していないときに実効値Vn(装置の電気のノイズ出力)
の値を測定できる位置に設定する。駆動部は,ドプラ信号を得るために操作され,探触子部の水平位置は,
出力振幅が最大になるような位置に調整する。
出力実効値Vs(信号及びノイズが混ざったもの)は,前出の音量調整器と同じ位置で測定する。被試験
装置の出力は,信号対雑音比Cが,約6 dBになるまで,探触子と標的との間に音響減衰器を加えること
によって減衰させる。
ここに,Cはデシベルで,次の式によって算出する。
=
)
rms
(n
)
rms
(s
10
log
20
V
V
C
総合感度S(dB)は,次の式によって算出する。
10
T 1506:2018
C
B
d
A
S
+
+
=
)
(
ここに, A(d): 距離dでの標的平面波反射損失(dB)(8.5.1.1及び附属書A
参照)
B: 音響減衰器,全結合窓及び水の進路を含む音響の進路全体に
わたる往復減衰(dB)(附属書C参照)
C: 信号対雑音比(dB)
8.5.2.4
ドプラ信号が確実に聞こえるように,信号対雑音比C=6 dBの条件の下で,音響出力Paは,音
量調整器を最大に設定した状態で,スピーカ駆動出力としてPa>1 mW,及びイヤホン又はヘッドホン駆
動出力としてPa>100 μWであることが望ましい。
出力Paは,次の式によって算出する。
v
)
rms
(
2
n
a
Z
V
P=
ここに,
Zv: 実質的な抵抗である負荷の公称電気インピーダンス
8.5.2.5
球状標的を使用する場合は,総合感度の決定は,直径の異なる二つの標的を用いて行わなければ
ならない。大きい標的と小さい標的との直径の比率は,1.1よりも大きくなければならない。総合感度S
の公示値は,より大きい値を与える標的からのデータに基づく(附属書A参照)。
8.5.2.6
総合感度Sは,探触子の面から50 mm,75 mm,100 mm及び200 mmの距離(d)に置いた標的
によって決定する。
注記 ここでの目的は,臨床に使われる距離の範囲での感度を決定することである。最大距離200 mm
は,遠い距離にある標的を表し,この距離は,比較的厳しい要求条件である。
9
性能の表示
装置の性能を表示するために,次のパラメータの値を明示する。
a) 公称音響作動周波数(有効数字2桁)
b) (対応国際規格では,この細別において,総合感度の表示について規定しているが,この規格では不
要であり,不採用とした。)
c) (対応国際規格では,この細別において,ドプラ周波数及び標的速度の表示について規定しているが,
この規格では不要であり,不採用とした。)
d) 空間のピーク時間的ピーク音圧
e) 出力
f)
超音波振動子の有効範囲
g) 通常使用する音響結合媒体及びその特性音響インピーダンスの記載
複数の周波数を使用する装置の場合は,パラメータa)〜f)は,各公称音響作動周波数に対する値を明示
する。周波数掃引をする装置の場合は,パラメータa)〜f)は,掃引された周波数範囲の下限及び上限の周
波数での値を明示する。
出力が変更できる装置の場合は,a)〜f)は,最大出力時の値を明示する。
ここに,箇条8で規定した試験で使用された水槽の温度を明示する。さらに,試験中の環境温度も明示
する。
10 附属文書の明細項目
超音波の性能に関するラベリングについては,次のパラメータの値を,適切な形式で附属文書の中に明
11
T 1506:2018
確に記載する。
a) 公称音響作動周波数(有効数字2桁)
b) (対応国際規格では,この細別において,総合感度の記載について規定しているが,この規格では不
要であり,不採用とした。)
c) (対応国際規格では,この細別において,ドプラ周波数及び標的速度の記載について規定しているが,
この規格では不要であり,不採用とした。)
d) 空間のピーク時間的ピーク音圧
e) 出力
f)
超音波振動子の有効範囲
g) 通常使用する音響結合媒体及びその特性音響インピーダンスの記載
公表値は,箇条11で規定したサンプリングと一致しなければならない。
複数の周波数を使用する装置の場合は,パラメータa)〜f)は,各公称音響作動周波数に対する値を明示
する。周波数掃引をする装置の場合は,パラメータa)〜f)は,掃引された周波数範囲の下限及び上限の周
波数での値を明示する。
出力の可変できる装置の場合は,a)〜f)は,最大出力時の値を明示する。
水槽の温度及び環境温度の範囲は,パラメータa)〜g)の記載ごとに明示する。
注記 3.10で定義した装置の総合感度は,出力及び装置によって発生した超音波音場での音響圧力分
布によって変わる。したがって,装置の性能を十分評価するためには,これらのパラメータの
知識を必要とするため,それらをこの項に含めた。その装置がIEC 61157の4.2.5に該当する場
合にも,これらの項目を含める。
11 サンプリング方法
箇条10で規定した性能パラメータの記載の必要条件は,少なくとも五つの同一形名の装置のサンプル群
による形式検査に基づかなければならない。
箇条10に従って記載した種々のパラメータの値は,サンプルから得た平均値としなければならない。
12
T 1506:2018
附属書A
(参考)
標的の選択及び標的平面波反射損失の決定
A.1 標的の選択
8.5.1.1に規定した小さい標的に要求する仕様は,多くの異なった形式の標的を用いることによって明確
になる。最も頻繁に用いられる二つの形式(終端の形状が,平面カット又は半球状の細い棒の場合及び細
い棒の端に支持される小球である場合)の標的について次に記載する。一般的な目的は,標的平面波反射
損失が40 dB〜60 dBの範囲の標的を使うことにある。
A.1.1 鋼球標的
A.1.1.1 特性
表A.1は,この規格で記載している応用例で使用し,良い結果を得た鋼球標的の詳細である。
表A.1−鋼球反射体の詳細
データ
形式
A
(周波数800 kHz以上)
B
(周波数1.2 MHz以上)
鋼球の直径 mm
2.38
1.58
鋼球の材質
マルテンサイト系ステンレス鋼
支柱
ステンレス製皮下注射針
鋼球標的の標的平面波反射損失は,その剛球の大きさ及び超音波の波長,すなわち,周波数に依存する。
重要なパラメータkaは,波数k=2πf/c[ここに,fは周波数(kHz),cは鉄の音速(m/s)]と鋼球の半径a
(m)との積である。ka≧4の範囲では,反射損失は,kaによって変化し,かつ,kaの増加に伴い,一定
の値に収束する傾向がある。表A.1に示した二つの標的で,ka=4であるための周波数は,形式Aでは800
kHz,形式Bでは1.2 MHzである。
A.1.1.2 反射損失
連続波の場合は,特定の方角での鋼球から反射される超音波は,鋼球及び支持棒の内部の種々な反射の
干渉によって強く影響される。したがって,標的平面波反射損失は,被試験装置の音響作動周波数及び使
用する標的の方向によって決定されることになる。これが,球状標的の場合は,異なった直径の二つの標
的が使われなければならず,かつ,Sが大きい方の標的からデータを取ることが望ましいと8.5.2.5で推奨
している理由である。これを考慮した場合は,直径が1.58 mmと2.38 mmとの二つが適切である。この方
法は,有害な干渉のために偶然に非常に高い反射損失が出るかもしれない不具合を回避できる。表A.1で
詳述した距離100 mmでの二つの鋼球の標的平面波反射損失の周波数による変化の例を,図A.1に示した。
A.1.2 細い棒状の標的
A.1.2.1 特徴
長い棒を標的として用いる。直径が約0.5 mmの終端が平面状のステンレス製の棒を使用し,標的平面
波反射損失が滑らかに変化することを,図A.1に示している。これらの標的は,音響のインピーダンスが
0.6×106 kgm−2s−1〜3.5×106 kgm−2s−1の範囲の材質を使うことが望ましい8.5.1.1の推奨に従わないが,鋼
球からの高い反射によって内部反射なしに直径を小さくできる利点がある。それによって,滑らかで適切
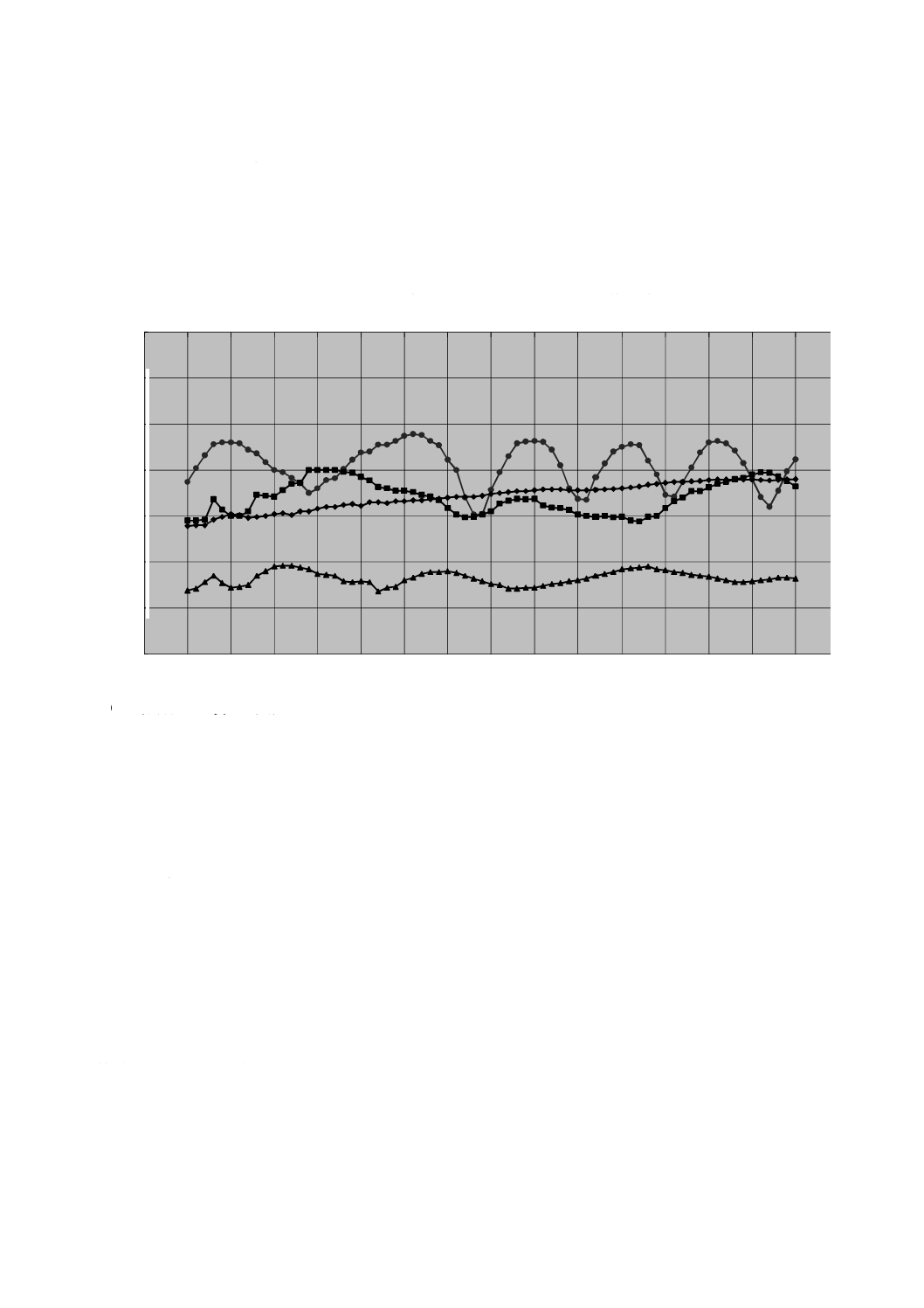
13
T 1506:2018
な標的平面波反射損失を算出できる。また,ポリメタクリル酸メチル,ポリカーボネート,ポリテトラフ
ルオロエチレンなどの損失の大きい材料から作った直径1 mmの終端が平面状の棒も使用できる。
ポリメタクリル酸メチルのような損失の大きい材料で組み立てた終端が半球状の長い棒の場合は,ka>4
(aは,半球部分の直径)において平たんな周波数応答をもつことを示した。使用した他の材料として,
ポリテトラフルオロエチレン(PTFE)がある。これらの材料の特性音響インピーダンスは,8.5.1.1に示す
値よりも十分に低い。しかし,十分に小さい標的平面波反射損失を得るためには,直径が上の規定よりも
大きい棒を使うほうがよく,一般に2 mm程度の値である。図A.1に代表的な結果を示す。
30
35
40
45
50
55
60
65
標
的
平
面
波
反
射
損
失
(
d
B
)
1.6
1.8
3.0
2.8
2.6
2.4
2.2
2.0
● 鋼球形式A 表A.1参照
■ 鋼球形式B 表A.1参照
◆ 直径0.56 mmで終端が平らな鋼棒
▲ 直径2 mmで終端が半球状のポリテトラフルオロエチレンの棒
図A.1−距離100 mmでの4種類の標的の周波数の作用に関する標的平面波反射損失
A.2 標的平面波反射損失の決定
A.2.1 一般
標的平面波反射損失は,多くの異なった試験方法を用いて決定する。その目的は,標的からの規定の距
離で,180°後方反射超音波音場と標的との位置で,標的を取り去ったときの音響圧力比を決定することに
ある。この規定のために,例えば,次のような異なった方法が使用される。三つの方法には,それぞれ概
略的に図A.2に示すような試験機器構成を用いる。図A.2のa)及びb)に示した機器構成ではハイドロホン
の使用を基本においているが,これは,最大の精度が要求される場合の参考測定として使用する。図A.2 c)
で示した機器構成は,超音波トランスジューサの使用に基づいており,測定の精度はそれほど重要でなく,
簡単なこと及び使いやすいことが最も重要である。
三つの機器構成に共通の初期設定の手順は,次による。
A.2.1.1 少なくとも0.5 mの長さの,水で満たした試験水槽を準備する。トランスジューサ,標的及び測
定用ハイドロホン(又は反射体)を支持するための位置調節機構が必要である。少なくとも,20サイクル
14
T 1506:2018
のトーンバースト励起を起こさせる超音波トランスジューサを,標的位置調節機構の移動軸の1本と,超
音波ビームとが平行に一直線に並ぶような,一つの位置調節機構に取り付ける。A.2.3によって小さい直径
のトランスジューサが必要でない場合は,トランスジューサの有効な振動子の直径(IEC 62127-1参照)
を,近距離域が50 mm以下になるように選ぶ(2 MHzの周波数に対しては,振動子の有効直径12.5 mmの
トランスジューサが適している。)。トランスジューサ励起レベルは,適切な信号対雑音比を得るために十
分に高く,かつ,非線形伝達によって起こされる波形のひずみを避けるために十分低くとることが望まし
い(IEC 62127-1参照)。
A.2.1.2 標的をトランスジューサから放射される超音波ビームの線上に置き,その方向を対称軸が入射す
る超音波ビームの方向と平行に,かつ,標的の先端がトランスジューサに向かうように調整する。超音波
ビームとの関係において標的の方向は,8.5.1.1で規定した総合感度試験のために使用したものと同一とす
る。散乱した超音波による干渉効果を減じるため,標的及び送信用トランスジューサの後方に音響吸収材
を置く。
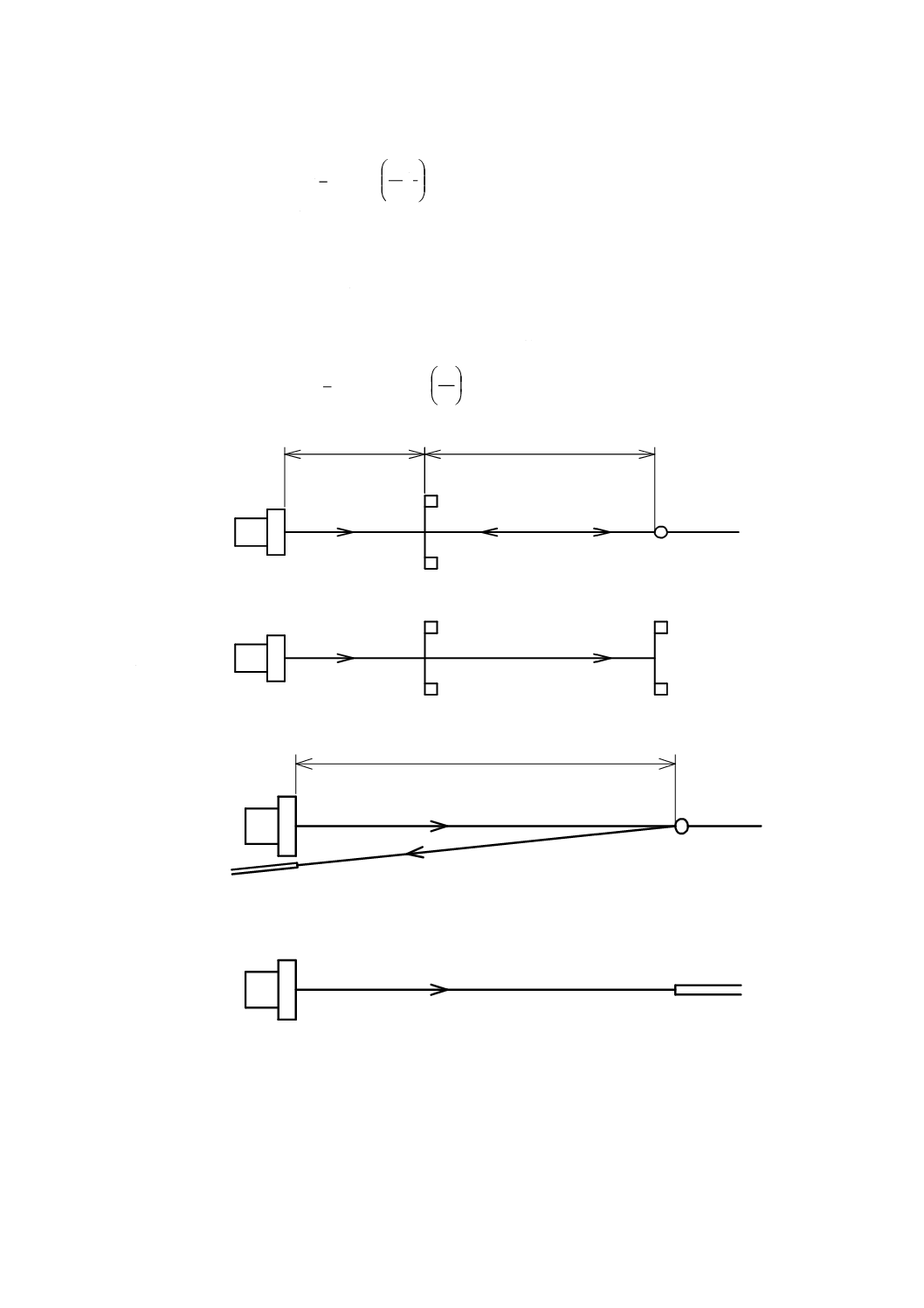
A.2.2 ハイドロホンを基準とした場合の手順
検出器としてハイドロホンを応用した二つの形態を,図A.2のa)及びb)に示す。図A.2 a)は,二つの検
出器を使用する。一つは,トランスジューサに近く,送信モードで作動する薄膜ハイドロホン(IEC 62127-1
参照)で,後方反射超音波ビームの音圧測定に使用し,もう一つは,ニードル探触子形ハイドロホン(IEC
62127-1参照)又は薄膜ハイドロホンで,標的を取り除いた後の標的の位置での音圧の決定に使用する。
この試験装置の優れた点は,標的,入射超音波ビーム及び後方反射ビームを同軸上に置くことができる
ことである。これは,重要な意味をもつ,様々な入射角を伴う標的平面波反射損失を表す球状標的の場合
は,最も考慮するところである。この装置の不利な点は,薄膜ハイドロホンからの干渉反射を避けるため
の方策の必要があること,及び二つの検出器の感度の比を知る必要があることである。
図A.2 b)に検出器としてニードル探触子形ハイドロホンを使用し,入射及び反射ビームの間の角度を最
小にするため,トランスジューサの横になるべく近づけた位置にハイドロホンを置いた二つ目の試験装置
を示す。前述したように,ニードル探触子又は薄膜ハイドロホンを標的の位置での,音圧測定のための検
出器として使用することができる。この装置の利点は,同じ検出器が両測定に使用できることであるが,
不利な点は,トランスジューサ,標的及び検出器が,後方反射信号の測定のために同軸上に配置すること
が不可能なことである。軸から外れた角度を伴う様々な反射損失を考慮することを確実にする方策を立て
ることが望ましい。特に,球状標的を使用したときには必要である。標的からの反射信号の測定には,十
分な信号対雑音比を得るために,標的の位置での音圧測定で使用する範囲よりも広い範囲で検出器を使用
することが必要になる。
この場合は,空間平均を説明するためには補正が必要になる[[1] 1) 参照]。
注1) 角括弧の番号は,附属書Eの参考文献の番号を表している。
ハイドロホンを基準とした場合の手順は,次のとおりである。
A.2.2.1 標的によって反射された超音波は,図A.2のa)又はb)に示した装置を用いて検出する。図A.2 a)
の場合は,薄膜ハイドロホンEは,透過送信モードで使用し,入射超音波ビームと同一線上にあり,また,
その振動子は,薄膜ハイドロホンとトランスジューサとの間の二重反射が,標的から反射した超音波を妨
害しないようなトランスジューサからの距離に置いている。
注記 標的が計測するハイドロホンから測定距離dを,50 mm,75 mm,100 mm及び200 mmの四つ
の位置としたとき,二重反射によって検出器で受信した信号が,標的から得られた信号の出現
と同時には出現しないことを確実にするために,距離eは,120 mmと150 mmとの間が適して
15
T 1506:2018
いる。
図A.2 b)で示した装置を使用する場合は,標的は,トランスジューサからの距離dの位置に置く。その
とき,ニードル探触子形ハイドロホンは,標的からの距離dの位置で,かつ,トランスジューサのそばに
できるだけ近づける。
A.2.2.2 ハイドロホンEによって受信される信号のp-p値は,標的の平行移動によって最大になる(すな
わち,入射超音波ビームに直交する平面上を移動することによって)。測定するトーンバーストの領域は,
トーンバーストの終わりに面し,振幅が全面にわたって一定である領域である。安定した状態の疑似連続
波状態を確実にするため,トーンバーストのサイクルの数を増やす必要があるかもしれない。この測定に
伴って,標的支持体からの反射の干渉がないことを確実にするよう注意する。
A.2.2.3 ハイドロホンEのp-p信号レベルUEは,距離dにおいて計測する。そのとき,標的に代わって2
番目のハイドロホンD[図A.2 b)]で示される形態の場合は,同じハイドロホン(両計測に用いることが
できる。)を置き,水平位置と方向とを,p-p信号が最大になるように調整する。p-p信号UDを決定する。
標的平面波反射損失A(d)は,次の式によって算出する。
=
R
U
U
d
A
E
D
10
log
20
)
(
ここに,
R: ハイドロホンE及びハイドロホンDのケーブル端負荷感度の
比
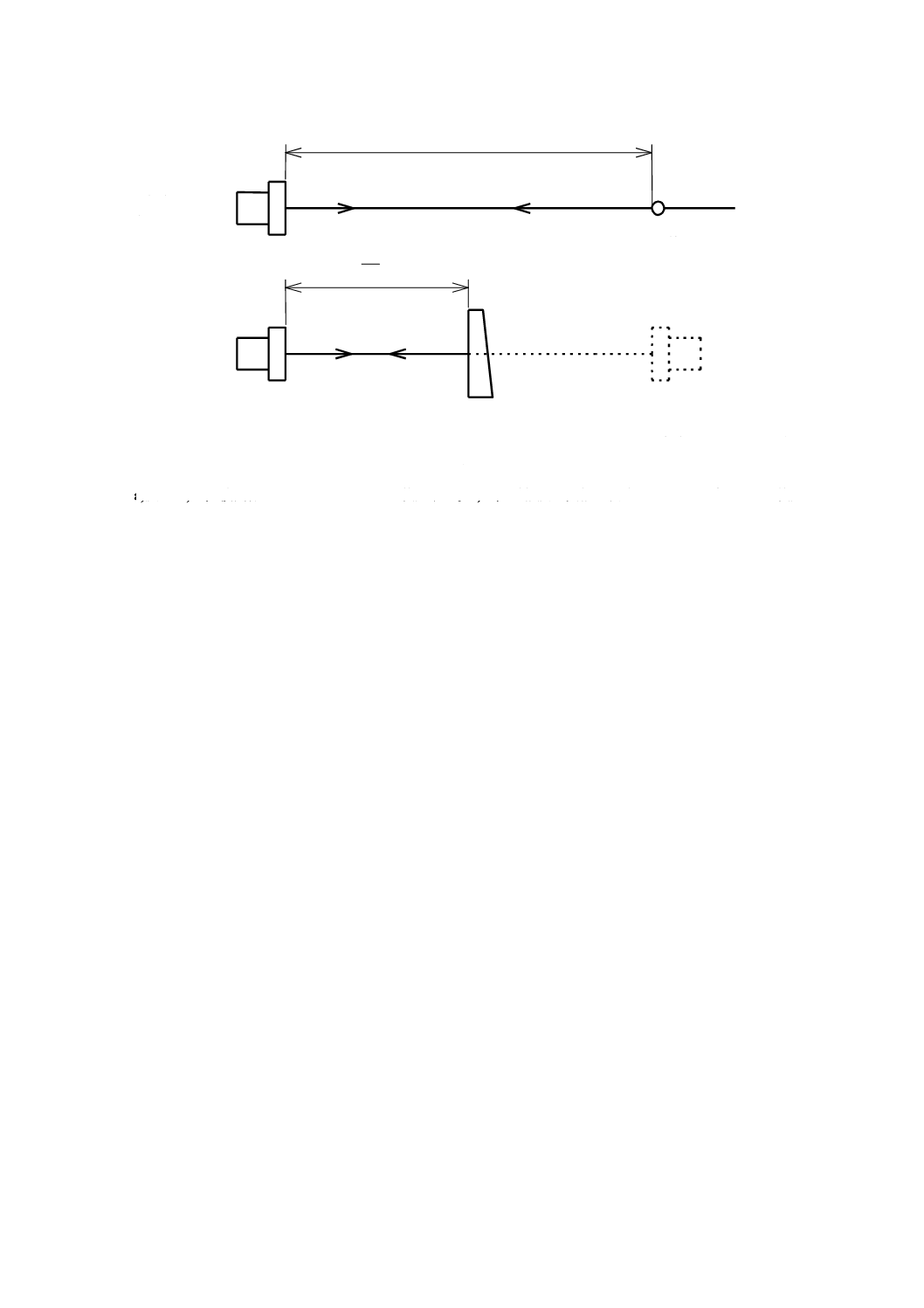
A.2.3 トランスジューサを基準とした場合の手順
図A.2 c)に示した装置は,検出器としてパルスエコーモードの超音波トランスジューサを利用する。標
的の位置での音圧を測定するために,トランスジューサと標的との間の中間に平面反射体を置く。この装
置の有利な点は,トランスジューサが全ての計測に使用できる点であるが,不利な点は,トランスジュー
サの限定された大きさが誤差の原因となる点である。この誤差を2 dBよりも小さくするためには,トラン
スジューサの振動子の直径を,
λd
2.1
ここに,
λ: 波長
d: トランスジューサと標的との間の距離[[1] 1)参照]
よりも小さくすることが望ましい。
図A.2 c)に示した装置構成の場合は,平面反射体は,中心が少なくとも20 mmの厚さのステンレス鋼で,
くさび形にできたものであることが必要である。くさびの角度は,後面からの超音波反射が測定に干渉し
ないように,少なくとも15°以上にすることが望ましい。反射体の振幅反射係数rは,鋼及び水の特性音
響インピーダンスによって算出する。
トランスジューサを基準とした場合の手順は,次のとおりである。
A.2.3.1 標的によって反射された超音波は,図A.2 c)に示した装置構成を用いて,パルスエコーモードで
超音波トランスジューサによって検出する。標的は,トランスジューサから距離dの位置に置く。
A.2.3.2 トランスジューサによって受信されるp-p信号は,標的の平行移動によって最大になる。測定す
るトーンバーストの領域は,トーンバーストの終わりに面し,振幅が全面にわたって一定の領域である。
安定した状態の準連続波状態を確実とするために,トーンバーストのサイクルの数を増やす必要がある場
合もある。この測定に伴って,標的支持体からの反射に干渉がないことを確実にするよう注意する。
A.2.3.3 p-pトランスジューサ信号レベルUTは,距離dでの標的によって計測する。平面反射体をトラン
スジューサからd/2の距離に挿入する。平面反射体の方向は,p-p反射信号が最大になるように調整する。
16
T 1506:2018
p-p信号URを決定し,標的平面波反射損失A(d)を,次の式によって算出する。
=
T
R
10
log
20
)
(
rU
U
d
A
ここに,
r: 平面反射体の振幅反射係数
A.2.4 8.5.2に規定した総合感度試験の目的のため,標的を探触子表面から四つの異なった距離に設置す
る。これには,8.5.2.6で記載している四つの異なった距離での標的平面波反射損失が分かっていることが
必要になる。それぞれの距離での反射損失を決定することが望ましいが,8.5.1.1の要求を満たす標的の標
的平面波反射損失は,距離に反比例する性質があることが分かっている。したがって,距離d1での標的平
面波反射損失A(d1)は,距離dでの測定から,次の式によって算出する。
+
=
d
d
d
A
d
A
1
10
1
log
20
)
(
)
(
e
d
a)
b)
図A.2−標的に対する平面波反射損失の決定のための三つの代表的装置形態
標的
ニードル探触子形
ハイドロホンE
ニードル探触子ハイドロホンD
超音波トランス
ジューサ
d
超音波トランス
ジューサ
薄膜ハイドロホンE
標的
薄膜ハイドロホンD
超音波トランス
ジューサ
超音波トランス
ジューサ
17
T 1506:2018
c)
a)及びb)は,検出器としてハイドロホンを使用する。c)は,送信及び受信の両方にトランスジューサを使用
する。全ての装置形態は,まず,標的と反射音圧の決定のための検出器との位置を示し,次に入射音圧決定の
ための検出器の位置を示している。
図A.2−標的に対する平面波反射損失の決定のための三つの代表的装置形態(続き)
標的
d
2
超音波トランス
ジューサ
d
平面反射体
トランスジューサの鏡像
(トランスジューサは標的の
位置で超音波ビームを受ける)
超音波トランス
ジューサ
18
T 1506:2018
附属書B
(参考)
一般的な試験装置及び試験手順
この附属書は,全体的な感度を正確に決めるために使用する代表的な試験装置及び手順を詳細に記載す
る。
B.1
試験器具
図3は,この目的に適した試験装置の例及び組立を示す。これには,次の項目を含んでいる。
B.1.1 標的反射体
標的反射体の反射損失は,標的からのp-pエコー振幅と完全な平面反射体の振幅との比である。この損
失は,装置に使用する個々の周波数範囲で決定する(8.5.1.1参照)。
B.1.2 水槽
感度試験に使用する水槽は,透明なプラスチックで造る。代表的な構造及び寸法を,図B.1に示す。探
触子の水平位置及び方向の調整装置を準備する。
B.1.3 駆動装置
装置は,波形発生器からの電気信号に応じて,標的反射体アームを支えて,駆動する。標的の垂直位置
調整装置を準備する。
B.1.4 波形発生器
この装置は,B.1.3に記載した駆動装置のために,三角波としての電気的励起を供給する。
B.1.5 オシロスコープ
オシロスコープは,試験中に波形を観察するために必要なものとして使用する。
B.1.6 実効値計測システム
装置の信号出力部で,実効値信号レベルを計測する方法を準備する。
B.1.7 スピーカ(音響出力部)
被試験装置に対する音響出力を準備する。
B.1.8 音響減衰材
好ましくない反射を減じるために,中心に直径10 mm以下の穴の開いた1枚の音響減衰材を,容器の水
表面上に設置する。同様の音響減衰材を,容器の側面からの不必要な反射を減衰させるために使用する。
B.1.9 音響減衰器
挿入損失が分かっている(附属書C参照)幾つかの音響減衰器は,探触子と標的との間に挿入して使用
する。
注記 図3は,探触子と水槽の底との間に挿入する減衰器を示す。もう一つの方法として,水中の水
槽の底に減衰器を挿入することもできる。減衰器の位置決めは困難かもしれないが,この配置
は,不確実な音響結合による問題を解決し(8.5.1.6参照),減衰器を挿入することによって,探
触子と標的との間の分割箇所が変化することを解決できる。
B.2
試験装置への結合
被試験装置は,水,その他の適切な液体又はゲルで試験装置に結合すると,図3に示す状態になる。
19
T 1506:2018
B.3
試験手順
装置の総合感度の計測は,次のように行う(図3参照)。
B.3.1 脱気水を深さ200 mm以上水槽に満たし,水表面に音響減衰材を置く。
B.3.2 波形発生器へオシロスコープを接続する。被試験装置の信号出力部へ実効値計測システムを接続す
る。音響結合媒体を用いて,図3に示した装置へ探触子を接続する。
B.3.3 駆動装置へ標的を,図3に示すように取り付ける。標的と探触子との間の距離を適切な開始位置,
約100 mmに合わせる。
B.3.4 波形発生器は,標的の三角波作動が生じるように調整する。標的の作動の振幅及び周波数は,8.5.1.2
に従って調整する。
B.3.5 8.5.2.3〜8.5.2.6に示した計測手順に従う。
単位 mm
材質:透明なプラスチック
図B.1−総合感度試験のための容器の標準寸法
20
T 1506:2018
附属書C
(参考)
音響減衰器の往復挿入損失の決定
C.1 音響減衰器に適切な材料は,ゴム又はプラスチック材料で作ったものである。減衰器は,通常,あ
らかじめ厚さを正確に決定した平面な素材でできたシート状又は板状のもので,両面が滑らかなものであ
る。
C.2 2 dB〜20 dBの間の往復挿入損失(往復減衰)をもつ,幾つかのシート状又は板状の減衰器を準備す
る。
C.3 透過法又は反射法によって,パルス波又は連続波を使用する,満足できる種々の減衰測定法がある。
適切な精度をもついずれの方法も,この規格の目的のために認められる。次に示したものは,そのような
方法の一例である。これは,この規格に規定した試験中に行う。
C.3.1 水を通じて音響的に結合する超音波送信機と受信トランスジューサとの間に,減衰シートが挿入さ
れているような,水で満たされた試験容器を組み立てる。受信トランスジューサは,ハイドロホンでもよ
い。受信トランスジューサの出力は,オシロスコープなどの信号測定システムへ接続する。
送信トランスジューサは,関係ある周波数でトーンバーストを繰り返すことによって駆動する。
C.3.2 音響減衰シート又は板を追加し,受信トランスジューサの電気信号出力のレベル変化に注意する。
この変化(デシベル)は,シートの減衰である(C.3.3参照)。
測定システムは,線形と仮定する。これは同じ減衰器を追加挿入し,出力の変化が0.3 dB以内であるこ
とを確認することによって証明してもよい。
C.3.3 音響減衰シート又は板の往復挿入損失Ba(dB)は,与えられた出力信号レベル変化から,次の式
によって決定する。
=
)1(
)0(
log
40
out
out
10
a
V
V
B
ここに, Vout (0): 減衰器のない出力信号レベル
Vout (1): 減衰器のある出力信号レベル
C.4 音響窓往復挿入損失Bwについては,8.5.2.3を考慮する。挿入損失の低い材料を用いてもよい。例え
ば,厚さ0.05 mmのポリエチレンは,水の特性音響インピーダンスとよく整合するため,特に良い音響窓
材料である。選択的に,音響窓を音響減衰シートの一部として構成してもよい。
C.5 音響窓の厚さが十分に厚い(10波長以上)ときのBwは,音響窓材料の既知の音響データによって算
出することができる。例えば,透明なアクリル樹脂(ポリメチルメタクリレイト)の減衰係数は,ほぼα
=1.3 dBcm−1MHz−1〜2.0 dBcm−1MHz−1である。アクリル樹脂の窓には,Bw(dB)の往復挿入損失がある。
f
t
α
B
2
w=
ここに,
t: 窓の厚さ(cm)
f: 超音波周波数(MHz)
α: 減衰係数(dBcm−1MHz−1)
21
T 1506:2018
C.6 窓の厚さが0.25波長〜10波長の間にある場合は,その往復挿入損失Bwは,その場で決定できる。
この目的のために,特別な窓板は,C.3に規定した手順で,音響減衰器として挿入する。板と板との不要
共振を避けるために,10 dB〜20 dBの挿入損失をもつもう一つの減衰器を,板と板との間に挿入すること
が望ましい。
22
T 1506:2018
附属書D
(参考)
理論的根拠
D.1 この規格の審議中に,総合感度の決定のための試験方法について,多くの考察が得られた。8.5に示
した試験方法のための要求事項及び附属書Bに示した参考事項は,我が国での長年にわたる広範囲の経験
に基づいている[2〜4] 1)。世界中のどこかで,装置の感度を決定するために,これらの試験方法を使用する
経験が積まれている。それにもかかわらず,この状況を考慮して,8.5で総合感度のための要求事項の記
載に,必須を意味しない語句の“望ましい”を使用した。8.5.1.2での標的を励起する周波数に対する要求
事項と同様に,8.5.1.3での試験容器の形状も,また,全体の試験方法の規定を維持している間は,試験装
置の代わりの方法を開発することを認めるために,少ない項目で作成された。最後に,8.5で規定した精度
の要求事項は,現在分かっている試験方法を反映して選んだが,これも強制ではない。
D.2 8.5.1.6で規定したそれぞれの減衰器は,減衰材料のシート状の積層プラスチックでもよい。
D.3 8.5.2.5で規定した二つの標的を使用することは,球状標的を使用したときの予防措置である。この
目的は,標的の特別な大きさが,試験される装置の音響作動周波数で早く変化している平面波反射損失を
もつときの問題を避けることにある。棒状標的を使用すれば,これは,問題ではない[[5〜8] 1)参照]。
D.4 試験の間,胎児の装置が,臨床現場で使用されるのと同じドプラ出力レベルで作動していることは,
重要である。したがって,標的の特性音響インピーダンスが,水の音響インピーダンスと余りかけ離れた
値ではないことが望ましい。これは,言及した鋼製標的が,理想的であるという意味ではない。そのため,
8.5.1.1には,その標的範囲0.6×106 kgm−2s−1〜3.5×106 kgm−2s−1において特性音響インピーダンスの材料
で作ることが望ましい。しかし,周波数に伴う標的平面波反射損失の最も小さい変動を示す標的が,先端
が平面な小さい半径の鋼製棒であることは,事実である。この標的が,参照標的として最適といえる一方,
先端が平たんなプラスチック棒が,臨床での使用を最もよく表している標的の代表と考えることができる。
D.5 装置についての性能評価結果表示は,装置の二つの範囲に対して検討している。1番目は,箇条9
に記載しているように,既に存在しているか,既に臨床で使用されているかもしれない装置の性能パラメ
ータの範囲に関することである。これは,性能モニタリング,評価及び記録のために保証される。この場
合は,パラメータの表示は,単独で表示される。2番目は,箇条10で与え,超音波の様相の仕様は,装置
の製造業者が記載する。
23
T 1506:2018
附属書E
(参考)
参考文献
[1] Beissner, K. “Maximum hydrophone size in ultrasonic field measurements”. Acustica, vol. 59, pp. 61-66, 1985
[2] Ide, M. Measurement method of the sensitivity of ultrasonic Doppler fetal diagnostic equipment. Proc. of the
10th International Congress on Acoustics, F-9.2, 1980
[3] Ide, M. “Steel ball method for measurement of overall sensitivity of ultrasonic diagnostic equipment”. Japanese
Journal of Medical Ultrasonics, vol. 3, No. 1, pp. 45-52, 1976
[4] JIS T 1506:2005 超音波手持探触子形ドプラ胎児心拍動検出装置性能要求事項,試験方法及び表示
[5] Morimatsu, E. and Ueda, M. “Estimation of frequency characteristics of echo scattered by a small sphere”. J.
Acoust. Soc. Jpn., vol. 43, pp. 65-70, 1987
[6] Anson, L. W. and Chivers, R. C. “Frequency dependence of the radiation force function (Yp) for spherical
targets for a wide range of materials”. J. Acoust. Soc. Am., vol. 69, pp. 1618-1623, 1981
[7] Faran, J. J. “Sound scattered by solid cylinders and spheres”. J. Acoust. Soc. Am., vol. 23, pp. 415-418, 1951
[8] Hickling, R. “Analysis of echoes from a solid elastic sphere in water”, J. Acoust. Soc. Am., vol. 34,
pp. 1582-1592, 1962
[9] IEC/TR 60854,Methods of measuring the performance of ultrasonic pulse-echo diagnostic equipment
24
T 1506:2018
附属書JA
(参考)
JISと対応国際規格との対比表
JIS T 1506:2018 超音波装置−超音波手持探触子形ドプラ胎児心拍動検出装置
−性能要求事項,試験方法及び表示
IEC 61266:1994,Ultrasonics−Hand-held probe Doppler foetal heartbeat detectors−
Performance requirements and methods of measurement and reporting
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇
条ごとの評価及びその内容
(V)JISと国際規格との技術的
差異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
2 引用規格
3 用語及び
定義
3.2 音響作動周波数
IEC 62127-1の3.3.1参照
3.2
IEC 61102の3.4.1参照
変更
実質的な技術的差異はない。
IEC 60866,IEC 61101及び
IEC 61102は,IEC 62127-1に
統合され,置き換えられた。
3.5 超音波振動子の有効範
囲
IEC 62127-1の3.7参照
3.5
IEC 61102の3.6参照
変更
実質的な技術的差異はない。
IEC 60866,IEC 61101及び
IEC 61102は,IEC 62127-1に
統合され,置き換えられた。
3.9 出力
IEC 61161の3.2参照
3.9
IEC 61161の3.5参照
変更
IEC 61161の最新版を適用
IEC 61161の最新版への整合
のため。
3.14 空間のピーク時間的ピ
ーク音圧
IEC 62127-1の3.43,3.45及
び3.63参照
3.14
IEC 61102の3.26,3.27及び
3.50参照
変更
実質的な技術的差異はない。
IEC 60866,IEC 61101及び
IEC 61102は,IEC 62127-1に
統合され,置き換えられた。
7 安全
JIS T 0601-1による。
7
IEC 60601-1:1988による。
変更
JIS T 0601-1の最新版を適用
JIS T 0601-1の最新版への整
合のため。
8 試験
8.1 音響作動周波数
IEC 62127-1に従わなけれ
ばならない。
8.1
IEC 60866に従わなければな
らない。
変更
実質的な技術的差異はない。
IEC 60866,IEC 61101及び
IEC 61102は,IEC 62127-1に
統合され,置き換えられた。
5
T
1
5
0
6
:
2
0
1
8

25
T 1506:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇
条ごとの評価及びその内容
(V)JISと国際規格との技術的
差異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
8 試験
(続き)
8.2 出力
・IEC 62127-1で規定する手
順
8.2
・IEC 61101及びIEC 61102で
規定する手順
変更
実質的な技術的差異はない。
IEC 60866,IEC 61101及び
IEC 61102は,IEC 62127-1に
統合され,置き換えられた。
・IEC 61157の4.2.5に従わ
ないような装置
・IEC 61157の箇条6に従わな
いような装置
IEC 61157の最新版を適用
IEC 61157の最新版への整合
のため。
8.3 空間のピーク時間的ピ
ーク音圧
・IEC 62127-1に規定する試
験方法か,
8.3
・IEC 61102に規定する試験方
法か,
変更
実質的な技術的差異はない。
IEC 60866,IEC 61101及び
IEC 61102は,IEC 62127-1に
統合され,置き換えられた。
・IEC 62127-1に従わなけれ
ばならない。
・IEC 60866及びIEC 61102に
従わなければならない。
・IEC 62127-1で与えられた
相互依存又は平面の走査方
法
・IEC 60866又はIEC 61101で
与えられた相互依存又は平面
の走査方法
8.4 超音波振動子の有効範
囲
IEC 62127-1の箇条6の方法
8.4
IEC 61102の8.1.5の方法
変更
実質的な技術的差異はない。
IEC 60866,IEC 61101及び
IEC 61102は,IEC 62127-1に
統合され,置き換えられた。
9 性能の表
示
b)及びc)の規定を削除
9
b),c)
b) 探触子表面から50 mm,
75 mm,100 mm及び200
mmの距離の総合感度
c) b)の決定のために使用し
たドプラ周波数及び標的
速度(有効数字2桁)
削除
現在販売されている装置には
表示されていないこと,及び
試験の再現が不確実であるた
め,要求事項とはしない。
修正提案を検討
5
T
1
5
0
6
:
2
0
1
8
26
T 1506:2018
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇
条ごとの評価及びその内容
(V)JISと国際規格との技術的
差異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
10 附属文
書の明細項
目
b)及びc)の規定を削除
10
b),c)
b) 探触子表面から50 mm,
75 mm,100 mm及び200
mmの距離の総合感度
c) b)の決定のために使用し
たドプラ周波数及び標的
速度(有効数字2桁)
削除
現在販売されている装置には
表示されていないこと,及び
試験の再現が不確実であるた
め,要求事項とはしない。
修正提案を検討
注記
IEC 61157の4.2.5に該当す
る場合にも,
注記
IEC 61157の公表免責条項6に
該当する場合にも,
変更
IEC 61157の最新版を適用
IEC 61157の最新版への整合
のため。
JISと国際規格との対応の程度の全体評価:IEC 61266:1994,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
5
T
1
5
0
6
:
2
0
1
8