2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 9800-1994
船用発電装置の
パワーマネージメントシステム
Power management system for marine generating plants
1. 適用範囲 この規格は,機関区域の無人化に必要な設備がある船に,装備する発電装置に用いるいつ
(溢)流制御,運転台数制御及び大容量補機始動ブロック制御の各機能をもつパワーマネージメントシス
テムの仕様について規定する。
2. 用語の定義 この規格で用いる主な用語の定義は,次のとおりとする。
(1) いつ(溢)流制御 異なった機種の発電機用原動機の並行運転が行われる場合,省エネルギーを目的
として,定められた発電装置(例 排ガスターボ発電機)の負荷率を一定にし,残りの負荷を他の発
電装置に分担させ,不平衡な負荷率で並行運転を行う制御。
(2) 運転台数制御 船内需要電力に応じて,発電装置の運転台数を自動的に増減する制御。
(3) 大容量補機 始動時に発電装置に過負荷,電圧降下などの影響を与える補機。
(4) 大容量補機始動ブロック制御 大容量補機を始動させる場合,始動に要する電力が不足するおそれが
あればその補機の始動を阻止し,かつ,その始動電力が賄えるように船内電源を自動的に確保する制
御。
3. 発電装置の組合せ パワーマネージメントシステムを適用する発電装置の組合せは,次のとおりとす
る。
(1) 複数台のディーゼル発電機
(2) 排ガスターボ発電機及びディーゼル発電機
(3) 軸発電機及びディーゼル発電機
(4) 排ガスターボ発電機,軸発電機及びディーゼル発電機
(5) ターボ発電機及びディーゼル発電機
4. パワーマネージメントの機能
4.1
機能の種類 機能の種類は,次のとおりとし,発電装置の組合せなどによって選択する。
参考 これらの制御に伴う発電装置の自動始動,自動同期,自動負荷配分などの制御については財団
法人日本船舶標準協会規格JMS 9805(船用発電装置の自動化標準)を参照する。
(1) いつ(溢)流制御
(2) 運転台数制御
(3) 大容量補機始動ブロック制御
2
F 9800-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2
いつ(溢)流制御 排ガスターボ発電機(以下,TGと書く。)又は,軸発電機(以下,SGと書く。)
に対して外部からの入力された目標値になるように負荷配分制御を行い,ディーゼル発電機(以下,DG
と書く。)に対しては船内負荷に応じて低負荷限度運転制御を含めた負荷配分制御を行う。
これらの制御は,運転中の発電装置の総負担電力を監視し,その状態に応じてTG又はSG及びDGの
負担すべき電力を算出し,ガバナモータを制御して行う。
(1) 排ガスターボ発電機又は軸発電機及びディーゼル発電機のいつ(溢)流制御 TGとDGとの2台の
組合せによるいつ(溢)流制御のフローの一例を図1に示す。
なお,SGの場合はTGをSGと読み替える。
また,船内需要電力に対する各領域における発電装置の負担電力は,次による。
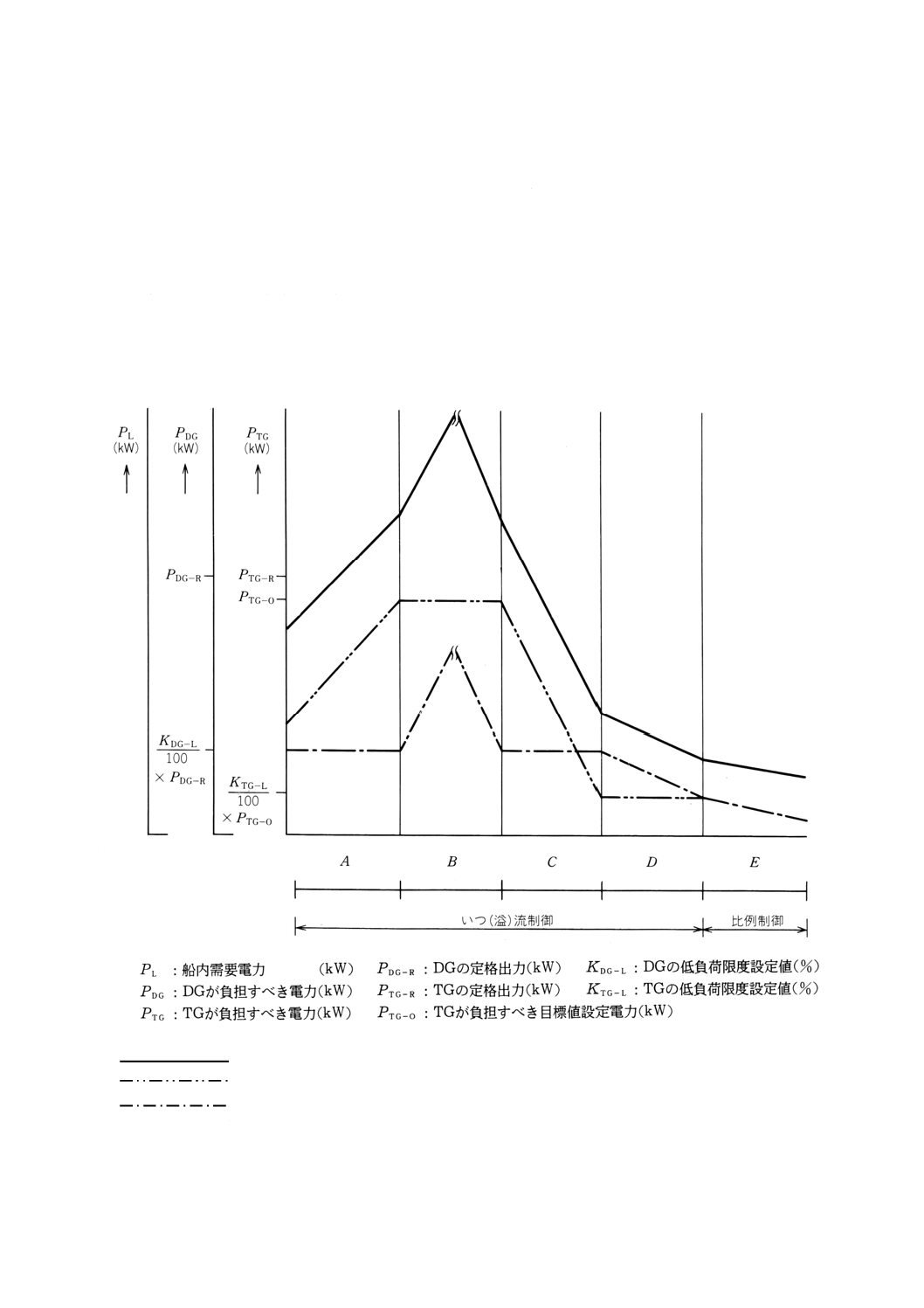
図1 いつ(溢)流制御のフローの一例
備考 線図記号は,次のとおりである。
船内需要電力PL
排ガスターボ発電機の負担電力PTG
ディーゼル発電機の負担電力PDG
(a) 領域Aの場合 DGは低負荷限度設定値一定で低負荷限度運転制御が行われ,TGが残りの負荷を負
担する。
3
F 9800-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
したがって,運転中の各発電装置が負担する電力は,次式による。
PDG=
)
kW
(
100
R
DG
L
DG
−
−×P
K
PTG=PL−PDG (kW)
(b) 領域Bの場合 船内需要電力が領域Aを超え,TGの負担する負荷が外部からの指令によって入力
された目標値PTG-o (kW) に達すると,DGの低負荷限度運転制御は解除され,TGはPTG-o (kW) 一
定で負荷配分制御が行われ,DGが残りの負荷を負担する。したがって,運転中の各発電装置が負
担する電力は,次式による。
PDG=PL−PTG (kW)
PTG=PTG-o (kW)
(c) 領域Cの場合 船内需要電力が減少し,DGの負荷率が低負荷限度設定値KDG-L (%) に達すると,
TGの一定負荷配分制御は解除され,DGはKDG-L (%) 一定で低負荷限度運転制御が行われ,TGが
残りの負荷を負担する。したがって,運転中の各発電装置が負担する電力は,領域Aの場合と同様
になる。
(d) 領域Dの場合 船内需要電力が減少し,TGの負荷率が低負荷限度設定値KTG-L (%) に達すると,
DGの低負荷限度運転制御は解除されTGは,KTG-L (%) 一定で低負荷限度運転制御が行われ,DG
が残りの負荷を負担する。したがって,運転中の各発電装置が負担する電力は,次式による。
PDG=PL−PTG (kW)
)
(kW
100
O
TG
L
TG
TG
−
−×
=
P
K
P
(e) 領域Eの場合 さらに,船内需要電力が減少し,DGの負荷率がTGの低負荷限度設定値KTG-L (%) に
達すると,TGの低負荷限度運転制御は解除され,TGはPTG-o (kW) を定格出力とみなされ,DGと
比例配分制御が行われる。この状態より船内需要電力が増加した場合,(d)及び(c)と同様の制御を行
い,更に,船内需要電力が増加した場合,(b)の制御に至る。
(2) その他の発電装置の組合せのいつ(溢)流制御 その他の発電装置の組合せにおいても4.2(1)制御と
同様な方法によって,いつ(溢)流制御を行うことができる。
4.3
運転台数制御 運転中の発電機負荷率を適正な範囲に保つため,船内需要電力の増減に応じて発電
装置の運転台数を自動制御する。これらの制御は,発電機負荷率を算出することによって発電装置を自動
発停させて行う。運転台数制御のフローの一例を図2に示す。
4
F 9800-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
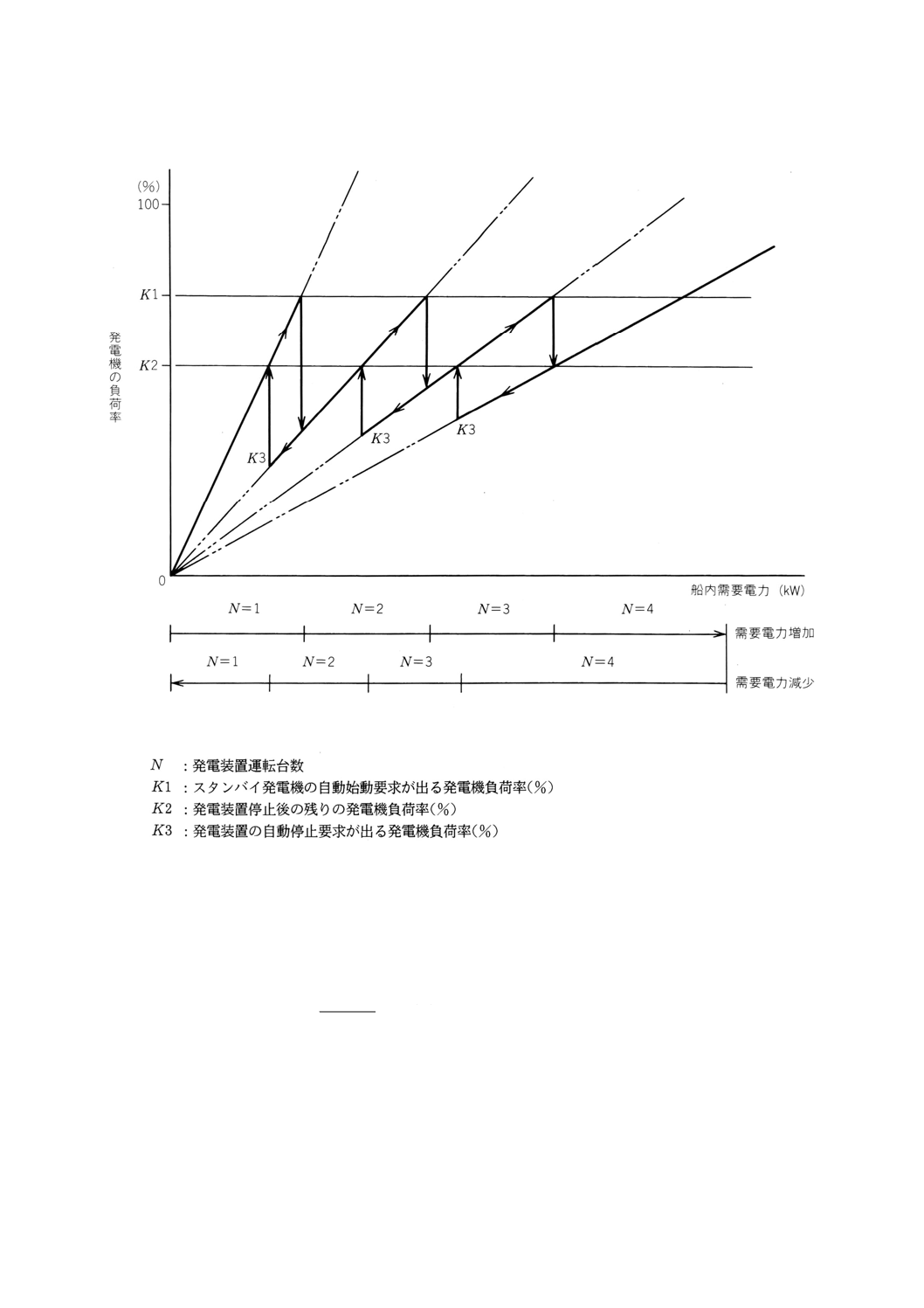
図2 運転台数制御
備考 この図は,発電装置4台の場合を示す。
(1) 自動投入 図2で船内需要電力が増加し,常用発電機単独又は並行運転中の各発電機の負荷率がK1
(%) に達し,その状態が一定時間継続した場合,スタンバイ発電機の自動始動要求信号を出し,スタ
ンバイ発電機は自動始動の後,先行機と並行運転を行う。並行運転中の発電機の負荷率K1 (%) は,
次式で求める。
(%)
100
1
1
1
×
Σ
Σ
=
−
=
Rn
N
n
Ln
N
n
P
P
K
PLn: 各発電装置の負担電力 (kW)
PRn: 各発電装置の定格電力 (kW)
N: 発電装置運転台数
(2) 自動解列 図2で船内需要電力が減少し,自動解列順位が1位に選択された発電装置を停止させても,
残りの各発電機の負荷率がK2 (%) 以下になり,その状態が設定時間継続した場合,自動解列要求信
5
F 9800-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
号を出し,自動解列順位が1位に選択された発電装置は負荷移行の後ACB(気中遮断器)が引き外さ
れ,機関は自動的に停止(必要があれば空転を行う。)する。発電装置解列後の残りの発電機負荷率
K2 (%) は,次式で求める。
(%)
100
2
1
1
×
−
Σ
Σ
=
−
=
R
Rn
N
n
Ln
N
n
P
P
P
K
PR: 自動解列順位が1位に選択された発電装置の定格出力 (kW)
4.4
大容量補機始動ブロック制御 大容量補機の始動時に,始動に必要な電力と発電機の余剰電力とを
比較して不足する場合には,始動を阻止し,同時にスタンバイ発電機に自動始動要求信号を出し,並行運
転後,補機の始動を賄える船内電源を自動的に確保する制御を行う。制御の内容を次に示す。
(1) 始動可能信号の出力 始動可能信号の出力は,補機の始動可能電力設定値PM (kW) と運転中の発電機
の総余剰電力PS (kW) を比較し,次による。
(a) PS≧PMの場合 補機が始動できる余剰電力があり,始動可能信号が出力される。補機は始動指令で
直ちに始動できる。
(b) PS<PMの場合 補機が始動できる余剰電力がなく,始動可能信号が出力されない。スタンバイ発電
機が並行運転され余剰電力が確保されるまでは,補機は始動指令を与えられても始動を阻止される。
(2) スタンバイ発電機の始動 (1)(b)の場合,補機の始動押ボタンなどの始動指令が装置へ入力されると,
該当補機が始動するのに十分な電力を確保するためにスタンバイ発電機に自動始動要求信号が出され
る。スタンバイ発電機の始動順位が1位の発電装置[定格出力PG1 (kW)]が並行運転された場合の余
剰電力PSS=PS+PG1 (kW) と,補機の始動可能電力設定値PM (kW) を比較し,次の制御を行う。
(a) PSS≧PMの場合 スタンバイ発電機1台に自動始動要求信号が出され,スタンバイ発電機1台が先
行機と並行運転する。
(b) PSS<PMの場合 スタンバイ発電機2台に自動始動要求信号が出され,スタンバイ発電機2台が先行
機と並行運転する。
4.5
いつ(溢)流制御と運転台数制御 排ガスターボ発電機又は軸発電機とディーゼル発電機で構成さ
れる発電装置の組合せにおいては,いつ(溢)流制御と運転台数制御を組み合わすことによって,船内需
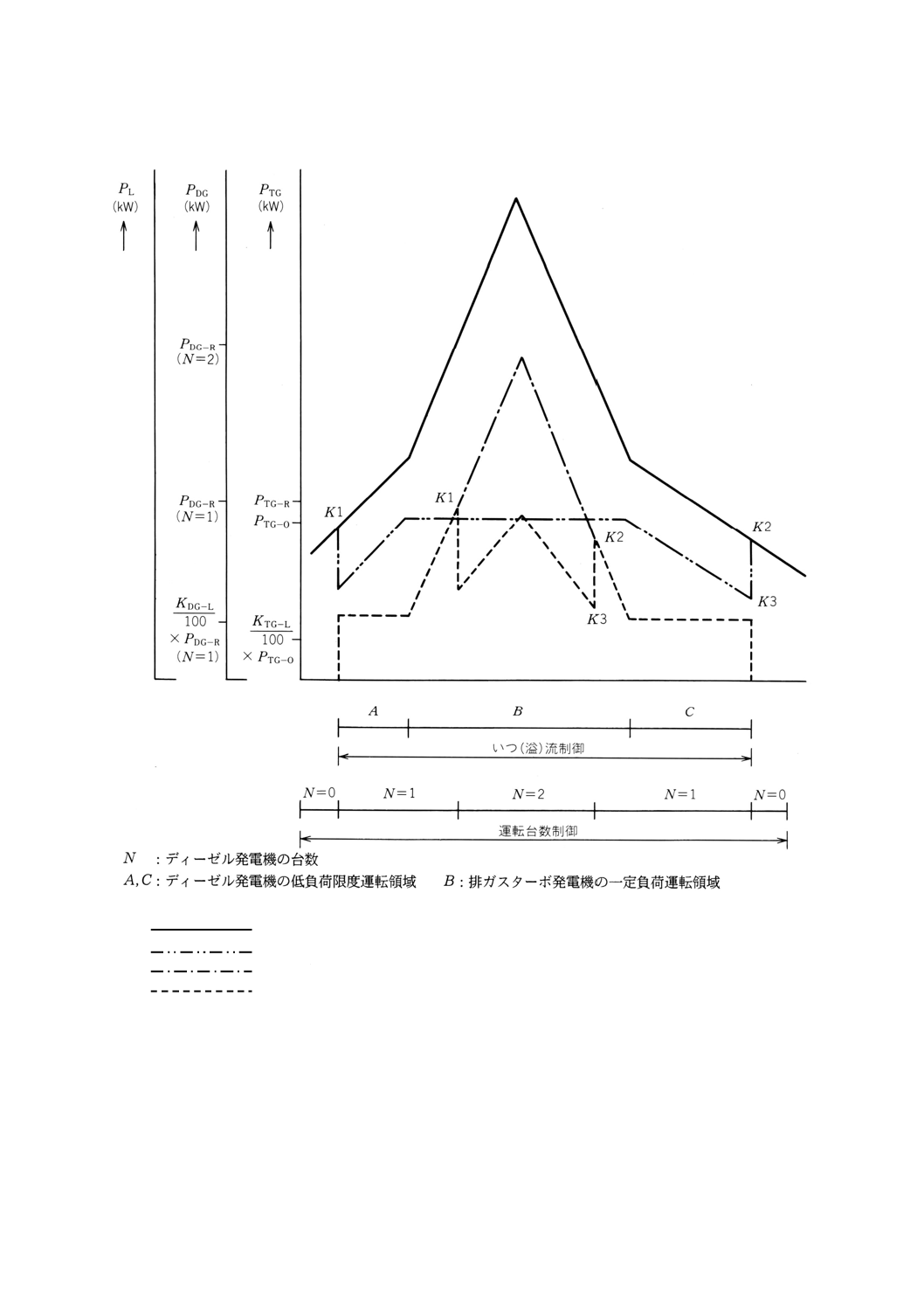
要電力の増減による一連の制御が可能となる。その一例を図3に示す。
6
F 9800-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 いつ(溢)流制御と運転台数制御
備考 線図記号は,次のとおりである。
船内需要電力PL
排ガスターボ発電機の負担電力PTG
ディーゼル発電機2台の負担電力PDG
ディーゼル発電機1台の負担電力
5. 操作,表示及び警報 取扱者がパワーマネージメント機能を容易に“入り”,“切り”できるようにす
るとともに,その状態を分かりやすく表示する。制御中に注意をうながす必要がある場合,その情報を分
かりやすく表示する。制御によって船舶の安全を損なうことがある場合,各機能の解除及び警報を行う。
7
F 9800-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6. 試験 パワーマネージメントシステムは,船上運転又は適当な時期において動作試験を行い,それぞ
れ仕様どおりの機能をもち満足な動作をすることについて十分に確認する。
関連規格 JMS 9805 船用発電装置の自動化標準
原案担当作業委員会の構成表
氏名
所属
(委員長)
吉 田 勲
NKK総合エンジニアリング事業部船舶・海洋本部
木 下 哲 也
財団法人日本海事協会
武 田 象
川崎汽船株式会社
松 尾 廣 昭
日本郵船株式会社
藤 田 茂
昭和海運株式会社
中 嶋 孝 雄
ナビックスライン株式会社
栢 文 雄
石川島播磨重工業株式会社船舶海洋事業本部
富 田 洋 司
川崎重工業株式会社船舶事業本部
横 山 和 憲
株式会社サノヤス・ヒシノ明昌水島造船所
大 矢 昭 三
アンリツ株式会社無線機事業部
中 居 幸 夫
寺崎電気産業株式会社
佐 野 良 幸
横河ナビテック株式会社
水 野 敏 光
明陽電機株式会社
酒 井 捷 夫
山武ハネウエル株式会社工業システム事業部エンジニア
リング統括部
山 田 学
西芝電機株式会社マイクロソフト事業部
竹 村 恭 嘉
日本無線株式会社
(事務局)
久 保 明 博
財団法人日本船舶標準協会