F 9005:2004
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人 日本船舶標準協会(JMSA)から,
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,国
土交通大臣が制定した日本工業規格である。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。国土交通大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
JIS F 9005には,次に示す附属書がある。
附属書1(参考)VDRで使用されるIEC 61162-1及びIEC 61162-2で規定されているセンテンスの説
明
附属書2(参考)IEC 61162-1とIEC 61162-2の対比表
F 9005:2004
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 用語の定義及び略語 ········································································································· 1
3.1 定義 ···························································································································· 1
3.1.1 航海情報記録装置(VDR) ···························································································· 2
3.1.2 センサ ······················································································································· 2
3.1.3 最終記録媒体 ·············································································································· 2
3.1.4 再生装置 ···················································································································· 2
3.1.5 専用予備電源 ·············································································································· 2
3.1.6 分解能 ······················································································································· 2
3.1.7 データ ······················································································································· 2
3.1.8 適切な警報の作動 ········································································································ 2
3.1.9 船橋ワークステーション ······························································································· 2
3.2 略語 ···························································································································· 2
4. VDR入力インタフェース ·································································································· 2
4.1 VDRで要求される入力信号の種類 ···················································································· 3
4.1.1 IEC 61162シリーズに準拠する信号 ················································································· 3
4.1.2 マイクロフォンからの音響信号 ······················································································ 3
4.1.3 VHFからの音声信号 ···································································································· 3
4.1.4 レーダ指示器の表示画像 ······························································································· 3
4.1.5 IEC 61162以外の信号(基準にない信号,信号が出ていないもの) ······································· 4
4.2 警報信号に関して ·········································································································· 4
5. VDRのセンサ接続 ··········································································································· 5
5.1 センサ接続信号の概要 ···································································································· 5
5.2 センサ及びVDR間接続基準 ···························································································· 5
5.3 信号別インタフェースチェックシートの詳細 ······································································· 6
5.3.1 日付と時刻 ················································································································· 6
5.3.2 船位 ·························································································································· 7
5.3.3 船速 ·························································································································· 8
5.3.4 船首方位 ···················································································································· 9
5.3.5 船橋音響 ··················································································································· 10
5.3.6 VHF送受信音声信号 ··································································································· 11
5.3.7 レーダ指示器画像 ······································································································· 12
5.3.8 水深 ························································································································· 14
5.3.9 船橋における警報 ······································································································· 15
F 9005:2004
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.10 操だ(舵)指令と応答 ································································································ 17
5.3.11 主機指令と応答/スラスタ指令と応答 ··········································································· 19
5.3.12 船体開口状態 ············································································································ 21
5.3.13 水密戸・防火戸状態 ··································································································· 22
5.3.14 加速度と船体応力 ······································································································ 24
5.3.15 風速と風向 ··············································································································· 25
6. 設置要領 ······················································································································· 26
7. 再生装置要件 ················································································································· 27
8. インタフェース難度判定指標 ···························································································· 28
附属書1(参考)VDRで使用されるIEC 61162-1及びIEC 61162-2で規定されているセンテンスの説明 30
附属書2(参考)IEC 61162-1とIEC 61162-2の対比表 ································································ 35
参考文献 ···························································································································· 36
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 9005:2004
航海情報記録装置の装備に関する指針
Guidelines for the installation of Voyage Data Recorder(VDR)
1. 適用範囲 この規格は,航海情報記録装置[Voyage Data Recorder(以下,VDRという。)]の採用・装
備に際してのセンサ,VDRのインタフェースの整合,本体装置とカプセルの据付要件及び再生に関わる要
件などについて,VDRの供給者と使用者又は信号源機器製造業者などの関係者との技術的打ち合わせを円
滑に行うことを目的にIMO決議A.861(20)及びIEC 61996に規定するVDRに関わる電気的又は音響的信
号の入出力データの仕様,又は設置据付に関する標準仕様について規定する。また,指針として具体的な
打ち合せ項目の様式を標準化するものである。
なお,この規格は,VDR本体の性能・機能に関わる標準化を意図するものではない。
2. 引用規格 次に掲げる規格は,この指針に引用されることによって,この指針の規定の一部を構成す
る。これらの引用規格のうちで,発効年(又は発行年)を付記してあるものは,記載の年の版だけがこの
指針の規定を構成するものであって,その後の改正版・追補には適用しない。発効年(又は発行年)を付
記していない引用規格は,その最新版(追補を含む。)を適用する。
IEC 61097-7:1996 Global marine distress and safety system (GMDSS) - Part 7: Shipborne VHF
radiotelephone transmitter and receiver - Operational and performance requirements, methods of testing
required test results
IEC 61162-1:1995 Marine navigation and radiocommunication equipment and systems - Digital interfaces -
Part 1: Single talker and multiple listeners
IEC 61162-2:1998 Marine navigation and radiocommunication equipment and systems - Digital interfaces -
Part 2: Single talker and multiple listeners,high-speed transmission
IEC 61996:2000 Marine navigation and radiocommunication equipment and systems - Shipborne voyage data
recorder(VDR) - Performance requirements - Methods of testing and required test results
IMO決議A.830(19):1995 Code on alarms and indicators
IMO決議A.861(20):1997 Performance standards for shipborne voyage data recorders(VDRs)
IMO 1974:1995 Convention on Safety of Life at Sea(SOLAS),as amended
ITU-T V.11:1980 電話網におけるデータ通信 Vシリーズ勧告 データ通信分野での集積回路装置
に用いられるはん用の平衡複流相互接続回路の電気的特性
VESA DMTS:1996 Video electronics standards association - Discrete monitor timing standard 1.0,
Revision 0.7(DMTS)
EIA基準:1978 米国電子工業会基準(Electronic Industries Association)
3. 定義及び略語 この規格に用いる主な用語の定義及び略語は,次による。
3.1
定義
2
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.1
航海情報記録装置(VDR) センサとの接続機能をもち,データの処理や変換機能,カプセル内
の最終記録媒体,専用予備電源をもつ記録装置。
3.1.2
センサ VDRに接続されて,記録するためのデータを得るところの,VDR外部のすべてのユニッ
ト。
3.1.3
最終記録媒体 適切な装置を使用したアクセスにより,データの復元及び再生ができるように,デ
ータを記録するハードウェア。
3.1.4
再生装置 記録媒体と記録中に使ったフォーマットとに互換性のある,データを復元するために用
いられる装置。もとのデータ源機器に対応した再生用のハードウェアとソフトウェアを含む。再生装置は,
通常船上設置ではなく,この規格においてはVDRの一部とはみなされない。
3.1.5
専用予備電源 適切な充電機能をもち,5.3.5(船内電源喪失後船橋音響を2時間記録)で要求され
る運用をするために十分な容量をもつ,VDR専用の二次電池。
3.1.6
分解能 2つの値の間で検知し得る最小増加量。
3.1.7
データ VDRで記録される各種情報,数値データ,テキストデータ,可聴音,レーダ画像。
3.1.8 適切な警報の作動 IMO決議A.830(19)で必要条件とされる消音可能な可聴警報及び連続可視表示。
ただし,音のレベルは55 dBA〜65 dBAの範囲である。
3.1.9
船橋ワークステーション 通常は,次の船橋の当直任務を行うために人がいると想定される場所を
示す。
− 操船指揮
− 船橋両ウイング
− 主レーダ
− 海図机
− 操だ(舵)手位置
− 通信操作を行う場所
3.2
略語
EPFS
electronic position fixing system
電子測位装置
IMO
International Maritime Organization
国際海事機関
INS
Integrated Navigation System
統合化航法装置
ITU
International Telecommunication Union
国際電気通信連合
4. VDR入力インタフェース VDR装備に関して,記録すべき情報の,センサとのインタフェースは,
IEC 61996において,可能な限りデジタルインタフェースについて定めたIEC 61162シリーズによること
が示され,いかなる場合でも,機器間を接続することにより相互の機器の作動に不具合を発生させない装
備とすることが規定されている。
情報源信号を統一することにより,接続上の問題を少なくできると考えられるので,同基準で十分に表
現し得ないもの,例えばマイクロフォン,VHF,レーダ画像信号又は水密戸・防火戸・船体開口状態やア
ラーム源等,国際基準が存在しない情報源との接続に関しても,できる限りIEC 61996の規定に準拠され
ることが望ましい。
VDRに接続が要求される各機器の条件を次に示すが,センサからの信号がIEC 61162で規定されるセン
テンス基準に準拠していないもの,信号出力があっても出力ポート数が不十分なもの,及び,もともと出
力信号が用意されていないもの等があることが考えられるため,各項目の基準と比較して機器出力仕様を
3
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
確認する必要がある。
4.1
VDRで要求される入力信号の種類 IMO決議A.861(20)及びIEC 61996で要求されている入力イン
タフェースは,次による。
4.1.1
IEC 61162シリーズに準拠する信号
1) IEC 61162 IEC 61162シリーズの信号は現在4種類あり,IEC 61996では一般的にはIEC 61162-1
及びIEC 61162-2が示されている。IEC 61162-3(未発行) 及びIEC 61162-4はマルチトーカ/マルチリ
スナであり,ネットワーク対応の通信形式であり,この規格では説明を省く。VDRへの信号接続に
当たっては,採用しようとするVDR信号がIEC 61162シリーズのどれであるかを確認する必要が
ある。附属書2にIEC 61162-1及びIEC61162-2で規定されている信号発信器,信号受信器の仕様を
示す。VDR装備においては,信号受信器はVDRであり,従って,信号受信器の仕様はVDR製造
業者の仕様であり,また,信号発信器は各センサ製造業者であり,信号発信器の仕様は各センサ製
造業者の仕様となる。装備に関しては,信号発信器側(センサ側)の信号仕様とVDRの信号仕様
を確認し,接続が可能となるよう信号を決める必要がある。
2) IEC 61162-1/IEC 61162-2 IEC 61162-1及びIEC 61162-2はシングルトーカ/マルチリスナの通信形
式であり,2つの大きな違いは,通信速度(IEC 61162-1:4 800bps,IEC 61162-2:38.4kbps)であ
る。現在,一般的に使用されているのはIEC 61162-1である。IEC 61162-1とIEC 61162-2の信号仕
様の比較を附属書2に示す。
4.1.2
マイクロフォンからの音響信号 マイクロフォンの接続仕様はIEC 61996の5.6.1で示され,マイ
クロフォンはVDR装置に含まれると規定されている。マイクロフォンは船橋に装備され,船橋の可聴信
号(会話音,音声指令・応答音,警報音等)を集音する。集音された信号は信号処理機で処理され,カプ
セル内の最終記録媒体に記録される。IEC 61996に,マイクロフォン装備場所として操船時の主要な当直
任務を行う船橋ワークステーションを示している。ただし,マイクロフォンの装備台数に関しては特に言
及されてない。
4.1.3
VHFからの音声信号 VHFの接続仕様はIEC 61996の5.7.1で示される。記録信号は操船に関す
るVHFの送受信信号であり,IEC 61097-7による。VHF送受信機は通常複数台装備されているがVDRと
の接続台数に関しては特に言及されていない。
4.1.4
レーダ指示器の表示画像 IEC 61996では,複数装備されているレーダのうち,主レーダ指示器を
VDRへ接続することが示されている。レーダ指示器の表示画像接続仕様はIEC 61996の5.8.1に示され,
画像信号の基準としてはVESA DMTS及びオプション仕様として製造業者独自の仕様が認められている。
VDRの装備が要求される3 000GT以上の客船以外の船及びほとんどの客船では,レーダは通常2台又はそ
れ以上装備されている。ただし,レーダ指示器のVDRとの接続台数に関しては特に言及されていない。
4
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.1.5
IEC 61162以外の信号(基準にない信号,信号が出ていないもの) 4.1.1でIEC 61162として規定
されている信号について示したが,ここでは,それ以外のIEC 61162で規定されていない信号を接続する
場合について説明する。接点信号,アナログ信号(電圧,電流,シンクロ信号,パルス信号等)等IEC 61996
で規定されていない信号形式,つまりIEC 61162で規定されていない信号形式の場合は,一般的には,デ
ジタル信号へ変換する必要があると考えられる。(VDRの基準であるIMO決議A.861(20)では,この指針
の4.1.1〜4.1.4で要求されている信号が必要であり,通常,型式認定されたVDRはこの指針を満足するも
のと考えられ,可聴信号,レーダ画像信号以外はデジタル信号を要求している上,記録メディアの関係で
信号は最終的にはデジタル信号へ変換する必要があると考えられる)。VDRによっては,内部に信号変換
器を持っているもの,又は外部接続の信号変換器をもつもの等があり,IEC 61996で要求される信号以外
の信号に対しても,かなりの範囲で対応可能であろうと考えられる。しかし,各センサ(装置)から出力
されるアナログ信号等の電圧,電流等はいろいろな場合が予想され,信号変換器の変換機能を含め,VDR
仕様に対応しているかどうかの確認が必要であり,また,出力信号が出ていない場合も含め,当該VDR
の接続仕様に基づき,当事者間で協議する必要がある。
4.2
警報信号に関して 警報信号に関しては,IMO決議A.861(20)の5.4.9に示され,船橋における強制
警報が示されている。船橋での強制警報の項目はIEC 61996の附属書Bに,SOLASⅡ-1及びⅡ-2で求ら
れている船橋警報を示している。船橋警報に関しては,IMO決議A.686(17)及びIMO決議A.830(19)で述
べられている。IEC 61996の4.6.9では,警報を可聴音で記録し,可能ならば警報をデータとして記録する
としている。しかし,可聴音だけでの警報記録は判別が難しいことが考えられ,IEC 61996の附属書Bに
示された警報信号を接続し,警報の確認を確実にすることが可能となり,警報接続の統一化も図られると
考えられる。
警報接続では次の注意が必要である。同一装置に複数のユニットがある場合(舵取機,主機遠隔操縦装
置等)は,装置のユニットごとに警報を接続する必要がある。また,接続する警報は,客船,Ro-Ro客船,
貨物船で若干異なるため,船種ごとの警報の確認が必要である。
なお,警報に関しては,主管庁又は,適用船級へ確認されることが望ましい。
5
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.
VDRのセンサ接続
5.1
センサ接続信号の概要 IMO決議A.861(20)でVDR接続に要求される各信号のチェックシートを次
のページに示し,当事者間で協議を行う場合のチェックシート機能として使用できるものとした。チェッ
ク内容は,IEC 61996に示されたものを元にしている。また,信号が基準と異なる場合や信号が出ていな
い場合も想定し,通常使用されている信号例を示した。
5.2
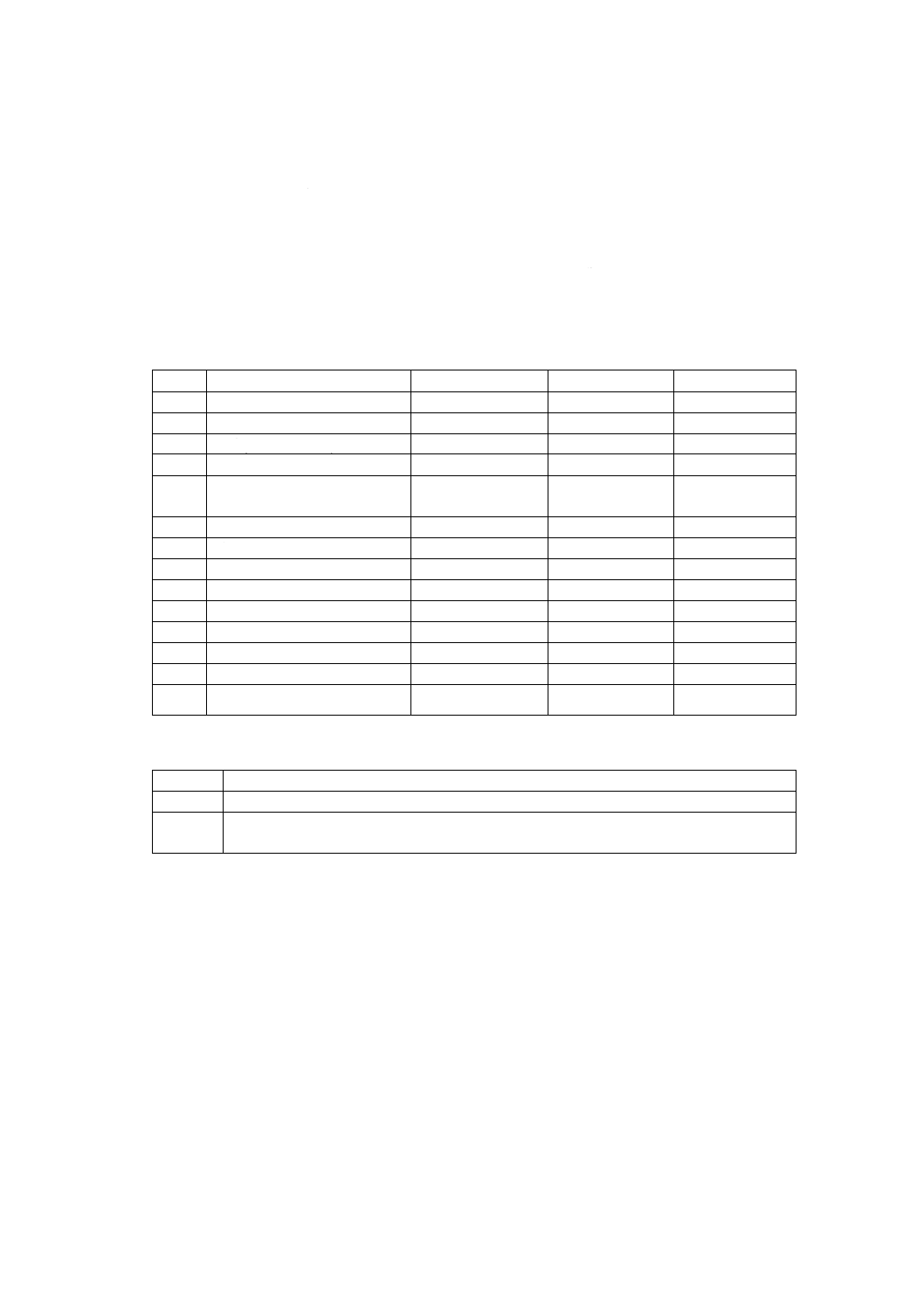
センサ及びVDR間接続基準 VDR用として示される(IMO決議A.861(20)及びIEC 61996による)
接続信号の種類とセンテンスを表1に示す。
表 1 VDRのインタフェースに使用される信号とセンテンス(IEC 61996の附属書Aによる)
No.
要求信号
IEC 61996項目
センテンス
備考
1
日付と時刻
4.6.1
ZDA
2
船位と参照測地系
4.6.2
GNS,DTM
3
船速(対水又は対地)
4.6.3
VBW
4
船首方位(真方位)
4.6.4
HDT
5
船首方位(磁気方位,自差及び
偏差)
4.6.4
HDG
6
水深(測深儀)
4.6.8
DPT
7
警報
4.6.9
ALR
8
操だ(舵) 指令/応答(手動) 4.6.10
RSA
備考1
9
操だ(舵) 指令/応答(自動) 4.6.10
HTC,HTD
10
主機 指令/応答
4.6.11
RPM,XDR
備考1及び2
11
船体開口,水密戸,防火戸
4.6.12,4.6.13
XDR
備考2
12
加速度/船体応力
4.6.14
XDR, ALR
備考2
13
風速/風向
4.6.15
MWV
14
VDR警報出力
$VRALR
備考3
(IEC 61996の附属書Aによる)
備考1
現行センテンスRSAとRPMは,指令フィールドがない。応答だけ。
備考2
現行センテンスXDR(センサ信号発信器用)は,VDR要求仕様になっていない。
備考3
VDRからの警報信号発信の要求はない。もし,追加仕様で警報信号を送る場合は,センテ
ンスALRが適当である。
6
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3
信号別インタフェースチェックシートの詳細 次の装置ごとに設けたチェックシートを用い,VDR
に接続される信号の確認を行う。
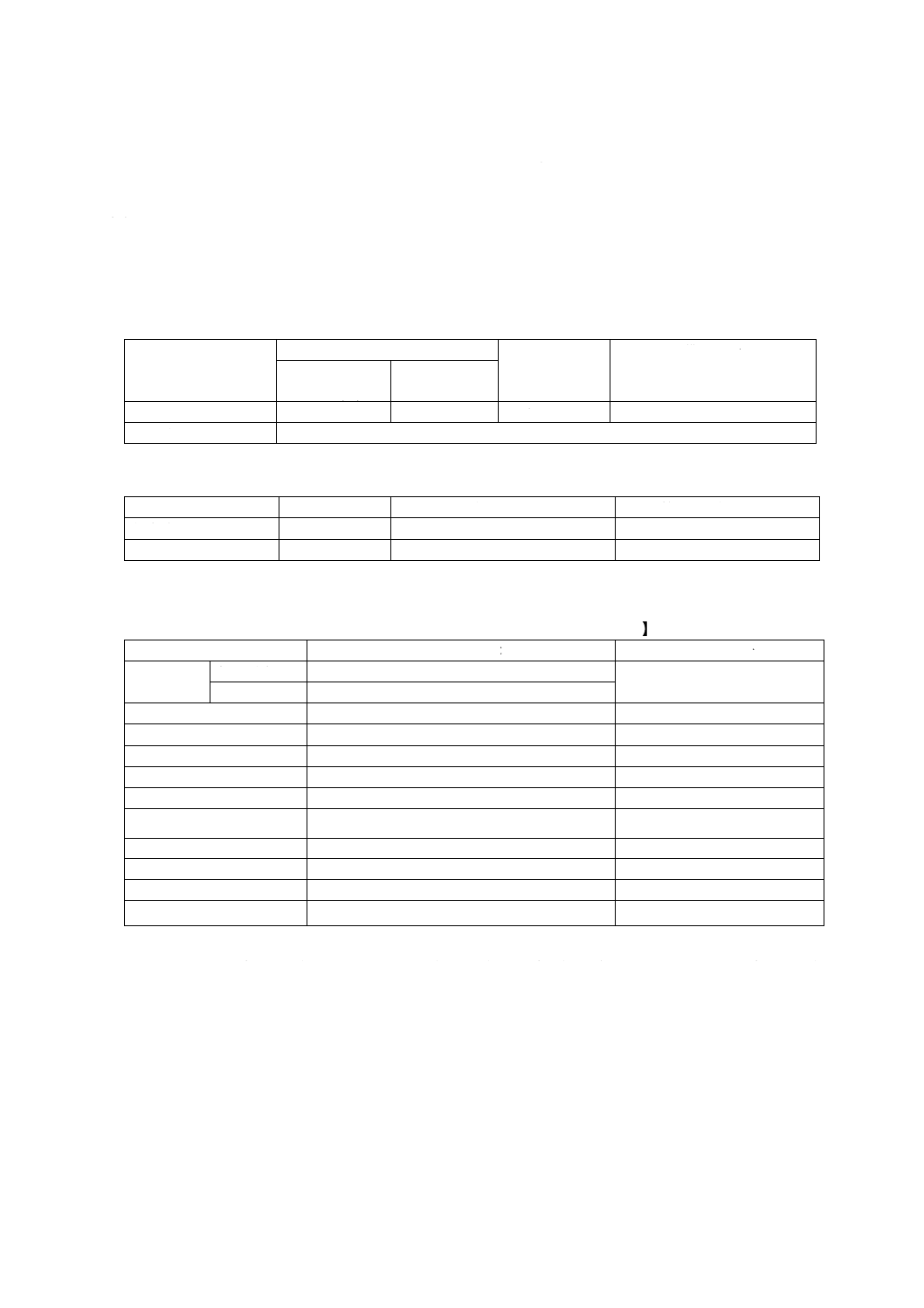
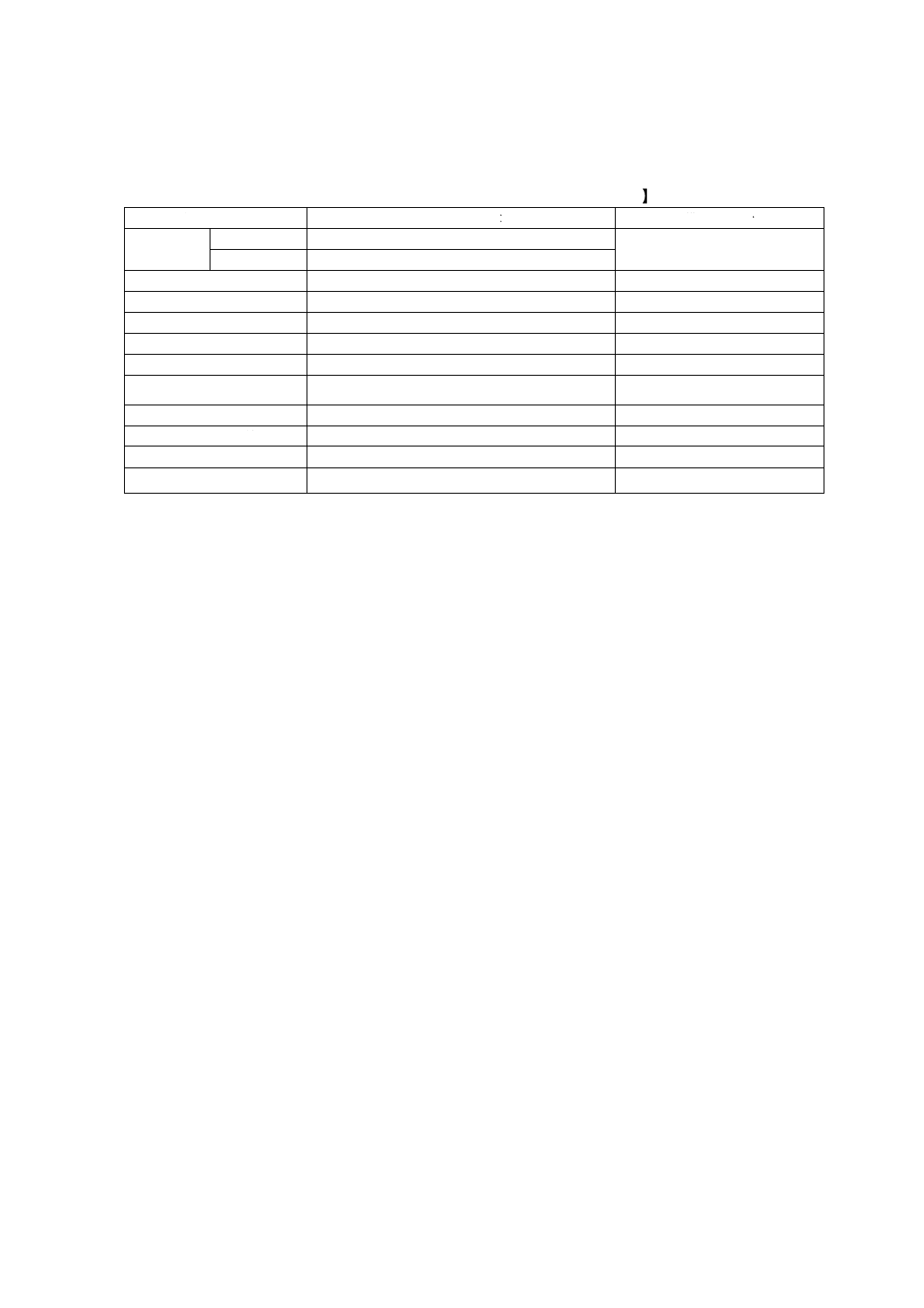
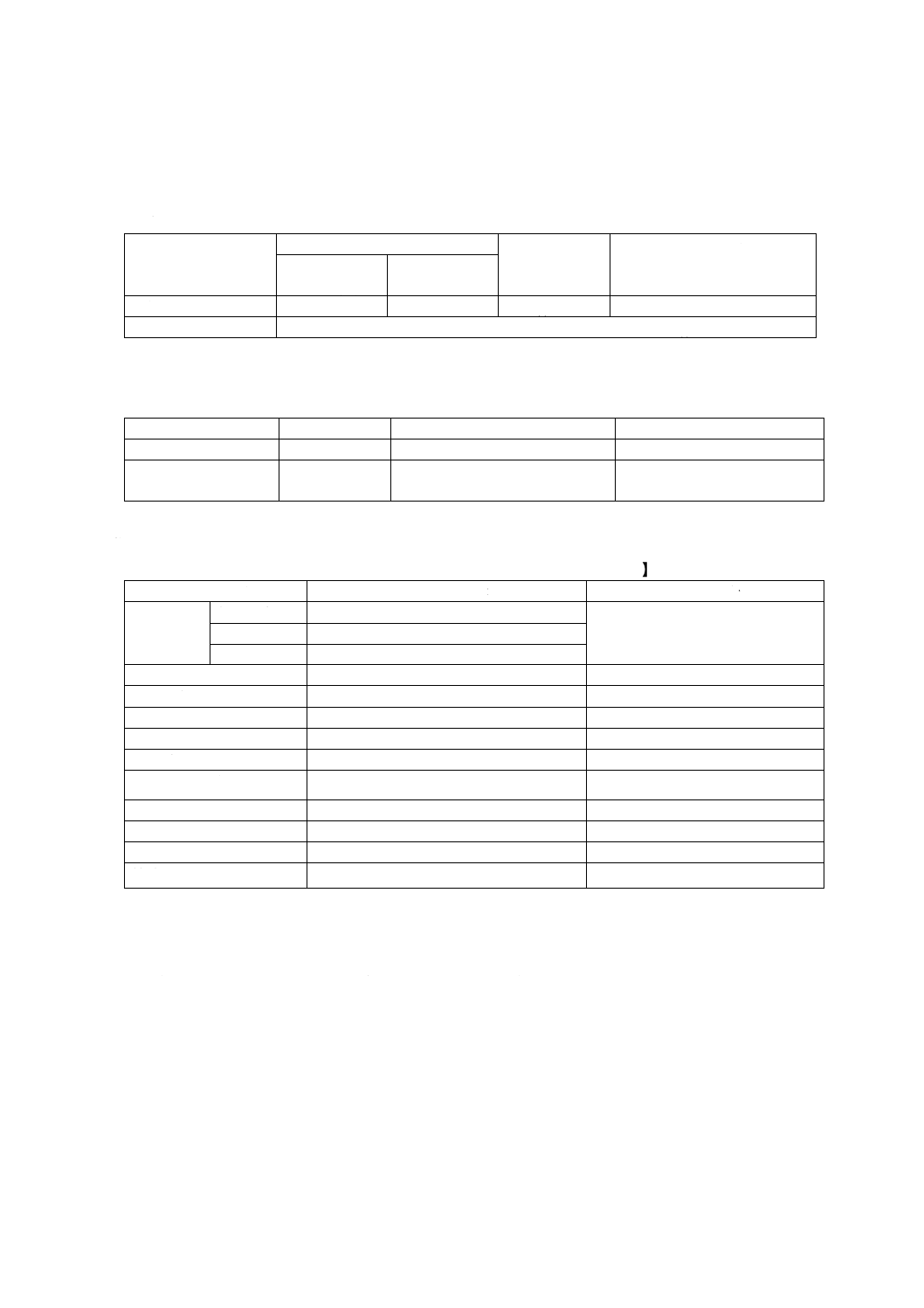
5.3.1
日付と時刻
1) 標準 UTC(協定世界時)に照合した日付と時刻情報は,出来れば船外の信号源(例えば,電子測
位装置又は無線時刻信号)から得るか,又は,少なくとも1時間に1回船内からの時刻を得るもの
とする。また,記録に使用された信号源も記録する。記録時の時間管理は,すべての記録データ項
目の記録時刻を1秒以内の分解能で,詳細に事故履歴を再現できるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
日付と時刻
5.4.1
4.6.1
ZDA
センテンス
$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh<CR><LF>
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
船内時計
EPFS(電子測位装置)
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・芯数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
7
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
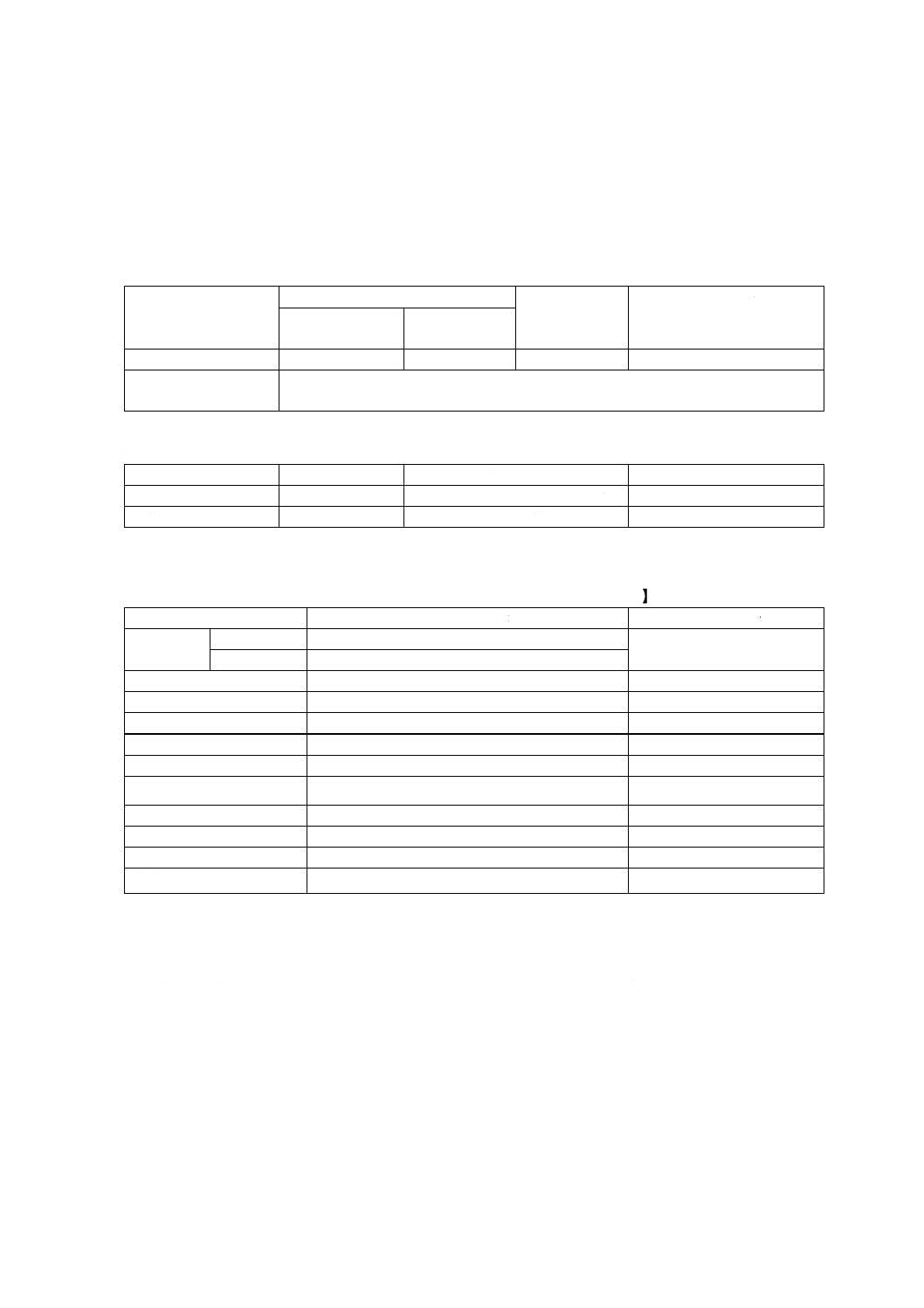
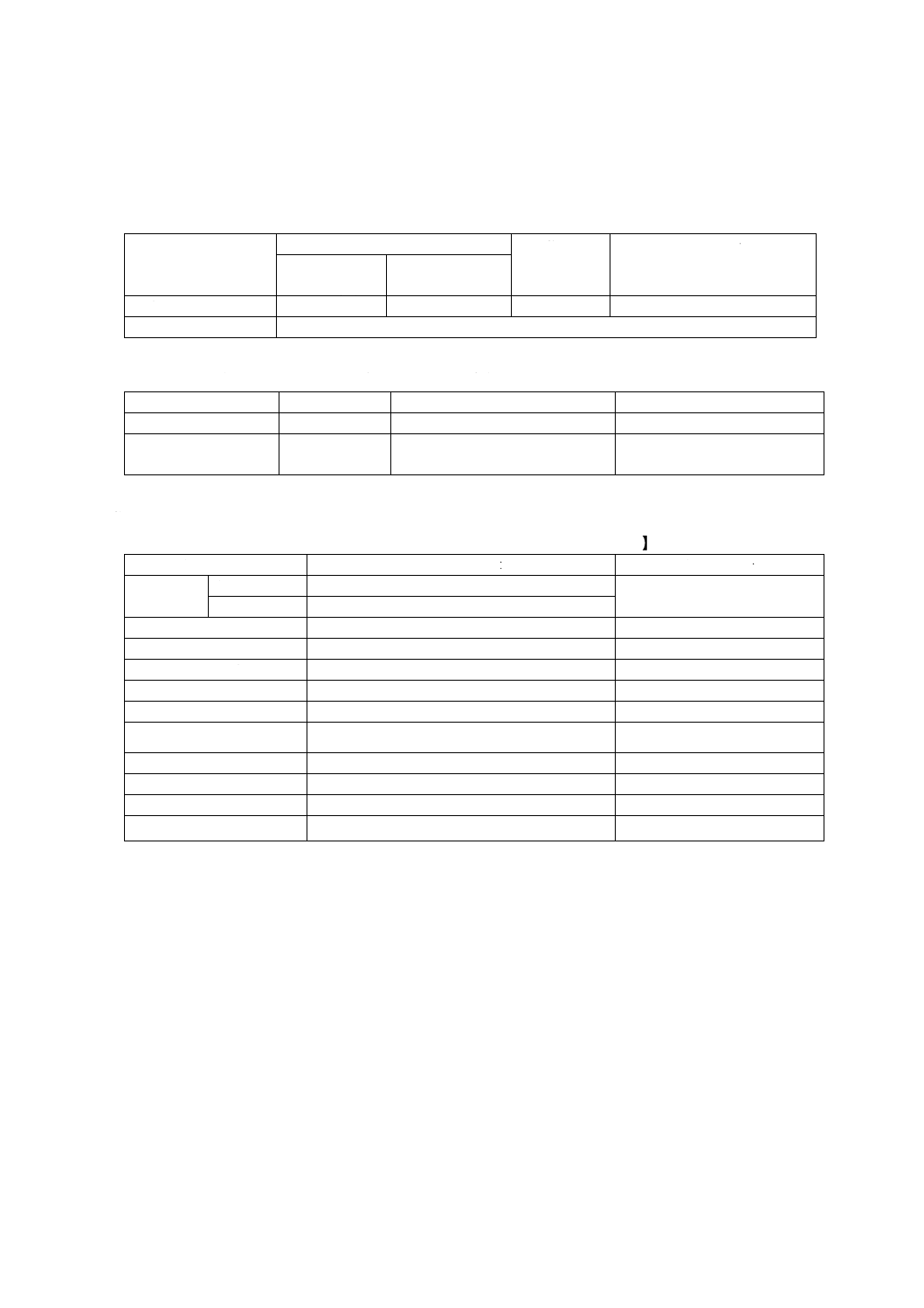
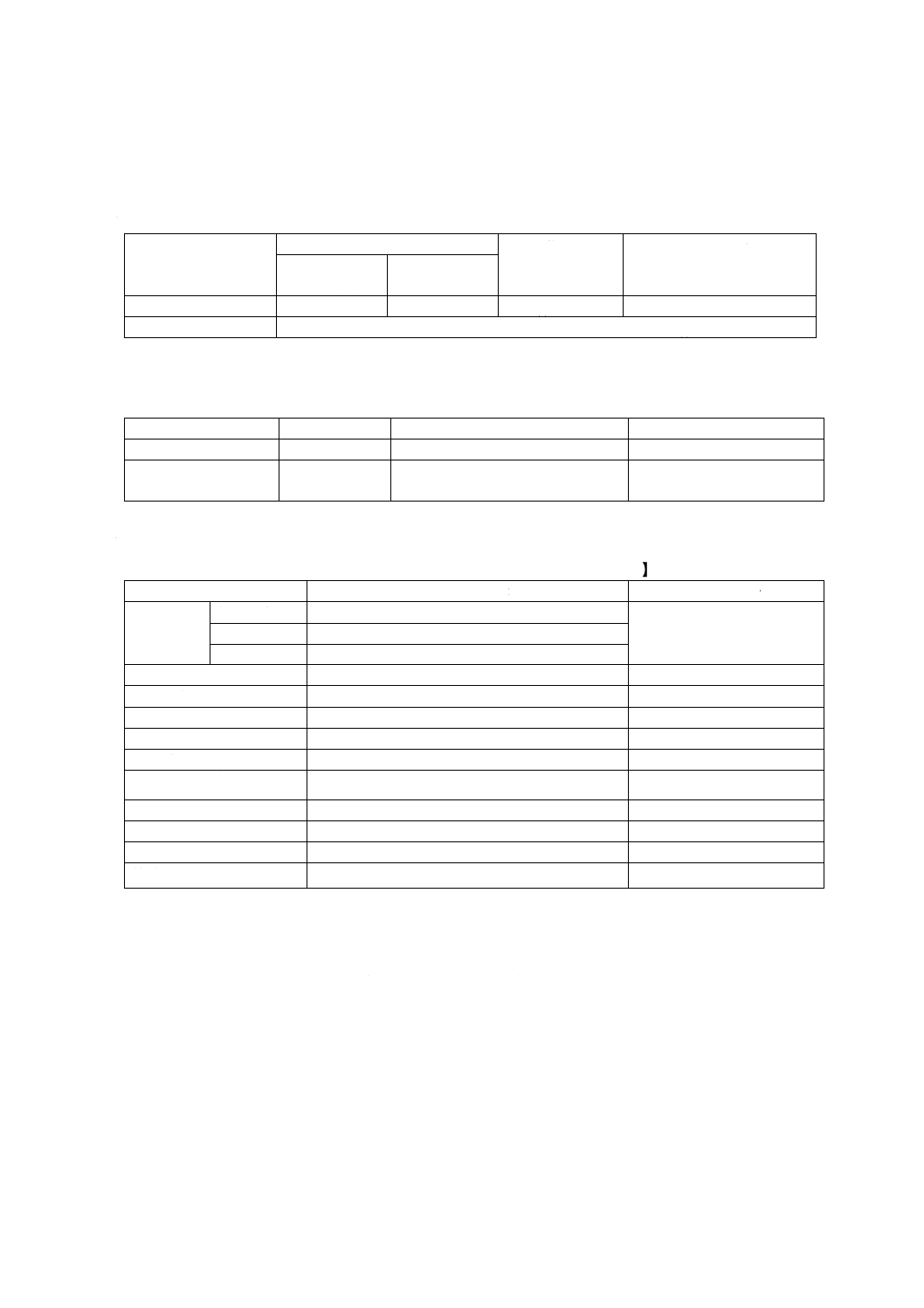
5.3.2
船位
1) 標準 緯度,経度や使用される測地系,出来れば本船の測位装置として指定された電子測位装置
(EPFS)又は統合化航法装置(INS)から得るものとする。記録の再生時には,記録信号源や装置
の状態が常に確認できなければならない。船位は,できれば,0.0001分の分解能より悪くない値で
記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
船位
5.4.2
4.6.2
GNS/DTM
センテンス 船位
測地系データ
$--GNS,hhmmss.ss,III.II,a,yyyyy.yy,a,c---c,xx,x.x,x.x,x.x,x.x,x.x*hh<CR><LF>
$--DTM,ccc,a,x.x,a,x.x,a,x.x,ccc*hh<CR><LF>
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
船位
IEC 61162
GGA,GLL,RMC等
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
8
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
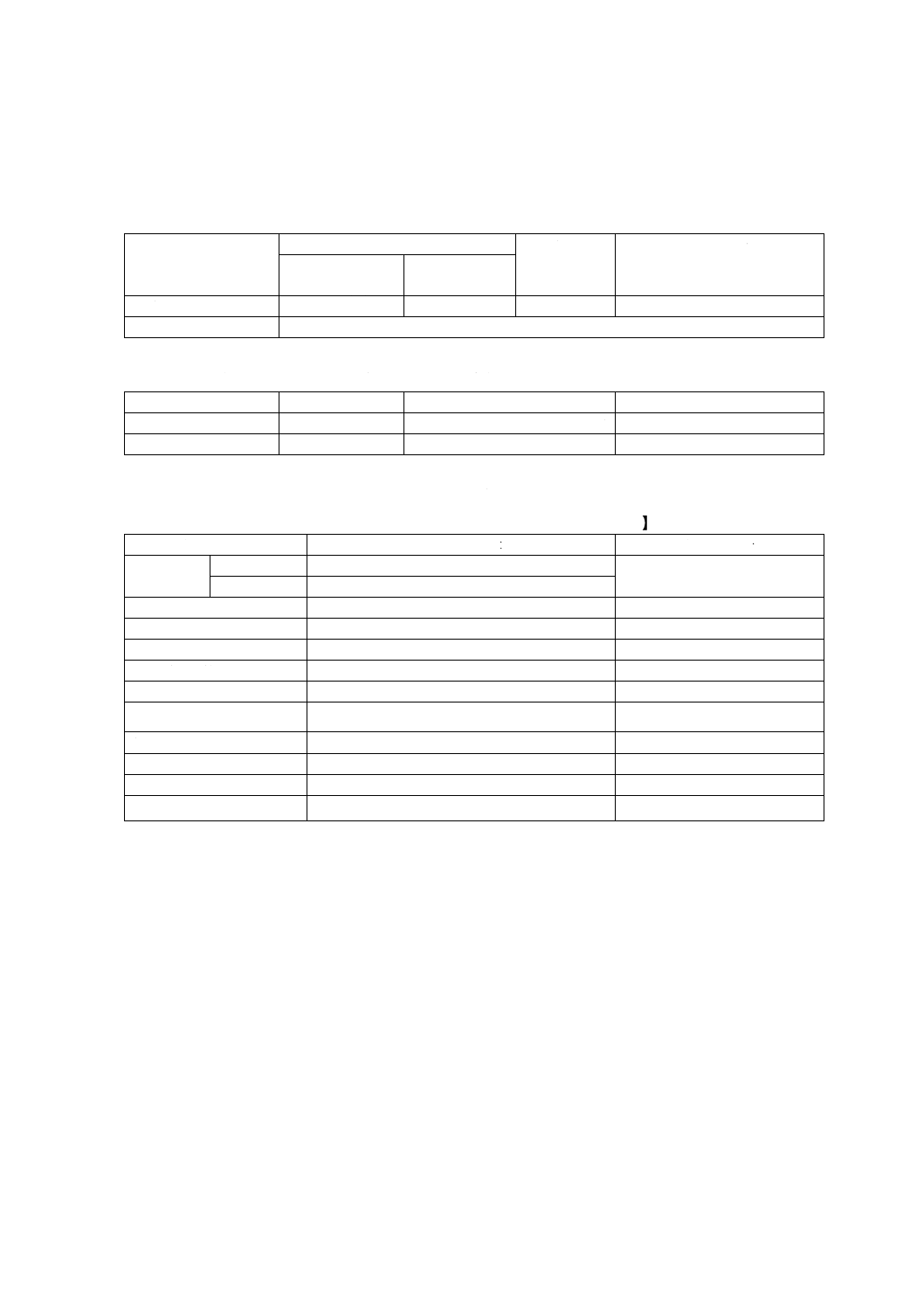
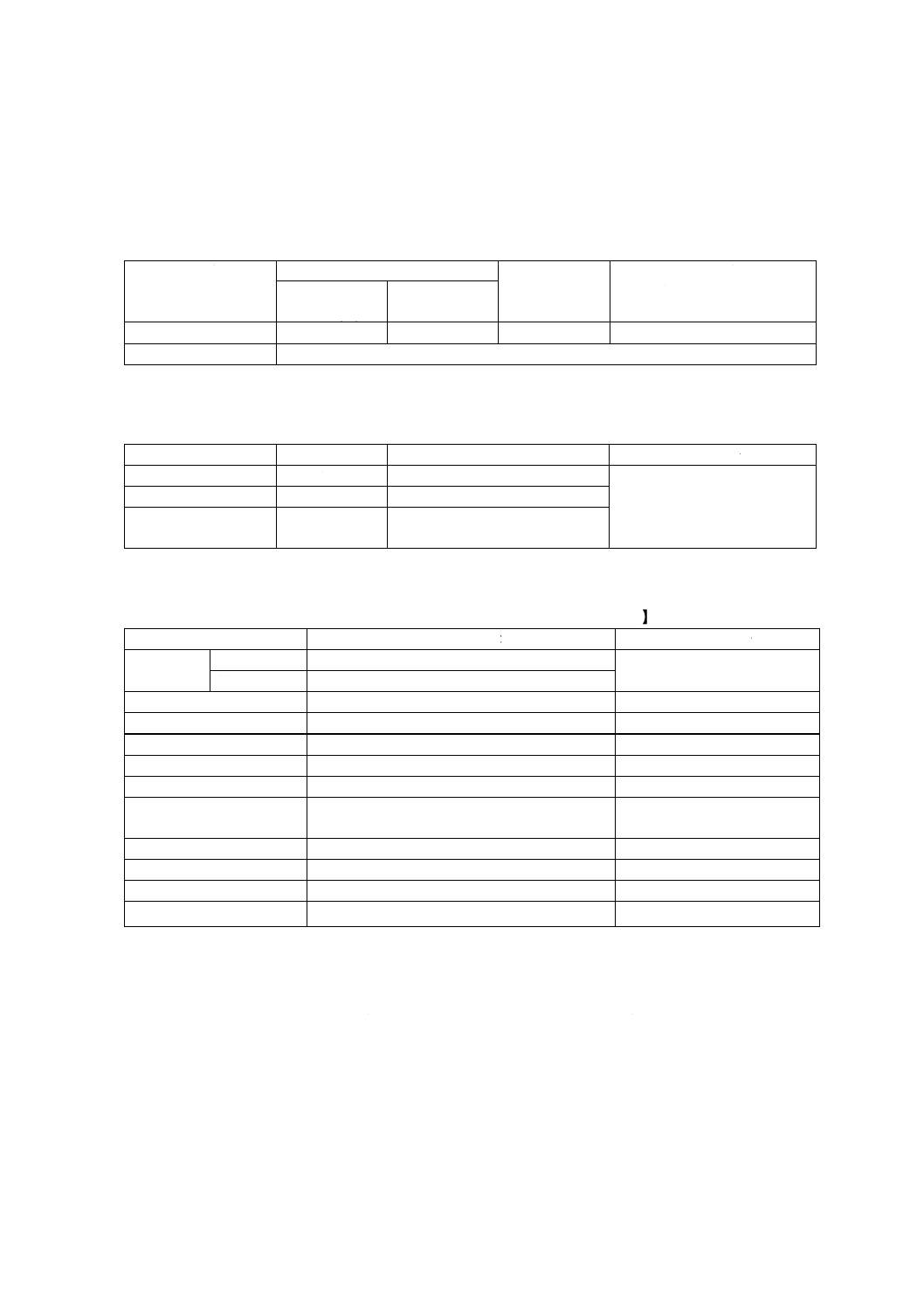
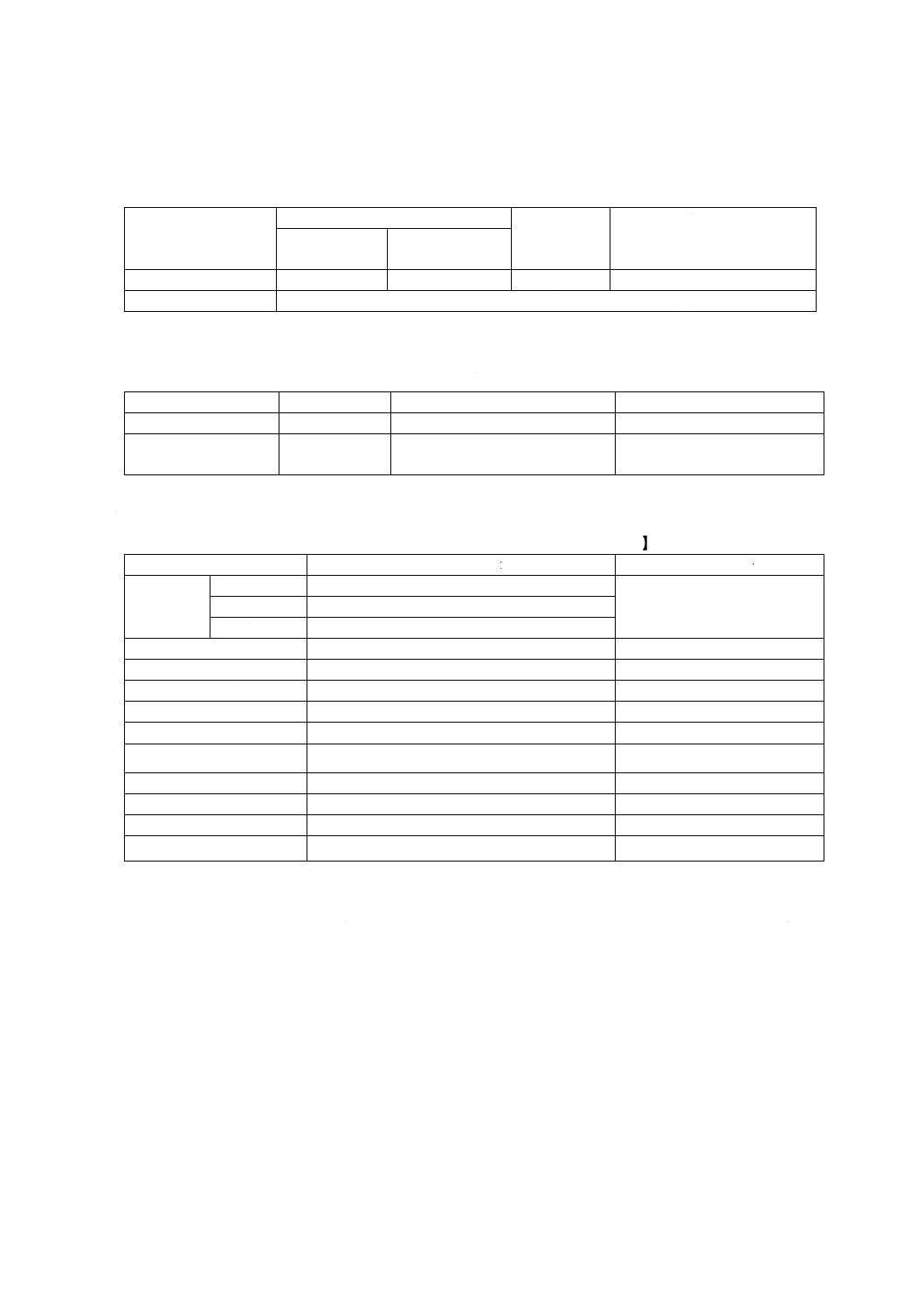
5.3.3
船速
1) 標準 本船の船速距離計として指定された装置から得られる対水又は対地(できれば前後方向同様,
横方向も)速度は,できれば0.1ノットの分解能より悪くない値で記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
船速(対水又は対地) 5.4.3
4.6.3
VBW
センテンス
$--VBW,x.x,x.x,A,x.x,x.x,A,x.x,A,x.x*hh<CR><LF>
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
パルス信号
200p/nm,400p/nm等
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
9
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
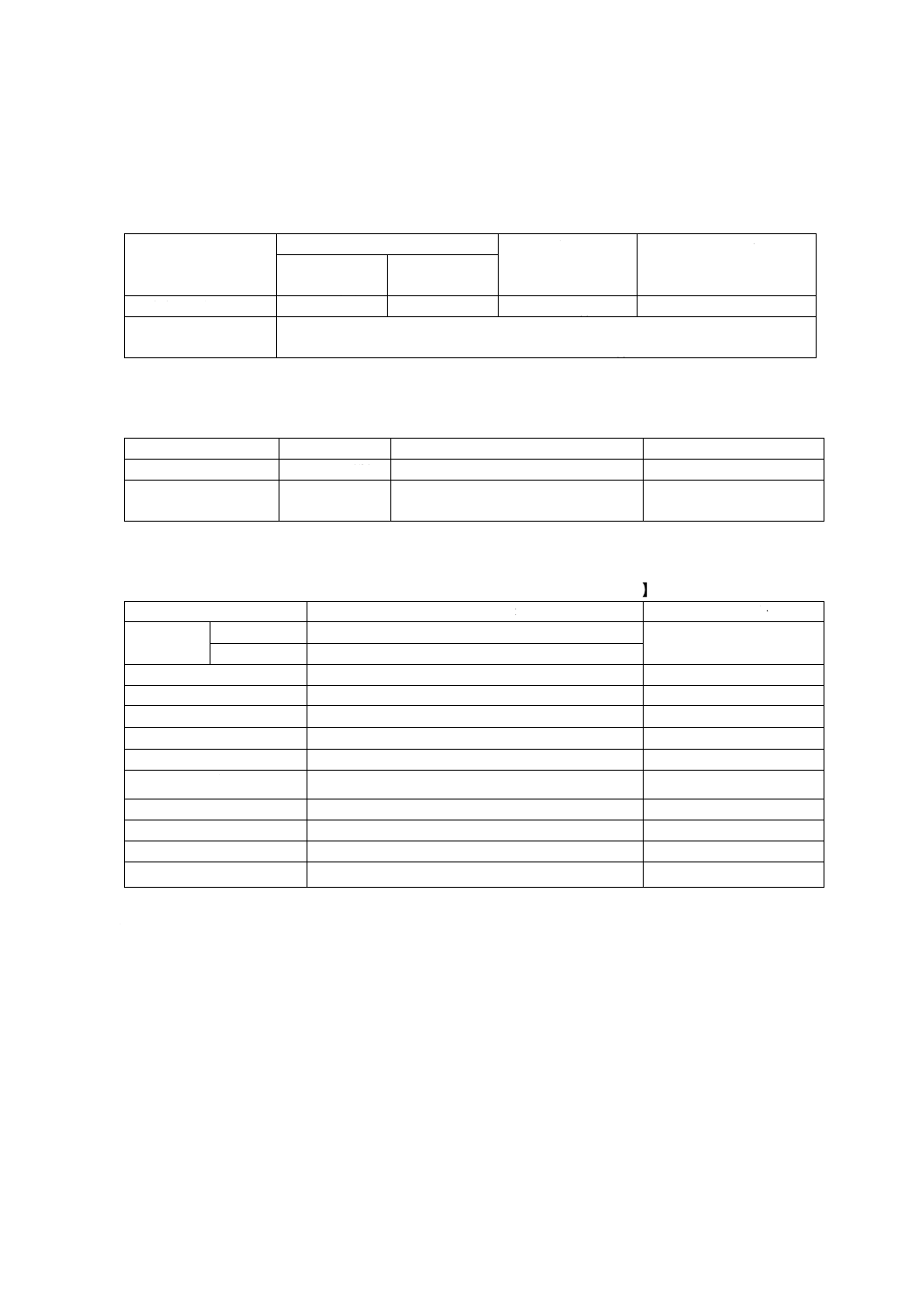
5.3.4
船首方位
1) 標準 本船のコンパスとして指定された装置によって表示される船首方位は,できれば0.1度の分
解能より悪くない値で記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態
IMO決議
A.861(20)
IEC 61996
船首方位(真方位)
5.4.4
4.6.4
HDT/HDG
センテンス
ジャイロコンパス
マグネットコンパス
$--HDT,x.x,T*hh<CR><LF>
$--HDG,x.x,x.x,a,x.x,a*hh<CR><LF>
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
製造業者センテンス
NMEA
専有センテンス(1)
信号電圧 V
シンクロ信号
360X,180X,90X,36X,1X等
1次電圧: V, Hz
ステップ信号
360X,180X,90X,36X,1X
電圧:24V,35V,50V,70V等
注(1) 専有センテンス:NMEA基準で,製造業者が独自に作成し,NMEAに届をしたセンテンス。
(例 センテンス:$Paaa.・・・*<CR><LF> )
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
10
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.5
船橋音響
1) 標準 船橋に置かれる,一つ又は複数のマイクロフォンの位置は,船橋指揮位置,レーダ指示器,
海図机等(すなわち,3.1.9で定義する船橋ワークステーション)での会話が十分に記録されるよう
に,マイクロフォンの集音範囲を考慮して配置されなければならない。マイクロフォンの配置は,
できる限りインターフォンの入出力,船内指令装置,及び船橋(船橋装置機器)(IEC 61996の5.6
の技術特性を参照)での可聴警報が取り込めなければならない。すべてのマイクロフォンは,耳障
りでない自然音で,少なくとも12時間に1回機能性の実証ができなければならない(IEC 61996の
6.1.10 c)による)。すべてのワークステーションにおける音響信号は連続的に記録されることとする。
オプションとして,記録された情報の再現中に解析される音響信号で,音源のワークステーション
が識別できる手段が設けられてよい。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
船橋可聴音
(可聴信号)
5.4.5
4.6.5
なし
センテンス
なし
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
該当なし
3) 実態 マイクロフォンは通常複数個が装備されることが考えられ,装備場所の確認を行う必要があ
る。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
船橋配置図の確認
入力端子までの電線長
電線の種類・心数
接続事項
その他
マイクのセルフチェック機能の有無
11
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.6
VHF送受信音声信号
1) 標準 船の運航に関連するVHF通信は,船橋音響とは独立して記録されるものとする。記録は送信
及び受信音声双方を記録されなければならない。そして,VHF装置の装備時(IEC 61996の5.7の
技術特性参照)に指定されたVHF装置に直接接続された装置(VHF遠隔管制器等)から連続して
記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
VHF送受信信号
(可聴信号)
5.4.6
4.6.6
なし
センテンス
なし
VHF出力信号
IEC 61097-7
0.775V RMS (600Ω)
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
特になし
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
5) VHF送受信機は通常2台装備されている。船によっては3台装備されている場合がある。複数の
VHF送信機をVDRに接続する場合,それぞれのVHF送受信機の信号確認を行う。
12
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.7
レーダ指示器画像
1) 標準 船内に装備されたレーダ装置の内,実際に主レーダ指示器に表示されていた電子信号情報を
記録するものとする。主レーダ指示器に表示されている電子信号情報は次のデータを含む(表示可
能な場合)。
−
レンジリング,マーカー,方位マーカー
−
電子的なプロット記号,レーダマップ
−
選択されたSENCの一部,表示されている電子海図又はマップ
−
航路計画
−
航海データ(レーダ指示器で見られるように表示されているもの)
−
航海上の警報(レーダ指示器で見られるように表示されているもの)
−
レーダの状態データ(レーダ指示器で見られるように表示されているもの)
記録方法は,VDRの作動に必要な画像圧縮技術を使った場合でも,記録時にレーダ指示器に表示
されていた画像を忠実に再生できるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議の信号形態)
IMO決議
A.861(20)
IEC 61996
レーダ表示器画像
画像
記録間隔:1回/15秒
又は以下(IEC 61996
の5.8.1.1による)
5.4.7
4.6.7
なし
センテンス
なし
画像分解能(画素数) 640×350から1 280×1 024
リフレッシュ間隔
60Hzから85Hz
信号種類
R,G,B,V,H
信号レベル
1V以下
2) レーダ指示器の仕様には,VESA DMTSによるもの,及び製造業者仕様のものに対応する必要があ
り,走査線方式の例を下表に示す。
走査線方式
信号形式
備考
1
ノンインターレース(1)
R,G,B V/H各独立
2
ノンインターレース(1)
R,G,B V/HはGに重畳
3
インターレース(2)
R,G,B V/H各独立
4
インターレース(2)
R,G,B V/HはGに重畳
5
その他
複合形式
・NTSC(日本,米国のテレビの走査方式)
・PAL(欧州のテレビの走査方式)等
注(1) ノンインターレース: パソコン等の表示器で使用されている VESA DMTS方式のもので,す
べての走査線を上から順に下へ描いていく方式。
注(2) インターレース: テレビで使用されている走査線方式で,走査線を奇数行,偶数行の走査線を
分けて描く方式。
13
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
5) IEC 61996では装備されている主レーダ指示器をVDRに接続することが示されている。レーダ指示
器のVDRとの接続台数に関しては,特に言及されていないが,1台又は複数のレーダ指示器をVDR
に接続することが考えられる。IEC 61996に従ったVDRではレーダ指示器の接続台数が1台のもの
があり,従って,複数のレーダ指示器をVDRに接続する場合は,VDRの仕様を確認することが望
ましい。また,1台のレーダ指示器を接続する場合は,レーダ指示器の選択が必要である。
14
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.8
水深
1) 標準 キール下水深は,できれば,分解能0.1mより悪くない値で記録されるものとする。また,で
きれば表示されている深度スケールや他の状態データも記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
深度
5.4.8
4.6.8
DPT
センテンス
$--DPT,x.x,x.x,x.x*hh<CR><LF>
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
アナログ信号
電圧:±10V等
電流:4-20mA等
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
15
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.9
船橋における警報
1) 標準 船橋におけるIMO要求警報(IEC 61996の附属書Bに示される)の状態を記録する。できる
なら,船橋警報を可聴音として記録し,また,データとしても記録されるものとする。IEC 61996
の附属書Bの概要を6)の警報一覧表で示す。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
警報,日付・時刻
5.4.9
4.6.9
ALR(1)
センテンス
$--ALR,hhmmss.ss,xxx,A,A,c---c*hh<CR><LF>(1)
注(1) ALRが示されているが,ALRを出力しない装置があると思われるので確認が必要と考える。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
備 考
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
接点信号
無電圧 接点信号
電圧信号
AC/DC V,
(警報時信号の電圧等)
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
6)の表に協議後の信号形式を
記入
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
16
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5) 各船級対応 船橋警報に関する各船級の考え方は,一応基本的な部分では一致していると考えられ
る。つまり,IMO決議A.686(17)とその変更分IMO決議A.830(19)及びSOLASで要求されている船
橋での警報が基本であることである。しかし,船級によっては若干警報の解釈の仕方が異なる部分
が見られるので,基本的な警報の他,船級としての考え方を確認しておくことが必要と考えられる。
特にタンカーや高速船等については船級で考え方が異なっていることも考えられる。また,船籍国
によっても解釈が異なる可能性があるので確認が必要であると考えられる。
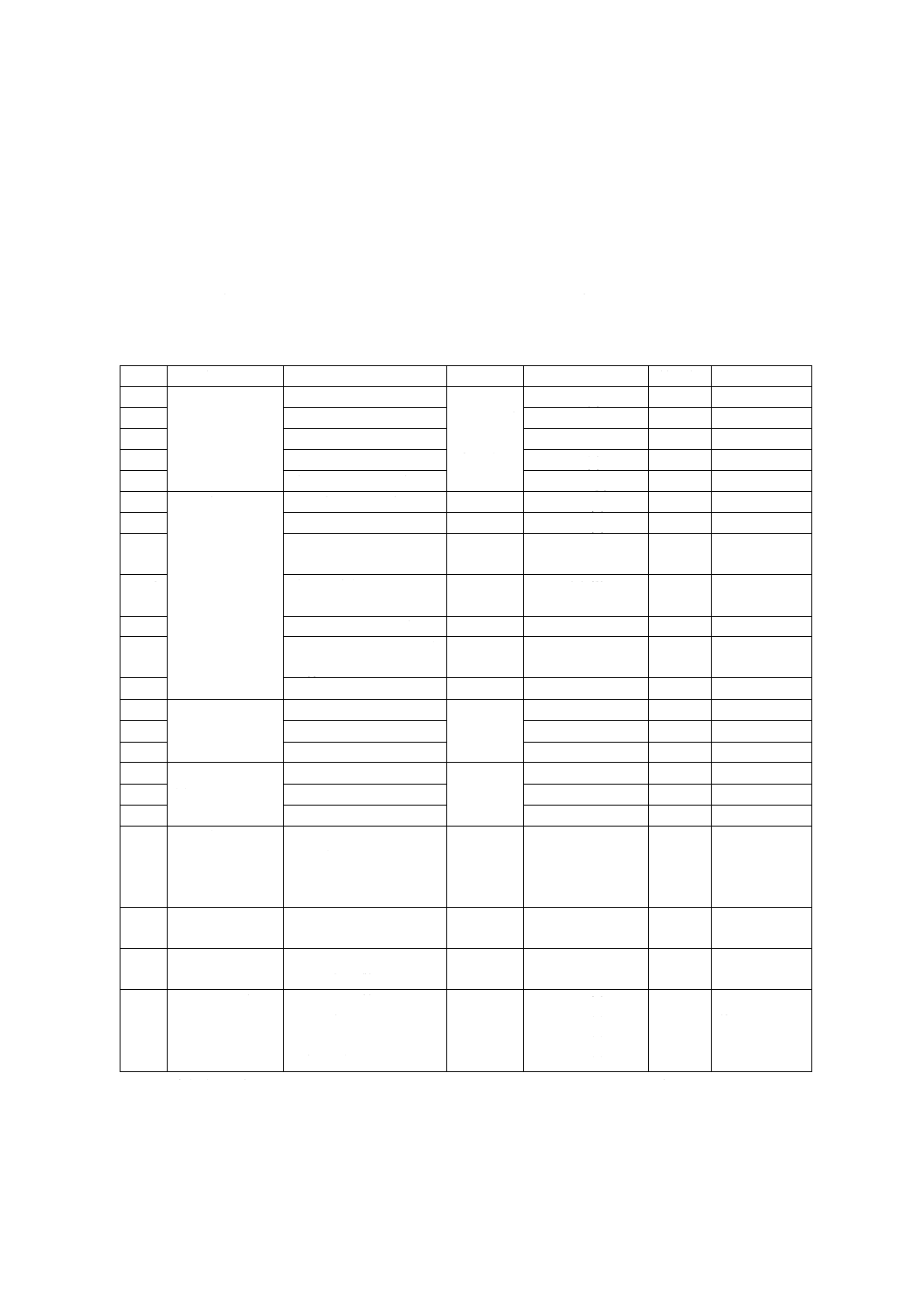
6) IEC 61996で示されている警報一覧(協議用チェックリストとして使用可能)。
番号
信号源
主警報
備考
SOLAS番号
接続数
協議後の信号
1 舵取機
故障・電源喪失
舵取機ユ
ニットご
とに警報
が必要
Ⅱ-1 29.5(2)
2
過負荷(含む短絡)
Ⅱ-1 30.3
3
欠相
Ⅱ-1 30.3
4
制御電源喪失
Ⅱ-1 29.8(4)
5
油圧タンクレベル低
Ⅱ-1 29.12(2)
6 主機遠隔操縦装
置等
主機遠隔操縦異常
Ⅱ-1 31.2.(7)/49.5
7
主機始動空気圧低下
Ⅱ-1 31.2.(9)/49.7
8
主機・主ボイラー等
自動危急停止
Ⅱ-1 52
9
機関当直員の呼出が必
要な警報
Ⅱ-1 51.1.(3)
10
機関警報装置電源喪失
Ⅱ-1 51.2.2
11
ビルジタンク高水位警
報(1)
Ⅱ-1 21.1.6.2
12
パーソナル警報
A.481附属書2 7.3
13 水密動力滑り戸
作動油タンク液面低下
旅客船に
適用
Ⅱ-1 15.7.3.(1)
14
作動油圧低下
Ⅱ-1 15.7.3.(1)
15
動力電源喪失
Ⅱ-1 15.7.8
16 船体開口監視装
置
外板付戸 開警報
Ro‐Ro
旅客船に
適用
Ⅱ-1 23-2.1
17
閉鎖 不完全警報
Ⅱ-1 23-2.1
18
特殊区域への漏水警報
Ⅱ-1 23-2.2
19 火災警報装置
故障・動力喪失
火災警報
(機関室火災警報以外)
機関室火災警報
Ⅱ-2 13.1.2
Ⅱ-2 13.1.5/13.1.6
Ⅱ-2 11.8/14.2
20 自動スプリンク
ラー装置
装置故障警報
作動警報
Ⅱ-2 12.1.2
Ⅱ-2 12.1.2.1/2
21 試料抽出煙探知
装置
電源喪失
可燃物探知警報
Ⅱ-2 13-1.1.3
Ⅱ-2 13-1.4.6
22 ハロン消火装置
ハロンガス放出
ガス圧低下
電源喪失
空気圧/水圧低下
Ⅱ-2 5.3.4(3)
Ⅱ-2 5.3.3(8)
Ⅱ-2 5.3.3(2)
Ⅱ-2 5.3.3(3)
1992年以降
使用不可とな
っている。
注(1) 横傾斜5度以下で,隔壁甲板又はフリーボード甲板が水没する船の場合,隔壁甲板,フリーボ
ード甲板以上の閉鎖された貨物区画の排水処理を行うタンクの高水位警報を示す。
17
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.10 操だ(舵)指令と応答
5.3.10.1 操だ(舵)指令と応答(自動:HCS又はTCSが搭載されている場合)
1) 標準 だ(舵)角の指令値,応答値は,できれば分解能1度より悪くない値で記録されるものとす
る。ヘディングコントロールシステム(HCS)又はトラックコントロールシステム(TCS)が装備
されている場合は,その状態や設定値も記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
操だ(舵)指令・応答(自動) 5.4.10
4.6.10
HTC/HTD(1)
センテンス
$--HTC,A,x.x,a,a,a,x.x,x.x,x.x,x.x,x.x,x.x,x,a,*hh<CR><LF>(1)
$--HTD,A,x.x,a,a,a,x.x,x.x,x.x,x.x,x.x,x.x,x,a,A,A,A,x.x*hh<CR><LF>(1)
注(1) HTC/HTDはオーダーフィールドで応答フィールドがない(IEC 61996の附属書A参照)。従っ
て,応答はシリアル信号(RSA)で取り出すか,又は,実だ(舵)角指示信号を別途取り出す
必要がある。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
シンクロ信号
360X,180X,90X,36X,1X
1次電圧:V, Hz
ステップ信号
360X,180X,90X,36X,1X
電圧35V,50V,70V等
アナログ信号
電圧:±10V 等
電流:4-20mA 等
操縦モード
接点信号等
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
18
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.10.2 操だ(舵)指令と応答(手動:HCS 又はTCSが搭載されてない場合)
1) 標準 だ(舵)角の指令値,応答値は,できれば分解能1度より悪くない値で記録されるものとす
る。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
だ(舵)角指令・応答(手動) 5.4.10
4.6.10
RSA(1)
センテンス
$--RSA,x.x, A, x.x, A*hh<CR><LF>(1)
注(1) RSAに指令フィールドがない(応答だけ)ため,指令信号センテンスの確認が必要と考えられ
る。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
シンクロ信号
360X,180X,90X,36X,1X
1次電圧:V, Hz等
ステップ信号
360X,180X,90X,36X,1X
電圧35V,50V,70V等
アナログ信号
電圧:±10V等
電流:4-20mA等
操縦モード
接点信号等
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
19
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.11 主機指令と応答/スラスタ指令と応答 エンジンテレグラフのすべてのハンドル位置又は直接主
機回転数制御信号,プロペラ回転数・翼角制御信号及びフィードバック指示値が記録されるものとする。
また,前進・後進表示がある場合は,その記録も含まれるものとする。もし装備されていれば他に,バウ
スラスタ,スターンスラスタの状態も記録されるものとする。回転数(RPM)の分解能は1r.p.m,翼角の
ピッチ分解能は1度より悪くない値でそれぞれ記録されるものとする。
5.3.11.1 主機指令と応答
1) 標準
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
主機指令・応答
5.4.11
4.6.11
RPM/XDR(1)
センテンス
$--RPM,a,x,x.x,x.x,A*hh<CR><LF>(1)
$--XDR,a,x.x,a,c---c,…………a,x.x,c---c*hh<CR><LF>(1)
注(1) RPMは応答だけである。XDRはこの信号用途のものではないため,センテンスの確認が必要
と考えられる。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
基準
信号仕様
協議後の信号形態
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
アナログ信号
電圧:±10V等
電流:4-20mA等
接点信号
無電圧接点信号
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
20
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.11.2 スラスタ指令と応答
1) 標準
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形態)
IMO決議
A.861(20)
IEC 61996
スラスタ指令・応答
5.4.11
4.6.11
RPM/XDR(1)
センテンス
$--RPM,a,x,x.x,x.x,A*hh<CR><LF>(1)
$--XDR,a,x.x,a,c---c,…………a,x.x,c---c*hh<CR><LF>(1)
注(1) RPMは応答だけである。XDRはこの信号用途のものではないため,センテンスの確認が必要
と考えられる。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
要求基準
信号仕様
協議後の信号形式
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
アナログ信号
電圧:±10V等
電流:4-20mA等
接点信号
無電圧接点信号
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
21
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.12 船体開口状態
1) 標準 IMOによって船橋に表示することが要求される船体開口(戸)の状態が記録されるものとす
る。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形式)
IMO決議
A.861(20)
IEC 61996
船体開口状態
5.4.12
4.6.12
XDR(1)
センテンス
$--XDR,a,x.x,a,c---c,…………a,x.x,c---c*hh<CR><LF>(1)
注(1) XDRはこの信号用途のものではないため,センテンスの確認が必要と考えられる。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
要求基準
信号仕様
協議後の信号形式
製造業者センテンス
NMEA
専有センテンス:信号電圧 V
接点信号
無電圧 接点信号
(警報時 On or Off)
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
船体開口部名の一覧表を作成する。
信号の確認を行う。
場所
信号数
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
22
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.13 水密戸・防火戸状態
5.3.13.1 水密戸状態
1) 標準 IMOによって船橋に表示することが要求される水密戸の開閉状態が記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形式)
IMO決議
A.861(20)
IEC 61996
水密戸状態
5.4.13
4.6.13
XDR(1)
センテンス
$--XDR,a,x.x,a,c---c,…………a,x.x,c---c*hh<CR><LF>(1)
注(1) XDRはこの信号用途のものではないため,センテンスの確認が必要と考えられる。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
要求基準
信号仕様
協議後の信号形式
製造業者センテンス
専有センテンス:信号電圧 V
接点信号
無電圧 接点信号
(警報時 On or Off)
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
水密戸の一覧表を作成する。
信号の確認を行う。
場所
信号数
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
23
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.13.2 防火戸状態
1) 標準 IMOによって船橋に表示することが要求される防火戸の開閉状態が記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形式)
IMO決議
A.861(20)
IEC 61996
防火戸状態
5.4.13
4.6.13
XDR(1)
センテンス
$--XDR,a,x.x,a,c---c,…………a,x.x,c---c*hh<CR><LF>(1)
注(1) XDRはこの信号用途のものではないため,センテンスの確認が必要と考えられる。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
要求基準
信号仕様
協議後の信号形式
製造業者センテンス
専有センテンス:信号電圧 V
接点信号
無電圧 接点信号
(警報時 On or Off)
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
防火戸の一覧表を作成する。信
号の確認を行う。
場所
信号数
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続事項
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
24
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.14 加速度と船体応力
1) 標準 船体の応力・加速度監視装置が装備されている場合は,装置内であらかじめ設定された可能
なすべてのデータ項目が記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形式)
IMO決議
A.861(20)
IEC 61996
加速度・船体応力
5.4.14
4.6.14
XDR,ALR(1)
センテンス
$--XDR,a,x.x,a,c---c,…………a,x.x,c---c*hh<CR><LF>(1)
$--ALR,hhmmss.ss,xxx,A,A,c---c*hh<CR><LF>(1)
注(1) XDR,ALRは,この信号用途のものではないため,センテンスの確認が必要と考えられる。
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
要求基準
信号仕様
協議後の信号形式
製造業者センテンス
IEC 61162準拠
専有センテンス:信号電圧 V
アナログ信号
電圧:±10V等
電流:4-20mA等
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
25
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.15 風速と風向
1) 標準 風速と風向は,船上に適切なセンサを装備している場合に記録されるものとする。風速と風
向は相対又は真のどちらで記録されてもよいが,真か相対かの状態も記録されるものとする。
記録すべきデータ名
要求基準
IEC 61162
備 考
(協議後の信号形式)
IMO決議
A.861(20)
IEC 61996
風向・風速
5.4.15
4.6.15
MWV
センテンス
$--MWV,x.x,a,x.x,a,A*hh<CR><LF>
2) 上記の基準信号が得られない場合の代わりの参考信号を示す。
記録すべきデータ名
要求基準
信号仕様
協議後の信号形式
シンクロ信号(風向)
360X,180X,90X,36X,1X
1次電圧: V, Hz
アナログ信号(風速)
電圧:±10V等
電流:4-20mA等
3) 実態 1)の基準信号がない場合,2)の信号形式を含め確認される信号を記入する。
【確認者名: 】 【使用資料・図番: 】 【日付 】
項 目
内 容
備 考
情報源
信号形式
場所
製造会社(情報供給者)
機器型式
インタフェース適用基準
バージョン等の識別
ヘッダ
センテンス詳細
信号出力間隔
入力端子までの電線長
電線の種類・心数
接続
4) 上記1),2)に該当する信号が出ていない(予備の信号も含め)場合は,上記1),2)を参考に出力信
号の仕様を当事者間で決め,協議した仕様を3)に記入する。この時,VDR入力信号の形式(含む代
替信号形式)が分かっている場合は,それに対応した信号を選択する方がよい。
26
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6. 設置要領 VDR本体とは,信号処理器,マイクロフォン,カプセル及び本体の附属品(接続用電線を
除く)をいう。装備要件は IMO決議A.861(20)及びIEC 61996による。VDRとセンサ等との各接続イン
タフェースは,5.により確認されることとする。
1) VDR供給電源 VDRへは,本船の主電源及び非常電源から供給することが要求されている。ただ
し,センサとなる機器の電源に関しては,ここでは取り扱わない。各センサに求められる要件に準
じる。
2) VDR機器装備の確認項目
No.
確認項目
取付けの条件等
備考
1
機器
①操作,メンテナンススペース
②取付け要領
③装備場所
・VDR本体及び附属機器すべてを
対象とする。
・製造業者推奨の作業スペースの確
保。
2 電線
①電線曲げ
②電線径等
③電線導入部スペース等
・VDR本体及び附属機器すべてを
対象とする。
・電線が集中する機器配置の配慮。
動力線との間隔,伝導・放射等ノイ
ズへの配慮要。
3 機器接続方法
①電線種類
②接続方法
(a)端子接続
(b)コネクタ接続
VDR本体及び附属機器すべてを対
象とする。
4 カプセルの装備
①装備場所
②取付け要領
③マグネットコンパスとの距離
船橋の外側で船体中心に近い場所。
5 その他
3) マイクロフォンの装備 IEC 61996によるマイクロフォンの装備場所として,船橋ワークステーシ
ョンが示され,通常は複数の装備が必要と考えられる。(船橋ワークステーションについては,3.
を参照)
No.
確認項目
取付け条件等
備考
1 装備台数
台
2 装備場所
1.
2.
3.
4.
5.
装備個数が5個以上の場合左欄の
“取付け条件等”の項を増やして使
用のこと
27
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7. 再生装置要件 再生装置は,最終記録媒体と記録時に使用される記録形式等と対応可能で,記録され
たデータの再生時に使用されるものである。本船から分離・回収されたカプセルからのデータ再生に関し
て,IEC 61996の5.5.3に記述されており,公的事故解析機関が対応できるように,次の事項が要求される。
a) 調査機関がカプセル内の最終記録媒体から,記録されたデータの読み出しができる特殊工具や記録器
へ接続できる機器の準備ができる様手順書の準備。
b) カプセル内の記録媒体からのデータの読み出し。
1) 破損していないカプセルから記録データを取り出す(読み出す)ための手順書の準備。
2) 事故等で破損したカプセルから記録データを取り出す(読み出す)ための手順書の準備。
c) 記録データを読み出すソフトウェアに関する説明書の準備。
記録されたデータの再生方法としては,2つのケースが考えられる。1つは,通常の運用の中で,最
終記録媒体から,便宜的に記録データを読み出すもの,もう1つは,海難事故後にカプセルを回収し
て最終記録媒体から直接記録データを読み出すものである。
最終記録媒体に関しては,本体データ処理装置と共にカプセルを独自で準備しているVDR製造業
者と,カプセルだけをカプセル製造業者から購入し,独自のデータ処理装置と組み合わせてVDRと
して供給するVDR製造業者とがある。
記録媒体からのデータの読み出しに関しては,VDR作動状態で記録媒体から記録されているデータ
を読み出す方法として,通常,VDRの標準のチェック機能として装備されていると考えられ,必要に
応じ記録データの読み出し確認が可能であると考えられる。記録データの読み出しは,最終記録媒体
に記録するために送り込むデータを読み出すものと,実際にカプセル内の最終記録媒体に記録保存さ
れたデータを読み出すもの,又は,その両方が可能なものがある。
VDRを販売した者(造船所を含む)は,後に,カプセル内に保存されたデータを再生させるための
準備として,次の例に沿った事項を船主又は調査機関に明示することを推奨する。
1) カプセルへの電源供給を含め信号線の種別及び電気条件。
2) データ解読のための装置。
カプセルの栓口から直接配線をしてデータを読みとる場合のインタフェース,又はハードディスク
にロードする場合のディスクドライブの条件等。
ただし,この装置がない場合,国内の販売店又は製造工場で当該装置の使用を保証できるところの
明示。
3) 解読のためのソフトウェアが供給できる場合は,その媒体(例えば,CD-ROM等)が作動可能な環
境(コンピュータのCPU作動速度,空きメモリ容量,OS等)の明示。
4) このソフトウェアを有償で提供される場合は,その旨の明示。
5) 納入したVDRを装備した船舶が調査対象となった場合に,データ解読の技術的な問い合わせに備
えて,責任ある対応部署の連絡先の明示。
6) 外国船籍の場合,又は調査機関が国外の場合で,その国に該当する指示事項があるかどうかの確認
事項。
28
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
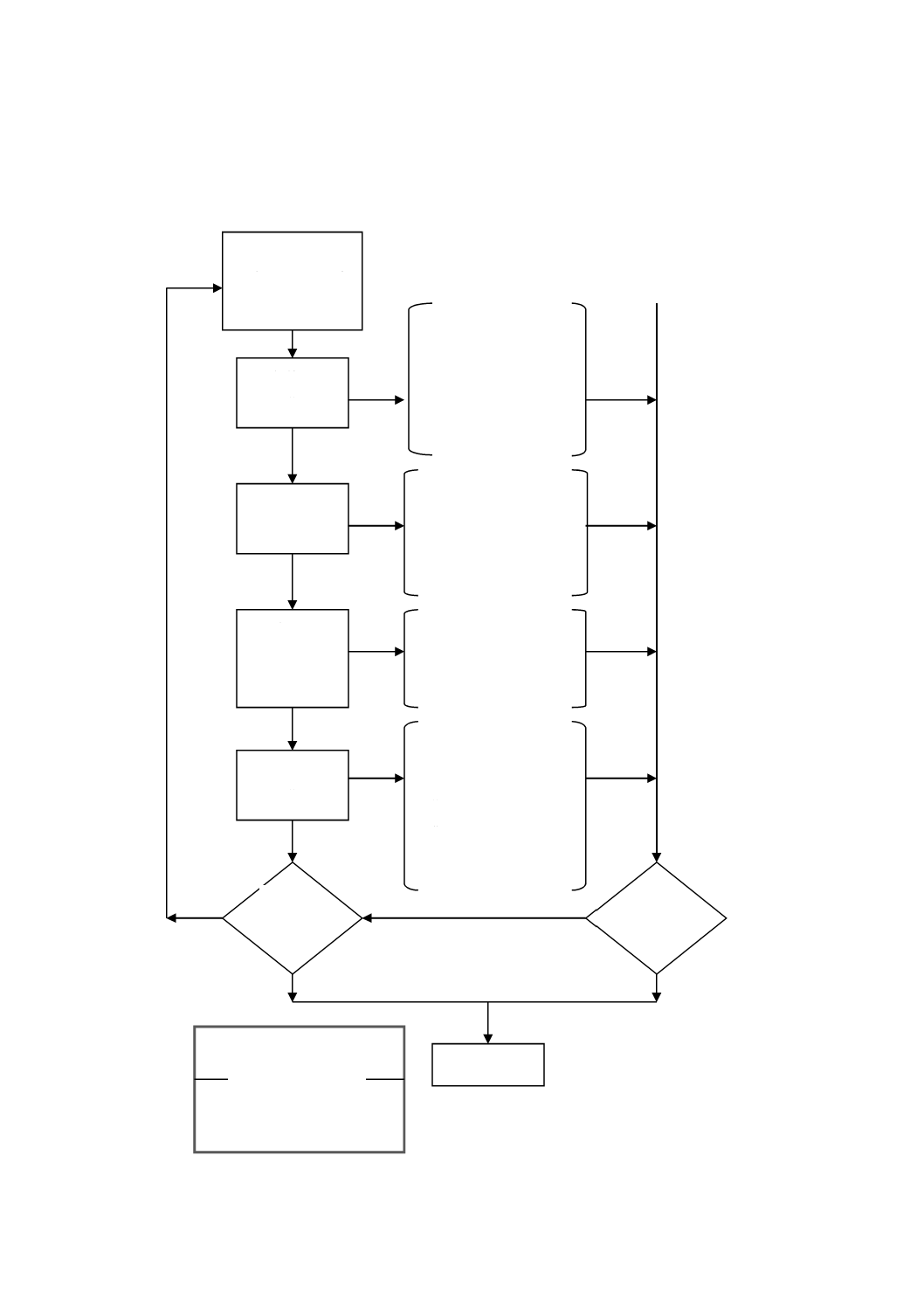
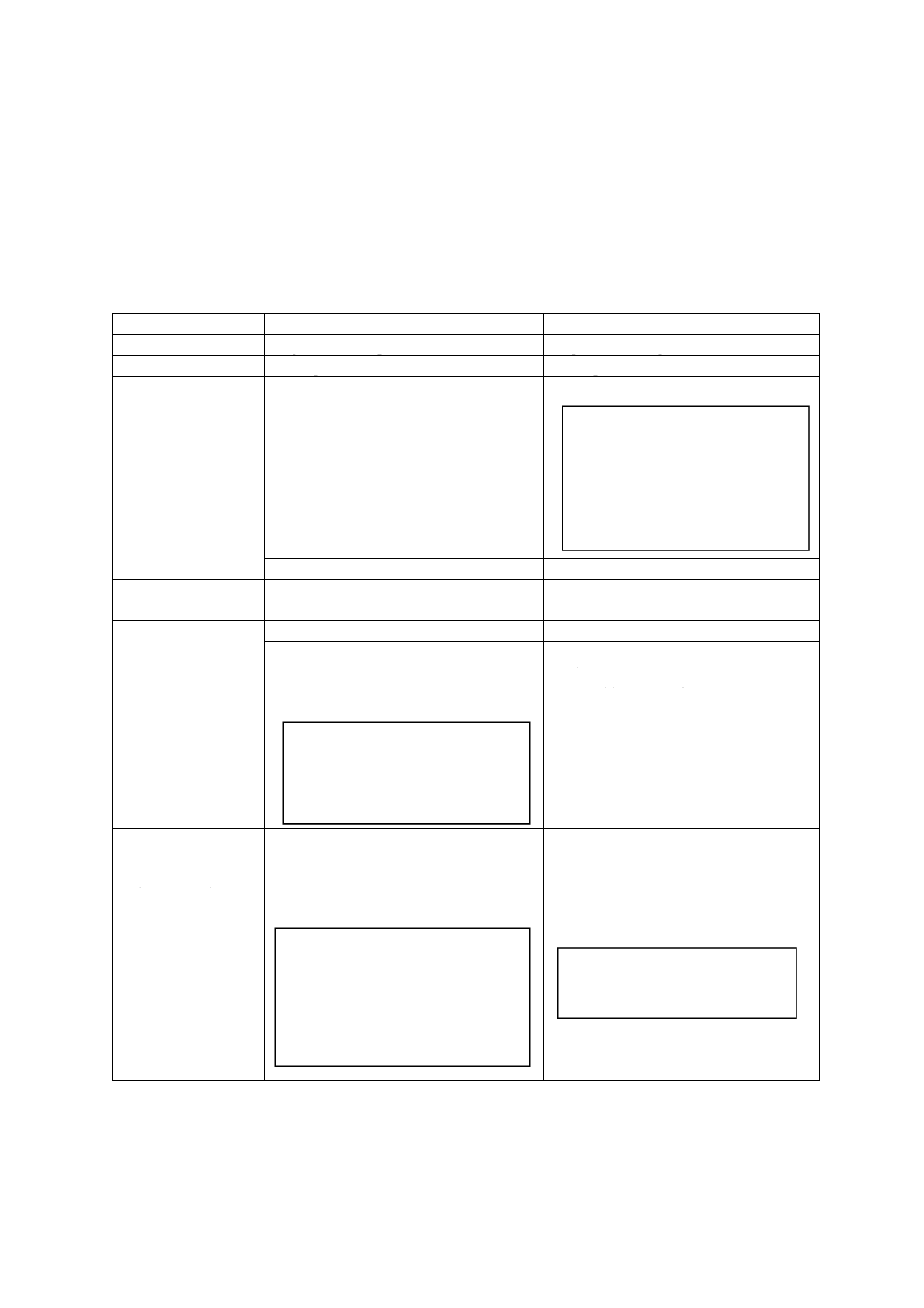
8. インタフェース難度判定指標 SOLAS第V章の20規則では,“主管庁は,Ro-Ro客船を除く2002年
7月1日以前に建造された船舶に対して,現存設備とVDRとのインタフェースが不合理かつ現実的でない
ことが証明される場合は,VDRの装備を免除することができる”と規定しているが,このインタフェース
することが不合理かつ現実的でない事例を挙げ判定の指標とする。
VDRへ信号を供給する機器とVDR本体とのインタフェースの難易度の具体的な判定は,実現するため
の技術レベルと,改造に要する手間と費用が大きな要素となるが,この要因は製品別の開発時期や国際標
準の発効時期,生産ロット,利用者要求による改造等,各製造業者の実態によることが多い。インタフェ
ースの問題は信号を送る側と受ける側の仕様の相違によるものである。相違については次図に示すように
各種の形態があるが,更に,違いがあった場合にどの程度の違いかの正しい判定の根拠を明らかにし,当
事者同士共通の理解をすることと,場合によっては検査当局に,その理由を説明する必要がある。
既存機器との接続に際しては,それらの機器が物理的に接続端子を用意しているか,用意できる場合に,
電気的又はソフトウェア的に対応できるか,その変更,改造によって従来機能に影響を及ぼさないか等等
の技術的な問題と,実施者は誰か,費用負担は誰か,今後も含め品質保証の責任所掌範囲はどう定めるの
か等を明確にして実施する必要がある。解決策基準を設けるとすれば,開発及び市場投入時期,影響度(他
の同一信号受信機器),費用,カタログ表示,マニュアルの性能限界記述等が目安になるのではないかと思
う。このため基礎資料は製品ごとの製造業者提出のデータが必要となる。
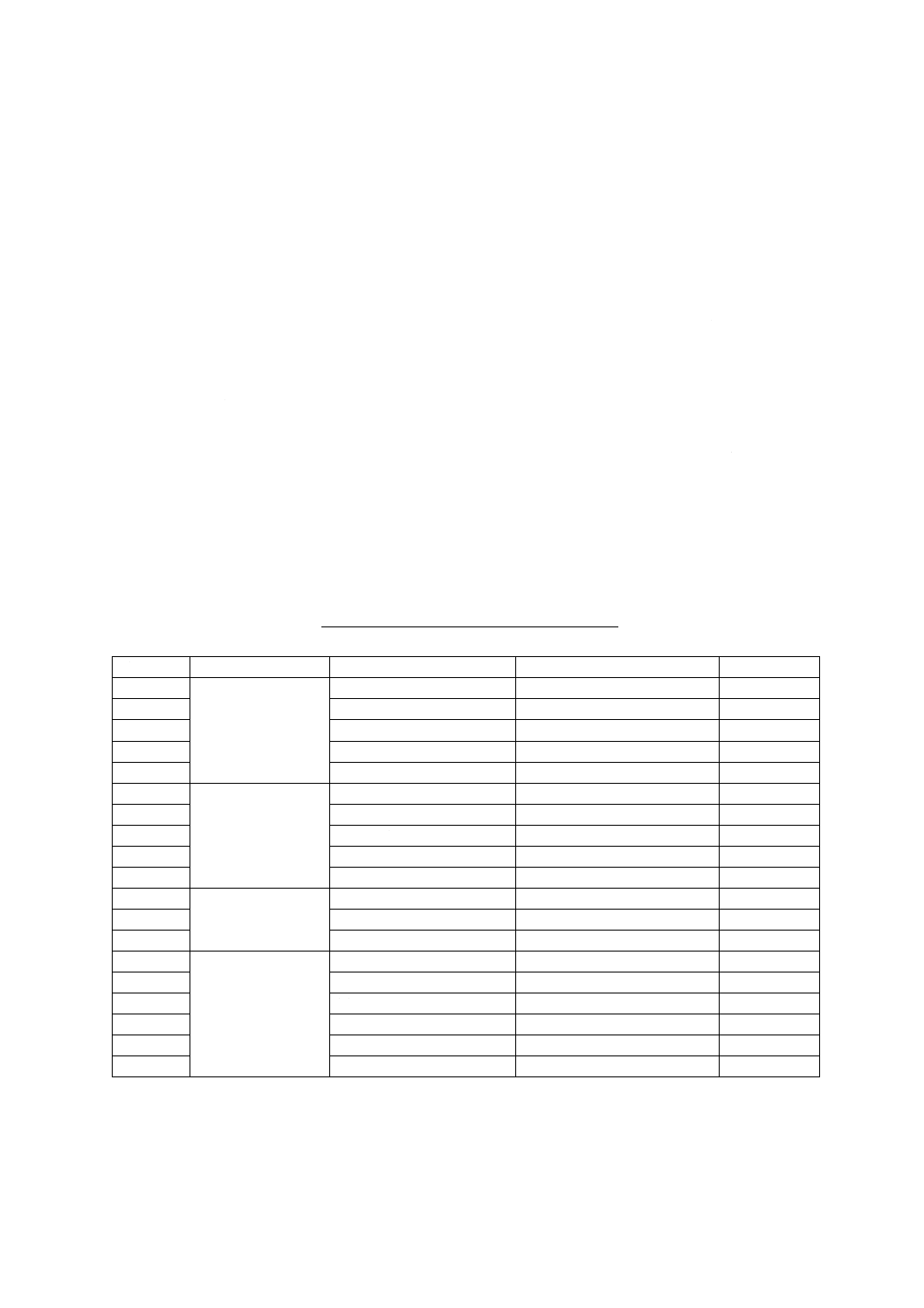
インタフェース不具合対策チェックシート
チェック
相違の性質
困難要因・理由
対処方法(記述欄)
結論
1-1
電気的特性
電気的信号源がない
1-2
アイソレーション
1-3
電線長
1-4
電圧・電流レベル
1-5
分解能・直線性・再現性
2-1
ソフトウェア
フォーマット
2-2
センテンス
2-3
ビットチェック
2-4
シリアル伝送
2-5
ソフトプログラム
3-1
構造・機構
ハードウェア
材料・部品
3-2
構造・スペース
3-3
型式承認品
4-1
その他
互換性
4-2
同一シリーズ
4-3
同一ロット
4-4
後のメンテナンス
4-5
費用対効果
4-6
型式検定再受検
29
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
VDR規定による製
造者明示との相違
の分類
電気的特性
要因
ソフトウェア
要因
構造・機構
ハードウェア
要因
その他の
要因
不可能
電気的信号源がない
アイソレーション
電線長
電圧・電流レベル
分解能・直線性・再現性
フォーマット
センテンス
ビットチェック
シリアル伝送
ソフトプログラム
材料・部品
構造・スペース
型式承認品
互換性
同一シリーズ
同一ロット
後のメンテナンス
費用対効果
型式検定再受検
受け入れ
られる程度か?
難しい
ができるか?
No
No
[困難な理由]
[変更の可能性]
[VDR入力インタフェース条件]
確認又は承認者
30
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1(参考)VDRで使用されるIEC 61162-1及びIEC 61162-2で規定
されているセンテンスの説明
この附属書(参考)は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではな
い。
1. 承認センテンス(Approved Sentence)共通部説明
承認センテンス(Approved Sentence)共通部説明
① ② ③ ④ ⑤⑥ ⑦
$ aaccc , ・・・・・・・・・・・・・・* hh <CR><LF>
ASCⅡ
HEX
説明
①
$
24
センテンスの始まり,スタート区切り記号。
②
aaccc
アドレスフィールド
英数字でトーカの識別とセンテンスの形式を示す。最初の2文
字がトーカの識別,次の3文字がデータの型と連続するフィー
ルドの一連の書式を識別するセンテンスの形式コード。同コー
ドは使用者によって読み出しを容易にするために用いられる。
③
“,”
2C
フィールドの区切り記号
アドレスフィールドとチェックサムフィールドを除いて各フィ
ールドの先頭に付く。又ヌルフィールドではフィールド内にデ
ータはないことを示す。
④
c---c
データセンテンスブロック
アドレスフィールドに続く。送信されるデータのすべてを含む
一連のデータフィールドの並びは固定である。アドレスフィー
ルドの3文字によって識別される。データフィールドは可変長
の場合もある。“,”で区切られている。
⑤
“*”
2A
チェックサムの区切り記号
最後のデータフィールドの後に付く。チェックサムの16進数値
を示す2文字が次に来る。
⑥
hh
チェックサムフィールド
センテンス内の各文字(“$”と“*”を除く)の8データビットにつ
いてExclusive−ORを計算した結果の絶対値。上位4ビットと下位4
ビットをそれぞれ2つのASCⅡ文字で表している。上位ビットが先に
送信される。チェックサムフィールドは必ず挿入する。
⑦
<CR><LF>
0D0A
センテンスの終わり
センテンスのエンド区切り記号
31
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2. 承認センテンス説明
1) ZDA:日付と時刻 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
ZDA
① ② ③ ④ ⑤ ⑥
$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh<CR><LF>
① UTC
② Day (01-31) (UTC)
③ Month (01-12) (UTC)
④ Year (UTC)
⑤ UTCに対する地域時間差(時)
⑥ UTCに対する地域時間差(分)
2) GNS:GNSSの測位データ センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
GNS
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ⑪ ⑫
$--GNS,hhmmss.ss,III.II,a,yyyyy.yy,a,c---c,xx,x.x,x.x,x.x,x.x,x.x*hh<CR><LF>
① 測位時のUTC
② 緯度
③ N/S
④ 経度
⑤ E/W
⑥ モード
⑦ 使用衛星数(00-99)
⑧ HDOP(水平面内精度低下率)
⑨ アンテナ高さ(平均海面値レベル)
⑩ 地球面誤差(平均海水面と地球だ(楕)円面の差)
⑪ ディファレンシャルデータの経過時間
⑫ ディファレンシャル局の識別番号
3) DTM:位置データの参照測地系 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
DTM
① ② ③ ④ ⑤ ⑥ ⑦ ⑧
$--DTM,ccc,a,x.x,a,x.x,a,x.x,ccc*hh<CR><LF>
① 測地系データ(例:W84→WGS84を示す)
② 測地系補助データ
③ 緯度オフセット値
④ N/S
⑤ 経度オフセット値
⑥ E/W
⑦ 高さの補正値(m)
⑧ 参照測地系データ
32
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4) VBW:対水速力と対地速力 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
VBW
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩
$--VBW,x.x,x.x,A,x.x,x.x,A,x.x,A,x.x,A,*hh<CR><LF>
① 船首尾方向対水船速(ノット)
② 横方向対水船速(ノット)
③ 対水速度状態(A:データ有効 又は V:データ無効)
④ 船首尾方向対地船速(ノット)
⑤ 横方向対地船速(ノット)
⑥ 対地速度状態(A:データ有効 又は V:データ無効)
⑦ 船尾横方向対水速度(ノット)
⑧ 船尾対水速度状態(A:データ有効 又は V:データ無効)
⑨ 船尾横方向対地速度(ノット)
⑩ 船尾対地速度状態(A:データ有効 又は V:データ無効)
5) HDT:船首方位(真方位) センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
HDT
① ②
$--HDT,x.x,T*hh<CR><LF>
① 船首方位(度)
② True
6) HDG:船首方位(磁気方位,自差と偏差) センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
HDG
① ② ③ ④ ⑤
$--HDG,x.x,x.x,a,x.x,a*hh<CR><LF>
① 磁気センサ船首方位(度)
② 自差
③ E/W
④ 偏差
⑤ E/W
7) DPT:水深 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
DPT
① ② ③
$--DPT,x.x,x.x,x.x*hh<CR><LF>
① 深度(送受信器からの深さ,m)
② (a)+: 送受信器と海面間距離, (b)-: 送受信器とキール間距離
③ 使用レンジの最大値
8) ALR:セットした警報の状態 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
ALR
① ② ③ ④ ⑤
$--ALR,hhmmss.ss,xxx,A,A,c---c*hh<CR><LF>
① 警報状態変化時のUTC
② 警報番号
③ 警報状態(基準値内 又は 基準値オーバー)
④ 警報認知(Acknowledge)
⑤ 警報に関する記述(text)
33
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9) RSA:実だ(舵)角 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
RSA
① ② ③ ④
$--RSA,x.x,A,x.x,A*hh<CR><LF>
① 右舷機角(又は単独機の場合)
② 状態(A:データ有効 又は V:データ無効)
③ 左弦機角
④ 状態(A:データ有効 又は V:データ無効)
10) HTC:船首方位又は航路保持装置への指令 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
HTC
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ⑪ ⑫ ⑬
$--HTC,A,x.x,a,a,a,x.x,x.x,x.x,x.x,x.x,x.x,x.x,a*hh<CR><LF>
① Override (A:Override, V:Not override)
② だ(舵)角指示値 (度)
③ だ(舵)角方向(L:port(左), R:starboard(右))
④ 操だ(舵)モード(M:Manual,H:Heading Control,T:Track Control,R:External Control)
⑤ 旋回モード(R:Radius, T:Turn rate, N:旋回制御なし)
⑥ だ(舵)角制限角(度)
⑦ 指示船首方位離脱制限値(度)
⑧ 指示旋回Radius(n.miles)
⑨ 指示旋回レート(度/min)
⑩ 指示船首方位(度)
⑪ 指示船首方位離脱距離制限値(n.miles)
⑫ トラックコントロール 指示コース
⑬ 現在船首方位(度)
11) HTD:船首方位又は航路保持装置のデータ センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
HTD
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ⑪ ⑫ ⑬ ⑭ ⑮ ⑯ ⑰
$--HTC,A,x.x,a,a,a,x.x,x.x,x.x,x.x,x.x,x.x,x.x,a,A,A,A,x.x*hh<CR><LF>
① Override (A:Override, V:Not override)
② だ(舵)角指示値(度)
③ だ(舵)角方向(L:port(左),R:starboard(右))
④ 操だ(舵)モード(M:Manual,H:Heading Control,T:Track Control,R:External Control)
⑤ 旋回モード(R:Radius, T:Turn rate, N:旋回制御なし)
⑥ だ(舵)角制限角(度)
⑦ 指示船首方位離脱制限値(度)
⑧ 指示旋回Radius(n.miles)
⑨ 指示旋回レート(度/min)
⑩ 指示船首方位(度)
⑪ 指示船首方位離脱距離制限値(n.miles)
⑫ トラックコントロール 指示コース
⑬ 船首方位参考(T/M)
⑭ 舵状態(A:制限だ(舵)角値以内,V:制限だ(舵)角値又は以上)
⑮ 船首方位離脱状態(A:制限方位値以内,V:制限方位値又は以上)
⑯ コース離脱状態(A:制限距離値以内,V:制限距離値又は以上)
⑰ 現在船首方位(度)
34
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12) RPM:回転数 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
RPM
① ② ③ ④ ⑤
$--RPM,a,x,x.x,x.x,A*hh<CR><LF>
① 軸/主機の区別 (S/Eのどちらかが入る)
② 軸/主機の数(船体中心線に表示:偶数:左舷機,奇数:右舷機,0:1台又はセンター機)
③ 回転数(rpm)
④ プロペラピッチ角(最大値の%表示)
⑤ 状態(A:データ有効 V:データ無効)
13) XDR:トランスデューサデータ センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
XDR
① ② ③ ④ ⑤ ⑥ ⑦ ⑧
$--XDR,a,x.x,a,c---c,…………a,x.x,a,c---c*hh<CR><LF>
① トランスデューサ 型式 (No.1)
② トランスデューサ データ(No.1) トランスデューサ No.1データ
③ データ単位(No.1)
④ トランスデューサ 識別符号(No.1)
⑤ トランスデューサ 型式 (No.n)
⑥ トランスデューサ データ(No.n) トランスデューサ No.nデータ
⑦ データ単位(No.n)
⑧ トランスデューサ 識別符号(No.n)
14) MWV:風速と風向 センテンス先頭部と最終部は附属書1の1.を参照。
センテンス
MWV
① ② ③ ④ ⑤
$--MWV,x.x,a,x.x,a,A*hh<CR><LF>
① 風向(0度から359度)
② 真・相対(T or R)
③ 風速
④ K=Knot, M=m/s, N=knots
⑤ 状態(A:データ有効 V:データ無効)
①から④はトランスデューサの数が
挿入される
35
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2(参考)IEC 61162-1とIEC 61162-2の対比表
この附属書(参考)は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではな
い。
項目
IEC 61162-1
IEC 61162-2
通信方式
Single Taker/Multiple Listeners
Single Taker/Multiple Listeners
通信速度
4 800 bps
38.4 kbps
送信器仕様
ITU-T X.27/V.11
ITU-T V.11(EIA-485仕様も認める)
平衡信号回路(ITU-T X.27/V.11)
平衡信号回路(ITU-T V.11)
最大センテンス文字
数
82文字
同左
最大相間電圧
6.0 V (ITU-T X.27/V.11)
6.0V (ITU-T V.11)
受信器の耐電圧
古い送信機器では出力電圧15Vのものが
あり,受信器ではこの電圧15Vに耐えるも
のとする。
同左
ただし,ITU-T V.11では受信器は電圧
12Vに耐えるものとなっている
受信器仕様
最低差動電圧等:2.0V,
流れる電流は2.0mAとする
最低差動電圧等:ITU-T V.11による
−0.3V〜+0.3V(高インピーダンス)
コネクタの規定
なし
なし
使用電線
2心導線(信号A,B)+シールド
3心導線(信号A,B,C(common))+シ
ールド
同左
シールドは送信器のシャーシに接続
し,受信器側ではシールドは接続しな
い。受信器が同じ送信器に複数接続さ
れている場合,各受信器用電線のシー
ルドは送信器のシャーシに接続し,連
続した状態とする。
古いものには,ロジック電圧
(“0”:+4V,+15V)
(“1”:−15V,0.5V)
を使用しているものがあるため。
EIA-485による基準電圧
送信器電圧:
1.5V〜5V (2.0V〜10V *)
受信器最低差動電圧:
−0.2V〜+0.2V *
(*:EIA-422の数値を示す)
36
F 9005:2004
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
IEC 60068-2-27:1987,
Environmental testing - Part 2: Tests - Test Ea and guidance shock
IEC 60068-16:1988,
Sound system equipment - Part 16: objective rating of speech intelligibility by speech
transmission index
IEC 60651:1979,
Sound level meters
IEC 60945:1996,
Marine Navigation and radiocommunication equipment and system - General
requirements - Methods of testing and required test results
IEC 61097-2:1994,
Global maritime distress and safety system (GMDSS) - Part 2: COSPAS-SARSAT
EPIRB - Satellite emergency position indicating radio beacon operating on 406 MHz
- Operational and performance requirements,methods of testing and required test
results
IEC 61907-5:1997,
Global maritime distress and safety system (GMDSS) - Part 5: Inmarsat-E - EPIRB -
Satellite emergency position indicating radio beacon operating on 406 MHz -
Operational and performance requirements,methods of testing and required test
results
IEC 61260:1995,
Electroacoustics - Octave-band and fractional - octave - band filters
IMO決議A.658:1989, Use and fitting of retro-reflective materials on life-saving appliances
IMO決議A.662:1989, Performance standards for float-free release and activation arrangements for
emergency radio equipment
IMO決議A.689:1991, Testing of life saving appliances
IMO決議A.694:1991, General requirements for shipborne radio equipment forming part of the Global
maritime distress and safety system (GMDSS) and for electronic navigational aids
IMO決議A.810:1995, Performance standards for float-free satellite emergency position - Indicating radio
beacons(EPIRBs) operating on 406 MHz
IMO決議A.812:1995, Performance standards for float-free satellite emergency position - Indicating radio
beacons (EPIRBs) operating through the geostationary INMARSAT satellite system
on 1.6 GHz
IMO決議A.961:1997, Performance standard for shipborne voyage data recorders (VDRs)
ITU-R M.632-3:1997,
Transmission characteristics of a satellite emergency position indicating radio Beacon
(satellite EPIRB) system operating through geostationary satellite in the 1.6GHz band
ITR-U M.633-1:1990,
Transmission characteristics of a satellite emergency position-indicating radio beacon
(satellite EPIRB) system operating through a low-orbiting satellite system in the 406
MHz band
Eurocae: ED56A
Minimum operational performance specification (MOPS) for cockpit voice
SAE AS8045: 1988,
Engineering Society for advancing mobility land sea air and space - Minimum
performance standard for underwater locating devices - acoustic - self - powered
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。