7
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
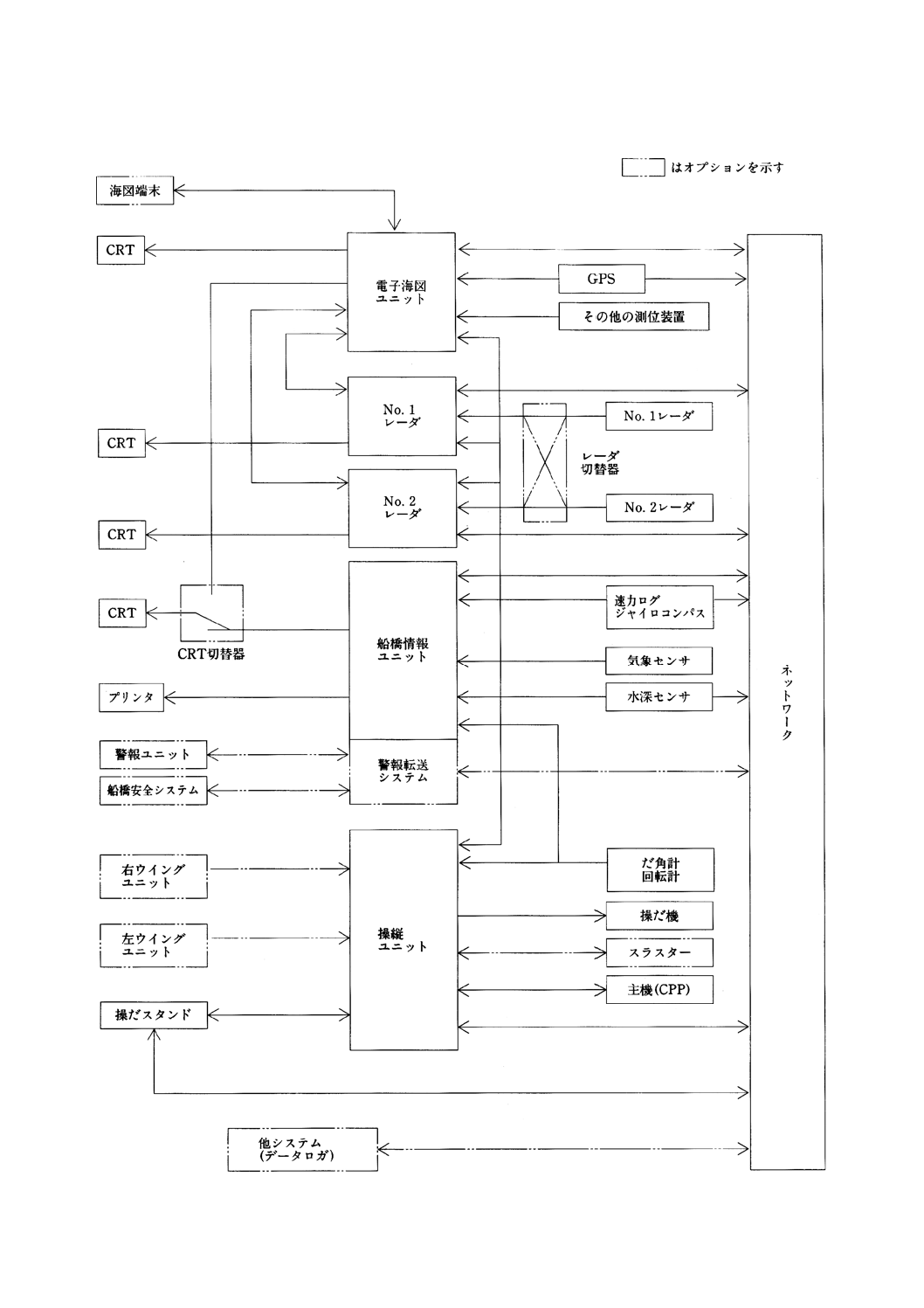
図1 システムブロック図
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 9002-1997
統合ブリッジシステム−
設計指針
Shipbuilding−Guidelines for design of integrated bridge systems
1. 適用範囲 この設計指針は,700総トン以上の内航船及び外航船に搭載する統合ブリッジシステム(以
下,システムという。)に必要な機能,操作,機器構成,レイアウト及び機器間接続について規定する。
備考1. トラッキング機能については,附属書1による。
2. 船橋情報(主として警報)については,附属書2による。
3. マン・マシン・インターフェイスについては,附属書3による。
4. ブリッジレイアウトについては,附属書4による。
5. この規格の引用規格を,次に示す。
JIS F 0417 船用警報‐等級
JIS X 0201 7ビット及び8ビットの情報交換用符号化文字集合
IEC 945 Marine navigational equipment − General requirements − Methods of testing and required test
results
IEC 1162 Maritime navigation and radiocommunication equipment and systems−Digital interfaces
IEC 1162-1 Maritime navigation and radiocommunication equipment and systems−Digital interfaces Part 1 :
Single talker and multiple listeners
IMO Resolution A224(7) Performance standards for echo sounding equipment
IMO Resolution A342(9) Performance standards for automatic pilots
IMO Resolution A422(11) Performance standards for automatic radar plotting aids
IMO Resolution A424(11) Performance standards for gyro compasses
IMO Resolution A477(12) Performance standards for radar equipment
IMO Resolution A478(12) Performance standards for devices to indicate speed and distance
IMO Resolution A686(17) Code on alarms and indicators
IMO Resolution A817(19) Performance standards for electronic chart display and information systems
2. 用語の定義 この規格で用いる主な用語の定義は,次のとおりとする。
(1) 統合ブリッジシステム 統合ブリッジシステムは,システムを構成するセンサ又は機器を統合し,主
に操作場所で集中的に操作できるようにしたシステム。
(2) トラッキング航行 あらかじめ設定された航路に沿って,定められた偏差の範囲内で自動的に航行す
る方法。
(3) 電子海図 内容・構成・フォーマットについて,標準化されている海図に関するデータベースのこと
2
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
をいう。
備考1. データベースとは,複数の適用業務分野を支援するデータの集まりであって,データの特性
とそれに対応する実体との間の関係を記述した概念的な構造に沿って編成されたものをいう。
2. ENC (electronic navigational chart),ERC (electronic reference chart) などがある。
(4) 電子海図ユニット 電子海図を表示させる装置。
備考 IMO (1) で規定されたECDIS (electronic chart display and information system),ECS(electronic chart
system,簡易電子海図表示装置ともいう。)などがある。
注(1) International maritime organizationの略語。
(5) オーバライド トラッキング航行又は自動航行中に,手動操作にモードを切り換えずに,操だ(舵)
スタンド以外の場所で手動で操船できる機能。
(6) ウイングユニット 着離桟時,ウイングで操船する場合に必要な操船機能と操船に必要な情報とを表
示するユニット。
3. 基本要求事項 システムの基本要求事項を,次に示す。
(1) 構成機器 システムを構成する各機器は,IMO要求事項を満たしていること。
また,耐環境性能は,IEC 945に準じること。
(2) 操作 システムを構成する機器のマン・マシン・インターフェイスは,附属書3に従って統一された
思想に基づいて設計されていること。システムの基本機能は簡単な操作で行え,一定の有資格者(2)が
特別な教育訓練なしに操船に関する基本機能を使えるように設計されていること。
また,システムを理解し,十分な性能が発揮できるような手段(取扱説明書・ビデオ・講習会など)
が用意されていること。
注(2) レーダを操作できる資格をもった者など。
(3) 安全性 主要構成機器は,自己診断機能を備えていること。
また,安全性及び信頼性の確保のため,機器の一つが故障してもシステムの基本機能を大きく損な
わないこと。
特に,操船にかかわるシステムの機能の一部が故障した場合,それに代わる機能のバックアップが
十分考慮されていること。
4. 機能要求 システムの機能は,次の4.1〜4.4による。
4.1
システムの機能 システムの機能は,運航に必要な一般機能並びに各機器が連携して一つの機能を
実現する統合機能及び各機器がもっている個別機能の3種類に分類される。
4.2
一般機能 操船場所から,次の事項を容易に行えるものとする。
(1) 船位,針路,船速,及び航跡の視認
(2) 船舶ふくそう(輻奏)度の判断
(3) 衝突回避操船の決定
(4) 変針操作
(5) 変速操作
(6) 船内通信及びVHFを使用した船外通信
(7) 汽笛信号の操作
(8) 音響信号の聴取
3
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(9) 針路,船速,プロペラ回転速度(CPPの場合は,翼角。),だ(舵)角,風向風速などの航海情報の監
視
4.3
統合機能
4.3.1
データ共有機能 データ共有機能は,次による。
(1) システム内で使用する船位・船首方位・船速などの運航にかかわるデータは,共通のデータを使用す
る。
(2) 使用している計画航路を複数のブラウン管 (CRT) で表示する場合には,同じデータを使用して表示
する。
4.3.2
警報管理機能 システム内で発生する警報を一括管理し,可視可聴警報又は音声警報を発し,警報
発生機器を船橋情報ユニットに表示すること。
4.3.3
トラッキング航行機能 トラッキング航行機能は,次による。
(1) 計画航路に従って航路を保持できること(潮流などによるドリフトを自動的に補正すること)。
(2) 変針点に接近した場合には,接近警報を発生すること。
(3) 安全確認操作の後に,変針すること(安全確認操作を経ず自動的に変針を行わないこと)。詳細は,附
属書1による。
4.3.4
緊急操だ機能 トラッキング航行中又は自動航行中に避航操船が容易に行える手段(オーバライ
ド)を備えていること。
4.3.5
重畳機能 重畳機能は,次による。
(1) 電子海図ユニット又はレーダ上で電子海図とレーダ映像とを重畳させる機能をもつこと。この場合,
重畳させた情報は,単一操作で除去できること。
(2) 電子海図とレーダ映像を,手動又は自動で一致させる修正機能をもつこと。修正中であることを明確
に表示すること。
(3) 電子海図上に,少なくとも選択された他船の位置,進路,船速などをベクトルで表示できること。
4.3.6
船位決定機能 船位決定機能は,次による。
(1) システムは,少なくともGPS及びDGPS (differential global positionning system) を含む2台の測位装置
と接続できること。
(2) GPS及びDGPSが使用できない場合でも,他の測位装置から連続した位置情報が得られること。ジャ
イロコンパスとスピードログによる推測航法でもよいが,その場合には明確に推測航法で使用してい
ることを表示できること。
4.3.7
データ収録機能 データ収録機能は,次による。
(1) 自船航跡を,1分間隔で最低12時間前まで記録/再生できること。
(2) 時刻,位置,船首方位及び速力を1分間隔で最低12時間前まで記録し,印字できること。
4.3.8
通信機能 他のシステムとデータを共有するための通信手段をもつこと。
4.4
個別機能
4.4.1
電子海図ユニット 電子海図ユニットがECDISの場合は,次の機能を備え,IMO Resolution A817
(19)を満足すること。
(1) 電子海図表示機能
(a) 電子海図(ENCなど)を表示できること。
(b) 自船位置及び自船ベクトルを明確に表示できること。
(2) 航海計画立案機能
4
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(a) 電子海図上で計画航路を立案できること。
(b) あらかじめ立案してある航路を呼び出し利用できること。
(3) 航行監視機能
(a) 選択した航路を表示できること。
(b) 自船航跡を表示できること。
(c) 距離,方位及び緯度経度を計測できること。
4.4.2
No.1/No2レーダ レーダは,2台を装備し,次による。
なお,レーダ切替器を装備することが望ましい。
(1) レーダ機能
(a) ノースアップ,コースアップ,ヘッドアップ表示ができること。
(b) 衝突予防援助装置 (ARPA) を装備するレーダでは,真運動,相対運動表示ができること。
(c) レーダ干渉除去機能をもっていること。
(2) 衝突予防機能
(a) 少なくとも1台のレーダには,衝突予防援助装置 (ARPA) 又は簡易衝突予防援助装置 (ARPA) を装
備すること。
(b) 20物標以上捕捉できること。
(c) 手動又は自動捕捉ができること。
(3) データ出力機能 捕捉目標の方位,距離,真針路,真速度,CPA,TCPAを出力できること。
4.4.3
船橋情報ユニット 船橋情報ユニットは,次による。
(1) 船橋情報表示機能 針路,船速,プロペラ回転速度(CPPの場合は,翼角),だ角,風向・風速,水
深などの航海に必要な情報を常時一か所で得られること。このほか,船橋情報表示機能の詳細は,附
属書2による。
(2) 警報管理機能 一人当直をする場合には,4.3.2の警報管理機能のほか,次の機能を備えること。
(a) 居眠り防止機能(船橋安全システム) 定期的に当直状態を確認し,不在又は居眠りをチェックで
きること。
(b) 警報転送システム 一定時間内に警報が確認されない場合には,警報を指定場所に転送する機能を
もつこと。
(3) 画面切替え機能 少なくとも電子海図ユニットに表示される内容が,表示できることが望ましい。
4.4.4
操縦ユニット 操縦ユニットは,次による。
(1) 次の制御機能をもつこと。
(a) 船速制御(機関回転速度又はCPP翼角)機能をもつこと。
(b) 変針(針路設定など)機能をもつこと。
(2) 通信機能
(a) 機関室,操だ室などと通話できる手段としての直通電話をもつこと。
(b) 汽笛吹鳴スイッチをもつこと。
4.4.5
操だスタンド 操だスタンドは,次による。
(1) 手動操だによる変針ができること。
(2) 操だモードの切替えができること(自動操だ,手動操だ,NF,リモート)。
(3) 操だ位置から操船に必要な情報が得られること。
5
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5. 操作 各機器の操作は,附属書3による。
6. 標準システムの構成
6.1
一般 統合ブリッジシステムの標準システム構成機器は,次の6.2〜6.6によって構成する。
6.2
システムブロック図 システムのブロック図は,図1のとおりとするほか,次による。
(1) システムの主要構成品は,電子海図ユニット,No.1/No.2レーダ(レーダのうち一台は,ARPA又は簡
易ARPA付きとする。),航海情報の表示や警報管理機能を担当する船橋情報ユニット,操船に必要な
機器を装備した操縦ユニット,操だスタンド及びセンサ機器で構成する。
(2) システムの信頼性を上げるため,レーダ切替器,CRT切替器,GPS又はDGPS以外の測位装置及び2
系統の操だ装置を装備することが望ましい。
(3) 各ユニット間でデータを共有するための通信は,ネットワークを経由して必要な情報を授受するほか,
各ユニットの基本動作に不可欠な信号(船位,船首方位など)は,そのユニットと直接接続する(ネ
ットワークがダウンした場合でも,各ユニットの基本動作を可能にするため。)。
(4) 基本動作以外に必要な信号で,複数のユニットで使用する信号(水深センサなど)は,ネットワーク
に接続し,データを共有する。
(5) 航海記録や航海日誌を設定時間ごとに自動的に印字するプリンタを設置することが望ましい。
(6) 電子海図ユニットで,海図とレーダ映像を重畳する場合には,レーダユニットからアナログレーダ信
号を電子海図ユニットへ送出する。
(7) 電子海図表示ユニットとは別の場所で航海計画を立案する場合には,海図端末(プランニングターミ
ナル)を設置する。
(8) 左右ウイングユニットを設ける場合には,操縦ユニットと接続して操縦権をウイングユニットに移動
して,ウイングでも操船可能とする。この場合,操船に必要な情報は,ウイングユニット又はその近
くに表示する。
6.3
主要構成機器 主要構成機器は,次の(1)〜(6)による。
なお,(1)〜(6)の機器は,単独又は機能の複合されたものでもよい。
(1) 電子海図ユニット
参考 関連するIMO規則:IMO Resolution A817(19),ただし,ECDISの場合を示す。
(2) No.1レーダシステム
参考 関連するIMO規則:IMO Resolution A477(12)及びA422(11)。
(3) No.2レーダシステム
参考 関連するIMO規則:IMO Resolution A477(12)及びA422(11)。
(4) 船橋情報ユニット
(5) 操縦ユニット(オートパイロット,ジャイロコンパスを含む。)
参考 関連するIMO規則:IMO Resolution A342(9)及びA424(11)。
(6) 操だスタンド
6.4
センサ機器 センサ機器は,次の(1)〜(9)による。
(1) ジャイロコンパス
参考 関連するIMO規則:IMO Resolution A424(11)。
(2) 速力ログ(ドップラーログ又は電磁ログ)
参考 関連するIMO規則:IMO Resolution M478(12)。
6
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(3) GPS (DGPS) 受信機
(4) その他の測位装置(GPS,LORAN-Cなど)
(5) 水深センサ(音響測深器)
参考 関連するIMO規則:IMO ResolutionA224(7)。
(6) 気象センサ(風向,風速,気温)
なお,気圧及び湿度センサを設けることが望ましい。
(7) だ角信号を,システムに接続するためのインターフェイス
(8) 機関回転信号を,システムに接続するためのインターフェイス
(9) データロガ(機関モニタ)などのほかのシステム
6.5
オプション機器 オプション機器は,次の(1)〜(9)による。
(1) レーダ切替器
(2) CRT切替器
(3) 左右ウイングユニット
(4) 海図端末(プランニングターミナル)
(5) スラスター制御器
(6) 船橋情報表示端末
備考 一人当直を行う船にあっては,(8)及び(9)を装備すること。
(7) プリンタ
(8) 警報転送システム
(9) 船橋安全システム及び警報ユニット
6.6
その他の機器 その他の機器は,次の(1)〜(9)による。
(1) 主推進機関の遠隔制御装置
(2) 船内通信装置
(3) VHF無線電話装置
(4) 汽笛制御装置
(5) ウインドワイパ及びウインドウウオッシャ制御装置
(6) コンソールの照明制御装置
(7) 航海灯などの灯火信号スイッチ及び表示器
(8) その他磁気コンパスなどの法定設備
(9) 船橋独立の空調機器
7
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 システムブロック図

8
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7. ブリッジレイアウト ブリッジレイアウトは,附属書4による。
8. 機器間通信
8.1
接続 次の接続形態で,システム内の各サブユニットとセンサ機器間との接続を可能にすること。
また,必要に応じインターフェイスを準備する。
(1) 各サブユニット間 直接又はネットワーク経由で接続できること。
(2) サブユニットとセンサ機器間 直接又はネットワーク経由で接続できること。
8.2
直接接続(データ入出力仕様) 次の8.2.1又は8.2.2のいずれかの形態で,システム内の各サブユ
ニットとセンサ機器間を直接接続できること。
8.2.1
ディジタル接続 ディジタル接続は,IEC 1162による。ただし,制御に関するデータの伝送は,
会話モード(ハンドシェイク)とする。
なお,信号仕様の参考例を参考図に示す。
参考図 信号仕様の参考例
備考1. TX,RXなどの信号名称をつける場合,送信・受信の区分は機器側から見た信号名と
する。
2. IEC1162-1では,次の(1)〜(4)が規定されている。
(1) 通信方式は,単一方向(2)とする。
注(2) シングルトーカ・マルチリスナを示す。
(2) 伝送方式は,シリアル,非同期で,次の(a)〜(d)による。
(a) ボーレイトは,4 800bpsとする。
(b) データビットは,8ビットとする。
(c) パリティビットは,なしとする。
(d) ストップビットは,1ビットとする。
(3) 伝送コードは,ASCII (d7=0)(3)とする。
注(3) JIS X 0201のローマ文字用7単位符号を示す。
(4) センテンスは,ʻ$ʼで始まり <CR> <LF> で終了する最大82文字で構成する。
センテンスの例を参考として次に示す。
参考 $GPGLL.5057.970. N.00146.110. E.142451. A*27 <CR> <LF>
8.2.2
アナログ接続 次の(1)〜(5)のとおりとする。
(1) 電流信号 電流信号は,次の(a)〜(c)による。
(a) 電気的仕様は,4〜20mAとする。
(b) 入力インピーダンスは,電流300Ω以下とする。
(c) 絶縁は,入力側で処理すること。
(2) 電圧信号 電圧信号は,次の(a)〜(b)による。
(a) 電気的仕様は,1〜5V,0〜5V,0〜10V,±5V,±10Vのいずれかによる。
(b) 入力インピーダンスは,電圧20kΩ以上とする。
(3) ステップ信号(ジャイロコンパス) ステップ信号は,次の(a)〜(b)による。
(a) 電気的仕様は,DC24V,DC35V,DC50V,DC70Vのいずれかによる。
9
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(b) 変換レートは,1/6度ステップとする。
(4) パルス信号(航程信号) パルス信号は,次の(a)〜(b)による。
(a) 信号形態は,無電圧接点とする。
(b) パルスレートは,200パルス/海里
(5) レーダ信号 レーダ信号は,次の(a)〜(d)による。
(a) レーダビデオ信号の信号レベルは,−1V〜−5Vとする。
(b) レーダトリガ信号(レーダの送信点を示すパルス信号)の信号レベルは,5V〜15Vとする。
(c) 船首線信号(空中線の1回転ごとに出力されるパルス信号)の信号レベルは,5V〜15V(オープン
コレクタの場合)とする。
(d) 空中線回転信号(空中線の回転に従って出力されるパルス信号)の信号レベルは,5V〜15V(オー
プンコレクタの場合)とし,回転パルス数は,1 024パルス/1回転以上とする。
8.3
ネットワーク接続 ネットワーク接続を通して,データの授受をする項目を参考として次の(1)〜
(12)に示す。
(1) 船位
(2) 船速
(3) 船首方位
(4) 水深
(5) 計画航路データ要求コマンド
(6) 変針点データ
(7) オートパイロット制御権獲得コマンド
(8) オートパイロット制御権データ
(9) オートパイロット制御コマンド
(10) ARPAデータ
(11) 警報データ
(12) その他
8.4
通信(データ入出力内容) システムの各サブユニット及び接続機器から直接伝送されるデータ内
容を表1に示す。
なお,デジタル通信においては,基本的にIEC 1162-1に準じる。
表1 データ内容及び信号形態
出力ユニット/機器
トーカID
データ内容
信号形態
ジャイロコンパス
HE
船首方位
HDT,アナログ,(シンクロ),ステッ
プ
回頭角速度
ROT,アナログ
速力ログ
VD
船速(前後方向,左右方向) VBW
VM
航程
パレス
GPS/DGPS
GP
船位
GLL,GGA
針路,船速
VTG
10
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
出力ユニット/機器
トーカID
データ内容
信号形態
その他の測位装置
TR
船位
GXA,GLC,GLL,DCN
LC
DE
OM
針路,船速
VTG
SN
音響測深機
SD
水深
DBT
操縦ユニット(オートパイロット)
AG
設定針路など
特定
操縦ユニット(主機制御装置)
−
設定主機回転数など
特定
操縦ユニット(CPP制御装置)
−
設定CPP翼角など
特定
操縦ユニット(スラスター制御装
置)
−
設定スラスター翼角など
特定
操縦ユニット(ジョイスティック装
置)
−
操作量など
特定
だ角計
ER
だ角
RSA,アナログ,(シンクロ)
主機回転計
ER
主機回転速度
RPM,アナログ
主軸回転計
ER
主軸回転速度
RPM,アナログ
CPP翼角指示計
ER
CPP翼角
RPM,アナログ
スラスター翼角指示計
ER
スラスター翼角
RPM,アナログ
データロガ
ER
機関部データ
XDR,特定
風向風速計
WI
相対風向風速,真風向風速 MWV,アナログ,(シンクロ)
気温・気圧・湿度計
WI
気温・気圧・湿度
XDR,アナログ'
水温計
WI
海水温度
MTW,アナログ
喫水計
−
喫水
アナログ
時計
ZQ
時刻
ZDA,パルス
No.1レーダユニット
−
レーダ画像
特定
RA
ARPAデータ
TTM
No.2レーダユニット
−
レーダ画像
特定
RA
ARPAデータ
TTM
電子海図ユニット
EC
警報など
特定
IN
指令針路など
HSC,特定
備考1. 表中の(シンクロ)は,標準として使用しないことが望ましい。
2. ʻトーカIDʼは,他の機器にデータを送り出す機器の身元をコードで表したもので,英文2文字で構成され
る。
11
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1 トラッキング機能(規定)
1. 適用範囲 この附属書は,レーダ・電子海図表示装置などによって,計画された航路に沿って航路保
持する機能(トラッキング機能)について規定する。
2. 用語の定義
(1) トラッキング機能 オートパイロット,ジャイロコンパス,GPS・DGPSなどの連携によって,電子
海図上の計画航路に沿って航路を保持すること。
備考 航路から外れた場合は,航路に自動復帰するようオートパイロットを制御する機能。
3. 基本要求
3.1
追従性能 使用海域(沿岸,大洋など)によって,設定可能なこと。
3.2
変針動作 変針動作は,次の(1)〜(2)による。
(1) 変針確認スイッチを設けること。
(2) 当直者が周囲の安全を確認し,この変針確認スイッチが押されるまでは変針動作を行わないこと。
3.3
緊急操だ 動作中に,簡単にコース変更ができる装置を備えるか,又は一つの動作で手動操だに切
り替えることができること。
3.4
警報 次の3.4.1〜3.4.5を備えること。
3.4.1
オフトラック警報 オフトラック警報は,次による。
(1) 航路幅を,最大1マイルの範囲で設定可能なこと。
(2) 航路から外れた場合には,可視・可聴の警報を発すること。
3.4.2
変針点接近警報 変針点接近警報は,次による。
(1) 距離又は時間で,設定できること。
(2) 変針点に接近した場合には,可視・可聴の警報を発すること。
3.4.3
変針点通過警報 変針点通過警報は,次による。
(1) 変針動作をせずに変針点を通過した場合には,可視可聴の警報を発すること。
(2) (1)の場合,変針せずに航行中の針路で直進すること。
(3) (2)の状態で1分間経過した場合には,可視・可聴の減速警報を発し,警報転送システムに警報を転送
すること。
3.4.4
最終目的地通過警報 最終目的地通過警報は,次による。
(1) トラッキングを中止せずに最終目的地を通過した場合には,可視・可聴の警報を発すること。
(2) (1)の場合,変針せずに航行中の針路で直進すること。
(3) (2)の状態で1分間経過した場合には,可視・可聴の減速警報を発し警報転送システムに警報を転送す
ること。
3.4.5
測位装置異常警報 測位装置異常警報は,次による。
(1) 測位装置の故障や連続した位置が得られなかった場合,測位装置異常警報を発すること。
(2) (1)の場合,変針せずに航行中のコースで直進すること。
12
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4. 操作方法(参考例)
4.1
予定航路の入力方法 予定航路の入力方法は,次による。
(1) 希望する変針点の位置にカーソルを合わせ,セットスイッチを押す。
(2) 続けて希望する位置にカーソルを合わせ,セットスイッチを押すと変針点番号が赫され,直線で変針
点間が結ばれる。旋回半径を指定できる装置では,旋回半径のカーブが表示される。
(3) (1)及び(2)の操作を最終目的地まで繰り返す。
(4) 座礁予防機能がある装置の場合は,危険がないかチェックする。
(5) 作成した航路を,記録する。
4.2
航路選択方法 航路選択方法は,次による。
(1) 登録されている航路リストを,表示する。
(2) (1)の中から,目的の航路を選択し表示させる。
4.3
確認作業 航路幅,接近警報範囲等が希望どおり設定されていることを確認する。
4.4
動作方法 動作方法は,次による。
(1) 電子海図表示器上で予定航路を表示させ,最初に向かう変針点を指定する。
(2) オートパイロットの操だモードを切り替える(外部コントロールとなる。)。トラッキング機能が準備
完了になっているときには,準備完了ランプを点灯する。
(3) トラッキング作動スイッチを押す。準備完了ランプが点灯していない場合には,作動しないこと。
(4) 作動中に避航のため一時中断する場合には,システムで用意されている切り替えスイッチ又は操だス
タンドで,手動操だに切り替えて避航操船を行う。
(5) 避航操作完了後,トラッキング作動スイッチを押し,トラッキング航行に復帰する。
4.5
変針点での操作 変針点での操作は,次による。
(1) 変針点接近警報が発生した場合,周囲の状況を確認し変針確認スイッチを押す。
(2) 変針点通過警報が出てから変針確認スイッチを押した場合には,新たに破線で次の変針点までの予定
航路を表示し変針を開始する。
13
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2. 船橋情報(主として警報)(規定)
1. 適用範囲 この附属書は,船橋情報(主として警報)について規定する。
2. 用語の定義 この附属書で用いる主な用語の定義は,次による。
(1) 航海者 航海,操船及び船橋の機器の操作を行う者。
(2) 支援航海者 船橋において,支援が必要となる場合に呼び出しを受けるよう船長に指定された者(通
常は,士官のことをいう。)。
(3) 操船作業場所 航海,操船を行うのに必要な作業を行う場合で,これに必要な機器などが集中配置さ
れた場所。
(4) オフトラック あらかじめ立案してある航路から逸脱すること。
3. 警報の等級 警報の等級は,次による。
(1) 非常警報 人命又は自船の船体にとって差し迫った危険が存在し,直ちに対処の行動をとらねばなら
ないことを示す警報。
(2) プライマリ警報 非常事態を防止するために,迅速な対応が求められている状況にあることを示す警
報。
(3) セカンダリ警報 非常警報及びプライマリ警報に含まれない警報ではあるが,装置にとってはできる
限り敏速な注意が望まれていることを示す警報。
4. 警報の分類 警報の分類は,次による。
(1) 船体関連警報
(2) 機関関連警報
(3) 荷役装置関連警報
(4) 航海装置関連警報
(5) 通信装置関連警報
5. 警報管理 警報管理は,次による。
(1) 船橋情報ユニットにおいて,4.で分類された警報を等級付けしたうえで,その内容を表示すること。
(2) 警報の等級及び内容は,JIS F 0417及びIMO Resolution A686(17)を満足すること。
(3) 航海装置関連警報は,5.(2)に加えて附属書2表1に示すシステム各機器の異状に関する警報及び附属
書2表2に示す追加の航海装置関連警報を含めること。
14
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2表1 システム各機器の異状に関する警報
警報
の等
級
装置名称
警報の原因
警報の表示
警報の時期
監視場所
可視・可聴
の別
個別・代表表
示の別
セ
カ
ン
ダ
リ
警
報
電子海図ユニット
異状
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
No.1レーダユニット 異状
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
No.2レーダユニット 異状
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
船橋情報ユニット
異状
操船作業場
所
可視・可聴
(1)
個別
常時
測位装置
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
センサ
異状
操船作業場
所
可視・可聴
(1)
個別
航海中
ネットワーク
異状
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
船橋安全システム
異状
操船作業場
所及び船長
室
可視・可聴
(1)
個別
航海中
注(1) 操船作業場所における警報は,可視警報とする。
附属書2表2 追加の航海装置関連警報
警報
の等
級
装置名称
警報の原因
警報の表示
警報の時期
監視場所
可視・可聴
の別
個別・代表表
示の別
プ
ラ
イ
マ
リ
情
報
ARPA
衝突の危険
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
船橋安全システム
設定時間を超過
船長室,支援
航海者個室,
公室
可視・可聴
(1)
個別
船橋ワンマ
ンワッチ中
エコサウンダー
設定以下の水深
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
セ
カ
ン
ダ
リ
警
報
自動操だ装置
オフトラック
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
変針点の通過
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
最終目的地の通
過
操船作業場
所及び機側
可視・可聴
(1)
個別
航海中
航海装置用分電盤
供給電力の喪失
操船作業場
所
可視・可聴 個別
常時
船橋安全システム
リセット要求
操船作業場
所
可視・可聴 個別
船橋ワンマ
ンワッチ中
(4) 可聴警報を止める装置が設けられる場合には,可聴警報を止めても可視警報は同時に消滅しないもの
であること。
6. 追加要件
15
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.1
一般 通常の運行条件下で,一人当直で運行するよう計画された船舶は,6.2〜6.5を満足すること。
6.2
航海者の対応が必要な警報の確認は,船橋だけで可能なものでなければならない。
6.3
航海者の対応が必要な警報が,30秒以内に船橋で確認されなかった場合は,自動的に船長,支援航
海者及び公室に転送されること。
6.4
航海者が操作することによって,6.3に示す場所に明りょうな可聴警報を発生させる装置を備えるこ
と。
6.5
7.に示す船橋安全システムを備えること。
7. 船橋安全システム 船橋安全システムは,次による。
(1) 船橋に警戒態勢の航海者がいることを,定期的に確認できるものであること。
(2) 通常の操作方法以外では,操作されないように設計及び設備されていること。
(3) 12分までの確認間隔を調整できるもので,かつ,船長だけが適当な間隔を設定できるように製作,据
付け及び配置されていること。
(4) 設定された確認間隔が経過した場合に,船橋のいかなる場所でも聴取できる可視・可聴警報を発する
ものであること。
(5) 操船作業場所及び適切な見張りを行うことができる船橋の適当な場所で,航海者による確認がなされ
ること。
(6) (4)に規定された警報は,6.3に規定された場所に転送されること。
8. 船橋情報の表示
8.1
次に示す情報を,船橋情報ユニットに見やすい方法によって表示すること。
(1) 針路及び設定針路(2)
(2) だ角及びだ角指令値(2)
(3) 船速(対水,対地)(2)
(4) 主機回転速度及び回転方向(可変ピッチプロペラにあっては,主機回転速度及び翼角)(2)
(5) 船位(経度,緯度)(2)
(6) 水深
(7) 風向(真方位,相対方位)(2)
(8) 風速(真風速,相対風速)(2)
(9) 回頭角速度(10 000総トン以上の船舶の場合)(2)
(10) スラスタ翼角及びスラスト方向(スラスタが,設備されている場合。)
(11) 日付及び時刻(UTC標準時及び船内時間)(2)
(12) 気温,気圧,海水温度
(13) 航程積算値
(14) 平均船速計算値
(15) 残航程
(16) 5.に示す警報
注(2) 常時表示する項目を示す。
8.2
情報の表示方法は,監視漏れ,操作の煩雑さ,誤認などを避けるため,表示内容によって画面を区
分すること。
16
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.3
船橋情報ユニットは,運航モードに応じた情報表示を行うため,少なくとも港内モード及び港外モ
ードにそれぞれ独立して切り替えられること。
8.4
それぞれの運航モードに対し,少なくとも次に示す情報は,船橋情報ユニットにおいて航海中常時
表示されること。
(1) 港内モードは,8.1(1)〜(11)の情報。
(2) 港外モードは,8.1(1)〜(5),(7),(8)及び(11)〜(13)までの情報。
(3) 8.4の規定にかかわらず,(2),(4),(7),(8),(9)の情報が,他の計器によって操船作業場所から視認で
きる位置に常時表示されている場合には,船橋情報ユニットに常時表示することを必要としない。
(4) 8.4に規定する情報以外の情報は,呼び出し操作によって表示できること。
(5) 8.4(2)〜(4)及び(6)〜(8)までの情報は,棒グラフなどのグラフィック表示と数値表示を併用するのが望
ましい。
(6) 船橋情報ユニットに表示される文字は,制御装置に関連する表示にあっては,少なくとも制御場所か
ら読み取ることができること。
(7) 船橋情報ユニットは,いかなる場合でも警報要因の発生に際し,これを表示できること。ただし,画
面の警報表示区分に警報の内容を表示しきれない場合には,その区分に警報の等級及び分類までを表
示し,警報の確認動作によって,その内容を表示できるものでも差し支えない。
(8) 各情報の表示色は,附属書2表3によるものとする。
附属書2表3 各情報の表示色
表示内容
表示色
一般情報
黄及び赤以外の色
セカンダリ警報
黄
非常及びプライマリ警報
赤
(9) 船橋情報ユニットに対し,操作方法などに精通するためのマニュアルを備えること。
17
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書3(規定) マン・マシン・インターフェイス
(標準化へのガイドライン)
1. 適用範囲 この附属書は,統合ブリッジシステムにおける,マン・マシン・インターフェイス(標準
化へのガイドライン)の詳細事項について規定する。
2. 基本的な考え方 統合ブリッジシステムにおいて,同システムと運転員との間での情報のやりとりや
操作で使用されるマン・マシン・インターフェイスの期待される機能は,次のようなことであり,インタ
ーフェイスの設計に当たって考慮する必要がある。
・インターフェイスの使用に当たって,運転員の作業負担が軽い。
・誤認識,誤判断,誤操作を招きにくい。
・例え過ちを犯しても,それに気付きやすく,過ちの修正が容易である。
これらのことは,運転員がインターフェイスを通して,その背後にある統合ブリッジシステムの機能の
理解が容易であり,また,運転員の意思が運航支援システムに伝えることも容易であることに相当する。
インターフェイスを通して,運航支援システムが,あたかももう一人のパートナとして存在するように感
じられるならば,理想的なインターフェイスといえよう。逆に,どのように統合ブリッジシステムの機能
が優れていても,インターフェイス部分の機能が悪ければ,システムとして十分な役割を果たすことがで
きないばかりか,運転員の過誤を誘発することもあり得る。
統合ブリッジシステムの機能とインターフェイス機能との関係は,複雑になることが予想されるが,そ
れぞれの機能を十分に発揮させるためには,インターフェイスの標準化が重要となってくる。インターフ
ェイスの標準化に際しては,インターフェイスの機能と運転員の人間としての機能とのマッチングをとる
ことが重要である。
3. インターフェイスの機能 統合ブリッジシステムのためのインターフェイスの機能を,支援する作業
で分類して考えてみると,次のようになる。
(1) 監視作業支援 監視作業支援は,ほとんどが情報提示であり,支援する内容によって次のように分類
できる。
・安全表示(システムの状態が安全であることの表示)
・警報表示(注目すべき警報点とその程度の表示)
・状態量表示(スカラー,ベクトル,数字,図形など)
・チャート表示(海図,多次元表示など)
情報の提示は,CRT画面,専用表示盤,音声,音響などを利用するが,インターフェイスからどの
距離にいる運転員にまで確実に情報を伝えるかは,インターフェイスの使用方法によって異なるので,
どの方法を選択するのかはよく考慮しなければならない。
(2) 判断作業支援 判断作業支援も情報提示が主となる。
・複合情報提示(判断の基となる複数の情報の関連付け表示)
・将来値予測表示(操作をしないと現状がどのように変化するかの表示)
18
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・仮定した操作の結果予測提示(操作量と予測される結果の対応表示)
・支援機器の知的判断結果表示(支援機器の判断したいくつかの選択肢表示)
(3) 操作作業支援 操作作業支援は,情報入力支援及び機器調整作業,マクロ命令実行が主となる。
・項目選択支援(モード選択,ON-OFF入力,スイッチ)
・数値,方位入力支援(ディジタル数値入力,数値セット)
・数値,方位入力支援[アナログ入力,だ(舵)輪,スライド]
・位置入力支援(2次元アナログ入力,マウス入力,ジョイスティック)
・機器調整支援(輝度調整,制御系調節)
・マクロ命令支援(音声指令)
4. 人間の機能(特にネガティブの意味で) 前述のように,インターフェイスの設計では,人間の機能
に十分な配慮を払わなければインターフェイスの機能,ひいては運航支援システムの機能を十分に発揮す
るものとはならない。その際に配慮する人間の機能とは,次のような点である。
・作業の信頼性が高い緊張した状態は長くは続かない。
・同時に並行できる作業は少なく,それぞれの作業の信頼性も低下する。
・同時に複数の事象又は複数の変数の動きを理解することは難しい。
・高次の現象や高次の動きを理解したり予測することは難しい。
・一べつ(瞥)で理解できないものは,他の誤りを導く可能性がある。
・大きな事象の陰の小さな事象は見付けにくい。
・軽い作業の結果は軽いと判断しやすい。
・いつもの作業と少し変えた作業は間違えやすい。
・人間は不在のときもある。
・作業における過ちは必ず発生する。
機械側は,インターフェイスを通して,人間側の誤りを見付け,これを修正するための行動を起こせる
機能をもつことが理想である。同様に,人間側は,インターフェイスを通して,機械側の誤り(故障,不
動作など)を見付けて,修正するための行動を起こせることも重要である。
このように,人間側及び機械側ともにインターフェイスを通して相手側の過誤を相互にチェックできる
ように十分に配慮することが,人間−機械系を構成している運転員と運航支援システムとによって行われ
る航行の安全性を向上させる。
また,上述の人間の特性をかんがみて,複雑で誤解を招く表示,操作手順,調節は,インターフェイス
の標準化のときは避けなければならない。
5. インターフェイスの注意点
(1) 情報表示一般 情報表示に対する一般的な注意は,次のとおりである。
・情報の表示開始と表示停止条件
警報の表示開始の条件は,警報を受けてから,運転員が間違いなく処置をとれるように,余裕をも
って,注意喚起の表示をする。警報の対象,状態,程度などのような附属の情報も,警報とともに表
示する。警報の表示は,必ずそれに対する確認を要求するようにする。
運転員の不在の場合をも考慮し,警報に対する確認がなく,緊急の処置を要する場合には,機械側
があらかじめ決めておいた必要な処置をとれるようにする。
19
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
警報停止の条件は,単なる警報確認の有無ではなく,警報表示開始の条件の解除まで,警報を出し
続ける。ただし,警報の種類によっては,確認後は,音響による表示は停止し,視覚への表示だけを
残すなど,運転員の注意力をそがないように工夫する。
情報の表示開始及び表示停止の条件の設定には,誤作業の防止の観点にたつとともに,他の種類の
誤作業の誘発を招かないように注意する。
・情報表示媒体の併用
情報の表示には,できる限り複数の表示媒体を併用する。情報の伝達を確実にする目的だけでなく,
2種類以上の関連情報を併用して冗長表示することによって,新たな表示の効果,臨場感を表現する
ことも可能である。また,前述の警報の表示のように,確認後の表示を変える際に便利である。
・情報加工機能
情報誤解を防ぐために,理解しやすい形に加工した情報を表示する。複数の情報を組み合わせると
新たな意味をもつ場合には,そのような複数の情報から抽出された情報を表示する機能をもつように
努力する。
・表示機能の診断
表示機能が正しく動作していることを診断したり,正しく動作していないときにはそれを補償でき
る機能を付ける。
備考 表示機能の分類は,次のようになる。
(1) 文字情報
・表示媒体と表示位置
表示媒体全体のどの部分にどのような種類の情報を表示するかは,運航支援システムの各サブシス
テムごとに決める必要がある。
・情報内容の表示
サブシステムごとに表示する情報の種類とその表現を統一する必要がある。
・文字属性
サブシステムごとに,誤認識を招かないように,情報の重要度によって,文字の大きさ,字体,色
(背景色含む),プリンタの有無などを統一する必要がある。
(2) 画像情報 文字による表示を補佐し,一べつで誤りなく理解できるように,次のような画像情報を用
いたい。これもサブシステムごとに表示の統一が必要である。
・記号
・図形による象徴化(記号では表せない複雑な事象の表示)
・チャート(海図,多次元表示など)
・概念説明表示(図形及び文字による説明用表示。例:フローチャート)
・動く図形(方向変化の表示,複雑な関係の解説,特に表示から予測したり,予測されたものの表
示に便利である)
・ビデオカメラの画像(現場の状況,運転員と違う視点からの画像,解説的な表示)
・立体表示(ウォークスルー,多次元表示,複雑な事象の理解の促進)
(3) 音響情報
・情報内容の表現(文字表示とは別に,聞いて誤解しない表現への統一)
・音響の種類(音声を含む)
・発音速度,ピッチ
20
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(4) 高度の情報の表示 システムの情報量を単に表示するのではなく,表示の前に情報処理を施して表示
するのに次のようなものがあり,それぞれサブシステムごとに表示を統一する必要がある。
・高次の情報(2階微分方程式以上で表現される系の変数の微分値,2次微分値及びそれらが0にな
る点,将来予測値など。例:着離桟運転支援)
・示唆情報(診断,予測系の出力,誤操作・無操作に対して正しい操作を示唆する表示など)
・必要な操作を指示する情報(警報と併用して,必要な一連の作業を指示する表示)
・表示の選択(個人の選択した表示方式を記憶しておくことや,外的条件変化によって必要な表示
を自動選択する方式)
・誤操作である可能性の表示(会話機能も必要である)
・運転員不在のときの対処(警報などの表示場所の延長,無応答時の対策)
6. 入力操作一般 入力操作のインターフェイスについて特に注意することは,操作の誤りに対する対策
があらかじめたててあることである。例えば次の事項が必要である。
・操作の誤りの検出が,運転員にとって容易なこと。
・誤りの修正ができること(理想的には,誤操作の結果が進行していても回復の手段があること)。一般
に,入力操作インターフェイスには,誤操作を防止するために,次のことの検討が必要である。しかし,
その標準化には,詳細な規定をする必然性はあまりないので,統合ブリッジシステムの各サブシステムで,
操作の機能グループごとに,入力操作端をグループ化して,グループの位置などを規定する程度に余裕を
もたせたほうがよい。
・操作端の種類
・操作端の配置,形状,色
・操作結果を運転員に予測させるフィードバック機能
備考 入力操作端の種類は,次のように分類される。
(1) 二値入力
・押しボタン,キー
押した際に,入力したことが分かること。押し続けたときに同じ入力が複数回繰り返されな
いこと。ただし,連続入力モードに使用されるキーは,この限りではない。ON-OFF入力の場
合,早く続けて2度押ししても,入力が元に戻らないこと。
(2) アナログ−変数入力
・レバー,つまみ(回転),スライド
入力端を離したときに,その位置に固定されること。
・ホイール
0位置(中立位置)への復帰が容易で,0位置に復帰したことが分かること。
(3) アナログ二変数入力
・ジョイスティック
用途によって,スティックを離したときに0位置に復帰する形と,スティックを離したとき
にその位置に固定される形があるが,安全面を考慮すると前者の形式が望ましい。いずれの形
も,0位置が手の感触で分かるようにすること。
・マウス,ボール
ワンタッチで,標準位置へ出力信号が復帰できること。
21
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(4) 多変数離散値入力
・タッチパネル
入力の容易さから誤入力を生じやすいので,入力の確認及び入力修正が容易であること。
(5) 音声入力
音声の判別が容易なように,サブシステムごとに簡潔な言葉の標準化が必要である。入力の
確認のためのアンサバックなどの会話機能が必要である。
(6) 信号処理に伴う入力
・積分形
操作端が操作されている間,操作入力の時間積分値を入力とする形式。単純な2値入力で広
い範囲の入力ができる。
・微分形
操作入力の時間微分値を入力とする形式。パルス的入力を作るのが容易。2階微分方程式で
表される系の運動の制御に効果的である。
・2次微分形
操作入力を2回,時間微分したものを入力とする形式。正負の1組のパルス的入力を作るの
が容易。2階微分方程式で表される系の位置の制御に効果的である。
(7) マクロ命令に対応した入力操作端
入力に対する運転員へのフィードバックとして,結果の予測,現在の命令実行の段階などを
表示する。
7. インターフェイスの使い勝手 インターフェイスの使い勝手は,統合ブリッジシステム全体の中でも
重要な意味をもっている。インターフェイスの使い勝手をよくするためには,表示,操作のどちらのイン
ターフェイスも,次のようなことの検討が必要である。
・インターフェイスへの接近が容易。
・カストマイズできる。
複数人が同一のインターフェイスを使用するときは,運転員各個人の差,使用初期と熟練後の差などを
吸収できるように,使いやすくチューニングできるようにする。
・必要な情報,操作端が他のものと間違い難く,区別できる。
・入力操作端の大きさが適当で,隣の端子と十分離れている。
特に,インターフェイスへの接近は重要であるので,次のような検討が必要である。
(1) 必要な情報へのアクセス
・階層形
情報の階層の構成は,理解しやすくする。説明の会話機能が必要である。
階層のステップ数は4以下を目標とする。
・目次形
情報の目次は,内容を分かりやすくし,複数の表現で検索できるようにする。目次入力の操作での
誤りは,訂正できるようにする。
・全項目表示形
情報項目を機能で分類し,分類が分かりやすいように表示する。不必要な項目は一時的に削除でき
るようにする。重要度ごとに分類しておく。
22
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・文字入力形,音声入力形
目次形と同様に,複数の表現でアクセスできるようにする。入力の誤りは分かりやすく,かつ,修
正できるようにする。
(2) 判断支援の結果のチェックの容易さ 診断系や航路選択などの知的情報処理系などとの会話機能は,
判断結果の正しい理解と判断支援への正しい評価のために必要である。
(3) 必要な操作端へのアクセス
・簡単な操作手順
分かりやすく簡単であるだけでなく,操作の結果が自覚できることが必要である。
・操作制限などの設定,解除条件
操作に制限値などが設定されている場合は,制限があることと,制限の設定値,及び制限の理由が
容易に分かること。制限を解除してよい場合と解除の方法の明示も必要である。
・誤操作の回復手段
8. その他 一般に,インターフェイスの標準化では,次の点を考慮する必要がある。特に,統合ブリッ
ジシステムのインターフェイスの標準化に際して,配慮が必要である。
・標準化の範囲
・普遍性
・技術の進歩に伴う更新の可能性
・文化の違いによる人間の機能,特性の差異への配慮
23
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書4 ブリッジレイアウト(規定)
1. 適用範囲 この附属書は,システムのブリッジ形状,視界,コンソールの装備位置などについての指
針を規定する。
2. ブリッジレイアウト
2.1
一般 システムをブリッジに装備する場合,コンソールの位置やレイアウトは,船種,動線,運航
形態などのさまざまな条件を十分考慮したうえで,最適位置を決定する必要がある。
また,ブリッジの形状は視界確保の点からブリッジ全体の形状及び設備の配置についても考慮する必要
がある。特に,一人当直を行う船では,各操船位置からの視界は,IMOのInternational Regulations for
Preventing Collisions at Seaの条件を満たすこと。この附属書では,ブリッジ形状,視界,コンソールの装
備位置及びコンソールのレイアウトについての指針を2.2〜2.5に示す。
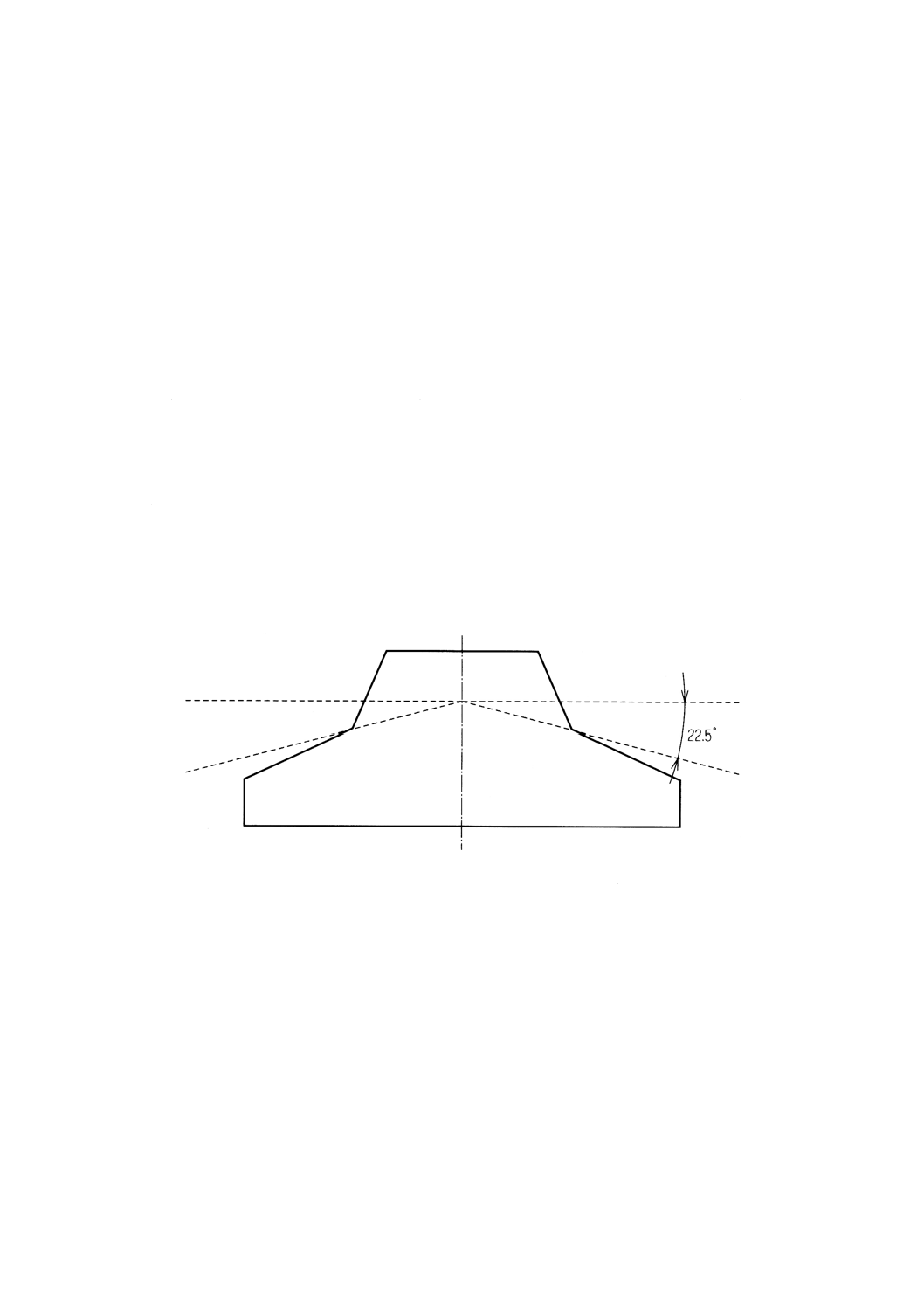
2.2
ブリッジ形状 ブリッジ形状は,次による。
(1) 前方向,横方向の視界を確保するためには,附属書4図1のように従来のブリッジ−ウイングライン
が横一線形となっているものより,ブリッジ前面部が相対的にウイングより出張る形のほうが望まし
い。
附属書4図1
(2) 後方視界を確保するために,視界の妨げとなる煙突は必要最小限の大きさとする。
また,階段はてすりなどの採用によってオープン構造として背面に窓を設け,トイレ,収納スペー
スの上部などは可能な限りガラス窓とすることが望ましい。周囲のガラス窓は,左右,上下方向とも
に十分な大きさをとることが望ましい。フレームは,強度上問題がなければできる限り狭く,かつ,
少なくなるよう配置すること。
(3) ブリッジに装備する機器や物の配置は,視界を確保するため当直者の目線上に装備しないこと。
(4) 前方の窓は,附属書4図2のように垂直から10度以上25度以下の傾斜をもたせる。
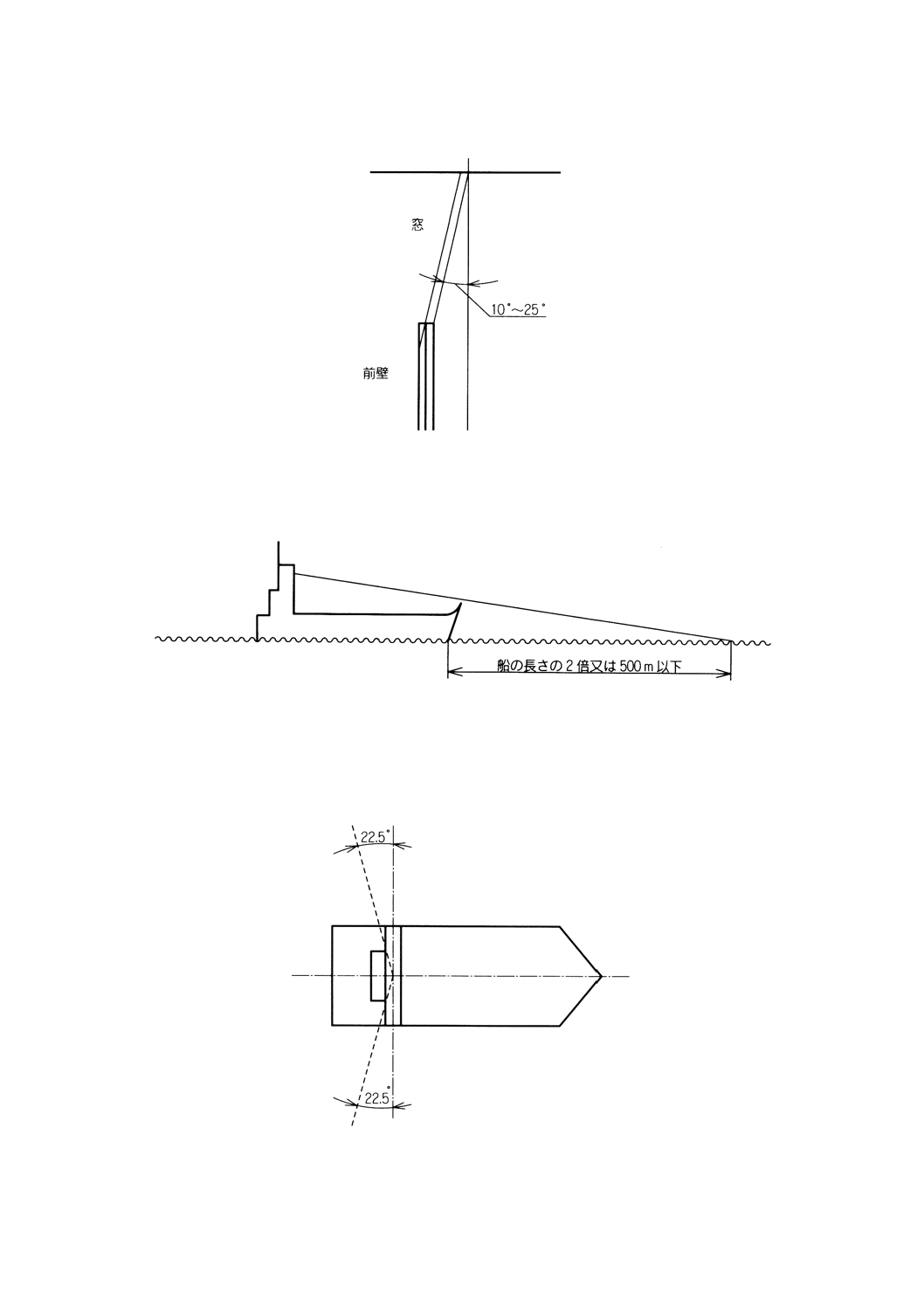
24
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書4図2
2.3
視界 視界は,次による。
(1) 船首方向±10度の間で,附属書4図3のように船の長さの2倍又は500mのいずれか短い距離の前方
が見えること。この場合,目の高さは1800mmとして計算する。
附属書4図3
(2) 船橋内の2点から,360度の水平視界が確保できること。
(3) システムの操船位置からの個々の死角は,10度を超えないこと。これらの死角の合計は,20度を超え
ないこと。特に,船首方向の死角は両玄各10度の間では,5度を超えないこと。
(4) システムの操船位置から,附属書4図4の範囲が見通せること。
附属書4図4
(5) コンソール上部(天井)の塗色は,夜間CRTの反射を抑える塗料を選択すること。
(6) 昼間の直射日光を避けるため,遮光用設備を設ける。
25
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.4
コンソールの装備位置 ブリッジにおけるシステムのコンソール位置は,船種,視界確保,運航形
態,動線などの条件を十分考慮したうえで,最適位置を決定する。コンソール位置は,大きく分けて次の
3種類が考えられるが,それぞれ次の利点と欠点があるので,参考として示す。
(1) ブリッジの中央前方(前窓に接する)
(2) ブリッジの右側前方(前窓に接する)
(3) ブリッジの中央前方(前窓との間に見張り・通行路確保)
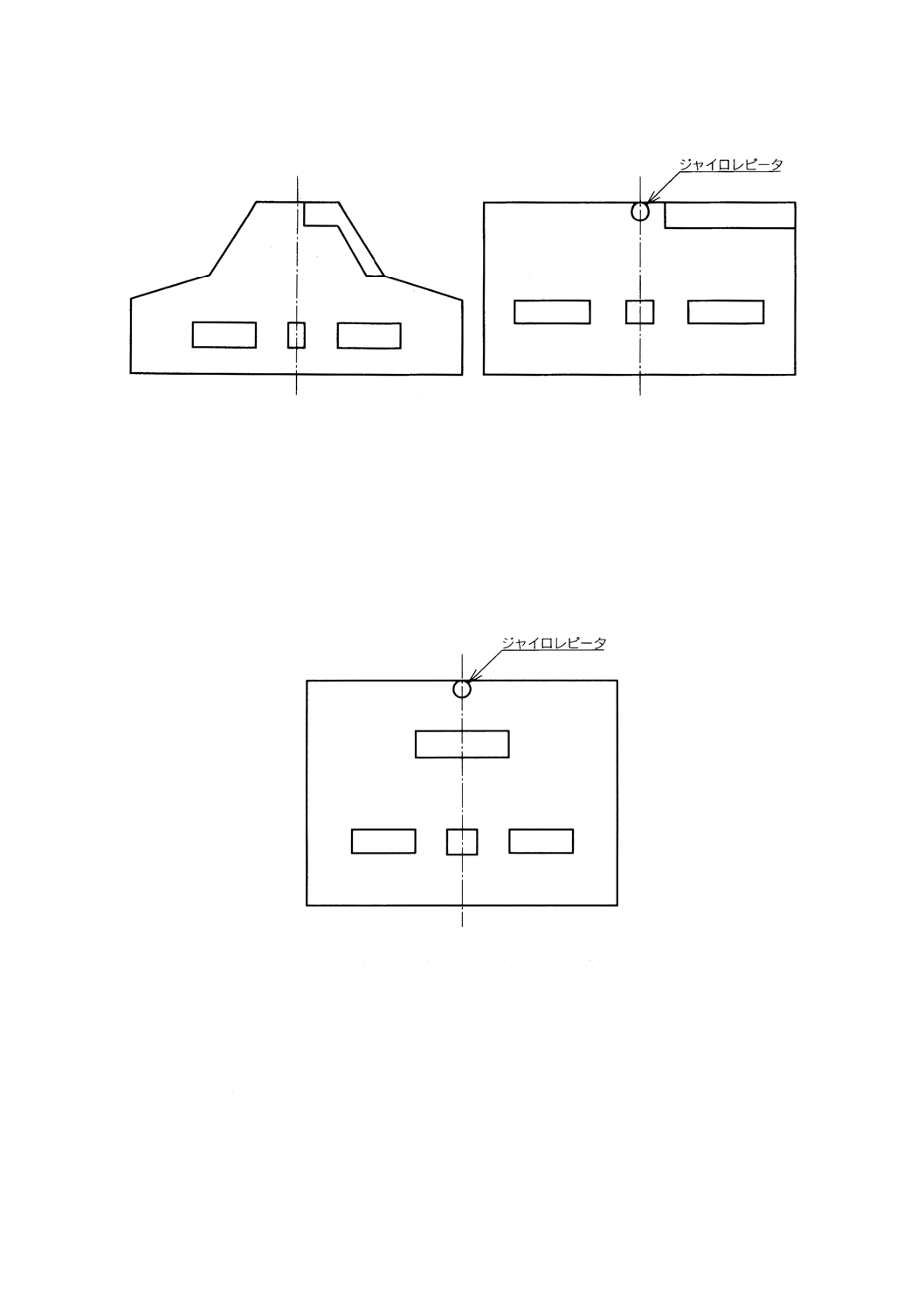
(1) ブリッジの中央前方(前窓に接する)の場合,附属書4図5のようにブリッジ前方窓に接した形で,
中央部にコンソールを配置する。
・利点:ブリヅジの横幅や縦方向の長さが短くても,配置が容易である。
通常の当直位置が比較的前にあるので,前方の視界も確保できる。
・欠点:パナマ規則によるコーニングポジションの確保が,困難である。
船首尾線上に,方位をとるためのジャイロレピータ取付けが困難である。
前方からの射光に対して,フードが必要不可欠となる。
附属書4図5
(2) ブリッジの右側前方(前窓に接する)の場合,附属書4図6のようにブリッジ右側前方窓に接した形
で,コンソールを配置する。
利点:ブリッジの縦方向がある程度短くても,余裕をもった配置が可能である。
通常の当直位置が比較的前にあるので,前方の視界も確保できる。
通常の当直位置から,中央前方までのアクセスが容易である。
欠点:W/H横方向の狭い船では,窮屈な配置となる。
前方からの射光に対して,フードが必要不可欠となる。
26
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書4図6
(3) ブリッジの中央前方(前窓との間に見張り及び通行路確保)の場合,附属書4図7のようにブリッジ
前方窓から800〜1200mm離した形で,中央部にコンソールを配置する。
利点:前方窓とコンソール間が見張り,通行スペースとして有効に利用できる。
ブリッジの横幅がある程度狭くても配置できる。
前方からの射光による影響を受けにくい。
欠点:ブリッジ縦方向の短い船では,窮屈となる。
通常の当直位置が若干後方に下がるため,前方視界に影響が出る。
通常の当直位置から中央前方までのアクセスが不便である。
附属書4図7
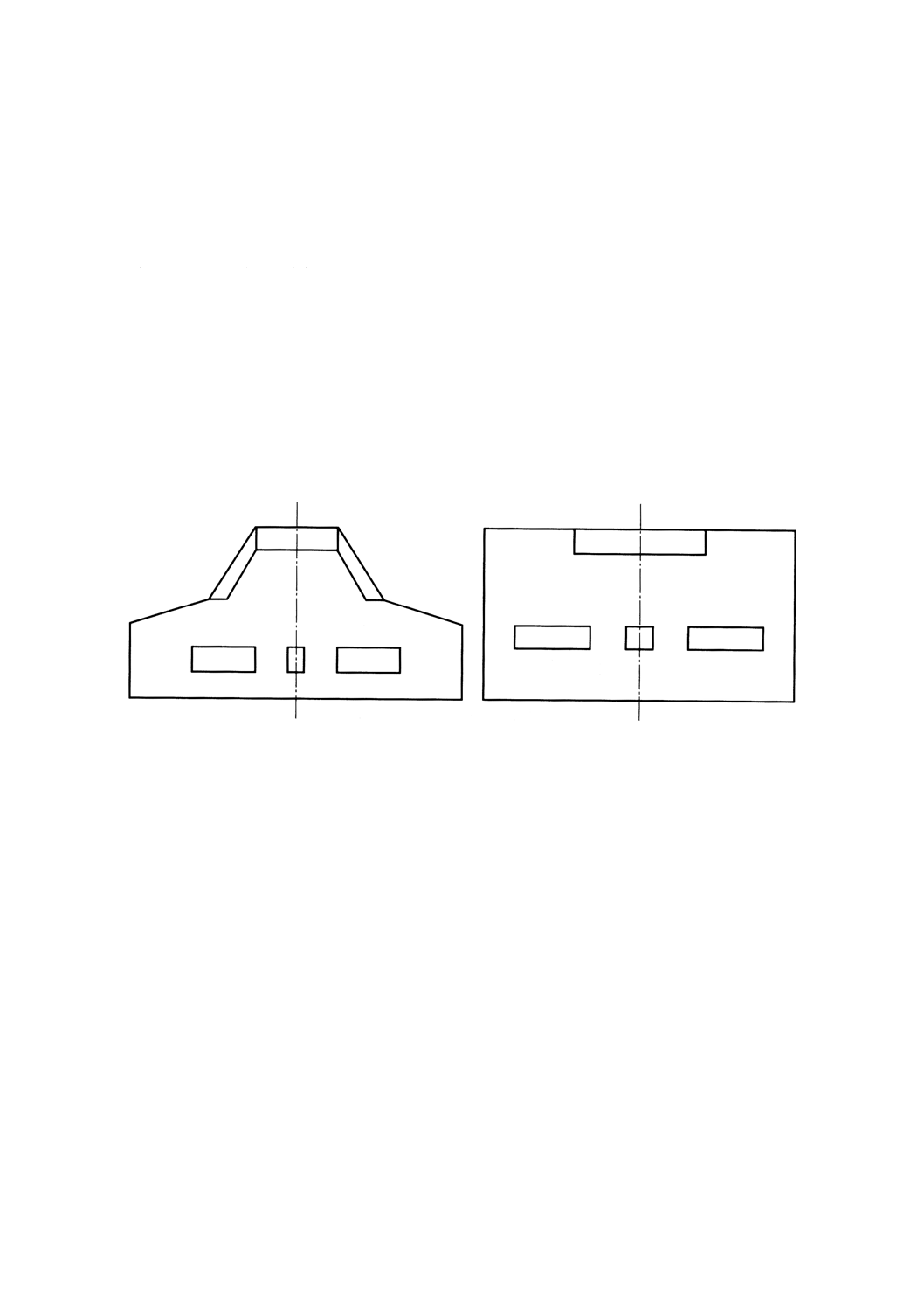
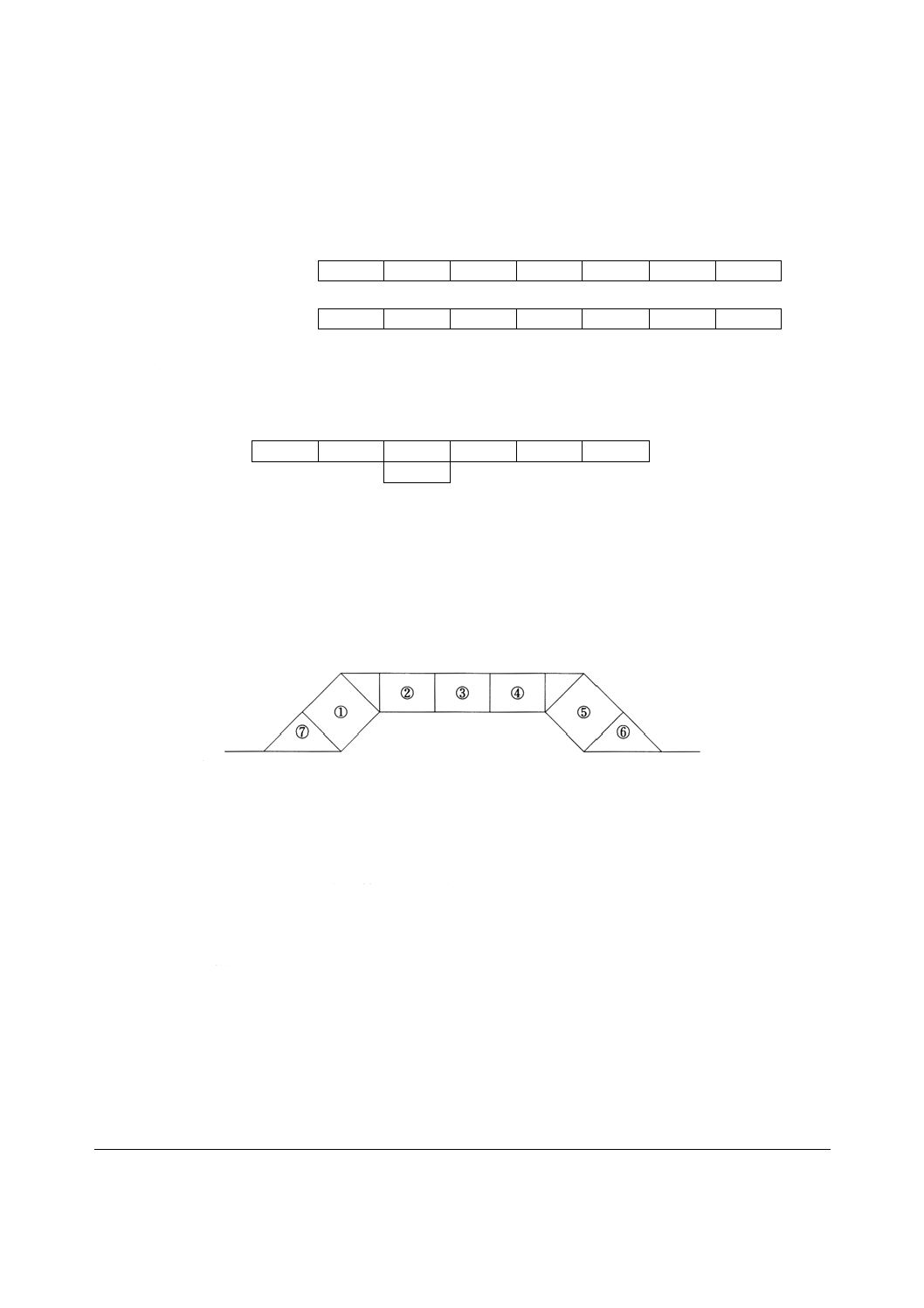
2.5
コンソールのレイアウト コンソールは,主として次のサブユニットで構成される。これらの機器・
装置類の並びについては,どの運航形態(大洋航海,沿岸航海,狭水道航行,出入港)においても,対応
できるよう組み合わせる必要がある。これらを組み合わせた,コンソール全体の形状を附属書4図8及び
附属書4図9に示す。
A:通信関連(船内,船外通信など)
B:操縦ユニット(テレグラフ,アラーム,主機操縦関連)
C:No.1レーダ/ARPA
D:電子海図ユニット
E:No.2レーダ
27
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
F:船橋情報ユニット
G:その他
H:操だスタンド'
(1) 横一直線形 左右の動線がよい反面,構成機器が横に長く広がり,特に,前方に通行スペースをとる
配置の場合,前後の動きに制限を受ける。次の(a)及び(b)がある。附属書4図8
(a)
A
B
C
D
E
F
G
備考 Hは,別置きとする。
(b)
A
E
F
B
D
C
G
備考 Hは,別置きとする。
(2) T形 左右の動線が悪くなるが,機器構成は集中してまとめることができる。当直者2名が着座して
操船できる。
附属書4図9
A
E
F
D
C
G
B
備考 上記(1)及び(2)の2種類が考えられるが,ブリッジのスペース(出張り部分を含めた横方向の長
さ,縦方向の長さなど)の状況によって,上記A〜Hの機器類を,どの形状でどのように配置
するか多くの選択肢があり,一概に決定できないが,参考として内航船用の標準配置図を2.6
に示す。
2.6
内航船のコンソールのレイアウト(参考) 内航船のコンソールのレイアウトの一例を,附属書4
図10に示す。
附属書4図10 内航船のコンソールのレイアウトの一例
ここで,①データロガ(機関モニタ)
CRT画面
:機関情報
操作面
:CRTコントロールパネル,機関コントロールパ
ネル
②No.1レーダ(遠距離レーダ)
③船橋情報ユニット
CRT画面
:航海情報,各種警報画面
操作面
:操縦ユニット,CRTコントロールパネル
オートパイロットダイアル,エンジンテレグラフ,スラスターダイアル,
ジョイスティックレバー,汽笛スイッチ
縦面
:ステアリングハンドル,船内電話
④電子海図ユニット
CRT画面
:電子海図,レーダ重畳
操作面
:CRTコントロールパネル
縦面
:VHF
⑤No.2レーダ(近距離レーダ)
⑥航海灯及び汽笛制御盤(縦面)
⑦スラスター及びステアリング制御盤
関連規格 ISO 8468 Ship's bridge layout and associated equipment−Requirements and guidelines
28
F 9002-1997
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
原案作成専門分科会 構成表
氏名
所属
(専門分科会長)
大 和 裕 幸
東京大学
(委員)
柴 田 幸 久
財団法人日本海事協会
村 山 雄二郎
運輸省船舶技術研究所
大 内 一 之
大阪商船三井船舶株式会社
松 尾 廣 昭
日本郵船株式会社
中 島 博 信
石川島播磨重工業株式会社
桑 原 克 郎
三菱重工業株式会社
川 島 元 雄
日本無線株式会社
本 田 忠 夫
株式会社トキメック
下 野 雅 生
全国内航タンカ海運組合
齊 藤 篤
泉汽船株式会社
松 阪 武 彦
栗林商船株式会社
(事務局)
小 郷 一 郎
財団法人日本船舶標準協会