F 8073:2017 (IEC 60092-501:2013)
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 3
4 システム························································································································· 4
4.1 システム設計 ················································································································ 4
4.2 システムについての責任 ································································································· 6
4.3 ねじり応力及びねじり振動 ······························································································ 6
4.4 保護及び動作安定性 ······································································································· 6
4.5 水分及び結露への対策 ···································································································· 6
4.6 励磁装置 ······················································································································ 6
4.7 電線,母線,トランキングシステム··················································································· 7
5 電磁両立性(EMC)及び高調波ひずみ ················································································· 7
5.1 一般 ···························································································································· 7
5.2 全高調波ひずみ(THD) ································································································· 7
5.3 伝導性及び放射性高周波エミッション················································································ 8
6 原動機···························································································································· 8
6.1 一般要求事項 ················································································································ 8
6.2 速度変動 ······················································································································ 8
6.3 並列運転 ······················································································································ 8
6.4 プロペラからの回生エネルギー ························································································ 8
7 発電機···························································································································· 9
7.1 一般要求事項 ················································································································ 9
7.2 軸受及び潤滑 ················································································································ 9
7.3 冷却 ···························································································································· 9
7.4 保護 ···························································································································· 9
7.5 試験 ···························································································································· 9
8 推進用配電盤 ·················································································································· 10
8.1 一般 ··························································································································· 10
8.2 試験 ··························································································································· 10
9 推進用変圧器 ·················································································································· 10
9.1 一般要求事項 ··············································································································· 10
9.2 冷却 ··························································································································· 10
9.3 計装 ··························································································································· 11
9.4 保護 ··························································································································· 11
F 8073:2017 (IEC 60092-501:2013) 目次
(2)
ページ
9.5 試験 ··························································································································· 11
10 コンバータ ··················································································································· 11
10.1 一般 ·························································································································· 11
10.2 半導体コンバータの設計 ······························································································· 11
10.3 半導体コンバータの冷却 ······························································································· 12
10.4 保護 ·························································································································· 12
10.5 試験 ·························································································································· 12
11 高調波フィルタリング ···································································································· 12
12 推進用電動機 ················································································································ 13
12.1 一般要求事項 ·············································································································· 13
12.2 軸受及び潤滑 ·············································································································· 13
12.3 推進用電動機の冷却 ····································································································· 13
12.4 水分及び結露への対策 ·································································································· 13
12.5 保護 ·························································································································· 13
12.6 試験 ·························································································································· 14
12.7 短絡耐量 ···················································································································· 14
12.8 船内修理のためのスペース及び設備 ················································································ 14
13 ポッド推進器に対する個別要求事項 ·················································································· 14
13.1 一般要求事項 ·············································································································· 14
13.2 センサ ······················································································································· 14
13.3 内部故障に対する推進用電動機の保護 ············································································· 15
13.4 湿度 ·························································································································· 15
13.5 電動機給電系統 ··········································································································· 15
13.6 スリップリング ··········································································································· 16
13.7 方位駆動装置 ·············································································································· 17
14 制御 ···························································································································· 18
14.1 総則 ·························································································································· 18
14.2 パワーマネジメントシステム(PMS) ············································································· 18
14.3 代表的な制御構成 ········································································································ 18
14.4 操縦操作盤の位置 ········································································································ 19
14.5 主制御ステーション及び機側制御ステーション ································································· 20
14.6 測定装置,表示装置,制御装置及び監視装置 ···································································· 20
14.7 有効性 ······················································································································· 21
14.8 始動インターロック ····································································································· 21
14.9 工場立会試験(FAT) ·································································································· 22
15 試験 ···························································································································· 22
15.1 一般 ·························································································································· 22
15.2 製造中試験 ················································································································· 22
15.3 工場立会試験 ·············································································································· 22
F 8073:2017 (IEC 60092-501:2013)
(3)
ページ
15.4 ドック及び海上での試運転 ···························································································· 23
16 文書化 ························································································································· 23
附属書A(規定)保護及び警報マトリックス ············································································ 24
F 8073:2017 (IEC 60092-501:2013) 目次
F 8073:2017 (IEC 60092-501:2013) 目次
(4)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般財団法人日本
船舶技術研究協会(JSTRA)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本
工業標準調査会の審議を経て,国土交通大臣が改正した日本工業規格である。これによって,JIS F 8073:2010
は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。国土交通大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
F 8073:2017
(IEC 60092-501:2013)
船用電気設備−第501部:個別規定−電気推進装置
Electrical installations in ships-Part 501: Special features-
Electric propulsion plant
序文
この規格は,2013年に第5版として発行されたIEC 60092-501を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格である。
1
適用範囲
この規格は,全ての電気推進装置に対する要求事項として次に示す仕様,システム設計,据付け及び試
験について規定する。
− 発電機及びその原動機
− 配電盤
− 変圧器/リアクトル
− 半導体コンバータ
− 推進用電動機
− 励磁システム
− 制御,監視及び安全装置
− 電線,母線及びトランキングシステム
− 高調波フィルタ
補助操だ(舵)装置として装備するバウスラスタ及びスターンスラスタ,推進加勢装置及び帰港用装置,
全ての補助発電装置,並びに蓄電池給電の推進機械及び機器を除く。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60092-501:2013,Electrical installations in ships−Part 501: Special features−Electric propulsion
plant(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
注記 対応国際規格:IEC 60529:2001,Degrees of protection provided by enclosures (IP Code)(IDT)
2
F 8073:2017 (IEC 60092-501:2013)
JIS C 61000-6-2 電磁両立性−第6-2部:共通規格−工業環境におけるイミュニテイ
注記 対応国際規格:IEC 61000-6-2:2005,Electromagnetic compatibility (EMC)−Part 6-2: Generic
standards−Immunity for industrial environments(MOD)
JIS F 8061 船用電気設備−第101部:定義及び一般要求事項
注記 対応国際規格:IEC 60092-101:1994,Electrical installations in ships−Part 101: Definitions and
general requirements及びAmendment 1:1995(IDT)
JIS F 8063 船用電気設備−第202部:システム設計−保護
注記 対応国際規格:IEC 60092-202:1994,Electrical installations in ships−Part 202: System design−
Protection(IDT)
JIS F 8064 船用電気設備 第301部 機器−発電機及び電動機
注記 対応国際規格:IEC 60092-301:1980,Electrical installations in ships−Part 301: Equipment−
Generators and motors,Amendment 1:1994及びAmendment 2:1995(IDT)
JIS F 8065 船用電気設備−第302部:低圧配電盤及び制御盤
注記 対応国際規格:IEC 60092-302:1997,Electrical installations in ships−Part 302: Low-voltage
switchgear and controlgear assemblies(IDT)
JIS F 8066 船用電気設備−第303部:機器−動力及び照明用変圧器
注記 対応国際規格:IEC 60092-303:1980,Electrical installations in ships−Part 303: Equipment−
Transformers for power and lighting及びAmendment 1:1997(IDT)
JIS F 8071 船用電気設備−第352部:電力系統用ケーブルの選択及び敷設
注記 対応国際規格:IEC 60092-352:2005,Electrical installations in ships−Part 352: Choice and
installation of electrical cables(IDT)
JIS F 8072 船用電気設備−第401部:装備基準及び完成試験
注記 対応国際規格:IEC 60092-401:1980,Electrical installations in ships−Part 401: Installation and test
of completed installation(IDT)
JIS F 8076 船用電気設備−第504部:個別規定−制御及び計装
注記 対応国際規格:IEC 60092-504:2001,Electrical installations in ships−Part 504: Special features
−Control and instrumentation(IDT)
JIS F 8081 船用電気設備及び電子機器−電磁両立性
注記 対応国際規格:IEC 60533:1999,Electrical and electronic installations in ships−Electromagnetic
compatibility(IDT)
IEC 60034(all parts),Rotating electrical machines
IEC 60034-1:2010,Rotating electrical machines−Part 1: Rating and performance
IEC 60076(all parts),Power transformers
IEC 60092(all parts),Electrical installations in ships
IEC 60146(all parts),Semiconductor converters
IEC 60146-2,Semiconductor converters−Part 2: Self-commutated semiconductor converters including direct
d.c. converters
IEC 61180-1,High-voltage test techniques for low voltage equipment−Part 1: Definitions, test and procedure
requirements
IEC 61378-1,Converter transformers−Part 1: Transformers for industrial applications
3
F 8073:2017 (IEC 60092-501:2013)
IEC 61439-1,Low-voltage switchgear and controlgear assemblies−Part 1: General rules
IEC 61439-2,Low-voltage switchgear and controlgear assemblies−Part 2: Power switchgear and controlgear
assemblies
IEC 61800(all parts),Adjustable speed electrical power drive systems
IEC 62271-200:2011,High-voltage switchgear and controlgear−Part 200: AC metal-enclosed switchgear and
controlgear for rated voltages above 1 kV and up to and including 52 kV
IMO(国際海事機関),1974年 海上人命安全条約(1974 SOLAS):2009年版
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
当該公的官庁(appropriate authority)
設備が準拠する必要のある規則をもつ主官庁及び/又は船級協会。
3.2
方位駆動装置(azimuth drive)
推進装置を,垂直軸を中心に回転させる装置。
3.3
二重化センサ(double sensor)
一つのハウジングにセンサが二つ備わったもの。
3.4
電動機給電系統(motor supply lines)
推進用電動機への給電に使用されるケーブル及び/又は母線。
3.5
機側制御ステーション(local control station)
遠隔制御装置及びその他の外的制限から独立したコンバータのための参照値が表示される制御場所。
3.6
主制御ステーション(main control station)
海上航行時において,乗員が主推進装置を制御する場所。
3.7
アクセス不能スペース(inaccessible spaces)
ドック入きょ(渠)時を除く作業時に,アクセス不能なスペース。
3.8
指定機関(nominated body)
推進装置全般について,直接的な責任を負う装置設置者又は装置の製造業者。
3.9
単一故障基準(single failure criterion)
単一故障時に操船性を維持するシステムに適用される基準。
3.10
ポッド推進器(podded drive)
没水した専用ハウジング内に電動機が装備された推進装置。
4
F 8073:2017 (IEC 60092-501:2013)
3.11
パワーマネジメントシステム,PMS(power management system)
負荷に応じた原動機の始動及び停止,負荷配分などを行う制御及び安全装置。
3.12
推進用発電機(propulsion generator)
主に推進システムの給電に用いる発電機。
3.13
推進用電動機(propulsion motor)
推進力の供給を目的とした電動機。
3.14
推進用配電盤(propulsion switchboard)
主に推進システムへの配電を目的とした配電盤。
3.15
冗長化センサ(redundant sensor)
個別のハウジングに収納された二つのセンサが備わったもの。
3.16
遠隔制御系(remote control system)
オペレータが,操作結果を直接監視できない制御場所から装置類を操作するために必要となる全ての機
器を備えたシステム。
4
システム
4.1
システム設計
4.1.1
一般
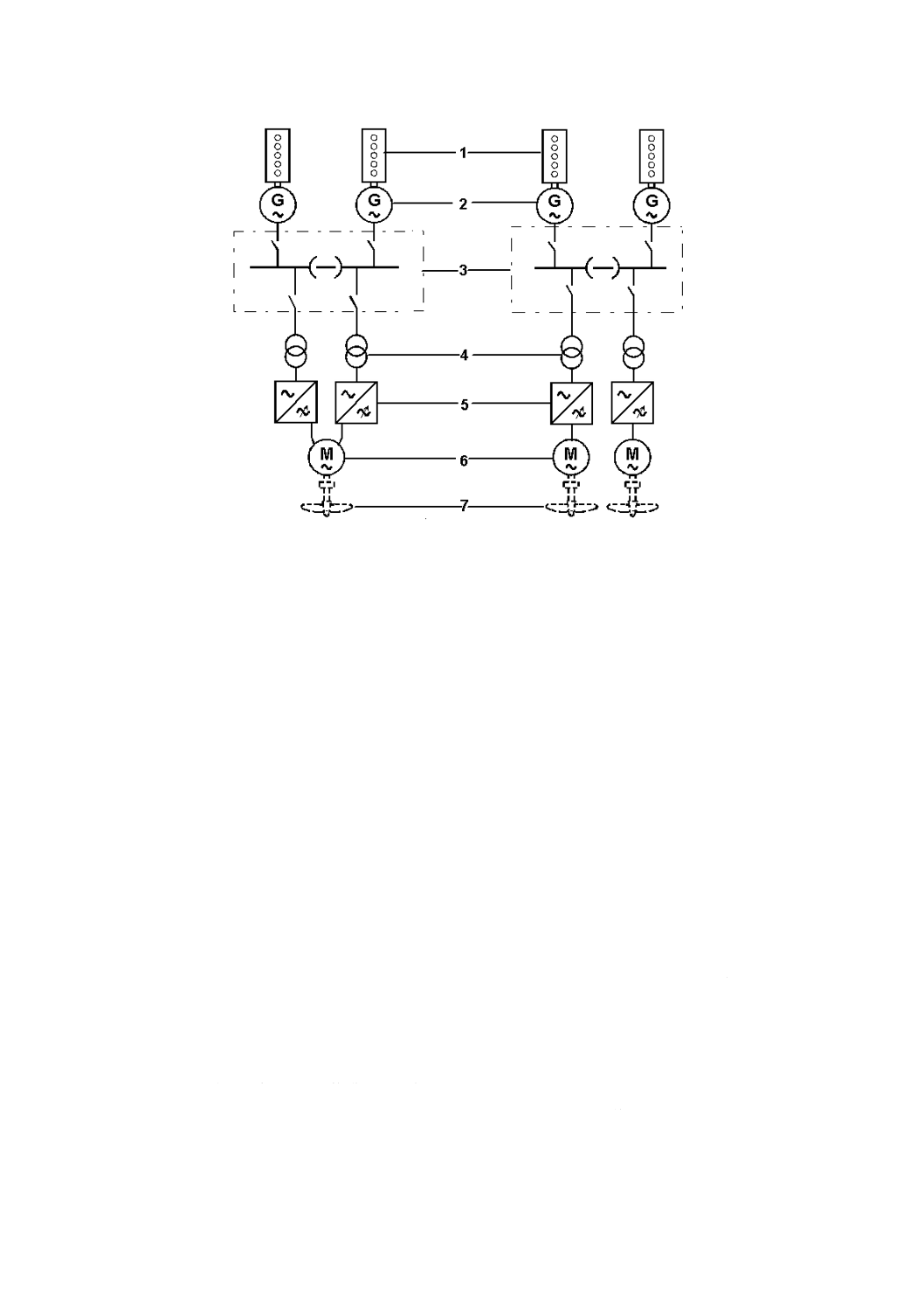
一般的な電気推進システムは,次のハードウェアで構成する。
− 推進用発電機
− 配電盤
− 船内電圧をコンバータ電圧に変換する変圧器
− 電動機用コンバータ
− 制御装置
− 推進用電動機
ハードウェアの代表的構成を,図1に示す。
5
F 8073:2017 (IEC 60092-501:2013)
1
主機関
4
推進用変圧器
7
プロペラ
2
推進用発電機
5
推進用コンバータ
3
配電盤
6
推進用電動機
図1−1軸又は2軸プロペラの船舶における一般的な装置(構成)
4.1.2
設計要件
単一故障基準を電気推進システムの設計の基礎としなければならない。
単一故障基準は,認識可能な故障によって崩れないことが望ましい。また,検出できない故障を回避す
ることが望ましい。ただし,検出できない故障による単一故障基準の破綻は,回避できないことがある。
自動遠隔制御系の一部に故障が発生した場合においても,船舶の安全航行に不可欠な重要機器は機側制
御ステーションから制御できなければならない(箇条14参照)。
4.1.3
シャフト固定装置
各シャフトは,シャフトの回転を固定して,えい(曳)航又は残りのシャフトの操作を可能にするシャ
フト固定装置を備えなければならない。ただし,全ての天候条件下で操縦性が維持されるのであれば,残
りのシャフトの駆動装置を制限してもよい。
4.1.4
推進用電動機が1台しかない船舶に対する個別要求事項
同期電動機及び誘導電動機は,それぞれのコンバータから分離可能な固定子巻線を二つ備えたシステム
としなければならない。各コンバータは,推進駆動装置の公称電力の少なくとも50 %で対応できるように
設計しなければならない。
直流電動機は,独立した2台の整流器(それぞれ電動機の公称電流の50 %に対応)を備え,かつ,各整
流器を分離する手段を備えなければならない。コンバータは互いに独立しなければならない。1台のコン
バータに生じた単一故障によって推進力が完全に失われてはならない。
永久励磁式の電動機は,それぞれのコンバータから分離可能な固定子巻線システムを二つ備えたシステ
ムとしなければならない。また,いかなる天候及び通常のえい航条件下においても,軸を固定できる制動
装置又はかん(嵌)合装置を設けなければならない。ただし,電動機軸をプロペラ軸から切り離し,確実
6
F 8073:2017 (IEC 60092-501:2013)
に静止させる装置を用いてもよい。
注記 巻線損傷は,推進用電動機の全損をもたらすことになる。この場合,単一故障設計基準を満た
すことはできない。
冷却,潤滑等の推進システムに重要な補機は,単一補助部品の故障や動作不良の場合に推進能力を継続
又は復旧させるために,二重化しなければならない。
4.1.5
複数の推進用電動機を搭載した船舶に対する個別要求事項
推進用コンバータ又は推進用電動機において発生した電気的故障によって,全ての軸が使用不能になっ
てはならない。
この点において,永久励磁式の電動機によって駆動する複数の軸に対しては特段の配慮をしなければな
らない。
4.2
システムについての責任
推進装置全体を統括する一つの指定機関を,決定しなければならない。
この機関は,統括業務の実施に当たり,必要となる専門知識及び手段をもたなければならない。
4.3
ねじり応力及びねじり振動
電動機及び軸は,全ての負荷条件に耐えられなければならない。ねじり応力・振動の負荷条件に対して,
ねじり振動計算の結果によって,耐えられることを証明しなければならない。
振動系全体には,原動機,発電機,変圧器,コンバータ,励磁機,電動機,滑り継手,歯車,軸及びプ
ロペラを含んでもよい。
構成部品の製造元は,必要な全ての情報をシステムを統括する指定機関に提供しなければならない(4.2
参照)。
電動機の二相短絡時には最大レベルの振動トルクが発生することがある。電動機の三相短絡時には,最
大レベルの定常状態トルクが発生することがある。
推進設備は,起こり得る全ての負荷条件に対応しなければならない。
4.4
保護及び動作安定性
必要な保護基準は附属書Aによる。
推進システムのシャットダウンは,可能な限り避けなければならない。
制御装置は,いかなる天候条件及び操船条件下においても,推進システムを制御できなければならない。
その他の船上システムは,船舶の推進又は操船に影響を与えてはならない。例えば,共通の通信リンク
又は共通のハードウェアを使わないようにする。このことは方位駆動装置にも適用しなければならない。
電磁干渉に対しては,特別な検討を行わなければならない。
推進システムの正常作動を実現するための全ての手段(必要電力の発電を含む。)は,異常動作及び損傷
を防ぐためのインターロックを備えなければならない。
4.5
水分及び結露への対策
電動機,発電機,コンバータ,変圧器及び配電盤には,それらを長期間使用しない場合においても,水
分及び結露の蓄積を防止する有効な手段(例えば,スペースヒータ又は空気乾燥機)を備えなければなら
ない。
4.6
励磁装置
4.6.1
一般要求事項
各励磁装置には,個別の給電線によって給電しなければならない。
励磁装置及びその電源において得られる電流及び電圧は,操船時,過電流,短絡又はプロペラ失速時に
7
F 8073:2017 (IEC 60092-501:2013)
必要とされる出力に対して適切でなければならない。
励磁電源回路の保護対象は,短絡に限定してもよい。引き外し処理においては警報を発しなければなら
ない。
励磁装置の内蔵短絡監視装置が引き外しを行った場合には,発電機又は電動機のそれぞれの遮断器も引
き外しを実行しなければならない。
独立した安全装置(例えば,不足周波数及び過電圧防止,又は電圧及び周波数を調整する機能を備えた
もの)が励磁装置に備わっている場合,それらは装置の保護機能が最初に作動するよう調節しなければな
らない。
励磁スイッチが開いたときに,電圧上昇を抑制する手段を励磁回路に備えなければならない。
全高調波ひずみ及び力率について,特別な検討を実施しなければならない。
4.6.2
発電機
自動電圧調整器を含む励磁システムの定常及び過渡的調整条件は,JIS F 8064に従わなければならない。
励磁装置への給電は発電機側から行い,かつ,発電機は自己励磁式としなければならない。電圧確立は,
一般に外部電源の助けを借りずに行わなければならない。
励磁制御回路に冗長性をもった外部給電を用いる場合,電圧確立用であっても励磁器制御回路に対して
外部電源を用いてもよい。外部電源への給電は,対応する主配電盤区画及び蓄電池バックアップ機能を備
えた非常用電源から行わなければならない。全ての発電機に対して少なくとも2系統の外部電源が必要で
ある。個々の発電機励磁システムは,独立した電源によって給電しなければならない。
4.6.3
推進用電動機
励磁器回路は,固定子巻線に給電する電源と同じ電源から給電しなければならない。
これは,励磁回路の電源が固定子巻線に給電する配電盤区画と同一の区画から給電されることである。
4.7
電線,母線,トランキングシステム
ケーブルの選択及び敷設は,JIS F 8071及びJIS F 8072に従わなければならない。
異なる推進システムのケーブルは分離して敷設しなければならない。
コンバータと電動機との間のケーブル敷設に特別な対応を必要とする“コンバータ方式”の場合,コン
バータ製造元の仕様書に従わなければならない。
注記 例 PWMコンバータを使用する場合は,ケーブルの静電容量を低くする対策が必要となる。
ケーブル敷設,母線,トランキングシステム及びスリップリングの設計には,故障電流の大きさ及び持
続時間を含む特別な故障条件を考慮しなければならない。
5
電磁両立性(EMC)及び高調波ひずみ
5.1
一般
推進装置は,JIS C 61000-6-2の性能判定基準Aに準拠しなければならない。これは,通常運用時におい
て性能劣化又は機能停止が,一切許容されないことを意味する。
5.2
全高調波ひずみ(THD)
電圧,周波数及び電流の過渡的変動をもたらす装置は,伝導,誘導又は放射のいずれによっても船上の
他の装置の誤動作を引き起こしてはならない。
設計に当たっては,推進用コンバータが推進ネットワーク内に障害を及ぼす点を考慮しなければならな
い。
推進ネットワークにおいて,電圧の全高調波ひずみ(THD)の値は,10 %を超えてはならない。ただし,
8
F 8073:2017 (IEC 60092-501:2013)
THD値が10 %を超える場合,推進システムの責任者(4.2参照)は,接続される全ての装置が異常なく動
作することを確実にしなければならない。
推進ネットワークと船舶のネットワークとが直接接続されている場合,船舶のネットワーク電圧のTHD
値はJIS F 8061に規定する値を超えてはならない。
配線及びケーブル,変圧器,保護装置などの設計に当たっては,コンバータ装置によって生じる高レベ
ルの高調波電流を考慮に入れなければならない。
高調波ひずみによって生じる熱寄与分は,全ての関係者によって決定する。
5.3
伝導性及び放射性高周波エミッション
JIS F 8081の6.2(エミッションの制限)に示されている伝導エミッション及び放射エミッション制限を
超えるコンバータは,JIS F 8081に規定する特別分電ゾーンの要件に従って設置しなければならない。推
進用コンバータのイミュニティ要件は,少なくとも船上に存在する他の全ての装置に対する要求事項に適
合しなければならない。
コンバータのキャビネット又は区画からの伝導エミッション及び放射エミッションは,許容レベルまで
低減しなければならない。
6
原動機
6.1
一般要求事項
推進用発電機を駆動する内燃機関は補助機関であるが,主機関に関する当該公的官庁の仕様及びJIS F
8076の仕様に適合しなければならない。
6.2
速度変動
推進用発電機を他の船内ネットワークへの給電にも使用する場合,定常時及び瞬時周波数変動は,船内
ネットワークの要求事項に適合しなければならない。
プロペラの速度制御に原動機の速度変化が必要な場合,調速機は,リモート制御に加えてローカル制御
の手段を備えなければならない。
原動機の定格出力は,その過負荷時及び負荷上昇時の能力も含めて,電気装置の動作条件が操縦及び海
洋・気象条件によって,過渡的に変化するときに必要となる電力を十分に供給できなければならない。
6.3
並列運転
複数の発電機を並列運転する場合,使用する調速装置は原動機の動作負荷全域にわたって安定動作を維
持できなければならない。
原動機の調速特性は,並列運転時に各発電機の負荷が,各発電機の出力にできるだけ比例した分担とな
るようにしなければならない。
速度の変更又はスロットル動作によって船の停電を起こしてはならない。
6.4
プロペラからの回生エネルギー
例えば,船が航行中に,船の全速前進から全速後進に切り替えたときに,回生電力が生じる場合がある。
過速度又は逆電力による引き外しを避けるために,回生電力の量は制御装置によって制限されなければ
ならない。
過剰な回生エネルギーを吸収して,推進用電動機を減速する制動抵抗器を,機械式及び電気式回転機械
の外部に設けることができる。
9
F 8073:2017 (IEC 60092-501:2013)
7
発電機
7.1
一般要求事項
発電機は,IEC 60034シリーズ及びJIS F 8064に従って設計しなければならない。
発電機は,少なくともIP 23の保護等級をもたなければならない。高圧発電機は,少なくともIP 44の保
護等級をもたなければならない。
半導体コンバータとともに動作する発電機は,装置において予測される高調波に合わせて設計しなけれ
ばならない。正弦波負荷に比べ,温度上昇に対して十分な余裕を考慮しなければならない。
定格値が500 kVAを超える発電機の固定子巻線には,温度センサを備えなければならない。
1 500 kVAを超える発電機は,差動電流保護継電器を設けなければならない。
7.2
軸受及び潤滑
7.2.1
一般
全ての軸受には温度計測装置を備えるか,又は温度計を設置しなければならない。測定点はIEC 60034-1
の規定によらなければならない。
傾斜した位置であっても十分な潤滑を確保しなければならない。軸受の潤滑を点検するための措置を講
じなければならない。
通常の潤滑油が供給できなくなったときに,機械が静止するまでに十分な潤滑を提供する装置を発電機
に設けなければならない。
潤滑液は,軸受から流出したり機械に浸入したりしてはならない。
軸受において強制潤滑を行う場合,油の供給に不具合がある(オイルポンプの停止,軸受供給管の圧力
低下など)及び過剰な軸受温度に達したときには,警報を発しなければならない。さらに,温度が上昇し
た場合には,発電機は停止しなければならない。
軸受の損傷防止のために,軸受と軸の間には,有害な電流が流れないように対策を講じなければならな
い。少なくとも一つの軸受は機械から電気的に絶縁された状態で取り付けなければならない。
7.2.2
スリーブ軸受
スリーブ軸受は,容易に交換可能なものでなければならない。
二つの部分からなる軸受は,そのいずれかに下側の軸受胴の温度を示す温度計を設けなければならない。
7.2.3
ころ軸受
必要な場合には,ころ軸受には,十分な予圧を与えなければならない。
7.3
冷却
強制換気装置,空気ダクト,エアフィルタ又は水冷式冷却器を備えた機械の冷却空気温度は,機械の外
から読み取ることができる温度計によって連続監視しなければならない。警報を発する温度センサを設け
なければならない。
熱交換器による閉回路冷却法を行う機械の場合,一次冷却剤及び二次冷却剤の流量を監視しなければな
らない。
水冷式熱交換器を備えた機械は,漏えい監視が必要である。
7.4
保護
保護はJIS F 8063によらなければならない。
7.5
試験
推進用発電機は,製造元の工場で個々に試験を行う。試験範囲はIEC 60034シリーズに規定されている。
温度上昇試験においては,全高調波ひずみ(5.2参照)によって発生する熱を考慮しなければならない。
10
F 8073:2017 (IEC 60092-501:2013)
8
推進用配電盤
8.1
一般
推進用配電盤は,造船技術として必要な要求事項に適合させたIEC 62271-200(高圧配電盤)又はJIS F
8065(低圧配電盤)に従わなければならず,主配電盤と同様の設計としなければならない。主母線系統の
分離は,負荷スイッチ断路器又はそれらと同等の装置によって行わなければならない。
推進用電動機に用いる発電機の電力は,船内給電に用いることができる。
全高調波ひずみ(5.2参照)及び力率は,特に考慮しなければならない。
8.2
試験
保護装置,インターロックなどの総合試験は,主配電盤の試験要件において行わなければならない。
9
推進用変圧器
9.1
一般要求事項
9.1.1
一般
変圧器及びリアクトルはJIS F 8066の規定,電力変圧器はIEC 61378-1及びIEC 60076シリーズの規定
にそれぞれ従わなければならない。
全高調波ひずみ(5.2参照)並びに力率及びPWMタイプのコンバータ採用の場合,コア損失の増加に特
別な考慮をしなければならない。
推進用変圧器を取り付ける場合,1軸船においては,独立した推進用変圧器を少なくとも2台装備しな
ければならない。
個別の巻線をもつ変圧器だけを使用しなければならない。電動機の始動には自動タップ切換え変圧器を
用いてもよい。
高圧から低圧を生成する変圧器には,低圧コイルと高圧コイルとの間に接地済みのシールド巻線を設け
なければならない。
推進用変圧器の巻線温度は,監視しなければならない。
9.1.2
保護等級
機関室に置く変圧器は,少なくともIP 23の保護等級としなければならない。機関室に置く高圧変圧器
は少なくともIP 44の保護等級としなければならない。その他の保護等級はJIS F 8075に従って選ぶこと
ができる。
9.2
冷却
9.2.1
液冷変圧器
22.5°までの傾斜においても,巻線が液体に完全に覆われるよう対策を講じなければならない。
上記対策には,液体の正しい処分を可能にする回収装置を設けなければならない。
可燃性の液体の場合,変圧器の近辺には火災検知器及び適切な消火装置を設置しなければならない。消
火装置は手動式としてもよい。
液冷変圧器には,ガス作動式保護装置を備えなければならない。
液体の温度は,監視しなければならない。最高許容温度に達する前に,予備警報を発しなければならな
い。最高許容温度に到達した場合,変圧器への給電を遮断しなければならない。
2個の個別センサによって,液体の液面レベルを監視しなければならない。監視システムは,第1段階
において警報を発し,許容値を超えた第2段階においてシャットダウンを行わなければならない。
9.2.2
空冷変圧器
11
F 8073:2017 (IEC 60092-501:2013)
強制換気変圧器の冷却空気の気流及び温度を,監視しなければならない。
9.2.3
強制空冷及び水冷変圧器
熱交換器による閉回路冷却法を行う変圧器の場合,一次冷却剤及び二次冷却剤の流量を監視しなければ
ならない。漏水及び凝結した水分が,巻線に触れないようにしなければならない。漏えい監視が必要であ
る。
9.3
計装
推進用変圧器の一次側系統には,三相電流計を設けなければならない。
9.4
保護
各推進用変圧器は,一次側及び二次側の短絡に対して保護しなければならない。
変圧器の一次側が短絡に対してだけ保護されている場合,二次側で過電流に対する保護を行わなければ
ならない。
二次側の保護はコンバータを用いることができる。
高圧変圧器では,主たる保護が適切でない場合,差動保護装置を備えなければならない。
9.5
試験
推進用変圧器は,製造元の工場で個々に試験を行わなければならない。試験範囲は,ベクトル群試験を
含めIEC 60076に規定されている。
温度上昇試験においては,全高調波ひずみによって発生する熱(5.2参照)を考慮しなければならない。
10 コンバータ
10.1 一般
コンバータは,IEC 60146シリーズ及びIEC 61800シリーズによって設計しなければならない。
コンバータの設置は,JIS F 8081の5.3(試験前調整)の要求事項に従わなければならない。
完全に分離された2個のコンバータを,装備しなければならない。
複数のコンバータの制御を共通にすることは認められない。これは,例えば,単体のセンサを2台又は
二重のセンサを1台装備する必要があることを意味する。
電気的に分離された二つの実速度センサを,それぞれの制御装置に対して設けなければならない。両方
のセンサを共通のハウジングに収容することは許される。
コンバータが永久励磁式の同期電動機に給電する場合,インバータの故障時に自動的に開く遮断容量を
もつスイッチを,電動機とコンバータの間に取り付けなければならない。
また,故障診断が行える装置を実装しなければならない。
10.2 半導体コンバータの設計
推進用コンバータは,駆動装置の公称トルクに合わせて設計しなければならない。短期的な過負荷及び
過負荷による速度変動によってシステムのシャットダウンが生じてはならない。
半導体コンバータ用の機械的ハウジングは,適用できる範囲について主配電盤の規格を満たさなければ
ならない。
高圧コンバータは,高圧開閉装置及び制御装置と同様に造船の要求事項に適合させたIEC
62271-200:2011に従って取り扱わなければならない。そのきょう(筐)体は,IEC 62271-200:2011の附属
書Aに従って,事故時アークに耐えられるように製造するか,又は人員の安全が確保される位置に設置し
なければならない。
半導体コンバータの電力用部品は,容易に交換可能としなければならない。
12
F 8073:2017 (IEC 60092-501:2013)
10.3 半導体コンバータの冷却
半導体コンバータに強制冷却装置が備わっている場合,冷却系統を監視する手段を設けなければならな
い。
冷却系統の故障時にコンバータが損傷を受けないための対策を実施しなければならない。警報信号は,
冷却剤の流量又は半導体の温度によって発する。
半導体を液体で冷却する場合,この液体回路はコンバータシステムごとに設けなければならない。また,
この液体の品質を監視しなければならない。
コンバータの冷却系の単一故障によって,船の推進に関する全てのコンバータが停止する事態に至って
はならない。
船の操縦性は,維持されなければならない。
10.4 保護
コンバータには,次に示す保護を施さなければならない。
− コンバータが接続される電源系統における動作過電圧を,適切な損傷防止装置によって制限しなけれ
ばならない。その装置に対する保護用ヒューズを,監視しなければならない。
− 適切な制御によって,正常運転時に半導体素子の許容電流値を超えないことを確実にしなければなら
ない。
− 端子における直接的な短絡によって,半導体に損傷が生じてはならない。ヒューズによる保護は,許
容される。コンバータによる電流制御によって,停止状態にかん合された電動機に対して,コンバー
タのスイッチを入れたときに,いかなる部品にも損傷が生じることがないようにしなければならない。
10.5 試験
コンバータは,製造元の工場で個々に試験を行わなければならない。試験範囲(例えば,機能試験,調
整,制限,故障処理など)は,IEC 60146-2に規定されている。
関連する設定を含め,全ての保護機能及び制限機能は,それらの設備を設置する前に試験しなければな
らない。警報,低減及び停止のカテゴリの全ての警報は,その設定によって試験を行い,文書化しなけれ
ばならない。コンバータ及び電動機保護機能において,適切な協調がとれていることを実証しなければな
らない。
11 高調波フィルタリング
推進の任意の段階において,高調波ひずみを適正なレベルに抑えるため,線路フィルタを使用すること
ができる。
それぞれのフィルタ回路に対して,過電流保護及び短絡電流保護を行わなければならない。高調波フィ
ルタの故障は,監視しなければならない。高調波フィルタ保護回路はフェイルセーフとしなければならな
い。
フィルタ回路が故障した場合,緊急操作を行うことができなければならない。海上承認試験(SAT)時
に当該ケースの操作及び制限について,実証を行わなければならない。
使用する高調波フィルタの推定寿命を考慮しなければならない。
線路フィルタの使用に当たっては,考えられる全ての回路構成を念頭に置いてフィルタ回路を設計しな
ければならない。特に,全ての負荷条件及び発電機の全ての組合せにおいて,共振が生じてはならない。
複数の並列フィルタ回路を使用する場合,電流の対称性を監視しなければならない。個々のフィルタ回
路内での非対称な電流分布の発生及び一つのフィルタの故障時には,警報を発しなければならない。
13
F 8073:2017 (IEC 60092-501:2013)
温度上昇試験においては,全高調波ひずみによって発生する追加熱を考慮しなければならない。
高調波フィルタのキャビネットは,適用できる範囲において主配電盤の規格を満たさなければならない。
12 推進用電動機
12.1 一般要求事項
電動機は,IEC 60034シリーズ及びJIS F 8064の要求事項を適用しなければならない。
電動機は,少なくともJIS C 0920に基づいたIP 23の保護等級をもたなければならない。高圧電動機は,
少なくともIP 44の保護等級をもたなければならない。
交流電動機の固定子巻線,直流電動機の補極,主磁極及び補償巻線(定格値が500 kVAを超えるもの全
て)に温度センサを設けなければならない。
半導体コンバータとともに動作する電動機は,システムにおいて予測される高調波に合わせて設計しな
ければならない。正弦波負荷に比べ,温度上昇に対して十分な余裕を考慮しなければならない。電動機の
絶縁は,接続されたコンバータの要求事項に従って設計しなければならない。
12.2 軸受及び潤滑
発電機の軸受及び潤滑に関する要求事項(7.2参照)に加えて,次の要求事項を適用する。
− 強制潤滑の軸受は,複数のポンプを設けなければならない。
− 電動機の軸受はシャフトの軸受でもよい。また,軸受及び潤滑は,当該公的官庁の要求事項を考慮し
なければならない。
12.3 推進用電動機の冷却
発電機の冷却に関する要求事項(7.3参照)に加えて,次の要求事項が適用される。
全ての負荷及び速度条件の下で十分な冷却を実施しなければならない。
適切な温度検知器によって,警報を発しなければならない。
推進用電動機の冷却が正しく機能しない場合,出力(操船性)の制限ができなければならない。例えば,
オペレータによる非常用換気口の開放などへの介入は許される。
12.4 水分及び結露への対策
推進用電動機には,機械内部の温度を周囲温度より約3 K高く維持するよう設計された電気ヒータを備
えなければならない。
12.5 保護
12.5.1 過電流
操船又は波浪時若しくは氷海での通常航行によって過電流が発生した場合でも,主回路及び励磁回路の
過電流保護機器が作動しないように,設定値を十分に高く設定しなければならない。
制御装置は,操船,波浪時若しくは荒天時の通常運転又は氷海航行によってシステムのいかなる部分に
も過負荷が生じないことを確実にしなければならない。
短絡及び過電流保護が必要であり,これらの保護はコンバータによって行ってもよい。
永久励磁式電動機,同期電動機,誘導電動機,直流電動機など,電動機のタイプ別の警報マトリックス
を,附属書Aに規定する。
過電流の場合,システムにおいて,その故障をシステムから切り離さなければならない。
12.5.2 推進用電動機の過速度
独立した過速度保護装置が必要である。1974 SOLAS(1974年 海上人命安全条約)第II-1章第27規則
第1項を参照。
14
F 8073:2017 (IEC 60092-501:2013)
推進用電動機は,その通常運転設定において,過速度保護機器の特性によって決まる上限値までの過速
度に耐えなければならない。
12.6 試験
推進用電動機は,製造元の工場で個々に試験を行わなければならない。試験範囲はIEC 60034シリーズ
に規定されている。
温度上昇試験においては,全高調波ひずみ(5.2参照)によって発生する熱を考慮しなければならない。
最初の温度上昇試験の後及び各検査の後には,絶縁抵抗の測定を実施しなければならない。
中性点にアクセスできないときは,規定の相間絶縁試験が実施できない。製造元は,同等の試験を提示
しなければならない。
12.7 短絡耐量
電動機は,いかなる条件下においても,その端子での突然の短絡に対して,損傷なく耐えなければなら
ない(10.1参照)。二相短絡及び三相短絡の両方の場合を考慮しなければならない。
永久励磁式電動機の定常短絡電流によって,電動機及び通電部品(例 ケーブル,給電線,スリップリ
ング)に熱的損傷が生じてはならない。
12.8 船内修理のためのスペース及び設備
修理点検のため,固定子及び回転子のコイルへのアクセス並びに界磁コイルの取外し及び交換に関する
措置を講じなければならない。
点検の実施並びに軸受の取外し及び交換を可能にするために,軸を支持する設備を設けなければならな
い。
整流子及びスリップリングがある場合は,その再表面処理が可能になるように,ブラシ,回転整流器及
び保護装置がある場合は,その交換及び取付けが可能となるように,十分なアクセス方法を提供しなけれ
ばならない。
滑りカップリングは,駆動軸及び被駆動軸が軸方向にずれることなく,かつ,極を外すことなく,カッ
プリングを外せるように設計しなければならない。
13 ポッド推進器に対する個別要求事項
13.1 一般要求事項
航行中,アクセスできない空間及び特別な環境条件に対し,十分な対策(例えば,信頼性の高い材料,
部品,十分な量のセンサ,特別な機械的対策など)が必要である点を,製造元は考慮しなければならない。
例えば,操作盤,センサ,スリップリング,ケーブル接続具,補助駆動装置などの構成要素は,3 Hz〜
100 Hzにおいて少なくとも4 gの振動強度に耐えなければならない。
13.2 センサ
13.2.1 一般要求事項
製造元は,全てのセンサの型式,実装位置,機能及び値(範囲,設定値及び生じる動作)を記載したリ
ストを作成しなければならない。
アクセス不能区域において,駆動能力及び制御能力を維持するのに重要な運転値を,冗長的に記録,評
価及び表示しなければならない。
記録した結果の妥当性を確認しなければならない。疑わしい入力信号がある場合には,警報を発しなけ
ればならない。極端な測定値とセンサの故障とが,区別できなければならない。
ドライドックだけで交換可能なセンサは,少なくとも二重化センサとして構成しなければならない。
15
F 8073:2017 (IEC 60092-501:2013)
13.2.2 軸受
油面の最低及び最高レベルを監視しなければならない。油の温度(最大値)も監視しなければならない。
これらは運航中にも適用する。油漏れの発生は警報をもって知らされなければならない。警報及び監視装
置とは別に,油面レベルの点検ができなければならない。
上記は,循環潤滑システムにも適用される。それらのシステムは,流量モニタ装置を別途,備えなけれ
ばならない。
シャフト軸受は,例えば,温度,振動,油の品質分析などによって監視し,運航中の変化を観察しなけ
ればならない。
シャフト軸受の温度を,監視しなければならない。警報処理は,2段階で行う(第1動作:警報,第2
動作:停止)。シャフト軸受の温度表示は,警報及び監視システムとは独立に提供しなければならない。冗
長化センサが必要である。
電動機軸受温度の測定は,IEC 60034-1:2010の8.9に従って実施しなければならない。
13.2.3 ビルジ
喫水線よりも低い全ての区域はビルジレベルセンサを備えなければならない。従来のビルジセンサ(ハ
イレベル,HL)に加え,推進を自動的に停止して派生的損害を防止する独立センサ(ハイハイレベル,
HHL)を設けなければならない。
軸シールの監視は,派生的損害の発生前に海水の浸入が検知されるように行わなければならない。非常
用シールを設けなければならない。非常用シーリングシステムと組み合わせて,いかなる天候及び通常の
えい航条件下において軸を固定できる制動装置又はかん合装置を設けなければならない。非常用シーリン
グシステム及び制動装置が作動したことは,それぞれの制御ステーションで表示しなければならない。
13.2.4 火災警報
効果的な火災監視を,実施しなければならない。
13.2.5 アクセス可能区域
定期保守作業が必要なアクセス可能区域には,十分な照明及び一時的な換気を提供しなければならない。
このような区域への入口は,駆動装置によって要員が危険にさらされることがない場合にだけ,アクセス
可能となるような方法で施錠しなければならない。
13.3 内部故障に対する推進用電動機の保護
1 MWを超える電動機及び全ての永久励磁式電動機には,コンバータと電動機との間の接続監視も行う
内部故障の保護機能を設けなければならない。故障発生時には,適切な時間内に不良装置への電源を遮断
しなければならない。
13.4 湿度
閉じた空気系統を備えた電動機は,湿度を監視しなければならない。
13.5 電動機給電系統
高い上限温度で運用されるケーブルは,他のケーブルとは別に敷設しなければならない。必要な場合,
接触の防止を実施しなければならない。
電流密度が大きい母線,又は高い導線温度で運用されるケーブルに対する温度上昇試験の試験報告書を
指定機関(4.2参照)に提出しなければならない。
海上試運転における温度上昇試験では,端子区域において最高許容温度を超えないことを証明しなけれ
ばならない。
全ての端子,電線貫通金物及び母線接続具の保護等級は,IP 44以上としなければならない。
16
F 8073:2017 (IEC 60092-501:2013)
上記の要求事項は,制御ケーブルにも適用される。
13.6 スリップリング
13.6.1 一般
スリップリングの機械及び電気特性が,油,カーボンダスト及び塩霧空気による汚染,又は酸化によっ
て劣化する可能性があることについて考慮しなければならない。
スリップリング部品のきょう体の保護等級は,少なくともJIS C 0920に基づいたIP 23としなければな
らない。
アークフォルトによって人員が危険にさらされないよう対策を講じなければならない。
使用材料が,許容最高温度において適切であることを証明しなければならない。接続するケーブルの最
高導体温度を超えてはならない。海上試運転における温度上昇試験では,最高許容温度を超えないことを
証明しなければならない。
バスシステムを使ってデータ伝送を行う場合は,二重化した伝送路を用意しなければならない。いずれ
か一方の故障について,警報を発しなければならない。
外部冷却又は強制冷却式のスリップリングは,冷却系統が機能しないときにも制限運転ができるような
寸法としなければならない。冷却系統に故障が発生した場合は,警報を発しなければならない。
13.6.2 試験
それぞれのスリップリングは,次の試験に合格しなければならない。
− 目視検査
− 絶縁抵抗測定
− 耐高電圧試験IEC 61180-1又はIEC 62271-200
− スリップリング接触抵抗
− 補助機器の機能試験(例 センサ,データ転送)
IEC 62271-200又はIEC 61439-1及びIEC 61439-2に基づいて,それぞれの各スリップリング設計に対す
る型式試験を行う。
− 環境試験(振動4 g,周囲温度55 ℃,湿度100 %)
− 無回転状態での温度上昇試験
− 耐久試験
速度1 r/minの回転試験を次のとおり行う。
− 定格電流10 %で100回転
− 定格電流90 %で100回転
− 定格電流150 %で1回転
− 無電流で100回転
この試験の後,再度スリップリング接触抵抗測定を行う。
− 電動機の特性に合わせた短絡
− 耐インパルス電圧試験
信号回路及び低圧回路については,適合する試験基準を適用しなければならない。EMCについては特別
な条件を考慮しなければならない。
海上試運転において,スリップリング,ブラシ及びケーブルの最高許容温度について,実証試験を行う。
17
F 8073:2017 (IEC 60092-501:2013)
13.7 方位駆動装置
13.7.1 一般要求事項
方位駆動装置は,1974 SOLAS(1974年 海上人命安全条約)第II-1章第29規則及び第30規則に規定す
る操だ(舵)装置の要求事項に従わなければならない。全ての電気制御装置及び全ての電子制御装置,セ
ンサ及び油圧部品に対して,単一故障基準を確実に適用しなければならない。そのために,指定機関(4.2
参照)による故障モード影響解析(FMEA)を可能な限り実施し,実用的な範囲でそれを証明しなければ
ならない。いかなる故障が発生しても,ポッドの角度位置及び船舶の速度にかかわらず,船舶の安全航行
を確保しなければならない。方位駆動装置の方向を,現場において機械的に表示しなければならない。
それぞれのポッド推進器に対して,独立した方位駆動装置を,少なくとも二つ設けなければならない。
この場合,一方の駆動装置は非常用配電盤から給電し,他方は主配電盤から給電しなければならない。
方位駆動装置は,過電流(例えば,コンバータを用いる。ただし,該当する場合。)及び短絡に対して保
護しなければならない。それらは1974 SOLAS(1974年 海上人命安全条約)第II-1章第29規則及び第30
規則における要求事項に従って,定格移動速度に必要なトルクの160 %を60秒間与えることができなけれ
ばならない。設計の異なる方位装置,例えば油圧装置も,上記の要求事項に準拠しなければならない。
13.7.2 推進の方位角
推力の方位角は,一般に±35°以内とする。1974 SOLAS(1974年 海上人命安全条約)第II-1章第29
規則及び第30規則を参照。推力の定格値が小さいとき,船の速度が小さいとき又は危急停止操作を行うと
きは,この制限値を超える可能性がある。
船の安全が損なわれないよう,推進軸出力及び/又は選択した運転モードに応じて,推力の方位角を制
限しなければならない。さらに,船の安全が損なわれないように実際の方位角に応じて,推進出力を制限
しなければならない。
制限値に到達するか,それを超えると警報を発しなければならない。
制限値に達した後,マニュアルリセットなしで,方位駆動装置を許容範囲に戻すことができなければな
らない。
13.7.3 制御
操作及び表示装置は,船舶の移動方向又は推進方向が,明確に認識できるように構成しなければならな
い。また,移動方向及び推進方向のいずれを選択したかを,操船者が,明確に認識できるようにしなけれ
ばならない。
13.7.4 方位駆動装置に対する制御ステーションにおける追加要求事項
推進に対する機側制御については,14.5を参照。方位駆動装置に対する機側制御ステーションには,装
置構成に応じて,次のものを備えなければならない。
− かじ(舵)制御
− 電流計(各負荷要素の各給電側電流に対して)
− 方位角指示器(各ポッド推進器に対して)
− 動作可能な推進設備の表示(各駆動に対して)
− 不具合が発生している推進設備の表示(各駆動に対して)
− 出力制限表示(コンバータからの)
− 機関制御室からの制御表示
− 船橋からの制御表示
− 対応する推進駆動装置に対する運転表示
18
F 8073:2017 (IEC 60092-501:2013)
− 1974 SOLAS(1974年 海上人命安全条約)第II-1章第29規則及び第30規則に従った警報
機側制御ステーションは,機側において起動可能でなければならない。これは,最優先となる。
13.7.5 追加始動インターロック条件
設備の始動を行うときには,次の基準を満たすことが望ましい。
− 駆動装置はアクセス不能である。
− 非常用シール装置が起動されていない。
− 十分な数の方位駆動装置が使用できる。
− ポッド推進器への通信故障がない。
14 制御
14.1 総則
コンピュータシステムは,JIS F 8076に従って設計及び試験をしなければならない。自動機能が失われ
たときは,警報を発しなければならない。
14.2 パワーマネジメントシステム(PMS)
14.2.1 一般
JIS F 8076に規定されている要求事項に加えて,次の要求事項を適用しなければならない。
− 並列運転される複数の発電機から給電されたときは,パワーマネジメント装置を備え,航行・操船時
であっても十分な発電量を確保しなければならない。操船中に負荷に応じて,ディーゼル発電機を自
動的に切り離すことを禁止する。
− 供給電源の周波数低下,過電流又は過負荷及び逆電力の場合,推進出力を制限しなければならない。
− 複数の発電機を並列運転し,かつ,そのうちの1基が遮断したとき,残りの発電機を許容できない負
荷増加から保護するために,電源系統に適切な負荷軽減手段を設けなければならない。同じ要求事項
は,母線接続用遮断器にも適用する。
− 母線接続用遮断器の引き外しによって,システムの異常が生じてはならない。電源系統が分割されて
いる場合は,システムが自動モードにとどまる必要はない。
14.2.2 試験
パワーマネジメントシステムは,製造元の工場で機能試験(ソフトウェアFAT)を受けなければならな
い。推進用配電盤との組合せ試験を推奨する。
試験の仕様は明確にされなければならない。
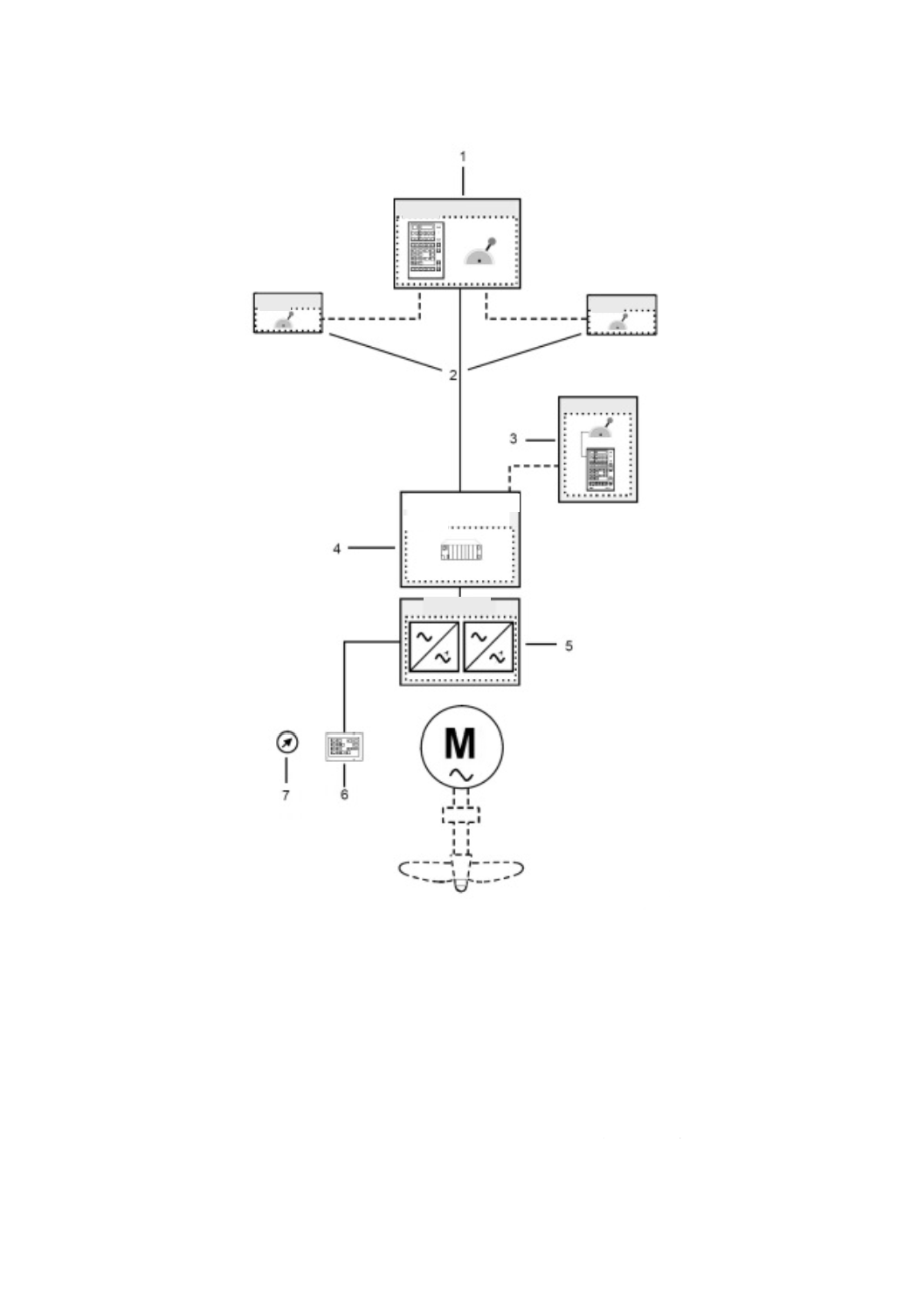
14.3 代表的な制御構成
制御構成は,JIS F 8076の規定によらなければならない。
代表的な設備構成は,複数の制御ステーション,一つの中央処理装置,二つのコンバータ,一つの電動
機(二つの巻線系),一つの機側操作盤(独立した二つの参照入力)及び一つのエンジンテレグラフ受信機
で構成される。
ウイング操作盤及び機関制御室(ECR)操作盤は,航海区域が制限されている船においては,強制では
ない。
遠隔制御系が故障しても,機側制御は可能としなければならない。そのため,機側操作盤は,コンバー
タに直接接続しなければならず,最優先となる。
19
F 8073:2017 (IEC 60092-501:2013)
1
船橋制御盤
4
推進用制御
7
エンジンテレグラフ受信機
2
ウイング
5
コンバータ
3
機関制御室(ECR)制御盤
6
機側制御盤
図2−代表的な制御構成
14.4 操縦操作盤の位置
操作盤を機関室の外に設置する場合は,推進設備を機関室又は機関制御室からも操作可能な構成としな
ければならない。
機側制御ステーションは,駆動装置又はコンバータの近辺に設置し,推進制御の変化が認識できるよう
にしなければならない。
Bridge desk
Wing
ECR desk
Wing
Propulsion control
system
Converters
20
F 8073:2017 (IEC 60092-501:2013)
14.5 主制御ステーション及び機側制御ステーション
JIS F 8076の9.5(機械制御装置)に規定されている要求事項に加え,次の要求事項を適用しなければな
らない。
少なくとも,相互に独立した主制御ステーション及び機側制御ステーションを設けなければならない。
推進用制御系の故障,機能不全又は電源喪失が発生しても,コンバータの制御は機側操作盤において可能
としなければならない(図2参照)。
操だ(舵)装置の監視及び制御を推進装置とは独立して運用できる装置を,船橋に設置しなければなら
ない。全ての機側制御ステーションに対して,同時に通信が可能でなければならない。
全ての警報は,機側制御ステーションにおいて確認応答可能としなければならない。更なる対処が不要
の警報については,主制御ステーションで確認応答可能とする。推進設備の再始動は,事前の選択に応じ
て,両方の制御ステーションから行うことができる。停電後は,主制御ステーションにおいて,推進装置
の再始動が可能でなければならない。
それぞれの制御ステーションには,駆動装置の制御及び作動中の制御ステーションから独立した非常停
止装置を備えなければならない。非常停止装置は,推進用コンバータの給電遮断器を確実に作動させなけ
ればならない。
14.3に従ってECRに制御ステーションを想定していない場合,非常停止装置がその場所で使用できなけ
ればならない。
14.6 測定装置,表示装置,制御装置及び監視装置
14.6.1 一般要求事項
測定,監視及び表示装置の故障によって,駆動装置の操作が不能になってはならない。例えば,実測値
又は参照値の異常が生じても,プロペラの速度及び/又は方向の過大な増加が生じてはならない。
14.6.2 機側制御ステーション
少なくとも次に示す測定装置,制御装置及び表示器を備えなければならない。
− 速度設定装置
− 機側遠隔スイッチ
− 電流計(各負荷要素の各給電側電流に対して)
− 励磁オン表示
− 回転計(各軸に対して)
− 可変ピッチ制御を備えた推進装置のピッチ表示
− 動作可能な推進装置の表示
− コンバータのオン/オフ表示
− 不具合の発生している推進装置の表示
− 出力制限表示
− 機関制御室からの制御表示
− 船橋からの制御表示
− 機側からの制御表示
14.6.3 船橋の(主)制御ステーション
船橋の(主)制御ステーションには,少なくとも次の測定装置及び表示器を備えていなければならない。
− 制御レバー
− 回転計(各軸に対して)
21
F 8073:2017 (IEC 60092-501:2013)
− 軸出力計
− スイッチ投入可能な推進装置の表示
− 動作可能な推進装置の表示
− 不具合の発生している推進装置の表示
− 出力制限表示
− 出力低減要求の表示(自動制御でない場合,又は強制押しボタンを備えていない場合)
− 機関制御室からの制御表示
− 機側制御ステーションからの制御表示
− 推進に用いる発電機の表示
− 運転モード選択スイッチ(すなわち,海上モード,河口モード及び港内モード)
余剰電力を示す表示器を推奨する。
可変速度装置及び可変ピッチプロペラに対して複数の制御ステーションが備わっているとき,プロペラ
の速度及びピッチを示す表示器を,それぞれの制御ステーションに設けなければならない。
14.6.4 機関制御室の(主)制御ステーション
機関制御室の(主)制御ステーションには,少なくとも次の測定装置及び表示器を備えなければならな
い。
− 制御レバー
− 回転計(各軸に対して)
− 軸出力計
− スイッチ投入可能な推進装置の表示
− 運転モード選択の表示
− 動作可能な推進装置の表示
− 不具合の発生している推進装置の表示
− 出力制限表示
− 出力低減要求の表示(自動制御でない場合,又は強制押しボタンを備えていない場合)
− 機側制御ステーションからの制御表示
− 船橋からの制御表示
− 推進に使用する発電機の表示
装置の障害監視は,附属書Aによる。
14.7 有効性
一般に,他の制御監視装置の電力喪失又はそれら装置の異常によって,推進,操だ又は方位駆動装置の
機能が失われてはならない。
推進及び方位駆動装置並びに制御装置は,自己故障検出機能を備えなければならない。
いかなる故障,例えば,停電,断線などが発生した場合,危機的ではなく,新しい安全な状態に移行し
なければならない(フェイルセーフ機能)。
14.8 始動インターロック
推進用設備の始動プロセスは,既存の異常状態がシャットダウンを引き起こす場合,又は始動プロセス
自体が推進用設備に損害を与える場合において,始動できないようインターロックがされなければならな
い。
次の場合,インターロックを考慮する必要がある(適用できる場合)。
22
F 8073:2017 (IEC 60092-501:2013)
− 軸固定装置が開放されない場合
− 静止形コンバータが冷却されない場合(解除可能)
− 推進用電動機が冷却されない場合(解除可能)
− 推進用変圧器が冷却されない場合(解除可能)
− 励磁装置が異常の場合
− 静止形コンバータが異常の場合
− コンバータ制御装置:シャットダウンが作動している場合
− 推進用配電盤が電源断になっている場合
− 非常停止が作動している場合
− 初期値,設定値又は基準値に戻ってない場合
− 軸受:潤滑油圧が低すぎる場合
− 冷却剤の導電率が高すぎる場合
− 保護機能が作動している場合
− 配電盤の遮断器が異常の場合
− 可変ピッチプロペラからの許可信号がない場合
“設備の起動可能”の表示灯は,全ての起動準備要件を満たしている場合だけ点灯することを可能とす
る。“設備の運転可能”の表示灯は,推進用設備が運転可能条件の設定値に対応している場合だけ点灯する
ことを可能とする。
14.9 工場立会試験(FAT)
シリーズで建造される最初の船舶について,遠隔制御は全ての制御ステーションを組み合わせて試験を
実施しなければならない。
15 試験
15.1 一般
IEC 60092シリーズの他の部に規定される標準試験に加えて,次の特別な試験を実施しなければならな
い。
製造,工場立会試験,ドック及び海上での試運転の工程において実施された構成要素又はサブシステム
若しくはシステムに関する全ての試験を,文書化しなければならない。試験結果は,構成要素の単位で特
定及びトレースできるように,文書化しなければならない。
ケーブル,母線システム並びにスリップリングの電流,電圧及び温度に関する性能を,形式試験又は定
期試験によって検証しなければならない。
15.2 製造中試験
製造業者及び下請け供給業者が実施する全ての試験を記した計画書を,製造前に作成しなければならな
い。
15.3 工場立会試験
工場立会試験の前に,試験手順を文書化しなければならない。
装置に関する全ての通常の立会試験は,実現可能な限り製造元の工場で実施し,それらがこの規格の要
求事項及び注文時の仕様を満たしていることを示さなければならない。
JIS F船用電気設備(IEC 60092シリーズ)の他の箇条に規定されている標準試験に加えて,全ての保護
装置を試験し,それらが電気的及び機械的に条件を満たしていることを示さなければならない。
23
F 8073:2017 (IEC 60092-501:2013)
15.4 ドック及び海上での試運転
ドック及び海上での試運転を行う前に,試験手順を文書化しなければならない。
ヒートラン試験及び操縦試験を含め,総合試験を実施しなければならない。これには全速力からゼロ速
度への船舶の危急停止を含めなければならない。
推進設備の各部分及びシステム全体が求められる仕様を満たしていることを実証するために必要となる
全ての試験を,実施しなければならない。
試験計画には,通常条件及び異常条件での推進装置の試験を含めなければならない。
次の項目別に,船の推進ネットワークにおける配電網の品質及び電源を確認しなければならない。
− 通常運航における様々な推進速度での計測
− 最も好ましくない電源及び推進装置の構成を決定するための計測
− 最も好ましくない電源及び推進装置の構成において,様々な推進速度での計測
− 可能な限り高調波フィルタのない計測の反復計測
計測の反復計測結果は記録しなければならない。
始動及び停止シーケンスを試験しなければならない。手動による起動及びパワーマネジメントシステム
による起動が関係する場合は,それによって起動するケースも試験しなければならない。
安全機能,警報及び表示器を試験しなければならない。全てのセンサに対する物理的検査を実施しなけ
ればならない。
FMEAが要求される場合,FMEA実証試験を実施しなければならない。FMEAにおいて想定されるそれ
ぞれの故障について試験手順は規定されなければならない。FMEA実証試験は,船舶の初回検査の前に完
了していなければならない。
全ての操作モードについて,全ての操作位置から試験しなければならない。
試運転の直前及び直後に電力回路の絶縁抵抗を測定し,記録しなければならない。
試験は,可能な限りドックでの試運転時に実施しなければならない。
16 文書化
関係する全ての構成要素及びシステムについて,完全な形の文書が確実に用意されることについて指定
機関(4.2参照)は,責任を負わなければならない。
それぞれの製造業者は,自社の装置がこの規格の要求事項を満たしていることを示す証書を提出しなけ
ればならない。
24
F 8073:2017 (IEC 60092-501:2013)
附属書A
(規定)
保護及び警報マトリックス
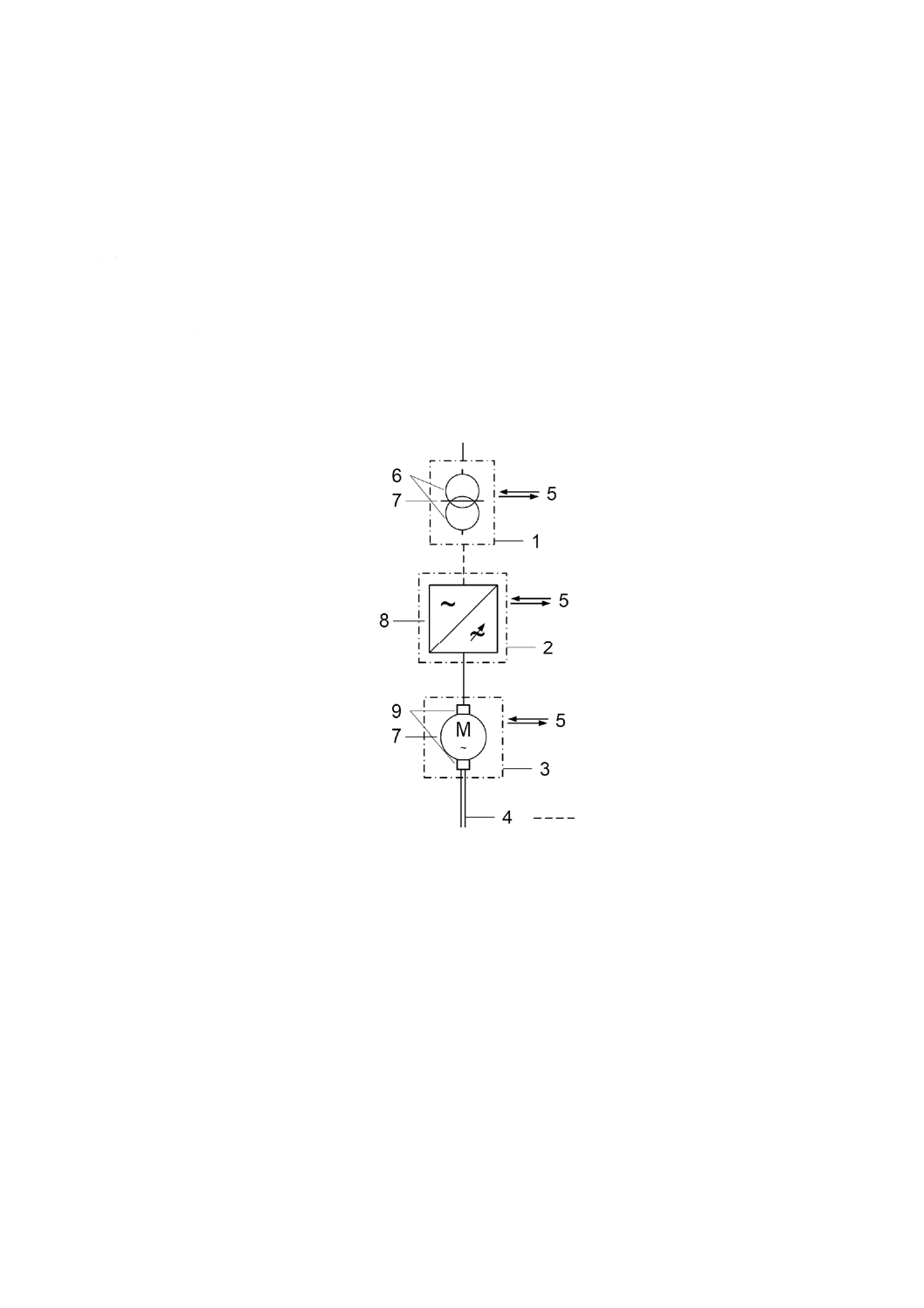
A.1 一般
この附属書は,各電動機別の警報マトリックスを示す。具体的には,永久励磁式電動機(表A.1),同期
電動機(表A.2),誘導電動機(表A.3)及び直流電動機(表A.4)である。
A.2 保護及び警報
警告,警報,低減及び停止の設定値は,次の保護レベルへ進む前に,乗組員が介入できるように,可能
な限り幅をもたせるか又は時間を遅らせる必要がある。
1
変圧器
4
シャフト
7
巻線
2
コンバータ
5
冷却剤
8
給電,電源及び補助装置
3
電動機
6
コア
9
軸受
監視要件については,表A.1,表A.2,表A.3及び表A.4参照。
図A.1−監視アイテムを備えた推進装置
オプション
25
F 8073:2017 (IEC 60092-501:2013)
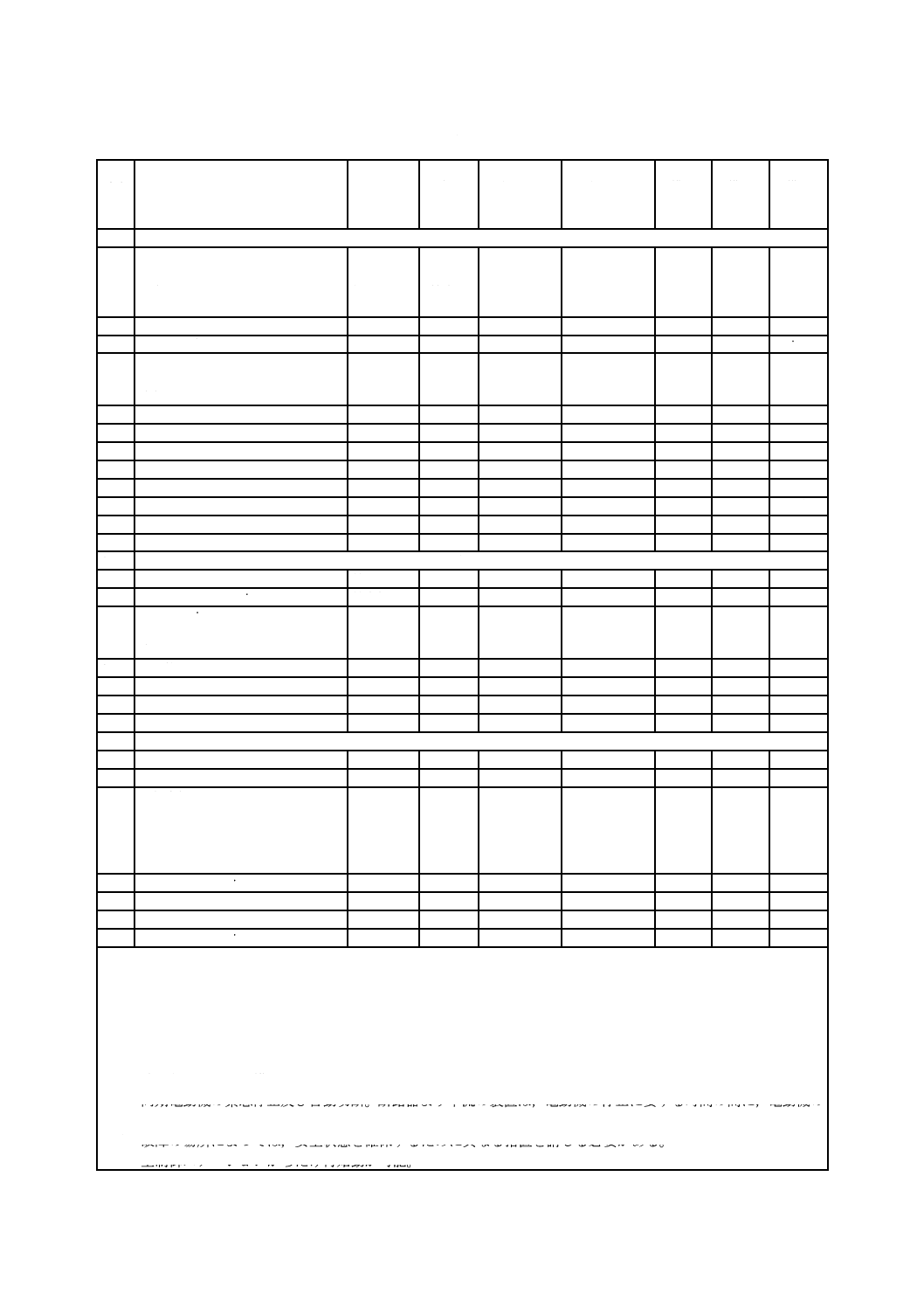
表A.1−保護及び警報:永久励磁式電動機
図
A.1
索引
監視対象値
制限値
ローカル
診断
装置
ECR制御
ステーション
の表示
船橋制御
ステーション
の表示(該当す
る場合)
第1段階
措置
警報
第2段階
措置
低減
最終段階
措置
停止/
引き外し
3
電動機
9
軸受油潤滑
温度
充塡レベル
高
低
検査用
ガラス窓
X
X
C
C
X
X
−
−
X
−
9
軸受ハウジング温度
最大値
温度計
X
C
X
−
X
7
固定子巻線温度
最大値
−
X
C
X
X
i.a.
5
外部冷却
冷却空気温度
冷却剤
最大値
漏えい
温度計
−
X
X
C
C
X
X
−
−
−
−
4
速度
過速度
−
X
C
X
−
X
4
回転子拘束保護
アクティブ
−
X
C
X
−
Xa)
3
地絡監視
最小値
−
X
C
X
−
−
3
電動機保護
短絡
−
X
X
X
−
Xb)
3
電動機保護
過電流
−
X
C
X
−
X
3
電動機保護
内部故障
−
X
C
X
−
Xc)
1
変圧器/リアクトル,i.a.
7
変圧器,巻線温度
最大値
−
X
C
X
X
−
6
変圧器,コア温度 i.a.
最大値
−
X
C
X
X
−
5
外部冷却 i.a.
冷却空気温度
冷却剤
最大値
漏えい
−
−
X
X
C
C
X
X
−
−
−
−
1
電気的保護
過電流
−
X
C
X
−
X
1
電気的保護
短絡
−
X
C
X
−
X
1
差動電流(リアクトルには不要)
最大値
−
X
C
X
−
X
2
コンバータ
8
電源(入力)
喪失
−
X
C
X
−
Xd)
8
補助電源及びバスシステムi.a.
喪失
−
X
−
X
−
−
5
外部冷却
冷却空気温度
冷却剤
冷却剤導電率(半導体直接冷却の場
合)
最大値
漏えい
高
−
−
X
X
X
X
C
C
C
X
X
X
−
−
−
−
−
X
2
半導体ヒューズ i.a.
溶断
表示器
X
C
X
−
X
6
出力過電流
最大値
−
X
C
X
−
X
高調波フィルタ i.a.
故障
−
X
C
X
−
−
X=必要
C=一括警報
ECR=機関制御室
i.a.=該当する場合
ローカル診断ツールが不可能又はアクセス不能の場合,独立した測定器を別途実装しなければならない。
自動低減は,制御ステーションに表示する。
注a) 砕氷船には特別な措置が必要。
b) 永久励磁式電動機の緊急停止及び自動切断。断路器より下流の装置は,電動機の停止に要する時間の間に,電
動機の短絡電流に耐えることができなければならない。
c) 故障の場所によっては,安全状態を確保するために異なる措置を講じる必要がある。
d) 主制御ステーションからだけ再始動が可能。
26
F 8073:2017 (IEC 60092-501:2013)
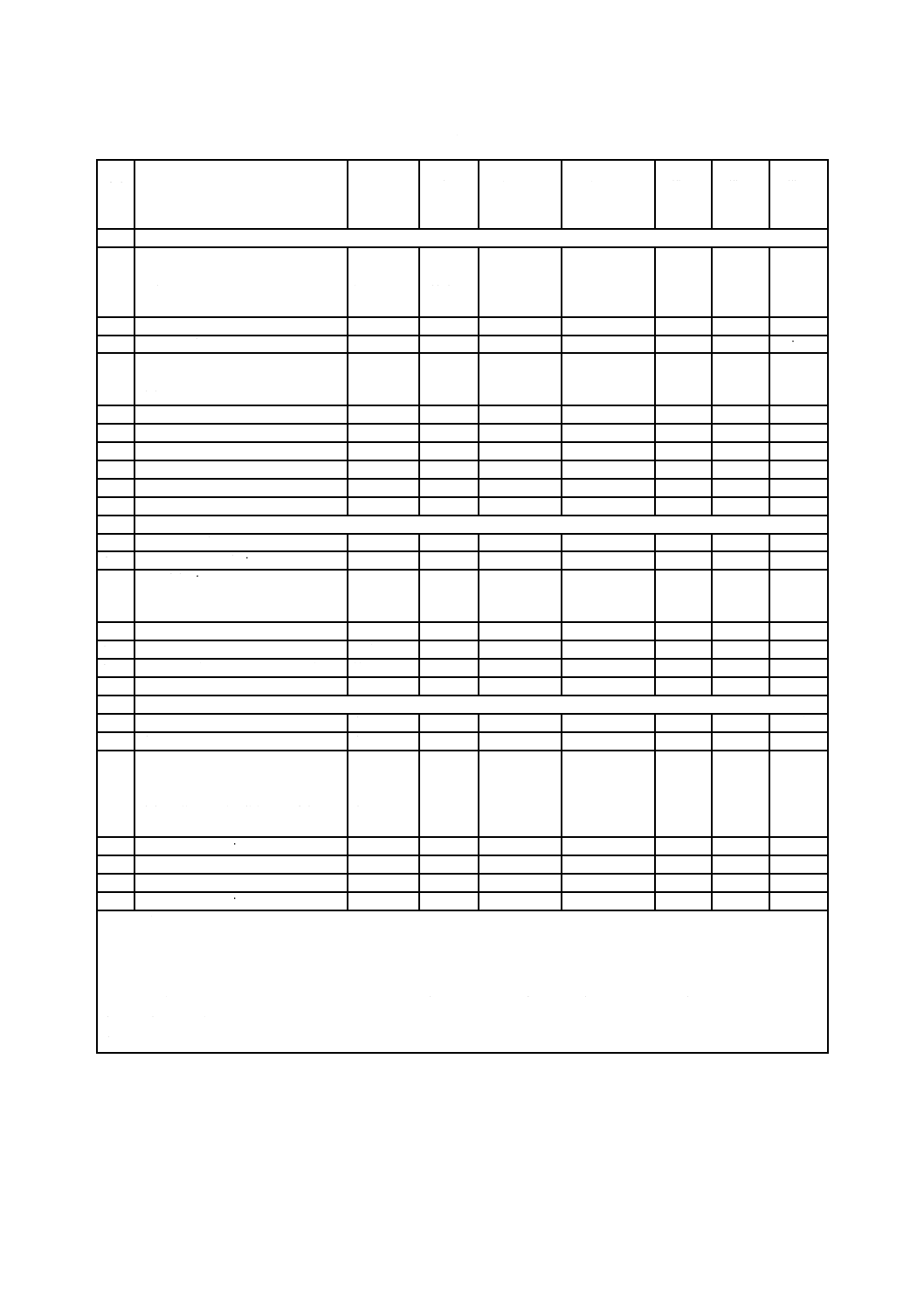
表A.2−保護及び警報:同期電動機
図
A.1
索引
監視対象値
制限値
ローカル
診断
装置
ECR制御
ステーション
の表示
船橋制御
ステーション
の表示(該当す
る場合)
第1段階
措置
警報
第2段階
措置
低減
最終段階
措置
停止/
引き外し
3
電動機
9
軸受油潤滑
温度
充塡レベル
高
低
検査用
ガラス窓
X
X
C
C
X
X
−
−
X
−
9
軸受ハウジング温度
最大値
温度計
X
C
X
−
X
7
固定子巻線温度
最大値
−
X
C
X
X
i.a.
5
外部冷却
冷却空気温度
冷却剤
最大値
漏えい
温度計
−
X
X
C
C
X
X
−
−
−
−
4
速度
過速度
−
X
C
X
−
X
4
回転子拘束保護
アクティブ
−
X
C
X
−
Xa)
3
地絡監視
最小値
−
X
C
X
−
−
3
電動機保護
短絡
−
X
X
X
−
Xb)
3
電動機保護
過電流
−
X
C
X
−
X
3
電動機保護
内部故障
−
X
C
X
−
Xc)
3
励磁システム
故障
−
X
C
X
−
X
1
変圧器/リアクトル,i.a.
7
変圧器,巻線温度
最大値
−
X
C
X
X
−
6
変圧器,コア温度 i.a.
最大値
−
X
C
X
X
−
5
外部冷却 i.a.
冷却空気温度
冷却剤
最大値
漏えい
−
−
X
X
C
C
X
X
−
−
−
−
1
電気的保護
過電流
−
X
C
X
−
X
1
電気的保護
短絡
−
X
C
X
−
X
1
差動電流(リアクトルには不要)
最大値
−
X
C
X
−
X
2
コンバータ
8
電源(入力)
喪失
−
X
C
X
−
Xd)
8
補助電源及びバスシステムi.a.
喪失
−
X
−
X
−
−
5
外部冷却
冷却空気温度
冷却剤
冷却剤導電率(半導体直接冷却の場
合)
最大値
漏えい
高
−
−
X
X
X
X
C
C
C
X
X
X
−
−
−
−
−
X
2
半導体ヒューズ i.a.
溶断
表示器
X
C
X
−
X
6
出力過電流
喪失
−
X
C
X
−
X
高調波フィルタ i.a.
故障
−
X
C
X
−
−
X=必要
C=一括警報
ECR=機関制御室
i.a.=該当する場合
ローカル診断ツールが不可能又はアクセス不能の場合,独立した測定器を別途実装しなければならない。
自動低減は,制御ステーションに表示する。
注a) 砕氷船には特別な措置が必要。
b) 同期電動機の緊急停止及び自動切断。断路器より下流の装置は,電動機の停止に要する時間の間に,電動機の
短絡電流に耐えることができなければならない。
c) 故障の場所によっては,安全状態を確保するために異なる措置を講じる必要がある。
d) 主制御ステーションからだけ再始動が可能。
27
F 8073:2017 (IEC 60092-501:2013)
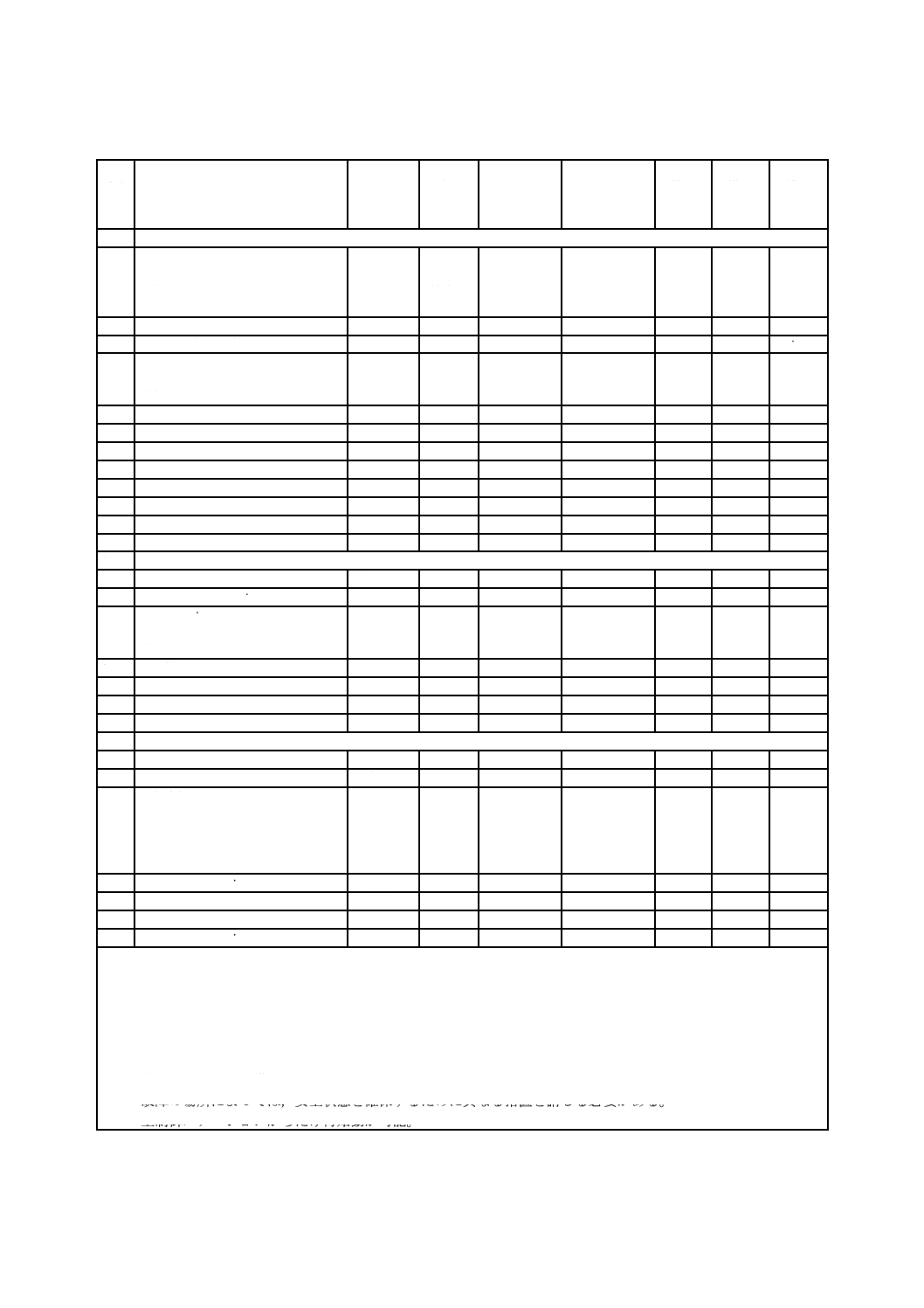
表A.3−保護及び警報:誘導電動機
図
A.1
索引
監視対象値
制限値
ローカル
診断
装置
ECR制御
ステーション
の表示
船橋制御
ステーション
の表示(該当す
る場合)
第1段階
措置
警報
第2段階
措置
低減
最終段階
措置
停止/
引き外し
3
電動機
9
軸受油潤滑
温度
充塡レベル
高
低
検査用
ガラス窓
X
X
C
C
X
X
−
−
X
−
9
軸受ハウジング温度
最大値
温度計
X
C
X
−
X
7
固定子巻線温度
最大値
−
X
C
X
X
i.a.
5
外部冷却
冷却空気温度
冷却剤
最大値
漏えい
温度計
−
X
X
C
C
X
X
−
−
−
−
4
速度
過速度
−
X
C
X
−
X
3
地絡監視
最小値
−
X
C
X
−
−
3
電動機保護
短絡
−
X
X
X
−
X
3
電動機保護
過電流
−
X
C
X
−
X
3
電動機保護
内部故障
−
X
C
X
−
X
1
変圧器/リアクトル,i.a.
7
変圧器,巻線温度
最大値
−
X
C
X
X
−
6
変圧器,コア温度 i.a.
最大値
−
X
C
X
X
−
5
外部冷却 i.a.
冷却空気温度
冷却剤
最大値
漏えい
−
−
X
X
C
C
X
X
−
−
−
−
1
電気的保護
過電流
−
X
C
X
−
X
1
電気的保護
短絡
−
X
C
X
−
X
1
差動電流(リアクトルには不要)
最大値
−
X
C
X
−
X
2
コンバータ
8
電源(入力)
喪失
−
X
C
X
−
Xd)
8
補助電源及びバスシステムi.a.
喪失
−
X
−
X
−
−
5
外部冷却
冷却空気温度
冷却剤
冷却剤導電率(半導体直接冷却の場
合)
最大値
漏えい
高
−
−
X
X
X
X
C
C
C
X
X
X
−
−
−
−
−
X
2
半導体ヒューズ i.a.
溶断
表示器
X
C
X
−
X
6
出力過電流
最大値
−
X
C
X
−
X
高調波フィルタ i.a.
故障
−
X
C
X
−
−
X=必要
C=一括警報
ECR=機関制御室
i.a.=該当する場合
ローカル診断ツールが不可能又はアクセス不能の場合,独立した測定器を別途実装しなければならない。
自動低減は,制御ステーションに表示する。
注d) 主制御ステーションからだけ再始動が可能。
28
F 8073:2017 (IEC 60092-501:2013)
表A.4−保護及び警報:直流電動機
図
A.1
索引
監視対象値
制限値
ローカル
診断
装置
ECR制御
ステーション
の表示
船橋制御
ステーション
の表示(該当す
る場合)
第1段階
措置
警報
第2段階
措置
低減
最終段階
措置
停止/
引き外し
3
電動機
9
軸受油潤滑
温度
充塡レベル
高
低
検査用
ガラス窓
X
X
C
C
X
X
−
−
X
−
9
軸受ハウジング温度
最大値
温度計
X
C
X
−
X
7
励磁及び補償巻線温度
最大値
−
X
C
X
X
i.a.
5
外部冷却
冷却空気温度
冷却剤
最大値
漏えい
温度計
−
X
X
C
C
X
X
−
−
−
−
4
速度
過速度
−
X
C
X
−
X
4
回転子拘束保護(分巻電動機のみ) アクティブ
−
X
C
X
−
Xa)
3
地絡監視
最小値
−
X
C
X
−
−
3
電動機保護
短絡
−
X
X
X
−
X
3
電動機保護
過電流
−
X
C
X
−
X
3
電動機保護
内部故障
−
X
C
X
−
Xc)
3
励磁システム
故障
−
X
C
X
−
X
1
変圧器/リアクトル,i.a.
7
変圧器,巻線温度
最大値
−
X
C
X
X
−
6
変圧器,コア温度 i.a.
最大値
−
X
C
X
X
−
5
外部冷却 i.a.
冷却空気温度
冷却剤
最大値
漏えい
−
−
X
X
C
C
X
X
−
−
−
−
1
電気的保護
過電流
−
X
C
X
−
X
1
電気的保護
短絡
−
X
C
X
−
X
1
差動電流(リアクトルには不要)
最大値
−
X
C
X
−
X
2
コンバータ
8
電源(入力)
故障
−
X
C
X
−
Xd)
8
補助電源及びバスシステムi.a.
故障
−
X
−
X
−
−
5
外部冷却
冷却空気温度
冷却剤
冷却剤導電率(半導体直接冷却の場
合)
最大値
漏えい
高
−
−
X
X
X
X
C
C
C
X
X
X
−
−
−
−
−
X
2
半導体ヒューズ i.a.
溶断
表示器
X
C
X
−
X
6
出力過電流
最大値
−
X
C
X
−
X
高調波フィルタ i.a.
故障
−
X
C
X
−
−
X=必要
C=一括警報
ECR=機関制御室
i.a.=該当する場合
ローカル診断ツールが不可能又はアクセス不能の場合,独立した測定器を別途実装しなければならない。
自動低減は,制御ステーションに表示する。
注a) 砕氷船には特別な措置が必要。
c) 故障の場所によっては,安全状態を確保するために異なる措置を講じる必要がある。
d) 主制御ステーションからだけ再始動が可能。
29
F 8073:2017 (IEC 60092-501:2013)
参考文献
IEC 60050 (all parts),International Electrotechnical Vocabulary(国際電気技術用語集)
(http://www.electropedia.org で閲覧が可能)
JIS F 8075 船用電気設備−第503部:個別規定−1 kVを超え15 kV以下の交流配電系統