2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 0906 : 1999
機関部機器類の振動許容値基準
Allowable value of vibration for ships machinery
序文 この規格は,1995年に第1版が発行されたISO 10816-1,Mechanical vibration−Evaluation of machine
vibration by measurements on non-rotating parts−Part 1 : General guidelinesを元に,対応する部分については,
その技術的内容を変更することなく作成した日本工業規格であるが,対応国際規格には規定されていない
規定内容を日本工業規格として追加している。
また,附属書には,JIS F 0906-1989で規定していた船内に取り付けられた場合の機関部機器類の振動許容
値を規定している。
なお,この規格の本体で点線の下線を施してある箇所は,対応国際規格にはない事項である。
1. 適用範囲 この規格は,一般商船の機関部に使用する機器(1)(以下,機器という。)の陸上試験時の振
動許容値基準,振動測定方法について規定する。
なお,船内据付後及び海上運転時の振動許容基準については,附属書に規定する。
注(1) 一般商船の機関部に使用する機器とは,船舶の推進に必要な機関室内及び機関室の周辺に装備
する一般機器のうち,次のものを示す。
a) 発電機用ディーゼル機関
b) ポンプ
c) 空気圧縮機(ロータリ形)
d) 油清浄機
e) 通風機
備考1. 防振装置を装備している機器には,この規定は適用しない。
2. b)のポンプの内訳は,渦巻きポンプ,歯車ポンプ,ねじポンプなどを示し,往復動ポンプは
除く。
3. この規格の対応国際規格を,次に示す。
ISO 10816-1 : 1995 Mechanical vibration−Evaluation of machine vibration by measurements on
non-rotating parts−Part 1 : General guidelines
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの規格は,その最新版を適用する。
JIS B 0906 機械振動−非回転部分における機械振動の測定と評価−一般的指針
備考 ISO 10816-1からの引用事項は,この規格の該当事項と同等である。
ISO/DIS 10816-3 Mechanical vibration−Evaluation of machine vibration by measurements on
non-rotating parts−Part 3 : Industrial machines with nominal power above 15 kW and
2
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
nominal operating speeds between 120 r/min and 15 000 r/min in site
ISO 10816-6 Mechanical vibration−Evaluation of machine vibration by measurements on
non-rotating parts−Part 6 : Reciprocating machines with power ratings above 100 kW
3. 振動許容値基準 振動測定結果は,JIS B 0906に従った評価基準によって評価する。各機器は,それ
ぞれに該当するISO/DIS 10816-3(ロータリ形圧縮機,ポンプ,通風機及び電動機),及びISO 10816-6に
よる評価ゾーンに従って評価する。評価ゾーンは,次の四つのゾーンに定義される。
ゾーンA: 新しく設置された機械の振動は,通常,このゾーンに含まれる。
ゾーンB: このゾーンの振動値の機械は,一般に何の制限もなく長期運転が可能である。
ゾーンC: このゾーンの振動値の機械は,長期間の連続運転は期待できない。
一般に,改善処理のための適切な機会が生じるまでの限定した期間だけ,この振動条
件で運転できる。
ゾーンD: このゾーンの振動値の機械は,通常,損傷を起こすのに十分なほどに厳しい。
機器類の振動許容値は,個々の機器の設計条件,機器の大きさ,支持構造の特性,運転状態などによっ
て変わるので,この規格では,振動許容値基準を陸上試験時ではゾーンBの上限に設定し,5.6の測定位
置で付表1及び付表2のとおりとする。各機器の振動の大きさに対するゾーンの取り方は,機器の種類及
び電動機の大きさによって異なり,そのクラス分けがISO/DIS 10816-3及びISO 10816-6に定められてい
る。
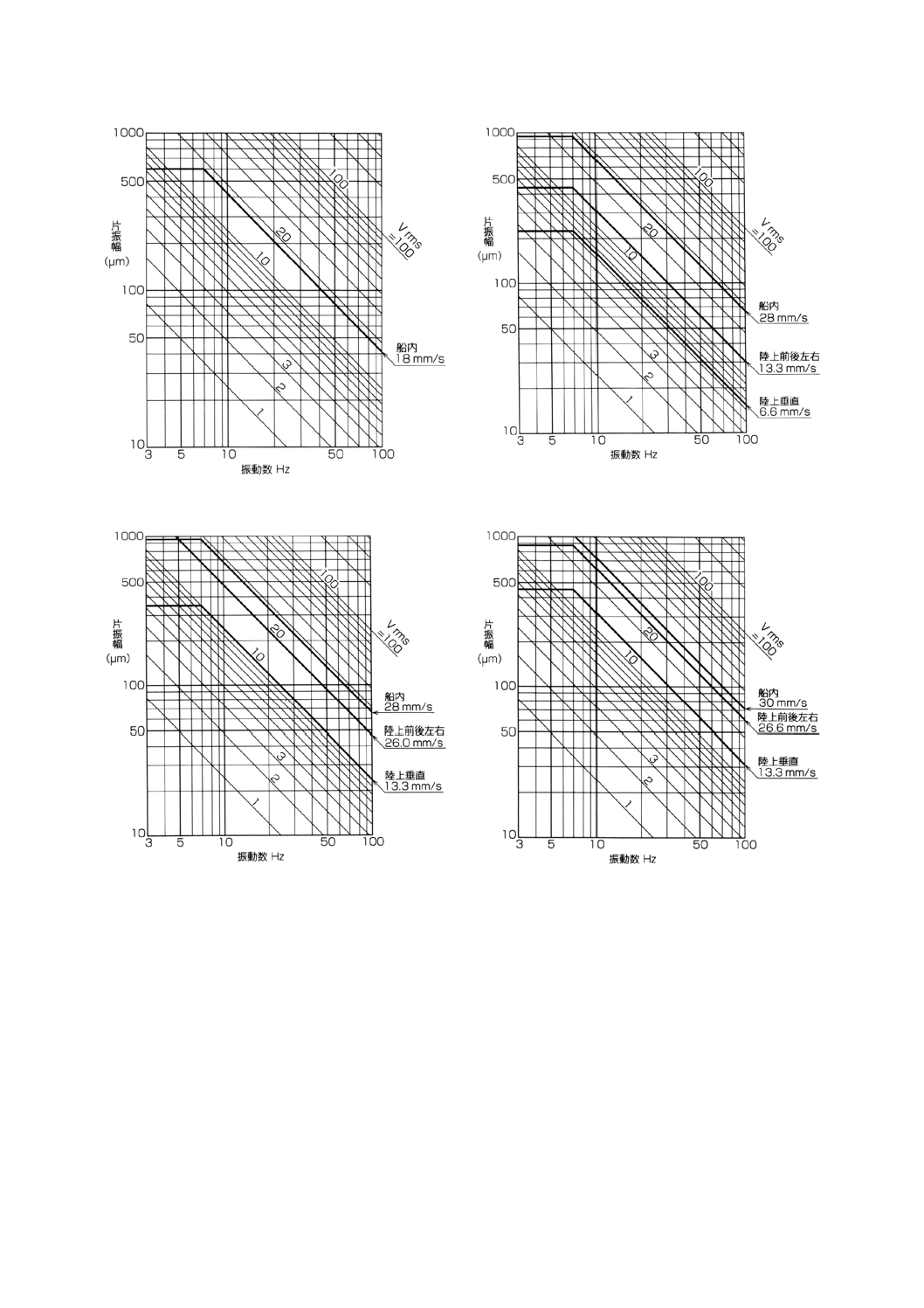
船内据付後及び海上運転時の振動許容値基準は,附属書付図1〜8に示したとおりとする。
4. 振動測定方法
4.1
測定装置 振動測定装置は,温度,湿度など使用する環境で満足に機能するように計画する。
また,振動変換器が正しく取り付けられ,その取付けが機器の振動応答特性に影響しないことに特別に
注意を払う必要がある。広帯域振動の監視には,次の二つの測定機器が一般的なものとして認められてい
る。
a) rms変換回路及びその表示機能をもつ測定器
b) rms値か,平均値のどちらかの変換回路をもち,p-p値又はピーク値が読めるように目盛られた測定器。
その目盛は,正弦波の場合のrms値,平均値,p-p値,ピーク値間の関係に基づいて付けられている
もの。
備考 “rms” は,二乗平方根 (root mean square) の略であり, “p-p” はpeak to peakの略である。
4.2
振動数範囲 振動数範囲は,対象とする機器の形式に依存する。この規格では,ISO/DIS 10816-3及
びISO 10816-6に従って10Hz〜1 000Hzの範囲とする。
4.3
測定量 測定量は,次による。
a) 振動変位 μm
b) 振動速度 mm/s
c) 振動加速度 m/s2
4.4
振動の大きさ 5.1の条件を満たす測定器による測定結果を,特定の測定位置及び測定方向での振動
の大きさと呼ぶ。これまでの実績から,回転機械の広帯域振動の評価は,振動速度のrmsで行うのが一般
的である。これは振動エネルギーと関係づけることができるためである。しかし,変位又は加速度のよう
な他の量,また,rms値の代わりにピーク値を選んでもよい。
3
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.5
振動シビアリティ 通常の測定では,種々の測定位置で2方向又は3方向について測定を行う。そ
の結果,振動の大きさの異なった一連の測定結果が得られる。決められた機械の支持状態と運転条件で測
定した複数の広帯域振動値の中の最大値を振動シビアリティと定義する。この規格では,振動速度の実効
値 (rms) の最大値を用いて表し,Vrmsと表現する。Vrmsは,振動速度の二乗平均値の平方根で,次のとお
り表される。
∫T
rms
dt
t
V
T
V
0
2)
(
1
=
ここに, V: 振動速度 (mm/s)
T: 周期 (s)
4.6
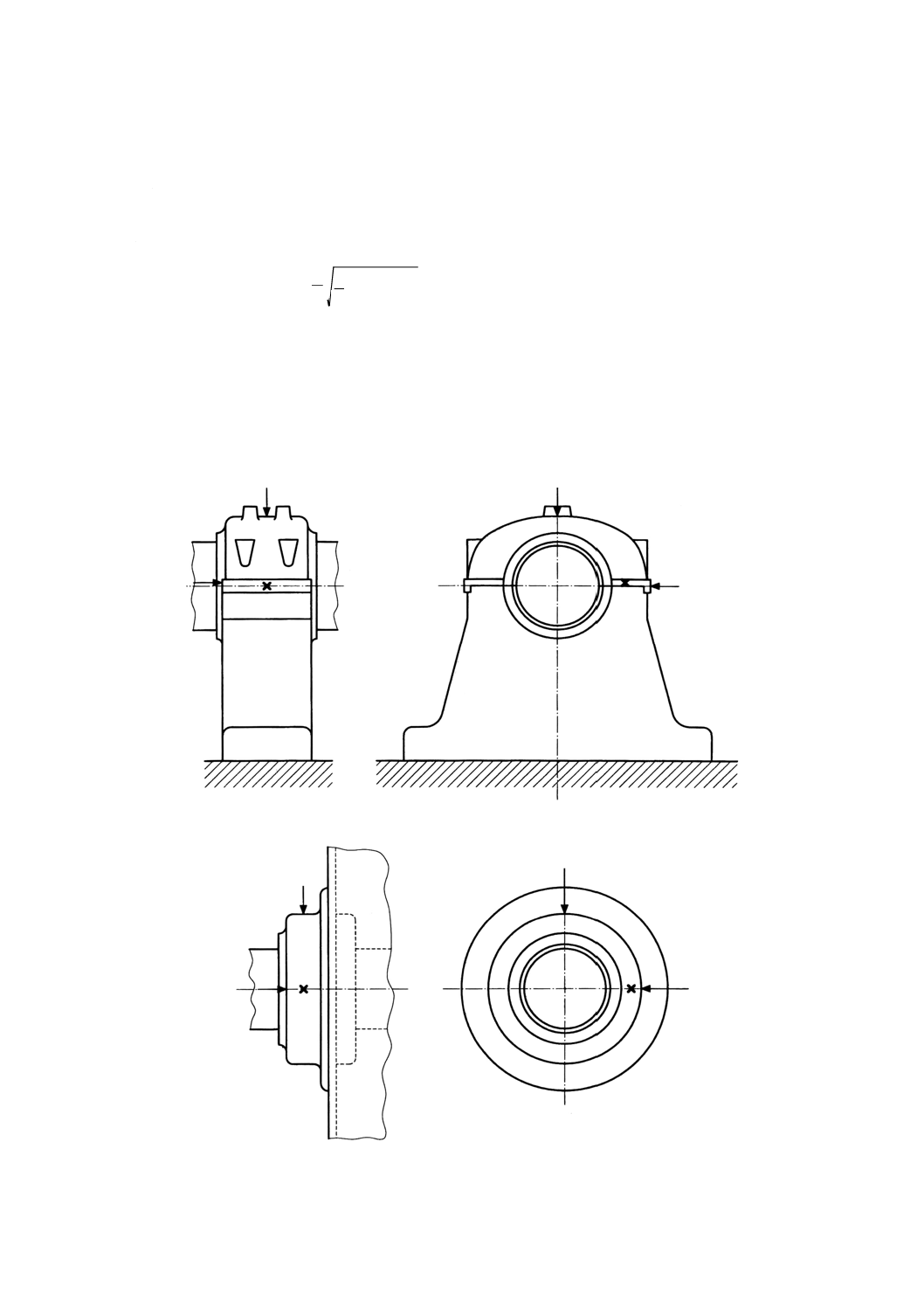
測定位置 代表的な測定位置を図1〜5に示す。各々の測定位置での振動挙動を明らかにするために
は,直交3方向で測定する必要がある。図1〜5に示した全点の測定は,一般に受入試験にだけ必要であり,
運転監視では,軸に直交する一つ又は二つの方向,例えば水平方向又は垂直方向で測定するのが普通であ
る。
船内据付後及び海上運転時の測定位置は,附属書付図9による。
図1 軸受台(ペデスタル形軸受)の測定位置
図2 軸受箱(ハウジング形軸受)の測定位置
4
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 小形電気機械の測定位置
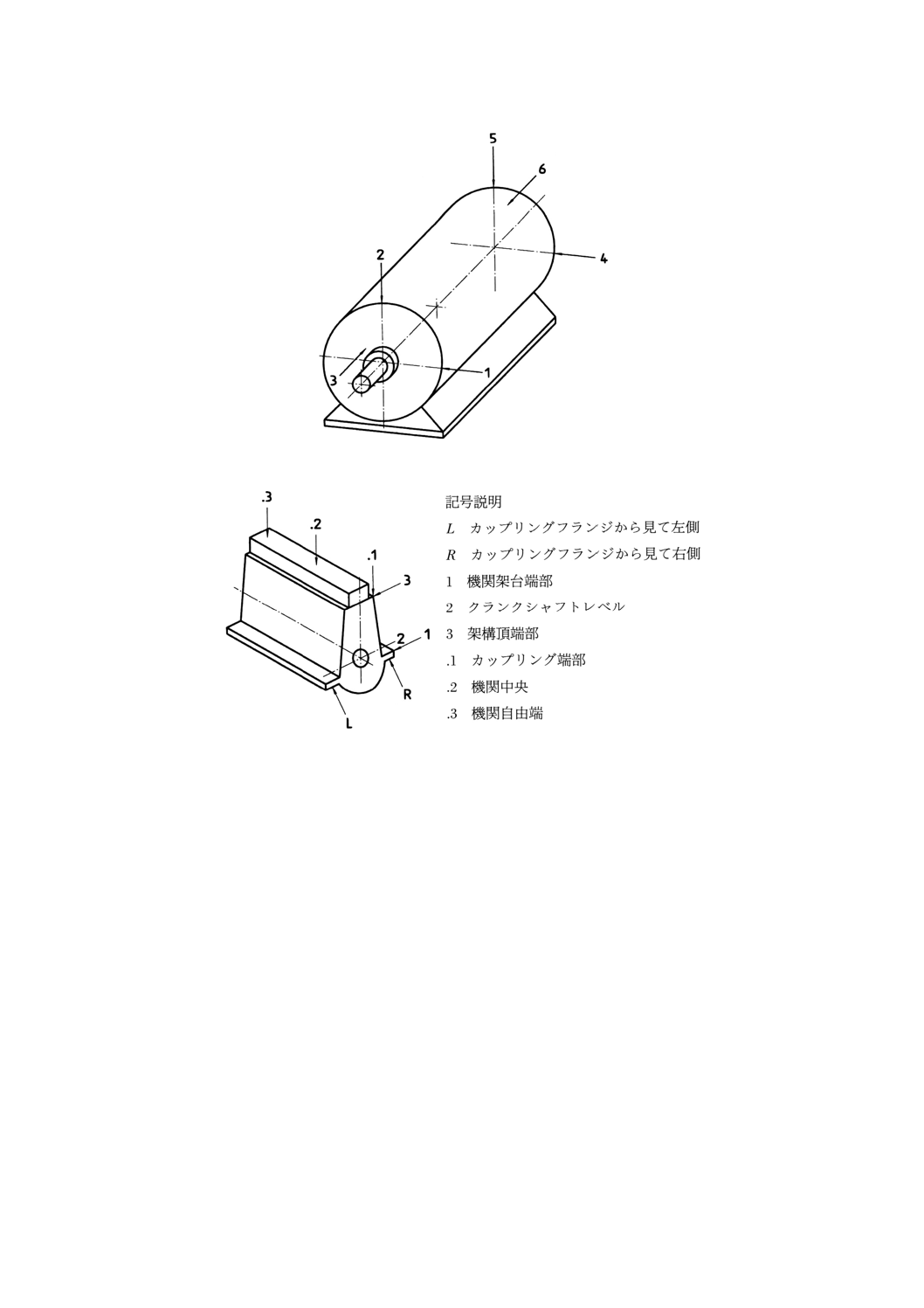
図4 往復動機関の測定位置
5
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
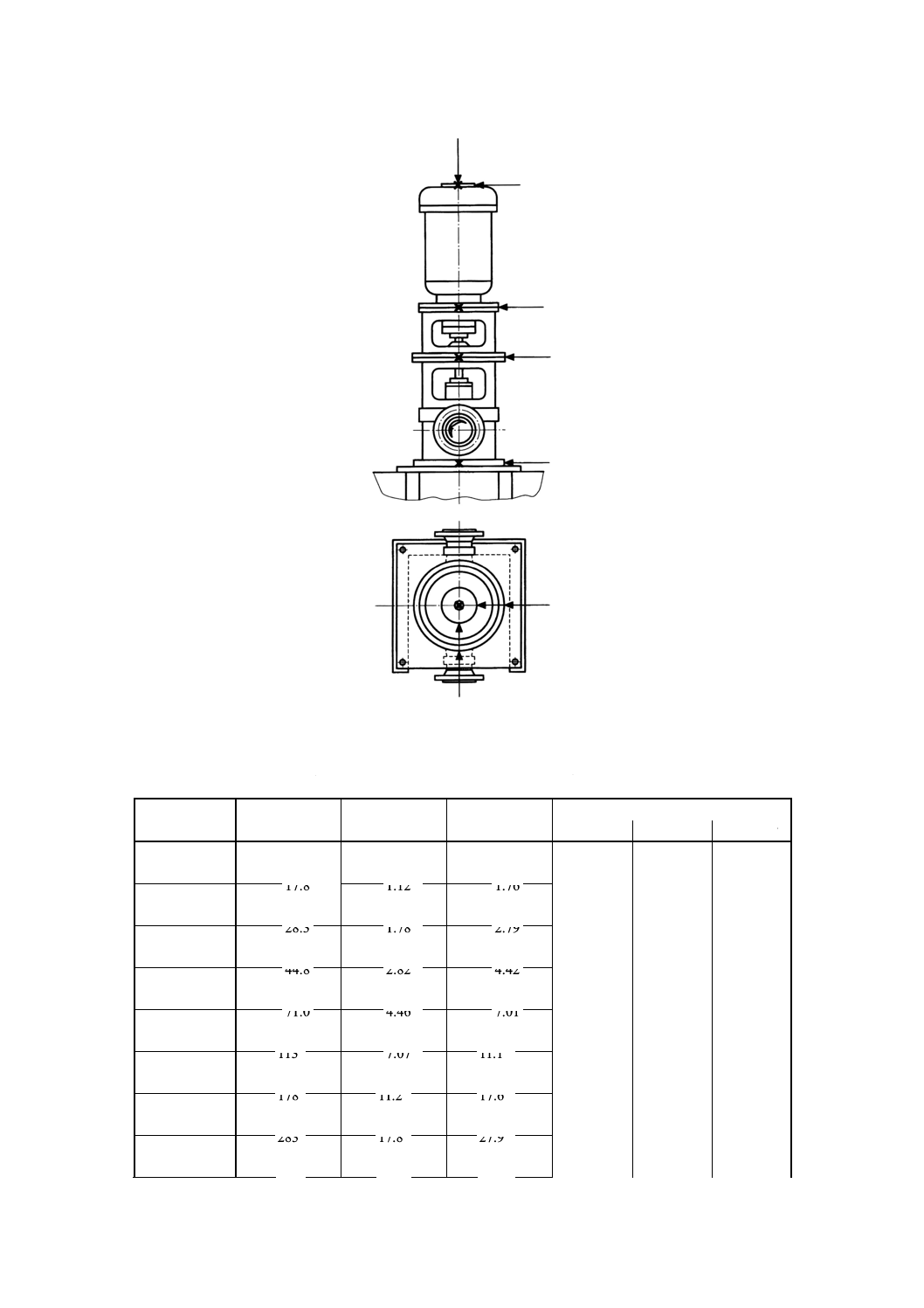
図5 立形機械の測定位置
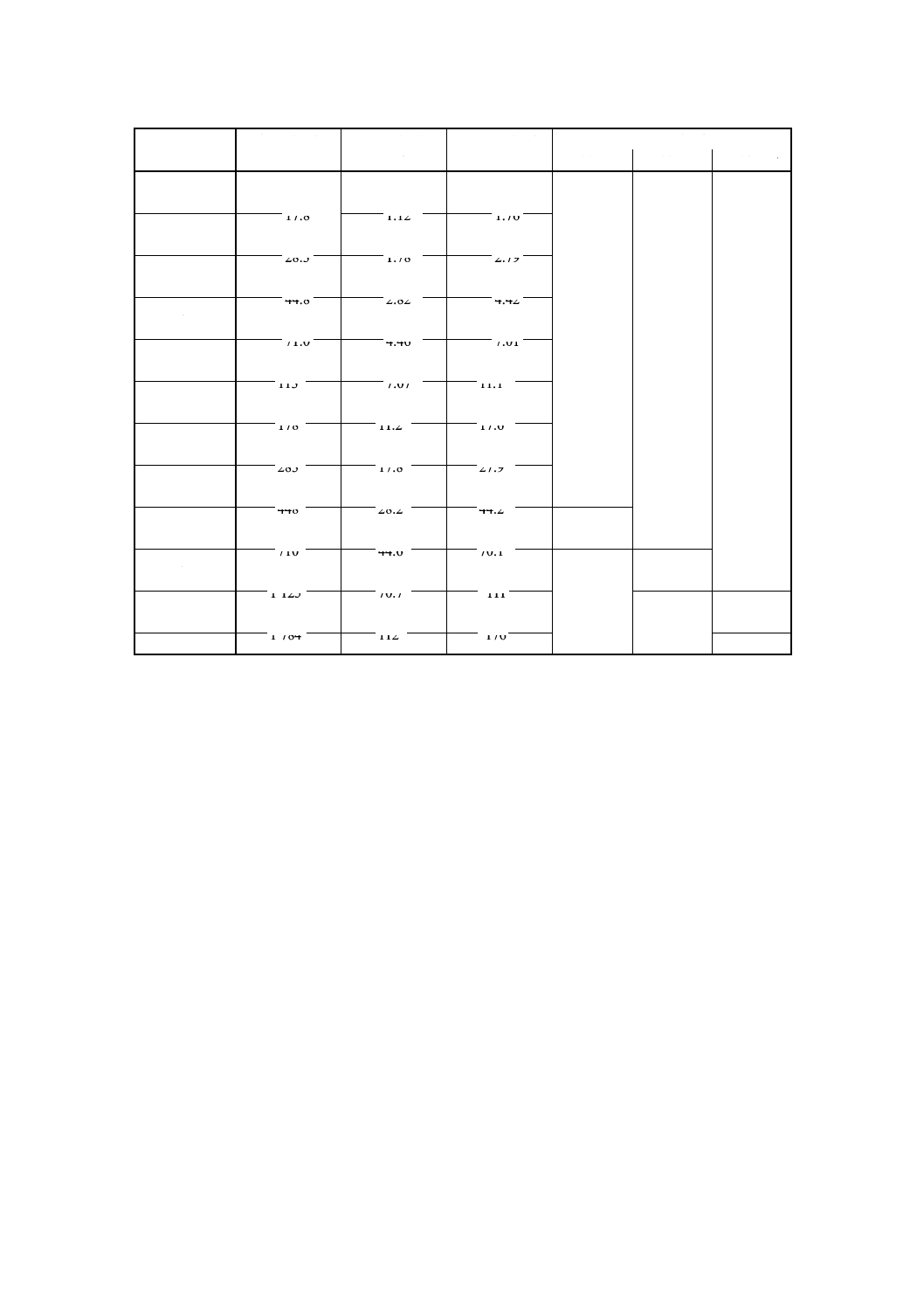
付表1 発電機用ディーゼル機関の陸上試験時の振動シビアリティ範囲と振動許容値
(ISO 10816-6:1995によるクラスとゾーン)
振動シビア
リティ等級
変位 (rms)
μm
速度 (rms)
mm/s
加速度 (rms)
m/s2
クラス別評価ゾーン
クラス5
クラス6
クラス7
1.1
17.8
1.12
1.76
1.8
28.3
1.78
2.79
2.8
44.8
2.82
4.42
4.5
71.0
4.46
7.01
7.1
113
7.07
11.1
11
178
11.2
17.6
18
283
17.8
27.9
A/B
28
448
28.2
44.2
A/B
6
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
振動シビア
リティ等級
変位 (rms)
μm
速度 (rms)
mm/s
加速度 (rms)
m/s2
クラス別評価ゾーン
クラス5
クラス6
クラス7
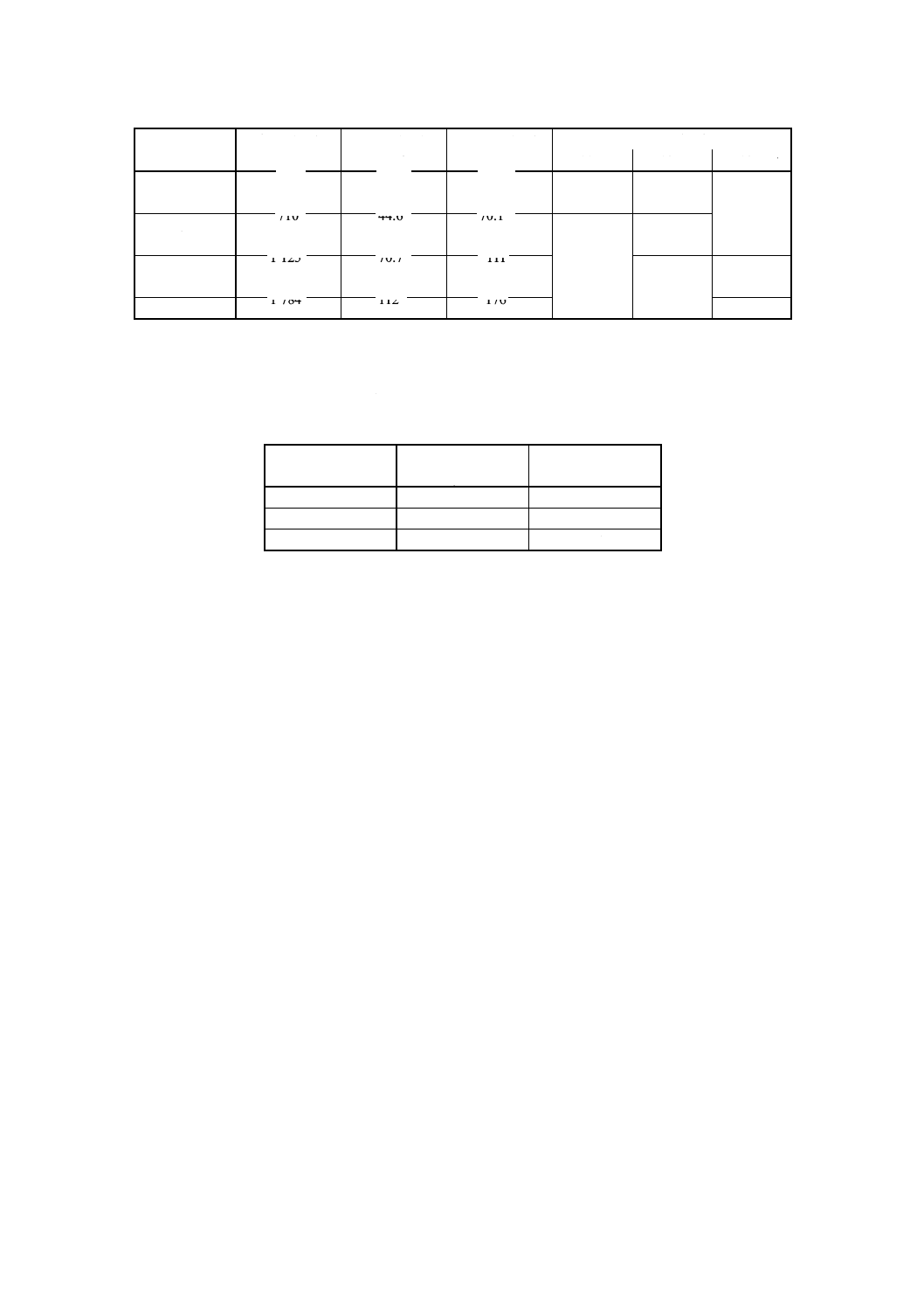
45
C
710
44.6
70.1
A/B
71
D
C
1 125
70.7
111
112
D
C
1 784
112
176
180
D
備考 陸上運転時の振動許容値は,ゾーンA/Bの上限とする。
付表2 ポンプ,ロータリ圧縮機,油清浄機,通風機の陸上試験
時の振動シビアリティ範囲と振動許容値(ISO/DIS
10816-3:1997の表A.3の固定支持による。)
ゾーン区切り
変位 (rms)
μm
速度 (rms)
mm/s
A/B
18
2.3
B/C
36
4.5
C/D
56
7.1
備考 陸上運転時の振動許容値は,ゾーンBの上限とする。
7
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書(規定) 船内据付後及び海上運転時の振動許容値
1. 適用範囲 この附属書は,JIS F 0906-1989に規定された機器の船内据付後及び海上運転時の振動許容
値について規定する。
2. 振動許容値基準 機器の振動許容値基準は,附属書付図9に示された測定位置で附属書付図1〜8のと
おりとし,それぞれの許容値基準以下となることが望ましい。機器の要目が附属書付図1〜8と異なる場
合は,より近いほうの要目の附属書付図1〜8を適用する。海上運転時の許容値基準は,船内据付後と同
じ値とする。往復動形圧縮機については,陸上運転時の許容値も併せ示した。
3. 振動測定方法 機器の振動測定の実施及びその内容は,使用する測定機器を含め受渡当事者間の打合
せによって,次による。
3.1
振動測定状態 振動計測は,機器の船内据付後に行い,陸上試験時の測定時と同じ運転状態又は相
当する運転状態で,同じ測定位置を測定する。
備考 解除運転時の振動測定は,次の状態を考慮して行うことが望ましい。
a) 特に指定のない限り,船の喫水の5倍以上の水深で行う。
b) できるだけ静かな海(風浪階級3以下)で行う。
c) その船の通常のバラスト容量以内で,運航条件にできるだけ近い排水量となるようにバラストを搭載
する。船尾喫水は,プロペラを確実に没水させる。
d) 測定中の当て舵は,約2度以内とする。
3.2
測定位置 振動測定位置は,附属書付図9に示すとおりとする。ただし,測定が困難な場合は,そ
の近傍でもよい。
なお,括弧を付けて示した測定位置は,振動評価を行う参考として測定することが望ましい。
3.3
振動数範囲 この附属書では,3Hz〜100Hzとする。ただし,発電機用ディーゼル機関については,
10Hz〜1 000Hzとする。
8
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
振動シビア
リティ等級
変位 (rms)
μm
速度 (rms)
mm/s
加速度 (rms)
m/s2
クラス別評価ゾーン
クラス5
クラス6
クラス7
1.1
17.8
1.12
1.76
1.8
28.3
1.78
2.79
2.8
44.8
2.82
4.42
4.5
71.0
4.46
7.01
7.1
113
7.07
11.1
11
178
11.2
17.6
18
283
17.8
27.9
A/B
28
448
28.2
44.2
A/B
45
C
710
44.6
70.1
A/B
71
D
C
1 125
70.7
111
112
D
C
1 784
112
176
180
D
備考 振動許容値は,ゾーンA/Bの上限とする。
附属書付図1 発電機用ディーゼル機関の船内据付後の振動許容値(海上試験時の振動シビアリティ範囲
及び振動許容値)
9
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書付図2 立形・横形ポンプの船内据付後の
振動許容値
附属書付図3 空気圧縮機(往復動形−22kW以下)
の船内据付後の振動許容値
附属書付図4 空気圧縮機(往復動形−22kW〜
37kW)の船内据付後の振動許容値
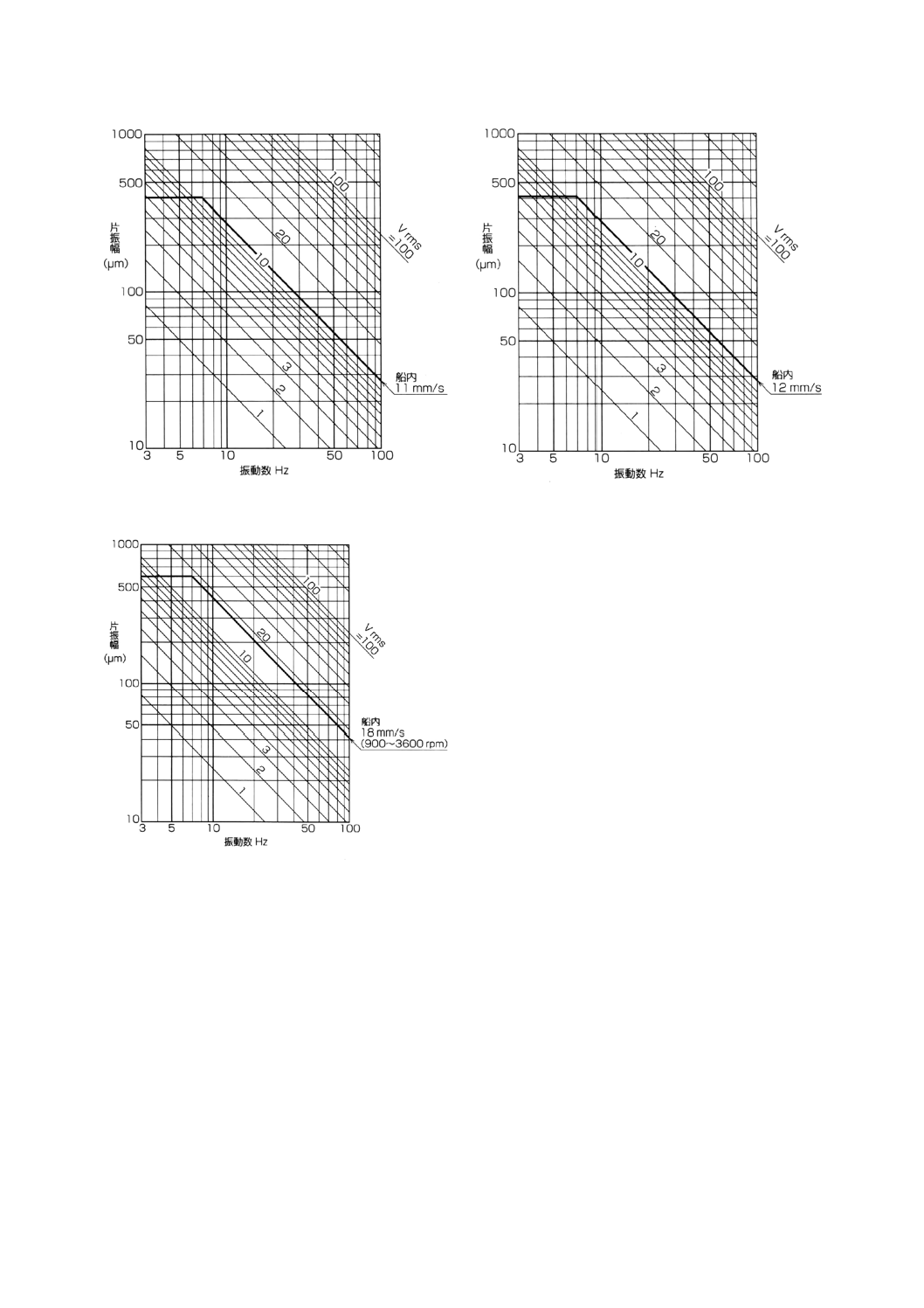
附属書付図5 空気圧縮機(往復動形−37kW以上)
の船内据付後の振動許容値
10
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書付図6 油清浄機(円筒形)の船内据付後の
振動許容値
附属書付図7 油清浄機(分離板形)の船内据付後
の振動許容値
附属書付図8 通風機の船内据付後の振動許容値
11
F 0906 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
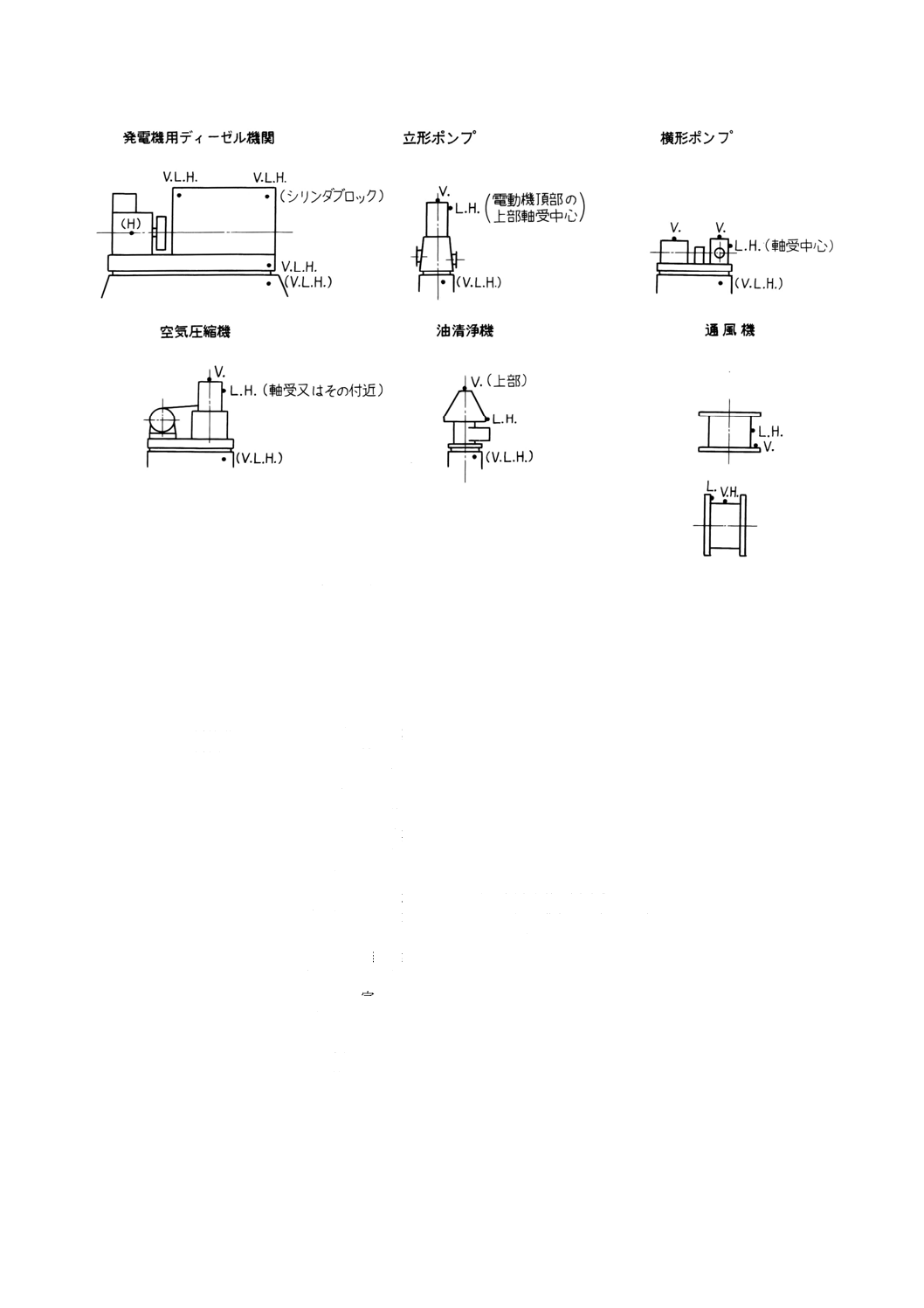
備考1. 付図中の “L” は前後方向,“V” は垂直方向,“H” は左右方向を示す。
2. 側面のL, Hは互いに90°ずらした位置とする。
附属書付図9 振動測定位置
財団法人 日本船舶標準協会機関部会/機関設計専門分科会 構成表
氏名
所属
(委員長)
柿 原 実
株式会社エイ・ディー・ディー
(委員)
穂 森 繁 弘
財団法人日本海事協会
鈴 木 博 信
社団法人日本舶用工業会
川 嶋 民 夫
日本郵船株式会社
杉 山 知 徳
石川島播磨重工業株式会社船舶海洋事業本部東京第一工場
花 崎 襄
川崎重工業株式会社船舶事業本部
秋 本 義 紀
住友重機械工業株式会社船舶艦艇鉄構事業本部
柴 田 菊 夫
NKK総合エンジニアリング事業部船舶・海洋本部
熊 谷 猛
日立造船株式会社船舶・防衛事業本部
池 田 敏
三井造船株式会社千葉事業所船舶・艦艇事業部
林 洋一郎
三菱重工業株式会社下関造船所船舶海洋部
筏 継 雄
ダイハツディーゼル株式会社技術第一部
桶 谷 敏 行
株式会社新潟鉄工所原動機事業部
大 島 宗 紀
阪神内燃機工業株式会社東京支店
西 村 孝 昭
ヤンマーディーゼル株式会社特機事業本部
小宮山 豊 海
株式会社赤阪鉄工所技術本部
杉 田 英 二
株式会社アイ・イー・エム
鹿 股 信 幸
運輸省海上技術安全局
橋 本 繁 晴
財団法人日本規格協会
(事務局)
小 郷 一 郎
財団法人日本船舶標準協会