E 5302:2016
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 構造及び種類 ··················································································································· 3
4.1 構造 ···························································································································· 3
4.2 端部の取付方法 ············································································································· 3
4.3 十字継手の固定方法 ······································································································· 3
4.4 ゴム軸継手 ··················································································································· 5
4.5 伸縮部 ························································································································· 5
5 技術要求項目 ··················································································································· 5
5.1 一般 ···························································································································· 5
5.2 伝達トルク ··················································································································· 6
5.3 回転速度 ······················································································································ 7
5.4 寸法 ···························································································································· 7
5.5 傾斜角度 ······················································································································ 8
5.6 スプラインしゅう動抵抗 ································································································· 8
5.7 潤滑 ···························································································································· 8
5.8 塗装 ···························································································································· 8
5.9 基本データ ··················································································································· 8
6 性能······························································································································· 8
7 試験······························································································································· 9
7.1 試験の種類 ··················································································································· 9
7.2 試験項目 ······················································································································ 9
7.3 試験方法 ····················································································································· 10
8 製品の呼び方 ·················································································································· 11
9 表示······························································································································ 12
9.1 合いマークの表示 ········································································································· 12
9.2 製品情報の表示 ············································································································ 12
附属書A(規定)伝達トルクの算出方法 ·················································································· 13
附属書B(規定)第一推進軸の傾斜角度の算出方法 ···································································· 18
附属書C(規定)平均回転速度,平均トルク及び平均傾斜角度の算出方法 ······································ 24
附属書D(規定)推進軸の危険回転速度の算出方法 ··································································· 28
E 5302:2016
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
鉄道車輌工業会(JARI)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規
格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,国土交通大臣が改正した日本工業規
格である。
これによって,JIS E 5302:1988は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。国土交通大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
E 5302:2016
鉄道車両−推進軸
Rolling stock-Propeller shafts
1
適用範囲
この規格は,鉄道車両の内燃動車及び直角カルダン駆動方式の電気車両,並びに低床式のLRV 1) 及び新
交通車両に用いる推進軸について規定する。
注1) ライトレールビークルの略語。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0905 回転機械−剛性ロータの釣合い良さ
JIS B 1455 ゴム軸継手
JIS E 4001 鉄道車両−用語
JIS K 2220 グリース
JIS Z 2320-1 非破壊試験−磁粉探傷試験−第1部:一般通則
JIS Z 2343-1 非破壊試験−浸透探傷試験−第1部:一般通則:浸透探傷試験方法及び浸透指示模様の
分類
JIS Z 2344 金属材料のパルス反射法による超音波探傷試験方法通則
JIS Z 3060 鋼溶接部の超音波探傷試験方法
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS E 4001によるほか,次による。
3.1
軸に関する用語
3.1.1
推進軸
鉄道車両の伝動軸として用いる第一推進軸,第二推進軸及び補機駆動軸を区別することなく総称する呼
称。
3.1.2
第一推進軸
原動機に附属する変速機,又は主電動機から台車の第一減速機に動力を伝える回転軸。
3.1.3
第二推進軸
連続(二軸)駆動式台車内の第一減速機と第二減速機との間で動力を伝える回転軸。
2
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.4
補機駆動軸
原動機から補機駆動装置に動力を伝える回転軸。
3.2
継手に関する用語
3.2.1
自在継手
傾斜角をもつ二つの回転軸を連結し,回転軸相互にトルクを伝達する継手。十字継手,ゴム軸継手など
がある。
3.2.2
十字継手
回転軸の角度変動を吸収する自在継手の一つの形態であり,十字軸と転がり軸受とからなる継手。
3.2.3
ゴム軸継手
回転軸の角度変動を吸収する自在継手の一つの形態であり,ゴムの弾性を利用した継手。
3.2.4
ヨーク
回転軸のシャフト又はスリーブにトルクを伝達する二股形状の部材。回転軸の構造及び周辺の構成品と
の相互関係によって,フランジ付き,固定ヨーク形などの種類がある。
3.3
トルクに関する用語
3.3.1
常用最大トルク
推進軸の各部材の疲労強度を評価する際の基準となる常用最大のトルク。
3.3.2
非常最大トルク
推進軸の各部材の静的破壊に対する強度を評価する際の基準となる非常最大のトルク。
3.3.3
平均トルク
十字継手部の転がり軸受の寿命算出に用いる車両の運用状態を考慮して平均化した推進軸の伝達トルク。
3.3.4
せりあいトルク
連続(二軸)駆動式台車において,前後輪軸のレールとの粘着状態,車輪直径の差などによって,第二
推進軸に作用するトルク。
3.4
回転速度に関する用語
3.4.1
最大回転速度
車両設計上で最大となる推進軸の回転速度。
3.4.2
平均回転速度
車両の運用状態を考慮して平均化した推進軸の回転速度。
3
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.4.3
危険回転速度
曲げ共振による激しい振動の発生で,推進軸などの破損に至る危険性がある回転速度。
3.5
傾斜角度
一つの継手部において,入力軸と出力軸との交わる角度。
4
構造及び種類
4.1
構造
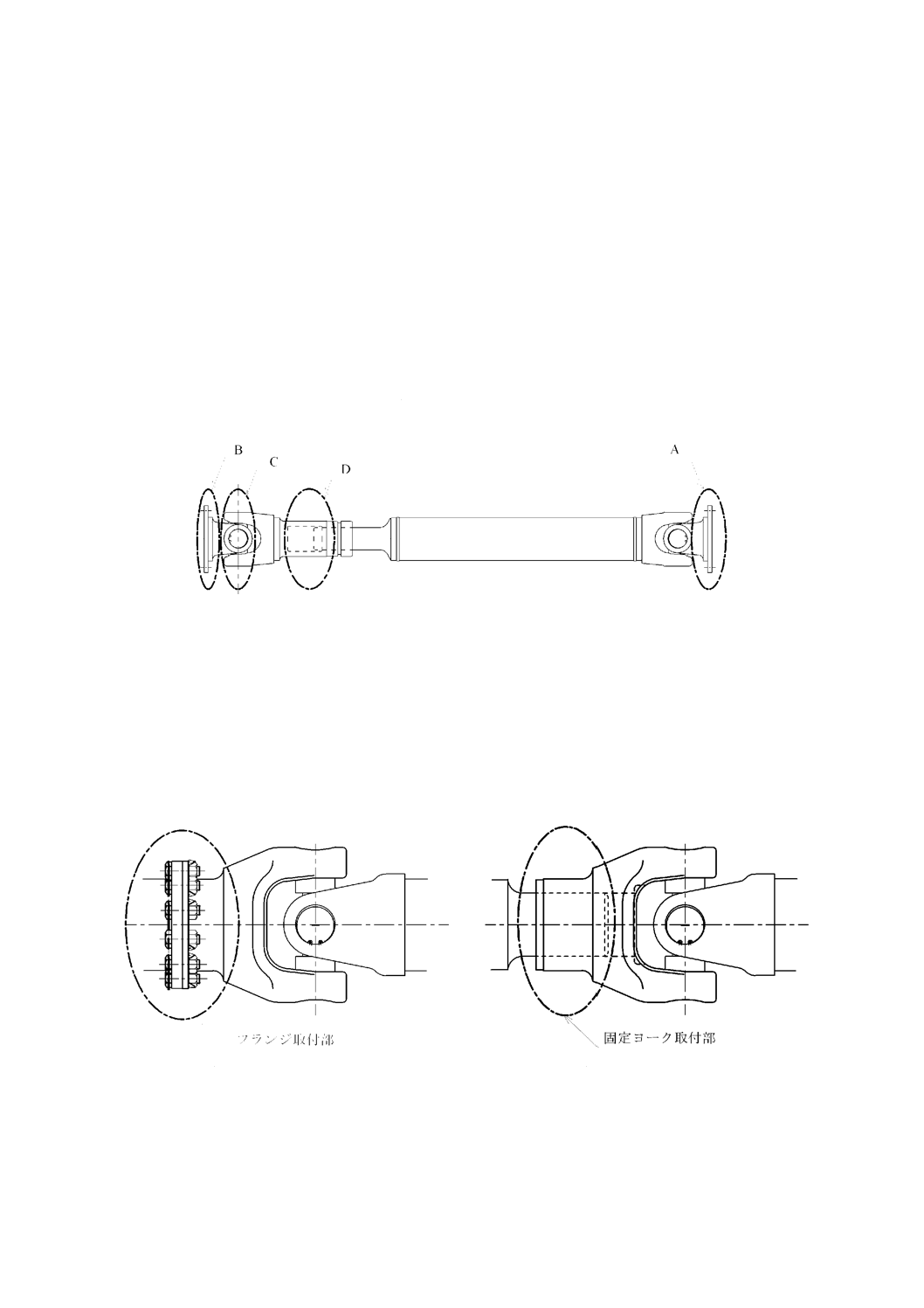
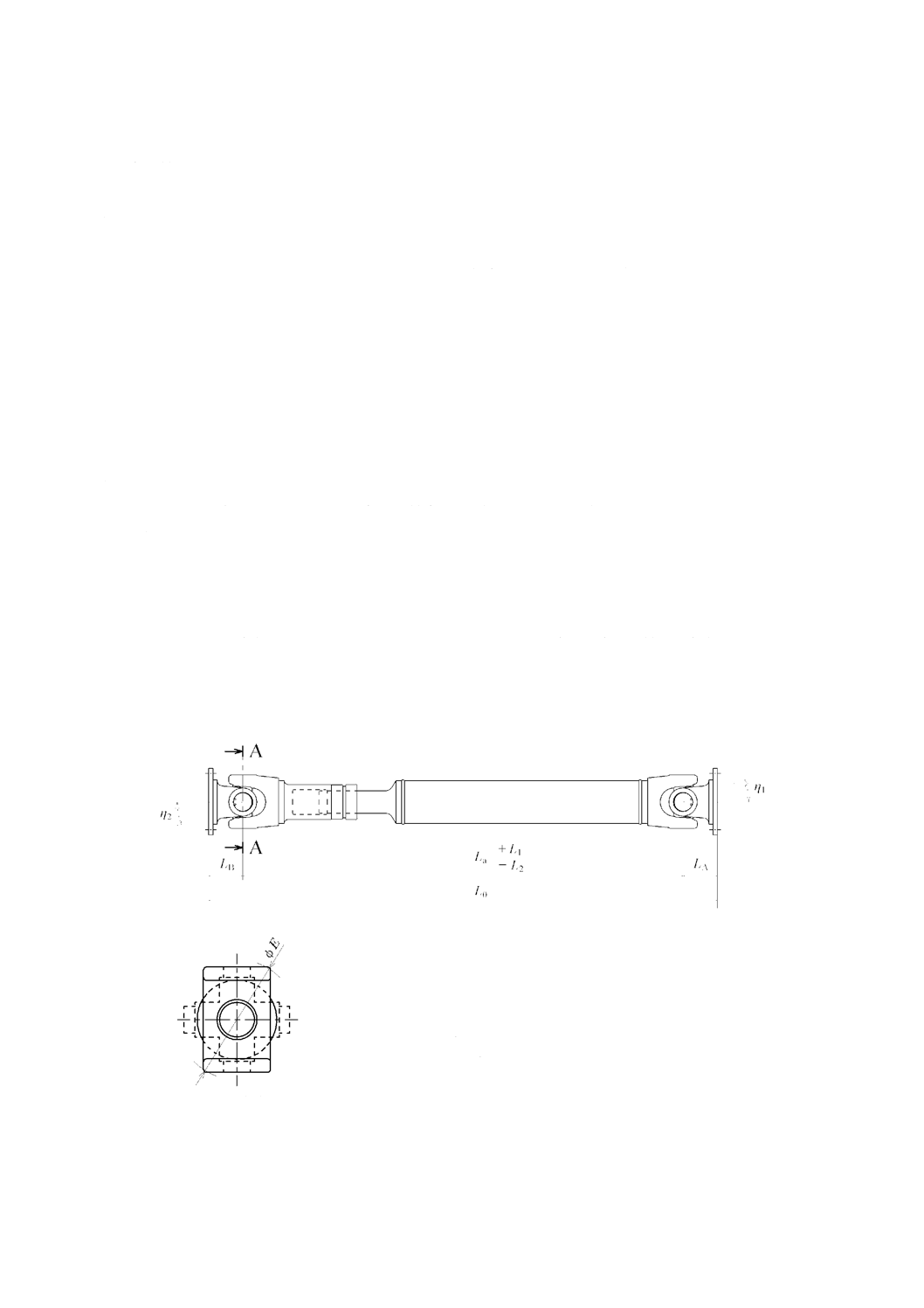
代表的な推進軸の構造例を,図1に示す。
なお,具体的な構造は,受渡当事者間で協定する図面(以下,図面という。)による。
A 端部I
B 端部II
C 自在継手部
D 伸縮部
図1−推進軸の構造例
4.2
端部の取付方法
一般的に用いられる端部I及び端部IIの取付方法の種類を,図2に示す。
a) フランジ取付方式
b) 固定ヨーク取付方式
図2−端部の取付方法の種類
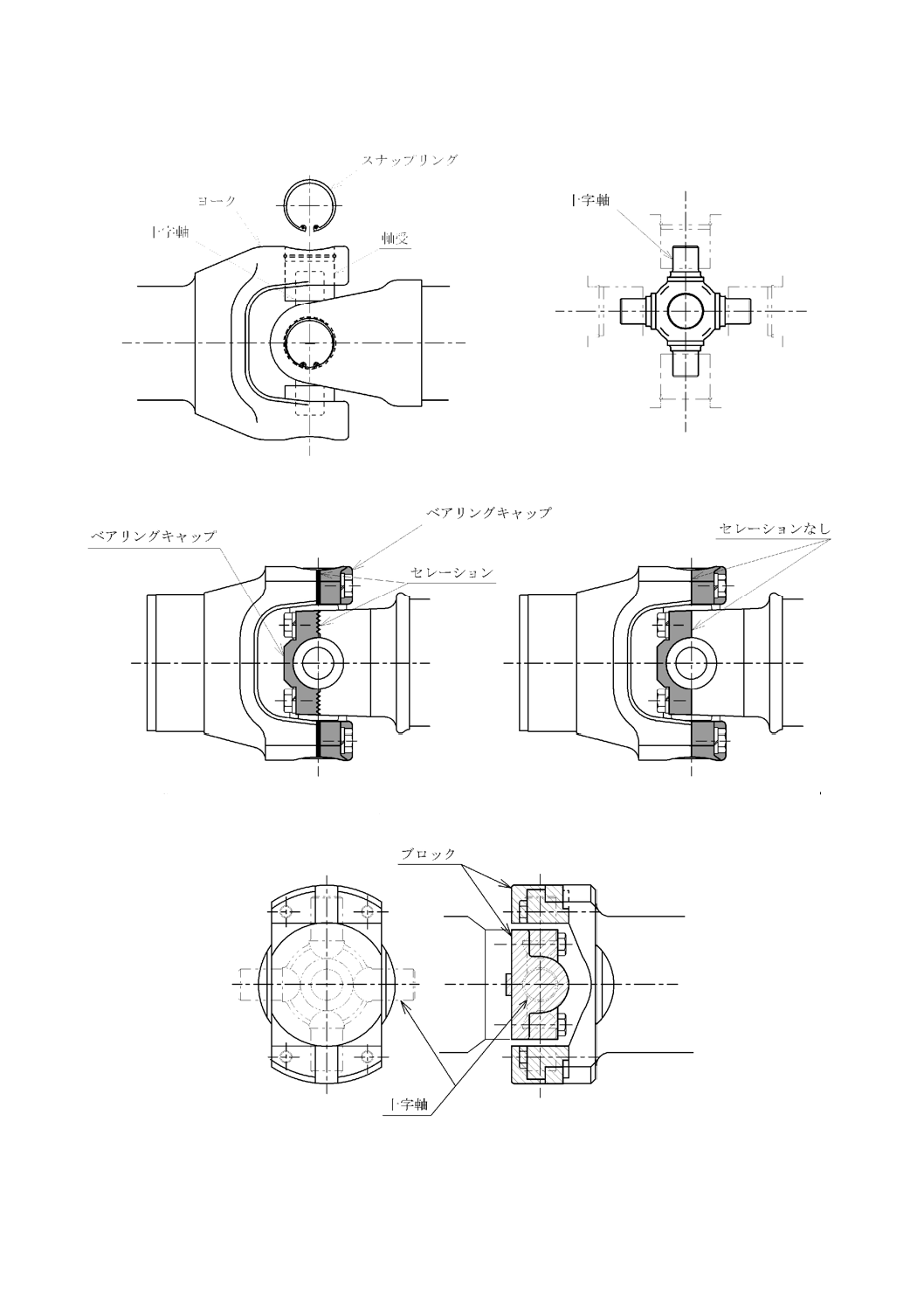
4.3
十字継手の固定方法
一般的に用いられる十字軸[図3のa) 参照]を固定する方法は,図3のa)〜c) がある。
端部II側
端部I側
4
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) スナップリング方式
1) セレーション付きベアリングキャップ
2) セレーションなしベアリングキャップ
b) ベアリングキャップ方式
c) ブロック方式
図3−十字軸の固定方法の種類
十字軸詳細(各方式に共通)
5
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
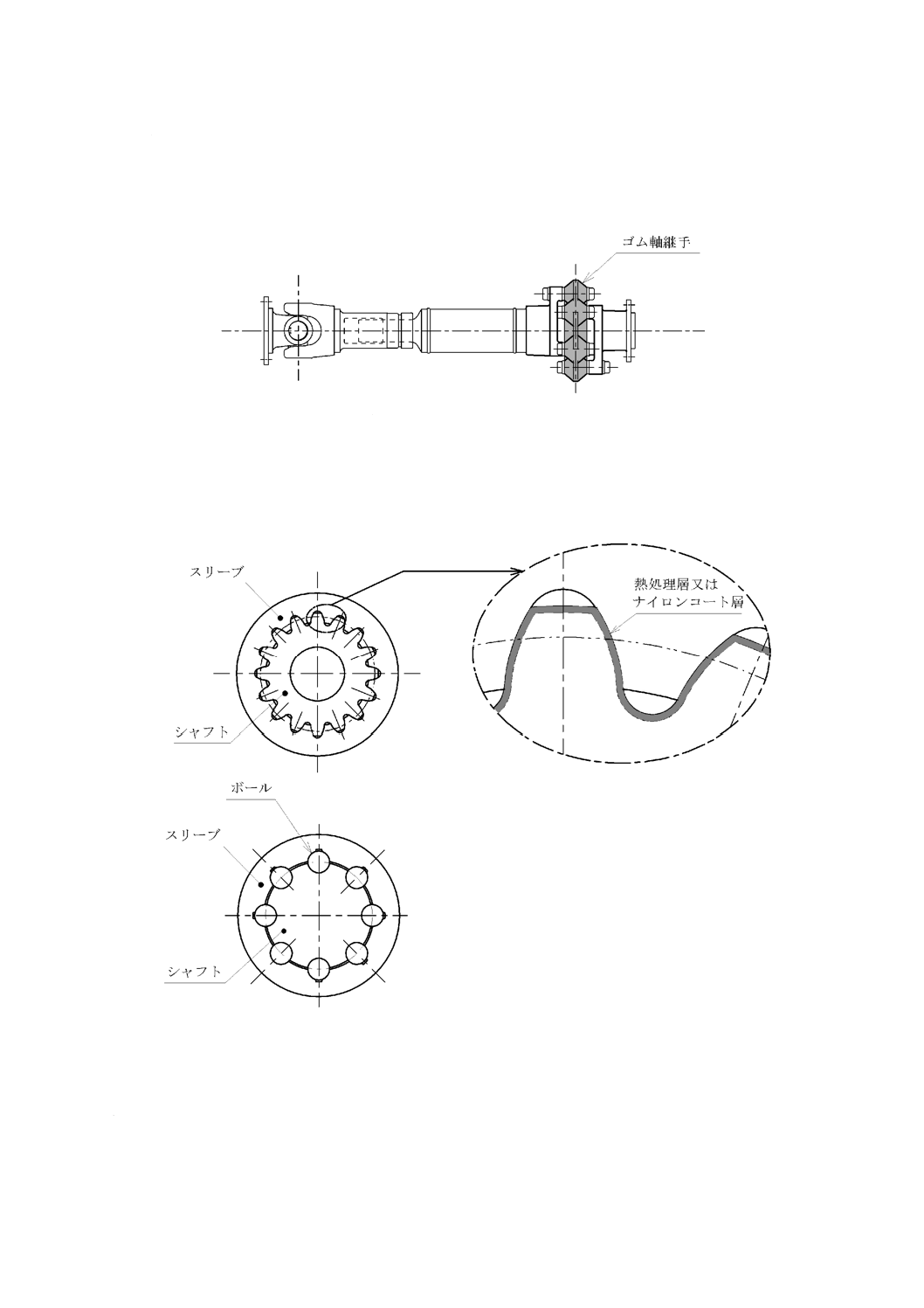
4.4
ゴム軸継手
自在継手部の一方にゴム軸継手を用いた推進軸の構造例を,図4に示す。
ゴム軸継手の例は,JIS B 1455による。
図4−ゴム軸継手を用いた推進軸の構造例
4.5
伸縮部
一般的に用いられる伸縮部の種類を,図5に示す。
図5−伸縮部の種類(断面)
5
技術要求項目
5.1
一般
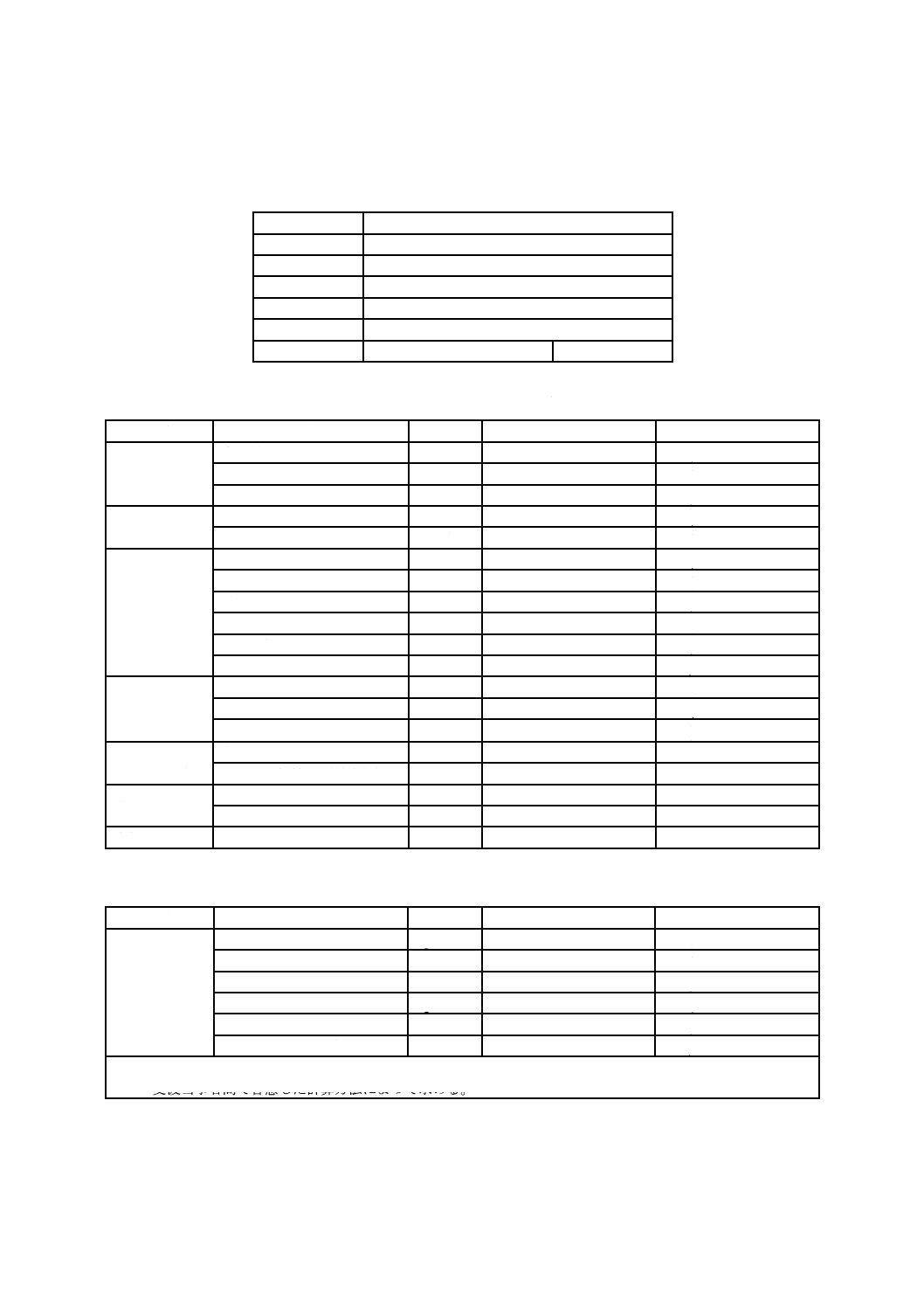
推進軸を発注する上で必要な技術要求項目は,次のとおりとする。表1の適用欄及び表2の要求数値欄
は発注者側が記入し,生産者側に提示する。また,表3の提示する数値欄は生産者側が記入し,発注者側
a) スプライン方式
b) ボールスプライン方式
6
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に提示する。
表1−技術要求項目(一般項目)
項目
適用
製作会社
事業者名
車両形式
車両製作会社
項目表作成日
環境条件
使用温度範囲
〜
表2−技術要求項目(発注者側が提示)
区分
項目
単位
要求数値
箇条番号
伝達トルク
常用最大トルク
N・m
5.2 a)
非常最大トルク
N・m
5.2 b)
平均トルク
N・m
5.2 c)
回転速度
最大回転速度
min−1
5.3 a)
平均回転速度
min−1
5.3 b)
寸法
静止取付寸法
mm
5.4 a)
最長寸法
mm
5.4 b)
最短寸法
mm
5.4 c)
伸縮量
mm
5.4 d)
最大回転径
mm
5.4 e)
取合部寸法
mm
5.4 f)
傾斜角度
静止取付け傾斜角度
度(°)
5.5 a)
最大傾斜角度
度(°)
5.5 b)
平均傾斜角度
度(°)
5.5 c)
スプライン
しゅう動抵抗
負荷トルク
N・m
5.6
しゅう動抵抗力(最大値)
N
5.6
潤滑
封入潤滑剤
−
5.7
グリースニップル形式
−
5.7
塗装
塗色
−
5.8
表3−技術要求項目(生産者側が提示)
区分
項目
単位
提示する数値
箇条番号
基本データ
質量(計算値・実測値)
kg
5.9 a)
重心位置(計算値・実測値) mm
5.9 b)
ねじり剛性a)
N・m/rad
5.9 c)
質量慣性モーメントa)
kg・m2
5.9 d)
危険回転速度
min−1
5.9 e)
十字継手部軸受計算寿命b)
h
5.9 f)
注a) 発注者側の要求があった場合に限る。
b) 受渡当事者間で合意した計算方法によって求める。
5.2
伝達トルク
推進軸の仕様を決定するためのトルクは次のa)〜c) の3種類で,単位はN・mとする。a) 及びb) のト
7
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ルクの算出方法は附属書A,c) のトルクは同様に附属書Cによる。
a) 常用最大トルク
b) 非常最大トルク
c) 平均トルク
5.3
回転速度
推進軸の仕様を決定するための回転速度は次のa) 及びb) の2種類で,単位はmin−1とする。
a) 最大回転速度 走行用推進軸の場合は,車両の設計最高速度における推進軸の回転数とし,補機駆動
軸の場合は,原動機の空ぶかし(無負荷最高回転の状態)も考慮した最大の回転速度とする。
なお,受渡当事業者間の協定がある場合は,より大きい回転速度を指定することができる。
b) 平均回転速度 走行用推進軸に対する平均回転速度の算出方法は,C.2 a) による。また,補機駆動用
推進軸に対する平均回転速度の算出方法は,C.2 b) による。
5.4
寸法(図6参照)
推進軸の仕様を決定する寸法は,次のa)〜f) の6種類とし,単位はmmとする。
a) 静止取付寸法 車両の新製空車時における長手方向の全長寸法(La+LA+LB)を示す。
b) 最長寸法 機能上必要となる長手方向の最大寸法(La+L1+LA+LB)を示す。
c) 最短寸法 推進軸の取付け及び取外しを考慮した機能上必要となる長手方向の最小寸法(La−L2+LA
+LB)を示す。
d) 伸縮量 最長寸法及び最短寸法から算出する伸縮量(L1+L2)を示す。
e) 最大回転径 端部以外で,回転中に最大となる径方向の寸法(視A-AのφE)を示す。推進軸と周辺
機器との干渉の有無を確認するため,図面に,入出力フランジ部を除いた最大回転径とその位置を記
載する。
f)
取合部寸法 端部の取付けに関わる全ての寸法,許容差,ピッチ,形状などを示す。
L0
全長
La
十字継手間セット長
L1
伸び量
L2
縮み量
LA
十字継手から取付面まで
LB
十字継手から取付面まで
φE 最大回転径
η1
端部I傾斜角度(η1S,η1max,η10)a)
η2
端部II傾斜角度(η2S,η2max,η20)a)
注a) 角度の記号は,条件によって使い分ける[5.5のa)〜c) 参照]。
視 A-A
図6−推進軸の寸法
端部II側
端部I側
8
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.5
傾斜角度(図6参照)
推進軸の仕様を決定するための傾斜角度は次のa)〜c) の3種類で,単位は度(°)とする。
a) 静止取付け傾斜角度 車両の新製空車時の静止状態における傾斜角度。
端部I側の静止取付け傾斜角度(η1S)
端部II側の静止取付け傾斜角度(η2S)
b) 最大傾斜角度 使用中の最大傾斜角度。
端部I側の最大傾斜角度(η1max)
端部II側の最大傾斜角度(η2max)
なお,算出方法は,附属書Bによる。
c) 平均傾斜角度 十字継手部の転がり軸受の寿命を算出するために,使用頻度によって平均化した傾斜
角度。
端部I側の平均傾斜角度(η10)
端部II側の平均傾斜角度(η20)
なお,平均傾斜角度の算出方法は,C.4による。
5.6
スプラインしゅう動抵抗
スプラインしゅう動面の摩擦係数によってトルクが作用した状態で伸縮するときに発生する抵抗力を示
す。
5.7
潤滑
十字継手部及びスプライン部の潤滑に用いるグリースニップルの形式及び取付位置は,図面に示す。封
入する潤滑剤は,一般にJIS K 2220による。
5.8
塗装
推進軸表面の塗色を指定する。ただし,発注者側及び使用者側の指定色がない場合は,生産者側の標準
塗色とすることができる。
5.9
基本データ
生産者は,図面に次の基本データを記載する。
なお,計算推定値による場合は,計算値である旨を併記する。
a) 質量
b) 重心位置
c) ねじり剛性 ただし,発注者側の要求があった場合に限る。
d) 質量慣性モーメント ただし,発注者側の要求があった場合に限る。
e) 危険回転速度 算出方法は,附属書Dによる。
f)
十字継手部軸受計算寿命 受渡当事者間で合意した計算方法によって求める。
6
性能
推進軸の性能は,箇条7の試験を行ったとき,表4のとおりとする。
9
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4−性能
項目
性能
該当の試験
の細分箇条
静的ねじり強度
非常最大トルクまでの負荷で,推進軸各部に破損,変形などの異
常が,あってはならない。
7.3.2
ねじり剛性
負荷トルクと推進軸のねじれ角度との関係が,設計上の許容範囲
でなければならない。
7.3.3
静的応力測定
最大応力が当該部の材料の許容応力以下でなければならない。
7.3.4
ねじり疲労強度
トルク伝達に支障するような破損,変形などが,推進軸各部にあ
ってはならない。
7.3.5
回転特性
回転中に異音又は異常振動を生じてはならない。
7.3.6
釣合い良さ
JIS B 0905のG16に適合しなければならない。
7.3.7
スプラインしゅう動抵抗
負荷トルクを負荷した状態でのしゅう動抵抗力が,定められた許
容範囲a) になければならない。
7.3.8
スプライン部の探傷
性能に支障するようなきず及び焼割れがスプラインの表面にあっ
てはならない。
7.3.9
溶接部の探傷
トルク伝達に支障するような表面の亀裂及び内部の融合不良が,
全溶接線にあってはならない。
7.3.10
傾斜角度の確認
最大傾斜角度までの傾斜角で回転できなければならない。
7.3.11
注a) 振り子車両などの場合は車体の傾斜に支障しない範囲の抵抗力を指定する。
7
試験
7.1
試験の種類
試験の種類は,次による。
a) 形式試験 形式試験は,同一の設計ごとに一つの製品について行う。ただし,量産品については,生
産者がそれ以前に製造した同一の製品についての形式試験成績書を提出する場合には,これらの試験
を省いて形式試験に合格したものとみなすことができる。
b) 受渡試験 受渡試験は,同一発注の全ての製品について行う。
c) 調査試験 調査試験は,受渡当事者間において必要と認めた場合に適用する。ただし,仕様書に特別
の合意が明示されていない限り,この試験結果を製品の受渡条件とはしない。
7.2
試験項目
推進軸の試験項目は,試験の種類ごとに表5に○印を付した項目を適用する。
表5−適用する試験項目
試験項目
形式試験
受渡試験
調査試験
静的ねじり強度
○
−
−
ねじり剛性
−
−
○
静的応力測定
−
−
○
ねじり疲労強度
○
−
−
回転特性
○
−
−
釣合い良さ
○
○
−
スプラインのしゅう動抵抗
−
−
○
スプライン部の探傷
○
○
−
溶接部の探傷
○
○
−
傾斜角度の確認
○
−
−
10
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3
試験方法
7.3.1
共通
推進軸は端部I及び端部IIの継手の位相を合わせた上で,車両搭載状態に準じた取付寸法及び傾斜角度
0°で試験機に取り付ける。この取付け姿は,7.3.2〜7.3.6において共通とする。
7.3.2
静的ねじり強度
破壊するまでトルクを負荷したとき,非常最大トルクまでの負荷の範囲で,推進軸各部[十字継手,ヨ
ーク,伸縮部(スプライン部),溶接部]に破損,変形などの異状がないことを確認する。
7.3.3
ねじり剛性
負荷トルクと推進軸のねじれ角度との関係が,設計上の許容範囲であることを確認する。この測定は,
7.3.2と同時に行うことができる。
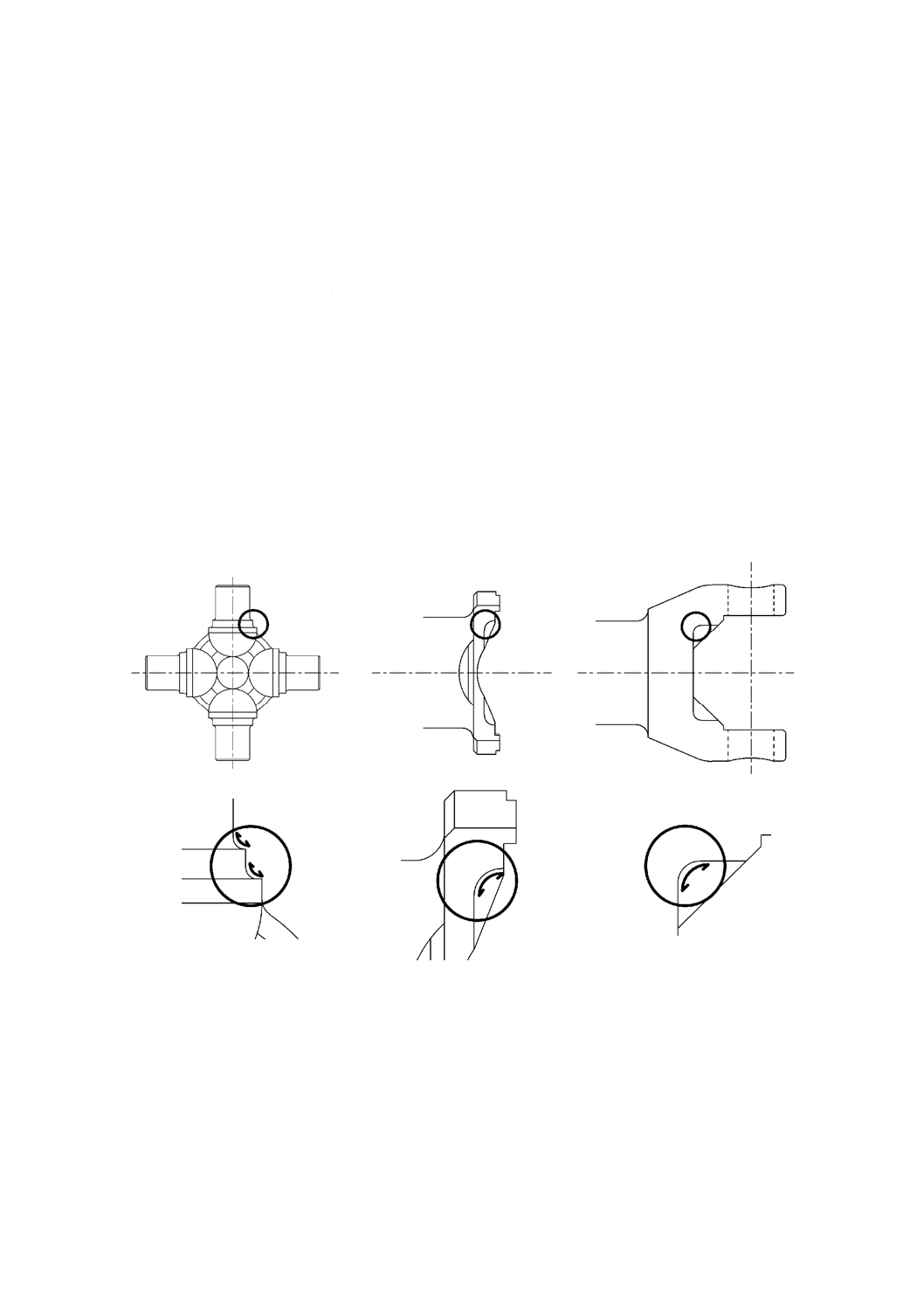
7.3.4
静的応力測定
トルク0から非常最大トルクまで負荷したときの十字軸,ヨークなど断面形状急変部の応力集中部位(図
7参照)にひずみゲージを貼付して応力を測定し,最大応力が当該部の材料の許容応力以下であることを
確認する。この測定は,7.3.2と同時に行うことができる。
注記 測定部位の特定のため,事前にFEM解析を実施することが望ましい。
a) 十字軸
b) ヨーク(ブロック方式)
c) ヨーク(スナップリング方式)
注記 太線の矢印で示すひずみゲージの位置は,代表例を示す。
図7−応力測定部位の例
7.3.5
ねじり疲労強度
常用最大トルク(負荷形態は両振りの正弦波)を1 000万回まで繰り返し負荷した後,推進軸各部[十
字継手,ヨーク,伸縮部(スプライン部),溶接部]にトルク伝達に支障するような破損,変形などがない
ことを確認する。
A部
B部
C部
A部詳細
B部詳細
C部詳細
↓
↓
↓
11
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3.6
回転特性
最大回転速度で回転させたとき,異音又は異常振動がないことを確認する。
7.3.7
釣合い良さ
最大回転速度で回転させ,釣合い良さの等級を確認する。
注記 釣合い良さ修正のための付加質量の調整(増減)は,本体の強度低下を招かないように注意す
る。
7.3.8
スプラインしゅう動抵抗
受渡当事者間で決めた負荷トルクを負荷した状態でのしゅう動抵抗力が,スプラインの種類によって定
められた許容範囲にあることを確認する。
7.3.9
スプライン部の探傷
高周波焼入れ処理を施工したスプラインは,JIS Z 2320-1の磁粉探傷試験(以下,MTという。)又はJIS
Z 2343-1の浸透探傷試験(以下,PTという。)を行い,性能に支障するようなきず及び焼割れがスプライ
ンの表面にないことを確認する。
7.3.10 溶接部の探傷
全溶接線に対して,JIS Z 2320-1のMT又はJIS Z 2343-1のPTを行い,トルク伝達に支障するようなき
ずが表面にないことを確認する。また,JIS Z 2344又はJIS Z 3060の超音波探傷試験を行い,トルク伝達
に支障するような内部の融合不良がないことを確認する。
7.3.11 傾斜角度の確認
最大傾斜角度までの傾斜角で回転できることを,実機又は図面上(3Dデータを含む。)で確認する。
8
製品の呼び方
推進軸の呼称は,規格番号に続けて各部を構成する種類記号を並べて表示する。
種類記号は,各部ごとに次による。
a) 端部の取付方法
A:フランジ固定方式
B:固定ヨーク方式
b) 自在継手部の種類
1:スナップリング方式
2:ベアリングキャップ方式
3:ブロック方式
4:ゴム軸継手方式
c) 最短寸法 図6の(La−L2)
d) 伸縮量 図6の(L1+L2)
e) 最大回転径 図6の(φE)
表示例 JIS E 5302;A-1-(L500+30)-1-A:180
最大回転径 mm
端部IIの取付方法
自在継手部の種類
最短寸法+伸縮量(L○○○+○○)mm
自在継手部の種類
端部Iの取付方法
12
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9
表示
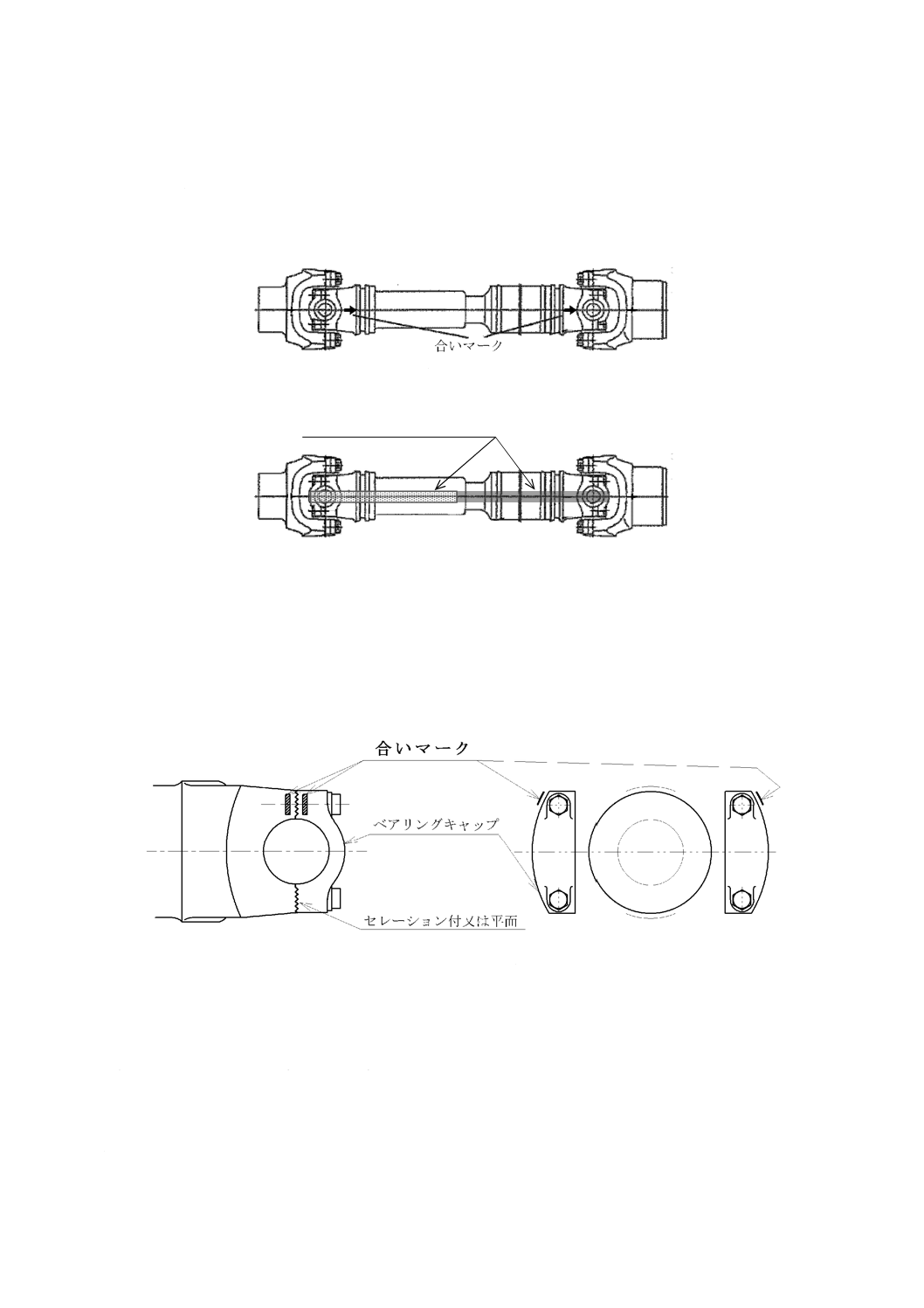
9.1
合いマークの表示
9.1.1
十字継手部の位相合わせ
推進軸には,十字継手部の位相合わせ用の合いマークを表示する(図8参照)。
図8−位相合わせ用の合いマークの例
9.1.2
ベアリングキャップの合わせ記号
十字軸の固定方法が,ベアリングキャップ方式の場合は,二つ割りのベアリングキャップ部分に,合い
マークを示す記号を表示する。合いマークを示す記号は,同じヨークの左右で区別する(図9参照)。
図9−合いマーク表示箇所の例
9.2
製品情報の表示
推進軸には,見やすい箇所に次の事項を表示する。表示に当たっては,推進軸の強度低下を防ぐための
注意を払い,シール貼り,刻印などの方法によって表示する。
a) 製造業者名又はその略号
b) 形式及び製造番号
c) 製造年月
入力側と出力側で色を変える
b) ペイント表示
a) 刻印表示
13
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
伝達トルクの算出方法
A.1 目的
この附属書は,推進軸の伝達トルクのうち,常用最大トルク及び非常最大トルクを算出する方法を示す。
A.2 記号及び単位
この附属書で用いる記号及び単位は,表A.1に示す。
表A.1−記号及び単位
記号
単位
適用
記事
D0
m
新製時の動輪直径
−
D
m
中間摩耗時の動輪直径
−
T0
kN・m
第一推進軸の常用最大トルク
−
T2
kN・m
第二推進軸の常用最大トルク
連続駆動の場合
Tm
kN・m
第一推進軸の非常最大トルク
−
Tm1
kN・m
第一推進軸の非常最大トルク
連続駆動の場合
Tm2
kN・m
第二推進軸の非常最大トルク
連続駆動の場合
V
km/h
車両速度
−
W
kN
動軸上最大質量による荷重
一動軸分
Z0
kN
動輪周引張力
一軸駆動一動軸分
Z1
kN
第一減速機軸の動輪周引張力
連続駆動の場合
Z2
kN
第二減速機軸の動輪周引張力
連続駆動の場合
Zmax
kN
粘着最大接線力(W×μ)
一動軸分
μ
−
粘着係数
鉄軌道では1/3
γ
−
二段減速機の減速比(γA×γB)
−
γA
−
はすば歯車の減速比
−
γB
−
かさ歯車の減速比
−
η
−
二段減速機の機械効率(ηA×ηB)
0.931
ηA
−
はすば歯車の機械効率a)
0.98
ηB
−
かさ歯車の機械効率a)
0.95
注a) 歯車の機械効率は,一般的な数値を用いる。
A.3 第一及び第二推進軸(主に鉄軌道車両の場合)
A.3.1 駆動方式別の伝達トルク
図A.1に示す性能線図から,速度0 km/h(内燃動車ではストール時という。)の動輪周引張力Z0を用い
て駆動方式別に常用最大トルクT0を,次によって求める。表示単位は,kN・mとする。

14
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 内燃動車
b) 電気車両
図A.1−性能線図
A.3.2 一軸駆動(図A.2参照)
常用最大トルクT0は,一軸駆動分の動輪周引張力Z0[図A.1のa) 参照]でのトルクとし,式(A.1)によ
って求める。
γη
1
2
0
0
×
×
=
D
Z
T
(kN・m) ························································ (A.1)
非常最大トルクTmは,最大車両質量における粘着最大接線力Zmaxでのトルクとし,式(A.2)によって求
める。
γη
1
2
0
max
m
×
×
=
D
Z
T
(kN・m)···················································· (A.2)
a) 逆転減速機(二段減速機と同等)
b) 二段減速機
図A.2−一軸駆動の場合の推進軸トルク
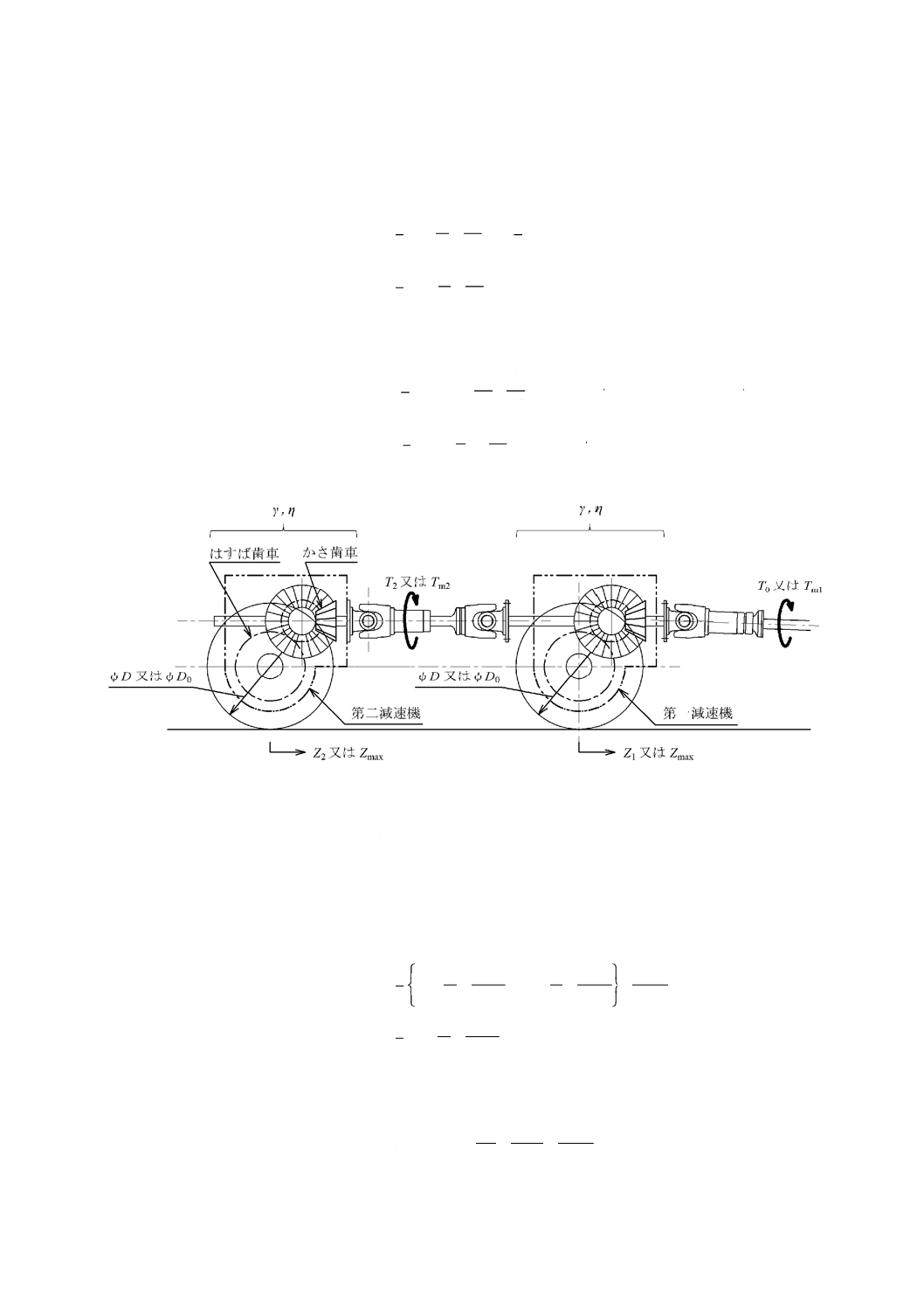
A.3.3 二段減速連続駆動(図A.3参照)
第一推進軸の常用最大トルクT0,及び第二推進軸の常用最大トルクT2は,第一減速機側の動輪周引張力
Z
15
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Z1及び第二減速機側の動輪周引張力Z2でのトルクとし,第一推進軸は,式(A.3)によって,また,第二推進
軸は,式(A.4)によって求める。
なお,第一減速機軸及び第二減速機軸の負担割合が明確でない場合は,Z1=Z2としてもよい。
第一推進軸
2
2
1
0
2
1
2
T
T
D
Z
T
=
+
×
×
=
γη
(Z1=Z2のとき)(kN・m) ··· (A.3)
第二推進軸
γη
1
2
2
2
×
×
=
D
Z
T
(kN・m) ······································ (A.4)
第一推進軸の非常最大トルクTm1,及び第二推進軸の非常最大トルクTm2は,最大車両質量での粘着最大
接線力でのトルクとし,第一推進軸は式(A.5),及び第二推進軸は式(A.6)によって求める。
第一推進軸
γη
1
2
2
0
max
1
m
×
×
×
=
D
Z
T
(kN・m) ······························ (A.5)
第二推進軸
γη
1
2
0
max
2
m
×
×
=
D
Z
T
(kN・m) ································· (A.6)
図A.3−連続駆動の場合の推進軸トルク(二段減速機×2台)
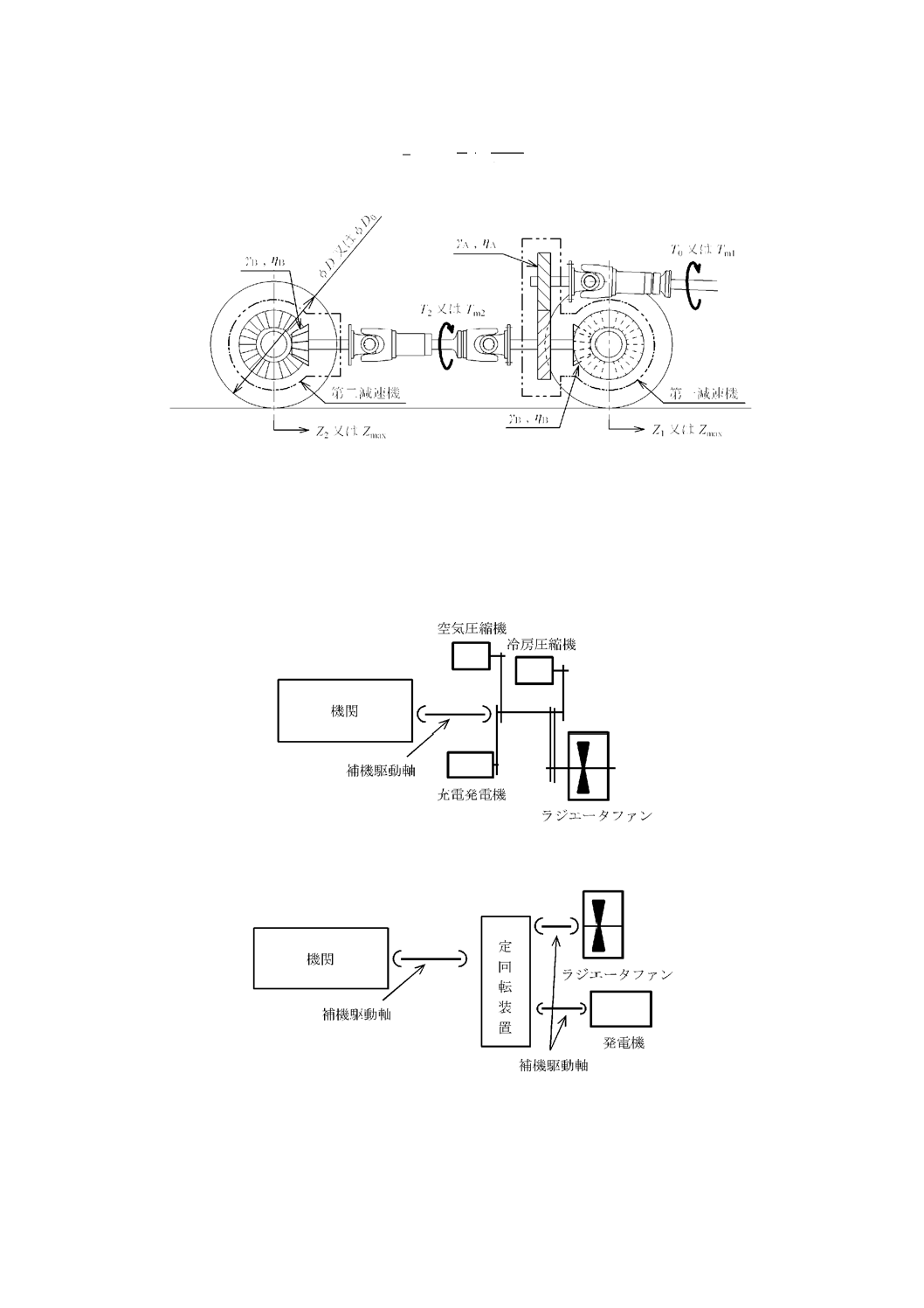
A.3.4 二段減速連続駆動(第二減速機が一段減速)(図A.4参照)
第一推進軸の常用最大トルクT0,及び第二推進軸の常用最大トルクT2は,第一減速機側の動輪周引張力
Z1及び第二減速機側の動輪周引張力Z2でのトルクとし,第一推進軸は式(A.7),及び第二推進軸は式(A.8)
によって求める。
なお,第一減速機軸及び第二減速機軸の負担割合が明確でない場合は,Z1=Z2としてもよい。
第一推進軸
A
A
B
B
2
B
B
1
0
1
1
2
1
2
η
γ
η
γ
η
γ
×
×
×
+
×
×
=
D
Z
D
Z
T
(kN・m) ·· (A.7)
第二推進軸
B
B
2
2
1
2
η
γ
×
×
=
D
Z
T
(kN・m) ··································· (A.8)
第一推進軸の非常最大トルクTm1,及び第二推進軸の非常最大トルクTm2は,最大車両質量での粘着最大
接線力でのトルクとし,第一推進軸は式(A.9),及び第二推進軸は式(A.10)によって求める。
第一推進軸
A
A
B
B
0
max
m1
1
1
2
2
η
γ
η
γ
×
×
×
×
=
D
Z
T
(kN・m) ················· (A.9)
16
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
第二推進軸
B
B
0
max
m2
1
2
η
γ
×
×
=
D
Z
T
(kN・m) ·····························(A.10)
図A.4−連続駆動の場合の推進軸トルク(二段減速+一段減速)
A.4 補機駆動軸
A.4.1 補機の駆動方式
補機の駆動方式例を,図A.5及び図A.6に示す。
図A.5−ベルト駆動の例
図A.6−定回転装置(CSU)を通して駆動する例
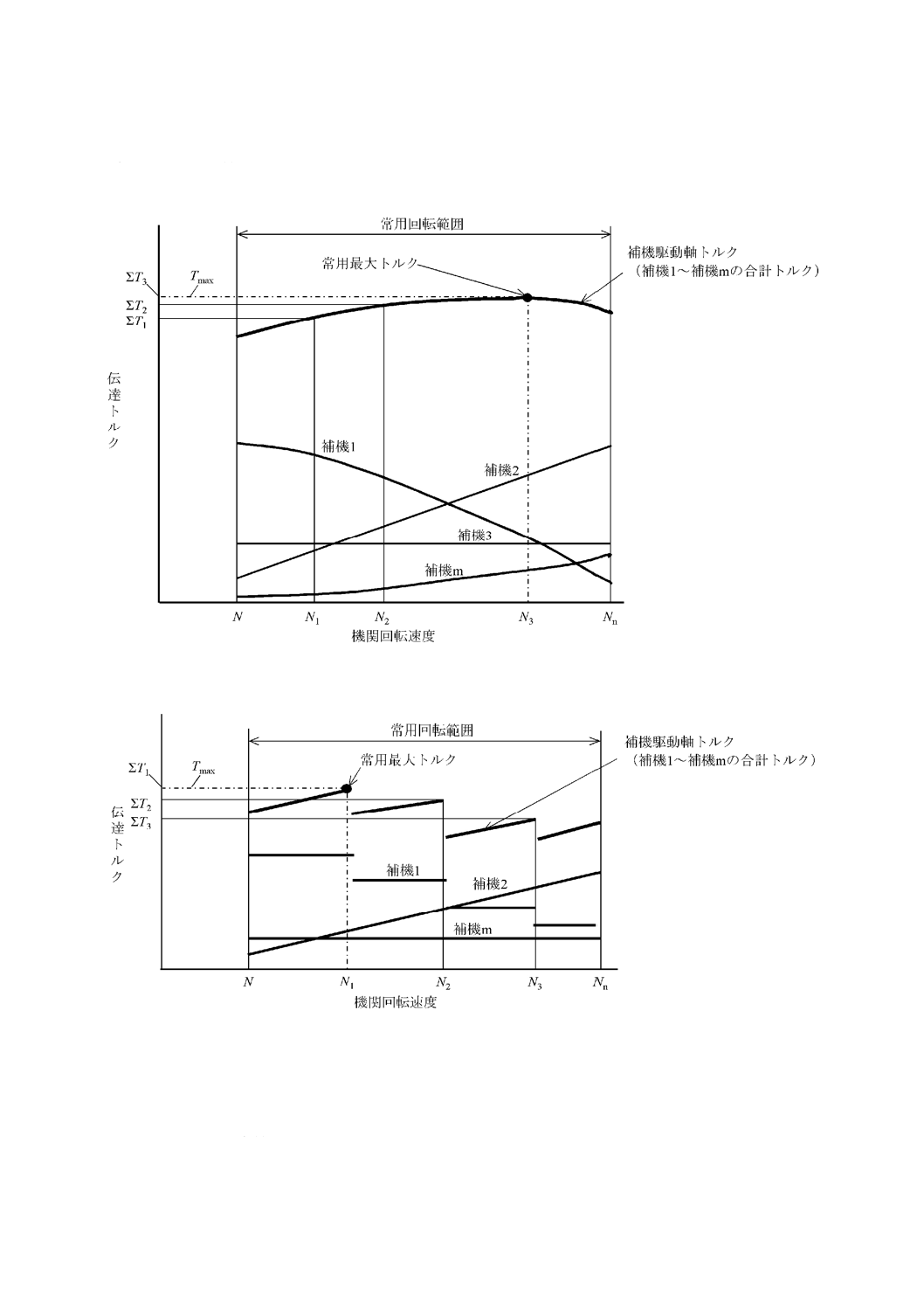
A.4.2 駆動方式別の常用最大トルク
17
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
常用最大トルクTmaxは,図A.7又は図A.8に示す補機の種類及び回転速度ごとに伝達トルク値の算術和
を求め,その中の最大値とする。
図A.7−ベルト駆動の補機性能曲線
図A.8−定回転装置駆動の補機性能曲線
A.4.3 非常最大トルク
受渡当事者間で取り決めた数値を採用する。ただし,取り決めがない場合は,従来の実績から“常用最
大トルクの3倍を非常最大トルクとする。”としてもよい。
18
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
第一推進軸の傾斜角度の算出方法
B.1
目的
この附属書は,第一推進軸の十字継手部の最大傾斜角度を算出する方法について示す。
B.2
記号及び単位
この附属書で用いる記号及び単位は,表B.1に示す。
表B.1−記号及び単位
記号 単位
適用
該当図
C
mm
曲線軌道に付加されるスラック
−
CA
mm
減速機支えの台車枠側位置から車軸中心までの長手寸法
図B.3参照
DA
mm
減速機支えの台車枠位置から車軸中心までの高さ寸法
図B.3参照
F
mm
最大フランジ摩耗
−
J
mm
プラス側の軌間公差
−
H
mm
台車枠側の減速機支え位置のレール面上からの高さ
図B.3参照
H2
mm
変速機出力軸又は主電動機軸のレール面上からの高さ
図B.1,図B.5参照
R
m
曲線半径
図B.2参照
RR
mm
減速機の車軸中心から支え位置までの半径
図B.3参照
RW
mm
減速機支え棒の中心間距離
RX
mm
駆動軸中心から減速機側の減速機支え位置までの前後距離
RZ
mm
車軸中心から減速機側の減速機支え位置までの高さ
r
mm
車輪半径
L10
m
車両心皿間距離の半分
図B.2参照
L20
m
台車軸距
La
mm
第一推進軸の十字継手間セット長
図B.4参照
Lb
mm
十字継手1の傾斜角度η1を含む面のLaの余弦
Lc
mm
十字継手1の傾斜角度η1を含む面のLaの正弦
Ld
mm
十字継手2の傾斜角度η2を含む面のLaの正弦
Le
mm
十字継手2の傾斜角度η2を含む面のLaの余弦
Lx
mm
Laのレール方向長さ
図B.1,図B.4,図B.5参照
Ly
mm
Laの枕木方向長さ
Lz
mm
Laの高さ方向長さ
S
mm
車輪とレールとの最大遊間(S=Y+C+F+J)
−
X0
mm
台車軸距の半分
図B.1,図B.3,図B.5参照
X1
mm
駆動軸中心から十字継手2までの距離
図B.1,図B.5参照
X2
mm
台車心皿中心から十字継手1までの距離
XR
mm
減速機支え位置
図B.3参照
Y
mm
車輪とレールとの基本隙間
−
Y0
mm
台車心皿の左右動
図B.1参照
Y1
mm
減速機入力軸の車両中心に対するオフセット量
図B.1参照
Y2
mm
変速機出力軸又は主電動機軸の車体中心線に対するオフセット量
Y3
mm
第二推進軸をZ配置する場合の台車中心に対するオフセット量
Z1
mm
減速機入力軸の車軸中心からのオフセット高さ
19
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表B.1−記号及び単位(続き)
記号 単位
適用
該当図
θ1
rad
曲線半径による偏い(倚)角
図B.2参照
θ2
rad
レールとフランジとの遊間による偏い角
θ3
rad
前後台車間の平行移動による偏い角
ζ
rad
減速機入力軸の迎角
図B.1,図B.3,図B.4参照
ξ
rad
台車最大偏い角度
図B.1,図B.4,図B.5参照
γ
rad
減速機支え棒の傾斜角
図B.3参照
η1
rad
入力軸側の傾斜角度(η1S,η1max,η10)
図B.4参照
η2
rad
出力軸側の傾斜角度(η2S,η2max,η20)
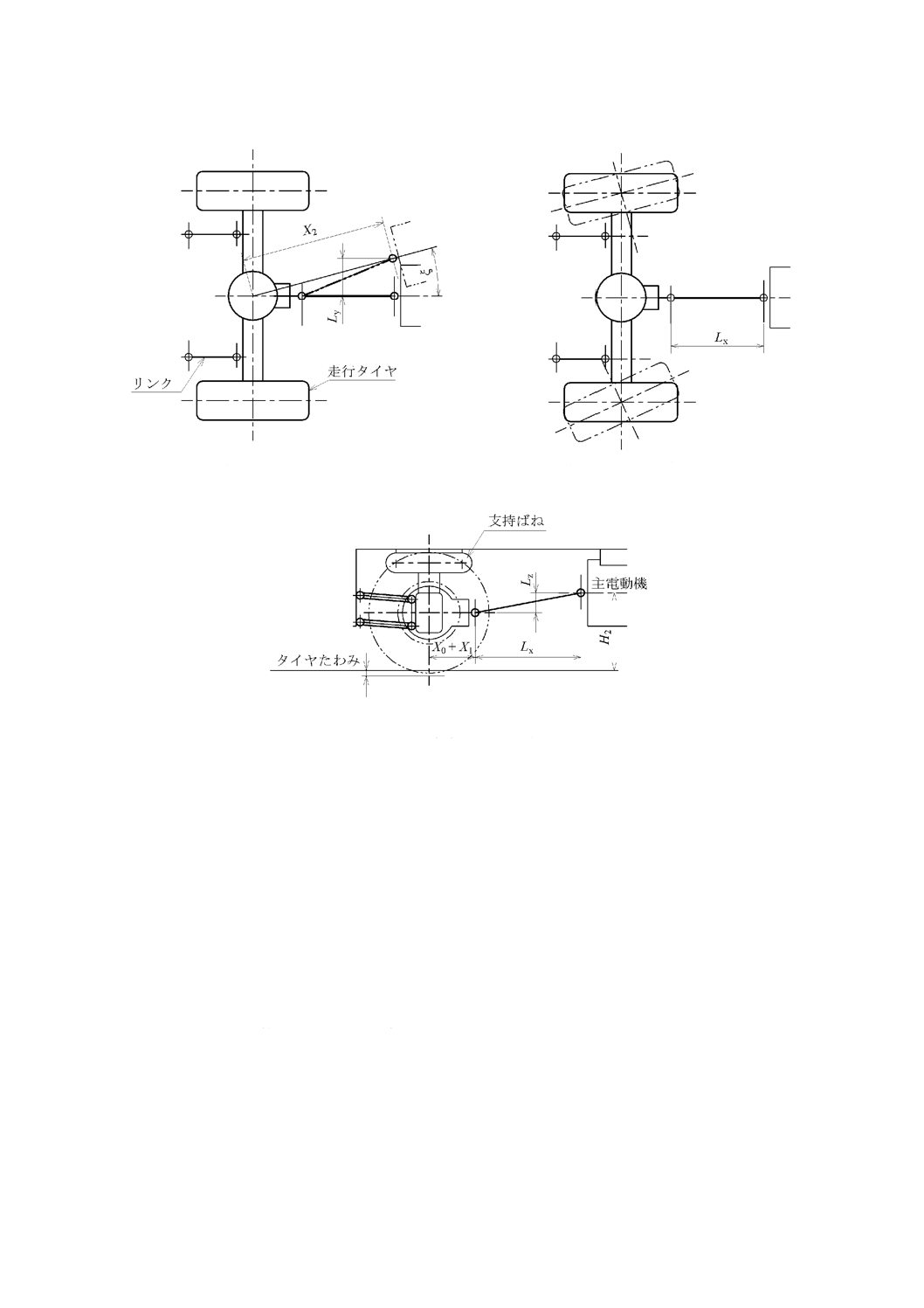
B.3
内燃動車における傾斜角度
内燃動車における傾斜角度の算出方法は,次による。
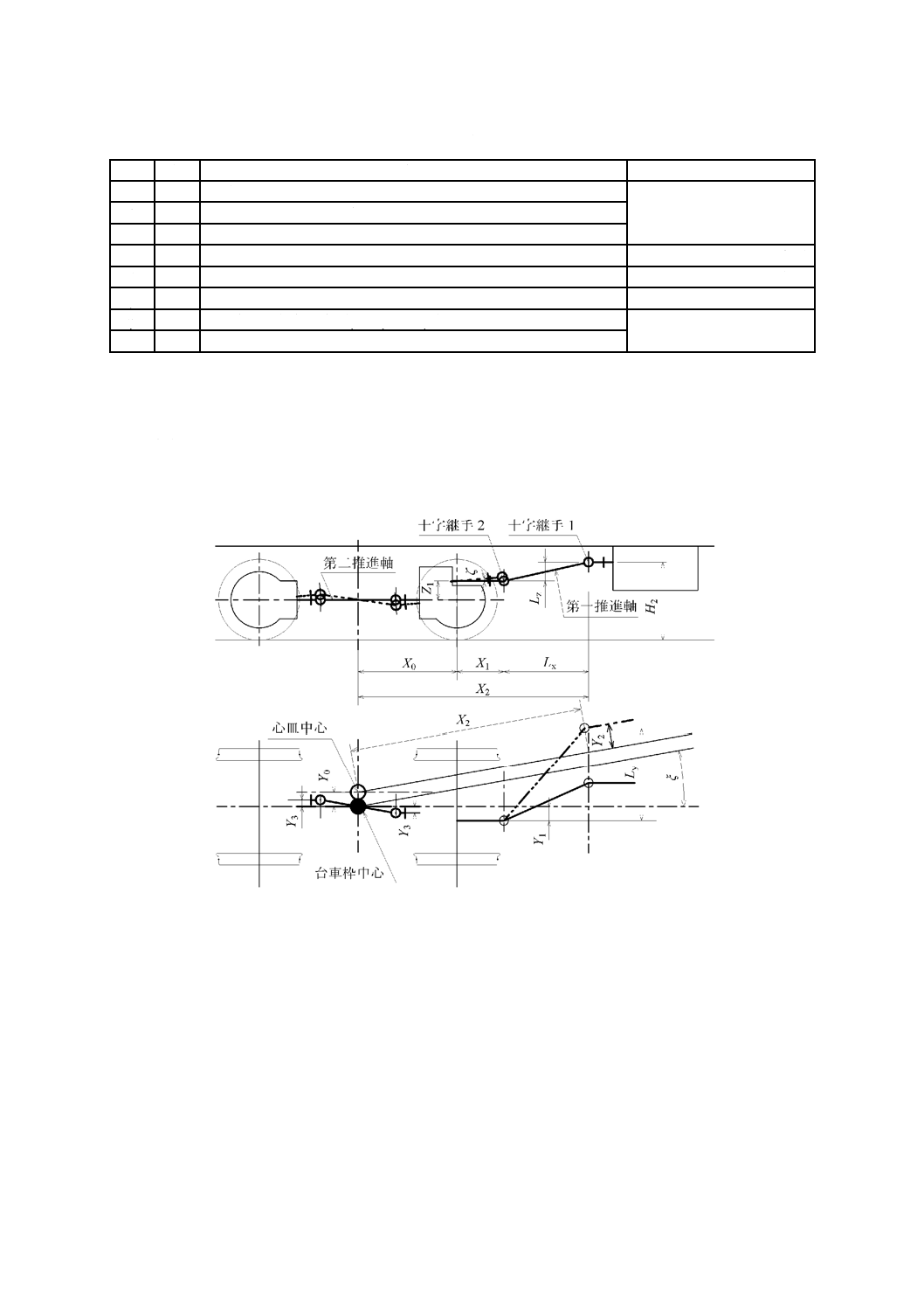
B.3.1 推進軸の取付け例
内燃動車における推進軸取付けの代表例を,図B.1に示す。
図B.1−推進軸取付け略図
20
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
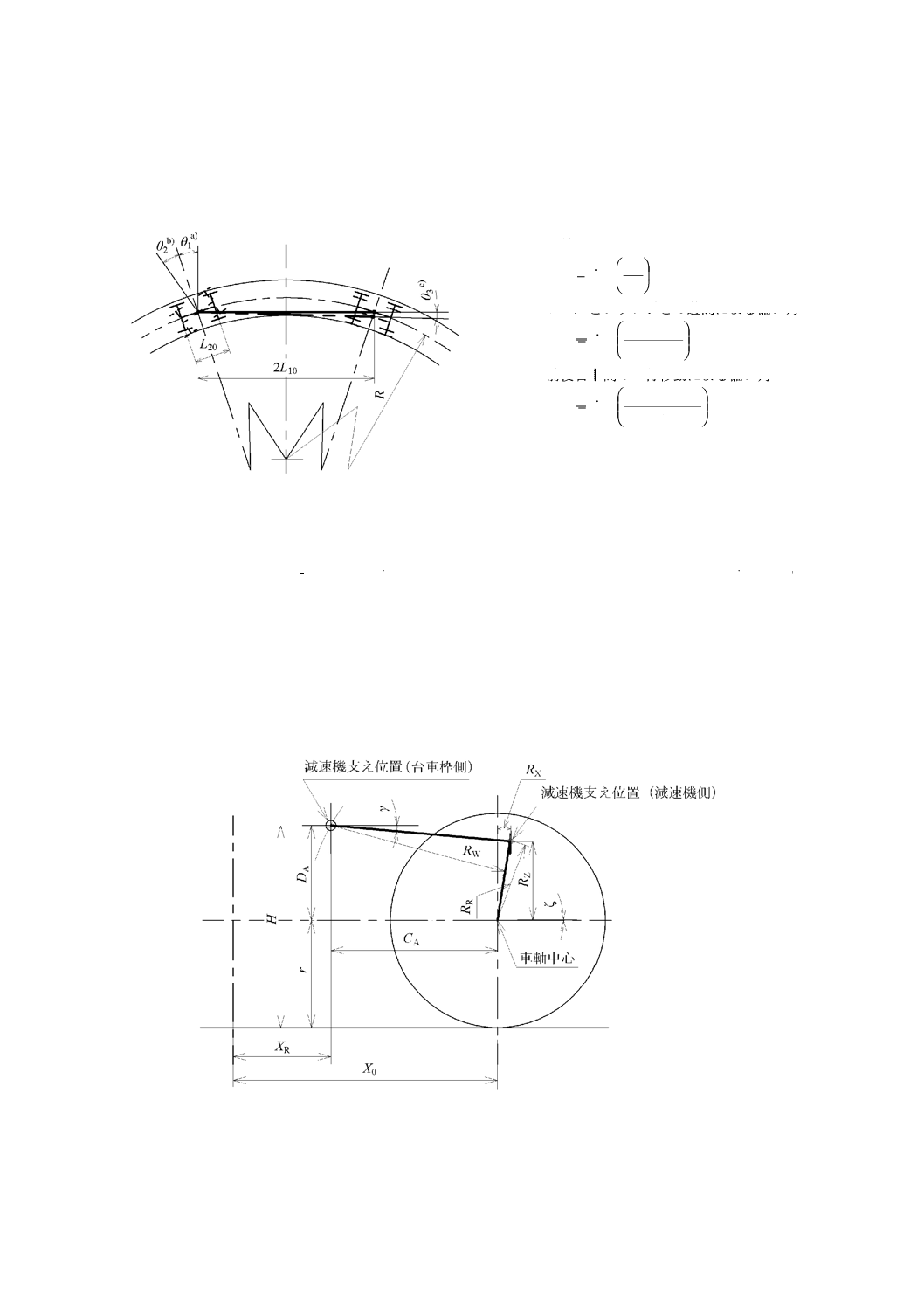
B.3.2 台車の偏い角度
図B.2に示す台車の偏い角の関係から,曲線上における台車の最大偏い角度ξは,式(B.1)によって求め
る。
注a) 曲線半径による偏い角
=
−
R
L10
1
1
sin
θ
b) レールとフランジとの遊間による偏い角
×
=
−
000
1
sin
20
1
2
L
S
θ
c) 前後台車間の平行移動による偏い角
×
×
=
−
000
1
2
sin
10
1
3
L
S
θ
図B.2−台車偏い角説明
台車の最大偏い角度ξ:
3
2
1
θ
θ
θ
ξ
+
+
=
········································································ (B.1)
B.3.3 減速機入力軸の迎角(傾斜角)
図B.3に示す寸法関係によって次の関係が成り立つ。軸ばねのたわみによって,DA及びHが減少するた
め連動して減速機の入力軸迎角ζが変化する。したがって,台車軸ばねのたわみに伴う減速機入力軸の迎
角ζは,式(B.2)〜式(B.6)の関係式を経て,式(B.7)によって求める。
図B.3−入力軸の迎角
21
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ζ
R
R
D
cos
sin
R
W
A
+
=
γ
···························································· (B.2)
ζ
R
R
C
sin
cos
R
W
A
−
=
γ
···························································· (B.3)
ここに,
CA=X0−XR
DA=H−r
式(B.2)及び(B.3)を変形する。
cosζ
sin
R
A
W
R
D
R
−
=
γ
···························································· (B.4)
sinζ
cos
R
A
W
R
C
R
+
=
γ
····························································· (B.5)
各々の二乗を加える。
(
)
ζ
C
ζ
D
R
R
C
D
R
sin
cos
2
A
A
R
2
R
2
A
2
A
2
W
×
−
−
+
+
=
これを変形して,次の式となる。
ζ
C
R
R
R
C
D
ζ
D
sin
2
cos
A
R
2
W
2
R
2
A
2
A
A
+
−
+
+
=
ζ
C
m
ζ
D
sin
cos
A
1
A
+
=
ここに,
R
2
W
2
R
2
A
2
A
1
2R
R
R
C
D
m
−
+
+
=
これを辺々二乗する。
(
)
ζ
C
ζ
C
m
m
ζ
D
ζ
D
2
2
A
A
1
2
1
2
2
A
2
2
A
sin
sin
2
sin
1
cos
+
+
=
−
=
(
)
0
sin
2
sin
2
A
2
1
A
1
2
2
A
2
A
=
−
+
+
+
D
m
ζ
C
m
ζ
D
C
································ (B.6)
式(B.6)はsinζに関する二次方程式であるので,次のように表す。
0
sin
sin2
=
+
+
c
ζ
b
ζ
a
ここに,
a=CA2+DA2
b=2m1CA
c=m12−DA2
二次方程式の根を求める公式から,軸ばねたわみによる減速機入力軸の迎角ζは,式(B.7)になる。
−
±
−
=
−
a
ac
b
b
ζ
2
4
sin
2
1
························································· (B.7)
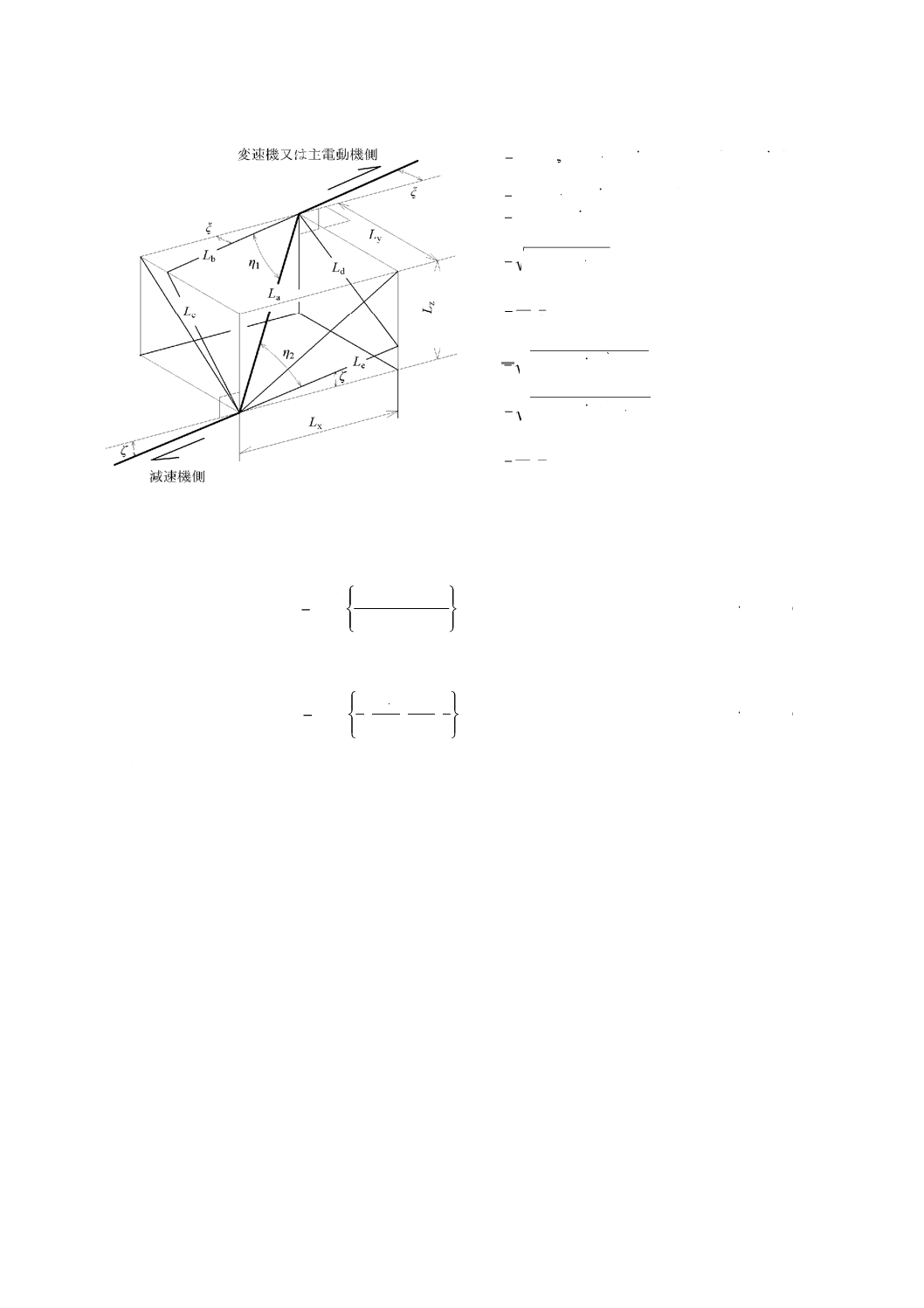
B.3.4 傾斜角度の算出方法
図B.4に示す関係から,第一推進軸の入力側の傾斜角度η1及び出力側の傾斜角度η2の最大値は,式(B.8)
及び式(B.9)によって求める。
22
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ξ
Y
ζ
X
ζ
Z
X
ξ
X
L
sin
cos
sin
cos
2
1
1
0
2
x
×
−
×
−
×
+
−
=
ξ
Y
ξ
X
Y
Y
L
cos
sin
2
2
1
0
y
×
+
×
+
−
=
r
ζ
Z
ζ
X
H
L
−
×
−
×
−
=
cos
sin
1
1
2
z
2
z
2
y
2
x
a
L
L
L
L
+
+
=
ξ
L
L
cos
x
b=
(
)
2
z
2
b
y
c
sin
L
ξ
L
L
L
+
×
−
=
(
)
2
y
2
e
z
d
sin
L
ζ
L
L
L
+
×
−
=
ζ
L
L
cos
x
e=
図B.4−推進軸十字継手部の立体傾斜角度
十字継手1の傾斜角度η1:
×
×
−
+
=
−
b
a
2
c
2
b
2
a
1
1
2
cos
L
L
L
L
L
η
························································ (B.8)
十字継手2の傾斜角度η2;
×
×
−
+
=
−
e
a
2
d
2
e
2
a
1
2
2
cos
L
L
L
L
L
η
························································ (B.9)
計算結果の中で,最も大きくなる角度η1及びη2を,それぞれ最大傾斜角度η1max及びη2maxと表示する。
B.4
新交通システム車両における傾斜角度
B.4.1 推進軸の取付け例
新交通システム車両における推進軸配置の代表例を,図B.5に示す。
23
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 旋回式
b) ステアリング式
c) 側面
図B.5−推進軸取付け略図
B.4.2 台車の偏い角度
新交通システム車両では,旋回式台車とステアリング式台車の2方式があり,偏い角ξをもつのは旋回
式だけである。ステアリング式は偏い角がないので偏い角度はξ=0とする。
B.4.3 減速機入力軸の迎角
平行リンク式の支え装置を用いている場合は,車軸の上下動に伴う減速機入力軸の迎角変動はないので,
ζ=0とする。
なお,タイヤ部分のたわみ及びタイヤパンク時は,推進軸の両端とも同じ量だけ下がるので,迎角の変
動は生じない。
B.4.4 傾斜角度の算出方法
傾斜角度η1及びη2の算出は推進軸の十字継手部寸法Lx,Ly及びLzを用い,B.3.4と同様に式(B.8),及び
式(B.9)によって求める。
24
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
平均回転速度,平均トルク及び平均傾斜角度の算出方法
C.1 目的
この附属書は,十字軸転がり軸受の寿命計算に用いる平均回転速度,平均トルク及び平均傾斜角度を算
出する方法について示す。
C.2 平均回転速度
推進軸の平均回転速度の算出方法は,次による。
a) 第一及び第二推進軸(図C.1参照) 第一推進軸における平均回転速度Nmの算出は,式(C.1)によっ
て求める。ここで,回転数niのときの使用割合をtiとする。
n
2
1
n
n
2
2
1
1
m
t
t
t
t
n
t
n
t
n
N
+
+
+
+
+
=
Λ
Λ
······················································· (C.1)
なお,第二推進軸の回転数は,図A.3の二段減速機2台の場合では第一推進軸と同じ回転数とし,
図A.4の二段減速機と一段減速機との組合せの場合は,Nmにはすば歯車の減速比γAを乗じた回転数
を用いる。
b) 補機駆動軸 補機駆動軸の平均回転速度Nmは,式(C.2)によって求める。ただし,N1〜Nnは機関回転
数から各補機の減速比に応じて算出した回転数とする。ここで,回転数Niのときの使用割合をeiとす
る。
n
2
1
n
n
2
2
1
1
m
e
e
e
e
N
e
N
e
N
N
Λ
Λ
+
+
+
+
=
······················································· (C.2)
C.3 平均トルク
推進軸の平均トルクの算出方法を,次に示す。
a) 第一及び第二推進軸(図C.2参照) 第一推進軸の平均トルクの算出は,式(C.3)によって求める。た
だし,トルクTi及び回転速度niのときの使用割合をtiとする。ただし,指数pは3又は10/3とし,ど
ちらの数値を用いたかを明記する。
p
p
p
p
t
n
t
n
t
n
t
n
T
t
n
T
t
n
T
T
1
n
n
2
2
1
1
n
n
n
2
2
2
1
1
1
m
+
+
+
+
+
=
′
Λ
Κ
································· (C.3)
なお,第二推進軸の場合は,駆動方式別に応じたトルク及び回転速度を用いる。
注記 第二推進軸においては,曲線走行時にせりあいトルクが作用することを考慮に入れることが
望ましい[図C.2の注a) 参照]。
25
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
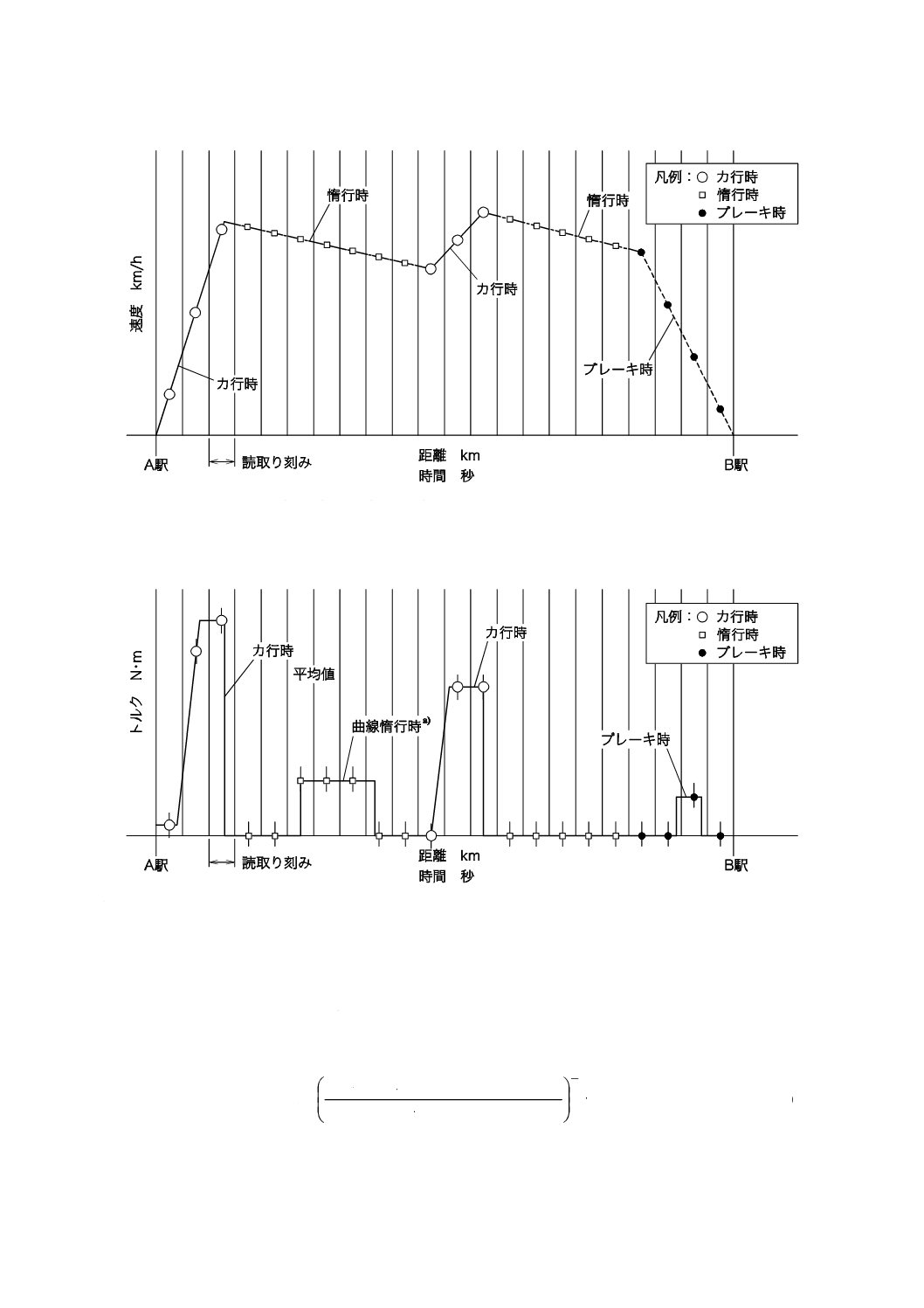
注記 凡例の記号の位置は,読取り刻み間ごとの平均値を示す。
図C.1−運転曲線の例
注記 凡例の記号の位置は,読取り刻み間ごとの平均値を示す。
注a) 曲線だ行時の発生トルクは,第二推進軸に対して,せりあいトルクとして作用する。
図C.2−走行中の発生トルクの例
b) 補機駆動軸(表C.1参照) 補機駆動軸用平均トルクTmは,式(C.4)によって求める。ただし,指数p
は3又10/3とし,どちらの数値を用いたかを明記する。
p
p
p
p
e
N
e
N
e
N
e
N
T
e
N
T
e
N
T
T
1
n
n
2
2
1
1
n
n
n
2
2
2
1
1
1
m
+
+
∑
+
∑
+
∑
=
Λ
Λ
································· (C.4)
ここで,トルクTi及び回転速度Niのときの使用割合をeiとする。
26
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表C.1−補機駆動軸の伝達トルク
機関回転速度
使用割合
伝達トルク
補機1
補機2
補機…
補機m
合計
N1
e1
T11
T12
…
T1m
ΣT1
N2
e2
T21
T22
…
T2m
ΣT2
N3
e3
T31
T32
…
T3m
ΣT3
|
|
|
|
|
|
|
Nn
en
T1n
T2n
…
Tnm
ΣTn
C.4 平均傾斜角度
平均傾斜角度の算出方法は,次による。
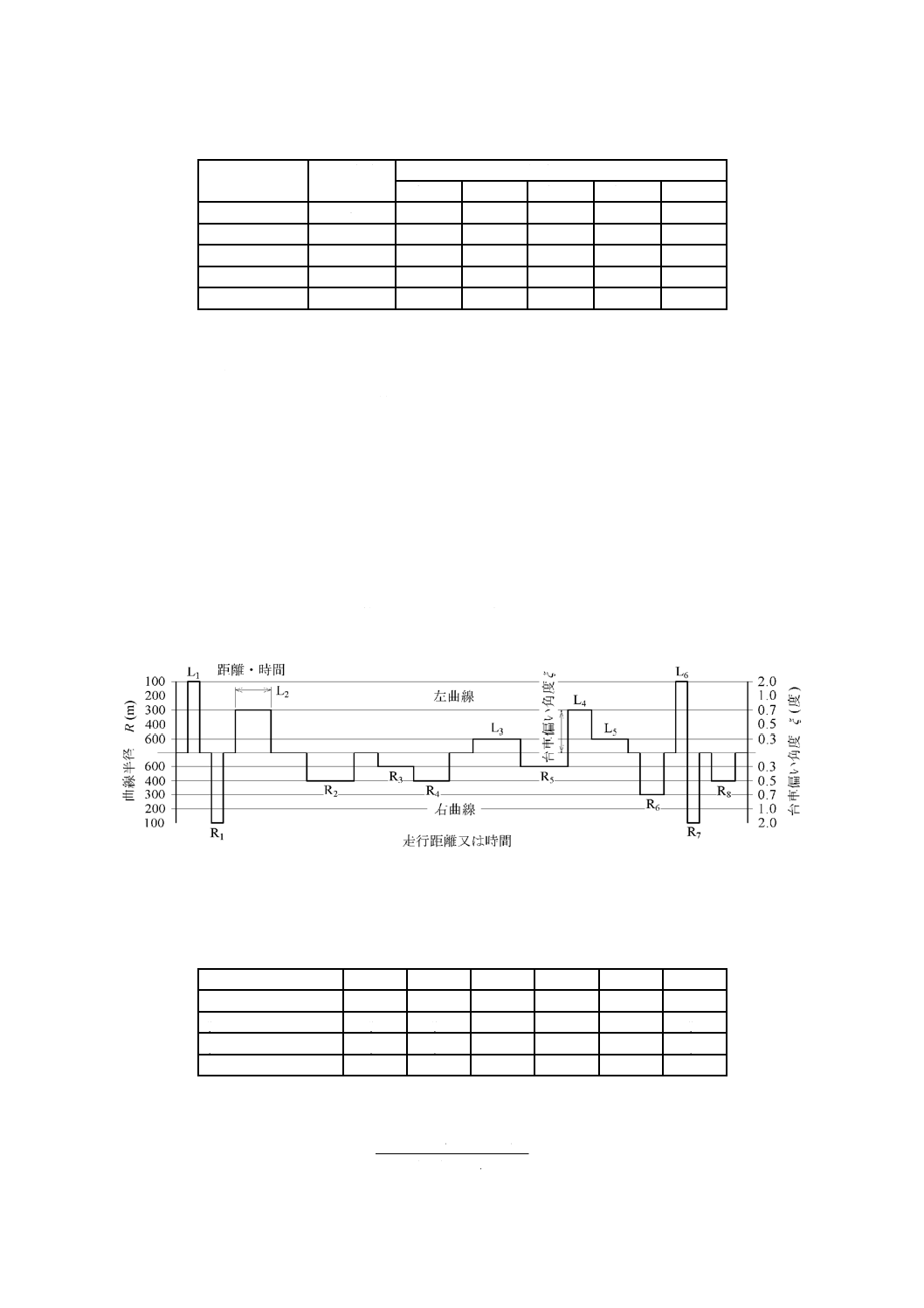
a) 第一推進軸の場合 平均傾斜角度の算出手順を次に示す。この傾斜角度を求める方法の基本は,附属
書Bに準じている。
1) 車両が運用される線区の左右別々の曲線半径ごとに台車の偏い角度ξを求める(図C.3参照)。この
場合に,台車の最大偏い角は用いず,θ2及びθ3は0とみなし,ξ=θ1とする。
2) 台車の偏い角度ξに応じた端部I及び端部IIの傾斜角η1i及びη2iを,右曲線及び左曲線別々に求め
る(表C.2及び表C.3参照)。ここで,推進軸の端部I及び端部IIの高さ方向の差LZは,車輪径の
摩耗状況又は空車〜満車の積載状態によって変わるため,平均値を用いる。
3) 端部I及び端部IIの傾斜角度は,曲線の左右別々に頻度を加味した平均値を求める。
4) 端部I及び端部IIの左右別々に算出した平均値の絶対値平均を平均傾斜角度η10及びη20とする。
図C.3−平均傾斜角度の算出方法例
右曲線について,
表C.2−右曲線における傾斜角
曲線No.
R1
R2
…
…
…
Rn
台車偏い角
ξ11
ξ12
…
…
…
ξn
η1
η11
η12
…
…
…
η1n
η2
η21
η22
…
…
…
η2n
時間
t1
t2
…
…
…
tn
右曲線における平均傾斜角度η1R及びη2R:
端部I
n
2
1
n
n1
2
12
1
11
R
1
t
t
t
t
t
t
Λ
Λ
+
+
+
+
=
η
η
η
η
27
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
端部II
n
2
1
n
n
2
2
22
1
21
R
2
t
t
t
t
t
t
Λ
Λ
+
+
+
+
=
η
η
η
η
左曲線について,
表C.3−左曲線における傾斜角
曲線No.
L1
L2
…
…
…
Ln
台車偏い角
ξ11
ξ12
…
…
…
ξn
η1
η11
η12
…
…
…
η1n
η2
η21
η22
…
…
…
η2n
時間
t1
t2
…
…
…
tn
左曲線における平均傾斜角度η1L及びη2L:
端部I
n
2
1
n
n1
2
12
1
11
L
1
t
t
t
t
t
t
Λ
Λ
+
+
+
+
=
η
η
η
η
端部II
n
2
1
n
n
2
2
22
1
21
L
2
t
t
t
t
t
t
Λ
Λ
+
+
+
+
=
η
η
η
η
端部I及び端部IIの平均傾斜角度η10及びη20は,式(C.5)によって求める。
2
L
1
R
1
10
η
η
η
+
=
2
L
2
R
2
20
η
η
η
+
=
································································· (C.5)
b) 第二推進軸及び補機駆動軸の場合 傾斜角度は第一推進軸ほど大きくないため,使用中に考えられる
最大角度を用いる。
28
E 5302:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
推進軸の危険回転速度の算出方法
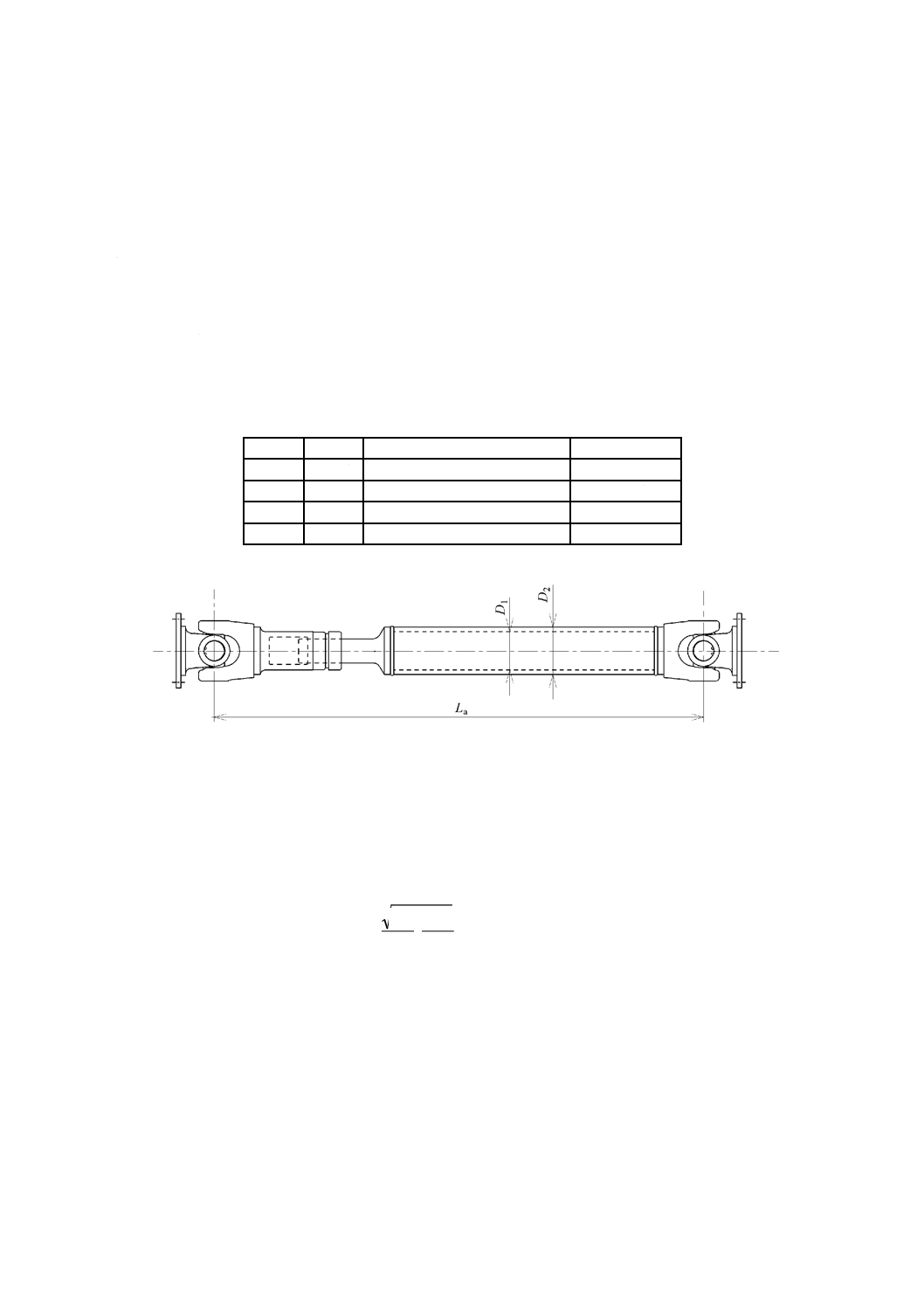
D.1 目的
この附属書は,危険回転速度を算出する方法について示す。
D.2 記号及び単位
この附属書で用いる記号及び単位は,表D.1に示す。また,記号の部位は,図D.1に示す。
表D.1−記号及び単位
記号
単位
適用
記事
NC
min−1
危険回転速度
−
D1
mm
推進軸の内径
パイプ部
D2
mm
推進軸の外径
パイプ部
La
mm
十字継手間セット長
図6参照
図D.1−記号の部位
D.3 算出方法
推進軸の十字継手間を一様な中空軸と仮定し,この部位を両端単純支持はりとしたときのはりのたわみ
振動(横振動)の振動方程式を解くことによって,危険回転速度が得られる。
推進軸の材質が鋼製の場合の算出方法は,次の式による。
a
2
2
2
2
1
8
c
10
2.1
L
D
D
N
+
×
×
=
(min−1)