E 3801-2:2018
(1)
目 次
ページ
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 システム構成 ··················································································································· 1
4.1 システム内の装置及び装置間の相互関連············································································· 1
4.2 無線システム ················································································································ 1
4.3 システム外の装置及び機器 ······························································································ 2
5 システム要求事項 ············································································································· 3
5.1 一般 ···························································································································· 3
5.2 システム性能 ················································································································ 3
5.3 システム構成装置への機能割付 ························································································ 3
5.4 列車制御 ······················································································································ 4
5.5 列車運行の監視及び管理 ································································································ 21
5.6 異常時の対応 ··············································································································· 23
附属書A(参考)機能要求事項のシステム構成装置への割付及び機能間授受情報 ····························· 25
附属書B(参考)システム構成装置の機能仕様 ·········································································· 38
附属書C(参考)装置間・機能間のインタフェース ··································································· 44
附属書D(参考)データベース及び装置間授受情報 ··································································· 48
附属書E(参考)システム構成及びシステム要求事項の具体例 ····················································· 51
E 3801-2:2018
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
鉄道電気技術協会(JREEA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工
業規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,国土交通大臣が改正した日本工
業規格である。
これによって,JIS E 3801-2:2010は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。国土交通大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願又は実
用新案権に関わる確認について,責任はもたない。
JIS E 3801の規格群には,次に示す部編成がある。
JIS E 3801-1 第1部:一般要求事項及び機能要求事項
JIS E 3801-2 第2部:システム要求事項
JIS E 3801-3 第3部:インタフェース要求事項(予定)
日本工業規格 JIS
E 3801-2:2018
無線式列車制御システム−
第2部:システム要求事項
Train control system using radio communication-
Part 2: System requirements
1
適用範囲
この規格は,普通鉄道において無線を利用して地上と車上との間で安全に関わる制御情報を交信する無
線式列車制御システム(Japan radio train control system:以下,JRTCという。)の,システム要求事項につ
いて規定する。また,この規格は,案内軌条式鉄道など特殊鉄道にも適用できる。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS E 3801-1 無線式列車制御システム−第1部:一般要求事項及び機能要求事項
IEC 62280,Railway applications−Communication, signalling and processing systems−Safety related
communication in transmission systems
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS E 3801-1による。
4
システム構成
4.1
システム内の装置及び装置間の相互関連
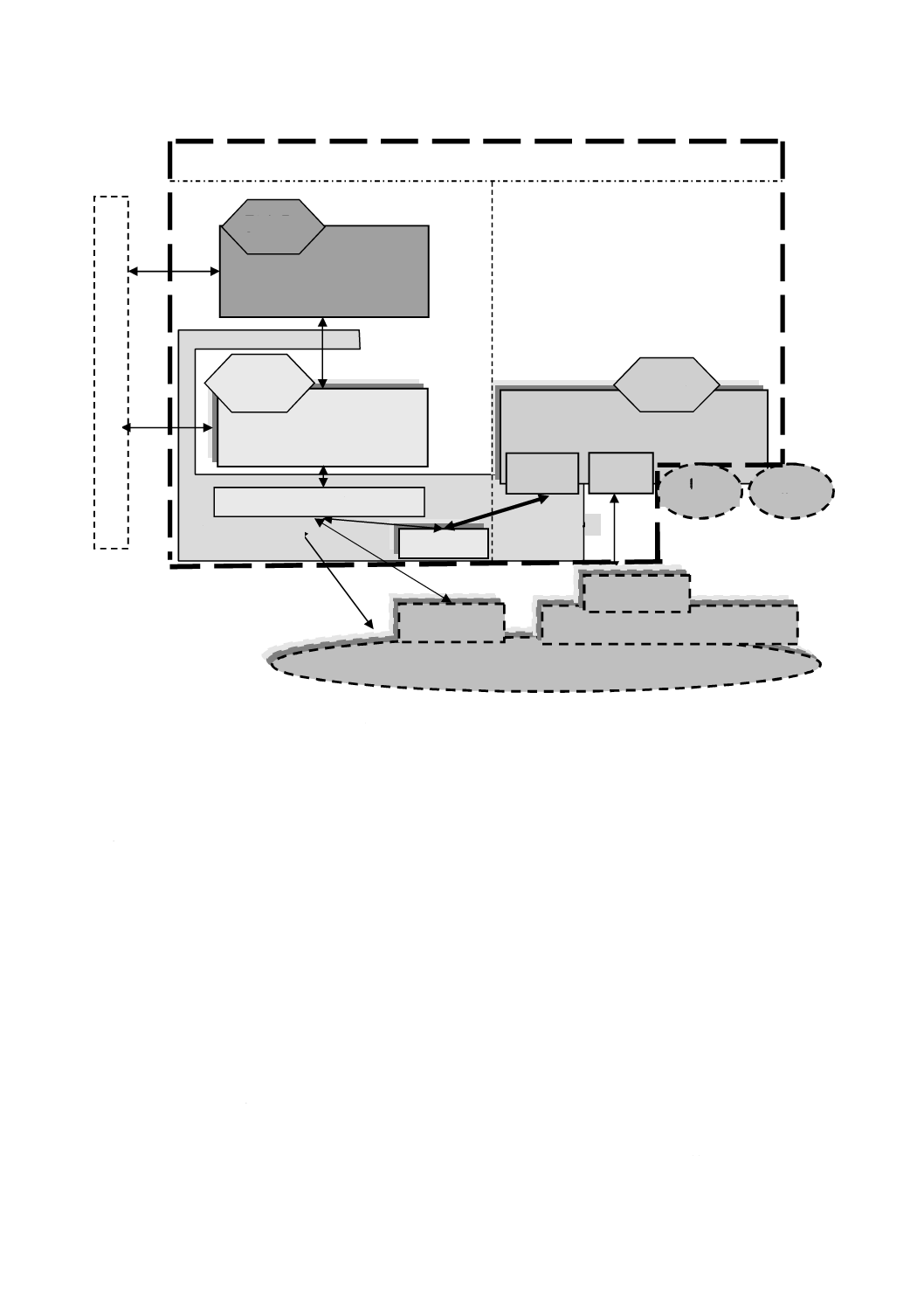
JRTC全体システムは,JIS E 3801-1の4.1(装置)に示した四つの装置から構成される。それらの装置
及びシステム外を含めた関連する装置は,図1に示す相互関係をもつ。システム内の装置は,地上システ
ムと車上システムとに大別され,それぞれに含む装置は,次による。
a) 地上システム JRTCのために地上に設置された装置であり,指令所装置,地上装置及びデータ通信
装置の地上部分からなる。
b) 車上システム JRTCのために車上に設置された装置であり,車上装置,データ通信装置の車上部分
からなる。
なお,図1では複数の地上装置と車上装置とに一つの指令所装置が対応する場合を示しているが,指令
所装置は,線区の事情に応じた多様な構成を許容する。すなわち,図1のような指令所機能を集中処理す
る方法だけでなく,機能を階層分割して下位階層機能を一つ以上の地上装置単位に分散処理する方法でも
よい。
4.2
無線システム
2
E 3801-2:2018
データ通信装置において,車上装置と地上装置との間の無線データ伝送を提供する装置を無線システム
と呼ぶ。無線システムは車上無線局(移動局)及び地上の基地局から構成し,基地局は無線の到達距離に
応じて沿線に1か所以上配置され,地上伝送路を介して地上装置とインタフェースする。車上装置と地上
装置との間の通信は双方向であり,無線システムは,JRTCの区間において次の機能を備える。
なお,使用する無線は,電波法第2条第1号で定める“電波”,すなわち,3 000 GHz以下の電磁波とす
る。無線システムの使用周波数,伝送方式,アクセス方式,エリアカバー率,伝送品質などについては鉄
道事業者が定める。
a) 接続状態の管理 JRTC区間において,車上装置及び地上装置は,無線システムを介して,列車の位
置又は速度に関係なく連続的に双方向のデータ伝送を行えなければならない。
b) ハンドオーバ処理 列車が基地局の境界を通過するとき,車上装置と地上装置との間の交信が継続的
に行えるようハンドオーバ処理を行う。
c) データ伝送の要求事項 データ伝送に関する要求事項は,IEC 62280による。
4.3
システム外の装置及び機器
JRTCの装置とインタフェースする主要なシステム外の装置及び機器を,次に示す。
a) 指令所装置とインタフェースするもの
− 運行計画系システム
− 電力管理システム
b) 地上装置とインタフェースするもの
− 連動装置(外部に設けた場合)
− 転てつ装置
− 踏切制御装置
− 境界進入検知装置及び車上ID検知装置
c) 車上装置とインタフェースするもの
− 列車速度・位置検出装置(具体的には速度発電機,GPS受信機など)
− ブレーキ装置
3
E 3801-2:2018
注a) HMIはHuman Machine Interfaceの略。
図1−相互接続に関する概略関連図
5
システム要求事項
5.1
一般
JRTCは,その機能の組込みにおいて,5.2〜5.6に規定する事項を満たさなければならない。
5.2
システム性能
指令所装置,地上装置,車上装置及びデータ通信装置(以下,システム構成装置という。)の処理能力は,
鉄道事業者が定める次の条件をシステムとして満足しなければならない。
− 最大在線列車数,最小運転時隔,列車最高速度及び最大列車長
− 地上と車上との無線伝送における許容最大交信間隔
− 列車位置検知の許容最大誤差
− システムの信頼性
− システムの安全性
なお,システム故障に関しては,JIS E 3801-1の7.2.2(システム故障)による。
5.3
システム構成装置への機能割付
JIS E 3801-1の機能要求事項のうち,7.3(列車制御)及び7.4(列車運行の監視及び管理)に示す機能の
その他周辺装置
(転てつ装置・列車接近警報装置・列車防護SW・転落検知装置など)
無線基地局
踏切制御装置
指令所装置
指令所
運行係員用
のHMI a)
境界進入検知装置・車上ID検知装置など
沿線装置
地上装置
拠点
運行係員用
のHMI a)
車上装置
車上
無線局
列車
車上子
乗務員用
のHMI a)
ブレーキ
装置
他
の
装
置
・
機
器
地上伝送路
JRTC
地上子
無線システム
車上システム
地上システム
データ通信装置
列車速度・
位置検出装置
4
E 3801-2:2018
システム構成装置である“指令所装置”,“地上装置”及び“車上装置”への割付は,種々の組合せが可能
である。この規格では機能の装置への割付をある程度固定し,“停止限界作成を地上に割り付けた場合”に
ついて記載する。この場合の機能割付の例を附属書Aに示す。附属書Aにおけるシステム構成装置の機能
を附属書Bに,装置間インタフェース(データフロー)を附属書Cに,装置がもつデータベース及び装置
間で授受される情報を附属書Dに示す。
5.4
列車制御
5.4.1
一般
列車制御機能の処理は,5.4.2〜5.4.11による。
5.4.2
線路上の位置の表現
線路上における,列車,勾配,曲線,付帯する設備などの位置は,それぞれの線路上の間隔,長さなど
がシステム内で特定できるように表現されなければならない。運転上の位置の取扱いについては,線区の
起点[ゼロ(零)キロポスト]からの離隔距離に基づくキロ程が一般的に使用されているため,HMIでは
JRTCで使用する位置表現方法との相互変換ができなければならない。
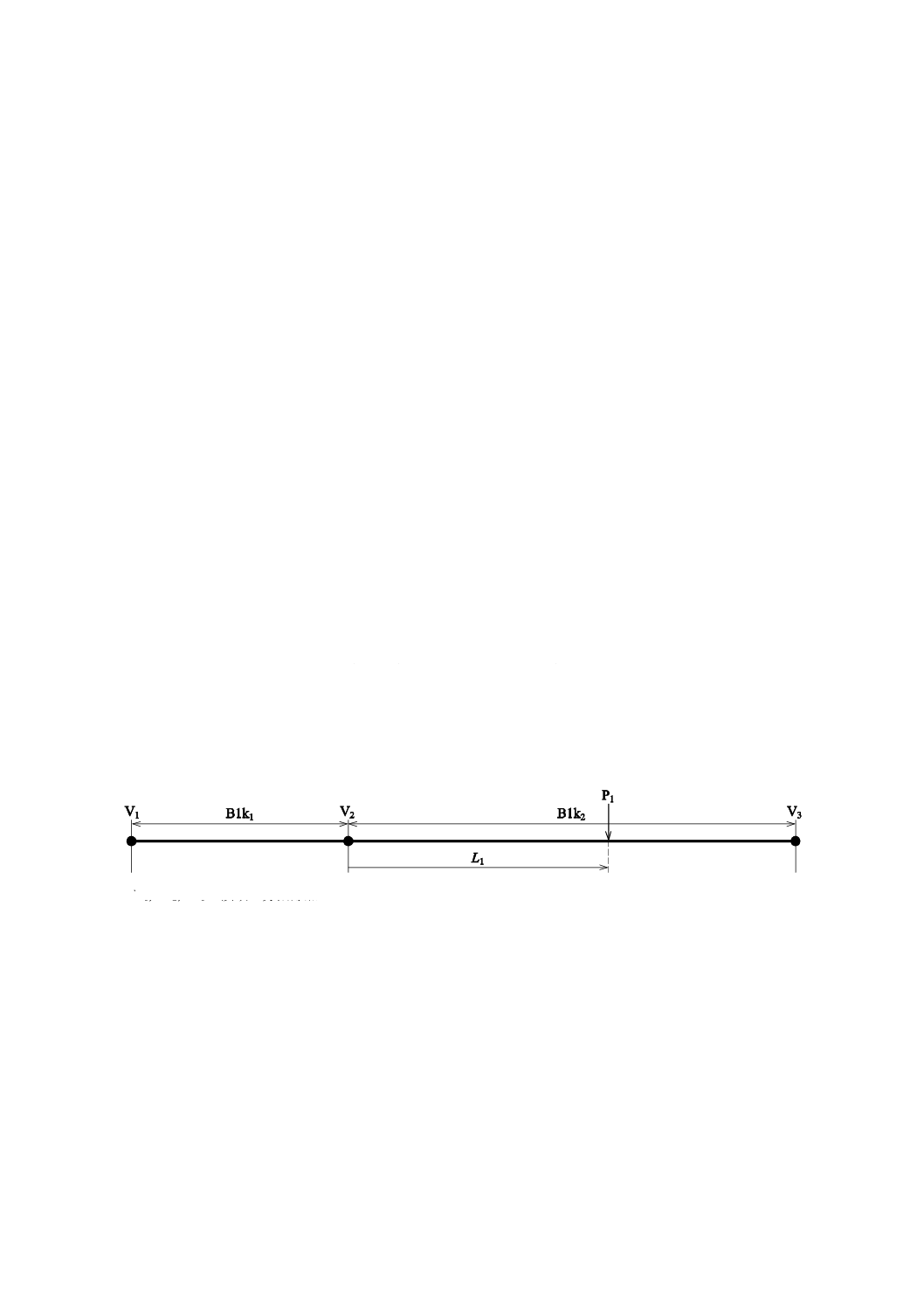
線路上の位置は,線路網を分岐のない線分状の領域に分割し,各領域に固有なIDを付与した上で,そ
の地点が所属する領域の片側の節点からの離隔距離によって表現することが望ましい(図2参照)。
従来の連動論理を踏襲する場合の軌道回路に相当する区間,及び僅かな退行の可能性のあるホーム区間,
き電区分制御区間などを用いる場合は,区間単位の列車の在線状態が列車在線位置から特定できなければ
ならない。線路上での位置表現の例を,E.3.1に示す。
なお,HMIでのキロ程表記の要否及びキロ程の単位精度は,次の事項に留意した上で鉄道事業者が定め
る。
− キロ程には,同一値のキロ程が複数存在する場合がある(重複キロ)。
− キロ程には,その値が存在しない場合がある(断キロ)。
− 位置の特定には,キロ程情報だけでは不足する場合があり,駅間における上下線情報,駅構内におけ
る番線情報などを追加する必要がある。
V1,V2,V3:領域の分割節点
Blk1,Blk2:分割した領域
P1:領域Blk2のあらかじめ定めた節点(V2)側からの離隔L1の位置
図2−線路上の位置の表現例
5.4.3
列車在線位置
5.4.3.1
一般
列車走行の安全を確保するためには,列車の位置を検知し,これに基づいて列車在線位置を把握しなけ
ればならない。
5.4.3.2
列車在線位置の表現
列車在線位置は,列車が在線する線路上の範囲をシステム内で特定できる表現とする。このために,列
5
E 3801-2:2018
車の位置を検知しなければならない。列車先頭位置及び列車後端位置に誤差を含む可能性がある場合には,
列車を安全に制御できるように,誤差を考慮して補正した列車先頭位置から列車後端位置までの範囲を列
車在線位置とする。
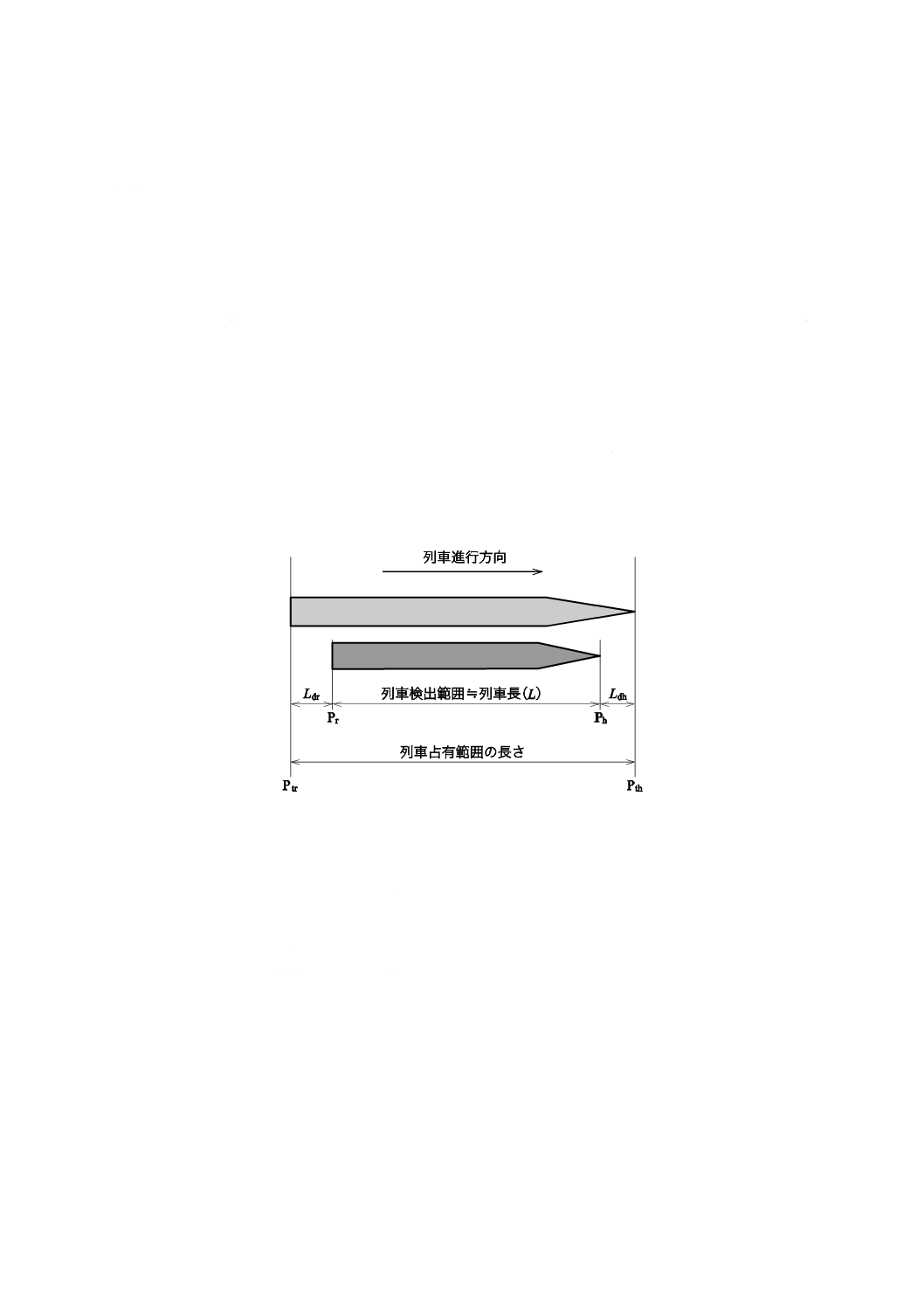
補正した値を含む,列車在線位置に関する諸量は,次のように定義することが望ましい(図3参照)。
− 列車先頭検出位置:列車進行方向の最前部として検出した位置。
− 列車後端検出位置:列車進行方向の最後部として検出した位置。
− 列車検出範囲:列車先頭検出位置から列車後端検出位置までの範囲。通常,列車長(L)に等しい。
− 列車先頭位置補正値(Ldh):列車位置検知機能に起因した安全制御上考慮すべき列車先頭位置の補正
値。
− 列車後端位置補正値(Ldr):列車位置検知機能に起因した安全制御上考慮すべき列車後端位置の補正
値。
− システム上の列車先頭位置(Pth):列車先頭検出位置に列車先頭位置補正値だけ進ませた位置。
− システム上の列車後端位置(Ptr):列車後端検出位置に列車後端位置補正値だけ遅らせた位置。
− 列車長補正値(Ld):列車先頭位置補正値と列車後端位置補正値との和(=Ldh+Ldr)。
− 列車占有範囲:システム上の列車先頭位置からシステム上の列車後端位置までの範囲。
Ph:列車先頭検出位置
Pr:列車後端検出位置
Ldh:列車先頭位置補正値
Ldr:列車後端位置補正値
Pth:システム上の列車先頭位置
Ptr:システム上の列車後端位置
列車長補正値 (Ld)=Ldh+Ldr
列車占有範囲の長さ=列車検出範囲+Ld
列車在線位置:列車占有範囲として検出した領域のシステム上の位置
図3−列車在線位置に関する諸量の例
5.4.3.3
列車進行方向の決定
列車編成方向及び運転台条件によって,列車進行方向を決定できなければならない。進行方向の表現及
びこれに関する列車編成方向,並びに運転台条件の概念についてはE.3.2に示す。
5.4.4
位置・速度情報の精度
5.4.4.1
一般
6
E 3801-2:2018
列車在線位置を表現する最小単位及び速度検知の精度は,次の5.4.4.2及び5.4.4.3による。
なお,これらの精度に対する留意事項についてはE.3.3に示す。
5.4.4.2
位置を表現する最小単位
在線位置を表現する最小単位は,列車運行に必要とされる列車在線位置を十分表現できるものでなけれ
ばならない。
5.4.4.3
速度検知の精度
速度検知の精度は,安全を確保できる精度でなければならない。
なお,GOA2[GOAについては,JIS E 3801-1の箇条5(自動化の程度)を参照]以上では現在速度と
許容速度との比較照査に求められる正確さで運転速度曲線に追随できる精度でなければならない。
5.4.5
列車在線位置の検知
JRTC区間の全ての列車在線位置は,JRTCが必要とする精度で連続的に検知されていなければならない。
列車在線位置の検知には,車上装置が行う方法と地上装置が行う方法とがある。
なお,必要とする精度は鉄道事業者が定める。
5.4.6
列車在線位置の把握
列車在線位置の把握は,地上装置が行う。地上装置は,車上装置又は地上に設けた位置検知装置が検知
した列車在線位置情報,及び進行方向を周期的に受信することによって,JRTC区間の全ての列車在線位
置を常時把握しなければならない。留置時(5.4.8.5.2参照)に車上装置の電源が遮断された場合も,地上
装置の列車位置把握情報は消滅してはならない。
列車在線位置の最新状態を,どの列車がどの位置にいるか,及びどの位置にどの列車がいるかの両方の
観点から把握することを可能とする。
なお,JRTCを初期立上げする場合には,JRTC区間の全ての列車在線位置のシステムによる把握及び/
又は運行係員による確認を必要とする。
5.4.7
列車走行の安全確保
5.4.7.1
一般
列車走行の安全を確保するために必要な制御全体の流れは,次の手順による。
なお,列車走行の安全確保に関する省令との関係をE.3.4に示す。
a) 地上装置は,各列車の列車在線位置を把握するとともに,転てつ器,踏切制御装置などの地上設備の
制御状態を把握する。
b) 地上装置は,各列車在線位置,転てつ器の制御状態などに基づき,設定要求のあったルートの構成を
安全要件が満たされる範囲内で行い,ルートの安全を確保する。
c) 地上装置は,安全を確保したルート条件,それ以外に存在する走行上の支障条件(例えば,先行列車,
緊急防護など)及び走行制限条件(例えば,臨時速度制限など)に基づき,走行を許可する情報を作
成し,無線を介して各列車の車上装置に伝達する。
d) 各列車の車上装置は,無線を介して受信した地上装置からの走行を許可する情報に基づいてブレーキ
パターン(5.4.7.6のブレーキパターンに相当する。)を作成し,自列車の現在位置,速度との照査を行
う。
e) 各列車の車上装置は,現在速度が許容速度曲線の速度を超えた場合にはブレーキを動作させ,列車が
停止限界の手前までに停車するか,又は走行速度が制限速度以下になるように制御する。
上記a)〜e) の手順に必要な列車走行の安全を確保するための要求事項を,5.4.7.2〜5.4.7.6に規定する。
これらの制御においては,列車在線位置の検知精度及び伝送遅延を考慮しなければならない。伝送遅延に
7
E 3801-2:2018
関する留意事項はE.3.3.3に示す。
5.4.7.2
ルートの安全確保
5.4.7.2.1
一般
JRTCにおけるルートの安全確保は,5.4.7.2.2〜5.4.7.2.4による。ルートの概念を,E.3.5及びE.3.6に示
す。
なお,ルートの安全確保に関する機能の一部又は全部に独立した装置(連動装置など)を使用すること
ができる。独立した装置は外部に設けてもよい。
5.4.7.2.2
ルートの鎖錠及び監視
地上装置は,指令所装置又はその他の装置からルート設定要求を受け付け,ルートの選択,ルート構成
要素の特定及びルートの競合判断を実施し,必要に応じて転てつ器への転換指令を出力して,ルートの鎖
錠及び監視を行う。この処理を実施するに当たって,次の要件を満たさなければならない。
a) ルートの特定及び転てつ器の転換 ルート設定要求を受け付け,ルートを選択し,ルート構成要素を
特定する。特定したルート構成要素が他の列車など若しくは作業による使用中でないか,又は使用中
であっても共用可能であれば,特定したルート構成要素を使用中とした後,分岐器上に列車が在線し
なければ必要な転てつ器に転換指令を出力し,転てつ器の転換完了を確認できなければならない。
b) ルートの鎖錠 ルート設定要求範囲の中で転換を指示した全ての転てつ器の開通を確認後,当該転て
つ器に関わるルートを鎖錠する。
c) ルートの監視
1) ルート構成要素確保の確認 設定されたルートに対し,全てのルート構成要素の使用状態を連続的
に監視し,使用状態が変化した場合に検知できなければならない。
2) ルートの鎖錠の監視 ルート構成要素確保が確認された当該ルートについて,転てつ器が転換され
ないよう鎖錠すると同時に,ルートの鎖錠状態を連続的に監視し,鎖錠状態に異常が認められた場
合には,直ちにルートへの進入を禁止できなければならない。
5.4.7.2.3
ルートへの進入の許容及び支障位置の決定
地上装置は,全ルートについて,ルートの状態(設定・鎖錠され,安全が確保されている状態,設定さ
れていない状態,及び列車在線状態)を常時認識する。地上装置は,ルート状態の監視結果に異常が認め
られない場合には,安全確保したルート単位で進入許容区間を決定し,進入許容区間の終端を支障位置と
する。進入許容区間の概念をE.3.7に示す。
なお,安全を確保した複数のルートが連続する場合は,その連続するルートを合わせて進入許容区間と
してもよい。この場合,従来の連動装置の概念における出発ルート終端内方に駅間のルートを設け,安全
を確保したルートとみなしてもよい。
5.4.7.2.4
ルートの解錠
ルートの解錠は,地上装置が行う。ルートの解錠には,列車の走行による場合とルート取消しによる場
合とがあり,それぞれに対する要求事項を次に示す。
a) 列車の走行による解錠 進入を許可された列車がルートへ進入することによってルートを解錠する場
合であり,次の要件を満たさなければならない。
− 列車が当該ルートに進入したこと,及び当該ルートから進出したことを検知するとともに,列車が
ルート内に存在するときは当該列車在線位置に対応するルート構成要素を特定する。
− 当該列車在線位置に応じてルートの鎖錠を解錠する。
なお,ルートの鎖錠を解錠する列車在線位置については,鉄道事業者が定める。
8
E 3801-2:2018
− 当該列車在線位置に応じてルート構成要素の当該列車による使用中を解除する。
なお,使用中を解除するルート構成要素と列車在線位置との関係については,鉄道事業者が定め
る。
b) ルート取消しによる解錠 指令所装置又はその他の装置から列車がルートへ進入する前にルート取消
要求が行われた場合のルートの解錠であり,次の1) による。ただし,1) によれない場合は,2) 又は
鉄道事業者が定める方法としてもよい。
1) 列車の停止可否判断による場合
− 任意のルートに対し,地上装置又は車上装置はルート始端外方で列車が停止可能かを判断できる。
− 取消しが行われたルート始端外方にて列車が停止不可と判断された場合は,当該ルートの鎖錠及
びルート構成要素の使用中を保持する。
− 取消しが行われたルート始端外方にて列車が停止可能又は停止中と判断された場合は,地上装置
は,支障位置をルート取消し後の位置に更新した上で,当該ルートに対してルート構成要素の当
該列車による使用中を解除し,解錠条件が満足していれば鎖錠を解錠する。
2) 従来の接近鎖錠による場合
− ルートごとの接近鎖錠区間に列車が在線したことを検知できる。
なお,接近鎖錠区間はルートごとに鉄道事業者が定める。
− 列車が当該ルートの接近鎖錠区間に到達していない場合,支障位置をルート取消し後の位置に更
新した後,当該ルートの鎖錠を解錠し,ルート構成要素の当該列車による使用中を解除する。
− 列車が当該ルートの接近鎖錠区間に在線している場合,列車が当該ルート内に非在線であれば,
当該ルート始端外方での停止を指示し,当該ルートの鎖錠,及び当該ルートのルート構成要素の
使用中を保持する。一定時間後に列車が当該ルート内に非在線であることを確認し,当該ルート
に対してルート構成要素の当該列車による使用中を解除し,解錠条件が満足していれば鎖錠を解
錠する。
なお,解錠と解除とを行うまでの時間は,ルートごとに鉄道事業者が定める。
5.4.7.3
列車間隔の安全確保
2列車が同一走行路上を同一方向に走行している場合,先行列車と続行列車との間に先行列車以外の支
障が存在しないとき,続行列車の支障位置は,先行列車のシステム上の列車後端位置とする。
5.4.7.4
停止限界の決定
5.4.7.4.1
一般
地上装置は,各列車の列車在線位置に基づき,5.4.7.4.2に示す支障位置から各列車の停止限界を決定す
る。各支障位置種別に対する停止限界は,それぞれの支障位置の手前に保安制御余裕距離を確保した位置
とするが,複数の支障が存在する場合には,それぞれの停止限界を求めて,最も列車に近い位置にある停
止限界を,その列車の停止限界としなければならない。
停止限界の決定に関する留意事項を,E.3.8に示す。
なお,保安制御余裕距離は鉄道事業者が定める。
5.4.7.4.2
支障位置の種別
制御対象列車のルート始端内方における支障位置の主な種別を,次に示す。
なお,これらのうち,c)〜h) については線区状況によって異なることから,支障の種別は,鉄道事業者
が定める。
a) 進入許容区間終端(5.4.7.2.3参照)
9
E 3801-2:2018
b) 他列車のシステム上の列車先頭位置,又はシステム上の列車後端位置(5.4.3.2参照)のうち,制御対
象列車のシステム上の列車先頭位置に近い方の位置
c) 僅かな退行を行う可能性のあるホーム区間に列車が在線する場合のホーム区間境界
d) 複数列車の進入を許容しないき電区分区間に列車が在線している場合,又は同き電区分区間に列車に
よる停止限界が存在する場合のき電区分境界
e) 線路閉鎖区間境界
f)
JRTC機能停止地上装置の制御区間境界
g) JRTC機能異常列車の列車在線位置
h) 外部システムで検知した異常区間境界
5.4.7.5
最大許容速度の決定
5.4.7.5.1
一般
最大許容速度とは,列車が走行する線路上の区間別に許容される安全上の最大速度であり,各種の速度
制限,車両の種別などから定まる。車上装置は,列車在線位置から停止限界までにおける最大許容速度を,
各種速度制限で示される制限速度の最小値を採用することによって決定する。
なお,車両の制限速度がある場合には,これを合わせて最大許容速度を決定しなければならない。
最大許容速度を表す情報は,速度が制限される区間(始端位置及び終端位置)を示す情報及び制限速度
情報(各種速度制限で示される制限速度の最小値情報)を含まなければならない。図4に最大許容速度の
設定例を示す。また,各種速度制限は,5.4.7.5.2〜5.4.7.5.5による。
注記 速度制限の種類及び区間を← →で示し,太い実線が最大許容速度を表す。
図4−最大許容速度の設定例
5.4.7.5.2
固定速度制限
車上装置は,線区最高速度を下回る速度領域において,曲線区間,分岐区間,勾配区間などに対応した
速度制限(固定速度制限)を設定する。車上装置が固定速度制限のデータベースをもたない場合は,地上
装置が固定速度制限情報を車上装置に送信してもよい。
5.4.7.5.3
臨時速度制限
最大許容速度を決定するときに必要となる臨時速度制限は,地上システムから車上システムに伝送する。
臨時速度制限の情報は,臨時速度制限が実施される区間(始端位置及び終端位置)を示す情報及び制限速
度情報を含まなければならない。
線区最高速度
制御列車
停止限界
分岐
曲線
臨時
曲線
分岐
勾配
10
E 3801-2:2018
なお,この臨時速度制限を指令所などで集中的に管理する機能を必要とするか否かは,鉄道事業者が定
める。
5.4.7.5.4
踏切制御による速度制限
JRTCに踏切制御に関する機能を設ける場合,車上装置又は地上装置に次の機能の一部,又は全てを設
けてもよい。踏切制御の実施例を,E.3.9に示す。
a) 踏切の制御 JRTCは,踏切制御装置に設けられたインタフェースを通じて,踏切制御装置が列車の
踏切接近時における踏切の警報・遮断,及び列車の踏切通過後における踏切の警報・遮断解除を行う
ための情報を伝える。
b) 踏切制御に従った速度制限の決定 車上装置は列車が踏切に接近したとき,踏切道手前に停止できる
ブレーキパターンを作成する。車上装置は,踏切の状態に応じて,当該ブレーキパターンの消去を行
う。
なお,このブレーキパターンによって列車が停車した後の扱いは,鉄道事業者が定める。
c) 踏切支障,踏切障害物などの異常情報 踏切遮断状況に加えて,踏切の支障報知,障害物検知などの
走行線路に関する異常情報を地上装置から車上装置に伝える。
5.4.7.5.5
他の制約条件
突発的に列車を停止させる必要がある場合の機能として,次のa) 及び/又はb) を設けることができる。
ただし,これらの機能を必要とするか否か,及びその方法は鉄道事業者が定める。
a) 地上装置から車上装置に対して,一斉停止又は個別停止情報を送信する。
b) 地上装置からは緊急情報を送信し,それを受信した車上装置が停止場所の判断を行う。緊急情報には,
防護すべき区間の始端位置及び終端位置を含める。
注記 突発的に列車を停止させる必要のある要因には,災害検知,ホーム列停(列車非常停止警報),
転落検知,踏切非常押しボタン,踏切障害物検知,限界支障,トンネル支障などがある。
5.4.7.6
ブレーキパターンの決定及び列車速度の監視制御
車上装置は,列車が停止限界までに停止でき,最大許容速度の制限速度を超えないよう速度を監視制御
するためのブレーキパターンを決定し,それに基づいて列車速度を監視制御しなければならない。これら
の制御は,次による。
なお,緊急防護に対するブレーキパターンの決定はc) 1)又はc) 2)とするが,パターンの詳細は鉄道事業
者が定める。
a) 制限速度の決定 5.4.7.5に示す最大許容速度による。
b) ブレーキ減速度の決定 車両性能(車両性能データベースを参照して決定),線路条件[勾配,トンネ
ル区間などの情報を列車在線位置から走行路線形データベース(附属書D参照)を参照して決定]に
よって,現在の列車在線位置から停止限界又はその外方に余裕距離を確保した位置までのブレーキ減
速度を決定する。
なお,線路条件は地上装置で決定し,車上装置に与えてもよい。
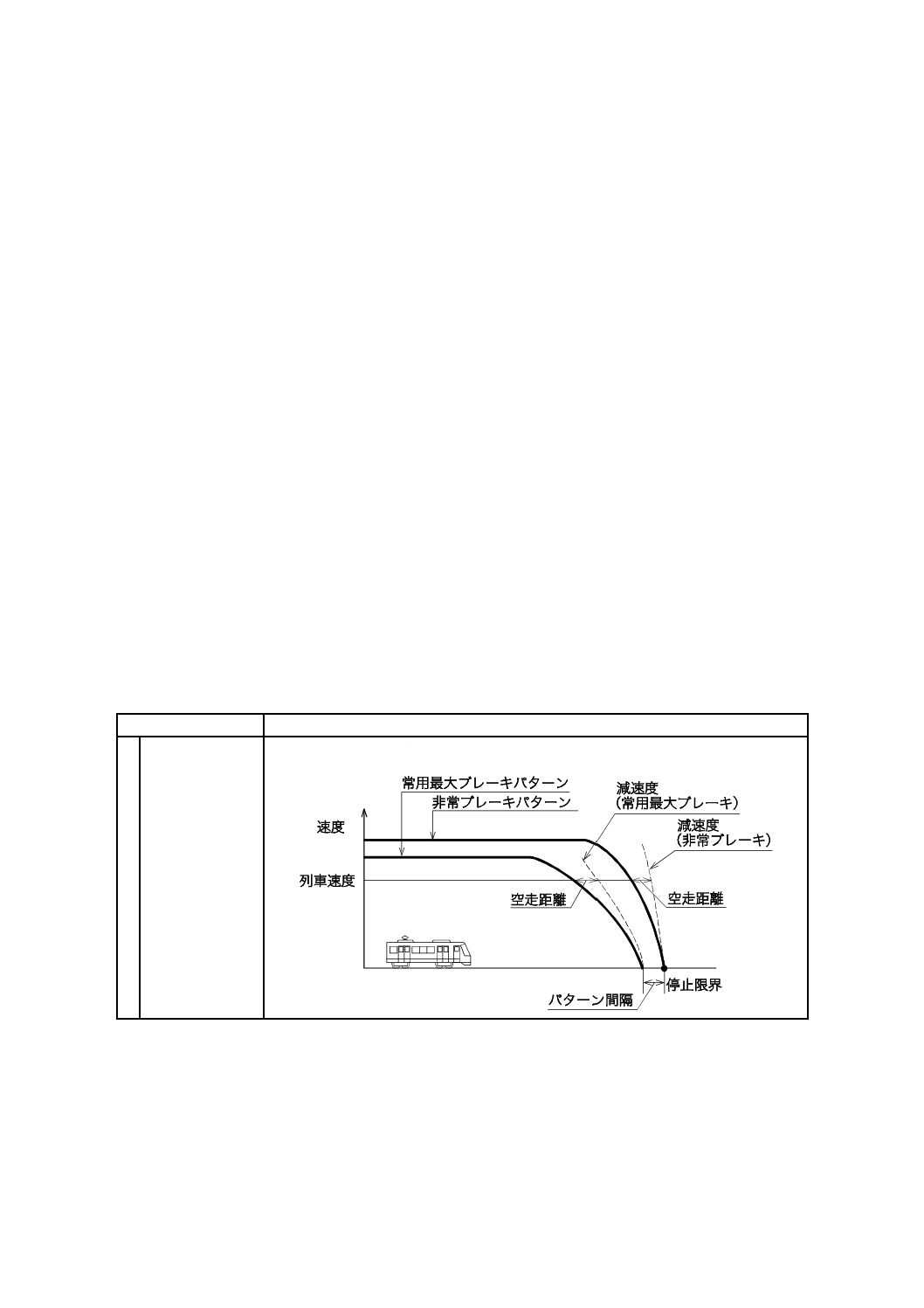
c) ブレーキパターンの決定 停止限界,速度制限及びブレーキ減速度を用いて,非常ブレーキに対する
ブレーキパターンを決定する。ブレーキパターンの形状は,停止限界パターン及び制限速度パターン
をもち,必要に応じて常用最大ブレーキパターン,停止目標近接パターン及び併合パターンを設けて
もよい。表1に各パターンの概念を示す。これらの決定は,次による。
なお,2) における調整速度設定の要否,及び1)〜4) におけるパターン間隔,余裕距離,調整速度
及び許容距離の値は,鉄道事業者が定める。
11
E 3801-2:2018
1) 停止限界パターン
− 停止限界に基づき,非常ブレーキを使用して減速するための非常ブレーキパターンを決定する。
必要に応じて常用ブレーキを使用して減速するための常用最大ブレーキパターンを用意してもよ
い。
− 非常ブレーキパターン,及び常用最大ブレーキパターンを決定するときには,ブレーキ指令が出
力されてから実際にブレーキが動作し列車が減速し始めるまでに想定される空走距離を考慮する。
− 非常ブレーキパターンの速度0となる位置は,停止限界又はその外方に余裕距離をとった位置と
する。
− 常用最大ブレーキパターンの速度0となる位置は,非常ブレーキパターンの速度0となる位置か
らパターン間隔だけ外方とする。
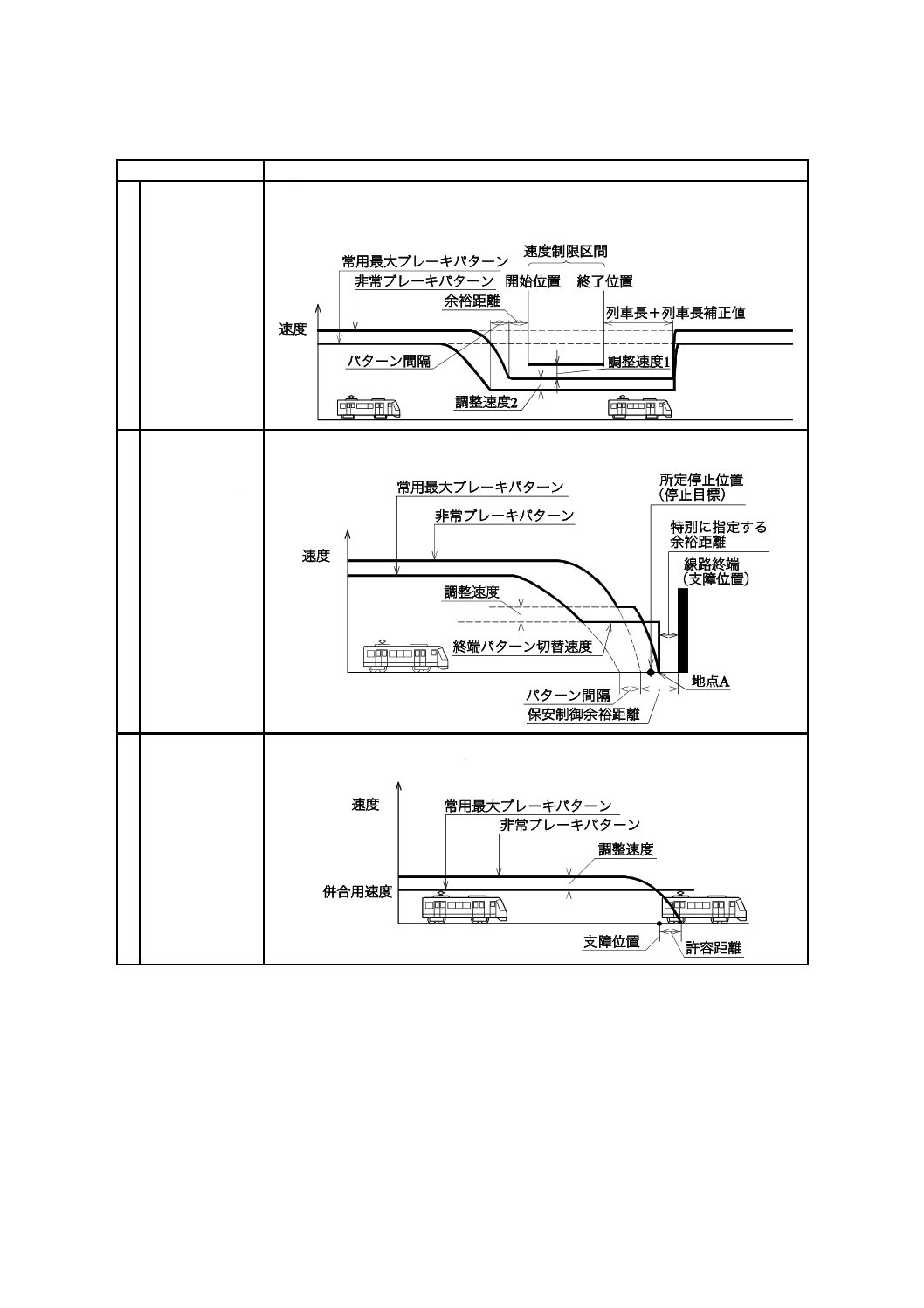
2) 速度制限パターン
− 速度が制限される区間に対しては,非常ブレーキを使用して減速するための非常ブレーキパター
ン及び常用ブレーキを使用して減速するための常用最大ブレーキパターンの2種類のパターンを
決定する。
− 非常ブレーキパターンは,速度制限区間の開始位置に対して余裕距離を加味した地点から非常ブ
レーキパターンの頭打ち速度区間(ブレーキパターンで規定される速度が一定値となる区間)を
開始する。必要に応じて制限速度に対して調整速度を加味した速度を設定して,頭打ち速度区間
を決定してもよい。制限速度とブレーキパターンとの関係について,E.3.10に示す。
なお,この場合の調整速度設定の要否,及びその値は,鉄道事業者が定める。
注記1 表1の例では,速度制限区間の開始位置から余裕距離だけ外方の地点で,非常ブレー
キパターンが制限速度から調整速度だけ下回った速度となるように決定され,その地
点から頭打ち速度区間を開始している。
− 常用最大ブレーキパターンは,速度制限区間の開始位置に対して,余裕距離及びパターン間隔を
加味した地点から常用最大ブレーキパターンの頭打ち速度区間を開始する。
注記2 表1の例では,速度制限区間の開始位置から“余裕距離+パターン間隔”だけ外方の
地点で,常用最大ブレーキパターンが制限速度から“調整速度1+調整速度2”だけ
下回った速度となるように決定され,その地点から頭打ち速度区間を開始している。
− 非常ブレーキパターン及び常用最大ブレーキパターンの頭打ち速度区間の終了位置は,補正値を
含む列車在線位置を考慮して決定する。
注記3 表1の例では,速度制限区間の終了位置から“列車長+列車長補正値”だけ内方を頭
打ち速度区間の終了位置としている。
3) 停止目標近接パターン 線路終端などで,列車の所定停止位置(停止目標)が常用最大ブレーキパ
ターンの速度0となる地点を越える場合に,次の要件を満たす停止目標近接パターンを特別に用意
する。
− 線路終端などの支障位置の手前側に保安制御余裕距離をとった地点を停止限界としたときの停止
限界パターンとして,非常ブレーキパターン及び常用最大ブレーキパターンの2種類のパターン
を決定する。決定方法は,5.4.7.6 c) 1) による。
− 上記の常用最大ブレーキパターンがあらかじめ定めた終端パターン切替速度に達した地点から,
常用最大ブレーキパターンの頭打ち速度区間を設ける。
− 上記頭打ち速度区間の終端は,所定停止位置を越える地点で,かつ,支障位置の手前側に特別に
12
E 3801-2:2018
指定する余裕距離をとった地点に設定する(表1のパターン種別3の地点A)。
− 上記の非常ブレーキパターンが終端パターン切替速度に調整速度を加味した速度に達した地点か
ら,非常ブレーキパターンの頭打ち速度区間を設ける。この頭打ち速度区間の終端は,常用最大
ブレーキの頭打ち速度区間の終端で速度0となる非常ブレーキパターンとの交点までとする。
4) 併合パターン 併合パターンは,次の要件を満たすように決定する。
− 被併合列車のシステム上の列車後端位置を越える地点に許容距離をとった地点で,速度0となる
併合作業用の非常ブレーキパターンを決定する。決定方法は,5.4.7.6 c) 1) に従う。
− 非常ブレーキパターンの最大速度に調整速度を加味した速度を併合用速度として決定する。
− 併合作業用の常用最大ブレーキパターンは,頭打ち速度区間だけとし,頭打ち速度は上記の併合
用速度とする。
d) 列車速度の決定 車上装置は,列車速度・位置検出装置から得た情報を用いて,列車速度の監視制御
に使用する列車速度を決定する。また,車上装置は,列車速度の急激な変化を検知した場合に列車の
安全を確保できるように,列車速度の補正演算を行ってもよい。
注記 列車速度の急激な変化には,速度発電機で速度検出を行う場合の空転時,滑走時などがある。
e) 列車速度の監視制御 車上装置は,列車速度が比較対象となるブレーキパターンを超過した場合には,
常用ブレーキ又は非常ブレーキを動作させる。一旦非常ブレーキが動作したときには,非常ブレーキ
は列車が停止するまで緩解しない。
なお,列車の停止を検知するときには,速度に関する精度を考慮した基準値を用いて,列車速度の
値を0と判断する。また,列車が停止した後に非常ブレーキを緩解させるための取扱いに関しては,
鉄道事業者が定める。
表1−パターン種別及びブレーキパターンの概念図
パターン種別
ブレーキパターンの概念図
1 停止限界パター
ン
停止限界に基づいたブレーキパターン。
13
E 3801-2:2018
表1−パターン種別及びブレーキパターンの概念図(続き)
パターン種別
ブレーキパターンの概念図
2 速度制限パター
ン
曲線区間での制限速度,臨時制限速度,進路種別による制限速度などを,超過しない
ためのブレーキパターン。
3 停止目標近接パ
ターン
(必要に応じて
設けてもよい。)
終端などで,列車の所定停止位置が破線のように常用最大ブレーキパターン終端(速
度0となる地点)の前方となる場合に特別に用意するブレーキパターン。
4 併合パターン
(必要に応じて
設けてもよい。)
併合作業を実施するために,併合作業用の制限速度と被併合列車のシステム上の列車
後端から許容距離をもたせたブレーキパターン。
5.4.8
制御列車の管理
5.4.8.1
列車走行における運転モード
列車がJRTC機能によって運転されている状態を“JRTC運転の状態”といい,JRTC区間外を運転され
る状態を“他システム運転の状態”という。JRTCは前者のJRTC運転の状態を,更に五つのモードに分け
て列車を管理する。これらの状態とモードの区分とを表2に示し,各モードの内容は次による。
なお,他システム運転の状態に対応する車上制御システムは必ずしも備える必要はない。また,JRTC
運転の状態におけるモードのb)〜d) は,必須ではなく必要な場合に装備することでよい。
14
E 3801-2:2018
表2−列車の運転モード
運転状態
内容
運転モード
JRTC運転の状態
JRTC機能によって,列車が運転される。
次のモードに応じて,車上装置の必要な機能が切り替わる。
通常モード
自動化レベル(GOA1,GOA2)に応じて,列車が運転される。
分割モード
(必要に応じて設けてもよい。)
分割時の列車の取扱いに対応した機能が有効となる。
併合モード
(必要に応じて設けてもよい。)
併合時の列車の取扱いに対応した機能が有効となる。
入換モード
(必要に応じて設けてもよい。)
入換時の列車の取扱いに対応して,制約が設けられる。
制限運転モード
停止限界を使用しないで,列車速度を一定速度に制限する制約の下で,列
車を運転する。
他システムによる運転の状態
JRTC機能を用いないで,列車が運転される。
他システムの運転モード
(必要に応じて設けてもよい。)
JRTC区間外における他システムの線区を列車が走行する場合。他システム
運転の状態における安全の確保は,他システムに従う。
a) 通常モード 停止限界の決定,速度制限などのJRTCの機能に従って決定されたブレーキパターンに
基づいて,列車走行の安全を確保する。車上装置において自列車の在線位置が確定しており,地上装
置は当該列車の列車在線位置を把握していることを条件とする。
b) 分割モード 列車分割時には,制御対象とする編成が新たに生まれる。地上装置と車上装置とがこれ
に対応するモードであり,分離移動する列車のブレーキパターンは5.4.7.6に従って決定され,列車走
行の安全を確保する。地上装置は,分割後の二つの列車の車上装置が正常であり,かつ,列車在線位
置が確定している場合,分割後の列車の状態を列車分離(異常)と認識してはならない。
c) 併合モード 列車併合時には,制御対象となっていた二つの編成が一つに統合される。地上装置と車
上装置とがこれに対応するモードである。ブレーキパターンは,表1のパターン種別4のように決定
されるので,連結速度の調整は乗務員の操作に委ねられる。地上装置は,併合後に同一列車となるこ
とを,システム機能,乗務員又は運行係員の扱いによって把握しなければならない。
なお,併合は,列車ダイヤに従った列車運行の一部として行われるほか,異常によって走行不能と
なった列車を救援する場合に使用することを前提としてもよい。
d) 入換モード ルートの安全確保はJRTCで担保するが,ルート上の走行速度はあらかじめ定めた上限
を設けてJRTCが規制する。また,入換などの運転形態に対応した停止限界の決定,速度制限などの
機能をもつ場合には,ブレーキパターンを決定して走行の安全を確保する。地上装置は,入換モード
で制御されることが,システム機能又は係員の扱いによって把握しなければならない。
e) 制限運転モード 停止限界を設けずに一定速度制限によってだけ,列車走行を制約する。地上からの
制御が不能であるが,車上の速度照査機能は可能である場合などに使用し,列車などとの間隔制御を
人間系を含む他システムに依存する状態である。指令などで特に認められた場合など,限定された条
件で使用する。このモードにおいては,ルート及び列車前方の安全確認は,地上及び/又は車上の係
員の扱いによるものとする。また,制限する速度は,鉄道事業者が定める。
5.4.8.2
JRTC運転の状態における運転モードの切替え
JRTC運転の状態におけるモード間の切替えに必要な事項は,次による。
なお,条件の詳細は鉄道事業者が定める。
15
E 3801-2:2018
JRTC運転の状態における運転モードの切替条件を表3に示す。
a) 通常モードから分割モードへの切替え
− 列車は,あらかじめ定められた位置に停車している。
− 地上装置は,車上装置からの情報,又は係員などの入力によって分割する列車を認識している。
− モードの切替えは,車上装置が地上装置から制御情報を受信すること,又は手動操作によって行う。
b) 通常モードから併合モードへの切替え
− 被併合列車は,あらかじめ定められた位置に停車している。
− 地上装置は,車上装置からの情報,又は係員などの入力によって併合に関わる列車を認識している。
− モードの切替えは,併合列車の車上装置が地上装置から制御情報を受信すること,又は手動操作に
よって行う。
c) 通常モードから入換モードへの切替え
− 列車は,停車している。
− 車上装置は,地上装置から受信した制御情報又は手動操作によって,モードの切替えを行う。
d) 通常モードから制限運転モードへの切替え
− 車上装置は,手動操作によって,モードを切り替える。
− 地上装置は,当該列車の車上装置のモード切替えを認識している。
e) 分割モードから通常モードへの切替え
− 列車は,あらかじめ定められた位置に在線している。
− 車上装置は,分割後の列車編成状態に対応して,5.4.8.4の要件を満たしている。
− 地上装置は,分割後の列車を認識している。
− 車上装置は,地上装置から受信した制御情報又は手動操作によって,モードの切替えを行う。
f)
分割モードから入換モード,又は制限運転モードへの切替え
− e) と同じ事項とする。
g) 併合モードから通常モードへの切替え
− 列車は,あらかじめ定められた位置に在線している。
− 車上装置は,併合後の列車編成状態に対応して,5.4.8.4の要件を満たしている。
− 地上装置は,併合後の列車を認識している。
− 車上装置は,地上装置から受信した制御情報又は手動操作によって,モードの切替えを行う。
h) 併合モードから入換モード,又は制限運転モードへの切替え g) と同じ事項とする。
i)
入換モードから通常モードへの切替え
− c) と同じ事項とする。
j)
入換モードから分割モードへの切替え
− a) と同じ事項とする。
k) 入換モードから併合モードへの切替え
− b) と同じ事項とする。
l)
入換モードから制限運転モードへの切替え
− d) と同じ事項とする。
m) 制限運転モードから他のモードへの切替え
− 車上装置は,5.4.8.4の要件を満たしている。
− 車上装置は,地上装置から受信した制御情報又は手動操作によって,モードの切替えを行う。
16
E 3801-2:2018
表3−運転モードの切替条件
切替前のモード
切替後のモード
通常モード
分割モード
併合モード
入換モード
制限運転モード
通常モード
−
a)
b)
c)
d)
分割モード
e)
−
−
e)
e)
併合モード
g)
−
−
g)
g)
入換モード
c)
a)
b)
−
d)
制限運転モード
m)
m)
m)
m)
−
5.4.8.3
車上装置の状態
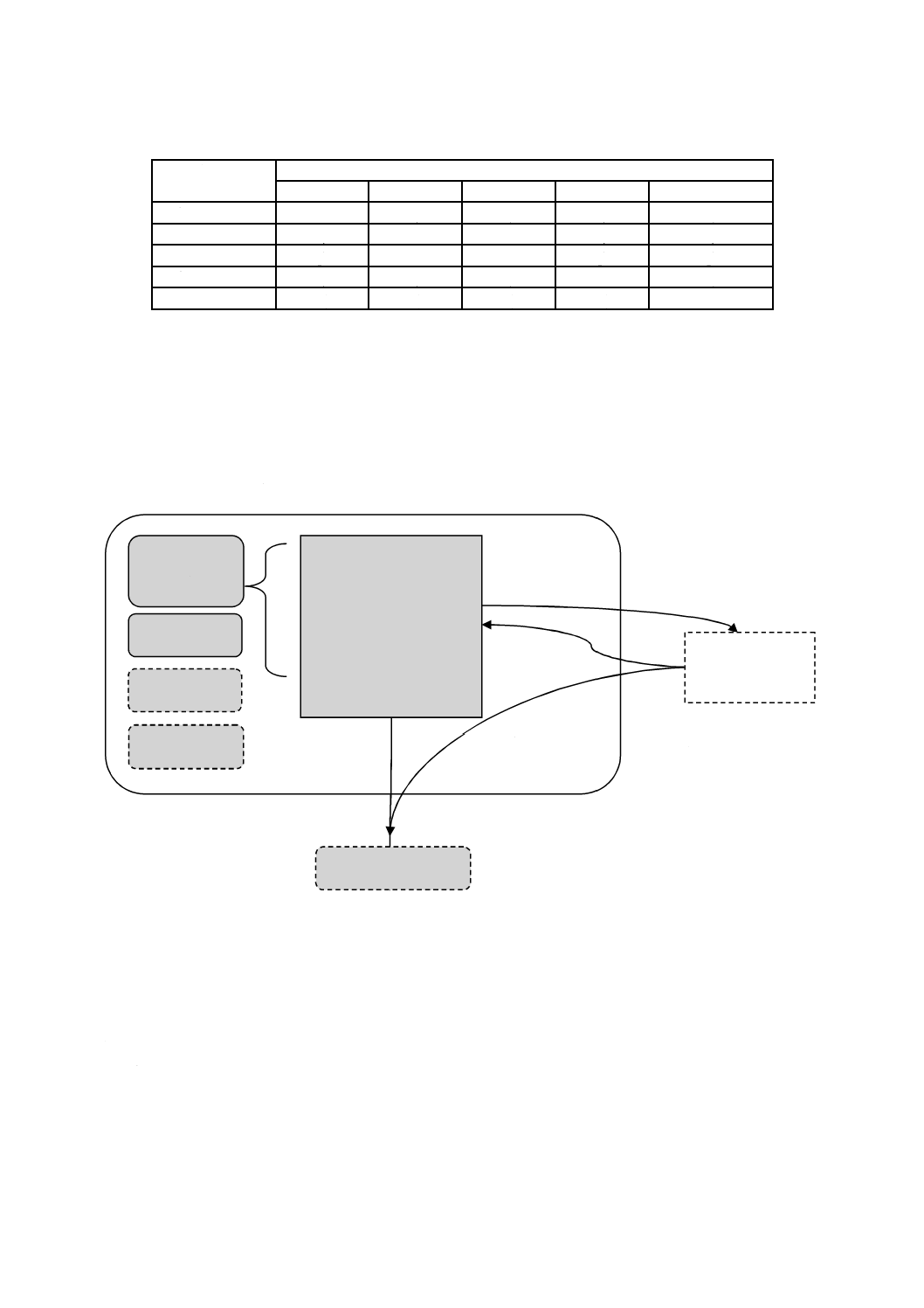
車上装置には,列車走行における運転モードに対応したJRTC運転の状態を備えなければならないが,
そのほかに四つの状態を設ける。これらの状態と状態間の切替関係の一部を図5に表し,各状態の定義を
次に示す。ただし,状態d) 及び状態e) は必須ではなく,必要に応じて設けることでよい。
図5−車上装置の状態の全体概要
a) JRTC運転の状態 車上装置によって列車運転を行う状態。運転状態として,通常モード,分割モー
ド,併合モード,入換モード,及び制限運転モードの5種類の運転モードをもつ。これら5種類の運
転モードは,5.4.8.1のa)〜e) による。
b) 電源断状態 車上装置の電源が切られた状態。この状態では,必要に応じて,非常ブレーキ状態を保
持する。
c) 開放状態 車上装置によってブレーキ制御出力を強制的に行わせない状態。例えば,車上装置の異常
時に使用する。
d) 非運転状態 車上装置によって列車運転を行わない状態。例えば,JRTC区間内において併合時に非
列車が他システムによる運転
の状態にあるときは,JRTC車
上装置は“JRTC運転の状態”
以外の状態となる。
JRTC運転の状態
・通常モード
・分割モード
・併合モード
・入換モード
・制限運転モード
進出
進入
(異常)
進入
(正常)
休止状態
非運転状態
電源断状態
JRTC運転の
状態
(異常)
JRTC車上装置の状態及びモード
開放状態
他システムによる
運転の状態
17
E 3801-2:2018
先頭車両となった車上装置に使用する。
e) 休止状態 車上装置の使用が停止されている状態。例えば,JRTC区間外に在線する車上装置に適用
する。
5.4.8.4
車上電源投入時の制御
5.4.8.4.1
一般
車上システムは乗務員の操作(電源投入)によって起動される。車上装置は,電源が投入されたとき
5.4.8.4.2の起動処理を行い,列車がJRTC無線区間に存在するときには,5.4.8.4.3の無線接続及び5.4.8.4.4
の列車在線位置の初期化を行う。これらの処理が完了することによって,列車は地上装置から制御可能な
状態となる。
5.4.8.4.2
車上システムの起動
車上装置は,電源投入後に次の診断を行い,装置の状態を決定しなければならない。
a) 自己診断 自己診断を自動的に実施し,車上に設けられたデータベース,及び外部装置(車上無線局,
車上子,速度センサなど)とのインタフェースに関する診断を行い,診断結果を表示する。
b) 外部装置の診断 必要に応じて,車上の外部装置に関する診断を行う。
c) 車上装置の状態決定 列車がJRTC区間内に在線するか,又はJRTC区間外に在線するかを手動又は
自動によって認識し,あらかじめ定められた状態に切り替える。
5.4.8.4.3
車上システムと地上システムとの無線接続
車上無線局は,列車がJRTC無線区間に在線する場合には,次の項目を含めて,地上の無線基地局との
無線通信を開始する。
なお,無線基地局−車上無線局間の通信開始条件は,車上から地上へ車上無線局によって通信開始要請
を行う方式と,車上から地上へ車上無線局以外の補助装置によって通信開始を要請し,地上基地局から車
上へのポーリングによって車上無線局と通信開始を行う方式とのいずれの方式でもよく,次の手順によっ
てデータ授受を行う。
a) 車上装置は,地上装置へ自列車識別IDを送信する。
b) 車上装置は,地上装置からの応答を確認する。
c) 車上装置は,必要に応じて,地上装置との整合性の確認を行う(データベースのバージョンなど)。
d) 車上装置及び地上装置は,車上電源を遮断するまでの間,無線通信の接続状態を常時監視する。
5.4.8.4.4
列車在線位置の初期化
a) 地上装置は,次のいずれかの方法で列車の編成方向を決定する。
1) 列車の編成方向が固定化されているシステムの場合は,各列車の編成方向は全て同一の既定値とす
る。
2) 列車の編成方向が固定化されないシステムの場合は,編成方向を特定する機能とのインタフェース
を設け,列車編成の方向を決定する。
b) 車上装置は,列車編成方向と運転台条件とから列車進行方向を決定(E.3.2参照)し,地上装置へ送信
する。
c) 車上装置は,次のいずれかの方法によって,列車在線位置の初期化を行い,それを地上装置に送信す
る。
1) 電源投入位置において,外部装置とのインタフェースなどによって列車在線位置を確認できる場合
は,それによって列車在線位置を確定する。
2) 1) の方法で列車在線位置を確定できない場合は,車上装置が保持するか,又は地上装置から与えら
18
E 3801-2:2018
れた列車の仮位置情報と停止限界との範囲内で一定速度以下での運転を行い,地上子などを検知す
ることによって列車在線位置を確定し,通常運転を行う。
5.4.8.5
JRTC区間内留置列車の制御
5.4.8.5.1
一般
地上装置は,JRTC区間内留置列車の車上電源遮断又は投入時に,次の処理を行う。
5.4.8.5.2
JRTC区間内留置列車の記憶
次のa) 及びb) の条件が成立した列車については,留置された列車として当該車両の位置を記憶する。
a) 列車は,あらかじめ定められた留置箇所に停止している。
b) 車上電源が遮断され,車上との通信が行われていない。
5.4.8.5.3
JRTC区間内留置列車の再起動
JRTC区間内に留置されていた列車の車上電源が投入されたとき,車上装置は,5.4.8.4の制御によって,
無線接続を行い,列車在線位置の初期化(確定)を行う。この一連の処理に対応する地上装置の制御手順
は,次による。
なお,留置箇所以外で電源投入を行った場合の制御について,E.3.11に示す。
a) JRTC区間内に留置列車があることを認識しており,列車からの制御開始要求を待ち受ける。
b) 制御開始要求を受け付けた列車の正当性を,列車から受信した列車識別IDなどの情報から確認する。
c) 列車在線位置の確定状況を確認する。
d) 上記確認が正常であるならば,当該列車に対して通常の制御動作を開始する。
e) 全てが正常とならない場合は,鉄道事業者が定めた制御を実施する。
5.4.8.6
システム進入・進出時の制御
5.4.8.6.1
一般
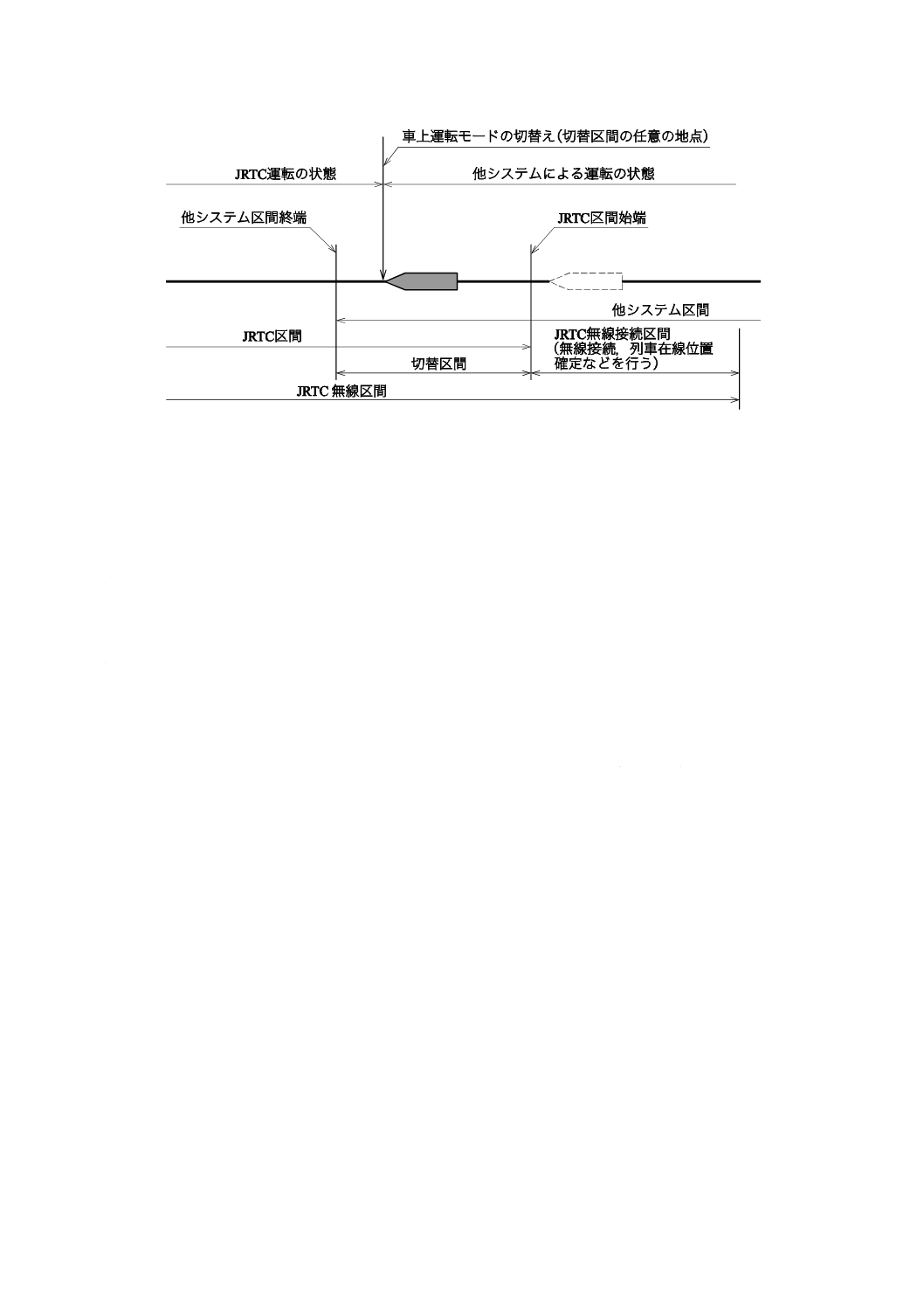
システム進入とは他システム区間からJRTC区間への進入を意味し,システム進出とはJRTC区間から
他システム区間への進出を意味する。JRTC区間と他システム区間との境界には,双方のシステムが制御
を行う切替区間を設け,列車は切替区間内においてJRTC運転の状態,他システムによる運転の状態間の
切替えを行う。切替区間内では,JRTCは他システムの支障位置を考慮して,安全側となるように支障位
置を決定しなければならない。この境界における制御は,5.4.8.6.2〜5.4.8.6.5による。また,切替区間内で
の安全確保の留意点をE.3.12に示す。
なお,運転状態の切替地点,通過切替えの許容などの条件は,鉄道事業者が定める。
5.4.8.6.2
システム進入時の車上装置の制御
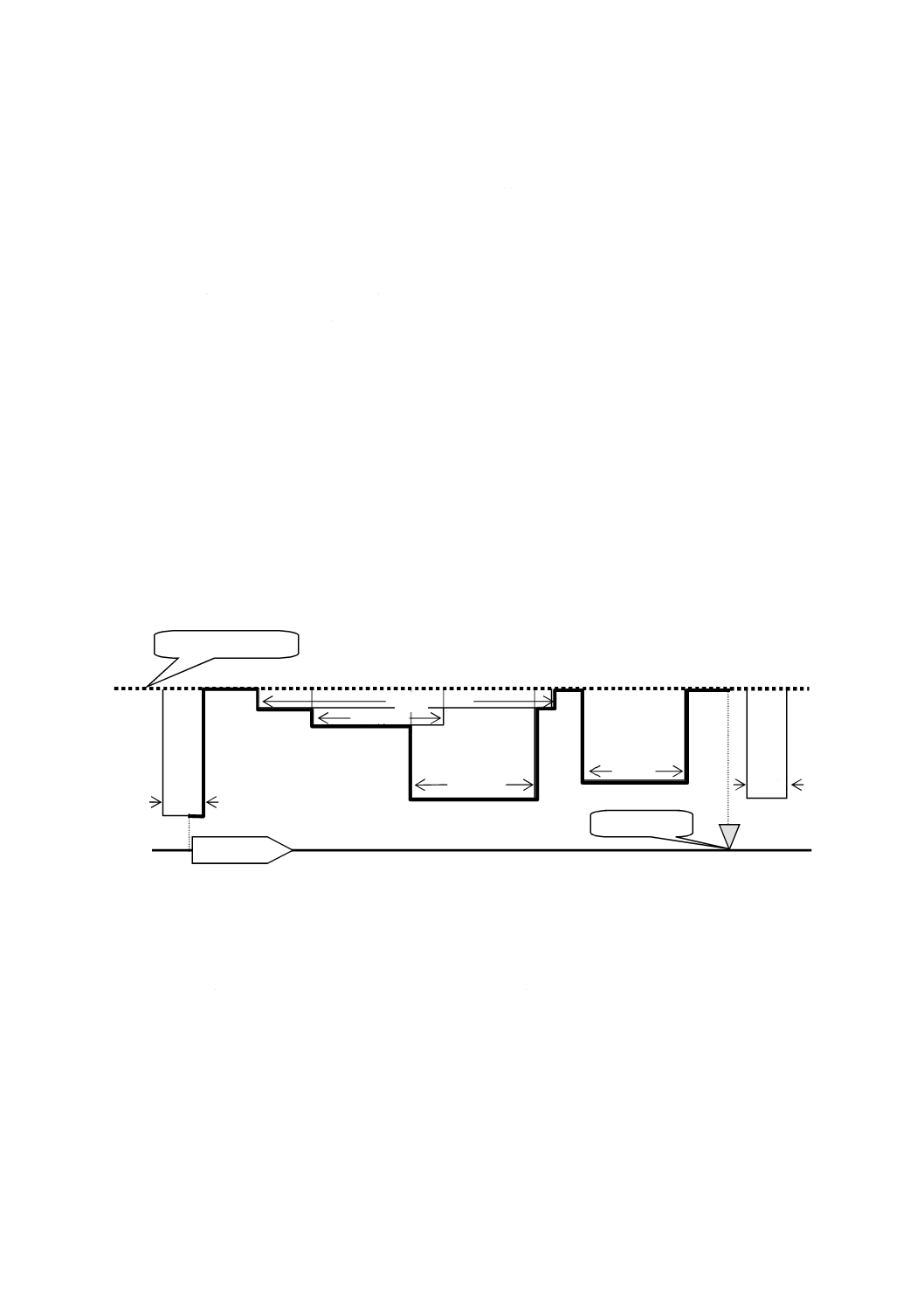
列車が他システム区間からJRTC区間に進入する場合には,JRTC区間始端までに,5.4.8.4の要件を満足
しなければならない。その後,他システム区間終端までに自動又は手動によって,JRTC運転の状態へ切
り替えなければならない。
なお,他システム区間終端までに運転状態の切替えができない場合には,他システムが当該地点以降へ
の進入を防止できなければならない(図6参照)。
19
E 3801-2:2018
図6−JRTC区間への進入
5.4.8.6.3
システム進入時の地上装置の制御
JRTCを搭載した列車が他システム区間からJRTC区間に進入するときの地上装置の制御動作は,次によ
る。
a) JRTC区間に進入する列車からの制御要求を待ち受ける。
b) 列車からの制御開始要求を受信したら,当該列車からの列車識別ID,列車在線位置情報の正当性を確
認する。
c) b) に示す列車からの情報の正当性が確認できれば,当該列車に対して通常の制御動作を開始する。
d) b) に示す列車からの情報の正当性が確認できない場合は,鉄道事業者が定めた異常時対策を実施す
る。
5.4.8.6.4
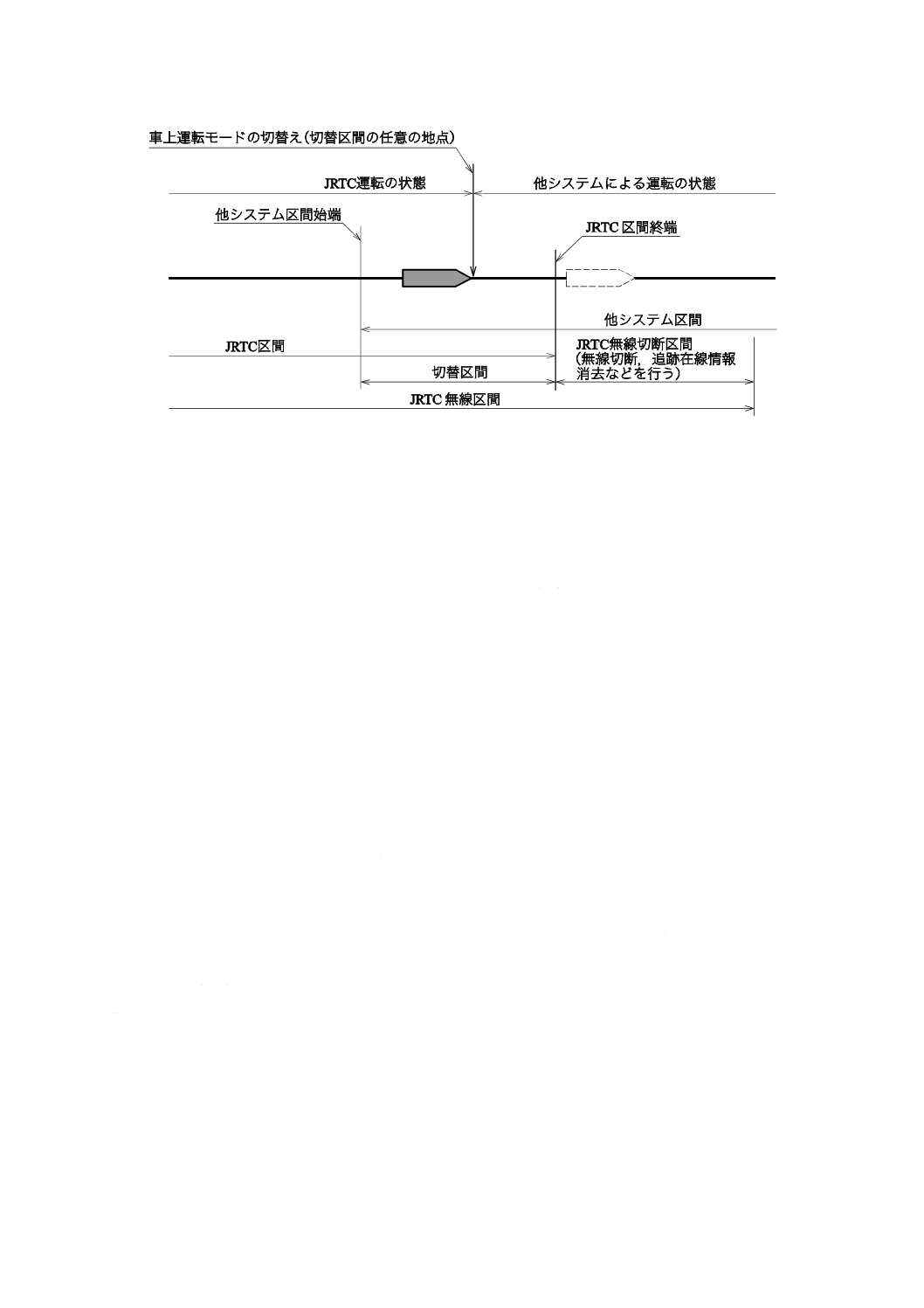
システム進出時の車上装置の制御
列車がJRTC区間から進出する場合には,JRTC区間終端までに他システムによる運転の状態へ切り替え
なければならない。JRTC区間終端までに切替えができない場合には,当該地点以降への進入を防止でき
なければならない。地上装置との無線接続は,列車がJRTC無線切断区間に進入した後に切断する(図7
参照)。
5.4.8.6.5
システム進出時の地上装置の制御
地上装置は,列車が切替区間から完全に進出し,無線が切断されたことを確認できた場合に,当該列車
をJRTC無線区間から進出した列車と判断する。これによって,当該列車の追跡を終了し,列車の追跡在
線情報を消去する。
20
E 3801-2:2018
図7−JRTC区間からの進出
5.4.8.7
列車折返し時の制御
列車折返し時における運転方向の切替えは,次による。
a) 列車の折返しは,鉄道事業者があらかじめ定めた区間で行う。
b) 地上装置は,列車運転方向の切替えが発生した場合,これを把握する。
c) 地上装置は,運転方向切替えの前後,及びその途中で列車在線位置を継続して正しく把握しなければ
ならない。
d) 地上装置は,列車運転方向の切替え後,折返し方向のルート構成状態を考慮して停止限界を決定し,
制御を開始する。
5.4.8.8
分割・併合時の制御
JRTCに分割・併合機能を設ける場合の制御は,次による。
a) 分割時の制御
1) 列車を分割する場合の地上装置,及び車上装置の条件は,5.4.8.2のa) 及びm) による。
2) 地上装置は,分割によって,分離した二つの車両編成を認識し,それぞれ独立した列車として管理
する。
3) 分割された二つの列車は,5.4.8.2 e) の要件を満足した場合に通常モードによって走行することがで
きる。
b) 併合時の制御
1) 列車を併合する場合の地上装置,及び車上装置の条件は,5.4.8.2のb) 及びm) による。
2) 上記要件を満足している場合に,併合列車は併合パターン(表1参照)に従って走行速度を制御す
ることができる。
3) 地上装置は,併合によって二つの列車を一つの列車に統合して管理する。
4) 併合された列車は,5.4.8.2 g) の要件を満足した場合に通常モードによって走行することができる。
5.4.8.9
非先頭運転台運転
列車が走行する方向の先頭運転台ではない運転台を使用して運転を行う場合は,地上装置及び車上装置
が走行しようとする方向の先頭以外の運転台で運転することを認識し,運転台の位置,システム上の列車
先頭及び列車後端位置並びに列車の進行方向を決定できなければならない。
21
E 3801-2:2018
なお,非先頭運転台運転時の運転取扱いは,鉄道事業者が定める。
5.4.9
自動列車運転(自動列車運転での制御)
この規格で定めるJRTCは,自動化の程度(GOA)の中でGOA1及びGOA2を対象としている。自動列
車運転はGOA2に該当しており,GOA2における列車の走行制御は,次による。
a) 駅における出発 列車は運転士の扱いによって自動運転を開始する。
b) 駅間における加速・減速制御 列車は,運転速度曲線に従って,加速・減速制御を行う。運転速度曲
線は,ブレーキパターン(5.4.7.6参照)の範囲内の速度を超えないように決定されなければならない。
なお,常用最大ブレーキパターンを設けた場合は,常用最大ブレーキパターンの範囲内とする。
c) 駅における停止制御 列車の定位置停止制御は,運転士による手動操作,又は車上装置の定位置停止
制御機能によって行う。列車が停止した後は,車上装置は,列車が出発のため戸閉状態になるまで停
止状態を保持しなければならない。
1) 定位置停止制御 車上装置の加速・減速制御機能によって,列車の定位置停止制御が行われる。こ
のとき,定位置停止制御の精度を確保するために,必要に応じて,駅手前及び駅構内に定位置検知
装置を設け,車上装置で検知する列車在線位置の補正を行ってもよい。
2) ホーム柵が設けられている場合の停止制御 駅にホーム柵を設けてもよい。この場合,車上装置は,
列車のホーム柵位置に対して十分な精度で列車を停止させなければならない。また,列車の停止位
置が,許容精度を満たさない場合には,微小移動によって停止位置を調整する機能を付加してもよ
い。
5.4.10 走行線路の監視制御
JRTCは,列車が走行線路上の人及び障害物と衝突することを防ぐために外部システムに設けられた検
知装置及び警報装置とのインタフェースを設けることができる。このようなインタフェースを設けた場合,
検知装置とのインタフェースを通じて支障を検知した場合の制御は,5.4.7.5.5による。
5.4.11 地上車上が連携したドア制御
GOA2において,列車の戸開制御及び/又は戸閉制御を自動化する場合には,次の要件を満足しなけれ
ばならない。
a) 戸開制御
− 列車があらかじめ定められた停車位置に停車していることを確認できる。
− 戸開制御してもよい側を検知できる。
b) 戸閉制御
− ホームの安全確認ができる。
− 出発許可など,出発制御に必要な情報を得られる。
5.5
列車運行の監視及び管理
5.5.1
指令所装置の基本機能
列車運行の監視及び管理に列車ダイヤを用いる方法を採用する場合,5.4.7に関係する指令所装置の基本
機能は,制御用列車ダイヤの管理,列車追跡及び自動ルート設定である。これらの処理は,5.5.1.1〜5.5.1.3
としてもよい。
なお,列車運行の監視及び管理を列車ダイヤを用いる方法とするか,それ以外の方法とするかは,鉄道
事業者が定める。
5.5.1.1
制御用列車ダイヤの管理
自動ルート設定及びその他の機能で用いる制御用列車ダイヤの管理は,次による。
22
E 3801-2:2018
a) 列車ダイヤの取込み 運行計画系システムなど,外部のシステムから列車ダイヤを取り込むためのイ
ンタフェースを介して列車ダイヤを取り込む。列車ダイヤには,次の項目を含める。
1) 列車日付 列車の始発駅(又は境界駅)の発時刻の属する日付。
2) 列車番号 列車日付別の固有な識別番号。
3) 走行路線情報 列車が走行する駅・線路の順序を示す情報。
− 駅名,到着番線,出発番線。
− 駅間運転線路(駅間での運転線路の指定情報)。
4) 着発時刻情報 駅の到着,出発の時刻指定に関する情報。
− 駅名,着時刻,発時刻,通過又は停車の区分。
b) 制御用列車ダイヤの更新 外部から取り込んだ列車ダイヤを用いて,定められたタイミングで制御用
列車ダイヤの更新を行う。
c) 制御用列車ダイヤの変更 制御用列車ダイヤに対しては,追加,削除及び変更の操作(例えば,発車
時刻の変更,停車駅の修正,追加,削除などの操作)を可能とする。変更された制御用列車ダイヤに
関しては,合理性チェックを行う。
d) 実績データの管理 各列車の走行に合わせて,出発時刻,到着時刻などの実績データを収集・記録で
きる仕組みをもつ。
e) 運行係員とのHMI 運行係員に対する制御用列車ダイヤの表示,及び運行係員による制御用列車ダイ
ヤの変更操作などのためのHMIをもつ。
5.5.1.2
列車追跡
指令所装置は,自動ルート設定及びその他の機能を行うために,列車の位置を追跡し,把握する。これ
に必要な情報として,各地上装置が管理している区域に存在する列車の在線位置情報を定期的に受信する。
これらの在線位置情報を基に対象路線全体の在線する列車の位置と状態とを管理する。
5.5.1.3
自動ルート設定
自動ルート設定では,制御用列車ダイヤに基づいて,各列車の現在位置,現在時刻などの情報によって,
対象となる全列車のルートを次の手順で設定する。
a) ルートの設定順序又は分岐器,交さ(叉)部の列車通過順序の決定 制御用列車ダイヤ及び列車運行
を効率的に行うための鉄道事業者の運用ルールに基づき,ルートの設定順序又は分岐器,交さ(叉)
部の列車通過順序の決定を行う。
b) ルート設定要求 線路配線データ及び列車追跡結果に基づき,制御用列車ダイヤに従って列車を駅に
到着,又は出発させるためのルート設定要求を地上装置に出力する。
c) ルート状態の管理 a) の決定及びb) の要求時期の判断を行うため,ルートの構成要素を含めた使用
状態を管理する。この処理のための情報として,地上装置がもっているルート構成要素使用状態の情
報(転てつ器の転換・鎖錠完了に関する情報も含む。)を用いる。
d) ルート取消要求 ルート取消要求を行う機能を持たせてもよい。
5.5.2
保守作業対応制御
保守作業に対応する機能をJRTC外のシステムが備える場合には,保守作業の安全確保及び補助のため
に転てつ器の転換,分岐器及び軌道の使用停止・解除,線路閉鎖の設定・解除などの要求を保守作業管理
システムからインタフェースを介して受け付け,それぞれの要求に対する実施結果を保守作業管理システ
ムに返信する。
なお,これらの処理の必要性と,これら以外に付加する機能,及びこれら機能をJRTC内でもつかJRTC
23
E 3801-2:2018
外のシステムで処理するかについては,鉄道事業者が定める。
5.6
異常時の対応
5.6.1
一般
JRTCに異常が発生した場合の対応は,5.6.2〜5.6.6による。
なお,異常を検出した後の正常な動作への復旧手順などは,鉄道事業者が定める。
5.6.2
列車の位置検知・把握に関して考慮すべき異常及び対応
列車の位置検知及び把握に関して考慮すべき異常及び対応は,次による。
a) 検出する異常 JRTCは,表4に示すような列車位置検知の異常を検出できなければならない。表4
に示す異常のほか,列車長設定,車輪径設定,編成の向き,進行方向など人間系の設定間違いによる
異常に対しても検出機能をもたせることが望ましい。
表4−位置検知に関する異常
分類
異常事象
位置検知結果の整合性異常
検知位置の一定量以上の変化
位置情報の一定時間以上の更新不良
位置検知機能異常
位置検知に使用する装置故障
位置検知に使用するデータの異常
地上装置での位置把握異常
位置情報の消失
装置故障
b) 異常を検出した場合の制御
1) 位置検知異常を検出した場合は,位置検知異常が発生した列車を停車させなければならない。地上
装置は,位置検知異常発生直前の正常と判断した列車在線位置を保持しなければならない。
2) 地上装置は,上記在線位置から当該異常列車が停止するまでに要する距離,当該異常列車の停止限
界などを考慮して安全側の制御を行わなければならない。安全側の制御方法の詳細は,JRTCの制御
方式,線区状況,異常の状況などを考慮して,鉄道事業者が定める。
5.6.3
列車又は車両の状態に関して考慮すべき異常及び対応
列車又は車両の状態に関して考慮すべき異常は,列車などの分離及び流転である。
JRTCにこれらを検知する機能を設ける場合は,次による。
a) 列車分離を検知したとき車上装置は非常ブレーキを出力する。地上装置は,列車分離発生直前の正常
と判断した列車在線位置を保持するとともに,その列車在線位置から後方に対する列車防護のための
処理を行わなければならない。列車防護のための処理の詳細は,JRTCの制御方式,線区状況,異常
の状況などを考慮して,鉄道事業者が定める。
b) 列車の流転を検知する機能を設けた場合,あらかじめ定めた範囲において他の列車の進入を許可しな
い,転てつ器の転換を許可しないなどの安全側の制御を行う。安全側の制御方法の詳細はJRTCの制
御方式,線区状況,異常の状況などを考慮して,鉄道事業者が定める。
5.6.4
無線通信異常への対応
無線通信異常への対応は,次による。
a) 検出する異常事象 無線通信に関する異常については,電文受信の未了,受信電文の異常,及び無線
通信装置の異常が一定時間以上継続した場合に,これを検出しなければならない。より細かく分類し
た無線通信に関係する異常事象についてはE.3.13による。
24
E 3801-2:2018
b) 異常を検出した場合の制御
1) 地上装置は,無線通信異常検出前の列車在線位置を保持し,車上装置は停止制御を行う。また,地
上装置は,無線通信異常が発生した列車,又は異常となった地上側無線システムと通信していた列
車を停止制御してもよい。
2) 地上の無線システムの異常であれば当該システムの制御エリアを防護範囲として,他列車の進入を
許可しない,転てつ器の転換を許可しないなどの安全側の制御を行う。車上の無線システムの異常
であれば,当該列車が停止するまでに要する距離などを考慮した安全側の制御を行わなければなら
ない。安全側の制御方法の詳細は,JRTCの制御方式,線区状況,列車異常の状況などを考慮して,
鉄道事業者が定める。
5.6.5
車上電源投入及び遮断時の異常並びに対応
車上電源投入及び遮断時の異常に対しては,次による。
a) 検出する異常事象 車上電源投入時に5.4.8.4及び5.4.8.5.3に示す要件が満足されない場合,並びに車
上電源遮断時に5.4.8.5.2に示す要件が満足されない場合には,JRTCは,これを異常として検出でき
なければならない。
b) 異常を検出した場合の制御
1) 車上電源投入時に異常を検出した場合,地上装置は,当該列車に走行の許可を与えないようにする
とともに,影響が及ぶ範囲の列車に対して安全側の制御を行わなければならない。
2) 車上電源遮断時に異常を検知した場合,無線通信異常列車と同様に扱い,地上装置は安全側の制御
を行わなければならない。
5.6.6
列車のシステム進入及び進出時の異常並びに対応
列車のシステム進入及び進出時の異常に対しては,次による。
a) 検出する異常事象
1) 列車が他システム区間からJRTC区間に進入するとき,5.4.8.6.1〜5.4.8.6.3に示す要件が満足されな
い場合。
2) 列車がJRTC区間から,他システム区間へ進出するとき,5.4.8.6.1,5.4.8.6.4,及び5.4.8.6.5に示す
要件が満足されない場合。
なお,1) においてJRTC区間へ他システム区間から異常列車が進入したことを検出するため,別
な検知手段を設けてもよい。
b) 異常を検出した場合の制御 異常を検出した場合,次のような制御を行うことが推奨されるが,採用
する制御方法の詳細は,JRTCの制御方式,線区状況などを考慮して,鉄道事業者が定める。
1) 異常列車の走行の検知結果及びシステムの状態によって,地上装置は,安全性に影響が及ぶ範囲の
列車に対して安全側の制御を行う。
2) 列車のJRTC区間からの進出異常を検知した場合は,当該列車のJRTC区間からの進出が確認され
るまで当該列車がJRTC区間に在線しているとみなして,地上装置は安全側の制御を実施する。
25
E 3801-2:2018
附属書A
(参考)
機能要求事項のシステム構成装置への割付及び
機能間授受情報
A.1 各機能の装置への割付
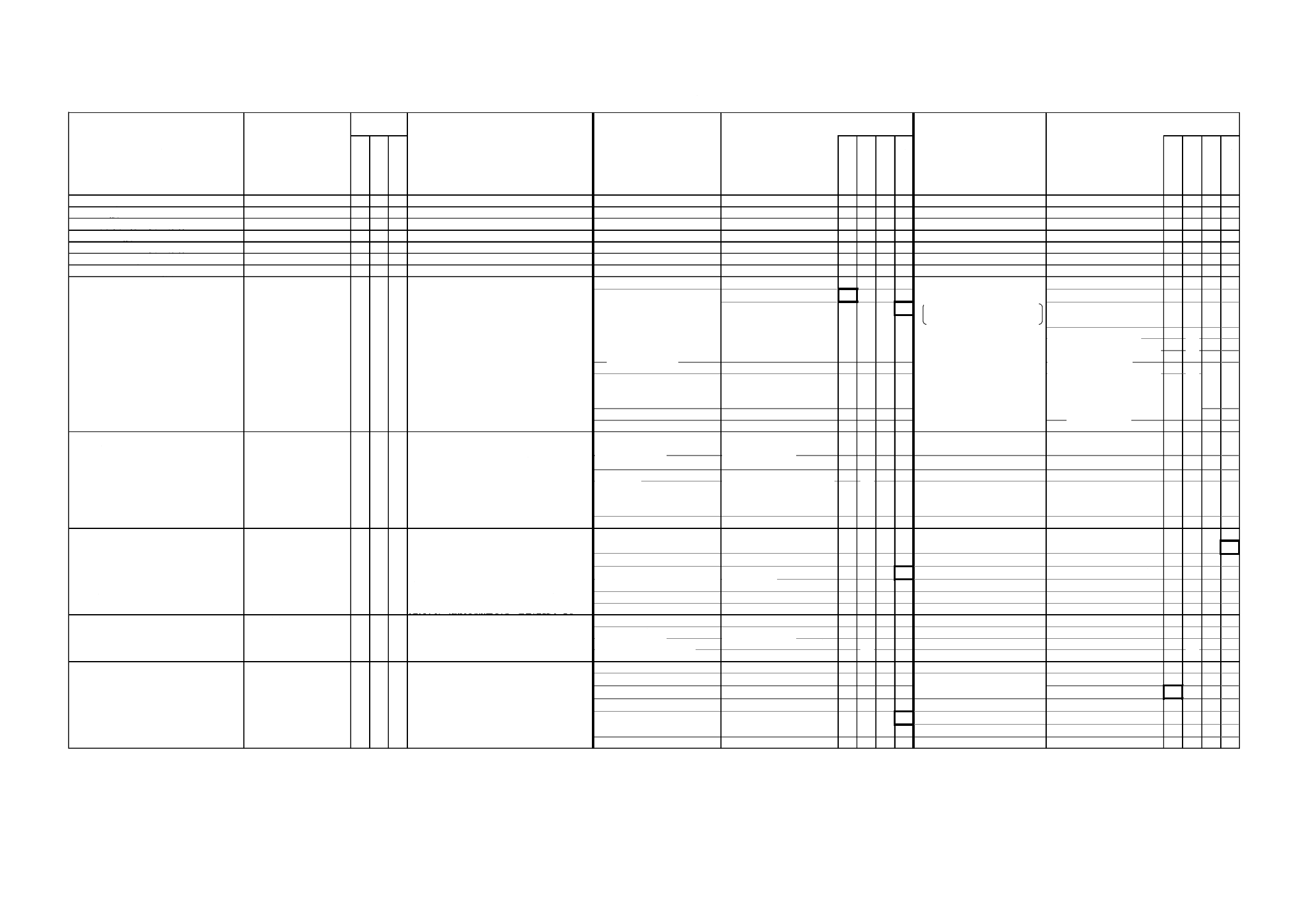
JIS E 3801-1で規定した機能“指令所装置”,“地上装置”及び“車上装置”の各装置への割付及び入出
力情報の例を,表A.1〜表A.11に示す。各表とJIS E 3801-1との対応は次のとおりである。
− 表A.1〜表A.7は,JIS E 3801-1の7.3.2(列車走行の安全確保)に関する機能割付を示す。
− 表A.8は,JIS E 3801-1の7.3.3(自動列車運転)に関する機能割付を示す。
− 表A.9は,JIS E 3801-1の7.3.4(走行線路の監視),7.3.5(ドア開閉制御)及び7.3.6(分割及び併合)
に関する機能割付を示す。
− 表A.10及び表A.11は,JIS E 3801-1の7.4(列車運行の監視及び管理)に関する機能割付を示す。
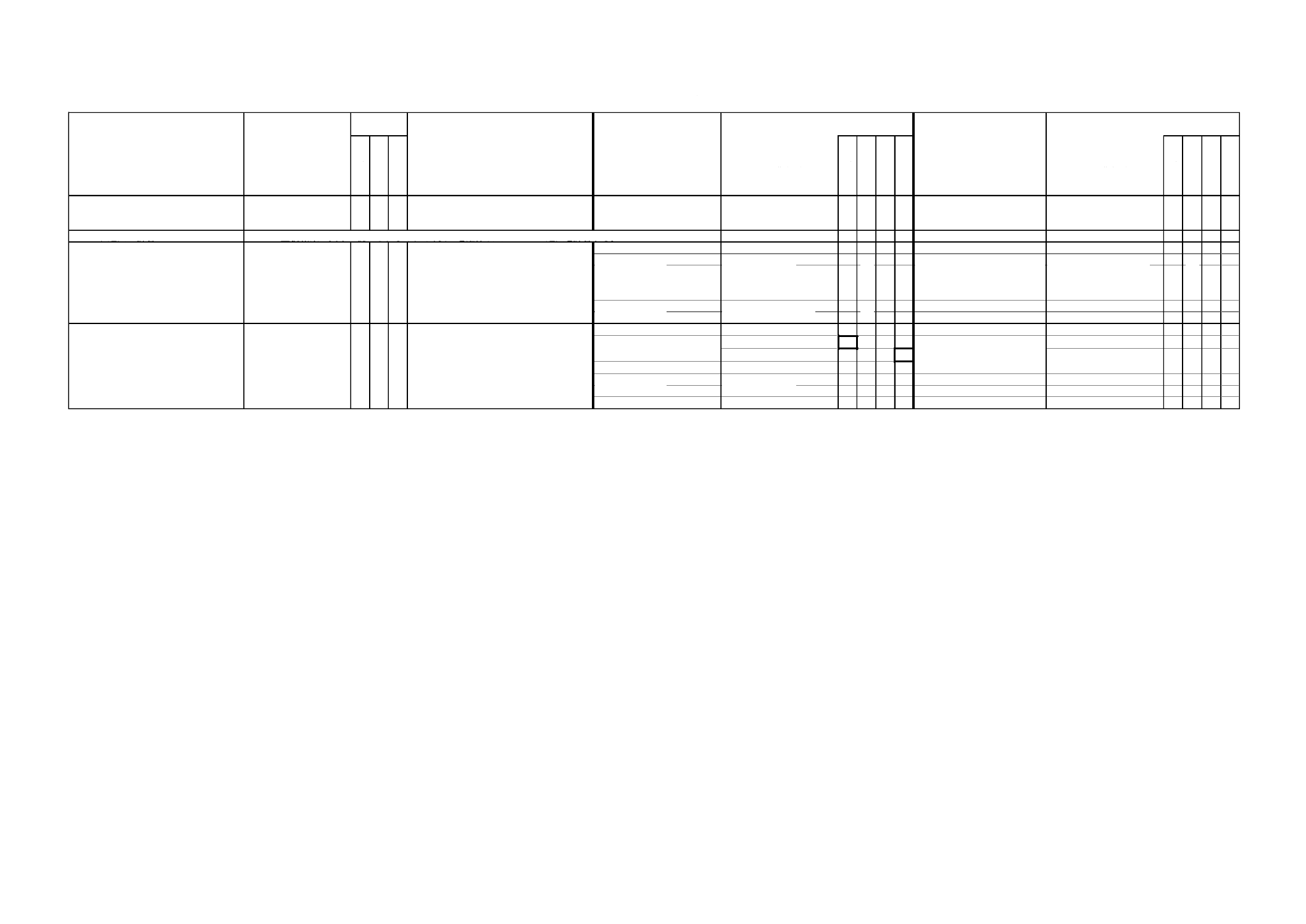
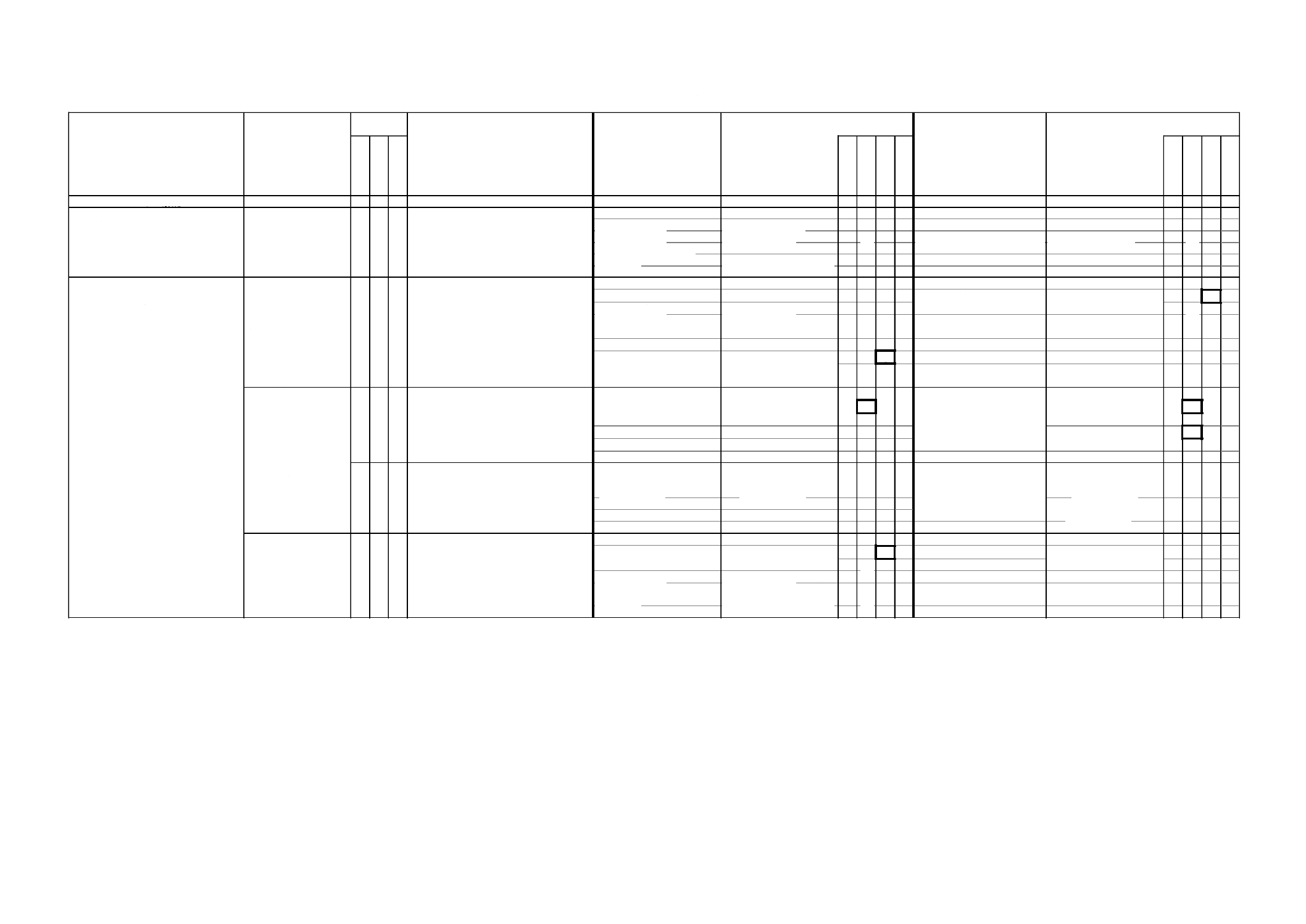
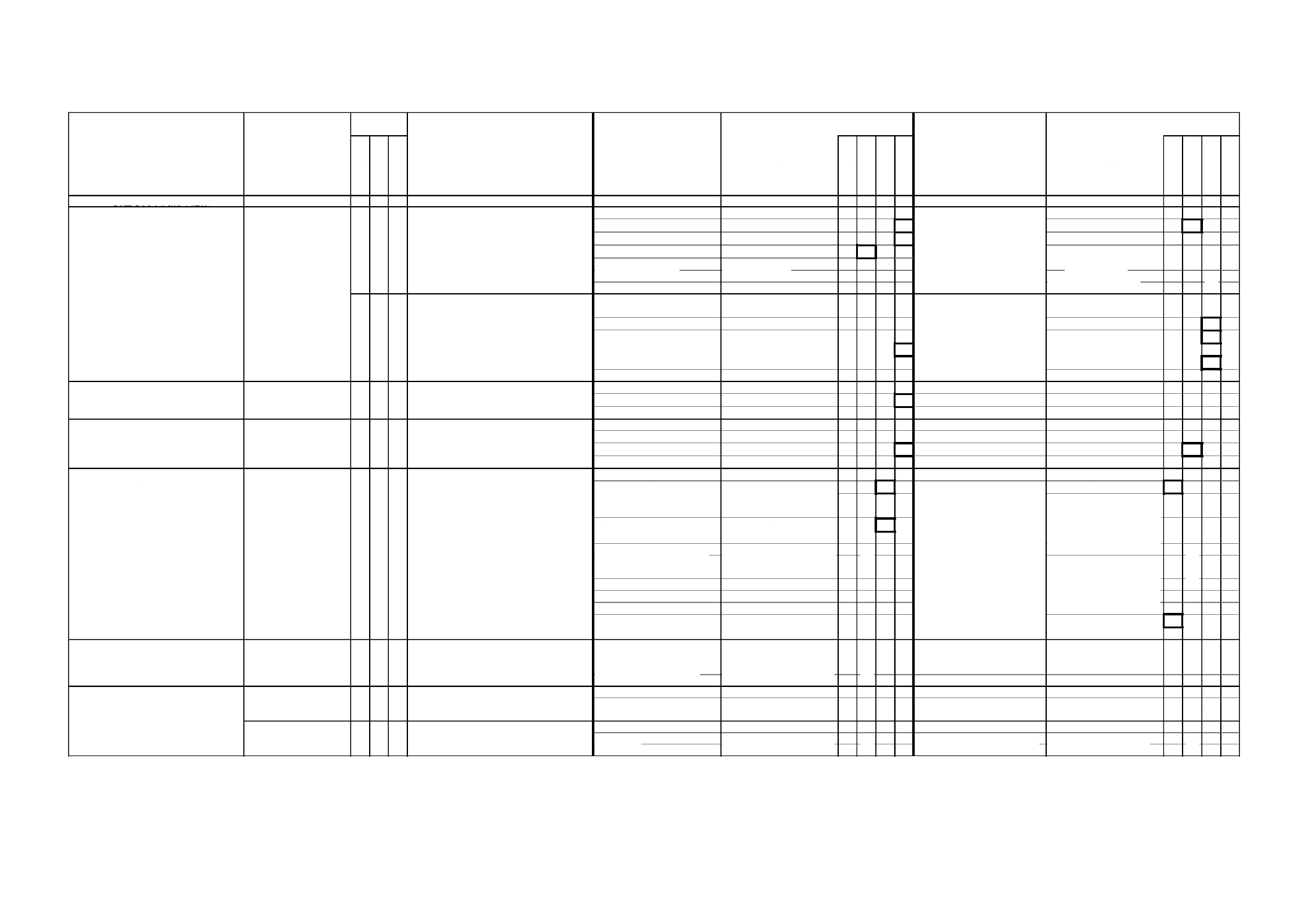
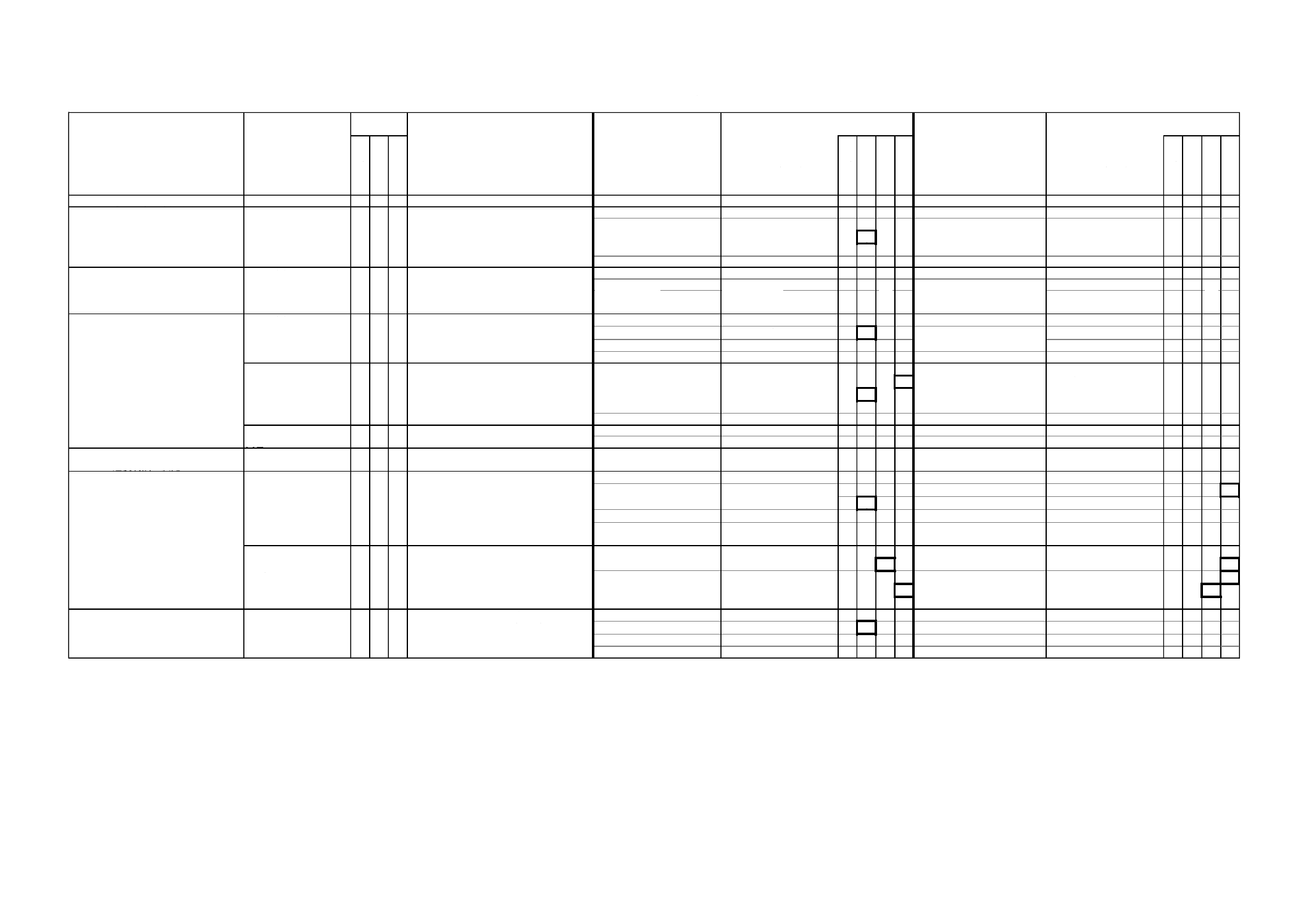
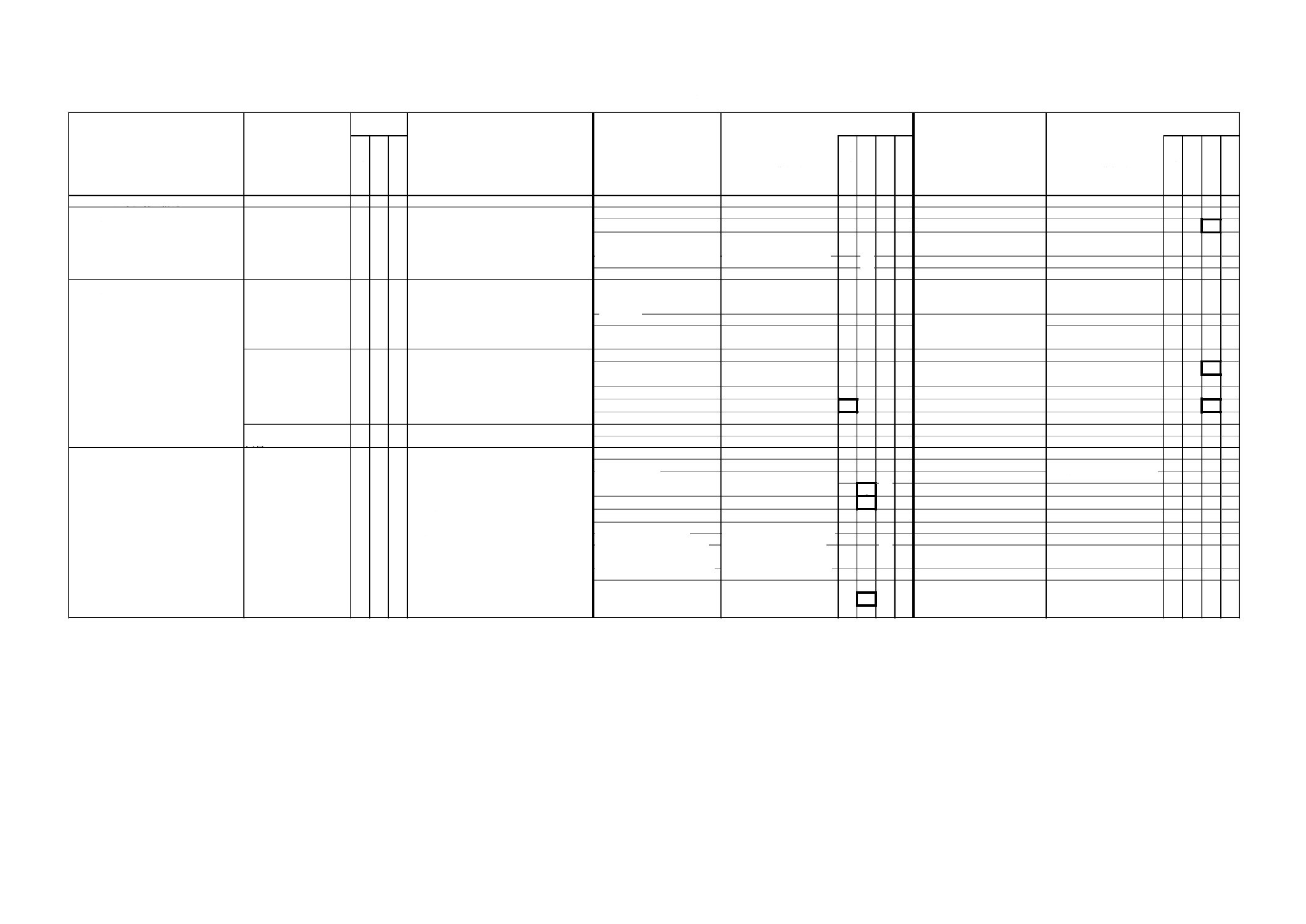
注記1 各表における“装置への割付”,“入力元”,“出力先”の各欄において,①,②という形で
割付がなされている箇所があるが,これは,いずれの装置に割り付けるかについて2種類
の選択肢があることを示す(複数の方式に対応するため)。
注記2 各表における“入力元”の欄における太枠(□)は,処理が割り付けられている装置以外
から入力を得ることを示す。
注記3 各表における“出力先”の欄における太枠(□)は,処理が割り付けられている装置以外
へ出力することを示す。
注記4 各表における“処理名称欄”において,(S)は安全関係の処理,(N)は安全関係以外の処
理を示す。
注記5 各表における“装置への割付”,“入力元”,“出力先”の各欄において,複数の装置が関係
する場合は,主たる担当を○で示し補助的役割を担う装置を△で示す。
27
E 3801-2:2018
表A.1−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3 列車制御
7.3.1 一般
7.3.2 列車走行の安全確保
7.3.2.1 一般
7.3.2.2 ルートの安全確保
7.3.2.2.1 一般
7.3.2.2.2 ルートの設定
[1] (S)
a) ルートの選択
ルートの特定
○
ルート設定要求に基づき,設定するルート
・ルート設定要求
・[50]自動ルート設定
○
・ルート特定結果
・[2]ルート競合判断
○
の始端から終端までの軌道,転てつ器
・運行係員
○ ルート(始端・終端)特定結果
・[3]転てつ器転換指令/開通確認
○
などのルート構成要素を特定する。
・ルート属性情報
・ルートDB
○
ルート構成要素特定結果
・[4]ルートの鎖錠
○
(ルート構成要素の
・[5]ルートの監視制御
○
接続関係及び位置に
・[6]停止限界の決定(ルート設定)
○
関する情報など)
・[7]ルート取消要求
○
・[8]列車の走行による解錠
○
・[9]停止限界の決定
○
(ルート取消し)
・[11]ルート解錠
○
(ルート取消し)
[2] (S)
b) ルートの競合判断
ルート競合判断
○
特定したルート構成要素について,他の
・ルート特定結果
・[1]ルートの特定
○
・ルート構成要素使用権登録情報・ルート構成要素の状態テーブル
○
列車又は作業などとの競合がないかを
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
判定する。
・在線状態
・[15]列車在線位置の決定
○
これら要素が使用中でないか,又は使用
中であっても共用可能であれば,これら
要素を当該列車においても使用中とする。
[3] (S)
c) 転てつ器などへの転換指令
転てつ器転換指令/開通確認
○
使用中となったルート上の転てつ器など
・ルート特定結果
・[1]ルートの特定
○
・転換指令
・転てつ装置
○
が所定方向に開通していない場合には,
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
該当する転てつ器などに転換指令を出力す
・転てつ器開通方向表示信号・転てつ装置
○・転換状態登録情報
・ルート構成要素の状態テーブル
○
る。
d) 転てつ器などの開通確認
転換指令を出力した転てつ器などが,所
定方向に転換し開通したことを確認する。
[4] (S)
7.3.2.2.3 ルートの鎖錠
ルートの鎖錠
○
設定したルートの全ての転てつ器の開通
・ルート特定結果
・[1]ルートの特定
○
・ルート鎖錠状態登録情報(鎖錠)・ルート状態テーブル
○
を確認後,当該ルートを鎖錠する。
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
○
7.3.2.2.4 ルートの監視制御
[5] (S)
ルートの監視制御
○
設定したルートの全ての転てつ器の
・ルート特定結果
・[1]ルートの特定
○
・ルート監視情報
・[6]停止限界の決定(ルート設定)
○
開通を確認。ルート構成要素が無許可
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
・[50]自動ルート設定
○
使用されていないことを監視。
監視結果に異常が認められた場合には,
・イベント発生情報
・他システム(地上)
○
ルート内方への進入を許容しない。
(他列車による無許可使用など)
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
28
E 3801-2:2018
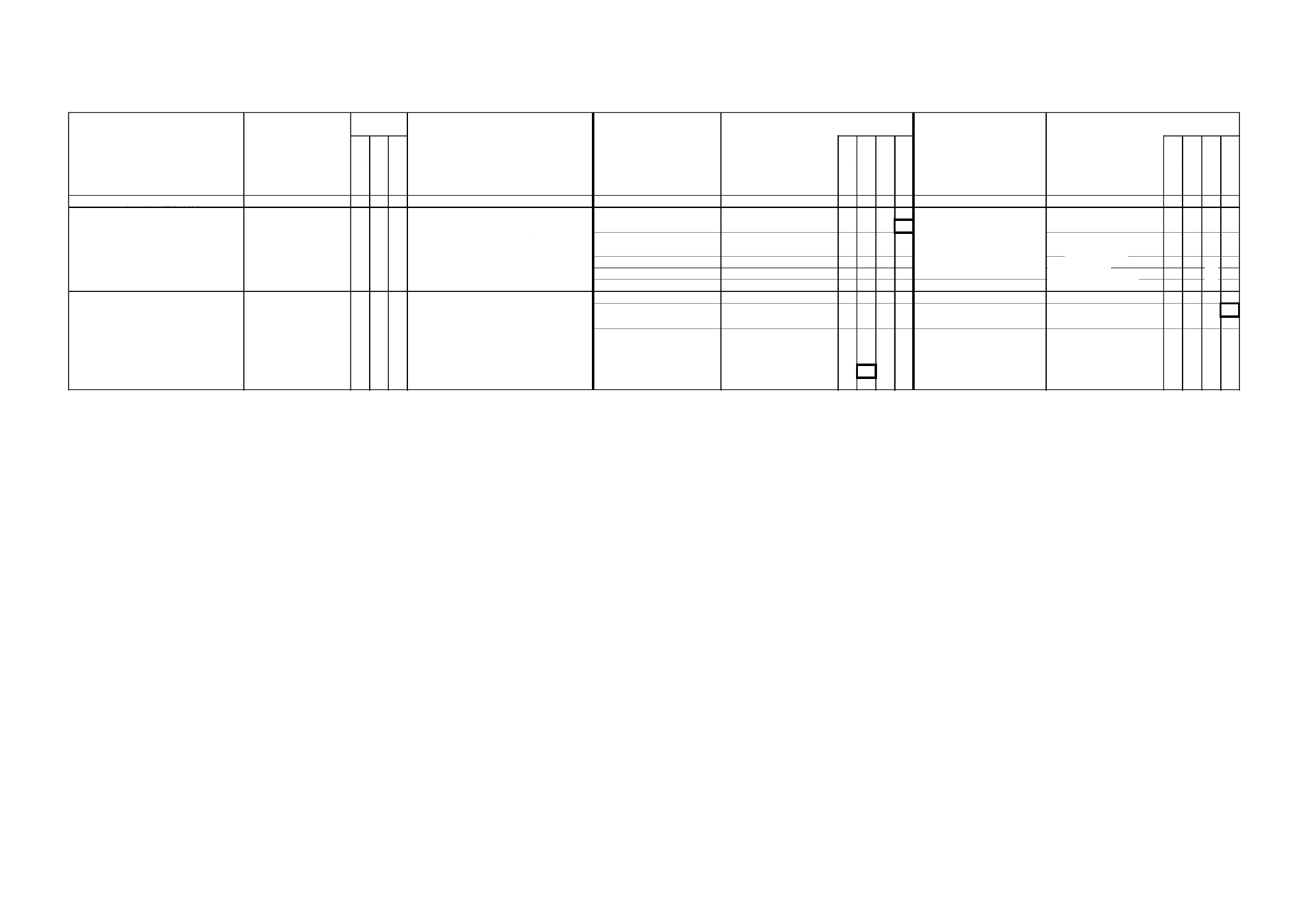
表A.2−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3.2.2.5 安全を確保したルート
への進入の許容
及び停止限界の決定
a) 進入の許容
ルートの監視結果に異常が認められなければ、安全を確保したルートへの進入を許容する。
[6] (S)
b) 停止限界の決定
停止限界の決定
○
安全を確保したルートの終端から外方に
・ルート特定結果
・[1]ルートの特定
○
・停止限界位置情報(ルート設定)・[27]停止限界最終判断
○
(ルート設定)
保安制御余裕距離を確保した位置を
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
停止限界とする。
・在線状態
・[15]列車在線位置の決定
○
・ルート鎖錠状態
・ルート状態テーブル
○
・ルート監視情報
・[5]ルートの監視制御
○
[7] (S)
7.3.2.2.6 ルート取消要求
ルート取消要求
○
列車が進行し,ルートへの進入を確認し
・ルート取消要求
・[50]自動ルート設定
○
・ルート取消要求
・[8]列車の走行による解錠
○
た後に,ルートの設定要求を取り消す。
・運行係員
○
・[9]停止限界の決定
○
自動ルート設定又は指令員のルート取消
・在線状態
・[15]列車在線位置の決定
○
(ルート取消し)
要求に基づきルート設定要求を取り消す。
・ルート特定結果
・[1]ルートの特定
○
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
29
E 3801-2:2018
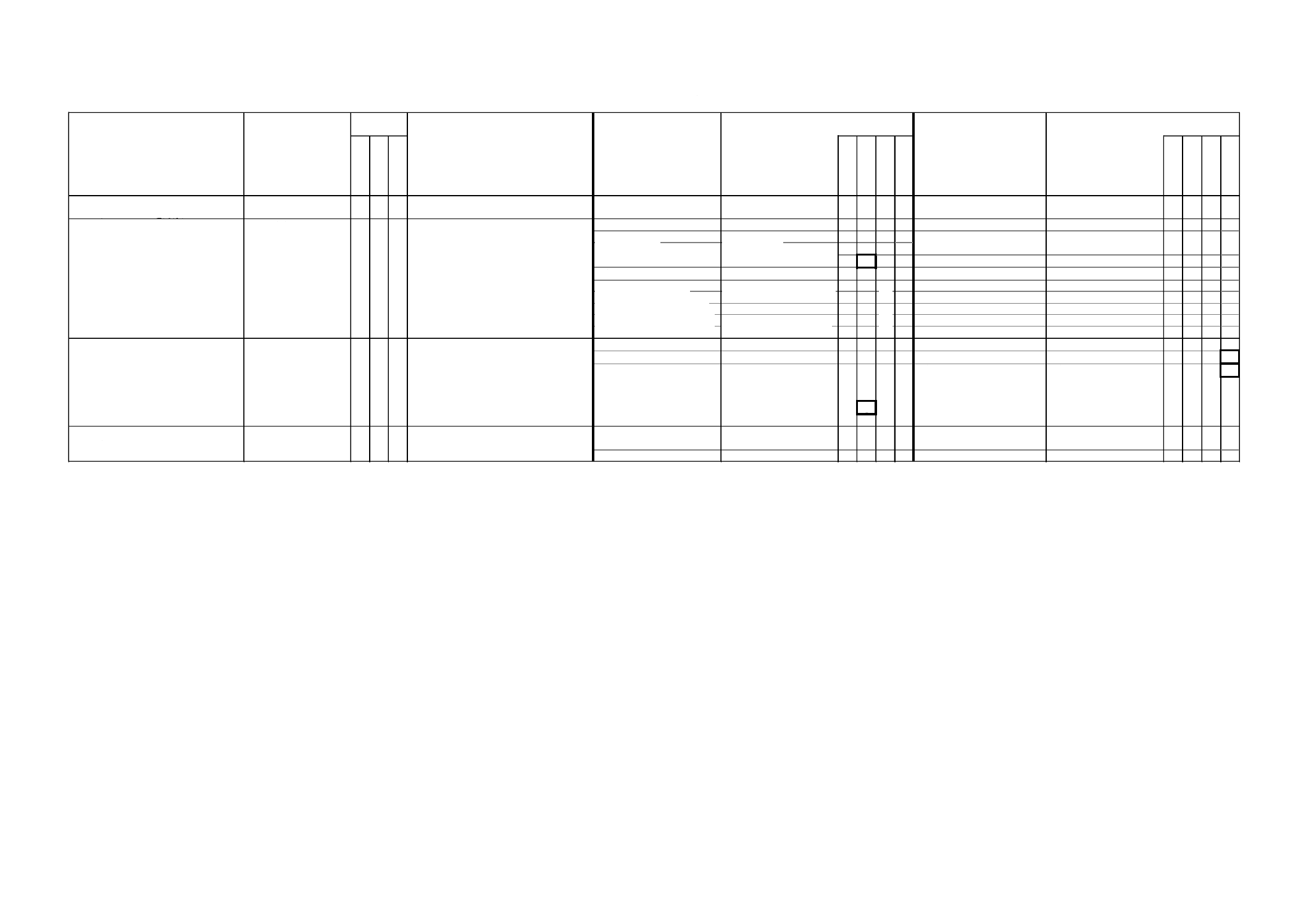
表A.3−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3.2.2.7 ルートの解錠
[8] (S)
a) 列車の走行による解錠
列車の走行による解錠
○
列車の進行に応じて当該ルート構成要素の ・ルート取消要求
・[7]ルート取消要求
○
当該列車の使用中を解除し,当該ルートの
・ルート特定結果
・[1]ルートの特定
○
・ルート鎖錠状態登録情報(解除)・ルート状態テーブル
○
鎖錠を解錠条件が満足したとき解錠する。
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
・ルート構成要素使用権破棄情報・ルート構成要素の状態テーブル
○
・在線状態
・[15]列車在線位置の決定
○
[9] (S)
b) ルート取消しによる解錠
停止限界の決定
○
進入を許可したルートの許可取消しを
・ルート取消要求
・[7]ルート取消要求
○
・停止可否確認情報
・[10]停止可否判断
①
(進入許可の取消し)
(ルート取消し)
受け,当該列車にルート始端外方での
・ルート特定結果
・[1]ルートの特定
○
(ルート取消し)
(ルート取消し)
②
停止を指示する。
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
・停止限界位置情報
・[27]停止限界最終判断
○
注記 ルート取消し:
取消対象列車に停止可否確認を行う。
・在線状態
・[15]列車在線位置の決定
○
(ルート取消し)
進入を許可したルート
・ルート鎖錠状態
・ルート状態テーブル
○
の取消し
・停止可否応答
・[10]停止可否判断
①
(ルート取消し)
②
[10] (S)
停止可否判断
①停止可否判断を行い,可否を回答する。
・停止可否確認情報
・[9]停止限界の決定
○
・停止可否応答
・[11]ルート解錠
○
(ルート取消し)
(ルート取消し)
(ルート取消し)
(ルート取消し)
・[9]停止限界の決定
○
(車上装置で行う
(ルート取消し)
場合と,地上装置で
行う場合の二種類の
選択肢がある。)
②
停止可否判断を行い,可否を回答する。
・停止可否確認情報
・[9]停止限界の決定
○
・停止可否応答
・[11]ルート解錠
○
(ルート取消し)
(ルート取消し)
(ルート取消し)
・[9]停止限界の決定
○
(ルート取消し)
[11] (S)
ルート解錠
○
停止可能であるとの回答を得た場合に
・停止可否応答
・[10]停止可否判断
①
・ルート鎖錠状態登録情報(解除)・ルート状態テーブル
○
(ルート取消し)
は,当該ルート構成要素の当該列車の
(ルート取消し)
②
・ルート構成要素使用権破棄情報・ルート構成要素の状態テーブル
○
注記 ルート取消し:
使用中を解除し,当該ルートの鎖錠を
・ルート特定結果
・[1]ルートの特定
○
進入を許可したルート
解錠条件が満足したとき解錠する。
・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
の取消し
・在線状態
・[15]列車在線位置の決定
○
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
30
E 3801-2:2018
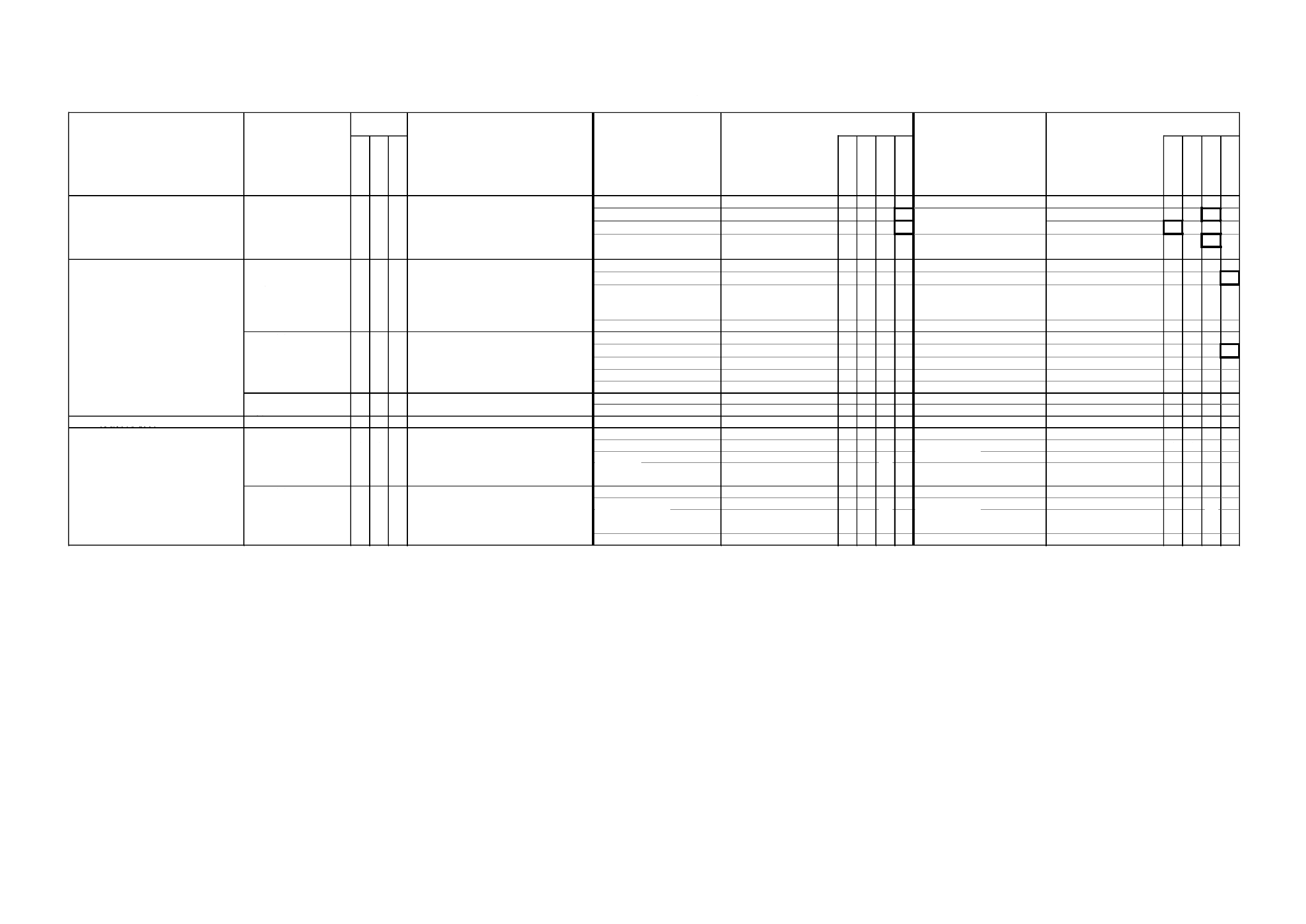
表A.4−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3.2.3 安全な列車間隔の確保
[12] (S)
a) 列車位置の決定
列車位置決定
①ルートの設定状態,地上子からの相対
・地上子信号
・位置検知地上子
○・列車位置計算値
・[15]列車在線位置の決定
○
距離などによって自列車の位置を決定
・列車速度・位置検出信号
・列車速度・位置検出装置
○ (列車先頭・後端位置情報)
・[33]ブレーキ制御(速度超過対応)
○
する(列車位置検出値の異常な変化
・ルート設定状態
○
・[35]運転速度曲線に従った
○
への対応も含む。)。
・走行路の線形情報
・走行路線形DB
○
列車走行制御
(車上装置で行う
・[24]踏切制御(車上)
○
場合と,地上装置で
行う場合の二種類の
選択肢がある。)
②
ルートの設定状態,無線測位などに
・ルート設定状態
○
・列車位置計算値
・[15]列車在線位置の決定
○
よって各列車の位置を決定する(列車
・走行路の線形情報
・走行路線形DB
○
(列車先頭・後端位置情報)
・[33]ブレーキ制御(速度超過対応)
○
位置検出値の異常な変化への対応
・[35]運転速度曲線に従った
○
も含む。)。
・無線測位情報
・無線測位網
○
列車走行制御
・[24]踏切制御(車上)
○
[13] (S)
b) 列車編成方向の決定
列車編成方向決定
○列車の編成方向を決定。
・編成方向設定情報
○・編成方向
・[14]列車進行方向の決定
○
[14] (S)
列車進行方向決定
○列車の進行方向を決定。
・編成方向
・[13]列車編成方向決定
○
c) 列車進行方向の決定
・進行方向設定情報
・運転台設定
○・進行方向
・[15]列車在線位置の決定
○
[15] (S)
d) 列車在線位置の決定
列車在線位置の決定
○
各列車の在線状態を把握する。
・列車位置計算値
・[12]列車位置決定
①
・在線状態
・[48]列車追跡
○
(列車先頭・後端位置情報)
②
・[2]ルート競合判断
○
・[6]停止限界の決定(ルート設定)
○
・進行方向
・[14]列車進行方向決定
○
・[7]ルート取消要求
○
・[8]列車の走行による解錠
○
・列車位置情報(異常対応)
・[16]列車位置検知異常対応
○
・[9]停止限界の決定(ルート取消し)
○
・[11]ルート解錠(ルート取消し)
○
・[16]列車位置検知異常対応
○
・[17]停止限界の決定(固定閉塞)
○
・[18]停止限界の決定(移動閉塞)
○
・[25]踏切制御(地上)
○
・[46]実績データの管理
○
[16] (S)
e) 異常時における
列車位置検知異常対応
○
位置検知異常に対し在線位置補正などを行う。・ルート構成要素の状態
・ルート構成要素の状態テーブル
○
・列車位置情報(異常対応)
・[15]列車在線位置の決定
○
列車占有区間の決定
・在線状態(異常検知前)
・[15]列車在線位置の決定
○
[17] (S)
f) 安全な列車間隔
停止限界の決定(固定閉塞)
○
固定閉塞システムによる停止限界の決定。
・在線状態
・[15]列車在線位置の決定
○
・停止限界位置情報(固定閉塞)
・[27]停止限界最終判断
○
を確保する停止限界の決定
[18] (S)
停止限界の決定(移動閉塞)
○
移動閉塞システムによる停止限界の決定。
・在線状態
・[15]列車在線位置の決定
○
・停止限界位置情報(移動閉塞)
・[27]停止限界最終判断
○
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
31
E 3801-2:2018
表A.5−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3.2.4 最大許容速度の決定
[19] (S)
a) 線路の条件などによる
固定の速度制限の決定
○線路条件などによって,あらかじめ
・走行路の線形情報
・走行路線形DB
①
・速度制限情報(固定)
・[31]ブレーキパターンの決定
○
速度制限
鉄道事業者から指定された箇所に
②
・[34]運転速度曲線の決定
○
制限速度を設定。
[20] (S)
b) 車両性能による
車両性能による速度制限の決定
○最高運転速度,編成両数,ブレーキ空走
・車両性能情報
・車両性能DB
○
・速度制限情報(車両性能)
・[31]ブレーキパターンの決定
○
速度制限
時分など車両性能による制限速度の設定。
・[34]運転速度曲線の決定
○
[21] (S)
c) 臨時の速度制限
運行係員による臨時速度制限
○工事,風雨などの状況により,運行係員が
・速度規制区間,規制速度
・[29]他の制約条件の決定(地上)
○
・速度制限情報(臨速:指令員)・[31]ブレーキパターンの決定
○
臨時の制限速度を設定。
(指令所装置から地上装置経由)
・[34]運転速度曲線の決定
○
[22] (S)
自動設定による臨時速度制限
○風雨などあらかじめ予測される危険に
・速度規制トリガ情報
・風速計,雨量計,地震計etc.
○・速度制限情報(臨速:自動)
・[31]ブレーキパターンの決定
○
対し,規制区間,規制速度に応じた,
・速度規制区間/規制速度
・速度規制区間/規制速度DB
○
・[34]運転速度曲線の決定
○
臨時速度制限を行う。
[23]
欠番
7.3.2.5 踏切制御による
速度制限の決定
[24] (S)
a) 踏切の制御
踏切制御
○踏切到達前の適切なタイミングにて
・踏切位置情報
・走行路線形DB
①
・踏切警報開始要求
・踏切制御装置
○
(オプション)
警報開始を要求する。
②
・列車位置計算値
・[12]列車位置決定
○
・列車速度計算値
・[32]列車速度計算
○
[25] (S)
踏切制御
○
踏切通過後に遮断解除を要求する。
・踏切警報開始要求
・[24]踏切制御(車上)
○
・踏切警報開始・遮断指令
・踏切制御装置
○
(オプション)
・在線状態
・[15]列車在線位置の決定
○
・踏切警報解除・遮断解除指令・踏切制御装置
○
・踏切状態信号
・踏切制御装置
○・踏切制御状態
・[26]速度制限の決定(踏切)
○
[26] (S)
踏切道手前に停止できるブレーキパ
b) 踏切制御に従った
速度制限の決定(踏切)
○ターンを作成し,踏切通過条件が満足した
・踏切制御状態
・[25]踏切制御(地上)
○
・速度制限情報(踏切)
・[31]ブレーキパターンの決定
○
速度制限の決定
(オプション)
とき当該ブレーキパターンを消去する。
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
32
E 3801-2:2018
表A.6−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3.2.6 列車走行の許可
[27] (S)
a) 列車走行時の
停止限界最終判断
○
ルートに関する停止限界と列車間隔に
・停止限界位置情報(ルート設定)
・[6]停止限界の決定(ルート設定)
○
・停止限界位置情報(最終)
・[31]ブレーキパターンの決定
○
停止限界の決定
関する停止限界のうち,列車の進行方向
・停止限界位置情報(固定閉塞)・[17]停止限界の決定(固定閉そく)
○
で最も手前の位置を停止限界とする。
・停止限界位置情報(移動閉塞)・[18]停止限界の決定(移動閉そく)
○
・停止限界位置情報(ルート取消し)
・[9]停止限界の決定(ルート取消し)
○
[28] (S)
b) 他の制約条件の決定
他の制約条件の決定(車上)
○車上側の他システムから得られる情報を基に,・列車走行の許容に関わる
・他システム(車上)
○・各種制約条件
・[31]ブレーキパターンの決定
○
列車の走行を許容するときのその他制約
各種情報
条件を決定する。
[29] (S)
他の制約条件の決定(地上)
○
地上側の他システムから得られる情報を基に,・列車走行の許容に関わる
・他システム(地上)
○・各種制約条件
・[31]ブレーキパターンの決定
○
列車の走行を許容するときのその他制約
各種情報
条件を決定する。
・速度規制区間,規制速度
・[47]運行係員とのHMI
○
・速度規制区間,規制速度
・[21]運行係員による臨時速度制限
○
[30]
欠番
[31] (S)
c) 保安制御のための
ブレーキパターンの決定
○速度制限情報,停止限界情報などから
・車両性能情報
・車両性能DB
○
・常用最大ブレーキパターン
・[33]ブレーキ制御(速度超過対応)
○
ブレーキパターンの決定
ブレーキパターンを決定する。
・走行路の線形情報(勾配など.)・走行路線形DB
①
・非常ブレーキパターン
・[33]ブレーキ制御(速度超過対応)
○
②
(車両性能と線路勾配などを考慮して,
・停止限界位置情報(最終)
・[27]停止限界最終判断
○
非常ブレーキパターンを作成する。
・速度制限情報(踏切)
・[26]速度制限の決定(踏切)
○
非常ブレーキパターンのほかに常用最
・速度制限情報(固定)
・[19]固定の速度制限の決定
○
大ブレーキパターンを用意してもよい。)
・速度制限情報(車両性能)
・[20]車両性能による速度制限の決定
○
・速度制限情報(臨速:指令員)
・[21]運行係員による臨時速度制限
○
・速度制限情報(臨速:自動)
・[22]自動設定による臨時速度制限
○
・各種制約条件
・[28]他の制約条件の決定(車上)
○
・各種制約条件
・[29]他の制約条件の決定(地上)
○
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
33
E 3801-2:2018
表A.7−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3.2.7 列車走行の監視制御
[32] (S)
a) 列車速度の決定
列車速度計算
○列車速度・位置検出装置からの入力データを・列車速度・位置検出信号
・列車速度・位置検出装置
○・列車速度計算値
・[33]ブレーキ制御(速度超過対応)
○
用いて,現在の列車速度を計算する。
・[35]運転速度曲線に従った
○
列車走行制御
・[38]戸開制御
○
・[24]踏切制御(車上)
○
[33] (S)
b) 安全な列車速度の
ブレーキ制御(速度超過対応)
○常用最大ブレーキパターン及び非常ブ
・常用最大ブレーキパターン
・[31]ブレーキパターンの決定
○
・ブレーキノッチ指令
・ブレーキ制御装置
○
監視制御
レーキパターンと列車速度とを照査し
・非常ブレーキパターン
・[31]ブレーキパターンの決定
○
ブレーキの制御を行う。
・列車位置計算値
・[12]列車位置決定
○
・列車速度計算値
・[32]列車速度計算
○
・走行路の線形情報
・走行路線形DB
①
②
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
34
E 3801-2:2018
表A.8−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.3.3 自動列車運転
(GOA2レベルを対象)
[34] (N)
a) 運転速度曲線の決定
運転速度曲線の決定
○保安制御のためのブレーキパターンの
・車両性能情報
・車両性能DB
○
・運転速度曲線
・[35]運転速度曲線に従った
○
範囲内において加減速,減速度を含めた
・走行路の線形情報(勾配ほか.)
・走行路線形DB
①
列車走行制御
運転速度曲線を決定する。
②
運転速度曲線の決定に当たっては,以下の・ダイヤ情報
○
要因などを考慮する。
・速度制限情報(固定)
・[19]固定の速度制限の決定
○
・停止点 ・時隔 ・速度制限
・速度制限情報(車両性能)
・[20]車両性能による速度制限の決定
○
・車両性能 ・省エネ走行
・速度制限情報(臨速:指令員)
・[21]運行係員による臨時速度制限
○
・速度制限情報(臨速:自動)
・[22]自動設定による臨時速度制限
○
[35] (N)
b) 運転速度曲線に
運転速度曲線に
○運転速度曲線に従い,列車の速度制御
・運転速度曲線
・[34]運転速度曲線の決定
○
・力行ノッチ指令
・駆動制御装置
○
従った列車走行制御
従った列車走行制御
を行う。
・列車位置計算値
・[12]列車位置決定
○
・ブレーキノッチ指令
・ブレーキ制御装置
○
・列車速度計算値
・[32]列車速度計算
○
・走行路の線形情報
・走行路線形DB
①
②
[36] (N)
c) 列車走行の制限
列車走行の制限
△ △ ○安全に支障を及ぼす要因により列車の走行を制限する。
○
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
35
E 3801-2:2018
表A.9−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
[37] (S)
7.3.4 走行線路の監視
走行線路の監視
○
運転士又は外部システムとのインタフェース
・走行線路障害物検知情報
・走行線路障害物検知装置
○・走行線路監視情報
・車上装置
○
(オプション)
によって,障害物との衝突防止及び人との接触・走行線路異常通知
・運転士
○
・指令所装置
○
防止を行うための走行線路の監視を行う。
・出発制御
○
[38] (S)
7.3.5 ドア開閉制御
戸開制御
△ ○列車の停止状態,停止位置及びドア方向など
・戸開指令
○
(オプション)
を考慮して,戸開制御を行う。
[39] (S)
戸閉制御
△ ○運行条件及び乗降客の安全性を考慮して,
・戸閉指令
○
(オプション)
戸閉制御を行う。
[40]
欠番
7.3.6 分割及び併合
[41] (S)
a) 分割及び併合時の安全確保
分割
△ △ ○列車の分割時に,ブレーキパターン,
・ブレーキパターン
○
・列車管理情報
△ △ ○ △
b) 列車の管理
(オプション)
速度制限を適用して手動運転を行う。
・速度制限
○
分割された列車ごとに管理を行う。
[42] (S)
併合
△ △ ○列車の併合時に,ブレーキパターン,
・ブレーキパターン
○
・列車管理情報
△ △ ○ △
(オプション)
速度制限を適用して手動運転を行う。
・速度制限
○
併合された列車は一つの列車として管理する。
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
36
E 3801-2:2018
表A.10−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.4 列車運行の監視及び管理
7.4.1 一般
7.4.2 制御用列車ダイヤ管理
[43] (N)
a) 列車ダイヤの取込み
列車ダイヤの取込み
○
運行計画系システムなど,外部システム
・列車ダイヤ
・運行計画系システムなど
○・ダイヤDB(列車ダイヤ)
・[44]制御用列車ダイヤの更新
○
(インタフェース)
から列車ダイヤを取り込むためのインタ
(オプション)
フェース機能。
[44] (N)
b) 制御用列車ダイヤの更新
制御用列車ダイヤの更新○
定められた期間で,外部システムから
・ダイヤDB(列車ダイヤ)
・[43]列車ダイヤの取込み
○
・制御用列車ダイヤ----更新後
○
(オプション)
取り込んだ列車ダイヤを用いて
制御用列車ダイヤの更新を行う。
[45] (N)
c) 制御用列車ダイヤの変更など
制御用列車ダイヤの変更○
発車時刻,停車駅など制御用列車ダイヤの
・制御用列車ダイヤ----変更前
○
・制御用列車ダイヤ----変更後
○
(オプション)
追加,削除及び変更を行う。追加,削除
・制御用列車ダイヤの変更情報
○
及び変更されたダイヤの合理性チェックを行う。 (発車時刻,停車駅の変更など)
[46] (N)
d) 実績データの管理
実績データの管理
○
列車の走行に合わせて,出発時刻,到着
・在線状態
・[15]列車在線位置の決定
○
・列車運行実績データ
・[49]運行乱れの監視
○
(オプション)
時刻などの実績データを収集し,必要に
・[51]制御用列車ダイヤの調整
○
応じて外部システムに出力する。
[47] (N)
e) 運行係員とのHMI
運行係員とのHMI
○
運行係員に対する表示及び運行係員に
・制御用列車ダイヤ(変更操作前)
○
・制御用列車ダイヤ(変更操作後)
○
(オプション)
よる制御用列車ダイヤの変更,臨時速度
・制御用列車ダイヤの変更操作情報
・運行係員
○・制御用列車ダイヤ表示情報
○
制限の設定などのためのHMI。
・臨時速度制限に関する操作情報・運行係員
○・速度規制区間,規制速度
[29]他の制約条件の決定(地上)
○
・運行乱れアラーム情報
・[49]運行乱れの監視
○
7.4.3 列車運行の監視
[48] (N)
a) 列車追跡
列車追跡
○
システム内の列車位置と列車番号を関連
・在線状態
・[15]列車在線位置の決定
○
・在線監視情報
・[50]自動ルート設定
○
(オプション)
付けて監視する。
[49] (N)
b) 運行乱れの監視
運行乱れの監視
○
列車ダイヤと実際の運行との差異が,
・制御用列車ダイヤ
○
・運行乱れアラーム情報
・[47]運行係員とのHMI
○
(オプション)
あらかじめ決められた値を超えた場合
・列車運行実績データ
・[46]実績データの管理
○
にアラームを出す。
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
37
E 3801-2:2018
表A.11−各機能の装置への割付及び入出力情報一覧
指
令
所
装
置
地
上
装
置
車
上
装
置
処理概要
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
指
令
所
装
置
地
上
装
置
車
上
装
置
そ
の
他
7.4.4 列車運行の管理
[50] (N)
a) 自動ルート設定
自動ルート設定
○
運行条件(制御用列車ダイヤ,列車の位置
・制御用列車ダイヤ
○
・ルート設定要求
・[1]ルートの特定
○
(オプション)
など)に基づいてルートの自動設定を
・在線監視情報
・[48]列車追跡
○
・ルート取消要求
・[7]ルート取消要求
○
行う。
・ルート監視情報
・[5]ルートの監視制御
○
b) 指令員の扱い
ルート設定要求及びルート取消要求は,
指令員の扱いで行うこともできる。
[51] (N)
c) 列車の運転整理
制御用列車ダイヤの調整○
制御用列車ダイヤの調整を自動又は手動
・制御用列車ダイヤ----整理前
○
・制御用列車ダイヤ----整理後
○
(オプション)
により行う。
・列車運行実績データ
・[46]実績データの管理
○
7.4.5 保守作業管理
[52] (N)
・保守作業管理システムとの
保守作業管理システム
○
保守作業の時に必要となる保守作業
・保守作業関連情報
・保守作業管理システム
○・保守作業関連情報
・[53]保守作業のための
○
インタフェース
とのインタフェース
管理システムとのインタフェース機能。
転てつ器転換制御
(オプション)
・[54]分岐器及び軌道の
○
使用停止/解除
・[55]保守作業エリア
○
(線路閉鎖,保守用車使用)
の設定/解除
[53] (S)
・保守作業のための転てつ器
保守作業のための
○
保守作業の時に必要となる転てつ器
・保守作業関連情報
・[52]保守作業管理シス
○
・転換指令
・転てつ装置
○
転換制御
転てつ器転換制御
転換制御を行う。
テムとのインタフェース
・転換状態登録情報
・ルート構成要素使用状態テーブル
○
(オプション)
[54] (S)
・分岐器及び軌道の
分岐器及び軌道の
○
保守作業に伴って,分岐器及び軌道の
・保守作業関連情報
・[52]保守作業管理シス
○
・分岐器,軌道等の使用停止・解除指令・外部システム
○
使用停止又は解除
使用停止/解除
使用停止/解除の処理を行う。
テムとのインタフェース
(オプション)
[55] (S)
・保守作業エリア
保守作業エリア
○
保守作業を行うに当たって,必要な
・保守作業関連情報
・[52]保守作業管理シス
○
・ルート構成要素使用状態
・ルート構成要素使用状態テーブル
○
(線路閉鎖,保守用車使用)
(線路閉鎖,保守用車使用)
エリアの設定と解除を行う。
テムとのインタフェース
(保守作業使用/解除登録情報)
の設定又は解除
の設定/解除
(オプション)
出力情報
出力先
(処理名称,装置名称,
データエリア名称,
DB名称など.)
JIS E 3801-1
“無線式列車制御システム−第1部:
一般要求事項及び機能要求事項”
の
箇条7 機能要求事項
入力情報
入力元
(処理名称,装置名称,
データエリア名称,
DB名称など.)
装置への割付
処理名称
([]内の番号は,
便宜上,付した
通し番号)
38
E 3801-2:2018
附属書B
(参考)
システム構成装置の機能仕様
B.1
一般
この附属書は,システム構成装置である“指令所装置”,“地上装置”,“車上装置”及び“データ通信装
置”の機能について記載する。
なお,附属書Aによって割り当てられた機能との対応を明確にするため,次の機能説明文の末尾に表
A.1〜表A.11に記載の処理名称の通し番号([ ]内の番号)を付記する。
B.2
指令所装置
B.2.1 装置概要
制御対象となる線区の指令所,輸送センタ,保守センタなどに設置する装置であり,中央集中形又は分
散形のいずれの装置構成としてもよい。線区規模に応じて装置の設置数を増減,又は一部の同等機能をシ
ステム外の装置に委ねた構成とすることもできる。地上伝送回線を介して,当JRTCの地上装置と接続さ
れる。必要に応じて,運行計画系システム,保守作業管理システム,電力管理システムなどの外部システ
ムとインタフェースしてもよい。
B.2.2 指令所装置の機能
指令所装置は,制御対象線区における列車運行の監視及び管理を行う装置である。保守作業管理機能を
もつ場合は,保守作業者及び列車運転の安全性に留意しなければならない。HMI処理部は制御処理部と分
離してもよく,装置の構成及び規模は,鉄道事業者が定める。指令所装置の機能を,次に示す。
a) 制御用列車ダイヤ管理 列車ダイヤの取込み,制御用列車ダイヤの更新及び変更,実績データの管理
などを行う。
1) 列車ダイヤの取込み(インタフェース) 運行計画系システムなど,外部システムから列車ダイヤを
取り込むためのインタフェース機能[43]。
2) 制御用列車ダイヤの更新 定められた期間で,外部システムから取り込んだ列車ダイヤを用いて制
御用列車ダイヤの更新を行う[44]。
3) 制御用列車ダイヤの変更 発車時刻,停車駅など制御用列車ダイヤの追加,削除,及び変更を行う。
さらに,追加,削除及び変更されたダイヤの合理性チェックを行う[45]。
4) 実績データの管理 列車の走行に合わせて,出発時刻,到着時刻などの実績データを収集し,必要
に応じて外部システムに出力する[46]。
5) 運行係員とのHMI 運行係員に対する表示及び運行係員による制御用列車ダイヤの変更,臨時速度
制限の設定などのためのHMI[47]。
b) 列車運行の監視及び管理 列車追跡及び運行乱れの監視を行う。
1) 列車追跡 システム内の列車位置及び列車番号を関連付けて監視する[48]。
2) 運行乱れの監視 列車ダイヤと実際の運行との差異が,あらかじめ決められた値を超えた場合にア
ラームを出す[49]。
c) 列車運行の管理 自動ルート設定及び制御用列車ダイヤの調整を行う。
1) 自動ルート設定 運行条件(制御用列車ダイヤ,列車の位置など)に基づいてルートの自動設定を
39
E 3801-2:2018
行う[50]。
2) 制御用列車ダイヤの調整 制御用列車ダイヤの調整を自動又は手動によって行う[51]。
d) 保守作業管理 保守作業管理システムとのインタフェース,保守作業エリアの設定・解除などを行う。
1) 保守作業管理システムとのインタフェース 保守作業のときに必要となる保守作業管理システムと
のインタフェース機能[52]。
2) 保守作業のための転てつ器転換制御 保守作業のときに必要となる転てつ器転換制御を行う[53]。
3) 分岐器及び軌道の使用停止/解除 保守作業に伴って,分岐器,軌道などの使用停止・解除の処理
を行う[54]。
4) 保守作業エリア(線路閉鎖,保守用車使用)の設定/解除 保守作業を行うに当たって,必要なエ
リアの設定・解除を行う[55]。
e) 分割及び併合 分割及び併合時の制御で,分割又は併合走行制御のために,指令所装置として次の機
能を実施する場合がある。
1) 分割 分割制御を実施するなどの列車管理情報を車上装置から地上装置経由で受信し,列車運行の
監視に反映する[41]。
2) 併合 併合制御を実施するなどの列車管理情報を車上装置から地上装置経由で受信し,列車運行の
監視に反映する[42]。
f)
自動列車運転における列車走行の制限 自動列車運転において,列車走行の安全に支障を及ぼす要因
に関する情報を指令所装置がもっていた場合,指令所装置は,当該情報を地上装置経由で車上装置に
出力する[36]。
B.3
地上装置
B.3.1 装置概要
制御対象となる線区の列車制御及び転てつ器などの制御を地上側で行う装置であり,線区及び駅構内の
規模などに応じて,駅単位の設置も,広域の複数駅範囲を集中的に制御するような設置も可能とする。無
線伝送回線を介して,当JRTCの車上装置と接続される。必要に応じて,地上伝送回線を介して,転てつ
器,踏切警報機,踏切遮断機などを直接制御してもよい。また,連動装置又は踏切制御装置などの外部装
置とインタフェースしてもよい。
B.3.2 地上装置の機能
地上装置は,各列車の走行位置の情報,転てつ器の開通状態情報などから各列車に必要なルートの安全
確保を行うとともに,それらの情報から各列車に必要な停止限界を求め,列車走行の安全確保を行う装置
であり,次の機能をもつ。
a) ルートの安全確保 各列車の走行位置の情報,転てつ器の開通状態情報などから各列車に必要なルー
トの安全確保を行う。
1) ルートの特定 ルート設定要求に基づき,設定するルートの始端から終端までの軌道,転てつ器な
どのルート構成要素を特定する[1]。
2) ルート競合判断 特定したルート構成要素が他の列車又は作業などによって使用中でないか,又は
使用中であっても共用可能であれば,そのルート構成要素を当該列車においても使用中とする[2]。
3) 転てつ器転換指令/開通確認 必要に応じて転てつ器転換指令を出力する。所定方向に開通してい
ることを確認する[3]。
4) ルートの鎖錠 設定したルートの全ての転てつ器の開通状態を確認後,当該ルートを鎖錠状態とす
40
E 3801-2:2018
る[4]。
5) ルートの監視制御 設定したルートの全ての転てつ器の開通を確認。ルート構成要素が無許可使用
されていないことを監視する。監視結果に異常が認められた場合には,ルートへの進入を許容しな
い[5]。
6) 停止限界の決定(ルート設定) 安全を確保したルートの終端位置を支障位置とし,ここから保安制
御余裕距離を手前に確保した位置をルートに関する停止限界とする[6]。
7) ルート取消要求 列車が進行ルートへの進入を確認した後に,ルートの設定要求を取り消す。自動
ルート設定又は指令員のルート取消要求に基づきルート設定要求を取り消す[7]。
8) 列車の走行による解錠 列車の進行に応じてルート構成要素の当該列車による使用中を順次解除し,
当該ルートの鎖錠を解錠条件が満足したとき解錠する[8]。
9) ルート取消しによる解錠
9.1) 停止限界の決定(ルート取消し) 進入を許可したルートの取消しを受け,取消し対象列車の新た
な停止限界を決定する。停止可否判断を車上装置で行う場合,取消し対象列車に停止可否の問合
せ,確認を行う[9]。
9.2) 停止可否判断(ルート取消し) 車上装置が停止可否判断[B.4.2のg) 参照]を行わない場合,取
消し対象列車の停止可否判断を行う。この機能には,従来の接近鎖錠によるものも含む[10]。
9.3) ルート解錠(ルート取消し) 停止可能であると回答を得た場合には,当該ルートのルート構成要
素の当該列車による使用中を解除し,当該ルートの鎖錠を解錠条件が満足したときに解錠する[11]。
b) 安全な列車間隔の確保 各列車の走行位置の情報,転てつ器の開通状態情報などから各列車に必要な
停止限界を求め,安全な列車間隔を確保する。制御対象区間が広域にわたる場合は,地上装置の処理
能力,又は地上伝送回線の構成上条件などに応じて,制御対象区間を複数の制御エリアに分割して,
各制御エリアごとに地上装置を設置してもよい。また,JRTCとは異なる他システムとの境界をもつ
場合は,両システムの境界に切替区間を設けてシステム切替えを行い,安全性が損なわれないように
しなければならない。
1) 列車位置決定 ルートの設定状態,地上子からの相対距離及び必要に応じて無線測位などによって
列車の位置を決定する。ただし,車上装置で列車位置を決定する場合には必須とはしない[12]。
2) 列車在線位置の決定 各列車の在線位置を把握する[15]。
3) 列車位置検知異常対応 位置検知異常に対し在線位置補正などを行う[16]。
4) 停止限界の決定(列車間隔確保)
4.1) 停止限界の決定(固定閉塞) 固定閉塞システムによる列車間隔に関する停止限界を決定する[17]。
4.2) 停止限界の決定(移動閉塞) 移動閉塞システムによる列車間隔に関する停止限界を決定する[18]。
c) 最大許容速度の決定 線路の条件などによる固定の速度制限及び運行係員による臨時の速度制限を設
定する。
1) 固定の速度制限の決定 走行路線形データベース(附属書D参照)が地上側にある場合,走行路の
線形情報を車上側に出力する[19]。
2) 運行係員による臨時速度制限 工事,風雨などの状況によって,運行係員が設定した臨時速度制限
を地上装置経由で車上装置に出力する[21]。
3) 自動設定による臨時速度制限 風雨などあらかじめ予測される危険に対し,規制区間,規制速度に
応じた臨時速度制限を車上装置に出力する[22]。
d) 踏切制御による臨時速度制限の決定における踏切制御(地上) 列車からの踏切遮断要求,列車の在
41
E 3801-2:2018
線位置などによって踏切の遮断警報制御を行ってもよい。踏切の遮断状況に応じて,列車の通過制限
速度制御を行うこともできる。踏切制御(地上)は,踏切警報開始要求を受けて,踏切の遮断及び遮
断解除に関する制御を行う[25]。
e) 列車走行の許可 列車に対する停止限界と制約条件を決定し,車上装置に送信する。
1) 停止限界の決定 ルートに関する停止限界と列車間隔に関する停止限界のうち,列車の進行方向で
最も手前の位置を停止限界とする[27]。
2) 他の制約条件の決定(地上) 地上側の他システムから得られる情報を基に,列車の走行を許容する
ときのその他制約条件を決定する[29]。
f)
自動列車運転 自動列車運転に関して,次の機能を地上制御装置にもたせてもよい。
1) 運転速度曲線の決定 走行路線形データベース(附属書D参照)が地上側にある場合,当該情報を
車上装置に出力する[34]。
2) 列車走行の制限 安全に支障を及ぼす要因が発生した場合,外部装置からの入力を基に,緊急停止
などの情報を車上装置に出力する[36]。
g) 走行線路の監視 運転士又は外部システムとのインタフェースによって,障害物との衝突防止及び人
との接触防止を行うための走行線路の監視を行い,緊急停止などの情報を車上装置に出力する[37]。
h) ドア開閉制御 ドア開閉制御用の処理として,次の処理を地上装置にもたせてもよい。
1) 戸開制御 ホームドアが設置されている場合は,列車が完全に停止したことを地上で検知し,又は
は車上装置からの指示に従いホームドアと連携し戸開制御を行う[38]。
2) 戸閉制御 ホームドアが設置されている場合は,車上装置からの指示に従いホームドアと連携し戸
閉制御を行う[39]。
i)
分割・併合 地上装置で,分割又は併合の場合に,間接的に次の処理を実施することがある。
1) 分割 列車の分割に際し,分割された列車ごとに管理を行う[41]。
2) 併合 列車の併合に際し,併合された列車は一つの列車として管理する[42]。
B.4
車上装置
B.4.1 装置概要
制御対象となる列車の制御を行う装置であり,JRTCの各列車に搭載される。無線システムを介してJRTC
の地上装置と接続される。列車速度検出装置,ブレーキ制御装置のほか,必要に応じて,列車速度の制御
に必要な情報の入出力を行うために,列車速度・位置検出装置などの車上に搭載されたシステム外装置と
インタフェースを設けてもよい。
B.4.2 車上装置の機能
車上装置は,列車の安全性を確保するために,速度制限及び停止限界から決定される保安制御のための
ブレーキパターンを用いて,列車速度の監視制御を行う。GOA2の場合には,運転速度曲線に従った列車
走行制御を行う。また,踏切装置への遮断・遮断解除の要求を行うことによって,踏切制御を行うことも
できる。これらの車上装置の機能を,次に示す。
a) 安全な列車間隔の確保 列車位置,列車編成方向及び列車進行方向を決定する。
1) 列車位置の決定 位置検知地上子及び列車速度・位置検出装置によって,現在の自列車位置を決定
し,地上装置へ送信する。分岐のある走行路においては,走行路線形データベース(附属書D参照)
によって,ルート設定状態に対応した自列車位置を決定する。ただし,地上装置で列車位置を決定
する場合には,必須とはしない[12]。
42
E 3801-2:2018
2) 列車編成方向の決定 列車の編成方向(列車の運転台位置と線路の起点側,終点側との関係)を決
定する[13]。
3) 列車進行方向の決定 列車の編成方向及び運転台設定に関する情報によって,列車の進行方向を決
定し,地上装置へ送信する[14]。
b) 最大許容速度の決定 固定の速度制限及び臨時の速度制限を用いて,速度制限情報を設定する。
なお,当該処理に関連する機能のうち,速度制限情報の設定に必要な情報を地上装置経由で受信す
る処理として,3) 及び4) がある。
1) 固定の速度制限の決定 走行路線形データベース(附属書D参照)に含まれる線路データと運転形
態によって,固定の速度制限情報を設定する。走行路線形データベースを地上装置から得てもよい
[19]。
2) 車両性能による速度制限の決定 車両性能データベース(附属書D参照)を参照して,最高運転速
度などの車両性能による速度制限情報を設定する[20]。
3) 運行係員による臨時速度制限 工事,風雨などの状況によって,運行係員が設定した臨時速度制限
を地上装置経由で受信することによって速度制限情報を設定する[21]。
4) 自動設定による臨時速度制限 風雨などあらかじめ予測される危険に対し,規制区間,規制速度に
応じて,自動で設定される臨時速度制限を地上装置経由で受信することによって速度制限情報を設
定する[22]。
c) 踏切制御による速度制限の決定 車上装置に踏切制御に関する機能を設ける場合,踏切接近時の遮
断・遮断解除要求及び踏切通過後の踏切通行の遮断解除を行ってもよい。
1) 踏切制御 踏切道到達前の適切なタイミングで,踏切制御装置に対して警報開始要求を送信し,踏
切の通過条件が確認できたときに警報停止要求を送信する[24]。
2) 速度制限の決定(踏切) 列車が踏切に接近したとき,踏切道手前に停止できるブレーキパターンを
作成し,踏切通過条件が満足されたとき,このブレーキパターンを消去する[26]。
3) 踏切の支障報知,障害物検知などの支障情報を地上装置から車上装置に送信する。
d) 列車走行の許可 速度制限情報,停止限界位置情報などを用いてブレーキパターンを決定する。
1) その他の制約条件の決定(車上) 必要に応じて,列車の走行に関わる制約条件を決定する[28]。
2) ブレーキパターンの決定 車上装置は,速度制限情報,停止限界情報などからブレーキパターンを
決定する。このブレーキパターンとしては,常用最大ブレーキパターン及び非常ブレーキパターン
の2種類を用意する[31]。
e) 列車走行の監視制御 ブレーキパターンに対する列車の速度超過を監視する。
1) 列車速度計算 列車速度・位置検出装置からの入力データを用いて,現在の列車速度を計算する
[32]。
2) ブレーキ制御(速度超過対応) 車上装置は,常用最大ブレーキパターン及び非常ブレーキパターン
と現在の列車速度とを照査し,速度超過を検知した場合にはブレーキの制御を行う[33]。
f)
自動列車運転 GOA2の場合には,運転速度曲線に従って駅間走行時の加速・減速制御を行う。
1) 運転速度曲線の決定 保安制御パターンの範囲内において,加速・減速を含めた運転速度曲線を決
定する[34]。
2) 運転速度曲線に従った列車走行制御 運転速度曲線に従って,列車の加速・減速制御を行う[35]。
3) 列車走行の制限 安全に支障を及ぼす要因が発生した場合には,外部装置からの入力に従って,列
車の走行を制限する[36]。
43
E 3801-2:2018
g) 停止可否判断 進入許可されたルートに進入する前に,該当ルートの取消しが行われた場合に,ルー
ト外方で列車が停止可能であるかの判断を行う。地上装置が停止可否判断[B.3.2 a) 9.2) 参照]を行
わない場合,車上装置は停止可否判断を行い,可否情報を地上装置へ送信する[10]。
h) ドア開閉制御 GOA2の場合には,列車のドア制御を自動化してもよい。また,ホーム柵が設置され
ている場合には,ホーム柵と連動して列車のドア制御を行うこともできる。
1) 戸開制御 列車の停止状態,停止位置及びドア方向を考慮して,戸開制御を行う。ホーム柵が設置
されている場合には,ホーム柵と連動した戸開制御を行ってもよい[38]。
2) 戸閉制御 運転条件及び乗降客の安全性を考慮して,戸閉制御を行う。ホーム柵が設置されている
場合には,ホーム柵と連動した戸閉制御を行ってもよい[39]。
i)
分割・併合 列車の分割・併合を行う場合,特別なブレーキパターンを用いて列車の監視制御を行う。
また,分割・併合後には,編成状態に対応した車上装置の設定と列車の管理を行う。
1) 分割 車上装置は,正常な分割制御であることを認識したうえで,列車の分割に対応したブレーキ
パターン及び速度制限を適用して,列車の移動に対する監視制御を行う。分割後,各編成の車上装
置は,列車編成の分割に対応した列車長などの車上制御に必要な制御パラメータを更新する[41]。
2) 併合 停車している列車に併合列車を接続させるために,前方に停車している列車を通常とは異な
る支障と認識し,列車の併合に対応したブレーキパターン及び速度制限を適用して,列車の移動に
関する監視制御を行う。併合後,新たに編成された列車の車上装置は,列車長など車上制御に必要
な制御パラメータを更新する[42]。
B.5
データ通信装置(地上〜車上間無線伝送系)
車上装置と地上装置間のデータ通信は,無線システムを介したデータ通信によって行われる。この無線
システムは,次の装置によって構成される。
a) 無線基地局 地上伝送路を介して地上装置と接続され,無線によって車上無線局とのデータ通信を行
う。地上の無線基地局をまたがる列車の移動がある場合には,該当列車の車上無線局に関する無線基
地局間のハンドオーバを行う。このとき,地上装置,車上装置などと連携して処理を行うこともでき
る。
b) 車上無線局 車上装置と接続され,無線によって無線基地局とのデータ通信を行う。
44
E 3801-2:2018
附属書C
(参考)
装置間・機能間のインタフェース
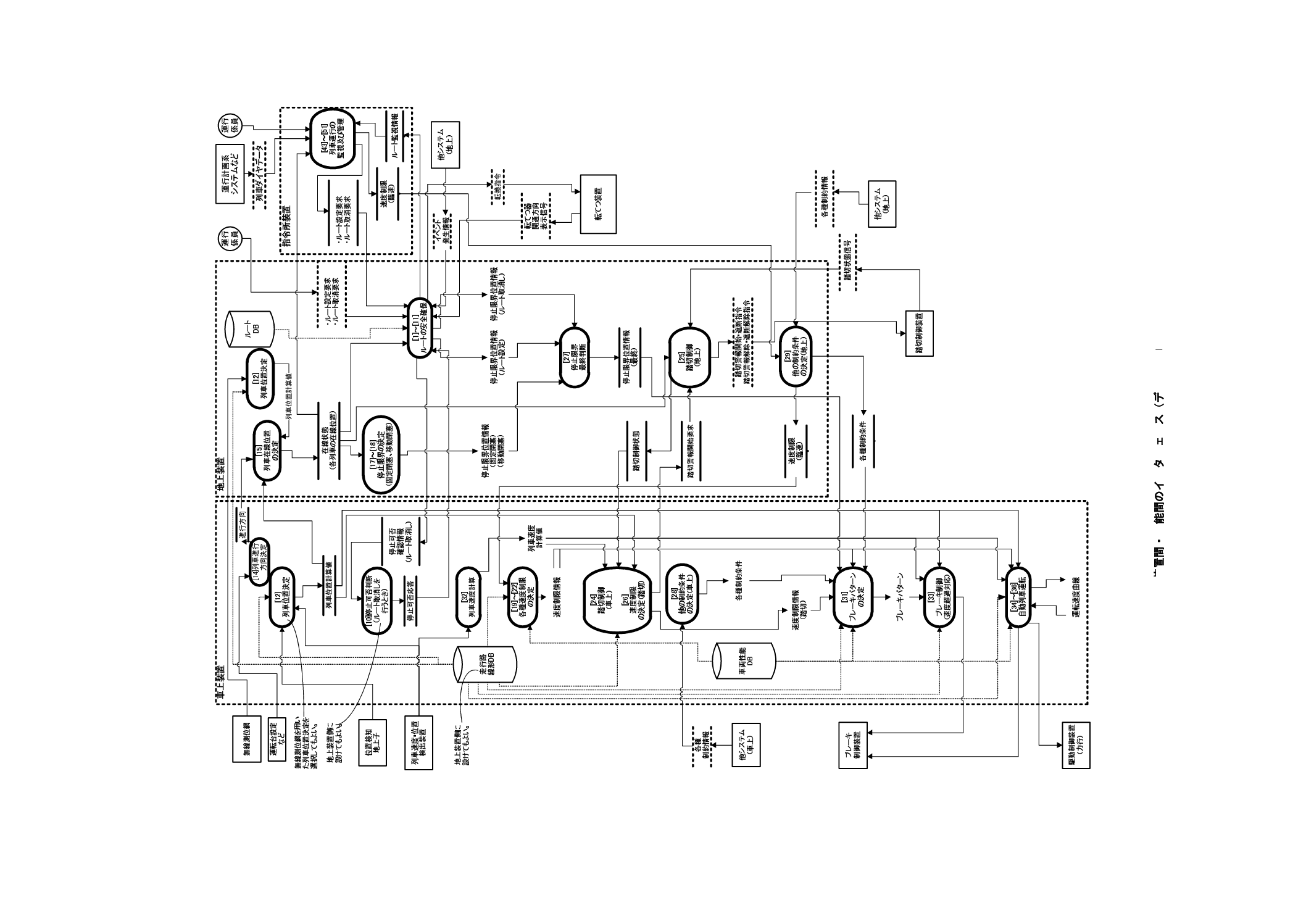
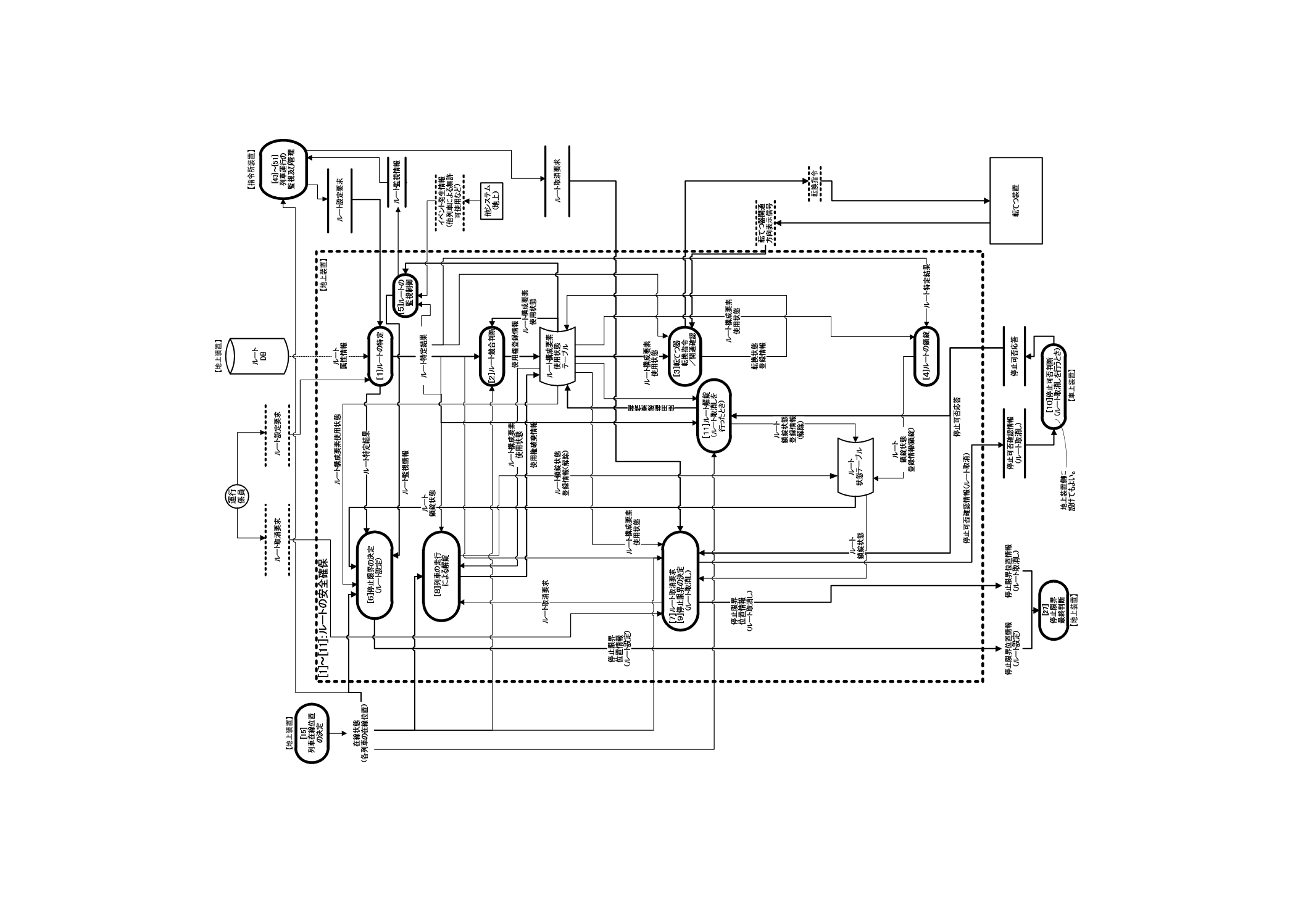
C.1 一般
この附属書では,附属書Aに示す各機能の装置への割付及び入出力情報一覧を基にした装置間・機能間
のインタフェース(データフロー)の正常時の主たる部分について,図C.1〜図C.3に示す。
なお,図C.1は,システム全体のデータフローを示し,その中の“[1]〜[11]:ルートの安全確保”及び
“[43]〜[51]:列車運行の監視及び管理”に関しては,更に詳細なデータフローを図C.2及び図C.3に示し
ている。図中の記号は,次による。
XXXXX
:処理名称
XXXXX
:上下に実線がある情報は,車上装置,地上装置及び指令所装置の各装置間で送受信
される情報を示す。
XXXXX
:上下に破線がある情報は,外部装置との間で送受信される情報を示す。
XXXXX
:上下に線のない情報は,車上装置,地上装置及び指令所装置の各装置内部での情報
を示す。
注記 附属書Aにおいて,車上装置に割り付ける案と地上装置に割り付ける案との2種類の選択肢が
あることを示した次の事項に関しては,その旨を図C.1にも記載している。
− 列車位置決定
− 走行路線形データベース(附属書D参照)
− 停止可否判断(ルート取消し時)
45
E 3801-2:2018
図
C
.1
−
装
置
間
・
機
能
間
の
イ
ン
タ
フ
ェ
ー
ス
(
デ
ー
タ
フ
ロ
ー
)
図
C
.1
−装
置
間
・
機
能
間の
イ
ン
タフ
ェ
ー
ス(
デ
ー
タ
フロ
ー
)
46
E 3801-2:2018
図
C
.2
−
ル
ー
ト
の
安
全
確
保
に
関
す
る
デ
ー
タ
フ
ロ
ー
図
図
C
.2
−ル
ー
ト
の
安
全
確保
に
関
する
デ
ー
タフ
ロ
ー
図
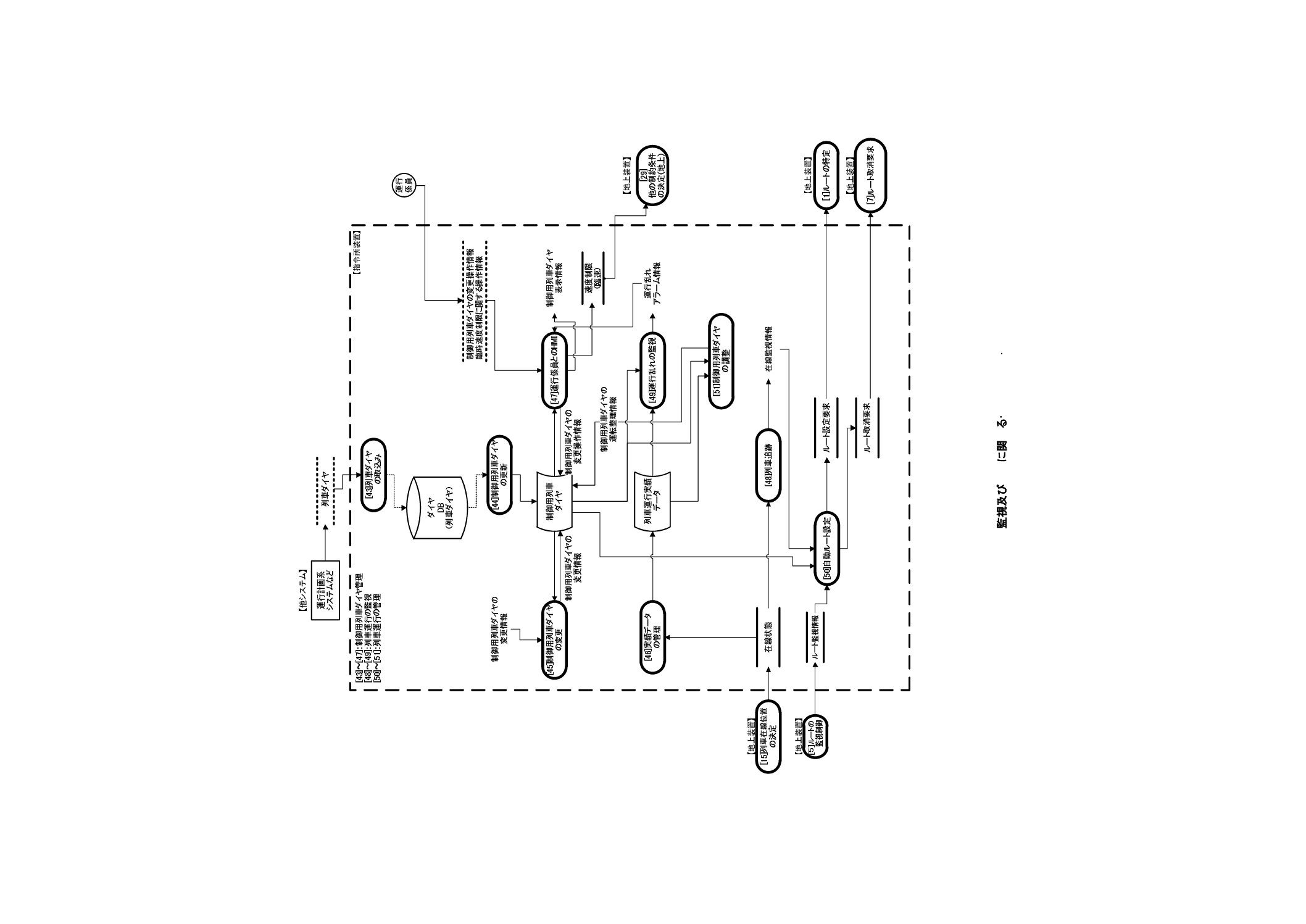
47
E 3801-2:2018
図
C
.3
−
列
車
運
行
の
監
視
及
び
管
理
に
関
す
る
デ
ー
タ
フ
ロ
ー
図
図
C
.3
−列
車
運
行
の
監
視及
び
管
理に
関
す
るデ
ー
タ
フ
ロー
図
48
E 3801-2:2018
附属書D
(参考)
データベース及び装置間授受情報
D.1 一般
この附属書は,JRTCを構成する装置において使用されるデータ及び装置間で授受される情報を示す。
このデータには,システム内外の装置間でやり取りされるデータ(外部装置とのインタフェース,システ
ム内の制御電文など)及び各装置機能で使用するデータ(データベース)がある。
D.2 データベース
システム装置内に設けられるデータベースには,次のものがある。
a) 走行路線形データベース
− 路線形態,線路データ
− ルート形態
− 位置検知地上子位置
b) 車両性能データベース
− 最高運転速度
− 編成両数
− ブレーキ性能
c) ルートデータベース
− ルート(発点,着点及び区間)
− ルート構成要素(転てつ器)
− 鎖錠条件
d) ダイヤデータ
− 列車日付
− 列車番号
− 走行路線情報
− 着発時刻情報
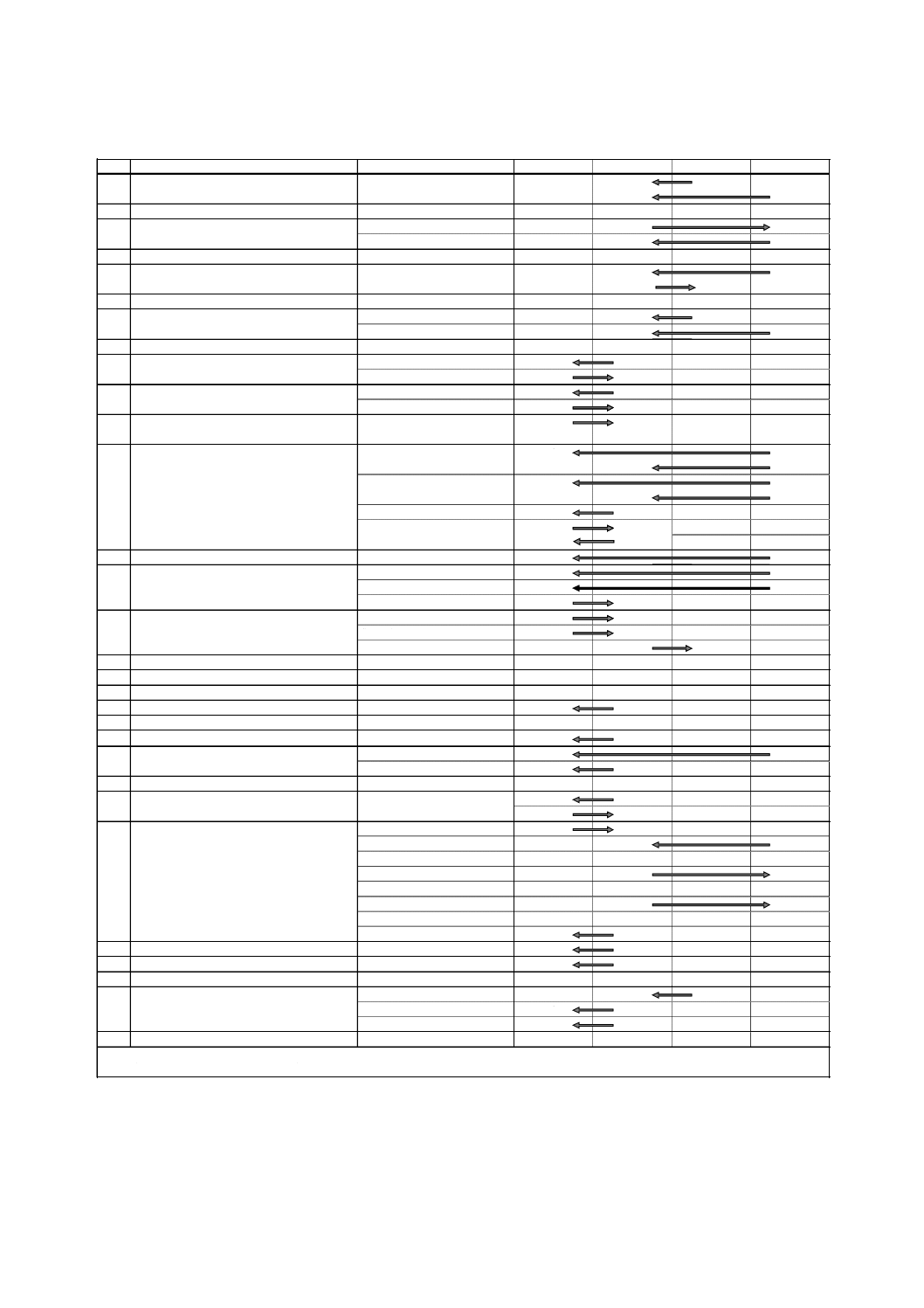
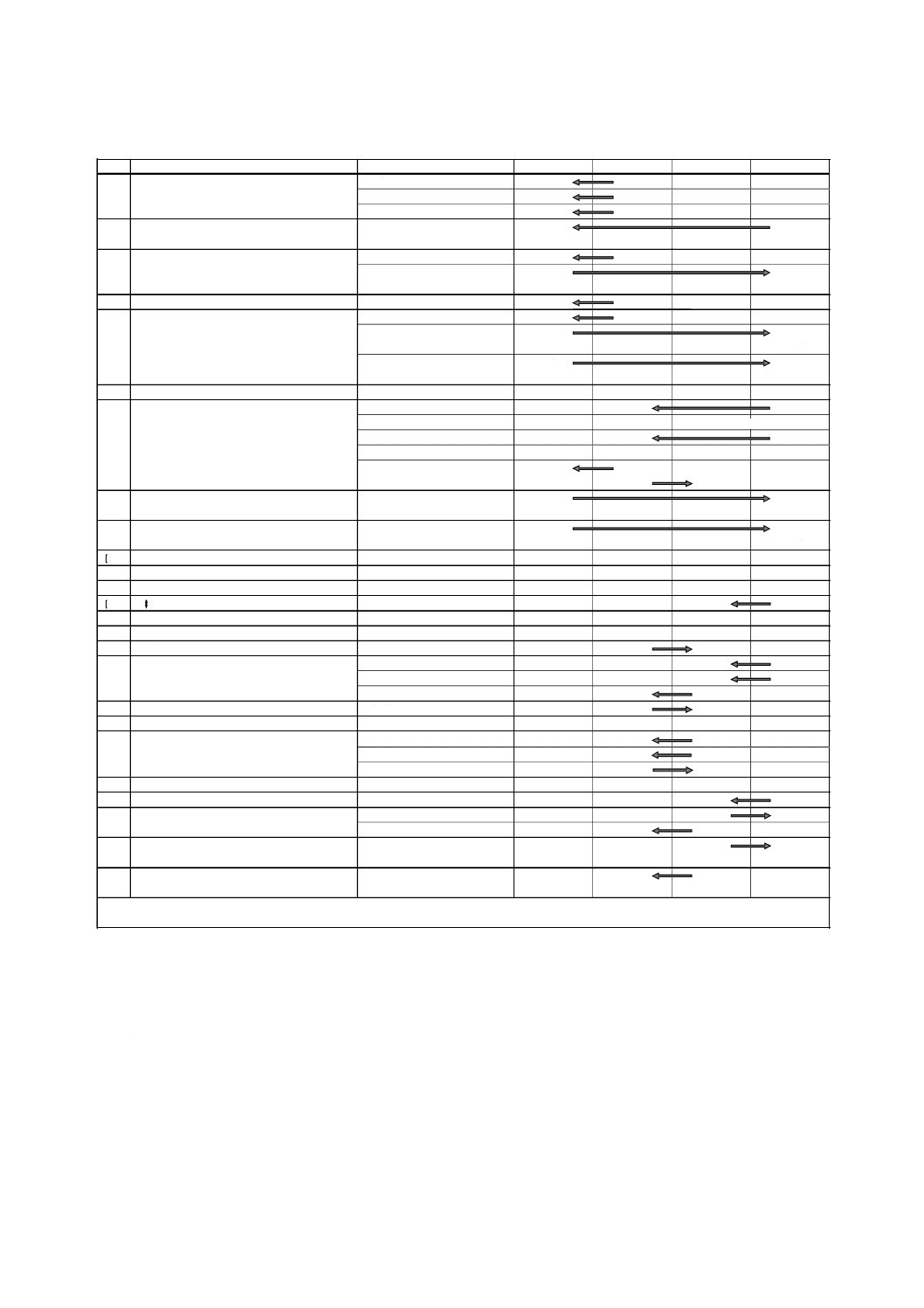
D.3 装置間授受情報
D.3.1 JRTC装置間の授受情報
附属書Aに示す機能ごとに装置間で授受する情報を,表D.1に示す。[ ] 内の番号は,附属書Aの機
能番号を示す。表D.1に示す授受情報は,JRTCとして必要と想定される例であり,詳細は鉄道事業者が定
める。
49
E 3801-2:2018
表D.1−JRTC装置間の授受情報
番号
処理名称(機能)
データ名
車上装置
地上装置
指令所装置
外部装置
[1]
ルートの特定
ルート設定要求
●
○
●
○
[2]
ルート競合判断
[3]
転てつ器転換指令/開通確認
転換指令
○
●
転てつ器開通方向表示信号
●
○
[4]
ルートの鎖錠
[5]
ルートの監視制御
イベント発生情報
●
○
ルート監視情報
○
●
[6]
停止限界の決定(ルート設定)
[7]
ルート取消要求
ルート取消要求
●
○
●
○
[8]
列車の走行による解錠
[9]
停止限界の決定(ルート取消し)
停止可否確認情報
●
①
停止可否応答
①
●
[10] 停止可否判断(ルート取消し)
停止可否確認情報
●
①
停止可否応答
①
●
[11] ルート解錠
停止可否応答
○
●
(ルート取消し)
[12] 列車位置決定
地上子信号
●
①
●
②
列車速度・位置検出信号
●
①
●
②
ルート設定状態
●
①
列車位置計算値
①
●
●
②
[13] 列車編成方向決定
編成方向設定情報
●
○
[14] 列車進行方向決定
運転方向設定情報
●
○
進行方向設定情報
●
○
進行方向
○
●
[15] 列車在線位置の決定
列車位置計算値
①
●
進行方向
○
●
在線状態
○
●
[16] 列車位置検知異常対応
[17] 停止限界の決定(固定閉塞)
[18] 停止限界の決定(移動閉塞)
[19] 固定の速度制限の決定
走行路の線形情報
●
②
[20] 車両性能による速度制限の決定
[21] 運行係員による臨時速度制限
速度規制区間,規制速度
●
○
[22] 自動設定による臨時速度制限
速度規制トリガ情報
●
○
速度規制区間,規制速度
●
○
[23] 欠番
[24] 踏切制御(車上)
踏切位置情報
●
②
踏切警報開始要求
○
●
[25] 踏切制御(地上)
踏切警報開始要求
○
●
踏切状態信号
●
○
踏切制御装置
踏切警報開始・遮断指令
○
●
踏切制御装置
踏切警報解除・遮断解除指令
○
●
踏切制御装置
踏切制御状態
●
○
[26] 速度制限の決定(踏切)
踏切制御状態
●
○
[27] 停止限界の決定
停止限界位置情報(最終)
●
○
[28] 他の制約条件の決定(車上)
[29] 他の制約条件の決定(地上)
速度規制区間,規制速度
●
○
各種制約条件
●
○
速度規制区間,規制速度
●
○
[30] 欠番
記号○,①及び②は送信元に当たる。記号①及び②はA.1の注記1に対応する。●は送信先(要受領応答)である。
情報名が空欄の行は,装置間の情報の授受がないことを示す。
50
E 3801-2:2018
表D.1−JRTC装置間の授受情報(続き)
番号
処理名称(機能)
データ名
車上装置
地上装置
指令所装置
外部装置
[31] ブレーキパターンの決定
走行路の線形情報(勾配など.)
●
②
停止限界位置情報(最終)
●
○
各種制約条件
●
○
[32] 列車速度計算
列車速度・位置検出信号
●
○
列車速度検知装置
[33] ブレーキ制御(速度超過対応)
走行路の線形情報
●
②
ブレーキノッチ指令
○
●
ブレーキ制御装置
[34] 運転速度曲線の決定
走行路の線形情報(勾配など.)
●
②
[35] 運転速度曲線に従った列車走行制御
走行路の線形情報
●
②
力行ノッチ指令
○
●
駆動制御装置
ブレーキノッチ指令
○
●
ブレーキ制御装置
[36] 列車走行の制限
[37] 走行線路の監視
走行線路障害物検知情報
●
○
走行路障害物検知装置
走行線路異常通知
●
○
運転士(HMI)
走行線路監視情報
●
○
○
●
[38] 戸開制御
戸開指令
○
●
ドア制御装置
[39] 戸閉制御
戸閉指令
○
●
ドア制御装置
[40] 欠番
[41] 分割
[42] 併合
[43] 列車ダイヤの取込み(インタフェース)
列車ダイヤ
●
○
[44] 制御用列車ダイヤの更新
[45] 制御用列車ダイヤの変更
[46] 実績データの管理
在線状態
○
●
[47] 運行係員とのHMI
制御用列車ダイヤの変更操作情報
●
○
臨時速度制限に関する操作情報
●
○
速度規制区間,規制速度
●
○
[48] 列車追跡
在線状態
○
●
[49] 運行乱れの監視
[50] 自動ルート設定
ルート設定要求
●
○
ルート取消要求
●
○
ルート監視情報
○
●
[51] 制御用列車ダイヤの調整
[52] 保守作業管理システムとのインタフェース
保守作業関連情報
●
○
[53] 保守作業のための転てつ器転換制御
転換指令
○
●
転換状態登録情報
●
○
[54] 分岐器及び軌道の使用停止/解除
分岐器,軌道等の
○
●
使用停止・解除指令
[55] 保守作業エリア(線路閉鎖,保守用車使用)
ルート構成要素使用状態
●
○
の設定/解除
(保守作業使用/解除登録情報)
記号○,①及び②は送信元に当たる。記号①及び②はA.1の注記1に対応する。●は送信先(要受領応答)である。
情報名が空欄の行は,装置間の情報の授受がないことを示す。
D.3.2 JRTCと他システム間の授受情報
JRTCは,次に示す他システムと情報(制御電文)をやり取りするが,詳細内容については鉄道事業者
が定める。
− 駅システム
− インフラ設備
− 車両システム
− メンテナンスシステム
− 運行計画系システム
− 電力管理システム
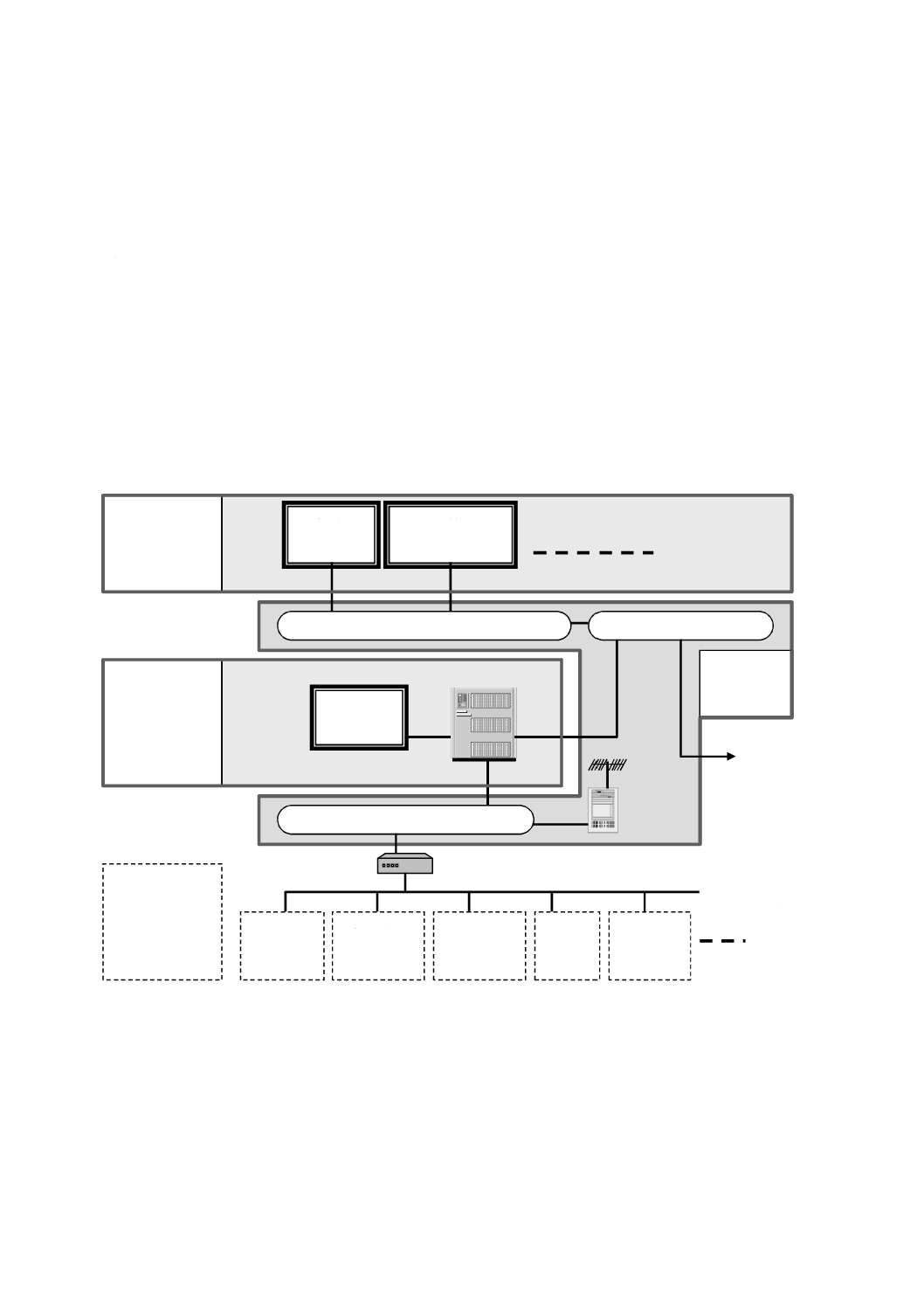
51
E 3801-2:2018
附属書E
(参考)
システム構成及びシステム要求事項の具体例
E.1
一般
この附属書は,システム要求仕様を構成する要素の基本的な概念の幾つかについて,具体的な例などに
よって示す。
E.2
全体システム構成
E.2.1 地上システム
図1に示す地上に設置されるシステムの主要装置構成例を,図E.1に示す。ここに示す内容は,装置構
成の一例であり,他の構成を排除するものではない。
図E.1−地上システム構成例
指令所内伝送ネットワーク(NW)
指令所装置
指令
端末
運行管理・
監視制御装置
保守作業管理装置など
必要なシステム
地上装置
(拠点)
沿線装置
(JRTCシステム外)
拠点間伝送NW
地上制御装置
拠点内NW
無線
基地局
沿線装置I/O
踏切制御
装置
境界進入
検知装置
車上ID
検知装置
転てつ
装置
転落検知
装置
接続が必要
となる沿線装置
拠点
端末
データ
通信装置
他の
地上装置へ
沿線装置
(JRTC外)
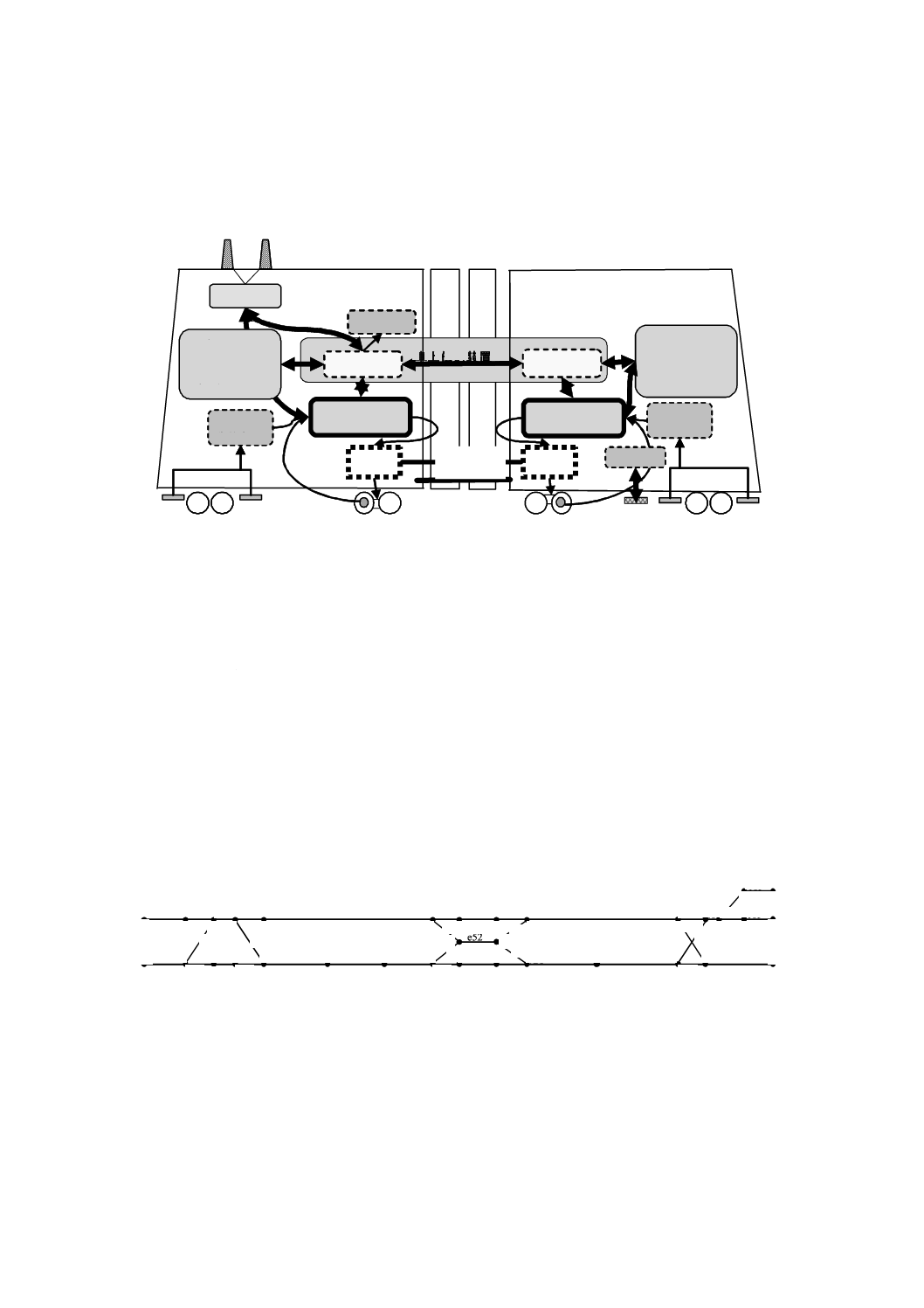
52
E 3801-2:2018
E.2.2 車上システム
車上システムの構成例を,車上装置と接続される列車制御に関係する装置とを中心に,図E.2に示す。
ここで示す内容は,装置構成の一例であり,他の構成を排除するものではない。
位置車上子
車上伝送装置
検査記録部
アンテナ
車上無線局
位置車上子
運転台
ID車上子
速度発電機
引き通し線
車上伝送部
トランスポンダ
送受信部
継電器
継電器部
乗務員HMI
表示装置(主・副)
操作盤
運転台条件
運転台
ブレーキ指令
車上伝送部
車上装置
乗務員HMI
表示装置(主・副)
操作盤
運転台条件
車上装置
トランスポンダ
送受信部
ID制御装置
図E.2−車上システム構成例
E.3
システム要求事項の具体例
E.3.1 線路上の位置の表現
E.3.1.1 線路網のグラフ表記法
線路網の図式化には,線路左右のレールを1本の線とみなしたグラフ表現をとることができる。線路網
上の始端,終端又は分岐点を節点(図E.3のv1〜v31)といい,それらの節点と節点とを結ぶ線分を辺(図
E.3のe1〜e31)という。辺は,データ管理上の便宜性の確保,従来制御との関係性,又は運転効率を高め
るために,必要に応じてその辺上の任意の節点(以下,分割節点という。)によって更に複数の辺に分割し
てもよい。各辺の始端,終端及び辺間の接続を定義し,辺内の相対位置を指定することで位置を表すこと
ができる。
図E.3−単純な線路網のグラフ表記
E.3.1.2 分岐部の分岐節点の配置例
代表的な2分岐箇所における分割ルールを定めるときの分岐箇所の節点(以下,分岐節点という。)の決
め方には,幾つかの案,例えば,A分岐器の前端部,Bトングレール前端部,Cクロッシング部などが考
えられるが,標準的なルールとしては,Aの採用を推奨する(図E.4参照)。
なお,図E.4における分岐節点(v2)の前後の辺(e1,e2及びe3)の範囲を決定する各分割節点(v1,
v1
v2
v3 v4
v5
v6
v7
v8
v9
v10 v11
v12 v13 v14
v15 v16
v17
v18
v19
v20
v21
v22
v23
v24
v25
v26
v27
v28
v29
v30
v31
v51
v52
e1
e2
e3
e4
e5
e6
e7
e8
e9
e10 e11 e12 e13
e14
e15
e16
e17
e18
e19
e20
e21
e22
e23
e24
e25
e26
e28
e29
e30
e31
e51 e52
e33
e32
e54
e53
e55
e27
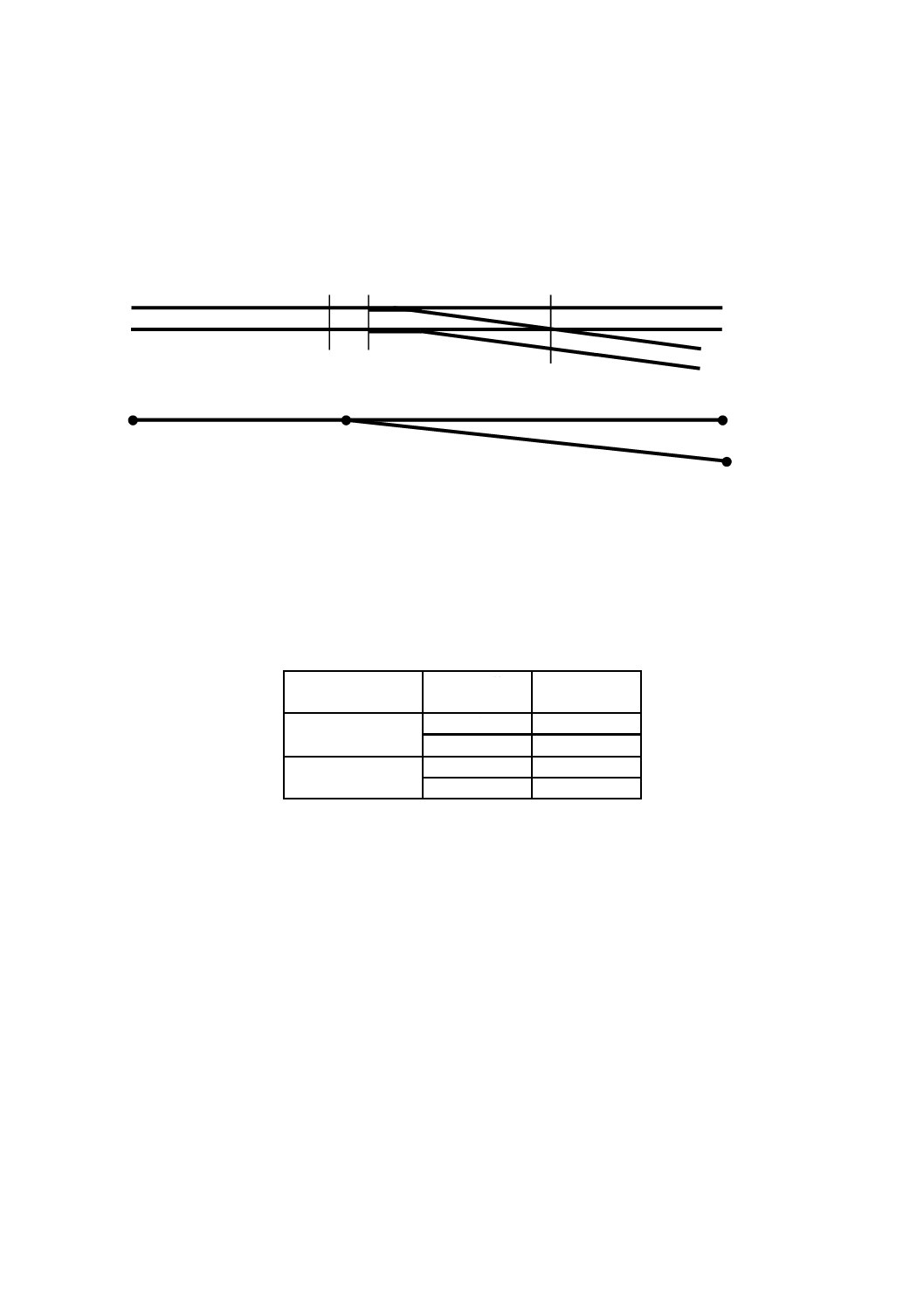
53
E 3801-2:2018
v3及びv4)については,運転の安全確保又は効率向上の要求に応じて,通常は,てっ査鎖錠区間若しくは
車両接触限界位置又は従来の連動論理に用いられる閉塞区間に基づき決定されるが,安全制御の条件だけ
でなくデータの管理上の便宜性,従来制御との関係なども考慮し,線区の特性に最も適した位置に節点を
配置すればよい。
図E.4−2分岐箇所における分岐節点の位置の例
E.3.2 列車進行方向の決定
列車の進行方向は,選択された運転台の方向とレバーサ位置とによって決定する。これらの関係を表E.1
に示す。
表E.1−選択された運転台の方向と列車進行方向との関係
選択された運転台
の方向
レバーサ位置
列車進行方向
起点方
前
起点方
後
終点方
終点方
前
終点方
後
起点方
表E.1における選択された運転台の方向は,編成方向及び編成内の運転台位置によって変わる。編成内
の運転台位置をA,Bと区別したとき,編成方向は運転台Aが起点方を向いているときに起点方とし,終
点方を向いているとき終点方とする。図E.5に示す例では,編成1の編成方向はケース1とケース3とで
は起点方であり,ケース2では終点方となる。編成2の編成方向はケース1が起点方であり,ケース2と
ケース3とでは終点方である。
選択された運転台の方向は,編成方向が起点方の場合に,運転台Aであれば起点方となり,運転台Bで
あれば終点方となる。編成方向が終点方の場合は,運転台の方向も上記の逆となる。
A
C
v3(分割節点)
v4(分割節点)
B
v1(分割節点)
v2(分岐節点)
e1
e2
e3
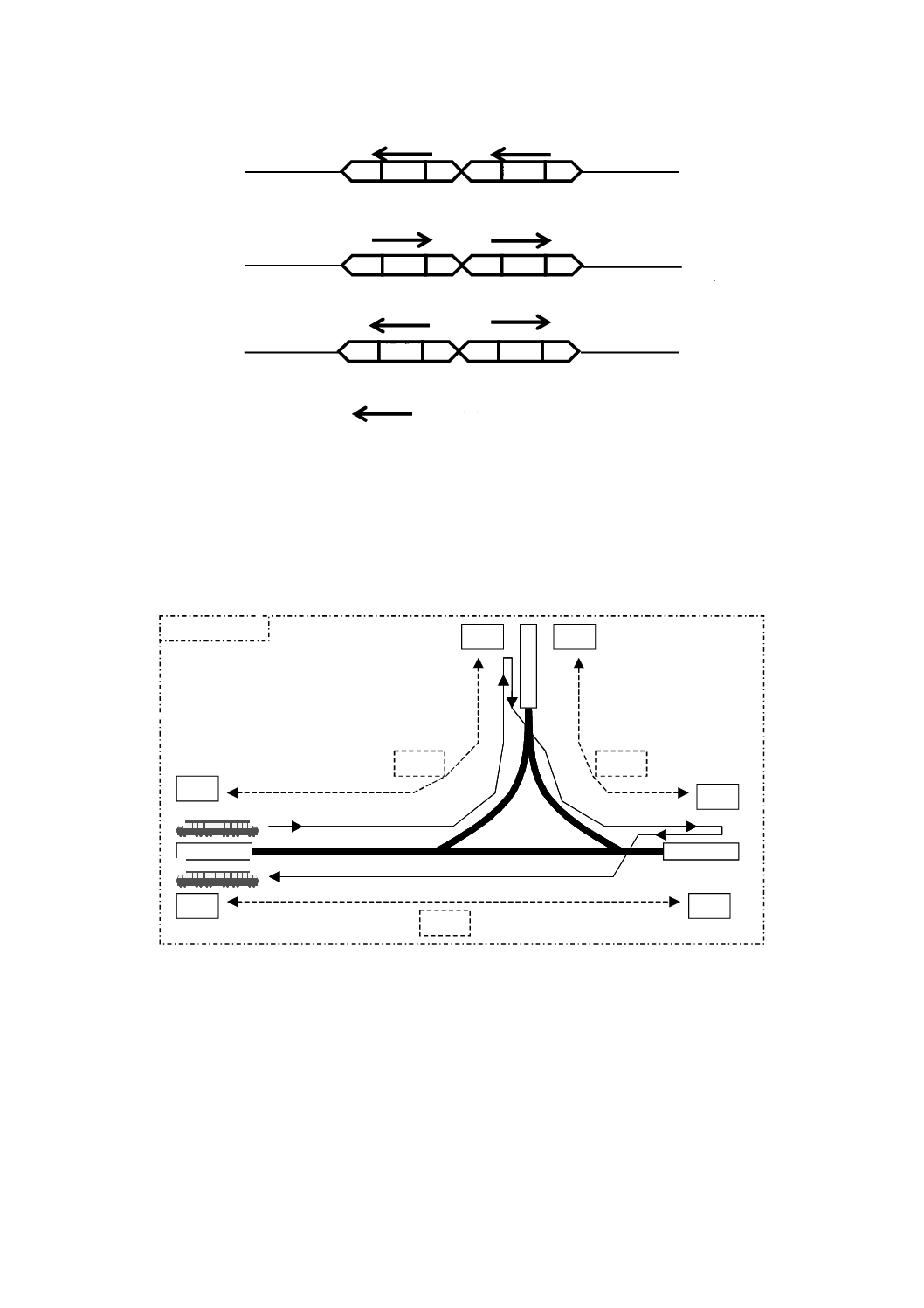
54
E 3801-2:2018
図E.5−列車編成方向の例
線区の条件によってはケース2,ケース3のような場合もある。例えば,図E.6のような特殊な路線形
態では,運転の都度,編成方向が変わる場合がある。このような場合には,編成方向を正しく認識する必
要がある。
S1
S3
S2
A
B
A
B
S1
S3
S2
A
B
A
B
起点
終点
終点
起点
終点
起点
路線K
路線L
路線M
制御エリアX
図E.6−特殊な線路形態の例
E.3.3 精度に関する注意事項
E.3.3.1 位置表現の最小単位に関する考え方
E.3.3.1.1 間隔制御を考えた場合の位置検知誤差及び位置検知精度
位置検知するため,特定の参照位置を認識し,そこからの移動距離を車輪の回転数などから求める方式
をとった場合,車輪径の設定誤差,空転滑走,踏面位置のずれなどで誤差が蓄積していくことが考えられ
る。この誤差は,安全な間隔を確保するためのブレーキ制御に影響する。ブレーキ制御に要求される位置
精度については,安全側の余裕距離に応じた精度を満足する必要がある。
B
A
A
B
B
A
B
A
A
B
A
B
起
点
方
終
点
方
ケース1
ケース3
ケース2
編成1
編成1
編成1
編成2
編成2
編成2
は編成方向を示す。
55
E 3801-2:2018
ここで,位置検知の分解能についてまず考えると,位置精度は,その最大許容誤差の少なくとも1/2(理
想的には1/10)の分解能をもつ必要がある。例えば,10 m程度の測定誤差を許容できるとすると,1〜5 m
の位置検知精度が必要になる。また,安全側の余裕距離は,統計的な数値の標準偏差,確率分布などを考
慮して定める手法が考えられるが,更に安全側を考えると,観測できる誤差の最大値の5倍程度の値に設
定する考え方もある。現実的には,運転士の心理的な要因なども考える必要があり,これらを考慮して余
裕距離を設定する。
E.3.3.1.2 特殊な場合の位置検知に関する最大許容誤差及び位置検知精度
特殊な場合(有効長の短い番線での停止制御など)では物理的な制約によって,余裕距離を短くしなけ
ればならない場合がある。例えば,停止限界から1〜2 m程度しか確保できないような位置に停車させな
ければならない特殊な状況では,最大許容誤差は0.2〜0.4 m程度となり,0.1 mの位置検知精度が必要に
なるような場合もある。
E.3.3.2 速度精度に関する注意事項
速度の検知誤差は,ブレーキパターンに対する速度照査機能の誤差となる。この照査機能は,実用化さ
れているブレーキパターンを用いるATCと同じ機能であり,少なくとも同等の速度検知精度をもつことが
求められる。
一方,乗務員への速度表示分解能は,制御に使用する速度精度と必ずしも等しい必要はなく,1 km/h単
位でも十分とも考えられるが,アナログ表示の場合は従来表示方式に準じればよい。指令所で運行監視情
報として伝える現在速度についても,乗務員に表示する内容と同様の精度でよいと考える。
E.3.3.3 制御遅延時間などに関する注意事項
各装置間の伝送遅延時間及び伝送周期時間については,位置の遅延誤差及び位置の分解能劣化の原因に
なることから,あらかじめ定めた処理性能が発揮できない場合には,安全側の制御に移行できるようにな
っていなければならない。例えば,緊急停止情報が発信された場合に,車上側でその発信情報の認識が遅
れると危険が及ぶ可能性がある。このため,無線通信の接続性を監視し,無線通信不良を一定時間以上検
知した場合は,列車を停止させるなどの制御をする必要がある。監視及び制御処理は,車上で電文を受信
し,その処理を実施する処理周期などにも関係する。すなわち,列車制御を車上のコンピュータで行う場
合,電文受信処理,列車位置認識,速度照査など列車制御に必要な処理を周期的に行うことが通常と考え
られる。この処理周期は,求められる検知誤差精度又はレスポンスタイムに応じて,適宜,必要な単位精
度(msオーダ)を選択しなければならない。
一方,地上で実施する制御である連動の進路転換制御などでは秒オーダの単位でレスポンス時間が管理
され,ダイヤについては一般的には分オーダの制御時刻の設定,ときには30秒又は15秒オーダの設定な
どもあり,このように制御に使用する時間単位にバリエーションがあるため,それぞれに必要な最小時間
単位に見合った処理周期で制御を実施することが必要である。
E.3.4 列車走行の安全確保における関連省令との関係
“鉄道に関する技術上の基準を定める省令(平成13年国土交通省令第151号)”の第101条第1項第2
号では,列車間の安全を確保するための運転方法の一つとして,“列車間の間隔を確保する装置による方
法”が規定されている。また,同省令第54条第2項では,“列車間の間隔を確保する装置は,列車と進路
上の他の列車等との間隔及び線路の条件に応じ,連続して制御を行うことにより,自動的に当該列車を減
速させ,又は停止させることができるものでなければならない。”と規定されている。JRTCの主要な機能
は,この“列車間の間隔を確保する装置”に相当する“列車間隔の安全確保機能”であるが,他の列車な
どとの間隔とともに線路の条件として,ルートの開通状況及び曲線・分岐などの速度制限などの運転を行
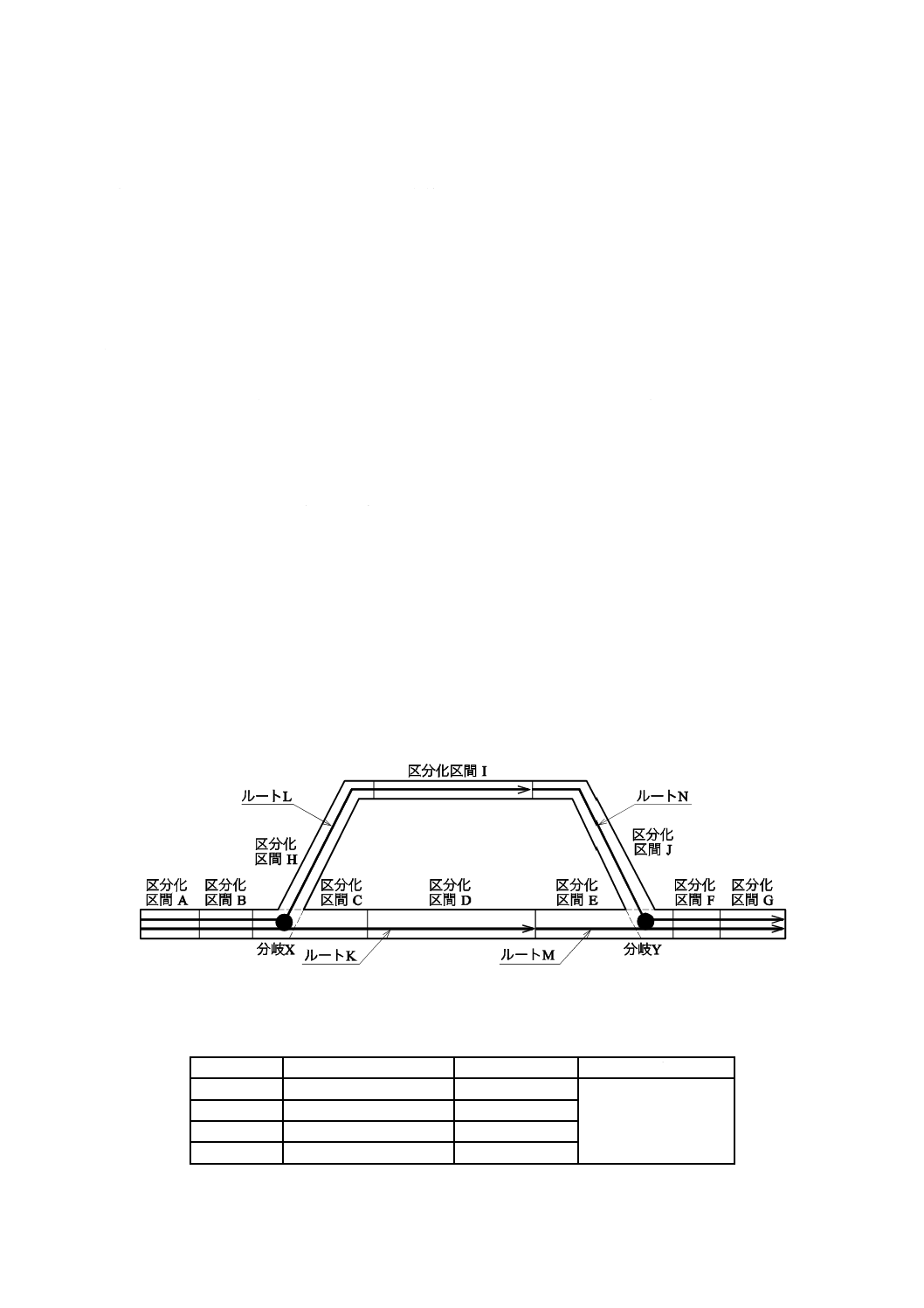
56
E 3801-2:2018
ううえの全ての条件を加味する必要がある。
そのためには,“列車等を検知する装置(同省令第59条)”及び“信号相互間等を連鎖させる装置等(同
省令第56条)”に相当する機能である“列車在線位置の検知機能”及び“ルートの安全確保機能”なども
併せもつ必要がある。
列車走行の安全を確保するためには,次の条件を満たす必要がある。
a) ルートの安全を確保した線路の条件の下で,
b) 前方を支障する列車との安全な間隔を確保し,
c) 固定及び臨時の制限速度を守り,
d) その他,緊急防護等の停止指示に従う。
a) については,5.4.7.2で,主として駅構内のルートの安全確保を規定しているが,従来の連動装置の概
念では,転てつ器の転換制御によるルートの開通及び鎖錠のほかに,b)〜d) を含み,ルートの安全確保を
実現してきた。JRTCでは,a) は主として転てつ器の転換制御によるルートの開通及び鎖錠機能に徹し,
b)〜d) は“列車間の間隔を確保する装置”に相当する機能に任せる考え方を取ることも可能である。また,
従来の連動装置と列車間の間隔を確保する装置とを組み合わせる方法又は従来の連動制御論理と列車間の
間隔を確保する装置とを組み合わせる方法をとることもできる。
E.3.5 ルートの表現手法及び区分化区間
線路網の一般的なグラフ表現手法はE.3.1.1に示すとおりである。図E.7及び表E.2は,辺に相当する区
域を区分化区間と定義し,区分化区間の一連の並びを定義することで,その並びが一つのルートになるこ
とを示している。また,設定する区分化区間は,E.3.4に記載したように,従来の連動装置に合わせて,分
割してもよい。又は路線情報(最高速度制限区間,路線情報の最大保有量など)に合わせて,適切な区間
に区切ってもよい。特に,区分化区間を設定する必要がない場合は,区切る必要はない。ここで示す各ル
ートは,ルート構成要素として,分岐を含まない区分化区間と分岐とを含み,その接続順序を規定して,
ルートを特定する場合の例を示している。
図E.7−ルート及びその構成要素の例
表E.2−ルート構成要素一覧
ルート名称
構成要素(区分化区間) 構成要素(分岐)
備考
K
A,B,C,D
X
区分化区間C,E,H,
及びJには分岐の可動
部を含む。
L
A,B,H,I
X
M
E,F,G
Y
N
J,F,G
Y
57
E 3801-2:2018
E.3.6 ルートの安全確保
ルートとは,JRTCでは,列車などの移動のためあらかじめ定められた通りみち(路)として定義して
いるが,列車の進行予定の通りみち(路)に分岐がある場合のルートの安全確保には,次の二通りの考え
方ができる(図E.8参照)。
a) 分岐器で分岐して異なる方向に向かう通りみち(路)に対して,走行しようとする列車が使用予定の
あらかじめ定められたルートの区間を独占することが可能な場合に限り,そのルートの転てつ器を転
換,開通かつ鎖錠することによって,そのルートを当該列車に独占させ,ルートの安全を確保する方
式。この場合の支障位置の決定は5.4.7.2.3に,停止限界の決定は5.4.7.4による。
b) 分岐器で分岐して異なる方向に向かう通りみち(路)に対して,走行しようとする列車が使用予定の
ルートの転てつ器をルートの開通方向に鎖錠することが可能な場合に限り,その転てつ器を,転換,
開通かつ鎖錠することによって,ルートの安全を確保する方式。したがって,安全を確保したルート
上に他の列車が存在してもよく,その場合の支障位置の決定は5.4.7.3に,停止限界の決定は,5.4.7.4
による。
a) の考え方によれば,従来の連動論理に準じた処理で安全なルートを確保することが可能である。
b) の方式は,ルート構成要素の使用状態と使用する列車との関係からルートの安全を脱線防止の面から
先に確保し,その後,間隔制御で停止限界を決定することによって衝突を防止し,列車走行の安全を確保
する方式であり,ルートの確保と間隔制御とが機能階層化された方式である。
a) 及びb) の方式の概要を,本線開通を例にとって図E.8に示す。
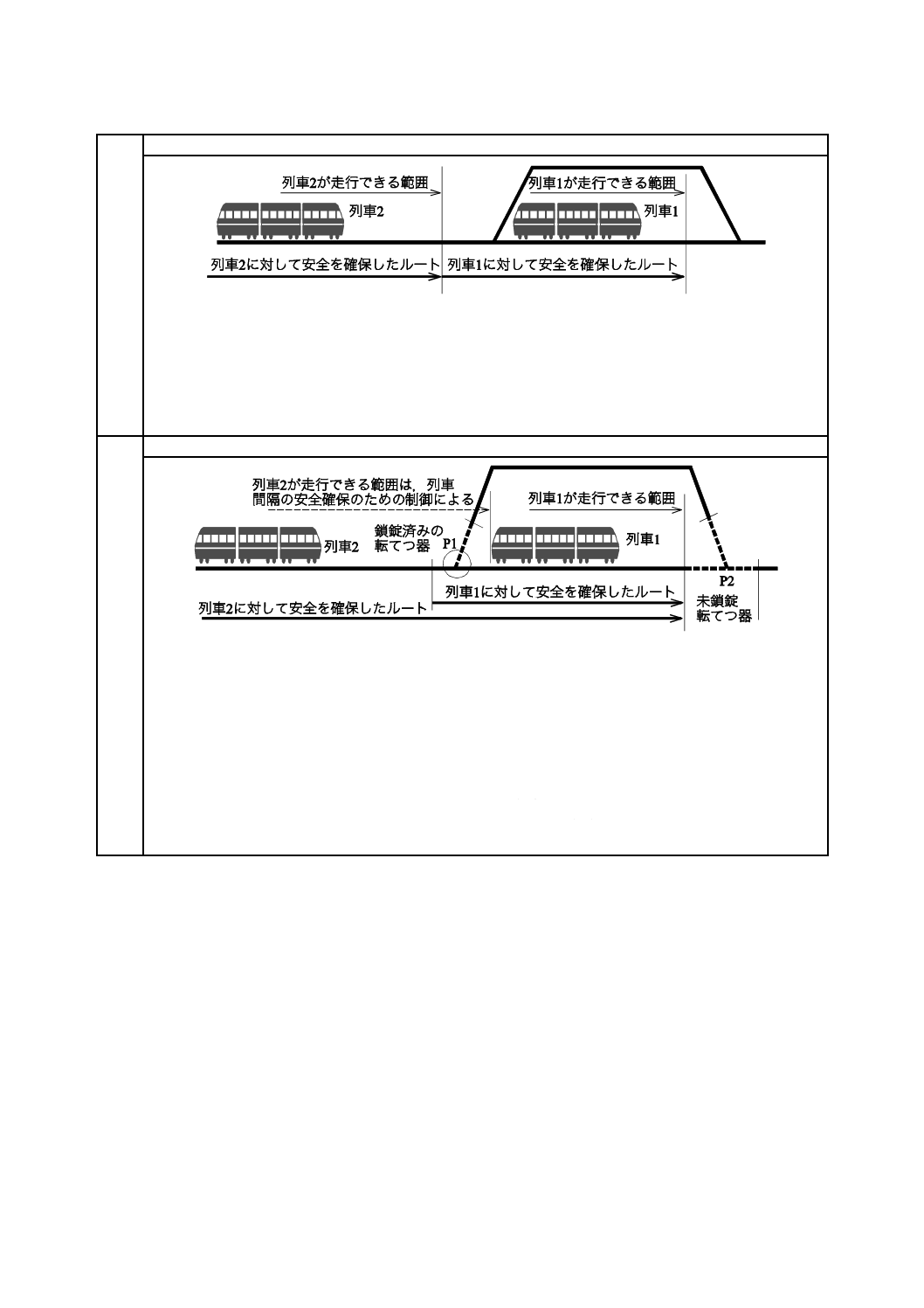
58
E 3801-2:2018
a)
定められたルートの区間を一列車に独占させてルートの安全を確保する方式
− 安全を確保したルート
列車1は,その列車に対し安全を確保したルートを独占する。列車2は,列車1と同一ルートを走行
する予定であるが,前方のルートを列車1が独占しているので,列車2の安全を確保したルートの終端
は,列車1の独占しているルートの始端までとなる。
− 列車の安全な走行が可能な範囲
安全を確保したルートの終端までが走行可能な範囲となる。
b)
ルート上の転てつ器の走行方向への開通・鎖錠完了をもってルートの安全を確保する方式
− 安全を確保したルート
列車1は,その進行方向に転てつ器P2が鎖錠されていないので,安全を確保したルートはP2の手前
までとなる。列車2は,転てつ器P1を列車1と同じ方向に進行する。転てつ器は複数の列車に対して
鎖錠することができ,上図では,転てつ器P1が列車1と列車2との双方に対し鎖錠されており,列車2
の進行に対しても安全が確保されている。しかし,転てつ器P2は鎖錠されていないので,列車2の安
全を確保したルートは,列車1と同様にP2手前までとなる。
− 列車の安全な走行が可能な範囲
列車1は,安全が確保されたルート上に他の列車が在線しないので,その終端までが走行可能な範囲
となる。列車2は,安全が確保されたルート上に他の列車1が在線するので,列車1との安全な間隔を
確保するために,走行可能な範囲は,5.4.7.3及び5.4.7.4による。
図E.8−ルートの安全を確保する方式
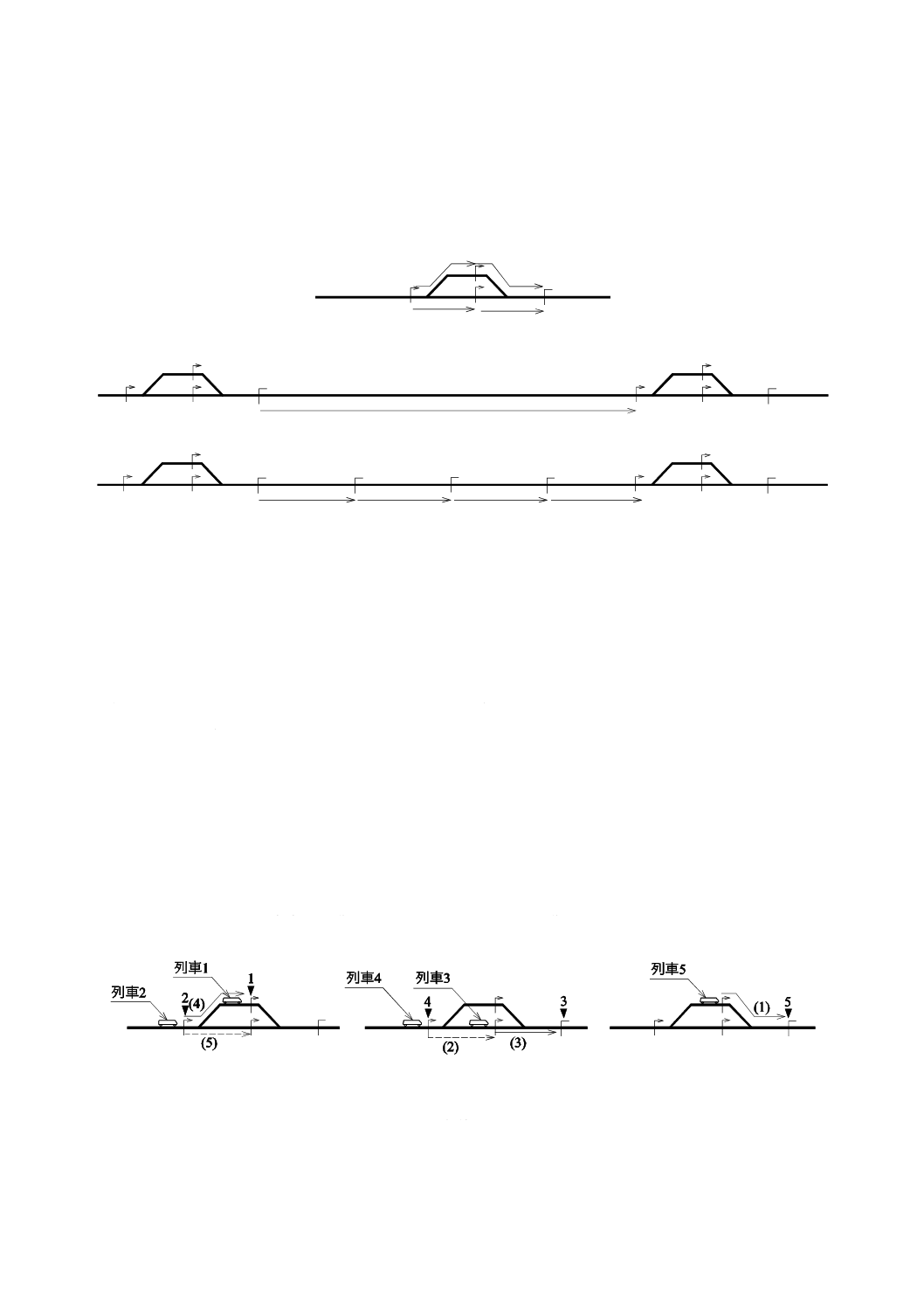
59
E 3801-2:2018
E.3.7 進入許容区間の概念
E.3.7.1 ルートの例
進入許容区間はルート単位となるが,図E.9に代表的なルートの例を示す。図中の→がルートを示して
おり,駅構内のルートに加えて,駅間についても図に示すようなルートを設けている。
a) 駅構内のルート(例)
b) 駅間のルート(例)
図E.9−代表的なルートの例
E.3.7.2 1ルート1列車の考え方を導入した場合
E.3.7.2.1 基本的な考え方
図E.9の各ルートに関し,1ルート1列車の考え方を導入した場合の進入許容区間の例を図E.10〜図E.14
に示す。図中,(1),(2),(3),…は,→のルートを示しており,▼1,▼2,▼3,…(又は▲1,▲2,▲3,
…)は,それぞれ列車1,列車2,列車3,…に関する進入許容区間の終端を示している。
なお,→が破線で示されているルートは,当該ルートに進入しようとしている列車に対し,進入が許容
されていない状態を示している。
図E.10は,駅構内の例を示し次の意味をもつ。
− 列車1はルート(4)の内方への進入が許容されており,▼1が進入許容区間の終端となる。
− 列車2はルート(5)の内方への進入が許容されていないため,▼2が進入許容区間の終端となる。
− 列車3はルート(3)の内方への進入が許容されており,▼3が進入許容区間の終端となる。
− 列車4はルート(2)の内方への進入が許容されていないため,▼4が進入許容区間の終端となる。
− 列車5はルート(1)の内方への進入が許容されており,▼5が進入許容区間の終端となる。
図E.10−1ルート1列車の考え方を導入した場合の進入許容区間(駅構内の例)
図E.11は,駅間の例を示しており,先行列車が在線しないルートに関しては,進入を許容されることに
なるため,各列車の進入許容区間の終端は,図に示すとおりとなる。
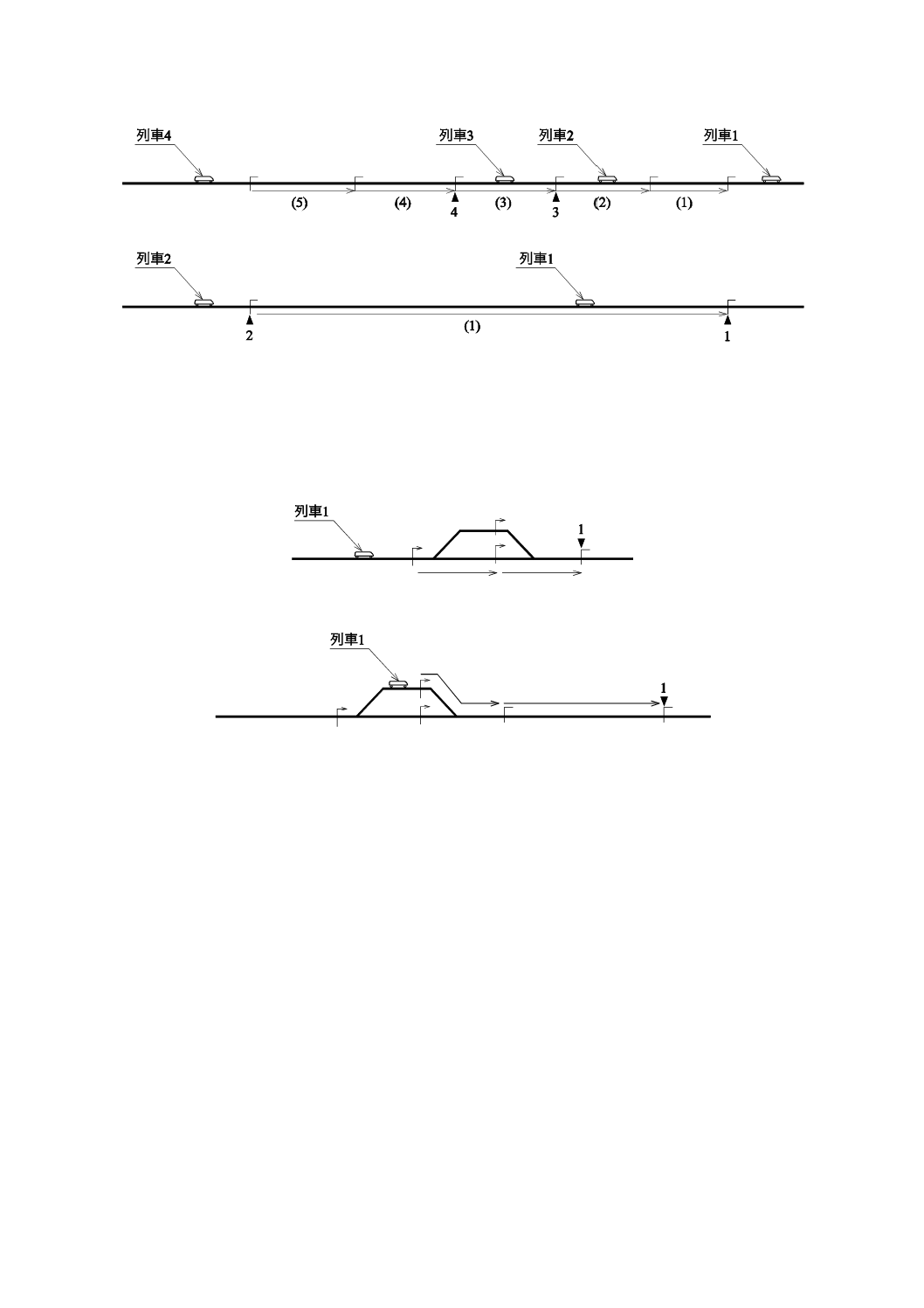
60
E 3801-2:2018
図E.11−1ルート1列車の考え方を導入した場合の進入許容区間(駅間の例)
E.3.7.2.2 連続する複数のルートをまとめて進入許容区間とする場合
駅通過又は出発のような場合,図E.12に示すように連続する複数のルートをまとめて進入許容区間とし
てもよい。
a) 場内と出発との連続ルート(通過ルート)を進入許容区間とする場合
b) 出発ルートと駅間ルートとの連続ルートを進入許容区間とする場合
図E.12−連続する複数のルートをまとめて進入許容区間とする場合(例)
E.3.7.3 ルート内に複数列車の進入を許容する考え方を導入した場合
E.3.7.3.1 駅間のルートに複数列車の進入を許容する場合
駅間のルートにおいて,図E.11に示したような1ルート1列車(固定閉塞)の考え方ではなく,図E.13
に示すように駅間の同一ルート内に複数列車の進入を許容する考え方を導入してもよい。
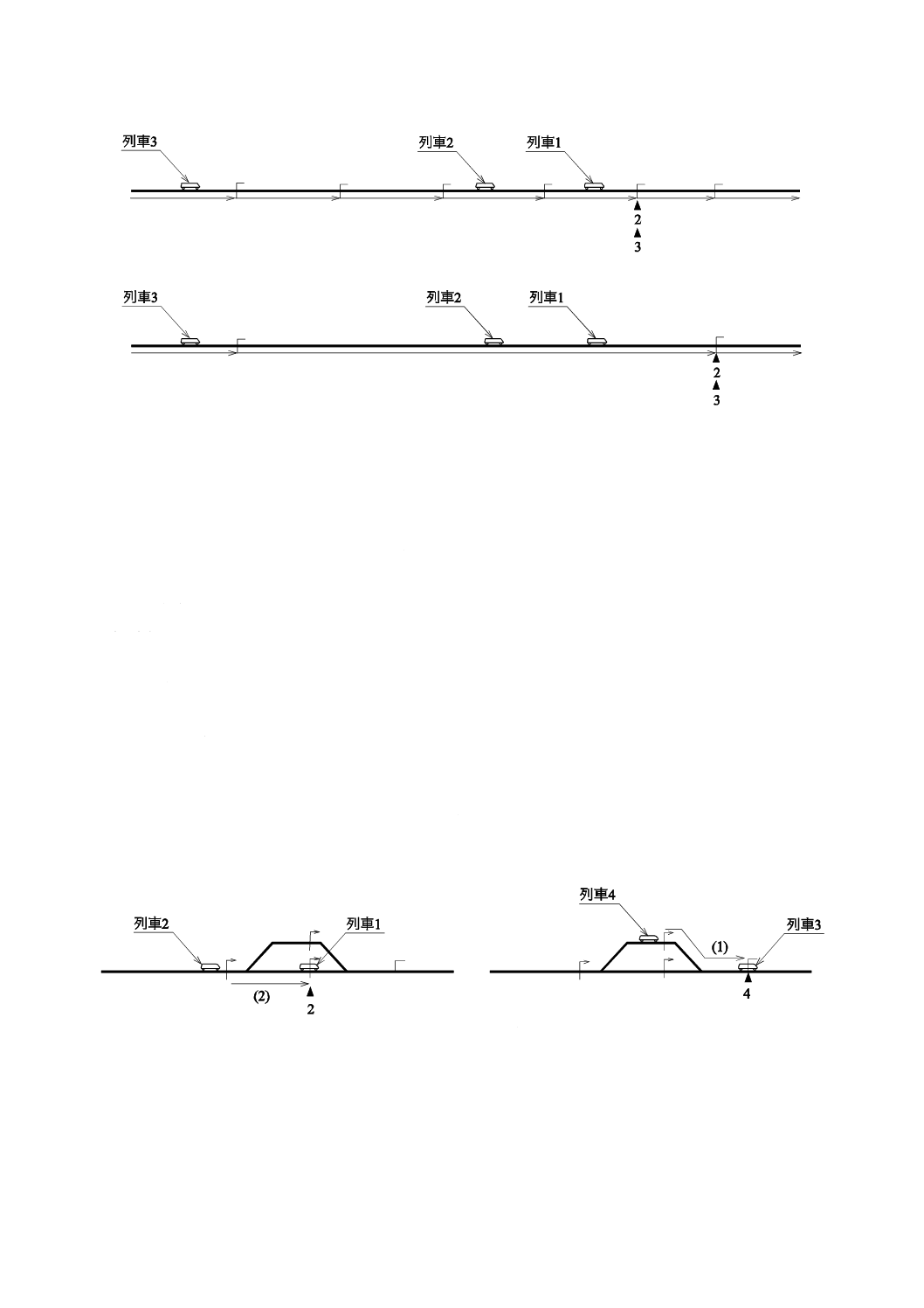
61
E 3801-2:2018
図E.13−駅間のルートに複数列車の進入を許容する場合(例)
図E.13上部の例では,列車1が在線する駅間のルートに列車2及び列車3の進入も許容しており,列車
2及び列車3の進入許容区間(ルート単位で決定)の終端は▲2及び▲3となる。
図E.13下部の例においても,列車1が在線する駅間のルートに列車2及び列車3の進入も許容しており,
列車2及び列車3の進入許容区間(ルート単位で決定)の終端はそれぞれ▲2及び▲3となる。
なお,同一ルートに複数列車の進入を許容する場合における列車の追突防止は,列車間の安全確保機能
によって行う。
E.3.7.3.2 駅構内のルートにも複数列車の進入を許容する場合
上述の例では,駅間のルートに複数列車の進入を許容する例を示したが,図E.14に示すように駅構内の
ルートに複数列車の進入を許容してもよい。図E.14の例では,ルートの安全を先に確保する(この段階で
は,転てつ器の転換・鎖錠状態は考慮するが,ルート内に他列車が在線するかどうかまでは考慮しない。)。
図E.14は,次のことを示す。
− 列車2は,ルート(2)内の分岐器が走行方向に転換・鎖錠されていれば,ルート(2)への進入を許容され,
▲2が進入許容区間の終端となる。
− 列車4は,ルート(1)内の分岐器が走行方向に転換・鎖錠されていれば,ルート(1)への進入を許容され,
▲4が進入許容区間の終端となる。
図E.14−駅構内のルートにも複数列車の進入を許容する場合(例)
E.3.8 停止限界の決定に関する留意事項
5.4.7.2.3で規定されるルートへの進入許容区間及び支障位置を用いて,5.4.7.4.1で規定される停止限界を
決定する上で,ルートの前方に存在する支障が停止限界に影響を与える場合があることに注意が必要であ
る。
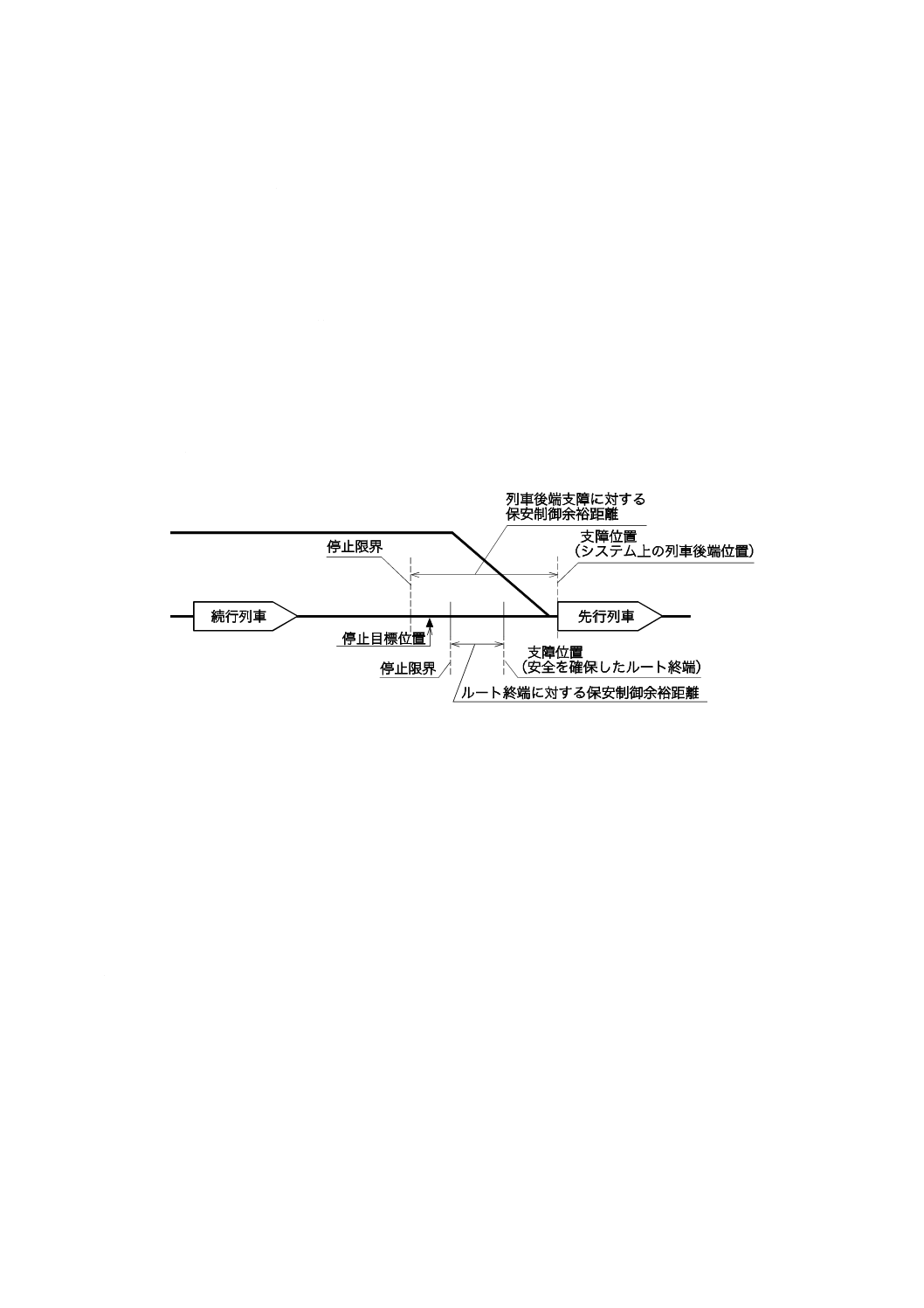
62
E 3801-2:2018
5.4.7.4.1では,列車の前方に複数の支障がある場合には最も手前の停止限界を選択すると規定した。支
障の種別ごとに最悪条件を考慮して決定された保安制御余裕距離に差異がある場合には,複数の支障位置
の前後関係が,対応する複数の停止限界の前後関係と異なる場合が起こり得る。このとき,駅の停止目標
位置,駅設備の境界位置など,運用の条件に従って列車の停車位置が定まっている場合,線区の地理的条
件によっては,支障種別の選択及び支障種別に対する保安制御余裕距離の調整を行うことが必要となる。
例えば,図E.15に示すように,有効長が短い駅構内番線においてルート終端の前方に先行列車が在線し
ている場合,先行列車の後端に対して保安制御余裕距離を確保して算出される停止限界が,ルートの終端
に保安制御余裕距離を確保して算出される停止限界よりも手前となることがある。このような状態におい
て,先行列車による通常の停止限界を越えて続行列車を停止目標位置まで進入させるためには,ルート終
端の前方の先行列車に対する停止限界が列車走行に支障を与えないよう,駅構内における先行列車に対す
る保安制御余裕距離を短縮するなどの対応を行う必要がある。
このような線区の地理的条件を考慮した保安制御余裕距離に対する具体的対策は,運行の形態などを考
慮して,鉄道事業者が定める。
図E.15−支障及び停止限界の特殊な例
E.3.9 踏切制御
JRTCは踏切制御機能を設けることができる。どのような機能をどのような仕組みで実現するかについ
ては多くの選択肢がある。ここでは,踏切制御の機能とその一部をJRTCで実施する場合の一例を示す。
E.3.9.1 踏切制御の基本機能
警報機及び遮断機を有する一般的な踏切の制御に関する基本的な事象を列車の接近通過の時間順に示す
と次のようなものとなる。
a) 警報開始時期の判断
b) 警報の開始
c) 遮断の開始
d) 遮断の完了
e) 列車の踏切進入(列車の先端が踏切道へ入ること)
f)
列車の踏切進出(列車の後端が踏切道から出ること)
g) 遮断の解除判断と警報の停止
JRTCの踏切制御では,列車が踏切道手前に停止する踏切ブレーキパターンを作成し,列車の踏切通過
条件が満足したときに,この踏切ブレーキパターンを解除する。踏切通過条件は,b) 警報開始の確認又は
d) 遮断完了の確認などであるが詳細は鉄道事業者が定める。遮断完了の確認を踏切通過条件とする場合に
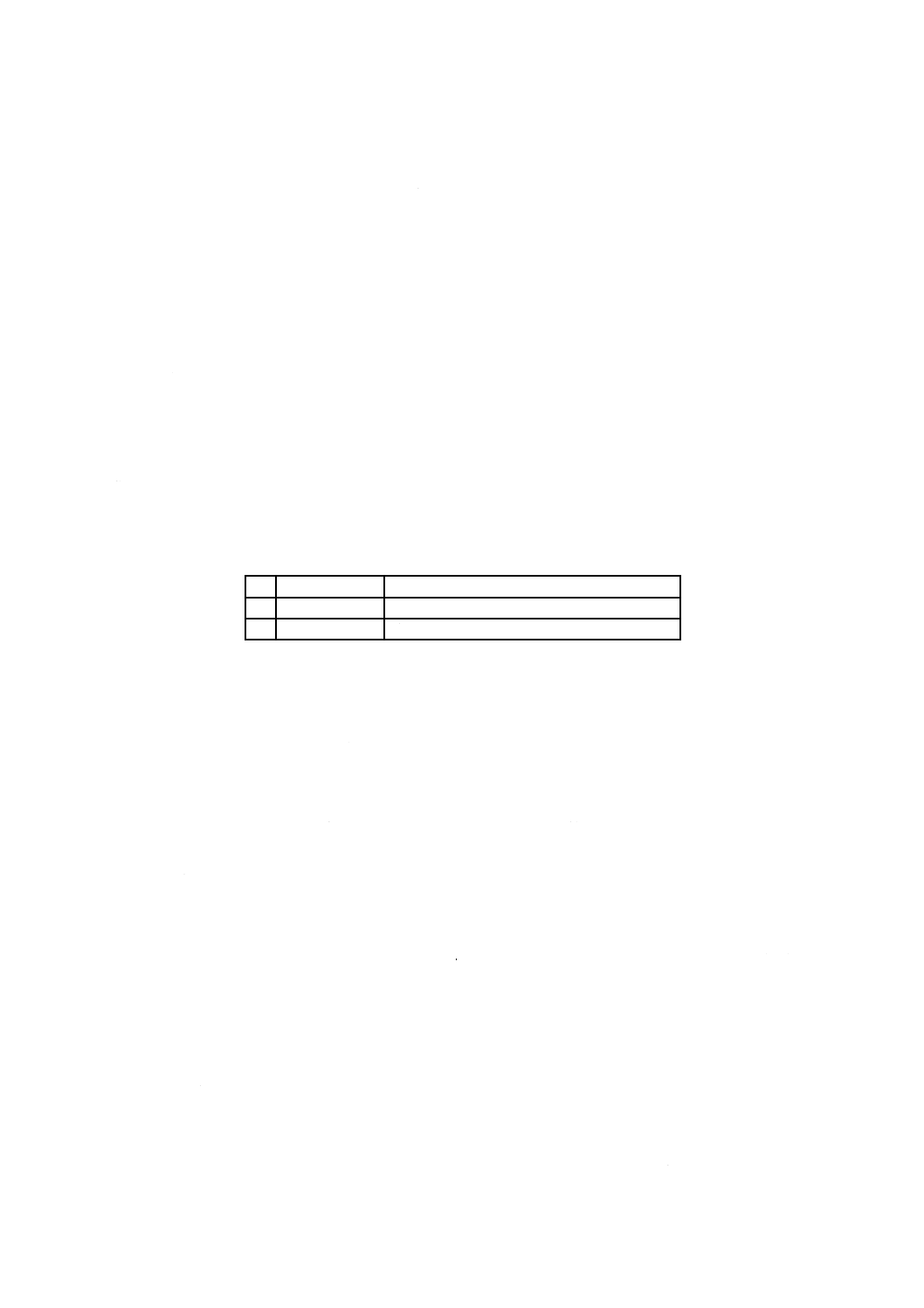
63
E 3801-2:2018
は,踏切の不具合によって遮断しないとき,列車は踏切道手前に停止することによって,踏切の安全性を
確保する。また,踏切の操作器扱い,踏切障害物検知装置とのインタフェースを用意することによって,
地上装置から各種情報を車上装置に伝送し,踏切ブレーキパターン等によって障害物などとの衝突を回避
することも可能である。
E.3.9.2 制御の方法
ここでは踏切ブレーキパターンの作成と解除,及び列車ごとの警報開始と踏切進出との判断機能をJRTC
が備える場合について示す。JRTCは通信システムを介して踏切制御装置と接続し,警報開始,遮断完了
などに関する制御情報を両者の間で伝送する方法とする。踏切制御装置は,列車毎の警報に関する情報を
管理して警報機,遮断機などを制御する場合を想定する。
a) 踏切ブレーキパターンの作成 車上装置はルート上の踏切道手前に停止できる踏切ブレーキパターン
を作成する。踏切ブレーキパターンの作成タイミングはあらかじめ指定した位置に列車が到達したと
きなどである。
b) 警報開始時期の判断と警報開始要求
1) 警報制御パラメータの設定 表E.3における警報制御パラメータ値を設定する。これらの値は通行
者の安全確保のため踏切道の幅員や踏切長等に応じて設定されなければならない。
表E.3−警報制御のパラメータ
名称
概要
T1 遮断完了時間
警報の開始から遮断動作の完了までの時間。
T2 踏切到達時間
遮断完了から列車進入までの時間。
このほか,制御の遅れ時間として,JRTC,踏切制御装置の処理時間及びそれらの間の通信遅延を考
慮した時間Tdを設定する。
2) 踏切進入予測時間Tn 列車が踏切道に進入するまでの最小の時間Tnを,列車の速度,車両性能及び
線路の速度制限データから計算する。踏切道までの間に停車駅がある場合には,駅に停車する時間
を考慮してもよい。
3) 踏切ブレーキパターン到達予測時間Tp 列車が踏切ブレーキパターンのブレーキ開始地点に到達
するまでの最小時間Tpを踏切進入予測時間と同様な条件で計算する。
図E.16にTn及びTpの概念を示す。
4) 踏切警報開始要求 表E.5に定めた時間を確保するには,列車が踏切道に進入する時間よりもT1+
Td時間前に踏切は警報を開始しなければならない。このための条件は,踏切進入予測時間Tnが式
(E.1)を満足していることである。
Tn>=T1+T2+Td ···································································· (E.1)
一方,列車が踏切ブレーキパターンによる減速を受けないためには,そのブレーキ開始地点に達す
る前に踏切ブレーキパターンを解除する必要がある。このための条件は,ブレーキパターン到達予測
時間Tpが式(E.2)を満足していることである。
Tp>=T1+Td ·········································································· (E.2)
列車が踏切に近づくに従ってTn,Tpは減少し,式(E.1)又は式(E.2)のいずれかが満足しなくなったと
きにJRTCは踏切制御装置に警報開始要求を送信する。式(E.1),式(E.2)のいずれが先に満足しなくな
るかは,列車の最高速度,減速度などに依存して変化する。図E.17は式(E.2)が先に満足しなくなる場
合を概念的に示したものである。この図においてT2が大きくなるとき,又は踏切ブレーキパターンが
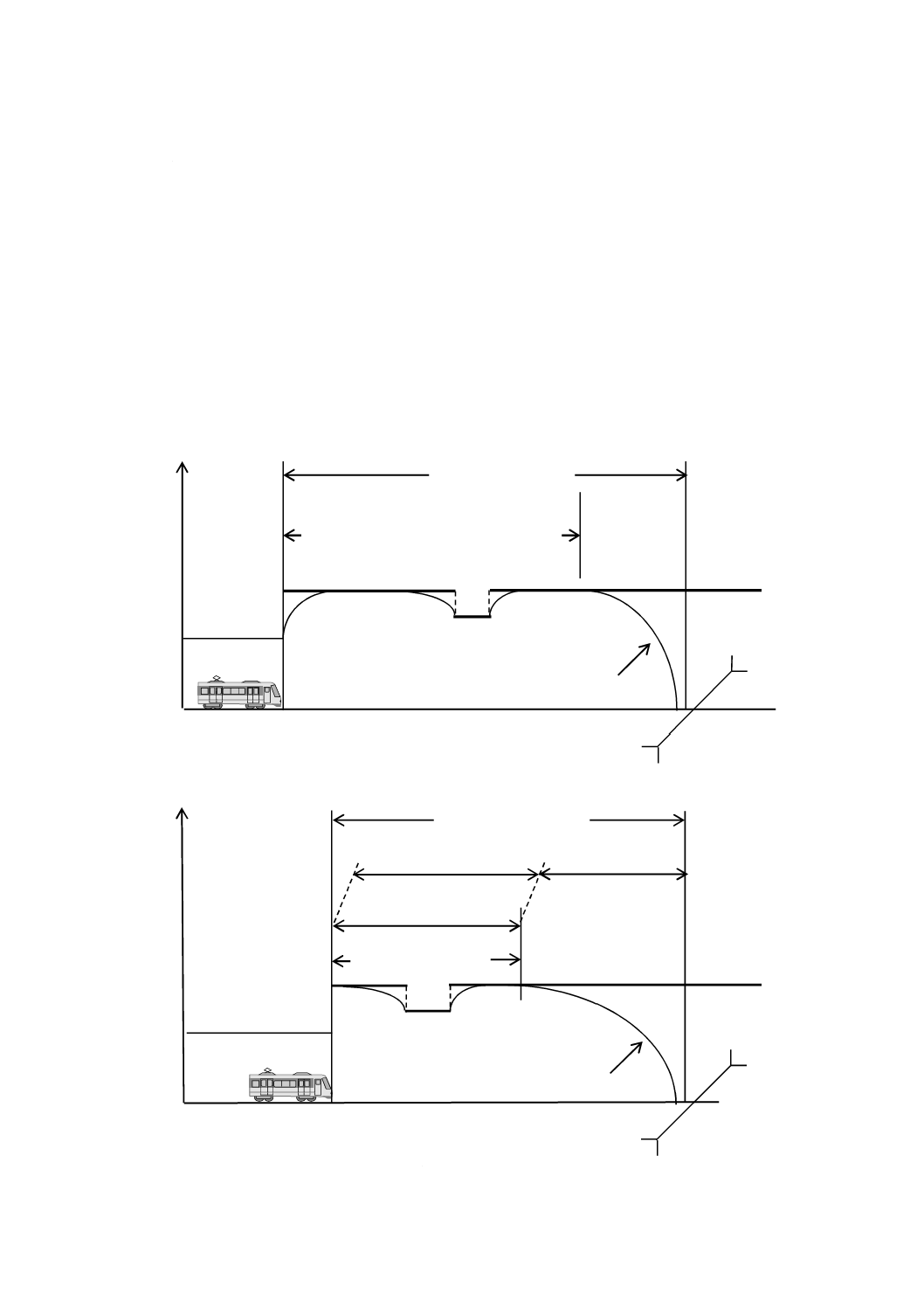
64
E 3801-2:2018
短くなるときに式(E.1)が先に満足しなくなる。
c) 踏切ブレーキパターンの解除 警報開始要求を受信した踏切制御装置は警報中でなければ警報を開始
し,列車の踏切通過条件を満足したときにJRTCに通過許可の情報を送信する。JRTCは通過可能と判
断された踏切に対する踏切ブレーキパターンを解除する。通信障害などによってJRTCが通過許可の
情報を受信できなければ,列車は踏切手前に停止する。
なお,警報開始要求の送信から踏切ブレーキパターンの解除までには少なくともT1+T2時間の経過が必
要である。このため,JRTCによって踏切制御する踏切を含むルートが安全を確保した状態に変化したと
き,列車が直ちに出発すると踏切ブレーキパターンによる減速を受けることがある。これを避けるために
は踏切ブレーキパターンの解除時間を見込んで,列車の出発を遅らせるなどの対策が必要である。
d) 列車進出の判断と警報停止要求 JRTCは,列車が踏切道を進出したとき警報停止要求を送信する。
踏切制御装置は他に警報中の列車がないなど警報停止条件が満足していれば踏切の遮断を解除し警報
を停止する。
速度
現在速度
踏切進入予測時間Tn
許容最高速度(太線)
踏切ブレーキパターン速度到達予測時間Tp
踏切ブレーキパターン
による停止パターン
踏切通過
パターン
図E.16−踏切制御に用いる予測時間の概念
速度
現在速度
踏切進入予測時間Tn
踏切ブレーキパターン
速度到達予測時間Tp
踏切ブレーキパターン
による停止パターン
踏切通過
パターン
遮断完了時間T1
踏切到達時間T2
遮断完了時間T1
図E.17−踏切ブレーキパターンが長い場合
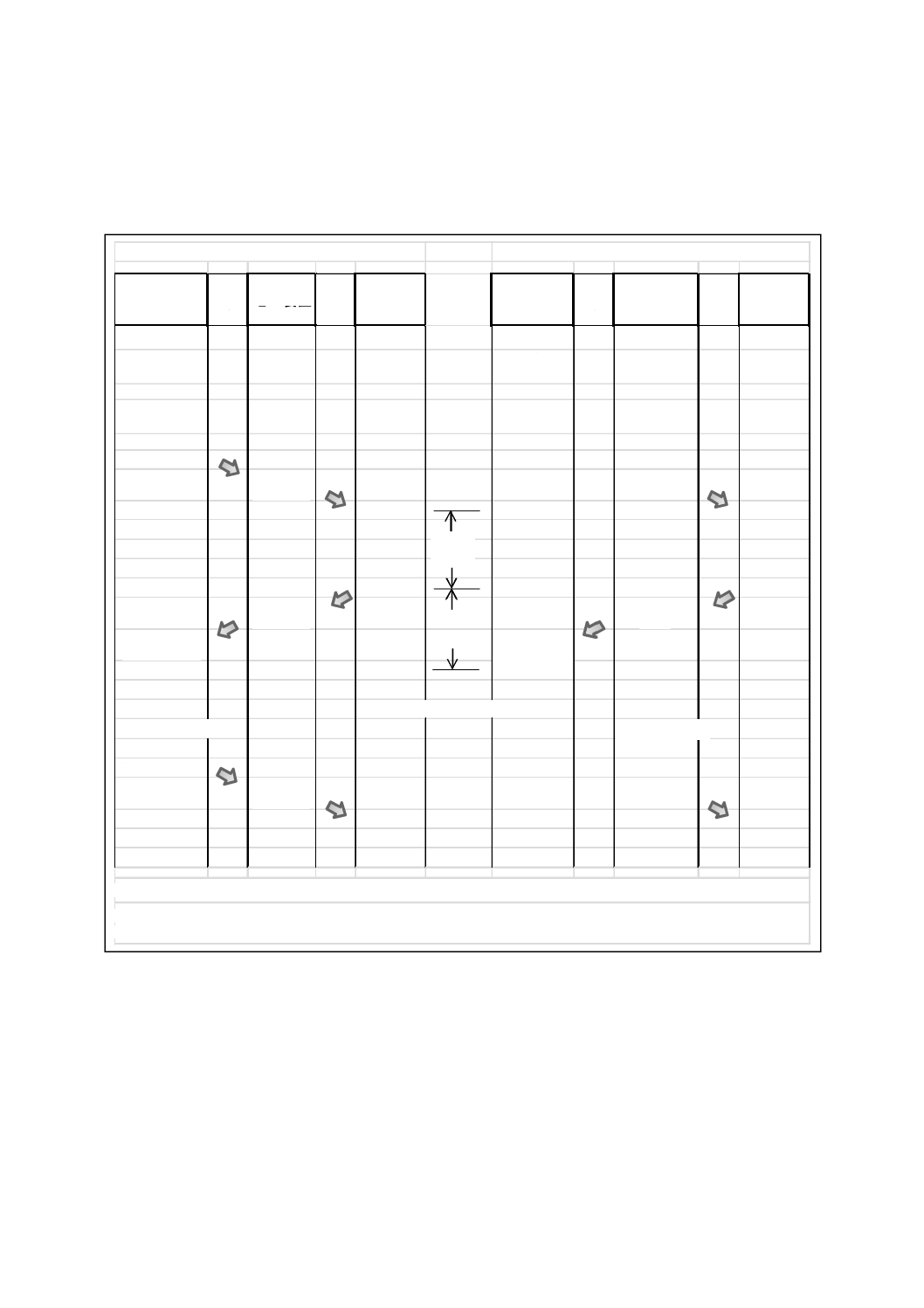
65
E 3801-2:2018
E.3.9.3 機能の割付の例
JRTCの踏切制御機能は地上装置と車上装置とが分担して行う。分担の方法には大きく分けると車上主
体及び地上主体がある。それぞれの場合における装置別処理タイムチャートの例を図E.18に示す。
図E.18−JRTC踏切制御における装置別の処理タイムチャート
E.3.10 ブレーキパターンと制限速度との関係
速度制限に対するブレーキパターンを設計する場合には,曲線における転覆限界速度などの“保安上の
制限速度”及び乗り心地,運転操作などを考慮した“運転上の制限速度”の双方を考慮する必要がある。
ここでは,表1に示す“制限速度”が,“保安上の制限速度”を指すものとした場合について,“運転上の
制限速度”とブレーキパターンとの関係について考え方の一例を示す。
図E.19では,“制限速度(保安上の制限速度)”に対し,調整速度を差し引いた速度を“常用最大ブレー
車上装置
無線
伝送
路
地上装置伝送
路
踏切制御
装置
車上装置
無線
伝送
路
地上装置
伝送
路
踏切制御
装置
踏切ブレーキ
パターン発生
踏切ブレーキ
パターン発生
警報開始時期
の判断
警報開始時期
の判断
警報開始要求
警報開始
要求中継
警報開始要求
警報開始
警報開始
遮断開始
遮断開始
遮断完了
遮断完了
通過許可
情報中継
通過許可情報
中継
踏切ブレーキ
パターン解除
列車の踏切進出
踏切進出の判断
踏切進出の判断
警報停止要求
警報停止
要求中継
警報停止要求
警報停止
警報停止
遮断解除
遮断解除
踏切ブレーキ
パターン解除
地上主体の場合
車上主体の場合
注記1:遮断完了を踏切通過条件としている例
注記2:通信障害等により車上装置が通過許可情報を受信できない場合には、踏切ブレーキパターンにより列車は踏切道の手
前までに停止する
踏切到
達時間
遮断完
了時間
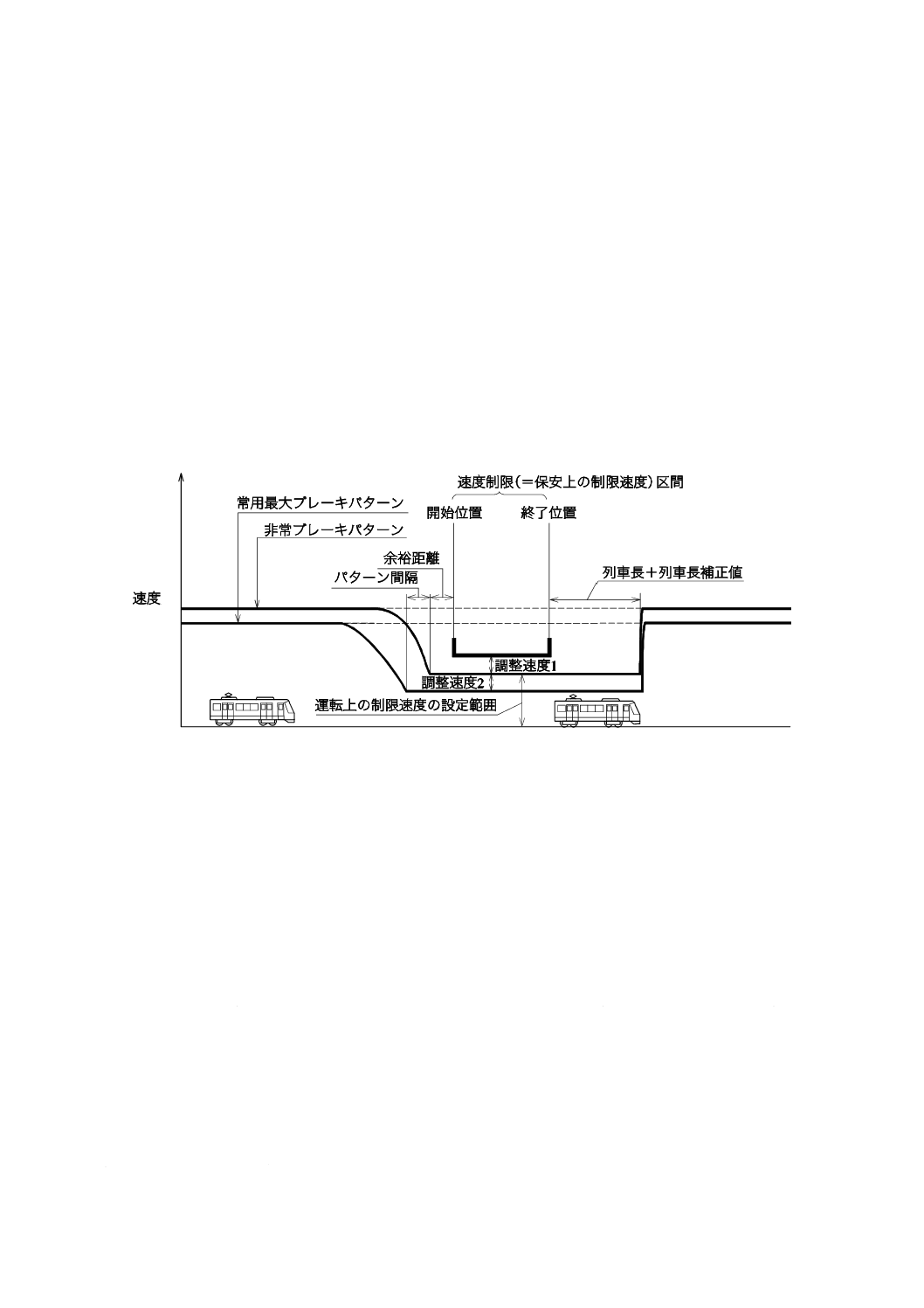
66
E 3801-2:2018
キパターン”としている。つまり,通常の運転における列車の速度は“常用最大ブレーキパターン”で制
御され,同パターンが示す速度に調整速度を加えた範囲で頭打ちとなる。
このとき,“運転上の制限速度”は,“常用最大ブレーキパターンが示す速度+調整速度”を超えない範
囲で,鉄道事業者が定める。次に代表的な例を示す。
例1 “列車間の間隔を確保する装置による運転”において,運転士が主体的に操縦する領域を示す
ため,“常用最大ブレーキパターンが示す速度”を“運転上の制限速度”とする。
例2 “列車間の間隔を確保する装置による運転”において,“常用最大ブレーキパターン”による自
動制御が行われている間も含めて“通常の運転で許容される速度”を示すため,“常用最大ブレ
ーキパターンが示す速度+調整速度”を“運転上の制限速度”とする。
例3 “閉塞による運転”において,“常用最大ブレーキパターン”に抵触しないように運転士に運転
させるため,“常用最大ブレーキパターンが示す速度”より十分低い値を“運転上の制限速度”
とする。
図E.19−制限速度とブレーキパターンとの関係(例)
E.3.11 留置箇所以外(駅中間など)における車上電源投入時の処理
留置箇所以外(駅中間など)における車上電源投入時に車上装置は,留置箇所における電源投入時と同
様な動作(5.4.8.4参照)を行う。しかしながら,5.4.8.4.4において,留置位置の確定のための地上子の検
知に失敗するとともに,システムから仮位置情報及び停止限界が与えられない状態となることも想定され
る。このような場合において,あらかじめ定められた取扱いに従って,手動操作によってJRTC運転の状
態(制限運転モード)への切替えを行い,5.4.8.4.4におけるc) 2) と同様にして,地上子などの検知によっ
て列車在線位置を確定し,通常運転に移行することも考えられる。
他システム区間で電源投入された車上装置は,5.4.8.4.2のc) において手動で状態決定を行う場合には,
手動操作でJRTC運転の状態以外の状態(図5参照)に切り替える。又は自動で状態決定を行う場合には,
5.4.8.4.3の失敗によって,JRTC運転の状態以外の状態となる。
E.3.12 切替区間における安全確保の留意点
他システムとの境界には,システム切替えを行う切替区間を設ける。切替区間では,JRTCとして,次
を満足しなければならない。
a) 列車位置の確定
b) JRTC用無線との接続通信
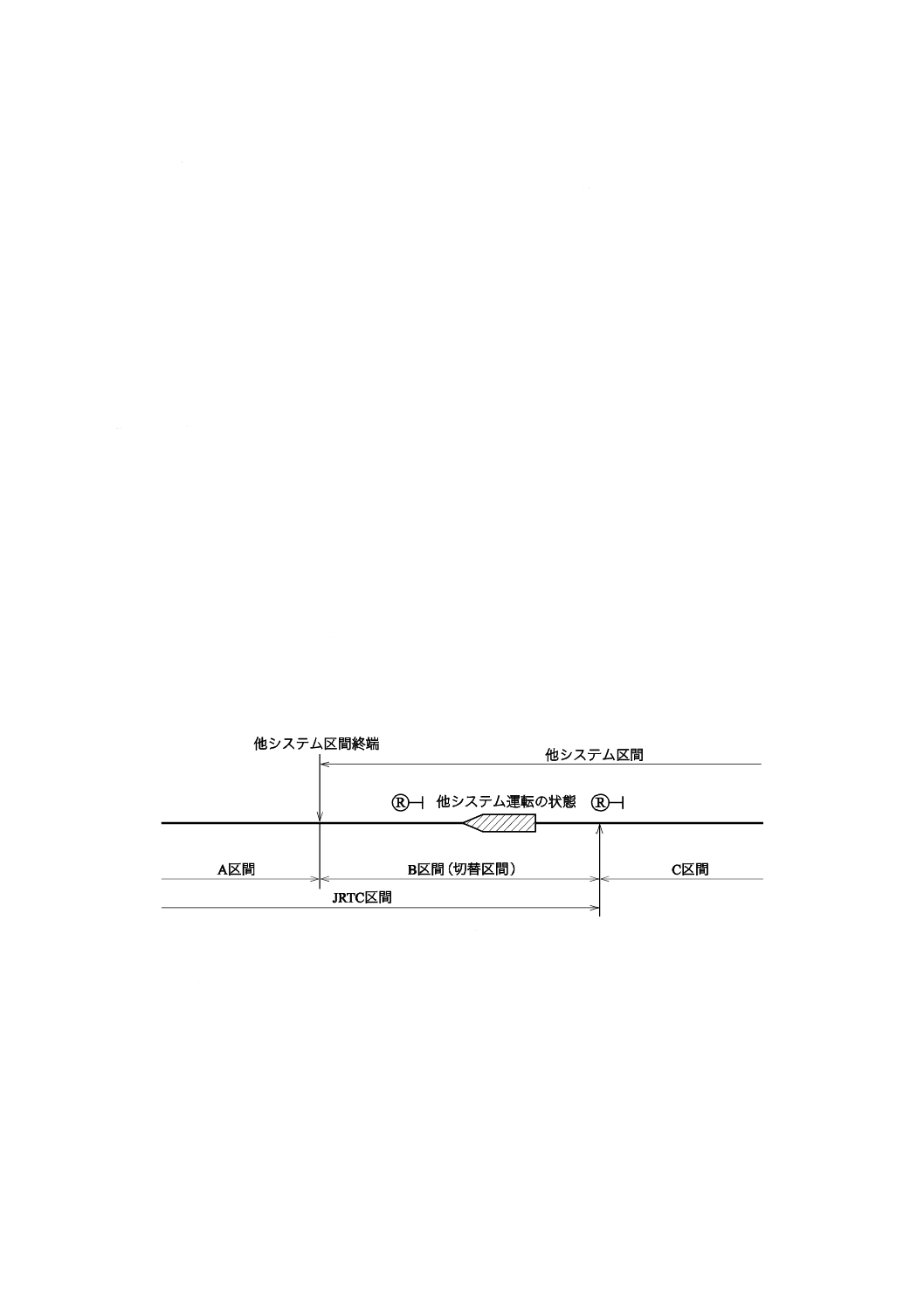
67
E 3801-2:2018
c) 車上運転モードの切替え
切替区間内で,上記a)〜c) が確立し,かつ,c) の車上運転モードがJRTCの場合には,JRTCによる列
車の追跡・制御を行う。そのためには,切替区間内の全ての列車の在線状態及びルートの状態が,各列車
の車上運転モードのいかんに関係なく把握されていなければならない。また,他システムにおいても,上
記と同様に切替区間内の全ての列車の在線状態及びルートの状態を把握した上で,列車の追跡・制御を行
う必要があるが,それらの在線及び制御時状態の把握は各々のシステムが独立に行ってもよいし,一方の
システムが把握した状態情報を安全な情報伝達手段を用いて,他方のシステムに提供してもよい。
図E.20〜図E.23に,他システムが地上信号機による方式であり,切替区間内に地上信号機が設置され
ている場合を例として,他システムの制御条件を反映して,安全を確保するための留意点を示す。
なお,切替区間の長さ,切替区間内での列車の制御モードの切替え方式などの具体的な条件は,鉄道事
業者が定める。
1) 列車がJRTC区間に向かって走行する場合
1.1) 列車が他システム運転の状態の場合
− 当該列車のB区間における制御は,他システムの制御によるが,JRTCは,当該列車を含むB区
間内の全列車の在線状態及びルートの状態を把握し,必要に応じて,A区間及びB区間における
JRTC運転列車の制御に反映しなければならない。
− 他システムは,当該列車が他システム運転の状態の場合にはA区間へ進入することがないように
抑止制御しなければならない。
なお,列車がJRTC運転の状態に切り替わった場合には,当該列車はJRTCによって制御される
[図E.21のa) 及びb) 参照]。
− JRTCは,他システム運転の状態のままのA区間への異常な列車進入を検出しなければならない。
なお,検出後の処置については,鉄道事業者が定める。
図E.20−他システム運転の状態の列車がJRTC区間に向かって走行する場合
1.2) 列車がJRTC運転の状態の場合
− 当該列車のB区間における制御は,JRTCの制御によるが,他システムの制御条件を反映した制
御を行わなければならない。
− 他システムは,当該列車を含むB区間内の全列車の在線状態及びルートの状態を把握し,必要に
応じて,B区間及びC区間における他システム運転列車の制御に反映しなければならない。
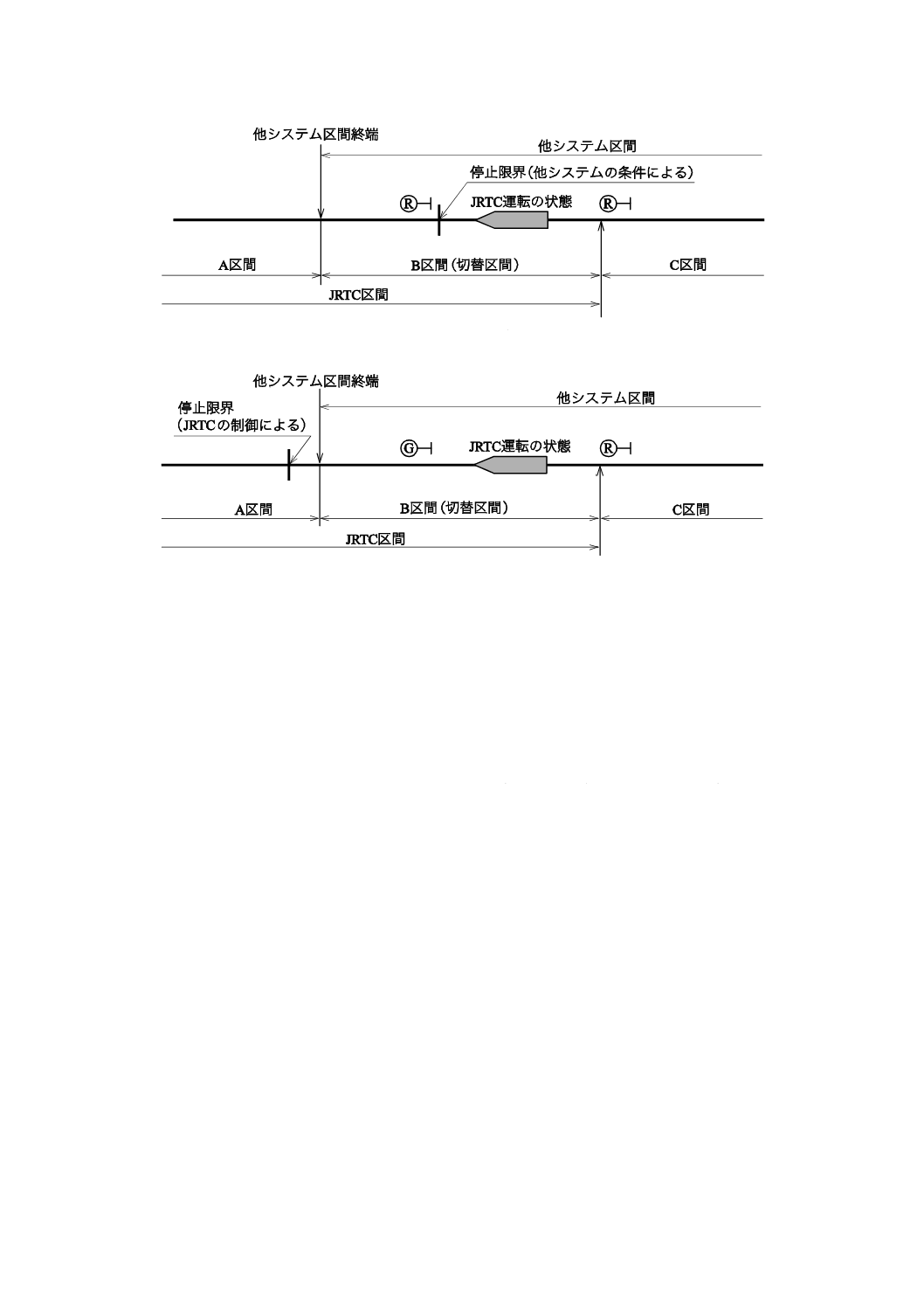
68
E 3801-2:2018
a) 切替区間内の地上信号機が停止現示の場合
b) 切替区間内の地上信号機が進行現示の場合
図E.21−JRTC運転の状態の列車がJRTC区間に向かって走行する場合
2) 列車が他システム区間に向かって走行する場合
2.1) 列車がJRTC運転の状態の場合
− 当該列車のB区間における制御は,JRTCの制御によるが,他システムの制御条件を反映した制
御を行わなければならない。
− 他システムは,当該列車を含むB区間内の全列車の在線状態及びルートの状態を把握し,必要に
応じて,B区間及びC区間における他システム運転列車の制御に反映しなければならない。
− JRTCは,当該列車がJRTC運転の状態の場合にはC区間へ進出することがないように,抑止制御
しなければならない。
なお,列車が他システム運転の状態に切り替わった場合には,当該列車は他システムによって
制御される(図E.22参照)。
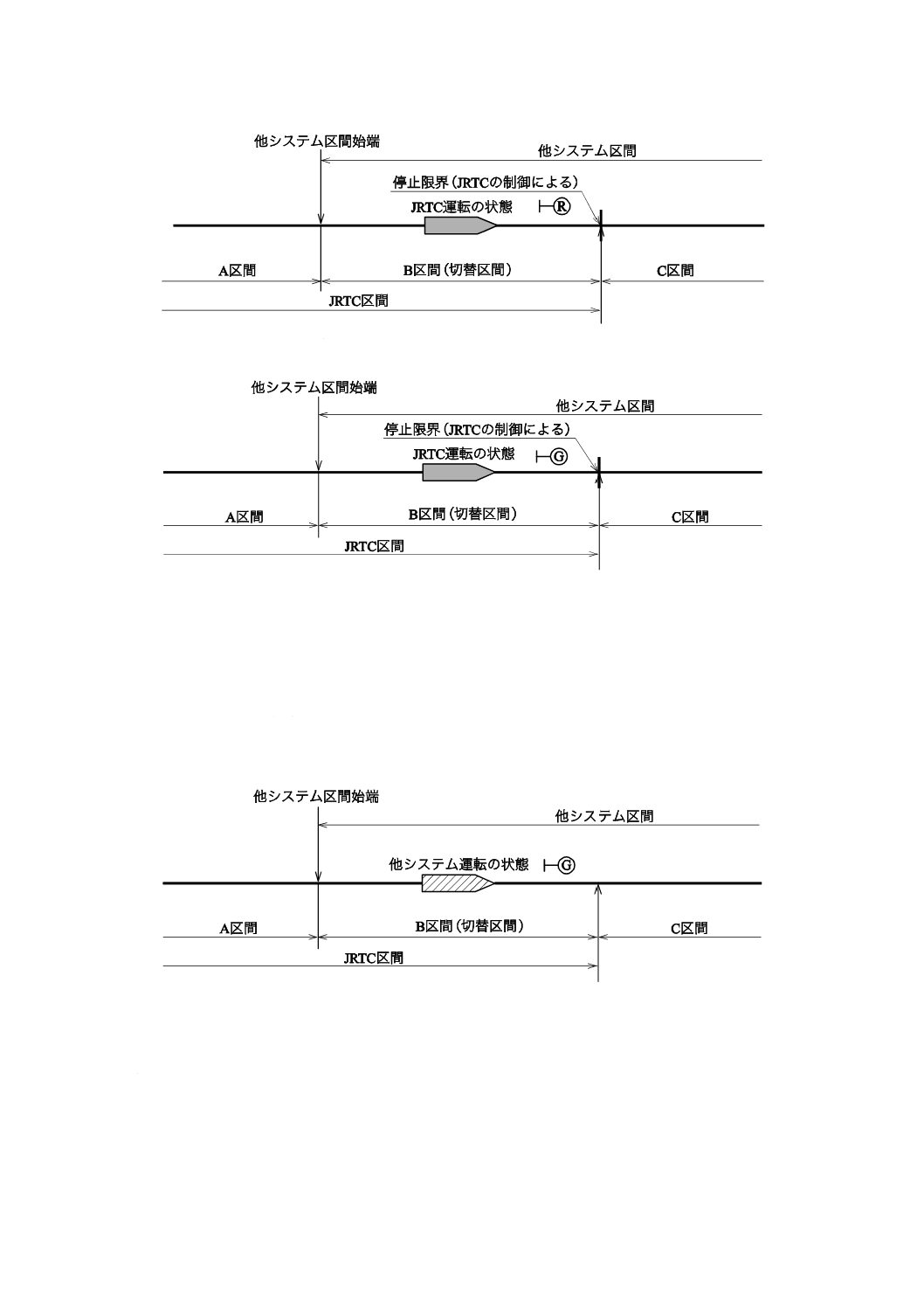
69
E 3801-2:2018
a) 切替区間内の地上信号機が停止現示の場合
b) 切替区間内の地上信号機が進行現示の場合
図E.22−JRTC運転の状態の列車が他システム区間に向かって走行する場合
2.2) 列車が他システムの状態の場合
− 当該列車のB区間における制御は,他システムの制御によるが,JRTCは,当該列車を含むB区
間内の全列車の在線状態及びルートの状態を把握し,必要に応じて,A区間及びB区間における
JRTC運転列車の制御に反映しなければならない。
図E.23−他システム運転の状態の列車が他システム区間に向かって走行する場合
E.3.13 無線通信に関する異常事象
無線通信機能に関して,障害を起こし得る原因と,受信結果として検知される異常について,表E.4に
まとめる。検知された異常に応じて,JRTCは適切に対応することが求められる。
70
E 3801-2:2018
表E.4−無線通信に関する異常事象
JRTCでの観測事象
原因
信頼性向上対策
分類
異常
自然原因
意図的妨害
受信デー
タの合理
性不一致
電文データ誤り
・伝送路特性の揺ら
ぎ(フェージング,
ノイズなどの変
化)
・なりすまし(意図
的な偽電文送信
など)
誤り検出機能,電文の
合理性判定機能,認証
機能,冗長伝送など
電文の合理性誤り
電文内容誤り
通信不能
受信可能な受信電力なし
・伝送特性の大きな
変動
・妨害意図のない違
法無線
・装置劣化
・妨害電波の送信
・装置に対する妨害
無線装置の冗長構成,
通信システム配置の
最適化など
電文復号不能(大電力の妨害電波,
同期信号などの検出不能)
無線装置故障(地上/車上)