E 3801-1:2018
(1)
目 次
ページ
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 JRTCの構成及びその機能 ································································································· 3
4.1 装置 ···························································································································· 3
4.2 機能構成及び装置への割当 ······························································································ 4
4.3 JRTC以外のシステムとのインタフェース ·········································································· 4
5 自動化の程度(GOA) ······································································································ 6
6 一般要求事項 ··················································································································· 6
6.1 相互運用性 ··················································································································· 6
6.2 互換性 ························································································································· 7
6.3 両立性 ························································································································· 7
6.4 適応性 ························································································································· 7
6.5 信頼性など ··················································································································· 7
6.6 安全性 ························································································································· 7
6.7 電磁両立性 ··················································································································· 7
6.8 環境条件 ······················································································································ 7
6.9 エネルギー消費の効率化 ································································································· 7
7 機能要求事項 ··················································································································· 7
7.1 一般 ···························································································································· 7
7.2 システム性能 ················································································································ 7
7.3 列車制御 ······················································································································ 8
7.4 列車運行の監視及び管理 ································································································ 12
附属書A(参考)用語の補足 ································································································· 14
附属書B(参考)相互運用性,互換性及び両立性 ······································································· 17
附属書C(参考)機能の留意事項と実施例 ··············································································· 20
E 3801-1:2018
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
鉄道電気技術協会(JREEA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工
業規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,国土交通大臣が改正した日本工
業規格である。
これによって,JIS E 3801-1:2009は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格に従うことは,次の者の有する特許権等の使用に該当するおそれがあるので,留意する。
発明の名称 列車制御装置
特許番号 第3451543号 登録日 平成15年7月18日
特許権者 株式会社日立製作所 東京都千代田区神田駿河台四丁目6番地
東日本旅客鉄道株式会社 東京都渋谷区代々木二丁目二番地二号
発明の名称 無線列車の列車間隔制御システム
特許番号 第3574917号 登録日 平成16年7月16日
特許権者 株式会社日立製作所 東京都千代田区神田駿河台四丁目6番地
東日本旅客鉄道株式会社 東京都渋谷区代々木二丁目二番地二号
上記の,特許権等の権利者は,非差別的かつ合理的な条件でいかなる者に対しても当該特許権等の実施
の許諾等をする意思のあることを表明している。ただし,この規格に関連する他の特許権等の権利者に対
しては,同様の条件でその実施が許諾されることを条件としている。
この規格に従うことが,必ずしも,特許権の無償公開を意味するものではないことに注意する必要があ
る。
この規格の一部が,上記に示す以外の特許権等に抵触する可能性がある。国土交通大臣及び日本工業標
準調査会は,このような特許権等に関わる確認について,責任はもたない。
なお,ここで“特許権等”とは,特許権,出願公開後の特許出願又は実用新案権をいう。
JIS E 3801の規格群には,次に示す部編成がある。
JIS E 3801-1 第1部:一般要求事項及び機能要求事項
JIS E 3801-2 第2部:システム要求事項
JIS E 3801-3 第3部:インタフェース要求事項(予定)
日本工業規格 JIS
E 3801-1:2018
無線式列車制御システム−
第1部:一般要求事項及び機能要求事項
Train control system using radio communication-
Part 1: General requirement and functional requirements
1
適用範囲
この規格は,普通鉄道において無線を利用して地上と車上との間で安全に関わる制御情報を交信する無
線式列車制御システム(JRTC:Japan radio train control system)の,一般要求事項及び機能要求事項につい
て規定する。また,この規格は,案内軌条式鉄道など特殊鉄道にも適用できる。
列車制御システムの機能のうち,列車又は車両(以下,列車などという。)の走行安全を確保するための
機能を,次の五つに類別する。
a) 線路の交差,分岐,その他の箇所で,列車などの脱線及び衝突を防止する安全なルートの確保
b) 列車相互の衝突を防止する安全間隔の確保
c) 列車の速度超過,安全を確保したルート外への走行の防止及び列車相互の安全な間隔を保つための安
全速度の確保
d) 列車の踏切通過に対する走行安全の確保
e) 走行線路上の障害物などに対する走行安全の確保
この規格は, a)〜c)の機能を基本とし機械で自動化したシステムを対象とするが,乗務員の乗務しない
自動列車運転は対象外とする。
なお,この規格は,列車の駅間走行における加速,惰行,減速及び停止に関わる自動運転を,上記機能
の制約下で行うシステムであっても適用できる。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS C 60068-1 環境試験方法−電気・電子−第1部:通則及び指針
JIS E 3013 鉄道信号保安用語
IEC 62236-1,Railway applications−Electromagnetic compatibility−Part 1: General
IEC 62236-2,Railway applications−Electromagnetic compatibility−Part 2: Emission of the whole railway
system to the outside world
IEC 62236-3-1,Railway applications−Electromagnetic compatibility−Part 3-1: Rolling stock−Train and
complete vehicle
IEC 62236-3-2,Railway applications−Electromagnetic compatibility−Part 3-2: Rolling stock−Apparatus
IEC 62236-4,Railway applications−Electromagnetic compatibility−Part 4: Emission and immunity of the
2
E 3801-1:2018
signalling and telecommunications apparatus
IEC 62236-5,Railway applications−Electromagnetic compatibility−Part 5: Emission and immunity of fixed
power supply installations and apparatus
IEC 62278,Railway applications−Specification and demonstration of reliability,availability,maintainability
and safety (RAMS)
IEC 62279,Railway applications−Communication,signalling and processing systems−Software for railway
control and protection systems
IEC 62280,Railway applications−Communication,signalling and processing systems−Safety related
communication in transmission systems
IEC 62425,Railway applications−Communication,signalling and processing systems−Safety related
electronic systems for signalling
IEC 62427,Railway applications−Compatibility between rolling stock and train detection systems
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS E 3013によるほか,次による。
3.1
ルート
列車などの移動のため,あらかじめ定めた通りみち(路)。
3.2
側面防護
列車などが走行する場合に,他の列車などと車両接触限界内での衝突を防ぐ対策。例えば,あるルート
の車両接触限界を列車などが侵している可能性があるときには,そのルートの設定を行えないようにする
こと,及びルート設定後に車両接触限界内に他の列車などが進入したときの防護対策。
3.3
ルート構成要素
ルートとして定められた区間,及びそのルートに関係する転てつ器など。
3.4
支障位置
列車走行が安全上許されない位置。
3.5
停止限界
列車の走行安全を確保するうえでシステムが列車の走行を許可する限界点。
3.6
保安制御余裕距離
停止限界を決定するときに,設定する余裕距離。
3.7
ブレーキパターン
列車をある地点までに停止又は所定速度まで減速させるための距離と走行速度との関係を表す曲線。
3.8
システム構成要素
3
E 3801-1:2018
システムを構成する主要なコンポーネント,コンポーネント群,機器又は装置であって,JRTCに組み
込まれた,又は組み込む予定のもの。
3.9
指令所装置
JRTCのために指令所に設置する装置。
3.10
データ通信装置
JRTCのために地上及び車上に設置する無線伝送を含む通信装置。
3.11
地上装置
JRTCのために地上に設置する装置。ただし,指令所装置及びデータ通信装置を除く。
3.12
車上装置
JRTCのために車上に搭載している装置。ただし,データ通信装置を除く。
3.13
制御用列車ダイヤ
列車運行の監視及び管理のために列車ダイヤを編集したデータ。
注記 ルート設定及び列車追跡を行うための基本データとなる。
3.14
列車番号
列車ダイヤ上で列車ごとに割り付けられた固有の番号。
3.15
列車追跡
列車の現在位置を把握し,列車番号を基に列車ダイヤとの対応付けを行うこと。
3.16
運転整理
列車運行の乱れを速やかに正常の状態に戻し,輸送への影響を最小限にとどめるための列車の運転順序
変更,行違い変更,運転の取消しなどの処置。
4
JRTCの構成及びその機能
4.1
装置
JRTCの装置及び機能は,通常,次による。
a) 指令所装置 指令所装置は,次の機能をもつ。
− 鉄道網又は線区における列車運行の監視及び管理を集中的に行う。
− 地上装置及び車上装置から情報を収集し,地上装置及び車上装置に適切な指示を与える。
b) データ通信装置 データ通信装置は,次の機能をもつ。
− 地上伝送路,地上無線基地局及び車上無線局で構成し,JRTCのシステム構成要素間のデータ伝送を
行う。
− 地上装置と車上装置との間のデータ伝送は無線で行う。
c) 地上装置 地上装置は,次の機能をもつ。
4
E 3801-1:2018
− 各列車の走行位置の情報及び転てつ器などの線路状態から各列車のルート,停止限界に関する制御
情報を決定し,車上装置にデータ通信装置を介して伝送する。
− 列車が安全に走行できるルートを確保するために,その機能の一部又は全部に独立した装置(連動
装置等)を使用することができる。独立した装置は外部に設けてもよい。
d) 車上装置 車上装置は,次の機能をもつ。
− 個々の列車において,地上装置からの制御情報及び車上装置がもつ制御情報に基づいて,自列車の
安全な走行制御を行う。
注記 ヒューマンマシンインタフェース(HMI:Human Machine Interface)機能は,a)〜d)の装置に含
まれる。
4.2
機能構成及び装置への割当
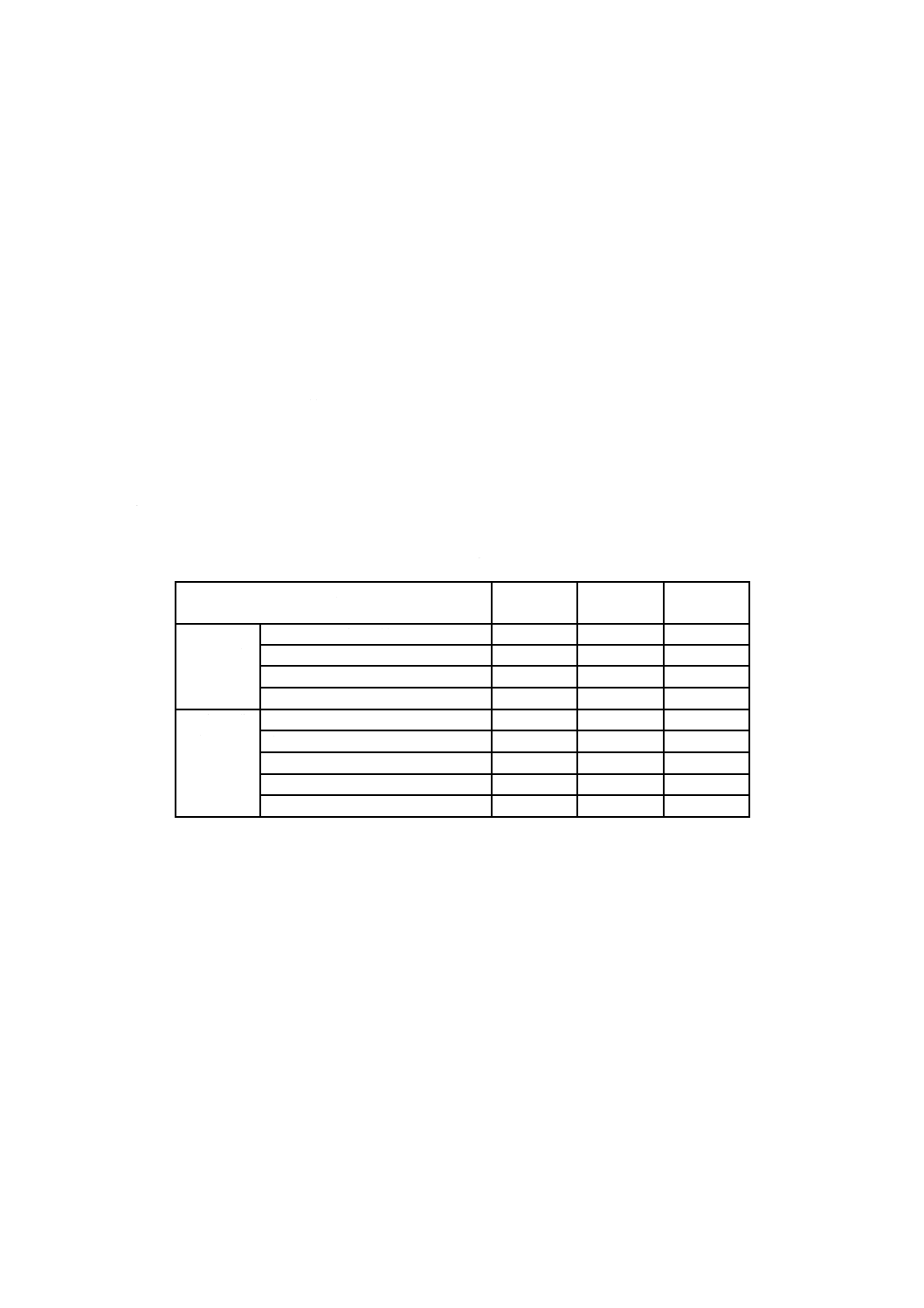
JRTCは,列車運行の監視・管理機能(7.4)及び列車制御機能(7.3)によって構成する。この機能の装
置への割当を表1に示す。表1において◎はJRTCの必須機能を表し,○はそうでないものを示している。
4.3
JRTC以外のシステムとのインタフェース
JRTCは,他のシステムとのインタフェースを必要に応じて備える。図1に他システム及びインタフェ
ース境界の例を示す。
表1−JRTCの機能及び装置への主な割当
機能
指令所
装置
地上
装置
車上
装置
列車運行
の監視・管
理機能
制御用列車ダイヤ管理機能
○
−
−
列車運行監視機能
○
−
−
列車運行管理機能
○
−
−
保守作業管理機能
○
−
−
列車制御
機能
列車運転の安全確保機能
−
◎
◎
自動列車運転機能
−
−
○
走行線路の監視機能
−
○
−
ドア開閉の制御機能
−
○
○
分割機能及び併合機能
−
○
○
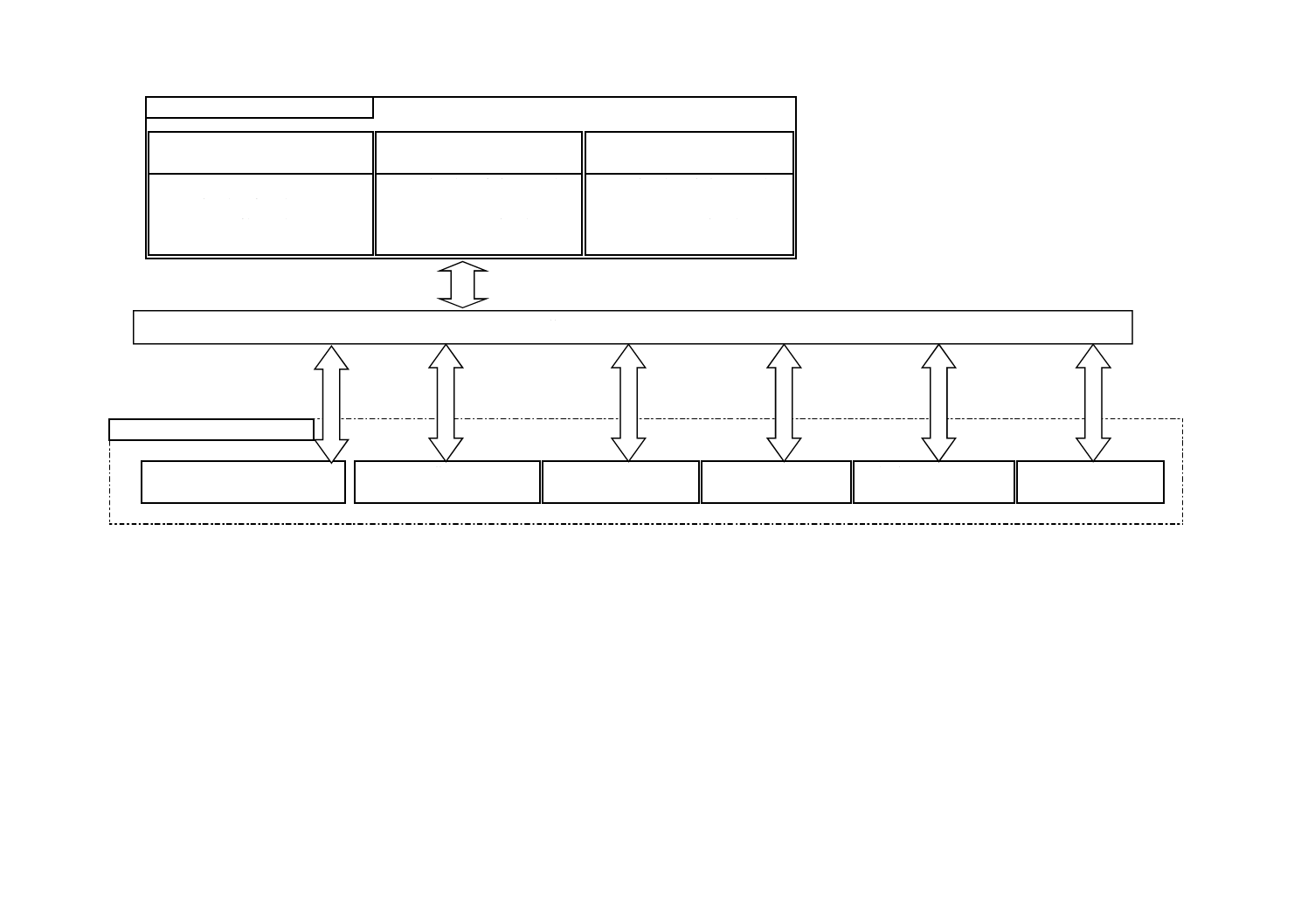
図1−JRTCのシステム構成と他システムとの境界(例)
4
E
3
8
0
1
-1
:
2
0
1
8
JRTC
列車運行の監視・管理機能
(指令所装置)
列車制御機能
(地上装置)
列車制御機能
(車上装置)
・ 制御用列車ダイヤ管理機能
・ 列車運行監視機能
・ 列車運行管理機能
・ 保守作業管理機能
・ 列車運行の安全確保機能
・ 走行線路の監視機能
・ ドア開閉の制御機能
・ 分割機能及び併合機能
・ 列車運行の安全確保機能
・ 自動列車運転機能
・ ドア開閉の制御機能
・ 分割機能及び併合機能
その他システムとのインタフェース
JRTC以外のシステム及び設備
駅システム
インフラ設備
車両システム
メンテナンスシステ
ム
運行計画系システム
電力管理システム
6
E 3801-1:2018
5
自動化の程度(GOA)
自動化の程度とは,乗務員の行う仕事がシステムでどこまで自動化されているかの程度(grade of
automation:以下,GOAという。)を示し,次のa)〜e)によって区分する(IEC 62290-1参照)。
この規格で定めるJRTCは,これらの区分のうちGOA1及びGOA2を対象としたものであり,いずれの
GOAを適用するかは鉄道事業者が指定する。乗務員の担務及びGOAについてはA.4及びA.5に示す。
なお,同一線区の違ったエリアで,同一列車に異なるGOAを適用してもよい。
a) 自動化レベル0(GOA0) 運転士が運転室にいて,前方の見通し,その他の安全な列車運転に必要な
条件を考慮して運転する。システムには運転士の操作を監視制御することを要求しない。しかし,転
てつ器の状態及び単線区間については,システムによって部分的に監視制御することがある。
b) 自動化レベル1(GOA1) 運転士が最前部の車両の前頭において列車を操縦し,危険な状況を認めた
ときは列車を停止させる。加速制御及び減速制御は,運転士が行う。システムは,運転士の操作を監
視制御する。ドア閉を含む駅からの安全な列車の発車は,運行乗務員の責任である。
c) 自動化レベル2(GOA2) 運転士が最前部の車両の前頭において列車を出発させ,危険な状況を認め
たときは列車を停止させる。加速制御及び減速制御は自動化され,速度はシステムによって連続して
監視制御される。駅からの安全な列車の発車は,運行乗務員の責任である。ただし,ドアの開閉は,
自動化しても差し支えない。
d) 自動化レベル3(GOA3) 最前部の車両の前頭において列車を操縦し,危険な状況を認めたときは列
車を停止させる運転士が乗務しないので,GOA2と比較して更に対策が必要である。このGOAでは,
運行乗務員の乗務が不可欠である。ドア閉を含む駅からの安全な列車の発車は,運行乗務員の責任で
もよいし,自動化しても差し支えない。
e) 自動化レベル4(GOA4) GOA3と比較して乗務員が乗車しないので,更に対策が必要である。ドア
閉を含む駅からの安全な列車の発車は,自動化しなければならない。システムは,旅客を避難させな
ければならない危険な状況を検知し,危険条件並びに脱線,煙及び/又は火災の検出のような非常事
態では,運行係員の介入を要請する。
6
一般要求事項
6.1
相互運用性
相互運用性とは,異なる製造業者の設備に対して機能及び性能に本質的な変化をもたらさずに,そのま
ま各種サービスを提供・受入・使用できる能力であり,JRTCは,列車と設備とを相互運用するためa)〜
d)に示す相互運用性を備えなければならない。相互運用性の概念をB.2に示す。
なお,この能力はどの製造業者がどのシステム構成要素を提供するかには関係しない。また,JRTC区
間における,車上装置を装備した列車(以下,JRTC列車という。)と非JRTC列車との混在運行の実施は,
この規格の適用外とする。
a) JRTC区間において,システム構成要素(同一GOA)の製造業者が異なる場合は,次による。
1) ある製造業者のJRTC列車は,車上に搭載された装置の製造業者と異なる製造業者が製造した地上
装置の区間であっても運行できる。
2) 二つの異なる製造業者によるJRTC列車を併合運転できる。
3) 地上装置は製造業者に関係なく,共通の指令所装置と接続できる。
4) JRTC列車は,製造業者の異なる地上装置の境界を通過できる。
b) JRTC区間におけるGOAが地上装置と車上装置とで異なっている場合は,製造業者に関係なくJRTC
7
E 3801-1:2018
は両者に共通な自動化レベルの最も高いGOAで作動できなければならない。
c) JRTC区間と隣接する非JRTC区間との間の進入及び進出に関する要求事項は,鉄道事業者が定める。
d) 相互乗入れを行う場合には,必要となるJRTCの要求事項を関係鉄道事業者間で定める。
6.2
互換性
JRTCのシステム構成要素は,異なる製造業者が製造したシステム構成要素と取り替えることができる
互換性を備えなければならない。互換性の概念をB.3に示す。
互換性確保のための要求事項は,鉄道事業者が定める。
6.3
両立性
JRTCは,同一鉄道網内の他のシステムと共存可能で,特に,システムの移行を容易なものとするため
の両立性をもたなければならない。両立性の概念をB.4に示す。
両立性確保のための要求事項は,鉄道事業者が定める。
6.4
適応性
JRTCは,線区の延伸,単位時間当たりの列車数増大,及び車両の性能向上に対して,対応できる適応
性を備えなければならない。
適応性確保のための要求事項は,鉄道事業者が定める。
6.5
信頼性など
JRTCに信頼性,保全性などに関する要求事項を適用する場合,鉄道事業者が特に指定しないときはIEC
62278による。
6.6
安全性
JRTCにシステムの安全性に関する要求事項を適用する場合,鉄道事業者が特に指定しないときはIEC
62278,IEC 62279,IEC 62280及びIEC 62425による。
6.7
電磁両立性
JRTCに各装置の電磁両立性に関する要求事項を適用する場合,鉄道事業者が特に指定しないときはIEC
62236-1〜IEC 62236-5及びIEC 62427による。
6.8
環境条件
各装置の使用温度などの使用環境条件及びその試験方法については,JIS C 60068-1による。それらに規
定された条件で不十分な場合は,鉄道事業者がその使用環境条件,試験項目及び試験方法を定める。
6.9
エネルギー消費の効率化
JRTCでエネルギー消費の効率化を実現しようとする場合は,鉄道事業者がその方法を定める。
注記 具体的な方法としては,列車の加速,惰行及び減速を制御することで列車に対してエネルギー
消費の効率化を行う方法などが挙げられる。また,電力管理システムとのインタフェースを考
慮することによって効率的な電力制御にもつながる。
7
機能要求事項
7.1
一般
JRTCは,その機能に関して,7.2〜7.4に規定する事項を満たさなければならない。
7.2
システム性能
7.2.1
一般
システム性能は,7.2.2〜7.2.6による。
なお,システムの性能を定める上で必要となる,列車運転速度,運転時隔(運転時間間隔)などの要件
8
E 3801-1:2018
は,鉄道事業者が定める。
7.2.2
システム故障
システムの故障に対する事項は,次による。
a) システムの監視 JRTCは,自己診断によってシステムが正常に機能していることを監視する。監視
項目,監視結果の出力などに関する要求事項は,鉄道事業者が定める。
b) システム故障対応 システムに故障が発生した場合,又はシステムの機能を維持するために必要な外
部システムからの情報が授受できなくなった場合のJRTCの要求事項は,鉄道事業者が定める。
c) システム再立上げ対応 システム故障を復旧させるときなど,システムの再立上げを行う場合のJRTC
の要求事項は,鉄道事業者が定める。
7.2.3
システム外事象
JRTCは,外部システムとのインタフェースをもつことによって,緊急停止などを必要とするシステム
外事象を検知できなければならない。
検知しなければならないシステム外事象及び検知後の処理は,鉄道事業者が定める。
7.2.4
線路変更
JRTCは,線区の延伸及び線路配線の変更に対応できなければならない。
7.2.5
HMI
JRTCのシステム構成要素ごとに必要となるHMIの要求事項は,鉄道事業者が定める。
7.2.6
システム管理
JRTCに必要となるデータ及びその管理方法,並びに訓練及び検査に関する要求事項は,鉄道事業者,
製造業者などの関係者が定める。
7.3
列車制御
7.3.1
一般
列車制御は,7.3.2〜7.3.6による。
7.3.2
列車走行の安全確保
7.3.2.1
一般
列車走行の安全確保は,7.3.2.2〜7.3.2.7による。
これらは列車の衝突及び脱線を防止し,列車運転の安全に直接関わる機能である。
7.3.2.2
ルートの安全確保
7.3.2.2.1
一般
ルートの安全確保は,7.3.2.2.2〜7.3.2.2.7による。ルートと進路との違いについてはA.2に示す。
7.3.2.2.2
ルートの設定
ルートの設定のため,次の機能を全て備えていなければならない。
a) ルートの選択 7.4.4で規定する自動ルート設定,指令員などによるルート設定要求に基づき,設定す
るルートの始端から終端までの区間(同区間を区分化した場合は,区分化した個々の区間,側面防護
が必要な区間なども含む。),及びそのルートに関する転てつ器などのルート構成要素を特定する。ル
ート概念の補足とルート構成要素の設定例とをA.2及びA.3に示す。
b) ルートの競合判断 特定したルート構成要素について,他の列車など又は作業との競合がないことを
判定する。これら要素が使用中でないか,又は使用中であっても共用可能であれば,そのルート構成
要素を当該列車においても使用中とする。
c) 転てつ器などへの転換指令 使用中となったルート上の転てつ器などが所定方向に開通していない場
9
E 3801-1:2018
合には,所定方向への転換指令を出力する。ただし,分岐器などの上に列車が在線している場合には,
該当する転てつ器などに転換指令は出力しない。
d) 転てつ器などの開通確認 転換指令を出力した転てつ器などが,所定方向に転換し開通したことを確
認する。
7.3.2.2.3
ルートの鎖錠
設定したルートの全ての転てつ器などが所定方向に開通していることを確認した場合は,当該ルート及
びルート構成要素を鎖錠する。
7.3.2.2.4
ルートの監視制御
設定したルートの全ての転てつ器などが所定方向に開通していること,及びルート構成要素が他列車に
よって無許可で使用されていないことを監視する。監視結果に異常が認められた場合には,関係する安全
を確保したルートへの進入を直ちに禁止できなければならない。
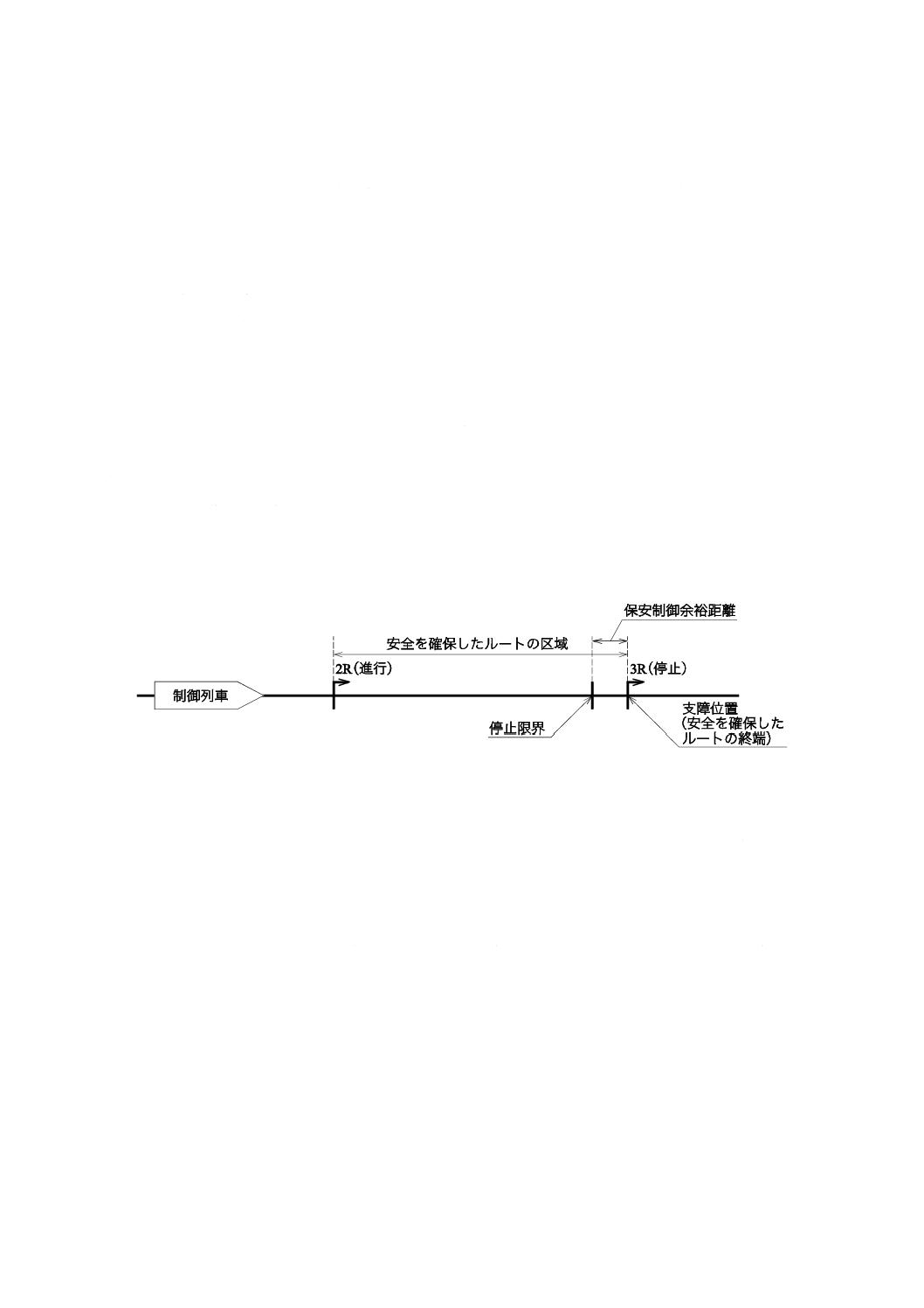
7.3.2.2.5
安全を確保したルートへの進入の許容及び停止限界の決定
ルートへの進入の許容及び停止限界の決定は,次による。
a) 進入の許容 開通確認後,鎖錠したルートの監視結果に異常が認められない場合は,安全を確保した
ルートへの進入を許容する。
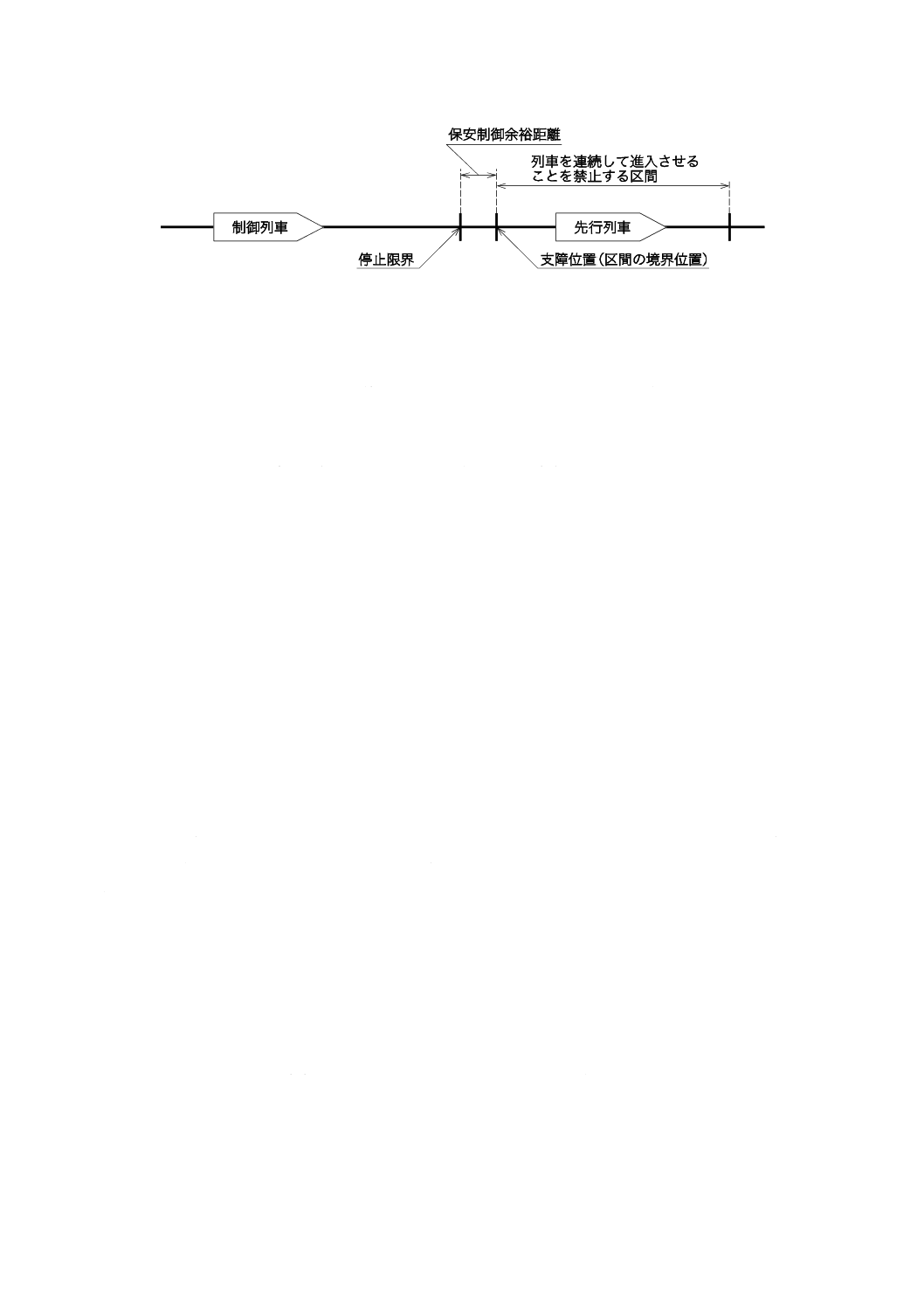
b) 停止限界の決定 停止限界は,安全を確保したルートの終端を支障位置とし,その支障位置から外方
に保安制御余裕距離を確保した位置とする(図2参照)。
図2−安全を確保したルートの停止限界の例
7.3.2.2.6
ルート取消要求
列車が進行し,ルートへの進入をJRTCが確認した後に,又は自動ルート設定若しくは指令員のルート
取消要求に基づき,ルート設定要求を取り消す(7.4.4参照)。
7.3.2.2.7
ルートの解錠
ルートの解錠は,次による。
a) 列車の走行による解錠 列車が進行し,ルートへの進入をJRTCが確認した後に,列車の進行に応じ
て当該ルート構成要素の当該列車による使用中を解除し,当該ルートの鎖錠を解錠条件が満足したと
き解錠する。
b) ルート取消しによる解錠 ルートへの進入を許可した列車がルート進入前に,ルート取消要求が行わ
れた場合は,当該列車にルート始端外方での停止を指示し,次の1)による。ただし,1)によれない場
合は,2)又は鉄道事業者が定める方法としてもよい。ルートの区間に関する概念をA.6に示す。
1) 取り消したルート始端の外方に列車が停止中又は列車が停止可能であることをJRTCが確認できた
時点で,当該ルート構成要素の当該列車による使用中を解除し,当該ルートの鎖錠を解錠条件が満
足していれば解錠する。列車が停止中又は列車が停止可能であることをJRTCが確認できないとき
10
E 3801-1:2018
は,当該ルートの鎖錠及びルート構成要素の使用中を保持する。
2) 接近鎖錠区間に列車が進入済か否かを判定し,次によって当該ルートの鎖錠を解錠し,ルート構成
要素の使用中を解除する。
− 接近鎖錠区間に列車が未進入の場合は,ルート構成要素の当該列車による使用中を直ちに解除し,
当該ルートの鎖錠を解錠条件が満足していれば解錠する。
− 接近鎖錠区間に列車が進入済の場合は,一定時間後に列車が当該ルートに非在線であることを確
認し,ルート構成要素の当該列車による使用中を解除し,当該ルートの鎖錠を解錠条件が満足し
ていれば解錠する。
なお,1)又は2)による解錠が行われる前に,列車がルートに進入した場合は,a)に従う。
7.3.2.3
安全な列車間隔の確保
JRTCは,列車の安全な間隔を確保するために,次の機能をもたなければならない。
a) 列車位置の決定 JRTCは,システム立上げ時を含め,各列車位置(列車のある場所)を漏れなく決
定する。列車位置の決定に必要な情報は,他のシステムからインタフェースを介して取得してもよい。
b) 列車編成方向の決定 次の1)又は2)による。
1) 列車の編成方向が固定化されている制御エリアをもつシステムにおいては,各列車の編成方向は全
て同一の既定値とする。
2) 列車の編成方向が固定化されない制御エリアをもつシステムにおいては,編成方向を特定する機能
によって列車編成の方向を決定する。編成方向の変わる例を,C.2に示す。
c) 列車進行方向の決定 列車の進行方向は,列車の編成方向と選択された運転台の設定状態とから決定
する。
d) 列車在線位置の決定 列車位置,列車の進行方向,列車長などの情報,及びルートの設定状態を基に,
各列車の在線位置を漏れなく決定する。
e) 異常時における列車占有区間の決定 JRTCに列車位置又は列車在線位置の決定に関する異常が認め
られた場合には,JRTCは,異常検知直前の列車在線位置から停止限界までの区間を列車占有区間と
みなすなど,安全側となる処理を行う。
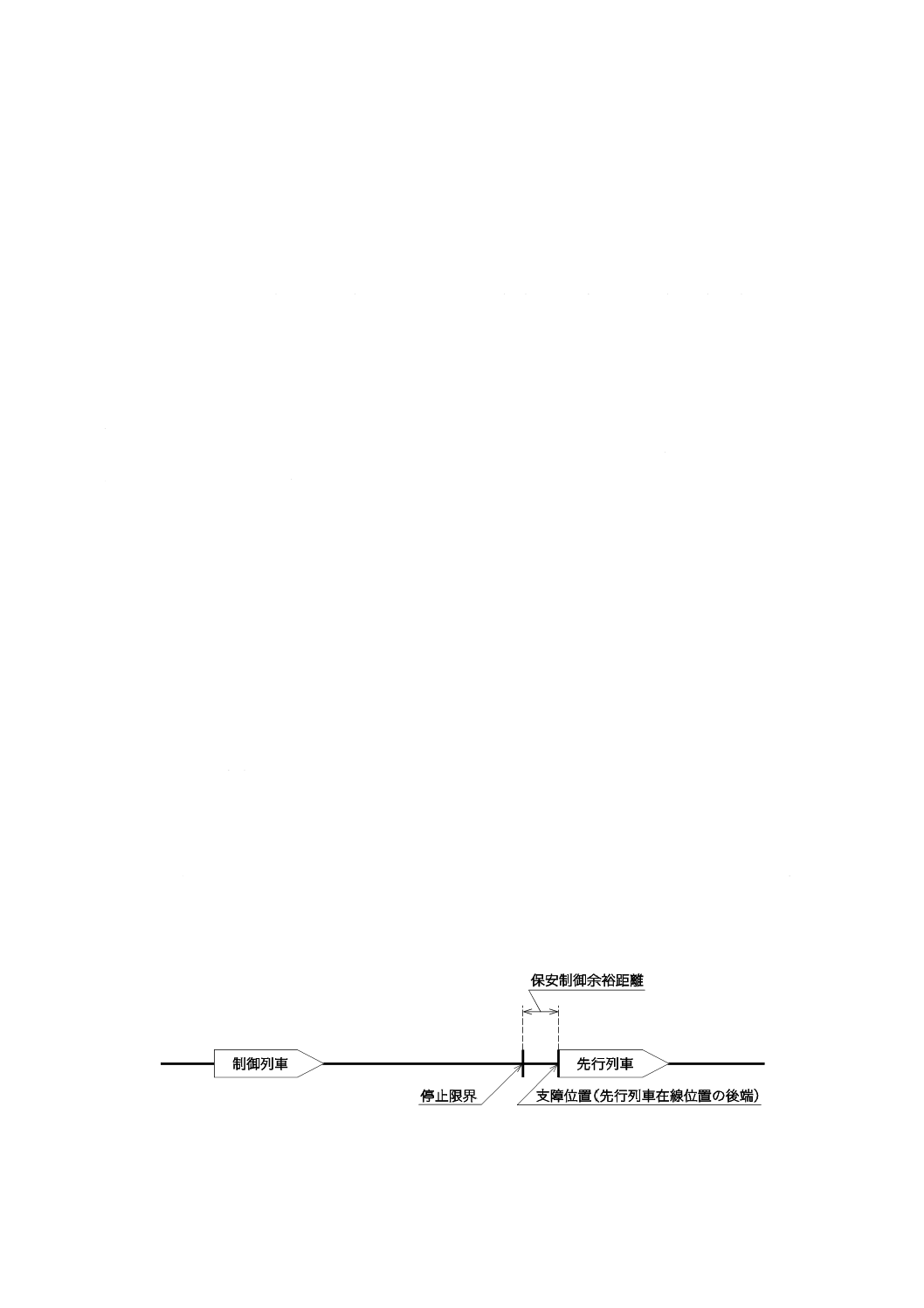
f)
安全な列車間隔を確保する停止限界の決定 先行列車が支障となる通常の間隔制御における停止限
界の決定は,先行列車在線位置の後端を支障位置とし,その支障位置に保安制御余裕距離を外方に確
保した位置を停止限界とする(図3参照)。ただし,特定区間(僅かな退行を行う可能性のあるホーム
区間,複数列車の進入を許容しない区間などの特定の区間)においては,各区間の境界位置を支障位
置とし,その支障位置に必要に応じて保安制御余裕距離を外方に確保した位置を停止限界とする(図
4参照)。
図3−先行列車を支障とする通常の間隔制御における停止限界の例
11
E 3801-1:2018
図4−複数列車の進入を許容しない区間の停止限界の例
7.3.2.4
最大許容速度の決定
JRTCは,最大許容速度を決定するために,次の機能をもたなければならない。
a) 線路の条件などによる速度制限 線路の条件などによって,あらかじめ鉄道事業者から指定された箇
所に制限速度を設定する。
b) 車両性能による速度制限 鉄道事業者によって指定された車両性能による制限速度を設定する。
c) 臨時の速度制限 鉄道事業者が臨時に指定する箇所に制限速度を設定する。また,必要に応じて,指
定する列車に制限速度を設定してもよい。
7.3.2.5
踏切制御による速度制限の決定
JRTCは,踏切制御に関して,次の機能をもたせることができる。
a) 踏切の制御 JRTCは,踏切通行の遮断及び遮断解除を行うために,踏切制御装置とのインタフェー
スをもつ。
なお,JRTCが,直接,踏切通行の遮断及び遮断解除の制御出力を行ってもよい。
b) 踏切制御に従った速度制限の決定 JRTCは,踏切道手前に停止するためのブレーキパターンを作成
し,踏切遮断完了など踏切通過条件が満足したときに当該パターンの消去を行う。このブレーキパタ
ーンの例を,C.3に示す。
7.3.2.6
列車走行の許可
JRTCは,列車走行に関して,次の機能をもたなければならない。
a) 列車走行時の停止限界の決定 停止限界は,ルートに関する停止限界及び列車間隔に関する停止限界
で,列車の進行方向で最も外方の停止限界に決定する。
b) 他の制約条件の決定 JRTCが列車走行の許可を決定する場合,その他の制約条件として,線路閉鎖
など鉄道事業者によって指定された事項を含めなければならない。
c) 保安制御のためのブレーキパターンの決定 ブレーキパターンは,列車を減速又は停止させることを
目的に算出される速度照査パターンである。車両性能,線路勾配など,及び停止限界又は制限速度開
始位置を考慮して,非常ブレーキ減速度に空走時間を加味して作成する非常ブレーキパターンを用意
する。
なお,非常ブレーキパターンのほかに常用最大ブレーキパターンを更に用意してもよい。これらの
ブレーキパターンは,次の条件を満たさなければならない。
− 7.3.2.4で規定する最大許容速度
− 7.3.2.5 b)で規定する速度制限及び7.3.2.6 b)で規定する他の制約条件
− 7.3.2.6 a)で規定する列車走行時の停止限界
これらのブレーキパターンの例を,C.4に示す。
12
E 3801-1:2018
7.3.2.7
列車走行の監視制御
JRTCは,列車走行の監視制御について,次の機能をもたなければならない。
a) 列車速度の決定 JRTCは,実際の列車速度とみなす速度を決定できなければならない。この速度の
決定に当たって,速度の連続性を監視し,異常な速度変化を検知した場合には列車の安全を確保でき
るように速度を設定する。
b) 安全な列車速度の監視制御 列車速度が非常ブレーキパターンを超えた場合には,直ちに非常ブレー
キを出力する。常用最大ブレーキパターンを用意した場合,列車速度が常用最大ブレーキパターンを
超えたときに,常用最大ブレーキが作動する。ブレーキの緩解条件は,鉄道事業者の定めに従う。
7.3.3
自動列車運転
GOA2を対象とした場合,JRTCは,自動列車運転のために,次の機能をもたなければならない。
なお,自動列車運転中に手動操作が行われた場合には,自動列車運転機能は解除され,手動操作が優先
されなければならない。
a) 運転速度曲線の決定 JRTCは,保安制御のためのブレーキパターンの範囲内における,加速又は減
速を含めた運転速度曲線を決定する。運転速度曲線を決定する上で必要となる加減速度などの要件は,
鉄道事業者の定めに従う。
b) 運転速度曲線に従った列車走行制御 JRTCは,運転速度曲線に従い,列車の速度制御を行う。
c) 列車走行の制限 列車状態に正常な運転を支障する要因がある場合には,列車の走行を制限する。
7.3.4
走行線路の監視
JRTCは,障害物との衝突及び人との接触を防止するために,外部システムとのインタフェースをもつ
ことによって走行線路の監視機能をもたせてもよい。
7.3.5
ドア開閉制御
JRTCは,外部システムとのインタフェースをもつことによって,ドア開閉の制御の自動化機能をもた
せてもよい。
7.3.6
分割及び併合
JRTCは,列車の分割又は併合のために,次の機能をもたせてもよい。
a) 分割及び併合時の安全確保 列車を分割又は併合させる場合,7.3.2で規定する列車走行の安全確保の
考え方に基づいて,安全を確保する。この機能の要求事項は,鉄道事業者が定める。併合時の制御の
例を,C.5に示す。
b) 列車の管理 分割された列車を独立に管理する。また,併合された列車を一つの列車として管理する。
7.4
列車運行の監視及び管理
7.4.1
一般
列車運行の監視及び管理は,列車ダイヤを用いる方法とそれ以外の方法とがある。列車運行の監視及び
管理をどの方法で行うかは,鉄道事業者が定める。列車ダイヤを用いて列車運行の監視及び管理を行う場
合には,JRTCに,7.4.2〜7.4.5の機能をもたせてもよい。列車運行の監視及び管理における機能の例とそ
れらの関連とをC.6に示す。
なお,それ以外の方法で列車運行の監視及び管理を行う場合は,この規格の適用外とする。
7.4.2
制御用列車ダイヤ管理
制御用列車ダイヤ管理は,次による。
a) 列車ダイヤの取込み 運行計画系システムなど,外部のシステムから列車ダイヤを取り込むためのイ
ンタフェースをもつ。
13
E 3801-1:2018
b) 制御用列車ダイヤの更新 定められた時期に,外部システムから取り込んだ列車ダイヤを用いて制御
用列車ダイヤの更新を行う。
c) 制御用列車ダイヤの変更など 発車時刻,停車駅など制御用列車ダイヤの追加,削除及び変更ができ
る。追加,削除又は変更された制御用列車ダイヤは,合理性チェックを行う。
d) 実績データの管理 列車の走行に合わせて,出発時刻,到着時刻などの実績データを収集する。実績
データは,必要に応じて,外部システムに出力してもよい。
e) 運行係員とのHMI 運行係員に対する表示,運行係員による制御用列車ダイヤの変更などのための
HMIをもつ。
7.4.3
列車運行の監視
列車運行の監視は,次による。
a) 列車追跡 システム内の列車位置及び列車番号を関連付けて監視する。
b) 運行乱れの監視 列車ダイヤと実際の運行との差を監視する機能をもち,必要な場合は,アラームを
出すことができる。
7.4.4
列車運行の管理
列車運行の管理は,次による。
a) 自動ルート設定 運行条件(制御用列車ダイヤ,列車の位置など)に基づいてルート設定要求を行う。
この機能に対応して,ルート取消要求を行う機能をもたせてもよい。
b) 指令員の扱い ルート設定要求及びルート取消要求は,指令員の扱いで行うこともできる。
c) 列車の運転整理 列車ダイヤに乱れが生じた場合,列車の遅れなどを減らすために制御用列車ダイヤ
の調整を,自動又は手動によってできなければならない。調整の基準については,鉄道事業者が定め
る。
7.4.5
保守作業管理
JRTCは,保守作業管理のために,次の機能をもたせてもよい。
− 保守作業管理システムとのインタフェース
− 保守作業のための転てつ器転換制御
− 分岐器及び軌道の使用停止又は解除
− 保守作業エリア(線路閉鎖,保守用車使用)の設定又は解除
14
E 3801-1:2018
附属書A
(参考)
用語の補足
A.1 一般
この附属書は,本体の用語について,定義及び内容に関する補足説明を記載する。
A.2 ルート
ルート “進路”という用語には,“列車又は車両の移動のためにあらかじめ定めた通りみち”を意味す
る場合と,“列車などの運転の安全が確保された通りみち”を意味する場合とがある。この規格では,曖昧
さを避けるため“進路”という用語は用いず,前者の意味合いを表す用語として“ルート”を定義し,後
者を指す場合には“安全を確保したルート”と表現することとした。
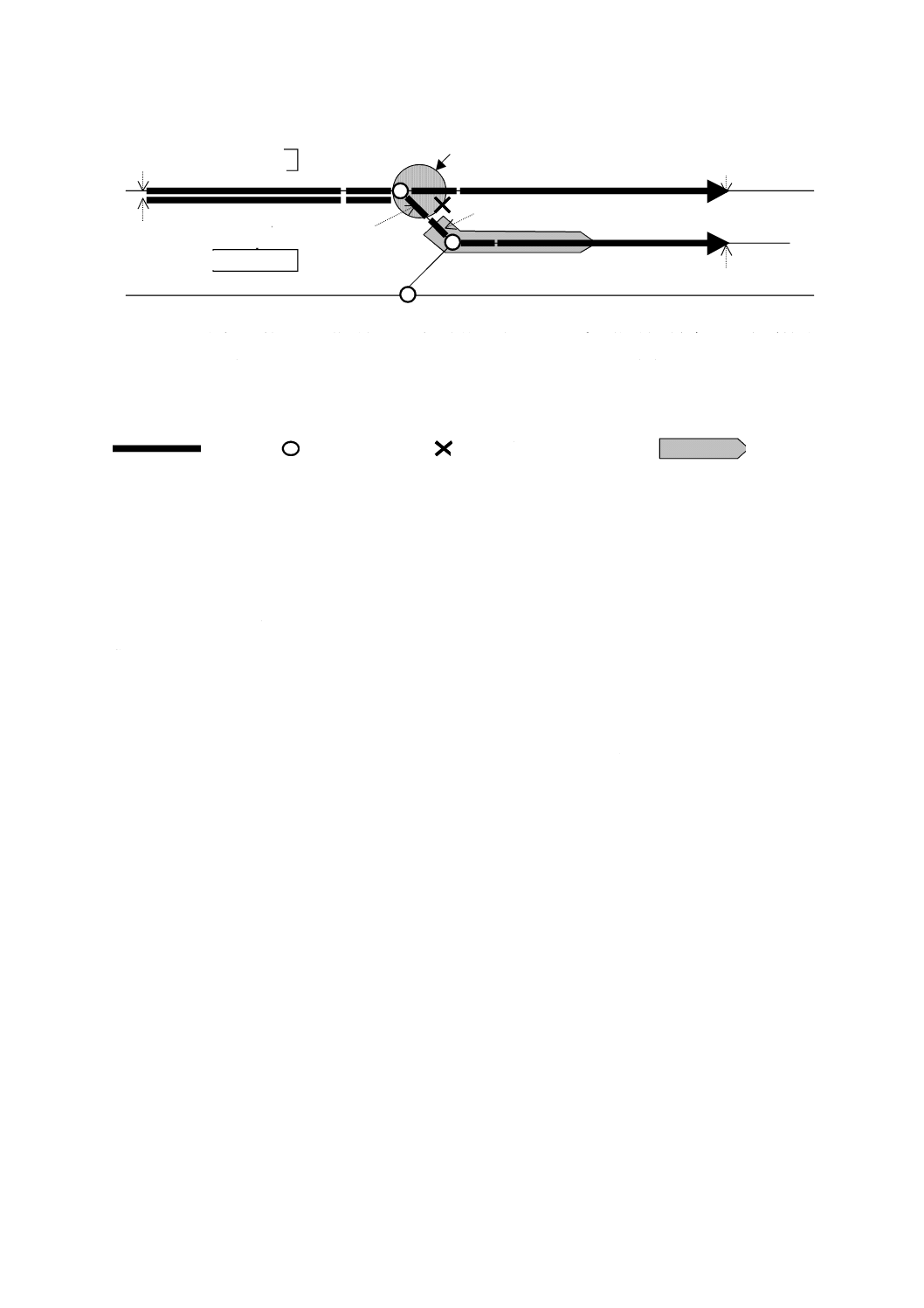
A.3 ルート構成要素
ルートの始端から終端までの区間は,必要に応じて複数のルート構成要素区間に分割されるが,この場
合には車両接触限界及び過走・流れ出しに対する側面防護を考慮する必要がある。
図A.1に,分岐箇所でルートを分割する場合の例,及び車両接触限界を考慮したルートの例を示す。
分岐に隣接する区間は,てっ査条件に関わるため,適切な長さとなるよう考慮する。
a) 分岐箇所でルートを分割する場合の例
図A.1−ルート区間分割及びルート区間設定の例
ルートA始端
ルートA終端
ルートB始端
ルートB終端
ルートA
ルートB
ルートA
ルートB終端
ルートA終端
ルートB
ルートB始端
ルートA始端
15
E 3801-1:2018
ルートCは車両接触限界までの構成要素が使用中の場合には設定できない。構成要素区間a,bのように分割す
ると,列車がaを抜け切った時点でルートCを設定することができる。a,bを一つの構成要素区間 (a+b) とする
と,列車がbの先の転てつ器を抜け切るまでa+bが使用中となって車両接触限界を支障し,ルートCが設定可能
となるまでに時間がかかる。
b) 車両接触限界を考慮したルートの例
:区間
:交差・分岐
:車両接触限界標識
:列車
図A.1−ルート区間分割及びルート区間設定の例(続き)
A.4 係員
係員には,運転士,運行乗務員及び運行係員があり,それぞれの担務は次のようなものである。
a) 運転士と運行乗務員とは表A.1に示す機能を担務する係員であり,それらを総称して乗務員という。
b) 運行係員は次の業務を行う係員をいう。
1) 列車の運転整理に関する業務
2) 信号機及び転てつ器の取扱い並びに車両の入換業務
A.5 自動化の程度(GOA)
自動化の程度(以下,GOAという。)は,列車運転の基本機能を人(乗務員)及びシステムへのいずれ
に割り当てるかによって決定される。この割当は,システムの運用方法と大きく関わる要素となる。この
ため,この規格では自動化の程度を鉄道事業者が指定することとした。
参考までに,IEC 62290-1での,自動化の程度に対する人(乗務員)及びシステムへの列車運転の基本
機能の割当を,表A.1に示す。GOA3以上はこの規格の対象外であるが,GOA3以上へアップグレードす
る場合に,GOA2以下の機能について,この規格の一部又は全部を適用できる。また,例えば自動列車制
御装置(以下,ATCという。)を用いたGOA1線区内で,一部のエリアだけ自動列車運転装置が導入され
GOA2となる場合も想定できることから,同一列車に,エリアに応じたGOAを適用してもよいこととし
た。
ルートD終端
ルートC
ルートD
ルートC始端
ルートC終端
ルートD始端
構成要素区間a
構成要素区間b
車両接触限界を支障する区間
ルートC始端
ルートC
ルートD始端
ルートD
構成要素区間a
構成要素区間b
車両接触限界を支障する区間
ルートC終端
ルートD終端
:区間
:交差・分岐
:車両接触限界標識
:列車
16
E 3801-1:2018
表A.1−自動化の程度に対する列車運転の基本機能の割当
列車運転の基本機能
自動化
レベル
0
自動化
レベル
1
自動化
レベル
2
自動化レ
ベル3
自動化レ
ベル4
車上の係員名称と
担務
乗務員
GOA0
GOA1a)
GOA2
GOA3
GOA4
運転士
運行
乗務員
列車走行の
安全確保
ルートの安全確保
×
○
○
○
○
□
−
列車間隔の安全確保
×
○
○
○
○
□
−
速度の安全確保
×
×
○
○
○
□
−
列車運転
加速制御及び減速制御
×
×
○
○
○
□
−
走行路の
監視
障害物との衝突回避
×
×
×
○
○
□
−
軌道上の人間との衝突回避
×
×
×
○
○
□
−
旅客乗降の
監視
旅客ドアの制御
×
×
×
×/○
○
□
□
車両間又はプラットフォーム
と列車間での旅客障害の回避
×
×
×
×/○
○
□
□
出発制御
×
×
×
×/○
○
□
□
列車操作
運転の起動・停止操作
×
×
×
×
○
□
□
列車状態の監視
×
×
×
×
○
□
□
緊急状態の
検知と管理
列車診断の実施,発火・発煙
の検知,脱線検知,列車統合
性不良の検知,緊急状態への
対処(連絡/避難,監視)
×
×
×
×
システム
及び/又
は指令所
係員
□
□
注記 ×=人(乗務員)への割当(システムへ割り当ててもよい。),○=システムへの割当
注a) IEC規格では日本のATCは,GOA1に含まれる。
□=係員の担務機
能(一部をシステム
が行ってもよい。)
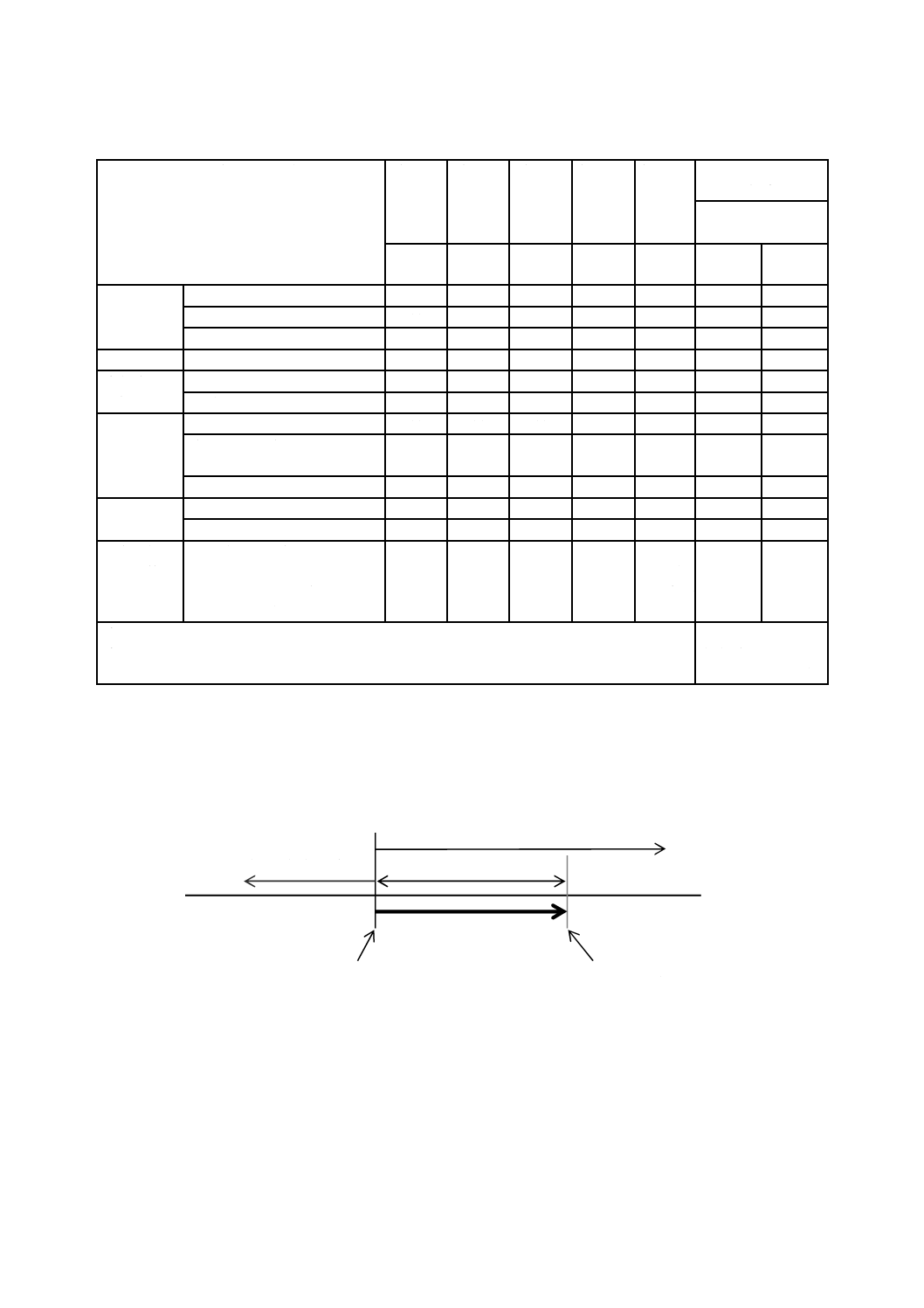
A.6 方向の表現
A.6.1 ルートに関する方向
ルートは長さと方向をもつ。図A.2にルートに関する区間と方向を例示する。
図A.2−ルート区間分割及びルート区間設定の例
A.6.2 列車の移動する方向
列車の移動する方向には次の表現を用いる。
1) 列車運転方向:列車の運転計画に定められた運転方向
2) 列車進行方向:列車が移動する方向
ルート(の)始端
ルート(の)終端
ルート
(長さと方向をもつ)
ルート始端(の)外方
ルート内
ルート始端(の)内方
17
E 3801-1:2018
附属書B
(参考)
相互運用性,互換性及び両立性
B.1
一般
この附属書は,相互運用性,互換性及び両立性の概念を記載する。
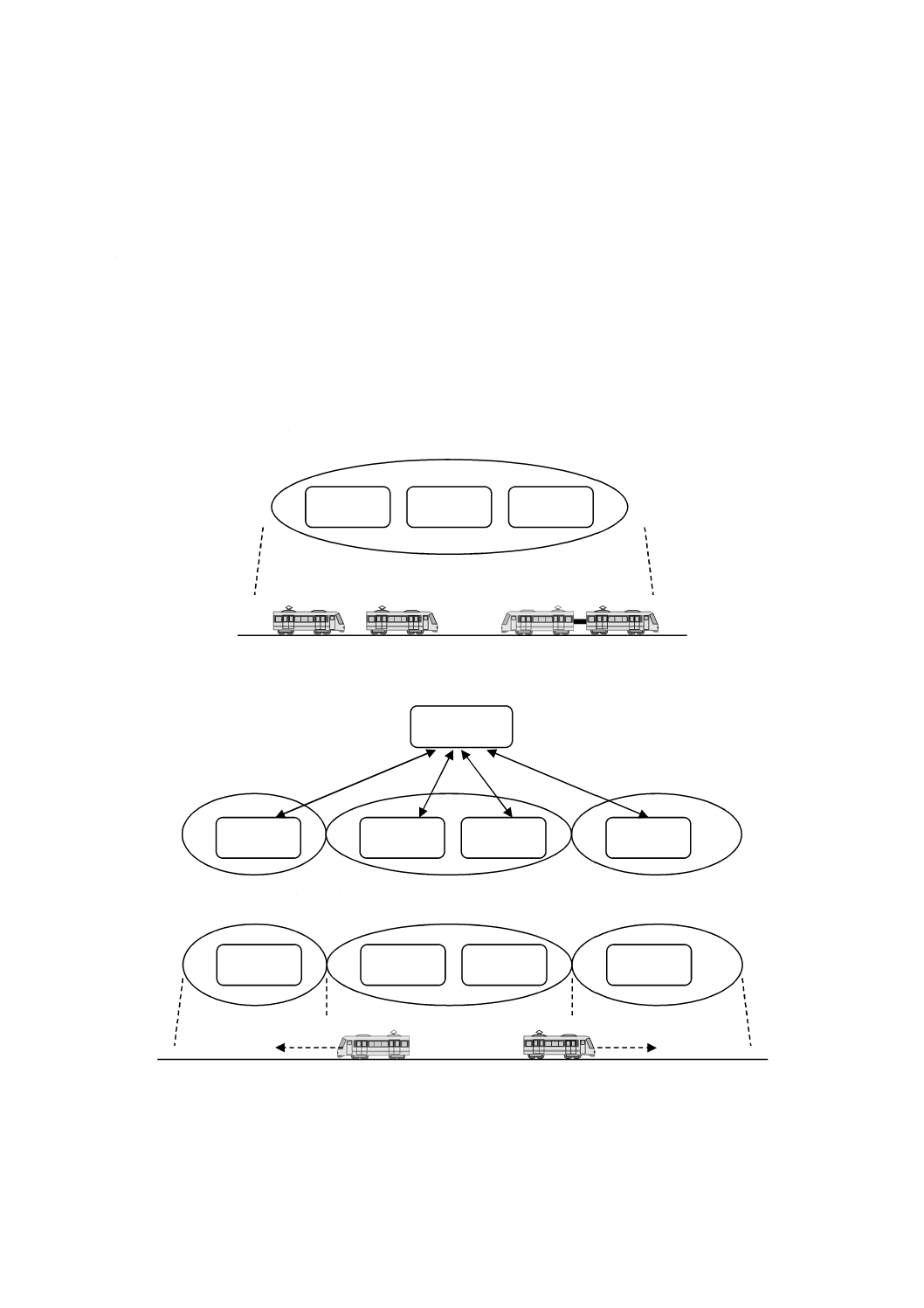
B.2
相互運用性
a) 同一GOAでの製造業者が異なる場合の相互運用性[6.1 a)] 相互運用性の概念図を図B.1に示す。
− ある製造業者のJRTC列車は,異なる製造業者の地上装置の区間でも走行できる。
− 二つの異なる製造業者によるJRTC列車を併合運転できる。
− 地上装置は製造業者に関係なく,共通の指令所装置と接続できる。
− JRTC列車は,製造業者の異なる地上装置の境界を通過できる。
OCC:指令所装置 WS:地上装置 **−X:製造業者Xの装置
図B.1−相互運用性の概念図
b) JRTC線区における異なるGOA間での相互運用性[6.1 b)] 上記のように同一のGOAでの相互運
WS−Y
WS−X
WS−X
WS−Z
JRTC列車−X
JRTC列車−Y
OCC−X
WS−Y
WS−X
WS−X
WS−Z
WS−X
WS−X
WS−X
JRTC列車−X
JRTC列車−Y
X-Y併合列車
18
E 3801-1:2018
用性をもたせるが,6.1 b) に述べるようにJRTCでは,同一線区内で異なるGOAエリアを許容してい
ること及び異なるGOAの複数の線区間で相互に乗入れを行う場合などが想定されるため,相互に共
通な自動化レベルの最も高いGOAで動作できることを要求事項とした。共通GOA内での相互運用性
は,6.1 a) に示すとおりである。
c) JRTC線区と隣接する非JRTC線区との間の相互運用性[6.1 c)] 非JRTC線区からJRTC線区への
進入及び進出に関しては,境界を正確に識別する能力,進入前のJRTC機能のチェック,非JRTC車
のJRTC区間への進入の防止,JRTC区間進入及び進出の運転士への通知など,種々の要求事項が挙げ
られるが,これらは鉄道事業者ごとの運転取扱いなどに基づき要求事項とされるべき内容であり,各
鉄道事業者が定めるものとした。
d) 相互乗入れを行う場合の相互運用性[6.1 d)] 鉄道事業者の異なる隣接するJRTC区間においては,
各々には6.1 a) に示す相互運用性をもつが,アーキテクチャなどが異なりそのままでは相互乗入れが
できない場合がある。その場合は,鉄道事業者間で協議し,合意した上で要求事項を定める必要があ
る。
B.3
互換性
JRTCは,幾つかのサブシステム,サブコンポーネントなどで構成される。このため,JRTCに互換性を
もたせるためには,どの構成要素の単位において互換性をもたせるのか決定する必要がある。しかし,こ
の構成要素の単位は鉄道事業者によって要求レベルが異なることが想定されるため,この規格では互換性
のための要求事項は鉄道事業者が定めることとした。図B.2に,互換性の概念図を示す。
図に示すように,同一の機能的インタフェース仕様(FIS:Functional Interface Specification),フォーム
フィット機能的インタフェース仕様(FFFIS:Form-Fit Functional Interface Specification)によって設計され
ることによって,異なる製造業者の構成要素と取替えが可能となる。
OBC:車上制御装置
図B.2−互換性の概念図
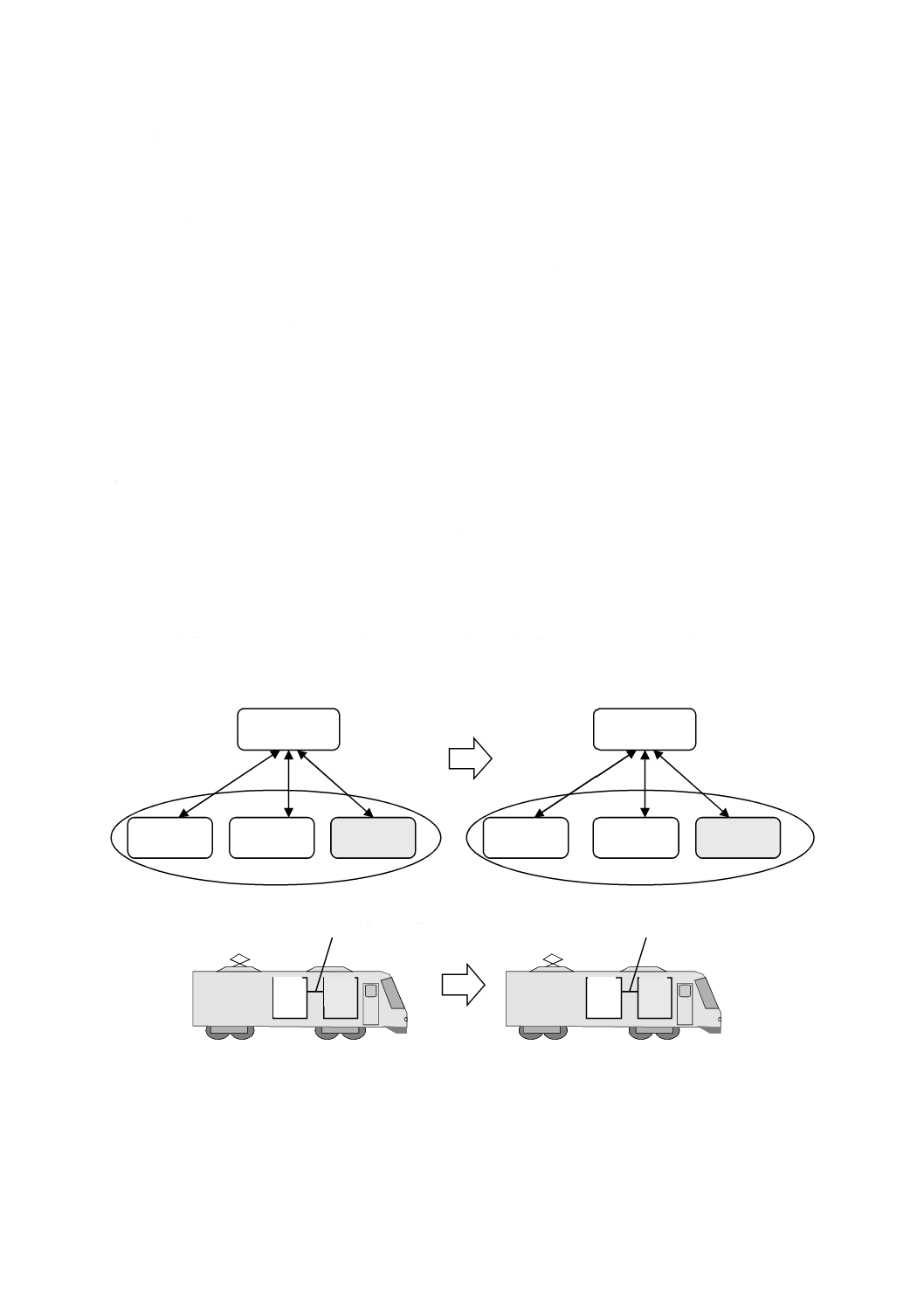
B.4
両立性
JRTCの導入を考えたとき,新線でない限り既存システムが存在する。このため,既存システムからJRTC
OCC−X
WS−X
WS−X
WS−X
OCC−X
WS−X
WS−X
WS−Y
FIS・FFFIS
FIS・FFFIS
OBC
−X
FIS・FFFIS
無線
装置
−X
FIS・FFFIS
OBC
−Y
無線
装置
−X
19
E 3801-1:2018
への移行を容易に行える必要があるが,両立性をもたせることによって可能となる。この規格では,既設
システムの種類も多岐にわたるため,両立性に関する具体的要求事項は一概に定めることが困難であり,
鉄道事業者によるものとした。
図B.3に,既存システムとの両立性による移行・更新の図を示す。移行期においては,JRTCの地上設備
及びJRTC列車は,既設システム列車の運行に影響を与えず,かつ,JRTC列車は既設システムから影響を
受けずに運行が可能なことを示す。
なお,移行期におけるJRTC列車と非JRTC列車との混在運行に関する具体的要求事項は,この規格の
対象外である。
図B.3−両立性によるシステム移行・更新図
既設システム
JRTC
JRTC列車
既設システム列車
既設システム
JRTC
JRTC列車
JRTC列車
撤去
既設システム
既設システム列車
既設システム列車
既設システムによる列車運行
両立性による既設システムとJRTCシステムでの列車運行(移行期)
JRTCシステムによる列車運行(システム更新完了)
20
E 3801-1:2018
附属書C
(参考)
機能の留意事項と実施例
C.1 一般
この附属書は,一部の機能について留意事項及び実施例を示す。
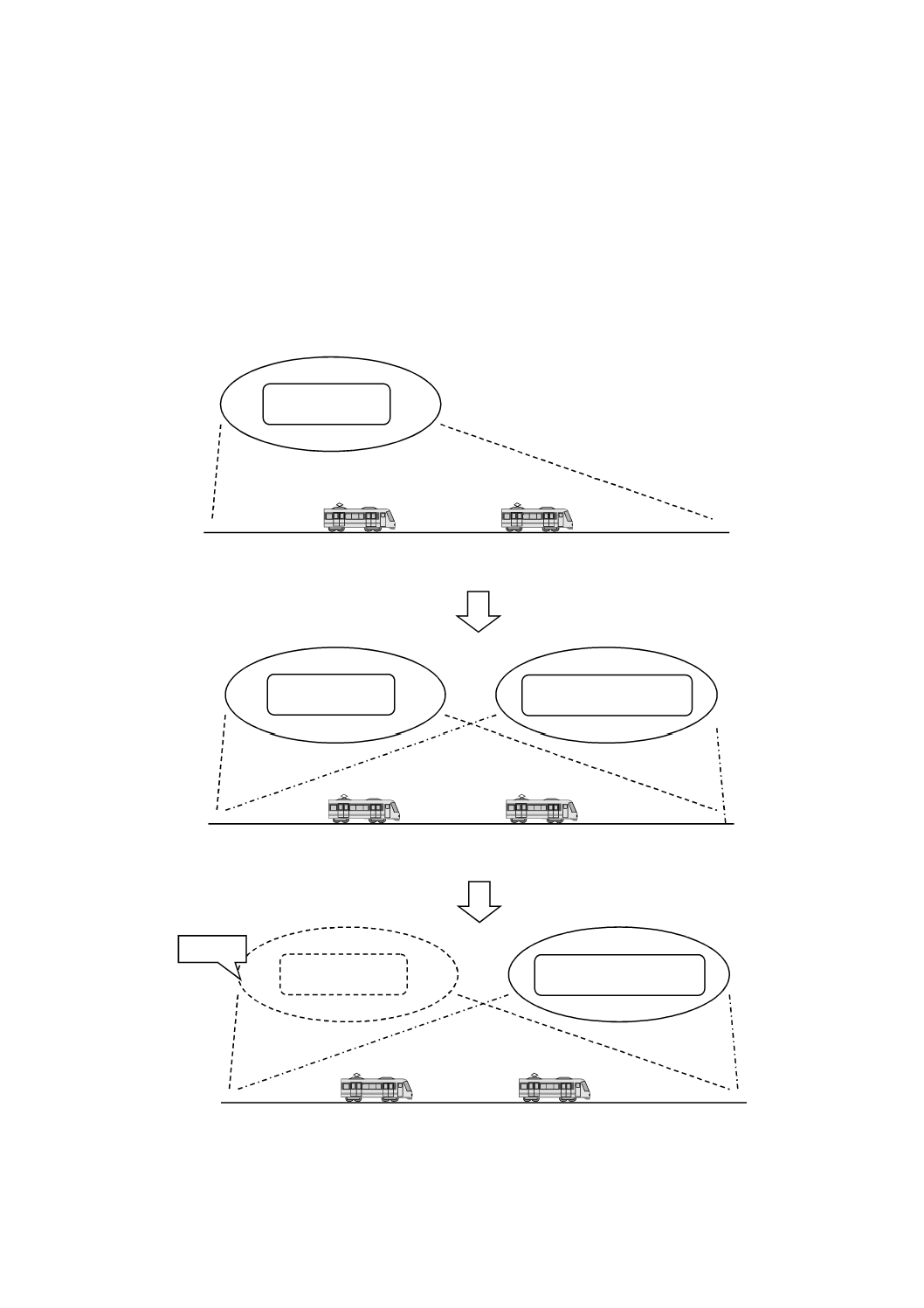
C.2 列車編成方向の決定[7.3.2.3 b)]
運転台が選ばれたときに,その運転台が路線の起点方にあるのか終点方にあるのかシステムは判別でき
なければならない。
編成の方向が,路線の起点に対して変化しない場合は,編成の使用が開始された時点で,どの運転台が
どちら方にあるか決まるため,編成方向は同一の既定値でよい。
しかし,図C.1に示すようなデルタ線などでは,列車が駅S1からS2及びS3を経由してS1に戻る場合,
S1に戻ってくると,運転台のAとBとの位置が逆になっていることが分かる。駅S1で運転台Aが選択さ
れたとして,運転台がどちらを向いているのか一意に決まらないことになる。
このように,編成の方向が路線の起点に対して変わる可能性がある場合は,選択した運転台がどちら方
にあるのかを,システムが正確に把握できる機能をもたなければならない。
S1
S3
S2
A
B
A
B
S1
S3
S2
A
B
A
B
起点
終点
終点
起点
終点
起点
路線K
路線L
路線M
制御エリアX
図C.1−編成方向が変わる例
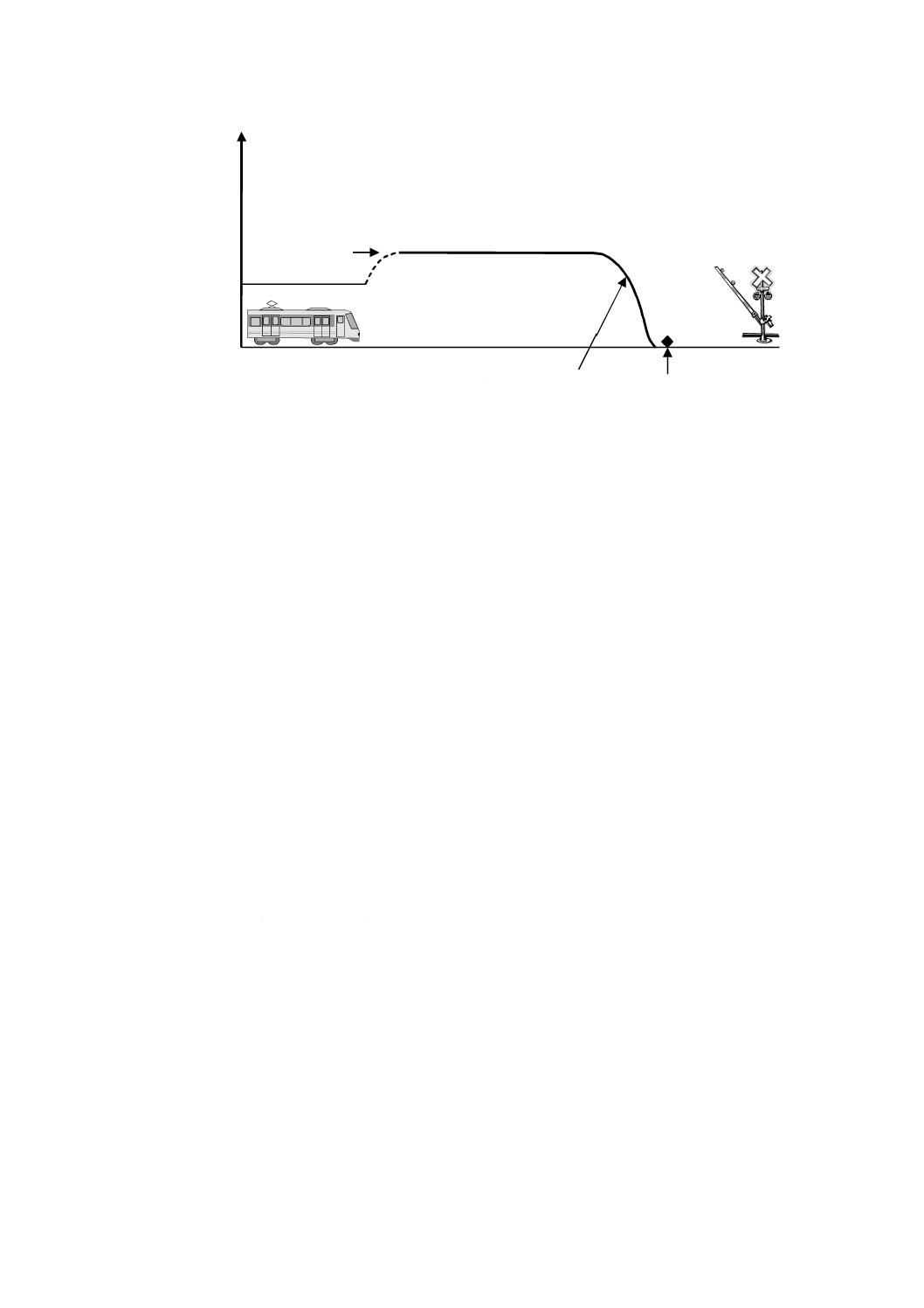
C.3 踏切制御による速度制限の決定(7.3.2.5)
踏切通行の遮断のためのブレーキパターン作成の一例を図C.2に示す。ブレーキパターンの作成タイミ
ングは,あらかじめ登録された位置に列車が接近したときなどである。このブレーキパターンの消去は,
踏切の遮断が確認できたときに行うが,もし踏切の遮断が確認できなければ,列車はブレーキパターンに
従って踏切道手前に停止することを基本とする。ただし,この規格では具体的なパターンの形状及び作成・
消去条件は規定していない。
21
E 3801-1:2018
図C.2−踏切前停止のブレーキパターンの例
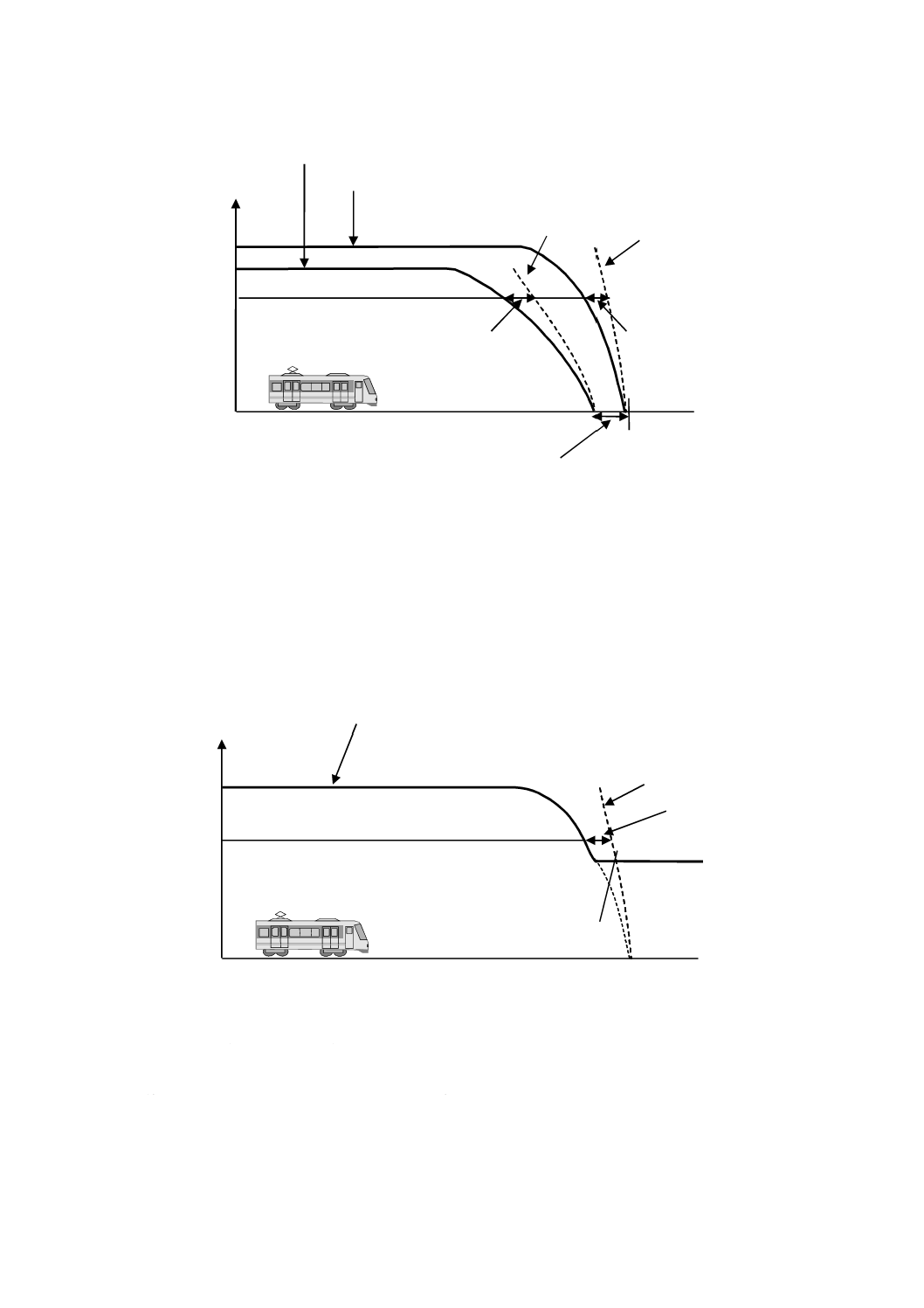
C.4 保安制御のためのブレーキパターンの決定[7.3.2.6 c)]
ブレーキパターンは,出力するブレーキの違いから非常ブレーキパターンと常用最大ブレーキパターン
とに分類できる。保安制御上必須となるのは,非常ブレーキパターンであり,常用最大ブレーキパターン
は乗客の乗り心地及び運転士の負荷軽減を目的にして用意される。このため,常用最大ブレーキパターン
が用意された場合,通常はこれによってブレーキ制御を行う。
参考までに,7.3.2.6 a) で規定する列車走行時の停止限界に対する各パターンの作成の考え方の例を,図
C.3に示す。非常ブレーキパターンは,速度0となる位置を停止限界又はその外方に余裕距離をとった位
置として,非常パターン減速度βeによって,空走時間Teを加味して作成する。列車速度が非常ブレーキパ
ターンを超えた場合には,直ちに非常ブレーキが出力され,列車は停止限界までに停止する。常用最大ブ
レーキパターンは,速度0となる位置を非常ブレーキパターンの速度0となる位置から一定距離Dp外方の
位置として,常用最大パターン減速度βnによって,空走時間Tnを加味して作成する。列車速度が常用最
大ブレーキパターンを超えると,常用最大ブレーキが出力される。また,常用最大ブレーキパターンと非
常ブレーキパターンとの最高速度が同じであると,僅かな速度超過であっても非常ブレーキによる列車停
止が発生するので運転上好ましくない。このため,図から分かるように常用最大ブレーキパターンの最高
速度は非常ブレーキパターンのそれより低く設定される。
なお,車両の条件,線路の条件,気象条件などによって期待する減速度が確保できない可能性があると
き,それらを考慮した上で各ブレーキパターンを作成することがある。
速度
現在速度
最大許容速度
踏切通行の遮断のためのブレーキパターン
踏切未遮断時の
停止限界
22
E 3801-1:2018
図C.3−停止限界パターンの作成例
次に,7.3.2.4で規定する安全な速度の確保に関する制限に対する各パターン作成の考え方の例を,図C.4
に示す。
ブレーキパターンは,空走時間を加味した上で速度制限開始位置を通過するように作成する。次に,速
度制限開始位置からは制限速度での一定速度パターンを作成し,列車速度がこれを超える場合はブレーキ
を出力する。
図C.4−制限速度パターンの作成例
最後に,7.3.2.5 b) 及び7.3.2.6 b) で規定する他の制約条件に対する各パターンは,基本的に上記の停止
限界パターン及び速度制限パターン並びにこれらの組合せで作成できると考えられる。例えば,線路閉鎖
時には線路閉鎖位置外方に停止限界が発生すると考えれば,図C.3の停止限界パターンで対応が可能であ
る。
速度
減速度βe
空走距離V×Te
列車速度V
制限速度開始位置
制限速度
ブレーキパターン
速度
停止限界
減速度βn
空走距離V×Tn
列車速度V
パターン間隔Dp
常用最大ブレーキパターン
非常ブレーキパターン
空走距離V×Te
減速度βe
23
E 3801-1:2018
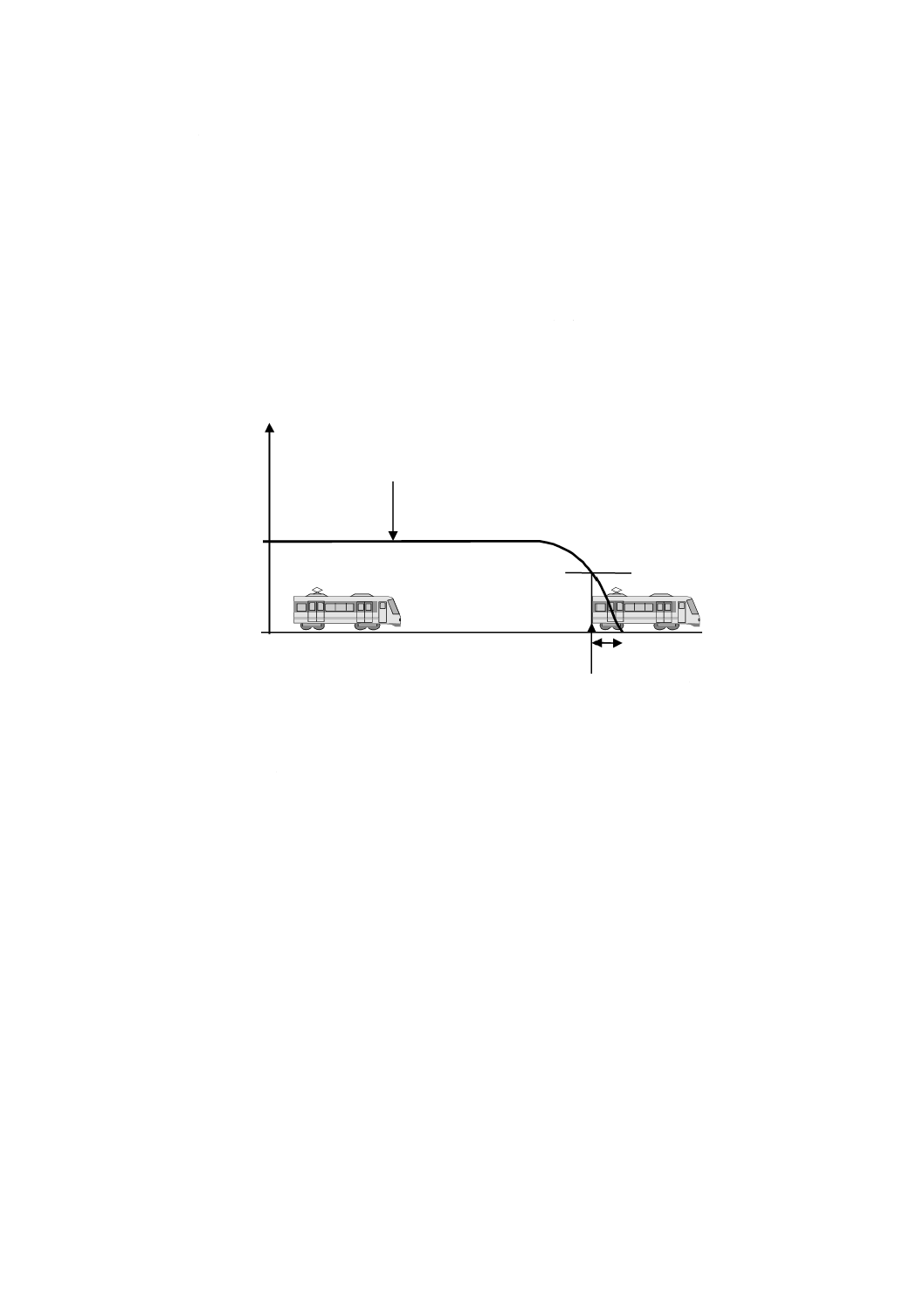
C.5 分割及び併合時の安全確保[7.3.6 a)]
列車を併合する場合,被併合列車の端部位置まで併合列車を接近させるので,7.3.2.3 f) で規定する安全
な列車間隔に関する停止限界での保安制御余裕距離を通常以下にして併合列車を制御する必要がある。こ
のような,保安上極めて精密な制御を行う場合には,システムに任せることなく運転士及び運行係員によ
って行うことも考えられる。いずれの方法を選択するかは,鉄道事業者の判断によるべきであるので,こ
の規格では,この機能の要求事項を鉄道事業者が定めるものとした。
なお,参考までに,システムで列車の併合機能を制御する場合の,併合パターンの作成方法の例を,図
C.5に示す。併合パターンは,併合列車の速度が,被併合列車の在線位置の後端であらかじめ定められた
安全上の所定速度V1以下となるようにブレーキパターンを立ち上げる。ブレーキパターンはあらかじめ定
められた併合用速度V2の頭打ちとする。
図C.5−併合パターンの作成例
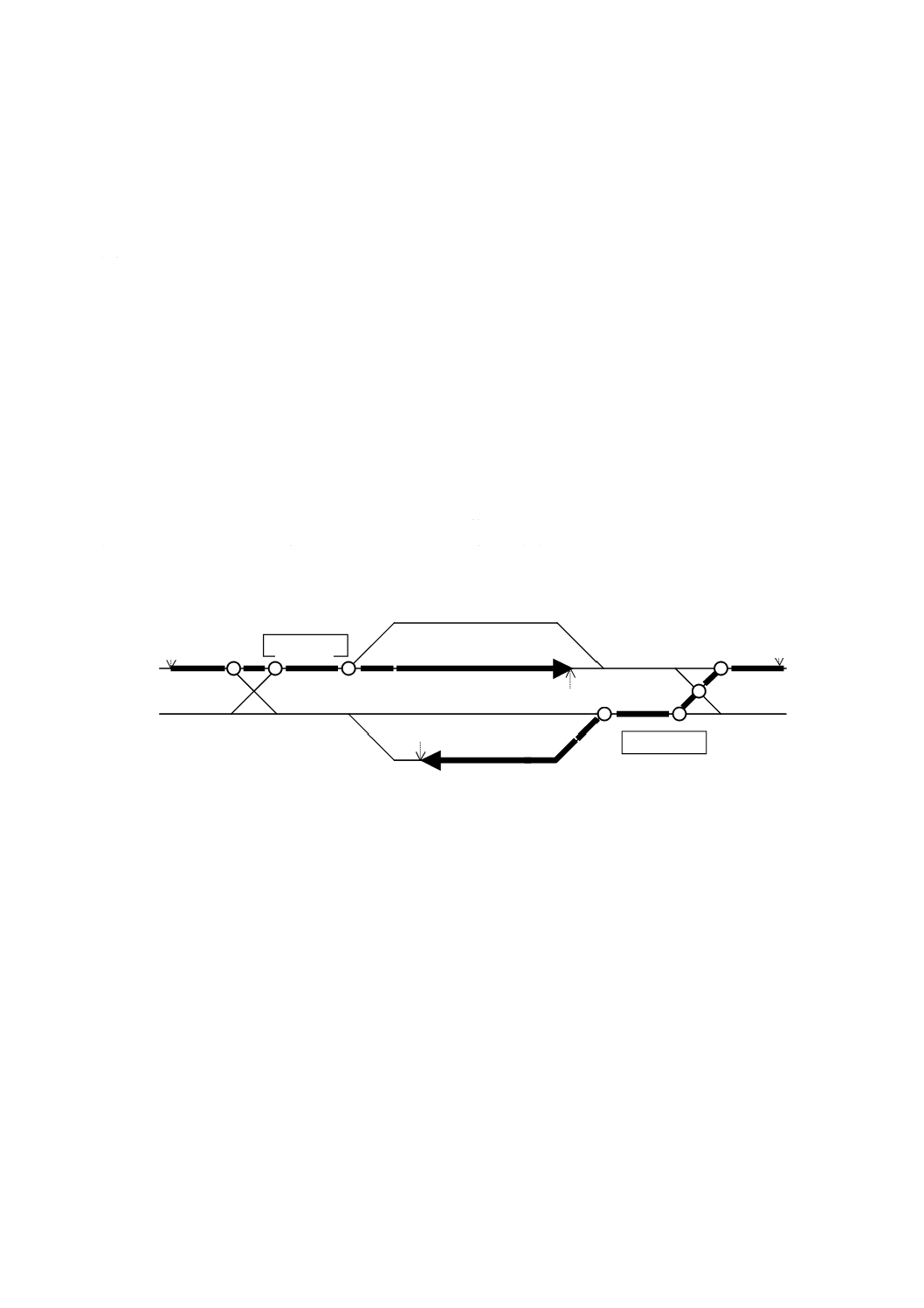
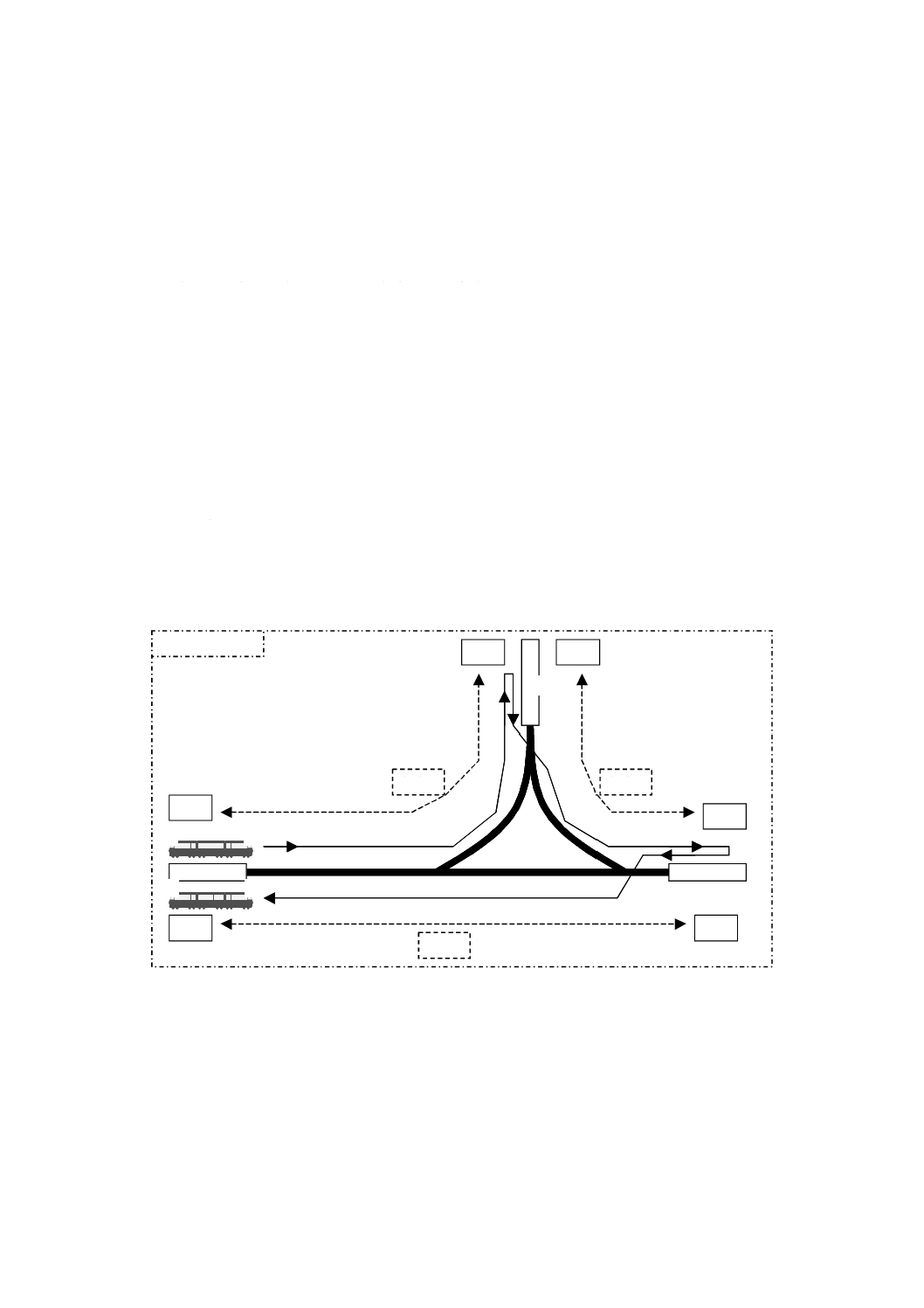
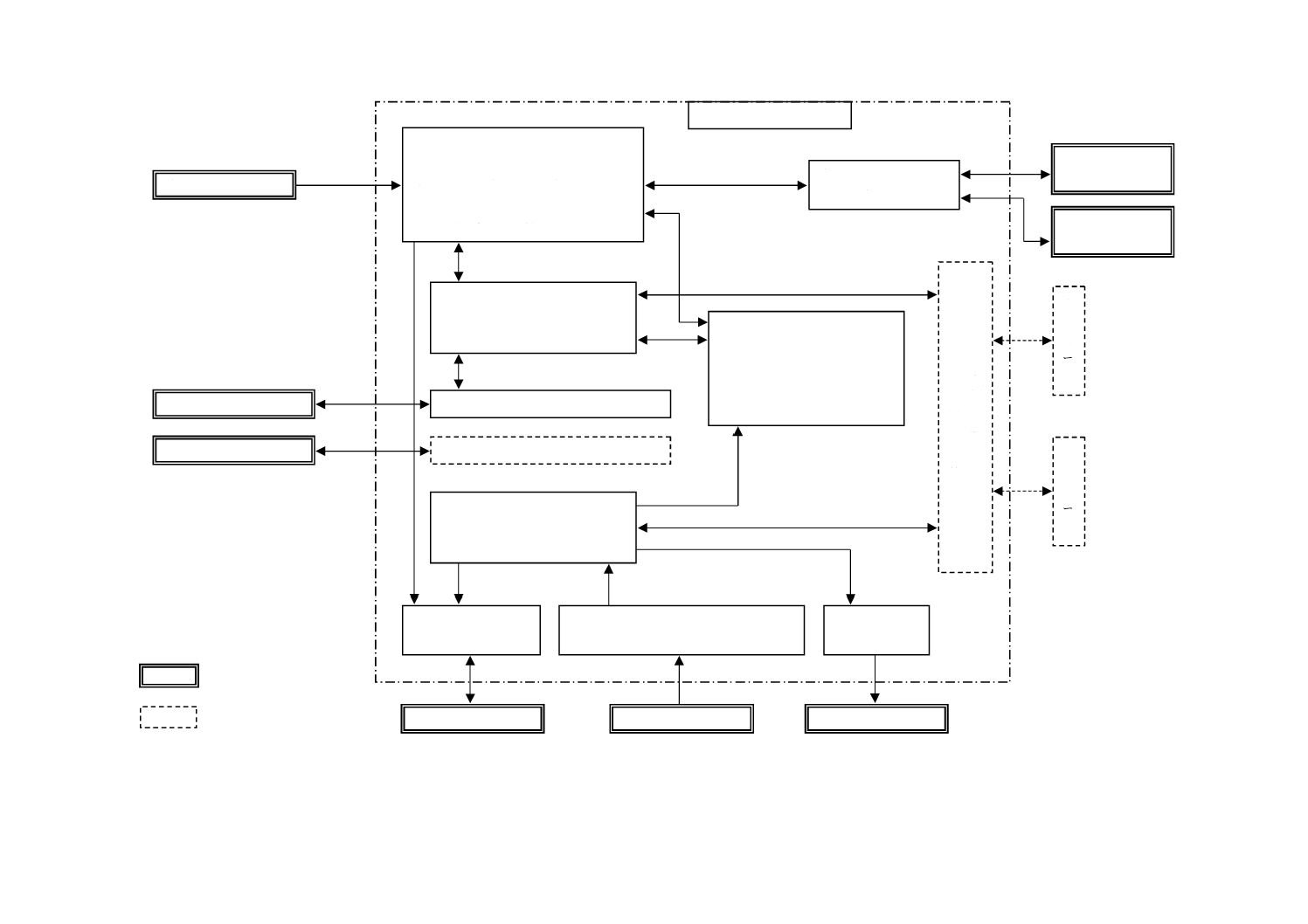
C.6 列車運行の監視及び管理(7.4)
7.4の列車運行の監視及び管理機能を中心としたJRTCの代表的な全体機能ブロックの例を,図C.6に示
す。ここでは,図1に挙げているJRTC以外の主要なシステムとのインタフェースも示した。電力管理シ
ステムについては,現状の国内システムで,列車運行の監視及び管理機能とのインタフェースをもつ事例
は見られないため,具体的な機能との関連は示していないが,将来的には,運用区域内でのけん(牽)引
電源のオン・オフ制御,回生ブレーキ制御,列車の加速などを制限するなどの機能を実現するためのイン
タフェースをもつことが考えられる。
速度
併合パターン
被併合列車在線位置の後端
併合用速度V2
安全上の所定速度V1
著作権法により無断での複製,転載等は禁止されております。
図C.6−列車運行の監視及び管理機能(全体機能ブロックの例)
保守支援
INF
ダイヤ作成システム
保守作業管理システム
電力管理システム
制御用列車ダイヤ管理機能(7.4.2)
・ 列車ダイヤの取込み INF
・ 制御用ダイヤの更新
・ 制御用ダイヤの変更など
・ 実績データの管理
列車運行の管理機能(7.4.4)
・ 自動ルート設定
・ 列車の運転整理
保守作業管理システム INF(7.4.5)
電力管理システム INF
列車運行の監視機能(7.4.3)
・ 列車追跡監視
・ 運行乱れの監視
旅客案内制御
INF
地上・車両設備監視システム
INF
システム管理機能(7.2.6)
・ 基本データの管理
・ 訓練機能
(シミュレーション機能)
・ 検査機能
JRTCの対象範囲
車両運用
・ 乗務員運用 INF
列
車
運
行
制
御
機
能
(
車
上
制
御
装
置
/
地
上
装
置
)
車
両
シ
ス
テ
ム
地
上
シ
ス
テ
ム
乗務員運用支援
システム
車両運用管理
システム
旅客案内システム
設備監視システム
設備管理システム
この図は,あくまで一例を示したも
のであり,システム構成としてこれ
にこだわるものではない。INFはイ
ンタフェースの略。
は,JRTCの対象範囲外
は,列車運行制御に関連する
装置及びシステム
4
E
3
8
0
1
-1
:
2
0
1
8
25
E 3801-1:2018
参考文献
IEC 62290-1,Railway applications−Urban guided transport management and command/control systems−Part
1: System principles and fundamental concepts
JIS E 3802 自動運転都市内軌道旅客輸送システム(AUGTシステム)−安全要求事項