2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 6804-1994
無人搬送車システム−設計通則
General rules on the design of automatic guided vehicle systems
1. 適用範囲 この規格は,無人搬送車(無人けん引車及び無人フォークリストを含む。)を中心にした無
人搬送車システムを導入する際の計画・検討を要する事項及び無人搬送車システムを設計する際の一般事
項について規定する。
備考 この規格の引用規格を,次に示す。
JIS D 6801 無人搬送車システム−用語
JIS D 6802 無人搬送車システム−安全通則
JIS D 6803 無人搬送車−設計通則
2. 用語の定義 この規格で用いる主な用語の定義は,JIS D 6801による。
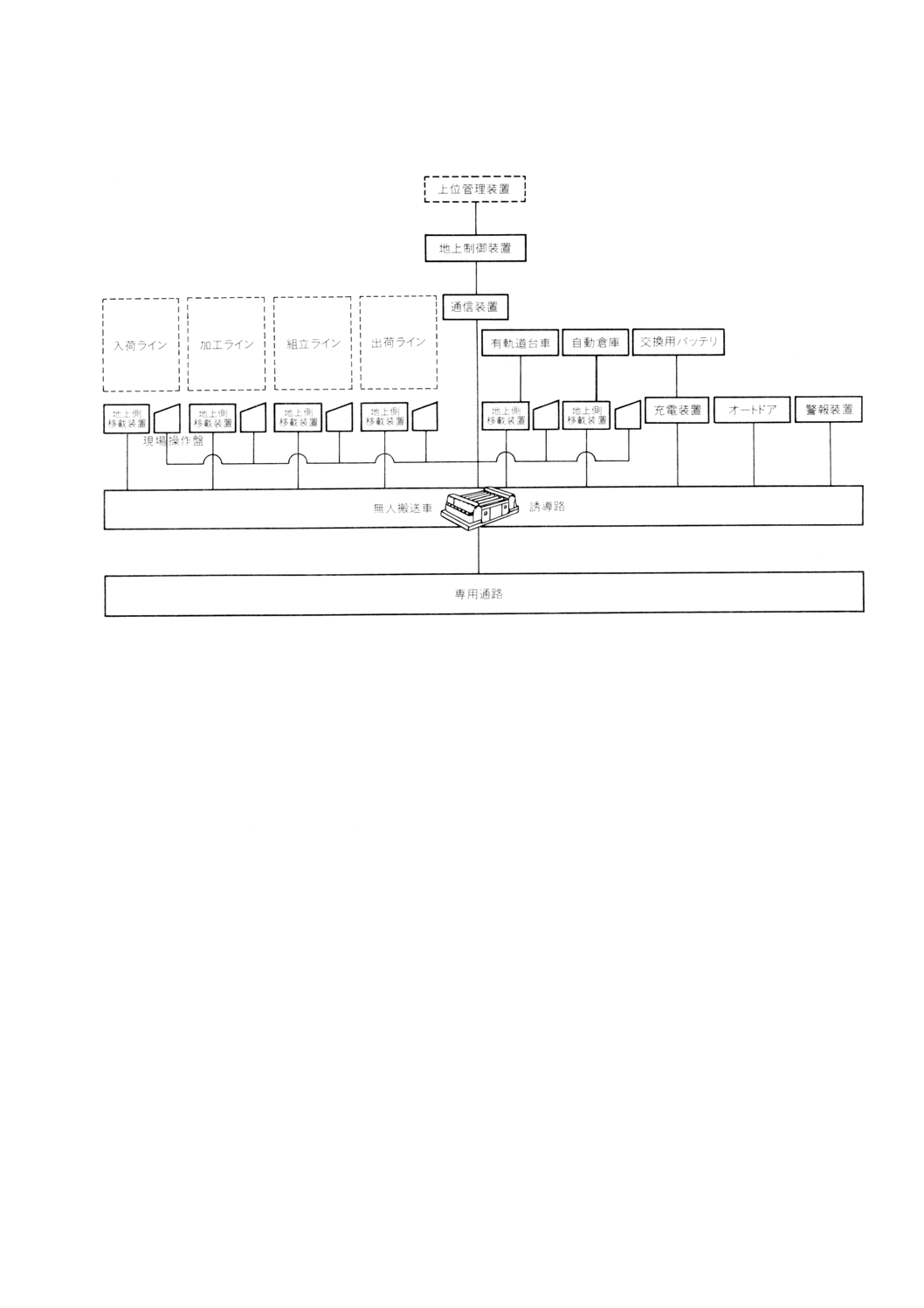
3. 無人搬送車システムの構成 無人搬送車システムは,図1に示すとおり,次の要素によって構成する。
(1) 無人搬送車
(2) 無人搬送車の誘導路
(3) 地上制御装置
(4) 通信装置
(5) 充電装置
(6) 地上側移載装置
(7) 周辺機器(オートドア,自動倉庫など)
(8) 警報装置
2
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 無人搬送車システムの構成
4. 無人搬送車システム導入計画
4.1
作業調査 無人搬送車システムを導入する場合,次の項目を明確にして計画する。
(1) 搬送作業 搬送作業についての確認事項は,次による。
(a) FROM-TO(無人搬送車又は搬送物の搬送起点と搬送先) 無人搬送車システムに対して入力され
る物・情報及びこれらに対する作業・目的地を明確にする。
(b) 搬送パターン 物の搬送と,積込み・積卸しに加えて,空パレットの回流を特定化する。
(c) 搬送物 搬送単位の形状,荷姿及び質量の範囲を明確にする。
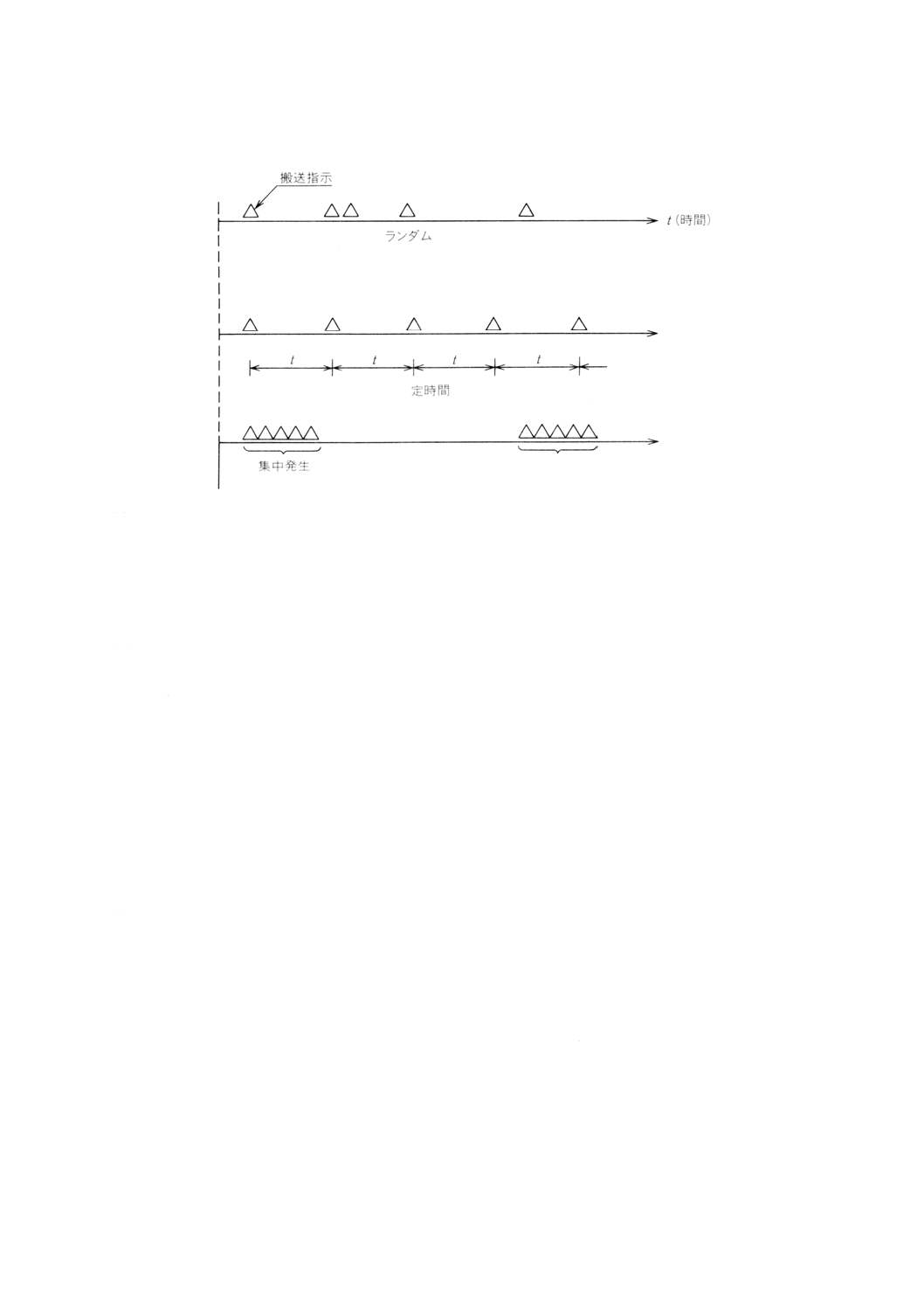
(d) 必要搬送量 搬送指示の時期及び実行時期(搬送量)のそれぞれのずれ又は集中性を明確にする(図
2参照)。
3
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2 搬送指示の発生頻度(タイミング)
(e) 稼働時間 休日稼働の有無を含め業務の形態及び稼働時間を明確にする。
(f) 工程間の関連性 前工程と次工程に対して無人搬送車の荷の受渡し条件(移載方法など)を明確に
する。
(2) 搬送要求 無人搬送車に対して作業要求となるデータの設定源と,次の指示変更源を検討する。
(a) 行先指示
(b) 移載指示
(c) 搬送指示の優先
(d) 予約キャンセル
(e) その他
(3) 異常時の処理 前工程,次工程に対する影響を調査し,次のような異常時のバックアップ法を検討す
る。
(a) 割込み
(b) 停電
(c) ダウンタイム(許容時間,代替手段及びバッテリ交換)
(4) 情報管理 無人搬送車システム全体の次のような情報管理の必要性を確認する。
(a) 搬送物の移動情報と管理項目
(b) 前工程,次工程とのコミュニケーション内容
4.2
環境調査 導入環境については,次の調査を行い,適合化を計画する。
(1) 走行領域及び環境状態については,JIS D 6803の3.2(設置条件)に基づいて調査する。
(2) 設置環境については,JIS D 6802の7.(使用環境)に基づいて計画する。
4.3
システムの安全と運用計画 システムの安全と運用計画は,JIS D 6802の5.(導入準備及び運用段
階における安全確保)に基づいて計画する。
4.4
設置計画
4
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4.1
工事計画 導入準備における環境整備工事からシステムの設置工事,システムの試運転及び稼働ま
でのそれぞれの施工範囲,確認内容を明確にし,他の生産設備に対する影響も考慮して引渡しまでの工事
計画をたてる。
4.4.2
設置管理 設置に当たっては,工事時間帯及び他の生産設備の稼働状況変化を十分に考慮し,現場
の安全規定にしたがった管理計画をたてる。
5. 無人搬送車システムの設計
5.1
環境との適合 導入環境調査に基づいた無人搬送車の仕様及び運転領域の条件を適合させる。
(1) 走行路 うねり,段差,溝幅,こう配,床構造など
(2) 環境 温度,湿度,雰囲気,静電気,ノイズ,屋外,屋内など
5.2
機種選定 無人搬送車の機種は,次の項目を検討し選定する。
(1) 搬送条件 搬送条件は,次のとおりとする。
(a) 搬送物の荷姿,搬送頻度及び質量
(b) 搬送ステーション
(c) 通路幅
(d) 他の車両などとの通路共用状況
(e) 走行路条件
(2) 無人搬送車の種類 無人搬送車の種類は,次の項目による。
(a) 誘導方式
(b) ステアリング方式
(c) 移載方式
5.3
システムレイアウト 搬送物のFROM-TO(無人搬送車又は搬送物の搬送起点と搬送先)と必要搬送
量を基本に次の項目を考慮して搬送ルートを定め,充電装置,周辺装置,地上制御装置,現場操作盤など
の配置を決める。
(1) 原点
(2) 待機点
(3) ステーション
(4) 充電場所
(5) 安全領域
(6) 運行可能台数
(7) 合流制御
(8) 待ち合わせ
(9) 移載装置
5.4
システムの搬送能力
5.4.1
無人搬送車システムのサイクルタイムの算出法 1台の無人搬送車が正常に搬送を行う場合でホ
ームポジションで通信開始から荷積み,荷卸しを完了し,ホームポジションへ戻って通信を終了するまで
の一連の動作を無人搬送車システムのサイクルタイムという。
サイクルタイム算出に当たっては,次の要因を含めた動作時間を累積して求める。
4
3
2
1
T
T
T
T
T
+
+
+
=
ここに,
T: サイクルタイム
5
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
T1: 走行時間[走行速度(前進,後進,徐行及びステーション停
止前走行),加速度及び減速度]
T2: 発車遅延時間
T3: 移載時間(移載に伴うタイムラグ及び移載インタロック時間
を含む。)
T4: 搬送命令及び搬送完了報告時間(無人搬送車制御盤との通信
時間)
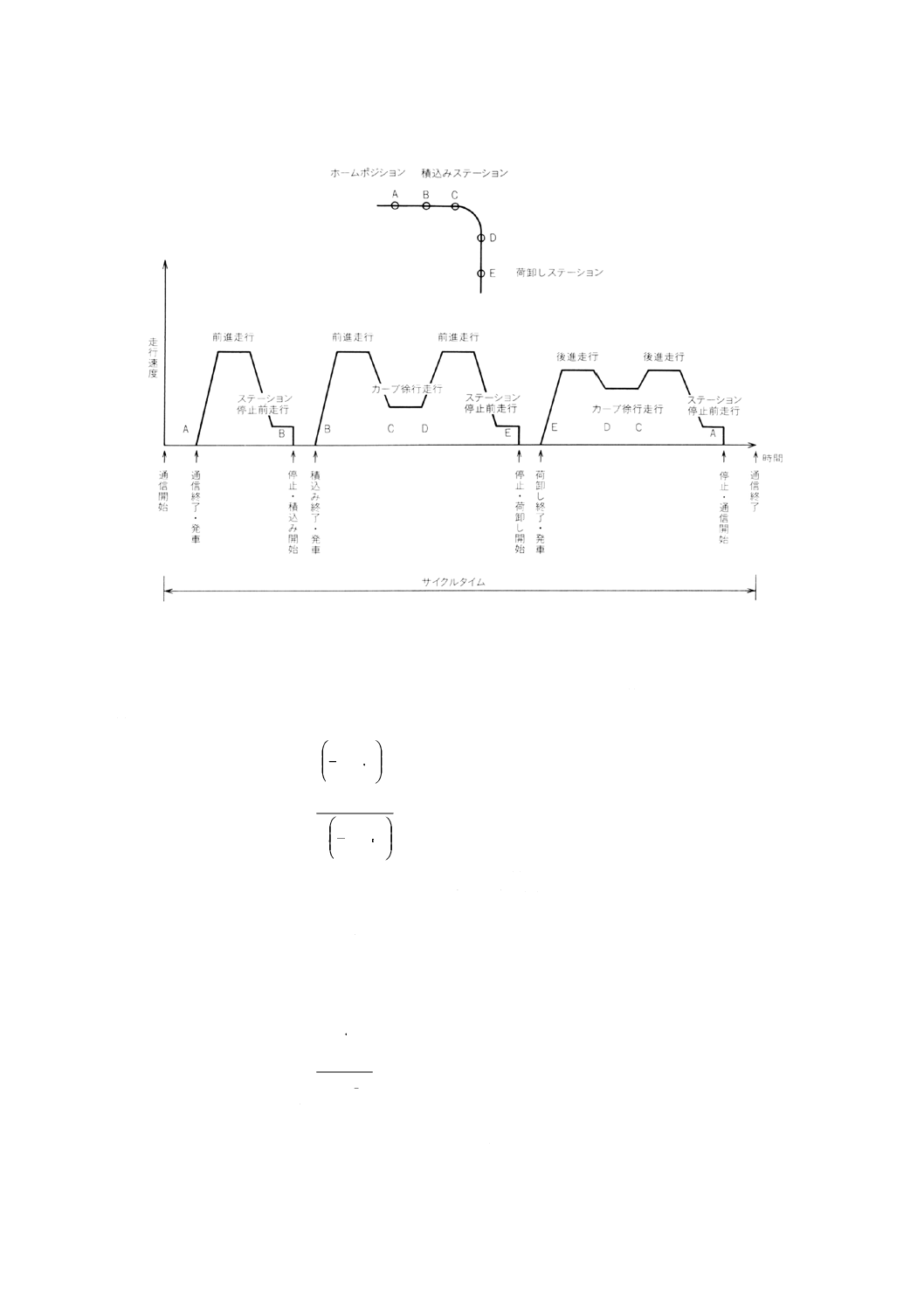
また,タイムチャートを作成して求める方法もある(図3参照)。
6
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 タイムチャート
備考 前進走行,後進走行速度は,搬送効率を加味して決定する。
5.4.2
システム能力の算出 システム能力の算出は,次による。
(1) 1台の無人搬送車システムの場合 5.4.1のサイクルタイムを求め,これから単位時間当たりの搬送回
数を求めて,この回数をシステム搬送能力とし,システム搬送能力の計算式は次のとおりとする。
(a) 1台の場合で搬送箇所が1か所の場合
+
∑
=
n
n
nt
V
L
T
+
∑
=
n
n
nt
V
L
M
3600
ここに,
T: サイクルタイム (s)
Ln: n番目の走行距離 (m)
Vn: n番目の走行速度 (m/s)
tn: n番目の移載時間 (s) +その他 (s)
M: 搬送回数(回数/h)
(b) 1台の場合で搬送箇所が複数ある場合
n
n
s
R
T
T
∑
=
n
nR
T
M
∑
=
600
3
ここに, Ts: 複合したサイクルタイム (s)
Tn: n番目の搬送箇所のサイクルタイム (s)
Rn: n番目の搬送箇所への搬送比率
M: 搬送回数(回数/h)
7
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(2) 複数台の無人搬送車システムの場合 (1)による能力×無人搬送車の台数×搬送効率とし,計算式は,
次のとおりとする。
なお,搬送効率とは,無人搬送車間の衝突防止による一時停止などのロスタイムを考慮した総合の
効率をいう。
E
N
t
V
L
M
n
n
n
+
∑
=
600
3
又は
E
N
R
T
M
n
n
∑
=
600
3
ここに, M: 搬送回数(回数/h)
Ln: n番目の走行距離 (m)
Vn: n番目の走行速度 (m/s)
tn: n番目の移載時間 (s) +その他 (s)
N: 無人搬送車の台数
E: 搬送効率
Tn: n番目の搬送箇所のサイクルタイム (s)
Rn: n番目の搬送箇所への搬送比率
5.5
運転モード及び通信
5.5.1
運転モード 運転モードは,システムの運用,運転を明確にするものであり,一般に自動と手動に
大別される。さらに,運転モードは,システム規模によって自動,半自動,個別,点検などに細分される。
この区分の考え方を次に示す。
(1) 自動モード 自動モードは,一般の稼働状態で常用されるモード,すなわち,何らかの始動指令によ
って正常な限り停止指令があるまで全システムが所定の一連動作を全く人手を介さないで繰り返され
るモード。
(2) 半自動モード 半自動モードは,全自動立上り準備,局部故障切離し時などに利用され,自動モード
の一連の動作をシステム構成機器,作動順位などによって分割し,この分割単位ごとに人手による始
動介入のある運転モード。
(3) 個別モード 個別モードは,トラブル時の原点復帰,単独動作確認などに利用され,すべての動作が
個別に人手によって操作できるモード。
(4) 点検モード 点検モードは,故障の復旧,保守メンテナンスなどに利用されるもので,個別又はブロ
ック単位で操作され,シーケンス上のインタロックを解除する回路,模擬信号を発生する回路などを
加えた点検操作用のモード。
5.5.2
通信 通信は,次による。
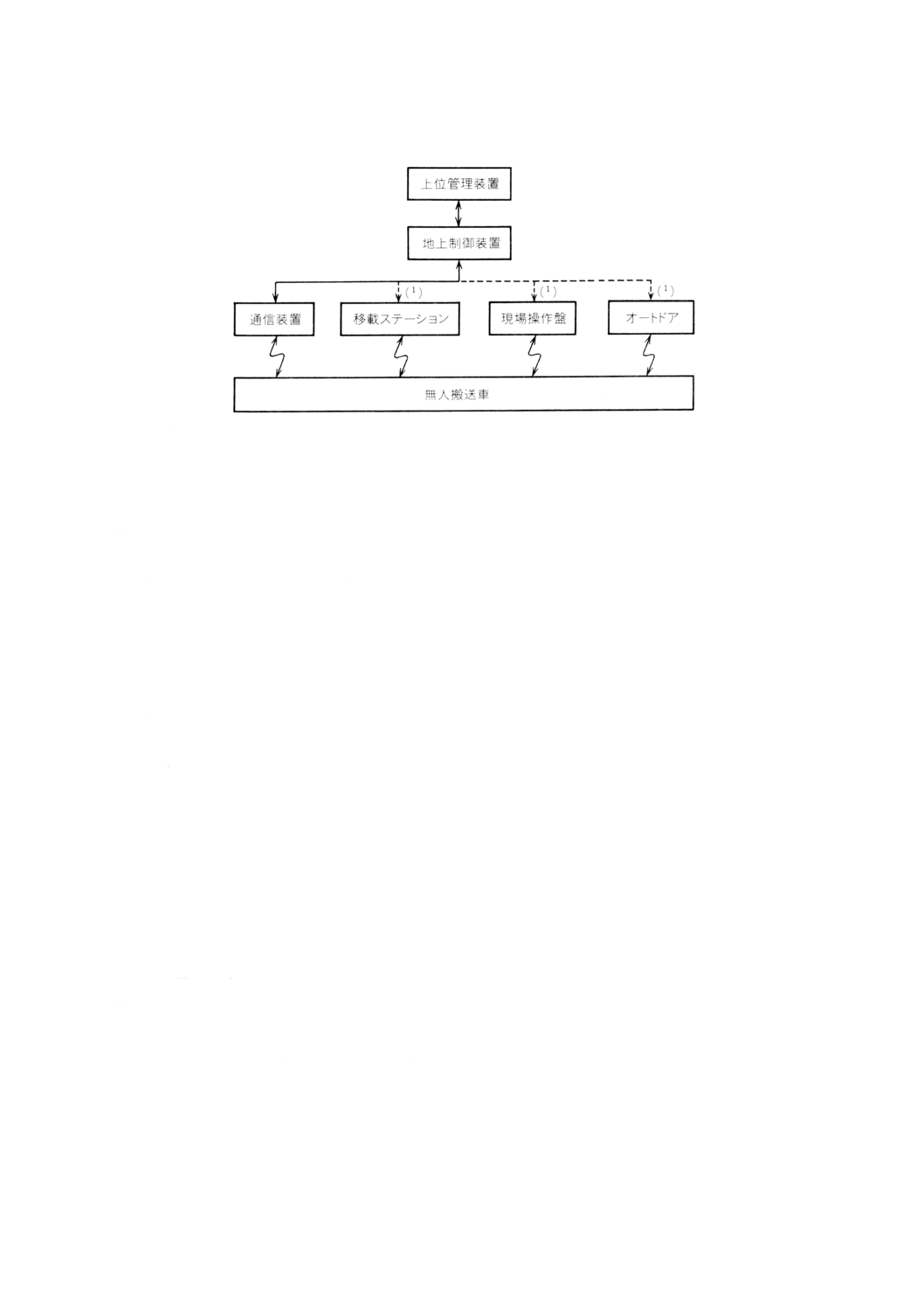
(1) 通信区分 無人搬送車システムを構成する装置及び機器間の通信系統を図4に示す。
8
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4 構成機器間の通信系統
注(1) システムによって接続しない場合もある。
(2) 通信の基本的機能及び仕様
(2.1) 上位管理装置と地上制御装置間の通信に関する次の基本的な機能について,それぞれの仕様を明確
にする。
(a) 搬送計画の送受信
(b) 搬送実績の送信
(c) 無人搬送車システムの状態送信
(2.2) 地上制御装置と通信装置,無人搬送車間の通信に関する次の基本的な機能について,それぞれの仕
様を明確にする。
(a) 搬送指示
(b) 走行情報指示
(c) 無人搬送車状態の報告
(2.3) 地上制御装置と移載ステーション間の通信に関する次の基本的な機能について,それぞれの仕様を
明確にする。
(a) 在荷情報
(b) 搬送要求
(2.4) 地上制御装置又は無人搬送車と現場操作盤間の通信に関する次の基本的な機能について,それぞれ
の仕様を明確にする。
(a) 搬送要求送信
(b) 搬送要求に対する応答
(2.5) 地上制御装置又は無人搬送車とオートドア間の通信に関する次の基本的な機能について,それぞれ
の仕様を明確にする。
(a) オートドア開閉の制御信号
(b) 無人搬送車とオートドアとの相互インタロック
(2.6) 移載ステーションと無人搬送車間の通信に関する次の基本的な機能について,それぞれの仕様を明
確にする。
(a) 移載開始及び完了信号
(b) 相互インタロック
9
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.6
モニタリング 無人搬送車システムのモニタリングは,システム規模の内容によって異なるが,次
の車上方式と地上方式に大別される。
(1) 車上方式 車上方式は,無人搬送車を構成している機器,用品などの動作状態を単独で監視する方式
であり,監視項目は次の項目とする。
(a) 接近検出装置
(b) 障害物接触バンパ
(c) 脱線検出
(d) 移載装置
(e) 誘導用検出器
(f) 走行モータ
(g) ブレーキ
(h) 制御回路
(i) バッテリ
(j) 搬送指令
(2) 地上方式 地上方式は,無人搬送車システムを構成している無人搬送車,ステーション移載装置,周
辺装置などのそれぞれの機器及び装置によって通信手段を経由して,無人搬送車システム全体の動作
状態監視を行う方式であり,監視項目は次の項目とする。
(a) 無人搬送車の運転,停止
(b) 無人搬送車の現在位置
(c) ステーションにおける搬送物の有無状態
(d) ステーションにおける移載装置の動作
(e) オートドアの開閉動作
(f) 搬送計画
(g) 無人搬送車の運行計画
5.7
周辺装置
5.7.1
充電装置 無人搬送車のバッテリ及び充電装置は,次の項目を考慮して選定,管理及び運用を行う。
(1) 無人搬送車システムの運用条件(稼働条件,充放電サイクル,メンテナンス,使用環境,経済性など),
無人搬送車に搭載されているバッテリの種類及び容量から充電装置を選定する。
(a) 車上搭載充電又は地上充電のいずれかを選定することが一般的である。
備考 車上搭載充電は,無人搬送車を停車して行うことが一般的であり,また,地上充電はあら
かじめ充電されたバッテリと交換することが一般的である。
(b) 充電装置の容量と供給電源の必要量を検討する。
(c) バッテリ交換方式を採る場合は,積替え台車,積替えホイストクレーンなどとその作業空間を確保
する。
(2) 充電場所の環境及びバッテリの集積度によっては,発生ガスの換気装置を設置する。
(3) バッテリの管理は,過放電,過充電,バッテリ液比重と液量などの日常管理と均等充電,漏電チェッ
クなどの定期メンテナンス管理などが必要である。
5.7.2
地上側移載装置 地上側移載装置は,車上の移載装置と密接な関係にあり,次の項目を考慮して設
計する。
(1) ワーク形状,質量など搬送物仕様及び無人搬送車の台数並びに地上側移載装置の台数から移載方式を
10
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
選定する。
(2) 搬送量の平準化を図って搬送効率を改善するために,地上側移載装置上に適切なバッファ容量を確保
する。
(3) 高精度の移載精度が必要な場合には,無人搬送車の高精度停止の採用,車上でワーク位置を修正する
方式などを考慮する。
(4) 落下防止装置などの安全装置について,その必要性を検討する。
(5) 地上側移載装置と無人搬送車間の移載手順の確認及び安全のためのインタロック条件を決める。
6. システムの安全 システムの安全については,JIS D 6802による。
関連規格 JIS D 6805 無人搬送車−特性・機能試験方法
11
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考1 無人搬送車システムの搬送経路の形状
この参考は,無人搬送車システムの搬送経路の形状について記述するものであり,規定の一部ではない。
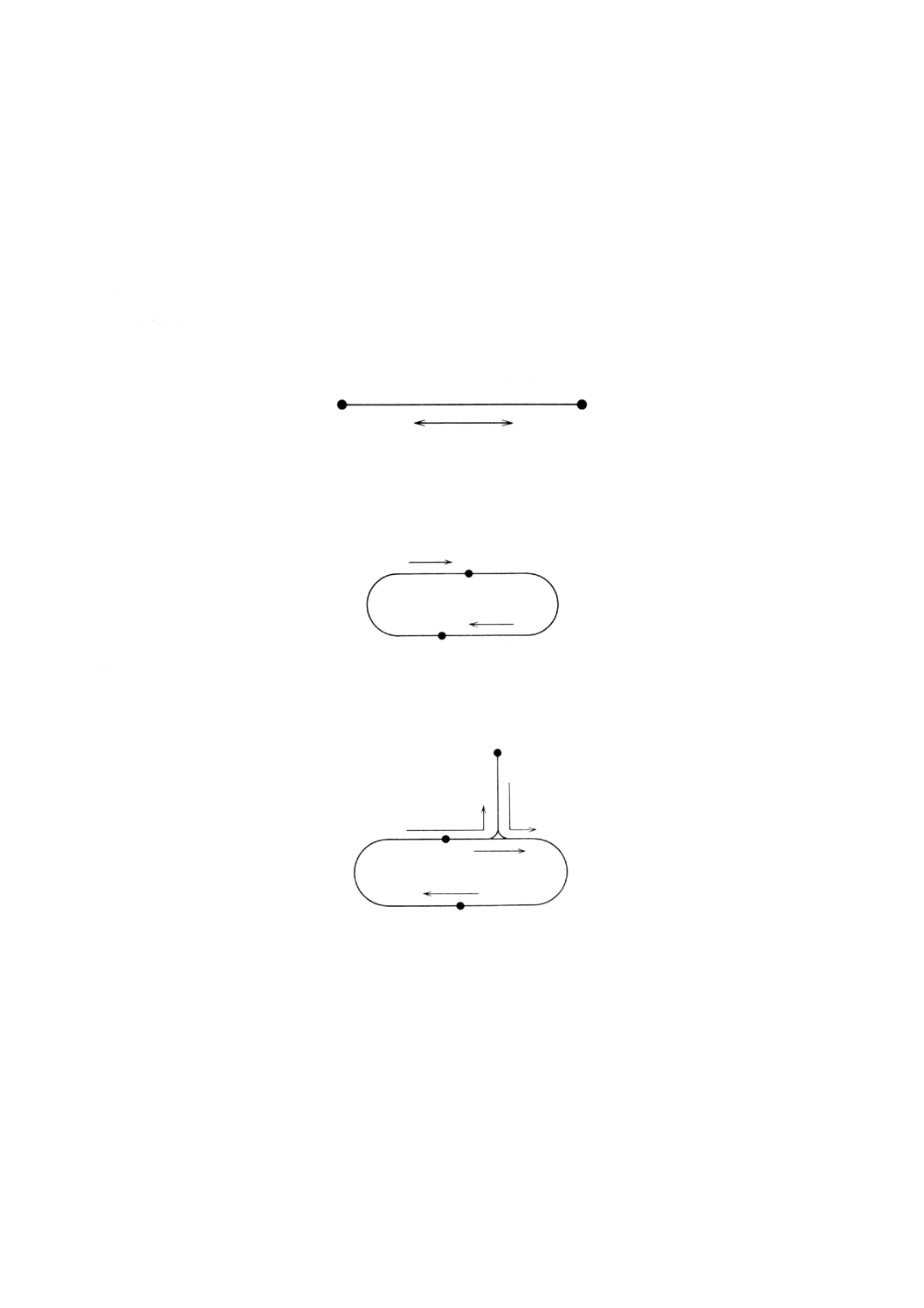
1. 搬送経路の形状 走行路の形状は,基本的には単線経路,ループ経路及び単線経路とループ経路との
組合せとなる。
(1) 単線経路 単線の往復運転である(参考1図1参照)。無人搬送車を複数投入すると,搬送効率はよく
ない。
参考1図1 単線経路
備考 ●は,ステーション例を示す。
(2) ループ経路 搬送経路をループにしたものである(参考1図2参照)。運転が一方通行になるため,無
人搬送車を複数投入しても無人搬送車の停車以外は後続に影響せず,効率のよい大搬送量システム向
きである。
参考1図2 ループ経路
備考 ●は,ステーション例を示す。
(3) 単線経路とループ経路との組合せ 単線経路とループ経路との結合したものである(参考1図3参照)。
単線経路との出合点のブロッキング制御が必要となり,(1)及び(2)よりも搬送効率は悪くなる。
参考1図3 単線経路とループ経路との組合せ
備考 ●は,ステーション例を示す。
12
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考2 無人搬送車システムの必要通路幅
この参考は,無人搬送車システムの必要通路幅について記述するものであり,規定の一部ではない。
1. 通路 無人搬送車が走行するための通路幅は,その通路が直線通路(緩やかな曲線通路もこの中に含
める。)か,直角通路か,無人搬送車だけの専用通路か,人間との共用通路か,車線数は幾らか,などの観
点によって決定する。
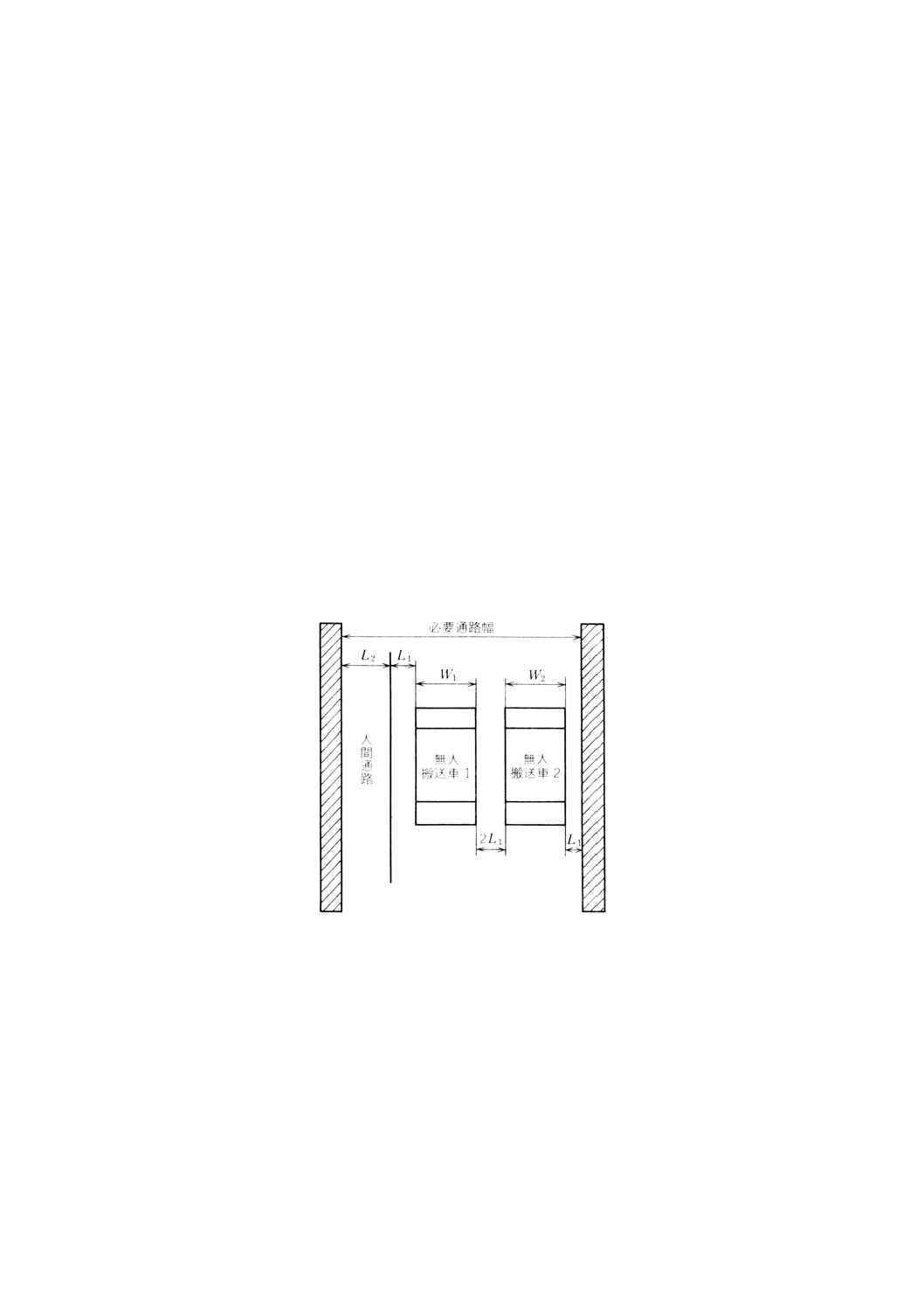
(1) 直線通路 無人搬送車が直線走行している場合,左右のブレのために,最低L1以上車幅両側に通路幅
として確保することが必要である。したがって,無人搬送車の車幅をWとすれば,W+2L2以上とな
る。
人間との共用通路がある場合は,安全確保のため更にL2にしたもの以上必要である。複数車線の場
合は,各々の無人搬送車に必要な通路幅の合計となる。
例えば,無人搬送車1,無人搬送車2の車幅をそれぞれW1,W2とすると,(W1+2L1)+(W2+2L)=
W1+W2+4L1以上となる。
参考2図1は,人間との共用通路がある場合で,二車線走行の場合の必要通路幅を示したものであ
る。この場合の必要通路幅は,W1+W2+4L1+L2以上となる。
参考2図1 直線通路
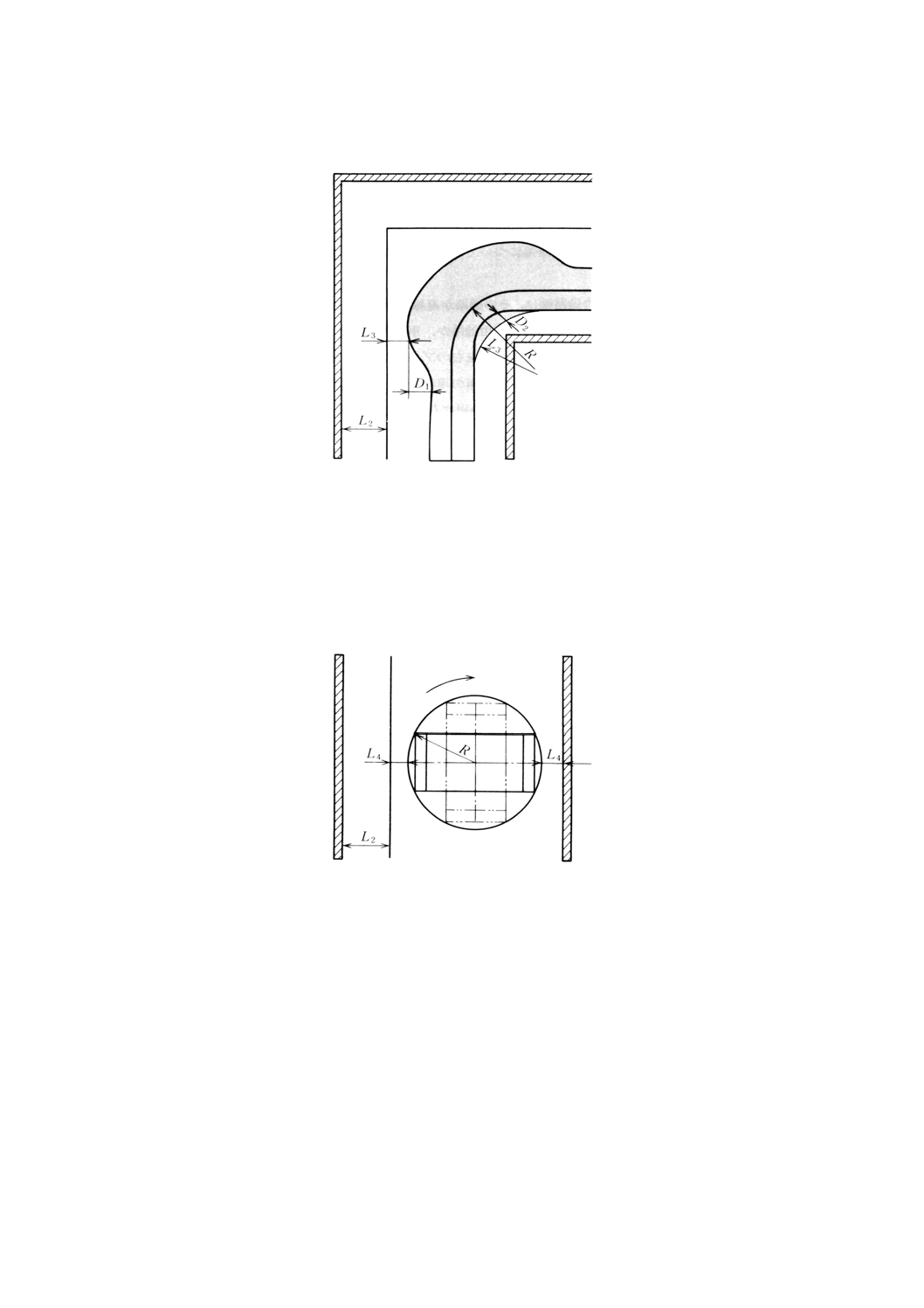
(2) 直角通路 無人搬送車が半径Rで参考2図2のとおり直角走行する場合,その軌跡は斜線部のように
なり,車幅Wより両側にかなり膨らみ (D1,D2) が生じる。この膨らみは,車体サイズ,足回り構造,
誘導方式,回転半径などによって異なる。
参考2図2の場合,必要通路幅は,最大膨らみから壁又は設備類までL3以上確保する値となる。す
なわち,W+D1+D2+2L3となる。無人搬送車によっては前進と,後進の軌跡が異なる。
13
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考2図2 直角通路
(3) スピンターン部の通路 無人搬送車がスピンターンする場合,回転軌跡+2L4以上の通路幅が必要で
ある。参考2図3では2R+2L4以上となる。
直線通路,直角通路以外の場合についても軌跡図によって,車幅間の距離,必要通路幅を検討する。
また,人間との共用通路がある場合は,安全確保のため無人搬送車の走行路をペンキなどによって
明示する。
参考2図3 スピンターン部の通路
14
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
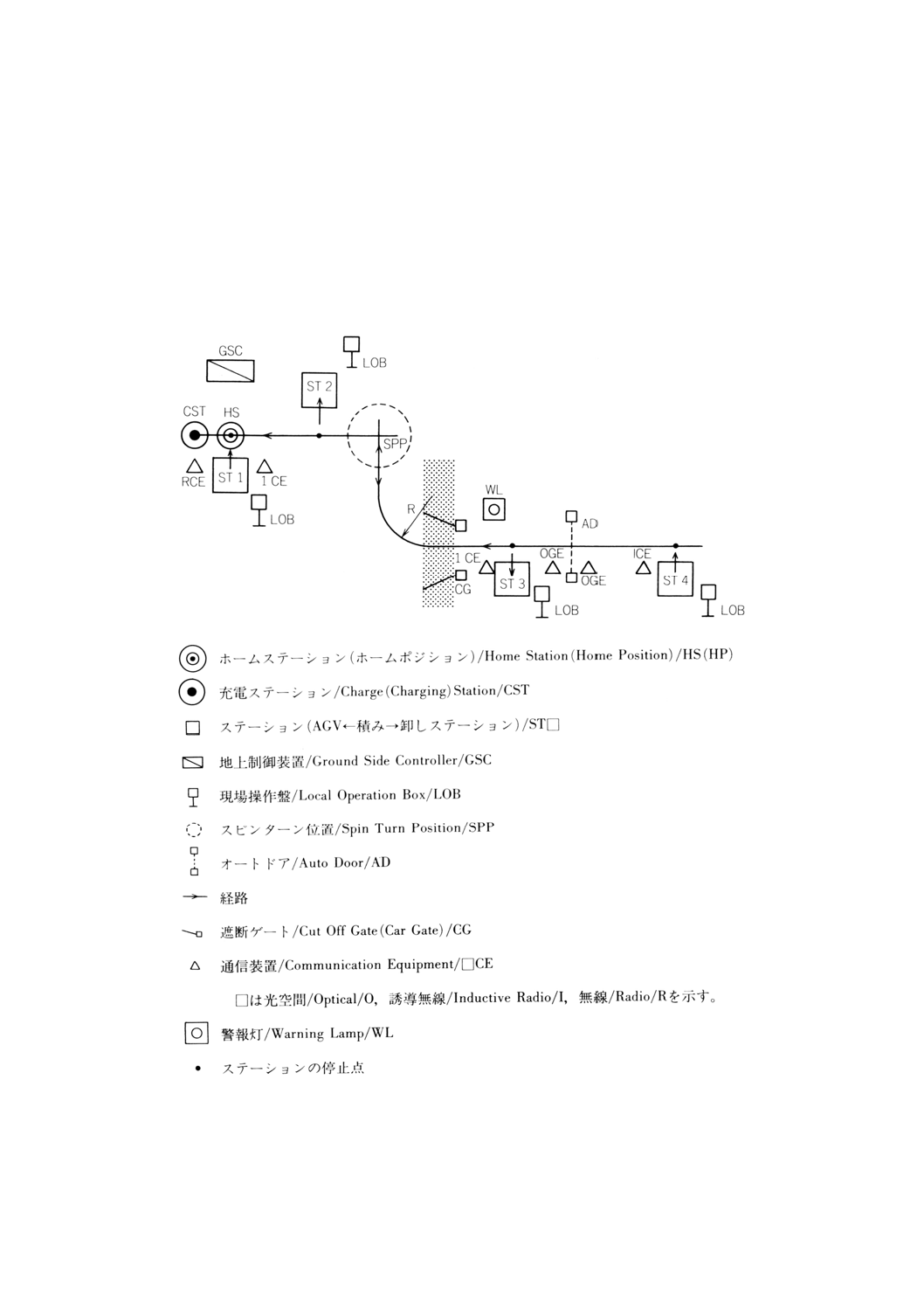
参考3 無人搬送車システムのレイアウト記号
この参考は,無人搬送車システムのレイアウト記号について記述するものであり,規定の一部ではない。
1. レイアウト記号 レイアウトを表す記号の参考として参考3図1を示す。
参考3図1 レイアウト記号
15
D 6804-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
原案作成委員会 構成表
氏名
所属
(委員長)
高 橋 輝 男
早稲田大学システム科学研究所
○ 若 松 茂 三
工業技術院標準部
林 洋 和
通商産業省機械情報産業局
大 関 親
労働省労働基準局
粂 川 壯 一
労働省産業安全研究所
高 木 隆 雄
中央労働災害防止協会
坂 口
前,花王株式会社
大 槻 文 宏
キリンビール株式会社
高 木 道 郎
株式会社講談社
新 美 雅 文
株式会社日立製作所
柳 田 俊 明
富士通株式会社
甲斐田 正 昭
株式会社ブリヂストン
○ 寺 田 克
社団法人日本産業車両協会
○ 中 村 明 德
株式会社ダイフク
○ 高 橋 育 之
小松フォークリフト株式会社
○ 宮 坂 孝 夫
東洋運搬機株式会社
○ 新 野 賢 一
トヨタ自動車株式会社
○ 小 野 益 美
日立機電工業株式会社
○ 近 堂 実
村田機械株式会社
(事務局)
○ 岩 橋 俊 彦
社団法人日本産業車両協会
備考 ○印は分科会を兼ねる
(上記以外の分科会委員)
氏名
所属
仁 木 將 雄
石川島播磨重工業株式会社
柳 町 九二彌
株式会社カナツー
中 島 修
川崎重工業株式会社
坪 川 正 勝
株式会社キトー
坂 部 正 宣
コレック株式会社
富 田 忠
神鋼電機株式会社
村 上 清 孝
住友重機械工業株式会社
上 山 巧
株式会社椿本チェイン
高 丸 陽 司
株式会社東芝
梅 原 茂
株式会社豊田自動織機製作所
川 崎 博
日産自動車株式会社
住 田 晋 輔
日本車輌製造株式会社
林 博
日本たばこ産業株式会社
古 川 善 彦
日本輸送機株式会社
中 村 雄 有
富士電機株式会社
大 竹 悟
松下電器産業株式会社
小 林 慶 信
株式会社マツダヒューテック
中 村 喜 信
株式会社三井三池製作所
杉 野 光
株式会社メイキコウ